mécanique des systèmes multicorps rapport élaboré par
TRANSCRIPT
Mécanique des systèmes multicorps Page 1
Rapport de synthèse sur le module deMécanique des systèmes multicorps
Rapport élaboré par
BEN AISSIA HAZEM
PIERRE ALAIN DESIX
Année universitaire : 2013/2014
Mécanique des systèmes multicorps Page 2
Remerciements
Ben Aissia Hazem remercie la Région Rhône Alpes pour son
soutien financier sous forme de bourse « accueil sup », ainsi quemonsieur le professeur Lionel FROSSARD pour l’excellente qualité deson cours. Il remercie également tous le staff enseignant etadministratif de l’école Polytech Lyon, en particulier messieurs lesprofesseurs Jean Christophe Béra, Bruno Gilles et Maher Ben Cheikh,d’être le fondateur de la convention double diplôme entre PolytechLyon et l’Ecole Nationale d’Ingénieurs de Monastir en Tunisie.
Mécanique des systèmes multicorps Page 3
Sommaire
1. Introduction générale,2. Aspect théorique du cours sur la mécanique des systèmes multicorps,
2.1 Formulation des équations du système mécanique,2.2 Résolution numérique des équations de mouvement2.3 Programmation et simulation sous Matlab du fonctionnement du
système mécanique,3. Développement des progiciels de simulation multicorps dynamique,
3.1 Introduction3.2 Fonctionnalités3.3 Valeur ajoutée pour les entreprises et bureaux d’étude,3.4 Exemples d’application de ces progiciels,
4. Utilisation du logiciel MSC Adams de simulation multicorps dynamique,4.1. Méthode de réception des données par Adams,4.2. Méthode de calcul,4.3. Les problèmes éventuels rencontrés : origines et remèdes.
Conclusion générale
Mécanique des systèmes multicorps Page 4
1. Introduction :
La mécanique des systèmes multicorps est une science basée sur la mécaniqueclassique et qui traite les systèmes composés de plusieurs corps en liaison entre eux.Dans notre cours on s’est placé dans le cas où les corps sont indéformables, et qu’ilssont connectés entre eux par des liaisons rigides sans jeu.
Il s’agit tout d’abord de formuler les équations mécaniques régissant le fonctionnementdu système mécanique répondant aux exigences demandées par le cahier de charge.Par la suite, de modéliser et de simuler sur ordinateur, le comportement dynamique deces corps qui décrivent des déplacements à la fois en rotation et en translation.
2. Aspect théorique du cours sur la mécanique des systèmes multicorps
En classe, durant les séances du cours sur la mécanique des systèmes multicorps, ontété abordés les paragraphes suivants :
2.1 Formulation des équations du système mécanique :2.1.1 En cinématique :
Nous avons appris dans cette partie les procédés sur le paramétrage d’un solide et lesméthodes de formulation des équations de contraintes. En première étape, il estdemandé de bien paramétrer notre système, c’est-à-dire, en déterminant un nombrerestreint de paramètres de ce système, on peut connaître la position de n’importe pointde ce dernier. On a appris à paramétrer avec trois types de coordonnées : coordonnéesrelatifs, coordonnées à point de référence, et coordonnées naturelles. Une fois leparamétrage bien fait, l’analyse cinématique du système mécanique permet d’aboutiraux équations algèbro-différentielles. Sous forme matricielle ces équations s’écrivent[Φ]= [0]. La méthode de formulation conduisant à ces équations de contraintes varieselon le type de paramétrage choisi. On expose par la suite la description desdifférentes configurations utilisées:
1) Coordonnées relatives : comme son nom l’indique chaque solide est repéré parcelui qui le précède dans l’arborescence. Le paramètre choisi dépend de lanature de la liaison entre les deux solides, par exemple : une liaison pivotapporte un paramètre d’angle, une liaison glissière apporte un paramètre dedistance, une liaison ponctuelle apporte un paramètre d’angle et un paramètrede distance.Pour générer les équations de contrainte [Φ]= [0] on utilise la fermeture de lachaine cinématique. On distingue deux cas : chaine cinématique ouverte etchaine cinématique fermée. Dans le premier cas, la fermeture se fait de manièreautomatique. Dans le cas des chaines cinématiques fermées on est emmené àfaire une coupure de liaison et pour choisir quelle liaison couper, on fera appel àla théorie des graphes.Ce type de paramétrage a l’avantage d’un faible nombre de paramètres, et queles variables correspondent directement aux variables articulées, ce qui est pluspratique pour faire un dimensionnement.L’inconvénient de ce paramètre est qu’il faut savoir quelle liaison ouvrir dans lecas d’une chaine cinématique fermée.
2) Coordonnées à point de référence : Dans ce cas chaque solide est référenciépar rapport à un solide de référence et non pas par rapport à un autre solide dumécanisme, c’est pourquoi ce type de coordonnées est dit absolu. En effet
Mécanique des systèmes multicorps Page 5
chaque solide est repéré par les coordonnées de son centre de gravité et parl’angle entre le repère qui lui est lié et le repère du solide de référence.Ce type de paramétrage nécessite l’analyse des degrés de liberté bloqués parles liaisons entre les solides(exemple l’arrêt en rotation pour la liaison glissière),pour la génération des équations[Φ]=[0] .L’avantage de ce paramétrage est qu’il est facile à générer ainsi les relations decontraintes.L’inconvénient de ce paramétrage est qu’il a un grand nombre de paramètresOn note par ailleurs, que le logiciel industriel MscAdams fonctionne avec ce typede paramétrage.
3) Coordonnées naturelles : De même que le paramétrage précédent, ce type deparamétrage est absolu, en effet, chaque solide est repéré par les coordonnéesdes deux points(mécanisme plan) distincts. Pour la génération des équations decontrainte on utilise l’indéformabilité du solide, et l’analyse des degrés de libertébloqués par toutes les liaisons qui ne sont pas pris en compte par le partage despoints de base.L’avantage de ce paramétrage est qu’on a un nombre modéré de paramètre. Deplus, on n’a pas des termes trigonométriques, ce qui rend la résolutionmathématique plus facile.L’inconvénient de ce paramétrage est qu’il est difficile à automatiser pour placerles points de bases aux liaisons. De plus, pour revenir aux variables auxarticulations (utile pour le dimensionnement), il faut faire un post traitement.
Le tableau ci-dessous résume le type de paramétrage et les méthodes de formulationdes équations [Φ]= [0].
Méthode de génération deséquations[Φ]=[0] :
Type
de
para
mét
rage
1) Coordonnées naturelles .L’ indéformabilité des solides.Traitement des liaisons qui ne sont paspris en compte par le partage des pointsde bases
2) Coordonnées relatives La fermeture de la chaine cinématique3) Coordonnées à point de
référenceLe traitement des liaisons entre lessolides
Exemples
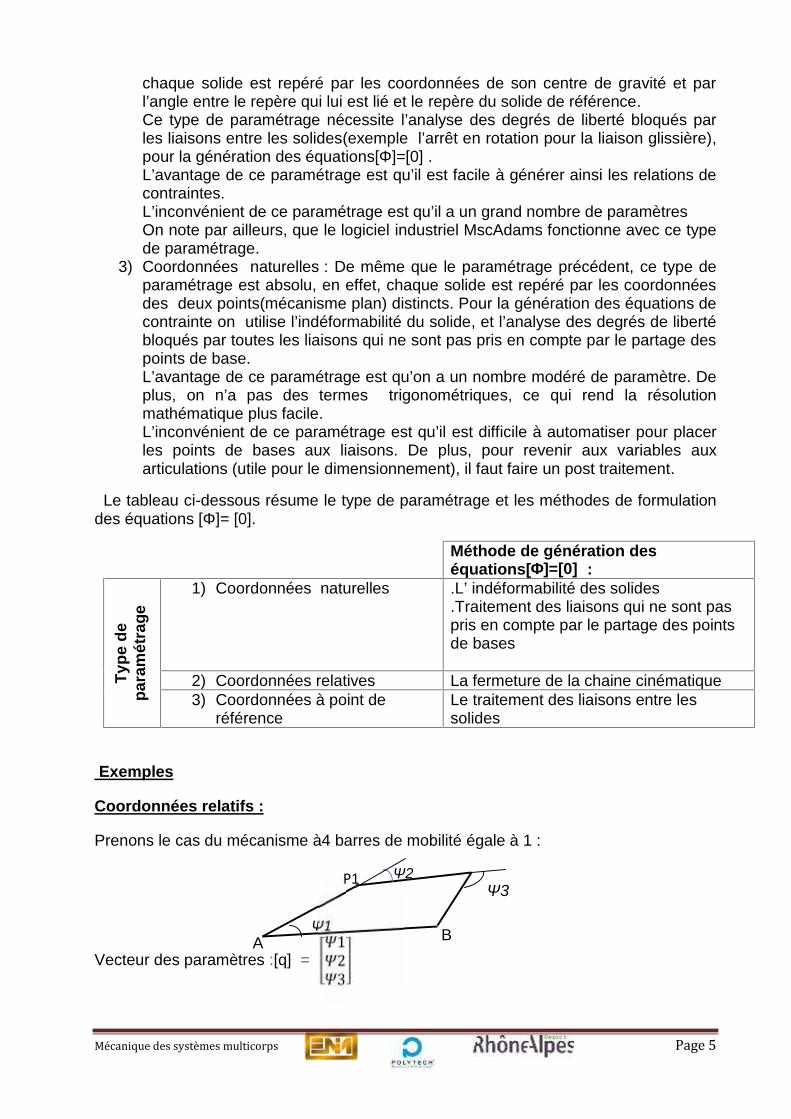
Coordonnées relatifs :
Prenons le cas du mécanisme à4 barres de mobilité égale à 1 :
Vecteur des paramètres :[q] =123A
P1
BΨ1
Ψ2Ψ3
Mécanique des systèmes multicorps Page 6
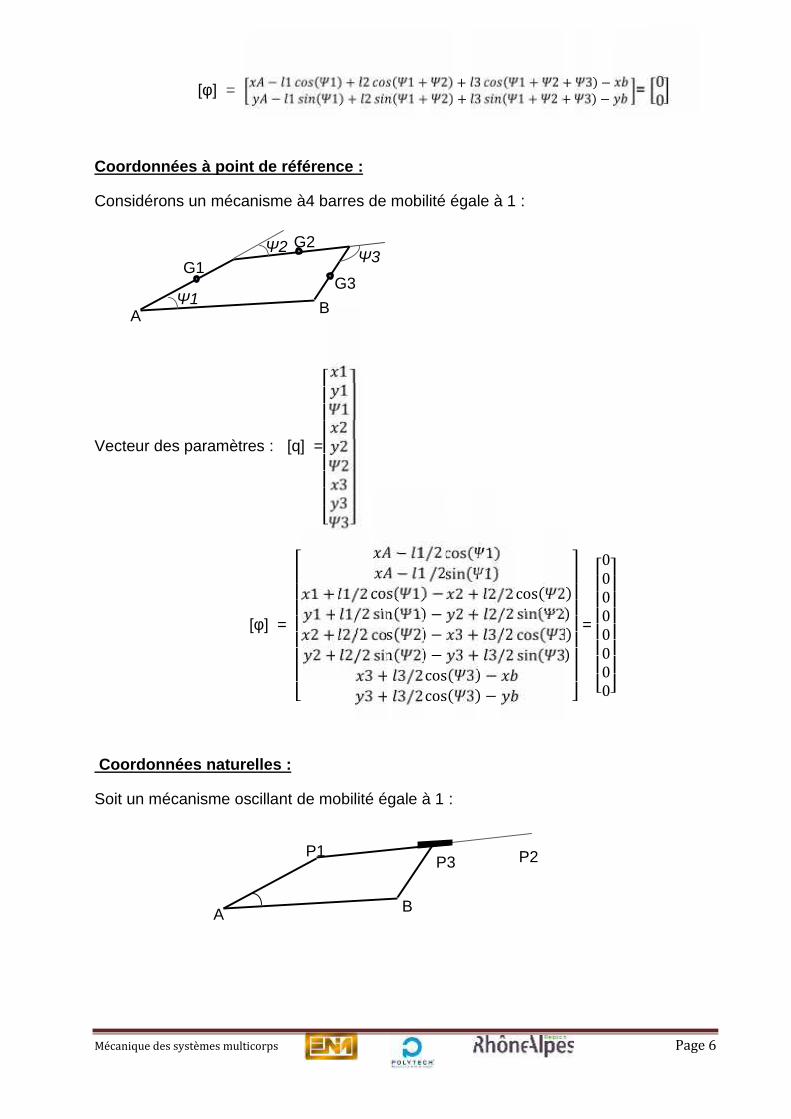
[φ] = − 1 ( 1) + 2 ( 1 + 2) + 3 ( 1 + 2 + 3) −− 1 ( 1) + 2 ( 1 + 2) + 3 ( 1 + 2 + 3) − = 00Coordonnées à point de référence :
Considérons un mécanisme à4 barres de mobilité égale à 1 :
Vecteur des paramètres : [q] =
⎣⎢⎢⎢⎢⎢⎢⎢⎡111222333⎦⎥⎥⎥⎥⎥⎥⎥⎤
[φ] =
⎣⎢⎢⎢⎢⎢⎢⎢⎡
− 1/2 cos( 1)− 1 /2sin( 1)1 + 1/2 cos( 1) − 2 + 2/2 cos( 2)1 + 1/2 sin( 1) − 2 + 2/2 sin( 2)2 + 2/2 cos( 2) − 3 + 3/2 cos( 3)2 + 2/2 sin( 2) − 3 + 3/2 sin( 3)3 + 3/2 cos( 3) −3 + 3/2 cos( 3) − ⎦⎥⎥⎥⎥⎥⎥⎥⎤
=
⎣⎢⎢⎢⎢⎢⎢⎡00000000⎦⎥⎥⎥⎥⎥⎥⎤
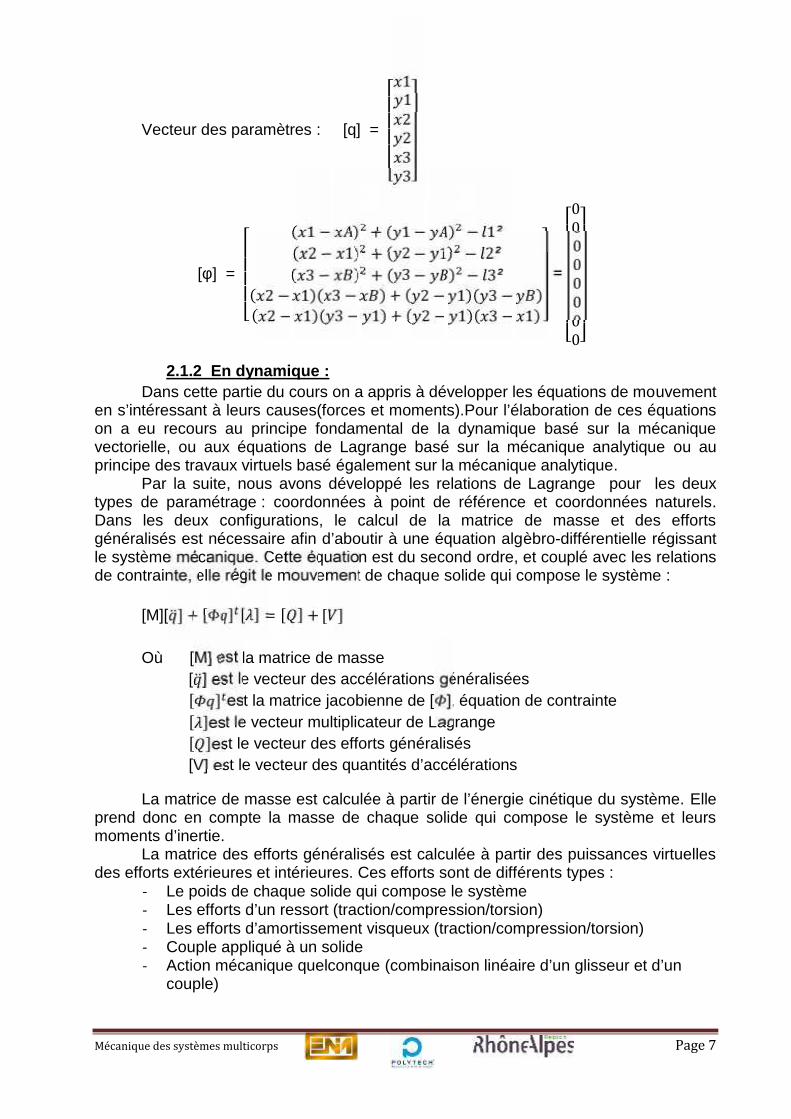
Coordonnées naturelles :
Soit un mécanisme oscillant de mobilité égale à 1 :
A
G1G2
BΨ1
Ψ2 Ψ3
G3
A
P1
B
P3 P2
Mécanique des systèmes multicorps Page 7
Vecteur des paramètres : [q] =
⎣⎢⎢⎢⎢⎡112233⎦⎥⎥⎥⎥⎤
[φ] = ⎣⎢⎢⎢⎢⎡ ( 1 − ) + ( 1 − ) − 1²( 2 − 1) + ( 2 − 1) − 2²( 3 − ) + ( 3 − ) − 3²( 2 − 1)( 3 − ) + ( 2 − 1)( 3 − )( 2 − 1)( 3 − 1) + ( 2 − 1)( 3 − 1) ⎦⎥⎥⎥
⎥⎤=
⎣⎢⎢⎢⎢⎢⎢⎡00000000⎦⎥⎥⎥⎥⎥⎥⎤
2.1.2 En dynamique :Dans cette partie du cours on a appris à développer les équations de mouvement
en s’intéressant à leurs causes(forces et moments).Pour l’élaboration de ces équationson a eu recours au principe fondamental de la dynamique basé sur la mécaniquevectorielle, ou aux équations de Lagrange basé sur la mécanique analytique ou auprincipe des travaux virtuels basé également sur la mécanique analytique.
Par la suite, nous avons développé les relations de Lagrange pour les deuxtypes de paramétrage : coordonnées à point de référence et coordonnées naturels.Dans les deux configurations, le calcul de la matrice de masse et des effortsgénéralisés est nécessaire afin d’aboutir à une équation algèbro-différentielle régissantle système mécanique. Cette équation est du second ordre, et couplé avec les relationsde contrainte, elle régit le mouvement de chaque solide qui compose le système :
[M][ ̈ ] + [ ] [ ] = [ ] + [ ]Où [M] est la matrice de masse
[ ̈ ] est le vecteur des accélérations généralisées[ ] est la matrice jacobienne de [ ], équation de contrainte[ ]est le vecteur multiplicateur de Lagrange[ ]est le vecteur des efforts généralisés[V] est le vecteur des quantités d’accélérations
La matrice de masse est calculée à partir de l’énergie cinétique du système. Elleprend donc en compte la masse de chaque solide qui compose le système et leursmoments d’inertie.
La matrice des efforts généralisés est calculée à partir des puissances virtuellesdes efforts extérieures et intérieures. Ces efforts sont de différents types :
- Le poids de chaque solide qui compose le système- Les efforts d’un ressort (traction/compression/torsion)- Les efforts d’amortissement visqueux (traction/compression/torsion)- Couple appliqué à un solide- Action mécanique quelconque (combinaison linéaire d’un glisseur et d’un
couple)
Mécanique des systèmes multicorps Page 8
On considère notre domaine d’étude limité aux hypothèses d’indéformabilité dusolide et des faibles vitesses comparées à la vitesse de la lumière. La premièrehypothèse nous ramène à des moments d’inertie constants, la seconde à des massesconstantes. En conclusion, notre matrice de masse étant constante, le vecteur desquantités d’accélération sera nul.
Cependant, la matrice de masse et des efforts généralisés dépendent de lanature du paramétrage utilisé.
2.2. Résolution numérique des équations de mouvement :
Les équations de mouvement établies sont des équations aux dérivés partiellesnon linéaires. La résolution de telles équations fait appel à des méthodes d’intégrationnumérique. La méthode utilisée est celle de Newton Raphson, nous permettant detrouver la position assemblée en cinématique. Pour la résolution des équations dedynamique du système mécanique nous avons utilisé la méthode d’Euler.
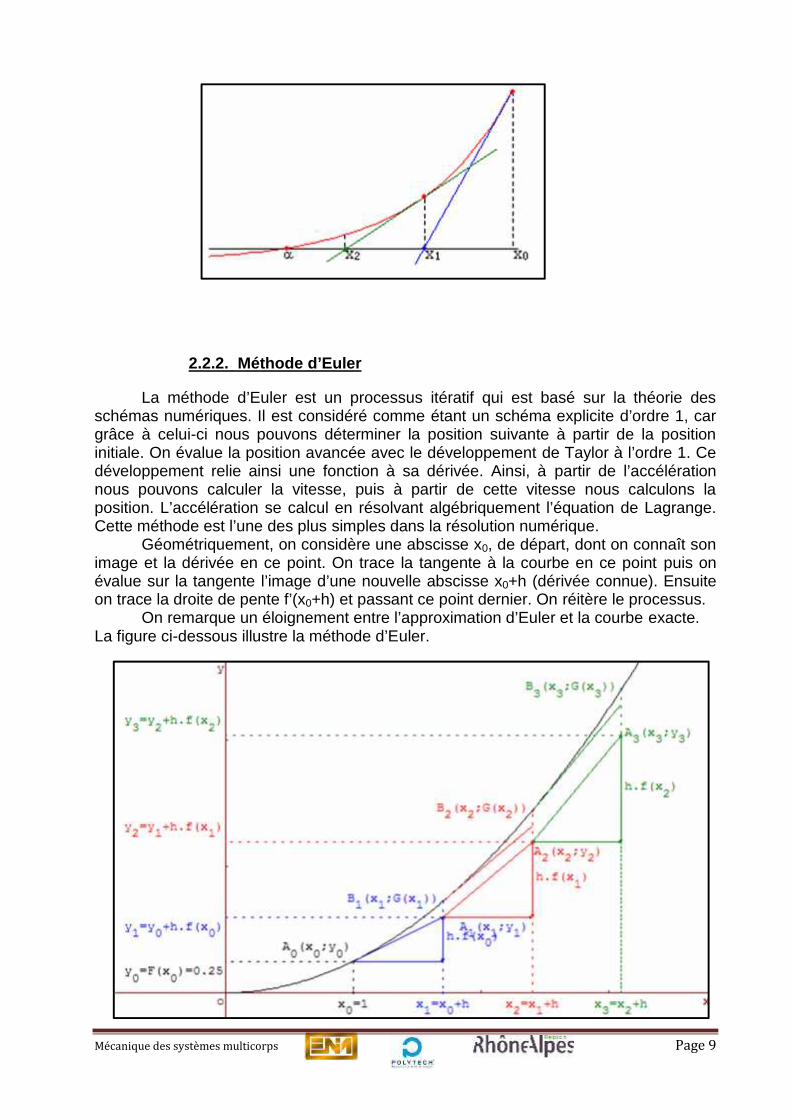
2.2.1 Méthode de Newton-Raphson
La méthode de Newton-Raphson est un processus itératif qui se base surl’approximation d’une solution, de proche en proche.
Géométriquement, cette méthode consiste à choisir un point de départ. On tracela tangente à la courbe en ce point. Ce qui nous intéresse est l’intersection de cettetangente avec l’axe des abscisses. En ce nouveau point, on considère son image sur lacourbe. On vérifie si cette image appartient à notre intervalle de tolérance. Si c’est lecas, on arrête notre processus itératif, sinon on continue notre approximation par laméthode de la tangente décrite précédemment.
Mathématiquement, on associe à cette courbe une fonction numérique. Demême on choisit un point de départ où on calcule l’équation de la tangente à l’aide dudéveloppement de Taylor à l’ordre 1. La détermination de l’intersection de la tangenteavec l’axe des abscisses se fait en résolvant l’équation de la tangente égale à zéro, cequi donne une solution unique. On vérifie si l’image, par la fonction, de notre solutionappartient à notre intervalle de tolérance. Si cette valeur est inclue, on arrête leprocessus, sinon, on applique la méthode décrite précédemment.
D’une part, cette méthode est très efficace pour résoudre des équations nonlinéaires car elle amène au final à chercher la solution d’une équation à une inconnue,par itération.
D’autre part, le choix du point de départ doit être pertinent. Si la fonctionconsidérée admet des extremums locaux, les tangentes à pente nulle, de la courbeassociée à la fonction, ne nous permettent pas de continuer notre processus itératif.La figure ci-dessous met en évidence cette méthode :On note par ailleurs, que le logiciel Adams utilise cette méthode.
Mécanique des systèmes multicorps Page 9
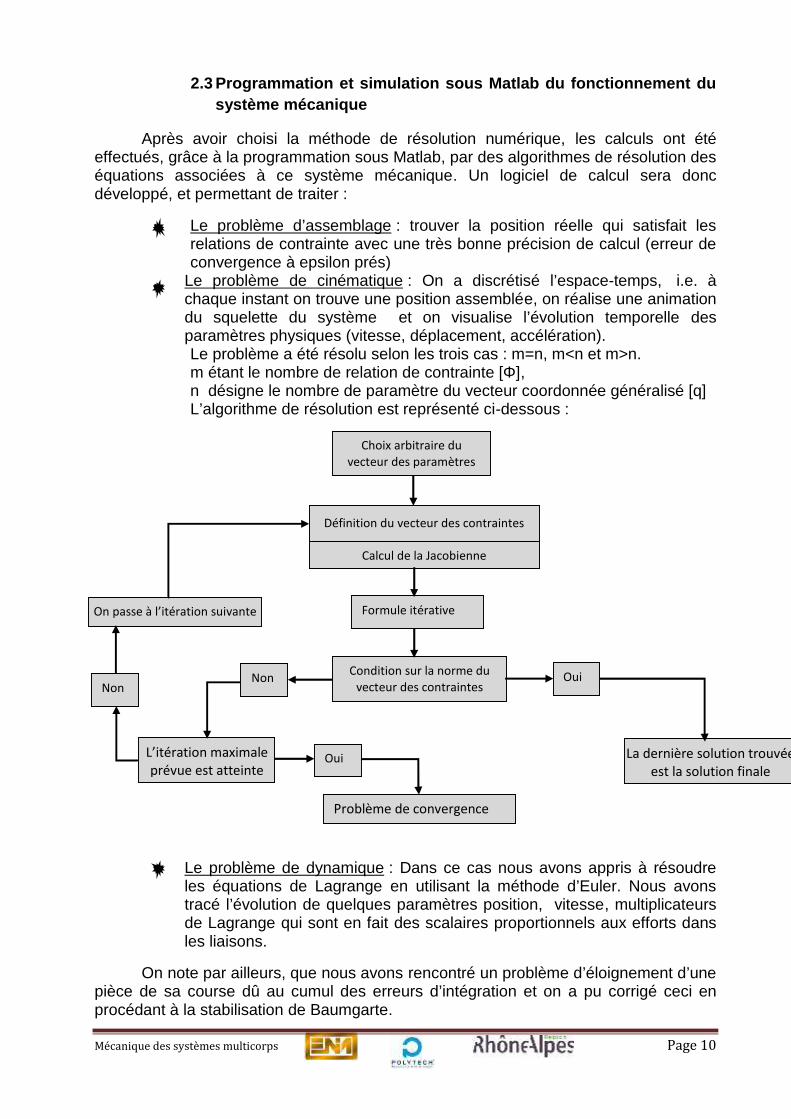
2.2.2. Méthode d’Euler
La méthode d’Euler est un processus itératif qui est basé sur la théorie desschémas numériques. Il est considéré comme étant un schéma explicite d’ordre 1, cargrâce à celui-ci nous pouvons déterminer la position suivante à partir de la positioninitiale. On évalue la position avancée avec le développement de Taylor à l’ordre 1. Cedéveloppement relie ainsi une fonction à sa dérivée. Ainsi, à partir de l’accélérationnous pouvons calculer la vitesse, puis à partir de cette vitesse nous calculons laposition. L’accélération se calcul en résolvant algébriquement l’équation de Lagrange.Cette méthode est l’une des plus simples dans la résolution numérique.
Géométriquement, on considère une abscisse x0, de départ, dont on connaît sonimage et la dérivée en ce point. On trace la tangente à la courbe en ce point puis onévalue sur la tangente l’image d’une nouvelle abscisse x0+h (dérivée connue). Ensuiteon trace la droite de pente f’(x0+h) et passant ce point dernier. On réitère le processus.
On remarque un éloignement entre l’approximation d’Euler et la courbe exacte.La figure ci-dessous illustre la méthode d’Euler.
Mécanique des systèmes multicorps Page 10
2.3 Programmation et simulation sous Matlab du fonctionnement dusystème mécanique
Après avoir choisi la méthode de résolution numérique, les calculs ont étéeffectués, grâce à la programmation sous Matlab, par des algorithmes de résolution deséquations associées à ce système mécanique. Un logiciel de calcul sera doncdéveloppé, et permettant de traiter :
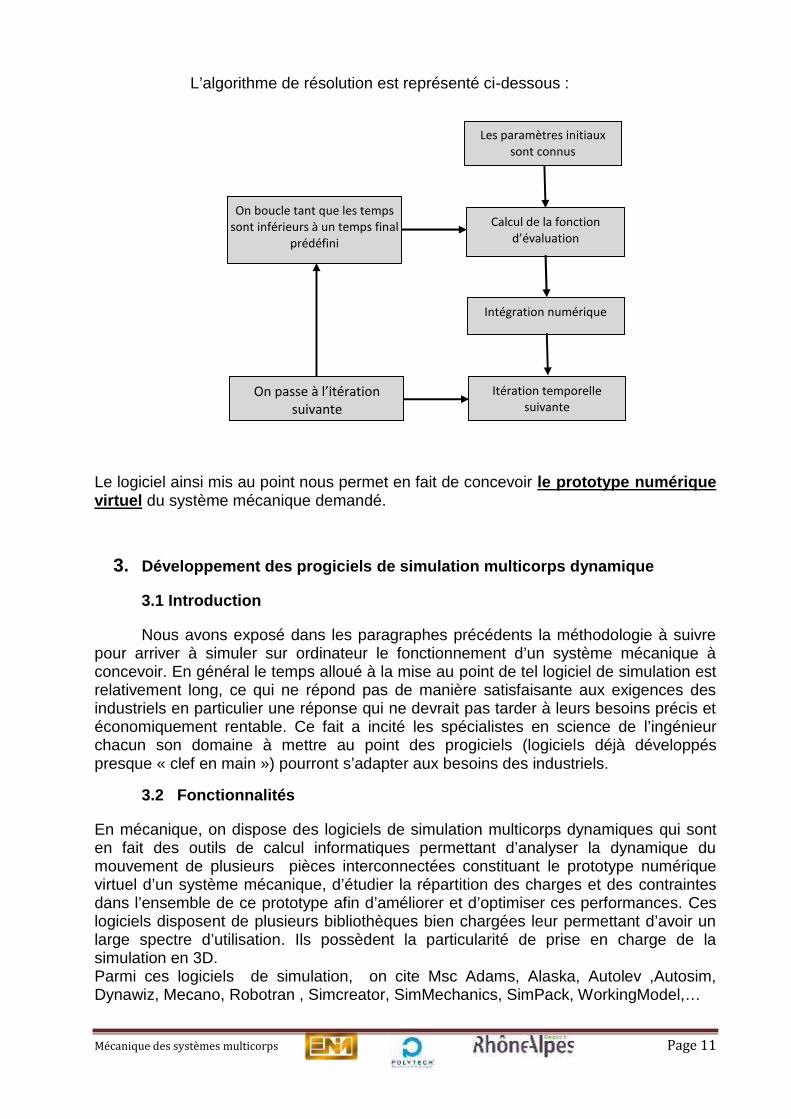
Le problème d’assemblage : trouver la position réelle qui satisfait lesrelations de contrainte avec une très bonne précision de calcul (erreur deconvergence à epsilon prés)
Le problème de cinématique : On a discrétisé l’espace-temps, i.e. àchaque instant on trouve une position assemblée, on réalise une animationdu squelette du système et on visualise l’évolution temporelle desparamètres physiques (vitesse, déplacement, accélération).Le problème a été résolu selon les trois cas : m=n, m<n et m>n.m étant le nombre de relation de contrainte [Φ],n désigne le nombre de paramètre du vecteur coordonnée généralisé [q]L’algorithme de résolution est représenté ci-dessous :
Le problème de dynamique : Dans ce cas nous avons appris à résoudreles équations de Lagrange en utilisant la méthode d’Euler. Nous avonstracé l’évolution de quelques paramètres position, vitesse, multiplicateursde Lagrange qui sont en fait des scalaires proportionnels aux efforts dansles liaisons.
On note par ailleurs, que nous avons rencontré un problème d’éloignement d’unepièce de sa course dû au cumul des erreurs d’intégration et on a pu corrigé ceci enprocédant à la stabilisation de Baumgarte.
Choix arbitraire duvecteur des paramètres
Condition sur la norme duvecteur des contraintes
L’itération maximaleprévue est atteinte
Non
Formule itérativeOn passe à l’itération suivante
La dernière solution trouvéeest la solution finale
Problème de convergence
Calcul de la Jacobienne
Définition du vecteur des contraintes
Oui
Oui
Non
Mécanique des systèmes multicorps Page 11
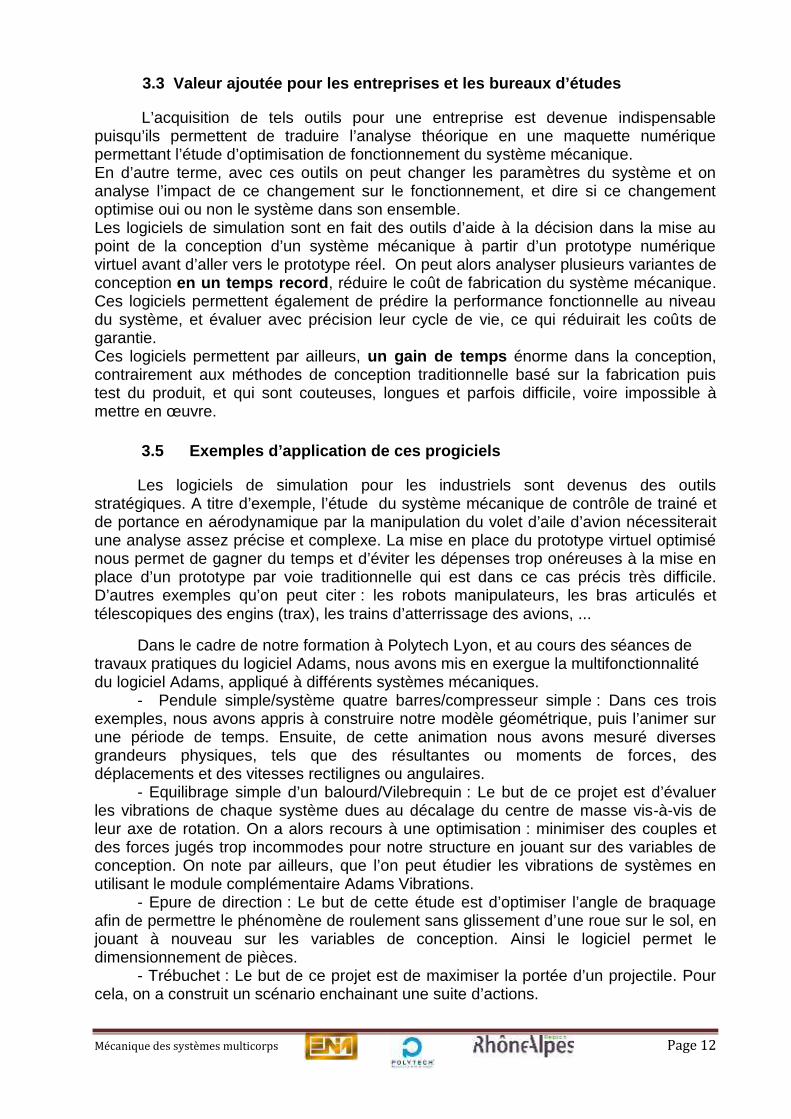
L’algorithme de résolution est représenté ci-dessous :
Le logiciel ainsi mis au point nous permet en fait de concevoir le prototype numériquevirtuel du système mécanique demandé.
3. Développement des progiciels de simulation multicorps dynamique
3.1 Introduction
Nous avons exposé dans les paragraphes précédents la méthodologie à suivrepour arriver à simuler sur ordinateur le fonctionnement d’un système mécanique àconcevoir. En général le temps alloué à la mise au point de tel logiciel de simulation estrelativement long, ce qui ne répond pas de manière satisfaisante aux exigences desindustriels en particulier une réponse qui ne devrait pas tarder à leurs besoins précis etéconomiquement rentable. Ce fait a incité les spécialistes en science de l’ingénieurchacun son domaine à mettre au point des progiciels (logiciels déjà développéspresque « clef en main ») pourront s’adapter aux besoins des industriels.
3.2 Fonctionnalités
En mécanique, on dispose des logiciels de simulation multicorps dynamiques qui sonten fait des outils de calcul informatiques permettant d’analyser la dynamique dumouvement de plusieurs pièces interconnectées constituant le prototype numériquevirtuel d’un système mécanique, d’étudier la répartition des charges et des contraintesdans l’ensemble de ce prototype afin d’améliorer et d’optimiser ces performances. Ceslogiciels disposent de plusieurs bibliothèques bien chargées leur permettant d’avoir unlarge spectre d’utilisation. Ils possèdent la particularité de prise en charge de lasimulation en 3D.Parmi ces logiciels de simulation, on cite Msc Adams, Alaska, Autolev ,Autosim,Dynawiz, Mecano, Robotran , Simcreator, SimMechanics, SimPack, WorkingModel,…
Les paramètres initiauxsont connus
Intégration numérique
On passe à l’itérationsuivante
Calcul de la fonctiond’évaluation
On boucle tant que les tempssont inférieurs à un temps final
prédéfini
Itération temporellesuivante
Mécanique des systèmes multicorps Page 12
3.3 Valeur ajoutée pour les entreprises et les bureaux d’études
L’acquisition de tels outils pour une entreprise est devenue indispensablepuisqu’ils permettent de traduire l’analyse théorique en une maquette numériquepermettant l’étude d’optimisation de fonctionnement du système mécanique.En d’autre terme, avec ces outils on peut changer les paramètres du système et onanalyse l’impact de ce changement sur le fonctionnement, et dire si ce changementoptimise oui ou non le système dans son ensemble.Les logiciels de simulation sont en fait des outils d’aide à la décision dans la mise aupoint de la conception d’un système mécanique à partir d’un prototype numériquevirtuel avant d’aller vers le prototype réel. On peut alors analyser plusieurs variantes deconception en un temps record, réduire le coût de fabrication du système mécanique.Ces logiciels permettent également de prédire la performance fonctionnelle au niveaudu système, et évaluer avec précision leur cycle de vie, ce qui réduirait les coûts degarantie.Ces logiciels permettent par ailleurs, un gain de temps énorme dans la conception,contrairement aux méthodes de conception traditionnelle basé sur la fabrication puistest du produit, et qui sont couteuses, longues et parfois difficile, voire impossible àmettre en œuvre.
3.5 Exemples d’application de ces progiciels
Les logiciels de simulation pour les industriels sont devenus des outilsstratégiques. A titre d’exemple, l’étude du système mécanique de contrôle de trainé etde portance en aérodynamique par la manipulation du volet d’aile d’avion nécessiteraitune analyse assez précise et complexe. La mise en place du prototype virtuel optimisénous permet de gagner du temps et d’éviter les dépenses trop onéreuses à la mise enplace d’un prototype par voie traditionnelle qui est dans ce cas précis très difficile.D’autres exemples qu’on peut citer : les robots manipulateurs, les bras articulés ettélescopiques des engins (trax), les trains d’atterrissage des avions, ...
Dans le cadre de notre formation à Polytech Lyon, et au cours des séances detravaux pratiques du logiciel Adams, nous avons mis en exergue la multifonctionnalitédu logiciel Adams, appliqué à différents systèmes mécaniques.
- Pendule simple/système quatre barres/compresseur simple : Dans ces troisexemples, nous avons appris à construire notre modèle géométrique, puis l’animer surune période de temps. Ensuite, de cette animation nous avons mesuré diversesgrandeurs physiques, tels que des résultantes ou moments de forces, desdéplacements et des vitesses rectilignes ou angulaires.
- Equilibrage simple d’un balourd/Vilebrequin : Le but de ce projet est d’évaluerles vibrations de chaque système dues au décalage du centre de masse vis-à-vis deleur axe de rotation. On a alors recours à une optimisation : minimiser des couples etdes forces jugés trop incommodes pour notre structure en jouant sur des variables deconception. On note par ailleurs, que l’on peut étudier les vibrations de systèmes enutilisant le module complémentaire Adams Vibrations.
- Epure de direction : Le but de cette étude est d’optimiser l’angle de braquageafin de permettre le phénomène de roulement sans glissement d’une roue sur le sol, enjouant à nouveau sur les variables de conception. Ainsi le logiciel permet ledimensionnement de pièces.
- Trébuchet : Le but de ce projet est de maximiser la portée d’un projectile. Pourcela, on a construit un scénario enchainant une suite d’actions.
Mécanique des systèmes multicorps Page 13
Ces systèmes restent relativement élémentaires et donc facile à étudier. Lelogiciel Adams peut aussi traiter des mécanismes plus complexes tout en restantpertinent sur les résultats qu’il fournit. Il s’utilise fréquemment dans l’industrie,notamment dans l’automobile, le ferroviaire et autres.
4. Fonctionnement du logiciel Msc Adams de simulation multicorpsdynamique,
Msc Adams est le logiciel de simulation multicorps le plus connu et le pluspuissant dans le monde. Msc Adams permet de construire des prototypes virtuels dessystèmes mécaniques complexes, de les tester et de simuler de façon plus réalisteleur comportement.Grâce à ces modules complémentaires, Adams peut simuler de façon plus généralen’importe quel système, par exemple : Adams/flex prend en considération la flexibilitédes éléments d’un système mécanique, d’autres modules tels qu’Adams/car permet desimuler le comportement d’un véhicule à partir des tests de fonctionnement identiques àcelles qu’on aurait à effectuer sur une piste d’essai ou en laboratoire. On cite plusieursautres modules complémentaires : Adams/Postprocesseur, Adams/view, Adams/solver,Adams/controls, Adams/vibration,…
Pour simuler un système multicorps dynamique on aborde cette démarche :
- Construire un modèle géométrique sous Adams/view (point, primitives, liaisons,moteur cinématique,…),- Réaliser des mesures (position, course, force, moment …),- Faire une optimisation en utilisant des variables de conception, ceci est utilepour faire l’équilibrage d’un système et donc minimiser ses vibrations,- faire un sensor : sorte de capteur qui permet éventuellement de faire une actionquand on atteint une valeur d’un paramètre,- faire un script : une sorte de suite d’actions qu’on programme au sein de notresystème : comme par exemple désactiver une liaison à une condition à fixer.
Dans le cadre de notre formation en mécanique des systèmes multicorps, unepartie du module de ce cours a été dédiée à l’apprentissage d’utilisation du logicielAdams pendant les séances des travaux pratiques au travers quatre projets.Nous allons dans la suite, exposer brièvement le fonctionnement des modulescomplémentaires utilisés pendant ces séances de TP :
a) Adams view :Ce module permet grâce à son interface graphique riche de construire lemécanisme qu’on veut étudier.Ce module permet aussi d’importer des fichiers CAO pour la construction dumodèle
b) Adams solver :Ce module est le noyau d’Adams, il permet la résolution, par approximationnumérique, des équations algèbro-différentielles du mouvement. Ce module aété continument développé et amélioré par MSC software
c) Adams post-processor :Ce module nous offre un environnement de post traitement complet.Grâce à ce module on peut tracer et étudier l’évolution des différentsparamètres du système
Mécanique des systèmes multicorps Page 14
d) Adams flex :Ce module permet de prendre en considération la déformabilité des solides.Une telle modélisation donne des résultats de qualité plus réaliste et plusprécieuse.Ce module permet d’utiliser des modèles éléments finis développés sousPatran Nastran
e) Adams vibration :Ce module permet d’étudier les vibrations forcées de notre structure enfaisant une analyse modale. De tels résultats peuvent être utiles pour uneétude NVH (Noise Vibration and Harshness) afin de prédire l'impact desvibrations sur le confort des passagers dans une automobile, train, avion ouautre véhicule.
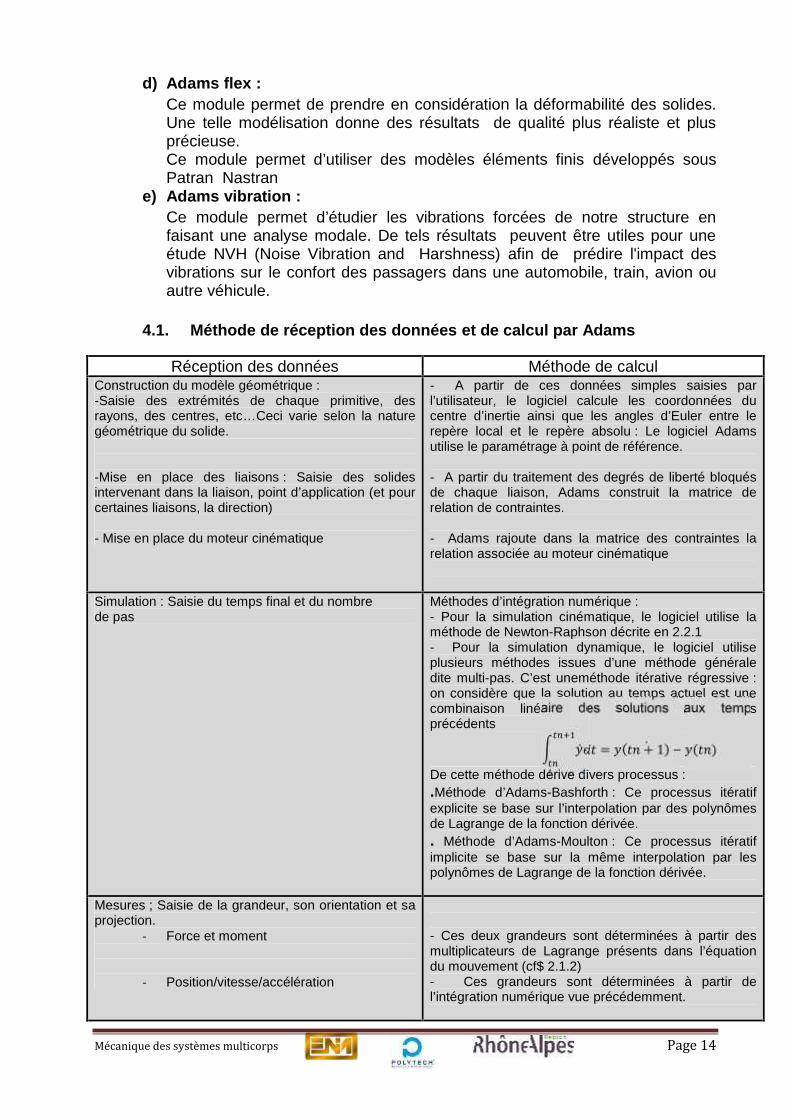
4.1. Méthode de réception des données et de calcul par Adams
Réception des données Méthode de calculConstruction du modèle géométrique :-Saisie des extrémités de chaque primitive, desrayons, des centres, etc…Ceci varie selon la naturegéométrique du solide.
-Mise en place des liaisons : Saisie des solidesintervenant dans la liaison, point d’application (et pourcertaines liaisons, la direction)
- Mise en place du moteur cinématique
- A partir de ces données simples saisies parl’utilisateur, le logiciel calcule les coordonnées ducentre d’inertie ainsi que les angles d’Euler entre lerepère local et le repère absolu : Le logiciel Adamsutilise le paramétrage à point de référence.
- A partir du traitement des degrés de liberté bloquésde chaque liaison, Adams construit la matrice derelation de contraintes.
- Adams rajoute dans la matrice des contraintes larelation associée au moteur cinématique
Simulation : Saisie du temps final et du nombrede pas
Méthodes d’intégration numérique :- Pour la simulation cinématique, le logiciel utilise laméthode de Newton-Raphson décrite en 2.2.1- Pour la simulation dynamique, le logiciel utiliseplusieurs méthodes issues d’une méthode généraledite multi-pas. C’est uneméthode itérative régressive :on considère que la solution au temps actuel est unecombinaison linéaire des solutions aux tempsprécédents ̇ = ( + 1) − ( )̇De cette méthode dérive divers processus :.Méthode d’Adams-Bashforth : Ce processus itératifexplicite se base sur l’interpolation par des polynômesde Lagrange de la fonction dérivée.. Méthode d’Adams-Moulton : Ce processus itératifimplicite se base sur la même interpolation par lespolynômes de Lagrange de la fonction dérivée.
Mesures ; Saisie de la grandeur, son orientation et saprojection.
- Force et moment
- Position/vitesse/accélération
- Ces deux grandeurs sont déterminées à partir desmultiplicateurs de Lagrange présents dans l’équationdu mouvement (cf$ 2.1.2)- Ces grandeurs sont déterminées à partir del’intégration numérique vue précédemment.
Mécanique des systèmes multicorps Page 15
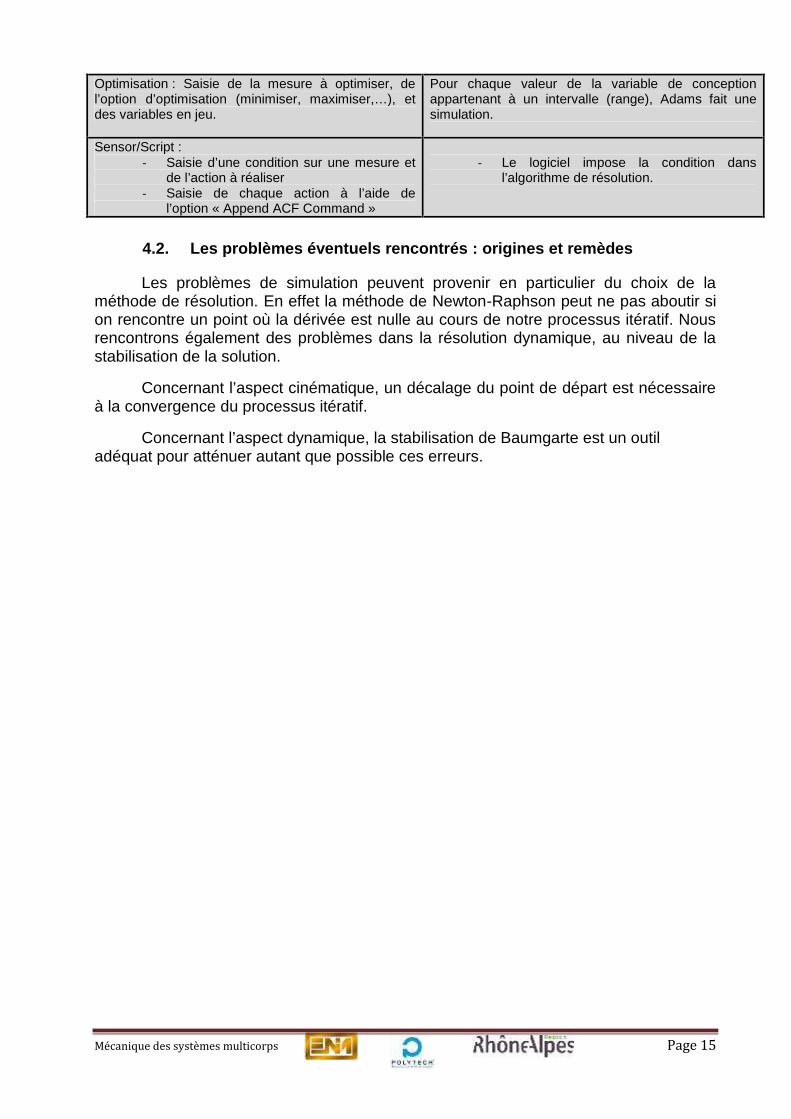
Optimisation : Saisie de la mesure à optimiser, del’option d’optimisation (minimiser, maximiser,…), etdes variables en jeu.
Pour chaque valeur de la variable de conceptionappartenant à un intervalle (range), Adams fait unesimulation.
Sensor/Script :- Saisie d’une condition sur une mesure et
de l’action à réaliser- Saisie de chaque action à l’aide de
l’option « Append ACF Command »
- Le logiciel impose la condition dansl’algorithme de résolution.
4.2. Les problèmes éventuels rencontrés : origines et remèdes
Les problèmes de simulation peuvent provenir en particulier du choix de laméthode de résolution. En effet la méthode de Newton-Raphson peut ne pas aboutir sion rencontre un point où la dérivée est nulle au cours de notre processus itératif. Nousrencontrons également des problèmes dans la résolution dynamique, au niveau de lastabilisation de la solution.
Concernant l’aspect cinématique, un décalage du point de départ est nécessaireà la convergence du processus itératif.
Concernant l’aspect dynamique, la stabilisation de Baumgarte est un outiladéquat pour atténuer autant que possible ces erreurs.
Mécanique des systèmes multicorps Page 16
Conclusion générale
La mécanique des systèmes multi-corps est une science de grande utilité dans lamise au point de tout système mécanique complexe faisant intervenir plusieurs corpsen liaison entre eux. Cette mise au point commence tout d’abord par une analysethéorique assez approfondie menant aux équations régissant le fonctionnement dusystème mécanique. En général ces équations sont non linéaires vu la complexité dusystème, d’où le recours à la résolution numérique de telles équations. L’évolutionvertigineuse des performances des systèmes informatiques qui sont en perpétuelleévolution a incité les scientifiques à la mise au point des logiciels industriels permettantde simuler les mécanismes multicorps pour aboutir à un prototype virtuel du systèmemécanique. Ces logiciels qui sont devenus indispensables pour l’industriel, permettentun gain de temps énorme dans la conception, contrairement aux méthodes deconception traditionnelle basé sur la fabrication puis test du produit, et qui sontcouteuses, longues et parfois difficiles, voire impossibles à mettre en œuvre, dans unmonde économique où vit une concurrence serrée et ardue.
En classe, notre formation est passée par trois principales étapes ayant desaspects chronologiques : de l’aspect théorique (équations, paramétrage, etc…) àl’aspect résolution numérique et programmation sous Matlab pour comprendre et utiliserle logiciel industriel Msc Adams.