chap3 systèmes discrets
TRANSCRIPT
ENSI Caen - Informatique 1A
M.FRIKEL - G.BINET 2008 –2009
���� LES SYSTEMES
DISCRETS
ENSI Caen - Informatique 1A
M.FRIKEL - G.BINET 2008 –2009
I DISCRETISATION-NUMERISATION............................................................................................1
I.1. SYSTEME DISCRET, FILTRES: ............................................................................................................1 I.2. SYSTEME DISCRET-SYSTEME NUMERIQUE:.......................................................................................1
II. SYSTEMES DISCRETS LINEAIRES INVARIANTS......... .........................................................2
II.1. LINEARITE. EQUATION RECURRENTE:.............................................................................................2 II.2. RECURSIVITE. FORME RECURSIVE. FORME NON RECURSIVE :.........................................................2 II.3. INVARIANCE TEMPORELLE. .............................................................................................................3 II.4. CAUSALITE : ...................................................................................................................................3
III. ANALYSE TEMPORELLE............................................................................................................3
III.1. OPERATEUR RETARD : ...................................................................................................................3 III.2. REPONSE IMPULSIONNELLE : .........................................................................................................4 III.3. CONVOLUTION DISCRETE : ............................................................................................................4
IV. UTILISATION DE LA TRANSFORMEE EN Z: FONCTION DE TRANSFERT ..................5
IV.1. RESOLUTION DES EQUATIONS AUX DIFFERENCES: .........................................................................5 Forme en z-1 ......................................................................................................................................5 Forme en z : ......................................................................................................................................5 Régime libre , régime forcé : ............................................................................................................6 Régime transitoire, Régime permanent : ..........................................................................................6
IV.2. FONCTION DE TRANSFERT: ............................................................................................................6
V. INVERSION DE LA TRANSFORMEE EN Z ANALYSE TEMPORE LLE - MODES ............7
V.1. DIVISION SELON LES PUISSANCES DE Z-1 : .......................................................................................8
V.2. RESOLUTION DE L’EQUATION AUX DIFFERENCES :..........................................................................8 V.3. DECOMPOSITION EN ELEMENTS SIMPLES: .......................................................................................8
Pôles, zéros: ......................................................................................................................................9 Décomposition, modes:.....................................................................................................................9 Pôles simples réels: zi est réel......................................................................................................9 Pôles simples complexes: zi est complexe. .....................................................................................9 Pôles multiples:...............................................................................................................................10
V.4. METHODE DES RESIDUS : ..............................................................................................................11
VI. MODES ET POLES.......................................................................................................................13
VI.1. CAS DE POLES SIMPLES: ..............................................................................................................13 VI.2. CAS DES POLES DE MULTIPLICITE >1:..........................................................................................16 VI.3. STABILITE : .................................................................................................................................18 VI.4. MODE DOMINANT - MODE AUXILIAIRE : ......................................................................................19
VII. ANALYSE FREQUENTIELLE..................................................................................................20
VII.1. JUSTIFICATION :.........................................................................................................................20 VII.2. REPONSE HARMONIQUE : ...........................................................................................................20 VII.3. ANALYSE SOMMAIRE :.................................................................................................................21
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
1
ETUDE DES SYSTÈMES DISCRETS
I DISCRETISATION-NUMERISATION
I.1. Système discret, filtres:
Un système discret répond à la définition générale des systèmes : ensemble qui introduit une relation
entre ses signaux d’entrée et signaux de sortie. Ici, tous ces signaux sont discrets. L'une des méthodes d'étude
de l'action des systèmes discrets étant l'approche fréquentielle (utilisation de la transformée de Fourier) nous
parlons alors de filtrage. Ainsi, nous utiliserons indifféremment de manière équivalente le terme de système
discret ou celui de filtre discret.
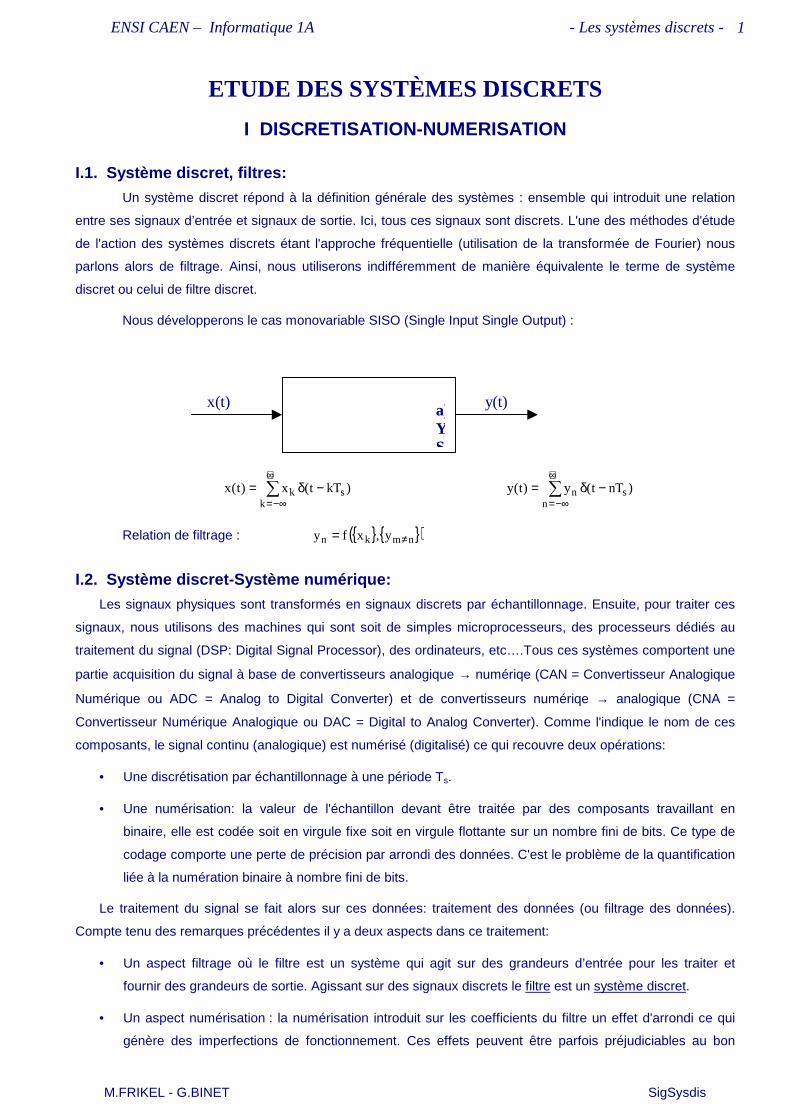
Nous développerons le cas monovariable SISO (Single Input Single Output) :
∑+∞
−∞=−δ=
ksk )kTt(x)t(x ∑
+∞
−∞=−δ=
nsn )nTt(y)t(y
Relation de filtrage : { } { }( )nmkn y,xfy ≠=
I.2. Système discret-Système numérique:
Les signaux physiques sont transformés en signaux discrets par échantillonnage. Ensuite, pour traiter ces
signaux, nous utilisons des machines qui sont soit de simples microprocesseurs, des processeurs dédiés au
traitement du signal (DSP: Digital Signal Processor), des ordinateurs, etc….Tous ces systèmes comportent une
partie acquisition du signal à base de convertisseurs analogique → numériqe (CAN = Convertisseur Analogique
Numérique ou ADC = Analog to Digital Converter) et de convertisseurs numériqe → analogique (CNA =
Convertisseur Numérique Analogique ou DAC = Digital to Analog Converter). Comme l'indique le nom de ces
composants, le signal continu (analogique) est numérisé (digitalisé) ce qui recouvre deux opérations:
• Une discrétisation par échantillonnage à une période Ts.
• Une numérisation: la valeur de l'échantillon devant être traitée par des composants travaillant en
binaire, elle est codée soit en virgule fixe soit en virgule flottante sur un nombre fini de bits. Ce type de
codage comporte une perte de précision par arrondi des données. C'est le problème de la quantification
liée à la numération binaire à nombre fini de bits.
Le traitement du signal se fait alors sur ces données: traitement des données (ou filtrage des données).
Compte tenu des remarques précédentes il y a deux aspects dans ce traitement:
• Un aspect filtrage où le filtre est un système qui agit sur des grandeurs d’entrée pour les traiter et
fournir des grandeurs de sortie. Agissant sur des signaux discrets le filtre est un système discret.
• Un aspect numérisation : la numérisation introduit sur les coefficients du filtre un effet d'arrondi ce qui
génère des imperfections de fonctionnement. Ces effets peuvent être parfois préjudiciables au bon
a)YS
x(t) y(t)
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
2
fonctionnement du filtre. Le filtre conçu, la réalisation peut se faire de plusieurs manières ou structures.
D'un point de vue théorique toutes ces structures sont équivalentes mais elles sont plus ou moins
sensibles aux erreurs commises par quantification des coefficients et cela justifie le choix d'une
structure par rapport à une autre.
En résumé: Filtre numérique = système discret+numérisation.
L'ambition de ce chapitre est de donner les notions nécessaires pour l’étude des systèmes discrets
l’aspect numérisation n'étant pas étudié.
II. SYSTEMES DISCRETS LINEAIRES INVARIANTS
II.1. Linéarité. Equation récurrente:
Un système est linéaire s’il répond au principe de superposition :
Si y1(t) = f[x1(t)] et y2(t) = f[x2(t)] x(t) = α1 x1(t)+α2 x2(t)
alors f[x(t)] = f[α1 x1(t)+α2 x2(t)] = α1 f[x1(t)] + α2 f[x2(t)] = α1 y1(t)+α2 y2(t)=y(t) ∀ α1 et α2 ∈ C.
En conséquence, pour un système linéaire, la relation « entrée → sortie » { }{ }( )nmkn y,xfy ≠= est une
relation linéaire du type équation récurrente (ou équation aux différences) :
4434421récursifterme
0mmnm
kknkn yaxby ∑∑
≠−− −=
ou, avec la convention a0 = 1 : ∑∑ −− =k
knkm
mnm xbya
Les {bk} et {am} étant les coefficients de l’équation récurrente.
II.2. Récursivité. Forme récursive. Forme non récu rsive :
La récursivité est, dans la modélisation mathématique, la dépendance du signal yn vis à vis de ses
valeurs aux autres instants soit le terme ∑≠
−0m
mnmya de l’équation récurrente.
expression non récursive, exemple: yn=xn+a1yn-1
avec yn-1=xn-1+a1yn-2 ⇒ yn=xn+a1xn-1+a12yn-2
puis yn-2=xn-2+a1yn-3 ⇒ yn=xn+a1xn-1+a12xn-2+a1
3yn-3
yn-3=xn-3+a1yn-4 ⇒ yn=xn+a1xn-1+a12xn-2+a1
3xn-3+a14yn-4
En poursuivant le procédé à l'infini yn ne dépend plus que des xn-i mais dans une expression comportant
à priori une infinité de termes.
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
3
Nous pouvons appliquer ceci à tout système en exprimant les yn-m pour m≠0 grâce à l’équation
récurrente elle-même ce qui amènera à une équation non récurrente. La relation d’entrée-sortie du système a
donc une forme récursive déjà évoquée et aussi une forme non récursive :
∑ −=i
inin xhy
Les {hi} sont les coefficients de cette forme. Ils sont appelés aussi séquence de pondération du système
et sont étroitement liés aux {bk} et {am}. Comme nous l'établirons par la suite ils ont pour le système une
signification particulière puisqu’ils sont les échantillons de sa réponse impulsionnelle.
II.3. Invariance temporelle.
L’invariance temporelle (ou invariance par translation) est liée à la propriété du système d’avoir une
relation entrée-sortie indépendante du temps :
y(t) = f[x(t)] ⇒ y(t-τ) = f[x(t-τ)] ∀ τ ∈ R
Pour un système linéaire, cela implique que les coefficients {hi}, {bk} et {am} sont indépendants du
temps.
II.4. Causalité :
La cause précède la conséquence. Pour un système causal, les équations récurrentes auront donc
nécessairement la forme :
∑∑+∞
=−
+∞
=− =
0kknk
0mmnm xbya ∑
+∞
=−=
0iinin xhy
La causalité permet de calculer immédiatement à un instant t = nTs la valeur yn de la sortie du système
puisque toutes les données nécessaires sont connues. Ce n’est pas le cas pour un système non causal puisque
celui-ci nécessite la connaissance de l’entrée du système à des instants suivant celui où on opère.
Ces notions sont souvent associées à celle de temps réel :
Système causal ⇒ temps réel Système non causal ⇒ temps différé
III. ANALYSE TEMPORELLE
III.1. Opérateur retard :
La réponse temporelle d’un système est connue si nous sommes capables de calculer ses échantillons
{yn} en temps réel ou différé. Ceci est donc directement lié à la connaissance de l’équation récurrente sous l’une
de ses formes. Ces formes peuvent être simplifiées mathématiquement en utilisant l’opérateur retard temporel
défini par : q-1x(t) = x(t-Ts) ou d’une manière plus générale q-d x(t) = x(t-dTs). Ces relations sont étendues aux
échantillons du signal soit : q-1xn = xn-1 et q-rxn = xn-r et permettent de formaliser les équations récurrentes en
faisant intervenir des opérateurs fonctions de q-1.
∑∑ −− =k
nk
km
nm
m xqbyqa ∑ −=i
ni
in xqhy

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
4
)t(x)q(B)t(y)q(A
)t(xqb)t(yqa
11
k
kk
m
mm
−−
−−
=
=
∑∑
)t(x)q(H)t(y
)t(xqh)t(y
1
i
ii
−
−
=
= ∑
III.2. Réponse impulsionnelle :
Elle correspond à une entrée x(t) = δ(t) => x0 = 1, xk≠0 = 0.
En utilisant la forme non récursive n = i ⇒ yn = hn
Les échantillons de la réponse impulsionnelle sont les coefficients de l’équation récurrente du
système mise sous forme non récursive.
La réponse impulsionnelle est donc une caractéristique du système et cela permet de les classer en
deux catégories :
• Filtres à réponse impulsionnelle finie : filtres RIF.
La suite {hi} comporte un nombre fini : ∑=
−=max
miniinin xhy
• Filtres à réponse impulsionnelle infinie : filtres RII. La suite {hi} comporte un nombre infini d’échantillons
hi ⇒ au moins l’une des bornes min ou max est infinie (le plus souvent min = 0 et max = +∞).
III.3. Convolution discrète :
La relation entrée-sortie ∑ −=i
inin xhy provient du produit de convolution. En effet un système est
caractérisé par sa réponse impulsionnelle h(t) et nous pouvons écrire :
)t()t(h)t(h δ⊗=
Pour une excitation quelconque : ∑+∞
−∞==−δ=
msm )mTt(x)t(x
Le système étant linéaire et invariant la réponse à x(t) peut s'écrire :
)t(x)t(h)mTt(x)t(h)mTt( x)t(h)nTt(y)t(ym
s mm
smn
sn ⊗=−δ⊗=−δ⊗=−δ= ∑∑∑+∞
−∞=
Nous retrouvons un résultat caractéristique des systèmes linéaires invariants: la sortie y(t) est le produit
de convolution de la réponse impulsionnelle h(t) par l’entrée x(t). L’équation qui permet de calculer les
échantillons du signal de sortie est ∑ −=i
inin xhy et constitue la convolution discrète étudiée lors des propriétés
de la transformée en Z.
En résumé :
Cas général des SLI continus ou discrets: ce sont des systèmes dits de convolution ⇒ le calcul de la
sortie y(t) se fait par un produit de convolution.
Cas particulier des SLI discrets : le calcul des échantillons {yn} de y(t) se fait par le produit de
convolution discret.

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
5
IV. UTILISATION DE LA TRANSFORMEE EN Z: FONCTION DE TRANSFERT
IV.1. Résolution des équations aux différences:
Forme en z -1
Elle est obtenue par utilisation de l’outil transformée en Z sur les équations récurrentes décrites avec
l’opérateur retard.
Exemple simple:
Pour illustrer la démarche prenons l'exemple de:
yn = xn+ a1 yn-1
En utilisant l'opérateur retard: y(t) - a1q-1y(t) = x(t)
Puis la transformée en Z: Y(z) - a1 [ z-1Y(z) + y(-1) ] = X(z) ce qui fait intervenir la
condition initiale y(-1).
En arrangeant les termes: )z(A
)z(CI )z(X )z(A
)z(B za 1
)1(y a )z(X
za 11 )z(Y 1
1
1
1
11
11
1−
−
−
−
−− +=−
−+−
=
La méthode générale est identique:
équation récurrente en q-1: )t(xqb)t(yqak
kk
m
mm
=
∑∑ −−
transformation en Z : )z(Xzb)z(CI)z(Yzak
kk
initialesconditions
1
m
mm
TZ
=−
⇒ ∑∑ −−−
321
4342143421libreRégime
1
1
forcéRégime
1
1
)z(A
)z(CI)z(X)z(A
)z(B)z(Y −
−
−
−+=⇒
Par convention, les coefficients sont normalisés par le coefficient a0 donc a0 = 1. Cette forme est
directement liée aux équations récurrentes et on passe aisément de l'un à l'autre en faisant la correspondance
q-1 ↔ z-1 en absence de conditions initiales.
Forme en z :
Pour étudier les signaux avec la transformée en Z, il est nécessaire de passer à une forme polynomiale
en z et non en z-1.
En reprenant l'exemple : a z
)1(y z a )z(X
a zz )z(Y
1
1
1 −−
+−=
Soit, dans le cas général : 32143421libreRégimeforcéRégime
)z(A)z(IC )z(X
)z(A )z(B)z(Y +=

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
6
Il y a un lien évident entre )z(B 1− et )z(B ainsi qu'entre )z(A 1− et )z(A . Bon nombre d'auteurs utilisent une
simplification d'écriture commode en écrivant )z(B au lieu de )z(B et )z(A au lieu de )z(A . D'un point de vue
strictement mathématique B(z) et A(z) ne sont bien sûr pas déduits de B(z-1) et A(z-1) par le simple changement
de z-1 en z et la notation est donc l'objet de confusions pour des néophytes. Pour passer d'une forme à l'autre il
faut utiliser la relation B(z)/A(z)=B(z-1)/A(z-1). Nous utiliserons cette pratique et il faudra ainsi interpréter les
choses comme A(z) ≡ forme en z du numérateur et A(z-1) ≡ forme en z-1 du numérateur. Il en sera de même
pour B(z) et B(z-1)
La forme en z est la seule à prendre en compte pour utiliser la transformée en Z et définir les pôles et les
zéros du système.
Régime libre , régime forcé :
Dans la solution temporelle, la transformée en Z fait apparaître 2 termes qui se superposent (propriété des
systèmes linéaires) l'un dépendant des conditions initiales du problème et l'autre de l'excitation x(t) du système.
Le régime libre est la partie de la solution qui ne dépend que des conditions initiales. La transformée en Z
du régime libre a comme pôles les racines de DH(z) soit les pôles du système. Les modes associés ne
dépendront donc que de la nature du système étudié.
Le régime forcé est la partie de la solution faisant intervenir l'excitation. La transformée en Z de cette
fraction de solution a deux types de pôles:
• Ceux provenant des racines de A(z) = pôles du système.
• Ceux provenant des racines de Dx(z) dénominateur de X(z) = pôles de l'excitation.
Le régime forcé est une caractéristique du système s'il n'y a pas de pôles de l'excitation soit, cas le plus
simple, X(z)=1 ⇒ x(t)=δ(t). C'est la réponse impulsionnelle.
Régime transitoire, Régime permanent :
Dans de nombreux cas, les pôles de l'excitation sont différents de ceux du système et le régime forcé
pourra alors se séparer en deux termes: régime transitoire et régime permanent.
A l'intérieur du régime forcé, il y a des modes qui proviennent des pôles du système : ils constituent le
régime transitoire.
Il y a des modes qui proviennent des pôles de l'excitation x(t) : ils forment le régime permanent.
IV.2. Fonction de transfert:
La fonction de transfert H(z) est définie avec conditions initiales nulles:
32143421
libreRégimeforcéRégime
)z(A)z(CI)z(X)z(H)z(Y
)z(A)z(B)z(H +=⇒=
En utilisant l'expression non récursive de l'équation aux différences sans conditions initiales:
)t(xqh)t(yi
ii
= ∑ − )z(Xzh)z(Y
i
ii
TZ
=⇒ ∑ −

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
7
La fonction de transfert prend donc deux formes principales:
==
=
∑
∑∑
−
−
−
−−−
m
mm
k
kk
1
1
i
ii
1
za
zb
)z(A
)z(Bzh)z(H
Si x(t)=δ(t) ⇒ X(z)=1 ⇒ Y(z)=H(z).
Avec la même discussion que sur B et A on utilisera indifféremment une notation H(z-1) ou H(z).
La fonction de transfert H(z) est la TZ de la répon se impulsionnelle du système avec conditions
initiales nulles.
remarque :
Au premier abord, la connaissance de la fonction de transfert ne permet d'obtenir que le régime forcé
mais comme elle permet de remonter à l'équation récurrente par la démarche inverse de celle adoptée pour
l'établir, elle nous permet aussi d'atteindre le régime libre.
exemple:
1-z a11)z(H
−= → équation récurrente: y(t) – a y(t-1) = x(t)
→ TZ: Y(z) - a [z-1 Y(z) ) + y(-1) ] = X(z)
→ régime libre: a z
)1(y z a )z(Y −
−=
V. INVERSION DE LA TRANSFORMEE EN Z ANALYSE TEMPORELLE - MODES
Dans ce paragraphe, nous nous contentons de rappeler les techniques établies dans tout cours d'étude
de la transformée en Z..
Pour les SLI les fonctions étudiées se mettent sous forme d'un rationnel de polynômes:
D(z)N(z)
)z(X =
et nous n'étudierons que ce cas correspondant à 99,9% des applications en ingénierie.
La transformée en Z utilisée est la transformée monolatérale qui ne fournit que la partie causale d’un
signal soit t ≥ 0).
4342143421causalepartie
0k
kk
eanticausalpartie
1
k
kk
k
kk zxzxzx)z(X ∑∑∑
+∞
=
−−
−∞=
−+∞
−∞=
− +==

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
8
V.1. Division selon les puissances de z -1 :
Si X(z) est une fraction rationnelle de deux polynômes en z, il suffit de la mettre sous forme d’une
fraction rationnelle de deux polynômes en z-1 et d’effectuer la division ce qui nous donne les échantillons par
identification avec la définition de la TZ.
∑+∞
=
−==0k
kk zx)z(X)]t(x[TZ
21
1
11
1
abzz)ba(1z
)bz1)(az1(z)z(X
)bz)(az(z)z(X −−
−
−−
−
++−=
−−=⇒−−=
z-1 1-(a+b) z-1+ab z-2
0+(a+b) z-2-ab z-3
0-abz-3+(a+b)2z-3-ab(a+b)z-4 z-1+(a+b)z-2+(a2+ab+b2)z-3+…..
=>x0 = 0 x1 = 1 x2 = a+b x3 = a2 + ab + b2 ………..
Nous ressortons ainsi la valeur de chaque échantillon sans faire apparaître une expression analytique
générale. C’est une méthode qui est plus intéressante avec des expressions à coefficients numériques, les
coefficients
V.2. Résolution de l’équation aux différences :
)z(Nzx)z(D)z(D
)z(Nzx)z(X 1
0k
kk
11
1
0k
kk
−+∞
=
−−−
−+∞
=
− =⇒== ∑∑
Les coefficients des polynômes D et N sont connus et on retrouve les xk en identifiant les deux
membres :
( ) 1
0k
kk
21
21
1
11
1
zzxabzz)ba(1
abzz)ba(1z
)bz1)(az1(z)z(X
)bz)(az(z)z(X
−∞+
=
−−−
−−
−
−−
−
=++−
++−=
−−=⇒−−=
∑
termes de degré 0 => x0=0
termes de degré 1 => -(a+b)x0+x1 =1 => x1=1
termes de degré 2 => abx0-(a+b)x1+x2 =0 => x2=a+b
termes de degré 3 => abx1-(a+b)x2+x3 =0 => x3=(a+b)2-ab
Cette méthode peut être intéressante dans des cas simples mais se trouve elle aussi vite limitée dans
son application.
V.3. Décomposition en éléments simples:
Le passage de X(z) = TZ[x(t)] à x(t) peut se faire à partir des éléments de base contenus dans les
tables: décomposition en éléments simples.

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
9
Pôles, zéros:
L'élément de base de la méthode est: ∑+∞
=α=
α−=α
0k
k-k z z
z ][TZ sTt
avec α complexe.
La fonction X(z) est sous forme polynomiale: )z(D)z(N
)z(X = . Nous pouvons définir:
• les pôles zi tels que D(z)=0. C'est l'équation caractéristique associée à X(z). Cela permet d'écrire:
∏ −=i
i1 )zz(K)z(D .
• les zéros zk tels que N(z)=0. Cela permet d'écrire: ∏ −=k
k2 )zz(K)z(N .
• la forme pôles et zéros de X(z): ∏∏
−
−=
ii
kk
)zz(
)zz(
K)z(X
Décomposition, modes:
Si le degré de N(z) est inférieur ou égal à celui de D(z) nous pouvons écrire dans le cas où tous les
pôles sont simples:
∑ −=
i i
izzz C
)z(X décomposition en éléments simples de X(z).
Le calcul de Ci se fait par ( )izz
ii z)z(X
zzC=
−=
L'inversion sera telle que: ∑=i
emod
kik
iz Cx321
Chaque terme de la somme est un mode de X(z).
Exemple: [ ] ba ba
1 x )bz(
z )az(
z ba
1 )z(X )bz( )az(
z )z(X kkk −
−=⇒
−
−−−
=⇒−−
=
Pôles simples réels: z i est réel.
Le mode associé est donc une simple puissance zik décroissante si |zi| <1 ou croissante si |zi| >1.
Pôles simples complexes: z i est complexe.
Si zi est complexe et si les coefficients des polynômes N(z) et D(z) sont réels (cas des problèmes
correspondant à la réalité), iz est aussi pôle du système et le coefficient de décomposition en éléments simples
associé sera iC .
Dans la solution temporelle apparaîtrons les termes:
......zCzC......x kii
kiik +++=
.
en posant siTjii ezz ω= et ij
ii eCC ϕ=
il vient: ( ) ( )[ ]
...)kTcos(zC2......
....eeCeeCz......x
isik
ii
jkTji
jkTji
kik
isiisi
+ϕ+ω+=
+++= ϕ−ω−ϕω

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
10
les deux pôles complexes conjugués correspondent à un mode sinusoïdal amorti si |zi| < 1 ou divergent
si |zi| > 1.
Pôles multiples:
Dans l'équation caractéristique D(z) = 0, il se peut que zi soit une racine multiple d'ordre m.
⇒ D(z) = (…….).(z-zi)m.(…….).
Dans ce cas la décomposition en éléments simples est un peu plus délicate :
( ) ( )...
zz
z C ...
zz
z C
zz
z C ... )z(X
mi
m,i2
i
2,i
i
1,i +−
++−
+−
+=
Le calcul des coefficients Ci,q est réalisable en prenant des cas particuliers (z = 0, z → ∞,…) mais cette
méthode est vite limitée et ne s'applique véritablement bien que pour m = 2. Pour une multiplicité plus grande il
y a une formulation générale que nous ne justifirons pas ici:
( )izz
miqm
qmq,i z
)z(Xzz
dpd
)!qm(1C
=−
−
−−=
Nous vérifions aisément que pour q = m : ( )izz
miq,i z
)z(XzzC
=
−=
de même que pour une multiplicité m = 1 : ( )izz
ii z)z(X
zzC=
−=
l'exemple simple: g(t) = t.x(t) et x(t) = zit/Ts avec zi réel.
xk = zik et gk = kTs zi
k.
izzz )z(X−
= et, en appliquant le théorème de la dérivation 2
i
si
is
)zz(
T z z
zzz
dzd Tz )z(G
−=
−−=
Utilisons ce résultat:
Un pôle zi de multiplicité 2 correspond aux échantillons (à quelques coefficients près) : (k.zik).
Le mode correspondant est donc une puissance zik multipliée par un temps échantillonné k. La
croissance comparée des deux fonctions pour k→ +∞ donne priorité à zik (pour |zi| ≠ 1) et nous retrouvons ainsi
en partie le cas d'un pôle simple:
• si |zi| < 1 ⇒ mode amorti.
• si |zi| > 1 ⇒ mode divergent.
• si |zi| = 1 ⇒ ce qui était un mode borné dans le cas du pôle simple devient un mode divergent
d'amplitude donnée par k.
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
11
Généralisation:
Le calcul précédent peut être généralisé à un pôle zi de multiplicité m quelconque. Sans détailler, nous
pouvons rapidement retracer les grandes lignes du raisonnement:
( ) ( ) ( ) ( )........
zz
z C .......
zz
z C
zz
z C ...
....zz.......
(..) )z(X
mi
m,i2
i
2,i
i
1,im
i
+−
++−
+−
+=−
=
Ceci donne comme échantillons:
xk =…….+ (.) zik + (.) k. zi
k +……..+ (.) km-1 zik +…………
xk =…….+[(.) + (.) k. +……..+ (.) km-1 ] zik +…………
où (.) désigne des coefficients à calculer.
Si nous appelons mode associé au pôle de multiplicité m le terme:
[(.) + (.) k. +……..+ (.) km-1 ] zik = Pm-1(k). zi
k
il est constitué du produit d'un polynôme en k (Pm-1(k)) d'ordre (m-1) par la puissance zik.
Pour les limites asymptotiques lorsque k→ +∞ nous aurons les trois points suivants:
• si |zi| < 1 ⇒ mode amorti.
• si |zi| > 1 ⇒ mode divergent.
• si |zi| = 1 ⇒ ce qui était un mode borné dans le cas du pôle simple devient un mode divergent
d'amplitude bornée par Pm-1(k) équivalent à km-1 lorsque k→ +∞.
V.4. Méthode des résidus :
Méthode de calcul beaucoup plus puissante que la décomposition en éléments simples. Elle permet de
calculer en 1 seule fois l'ensemble du mode associé à un pôle multiple. D'un point de vue pratique elle
nécessite des calculs qui sont toujours plus simples que ceux impliqués par la décomposition en éléments
simples et elle dispense de l'apprentissage fastidieux de résultats tabulés. C'est donc une méthode a utiliser de
préférence lorsque nous sommes obligés de faire nous même le calcul à la main.
Basée sur la méthode des résidus, il est établi que :
[ ] [ ]i
)1m(
)1m(
i zz
midz
d)!1m(
1zz )z(F)zz()z(FRésidu
=−=
−= −
−
⇒ [ ]∑−
−
−
=
−−
−=
)z(Xzpôles/ zz
1nmidz
d)!1m(
1n
1n i
)1m(
)1m(
)z(Xz)zz(x
Le résidu par rapport à un pôle de la fonction zn-1X(z) fournit le mode associé à ce pôle.
Toujours se simplifier le travail : Les points singuliers intervenant dans le calcul des résidus peuvent
être de deux origines : les pôles de X(z) et éventuellement des pôles à l’origine provenant du terme en zn-1 si
celui-ci n’a pas été simplifié par X(z).

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
12
exemple: )bz)(az(
1)z(X −−= avec a et b réels. )bz)(az(
z)z(Xz1n1n−−
=−−
pour n>0 deux pôles simples z1=a et z2=b ⇒ deux résidus à calculer.
résidu en z = a: )ba(
a 1n
−−
résidu en z = b: )ab(
b 1n
−−
⇒ solution pour n ≥ 1: )ba(
ba)ab(
b)ba(
ax1n1n1n1n
n −−=
−+
−=
−−−−
pour n = 0 trois pôles simples z1 = a et z2 = b et z3 = 0 ⇒ trois résidus à calculer.
résidu en z = a: )ba(a
1−
résidu en z = b: )ab(b
1−
résidu en z = 0: ba
1
⇒ solution pour n = 0: 0ba
1)ab(b
1)ba(a
1x0 =+−
+−
=
Une simple remarque permet d'éviter les états d'âme et de savoir quels sont les termes qu'il est utile de
calculer.
Repartons de l'hypothèse où X(z) est sous forme rationnel polynomial :
∑
∑
=
===b
b
n
0i
ii
n
0k
kk
z a
z b
)z(D)z(N
)z(X na et nb sont respectivement les degrés du dénominateur et du numérateur.
Nous pouvons nous ramener à une forme en z-1 en factorisant znb au numérateur et zna au
dénominateur :
∑
∑
∑
∑
∑
∑
∑
∑
=
−
=
−
−
=
−
=
−
=
−
=
−
=
= =====b
a
bb
ab
1-
ba
bb
a
b
baa
bbb
b
b
n
0i
nii
n
0k
nkk
)nn(
)F(z
n
0i
nii
n
0k
nkk
n
n
n
0i
nii
n
n
0k
nkk
n
n
0i
ii
n
0k
kk
z a
z b
z
z a
z b
zz
z a z
z b z
z a
z b
)z(D)z(N
)z(X
44 344 21
Nous faisons ainsi apparaître une fonction en z-1 : F(z-1) dont il est théoriquement aisé de calculer
l'original en utilisant la division polynomiale. Ceci nous permet d'affirmer que F(z-1) est de la forme :
∑+∞
=
− =0n
n-n
1 z f )z(F et il est immédiat de voir que f0 = b0/a0 et nous savons calculer les autres coefficients mais
nous allons bien nous en garder compte tenu des remarques faites sur la méthode de la division polynomiale.
Quelles en sont les conséquences sur le calcul d'inversion de X(z) ? Trois cas sont possibles :
1. numérateur et dénominateur de même degré en z : na = nb . X(z) = F(z-1) ⇒ xn = fn et nous devons
calculer tous les termes donc tous les résidus pour n ∈[ 0 ; +∞ ].
2. numérateur de degré inférieur à celui du dénominateur : nb < na. Nous pouvons poser na-nb = d et : X(z)
= z-d F(z-1). Cette expression indique que x(t) est un signal presque identique à f(t) mais retardé de d
périodes d'échantillonnage ⇒ le premier échantillon non nul de x(t) sera donc

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
13
xd = f0. En utilisant la méthode des résidus sur X(z), nous n'avons besoin de calculer les résidus que
pour n ∈[ d ; +∞ ], ceux pour n < d donnant des échantillons nuls.
3. numérateur de degré supérieur à celui du dénominateur : nb > na. Nous pouvons poser nb-na = c et :
X(z) = zc F(z-1). Cette expression indique que x(t) est un signal presque identique à f(t) mais avancé de
c périodes d'échantillonnage ⇒ le premier échantillon non nul de x(t) sera donc
x0 = fd. En utilisant la méthode des résidus sur X(z) nous devrons donc calculer tous les termes pour n
∈[ 0 ; +∞ ]. Ici n'apparaît pas de simplification de calcul.
Ce qui est intéressant dans la pratique, ce sont surtout les cas 1 et 2 (le cas 1 n'étant que le 2 avec d=0
) qui permettent de savoir à priori le nombre d'échantillons nuls et donc inutiles à calculer ainsi que la valeur du
premier échantillon non nul xd = f0 = b0/a0 ce qui fournit une vérification possible pour les calculs effectués.
En reprenant l'exemple précédent : )bz)(az(
z)z(X−−
=
soit d = 1 ⇒ x0 = 0 et x1 = 1 ⇒ il était inutile de calculer x0 et nous vérifions bien que dans la
solution xn>0 nous obtenons x1 = 1 donc à priori pas d'erreur de calcul.
VI. MODES ET POLES
Dans l'étude de l'inversion de la transformée en Z soit X(z) → {xk} deux grandes méthodes s'associent à
la notion de "modes": la décomposition en éléments simples et la méthode des résidus. Ces deux méthodes
sont rigoureusement équivalentes et décomposent le problème en séparant les différents termes liés aux pôles
de X(z).
VI.1. Cas de pôles simples:
Il y a deux raisons essentielles pour s'intéresser au cas particulier d'une fonction en z n'ayant que des
pôles simples: c'est un cas simple à analyser et c'est, pratiquement, le cas le plus fréquent.
Dans le cas de pôles simples, nous avons établi le résultat général suivant: un pôle simple zi dans
l'expression de X(z) introduira un terme en (zi)k dans la réponse temporelle. Ce terme est appelé un "mode".
Cette notion est légèrement modifiée:
• zi réel: le mode est bien en (zi)k
• zi complexe: zi = |zi| ejωTs. On associe dans l'expression temporelle, le terme provenant du pôle
complexe conjugué. Le résultat donne un terme du type |zi|k cos(ωkTs+ϕ) qui est appelé un mode
oscillant (c'est en réalité la superposition de deux modes associés à deux pôles complexes conjugués).
première conséquence:
Pour un pôle simple donné, le mode temporel correspondant peut avoir trois comportements:
• il est amorti et tend asymptotiquement vers 0 lorsque k→+∞. C'est le cas si |zi| < 1 ⇒ le ou les pôles
étudiés sont à l'intérieur d'un cercle de rayon 1 : le cercle unité. L'amortissement sera d'autant plus lent
que le ou les pôles seront voisins du cercle unité.

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
14
• il est divergent et tend asymptotiquement vers une limite non bornée lorsque k→+∞. C'est le cas si |zi| >
1 ⇒ le ou les pôles étudiés sont à l'extérieur du cercle unité. La divergence sera d'autant plus lente que
le ou les pôles seront voisins du cercle unité.
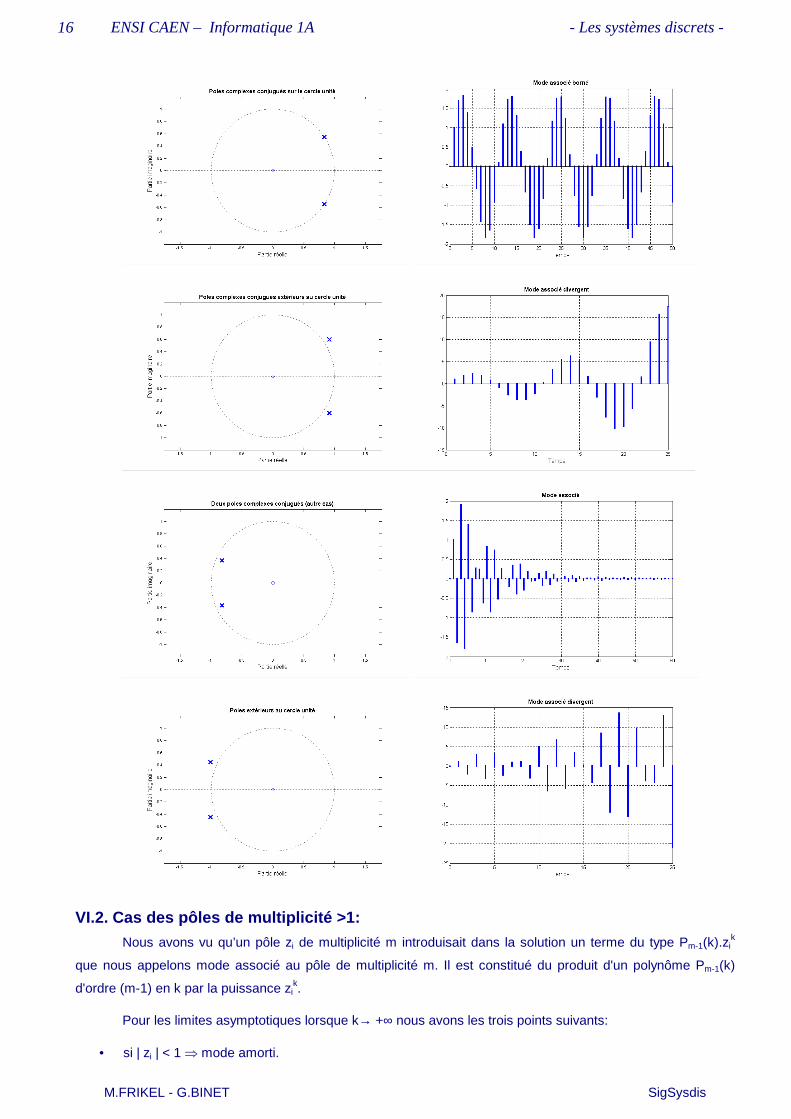
• il n'est ni convergent ni divergent et son amplitude reste bornée à une valeur non nulle lorsque k→+∞.
C'est le cas si |zi| = 1 ⇒ le ou les pôles étudiés sont sur le cercle unité.
Ces résultats sont rappelés dans des cas simples par les figures ci-dessous. Lorsque les modes se
superposent dans une expression temporelle, ils sont affectés de coefficients plus ou moins grands qui
dépendent des zéros de la fraction X(z).

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
15
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
16
VI.2. Cas des pôles de multiplicité >1:
Nous avons vu qu’un pôle zi de multiplicité m introduisait dans la solution un terme du type Pm-1(k).zik
que nous appelons mode associé au pôle de multiplicité m. Il est constitué du produit d'un polynôme Pm-1(k)
d'ordre (m-1) en k par la puissance zik.
Pour les limites asymptotiques lorsque k→ +∞ nous avons les trois points suivants:
• si | zi | < 1 ⇒ mode amorti.
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
17
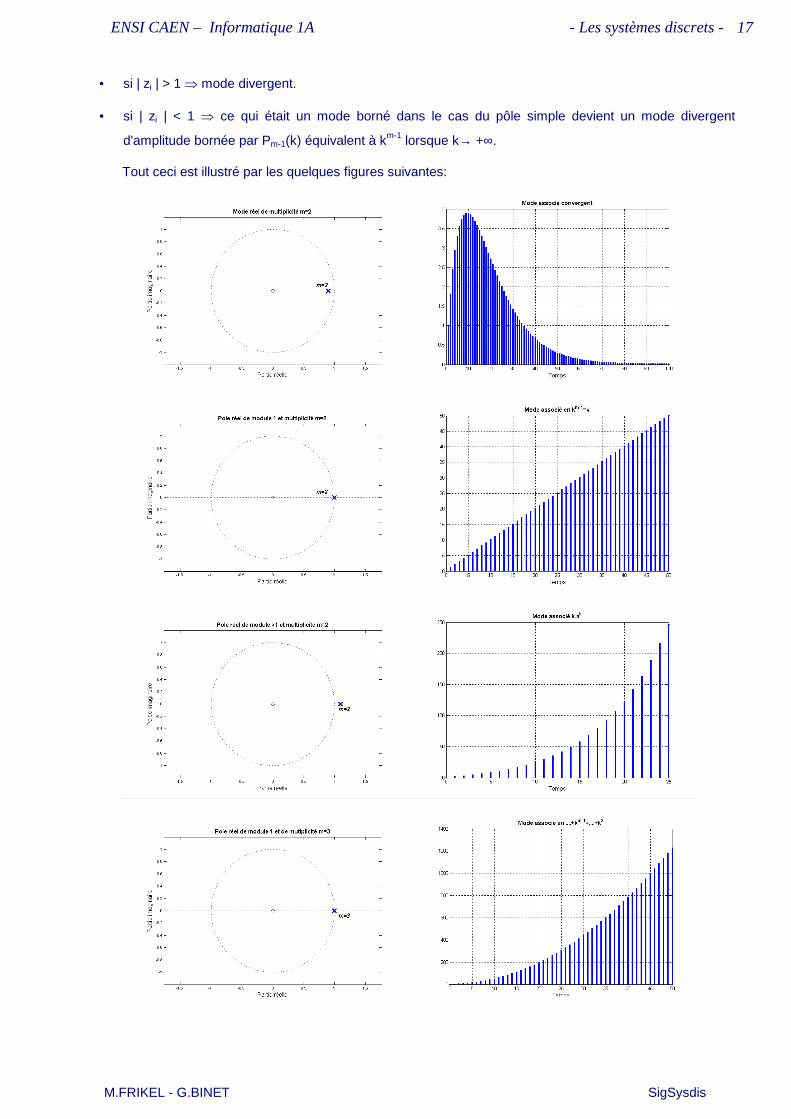
• si | zi | > 1 ⇒ mode divergent.
• si | zi | < 1 ⇒ ce qui était un mode borné dans le cas du pôle simple devient un mode divergent
d'amplitude bornée par Pm-1(k) équivalent à km-1 lorsque k→ +∞.
Tout ceci est illustré par les quelques figures suivantes:

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
18
VI.3. Stabilité :
Lors de l'étude de l'inversion de la TZ nous avons établi qu'il existe une représentation par pôles et
zéros telle que:
Zéros du système ≡ Racines du numérateur N(z)=0 → {zk}.
Pôles du système ≡ Racines du dénominateur D(z)=0 → {zi}.
∏∏
−
−=
ii
kk
)zz(
)zz(K)z(H
A un pôle zi simple ou multiple nous pouvons associer un mode qui diverge si |zi|>1 et converge si
|zi|<1.
Pour un pôle complexe, on lui associe son complexe conjugué ce qui fait apparaître un mode oscillant
amorti ou divergent selon la valeur de |zi|.
ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
19
La réponse impulsionnelle ou une réponse libre sont caractéristiques du système. Dans ces réponses
nous avons la superposition de tous les modes du système associés à ses pôles. Pour que le système soit
stable, il faut que tous ses modes le soient et donc que tous les pôles du système soient situés à l'intérieur du
cercle unité.
Un système linéaire invariant discret est asymptoti quement stable lorsque tous les pôles de sa
fonction de transfert sont situés à l’intérieur du cercle unité du plan z.
Nous aurons les trois situations suivantes:
• Tous les pôles sont à l'intérieur du cercle unité: le système est dit strictement stable.
• Un ou plusieurs pôles de multiplicité simple sont situés sur le cercle unité : le système est à la limite de
stabilité ou stabilité au sens large.
• Un ou plusieurs pôles sont situés à l'extérieur du cercle unité: système instable.
Autre conséquence un filtre RIF a tous ses pôles à l’origine et sera donc toujours stable.
VI.4. Mode dominant - Mode auxiliaire:
Dans le cas de modes amortis, plusieurs modes peuvent se superposer dans l'expression temporelle. Il est
évident que lorsque k→+∞ le mode qui a tendance à subsister est celui qui est le moins amorti et nous le
qualifieront de dominant.
• lors de la comparaison de deux modes, on appellera mode dominant celui dont l'expression s'amortit le
plus lentement. L'autre sera qualifié de mode auxiliaire.
• le mode dominant correspond donc à un ou des pôles plus proches du cercle unité que dans le cas d'un
mode auxiliaire. Par extension on parle aussi de pôle(s) dominant(s) et de pôle(s) auxiliaire(s).

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
20
VII. ANALYSE FREQUENTIELLE
L’analyse fréquentielle est liée à une des propriétés essentielles des SLI continus et discrets : ej2πft est
valeur propre du système.
VII.1. Justification :
x(τ)= ej2πfτ => y(τ)=f[ej2πfτ]
Le système étant invariant, pour une valeur de t fixée : x(t-τ)= ej2πf(t-τ) => y(t-τ)=f[ej2πf(t-τ)]
ej2πft est une constante vis à vis de τ et comme le système est linéaire :
y(t-τ)=f[ej2πf(t-τ)]= ej2πft f[e-j2πfτ]= ej2πfty(-τ) => ej2πft est valeur propre de la transformation. Ceci est vrai
quelque soit t et aussi pour la valeur particulière τ=0 :
=> y(t)= ej2πfty(0) lorsque x(t)= ej2πft
Lorsque l’entrée du SLI comporte une seule fréquence f la sortie ne comporte, elle aussi, que cette
fréquence. Nous pouvons donc étudier le comportement du système sur l’ensemble des fréquences f : analyse
harmonique, le signal d’entrée étant décomposé sur la base des ej2πft ce qui est le rôle de la transformation de
Fourier.
VII.2. Réponse harmonique :
C’est la réponse du système lorsque l’entrée ne comporte qu’une seule fréquence.
sssss
s
fnT2jfT2jfnT2jfiT2j
ii
T)in(f2j
iin
iinin
fmT2jm
e)e(Heehehyxhy
exππ−ππ−−π
−
π
=
==⇒
=
=∑∑
∑
Le signal de sortie est à la même fréquence que celui d’entrée. L’amplitude et la phase ont été
modifiées par le système par le facteur H(e-jωTs) qui est la transmittance du système ou sa fonction de transfert
isochrone. On vérifie aisément un second résultat du filtrage linéaire :
La transmittance est la transformée de Fourier de l a réponse impulsionnelle du système .
)e(Heh)]t(h[TF)iTt(h)t(h ss fT2jifT2j
iis
ii
ππ− ==−δ= ∑∑
Usuellement on sépare la transmittance sous la forme module-argument :
H(ej2πfTs)=A(f)ejϕ(f). Module A(f)=|H(ej2πfTs)| Phase ϕ(f)=Arg[H(ej2πfTs)].
Ces grandeurs peuvent être représentées sur les diagrammes habituels de Bode, de Nyquist,
etc….Cependant il y a une différence essentielle avec le continu due au fait que h(t) est un signal discret et sa
transformée de Fourier H(e-j2πfTs) est donc périodique. Pour les diagrammes de représentation fréquentielle,
nous nous contentons de la représenter dans la bande de fréquences de Shannon [-1/2,1/2] ou plutôt [0,1] en
fréquences normalisées ceci impliquant une échelle de fréquences linéaire plutôt que logarithmique.
Le lien avec la transformée en Z est immédiat : H(z=ej2πfTs)

ENSI CAEN – Informatique 1A - Les systèmes discrets -
M.FRIKEL - G.BINET SigSysdis
21
A partir de la transmittance nous pouvons retrouver les échantillons temporels de la réponse
impulsionnelle du système en appliquant le résultat général des signaux discrets :
dfe)e(HTdfe)e(Hf1h
)T/1(fiT2jfT2j
s)f(fiT2jfT2j
si
s
ss
s
ss ∫∫ππππ ==
VII.3. Analyse sommaire :
Elle utilise la forme pôles et zéros du
système et permet une analyse rapide, souvent
qualitative des caractéristiques du système. On
reprend l’analogie entre les complexes et leur
représentation géométrique vectorielle.
Dans le plan complexe on associe :
• z → vecteur OM .
• z=ejωTs ⇒ M sur le cercle unité
• Zéro αi -> vecteur iOZ
• (z-αi) -> vecteur MZi
• pôle βj -> vecteur jOP
• (z-βj) -> vecteur MPj
∏∏
β−
α−= π
π
π
jj
fT2ji
ifT2j
fT2j
)e(
)e(K)e(H
s
s
s => ∑∑∏∏
−=ϕ==π
jj
ii
jj
ii
fT2j )MP,Ox()MZ,Ox()f(MP
MZK)f(A)e(H s
De l’expression du module nous tirons les remarques suivantes :
• un zéro ou un pôle à l’origine n’influent pas sur le module de la réponse fréquentielle.
• Un zéro sur le cercle unité introduit une annulation du module pour la fréquence correspondant à iOZ
• Un zéro au voisinage du cercle unité introduit une atténuation dans le module de la réponse en fréquence. Atténuation d’autant plus importante que le zéro est proche du cercle unité.
• Un pôle sur le cercle unité introduit une résonance infinie dans le module de la réponse en fréquence
pour la fréquence correspondant à jOP .
• Un pôle au voisinage du cercle unité introduit une résonance d’autant plus importante dans le module de la réponse en fréquence que le pôle est proche du cercle unité.
A partir de ces remarques, dans le cas d’un nombre faible de pôles et zéros, nous aurons une idée des
atténuations ou des résonances introduites par un système. On peut aussi avoir une idée de son comportement
général : passe-bas, passe-haut ou passe-bande. Elles peuvent aussi être utilisées pour mener à bien une
synthèse sommaire des filtres.
y
x
M
Zi
Pj
O
ωTs
ω=0
ω=π/Ts