lei fundamental
TRANSCRIPT

ENGRENAGENS
I – INTRODUÇÃO
Denomina-se engrenagem, o par de duas rodas dentadas que
trabalham acopladas para transmissão de movimento e torque entre
dois eixos. Na prática, o termo “engrenagem” é também empregado
com sinônimo de “roda dentada”.
A roda dentada menor denomina-se “Pinhão”.
A roda dentada maior denomina-se simplesmente roda. No caso
de engrenagem não cilíndrica, a roda dentada maior denomina-se
“Coroa”.
CLASSIFICAÇÃO GERAL DAS ENGRENAGENS
Para atender as necessidades da indústria mecânica foram
desenvolvidos diversos t ipos de engrenagens que podem ser
classif icadas sob diferentes critér ios. O critério mais uti l izado é o que
se apresenta a seguir:
1º - ENGRENAGENS CILÍNDRICAS
Sabe-se que as superfícies ci líndricas são obtidas pela
rotação de uma reta geratriz convenientemente em torno de um eixo.
Colocando-se dois ci l indros em contato, segundo uma l inha
geratriz comum aos dois ci l indros, pode-se obter transmissão de
movimento circular, por atrito, de um cil indro para o outro. Este é o
princípio básico de funcionamento das engrenagens ci l índricas.
01

Engrenagens cilíndricas são compostas por rodas dentadas
de corpo ci l índrico que são classif icadas de acordo com o formato dos
dentes em:
a) Engrenagens ci l índricas de dentes retos
• Dentes externos
• Dentes internos
As engrenagens cil índricas de dentes retos são empregadas
em larga escala na transmissão de movimento entre eixos paralelos.
São as de mais fácil estudo, fabricação e controle. Possuem alto
rendimento da ordem de 98-99% porém são ruidosas em velocidades
elevadas. Transmitem aos eixos de trabalho somente cargas radiais e
por isso necessitam de mancais para esforços apenas radiais.
As engrenagens cilíndricas de dentes retos internos são
empregadas quando o espaço disponível é restrito ou quando não se
quer expor os dentes da engrenagem, facil i tando com isso sua
proteção. Neste caso a rotação dos dois eixos do par de rodas tem o
mesmo sentido de rotação.
b) Engrenagens ci l índricas de dentes helicoidais
As engrenagens cil índricas de dentes helicoidais são
empregadas geralmente com eixos paralelos podendo, contudo, ser
uti l izadas com eixos reversos. São muito usadas quando cargas e/ou
velocidades de trabalho são elevadas. Transmitem empuxo axial ao
eixo de trabalho, porém, trabalham de modo mais suave e si lencioso
que as engrenagens de dentes retos. Por transmitirem aos eixos de
trabalho cargas radiais e axiais necessitam, por isso, de mancais para
esforços radiais e axiais simultâneos.
02

2º - ENGRENAGENS CÔNICAS
Sabe-se que as superfícies cônicas são obtidas pela
rotação de uma reta geratriz convenientemente em torno de um eixo.
Em se tratando de eixos concorrentes, colocando-se os dois
cones em contato, segundo uma l inha geratriz comum aos dois cones,
pode-se obter transmissão de movimento circular, por atrito, de um dos
cones para o outro. Este é o princípio básico de funcionamento das
engrenagens cônicas.
As engrenagens cônicas são, portanto, uti l izadas para na
transmissão de potência entre eixos concorrentes ou reversos. Este
conjunto de rodas dentadas exige grande precisão de montagem,
motivo pelo qual se uti l iza usualmente de mancais de rolamento.
As engrenagens cônicas são classif icadas de acordo com o
formato dos dentes em:
a) Engrenagens cônicas de dentes retos
As engrenagens cônicas de dentes retos são empregadas
na transmissão de movimento entre eixos concorrentes, porém não
devem ser empregadas em velocidades elevadas.
b) Engrenagens cônicas de dentes inclinados
As engrenagens cônicas de dentes inclinados são também
para transmissão de movimento entre eixos concorrentes podendo ser
empregadas em velocidades mais elevadas que as de dentes retos.
c) Engrenagens cônicas de dentes curvos
As engrenagens cônicas de dentes curvos são empregadas
na transmissão de movimento entre eixos concorrentes podendo ser
empregadas em velocidades bem mais elevadas que os outros t ipos.
03

3º - ENGRENAGENS HIPERBÓLICAS
As engrenagens hiperbólicas também conhecidas como
hipóides permitem a transmissão de movimento entre eixos reversos.
São projetadas para grandes variações de velocidade e
também desenvolvem grande capacidade de carga. Por estas
características são largamente empregadas na indústria
automobilística, em carros, caminhões e tratores.
4º - CREMALHEIRA
A cremalheira é um sistema de dentes dispostos em linha
reta e por isto pode ser considerada como um caso l imite de
engrenagem cilíndrica, quando o raio do ci l indro tende a um valor
infinitamente grande.
Transforma movimento de rotação em movimento de
translação reti líneo e tem sua importância não só pelo uso específico
como também o de forma básica para várias ferramentas empregadas
na usinagem de rodas dentadas.
5º - ENGRENAGENS: COROA - PARAFUSO SEM FIM
As engrenagens do t ipo coroa - parafuso sem fim
apresentam dois campos de aplicações importantes:
a) grandes reduções de velocidade na transmissão de
potência.
b) Controle preciso do movimento circular de algum
equipamento, como por exemplo a mesa rotativa de uma máquina
operatriz.
04

05

II – EVOLVENTE
Definição: A curva evolvente é gerada por um ponto de uma reta
que rola, sem deslizamento, sobre uma circunferência.
Na prática, sentido físico, a evolvente é a curva gerada por um
ponto de uma corda que se desenrola de um círculo.
EVOLVENTE Esquema de funcionamento
Sobre o ci l indro 1 está enrolada a extremidade de um fio e sobre
o cil indro 2 está enrolada a outra extremidade deste mesmo fio.
Girando-se o ci l indro 1, o ponto “P” do f io irá se desenrolando do
cil indro 2 e, após descrever uma trajetória reti l ínea, irá enrolar-se
sobre o cil indro superior.
Considerando-se que dois planos I e II girem respectivamente
com os ci l indros de centros O1 e O2, as projeções do ponto P sobre
estes dois distintos planos, durante seu deslocamento, serão duas
evolventes que terão em cada instante como ponto de tangência a
projeção de P. Estas duas evolventes são as curvas do perfi l dos
dentes das duas rodas dentadas de uma engrenagem.
06

A
r P
ρ P
P
C
B
r b
α P
O
y
x
1º - TERMINOLOGIA
βP
a) Circunferência de base: é aquela sobre a qual rola a reta
que contém o ponto geratriz da evolvente.
b) Raio de base rb: é o raio da circunferência de base.
c) Reta geratriz: é aquela que rola sobre a circunferência de
base e contém o ponto gerador P.
d) Raio vetor rp: é aquele que une o centro da circunferência
de base com um ponto genérico P da evolvente.
e) Ângulo de incidência αP: é aquele determinado pelo raio
vetor e o raio que passa pelo ponto de tangência da reta geratriz com
a circunferência de base.
f) Raio da evolvente ρP: é a distância entre o ponto de
tangência C da reta geratriz e o ponto gerador P na curva evolvente.
07

2º - PROPRIEDADES
a) Qualquer geratriz da evolvente é tangente ao círculo base.
b) O segmento da geratriz entre o ponto gerador P e o ponto
de tangência C é o raio da evolvente no ponto P.
c) A tangente à evolvente é normal à geratriz correspondente.
d) O arco AC é igual ao segmento de reta CP.
e) O raio da evolvente em A é nulo.
f) A direção da evolvente na origem é a do raio
correspondente do círculo de base.
3º - A FUNÇÃO EVOLVENTE “βP”
Do tr iângulo retângulo OPC tem-se que: cos αP = rb / rP
então: rb = rP cos αP (1)
Na f igura tem-se para os arcos: AB + BC = AC (2)
Pela geração da curva evolvente tem-se: AC = CP (3)
Substituindo-se (3) em (2) tem-se: AB + BC = CP
08

Dividindo-se ambos os membros por rb tem-se:
AB + BC = CP βP + αP = CP rb rb rb rb
Substituindo-se rP por (1)
βP + αP = CP como: CP = sen αP rP cos αP rP
então: βP + αP = tg αP
ou: βP = tg αP - αP
O angulo “βP” é chamado de “Função da Evolvente” e como
visto anteriormente é calculado em função de αP.
A função evolvente pode então ser tabelada sendo de
grande importância no estudo de engrenagens com perfi l de dente
evolvente.
O raio genérico da evolvente também pode ser calculado
em função de αP, conforme mostrado na seqüência:
Como ρ = CP e, pela f igura tgαP = CP rb
então: ρ = rb tgαP
09

I I I – CINEMÁTICA DO ENGRENAMENTO
1º - LEI FUNDAMENTAL DO ENGRENAMENTO
Para que o engrenamento seja perfeito, é necessário que:
• Não haja choque entre os dentes em contato
• A relação de transmissão permaneça constante durante
todo o percurso de engrenamento entre os dentes, isto é,
não pode ocorrer deslizamento entre as superfícies dos
f lancos dos dentes em contato.
10

As curvas que formam os perfis dos dentes deverão
obedecer a lei fundamental do engrenamento.
Ao observar-se a f igura, considere um dente da roda motora
(1) em contato com um dente de roda movida (2) no ponto P.
Estudando-se a velocidade periférica do ponto P como
pertencente a roda motora tem-se:
V1 = ω1 x O1P
Estudando-se agora a velocidade periférica do ponto P
como pertencente a roda movida tem-se:
V2 = ω2 x O2P
A projeção Vn dessas velocidades sobre a l inha normal às
superfícies em contato deverá ser igual pois se ocorrer:
Vn1 > Vn2 haverá penetração do dente da roda (1) em (2)
ou se ocorrer
Vn1 < Vn2 haverá afastamento do dente da roda (1) em (2)
As velocidades angulares das rodas são:
ω1 = V1/O1P e ω2 = V2/O2P
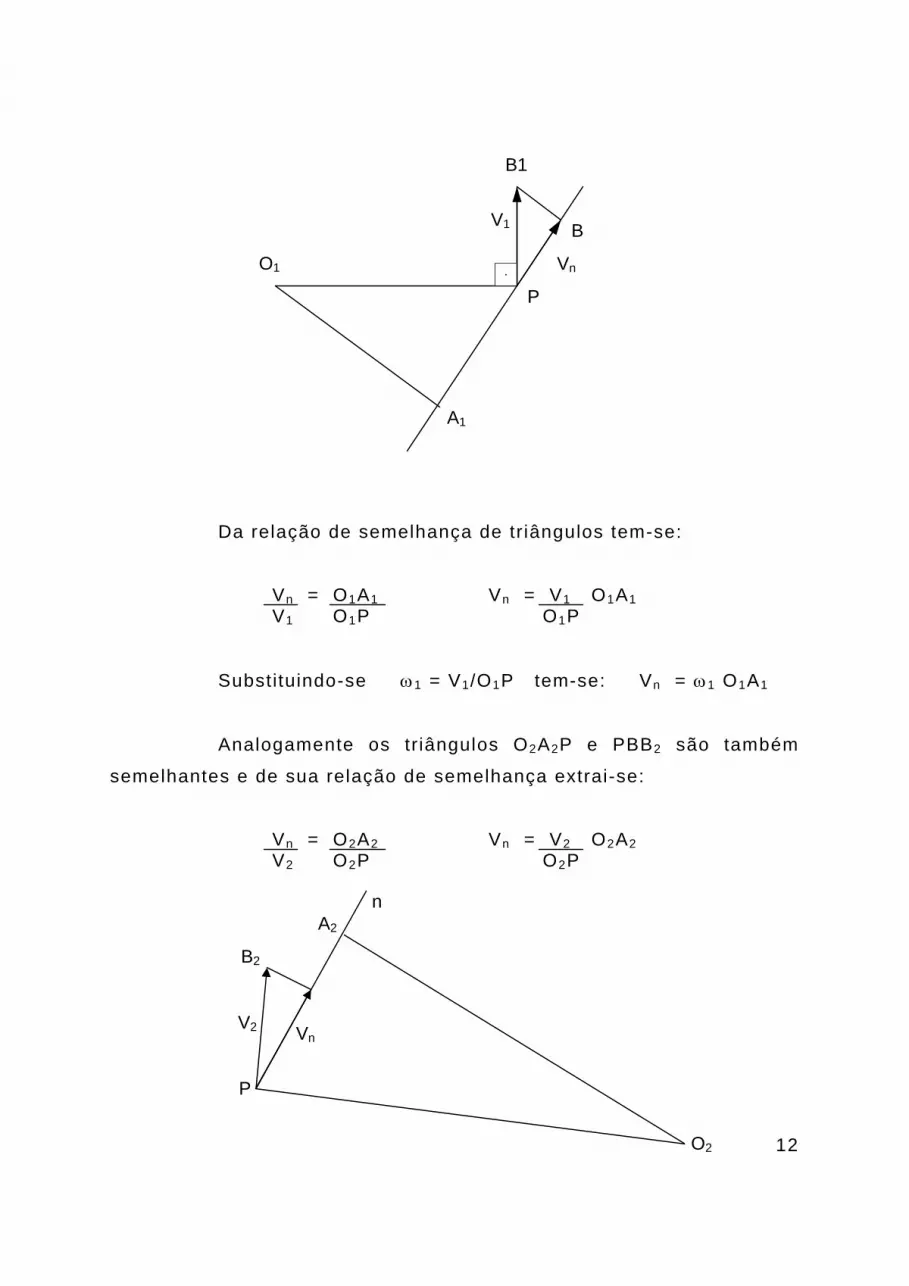
Observando-se a f igura do engrenamento, pode-se concluir
que os tr iângulos retângulos O1A1P e PBB1 são semelhantes, pois além
de seus ângulos retos nos vértices A1 e B, possuem seus outros
ângulos dos vértices O1 e P e também dos vértices P e B1
respectivamente iguais. A f igura que se segue melhor i lustra estas
identidades.
11
V1
Vn
P
A1
B
O1 .
B1
n
P
Vn V2
B2
A2
O2
Da relação de semelhança de triângulos tem-se:
Vn = O1A1 Vn = V1 O1A1 V1 O1P O1P
Substituindo-se ω1 = V1/O1P tem-se: Vn = ω1 O1A1
Analogamente os tr iângulos O2A2P e PBB2 são também
semelhantes e de sua relação de semelhança extrai-se:
Vn = O2A2 Vn = V2 O2A2 V2 O2P O2P
12

n
O2O1
A1
C
A2
Substituindo-se ω2 = V2/O2P tem-se: Vn = ω2 O2A2
Como Vn é comum, tem-se: ω1 O1A1 = ω2 O2A2
ou ω1/ω2 = O2A2/O1A1
Os triângulos O1A1C e O2A2C também são semelhantes.
O2A2 O2C Portanto, O1A1 O1C
Resultando: ω1 O2C Constante ω2 O1C
onde: ω1 = Velocidade angular da roda dentada 1
ω2 = Velocidade angular da roda dentada 2
O1C = Raio primit ivo da roda dentada 1
O2C = Raio primit ivo da roda dentada 2
Ou seja, a relação de transmissão ω1/ω2 é inversamente
proporcional aos raios primit ivos.
13

O2
O1
n
r1
C
rb1
rb2
r2
α
α
α
2º - PERFIS CONJUGADOS
Para que a transmissão por engrenamento se efetue com
“relação de transmissão constante”, é necessário que a normal às
curvas dos perfis dos dentes em contato, traçada pelo ponto de
contato, passe pelo ponto de tangência das circunferências primit ivas.
Os perfis que obedecem estas condições são chamados de
“conjugados”
• Perfis evolventes - uti l ização atual
• Perfis cicloidais - uti l ização no passado
Por ser o mais uti l izado pela indústria mecânica mundial,
será objeto de estudo desta disciplina o perfi l evolvente.
3º - ENGRENAMENTO DE DUAS EVOLVENTES
r b 1 = raio do c irc . base 1
r b 2 = raio do c irc . base 2 r 1 = raio do c irc. pr imi t ivo 1 r 2 = raio do c irc. pr imi t ivo 2 α = ângulo de pressão
14

v1 = ω1.r1
v = ω1.r1 = ω2.r2 ω1/ω2 = r2/ r1
v2 = ω2.r2
rb1 = r1 . cosα
r2/ r1 = rb2/rb1
rb2 = r2 . cosα
Portanto: ω1 r2 rb2 ω2 r1 rb1
Como se vê, a relação de velocidades angulares depende
exclusivamente das circunferências de base, as quais correspondem
duas curvas envolventes.
Independem, portanto, da distância entre centros O1O2.
IV – A RODA DENTADA
É possível transmitir forças elevadas entre dois eixos, sem
eventuais escorregamentos que alterariam a relação de transmissão.
Para isto, a transmissão é executada por meio de rodas com dentes
convenientemente perfi lados e igualmente espaçados sendo chamadas
de rodas dentadas ou engrenagens.
Durante o movimento, os dentes da roda motora (pinhão)
empurram os dentes da roda movida (coroa) rolando uns contra os
outros.
15

As circunferências que determinam a relação de transmissão
rolam, uma contra a outra, sem escorregar. Estas circunferências são
chamadas de “circunferências primit ivas” cujos diâmetros d1 e d2 são
chamados de “diâmetros primitivos”.
1 - ENGRENAGEM CILíNDRICA DE DENTES RETOS.
Nomenclatura
p = passo da roda dentada
e = espessura do dente
l = largura do dente
df = diâmetro da circunferência do pé
ds = diâmetro da circunferência de cabeça
d = diâmetro da circunferência primitiva
db = diâmetro da circunferência de base
h = altura do dente h = 0,5 (ds - df)
hs = adendo hs = 0,5 (ds - d)
hf = dedendo hf = 0,5 (d – df)
ac = vão entre os dentes
a = distância ente os centros de duas rodas dentadas
z = número de dentes
i = relação entre o número de dentes da roda e pinhão i≥1
16
Definições
Passo (p): é a distância medida ao longo da circunferência primitiva de um
certo ponto, num dente, ao ponto correspondente no dente
adjacente.
Espessura do dente (e): é o comprimento do arco da circunferência primit iva
compreendido entre os f lancos do mesmo dente.
Largura do dente (l): é a largura da engrenagem medida axialmente.
Circunferência de Pé (df): é a circunferência que passa pelo fundo dos vãos entre os dentes.
Circunferência de cabeça (ds) :
também chamada circunferência de topo, ou externa, l imita as
extremidades externas (topos) dos dentes.
Circunferência primitiva (d): é a base do dimensionamento das engrenagens e seu diâmetro
caracteriza a engrenagem. As rodas conjugadas tem usualmente
seus circulos primit ivos tangentes.
Circunferência de base (db) :
é a circunferência onde a evolvente é gerada.
Altura do dente (h): é a distância radial entre as circunferências de cabeça e da pé.
17

Adendo (hs): também chamado de altura da cabeça do dente, é a distância
radial entre as circunferências primitiva e de cabeça.
Dedendo (hf): também chamado de altura do pé do dente, é a distância radial
entre as circunferências primit iva e de pé.
Vão entre os dentes (ac): é a distância tomada em arco sobre a circunferência primit iva,
entre dois f lancos confrontantes de dentes consecutivos.
2 - MÓDULO
Sendo o passo p a distância medida ao longo da
circunferência primitiva entre pontos correspondentes de dentes
adjacentes e, Z o número de dentes da roda dentada, tem-se na
circunferência primit iva:
2πr = pZ ou πd = pZ
portanto: d = (p/π) Z
A relação p/π denomina-se módulo
m p π
então d = mZ
18

3 - RELAÇÃO PARA ENGRENAGENS CILINDRICAS DE
DENTES RETOS
SÍMBOLO E DESCRIÇÃO RELAÇÕES
z Número de dentes z = d/m
m Módulo m = d/z = p/π
d diâmetro primit ivo d = mz
p Passo p = (πd)/z = mπ
e Espessura do dente e = p/2 = (mπ)/2
df diâm. da circunf. de pé df = (d-2hf) = zm-2(1,167m) = m(z-2,334)
ds diâm. da circ. de cabeça ds = d+2hs = zm+2m = m(z+2)
α Ângulo de pressão α = 14º30’ ; α = 15º ; α = 20º (mais usuais)
db diâm. da circ. de base db = d cosα
h altura do dente h = hs+ hf = m + (7/6)m = (13/6)m = 2,167m
hs adendo hs = m
hf dedendo hf = h-hs = (13/6)m –m = (7/6)m = 1,167m
a distância entre centros a = m(z1±z2)/2 = (d1±d2)/2 {*}
i Relação de multipl icação i = ω1/ω2 = d2/d1 = z2/z1 = db2/db1 = n1/n2
{*} O sinal – é usado para acoplamento interno. Exemplo: Um pinhão com 24 dentes, módulo 2 mm, ângulo de pressão 20º, aciona uma
engrenagem de 40 dentes. Calcule:
a) Diâmetros primitivos d1 e d2; b) Passo e espessura do dente; c) diâmetros das circunferências de base db1 e db2; d) adendo hs; e) dedendo hf; f) Distância entre centros a g) relação de multipl icação i;
h) se o pinhão gira a 1750 rpm qual será a rotação da roda e quais os módulos das velocidades tangenciais nas circunferências primitivas?
19

EXERCÍCIOS
1) Um par de rodas dentadas ci l índricas de dentes retos, com
módulo 2,000mm e ângulo de pressão α = 20º, foi projetado para
operar uma redução de rotação de n1 = 1800 rpm para n2 = 1200
rpm, trabalhando em eixos paralelos com distância entre centros de a
= 60,000mm. Calcular:
a) Numero de dentes z1 do pinhão e z2 da roda.
b) Diâmetro primit ivo do pinhão d1 e da roda d2.
c) Diâmetro da circunferência de base do pinhão db1 e da roda db2.
d) Diâmetro da circunferência de cabeça do pinhão ds1 e da
roda ds2.
e) Quando da montagem, a distância entre centros foi montada
incorretamente com 1,000mm para maior. Calcule os novos
valores dos diâmetros primit ivos e do ângulo de pressão.
2) Um sistema de transmissão com engrenagem cilíndrica de
dentes retos, está montado na seguinte configuração:
módulo = 12 mm
pinhão = 16 dentes
roda = 40 dentes
α = 20º
a) calcule: passo: p
distância de centros: a
diâmetros de base: db
b) na montagem do sistema, a distância entre os centros foi
montada incorretamente com 5,6 mm para maior. Calcule os novos
valores dos diâmetros primitivos e do ângulo de pressão.
20

4 - GRAU DE RECOBRIMENTO
O grau de recobrimento informa ao projetista quantos pares
de dentes se encontram acoplados numa engrenagem. Assim, um grau
um grau de recobrimento igual a 1,9 informa que temos durante todo o
tempo, um par de dentes em contato e 9/10 do tempo um segundo par
está em contato.
O início de engrenamento se dá quando um dente da roda
motora toca na aresta de um dente da roda movida. Como a aresta
está situada sobre a circunferência de cabeça da engrenagem e como
o lugar geométrico dos pontos de contato é a reta de ação, concluimos
que o ponto A1 da figura abaixo representa o primeiro ponto de
contato. O fim do contato se verif ica no ponto A2 onde a circunferência
de cabeça da roda motora corta a reta de ação. Na figura, em linha
cheia aparece o par de dentes no início do engrenamento e em linha
ponti lhada no final do engrenamento.
Os pontos A1 e A2 denominam-se pontos l imites. O
segmento A1 A2 denomina-se segmento de ação e constitui o lugar
geométrico dos pontos de contato das duas superfícies evolventes.
21

Como já visto, o ponto P genérico de contato das duas
superfícies evolventes se desloca sobre a reta de ação (que é sempre
normal às superfícies, no ponto de contato) com uma velocidade:
vn = ω1rb1 = ω2rb2 = ω1r1cosα
Um par de dentes permanece em engrenamento durante o
tempo que o ponto P leva para ir de A1 até A2.
Define-se grau de recobrimento “R” como sendo a relação
entre o tempo que um par de dentes permanecem e engrenamento e o
tempo entre dois inícios de engrenamento sucessivos. De forma que:
R Tempo para o ponto de contato percorrer o segmento de ação Tempo entre dois inícios de engrenamento sucessivos
Chamando de t1 o tempo dado pelo numerador tem-se:
t1 = A1A2/vn
Chamando de t2 o tempo dado pelo denominador tem-se:
t2 = P/v
pois este é o tempo necessário para que o dente seguinte (por ex. da
roda 1) venha se encontrar na posição de contato A1, de seu
antecessor. A distância entre dois dentes sucessivos é o passo, que
deve ser dividido pela velocidade ”v” na circunferência primit iva , sobre
a qual o passo é normalmente medido.
Então:
R t1 A1A2 ÷ p A1A2 t2 ω1r1cosα ω1r1 pcosα
Observando-se a próxima figura, determina-se o valor do
segmento de ação:
A1A2 A1C + CA2 (A1B2 – CB2) + (A2B1 – CB1)
22

Observando-se o tr iângulo A1O2B2 obtêm-se: A1B2 [(rs2)2 – (rb2)2]1 /2 e CB2 r2sen∝ Observando-se o tr iângulo A2O1B1 obtêm-se: A2B1 [(rs1)2 – (rb1)2]1 /2 e CB1 r1sen∝ Como: CB1 + CB2 (r1 + r2)sen∝ asen∝ Portanto: R 1 [(rs2)2 – (rb2)2]1 /2 + [(rs1)2 – (rb1)2]1 /2 - asen∝ pcos∝
Nas engrenagens de dentes retos o grau de recobrimento
não pode ser menor que 1 a f im de garantir a continuidade do
movimento. Praticamente deve-se evitar que R < 1,2. Quanto maior o
valor de R, maior a suavidade de funcionamento da engrenagem,
menos vibrações e ruídos. Contudo geralmente R é menor que 2.
23
5 - ENGRENAGENS CILINDRICAS DE DENTES HELICOIDAIS
Engrenagens com dentes helicoidais são usadas em
sistemas mecânicos que exigem alta velocidade e baixo ruído.
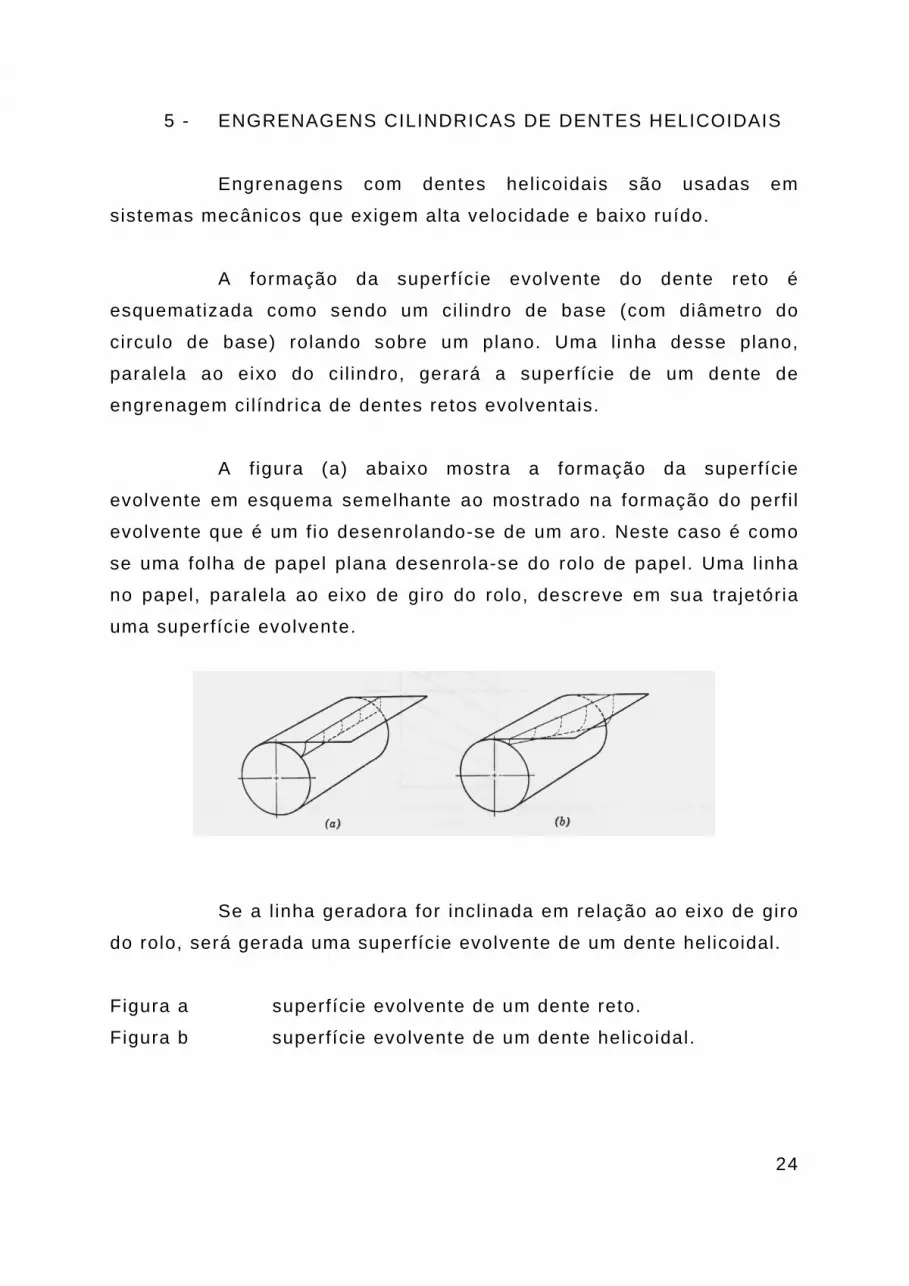
A formação da superfície evolvente do dente reto é
esquematizada como sendo um cil indro de base (com diâmetro do
circulo de base) rolando sobre um plano. Uma linha desse plano,
paralela ao eixo do ci l indro, gerará a superfície de um dente de
engrenagem cilíndrica de dentes retos evolventais.
A f igura (a) abaixo mostra a formação da superfície
evolvente em esquema semelhante ao mostrado na formação do perfi l
evolvente que é um fio desenrolando-se de um aro. Neste caso é como
se uma folha de papel plana desenrola-se do rolo de papel. Uma linha
no papel, paralela ao eixo de giro do rolo, descreve em sua trajetória
uma superfície evolvente.
Se a l inha geradora for inclinada em relação ao eixo de giro
do rolo, será gerada uma superfície evolvente de um dente helicoidal.
Figura a superfície evolvente de um dente reto.
Figura b superfície evolvente de um dente helicoidal.
24

Roda dentada helicoidal
A
B
pc β
pc
β
pn pn
C
pc = Passo circular
pn = passo normal
β = ângulo de hélice ou ângulo de inclinação
Pelo tr iângulo retângulo ABC tem-se: cosβ = pn/pc ou pn = pccosβ Observando-se o perfi l do dente helicoidal por um plano de corte normal ao dente, e também por um plano frontal da roda (região lateral) teremos: No plano normal mn = módulo normal
No plano frontal mf = módulo frontal Pela definição de módulo tem-se: m = p/π Portanto: mn = pn/π e mf = pc/π
Ou: pn = mnπ e pc = mfπ
como: pn = pccosβ mnπ = mfπ cosβ
então: mn = mfcosβ ou mf = mn/cosβ
Para o diâmetro primit ivo tem-se:
d = mz
no caso do dente helicoidal, o diâmetro primit ivo é:
d = mfz ou ainda d = (mn/cosβ)z
25

6 - RELAÇÕES PARA ENGRENAGENS CILINDRICAS DE
DENTES HELICOIDAIS
SÍMBOLO E DESCRIÇÃO RELAÇÕES
z Número de dentes z = d/mf
mn Módulo normal mn = mfcosβ = (d/z)cosβ = pn/π
mf Módulo frontal (circunfer) mf = (d/z) = mn/cosβ = pc/π
d Diâmetro primitivo d = mfz = mnz/cosβ = pcz/π
p Passo circular pc = mfπ = pn/cosβ = (πd)/z = πmn/cosβ
p Passo normal pn = mnπ = pccosβ
ec Espessura circular do dente ec = pc/2 = (mfπ)/2
en Espessura normal do dente en = pn/2 = (mnπ)/2
df Diâm. da circunfer de pé df = d-2hf = d-(14/6)mn = mn[(z/cosβ) -2,334]
ds Diâm. da circ. de cabeça ds = d+2hs = d+2mn = mn[(z/cosβ) +2]
hs Adendo hs = mn
hf Dedendo hf = (7/6)mn = 1,167mn
α Ângulo de pressão α = 14º30’ ; α = 20º (mais usuais)
β Ângulo de helice/inclinação cosβ = mn/mf = pn/pc =mnz/d
a Distância entre centros {*} a = (d1±d2)/2 = mf(z1±z2)/2 = (z1±z2)mn/2 cosβ
i Relação de multipl icação i = ω1/ω2 = d2/d1 = z2/z1 = n1/n2
{*} O sinal – é usado para acoplamento interno.
Exemplo: Para uma roda dentada com 32 dentes, módulo normal mn= 2 mm, e ângulo
de inclinação 19º 30’, calcular:
a) módulo frontal mf b) diâmetro primit ivo c) diâmetro da circunferência de cabeça d) passo normal e) passo circular
26

EXERCÍCIOS
1 – Um par de rodas dentadas helicoidais deve efetuar a redução de
1650 rpm (pinhão), para 300 rpm (coroa), entre dois eixos paralelos
que distam a = 229,500 mm, entre seus centros de giro.
Sabendo-se que o modulo normal é mn = 4,000 mm e, o passo circular,
pc = 13,8655 mm, calcular:
a) Ângulo de hélice β.
b) Número de dentes Z1 e Z2.
c) Diâmetros primitivos d1 e d2.
d) Módulo frontal mf.
e)Passo normal pn.
2 – Um conjunto de transmissão por engrenagem externa helicoidal
sofreu avarias em seus dentes. Para fabricação de um novo conjunto,
foram obtidas as seguintes informações:
• Diâmetro da circunferência de cabeça ds
do pinhão ds1 = 125,260 mm
da roda ds2 = 206,540 mm
• Distância entre centros a = 160,400 mm
• Número de dentes do pinhão Z1 = 28 dentes
Através das informações obtidas calcular:
a) O módulo normal mn
b) Os diâmetros primitivos d1 e d2
c) O número de dentes da roda Z2
d) O ângulo de inclinação β
e) Qual a rotação da roda para 1680rpm do pinhão?
27

3 – Duas engrenagens cilíndricas de dentes helicoidais devem ser
substituídas por engrenagens helicoidais. As retas foram cortadas por
um fresa de dentes normais, ângulo de pressão 20º, módulo 3,000 mm,
tem relação de velocidades 1,75 : 1 e a distância entre eixos de
132,000 mm.
As engrenagens helicoidais devem ser cortadas com a mesma
fresa, manter a mesma distância entre eixos e, a mesma relação de
velocidades.
Determine para o par helicoidal:
a) O novo número de dentes Z1’ e Z2’.
b) Ângulo de hélice β.
c) Os novos diâmetros primitivos d1’ e d2’.
d) Os novos diâmetros de cabeça ds1’ e ds2’.
28