internship project topics - summer 2018 - mit energy club
TRANSCRIPT

1 1/8/2018
-
KPIT Research ProjectsFor Summer 2018 Internships with Premier Institutes
© KPIT Technologies Limited
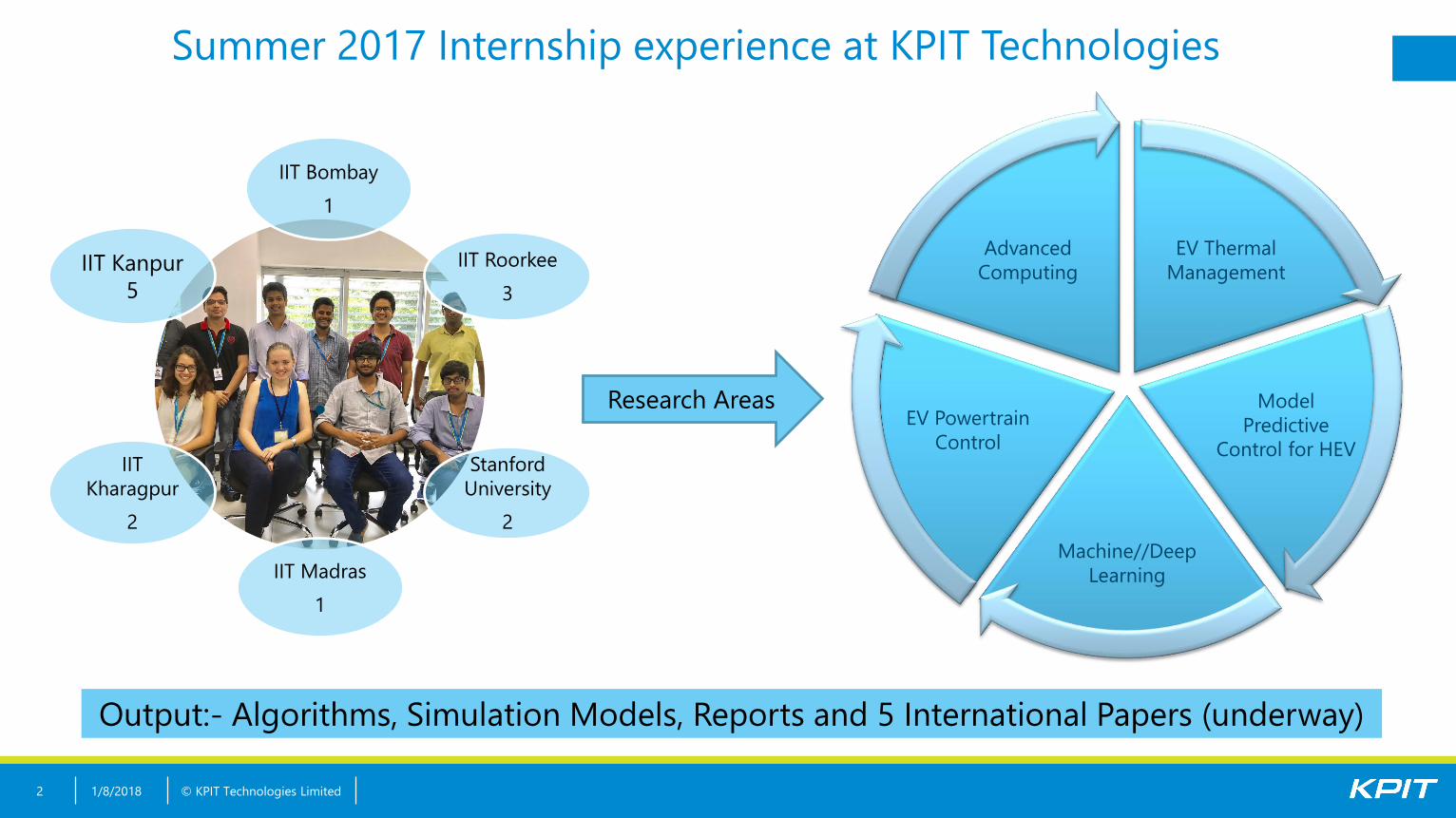
Summer 2017 Internship experience at KPIT Technologies
1/8/20182
Output:- Algorithms, Simulation Models, Reports and 5 International Papers (underway)
.
IIT Bombay
1
IIT Roorkee
3
Stanford
University
2
IIT Madras
1
IIT
Kharagpur
2
IIT Kanpur
5
EV Thermal
Management
Model
Predictive
Control for HEV
Machine//Deep
Learning
EV Powertrain
Control
Advanced
Computing
Research Areas
© KPIT Technologies Limited1/8/20183
Electric Vehicle Management System
© KPIT Technologies Limited
Heat generation and dissipation models for electric vehicle systemBackground :- In an electric vehicle, thermal management of key components is very important. To design appropriate energy management schemes, it is important to quantitatively model the heat generated and dissipated at individual components of the EV system, and accumulate at the system level.
Project Scope*:- Develop heat generation and dissipation models for the EV system components..
• Develop mathematical models for heat generation and dissipation and implement in MATLAB/Simulink
for :
– Batteries
– Power converters
– Motors
– Transmission
– Vehicle (includes drag, tyre friction etc. )
• Model validation
– Validate the models against real measurement data from EV
1/8/20184
* The project scope may vary depending on internship duration.
Deliverable:- Transient Simulink/Simscape mathematical model with project report
© KPIT Technologies Limited
Transient Thermal Mathematical Model for Electric Vehicle with controls
Background :- In an electric vehicle, thermal management of key components is very important and to understand
and optimize the same we need to capture key parameters in form of model which is predictive transient and control
enabled.
Project Scope*:- Develop transient mathematical model for EV in following areas.
1/8/20185
• Battery Thermal Management
– Air cooled system
– Liquid cooled system with passive method
– Liquid cooled system with active cooling system (Vapor compression)
– Validation of model with test data
– Consider all modes of heat transfer and control cycle.
• Motor Cooling
– In addition to above Battery Thermal Management following are additional points.
– Model complexity of conjugate heat transfer from metal to coolant and coolant to air.
– Model Thermal inertia with best accuracy.
Deliverable:- Transient Simulink/Simscape mathematical model with project report
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Mathematical Model of EV Climate Control System
• Develop Transient model of vehicle cooling load calculations with
– Variable human and vehicle load inclusive of sensible, latent and radiative components.
– Variable ambient temperature, humidity and atmospheric pressure load.
– Variable running conditions of vehicle.
• Develop model of HVAC system to suit above load using
– Conventional vapour compression system
– Active and Passive evaporative cooling
– Optimize above models for power consumption and performance.
– Validate with test data
1/8/20186
Background :- In an electric vehicle, Climate Control is one very important for passenger comfort and is also power
consuming. In order to identify and optimize key parameters to enhance comfort with reduced power consumption
we need to have a predictive and efficient mathematical model for the same.
Project Scope*:- Develop transient mathematical model for EV in following areas.
Deliverable:- Transient Simulink/Simscape mathematical model with project report
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Development of high fidelity Li-Ion battery model
1/8/20187
• Develop the battery model
– Develop the battery model based on chemical kinetics and equivalent electrical components.
– Parameterize the battery model, and incorporate all usually occurring faults.
– Simulate and identify all the nominal and faulty operating conditions and corresponding battery parameters.
– Analyse the model behaviour under nominal and faulty operating conditions.
• Develop diagnosis and prognosis schemes for battery
– Develop algorithms for diagnosis of faults.
– Monitor parameter degradation for batteries.
– Predict the RUL (Remaining Useful Life) of batteries.
• Validation of modeling and diagnosis schemes
– Validation by simulation using existing EV model under different drive cycles.
– Validation using real data from EVs
Background :- Using a high fidelity battery model a lot of time/expenses can be saved while trying to understand
the dynamic characteristics for prediction of SOC/SOH dynamics, analysis for diagnostics, predicting the range of
vehicle under various operating/driving conditions, characterizing the battery, etc.
Project Scope*:- Development of high fidelity Li-Ion battery model
Deliverables:-• MATLAB scripts and Simulink models for battery
• Scripts for diagnosis and prognosis schemes
• Project report detailing modelling, diagnosis, prognosis and validation.
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Fault analysis of EV through simulation
1/8/20188
• Identify the fault modes of individual subsystems/components in the EV in different EV architectures– Simulate EV models for all EV configurations under nominal mode and different fault modes
– Identify key variables indicating fault symptoms
– Prioritize faults based on levels of severity
– Automate the simulation of faults by identifying (through script) the individual components and interconnections in an existing simulation model, and changing their fault modes.
• Build dependency graphs/tables between component fault modes and system variables– Develop fault dependency graphs and/or tables based on the effect of different faults on key system variables
– Validate the graphs based on real data as much as possible from experiments
• Automated diagnosis scheme based on data generated through fault simulation– Apply model based and data driven fault detection, isolation and identification schemes on fault data generated through
simulation
– Validation of fault diagnosis scheme using real fault data
Background :- In an electric vehicle, there are various electrical and mechanical faults that could happen. It is
impossible to replicate all fault scenarios practically. Hence, it is important to investigate the effects of faults in
individual components on other components and the system as a whole using simulation models. The fault
propagation effects can be represented in appropriate forms such as graphs, and can help in diagnosis.
Project Scope:- Fault analysis of electric vehicles through simulation studies
Deliverables:-• MATLAB scripts for fault simulation.
• Project report .
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Real time simulation techniques for Electric vehicles
• Employment of best coding practices in the existing EV models for maximum computing resource
utilization
• Exploration of real time operating systems and virtual real time environments for running the models
• Utilization of GPUs and cloud computing resources for simulation of models.
1/8/20189
Background :- Development of performance analysis, control and diagnostic strategies for EVs might require
complex models for batteries, converters, motors, transmission and vehicle. The models have to be simulated
for all possible drive conditions and fault scenarios for adequate test depth. This requires optimization of the
models for real time amenability without compromising fidelity and optimal utilization of computing
resources. Models have to be reorganized for exploiting parallel computing resources when available. On the
computing platforms, different operating systems and usage of GPU and cloud computing for such
simulations should be explored.
Project Scope*:- Real time simulation techniques for electric vehicles
* The project scope may vary depending on internship duration.
Deliverables:-
• Scripts used for simulations
• Project report.
© KPIT Technologies Limited
Sizing of electric vehicle components for optimal efficiency
1/8/201810
• Determine the optimal parameters and placement of EV subsystems for improving electrical and
mechanical efficiency
– Enhance the existing EV model to capture vehicle dynamics and environmental conditions in detail
– Formulate an optimization problem for overall EV system efficiency considering all the relevant parameters of individual
components.
– Using the simulation model for EV, find the optimal values of component parameters by using nonlinear optimization
techniques
Background :- Increasing the electrical and mechanical efficiency of EVs help increasing the range and reducing the
charging intervals, as well as reducing the battery packs required. The overall efficiency of EV depends on a number of
parameters related to individual components such as batteries, power converters, motors and transmission. It is
required to optimize each of these component parameters for specific EV sizes and configurations to maximize
efficiency.
Project Scope*:- Sizing of electric vehicle components for optimal efficiency
Deliverables:-• MATLAB/Simulink scripts and models for EV
• Scripts for optimization of efficiency and determination of parameters.
• Report detailing the optimization procedures.
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Supervisory control structures for EVs
Background :- The supervisory controller in EV is required to generate the torque demand set point for the electric
motor. This is based on throttle input, speed etc. subject to several constraints on battery SOC, voltages, currents,
temperatures, response time etc. In order to satisfy the control performance requirements while maintaining the
constraints, advanced control strategies such as Model Predictive Control (MPC) might be needed in supervisory
controllers.
• Development of advanced control schemes for supervisory control in EV
– Identification of controlled variables, manipulated variables and constraints for EV control for safe operation
and optimal performance.
– Formulation of supervisory control problem for EV in terms of controlled variables, manipulated variables
and constraints, with associated cost function.
– Development of advanced control schemes for supervisory control of EV based on the above formulation.
– Performance comparison of developed control schemes with conventional control schemes.
1/8/201811
Project Scope*:- Supervisory control structures for EVs
Deliverables:-• Scripts used for simulations
• Project report.
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Virtual sensing for EV control applications
1/8/201812
• Development of virtual sensing schemes for unmeasured signals in an EV system
– The sensing schemes can make use of the EV system model and estimation schemes for computation of signals.
– Different sensing schemes might be implemented and compared for performance
– Validation of virtual sensing shall be performed with real measurement data.
• Illustration of improvement in control performance using virtually sensed signals
– Using the virtually sensed signals, the performance of control algorithms should be evaluated for indicators such as
sensitivity and robustness
Background :- The controllers in an EV system require various signals for computation of control logic. For example,
the vehicle controller requires velocity of the vehicle, and the brake controller requires brake pedal position. Not all of
the required variables may be available as direct measurements or some may be unreliable. Soft sensing techniques
such as Kalman filtering can be used for computing some of the required signals, in conjunction with a dynamic
model of the vehicle.
Project Scope*:- Virtual sensing for EV control applications
Deliverables:-• Scripts/models in MATLAB/Simulink for virtual sensing and models in Simulink for controller
implementation for the vehicle system
• Project report detailing virtual sensing schemes and controller validation
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited1/8/201813
Autonomous Vehicle / ADAS projects
© KPIT Technologies Limited
Sensor Fusion platform for autonomous vehicles
1/8/201814
• Sensor Fusion platform for autonomous vehicles
– Data processing of typical sensors like ultrasound, Radar, LiDar and Camera
– Use of techniques such as Kalman filter, convolution neural networks, fuzzy logic etc. for data fusion from these sensors to re-create 360° view of surroundings around the vehicle
– Comparison of fusion schemes for performance
– Feasibility Analysis
– Design by simulation
– Validation using real data
– Prototype development
Background :- There could be several measurement sources for control purposes in an autonomous vehicle, such as
ultrasound, Radar, LiDar and camera. For better reconstruction of the vehicle surroundings, combining the data from
multiple sensors to create cleaner signals is advantageous. Kalman filtering, neural networks etc. can be used for such
sensor fusion.
Project Scope*:- Sensor Fusion platform for autonomous vehicles
Deliverables:-• Scripts/models used for simulation studies
• Project report.
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Deep learning library on tiny Embedded platform
1/8/201815
• Embedded platform for Deep learning
– Task Specific Libraries
– Lower execution Time
– Small footprint
– Highly efficient
Background :- Deep learning algorithms require a lot of libraries. These libraries have many computing approaches
and need high speeds for the execution in short time. Traditionally GPU’s are used to perform these tasks, however to
make cost effective solution, alternative solutions or task specific libraries need to be built.
Project Scope:- Design and develop optimized deep learning libraries.
Deliverables:-• Optimized deep learning libraries.
• Project report.
© KPIT Technologies Limited
Tiny computing platform for Deep learning
1/8/201816
• Embedded platform for Deep learning
– Camera Input
– Sensor Input
– Network connectivity
– Deep learning algorithm processing capability
– Small form factor
Background :- There could be several high end computing machines available for the deep learning, local or cloud
based. However the challenge is the vehicle, where the application is very specific and has no room for high end
onboard computing. It is required to develop cost effective, low end computing platform for deep learning onboard
the vehicle.
Project Scope:- Design and develop a Small factor embedded system for deep learning.
Deliverables:-• Architectural Design of the system
• Project report.
© KPIT Technologies Limited
Tiny Embedded platform Lidar
1/8/201817
• Embedded platform for Deep learning
– Receive Lidar data over Ethernet
– Lower execution Time
– Small footprint
– Highly efficient
– Quick detection
Background :- Lidar is the primary sensor in an autonomous vehicle. The challenge is how to use Lidar data to
extract useful information using a small embedded platform. Currently, processing lidar data requires high end
computing platform as generated data is very large.
Project Scope:- Design and develop a small Embedded platform for lidar data processing.
Deliverables:-• Architectural design and Prototype on development board.
• Project report.
© KPIT Technologies Limited
SLAM and DATMO for automotive applications
Background :- For autonomous navigation of vehicles, it is important to have good perception of surroundings,
both static and dynamic. If the maps (static part) do not exist or are not up to date, the maps have to be created on
the fly and used for path planning. The dynamic objects also need to be identified and tracked for successful
navigation.
Project Scope*:- Generate grid map using Simultaneous Localization and Mapping (SLAM) and then detect and
track moving objects (DATMO).
1/8/201818
• Grid Map
– Lidar and Radar data processing
– Occupancy based grid map
– Ego motion estimation and map update
• Moving Obstacles
– Categorize objects as static and dynamic .
– Classify dynamic objects as pedestrians, vehicles, etc
– Track dynamic objects as per the class specific motion model.
Deliverable:- Source code and documentation
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Marker-less online calibration
Background :- Autonomous vehicles have multiple sensors and sensor fusion is an important task to improve
robustness of perception of the surroundings. The extrinsic calibration of these sensors is critical for sensor fusion and
needs to be kept correct even when there is relative physical movement between them.
Project Scope*:- Develop an online marker-less extrinsic calibration solution.
1/8/201819
• Extrinsic Calibration
– 6 DOF are involved and need to be estimated
– Need to estimate them for sensors like cameras, Lidars, etc
– Online calibration while vehicle is moving. Not in factory or in garage.
• Marker-less Calibration
– Cannot rely on known calibration targets like checker boards.
– Online miscalibration detection
– Automatic calibration tracking.
Deliverable:- Source code and documentation
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited1/8/201820
Power Train
© KPIT Technologies Limited
Power Line Communication (PLC) for EV charging
• Develop SPI based communication interface from Microcontroller to QCA7005 Qualcomm chip
– SPI protocol development and testing for Smart charge communication packets.
– Interface logic to send/receive this data to/from Qualcomm chip.
• Configuration of Qualcomm chip for PLC SLAC based communication on Qualcomm QCA 7005 chip
– PIB file configuration
– Flash programming logic
– SLAC protocol configuration
– Testing
1/8/201821
Background :- In electric vehicle, Powerline Communication is used for communication between electric vehicle
charging station (EVSE) and plug-in electric vehicle (PEV). Power line communication (PLC) is a technology designed to
use the existing power lines and support communications. An ISO/IEC 15118 standard is pushing to standardize PLC
as a technology that supports EV charging systems.
Project Scope*:- Develop PLC interface for EV-EVSE communication for Smart charging.
Deliverable:- PLC communication software and hardware interface with project report
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
OBD Monitors for Conventional/HEV/EV powertrains
1/8/201822
Background:
OBD Monitor control's development has to address the multiple requirements from the legislation, creation of a
requirement library, based on input and interfaces from engine EMS signal can be advantageous to create a requirement
framework and validation of the set of requirements for OBD monitors
Project Scope:
▪ OBD monitor requirements for conventional powertrain and diagnostics requirements specific to individual
components and overall vehicle level for HEV / EV powertrain
▪ OBD monitor requirement gathering as per various global legislations for conventional powertrain
▪ Mapping the diagnostics requirements, when the powertrain application is varied with different HEV / EV configuration
Project Deliverables:
▪ Requirement library for select number of OBD monitors for conventional powertrain
▪ Requirement library for Diagnostics and legislation requirements of HEV / EV powertrain as per various global
standards
Assumptions:
▪ Engineers are from automobile background, willing to take this work as their internship program with minimum
supervision / inputs
▪ KPIT shall invest in required standards and literature and not only depend on the public data available on internet
© KPIT Technologies Limited
Gasoline Engine EMS - Control Strategy development
1/8/201823
Background:
Low cost development of the control strategy and proving it on the a proto EMS can address various Tier1 companies,
which are in to manufacturing of the engine sensors and actuators to partner with KPIT
Project Scope:
▪ Gathering / benchmarking the engine data from internet
▪ study of patents on gasoline engine EMS and control software's
▪ Creation of control strategy for Air Flow, Fuel Injection, Spark Control
Project Deliverables:
▪ Control strategy for Gasoline engine EMS functions
▪ POC running on Proto engine and Engine interfaced with HIL setup
Assumptions:
▪ Engineers are from automobile background, willing to take this work as their internship program with minimum
supervision / inputs
▪ Engine, Test facility and HIL setup will be available either with outsourced location or with institutes
▪ KPIT shall invest in required standards and literature and not only depend on the public data available on internet
© KPIT Technologies Limited1/8/201824
Diagnostics Projects
© KPIT Technologies Limited
Vehicle Diagnostic ChatBot
Background :- Vehicle diagnostic is becoming more and more important with increasing electronics in the vehicles.
As a vehicle user, many times we face problems which could get solved without taking the vehicle to workshop. Can
Vehicle Diagnostic ChatBot backed-up by appropriate vehicle diagnostic model, be used in such scenarios ?
Project Scope*:- Develop vehicle diagnostic ChatBot
1/8/201825
• Develop ChatBot application
• NLP (natural language processing) engine to analyse inputs from vehicle user.
• Enhance existing vehicle diagnostic model to make it context aware.
• Deploy the diagnostic model on cloud.
• Develop mobile app for the ChatBot
• Interface ChatBot with the diagnostic model.
• Create known faults and train the ChatBot.
Deliverable:- Vehicle Diagnostic Chatbot implemented for a specified vehicle.
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited1/8/201826
CyberSecurity Projects
© KPIT Technologies Limited
Development of SHE+ library for next-gen Aurix
Background :- Secure Hardware Extension or SHE is functional specification of a minimalistic hardware co-
processing unit. SHE follows the approach of bringing a fixed and self-contained functionality in the form of an on-
chip hardware extension of a regular micro-controller. The purpose of SHE is to separate symmetric keys from ECU
applications. Its core functionality is the storage of symmetric keys and basic operations such as encryption,
decryption, etc., with these keys. It offers protocols and processes to allow for a secure injection of keys into the ECU
by providing end-to-end security from backend.
Project Scope*:- SHE library for next generation Aurix board.
1/8/201827
• Develop SHE+ library and crypto algorithms
– Build SHE+ library on top of HSM drivers
– Develop Crypto algorithms to run on HSM core (ARM)
Deliverable:-SHE+ library integrated with HSM and crypto algorithms
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Certificate Handling for automotive embedded systems
• Develop certificate handling infrastructure
– Generate secret keys
– Build secure storage to store secret keys
– Certificate Authority or CA to issue certificates.
– Root chain validation of certificates
– Manage security profiles
– Public Key Infrastructure or PKI
1/8/201828
Background :- Number of electronic devices in modern cars are increasing day-by-day. Also, cars are connecting to
other cars, infrastructure, cloud, etc. Each of these external interface is a potential attack surface. So, electronic devices
(or ECUs) running inside a cars need a mechanism to authenticate an external device before connecting. Digital
Certificates are one popular form of authentication used by computer industry. The same can be adopted in
automotive industry to validate the authenticity of connecting devices. Creation of certificates, provisioning, issuing,
renew, revoke, etc., are needed to manage certificates. Also, a secure storage is needed to store the keys. Also, many
ECUs will need certificates. So, a Public Key Infrastructure or PKI needs to be developed to handle certificates .
Project Scope*:- Development of certificate handling infrastructure.
Deliverable:- Certificate handling infrastructure
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Light Weight Cryptography for Automotive
– Light Weight Block Ciphers
– Light Weight Stream Ciphers
– Light Weight Hash Functions
– Light Weight Message Authentication Codes
1/8/201829
Background :- Number of Electronic Control Units or ECUs inside a car are increasing rapidly. These advancements
have also thrown up challenges to security of the cars internal networks. Traditionally computer networks use
cryptography to secure the networks. But, ECUs are low powered micro controllers. Running sophisticated
cryptographic algorithms inside an ECU will affect the performance of the ECU. Some critical applications inside a car
need real time performance and also good security. Hence light weight cryptography assumes importance. These light
weight cryptographic algorithms are aimed to providing good security while not affecting the performance of the
ECU.
Project Scope*:- Implementing Light Weight Cryptographic algorithms for automotive embedded systems
Deliverable:- Light Weight Crypto Library and related applications
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited
Elliptic Curve Cryptography for Automotive
– Generation of asymmetric keys (public key and private key)
– Key exchange using Elliptic Curve Diffie–Hellman or ECDH
– Elliptic Curve Digital Signature Algorithm or ECDSA
– Client Applications
1/8/201830
Background :- Elliptic Curve Cryptography or ECC is gaining importance in embedded systems due to various
advantages over the traditional RSA. The major disadvantage of RSA is, it needs longer keys for higher security, which
directly affects the performance. But, ECC can achieve the same level of security with smaller key lengths with lesser
impact on performance. At 128-bit security levels RSA is 10 times slower than ECC for performing private key
operations such as signature generation and key management, At 256-bit security level RSA is 50 to 100 times slower.
The public and private keys generated by RSA takes up more space than ECC. In embedded systems, sessions will be
shorter and each time a session starts keys need to be generated. So, ECC is becoming preferred algorithm for
Automotive Embedded Systems,
Project Scope*:- Implementing ECC for automotive cyber security
Deliverable:- ECC Library and client applications
* The project scope may vary depending on internship duration.
© KPIT Technologies Limited1/8/201831
Thank You
www.kpit.com