efficiency speed-up strategies for evolutionary computation: fundamentals and fast-gas
TRANSCRIPT
Efficiency speed-up strategiesfor evolutionary computation:fundamentals and fast-GAs
Zong-Ben Xu a, Kwong-Sak Leung b,*, Yong Liang b,Yee Leung c
a Research Center for Applied Mathematics and Institute for Information and System Science,
Xi’an Jiaotong University, Xi’an 710049, Chinab Department of Computer Science and Engineering, The Chinese University of Hong Kong,
Shatin, NT, Hong Kongc Department of Geography, The Chinese University of Hong Kong, Shatin, NT, Hong Kong
Abstract
Through identifying the main causes of low efficiency of the currently known evo-
lutionary algorithms, a set of six efficiency speed-up strategies are suggested, analyzed,
and partially explored, including those of the splicing/decomposable representation
scheme, the exclusion-based selection operators, the ‘‘few-generation-ended’’ EC search,
the ‘‘low-resolution’’ computation with reinitialization, and the coevolution-like de-
composition. Incorporation of the strategies with any known evolutionary algorithm
leads to an accelerated version of the algorithm. On the basis of problem space dis-
cretization, the proposed strategies accelerate evolutionary computation via a ‘‘best-so-
far solution’’ guided, exclusion-based space-shrinking scheme. With this scheme, an
arbitrarily high-precision (resolution) solution of a high-dimensional problem can be
obtained by means of a successive low-resolution search in low-dimensional search
spaces. As a case study, the developed strategies have been endowed with genetic al-
gorithms (GAs), yielding an accelerated genetic evolutionary algorithm: the fast GAs.
The fast-GAs are experimentally tested with a test suit containing 10 complex multi-
modal function optimization problems and a difficult real-life problem––the moment
matching problem for inverse to the fractal encoding of the spleenwort fern. The per-
formance of the fast-GA is compared against the standard GA (SGA) and the forking
GA (FGA) (that is one of the most recent and fairly established variants of GAs). The
*Corresponding author.
E-mail address: [email protected] (K.-S. Leung).
0096-3003/02/$ - see front matter � 2002 Elsevier Science Inc. All rights reserved.
doi:10.1016/S0096-3003(02)00309-0
Applied Mathematics and Computation 142 (2003) 341–388
www.elsevier.com/locate/amc

experiments all demonstrate that the fast-GAs consistently and significantly outperform
the SGA and FGA in efficiency and solution quality in the test cases. Besides the speed-
up of efficiency, other visible features of the fast-GAs include: (i) no premature con-
vergence occurs; (ii) better convergence capability to global optimum; and (iii) variable
high-precision solutions attainable. All these support the validity and usefulness of the
developed strategies.
� 2002 Elsevier Science Inc. All rights reserved.
Keywords: Evolutionary computation; Genetic algorithms; Efficiency speed-up; Space discretiza-
tion; Refined cellular partioning; Space shrinking; Splicing/decomposable representation scheme;
Exclusion-based selection operator; Reinitialization; Coevolution-like decomposition; Fractal
image compression
1. Introduction
Evolutionary computation (EC) comprises techniques that have been in-
spired by biological mechanism of evolution to develop strategies for search andoptimization. It attempts to find the best solution to a problem by generat-
ing a collection (population) of potential solutions (individuals) to the problem.
Through selection and recombination (mutation, crossover, etc.) operations,
better solutions are hopefully generated out of the current set of potential
solutions. This process continues until an acceptably good solution is found
[7,8,21,26,36]. Typical examples of such EC techniques include, e.g., genetic
algorithms (GAs), evolutionary strategies (ES) and evolution programming
(EP).For several reasons, EC is appealing as tools for search and optimization: (i)
It presents a powerful metaphor and abstraction of biological evolution that
represents a more effective way to adapt an individual to the environment. (ii)
It applies to complex (say, ill-defined or not explicitly expressed), irregular (say,
combinatorial or undifferentiable), and heterogeneous (say, with mixture-type
of variables) problems to which traditional optimization methods fail. (iii) It
employs random, yet directed search, and therefore, can be expected to be
robust and yield high-performance. (iv) As multi-point search procedures, it isinherently parallel, and hence, can be very efficiently implemented. EC has been
successfully applied to a wide variety of problems including multimodal,
multiobjective function optimization [1,4,10,12], machine learning [8,12], DNA
assembly [29], and the evolution of complex structures such as neural networks,
fuzzy controller and Lisp programs [2,21,36,43].
In spite of such broad applications and virtual successes, EC has not dem-
onstrated itself to be very efficient as expected. Particularly its efficiency has
been criticized recently [33,34]. We identify some of the main factors that causeless efficiency of the current EC algorithms (GAs, in particular) as follows:
342 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

1. The stochastic mechanism of EC yields unavoidable resampling, which
increases in great extent algorithm�s complexity and decelerates the search ef-ficiency. The EC algorithms are generally time-consuming because they needs
much trial and error. This computational overhead is much upgraded with the
resampling effect. (For example, this resampling increases the computational
complexity of GAs from OðNÞ to OðN lnNÞ for a simple minimization problem[33], leading to the additional lnðNÞ factor, where N is the search space di-
mension size used.)
2. EC performs the highest-resolution computation (that is, using a fixed
highest-resolution problem representation in search in order for a present high-precision solution to be obtained), resulting in huge size of search space to
which GAs, for example, apply rather inefficiently. Some researchers proposed
other strategies using shorter coding representation to solve the high-precision
problem, such as Delta-code in GAs [25], but it is difficult to handle. Another
strategy of the real coding was proposed by Eshelman and Schaffer [6]. It in-
creased precision of the solution efficiently, however, the genetic operators of
the real coding is complicated and hard for computation and analysis [12,16].
3. Most evolutionary operators in EC developed so far are ‘‘selection-based’’, aiming to find the optimal solution in a successive ‘‘selection for the
best’’ way (this is one way to simulate the ‘‘survival for the fittest’’ principle). In
most cases, however, finding the optimal solution in the successive selection
way might not be as efficient as in a successive ‘‘exclusion for the worst’’ way,
just like the case of finding the tallest out of 100 persons, where to successively
select taller person (that requires to select one from 100, and each selection
therefore is with 1% success probability) is clearly much harder than to suc-
cessively exclude ‘‘not tallest’’ (this then requires to exclude 99 persons from100, and hence, each action is with 99 success probability). This yields lower
efficiency (reliability) of the current EC techniques.
4. Any GA with fixed-length (say, L bits) binary representation solves an
optimization problem, say,
ðPÞ : minff ðxÞ: x 2 Xg
where f : X � Rn ! R1 is a function, in essence, through solving the combi-
natorial optimization problem minfgðV Þ: V 2 HLg with HL ¼ f0; 1gL � X and
g being such that
gðxÞ ¼ f ðxÞ whenever x 2 HL ð1Þ
The function g can be viewed as an implicit performance measure of GA be-
cause it characterizes real performance of GA when implemented with ðPÞ.There are infinitely many functions g that meet Eq. (1). Because of such one-to-
many (infinity) nature of performance measures, there would be a possibilitythat a very nice featured function f might correspond to a very bad perfor-
mance measure g, resulting in correspondingly very poor performance of the
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 343

GA. So an intrinsically easy problem ðPÞ may be extremely difficult for GA
search. This demonstrates, on one side, that performance of the current GAsdepends actually too much more on their search mechanism than on the ob-
jective function f to be optimized, and, on the other side, that any possibly
useful characteristic of f (say, continuity, differentiability) cannot be made ef-
fectively use in GA implementation. This is no doubt another factor leading to
low efficiency of GAs (particularly when applied to numerical optimization
problems).
The above identified factors (problems) causing low efficiency of EC have
been studied by many authors in the past years. Most of the studies considersto accelerate EC through finding the modification technique for the better
offsprings, such as using new evolutionary operators [17,18,26,28,42], chang-
ing problem representation during search [25,27,32,39], dynamically or adap-
tively adjusting EC parameters [14,26,35], hybridizing with other optimization
techniques [11,19,22,31], and so on. Typical such modifications in GAs, for
example, include the Messy GA [13], dynamic parameter encoding GA [32],
breeder GA [27] cooperative coevolutionary GA [30], real-coded GAs [6],
delta-coding GA [25], hybrid GA [5,31], forking GA [37], and so forth. With allthese improvements, we can indeed obtain the solution in the early generation,
but they still require a great of ‘‘actual time’’. In this paper we aim at devel-
oping a new method for accelerating traditional EC algorithms for function
optimization from another viewpoint.
We will explain our main ideas in the next section on how to circumvent the
above-listed efficiency-lower-down problems of EC. And then a series of novel
efficiency speed-up strategies for EC implementation is developed in Sections 3
and 4 (particularly, a splicing/decomposable problem representation scheme isestablished in Section 3 to ground the present research, and a set of ‘‘exclusion-
based’’ selection operators are proposed in Section 4 to more powerfully
simulate the survival for the fittest principle). Incorporation of the strategies
proposed with any known EC algorithm can lead to an accelerated version of
the algorithm. We present in Section 5, as an case study, the accelerated version
of genetic algorithms––the fast-GAs. The fast-GAs are then experimentally
examined, analyzed and compared in Section 6 with a set of typical, multi-
modal function optimization problems and and a rather difficult real-life ap-plication problem appeared in fractal image compression technology. The
paper concludes in Section 7 with some useful remarks on future research
related to the present work.
2. Motivation and strategies
The main ideas behind the accelerated EC technique (the fast-EAs) to be
developed are outlined in this section.
344 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

It is observed first that the efficiency-lower-down problems listed in the
previous section are, in essence, related to some fundamental dilemmas in ECimplementation, and any attempt of obviating those problems has to com-
promise these dilemmas. These dilemmas, for instance, include:
ii(i) The general applicability versus efficiency dilemma: EC (particularly, GAs)
has been conceived as general purpose heuristics validated for every prob-
lem spaces and optimization problems. It therefore asks for the use of uni-
fied problem representation scheme, random search operations as well as
the performance evaluation independent of characteristic of the functionto be optimized, as that in the currently known EC algorithms; these
EC features make them, on one side, generally applicable, but have, on
the other side, greatly lowered down the efficiency of EC, as analyzed in
Problems 1, 2, and 4 of the last section. Moreover, when the natural data
representation (like in ES) or pure deterministic search operations are ap-
plied, or further, some advantages of useful characteristics (say, differen-
tiability) of the function being optimized are taken, the efficiency of EC
(say, ES) then may be much improved, but the efficacy (applicability) willbe degraded (confined).
i(ii) The accuracy versus complexity dilemma:Whenever a specific problem rep-
resentation scheme (say, binary encoding) is fixed, the choice of represen-
tation precision (say, the encoding length L) is crucial to efficiency and
complexity of EC execution. If L is chosen to be small, for example, the
search space HL is then small and the GA searches with low complexity,
but the yielded solution may be inaccurate; whereas if L is large, the ob-
tained solution might be accurate but the resultant search space gets large,leading to then a very hard combinatorial optimization problem for which
GA searches rather inefficiently, as noted in Problem 2 of the last section.
(iii) The exploration versus exploitation dilemma: EC algorithms have been also
expected to be global optimizers, which ask then that the algorithms
should have unique global search capability so as to guarantee exploration
of the global optimum of a problem. This is normally realized via keeping
the selection pressure weak in implementation. A weak selection pressure
EC, however, makes the search ineffective (the weaker the selection pres-sure is, the more ineffective the search is in general). Furthermore, if the
selection pressure is excessively high, the EC search is then concentrated
on some ‘‘super’’ individuals in the population, leading to in turn the pre-
mature convergence.
Our idea in this study is to strike a tactical balance between the two con-
tradictory issues of all these three dilemmas through adaptation of a new series
of EC mechanism (problem representation scheme, selection strategies andevolutionary operators). More specifically, we propose to use the following
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 345

strategies to alleviate the efficiency-lower-down problems listed in the last
section, and then develop an accelerated family of EC algorithms––the fast-EAs.
2.1. Strategy 1: Using a splicing/decomposable problem representation scheme
A completely new problem representation scheme is to be proposed to un-
derlie the fast-EA search. This representation scheme, based on problem space
discretization, will realize: (a) a unified, joint binary representation of the
problem parameters of any type and the data structure of the space discreti-
zation processes; (b) a perfect one-to-one mapping (homeomorphism) between
the binary strings and the regular regions (the cells) of the problem space,
implying particularly that a binary string represents not only a point but anregion as well (in biological terms, this then means that a binary string stands
both for an individual and for a sub-population); (c) any fixed-resolution en-
coding can be obtained by splicing lower-resolution codes or tructing a higher-
resolution code, and the spliced and truncated codes both can be decoded in an
additive way; (d) the gene-position and -value of a code explicitly endow with
the information on the encoding resolution as well as the encoding significance.
Such an encoding/decoding system, called henceforth the splicing/decompos-
able representation scheme, will provide the unique framework under whichall other strategies take effect. This will particularly make it possible and re-
alistic that the problem representation can be adoptively changed during search
[39], the encoding can be decomposed and decoded, and a more powerful cell-
type selection operator––the ‘‘exclusion-based selection’’ operator can be ap-
plied in implementation of EC. It will pave a road of yielding ‘‘high-resolution’’
solutions through ‘‘low-resolution’’ computation and solving ‘‘large’’ (high-
dimension) problems via using ‘‘small’’ (low-dimension) algorithms; the strat-
egies are to be elucidated below.
2.2. Strategy 2: Using the ‘‘exclusion-based’’ selection operators
To simulate the natural selection principle in a more powerful way, the
exclusion-based selection operators are introduced and incorporated into the
EC implementation. Such type of operators, not only combine the chromo-
some strings to form higher-fitness individual(s) as usual, but carry out com-
putationally verifiable tests on ‘‘perspectives’’ (no existence) of global optimum
solution(s) in the cell corresponding uniquely to the string the operators are
being applied to (note that, according to strategy 1, any string in the splicing/
decomposable representation scheme represents a cell), so that any not or lessprospective cells (i.e., the individuals with zero or very low-perspective values)
can be excluded. This serves to provide a unique means of shrinking the search
space, undermining the resampling effect (Problems 1 and 2), and of adoptively
346 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

taking full advantages of characteristics of the function to be optimized
(Problem 4) in acceleration of EC implementation.
2.3. Strategy 3: Using the ‘‘few-generation-ended’’ EC search
Various applications of EC have revealed a fact that most of EC algorithmstend to converge (i.e., improve the fitness of individuals) very fast in the first
few generations of evolution, but as the evolution goes further, the convergence
gets slower and slower, exhibiting, finally, an unacceptable low efficiency (see,
e.g. Figs. 11–14 for an representative evolution chart of the standard GA
(SGA)). This, on one side, displays the inherent difficulties of EC to perform
local search and inability of generating high-precision solutions, and, on the
other side, suggests the high-suitability of utilizing EC algorithms as prepro-
cessors of performing the initial search, before turning the search over to otherlocal search procedures. In particular, we will suggest the use of EC algorithms
in the few-generation-ended fashion: To implement an EC algorithm only few
steps (such an EC algorithm henceforth is called the ‘‘few-generation-ended’’
EC search), yielding correspondingly relative lower-precision solutions, and
then turn to the exclusion-based selection procedure defined as in strategy 2, or
an EC algorithm with much higher-selection pressure. This strategy will play
an important part in accelerating the efficiency of EC and balancing the ex-
ploration–exploitation dilemma.
2.4. Strategy 4: Performing fixed low-resolution computation with reinitialization
to yield high-resolution solutions
For the purpose of attaining high-efficiency computation, we suggest the
application of EC being kept with low-resolution implementation. This means
that the EC algorithm should be executed always with low-resolution encoding
(i.e., with short-length strings and within an relatively small search space).
Because of the splicing and decomposable properties of the problem repre-
sentation scheme we will use (strategy 1), any high-resolution problem en-
coding can be spliced by means of lower-resolution encodings (or, equivalently,by means of successive refined fixed low-resolution partitioning), and, there-
fore, we propose to generate any high-precision solution of a problem through
a series of low-resolution coded EC computation with initialization. Thanks
to the splicing/decomposable representation scheme, which has bridged the
chromosome strings (i.e, individuals) with the cells in search space, the
variable-length problem representation and the arbitrarily high-resolution en-
coding/decoding needed for successive refinement of the solutions can be
straight-forwardly constructed through appropriate search space shrinkingstrategies and initialization. This will offer a useful means of compromising the
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 347

accuracy–complexity dilemma and inactivating the efficiency lower-down
problems (particularly, Problem 2) in Section 1.
2.5. Strategy 5: Solving large problems via small algorithms by using the
coevolution-like decomposition
To further speed up EC, we are to employ the coevolution-like strategy (see,
e.g., [30]) to help solving high-dimensional problems, the problems have been
challenging applicability and efficiency of EC application. More precisely,
through splitting the space Rn into the union of, say, K subspaces Xiði ¼ 1;2; . . . ;KÞ, such that Rn ¼ X1 [ X2 [ [ XK with Xi \ Xj ¼ ;ði 6¼ jÞ (the non-
overlapped decomposition) or Xi \ Xj 6¼ ; (the overlapped decomposition), and
letting Xi be the projection of X on Xi (therefore any x ¼ ðx1; x2; . . . ; xnÞ 2 Xcan be rewritten as x ¼ ðxð1Þ; xð2Þ; . . . ; xðKÞÞ with xðiÞ 2 Xiði ¼ 1; 2; . . . ;KÞÞ,we will transfer problem (P) into the following K low-dimensional subprob-
lems:
ðPiÞ : maxff ð�xxð1Þ;�xxð2Þ; . . . ;�xxði�1Þ; xðiÞ;�xxðiþ1Þ; . . . ;�xxðKÞÞ : xðiÞ 2 Xi;
�xxðjÞ ðj 6¼ iÞ fixedg
which will be circularly solved by a fast-EA (or simultaneously solved with a
parallel version of the fast-EAs) [44], where �xxðjÞ are all fixed and set to be the
currently known best solutions of the subproblem ðPjÞ. This strategy will en-
able us to apply the fast-EAs directly to high-dimensional problems.All these strategies will be shown to be effective and efficient in both com-
promising the fundamental dilemmas and in diminishing the efficiency lower-
down problems listed in the last section. We will explain these strategies in
great detail in subsequent sections.
3. The splicing/decomposable problem representation scheme
In this section we present the splicing/decomposable problem representation
scheme to underlie the fast-EAs to be proposed.
At the heart of problem representation is the choice of an alphabet from
which the strings that the EC manipulates are built. Although real (floating
point) codings are claimed recently to work well and faster in a number of
practical problems, such as evolutionary strategies [6,26], we suggest the use of
binary strings in the present paper. This is not only because binary represen-
tation has a stronger theoretical basis, but we also have for the following moredirect reasons: First, when we apply EC to data mining tasks (see, e.g., [9]), a
heterogeneous database including numerical (real and discrete), symbolic and
text attributes leads naturally to the search problems in which different type of
348 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

data have to be encoded in an unified fashion. In this case, binary represen-
tation may-be more applicable. Second, in the representation scheme to bedeveloped, binary strings, instead of merely as an approximate representations
of problem variables, offer a more suitable and irreplaceable data structure for
expressing the space discretization process. It then makes every bit-code (i.e.,
every gene) of the problem encoding geometrically interpretable and theoret-
ically valuable. These valuable information enable the representation to be
more flexible and useful.
For comparison purpose, we first briefly review the conventional binary
representation scheme below.
3.1. Conventional representation scheme
For simplicity, consider the problem ðPÞ with the domain X specified by
X ¼ ½a1; b1� � ½a2; b2� � � ½an; bn�
Suppose we wish to find solutions of problem ðPÞ with precision e (which canbe inverted, say, requiring k decimal places for every variable). Then, con-
ventionally, through encoding each variable xi as a binary string of length mi,
where mi is the smallest integer such that ðbi � aiÞ � 10k 6 2mi � 1, a binary
string representation for each potential solution (chromosome) of length
m ¼Pn
i¼1 mi is adopted. To be more precise, if eðiÞ ¼ ðe1ðiÞ; e2ðiÞ; . . . ; emiðiÞÞ,ejðiÞ 2 f0; 1g, is a code of variable xi which maps (is decoded) into a value fromthe range ½ai; bi� according to
xðeðiÞÞ ¼ ai þ decimal ðeðiÞÞ � bi � ai2mi � 1
with decimal ðeðiÞÞ ¼Xmi
j¼1ejðiÞ2j�1
then a general chromosome A is represented as
A ¼ ðeð1Þ; eð2Þ; . . . ; eðnÞÞ¼ ðe1ð1Þ; e2ð1Þ; . . . ; em1
ð1Þje1ð2Þ; e2ð2Þ; . . . ; em2ð2Þj . . . ;
e1ðnÞ; e2ðnÞ; . . . ; emnðnÞÞ
which maps to a vector xðAÞ ¼ ðxðeð1ÞÞ; xðeð2ÞÞ; . . . ; xðeðnÞÞÞ 2 X. It should be
noted that the m-bits string A is organized in such a way that the first m1 bits
encode the variable x1 and map into a value from the range ½a1; b1�; the nextgroup of m2 bits encode the variable x2 and map into a value from the range
½a2; b2�, and so on; the last group of mn bits encode the variable xn and map intoa value from the range ½an; bn�.
This conventional problem representation scheme, dominantly adopted inthe past applications of GAs, is simple, natural, and universally applicable. But
it has some serious disadvantages, among which, for instance, are (i) it un-
avoidably faces the accuracy versus complexity dilemma, and, most likely,
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 349

leads to the GA search at the highest resolution (cf. Problem 2 listed in Section
1); (ii) each bit-code (i.e., gene) of the representation lacks independent andtheoretical significance (at least, lacks a theoretically significant interpretation).
Such lack of significance, on one side, makes interpretation of GA manipu-
lations (say, crossover and mutation) difficult, and, on the other side, hampers
application of some more sophisticated genetic operations; (iii) the encoding is
not splicing and the decoding is not decomposable (particularly, no meaning of
ðA;BÞ exists whenever a ‘-bit code A and a j-bit code B are spliced into a longer
string ðA;BÞ; a long string cannot be deciphered indenpendently through de-
coding its substrings in a composition way). These disadvantages are the mainorigin of causing the low efficiency of the currently known GA implementa-
tions. In the subsequent subsection, we present a new binary representation
scheme which will dismisses all the above-mentioned disadvantages of the
traditional scheme.
3.2. The new representation scheme
The new scheme is based on the cellular partition methodology in combi-natorial topology.
Given an integer ‘, let L ¼ n� ‘, H ¼ f0; 1gL, I ¼ f0; 1; . . . ; 2‘ � 1g and
hið‘Þ ¼ ðbi � aiÞ=2‘, i ¼ 1; 2; . . . ; n. For any integer vector z ¼ ðz1; z2; . . . ; znÞ 2In (i.e., zi 2 I), we define
rðzÞ ¼ fx ¼ ðx1; x2; . . . ; xnÞ 2 X : zihið‘Þ6 xi � ai 6 ðzi þ 1Þhið‘Þg
and let
Cð‘Þ ¼ frðzÞ : z 2 Ing
The subset rðzÞ, for any z 2 In, is called a cell, and the cell collection Cð‘Þ iscalled a cellular partition of X with the partition size Hið‘Þ in i dimension, where
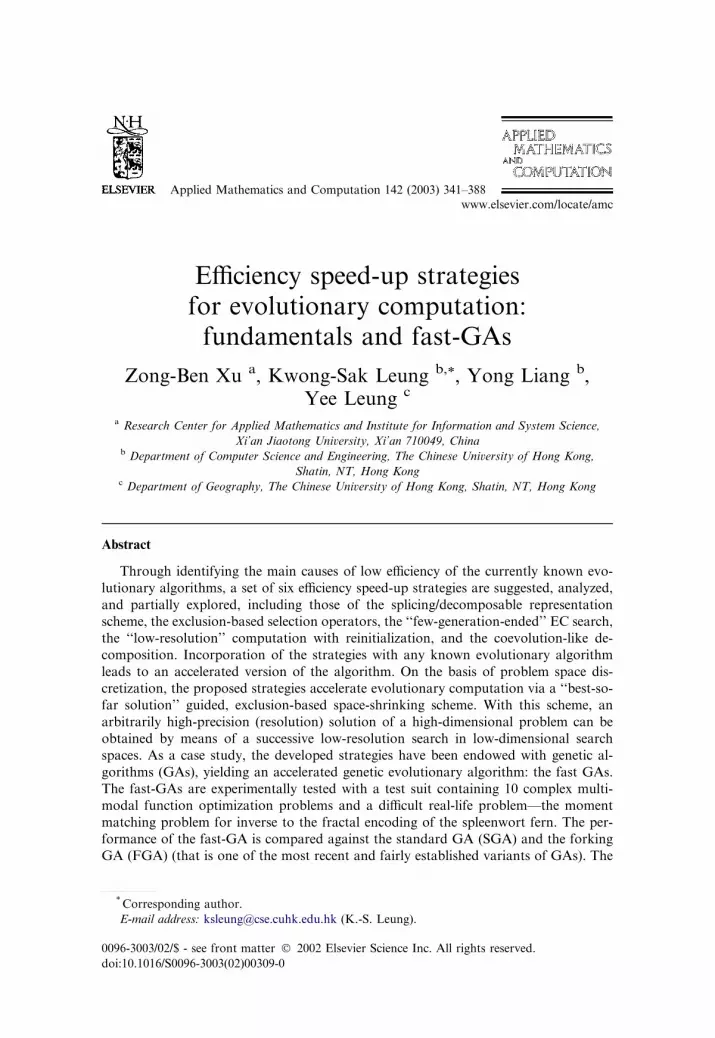
1 < i < n. (It is noted that Cð‘Þ ¼ X.) To emphasize the dependence of Cð‘Þ on‘, we also call Cð‘Þ as ‘th successive refinement partition (briefly, ‘-SRP) of Xbecause Cð‘Þ can be viewed as the consequence of ‘-times successive bisectionson X (cf. Fig. 1). Moreover, if ‘1 and ‘2 are two integers such that ‘2 P ‘1, thepartition Cð‘2Þ is said to be the ð‘2 � ‘1Þ times refinement of Cð‘1Þ, and, cor-respondingly, Cð‘1Þ is the ð‘2 � ‘1Þ times coarseness of Cð‘2Þ.
The center of a cell rðzÞ is the vector mðrðzÞÞ defined by
mðrðzÞÞ ¼ z1
�þ 1
2
�h1ð‘Þ; z2
�þ 1
2
�h2ð‘Þ; . . . ; zn
�þ 1
2
�hnð‘Þ
For any x ¼ ðx1; x2; . . . ; xnÞ 2 X, we now assign the center mðrðzÞÞ to stand forx whenever x 2 mðrðzÞÞ. Then a L-bit (L-length or ‘-resolution) encoding
of x can be obtained as follows: since there is a unique binary string ðe1ðiÞ;e2ðiÞ; . . . ; e‘ðiÞÞ, ek 2 f0; 1g, such that
350 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
zi ¼X‘k¼1
ekðiÞ2‘�k
and therefore,
½mðrðzÞÞ�i ¼ zi
�þ 1
2
�hið‘Þ ¼ ai þ
X‘k¼1
ekðiÞ1
2k
(þ 1
2‘þ1
)ðbi � aiÞ
we can associate each xi with a ‘-bit binary string eðxiÞ defined by
eðxiÞ ¼ e1ðiÞ; e2ðiÞ; . . . ; e‘ðiÞ ð2Þand, furthermore, associate x with a L-bit binary string eðxÞ 2 H by
eðxÞ ¼ e1ð1Þ; e1ð2Þ; . . . ; e1ðnÞ; e2ð1Þ; e2ð2Þ; . . . ; e2ðnÞ; . . . ; e‘ð1Þ;e‘ð2Þ; . . . ; e‘ðnÞ ð3Þ
Such a binary string eðxÞ will be defined as the L-bit encoding of x.
Definition 1. (i) For any x 2 X, eðxÞ defined by Eq. (3) is called the ‘-code of x;(ii) If L ¼ n� ‘ and A ¼ ða1; a2; . . . ; aLÞ 2 f0; 1gL is a L-bit binary string, the
vector
dðAÞ ¼ ðd1ðAÞ; d2ðAÞ; . . . ; dnðAÞÞdefined by
diðAÞ ¼ ai þX‘k¼1
ak1
2k
"þ 1
2‘þ1
#ðbi � aiÞ; i ¼ 1; 2; . . . ; n
is called a decoder of A.
Fig. 1. A graphical illustration of the splicing/decomposable representation scheme, where (b) is
the refined bisection of the gray cell (10) in (a) (with mesh size O(1=2)), (c) is the refined bisection of
the black cell (1001) in (b) (with mesh size O(1=22)), and so forth.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 351

By Definition 1, the ‘-code eðxÞ of x is an approximate representation of
x with precision Oð2�‘Þ (more precisely, kxi �P‘
k¼1 eiðkÞ1=2kk1 6
max16 i6 nðbi � aiÞ2�‘), and any string A is the ‘-code of its decoder dðAÞ. Also,it is clear that for any binary string A, its decoder dðAÞ is nothing but the centerof the cell rðzÞ, where z ¼ ðz1; z2; . . . znÞ is specified by
zi ¼X‘k¼1
ak2‘�k
Thus, for any given x 2 X and any preset representation precision (say, e),through partitioning X with the size Hð‘Þ, where ‘ is such that 2�‘
6 e, a uniquecell rðzÞ ¼ hmðrðzÞ;Hð‘ÞÞi in Cð‘Þ can be related, which then leads to a unique
L-bit binary representation (i.e., ‘-code) eðxÞ of x in H ¼ f0; 1gL. Conversely,given a L-bit string A 2 H, via splitting L ¼ n� ‘, a unique vector dðAÞ 2 Xdefined as in (4) then can be corresponded, which, combined with the string-
length ‘, in turn uniquely mapped to a cell hdðAÞ;Hð‘Þi in Cð‘Þ. Accordingly,there are perfect, one-to-one and onto mappings (actually homeomorphisms)
among the problem domain X, the cell space Cð‘Þ and the encoding space H (cf.Fig. 2). It is noted that Cð‘Þ is identical with X in set theory viewpoint, but it
provides a much more powerful, cell-collection representation of X. Also, dueto the existed perfect correspondence, any binary string A in H now does not
serve to represent only a point (vector), but a subset (cell) in the problem
domain. In biological terms, this then means that a string now stand not only
for an individual but for a subpopulation as well. This is one of the exclusive
Fig. 2. The homeomorphisms among problem space X, cell space Cð‘Þ, and encoding (search space)H ¼ f0; 1gL.
352 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

features of the suggested representation scheme that distinguish himself from
other encoding system (particularly, the conventional representation scheme).The second exclusive feature of the suggested representation scheme is its
splicing and decomposable property. We state this as the following theorem.
Theorem 1. Assume A ¼ ða1; . . . ; aL1Þ is a ‘-code of dðAÞ, and B ¼ ðb1; . . . ; bL2Þ isa j-code of dðBÞ. If A _ B is the spliced string ðA;BÞ, then
(i) A _ B is a ‘-code of dðAÞ;(ii) A _ B is a ð‘þ jÞ-code of dðA _ BÞ;(iii) dðA _ BÞ ¼ dðAÞ þ ð1=2‘Þ½dðBÞ � ðbi þ aiÞ=2�.
Proof. This is direct from Definition 1 and Eqs. (2) and (3).
Theorem 1 (i) says that kA _ B� dðAÞk1 6Oð2�‘Þ for any binary string B.That is, the spliced encoding ðA;BÞ will always be in the cell hdðAÞ;Hð‘Þi inCð‘Þ. Together with Theorem 1 (ii), this then shows that a higher-resolutionrepresentation of the problem variables, when confined to the region hdðAÞ;Hð‘Þi, can be directly formed via splicing A with additional strings B. Fur-thermore, Theorem 1 (iii) says that such spliced (a long) string can be decoded
through a decomposable manner, that is, through independently decoding two
shorter strings A and B where the decoding of A ðdðAÞÞ is already known (or, atleast, its computation is in common). This splicing/decomposable property can
be shown to be very fundamental for any attempt to perform adaptive EC
computation (like using variable-length representation scheme) (cf. [39]).It particularly underlies applications of all strategies mentioned in the last
section.
The third feature of the suggested representation scheme is its bit-value-
significance interpretability. That is, the significance of each bit of the encoding
can be clearly and uniquely interpreted (hence, each gene of the encoded
chromosome has a specific meaning). Take X ¼ ½0; 1� � ½0; 1� and the binary
string A ¼ ð1; 0; 0; 1; 0; 1Þ as an example (in this case, L ¼ 6, n ¼ 2, ‘ ¼ 3, and
Hð‘Þ ¼ ð1=8; 1=8Þ). By Definition 1, A then is the 3-code of the vectordðAÞ ¼ ð9=16; 7=16Þ 2 X ¼ Cð3Þ. Let us look through the 3-SRP process, i.e.,
Cð1Þ, Cð2Þ, Cð3Þ performed on X (cf. Fig. 1) and see what each bit value of Ameans. In the 1-SRP, Cð1Þ, the domain X is bisected into four 1/2-cells (i.e., the
cells with uniform size 1/2). According to the left-0 and right-1 correspondencerule in each coordinate direction, these four 1/2-cells then can be identified with
(0,0), (0,1), (1,0) and (1,1), as shown in Fig. 1(a). As dðAÞ lies in the cell (1,0)
(the gray square), its 1-code, by Definition 1, should be A1 ¼ ð1; 0Þ. This leadsto the first two bits of A. Likewise, in the 2-SRP, Cð2Þ, X is partitioned into22�2ð1=22Þ-cells which are obtained through further bisecting each cell in Cð1Þalong each direction. Particularly this further divides the 1/2-cell (1,0) into four
1/4-cells that can be respectively labelled by ðA1; 0; 0Þ, ðA1; 0; 1Þ, ðA1; 1; 0Þ and
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 353

ðA1; 1; 1Þ (Fig. 1(b)). The dðAÞ is in ðA1; 0; 1Þ-cell (the black square), so its 2-
code should be A2 ¼ ð1; 0; 0; 1Þ, coinciding with the first four positions of A. Inthe same way, X is partitioned into 22�3ð1=23Þ-cells in the 3-SRP, r(3), with the
1/4-cell A2 particularly partitioned into four 1/8-cells labelled by ðA2; 0; 0Þ,ðA2; 0; 1Þ, ðA2; 1; 0Þ and ðA2; 1; 1Þ (Fig. 1(c)). So the 3-code of dðAÞ is found to beðA2; 0; 1Þ, that is, identical with string A. This shows that for any 3-code
A ¼ ða1; a2; a3; a4; a5; a6Þ, each bit value ai can be interpreted geometrically as
follows: a1 ¼ 0ða2 ¼ 0Þ means dðAÞ is in the left half along the x-coordinatedirection (the y-coordinate direction) in Cð1Þ partition, and a1 ¼ 1ða2 ¼ 1Þmeans dðAÞ is in the right half. Therefore, the first two bits A1 ¼ ða1; a2Þ givethe 1-code of dðAÞ and determine the 1/2-precision location of dðAÞ (i.e,
dðAÞ 2 hA1;Hð1ÞiÞ. If a3 ¼ 0 ða4 ¼ 0Þ, it then further indicates that when the
Cð1Þ is refined into Cð2Þ, the dðAÞ lies in the left half of hA1;Hð1Þi in the x-direction (y-direction), and it lies in the right half if a3 ¼ 1 ða4 ¼ 1Þ. Thus amore accurate geometric location, hA2;Hð2Þi, (i.e., the 1/4-precision location)
and a more refined representation, 2-code of dðAÞ, is obtained from
A2 ¼ ða1; a2; a3; a4Þ ¼ ðA1; a3; a4Þ. Similarly we can explain a5 and a6 and con-
clude that A3 ¼ ðA2; a5; a6Þ ¼ A is the 3-code of dðAÞ, and hA;Hð3Þi offers the 1/8-precision location of dðAÞ. This interpretation holds for any high-resolution
Lð¼ n� ‘Þ-bits encoding.The above interpretation reveals an important fact that in the new repre-
sentation scheme the significance of the gene value varies as its position goes
from front to back, and, in particular, the more in front the gene position lies,
the more significantly it functions. We refer such delicate feature of the new
scheme to as the gene-significance-variable property. Actually, it is seen from
the above interpretation that the first n genes of an encoding are responsible forthe location of the variable dðAÞ in a global way (particularly, with Oð1
2Þ-pre-
cision); the next group of n bits are responsible for the location of dðAÞ in a lessglobal (might be called �local�) way, with Oð1
4Þ-precision, and so forth; the last
group of n-bits then locate dðAÞ in an extremely local (might be called �mi-crocosmic�) way (particularly, with O 1
2‘
-precision). Thus, we have seen that as
the encoding length L increases, the representation
ða1; a2; . . . ; an; anþ1; anþ2; . . . ; a2n; . . . ; að‘�1Þn; að‘�1Þnþ1 . . . ; aLÞ
can provide a successive refined (from global, to local, and to microcosmic),
more and more accurate representation of problem variables. This gene-
significance-variable property of the representation scheme embodies many
important information useful to EC search. We will partially explore this in-
formation in the subsequent sections and in [23,24,44]. �
Remark 1. It is worthwhile to note the difference of the concatenation strate-
gies used in the new representation scheme and the conventional scheme: In the
conventional scheme (Eq. (2)), the encoding eðxÞ of a vector x ¼ ðx1; x2; . . . ; xnÞ
354 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

is organized in the purely component-wise manner, i.e., the code of x1; eðx1Þ,is collected first, then followed by that of x2; eðx2Þ, and then, by eðx3Þ;eðx4Þ; . . . ; eðxnÞ in order (cf. Eq. (2)). However, in the new representation
scheme, the vector encoding eðxÞ is concatenated in the gene-significance or-
dering way, that is, the most significant bits of all components of x are collectedtogether first, then, less significant, and then, less and less significant bits of all
the components are organized in order (cf. Eq. (3)). This difference has led to
the differences of not only the decoding mappings but also the representation
significance of the two systems.
In the subsequent sections we will demonstrate the usefulness and promise
of the new representation scheme suggested in this section. Particularly, we
show in the next section that with the new scheme, it is possible to define a
much more powerful operator, exclusion-based operator, to emulate the
‘‘survival for the fittest’’ principle.
4. Exclusion-based selection operators
This section defines and explores a somewhat different selection mecha-
nism––the exclusion-based selection operators. We first formalize the exclusion
operators with reference to the cellular partition Cð‘Þ of X.
Definition 2. An exclusion operator is a computationally verifiable test for non-
existence of solution to problem (P) which can be implemented on every cells ofCð‘Þ.
For an immediate example, assume that f satisfies the Lipschitz condition:jf ðxÞ � f ðyÞj6 akx� yk. Then, for any r 2 Cð‘Þ, there is a global maximizer x�in r only if jf ðmðrÞ � f ðx�ÞÞj6 akmðrÞ � x�k6 a=2xðrÞ, where xðrÞ is themesh size of Cð‘Þ, defined by
xðrÞ ¼ 1
2‘max 16 i6 nfbi � aig
This implies that for any reference value fc ¼ f ðxcÞ, fc 6 f ðx�Þ6 f ðmðrÞÞþa=2xðrÞ is a necessary condition for existence of global optimum of ðPÞ. Thusfc P f ðmðrÞÞ þ a=2xðrÞ gives an non-existence test for solution. This test is an
exclusion operator because it can be computationally verified in each cells of
Cð‘Þ.By Definition 2, any exclusion operator can serve to computationally test
non-existence of solution of ðPÞ in any given cells of Cð‘Þ. It therefore can be
used to check if a given string (that is, a cell in Cð‘Þ) is prospective or not as aglobal optimum (or, as a portion of attraction basin of a global optimum) of
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 355

ðPÞ. Accordingly, the non-global optimum, or, more loosely, less prospective
strings (cells) can be identified and can be deleted from further consideration.This is the key mechanism that is adopted in the present work to accelerate EC.
Hereafter any selection mechanism based on such exclusion principle will be
called an exclusion-based selection operator.Let r be an arbitrary cell in Cð‘Þ with its centre mðrÞ and the mesh size xðrÞ.
The following provides us with a series of exclusion operators for maximization
problems. Please note that these operators (tests) can be equally applied to
minimization problems by reversing the inequality signs.
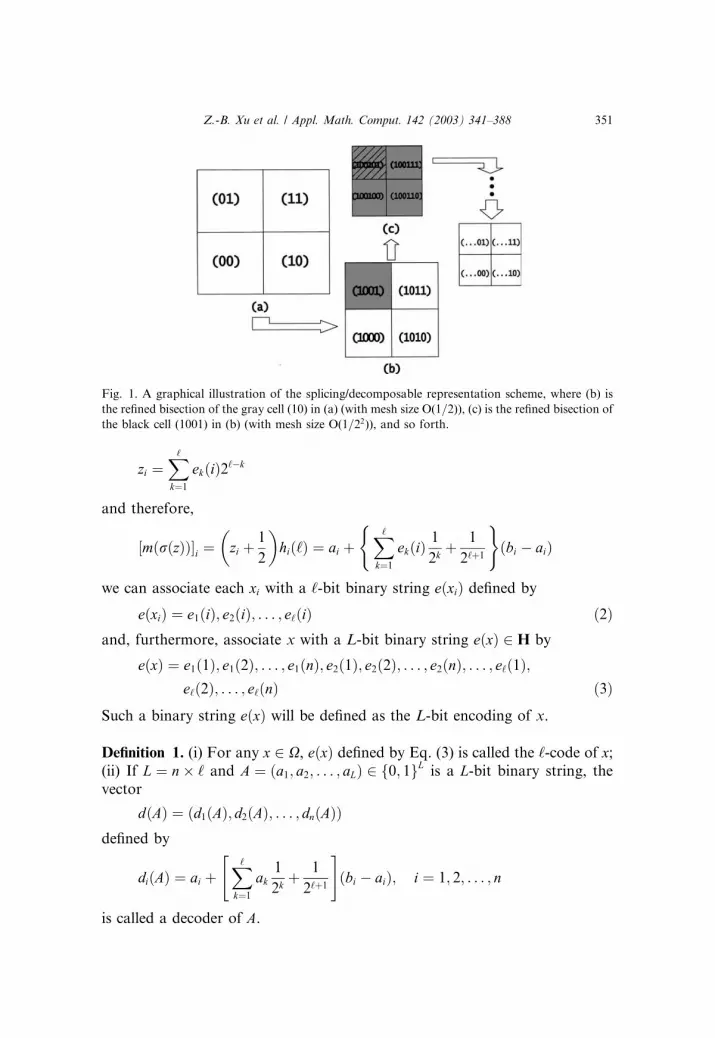
Example 1 [Concavity test]
Suppose f is continuous, then a necessary condition for a string x ¼ mðrÞ tobe global maximizer is that f is concave at neighborhood of x. Therefore, when‘ is sufficiently large, the following tests (E1)–(E2) are exclusion operators.
(E1) There is a direction e 2 RN such that
f ðmðrÞÞ < 1
2½f ðxþÞ þ f ðx�Þ�
where x� ¼ x� ge, xþ ¼ xþ ge and 0 < g6 12xðrÞ.
(E2) There is a direction e 2 RN such that maxff ðxþÞ; f ðx�Þg < fbest and
½f ðxþÞ � f ðmðrÞÞ�½f ðx�Þ � f ðmðrÞÞ� < 0
where xþ and x� are the same as in (E1), and fbest is the current known bestfitness value.
The tests (E1)–(E2) can immediately follow from the observations that every
mðrÞ is in the interior of X, the (E1) features the convex property of f on cell r,and (E2) characterizes the convex and concave overlapped property in which
no global optimum of f exists. See Fig. 3, e.g., for an illustration.
Example 2 [Dual fitness test]
Given an reference value C, we can relate the fitness function f to a new
function gc, called the dual fitness function, defined by
gcðxÞ ¼�f ðxÞ
f 2ðxÞ þ C
It is easy to justify that these two functions are tightly related and there holds
the following basic identity:
gcðxÞ � gcðyÞ ¼f ðxÞf ðyÞ � C
½f 2ðxÞ þ C�½f 2ðyÞ þ C� ½f ðxÞ � f ðyÞ�
Based on this identity, the following properties of gc can be verified:
356 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
Theorem 2. If x� is a local maximizer of f with attraction basin Xf ðx�Þ, then
ii(i) x� is a local minimizer of gc with attraction basin Xgcðx�Þ ¼ Xf ðx�Þif f ðx�Þ6
ffiffiffiffiC
p;
i(ii) x� remains to be a local maximizer of gc but with attraction basin
Xgcðx�Þ ¼ Xf ðx�Þ \ fx 2 X; f ðxÞPffiffiffiffiC
pg
if f ðx�Þ >ffiffiffiffiC
p;
(iii) ½gcðxÞ � gcðyÞ�½f ðxÞ � f ðyÞ� > 0 for any x; y 2 fz 2 �X: f ðzÞ >ffiffiffiffiC
pg.
The above theorem shows that wheneverffiffiffiffiC
pis regarded as the global-
optimum-acceptance criterion (i.e., any x� such that f ðx�ÞPffiffiffiffiC
pis accepted a
global maximizer, otherwise accepted as a local maximizer), the dual fitness
Fig. 3. A graphical illlustration of the concavity test, where rð2Þ, rð6Þ are the cells satisfying (E1),
and rð3Þ, rð5Þ are the cells satisfying ðE2Þ.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 357

function gc then provides us a such novel transformation that inverts every
local maximizers (of f) into minimizers (of gc) while retaining global maxi-
mizers (of f) intact (cf. Fig. 4 for an illustration). Consequently, if we takeffiffiffiffiC
p¼ fbest � e be the ‘‘acceptable-so-far’’ optimum criterion, where e is a very
small real number, the gc then can be used as a quick discriminator of whether
or not a string x lies in an attraction basin of a local maximizer (the less
prospective area), or in a global attraction basin (the high-prospective area)
that needs to be further searched. This analysis then shows that whenever theencoding length ‘ satisfies the minimal resolution requirement (i.e., the dis-
cretization is fine enough so that no global and local optima lie in the same cell
of Cð‘Þ) [32], the following test (E3) defines another exclusion operator:
(E3) For a fixed y 2 r andffiffiffiffiC
p¼ fbest � e,
½gcðmðrÞÞ � gcðyÞ�½f ðmðrÞÞ � f ðyÞ� < 0
Fig. 4. An illustration of the dual fitness function transformation, where f ðxÞ ¼ sinð3pxÞþ0:75x2 � 4:6xþ 8:35 and gðc; xÞ ¼ f ðxÞ=½f 2ðxÞ þ c�. It is seen that under the global-optimum-
acceptance criterionffiffiffic
p, any local maximizer of f is inverted into a local minimizer of gðc; xÞ,
while any ‘‘global’’ maximizer of f remains intact.
358 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

Example 3 [Lipschitz test]
Let £ðf ; aÞ denote the family of all continuous functions that satisfies the
Lipschitz conditions: jf ðxÞ � f ðyÞj6 aðXÞkx� yk, x; y 2 X 2 Cð‘Þ. Then the
following tests (E3)–(E4) are exclusion operators.
(E4) fbest > f ðmðrÞÞ þ aðrÞ2;wðrÞ if f 2 £ðf ; aÞ
(E5) fbest > f ðmðrÞÞ þ aðrÞ8
x2ðrÞ; if f 0 2 £ðf ; aÞ
where fbest is again the ‘‘best-so-far’’ fitness value, and f 0 is the derivative of f .The (E4) has been given as the immediate example of Definition 2. The (E5)
can be justified as follows: Assume x� ¼ mðrÞ is a global maximizer of f, thenf 0ðx�Þ ¼ 0. The well known Taylor formula then implies
f ðx�Þ � f ðxÞ ¼ jf ðxÞ � f ðx�Þj
¼ f 0ðx�Þðx���� � x�Þ þ 1
2
Z 1
0
½f 0ðx� þ nðx� x�ÞÞ � f 0ðx�Þ�ðx� x�Þdn����
61
2
Z 1
0
kf 0ðx� þ nðx� x�ÞÞ � f 0ðx�Þkkðx� x�Þkdn
61
2ðrÞkðx� x�Þk2 6 1
8aðrÞxðrÞ2 8x 2 r:
So f ðx�Þ6 f ðmðrÞÞ þ ð1=8ÞaðrÞx2ðrÞ holds, and, whenever (E5) is satisfied, we
get f ðx�Þ6 f ðmðrÞÞ þ ð1=8ÞaðrÞx2ðrÞ < fbest and arrive to a contradiction:
f ðx�Þ < fbest.
Example 4 [Formal series test]
Let J be the class of all functions that can be expressed as a finite number
of superpositions of formal series and their absolute values, i.e., J ¼ff : RN ! R; 9k formal series f ðjÞ; j ¼ 1; 2; . . . ; k, such that f ðxÞ ¼ f ð1ÞðxÞþPk
j¼2 jf ðjÞðxÞjg. For any f 2 J, the absolute value Aðf Þ of f is defined by
Aðf Þ ¼ Aðf ð1ÞÞ þXkj¼2
Aðf ðjÞÞðxÞ
and, if gðxÞ ¼P1
jaj¼0 caxa is a formal series, AðgÞ is defined by
AðgÞðxÞ ¼X1jaj¼0
jcajxa
where, as usual, the notations a ¼ ða1; a2; . . . ; aNÞ 2 ZNþ , jaj ¼ ja1j þ ja2j þ þ
jaN j, xa ¼ ðx1Þa1ðx2Þa2 ðxN ÞaN , and ca 2 R. Given two formal series gð1Þ andgð2Þ, we presume that gð1Þ � gð2Þ if and only if
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 359

gð1ÞðxÞ ¼X1jaj¼0
cð1Þa xa; gð2ÞðxÞ ¼X1jaj¼0
cð2Þa xa with jcð1Þa jP jcð2Þa j
Also we define jxj ¼ ðjx1j; jx2j; . . . ; jx3jÞ for any x 2 RN .
For any f 2 J and g � Aðf Þ, it is known [41] that there holds the following
basic inequality:
jf ðxÞ � f ðyÞj6AðgÞðjyj þ jx� yjÞ � AðgÞðjyjÞ 8x; y 2 RN ð4Þ
This implies, similar to test (E4), that the following test (E6) is an exclusion
operator.
(E6) There is a formal series g � Aðf Þ such that
fbest P f ðmðrÞÞ þ AðgÞ jmðrÞj�
þ 1
2xðrÞ
�� AðgÞðjmðrÞjÞ
Various other exclusion operators may also be constructed by virtue of
other delicate mathematical tools such as interval arithmetic [15] and the cell
mapping methods [40,41].
Remark 2
(i) The exclusion-based selection is the main component and contributor
to the accelerated evolutionary algorithms (the fast-EAs). Aiming at sup-pressing the resampling effect of EC, such type of selection provides a smart
guidance to EC search towards promising areas through eliminating non-
promising areas. Different in principle from the conventional selection opera-
tors, the construction of which is based on sufficient condition for existence of
solution to ðPÞ, the exclusion-based selection operators can be constructed
based on necessary condition. This presents a general methodology of con-
structing exclusion operators. The above listed (E1)–(E6) show such examples
of the construction.(ii) The application of exclusion-based operator has another advantage: It
can very naturally incorporate some useful properties of the objective function
into the EC search, providing other acceleration means whenever possible.
Indeed, Examples 1–4 all have taken advantage of properties of f in certain
ways (say, continuity in Examples 1 and 2, Lipschitz conditions in Example 3
and analyticity in Example 4). As a general rule, the more exclusive property of
f is utilized, the more sharp (accurate) test could be deduced (for example, (E5)
is sharper than (E4) when the Lipschitz condition was applied for the derivativef 0 instead of for f). These different tests deduced from different properties by
no means have to be applied for a problem in the same time. They can, for
instance, be applied either independently, or with several together, or totally
360 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

simultaneously, depending on the available information on f that can actually
be made use of.(iii) Two groups of exclusion tests could be distinguished among (E1)–(E6) in
feature and complexity. One is those of (E1)–(E3) which are encoding-resolu-
tion dependent in feature, and require continuity of f only. The other group is
those of (E4)–(E6) which are encoding-resolution independent, but hinge on
more stringent requirement on f in feature. Although applicable to any con-
tinuous search space, the former group can be employed with high reliability
only for high-resolution encoding (i.e., when the space discretization is suffi-
ciently fine, or, ‘ is sufficient large). These tests can, of course, be applied forlow-resolution-encoding case provided one expects only to perform an exclu-
sion in certain level of confidence. (this may be useful when the exclusion
operation is applied combined with other repeatedly random search mecha-
nism, see, e.g. [18,24]). Otherwise, we have to use the tests with multiple points
and multiple direction versions. For instance, in this case, test (E1) should be
modified as the following
ðE1Þ0 For a set of k directions eð1Þ; eð2Þ; . . . ; eðKÞ 2 RN such that
fmðrÞ þ
Psi¼1ðxþi þ x�i Þ
2sþ 1
� �6
1
2sþ 1f ðmðrÞÞ"
þXsi¼1
f ðxþi Þ þ f ðx�i Þ#
where x�i ¼ mðrÞ � gieðjÞ, xþi ¼ mðrÞ þ gie
ðjÞ with fgig uniform randomly
distributed on ð0; ð1=2ÞxðrÞ�, and i ¼ 1; 2; . . . ; s, j ¼ 1; 2; . . . ; k. Corre-spondingly, (E3) should be modified as
ðE3Þ0 For a set of l test points yi 2 r; i ¼ 1; 2; . . . ; l; andffiffiffiffiC
p¼ fbest,
½gcðmðrÞÞ � gcðyiÞ�½f ðmðrÞÞ � f ðyiÞ� < 0; i ¼ 1; 2; . . . ; l
In the experimental studies in Section 6, we will particularly adopt this mod-
ified tests with k ¼ N , s ¼ 2 and l ¼ 4 (for all scale of encoding-resolutions).Note that the tests ðE1Þ0 and ðE3Þ0 now ask for ð2sþ 1Þk and l þ 1 times of
function evaluations, as opposed to the 3 and 2 times function evaluations
in (E1) and (E3).
As contrasted, the encoding-resolution independent group (E4)–(E6) can be
always, reliably employed for any scale of resolution level, but they are tailored
to some special classes of functions. Particularly their use hinges upon the
acquisition of certain global informations like Lipschitz constant and the an-
alyticity of f. This is of course less convenient. Nevertheless, we argue that in(E4) and (E5) the imprecision of the Lipschitz constants in fact does not affect
their validity because unless aðrÞ equal to zero, aðrÞxðrÞ will keep the same
order infinitesimal with xðrÞ in (E4) and x2ðrÞ in (E5) as xðrÞ goes to zero.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 361

Therefore, in practical applications, a coarse estimation of the Lipschitz
constants can be applied (note however that the coarseness of the estimationmay have impact on efficiency of exclusion, in spite of not so sensitive, [40]).
The test (E6) is a tactical modification of the Lipschitz test (E4) in the sense that
Lipschitz constant does not involved any more in (E6). This is because the basic
inequality (4) presents a very useful localized generalization of the Lipschitz
condition jf ðxÞ � f ðyÞj6 akx� yk in the sense that the right-hand side of the
inequality will go to zero whenever kx� yk does. In applications of test (E6), a
function g satisfying g � Aðf Þ must be chosen a priori. To facilitate this, let us
notice that the definition of absolute value of a formal series can yield thefollowing estimations:
R1:Pki¼1
jcijAðfiÞ � APki¼1
cifi
� �
and
R2: AðhÞðAðQÞÞ � AðhðQÞÞ;
where fi, h, Q are all formal series. And, furthermore, we easily find the ab-solute values of all elementary functions given as in Table 1. Therefore for any
given function f 2 J, a function g ¼ Nðf Þ satisfying g � Aðf Þ can be con-
structed straightforwardly. The procedure may be as follows (cf. [41]):
Step 1: split f : into basic terms so that each basic term is an elementary
function composition of elementary functions and f is a finite number of su-
perposition of basic terms and their absolute values;
Step 2: write down the absolute value of each respective elementary func-
tions according to Table 1;
Table 1
Absolute value of elementary functions
f ðxÞ jf ðxÞjexpðxÞ expðxÞlnðxÞ � lnð1� xÞsinðxÞ shðxÞcosðxÞ chðxÞtgðxÞ tgðxÞsecðxÞ secðxÞarcsinðxÞ arcsinðxÞarctgðxÞ th�1ðxÞthðxÞ tgðxÞsh�1ðxÞ arcsinðxÞPn
i¼1 cixi
Pni¼1 jcijxi
362 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

Step 3: g ¼ Nðf Þ is defined according to NðPk
i¼1 cifiÞ ¼Pk
i¼1 jcijNðfiÞ andNðhðQÞÞ ¼ AðhÞðAðQÞÞ.
For example, assume
f ðx1; x2; x3Þ ¼ 2 sinðx1Þ þ expððx21 þ lnðx1Þ þ x3ÞÞ� jx1 þ x2x3 þ arctgðx2 þ 3Þj
Then we can express f ðxÞ ¼ 2f1ðxÞ þ f2ðxÞ � jf3ðxÞj with the basic terms defined
by f1ðxÞ ¼ sinðx1Þ, f2ðxÞ ¼ expððx21 þ lnðx1Þ þ x3ÞÞ and f3ðxÞ ¼ jx1 þ x2x3 þarctgðxþ 3Þj. Table 1 shows that the absolute values of elementary functions et,sinðx1Þ, lnðx1Þ and arctgðx2 þ 3Þ are et, shðx1Þ, � lnð1� x1Þ and th�1ðx2Þ, re-spectively. Consequently, Nðf1Þ ¼ shðx1Þ; Nðf2Þ ¼ expðx21 � lnð1� x1Þ þ x3ÞÞand Nðf3Þ ¼ th�1ðx2Þ, and, according to step 3,
g ¼ Nðf Þ ¼ 2shðx1Þ þ expðx21 � lnð1� x1Þ þ x3ÞÞ þ th�1ðx2Þ
5. A case study: fast-GAs
In this section we present a case study to show how all the strategies de-
veloped in the previous sections can be embedded into the known evolutionary
algorithms, to yield accelerated versions of the algorithms. We will particularlyconsider GAs as an example. Consequently, an accelerated genetic algorithm
called the fast-GA will be developed. The incorporation of the developed
strategies with other known evolutionary algorithms might be straightforward,
and could be done similarly as that in the example presented below.
5.1. The fast-GA
5.1.1. I. Initialization step
I.1. Set k ¼ 0, Xð0Þ ¼ X, nð0Þ ¼ 1 and f ð0Þbest ¼ f ð�1Þ
best ¼ f ð�2Þbest ¼ 0; determine the
encoding resolution ‘, and stopping criteria e1 and e2, where e1 is the solu-tion precision requirement and e2 is the space discretization precision tol-
erance.
I.2. Assign the GA parameters, such as
Pc––the crossover rate; Pm––the mutation rate;
N––the population size;
M––the maximum number of GA evolution.
5.1.2. II. Iteration step
Assume XðkÞ consists of nðkÞ subregions, say, XðkÞ ¼ XðkÞ1 [ XðkÞ
2 [ [ XðkÞnðkÞ.
For each subregion XðkÞi , do the following
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 363

II.1. Few-generation-ended GA search:
(a) Randomly select N individuals from XðkÞi to form initial population;
(b) PerformM steps of GA search, yielding the currently best maximum f ðkÞi in
the subregion XðkÞi ;
(c) Let f ðkÞbest :¼ maxff ðkÞ
i ; f ðkÞbestg.
II.2. Exclusion-based selection:
With the ‘‘best-so-far’’ fitness value f ðkÞbest guided, eliminate the ‘‘less pro-
spective’’ individuals (cells) from XðkÞi by employing appropriate exclusion
operator(s) and according to a specific exclusion scheme. The remaining cells
are denoted byQðkÞ
i .
II.3. Space shrinking:
(a) Generating a cell Xðkþ1Þi such that Xðkþ1Þ
i �QðkÞ
i and xðXðkþ1Þi Þ < xðXðkÞ
i Þwhenever possible; in this case, set Xðkþ1Þ
i1 ¼ Xðkþ1Þi and Xðkþ1Þ
i2 ¼ ;;(b) Bisect
QðkÞi and construct two large cells Xðkþ1Þ
i1 and Xðkþ1Þi2 such thatQðkÞ
i � Xðkþ1Þi1 and maxfxðXðkþ1Þ
i1 Þ;xðXðkþ1Þi2 Þg < xð
QðkÞi Þ.
5.2. III. Termination test step
If xðXðkÞÞ6 e2 and jf ðkÞ � f ðk�1Þj6 e1 hold for three consecutive iteration
steps, then stop; Otherwise, go to step II with k :¼ k þ 1, and
Xðkþ1Þ ¼[nðkÞi¼1
ðXðkþ1Þi1 [ Xðkþ1Þ
i2 Þ
Some remarks on each step of the above algorithm are as follows.
The initialization step (step I) is on the fast-GA parameter setup. The setting
reflects some of the basic strategies of the authors: ‘, the encoding resolution
which determines both the solution precision at each step, the complexity and
efficiency of the fast-GA, will consistently be set to a low level (say, ‘ ¼ 3 or 5),realizing the ‘‘low-precision’’ computation strategy; e1 and e2, the solution pre-
cision and discretization precision settings which are mutually related can be
set according to application requirement. The parameters Pc, Pm, N, T in step
I.2 all are for GA application of the next step II.1. Totally unlike other GA
applications in that the setting of the parameters might be crucial and sensitive,
these can be set according to the user�s wish. This does not essentially affect theefficacy of the fast-GA (there is, of course, certain impact on efficiency of the
algorithm). Nonetheless, we suggest here the use of a not so large number M(say, 50 or 100), so as to keep GA search consistently in the high-diversity
stage, avoiding the time-consuming, rather inefficient local search stage of
GAs.
364 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

The iteration step (step II) is the core of the algorithm. Step II.1 performs
the ‘‘few (M)-generation-ended’’ GA search, aiming to find the best individualsin each subregion of the current search space in a most economic and efficient
way, and then update the ‘‘best-so-far’’ fitness value fbest. This ‘‘best-so-far’’fitness value is used as reference in the next step II.2 to eliminate the ‘‘less-
prospective’’ areas in the current search space, guiding the fast-GA search to
promising areas. In the exclusion-based selection step (step II.2), two key op-
tional strategies have to be made: the choice of exclusion operator(s) and the
design of the specific exclusion scheme. As noted in Remark 2, which and how
many exclusion operators should be applied in this step depend on user�s choiceand on a prior understanding on the feature of the problem in consideration. In
general, the more exclusion operators are employed, the more ‘‘less-prospec-
tive’’ areas could be excluded, but the more function evaluation (cost) must be
paid. (It is noted that to implement the exclusion-based selection on all cells in
XðkÞi requires a total of 2‘n times function evaluations when an exclusion op-
erator with complexity of one function evaluation is applied.) Therefore there
is a trade-off between the exclusion efficiency and exclusion complexity. To
compromise these two contradictive factors, an appropriate exclusion schemethat specifies how many and in what manner the cells in XðkÞ are excluded thus
should be developed. We propose a such scheme called ‘‘orange-peelingscheme’’ in Remark 3, which instead of performing exclusion test on every cells,
a portion of cells are carefully selected for possible elimination.
The space-shrinking step (step II.3) presents two somewhat different un-
derlying search space reduction schemes. One is that could be named as
merging scheme (II.3-(1)): all the remaining cells are merged into one big cell, asthe next step search space, whenever it shrinks. The other is the forking scheme(II.3-(2)): the remaining cells are forked into two groups, with each being en-
closed by a size-shrunk cell. The two size-shrunk cells are then taken as the next
step search space. These space shrinking strategies, schematically shown as in
Fig. 5, seem conservative, but are quite appropriate in preventing the re-
maining cells from possibly exponential growth in number. The simulations
provided in the next section all strongly support these strategies.
The ‘‘few-generation-ended’’ GA search step (step II.1) combined with the
low-encoding-resolution setting (step I.1) embodies the low-resolution com-putation with reinialization strategy. The space shrinking together with the
reinitialization amount in principle, to adaptively controlling the mapping
from the fixed-length binary genes to real numbers and dynamically changing
the problem representation with successive higher resolution (geometrically,
through partitioning the shrunk space with refined mesh size). Thus with the
suggested schemes, an arbitrary precision solution can be expected to be found
via the low-precision computation.
Finally, we remark that the common use of the static binary place-valuecoding for real-valued parameters of the phenotypes usually forces either the
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 365

sacrifice of efficiency of search for representation precision or vice versa. The
fast-GA proposed above, however, provides a mechanism that avoids this
dilemma, and it demonstrates that a sacrifice of search resolution need notnecessarily lead to an identical loss of precision in the search result. There have
been several other GA variants that possess the same feature (e.g., [25,32]). But
all of them have used the convergence statistics of evolution to guide search
(specifically, to trig their search until the diversity of the current population is
exhausted), thereby time-consuming and unavoidably encountering premature
convergence [26,37]. In contrast, the fast-GA reinitializes its focused search
after a fixed (M)-generation evolution, independent of the convergence sta-
tistics, and, there would hardly be any premature convergence due to the searchspace shrinking scheme and use of exclusion-based selection operators.
Remark 3. To compromise the search space shrinking speed (exclusion effi-
ciency) and the exclusion complexity, a partial exclusion strategy may be more
beneficial that performs possible exclusion in a portion instead of whole cells
in XðkÞi . We suggest particularly the following ‘‘orange-peeling scheme’’:
orange-peeling scheme: Successively test the boundary cells of XðkÞi (layer
by layer) until one cell is met in a husk layer that cannot be eliminated.
Fig. 5. A schematic illustration for the search space shrinking (merging/forking) procedure in the
fast-GA.
366 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

If there is no husk layer, all cells of which are justified to be eliminated,
bisect XðkÞi into two smaller subregions.
Here a husk layer is a face of XðkÞi (viewed as a hyperrectangle in Rn), or,
equivalently, the cells bounded by a schema of the form:
R ¼fða1; . . . ; a‘nÞ : 9an is such that ai ¼ anþi ¼ ¼ að‘�1Þnþi
¼ 0 ðor 1Þ:aj ¼ � for any other indices jg
(cf. Fig. 6). This scheme offers not only a partial exclusion way but a specific
space shrinking scheme as well. Actually, whenever one husk layer of XðkÞi is
justified to be able to delete, the remaining cellsQðkÞ
i are covered naturally bya big cell with the mesh size ð2‘n � 2‘ÞxðrðkÞ
i Þ, which is strictly less than
2‘nxðrðkÞi Þ of XðkÞ
i . In this case, the search space XðkÞi is naturally shrunk to
Xðkþ1Þi ¼
QðkÞi (step II.3-(1)). It is observed that with this scheme, the complexity
of the exclusion-based selection significantly reduced, at least from 2‘n to
2‘n � ð2‘ � 2Þn times of function evaluation.
6. Simulation and comparison
We now experimentally evaluate performance of the fast-GA, with its per-formance compared again the SGA, and other latest, fairly established variants
of GAs in terms of solution quality and computational efficiency. All experi-
ments are conducted on a Pentium II 300 computer.
Fig. 6. The husk larges of a search space X (cellularly partitioned by l ¼ 3). They respectively
correspond to the schemata: (0 � 0 � 0) (the left) (1 � 1 � 1) (the right) (0 � 0 � 0) (the lower)
(1 � 1 � 1) (the upper).
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 367
The fast-GA was implemented with ‘ ¼ 5, Pc ¼ 0:8, Pm ¼ 0:01, N ¼ 1000 or
10 000 and e1 ¼ e2 ¼ 10e� 8. The maximal number M of GA evolutionwas taken uniformly to be 200. In experiments, all the four exclusion opera-
tors were applied and the ‘‘orange-peeling’’ exclusion scheme was adopted. All
these parameters and schemes kept invariant unless noted otherwise. For
fairness of comparison, we also implemented the SGA and other related GAs
with the same parameter setting and the same initial population. All experi-
ments more run for five times with random initial population, and the averages
out of the five runs were taken as the final result. Also, whenever the dimension
n of the problems to be solved exceeds 10, the coevolution like decompositiontechnique were uniformly applied to every respective algorithms (with subspace
dimension ni ¼ n=10).The test suits used in our experiment are those minimization problems listed
in Table 2 and a difficult application problem appeared in fractal image
compression technique (Table 9). These suits contain mainly some represen-
tative, complex, multimodal functions with many local optima and being
highly non-separable in features. These types of functions are normally re-
garded as being difficult to optimize, particularly challenging for the applica-bility and efficiency of genetic algorithms.
Our experiments were organized as three groups with different purposes. We
report the result of each group below in order.
6.1. Explanatory experiments
This group of experiments aims to exhibit the detailed evolution processesof the fast-GA, demonstrating its validity and exclusive features. The problems
f1–f5 were simulated. The simulation results are then summarized in Tables 3–7.Tables 3–7 show that the fast-GA can consistently yield the global optimum
of each test problem, and, the convergence is monotonic in the following senses:
(i) the best-so-far fitness values f ðkÞbest are monotonically increased; (ii) the pre-
cision of the approximate solutions xðkÞ� is monotonically improved; and (iii) the
search spaces XðkÞ (the widths of the search spaces xðXðkÞÞ) are monotonicallyshrunk (cf. also, Figs. 8 and 10). This demonstrates the common features ofthe fast-GA.
The experiments also show that the number of subregions, nðkÞ, contained insearch space XðkÞ in each step are uniformly bounded. These bounds are seen to
be very small in each case, but vary with the problems under consideration.
Particularly we observed in the experiments that the bounds nðkÞ are generallyrelated (actually, proportional) to the number of global optima of the function
to be optimized. It gets larger whenever there are many global or almost the
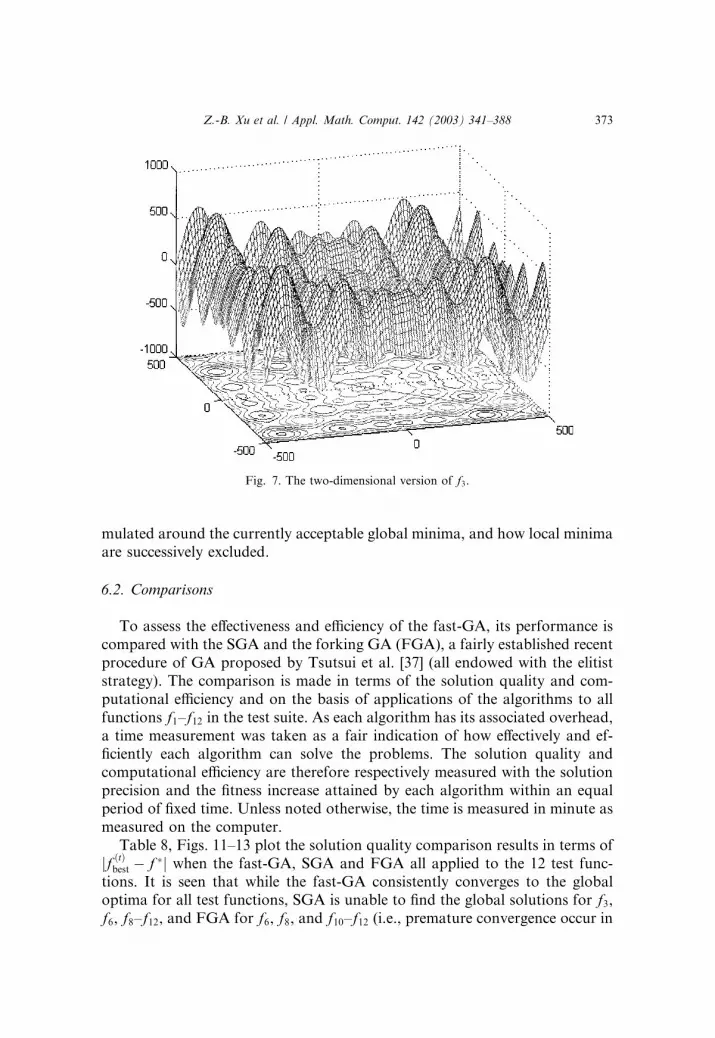
same global optima, as in the case of f2. Fig. 7 shows the two-dimensionalversion of f3, the number of minima of which is known to increase exponen-
tially as the dimension n increases but with only one global minimizer. As
368 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
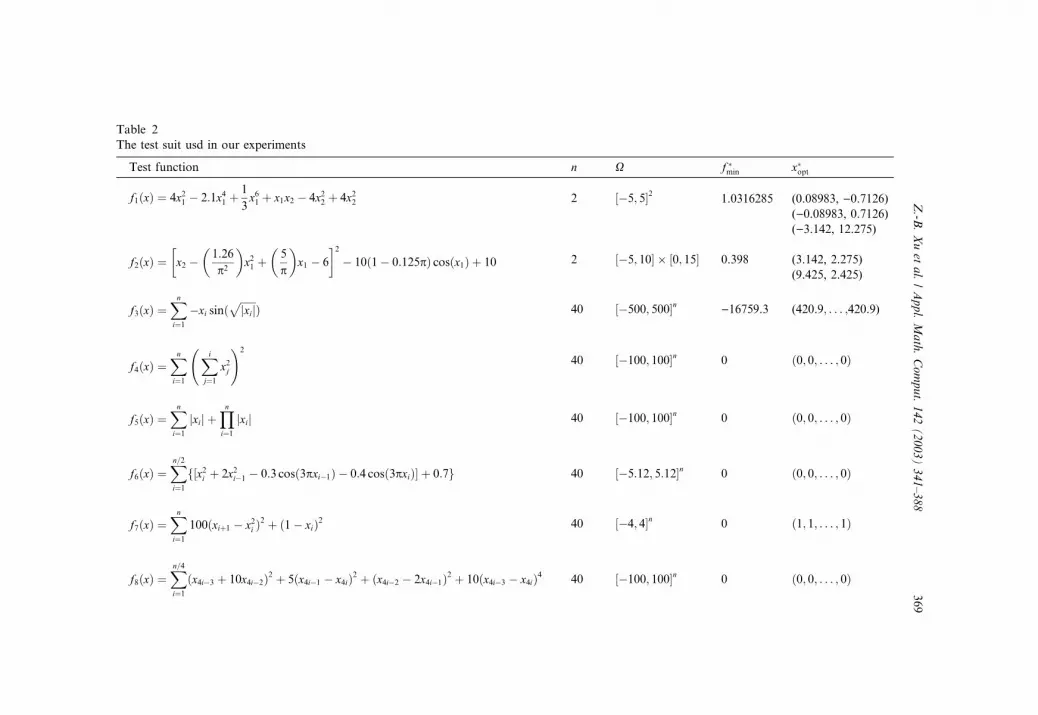
Table 2
The test suit usd in our experiments
Test function n X f �min x�opt
f1ðxÞ ¼ 4x21 � 2:1x41 þ1
3x61 þ x1x2 � 4x22 þ 4x22 2 ½�5; 5�2 1.0316285 (0.08983, )0.7126)
()0.08983, 0.7126)()3.142, 12.275)
f2ðxÞ ¼ x2
�� 1:26
p2
� �x21 þ
5
p
� �x1 � 6
�2� 10ð1� 0:125pÞ cosðx1Þ þ 10 2 ½�5; 10� � ½0; 15� 0.398 (3.142, 2.275)
(9.425, 2.425)
f3ðxÞ ¼Xni¼1
�xi sinðffiffiffiffiffiffijxij
pÞ 40 ½�500; 500�n )16759.3 (420.9; . . . ;420.9)
f4ðxÞ ¼Xni¼1
Xi
j¼1x2j
!2
40 ½�100; 100�n 0 ð0; 0; . . . ; 0Þ
f5ðxÞ ¼Xni¼1
jxij þYni¼1
jxij 40 ½�100; 100�n 0 ð0; 0; . . . ; 0Þ
f6ðxÞ ¼Xn=2i¼1
f½x2i þ 2x2i�1 � 0:3 cosð3pxi�1Þ � 0:4 cosð3pxiÞ� þ 0:7g 40 ½�5:12; 5:12�n 0 ð0; 0; . . . ; 0Þ
f7ðxÞ ¼Xni¼1
100ðxiþ1 � x2i Þ2 þ ð1� xiÞ2 40 ½�4; 4�n 0 ð1; 1; . . . ; 1Þ
f8ðxÞ ¼Xn=4i¼1
ðx4i�3 þ 10x4i�2Þ2 þ 5ðx4i�1 � x4iÞ2 þ ðx4i�2 � 2x4i�1Þ2 þ 10ðx4i�3 � x4iÞ4 40 ½�100; 100�n 0 ð0; 0; . . . ; 0Þ
Z.-B
.Xuet
al./Appl.Math.Comput.142(2003)341–388
369
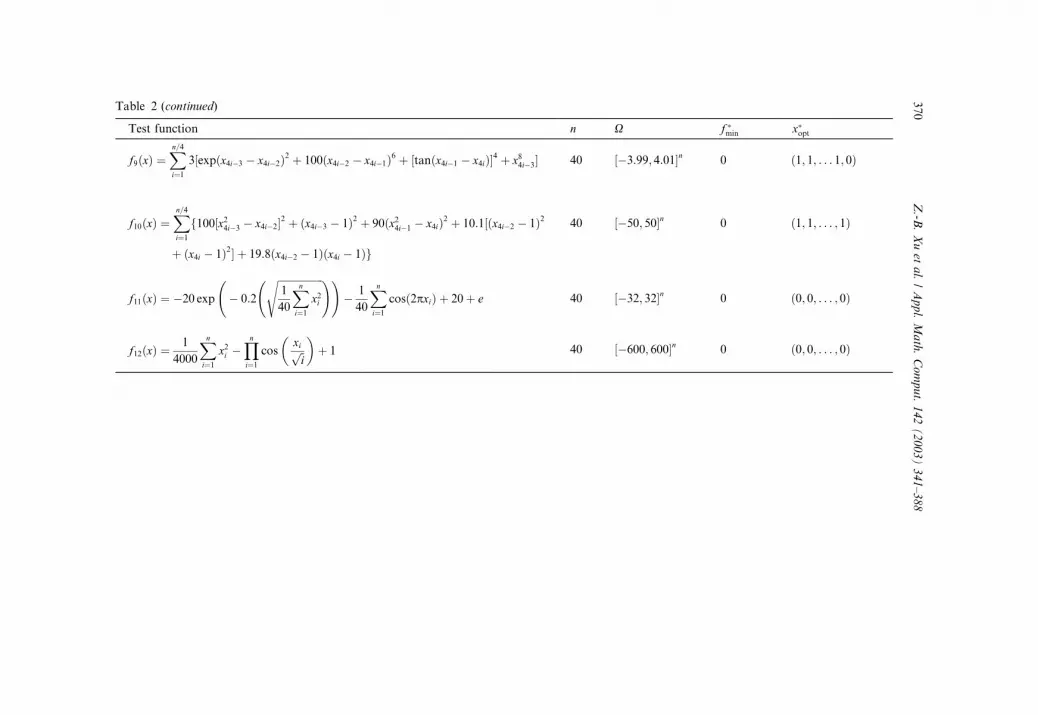
Table 2 (continued)
Test function n X f �min x�opt
f9ðxÞ ¼Xn=4i¼1
3½expðx4i�3 � x4i�2Þ2 þ 100ðx4i�2 � x4i�1Þ6 þ ½tanðx4i�1 � x4iÞ�4 þ x84i�3� 40 ½�3:99; 4:01�n 0 ð1; 1; . . . 1; 0Þ
f10ðxÞ ¼Xn=4i¼1
f100½x24i�3 � x4i�2�2 þ ðx4i�3 � 1Þ2 þ 90ðx24i�1 � x4iÞ2 þ 10:1½ðx4i�2 � 1Þ2
þ ðx4i � 1Þ2� þ 19:8ðx4i�2 � 1Þðx4i � 1Þg
40 ½�50; 50�n 0 ð1; 1; . . . ; 1Þ
f11ðxÞ ¼ �20 exp
� 0:2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
40
Xni¼1
x2i
s !!� 1
40
Xni¼1
cosð2pxiÞ þ 20þ e 40 ½�32; 32�n 0 ð0; 0; . . . ; 0Þ
f12ðxÞ ¼1
4000
Xni¼1
x2i �Yni¼1
cosxiffiffii
p� �
þ 1 40 ½�600; 600�n 0 ð0; 0; . . . ; 0Þ
370
Z.-B
.Xuet
al./Appl.Math.Comput.142(2003)341–388

Table 3
The evolution process of the fast-GA applied to f1
Iteration (k) Width of
research space
xðXðkÞÞ
jf ðkÞbest � f �j Percentage of
deleted cells in
XðkÞ
Number of
subregions
contained in XðkÞ
1 10 5.198905 97.7 1
2 1.875 0.683846 84.8 1
3 1.523 0.060562 0 1
4 0.7615 0.020697 99.6 2
5 0.05 10e)5 Stopping criteria
are met
2
xmin ¼ ð�0:089226; 0:712423Þ; ð0:089226;�0:712546Þ
Table 4
The evolution process of the fast-GA applied to f2
Iteration (k) Width of
research space
xðXðkÞÞ
jf ðkÞbest � f �j Percentage of
deleted cells in
XðkÞ
Number of
subregions
contained in XðkÞ
1 15 1.236906 29.8 1
2 12.767 0.103892 16.8 1
3 12.767 0.003590 0 1
4 10.783 0.001807 94.1 2
5 10.717 0.000232 0 2
6 6.158 0.000203 97.3 3
7 0.372 10e)5 Stopping criteria
are met
3
x ¼ ð�3:140701; 12:275548Þ; ð3:137760; 2:279323Þ; ð9:415894; 2:467756Þ
Table 5
The evolution process of the fast-GA applied to f3
Iteration (k) Width of
research space
xðXðkÞÞ
jf ðkÞbest � f �j Percentage of
deleted cells in
XðkÞ
Number of
subregions
contained in XðkÞ
1 1000 3304.91874 22.0 1
2 780 1338.30647 97.6 1
3 31 992.34704 98.4 1
4 5 226.43583 76.0 1
5 1.2 10e)5 Stopping criteria
are met
1
x ¼ ð421:1; 421:1; . . . ; 421:1Þ
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 371

compared, Fig. 9 shows the function f1 that has not so many local optima but
with two global minimizers. The evolution details (particularly, the search
space shrinking details) of the fast-GA when applied to minimization of these
two functions are presented respectively in Figs. 8 and 10 (corresponding toTables 3 and 5), which demonstrate clearly how the remaining cells are accu-
Table 6
The evolution process of the fast-GA applied to f4
Iteration (k) Width of
research
space xðXkÞ
jf ðkÞbest � f �j Percentage of
deleted cellsin
X�
Number of
subregions
contained in Xk
1 200 1.1eþ04 86.2 1
2 25 9.4eþ01 75.9 1
3 6.0 3.8eþ00 83.3 1
4 0.99 2.3e)01 80.0 1
5 0.19 3.0e)02 73.7 1
6 0.05 7.3e)03 86.0 1
7 0.007 3.3e)04 71.4 1
8 0.002 2.3e)06 85.0 1
9 0.0003 6.9e)07 66.7 1
10 0.0001 8.4e)08 71.5 1
11 0.00003 4.9e)09 Stopping criteria
are met
1
x ¼ ð0:000001;�0:000063; 0:000027; . . . ; 0:000031Þ
Table 7
The evolution process of the fast-GA applied to f5
Iteration (k) Width of
research space
xðXkÞ
jf ðkÞbest � f �j Percentage of
deleted cells in
X�
Number of
subregions
contained in Xk
1 200 9.43eþ01 95.5 1
2 9 5.42e)01 88.9 1
3 1 1.20e)01 69.0 1
4 0.3 1.62e)02 68.8 1
5 0.09 1.17e)03 50.3 1
6 0.03 1.37e)04 76.7 1
7 0.004 9.81e)06 75.0 1
8 0.001 1.12e)06 96.0 1
9 0.00003 8.97e)08 Stopping criteria
are met
1
x ¼ ð0:000089;�0:000254; 0:000327; . . . ; 0:000007Þ
372 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
mulated around the currently acceptable global minima, and how local minima
are successively excluded.
6.2. Comparisons
To assess the effectiveness and efficiency of the fast-GA, its performance is
compared with the SGA and the forking GA (FGA), a fairly established recent
procedure of GA proposed by Tsutsui et al. [37] (all endowed with the elitist
strategy). The comparison is made in terms of the solution quality and com-
putational efficiency and on the basis of applications of the algorithms to all
functions f1–f12 in the test suite. As each algorithm has its associated overhead,
a time measurement was taken as a fair indication of how effectively and ef-ficiently each algorithm can solve the problems. The solution quality and
computational efficiency are therefore respectively measured with the solution
precision and the fitness increase attained by each algorithm within an equal
period of fixed time. Unless noted otherwise, the time is measured in minute as
measured on the computer.
Table 8, Figs. 11–13 plot the solution quality comparison results in terms of
jf ðtÞbest � f �j when the fast-GA, SGA and FGA all applied to the 12 test func-
tions. It is seen that while the fast-GA consistently converges to the globaloptima for all test functions, SGA is unable to find the global solutions for f3,f6, f8–f12, and FGA for f6, f8, and f10–f12 (i.e., premature convergence occur in
Fig. 7. The two-dimensional version of f3.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 373

these cases). So while the fast-GA can successively solve all the problems, SGA
can only solve 5/12 and FGA 7/12 of the problems. In the cases when all al-
gorithms converge, Table 8 shows that the fast-GA can always attains higher-
solution precision. That is, the fast GA outperforms SGA and FGA in solution
quality (particularly in the senses of obviating premature convergence and
wider applicability).
The computational efficiency comparison results are shown in Figs. 11–13. Itis clear from these figures that the fast-GA exhibits also a very significant
outperformance over the SGA and FGA for all the test functions. Particularly
the efficiency speed-up of the fast-GA can be seen to be at least more than four
times higher, as compared with SGA, and more than 2.5 (averagingly 6) times
higher, as compared with FGA the cases where all algorithms converge. In
addition, we can observe from Figs. 11–13 that such efficiency acceleration
becomes even more and more striking when the function to be optimized gets
more and more complex. Even with such efficiency speed-up, the guaranteed
Fig. 8. The search space (containing all the cells) shrinking process when the fast-GA is applied to
f3 ðn ¼ 2Þ, where ‘‘�’’ is the location of the global minimiza, and ‘‘�’’ is the best-so-far solutionfound by the algorithm. The darker part of (b) consists of the cells excluded by the algorithm in the
first iteration (step). Correspondingly, the darkest parts in (c) and (d) are excluded respectively in
the second and third steps. The algorithm finds the global optimum with precision 10�4 in the
fourth step.
374 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

monotonic convergence of the fast-GA is still clearly observed in all theseexperiments.
All these comparisons show the superior performance of the fast-GA in
efficacy and efficiency.
6.3. An application
The fast-GEA, SGA and FGA have been further compared with application
to a difficult real-life application problem: the inverse problem of fractal en-
coding related to fractal image compression technique [3,20]. Given an image,the problem is to find a set of so-called fractal codes with which the image can
be compressedly approximated (expressed, stored and further transferred) by a
fractal image. As known, a fractal image occurs very frequently as an attractor
(or an invariant measure) of an iterated function system (IFS) (or a probabi-
listic iterative function system-PIFS). Here an IFS fK;W g means a set of
contraction mappings wi : K ! K, i ¼ 1; 2; . . . ; n, with the properties
dðwiðxiÞ;wiðyÞÞ6 sidðx; yÞ8x; y 2 K for some 06 si < 1
where dð:; :Þ is the metric of the compact metric space K, and, a PIFS fK;W ; Pgis a system excepted to give an IFS fK;W g, a probabilistic distribution vector
Fig. 9. The function f1. It has two global minimizers.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 375

P ¼ fpi; 16 i6 ng is also attached. It is known that any IFS (PIFS) has a
unique attractor A (an invariant measure l) that satisfies
A ¼ W ðAÞ ¼[ni¼1
wiðAÞ
ðl ¼Pn
i¼1 pil w�1i ; suppðlÞ ¼ AÞ and the attractor (the invariant measure)
can be computed through the iteration:
W ðkþ1ÞðSÞ ¼ W ðW ðkÞðSÞÞ; W ðSÞ ¼[ni¼1
wiðSÞ; k ¼ 1; 2; . . . ;
ðM ðkþ1ÞðmÞÞ ¼ MðM ðkÞðmÞÞ; MðmÞ ¼Xni¼1
pim w�1i ; k ¼ 1; 2; . . . ;
It is known also in fractal geometry (see, e.g. [3]) that given an objectiveimage S and any e > 0, there is an IFS fK;W g (a PIFS) fK;W ; Pg such that theattractor A of the IFS (the invariant measure l of the PIFS) approaches S in
Fig. 10. The search space (the white cells) shrinking process when the fast-GA applied to f1. (a)Shows the location of the global optima of f1 (denoted by ‘‘�’’); (b) and (c) show the cells excluded
by the algorithm in steps 1 and 2. In step 3, the search space is forked into two subregions in (d)
because of that the two global optima all lie in the husk layer of the search space. After forking, one
more iteration (step) yields the two global optima with precision 10�8 (e).
376 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
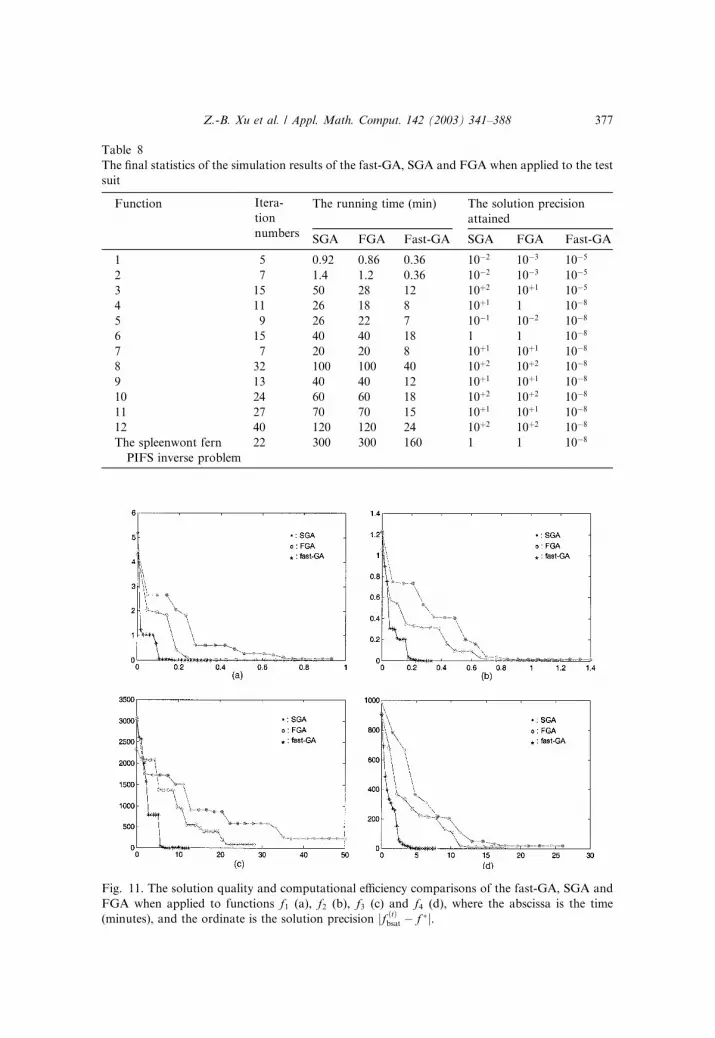
Table 8
The final statistics of the simulation results of the fast-GA, SGA and FGA when applied to the test
suit
Function Itera-
tion
numbers
The running time (min) The solution precision
attained
SGA FGA Fast-GA SGA FGA Fast-GA
1 5 0.92 0.86 0.36 10�2 10�3 10�5
2 7 1.4 1.2 0.36 10�2 10�3 10�5
3 15 50 28 12 10þ2 10þ1 10�5
4 11 26 18 8 10þ1 1 10�8
5 9 26 22 7 10�1 10�2 10�8
6 15 40 40 18 1 1 10�8
7 7 20 20 8 10þ1 10þ1 10�8
8 32 100 100 40 10þ2 10þ2 10�8
9 13 40 40 12 10þ1 10þ1 10�8
10 24 60 60 18 10þ2 10þ2 10�8
11 27 70 70 15 10þ1 10þ1 10�8
12 40 120 120 24 10þ2 10þ2 10�8
The spleenwont fern
PIFS inverse problem
22 300 300 160 1 1 10�8
Fig. 11. The solution quality and computational efficiency comparisons of the fast-GA, SGA and
FGA when applied to functions f1 (a), f2 (b), f3 (c) and f4 (d), where the abscissa is the time
(minutes), and the ordinate is the solution precision jf ðtÞbsat � f �j.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 377

the sense of hðS;AÞ < eðdHðS; lÞ < eÞ, where hð:; :Þ is the Hausdorff metric be-tween sets and dHð:; :Þ is the Hutchinson metric between measures. By this
theory, any objective image then can be approximately viewed as an attractor
of an IFS (therefore, a fractal image) and therefore can be coded as simple
fractal codes (this is the underlying principle of the fractal image compression).
To specify such fractal codes, assume each contraction mapping xi in the IFS
(PIFS) is a linear affine transformation of the form:
xixy ¼ a11a12a21a22xy þ bi1bi2 8xy 2 K � R2
Then the IFS (PIFS) is characterized uniquely by the parameters a ¼ ðai1; ai2;ai3; ai4; bi1; bi2; i ¼ 1; 2; . . . ; ng 2 R6n (the parameters a ¼ ðai1; ai2; ai3; ai4; bi1; bi2;pi; i ¼ 1; 2; . . . ; ng 2 R7n). Such parameters are then referred to as the fractal
codes of the objective image S. Given an objective image, finding its fractalcodes is the IFS inverse problem, which is central to the fractal image com-
pression technology.
There are several approaches to the IFS (or PIFS) inverse problems. One of
such approaches is the moment matching: Consider the PIFS encoding case. If
Fig. 12. The solution quality and computational efficiency comparisons of the fast-GA, SGA and
FGA when applied to functions f5 (a), f6 (b), f7 (c) and f8 (d), where the abscissa is the time
(minutes), and the ordinate is the solution precision jf ðtÞbsat � f �j.
378 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

the moments fGijg of the objective image S is known (which is the case in mostof applications), then the PIFS codes of S can be obtained as a solution of the
optimization problem modeled as in Table 9 [38].This PIFS inverse problem is well recognized to be one of the most chal-
lenging optimization problems to solve, especially by traditional gradient
methods and the classical genetic algorithm [38]. Here we do not attempt to
Fig. 13. The solution quality and computational efficiency comparisons of the fast-GA, SGA and
FGA when applied to functions f9 (a), f10 (b), f11 (c) and f12 (d), where the abscissa is the time
(minutes), and the ordinate is the solution precision jf ðtÞbsat � f �j.
Table 9
The PIFS inverse problem
min F ðaÞ ¼PM1
i¼0PM2
j¼0½gijðaÞ � Gij�2with g00 ¼ 1 and
gij ¼Xnk¼1
pkXi
i1¼0ii1a
i1k1
Xi�i1
12¼0i
"� i1i2a
i2k2b
i�i1�i2k1
# Xjj1¼0
jj1aj1k3
Xj�j1
j2¼0j
"� j1j2a
j2k4b
j�j1�j2k2 gði1 þ j1Þði2 þ j2Þ
#
Where fgij : i; j > 1g are the moments of the invariant measure l of PIFS.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 379

provide general solutions to this problem, rather we attempt to assess appli-
cability and performance of the fast-GA, SGA and FGA when all applied tothis real-life difficult problem. Our simulation was with the following specific
spleenwort fern image [20,38]:
The spleenwort fern IFS inverse problem: Given a spleewort fern S, asshown in Fig. 16(f), whose up-to (5,5)-order moments fGijg5�5 are listedin Table 10, to find a set of PIFS codes a ¼ ðai1; ai2; ai3; ai4; bi1;bi2; pi; i ¼ 1; 2; 3; 4g 2 R28 of S through solving the PIFS inverse problem
in the region X ¼ ½�1; 1�24 � ½0; 1�4.
Considering the known poor performance of CGA in [38], we have set the
solution precision requirement e1 ¼ jfbest � f �j ¼ 10e� 2, and the mutation
rate Pm ¼ 0:9 for SGA and FGA, the maximal generation number of evolutionM ¼ 500 for the fast-GA in this experiment but kept other parameters intact as
before. With such parameter setup, implementations of the fast-GA, CGA and
FGA yield the solutions shown as in Table 8. The actual PIFS codes of the
spleenwort fern are those listed in Table 12. Comparing Table 11 with Table 12
(also Fig. 15), we see that the fast-GA again successfully finds the global so-
lution with the required precision, while, in contrast, SGA and FGA both fail.
Fig. 14 shows the comparisons of these three algorithms in terms of solution
quality and efficiency. Fig. 15 shows the images reconstructed from the solu-
Table 10
The moments of the spleenwort fern
m Gm0 Gm1 Gm2 Gm3 Gm4 Gm5
0 1.000000 0.608444 0.467175 0.403542 0.374759 0.364592
1 0.592843 0.377998 0.303892 0.271990 0.259448 0.262724
2 0.367721 0.244500 0.203987 0.187878 0.183665 0.190515
3 0.236229 0.163092 0.140316 0.132420 0.132156 0.138869
4 0.155983 0.111419 0.098330 0.096107 0.097635 0.103079
5 0.105882 0.079268 0.051057 0.054156 0.058486 0.064014
Table 11
The PIFS codes of the spleenwort fern
i a�i1 a�i2 a�i3 a�i4 b�i1 bi2� p�i
1 0.00 0.00 0.00 0.16 0.50 0.00 0.01
2 0.20 )0.26 0.23 0.22 0.40 0.05 0.07
3 )0.15 0.28 0.26 0.24 0.57 )0.12 0.07
4 0.85 0.04 )0.04 0.85 0.08 0.18 0.85
380 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

tions respectively yielded by the SGA, FGA and the fast GA, and Fig. 16
shows the evolution details of the fast-GA.
Note that the spleenwort fern IFS inverse problem is strongly non-linear
and highly non-separable. This experiment strongly supports the superior
performance (especially the fast convergence) of the fast-GA when compared
with other two GAs.
7. Conclusion
This paper has suggested, analyzed, and partially explored a set of six
efficiency speed-up strategies for evolutionary computation. The strategies
Fig. 14. The solution quality and computational efficiency comparisons of the fast-GA, SGA and
FGA when applied to the spleenwort fern PIFS inverse problem.
Table 12
The PIFS codes found by the fast-GEA
i ai1 ai2 ai3 ai4 bi1 bi2 pi
1 0.01228 0.01563 0.00736 0.16424 0.52809 0.00483 0.01022
2 0.22212 )0.26037 0.24796 0.23542 0.42136 0.06202 0.07076
3 )0.14071 0.30123 0.27256 0.24584 0.59374 )0.10677 0.07082
4 0.85351 0.04056 )0.03874 0.85280 0.08896 0.18464 0.84820
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 381
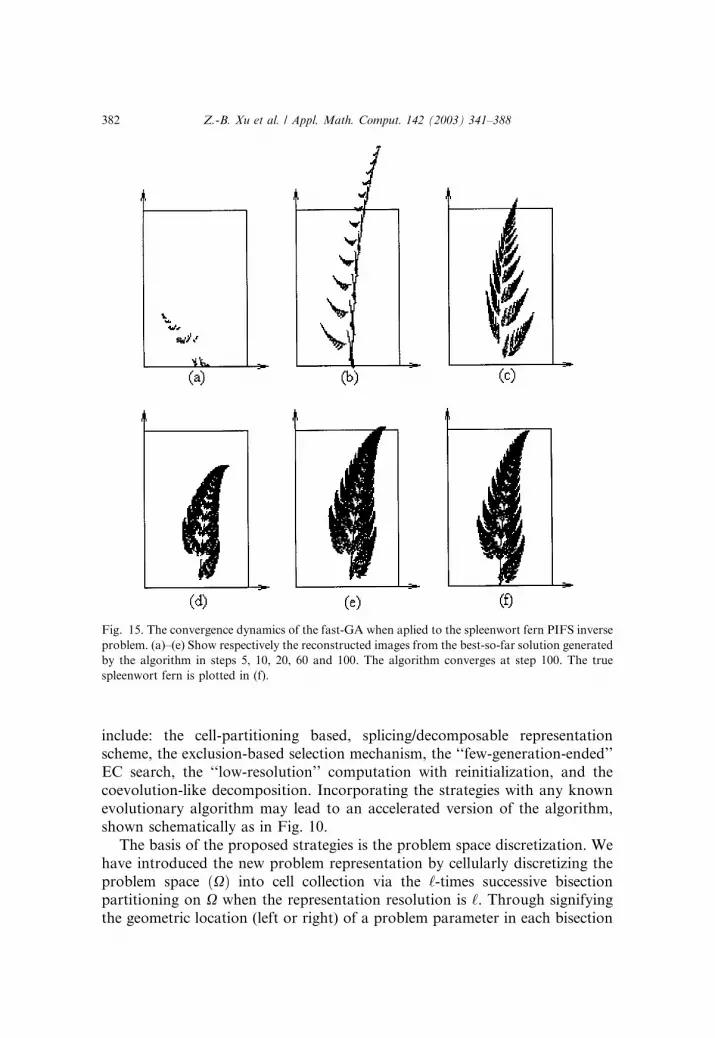
include: the cell-partitioning based, splicing/decomposable representationscheme, the exclusion-based selection mechanism, the ‘‘few-generation-ended’’
EC search, the ‘‘low-resolution’’ computation with reinitialization, and the
coevolution-like decomposition. Incorporating the strategies with any known
evolutionary algorithm may lead to an accelerated version of the algorithm,
shown schematically as in Fig. 10.
The basis of the proposed strategies is the problem space discretization. We
have introduced the new problem representation by cellularly discretizing the
problem space ðXÞ into cell collection via the ‘-times successive bisectionpartitioning on X when the representation resolution is ‘. Through signifying
the geometric location (left or right) of a problem parameter in each bisection
Fig. 15. The convergence dynamics of the fast-GA when aplied to the spleenwort fern PIFS inverse
problem. (a)–(e) Show respectively the reconstructed images from the best-so-far solution generated
by the algorithm in steps 5, 10, 20, 60 and 100. The algorithm converges at step 100. The true
spleenwort fern is plotted in (f).
382 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388

procedure, the new representation scheme provides both a unique binary en-
coding of the problem parameters and a useful data structure of expressing the
cellular partitioning. Three exclusive properties of the new representation
scheme have been shown: (i) There are homeomorphisms among the problem
space X, the cell space Cð‘Þ and the encoding space f0; 1gn‘ (the search space),
which in particular implies that in the scheme a binary string denotes both aproblem variable and a cell in Cð‘Þ (it therefore stands not just for an individualbut for a subpopulation in simulated biology terms); (ii) the encoding is
splicing and decoding is decomposable, detailed as in Theorem 1, and (iii) there
holds specific meaning of each bit of a binary code, and the significance varies
from left to right in descent order, corresponding to approximating a problem
parameter from coarse to fine (macro to micro, global to local) manner. All
these properties feature the new representation scheme, distinguish itself from
the traditional binary representation scheme, and underlie the applicability andeffectiveness of the present research.
The core mechanism and step of an accelerated evolutionary algorithm is the
space shrinking (cf. Fig. 10). Functionally it guides the EC search to more and
more promising area and assures convergence of the algorithm. This has been
realized in this work through using the best-so-far solution guided, and ex-
clusion-based selection operations (cf. Fig. 10). The best-so-far solution is very
loosely required in precision and therefore we generate it via a time-saving,
fast EC search procedure endowed with the ‘‘few-generation-ended’’ searchstrategy and the ‘‘low-resolution’’ computation with reinitialization strategy,
both of which are known to be the most economic and efficient ways for use of
EC. The exclusion-based selection is the main contributor to efficiency accel-
eration of EC, which are carried out by employing exclusion operators com-
bined with a specified exclusion scheme. We have developed four exclusion
operators, based respectively on the concavity test, the dual fitness test, the
Fig. 16. A comparision of the reconstructed spleenwort ferns from the final solutions yielded by the
SGA, FGA and fast-GA.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 383

Lipschitz test and the formal series test, and one exclusion scheme called the
orange-peeling scheme. All these have made the exclusion-based selectiontheoretically sound and practically powerful, both as a new way to simulate the
‘‘survival for the fittest’’ principle and in guiding EC search to monotonically
converging to the global optimum. It is noted that in this step, the exclusion-
based selection has used the exclusion for the worst mechanism, whereas the
best-so-far solution guided search employed the selection for the best principle.
The combinative use of these two complementary selection mechanism has also
contributed a lot of efficiency speed-up to the accelerated evolutionary algo-
rithm.The focused search in the accelerated algorithm (Fig. 10) means that in the
next step of evolution the algorithm will perform search focused on the shrunk
Fig. 17. A schematic representation of an accelerated evolutionary algorithm (the fast-EA).
384 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
space (the reinitialization corresponds to an refined cellular partition on the
shrunk space).This, in essence, amounts to performing search with lengthened (longer)
encoding (i.e., changing representation during search). So we can conclude
that the proposed acceleration algorithms finds the global optimum via the
space-shrinking directed search with successively increased representation
length (or, to be more precise, via successively finding the significant bits of its
chromosome representation, from the most significant to less significant, with
sucesssively increased precision). During this process, the reintialization (suc-
cessively refined partitioning) plays a role of compensation for the lack of localsearch capability of the traditional EC. This is the underlying principle of the
proposed strategies, and explains in particular why an arbitrarily high-preci-
sion (resolution) solution can be obtained by means of the successive low-
resolution search.
As an example, we have endowed all the strategies with genetic algorithms,
yielding an accelerated genetic algorithm––the fast-GA (see Fig. 17). The fast-
GA then is experimentally tested with a difficult test suite consisted of 10
complex multimodal function optimization examples and a real-life applica-tion problem––the moment matching problem of fractal encoding of the
spleenwort fern. The performance of the fast-GA is compared against the SGA
and one of the most recently and fairly established variants of GAs, the FGA.
The experiments all have demonstrated that the fast-GA consistently and
significantly outperforms the SGA and FGA in efficiency and solution quality.
Besides the speed-up of efficiency, other visible features of the fast-GA have
been also observed in the experimental studies including: (i) no premature
convergence occurs; (ii) guaranteed convergence to global optimum; and (iii)variable high-precision solution attainable. All these support the validity and
the power of the strategies developed in the present work.
The limitation of the developed strategies is clear: they can only apply to the
continuous problem space. We plan on relaxing this limitation in our near
future investigation. There are also many other opportunities for further re-
search related to the developed strategies: fully comparing the four exclusion
operators, developing new generic, more efficient exclusion operators and ex-
clusion schemes; specializing the developed strategies to other evolutionaryalgorithms (like ES); exploring other more powerful efficiency speed-up strat-
egies, and so on. In addition, the cell partitioning based representation scheme
suggested in this paper has provided a unique geometric language for signifying
schema-related concepts in GAs (say, a cell hdðAÞ; hð‘Þi corresponds to the
family of schemata of the form (A; �; �; . . . ; �), where A is a binary string). It is
therefore plausible to expect that with the new representation scheme, the
classical schema theory (particularly, the building block hypothesis) can be
more precisely explained and clarified, which may constitute another part offuture study.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 385

Acknowledgements
This research is partially supported by the Hi-Tech, R&D (863) Program(No. 2001AA113182), the Natural Science Foundation Project (No. 69975016)
and the earmarked grant CUHK4212/01E of the Hong Kong Research Grant
Council.
References
[1] T. B€aack, H.P. Schwefel, An overview of evolutionary algorithm for parameter optimization,
Evolutionary Computation 1 (1) (1993) 1–23.
[2] T. B€aack, F. Kursawe, Evolutionary algorithms for fuzzy logic: a brief overview, in: B.
Bouchon-Meunier, R.R. Yager, L.A. Zadeh (Eds.), Fuzzy Logic and Soft Computing, World
Scientific, Singapore, 1995, pp. 3–10.
[3] M.F. Barnsley, S. Demoko, Iterated function systems and the global construction of fractals,
Proceedings of Royal Soceity London A 399 (1985) 243–275.
[4] K. Deb, Multi-objective genetic algorithms: problem difficulties and construction of test
problems, Evolutionary Computation 7 (3) (1999) 205–231.
[5] T.E. Davis, J.C. Principle, A simulated annealing like convergence theory for the simple
genetic algorithm, in: Proceedings of Fourth International Conference on Genetic Algorithms,
Morgan Kaufmann, San Mateo, 1991, pp. 174–218.
[6] L.J. Eshelman, J.D. Schaffer, Real-coded genetic algorithms and interval schemate, in: L.D.
Whitley (Ed.), Foundations of Genetic Algorithms, II, Morgan Kaufmann, San Mateo, CA,
1993, pp. 187–202.
[7] D.B. Fogel, An introduction to simulated evolutionary optimization, IEEE Transactions on
Neural Networks 5 (1994) 3–13.
[8] D.B. Fogel, Evolutionary Computation: Towards a New Philosophy of Machine Intelligence,
IEEE Press, New York, 1995.
[9] U.M. Fayyad, G. Piatetsky-Shapire, P. Smyth, R. Uthurusamy (Eds.), Advances in Knowl-
edge Discovery and Data Mining, MIT Press, Cambridge, MA, 1996.
[10] C.M. Fonseca, P.J. Fleming, An overview of evolutionary algorithms in multiobjective
optimization, Evolutionary Computation 3 (1995) 1–16.
[11] O. Francois, An evolutionary strategy for global minimization and its Markov chain analysis,
IEEE Transactions on Evolutionary Computation 2 (30) (1998) 77–90.
[12] D.E. Goldberg, Genetic Algorithms in Search, Optimization and Machine Learning, Addison-
Wesley, Reading, MA, 1989.
[13] D.E. Goldberg, B. Korb, K. Deb, Messy genetic algorithm: motivation, analysis, and the first
result, Complex System 3 (1989) 493–530.
[14] J.J. Grefenstette, Optimization of control parameters for genetic algorithms, IEEE Transac-
tions on System, Man, and Cybernetics 16 (1) (1986) 122–128.
[15] E. Hansen, Global Optimization Using Interval Analysis, Marcel Dekker, New York, 1992.
[16] J.H. Holland, Adaption in Natural and Artificial Systems, The university of Michigan Press,
Ann Arbor, 1975.
[17] Y. Hanaki, T. Hashiyama, S. Okuma, The acceleration of evolutionary computation using
fitness estimation, in: Proceedings of the 1999 IEEE/ASME International Conference on
Advanced Intelligent Mechtronics, Atlanta, USA, 1999, pp. 776–781.
[18] G.R. Harik, F.G. Lobo, D.E. Goldberg, The compact genetic algorithm, IEEE Transactions
on Evolutionary Computation 3 (1999) 287–297.
386 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388
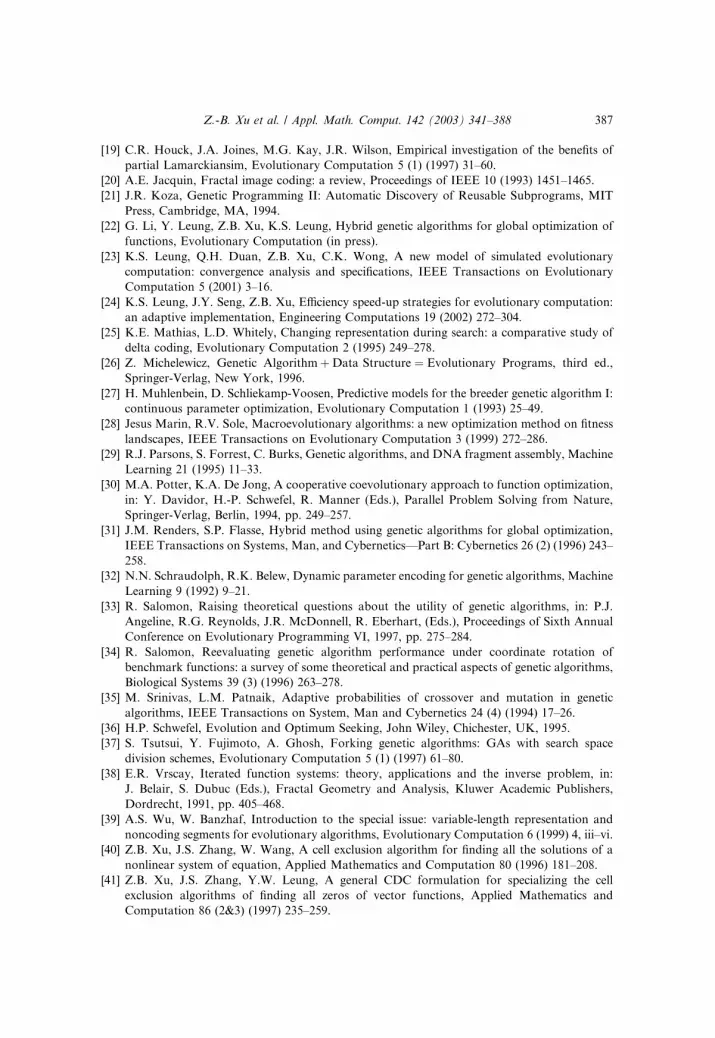
[19] C.R. Houck, J.A. Joines, M.G. Kay, J.R. Wilson, Empirical investigation of the benefits of
partial Lamarckiansim, Evolutionary Computation 5 (1) (1997) 31–60.
[20] A.E. Jacquin, Fractal image coding: a review, Proceedings of IEEE 10 (1993) 1451–1465.
[21] J.R. Koza, Genetic Programming II: Automatic Discovery of Reusable Subprograms, MIT
Press, Cambridge, MA, 1994.
[22] G. Li, Y. Leung, Z.B. Xu, K.S. Leung, Hybrid genetic algorithms for global optimization of
functions, Evolutionary Computation (in press).
[23] K.S. Leung, Q.H. Duan, Z.B. Xu, C.K. Wong, A new model of simulated evolutionary
computation: convergence analysis and specifications, IEEE Transactions on Evolutionary
Computation 5 (2001) 3–16.
[24] K.S. Leung, J.Y. Seng, Z.B. Xu, Efficiency speed-up strategies for evolutionary computation:
an adaptive implementation, Engineering Computations 19 (2002) 272–304.
[25] K.E. Mathias, L.D. Whitely, Changing representation during search: a comparative study of
delta coding, Evolutionary Computation 2 (1995) 249–278.
[26] Z. Michelewicz, Genetic AlgorithmþData Structure ¼ Evolutionary Programs, third ed.,
Springer-Verlag, New York, 1996.
[27] H. Muhlenbein, D. Schliekamp-Voosen, Predictive models for the breeder genetic algorithm I:
continuous parameter optimization, Evolutionary Computation 1 (1993) 25–49.
[28] Jesus Marin, R.V. Sole, Macroevolutionary algorithms: a new optimization method on fitness
landscapes, IEEE Transactions on Evolutionary Computation 3 (1999) 272–286.
[29] R.J. Parsons, S. Forrest, C. Burks, Genetic algorithms, and DNA fragment assembly, Machine
Learning 21 (1995) 11–33.
[30] M.A. Potter, K.A. De Jong, A cooperative coevolutionary approach to function optimization,
in: Y. Davidor, H.-P. Schwefel, R. Manner (Eds.), Parallel Problem Solving from Nature,
Springer-Verlag, Berlin, 1994, pp. 249–257.
[31] J.M. Renders, S.P. Flasse, Hybrid method using genetic algorithms for global optimization,
IEEE Transactions on Systems, Man, and Cybernetics––Part B: Cybernetics 26 (2) (1996) 243–
258.
[32] N.N. Schraudolph, R.K. Belew, Dynamic parameter encoding for genetic algorithms, Machine
Learning 9 (1992) 9–21.
[33] R. Salomon, Raising theoretical questions about the utility of genetic algorithms, in: P.J.
Angeline, R.G. Reynolds, J.R. McDonnell, R. Eberhart, (Eds.), Proceedings of Sixth Annual
Conference on Evolutionary Programming VI, 1997, pp. 275–284.
[34] R. Salomon, Reevaluating genetic algorithm performance under coordinate rotation of
benchmark functions: a survey of some theoretical and practical aspects of genetic algorithms,
Biological Systems 39 (3) (1996) 263–278.
[35] M. Srinivas, L.M. Patnaik, Adaptive probabilities of crossover and mutation in genetic
algorithms, IEEE Transactions on System, Man and Cybernetics 24 (4) (1994) 17–26.
[36] H.P. Schwefel, Evolution and Optimum Seeking, John Wiley, Chichester, UK, 1995.
[37] S. Tsutsui, Y. Fujimoto, A. Ghosh, Forking genetic algorithms: GAs with search space
division schemes, Evolutionary Computation 5 (1) (1997) 61–80.
[38] E.R. Vrscay, Iterated function systems: theory, applications and the inverse problem, in:
J. Belair, S. Dubuc (Eds.), Fractal Geometry and Analysis, Kluwer Academic Publishers,
Dordrecht, 1991, pp. 405–468.
[39] A.S. Wu, W. Banzhaf, Introduction to the special issue: variable-length representation and
noncoding segments for evolutionary algorithms, Evolutionary Computation 6 (1999) 4, iii–vi.
[40] Z.B. Xu, J.S. Zhang, W. Wang, A cell exclusion algorithm for finding all the solutions of a
nonlinear system of equation, Applied Mathematics and Computation 80 (1996) 181–208.
[41] Z.B. Xu, J.S. Zhang, Y.W. Leung, A general CDC formulation for specializing the cell
exclusion algorithms of finding all zeros of vector functions, Applied Mathematics and
Computation 86 (2&3) (1997) 235–259.
Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388 387

[42] X. Yao, Y. Liu, G.M. Lin, Evolutionary programming made faster, IEEE Transactions on
Evolutionary Computation 3 (1999) 82–97.
[43] X. Yao, L. Liu, Towards designing artificial neural networks by evolution, Applied
Mathematics and Computation 91 (1998) 83–90.
[44] Z.Y. Zhou, K.S. Leung, Z.B. Xu, Exclusion-based cooperative coevolution genetic algorithm,
2001 WSES International Conference on Evolutionary Computations (EC�01), 2001, 637(1)–637(6).
388 Z.-B. Xu et al. / Appl. Math. Comput. 142 (2003) 341–388