Đồ án học phần 3,4 nhóm 13
TRANSCRIPT
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
BỘ CÔNG THƯƠNG
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP HÀ NỘI
BÁO CÁO
ĐỒ ÁN HỌC PHẦN 3,4 (VXL, VKĐ, SCADA)
ĐỀ TÀI SỐ 3 : THIẾT KẾ HỆ THỐNG BƠM
NƯỚC
NHÓM SINH VIÊN THỰC HIỆN : NHÓM
28
PHẠM VĂN TOÀN
VŨ BÁ TRÁNG
Đồ án học phần 3 và 4 Page 1
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
NGUYỄN ĐỨC TOÀN
HOÀNG HỒNG GIANG
Hà Nội ngày…tháng…năm…
ĐỀ 3
Nội dung: xây dựng hệ thống gồm máy tính điều khiển giám sát, trạm điều khiển cục và hệ thống bơm nước trong đó:
P: điểm đo áp suất (có điều khiển và cảnh báo) có dải đo từ [0 -5] bar, điểm làm việc là 3.5 bar.
L: điểm đo mức (cảnh báo) có dải đo từ [o - 5] m.
RUN: đèn báo hệ thống đang làm việc.
HAP: đèn cảnh báo áp suất cao (lớn hơn 4.5 bar).
LAL: đèn cảnh báo mức thấp (nhỏ hơn 1.0m).
HAL: đèn cảnh báo mức cao (lớn hơn 4m).
START, STOP: hai nút nhấn khởi động và dừng hệ thống.
Đồ án học phần 3 và 4 Page 2
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
PHẦN 1:CƠ SỞ LÍ THUYẾT
1.1. Mục đíchNguồn nước rất quan trọng đối với sự sống và mọi hoạt
động của con người, nguồn nước ở 1 số nơi trên thế giớirất là khan hiếm và tình trạng ô nhiễm nguồn nước ngàycàng gia tăng.Trước thực trạng ấy chúng ta cần phải cógiải pháp để khai thác và sử dụng nguồn nước sạch 1 cáchhiệu quả và tiết kiệm. Muốn làm được điều này,chúng taphải đưa hệ thống điều khiển vào bể chứa để điều khiểnmức nước trong bể dùng PLC,qua đó duy trì mức nước trongbể ở trong giới hạn mức cho phép. Khi đó nước sẽ được bơmvà sử dụng một cách hợp lý.
I. Phương pháp đo áp suất
Đồ án học phần 3 và 4 Page 3

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Phương pháp đo áp suất phụ thuộc vào dạng áp suất
1.Đo áp suất tĩnh
- Đo trực tiếp chất lưu thong qua 1 lỗ khoan trên
thành bình
- Đo gián tiếp thong qua biến dạng của thành bình
dưới tác động của áp suất
2.Đo áp suất động
- Dựa theo nguyên tức chung là đo hiệu suất tổng và
áp suất tĩnh
- Có thể đo bằng cách đặt áp suất tổng lên màng
trước, đặt áp suất tĩnh lên màng sau của màng đo,
tín hiệu đưa ra là đọ chênh lệch giữa áp suất tổng
và áp suất tĩnh
- Áp suất có đơn vị đo là pascal (Pa)
- Trong công nghiệp còn dùng đơn vị đo là bar (1bar=
10^5 Pa)
Công thức xác định
p=dFdS
dF: lực
tác dụng
Đồ án học phần 3 và 4 Page 4
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
dS: diện
tích thành ống chị lực tác dụng
II. Phương pháp đo mức chất lỏng
Có hai dạng đo: đo liên tục và xác định theo ngưỡng.
Khi đo liên tục biên độ hoặc tần số của tín hiệu đo cho
biết thể tích chất lưu còn lại trong bình chứa. Khi xác
định theo ngưỡng, cảm biến đưa ra tín hiệu dạng nhị
phân cho biết thông tin về tình trạng hiện tại mức
ngưỡng có đạt hay không.
Có ba phương pháp hay dùng trong kỹ thuật đo và phát
hiện mức chất lưu:
- Phương pháp thuỷ tĩnh dùng biến đổi điện.
- Phương pháp điện dựa trên tính chất điện của chất
lưu.
- Phương pháp bức xạ dựa trên sự tương tác giữa bức xạ
và chất lưu.
Một số loại cảm biến đo mức chất lưu
* Cảm biến độ dẫn
Các cảm biến loại này dùng để đo mức các chất lưu có
tính dẫn điện (độ dẫn điện ~ 50μScm-1). Trên hình 20.22
giới thiệu một số cảm biến độ dẫn đo mức thông dụng.
Đồ án học phần 3 và 4 Page 5

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 20.22: Cảm biến độ dẫn
a) Cảm biến hai điện cực b) Cảm biến một điện cực
c) Cảm biến phát hiện mức
Sơ đồ cảm biến hình 20.22a gồm hai điện cực hình trụ
nhúng trong chất lỏng dẫn điện. Trong chế độ đo liên
tục, các điện cực được nối với nguồn nuôi xoay chiều ~
10V (để tránh hiện tượng phân cực của các điện cực).
Dòng điện chạy qua các điện cực có biên độ tỉ lệ với
chiều dài của phần điện cực nhúng chìm trong chất lỏng.
Sơ đồ cảm biến hình 20.22b chỉ sử dụng một điện cực,
điện cực thứ hai là bình chứa bằng kim loại.
Sơ đồ cảm biến hình 20.22c dùng để phát hiện ngưỡng,
gồm hai điện cực ngắn đặt theo phương ngang, điện cực
còn lại nối với thành bình kim loại,vị trí mỗi điện cực
ngắn ứng với một mức ngưỡng. Khi mức chất lỏng đạt tới
điện cực, dòng điện trong mạch thay đổi mạnh về biên
độ.
Đồ án học phần 3 và 4 Page 6
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
* Cảm biến tụ điện
Khi chất lỏng là chất cách điện, có thể tạo tụ điện
bằng hai điện cực hình trụ nhúng trong chất lỏng hoặc
một điện cực kết hợp với điện cực thứ hai là thành bình
chứa nếu thành bình làm bằng kim loại. Chất điện môi
giữa hai điện cực chính là chất lỏng ở phần điện cực bị
ngập và không khí ở phần không có chất lỏng. Việc đo
mức chất lưu được chuyển thành đo điện dung của tụ
điện, điện dung này thay đổi theo mức chất lỏng trong
bình chứa. Điều kiện để áp dụng phương pháp này hằng số
điện môi của chất lỏng phải lớn hơn đáng kể hằng số
điện môi của không khí (thường là gấp đôi).
Trong trường hợp chất lưu là chất dẫn điện, để tạo tụ
điện người ta dùng một điện cực kim loại bên ngoài có
phủ cách điện, lớp phủ đóng vai trò chất điện môi còn
chất lưu đóng vai trò điện cực thứ hai.
Đồ án học phần 3 và 4 Page 7
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
1.2. Tìm hiểu về PLC
1.2.1. Khái quát chung về PLC S7-300
1.3.1.1. Cấu trúc PLC S7-300PLC là thiết bị điều khiển logic khả trình (Programmable
Logic Control) là loại thiết bị cho phép thực hiện linh hoạtcác thuật toán điều khiển số thông qua một ngôn ngữ lậptrình. PLC là một bộ điều khiển số nhỏ gọn, dễ thay đổithuật toán và đặc biệt dễ trao đổi thông tin với môitrường xung quanh ( với PLC khác hoặc với máy tính). Toànbộ chương trình điều khiển được lưu trong bộ nhớ của PLCdưới dạng các khối chương trình ( Khối OB, FC hoặc FB) vàđược thực hiện theo chu kỳ vòng quét.
Đồ án học phần 3 và 4 Page 8
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
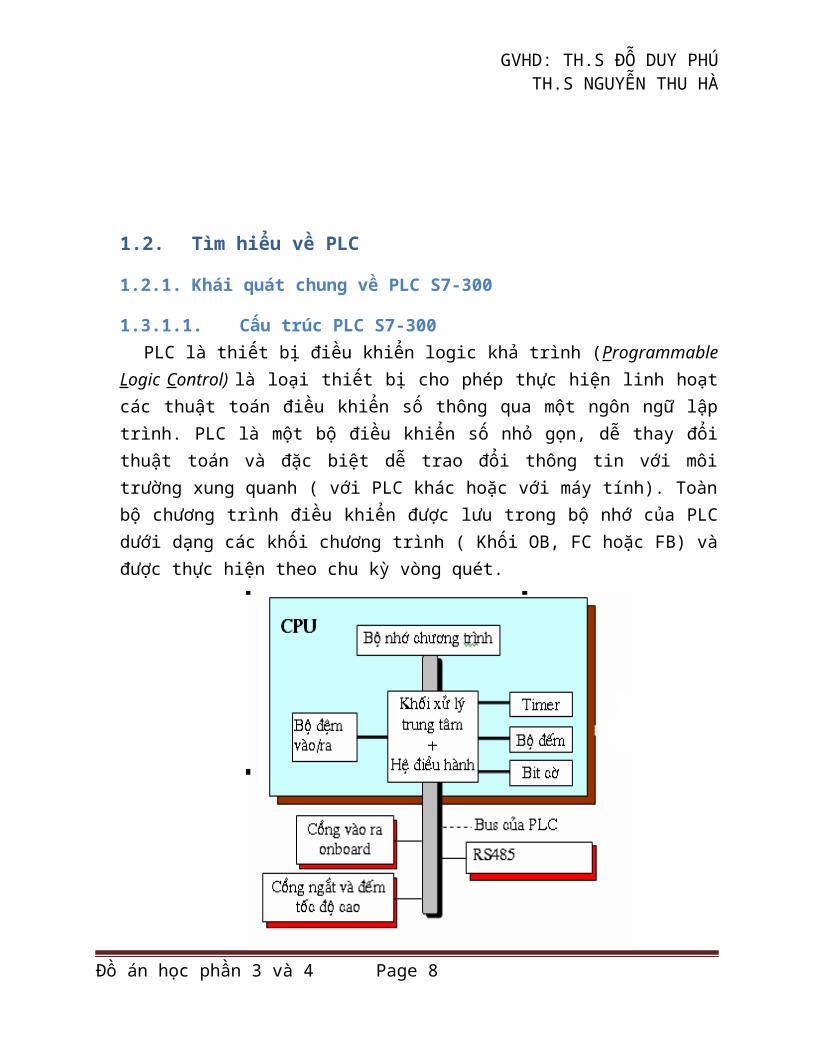
Hình 1.8 Nguyên lí chung về cấu trúc của một bộ điềukhiển logic khả trình (PLC)
Để có thể thực hiện được một chươg trình điều khiển, tất nhiên PLC phải có tính năng như một máy tính, nghĩa là phải có bộ vi xử lý (CPU), một hệ điều hành, bộ nhớ đểlưu chương trình điều khiển và tất nhiên phải có cổng vào/ ra để giao tiếp được với đối tượng điều khiển và để trao đổi thông tin với môi trường xung quanh. Bên cạnh đó, nhằm phục vụ bài toán điều khiển số, PLC cần phải có thêm các khối chức năng đặc biệt khác như bộ đếm (Counter), bộ thời gian (Timer)và những khối hàm chuyên dụng (hình 1.8).
Các module của PLC S7-300
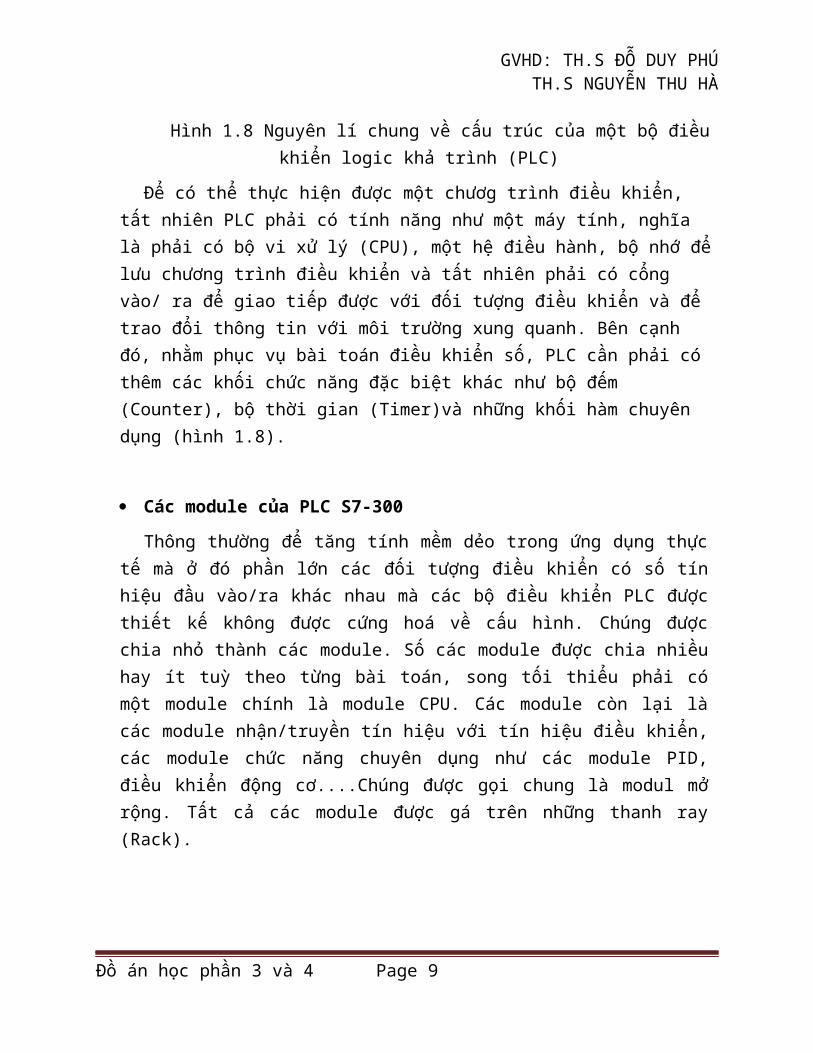
Thông thường để tăng tính mềm dẻo trong ứng dụng thựctế mà ở đó phần lớn các đối tượng điều khiển có số tínhiệu đầu vào/ra khác nhau mà các bộ điều khiển PLC đượcthiết kế không được cứng hoá về cấu hình. Chúng đượcchia nhỏ thành các module. Số các module được chia nhiềuhay ít tuỳ theo từng bài toán, song tối thiểu phải cómột module chính là module CPU. Các module còn lại làcác module nhận/truyền tín hiệu với tín hiệu điều khiển,các module chức năng chuyên dụng như các module PID,điều khiển động cơ....Chúng được gọi chung là modul mởrộng. Tất cả các module được gá trên những thanh ray(Rack).
Đồ án học phần 3 và 4 Page 9
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 1.9. Cấu trúc một thanh Rack của PLC S7-300
Module CPU
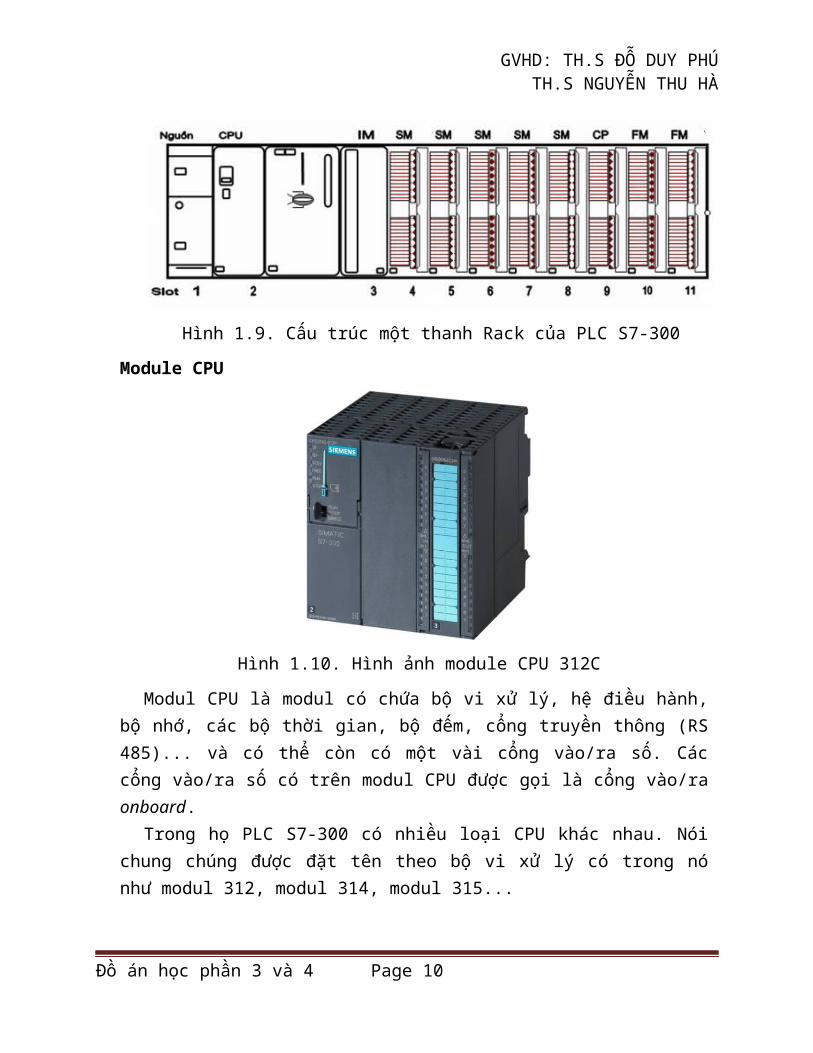
Hình 1.10. Hình ảnh module CPU 312C
Modul CPU là modul có chứa bộ vi xử lý, hệ điều hành,bộ nhớ, các bộ thời gian, bộ đếm, cổng truyền thông (RS485)... và có thể còn có một vài cổng vào/ra số. Cáccổng vào/ra số có trên modul CPU được gọi là cổng vào/raonboard.
Trong họ PLC S7-300 có nhiều loại CPU khác nhau. Nóichung chúng được đặt tên theo bộ vi xử lý có trong nónhư modul 312, modul 314, modul 315...
Đồ án học phần 3 và 4 Page 10
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Những modul cùng sử dụng một loại bộ vi xử lý, nhưngkhác nhau về cổng vào/ra onboard cũng như các khối hàmđặc biệt được tích hợp sẵn trong thư viện của hệ điềuhành phục vụ cho việc sử dụng các cổng vào/ra onboardnày sẽ được phân biệt với nhau trong tên gọi bằng thêmcụm chữ cái IFM (Intergrated Function Module). Ví dụ modul 312IFM, modul 314 IFM...
Ngoài ra còn có các loại modul CPU với hai cổng truyềnthông, trong đó cổng truyền thông thứ hai có chức năngchính là phục vụ việc nối mạng phân tán. Tất nhiên kèmtheo cổng truyền thông thứ hai này là những phần mềm tiệndụng thích hợp cũng đã được cài sẵn trong hệ điều hành.Các loại CPU được phân biệt với những modul CPU khác bằngthêm cụm từ DP (Distributed Port) trong tên gọi. Ví dụ modul315-DP, 315-2DP
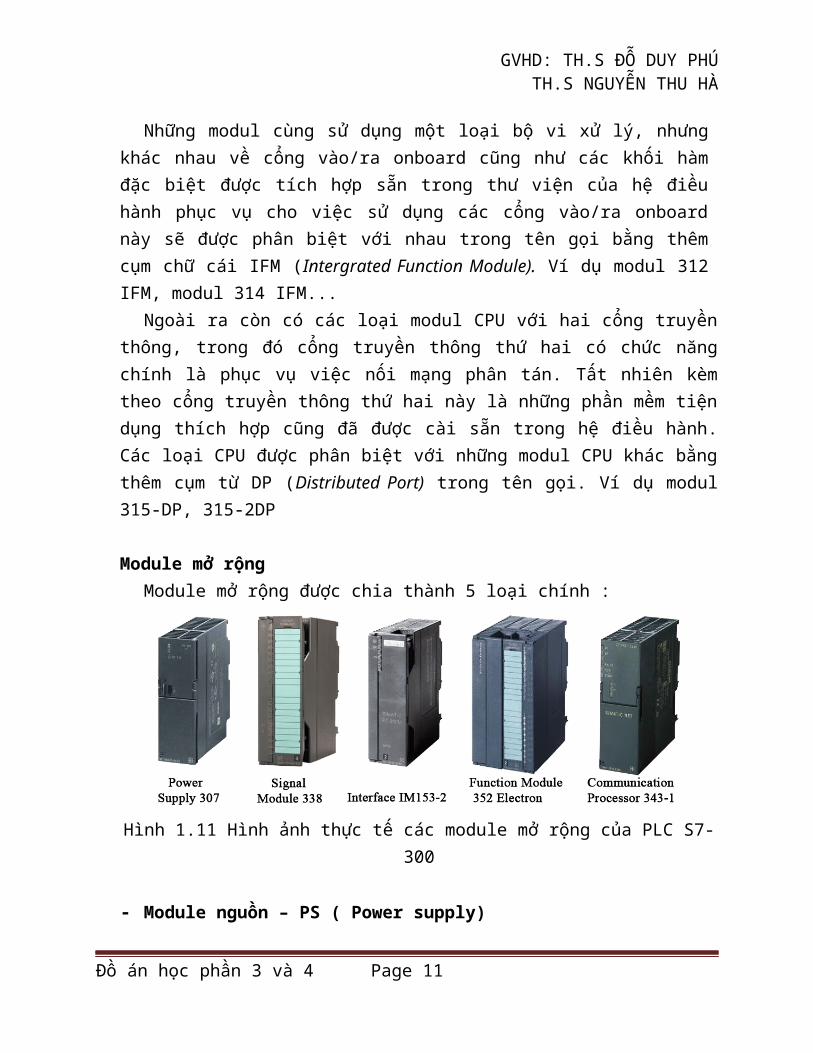
Module mở rộngModule mở rộng được chia thành 5 loại chính :
Hình 1.11 Hình ảnh thực tế các module mở rộng của PLC S7-300
- Module nguồn – PS ( Power supply)
Đồ án học phần 3 và 4 Page 11

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Có chức năng cung cấp nguồn cho các module của hệSimatic S7_300. Module nguồn có 3 loại : 2A, 5A, 10A*PS 307 2A dòng ra 2AĐiện áp ra: 24VDC, chống ngắn mạchNối với hệ thống AC một pha (điện áp vào 120/230 VACtần số 50/60 Hz)*PS 307 5A dòng ra 5AĐiện áp ra: 24VDC, chống ngắn mạchNối với hệ thống AC một pha (điện áp vào 120/230 VACtần số 50/60 Hz)*PS 307 10A dòng ra 10AĐiện áp ra: 24VDC, chống ngắn mạchNối với hệ thống AC một pha (điện áp vào 120/230 VAC tần số 50/60 Hz)
- Module tín hiệu SM (Signal module)
SM (Signal modul): modul mở rộng cổng tín hiện vào/ra baogồm:
+ DI (digital input): modul mở rộng các cổng vào số. Số các cổng vào số mở rộng có thể là 8, 16, hoặc 32 tuỳ theo từng loại module.
+ DO (digital output): modul mở rộng các cổng ra số. Số các cổng ra số mở rộng có thể là 8, 16, hoặc 32 tuỳ theo từng loại modul
+ DI/DO (digital input/digital output): modul mở rộng các cổng vào/ra số. Số các cổng vào/ra số mở rộng có thể là 8vào/8ra, 16vào/16 ra theo từng loại modul.
Đồ án học phần 3 và 4 Page 12
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
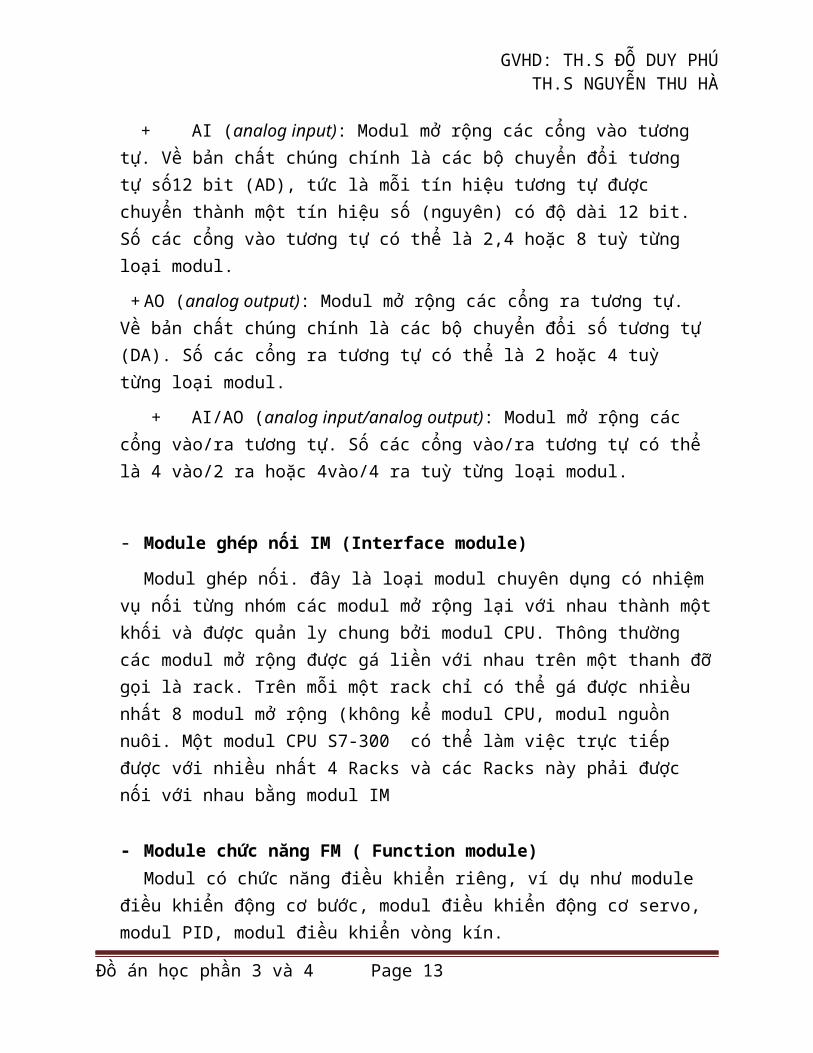
+ AI (analog input): Modul mở rộng các cổng vào tương tự. Về bản chất chúng chính là các bộ chuyển đổi tương tự số12 bit (AD), tức là mỗi tín hiệu tương tự được chuyển thành một tín hiệu số (nguyên) có độ dài 12 bit. Số các cổng vào tương tự có thể là 2,4 hoặc 8 tuỳ từng loại modul.
+ AO (analog output): Modul mở rộng các cổng ra tương tự. Về bản chất chúng chính là các bộ chuyển đổi số tương tự(DA). Số các cổng ra tương tự có thể là 2 hoặc 4 tuỳ từng loại modul.
+ AI/AO (analog input/analog output): Modul mở rộng các cổng vào/ra tương tự. Số các cổng vào/ra tương tự có thểlà 4 vào/2 ra hoặc 4vào/4 ra tuỳ từng loại modul.
- Module ghép nối IM (Interface module)
Modul ghép nối. đây là loại modul chuyên dụng có nhiệm vụ nối từng nhóm các modul mở rộng lại với nhau thành mộtkhối và được quản ly chung bởi modul CPU. Thông thường các modul mở rộng được gá liền với nhau trên một thanh đỡgọi là rack. Trên mỗi một rack chỉ có thể gá được nhiều nhất 8 modul mở rộng (không kể modul CPU, modul nguồn nuôi. Một modul CPU S7-300 có thể làm việc trực tiếp được với nhiều nhất 4 Racks và các Racks này phải được nối với nhau bằng modul IM
- Module chức năng FM ( Function module)Modul có chức năng điều khiển riêng, ví dụ như module
điều khiển động cơ bước, modul điều khiển động cơ servo, modul PID, modul điều khiển vòng kín.
Đồ án học phần 3 và 4 Page 13
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
- Module truyền thông CP ( Communication module)Phục vụ truyền thông trong mạng giữa các PLC với nhau hoặc giữa PLC với máy tính.
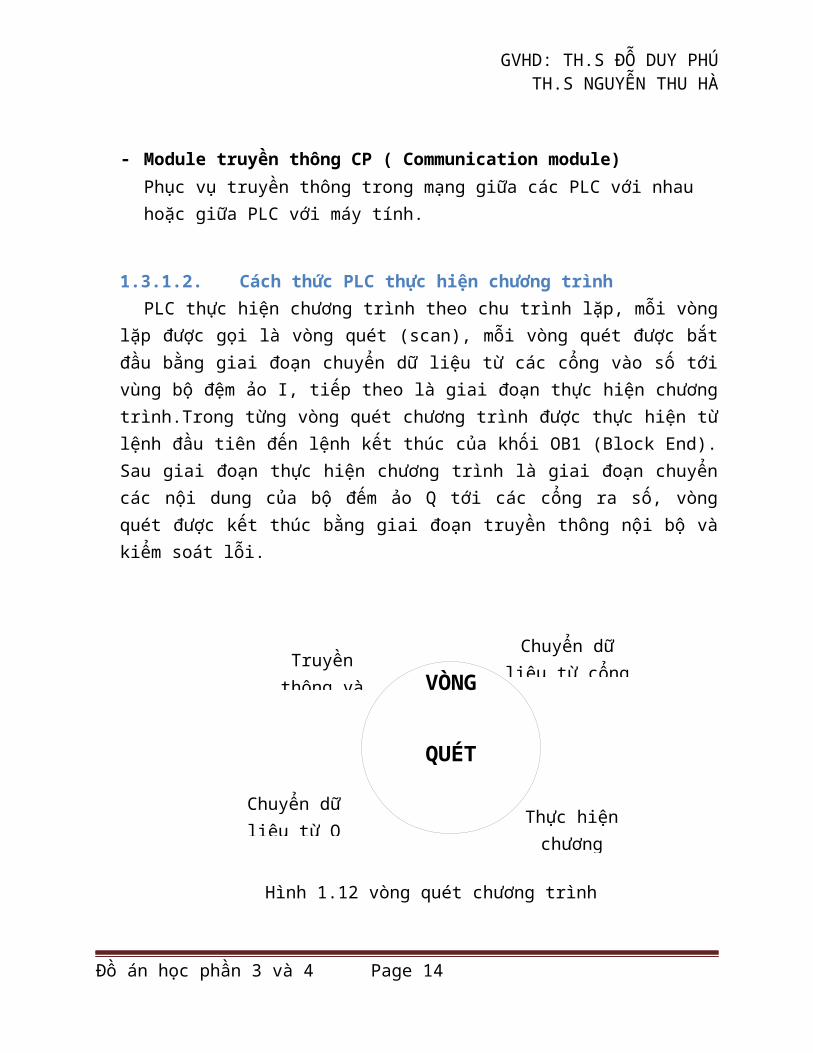
1.3.1.2. Cách thức PLC thực hiện chương trìnhPLC thực hiện chương trình theo chu trình lặp, mỗi vòng
lặp được gọi là vòng quét (scan), mỗi vòng quét được bắtđầu bằng giai đoạn chuyển dữ liệu từ các cổng vào số tớivùng bộ đệm ảo I, tiếp theo là giai đoạn thực hiện chươngtrình.Trong từng vòng quét chương trình được thực hiện từlệnh đầu tiên đến lệnh kết thúc của khối OB1 (Block End).Sau giai đoạn thực hiện chương trình là giai đoạn chuyểncác nội dung của bộ đếm ảo Q tới các cổng ra số, vòngquét được kết thúc bằng giai đoạn truyền thông nội bộ vàkiểm soát lỗi.
Hình 1.12 vòng quét chương trình
Đồ án học phần 3 và 4 Page 14
Chuyển dữliệu từ cổngTruyền
thông và VÒNG
QUÉT
Chuyển dữliệu từ Q
Thực hiệnchương
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Thời gian cần thiết để PLC thực hiện được một vòng quétgọi là thời gian vòng quét (Scan time). Thời gian vòngquét không cố định tức là không phải vòng quét nào cũngthực hiện trong khoảng thời gian như nhau. Có vòng quétthực hiện lâu có vòng quét thực hiện nhanh tuỳ thuộc vàosố lệnh trong chương trình được thực hiện, vào khối dữliệu được truyền thông trong vòng quét đó.
Như vậy giữa việc đọc dữ liệu từ đối tượng để xử lý,tính toán và việc gửi tín hiệu điều khiển tới các đốitượng có một khoảng thời gian trễ đúng bằng thời gianvòng quét. Nói cách khác thời gian vòng quét quyết địnhtính thời gian thực của chương trình điều khiển trongPLC. Thời gian vòng quét càng ngắn thì tính thời gianthực của chương trình càng cao
1.3.1.3. Kiểu dữ liệu và phân chia bộ nhớ Kiểu dữ liệu
Một chương trình ứng dụng S7 – 300 có thể sử dụng cáckiểu dữ liệu sau:- BOOL: Với dung lượng 1 bit và có giá trị là 0 hoặc 1( đúng hoặc sai ). Đây là kiểu dữ liệu cho biến haitrị.- BYTE: Gồm 8 bits, thường được dùng để biểu diễn mộtsố nguyên dương trong khoảng từ 0 đến 255 hoặc mã ASCIIcủa một ký tự.- WORD: Gồm 2 bytes để biểu diễn 1 số nguyên dương từ 0đến 65535.- INT: Cũng có dung lượng là 2 bytes, dùng để biểu diễnsố nguyên trong khoảng – 32768 đến 32767.- DINT: gồm 4 bytes, dùng để biểu diễn một số nguyên từ– 2147483648 đến 2147483647.
Đồ án học phần 3 và 4 Page 15
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
- REAL: gồm 4 byte dùng để biểu diễn một số thực dấuphẩy động.- S5T (hay S5TIME): khoảng thời gian, được tính theogiờ/phút/giây/mini giây.- TOD: Biểu diễn giá trị thời gian tính theogiờ/phút/giây.- DATE: Biểu diễn giá trị thời gian tính theonăm/tháng/ngày.- CHAR: Biểu diễn một hoặc nhiều ký tự (nhiều nhất là 4ký tự)
Cấu trúc bộ nhớ của CPUBộ nhớ của S7–300 được chia làm 3 vùng chính:
- Vùng chứa chương trình ứng dụng
Vùng nhớ chương trình được chia thành 3 miền:
+ OB (Organisation Block ): Miền chứa chương trình tổ chức.
+ FC (Function): Miền chứa chương trình con được tổ chức thành hàm có biến hình thức để trao đổi dữ liệu với chương trình đã gọi nó.
+ FB (Function Block): Miền chứa chương trình con, được tổ chức thành hàm và có khả năng trao đổi dữ liệu với bất cứmột khối chương trình nào khác. Các dữ liệu này phải đượcxây dựng thành khối dữ liệu riêng (gọi là DB – Data Block).
- Vùng chứa tham số của hệ điều hành và chương trình ứng dụng, được chia thành 7 vùng khác nhau bao gồm :
+ I ( Process image input): Miền bộ đệm các dữ liệu cổng vàosố. Trước khi bắt đầu thực hiện chương trình PLC sẽ đọc
Đồ án học phần 3 và 4 Page 16
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
giá trị logic của tất cả các cổng đầu vào và cất giữ chúng tại vùng nhớ I, thông thường chương trình ứng dụng không đọc trực tiếp trạng thái logic của cổng vào số mà chỉ lấy dữ liệu của cổng vào từ bộ đệm I.
+. Q ( Process image output): Miền bộ nhớ đệm các dữ liệu cổng ra số. Kết thúc giai đoạn thực hiện chương trình, PLC sẽ chuyển giá trị logic của bộ đệm Q tới các cổng ra số. Thông thường chương trình không trực tiếp gán giá trịtới cổng ra mà chỉ chuyển chúng vào bộ nhớ đệm Q.
+ M ( Miền các biến cờ ): Chương trình ứng dụng sử dụngvùng nhớ này để lưu giữ các tham số cần thiết và có thể truy cập nó theo bit(M) byte(MB), từ (MW) hay từ kép (MD).
+ T : Miền nhớ phục vụ bộ thời gian (Timer ) bao gồm việc lưu trữ giá trị thời gian đặt trước ( PV - Preset value ) ,giá trị đếm thời gian tức thời ( CV - Current value ) cũng như giá trị logic đầu ra của bộ thời gian.
+ C : Miền nhớ phục vụ bộ đếm ( Counter ) bao gồm việclưu giữ giá trị đặt trước ( PV - Preset value ),giá trị đếm tức thời (CV - current value ) và giá trị logic đầu ra của bộ đếm.
+ PI: Miền địa chỉ cổng vào các module tương tự (I/O: external input ).Các giá trị tương tự tại cổng vào của module tương tự sẽ được module đọc và chuyển tự động theonhững địa chỉ. Chương trình ứng dụng có thể truy cập miềnnhớ PI theo từng byte (PIB), từng từ (PIW) hoặc từng kép (PID).
+ PQ: Miền địa chỉ cổng ra cho các module tương tự (I/O- external output). Các giá trị theo những địa chỉ này sẽ
Đồ án học phần 3 và 4 Page 17
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
được module tương tự chuyển tới các cổng ra tương tự. Chương trình ứng dụng có thể truy cập miền nhớ PQ theo từng byte (PQB), từng từ kép (PQD).
- Vùng chứa các khối dữ liệu, được chia thành 2 loại:+DB (Data block). Miền chứa các dữ liệu được tổ chức
thành khối, kích thước cũng như số lượng, khối do ngườisử dụng qui định và phù hợp với từng bài toán điều khiển.Chương trình có thể truy cập miền này theo từng bit(DBX), byte (DBB), từ (DBW), từ kép (DBD).
+L ( Local data block ): Đây là miền dữ liệu địa phươngđược các khối chương trình OB, FC, FB tổ chức và sử dụngcho các biến nháp tức thời và trao đổi dữ liệu của biếnhình thức với những khối chương trình đã gọi nó. Nội dungcủa một số dữ liệu trong miền nhớ này sẽ bị xoá khi kếtthúc chương trình tương ứng trong OB, FC. FB.
Miền nhớ này có thể truy nhập từ chương trình theo bit (L), byte (LB), từ kép LD
1.3.1.4. Những khối OB đặc biệt- OB10 (Time of Day Interrupt): Chương trình trong khốiOB10 sẽ được thực hiện khi giá trị thời gian của đồng hồthời gian thực nằm trong một khoảng thời gian đã được quyđịnh. Việc quy định khoảng thời gian hay số lần gọi OB10được thực hiện nhờ chương trình hệ thống SFC28 hay trongbảng tham số của module CPU nhờ phần mềm STEP 7- OB20 (Time Relay Interrupt): Chương trình trong khốiOB20 sẽ được thực hiện sau một khoảng thời gian trễ đặt
Đồ án học phần 3 và 4 Page 18

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
trước kể từ khi gọi chương trình hệ thống SFC32 để đặtthời gian trễ- OB35 (Cyclic Interrupt): Chương trình trong khối OB35sẽ được thực hiện cách đều nhau một khoảng thời gian cốđịnh. Mặc định, khoảng thời gian này là 100ms, nhưng tacó thể thay đổi nhờ STEP 7- OB40 (Hardware Interrupt): Chương trình trong khối OB40sẽ được thực hiện khi xuất hiện một tín hiệu báo ngắt từngoại vi đưa vào CPU thông qua các cổng onbroad đặc biệt,hoặc thông qua các module SM, CP, FM- OB80 (Cycle Time Fault): Chương trình trong khối OB80sẽ được thực hiện khi thời gian vòng quét (scan time)vượt quá khoảng thời gian cực đại đã quy định hoặc khi cómột tín hiệu ngắt gọi một khối OB nào đó mà khối OB nàychưa kết thuc ở lần gọi trước. Thời gian quét mặc định là150ms- OB81 (Power Supply Fault): Chương trình trong khối OB81sẽ được thực hiện khi thấy có xuất hiện lỗi về bộ nguồnnuôi- OB82 (Diagnostic Interrupt): Chương trình trong khốiOB82 sẽ được thực hiện có sự cố từ các module mở rộngvào/ra. Các module này phải là các module có khả năng tựkiểm tra mình (diagnostic cabilities)- OB87 (Communication Fault): Chương trình trong khốiOB87 sẽ được thực hiện có xuất hiện lỗi trong truyềnthông- OB100 (Start Up Information): Chương trình trong khốiOB100 sẽ được thực hiện một lần khi CPU chuyển từ trạngthái STOP sang RUN
Đồ án học phần 3 và 4 Page 19
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
- OB121 (Synchronous Error): Chương trình trong khốiOB121 sẽ được thực hiện khi CPU phát hiện thấy lỗi logictrong chương trhhh đổi sai kiuu dữ liệu hay lỗi truy nhậpkhối DB, FC, FB không có trong bộ nhớ
1.3.1.5. Một số tập lệnh cơ bản Một số lệnh logic tiếp điểm- Lệnh gán
Cú pháp = <toán hạng>Toán hạng là địa chỉ bit I,Q,M,L,D
- Lệnh thực hiện phép tính ^Cú pháp A <toán hạng>Toán hạng là dữ liệu kiểu BOLL hoặc địa chỉ bit I,Q,M,L,D,T,CVí dụ : thực hiện Q0.4=I0.3^I0.4Network 1A I0.3 // đọc nội dung của I0.3 vào RLOA I0.4 //kết hợp với nội dung cổng I0.4= Q0.4
- Lệnh phát sườn lênCú pháp FP <toán hạng>Toán hạng là địa chỉ bit I,Q,M,L,D
- Lệnh phát hiện sườn xuốngCú pháp FN <toán hạng>
Nhóm lệnh so sánh số thực 32bit- Lệnh so sánh bằng nhau giữa 2 số thực 32bit
Cú pháp ==RLệnh thực hiện so sánh 2 số thự 32bit trong 2 thanh ghiACCU1 và ACCU2. Nếu số thực trong ACCU1 = ACCU2 thì
Đồ án học phần 3 và 4 Page 20

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
trạng thái RLO sẽ nhận giá trị 1,ngược lại nhận giá trị0.
- Lệnh so sánh không bằng nhau giữa 2 số thực 32bitsCú pháp <>R
- Lệnh so sánh lớn hơn 2 số thực 32bitsCú pháp >R
- Lệnh so sánh nhỏ hơn hai số thực 32 bítCú pháp <R
- Lệnh so sánh lớn hơn hoặc bằng 2 số thực 32 bitCú PHáp >=R
- Lện so sánh nhỏ hơn hoặc bằng 2 số thực 32 bitCú pháp <=R
Một số lệnh chuyển đổi dữ liệu- Lệnh chuyển đổi BCD thành số nguyên 32 bit
Cú pháp BTDLệnh không có toán hạng và thực hiện việc chuyển đổi sốBCD có 7 chữ số nằm trong 28 bit đầu của ACCU1 thành sốnguyên 32 bit. Kết quả được cất giừ vào ACCU1
- Lệnh chuyển đổi số nguyên 32 bit thành số thựcCú pháp DTRLệnh thực hiện chuyển đổi một số nguyên 32 bit trong ACCU1 thành số thực 32 bit dấu phảy động. kết quả được cất lại vào ACCU1.Ví dụ : đổi số nguyên 16 bit (-3278 ÷ 3277) đọc từ cổngtương tự PIW304 thành một số thực có giá trị bằng mức điện áp tại cổng (-10÷10V) và cất vào ô nhớ MD0L PIW304 //số đọc được là số nguyên 16 bitITD //chuyển đổi thành số nguyên 32 bit
Đồ án học phần 3 và 4 Page 21
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
DTR //chuyển thành số thựcL 3276.7/R //tính ra giá trị điện áp tại cổngT MD0
1.2.2. Module analogModule analog là một công cụ để xử lý các tín hiệu
tương tự thông qua việc xử lý các tín hiệu số
Analog input: Thực chất nó là một bộ biến đổi tương tự- số (A/D). Nó chuyển tín hiệu tương tự ở đầu vào thànhcác con số ở đầu ra. Dùng để kết nối các thiết bị đo vớibộ điều khiển: chẳng hạn như đo nhiệt độ.
Analog output : Analog output cũng là một phần củamodule analog. Thực chất nó là một bộ biến đổi số - tươngtự (D/A). Nó chuyển tín hiệu số ở đầu vào thành tín hiệutương tự ở đầu ra. Dùng để điều khiển các thiết bị vớidải đo tương tự. Chẳng hạn như điều khiển Van mở với góctừ 0-100%, hay điều khiển tốc độ biến tần 0-50Hz.
Thông thường đầu vào của các module analog là các tínhiệu điện áp hoặc dòng điện. Trong khi đó các tín hiệutương tự cần xử lý lại thường là các tín hiệu không điệnnhư nhiệt độ, độ ẩm, áp suất, lưu lượng, khối lượng . . .Vì vậy người ta cần phải có một thiết bị trung gian đểchuyển các tín hiệu này về tín hiệu điện áp hoặc tín hiệudòng điện – thiết bị này được gọi là các đầu đo hay cảmbiến.
Để tiện dụng và đơn giản các tín hiệu vào của moduleAnalog Input và tín hiệu ra của module Analog Output tuân
Đồ án học phần 3 và 4 Page 22

Analog Input( A/D)
Các con số
Analog Output( D/A)
Các con số
Đầu đoThiết bị chuyển đổi
Thiết bị cảm biến
Module analog
Tín hiệu vào không điện
0 – 10V
4-20 mA
Tín hiệu ra tương tự 0 – 10 V 4 – 20 mA
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
theo chuẩn tín hiệu của công nghiệp.Có 2 loại chuẩn phổbiến là chuẩn điện áp và chuẩn dòng điện.
- Điện áp : 0 – 10V, 0-5V, ± 5V…- Dòng điện : 4 – 20 mA, 0-20mA, ± 10mA.Trong khi đó tín hiệu từ các cảm biến đưa ra lại không
đúng theo chuẩn . Vì vậy người ta cần phải dùng thêm mộtthiết chuyển đổi để đưa chúng về chuẩn công nghiệp.
Kết hợp các đầu cảm biến và các thiết bị chuyển đổi nàythành một bộ cảm biến hoàn chỉnh , thường gọi tắt làthiết bị cảm biến, hay đúng hơn là thiết đo và chuyểnđổiđo ( bộ transducer).
Hình 1.13. quá trình chuyển đổi ADC (analog to digitalconveter)
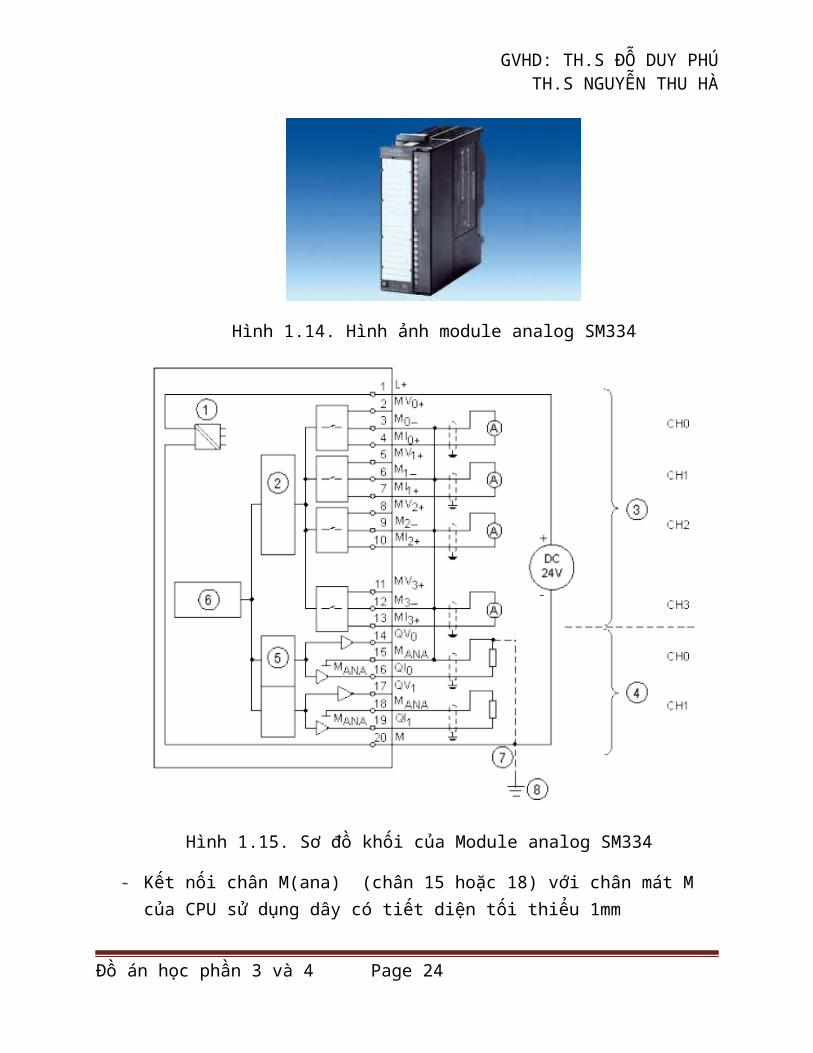
SM 334 là 1 module tương tự gồm có 4AI và 2AO 12bit cótích hợp bộ chuyển đổi ADC ( analog to digital converter)
Đồ án học phần 3 và 4 Page 23
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 1.14. Hình ảnh module analog SM334
Hình 1.15. Sơ đồ khối của Module analog SM334
- Kết nối chân M(ana) (chân 15 hoặc 18) với chân mát M của CPU sử dụng dây có tiết diện tối thiểu 1mm
Đồ án học phần 3 và 4 Page 24
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
- Nếu 2 chân này không được nối với nhau thì module sẽ tắt. ngõ vào lúc này có giá trị 7HHH. Ngõ ra có giá trịbằng 0. Nếu để module hoạt động không được nối mát trong 1 thời gian có thể dẫn tới hư hỏng
- Chiều dài tối đa của cáp là 200m
1.3. Tìm hiểu về HMI và WINCC
1.3.1. Tìm hiểu về HMIHMI là từ viết tắt của Human-Machine-Interface, có
nghĩa là thiết bị giao tiếp giữa người điều hành thiết kếvới máy móc thiết bị.
Nói một cách chính xác, bất cứ cách nào mà con người “giao tiếp” với một máy móc thì đó là một HMI. Cảm ứng trên lò viba của bạn là một HMI, hệ thống số điều khiển trên máy giặt, bảng hướng dẫn lựa chọn phần mềm hoạt độngtừ xa trên TV đều là HMI,… Các ưu điểm của HMI
Ưu điểm lớn nhất là trong các máy tính nhúng có hình dạng nhỏ gọn giúp nó thay thế hiển thị 2 đường trên một công cụ thông thường hay trên bộ truyền với một HMI có đầy đủ tính năng. Người điều khiển làm việc trong không gian rất hạn chế tại sản nhà máy. Đôi khi không có chỗ cho họ, cáccông cụ, phụ tùng và HMI cỡ lớn nên họ cần có HMI có thể di chuyển được.- Một số hệ thống HMI
Đồ án học phần 3 và 4 Page 25

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 1.16. HMI điều khiển trực tiếp 1 bộ điềukhiển thông qua PROFIBUS
Hình 1.17 HMI điều khiển nhiều bộ điều khiển thông PROFIBUS
Đồ án học phần 3 và 4 Page 26
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
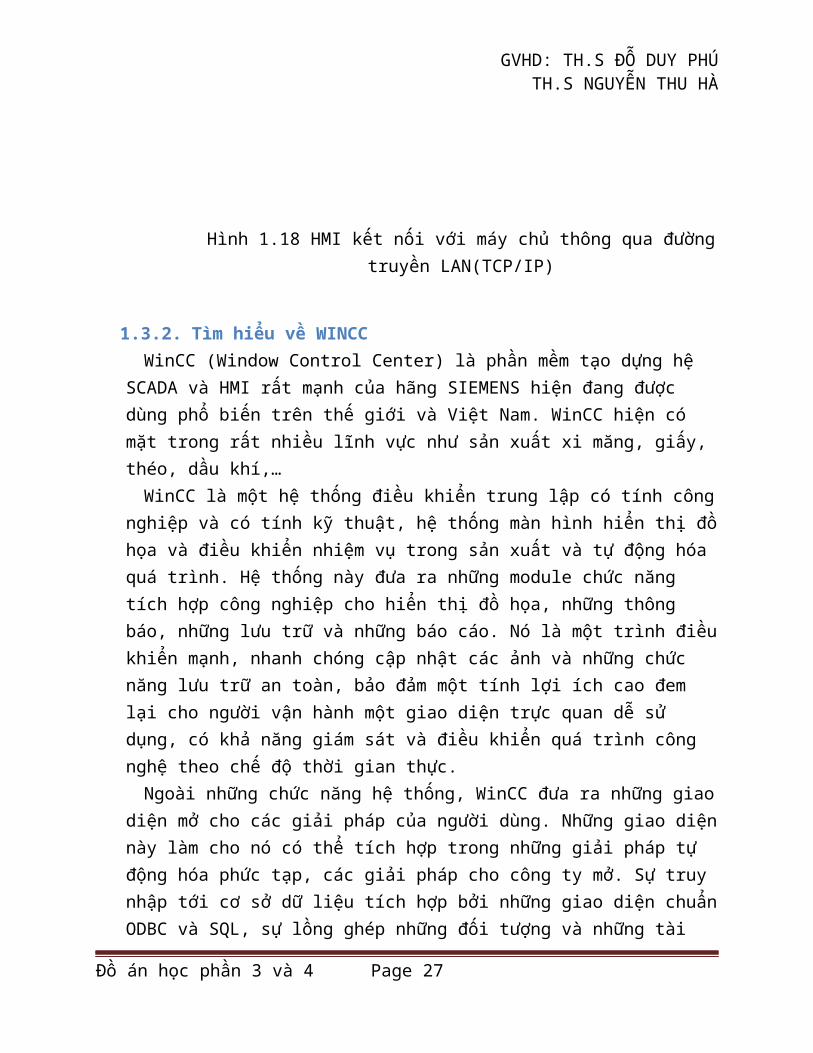
Hình 1.18 HMI kết nối với máy chủ thông qua đườngtruyền LAN(TCP/IP)
1.3.2. Tìm hiểu về WINCCWinCC (Window Control Center) là phần mềm tạo dựng hệ
SCADA và HMI rất mạnh của hãng SIEMENS hiện đang được dùng phổ biến trên thế giới và Việt Nam. WinCC hiện có mặt trong rất nhiều lĩnh vực như sản xuất xi măng, giấy, théo, dầu khí,…WinCC là một hệ thống điều khiển trung lập có tính công
nghiệp và có tính kỹ thuật, hệ thống màn hình hiển thị đồhọa và điều khiển nhiệm vụ trong sản xuất và tự động hóa quá trình. Hệ thống này đưa ra những module chức năng tích hợp công nghiệp cho hiển thị đồ họa, những thông báo, những lưu trữ và những báo cáo. Nó là một trình điềukhiển mạnh, nhanh chóng cập nhật các ảnh và những chức năng lưu trữ an toàn, bảo đảm một tính lợi ích cao đem lại cho người vận hành một giao diện trực quan dễ sử dụng, có khả năng giám sát và điều khiển quá trình công nghệ theo chế độ thời gian thực.Ngoài những chức năng hệ thống, WinCC đưa ra những giao
diện mở cho các giải pháp của người dùng. Những giao diệnnày làm cho nó có thể tích hợp trong những giải pháp tự động hóa phức tạp, các giải pháp cho công ty mở. Sự truy nhập tới cơ sở dữ liệu tích hợp bởi những giao diện chuẩnODBC và SQL, sự lồng ghép những đối tượng và những tài
Đồ án học phần 3 và 4 Page 27
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
liệu được tích hợp bởi OLE2.0 và OLE Custom Controls (OCX). Những cơ chế này làm cho WinCC là một đối tác dễ hiểu, dễ truyền tải trong môi trường WindowsĐể xây dựng được giao diện HMI bằng phần mềm WinCC thì
cấu hình phần cứng phải bao gồm thiết bị PLC S7-xxx và cấu hình phần cứng tối thiểu của máy tính cho việc sử dụng phần mềm WinCC và các thiết bị khác phục vụ cho việctruyền thông.
Các thành phần cơ bản của WinCC- Communications Drivers : là các driver giúp WinCC có
thể thực hiện giao tiếp với các thiết bị theo các tiêu chuẩn khác nhau, ví dụ như theo chuẩn mạng profibus, chuẩn mạng modbus…
- Graphics Designer : là công cụ giúp người dùng tạo các giao diện tương thích với hệ thống thực tế, từ đó ngườidùng có thể thực hiện các thao tác điều khiển các thiếtbị của hệ thống đó .
- Tag Logging : là công cụ thực hiện việc lấy dữ liệu từ các quá trình thực thi, chuẩn bị để hiển thị và lưu trữcác dữ liệu . Từ những dữ liệu trên giúp thiết lập các thông báo, các bảng, biểu hoàn chỉnh về giá trị của quátrình .
- Alarm Logging : đây là công cụ giúp cung cấp các thông tin về các lỗi phát sinh và trạng thái hoạt động toàn diện của hệ thống . Từ công cụ Alarm Logging nó giúp người dùng sớm nhận ra các tình trạng nguy cấp của hệ thống từ đó tránh và giảm thiểu rủi ro, nâng cao chất lượng cho hệ thống .
Đồ án học phần 3 và 4 Page 28

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Nguyên tắc hoạt động của WinCCMột chương trình của chúng ta sẽ được tạo ra bởi các công cụ soạn thảo ( bao gồm các chương trình Graphic System, Alarm Logging, Archive System…) . Các thông số trong chương trình của ta sẽ được lưu trong vùng nhớ dữliệu CS (Configuration database) .
- Khi runtime, thì phần mềm Runtime sẽ đọc các thông tin từ vùng dữ liệu CS và Project được khởi động . Các giá trị của các biến quá trình sẽ được lưu vào vùng dữ liệuRT (Runtime database) . Các biến thực tế này sẽ được đưa đến màn hình giao diện ( tạo bởi Graphics Designer ), đến hệ thống lưu trữ...
Quy trình tạo một project trên WinCC- Tạo một dự án “project” WinCC mới
Có 3 lựa chọn cho dự ánSingle-User Project : Dự án thực hiện trên máy đơnMulti-User Project Multi-Client Project
Đồ án học phần 3 và 4 Page 29

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
- Chọn PLC hoặc Drivers từ Tag Management .
Mục đích : để thiết lập kết nối truyền thông giữa WinCCvới các thiết bị (chủ yếu là PLC ) bằng một mạng liên kếtchúng với nhau trong việc trao đổi dữ liệu . Mỗi một driver có định dạng *.chn . Ví dụ : để liên kết WinCC vớiS7-300 ta có thể chọn driver “ SIMATIC S7 Protocol Suite.chn ”, để liên kết WinCC với S7-200 thông qua mạng Modbus ta có thể chọn driver “Modbus Serial.chn ”…
Sau khi ta chọn Driver, thì mỗi một Driver sẽ xuất hiệncác loại cổng kết nối riêng của nó . Trong WinCC thì mỗi cổng được gọi là một channel . Các cổng này thông thường chỉ định cổng COM của máy tính .
Để thêm một kết nối Driver mới, ta chỉ cần nhấp phải chuột vào các cổng kết nối >> chọn New Driver Connection .- Tạo các biến ( Tag )
Để tạo kết nối các thiết bị của một dự án trong WinCC.,trước tiên phải tạo các Tags trên WinCC. Tags được tạo dưới Tags Management. Gồm có Tags nội và Tags ngoại.
Tags Internal (tags nội) : là Tag có sẵn trong WinCC. Những Tags nội này là những vùng nhớ trong WinCC, nó có chức năng như một PLC thực sự.
Tags External (Tags ngoại) : Là Tag quá trình, nó phản ánh thông tin địa chỉ của hệ thống PLC khác nhau.
Các Tags có thể được lưu trong bộ nhớ PLC hoặc trên cácthiết bị khác nối với PLC thông qua các Tags.
- Tạo hình ảnh từ cửa sổ giao diện Graphic Designer
Đồ án học phần 3 và 4 Page 30
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Ta phải tạo một màn hình giao diện cho quá trình điều
khiển và giám sát .
Các tạo một màn hình mới : Right click >> Graphics
Designer >> New Picture
CHƯƠNG II : THIẾT KẾ HỆ THỐNG
2.1. Lựa chọn thiết bị
2.1.1. Lựa chọn cảm biến áp suấtCảm biến áp suất Danfoss MBS3000 được áp dụng trong hầu
hết các lĩnh vực, điều kiện làm việc khác nhau trong côngnghiệp, dải đo có thể từ 0-600 bar. Trong nhà máy bia, cảm biến áp suất MBS3000 được sử dụng rộng rãi như lắp đặt trên đường ống để đo áp suất hệ thống cấp nước nấu bia (hệ thống nước nóng 80 độ; hệ thống nước lạnh 2 độ vànước thường 26 độ), hệ thống xử lý nước (áp suất nước giếng cấp; áp suất vào lọc cát AGF; áp suất sau lọc cát AGF), hệ thống xử lý nước thải, ...
Lựa chọn cảm biến MBS3000-20-2-1-1AB04 của hãng Danfoss
Đồ án học phần 3 và 4 Page 31

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 2.1 Cảm biến áp suất của hãng Danfoss
Thông số cơ bản của cảm biến MBS3000-20-2-1-1AB04
- Dải đo 0 – 10 Bar- Tín hiệu ngõ ra 4-20mA- Nguồn cung cấp 9 – 32 VDC- Dòng điện cực đại 34 mA- Nhiệt độ hoạt động -40 ÷ 85 °C
2.1.2. Lựa chọn cảm biến đo mứcChọn cảm biến siêu âm E4PA-LS600-M1-N của hãng Omron
Đồ án học phần 3 và 4 Page 32
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
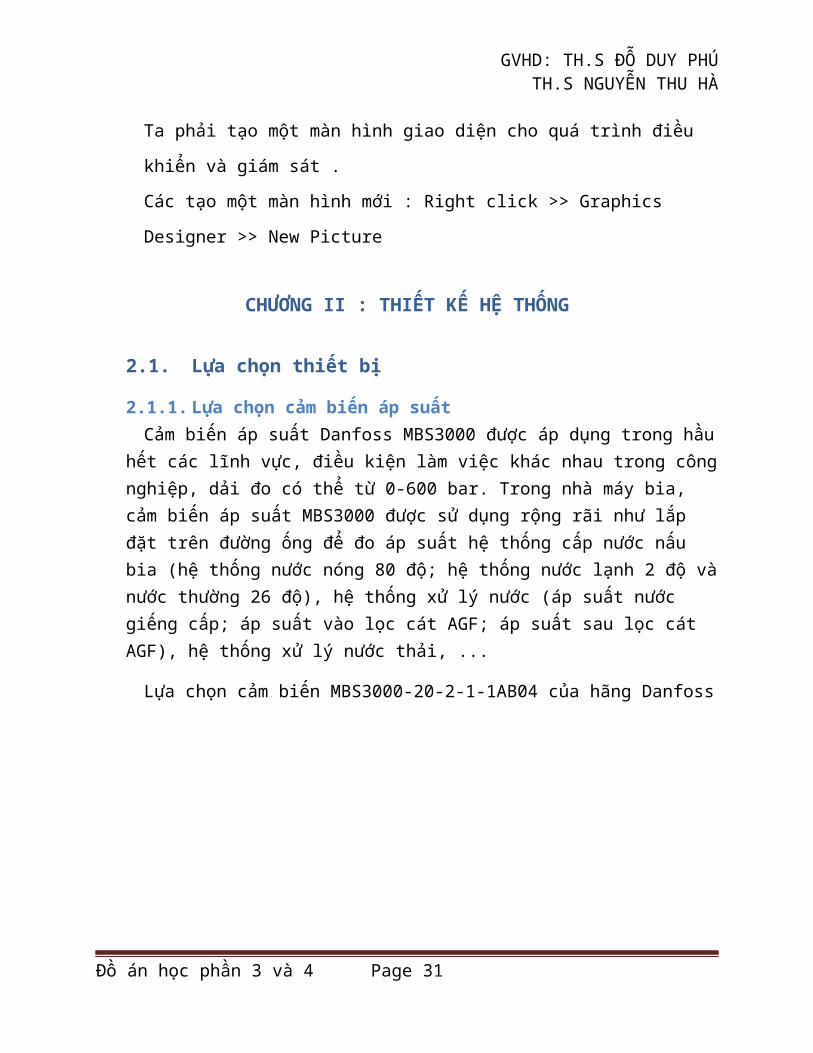
Hình 2.2. Cảm biến siêu âm Omron E4PA-LS600-M1-N
Các thông số cơ bản của cảm biến siêu âm E4PA-LS600-M1-N
- Nguồn cấp 12-24VDC ±10%- Ngõ ra analog 4-20mA.- Khoảng cách đo 400 – 6000mm.- Tần số sóng siêu âm hoạt động 65-380KHz.- Góc phát sóng hẹp ±80, kiểm tra được các vật có diện tích nhỏ 100×100mm.- Đèn báo chỉ thị trạng thái ngõ ra màu xanh.- Nhiệt độ hoạt động -10~55°C, đạt độ kín IEC IP65.- Lắp đặt dơn giản , dễ dàng bảo trì, thiết kế với tuổi thọ cao.Cảm biến siêu âm hoạt động bằng cách phát đi 1 xung tín
hiệu và đo thời gian nhận được tín hiệu trở vể. Sau khi đo được tín hiệu trở về trên cảm biến siêu âm, ta tính được thời gian từ lúc phát đến lúc nhận được tín hiệu. Từthời gian này có thể tính ra được khoảng cách.Nếu đo được chính xác thời gian và không có nhiễu, mạch
cảm biến siêu âm trả về kết quả cực kì chính xác. Điều
Đồ án học phần 3 và 4 Page 33
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
này phụ thuộc vào cách viết chương trình không sử dụng các hàm delay.Lưu ý: sóng siêu âm chỉ bị dội lại khi gặp 1 số loại
vật cản, nếu phát sóng siêu âm vào chăn, nệm bạn sẽ khôngnhận được sóng phản hồi.
2.1.3. Lựa chọn PLC Lựa chọn Module nguồn cho PLC S7-300Chọn loại nguồn PS 307 -2A, mã 6ES7307-1BA00-0AA0
Hình 2.3. Module nguồn PS 307-2A của Siemens- Nguồn cấp đầu vào 120/230 VAC- Đầu ra 24 VDC- 2A Lựa chọn Module CPU cho PLC S7-300Chọn loại CPU S7-300 312C
Đồ án học phần 3 và 4 Page 34
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 2.4. Module CPU 312C
Các thông số của CPU 312C
- S7-300, CPU 312C- 6ES7312-5BE03-0AB0 - Số đầu vào tích hợp sẵn: 10 DI DC- Số đầu ra tích hợp sẵn: 6 DO DC - Bộ đếm tốc độ cao tích hợp sẵn: 2 x 10 KHz, - Nguồn cung cấp: 24V DC- WORKING MEMORY: 32Kbyte - Phụ kiện yêu cầu:
FRONT CONNECTOR (1 X 40PIN)
Thẻ nhớ (MICRO MEMORY CARD)
- Ngôn ngữ lập trình: Step 7, từ V5.1 hoặc cao hơn- Bộ nhớ lưu chương trình: MMC ( tối đa 4 MB)- Số đầu vào số tích hợp sẵn: 10 ( 24 VDC)- Số đầu ra số tích hợp sẵn: 6 ( 24 VDC)- Bộ đếm: 128- Bộ định thời: 128- Vùng địa chỉ vào/ra: 1024/1024 byte ( có thể định địa
chỉ tự do).- Vùng đệm vào/ra: 128/128 byte
Đồ án học phần 3 và 4 Page 35
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
- Kênh số vào/ra tối đa: 256/256- Kênh tương tự vào/ra tối đa: 64/32- Khả năng mở rộng modul:- Số CPU/Rack tối đa: 1/0- Số modul tối đa: 8- Tần số chuyển mạch tối đa: 100Hz ( tải trở), 0.5 Hz
( tải cảm)- Đồng hồ thời gian thực- Kiểu kết nối: MPI- Ngôn ngữ lập trình: Step 7 (LAD/FBD/STL), SCL, GRAPH,
HiGraph- Nguồn cung cấp: 24 VDC- Dòng tiêu thụ: 0.5A- Công suất tiêu thụ: 6W- Kích thước W x H x D: 80 x 125 x 130
Chọn Module analog cho PLC S7-300
Module tương tự SM334 4 AI/ 2AO x 12/12 bits (6ES7334-0CE01-0AA0)
Đồ án học phần 3 và 4 Page 36
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 2.5. Module analog SM334
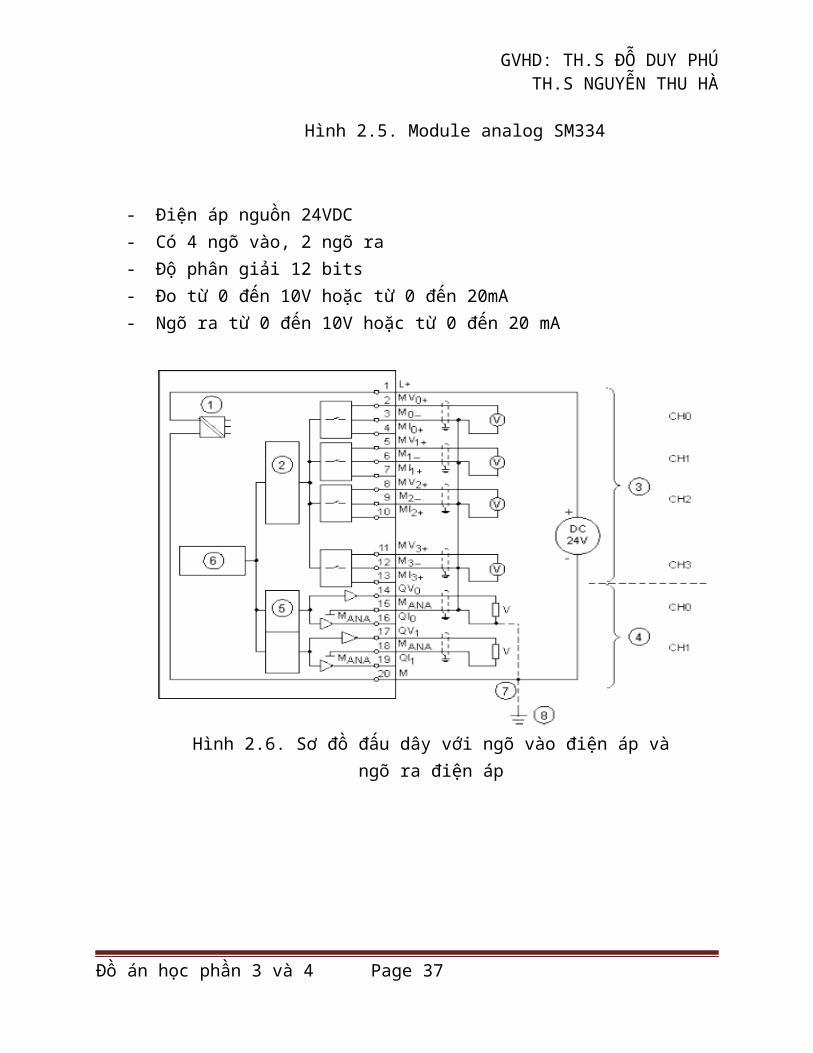
- Điện áp nguồn 24VDC- Có 4 ngõ vào, 2 ngõ ra- Độ phân giải 12 bits- Đo từ 0 đến 10V hoặc từ 0 đến 20mA- Ngõ ra từ 0 đến 10V hoặc từ 0 đến 20 mA
Hình 2.6. Sơ đồ đấu dây với ngõ vào điện áp vàngõ ra điện áp
Đồ án học phần 3 và 4 Page 37
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
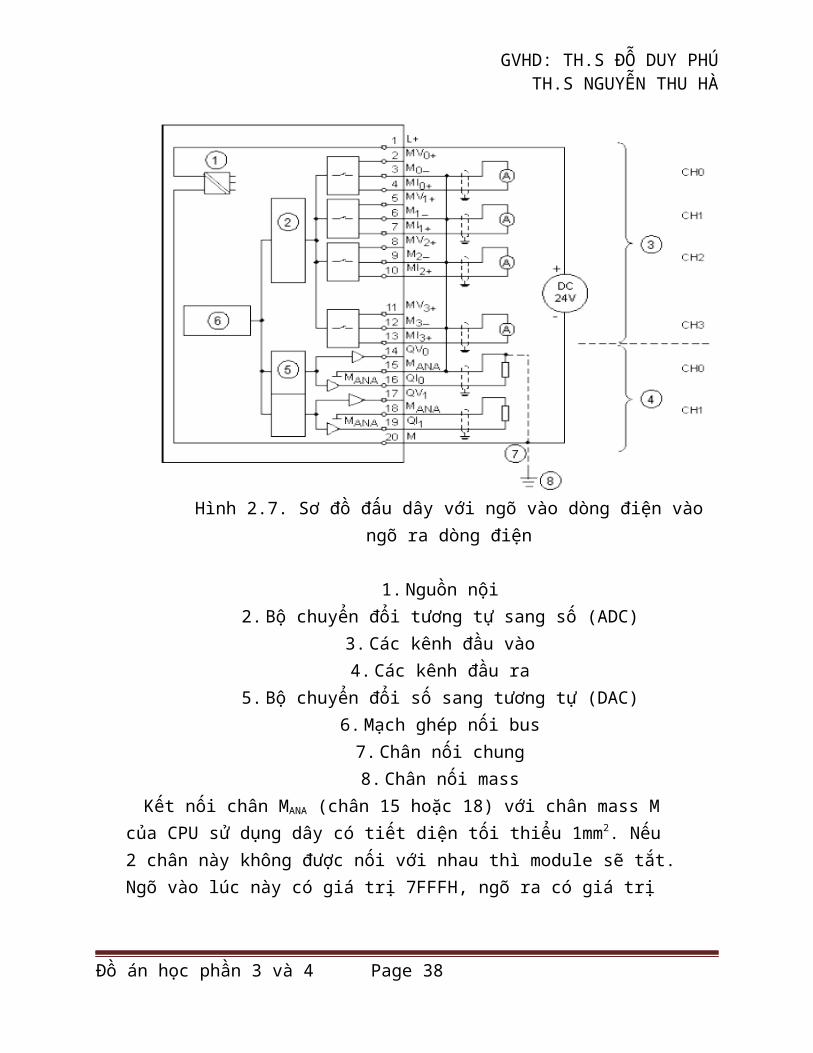
Hình 2.7. Sơ đồ đấu dây với ngõ vào dòng điện vàongõ ra dòng điện
1. Nguồn nội2. Bộ chuyển đổi tương tự sang số (ADC)
3. Các kênh đầu vào4. Các kênh đầu ra
5. Bộ chuyển đổi số sang tương tự (DAC)6. Mạch ghép nối bus7. Chân nối chung8. Chân nối mass
Kết nối chân MANA (chân 15 hoặc 18) với chân mass M của CPU sử dụng dây có tiết diện tối thiểu 1mm2. Nếu 2 chân này không được nối với nhau thì module sẽ tắt.Ngõ vào lúc này có giá trị 7FFFH, ngõ ra có giá trị
Đồ án học phần 3 và 4 Page 38
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
bằng 0. Nếu để module hoạt động không được nối mass trong một thời gian có thể dẫn tới hư hỏngTuyệt đối tránh đâu nguồn ngược cực. Việc này có
thể là nguyên nhân làm chay module
2.1.4. Lựa chọn biến tầnChọn loại biến tần MM420 của hãng Siemens
Hình 2.8 Biến tần MM420 của Siemens
Cài đặt biến tần.
- Biến tần MM420 điều khiển.
+ cài đặt các thông số:
P0003 = 1: chọn mức truy nhập cơ bản
P0004 = 0: lọc tất cả cá thông số
P0010 = 1: chọn loại cài đặt nhanh
P0100 = 0: tần số là 50Hz
P2050 = 0: chọn loại động cơ có mô men k đổi
P0300 = 1: loại động cơ không đồng bộ
Đồ án học phần 3 và 4 Page 39
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
P0304 = 220: điện áp định mức
P0305 : I đm động cơ
P0307 : công suất định mức động cơ
P0308: cos phi định mức
P0310: tần số định mức
P0311: tốc độ định mức
P700 = 1: chọn điểm đặt điều chỉnh là bàn phím
P1000 = 2: chọn điểm đặt tương tự lấy từ PLC
P1080= 0: tần số min
P1082 = 60: tần số max.
Kết thúc chọn P0010 = 0: chế độ sẵn sàng hoạt động.
2.1.5. Lựa chọn động cơ bơm nướcChọn máy bơm là động cơ KĐB 3 pha rô to dây quấn với
số liệu: Pđm=3,6kW,Y-380V,f=50Hz,Iđm=10A,nđ m=1500v /ph;cosđmφ=0,8
Đồ án học phần 3 và 4 Page 40
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
2.2. Xây dựng sơ đồ khối, sơ đồ đấu dây
2.2.1. Xây dựng sơ đồ khối
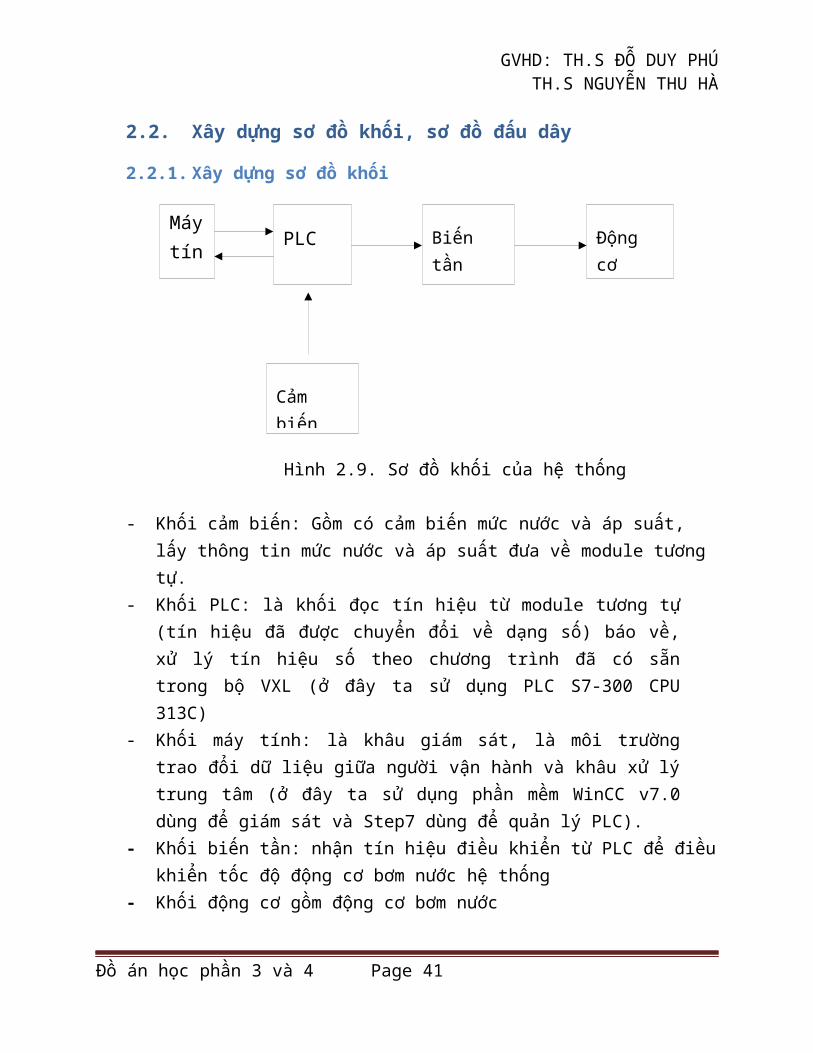
Hình 2.9. Sơ đồ khối của hệ thống
- Khối cảm biến: Gồm có cảm biến mức nước và áp suất, lấy thông tin mức nước và áp suất đưa về module tương tự.
- Khối PLC: là khối đọc tín hiệu từ module tương tự(tín hiệu đã được chuyển đổi về dạng số) báo về,xử lý tín hiệu số theo chương trình đã có sẵntrong bộ VXL (ở đây ta sử dụng PLC S7-300 CPU313C)
- Khối máy tính: là khâu giám sát, là môi trườngtrao đổi dữ liệu giữa người vận hành và khâu xử lýtrung tâm (ở đây ta sử dụng phần mềm WinCC v7.0dùng để giám sát và Step7 dùng để quản lý PLC).
- Khối biến tần: nhận tín hiệu điều khiển từ PLC để điềukhiển tốc độ động cơ bơm nước hệ thống
- Khối động cơ gồm động cơ bơm nước
Đồ án học phần 3 và 4 Page 41
Máytính
PLC
Cảm biến
Biến tần
Động cơ
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
2.2.2. Xây dựng sơ đồ đấu dây
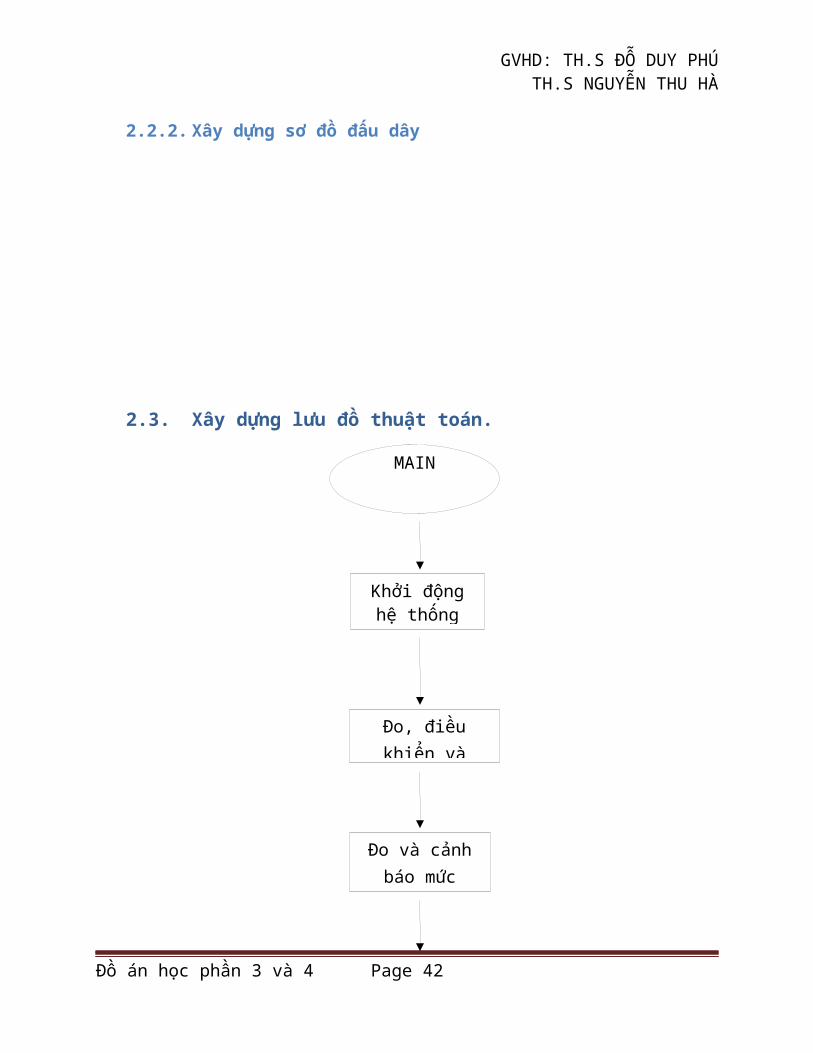
2.3. Xây dựng lưu đồ thuật toán.
Đồ án học phần 3 và 4 Page 42
MAIN
Khởi độnghệ thống
Đo và cảnhbáo mức
Đo, điềukhiển và
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
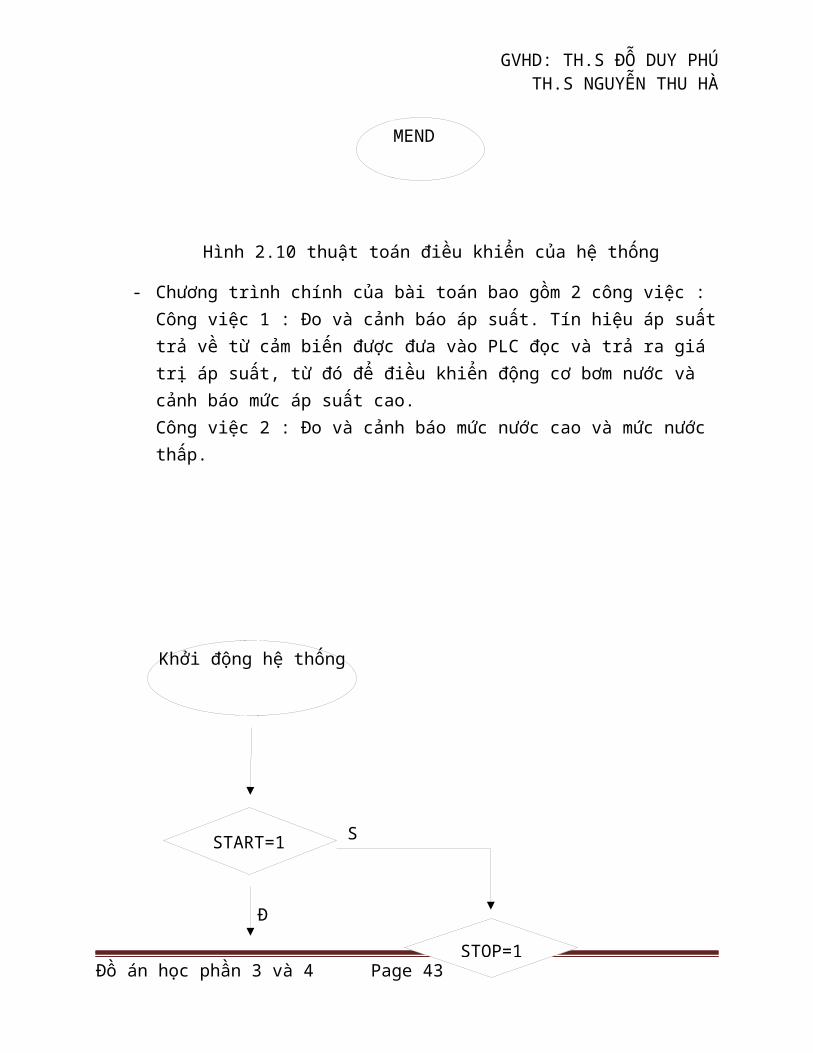
Hình 2.10 thuật toán điều khiển của hệ thống
- Chương trình chính của bài toán bao gồm 2 công việc :Công việc 1 : Đo và cảnh báo áp suất. Tín hiệu áp suấttrả về từ cảm biến được đưa vào PLC đọc và trả ra giá trị áp suất, từ đó để điều khiển động cơ bơm nước và cảnh báo mức áp suất cao.Công việc 2 : Đo và cảnh báo mức nước cao và mức nước thấp.
S
Đ
Đồ án học phần 3 và 4 Page 43
MEND
START=1
Khởi động hệ thống
STOP=1
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
S
Đ
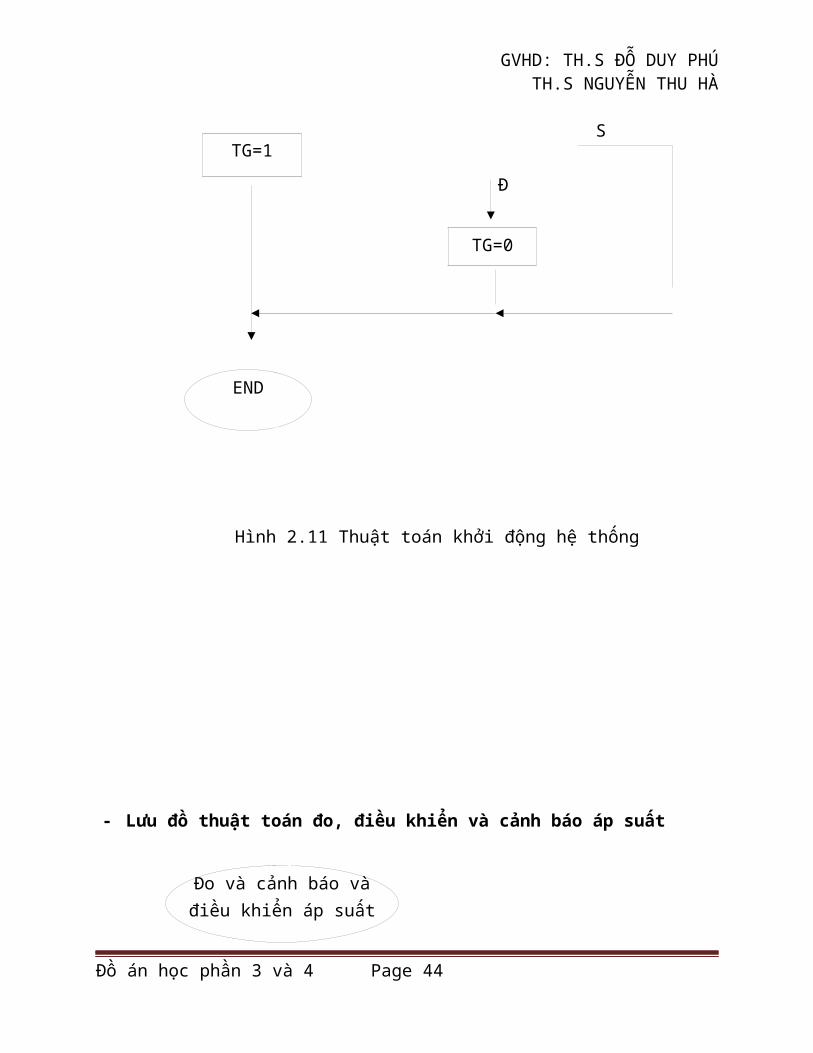
Hình 2.11 Thuật toán khởi động hệ thống
- Lưu đồ thuật toán đo, điều khiển và cảnh báo áp suất
Đồ án học phần 3 và 4 Page 44
TG=1
END
TG=0
Đo và cảnh báo vàđiều khiển áp suất
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
S
Đ
Đ
S
S
Đ
Đ
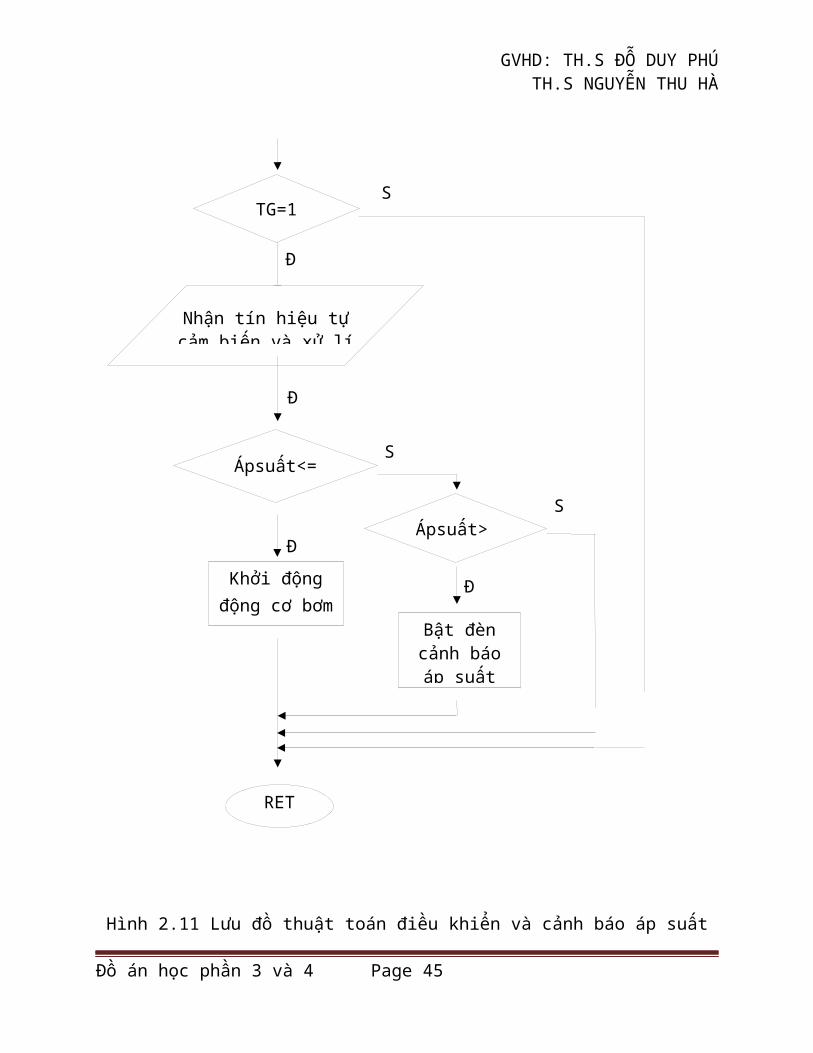
Hình 2.11 Lưu đồ thuật toán điều khiển và cảnh báo áp suất
Đồ án học phần 3 và 4 Page 45
Nhận tín hiệu tựcảm biến và xử lí
TG=1
Khởi độngđộng cơ bơm
nước
Ápsuất<=3.5
Ápsuất>
Bật đèncảnh báoáp suất
RET
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
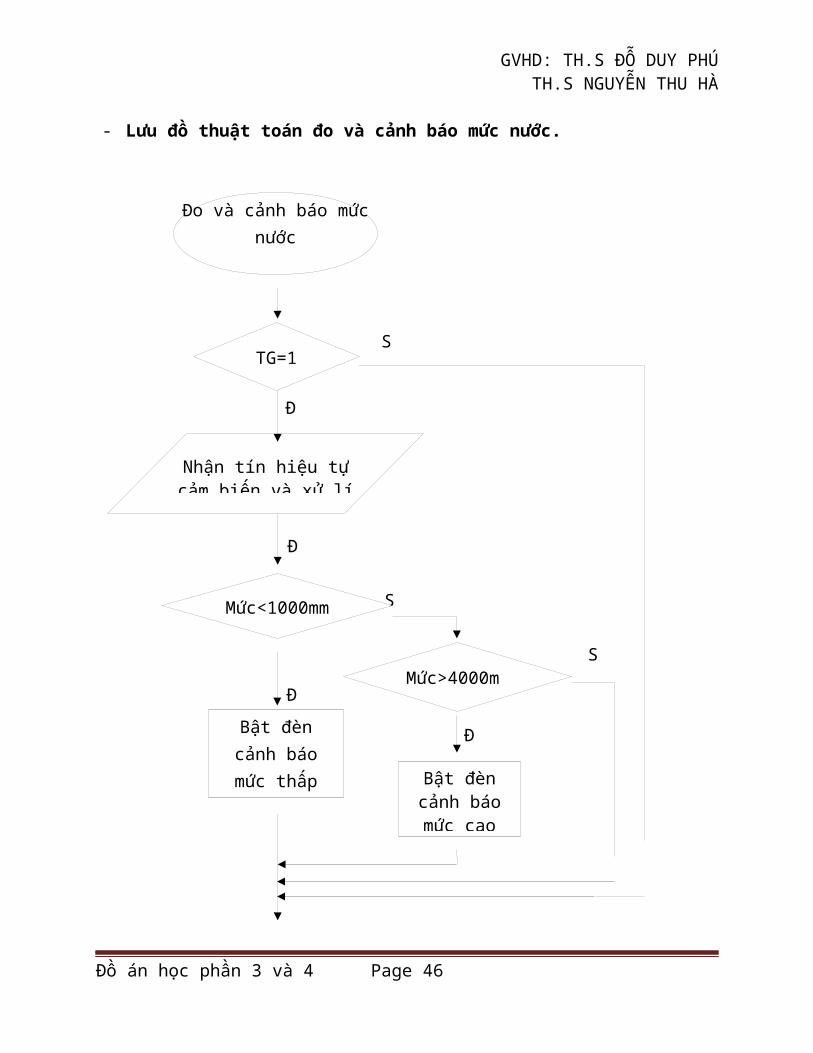
- Lưu đồ thuật toán đo và cảnh báo mức nước.
S
Đ
Đ
S
S
Đ
Đ
Đồ án học phần 3 và 4 Page 46
Bật đèncảnh báomức thấp
LAL
Mức<1000mm
Mức>4000m
Nhận tín hiệu tựcảm biến và xử lí
Bật đèncảnh báomức cao
TG=1
Đo và cảnh báo mứcnước
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Hình 2.12 Lưu đồ thuật toán đo và cảnh báo mức nước
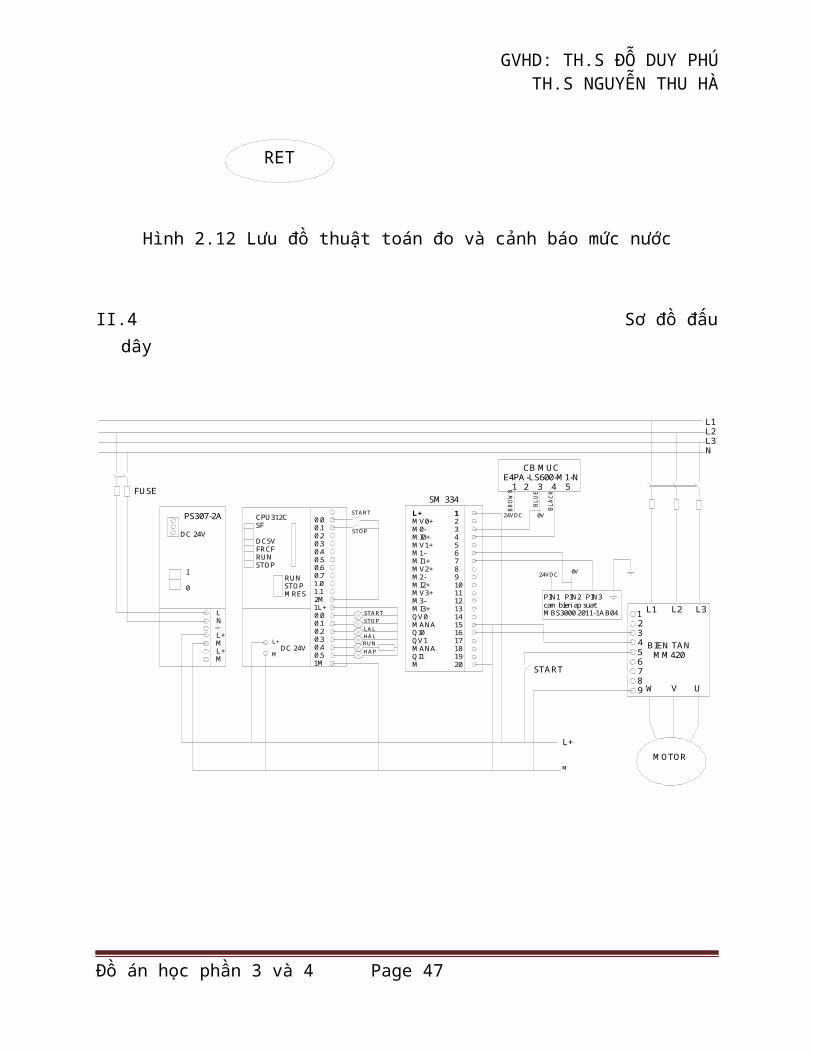
II.4 Sơ đồ đấudây
LN
L+ML+M
DC 24V
L+
MDC 24V
0.00.10.20.30.40.50.60.71.01.12M1L+0.00.10.20.30.40.51M
I
0RUNSTOPM RES
CPU312CSF
DC5VFRCFRUNSTOP
L+
M
L+ 1M V0+ 2M 0- 3M I0+ 4M V1+ 5M 1- 6M I1+ 7M V2+ 8M 2- 9M I2+ 10M V3+ 11M 3- 12M I3+ 13QV0 14M ANA 15QI0 16QV1 17M ANA 18QI1 19M 20
CB M UCE4PA-LS600-M 1-N1 2 3 4 5FUSE
BIEN TANM M 420
123456789
START
L1 L2 L3
W V U
M OTOR
L1L2L3N
PS307-2A
LALHALRUNHAP
STOPSTART
START
STOP
BROW
N24VDC 0V
BLUE
BLAC
K
PIN1 PIN2 PIN3cam bien ap suatM BS3000 2011-1AB04
24VDC 0V
SM 334
Đồ án học phần 3 và 4 Page 47
RET
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
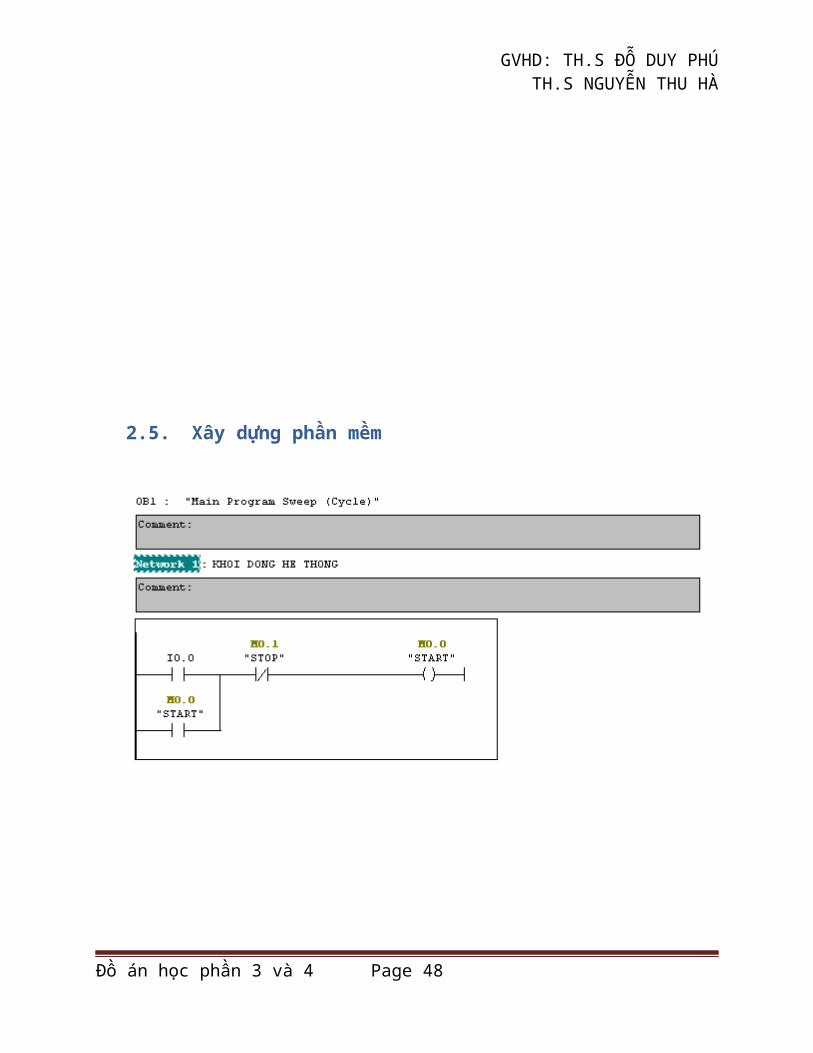
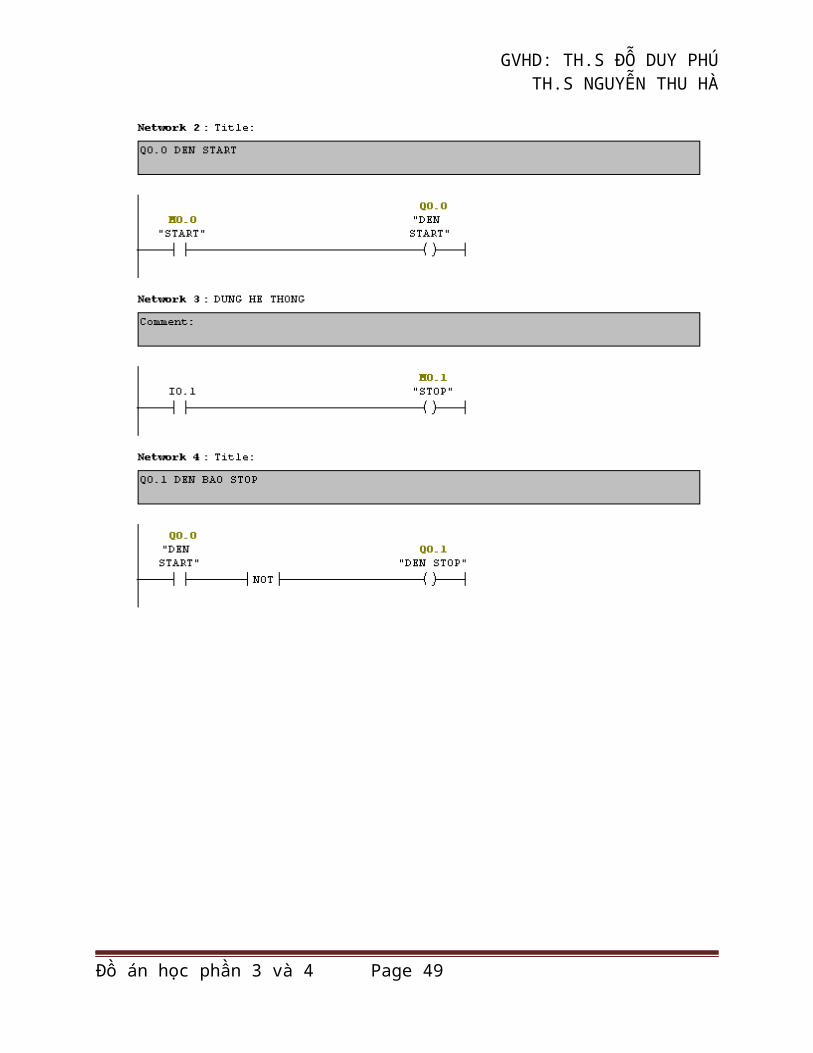
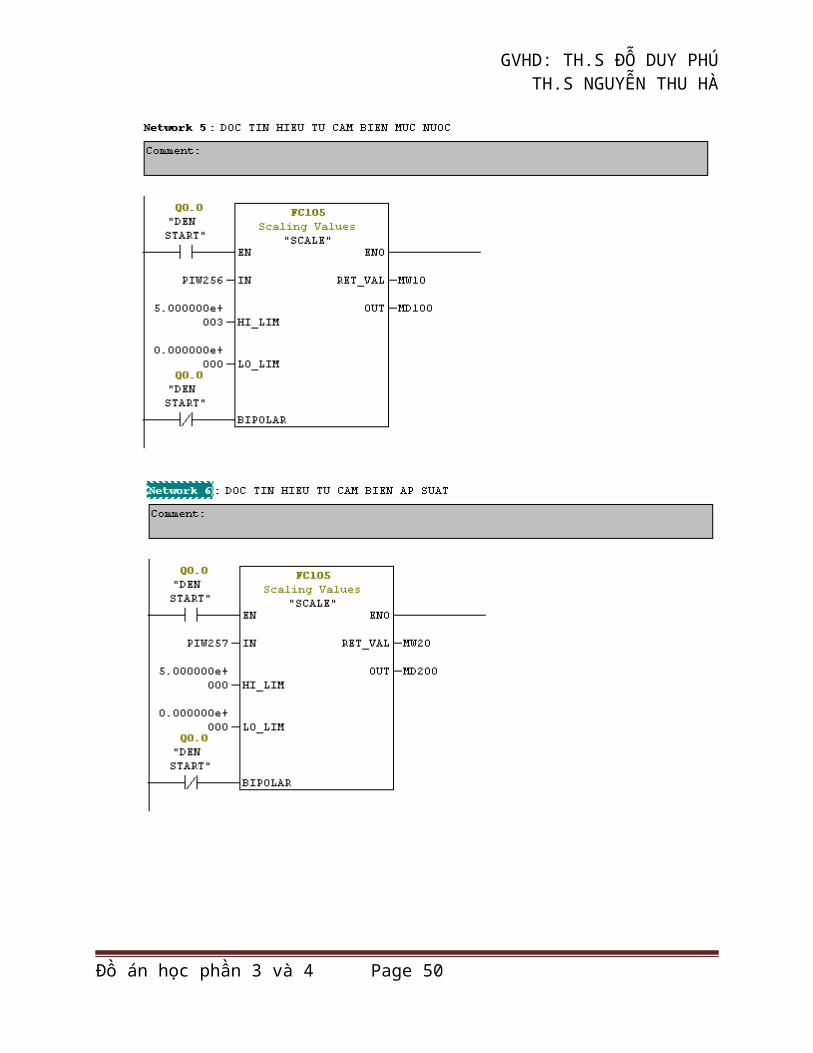
2.5. Xây dựng phần mềm
Đồ án học phần 3 và 4 Page 48
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Đồ án học phần 3 và 4 Page 49
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Đồ án học phần 3 và 4 Page 50

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Đồ án học phần 3 và 4 Page 51
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
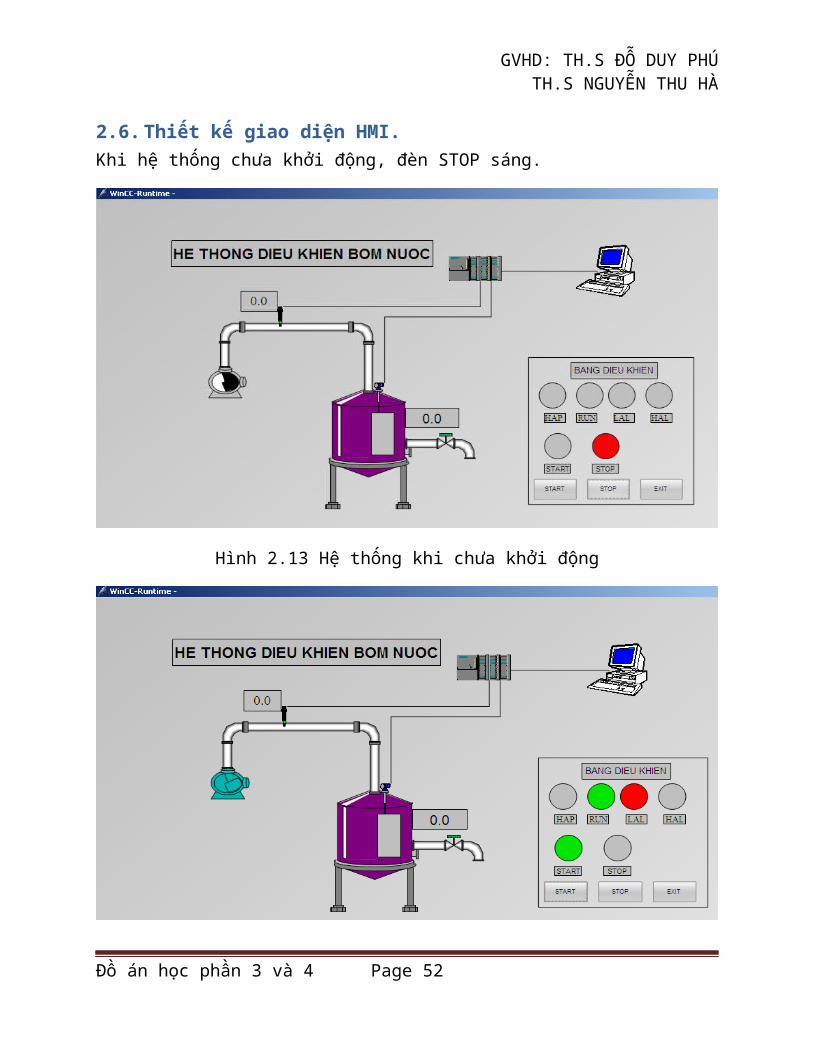
2.6.Thiết kế giao diện HMI.Khi hệ thống chưa khởi động, đèn STOP sáng.
Hình 2.13 Hệ thống khi chưa khởi động
Đồ án học phần 3 và 4 Page 52
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
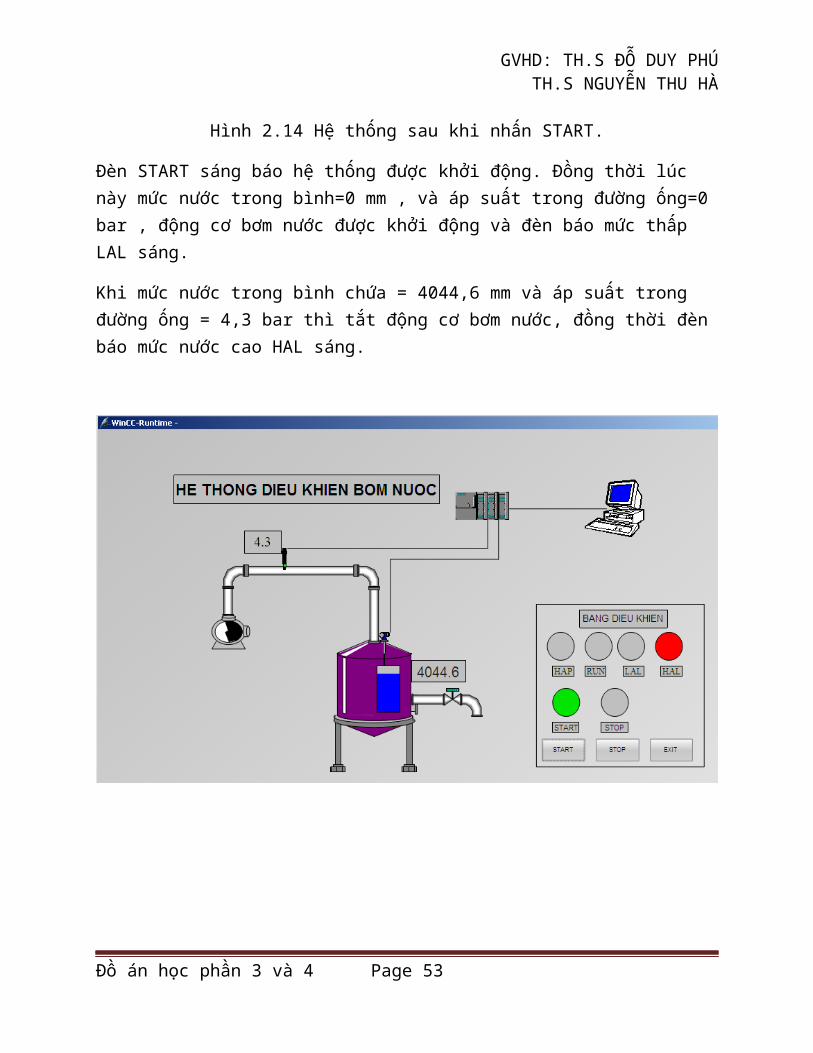
Hình 2.14 Hệ thống sau khi nhấn START.
Đèn START sáng báo hệ thống được khởi động. Đồng thời lúc này mức nước trong bình=0 mm , và áp suất trong đường ống=0 bar , động cơ bơm nước được khởi động và đèn báo mức thấp LAL sáng.
Khi mức nước trong bình chứa = 4044,6 mm và áp suất trong đường ống = 4,3 bar thì tắt động cơ bơm nước, đồng thời đèn báo mức nước cao HAL sáng.
Đồ án học phần 3 và 4 Page 53

GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
Đồ án học phần 3 và 4 Page 54
GVHD: TH.S ĐỖ DUY PHÚTH.S NGUYỄN THU HÀ
.
Đồ án học phần 3 và 4 Page 55