differential geometric methods in geometric modeling differential geometric methods in geometric...
TRANSCRIPT

Differential Geometric Methods in Geometric Modeling
Prof. Dr. F.-E. Wolter
July 13, 2011
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 1 / 52

Surface Contact Criteria
Outline
1 Surface ContactCriteriaHigher Order ContactApplications
2 Distance ComputationsConceptsApplications
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 2 / 52

Surface Contact Criteria
Criteria for Second Order Contact
Problem:Develop Criteria, which employ minimal 1-dimensional Contact- orCurvature Conditions and control all Curvatures in a Surface Point.
1-dimensional Curvature- or Contact-Condition means e.g. Prescribing:
1 Normal Curvature respective a direction in a point
2 Tangential Contact with another surface along a curve
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 3 / 52

Surface Contact Criteria
Contact-Curve-Theorem
Theorem on Curvature Equality of two surfaces along a tangentialcontact curve:Asssume that both regular C 2-surfaces F ,G have tangential contact alonga regular C 1-curve β(s). If at any point p of β(s) both surfaces F ,G havethe same normal curvature for a direction ~t transversal to β(s) then F ,Ghave indentical I- and II fundamental tensors at p.
p
t
1Pegna, J.; Wolter, F.-E., ”A Simple Practical Criterion to Guarantee Second Order Smoothness of Blend Surfaces”,
Proceedings of the 15th ASME Design Automation Conference: Advances in Design Automation., vol. 1, ASME, 1989, p.93-105
2J. Pegna, F.-E. Wolter, ”Geometrical Criteria to Guarantee Curvature Continuity of Blend Surfaces”, J MECH DESIGN
114 (1992) no. 1, 201-210
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 4 / 52

Surface Contact Criteria
Point-Contact-Theorem (Three-Tangents-Theorem)
Theorem on Curvature-Equality of two surfaces in a tangentialcontact point:If two surfaces with tangential contact in a point p have in p commonnormal curvatures for 3 pairwise linearly independent directions ~ti , thenboth surfaces have identical I - and II fundamental tensors in p.
p
t
t
t1
2
3
1Pegna, J.; Wolter, F.-E., ”A Simple Practical Criterion to Guarantee Second Order Smoothness of Blend Surfaces”,
Proceedings of the 15th ASME Design Automation Conference: Advances in Design Automation., vol. 1, ASME, 1989, p.93-105
2J. Pegna, F.-E. Wolter, ”Geometrical Criteria to Guarantee Curvature Continuity of Blend Surfaces”, J MECH DESIGN
114 (1992) no. 1, 201-210
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 5 / 52

Surface Contact Criteria
Proof: Notations
Take local representations of two surfaces by two height functions
z = αf (x , y) , α ∈ {1, 2}
with corresponding parametrizations:
αf (x , y) =[x , y ,α f (x , y)
]TPoint:
p =[xp, yp, zp
]T; p =
[xp, yp
]TTangent directions:
~ti = αf ′(p)
[xi
yi
]1 ≤ i ≤ 3
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 6 / 52

Surface Contact Criteria
Proof (cont.)
Assuming for both surfaces αf common normal curvatures for 3 directions
~ti = αf ′(p)
[xi
yi
]=⇒
1k(xi ,yi )︷ ︸︸ ︷x2i 1fxx +2xiyi 1fxy +y2
i 1fyy√1+ 1f 2
x + 1f 2y |~ti |2
=
2k(xi ,yi )︷ ︸︸ ︷x2i 2fxx +2xiyi 2fxy +y2
i 2fyy√1+ 2f 2
x + 2f 2y |~ti |2
(1)
1f (p), 2f (p) tangential in p ⇒
(1fx(p), 1fy (p)) = (2fx(p), 2fy (p))
(2) and (1) =⇒
x2i 1fxx +2xiyi 1fxy +y2
i 1fyy =x2i 2fxx +2xiyi 2fxy +y2
i 2fyy
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 7 / 52

Surface Contact Criteria
Proof (cont.)
L
1fxx2 1fxy
1fyy
= L
2fxx2 2fxy
2fyy
∀1 ≤ i ≤ 3 with L :=
x21 x1y1 y2
1
x22 x2y2 y2
2
x23 x3y3 y2
3
det(L) = det
[x1 x2
y1 y2
]det
[x2 x3
y2 y3
]det
[x1 x3
y1 y3
]6= 0,
as ~ti , 1 ≤ i ≤ 3 pairwise linearly independent. As
=⇒ (1fxx , 1fxy , 1fyy ) = (2fxx , 2fxy , 2fyy )
in p.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 8 / 52

Surface Contact Higher Order Contact
Outline
1 Surface ContactCriteriaHigher Order ContactApplications
2 Distance ComputationsConceptsApplications
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 9 / 52

Surface Contact Higher Order Contact
Definition of Higher Order Contact
Definition: Let f (x , y) and g(x , y) be two Cn-smooth height functionsrepresenting two surfaces f , g which share the point
p = (0, 0, f (0, 0)) = (0, 0, g(0, 0)) .
Contact of n-th order at p means that the Taylor expansions off (x , y) and g(x , y) agree up to order n at the point (0, 0).
Directional contact of n-th order for a direction vector (x1, y1)means that the Taylor expansions for the two univariatefunctions d(s) := f (sx1, sy1) and e(s) := g(sx1, sy1) agreefor s = 0 up to order n.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 10 / 52

Surface Contact Higher Order Contact
General Point Contact Theorem
Theorem: 1 Two surfaces f , g have contact of n-th order at p if andonly if they have directional contact of n-th order for (n + 1) pairwiselinerly independent tangent directions at the point p.
1Wolter, F.-E.; Tuohy, S.-T., ”Curvature Computations for degenerate surface patches”. Computer Aided Geometric
Design 4 (1992), no. 9, 241-270
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 11 / 52

Surface Contact Higher Order Contact
General Curve Contact Theorem
Theorem: Let f (x , y) and g(x , y) be two Cn-smooth height functionsrepresenting two surfaces f , g which have tangential contact along a curveα(s). Let V (s) be a vector field tangential to f along α(s) which istransversal to α(s). Assume that f and g have directional contact of ordern in direction V (s) for all points α(s). Then f and g have contact oforder n in all points α(s).
1Hermann, T.; Lukacs, G.; Wolter, F.-E., ”Geometrical criteria on the higher order smoothness of composite surfaces”,
Computer Aided Geometric Design 9 (1999), no. 16,907-911
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 12 / 52

Surface Contact Applications
Outline
1 Surface ContactCriteriaHigher Order ContactApplications
2 Distance ComputationsConceptsApplications
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 13 / 52

Surface Contact Applications
Curvature Computations for Degenerate SurfaceRepresentations
Problem:Determine curvatures of a surface piece F whose representation f (1u, 2u)is degenerate but where the point set F has geometrically meaningfulcurvature.f () degenerate means there are points where rank f ′ < 2.
u2
1u
f( , )u21u
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 14 / 52

Surface Contact Applications
Curvature Computations for Degenerate SurfaceRepresentations
Solution:
Determine in a point p ∈ F the second derivatives of anon-degenreate parametrization of F .
Use those derivatives for curvature computations.
Choose for a parametrization of F the height function defined overthe tangent plane at F in p.
1Wolter, F.-E.; Tuohy, S.-T., ”Curvature Computations for degenerate surface patches”. Computer Aided Geometric Design
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 15 / 52

Surface Contact Applications
Curvature Computations
Let f (1u, 2u) : R2 → R3 surface
gij = ∂iuf ◦ ∂juf I-Fundamental Tensor
bij = N ◦ (∂iu∂juf ) II-Fundamental Tensor
with N Surface Normal and i , j ∈ {1, 2}.
Gauss-Curvature K =det(bij)det(gij)
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 16 / 52

Surface Contact Applications
Degeneration to a triangle Surface Patch
p
1
1
z
N
z=h(x,y)
y
x
¹
u²
f( , ) ²uu¹u
f (1u, 2u) = p for 0 ≤ 2u ≤ 1=⇒ ∂2uf (1, 2u) = 0=⇒ det(gij(1, 2u)) = 0=⇒Classical Curvature Computations Impossible!
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 17 / 52

Surface Contact Applications
Positive Gauss Curvature at the Degenerate Vertex
Octant of Sphere of Radius r=2, Represented by a Bezier-Patch
Elliptic Bezier-Patch Examples and Close Up
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 18 / 52

Surface Contact Applications
Non-Positive Gauss Curvature at the Degenerate Vertex
Parabolic Bezier-Patch Examples and Close Up
Hyperbolic Bezier-Patch Examples and Close Up
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 19 / 52

Surface Contact Applications
Example without well-defined Curvature at the DegenerateVertex
Here the parametric coordinate functions x(u, v) , y(u, v) , z(u, v) arepolynomials in u, v !
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 20 / 52

Surface Contact Applications
An equivalent Curve Example
x
y
y=h(x)
x(u) = u2 , y(u) = u3 , 0 ≤ u ≤ 1y(x(u)) = (x(u))3/2
y = h(x) = x3/2 ist C 1-smooth,but has no second order Taylor approximation in x = 0.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 21 / 52

Surface Contact Applications
Problem
Problem: Under what Conditions are the Surface Curvatures at theDegenerate Vertex well defined?Is the computed surface curvature or are the computed second derivativesof the height function independent of the chosen 3 curves emating fromthe degenerate vertex?
Yes, if the Height function z = h(x , y)has a second order Taylor-Approximation.
However, even for degenerate parametric polynomial surfaces a C 1-smoothHeight function need not have a second order Taylor-Approximation at thedegenerate vertex.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 22 / 52

Surface Contact Applications
Solution
Determine in a point p ∈ F the second derivatives of anon-degenerate parametrization of F .
Use those derivatives for curvature computations.
Choose for a parametrization of F the height function defined overthe tangent plane at F in p.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 23 / 52

Surface Contact Conclusions
Conclusion
1 The 3-Tangent-Theorem gives necessary and sufficient conditions toensure 2-order-Point-Contact for surfaces.
2 This theorem can be used to compute candidates for 2-order partialsof a (non-degenerate) local height function representation of adegenerate surface. The height function is defined over the tangentplane of the surface point set at a degenerate surface vertex.
3 Those candidates give well-defined 2-order-partials and yield welldefined surface curvatures, provided the surface’s height functionrepresentation has a 2-order-Taylor-approximation at the degeneratevertex.
Contact Order 2 case of Curve-Contact-Theorem andPoint-Contact-Theorem are joined work with Joe Pegna (RPJ)
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 24 / 52

Distance Computations Concepts
Outline
1 Surface ContactCriteriaHigher Order ContactApplications
2 Distance ComputationsConceptsApplications
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 25 / 52

Distance Computations Concepts
Notations
Let M,M1,M2 ⊂ Rk be submanifolds with or without boundary.M,M1,M2,⊂ Rk may be given parametrically e.g. by splines orimplicitely as solutions of (e.g. algebraic) equations.
dist (.,.) will refer to Euclidean distance.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 26 / 52

Distance Computations Concepts
Problems
1 Let p ∈ Rk . Compute points nearest on M to p.
2 Compute:min{dist(a, b) | (a, b) ∈ M1 ×M2} ormax{dist(a, b) | (a, b) ∈ M1 ×M2}
3 Let c(t) be a curve in Rk . Trace a curve of nearest foot pointsπ(c(t)) on M. i.e.dist(π(c(t)), c(t)) =dist(M, c(t))
4 Compute all pairs of points in M1 ×M2 with distance 0.(Intersection-Problem)
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 27 / 52

Distance Computations Concepts
Differential Equations for orthogonal Projectionsparametric case
f(u(t))u(t)
2u1u
1u
f( , )
(t)α2u
with: t ∈ [0, 1]α(t) = f (u(t)) + r(t)N(u(t))α′ = f ′(u(t))u′ + r(t)N ′(u(t))u′ + r ′(t)N(u(t))fi = ∂i f , Ni = ∂iNα′ = (f1f2)u′ + r(t)(N1N2)u′ + r ′(t)N(u(t))
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 28 / 52
Distance Computations Concepts
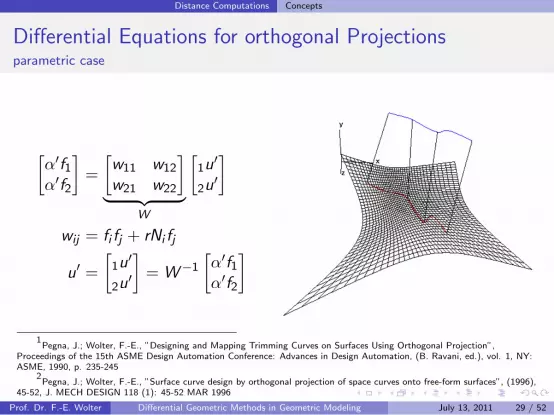
Differential Equations for orthogonal Projectionsparametric case
[α′f1α′f2
]=
[w11 w12
w21 w22
]︸ ︷︷ ︸
W
[1u′
2u′
]
wij = fi fj + rNi fj
u′ =
[1u′
2u′
]= W−1
[α′f1α′f2
]
1Pegna, J.; Wolter, F.-E., ”Designing and Mapping Trimming Curves on Surfaces Using Orthogonal Projection”,
Proceedings of the 15th ASME Design Automation Conference: Advances in Design Automation, (B. Ravani, ed.), vol. 1, NY:ASME, 1990, p. 235-245
2Pegna, J.; Wolter, F.-E., ”Surface curve design by orthogonal projection of space curves onto free-form surfaces”, (1996),
45-52, J. MECH DESIGN 118 (1): 45-52 MAR 1996
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 29 / 52

Distance Computations Concepts
Differential Equations for orthogonal projectionsimplicit case
α (t)
N( )S
(t)β
(t)βS = {(x , y , z)|g(x , y , z) = 0}N = 5gα(t) = β(t) + r(t)N(β(t))α′(t) = β′(t) + r(t)N ′(β(t))β′(t) + r ′(t)N(β(t))α′(t)− (r ′)tN(β(t)) = (ID + r(t)N ′(β(t)))︸ ︷︷ ︸
M(t)
β′(t)
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 30 / 52

Distance Computations Concepts
Differential Equations for orthogonal projectionsimplicit case
α′(t)− r ′(t)N(β(t)) = M(t)β′(t)α′ − (Nα′)N = β′ + r(∂1Nβ
′1 + ∂2Nβ
′2 + ∂3Nβ
′3)
α′ − (Nα′)N = (ID + r(t)N ′)︸ ︷︷ ︸M(t)
β′
β′(t) = M−1(t)(α′ − (Nα′))
1Pegna, J.; Wolter, F.-E., ”Designing and Mapping Trimming Curves on Surfaces Using Orthogonal Projection”,
Proceedings of the 15th ASME Design Automation Conference: Advances in Design Automation, (B. Ravani, ed.), vol. 1, NY:ASME, 1990, p. 235-245
2Pegna, J.; Wolter, F.-E., ”Surface curve design by orthogonal projection of space curves onto free-form surfaces”, (1996),
45-52, J. MECH DESIGN 118 (1): 45-52 MAR 1996
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 31 / 52

Distance Computations Concepts
Approximation of the Orthogonal Projection
Non-linear Inversion:
r 00 0r 0( )α t0tt f( , )
0
N( )r
-1
1f(t,r)
f (x,y)
r r
t
t
0
A = ([0,1])α
0 ( )α t0
0
( , )
f (t, r) := α(t) + rN(α(t))
Compute (approximate) the inverse map f −1(x , y): Ifdet(f ′(t0, r0)) 6= 0 then f (t, r) is locally around f (t0, r0) = (x0, y0)invertible.
Compute the Taylor-approximation for f −1(x , y) at f (t0, r0)
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 32 / 52

Distance Computations Concepts
Localize Extrema of the Distance Function by TopologicalMethods (Gradient field-Rotation-Index)
Let p ∈ Rk and let Q(u, v) a parametric surface in Rk .
ϕ(u, v) := dist(p,Q(u, v))
Lokalize Extrema of ϕ by searching zeros of 5ϕ with (Rotation-) Index +1
1Kriezis, G.A.; Patrikalakis, N. M.; Wolter, F.-E., ”Topological and Differential-Equation Methods for Surface
Intersections”, Computer Aided Design 24 (1992), no. 1, 41-55
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 33 / 52

Distance Computations Concepts
Rotation Index
The Rotation (Index) counts the number of rotations of 5ϕ along aclosed curve.
Rotation Index = -1Rotation Index = 1
If the rot-index of 5ϕ along a closed curve γ is non-zero then there existsal least one critical point of ϕ in the domain bounded by γ.
Rotation Index for an isolated Extrema is +1
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 34 / 52

Distance Computations Concepts
Rotation Index
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 35 / 52

Distance Computations Concepts
Rotation Index
V (u, v) = {χ, ψ}
W (V , γ) =1
2π
∫γ
χdψ − ψdχ
χ2 + ψ2
Θ = arctan
(ψ
χ
)for − π < Θ < π
W =1
2π
n−1∑i=0
4Θi with 4Θi = Θ(i+1) mod n −Θi and − π < 4Θi < π
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 36 / 52

Distance Computations Concepts
Elimination of Search Areas with Taylor Estmiation
ϕ(S0 + ε) ≥ ϕ(S0) + ϕ′(S0)ε− maxS0≤S≤S0+ε
ϕ′′(S)ε2︸ ︷︷ ︸≥ ϕ(S)
Leopold Kronecker (1869):Vector Field Index of a Vector Field Z on Rn (at 0)
1Area(Sn−1)
RSn−1ε
1|Z |n det(Z ,∂u1Z ,...,∂un−1Z)du1...dun−1
with (u1 . . . un−1) coordinates for the Sphere Sn−1ε
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 37 / 52

Distance Computations Concepts
Minimal Distance between Submanifolds
Let a(s), c(t) be two closed curves in Rk .
c(t)
a(s)
Search min{ϕ(s, t)| ϕ(s, t) :=dist(c(s), a(t))}
Find local Extrema of ϕ(s, t) by locating zeros (with Index 1) of 5ϕ byVectorfield Index method.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 38 / 52

Distance Computations Concepts
The Cut Locus CM
b(t)M
MC
MC
Cut Locus CM := {q ∈ Rk | q has atleast 2 minimal joins to M}Trace nearest foot points on M of thecurve b(t). A normal ray is distanceminimal to M until it reaches the cutlocus CM of M !
Background for all this is contained in:
1Wolter, F.-E., ”Distance Function and Cut Loci on a Complete Riemannian Manifold”, Archiv d. Math. 1(1979), no. 32,
92-962
Wolter, F.-E., ”Cut Loci in Bordered and Unbordered Riemannian Manifolds”, Ph.D. thesis, Technical Univ. Berlin 19853
Wolter, F.-E., ”Cut Locus and Medial Axis in Global Shape Interrogation and Representation”,(1993), MIT, Dec. 1993(revised version) Published as: MIT Design Laboratory Memorandum 92-2 and MIT Sea Grant Report, 1992.
4Abrams, S.; Bardis, L.; Chryssostomidis, C.; Clement, A.; Jinkerson, R.; Patrikalakis, N. M.; Wolter, F.-E., ”Inspection
and Feature Extraction of Marine Propellers”, Journal of Ship Production 9 (1993), no. 2, 88-1065
Rausch, T.; Wolter, F.-E.; Sniehotta, O. , ”Computation of Medial Curves in Surfaces”,(1996), 43-68, Hannover, August1996. Published in: Conference on the Mathematics of Surfaces VII (September 1996), Institute of Mathematics and itsApplications, IMA Conference Series, pp. 43-68, 1997
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 39 / 52

Distance Computations Concepts
The Cut Locus
Define the path length to the cut locus for all unit normals N(x) of M bya function
s(N(x)) := sup{λ|Segment(x + [0, λ]N(x)) is distance minimal from(x + λN(x)) to M}
If we find for q ∈ Rk an orthogonal foot pointO(q) ∈ M, with |q − O(q)| ≤ s(N(O(q))) and
N =q − O(q)|q − O(q)| then O(q) is a point nearest on M
to q.
M
O(q) q
N
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 40 / 52

Distance Computations Concepts
Computing dist (M , CM)
Determine dist(M,CM) to support the computation of dist(q,M) for apoint q close to M:
If O(q) is an orthogonal projection of a point p ∈ Rk on a submanifold Mand if,
dist(q,O(q)) ≤dist(M,CM)then O(q) is a point nearest on M to q.
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 41 / 52

Distance Computations Concepts
dist (M , CM) in a Special Case
Let c : [0, 1]→ Rk be a smooth closed curve yielding the submanifoldM = c[0, 1] .
η
M r m
δ
t
u
α=min{dist(c(u),c(t)) | u≤t−δ} δ=πrm
max0≤t≤1
|c′(t)|
dist (M,CM) = min{rm, η}rm = minimal curvature radius of cη = 1
2 lenghth(shortest binormal segment joining 2 points of c)
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 42 / 52

Distance Computations Applications
Outline
1 Surface ContactCriteriaHigher Order ContactApplications
2 Distance ComputationsConceptsApplications
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 43 / 52

Distance Computations Applications
Application Examples for Distance Computations
Quality Control in Manufactoring 1
Medial Curves and Surfaces 2
Cut Locus in Shape Classification 3
Automatic Mesh Generation 4
Surface Intersection (Small Loops) 5
1Abrams, S.; Bardis, L.; Chryssostomidis, C.; Clement, A.; Jinkerson, R.; Patrikalakis, N. M.; Wolter, F.-E., ”Inspection
and Feature Extraction of Marine Propellers”, Journal of Ship Production 9 (1993), no. 2, 88-1062
Rausch, T.; Wolter, F.-E.; Sniehotta, O. , ”Computation of Medial Curves in Surfaces”,(1996), 43-68, Hannover, August1996. Published in: Conference on the Mathematics of Surfaces VII (September 1996), Institute of Mathematics and itsApplications, IMA Conference Series, pp. 43-68, 1997.
3Wolter, F.-E., ”Cut Locus and Medial Axis in Global Shape Interrogation and Representation”,(1993), MIT, Dec. 1993
(revised version) Published as: MIT Design Laboratory Memorandum 92-2 and US National Seagrant Library, MIT Sea GrantReport, 1992
4Kriezis, G.A.; Patrikalakis, N. M.; Wolter, F.-E., ”Topological and Differential-Equation Methods for Surface
Intersections”, Computer Aided Design 24 (1992), no. 1, 41-555
Abrams, S.; Bardis, L.; Chryssostomidis, C.; Clement, A.; Jinkerson, R.; Patrikalakis, N. M.; Wolter, F.-E., ”Inspectionand Feature Extraction of Marine Propellers”, Journal of Ship Production 9 (1993), no. 2, 88-106
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 44 / 52

Distance Computations Applications
Quality Control in Manufacturing
Check, if measured points of manufactured object are close enough to theDesign object.(More thee than 3 dimensions may be relevant if beyond 3 spacecoordinates physical parameters for material properties enter.)
1Abrams, S.; Bardis, L.; Chryssostomidis, C.; Clement, A.; Jinkerson, R.; Patrikalakis, N. M.; Wolter, F.-E., ”Inspection
and Feature Extraction of Marine Propellers”, Journal of Ship Production 9 (1993), no. 2, 88-106
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 45 / 52

Distance Computations Applications
Propeller Blade
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 46 / 52

Distance Computations Applications
Medial Curves
The differential equation concept for orthogonal projections yields alsodifferential equations for medial curves between 2 curves.
γ
α
β γ ⊂ {w ∈ R2| dist(α,w) = dist(β,w)}
In Experiments with Splines: Position accuracy of γ 10−11, after Splineinterpolation 10−8
1F.-E. Wolter. Distance Computations for Curves and Surfaces. Mini-Symposium on Engineering Geometry at SIAM
Conference on Geometric Design, Tempe, Arizona, 19892
F.-E. Wolter. Geodesic Offsets, Computations and Applications. International Symposium on Freeform Curves andSurfaces 95, Mathematical Research Institute Oberwolfach, Germany, 1995.
3Rausch, T.; Wolter, F.-E.; Sniehotta, O. , ”Computation of Medial Curves in Surfaces”,(1996), 43-68, Hannover, August
1996. Published in: Conference on the Mathematics of Surfaces VII (September 1996), Institute of Mathematics and itsApplications, IMA Conference Series, pp. 43-68, 1997
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 47 / 52

Distance Computations Applications
Cut Locus and Shape Classification
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 48 / 52

Distance Computations Applications
Automatic Mesh Generation
Medial Axis of a Multiply-Connected Shape
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 49 / 52

Distance Computations Applications
Mesh
Finite Element Mesh of a Multiply Connected Domain
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 50 / 52

Distance Computations Applications
Surface Intersection Curves
Intersection of Two Biquartic Bezier Patches
Localization of small loops
Binormal
1Kriezis, G.A.; Patrikalakis, N. M.; Wolter, F.-E., ”Topological and Differential-Equation Methods for Surface
Intersections”, Computer Aided Design 24 (1992), no. 1,41-55
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 51 / 52

Distance Computations Conclusions
Conclusions
Methods use local and global Differential Geometric Concepts!1 Local
1 Tensorial differential equations for orthogonal projection2 Approximation (non-linear) inverse (of Normal map)3 Elimination of search areas e.g. by Taylor estimates
2 (Semi-)GlobalVectorfield Index-Method
3 GlobalGlobal Differential Geometric tools employing the Cut Locus
Prof. Dr. F.-E. Wolter Differential Geometric Methods in Geometric Modeling July 13, 2011 52 / 52