biomagnetic systems for clinical use
TRANSCRIPT

PHILOSOPHICAL MAGAZINE B, 2000, VOL. 80, NO. 5, 937±948
Biomagnetic systems for clinical use
S.DELLA PENNA1y,C.DEL GRATTA
1 ;2,C.GRANATA3 ;4,A.PASQUARELLI
5,V. PIZZELLA
6, R. ROSSI4, M. RUSSO
3, K.TORQUATI1;2 and S. N. ERNEí5
1Institute of Advanced Biomedical Technologies, University of Chieti, Chieti,Italy
2Department of Clinical Sciences and Biomedical Images, University of Chieti,Chieti, Italy
3Istituto di Cibernetica, Consiglio Nazionale delle Ricerche, Arco Felice, Italy4Advanced Technologies Biomagnetics, Chieti, Italy
5Zentralinstitut fuÈ r Biomedizinische Technik, University of Ulm, Ulm, Germany6Institute of Solid State Electronics, Consiglio Nazionale delle Ricerche, Rome,
Italy
ABSTRACT
We present two multichannel systems based on a superconducting quantuminterference device (SQUID) for biomagnetic measurements, installed at theUniversity of Chieti. Both systems have been designed for clinical and routineuse and have been developed owing to an international cooperation. The mainissues in the instrument implementation were ®eld sensitivity and spatialresolution, as well as ¯exibility and stability during operation. The ®rst systemis a planar system and is devised for magnetocardiographic measurements. Thissystem is composed of 74 dc SQUID integrated magnetometers contained in alow-noise dewar: 55 sensors are measurement channels and 21 are placed far fromthe subject and are used as reference channels to create software gradiometers.The second system is a helmet system and consists of 165 dc SQUID integratedmagnetometers to perform magnetoencephalographic recordings; 153 channelsare distributed over a surface covering the whole scalp and 12 channels areused as references. The ®eld noise of the SQUID magnetometers is about5 fT Hz¡1=2. Each system is placed in a magnetically shielded room for eddycurrent shielding and magnetic shielding. The magnetic ®eld is recorded withsampling frequencies up to 10 kHz. The analogue-to-digital converted data areprocessed on line by means of an array of digital signal processors, allowingbandpass ®ltering, decimation and noise compensation.
} 1. INTRODUCTION
Biomagnetism (for a review see HaÈmaÈ laÈ inen et al. (1993)) is one of the mostimportant ®elds of application of superconducting quantum interference devices,namely SQUIDs, and deals with the study of the magnetic ®eld generated by elec-trophysiological activity in the human body. Biomagnetic recordings by means ofmultichannel sensors provide time sequences of magnetic ®eld maps to be used forthe inspection of the activity of human organs, such as the brain and the heart, forthe diagnosis of pathologies or abnormalities and for the location of the region oforigin of such abnormalities. SQUID-based instrumentation o�ers the sensitivityand bandwidth for the detection of these low magnetic ®elds, ranging from few
Philosophica l Magazine B ISSN 0141±8637 print/ISSN 1463±6417 online # 2000 Taylor & Francis Ltd
http://www.tandf.co.uk/journals/tf/01418637.htm l
yEmail: [email protected]
femtoteslas to hundreds of picoteslas, at frequencies from dc to a few kilohertz. Sincethe measurements are performed in the presence of background magnetic noise,which is much higher than the biomagnetic ®elds, the use of noise rejection methodsis mandatory ; indeed a passive shielding, based on the principles of eddy currentsand of magnetic shielding, is used (Erne 1983) , as well as a di�erential measurementmethod, using hardware or software gradiometers (Vrba 1996). The use of biomag-netic instrumentation for clinical applications and basic physiology researchrequires, on the one hand, that total head or total chest systems are utilized inorder to record the magnetic ®eld simultaneously over a large number of pointsand, on the other hand, that stable and reliable operation, even in noisy environ-ments, and easy and fast measurement procedure are ensured. Early biomagnet-ometers, in the 1980s, featured only a small number of channels, ranging fromone to nine (Carelli et al. 1989). These instruments covered only a small portionof the scalp (or chest) and, in order to obtain a meaningful map of the magnetic ®elddistribution for dipole localization, the sensor had to be sequentially repositioned.This measurement method implied ®rstly that only events that were assumed to berepeating in time could be observed and secondly that magnetic epochs recorded atdi�erent times had to be correlated to a continuous electric recording. As a conse-quence, the possibilities for performing `real-time’ and dynamical studies weregreatly reduced by fatigue of the subject. The measurement condition improvedwith the advent of systems with a medium number of channels in the early1990s (Foglietti et al. 1991, Benzel et al. 1993) , and have now reached thematurity with state-of-the-art systems that fully cover the head, or a large areaover the chest. These systems allow `single-shot’ measurements, thus providinginstantaneous maps of the magnetic ®eld (Knuutila et al. 1993, Vrba et al.1999) and therefore allowing the investigation of temporal dynamics of acti-vated areas, for which the millisecond time resolution of biomagnetic measure-ments proves to be ideal. It is now possible to routinely perform morecomplex experimental paradigms, such as those for the investigation of cogni-tive functions. Finally, the high density of sensors, oversampling the magnetic®eld distribution, allows noise reduction and opens the way to non-averageddata analysis. Moreover the clinical validation of a study claims for measure-ments performed on a large number of subjects. In this paper we present twomultichannel systems, one for magnetocardiograph y (MCG) and the other formagnetoencephalograph y (MEG), that have been developed in the frameworkof an international cooperative project and have been installed at theUniversity of Chieti. Our systems di�er in the layout of the sensors, whilethe main designs are similar. Both systems are conceived for clinical useand, with this aim, important issues in the instrument implementation areenvironmental noise reduction, ensuring stability during operation, and ¯exibil-ity. Thus, the SQUID sensors were developed using a standard trilayer tech-nology, ensuring stability of the performances during time and low noise levelat low frequencies. Moreover, we used integrated SQUID magnetometers as thebase sensing elements to detect the magnetic ®elds of interest as well as thesensors sampling the noise ®eld to compose software gradiometers. Each systemis placed inside a good-quality magnetically shielded room (MSR) to reducethe environmental magnetic noise at low and high frequencies. Finally, in orderto reduce the set-up times before each measurement, a hands-o� hardwaresetup and a friendly interface for experimental control were implemented.
938 S. Della Penna et al.

} 2. DESCRIPTION OF THE SYSTEMS
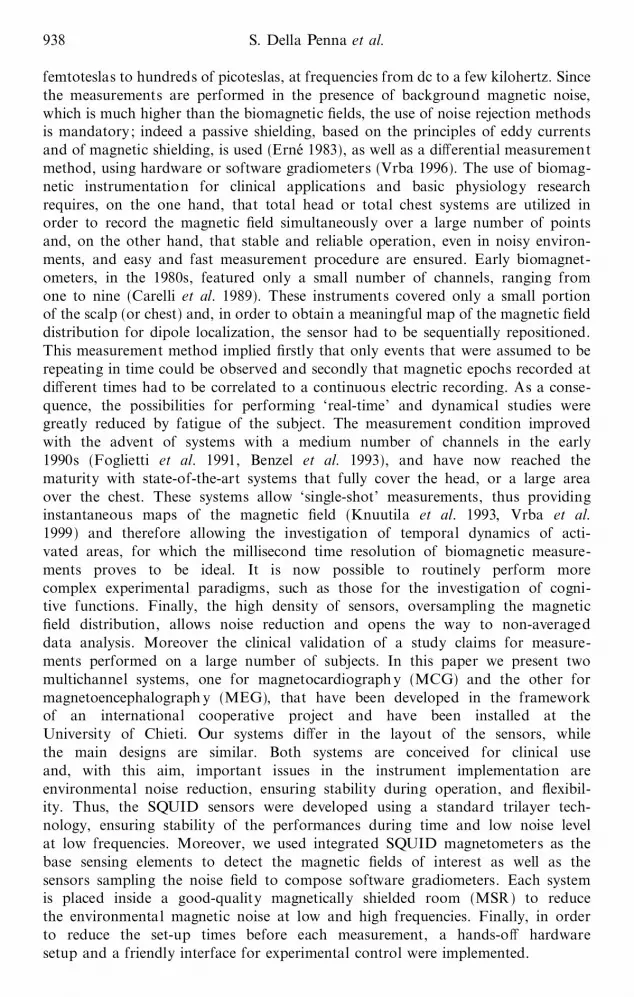
The MCG system and the MEG sensor layouts consist mainly of a set of mea-surement channels and a set of reference channels. The reference sensors are used forthe detection of the magnetic noise ®eld to be software subtracted from the signalrecorded by the sensing elements. Schematic drawings of the MCG and the MEGsensor layouts are displayed in ®gures 1 (a) and (b) respectively.
In particular, the MCG system consists of a measurement plane, a referenceplane and a reference orthogonal triplet. The measurement plane holds 55 dcSQUID sensors distributed according to a hexagonal pattern over a circular surfaceof about 23 cm diameter with a spacing between the sensors of about 3.2 cm. 19reference sensors, with the same features as the measurement sensors, are placed on acircular surface 9 cm above the sensing plane and coaxial with it. The referencesensors are arranged according to a double hexagonal pattern and are spacedabout 5.7 cm. The reference triplet is placed on the system axis, 16 cm from themeasurement plane. This sensors structure is contained in a low-noise dewar with
Biomagnetic systems for clinical use 939
(a)
Figure 1. (a) MCG sensor layout ; the positions of the reference channels over the sensingplane are indicated. (b) A partial view of the MEG sensor layout; three sets ofreferences are shown.
a planar bottom, with a distance of 1.8 cm between the sensing plane and roomtemperature.
The MEG system consists of 153 dc SQUID magnetometers placed on a helmet-shaped surface covering the whole scalp and spaced about 3.2 cm. Four orthogonaltriplets of reference sensors are placed 7 cm from the sensing surface, above the areascorresponding to the occipital lobe, the two temporal lobes and the vertex. Thesensors are housed inside a low-noise dewar with a helmet shaped bottom, at adistance of 1.8 cm from room temperature.
Both the measurement and the reference sensors are low-temperature dc SQUIDintegrated magnetometers. The SQUID parameters and the technology used areaimed at producing reliable sensors. The design of the sensors is based on magnet-ometers of Ketchen±Jaycox (1982) type. The planar dc SQUID is based on a squarewasher con®guration, with an inductance of 100 pH, and is tightly coupled to a 12-turn thin-®lm input coil, with 12 nH inductance; the input coil is connected to asingle-turn square pick-up loop, of 81 mm2 area and about 25 nH inductance. TheSQUID, the pick-up loop and input coil are integrated on single square silicon chipof area 90 mm2. Since the SQUID is designed to be operated in non-hystereticmanner, each junction is shunted by an external shunt resistor (of resistance Rs)(Clarke 1996) . A thin ®lm resistor (of damping resistance Rd) across the SQUIDinductance was inserted to eliminate parasitic resonances and to improve the overallperformances (Enpuku et al. 1993) . Moreover, the damping resistance guaranteessmooth ¯ux±voltage SQUID characteristics, allowing constant operation during
940 S. Della Penna et al.
(b)
Figure 1. (Continued )
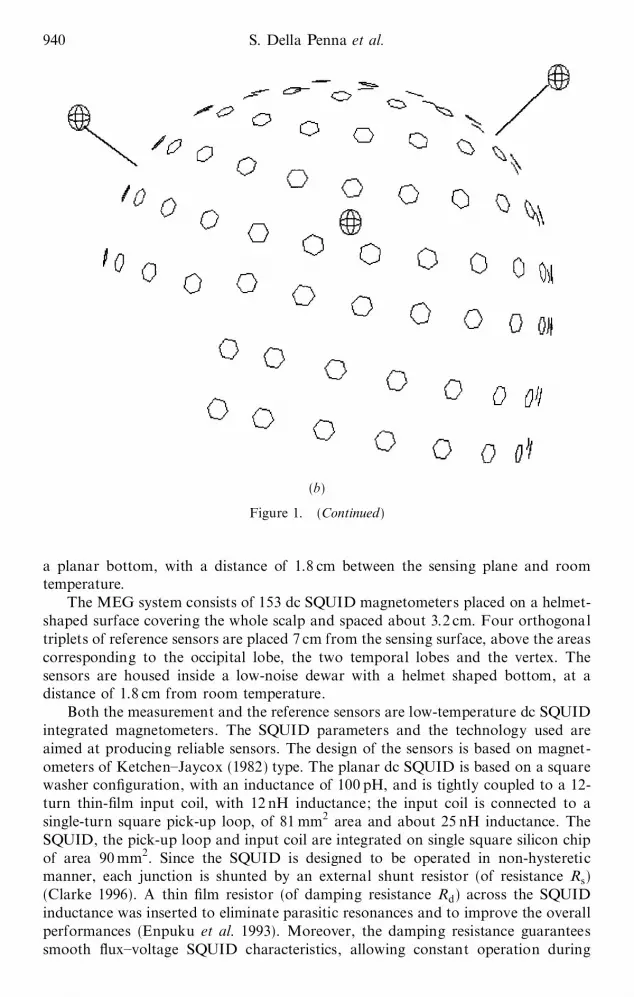
utilization when the SQUID is operated in a ¯ux-locked loop, as explained in thefollowing. The shunt resistor and the damping resistor are fabricated with a singlelayer. Since the resulting damping parameter ® , de®ned as Rs=Rd, is equal to unity,the noise level of the damped SQUID is not appreciably di�erent from that ofundamped SQUID (RyhaÈnen et al. 1992) . The fabrication procedure is based onthe high-quality Nb/AlOx/Nb trilayer junctions, ensuring good thermal and mechan-ical stability and low noise level at low frequency. The technology used for thetrilayer junctions and the resistors deposition are dc-magnetron sputtering andlift-o� process. The SQUID design and the fabrication technology used yield amagnetic noise density for the sensors of 5 fT Hz¡1=2 above 1 Hz. Figures 2 (a) and(b) show the dc SQUID integrated magnetometer and details respectively. TheSQUID read-out electronics are based on a ¯ux-locked loop with a direct-coupledscheme. In comparison with the standard read-out electronics with ¯ux modulation,the direct-coupled electronics are more compact, simpler and less expensive and arethus more suitable for multichannel systems. In such a con®guration, the SQUID isdirectly coupled to a pre-ampli®er, which contributes to the overall sensor noise:
SF;ef f … f † ˆ SF… f † ‡SV ;pre-amp… f †
V 2F
;
where SF;ef f … f †, SF… f † and SV ;pre-amp… f † are the e�ective, the SQUID intrinsic andthe pre-ampli®er ¯ux noise spectral densities, and V F
ˆ dV =dF is the SQUID trans-fer coe�cient. On the one hand, the SQUID design was optimized to supply smoothV -F characteristics, in order to operate the sensor in a wide range of bias points. Onthe other hand, the pre-ampli®er noise contribution was reduced to a negligible level
Biomagnetic systems for clinical use 941
(a)
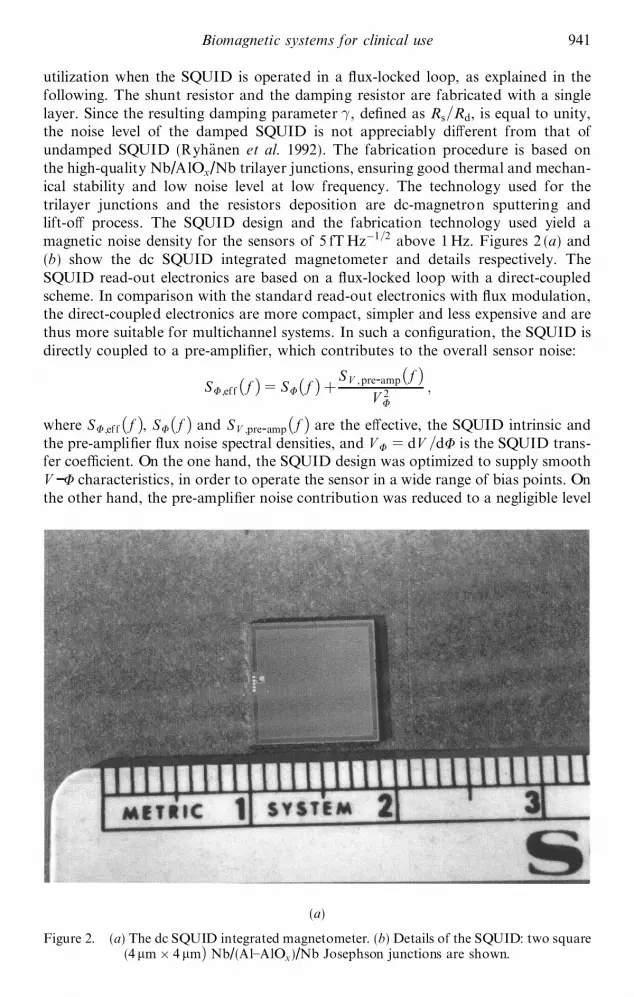
Figure 2. (a) The dc SQUID integrated magnetometer. (b) Details of the SQUID: two square(4 mm £ 4 mm† Nb/(Al±AlOx)/Nb Josephson junctions are shown.
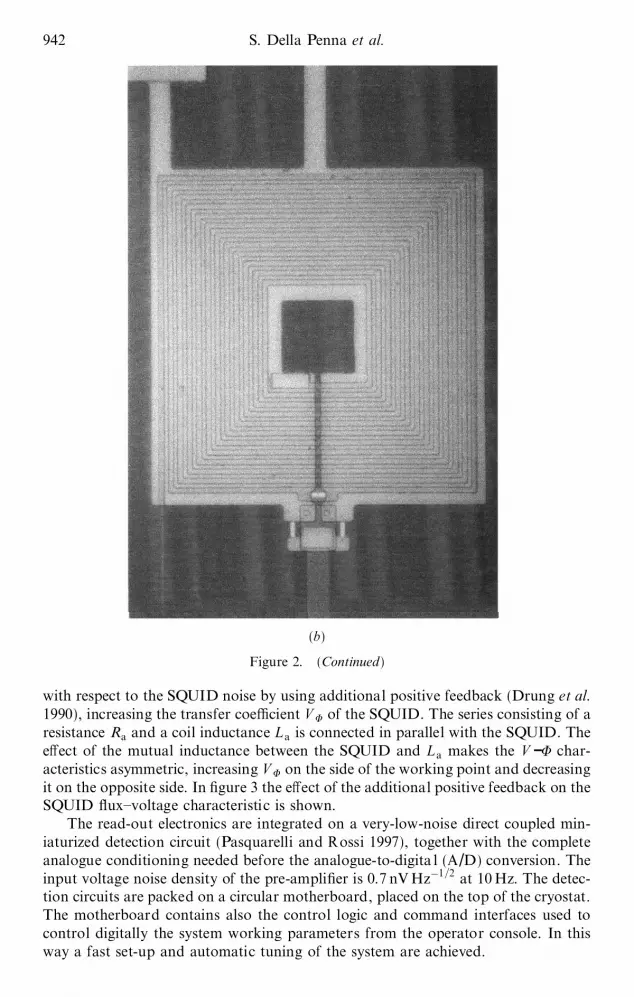
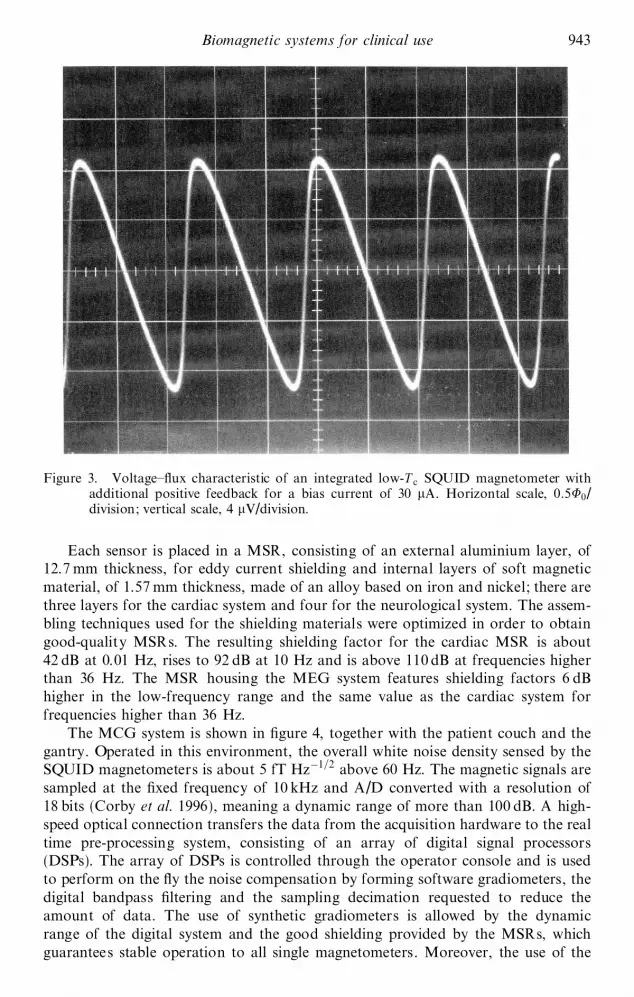
with respect to the SQUID noise by using additional positive feedback (Drung et al.1990) , increasing the transfer coe�cient V F of the SQUID. The series consisting of aresistance Ra and a coil inductance L a is connected in parallel with the SQUID. Thee�ect of the mutual inductance between the SQUID and L a makes the V -F char-acteristics asymmetric, increasing V F on the side of the working point and decreasingit on the opposite side. In ®gure 3 the e�ect of the additional positive feedback on theSQUID ¯ux±voltage characteristic is shown.
The read-out electronics are integrated on a very-low-noise direct coupled min-iaturized detection circuit (Pasquarelli and Rossi 1997) , together with the completeanalogue conditioning needed before the analogue-to-digita l (A/D) conversion. Theinput voltage noise density of the pre-ampli®er is 0.7 nV Hz¡1=2 at 10 Hz. The detec-tion circuits are packed on a circular motherboard, placed on the top of the cryostat.The motherboard contains also the control logic and command interfaces used tocontrol digitally the system working parameters from the operator console. In thisway a fast set-up and automatic tuning of the system are achieved.
942 S. Della Penna et al.
(b)
Figure 2. (Continued )
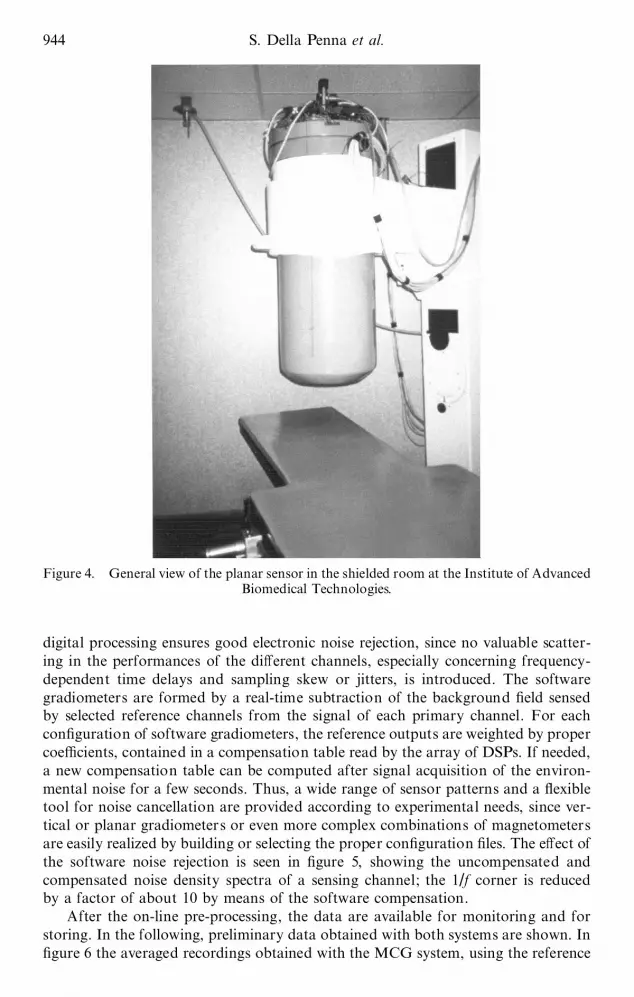
Each sensor is placed in a MSR, consisting of an external aluminium layer, of12.7 mm thickness, for eddy current shielding and internal layers of soft magneticmaterial, of 1.57 mm thickness, made of an alloy based on iron and nickel; there arethree layers for the cardiac system and four for the neurological system. The assem-bling techniques used for the shielding materials were optimized in order to obtaingood-quality MSRs. The resulting shielding factor for the cardiac MSR is about42 dB at 0.01 Hz, rises to 92 dB at 10 Hz and is above 110 dB at frequencies higherthan 36 Hz. The MSR housing the MEG system features shielding factors 6 dBhigher in the low-frequency range and the same value as the cardiac system forfrequencies higher than 36 Hz.
The MCG system is shown in ®gure 4, together with the patient couch and thegantry. Operated in this environment, the overall white noise density sensed by theSQUID magnetometers is about 5 fT Hz¡1=2 above 60 Hz. The magnetic signals aresampled at the ®xed frequency of 10 kHz and A/D converted with a resolution of18 bits (Corby et al. 1996) , meaning a dynamic range of more than 100 dB. A high-speed optical connection transfers the data from the acquisition hardware to the realtime pre-processing system, consisting of an array of digital signal processors(DSPs). The array of DSPs is controlled through the operator console and is usedto perform on the ¯y the noise compensation by forming software gradiometers, thedigital bandpass ®ltering and the sampling decimation requested to reduce theamount of data. The use of synthetic gradiometers is allowed by the dynamicrange of the digital system and the good shielding provided by the MSRs, whichguarantees stable operation to all single magnetometers. Moreover, the use of the
Biomagnetic systems for clinical use 943
Figure 3. Voltage±¯ux characteristic of an integrated low-T c SQUID magnetometer withadditional positive feedback for a bias current of 30 mA. Horizontal scale, 0:5F0/division; vertical scale, 4 mV/division.
digital processing ensures good electronic noise rejection, since no valuable scatter-ing in the performances of the di�erent channels, especially concerning frequency-dependent time delays and sampling skew or jitters, is introduced. The softwaregradiometers are formed by a real-time subtraction of the background ®eld sensedby selected reference channels from the signal of each primary channel. For eachcon®guration of software gradiometers, the reference outputs are weighted by propercoe�cients, contained in a compensation table read by the array of DSPs. If needed,a new compensation table can be computed after signal acquisition of the environ-mental noise for a few seconds. Thus, a wide range of sensor patterns and a ¯exibletool for noise cancellation are provided according to experimental needs, since ver-tical or planar gradiometers or even more complex combinations of magnetometersare easily realized by building or selecting the proper con®guration ®les. The e�ect ofthe software noise rejection is seen in ®gure 5, showing the uncompensated andcompensated noise density spectra of a sensing channel; the 1/f corner is reducedby a factor of about 10 by means of the software compensation.
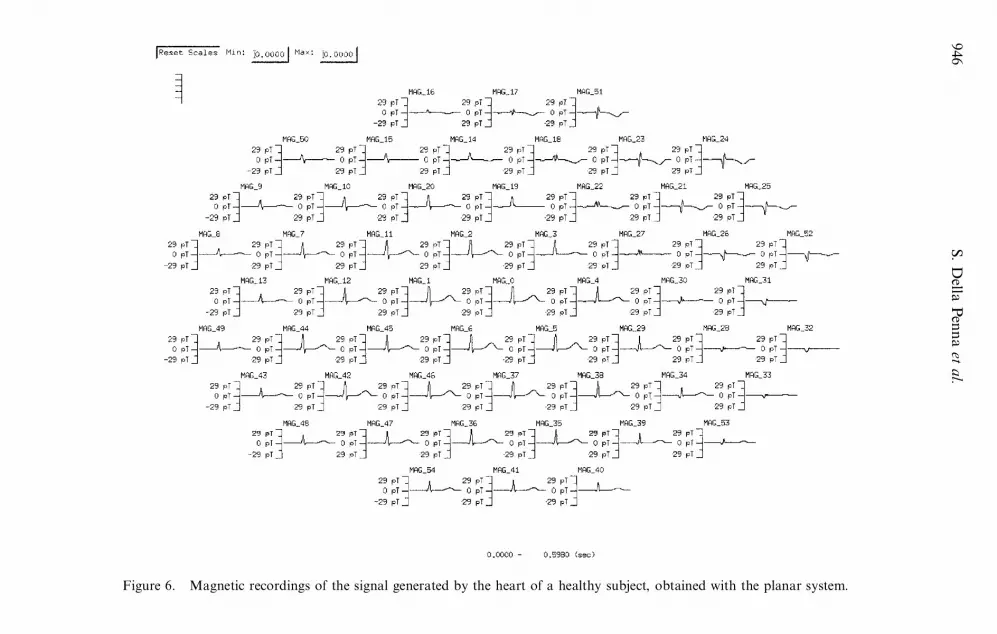
After the on-line pre-processing, the data are available for monitoring and forstoring. In the following, preliminary data obtained with both systems are shown. In®gure 6 the averaged recordings obtained with the MCG system, using the reference
944 S. Della Penna et al.
Figure 4. General view of the planar sensor in the shielded room at the Institute of AdvancedBiomedical Technologies.

plane for noise subtraction, are displayed. These results are obtained with 300averages of the raw data recorded on a healthy voluntary subject.
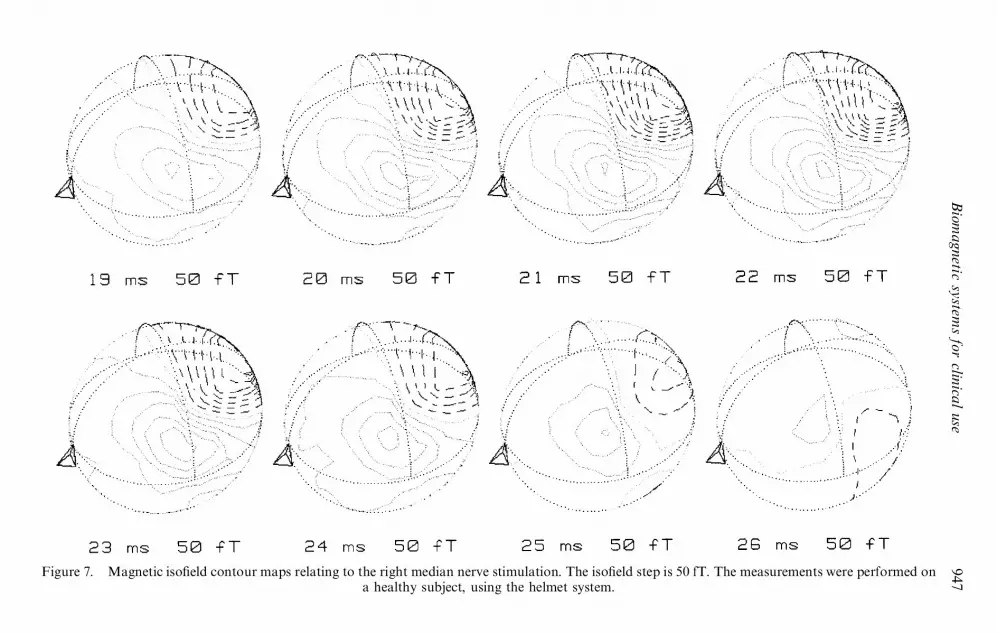
In ®gure 7 a preliminary measurement of the somatosensory evoked ®eldrecorded by the MEG system on a healthy voluntary subject is shown. In the mea-surement, the right median nerve was stimulated by means of current pulses. Themagnetic iso®eld contour maps, obtained with 200 averages of the raw data, aredisplayed for 8 ms, after 19 ms from the stimulus onset. The iso®eld step is 50 fT.
} 3. DISCUSSION
In the last few years, many pilot studies have been performed in MCG and MEGand several possible clinical and physiological applications have been suggested.However, for these kinds of application, the biomagnetic systems must allow alarge throughput of patients, ®rst for the validation of the clinical study and thenfor the evaluation of the clinical routine use of MCG and MEG in the context of theavailable diagnostic and therapeutic techniques. Owing to the lack of biomagneticsystems suitable for clinical work, the validation of the results of the biomagneticmethod at a clinical level is still an ongoing task. In order to analyse a large numberof patients in a reasonable amount of time and with reasonable ®nancial e�ciency,necessary features of the system are a fast set-up, short measurement time andstability during the measurements.
The presented systems provide the required characteristics for clinical and rou-tine use. The noise ®gure of the senosrs is about 5 fT Hz¡1=2 in the high-frequencyrange whereas, in the low-frequency range, the use of software gradiometers reducesdramatically the background ®eld; indeed, the 1/f corner is moved down to about1 Hz and, with this ®eld sensitivity, high-quality MEG and MCG recordings arepossible. The sensor performances are stable during operation and the working
Biomagnetic systems for clinical use 945
Figure 5. Noise density spectra measured with a dc SQUID magnetometer (grey) and withthe corresponding synthetic gradiometer (black).
946
S.
Della
Pen
na
etal.
Figure 6. Magnetic recordings of the signal generated by the heart of a healthy subject, obtained with the planar system.
Bio
magnetic
syste
ms
for
clinica
luse
947Figure 7. Magnetic iso®eld contour maps relating to the right median nerve stimulation. The iso®eld step is 50 fT. The measurements were performed on
a healthy subject, using the helmet system.
parameters are easily set by the operator using a digital control unit, thus allowing alarge number of measurements during working day. Work in the near future will alsoprovide the information needed about the reliability of the system and the validity ofthe approach.
REFERENCES
BENZEL, E. C., LEWINE, J. D., BUCHOLZ, R. D., and ORRISON, W. W., 1993, Neurosurgery,33, 252.
CARELLI, P., DEL GRATTA, C., FOGLIETTI, V., MODENA, I., PASQUARELLI, A., PIZZELLA, V.,PULLANO, M., ROMANI, G. L., and TORRIOLI, G., 1989, Advances in Biomagnetism,Proceedings of the Seventh International Conference on Biomagnetism, edited by S. J.Williamson, M. Hoke, G. Stroink, and M. Kotani (New York: Plenum Press), pp 665±668.
CLARKE, J., 1996, SQUID Sensors: Fundamentals, Fabrication and Applications, edited by H.Weinstock (Deventer: Kluwer), chapter 1, pp. 1±62.
CORBY, N. R. JR., M ILLER, P. D., HOGLE, R. A., and PASQUARELLI, A., 1996, Book ofAbstracts of the Tenth International Conference on Biomagnetism, Santa Fe, NewMexico, USA, 16±21 February, 1996, pp. 313.
DRUNG,D.,CANTOR,R.,PETERS,M.,SCHEER,H. J., and KOCH,H.,1990, Appl. Phys. L ett.,57, 406.
ENPUKU, K., SHIMOMURA, Y., and K ISU, T., 1993, J. appl. Phys., 73, 7929.ERNEí, S. N., 1983, Biomagnetism: An Interdisciplinary Approach, edited by S. J. Williamson,
G. L. Romani, L. Kaufman and I. Modena (New York: Plenum), chapter 16, pp. 569±578.
FOGLIETTI,V.,DEL GRATTA,C.,PASQUARELLI,A.,PIZZELLA, V.,TORRIOLI,G.,ROMANI,G.L., GALLAGHER, W. J., KETCHEN, M. B., KLEINSASSER, A. W., and SANDSTROM, R.L., 1991, IEEE Trans. Magn., 27, 2959.
HAïMAïLAï INEN, M., HARI, R., ILMONIEMI, R., KNUUTILA, J., and LOUNASMAA, O., 1993, Rev.Mod. Phys., 65, 413.
KETCHEN, M. B., and JAYCOX, J. M., 1982, Appl. Phys. L ett., 40, 736.KNUUTILA, J., AHONEN, A., HAïMAïLAï INEN, M., KAJOLA, M., LAINE, P., LOUNASMAA, O.,
PARKKONEN, L., SIMOLA, J., and TESCHE, C., 1993, IEEE Trans. Magn., 29, 3315.PASQUARELLI, A., and ROSSI, R., 1997, Extended Abstracts from the International Super-
conductive Electronics Conference, Vol. 3, Berlin, Germany, 25±28 June, 1997, pp.74±76.
RYHAïNEN, T., SEPPAï , H., and CANTOR, R., 1992, J. Appl. Phys., 71, 6150.VRBA, J., 1996, SQUID Sensors: Fundamentals, Fabrication and Applications, edited by H.
Weinstock (Deventer: Kluwer), chapter 3, pp. 117±178.VRBA, J., ANDERSON, G., BETTS, K., BURBANK, M. B., CHEUNG, T., CHEYNE, D., F IFE, A.
A., GOVORKOV, S., HABIB, F ., HAID, G., HAID, V., HOANG, T., HUNTER, C.,KUBIK, P. R., LEE, S., MCCUBBIN, J., MCKAY, J., MCKENZIE, D., NONIS, D., PAZ,J., REICHL, E., RESSL, D., ROBINSON, S. E., SCHROYEN, C., SEKATCHEV, I., SPEAR,P., TAYLOR, B., TILLOTSON, M ., and SUTHERLING, W., 1998, Recent Advances inBiomagnetism, edited by T. Yoshimoto, M. Kotani, S. Kuriki, H. Karibe and N.Nakasato (Sendai: Tohoku University Press), pp. 93±96.
948 Biomagnetic systems for clinical use
