biased reduction method by combining improved modified pole clustering and improved pade...
TRANSCRIPT

Accepted Manuscript
Biased Reduction Method by Combining Improved Modified PoleClustering and Improved Pade Approximations
Jay Singh , C.B. Vishwakarma , Kalyan Chattterjee
PII: S0307-904X(15)00440-0DOI: 10.1016/j.apm.2015.07.014Reference: APM 10659
To appear in: Applied Mathematical Modelling
Received date: 9 April 2013Revised date: 13 May 2015Accepted date: 21 July 2015
Please cite this article as: Jay Singh , C.B. Vishwakarma , Kalyan Chattterjee , Biased ReductionMethod by Combining Improved Modified Pole Clustering and Improved Pade Approximations, AppliedMathematical Modelling (2015), doi: 10.1016/j.apm.2015.07.014
This is a PDF file of an unedited manuscript that has been accepted for publication. As a serviceto our customers we are providing this early version of the manuscript. The manuscript will undergocopyediting, typesetting, and review of the resulting proof before it is published in its final form. Pleasenote that during the production process errors may be discovered which could affect the content, andall legal disclaimers that apply to the journal pertain.
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
Highlights
We propose a biased method for model order reduction of any linear dynamic system.
It generates 𝑘 − number of reduced order models for the 𝑘𝑡ℎ − order reduction.
It maintains the stability, transient and steady state values of the original model.
Decreasing error index will increase the performance of reduced models.

ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
Biased Reduction Method by Combining Improved Modified Pole
Clustering and Improved Pade Approximations Jay Singh
a, C. B. Vishwakarma
b, Kalyan Chattterjeec
1&2Department of Electrical Engineering, GCET, Greater Noida, U. P. India
3Department of Electrical Engineering, Indian School of Mines, Dhanbad, Jharkhand, India
Abstract
This paper presents a mixed method to reduce the order of the linear high order dynamic
systems by combining improved modified pole clustering technique and improved Pade
approximations. The denominator of the reduced order model is computed by improved
modified pole clustering while the numerator coefficients are obtained by improved Pade
approximations. The proposed method is competent in generating ‘k’ number of reduced
order models form the original high order system. The superiority of the proposed method is
concluded through numerical examples taken from literature and compared with existing
well- known order reduction methods. Keywords
Modified Pole clustering; Order reduction; Improved Pade approximations; Stability; Transfer function.
1. Introduction
Model order reduction (MOR) technique is a smart idea in computer aided design (CAD)
area since few decades. It converts an original high order system into low order system, yet
still retains the main characteristics of original system in an optimum manner. Therefore, by
converting the original model to a reduced model, the higher order original system can be
analyzed easily. Model order reduction technique has become an interesting tool in the field
of engineering design such as control theory, power system, fluid dynamics etc. For linear
dynamic systems, there are several reduction techniques in time domains and frequency
domains both, are available in the literature [1-4]. Also, some mixed reduction techniques
have been suggested by combining two frequency domain methods [5-7]. In clustering
technique [8], zeroes and poles are freely collected to form clusters and then clusters are
formulated by inverse distance measure (IDM) criterion to find cluster centers. For the
reduced order model, in method [9], to synthesize the reduced order denominator polynomial,
the pole cluster centers are obtained by pole clusters. Further, Vishwakarma [10] has
suggested a seven step algorithm based on IDM criterion known as modified pole clustering
technique, which is capable of generating more dominant cluster centers as compared to
obtained in [8, 9]. In the proposed method, a small modification in the algorithm [10] is
suggested in order to improve the pole cluster centers and calling it improved modified pole
clustering technique. Pade approximation method [11], which is computationally simple and
retains even small initial time-moments, is used to match the forced response of the original
system. The drawback of the method [11] is its inability to retain stability in the reduced
order model even though the original system is stable. This problem was removed by
improved Pade approximations method [12]. The important features of the both techniques
i.e. improved modified pole clustering technique and improved Pade approximations [12] are
combined together to develop a more powerful algorithm for order reduction of the linear
dynamic systems.
The proposed biased method has few major advantages i.e. computational simplicity,
stability retention and robustness etc. In addition to these advantages, it is able to generate ‘k’
number of reduced order models for thk order reduction, and also a reduced order model
with better response may be further preferred for the design and analysis. Sometimes,
reduced order models obtained by proposed method have tendency to turn into non-minimum
phase, which may be considered as a drawback of the method.
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
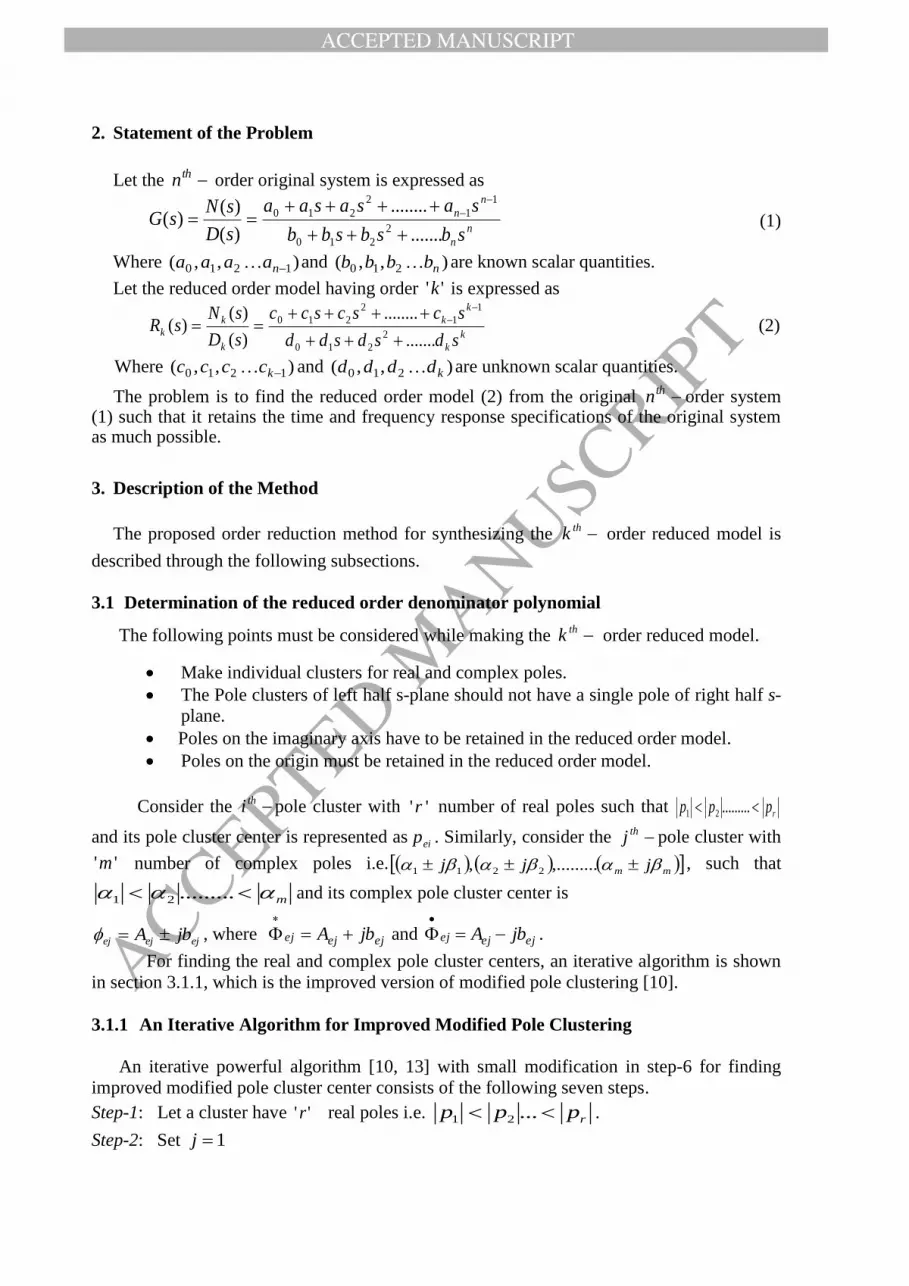
2. Statement of the Problem
Let the thn order original system is expressed as
n
n
n
n
sbsbsbb
sasasaa
sD
sNsG
.......
........
)(
)()(
2
210
1
1
2
210
(1)
Where ),,( 1210 naaaa and ),,( 210 nbbbb are known scalar quantities.
Let the reduced order model having order ''k is expressed as
k
k
k
k
k
k
ksdsdsdd
scscscc
sD
sNsR
.......
........
)(
)()(
2
210
1
1
2
210
(2)
Where ),,( 1210 kcccc and ),,( 210 kdddd are unknown scalar quantities.
The problem is to find the reduced order model (2) from the original thn order system (1) such that it retains the time and frequency response specifications of the original system as much possible.
3. Description of the Method
The proposed order reduction method for synthesizing the thk order reduced model is
described through the following subsections.
3.1 Determination of the reduced order denominator polynomial
The following points must be considered while making the thk order reduced model.
Make individual clusters for real and complex poles.
The Pole clusters of left half s-plane should not have a single pole of right half s-
plane.
Poles on the imaginary axis have to be retained in the reduced order model.
Poles on the origin must be retained in the reduced order model.
Consider the thi pole cluster with ' 'r number of real poles such that rppp .........21
and its pole cluster center is represented as eip . Similarly, consider the thj pole cluster with
' 'm number of complex poles i.e. mm jjj ,........., 2211, such that
m .........21 and its complex pole cluster center is
ejejej jbA , where ejejej jbA
and ejejej jbA
.
For finding the real and complex pole cluster centers, an iterative algorithm is shown
in section 3.1.1, which is the improved version of modified pole clustering [10].
3.1.1 An Iterative Algorithm for Improved Modified Pole Clustering
An iterative powerful algorithm [10, 13] with small modification in step-6 for finding
improved modified pole cluster center consists of the following seven steps.
Step-1: Let a cluster have ''r real poles i.e. rppp ...21 .
Step-2: Set 1j

ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
Step-3: Estimate pole cluster center
1
0
1
r
ii
j rp
q
Step-4: Set 1 jj
Step-5: Generate an improved modified pole cluster center from
1
11
211
j
jqp
q
Step-6: Is, ?)1( rj if no go to Step-4, else go to Step-7.
Step-7: For thk cluster, an improved modified pole cluster center is obtained as jek qp .
After finding ‘ ekp ’, the reduced order denominator )(sDk can be obtained from the
following cases.
Case-1: If, all improved modified pole cluster centers are real then reduced order
denominator polynomial )(sDk can be obtained as
))...()(()( 21 ekeek pspspssD (3)
where ekee ppp ..., 21 are thndst k...2,1 improved modified cluster centers respectively.
Case-2: If, all improved modified pole cluster centers are complex conjugates, then )(sDk
can be obtained as
))()...()(()( 2/2/11 ekekeek sssssD
(4)
Case-3: If, )2( k improved modified pole cluster centers are real and one pair of improved
modified pole cluster center is complex conjugates, then )(sDk can be obtained as
))()()...()(()( 11)2(21 eekeeek sspspspssD
(5)
Finally, )(sDk can be rewritten as
2
o 1 2( ) s s ....+ s k
k kD s d d d d (6)
3.2 Determination of the reduced order numerator
A high order original system is the series expansion of
0
1)(i
i
i sMsG (about )s (7)
i
i
i sT
0
(about )0s (8)
where iT and iM are the thi Time moment and Markov parameter of )(sG
respectively. The thk order reduced model is considered as
k
i
i
i
k
i
i
i
k
kk
sd
sc
sD
sNsR
0
1
0
)(
)()( (9)

ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
The coefficients of the reduced order numerator )(sNk can be obtained from the following
set of equations [12].
01
0112
02133121
0112211
011221101
0211202
01101
...
...
...
...
...
...
...
Mdc
MdMdc
MdMdMdMdc
MdMdMdMdc
TdTdTdTdc
TdTdTdc
TdTdc
Tdc
kk
kkk
kkkkk
kkkkk
ooo
(10)
The coefficients )1...(2,1,0; kjc j of the numerator can be calculated by solving the
above ''k linear equations. Finally, the numerator )(sNk is obtained as
1
1
2
210 ...)(
k
kk scscsccsN (11)
4. Numerical Examples
To check the effectiveness of the proposed method, four original high order systems are
selected from the literature [5,8,15]. To understand the proposed algorithm, few examples are
solved in details and remaining examples are described only with the results. The proposed
method has been compared with existing methods [4,5,6,7,10,14,15,16] through performance
indices i.e. an integral of the absolute magnitude of error (IAE) and integral of square of error
(ISE) in between the transient portion of reduced and original order systems. Simulations
have been done by MATLAB simulation environment. Lower value of performance index
means, nearby the time/frequency response of )(sRk to )(sG .
IAE
0
)()( dttyty k (12)
ISE
0
2)()( dttyty k (13)
where )(tyk and )(ty are the unit step responses of the reduced model and original systems
respectively.
Example 1. Consider a system of eight-order taken from Mukherjee [5].
403201095841181246728422449453654636
40320185760222088122664.36380598251418)(
2345678
234567
ssssssss
ssssssssG
Poles of the above system are as: )8,7,6,5,4,3,2,1(
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
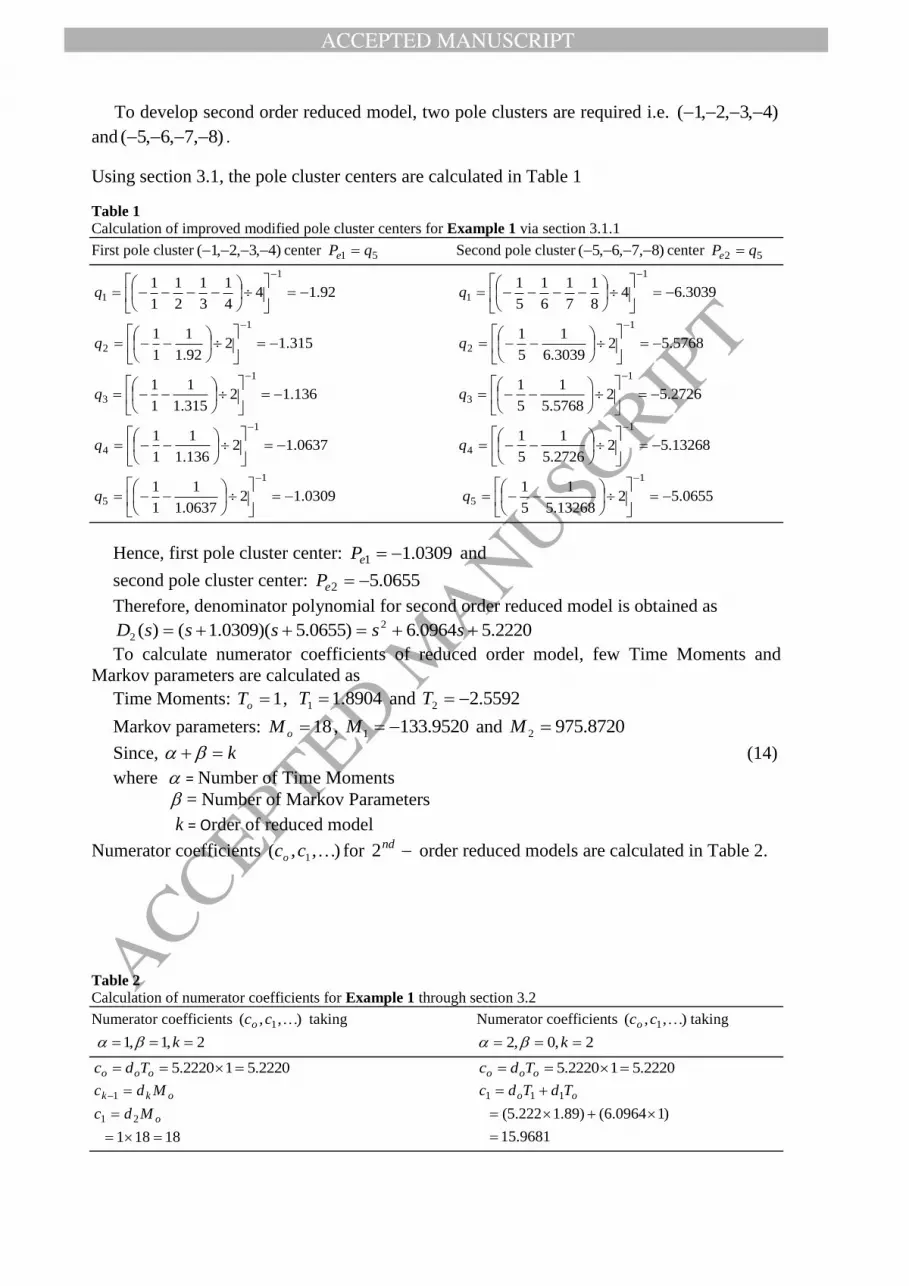
To develop second order reduced model, two pole clusters are required i.e. )4,3,2,1(
and )8,7,6,5( .
Using section 3.1, the pole cluster centers are calculated in Table 1
Table 1
Calculation of improved modified pole cluster centers for Example 1 via section 3.1.1
First pole cluster )4,3,2,1( center 51 qPe Second pole cluster )8,7,6,5( center 52 qPe
92.144
1
3
1
2
1
1
11
1
q 3039.648
1
7
1
6
1
5
11
1
q
315.1292.1
1
1
11
2
q 5768.523039.6
1
5
11
2
q
136.12315.1
1
1
11
3
q 2726.525768.5
1
5
11
3
q
0637.12136.1
1
1
11
4
q 13268.522726.5
1
5
11
4
q
0309.120637.1
1
1
11
5
q 0655.5213268.5
1
5
11
5
q
Hence, first pole cluster center: 0309.11 eP and
second pole cluster center: 0655.52 eP
Therefore, denominator polynomial for second order reduced model is obtained as
2220.50964.6)0655.5)(0309.1()( 2
2 sssssD
To calculate numerator coefficients of reduced order model, few Time Moments and
Markov parameters are calculated as
Time Moments: 1oT , 8904.11 T and 5592.22 T
Markov parameters: 18oM , 9520.1331 M and 8720.9752 M
Since, k (14)
where = Number of Time Moments
= Number of Markov Parameters
k = Order of reduced model
Numerator coefficients ),,( 1 cco for nd2 order reduced models are calculated in Table 2.
Table 2
Calculation of numerator coefficients for Example 1 through section 3.2
Numerator coefficients ),,( 1 cco taking Numerator coefficients ),,( 1 cco taking
2,1,1 k 2,0,2 k
2220.512220.5 ooo Tdc 2220.512220.5 ooo Tdc
18181
21
1
o
okk
Mdc
Mdc
9681.15
)10964.6()89.1222.5(
111
oo TdTdc
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
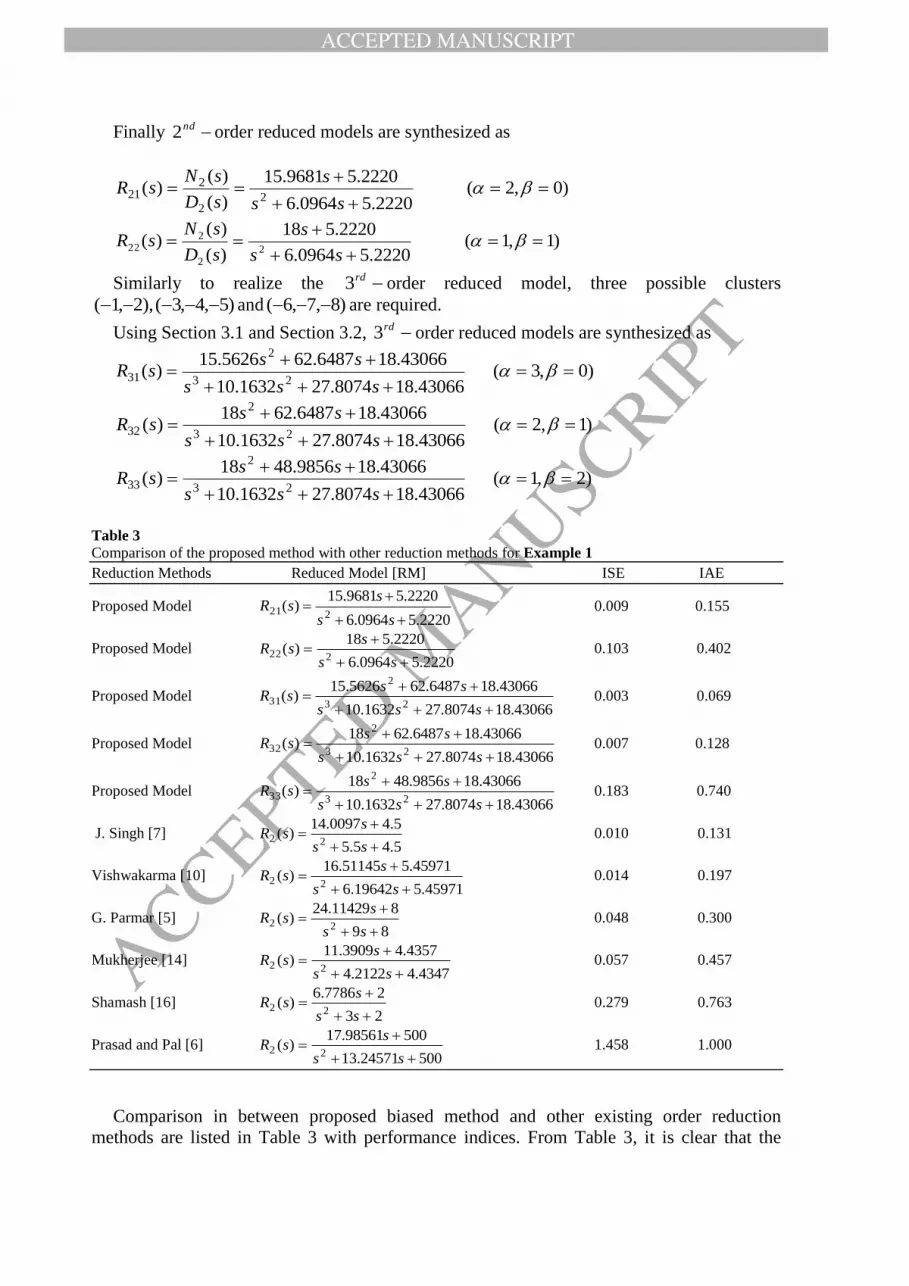
Finally nd2 order reduced models are synthesized as
)0,2(2220.50964.6
2220.59681.15
)(
)()(
22
221
ss
s
sD
sNsR
)1,1(2220.50964.6
2220.518
)(
)()(
2
2
222
ss
s
sD
sNsR
Similarly to realize the rd3 order reduced model, three possible clusters
)5,4,3(),2,1( and )8,7,6( are required.
Using Section 3.1 and Section 3.2, rd3 order reduced models are synthesized as
)0,3(43066.188074.271632.10
43066.186487.625626.15)(
23
2
31
sss
sssR
)1,2(43066.188074.271632.10
43066.186487.6218)(
23
2
32
sss
sssR
)2,1(43066.188074.271632.10
43066.189856.4818)(
23
2
33
sss
sssR
Table 3
Comparison of the proposed method with other reduction methods for Example 1
Reduction Methods Reduced Model [RM] ISE IAE
Proposed Model 2220.50964.6
2220.59681.15)(
221
ss
ssR 0.009 0.155
Proposed Model 2220.50964.6
2220.518)(
222
ss
ssR 0.103 0.402
Proposed Model 43066.188074.271632.10
43066.186487.625626.15)(
23
2
31
sss
sssR 0.003 0.069
Proposed Model 43066.188074.271632.10
43066.186487.6218)(
23
2
32
sss
sssR 0.007 0.128
Proposed Model 43066.188074.271632.10
43066.189856.4818)(
23
2
33
sss
sssR 0.183 0.740
J. Singh [7] 5.45.5
5.40097.14)(
22
ss
ssR
0.010 0.131
Vishwakarma [10] 45971.519642.6
45971.551145.16)(
22
ss
ssR
0.014 0.197
G. Parmar [5] 89
811429.24)(
22
ss
ssR
0.048 0.300
Mukherjee [14] 4347.42122.4
4357.43909.11)(
22
ss
ssR
0.057 0.457
Shamash [16] 23
27786.6)(
22
ss
ssR
0.279 0.763
Prasad and Pal [6] 50024571.13
50098561.17)(
22
ss
ssR
1.458 1.000
Comparison in between proposed biased method and other existing order reduction
methods are listed in Table 3 with performance indices. From Table 3, it is clear that the

ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
second order reduced model )(21 sR and third order reduced model )(31 sR have low
performance indices and may be suitable for controllers design. The time response and
frequency response of the reduced order models are compared with the original high order
system in Fig.1 and 2 respectively, which shows good response matching with original high
order system.
Fig. 1. Comparison of the step responses for example 1
Fig. 2. Comparison of the Bode plots for example 1
Example 2. Consider a fourth order system taken from Lucas T.N. [15].
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
240360204362
2400180049628)(
234
23
ssss
ssssG
The poles of the system are: 3576.18033.7 j and 6934.01967.1 j
Let first and second clusters are )1967.1,8033.7( and )6934.0,3576.1( from real and
imaginary parts of complex conjugates poles respectively.
Using Section 3.1, pole cluster centers are calculated as 3383.11 eA from first pole
cluster and 7385.01 eb from second pole cluster.
Hence, complex pole cluster center is obtained as 7383.03383.11 je
Finally, using Section 3.1.1 and Section 3.2 the second order reduced models are
synthesized as
)0,2(3366.2677.2
366.23236.9)(
221
ss
ssR
)1,1(3366.2677.2
366.2314)(
222
ss
ssR
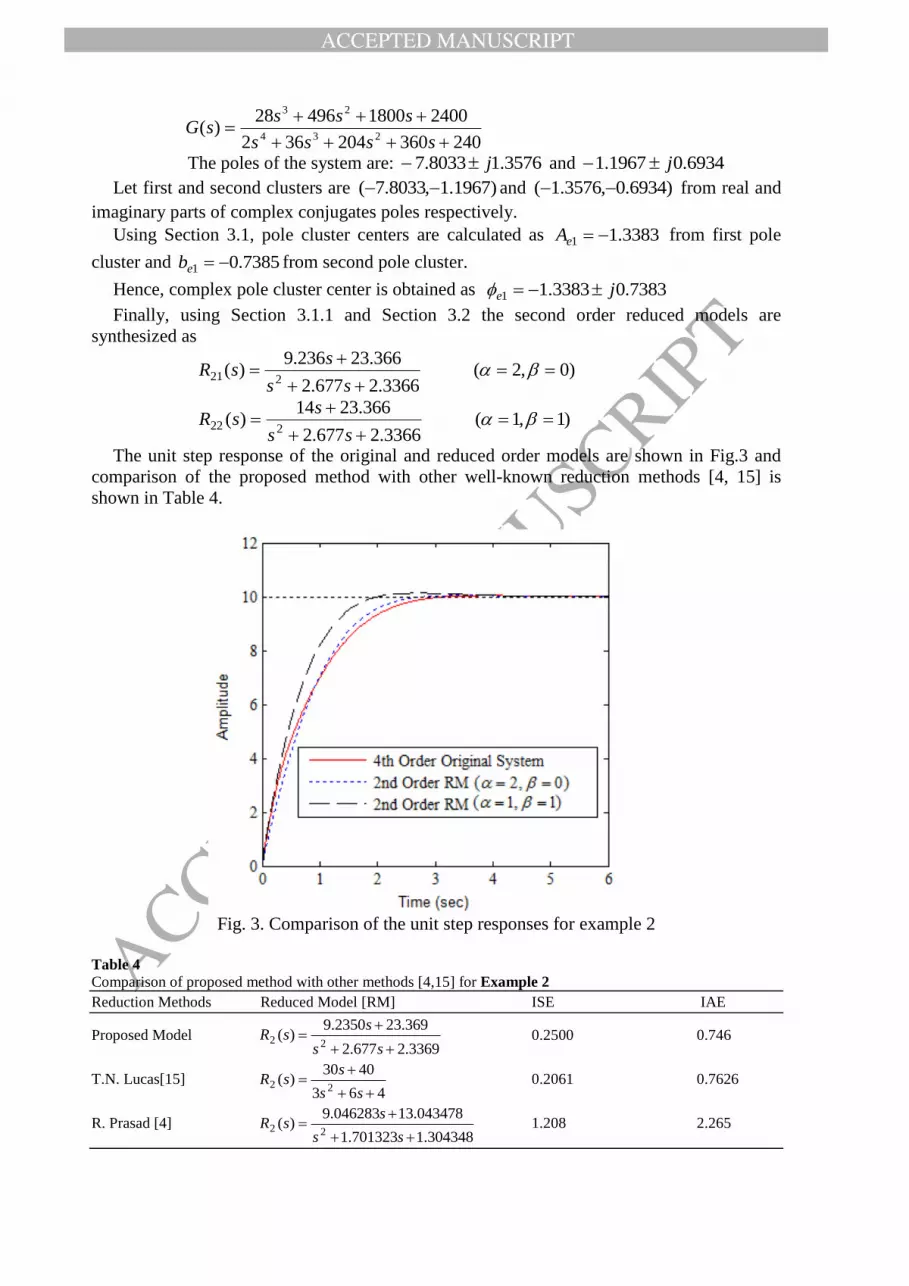
The unit step response of the original and reduced order models are shown in Fig.3 and
comparison of the proposed method with other well-known reduction methods [4, 15] is
shown in Table 4.
Fig. 3. Comparison of the unit step responses for example 2
Table 4
Comparison of proposed method with other methods [4,15] for Example 2
Reduction Methods Reduced Model [RM] ISE IAE
Proposed Model 3369.2677.2
369.232350.9)(
22
ss
ssR 0.2500 0.746
T.N. Lucas[15] 463
4030)(
22
ss
ssR
0.2061
0.7626
R. Prasad [4] 304348.1701323.1
043478.13046283.9)(
22
ss
ssR
1.208 2.265
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
Example 3. Consider an eight order system taken from Sinha and Pal [8].
)(
)()(8
sD
sNsG ,
where
95.8425971.1890443
05.90581275.241544892.455758098.484326156.42982.19)( 234567
s
sssssssN
and
826.3775219.149172
58.173383983.67556567.181108638.29134295.35841.30)( 2345678
s
ssssssssD
The poles of the system are obtained from the )(sD as
)6.15,5.8,75.0,46.0( Real poles
)6.32.2,8.635.0( jj Complex poles
To synthesize fourth order reduced model, three different pole clusters are considered as
)75.0,46.0( , )6.15,5.8( and )6.32.2,8.635.0( jj .
Using Section 3.1.1, improved modified pole cluster center 1eP , 2eP and 1e are calculated
for first, second and third pole clusters respectively.
8249.33911.0;0127.9;48315.0 121 jPP eee
Few Time Moments and Markov Parameters are calculated as
9424.142;9741.71;0876.38;3156.22 321 TTTTo
9.3017;5358.173;8240.19 21 MMM o
Finally, 4th
–order reduced model is obtained using section 3.1 and 3.2.
)2,2(37.648.14356.2628.10
5.14362845.7572549.308240.19)(
234
23
4
ssss
ssssR
with ISE and IAE of 8.55 and 5.59 respectively, where in Pal [8] ISE and IAE are 41.54
and 12.47 respectively. It can be observed here that reduced order model )(4 sR has lesser
value of error as compared to Pal [8].
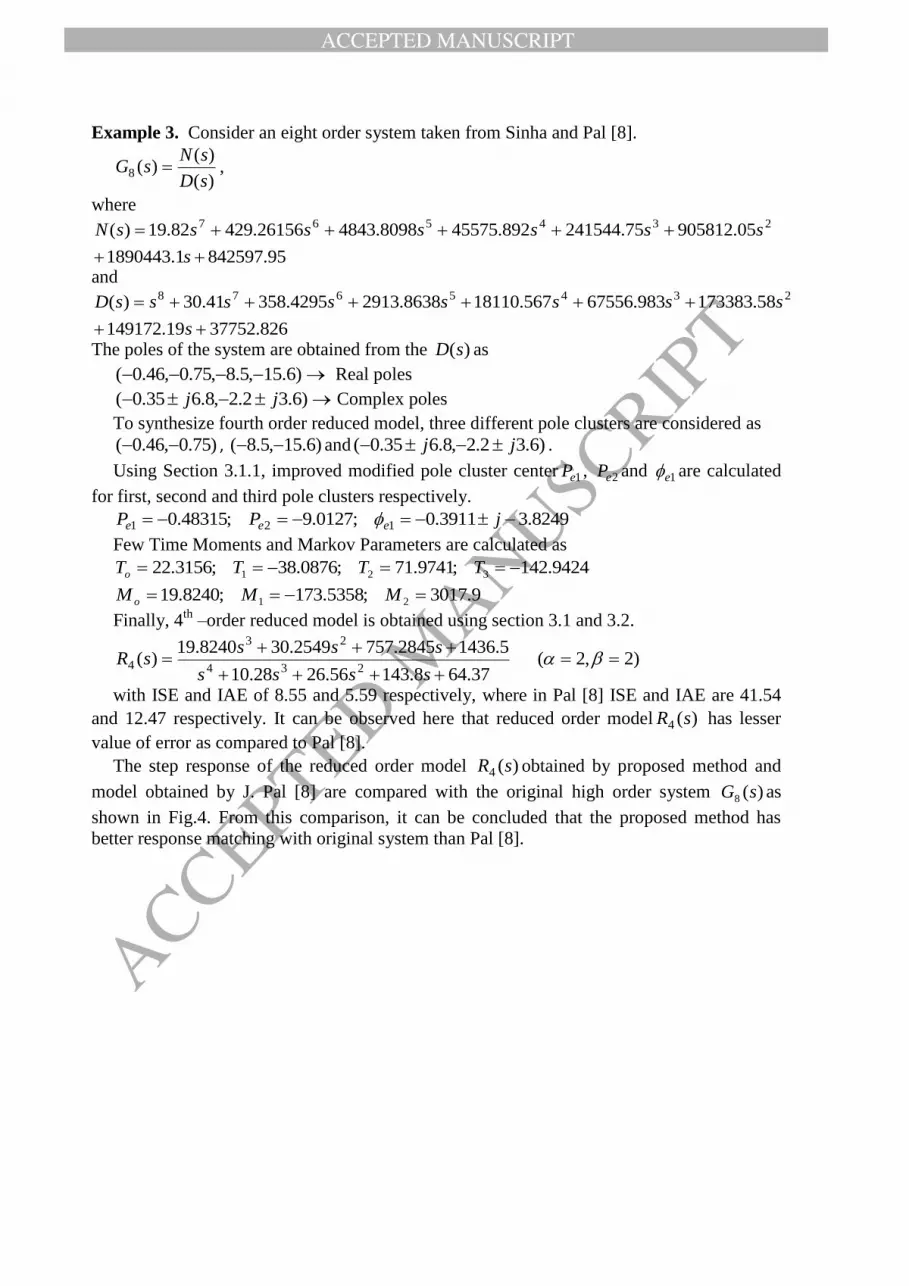
The step response of the reduced order model )(4 sR obtained by proposed method and
model obtained by J. Pal [8] are compared with the original high order system )(8 sG as
shown in Fig.4. From this comparison, it can be concluded that the proposed method has
better response matching with original system than Pal [8].
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
Fig. 4. Comparison of the Step responses for example 3
Example 4. Consider a tenth order system earlier taken by G. Parmar [5], where system gain
is very high and all poles are real with no numerator dynamics. The transfer function )(10 sG
is given as
)(
1070748.540)(
10
17
10
jj ssG
,
where 16.205,85.148,15.95,13.50,3.18,04.2 654321
16.404,97.320,03.298,21.257 10987
To synthesize second order reduced model, two pole clusters have been considered as
)85.148,15.95,13.50,3.18,04.2( and )16.404,97.320,03.298,21.257,16.205(
Using Section 3.1 and 3.2, second order reduced model is obtained as
)0,2(
4174.4320177.209
4174.432346.50)(
22
ss
ssR
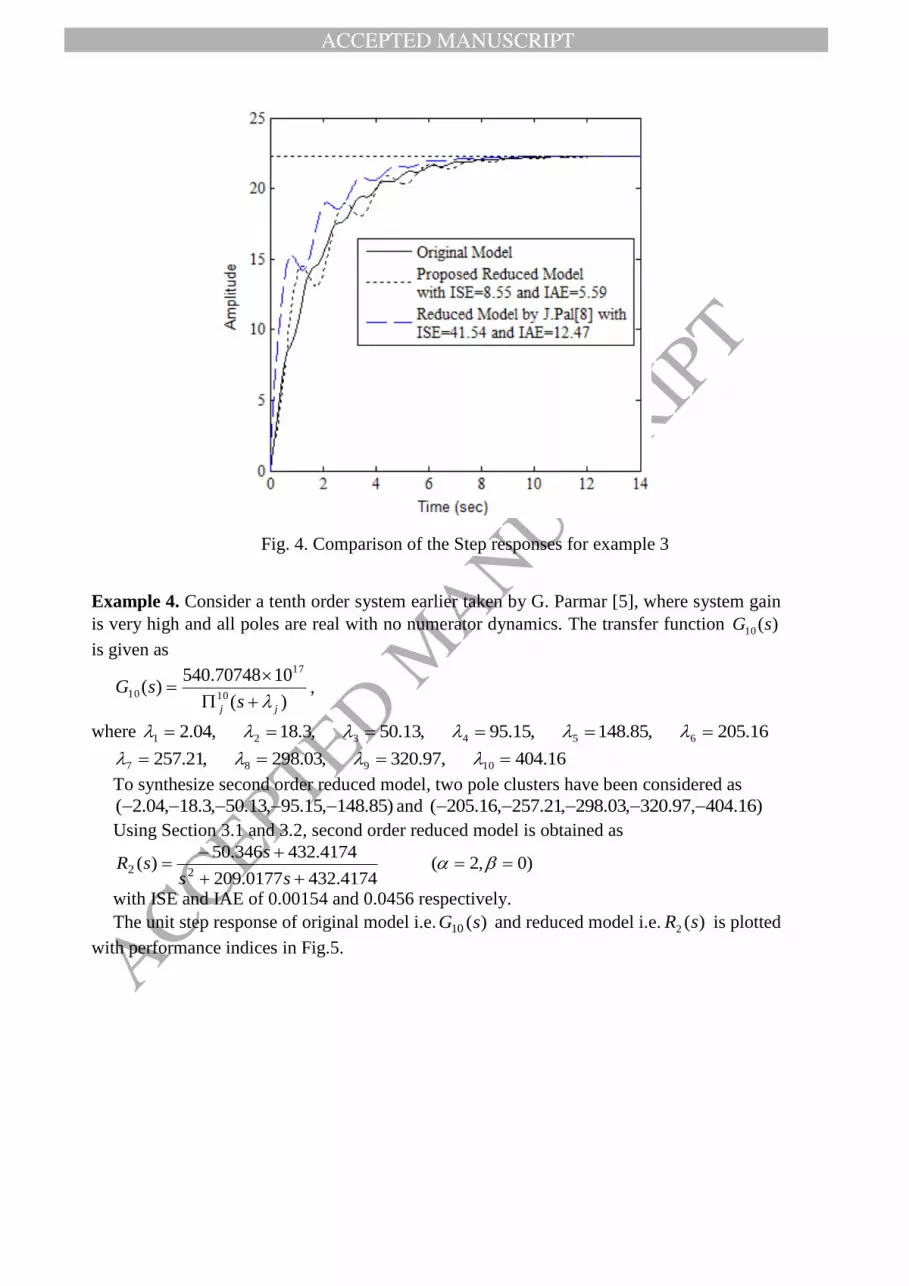
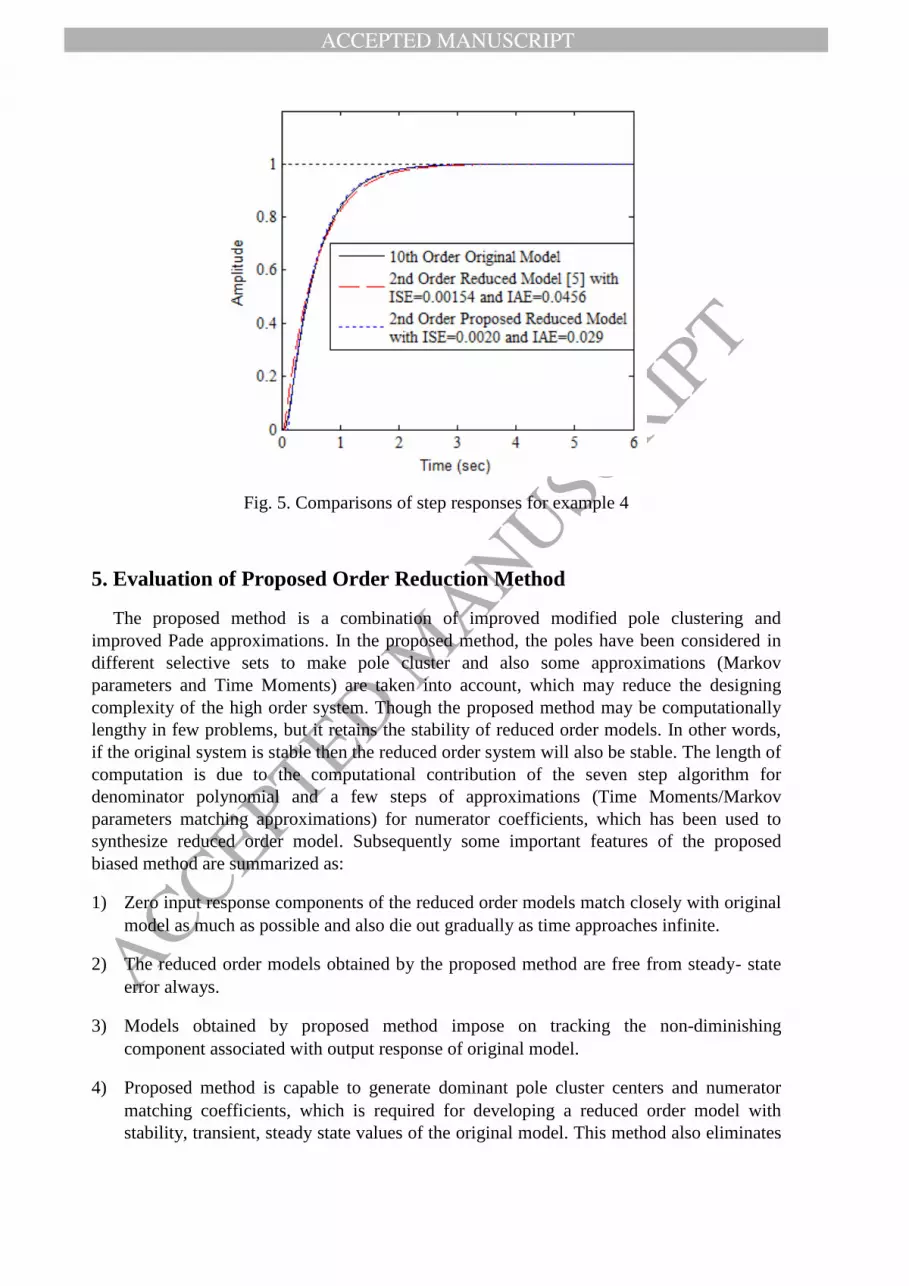
with ISE and IAE of 0.00154 and 0.0456 respectively.
The unit step response of original model i.e. )(10 sG and reduced model i.e. )(2 sR is plotted
with performance indices in Fig.5.
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
Fig. 5. Comparisons of step responses for example 4
5. Evaluation of Proposed Order Reduction Method
The proposed method is a combination of improved modified pole clustering and
improved Pade approximations. In the proposed method, the poles have been considered in
different selective sets to make pole cluster and also some approximations (Markov
parameters and Time Moments) are taken into account, which may reduce the designing
complexity of the high order system. Though the proposed method may be computationally
lengthy in few problems, but it retains the stability of reduced order models. In other words,
if the original system is stable then the reduced order system will also be stable. The length of
computation is due to the computational contribution of the seven step algorithm for
denominator polynomial and a few steps of approximations (Time Moments/Markov
parameters matching approximations) for numerator coefficients, which has been used to
synthesize reduced order model. Subsequently some important features of the proposed
biased method are summarized as:
1) Zero input response components of the reduced order models match closely with original
model as much as possible and also die out gradually as time approaches infinite.
2) The reduced order models obtained by the proposed method are free from steady- state
error always.
3) Models obtained by proposed method impose on tracking the non-diminishing
component associated with output response of original model.
4) Proposed method is capable to generate dominant pole cluster centers and numerator
matching coefficients, which is required for developing a reduced order model with
stability, transient, steady state values of the original model. This method also eliminates
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
the weakness [6], where a stable reduced order model is obtained through stability
equation method.
5) Method is applicable for model order reduction of any linear dynamic system having
real, complex or real-complex poles from 2nd
- order onwards unlike[7,17], where most
dominant pole is retained and remaining poles are acquired in a group, to find another
dominant pole. Also, proposed method overcomes the drawback [7,17], where method is
applicable for systems having real or complex conjugates poles only.
6) Method provides a good approximations of original system for a healthy reduced order
model rather than approximations taken by authors [4,11,16,18,19].
6. Conclusions
This paper suggested a new mixed order reduction method for the large-scale single-input
single-output (SISO) systems. The denominator polynomial of the reduced model is obtained
using improved modified pole clustering while the numerator coefficients are computed by
improved Pade approximations. Biased method has been tested on four numerical examples
having real poles, complex poles and both. Natural and forced responses of the reduced
models, matches closely with response of original system as shown in figure 1, 3, 4 and 5.
The proposed reduction method has been compared with some existing order reduction
techniques via performance indices, i.e. ISE and IAE. The proposed algorithm is also valid
for large scale multi-input multi-output (MIMO) systems. From the results of the numerical
examples, it may be concluded that method is efficient and computationally simple. The
algorithm of the proposed method will be helpful to the scholars and engineers working on
model order reduction and controller design areas.
References
[1] Vimal Singh, Dinesh Chandra, Haranath Kar, Improved Routh Pade approximants: a computer aided
approach, IEEE Transactions on Automatic Control, 49(2) (2004) 292-296.
[2] C.B. Vishwakarma, R. Prasad, Time domain model order reduction using Hankel matrix approach,
Journal of the Franklin Institute, 351(2014) 3445-3456.
[3] Sastry G.V.K.R, Raja Rao R., Mallikarjuna Rao P., Large scale interval system modelling using Routh
approximant, Electronic Letters, 36(8) (2000) 768-769.
[4] R. Prasad, Pade type model order reduction for multivariable systems using Routh approximations,
Computer and Electrical Engineering, 26 (2000) 445-459.
[5] G. Parmar, S. Mukherjee, R. Prasad, System reduction using factor division algorithm and eigen
spectrum analysis, Applied Mathematical Modelling, 31 (2007) 2542-2552.
[6] R. Prasad, J. Pal, Stable reduction of linear systems by continued fractions, Journal of Institution of
Engineers (India), 72 (1991) 113-116.
[7] Jay singh, Kalyan Chattterjee, C.B. Vishwakarma, System reduction by eigen permutation algorithm and
improved Pade approximations, Journal of Mathematical, Computational Science and Engineering, 8(1)
(2014) 1-5.
[8] A.K. Sinha, Jayanta Pal, Simulation based reduced order modelling using a clustering technique,
Computers and Electrical Engineering, 16(3) (1990) 159-169.
[9] J. Pal, A.K. Sinha, N.K. Sinha, Reduced order modelling using pole clustering and time moment
matching, Journal of the Institution of Engineers(India) (EED), 76 (1995) 1-6.
[10] CB Vishwakarma, Order reduction using Modified pole clustering and Pade approximations, World
Academy of Science, Engineering and Technology, 56 (2011) 787-791.
[11] H. Padé, Sur la représentation approchée d’une fonction par des fractions rationelles, Ann. Sci. Ecole
Norm. Sup., 9(3) (1892) 3–93.
ACCEPTED MANUSCRIPT
ACCEPTED MANUSCRIP
T
[12] Jayanta Pal, Improved Pade approximants using stability equation methods, Electronics Letters, 19 (11)
(1983) 426-427.
[13] C.B. Vishwakarma, R. Prasad, MIMO system reduction using modified pole clustering & genetic
algorithm, Modelling and Simulation in Engineering, 2009 (2009) 1-6.
[14] S. Mukherjee, Satakshi, R.C. Mittal, Model order reduction using response-matching technique, Journal
of the Franklin Institute, 342 (2005) 503–519.
[15] Smith ID, Lucas TN, Least-squares moment matching reduction methods, Electronics Letters, 31(11)
(1995) 929-930.
[16] Y. Shamash, Linear system reduction using Pade approximations to allow retention of dominant modes,
International Journal of Control, 21(2) (1975) 257–272.
[17] Jay Singh, Kalyan Chattterjee, C.B.Vishwakarma, MIMO system using eigen algorithm and improved
Pade approximations, SOP Transaction of Applied Mathematics, 1(1) (2014) 60-70.
[18] Avadh P., Awadhesh K., D. Chandra, Suboptimal control using model order reduction, Chinese Journal
of Engineering, 2014 (2014) 1-5.
[19] Othman M.K. Alsmadi, Zaer S. Abo-Hammour, Substructure preservation model order reduction with
power system model investigation, Wulfenia Journal, 22(3) (2015) 44-55.