dinamički proračun međudjelovanja tramvaja i kolosijeka
DESCRIPTION
Dinamički proračun međudjelovanja tramvaja i kolosijekaTRANSCRIPT

7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 1/8
UDK 624.042:625.622 Primljeno 12. 1. 2006.
GRAĈEVINAR 58 (2006) 4, 281-288 281
Dinamiþki proraþun meÿudjelovanjatramvaja i kolosijekaStjepan Lakušiü, Damir Lazareviü, Josip Dvornik
Kljuþne rijeþi
tramvaj,kolosijek,meÿ udjelovanje,dinamiþ ki proraþ un,numeriþ ki model,metoda prediktor-korektor
S. Lakušiü , D. Lazareviü , J. Dvornik Izvorni znanstveni rad
Dinamiþki proraþun meÿudjelovanja tramvaja i kolosijeka
Prikazan je numeriþ ki model gibanja tramvajskog vozila. Traþ nica je modelirana kao Euler-Bernullijevkontinuirani nosaþ s diskretno raspodijeljenom masom. Vozilo je diskretizirano s tri koncentrirane masei prijenosom optereüenja preko jednog kotaþ a. Ležajevi nosaþ a i veze meÿ u masama modelirane su Kelvinovim reološkim elementima. Sustav diferencijalnih jednadžbi gibanja riješen je metodom prediktor-(re)korektor, a kontakt kotaþ a i traþ nice proraþ unan je primjenom metoda sila.
Key words
tramcar,track,interaction,dynamic analysis,numerical model, predictor-corrector method
S. Lakušiü , D. Lazareviü , J. Dvornik Original scientific paper
Dynamic analysis of the tramcar & track interaction
The numerical model of tramcar motion is presented. The rail is modelled as an Euler-Bernoullicontinuous beam with the discretely distributed mass. The vehicle is discretized with three concentrated masses, and with load transfer via one wheel. Beam bearings and mass links are modelled by means of Kelvin rheological elements. The differential equation system for motion was solved by the predictor -(re)corrector method, and the wheel and rail contact was calculated by means of the force methods.
Mots clés
tramway,voie ferrée,interaction,calcul dynamique,
modèle numérique,méthode prédicteur-correcteur
S. Lakušiü , D. Lazareviü , J. Dvornik Ouvrage scientifique original
Analyse dynamique de l'interaction entre le tramway et la voie ferrée
Le modèle numérique du mouvement de tramway est présenté. Le rail est modelé comme une poutrecontinue Euler-Bernoulli, avec la masse discrètement répartie. Le véhicule est discrétisé par trois
masses concentrées, et par transfert de la charge à travers une roue. Les appuis de la poutre ainsi queles liaisons entre les masses sont modelées à l'aide des éléments rhéologiques de Kelvin. Le système deséquations différentielles de mouvement a été résolu par la méthode prédicteur - (re) correcteur, tandisque le contact entre les roues et les rails a été calculé à l'aide de la méthode des forces.
Ʉɥɸɱɟɜɵɟ ɫɥɨɜɚ
ɬɪɚɦɜɚɣ ,ɤɨɥɟɹ , ɪɟɥɶɫ ,ɜɡɚɢɦɨɞɟɣɫɬɜɢɟ ,ɞɢɧɚɦɢɱɟɫɤɢɣ ɪɚɫɱɺɬ ,ɱɢɫɥɨɜɚɹ ɦɨɞɟɥɶ ,
ɦɟɬɨɞɩɪɟɞɢɤɬɨɪ-ɤɨɪɟɤɬɨɪ
ɋ . Ʌɚɤɭɲɢɱ , Ⱦ . Ʌɚɡɚɪɟɜɢɱ , Ƀ . Ⱦɜɨɪɧɢɤ Opɢɝɢɧɚɥɶɧɚɹ ɧɚɭɱɧɚɹ ɪɚɛɨɬɚ
Ⱦɢɧɚɦɢɱɟɫɤɢɣ ɪɚɫɱɺɬ ɜɡɚɢɦɨɞɟɣɫɬɜɢɹ ɬɪɚɦɜɚɹ ɢ ɤɨɥɟɢ
ȼ ɪɚɛɨɬɟ ɩɨɤɚɡɚɧɚ ɱɢɫɥɨɜɚɹ ɦɨɞɟɥɶ ɞɜɢɠɟɧɢɹ ɬɪɚɦɜɚɹ. Ɋɟɥɫɶ ɦɨɞɟɥɢɪɨɜɚɧ ɤɚɤ Euler-Bernulli-ɟɜɤɨɧɬɢɧɭɢɪɨɜɚɧɧa ɹ ɛɚɥɤɚ ɫ ɞɢɫɤɪɟɬɧɨ ɪɚɫɩɪɟɞɟɥɺɧɧɨɣ ɦɚɫɫɨɣ. Ɍɪɚɦɜɚɣ ɞɢɫɤɪɟɬɢɡɢɪɨɜɚɧ ɬɪɟɦɹɤɨɧɰɟɧɬɪɢɪɨɜɚɧɧɵɦɢ ɦɚɫɫɚɦɢ ɢ ɩɟɪɟɞɚɱɟɣ ɧɚɝɪɭɡɤɢ ɱɟɪɟɡ ɨɞɧɨ ɤɨɥɟɫɨ. Oɩɨɪɵ ɛɚɥɨɤ ɢ ɫɜɹɡɢ ɦɟɠɞɭ
ɦɚɫɫɚɦɢ ɦɨɞɟɥɢɪɨɜɚɧɵ Ʉɟɥɶɜɢɧɨɜɵɦɢ ɪɟɨɥɨɝɢɱɟɫɤɢɦɢ ɷɥɟɦɟɧɬɚɦɢ. ɋɢɫɬɟɦɚ ɞɢɮɮɟɪɟɧɰɢɚɥɶɧɵɯ ɭɪɚɜɧɟɧɢɣ ɞɜɢɠɟɧɢɹ ɪɟɲɟɧɚ ɦɟɬɨɞɨɦ ɩɪɟɞɢɤɬɨɪ-( ɪɟ )ɤɨɪɪɟɤɬɨɪ , ɚ ɤɨɧɬɚɤɬ ɤɨɥeɫɚ ɢ ɪɟɥɶɫa ɪɚɫɱɢɬɚɧ ɩɪɢɦɟɧɟɧɢɟɦ ɦɟɬɨɞɚ ɫɢɥ.
Schlüsselworte
Strassenbahn,Geleise, gegenseitige Einwirkung,dynamische Berechnung,numerisches Modell, Methode Prediktor-Korrektor
S. Lakušiü , D. Lazareviü , J. Dvornik Wissenschaftlicher Originalbeitrag
Dynamische Berechnung der gegenseitigen Einwirkung von Strassenbahn und Geleise
Dargestellt ist ein numerisches Modell der Bewegung des Strassenbahnfahrzeugs. Die Schiene modellierteman als Euler-Bernoullischen Durchlaufträger mit diskret verteilter Masse. Das Fahrzeug diskretisierte manmit drei konzentrierten Massen und die Übertragung der Belastung über ein Rad. Die Lager der Träger und Verbindungen zwischen den Massen modellierte man mit Kelvin , s rheologischen Elementen. Das System der Differentialgleichungen der Bewegung löste man mit der Methode Prediktor-(re)Korrektor, und den Kontakt zwischen Rad und Schiene berechnete man unter Anwendung des Kraftgrössenverfahrens.
Autori: Doc. dr. sc. Stjepan Lakušiü, dipl. ing. graÿ.; doc. dr. sc. Damir Lazareviü, dipl. ing. graÿ.; prof. dr. sc.
Josip Dvornik , dipl. ing. graÿ., Sveuþilište u Zagrebu, Graÿevinski fakultet, Zagreb

7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 2/8
Meÿudjelovanje tramvaja i kolosijeka S. Lakušiü i drugi
282 GRAĈEVINAR 58 (2006) 4, 281-288
1 Uvod
Tramvajskim kolosijecima, kao posebnoj skupini kolo-
sijeþnih konstrukcija, posveüena je manja pažnja nego
klasiþnim željezniþkim kolosijecima. Postojeüi propisi
iz podruþ ja željeznica (UIC, VDV Oberbau-Richtlinien,
CEN) vrlo malo ili uopüe ne razmatraju tramvajske ko-
losijeke [1, 2, 3]. Iako je njihovo obilježje manja brzina
vozila i optereüenje po kotaþu, þesta ošteüenja upozora-
vaju da im se mora posvetiti veüa pažnja [4].
Nadzorom nad rekonstrukcijama razliþitih tipova kolo-
sijeka u Zagrebu (od 1994. do 2005. rekonstruirano je
oko 80 km tramvajskih pruga), ustanovljeno je da najve-
üi postotak ošteüenja nastaje u podruþ ju zavara, gdje su
þesto prisutne neravnine na voznoj površini traþnice [5,
6]. Sanacije su uvijek skupe i zahtijevaju obustavljanje
tramvajskog, aþesto i cestovnog prometa. Nakon više-godišnjeg iskustva s razliþitim tipovima kolosijeka, eks-
perimentalnim i numeriþkim postupcima dokazano je da
se na tim mjestima pojavljuje nepovoljan odnos dinamiþ-
kih i statiþkih optereüenja, zbog þega može nastati veliki
dinamiþki faktor [5, 7]. Tome je razlog velika masa u
gibanju u odnosu na masu koja miruje. Za približnu us-
poredbu, masa punoga tramvaja tipa KT 4 jest 33,15 t,
dok je masa kolosijeka (traþnice i betonska podloga u
duljini tramvaja) iznosi svega 13,75 t.
2 Matematiþki model
Matematiþki pristup ovome problemu temelji se na sus-tavu diferencijalnih jednadžbi gibanja kojima je opisano
dinamiþko ponašanje vozila, kolosijeka i njihova meÿu-
djelovanja. Postoje brojne inaþice ovoga pristupa koje,
ovisno o modelu vozila, možemo podijeliti u þetiri grupe:
1. primjenom utjecajnih linija
2. s pokretnom silom
3. s pokretnom masom i
4. s pokretnim modelom vozila.
Prvim se modelom uzima u obzir samo najnepovoljnije
statiþko optereüenje vozilom, a dinamiþki se utjecaji do-daju množenjem statiþkih vrijednosti propisanim dina-
miþkim faktorima. Prema drugome modelu unutarnje
sile ovise i o brzini vozila. Horizontalna komponenta
brzine je najþešüe konstantna, a vertikalna uzrokuje do-
datne dinamiþke utjecaje. Oba su pristupa dovoljno dob-
ra ako visoke frekvencije osciliranja sustava konstrukci-
ja – vozilo nemaju znatnog utjecaja na globalnu raspo-
djelu unutarnjih sila (primjerice kod mostova). Lokalni
se efekti, koje pobuÿuju ti oblici, þesto riješe posebno ili
odrede primjenom propisanih faktora. Ipak, ovim se pri-
stupima ne uzima u obzir inercijalni doprinos (masa)
vozila pri vertikalnim oscilacijama konstrukcije, što je
obuhvaüeno treüim pristupom. On može biti mjerodavan
ako je masa vozila znatna u odnosu na masu konstrukcije.
Lokalni se dinamiþki doprinosi mogu djelomiþno obuhva-
titi, ali samo uz uvjet da krutosti i prigušenja vozila ne-
maju veüeg utjecaja na frekvencije osciliranja. Konaþno,ako su utjecaji krutosti i prigušenja vozila veliki u odno-
su na vrijednosti koje pripadaju konstrukciji, potreban je
i þetvrti model. Tada su lokalni efekti uvijek znatni, a
þesto i mjerodavni za dimenzioniranje nosivih elemena-
ta i spojeva. Zbog toga treba uzeti u obzir utjecaje viših
vlastitih vektora.
Ako se radi o jednostavnijim statiþkim sustavima, prva
tri modela možemo riješiti analitiþkim i poluanalitiþkim
pristupima, dok se þetvrti model rješava iskljuþivo numeriþ-
kim putem. Pri tome se þesto uzimaju u obzir i utjecaji
poput koþenja, promjene putanje vozila i sliþno. Zbog
velike mase, krutosti i prigušenja tramvaja u odnosu nakolosijek i visokih frekvencija osciliranja sustava (prve
þetiri frekvencije nalaze se izmeÿu 400 i 1400 Hz) u ovo-
me je radu odabran þetvrti pristup (slika 1.).
Slika 1. Matematiþki model vozila i kolosijeka
2.1 Model vozilaRazmatran je model vozila s tri vertikalna stupnja slobo-
de (z1, z2 i z3). Svakome pripada odgovarajuüa masa: oso-
vinskog sklopa (m1), okretnog postolja (m2) i sanduka
vozila (m3), koje su meÿusobno povezane oprugama
krutosti k 1 i k 2 te linearno viskoznim prigušivaþima s
konstantama c1 i c2 (slika 2.a). S obzirom na dinamiþko
meÿudjelovanje vozila i kolosijeka, kotaþ je optereüen i
kontaktnom silom n ( x, t ). Sile koje djeluju na vozilo prika-
zane su na slici 2.b. Opisanome modelu vozila pripada
diferencijalna jednadžba gibanja u obliku:
v v v vM z C z K z f - n x,t + x,t + x,t = x,t (1)

7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 3/8
S. Lakušiü i drugi Meÿudjelovanje tramvaja i kolosijeka
GRAĈEVINAR 58 (2006) 4, 281-288 283
gdje su Mv, Cv i K v konstantne matrice masa, prigušenja
i krutosti, a z ( x,t ), z ( x,t ) i z ( x,t ) vektori ubrzanja, brzi-
ne i pomaka modela. Spomenute matrice imaju oblik:
0 00 0
0 0
vM3
2
1
m= m
m
ª º« »« »« »¬ ¼
;2 2
2 1 2 1
1 1
0
0
vC
c c
c c c c
c c
ª º« » « »« »¬ ¼
;
2 2
2 1 2 1
1 1
0
0
vK
k k
k k k k
k k
ª º« » « »« »¬ ¼
, (2)
a pripadajuüe vektore (uz izostavljanje x i t) možemo
napisati u obliku:
»»
¼
º
««
¬
ª
1
2
3
z
z z
z ;
»
»»
¼
º
«
««
¬
ª
1
2
3
z
z
z
z ;
»»»
¼
º
«««
¬
ª
1
2
3
z
z
z
z ;
»»»
¼
º
«««
¬
ª
1
2
3
v
m
m
m
g f ;»»
¼
º
««
¬
ª
n0
0
n ,, (3)
gdje f v sadrži težine komponenata vozila. Statiþka kom-
ponenta nv kontaktne sile n jest ukupna težina vozila:
321v mmm g m g n v (4)
a) b)
2.2 Model kolosijeka
Buduüi da se razmatra tip tramvajskog kolosijeka izve-
denog na betonskoj ploþi, položenoj na tlu dobre nosivosti,
uvedena je pretpostavka apsolutno krutih oslonaca reo-
loških elemenata koji pridržavaju kontinuirani nosaþ. Za
homogeni model traþnice ( E=const .), konstantnog pop-
reþnog presjeka ( I=const.) i mase po jedinici duljine mt ,
optereüene dinamiþkim optereüenjem f(x,t) i težinom
vozila nv (slika 3.), može se napisati diferencijalna jed-
nadžba dinamiþke ravnoteže u obliku:
vt IV nt) f(x,t)(x,umt)(x, EIu (5)
gdje je u IV (x,t) þetvrta derivacija progibne linije nosaþa
po x, a u(x , t ) ubrzanje, pri þemu je zanemarena masa
ležajnog mjesta, prigušenje traþnice i progib od težine
traþnice. Dinamiþka se sila može odrediti kao:
°°¯
°°®
-
!
inaþ e,0
0
0
t),n(x,t) ,u(xt),n(x,t)(x,uct) ,u(xt),n(x,t)u(x,k t)(x,uct) ,u(xt),n(x,t)u(x,k t)(x,uc
t) f(x,l L
l K L
l L L
,
,
,
(6)
gdje su k L i k K konstantne vrijednosti krutosti ležajnog
mjesta u tlaku i vlaku (slika 4.a), a c L viskoznost ležaj-
nog mjesta (slika 4.b). Koordinata xl oznaþava položaj
ležajnog mjesta. Prema izrazu (6) i slici 4.a, aktiviranje
krutosti k L ili k K ovisi o položaju traþnice. Ako se traþni-
ca progiba, tada se aktivira krutost ležaja u tlaku (k L > 0), a
krutost ležaja u vlaku je k K = 0. Nasuprot tome, pri
izdizanju traþnice, aktivira se krutost ležaja u vlaku
(k K > 0), a krutost ležaja u tlaku je k l = 0.
Slika 3. Matematiþki model kolosijeka (traþnica i ležaji)
Slika 4. Model ponašanja ležaja: a) krutosti, b) prigušenje
2.3 Meÿ udjelovanje modela vozila i kolosijeka
Povezivanje modela vozila i kolosijeka izvedeno je na
temelju pretpostavke jednakih vertikalnih pomaka u toþ-
ki kontakta kotaþa i traþnice. Navedeni uvjet kompatibil-
nosti može se izraziti kao:
t)(x, zt)u(x, 1 , (7)
gdje je u(x,t) pomak traþnice, a z1(x,t) pomak kotaþa. Na-
glasimo da uvjet (7) ne dopušta odvajanje kotaþa od traþ-
nice. Sustav jednadžbi (1), (5) i (7) jest matematiþki mo-
del gibanja vozila po kolosijeku.
Slika 2. Matematiþki model
vozila:
a) diskretizacija,
b) sile meÿudjelovanja

7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 4/8
Meÿudjelovanje tramvaja i kolosijeka S. Lakušiü i drugi
284 GRAĈEVINAR 58 (2006) 4, 281-288
2.4 Poþ etni i rubni uvjeti
Za dobivanje jedinstvenog rješenja potrebno je poznavati
poþetne i rubne uvjete. Za kolosijek se poþetni uvjeti de-
finiraju u obliku:
0000 )u(x, , )(x,u (8)
dok se rubni uvjeti za dovoljnu duljinu traþnice l , mogu
izraziti kao:
000, t)u(l, ,t)u( (9)
Zbog utjecaja Saint-Venantova principa i moguüe refleksi-
je dinamiþkih valova od ležajeva modela potrebno je
odrediti dovoljnu duljinu traþnice kako bi se rubni pore-
meüaji što manje odrazili na rezultate proraþuna. Nakon
parametarske analize veüeg broja modela, ustanovljena je
referencijska duljina od l = 10 m, kao najmanja vrijed-nost kod koje postoji zanemarivi utjecaj rubnih uvjeta [5].
Za vozilo u statiþkoj ravnoteži koje kreüe iz stanja miro-
vanja, poþetni su uvjeti:
v1
(0,0),(0,0) f K z0z i .t)(x, x constvv (10)
Drugi je uvjet statiþki sluþaj jednadžbe (1), a to je isto-
dobno i rubni uvjet po pomacima. Posljednjim je uvjetom
definirana poþetna brzina vozila koja ostaje konstantnom
za vrijeme proraþuna.
Rubni uvjet po silama za vozilo i kolosijek odreÿen je
statiþkom komponentom kontaktne sile prema (4).
2.5 Numeriþ ki model gibanja sustavavozilo-kolosijek
2.5.1 Prostorna diskretizacija
Matematiþki model vozila (1) prikazan je u diskretnom
obliku, pa istovremeno predstavlja i numeriþki model.
Diferencijalna jednadžba traþnice (5) može se drugaþije
zapisati kao:
> @t)(x, EIunt)(x, f
m
1t)(x,u IV
vt
(11)
Primjenom metode konaþnih razlika ova se jednadžba
može diskretizirati pa dobivamo:
> @¸ ¹
ᬩ
§
'
(t)u(t)u4-(t)u6(t)u4-(t)ux
EI-n(t)f
m
1(t)u
2i1ii1-i2-i4vi
it,i
(12)
gdje je ǻ x korak mreže s þvorovima 1n1,...,i . Pri-
padajuüa masa u þvoru i oznaþena je s t it, m xm ǻ . Di-
skretizacija traþnice izmeÿu dvaju ležajnih mjesta prika-
zana je na slici 5.
Slika 5. Numeriþki model kolosijeka meÿu osloncima
Dinamiþko je optereüenje prema (6):
°°¯
°°®
-
!
inaþ e,0
0
0
(t),n(t)u(t),n(t)uc(t)u(t),n(t)uk (t)uc(t)u(t),n(t)uk (t)uc
(t) f
i
l ii L
l ii K i L
l ii Li L
i ,
,
,
(13)
gdje je ni(t) kontaktna sila u þvoru i, a l broj ležajnog
þvora. Prema (12) i (13), ravnoteža þvora unutar raspona
prikazana je na slici 6.a, dok je ravnoteža ležajnoga þvo-
ra prikazana na slici 6.b.
Slika 6. Ravnoteža þvora modela traþnice: a) unutar raspona, b)
na mjestu ležaja
Prema uvedenim oznakama diskretizirani oblik uvjeta
kompatibilnosti jest:
ui(t) = z1(t). (14)
2.5.2 Vremenska diskretizacija
Opisani je model geometrijski i materijalno nelinearan.
Geometrijska nelinearnost nastaje zbog promjene matri-
ca mase, krutosti i viskoznosti sustava jer se model vozilagiba po modelu kolosijeka. (Možemo govoriti i o prom-
jeni statiþkog sustava u vremenu.) Materijalna se neline-
arnost pojavljuje zbog modela ležaja koji ima razliþite
krutosti u tlaku i vlaku, pa se može govoriti o nelinearno
elastiþnom (preciznije, po dijelovima linearnom) mode-
lu opruge. Zbog ovih svojstava ne vrijedi princip super-
pozicije, pa se problem mora riješiti nekom od metoda
korak po korak. U ovome istraživanju odabran je postu-
pak izravne integracije prediktor-korektor (engl. predictor-corrector ). Upotrijebljena je inaþica prvog reda s konstant-
nim ubrzanjem u fazi prediktora i linearnim ubrzanjem
(popravkom) u fazi korektora, s moguünošüu iteriranja
a) b)
7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 5/8
S. Lakušiü i drugi Meÿudjelovanje tramvaja i kolosijeka
GRAĈEVINAR 58 (2006) 4, 281-288 285
korektora (tzv. rekorektor). Zbog toga govorimo o im-
plicitnoj inaþici metode. Iscrpan opis ovoga postupka
može se vidjeti u [10] i [11].
2.5.3 Postupak rješavanjaPostupak rješavanja diskretiziranog sustava u nekom
vremenskom odsjeþku ǻt može se podijeliti u tri cjeline:
a) Odvojeno rješavanje jednadžbi vozila (1) i kolosije-
ka (12) za sluþaj kada je kontaktna sila 0(t)ni
b) Rješavanje istih jednadžbi za sluþaj kada kontaktna
sila ima jediniþnu vrijednost, odnosno 1(t)ni
c) Iz uvjeta kompatibilnosti (14) treba pronaüi stvarnu
veliþinu kontaktne sile izmeÿu kotaþa i traþnice.
Opisani se postupak može shvatiti kao primjena metode
sila na zadani sustav (u svakom vremenskom odsjeþku)þija je statiþka neodreÿenost uzrokovana nepoznatom
kontaktnom silom ni na spoju kotaþa i traþnice [9]. Metoda
pretpostavlja da u svakom koraku vremena problem mo-
žemo linearizirati, što je za male korake razumno pretpos-
taviti, pa vrijedi princip superpozicije.
3 Provjera numeriþkog modela
Ulazni parametri za vozilo i kolosijek dobiveni su od pro-
izvoÿaþa i mjerenjima u laboratoriju i na terenu. Usporedba
izmeÿu eksperimenta i numeriþke simulacije izvršena je
za progib i vertikalno ubrzanje idealno ravne, a zatim i
urezane traþnice (slika 7.).
Slika 7. Ležajno mjesto i putanja kotaþa po urezanoj traþnici
Progibi traþnice mjereni su induktivnim senzorima
osjetljivosti 700 mV /1mm, dok su ubrzanja traþnice
mjerena akcelerometrima osjetljivosti 10 mV /1m/s2 (pod-
ruþ je 0,1-20 kHz). Pri mjerenju je uporabljen ADC-216
(16 bitni) pretvaraþ tvrtke PICO Technology i pripada- juüi programski paket PicoScope. Mjerenja su provede-
na na novom tramvajskom kolosijeku (starosti 10 dana).
Na ovaj su naþin uklonjeni utjecaji dotrajalih elemenata
priþvršüenja traþnice na podlogu i geometrijskih nepra-
vilnosti koji se pojavljuju na traþnicama nakon dulje upo-
rabe kolosijeka. Mjerenja na terenu izvršio je Laborato-
rij za ispitivanje konstrukcija u Zavodu za Tehniþku me-
haniku Graÿevinskog fakulteta u Zagrebu.
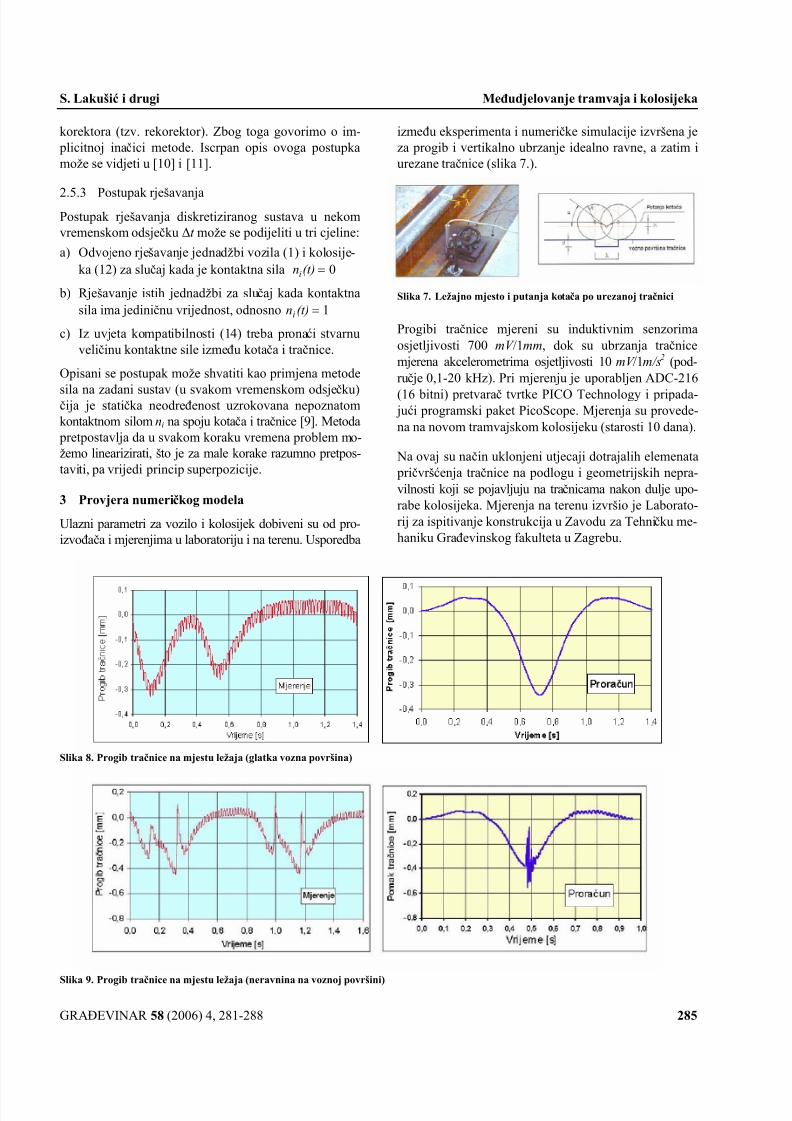
Slika 8. Progib traþnice na mjestu ležaja (glatka vozna površina)
Slika 9. Progib traþnice na mjestu ležaja (neravnina na voznoj površini)

7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 6/8
Meÿudjelovanje tramvaja i kolosijeka S. Lakušiü i drugi
286 GRAĈEVINAR 58 (2006) 4, 281-288
3.1 Usporedba progiba traþ nice
Progib traþnice s glatkom voznom površinom dobiven
mjerenjem i proraþunom prikazan je na slici 8. Dijagra-
mi prikazuju usporedbu za tramvajsko vozilo tipa TMK 101, brzinu 25 km/h i optereüenje po kotaþu od 41 kN.
Progib u sluþaju neravnine na voznoj površini priložen
je na slici 9. Dijagrami prikazuju usporedbu za tramvaj
tipa KT 4, brzinu 37 km/h i optereüenje po kotaþu od 36
kN. Detaljnijom analizom dijagrama pomaka dobivenog
mjerenjem, uoþen je poremeüaj oscilatornom krivuljom
frekvencije 50 Hz. Tome je razlog napajanje mjerne op-
reme elektriþnom energijom dobivenom s pomoüu prije-
nosnog agregata, a ne kao što je uobiþajeno baterijom.
Mjerenjem progiba traþnice zabilježen je prolaz svakog
kotaþa, dok je proraþunom dobiven progib samo jednog
kotaþa, prema modelu opisanom u toþki 2.1.
3.2 Usporedba ubrzanja traþ nice
Podaci dobiveni mjerenjem i proraþunom ubrzanja traþ-
nice s glatkom voznom površinom zbog kretanja vozila
tipa TMK 101, brzinom 25 km/h i optereüenjem po ko-
taþu od 41 kN, prikazani su na slikama 10. i 11. Slika
10. prikazuje usporedbu rezultata u vremenskom podruþ ju,
dok je na slici 11. prikazana usporedba u frekvencijskom
podruþ ju.
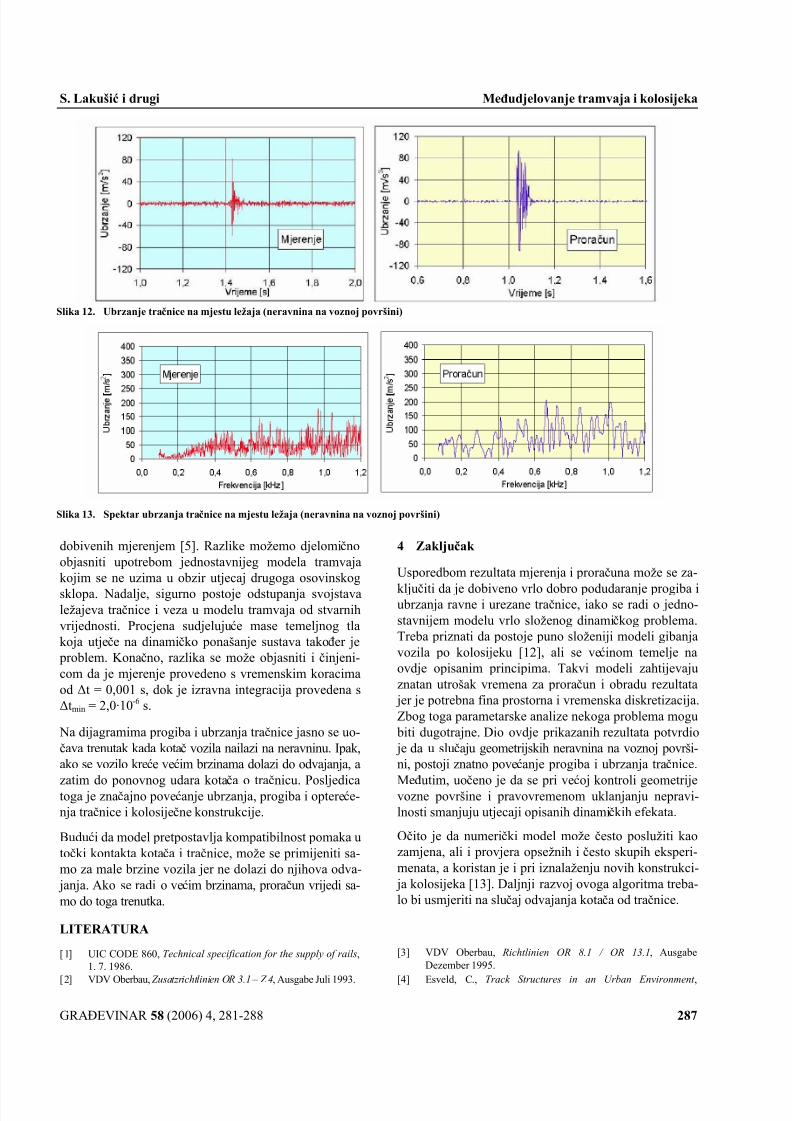
Na isti je naþin razmatrana i neravnina na voznoj površini.
Na slikama 12. i 13. prikazana je usporedba rezultata
mjerenja i proraþuna zbog kretanja vozila tipa TMK 101,
brzinom 10 km/h i optereüenjem po kotaþu od 46 kN. Iz
dijagrama se jasno uoþava da je veliþina ubrzanja traþni-ce u sluþaju neravnine na voznoj površini i nekoliko pu-
ta veüa od one s glatkom površinom. Rezultati pokazuju
da se veliþine ubrzanja poveüavaju i do 8 puta (ovisno o
brzini kretanja tramvaja i širini ureza).
Treba spomenuti da je za vozila koja se kreüu brzinama
veüim od 15 km/h provedena samo frekvencijska anali-
za, zbog ograniþenoga mjernog podruþ ja akcelerometra
(± 700 m/s2). Ubrzanja traþnice kod malih brzina nalaze
se u navedenom mjernom podruþ ju, dok se u sluþaju ve-
üih brzina, ubrzanja kreüu i do ±2000 m/s2.
Za frekvencijsku analizu podataka dobivenih proraþunom
izraÿen je poseban postprocesor za brzu Fourierovu trans-
formaciju s pomoüu programa Mathcad [5]. Frekvencijs-
ka analiza napravljena je u podruþ ju od 0 do 1,2 kHz
koje odgovara podruþ ju obuhvaüenom mjerenjem.
3.3 Analiza rezultata mjerenja i proraþ una
Usporedbom rezultata mjerenja i proraþuna vidljivo je
da su rezultati proraþuna 10% do 15% veüi od podataka
Slika 10. Ubrzanje traþnice na mjestu ležaja (glatka vozna površina)
Slika 11. Spektar ubrzanja traþnice na mjestu ležaja (glatka vozna površina)
7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 7/8
S. Lakušiü i drugi Meÿudjelovanje tramvaja i kolosijeka
GRAĈEVINAR 58 (2006) 4, 281-288 287
dobivenih mjerenjem [5]. Razlike možemo djelomiþno
objasniti upotrebom jednostavnijeg modela tramvaja
kojim se ne uzima u obzir utjecaj drugoga osovinskog
sklopa. Nadalje, sigurno postoje odstupanja svojstava
ležajeva traþnice i veza u modelu tramvaja od stvarnih
vrijednosti. Procjena sudjelujuüe mase temeljnog tla
koja utjeþe na dinamiþko ponašanje sustava takoÿer je
problem. Konaþno, razlika se može objasniti i þinjeni-
com da je mjerenje provedeno s vremenskim koracima
od ǻt = 0,001 s, dok je izravna integracija provedena s
ǻtmin = 2,0·10-6 s.
Na dijagramima progiba i ubrzanja traþnice jasno se uo-
þava trenutak kada kotaþ vozila nailazi na neravninu. Ipak,
ako se vozilo kreüe veüim brzinama dolazi do odvajanja, a
zatim do ponovnog udara kotaþa o tra
þnicu. Posljedicatoga je znaþajno poveüanje ubrzanja, progiba i optereüe-
nja traþnice i kolosijeþne konstrukcije.
Buduüi da model pretpostavlja kompatibilnost pomaka u
toþki kontakta kotaþa i traþnice, može se primijeniti sa-
mo za male brzine vozila jer ne dolazi do njihova odva-
janja. Ako se radi o veüim brzinama, proraþun vrijedi sa-
mo do toga trenutka.
4 Zakljuþak
Usporedbom rezultata mjerenja i proraþuna može se za-
kljuþiti da je dobiveno vrlo dobro podudaranje progiba iubrzanja ravne i urezane traþnice, iako se radi o jedno-
stavnijem modelu vrlo složenog dinamiþkog problema.
Treba priznati da postoje puno složeniji modeli gibanja
vozila po kolosijeku [12], ali se veüinom temelje na
ovdje opisanim principima. Takvi modeli zahtijevaju
znatan utrošak vremena za proraþun i obradu rezultata
jer je potrebna fina prostorna i vremenska diskretizacija.
Zbog toga parametarske analize nekoga problema mogu
biti dugotrajne. Dio ovdje prikazanih rezultata potvrdio
je da u sluþaju geometrijskih neravnina na voznoj površi-
ni, postoji znatno poveüanje progiba i ubrzanja traþnice.
Meÿutim, uo
þeno je da se pri ve
üoj kontroli geometrijevozne površine i pravovremenom uklanjanju nepravi-
lnosti smanjuju utjecaji opisanih dinamiþkih efekata.
Oþito je da numeriþki model može þesto poslužiti kao
zamjena, ali i provjera opsežnih i þesto skupih eksperi-
menata, a koristan je i pri iznalaženju novih konstrukci-
ja kolosijeka [13]. Daljnji razvoj ovoga algoritma treba-
lo bi usmjeriti na sluþaj odvajanja kotaþa od traþnice.
LITERATURA
[1] UIC CODE 860, Technical specification for the supply of rails,
1. 7. 1986.
[2] VDV Oberbau, Zusatzrichtlinien OR 3.1 – Z 4, Ausgabe Juli 1993.
[3] VDV Oberbau, Richtlinien OR 8.1 / OR 13.1, Ausgabe
Dezember 1995.
[4] Esveld, C., Track Structures in an Urban Environment ,
Slika 12. Ubrzanje traþnice na mjestu ležaja (neravnina na voznoj površini)
Slika 13. Spektar ubrzanja traþnice na mjestu ležaja (neravnina na voznoj površini)

7/16/2019 Dinamički proračun međudjelovanja tramvaja i kolosijeka
http://slidepdf.com/reader/full/dinamicki-proracun-medudjelovanja-tramvaja-i-kolosijeka 8/8
Meÿudjelovanje tramvaja i kolosijeka S. Lakušiü i drugi
288 GRAĈEVINAR 58 (2006) 4, 281-288
Symposium K. U. Leuven, 1997.
[5] Lakušiü, S.: Dinamiþ ki utjecaj vozila na tramvajski kolosijek ,Doktorska disertacija, Graÿevinski fakultet Sveuþilišta u
Zagrebu, 2003.
[6] Lakušiü, S., Rak, M., Lazarevi
ü, D.: Numerical model of tram-track interaction with and without irregularity on rail running
surface, GESTS International Transaction on Computer
Science and Engineering, Volume 17, Number 1, (2005), pp.
97-108.
[7] Esveld, C.: Modern Railway Track , Second edition, MRT-
Productions, Delft, 2001.
[8] Popp, K.; Kruse, H.; Kaiser, I.: Vehicle-Track Dynamics in the Mid Frequency Range, Vehicle System Dynamics, 31, pp. 423-
464, 1999.
[9] Lakušiü, S., Rak, M., Lazareviü, D.: Numerical and experimental investigation of the tram-track interaction ,
2ndYouth Symposium on Experimental Solid Mechanics (2nd
YSESM), (Ed. A. Freddi), Ravenna, Italy, pp. 121-123, 2003.
[10] Lazareviü, D.; Dvornik, J.; Fresl, K.: Diskretno numeriþ ko
modeliranje optereüenja silosa, Graÿevinar 54 (2002) 3, 135-144.
[11] Lazarevic, D.; Dvornik, J.: Selective Time Steps in Predictor-Corrector Methods Applied to Discrete Dynamic Models of Granular Assemblies, 4 th International Conference on Analysis
of Discontinuous deformation, Glasgow, pp. 193-201, 2001.
[12] http://www.abaqus.com
[13] Knothe, K. L.; Grassie, S. L.: Modelling of Railway Track and Vehicle/track Interaction at High Frequencies, Vehicle System
Dynamics, 22, pp. 209-262, 1993