detekcja i estymacja parametrÓw sygnaŁÓw …
TRANSCRIPT

7. KONFERENCJA URZĄDZENIA I SYSTEMY RADIOELEKTRONICZNE
JACHRANKA, 28-29 października 2014 r.
DETEKCJA I ESTYMACJA PARAMETRÓW SYGNAŁÓW
RADAROWYCH Z WYKORZYSTANIEM METOD
CZASOWO-CZĘSTOTLIWOŚCIOWYCH
Karol KLINCEWICZ, Piotr SAMCZYŃSKI
Instytut Systemów Elektronicznych, Politechnika Warszawska
ul. Nowowiejska 15/19, 00-665 Warszawa
Streszczenie: W pracy przedstawiono autorski algorytm detekcji i estymacji parametrów
impulsowych sygnałów radarowych z liniową i nieliniowej modulacją częstotliwości. Głównymi
założeniami działania algorytmu są: brak informacji o częstotliwościach na których nadawany jest
sygnał; niski dopuszczalny stosunek sygnału do szumu; założenie, że modulację w częstotliwości
sygnału można przybliżyć wielomianem znanego stopnia; brak jakiejkolwiek wiedzy o wartościach
współczynników wielomianu modulującego częstotliwość. Poprawność działania algorytmu została
zweryfikowana z wykorzystaniem zarówno sygnałów symulowanych, jak również sygnałów
pochodzących z rzeczywistych rejestracji pozyskanych z takich oświetlaczy radarowych jak: radar
ASR-10SS kontroli ruchu powietrznego, radar ASAR umieszczony na satelicie EnviSAT oraz radar
satelitarny TerraSAR-X. Uzyskane wyniki zostały opisane w niniejszym artykule.
Słowa kluczowe: detekcja, estymacja, sygnały radiolokacyjne, metody czasowo-
częstotliwościowe.
1. Wstęp
Rozpoznanie elektroniczne jest jednym z głównych elementów wykorzystywanych na
współczesnym polu walki elektronicznej. Głównym zadaniem współczesnych systemów
rozpoznania ELINT (ang. Electronic Inteligence) jest wykrycie, estymacja parametrów i
namierzanie m.in. źródeł sygnałów radarowych. Oprócz stricte wywiadowczych zastosowań,
informacje te mogą być również bardzo użyteczne na potrzeby pasywnych odbiorników
radarowych wykorzystujących jako źródła oświetlenia obce systemy radarowe. Jednym z
głównych problemów odbiorników ELINT jest detekcja słabych sygnałów radarowych
pochodzących z odległych źródeł oraz brak informacji a priori o charakterystyce
analizowanych sygnałów radarowych [1, 2, 4].
W niniejszym artykule przedstawiono algorytm pozwalający na detekcję słabych,
charakteryzujących się niskim stosunkiem sygnał-szum sygnałów radarowych oraz estymację
ich parametrów przy braku informacji a priori o odbieranym sygnale radarowym. W pierwszej
części referatu przedstawiono krótką charakterystykę sygnałów wykorzystywanych w
radiolokacji, które w dalszej części pracy są analizowane pod kątem detekcji i estymacji ich
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

2
głównych parametrów z wykorzystaniem zaproponowanego algorytmu. W ostatniej części
artykułu przedstawiono wyniki weryfikacji zaproponowanego algorytmu z wykorzystaniem
różnych rodzajów sygnałów radarowych, zarówno symulowanych, jak również pochodzących
z rejestracji rzeczywistych.
2. Sygnały z modulacja częstotliwości wykorzystywane w radiolokacji
Sygnały z modulacja częstotliwości są powszechnie używane w wielu dziedzinach
nauki, choć pierwotnie stosowane były głównie w radiolokacji [15]. Ważnym parametrem
radaru jest rozróżnialność w odległości tj. minimalna odległość pomiędzy dwoma obiektami
dla której są one widoczne jako obiekty rozdzielne. Decydując się na krótszy impuls
uzyskujemy lepszą rozróżnialność w odległości zgodnie z wzorem [15]:
, (1)
gdzie – rozróżnialność odległościowa, – czas trwania impulsu sondującego, c –
prędkość światła, B – szerokość pasma sygnału. Negatywnym efektem skracania impulsu jest
zmniejszanie mocy nadawanego sygnału, co skraca zasięg działania radaru. Rozwiązaniem
tego problemu jest kompresja impulsu umożliwiająca wykorzystanie długiego impulsu o
szerokim paśmie. W tym celu powszechnie w radiolokacji wykorzystywane są sygnały
z częstotliwością modulowaną w czasie wśród których dużą uwaga cieszą się tzw. sygnały
świergotowe (ang. chirp signals) z liniową modulacją częstotliwości LFM (ang. Linear
Frequency Modulation) i nieliniową modulacją częstotliwości NLFM (ang. Non-Linear
Frequency Modulation).
2.1. Sygnał LFM
Sygnał z liniową modulacją częstotliwości LFM charakteryzuje się stałą zmianą
częstotliwości impulsu sondującego f w czasie t zgodnie ze wzorem:
, (2)
gdzie f0- częstotliwość początkowa, α- przyrost częstotliwości w czasie [ ].
Wzór (2) opisuje zmianę częstotliwości w czasie. W praktyce bardziej użytecznym jest opis
zmian fazy sygnału, który wyznacza się z zależności fazy od częstotliwości, według
następującej zależności:
, (3)
gdzie – faza początkowa, Tp – czas trwania impulsu.
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

3
Podstawiając (2) do (3) można zapisać wzór na sygnał LFM w postaci [8, 15]:
, (4)
gdzie - amplituda sygnału, to funkcja okna wyrażona w następującej postaci:
. (5)
2.2. Sygnał NLFM
Modulacje częstotliwości NLFM można opisać za pomocą uogólnionego wzoru [8, 15]:
, (6)
gdzie jest fazą sygnału, którą można zapisać jako wielomian N-tego rzędu:
. (7)
Warto tu wspomnieć, że pierwszy składnik takiej sumy dla można interpretować jako
faza początkowa sygnału, drugi składnik to jego częstotliwość początkowa dla ,
a kolejne opisują sposób modulacji sygnału w czasie. Sygnały NLFM zostały wprowadzone
jako odpowiedź na problem wysokiego poziomu listków bocznych występującego przy
operacji kompresji impulsu sondującego dla sygnałów LFM.
3. Czasowo-częstotliwościowe metody analizy sygnałów
Istnieje wiele sposobów analizy sygnałów o zmiennej częstotliwości w czasie.
W niniejszym referacie skupiono się nad dwiema z nich: krótkoczasową transformacją
Fouriera (i związaną z nią spektrogram) i transformacją Wignera-Ville’a. Zostaną one
wykorzystane w celu estymacji podstawowych parametrów analizowanego sygnału.
3.1. STFT i Spektrogram
Krótkoczasową transformację Fouriera STFT (ang. Short Time Fourier
Transformation) sygnału x(t) opisuje wzór [16]:
, (8)
gdzie: γ(t) - funkcja opisująca okno czasowe.
Transformata ta polega na wykonywaniu przekształcenia Fouriera na fragmentach
sygnału wycinanych przez okno czasowe przesuwające się w czasie. Powszechnie używaną
metodą wizualizacji krótkoczasowej transformacji Fouriera (STFT) jest spektrogram, czyli
kwadrat modułu STFT:
. (9)
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

4
3.2. Transformata Wignera-Ville'a
Dobrą alternatywą dla spektrogramu może być transformata Wignera-Ville'a, którą
definiuje następujący wzór [16]:
. (10)
Jedną z własności transformaty Wignera-Ville'a jest fakt, że liniowa modulacja jest
odwzorowana punktowo w dziedzinie częstotliwości. Niestety dla modulacji wyższego rzędu
(lub dowolnej innej modulacji innego rodzaju niż liniowa) przy stosowaniu transformacji
Wignera-Ville'a występują interferencje wzajemne pomiędzy składowymi widma. Innym
problemem transformaty Wignera-Ville'a są interferencje zachodzące pomiędzy dwoma
sygnałami występującymi w tym samych czasie, ale na różnych częstotliwościach (np. ten
sam sygnał nieznacznie opóźniony w czasie) [8, 16].
4. Detekcja i estymacja parametrów sygnałów radarowych
4.1. Detekcja
Pierwszym krokiem estymacji parametrów sygnału jest jego detekcja. Jeżeli
poszukiwany sygnał jest znany to najczęściej stosowaną metodą jest wykorzystanie filtracji
dopasowanej. Problem detekcji komplikuje się, kiedy nadawany jest sygnał o nieznanych
parametrach. Można tu rozdzielić problem na sygnały o ciągłej i przerywanej transmisji. Przy
tworzeniu algorytmu założono, że sygnały nadawane są w transmisji przerywanej (radar
impulsowy). Poniżej przedstawione jest omówienie i porównanie wybranych metod detekcji:
detekcja na podstawie mocy chwilowej (11), wariancji (12), filtracji dopasowanej (13) i
analiza maksimów spektrogramu.
(11)
(12)
(13)
Na potrzebę ich porównanie i weryfikacji stworzono syntetyczny symulowany sygnał o
modulowanej w czasie częstotliwości o amplitudzie As=1 i zaburzony szumem o rozkładzie
normalnym o wariancji σ zależnej od amplitudy sygnału. Na rysunku 1 z lewej przedstawiono
wizualizację zaszumionego sygnału w dziedzinach czasowej i czasowo-częstotliwościowej, a
po prawej wyniki detekcji wybranych metod dla σ=0.05As. Analogicznie na rysunku 2
wizualizacja i wyniki dla σ=5As. W tabeli 1 zestawienie wyników detekcji dla czterech
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

5
wybranych wartości σ. Pomimo, że zgodnie z tabelą 1 najlepszą metodą wydaje się filtracja
dopasowana, zrezygnowano z niej jako sposobu na detekcję z dwóch powodów. Po pierwsze,
wymaga on precyzyjnej informacji a priori o sygnale. Po drugie, nie wyznacza dokładnie
początku i końca transmisji, a jedynie jeden punkt w którym ona występuje. Zdecydowano się
na spektrogram, gdyż nawet dla wysokich wariancji szumu jest możliwość odzyskania
informacji o sygnale przy użyciu operacji znanych w cyfrowym przetwarzaniu obrazów.
Rysunek 1 Wyniki detekcji dla σ=0.05∙As
Rysunek 1 Wyniki detekcji dla σ=5∙As
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

6
Wybór spektrogramu przenosi problem detekcji na płaszczyznę czasowo
częstotliwościową. W przypadku mocno zaszumionych sygnałów automatyzacja detekcji
może być problematyczna. Rozwiązanie tego problemu można podzielić na dwa etapy:
progowanie i filtracja. Pierwszym krokiem detekcji jest progowanie, czyli uzyskanie obrazu
binarnego z reprezentacji sygnału na płaszczyźnie czasowo-częstotliwościowej. Uzyskuje się
to poprzez dobór progu na podstawie histogramu obrazu.
Tabela 1 Porównanie wyników pod kątem SNR
SNR porównanie
[dB] σ=0,05∙As σ=0,5∙As σ=5∙As σ=40∙As
Moc chwilowa 7 2,5 <0,5 ~0
Wariancja chwilowa 12 3 0,5 ~0
Filtracja dopasowana 28 20 12 3,5
Maks. spektrogramu 15 10 5 2
Drugim krokiem jest odfiltrowanie szumu binarnego i uzyskanie kształtu transmisji w
dziedzinie czasowo-częstotliwościowej. Dobrym narzędziem do przeprowadzenia takiej
filtracji są metody cyfrowego przetwarzania obrazów (przykład transmisji dla σ=40As przed i
po odszumieniu na rysunku 3).
Rysunek 3 Spektrogram przed filtracją (po lewej) i po filtracji (po prawej)
4.2. Estymacja
Przy pomocy obrazu binarnego wyznaczono czas rozpoczęcia i zakończenia transmisji
sygnału i wycięto odpowiadający jej fragment sygnału. Następnie na fragmencie wykonano
STFT i narysowano spektrogram (rys. 4a poniżej) i dopasowano do niego maskę (otrzymaną
z obrazu binarnego rys. 4b). Po nałożeniu maski na spektrogram określono linię dla której
spektrogram przyjmuje wartości maksymalne (rys. 4c). Warto tu zaznaczyć, że sygnał był
modulowany w częstotliwości wielomianem o współczynnikach: a1=107 Hz/s, a2=7∙10
8 Hz/s,
a3=0 , a4=1014
Hz/s. Dla σ=1∙As w wyniku dopasowania wielomianu do wyznaczonej linii
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

7
otrzymano współczynniki: a1=0,979∙107, a2=5,943∙10
8, a4=0,554∙10
14 , a względne błędy
estymacji wynoszą odpowiednio 2,07%, 15,08%, 44,43%. Są to zbyt duże błędy, dlatego
konieczne jest zastosowanie lepszej metody aproksymacji. W tym celu na wyciętym
fragmencie sygnału zastosowano transformatę Wignera-Ville'a, a dokładniej jej realizację
zaproponowaną przez Profesora Boualem Boashash'a [1]. Otrzymane wyniki nie odbiegały od
wyników spektrogramu (rys. 26a). Aproksymowane współczynniki wynoszą: a1=0,977∙107,
a2=5,88∙108, a4=0,522∙10
14, a błędy względne: 2,30%, 16,00%, 47,81%.
Rysunek 4 Od lewej: a) Spektrogram, b) Maska, c) Dopasowanie
Tabela 2 Porównanie estymacji spektrogramu i transformaty Wignera-Ville’a.
Spektogram[Hz/s] Spektogram błąd [%] Wigner-Ville[Hz/s] Wigner-Ville błąd [%]
a1 0,979∙107 2,07 0,977∙10
7 2,30
a2 5,943∙108 15,08 5,88∙10
8 16,00
a4 0,554∙1014
44,43 0,522∙1014
47,81
Tak duże błędy estymacji nie są zadowalające, dlatego potrzebna jest metoda
pozwalająca na dokładniejsze wyznaczenie współczynników wielomianu. Interesującym
rozwiązaniem jest zastosowanie rozszerzonej wersji zgeneralizowanej transformaty
świergotowej EGCT (ang. Extended Generalised Chirp Transform). Technika EGCT jest
iteracyjną metodą wykorzystującą filtracją dopasowaną w celu precyzyjnej estymacji
współczynników wielomianowej fazy sygnału. Estymacja polega na odnalezieniu maksimum
na 2 wymiarowej mapie współczynników wielomianu. Zastosowanie EGCT w przypadku
nieznanych sygnałów modulowanych nieliniowo jest jednak dość ograniczone z racji dużego
nakładu obliczeń potrzebnego pojedynczej iteracji algorytmu obliczającego EGCT. Sam
algorytm, opisany dokładnie w [8, 14], wymaga znajomości dobrego przybliżenia wszystkich
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

8
współczynników wielomianu modulującego sygnał, a więc może być stosowany jako
ostateczne doszacowanie wcześniej znanych współczynników.
5. Algorytm
Na podstawie wyników przedstawionych w poprzednich rozdziałach zaproponowano
algorytm mający na celu estymację parametrów sygnałów modulowanych w częstotliwości
(rysunek 5).
Rysunek 5 Schemat algorytmu
Kroki algorytmu:
1. Obliczenie STFT i wyznaczenie spektrogramu całego sygnału.
2. Dobranie progu i uzyskanie obrazu binarnego sygnału.
3. Odfiltrowanie szumu z obrazu binarnego i uzyskanie maski binarnej.
4. Odseparowanie pojedynczej transmisji.
5. Obliczenie STFT i wyznaczenie spektrogramu pojedynczej transmisji.
6. Nałożenie (mnożenie) przeskalowanej maski binarnej na spektrogram wycinka sygnału.
7. Wyznaczenie krzywej zmian częstotliwości w czasie i dopasowanie do tej krzywej
wielomianu. Uzyskiwane są wstępne współczynniki wielomianu modulującego.
8. Obliczenie EGCT na wyciętym fragmencie sygnału w otoczeniu wartości
współczynników obliczonych w punkcie 7. Uzyskiwane są dokładne współczynniki
wielomianu modulującego.
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

9
9. Na podstawie współczynników obliczonych w punkcie 8 należy stworzyć filtr
dopasowany do pojedynczej transmisji. Następnie należy przefiltrować nim cały sygnał w
celu odnalezienie wszystkich czasów transmisji.
6. Wyniki
W rozdziale tym przedstawiono weryfikację działań algorytmu. Weryfikacja odbyła się w
dwóch etapach: na danych symulacyjnych i danych rzeczywistych.
6.1. Wyniki przetwarzania danych symulacyjnych
Ten etap weryfikacji przeprowadzono na dwóch symulowanych sygnałach różniących
się miedzy sobą jedynie poziomem szumów (σ1=1∙As, σ2=40∙As). Pozostałe parametry dla obu
sygnałów wynoszą: współczynniki wielomianu: =0 Hz/s, =107 Hz/s, =7∙10
8 Hz/s,
=0 Hz/s, =1014
Hz/s; PRF=100 Hz; wypełnienie sygnału = ; czas trwania impulsu
sondującego 25 ms. Watro wyjaśnić, że współczynnik został wyzerowany, ponieważ nie
niesie on ze sobą żadnych istotnych informacji o sygnale. Współczynnik wyzerowano,
ponieważ sygnały radiolokacyjne zazwyczaj nie są modulowane w tej potędze. Poniżej
przedstawiono tabele 3 opisującą wyniki algorytmu dla punktu 7 (oznaczone jako SPEC) i
punktu 8 (oznaczone jako EGCT) dla obydwu wartości szumów. Jak można zauważyć
algorytm działa poprawnie (wyniki z błędem < 2%) nawet przy niskim stosunku sygnału do
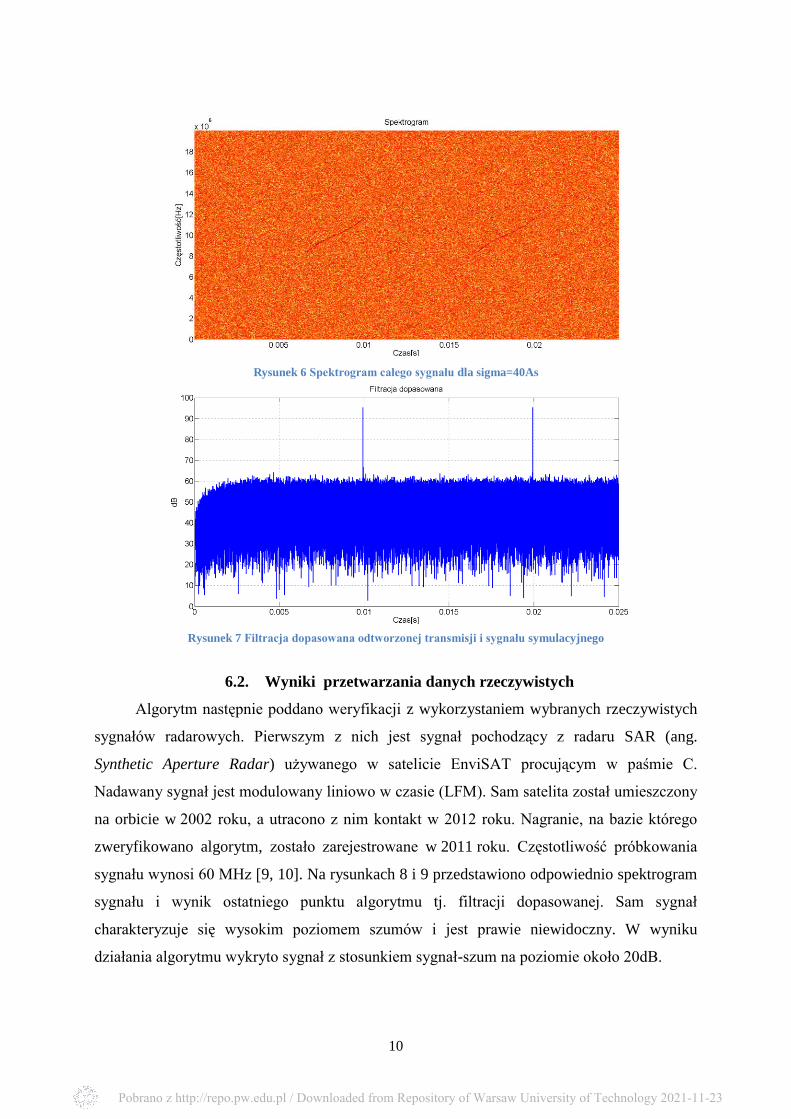
szumu. Na rysunku 6 przedstawiono spektrogram całego sygnału z wariancją σ2=40∙As.
Wynik filtracji dopasowanej do odtworzonego sygnału widoczny na rysunku 7. Obliczono czas
pomiędzy początkami kolejnych transmisji PRI, co pozwoliło znaleźć PRF zgodnie z zależnością
równy 100,02 Hz w przypadku σ1 i 100,03Hz w przypadku σ2.
Tabela 3 Porównanie wyników przykładowych wyników dla punktu 7 (SPEC) i 8 (EGCT)
σ1=1∙As σ2=40∙As
SPEC[Hz/s] SPEC[%] EGCT[Hz/s] EGCT[%] SPEC[Hz/s] SPEC[%] EGCT[Hz/s] EGCT[%]
a1 0,979∙107 2,07 0,9994∙10
7 0,029 0,981∙10
7 1,90 0,9994∙10
7 0,029
a2 5,943∙108 15,08 6,995∙10
8 0,075 6,053∙10
8 13,53 6,997∙10
8 0,047
a4 0,554∙1014
44,43 0,984∙1014
1,57 0,622∙1014
37,80 0,980∙1014
1,97
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23
10
Rysunek 6 Spektrogram całego sygnału dla sigma=40As
Rysunek 7 Filtracja dopasowana odtworzonej transmisji i sygnału symulacyjnego
6.2. Wyniki przetwarzania danych rzeczywistych
Algorytm następnie poddano weryfikacji z wykorzystaniem wybranych rzeczywistych
sygnałów radarowych. Pierwszym z nich jest sygnał pochodzący z radaru SAR (ang.
Synthetic Aperture Radar) używanego w satelicie EnviSAT procującym w paśmie C.
Nadawany sygnał jest modulowany liniowo w czasie (LFM). Sam satelita został umieszczony
na orbicie w 2002 roku, a utracono z nim kontakt w 2012 roku. Nagranie, na bazie którego
zweryfikowano algorytm, zostało zarejestrowane w 2011 roku. Częstotliwość próbkowania
sygnału wynosi 60 MHz [9, 10]. Na rysunkach 8 i 9 przedstawiono odpowiednio spektrogram
sygnału i wynik ostatniego punktu algorytmu tj. filtracji dopasowanej. Sam sygnał
charakteryzuje się wysokim poziomem szumów i jest prawie niewidoczny. W wyniku
działania algorytmu wykryto sygnał z stosunkiem sygnał-szum na poziomie około 20dB.
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

11
Drugim użytym sygnałem jest sygnał radarowy z satelity TerraSAR-X. Satelita zaczął swoja
misję w 2007 roku i działa do dziś. Sygnał nadawany w paśmie X zarejestrowano w 2011
roku. Również jest to sygnał LFM. Sygnał próbkowano z częstotliwością 60 MHz [5, 6, 7].
Rysunek 10 przedstawia spektrogram sygnału z wyraźnie zaznaczonymi momentami
transmisji. W wyniku filtracji dopasowanej (rysunek 11) oprócz podstawowego sygnału
(SNR~30dB) wykryto jego słabsze, wcześniej niewidoczne, sygnały pochodzące z przeciwnej
polaryzacji na poziomie około 10dB.
Ostatnim użytym sygnałem jest sygnał nadawany przez radar do kontrolowania
przestrzeni powietrznej z lotniska na Okęciu w Warszawie (ASR-10SS) zarejestrowanym
przy pomocy wektorowego analizatora sygnałowego (VSA- ang Vector Signal Analyzer).
Częstotliwość próbkowania sygnału wynosi 40 MHz [11, 13]. Zastosowano w nim modulację
NLFM wyraźnie widoczną na spektrogramie (rysunek 12). Po filtracji dopasowanej (rysunek 13)
SNR wyniósł około 24 dB dla pierwszych czterech impulsów sondujących i tylko około 7 dB dla
następnej czwórki. Wynika to ze zmiany częstotliwości nośnej sygnału co każde 4 impulsy.
Rysunek 8 Spektrogram sygnału z satelity EnviSAT
Rysunek 9 Filtracja dopasowana sygnału z satelity EnviSAT
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

12
Rysunek 10 Spektrogram sygnału z satelity TerraSAR-X
Rysunek 11 Filtracja dopasowana sygnału z satelity TerraSAR-X
Rysunek 12 Spektrogram sygnału z radaru ASR-10SS
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

13
Rysunek 13 Filtracja dopasowana sygnału z radaru ASR-10SS
7. Podsumowanie
W artykule przedstawiono szczegółowy opis algorytmu do detekcji i estymacji impulsowych
sygnałów radarowych z modulacją częstotliwości. Przedstawione wyniki wykazują poprawność
działania zaproponowanego algorytmu zarówno dla sygnałów modulowanych liniowo i nieliniowo w
częstotliwości. W pracy wykazano również, że algorytm z powodzeniem pozwala na detekcję mocno
zaszumionych sygnałów i poprawną estymację ich parametry. Przy użyciu zaprezentowanego
rozwiązania można z dużą dokładnością określić takie cechy sygnału jak: czas trwania impulsu
radarowego, częstotliwość powtarzania impulsów (PRF), współczynniki wielomianu modulującego
częstotliwość sygnału. Zaproponowany algorytm może być w przyszłości z powodzeniem
wykorzystywany do detekcji i analizy sygnałów współczesnych systemów ELINT, jak również
radarów pasywnych wykorzystujących jako źródła oświetlenia impulsowe stacje radarowe. W obecnej
formie realizacji algorytm charakteryzuje się stosunkowo dużą złożonością obliczeniową. W
przyszłości autorzy zamierzają skupić swoją uwagę nad optymalizacją związaną ze zmniejszeniem
nakładu obliczeniowego w celu implementacji zaproponowanego algorytmu w systemach czasu
rzeczywistego.
Literatura
[1] Adamy, D. “EW 101: A First Course in Electronic Warfare” Norwood, MA: Artech
House, 2001.
[2] Avionics Department of NAWCWD, “Electronic Warfare and Radar Systems
Engineering Handbook”, Naval Air Warfare Center Weapons Division, Point Mugu,
California 93042, USA, Fourth Edition, 2013.
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

14
[3] Boashash B., Ghafoor, M., "Time frequency signal analysis and processing toolbox
update 6.2: An enhanced research platform with new advanced high-resolution
TFDs," Systems, Signal Processing and their Applications (WoSSPA), 2013 8th
International Workshop on , vol., no., pp.442,451, 12-15 May 2013.
[4] Chi-Hao Cheng; Lin, D.M.; Liou, L.L.; Tsui, J.B., "Electronic Warfare Receiver with
Multiple FFT Frame Sizes," IEEE Transactions on Aerospace and Electronic Systems,
vol.48, no.4, pp.3318,3330, October 2012.
[5] P. Krysik, Ł. Maślikowski, P. Samczyński, A. Kurowska, “Bistatic Ground-Based
Passive SAR Imaging Using TerraSAR-X as an Illuminator of Opportunity”, in 2013
International Conference on Radar,9-12 September 2013, Adelaide, Australia, ISBN
978-1-4673-5177-5, pp. 39-42.
[6] K. Kulpa, P. Samczynski, M. Malanowski, Ł. Maslikowski, V. Kubica: “The use of
CLEAN processing for passive SAR image creation”, in Proc. of 2013 IEEE Radar
Conference, 29 April-3 May 2013, pp.1-6. w Ottawa, Ontario, Canada.
[7] L. Maślikowski , P. Samczyński, and M. K. Bączyk: “X-band receiver for passive
imaging based on TerraSar-X illuminator,” in Proceedings of 2013 Signal Processing
Symposium (SPS) / Kulpa Krzysztof [i in.] ( red. ), 5–7 June 2013, Jachranka, Poland
[8] P. Samczyński, "Passive Radars Using Non-cooperative Ground- and Satellite-based
Pulse Radars as Illuminators", Warszawa 2013.
[9] P. Samczyński, K. Kulpa, “Passive SAR imaging using a satellite pulsed radar as an
illuminator of opportunity”, in Proc. of IRS 2012, May 23-25, 2012, Warsaw, Poland,
pp. 157-161.
[10] P. Samczyński, K. Kulpa, Ł. Maślikowski, D. Gromek, and V. Kubica: “Challenges
in signal processing for passive SAR radars utilizing non-cooperative space-based
pulse radars as illuminators,” in Proceedings of NATO Specialist Meeting SET-187,
Szczecin, Poland, 13–14 May 2013, p. CD.
[11] P. Samczyński, K. Kulpa, M. Malanowski, M. Wilkowski: „Radar bistatyczny
z niekooperującym oświetlaczem – potencjał i ograniczenia”, w: Urządzenia i
Systemy Radioelektroniczne, wybrane problemy 2 / Kawalec Adam red., 2013,
Wojskowa Akademia Techniczna.
[12] P. Samczyński, K. Kulpa, M. Malanowski, P. Krysik, Ł. Maślikowski: „Trial Results
on Passive SAR Measurement using the Envisat-1 Satellite as an Illuminator of
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

15
Opportunity” – w Proceedings on EuSAR 2012 – 9th European Conference on
Synthetic Aperture Radar, April 23-26, 2012, Nurnberg, Germany, pp. 291-294.
[13] P. Samczyński, M. Wilkowski K. Kulpa “Trial Results on Bistatic Passive Radar
Using Non-Cooperative Pulse Radar as Illuminator of Opportunity”, in INTL –
International Journal of Electronics and Telecommunications 2012, Vol. 58, No 2, 04
July 2012, pp. 171–176.
[14] P. Samczyński, “Extended Generalized Chirp Transform for signal parameter
estimation in bistatic passive pulse radars”, in Proceedings of 14th International
Radar Symposium 2013, vol.1, pp. 155-160, 19-21 June 2013, Dresden, Germany.
[15] M. I. Skolnik, "Radar Handbook 3rd edition" 2008.
[16] T. P. Zieliński, "Cyfrowe przetwarzanie sygnałów od teorii do zastosowań",
Warszawa 2005.
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23

16
DETECTION AND ESTIMATION OF RADAR SIGNAL PARAMETERS
USING METHODS OF TIME-FREQUENCY ANLYSIS
Abstract. The paper presents novel algorithm dedicated for detection and parameters
estimation of pulse radar signals with linear and non-linear frequency modulations (LFM and
NLFM). The lack of a priori knowledge about signal characteristics (e.g. carrier frequency,
pulse repetition frequency (PRF), model of waveform – LFM or NLFM, coefficients of signal
polynomial phase, etc.) are the main advantages of proposed algorithm. The proposed method
has been successfully verified using both, simulated and real radar signals. Examples of signal
detection and unknown parameter estimation of hitchhiked from air traffic control (ATC)
radar ASR-10SS, and space-based radars (EnviSAT and TerraSAR-X) signals are presented.
Key words: detection, estimation, radar signals, time-frequency analysis
Pobrano z http://repo.pw.edu.pl / Downloaded from Repository of Warsaw University of Technology 2021-11-23