control analÓgico iisidrolazaro.com/wp-content/uploads/2019/04/... · si el segundo elemento...
TRANSCRIPT

MODELADO MATEMÁTICOS DE
SISTEMAS DE CONTROL
Unidad II
CONTROL ANALÓGICO I

Modelado de sistemas
Con la finalidad de diseñar y analizar el
comportamiento dinámico de un sistema
físico, es necesario obtener modelos
matemáticos cuantitativos de ellos.
Ejemplos de sistemas mecánicos

Modelado Cont.
Ejemplos de sistemas

Modelado Cont.

La mayoría de los sistemas de interés en
el área de control son de naturaleza
dinámica, la forma general de una
ecuación diferencial lineal de orden n es:
Donde:
u es la entrada del sistema
y es la salida del sistema
1 1
1 0 1 01 1
( ) ( ) ( ) ( )... ( ) .. ( )
n n m m
n n m mn n m m
d y t d y t d u t d u ta a a y t b b b u t
dt dt dt dt

Representación
Además
a0,a1,…,an y b0, b1,…,bm son constantes o
funciones del tiempo.
1 1
1 0 1 0... ...n n m m
n n m ma y a y a y b u b u b u

Tipos de sistemas
Para los sistemas físicos , además:
Si los coeficientes son constantes, se trata de
sistemas lineales invariantes en el tiempo
(SLIT), por ejemplo: redes eléctricas, sistemas
de suspensión de automóviles, motores
eléctricos, etc.
Si los coeficientes son variables, se les llama
sistemas variantes en el tiempo (SLVT), como
ejemplo tenemos: aviones, hornos, cohetes,
etc.
n m

Ejemplos
Analice cada ecuación diferencial y
determine tipo de sistema al que
pertenece.

FUNCION DE TRANSFERENCIA
La función de transferencia de un sistema se define como la relación entre la
transformada de Laplace de la variable de salida y la transformada de Laplace
de la variable de entrada, suponiendo que todas las condiciones iniciales se
hacen igual a cero.
L( ) ( )
L( ) ( )
y Y s
u U s
Ec. Diferencial Ec. Algebraica
Dominio del tiempo Dominio de la frecuencia
L
1L
1
1 0
1
1 0
...( )
( ) ...
m m
m m
n n
n n
b s b s bY sn m
U s a s a s a

De hecho, la transformada de Laplace permite resolver ecuaciones diferenciales lineales mediante la transformación en ecuaciones algebraicas con lo cual se facilita su estudio.
Una vez que se ha estudiado el comportamiento de los sistemas dinámicos, se puede proceder a diseñar y analizar los sistemas de control de manera simple.
¿Por qué Transformada de
Laplace?

Transformada de Laplace de
funciones básicas
Función escalón unitario.
Aplicando la definición de transformada
de Laplace𝐹(𝑠) =
0
∞
𝑓(𝑡)𝑒−𝑠𝑡𝑑𝑡
𝑓 𝑡 = 1 𝑡 > 00 𝑝𝑎𝑟𝑎 𝑡 < 0
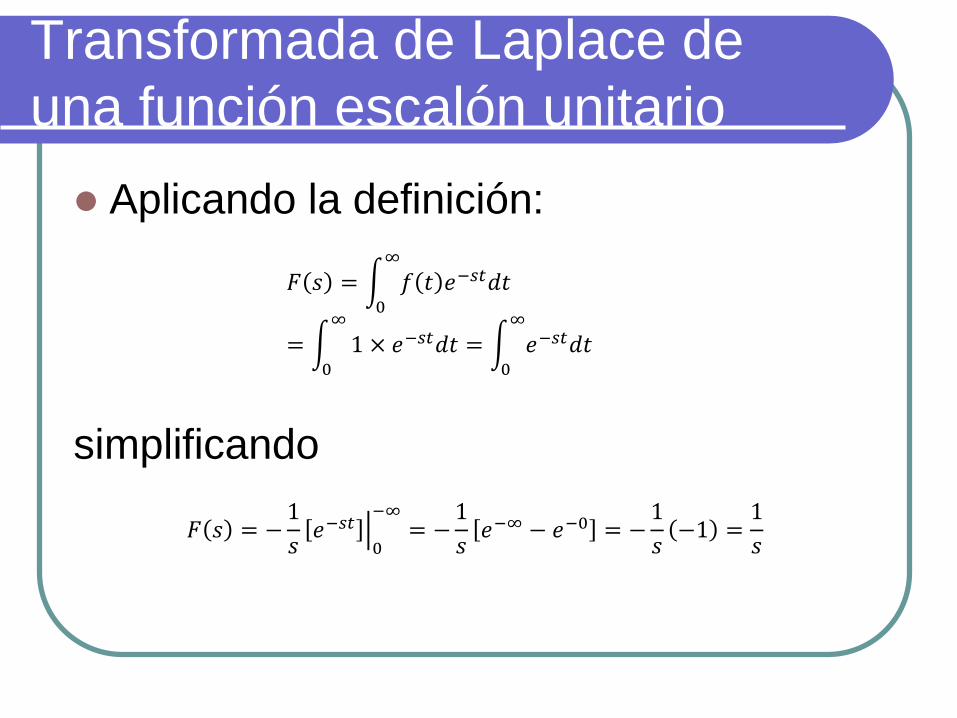
Transformada de Laplace de
una función escalón unitario
Aplicando la definición:
simplificando
𝐹 𝑠 = 0
∞
𝑓 𝑡 𝑒−𝑠𝑡𝑑𝑡
= 0
∞
1 × 𝑒−𝑠𝑡𝑑𝑡 = 0
∞
𝑒−𝑠𝑡𝑑𝑡
𝐹 𝑠 = −1
𝑠 𝑒−𝑠𝑡
0
−∞= −
1
𝑠𝑒−∞ − 𝑒−0 = −
1
𝑠−1 =
1
𝑠

Ejemplos: Obtención de función
de transferencia
Obtener la función de transferencia de
los siguientes sistemas así como los
polos y ceros de la misma.

OBTENCIÓN DE F.T DE
SISTEMAS
Considere un circuito eléctrico RC de la figura 2.3, aplique las leyes de voltajes
de kirchhoff para obtener la ecuación diferencial que rige la dinámica del
sistema y a partir de esta determine la función de transferencia del circuito
considerando como salida Vo(t) y como entrada Vi(t).
Vi (t)
+
-
R
Ci(t) Vo(t)
+
-
Aplicando la ley de voltajes de Kirchhoff
0( ) ( ) ( ) 0iV t i t R V t
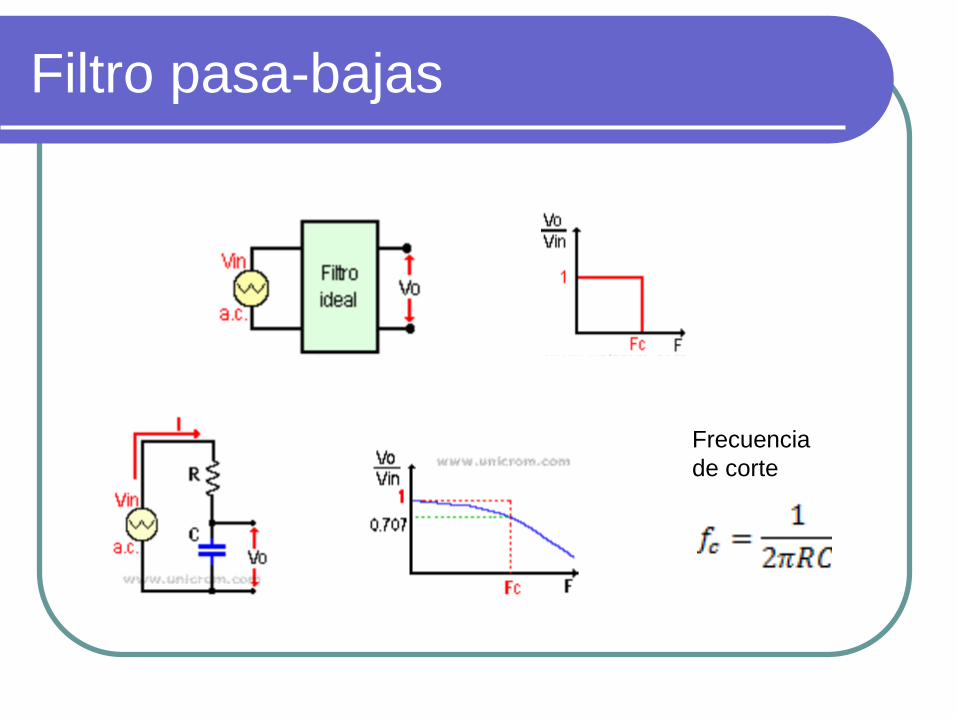
Filtro pasa-bajas
Frecuencia
de corte

Además
0
1( ) ( )V t i t dt
C 0 ( )
( )dV t
i t Cdt
Sustituyendo las ecuaciones anteriores en la primera
00
( )( ) ( ) 0 i
dV tV t RC V t
dt
00
( )( ) ( ) i
dV tRC V t V t
dt

Aplicando
0 0( ) ( ) ( ) iE s RCsE s E s
0 ( ) 1
( ) 1i
E s
E s RCs
1s
RC
Factorizando y reacomodando
Obsérvese que el polo del sistema está localizado en.
L

Función de Transferencia de
Elementos en Cascada
Se dice que dos elementos están en
cascada, cuando la salida del primero
corresponde a la entrada del segundo.
Hay dos casos:
1. Si los elementos no se cargan.
2. Si el segundo elemento produce un
efecto de carga sobre el primero, es
decir, si el segundo elemento toma
cierta cantidad de potencia del primero.

En el primer caso se puede obtener una
función de transferencia del sistema
simplemente eliminando la salida y
entrada intermedias.

Si el segundo elemento no carga al
primero, obtenemos
3 3 2
2 1
1 2 1
X s X s X sG s G s G s
X s X s X s

Ejemplo
Sea el siguiente sistema eléctrico en
cascada mostrado en la figura, obtener
la función de transferencia .0 ( )
( )i
V s
V s

Diagramas de bloques
Esta representación gráfica permite
describir de manera clara el
funcionamiento de un sistema real
(amplificadores, control de motores,
circuitos eléctricos, servomecanismo,
hornos, etc.), debido a que muestra
como se realiza el flujo de señales
dentro del mismo.

Elementos básicos
Punto de suma: Indica la suma o resta de señales.
Puntos de toma o derivación: Se emplea para indicar que alguna
señal sale
a diferentes lugares.
+
-
+G(s)
C(s)R(s)
R2(s)
R1(s)
R3(s)
C(s)=R1(s)+ R2(s)-R3(s)
Y(s)
Y(s)
Y(s)
Y(s)
a) b) c)
a) diagrama de bloque b) punto de suma c) punto de toma

Reglas para reducir diagramas de
bloques
Una regla para simplificar un diagrama de bloques consiste en desplazar los puntos de toma hacia la salida y los puntos de suma hacia la entrada e ir reduciendo los lazos internos de retroalimentación aplicando las reglas de las tablas siguientes.
En toda simplificación de diagrama de bloques se deben cumplir las siguientes reglas básicas.
El producto de F.T. a lo largo de un trayecto desde la entrada hasta la salida (siguiendo el sentido de las flechas) debe permanecer constante.
El producto de F.T. a lo largo de un lazo también debe permanecer constante.



Ejemplo
( )
( )
Y s
R s
Y(s)
R(s)
+
-
+
-
-
1( )G s 2 ( )G s 3( )G s
1( )H s
2 ( )H s
Reduzca el diagrama de bloques mostrado en la figura
y obtenga la función de transferencia

Usando regla 6
Y(s)R(s)
+
-
+
-
-
1
1
( )G s
1( )G s
1( )H s
2 ( )G s 3( )G s
2 ( )H s

Ahora a partir de la regla 9 y 4 obtenemos el sistema mostrado
Y(s)R(s) +
-
+
-
-
1
1
( )
( )
H s
G s
1 2( ) ( )G s G s3( )G s
2 ( )H s3
1
( )G s
De igual forma usando la regla 4 al esquema de la figura obtenemos
Y(s)R(s) +
-
+
-
-
1
1
( )
( )
H s
G s
1 2 3( ) ( ) ( )G s G s G s
2
3
( )
( )
H s
G s

Por regla 13 y 2 aplicada a la figura obtenemos
Y(s)R(s) +
-
+-
2
3
( )
( )
H s
G s
1 2 3
11 2 3
1
( ) ( ) ( )
( )1 ( ) ( ) ( )
( )
G s G s G s
H sG s G s G s
G s
Simplificando vía regla 13 el sistema de la figura llegamos al esquema
mostrado
Y(s)R(s) +
-
1 2 3
2 3 1
1 2 3 2
2 3 1 3
( ) ( ) ( )
1 ( ) ( ) ( )
( ) ( ) ( ) ( )
1 ( ) ( ) ( ) ( )
G s G s G s
G s G s H s
G s G s G s H s
G s G s H s G s

Simplificando
Y(s)R(s)1 2 3
2 3 1 1 2 2 1 2 3
( ) ( ) ( )
1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
G s G s G s
G s G s H s G s G s H s G s G s G s

Ejemplo
Reduzca el diagrama de bloques
mostrado en la figura y obtenga la
función de transferencia
Y(s)R(s) +
-
++
8 2 10
s
s s
1
1s
1
s
s
-

solución
Por regla #9
Y(s)R(s) +
-
++
8 2 10
s
s s
1
1s
1
s
s
-
2 10s s
s

Por regla #4 y #6
Y(s)R(s)
+
-
++
1
8
2 10
s
s s
1
s
s
-
2 10
( 1)
s s
s s
8

Por Regla #1
Y(s)R(s) +
-
+
+
2
8
10
s
s s
8 8
s
s
-
2 10
( 1)
s s
s s

Solución Cont.
Por regla #13
Y(s)R(s) +
-
+
2
8
10
s
s s 1
8 8
s
s
-
2 10
( 1)
s s
s s

Solución Cont.
Por regla #13
Y(s)R(s)
-
+ 2
2
2
8
10
8 101
10 ( 1)
s
s s
s s s
s s s s
18 8
s
s

Y(s)R(s)
-
+
2
(8 8)
10 9
s s
s s s
9 8
8 8
s
s
Y(s)R(s)
2
2
(8 8)
10 9
(8 8)1
10 9
s s
s s s
s s
s s s
9 8
8 8
s
s

Solución
Simplificando
Y(s)R(s)
2
9 8
10 9 8 1
s s
s s s s s

Gráficos de flujo de señal
Nodo.- Es un punto de entrada o salida que representa
una variable o señal.
Nodo fuente.- Este representa las variables
independientes del sistema y es un nodo en donde
solo existen ramas de salida.
Nodo sumidero.- Representa las variables
dependientes del sistema y es un nodo en donde
solamente hay ramas de entrada.
Rama.- Línea con dirección y sentido que conecta dos
nodos.
Transmitancia.- Es la ganancia de una rama.
Camino o trayectoria.- Es un conexión continua de
ramas de un nodo a otro, en una dirección acorde con
el sentido de las flechas de las ramas.
Trayecto o camino directo.-Es una trayectoria que
conecta a un nodo fuente con un nodo sumidero.
Ganancia del trayecto.- Es el producto de las
transmitancias de todas las ramas del trayecto.
Lazo.- Es un camino o trayectoria cerrada.
Ganancia de lazo.- Es el producto de las transmitancias
de todas las ramas del lazo.
Lazo disjunto.- Es un lazo que no tiene ningún nodo en
común con otro lazo, es decir, no se tocan.

Semejanzas entre gráficos de flujo de señal y diagramas
de bloques
Gráfico de flujo de señal Diagrama de bloques
Nodo de entrada Señal de entrada
Nodo de salida Señal de salida
rama bloque
Transmitancia Ganancia del bloque
Nodo señal
C(s)R(s) +
-
+
-1( )G s 2 ( )G s 3( )G s
1( )H s
+ -C(s)
R(s)1 1 G1(s) G2(s) G3(s) 1
-1
-H2(s)
1L
2L
3L

Fórmula de ganancia de Mason
La fórmula de Mason establece que la ganancia de un
sistema esta dada por
def
fed
bc
cb
a
a LLLLLL1
a
aL
Donde
k = número de trayectos directos.
Pk = Ganancia de trayectoria de la k-ésima trayectoria directa.
Suma de todas las ganancias de lazo individuales.
1k k
k
P P
bc
cbLL
def
fed LLL
Suma de los productos de ganancias de todas las combinaciones posibles de dos lazos disjuntos.
Suma de los productos de ganancias de todas las combinaciones posibles de tres lazos disjuntos.
k = Cofactor del determinante de la k-ésima trayectoria directa del gráfico con los lazos que tocan la
trayectoria directa k-ésima eliminados, es decir, el cofactor se obtiene apartir de al eliminar o hacer
cero todos los lazos que tocan la trayectoria directa Pk.

Ejemplo
Identificando las trayectorias directas, tenemos
En este caso hay tres lazos individuales
Como puede observarse, todos los lazos tienen nodos en común, por lo
tanto no hay lazos disjuntos.
C(s)R(s)
1 1 G1(s) G2(s) G3(s) 1
-1
-H2(s)
1L
2L
3L
1 1 2 3( ) ( ) ( )P G s G s G s
1 1 2 1( ) ( ) ( )L G s G s H s
2 2 3( ) ( )L G s G s
3 1 2 3 2( ) ( ) ( ) ( )L G s G s G s H s

Ejemplo cont.
Calculando el determinante del gráfico
Sustituyendo valores
Como solo hay un trayecto directo, calculamos el único cofactor, tenemos:
De manera tal que, la ganancia total o función de transferencia es:
1 2 31 L L L
1 2 1 2 3 1 2 3 21 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )G s G s H s G s G s G s G s G s H s
1 1
1 2 31 1
1 2 1 2 3 1 2 3 2
( ) ( ) ( )( )
( ) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
G s G s G sPC sP
R s G s G s H s G s G s G s G s G s H s

MATRIZ DE TRANSFERENCIA
1 1
2 2
( ) ( )
( ) ( )( ) ( )
( ) ( )
m r
y t u t
y t u ty t U t
y t u t
( ) ( ) ( )Y s G s U s
Para un sistema MIMO, se tienen r entradas u1, u2,.., ur y m
salidas y1, y2,…,ym definidos como
La matriz de transferencia G(s) relaciona la salida Y(s) con
la entrada U(s), o sea
Donde
U(s) vector de entradas de orden r
Y(s) vector de salida de orden m
G(s) matriz de transferencia de orden mxr
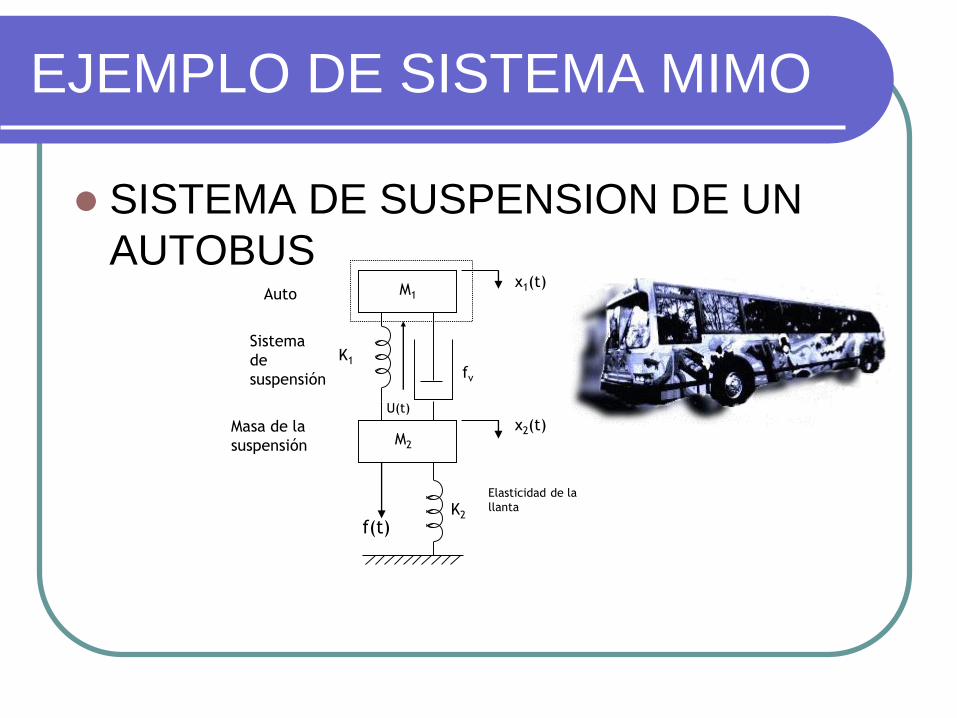
EJEMPLO DE SISTEMA MIMO
SISTEMA DE SUSPENSION DE UN
AUTOBUS
f(t)
x1(t)
fv
M1
M2
x2(t)
K1
K2
Auto
Sistema
de
suspensión
Elasticidad de la
llanta
Masa de la
suspensión
U(t)

Modelos matemáticos de sistemas físicos y conceptos de
no linealidades
Durante el proceso de diseño de control
hay que resolver la siguiente disyuntiva.
Simplicidad vs. Exactitud

Simplicidad vs. Exactitud
Que aspectos debemos considerar para
modelar un sistema?

Simplicidad vs. Exactitud
Modelado de un Sebway

Simplicidad vs. Exactitud
Modelo de un Sebway
Se debe establecer un compromiso
entre la simplicidad y la exactitud en el
resultado del análisis.

Prototipo de un Sebway

Modelo matemático del prototipo

Al plantear un modelo matemático
debemos decidir entre:
Lineal vs No lineal
f f
m m
x x
KkKk
K depende de x
a) b)

Ventajas de la linealidad
Aplicación del principio de
superposición.
y(t)K
y(t)
u(t)u(t)
K
u1(t)K
K
u2(t)
u2(t)
u1(t)y1(t)
y2(t)
y(t)=y1(t)+y2(t)

Ejemplo de no linealidades
y(t)
u(t)
u(t)
y(t) y(t)
u(t) u(t)
y(t)
a)
Saturación
b) Saturación de
amplificador
c) Zona muerta d) On- Off

Sistemas con parámetros concentrados
vs distribuidos
f
m
x
K
a) b)
f
m
x
K
mr

Sistemas Lineales Invariantes en el Tiempo vs Sistemas
Lineales Variantes en el Tiempo
SLIT SLVT
f
m
x
K
a) b)
f
m(t)
x
K

Clasificación de los sistemas de
control
Incrementa la facilidad de análisis Incremento de realismo
Estocásticos Dinámicos
EstocásticosDeterminísticos
Parámetros concentrados Parámetros distribuidos
Lineales No lineales
Coeficientes constantes Coeficientes variables
Continuo Discreto
Primer orden Segundo ordenOrden n
Sistemas acoplados
SLIT SLVT

Modelado de Sistemas de nivel de
líquido
1
( )( ) ( )
( )
( )
( )( ) ( )
i o
o
i
dh tq t q t C
dt
h tR
q t
dh tq t h t C
R dt

Resistencia
Resistencia (R).- Se define la resistencia
al flujo de líquido como la razón de la
variación de nivel a la velocidad del
caudal producido por éste.
Sí el número de Reynolds es menor de
2000 el flujo será laminar y si es mayor
de 4000 el flujo será turbulento,
hR
q

Resistencia Lineal y No Lineal
Flujo laminar vs flujo turbulento
q
h
q
h
q
h
q
h
q k hh
Rq

Capacitancia
Esta se define como la relación del
cambio de volumen de líquido contenido
a la variación de nivel.
Donde
v – volumen en m3
A – área en m2
h – altura en m
v dvC
h dh
h
r
2 A r
h
A
h
Área no constante
a) b)

Sistemas de nível de líquido
1
1
1
1
1 1
Aplicando la transformada de Laplace
( )( ) ( )
( ) ( ) ( )
( ) ( )( )
( )
( )
i
i
dh tq t h t C
R dt
Qi s H s CsH sR
Qi s H s CsR
H s R
Q s CRsCsR

Sistemas de Nivel de Líquido
C
R
Válvula de control
Válvula de carga
iQ q
H h
0Q q

Modelado de sistemas eléctricos
Las leyes básicas que rigen los circuitos eléctricos son las leyes de
corriente y voltaje de kirchhoff. Los elementos de un circuito incluyen
resistores, capacitares, inductores, fuentes de voltaje y de corriente.
Para obtener la función de transferencia de los circuitos eléctricos es
conveniente tratar los elementos pasivos como impedancias complejas.
C
+ Vc -0
1( ) ( )
t
v t i t dtC
( )
( )dv t
i t Cdt
1
CsCs
LiL( )
( )di t
V t Ldt
0
1( ) ( )
t
i t v t dtL
Ls 1
Ls
R( ) ( )v t Ri t
( )( )
v ti t
R R 1
GR
Componente Voltaje Corriente Impedancia
Z(s)
Admitancia
Y(s)

EJEMPLO DE MODELADO DE
CIRCUITOS ELÉCTRICOS
Encontrar la función de transferencia
para el circuito mostrado en la figura.
LiLR
Vi(t)+
-V0(t)+
-C Vc
+
-
Transformando los elementos en impedancias complejas
LsI(s)
Vi(s)+
-V0(s)+
-Cs
R
1
0
1( )
1( )i
V s Cs
V sR Ls
Cs
0
2
( ) 1
( ) 1
i
V s
V s LCs RCs
Simplificando

Sistemas mecánicos
Los sistemas mecánicos son aquellos que están compuestos por
masas que al aplicárseles una fuerza se ponen en movimiento,
dos elementos adicionales como son el resorte y el
amortiguador, son empleados en estos sistemas para
representar los efectos de torsión y la fricción que puede
presentarse.
Algunos ejemplos de estos sistemas son:
Grúas,
Sistemas de suspensión de automóviles,
Servomecanismos
Brazos manipuladores
Sistemas de posición, etc.

Modelado de sistema mecánicos
Sistema de suspensión de un
automóvil
2
2
( ) ( )( ) ( ) v
F ma
dx t d x tf t Kx t f m
dt dt

Modelado cont.
2
2
2
2
2
1
Aplicando la transformada de Laplace a cada término
(considerando condiciones iniciales igual a cero)
( ) ( )( ) - ( ) -
( ) - ( ) - ( ) ( )
( ) ( )
( )
( )
v
v
v
v
dx t d x tf t Kx t f m
dt dt
F s KX s f sX s ms X s
F s X s ms f s K
X s
F s ms f s K

Modelado usando impedancias
mecánicas
En general los sistemas de control contienen componentes tanto
mecánicos como eléctricos. Desde el punto de vista de su modelo
matemático, la descripción de los elementos mecánicos y eléctricos es
análoga.
( )
( )
F s
X s
f(t)
x(t)
M
Masa
wM
g 2
2( )
d xf t M
dt 2Ms
f(t)
K
Resorte
x(t) ( ) ( )f t Kx tK
f(t)
x(t)
fv
Amortiguador
( )( ) v
dx tf t f
dt
vf s
Impedancia
Es la propiedad que tiene un
elemento para almacenar
energía cinética debido a su
movimiento de traslación.
Componente Definición Relación
Su análogo es la inductancia
Es un elemento que tiene la
propiedad de almacenar
energía potencial, su análogo
es un capacitor.
Este elemento representa la
fuerza de fricción viscosa
entre una fuerza aplicada y
la velocidad.

Considera el sistema masa-resorte-fricción mostrado en la figura,
donde K es la constante del resorte, fv la fricción viscosa y M la masa
del cuerpo. Obtenga la función de transferencia y .( )
( )
X s
F s
( )
( )
V s
F s
K
M f(t)
x(t)
fv
v(t)
Aplicando el concepto de las impedancias mecánicas bajo
la siguiente estructura:
Suma de impedancias mecanicas Suma de fuerzas aplicadasX s

De aquí, tenemos:
Para el caso de dos grados de libertad:
1 1 2
1 2
Suma de impedancias mecánicas Suma de impedancias mecánica mutuas
conectadas al movimiento de x entre x y x
Suma de impedancias mecánica mutuas Suma de impedancias me
entre x y x
1
2
( )
( )
1
22
Suma de fuerzas
aplicadas a x
Suma de fuerzas cánicas
aplicadas a xconectadas al movimiento de x
x s
x s
2( ) ( ) vF s X s Ms K f s
2
( ) 1
( ) v
X s
F s Ms f s K

Modelado de sistemas mecánicos
rotacionales
En el caso de los sistemas mecánicos de rotación, los cuerpos
experimentan un movimiento de rotación en lugar de uno de
traslación. Estos sistemas tienen como elementos los mostrados
( )
( )
T s
sT( )t (t)
J
Inercia
2
2
( )( )
d tT t J
dt
2Js
K
T( )t (t)
Resorte
torsional
( ) ( )T t K tK
( )( ) v
d tT t f
dt
vf s
Amortiguador
T( )t (t)
fv
Impedancia Componente Definición Relación
Es la propiedad que tiene un
elemento de almacenar
energía cinética del
movimiento de rotación.
Es un elemento que
representa la torsión de una
varilla o eje cuando está
sometido a un par aplicado.
Este elemento representa la
fuerza de fricción viscosa
entre el par aplicado y la
velocidad angular.

Modelado de sistemas mecánicos
rotacionales
Una de las herramientas básicas que se utilizan para describir la dinámica de los sistemas mecánicos rotacionales son las leyes de Newton, la cual establece que: “La suma algebraica de los momentos o pares aplicados alrededor de un eje fijo es igual al producto de la inercia por la aceleración angular alrededor del eje”. Esto puede expresarse mediante la siguiente ecuación.
Donde
J es la inercia
es la aceleración angular
Pares J

Ejemplo
La figura muestra la representación de un motor que está sujeto a una flecha
flexible, la fricción de los cojinetes se representa por medio de una constante.
Determinar la función de transferencia .T ( )m (t)mT
Cojinetes
Jm
( )
m
s
T s
primero se realiza una representación esquemática del mismo, empleando los elementos
de la tabla
fv
K
Jm
T ( )m t (t)

Ejemplo
El análisis del sistema de la figura se
realiza a partir del diagrama de cuerpo
libre.
( )s
T ( )m s 2
mJ s s
vf s s
K s
Jm
2( ) ( )m v mT s K s f s s J s s
Aplicando suma de pares
2 ( )m v mJ s f s K s T s
Obteniendo la F.T.
Suma de impedancias mecánicasSuma de pares aplicados
conectadas al movimiento en s
s
Se observa que

Tren de engranes
Cuando se utilizan sistemas mecánicos rotacionales tales como motores
o generadores, es común que se presente la necesidad de requerir un
par diferente al que se genera para aplicarlo a la carga, en esta
situación suelen emplearse los trenes de engranes.
2 1 1
1 2 2
( )
( )
t r N
t r N
2 1 2
1 2 1
( ) ( )
( ) ( )
T t t N
T t t N
N2
N1
2 ( )T t1( )T t
N1
N21( )t 2 ( )t

Aplicaciones

Aplicaciones: Barreras para
estacionamientos
BA 1200 ALTA VELOCIDAD: Modelo de alta velocidad y uso intensivo Tiempo
de apertura y cierre: 1,2 segundos. El mecanismo posee una transmisión de
engranajes que optimiza el funcionamiento del motor logrando una mayor
velocidad en el ciclo de maniobra. Este tipo de transmisión simple asegura una
vida útil muy prolongada del equipo. Esta diseñada para soportar lanzas de hasta
3 metros, de sección redonda o rectangular. El motor que acciona la barrera tiene
una potencia de 1/5 de HP

Ejemplo
Determine la función de transferencia
y . Considere que N1=10, N2=20, J = 1
kg-m2, fv = 1 N-m-s/rad y K = 2 N-m/rad.
2
1
( )s
T s
1
1
( )s
T s
fv
J
K
T1(t)
1( )t
2 ( )t
N1
N2
T2(t)
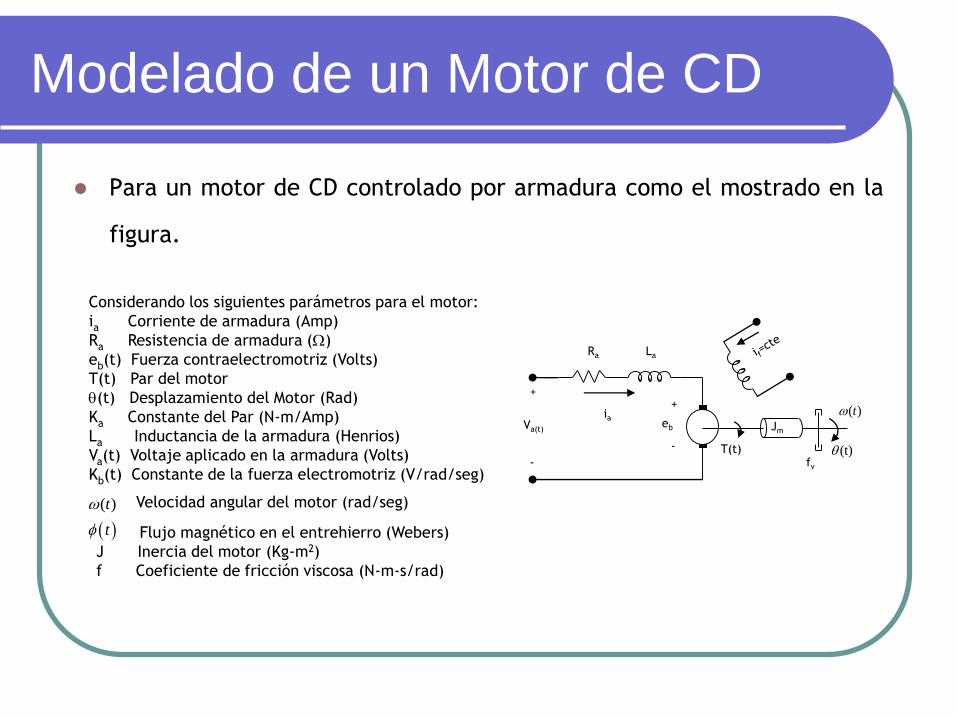
Modelado de un Motor de CD
Para un motor de CD controlado por armadura como el mostrado en la
figura.
(t)T(t)
Jm
Ra La
+
-
+
-
Va(t)eb
ia
fv
( )t
( )t
t
Considerando los siguientes parámetros para el motor:
ia Corriente de armadura (Amp)
Ra Resistencia de armadura ()
eb(t) Fuerza contraelectromotriz (Volts)
T(t) Par del motor
(t) Desplazamiento del Motor (Rad)
Ka Constante del Par (N-m/Amp)
La Inductancia de la armadura (Henrios)
Va(t) Voltaje aplicado en la armadura (Volts)
Kb(t) Constante de la fuerza electromotriz (V/rad/seg)
Velocidad angular del motor (rad/seg)
Flujo magnético en el entrehierro (Webers)
J Inercia del motor (Kg-m2)
f Coeficiente de fricción viscosa (N-m-s/rad)

( )( ) ( ) ( ) 0a
a a a a b
di tV t R i t L e t
dt
( )( ) ( ) ( )a
a a a a b
di tV t R i t L e t
dt
( ) ( )b be t K t
Modelado de la parte eléctrica.
Por ley de voltajes de kirchhoff al circuito de armadura tenemos
Relación eléctrica-mecánica.
La fuerza contraelectromotriz eb(t) se relaciona con la velocidad con la ecuación
( ) ( ) ( )t aT t K t i t
( )a aT K i t
el par desarrollado por el motor depende de la corriente de armadura y
del flujo en el entrehierro.
Si consideramos que el flujo magnético es constante

2( ) ( )( )
d t d tT t f J
dt dt
( )( )
d tt
dt
( )( ) ( )
d tT t f t J
dt
Modelado de la parte mecánica.
En un motor de CD controlado por armadura el par producido está dado por
Si consideramos la velocidad como salida
entonces

Aplicando la transformada de Laplace a las ecuaciones
( ) ( ) ( ) ( )a a a a b aR I s L sI s E s V s
( ) ( )b bE s K s
( ) ( )a aT s K I s
( ) ( ) ( )T s Js s f s
Ia(s)
Las+Ra
Va(s) 1
-
+
Eb(s)
Ka
Ia(s) T(s)
T(s) (s)
Js+f
1
Eb(s) (s)Kb

Representación en diagrama de bloques
Ia(s)Va(s)
-
+
Eb(s)
Las+Ra
1
Kb
Ka
T(s)(s)
Js+f
1
Simplificando
( )
( )
a
a a a a b
Ks
V s L s R Js f K K

Función de transferencia de un
servomecanismo
Determinar la función de transferencia de un
motor de Cd con carga .

Calculando la impedancia mecánica
equivalente vista en la armadura (eje
fuente).
Sustituyendo valores

De la curva de velocidad-Par,
determinamos las constantes.

Del modelo del motor de CD
Sustituyendo valores

Para encontrar la FT
como
Entonces
Así

Modelado de Motor de CD
controlado por Campo
Determine la función de transferencia del
sistema dada por .( )
( )
f
s
V s
Considerando los siguientes parámetros para el motor:
If Corriente de campo (Amp)
Rf Resistencia de campo ()
T(t) Par del motor
(t) Desplazamiento del Motor (Rad)
K2 Constante del Par (N-m/Amp)
Lf Inductancia de campo (Henrios)
Vf(t) Voltaje aplicado en el devanado de campo (Volts)
( )t Velocidad angular del motor (rad/seg)
J Momento de inercia del motor (Kg-m2)
f Coeficiente de fricción viscosa (N-m-s/rad)
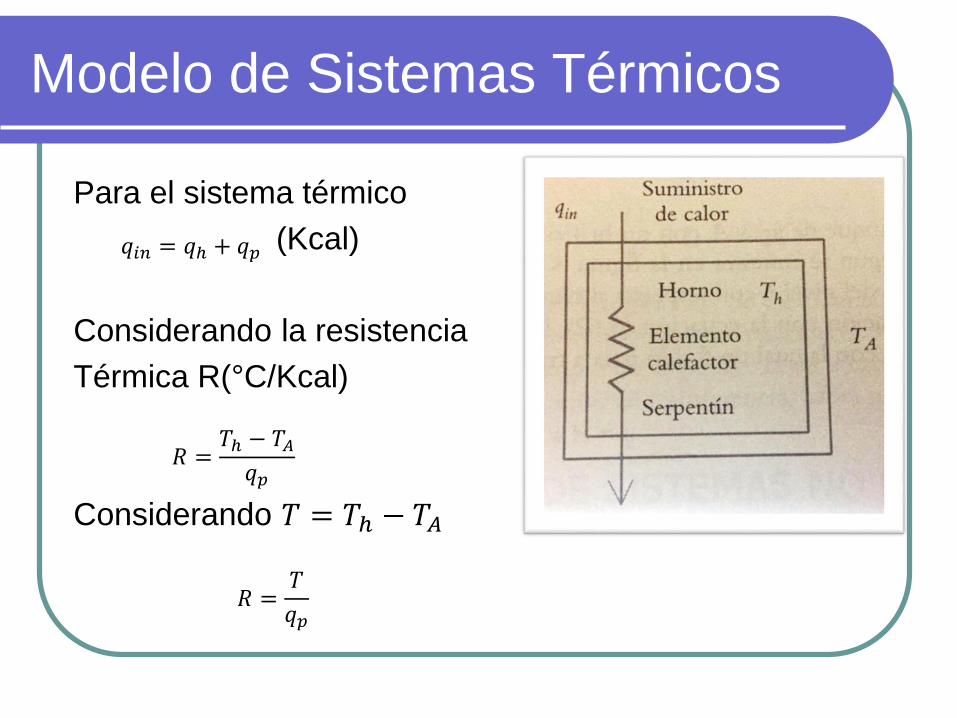
Modelo de Sistemas Térmicos
Para el sistema térmico
(Kcal)
Considerando la resistencia
Térmica R(°C/Kcal)
Considerando 𝑇 = 𝑇ℎ − 𝑇𝐴
𝑞𝑖𝑛 = 𝑞ℎ + 𝑞𝑝
𝑅 =𝑇ℎ − 𝑇𝐴
𝑞𝑝
𝑅 =𝑇
𝑞𝑝

Modelado de Sistemas Térmicos
Donde:qin =Flujo de entrada de energía calorífica (Kcal)
qh = Energía para calentar el horno (Kcal)
qp = Energía calorífica perdida (Kcal)
Tp = Temperatura del horno (°C)
TA = Temperatura del medio ambiente (°C)
Sea C la capacitancia térmica del horno (Kcal/°C), es la
propiedad de almacena calor en su interior.

El suministro de energía qh ocasionará
un incremento de temperatura T del
horno:
𝐶𝑑𝑇
𝑑𝑡= 𝑞ℎ
Y como
Entonces:
𝑞𝑖𝑛 = 𝐶𝑑𝑇
𝑑𝑡+
𝑇
𝑅
𝑞𝑝 =𝑇
𝑅
𝑞𝑖𝑛 = 𝑞ℎ + 𝑞𝑝

Por lo cual la FT es:
𝐺 𝑠 =𝑇(𝑠)
𝑄𝑖𝑛(𝑠)=
1/𝐶
𝑠 +1
𝑅𝐶

Linealización de sistemas no
lineales
En el modelado la mayoría de los
componentes y actuadores que se encuentran
en los sistemas físicos tienen características
no lineales, para evitar que se tenga un
ecuación diferencial no lineales, se debe
linealizar el sistema.

Linealización Cont
Para mostrar el proceso de linealización
supongamos que deseamos linealizar la
función f(x) alrededor del punto de operación
x0.
Usando una expansión por series de Taylor la
aproximación para f(x) está dada por:
0 0
220 0
0 2( ) ( )
1! 2!x x x x
x x x xdf d ff x f x
dx dx

Si se consideran pequeñas variaciones
alrededor del punto de operación x0, se
pueden ignorar los términos de orden
superior de la ecuación
0
0 0( ) ( )x x
dff x f x x x
dx
O bien
Por lo que0
0 0( ) ( ) ( )x x
dff x f x x x
dx
0
( )x x
dff x x
dx

Ejemplo
Considere la red no lineal mostrada en la
figura, donde , , representa la
aplicación de un generador de pequeña señal.
Determine la función de transferencia
linealizada alrededor del punto de
operación correspondiente al estado estable
del circuito.
1
2C F
2( ) Rv
Ri t e
( )( )
( )
v sG s
I s
v(t)
CR2A i(t)
iR(t)
vR
+
-

Ejemplo Cont.
Por LCK
v(t)
CR2A i(t)
iR(t)
vR
+
-
( )( ) 2 ( )R
dv tC i t i t
dt
1 ( )( ) 2 ( )
2R
dv ti t i t
dt
0( ) Rv t V v v

Entonces
Sustituyendo las ecuaciones
Considerando como función , con
donde es el punto de operación en
estado estable y aplicando la ecuación
02( )
v v
Ri t e
020 0( )12 ( )
2
v vd v ve i t
dt
2( ) vf t e 0v v v
0v
0 0
0
22 2
vv v v
v
dee e v
dv

Resolviendo para
Consideremos ahora el punto de
operación en estado estable con ,
por lo que ante la fuente de CD el
capacitor actúa como circuito abierto,
por lo tanto con .
02 v ve
0 0 0 0
0
22 2 2 2
2v
v v v v v
v
dee e v e e v
dv
0 Rv v 2Ri
( ) 0i t

Ejemplo cont
Por lo que
Y resolviendo para vR
Por lo que
2 Rv
Ri e
2ln ln Rv
Ri e
ln 2ln Rv
Ri e
ln
2
RR
iv

Como , tenemos
Sustituyendo este resultado
2Ri
0
ln 2 0.693
2 2rv v
0
0.693 0.6932 2
2 2 22v v
e e e v
022 4
v ve v

La ecuación anterior nos representa la
linealización de la función no lineal
alrededor del punto de operación
Aplicando Laplace
12 4 2 ( )
2
d vv i t
dt
14 ( )
2
d vv i t
dt
1
4 ( )2
s v s v s I s 4 2 ( )v s s I s
( ) 2
4
v s
I s s

Referencias
1.- Nise S. N., Control Systems Engineering, John Wiley & Sons, 4th Edition, 2004.
2.- Dorf B, Sistemas de Control Moderno, Pearson Prentice Hall, 10ª Edición, 2005.
3.- Navarro R, Ingeniería de Control Analógica y Digital, McGraw Hill, 1ra Edición, 2004.
4.- Ogata K., Ingeniería de Control Moderno, Pearson Prentice Hall, 4tª Edición, 2003.
5.- Sinha N. K., Control Systems, John Wiley & Sons, 2nd Edition, 1994.
6.- Lewis P. H. & Yang C., Sistemas de Control en Ingeniería,1ra Edición, Prentice Hall, 1999.
7.- D´azzo J. J., Sistemas Retroalimentados de Control, 4a edición, Paraninfo, 1989.
8.- Kuo C. B, Sistemas de Control Automático, Séptima Edición, Prentice Hall, 1996.
9.- Phillips L. Ch., Harbor R. D., Feedback Control Systems, Third Edition, Prentice Hall, 1996.