bulanik mantik yontemiyle bir servo motorun kontrolu ve geleneksel yontemlerle karsilastirilmasi the...
TRANSCRIPT

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 1/114
T.C.
MARMARA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
BULANIK MANTIK YÖNTEMİYLE BİR SERVOMOTORUN KONTROLÜ VE GELENEKSEL
YÖNTEMLERLE KARŞILAŞTIRILMASI
MEHMET AKAR
(Teknik Öğretmen)
YÜKSEK LİSANS TEZİ
ELEKTRİK EĞİTİMİ ANABİLİM DALI
DANIŞMAN
Yrd. Doç. Dr. İsmail TEMİZ
İSTANBUL 2005

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 2/114
T.C.
MARMARA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
BULANIK MANTIK YÖNTEMİYLE BİR SERVOMOTORUN KONTROLÜ VE GELENEKSEL
YÖNTEMLERLE KARŞILAŞTIRILMASI
MEHMET AKAR
(Teknik Öğretmen)
14110122003179
YÜKSEK LİSANS TEZİ
ELEKTRİK EĞİTİMİ ANABİLİM DALI
DANIŞMAN
Yrd. Doç. Dr. İsmail TEMİZ
İSTANBUL 2005
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 3/114
T.C.MARMARA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
KABUL VE ONAY BELGESİ
TEZ ADI
Mehmet AKAR’ ın ‘BULANIK MANTIK YÖNTEMİYLE BİR SERVO
MOTORUN KONTROLÜ VE GELENEKSEL YÖNTEMLERLE
KARŞILAŞTIRILMASI’ isimli Lisansüstü tez çalışması, M.Ü. Fen Bilimleri
Enstitüsü Yönetim Kurulu’nun 12.08.2005 tarih ve 2005/13-41 sayılı kararı ile
oluşturulan jüri taraf ından Elektrik Eğitimi Anabilim Dalında YÜKSEK LİSANS
Tezi olarak Kabul edilmiştir.
Danışman : Yrd. Doç. Dr. İsmail TEMİZ
Üye : Doç. Dr. Fevzi BABA
Üye : Yrd. Doç. Dr. Yaşar BİRBİR
Tezin Savunulduğu Tarih : 10.11.2005
ONAY
M.Ü. Fen Bilimleri Enstitüsü Yönetim Kurulu’nun .................. tarih
ve ...................... sayılı kararı ile Mehmet AKAR ’ın Elektrik Eğitimi Anabilim
Dalında Y.Lisans (MSc.) derecesi alması onanmıştır.
Marmara Üniversitesi
Fen Bilimleri Enstitüsü Müdürü
Prof. Dr. Adnan AYDIN

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 4/114
I
ÖNSÖZ
Teknolojinin tüm hızıyla ilerlemeye devam ettiği çağımızda kontrol
yöntemleride bu gelişmeye parellel olarak yenilenmekte ve artık insan beyni gibi
kendi kendine düşünebilen , karar verebilen algoritmalar piyasada kendine yer
bulmaktadır. Bu algoritmalardan biri olan ve ilk olarak 1974 yılında Mamdani
taraf ından buhar makinesinin denetimi amacıyla kullanılan bulanık mantık da
makinelere insanların özel verilerini işleyebilme ve onların deneyimlerinden,
önsezilerinden yararlanarak çalışabilme yeteneği verir.
Bu yüksek lisans tezinde de lisans tezinde olduğu gibi değerli vakitlerini
ayıran, yardımlarını esirgemeyen değerli hocalarımız Yrd. Doç. Dr. İsmail TEMİZ ,Yrd. Doç. Dr. Hasan ERDAL’ a ve Dumlupınar Üniversitesi Elektrik-Elektronik
mühendisliği bölümü araştırma görevlilerinden Kadir VARDAR’ a en içten
şükranlarımı sunarım.
Son olarak tüm çalışmam boyunca maddi , manevi desteklerini esirgemeyen,
geç saatlere kadar uyumamam için gitar resitali yapan ev arkadaşım Mustafa
SONGÜN ve kardeşim Dursun’ a teşekkür ederim.
Temmuz , 2005 Mehmet AKAR

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 5/114
II
İÇİNDEKİLER
SAYFA
ÖNSÖZ…………………………………………………………………I
İÇİNDEKİLER……………………………………………………….II
ÖZET……………………………………………………….…………V
ABSTRACT…………………………………………………………VII
SEMBOL LİSTESİ………………...………………………………VIII
KISALTMALAR……………………………………………………..X
ŞEKİL LİSTESİ……………………………………………………...XI
TABLO LİSTESİ…………………………………………………...XIV
BÖLÜM I GİRİŞ VE AMAÇ………………………………….........…1
I.1.GİRİŞ……………………………………………………………………… ….1I.2. AMAÇ…………………………………………………………………….. ….2
BÖLÜM II SERVO MOTORLAR………………………………… …4
II.1.SERVO MOTORLARIN TANIMI……………………………………... ….4II.2.SERVO MOTOR ÇEŞİTLERİ…………………………………………. ….6
II.2.1. Doğru Akım Servo Motorlar..................................................6II.2.1.1. Alan Kontrollü Servo Motorlar………………………….8II.2.1.2. Endüvi Kontrollü Servo Motorlar……………………….9II.2.1.3. Sabit Mıknatıslı-Endüvi Kontrollü Servo Motorlar……..9II.2.1.4. Seri –Ayrık Alanlı Servo Motorlar…………………….11
II.2.2. Alternatif Akım Servo Motorlar…………………………..13II.2.2.1. Alternatif Akım Servo motor Bileşenleri………….........14II.2.2.2. Rotor……………………………………………………14

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 6/114
III
II.2.2.3. Rotor Yapısında Kullanılan Kalıcı Mıknatıslı Malzemelerve Özellikleri……………………………………………………..15II.2.2.4. Stator.................................................................................. ...16II.2.2.5. Sensörler……………………………………………. ...16II.2.2.6. Alternatif Akım Servo motor Karakteristikleri ...............16
II.2.3. Alternatif Akım Servo Motorun Kontrolü…………….. ...17
II.2.3.1. Rotor Pozisyonu Algılayıcı………………………….. ...17II.2.3.2. Sinüs-Dalga Üretim Devresi………………………… ...18II.2.3.3. Dc-Sin Dönüşüm Devresi............................................ ...18II.2.3.4. Sinüs dalga PWM (Darbe Genişlik Modülasyonu)Devresi………………………………………………………... ...18II.2.3.5. Hız Algılayıcı……………………………………….. ...19II.2.3.6. Kodlayıcılar………………………………………….. ...20II.2.3.7. Artırımlı (Incremental) Encoder……………………... ...22II.2.3.8. Mutlak (Absolute) Encoderler………………………. ...24II.2.3.9. Resolver....................................................................... ...25II.2.3.10. Kodlayıcıdan Elde Edilen Darbeler ile Hız MiktarınınÖlçülmesi……………………………………………………... ...29
II.2.4. Atalet Hesapları…………………………………………. ...30 II.2.4.1. Silindirin ataleti……………………………………… ...32II.2.4.2. Doğrudan Tahrik…………………………………….. ...32II.2.4.3. Dişli Mekanizmalı Tahrik…………………………… ...32
II.5. Servo Sistemlerin Hesaplama Adımları………………….. ...35
BÖLÜM III KONTROL YÖNTEMLERİ..............................................41
III.1. PID KONTROL………………………………………………………... ...41III.1.1 Giriş………………………………………………………. ...41
III.1.2. P (Oransal kontrolör)………………………………….......42III.1.3. PI (Oransal İntegral) Kontrolor ………………………..43III.1.4.PD(Oransal –Türevsel) Kontrolör ………………………..45III.1.5.PID(Oransal –İntegral-Türevsel) Kontrolör…………... ...47III.1.6. KP, KI, KD Katsayılarının Sistem Üzerindeki Etkisi ...48III.1.7. PID Kontrol Parametrelerinin Hesaplanması ………...49
III.2. BULANIK MANTIK KONTROL…….. ………………………………..57III.2.1 Bulanık Mantığın Tarihsel Gelişimi……………………. ...57III.2.2. Bulanık Mantığa Giriş…………………………………….59III.2.3. Bulanık Küme, Sistem ve Teknolojisi…………………….62
III.2.3.1 Bulanık Kümeler……………………………………….64III.2.3.2 Kural Tabanı…………………………………………...68
III.2.3.3 Bulanık Mantık Sistemlerin Genel Yapısı……………..68III.2.4. Kontroldeki uygulamaları………………………………...69III.2.5. Bulanık Teorinin Avantajları ve Dezavantajları ……….71
III.2.5. 1 Bulanık Teorinin Avantajları………………………….71III.2.5. 2 Bulanık Teorinin Dezavantajları ……………………...72
III.2.6 Genel Yapı ve Çalışma Mekanizması……………………..72III.2.6.1 Bulanık Uzman Sistemler……………………………...72

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 7/114
IV
BÖLÜM IV MATERYAL VE METHOD……………………………….75
IV.1. MATERYAL……………………………………………………………...75IV.2.METHOD…………………………………………………………………..80
IV.2.1. Doğru Akım servo motorun klasik kontrolü…………….80IV.2.2 Doğru akım servo motorun bulanık kontrolü…………...81IV.2.3.Bulanık kontrolör tasarımı………………………………...83
BÖLÜM V………………………………………………………………………..86
SONUÇLAR……………………………………………………………………..86
KAYNAKÇA……………………………………………………………………96
ÖZGEÇMİŞ……………………………………………………………………..99

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 8/114
V
ÖZET
BULANIK MANTIK YÖNTEMİYLE BİR SERVO MOTORUNKONTROLÜ VE GELENEKSEL YÖNTEMLERLEKARŞILAŞTIRILMASI
Yıllardır elektrik motorları endüstride tahrik elemanı olarak kullanılmakta ve
bunların kontrolü de büyük önem arz etmektedir. Servo motorlarda hassas kontrol
edilebilmeleri gibi sebeplerle günümüz endüstrisinde aranan makineler olmuştur. Bu
motorların bazı kullanım yerleri şunlardır:• Bilgisayarlarda ve haf ızalı makinelerde;
• Endüstriyel aletlerde;
• 400 Hz olanları askeri silah sanayinde;
• Elektrik santrallerinde ,alternatör devir ayarı sistemlerinde;
• Tam otomatik regülatörlerin kumanda sistemlerinde kullanılır.
Servo motor uygulamalarda istenen durum ilk yol alma ve kalkınma anında aşmanın
olmaması, sistemin en kısa zamanda karalı hale gelmesi ve ani yük değişimlerinde
sistemin karalılığının bu durumdan minimum etkilenmesidir.
Bazı sistemlerde modelleme doğru şekilde yapılsa bile elde edilen modelin
denetleyici tasarımında kullanımı karmaşık problemlere ve oldukça yüksek maliyete
neden olabilir. Bu nedenle , bazı denetim algoritmalarının belirsiz, doğru olmayan,
iyi tanımlanmamış, zamanla değişen ve karmaşık sistemlere uygulanması mümkün
olmayabilir. Bulanık mantık için matematiğin gerçek dünyaya uygulanması
denilebilir. Çünkü gerçek dünyada her an değişen durumlarda değişik sonuçlar
çıkabilir. Bu sebeple servo motorların yapısı tanıtılmış ve matematiksel modeli
çıkartılmıştır.
Elde edilen matematiksel modele yük altında PID kontrol algoritması ve bulanık
mantık (bulanık logic) kontrol yöntemi uygulanmıştır. Oluşturulan matematiksel
model bilgisayar ortamında MATLAB programıyla simüle edilmiş ve ulaşılan
grafikler verilmiştir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 9/114
VI
Bu çalışmada hedeflenenlere ulaşmak için PID kontrol ve bulanık mantık
kullanılmıştır. Uygulama sonucunda yük altında servo motorlarda ilk kalkınma
anında oluşan salınımın ortadan kalktığı, daha çabuk karalı hale geldiği ve bulanık
mantık yönteminin daha etkili sonuç elde ettiği gözlenmiştir.
Temmuz, 2005 Mehmet AKAR

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 10/114
VII
ABSTRACT
THE COMPARING OF SERVO MOTOR CONVENTIOANAL
AND FUZZY LOGIC CONTROL METHOD.
Electrical machines has been used many years as a drive systems and their control
are vey important for industry. Servo motor can be control very easily so they can
use a lot of experiment. Some of:
• Computers and memory machines;
•
Industrial equipments;• Milatary weapons industry which one frequency is 400 Hz
• For regulating speed control of generators
• Control systems of full automatic regulator.
In their experiment very important thing that not to be oscillation ,not much more
current when they start and quickly sit steady-state position .
Some of system models can make truily but to worry of control systems for these
model may have some problem and high cost solution. For these reason some
control algorithm can’t use nonliner, complex and not good at description systems.For fuzzy logic control can say that using of mathematic to real life because real
life may have chageable position and result.
For these reason servo motors construction descripted and mathematical model has
caused. For dc servo motor mathematical model used bulanık, propotional-integral-
derivative control algorithms and their results simulated in the computer with
Matlab .
At and of the simulation: Fuzyy logic control algoritm is succesfull than the P ıd
control because of not have oscillation ,not much more current when they start and
quickly sit steady-state position
July, 2005 Mehmet AKAR

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 11/114
VIII
SEMBOL LİSTESİ
V : Kaynak gerilimi (V)
T : Motorda meydana gelen tork (Nm)
k : Tork sabiti
Ø : Manyetik akı( Wb)
Ia : Endüvi akımı (A)N : Dönme Hızı (d/dak)
Ts : Örnekleme zamanı (sn)
m : Örnekleme aralığındaki pals sayısı
M : Devir başına pals sayısı
f e : Saat Frekansı (Khz)
n :w
T aralığında sayılan saat palsleri
J : Atalet momenti (kgm2)
Jy : Yükün ataleti (kgm2)
Jm : Motorun ataleti (kgm2)
R : Silindirin yarıçapı (mm)
g : Silindirin ağırlığı (kg)
l : Silindirin boyu (mm)
Vm : Motorun hızı (m/sn)
Vy : Yükün hızı (m/sn)
Mm : Motor momenti (Nm)
My : Yük momenti (Nm)
F : Sürtünme katsayısı
a : İvme (rad/sn2)
∆t : Zamandaki değişim (sn)
U : Silindir dairenin çevresi (m)
Δφ : Dönme açısı (rad)
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 12/114
IX
ω : Max. Hız (rad/sn)
n : Devir sayısı (min-1)
U(t) : Kontrolör çıkışı
KP : Oransal kazancı
e(t) : HataGp(s) : İleri yol transfer fonksionu
KI : İntegral kazancı
TI : İntegral zamanı( sn)
GI(s) : İntegral kontrolörün transfer fonksiyonu
KD : Türevsel kazancı
F(s) : Transfer fonksiyonu
Wn : Sistemin kökü
δ : Sönüm katsayısı
I0 : İlk andaki İntegral katsaysı
∆I : İntegral katsayısındaki değişim
P0 : İlk andaki oransal katsaysı
∆P : Oransal katsayısındaki değişim
D0 : İlk andaki türev katsaysı
∆D : Türev katsayısındaki değişim
XA : Karakteristik fonksiyon
µA(x) : x’in A bulanık kümesindeki değeri
Vf : Alan sargısının gerilimi (V)
If : Alan sargısının akımı (A)
La : Endüvi devresi indüktansı (H)
Ra : Endüvi devresi direnci (Ω)
Va : Endüvi devresi gerilimi (V)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 13/114
X
KISALTMALAR
PID : Proportiona1-Integra1- Derivative
FET : Field Efect Transistor
DC : Direct Current
AC : Alternative CurrentEMK : Elektro Motor Kuvvet
NEFEB : Neodyum Iron Boron
ALNICO : Aliminyum Nikel Cobalt
ROM : Read Only Memory
PWM : Pulse Width Modulation
TG : Tako Generator
BMS : Bulanık Mantık Sistemi
PI : Proportiona1-Integra1PD : Proportional-Derivative
IGBT : Insulated GATE Bipolar Transistor
MOSFET : Metal Oxide Field EffectTransistor
GTO : Gate Turn Off Thyristör
NO : Negatif Orta
NB : Negatif Büyük
SR : S ıf ır
PO : Pozitif Orta
PB : Pozitif Büyük

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 14/114
XI
ŞEKİL LİSTESİ
SAYFA NO
Şekil II.1: Doğru Akım Servo Motor Kesiti. ..............................................................5
Şekil II.2: Doğru Akım Servo Motor.........................................................................6
Şekil II.3: Alan kontrollü Servo Motor Prensip Şeması ............................................8
Şekil II.4: Endüvi kontrollü Servo Motor Prensip Şeması.........................................9
Şekil II.5: Sabit mıknatıslı Endüvi Kontrollü Servo Motor Prensip Şeması..............10
Şekil II.6: Seri –Ayrık Alan kontrollü Servo Motor Prensip Şeması .......................11
Şekil II.7: Alternatif Akım Servo Motorun Rotorunun Yapısı ................................13
Şekil II.8: Alternatif Akım Servo Motorun Kesiti...................................................14
Şekil II.9: Silindirik Yapıda Yay Mıknatıs -Çıkıntılı Kutuplu Mıknatıs yapısı.......14
Şekil II.11: Sinüs Dalga PWM Esası .....................................................................19
Şekil II.12: Kodlayıcı Faz Sinyalleri ve Dönme Yönünün Belirlenmesi ..................22
Şekil II.13: Artırımlı (Incremental ) Enkoderin Birleşenleri....................................23
Şekil II.14: Mutlak (Absolute) Encoderin Yapısı ..................................................24
Şekil II.15: Motorun Encoder ile Geri Beslemesi ..................................................25
Şekil II.16: Resolver..............................................................................................26
Şekil II.17: Resolver Şematiği...............................................................................26
Şekil II.18: Resolver Şematiği Blok Şeması.........................................................27
Şekil II.19: Motorun Resolver ile Geri Beslemesi .................................................28
Şekil II.20: Dönme Hızının Hesaplanması ............................................................29
Şekil II.21: Katı Silindir........................................................................................31
Şekil II.22: İçi Boş Silindir ...................................................................................32
Şekil II.23: Doğrudan Tahrik ................................................................................32
Şekil II.24: Hız Çevirici Motor ile Yük Arasında..................................................33

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 15/114
XII
Şekil II.25: Teğetsel Tahrik...................................................................................35
Şekil II.26: Uygulamaya ait grafik ........................................................................36
Şekil III.1: PID kontrol algoritması.......................................................................41
Şekil III.2: Oransal Kontrolör ...............................................................................42
Şekil III.3: Oransal Kontrolör Çıkışının Hata ile Değişimi ...................................43Şekil III.4: İntegral Kontrolör Çıkışı .....................................................................44
Şekil III.5: PI Kontrolör Çıkışı..............................................................................45
Şekil III.6: PD Kontrolör etkisi .............................................................................46
Şekil.III.7: PID Kontrol Sistemi............................................................................48
Şekil.III.8: Ziegler-Nichols Metodu......................................................................49
Şekil.III.9: Sistemin Kapalı Çevrim Frekans Cevabı.............................................50
Şekil.III.10: Doğru akım Motor Prensip Şeması ..................................................51
Şekil.III.11: Doğru Akım Motorun Oransal Kontrole tepkisi ................................53
Şekil.III.12: Küçük Ki Ve Kd Katsayılı PID Kontrol............................................54
Şekil.III.13: Büyük Ki Katsayılı PID Kontrol ......................................................55
Şekil.III.14: İstenen Ki ,Kd ,Kp Katsayılı PID Kontrol.........................................56
Şekil III.15: "x, 1'e yakındır" önermesine ait ayrık üyelik fonksiyonu ...................61
Şekil III.16: "x, 1'e yakındır" önermesine ait üyelik fonksiyonu...........................62
Şekil III.17: (a): Klasik mantık ,(b): Bulanık mantık ............................................64
Şekil III.18: Farklı Üyelik Fonksiyonları ..............................................................65
Şekil III.19: Isı değişkeninin [0,100] aralığında aldığı alt durumların; bulanık (a) ve
klasik değişkenler (b), yardımıyla gösterilmesi. .....................................................66Şekil III.20: A ve B üçgen bulanık sayıların birleşimi ............................................67
Şekil III.21: A ve B üçgen bulanık sayıların kesişimi .............................................67
Şekil III.22: A ve B üçgen bulanık sayıların tümleyeni ..........................................68
Şekil III.23: Sistemin Çalışma Mekanizması ........................................................72
Şekil IV.1: Model Olarak Alınan Doğru Akım Servo Motorun Eşdeğer Devresi ..75
Şekil IV.2: Servo Motorun Transfer Fonksiyonu...................................................79
Şekil IV.3: Servo Motorun Hız Kontrolünün Blok Diyagramı ..............................81
Şekil IV.4: Bulanık Mantık Sonuçlandırma Sistemi ..............................................82Şekil IV.5: Doğru Akım Servo Motorun Hız Kontrol Şeması ...............................83
Şekil IV.6: ∆W Girişine Ait Üyelik Fonksiyonları ................................................84
Şekil IV.7:PWM Duty Çıkışına Üyelik Fonksiyonları..........................................84
Şekil V.1: Servo Motorun Kontrolör Uygulanmamış Haline Ait Simulink Modeli.86
Şekil V.2: Servo motorun kontrolör uygulanmamış haline ait hız –zaman grafiği 87

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 16/114
XIII
Şekil V.3: Servo Motorun Bulanık Mantık Kullanılarak Kontrolüne Ait SimulinkModeli....................................................................................................................87
Şekil V.4.a: Doğru Akım Şebeke Modeli ...............................................................89
Şekil V.4.b: Doğru Akım Kıyıcı Modeli.................................................................89
Şekil V.4.c: Mil Yükü Modeli .................................................................................89
Şekil V.4.d: Doğru Akım Servo Motor Modeli......... ...................... ........................89
Şekil V.4.e: Ölçüm Bloğu Modeli ...........................................................................89
Şekil V.4.f: Motor İçin Bulanık Kontrol Ünitesi Modeli..........................................89
Şekil V.4.g: Darbe Genişlik Modülasyonu Modülü .................................................89
Şekil V.5: Servo Motor Boş Çaılşmada Bulanık Mantık Kontrolüne Ait GerilimAkım -Hız-zaman grafiği .......................................................................................89
Şekil V.6: Servo Motor 5 Nm Mekaniki Yükte Bulanık Mantık Kontrolüne AitGerilim Akım Hız-zaman grafiği ...........................................................................90
Şekil V.7: Servo Motor 7 Nm Mekaniki Yükte Bulanık Mantık Kontrolüne AitGerilim Akım Hız-zaman grafiği ...........................................................................91
Şekil V.8: Servo Motorun PID Kullanılarak Kontrolüne Ait Simulink Modeli ....91
Şekil V.9: Servo Motor 5 Nm’lik Mekaniki Yükte PID Kontrolüne Ait Akım-Gerilim-Hız-zaman grafiği .....................................................................................92
Şekil V.10: Servo Motor 7 Nm’lik Mekaniki Yükte PID Kontrolüne Ait Akım-Gerilim-Hız-zaman grafiği .....................................................................................92
Şekil V.11: Servo Motorun Değişen Referans Hızlarda Bulanık Kontrolöre Ait Hızve Akım grafiği ......................................................................................................93
Şekil V.12: Servo Motorun Sabit Referans Hızlarda Değişen Mekaniki Yüke
Tepkisi ...................................................................................................................93Şekil V.13: 5 Nm’ lik Mekaniki Yükte PID ve Bulanık Mntık Hız-zaman grafiği...............................................................................................................................93
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 17/114
XIV
TABLO LİSTESİ
SAYFA NO
Tablo II 1:Servo Motor Birleşenleri.........................................................................5
Tablo II 2: Artırımlı Encoderin Bileşenleri. ............................................................23
Tablo II 3: Artırımlı Encoderin birleşenleri............................................................24
Tablo II 4: Encoder ile Resolverin Karşılaştırılması...............................................28
Tablo III.1: PID Katsayılarının sistem üzerine etkisi………………………………53
Tablo III.2: P,PI, PID Katsayılarının Etkisi………………………………………..54
Tablo III.3: Z-N Basamak cevabı deneyinden elde edilen PID parametreleri……..55
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 18/114
1
BÖLÜM I
GİRİŞ VE AMAÇ
I.1.GİRİŞ
Günümüz imalat sanayinde kullanılan makinelerin hızlı çalışmaları, üretiminartması bakımından önemlidir. Üretimde insan faktörünün en aza indirilmesi,
üretimin kalitesi ve üretimin eşdeğerliği bakımından önem arz etmektedir. Bunu
gerçekleştirecek sistemlere otomasyon sistemleri adı verilmektedir.
Endüstriyel süreç kontrolünde bazı zorluklar vardır. Bu zorluklar sürecin
matematiksel modelinin bilinmemesi, kontrol edilecek sistemin lineer olmaması,
ölçme zorluklan, model parametrelerinin zamanla büyük değişiklikler
gösterebilmesidir. Ayrıca, istenilen sistem davranışı ve bunun gerçekleştirilmesi için
gerekli sınırlamalar nümerik değerlerle ifade edilemeyebilir. Böyle durumlarda biruzman kişiden yararlanmak gerekir. Uzman kişi denetiminde kesin matematiksel
ilişki yerine "sıcak, "az sıcak", "ılık", "soğuk" gibi sözel ifadeler kullanılır. Bulanık
kontrol bu tür bulanık mantık ilişkileri üzerine kurulmuştur.
İçinde bulunduğumuz sanayi sürecinde servo motorlar küçük olmaları, az yer
kaplamaları, f ırçasız olmaları, değişik kumanda ve komutlarla duyarlı olarak geniş

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 19/114
2
bir hareket kabiliyetlerinin bulunması sebebiyle günümüzde otomasyon sistemlerinin
oluşturulmasında kullanılan en önemli elemanlardır.
Servo Motor sistemleri belirli bir tasarım ve uygulama zorlukları olmadan, basit
düşük sıralı (ikinci veya üçüncü sıra) sistemler olarak kabul edilebilirler. Dinamiksistemlerdeki nonlineer parametrelerin optimizasyonu sağlanabildiğinden servo
motor kontrol tercih nedeni olmaktadır. Bununla birlikte, yük etkilerinin sistem
cevabı üzerinde engelleyici bir etkisi vardır. Yük değiştirildikçe, genellikle orijinal
kontroller tasarım performansını koruyamaz ve böylece yeni sistem durumları için
kontrollerin tasarımının yeniden yapılması gerekir. Ayrıca, servo motorun bir
dinamik sistem olduğu düşünülürse, motorda oluşan sürtünmeler, ani ve şiddetli geri
kaçmalar ve motor kalkma momentindeki düzgünsüzlükler gibi bazı parametrelerin
nonlineer davranışlar gösterdiği bilinmektedir. Motorlarda oluşan bu bozucu etkiler
hem motor performansını hem de motorun kontrol ettiği dinamik sistemin
performansını olumsuz yönde etkilemektedir. Motorlardaki bu olumsuz etkileri
minimize etmek için PID, Adaptive, Sliding Mode gibi birçok kontrol yöntemi
geliştirilmiştir. Bu yöntemlerden biri de bulanık mantık (Bulanık Logic)'tir.
Bulanık mantık yaklaşımı, makinelere insanların özel verilerini işleyebilme ve
onların deneyimlerinden ve önsezilerinden yararlanarak çalışabilme yeteneği verir.
Bu yeteneği kazandırırken sayısal ifadeler yerine sembolik ifadeler kullanılır. İşte bu
sembolik ifadelerin makinelere aktarılması matematiksel bir temele dayanır.
Son on yıl boyunca bulanık mantık kontrol teknolojisi birçok endüstriyel tasarımda
yaygın olarak uygulanmakta ve çalışmaktadır. Bulanık mantık servo motor kontrolü
için iyi bir uygulama alanıdır.
I.2. AMAÇ
Bu çalışmada bir doğru akım servo motorun yük altında hız kontrolü klasik
yöntemlerden pid kontrol ve bulanık mantık kontrolü yapılmıştır. Amaç servo
motorun ilk çalışma ve yol alma esnasında salınımı ortadan kaldırmak veya
minimuma indirmek ve karalı hale gelmesi için gereken süreyi düşürmektir. Bu
amaçla bir doğru akım servo motorun matematiksel modeli ve denklemleri çıkartıldı.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 20/114
3
Daha sonra siteme pid kontrolör ve bulanık mantık kontrolör tasarlandı. Sonra
matlab simulink modülü kullanılarak kontrol işlemleri simüle edilmiş ve sonuçlar
karşılaştırılmıştır.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 21/114
4
BÖLÜM II
SERVO MOTORLAR
II.1.SERVO MOTORLARIN TANIMI
1 d/dk lık hız bölgelerinin altında bile kararlı çalışan, hız-moment kontrolü
yapan yardımcı motorlara veya akımı bilezikler (motor miline takılan halkalar)
üzerinden devresini tamamlayan motorlara servo motor denir.
Servo motorlar yardımlı amaçlı motorlardır. Asıl iş makineleri gibi çalışmazlar.
Servo motorların anma güçleri yaklaşık 5 Kw kadardır. Servo motorlar şu istekleri
yerine getirebilirler:
• Motor milindeki 40 Nm ‘ ye kadar olan büyük dönme momenti
• Dönme momentinin, iki katına kadar olan kısa aralık aşırı yük yüklenebilme
• Yüksek devir kararlılığı, böylece çeşitli yüklerde hızın sabit kalması
• Yaklaşık 1-10000 arasındaki devir sayısının ayarlanabilmesi
• Çok küçük yol adımları ile hareket edebilme
• Küçük atalet momenti sayesinde, komutların geciktirilmeden yerine
getirilmesinin sağlanması.[1]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 22/114
5
Şekil II.1: Doğru Akım Servo Motor Kesiti.[2]
Tablo II 1:Servo Motor Birleşenleri
1: Flanş
2: Motor çerçevesi
3: Preslenmiş çelik nüve
4: Sargılar
5: Permanet mıknatıs
6: Rotor
7: Dengeleme diski
8: Hall sensör
9: Kontrol mıknatısı
10:Bilye ve yatağı
11: Yay

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 23/114
6
II.2. SERVO MOTOR ÇEŞİTLERİ
Servo motorlar; konum kontrolü yapan, otomatik kontrol sistemlerinde çokkullanılan özel motorlardır. Servo motorlar, Doğru Akım ve Alternatif Akım servo
motorlar olmak üzere iki çeşittir.[1]
II.2.1. Doğru Akım Servo Motorlar
Doğru Akım servo motorlar yapı olarak doğru akım motoruna benzemektedir.
Doğru Akım servo motorda sıradan motordaki endüvinin yerini, sabit mıknatısalmıştır. Bu yüzden bu tip motorlara sabit mıknatıslı motorda denir. Temel olarak
rotor pozisyonuna göre anahtarların açılıp kapanmasıyla sabit mıknatısın dönmesi
esasıyla çalışır. Bu iş şekilde görüldüğü üzere anahtarlara bağlı A, B ve C bobinleri
vasıtasıyla gerçekleştirilir.
Şekil II.2: Doğru Akım Servo Motor [3]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 24/114
7
A ile B bobini arasını b sensörü, B ile C arasını c sensörü, A ile C arasını ise a
sensörü vasıtasıyla denetlenmektedir. Yani A, B, ve C sensörleri 120° lik bölgeleri
kontrol etmektedir. Eğer sabit mıknatısın S kutbu A ve B bobinleri arasında ise b
sensörü aktif hale geçecektir ve bu sensör kontrol devremizdeki b anahtarını açacaktır. İndüklenen bobin sabit mıknatısın S kutbunu etkileyecektir ve kendine
doğru çekecektir. Oluşacak momentle sabit mıknatıs hareketine başlayacaktır. Bu
momentin değeri bobinlerde endüklenen alanla orantılı olur. Bu alan da kaynak
voltajı ile ayarlanabilir. Sabit mıknatıs hareketine devam ederken B bobiniyle
çakıştıklarında b sensörü görevini tamamlayacaktır. Sabit mıknatıs tamamlayacaktır.
Sabit mıknatıs ataleti nedeniyle biraz daha yol alacak ve c sensörünün kontrol ettiği
120° lik bölgeye gelecektir.
Artık c sensörü aktif hale gelmiştir. Bu sensör C anahtarını kapatarak C bobininde
alan indüklenmesine ve sabit mıknatısının hareketinin C bobinine doğru devam
etmesine sebebiyet verecektir. Bu anda A ve B anahtarların kapalı olduğuna dikkat
edilmelidir. Sabit mıknatısın S kutbu C bobiniyle çakıştığı anda c sensörü devreden
çıkar ve C anahtarı kapanır. Yine sabit mıknatıs (rotor) dönme ateleti nedeniyle a
sensörünün kontrol ettiği bölgeye girer. Dolayısıyla A anahtarı kapanıp A bobininde
endüklenen alan sabit mıknatısın S kutbunu çeker. Böylece sabit mıknatıs bir turunu
tamamlamıştır. Bu olay zincirleme olarak devam eder. Bu dönüşün hızı voltajı
ayarlanarak değiştirilebilir.[3]
Servo motorların rotorunun dönme momenti rotor çapına bağlı olarak değişmesinden
dolayı servo motorların boyları uzundur. Enerji kısımları asıl motorlara göre daha az
enerjiye ihtiyaç gösterirler ve bu motorların atalet momenti küçüktür. Servo motorlar,
bir servo sistemde çalışırken ya endüvisi ya da kutupları kontrol edilir. Kutuplar ya
bir voltaj kaynağından ya da akım kaynağından beslenir. Her iki tür uygulama farkl ı
bir hız-tork karakteristiğinin ortaya çıkmasına sebep olur.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 25/114
8
II.2.1.1. Alan Kontrollü Servo Motorlar
Şekil II.3 ‘de alan konrollü servo motorun prensip şeması görülmektedir. Bu tip
kontrol normal bir şönt motorun alan akımını değiştirmek sureti ile yapılan kontrolünbenzeridir. Hatırlanacağı gibi bu tip kontrolde eğer alan akımı yoksa manyetik alan
meydana gelmez ve buna bağlı olarak motorda meydana gelen tork sıf ır olur. Motora
uygulanan alan akımı doğrudan doğruya hata yükseltecinden elde edilir. Endüvi
akımının sabit olmasından dolayı meydana gelecek tork , manyetik akı ile değişir.[1]
Yani ;
a I k T ..φ= (Nm) (II.11)
Şekil II.3: Alan kontrollü Servo Motor Prensip Şeması[1]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 26/114
9
Eğer , manyetik alanın polaritesi ters çevrilirse, motorda ters döner, küçük güçlü
servo motorlarda alan akımının kontrolü bu yöntemle yapılır. Çünkü ,büyük güçlü
motorlarda sabit endüvi akımı karşılanamaz ve endüvi kontrollü motora göre
dinamik tepki daha yavaştır. Çünkü alan sargısının zaman sabiti daha büyüktür.
II.2.1.2. Endüvi Kontrollü Servo Motorlar
Şekil II.4’te görüldüğü gibi sabit Doğru akım uyartım akımı bir sabit akım
kaynağından elde edilir. Daha önce de ifade edildiği gibi bu tip kontrol daha hızlıdır.
Endüvi gerilimindeki büyük ya da küçük ani değişim aynı olarak torkun değişmesine
neden olur. Çünkü , endüvi devresi endüktörle karşılaştırıldığında daha fazla omiktir.
Ayrıca endüktör devresindeki manyetik akının yoğunluğu arttıkça makinenin tork
hassasiyetide artar. 1000 Hp ‘ ye kadar olan doğru akım motorları endüvi gerilimininkontrolü ile çalıştırılırlar. Eğer hata sinyali ve endüvi devresinin polaritesi ters
çevrilirse motorun devir yönünde ters çevrilmiş olur. Bu tür motorlar genel olarak
amplidin ve çok alanlı dönel yükselteçlerle kontrol edilirler.[1]
Şekil II.4: Endüvi kontrollü Servo Motor Prensip Şeması [1]
II.2.1.3. Sabit Mıknatıslı-Endüvi Kontrollü Servo Motorlar
Bu tip motorlar daha çok 6 V ile 28 V değerleri arasında imal edilirler. Endüvi Doğru
akım geriliminin ani olarak ters çevrilmesi ile sabit mıknatısa olan zararları

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 27/114
10
kompanze etmek için bu tip motorlarda kompanze sargıları kullanılır. ayrıca bu
motorların fuko ve histerisiz kayıpları çok küçüktür. Endüvi gerilimleri değiştirilmek
suretiyle motorun devir sayısı kontrol edilir.
Aşağıdaki şekilde sabit mıknatıslı endüvi kontrollü servo motorun prensip şeması
verilmiştir.[1]
Şekil II.5: Sabit mıknatıslı Endüvi Kontrollü Servo Motor Prensip Şeması [1]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 28/114
11
II.2.1.4. Seri –Ayrık Alanlı Servo Motorlar
Bu tip motorlar alan kontrollü motorlar gibi çalışırlar ve 2 sargıları vardır. Bunlar ana
sargı ve ekstra sargı denir. Bunların E.M.K. ‘leri eşit olup alan nüvelerine zıt yönlü
polarite üretecek biçimde sarılmıştırlar.Şekil II.6-a ‘te görüldüğü gibi endüvi sabitakım kaynağından beslenirken motor başka kaynaktan uyartılabilir.
(a) (b)
Şekil II.6: Seri –Ayrık Alan kontrollü Servo Motor Prensip Şeması [1]
Sabit akım kaynağı kullanarak endüviyi ayrı olarak uyarmak için kaynak bulma
güçlüğü nedeniyle büyük güçlü seri motorlar şekil II.6-b ‘ deki gibi bağlanırlar. Bu
tip bağlantıda, ayrık alanlı seri motorun endüvi akımı ana ve ekstra sargılardan geçen
akımların toplamıdır. Fakat , seri alan akımları eşit ve zıt yönlü oldukları zaman ,
herhangi bir tork meydana gelmez. Ekstra sargının akımındaki çok küçük bir artma
ya da azalma ani tork oluşturur ve herhangi bir yönde dönüş sağlar.
Seri–ayrık alanlı servo motorlar küçük hata sinyallerine karşı çabuk tepkide
bulunurlar ve büyük kalkınma torku sağlar. Buna karşılık bu tip motorların hız
regülasyonu pek iyi değildir.[1]
Doğru akım motoruyla doğru akım servo motorun kısaca karşılaştırması yapılırsa;
Sıradan Doğru akım motorunda komütatörün üstlendiği döner alan oluşturma
görevini Doğru akım servo motorda yarı iletken anahtarlama elemanları
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 29/114
12
üstlenmiştir. Doğru akım servo motorun en açık üstünlüğü f ırça elemanlarının
olmamasıdır. Bu sebeple f ırçaların bakımı diye bir şeyden bahsedilmez ve
f ırçalardan kaynaklanan çoğu problem elimine edilmiştir. Doğru akım servo
motorun en açık üstünlüğü f ırça elemanlarının olmamasıdır. Bu sebeple f ırçaların
bakımı diye bir şeyden bahsedilmez ve f ırçalardan kaynaklanan çoğu problemelimine edilmiştir. Komütatörlü Doğru akım motorlarda oluşan problemler bazen
çok açık bir şekilde belli olmaz. Bazen f ırçalarda oluşan pislenme dahi problem
teşkil edebilir. Fırçaların performansı ve ömrü atmosferik şartlarla bile değiştiğinden
dolayı değişik ortam koşullarında değişik yapılı f ırçalar kullanılabilmektedir.
Fırçasız konfigürasyonda sarımların sabit stator içine sarılması sebebi ile ısı yalıtımı
için daha fazla en-kesit alanı sağlanabilmekte ve sargılarda oluşabilecek ısı artışı
algılama elemanları vasıtasıyla kolayca algılanabilmektedir.[4]
Doğru akım servo motorlarda verim eş ölçülerdeki bir doğru akım komütatörlü
motora oranla daha yüksektir ve f ırçaların sürtünme etkisi olmadığından dolayı
sürtünme kuvveti verime katkıda bulunur. Komütatör ve f ırça aksamının yokluğu
motor boyunu düşürür. Bu sadece motor hacmini düşürmekle kalmaz rotor destek
rulmanları arasındaki mesafe ve rotor boyunun kısalması dolayısı ile rotorun yanal
rijitliği de artırılmış olmaktadır. Bu özellikle yüksek hız/eylemsizlik oranına
gereksinim duyulan uygulamalarda önemlidir.
Fırçasız motorun yukarıda belirtilen üstünlüklerinin yanında dezavantajları olarak;
Rotor pozisyonunun bir kodlayıcı vasıtasıyla mutlak olarak algılanması ve motor
kontrol devresinin kompleks olması gösterilebilir.[4]
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 30/114
13
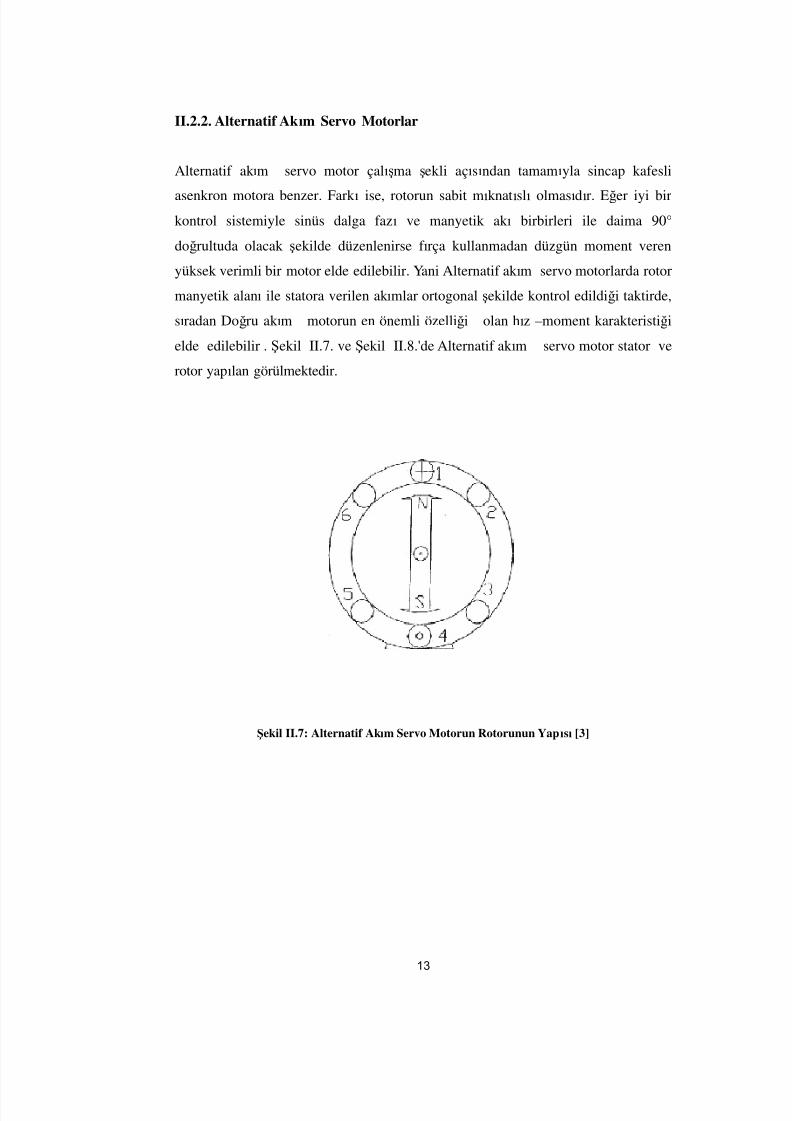
II.2.2. Alternatif Akım Servo Motorlar
Alternatif akım servo motor çalışma şekli açısından tamamıyla sincap kafesli
asenkron motora benzer. Farkı ise, rotorun sabit mıknatıslı olmasıdır. Eğer iyi birkontrol sistemiyle sinüs dalga fazı ve manyetik akı birbirleri ile daima 90°
doğrultuda olacak şekilde düzenlenirse f ırça kullanmadan düzgün moment veren
yüksek verimli bir motor elde edilebilir. Yani Alternatif akım servo motorlarda rotor
manyetik alanı ile statora verilen akımlar ortogonal şekilde kontrol edildiği taktirde,
sıradan Doğru akım motorun en önemli özelliği olan hız –moment karakteristiği
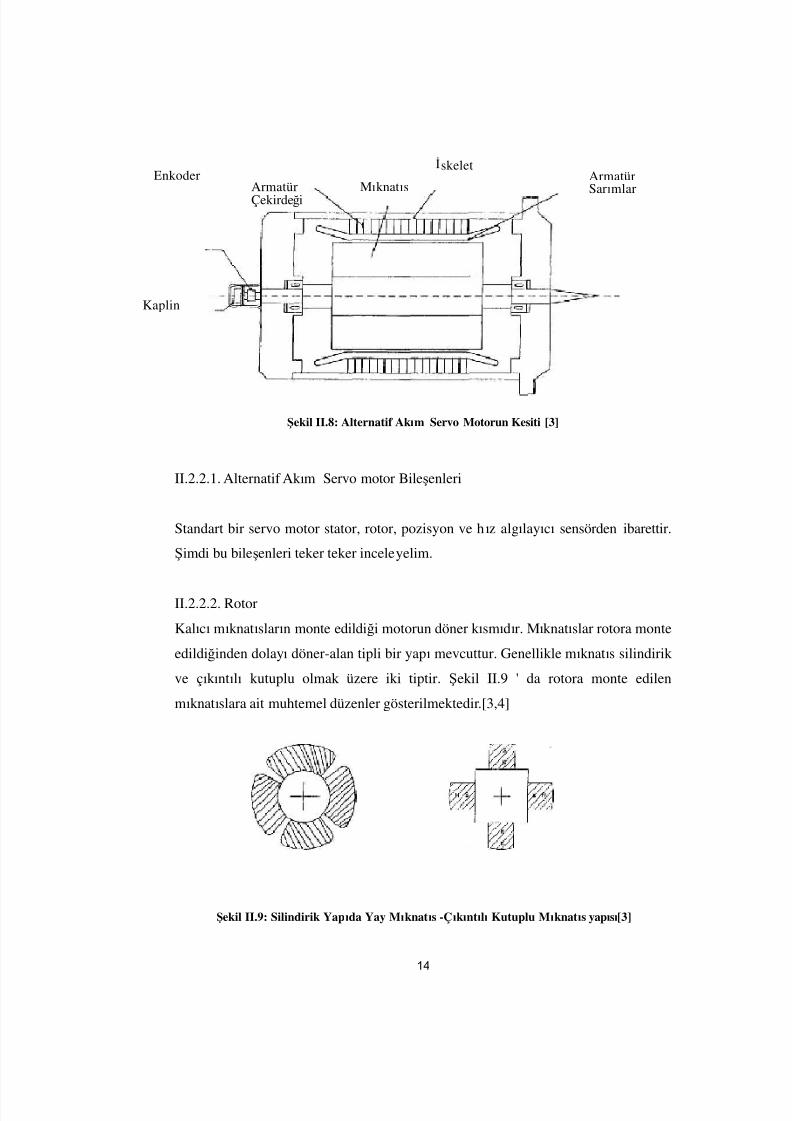
elde edilebilir . Şekil II.7. ve Şekil II.8.'de Alternatif akım servo motor stator ve
rotor yapılan görülmektedir.
Şekil II.7: Alternatif Akım Servo Motorun Rotorunun Yapısı [3]
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 31/114
14
Şekil II.8: Alternatif Akım Servo Motorun Kesiti [3]
II.2.2.1. Alternatif Akım Servo motor Bileşenleri
Standart bir servo motor stator, rotor, pozisyon ve hız algılayıcı sensörden ibarettir.
Şimdi bu bileşenleri teker teker inceleyelim.
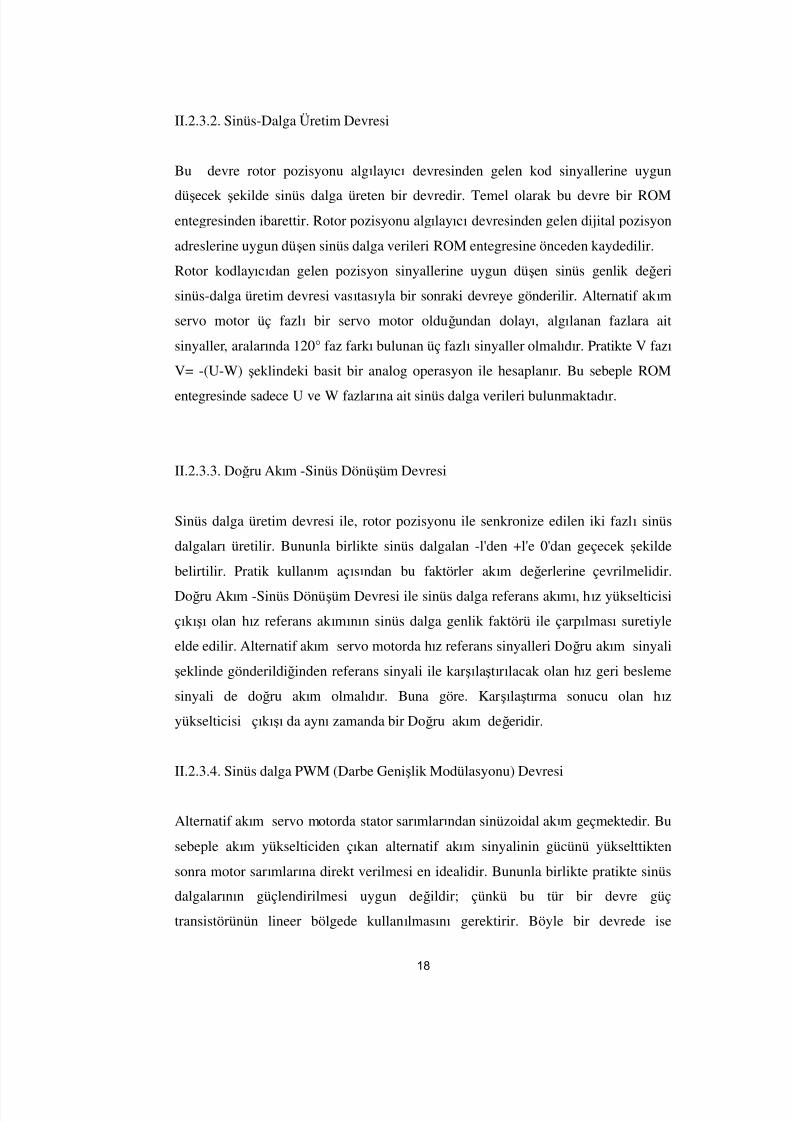
II.2.2.2. Rotor
Kalıcı mıknatısların monte edildiği motorun döner kısmıdır. Mıknatıslar rotora monte
edildiğinden dolayı döner-alan tipli bir yapı mevcuttur. Genellikle mıknatıs silindirik
ve çıkıntılı kutuplu olmak üzere iki tiptir. Şekil II.9 ' da rotora monte edilen
mıknatıslara ait muhtemel düzenler gösterilmektedir.[3,4]
Şekil II.9: Silindirik Yapıda Yay Mıknatıs -Çıkıntılı Kutuplu Mıknatıs yapısı[3]
EnkoderArmatürÇekirdeği
Mıknatıs
skeletArmatürSarımlar
Kaplin

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 32/114
15
II.2.2.3. Rotor Yapısında Kullanılan KalıcıMıknatıslıMalzemeler ve Özellikleri
Rotor mıknatıslarında kullanılan kalıcı mıknatıslı malzemelerden en göze çarpanı
Neodmiyum- Iron-Boron (NdFeB) olarak adlandırılan malzemedir. Bu malzeme
yapısındaki mıknatıslar Sumitomo firmasınca "Neomax", General Motor firmasınca
"Magnequench" ve Crucible firmasınca "Crumax" ticari adları altında
üretilmektedirler.Oda sıcaklığında NdFeB ticari olarak temin edilebilen
mıknatıslardan daha fazla enerji çarpımına sahiptir (Mamur, 1996).Hem seramik hem
de NdFeB mıknatıslar sıcaklık değişimlerine karşı duyarlıdırlar. 100 °C lik çalışma
sıcaklıklarının üstünde çalışma durumunda özel önlemlerin alınması gereklidir. Çok
yüksek sıcaklıktaki uygulamalarda Alnico veya Samaryum-Kobalt mıknatıslar
kullanılır. Bunlardan birisi olan Kobalt-Samaryum 200 °C ile 250 °C arasındaki
sıcaklıklarda kullanılabilir.
Alnico Mıknatıslar: Alüminyum, Nikel, Kobaltın ana bileşenler olarak bulunduğu ek
olarak bakır, titanyum ve diğer elemanların bulunduğu mıknatıs yapısıdır. Ana
bileşenlerini simgeleyecek şekilde Ainico olarak kısaca adlandırılırlar ve genel
amaçlar için geniş bir şekilde kullanılır.[4]
Ferrit Mıknatıslar: Ferrit mıknatıslar Alnico mıknatıslara oranla daha düşük manyetik
akı yoğunluğuna sahiptir. Buna mukabil çok yüksek koversif kuvvet değerine sahiptir.
Ferrit mıknatıslar ağır malzemeleri içermezler ve ana bileşeni demir oksit olması
dolayısı ile diğer mıknatıslara oranla oldukça ucuzdur. Aynı şekilde yapısı seramik
teknikler kullanılmak suretiyle homojen yapılabildiğinden dolayı kütle üretimine
uygundur. Bunun yanında ferrit mıknatıslar kırılgandır ve. küçük bir darbe ile hasar
görebilirler. Aynı şekilde yüksek sıcaklık katsayına sahiptir ki bu da Alnico dan
yüzlerce kat daha fazladır.[4]
Samanyum Kobalt Mıknatıslar: Alnico mıknatıslara yakın kalıcı manyetik akı
yoğunluğuna ve ferrit mıknatısa oranla 2-3 kat daha fazla koversif kuvvete sahiptir.
Bazı mıknatıslar 240 kj/m3 lük enerji çarpımına sahiptir ki bu yapıda bir motor
diğerlerine oranla daha küçük ebatlarda olmaktadır. Bununla birlikte samaryum ve

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 33/114
16
kobalt ana bileşenlerini teşkil ettiğinden dolayı çok pahalıdırlar. Ana bileşenlerini
çağrıştıracak şekilde genellikle "samacoba" mıknatıs olarak da adlandırılır. Düşük
sıcaklık katsayısına sahiptir. Yüksek yoğunluğa (8.0-8.5 g/cm3) sahip olması ise bir
dezavantajıdır.[4]
II.2.2.4. Stator
Alternatif akım servo motorlar statorlarına yerleştirilen üç fazlı sargılara üç fazlı
alternatif akım verilmek suretiyle çalıştırılırlar. Rotor pozisyonu ile uygun olacak
şekilde üç fazlı alternatif akım stator sarımlarına tatbik edildiğinde statorda döner
manyetik alan elde edilir. Bu manyetik alan senkron hızda döner. Senkron hız ise
motorun kutup sayısı ve alternatif akım frekansı ile orantılıdır.[3]
Statorda elde edilen döner manyetik alan statora yerleştirilen iletkenleri keserek
iletkenlerde e.m.k.'ler endükler. Bununla birlikte iletkenlerde endüklenen e.m.k.'ler
arasında iletkenleri farklı stator oluklarının da olması dolayısıyla bir faz farkı oluşur.
Alternatif akım servo motorların temeli, stator sarımlarında döner manyetik alanın
elde edilmesidir. Stator sarımlarında döner manyetik alan elde edilmesi için servo
motorun kutup sayısına göre stator sarımlarının düzenlenmesi gerekir.
II.2.2.5. Sensörler
Servo motorlarda sensörler iki temel amaç için kullanılır. Bunlardan birincisi rotor
pozisyonun algılanması ve diğeri ise dönme hızının ölçülmesidir. Genellikle servo
motorlarda döner kodlayıcılar ve firçasız resolverler kullanılır. Kodlayıcıların
maliyetinin düşük olması sebebi ile en fazla kullanılan pozisyon sensörüdür.
II.2.2.6. Alternatif Akım Servo motor Karakteristikleri
Servo motorlar kullanımları gereği çok sık şekilde ivmelenme ve yavaşlatma
işlemlerine maruz kaldıklarından, maksimum moment değerleri anma moment
değerlerinden katlarca fazla olmalıdır. Doğru akım motorlarda anma momentlerinin
aşılması durumunda komütatör aksamında kıvılcımlaşma olayı gözükür. Aynı şekilde
hız arttıkça moment değeri de çok hızlı bir şekilde düşer.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 34/114
17
Alternatif akım servo motorlarda ise yukarıda bahsedilen kıvılcımlarıma olayı, yapısı
dolayısıyla görülmez. Fırçasız servo motorlar maksimum momenti düşürmeden
yüksek hız limitlerinde çalıştırılabilir.
II.2.3. Alternatif Akım Servo Motorun Kontrolü
Fırçasız servo motorun kontrolü için kullanılan kontrol elemanları, rotor pozisyonuna
göre değişen manyetik akı doğrultusu ile motordan geçen akım doğrultusu arasındaki
ortogonal ilişkiyi sağlamalıdır.[4]
II.2.3.1. Rotor Pozisyonu Algılayıcı
Daha önceki kısımlarda bahsedildiği gibi manyetik akı ile stator sarımlarından geçen
akımın doğrultuları arasında ortogonal ilişki temin edilebilmesi için rotor
pozisyonunun hassas bir şekilde algılanması gerekir.Rotor pozisyonu algılayıcı devresi, rotora monte edilen kodlayıcı sinyallerini
algılayan ve bu dijital bilgileri kendisinden sonra gelen sinüs-dalga üretim devresi
taraf ından kullanılabilecek sinyaller şekline dönüştüren bir devredir. Eğer rotora
monte edilen kodlayıcı 8 bitlik mutlak kodlayıcı ise rotorun bir tam dönüşünde 256
farklı kod kodlayıcıdan rotor pozisyonu algılayıcısına gönderilir.[4]
Şekil II.10’ da Alternatif akım servo motorların kontrolüne ait blok diyagram
görülmektedir.
Şekil II.10: Alternatif akım servo motorların kontrolüne ait blok diagram görülmektedir.[4]
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 35/114
18
II.2.3.2. Sinüs-Dalga Üretim Devresi
Bu devre rotor pozisyonu algılayıcı devresinden gelen kod sinyallerine uygun
düşecek şekilde sinüs dalga üreten bir devredir. Temel olarak bu devre bir ROMentegresinden ibarettir. Rotor pozisyonu algılayıcı devresinden gelen dijital pozisyon
adreslerine uygun düşen sinüs dalga verileri ROM entegresine önceden kaydedilir.
Rotor kodlayıcıdan gelen pozisyon sinyallerine uygun düşen sinüs genlik değeri
sinüs-dalga üretim devresi vasıtasıyla bir sonraki devreye gönderilir. Alternatif akım
servo motor üç fazlı bir servo motor olduğundan dolayı, algılanan fazlara ait
sinyaller, aralarında 120° faz farkı bulunan üç fazlı sinyaller olmalıdır. Pratikte V fazı
V= -(U-W) şeklindeki basit bir analog operasyon ile hesaplanır. Bu sebeple ROM
entegresinde sadece U ve W fazlarına ait sinüs dalga verileri bulunmaktadır.
II.2.3.3. Doğru Akım -Sinüs Dönüşüm Devresi
Sinüs dalga üretim devresi ile, rotor pozisyonu ile senkronize edilen iki fazlı sinüs
dalgaları üretilir. Bununla birlikte sinüs dalgalan -l'den +l'e 0'dan geçecek şekilde
belirtilir. Pratik kullanım açısından bu faktörler akım değerlerine çevrilmelidir.
Doğru Akım -Sinüs Dönüşüm Devresi ile sinüs dalga referans akımı, hız yükselticisi
çıkışı olan hız referans akımının sinüs dalga genlik faktörü ile çarpılması suretiyle
elde edilir. Alternatif akım servo motorda hız referans sinyalleri Doğru akım sinyali
şeklinde gönderildiğinden referans sinyali ile karşılaştırılacak olan hız geri besleme
sinyali de doğru akım olmalıdır. Buna göre. Karşılaştırma sonucu olan hız
yükselticisi çıkışı da aynı zamanda bir Doğru akım değeridir.
II.2.3.4. Sinüs dalga PWM (Darbe Genişlik Modülasyonu) Devresi
Alternatif akım servo motorda stator sarımlarından sinüzoidal akım geçmektedir. Bu
sebeple akım yükselticiden çıkan alternatif akım sinyalinin gücünü yükselttikten
sonra motor sarımlarına direkt verilmesi en idealidir. Bununla birlikte pratikte sinüs
dalgalarının güçlendirilmesi uygun değildir; çünkü bu tür bir devre güç
transistörünün lineer bölgede kullanılmasını gerektirir. Böyle bir devrede ise

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 36/114
19
transistörde oluşacak olan ısı ve güç kayıpları çok fazla olur. Buna karşın transistörün
anahtarlamalı modda kullanılması suretiyle güç kayıpları minimum seviyeye
indirilebilir. Bu metot PWM (Darbe Genişlik Modülasyonu) olarak adlandırılır. Bu
metodda motor akım ortalama değeri, bir sinüs dalga olan ve. Doğru Akım -Sinüs
dönüşüm devresinden gönderilen sinüs dalga genliği ile orantılı ve kontrollü darbegenişliğine dönüştürülür. Sabit frekans ve genlikte salınım yapan bir üçgen taşıyıcı
dalga, ve akım yükselticiden elde edilen sinüs dalga çıkışı bir komparator vasıtasıyla
kıyaslanmaktadır. Şekil II.10. 'da gösterildiği gibi, eş olmayan genişlikteki darbeler,
sinüs dalga büyüklüğünün taşıyıcı dalga büyüklüğünü geçtiği noktaların bulunması
ile elde edilir.
Üçgen Dalga Stator
Şekil II.11: Sinüs Dalga PWM Esası [4]
Burada kırpıcı dalganın salınım frekansının seçilmesi önemli bir faktördür. Taşıyıcı
frekansı güç transistörünün anahtarlama frekansına eşit olduğu gibi, yüksek olduğu
durumda anahtarlama kayıplarını da oransal olarak arttırır, düşük yapıldığı durumda
ise servo motorun hız cevabını düşürür. Genel olarak; taşıyıcı frekansı inverter
bipolar transistörlerden ibaret olduğu durumda 1-3 kHz, FET’ lerden ibaret olduğu
durumda ise 5-20 kHz arasında seçilir.
II.2.3.5. Hız Algılayıcı
Genellikle Doğru akım servo motorda hız algılayıcı olarak Takojenerator (TG)
kullanılır. Bununla birlikte takojeneratorde f ırçalar vardır ve f ırçaların bakımı

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 37/114
20
problem teşkil eder. Alternatif akım servo motorlarda pozisyon algılama elemanı
olarak genellikle kodlayıcılar (enkoder) kullanılmaktadır. Servo motorlar geri-
besleme sinyali olmaksızın kullanılamazlar. Pozisyon ölçümü için değişik tiplerde
geri-besleme sinyalleri olmasına karşın yapısının basit ve ucuz olması sebebi ile
artımsal kodlaycılar (incremental encoders) özel önem arz eder.
II.2.3.6. Kodlayıcılar
Artımsal kodlayıcılar geri-beslemeli kontrol sistemlerinde pozisyonların teyidi ve
geri-besleme sinyallerinin üretilmesinde kullanılırlar. Genel olarak mutlak ve
artımsal olmak üzere iki tiptedirler. Artımsal kodlayıcılar mutlak kodlayıcılara oranla
ucuz olmaları ve yapılarının basit olması sebebi ile tercih edilmektedir.[5,6]
Tipik bir kodlayıcıda A B ve Z şeklinde üç farklı sinyal çıkışı mevcuttur. BunlardanA ve B fazına ait sinyaller, aralarında 90° faz farkı olan iki sinyaldir. Z sinyali ise
referans sinyali olarak adlandırılır ve sayıcıyı reset etmekte veya bir dönüşe ait
mutlak pozisyon bilgisinin belirlenmesinde kullanılır. Bununla birlikte bazı artımsal
kodlayıcı mekanizmaları A B ve Z sinyallerine ek olarak bunlar ın değillerini de çıkış
olarak veren yapıda yapılmaktadır. Kodlayıcıdan elde edilen çıkış darbeleri mutlak
pozisyon bilgisini göstermez. Kodlayıcının verdiği darbe sayısı bağlı olduğu şaftın
dönme miktarı ile orantılıdır.
Eksen dönme miktarının mutlak değeri kodlayıcıdan alınan çıkış darbelerinin bir
sayıcı (counter) devresi kullanılmak suretiyle depolanması ile elde edilir.
Kodlayıcıdan alınan darbe sayısının düşük olduğu durumlarda kodlayıcı çıkış
darbeleri 4 ile çarpılmak suretiyle darbe sayısı arttırılır ve sonra bu darbeler sayma
işlemine tabi tutulur. Şekil II.11.'de kodlayıcıdan alınan çıkış sinyalleri ve rotor
dönüş yönünün belirlenmesi esası gösterilmektedir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 38/114
22
Şekil II.12: Kodlayıcı Faz Sinyalleri ve Dönme Yönünün Belirlenmesi [7]
II.2.3.7. Artırımlı (Incremental) Encoder
Şekil II.13 'de bir artırımlı enkoderin kesiti gösterilmektedir. Döner encoderler
fotoelektriğe dayalı tarama prensibi ile çalışır. Ölçme belirli bir standarttataksimatlandırılmış disk üzerinden yapılır. Disk üzerinde dairesel olarak dağılan
taksimat çizgileri ve boşlukları vardır. Koyu tonlu bu çizgiler ile boşluklar aynı
genişliktedirler. Çizgiler arkasını göstermeyecek şekilde koyu, boşluklar ise
transparan olacak şekilde özel bir cam alaşım üzerine yerleşmişlerdir.[7]
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 39/114
23
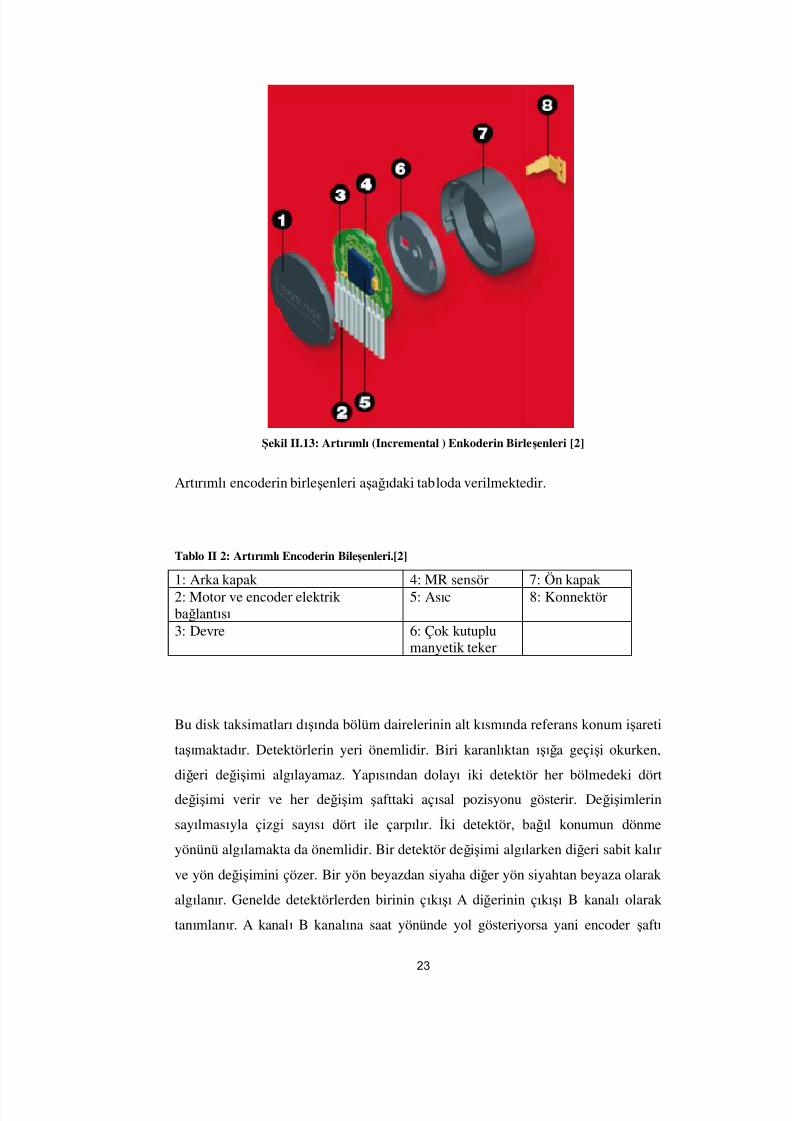
Şekil II.13: Artırımlı (Incremental ) Enkoderin Birleşenleri [2]
Artırımlı encoderin birleşenleri aşağıdaki tabloda verilmektedir.
Tablo II 2: Artırımlı Encoderin Bileşenleri.[2]
1: Arka kapak 4: MR sensör 7: Ön kapak2: Motor ve encoder elektrikbağlantısı
5: Asıc 8: Konnektör
3: Devre 6: Çok kutuplumanyetik teker
Bu disk taksimatları dışında bölüm dairelerinin alt kısmında referans konum işareti
taşımaktadır. Detektörlerin yeri önemlidir. Biri karanlıktan ışığa geçişi okurken,
diğeri değişimi algılayamaz. Yapısından dolayı iki detektör her bölmedeki dört
değişimi verir ve her değişim şafttaki açısal pozisyonu gösterir. Değişimlerin
sayılmasıyla çizgi sayısı dört ile çarpılır. İki detektör, bağıl konumun dönme
yönünü algılamakta da önemlidir. Bir detektör değişimi algılarken diğeri sabit kalır
ve yön değişimini çözer. Bir yön beyazdan siyaha diğer yön siyahtan beyaza olarak
algılanır. Genelde detektörlerden birinin çıkışı A diğerinin çıkışı B kanalı olarak
tanımlanır. A kanalı B kanalına saat yönünde yol gösteriyorsa yani encoder şaftı

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 40/114
24
saat yönünde döndüğünde A B' den önce açılır ve A B' den önce kapanır. Her iki
kanaldaki değişimler dijital sayıcı taraf ından sayılır. İstendiğinde bir z kanalı ile bir
referans noktası da tanımlanabilir.
II.2.3.8. Mutlak (Absolute) Encoderler
Şekil II.14 ‘de bir mutlak(absolute) enkoderin kesiti gösterilmektedir, ölçme için
standart bir cam disk kullanılır. Bu disk taksimatlandırılmış ve kodlanmıştır.
Tarama prensibi artırımlı encoderlerle aynı olmakla birlikte daha fazla sayıda
bölüme (hücreye) sahiptir. Mutlak encoderler herhangi bir sayıcı, konum
belirleyici, dönme yönünü çözecek elektronik bir çevrime ihtiyaç duymaz.
Şekil II.14: Mutlak (Absolute) Encoderin Yapısı[7]
Tablo II 3: Artırımlı Encoderin birleşenleri [7]
1: Veri işleme kısmı 4: Infared verici 7: Dönüş ışığını kaydeden disk
2: Infred alıcı 5: Sürücü şaftı 3: Her bir dönüşteki artışı kaydedenoptik kollu disk
6: opto elektronikiçin aralık
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 41/114
25
Ölçülen değerler direkt olarak taksimatlandırılmış disk üzerindeki modeller
üzerinden alınırlar ve çıkışlar kodlanmış sinyaller olarak gönderilirler. Mutlak
encoderler tek dönüşlü ve çok dönüşlü tipleri ile ikiye ayrılırlar.[7]
Tek dönüşlü encoderler; Belirli bir duruş sayısında bir tur çizer (0°-360°). Bir
dönüşten sonra konum değerleri tekrarlanır.
Çok dönüşlü encoderler; Sadece bir turun üzerindeki, açısal konumlan çözmekle
kalmaz, aynı zamanda birkaç turu ayırt edebilir. Bu kabiliyeti encoder şaftına
bağlanmış ve kodlanmış disklerin eklenmesiyle yapar.Çok dönüşlü mutlak
encoderler vidalı mil, krameyer mekanizmaları kullanılan lineer mekanizmalarda
lineer hareketleri ölçmek için de kullanılır. Encoderler yüksek sıcaklık, vakum,
radyasyon, titreme ve sallanma gibi kötü koşullardan etkilenirler. Şekil II.15 ‘ de bir
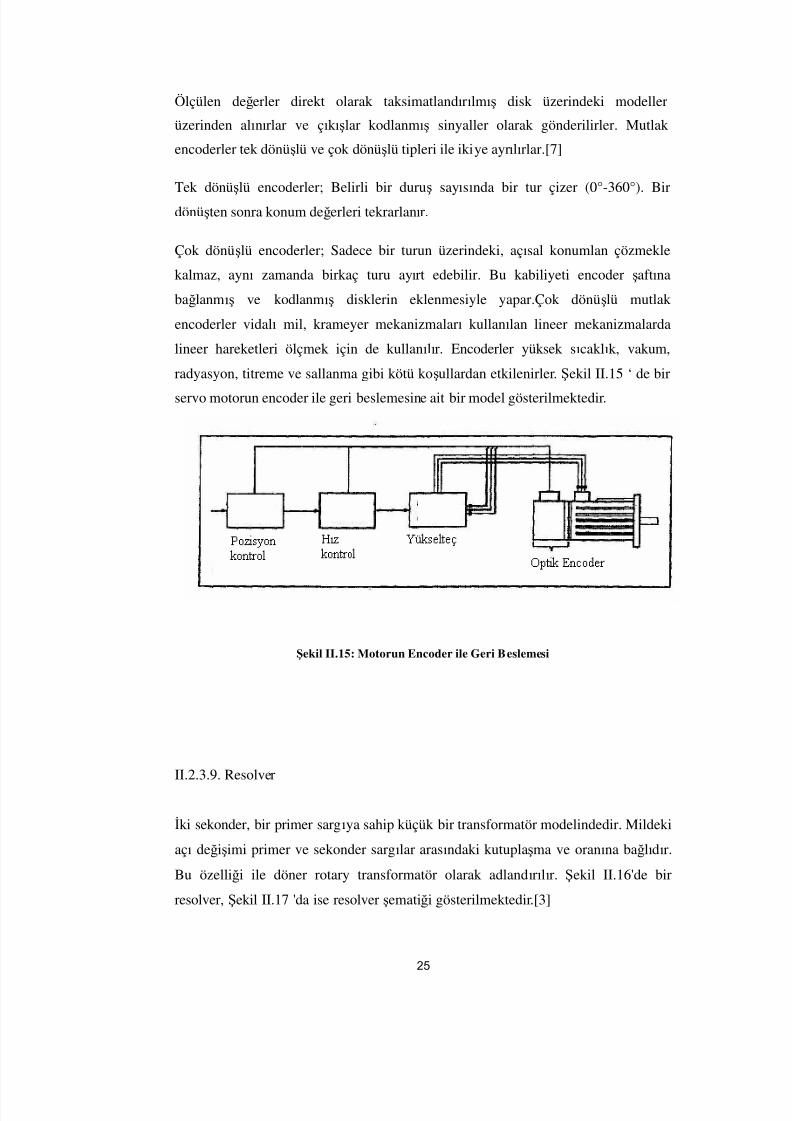
servo motorun encoder ile geri beslemesine ait bir model gösterilmektedir.
Şekil II.15: Motorun Encoder ile Geri Beslemesi
II.2.3.9. Resolver
İki sekonder, bir primer sargıya sahip küçük bir transformatör modelindedir. Mildeki
açı değişimi primer ve sekonder sargılar arasındaki kutuplaşma ve oranına bağlıdır.
Bu özelliği ile döner rotary transformatör olarak adlandırılır. Şekil II.16'de bir
resolver, Şekil II.17 'da ise resolver şematiği gösterilmektedir.[3]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 42/114
26
Şekil II.16: Resolver [2]
Şekil II.17: Resolver Şematiği [2]
Rotora ve statora bağlı olarak, resolver sürekli olarak motor rotorunun açısal
pozisyonunu ölçer. Sekonderler motor bloğu üzerinde konumlandırılmış ve
bağlanmıştır ki bu bloğa stator denir. Sekonderler stator üzerinde birbirlerine göre
90°'lik açı ile bağlıdırlar. Primer ise resolver şaftına yani rotora bağlıdır.
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 43/114
27
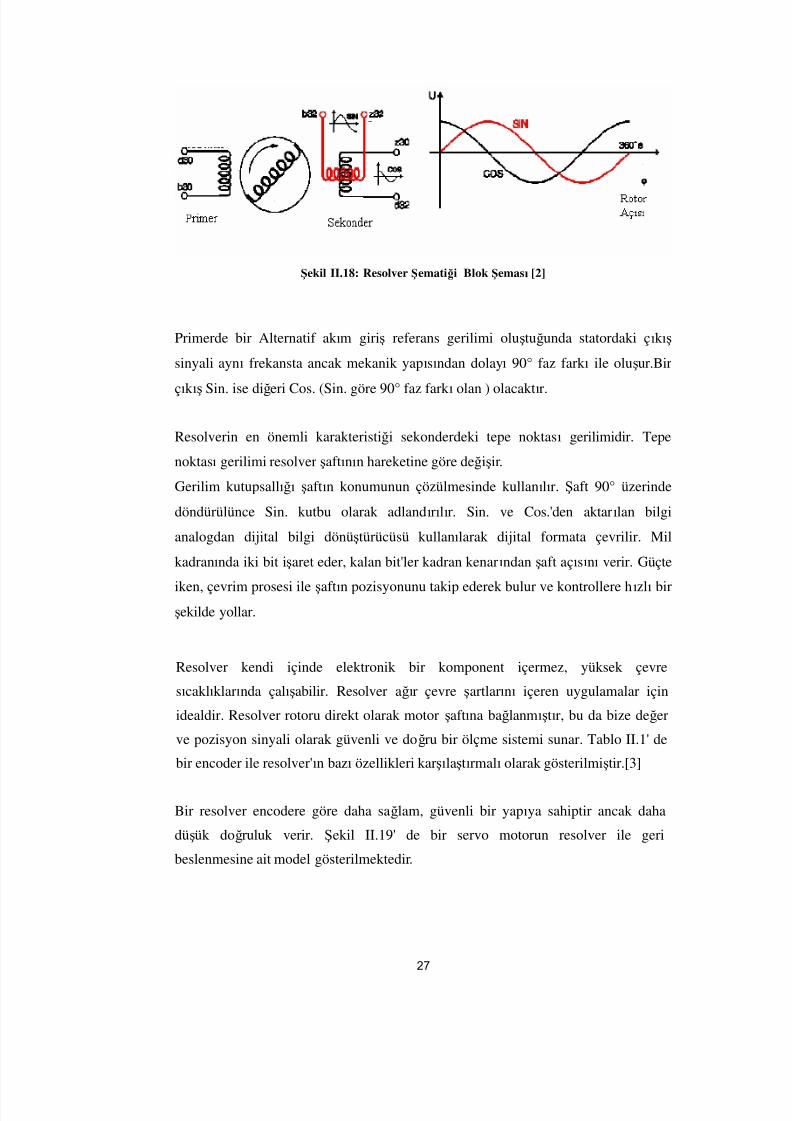
Şekil II.18: Resolver Şematiği Blok Şeması [2]
Primerde bir Alternatif akım giriş referans gerilimi oluştuğunda statordaki çıkış
sinyali aynı frekansta ancak mekanik yapısından dolayı 90° faz farkı ile oluşur.Bir
çıkış Sin. ise diğeri Cos. (Sin. göre 90° faz farkı olan ) olacaktır.
Resolverin en önemli karakteristiği sekonderdeki tepe noktası gerilimidir. Tepe
noktası gerilimi resolver şaftının hareketine göre değişir.
Gerilim kutupsallığı şaftın konumunun çözülmesinde kullanılır. Şaft 90° üzerinde
döndürülünce Sin. kutbu olarak adlandırılır. Sin. ve Cos.'den aktarılan bilgi
analogdan dijital bilgi dönüştürücüsü kullanılarak dijital formata çevrilir. Mil
kadranında iki bit işaret eder, kalan bit'ler kadran kenarından şaft açısını verir. Güçte
iken, çevrim prosesi ile şaftın pozisyonunu takip ederek bulur ve kontrollere hızlı birşekilde yollar.
Resolver kendi içinde elektronik bir komponent içermez, yüksek çevre
sıcaklıklarında çalışabilir. Resolver ağır çevre şartlarını içeren uygulamalar için
idealdir. Resolver rotoru direkt olarak motor şaftına bağlanmıştır, bu da bize değer
ve pozisyon sinyali olarak güvenli ve doğru bir ölçme sistemi sunar. Tablo II.1' de
bir encoder ile resolver'ın bazı özellikleri karşılaştırmalı olarak gösterilmiştir.[3]
Bir resolver encodere göre daha sağlam, güvenli bir yapıya sahiptir ancak daha
düşük doğruluk verir. Şekil II.19' de bir servo motorun resolver ile geri
beslenmesine ait model gösterilmektedir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 44/114
28
Şekil II.19: Motorun Resolver ile Geri Beslemesi [2]
Tablo II 4: Encoder ile Resolverin Karşılaştırılması [3]
Encoder Resolver
Standart
çözünürlük(/rev)
32,640 16,384
Max. Hız(/sn) 2,448,000 500,000
Doğruluk (arc-dak.) 1,5/10 15,0/7,0
Cevap verme süresi <1 15
Şok toleransı 5 50
Sıcaklık aralığı (ºC) 0’ dan 10 ºC -55’ den 175 ºC

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 45/114
29
II.2.3.10. Kodlayıcıdan Elde Edilen Darbeler ile Hız Miktarının Ölçülmesi
Artımsal tipli kodlayıcılarda yüksek hız değerlerinde hız ölçümü bir problem teşkil
etmemektedir. Yüksek hızlarda kodlayıcıdan alınan sinyallerle hızın ölçülmesinde,darbe trenleri(Şekil II.20) bir sayıcıda depolanır ve hız hesabı basit bir aritmetik ifade
ile kolayca bulunabilir.[7]
Şekil II.20: Dönme Hızının Hesaplanması
dak devT M
m
N s / .10*6
4
= (II.2)
Ts: Örnekleme zamanı
m: Örnekleme aralığındaki pals sayısı
M: Devir başına pals sayısı
Düşük frekanslarda darbe sayısının düşük olması dolayısı ile hızın ölçümünde
yukarıda verilen metodun kullanılmasında problemler ortaya çıkar. Bu problemiortadan kaldırmak için ya darbe sayısı belirli bir sayı ile çarpılarak yeni darbe
frekansına göre hesaplama yapılır veya aşağıda bahsedilen kesme modeli göz önüne
alınarak dönme hızı hesaplanır. Sabit frekanslı bir saat ile verilen darbeler Tw darbe
genişliği boyunca entegre edilir ve aşağıdaki hız denklemi ile kolayca hesaplanabilir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 46/114
30
dak devn M
f N c /
.10*6 4=
(II.3)
c f : Saat Frekansı (Khz)
n: wT aralığında sayılan saat palsleri
M: Devir başına pals sayısı
II.2.4. Atalet Hesapları
Elektromekanik konumlama uygulamaları için kullanılan tahrik elemanlarının
sürtünme ve atalet etkilerinin çözümünde aşağıdaki rutinler izlenirse kolaylıkla
çözümlere ulaşılabilir[4,7].
Hareket kontrol sistemlerinde ihtiyaçların belirlenmesindeki ilk adım yükün
konumuna göre mekanik analizi sürtünme ve ataleti de içeren- yapmakt ır. Yük
sürtünmesi kolayca ya tahminle ya da basitçe döndürme momenti ölçülmesi ile
belirlenir.Atalet, bir cismin hızlanmaya veya yavaşlamaya gösterdiği direnç - bir yükün bir
hızdan diğer hıza ivmelenmesi için gerekli olan momenti ifade eder, fakat sürtünme
kuvvetlerini içermemektedir. Atalet, hareket ettirilecek mekanik bağlantı sisteminin
analizi ile hesaplanır. Bu tip sistemler doğrudan, dişli, teğetsel, vidalı mil şeklindeki
dört temel tahrik dizaynından biri olarak sınıflandırılırlar. Mekanik bağlantı
sisteminin analizinde denklemler motor miline indirgenmiş yük parametrelerini
gösterir. Motor ve kontroller seçimi için motorun ne 'gördüğünün' belirlenmesi
gereklidir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 47/114
31
II.2.4. 1. Silindirin Ataleti
Silindirin atalet momenti ağırlığına ve yarıçapına veya özgül ağırlığına, yarıçapına
ve uzunluğuna bağlı olarak hesaplanabilir. Katı silindir için:
Ağırlık ve yarıçapa bağlı olarak:
g
WR J
2
2
=(II.4)
Özgül ağırlık, yarıçap ve uzunlığa bağlı olarak;
g
LpR
J 2
4τ
= (II.5)
İçi boş silindir için:
Ağırlık ve yarıçapa bağlı olarak:
( )202 i R R
g
WR J +=
(II.6)
Özgül ağırlık, yarıçap ve uzunluğa bağlı olarak
g
LpR J
2
4τ
=(II.7)
Bu eşitlikler sayesinde makine parçalarının ataletleri hesaplanabilir. Motor
seçimlerinde mekanik sistemlere dair atalet kuvveti ve sürtünme değerleri kullanılır.
Şekil II.21: Katı Silindir [3]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 48/114
32
Şekil II.22: İçi Boş Silindir [3]
II.2.4.2. Doğrudan Tahrik
En basit tahrik sistemidir. Yük arada hiçbir hız çevirici olmadan motora bağlanır.Çünkü herhangi bir atalet etkisi yaratan mekanik sistemler içermez. Hareket doğrudan
iletilir. Motor hızı ile yük hızı aynı olur. Yük sürtünmesi direkt motor sürtünmesine
karşılık gelir. Toplam atalet yük ve motor ataletlerin toplamına eşittir. Şekil II.23' de
doğrudan tarik sistemi görülmektedir.
m yt J J J += (II.8)
Şekil II.23: Doğrudan Tahrik [3]
II.2.4.3. Dişli Mekanizmalı Tahrik
Motor ile yük arasında dişli içeren mekanik sistemdir (Şekil II.24). Hız değişimi olan
sistemlerde yük atalet momentinin motor miline indirgenmesinde çevrim oranının
karesine etkili olur.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 49/114
33
Motor hızı:
xN V V ym = (II.9)
Veya
m
y y
m N
xN V
V = (II.10)
Motor momenti:
m ym N M M *=(II.11)
İndirgenmiş atalet momenti:
m
y
i J N
J J +=
2(II.12)
Toplam motor atalet momenti:
m
y
t J N
J J +=
2(II.13)
Şekil II.24: Hız Çevirici Motor ile Yük Arasında [3]
Toplam atalet momenti hatasız bulunmak istenirse dişlilerin de atalet momenti
hesaba katılmalıdır. Moment hesaplarında da dişli mekanizması verimi etki
ettirilmelidir.[7]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 50/114
34
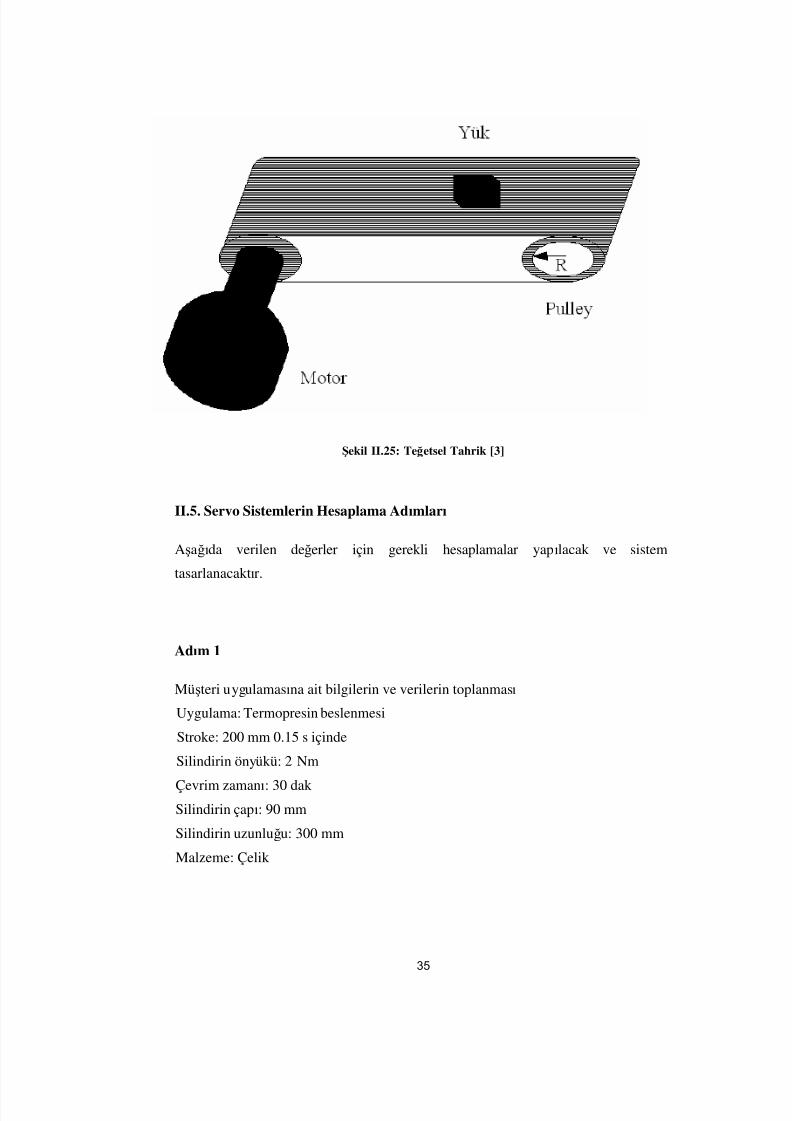
II.2.4.4. Teğetsel Tahrik
Kayış –kasnak , zincir, kremayer-pinyon mekanizmalarını içerir.
Yük momenti:
RF M y y = (II.14)
Sürtünme momenti:
RF M ss = (II.15)
Yük atalet momenti:
g
WR J y
2
=(II.16)
Toplam atalet momenti:
321
2
p p p y J J J g
WR J +++=
(II.17)
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 51/114
35
Şekil II.25: Teğetsel Tahrik [3]
II.5. Servo Sistemlerin Hesaplama Adımları
Aşağıda verilen değerler için gerekli hesaplamalar yapılacak ve sistem
tasarlanacaktır.
Adım 1
Müşteri uygulamasına ait bilgilerin ve verilerin toplanması
Uygulama: Termopresin beslenmesi
Stroke: 200 mm 0.15 s içinde
Silindirin önyükü: 2 Nm
Çevrim zamanı: 30 dakSilindirin çapı: 90 mm
Silindirin uzunluğu: 300 mm
Malzeme: Çelik

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 52/114
36
Hız
0,075/0,075 s 0,15s
Şekil II.26: Uygulamaya ait grafik [3]
Adım 2
Hareket profilinin hesaplanması
İvmelenme ;
22
/ *2
srad t
a∆∆Φ
= (II.18)
a=(2*2,22)/(0,075*0,075)=789,33
Silindir dairenin çevresi ;π*Φ=U m (II.19)
U=0,009*3,17=0,283 m
Dönme açısı;
Δφ=s
U ∆*
3600
(II.20)
Δφ=360/0,283=254,410
=4,44 rad
Maksimum .hız;
t at ∆= *ω (rad/s) (II.21)
π
ω*30=n
(min-1) (II.22)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 53/114
37
n=30*59,2/3,14=565 (min-1)
Adım 3
Jsilindir=0,5*5,15*0,045*0,045=0,00521 kgm2
Jcoup=0,002 kgm2
Jtotal =0,01062 kgm2
Adım 4
İvmelenme torkunun hesabı;
a J M *= (Nm) (II.23)
Nm M ivmelenme 39,8789233*0162,0 ==
Adım 5
Toplam Tork
İvmelenme Torku : 8.39 Nm
Silindir Önyükleme Torku : 2.00 Nm
Toplam maksimum. Tork : 10.39 Nm
Adım 6
Motor Seçimi;
i
J J
yük
motor =(II.24)
J=0,00177 kgm2
Yük / Motor ataleti oranı 6:1 'den az ise kabul edilebilir değerdedir. 6:1 'den daha
büyük atalet oranında, sistemde titreşimler oluşturur, işlem zamanlarını uzatır,
kararsız bir çalışma sağlar. Büyük atalet oranı farkları olduğu zaman, motor
aşmalarını, titreşimlerini önlemek için kontrol kazancı azaltılabilir. Bu ise hareket ve
konumlama zamanlarını azaltacaktır ve uygulama için dezavantaj getirecektir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 54/114
38
Uygulamalarda yük ile motor arasındaki atalet oranını ayarlarken mekanik aktarma
organlarından faydalanılır. Kullanılan redüktör çevrim oranlan vidalı mil çevrim
oranları ile motora indirgenmiş atalet kuvvetleri azaltılabilir. Aynı zamanda kontrol
sistemi üzerinde uygulanacak özel çevrimler ile de ayarlanabilir, ancak bu yöntem
hem pahalı olacaktır, hem de standart kontrol çevrimleri dışında uygulamaya özel birtasarım olacaktır. Çalışma noktasının kararlı olabilmesi için yük momentinin hıza
göre değişimi motor momentinin hıza göre değişiminden büyük olmalıdır.
Tepe torku :10,39 Nm
Hız:5651min−
Atalet:17,70 kgm2
Motor Bilgileri:
Tepe tork: 18 Nm
Atalet :21,241 kgm2
Atalet Oranı:
m
y
oran J
J J =
(II.25)
99,4=oran J
Adım 7
Motor ataleti ve yük ataletine göre ivmelenme torkunun hesabı:
Toplam atalet
01062,0= yük J kgm2
00212,0=motor J kgm2
01274,0=toplam J kgm2
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 55/114
39
Gerekli ivmelenme torku
Nm M ivmelenme 05,1033,789*01274,0 ==
İvmelenme Torku: 10,05 Nm
Silindirin önyükleme torku: 2 NmToplam tepe torku: 12,05 Nm
Adım 8
RMStork: 3,30 Nm
İzin verilen çalışma sıcaklığının aşılmaması için etkin moment değeri anma
momentinden küçük ve motor anma momentinin üstündeki yüklenme süreleri ısıl
dengeye erişme süresinden kısa olmalıdır. Yük momentinin etkin değerinin (RMS),sürekli çalışmadaki motor anma momentine eşit olması durumunda motor son
çalışma sıcaklığına ulaşır.[4,7]
Adım 9
Motor Boyunun ve Elektriksel Değerlerinin Kontrolü
Motor tipi, motor boyutu ile birlikte en düşük tepe akım değerine göre seçilir.
Tepe Tork : 12.05 Nm Hız : 565 min'1
; DC Bus 300 V (AC 230 V, 1 faz)
Adım 10
Sürücü tipinin seçimi:
Max. Tepe akımına göre sürücü seçilir.
Tepe akımı:10 A
Sürekli akım: 5 A

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 56/114
40
Adım 11
Redüktör kutusu seçimi:
Sürekli Tork. 2.07 Nm
Sürekli Hız :28251min−
Yukarıda yapılan hesaplamalarda sistemin gereksinimleri olan alt ve üst moment,
akım ve yük değerleri hesaplanmıştır. Bu sınırlara uygun olacak şekilde servo motor,
sürücü ve redüktör kutusu seçilebilir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 57/114
41
BÖLÜM III
KONTROL YÖNTEMLERİ
III.1. PID KONTROL
III.1.1 Giriş
PID (Proportional-Integral-Derivative) günümüzde çok kullanılan bir kontrol
yöntemidir. Endüstrideki uygulamaların %75’inde uygulanmıştır. Çok geniş bir
uygulama alanının olmasına rağmen PID uygulamaları için standart bir tanımlama
yoktur. Genel olarak PID algoritması aşağıdaki gibidir:
Şekil III.1: PID kontrol algoritması [18]
∫ ++=t
dt
t deTd dt t eTit eK t u
0
])(
)( / 1)([)( (III.1)
)()()( t yt r t e −= (III.2)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 58/114
42
Burada u(t) kontrol değişkeni, e(t) toplama noktası, y(t) çıkıştan ölçülen değerle
aynıdır. K, Ti, Td PID parametreleridir. Yukarıdaki formülü biraz daha basite
indirgersek:
)()()()( t Dt I t Pt u ++= (III.3)
III.1.2. P (Oransal kontrolör)
Sürekli sistemde oransal kontrolör aşağıdaki gibi ifade edilebilir.
U(t)=KP.e(t) (III.4)
Burada U(t) kontro1ör çıkışını, KP oransal kazancı, e(t) hatayı göstermektedir.
Oransal kontrolörün blok diyagramı şekil III.2’ de verilmiştir.
Şekil III.2: Oransal Kontrolör [8]
Oransal kontrolörün transfer fonksiyonu
KPsGps E
sU == )(
)(
)((III.5)
olarak yazılabilir. Sayısal simülasyon için denklem III.2 ayrık biçimde aşağıdaki gibi
yazılabilir.
)(.)( k eKPk U = (III.6)
KPk ek U =)( )(
(III.7)
Denklem III.4’ de görüldüğü gibi oransal kontrolör bir kazanç elemanı olarak görev
yapar. Oransal kontrolörde hata ile kontrolör çıkışı arasında ki ilişki şekil III.3’ de
çeşitli kazanç değerleri için gösterilmiştir.[8]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 59/114
43
Şekil III.3: Oransal Kontrolör Çıkışının Hata ile Değişimi [8]
Şekil III.2'de görüldüğü gibi belirli bir hata değerinde kontrolör çıkışı %100' e
ulaşarak doyuma girer. Hatanın daha da büyümesi kontrolör çıkışını etkilemez. Aynı durum kontrolör çıkışının %0’ a düştüğü zamanda da görülür. Kontrolör çıkışının %0
ile %100 arasında değişmesi sonucunu doğuran hata bölgesine "oransal bölge" adı
verilir. Oransa1 kazanç artıkça oransal bölge azalır. Oransal kazancın büyük olması
durumunda sistem davranışı kararsız olabilir. Oransal kontrolörün en büyük
dezavantajı kazancın sıf ır olduğu anda kontrolör çıkışının pratikte sıf ır olmasıdır.
Buna öteleme hatası denir.[8]
III.1.3. PI (Oransal İntegral) Kontrolör
Oransal kontrolörde öteleme hatasını önlemek için kontrolöre integral kontrol
elemanı ilave edilir. Böylece kontrolör çıkışı hatanın sadece o andaki değerine bağlı
olmayıp, geçmiş hata değerlerine de bağlı olur. İntegral kontrol aşağıdaki şekillerde
ifade edilebilir.
∫ =
t
dt t eKI t u0
).()( (III.8)
Burada KI integral kontrolörün kazancıdır. TI integral zamanı olmak üzere,
integral kontrolör kazancı ;
TI
KPKI =
(III.9)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 60/114
44
olarak yazılır. İntegral kontrolörün transfer fonksiyonu aşağıdaki gibi yazılır.
s
KI sG =)(1
(III.10)
İntegral kontrolörün açık çevrim koşulları altında çıkışı şekil III.4’ de verilmiştir.
Şekil III.4: İntegral Kontrolör Çıkışı [8]
PI kontrolör, oransal ve integral kontrollerin her ikisininde bir arada kullanılmasıyla
gerçekleştirilir. Denklem III.3 ile denklem III.8’ den faydalanarak PI kontrolörün
cevabı aşağıdaki şekilde yazılır.
∫ +=t
dt t eKI t eKPt u0
).()(.)( (III.11)
Denklem III.7’ yi euler metodu kullanarak ayrıklaştırılırsa Pı kontrolörü ayrık
sistemde temsil eden ifade aşağıdaki gibi yazılabilir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 61/114
45
∑=
+=k
i
ieT KI k eKPk U 0
)(.)(.)((III.12)
Burada T, ayrık sistemde örnekleme zamanıdır. Hatanın çok büyük olması halindeoransal kontrolörün doyuma girip kontrol etmediğini belirtmiştik. Bu durumda
integral kontrolör şekil III.3' deki oransal bölgeyi gerektiği kadar sola kaydırak
kontrolörün açık çevrim altında çıkışı görülmektedir.
Şekil III.5: PI Kontrolör Çıkışı [8]
III.1.4.PD(Oransal –Türevsel) Kontrolör
Hatanın çok hızlı değiştiği durumlarda oransal kontrolörlerde hatanın
değişimine oranlı bir terim ilave etmek gerekir. Bu da türevsel kontrolör ile
gerçekleştirilir. PD kontrol sürekli sistemde aşağıdaki gibi ifade edilir.
dt
t deKDt eKPt u
)()(.)( += (III.13)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 62/114
46
Burada KD türevsel kontrolörün kazancıdır. Türevsel kontrolörün transfer
fonksiyonu;
sKDKPsG .)( += (III.14)
şeklinde yazılabilir.
Denklem III.10’ da türevsel terim yaklaşık fark elemanları cinsinden ifade edilirse,PD kontrolörün ayrık zamandaki ifadesi aşağıdaki şekilde yazılabilir.
)1()()(.)( −−+= k ek eT
KDk eKPk U
(III.15)
Şekil III.6’ de PD kontrolörün açık çevrim koşulları altında çıkışı görülmektedir.[8]
Şekil III.6: PD Kontrolör etkisi [8]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 63/114
47
III.1.5.PID(Oransal –İntegral-Türevsel) Kontrolör
PID (oransa1 -integra1 -türevsel ) olarak adlandırılan bu kontrol ayrı ayrı üç
kontrol elemanı içerdiğinden bunların tüm özelliklerini kapsar. Sürekli sistemde, PIDkontrolüyle ilişkili denklemi aşağıdaki gibi yazabiliriz;
dt
t deKDdt t eKI t eKPt u
t )().()(.)(
0
++= ∫ (III.16)
Kontrolörün transfer fonksiyonu ise ;
KDs
s
KI KP
s E
sU sGpid ++==
)(
)()( (III.17)
şeklinde yazılabilir. Şekil III.7’ da PID kontrolörün blok diyagramı gösterilmektedir.
Denklem III.12 ve III.15’ den yaralanılarak PID kontrolörün ayrık sistemdeki ifadesi
aşağıdaki şekilde yazılabilir.
)1()()(.)(.)(0
−−++= ∑=
k ek eT
KDieT KI k eKPk U
k
i
(III.17)
T k t kT k U t u )1(),()( += pp (III.18)
Denklem III.17’ de verilen PID kontrol ifadesinden P, PI, PD ve PID olmak üzere 4
çeşit kontrolör gerçekleştirilebilir.
Örneğin KP=1, KI=O, KD=O alınırsa Denklem III.9’ da ki PI kontrol eşitliğini
bulabiliriz.
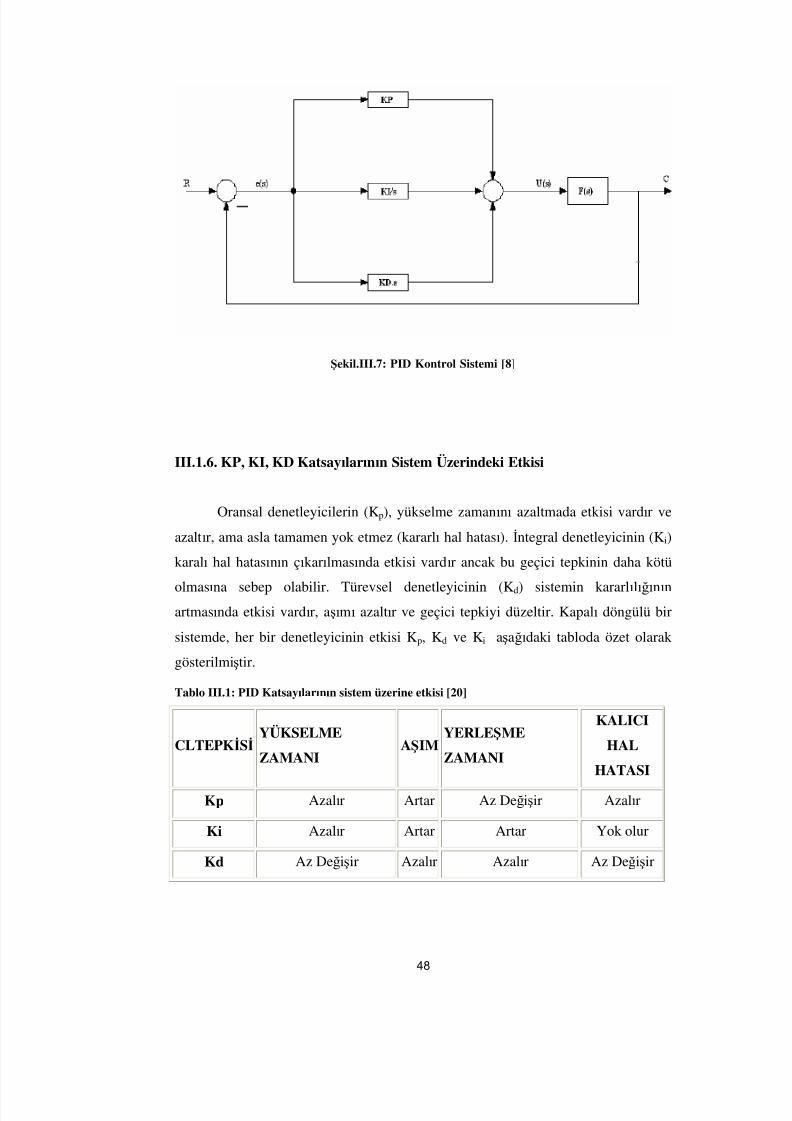
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 64/114
48
Şekil.III.7: PID Kontrol Sistemi [8]
III.1.6. KP, KI, KD Katsayılarının Sistem Üzerindeki Etkisi
Oransal denetleyicilerin (Kp), yükselme zamanını azaltmada etkisi vardır ve
azaltır, ama asla tamamen yok etmez (kararlı hal hatası). İntegral denetleyicinin (Ki)
karalı hal hatasının çıkarılmasında etkisi vardır ancak bu geçici tepkinin daha kötü
olmasına sebep olabilir. Türevsel denetleyicinin (Kd) sistemin kararlılığınınartmasında etkisi vardır, aşımı azaltır ve geçici tepkiyi düzeltir. Kapalı döngülü bir
sistemde, her bir denetleyicinin etkisi Kp, Kd ve Ki aşağıdaki tabloda özet olarak
gösterilmiştir.
Tablo III.1: PID Katsayılarının sistem üzerine etkisi [20]
CLTEPKİSİ YÜKSELME
ZAMANIAŞIM
YERLEŞME
ZAMANI
KALICI
HAL
HATASI
Kp Azalır Artar Az Değişir Azalır
Ki Azalır Artar Artar Yok olur
Kd Az Değişir Azalır Azalır Az Değişir
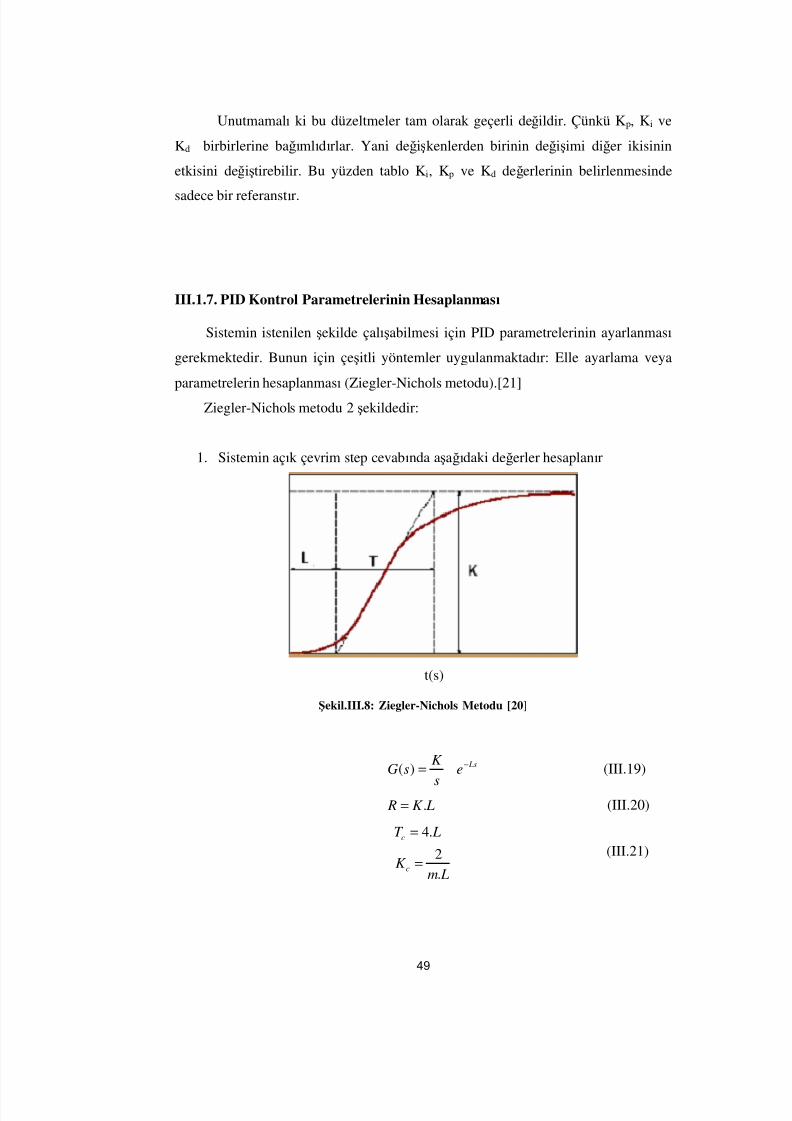
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 65/114
49
Unutmamalı ki bu düzeltmeler tam olarak geçerli değildir. Çünkü Kp, Ki ve
Kd birbirlerine bağımlıdırlar. Yani değişkenlerden birinin değişimi diğer ikisinin
etkisini değiştirebilir. Bu yüzden tablo Ki, Kp ve Kd değerlerinin belirlenmesinde
sadece bir referanstır.
III.1.7. PID Kontrol Parametrelerinin Hesaplanması
Sistemin istenilen şekilde çalışabilmesi için PID parametrelerinin ayarlanması
gerekmektedir. Bunun için çeşitli yöntemler uygulanmaktadır: Elle ayarlama veya
parametrelerin hesaplanması (Ziegler-Nichols metodu).[21]
Ziegler-Nichols metodu 2 şekildedir:
1. Sistemin açık çevrim step cevabında aşağıdaki değerler hesaplanır
t(s)
Şekil.III.8: Ziegler-Nichols Metodu [20]
Lse
s
K sG −=)(
(III.19)
LK R .= (III.20)
LmK
LT
c
c
.2
.4
=
=(III.21)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 66/114
50
K Ti Td Tp
P 0.5Kc T c
PI 0.45 Kc 0.83 T c 1.4 T c PID 0.6 Kc 0.5 T c 0.125 T c 0.85 T c
Tablo III.2: P,PI,PID Katsayılarının Etkisi [21]
2. PID kontrolörün I,D katsayıları 0 yapılır. P sistem osilasyona gidene kadar
yavaş yavaş arttırılır. Sistemin osilasyona gittiği andaki P değerine Ku,
osilasyon frekansına Pu dersek
Ş ekil.III.9: Sistemin Kapalı Çevrim Frekans Cevabı [21]
Tablo III.3: Z-N Basamak cevabı deneyinden elde edilen PID parametreleri [21]
Controller Kc tI tD
P Ku/2
PI Ku /2.2 Pu /1.2
PID Ku /1.7 2/Pu Pu /8
PID denetleyici tasarımında istenilen tepkiyi elde etmek için aşağıdaki
adımlar izlenir:
1.Açık döngü tepkisi bulunur ve ihtiyaçlar belirlenir.
2.Yükselme zamanını düzeltmek için oransal denetleyici eklenir.3.Aşmayı düzeltmek için türevsel denetleyici eklenir.
4.Kararlı hal hatasını yok etmek için integral denetleyici eklenir.
5.İstenilen tepki elde edilene kadar Kp, Ki ve KD ayarlanır. Hangi denetleyicinin
hangi karakteristiği kontrol ettiğini tablo-1’den yararlanılarak bulabiliriz.[22]
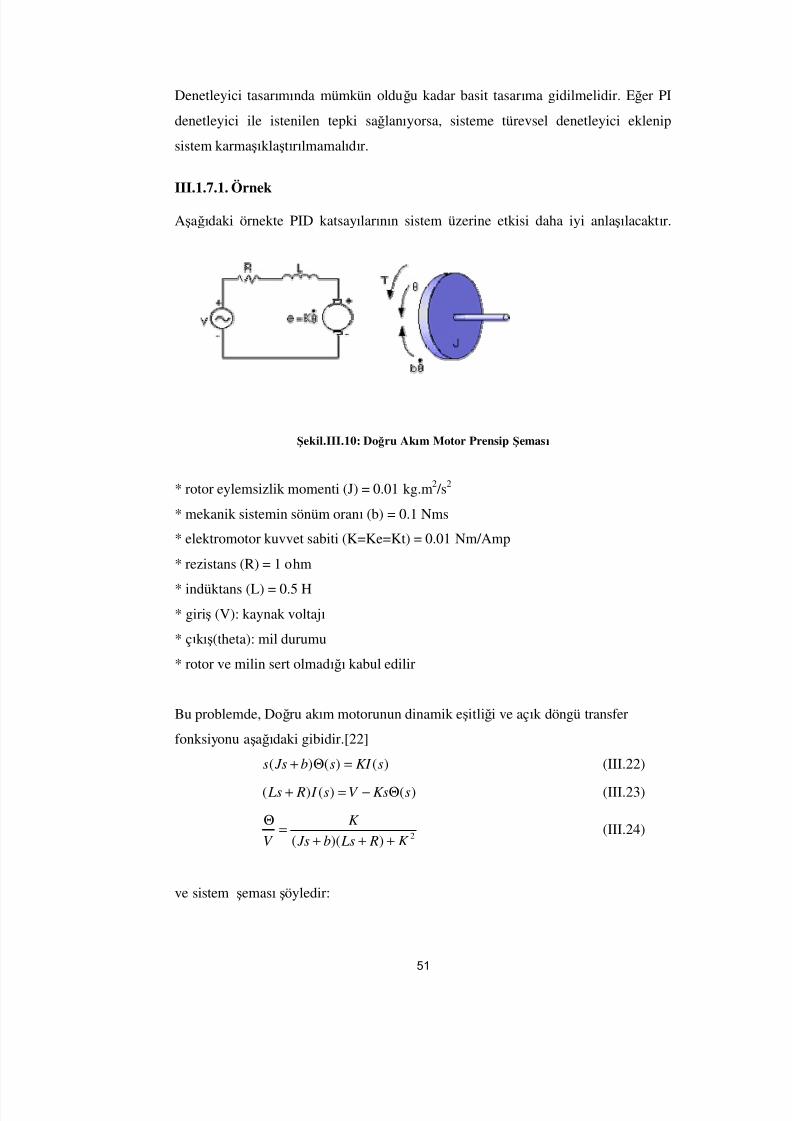
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 67/114
51
Denetleyici tasarımında mümkün olduğu kadar basit tasarıma gidilmelidir. Eğer PI
denetleyici ile istenilen tepki sağlanıyorsa, sisteme türevsel denetleyici eklenip
sistem karmaşıklaştırılmamalıdır.
III.1.7.1. Örnek
Aşağıdaki örnekte PID katsayılarının sistem üzerine etkisi daha iyi anlaşılacaktır.
Şekil.III.10: Doğru Akım Motor Prensip Şeması
* rotor eylemsizlik momenti (J) = 0.01 kg.m2 /s2
* mekanik sistemin sönüm oranı (b) = 0.1 Nms
* elektromotor kuvvet sabiti (K=Ke=Kt) = 0.01 Nm/Amp
* rezistans (R) = 1 ohm
* indüktans (L) = 0.5 H* giriş (V): kaynak voltajı
* çıkış(theta): mil durumu
* rotor ve milin sert olmadığı kabul edilir
Bu problemde, Doğru akım motorunun dinamik eşitliği ve açık döngü transfer
fonksiyonu aşağıdaki gibidir.[22]
)()()( sKI sb Jss =Θ+ (III.22)
)()()( sKsV s I R Ls Θ−=+ (III.23)
2))(( K R Lsb Js
K
V +++=
Θ(III.24)
ve sistem şeması şöyledir:

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 68/114
52
1 rad/sn basamak girişli tasarım kriterleri:
• 2 saniyeden az yerleşme zamanı
• %5’den az aşma
• %1’den az kararlı hal hatası
Şimdi bir PID denetleyici tasarlayalım ve sisteme dahil edelim. İlk önce yeni birm_kütük oluşturalım.
J=0.01;
b=0.1;
K=0.01;
R=1;
L=0.5;
num=K;den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)];
PID kontrolü transfer fonksiyonu aşağıdaki gibidir:
s
K sK sK sK
s
K K
I p D
D I
p
++=++
2
(III.25)
Oransal kontrol
İlk önce kazancı 100 olan oransal denetleyici kullanarak inceleyelim.
M_kütüğümüzün sonuna aşağıdaki komut dizisini ekleyelim.
Kp=100;
numa=Kp*num;
dena=den;
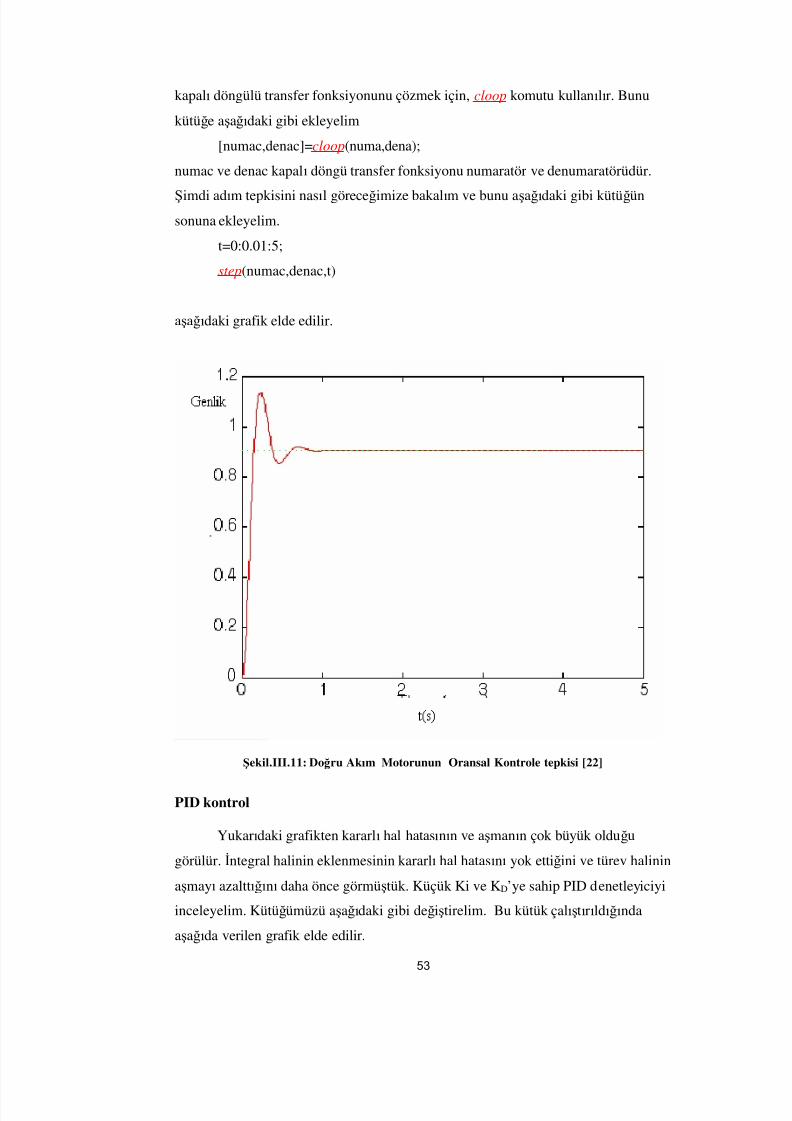
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 69/114
53
kapalı döngülü transfer fonksiyonunu çözmek için, cloop komutu kullanılır. Bunu
kütüğe aşağıdaki gibi ekleyelim
[numac,denac]=cloop(numa,dena);
numac ve denac kapalı döngü transfer fonksiyonu numaratör ve denumaratörüdür.
Şimdi adım tepkisini nasıl göreceğimize bakalım ve bunu aşağıdaki gibi kütüğünsonuna ekleyelim.
t=0:0.01:5;
step(numac,denac,t)
aşağıdaki grafik elde edilir.
Şekil.III.11: Doğru Akım Motorunun Oransal Kontrole tepkisi [22]
PID kontrol
Yukarıdaki grafikten kararlı hal hatasının ve aşmanın çok büyük olduğu
görülür. İntegral halinin eklenmesinin kararlı hal hatasını yok ettiğini ve türev halinin
aşmayı azalttığını daha önce görmüştük. Küçük Ki ve KD’ye sahip PID denetleyiciyi
inceleyelim. Kütüğümüzü aşağıdaki gibi değiştirelim. Bu kütük çalıştırıldığında
aşağıda verilen grafik elde edilir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 70/114
54
J=0.01;
b=0.1;
K=0.01;
R=1;
L=0.5;num=K;
den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)];
Kp=100;
Ki=1;
Kd=1;
numc=[Kd, Kp, Ki];
denc=[1 0];
numa=conv(num,numc);dena=conv(den,denc);
[numac,denac]=cloop(numa,dena);
step(numac,denac)
title('PID Control with small Ki and Kd')
Şekil.III.12: Küçük Ki Ve Kd Katsayılı PID Kontrol [22]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 71/114
55
Kazanç ayarı
Yükselme zamanını çok uzun yapalım. Yükselme zamanını azaltmak için Ki’yi
arttıralım. Kütükte Ki’yi 200 olarak değiştirelim. Bu durumda aşağıdaki grafik eldeedilir.
Şekil.III.13: Büyük Ki Katsayılı PID Kontrol [22]
Şimdi etkinin öncesinden daha hızlı ama büyük olduğunu görüyoruz. Ki kötü bir
geçici tepkiye sahip olur (büyük aşma). Aşmayı düşürmek için KD’yi arttıralım.
Kütükte KD’yi 10 olarak değiştirelim. Bu durumda aşağıdaki grafik elde edilir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 72/114
56
Şekil.III.14: İstenen Ki ,Kd ,Kp Katsayılı PID Kontrol [22]
Böylece, Kp=100,Ki=200, KD=10 alınarak PID denetleyicili tasarım için gereklilikler
karşılanmış olur

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 73/114
57
III.2. BULANIK MANTIK KONTROL
III.2.1 Bulanık Mantığın Tarihsel Gelişimi
Gerçek bir olay, insanın düşünce sisteminde ve zihninde yaklaşık
olarak canlandırılarak yorumlanır. Bilgisayarların kullandığı Aristo mantığından
farklı olarak; insanın yaklaşıklık ve belirsizlik içeren veri ve bilgi ile işlem
yapabilme yeteneği vardır. Bulanık mantık kavramı, kesin sonuçlardan çok kesin
olmayan yaklaşık kriterleri göz önüne alır. Örneğin; "hava sıcak." denildiğinde,
"sıcak" kelimesinin ifade ettiği anlam olarak birbirinden farklı olabilir. Kutuplarda
bulunan bir kişinin sıcak için 1 dereceyi algılamasına karşın; ekvator civarındaki bir
kişi için bu 35 dereceyi bulabilir. Bu, kesin değildir; ancak belirsizdir. Bu şekilde
kelimelerin ima ettikleri belirsizliklere bulanık (bulanık) denmektedir. Burada dikkat
edilmesi gereken nokta, "sıcak" kelimesinin ne kadar fazla sayısal dereceler
topluluğunu temsil ettiğidir. Bu topluluğa da fuzzy kümesi adı verilmektedir. Bazı
insanların sıcaklığı, 15 derece; bazılarının ise 35 derece gibi oldukça farklı sayısal
biçimde algılanmasına rağmen; bu insanlar arasında bir farklılık bulunmaz. Ancak
Aristo mantığında sadece "sıcak" ve "soğuk" vardır. İşte bulanık mantığın avantajı da
budur. Zadeh insan düşüncesindeki belirleyici fikirlerin sayılar olmayıp bulanık
kümelerin seviyeleri olduğunu gözlemlemesi ile bulanık mantık üzerindeki
çalışmalarını yoğunlaştırmıştır. Sosyal bilimlerden mühendislik uygulamalarına
kadar hemen her alanda bir uygulama örneği bulmak mümkündür. Bulanık mantığın
en fazla uygulama bulduğu alan, kontrol sistemleri olarak görülmektedir. Bunun
nedeni de 1970'li yılların başında Mamdani ve arkadaşlarının bulanık mantık tabanlı
bir denetleyici tasarlayarak uygulamaya koymaları olmuştur.[9-12]
Kontrol işlemi için uygulama yapılırken her şeyden önce sistemin matematiksel
modeline ihtiyaç duyulur. Ancak pratikte bu modelleme her zaman mümkün
olmayabilir. Bazı durumlarda doğru model kurulsa bile bunun uygulamada
kullanılması karmaşık problemlere yol açabilir. Bu gibi sorunlarla karşılaşıldığı
zaman genellikle kontrol olayını gerçekleştiren uzman kişinin bilgi ve

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 74/114
59
deneyimlerinden yararlanma yoluna gidilir. Uzman kişi özel değişkenler olarak
tanımlanan; uygun, çok uygun değil, yüksek, biraz yüksek, fazla, çok fazla gibi
günlük yaşantımızda sıkça kullandığımız kelimeler doğrultusunda esnek bir kontrol
mekanizması geliştirir. İşte bulanık küme teorisinin ve bulanık mantığın uygulaması olan bulanık mantık kontrol bu tür mantıksal ilişkiler üzerine kurulmuştur. Ayrıca
bulanık küme teorisinin günümüzde içerdiği diğer uygulama alanları ve tarihsel
gelişimi aşağıdaki gibi sıralanmıştır.
• Kontrol işlemi: (Mamdani, 1976: King and Mandanı, 1977; Rutherford
and Bloore, 1976; Braae and Rutherford, 1979; Tong, 1977; Kickert,
1976; Sugeno, 1985; Pedrycz, 1989; Huang and Tomuzuka, 1990; Liaw
and Wang, 1993; Yamakawa, 1993).
• Karar verme: Karar vermeyle ilgili ilk uygulamalar 1970 yılında
başlatıldı, (Bellman and zadeh, 1970) daha sonra karar verme
geliştirilmeye başlandı, (Yager, 1977; Tong ve Benissone, 1980; Watson
et. Al.)
• Görüntü tanıma: (Pal and Majunder, 1986; Kandel, 1982; Bezdek, 1981).
• Yapay zeka: (Zadeh, 1978a, 1978b, 1984; Tong and Sahapiro, 1985;
VVhalen and Schott, 1985; Bandler and Khout, 1985; Leung and Lam,
1988).
• Sınıflama: (Xie,1984; Miyamato and nakayama, 1986)
III.2.2. Bulanık Mantığa Giriş
Boolean mantığı ile klasik küme kavramı arasındaki ilişkiye benzer güçlü bir
ilişki, bulanık mantık ile bulanık küme kuramı arasında mevcuttur.
Klasik küme kuramında, bir X kümesindeki A altkümesi, kendisine aitkarakteristik fonksiyonu olan Aχ ile ifade edilir. Karakteristik fonksiyon, X in
elemanlarını 0,1 kümesine dönüştürür,
1,0: → X Aχ (III.26)
Bu dönüşüm, X in her elemanı için bir sıralı ikili kümesiyle ifade edilebilir.
Bir sıralı ikililerin ilk elemanı, X in bir elemanı ve sıralı ikilinin ikinci elemanı ise

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 75/114
60
0,1 kümesinin bir elemanıdır. Sıf ır değeri ait olamamayı temsil ederken Bir değeri
ise aitliği gösterir.
"x, A nın içindedir" şeklindeki bir önermenin doğruluğu (ya da yanlışlığı), (x, χA(x))
sıralı ikilisiyle belirlenir. Eğer sıralı ikilinin ikinci elemanı 1 ise önerme doğru, eğer
bu değer 0 ise önerme yanlıştır.
Benzer şekilde, X kümesinin bir altkümesi olan A bulanık kümesi, sıralı ikililer
kümesi ile ifade edilebilir. Bir sıralı ikilinin ilk elemanı, X in bir elemanı iken bu
sefer ikilinin ikinci elemanı ise [0, 1] aralığından bir değerdir. Böylece, X in her
elemanı bir sıralı ikili ile ifade edilmiş olur. Aslında bu, X in her elemanı ile [0, 1]
aralığı arasında bir dönüşüm, Aµ , tanımlar. Sıf ır değerli tam olarak ait olmamayı
tanımlarken, bir değeri tam üye olma anlamında ve diğer değerler ise ara üyelik
değerlerini gösterir. A bulanık kümesi için X kümesi evrensel kümedir. Aµ
dönüşümü, genellikle, A’ nın üyelik fonksiyonu olarak tanımlanır.[13,14]
"x, A nın içindedir" gibi bir önermenin doğruluk derecesi, ))x(,x( Aµ sıralı
ikililerinin ikinci elemanı aracılığı ile belirlenir. Burada üyelik fonksiyonu ile
bulanık küme terimleri kendi aralarında değişebilecek şekilde kullanılır.
A kümesi,
( ) Xx|)x(,xA A ∈µ= (III.27)
şeklinde tanımlanır ve genellikle Aµ yerine kısaca A(x) yazılır.
X=x1, x2, … , xn sonlu kümesindeki A bulanık kümesi çoğunlukla;
n
n
2
2
1
1
x...
xxA
µ++
µ+
µ=
(III.28)
şeklinde gösterilir. Bu ifadede, A kümesinin elemanı xi (i = 1, 2 , … , n) için üyelik
derecesi değeri iµ ile gösterilirken toplama işareti birleşimi ifade eder. Tüm buanlatılanlar aşağıdaki iki örnekle daha iyi anlaşılacaktır.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 76/114
61
Örnek 1:
"1'e yakın" doğal sayılar kümesini tanımlayalım. Bu küme aşağıdaki şekilde ifade
edilebilir:
40.0
33.0
26.0
10.1
06.0
13.0
20.0
A +++++−+−= (III.29)
Şekil III.15: "x, 1'e yakındır" önermesine ait ayrık üyelik fonksiyonu [14]
Örnek 2:
"1'e yakın" gerçel sayılar kümesine ait üyelik fonsiyonu ise aşağıdaki şekilde ifade
edilebilir:
))1x((exp)x(A 2−β−= (III.30)
Burada β bir pozitif gerçel sayıdır.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 77/114
62
Şekil III.16: "x, 1'e yakındır" önermesine ait üyelik fonksiyonu [14]
III.2.3. Bulanık Küme, Sistem ve Teknolojisi
Gün geçtikçe etraf ımızda bulunan belirsizliğin nesnel olarak incelenmesi için alışıla
gelmiş yöntemlerin dışında bilimsel yöntemlere duyulan ihtiyaç artmaktadır.
Özellikle bu belirsizlik durumları arasında sözel olanlar için Lütfü Asker Zade
taraf ından en uygun yöntem bilim esasının küme elemanlarına değişik üyelik
derecelerinin verilmesi ile olacağı belirtilmiştir. Aristo mantığına göre çalışan klasik
küme kavramında bir öğe bir kümeye ya aittir ya da değildir. Bir öğeden diğerine
geçiş keskin ve aniden değişen üyelik dereceleri sayesinde olmaktadır. Bulanık
kümelerde ise bu geçiş yumuşak ve sürekli bir şekilde olmaktadır. Bu geçişte hayal
gücü ve sezgi gibi görüşler büyük rol oynar. [14]
Bulanık Mantık Temeli Bulanık Küme Kuramı’na dayanır (ZADEH, 1965).
Geleneksel mantık sistemi yalnızca 1 ve 0 üzerine kuruludur. Doğru veya yanlış
vardır. Bu ikisinin arası yoktur. Belirsiz bir problemin çözümü güçtür. Bulanık
Mantık sisteminde de 1 ve 0 değerleri vardır. Bununla birlikte 0 ile 1 arasındaki
değerler de kullanılır. Doğru ya da yanlışın ne kadar doğru ya da ne kadar yanlış
olduğu belirlenebilir. Bulanık mantık olasılık teorisinden farklıdır. Olasılıkta
problemin kendisi tanımlıdır.[12]
Bulanık sistemler, teorik ve matematik aksiyomlu yaklaşımlardan bağımsız
bir çözüm algoritması temsil ettiğinden, bir sistemin modellenmesinde yaklaşık ve

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 78/114
63
kolay çözünürlük verirler. Elde edilebilen tüm sayısal ve sözel bilgiler çözüm
algoritmasına katılarak anlamlı çözümlere varılabilir. Bu bakımdan bulanık yöntem
uzman kişilerinde vereceği sözel bilgileri işleyerek toptan çözüme gitmeye yarar.[14]
Bulanık kuramının merkez kavramı bulanık kümeleridir. Küme kavramı kulağa biraz matematiksel gelebilir ama anlaşılması kolaydır. Örneğin “orta yaş”
kavramını inceleyecek olursak, bu kavramın sınırlarının kişiden kişiye değişiklik
gösterdiğini görürüz. Kesin sınırlar söz konusu olmadığı için kavramı matematiksel
olarak da kolayca formüle edemeyiz. Ama genel olarak 35 ile 55 yaşları orta yaşlılık
sınırları olarak düşünülebilir. Bu kavramı grafik olarak ifade etmek istediğimizde
karşımıza şekildeki gibi bir eğri çıkacaktır. Bu eğriye “aitlik eğrisi” adı verilir ve
kavram içinde hangi değerin hangi ağırlıkta olduğunu gösterir.
Bir bulanık kümesi kendi aitlik fonksiyonu ile açık olarak temsil edilebilir.
Şekilde görüldüğü gibi aitlik fonksiyonu 0 ile 1 arasındaki her değeri alabilir. Böyle
bir aitlik fonksiyonu ile “kesinlikle ait” veya “kesinlikle ait değil” arasında istenilen
incelikte ayarlama yapmak mümkündür.
Bulanık mantık ile matematik arasındaki temel fark bilinen anlamda
matematiğin sadece aşırı uç değerlerine izin vermesidir. Klasik matematiksel
yöntemlerle karmaşık sistemleri modellemek ve kontrol etmek işte bu yüzden zordur,
çünkü veriler tam olmalıdır. Bulanık mantık kişiyi bu zorunluluktan kurtarır ve daha
niteliksel bir tanımlama olanağı sağlar. Bir kişi için 38,5 yaşında demektense sadece
orta yaşlı demek birçok uygulama için yeterli bir veridir. Böylece az ımsanamayacak
ölçüde bir bilgi indirgenmesi söz konusu olacak ve matematiksel bir tanımlama
yerine daha kolay anlaşılabilen niteliksel bir tanımlama yapılabilecektir.
Bulanık Mantıklı Sistemleri(BMS) incelerken öncelikle Bulanık Mantık(BM)
yada Bulanık Kümelerin tanımının yapılması gerekmektedir. Bulanık Mantık bir
yöntemden çok bir düşünce yapısıdır. BMS’ lerde diğer BTS’ lerde de olduğu gibi bir
bilgi tabanı vardır. Bu bilgi tabanı BMS’ de kullanılacak çıkarım mekanizmasının
kural tabanı ve yöntemlerini ve uygulama alanı ile bağlantıyı sağlayacak olan
işlevlerin değişkenlerini içermektedir. Bu bilgi tabanı içeriğini öğrenme ve
adaptasyon özelliklerini kullanarak dinamik olarak değiştirebilecektir.[2]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 79/114
64
III.2.3.1 Bulanık Kümeler
Klasik mantık iki mutlak sonuç içerir ve “0” ve “1” olarak tanımlanabilir.
Bulanık mantıkta ise [ 0,1] aralığında tanımlayabileceğimiz sonsuz değerli sonuçbulunmaktadır. Bu değerlere ise “üyelik derecesi” adı verilir. Klasik mantıkta bir A
kümesinin üye olma derece "0" veya "1" dir. Bulanık mantıkta ise µ A(x)∈ [0,1]
arasında değişmektedir. [23]
(a) (b)
Şekil III.17: (a): Klasik mantık ,(b): Bulanık mantık [23]
Şekil III.17.a-b de A uzun boylu insanlar kümesi h≥180 olarak tanımlanmış ve iki
mantığa göre kümeler çizilmiştir. Şekil III.17.a' da ki A kümesi keskin bir sınırla
ayrılmış, Şekil III.17.b' deki A bulanık kümesi ise belirsizliği tanımlamak ve hatayı
tolere etmek açısından farklı üyelik dereceleri kullanmıştır. h=179 cm klasik mantığa
göre uzun boylu insanlar sınıf ına giremezken, bulanık yaklaşımda belirli bir üyelik
derecesine sahiptir. Ve insan mantığını ve sübjektifliğini belirli oranda yansıtmış
olmaktadır[23].
Açıkça görülmektedir ki bulanık kümelerin kullanışlılığı; büyük oranda, farklı
kavramlara uygun üyelik derecesi fonksiyonlarını oluşturabilme becericisine
dayanmaktadır. Bu beceri, bulanık kümeler teorisinin ilk zamanlarında zayıf olsa da,
günümüzde birçok alanda gelişmiştir. En sık kullanılan fonksiyonlar kolaylık
açısından “üçgen” ve “yamuktur”. Fakat problemin tipine uygun küme biçimlerinin
seçimi performansı büyük oranda etkilemektedir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 80/114
65
Şekil III.18: Farklı Üyelik Fonksiyonları [24]
Günlük kullanım diline ait olan; düşük, orta seviye, yüksek ve bunun gibi
kavramları temsil eden çeşitli bulanık kümeler bir değişkenin durumlarını
tanımlamak amacıyla kullanılırlar. Bu değişkenlere bulanık değişkenler ve onun
alt durumlarına da bulanık terimler denilir. Örneğin “ısı” kavramı kendi içinde
çok düşük, düşük, orta seviye, yüksek ve çok yüksek gibi durumlarla nitelenebilen
bulanık bir değişken olarak alınabilir. Bu durumda, [0,100] aralığında ki ısı değerlerine karşılık gelecek uygun bulanık kümeler sistemimize uygun bir şekilde
seçilmelidir. [24]
Isı değişkeninin klasik kümeler yardımıyla tanımlanması durumda ise;
üyelikler, keskin çizgilerle sınırlandırılmış olmaktadır. Şekil III.19’da 0-100 oC
arasında giriş sıcaklık değerlerinin bulanık ve klasik mantıkta nasıl ifade edildiği
gösterilmektedir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 81/114
66
1
(a)
[ )[ )[ )[ )[ )
(b)
Şekil III.19: Isı değişkeninin [0,100] aralığında aldığı alt durumların; bulanık (a) ve klasikdeğişkenler (b), yardımıyla gösterilmesi [24]
Bulanık değişkenler; kavramlara ait geçişleri eksiksiz bir şekilde yansıtabilirler.
Belirsizlik altında yapılan yöntem ve ölçümleri ifade etme de diğer yöntemlerden
daha başarılı sonuçlar vermektedirler. Geleneksel klasik değişkenler ise bu
kapasiteden yoksundurlar. Bir durumun klasik değişkenler yardımıyla tanımlanması
matematiksel olarak doğru olduğu halde, kaçınılmaz ölçüm hataları karşısında
gerçeğe uygunluk göstermez. Klasik mantıkta ara ve sınır değerlerde sonuç sadece
bir kümeye ait olmaktadır. Bundan da belirsizliklerin ifade edilemediği ve ihmallerin
yapıldığı anlaşılmaktadır.
Bulanık değişkenler; belirsizlikleri, deneysel verilerin bir parçası olarak ele
aldıklarından dolayı, gerçeğe daha uygundurlar ve olgular hakkında klasik
değişkenlere dayanan bilgilerden daha doğru bilgiler verirler. Ünlü fizikçi Einstein
bu durumu şu şekilde ifade etmiştir: “Matematiğin kavramları kesin oldukları sürecegerçeği yansıtmazlar, gerçeği yansıttıkları sürece de kesin değillerdir. Bu bağlamda
bulanık mantık matematiğin günlük hayata uygulanması denebilir. Çünkü gerçek
dünyada her an değişen durumlarda değişik sonuçlar çıkabilir.
Bulanık kümeler üzerine kurulan matematiksel yapı klasik matematikten daha fazla
açıklayıcı bir güce sahip olmasına rağmen; kullanılabilirliği, uygulama alanlarında
Çok düşük Düşük Orta seviye Yüksek Çok yüksek
1000
Üyel
ik
Isı OC
Isı OC 1000
Çok düşük Düşük Orta seviye Yüksek Çok

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 82/114
67
karşımıza çıkan kavramlar için uygun üyelik fonksiyonlarının inşa edilmesine
bağlıdır. Bu da bir uzman kişinin bilgi ve deneyimlerine bağımlılığa neden
olmaktadır.
Boş olmayan bir X evreninde A ve B bulanık kümeleri tanımlanmış
olsun. A ve B kümeleri için birleşme, kesişme ve tümleme matematiksel
küme işlemleri sırasıyla aşağıdaki gibi verilmiştir. [24]
(A∪B)(t) = max[A(t), B(t)] = A(t) ∨ B(t) (III.31)
(A∩B)(t) = min[A(t), B(t)] = A(t) ∧ B(t) (III.32)
A'(t) = 1– A(t) (III.33)
A U B
A B
Şekil III.20: A ve B üçgen bulanık sayıların birleşimi [24]
A ∩ B
A B
Şekil III.21: A ve B üçgen bulanık sayıların kesişimi [24]
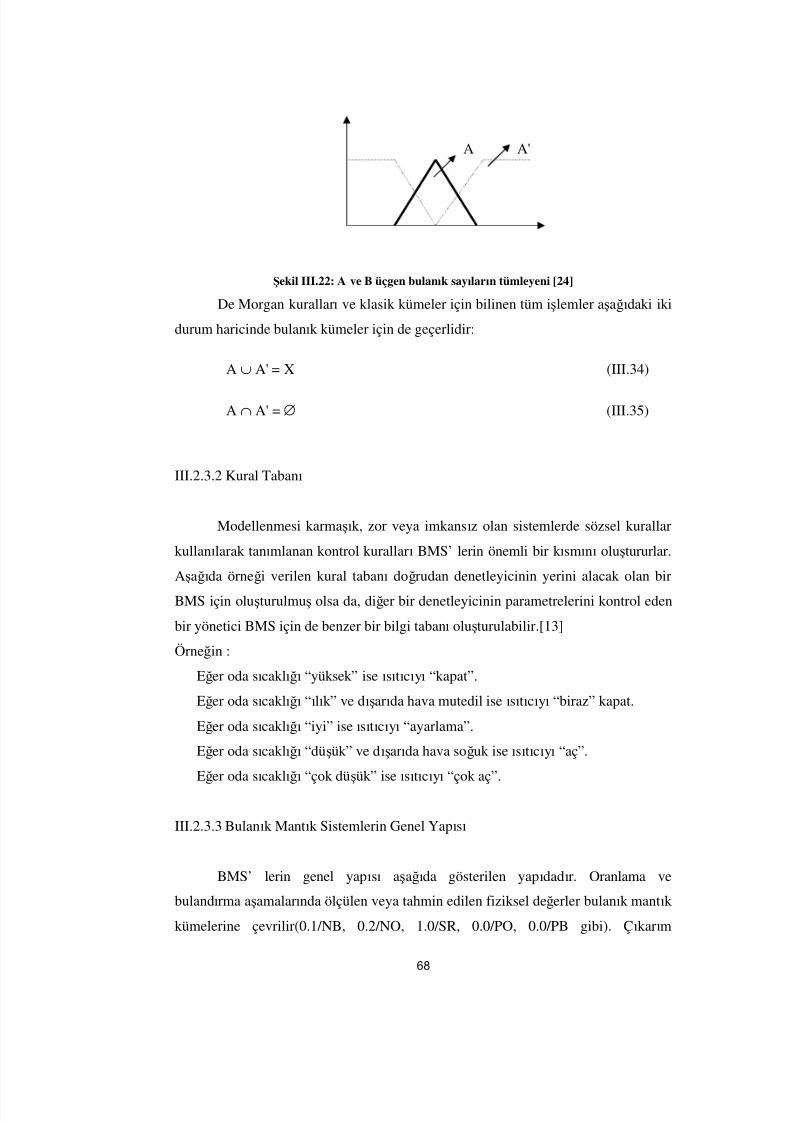
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 83/114
68
Şekil III.22: A ve B üçgen bulanık sayıların tümleyeni [24]
De Morgan kuralları ve klasik kümeler için bilinen tüm işlemler aşağıdaki iki
durum haricinde bulanık kümeler için de geçerlidir:
A ∪ A' = X (III.34)
A ∩ A' = ∅ (III.35)
III.2.3.2 Kural Tabanı
Modellenmesi karmaşık, zor veya imkansız olan sistemlerde sözsel kurallar
kullanılarak tanımlanan kontrol kuralları BMS’ lerin önemli bir kısmını oluştururlar.
Aşağıda örneği verilen kural tabanı doğrudan denetleyicinin yerini alacak olan bir
BMS için oluşturulmuş olsa da, diğer bir denetleyicinin parametrelerini kontrol eden
bir yönetici BMS için de benzer bir bilgi tabanı oluşturulabilir.[13]
Örneğin :
Eğer oda sıcaklığı “yüksek” ise ısıtıcıyı “kapat”.
Eğer oda sıcaklığı “ılık” ve dışarıda hava mutedil ise ısıtıcıyı “biraz” kapat.
Eğer oda sıcaklığı “iyi” ise ısıtıcıyı “ayarlama”.
Eğer oda sıcaklığı “düşük” ve dışarıda hava soğuk ise ısıtıcıyı “aç”.
Eğer oda sıcaklığı “çok düşük” ise ısıtıcıyı “çok aç”.
III.2.3.3 Bulanık Mantık Sistemlerin Genel Yapısı
BMS’ lerin genel yapısı aşağıda gösterilen yapıdadır. Oranlama ve
bulandırma aşamalarında ölçülen veya tahmin edilen fiziksel değerler bulanık mantık
kümelerine çevrilir(0.1/NB, 0.2/NO, 1.0/SR, 0.0/PO, 0.0/PB gibi). Çıkarım
A A'

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 84/114
69
mekanizmasında ise kurallar dikkate alınarak sistem çıktılarının bulanık mantıkla
gösterimi sağlanır. Bu kural tabanı denetleyicinin en önemli kısmıdır. Burada veri
tabanını oluşturacak uzman bilginin toplanması, özellikle çok değişkenin kullanıldığı
karmaşık sistemlerde oldukça zordur. Bu işlem için geliştirilen yöntemler arasında
genetik algoritmaları, öğrenebilen yapay sinir ağlarını sıralayabiliriz.[13]
Kural tabanının tam(complete), tutarlı ve en önemlisi doğru olması için
karmaşık sistemlerde yardımcı yöntemlerin kullanılması kaçınılmazdır. Hangi
kuralların nasıl birleştirileceği durulama aşamasında belirlenir ve son aşama olan
oranlamada ise bu çıktılar fiziksel değerlere çevrilip uygun çarpanlarla oranlanır.
Denetleyici ile ilgili tüm bilgilerin bulunduğu bilgi tabanı, kuralların belirlendiği
“kural tabanı” ve diğer bilgilerin bulunduğu “veri tabanı” olarak iki kısımda
gösterilmiştir. Adaptif BMS’lerde bu bilgi tabanı denetleme sürecinde degüncelleştirilebilmekte ve bu denetleyicinin performansını arttırmada önemli bir rol
oynamaktadır. Bu gürültülü bir ortamda müzik sesinin yüksekliğinin, sessiz bir
yerdeki aynı müziğin sesine göre yüksek olarak sınıflandırılması gibi. Yani
ortamdaki değişikliklere göre tanımların ve kuralların da adaptif olarak değişebilmesi
gibi tanımlanabilir.[13]
Bulanık mantıkta bulanık kümeleri kadar önemli bir diğer kavramda
linguistik değişken kavramıdır. Linguistik değişken “sıcak” veya “soğuk” gibi
kelimeler ve ifadelerle tanımlanabilen değişkenlerdir. Bir linguistik değişkenin
değerleri bulanık kümeleri ile ifade edilir. Örneğin oda sıcaklığı linguistik değişken
için “sıcak”, “soğuk” ve “çok sıcak” ifadelerini alabilir. Bu üç ifadenin her biri ayrı
ayrı bulanık kümeleri ile modellenir.[14]
III.2.4. Kontroldeki uygulamaları
• Elektrikli ev aletleri
• Oto elektroniği, fren sistemleri
• Elektronik denetim sistemleri
• Karar Verme
• Proses Planlama
• Kameralar

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 85/114
70
1974 yılında Mamdani ve Assilian taraf ından ilk defa bir buhar makinasının
kontrolünün bulanık sistem ile modellenmesi çeşitli araştırma merkezlerinin bulanık
mantık ve sistemlerine ilgisini artırmıştır. 1978 yılında Holmblad ve Östergaard
bulanık sistem uygulamasını bir çimento fabrikasının işletilmesi ve kontrolü içinyapınca, bulanık kavramlar gittikçe yaygınlaşmaya başlamıştır. Bu yaygınlaşma
özellikle Japonya, Singapur, Kore ve Malezya’da fazlaca kendisini göstermiştir.[14]
Bulanık mantık konusunda yapılan araştırmalar Japonya’da oldukça fazladır.
Özellikle bulanık process controller olarak isimlendirilen özel amaçlı bulanık mantık
mikroişlemci çipi’nin üretilmesine çalışılmaktadır.[15]
1980 yılından sonra Japonya’da bulanık sistem elektrikli süpürgeler, asansörler,
metro, şirket işletimi ve veri tabanlarının sözelleştirilmesi gibi konularda yaygın bir
biçimde kullanılmaya başlanmıştır.[14] Bu teknoloji fotoğraf makineleri, çamaşırmakineleri, klimalar ve otomatik iletim hatları gibi uygulamalarda da
kullanılmaktadır. Bundan başka uzay araştırmaları ve havacılık endüstrisinde de
kullanılmaktadır. TAI’de araştırma gelişme kısmında bulanık mantık konusunda
çalışmalar yapılmaktadır. Yine bir başka uygulama olarak otomatik civatalamaların
değerlendirilmesinde bulanık mantık kullanılmaktadır. Bulanık mantık yardımıyla
civatalama kalitesi belirlenmekte, civatalama tekniği alanında bilgili olmayan kişiler
açısından konu şeffaf hale getirilmektedir. Burada bir uzmanın değerlendirme
sınırlarına erişilmekte ve hatta geçilmektedir. [15]
Bulanık Mantık Yapay Zeka metotları içerisinde en çok endüstriyel uygulama
alanı bulan araçtır.[12] Bulanık mantık, "sıcak" ya da "hâlâ kirli" gibi kavramlar
kullanır ve bu sayede, hangi hızla çalışacağına ya da programlandığı bir aşamadan
diğerine ne zaman geçeceğine kendisi karar veren havalandırma, çamaşır makinası
ve benzeri aygıtları yapabilmeleri için mühendislere yardımcı olur. Matematikçilerin
elinde bir sistemin girdilerine yanıt verecek özel algoritmalar bulunmadığında,
bulanık mantık belirsiz niceliklere başvuran "sağduyulu kurallar" kullanarak sistemi
denetleyebilir ve betimleyebilir. Bilinen hiçbir matematiksel model bir kamyonun
yükleme yerinden park yerine gidişini, kamyonun hareket noktası rasgele
seçilebiliyorsa yönetemez. Oysa gerek insan, gerekse bulanık mantık sistemleri
"Kamyon biraz sola dönerse sende biraz sağa çevir" gibi pratik, ancak kesinlik

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 86/114
71
taşımayan kurallar kullanarak bu doğrusal olmayan (nonlinear) kılavuzluk işlemini
gerçekleştirebilir.[16]
III.2.5. Bulanık Teorinin Avantajları ve Dezavantajları:
Bulanık mantığın uygulama alanları kontrol sistemlerinin de ötesine
uzanmaktadır. Geliştirilen son teoremler bulanık mantığın ilke olarak, ister
mühendislik, ister fizik, ister biyoloji ya da ekonomi olsun, her türlü konuda sürekli
sistemleri modellemek üzere kullanılabileceğini göstermektedir. Çoğu alanda,
bulanık mantıklı sağduyu modellerinin standart matematik modellerinden dahayararlı ya da kesin sonuçlar verdiği görülmektedir. [16]
Bulanık mantığın uygulama alanları çok geniştir. Sağladığı en büyük fayda ise
“insana özgü tecrübe ile öğrenme” olayının kolayca modellenebilmesi ve belirsiz
kavramların bile matematiksel olarak ifade edilebilmesine olanak tanımasıdır. Bu
nedenle lineer olmayan sistemlere yaklaşım yapabilmek için özellikle uygundur. [15]
III.2.5. 1 Bulanık Teorinin Avantajları
Bulanık mantık sisteminin avantajlarını ;
1. İnsan düşünme tarzına yakın olması,
2. Uygulanışının matematiksel modele ihtiyaç duymaması,
3. Yazılımın basit olması dolayısıyla ucuza mal olması.
4. Bulanık Mantığın eksik tanımlı problemlerin çözümü için kullanılabilir
olması
5. Uygulanmasının oldukça kolay olması.şeklinde sıralanabilir. [12,16]
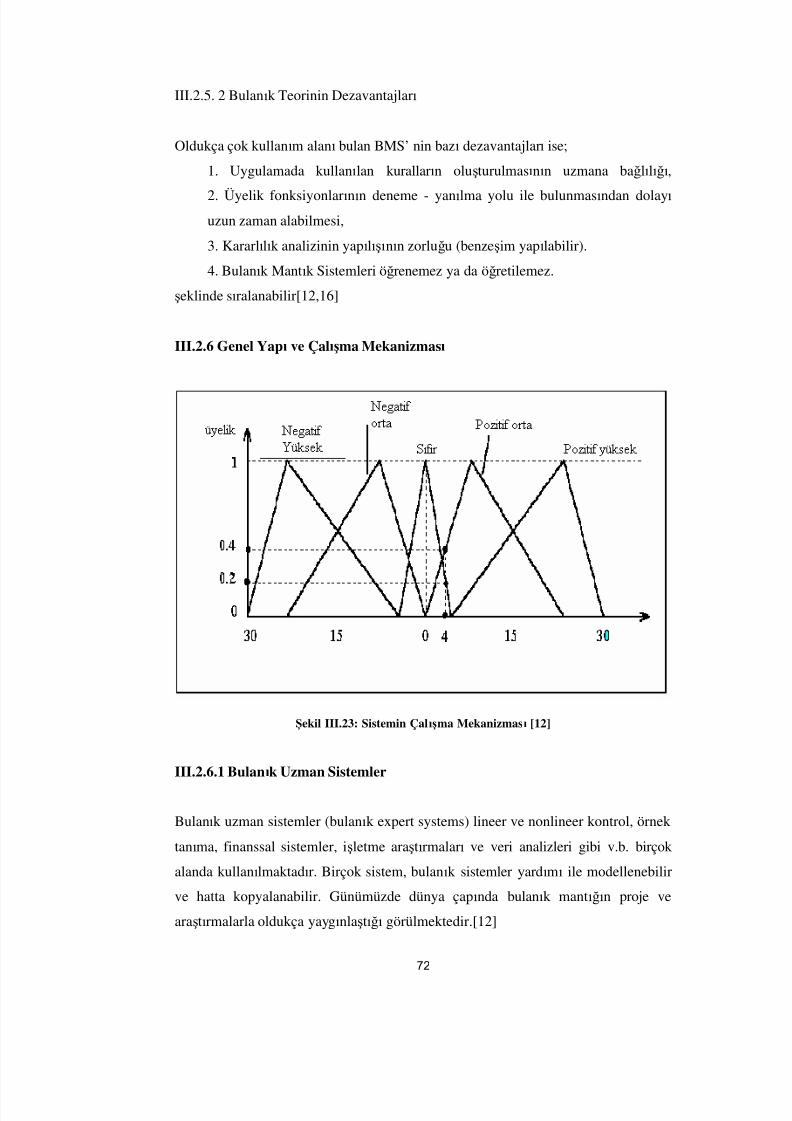
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 87/114
72
III.2.5. 2 Bulanık Teorinin Dezavantajları
Oldukça çok kullanım alanı bulan BMS’ nin bazı dezavantajları ise;
1. Uygulamada kullanılan kuralların oluşturulmasının uzmana bağlılığı,
2. Üyelik fonksiyonlarının deneme - yanılma yolu ile bulunmasından dolayı uzun zaman alabilmesi,
3. Kararlılık analizinin yapılışının zorluğu (benzeşim yapılabilir).
4. Bulanık Mantık Sistemleri öğrenemez ya da öğretilemez.
şeklinde sıralanabilir[12,16]
III.2.6 Genel Yapı ve Çalışma Mekanizması
Şekil III.23: Sistemin Çalışma Mekanizması [12]
III.2.6.1 Bulanık Uzman Sistemler
Bulanık uzman sistemler (bulanık expert systems) lineer ve nonlineer kontrol, örnek
tanıma, finanssal sistemler, işletme araştırmaları ve veri analizleri gibi v.b. birçok
alanda kullanılmaktadır. Birçok sistem, bulanık sistemler yardımı ile modellenebilir
ve hatta kopyalanabilir. Günümüzde dünya çapında bulanık mantığın proje ve
araştırmalarla oldukça yaygınlaştığı görülmektedir.[12]
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 88/114
73
Bunlardan bazıları:
Okyanuslarda delik açma için bulanık mantık kontrol sistemleri; bu proje, okyanusta
delik açarak elmas kaynağı bulma sistemi için bir kontrol sistemi geliştirmeyi
amaçlayan yaklaşımları ve konuları araştırmaktadır. Şu an, bu problem için önhazırlık olarak uyarlayıcı bulanık mantık kontrol ve diğer geçerli çözümler
değerlendirilmektedir.
Bulanık mantık ve genetik algoritma kullanılarak model tanımlama; bu araştırmanın
amacı, metabolik modellerin yapısının ve parametrelerinin tanımlanması için bulanık
mantık, genetik algoritma ve diğer optimizasyon tekniklerinin etkin kombinezonunu
araştırmaktır.
Bulanık modelleme için optimumluma kriteri; bu projenin amacı, bulanık
modellemede model karmaşıklığı ile veri uygunluğu arasında iyi bir değiş tokuş
yaparak elden çıkarma yoluyla başarı için optimum kriterin geliştirilmesidir.
Tıbbi görüntülemede örnek tanıma; bu proje, yeni bulanık tanıma teknikleri ve
bunların tıbbi görüntü analizine uygulanmasını araştırmaktadır.
Akıllı otoyol için olay tespit tabanlı bulanık mantık; bu projenin amacı, eşkenar
dörtgen şeklinde değişimli trafik huzursuzluğunu bulmak için bulanık mantık
uygulamaktır.
Bulanık mantık, ev ya da ev yönetimine özgü ve eğlence elektroniği, teşhis sistemleri
ve diğer uzman sistemler için olduğu kadar yer altı geçidi sistemlerinin kontrolü ve
karmaşık endüstriyel işlemler için de yararlı bir araç olarak ortaya çıkmaktadır.
Bulanık mantık, Birleşmiş Milletlerde keşfedilmesine rağmen, bu teknolojinin hızlı
gelişimi Japonya’ da başlamış ve şimdilerde ABD ve Avrupa’ ya ulaşmıştır.
Bulanık (bulanık), pazarlama için bir anahtar sözcük olmuştur. Bulanık bileşeni
bulunmayan elektronik makaleler yavaş yavaş dışlanılmaktadır. Japonya’da bulanık
araştırmaları muazzam bir bütçe ile desteklenmektedir. Avrupa ve ABD’ de

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 89/114
74
Japonların olağanüstü başarılarını yakalamak için birçok çaba sarf edilmektedir.
Örneğin, NASA uzay ajansı, karmaşık liman manevraları (complex docking-
maneuvers) için bulanık mantığı uygulamaya çalışmaktadır.[14]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 90/114
75
BÖLÜM IV
MATERYAL VE METHOD
IV.1. MATERYAL
Şekil IV.1.'de model olarak alınan Doğru akım servo motorun eşdeğer devresi
verilmiştir. Servo motorlarda hız, gerilim değiştirilerek kontrol edilir
Şekil IV.1: Model Olarak Alınan Doğru akım Servo Motorun Eşdeğer Devresi [3]

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 91/114
76
Yukarıdaki eşdeğer devreye göre aşağıdaki gerilim ve moment denklemleri
yazılabilir.[3]
dt
di L I RV
f
f f f f += . (IV.1)
)()(
)(. t edt
t di Lt i RV ++=
(IV.2)
)()(.)(
t M t Bdt
t d j M ye ++= ϖ
ϖ(IV.3)
)()(
)(.)( t e
dt
t di Lt i Rt V ++=
(IV.4)
L
t e
dt
t di
L
t i R
L
t V )()()(.)(++=
(IV.5)
L
t e
L
t i R
L
t V
dt
t di )()(.)()(−−=
(IV.6)
L
t V
L
t et i
L
R
dt
t di )()()(
)(+−−=
(IV.7)
e(t): Motorda indüklenen gerilim;
)(.)( t K t e ϖ= (IV.8)
Denklem IV.8 eşitliğindeki değer IV.7 eşitliğinde yerine konulursa ;
)()(.)(
)( t M t w Bdt
t dw jt M ye ++=
(IV.9)
j
t M
j
t w B
dt
t dw
j
t M ye)()(.)()(
++=(IV.10)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 92/114
77
j
t M
j
t w B
j
t M
dt
t dw ye)()(.)()(
−−=(IV.11)
)(.)( t iK t M c = (IV.12)
Denklem IV.12 eşitliğindeki değer IV.11 eşitliğinde yerine konulursa;
j
t M
j
t w B
j
t Ki
dt
t dw y )()(.)()(−−=
(IV.13)
eşitliği elde edilir.[3]
Sistemin blok diyagramını çıkarabilmek için, başlangıç koşulları sıf ır alınarak (IV.9)ve (IV.13) eşitlikleri üzerinde laplace dönüşümünün yapılması gerekir.
(IV.9) eşitliği üzerinde laplace dönüşümü yapılırsa;
)()(.
)(. sw L
K
L
si R
L
Vssis −−=
(IV.14)
)()(.)(.)(.. sV sK si Rsis L +−−= ϖ (IV.15)
)()(.)(.)(.. sV sK si Rsis L +−=+ ϖ (IV.16)
)()())((. sK sV R Lssi ϖ−=+ (IV.17)
Ls R
sK sV si
+−
=)(.)(
)(ϖ
(IV.18)
elde edilir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 93/114
78
Denklem (IV.13) eşitliği üzerinde laplace dönüşümü yapılırsa;
j
s M s
j
Bsi
j
K ss
y )()()()(. −−= ϖϖ (IV.19)
)()()()(.. s M s BwsKisws j y−−= (IV.20)
)()(.)(.)(.. s M siK s Bss j y
−=+ ϖϖ (IV.21)
)()(.).)(( s M siK Bs js y−=+ϖ (IV.22)
sj B
s M siK s
y
+
−=
)()(.)(ϖ (IV.21)
elde edilir.
V(s) rotor gerilimi ve My(s) yük momenti giriş büyüklükleri, w(s) açısal hızda çıkış
büyüklüğü olmak üzere sistemin transfer fonksiyonu Şekil IV.2.' de görüldüğü
gibidir.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 94/114
79
Şekil IV.2: Servo Motorun Transfer Fonksiyonu [17]
Aşağıda model olarak ele alınan de servo motora ait parametreler yer almaktadır;
V=240 V
I=15,3 A
n=3000 d/dak
M=5 Nm
B=0,02 NmsJ= 0,05 kgm2
K =5/15,3 Nm/A
Ra=0,5 Ω
La=0,01 H

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 95/114
80
IV.2.METHOD
Doğru akım servo motorların hızları bir kaç metotla kontrol edilebilmektedir.Günümüzde özellikle klasik kontrol ve bir uygulaması olan PID kontrol, oldukça
yaygın bir kullanım alanına sahiptir. Fakat lineer olan bu kontrol teknikleri nonlineer
sistemlerde kötü performans sergilediklerinden yeni arayışlar içine girilmiştir.[16]
Yapay Zeka (Artificial Intelligence) tekniklerinin ortaya çıkması ile insan
düşüncesinin mantıksal ve sezgisel yada objektif taraflarının kullanan metotlar
geliştirildi. Bu tekniklerden biri olan Bulanık Logic bir çok alanda kullanıldığı gibi
nonlineer sistemlerin etkili bir şekilde kontrolüne de olanak sağlanmıştır.[17]
IV.2.1. Doğru akım servo motorun klasik kontrolü
Güç elektroniğinde anahtarlama elemanı olarak tristörün kullanılmaya başlamasıyla
Doğru akım servo motorların hız ayarında ayarlı gerilim kaynakları ön plana
çıkmıştır. Daha sonraki yıllarda anahtarlama elemanı olarak MOSFET, IGBT ve
GTO gibi yarı iletken elemanlar kullanılmıştır.[18] Günümüzde de genel olarak
Doğru akım motor kontrollerinde aktuatör olarak bir PWM (Darbe Genişlik
Modülasyonu) ile Duty periyodu ayarlanak Doğru akım kıyıcıların iş yapma süreleri
değiştirilmesi ile sağlanan yapı kullanılmaktadır.
Doğru akım motorunun kontrolünde dikkat edilecek unsurlardan biri de yol alma
(starting) akımıdır.
Kalkış anında veya düşük bir set noktasından yüksek bir seviyeye geçerken motordan
yüksek bir akım geçer. Yüksek yol alma akım şebekemizde istenilmeyen parazitlere
neden olabilir ve motorumuza da zarar verebilir. Bu nedenle kontrolcümüz bir ak ım
kontrolcüsü de içermeli ve akımı belirli sınırlı içinde tutarak motorun yumuşak kalkış
sağlanmıştır.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 96/114
81
Şekil IV.3: Servo Motorun Hız Kontrolünün Blok Diyagramı
En basit halde bir Doğru akım motoru hız kontrolcüsü sekil IV.3' de gösterildiği gibi
akım ve gerilime etki etmelidir. Burada armatür gerilim ile motorun h ızayarlanmaktadır. Klasik kontrolde genellikle gerilim, bir PID
(Oransal+Integral+Türev) ile kontrol edilir. PID tekniği lineer bir tekniktir ve çıkış,
hata sinyalinin kendisi, integrali ve türevin toplamından meydana gelir.
Burada Kp, Ki ve Kd kontrol edilecek sisteme ve kontrol bölgesinin genişliğine bağlı
olarak seçilmektedir. Belirli bir aralık iyi performans sergilese de lineer bir kontrol
tekniği olan PID, nonlineer sistemlerde iyi bir performans gösteremez.
IV.2.2 Doğru akım servo motorun bulanık kontrolü
Bulanık sistemleri üç temel yapıdan meydana gelmektedir. Bunlar; Fuzzification
(bulanıklaştırma), Inference (sonuç çıkarma) ve Defuzzification (durulaştırma) dır.
Fuzzification; olası giriş ve çıkışı vektörleri, üyelik fonksiyonları, sayıları, şekilleri
ve parametreleri belirlenir. Giriş ve çıkış bulanık kümeleri oluşturulur.
Inference; giriş ve çıkış bulanık kümeleri arasında kurallar tanımlamak vasıtasyla ilearalarında ilişki kurulur.
Defuzzification; kurallar vasıtasıyla belirli bir metod kullanılarak çıkış vektörü
bulunur.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 97/114
82
Şekil IV.4: Bulanık Mantık Sonuçlandırma Sistemi
Sekil IV.4' te sol tarafta giriş ve en sağda da çıkış bulanık kümeleri bulunmaktadır.
Ortada aralarındaki ilişkiyi tanımlayan kurallar gösterilmiştir. N giriş m çıkışı bu
sistemde 1. çıkış için gerçeklesen olaylara bakılırsa; X1 girişi iki bulanık bulanık
kümesine ait olmakta ve kurallarla iki çıkış kümesine gönderilmektedir. Bu girişe
karşılık çıkış kümelerinde bir levha tanımlanmaktadır. Defuzzification metotlarından
biri olan ağırlık merkezi yöntemi ile çözümlenirse ortaya çakan levhanın ağırlık
merkezi Y1 çıkışını üretir.
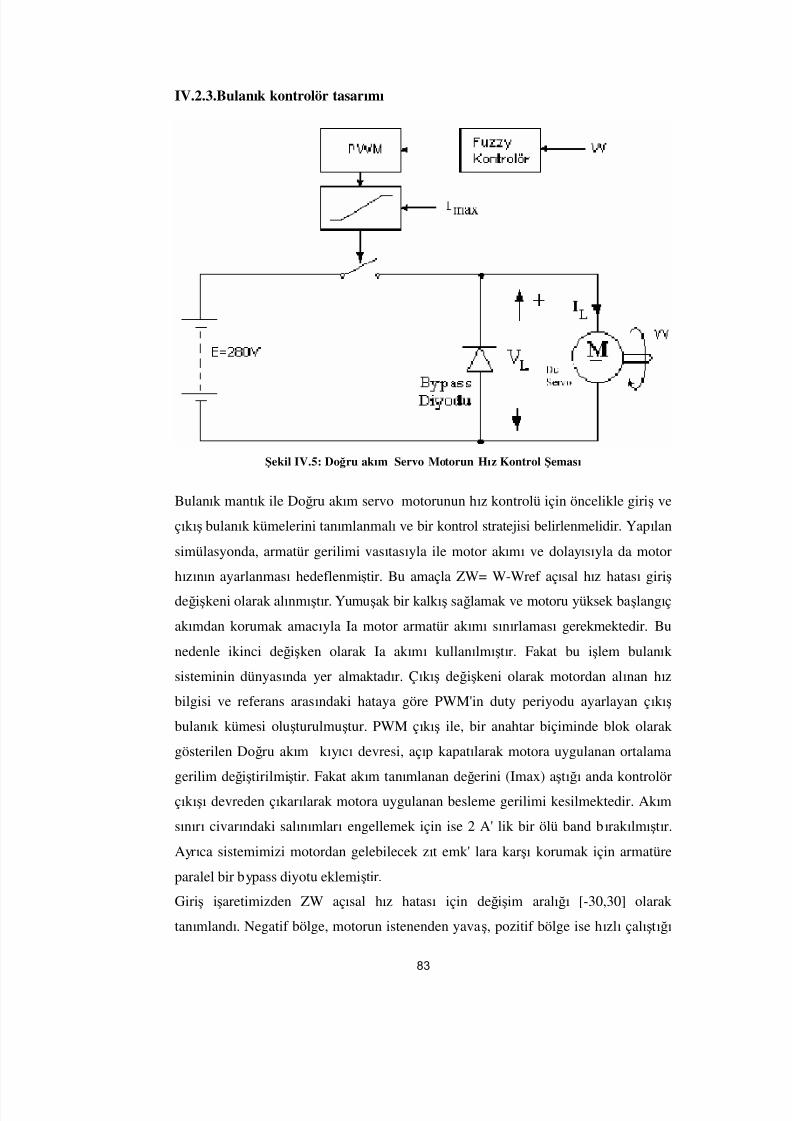
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 98/114
83
IV.2.3.Bulanık kontrolör tasarımı
Şekil IV.5: Doğru akım Servo Motorun Hız Kontrol Şeması
Bulanık mantık ile Doğru akım servo motorunun hız kontrolü için öncelikle giriş ve
çıkış bulanık kümelerini tanımlanmalı ve bir kontrol stratejisi belirlenmelidir. Yapılan
simülasyonda, armatür gerilimi vasıtasıyla ile motor akımı ve dolayısıyla da motor
hızının ayarlanması hedeflenmiştir. Bu amaçla ZW= W-Wref açısal hız hatası giriş
değişkeni olarak alınmıştır. Yumuşak bir kalkış sağlamak ve motoru yüksek başlangıç
akımdan korumak amacıyla Ia motor armatür akımı sınırlaması gerekmektedir. Bu
nedenle ikinci değişken olarak Ia akımı kullanılmıştır. Fakat bu işlem bulanık
sisteminin dünyasında yer almaktadır. Çıkış değişkeni olarak motordan alınan hız
bilgisi ve referans arasındaki hataya göre PWM'in duty periyodu ayarlayan çıkış
bulanık kümesi oluşturulmuştur. PWM çıkış ile, bir anahtar biçiminde blok olarak
gösterilen Doğru akım kıyıcı devresi, açıp kapatılarak motora uygulanan ortalama
gerilim değiştirilmiştir. Fakat akım tanımlanan değerini (Imax) aştığı anda kontrolör
çıkışı devreden çıkarılarak motora uygulanan besleme gerilimi kesilmektedir. Akım
sınırı civarındaki salınımları engellemek için ise 2 A' lik bir ölü band b ırakılmıştır.
Ayrıca sistemimizi motordan gelebilecek zıt emk' lara karşı korumak için armatüre
paralel bir bypass diyotu eklemiştir.
Giriş işaretimizden ZW açısal hız hatası için değişim aralığı [-30,30] olarak
tanımlandı. Negatif bölge, motorun istenenden yavaş, pozitif bölge ise hızlı çalıştığı

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 99/114
84
ifade etmektedir. ZW için giriş üyelik fonksiyonları şekil IV.6'da görülmektedir.
Üyelik fonksiyonları "cokaz", "az", "tamam", "fazla" ve "cokfazla" olarak motor hız
bilgisini temsil etmekte ve insanın tecrübelerini sisteme yansıtmış olmaktadır.
Şekil IV.6: ∆W Girişine Ait Üyelik Fonksiyonları
Çıkış üyelik fonksiyonu, PWM' in duty periyodunun ne kadar artıp azalacağını temsil
eder.Aralık olarak [-5,5] arasında 5 adet üyelik fonksiyonu içermektedir. Bulanık
kümeleri "azalt", "azazalt", "tamam", "azarttır" ve "arttır" olarak tanımlanmıştır.
Şekil IV.7:PWM Duty Çıkışına Üyelik Fonksiyonları

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 100/114
85
Kontrolörde kullanılan insan deneyimi ve bilgisine dayalı kurallar ise:
1- Eğer Werr= cokaz => çıkış=arttır
2- Eğer Werr= az => çıkış=azarttır3- Eğer Werr= tamam => çıkış=tamam
4- Eğer Werr= fazla => çıkış=azazalt
5- Eğer Werr= cokfazla => çıkış=azalt
Kurallar çerçevesinde; oluşan üyelik fonksiyonları ağırlık merkezinin sayısal
karşılığı kontrolör çıkışının oluşturmaktadır.
Giriş ve çıkış üyelik fonksiyonları Bulanık Mantık Toolbox ile hazırlandıktan sonra
tasarıyı test etmek amacı ile modelleme MATLAB/Simulink®' te yapılmıştırr. 240V5HP Vf=240V'luk Doğru akım servo motoru değişik mekaniki yükler altında kontrol
edilecektir. Bunun için motordan alınan açısal hız bilgisi bulanık kontrolör bloğuna
iletilmektedir. Belirtilen esaslara göre çalışan bulanık kontrolör hazırlanan PWM
bloğuna Duty Periyodu bilgisini gönderir. PWM, 10 kHz' lik taşıyıcı frekansı sinyal
ile GTO kullanılarak tasarlanmış Doğru akım kıyıcı kontrol eder. Kıyıcı çıkışında
değişen gerilim motora, sürülmek vasıtasıyla hız ayarı yapılmış olur. Motoru yüksek
akımlardan korumak amacıyla armatürden geçen akım 30 A ile sınırlanmaktadır.
Akım 30 A'i geçtiğinde akım sınırlama bloğu, PWM çıkışı gönderilmesini engeller.
Dolayısıyla motora uygulanan gerilim kesilir çekilen akım düşer.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 101/114
86
BÖLÜM V
SONUÇLAR
Şekil V.1’ de servo motorun hız kontrolü için matlab simulink modülünde çizilmiş
blok diyagram görülmektedir.
Şekil V.2’ de ise bu kontrol sonucunda elde edilen hız zaman grafiği çizilmiştir. Bu
kontrol sistemlerinde istenmeyen bir aşma gözlemlenmiştir. Sistem 5 s gibi bir
sürede karalı hale gelmiştir.
Şekil V.1: Servo Motorun Kontrolör Uygulanmamış Haline Ait Simulink Modeli

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 102/114
87
Şekil V.2: Servo motorun kontrolör uygulanmamış haline ait hız –zaman grafiği
Şekil V.3: Servo Motorun Bulanık Mantık Kullanılarak Kontrolüne Ait Simulink Modeli

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 103/114
88
(a) (b) (c)
(d) (e)
(f)

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 104/114
89
(g)
Şekil V.4.a: Doğru akım Şebeke Modeli
Şekil V.4.b: Doğru akım Kıyıcı Modeli
Şekil V.4.c: Mil Yükü Modeli
Şekil V.4.d: Doğru akım Servo Motor Modeli
Şekil V.4.e: Ölçüm Bloğu Modeli
Şekil V.4.f: Motor İçin Bulanık Kontrol Ünitesi Modeli
Şekil V.4.g: Darbe Genişlik Modülasyonu Modülü
Şekil V.5: Servo Motor Boş Çaılşmada Bulanık Mantık Kontrolüne Ait Gerilim Akım -Hız-zaman grafiği

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 105/114
90
Şekil V.6: Servo Motor 5 Nm Mekaniki Yükte Bulanık Mantık Kontrolüne Ait Gerilim AkımHız-zaman grafiği

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 106/114
91
Şekil V.7: Servo Motor 7 Nm Mekaniki Yükte Bulanık Mantık Kontrolüne Ait Gerilim AkımHız-zaman grafiği
Şekil V.8: Servo Motorun PID Kullanılarak Kontrolüne Ait Simulink Modeli

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 107/114
92
Şekil V.9: Servo Motor 5 Nm’lik Mekaniki Yükte PID Kontrolüne Ait Akım-Gerilim-Hız-zaman grafiği
Şekil V.10: Servo Motor 7 Nm’lik Mekaniki Yükte PID Kontrolüne Ait Akım-Gerilim-Hız-zaman grafiği
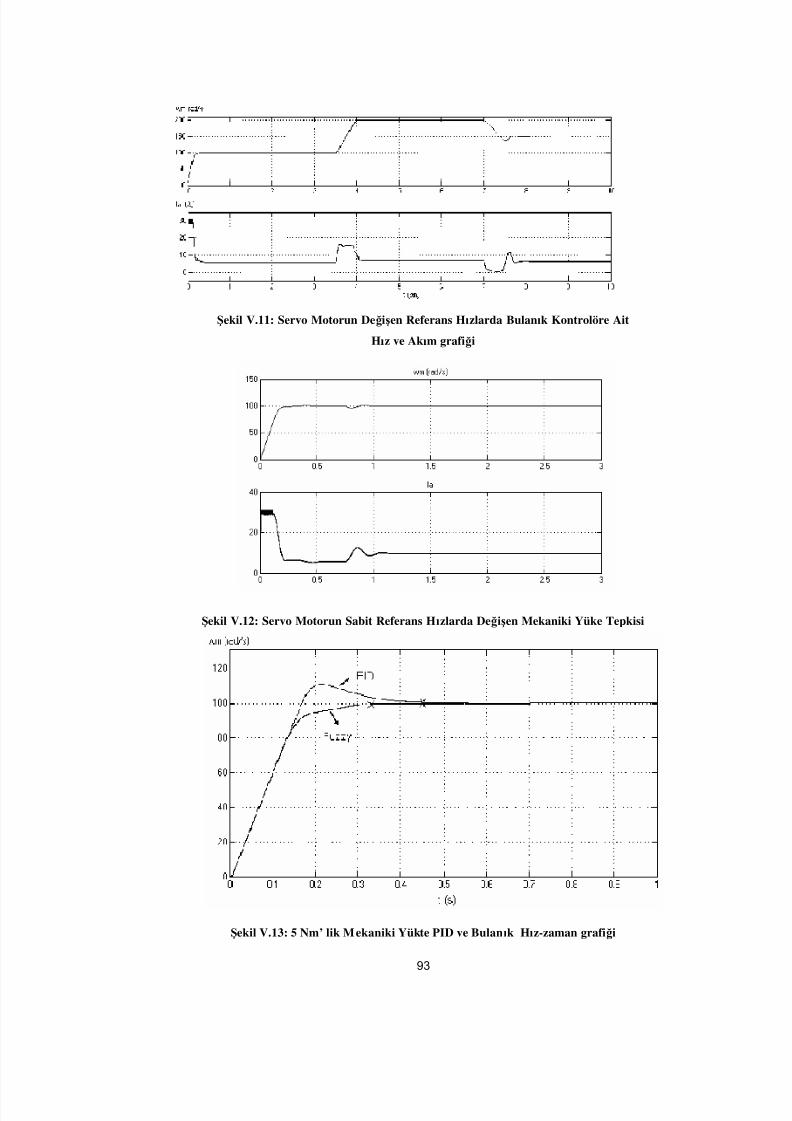
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 108/114
93
Şekil V.11: Servo Motorun Değişen Referans Hızlarda Bulanık Kontrolöre Ait
Hız ve Akım grafiği
t (s)
Şekil V.12: Servo Motorun Sabit Referans Hızlarda Değişen Mekaniki Yüke Tepkisi
Şekil V.13: 5 Nm’ lik Mekaniki Yükte PID ve Bulanık Hız-zaman grafiği

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 109/114
94
Model olarak alınan doğru akım servo motora herhangi bir kontrolör
uygulanmadan yol verildiğinde aşmanın olduğu ve sistemin 5 s gibi bir süre zarf ında
ancak karalı hale geçtiği gözlemlenmiştir.
Aynı modele klasik kontrol yöntemlerinden PID kontrol 2 farlı yük değerinde
uygulanmıştır. Motor 5 Nm’ lik mekaniki yük altında iken( Şekil V.9) verilen 120
rad/sn’ lik hız sınırında aşma olduğunu ancak sistemin 0,48 s gibi kısa bir sürede
kararlı hale gelmiştir ancak aşmanın önüne geçilememiştir. Akım değerleri verilen
sınırlar içinde olduğu gözlemlenmiştir. Daha sonra aynı modele 7 Nm’ lik mekaniki
yük uygulanmış(Şekil V.10) akım ,gerilim ve açısal hızdaki değişim incelenmiştir.
Çekilen akım bir öncekine oranla daha fazladır. Aşma yine gözlemlenmesine karşınsistem 0,58 s gibi kısa bir sürede kararlı hale gelerek verilen referans hız değerine
oturmuştur.
Sisteme bulanık mantık kontrolör tasarlanmış ve boş, 5 Nm ,7Nm ‘lik 3
değişik çalışma durumunda gerilimi,akımı ve açısal hızındaki değişiklikler
gözlemlenmiştir. Servo motor bulanık kontrolörle kontrol edildiğinde uygulanmış
100 rad/sn’ lik referans hıza 0.38 s gibi bir sürede karalı hale geçmiş ve kontrol
sistemlerinde istenmeyen durum olarak kabul edilen aşmanın gözlemlenmediği
görülmüştür. Üç farlı çalışma durumunda da servo motorun kararlı hale birbirine çok
yakın sürelerde geldiği ancak miline bağlı olan yükün durumuna göre çekmiş olduğu
akımın farklı olduğu gözlenmiştir.
Bulanık kontrolörün performansı Şekil V.11-12’ de ise değişik referans
hızlarda ve değişik mekaniki yüklerde tekrar gözden geçirilmiştir. Şekil V.11
referans hızımız motor milinde 5 Nm’lik yük varken 2 katına çıkartılmıştır. Bu
esnada akımda bir artma gözlemlenmesine rağmen motor referans hıza geldiğinde
akımda tekrar düşmüştür.
Kontrolörün değişen mekaniki yüklerdeki tepkisi Şekil V.12'de verilmiştir.
Burada motor sabit hızda hareket etmekte iken t=0.75 s' de mekanik yük 5 N'dan 10
N'a çıkarılmıştır. Bu artış, akımının artmasına ve motor hızının ilk anda azalmasına
neden olmuştur. Mekanik yükteki değişme sonucunda açısal hızdaki değişim
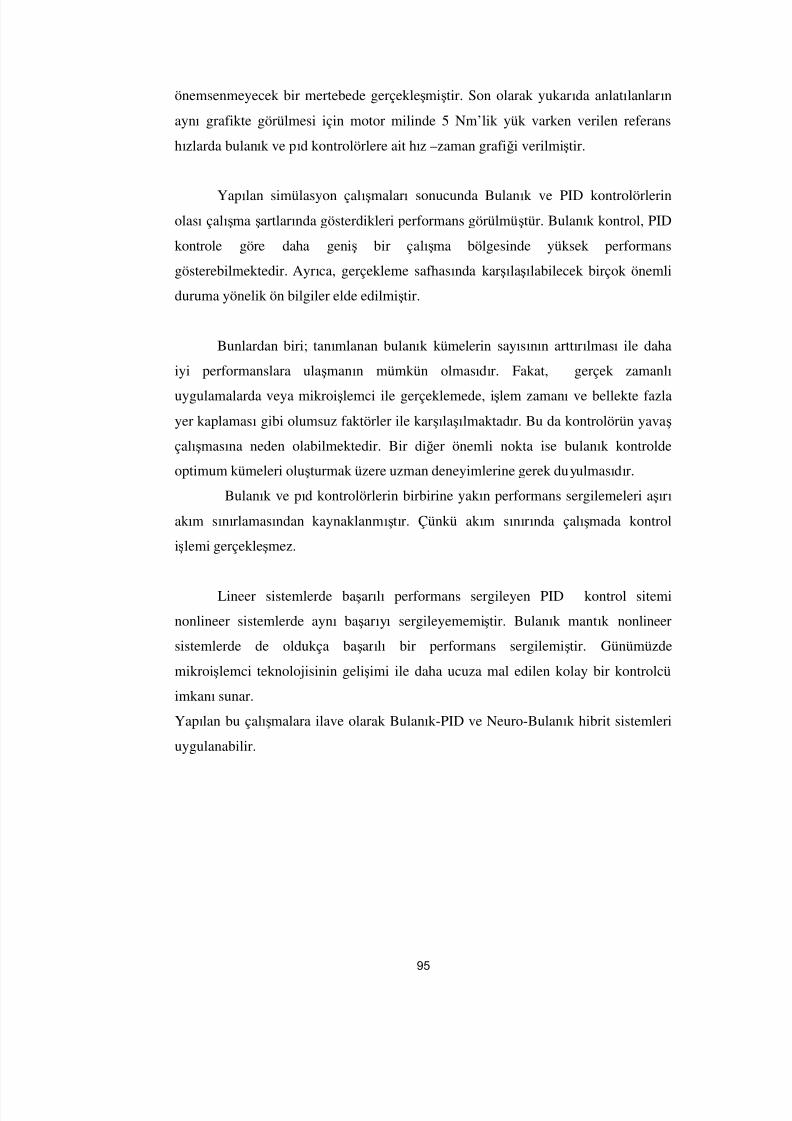
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 110/114
95
önemsenmeyecek bir mertebede gerçekleşmiştir. Son olarak yukarıda anlatılanların
aynı grafikte görülmesi için motor milinde 5 Nm’lik yük varken verilen referans
hızlarda bulanık ve pıd kontrolörlere ait hız –zaman grafiği verilmiştir.
Yapılan simülasyon çalışmaları sonucunda Bulanık ve PID kontrolörlerinolası çalışma şartlarında gösterdikleri performans görülmüştür. Bulanık kontrol, PID
kontrole göre daha geniş bir çalışma bölgesinde yüksek performans
gösterebilmektedir. Ayrıca, gerçekleme safhasında karşılaşılabilecek birçok önemli
duruma yönelik ön bilgiler elde edilmiştir.
Bunlardan biri; tanımlanan bulanık kümelerin sayısının arttırılması ile daha
iyi performanslara ulaşmanın mümkün olmasıdır. Fakat, gerçek zamanlı
uygulamalarda veya mikroişlemci ile gerçeklemede, işlem zamanı ve bellekte fazlayer kaplaması gibi olumsuz faktörler ile karşılaşılmaktadır. Bu da kontrolörün yavaş
çalışmasına neden olabilmektedir. Bir diğer önemli nokta ise bulanık kontrolde
optimum kümeleri oluşturmak üzere uzman deneyimlerine gerek duyulmasıdır.
Bulanık ve pıd kontrolörlerin birbirine yakın performans sergilemeleri aşırı
akım sınırlamasından kaynaklanmıştır. Çünkü akım sınırında çalışmada kontrol
işlemi gerçekleşmez.
Lineer sistemlerde başarılı performans sergileyen PID kontrol sitemi
nonlineer sistemlerde aynı başarıyı sergileyememiştir. Bulanık mantık nonlineer
sistemlerde de oldukça başarılı bir performans sergilemiştir. Günümüzde
mikroişlemci teknolojisinin gelişimi ile daha ucuza mal edilen kolay bir kontrolcü
imkanı sunar.
Yapılan bu çalışmalara ilave olarak Bulanık-PID ve Neuro-Bulanık hibrit sistemleri
uygulanabilir.
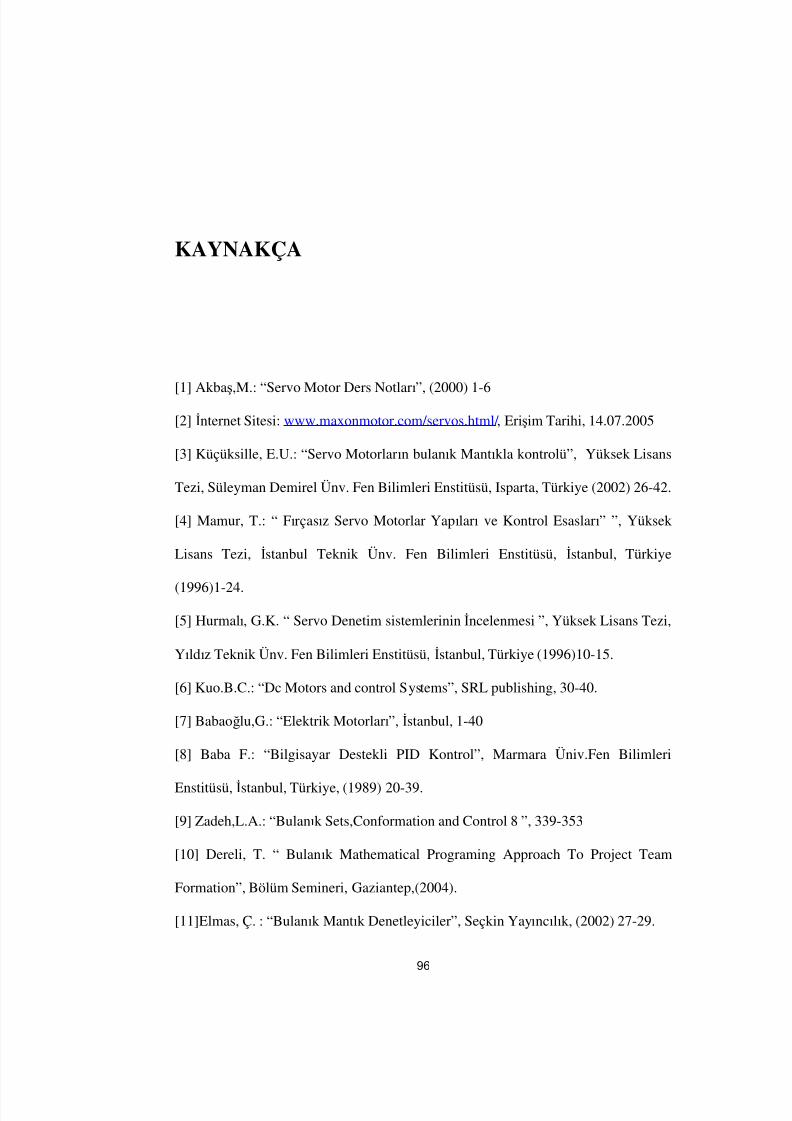
7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 111/114
96
KAYNAKÇA
[1] Akbaş,M.: “Servo Motor Ders Notları”, (2000) 1-6[2] İnternet Sitesi: www.maxonmotor.com/servos.html/ , Erişim Tarihi, 14.07.2005
[3] Küçüksille, E.U.: “Servo Motorların bulanık Mantıkla kontrolü”, Yüksek Lisans
Tezi, Süleyman Demirel Ünv. Fen Bilimleri Enstitüsü, Isparta, Türkiye (2002) 26-42.
[4] Mamur, T.: “ Fırçasız Servo Motorlar Yapıları ve Kontrol Esasları” ”, Yüksek
Lisans Tezi, İstanbul Teknik Ünv. Fen Bilimleri Enstitüsü, İstanbul, Türkiye
(1996)1-24.
[5] Hurmalı, G.K. “ Servo Denetim sistemlerinin İncelenmesi ”, Yüksek Lisans Tezi,
Yıldız Teknik Ünv. Fen Bilimleri Enstitüsü, İstanbul, Türkiye (1996)10-15.
[6] Kuo.B.C.: “Dc Motors and control Systems”, SRL publishing, 30-40.
[7] Babaoğlu,G.: “Elektrik Motorları”, İstanbul, 1-40
[8] Baba F.: “Bilgisayar Destekli PID Kontrol”, Marmara Üniv.Fen Bilimleri
Enstitüsü, İstanbul, Türkiye, (1989) 20-39.
[9] Zadeh,L.A.: “Bulanık Sets,Conformation and Control 8 ”, 339-353
[10] Dereli, T. “ Bulanık Mathematical Programing Approach To Project Team
Formation”, Bölüm Semineri, Gaziantep,(2004).
[11]Elmas, Ç. : “Bulanık Mantık Denetleyiciler”, Seçkin Yayıncılık, (2002) 27-29.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 112/114
97
[12] İnternet Sitesi: www.bumat.itu.edu.tr, Erişim Tarihi, 14.05.2005
[13] Bulanık Mantıklı Bilgi Tabanlı Sistemler ve Uçuş Kontrolu Uygulaması,
members.fortunecity.com/pisipisi1/Bilgisayar/Dersler/bulanik.htm
[14] İnternet Sitesi: www.ealt.org , Erişim Tarihi, 14.05.2005
[15] İnternet Sitesi: http://members.tripod.com/~Bagem/bagem/index.html
www.ealt.org , Erişim Tarihi, 27.02.2005
[16] Yurkovich, S. And Passino. 1999, K, M. “A Laboratuar Course On Bulanık
Control ”,IEEE Trans. Edu., vol.42, No.1, Febuary (1999), 15-21.
[17] Florescu A., Grigore O., Vasile D.: “ Bulanık Logic and Neuro-Bulanık
Theories applied to design a Dut Cycle Compansation Controller for Dc Motor
Speed Control ”, ISSE2000,ISBN 963-420-639-4, May 6-10, Balatonfured, Hungary
(2000).
[18] Khoei, A., Hadidi,Kh.: “Microprocessor Based Closed Loop Speed Control
System For Dc Motor Using Power Mosfet ”, Electronics circuit and Systems IEEE
International Conference ICECS’96, Vol. 2, (1996) 1247-1250.
[19] Vardar K.: “ Dc Motorun Hızının Bulanık Logic ile kontrolü ”, Dumlupınar
Ünv. Elektrik-Elektronik Mühendisliği Bölüm Semineri (2002) 3-8.
[20] Mumyakmaz B. , Vardar, K.: “Ark Fırınları İçin Bulanık Kontrole Dayalı
Reaktif Güç Kompanzatörü Tasarımı ”, Elektrik-Elektronik Bilgisayar Mühendisliği
Sempozyumu ELECO , Bursa, Türkiye, (2002) 211-215.
[21] Åström K.J., Hägglund T.," PID Controllers", 2nd Edition, Instrument Society
of America,1995
[22] Chen, C. T.,1993, "Analog And Digital Control System Design", International
Edition, ISBN 0-03-094070-2, pp 70-72.

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 113/114
98
[23] Babuška R., 2001, "Bulanık and Neural Control Disc Course", Delft University
of Technology, Oct. 2001, Delft, Netherlands.
[24] www.yapay-zeka.org ,2002

7/31/2019 Bulanik Mantik Yontemiyle Bir Servo Motorun Kontrolu Ve Geleneksel Yontemlerle Karsilastirilmasi the Comparing o…
http://slidepdf.com/reader/full/bulanik-mantik-yontemiyle-bir-servo-motorun-kontrolu-ve-geleneksel-yontemlerle 114/114
ÖZGEÇMİŞ
1979 yılında Tokat’ ta doğdu. İlk orta ve lise eğitimimi Tokat’ ta tamamladıktan sonra
1998 yılında Marmara Üniversitesi Teknik Eğitim Fakültesi Elektrik Eğitimi
bölümünü kazandı. 17.06.2002 yılında Elektrik Teknik Öğretmeni unvanı alarak
mezun oldu. Bir yıl özel bir şirkette çalıştıktan sonra 2003 yılında Marmara
Üniversitesi Fen Bilimleri Enstitüsünde Elektrik Eğitimi Anabilim Dalında Yüksek
lisans eğitimine başladı.