análisis y control de sistemas lineales · análisis y control de sistemas lineales...
TRANSCRIPT
Análisis y Control de
Sistemas Lineales
Controlabilidad y Observabilidad

E. Interiano 2
Contenido
◼ Controlabilidad de estado
◼ Transformación a forma canónica (regular)
controlable, FCC
◼ Observabilidad de estado
◼ Transformación a forma canónica (regular)
observable, FCO
◼ Ejemplos y ejercicios
E. Interiano 3
Controlabilidad
◼ La controlabilidad trata de la existencia de un vector de control que puede causar que el estado del sistema llegue a algún estado arbitrario en un tiempo finito.
◼ El concepto de controlabilidad es la base para solucionar el problema de la ubicación de polos
◼ Si el sistema es de estado completamente controlable, entonces es posible seleccionar los polos en lazo cerrado deseados (o las raíces de la ecuación característica)
E. Interiano 4
Controlabilidad de estado
Partimos del sistema MIMO
Para que este sistema sea de estado
completamente controlable, es necesario y
suficiente que la matriz de controlabilidad M de
n x nr tenga rango n
)()()(
)()(
ttt
tt
DuCxy
BuAxx
+=
+=
]B A B A AB[BM1-n2 =
E. Interiano 5
◼ Si M no es cuadrada (MIMO), se puede formar
la matriz MM’, que es de n x n; entonces si
MM’ es no singular M tiene rango n.
◼ El par [A, B] es completamente controlable si
A y B están en la Forma Canónica Controlable
o FCC, o son transformables a la Forma
Canónica Controlable
Pruebas para la controlabilidad
de estado
E. Interiano 6
◼ Si los valores propios de A son diferentes y Aestá en la Forma Canónica Diagonal el par [A, B] es completamente controlable si todos los elementos de B no son cero
◼ Si A está en la Forma Canónica de Jordan, el par [A, B] es completamente controlable si al menos uno, de los elementos en los renglones de B que corresponden al último renglón de cada bloque de Jordan, es diferente de cero
Pruebas para la controlabilidad
de estado (2)
E. Interiano 7
Ejemplo 1: Controlabilidad
◼ Sea el sistema SISO descrito por:
◼ La matriz de controlabilidad (nxn) es
◼ Que es singular y por lo tanto el sistema es
NO controlable.
−=
1- 0
1 2A
=
0
1B
==
0 0
2- 1 ABBM
E. Interiano 8
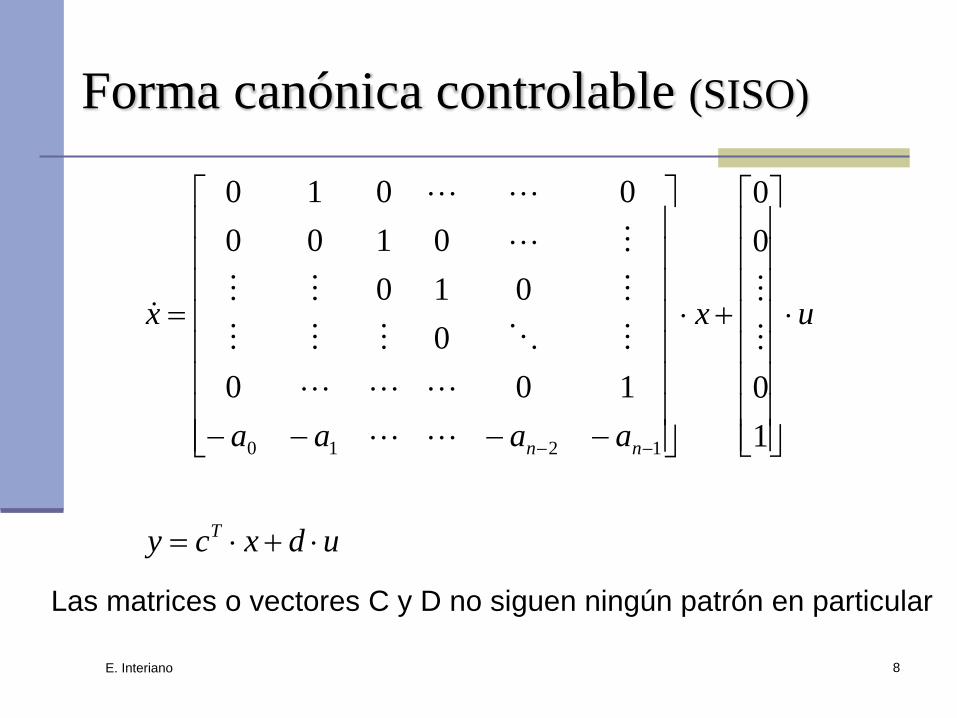
Forma canónica controlable (SISO)
udxcy
ux
aaaa
x
T
nn
+=
+
−−−−
=
−− 1
0
0
0
100
0
010
0100
0010
1210
Las matrices o vectores C y D no siguen ningún patrón en particular
E. Interiano 9
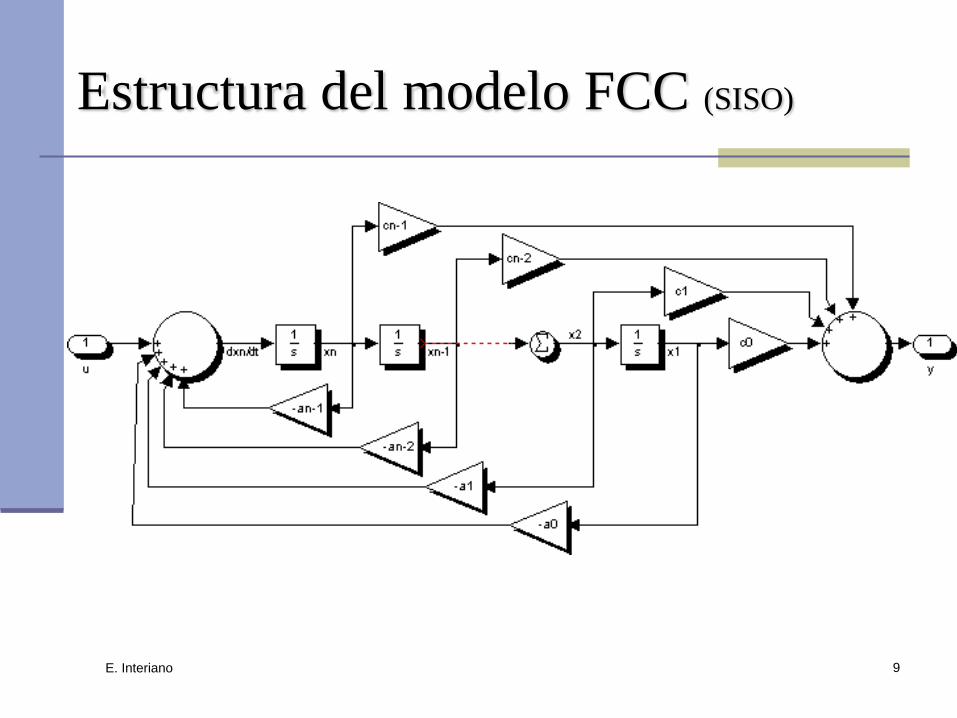
Estructura del modelo FCC (SISO)
E. Interiano 10
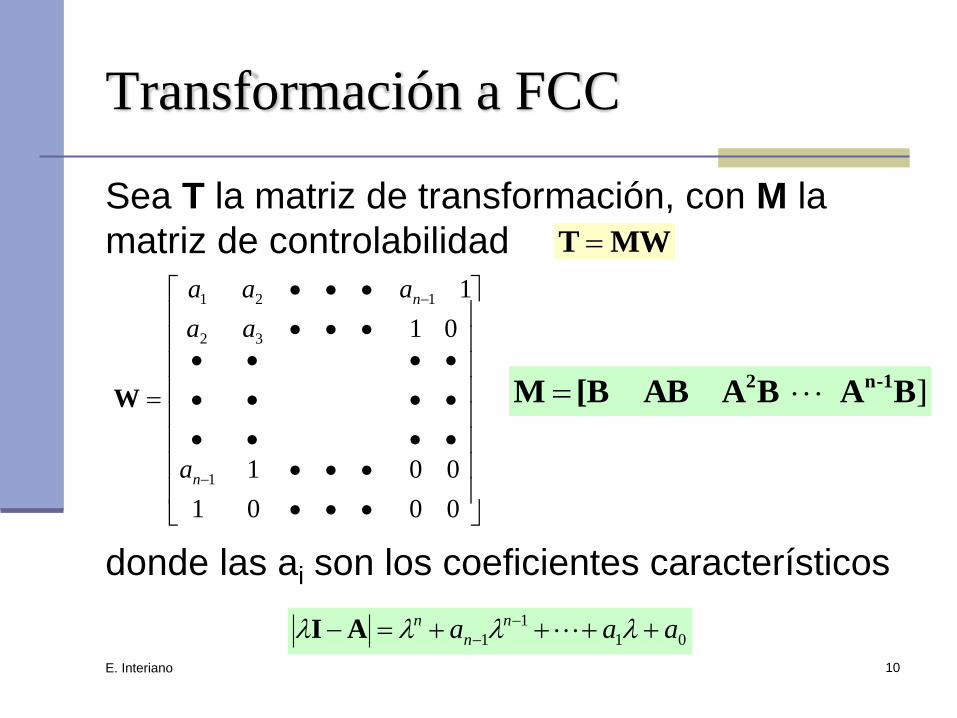
Transformación a FCC
Sea T la matriz de transformación, con M la
matriz de controlabilidad
donde las ai son los coeficientes característicos
MWT =
•
•
•
•
•
•
••
••
••
•
•
•
•
•
•
•••
•••
=
−
−
0
0
0
0
0
1
1
01
1
1
32
121
n
n
a
aa
aaa
W
01
1
1 aaa n
n
n ++++=− −
− AI
]B A B A AB[BM1-n2 =
E. Interiano 11
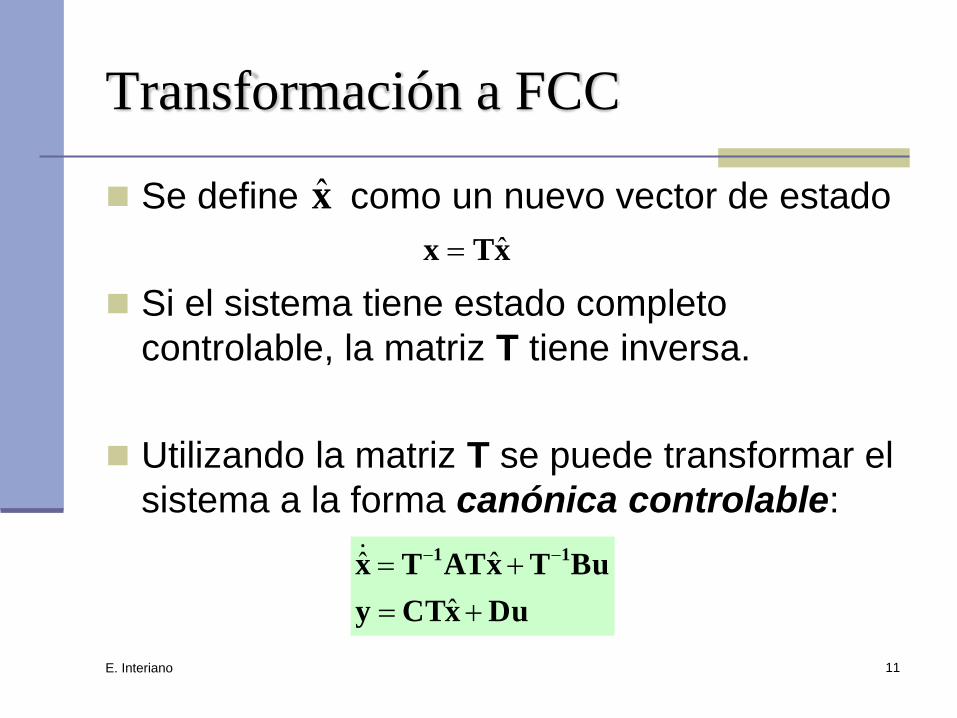
Transformación a FCC
◼ Se define como un nuevo vector de estado
◼ Si el sistema tiene estado completo
controlable, la matriz T tiene inversa.
◼ Utilizando la matriz T se puede transformar el
sistema a la forma canónica controlable:
x̂
xTx ˆ=
DuxCTy
BuTxATTx11
+=
+= −−
ˆ
ˆ̂
E. Interiano 12
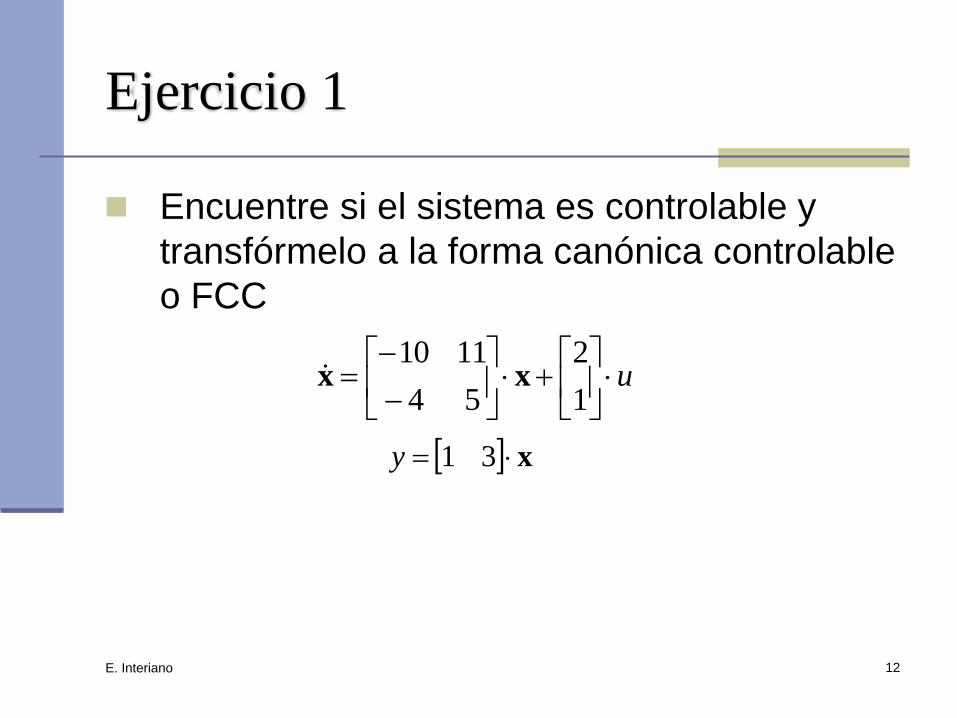
Ejercicio 1
◼ Encuentre si el sistema es controlable y
transfórmelo a la forma canónica controlable
o FCC
u
+
−
−=
1
2
54
1110xx
x= 31y
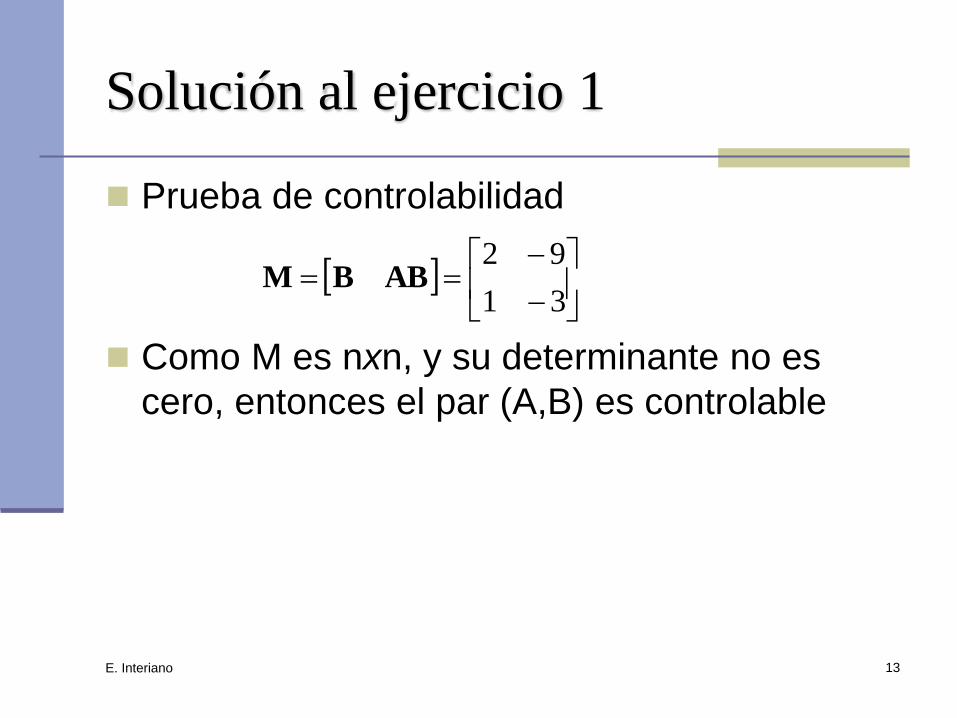
Solución al ejercicio 1
◼ Prueba de controlabilidad
◼ Como M es nxn, y su determinante no es
cero, entonces el par (A,B) es controlable
E. Interiano 13
−
−==
31
92ABBM
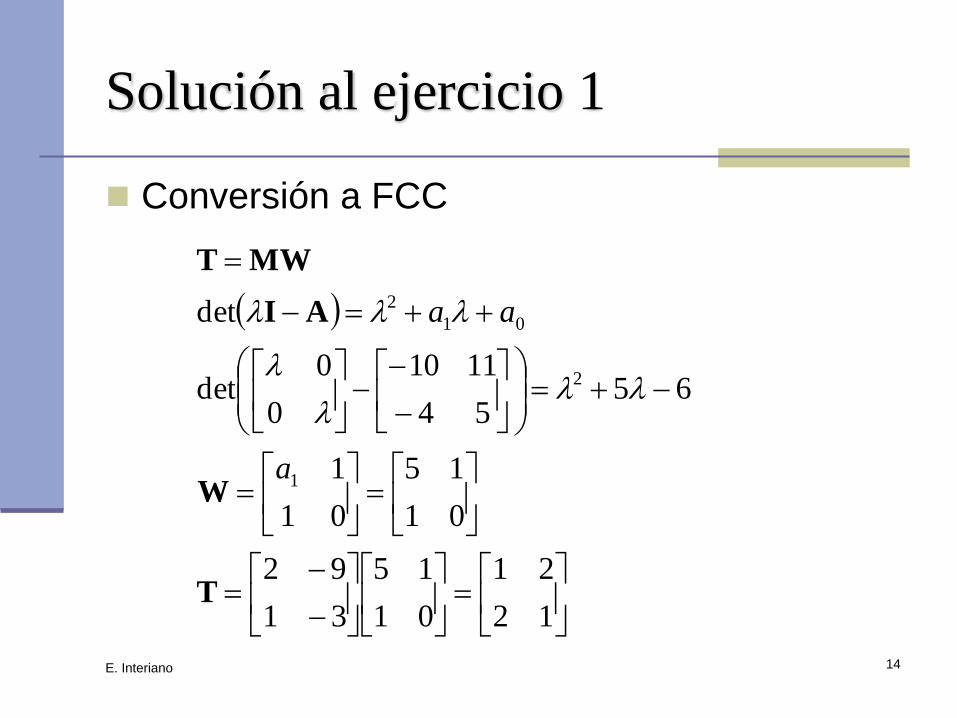
Solución al ejercicio 1
◼ Conversión a FCC
E. Interiano 14
( )
=
−
−=
=
=
−+=
−
−−
++=−
=
12
21
01
15
31
92
01
15
01
1
6554
1110
0
0det
det
1
2
01
2
T
W
AI
MWT
a
aa
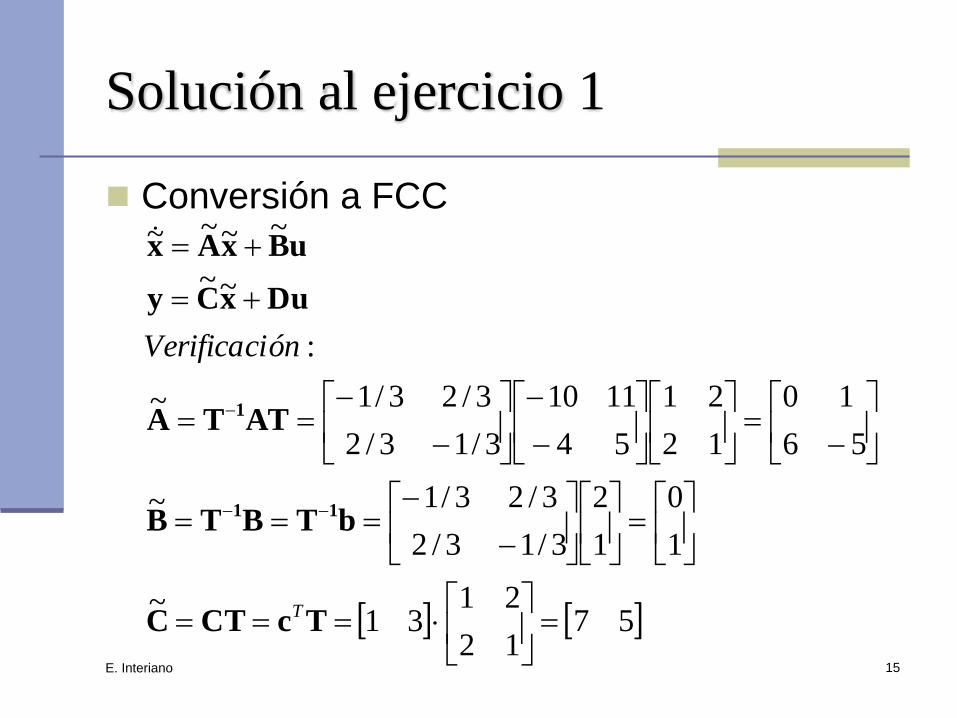
Solución al ejercicio 1
◼ Conversión a FCC
E. Interiano 15
5712
2131
~
1
0
1
2
3/13/2
3/23/1~
56
10
12
21
54
1110
3/13/2
3/23/1~
:
~~
~~~~
=
===
=
−
−===
−=
−
−
−
−==
+=
+=
−−
−
TcCTC
bTBTB
ATTA
DuxCy
uBxAx
11
1
T
ónVerificaci
E. Interiano 16
Observabilidad: definición
Partimos del sistema
◼ se dice que el estado x(t0) es observable si dada cualquier entrada u(t), existe un tiempo finito tf t0 tal que, el conocimiento de:
◼ u(t) para t0 t tf◼ las matrices A, B, C y D
◼ la salida y(t) para t0 t tfsea suficiente para determinar x(t0).
)()()(
)()(
ttt
tt
DuCxy
BuAxx
+=
+=
E. Interiano 17
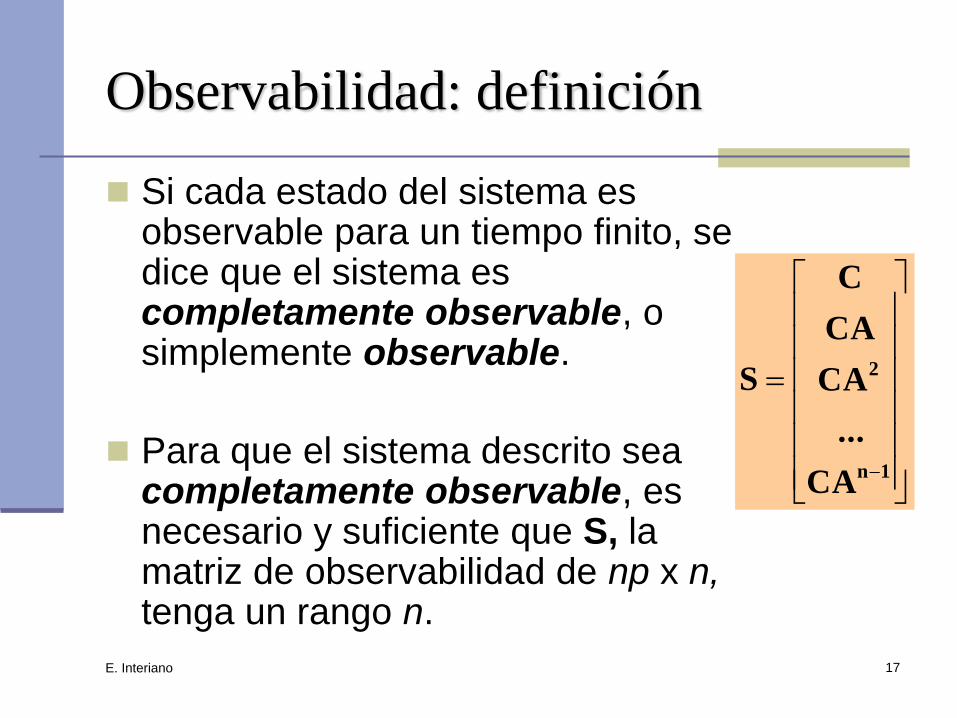
Observabilidad: definición
◼ Si cada estado del sistema es observable para un tiempo finito, se dice que el sistema es completamente observable, o simplemente observable.
◼ Para que el sistema descrito sea completamente observable, es necesario y suficiente que S, la matriz de observabilidad de np x n, tenga un rango n.
=
−1n
2
CA
...
CA
CA
C
S
E. Interiano 18
Pruebas para la
observabilidad◼ Si el sistema tiene solo una salida, C es una
matriz de reglón de 1 x n y S es una matriz cuadrada de n x n. Entonces, el sistema es completamente observable si S es no singular
◼ Para un sistema SISO, el par A,C es completamente observable si A y C están en la forma canónica observable (FCO) o son transformables a la FCO mediante una transformación de similitud.
E. Interiano 19
Pruebas para la
observabilidad (2)◼ Si A está en la forma canónica diagonal
(FCD) el par A,C es completamente observable si todos los elementos en las columnas de C son diferentes de cero.
◼ Si A está en la forma canónica de Jordan (FCJ), el par A,C es completamente observable si al menos uno, de los elementos en las columnas de C que corresponden a la primera columna de cada bloque de Jordan, es diferente de cero.
E. Interiano 20
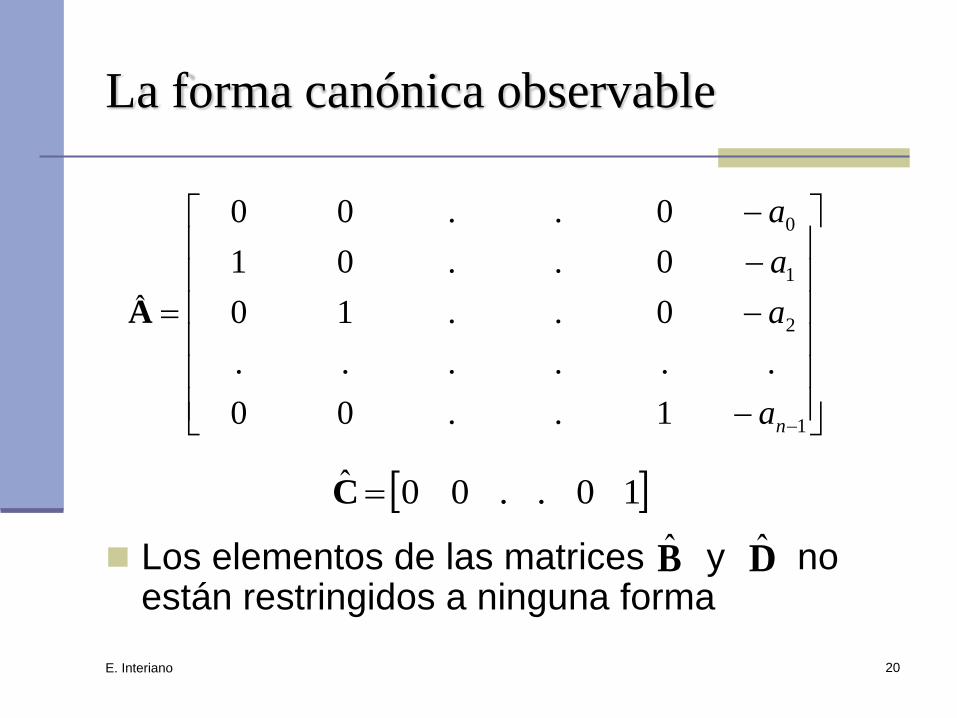
◼ Los elementos de las matrices y no están restringidos a ninguna forma
La forma canónica observable
−
−
−
−
=
−1
2
1
0
1..00
......
0..10
0..01
0..00
ˆ
na
a
a
a
A
10..00ˆ =C
B̂ D̂
E. Interiano 21
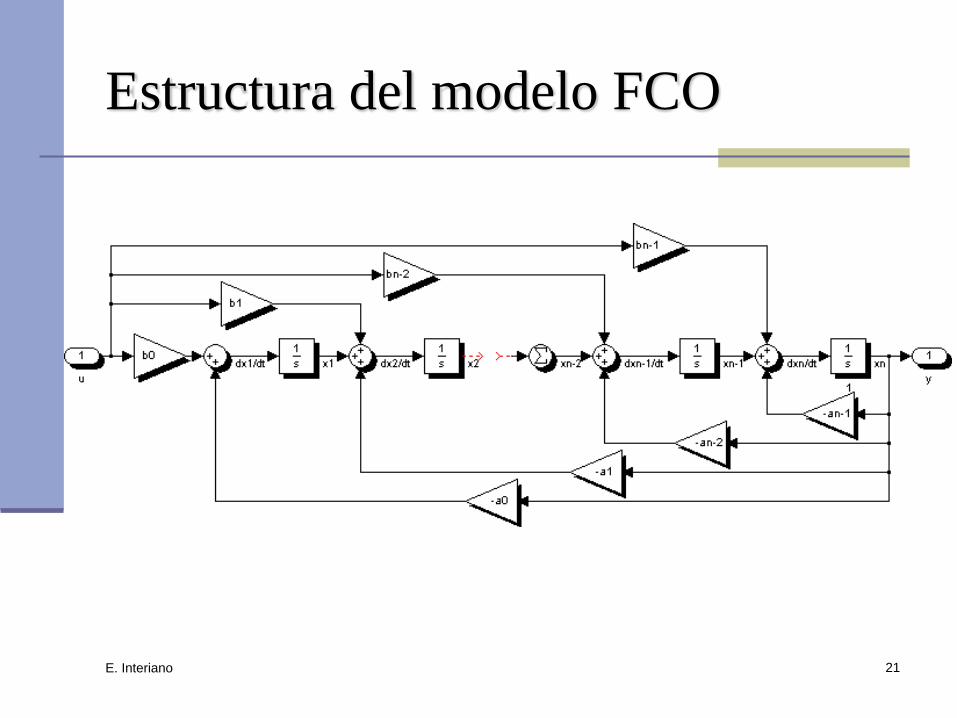
Estructura del modelo FCO
E. Interiano 22
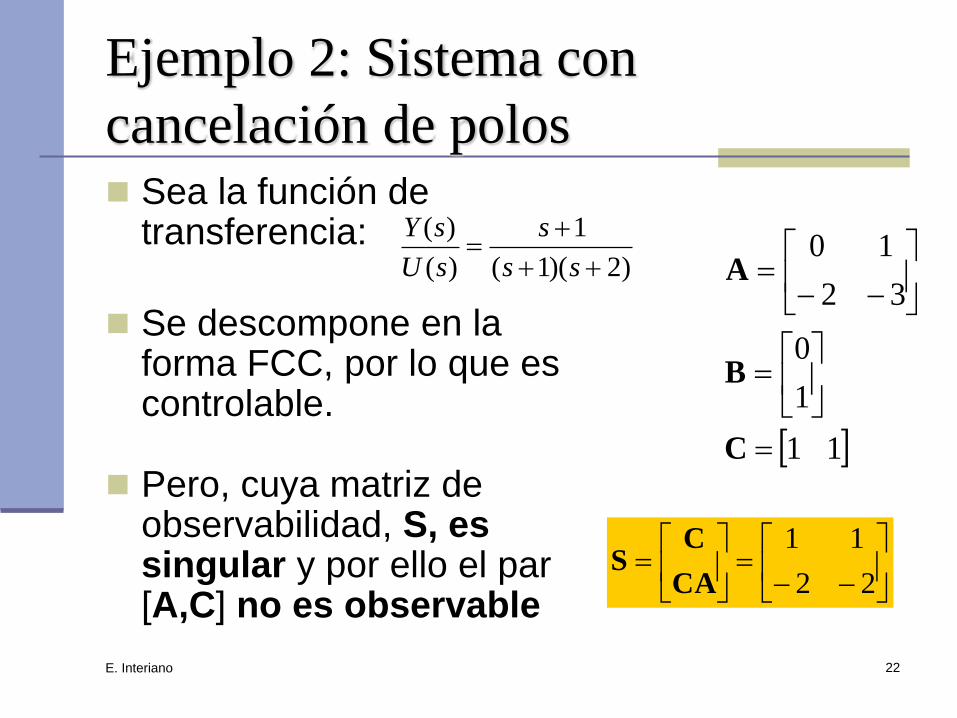
Ejemplo 2: Sistema con
cancelación de polos◼ Sea la función de
transferencia:
◼ Se descompone en la forma FCC, por lo que es controlable.
◼ Pero, cuya matriz de observabilidad, S, es singular y por ello el par [A,C] no es observable
)2)(1(
1
)(
)(
++
+=
ss
s
sU
sY
11
1
0
32
10
=
=
−−=
C
B
A
−−=
=
22
11
CA
CS
E. Interiano 23
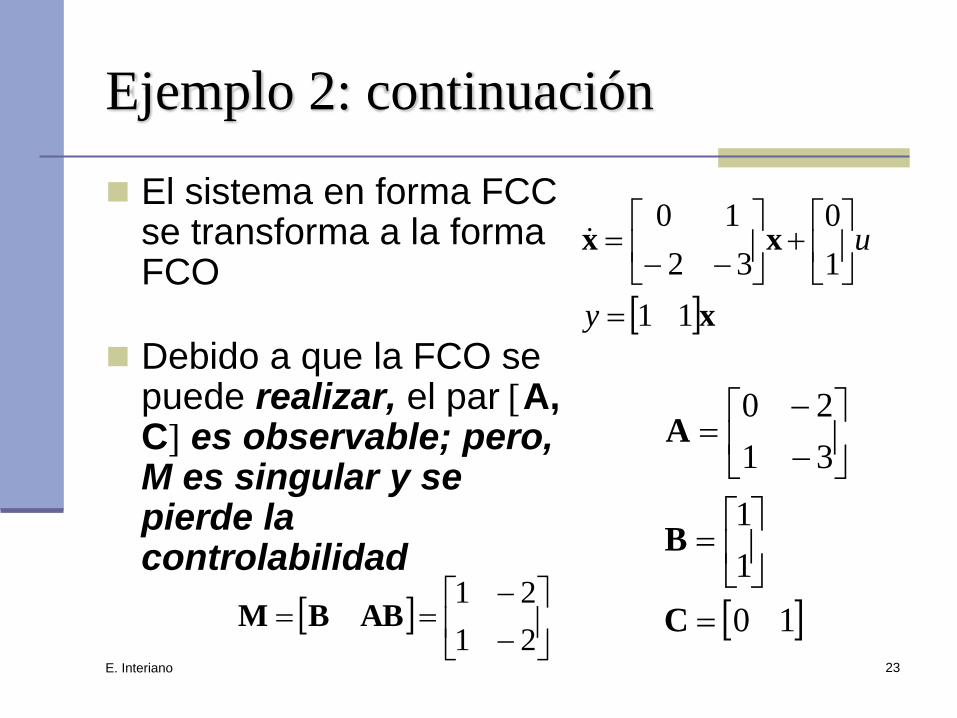
Ejemplo 2: continuación
◼ El sistema en forma FCC se transforma a la forma FCO
◼ Debido a que la FCO se puede realizar, el par A, C es observable; pero, M es singular y se pierde la controlabilidad
10
1
1
31
20
=
=
−
−=
C
B
A
x
xx
11
1
0
32
10
=
+
−−=
y
u
−
−==
21
21ABBM
E. Interiano 24
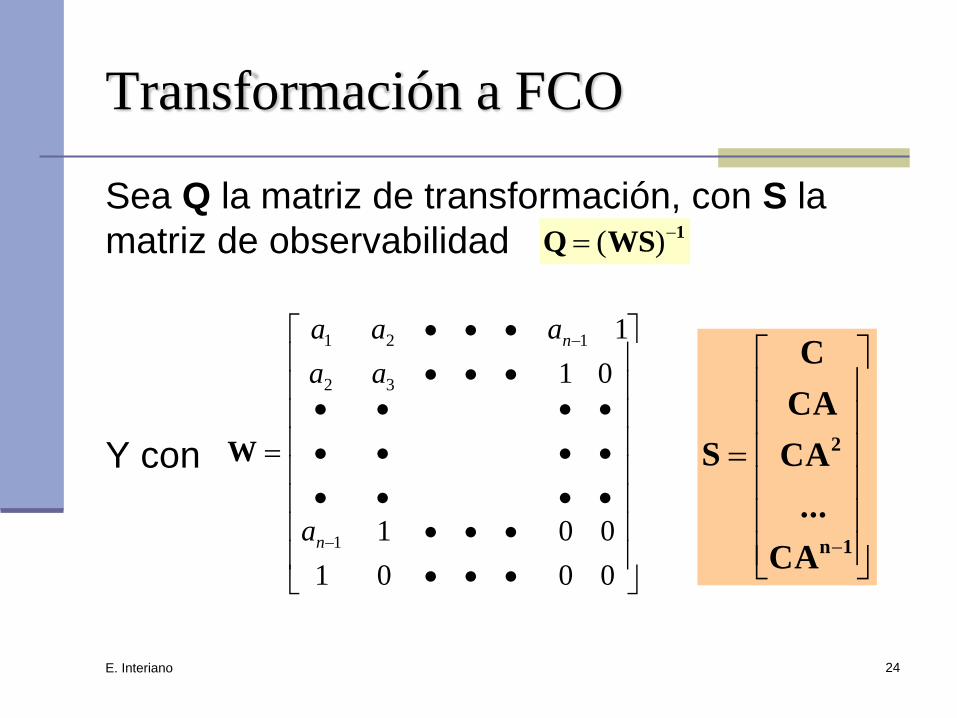
Transformación a FCO
Sea Q la matriz de transformación, con S la
matriz de observabilidad
Y con
1WSQ
−= )(
•
•
•
•
•
•
••
••
••
•
•
•
•
•
•
•••
•••
=
−
−
0
0
0
0
0
1
1
01
1
1
32
121
n
n
a
aa
aaa
W
=
−1n
2
CA
...
CA
CA
C
S
E. Interiano 25
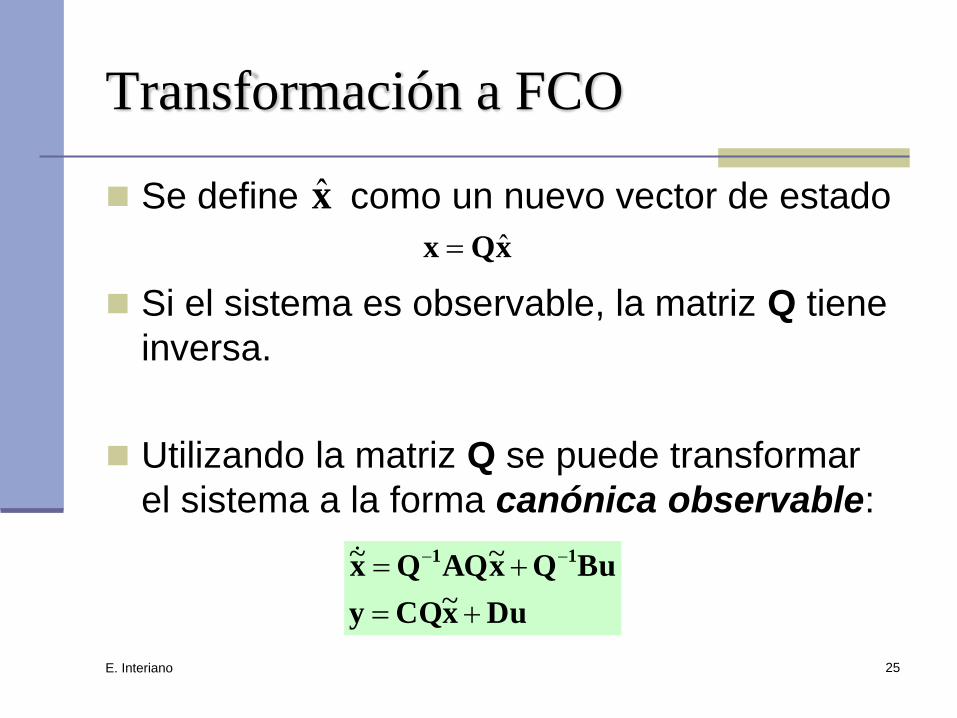
Transformación a FCO
◼ Se define como un nuevo vector de estado
◼ Si el sistema es observable, la matriz Q tiene
inversa.
◼ Utilizando la matriz Q se puede transformar
el sistema a la forma canónica observable:
x̂
xQx ˆ=
DuxCQy
BuQxAQQx11
+=
+= −−
~
~~
E. Interiano 26
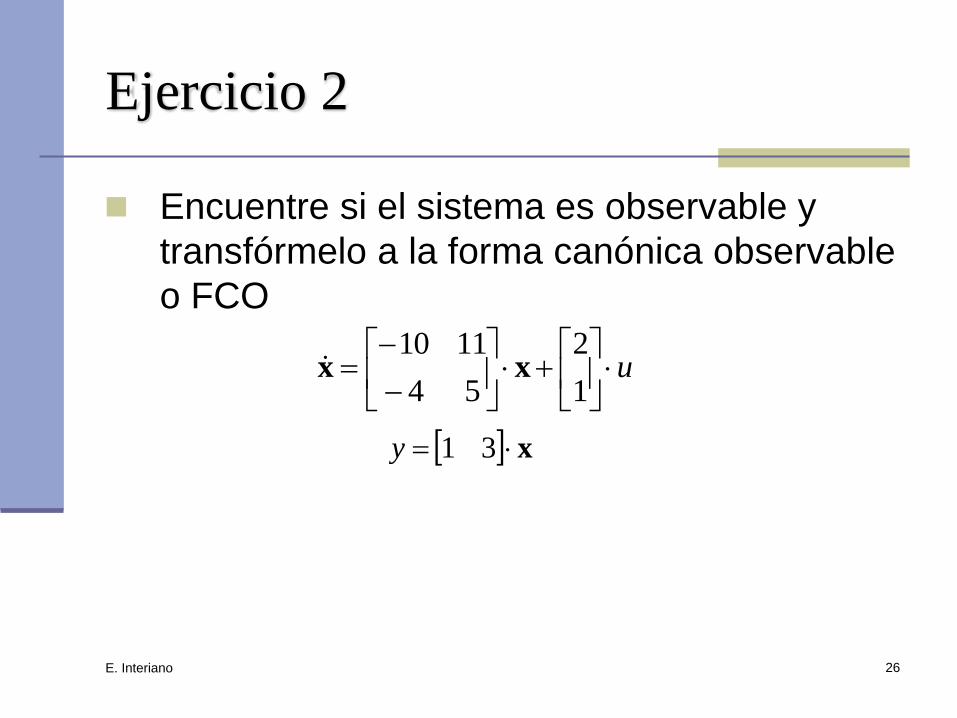
Ejercicio 2
◼ Encuentre si el sistema es observable y
transfórmelo a la forma canónica observable
o FCO
u
+
−
−=
1
2
54
1110xx
x= 31y
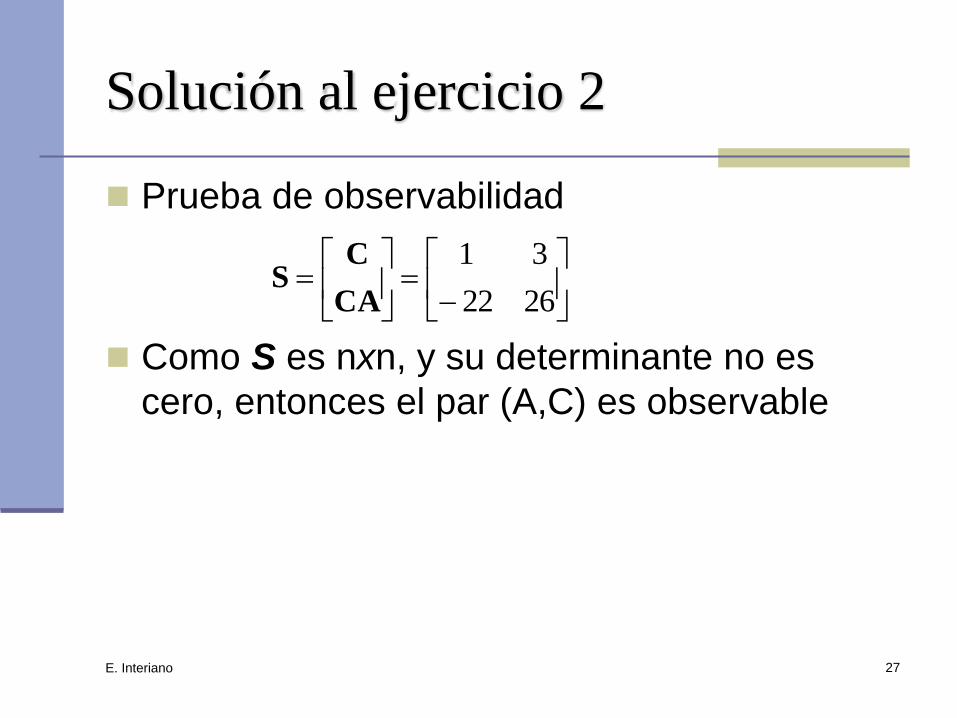
Solución al ejercicio 2
◼ Prueba de observabilidad
◼ Como S es nxn, y su determinante no es
cero, entonces el par (A,C) es observable
E. Interiano 27
−=
=
2622
31
CA
CS
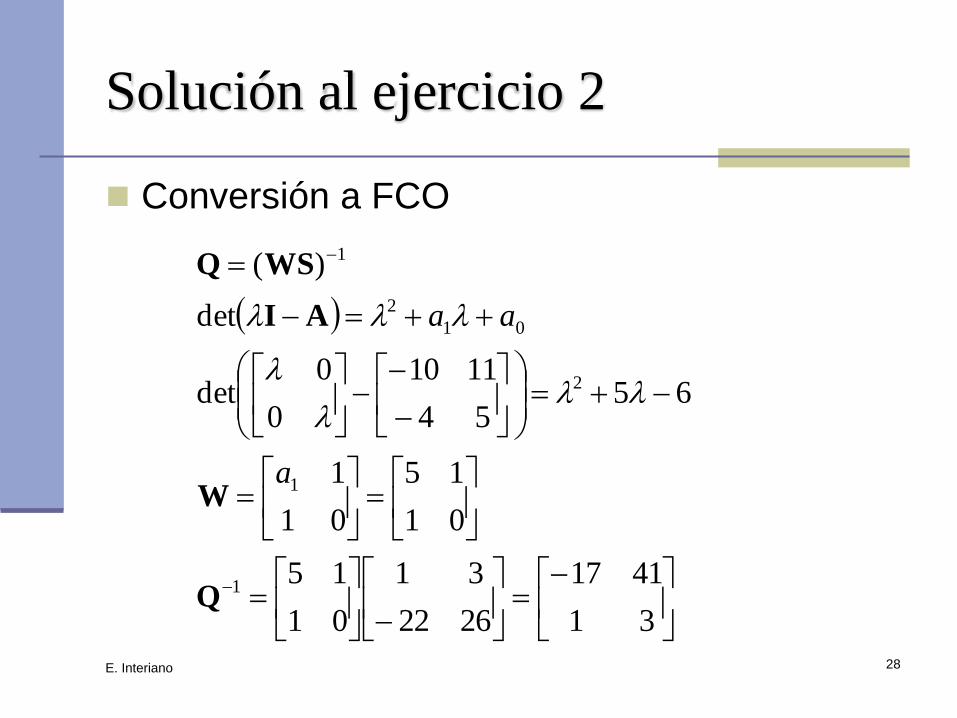
Solución al ejercicio 2
◼ Conversión a FCO
E. Interiano 28
( )
−=
−
=
=
=
−+=
−
−−
++=−
=
−
−
31
4117
2622
31
01
15
01
15
01
1
6554
1110
0
0det
det
)(
1
1
2
01
2
1
Q
W
AI
WSQ
a
aa
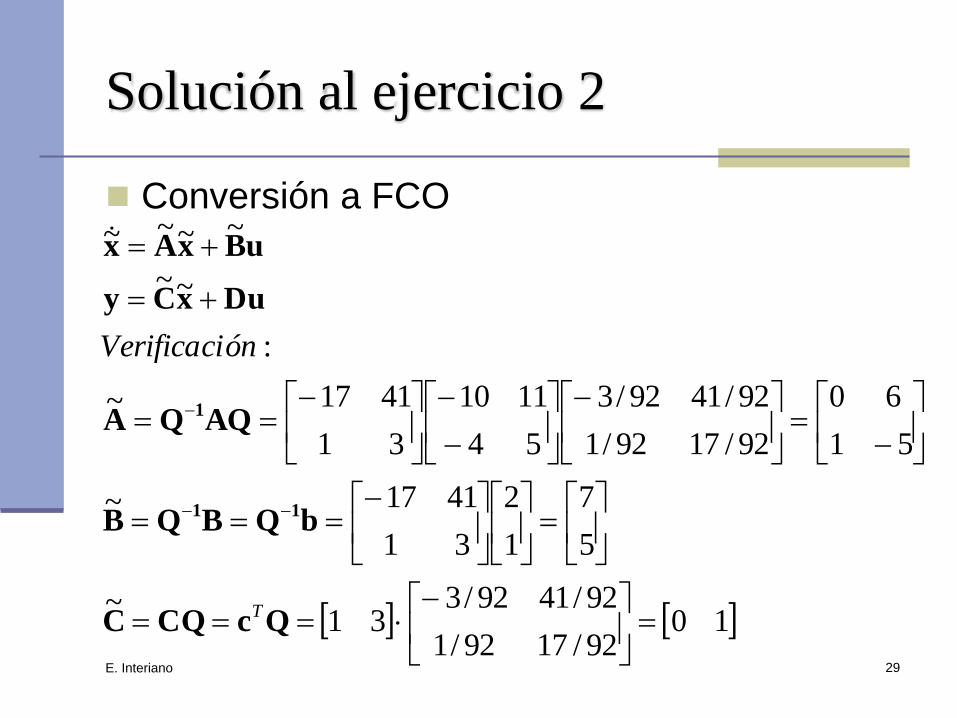
Solución al ejercicio 2
◼ Conversión a FCO
E. Interiano 29
1092/1792/1
92/4192/331
~
5
7
1
2
31
4117~
51
60
92/1792/1
92/4192/3
54
1110
31
4117~
:
~~
~~~~
=
−===
=
−===
−=
−
−
−
−==
+=
+=
−−
−
QcCQC
bQBQB
AQQA
DuxCy
uBxAx
11
1
T
ónVerificaci
E. Interiano 30
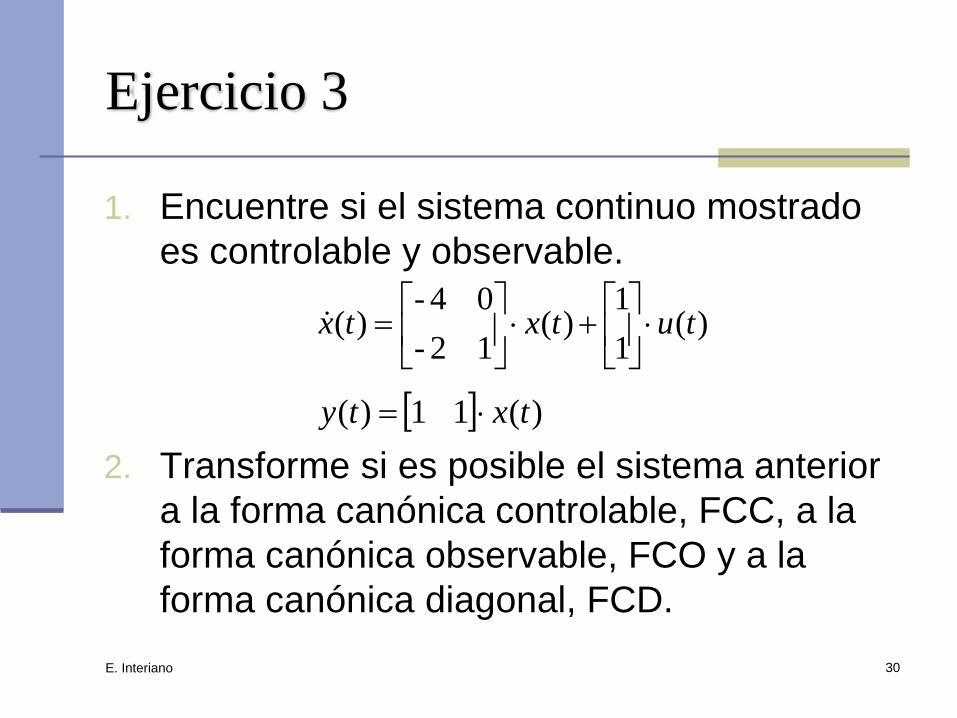
Ejercicio 3
1. Encuentre si el sistema continuo mostrado
es controlable y observable.
2. Transforme si es posible el sistema anterior
a la forma canónica controlable, FCC, a la
forma canónica observable, FCO y a la
forma canónica diagonal, FCD.
)(1
1)(
12-
04-)( tutxtx
+
=
)(11)( txty =
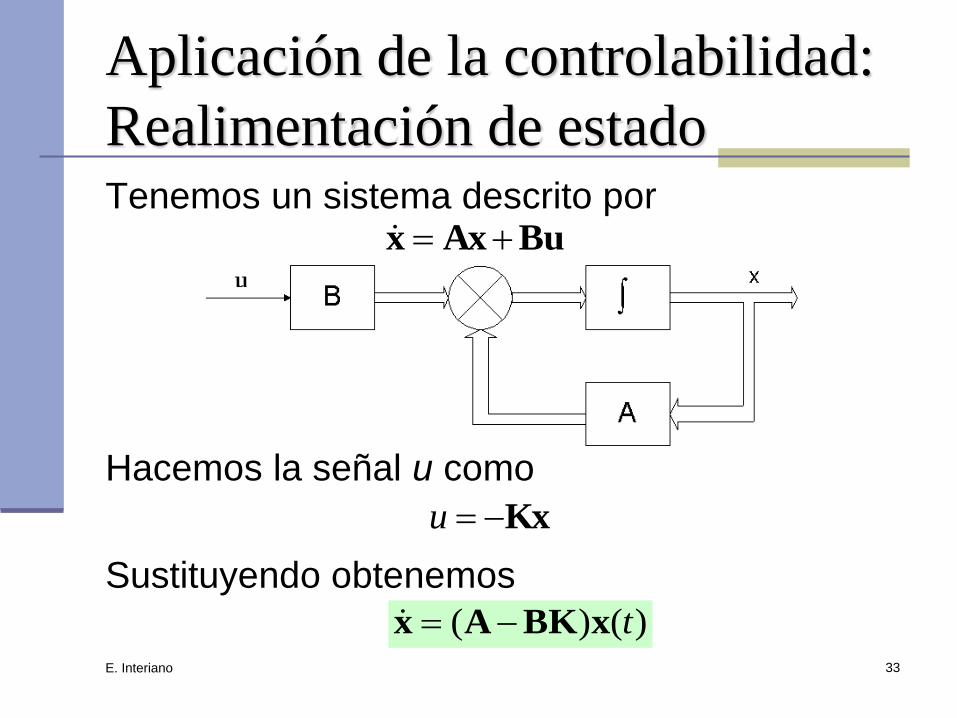
Aplicación de la controlabilidad:
Realimentación de estadoTenemos un sistema descrito por
Hacemos la señal u como
Sustituyendo obtenemos
E. Interiano 33
BuAxx +=
Kx−=u
)()( txBKAx −=
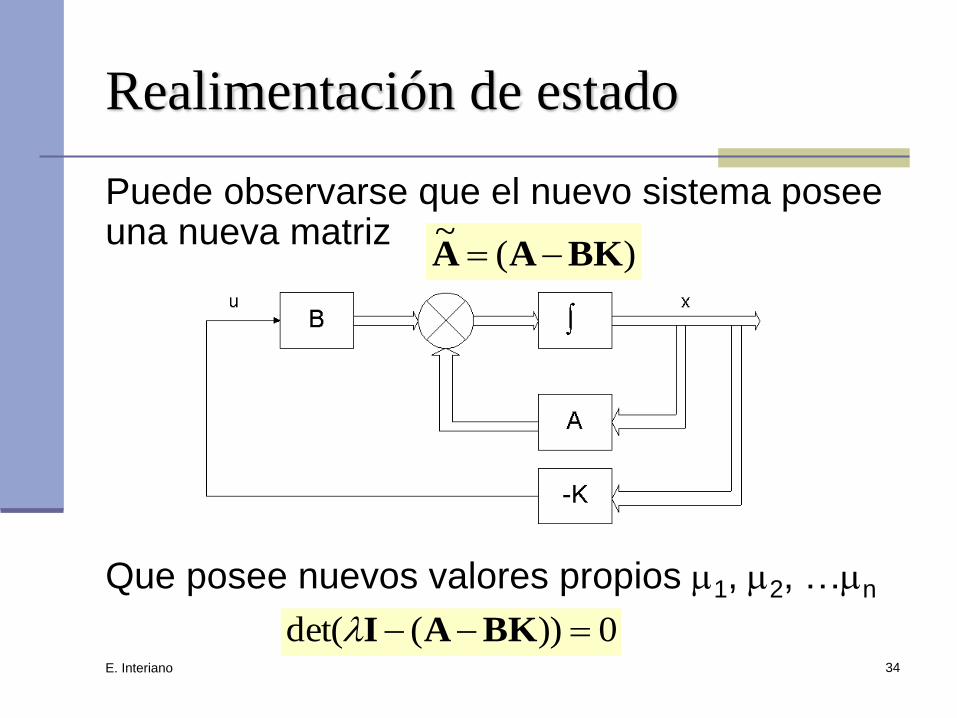
Realimentación de estado
Puede observarse que el nuevo sistema posee una nueva matriz
Que posee nuevos valores propios 1, 2, …n
E. Interiano 34
)(~
BKAA −=
0))(det( =−− BKAI
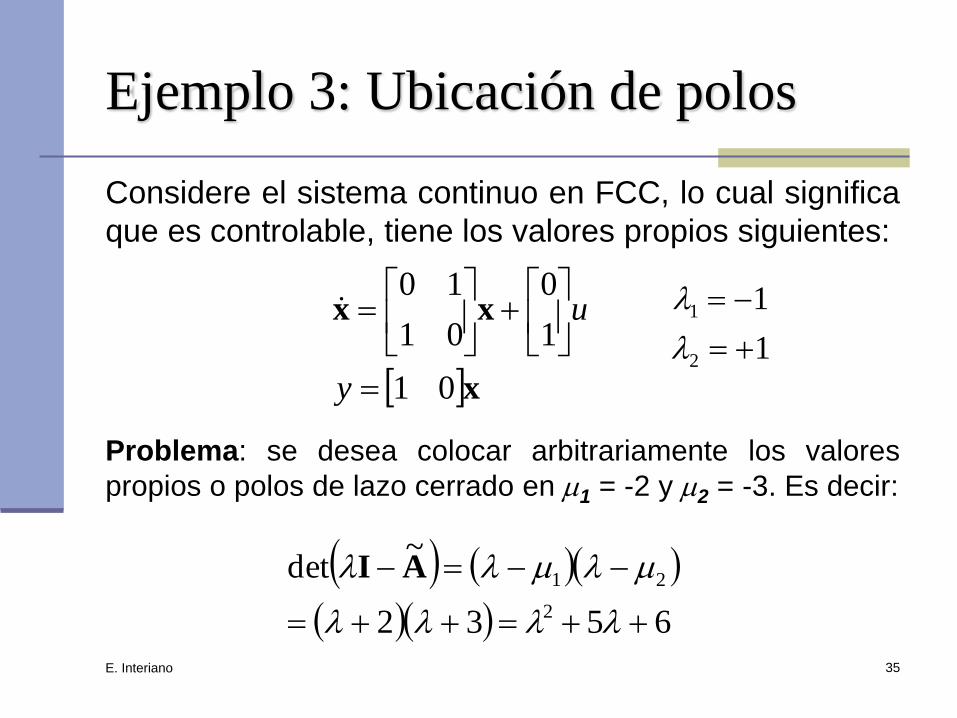
Ejemplo 3: Ubicación de polos
Considere el sistema continuo en FCC, lo cual significa
que es controlable, tiene los valores propios siguientes:
Problema: se desea colocar arbitrariamente los valores
propios o polos de lazo cerrado en 1 = -2 y 2 = -3. Es decir:
E. Interiano 35
x
xx
01
1
0
01
10
=
+
=
y
u1
1
2
1
+=
−=
( ) ( )( )
( )( ) 6532
~det
2
21
++=++=
−−=−
AI
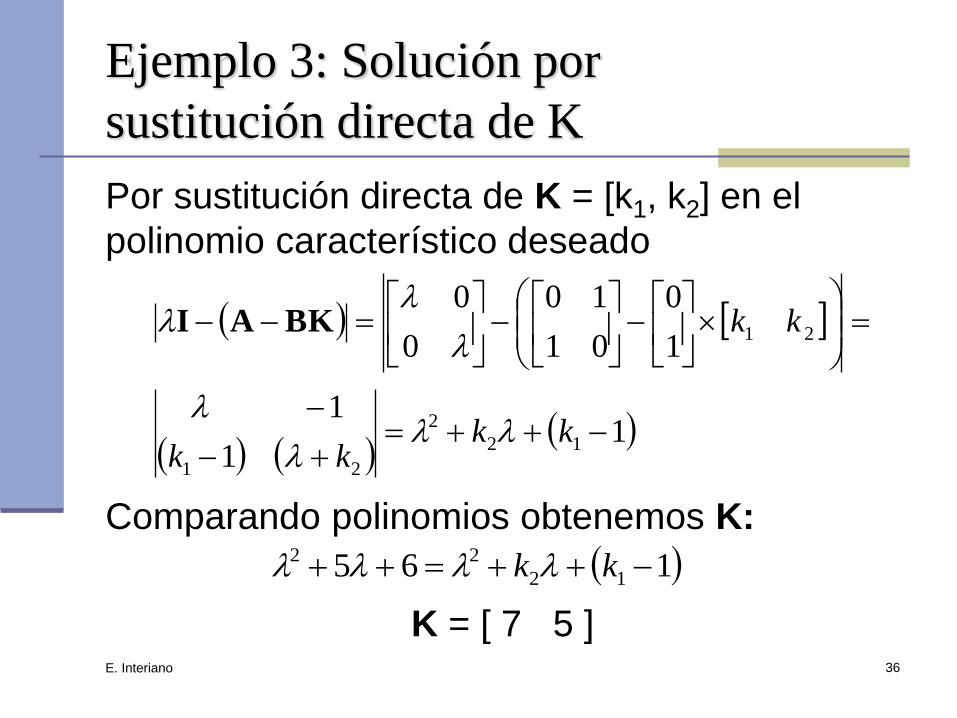
Ejemplo 3: Solución por
sustitución directa de K
Por sustitución directa de K = [k1, k2] en el
polinomio característico deseado
Comparando polinomios obtenemos K:
K = [ 7 5 ]E. Interiano 36
( )
( ) ( )( )1
1
1
1
0
01
10
0
0
12
2
21
21
−++=+−
−
=
−
−
=−−
kkkk
kk
BKAI
( )165 12
22 −++=++ kk
E. Interiano 37
Referencias
[1] Kuo, Benjamin C.. „Sistemas de Control
Automático“, Ed. 7, Prentice Hall, 1996,
México.
[2] Ogata, Katsuhiko. „Ingeniería de Control
Moderna“, Pearson, Prentice Hall, 2003, 4ª
Ed., Madrid.