an overview of the resolver interface for motor control...
TRANSCRIPT

External Use
TM
An Overview of the Resolver
Interface for Motor Control
Applications
FTF-AUT-F0234
A P R . 2 0 1 4
Leos CHALUPA | Automotive MCU Product Group

TM
External Use 1
Session Introduction
• This session will explain cost-effective solutions to interface the
resolver position sensor directly to Freescale's automotive MCU.
• We will discuss basic operation, benefits of saving an external IC,
run time diagnostics and flexible selection of the “limp” mode.

TM
External Use 2
Session Objectives
• By the end of this session you will:
− Be more familiar with resolver-based position sensing
− Understand the run-time diagnostic principles
− Describe how to use Freescale microcontrollers to save an external
IC for Resolver interfacing
− Name the advantages of the presented solution
− Know where to look for support, documentation and examples

TM
External Use 3
Agenda
• Resolver basics
− Brief history
− Resolver types, constructions and operation principles
• Angle position sensing
− Principle of resolver position extraction
− Sources of position sensing errors
• Direct MCU-resolver interface
• Freescale support, examples, documentation and
more

TM
External Use 4
Resolver Basics

TM
External Use 5
Brief Resolver History
• Developed in 1940s at MIT (Supported by the U.S. military)
• Resolvers have been part of electromechanical servo and shaft angle positioning systems for over 50 years
• Resolver position sensor constructions evolved over time − 1970s: Brushless resolver
− 1980s: Hollow shaft brushless resolver
− 1990s: Variable reluctance resolver
• Resolver position conversion methods evolved from phase analog techniques to tracking observer-based digital techniques with run-time diagnostic
• Since 2000, the Freescale Motor Control team has investigated different approaches of the resolver-to-digital conversion using available MCUs/DSCs. The first application was the SMT pick and place machine where fast dynamics and high precision is a key for overall cost effectiveness. Until today, the method was continuously improved and ported to practically all el. motor control MCUs, including special CPU autonomous version based on the eTPU to target ramping EV and HEV markets

TM
External Use 6
Resolvers: Electro-magnetic Induction Angle Sensors
Rotor is put directly on the drive’s shaft
Stator is fixed on drive’s shield
Simple assembly and maintenance
No bearings – “unlimited” durability
Resist well against distortion, vibration, deviation of operating temperature and dust
Worldwide consumption is millions of pieces at present time
Widely used in precise positioning applications
The number of generated sine and cosine cycles per one mechanical revolution depends on the number of resolver pole-pairs (usually 1-3 cycles)
Basic parameters:
− Electrical Error – +/-10’, Transformation Ratio – 0.5, Phase Shift – +/-10°
− Input Voltage – 4-30V, Input Current – 20-100 mA, Input Frequency – 400 Hz – 40 kHz
Uref
Usin
Rotor shaft
Ucos
Uref
Usin
Rotor shaft
Ucos

TM
External Use 7
Resolver Types
θ [°] stator
rotor
sin
cos
HF
excitation
Secondary Side
Primary side
θ [°] stator
sin
cos
HF
excitation
Secondary side
Primary side
rotor
θ [°]
sin
cos
HF
excitation
Secondary side
Primary side Rotary coupling
transformers
Traditional Brushless
With variable air-gap
Brushless Variable Reluctance
With solid rotor
Rotating magnetic coupling transfers HF
energy from the stator (primary) to the rotor
(secondary), connected directly to the resolver
primary. This generates an AC magnetic field
with a sinusoidal distribution, hence causing HF
voltages in the stator windings (secondary side)
with amplitudes dependent (sine/cosine) on the
rotational angle of the rotor.
The VR solid rotor resolver has primary
and secondary windings in the stator,
therefore it does not need a rotating
magnetic coupling. The rotor contains a
diagonal section of highly permeable
material that varies the magnetic field
across the stator as the rotor turns.
Thus, the induced voltage amplitudes
correspond to the sine and cosine of
the rotor angle.
The VR variable air-gap resolver has
primary and secondary windings in the
stator, therefore it does not need a
rotating magnetic coupling. The contour
of rotor is made as the permeance
of air-gap between the stator and rotor
is varied in sinusoid oscillation. Thus,
the induced voltage amplitudes
correspond to the sine and cosine of
the rotor angle.

TM
External Use 8
Traditional Brushless Resolver
Source: Artus, www.psartus.com Source: Tamagawa Seiki co., www.tamagawa-seiki.com

TM
External Use 9
Brushless VR Resolver
Source: Tamagawa Seiki co., www.tamagawa-seiki.com Source: Admotec Inc., machinedesign.com

TM
External Use 10
Basic Resolver Terms
• Excitation – The winding powered by high frequency (e.g. 10 kHz) sine
wave
• Number of multiples/poles – The multiplied speed ratio of the output
angle signal is indicated. The number of poles is twice that of shaft angle
multiplication
• Transformation ratio – Ratio of output voltage amplitude to the excitation
voltage amplitude
• Phase shift – Phase difference between the excitation voltage and output
voltage
• Electrical error – The difference between electrical angle (presented by
the ratio of resolver outputs) and theoretical angle value
• Input impedance – The impedance of the excitation side
• Output impedance – The impedance of the output windings

TM
External Use 11
Resolver Angle Position Sensing

TM
External Use 12
Resolver Based Angular Sensing Methods
• Phase Analog Technique
− The two stator windings are excited by signals that are in phase quadrature to each
other. This induces a voltage in the rotor winding with an amplitude and frequency that
are fixed and a time-phase that varies with shaft angle. This has been the most widely
used technique because it can easily be converted to produce a digital signal by
measuring the change in phase shift with respect to the reference signal.
• Angle Tracking Resolver to Digital Conversion (RDC)
− A tracking converter contains a phase demodulator. Therefore, frequency variation and
incoherent noise do not affect accuracy. Tracking converters can operate with any
reference excitation, sine or square wave, with only minor accuracy variations.
− This technique is implemented by most of the RDC ICs.
− More will be discussed further in this presentation.
RDC IC Ext. circuitry
Analogue demodulation,
PLL RC
Network
Amplifier Resolver
excitation
Angle
Sensor
Δ sin
Δ cos
VCO Counter
Sine
Cosine
Run Time Diagnostic

TM
External Use 13
Angle Tracking Observer Principle
Pos. Error
Comparator Regulator
Angle Tracking
e() Envelope
Extractor
LP
Filter
est
est
Sine
Cosine
Generator
TM
External Use 14
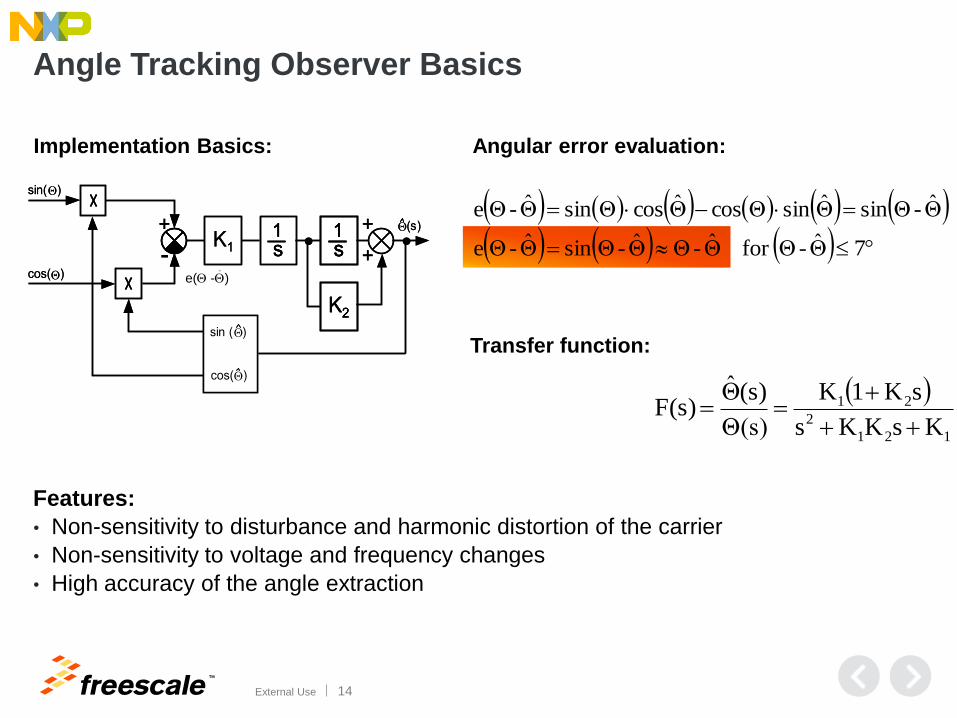
+ +K1
1s
1s
K2
- +
sin ( )
cos( )
sin( )
cos( )
(s) + +K1
1s1s
1s
K2
1s1s
K2
- +
sin ( )
cos( )
sin( )
cos( )
(s)
e( -)
Angle Tracking Observer Basics
Features:
• Non-sensitivity to disturbance and harmonic distortion of the carrier
• Non-sensitivity to voltage and frequency changes
• High accuracy of the angle extraction
( )
121
2
21
KsKKs
sK1K
Θ(s)
(s)Θ̂F(s)
Implementation Basics:
Transfer function:
Angular error evaluation:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )
7Θ̂-Θfor Θ̂-ΘΘ̂-ΘsinΘ̂-Θe
Θ̂-ΘsinΘ̂sinΘcosΘ̂cosΘsinΘ̂-Θe

TM
External Use 15
400600
8001000
12001400
0.51
1.52
0
5
10
15
20
25
30
35
Damping factor [-]Natural frequency [rad/s]
Pe
ak o
ve
rsh
oo
t [%
]
400600
8001000
12001400
0.51
1.52
0
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.045
0.050
Damping factor [-]Natural frequency [rad/s]
Se
ttlin
g t
ime
[s]
Transfer function of the General Second Order System:
BASICS OF ANGLE EXTRACTION 5/6 TUNNING THE ANGLE TRACKING OBSERVER
Transient responses:
Overs
hoot
±2%
Settling time
Tuning the Angle Tracking Observer

TM
External Use 16
Direct MCU R-D Conversion
There are two basic approaches to performing resolver-to-digital conversion using on-chip resources
• Case 1) – Based on the synchronous “rectification” of the high frequency carrier of the feedback signals:
− This requires synchronized triggering of the ADC S&H circuit with respect to the resolver excitation signal
− This is mostly approached by using RSD ADC + triggering timer channels + angle tracking software algorithm
• Case 2) – “Demodulation” of the oversampled feedback signals:
− This does not require synchronized triggering, however it requires fast ADC capable to over-sample two high-frequency feedback signals
− This is mostly approached by using Sigma-Delta ADC + high-frequency digital demodulation + angle tracking software algorithm (with phase-delay compensation)
− Improves dynamics

TM
External Use 17
Case 1: Sin/Cos Envelope Extractor
Timer OC
ADC Trigger
ADC
sampling
ADC
sampling
Resolver excitation
signal at 10 kHz
Resolver feedback
“sin” signal
Resolver feedback
“cos” signal
“sin” envelope
“cos” envelope
Detail view

TM
External Use 18
Case 2: Over-sampling of Resolver Signals
Timer OC
SDADC sampling
Resolver excitation
signal at 10 kHz
Resolver feedback
“sin” signal
Resolver feedback
“cos” signal
“sin” envelope
“cos” envelope
Detail view

TM
External Use 19
Direct MCU-Resolver Interface

TM
External Use 20
Direct MCU R-D Conversion vs. RDC IC
Peripherals CPU Ext. circuitry
∑∆A/D Demodulation ATO PD RC
Network
Output
H/W layer eTIMER
Angle
Sensor
Δ sin
Δ cos
Application
s/w SW RDC
MPCxxxxX
Sync.
RDC IC
Run Time Diagnostic
RDC IC MCU Ext. circuitry
Analogue demodulation,
PLL RC
Network
Amplifier
SWG -
Resolver
excitation
Angle
Sensor
Δ sin
Δ cos
Application
s/w
Run Time Diagnostic
VCO Counter
Sine
Cosine
Run Time Diagnostic

TM
External Use 21
MPCxxxxX
Direct MCU R-D Conversion: Application Example
Resolver
S1 S3
S2
S4
R2 R1
Cosine
Sine
Excitation
Amplifier
LP Filter,
DC
Common
Mode
Shift
Detection
SDADC 2+3 2xch. s. ended mode
SDADC 0+1 2xch. s. ended mode
SDADC 4+5 2xch s. ended mode;
optional excitation
monitoring
PWM (eTPU)
2nd order
LP Filter
CPU
12 V
Angle Tracking
Observer
ATO Angular position
Angular speed
INIT values
Diagnostic
sin
, co
s
Tra
ckin
g e
rr.
Fault diagnostic
Angular speed

TM
External Use 22
Resolver Differential Excitation Stage
Excitation Amplifier ≈ existing solution
Low-pass filter
MPCxxxxX
PWM (eTPU)

TM
External Use 23
Resolver Input Stage (Phy. Layer)
MPCxxxxX
SDADC 0+1 2xch. s. ended mode
SDADC 2+3 2xch. s. ended mode
SDADC 4+5 2xch s. ended mode;
optional excitation
monitoring

TM
External Use 24
• Position accuracy ±0.13 deg. 12bit ±2LSB
• External hardware
‒ Excitation amplifier
‒ LP Filter, DC Common Mode Shift Detection
• True 12-bit resolution without noise
• Repeatability ±0.07 deg.
Evaluation Results
RDC IC
• Position accuracy ±0.09 deg. 12bit ±1LSB
• External hardware
‒ Excitation amplifier
‒ Hardware tuned for given resolver
‒ Differential measurement
‒ Phase difference, offset, gain error uncompensated
‒ LP Filter, DC Common Mode Shift Detection
• Noise, repeatability ±0.033 deg.
‒ Higher CPU* & ADC load
MPC5746M SW RDC
-0,1
-0,05
0
0,05
0,1
0,15
-180 -135 -90 -45 0 45 90 135 180
reso
lve
r e
rro
r [m
ech
. d
eg[
reference position [mech. deg]
angleErr
Po
sitio
n a
ccu
racy
Nois
e
TM
External Use 25
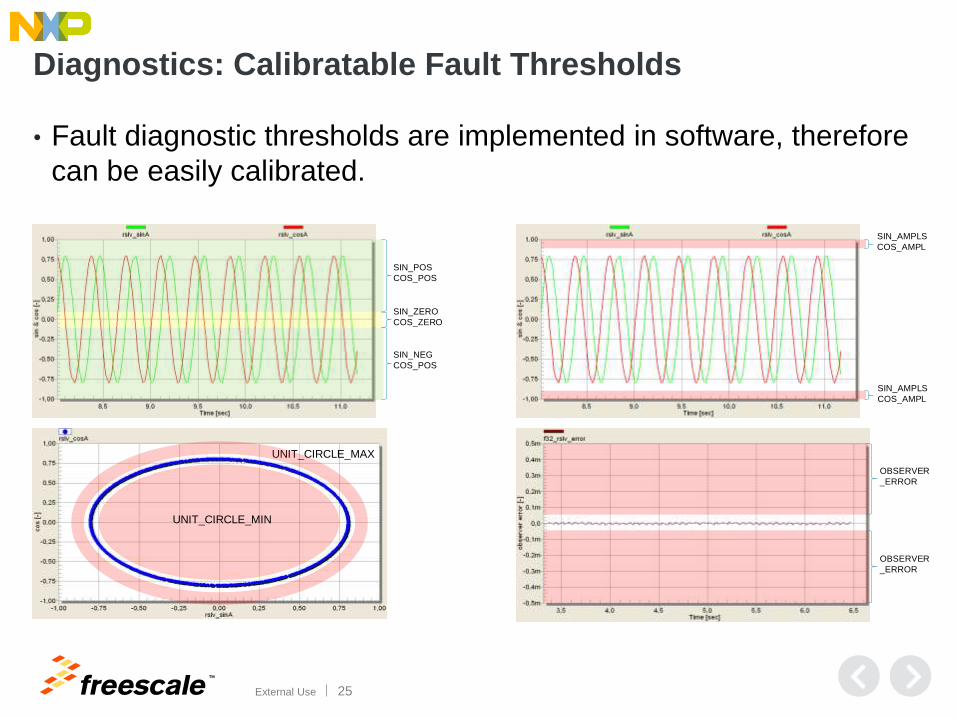
Diagnostics: Calibratable Fault Thresholds
• Fault diagnostic thresholds are implemented in software, therefore
can be easily calibrated.
SIN_POS
COS_POS
SIN_ZERO
COS_ZERO
SIN_NEG
COS_POS
SIN_AMPLS
COS_AMPL
SIN_AMPLS
COS_AMPL
UNIT_CIRCLE_MAX
UNIT_CIRCLE_MIN
OBSERVER
_ERROR
OBSERVER
_ERROR

TM
External Use 26
Fault Example: SIN Short to GND
Sin Cos Means Unit Circle ATO
Calculated Angle
SIN_ZERO
SIN_POS
SIN_NEG
SIN_AMPL
COS_ZERO
COS_POS
COS_NEG
COS_AMPL
SIN_MEAN_POS
SIN_MEAN_NEG
COS_MEAN_POS
COS_MEAN_NEG
UNIT_CIRCLE_MIN
UNIT_CIRCLE_MAX
OBSERVER_ERROR
1.2b SIN Wire(or pin) short to GND ? ? ? 1 ? ? ? ? 1 0 ? ? 1 1 ? +/- 35deg

TM
External Use 27
Fault Example: REFSIN Open
Sin Cos Means Unit Circle ATO
Calculated Angle
SIN_ZERO
SIN_POS
SIN_NEG
SIN_AMPL
COS_ZERO
COS_POS
COS_NEG
COS_AMPL
SIN_MEAN_POS
SIN_MEAN_NEG
COS_MEAN_POS
COS_MEAN_NEG
UNIT_CIRCLE_MIN
UNIT_CIRCLE_MAX
OBSERVER_ERROR
1.3a REFSIN Wire(or pin) open ? 0 1 0 ? ? ? ? 0 1 ? ? 1 1 ? wrong

TM
External Use 28
Fault Example: Shortcut REZ_GEN and REFSIN
Sin Cos Means Unit Circle ATO
Calculated Angle
SIN_ZERO
SIN_POS
SIN_NEG
SIN_AMPL
COS_ZERO
COS_POS
COS_NEG
COS_AMPL
SIN_MEAN_POS
SIN_MEAN_NEG
COS_MEAN_POS
COS_MEAN_NEG
UNIT_CIRCLE_MIN
UNIT_CIRCLE_MAX
OBSERVER_ERROR
2.2 Short between REZ_GEN and REFSIN ? 1 0 1 ? ? ? ? 1 0 ? ? 1 1 ? wrong

TM
External Use 29
Resolver + R/D IC Comments
• Advantages
− Position information during MCU initialization stage
− High resolution: 12-bit
− Simple SPI interface between MCU and RDC IC
• Disadvantages
− Only simple diagnostic possible (raw signal data not accessible)
− No limp operation modes
− RDC IC may require up to 30 pins
− Larger board area
− Higher system cost

TM
External Use 30
Resolver + SW Observer Comments
• Advantages
− High resolution: 10-12 bit (dependent on the resolution of A/D converter)
− Simple hardware
− Lower cost than resolver + ASIC
− Intelligent diagnostics possible with complex conditioning for fault source
detection
− Limp mode operation modes possible
• Disadvantages
− Intensive calculation needs, higher CPU load easily managed by
Freescale 32-bit Qorivva microcontrollers

TM
External Use 31
Freescale Support, Examples,
Documentation

TM
External Use 32
Motor Control Development Kit: Composition
MCU
Controller Board
MC33937A
3-phase
Low Voltage
Power Stage
PMSM with
Resolver/Encoder or
BLDC with
Hall/No Sensor
FET DRIVER
MC33937A
FET 3-phase
Power Stage
3-phase Current
Shunts
Resolver/Sin-Cos
Interface
Incremental
Encoder Interface
Qorivva
MPC5643L MCU
Switches and Pushbuttons
ON/OFF, Up/Down, Reset
SBC
MC33905

TM
External Use 33
Sensor: Position and Speed Measurement
Functional properties:
• Sine-wave excitation signal generation
• Position measurement
• Speed measurement
• Revolution measurement
Key features:
• Adjustable magnitude of excitation signal
• Adjustable frequency of excitation signal
• Sensor fault state detection
ADC measurement
Uref
Usin
Rotor shaft
Ucos
Uref
Usin
Rotor shaft
Ucos
Resolver
Encoder
Incremental Encoder Pulses
Source: Heidenhain

TM
External Use 34
Motor Control Development Kit Series: Content
• Out-of-the-box experience offers:
− Complete schematics of the development kit hardware
− Complete source code of the development kit software application
− Math and Motor Control libraries (MCLib) in object code
− FreeMASTER & MCAT interface to easy application visualization / control
− Extensive documentation including User Guide, Quick Start Guide and Fact Sheet
FreeMASTER HTML-based Control Page FreeMASTER Scope
www.freescale.com/AutoMCDevKits

TM
External Use 35
MLIB
• Trigonometric Functions
• GFLIB_Sin, GFLIB_Cos,
GFLIB_Tan
• GFLIB_Asin, GFLIB_Acos,
GFLIB_Atan, GFLIB_AtanYX
• Limitation Functions
• GFLIB_Limit,
GFLIB_VectorLimit
• GFLIB_LowerLimit,
GFLIB_UpperLimit
• PI Controller Functions
• GFLIB_ControllerPIr,
GFLIB_ControllerPIrAW
• GFLIB_ControllerPIp,
GFLIB_ControllerPIpAW
• Interpolation
• GFLIB_Lut1D, GFLIB_Lut2D
• Hysteresis Function
• GFLIB_Hyst
• Signal Integration
Function
• GFLIB_IntegratorTR
• Sign Function
• GFLIB_Sign
• Signal Ramp Function
• GFLIB_Ramp
• Square Root Function
• GFLIB_Sqrt
GFLIB
• Finite Impulse Filter
• GDFLIB_FilterFIR
• Moving Average Filter
• GDFLIB_FilterMA
• 1st Order Infinite Impulse
Filter
• GDFLIB_FilterIIR1init
• GDFLIB_FilterIIR1
• 2nd Order Infinite Impulse
Filter
• GDFLIB_FilterIIR2init
• GDFLIB_FilterIIR2
GDFLIB
• Clark Transformation
• GMCLIB_Clark
• GMCLIB_ClarkInv
• Park Transformation
• GMCLIB_Park
• GMCLIB_ParkInv
• Duty Cycle Calculation
• GMCLIB_SvmStd
• Elimination of DC Ripples
• GMCLIB_ElimDcBusRip
• Decoupling of PMSM
Motors
• GMCLIB_DecouplingPMSM
GMCLIB
• Absolute Value, Negative
Value
• MLIB_Abs, MLIB_AbsSat
• MLIB_Neg, MLIB_NegSat
• Add/Subtract Functions
• MLIB_Add, MLIB_AddSat
• MLIB_Sub, MLIB_SubSat
• Multiply/Divide/Add-
multiply Functions
• MLIB_Mul, MLIB_MulSat
• MLIB_Div, MLIB_DivSat
• MLIB_Mac, MLIB_MacSat
• MLIB_VMac
• Shifting
• MLIB_ShL, MLIB_ShLSat
• MLIB_ShR
• MLIB_ShBi, MLIB_ShBiSat
• Normalisation, Round
Functions
• MLIB_Norm, MLIB_Round
• Conversion Functions
• MLIB_ConvertPU,
MLIB_Convert
ACLIB/AMCLIB
• Angle Tracking Observer
• Tracking Observer
• PMSM BEMF Observer in
Alpha/Beta
• PMSM BEMF Observer in
D/Q
• Content To Be Defined
Target Platform GreenHills Multi WindRiver Diab Cosmic
Qorivva MCU RTM Rev 1.0 RTM Rev 1.0
S12ZVM RTM Rev 1.0
Auto Math and Motor Control Library Set
ω ωfbck wRotElRes
GetPositionElRes()
GetSpeedElRes()
GDFLIB_FilterMA
GFLIB_ControllerPIrA
W GFLIB_IntegratorTr
θerr θfbck
- thRotElRes
GFLIB_Sin
GFLIB_Cos
si
n
cos

TM
External Use 36
MC Development Kits: Web Page Summary
Motor Control Development Kits
Math & Motor Control Library Set
Motor Control Application Tuning Tool (MCAT)
FreeMASTER
www.freescale.com/MCAT
www.freescale.com/freemaster
www.freescale.com/automclib
www.freescale.com/AutoMCDevKits
See short promotional video on Freescale’s YouTube channel
See short promotional video on Freescale’s YouTube channel

TM
© 2014 Freescale Semiconductor, Inc. | External Use
www.Freescale.com