advanced driver assistance systems its, cc, acc, cacc · prof. dr. ali g. göktan, "akıllı...
TRANSCRIPT

MARMARA ÜNİVERSİTESİ
TEKNOLOJİ FAKÜLTESİ
AKTİF EMNİYET SİSTEMLERİ
Advanced Driver Assistance
Systems
ITS, CC, ACC, CACC
Abdullah DEMİR, Yrd. Doç. Dr.

AKILLI ULAŞIM SİSTEMLERİ – GİRİŞ
Abdullah DEMİR, Yrd. Doç. Dr.

Günümüz şartlarında, özellikle karayolu kapasitelerini artırmanın, iyi ve
sürdürülebilir bir çözüm olmadığı artık pek çok kesim tarafından anlaşılan bir
gerçektir. Artık, çözümlerin odağını her türlü ulaştırma altyapısının en uygun
şekilde yönetilmesi oluşturmaktadır. Bu noktada Akıllı Ulaştırma Sistemleri
(AUS; Intelligent Transportation System - ITS), çözüm sürecine önemli katkılar
sağlayacak bir potansiyele sahiptir (Yardım ve Demir, 2009).
Günümüzde teknolojik gelişmelere paralel olarak, otopark yönetimi konusunda
kullanılmaya başlanan araçlardan biri de AUS yaklaşımlarıdır. AUS; iletişim,
bilgisayar ve elektronik gibi gelişmiş teknolojiler üzerine kurulmuş,
gerçek zamanlı ve güncel veri tabanlarını kullanan, ulaştırma
konusundaki etkinliği, güvenliği ve hizmet kalitesini geliştirmek amacıyla
daha çok işletme, denetim ve yönetim problemlerinin çözümüne yönelik
olarak hizmet veren sistemlerin ortak adıdır. Kavramın adında geçen
“akıllı/uzman” terimi, bu sistemlerde var olan fonksiyonların, bellek,
iletişim, bilgi analiz yeteneği ve adapte olabilme davranışının yanı sıra,
duyarlı bazı özelliklere sahip bulunmaları sebebi ile kullanılmaktadır.
Diğer taraftan insan ve eşyaların bir yerden bir yere taşınmasını sağlayan teknolojik
ve kurumsal temeldeki tüm ulaştırma sitemlerinin entegrasyonu da “akıllı ulaştırma
sistemi” kavramının içinde değerlendirilmektedir (Yardım ve Akyıldız, 2005).
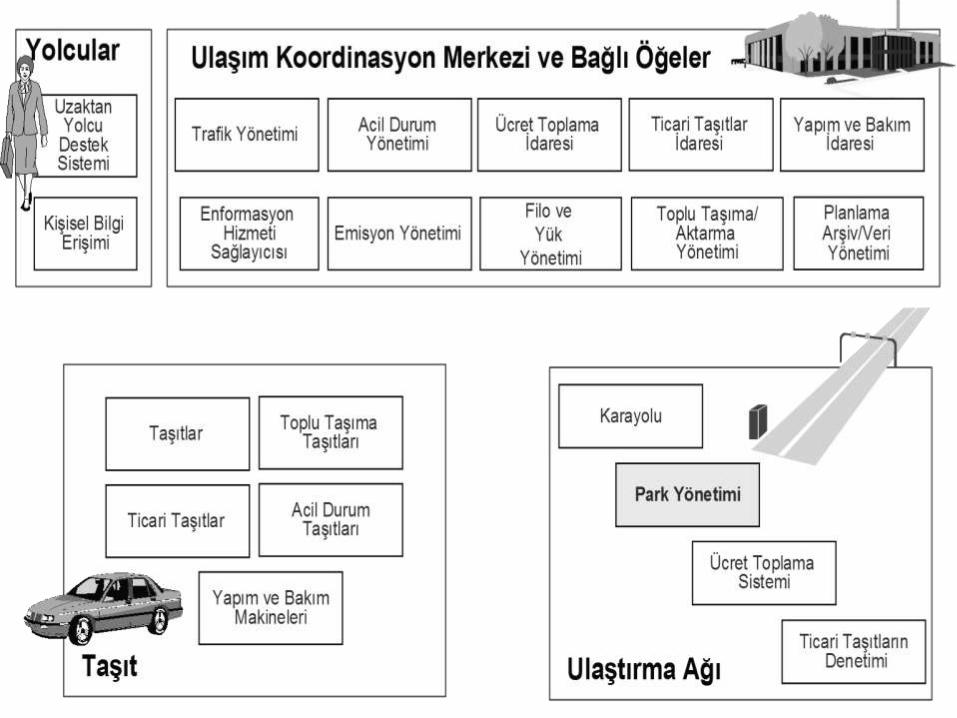
AUS, birçok alt sistemlerden oluşan bir yönetim ve denetim sistemidir.
Bu sistem, dört önemli nokta üzerinde odaklanmıştır. Bunlar; ulaşım
koordinasyon merkezi, yolcular, taşıtlar ve ulaşım ağındaki
düzenlemelerdir (Şekil). Birinci önemli nokta olan koordinasyon
merkezi; trafik yönetimi, acil durum yönetimi, ücretli geçiş idaresi,
ticari taşıtlar idaresi, bakım ve yapı idaresi, enformasyon servis
sağlayıcısı, emisyon yönetimi, ulaşım/aktarma yönetimi, arşiv veri
yönetimi, toplu taşıma ve yük taşımacılığı yönetimi ve planlamadan
oluşmaktadır. İkinci önemli noktayı oluşturan yolcular ise; uzaktan
yolcu destek sistemi ve kişisel bilgi erişiminden oluşmaktadır. Üçüncü
önemli noktayı oluşturan taşıtlar ise; transit taşıtlar, ticari taşıtlar,
bakım ve yapı makineleri ve acil durum taşıtlarından meydana
gelmektedir. Akıllı ulaşım sisteminin son önemli noktasını yol ile ilgili
alt sistemler oluşturmaktadır. Bunlar; güvenlik gözlemleri, paralı
geçişler, park yönetimi ve ticari taşıt kontrollerinden oluşmaktadır
(Demir ve Çavdar, 2008). Akıllı ulaşım sistemi, tüm bu saymış
olduğumuz alt sistemlerin entegrasyonundan oluşan tümleşik
sistemler bütünüdür.

Intelligent Transportation Systems (ITS) Standards Program Strategic Plan for 2011–2014 http://www.its.dot.gov/standards_strategic_plan/
ASTM: American Society for Testing and Materials - American Society for Testing and Materials

Ferdi ve toplu ulaşımda kara yolu bileşeninin her zaman mevcut
olacağı ve hatta bu durumun ekonomik, sosyolojik ve psikolojik
yönleriyle belki de kaçınılmaz olduğu gerçeği göz önüne alındığında,
gerek ulusal trafik koordinasyonu ve güvenlik açısından gerekse
yoğun transport ilişkimiz olan Avrupa Birliğine paralel gelişmeleri
sağlamak açısından AUS izlenmesi ve geliştirilerek uygulanması
gereken bir gelişmedir.
Bu gereklilik doğrultusunda “İleri teknoloji ile donatılmış altyapı
etkileşim sistemleri (araç – araç iletişimi; araç – altyapı iletişimi,
yol-araç-sürücü etkileşimine yönelik işbirlikçi sistemler ve
yenilikçi ara yüz araştırmaları, kaza sonrası kurtarma
teknolojileri, akıllı araç kontrol, haberleşme, eğlence sistemleri,
trafik altyapı ve kontrol sistemleri)” teması ulusal öncelikli
araştırma konuları arasında olup ülke için önem taşımaktadır.
“Akıllı Ulaşım Sistemleri” (AUS) konusunda Dünyadaki ve Türkiye’deki mevcut durumun
analizi sonrasında Türkiye’deki çalışmaların daha çok yol kaynaklı olduğu, denetleme ve
ücret alımına dönük olduğu görülmekte, trafik durumunu gösteren sistemler mevcut
olduğu fakat proaktif sistemler olmadıkları, sistemler arasında entegrasyon eksikliği
bulunduğu ve ayrıca akıllı yollar ile entegre olabilecek akıllı araçlara yönelik çalışmaların,
Dünyadaki çalışmaların çok gerisinde bulunduğu anlaşılmaktadır. Ulaşım sektörünün
neden olduğu önemli bazı problemlere akıllı ulaşım teknolojileri ve akıllı araçlar ile
çözümler geliştirilmesi, tüm Dünyanın üzerinde çalıştığı konular arasında olup bu
problemlerle ilgili yaklaşımlar; “Kazaların azaltılması, ölümlü kazaların sıfırlanması”,
“Güvenli ve hızlı farklı ulaşım türleri kullanılarak ulaşım”, “Karbon salımının azaltılması”,
“Enerji verimliliğinin iyileştirilmesi, yakıt sarfiyatının azaltılması” ve “Şehirlerde trafik
sıkışıklığının iyileştirilmesi” şeklinde sıralanabilir. Bu amaçlarla öngörülen başlıca
eylemler; “Toplu taşıma ve özel taşıtların etkin entegrasyonu ve taşımanın engellileri de
içine alacak şekilde yaygınlaşması”, “Araç İletişimi için alt yapı geliştirilmesi”, “Kaza ve
Felaket Alt Yapı Sistemleri Kurulması”, “Enerji verimliliği, karbon ayak izi, maliyet
açısından kısa vadeli çözümlerin hızlı hayata geçirilmesi”, ”Otonom Sürüş için V2V ve V2I
Sistemleri Geliştirilmesi”, “Lojistik sistem ve araçların optimizasyonu”, “Hibrit ve Elektrikli
Araç Teknolojileri Geliştirme”, Şarj Alt yapısı oluşturulması”, “Hibrit ve elektrikli araç
kullanımına yönelik yenilikçi iş modelleri geliştirilmesi”, “Güvenli sürüş için sürücü desteği”
şeklinde sıralanmaktadır.
Otomotiv Teknoloji Platformu Stratejik Araştırma Eylem Planı Raporu Versiyon 3.0 (08.2014)
Bugün güvenlik ve verimlilik ihtiyacına yönelik olarak trafik
iletişim ağı için çeşitli efektif mobil servisler ve uygulamalar
geliştirilmektedir.
Avrupa Birliği için 2050 hedefi SIFIR ÖLÜM
şeklindedir.
Bütün bu servis ve uygulamalar AUS’nin basamaklarını
oluşturmaktadır. Geleneksel yöntemlerle alınan önlemler
bugün doyum noktasına gelmiş olduğundan AUS
bilgisayar mühendisliği, iletişim mühendisliği,
algılama mühendisliği ve kontrol mühendisliği gibi ileri
teknoloji konularına dayanmaktadır.
Gündelik kullanım ve ulaşım menzilleri büyüyerek hareketlilik ve üretkenlik
artarken karayolu trafiğinden kaynaklanan bir takım sorunların ağırlığı da
artmaktadır.
• Çevre kirliliği
• Zehirli egzoz gazları
• CO2
• Gürültü
• Atıklar
• Trafik kazaları
• Can kayıpları
• Mal kayıpları
• Yoğun trafik
• Zaman kaybı
• Stres
• Park yeri ihtiyacı
• Mevcut kaynakların tüketilmesi
Prof. Dr. Ali G. Göktan, "Akıllı Ulaşım Sistemleri - Ulaşım Güvenliği Paneli, Akıllı Ulaşım Sistemleri Çalıştayı, 25 Mayıs 2012
Sonuç olarak ulaşım işlevi aksamakta
olup daha etkili ve güvenli ulaşım
sistemlerinin geliştirilmesine ihtiyaç
duyulmaktadır.
En eski bilinen uygulamalar
• Trafik polisleri
• Trafik levhaları
• Trafik lambaları
Prof. Dr. Ali G. Göktan, "Akıllı Ulaşım Sistemleri - Ulaşım Güvenliği Paneli, Akıllı Ulaşım Sistemleri Çalıştayı, 25 Mayıs 2012
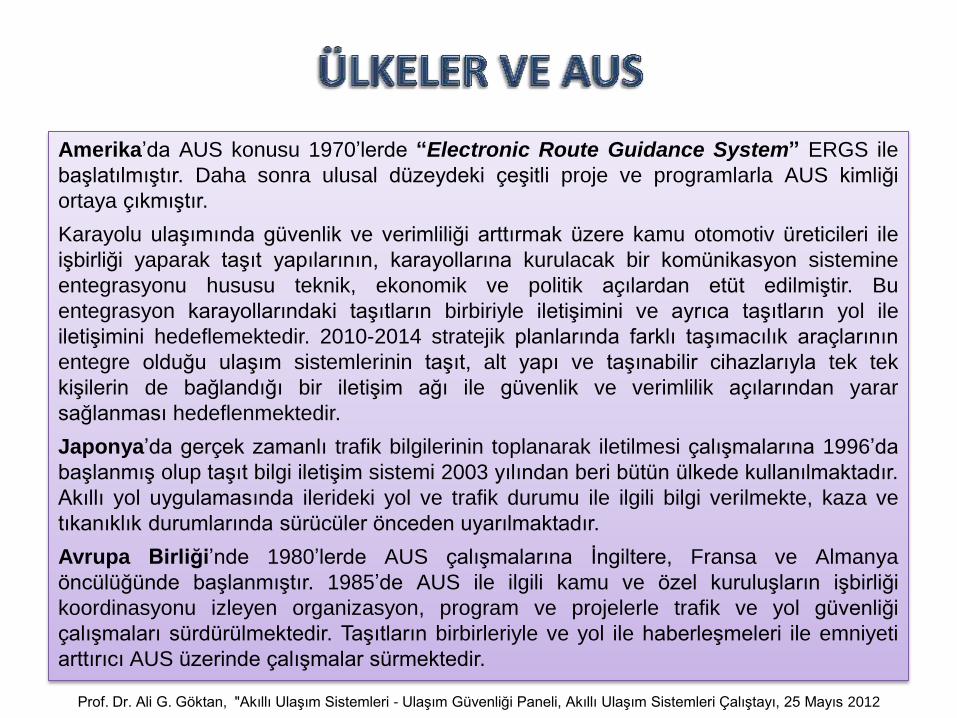
Amerika’da AUS konusu 1970’lerde “Electronic Route Guidance System” ERGS ile
başlatılmıştır. Daha sonra ulusal düzeydeki çeşitli proje ve programlarla AUS kimliği
ortaya çıkmıştır.
Karayolu ulaşımında güvenlik ve verimliliği arttırmak üzere kamu otomotiv üreticileri ile
işbirliği yaparak taşıt yapılarının, karayollarına kurulacak bir komünikasyon sistemine
entegrasyonu hususu teknik, ekonomik ve politik açılardan etüt edilmiştir. Bu
entegrasyon karayollarındaki taşıtların birbiriyle iletişimini ve ayrıca taşıtların yol ile
iletişimini hedeflemektedir. 2010-2014 stratejik planlarında farklı taşımacılık araçlarının
entegre olduğu ulaşım sistemlerinin taşıt, alt yapı ve taşınabilir cihazlarıyla tek tek
kişilerin de bağlandığı bir iletişim ağı ile güvenlik ve verimlilik açılarından yarar
sağlanması hedeflenmektedir.
Japonya’da gerçek zamanlı trafik bilgilerinin toplanarak iletilmesi çalışmalarına 1996’da
başlanmış olup taşıt bilgi iletişim sistemi 2003 yılından beri bütün ülkede kullanılmaktadır.
Akıllı yol uygulamasında ilerideki yol ve trafik durumu ile ilgili bilgi verilmekte, kaza ve
tıkanıklık durumlarında sürücüler önceden uyarılmaktadır.
Avrupa Birliği’nde 1980’lerde AUS çalışmalarına İngiltere, Fransa ve Almanya
öncülüğünde başlanmıştır. 1985’de AUS ile ilgili kamu ve özel kuruluşların işbirliği
koordinasyonu izleyen organizasyon, program ve projelerle trafik ve yol güvenliği
çalışmaları sürdürülmektedir. Taşıtların birbirleriyle ve yol ile haberleşmeleri ile emniyeti
arttırıcı AUS üzerinde çalışmalar sürmektedir.
Prof. Dr. Ali G. Göktan, "Akıllı Ulaşım Sistemleri - Ulaşım Güvenliği Paneli, Akıllı Ulaşım Sistemleri Çalıştayı, 25 Mayıs 2012
Genel olarak AUS gerçek zamanlı (real-time), hassas ve verimli ulaşım yönetimi
sağlamak üzere enformasyon, iletişim (komünikasyon), kontrol, bilgi işlem teknolojileri
ve diğer güncel teknolojileri kullanmak şeklinde tanımlanmaktadır.
Anahtar Teknolojiler:
• Global positioning system (GPS)
Araçlarda ve son zamanlarda şahıslarda bulunan GPS sistemleri ile 5-10 m
hassasiyette konum belirleme yapılarak navigasyon amacıyla kullanılmaktadır.
• Kısa mesafe iletişim protokolü (DSRC)
5.8 ve 5.9 GHz bandında taşıt alt yapı haberleşmesi, taşıt-taşıt haberleşmesi,
adaptif trafik sinyal ışıkları zamanlaması, elektronik köprü ve yol ücreti toplanması
vb sistemler için kullanılmaktadır.
• Kablosuz ağlar
Trafik ve toplu taşıma ile ilgili bilgilerin taşımacılık ağına iletilmesi
• Mobil telefonlar
3G, 4G, 4.5G ve 5G ile giderek yeteneği artan kişisel kullanım
• Kamera görüntü işleme
Prof. Dr. Ali G. Göktan, "Akıllı Ulaşım Sistemleri - Ulaşım Güvenliği Paneli, Akıllı Ulaşım Sistemleri Çalıştayı, 25 Mayıs 2012


• Trafik panolarında verilen trafik ve
yol durumu bilgileri
• Köprü ve otoyol gişelerinden
otomatik geçiş
• Radyo istasyonlarının trafik bilgileri
• IBB trafik ve yol durumu sitesi
• VMS – DMS: Değişken mesaj
sistemleri
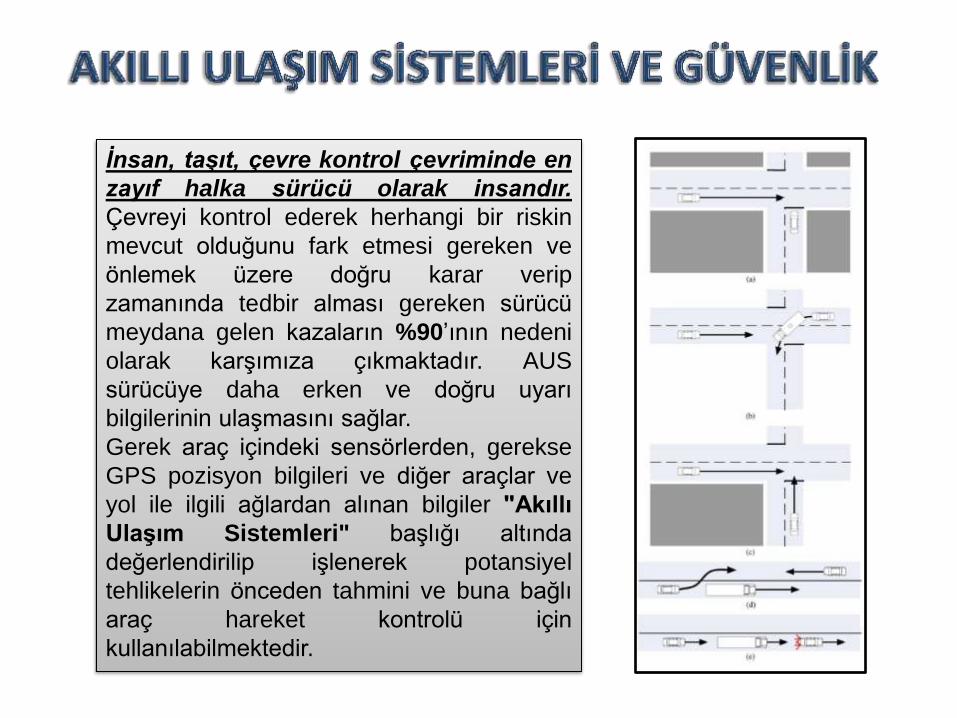
İnsan, taşıt, çevre kontrol çevriminde en
zayıf halka sürücü olarak insandır.
Çevreyi kontrol ederek herhangi bir riskin
mevcut olduğunu fark etmesi gereken ve
önlemek üzere doğru karar verip
zamanında tedbir alması gereken sürücü
meydana gelen kazaların %90’ının nedeni
olarak karşımıza çıkmaktadır. AUS
sürücüye daha erken ve doğru uyarı
bilgilerinin ulaşmasını sağlar.
Gerek araç içindeki sensörlerden, gerekse
GPS pozisyon bilgileri ve diğer araçlar ve
yol ile ilgili ağlardan alınan bilgiler "Akıllı
Ulaşım Sistemleri" başlığı altında
değerlendirilip işlenerek potansiyel
tehlikelerin önceden tahmini ve buna bağlı
araç hareket kontrolü için
kullanılabilmektedir.
Gerek araç içindeki sensörlerden, gerekse GPS pozisyon bilgileri
ve diğer araçlar ve yol ile ilgili ağlardan alınan bilgiler “Akıllı
Ulaşım Sistemleri” başlığı altında değerlendirilip işlenerek
potansiyel tehlikelerin önceden tahmini ve buna bağlı araç
hareket kontrolü için kullanılabilmektedir.
• İleri yolcu bilgilendirme sistemleri
• Otomatik sıradışı olay fark etme sistemleri
• İleri sürücü destek sistemleri
• Yol bilgileri kontrolü
• Çarpışma analizi ve engelleme sistemleri
• Trafik ihtiyacı tahmini
• Trafik durumu tahmini ve trafiği izleme
• Hassas konum tahmini
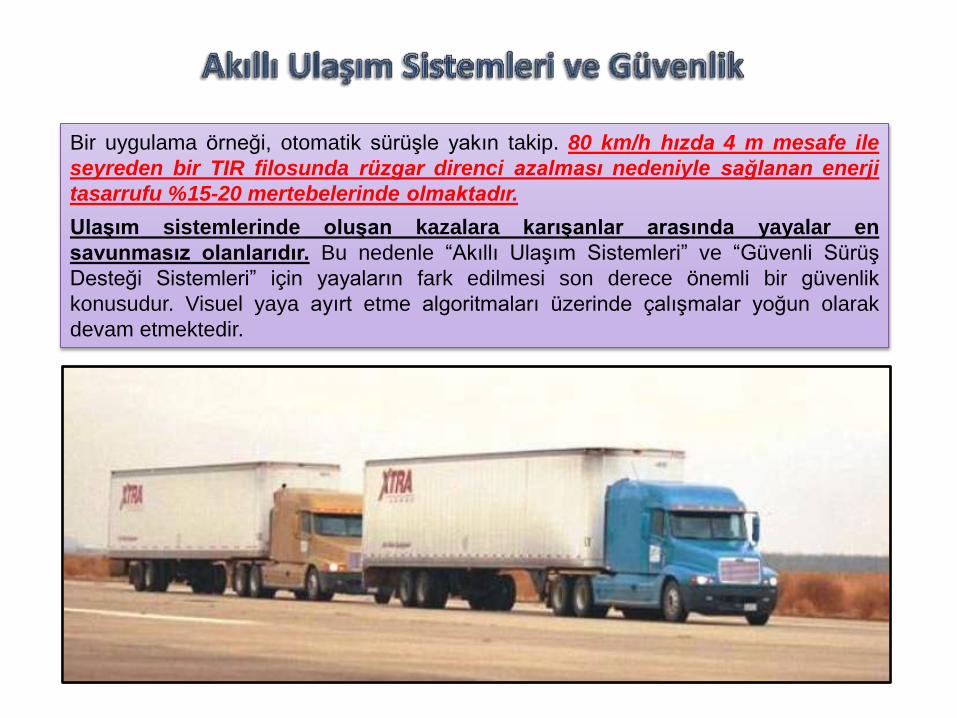
Bir uygulama örneği, otomatik sürüşle yakın takip. 80 km/h hızda 4 m mesafe ile
seyreden bir TIR filosunda rüzgar direnci azalması nedeniyle sağlanan enerji
tasarrufu %15-20 mertebelerinde olmaktadır.
Ulaşım sistemlerinde oluşan kazalara karışanlar arasında yayalar en
savunmasız olanlarıdır. Bu nedenle “Akıllı Ulaşım Sistemleri” ve “Güvenli Sürüş
Desteği Sistemleri” için yayaların fark edilmesi son derece önemli bir güvenlik
konusudur. Visuel yaya ayırt etme algoritmaları üzerinde çalışmalar yoğun olarak
devam etmektedir.
GÜVENLİK
Araç – İnsan arayüzü (sürücü, yolcunun tariflenmesi ve takip edilmesi)
• Yol koşullarının denetlenmesi, datanın yol/araç/sürücü arayüzleri ile
paylaşılması.
• Yol/araç/sürücü iletişimini sağlayacak yenilikçi arayüzlerin
geliştirilmesi.
• Araç sürüş koşullarının takibi, üretilen bilgilerin paylaşımı ve hukuki
boyutu üzerine çalışmalar yapılması.
• Sürüş koşullarını algılayan sensörler konusunda çalışılması.

AKILLI YOL UYGULAMALARI
• Kaza anı ve sonrasında güvenliğin geliştirilmesi yolu ile insan
kayıplarının en aza indirilmesi.
• Kaza sonrası ilk yardımın kalitesini artıracak yöntemler geliştirilmesi,
acil kurtarma ve kaza sonrası tedavi için aksiyon senaryoları
geliştirilmesi ve sorumlu birimlerle paylaşılarak uygulamaya alınması.
• Kaza sonrası kurtarma ekibinin hızlı olarak ulaşması için doğru bilgi
ile hızlı bir şekilde bilgilendirilmesi için bir tür aktif iletişim kuran
bir (karakutu) sistem tasarlanması.
• İlk yardım için gerekli bilgilerin kaza alanından üretilmesi ve
paylaşılması
• Yeni yol tasarımlarında Yol-Araç arayüzü ile uyumluluğun gözetilmesi,
• Trafiği denetleyen elektronik sistemlerin aktif kullanımı üzerine
çalışmalar yapılması.
MOBİLİTE - TRANSPORT VE ALTYAPI
Tüm yol ve taşıma sisteminin birbiri ile kesintisiz bağlantısı
• Yol ağları, tüm diğer taşımacılık sistemleri ile akıllı, akıcı ve kesintisiz
bağlantının sağlanabildiği, verimli ve müşterek çalışan bir sistem haline
getirilmesi.
Yolcuların farklı taşıma sistemleri arasında aktarımı
• Yolcuların farklı taşımacılık sistemleri arasında kesintisiz aktarma esnekliğine
sahip olma ve bu esnada minimum araç kullanımını temel hedefi olması.
Gerçek zamanlı trafik ve yol bilgileri kullanılarak trafiğin yönetilmesi ve
insanların trafikte geçen sürenin minimuma indirilmesi
• Ulaşım alt yapılarının yenilikçi teknolojiye dayalı tasarımı ve optimizasyonu ile
alt yapı-araç iletişiminin sağlanması.
• Etkin, gerçek zamanlı şebeke yoğunluk yönetimi.
• Yol ve navigasyon bilgilendirme sistemlerinin iletişim ve yönetim sistemine
gerçek zamanlı entegrasyonu.
• Birbiri ve şebeke ile haberleşen araç bilgilendirme sistemleri, yeni taşımacılık
yönetim sistemleri için uygun teknik değer ve talimatların belirlenmesi, hukuksal
altyapının geliştirilmesi
Hareketli Kamera Çekim Sistemleri (HKÇ)
Fotoğraf Çekim Sistemleri (FÇS)
Elektronik Perde Sayımları (EPS)
Elektronik Kordon Sayımları (EKS)
Elektronik Yol/Kesim Sayımları (EYS)
Yol Boyunca Algılama Sistemleri (YAS)
Güzergâh Bilgilendirme Sistemleri (GBS)
En Kısa Yol Bilgilendirme Sistemleri (EKY)
Değişken Bilgi Sistemi (DMS)
Trafik Analiz Sistemi (TAS)
Bilgi Sistemi Güncelleme (BSG)
Kural Denetleme Sistemi (KDS)
Seyahat Süresi Tabloları (SST)
Trafik Yoğunluk Haritaları (TYH)
Hacim ve Kompozisyon Tabloları (HKT)
Zirve/Zirve Dışı Trafik Tabloları (ZTT)
Ulaşım/Trafik Yazılım Sistemleri (TYS)
AKILLI ULAŞIM SİSTEMLERİNDEN GÜNCEL
BAZI ÖRNEKLER
Intelligent Vehicles
Ref.: Charles Desjardins, "Cooperative Adaptive Cruise Control: A Learning Approach", M.Sc., Janvier 2009

Table 1: List of Advanced Driver Assistance Systems (ADAS) and their definition (after Bishop [2005]).

Table 1: List of Advanced Driver Assistance Systems (ADAS) and their definition (after Bishop [2005]).
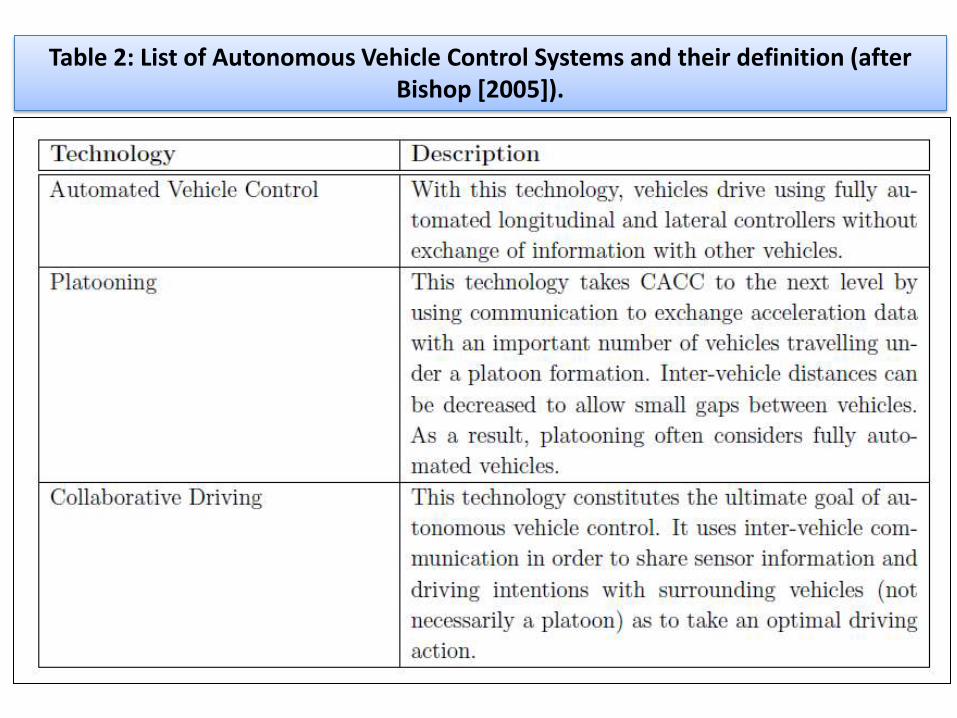
Table 2: List of Autonomous Vehicle Control Systems and their definition (after Bishop [2005]).

2016 SAE Congress: Fear of the driverless car as 2020 approaches; 18-Apr-2016
John Capp, GM's Director of Global Safety Strategy, pointed to the forthcoming installations of a V2V module on the 2017 Cadillac CT6 and "Super Cruise" on an unnamed other Cadillac model. Super Cruise is GM's fusion of radar, ultrasonic sensors, cameras and GPS. It represents more active control, derived from the Driver Assist package (adaptive cruise with automatic braking) introduced in 2013, but the performance specifications are yet to be revealed. Cadillac will join the Volvo S90, with its latest version of Pilot Assist, a semi-autonomous system with advanced camera detection of pedestrians, cyclists and animals, that controls steering to keep the car in lane even without a vehicle ahead to track. It operates up to 80 mph/130 km/h.
Advanced Driver Assistance Systems
Advanced Driver Assistance Systems
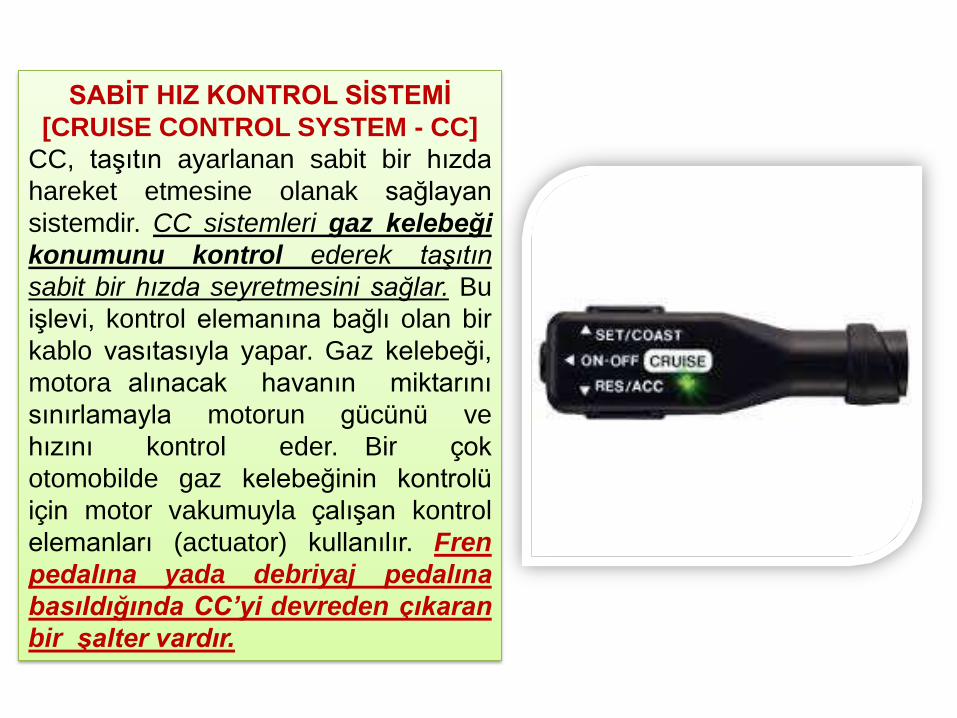
SABİT HIZ KONTROL SİSTEMİ
[CRUISE CONTROL SYSTEM - CC]
CC, taşıtın ayarlanan sabit bir hızda
hareket etmesine olanak sağlayan
sistemdir. CC sistemleri gaz kelebeği
konumunu kontrol ederek taşıtın
sabit bir hızda seyretmesini sağlar. Bu
işlevi, kontrol elemanına bağlı olan bir
kablo vasıtasıyla yapar. Gaz kelebeği,
motora alınacak havanın miktarını
sınırlamayla motorun gücünü ve
hızını kontrol eder. Bir çok
otomobilde gaz kelebeğinin kontrolü
için motor vakumuyla çalışan kontrol
elemanları (actuator) kullanılır. Fren
pedalına yada debriyaj pedalına
basıldığında CC’yi devreden çıkaran
bir şalter vardır.
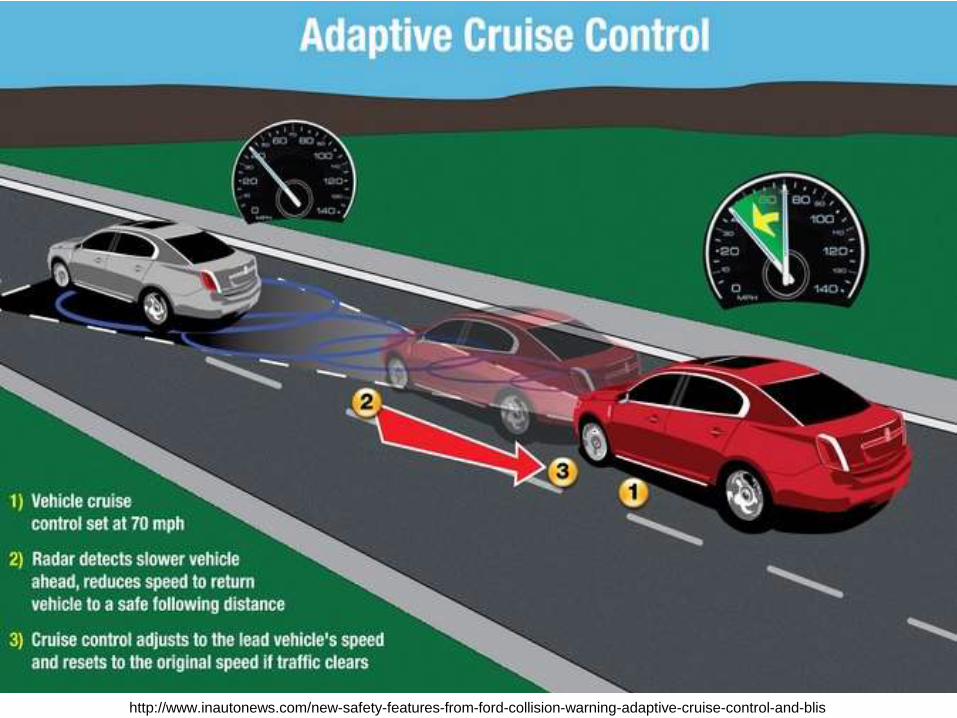
ADAPTİF SABİT HIZ KONTROL SİSTEMİ - ACC ACC sistemleri; yukarıda açıklanan CC sistemine ek olarak, önünde seyreden diğer araçları algılar ve öndeki araçla arada emniyetli bir mesafenin bırakılması için aracın hızını öndeki aracın hızına göre düzenleyen bir sistemdir. Bu amaçla öndeki aracın göreceli hızı ve aradaki mesafe sürekli ölçülür. Gerekli emniyet mesafesi araç hızı ile doğru orantılı olarak değişir. Araç hızlı giderken mesafe fazla, yavaş giderken ise az olmalıdır. Şeridin boş olduğu veya önde giden aracın daha hızlı seyrettiği durumlarda sistem CC ile aynı şekilde çalışarak aracın hedef hızda sabit hareketini sağlar; ancak önde daha yavaş giden bir araç algılandığında araç hızı da otomatik olarak düşürülür. Sistem; uzun yol sürücülerinin işini çok kolaylaştırması ve yorgunluğunu azaltmasının ötesinde, sollayan bir aracın aniden taşıtın önüne geçmesi, yola çıkan ani engellerin algılanması, sisli-puslu havalarda öndeki aracın emniyetli takibi gibi ani tepki verilmesi gereken durumlarda da aktif güvenliği artırıcı bir donanım olarak görülmektedir. Yolcu otomobilleri haricinde özellikle kamyon, otobüs gibi uzun yol araçlarında da yaygın olarak kullanılması hedeflenmektedir. Bu sistem, 1999 yılından itibaren lüks taşıtlarda opsiyonel olarak kullanılmaya başlamıştır.
http://www.inautonews.com/new-safety-features-from-ford-collision-warning-adaptive-cruise-control-and-blis
ADAPTİF SABİT HIZ KONTROL SİSTEMİ - ACC (dvm.) ACC sistemi ile şehir dışı trafikte gaz ve fren pedalını kullanmadan araç sürmek mümkün olmaktadır. Araç; şerit boş olduğu sürece ayarlanan azami hızda seyretmekte, önde araç olduğunda ise onunla aynı hızda ve emniyetli bir sürüş mesafesi oluşturacak şekilde seyretmektedir. Şerit değiştirildiğindeyse, otomatik olarak taşıt hızlanmaktadır. Sistem; araç hızını kontrol ederken, elektronik gaz kelebeği kumandası ve vites değiştirme gibi işlevlerin dışında, belli bir şiddette frenleme de uygulayabilmektedir. Bu özellik ACC sistemini standart CC sistemlerinden ayırır. ACC sistemi; radar, sapma [rotadan çıkma], yanal ivmelenme, tekerlek hızı ve yönlendirme açıları hakkındaki bilgileri sensörlerden alır. Şekil 4’de ACC sisteminin temel çalışma şeması gösterilmiştir. Radar sensörü tampona yerleştirilmiştir ve öndeki şeritte bulunan taşıtı tanımlamada kullanılır. Motor gücü, taşıtlar arasında emniyetli sürüş mesafesini korumak için sistem tarafından kontrol edilir. Eğer iki taşıt birbirine çok yaklaşacak olursa sürücü ya ikaz ışıkları ya da sesli olarak uyarılır.
NOTE: Laser-based systems require a clear field of vision for accurate range finding, so the laser must be mounted in the grille or behind the windshield (which provides additional protection against dirt and moisture). Radar-based systems, by comparison, are more expensive, but can be mounted behind plastic bumper covers and are unaffected by dirt or weather conditions.
Reading Text:
Distance sensor: The most important component in
an ACC system is a sensor which measures the
distance, the relative speed and the relative position
of the preceding vehicles. Maximum performance is
achieved – even in poor weather conditions – with a
radar sensor.
The radar sensor operates at a frequency of ... 77
GHz which was specially allocated for ACC. Three
beams are emitted simultaneously for measurement
purposes. The beams reflected by the preceding
vehicles are analyzed regarding their propagation
time, Doppler shift and amplitude ratio, and from these
factors the distance, relative speed, and relative
position are calculated.
ADAPTİF SABİT HIZ KONTROL SİSTEMİ - ACC (dvm.) ACC sistemlerinde önceleri özellikle Japon firmaları tarafından lazer algılayıcılar kullanılmışsa da, bunlarda görülen sorunlar nedeniyle sonradan radar sensörlerine geçilmiştir [Şekil 5]. Standart radar algılayıcıları, 76-77 GHz frekansa 3 mW çıkış gücüne ve 150 metrelik menzile sahiptir. 30 ile 180 km/h arası hızlarda çalışabilen bu tür radarlar, aynı anda 30 nesneyi algılayabilmektedir. Sinyal işlemci, radardan gelen yansımaları değerlendirerek tüm nesnelerin hız ve mesafelerini sürekli takip eder. Öncelik en yakındaki nesneye verilir. Eğer nesne yaklaşmaktaysa araç hızı, bu nesnenin hızına düşünceye kadar azaltılır. Daha sonra aradaki mesafe sabit kalacak şekilde hız ayarlanır. Son zamanlarda giderek yaygınlaşan diğer bir metot ise Frekans Modülasyonlu Sürekli Dalga [FMCW] yöntemidir. Bu sistemde; taşıyıcı dalga sürekli olup, frekansı testere dişi sinyali ile modüle edilir. Giden ve yansıyan sinyaller arasındaki frekans farkı zamana, dolayısıyla mesafeye bağlı olacaktır. Böylece her iki sinyalin belli ölçüde çakıştırılmasıyla elde edilecek fark sinyalinin frekansı araçlar arasındaki mesafeye, frekans değişimi ise bağıl hıza karşılık gelmektedir. Radar, sadece kendi şeridinde giden araçları izleyebilmektedir. Bunu, dar ışın açılı [8º] sensörlerle düz bir yolda sağlamak kolaydır. Ancak sistemin virajlarda da etkin çalışabilmesi için nesnelere kilitlenerek onların hareketlerini izlemesi gerekmektedir. Bunun için ise nesnenin açı bilgisine ihtiyaç duyulur. Açının ölçümü için iki yöntem yaygındır.
ADAPTİF SABİT HIZ KONTROL SİSTEMİ [ACC] (dvm.) 1. Taramalı Radarla Anten Yöntemi: Bu yöntemde; anten, titreşimli bir motora bağlıdır
ve saniyede on kez belli bir açıyı tarar. Algılanan nesne, o anki anten açısıyla eşleştirilir. 2. Stereoskopik Yöntem: Bu yöntemde ise iki anten kullanılır. Tam karşıdaki nesnelerin
yansıması her iki antene aynı gecikmeyle gelirken, açılı nesnelerde antenlere ulaşacak ekoların gecikmesi farklı olacaktır. Sayısal sinyal işleme [DSP] birimi, direksiyon konum algılayıcısından gelen direksiyon açısı bilgisi ile, algılanan nesnenin uzaklık ve açı bilgilerini karşılaştırarak nesnenin bulunduğu şeride karar verir.
Günümüz teknolojisi, ancak otoyollar ve keskin olmayan virajlar için doğru şerit seçimine imkan vermektedir. Araç; çevresini algılayan sensörlerdeki gelişmeler sonucunda, kendi çevresini tanıyabilen ve buna göre tepki veren araçların tasarlanması fikri ağırlık kazanmıştır. Akıllı Dur-Kalk Hız Sabitleyicisi, işlevini çok düşük hızlarda da sürdürebilmektedir. Yakın mesafenin algılanması için geniş açılı [100º] 24 GHz kısa menzil [20 m] radar veya kızılötesi [IR] dedektör kullanılmaktadır. Bu alanda yeni geliştirilen araçlarda; çevresini algılama sisteminde, orta mesafenin algılanması için video kamera [CCD] ve görüntü işlem birimi kullanılmaktadır. Video kamera kullanımı nesnelerin tanımlanmasını ve radar sensörlerinden gelen bilgiyle de karşılaştırarak doğru karar vermeyi kolaylaştırmaktadır. Bu sistemle aracın şehir içi dur-kalk trafiğinde kendi kendine hareket etmesi mümkün hale gelmektedir. Böylece sürücüye, pedallardan kurtularak, can sıkıcı şehir trafiğinde etrafını seyredebilme imkanı sağlamaktadır.
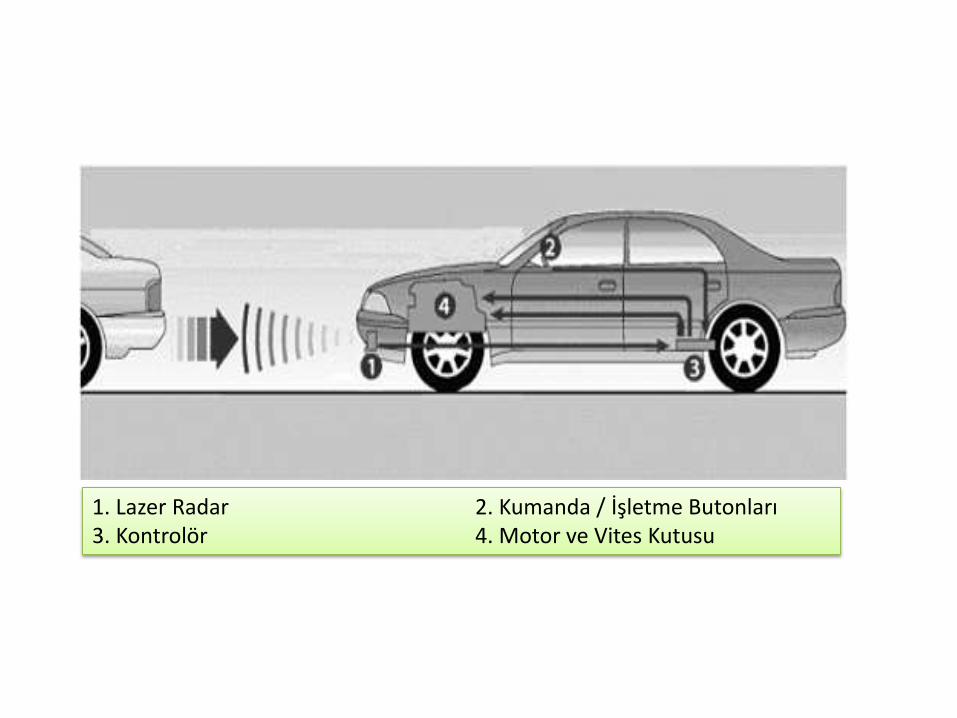
1. Lazer Radar 2. Kumanda / İşletme Butonları 3. Kontrolör 4. Motor ve Vites Kutusu
ACC SİSTEMİNİN MOTORA MÜDAHALESİ: Hız kontrolü, bir elektronik motor
güç yönetim sistemi gerektirir. Böyle bir sistem; taşıtın arzulanan hıza
çıkmasına olanak verir yada eğer bir engel algılanırsa, otomatik olarak gaz
kelebeğini kapamayla taşıtın hızını keser [4].
ACC SİSTEMİNİN AKTİF FREN MÜDAHALESİ: Yapılan deneyler; gaz
kelebeği müdahalesinin, tek başına taşıtın yavaşlamasını yeterince
sağlayamadığını göstermiştir. ACC sistemi sadece yumuşak fren müdahalesine
izin verir [5,6]. Bundan dolayı, önde yavaş hareket etmekte olan bir taşıtın ani
olarak şerit değiştirmesi gibi engellerin vuku bulmasında acil frenleme mümkün
olamamaktadır.
Sistem; frenlerin bloke olmasını önleyici sistemle [anti-lock brake system-
ABS], çekiş kontrol sistemiyle [Traction control system - TCS] ve taşıt
stabilitesini iyileştirme sistemiyle [vehicle stability enhancement - VSE]
koordineli olarak ideal frenleme performansı sağlar. Sürücünün fren pedalı
üzerinde etkisi olmaksızın otomatik frenleme temin eder. ABS kontrolörü,
modülatördeki motorun merkez silindirinden fren hidroliğini selenoid valfler
vasıtasıyla tekerlek frenleme hatlarına pompalaması sinyalini gönderir.
Neticede düzgün ve sessiz bir şekilde taşıtın hızı azaltılır. ACC’li otomatik
frenleme; tekerlek fren merkezleri ve izolasyon valfleri arasındaki hidrolik
akışkanı ayarlamakta, değişken izolasyonlu valflerden [variable insulation
valve - VIV] yararlanır [6].
ACC SİSTEMİNİN AKTİF FREN MÜDAHALESİ (dvm.): VIV teknolojisi, aşırı derecede düşük basınç atımlı selenoid valfin delikleri arasından frenleme akışkanını kısma fonksiyonunu icra eder. VIV, akışkan akışına orantılı olarak uygulanan voltajla cazip bir alternatif sunmakta ve bugünkü endüstriyel pazarlarda mevcut olan geleneksel ON / OFF tarzı selenoid valflerin sınırlamalarının üstesinden gelmektedir.
Taşıttaki ACC sistemi üç durumda devre dışı kalır. Bunlar; 1. Sürücü Frene Bastığında: ACC devre dışı kalır. 2. Sürücü Taşıtın Hızını Arttırdığında: ACC aktif kalır; fakat sistem, eğer yeni bir seyir hızı
ayarlanmazsa sürücü gazı keser kesmez taşıt daha önce ayarlanan hıza döner. 3. Öndeki Engeli Algılama/Saptama Sistemi [Forward Obstacle Detection System]:
Sistem, önündeki şeritte daha yavaş seyreden bir taşıtı algıladığında devreden çıkar.
ACC’nin taşıtı frenlemesi için hız kesme kontrolü; ABS modülatörü, kontrol elemanlı frenleme uygulaması [brake-by wire] yada akıllı basınç arttırıcıyla [smart booster] yapılır. Akıllı basınç arttırıcı kullanmayla hız kesme kontrolünde; basınç arttırıcı içindeki vakumun ayarlanması ve hava akış valfini kontrol etmesiyle yapılır. Son kontrol elemanlarına sahip bir frenleme uygulamasındaki hız kesme kontrolü; tekerleklere frenleme uygulayan her bir tekerlekteki son kontrol elemanına frenleme sinyali göndermeyle yapılır. ABS modülatörü kullanmayla hız kesme kontrolündeyse; modülatördeki selenoid valflerle, tekerlek basıncı ayarlanır. Hız kesme kontrolünde kullanılan modülatörler genellikle VIV teknolojisinden yararlanılarak üretilir. Bu teknoloji düzgün ve sessiz bir yavaşlama sağlar. Ayrıca taşıtın negatif ivmelenmesine bağlı olarak direksiyonda ve taşıtın gövdesinde oluşan titreşimleri minimize etmektedir.
Dur Kalk İşlevli Aktif Cruise Control
Dur & Kalk işlevli aktif cruise control, gerektiğinde hızı sıfıra kadar düşürerek, aracınızı öndeki araçtan önceden tanımlanmış mesafe kadar geride kalmasını sağlar. Trafik yeniden hareket ettiğinde sistem aracınızı hızlandırarak, mümkünse tercih ettiğiniz seyir hızına ulaştırır.
Dur & Kalk işlevli aktif cruise control’ün (ACC) öncelikle otobanlarda bir sürücü destek sistemi olarak hizmet görmesi amaçlanmıştır. 150 metreye kadar menzili olan üç radar algılayıcı önünüzdeki yolu sürekli olarak tarar. Şeridinizde sizden daha yavaş seyreden bir araca yaklaştıkça sistem, motor kontrol birimini gücü düşürecek ve gerekirse fren yapacak şekilde yönlendirerek, öndeki araçtan önceden tanımlanmış mesafe kadar geride kalmanızı sağlar. Eğer öndeki araç durursa, dur & kalk işlevli ACC aracınızı da tamamen durdurur. Öndeki araç yeniden hareket ettiğinde veya şerit değiştirdiğinde, dur & kalk işlevli ACC motor gücünü artırır ve mümkün olduğunda aracınızın hızını tercih ettiğiniz seyir hızına kadar yükseltir. Eğer durma süresi üç saniyeden uzun olursa, dur & kalk işlevli ACC, aracın yeniden harekete geçmesi için hafifçe gaz pedalına ya da ACC düğmesine basmanızı gerektirir. Eğer durma süresi üç saniyeden kısa ise hızlanma otomatiktir. Dört adede kadar farklı seyir hızı önceden tanımlanabilir ve bunlar bir tuşa basılarak aktifleştirilebilir. En düşük seyir hızı 30 km/h; azami seyir hızı 180 km/h’dir.
Öndeki araç ile aranızdaki mesafe metre yerine saniyeler ile ölçülür. Bu sayede seyahat ettiğiniz hıza bağlı olarak yeterli tepki sürenizin olması sağlanır. Dur & Kalk işlevli ACC, sürüşü daha rahat ve güvenli bir hale getirir. Gerekli olduğu takdirde virajlarda, DSC ve navigasyon sisteminden alınan verileri kullanarak güvenli bir hız hesaplar ve hızınızı ayarlar. Çok şeritli yollarda sistem, bulunduğunuz şeritte ve komşu şeritlerde bulunan araçları ayırt edebilir. Dur & Kalk işlevli ACC, herhangi bir zamanda gaz veya fren pedalına basılarak devre dışı bırakılabilir ve hızınızın kontrolünü tümüyle size bırakır. Dur & Kalk işlevli Aktif Cruise Control bir otomatik pilot değildir. Eğer önünüzdeki araç ani ve sert bir fren yaparsa veya sistem kritik bir durum algılarsa, sürücüyü sesli ve optik uyarılar ile ikaz eder. Her durumda Dur & Kalk işlevli ACC, yoğun trafikte araç kullanmayı çok daha az yorucu bir hale getirir. Kaynak: “BMW.com.tr” web sitesi, BMW Teknoloji Rehberi (Erişim Tarihi: 03/04/2014).

Özetle… Hız Kontrol Sistemi (Cruise Control System – CCS), özellikle şehirlerarası trafikte, aracın sabit bir hızda seyrini mümkün kılan bir yardımcı sistemdir. Trafiğin yoğun olmadığı otoyol vb. yollarda sürücü, izin verilen azami hızı geçmemek için bir gözü hız göstergesinde, sürekli olarak araç hızını sabit tutmaya çalışmaktadır. Özellikle yol eğiminin değişmesiyle hızı düzeltmek için gaz pedalına müdahale ihtiyacı duymaktadır. Hız kontrol sistemi, sürücüyü bu zahmetten kurtarmak amacıyla tasarlanmıştır. Bu sistem sayesinde sürücü, hem hız göstergesini sürekli kontrol etmekten kurtularak yola daha fazla konsantre olabilecek, hem de ayağını gaz pedalından tamamen çekerek daha rahat bir sürüş imkanı kazanacaktır. Akıllı Hız Sabitleme Sistemi (Adaptive Cruise Control – ACC), CC sisteminin gelişmişidir. Akıllı Hız Sabitlemenin hedefi, öndeki araçla arada emniyetli bir mesafenin bırakılmasıdır. Bu amaçla öndeki aracın göreceli hızı ve aradaki mesafe sürekli ölçülür. Gerekli emniyet mesafesi araç hızı ile doğru orantılıdır; araç hızlı giderken mesafe fazla, yavaş giderken ise az olmalıdır. Genel kabul gören kural, her 10 km/h hız için 5 metre mesafenin korunmasıdır ki bu da araçlar arasında yaklaşık 2 saniyelik süre bulunması anlamına gelir. Yani araç hızdan bağımsız olarak 2 saniye içinde öndeki araca yetişmelidir. Sistem bu sürenin sürücü tarafından değiştirilmesine de olanak sağlamaktadır. / Ref: Otoguncel
Active Cruise Control Trafiğin yoğun olduğu otobanlarda araç kullanmak Aktif Cruise Control ile çok daha
rahattır. Aktif Cruise Control, mümkün olduğunda, aracınızı şeridinizde önünüzdeki
araçtan önceden tanımlanmış mesafe kadar geride tutar. Aracın ön tarafındaki radar
algılayıcı önünüzdeki yolu sürekli olarak tarar. Aracınız daha yavaş seyreden bir araca
yaklaştıkça, Aktif Cruise Control otomatik olarak motor gücünü düşürerek hafifçe fren
yapar ve aracınızı öndeki araçtan önceden tanımlanmış mesafe kadar geride tutar. Bu
mesafe metre olarak değil saniye olarak ayarlanır, böylelikle mevcut hızınıza bağlı
olarak güvenli bir tepki süresi her zaman korunmuş olur. Şerit boşaldığında, Aktif Cruise
Control otomatik olarak aracın hızını tercih ettiğiniz seyir hızına kadar artırır. Dört adede
kadar farklı seyir hızını önceden programlamak mümkündür. Gaz veya fren pedalına
bir kez dokunarak, sistemi devre dışı bıraklılabilir.
Aktif Cruise Control, virajlarda Dinamik Denge Kontrolü ve navigasyon
sisteminden aldığı veriler ile seyir hızının ayarlanmasının gerekip gerekmediğini
hesaplar ve radar alanındaki araçların aynı şeritte mi yoksa komşu şeritte mi
olduğunu belirler. Yüksek performanslı radar algılayıcılar soğuk havalarda ısıtılarak,
yılın her döneminde kullanılabilmesi sağlanır.
Sistemin bir otomatik pilot gibi hizmet görmesi amaçlanmamıştır; bu hız aralığının
dışında ve ani hız kesme gerekli olduğunda sürücü bir uyarı sesi ve görsel mesaj ile
uyarılır. Önce ikaz sinyali verilir ardından gösterge tablosunda veya Control Display’de
kırmızı renkli otomobil sembolü biçiminde güçlü bir uyarı verilir. Aynı zamanda fren
balataları ve diskler arasındaki mesafe sürücünün ani fren yapma gerekliliği düşünülerek
azaltılır.
Kaynak: “BMW.com.tr” web sitesi, BMW Teknoloji Rehberi (Erişim Tarihi: 03/04/2014).
Adaptive Cruise Control (ACC) The basic function of Adaptive Cruise Control relies on the conventional cruise control system (vehicle-speed controller), which maintains a desired speed specified by the driver. In addition, ACC can adapt vehicle speed to changing traffic conditions by means of automatic acceleration, deceleration or braking. This system thus maintains the vehicle's distance to the vehicle driving in front as a function of road speed. Distance sensor: The most important component in an ACC system is a sensor which measures the distance, the relative speed and the relative position of the preceding vehicles. Maximum performance is achieved – even in poor weather conditions – with a radar sensor. The radar sensor operates at a frequency of ... 77 GHz which was specially allocated for ACC. Three beams are emitted simultaneously for measurement purposes. The beams reflected by the preceding vehicles are analyzed regarding their propagation time, Doppler shift and amplitude ratio, and from these factors the distance, relative speed, and relative position are calculated.
Course Setting To ensure reliable ACC operation, no matter what the situation – e.g. also on curves/bends – it is essential that the preceding vehicles are allocated to the correct lane(s). For this purpose, the information from the ESP sensor system (yaw rate, steering-wheel angle, wheel speeds and lateral acceleration) is evaluated with regard to the ACC-equipped vehicle's actual curve status. Further information on the traffic flow is obtained from the radar signals. Video imaging and navigation systems are also being considered for future assistance in defining the courses taken by the vehicles. Active brake intervention Experience has shown that deceleration by means of throttle closing is not sufficient for ACC operation. Only the inclusion of brake intervention makes it possible for longer follow-on control operations with ACC without the need for frequent driver interventions. ESP provides the possibility of braking without driver intervention. ACC permits only "soft" brake interventions. Emergency braking due to the sudden appearance of obstacles (e.g. the slow-moving vehicle in front suddenly changing its lane) is therefore not possible.
http://www.tomorrowstechnician.com/Article/72504/staying_active_with_vehicle_electronics_technology.aspx
Adaptive Cruise Control Though most people think cruise control is more of a convenience option than a safety feature, next generation adaptive cruise control systems are combining both. Conventional cruise control systems simply maintain a preset speed. The driver presses a button to set the speed, and a servo or actuator on the throttle linkage maintains that speed until the driver steps on the brake, changes the speed setting up or down, or disengages the cruise control. Adaptive cruise control (ACC), by comparison, is a “smart” system that actively maintains a preset distance between vehicles rather than a preset speed. A laser or radar range finder sensor in the front of the vehicle measures the distance to the vehicle ahead. The driver then selects a distance that suits the driving conditions, and the system automatically maintains that distance as traffic speeds up and slows down. This makes adaptive cruise control much better than conventional cruise control for driving in heavy traffic, and it reduces the risk of rear ending another vehicle if the driver isn’t paying attention. Laser-based systems require a clear field of vision for accurate range finding, so the laser must be mounted in the grille or behind the windshield (which provides additional protection against dirt and moisture). Radar-based systems, by comparison, are more expensive, but can be mounted behind plastic bumper covers and are unaffected by dirt or weather conditions.
http://www.tomorrowstechnician.com/Article/72504/staying_active_with_vehicle_electronics_technology.aspx
Adaptive Cruise Control (cont.) The adaptive cruise control module (which may be its own separate module or integrated into the body control module) interacts not only with the throttle, but also the brake system to speed up or slow down the vehicle as needed. This requires a lot of two-way communication, data sharing and feedback via the vehicle’s controller area network system. The active cruise control module needs inputs from its range finder sensor as well as vehicle speed, throttle position and braking status so it can calculate and maintain the proper following distance. Consequently, if there are any communication faults on the CAN bus, or the vehicle has lost input from a key sensor such as the laser or radar range finder, the vehicle speed sensor or throttle position sensor, the system can’t function. The same is true if it can’t communicate with the throttle control system and brakes to regulate vehicle speed. Any of these faults should set one or more codes and make adaptive cruise control unavailable until the problem has been diagnosed and repaired. Diagnostics currently require a factory scan tool and software to run system self-tests and to check the range finder’s inputs. Replacement modules and range sensors are currently dealer-only parts, but that will likely change as time goes on and these systems become more common.

Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trTUR, Edition date: 02/2014
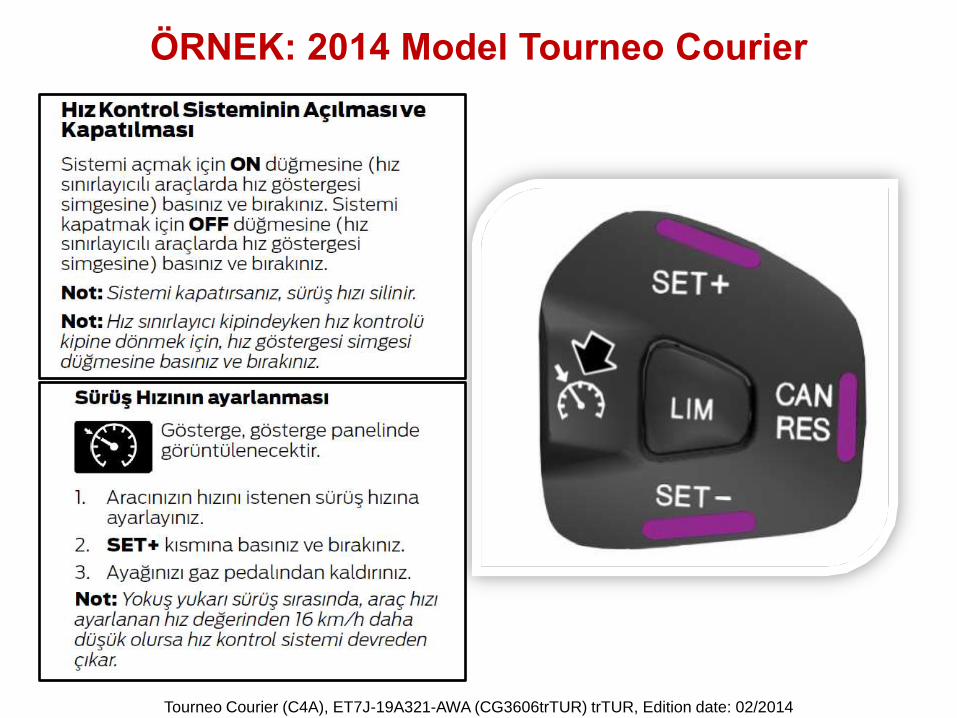
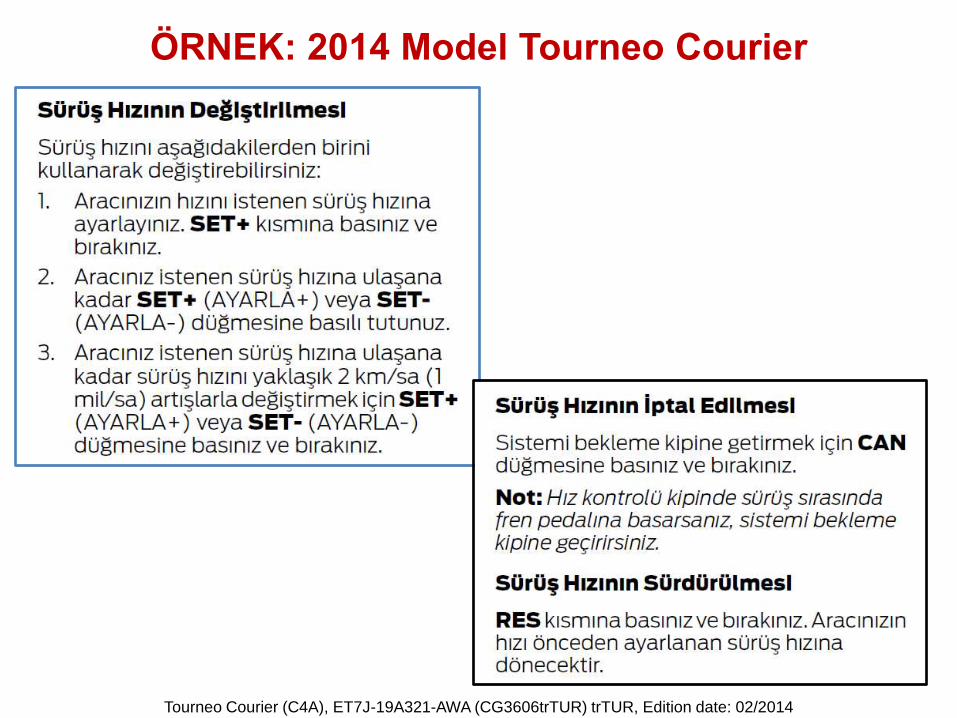
Hız kontrol sistemi, ayağınızı gaz pedalı üzerinde tutmadan ayarlanmış hızı korumanızı sağlar. Hız kontrol sistemini aracınızın hızı 30 km/h üzerinde olduğunda kullanabilirsiniz.
ÖRNEK: 2014 Model Tourneo Courier
Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trTUR, Edition date: 02/2014
ÖRNEK: 2014 Model Tourneo Courier
Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trTUR, Edition date: 02/2014
ÖRNEK: 2014 Model Tourneo Courier

Tourneo Courier (C4A), ET7J-19A321-AWA (CG3606trTUR) trTUR, Edition date: 02/2014
ÖRNEK: 2014 Model Tourneo Courier

RADAR VE LAZER SENSÖR
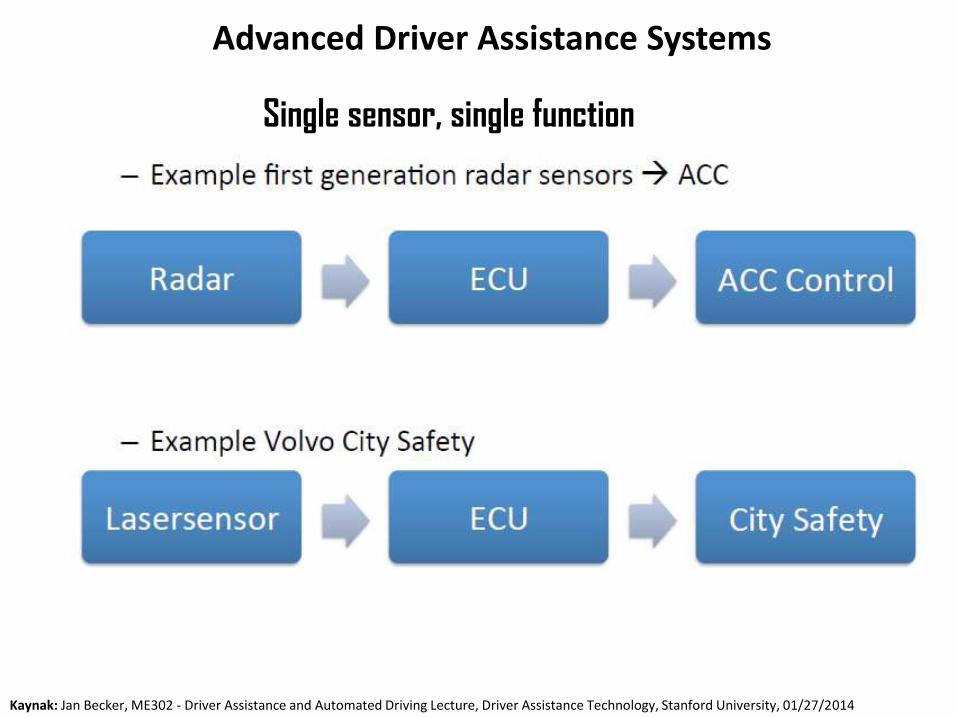
Advanced Driver Assistance Systems
Single sensor, single function
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

Advanced Driver Assistance Systems
Single sensor, dual function
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Example current generation radar sensors
Multiple sensors, dual function Forward Collision Warning (FCW)

Advanced Driver Assistance Systems
Architecture
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Haptic: dokunma/temas duyusu ile ilgili

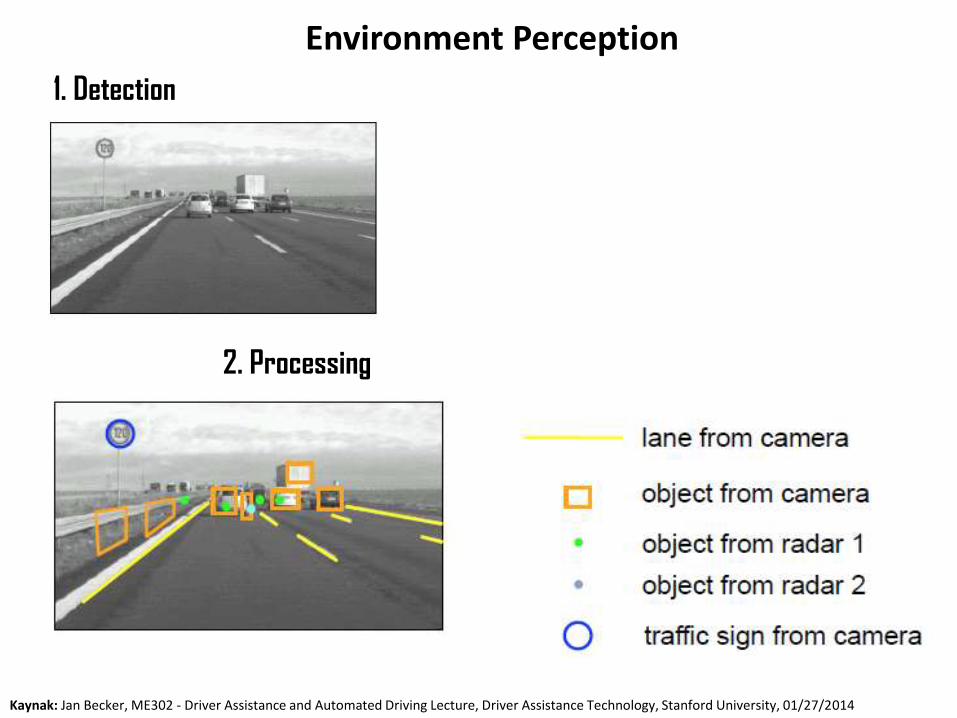
Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
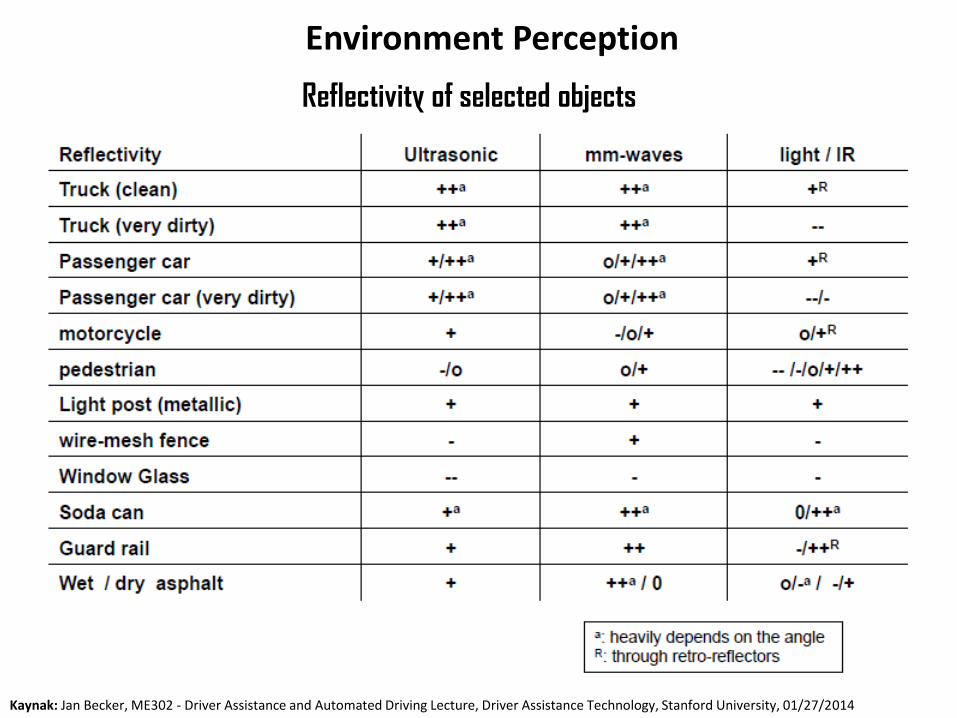
Reflectivity of selected objects
Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
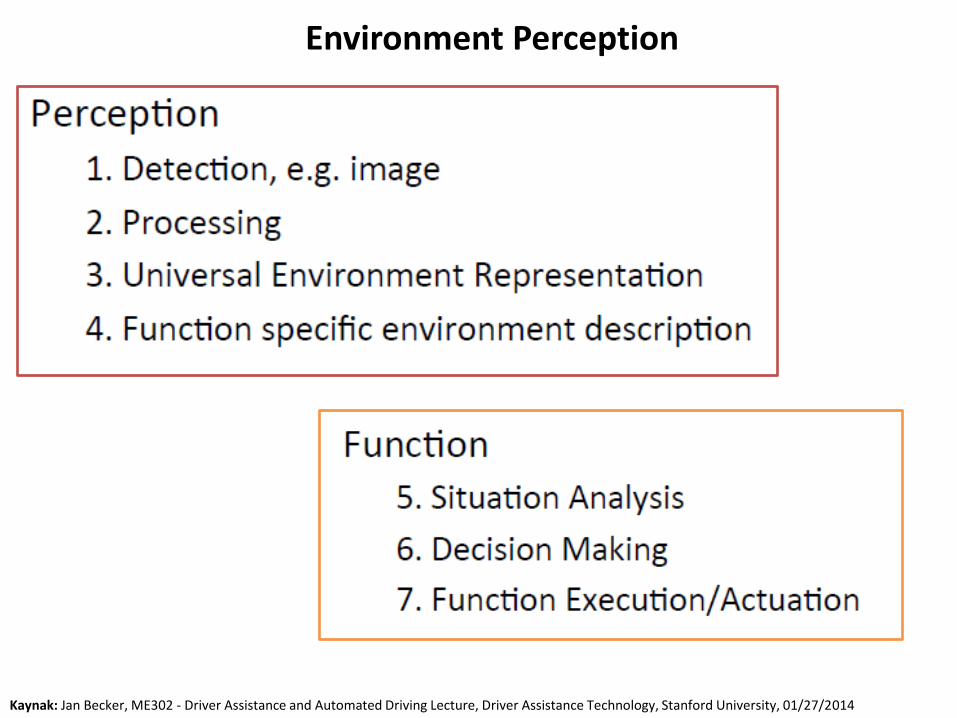
Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
1. Detection
2. Processing
Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
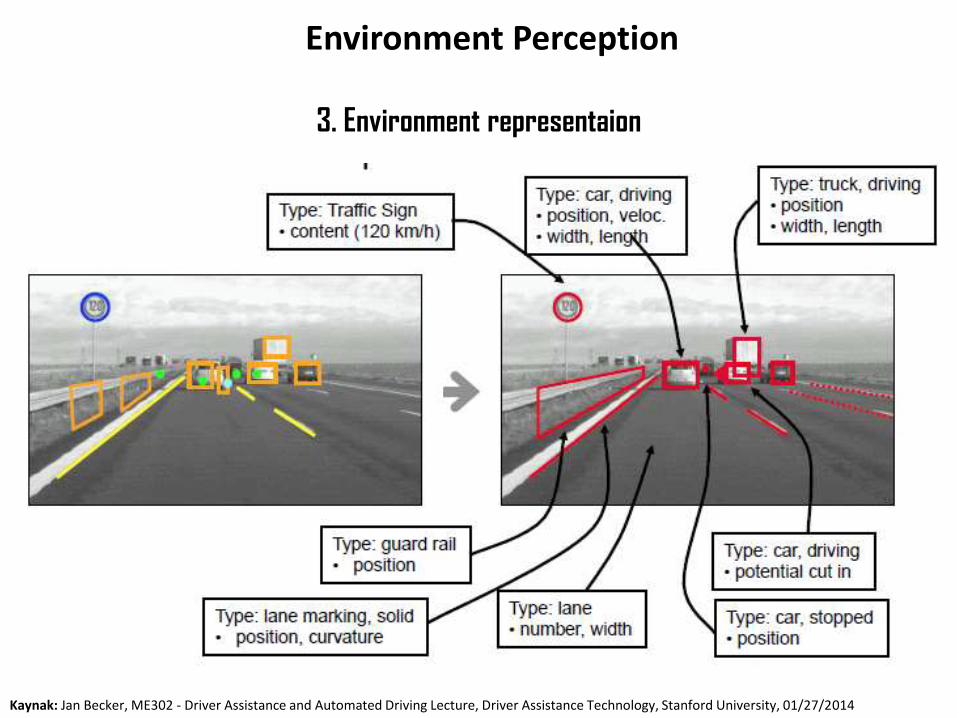
3. Environment representaion

Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
4. Function specific environment description

Environment Perception
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Sensors – Radar
– Lidar
– Computer Vision Radar
Lidar: Işıklı radar
Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
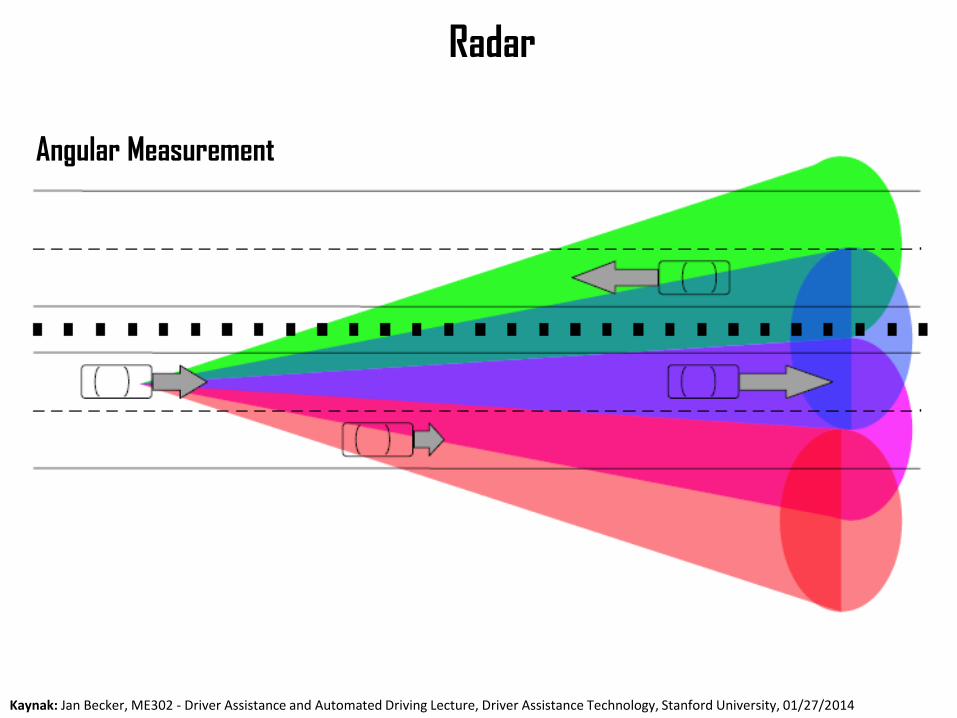
Angular Measurement
Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
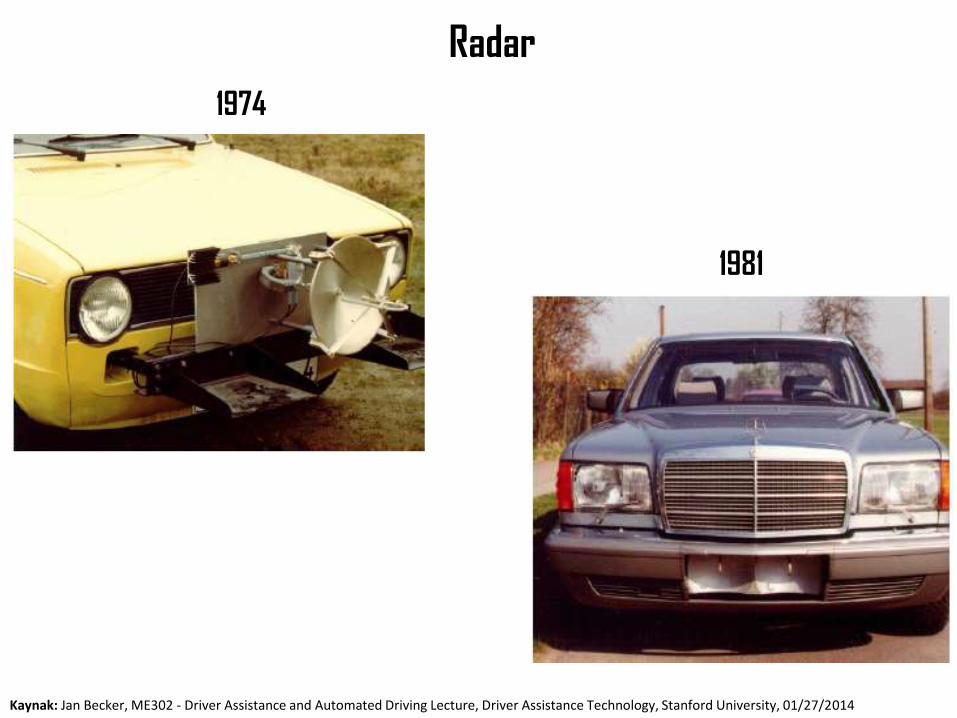
1974
1981

Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Continental ARS 300 Long Range Radar 77 GHz
Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
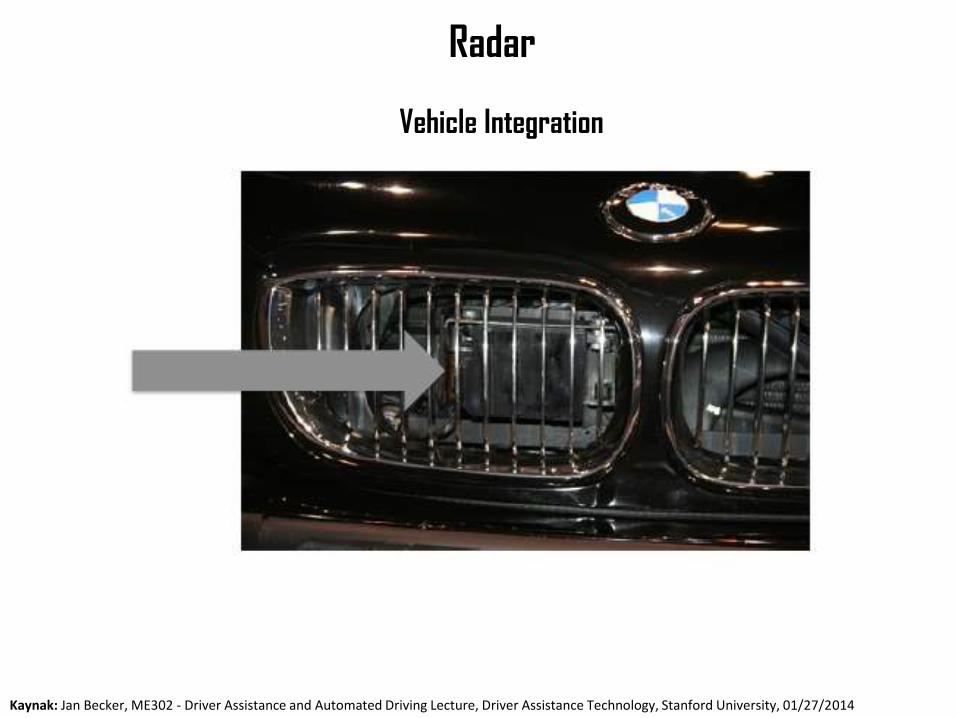
Vehicle Integration

Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Vehicle Integration

Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
LRR3: ECU Board and RF Module
source: Bosch

Radar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Adaptive Cruise Control www.youtube.com/watch?v=own_VaRZ9M8
Predictive Emergency Braking
www.youtube.com/watch?v=fh�LzFt3EYPY

«Lidar» nedir? • A detection system which
works on the principle of radar, but uses light from a laser
• (acronym for Laser Imaging Detection and Ranging) a method of detecting distant objects and determining their position, velocity, or other characteristics by analysis of pulsed laser light reflected from their surfaces.
Işıklı radar
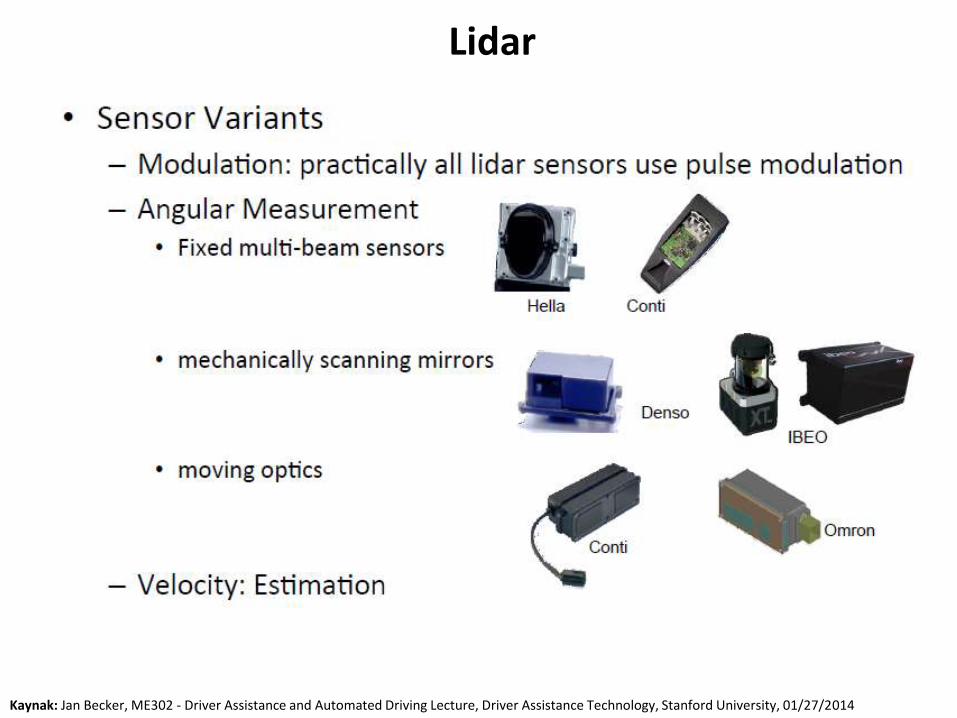
Lidar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
Kaynak: Seslisozluk
Lidar
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014

Predictive Emergency Braking
Kaynak: Jan Becker, ME302 - Driver Assistance and Automated Driving Lecture, Driver Assistance Technology, Stanford University, 01/27/2014
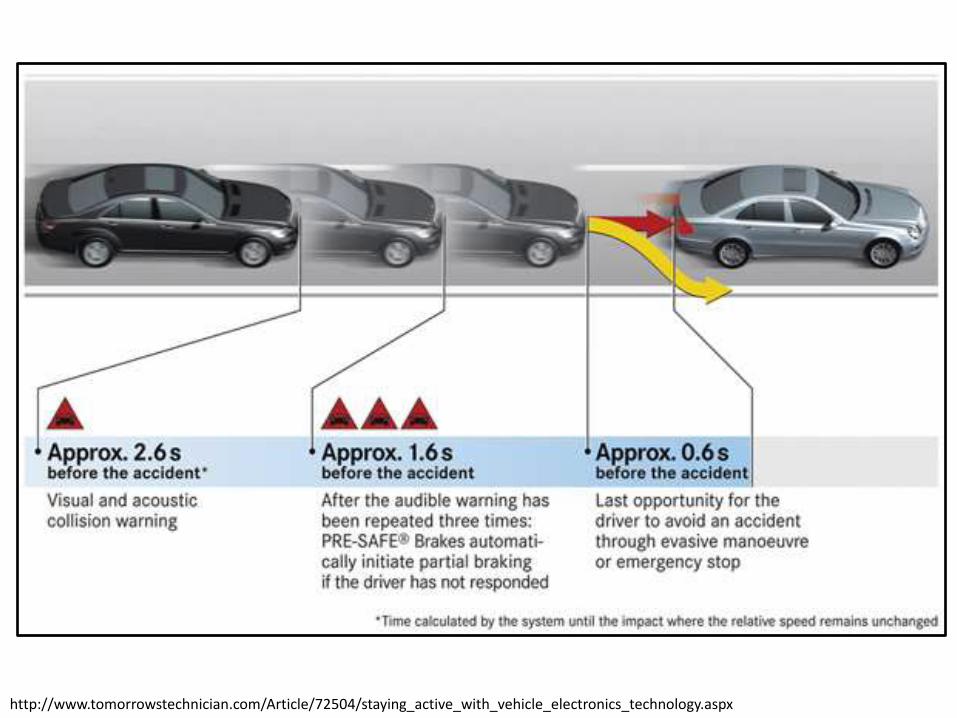
http://www.tomorrowstechnician.com/Article/72504/staying_active_with_vehicle_electronics_technology.aspx
ÖRNEK UYGULAMALAR
Dr. Joseph D’Ambrosio
ECS Process, Methods,
& Tools
GLOBAL RESEARCH &
DEVELOPMENT
Systems Engineering of GM’s
Global EE / SW Product Line
Design Automation Conference Panel Session REVISED June 17, 2010
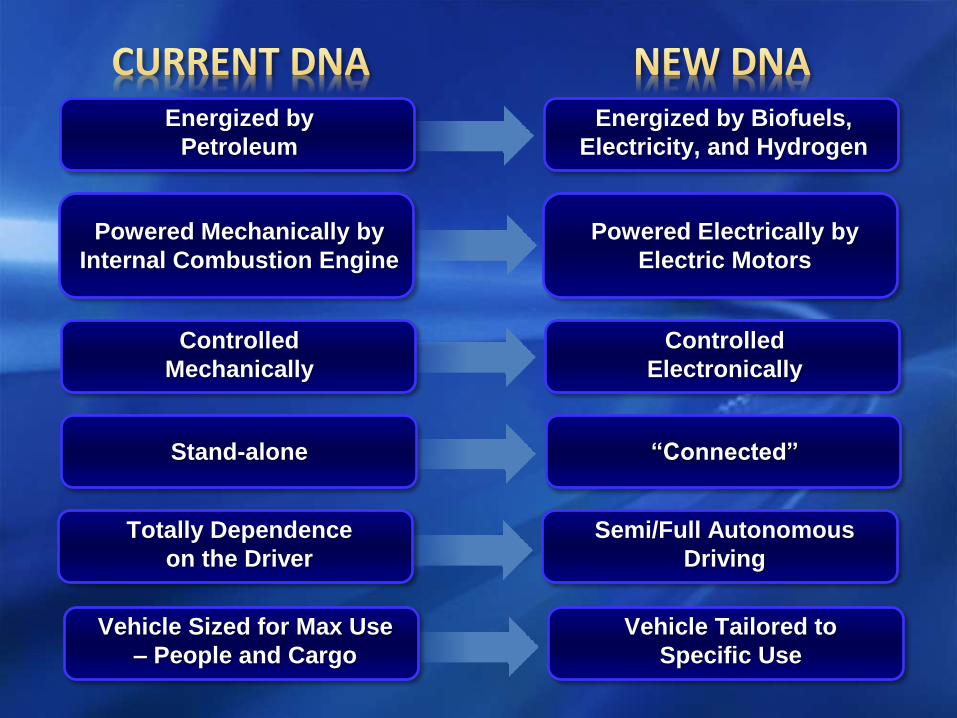
Powered Mechanically by
Internal Combustion Engine
Controlled
Mechanically
Energized by
Petroleum
Stand-alone
Powered Electrically by
Electric Motors
Controlled
Electronically
Energized by Biofuels,
Electricity, and Hydrogen
“Connected”
Totally Dependence
on the Driver
Semi/Full Autonomous
Driving
Vehicle Sized for Max Use
– People and Cargo
Vehicle Tailored to
Specific Use

CADILLAC DRIVER ASSISTANCE / ACTIVE SAFETY
Package 2 – “Driver Assist Package”
Package 1 plus:
Full Speed-Range ACC (Stop w/Go Notifier)
Auto Collision Preparation (includes Collision
Imminent Braking)
Low-Speed Front/Rear Automatic Braking
(Emergency Braking to Avoid Contact)
Cadillac ATS
Cadillac XTS
Cadillac SRX
Package 1 – “Driver Awareness Package”
Lane Departure Warning
Forward Collision Alert
Side Blind-Zone Alert
Rear Cross-Traffic Alert
Haptic Safety Alert Seat Feedback
Also includes:
Rear Vision Camera
Front & Rear Park Assist
Cadillac ATS
Cadillac XTS
Cadillac SRX
Front Camera
Rear Camera
Ultrasonic Sensors
Short Range Radars
Safety Alert Seat Short Range Radar
Long/Mid Range Radar
Short Range Radars
Front Camera
Ultrasonic Sensors
Short Range Radars
Rear Camera
77 77
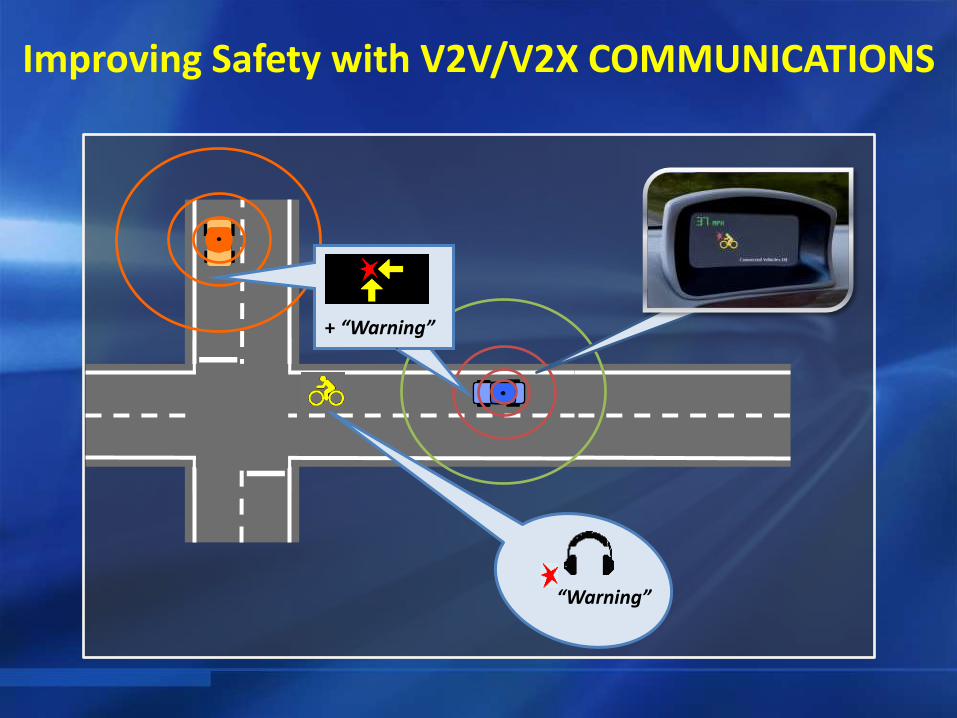
+ “Warning”
“Warning”
Improving Safety with V2V/V2X COMMUNICATIONS
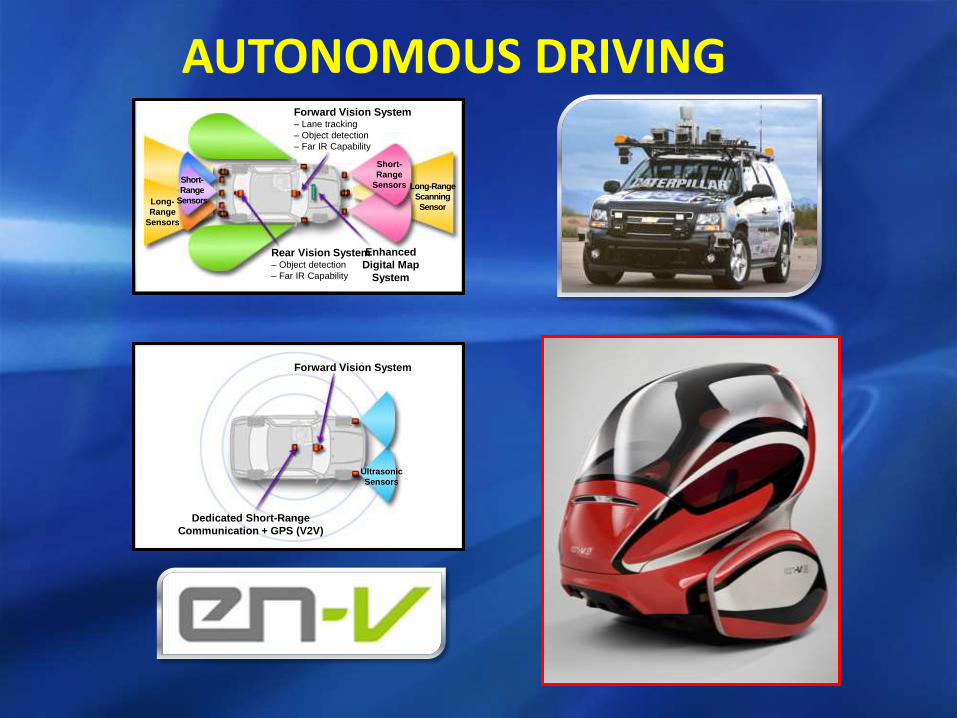
AUTONOMOUS DRIVING
Rear Vision System – Object detection
– Far IR Capability
Short-
Range
Sensors Long-Range
Scanning
Sensor
Forward Vision System – Lane tracking
– Object detection
– Far IR Capability
Short-
Range
Sensors Long-
Range
Sensors
Enhanced
Digital Map
System
Ultrasonic
Sensors
Ultrasonic
Sensors
Dedicated Short-Range
Communication + GPS (V2V)
Forward Vision System