15-10-2015 challenge the future delft university of technology design of the actuator for the euv...
TRANSCRIPT

20-04-23
Challenge the future
DelftUniversity ofTechnology
Design of the actuator for the EUV full flex illuminatorIn cooperation with ASML
Ruipan Chen, MSc. Department: PME , Specialisation: MSD

2
Contents
• Introduction: full flex illuminator
• What is a flex illuminator ?
• What is a full flex illuminator ?
• Actuator design: linear hybrid actuator
• Actuator requirements & building volume
• Actuator configuration
• Working principle
• Simulation results
• Stiffness analyses: parallel guiding
• Summary
Confidential

3
Contents
• Introduction: full flex illuminator
• Actuator design: linear hybrid actuator
• Stiffness analyses: parallel guiding
• Summary
Confidential

4
What is a Flex illuminator ?
Tiltable mirror elements
Confidential
FlexRay changes illumination modes
5
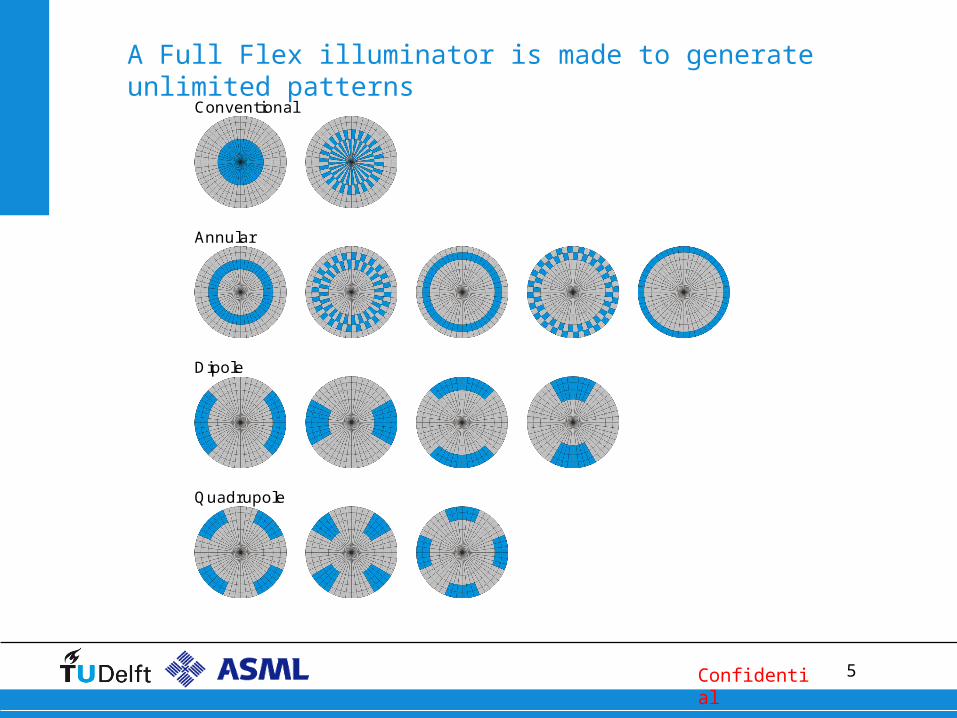
A Full Flex illuminator is made to generate unlimited patterns
Conventional
Annular
Dipole
Quadrupole
Confidential

6
Flexures
Full flex illuminator
EUV light
Approx. 45
cm
Mirror surface
Actuators
Confidential

7
A mirror stack and its manipulatorsfull flex illuminator
Confidential

8
A single element and its manipulator
• Mirror can tilt around two axes Z and Y.
• This is realized by manipulating the two vertical rods.
• The actuator mover is connected to these rods
• Driving force: ±2 [N] (for the illuminator)
• Stroke : ±2 [mm]
full flex illuminator
Confidential

9
Contents
• Introduction: full flex illuminator
• Actuator design: linear hybrid actuator
• Stiffness analyses: parallel guiding
• Summary
Confidential

10
Actuator requirements
• Building volume: 60mm×36mm×6mm per actuator
• Linear actuator for mechatronic feedback system
• Driving force: ±2 [N]
• Stroke: ±2 [mm]
• Dissipation < 5 Watts per actuator
The design goal
Confidential

11
Actuator configurationLinear hybrid actuator
Confidential

12
Actuator locationLinear hybrid actuator
Confidential

13
Reluctance force of a iron pole-pairLinear hybrid actuator
Virtual work principle to determine the tangent force Fx. It is proportional to the flux squared.
Confidential

14
Working principleLinear hybrid actuator
Flux increased in airgap 1 and 3, decreased in 2 and 4. A net force is generated.
Confidential

15
Analytical modellingLinear hybrid actuator
Permanent magnet Voltage source + resistanceCurrent-carrying coils Voltage sourceAirgap reluctances Resistance.
Confidential

16
Analytical modelingLinear hybrid actuator
Assumptions: - No saturation - simplified 2-D airgap reluctance (no leakage flux, no fringing flux). Iron reluctance is neglected.
Confidential

17
Analytical resultsMATLAB
Confidential

18
2-D FEM resultsOersted
Confidential
-2-1
01
2
-100
-50
0
50
100
-3
-2
-1
0
1
2
3
Displacement x [mm]
Full Flex Actuator (config b) Drive Force
Coil current [Aturn]
Driv
ing
For
ce F
x [N
]

19
3-D FEM resultsANSYS workbench
With an input current of 150 [A*turn] (corresponding to a dissipation of 4.3 [W]), the actuator is able to give a driving force of 2.3 [N] at the neutral position and 2.1 [N] at the end of the stroke.
Confidential

20
Contents
• Introduction: full flex illuminator
• Actuator design: linear hybrid actuator
• Stiffness analyses: parallel guiding
• Summary
Confidential

21
Three stiffnesses of the mechanismStiffness analyses
• Stiffness of the illuminator: positive• Stiffness of the parallel guiding: positive• Normal force on parallel guiding: negative
Confidential

22
The negative stiffness lower the total driving stiffness! The required driving force becomes 1.58 [N] with the help of the normal force.
Energy method
Confidential

23
Contents
• Introduction: full flex illuminator
• Actuator design: linear hybrid actuator
• Stiffness analyses: parallel guiding
• Summary
Confidential

24
Summary
• Linear
• low inherent stiffness
• Low driving stiffness
• Easy water cooling
- stator is equipped with coils and magnet.
Cooling facility can be made easy.
• No contamination to the vacuum
- clear mechanical clearance
- magnets and coils are in one enclosure
Merits of the actuator
Confidential

25
Thank you for your attentions !Please feel free to ask questions.
Confidential

26
Backup slides
Confidential

27
Backup slides
-2-1
01
2
-100
-50
0
50
100
-3
-2
-1
0
1
2
3
Displacement x [mm]
Full Flex Actuator (config b) Drive Force
Coil current [Aturn]
Driv
ing
For
ce F
x [N
]
Confidential
28
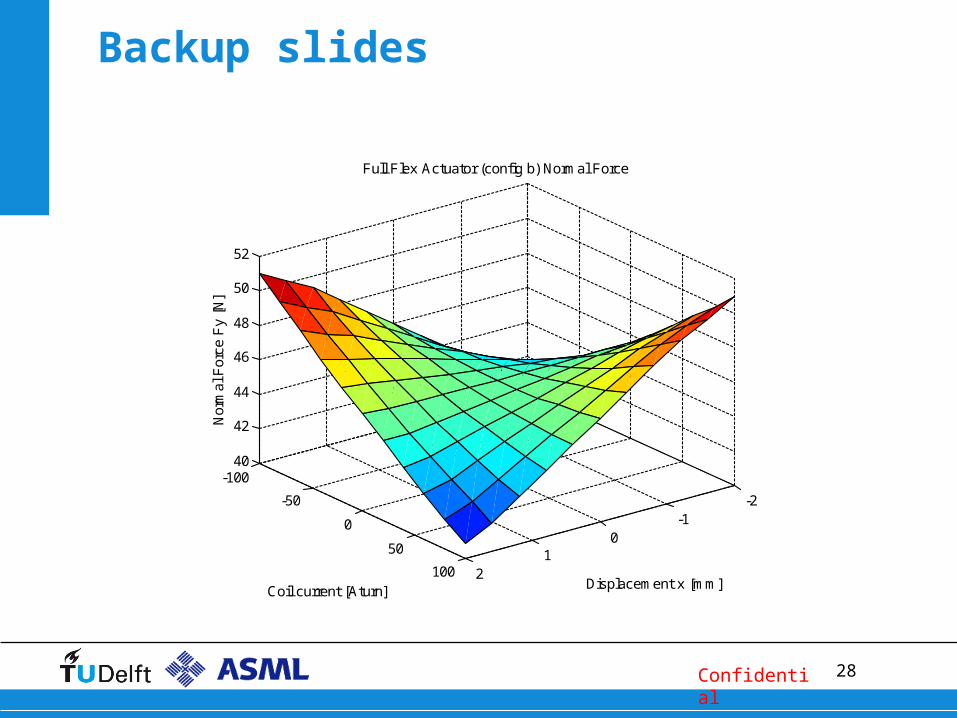
Backup slides
-2-1
01
2
-100
-50
0
50
100
40
42
44
46
48
50
52
Displacement x [mm]
Full Flex Actuator (config b) Normal Force
Coil current [Aturn]
Nor
mal
For
ce F
y [N
]
Confidential

29
Backup slides
Confidential

30
Backup slides
Confidential

31
Backup slides
Rotation angle: 5 degrees
Deflection : 1mm
Normal force Vs Euler formula:
Normal force increased by 0.1 %
Confidential