vorlesung mathematik und statistik ws 2006 / 2007 teil i ... · dieses dokument ("skript...
TRANSCRIPT
Vorlesung
"Mathematik und Statistik"
WS 2006 / 2007
Teil I
Abbildungen
Differential und Integralrechnung
Oktober 2006
Dozent: Dr. Norbert Marxer
0. Inhaltsverzeichnis
0. Inhaltsverzeichnis ................................................................................................. 2
1. Einleitung .................................................................................................................. 6
Vorbemerkung ............................................................................................... 6
Einleitung .......................................................................................................... 6
Referenzen ...................................................................................................... 7
2. Mathematische Aussagen, Notation ............................................................. 8
Zusammenfassung ...................................................................................... 8
Aussage ............................................................................................................ 8
Allaussagen ..................................................................................................... 9
Existenzaussagen ........................................................................................ 9
Negation von Aussagen ............................................................................ 10
Bequeme Schreibweise ............................................................................ 10
Verknüpfung von Eigenschaften ........................................................... 10
3. Mengenlehre ............................................................................................................ 11
Definitionen und Spezifikation von Mengen .................................... 11
Definitionen .................................................................................................. 11
Spezifikation von Mengen ............................................................................ 11
Mengenoperationen .................................................................................... 12
Komplement einer Menge ............................................................................ 12
Durchschnitt zweier Mengen ........................................................................ 12
Vereinigung zweier Mengen ......................................................................... 13
Differenz zweier Mengen ............................................................................. 13
Gesetze bei Mengenoperationen ......................................................... 13
Spezielle Zahlenmengen .......................................................................... 13
Graphische Darstellungen von Mengenoperationen ................... 14
4. Klassifizierung von Abbildungen ................................................................... 15
Einleitung .......................................................................................................... 15
Begriffe .............................................................................................................. 16
Definitionsbereich ......................................................................................... 17
Wertebereich .................................................................................................. 18
Teilmengen von Funktionstypen ........................................................... 18
Einleitung .............................................................................................. 18
Ganzrationale Funktionen (Polynomfunktionen) ....................................... 18
Gebrochen Rationale Funktionen (Rationale Funktionen) ........................... 19
Algebraische Funktionen ........................................................................ 19
Analytische Funktionen .......................................................................... 19
Differenzierbare Funktionen .................................................................... 19
Stetige Funktionen ................................................................................. 19
Riemann integrierbare Funktionen ........................................................... 20
Lebesgue integrierbare Funktionen .......................................................... 20
Skript Abbildungen WS 2006 / 2007 2
Komplementäre Funktionstypen ........................................................... 20
Irrationale Funktionen ............................................................................ 20
Transzendente Funktionen ...................................................................... 20
5. Gleichungen und Ungleichungen ................................................................... 22
Einleitung .......................................................................................................... 22
Explizite, Implizite und Parameter Form ........................................... 23
Einleitung .............................................................................................. 23
Kreisgleichung ....................................................................................... 23
Gruppe Mathematica .............................................................................. 24
Ungleichungen ............................................................................................... 25
Funktionen zur Lösung von Gleichungen ......................................... 25
Gruppe Excel ................................................................................................ 26
Gruppe Mathematica .................................................................................... 26
Solve .................................................................................................... 26
Reduce .................................................................................................. 27
FindRoot ............................................................................................... 27
6. Folgen, Reihen ........................................................................................................ 28
Einleitung .......................................................................................................... 28
Zusammenfassung ...................................................................................... 28
Definition von Folgen und Reihen ........................................................ 29
Bildungsgesetze für eine Folge ............................................................. 29
Angabe aller Glieder der Folge .................................................................... 30
Funktionsvorschrift für das allgemeine Glied der Folge ............................... 30
Rekursion ..................................................................................................... 30
Reihe bzw. Partialsumme einer Folge .......................................................... 31
Arithmetische Reihe ............................................................................... 31
Geometrische Reihe ................................................................................ 31
Algorithmus .................................................................................................. 31
Eigenschaften einer Folge ....................................................................... 32
Einleitung ..................................................................................................... 32
Monotone Folgen ......................................................................................... 32
Beschränkte Folgen ...................................................................................... 32
Konvergenz und e - Umgebung ................................................................... 32
Häufungspunkt ............................................................................................. 33
Rechenregeln für Folgen .............................................................................. 33
Konvergenzkriterium .................................................................................... 34
Spezielle Folgen: periodisch, alternierend, konstant .................................... 34
Graphische Darstellungen von Folgen ............................................... 34
Anwendungen ................................................................................................ 34
Verzinsung ................................................................................................... 35
Ohne Zinseszins ..................................................................................... 35
Mit Zinseszins - Exponentielles Wachstum ............................................... 36
Stetige Verzinsung ................................................................................. 36
Annuity ................................................................................................. 37
Wachstum: an+1 = r an + b ........................................................................ 38
Fall: b = 0, d.h. an+1 = r an ................................................................... 38
Fall: b ∫ 0 ............................................................................................. 38
Heron'sches Verfahren zur Berechnung von è!!!!
a ........................................ 39
Skript Abbildungen WS 2006 / 2007 3
7. Funktionen ................................................................................................................ 40
Eigenschaften wichtiger Funktionen ................................................... 40
Potenzfunktion .............................................................................................. 40
Exponentialfunktion und Logarithmus ......................................................... 41
Graphische Darstellungen ...................................................................... 41
Gruppe Mathematica ................................................................................... 42
� Ø � .................................................................................................. 42
� Ø �2 ................................................................................................ 42
�2 Ø � ................................................................................................ 42
�2 Ø �2 ............................................................................................... 42
�2 Ø �3 ............................................................................................... 42
�3 Ø �3 ............................................................................................... 42
8. Differentialrechnung und Kurvendiskussion ............................................ 43
Einleitung ..................................................................................................... 43
Graphische Ableitung ................................................................................... 44
Tabellarische Ableitung ................................................................................ 44
Symbolisch (von Hand) ................................................................................ 45
Ableitungsregeln ........................................................................................... 45
Multiplikation mit einer Konstanten ......................................................... 45
Summe zweier Funktionen ...................................................................... 45
Produktregel .......................................................................................... 45
Quotientenregel ..................................................................................... 45
Kettenregel ............................................................................................ 45
Gruppe Mathematica .............................................................................. 45
Kurvendiskussion ......................................................................................... 46
Beispiel f HxL = x2 - 2 ............................................................................. 47
Beispiel f HxL = x2-2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ-3 x+5
............................................................................ 47
9. Integralrechnung ................................................................................................... 48
Einleitung ..................................................................................................... 48
Zusammenstellung - Definitionen und Sätze ................................................ 49
Tabelle mit Funktionen, Ableitungen und Integralen ................................... 49
Ableitung nach der oberen Integrationsgrenze ............................................. 50
Trapezformel zur Integration ........................................................................ 50
Gruppe Mathematica ................................................................................... 51
Integrate und NIntegrate ......................................................................... 51
IntegrateëD bzw. DëIntegrate ................................................................... 52
Tabelle mit Funktionen, Ableitungen und Integralen .................................. 53
10. Potenzreihen und Taylor Reihen .................................................................. 54
Zusammenfassung ........................................................................................ 54
Potenzreihen ................................................................................................. 54
Taylorreihen ................................................................................................. 55
Approximation durch Taylor Polynome ....................................................... 55
Approximation ‰x .................................................................................. 56
Approximation Sin@xD+ 0.3 Sin@4 x - 0.6D ................................................ 56
Gruppe Mathematica ................................................................................... 57
Einleitung .............................................................................................. 57
Approximation ‰x .................................................................................. 58
Approximation Sin@xD+ 0.3 Sin@4 x - 0.6D ................................................ 58
Skript Abbildungen WS 2006 / 2007 4
11. Partielle Ableitung .............................................................................................. 60
Beispiel: Ableitung von sinHx yL nach x und y ............................................ 61
Gruppe Excel ................................................................................................ 61
Gruppe Mathematica .................................................................................... 61
Mathematica Funktionen ........................................................................ 61
Graphische Darstellung ........................................................................... 62
Gruppe Mathematica: Preis einer Call Option und Delta ............................. 62
Aufgabe: Preis einer Call Option und Delta .............................................. 62
Lösung a ............................................................................................... 63
Lösung b ............................................................................................... 63
Lösung c ............................................................................................... 63
Lösung d ............................................................................................... 63
Skript Abbildungen WS 2006 / 2007 5
1. Einleitung
VorbemerkungDie Vorlesung "Mathematik und Statistik", die im WS 2006 / 2007 an der Hochschule Liechtenstein angeboten wird,beinhaltet nach einer allgemeinen Repetition von vorausgesetzten mathematischen Grundlagen die Gebiete TaylorEntwicklung und Partielle Differentiation, Zeitreihenanalyse, Regression und allgemeine Optimierung sowie aus demGebiet der Statistik und Stochastik die Gebiete Deskriptive Statistik, Induktive Statistik und Stochastic Calculus.
Der ganze Vorlesungsstoff wird in zwei Dokumenten bzw. Skripten präsentiert.
Das mit "Skript Abbildungen" bezeichnete Dokument beinhaltet die Gebiete, die nicht dem Gebiete der Statistik undStochastik zugerechnet weden können.
Das mit "Skript Statistik" bezeichnete Dokument beinhaltet die Gebiete, die dem Gebiete der Statistik und Stochastikzugerechnet werden können.
EinleitungDieses Dokument ("Skript Abbildungen") enthält die Gebiete, die nicht (direkt) dem Gebiet der Statistik und Stochas-tik zugerechnet werden können.
Die Kapitel dieses Dokuments enthalten die folgenden Inhalte.
Das Kapitel "Mathematische Aussagen, Notation" behandelt die mathematische Notation und die in der Mathematikverwendeten Symbole. Dieses Kapitel soll die Voraussetzungen dafür schaffen, dass die Studierenden in der Lage seinwerden, die in mathematischen Büchern und Publikationen verwendete Syntax zu verstehen und eventuell selbst zugebrauchen.
Das Kapitel "Mengenlehre" fasst die zentralen Elemente der Mengenlehre, wie sie im Laufe der Vorlesung, vor allemauch im Zusammenhang mit der Statistik, gebraucht werden.
Das Kapitel "Klassifizierung von Abbildungen" definiert den Begriff der Abbildung und untersucht wie Abbildungenauf Grund ihres Definitions- und Wertebereichs sowie auf Grund ihrer Formel klassifiziert werden können.
Das Kapitel "Gleichungen, Ungleichungen" diskutiert die verschiedenen Arten, in denen Gleichungen vorliegenkönnen, wie Gleichungen und Ungleichungen manipuliert und gelöst werden können.
Das Kapitel "Folgen, Reihen" beschäftigt sich mit diskreten Abbildungen, den Folgen und Reihen. Sie beide spielen inder Mathematik eine wichtige Rolle: die Folgen vor allem bei Grenzprozessen, die geometrische Reihe bei der Berech-nung in der Finanzmathematik.
Das Kapitel "Funktionen" fasst kurz und prägnant Eigenschaften wichtiger Funktionen zusammen.
Das Kapitel "Differentialrechnung und Kurvendiskussion" illustriert (ausgehend von der Definition der Ableitung alsGrenzprozess) den Begriff und die Berechnung der Ableitung auf verschiedene Arten: Graphisch, Tabellarisch,Symbolisch. Zusätzlich wird exemplarisch eine Kurvendiskussion durchgeführt.
Das Kapitel "Integralrechnung" diskutiert die Integration als Grenzübergang einer Flächenberechnung mit Treppenfunk-tionen, enthält eine Tabelle mit vielen Funktionen sowie deren Ableitungen und Stammfunktionen.
Das Kapitel "Potenzreihen und Taylor Reihen" erläutert die beiden Begriffe Potenzreihen und Taylor Reihe. Mit Hilfeder Taylor Polynome werden dann verschiedene Funktionen approximiert.
Skript Abbildungen WS 2006 / 2007 6
Das Kapitel "Partielle Ableitung" erläutert den Begriff der partiellen Ableitung bei Funktionen, die von mehrerenunabhängigen Variablen abhängen.
Wir wollen mit diesem Skript nicht das Differenzieren und Integrieren lernen bzw. üben: dies sollte in den Grundzügenbereits bekannt sein. Das Ziel der Vorlesung ist es, die Differentialrechnung und deren Möglichkeiten bei diversenFragestellungen anzuwenden.
ReferenzenDas in der Vorlesung behandelte Gebiet ist sehr weit und es gibt natürlich eine Unmenge an Literatur zu den ver-schiedenen Themen.
So wie man sich im Wald dieser Literatur verlieren kann, so kann man sich auch im Wald einer zu langen Literaturlisteverlieren. Ich möchte deshalb im Folgenden nur sehr wenige, meines Erachtens nützliche, Hinweise geben.
Sehr kostengünstig sind natürlich die im Internet verfügbaren Informationen. Diese Informationen werden auch vonJahr zu Jahr besser. Interessant sind sicherlich die unter
http://de.wikipedia.org/wiki/Mathematik
vorhandenen Beiträge: über Mengenlehre, Analysis, ...
Sehr gut und hilfreich können als Zusatzinformation zur Vorlesung im Gebiete der Statistik auch die beiden folgendenBücher (zusammen 600 Seiten) sein:
† "Wahrscheinlichkeitsrechnung und schliessende Statistik" von K. Mosler und F. Schmid, Springer, 2. Auflage,
2006.
www.uni-koeln.de/wiso-fak/wisostatsem/buecher/wrechng_schliessende/index.htm
† "Beschreibende Statistik und Wirtschaftsstatistik" von K. Mosler und F. Schmid, Springer, Berlin, 2. Auflage,
2005.
www.uni-koeln.de/wiso-fak/wisostatsem/buecher/beschr_stat/
Skript Abbildungen WS 2006 / 2007 7
2. Mathematische Aussagen, Notation
ZusammenfassungDie Mathematik beschäftigt sich mit gewissen "idealen" Objekten (z.B. Zahlen, geometrischen Figuren, ...), ihrenEigenschaften und den zwischen ihnen bestehenden Beziehungen.
Da sich solche Eigenschaften und Beziehungen verbal (umgangssprachlich) oft nur umständlich in Sätzen beschreiben lassen, bedient sich die Mathematik (wie auch andere Wissenschaften) einer eigenen Fachsprache samt zugehöriger Notation.
In diesem Kapitel befassen wir uns mit der Sprachweise bzw. Notation, mit der die Mathematiker Eigenschaften vonObjekten bzw. Beziehungen zwischen ihnen beschreiben.
Die Kenntnis dieser Notation wird uns im weiteren Verlauf der Vorlesung viel Schreibarbeit abnehmen.
Dabei lernen wir im Folgenden insbesondere die folgende Symbole und Definitionen kennen:
" Allquantor; für alle ...
$ Existenzquantor; für mindestens ein ...
$ ! für genau ein ...
fl Und Verknüpfung
fi Oder Verknüpfung
Ÿ Negation Heiner AussageL
Eine Aussage kann entweder wahr oder falsch sein.
Allaussagen behaupten, dass die Aussage für die ganze Grundmenge G gilt: " x œ G : aHxL
Esistenzaussagen behaupten, dass es mindestens ein Element mit der angegebenen Eigenschaft gibt: $ x œ G : aHxL
Weitere Symbole:
a fl b wenn a, dann b
a ñ b a genau dann, wenn b
a › b a nur dann, wenn b
: a gilt a
, wobei
AussageDie Eigenschaften von mathematischen Objekten oder Beziehungen zwischen ihnen werden in sogenannten Aussagen(in Form von Behauptungen) verbal oder formalisiert angegeben.
Eine Aussage kann dabei entweder wahr oder falsch sein.
Skript Abbildungen WS 2006 / 2007 8
Beispiel für wahre Aussage:
verbal: p ist kleiner als 3
formalisiert: p < 3
Eine Aussage kann eine Eigenschaft für ein einzelnes, konkretes Objekt (wie oben für p) oder aber auch für mehrereObjekte gleichzeitig behaupten.
Die Gesamtheit dieser Objekte (bei mehreren Objekten) nennt man die Grundmenge G der Aussage. Solche Aussagenformuliert man mittels Variablen und Quantoren (Allquantor ", Existenzquantor $) . Dabei unterscheidet manzwischen Allaussagen und Existenzaussagen.
Allaussagen
Allaussagen behaupten, dass die Aussage für die ganze Grundmenge G gilt. Dies kann prägnant mit dem Allquantor " formuliert werden.
† allgemein:
verbal: "Alle x von G haben die Eigenschaft aHxL"formalisiert: " x œ G : aHxL
† speziell:
verbal: "Alle ganzen Zahlen sind durch 1 teilbar"
formalisiert: " x œ � : 1 » x
† Eine Allaussage ist als falsch entlarvt, wenn man auch nur ein einziges Gegenbeispiel angeben kann. Man sagt
dann, dass die Allaussage falsifiziert wurde. Nachzuweisen, dass eine Allaussage wahr ist, ist meist viel schwieri-
ger durchzuführen.
Existenzaussagen
Esistenzaussagen behaupten, dass es mindestens ein Element mit der angegebenen Eigenschaft gibt. Dies kann prägnant mit dem Existenzquantor $ formuliert werden.
† allgemein:
verbal: "Es gibt mindestens ein x von G mit der Eigenschaft aHxL"formalisiert: $ x œ G : aHxL
† speziell:
verbal: "Es gibt eine ganze Zahl zwischen 15 und 19, die Primzahl ist"
formalisiert: $ x œ � : 15 < x < 19 fl x œ �
† Eine Existenzaussage ist als wahr bestätigt, wenn man auch nur ein einziges Beispiel angeben kann. Man sagt
dann, dass die Existenzaussage verifiziert wurde. Nachzuweisen, dass eine Existenzaussage falsch ist, ist meist
viel schwieriger durchzuführen.
† Wenn man behaupten will, dass die Aussage für genau ein Element gelten soll, verwendet man statt des Symbols $
das Symbol $! und schreibt formal: $ ! x œ G : aHxL und spricht "Es gibt genau ein x Element aus G mit der Eigen-
schaft aHxL."
Skript Abbildungen WS 2006 / 2007 9
Negation von AussagenWie in jeder anderen Wissenschaft bemüht man sich auch in der Mathematik, wahre Aussagen zu machen. Wenn eineAussage A falsch ist, ist die Negation der Aussage bzw. die Gegenaussage (symbolisch Ÿ A, gesprochen "nicht A","non A") wahr.
Es gibt mehrere Möglichkeiten eine Aussage A formal zu verneinen:
† Durch Voranstellen des Negationssymbols: Ÿ A
† Durch Durchstreichen des Symbols: zB –
† Durch Verwenden der gegenteiligen Eigenschaft: zB < statt ¥
Es gilt:
† Die Negation einer Existenzaussage führt auf eine Allaussage bezüglich der gegenteiligen Eigenschaft Ÿ aHxL.† Die Negation einer Allaussage führt zu einer Existenzaussage bezüglich der gegenteiligen Eigenschaft Ÿ aHxL.† Die doppelte Verneinung Ÿ HŸ aL stimmt mit der ursprünglichen Aussage a überein.
Bequeme SchreibweiseAus Bequemlichkeit werden oftmals die Quantoren weggelassen oder in einer kürzeren Form geschrieben. Gemeint istdabei das Gleiche. Man schreibt z.B. für das Kommutativgesetz:
† " a, b œ � : a + b = b + a
† a + b = b + a, a, b œ �
† a + b = b + a
Ebenso ist genaugenommen die Gleichung x + 4 = 5 eine Existenzaussage, da wir behaupten, dass es (mindestens) eine(uns noch unbekannte) Zahl x gibt, welche die Gleichung erfüllt: $ œ � : x + 4 = 5.
Verknüpfung von EigenschaftenWenn für Elemente einer Grundmenge G mehrere Eigenschaften aHxL, bHxL, ... möglich sind, lassen sich auch ver-schiedene Verknüpfungen der Eigenschaften bilden.
Es kann gezeigt werden, dass man mit der Negation (¬, !, Not) sowie den beiden logischen Verknüfungen "Und"(And) und "Oder" (Or) alle Kombinationen abdecken kann.
Logische Und Verknüpfung (Konjunktion):aHxL fl bHxL heisst "... und ..." bzw. "sowohl ... als auch ..."
Die Aussage aHxL fl bHxL ist genau dann wahr, wenn sowohl a als auch b wahr sind.
Logische Oder Verknüpfung (Disjunktion):aHxL fi bHxL heisst "... oder ..." bzw. "entweder ... oder ... oder auch beides"
Die Aussage aHxL fi bHxL ist genau dann wahr, wenn entweder a oder b oder auch beide wahr sind.
Weitere bekannte Verknüpfungen, die sich jedoch alle mittels ¬, fl und fi darstellen lassen sind: Nand (Not And), Nor(Not Or), Xor (exclusive Or). Die Ergebnisse dieser Verknüpfungen lassen sich auch mittels Wahrheitstafeln anschau-lich darstellen.
Skript Abbildungen WS 2006 / 2007 10
3. Mengenlehre
Definitionen und Spezifikation von Mengen
Definitionen
Der Begriff "Menge" ist ein grundlegendes und eines der wichtigsten Konzepte der Mathematik. Wir werden imFolgenden nur einige der für uns wichtigen Begriffe aus dem Gebiet der Mengenlehre erwähnen.
Unter einer Menge M versteht man die Zusammenfassung gewisser, wohlunterschiedener Objekte, Elemente genannt, zu einer Einheit.
Ein Element kann deshalb in einer Menge nur einmal vorkommen.
Leere Menge: Eine Menge heisst leer, wenn sie kein Element enthält. Symbolische Schreibweise: 8 < oder «
Teilmenge: Eine Menge A heisst Teilmenge einer Menge B, wenn jedes Element von A auch zur Menge B gehört. Symbolische Schreibweise: A Œ B
Formal: A Œ B ñ Hx œ A fl x œ BL
Elemente einer Menge: Wenn ein Element a zur Menge M gehört (bzw. a ein Element von M ist), schreibt man kurz: a œ M . Wenn ein Element a nicht zur Menge M gehört (bzw. a kein Element von M ist), schreibt man kurz: a – M
Gleichheit von Mengen: Zwei Mengen A und B heissen gleich, wenn jedes Element von A auch Element von B ist und umgekehrt, wenn also beide Mengen dieselben Elemente enthalten. Symbolische Schreibweise: A = B.
Die Mächtigkeit einer Menge A gibt bei endlichen Mengen die Anzahl der Elemente an und wird mit †A§ bezeichnet.
Eine Potenzmenge P einer Menge A ist die Menge aller Teilmengen von A. Wenn die Menge A die Mächtigkeit n hat, so hat die Potenzmenge von A die Mächtigkeit 2n.
Spezifikation von Mengen
Es gibt mehrere Möglichkeiten eine Menge zu spezifizieren. Die allgemeinste Form ist die beschreibende Form.
Beschreibende Form
Eine Menge wird durch eine bestimmte Bedingung beschrieben, die alle Elemente der Menge (und nur diese) erfüllen.
Beispiel: M = 8 x » x ist eine gerade natürliche Zahl und größer als 2<... gelesen "M ist die Menge aller x, die die Eigenschaft haben, eine gerade natürliche Zahl und größer als zwei zusein", oder kürzer: "M ist die Menge aller geraden natürlichen Zahlen > 2".
Skript Abbildungen WS 2006 / 2007 11
Aufzählende Form
Endliche Mengen können (insbesondere wenn sie relativ wenig Elemente haben) auch durch Aufzählen ihrer Elementeangegeben werden.
Beispiel: M = 8blau, grün, rot<Alternativ (aber umständlicher) könnte man auch in der beschreibenden Form spezifizieren.
M = 8 x » x = blau fi x = grün fi x = rot<Mittels ... können auch unendliche Mengen in der aufzählenden Form spezifiziert werden.
Beispiel: M = 81, 2, 3, ...<Der Übersichtlichkeit halber verwendet man beim Aufzählen der Elemente meist eine "natürliche" Ordnung, z.B. diealphabetische Reihenfolge; prinzipiell ist die Reihenfolge beliebig.
Mengenoperationen
Eine dritte Möglichkeit zur Spezifikation von Mengen geschieht durch Mengenoperationen (z.B. Schnittmenge).
Beispiel: M = 8a, b, c< › 8c, d< = 8c<Eine Menge kann leer sein ("Leere Menge", «, 8 <), enthält aber nie mehrere Exemplare eines Elements.
MengenoperationenMittels Mengenoperationen (d.h. Operationen, die auf Mengen operieren) können neue Mengen erhalten werden. Diewichtigsten Mengenoperationen sind das Komplement einer Menge sowie der Durchschnitt, die Vereinigung und dieDifferenz zweier Mengen.
Ähnlich wie bei der Verknüpfung von mathematischen Aussagen sind noch die Mengenoperationen Nand (Not And),Nor (Not Or) und Xor (exclusive Or) gebräuchlich. Sie lassen sich jedoch auch mittels Komplement, Durchschnitt undVereinigung darstellen.
Komplement einer Menge
Das Komplement Aêêê
einer Menge A enthält die Elemente, die nicht in der Menge A enthalten sind.
Aêêê= 8 x » x – A <
Durchschnitt zweier Mengen
Der Durchschnitt A › B zweier Mengen A und B ergibt die Schnittmenge, d.h. die Menge aller Elemente, die sowohlzu A als auch zu B gehören. Symbolische Schreibweise:
A › B = 8 x » x œ A Ï x œ B <
Skript Abbildungen WS 2006 / 2007 12
Vereinigung zweier Mengen
Die Vereinigung A ‹ B zweier Mengen A und B ergibt die Vereinigungsmenge, d.h. die Menge aller Elemente, die zuA oder zu B oder zu beiden Mengen gehören. Symbolische Schreibweise:
A ‹ B = 8 x » x œ A Í x œ B <
Differenz zweier Mengen
Die Differenz A \ B zweier Mengen A und B ergibt die Differenzmenge (Restmenge), d.h. die Menge aller Elemente,die zu A, nicht aber zu B gehören. Symbolische Schreibweise:
A \ B = 8 x » x œ A Ï x – B <
Gesetze bei MengenoperationenEs seien A, B und C Teilmengen einer gegebenen Grundmenge G.
Es gelten die folgenden Gesetze:
Kommutativität A ‹ B = B ‹ A
A › B = B › A
Assoziativität (A ‹ BL ‹ C = A ‹ HB ‹ CL(A › BL › C = A › HB › CL
Absorption A ‹ HB › AL = A
A › HB ‹ AL = A
Distributivität A ‹ HB › CL = HA ‹ BL › HA ‹ CLA › HB ‹ CL = HA › BL ‹ HA › CL
Idempotenz A ‹ A = A
A › A = A
Spezialfälle A ‹« = A A ›« = «
A ‹ G = G A › G = A
de Morgan A ‹ Bêêêêêêêêê
= Aêêê› B
êêêA › Bêêêêêêêêê
= Aêêê‹ B
êêê
Spezielle ZahlenmengenWir haben schon in früheren Kapiteln die folgenden Zahlenmengen kennengelernt:
Skript Abbildungen WS 2006 / 2007 13
� = 80, 1, 2, ...< Menge der natürlichen Zahlen� = 80, ≤1, ≤2, ...< Menge der ganzen Zahlen� = 9 pÅÅÅÅÅ
q… p œ � und q œ � \ 80<= Menge der rationalen Zahlen
� Menge der reellen Zahlen� Menge der komplexen Zahlen
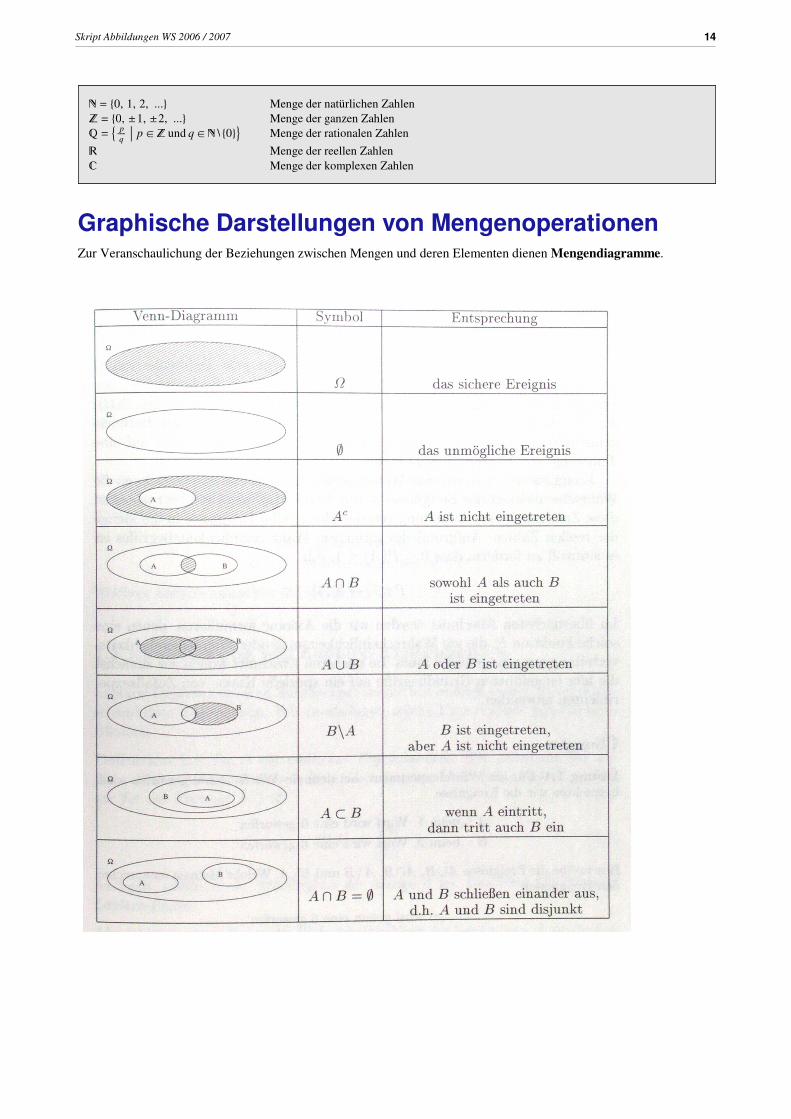
Graphische Darstellungen von MengenoperationenZur Veranschaulichung der Beziehungen zwischen Mengen und deren Elementen dienen Mengendiagramme.
Skript Abbildungen WS 2006 / 2007 14
4. Klassifizierung von Abbildungen
EinleitungWir werden uns in diesem Kapitel ausführlich mit Abbildungen bzw. Funktionen beschäftigen. Zuerst soll der Begriffder Abbildung erläutert werden.
Eine Abbildung (eine Funktion, ein Operator) f drückt die Abhängigkeit einer Größe von einer anderen aus. Traditionell werden Funktionen als Regel oder Vorschrift definiert, die eine Eingangsgrösse (Argument, unabhängige Variable, meist als x bezeichnet) aus dem sogenannten Definitionsbereich D in eine Ausgangsgrösse (Funktionswert, abhängige Variable, meist als y bezeichnet) des Wertebereichs W transformiert (überführt, abbildet).
f : D Ø W
f : x Ø y = f HxLFunktionen können sich unterscheiden durch ihren Definitionsbereich, ihren Wertebereich, der Art ihrer Definition(explizite, implizite oder in Parameterform) und der Formel bzw. Gleichung für ihre Charakterisierung.
Wir werden uns in diesem Dokument fast ausschliesslich mit Funktionen beschäftigen, bei denen sowohl der Defini-tionsbereich als auch der Wertebereich (Teil)Mengen aus � (Menge der reellen Zahlen) sind.
Die hier betrachteten Funktionen sind ausserdem in den meisten Fällen nur von einer unabhängigen Variablen abhän-gig. Erst im Kapitel "Partielle Ableitung" werden wir den Fall mehrerer unabhängiger Variablen untersuchen.
Die Abschnitte dieses Kapitel enthalten im einzelnen den folgenden Inhalt:
Der Abschnitt "Begriffe" definiert kurz und prägnant (im Sinne einer Wiederholung) wichtige Begriffe im Zusammen-hang mit Funktionen.
Die Abschnitte "Definitionsbereich" und "Wertebereich" diskutieren kurz wie Funktionen auf Grund ihrer Definitions-und Wertebereiche unterschieden werden können.
Die Abschnitte "Teilmengen von Funktionstypen" und "Komplementäre Funktionstypen" untersuchen, wie Funktionenauf Grund ihrer Formel (bzw. ihres Ausdrucks) in verschiedene Kategorien eingeteilt werden können.
Das folgende Schema (wo jeder Typ eine Teilmenge des nachfolgenden Typs ist) wird diskutiert:
Ganzrationale Funktionen (Polynomfunktionen)
Õ Gebrochen Rationale Funktionen (Rationale Funktionen)
Õ Algebraische Funktionen
Õ Analytische Funktionen
Õ Differenzierbare Funktionen
Õ Stetige Funktionen
Õ Riemann integrierbare Funktionen
Õ Lebesgue integrierbare Funktionen.
Ausserdem werden die Begriffe irrationale Funktionen und transzendente Funktionen geklärt.
Skript Abbildungen WS 2006 / 2007 15
BegriffeIn diesem Abschnitt werden die im Zusammenhang mit Funktionen wichtigen Definitionen kurz (es wird nicht jedesSymbol bis ins letze spezifiziert) und prägnant aufgelistet.
Das Bild f HxL eines Elements x œ D ist f HxL.
Das Bild f HDL einer Funktion f ist die Menge aller Bilder, also f HDL = 8 f HxL » x œ D <.
Das Urbild f -1HyL eines Elements y œ W ist die Menge aller Elemente des Definitionsbereichs, deren Bild y ist, also f -1HyL = 8x œ D : f HxL = y< .
Das Urbild f -1HML einer Teilmenge M der Wertemenge ist die Menge aller Elemente des Definitionsbereichs, deren Bild Element dieser Teilmenge ist, also f -1HM L = 8x œ D : f HxL in M <.
Die Komposition ist die Verknüpfung von Funktionen durch Hintereinanderausführung H f o gL x = f Hg xL.
Ein Fixpunkt ist ein Element x œ D, für das f HxL = x gilt.
Eine Asymptote ist eine Gerade, an die sich die Funktionswerte für x Ø x0 Hoder ≤¶L immer mehr annähern. Eine vertikale Asymptote wird auch Polgerade genannt.
Ein Pol (Unendlichkeitsstelle) ist ein Element x œ D, in dessen Umgebung † f HxL§ Ø ¶.
Eine Nullstelle ist ein Element x œ D für das gilt f HxL = 0.
Eine Kurvendiskussion untersucht die allgemeinen Eigenschaften von Kurven wie Definitionsbereich, Wertebereich, Injektivität, Monotonie, Periodizität, Positivität, Nullstellen, Asymptoten, Unendlichkeitsstellen etc.
Eine Funktion ist injektiv, wenn jedes Element des Wertebereichs höchstens ein Urbild hat.Das heisst: aus x1 ∫ x2 folgt f Hx1L ∫ f Hx1L.
Eine Funktion ist surjektiv, wenn jedes Element des Wertebereichs mindestens ein Urbild hat.
Eine Funktion ist bijektiv, wenn sie injektiv und surjektiv ist, also wenn jedes Element des Wertebereichs genau ein Urbild hat.
Die Umkehrfunktion einer bijektiven Funktion weist jedem Element der Wertemenge das Urbildelement zu. (Bei bijektiven Funktionen hat das Urbild jedes Elements genau ein Element.)
Eine Funktion ist idempotent, wenn f H f HxLL = f HxL " x œ D.
Skript Abbildungen WS 2006 / 2007 16
Eine Funktion ist eine Involution, wenn f H f HxLL = x " x œ D.
Eine Funktion ist kommutativ, wenn f Hx, yL = f Hy, xL " x und y œ D.
Eine Funktion ist periodisch, wenn f Hx + pL = f HxL für ein p œ � und " x œ D.
Eine Funktion ist symmetrisch (gerade), wenn f HxL = f H-xL für " x œ D.
Eine Funktion ist asymmetrisch (ungerade), wenn f HxL = - f H-xL für alle x œ D.
Eine Funktion ist stetig, wenn kleine Änderungen von x innerhalb von D kleine Änderungen von f HxL zur Folge haben. Der Graph einer stetigen Funktion ist eine zusammenhängende Kurve (die sozusagen mit dem Bleistift nachgezogen werden kann, ohne ihn abzusetzen).
Eine Funktion ist monoton wachsend, wenn f Hx1L f Hx2L für x1 < x2. Eine Funktion ist streng monoton wachsend, wenn f Hx1L < f Hx2L für x1 < x2. Analog werden monoton fallend und streng monoton fallend definiert.
Eine Funktion ist nach oben beschränkt, wenn f HxL c " x œ D. Analog wird nach unten beschränkt definiert.
Eine Funktion ist an der Stelle x positiv, wenn f HxL > 0. Analog wird negativ definiert.
Eine Funktion heisst konvex, wenn alle Funktionswerte zwischen zwei Werten x, y unterhalb der Verbindungsgeraden der beiden Funktionswerte f HxL, f HyL sind: f Ht x + H1 - tL yL t f HxL + H1 - tL f HyL.Gilt das Grössergleich Zeichen ¥ Hstatt L nennt man die Funktion konkav.
Eine Funktion ist differenzierbar an der Stelle x, wenn es eine reelle Zahl c mit folgender Eigenschaft gibt: für jede Folge 8x1, x2, ...<, die gegen x konvergiert, gilt: limnض
f HxiL- f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅxi-x
= c .
c heisst Ableitung der Funktion f an der Stelle x. Rechtsseitige bzw. linksseitige Differenzierbarkeit liegt dann vor, wenn dieser Grenzübergang nur für Folgen 8x1, x2, ...< existiert, die von rechts bzw. links gegen x konvergieren.
Eine Funktion ist stetig differenzierbar, wenn ihre Ableitung stetig ist.
Eine Funktion auf den reellen Zahlen heisst glatt, wenn sie unendlich oft differenzierbar ist und wird mit C¶HD, �L bezeichnet.
Eine Funktion ist analytisch, wenn sie lokal durch eine konvergente Potenzreihe darstellbar ist. Eine solche Funktion ist ¶ oft differenzierbar und die lokale Potenzreihendarstellung ist die Taylorreihe.
DefinitionsbereichDer Definitionsbereich einer Funktion kann nach unterschiedlichen Kriterien eingeteilt werden. Zum Beispiel:
† diskret (endlich) õ stetig (abzählbar ¶, überabzählbar ¶)
Skript Abbildungen WS 2006 / 2007 17
† zusammenhängend õ zusammengesetzt
† eindimensional õ mehrdimensional
Beispiele für Wertebereiche
† Diskret und endlich: 81, 2, 3<, 8Januar, ..., Dezember<† Diskret und abzählbar unendlich: �+ bzw. {1, 2, ...};
† Stetig: �;
† Stetig: reelles Intervall [2,4];
† Zusammenhängend: �, Intervall [0,1]
† Nicht zusammenhängend: � \ {0}
† 1 dimensional: �, �, Intervall [0,1]
† 2 dimensional: { {x1, x2} » x1, x2 œ � };
† 5 dimensional: { {x1, x2, x3, x4, x5} » alle xi œ � };
Beispiele für Funktionen auf unterschiedlichen Wertebereichen
† Die Quadratfunktion operiert auf �;
† Die ¶-lichen Zahlenfolgen operieren (meistens) auf � oder �+;
WertebereichDer Wertebereich kann gemäss den gleichen Kriterien eingeteilt werden wie der Definitionsbereich (s.o).
Teilmengen von Funktionstypen
Einleitung
In diesem Abschnitt werden die Funktionen gemäss ihrer Formel (Gleichung) in der in der Einleitung gegebenenReihenfolge diskutiert. Jede Funktion, die die Kriterien eines Funktionstyps erfüllt, gehört auch zu den nachfolgendenFunktionstypen.
So ist beispielsweise eine gebrochen rationale Funktion auch eine algebraische Funktion.
Ganzrationale Funktionen (Polynomfunktionen)
Eine Polynomfunktion (ganzrationale Funktion) der Ordnung n ist eine Funktion der Form:f HxL = an x
n + an-1 xn-1 + ... + a0 Hn œ �, an ∫ 0L
Sie lässt sich aus einer Variablen x und einem endlichen Satz reeller Zahlen durch Addition, Subtraktion und Muliplikation aufbauen.
Häufig gebrauchte Beispiele sind die Polynomfunktionen mit kleinem n:
† konstante Funktion: f HxL = a0
† lineare (affine) Funktion: f HxL = a1 x + a0
† quadratische Funktion (Parabel): f HxL = a2 x2 + a1 x + a0
Skript Abbildungen WS 2006 / 2007 18
Gebrochen Rationale Funktionen (Rationale Funktionen)
Eine rationale oder gebrochen rationale Funktion ist ein Quotient zweier Polynomfunktionen:
f HxL = an xn+an-1 x
n-1+...+a0ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅbm xm+bm-1 xm-1+...+b0
Hn, m œ � LSie lässt sich aus einer Variablen und einem endlichen Satz reeller Zahlen durch die Grundrechenarten Addition, Subtraktion, Muliplikation und Division aufbauen.
Häufig gebrauchte Spezialfälle
† gebrochen linear: f HxL = a1 x+a0ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅb1 x+b0
Algebraische Funktionen
Eine reelle Funktion heisst algebraisch, wenn sie sich aus einer Variablen und einem endlichen Satz reeller Zahlen durch die Grundrechenarten (Addition, Subtraktion, Multiplikation, Division) und das Bilden von Potenzen aufbauen lässt.
Häufig gebrauchte Spezialfälle.
† Quadratwurzel: f HxL = è!!!!x
† Potenzfunktion: f HxL = xr mit r e�.
Analytische Funktionen
Eine Funktion heisst analytisch, fall sie um jeden Punkt ihres Definitionsbereichs in eine Potenzreihe entwickelt werden kann.
Wichtige Beispiele (diese Beispiele sind analytisch, aber nicht algebraisch).
† Exponentialfunktion: ‰x � ‚k=0
¶xk
ÅÅÅÅÅÅk!
mit D = �
† Sinusfunktion: sin x � ‚k=0
¶ H-1Lk x2 k+1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH2 k+1L! mit D = �
Differenzierbare Funktionen
Eine Funktion heisst differenzierbar an der Stelle x, wenn es eine reelle Zahl c mit folgender Eigenschaft gibt: für jede Folge 8x1, x2, ...<, die gegen x konvergiert, gilt: limnض
f HxiL- f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅxi-x
= c.
Stetige Funktionen
Eine Funktion heisst stetig, wenn kleine Änderungen von x innerhalb des Definitionsbereichs kleine Änderungen von f (x) zur Folge haben. Der Graph einer stetigen Funktion ist eine zusammenhängende Kurve (die sozusagen mit dem Bleistift nachgezogen werden kann, ohne ihn abzusetzen).
Beispiel: Sägezahn
Diese Funktion ist stetig, jedoch nicht differenzierbar. An den Minima und Maxima sind die links- und die rechtsseit-ige Ableitung nicht gleich.
Plot@ If@Hy = Mod@x, 2DL < 1, y, 2 − yD, 8x, 0, 10<D;
Skript Abbildungen WS 2006 / 2007 19
2 4 6 8 10
0.2
0.4
0.6
0.8
1
Riemann integrierbare Funktionen
Eine Funktion heisst Riemann integrierbar, falls ... (Definition würde zu viel voraussetzen).
Beispiel: UnitStep
Diese Funktion ist Riemann integrierbar, jedoch nicht stetig (in x = 0).
Plot@ UnitStep@xD , 8x, −2, 2<, PlotStyle → RedD;
-2 -1 1 2
0.2
0.4
0.6
0.8
1
Lebesgue integrierbare Funktionen
Eine Funktion heisst Lebesgue integrierbar, falls ... ... (Definition würde zu viel voraussetzen).
Komplementäre FunktionstypenIm vorherigen Abschnitt wurden die verschiedenen Funktionstypen so definiert, dass jeder weitere Funktionstyp dievorherigen mit einschliesst.
Die in diesem Abschnitt diskutierten Funktionstypen haben nicht diese Eigenschaft: sie sind das Komplement zu einemanderen Funktionstyp.
Irrationale Funktionen
Irrationale Funktionen sind Funktionen, die weder ganz rational noch gebrochen rational sind.
Beispiele
† Wurzel, Potenzfunktionen
† Exponentialfunktion, Logarithmusfunktion
† Trigonometrische Funktionen
† Hyperbelfunktionen
Transzendente Funktionen
Eine reelle Funktion f heisst transzendent, wenn sie nicht algebraisch ist.
Skript Abbildungen WS 2006 / 2007 20

Einfache Beispiele
† Exponentialfunktion: f HxL = ex
† Logarithmusfunktion: f x = log x
† trigonometrische Funktionen : f HxL = sinHxL .
Skript Abbildungen WS 2006 / 2007 21
5. Gleichungen und Ungleichungen
Einleitung
In der Mathematik ist eine Gleichung eine symbolische Formel, in der die Gleichheit zweier Werte oder Terme behauptet wird: T1 = T2. Wesentlicher formaler Bestandteil jeder Gleichung ist das Gleichheitszeichen.
Gleichungen werden in der Mathematik in vielen unterschiedlichen Zusammenhängen verwendet; dementsprechendgibt es viele verschiedene Möglichkeiten, die Gleichungen nach unterschiedlichen Gesichtspunkten einzuteilen.
Wir wollen diesen Aspekt hier jedoch nicht vertiefen, sondern auf die Literatur verweisen.
Das Lösen von Gleichungen spielt bei vielen Aufgaben und Anwendungen eine sehr wichtige Rolle und Sie alle habendas Lösen von Gleichungen im Rahmen der bisherigen Schulkarriere und des Mathematikunterrichts schon mehr oderweniger ausführlich behandelt.
Zum Beispiel können folgende Fragestellungen in die Lösung einer Gleichung transformiert werden:
† An welcher Stelle hat die Funktion einen bestimmten Funktionswert?
Dies führt auf die Gleichung: f HxL = c
† An welcher Stelle hat die Funktion einen Maximalwert?
Dies führt auf die Gleichung: f ' HxL = 0
† An welcher Stelle hat eine gebrochen rationale Funktion einen Pol?
Dies führt auf die Gleichung (für den Nenner): an xn + an-1 x
n-1 + ... + a0 = 0
† Wie lautet die in impliziter Form gegebene Funktion in expliziter Darstellung?
Dies führt auf die Auflösung der Gleichung nach y: FHx, yL = 0
Bei diesen Aufgaben geht es darum, einen x-Wert zu finden derart, dass er in die Gleichung eingesetzt die Gleichungerfüllt. Dies ist im Gegensatz zur Lösung von Differentialgleichungen, wo es darum geht Funktionen (nicht x-Werte)zu finden, die die Differentialgleichung erfüllen.
Bei der Lösung von Gleichungen werden die linke und die rechte Seite so lange äquivalent umgeformt, bis das Sym-bol, nach dem aufgelöst werden soll, nur noch und allein auf der linken Seite aufscheint. Die dazu notwendigenTransformationen sind jedoch nicht eindeutig, da viele Funktionen wie z.B.
è!!! oder sinH L-1 keine, mehrere oder ¶
viele Lösungen (in �) haben können.
Wir haben somit ein ganzes Spektrum von möglichen Lösungsmengen: eine Gleichung kann im angegebenen Defini-tionsbereich (hier �)
keine Lösung: sinHxL = 2, x2 = -1
eine Lösung: x = 3
mehrere Lösungen: x2 = 1
¶ viele Lösungen: sin x = 0
haben.
Es geht also vielfach darum, die richtige bzw. die richtigen Lösungen auszuwählen. Dies kann auch nicht trivial sein.
Wenn wir eine explizite Funktionsdefinition haben, d.h. y = f HxL, dann können wir für jeden x Wert den entsprech-enden y Wert leicht bestimmen. Dies ist jedoch nicht immer der Fall.
Skript Abbildungen WS 2006 / 2007 22
Funktionale Beziehungen können auch in der impliziten Form FHx, yL = 0 gegeben sein. Um eine explizite Darstellungzur Analyse der funktionalen Beziehung zwischen x und y zu bekommen, müssen wir zunächst die Gleichung nach yauflösen.
Ausserdem kann die Abhängigkeit von x und y auch in der sogenannten Parameterform gegeben sein: d.h. via Parame-ter t werden die zusammengehörenden x und y spezifiziert: 8xHtL, yHtL<. Um hier eine explizite Darstellung zu erhalten,müssen wir den Parameter t eliminieren.
Der Abschnitt "Explizite, Implizite und Parameter Form" vertieft diese verschiedenen Darstellungsmöglichkeiten mitHilfe eines Beispiels.
Manchmal ist auch eine Ungleichung statt einer Gleichung gegeben. Ganz kurz wird darauf im Abschnitt "Ungleichun-gen" eingegangen.
Der Abschnitt "Funktionen zur Lösung von Gleichungen" erwähnt zum Abschluss einige Methoden zur Lösung vonGleichungen mit Excel und Mathematica.
Explizite, Implizite und Parameter Form
Einleitung
Eine Funktion kann auf verschiedene Arten (explizit, implizit, Parameterform) definiert werden.
Bei einer Funktionsdefinition in der expliziten Form wird y = f HxL durch die Auswertung des Terms f HxL berechnet.
Bei einer Funktionsdefinition in der impliziten Form wird die Zuordnung von x und y in Form einer Gleichung FHx, yL = 0 definiert.
Die explizite Form kann (eventuell) durch Auflösen nach y gefunden werden. Dies kann jedoch mit Problemenbehaftet sein. Es kann auch mehrere Lösungen geben.
Eine Funktionsdefinition in der Parameterform wird die Zuordnung von x und y durch die Form {xHtL, yHtL} definiert.
Die explizite Form kann eventuell durch Elimination des Parameters (t) gefunden werden. Auch diese Auflösung istnicht immer möglich.
Im folgenden Abschnitt behandeln wir diese möglichen Darstellungsarten am Beispiel des Einheitskreises um denNullpunkt.
Kreisgleichung
Wenn die Kreisgleichung in Parameterform gegeben ist
88sinHtL, cosHtL< » t œ @0, 2 PiD<dann können wir diese Kurve in einer Graphik einfach darstellen.
Wir können diese Beziehung zwischen x und y auch einfach in eine implizite Darstellung umformen, indem wirxHtL2 + yHtL2 = sinHtL2 + cosHtL2 = 1 verwenden und feststellen, dass dies für alle t gilt. Somit gilt allgemein:
x2 + y2 = 1
Skript Abbildungen WS 2006 / 2007 23
Diese Gleichung können wir weiters nach y auflösen. Wir erhalten die beiden Lösungen
y = ≤è!!!!!!!!!!!!!!
1 - x2
was nur für †x§ < 1 in � definiert ist.
Es gibt keine eindeutige Funktion, die den Kreis beschreibt. Der ganze Kreis kann jedoch aus den beiden Funktionenè!!!!!!!!!!!!!!1 - x2 und -
è!!!!!!!!!!!!!!1 - x2 zusammengesetzt werden.
Auf alle drei Arten kann deshalb die gleiche Kurve im �2 beschrieben werden.
Gruppe Mathematica
Mathematica kennt für die verschiedenen Darstellungsformen von Kurven angepasste Plotfunktionen. An Hand derBahnkurve für den Kreis sollen diese kurz vorgestellt werden.
Darstellung für eine in Parameterform gegebene Funktion
Für eine in Parameterform gegebene Bahnkurve kann ParametricPlot verwendet werden.
ParametricPlot@8cosHtL, sinHtL<, 8t, 0, 2 p<, AspectRatio Ø Automatic, ImageSize Ø 150D;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
Darstellung für implizit gegebene Funktion
Für eine in impliziter Form gegebene Bahnkurve kann ImplicitPlot verwendet werden.
ImplicitPlotHx2 + y2 � 1, 8x, -2, 2<, ImageSize Ø 150L;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
Darstellung für eine in expliziter Form gegebene Funktion
Der Einheitskreis in der Ebene kann nicht durch eine explizite Funktion beschrieben werden, da einem x-Wert zwei
y-Werte zugewiesen werden müssen. Aus den zwei in expliziter Darstellung gegebenen Funktionen f1HxL = è!!!!!!!!!!!!!!1 - x2
bzw. f2HxL = -è!!!!!!!!!!!!!!
1 - x2 , die wir erhalten, wenn wir die Kreisgleichung nach y auflösen, ...
Skript Abbildungen WS 2006 / 2007 24

Solve@x2 + y2 � 1, yD99y Ø -
è!!!!!!!!!!!!!!1 - x2 =, 9y Ø
è!!!!!!!!!!!!!!1 - x2 ==
... können wir jedoch die Kurve konstruieren.
Die eine Lösung beschreibt den unteren Teil der Bahnkurve, die andere den oberen. Aus diesen zwei Teilbahnkurvenkönnen wir die Bahnkurve mit Hilfe der Funktion Plot konstruieren.
PlotA9-è!!!!!!!!!!!!!!1 - x2 ,
è!!!!!!!!!!!!!!1 - x2 =, 8x, -1, 1<, AspectRatio Ø Automatic, ImageSize Ø 150E;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
UngleichungenWir wir gesehen haben, kann es bei der Lösung von Gleichungen keine, eine, mehrere oder ¶ viele Lösungen geben.Zum Beispiel hat die Gleichung x2 = 9 die Lösungsmenge 8-3, 3<.Intervalle
Im Gegensatz zu Gleichungen, die das Gleichheitszeichen = enthalten, enthalten Ungleichungen eines der Ungleich-heitszeichen ( < , , > , ¥).
Dies führt dazu, dass es bei der Lösung von Ungleichungen in der Regel keine Lösung oder (ein oder mehrere) Inter-valle als Lösung (und damit ¶ viele Lösungen) gibt. Zum Beispiel hat die Gleichung x2 < 9 die Lösungsmenge8x » -3 < x < 3<.Multiplikation mit negativer Zahl
Es gibt einen weiteren Unterschied bei der Behandlung von Gleichungen und Ungleichungen. Wenn bei der Umwand-lung einer Ungleichung beide Seiten der Gleichung mit einer negativen Zahl multipliziert oder durch eine negativeZahl dividiert werden, dann muss das Ungleichheitszeichen durch das entgegengesetzte Ungleichheitszeichen ersetztwerden: d.h. < Ø >, Ø ¥, etc.
Funktionen zur Lösung von GleichungenEs ist immer eine gute Idee, vor der Lösung einer Gleichung die Funktion graphisch darzustellen. Auf diese Weisesieht man sehr schnell, wo sich die interessanten Bereiche befinden, wie sich die Funktion verhält, ob mehrere Lösun-gen vorhanden sind etc.
Auf diese Weise kann man dann gezielt die gewünschte Funktion (Solve, Reduce ...) einsetzen und optimale Startwerte(bei numerischen Methoden) auswählen.
Skript Abbildungen WS 2006 / 2007 25
Gruppe Excel
Wir werden die Möglichkeiten der graphischen Darstellung und der Lösung von Gleichungen im Rahmen der Vorle-sung kurz behandeln.
Excel kann mit Hilfe der Funktion Solve gewisse Gleichungen und Optimierungsaufgaben numerisch lösen.
Excel stellt jedoch im Gegensatz zu Mathematica keine Funktionen zur Verfügung, die Gleichungen symbolisch lösenkönnen.
Gruppe Mathematica
Mathematica stellt verschiedene Methoden zur Lösung von Gleichungen zur Verfügung:
† symbolisch: Solve, Reduce
† numerisch: NSolve, FindRoot
† und weitere wie FindInstance, Eliminate, Resolve, SolveAlways
Die in diesen Funktionen implementierten Algorithmen sind sehr ausgereift. Die folgende Zusammenstellung dient nureiner exemplarischen Übersicht und verwendet einfachste Beispiele, die auch von Hand gelöst werden könnten.
Solve
Solve kann vor allem zur Lösung von linearen Gleichungen und Polynomgleichungen eingesetzt werden.
Die Lösungen werden in der Form von Rules zurückgegeben ...
sol = Solve@x2 � 0.3, xD88x → −0.5477225575051661<, 8x → 0.5477225575051661<<
... die mit Hilfe des ReplaceAll (/.) Operators extrahiert werden können.
x ê. sol
8−0.5477225575051661 ,̀ 0.5477225575051661`<
Es gibt nicht nur reelle Lösungen (hier auch komplexe):
ColumnForm@Solve@x3 � 0.3, xDD8x → −0.3347164750410848`− 0.5797459409015188` �<8x → −0.3347164750410846`+ 0.579745940901519` �<8x → 0.6694329500821695`<
Solve gibt (neben Meldungen mit Hinweisen auf eventuelle Nichteindeutigkeiten) nur eine der ¶ vielen Lösungen, die das folgende Beispiel hat.
Solve@sinHxL � 0.3, xDSolve::ifun :
Inverse functions are being used by Solve, so some solutions may not
be found; use Reduce for complete solution information. More…
88x → 0.3046926540153975`<<
Skript Abbildungen WS 2006 / 2007 26
Reduce
Falls mehrere Lösungen vorhanden sind kann Reduce verwendet werden. Die Lösungen werden in der Form von logischen Verknüpfungen und Gleichungen zurückgegeben:
Reduce@sinHxL � 0.3, xDReduce::ratnz :
Reduce was unable to solve the system with inexact coefficients. The
answer was obtained by solving a corresponding exact
system and numericizing the result. More…
C@1D ∈ Integers && Hx 2.8368999995743955`+ 6.283185307179586` C@1D »»x 0.3046926540153975`+ 6.283185307179586` C@1DL
FindRoot
FindRoot ist ein numerisches Verfahren. Deshalb muss ein Startwert zum Finden einer Lösung eingegeben werden.
Die Lösung der Gleichung hat ¶ viele Lösungen. Das numerische Verfahren findet (in der Regel) die am nächstenbeim Startwert liegende Lösung.
FindRoot@sinHxL � 0.3, 8x, 0<D8x → 0.3046926540153975`<
Bei Eingabe eines anderen Startwerts wird auch eine andere Lösung gefunden.
FindRoot@sinHxL � 0.3, 8x, 2 p<D8x → 6.587877961194984`<
Skript Abbildungen WS 2006 / 2007 27
6. Folgen, Reihen
EinleitungIn diesem Kapitel werden wir uns im Sinne einer Zusammenfassung mit endlichen und unendlichen Zahlenfolgen8a1, a2, ...< beschäftigen. Zahlenfolgen unterscheiden sich in zwei wichtigen Punkten von einer Menge:
† bei einer Menge spielt die Reihenfolge der Elemente keine Rolle, bei einer Folge schon;
† bei einer Menge kommt ein Element nur einmal vor, bei einer Folge kann jedes Glied auch mehrmals vorkommen;
Zahlenfolgen können auch verstanden werden als Abbildungen, wo der Definitinsbereich nur diskrete Werte i anneh-men kann (z.B. i œ �), und deren Glieder ai funktional, rekursiv oder anderweitig definiert werden.
Zahlenfolgen, Grenzwertbetrachtungen und das Prinzip der näherungsweisen aber beliebig genauen Erfassung undDarstellung gewisser Grössen und Zahlen spielen in der Mathematik eine zentrale Rolle. Sie werden verwendet ...
† ... bei Iterations- und Näherungsverfahren: allgemein bei der Beschreibung sich schrittweise ändernder Grössen
und Abläufen;
† ... bei der exakten Erfassung und Definition mathematischer Begriffe: beispielsweise bei der Definition der
Ableitung, bei der Definition des Riemann'schen Integralbegriffs, bei der Berechnung von irrationalen Zahlen, bei
der Berechnung der Koeffizienten einer Taylor Reihe, bei der Definition der Stetigkeit etc.
Die Zahlenfolgen haben jedoch ausserdem wichtige Anwendungen:
† Bei der Zins- und Zinseszinsberechnung; die dazugehörigen Zeitreihen können als Partialsummen einer geome-
trischen oder arithmetischen Folge geschrieben werden;
† Im Prinzip kann jede Zeitreihe als Zahlenfolge angesehen werden.
† Mit Tabellenkalkulationsprogrammen können die Glieder von Zahlenfolgen einfach berechnet (funktional oder
rekursiv), analysiert und graphisch dargestellt werden.
Bei der Behandlung von unendlichen Zahlenfolgen stellt sich häufig die Frage, ob die Folge gegen einen endlichenWert konvergiert, gegen ¶ divergiert oder mehrere Häufungspunkte hat. Wir werden diese Begriffe in diesem Kapiteldefinieren und diskutieren.
Etwas intensiver werden wir uns auch mit den geometrischen Folgen und Reihen beschäftigen, da sie wichtigeAnwendungen in der Finanzmathematik bei der Berechnung von Kapitalentwicklungen bei Zinseszins sowie bei derBerechnung von Barwerten etc. haben.
Zusammenfassung
Eine in ihrer Anordnung festgelegte Auflistung von endlich vielen 8a1, a2, ... an< oder ¶ vielen 8a1, a2, ...< Zahlen heißt in der Mathematik Zahlenfolge oder kurz Folge. Die einzelnen Zahlen (z.B. a1), aus denen die Folge zusammengesetzt ist, heissen Glieder der Folge. Der Index i eines Glieds der Folge ai heisst Zählindex oder einfach Index des Folgengliedes: er zeigt an, das wievielte Glied der Folge gemeint ist.
Es gibt mehrere Möglichkeiten, die Glieder einer Folge zu spezifizieren: nämlich durch Angabe aller Glieder derFolge, durch Angabe einer Funktionsvorschrift für das allgemeine Glied der Folge, durch Angabe einer Rekursionsvor-schrift, durch Angabe eines Algorithmus zur Berechnung des allgemeinen Glieds der Folge oder als Partialsummeneiner zweiten Folge.
Skript Abbildungen WS 2006 / 2007 28
Unendliche Folgen können gegen einen Grenzwert konvergieren. Die Theorie der Grenzwerte unendlicher Folgen isteine wichtige Grundlage der Analysis, denn auf ihr beruhen die Berechnung von Grenzwerten von Funktionen, dieDefinition der Ableitung (Differentialquotient als Grenzwert einer Folge von Differenzenquotienten) und die Defini-tion des Riemannschen Integralbegriffs.
Wichtige Folgen erhält man auch als Koeffizienten von Taylorreihen stetiger Funktionen.
Im Prinzip können alle Zeitreihen, wie sie zum Beispiel durch die Aufzeichnung von Temperaturbeobachtungen oderWirtschaftsdaten entstehen, mathematisch als Folgen aufgefasst werden.
Definition von Folgen und Reihen
Eine in ihrer Anordnung festgelegte Auflistung von endlich vielen 8a1, a2, ... an< oder ¶ vielen 8a1, a2, ...< Zahlen heißt in der Mathematik Zahlenfolge oder kurz Folge. Die einzelnen Zahlen (z.B. a1), aus denen die Folge zusammengesetzt ist, heissen Glieder der Folge. Der Index i eines Glieds der Folge ai heisst Zählindex oder einfach Index des Folgengliedes: er zeigt an, das wievielte Glied der Folge gemeint ist.
Bemerkung: Oft hat das erste Glied der Folge auch den Index 0 statt 1 (d.h. a0 statt a1).
Wir können eine unendliche oder endliche Folge formal auch als Abbildung a aus dem Definitionsbereich D in denWertebereich W definieren:
a : D Ø W
i Ø ai
Wir werden im Folgenden insbesondere Abbildungen aus der Menge der natürlichen Zahlen �+ 81, 2, 3, ...< in dieMenge der reellen Zahlen betrachten.
Wichtige Folgen sind die arithmetische und die geometrische Folge.
Eine arithmetische Folge ist eine Folge mit konstanter Differenz d zwischen aufeinanderfolgenden Gliedern: d.h. 8a1, a1 + d, a1 + 2 d, ...< bzw. ai+1 = ai + d. Das einzelne Glied der Folge kann direkt berechnet werden: ai = a1 + Hi - 1L d.
Eine geometrische Folge ist eine Folge mit konstantem Quotient q zwischen aufeinanderfolgenden Gliedern: d.h. 8a1, q a1, q2 a1, ...< bzw. ai+1 = q ai . Das einzelne Glied der Folge kann direkt berechnet werden: ai = a1 q
Hi-1L .
Aus jeder Folge 8a1, a2, ...< lässt sich eine Reihe 8s1, s2, ...< konstruieren.
Eine Reihe 8s1, s2, ...< ist eine spezielle Folge, deren einzelne Glieder si sich aus der Summe der ersten i Glieder ⁄ j=1i a j (d.h.
Partialsummen) einer anderen Folge 8a1, a2, ...< ergeben.
Bildungsgesetze für eine FolgeEs gibt mehrere Möglichkeiten, eine Folge zu definieren, nämlich ...
† ... durch Angabe aller Glieder der Folge;
† ... durch Angabe einer Funktionsvorschrift für das allgemeine Glied der Folge;
† ... durch Angabe einer Rekursionsvorschrift;
† ... als Partialsummen einer zweiten Folge;
† ... durch Angabe eines Algorithmus zur Berechnung des allgemeinen Glieds der Folge;
Skript Abbildungen WS 2006 / 2007 29
Wir werden im Folgenden diese Möglichkeiten etwas genauer anschauen und Beispiele angeben.
Durch die obigen Bildungsgesetze lassen sich die Glieder einer Folge eindeutig berechnen. Manchmal sieht man sichmit der Aufgabe konfrontiert, aus einer Folge von endlich vielen Gliedern der Folge das Bildungsgesetz zu finden. Esgilt jedoch zu beachten, dass das Bildungsgesetz einer unendlichen Folge aus nur endlich vielen Gliedern niemalseindeutig bestimmt werden kann.
Angabe aller Glieder der Folge
Die explizite Angabe aller Glieder einer Folge ist nur bei endlichen Folgen möglich.
Beispiel
82, 7, 9, 10<
Funktionsvorschrift für das allgemeine Glied der Folge
In diesen Fällen kann man eine Vorschrift angeben, die zu jedem i das entsprechende ai direkt berechnet:
Beispiele (wobei i œ �+):
† Die Folge der ungeraden Zahlen ¥ 1 wird durch die Vorschrift ai = 2 i - 1 gegeben.
† Die Folge der Quadratzahlen > 0 wird durch die Vorschrift ai = i2 gegeben.
† Die arithmetische Folge wird durch die Vorschrift ai = a1 + Hi - 1L d gegeben.
† Die geometrische Folge wird durch die Vorschrift ai = a1 qHi-1L gegeben.
Der Quotient q wird auch als Wachstumsrate bezeichnet und wir sprechen auch von geometrichem oder exponen-
tiellem Wachstum.
Die Zahl è!!!!!!!
a b wird auch als geometrisches Mittel bezeichnet, da 9a,è!!!!!!!
a b , b= eine geometrische Folge ist (mit
dem Quotienten q =è!!!!!
bÅÅÅÅÅÅÅÅÅÅè!!!!!a
).
Wenn eine funktionale Vorschrift für die Berechnung des Glieds einer Folge gegeben ist, kann das i - te Glied direktberechnet werden und es müssen nicht alle vorangehenden Glieder (wie bei der rekursiven Definition) zuerst ausgerech-net werden.
Rekursion
In diesem Fall sind k Startwerte 8a1, ... ak< gegeben, sowie eine Vorschrift, die aus k aufeinanderfolgenden Gliedern das nächste Glied der Folge berechnet.
Beispiele (wobei i œ �+):
† Die arithmetische Folge wird durch den Startwert 8a1< sowie die Vorschrift ai+1 = ai + d gegeben.
† Die geometrische Folge wird durch den Startwert 8a1< sowie die Rekursionsvorschrift ai+1 = q ai gegeben.
† Die Folge der Fakultätsfunktion n! wird durch den Startwert a0 = 81< sowie die Rekursionsvorschrift
ai = i ai-1 " i ¥ 1 gegeben. Dies ergibt die Folge 81, 1, 2, 6, 24, 120, ...<. Diese Funktion (Folge) spielt u.a. in der
Kombinatorik eine sehr wichtige Rolle.
Skript Abbildungen WS 2006 / 2007 30
† Die Fibonacci Folge wird durch die beiden Startwerte 80, 1< sowie die Rekursionsvorschrift ai+1 = ai-1 + ai
gegeben. Dies führt auf die Folge 80, 1, 1, 2, 3, 5, 8, ...<.Bei einer rekursiv spezifizierten Zahlenfolge müssen zur Berechnung des i - ten Glieds zunächst alle vorangehendenGlieder 8a1, a2, ... ai-1< berechnet werden. Dies kann bei grossen i zeitaufwendig sein.
Eine rekursive Vorschrift kann auch einfach in einem Tabellenkalkulationsprogramm implementiert werden.
Reihe bzw. Partialsumme einer Folge
Aus einer gegebenen Folge 8a1, a2, ...< kann eine zweite Folge 8s1, s2, ...<, die als Reihe bezeichnet wird, abgeleitet werden, indem man die Glieder si der zweiten Folge als Partialsumme der ersten Folge auffasst si = ⁄ j=1
i a j.
Manchmal wird der Ausdruck Reihe nicht für die Folge der Partialsumme, sondern nur für die Summe aller Gliederder Folge 8a1, a2, ...< : d.h. für ⁄ j=1
n a j bei endlichen Folgen bzw. ⁄ j=1¶ a j bei unendlichen Folgen, verwendet.
Bei unendlichen Folgen gilt: Wenn der Grenzwert der Reihe (d.h. die Folge der Partialsummen) limiض si = s existiert,sagt man, dass die Reihe konvergiert; den Grenzwert s nennt man die Summe oder den Wert der Reihe.
Arithmetische Reihe
Die arithmetische Reihe hat die Glieder 8a1, a1 + a1 + d, a1 + a1 + d + a1 + 2 d, ...<.Die explizite Funktionvorschrift für die einzelnen Glieder der arithmetischen Reihe lautet:
sn = nÅÅÅÅ2 Ha1 + anL = nÅÅÅÅ2 Ha1 + a1 + Hn - 1L dL = n a1 +n Hn-1LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 d
Die arithmetische Reihe divergiert für d ∫ 0.
Geometrische Reihe
Die geometrische Reihe hat die Glieder 8a1, a1 + q a1, a1 + q a1 + q2 a1, ...<.Die explizite Funktionvorschrift für die einzelnen Glieder der geometrischen Reihe lautet für q ∫ 1:
sn = a1H1 + q + ... + qn-1L = a1 1-qn
ÅÅÅÅÅÅÅÅÅÅÅÅ1-q.
Eine Folgerung der Summenformel für die Glieder der geometrischen Reihe ist der folgende Satz.
Konvergenzsatz für unendliche geometrische Reihen: Die geometrische Reihe 8s1, s2, ...< konvergiert für †q§ < 1 gegen s = a1
1ÅÅÅÅÅÅÅÅÅÅÅ1-q
. Sie ist divergent für †q§ > 1.
Algorithmus
Für manche Folgen gibt es einen klar definierten Algorithmus (Konstruktionsvorschrift), jedoch keine Funktionsvorschrift.
Das bekannteste Beispiel ist die Folge der Primzahlen 82, 3, 5, 7, 11, ... <.Bereits den alten Griechen war bekannt, wie man weitere Glieder dieser Folge berechnet. Eine Möglichkeit ist, dasSieb des Eratosthenes anzuwenden. Es gibt jedoch keine Methode, zu einem gegebenen i die i - te Primzahl anzuge-ben, ohne zuvor die gesamte Folge von der ersten bis zur Hi - 1L-ten Primzahl zu berechnen (oder nachzuschlagen).
Skript Abbildungen WS 2006 / 2007 31
Eigenschaften einer Folge
Einleitung
Bei der Analyse von Folgen und Reihen muss man - insbesondere wenn sie ¶ viele Glieder enthalten - aufpassen.Ansonsten könnte man leicht Fehler machen. Dies sei am Beispiel der folgenden alternierenden Reihe illustriert.Gegen welchen Wert konvergiert sie?
1 - 1 + 1 - 1 + 1 ...
Je nachdem, wie die einzelnen Terme dieser Reihe zusammengefasst werden ...
1 - 1 + 1 - 1 + 1 ... = H1 - 1L + H1 - 1L + ... = 0 + 0 + ... = 0
1 - 1 + 1 - 1 + 1 ... = 1 - H1 - 1L - H1 - 1L - ... = 1 - 0 - 0 + ... = 1
... oder wenn die Reihenfolge der Summanden (hier von jeweils 2 Summanden ab dem zweiten Term) vertauscht wird
...
1 - 1 + 1 - 1 + 1 ... = 1 + 1 - 1 + 1 - 1 ... =
2 + H-1 + 1L + H-1 + 1L ... = 2 + 0 + 0. .. = 2
... kann man "zeigen", dass die Reihe gegen 0, 1, 2 oder beliebiges x konvergiert.
Aus diesem Grund ist es sehr wichtig, die Grenzwertbestimmung und Konvergenzkriterien klar festzulegen. Dazuwerden im Folgenden zunächst verschiedene wichtige Begriffe eingeführt.
Monotone Folgen
Eine Folge heisst monoton fallend, falls: ai+1 ai " i œ �.
In analoger Weise werden streng monoton fallend H < L, monoton steigend oder wachsend H > L und streng monotonsteigend H ¥ L definiert.
Beschränkte Folgen
Eine Folge heisst nach oben beschränkt, falls sie eine obere Schranke S besitzt mit: ai < S " i.Die kleinste obere Schranke einer Folge heisst Supremum.
In analoger Weise werden nach unten beschränkt, untere Schranke und Infimum definiert.
Konvergenz und e - Umgebung
Zur exakten Definition der Konvergenz brauchen wir den (in der Mathematik weihin üblichen) Begriff dere-Umgebung.
Skript Abbildungen WS 2006 / 2007 32
Das Intervall D a - e, a + e@ nennt man e-Umgebung von a und bezeichnet es mit UeHaL:UeHaL =D a - e, a + e@ = 8x » a - e < x < a + e<
Die Konvergenz einer Folge kann man nun verbal so ausdrücken:
Eine Folge 8a1, a2, ...< konvergiert gegen a (für n Ø ¶), d.h. limnض an = a, wenn in jeder (auch noch so kleinen) e-Umgebung von a fast alle (d.h. alle bis auf endlich viele) Glieder der Folge liegen.
Oder mathematisch ausgedrückt:
Hlimnض an = aL ñ " e > 0 $ N œ � " n > N : †an - a§ < e
Man kann auch sagen, dass die Folge den Grenzwert a besitzt, falls sie gegen a konvergiert.
Folgen, die einen Grenzwert besitzen, heissen konvergente Folgen.
Folgen, die keinen Grenzwert besitzen, heissen divergente Folgen.
Divergente Folgen müssen nicht unbedingt gegen ¶ oder -¶ streben. Auch die alternierende Folge 81, -1, 1, -1, ...<ist divergent. Sie hat zwei Häufungspunkte.
Folgen, die den Grenzwert 0 haben, heissen Nullfolgen.
Häufungspunkt
Eng verwandt mit dem Begriff Grenzwert ist der Begriff Häufungspunkt. Während für einen Grenzwert gilt, dass fürjedes e ab einem bestimmten n alle Glieder der Folge in der e-Umgebung des Grenzwerts liegen, gilt für einen Häufung-spunkt, dass für jedes e unendlich viele (aber nicht notwendigerweise alle ab einem bestimmten n) Glieder in dere-Umgebung des Häufungspunktes liegen.
Die mathematische Formulierung ist sehr ähnlich: es werden nur der Existenzquantor $ und der Allquantor "vertauscht.
Ha ist Häufungspunkt der FolgeL ñ " e > 0 " N œ � $ n > N : †an - a§ < e
Rechenregeln für Folgen
Es gelten die folgenden Regeln, falls c œ � und falls die Grenzwerte limnض an = a und limnض bn = b existieren:
† limnض c an = c a
† limnض H an + cL = a + c
† limnض H an + bnL = a + b
† limnض H an bnL = a b
† limnض I anÅÅÅÅÅÅÅbn
M = aÅÅÅÅb
, falls b ∫ 0 und bn ∫ 0 ab einem bestimmten n.
Es gilt sogar noch allgemeiner:
† limnض f HanL = f Hlimnض anL = f HaL falls f : �Ø � stetig im Punkt a
Skript Abbildungen WS 2006 / 2007 33
† limnض f Han, bnL = f Hlimnض an, limnض bnL = f Ha, bL falls f : �2 Ø � stetig im Punkt Ha, bL Mit Hilfe dieser Rechenregeln lassen sich in vielen Fällen aus bekannten Grenzwerten einfach weitere Grenzwerteberechnen. Beispielsweise.
limnض I 2 n2-1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅn2+1 M = limnض J 2- 1ÅÅÅÅÅÅÅ
n2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅ1+ 1ÅÅÅÅÅÅÅ
n2
N = limnضI2- 1ÅÅÅÅÅÅÅn2 M
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅlimnضI1+ 1ÅÅÅÅÅÅÅ
n2 M =2-limnض
1ÅÅÅÅÅÅÅn2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
1+limnضI 1ÅÅÅÅÅÅÅn2 M = 2-0ÅÅÅÅÅÅÅÅÅÅ1+0 = 2
Konvergenzkriterium
In der Praxis ist es oft schwierig, auf Grund des Bildungsgesetzes zu entscheiden, ob eine Folge konvergiert oder nicht.
Beispielsweise liefert die Rekursion ai+1 = a1 +1ÅÅÅÅÅÅÅÅÅ
i+1 mit dem Startwert a1 = 1 die Folge:
81, 1 + 1ÅÅÅÅ2 , 1 + 1ÅÅÅÅ2 + 1ÅÅÅÅ3 , ...<Die Ausrechnung liefert eine langsam anwachsende jedoch divergente Folge.
Wir müssen deshalb Kriterien finden, die uns helfen bei der Entscheidung, ob eine Folge konvergent ist oder nicht.
Ein solches Kriterium gilt für monotone Folgen und ist der folgende wichtige Satz.
Satz von der Konvergenz monotoner Folgen. Eine monoton fallende und nach unten beschränkte Folge ist konvergent. Ebenso ist eine monoton steigende und nach oben beschränkte Folge konvergent.
Aufpassen muss man in diesem Zusammenhang noch auf den verwendeten Zahlenbereich. So ist z.B. die Folge derDezimalzahlen von
è!!!!2 , d.h. 81.4, 1.41, 1.414, ...< monoton wachsend und nach oben beschränkt (z.B. 1.5). Die
Zahlenfolge konvergiert jedoch in � nicht, denn ihr reeller Grenzwert ist irrational und somit kein Element von �.
Spezielle Folgen: periodisch, alternierend, konstant
Eine unendliche Folge, die aus Wiederholungen einer endlichen Teilfolge mit k Gliedern besteht, nennt man periodische Folge. Es gilt: ai+k = ai " i œ �.
Eine Folge, deren Glieder alternierend positiv oder negativ sind, heisst alternierende Folge.
Eine Folge, deren Glieder alle gleich sind, heisst konstante Folge.
Graphische Darstellungen von Folgen
Vielfach hilft eine graphische Darstellung, um eine Übersicht über das Verhalten - insbesondere auch der Konvergenz - einer Folge zu gewinnen.
AnwendungenIn diesem Abschnitt wollen wir kurz an Hand einiger Beispiel zeigen, wie die Eigenschaften von Zahlenfolgen und-Reihen angewendet werden können.
Skript Abbildungen WS 2006 / 2007 34
Im ersten Beispiel schauen wir uns den Verzinsungsprozess etwas genauer an. Die Summenformel für geometrischeReihen kann verwendet werden, um Annuitäten zu berechnen.
Im zweiten Beispiel untersuchen wir die etwas allgemeineren Wachstumsprozesse, die zu interessantem Verhaltenführen können.
Im dritten Beispiel zeigen wir, wie eine rekursive Formel zur Berechnung von Wurzeln eingesetzt weden kann.
Verzinsung
In diesem Abschnitt wollen wir Investitionen bzw. Guthaben untersuchen, die Zinsen abwerfen.
Die Entwicklung des Werts der Investition Vt (V für value, t für time) zu bestimmten Zeitpunkten t kann als Zahlen-folge 8V0, V1, ...< betrachet werden. Beachten Sie, dass in dieser Betrachtung der Index der Folge bei 0 startet.
Interessant sind insbesondere der Wert der Investition zu Beginn (PV = V0: present value) und am Ende (FV = VT :future value) der Investition nach T Zeitperioden.
Wir werden verschiedene Fälle untersuchen:
† Investition ohne Zinseszins
† Investition mit Zinseszins
† Stetige Verzinsung
† Barwert einer zukünftigen Auszahlung
Der Zins kann auf mehrere Arten spezifiziert werden:
† Zinssatz oder Zinsfuss (p.a.) p*
† Dezimaler Zinsatz p
† Aufzinsungsfaktor q
Sie stehen zueinander in folgender Beziehung: q = 1 + p = 1 +p*
ÅÅÅÅÅÅÅÅÅÅ100
Wir interessieren uns vor allem für den Faktor f mit der sich der Wert der Investition verändert: dh. Vt = f V0.Deshalb werden wir im Folgenden in den Zahlenfolgen für die Zeitwerte den Anfangswert V0 zumeist ausklammern.
Ohne Zinseszins
Der Zins (Coupon) einer Investititon betrage pro Zeitperiode gleich p. Am Ende jeder Periode wird deshalb ein Zinsvon p V0 ausbezahlt.
Wenn der Zins nicht wieder investiert wird (was in der Regel jedoch nicht der Fall sein wird), ist der Zeitwert derInvestition gegeben durch eine arithmetische Folge mit der Differenz p V0 und den Gliedern Vt = V0 H1 + t pL: d.h.
81, H1 + pL, ... H1 + t pL, ...< V0
Für eine Zeitdauer von T Perioden resultiert folgende Beziehung: VT = V0 H1 + T pL.Dies ist eine Gleichung mit 4 Parametern. Wenn drei bekannt sind, kann der vierte berechnet werden. Dies führt aufdie folgenden 4 Gleichungen.
VT = V0 H1 + p TL V0 = VTÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ1+p T
p = VT-V0ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅT V0
T = VT-V0ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅp V0
Skript Abbildungen WS 2006 / 2007 35
Mit Zinseszins - Exponentielles Wachstum
Der Zins (Coupon) einer Investititon betrage pro Periode gleich p.
Wenn der Zins jeweils (mit gleichem Zinssatz) reinvestiert wird, dann resultiert für den Zeitwert eine geometrischeFolge mit dem Quotienten 1 + p und den Gliedern Vt = V0 H1 + pLt: d.h.
81, H1 + pL, ... H1 + pLt, ...< V0
Für eine Zeitdauer von T Perioden resultiert folgende Beziehung: VT = V0 H1 + pLT .
Dies ist eine Gleichung mit 4 Parametern. Wenn drei bekannt sind, kann der vierte berechnet werden. Dies führt aufdie folgenden 4 Gleichungen.
VT = V0 H1 + p LT V0 = VTÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH1+pLT p = I VTÅÅÅÅÅÅÅÅV0
M 1ÅÅÅÅÅT - 1 T =
LogA VTÅÅÅÅÅÅÅÅÅÅV0
EÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅLog@1+pD
Die Beziehung V0 = VTÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅHp+1LT wird auch benutzt, um den momentanen Wert (Barwert) einer Investition, die nach T
Zinsperioden einen Wert von VT hat, zu bestimmen. Es wird einfach mit dem (entsprechenden) Zinsfaktor Hp + 1Lentsprechend oft abdiskontiert.
Stetige Verzinsung
Interessant wird auch die Betrachtung, wenn die Zinsperiode kleiner als ein Jahr beträgt.
Wichtig ist, dass man die auftretenden Begriffe genau auseinanderhält (im Folgenden werden die CFA Begriffegewählt):
† rs = "stated annual interest rate" oder "quoted interest rate". Sie bezieht sich auf ein Jahr. Für eine kürzere Periode
(als ein Jahr) wird dieser jährliche Zinssatz durch die Anzahl der Perioden pro Jahr geteilt und für jede Periode in
Anwendung gebracht.
Beispielsweise hat sich bei m-maliger Verzinsung pro Jahr und einem jährlichem Zinssatz rs
† nach einer Periode um den Faktor 1 + rsÅÅÅÅÅm
† nach 2 Perioden um den Faktor H1 + rsÅÅÅÅÅmL2
† nach einem Jahr um den Faktor H1 + rsÅÅÅÅÅmLm
† und nach n Jahren um den Faktor H1 + rsÅÅÅÅÅmLm n
Bei all diesen Zeiten ist der Faktor f gleich dem (gleichen) Faktor pro Periode H1 + rsÅÅÅÅÅmL hoch der (unterschiedlichen)
Anzahl Perioden.
Die effektive Verzinsung in einem Jahr beträgt somit H1 + rsÅÅÅÅÅÅmLm - 1. Die effektive Verzinsung stimmt nicht mit der
angegebenen Verzinsung rs überein.
So beträgt z.B. die effektive Verzinsung bei rs = 0.08 und bei 81, 2, 3, 12< Zinsperioden pro Jahr gleich80.08, 0.0816, 0.082152, 0.083<.
rs = 0.08; HNumberForm@#1, 5D &LAHTableForm@#1, TableHeadings → 8None, 8"m", "eff. Verzinsung", "rs"<<D &LAJTableA9#1, I rs
#1
+ 1M#1 − 1, rs=E &N ê@ 81, 2, 4, 12, 365<EE
Skript Abbildungen WS 2006 / 2007 36

m eff. Verzinsung rs
1 0.08 0.08
2 0.0816 0.08
4 0.082432 0.08
12 0.083 0.08
365 0.083278 0.08
Wir können auch den Fall untersuchen, wenn die Zinsperioden immer kleiner (oder m immer grösser) wird, was im Grenzfall m Ø ¶ als stetige Verzinsung bezeichnet wird. Da limmض H1 + rsÅÅÅÅÅÅ
mLm = ‰rs
entspricht die stetige Verzinsung dem effektiven Faktor ‰rs und dem effektiven Zinssatz ‰rs - 1.
Stetige Verzinsung liefert in unserem oberen Beispiel den Wert ‰rs = ‰0.08 = 0.083287, was minimal mehr als beitäglicher Verzinsung ergibt.
Stetige Verzinsung ist mathematisch einfacher zu handhaben als diskrete Verzinsung.
Der Wert der Investition berechnet sich einfach zu: Vt = ‰rs t (t = Anzahl JahreL.Annuity
In diesem Abschnitt wollen wir die Summenformel für eine geometrische Reihe
a1H1 + q + ... + qn-1L = a1 1-qn
ÅÅÅÅÅÅÅÅÅÅÅÅ1-q
für verschiedene Situationen anwenden.
Im Folgenden verwenden wir q = 1 + p, den Aufzinsungsfaktor pro Periode.
Momenanwert eines zukünftigen Cash Flow
Wie gross ist der momentane Wert eines Cash Flow A, der in n Jahren stattfindet?
Die Abzinsung ergibt:
V0 = AÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH1+pLn
Ordinary Annuity (Nachschüssige Ratenzahlung)
Wie gross ist der heutige Wert und der Wert nach n Jahren, wenn ab Ende Jahr 1 n Cash Flows A stattfinden?
Die (auf das Jahr n aufdiskontierten Cashflows) führen zum zukünftigen Wert:
Vn = AH qn-1 + ... + q + 1L = A qn-1ÅÅÅÅÅÅÅÅÅÅÅÅq-1 = A
H1+pLn-1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
p
Die (auf das Jahr 0 abdiskontierten Cashflows) führen zum heutigen Wert:
V0 = VnÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH1+pLn = A H1+pLn-1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅp H1+pLn = A
1- 1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH1+pLnÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅp
Man sieht auch, wenn dieser Cash Flow unbegrenzt stattfindet Hn Ø ¶L, dann gilt:
V0 = limnض A 1- 1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH1+pLnÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
p= AÅÅÅÅÅ
p
Annuity Due (Vorschüssige Ratenzahlung)
Wie gross ist der Wert nach n Jahren, wenn ab Beginn Jahr 1 n Cash Flows A stattfinden?
Skript Abbildungen WS 2006 / 2007 37
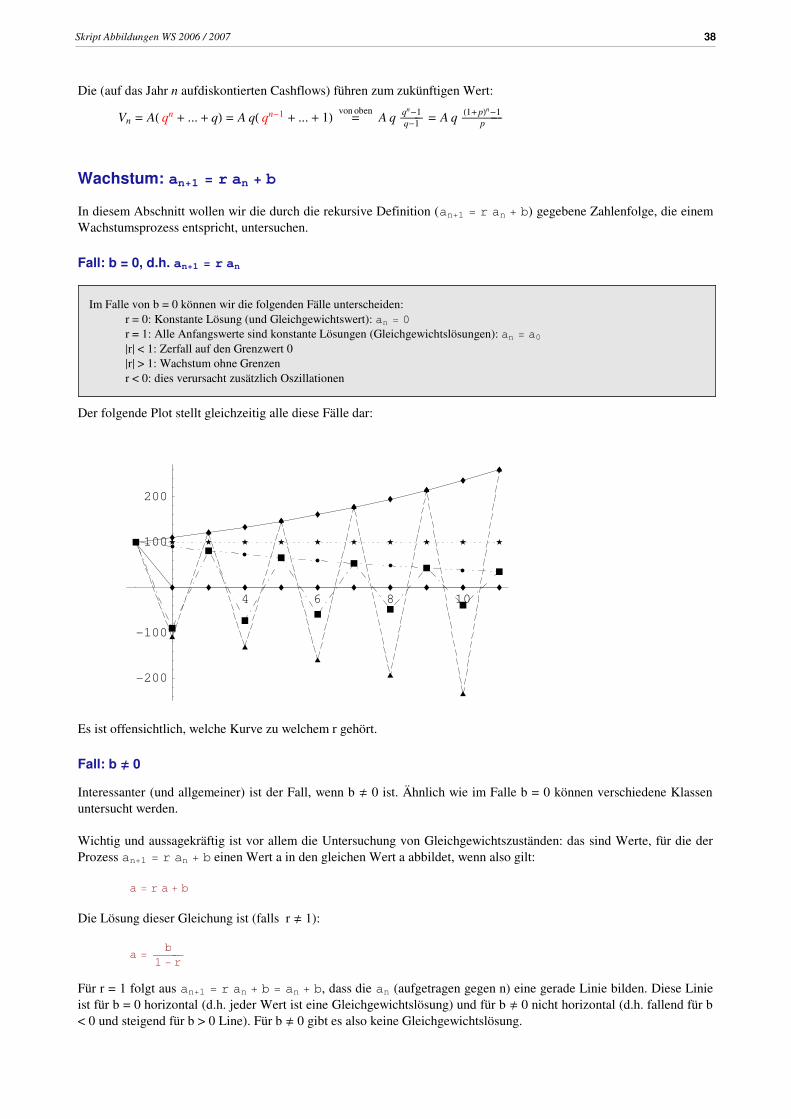
Die (auf das Jahr n aufdiskontierten Cashflows) führen zum zukünftigen Wert:
Vn = AH qn + ... + qL = A qH qn-1 + ... + 1L =von oben
A q qn-1ÅÅÅÅÅÅÅÅÅÅÅÅq-1 = A q
H1+pLn-1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
p
Wachstum: an+1 = r an + b
In diesem Abschnitt wollen wir die durch die rekursive Definition (an+1 = r an + b) gegebene Zahlenfolge, die einemWachstumsprozess entspricht, untersuchen.
Fall: b = 0, d.h. an+1 = r an
Im Falle von b = 0 können wir die folgenden Fälle unterscheiden:r = 0: Konstante Lösung (und Gleichgewichtswert): an = 0
r = 1: Alle Anfangswerte sind konstante Lösungen (Gleichgewichtslösungen): an = a0»r» < 1: Zerfall auf den Grenzwert 0»r» > 1: Wachstum ohne Grenzenr < 0: dies verursacht zusätzlich Oszillationen
Der folgende Plot stellt gleichzeitig alle diese Fälle dar:
4 6 8 10
-200
-100
100
200
Es ist offensichtlich, welche Kurve zu welchem r gehört.
Fall: b π 0
Interessanter (und allgemeiner) ist der Fall, wenn b ∫ 0 ist. Ähnlich wie im Falle b = 0 können verschiedene Klassenuntersucht werden.
Wichtig und aussagekräftig ist vor allem die Untersuchung von Gleichgewichtszuständen: das sind Werte, für die derProzess an+1 = r an + b einen Wert a in den gleichen Wert a abbildet, wenn also gilt:
a = r a + b
Die Lösung dieser Gleichung ist (falls r ∫ 1):
a =b
1 − r
Für r = 1 folgt aus an+1 = r an + b = an + b, dass die an (aufgetragen gegen n) eine gerade Linie bilden. Diese Linieist für b = 0 horizontal (d.h. jeder Wert ist eine Gleichgewichtslösung) und für b ∫ 0 nicht horizontal (d.h. fallend für b< 0 und steigend für b > 0 Line). Für b ∫ 0 gibt es also keine Gleichgewichtslösung.
Skript Abbildungen WS 2006 / 2007 38
Diese führt auf folgende Klassifizierung (mit b ∫ 0)r = 1: Der Graph ist eine Linie ohne Gleichgewicht»r» < 1: Stabiles Gleichgewicht»r» > 1: Unstabiles Gleichgewicht
Der n-te Wert des Prozesses an+1 = r an + b kann auch direkt mit der folgenden Formel angegeben werden:
an = c rn +b
1 − r
Dies kann durch direktes Einsetzen gezeigt werden.
Heron'sches Verfahren zur Berechnung von è!!!!
a
Prozessoren können einfach Zahlen addieren, subtrahieren, multiplizieren oder dividieren. Zur Berechnung einesLogarithmus oder einer Wurzel sind jedoch zusätzliche Verfahren bzw. Algorithmen notwendig.
Mit Hilfe des folgenden Algorithmus kann beispielsweise eine Zahlenfolge erzeugt werden, die gegen die è!!!!
a konver-giert, womit also eine Wurzel berechnet werden kann.
† Für die Lösung è!!!!
a gilt: è!!!!
a è!!!!
a = a; wir können somit è!!!!
a als Seite eines Quadrats mit der Fläche a auffassen.
† Wenn wir eine Näherung x1 für è!!!!
a haben, dann entsprechen x1 und aÅÅÅÅÅÅx1
den Seiten eines Rechtecks mit der
gleichen Fläche wie der Fläche des Quadrats: Fläche = x1 aÅÅÅÅÅÅx1
= a.
† Falls für die Näherung x1 >è!!!!
a gilt (sonst vertauschen wir die Rechteckseiten): aÅÅÅÅÅÅx1
< aÅÅÅÅÅÅÅÅÅÅè!!!!!a
=è!!!!
a < x1.
† Mit dem Ansatz x2 = 1ÅÅÅÅ2 Ix1 +aÅÅÅÅÅÅx1
M liegt x2 zwischen x1und aÅÅÅÅÅÅx1
und wir haben somit einen besseren Schätzwert für è!!!!a gefunden.
† Wenn wir wiederholt xi+1 = 1ÅÅÅÅ2 Ixi +aÅÅÅÅÅÅxiM anwenden erzeugen wir eine Zahlenfolge, die gegen
è!!!!a konvergiert.
è!!!!5 Berechnung
Die folgende Berechnung zeigt, dass wir mit diesem Algorithmus und einem Startwert von 1 bereits nach 4 Iterationeneine Genauigkeit von 8 Stellen (was von einem Taschenrechner typischerweise angezeigt wird) und nach 7 Iterationeneine Genauigkeit von 15 Stellen.
f Hx_L = 1ÅÅÅÅÅÅ2
Jx + 5ÅÅÅÅÅÅxN;
HN@#1, 15D &L@ColumnForm@NestList@ f , 1, 7DDD1.`15.
3.`15.
2.3333333333333333333333333333`15.
2.2380952380952380952380952381`15.
2.2360688956433637284701114488`15.
2.2360679774999781940945935586`15.
2.2360679774997896964091736767`15.
2.2360679774997896964091736687`15.
Der genaue Wert beträgt auf 15 Stellen genau 2.2360679774997896964091736687.
HN@#1, 15D &LAè!!!!5 E
2.2360679774997896964091736687`15.
Skript Abbildungen WS 2006 / 2007 39

7. Funktionen
Eigenschaften wichtiger FunktionenBeim Auflösen von Gleichungen, die kompliziertere Funktionen wie Potenzen, Wurzeln, Logarithmus etc. enthalten,ist es wichtig, dass man ein ungefähres Verständnis über das Verhalten und die Eigenschaften dieser Funktionen hat.
Insbesondere muss man wissen, wie die inversen Funktionen lauten.
Wenn beispielsweise die Gleichung
‰x+3 � 10
gelöst werden soll, können wir den Logarithmus auf beiden Seiten anwenden (was erlaubt ist, da beide Seiten > 0sind) und erhalten
x + 3 = logH10Lund damit als Lösung
x = -3 + logH10LDies ist jedoch nicht die einzige Lösung! Die allgemeine Lösung lautet (in �):
x � -3 + 2  p c + logH10L mit c œ �
Diese Ausführungen sowie die Bemerkungen zu Potenzfunktionen und Logarithmus sollen nur als Hinweis verstandenwerden. Im Einzelfall sind die Eigenschaften der jeweiligen Funktionen im Detail zu untersuchen.
Es wird davon ausgegangen, dass die Studierenden mit den Potenzfunktionen, den Exponential- und Logarithmusfunk-tionen, sowie den trigonometrischen Funktionen (die alle in der Schulmathematik behandelt werden) vertraut sind.
Potenzfunktion
Man sieht in der folgenden Graphik, in der die Potenzfunktionen x1, x2, x3, x1ê2 eingezeichnet sind, dass diese Funk-tionen die folgenden Definitions und Wertebereiche haben.
x1 D = � W = �
x2 D = � W = �0+
x3 D = � W = �
x1ê2 D = �0+ W = �0
+
Bei mathematischen Umformungen muss man also aufpassen, ob das Argument dieser Funktionen im Definitionsbere-ich liegt.
Skript Abbildungen WS 2006 / 2007 40
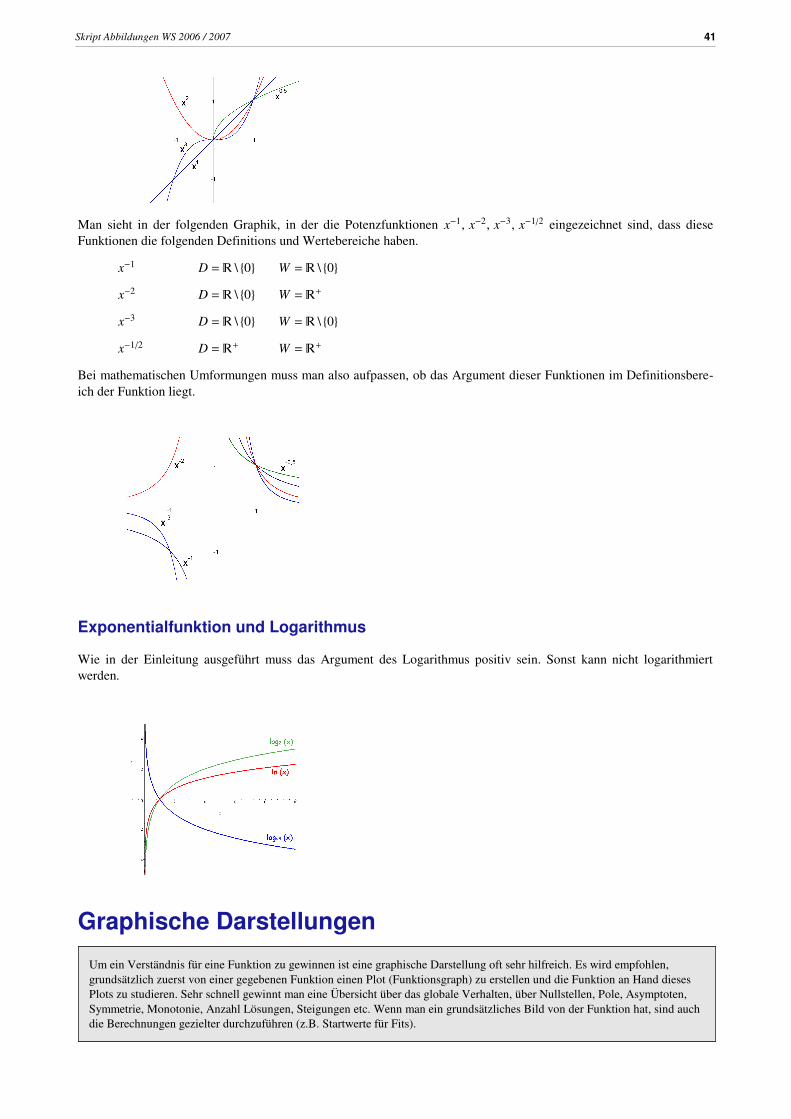
Man sieht in der folgenden Graphik, in der die Potenzfunktionen x-1, x-2, x-3, x-1ê2 eingezeichnet sind, dass dieseFunktionen die folgenden Definitions und Wertebereiche haben.
x-1 D = � \ 80< W = � \ 80<x-2 D = � \ 80< W = �+
x-3 D = � \ 80< W = � \ 80<x-1ê2 D = �+ W = �+
Bei mathematischen Umformungen muss man also aufpassen, ob das Argument dieser Funktionen im Definitionsbere-ich der Funktion liegt.
Exponentialfunktion und Logarithmus
Wie in der Einleitung ausgeführt muss das Argument des Logarithmus positiv sein. Sonst kann nicht logarithmiertwerden.
Graphische Darstellungen
Um ein Verständnis für eine Funktion zu gewinnen ist eine graphische Darstellung oft sehr hilfreich. Es wird empfohlen, grundsätzlich zuerst von einer gegebenen Funktion einen Plot (Funktionsgraph) zu erstellen und die Funktion an Hand dieses Plots zu studieren. Sehr schnell gewinnt man eine Übersicht über das globale Verhalten, über Nullstellen, Pole, Asymptoten, Symmetrie, Monotonie, Anzahl Lösungen, Steigungen etc. Wenn man ein grundsätzliches Bild von der Funktion hat, sind auch die Berechnungen gezielter durchzuführen (z.B. Startwerte für Fits).
Skript Abbildungen WS 2006 / 2007 41
Wir haben in früheren Kapiteln gesehen, dass die Funktionen unterschiedliche Definitionsbereiche und Wertebereichehaben können. Je nach Situation müssen zur optimalen Veranschaulichung andere Funktionen für die Plots verwendetwerden.
Der folgende Teil mit einer Auflistung der für verschiedene Situationen zu verwendenden Plot Funktionen wendet sichvor allem an die Gruppe Mathematica, da innerhalb von Mathematica - nicht jedoch in Excel - diese Fülle von Funk-tionen angeboten werden.
Gruppe Mathematica
Die folgenden Abschnitte zeigen, welche Art von Plots und welche Plotfunktionen bei welcher Definitionsbereich / Wertebereich Kombination einsetzbar sind.
Diese Plotfunktionen können verwendet werden, wenn die Funktion explizit gegeben ist. Dies ist jedoch nicht immerder Fall. Wenn die Funktion implizit als Gleichung oder in Parameterform gegeben ist, kann Implicit Plot bzw.ParametricPlot eingesetzt werden. Eventuell kann aber auch durch Auflösen nach y die Funktion in expliziter Darstel-lung gewonnen und dann eine der untenstehenden Plotfunktionen verwendet werden.
In den folgenden Abschnittsüberschriften steht
† � für die Menge der reellen Zahlen: d.h. ( x » x œ �) ;
† �2 für die Menge der reellen Zahlenpaare: d.h. ( {x,y} » x,y œ �);
† �3 für die Menge der reellen Zahlentripel.
Für diese Art von Plots können wir die folgenden Mathematica Funktionen verwenden:
����Æ ����
Plot, FilledPlot, SurfaceOfRevolutionPlot,PolarPlot, LogPlot, LogLinearPlot, LogLogPlot
����Æ ����2
ParametricPlot, SurfaceOfRevolution
����2 Æ ����
ContourPlot, DensityPlot, Plot3D, ShadowPlot3D
����2 Æ ����2
PlotVectorField
����2 Æ ����3
ParametricPlot3D, PointParametricPlot3D
����3 Æ ����3
PlotVectorField3D, PlotGradientField3D
Skript Abbildungen WS 2006 / 2007 42

8. Differentialrechnung und Kurvendiskussion
Einleitung
Für die Differentialrechnung ist der Begriff der Differenzierbarkeit sehr wichtig. Wir wiederholen deshalb diesenBegriff noch einmal.
Eine Funktion ist differenzierbar an der Stelle x, wenn es eine reelle Zahl c mit folgender Eigenschaft gibt: für jede Folge 8x1, x2, ...<, die gegen x konvergiert, gilt: limnض
f HxiL- f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅxi-x
= c .
c heisst Ableitung der Funktion f an der Stelle x. Rechtsseitige bzw. linksseitige Differenzierbarkeit liegt dann vor, wenn dieser Grenzübergang nur für Folgen 8x1, x2, ...< existiert, die von rechts bzw. links gegen x konvergieren.
Wenn die Ableitung f ' Hx0L einer Funktion an einem Punkt x0 bekannt ist, dann kann die Tangente tHxL an diesen Punkteingezeichnet werden. Diese Tangente beschreibt die Kurve in der Umgebung dieses Punktes in erster Näherung.Bessere Approximationen werden im Kapitel über Taylorpolynome besprochen werden.
Die Tangente hat dabei die Gleichung:
tHxL = f Hx0L + f ' Hx0L Hx - x0LWenn statt der Ableitung f ' Hx0L die Steigung f Hx1L- f Hx0LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
x1-x0genommen wird, dann resultiert die sogenannte Sekante sHxL,
d.h. eine Gerade die die Punkte 8x0, f Hx0L< und 8x1, f Hx1L< durchläuft:
sHxL = f Hx0L + f Hx1L- f Hx0LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅx1-x0
Hx - x0LIm Grenzübergang x1 Ø x0 wird (gemäss Definition der Ableitung) die Sekante in die Tangente übergehen.
Wir können somit für jede Funktion die Steigung (Ableitung) bestimmen, auch wenn wir sie nicht symbolisch ableitenkönnen.
Wir haben also prinzipiell drei Möglichkeiten die Steigung einer Funktion zu bestimmen:
† Graphisch: wir bestimmen die Tangente im Punkt 8x0, f Hx0L<† Tabellarisch: wir berechnen den Quotienten f Hx1L- f Hx0LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
x1-x0 und lassen x1 Ø x0 streben
† Symbolisch: wir verwenden die Ableitungsregeln
Die folgenden Abschnitte illustrieren den Begriff und die Interpretation der Ableitung auf verschiedene Arten (Gra-phisch, Tabellarisch, Symbolisch).
Als Beispiel für die folgenden Untersuchungen wollen wir die ganzrationale Funktion f HxL := x3 - 10 x2 + 20 x + 30verwenden und die Ableitung an der Stelle x0 = 0.9 bestimmen.
Sie hat folgenden Verlauf.
f Hx_L := x3 - 10 x2 + 20 x + 30; x0 = 0.9; del = 1;
PlotB f HxL, 8x, 0, 9<, PlotRange Ø 80, 50<, Epilog Ø :Red, [email protected], Point@8x0, f Hx0L<D,[email protected], 0.015<D, LineBikjjj
x0 0
x0 50y{zzzF, Blue, LineBikjjj
x0 - del f Hx0L - del f £Hx0Ldel + x0 f Hx0L + del f £Hx0L
y{zzzF>F;
Skript Abbildungen WS 2006 / 2007 43
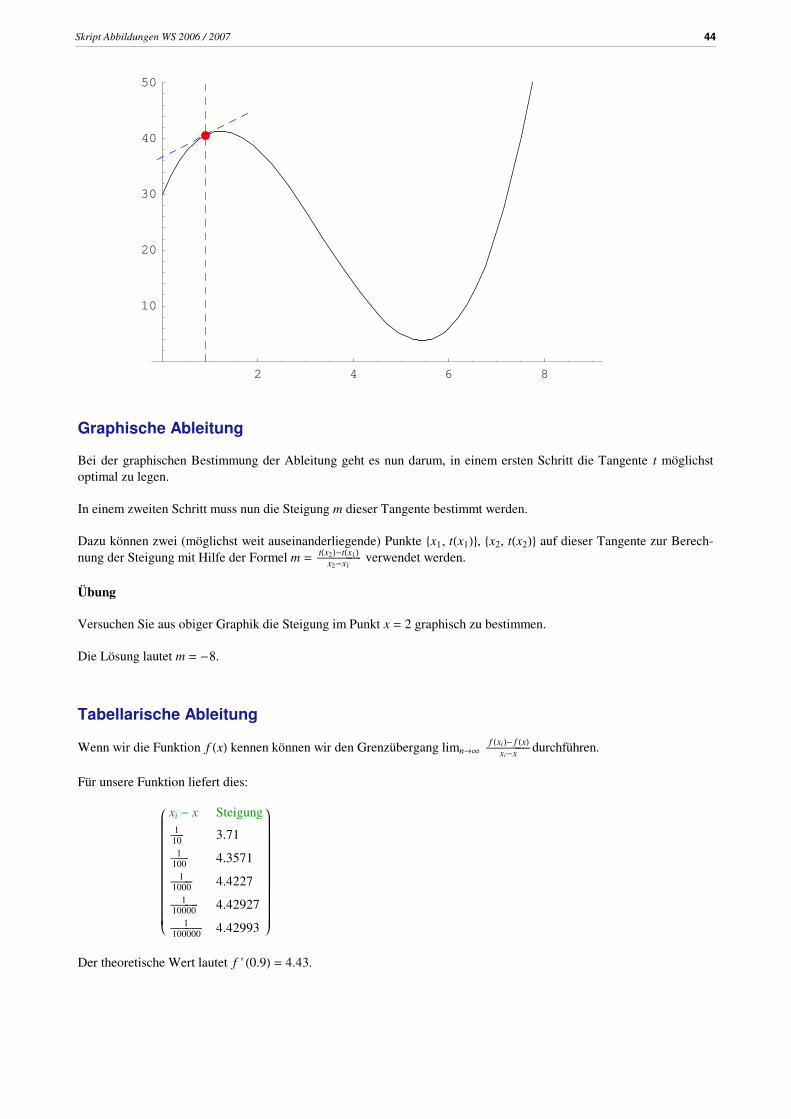
2 4 6 8
10
20
30
40
50
Graphische Ableitung
Bei der graphischen Bestimmung der Ableitung geht es nun darum, in einem ersten Schritt die Tangente t möglichstoptimal zu legen.
In einem zweiten Schritt muss nun die Steigung m dieser Tangente bestimmt werden.
Dazu können zwei (möglichst weit auseinanderliegende) Punkte 8x1, tHx1L<, 8x2, tHx2L< auf dieser Tangente zur Berech-nung der Steigung mit Hilfe der Formel m = tHx2L-tHx1LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
x2-x1 verwendet werden.
Übung
Versuchen Sie aus obiger Graphik die Steigung im Punkt x = 2 graphisch zu bestimmen.
Die Lösung lautet m = -8.
Tabellarische Ableitung
Wenn wir die Funktion f HxL kennen können wir den Grenzübergang limnضf HxiL- f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
xi-xdurchführen.
Für unsere Funktion liefert dies:
i
k
jjjjjjjjjjjjjjjjjjjjjjjjjjjjj
xi - x Steigung1ÅÅÅÅÅÅÅ10 3.711ÅÅÅÅÅÅÅÅÅÅ100 4.35711ÅÅÅÅÅÅÅÅÅÅÅÅ1000 4.42271ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ10000 4.429271ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ100000 4.42993
y
{
zzzzzzzzzzzzzzzzzzzzzzzzzzzzz
Der theoretische Wert lautet f ' H0.9L = 4.43.
Skript Abbildungen WS 2006 / 2007 44
Symbolisch (von Hand)
Nachdem wir nun graphisch und numerisch die Steigung berechnet haben, wollen wir noch von Hand die Funktionableiten und im Punkt x0 = 0.9 auswerten.
Wir haben als Ausgangspunkt die Funktion
f HxL = 30 + 20 x - 10 x2 + x3.
Wir könnten (aus den bekannten Formeln HxnL ' = n xn-1 die Ableitung sehr schnell zu
20 - 20 x + 3 x2
bestimmen. Wenn wir nun x0 = 0.9 einsetzen erhalten wir den Wert 4.43.
Wir könnten auch (umständlicher) den Grenzprozess über die Definition der Sekantensteigung durchführen:
limnضf HxiL- f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
xi-x= limdØ0
f Hx+dL- f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
d= limdØ0
20 d-10 d2+d3-20 d x+3 d2 x+3 d x2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅd
= limdØ0 H20 - 10 d + d2 - 20 x + 3 d x + 3 x2L = 20 - 20 x + 3 x2
Wir werden in Zukunft diesen Grenzprozess nicht durchführen. Wir kennen ja bereits die im nächsten Abschnitt undim Kapitel "Integralrechnung" aufgeführten Ableitungsregeln bzw. Funktionsableitungen.
Ableitungsregeln
In diesem Abschnitt sollen die in den Lehrbüchern zu findenden Ableitungsregeln kurz zusammengefasst werden. Imletzten Abschnitt werden sie mit Hilfe der Mathematica Funktion D abgeleitet.
Multiplikation mit einer Konstanten
∑ Hc f HxLLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x= c f £HxL
Summe zweier Funktionen
∑ H f H xL + g HxLLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑ x= f £HxL + g£HxL
Produktregel
∑H f HxL gHxLLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x= gHxL f £HxL + f HxL g£HxL
Quotientenregel
∑ f HxLÅÅÅÅÅÅÅÅÅÅÅgHxLÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
=gHxL f £HxL- f HxL g£HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
gHxL2
Kettenregel
∑ f HgHxLLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x= f £HgHxLL g£HxL
Gruppe Mathematica
Die oben aufgeführten Ableitungsregeln können in Mathematica sehr einfach mit der Funktion D aufgerufen werden.
In einem ersten Schritt gebe ich die zu bearbeitenden Funktionen ein.
Skript Abbildungen WS 2006 / 2007 45

funcs = 8c f@xD, f@xD + g@xD, f@xD g@xD, f@xDê g@xD, f@g@xDD<;
In einem zweiten Schritt erzeuge ich eine kleine Tabelle mit den Funktionen (links) und den Ableitungen nach x(rechts).
MapA9#, " �∂x
", Simplify@D@#, xD= &, funcsE êê TableForm
c f HxL öøø∑x
c f £HxLf HxL+ gHxL öøø
∑xf £HxL+ g£HxL
f HxL gHxL öøø∑x
gHxL f £HxL+ f HxL g£HxLf HxLÅÅÅÅÅÅÅÅÅÅÅgHxL öøø
∑x gHxL f £HxL- f HxL g£HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅgHxL2
f HgHxLL öøø∑x
f £HgHxLL g£HxLIn einem letzten Schritt wurde die obige Outputzelle selektiert und mittels Ctrl+Shift+T in die TraditionalFormDarstellung umgewandelt.
Kurvendiskussion
Wir haben im Abschnitt "Begriffe" im Kapitel "Funktionen" viele wichtige Begriffe zu Funktionen zusammengestellt.Bei der Kurvendiskussion sind viele der dortigen Begriffe zu berechnen.
Wie schon ausgeführt umfasst eine ausführliche Kurvendiskussion die Symmetrie, Monotonie, Nullstellen, Extremw-erte, Wendepunkte, Polstellen, Asymptoten etc.
Diese Untersuchungen laufen zumeist auf die Untersuchung von Gleichungen hinaus.
† Symmetrie: f HxL = f H-xL " x
† Antisymmetrie: f H xL = - f H-xL " x
† Nullstelle: f H xL = 0
† Extremwert: f ' H xL = 0
† Wendepunkt: f '' H xL = 0
† Polstelle: 1ÅÅÅÅÅÅÅÅÅÅÅÅf H xL = 0
Bei Extemwerten kann noch unterschieden werden zwischen Maximum und Minimum. Bei Wendepunkten ist noch derSattelpunkt ein Spezialfall. Zur Klärung dieser Frage müssen höhere Ableitungen herangezogen werden.
Dies kann man sich leicht klarmachen, wenn man sich die Taylorentwicklung (siehe später) in einem Punkt x0 genaueranschaut:
f Hx0 +DL = f Hx0L + f ' Hx0L D + 1ÅÅÅÅ2 f '' Hx0LD2 + ...
Wenn f Hx0L = 0, dann haben wir eine Nullstelle in x0.
Wir stellen weiters fest, dass das Verhalten bei x0 in erster Näherung symmetrisch ist, falls der kleinste nicht verschwin-dende Exponent von Dn gerade (d.h. n = 2, 4, ...) ist, und antisymmetrisch für n = 1, 3, ....
Für einen Extremwert müssen wir Symmetrie (in erster Näherung) verlangen, da sowohl links als auch rechts desPunkts x0 die Funktion entweder ansteigen oder fallen muss. Dies kann beispielsweise erreicht werden durch:
† f ' Hx0L = 0 und f '' Hx0L ∫ 0, wobei ein positives f '' Hx0L > 0 dazu führt, dass die Funktion zunimmt, d.h. dass es sich
um ein Minimum handelt. f '' Hx0L > 0 bedeutet ausserdem eine Rechtskurve. Analog handelt es sich bei f '' Hx0L < 0
um ein Maximum.
Skript Abbildungen WS 2006 / 2007 46
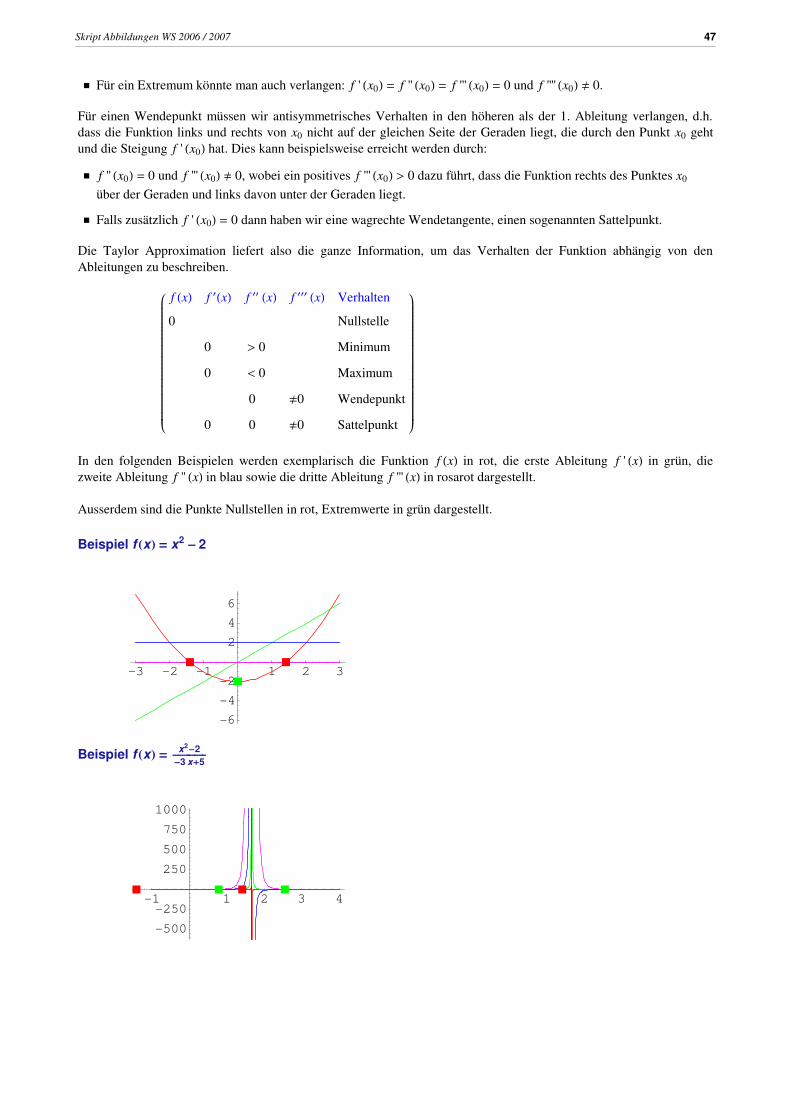
† Für ein Extremum könnte man auch verlangen: f ' Hx0L = f '' Hx0L = f ''' Hx0L = 0 und f '''' Hx0L ∫ 0.
Für einen Wendepunkt müssen wir antisymmetrisches Verhalten in den höheren als der 1. Ableitung verlangen, d.h.dass die Funktion links und rechts von x0 nicht auf der gleichen Seite der Geraden liegt, die durch den Punkt x0 gehtund die Steigung f ' Hx0L hat. Dies kann beispielsweise erreicht werden durch:
† f '' Hx0L = 0 und f ''' Hx0L ∫ 0, wobei ein positives f ''' Hx0L > 0 dazu führt, dass die Funktion rechts des Punktes x0
über der Geraden und links davon unter der Geraden liegt.
† Falls zusätzlich f ' Hx0L = 0 dann haben wir eine wagrechte Wendetangente, einen sogenannten Sattelpunkt.
Die Taylor Approximation liefert also die ganze Information, um das Verhalten der Funktion abhängig von denAbleitungen zu beschreiben.
i
k
jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
f HxL f £HxL f ££ HxL f £££ HxL Verhalten
0 Nullstelle
0 > 0 Minimum
0 < 0 Maximum
0 ∫0 Wendepunkt
0 0 ∫0 Sattelpunkt
y
{
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz
In den folgenden Beispielen werden exemplarisch die Funktion f HxL in rot, die erste Ableitung f ' HxL in grün, diezweite Ableitung f '' HxL in blau sowie die dritte Ableitung f ''' HxL in rosarot dargestellt.
Ausserdem sind die Punkte Nullstellen in rot, Extremwerte in grün dargestellt.
Beispiel f HxL = x2 - 2
-3 -2 -1 1 2 3
-6
-4
-2
2
4
6
Beispiel f HxL = x2-2ÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄ-3 x+5
-1 1 2 3 4
-500
-250
250
500
750
1000
Skript Abbildungen WS 2006 / 2007 47

9. Integralrechnung
Einleitung
Wie im Abschnitt über die Differentialrechnung wollen wir in einem Schnelldurchgang die Integrationsrechnungbehandeln.
Wir unterscheiden prinzipiell zwischen einem bestimmten Integral Ÿa
bf HxL „ x, bei dem Integrationsgrenzen 8a, b<
gegeben sind, und einem unbestimmten Integral Ÿ f HxL „ x, bei dem keine Integrationsgrenzen gegeben sind.
Bestimmtes Integral
Beim bestimmten Integral gilt Ÿa
bf HxL „ x = FHbL - FHaL, wobei FHxL als Stammfunktion bezeichnet wird.
Bei der symbolischen Integration gilt beispielsweise für f HxL = x2:
Ÿa
bf HxL „ x = Ÿa
bx2 „ x = b3
ÅÅÅÅÅÅÅ3 - a3
ÅÅÅÅÅÅÅ3
Es resultiert ein Ausdruck, bei dem die Integrationsgrenzen explizit vorkommen.
Bei der numerischen Integration müssen numerische Werte für a und b eingegeben werden, sonst kann keinenumerische Integration durchgeführt werden. Beispielsweise:
Ÿ0
10f HxL „ x = Ÿ0
10x2 „ x = 1000ÅÅÅÅÅÅÅÅÅÅÅÅ3
Unbestimmtes Integral
Beim unbestimmten Integral gilt
Ÿ f HxL „ x = x3
ÅÅÅÅÅÅ3
Der Ausdruck Ÿ f HxL „ x liefert die sogenannte Stammfunktion FHxL von f HxL. Diese Schreibweise ist etwas unsauber,da es sich auf der linken und rechten Seite der Gleichung nicht um das gleiche x handelt: links ist x eine Integrations-variable, rechts eine Variable. Ausserdem wird die Integrationskonstante ignoriert.
Die Ableitung der Stammfunktion ergibt wieder die ursprüngliche Funktion.
Flächenbestimmung
Zur Bestimmung einer Fläche müssen zwingend die untere und obere Integrationsgrenze eingegeben werden. Es kannjedoch sowohl das Integral als auch die Stammfunktion zur Angabe der Fläche benutzt werden:
Fläche = Ÿa
bf HxL „ x = FHbL - FHaL
Wir halten also fest: Während die Ableitung bzw. die Differentiation die Steigung des Funktionsgraphen ergibt, lässt sich mit Hilfe der Integralrechnung eine Fläche unter dem Funktionsgraphen berechnen.
Inhaltsangabe
Es ist nicht vorgesehen, im Rahmen dieser Vorlesung das Integrieren zu lernen bzw. zu üben. Es wird vorausgesetzt,dass die Studierenden mit der Integrationsrechnung und auch mit den verschiedenen Verfahren "Substitutionsmeth-ode", "partielle Integration" sowie "Partialbruchzerlegung" vertraut sind.
Skript Abbildungen WS 2006 / 2007 48
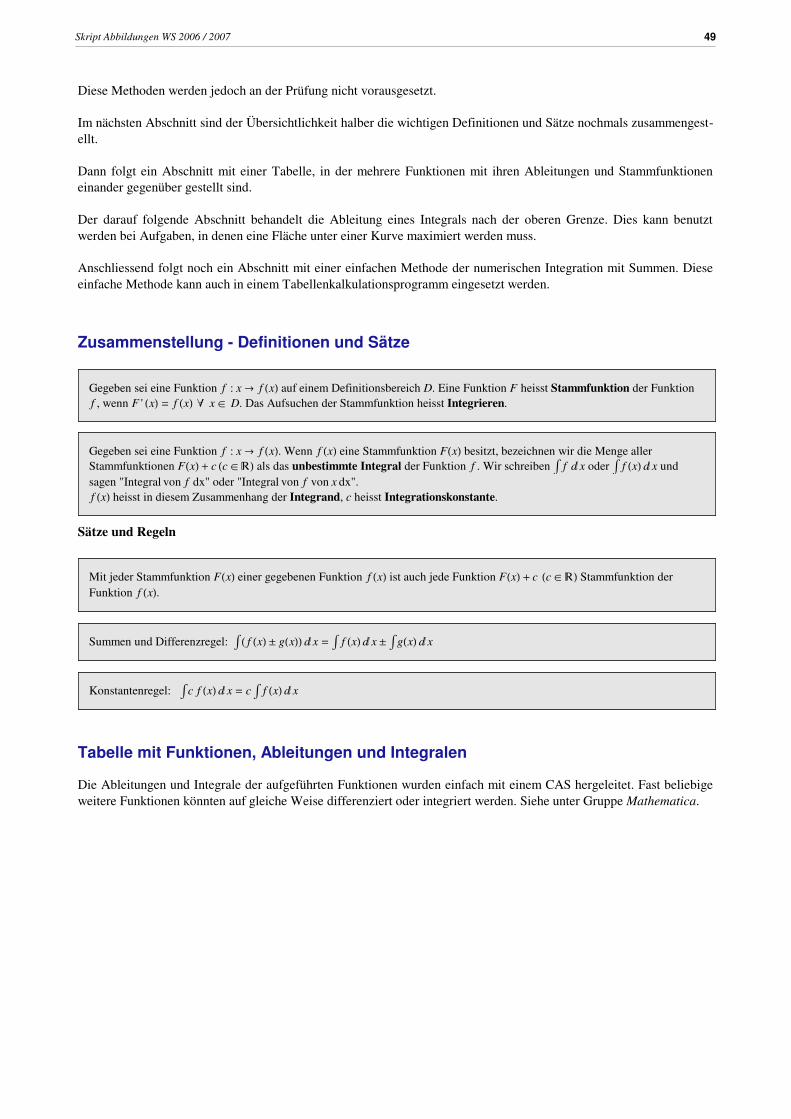
Diese Methoden werden jedoch an der Prüfung nicht vorausgesetzt.
Im nächsten Abschnitt sind der Übersichtlichkeit halber die wichtigen Definitionen und Sätze nochmals zusammengest-ellt.
Dann folgt ein Abschnitt mit einer Tabelle, in der mehrere Funktionen mit ihren Ableitungen und Stammfunktioneneinander gegenüber gestellt sind.
Der darauf folgende Abschnitt behandelt die Ableitung eines Integrals nach der oberen Grenze. Dies kann benutztwerden bei Aufgaben, in denen eine Fläche unter einer Kurve maximiert werden muss.
Anschliessend folgt noch ein Abschnitt mit einer einfachen Methode der numerischen Integration mit Summen. Dieseeinfache Methode kann auch in einem Tabellenkalkulationsprogramm eingesetzt werden.
Zusammenstellung - Definitionen und Sätze
Gegeben sei eine Funktion f : x Ø f HxL auf einem Definitionsbereich D. Eine Funktion F heisst Stammfunktion der Funktion f , wenn F ' HxL = f HxL " x œ D. Das Aufsuchen der Stammfunktion heisst Integrieren.
Gegeben sei eine Funktion f : x Ø f HxL. Wenn f HxL eine Stammfunktion FHxL besitzt, bezeichnen wir die Menge aller Stammfunktionen FHxL+ c Hc œ �L als das unbestimmte Integral der Funktion f . Wir schreiben Ÿ f „ x oder Ÿ f HxL „ x und
sagen "Integral von f dx" oder "Integral von f von x dx". f HxL heisst in diesem Zusammenhang der Integrand, c heisst Integrationskonstante.
Sätze und Regeln
Mit jeder Stammfunktion FHxL einer gegebenen Funktion f HxL ist auch jede Funktion FHxL + c Hc œ �L Stammfunktion der
Funktion f HxL.
Summen und Differenzregel: Ÿ H f HxL≤ gHxLL „ x = Ÿ f HxL „ x ≤ Ÿ gHxL „ x
Konstantenregel: Ÿ c f HxL „ x = c Ÿ f HxL „ x
Tabelle mit Funktionen, Ableitungen und Integralen
Die Ableitungen und Integrale der aufgeführten Funktionen wurden einfach mit einem CAS hergeleitet. Fast beliebigeweitere Funktionen könnten auf gleiche Weise differenziert oder integriert werden. Siehe unter Gruppe Mathematica.
Skript Abbildungen WS 2006 / 2007 49
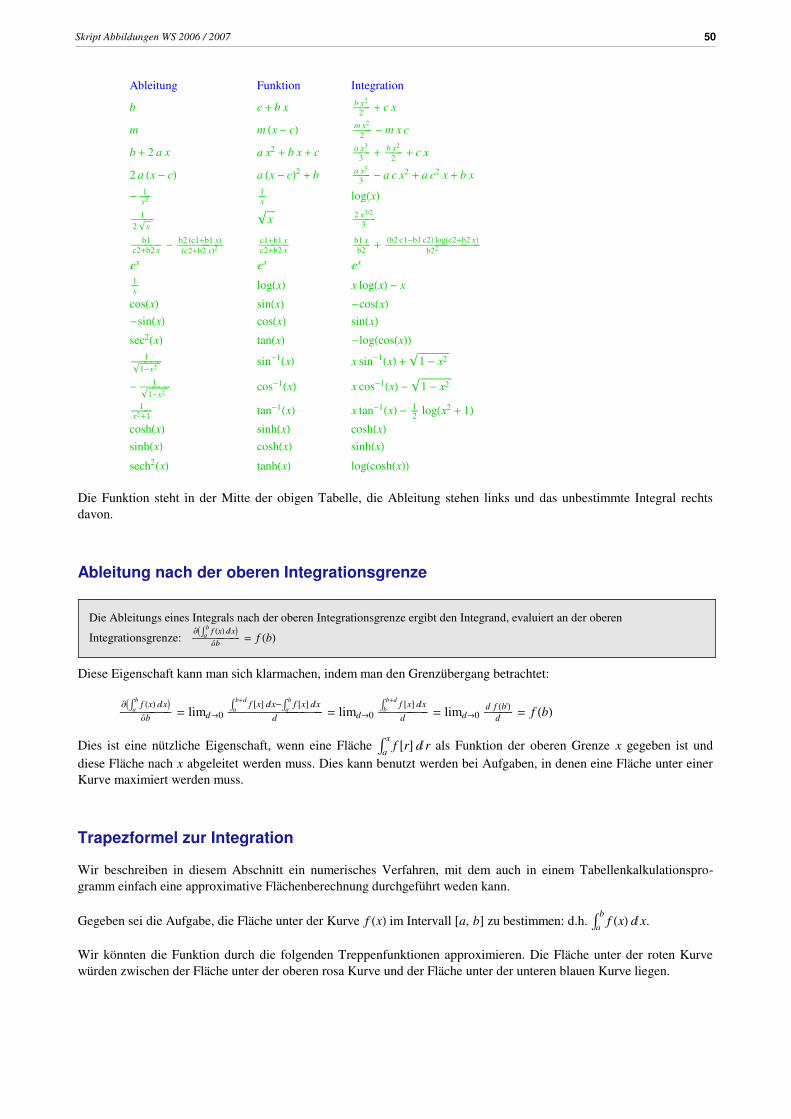
Ableitung Funktion Integration
b c + b x b x2ÅÅÅÅÅÅÅÅÅÅÅ
2+ c x
m m Hx - cL m x2ÅÅÅÅÅÅÅÅÅÅÅÅ
2- m x c
b + 2 a x a x2 + b x + c a x3ÅÅÅÅÅÅÅÅÅÅÅ
3+ b x2
ÅÅÅÅÅÅÅÅÅÅÅ2
+ c x
2 a Hx - cL a Hx - cL2 + b a x3ÅÅÅÅÅÅÅÅÅÅÅ
3- a c x2 + a c2 x + b x
- 1ÅÅÅÅÅÅÅx2
1ÅÅÅÅx
logHxL1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
2è!!!!
x
è!!!!x
2 x3ê2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
3
b1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅc2+b2 x
- b2 Hc1+b1 xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅHc2+b2 xL2c1+b1 xÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅc2+b2 x
b1 xÅÅÅÅÅÅÅÅÅÅÅb2
+ Hb2 c1-b1 c2L logHc2+b2 xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅb22
‰x ‰x ‰x
1ÅÅÅÅx
logHxL x logHxL - x
cosHxL sinHxL -cosHxL-sinHxL cosHxL sinHxLsec2HxL tanHxL -logHcosHxLL
1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅè!!!!!!!!!!!!!!1-x2
sin-1HxL x sin-1HxL +è!!!!!!!!!!!!!!1 - x2
- 1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅè!!!!!!!!!!!!!!1-x2
cos-1HxL x cos-1HxL -è!!!!!!!!!!!!!!1 - x2
1ÅÅÅÅÅÅÅÅÅÅÅÅÅx2+1
tan-1HxL x tan-1HxL- 1ÅÅÅÅ2
logHx2 + 1LcoshHxL sinhHxL coshHxLsinhHxL coshHxL sinhHxLsech2HxL tanhHxL logHcoshHxLL
Die Funktion steht in der Mitte der obigen Tabelle, die Ableitung stehen links und das unbestimmte Integral rechtsdavon.
Ableitung nach der oberen Integrationsgrenze
Die Ableitungs eines Integrals nach der oberen Integrationsgrenze ergibt den Integrand, evaluiert an der oberen
Integrationsgrenze: ∑IŸa
bf HxL „xM
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑b
= f HbL
Diese Eigenschaft kann man sich klarmachen, indem man den Grenzübergang betrachtet:
∑IŸa
bf HxL „xM
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑b
= limdØ0Ÿa
b+df @xD „x-Ÿa
bf @xD „x
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅd
= limdØ0Ÿb
b+df @xD „x
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅd
= limdØ0d f Hb'LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
d= f HbL
Dies ist eine nützliche Eigenschaft, wenn eine Fläche Ÿa
xf @rD „ r als Funktion der oberen Grenze x gegeben ist und
diese Fläche nach x abgeleitet werden muss. Dies kann benutzt werden bei Aufgaben, in denen eine Fläche unter einerKurve maximiert werden muss.
Trapezformel zur Integration
Wir beschreiben in diesem Abschnitt ein numerisches Verfahren, mit dem auch in einem Tabellenkalkulationspro-gramm einfach eine approximative Flächenberechnung durchgeführt weden kann.
Gegeben sei die Aufgabe, die Fläche unter der Kurve f HxL im Intervall @a, bD zu bestimmen: d.h. Ÿa
bf HxL „ x.
Wir könnten die Funktion durch die folgenden Treppenfunktionen approximieren. Die Fläche unter der roten Kurvewürden zwischen der Fläche unter der oberen rosa Kurve und der Fläche unter der unteren blauen Kurve liegen.
Skript Abbildungen WS 2006 / 2007 50
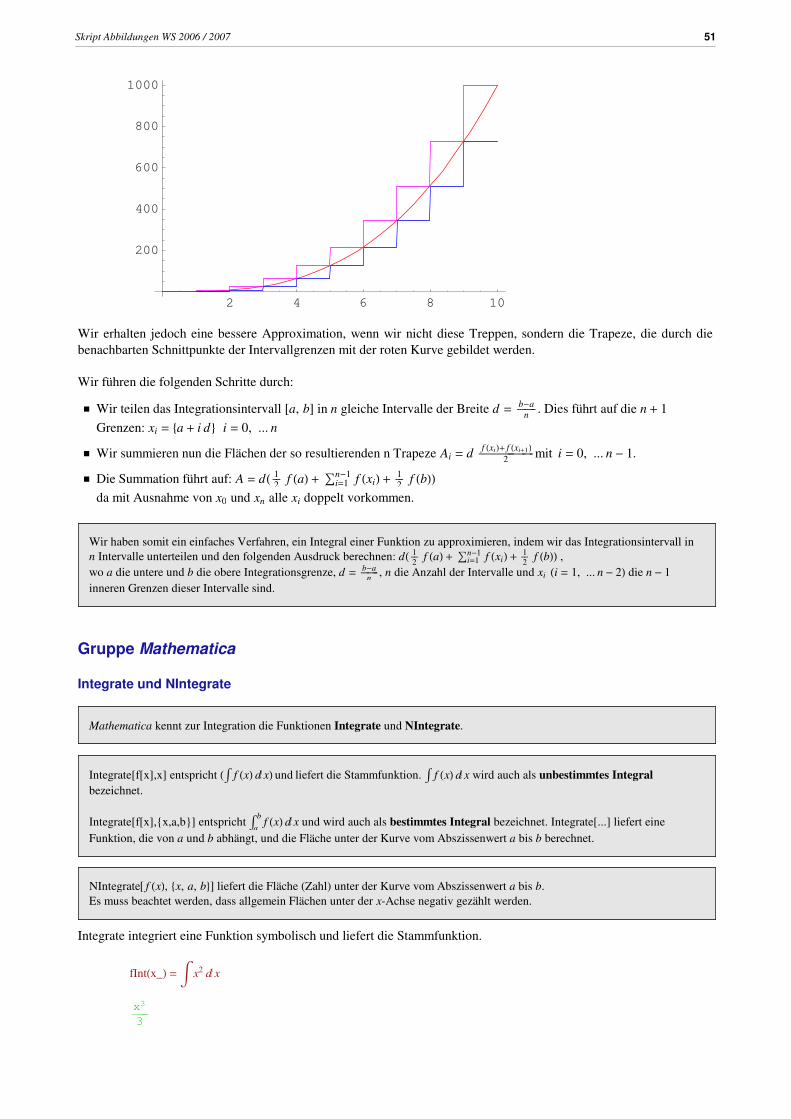
2 4 6 8 10
200
400
600
800
1000
Wir erhalten jedoch eine bessere Approximation, wenn wir nicht diese Treppen, sondern die Trapeze, die durch diebenachbarten Schnittpunkte der Intervallgrenzen mit der roten Kurve gebildet werden.
Wir führen die folgenden Schritte durch:
† Wir teilen das Integrationsintervall @a, bD in n gleiche Intervalle der Breite d = b-aÅÅÅÅÅÅÅÅÅÅn
. Dies führt auf die n + 1
Grenzen: xi = 8a + i d< i = 0, ... n
† Wir summieren nun die Flächen der so resultierenden n Trapeze Ai = df HxiL+ f Hxi+1LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 mit i = 0, ... n - 1.
† Die Summation führt auf: A = dH 1ÅÅÅÅ2 f HaL + ⁄i=1n-1 f HxiL + 1ÅÅÅÅ2 f HbLL
da mit Ausnahme von x0 und xn alle xi doppelt vorkommen.
Wir haben somit ein einfaches Verfahren, ein Integral einer Funktion zu approximieren, indem wir das Integrationsintervall in n Intervalle unterteilen und den folgenden Ausdruck berechnen: dH 1ÅÅÅÅ
2 f HaL+ ⁄i=1
n-1 f HxiL+ 1ÅÅÅÅ2 f HbLL ,
wo a die untere und b die obere Integrationsgrenze, d = b-aÅÅÅÅÅÅÅÅÅÅÅn
, n die Anzahl der Intervalle und xi Hi = 1, ... n - 2L die n - 1
inneren Grenzen dieser Intervalle sind.
Gruppe Mathematica
Integrate und NIntegrate
Mathematica kennt zur Integration die Funktionen Integrate und NIntegrate.
Integrate[f[x],x] entspricht HŸ f HxL „ xL und liefert die Stammfunktion. Ÿ f HxL „ x wird auch als unbestimmtes Integral bezeichnet.
Integrate[f[x],{x,a,b}] entspricht Ÿa
bf HxL „ x und wird auch als bestimmtes Integral bezeichnet. Integrate[...] liefert eine
Funktion, die von a und b abhängt, und die Fläche unter der Kurve vom Abszissenwert a bis b berechnet.
NIntegrate@ f HxL, 8x, a, b<D liefert die Fläche (Zahl) unter der Kurve vom Abszissenwert a bis b.Es muss beachtet werden, dass allgemein Flächen unter der x-Achse negativ gezählt werden.
Integrate integriert eine Funktion symbolisch und liefert die Stammfunktion.
fIntHx_L = ‡ x2 „ x
x33
Skript Abbildungen WS 2006 / 2007 51

Die Stammfunktion kann benutzt werden, um die Fläche unter der Kurve zwischen den Grenzen a und b zu berechnen.(Mit N wandeln wir die rationale Zahl in eine reelle Zahl um).
integr = fIntH4L - fIntH3L;8integr, N@integrD<9 373
, 12.333333333333334`=
Wenn wir in Integrate auch Integrationsgrenzen einsetzen, wird eine Funktion mit den zwei Argumenten a und bzurückgegeben, die die Fläche unter der Kurve im Intervall @a, bD zurückgibt.
‡a
b
x2 „ x
−a33
+b33
Nicht alle Funktionen lassen sich jedoch symbolisch integrieren. Dann muss auf die numerische Integration zurückge-griffen werden, bei der natürlich die Integrationsgrenzen eingegeben werden müssen. Es wird eine Zahl (keine Funk-tion) zurückgegeben.
NIntegrate@x2, 8x, 3, 4<D12.333333333333336`
Dies ergibt natürlich (innerhalb der Präzision) das gleiche wie die oben erfolgte Auswertung der symbolisch erhaltenenFunktion an diesen Intervallgrenzen.
Mit dem Menubefehl "Cell Ø Convert To Ø StandardForm" (kurz: Ctrl+Shift+N) oder dem Menubefehl "Cell Ø Convert To Ø TraditionalForm" (kurz: Ctrl+Shift+T) kann die Input Form bei Integrate, D, etc. in eine ansehnlichere mathematische Form konvertiert werden. Dies ist jedoch bei NIntegrate - damit es nicht mit Integrate verwechselt wird - nicht möglich.
Aus der InputForm Integrate@x^2, xD kann so die StandardForm Ÿ x2 „ x erzeugt werden.
Der Inhalt ist jedoch bei beiden Darstellungen der gleiche:
Clear@ f , xD; Integrate@ f @xD, xD � ‡ f HxL „ x
True
IntegrateëD bzw. DëIntegrate
Integrate und D sind zueinander inverse Funktionen (bis auf eine Integrationskonstante).
Wir können eine Funktion f ableiten und dann integrieren oder integrieren und dann ableiten.
Clear@ f D; : f HxL, ‡ ∑ f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
„ x,∑HŸ f HxL „ xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x>
8f@xD, f@xD, f@xD<
Wie man sieht resultiert beide Male die Ursprungsfunktion.
Dies funktioniert auch, wenn die Funktion (irgendwie) definiert wurde.
f Hx_L = sinHxL; : f HxL, ‡ ∑ f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
„ x,∑HŸ f HxL „ xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x>
Skript Abbildungen WS 2006 / 2007 52

8Sin@xD, Sin@xD, Sin@xD<
Dies ist (im allgemeinen) jedoch nur bis auf eine Integrationskonstante der Fall:
f Hx_L = x + 5; : f HxL, ‡ ∑ f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
„ x,∑HŸ f HxL „ xLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x>
85 + x, x, 5 + x<
Es wird nicht die Originalfunktion x + 5, sondern x retourniert. Durch das Ableiten haben wir den konstanten Term 5verloren.
Tabelle mit Funktionen, Ableitungen und Integralen
In diesem Abschnitt wollen wir die im Hauptteil aufgeführte Tabelle mit Funktionen, Ableitungen und Integralenerzeugen.
In einem ersten Schritt geben wir die Liste der Funktionen ein, für die wir die Ableitungen und Integrale berechnenmöchten.
funcs = :c + b x, m Hx - cL, a x2 + b x + c, a Hx - cL2 + b,1ÅÅÅÅÅÅx
,è!!!!
x ,c1 + b1 xÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅc2 + b2 x
,
‰x, logHxL, sinHxL, cosHxL, tanHxL, sin-1HxL, cos-1HxL, tan-1HxL, sinhHxL, coshHxL, tanhHxL>;
In einem zweiten Schritt erzeugen wir die Tabelle.
TableFormBJ: ∑#1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
, #1, ‡ #1 „ x> &N êü funcs, TableHeadings Ø 8None, 8"Ableitung", "Funktion", "Integration"<<FAbleitung Funktion Integration
b c + b x c x + b x22
m m H−c + xL −c m x + m x22
b + 2 a x c + b x + a x2 c x + b x22
+ a x33
2 a H−c + xL b + a H−c + xL2 b x + a c2 x − a c x2 + a x33
− 1x2
1x
Log@xD1
2è!!!!!x
è!!!!x 2 x3ê2
3
−b2 Hc1+b1 xLHc2+b2 xL2 + b1
c2+b2 x
c1+b1 xc2+b2 x
b1 xb2
+Hb2 c1−b1 c2L Log@c2+b2 xD
b22
�x �x �x
1x
Log@xD −x + x Log@xDCos@xD Sin@xD −Cos@xD−Sin@xD Cos@xD Sin@xDSec@xD2 Tan@xD −Log@Cos@xDD
1è!!!!!!!!!!!!!!1−x2
ArcSin@xD è!!!!!!!!!!!!!!1 − x2 + x ArcSin@xD
− 1è!!!!!!!!!!!!!!1−x2
ArcCos@xD −è!!!!!!!!!!!!!!1 − x2 + x ArcCos@xD
11+x2
ArcTan@xD x ArcTan@xD −12Log@1 + x2D
Cosh@xD Sinh@xD Cosh@xDSinh@xD Cosh@xD Sinh@xDSech@xD2 Tanh@xD Log@Cosh@xDD
Die Funktion steht in der Mitte der obigen Tabelle, die Ableitung stehen links und das unbestimmte Integral rechtsdavon.
Es wäre ein Leichtes, die Ableitungen und Integrale weiterer Funktionen berechnen zu lassen.
Skript Abbildungen WS 2006 / 2007 53
10. Potenzreihen und Taylor Reihen
Zusammenfassung
Wir werden in diesem Kapitel zwei wichtige Themen anschneiden: Potenzreihen und Taylorreihen. Sie sind mitein-ander verknüpft, haben jedoch eine andere Intention.
Bei der Potenzreihe geht man von einer Zahlenfolge 8ak< aus und betrachtet die Funktion f HxL = ⁄k=0¶ ak Hx - x0Lk . Es
gibt Zahlenfolgen, für die die so definierte Funktion auf ganz � konvergiert. Wichtige Beispiele sind die Exponential-funktion sowie die Sinus- und Cosinusfunktion. Es gibt aber auch Zahlenfolgen, für die die so definierte Funktion nurin einem Intervall konvergiert oder gar nur in einem Punkt.
Der Begriff der Potenzreihe ist sehr wichtig, da damit eine grosse Klasse von Funktionen definiert werden. Wie wirschon gehört haben sind die analytischen Funktionen so definiert, dass sie um jeden Punkt ihres Definitionsbereichs ineine Potenzreihe entwickelt werden können.
Bei der Taylorreihe startet man mit einer ¶-mal differenzierbaren Funktion und bildet die Funktion
THxL = ‚k=0
¶ f HkLHxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
k! Hx - x0Lk . Diese so genannte Taylorreihe von f approximiert die Funktion f in der Umgebung von
x0.
Partialsummen der Taylorreihe, die sogenannten Taylor Polynome, haben eine wichtige Anwendung, da sie benutzt werden können, um differenzierbare Funktionen in einer Umgebung eines Punktes zu approximieren.
Potenzreihen
Ist x0 aus � und 8ak< irgendeine Folge reller Zahlen, so heisstf HxL = ⁄k=0
¶ ak Hx - x0Lkeine Potenzreihe mit dem Entwicklungspunkt x0.Falls diese Reihe (in einem Intervall) konvergiert so sagt man, f lässt sich um x0 in eine Potenzreihe entwickeln bzw. durch eine Potenzreihe darstellen.
Jede Potenzreihe besitzt ein eindeutig bestimmtes r œ [0,¶], den sogenannten Konvergenzradius, derart, dass die Reihe für †x - x0§ < r konvergiert und für †x - x0§ > r divergiert. Auf dem Rand †x - x0§ = r kann sowohl Konvergenz als auch Divergenz vorliegen.
Beispiele für Konvergenzradien:
† Die Potenzreihe ⁄k=0¶ k ! xk hat den Konvergenzradius 0, konvergiert also nur für x gleich 0.
† Die geometrische Reihe ⁄k=0¶ xk hat den Konvergenzradius 1 und konvergiert für kein x mit †x§ = 1.
† Die Potenzreihe ‚k=0
¶ 1ÅÅÅÅÅÅk2 xk hat den Konvergenzradius 1 und konvergiert für x mit †x§ = 1.
† Die Potenzreihe ‚k=0
¶ 1ÅÅÅÅk
xk hat den Konvergenzradius 1 und konvergiert für x = -1 und divergiert für x = 1.
† Die Exponentialreihe ‚k=0
¶ 1ÅÅÅÅÅÅk!
xk hat den Konvergenzradius ¶, konvergiert also für alle x œ �.
Viele Funktionen lassen sich (auf ganz � oder in einem Intervall) durch Potenzreihen darstellen, können also durcheine Folge reeller Zahlen charakterisiert werden.
Skript Abbildungen WS 2006 / 2007 54

‰x� „
k=0
¶xk
ÅÅÅÅÅÅÅÅk !
sinHxL � „k=0
¶ H-1Lk x2 k+1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH2 k + 1L !
cosHxL � „k=0
¶ H-1Lk x2 k
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH2 kL !
Taylorreihen
In der Analysis verwendet man Taylorreihen, um bekannte Funktionen in der Umgebung eines Punktes durch Poten-zreihen darzustellen. Die Taylorreihe einer Funktion f in einem Punkt x0 ist die Potenzreihenentwicklung der Funk-tion an diesem Punkt.
Sei die Funktion f ¶ oft differenzierbar in x0, dann heisst
THxL = ‚k=0
¶ f HkLHxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅk!
Hx - x0Lkdie Taylorreihe von f um x0.Für den Spezialfall x0 = 0 wird die Reihe auch McLaurin Reihe genannt.
Die Taylorreihe muss nicht unbedingt einen positiven Konvergenzradius haben. Ausserdem muss sie (auch innerhalbdes Konvergenzradius) nicht mit der Funktion f HxL übereinstimmen. Sie konvergiert jedoch gegen f HxL, wenn dasRestglied gegen 0 konvergiert.
Beispiel: Die Funktion 11−x
hat die Taylorreihe ⁄k=0¶ xk . Dies konvergiert nur für †x§ < 1. Die Funktion lässt sich
deshalb ausserhalb dieses Konvergenzbereichs nicht durch die Taylorreihe darstellen.
Sei die Funktion n-mal differenzierbar in x0. Dann heisst das Polynom
TnHxL = ‚k=0
n f HkLHxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅk!
Hx - x0Lkdas n-te Taylor Polynom von f um x0.
Die Differenz RnHxL = f HxL- TnHxL
heisst das n-te Restglied der Taylorentwicklung von f um x0.
Die Taylorpolynome sind Partialsummen der Taylorreihe, und wenn die Taylorreihe gegen f konvergiert, dann sindhöhere Taylorpolynome automatisch bessere Näherungen, da ihre Restglieder kleiner sind.
Approximation durch Taylor Polynome
In diesem Abschnitt wollen wir uns nun näher anschauen, wie Funktionen in einem bestimmten Intervall durch TaylorPolynome approximiert werden können.
Das Taylor Polynom approximiert die Funktion in einer Umgebung von x0 durch (z.B. für n = 3)
f HxL � f Hx0L + f £Hx0L Hx - x0L + 1ÅÅÅÅ2 f ££Hx0L Hx - x0L2 + 1ÅÅÅÅÅÅ3! f £££Hx0L Hx - x0L3
Je mehr Terme genommen werden, desto besser und in einem desto grösseren Bereich wird die Funktion gutapproximiert.
Skript Abbildungen WS 2006 / 2007 55
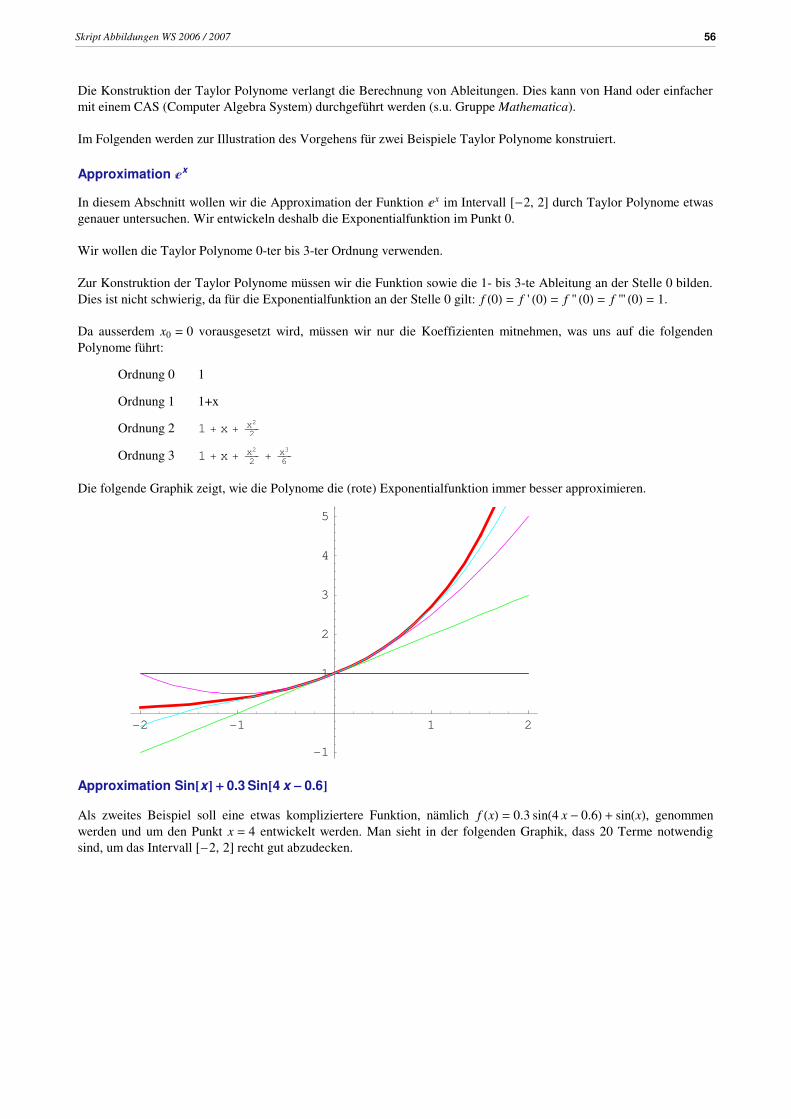
Die Konstruktion der Taylor Polynome verlangt die Berechnung von Ableitungen. Dies kann von Hand oder einfachermit einem CAS (Computer Algebra System) durchgeführt werden (s.u. Gruppe Mathematica).
Im Folgenden werden zur Illustration des Vorgehens für zwei Beispiele Taylor Polynome konstruiert.
Approximation „x
In diesem Abschnitt wollen wir die Approximation der Funktion ‰x im Intervall @-2, 2D durch Taylor Polynome etwasgenauer untersuchen. Wir entwickeln deshalb die Exponentialfunktion im Punkt 0.
Wir wollen die Taylor Polynome 0-ter bis 3-ter Ordnung verwenden.
Zur Konstruktion der Taylor Polynome müssen wir die Funktion sowie die 1- bis 3-te Ableitung an der Stelle 0 bilden.Dies ist nicht schwierig, da für die Exponentialfunktion an der Stelle 0 gilt: f H0L = f ' H0L = f '' H0L = f ''' H0L = 1.
Da ausserdem x0 = 0 vorausgesetzt wird, müssen wir nur die Koeffizienten mitnehmen, was uns auf die folgendenPolynome führt:
Ordnung 0 1
Ordnung 1 1+x
Ordnung 2 1 + x + x22
Ordnung 3 1 + x + x22
+ x36
Die folgende Graphik zeigt, wie die Polynome die (rote) Exponentialfunktion immer besser approximieren.
-2 -1 1 2
-1
1
2
3
4
5
Approximation Sin@xD+ 0.3 Sin@4 x - 0.6D
Als zweites Beispiel soll eine etwas kompliziertere Funktion, nämlich f HxL = 0.3 sinH4 x - 0.6L + sinHxL, genommenwerden und um den Punkt x = 4 entwickelt werden. Man sieht in der folgenden Graphik, dass 20 Terme notwendigsind, um das Intervall @-2, 2D recht gut abzudecken.
Skript Abbildungen WS 2006 / 2007 56
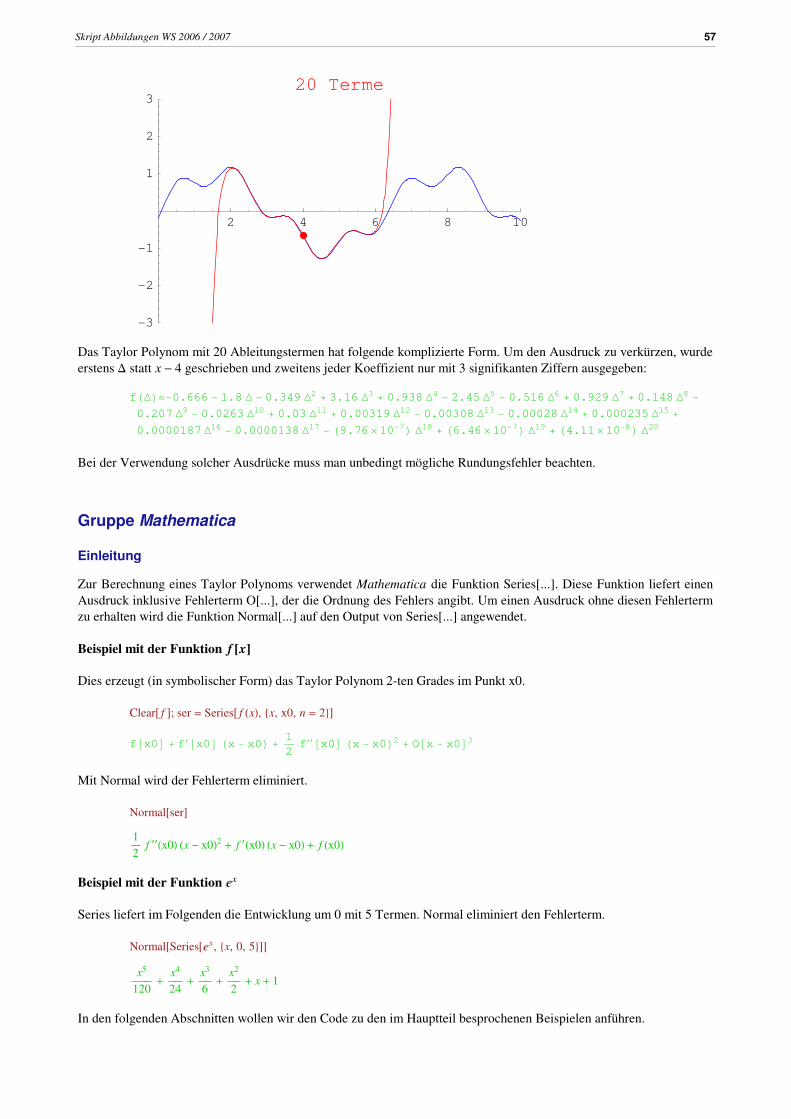
2 4 6 8 10
-3
-2
-1
1
2
320 Terme
Das Taylor Polynom mit 20 Ableitungstermen hat folgende komplizierte Form. Um den Ausdruck zu verkürzen, wurdeerstens D statt x - 4 geschrieben und zweitens jeder Koeffizient nur mit 3 signifikanten Ziffern ausgegeben:
fH∆L≈−0.666 − 1.8 ∆ − 0.349 ∆2 + 3.16 ∆3 + 0.938 ∆4 − 2.45 ∆5 − 0.516 ∆6 + 0.929 ∆7 + 0.148 ∆8 −
0.207 ∆9 − 0.0263 ∆10 + 0.03 ∆11 + 0.00319 ∆12 − 0.00308 ∆13 − 0.00028 ∆14 + 0.000235 ∆15 +
0.0000187 ∆16 − 0.0000138 ∆17 − H9.76×10−7L ∆18 + H6.46×10−7L ∆19 + H4.11×10−8L ∆20
Bei der Verwendung solcher Ausdrücke muss man unbedingt mögliche Rundungsfehler beachten.
Gruppe Mathematica
Einleitung
Zur Berechnung eines Taylor Polynoms verwendet Mathematica die Funktion Series[...]. Diese Funktion liefert einenAusdruck inklusive Fehlerterm O[...], der die Ordnung des Fehlers angibt. Um einen Ausdruck ohne diesen Fehlertermzu erhalten wird die Funktion Normal[...] auf den Output von Series[...] angewendet.
Beispiel mit der Funktion f @xD
Dies erzeugt (in symbolischer Form) das Taylor Polynom 2-ten Grades im Punkt x0.
Clear@ f D; ser = Series@ f HxL, 8x, x0, n = 2<Df@x0D + f′@x0D Hx − x0L +
12f′′@x0D Hx − x0L2 + O@x − x0D3
Mit Normal wird der Fehlerterm eliminiert.
Normal@serD1ÅÅÅÅÅÅ2
f ££Hx0L Hx - x0L2 + f £Hx0L Hx - x0L+ f Hx0L
Beispiel mit der Funktion ‰x
Series liefert im Folgenden die Entwicklung um 0 mit 5 Termen. Normal eliminiert den Fehlerterm.
Normal@Series@‰x, 8x, 0, 5<DDx5
ÅÅÅÅÅÅÅÅÅÅÅÅÅ120
+x4
ÅÅÅÅÅÅÅÅÅ24
+x3
ÅÅÅÅÅÅÅÅ6
+x2
ÅÅÅÅÅÅÅÅ2
+ x + 1
In den folgenden Abschnitten wollen wir den Code zu den im Hauptteil besprochenen Beispielen anführen.
Skript Abbildungen WS 2006 / 2007 57
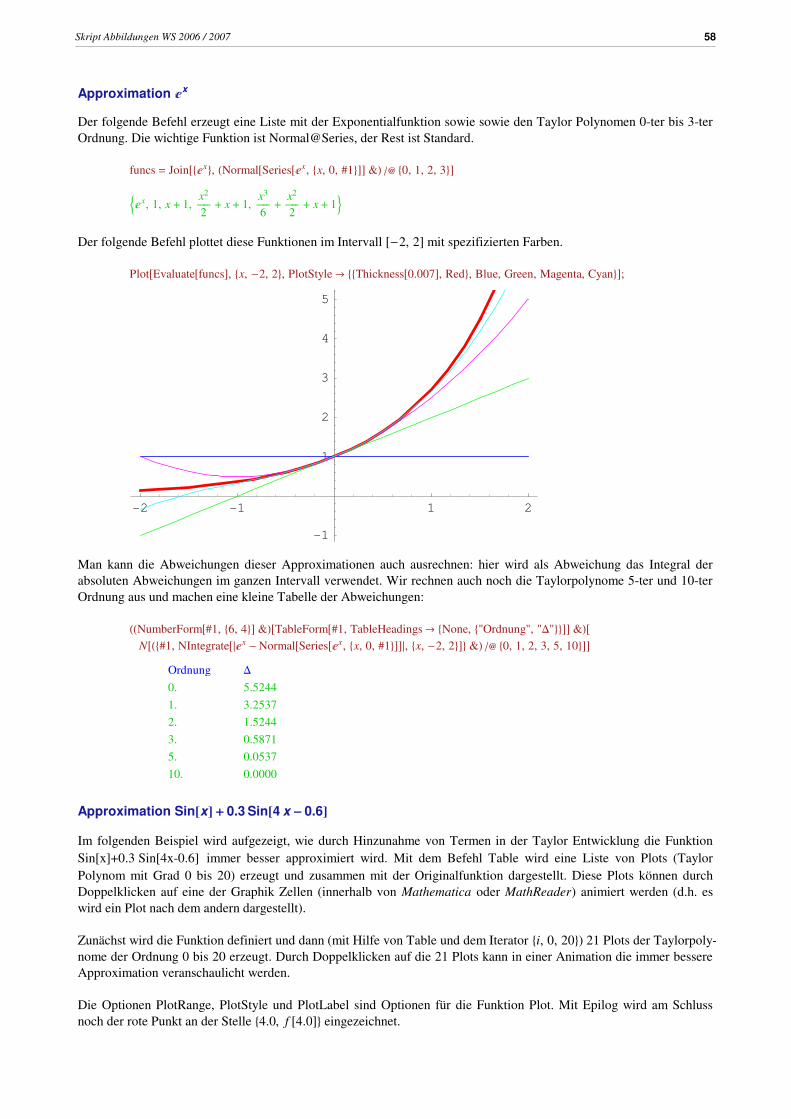
Approximation „x
Der folgende Befehl erzeugt eine Liste mit der Exponentialfunktion sowie sowie den Taylor Polynomen 0-ter bis 3-terOrdnung. Die wichtige Funktion ist Normal@Series, der Rest ist Standard.
funcs = Join@8‰x<, HNormal@Series@‰x, 8x, 0, #1<DD &L êü 80, 1, 2, 3<D:‰x, 1, x + 1,
x2
ÅÅÅÅÅÅÅÅ2
+ x + 1,x3
ÅÅÅÅÅÅÅÅ6
+x2
ÅÅÅÅÅÅÅÅ2
+ x + 1>
Der folgende Befehl plottet diese Funktionen im Intervall @-2, 2D mit spezifizierten Farben.
Plot@Evaluate@funcsD, 8x, -2, 2<, PlotStyle Ø [email protected], Red<, Blue, Green, Magenta, Cyan<D;
-2 -1 1 2
-1
1
2
3
4
5
Man kann die Abweichungen dieser Approximationen auch ausrechnen: hier wird als Abweichung das Integral derabsoluten Abweichungen im ganzen Intervall verwendet. Wir rechnen auch noch die Taylorpolynome 5-ter und 10-terOrdnung aus und machen eine kleine Tabelle der Abweichungen:
HHNumberForm@#1, 86, 4<D &L@TableForm@#1, TableHeadings Ø 8None, 8"Ordnung", "D"<<DD &L@N@H8#1, NIntegrate@†‰x - Normal@Series@‰x, 8x, 0, #1<DD§, 8x, -2, 2<D< &L êü 80, 1, 2, 3, 5, 10<DD
Ordnung D
0. 5.5244
1. 3.2537
2. 1.5244
3. 0.5871
5. 0.0537
10. 0.0000
Approximation Sin@xD+ 0.3 Sin@4 x - 0.6D
Im folgenden Beispiel wird aufgezeigt, wie durch Hinzunahme von Termen in der Taylor Entwicklung die FunktionSin[x]+0.3 Sin[4x-0.6] immer besser approximiert wird. Mit dem Befehl Table wird eine Liste von Plots (TaylorPolynom mit Grad 0 bis 20) erzeugt und zusammen mit der Originalfunktion dargestellt. Diese Plots können durchDoppelklicken auf eine der Graphik Zellen (innerhalb von Mathematica oder MathReader) animiert werden (d.h. eswird ein Plot nach dem andern dargestellt).
Zunächst wird die Funktion definiert und dann (mit Hilfe von Table und dem Iterator 8i, 0, 20<) 21 Plots der Taylorpoly-nome der Ordnung 0 bis 20 erzeugt. Durch Doppelklicken auf die 21 Plots kann in einer Animation die immer bessereApproximation veranschaulicht werden.
Die Optionen PlotRange, PlotStyle und PlotLabel sind Optionen für die Funktion Plot. Mit Epilog wird am Schlussnoch der rote Punkt an der Stelle 84.0, f @4.0D< eingezeichnet.
Skript Abbildungen WS 2006 / 2007 58
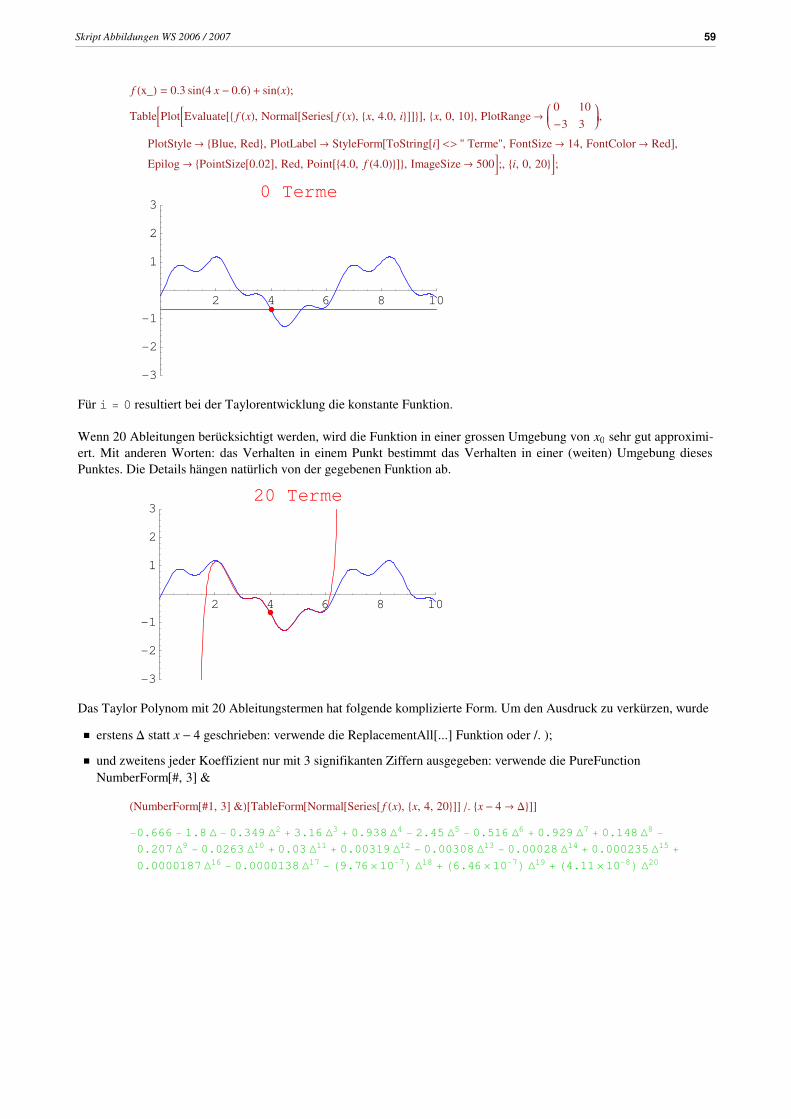
f Hx_L = 0.3 sinH4 x - 0.6L+ sinHxL;TableBPlotBEvaluate@8 f HxL, Normal@Series@ f HxL, 8x, 4.0, i<DD<D, 8x, 0, 10<, PlotRange Ø
ikjjj
0 10
-3 3y{zzz,
PlotStyle Ø 8Blue, Red<, PlotLabel Ø StyleForm@ToString@iD<> " Terme", FontSize Ø 14, FontColor Ø RedD,Epilog Ø [email protected], Red, [email protected], f H4.0L<D<, ImageSize Ø 500F;, 8i, 0, 20<F;
2 4 6 8 10
-3
-2
-1
1
2
30 Terme
Für i = 0 resultiert bei der Taylorentwicklung die konstante Funktion.
Wenn 20 Ableitungen berücksichtigt werden, wird die Funktion in einer grossen Umgebung von x0 sehr gut approximi-ert. Mit anderen Worten: das Verhalten in einem Punkt bestimmt das Verhalten in einer (weiten) Umgebung diesesPunktes. Die Details hängen natürlich von der gegebenen Funktion ab.
2 4 6 8 10
-3
-2
-1
1
2
320 Terme
Das Taylor Polynom mit 20 Ableitungstermen hat folgende komplizierte Form. Um den Ausdruck zu verkürzen, wurde
† erstens D statt x - 4 geschrieben: verwende die ReplacementAll[...] Funktion oder /. );
† und zweitens jeder Koeffizient nur mit 3 signifikanten Ziffern ausgegeben: verwende die PureFunction NumberForm@#, 3D &
HNumberForm@#1, 3D &L@TableForm@Normal@Series@ f HxL, 8x, 4, 20<DD ê. 8x - 4 Ø D<DD−0.666 − 1.8 ∆ − 0.349 ∆2 + 3.16 ∆3 + 0.938 ∆4 − 2.45 ∆5 − 0.516 ∆6 + 0.929 ∆7 + 0.148 ∆8 −
0.207 ∆9 − 0.0263 ∆10 + 0.03 ∆11 + 0.00319 ∆12 − 0.00308 ∆13 − 0.00028 ∆14 + 0.000235 ∆15 +
0.0000187 ∆16 − 0.0000138 ∆17 − H9.76×10−7L ∆18 + H6.46×10−7L ∆19 + H4.11×10−8L ∆20
Skript Abbildungen WS 2006 / 2007 59
11. Partielle AbleitungBisher haben wir Funktionen f HxL, die nur von einer unabhängigen Grösse x abhängen untersucht. In diesem Kapitelbeschäftigen wir uns nun mit Funktionen uHx1, x2, ... xnL, die von mehreren unabhängigen Grössen x1, x2, ... xn
abhängen.
Ähnlich wie im 1-dimensionalen Fall (d.h. 1 unabhängige Variable) spielen auch im mehrdimensionalen Fall dieAbleitungen eine grosse Rolle.
Hier haben wir jedoch nicht nur eine einzige erste Ableitung ∑ f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
, sondern insgesamt n, d.h. für jede unabhängige
Variable xi (i = 1, ... n) eine ∑uHx1,x2,... xnLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑xi
.
Ausserdem haben wir nicht nur eine zweite Ableitung f ££HxL = ∑2 f HxLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH∑xL2 , sondern neben den gewohnten ∑2uHx1,x2,... xnLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑xi ∑xi, wo
zweimal nach der gleichen Variablen xi abgeleitet wird, auch Ableitungen ∑2uHx1,x2,... xnLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑xi ∑x j
, wo (auch zweimal aber) nach
verschiedenen Variablen xi, x j abgeleitet wird.
Dies führt uns auf die folgende Definition.
Eine Funktion u von �n Ø � und u: 8x1, x2, ... xn< Ø y = uHx1, x2, ... xnL ist partiell differenzierbar, wenn für alle i gilt: die Ableitung nach xi existiert, falls alle x j mit j ∫ i festgehalten werden.Falls der Wertebereich �n (statt �) beträgt, kan diese Definition komponentenweise angewandt werden.
Die Definition stützt sich sich also auf die Definition für Funktionen, die nur von einem Argument abhängen. Diepartielle Ableitung ∑uHx1,x2,... xnLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑xi sagt damit aus, wie sich die Funktion u ändert, wenn wir die Variable xi ändern, aber
alle andern xi festhalten. Wenn man den Graphen der Funktion u gegen xi aufträgt, entspricht die partielle Ableitung indiesem Graphen also der gewohnten Steigung.
Die partielle Ableitung spielt in vielen Bereichen eine wichtige Rolle, da viele Grössen nicht nur von einer unabhängi-gen, sonderen von mehreren unabhängigen Variablen abhängen können und (analog zum 1-dimensionalen Fall)Steigungen sowie Extremwertaufgaben mit Hilfe der partiellen Ableitungen berechnet bzw. angegangen werdenkönnen.
Wie die Funktion f HxL um einen Punkt x0 durch ein Taylor Polynom approximiert werden kann, kann auch die Funk-tion uHx, y, ...L in einem Punkt Hx0, y0, ...L durch ein Taylor Polynom approximiert werden.
Der Einfachheit halber wurden die Variablen x, y, ... verwendet um Ausdrücke wie x1,0, x2,0 für den Punkt, um denentwickelt weden soll, zu vermeiden.
Taylor Polynome bis zweiter Ordung
Im Folgenden wollen wir den Fall von 2 Variablen x, y untersuchen und setzen Dx = x - x0 und Dy = y - y0.
Die Funktion uHx, yL kann nun in der Umgebung des Punktes 8x0, y0< in erster Näherung durch
uHx, y0L º uHx0, y0L + Dx uH1,0L
approximiert werden, wenn nur die Variable in x-Richtung verändert wird. Dies entspricht dem 1-dimensionalen Fall.
Die Funktion uHx, yL kann nun allgemein in der Umgebung des Punktes 8x0, y0< in erster Näherung durch
uHx, yL º uHx0, y0L + Dx uH1,0L +Dy uH0,1L
approximiert werden, wenn die Variablen in x-Richtung und y-Richtung verändert werden. Die Funktionswerte bildendie Tangentialebene im Punkt uHx0, y0L.
Skript Abbildungen WS 2006 / 2007 60

Die Funktion uHx, yL kann nun in der Umgebung des Punktes 8x0, y0< in zweiter Näherung durch
uHx, yL º u + x uH1,0L + y uH0,1L + 1ÅÅÅÅ2 x2 uH2,0L + 1ÅÅÅÅ2 y2 uH0,2L + x y uH1,1L
approximiert werden, wenn die Variablen in x-Richtung und y-Richtung verändert werden.
Der Kürze halber wurde u statt uHx0, y0L , uH2,0L statt ∑uHx0,y0LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH∑xL2 , uH1,1L statt ∑uHx0,y0LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x ∑y
, etc. geschrieben.
Beispiel: Ableitung von sinHx yL nach x und y
Die Funktion hat das folgende Aussehen:
01
23
40
1
2
3
4
-1-0.5
00.51
01
23
Die Ableitung nach x wird berechnet, indem y als konstant angenommen wird und führt auf:
∑sinHx y2LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x= y2 cosHx y2L
Die Ableitung nach x und y wird berechnet, indem nach x und dann nach x ...
∑2 sinHx y2LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x∑ y=
∑I ∑sinHx y2LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x
MÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑ y=
∑Hy2 cosHx y2LLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑ y= 2 y cosHx y2L- 2 x y3 sinHx y2L
... oder nach y und dann nach x (die Reihenfolge spielt keine Rolle) abgeleitet wird ...
∑2 sinHx y2LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x∑ y=
∑I ∑sinHx y2LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑y
MÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x=
∑H2 x y cosHx y2LLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑x= 2 y cosHx y2L - 2 x y3 sinHx y2L
Gruppe Excel
Übung wird verteilt.
Gruppe Mathematica
Mathematica Funktionen
Zur Berechnung der Ableitung dient die gleiche Mathematica Funktion (D), die auch für Funktionen, die nur von einer Variable abhängen, verwendet wird.
D@Sin@x yD, 8x<D
y Cos@x yD
Mit Ctrl+Shift+N bzw. Ctrl+Shift+T kann die obige Inputzelle auch in ...
† ∑8x< Sin@x yD Mathematica StandardForm, der Index {x} deutet die partielle Ableitung nach x an;
Skript Abbildungen WS 2006 / 2007 61
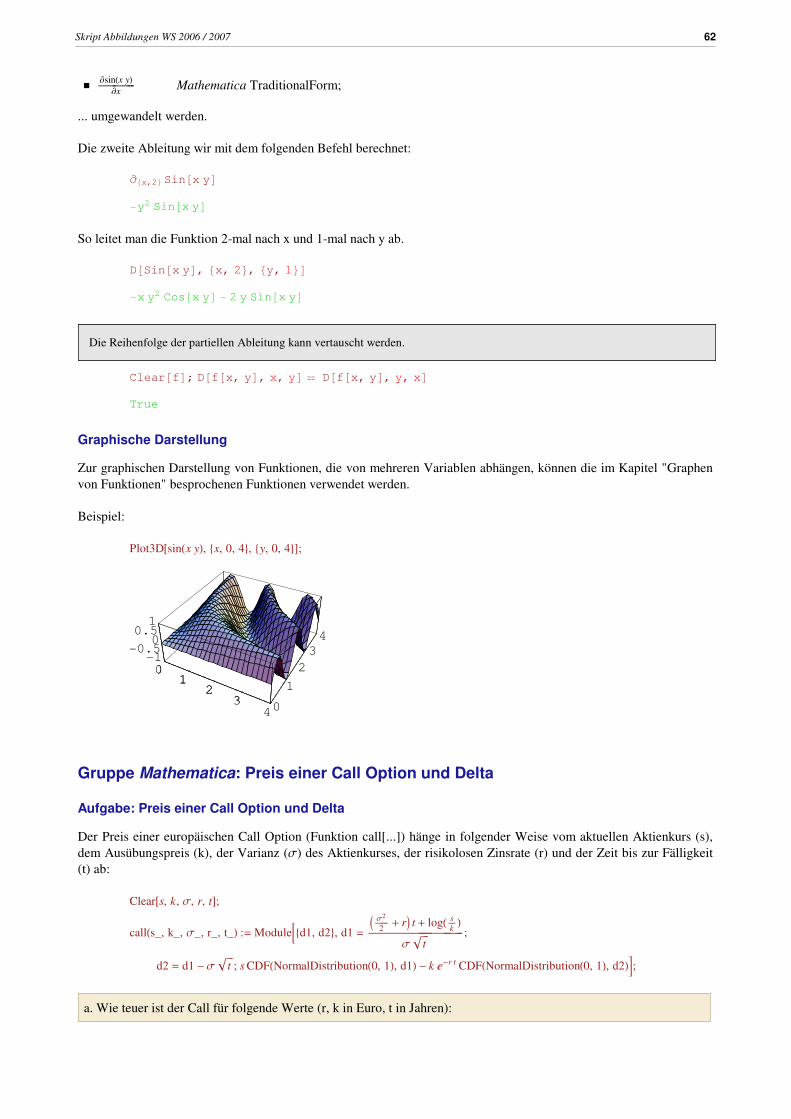
†∑sinHx yLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑xMathematica TraditionalForm;
... umgewandelt werden.
Die zweite Ableitung wir mit dem folgenden Befehl berechnet:
∂8x,2<Sin@x yD
−y2 Sin@x yD
So leitet man die Funktion 2-mal nach x und 1-mal nach y ab.
D@Sin@x yD, 8x, 2<, 8y, 1<D
−x y2 Cos@x yD − 2 y Sin@x yD
Die Reihenfolge der partiellen Ableitung kann vertauscht werden.
Clear@fD; D@f@x, yD, x, yD D@f@x, yD, y, xD
True
Graphische Darstellung
Zur graphischen Darstellung von Funktionen, die von mehreren Variablen abhängen, können die im Kapitel "Graphenvon Funktionen" besprochenen Funktionen verwendet werden.
Beispiel:
Plot3D@sinHx yL, 8x, 0, 4<, 8y, 0, 4<D;
01
23
40
1
2
3
4
-1-0.5
00.51
01
23
Gruppe Mathematica: Preis einer Call Option und Delta
Aufgabe: Preis einer Call Option und Delta
Der Preis einer europäischen Call Option (Funktion call[...]) hänge in folgender Weise vom aktuellen Aktienkurs (s),dem Ausübungspreis (k), der Varianz (s) des Aktienkurses, der risikolosen Zinsrate (r) und der Zeit bis zur Fälligkeit(t) ab:
Clear@s, k, s, r, tD;callHs_, k_, s_, r_, t_L := ModuleB8d1, d2<, d1 =
I s2ÅÅÅÅÅÅÅÅ2
+ rM t + logH sÅÅÅÅkL
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅs
è!!!t
;
d2 = d1 -sè!!!
t ; s CDFHNormalDistributionH0, 1L, d1L - k ‰-r t CDFHNormalDistributionH0, 1L, d2LF;
a. Wie teuer ist der Call für folgende Werte (r, k in Euro, t in Jahren):
Skript Abbildungen WS 2006 / 2007 62
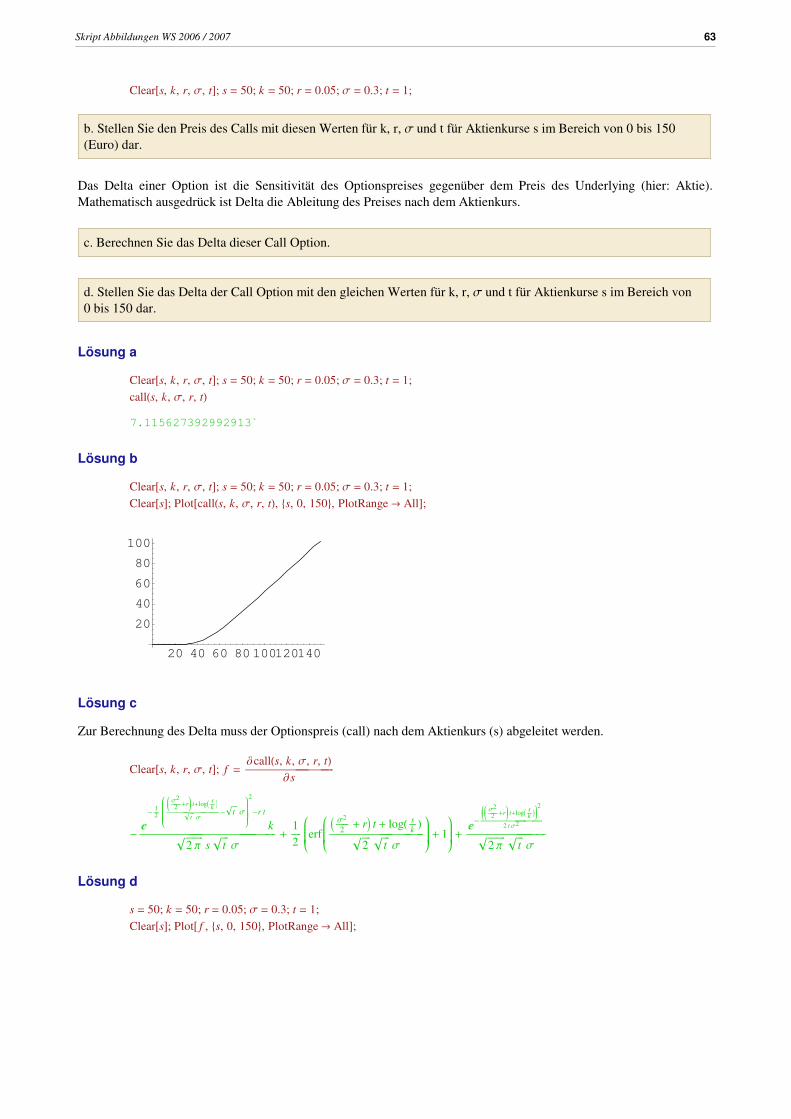
Clear@s, k, r, s, tD; s = 50; k = 50; r = 0.05; s = 0.3; t = 1;
b. Stellen Sie den Preis des Calls mit diesen Werten für k, r, s und t für Aktienkurse s im Bereich von 0 bis 150 (Euro) dar.
Das Delta einer Option ist die Sensitivität des Optionspreises gegenüber dem Preis des Underlying (hier: Aktie).Mathematisch ausgedrück ist Delta die Ableitung des Preises nach dem Aktienkurs.
c. Berechnen Sie das Delta dieser Call Option.
d. Stellen Sie das Delta der Call Option mit den gleichen Werten für k, r, s und t für Aktienkurse s im Bereich von 0 bis 150 dar.
Lösung a
Clear@s, k, r, s, tD; s = 50; k = 50; r = 0.05; s = 0.3; t = 1;
callHs, k, s, r, tL7.115627392992913`
Lösung b
Clear@s, k, r, s, tD; s = 50; k = 50; r = 0.05; s = 0.3; t = 1;
Clear@sD; Plot@callHs, k, s, r, tL, 8s, 0, 150<, PlotRange Ø AllD;
20 40 60 80 100120140
20
40
60
80
100
Lösung c
Zur Berechnung des Delta muss der Optionspreis (call) nach dem Aktienkurs (s) abgeleitet werden.
Clear@s, k, r, s, tD; f =∑callHs, k, s, r, tLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∑s
-‰- 1ÅÅÅÅÅ2
ikjjjjjjjjj
ikjjj s2ÅÅÅÅÅÅÅÅÅÅÅÅÅ2 +r
y{zzz t+logI s
ÅÅÅÅÅÅkM
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅè!!!!t s
-è!!!
t s
y{zzzzzzzzz2
-r t
kÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅè!!!!!!!!
2 p sè!!!
t s+
1ÅÅÅÅÅÅ2
ikjjjjjjerf
ikjjjjjjI s2ÅÅÅÅÅÅÅÅ2
+ rM t + logH sÅÅÅÅkL
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅè!!!!2
è!!!t s
y{zzzzzz+ 1
y{zzzzzz+
‰-
ikjjjikjjjs2ÅÅÅÅÅÅÅÅÅÅÅÅÅ2 +r
y{zzz t+logI s
ÅÅÅÅÅÅkMy{zzz
2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 t s2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅè!!!!!!!!2 p
è!!!t s
Lösung d
s = 50; k = 50; r = 0.05; s = 0.3; t = 1;
Clear@sD; Plot@ f , 8s, 0, 150<, PlotRange Ø AllD;
Skript Abbildungen WS 2006 / 2007 63
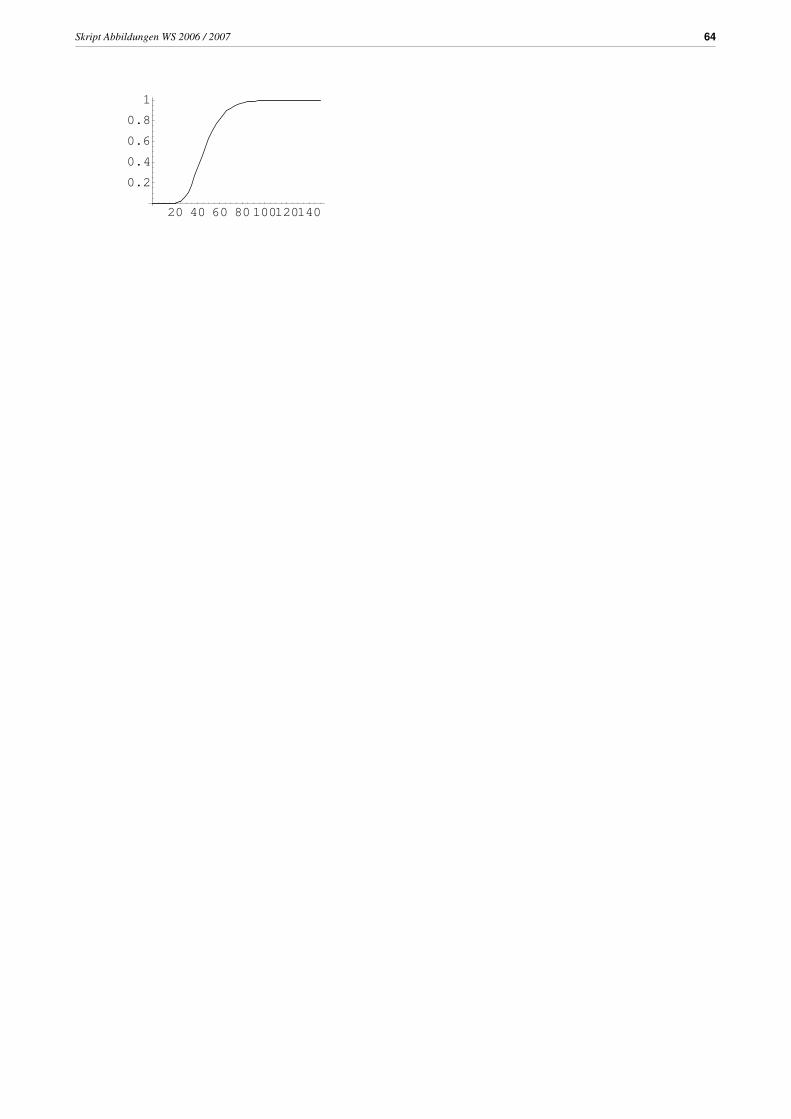
20 40 60 80 100120140
0.2
0.4
0.6
0.8
1
Skript Abbildungen WS 2006 / 2007 64