varias variables cap1
TRANSCRIPT

Analisis de Varias Variables
Ricardo A. Saenz


Indice general
Parte 1. Preliminares
Capıtulo 1. El espacio euclidiano 3
§1. Definiciones basicas 3
§2. Bestiario 9
§3. Topologıa de Rn 10
§4. Sucesiones en Rn 15
§5. Conjuntos Compactos 18
Ejercicios 22
Capıtulo 2. Funciones de varias variables 25
§1. Definiciones basicas 25
§2. Continuidad 26
§3. Funciones lineales 29
§4. Continuidad uniforme 31
§5. Oscilacion 33
Ejercicios 35
Parte 2. Calculo en el espacio Euclideano
Capıtulo 3. Diferenciabilidad 39
§1. Derivada 39
§2. Derivadas parciales 47
§3. Teorema de la funcion inversa 51
§4. Teorema de la funcion implıcita 55
iii

iv Indice general
§5. Derivadas de orden mayor 57
Ejercicios 62
Capıtulo 4. Convexidad 65
§1. Conjuntos convexos 65
§2. Combinaciones convexas y simplejos 68
§3. Funciones convexas 70
§4. Puntos y valores extremos 75
Ejercicios 77
Capıtulo 5. Integracion 79
§1. La integral de Riemann 79
§2. Funciones Riemann-integrables 85
§3. Medida de Jordan 93
§4. El teorema de Fubini 96
Ejercicios 100
Capıtulo 6. Cambio de variable y aplicaciones 103
§1. Particiones de la unidad 103
§2. La integral de Riemann en conjuntos abiertos 108
§3. Cambio de variable 116
§4. El teorema de Sard 122
§5. El teorema de punto fijo de Brouwer 125
Ejercicios 127
Parte 3. Analisis vectorial
Capıtulo 7. Formas diferenciales 133
§1. Campos vectoriales 133
§2. Formas diferenciales en R3 135
§3. Algebra exterior 142
§4. Cambio de coordenadas 150
Ejercicios 154
Capıtulo 8. El diferencial exterior 155
§1. El diferencial exterior 155
§2. Campos vectoriales y formas 158
§3. El lema de Poincare 160
§4. Conjuntos simplemente conexos 164

Indice general v
Ejercicios 168
Capıtulo 9. Integracion de formas diferenciales 171
§1. Complejos en Rn 171
§2. Integrales de lınea 178
§3. Integracion de formas diferenciales 185
§4. Teorema de Stokes 186
Ejercicios 192
Parte 4. Variedades diferenciables
Capıtulo 10. Variedades diferenciables 197
§1. Variedades diferenciables en Rn 197
§2. Espacio tangente 202
§3. Variedades con frontera 205
Ejercicios 208
Capıtulo 11. Orientacion 211
§1. Campos vectoriales y formas diferenciales 211
§2. Orientacion 214
§3. Orientacion inducida en ∂M 218
Ejercicios 221
Capıtulo 12. El teorema de Stokes 223
§1. Integracion de formas en variedades 223
§2. El teorema de Stokes 227
§3. Volumen 229
§4. Los teoremas clasicos 233
Ejercicios 235


Parte 1
Preliminares


Capıtulo 1
El espacio euclidiano
1. Definiciones basicas
El espacio euclidiano, denotado por Rn, esta definido por el conjunto
(1.1) Rn = {x = (x1, x2, . . . , xn) : xi ∈ R}.
Es decir, Rn es el producto cartesiano de n copias de R, el conjunto de losnumeros reales. Recordemos que R es un campo ordenado completo, es decir,todo conjunto no vacıo acotado por arriba tiene una mınima cota superior(supremo). Una manera equivalente de enunciar la completitud de R es elhecho de que toda sucesion de Cauchy en R converge. Hablaremos mas sobresucesiones de Cauchy, particularmente en Rn, mas adelante.
Notemos que, en la ecuacion (1.1), las coordenadas de cada vector enRn se denotan con superındices, en lugar de subındices: x1, x2, etc. Esto nossimplificara la notacion mas adelante.
Rn es un espacio vectorial con suma
x+ y = (x1 + y1, x2 + y2, . . . , xn + yn)
y multiplicacion escalar
αx = (αx1, αx2, . . . , αxn).
Ademas, posee el producto interno
x · y = x1y1 + x2y2 + . . .+ xnyn =
n∑
i=1
xiyi,
3

4 1. El espacio euclidiano
tambien denominado producto punto. Este, a su vez, induce la norma
|x| =√x · x =
√√√√
n∑
i=1
(xi)2,
llamada la norma euclideana.
Proposicion 1.1. 1. |x| = 0 si y solo si x = 0;
2. |αx| = |α||x| para todo α ∈ R, x ∈ Rn;
3. Si x, y ∈ Rn,
(1.2) |x · y| ≤ |x||y|;4. Si x, y ∈ Rn,
(1.3) |x+ y| ≤ |x|+ |y|.
La desigualdad (1.2) es llamada la desigualdad de Cauchy-Schwarz, mien-tras que la (1.3) como la desigualdad del triangulo.
Demostracion. La demostracion de las propiedades (1) y (2) se dejan comoejercicio. Para (3), si x = 0, entonces ambos lados de la ecuacion (1.2) soncero. Supongamos entonces que x 6= 0. Sea w el vector
w =y · x|x|2 x.
El vector w es llamado la proyeccion de y sobre x (vease la figura 1).Entonces,
y
wx
Figura 1. Proyeccion de y en x
0 ≤ |y −w|2 = (y − w) · (y − w) =(
y − y · x|x|2 x
)
·(
y − y · x|x|2 x
)
= |y|2 − 2(y · x)2|x|2 +
(y · x)2|x|4 |x|2 = |y|2 − (y · x)2
|x|2 ,
de lo cual la ecuacion (1.2) se sigue inmediatamente.

1. Definiciones basicas 5
Para (4),
|x+ y|2 = (x+ y) · (x+ y) = |x|2 + 2x · y + |y|2 ≤ |x|2 + 2|x||y| + |y|2,donde la ultima desigualdad se sigue por la desigualdad de Cauchy-Schwarz.Por lo tanto, tenemos
|x+ y|2 ≤ (|x|+ |y|)2.�
Observacion 1.2. De la demostracion de la proposicion 1.1, podemos ob-servar que tenemos igualdad en (1.2) si y solo si uno de los vectores x o y esmultiplo escalar del otro. De hecho, si y es multiplo escalar de x, entoncesy = w, su proyeccion sobre x.
Similarmente, tenemos igualdad en (1.3) si y solo si x·y = |x||y|, es decir,cuando uno de los vectores x o y es multiplo escalar del otro y x · y > 0.Geometricamente, y se encuentra en la recta generada por x, y en la mismadireccion.
Decimos que los vectores u1, u2, . . . , um ∈ Rn generan Rn si para todox ∈ Rn existen α1, . . . , αm tales que
x = α1u1 + α2u2 + . . .+ αmum.
Es decir, todo x ∈ Rn es una combinacion lineal de los vectores u1, u2,. . . , um.
Decimos que u1, u2, . . . , um son linealmente independientes si
α1u1 + α2u2 + . . .+ αmum = 0
implica que
α1 = α2 = . . . = αm = 0.
Si u1, u2, . . . , um generan Rn y son linealmente independientes, entonces de-cimos que forman una base. Enunciaremos el siguiente teorema, cuya de-mostracion se puede encontrar en cualquier libro de algebra lineal.
Teorema 1.3. Si u1, u2, . . . , um forman una base de Rn, entonces m = n.
Es preciso observar que las bases no son unicas; ademas, si u1, . . . , um for-man una base de Rn, entonces, para cada x ∈ Rn, existen unicos α1, . . . , αn
tales que
x = α1u1 + α2u2 + . . . + αnun.
Ejemplo 1.4. La base estandar de Rn esta formada por los vectores e1, e2,. . . , en, donde
ei = (0, 0, . . . ,
i-esimo︷︸︸︷
1 , . . . , 0).

6 1. El espacio euclidiano
De hecho, si x ∈ Rn,
x = (x1, x2, . . . , xn) = x1e1 + x2e2 + . . .+ xnen.
En otras palabras, cada vector de Rn ya se encuentra representado en labase estandar.
Ejemplo 1.5. En R2, los vectores u1 = (1, 1), u2 = (1,−1) forman unabase, ya que
(x1, x2) =x1 + x2
2u1 +
x1 − x2
2u2
y son linealmente independientes.
Decimos que los vectores x, y ∈ Rn son ortogonales si x · y = 0. Porejemplo, como ei · ej = 0 si i 6= j, entonces los vectores e1, . . . , en de la baseestandar son ortogonales entre sı.
Decimos que u1, u2, . . . , un forman una base ortonormal (o.n.) si los vec-tores son ortogonales entre sı y unitarios, es decir, |ui| = 1 para todo i.
Por ejemplo, la base estandar e1, . . . , en es una base ortonormal.
Los vectores u1 = (1, 1) y u2 = (1,−1) son ortogonales, pero no unitarios.Sin embargo, se pueden “normalizar”dividiendo cada vector entre su norma:
v1 =u1|u1|
=( 1√
2,1√2
)
, v2 =u2|u2|
=( 1√
2,− 1√
2
)
.
Proposicion 1.6. Sea u1, u2, . . . , un una base ortonormal de Rn.
1. Si x ∈ Rn, x = (x · u1)u1 + . . .+ (x · un)un.2. Si x ∈ Rn, |x| =
√∑
i(x · ui)2.3. Si x, y ∈ Rn,
x · y =n∑
i=1
(x · ui)(y · ui).
Demostracion. 1. Si x = α1u1 + α2u2 + . . .+ αnun, entonces
x · ui = (α1u1 + α2u2 + . . .+ αnun) · ui = αiui · ui = αi.
2. Del inciso anterior,
|x|2 = x · x =( n∑
i=1
(x · ui)ui)
·( n∑
i=1
(x · ui)ui)
=
n∑
i,j=1
(x · ui)(x · uj)ui · uj =n∑
i=1
(x · ui)2.

1. Definiciones basicas 7
3. Similarmente al inciso anterior,
x · y =( n∑
i=1
(x · ui)ui)
·( n∑
i=1
(y · ui)ui)
=n∑
i,j=1
(x · ui)(y · uj)ui · uj =n∑
i=1
(x · ui)(y · ui).
�
El espacio generado por los vectores v1, v2, . . . , vr es el subespacio de Rn
formado por todas las combinaciones lineales de v1, v2, . . . , vr, y se denotapor gen{v1, v2, . . . , vr}.
ProyV x es la proyeccion ortogonal de x sobre el subespacio V , es decir,el unico vector y ∈ V tal que x− y es ortogonal a todo vector en V .
Proposicion 1.7. Si V es el subespacio de Rn generado por los vectores
ortonormales v1, v2, . . . , vr, entonces
ProyV x =
r∑
i=1
(x · vi)vi.
Demostracion. La misma demostracion de la proposicion 1.6 muestra que,si z ∈ V , entonces
z =
r∑
i=1
(z · vi)vi,
si v1, v2, . . . , vr son ortonormales.
Por lo tanto, si y =
r∑
i=1
(x · vi)vi, entonces y ∈ V y, para z ∈ V ,
(x− y) · z =(
x−r∑
i=1
(x · vi)vi)
·( r∑
i=1
(z · vi)vi)
= x ·r∑
i=1
(z · vi)vi −r∑
i=1
(x · vi)(z · vi) = 0.
�
El siguiente teorema nos garantiza que, dado un espacio generado porvectores v1, v2, . . . , vr, siempre podemos escoger en el una base ortonormal.Su demostracion es constructiva, y al algoritmo resultante se le conoce comoel proceso de Gram-Schmidt.

8 1. El espacio euclidiano
Teorema 1.8 (Proceso de Gram-Schmidt). Sean v1, v2, . . . , vr vectores li-
nealmente independientes en Rn. Entonces existen vectores ortonormales
u1, u2, . . . , ur tales que
gen{u1, u2, . . . , uk} = gen{v1, v2, . . . , vk}para k = 1, . . . , r.
Demostracion. Tomamos
u1 =v1|v1|
.
Para construir u2, sea
w2 = v2 − (v2 · u1)u1.Vemos que w2 es ortogonal a u1 (figura 2), ası que tomamos
w2
u1
u2
v2
Figura 2. La construccion del vector w2.
u2 =w2
|w2|.
Como u1 y u2 son combinaciones lineales de v1 y v2,
gen{u1, u2} ⊂ gen{v1, v2}.De manera similar, v1 y v2 son combinaciones lineales de u1 y u2, ası que
gen{v1, v2} ⊂ gen{u1, u2}.Por induccion, para construir uk+1 tomamos
wk+1 = vk+1 − Proygen{u1,...,uk}vk+1.
Entonces es facil ver que wk+1 · ui = 0, i = 1, .., k, y wk+1 6= 0 por que los vison linealmente independientes. Por lo que escogemos
uk+1 =wk+1
|wk+1|.
Es facil ver, como antes, que
gen{u1, . . . , uk+1} = gen{v1, . . . , vk+1}.�

2. Bestiario 9
La proposicion 1.6 y el proceso de Gram-schmidt implican que podrıamosescoger cualquier producto interno en Rn y serıa indistinguible del productopunto estandar, es decir, tendrıamos la misma geometrıa siempre y cuandotomemos una base ortonormal respecto de dicho producto.
2. Bestiario
En esta seccion listamos los subconjuntos de Rn de uso comun, comorectas, planos, o esferas, entre otros. La notacion definida aquı sera utilizadaen el resto del texto.
2.1. Rectas. La recta que pasa por x1 y x2 esta parametrizada por
γ(t) = (1− t)x1 + tx2, t ∈ R.
Notemos que γ(0) = x1 y γ(1) = x2. La restriccion de γ a [0, 1] es el segmento
de x1 a x2.
2.2. Hiperplanos. Un hiperplano es un conjunto de la forma
P = {x ∈ Rn : x · x0 = c},donde x0 ∈ Rn, x0 6= 0, y c ∈ R. El hiperplano ortogonal a n ∈ R, que pasapor x∗ ∈ R, esta dado por
{x : (x− x∗) · n = 0}.Un hiperplano P divide a Rn en dos semiespacios
{x : x · x0 > c} y {x : x · x0 < c}.Si x0 = en y c = 0, a estos se les llama semiespacio superior e inferior deRn, respectivamente.
2.3. Esferas y Bolas. La esfera en Rn es el conjunto
Sn−1 = {x : |x| = 1},es decir, el conjunto de vectores unitarios en Rn. La bola esta dada por elconjunto
Bn = {x : |x| ≤ 1}.Si x0 ∈ Rn y r > 0, la esfera de radio r alrededor de x0 esta dada por elconjunto
Sr(x0) = {x : |x− x0| = r} = rSn−1 + x0,
mientras que la bola de radio r alrededor de x0 esta dada por
Br(x0) = {x : |x− x0| ≤ r} = rBn + x0.
La bola abierta de radio R alrededor de x0 es el conjunto
B0r (x0) = {x : |x− x0| < r}.
10 1. El espacio euclidiano
En la siguiente seccion se aclarara la razon por la cual B0r (x0) es llamada
bola abierta.
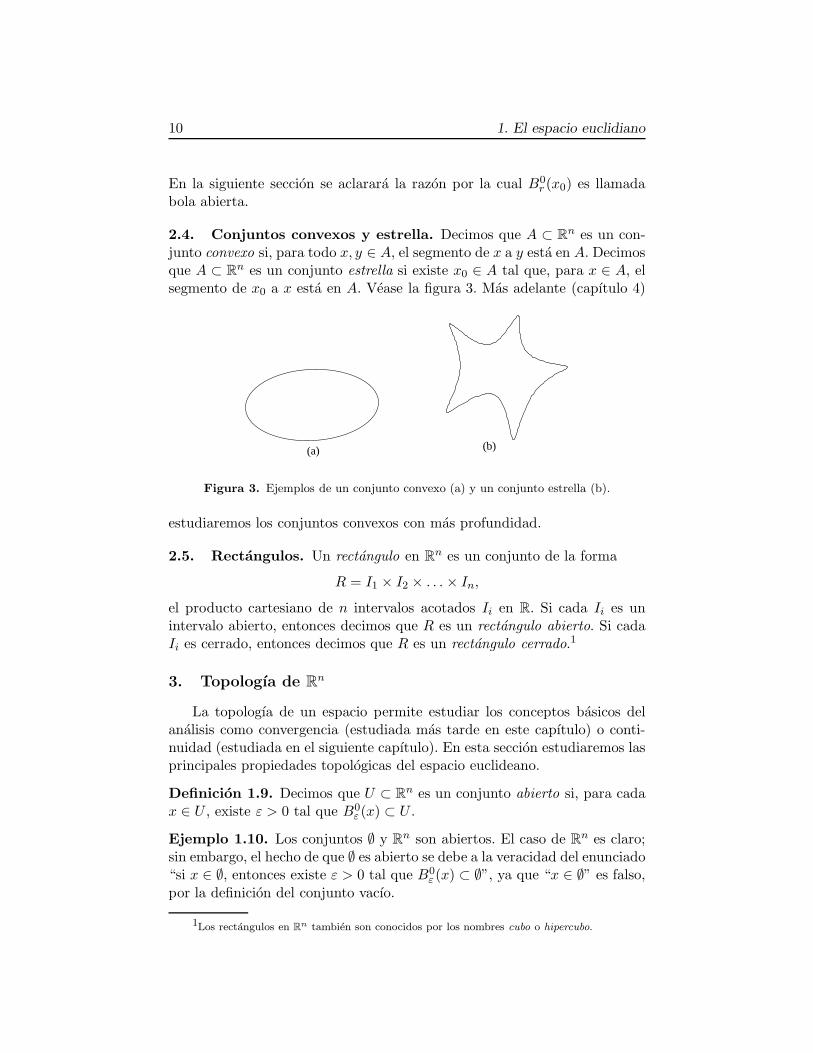
2.4. Conjuntos convexos y estrella. Decimos que A ⊂ Rn es un con-junto convexo si, para todo x, y ∈ A, el segmento de x a y esta en A. Decimosque A ⊂ Rn es un conjunto estrella si existe x0 ∈ A tal que, para x ∈ A, elsegmento de x0 a x esta en A. Vease la figura 3. Mas adelante (capıtulo 4)
(a) (b)
Figura 3. Ejemplos de un conjunto convexo (a) y un conjunto estrella (b).
estudiaremos los conjuntos convexos con mas profundidad.
2.5. Rectangulos. Un rectangulo en Rn es un conjunto de la forma
R = I1 × I2 × . . . × In,
el producto cartesiano de n intervalos acotados Ii en R. Si cada Ii es unintervalo abierto, entonces decimos que R es un rectangulo abierto. Si cadaIi es cerrado, entonces decimos que R es un rectangulo cerrado.1
3. Topologıa de Rn
La topologıa de un espacio permite estudiar los conceptos basicos delanalisis como convergencia (estudiada mas tarde en este capıtulo) o conti-nuidad (estudiada en el siguiente capıtulo). En esta seccion estudiaremos lasprincipales propiedades topologicas del espacio euclideano.
Definicion 1.9. Decimos que U ⊂ Rn es un conjunto abierto si, para cadax ∈ U , existe ε > 0 tal que B0
ε (x) ⊂ U .
Ejemplo 1.10. Los conjuntos ∅ y Rn son abiertos. El caso de Rn es claro;sin embargo, el hecho de que ∅ es abierto se debe a la veracidad del enunciado“si x ∈ ∅, entonces existe ε > 0 tal que B0
ε (x) ⊂ ∅”, ya que “x ∈ ∅” es falso,por la definicion del conjunto vacıo.
1Los rectangulos en Rn tambien son conocidos por los nombres cubo o hipercubo.

3. Topologıa de Rn 11
Ejemplo 1.11. Una bola abierta es un conjunto abierto. Para mostrar esto,consideremos la bola
B0r (x) = {y ∈ Rn : |x− y| < r},
y tomamos y ∈ B0r (x). Sean δ = r − |x − y| y z ∈ B0
δ (y). Entonces, por ladesigualdad del triangulo,
|z − x| ≤ |z − y|+ |y − x| < δ + |x− y| = r,
por lo que z ∈ B0r (x) y por lo tanto B0
δ (y) ⊂ B0r (x).
Ejemplo 1.12. Un rectangulo abierto es un conjunto abierto: Si
R = (a1, b1)× (a2, b2)× · · · × (an, bn)
y x ∈ R, sea
ε =1
2mın{x1 − a1, b1 − x1, . . . , xn − an, bn − xn}.
Entonces B0ε (x) ⊂ R.
El ejemplo anterior permite concluir la siguiente proposicion, la cualprovee una definicion equivalente de conjunto abierto.
Proposicion 1.13. U ⊂ Rn es abierto si, y solo si, para todo x ∈ U existe
un rectangulo abierto R tal que x ∈ R y R ⊂ U .
Demostracion. Sea U abierto y x ∈ U . Entonces existe ε > 0 tal queBε(x) ⊂ U . Sea
R =(
x1− ε√n, x1+
ε√n
)
×(
x2− ε√n, x2+
ε√n
)
×· · ·×(
xn− ε√n, xn+
ε√n
)
.
Entonces x ∈ R y R ⊂ B0ε (x) ⊂ U .
Supongamos ahora que para cada x ∈ U podemos encontrar un rectangu-lo abierto R = (a1, b1) × (a2, b2) × . . . × (an, bn) tal que x ∈ R y R ⊂ U .Sea
ε =1
2mın{x1 − a1, b1 − x1, . . . , xn − an, bn − xn}.
Entonces B0r (x) ⊂ R ⊂ U , y U es abierto. �
Definicion 1.14. Sea A ⊂ Rn y x ∈ Rn. Decimos que x es un punto de
acumulacion de A si, para todo r > 0, B0r (x) ∩A es infinito.
Observacion 1.15. De manera analoga a la definicion de abierto, podemosmostrar que x es un punto de acumulacion de A si, y solo si, para todorectangulo abierto R tal que x ∈ R, R ∩A es infinito.
12 1. El espacio euclidiano
Si el conjunto A tiene algun punto de acumulacion, entonces A, por ladefinicion anterior, es infinito. Ademas, si x es un punto de acumulacion deA, entonces no necesariamente x ∈ A. Sin embargo, si x es un punto deacumulacion de A y x /∈ A, entonces nos podemos “acercar” desde A a xarbitrariamente; es decir, para todo r > 0, existe y ∈ A tal que |x− y| < r.
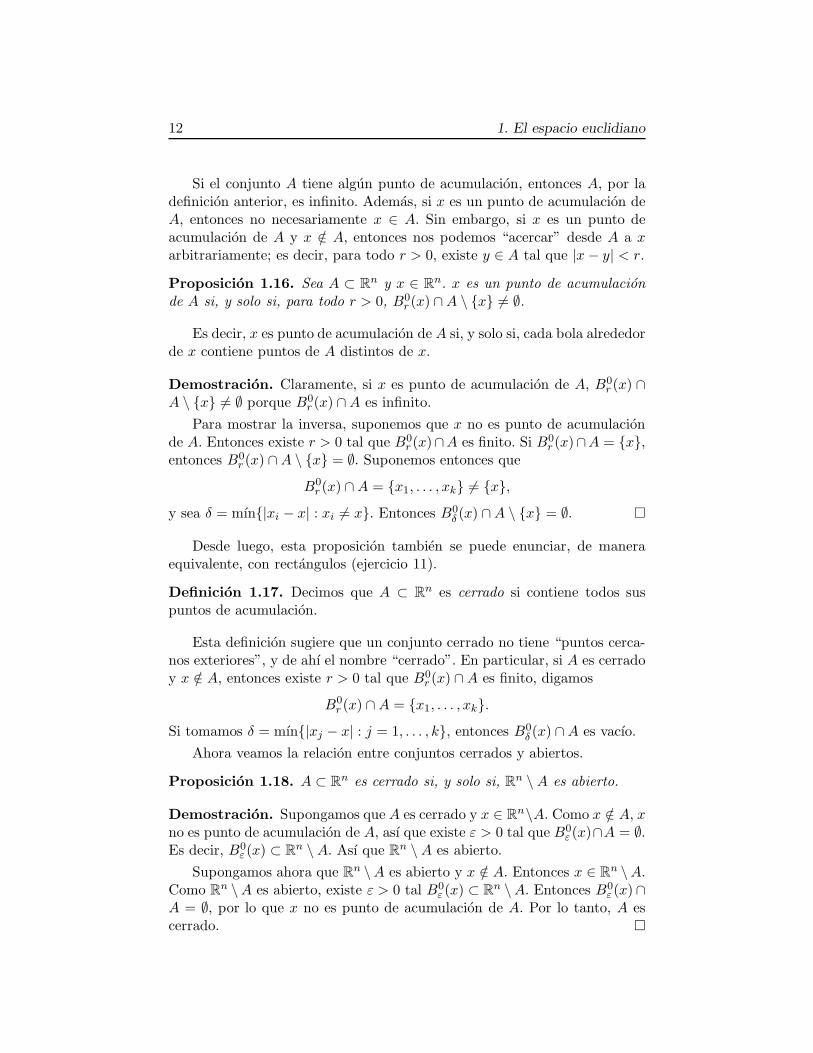
Proposicion 1.16. Sea A ⊂ Rn y x ∈ Rn. x es un punto de acumulacion
de A si, y solo si, para todo r > 0, B0r (x) ∩A \ {x} 6= ∅.
Es decir, x es punto de acumulacion de A si, y solo si, cada bola alrededorde x contiene puntos de A distintos de x.
Demostracion. Claramente, si x es punto de acumulacion de A, B0r (x) ∩
A \ {x} 6= ∅ porque B0r (x) ∩A es infinito.
Para mostrar la inversa, suponemos que x no es punto de acumulacionde A. Entonces existe r > 0 tal que B0
r (x)∩A es finito. Si B0r (x)∩A = {x},
entonces B0r (x) ∩A \ {x} = ∅. Suponemos entonces que
B0r (x) ∩A = {x1, . . . , xk} 6= {x},
y sea δ = mın{|xi − x| : xi 6= x}. Entonces B0δ (x) ∩A \ {x} = ∅. �
Desde luego, esta proposicion tambien se puede enunciar, de maneraequivalente, con rectangulos (ejercicio 11).
Definicion 1.17. Decimos que A ⊂ Rn es cerrado si contiene todos suspuntos de acumulacion.
Esta definicion sugiere que un conjunto cerrado no tiene “puntos cerca-nos exteriores”, y de ahı el nombre “cerrado”. En particular, si A es cerradoy x /∈ A, entonces existe r > 0 tal que B0
r (x) ∩A es finito, digamos
B0r (x) ∩A = {x1, . . . , xk}.
Si tomamos δ = mın{|xj − x| : j = 1, . . . , k}, entonces B0δ (x) ∩A es vacıo.
Ahora veamos la relacion entre conjuntos cerrados y abiertos.
Proposicion 1.18. A ⊂ Rn es cerrado si, y solo si, Rn \ A es abierto.
Demostracion. Supongamos que A es cerrado y x ∈ Rn\A. Como x /∈ A, xno es punto de acumulacion de A, ası que existe ε > 0 tal que B0
ε (x)∩A = ∅.Es decir, B0
ε (x) ⊂ Rn \ A. Ası que Rn \ A es abierto.
Supongamos ahora que Rn \A es abierto y x /∈ A. Entonces x ∈ Rn \A.Como Rn \A es abierto, existe ε > 0 tal B0
ε (x) ⊂ Rn \A. Entonces B0ε (x)∩
A = ∅, por lo que x no es punto de acumulacion de A. Por lo tanto, A escerrado. �

3. Topologıa de Rn 13
Esta proposicon nos permite definir, equivalentemente, un conjunto ce-rrado simplemente como el complemento de un conjunto abierto, sin hacerreferencia a los puntos de acumulacion. Sin embargo, de manera inversa,tambien nos ofrece una alternativa: podemos definir primero los conjuntoscerrados a traves de sus puntos de acumulacion, y luego definir un conjuntoabierto como el complemento de un conjunto cerrado. Cualquiera de estasopciones es valida para definir la topologıa en Rn, y todas son utilizadas endistintos textos de analisis, dependiento del gusto del autor.
Definicion 1.19. Sea A ⊂ Rn. La frontera de A, frA, es el conjunto dex ∈ Rn tales que, para todo ε > 0,
B0ε (x) ∩A 6= ∅ y B0
ε (x) ∩ (Rn \ A) 6= ∅.
Equivalentemente, x ∈ frA si, y solo si, para todo rectangulo abierto Rque contiene a x,
R ∩A 6= ∅ y R ∩ (Rn \A) 6= ∅.
Vease la figura 4.
A
A C
Figura 4. Un punto en la frontera de A.
Notemos que, si x ∈ frA, entonces x es un punto de acumulacion de A ode Rn \A. Mas aun, si x es un punto de acumulacion de A y x /∈ A, entoncesx ∈ frA.
Podemos observar, ademas, que frA = fr(Rn \A).
Ejemplo 1.20. frRn = fr ∅ = ∅.

14 1. El espacio euclidiano
Ejemplo 1.21. La frontera de un bola es una esfera. De hecho,
frBr(x) = frB0r (x) = Sr(x).
Mas aun, frSr(x) = Sr(x).
Ejemplo 1.22. Si R = (a1, b1)× . . .× (an, bn), entonces
frR =
{a1} × [a2, b2]× . . . × [an, bn] ∪ {b1} × [a2, b2]× . . .× [an, bn] ∪ . . .
∪ [a1, b1]× . . .× {bn}.Es decir, frR es la union de las ”caras”de R.
Ejemplo 1.23. Sea Q = [0, 1]⋂
Q y consideremos Q× [0, 1] ⊂ R2. (Veasela figura 5.) Si x ∈ [0, 1] × [0, 1] y x ∈ (a, b) × (c, d) entonces existe
.
1/2 11/3 2/30
1
Figura 5. Representacion simple del conjunto A = Q × [0, 1]. Noteseque A esta formado por la union de rectas verticales, cada una sobre unnumero racional en [0, 1].
q ∈ (a, b) ∩ [0, 1] ∩Q,
ası que (q, x2) ∈ Q× [0, 1]. Ademas, existe
α ∈ (a, b) ∩ [0, 1] \Q,
ası que (α, x2) ∈ R2 \ (Q× [0, 1]). Por lo tanto
fr(Q× [0, 1]) = [0, 1] × [0, 1].
Definicion 1.24. Sea A ⊂ Rn. La cerradura de A, denotada por A, esta de-finida como la union de A y sus puntos de acumulacion.
La siguiente proposicion establece algunas propiedades de la cerradura.
Proposicion 1.25. Sea A ⊂ Rn.
1. A es cerrado.
2. Si E es cerrado y E ⊃ A, entonces A ⊂ E.
3. Si A ⊂ B entonces A ⊂ B.

4. Sucesiones en Rn 15
4. A = A.
Demostracion. 1. Sea x un punto de acumulacion de A y sea R unrectangulo que contiene a x. Queremos mostrar que R∩A es infinito,de tal forma que x es punto de acumulacion de A y entonces x ∈ A.Si no, como R∩ A es infinito, podemos tomar y ∈ R∩ (A \A). Peroentonces y es un punto de acumulacion de A y, como y ∈ R, R ∩Aes infinito, lo cual es una contradiccion.
2. Si x es un punto de acumulacion de A y A ⊂ E, entonces x es unpunto de acumulacion de E. Como E es cerrado, x ∈ E. Pero estoimplica que A ⊂ E.
3. La demostracion es similar a (2).
4. Por (1), A es cerrado, ası que, por (2), A ⊂ A. De (3), como A ⊂ A,
tenemos A ⊂ A.
�
La parte (2) de la proposicion 1.25 implica que la cerradura del conjuntoA es el “menor” de los conjuntos cerrados que contienen a A.
Definicion 1.26. Sea A ⊂ Rn. El interior de A es el conjunto
int(A) = A0 = {x ∈ A : existe ε > 0 tal que B0ε (x) ⊂ A}.
El exterior de A esta definido como el conjunto
ext(A) = {x ∈ Rn \ A : existe ε > 0 tal que B0ε(x) ∩A = ∅}.
Similarme a la cerradura, es posible mostrar que el interior de A es ahorael “mayor” de los conjuntos abiertos contenidos en A (ejercicio 14). Ademas,notamos que ext(A) = int(Rn \A). La siguiente proposicion es muy facil dedemostrar (ejercicio 15).
Proposicion 1.27. Sea A ⊂ Rn.
1. A0 = A \ frA.2. ext(A) = int(Rn \ A).3. frA = A ∩ (Rn \ A).
Ejemplo 1.28. Q0 = ∅ y Q = R. Notese que, en este caso, el interior esvacıo, aun cuando la cerradura es “grande”.
4. Sucesiones en Rn
Una sucesion en Rn es una funcion f : N → Rn. Si f(k) = xk, simple-mente denotamos f como (xk)
∞k=0, o simplemente como (xk)k o (xk), si los

16 1. El espacio euclidiano
subındices y sus rangos son claros. Notemos que
xk = (x1k, x2k, . . . , x
nk ),
por lo que cada una de las coordenadas de los xk definen una sucesion (xik)ken R.
Definicion 1.29. Decimos que la sucesion (xk) converge a L ∈ Rn si, paratodo ε > 0, existe N tal que, si k ≥ N ,
|L− xk| < ε.
Si la sucesion (xk) converge a L, escribimos xk → L. Mas aun, L es unico(ejercicio 16), y lo llamamos el lımite de (xk), y escribimos
L = lımxk.
No es muy difıcil verificar los siguientes enunciados, cada uno caracteri-zando la convergencia de una sucesion:
1. La sucesion (xk) converge a L ∈ Rn si, para todo ε > 0, existe N talque, para k ≥ N , xk ∈ B0
ε (L);
2. La sucesion (xk) converge a L ∈ Rn si, para todo rectangulo abiertoR que contiene a x, existe N tal que, para k ≥ N , xk ∈ R.
Sin embargo, en la practica, la siguiente proposicion es muy util.
Proposicion 1.30. La sucesion (xk)k converge en Rn si, y solo si, cada
(xik)k converge en R.
Demostracion. Suponemos que xk → L y sea ε > 0. Sea N tal que k ≥ Nimplica |xk − L| < ε. Entonces, para k ≥ N ,
|xik − Li| ≤√
(x1k − L1)2 + . . .+ (xik − Li)2 + . . .+ (xnk − Ln)2 < ε.
Suponemos ahora que cada xik → Li, y sea ε > 0. Tomamos Ni tal que,para k ≥ Ni,
|xik − Li| <ε√n.
Tomamos N = maxiNi y L = (L1, . . . , Ln). Entonces, si k ≥ N ,
|xk − L| ≤√
(x1k − L1)2 + . . .+ (xnk − Ln)2 <
√
ε2
n+ . . .+
ε2
n= ε.
�
Decimos que (xk) es una sucesion en A ⊂ Rn si xk ∈ A para todok. La siguiente proposicion clasifica los conjuntos cerrados en terminos desucesiones.

4. Sucesiones en Rn 17
Proposicion 1.31. Un conjunto A ⊂ Rn es cerrado si, y solo si, para toda
sucesion (xk) en A que converge a L, L ∈ A.
En otras palabras, un conjunto es cerrado si contiene sus lımites.
Demostracion. Supongamos que A es cerrado y sea (xk) en A una sucesionque converge a L. Sea R un rectangulo abierto que contiene a L, y ε > 0 talque Bε(L) ⊂ R. Entonces, como xk → L, existe K tal que xK ∈ R. ComoxK ∈ A, hemos demostrado que R ∩ A 6= ∅. Entonces, L esta en A o es unpunto de acumulacion de A. Como A es cerrado, en ambos casos L ∈ A.
Supongamos ahora que toda sucesion en A que converge tiene su lımiteen A. Sea x un punto de acumulacion de A. Para cada k ≥ 1, sea xk ∈ A talque |xk − x| < 1/k. Tal xk debe existir porque B1/k(x) ∩ A 6= ∅. Entoncesxk es una sucesion en A y xk → x, por lo que x ∈ A. �
Definicion 1.32. Decimos que la sucesion (xk) es acotada si existe M > 0tal que xk ∈ BM (0) para todo k; es decir , |xk| ≤ M .
Equivalentemente, (xk) es acotada si existe un rectangulo R tal quexk ∈ R, para todo k. Mas aun, (xk) es acotada en Rn si, y solo si, cada (xik)es acotada en R.
El siguiente teorema es muy importante, y es conocido como el teoremade Bolzano-Weierstrass. Para su demostracion asumiremos el teorema en larecta real R.2
Teorema 1.33 (Bolzano-Weierstrass). Toda sucesion acotada tiene una
subsucesion que converge.
Demostracion. Si (xk) es acotada, cada (xik) es acotada. Por el teorema deBolzano-Weierstrass en R, (x1k) tiene una subsucesion que converge, digamos(x1kl)l. Inductivamente, si
(x1kl)l, (x2kl)l, . . . , (x
pkl)l
son subsucesiones convergentes de (x1k), . . . , (xpk), respectivamente, entonces
tomamos una subsucesion de (kl) de tal forma que (xp+1klm
)m converge. Al
final, obtenemos subsucesiones
(x1kl)l, (x2kl)l, . . . , (x
nkl)l
convergentes, por lo que (xkl) es un subsucesion de (xk) convergente, por laproposicion 1.30. �
El teorema de Bolzano-Weierstrass nos permite demostrar la siguientepropiedad de los conjuntos cerrados, de la cual haremos uso mas adelante.
2Vease, por ejemplo, [Gaughan].

18 1. El espacio euclidiano
Proposicion 1.34. Sea A un conjunto cerrado no vacıo y x ∈ Rn. Entonces
existe un punto y ∈ A tal que |x− y| es mınimo.
Demostracion. Sea x ∈ Rn y definimos d : A → R por d(y) = |x− y|. Sear0 = ınf{d(y) : y ∈ A}. Entonces, para todo k ≥ 1, existe yk ∈ A tal que
r0 ≤ d(yk) < r0 + 1/k.
La sucesion (yk) es acotada y, por el teorema de Bolzano-Weierstrass, tieneuna subsucesion que converge, digamos ykl → y. Como A es cerrado, laproposicion 1.31 implica que y ∈ A.
Ademas, d(y) = r0. Para ver esto, dado ε > 0 tomamos K > 2/ε tal que|yK − y| < ε/2. Entonces
r0 ≤ d(y) = |x− y| ≤ |x− yK |+ |yK − y| < r0 +1
K+
ε
2< r0 + ε.
Como ε > 0 es arbitrario, d(y) = r0. �
Si x ∈ A, entonces d(x) = 0, por lo que d toma su mınimo en x. Ahorabien, como A es cerrado, si x /∈ A, entonces x no es un punto de acumulacionde A y existe r > 0 tal que B0
r (x) ∩A = ∅. Entonces r0 ≥ r > 0.
Definicion 1.35. Decimos que la sucesion (xk) es una sucesion de Cauchy
si, para cada ε > 0, existe N tal que, si k, l ≥ N , entonces |xk − xl| < ε.
En otras palabras, (xk) es de Cauchy si sus terminos se acercan entre sı,arbitrariamente.
Si una sucesion converge, entonces es de Cauchy. Para verificarlo, su-ponemos que xk → L. Entonces, dado ε > 0, existe N tal que, si k ≥ N ,|xk − L| < ε/2. Por lo tanto, si k, l ≥ N ,
|xk − xl| ≤ |xk − L|+ |L− xl| <ε
2+
ε
2= ε.
De manera inversa, si (xk) es de Cauchy, entonces converge. Esto se siguedel teorema de Bolzano-Weierstrass (ejercicios 19-21).
5. Conjuntos Compactos
En esta seccion estudiaremos los conjuntos compactos y su relacion consucesiones en Rn. La idea de compacidad fue descubierta por Heine en elestudio de funciones uniformemente continuas, las cuales estudiaremos en elsiguiente capıtulo.
Definicion 1.36. Sea A ⊂ Rn. Una cubierta de A es una coleccion {Uα} deconjuntos abiertos tales que A ⊂ ⋃
α Uα.
Si {Uα} es una cubierta de A, una subcubierta es un subconjunto de{Uα}, digamos {Uαβ
} ⊂ {Uα}, tal que A ⊂ ⋃
β Uαβ.
5. Conjuntos Compactos 19
Decimos que A es compacto, si toda cubierta de A tiene una subcubiertafinita.
Ejemplo 1.37. ∅ es compacto.
Ejemplo 1.38. Un conjunto finito {x1, x2, . . . , xk} es compacto. Si {Uα} esuna cubierta de {x1, x2, . . . , xk}, existe, para cada i = 1, 2, .., k, αi tal quexi ∈ Uαi
. Entonces {Uα1, Uα2
, . . . , Uαk} es una subcubierta finita.
Proposicion 1.39. Si A es compacto, entonces es cerrado.
Demostracion. Demostraremos que, si A no es cerrado, entonces existeuna cubierta de A que no tiene subcubiertas finitas, y por lo tanto no escompacto.
Sea x /∈ A un punto de acumulacion de A. Entonces, para todo ε > 0,Bε(x) ∩ A 6= ∅. Consideremos los conjuntos Uk = Rn \ B1/k(x). Cada Uk
es abierto porque B1/k(x) es cerrado, y⋃
k Uk = Rn \ {x}. Como x /∈ A,entonces la coleccion {Uk : k ≥ 1} es una cubierta para A.
Sin embargo, {Uk : k ≥ 0} no tiene subcubiertas finitas: Para cadacoleccion finita Uk1 , . . . , Ukp , si N = maxi ki, entonces
p⋂
i=1
Uki = UN = Rn \B1/N (x).
Como BN (x) ∩A 6= ∅, entonces {Uk1 , . . . , Ukp} no cubre a A. �
No todos los conjuntos cerrados son compactos. El espacio Rn es cerrado,por ejemplo, pero no es compacto porque la cubierta de bolas B0
k(0), k ≥ 1,no tiene una subcubierta finita. Sin embargo, los subconjuntos cerrados deconjuntos compactos sı lo son.
Proposicion 1.40. Sean E ⊂ F ⊂ Rn. Si E es cerrado y F es compacto,
entonces E es compacto.
Demostracion. Sea {Uα} una cubierta de E. Como E es cerrado, entoncesRn \E es abierto, ası que {Rn \E}⋃{Uα} es una cubierta de F . Como F escompacto, tiene una subcubierta finita, digamos {Rn\E,Uα1
, Uα2, . . . , Uαk
}.Entonces {Uα1
, Uα2, . . . , Uαk
} es una subcubierta finita para E. �
Definicion 1.41. Decimos que un conjunto A es acotado si esta contenidoen una bola BM (0), para algun M > 0.
De manera equivalente, A es acotado si existe un rectangulo R tal queA ⊂ R.
Proposicion 1.42. Si A es compacto, entonces es acotado.

20 1. El espacio euclidiano
Demostracion. Al igual que en la demostracion de la proposicion 1.39,mostraremos la contrapositiva. Es decir, supondremos que A no es acotadopara concluir que no es compacto.
Consideremos la coleccion {B0k(0) : k ≥ 1}. Como
⋃
k B0k(0) = Rn,
{B0k(0) : k ≥ 1} es una cubierta para A. Sin embargo, no tiene subcubiertas
finitas, porque
B0k1(0) ∪ . . . ∪B0
kp(0) = B0N (0) 6⊃ A,
donde N = maxi ki, porque A no es acotado. �
Las proposiciones 1.39 y 1.42 implican el siguiente teorema.
Teorema 1.43. Sea A un conjunto compacto y (xk) una sucesion en A.Entonces (xk) tiene una subsucesion que converge en A.
Demostracion. Como A es acotado, entonces la sucesion (xk) tiene unasubsucesion que converge, por el teorema de Bolzano-Weierstrass. Como Aes cerrado, el lımite de esta subsucesion esta en A. �
El siguiente teorema clasifica los conjuntos cerrados en Rn, y es conocidocomo el teorema de Heine-Borel.
Teorema 1.44 (Heine-Borel). A ⊂ Rn es compacto si y solo si A es cerrado
y acotado.
Demostracion. Ya hemos demostrado que todo conjunto compacto es ce-rrado y acotado (proposiciones 1.39 y 1.42).
Para la inversa, por la proposicion 1.40, es suficiente con demostrar queun rectangulo cerrado es compacto, y lo haremos por contradiccion.
Sea R = [a1, b1]×· · ·× [an, bn] un rectangulo cerrado en Rn, y {Uα} unacubierta para R que no tiene subcubiertas finitas.
Observemos que R es la union de 2n rectangulos cerrados I1 × · · · × In,
donde cada Ij es [aj , cj ] o [cj , bj ], cj =aj + bj
2, el punto medio del intervalo
[aj, bj ]. Entonces, para al menos uno de esos rectangulos, digamos R1, {Uα}no tiene subcubiertas finitas para R1.
Continuamos de esta forma para obtener una sucesion R1, R2, . . . derectangulos cerrados tales que
1. {Uα} no tiene subcubiertas finitas para Rk;
2. Rk+1 ⊂ Rk; y
3. si Rk = I1 × · · · × In, la longitud de cada intervalo Ij esbj − aj
2k.

5. Conjuntos Compactos 21
Tomamos xk ∈ Rk. Entonces cada sucesion (xjk) satisface que, parak, l ≥ N ,
|xjk − xjl | ≤bj − aj2N
.
Entonces cada (xjk) es de Cauchy, y por lo tanto (xk) es de Cauchy y converge(ejercicios 18-21). Digamos xk → x.
Como R es cerrado, x ∈ R, y existe α0 tal que x ∈ Uα0. Pero Uα0
esabierto, por lo que existe un rectangulo abierto S tal que x ∈ S y S ⊂ Uα0
.
Si S = (p1, q1)× · · · × (pn, qn), sea
δ = mın1≤j≤n
{xj − pj, qj − xj},
y sea K tal quebj − aj2N
<δ
2para todo j = 1, . . . , n. Como RK es cerrado,
x ∈ RK , y entonces RK ⊂ S. Pero ası, RK ⊂ Uα0, lo cual contradice el
hecho que {Uα} no tiene subcubiertas finitas para RK .
Por lo tanto, todo rectangulo cerrado es compacto, como querıamos ve-rificar. �
Ejemplo 1.45. La bola Bn y la esfera Sn−1 son conjuntos cerrados y aco-tados en Rn. Por el teorema de Heine-Borel, son compactos.
El teorema de Heine-Borel tambien implica la inversa del teorema 1.43.
Corolario 1.46. Si A es un conjunto tal que toda sucesion en A tiene una
subsucesion que converge en A, entonces A es compacto.
Demostracion. Mostraremos que, si A es un conjunto que no es cerradoo no es acotado, entonces tiene una sucesion sin subsucesiones convergentesen A. De hecho, por la proposicion 1.31, si no es cerrado entonces existe unasucesion en A con lımite fuera de A.
Si A no es acotado, entonces existe una sucesion (xk) en A tal que,digamos, |xk| > k. Entonces (xk) no tiene subsucesiones convergentes.
Por lo tanto, si A es un conjunto tal que toda sucesion en A tiene unasubsucesion que converge en A, entonces A es cerrado y acotado. Por elteorema de Heine-Borel, A es compacto. �

22 1. El espacio euclidiano
Ejercicios
1. Muestra las primeras dos partes de la proposicion 1.1.
2. Muestra la desigualdad del triangulo inversa: Si x, y ∈ Rn,∣∣|x| − |y|
∣∣ ≤ |x− y|.
3. Demuestra la identidad del palalelogramo: Si x, y ∈ Rn,
|x|2 + |y|2 = 1
2
(|x+ y|2 + |x− y|2
).
Explica que tiene que ver esta identidad con un paralelogramo.
4. Sea V un subespacio de Rn y x ∈ Rn. Si y1, y2 ∈ V son tales que
x− y1 ⊥ z y x− y2 ⊥ z
para todo z ∈ V , muestra que y1 = y2. (Sugerencia: Calcula |y1 − y2|.)5. Muestra que, si x1, x2 ∈ Rn, el conjunto
{x ∈ Rn : |x− x1| = |x− x2|}es un hiperplano.
6. Muestra que la interseccion de dos rectangulos en Rn es vacıa o es otrorectangulo.
7. Muestra que U ∈ Rn es abierto si, y solo si, para todo x ∈ U existe ε > 0tal que Bε(x) ⊂ U . En otras palabras, podemos definir a los conjuntosabiertos en terminos de bolas cerradas.
8. Muestra que un semiespacio es abierto.
9. Muestra que si {Uα} es una coleccion de conjuntos abiertos en Rn, en-tonces la union
⋃
α Uα es un conjunto abierto.
10. Muestra que si U1, U2, . . . , Uk son conjuntos abiertos en Rn, entonces la
interseccion⋂k
i=1 Ui es un conjunto abierto.
11. Muestra que x es punto de acumulacion de A si, y solo si, para todorectangulo abierto R que contiene a x, R ∩A \ {x} 6= ∅.
12. Muestra la tercera parte de la proposicion 1.25.
13. Muestra que, si x ∈ (frA) \ A, entonces x es un punto de acumulacionde A.
14. Sea A ∈ Rn y U ⊂ A abierto. Muestra que U ⊂ intA.
15. Demuestra la proposicion 1.27.
16. Sea (xk) una sucesion en Rn tal que xk → L y xk → M . Muestra queL = M .
17. Muestra que, si (xk) converge, entonces es acotada.

Ejercicios 23
18. Muestra que la sucesion (xk) es de Cauchy en Rn si y solo si cada sucesion(xik) es de Cauchy en R.
19. Si (xk) es una sucesion de Cauchy, entonces es acotada.
20. Sea (xk) una sucesion de Cauchy tal que una subsucesion converge,digamos xkl → L. Muestra que xk → L.
21. Concluye, de los problemas anteriores, que toda sucesion de Cauchy enRn converge. (Utiliza el teorema de Bolzano-Weierstrass.)
22. Muestra que todo conjunto infinito y acotado en Rn tiene un punto deacumulacion.
23. Considera, en R, la cubierta {( 1
2n,3
2n
)
: n = 1, 2, . . .} del conjunto{
1,1
2,1
3, . . .
}
. Muestra que esta cubierta no tiene subcubiertas finitas.
24. Considera, en Rn, la cubierta {An}n,
An = {x ∈ Rn :1
2n< |x| < 3
2n},
para la bola punteada B∗1(x) = {x : 0 < |x| ≤ 1}. Muestra que esta
cubierta no tiene subcubiertas finitas.
