unit 3: computer system evolution
TRANSCRIPT
Unit 3: Computer System Evolution
3.1 Unit Introduction
Welcome to the third unit of Module 1, Computer System Evolution. In
unit 2, you were introduced to computer architecture as comprising the
design of a computer system. In particular, you gained insight into the main
structural components that make up a computer system’s architecture and
into the interactions among these components to achieve the overall
function of a computer, that is, program execution. So far, the previous two
units have introduced computer systems as we know and use them today.
However, as I am sure you are aware, if using computers makes life easier
for us today, we can thank a number of people for their discoveries and
inventions in the computing field.
The field of computing is incredibly fast paced, with dramatic changes
seeming to occur every few years. You only have to look at advances in the
fields of machine learning, automation and artificial intelligence to realise
that the field of computing may look like a very different world in a decade’s
time. Yet it all mostly stems from those simple discoveries made by a
handful of individuals between the late 1930s and the early 1980s.
As I am sure you are aware, a study of history in any field helps us
understand the different changes that have taken place over time and how
these events have influenced the world we live in today. In this unit, you will
be introduced to a number of significant inventions that have taken place
over time in the rapidly changing world of computing. You will also learn
about the direction in which developments in computer architecture are
heading.

3.2 Unit Aims
The aim of this unit is to introduce you to a number of significant
inventions that have taken place over time in the rapidly changing world
of computing.
3.3 Unit Objectives
By the end of this unit, you should be able to:
● Present an overview of the evolution of computer technology from
early human computers to the latest electronic computers.
● Describe the key performance issues that relate to the design of a
computer system.
3.4 Origins of Computation
Electronic computers maybe relatively new, but the need for computation is
not.
The Abacus
The earliest recognised device for computing was the abacus, Figure 3-1, invented in
Mesopotamia around 2700 – 2500 BCE. It’s essentially a hand operated calculator, that
helps add and subtract many numbers. It also stores the current state of the computation,
much like your hard drive does today. Before computers, calculators, or even arithmetic
using paper and pencil, the abacus was the most advanced device for crunching
numbers. Before the abacus, the only methods people had to use for their mathematical
calculations were their fingers and toes, or stones in the dirt.

Figure 3-1: The Abacus
To use the abacus, lay it on a flat surface and set it to zero by making sure no beads are
touching the reckoning bar. To count on the abacus start on the far right side of the
abacus, and slide one earthly bead up to the reckoning bar. For example, in the picture,
the abacus is equal to "283" with nine beads moved towards the reckoning bar.
Figure 3-2: Abacus equal to 283
The third column (100's column) has two beads counted for 200. The second column
(10's column) has a Heavenly bead counted for 50, and three Earthly beads counted for
30 giving it a total of 80. Finally, the first column (1's column) has three beads counted.
Adding all columns together (200 + 80 + 3) gives you the total of 283.
Over the next thousands of years, humans developed all sorts of clever computing
devices, each one of these devices making something that was previously laborious to
calculate much faster, easier, and often more accurate. Two prominent examples are
Napier’s Bones and the Slide Rule.
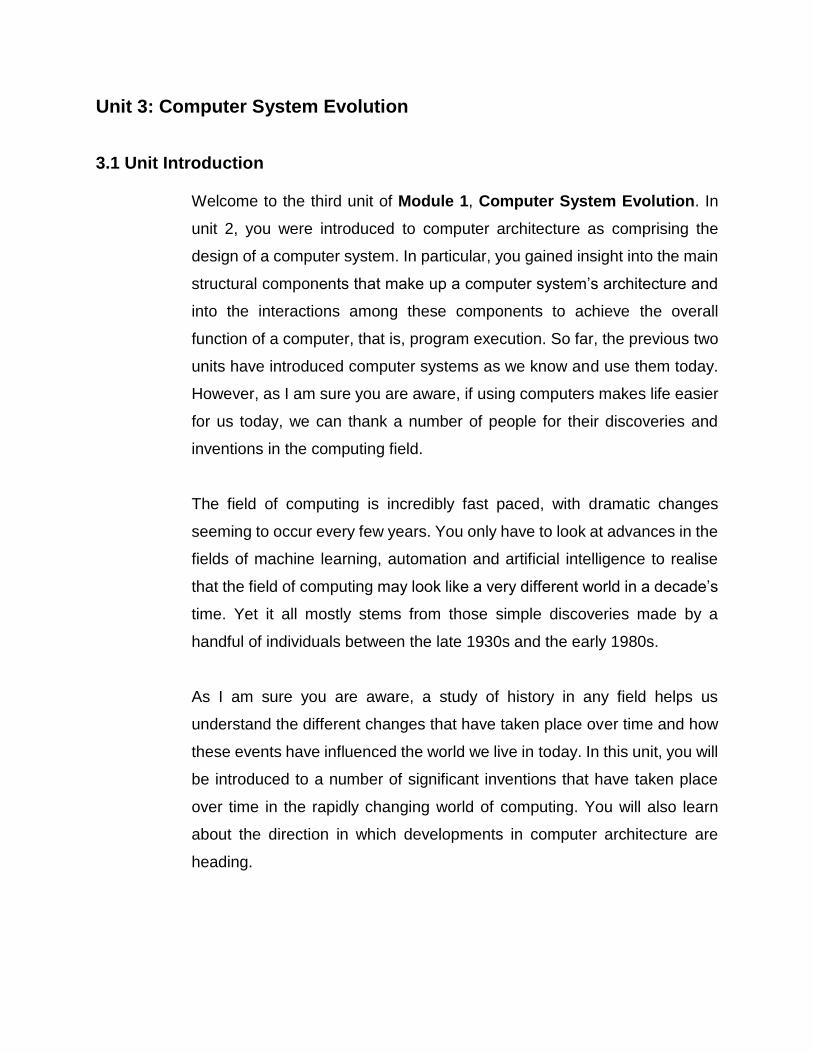
Napier’s Bones - 1614
John Napier invented this aid that reduced division to a process of subtraction and
multiplication to a process of addition.
Figure 3-3: The Slide Rule
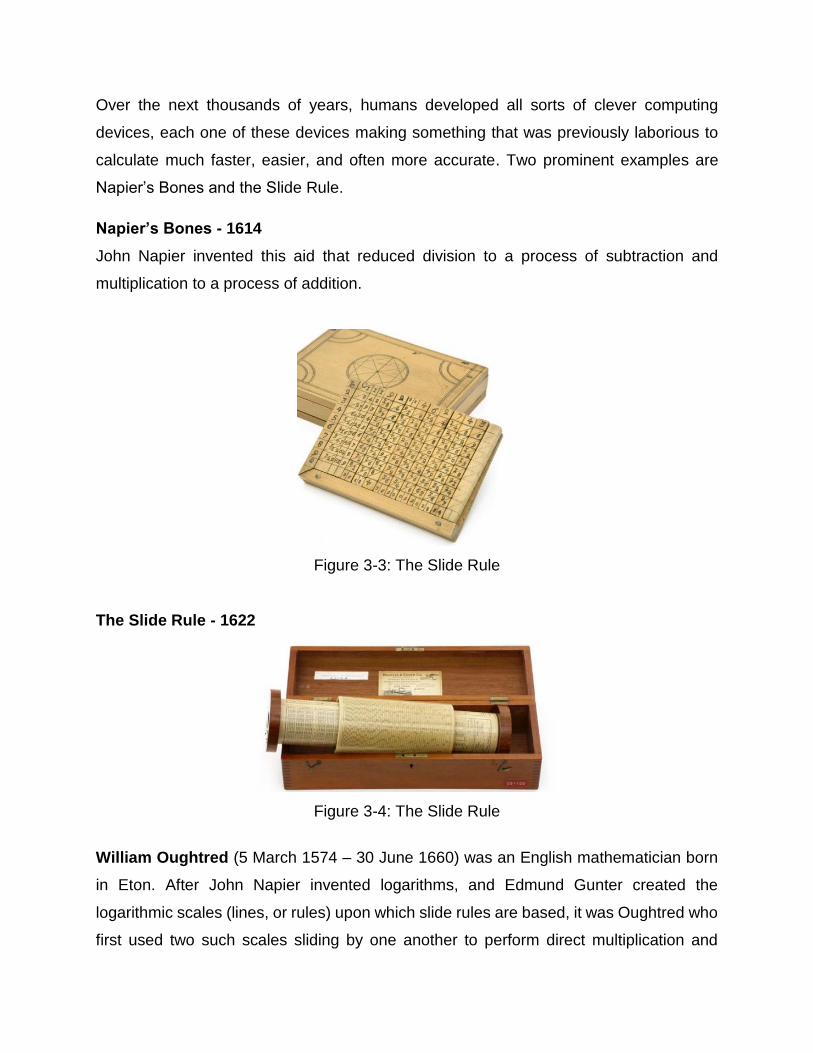
The Slide Rule - 1622
Figure 3-4: The Slide Rule
William Oughtred (5 March 1574 – 30 June 1660) was an English mathematician born
in Eton. After John Napier invented logarithms, and Edmund Gunter created the
logarithmic scales (lines, or rules) upon which slide rules are based, it was Oughtred who
first used two such scales sliding by one another to perform direct multiplication and

division; and he is credited as the inventor of the slide rule in 1622. Oughtred also
introduced the "×" symbol for multiplication as well as the abbreviations "sin" and "cos"
for the sine and cosine functions.
3.5 Mechanical Computation
A mechanical computer is one that is built from mechanical components such
as levers and gears.
These devices were unlike the previous simple inventions. The most common types of
mechanical computers are adding machines and mechanical counters, which use the
turning of gears to increment numbers. Some notable examples include:
Wilhelm Schickard’s Calculator – Around 1623
Figure 3-5: Schickard’s Calculator
Wilhelm Schickard, a German astronomer and mathematician, is credited for inventing
the world’s first mechanical calculator. The machine could add and subtract six-digit
numbers, and indicated an overflow of this capacity by ringing a bell; to add more complex
calculations, a set of Napier's bones were mounted on it. Unlike other devices of its time
which relied on a human operator to change different portions, his device was a state
machine. In different situations, gears would be placed and interact with each other
mechanically. It was also the first calculator that was active, meaning that each number
inputted modified others.
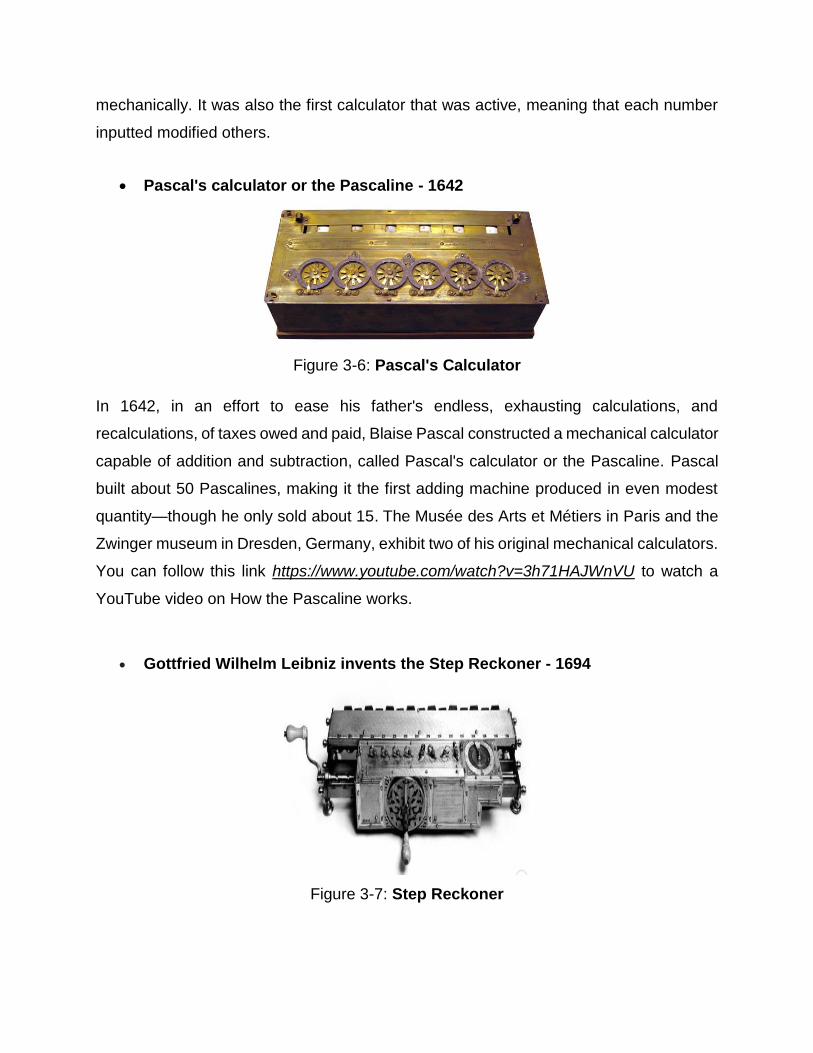
Pascal's calculator or the Pascaline - 1642
Figure 3-6: Pascal's Calculator
In 1642, in an effort to ease his father's endless, exhausting calculations, and
recalculations, of taxes owed and paid, Blaise Pascal constructed a mechanical calculator
capable of addition and subtraction, called Pascal's calculator or the Pascaline. Pascal
built about 50 Pascalines, making it the first adding machine produced in even modest
quantity—though he only sold about 15. The Musée des Arts et Métiers in Paris and the
Zwinger museum in Dresden, Germany, exhibit two of his original mechanical calculators.
You can follow this link https://www.youtube.com/watch?v=3h71HAJWnVU to watch a
YouTube video on How the Pascaline works.
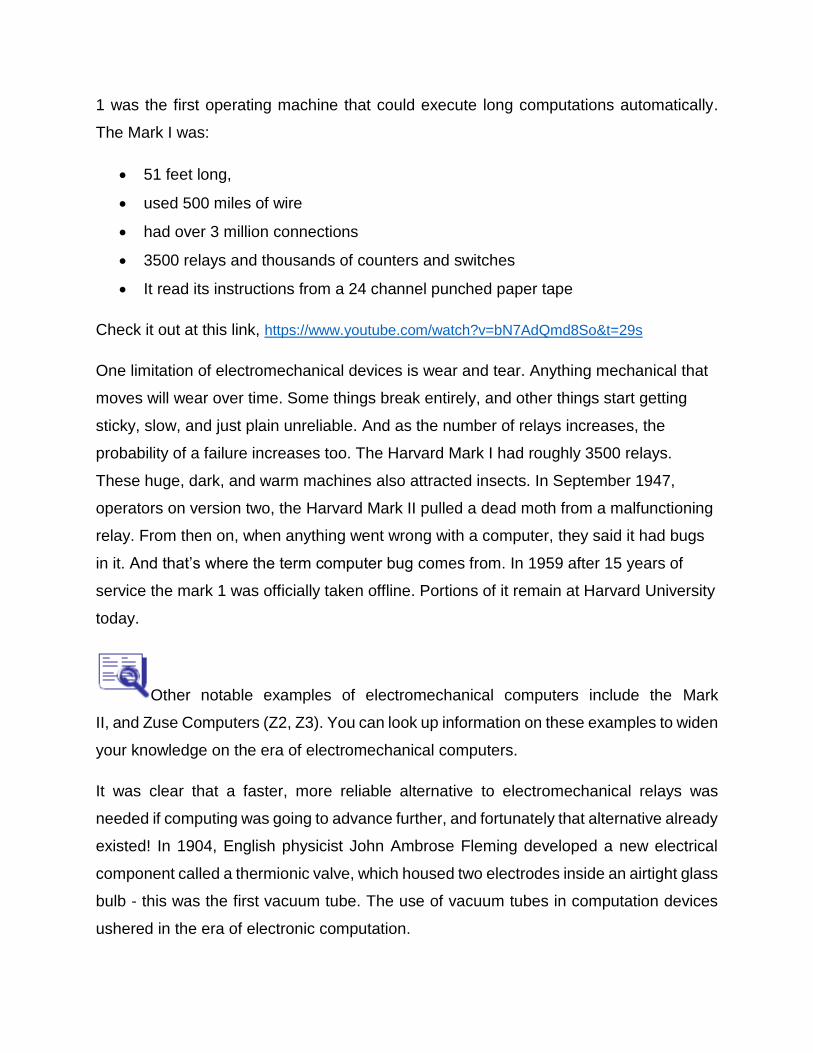
Gottfried Wilhelm Leibniz invents the Step Reckoner - 1694
Figure 3-7: Step Reckoner

The step reckoner (or stepped reckoner) was a digital mechanical calculator invented by
the German mathematician Gottfried Wilhelm Leibniz around 1672 and completed in
1694. It was the first calculator that could perform all four arithmetic operations. The
device had a series of gears that turned; each gear had ten teeth, to represent the digits
from 0 to 9. Whenever a gear bypassed nine, it rotated back to 0 and advanced the
adjacent gear by one tooth. This worked in reverse when doing subtraction, too. With
some clever mechanical tricks, the Step Reckoner was also able to multiply and divide
numbers. Multiplications and divisions are really just many additions and subtractions.
For example, if we want to divide 17 by 5, we just subtract 5, then 5, then 5 again, and
then we can’t subtract any more 5’s… so we know 5 goes into 17 three times, with 2 left
over. The Step Reckoner was able to do this in an automated way, and was the first
machine that could do all four of these operations. Its intricate precision gear work,
however, was somewhat beyond the fabrication technology of the time; mechanical
problems, in addition to a design flaw in the carry mechanism, prevented the machines
from working reliably. You can follow this link
https://www.youtube.com/watch?v=klLB5k3LkwU&feature=youtu.be to watch a video
simulation of the Step Reckoner.
Charles Babbage's Difference Engine - 1822
Why it was invented
By promoting their commercial and military navies, the British government had managed
to become the earth's greatest empire. But in that time frame the British government was
publishing a seven volume set of navigation tables which were used to chart the course
of the empire’s ships. These navigational tables came with a companion volume of
corrections, which showed that the set of published tables had over 1000 numerical
errors!

Figure 3.8: A small section of the type of mechanism employed in Babbage's
Difference Engine [photo © 2002 IEEE]
The Proposed Mechanical Computer Solution
Charles Babbage proposed a new mechanical device called the Difference Engine, a
much more complex machine that could approximate polynomials. Polynomials describe
the relationship between several variables - like range and air pressure, Polynomials
could also be used to approximate logarithmic and trigonometric functions, which are a
real hassle to calculate by hand. Babbage started construction in 1823, and over the next
two decades, tried to fabricate and assemble the 25,000 components, collectively
weighing around 15 tons. Unfortunately, the project was ultimately abandoned. But, in
1991, historians finished constructing a Difference Engine based on Babbage's drawings
and writings - and it worked! Check it out at this link, https://youtu.be/be1EM3gQkAY
(Difference Engine No. 2, built faithfully to the original drawings, consists of 8,000 parts,
weighs five tons, and measures 11 feet long.

Charles Babbage's Analytical Engine
During construction of the Difference Engine, Babbage imagined an even more complex
machine - the Analytical Engine. Unlike the Difference Engine, Step Reckoner and all
other computational devices before it - the Analytical Engine was a “general purpose
computer”. It could be used for many things, not just one particular computation; it could
be given data and run operations in sequence; it had memory and even a primitive printer.
Like the Difference Engine, it was ahead of its time, and was never fully constructed.
However, the idea of an “automatic computer” – one that could guide itself through a
series of operations automatically, was a huge deal, and would foreshadow computer
programs.
English mathematician Ada Lovelace wrote hypothetical programs for the Analytical
Engine. For her work, Ada is often considered the world’s first programmer. The Analytical
Engine would inspire, arguably, the first generation of computer scientists, who
incorporated many of Babbage’s ideas in their machines. This is why Babbage is often
considered the "father of computing".
Over many years, a number of inventors proposed a variety of mechanical computers.
Unfortunately, even with mechanical calculators, most real world problems required many
steps of computation before an answer was determined. It could take hours or days to
generate a single result. Also, these hand-crafted machines were expensive, and not
accessible to most of the population.
Activity 3.1: Using the Internet, search for information on the Hollerith
desk.
1. When was it invented, and by whom?
2. What computational challenge did the inventor address?
3. What was the proposed solution? Did it work?

1.5 Electromechanical Computation
The second mechanisms invented for the purpose of performing calculations were
electromechanical computers.
An electromechanical computer is one that was built from both electronic
components such as relays (i.e., electrically-controlled mechanical switches) and
mechanical components such as levers and gears.
These devices were unlike the previous purely mechanical inventions. One notable
example is the Harvard Mark I:
Howard Aiken’s Mark I - 1944
Figure 3-9: Harvard Mark I
In 1944 IBM introduced the automatic sequence controlled calculator (ASCC), the largest
electromechanical calculator built. It was a general-purpose electromechanical computer
that was used in the war effort during the last part of World War II. The original concept
for this giant calculator was presented to IBM by Dr. Howard Aiken in November of 1937.
The ASCC was developed and built by IBM then shipped to Harvard in February 1944
where it became known as the Harvard mark 1 by University staff and others. The mark
1 was the first operating machine that could execute long computations automatically.
The Mark I was:
51 feet long,
used 500 miles of wire
had over 3 million connections
3500 relays and thousands of counters and switches
It read its instructions from a 24 channel punched paper tape
Check it out at this link, https://www.youtube.com/watch?v=bN7AdQmd8So&t=29s
One limitation of electromechanical devices is wear and tear. Anything mechanical that
moves will wear over time. Some things break entirely, and other things start getting
sticky, slow, and just plain unreliable. And as the number of relays increases, the
probability of a failure increases too. The Harvard Mark I had roughly 3500 relays.
These huge, dark, and warm machines also attracted insects. In September 1947,
operators on version two, the Harvard Mark II pulled a dead moth from a malfunctioning
relay. From then on, when anything went wrong with a computer, they said it had bugs
in it. And that’s where the term computer bug comes from. In 1959 after 15 years of
service the mark 1 was officially taken offline. Portions of it remain at Harvard University
today.
Other notable examples of electromechanical computers include the Mark
II, and Zuse Computers (Z2, Z3). You can look up information on these examples to widen
your knowledge on the era of electromechanical computers.
It was clear that a faster, more reliable alternative to electromechanical relays was
needed if computing was going to advance further, and fortunately that alternative already
existed! In 1904, English physicist John Ambrose Fleming developed a new electrical
component called a thermionic valve, which housed two electrodes inside an airtight glass
bulb - this was the first vacuum tube. The use of vacuum tubes in computation devices
ushered in the era of electronic computation.
3.6 Electronic Computation
An electronic computer is one that is built from electronic components such as
vacuum tubes, transistors and integrated circuits, rather than mechanical components
such as levers and gears.
The inventions of electronic computers can be organised according to the different types
of electronic technology they used. These electronic technologies are vacuum tubes,
transistors and integrated circuits. Let us examine how each type of these electronic
technologies changed the history of computing.
3.6.1 The First Generation: Vacuum Tubes
The first generation of electronic computers used vacuum tubes (see Figure 1.2).
A vacuum tube is an electronic device that controls the flow of electrons (primary
carriers of electricity) in a vacuum (a space from which almost all air or gas has been
evacuated).
Please note: the focus of this unit are the technological advances in the history of
computers. As such, only a brief overview of the electronic devices is provided for
introductory purposes.

Figure 3-10: A Basic Vacuum Tube [photo © Collectors Weekly]
How a Vacuum Tube Works
Current passing through the filament (or cathode) heats it up so that it gives off electrons.
These, being negatively charged, are attracted to the positive plate (or anode). A grid of
wires between the filament and the plate is negative, which repels the electrons and
hence controls the current to the plate. When used as on/off switches, vacuum tubes
allowed the first electronic computers to perform digital computations. That is, to
generate, store, and process data (any set of values) in terms of two states: positive and
non-positive. Other than electronic computers, some other applications of vacuum tubes
you might be familiar with are switches, audio amplifiers and television display screens.
Let us now examine two notable electronic computer inventions that used vacuum tubes:
the Colossus and ENIAC (Electronic Numerical Integrator and Computer).
Colossus (Tommy Flowers) - 1943
The first large-scale use of vacuum tubes for computing was the Colossus designed by
engineer Tommy Flowers and completed in December of 1943. The Colossus was
installed at Bletchley Park, in the UK, and helped to decrypt Nazi communications. The

first version of Colossus contained 1,600 vacuum tubes, and in total, ten Colossi were
built to help with code-breaking.
Figure 3-11: Colossus [computerhistory.org/]
Colossus is regarded as the first programmable, electronic computer. Programming
was done by plugging hundreds of wires into plug boards, sort of like old school telephone
switchboards, in order to set up the computer to perform the right operations. So while
“programmable”, it still had to be configured to perform a specific computation.
The ENIAC - 1946
Figure 3-12: ENIAC [U.S. Army photo]
In computing history, the ENIAC is believed to be the world’s first truly general purpose,
programmable, electronic computer. It was designed and constructed at the University
of Pennsylvania in the United States (U.S.) between 1943 and 1946 by two professors,
John Mauchly, a professor of electrical engineering, and John Eckert, one of his graduate
students. ENIAC was enormous, weighing 30 tons (over 27,000 kg!), occupying 1500
square feet of floor space, and containing more than 18,000 vacuum tubes. When
operating, it consumed 140 kilowatts of power.
ENIAC could perform 5000 ten-digit additions or subtractions per second, many, many
times faster than any machine that came before it. To give you an example, the very first
problem run on ENIAC required only 20 seconds and was checked against an answer
obtained after forty hours of work with a mechanical calculator.
The ENIAC was completed in 1946, too late to be used in the war effort. So instead, its
first task was to perform a series of complex calculations that were used to help determine
the possibility of building a hydrogen bomb (a very powerful weapon capable of wiping
out an entire city!). The use of the ENIAC for a purpose other than that for which it was
built demonstrated its general- purpose nature. The ENIAC continued to operate under
BRL management until 1955, when it was disassembled.
By the 1950’s, even vacuum-tube-based computing was reaching its limits. The use of
vacuum tube technology presented two major disadvantages,
1. vacuum tubes require a large amount of power supply, and
2. high voltages present an electric shock hazard.
For instance, vacuum tube failures were so common on the ENIAC that it was generally
only operational for about half a day at a time before breaking down. To reduce cost and
size, as well as improve reliability and speed, a radical new electronic switch would be
needed. In 1947, Bell Laboratory scientists John Bardeen, Walter Brattain, and William
Shockley invented the transistor, and with it, a whole new era of computing was born!

3.6.2 The Second Generation: Transistors
A transistor is a semiconductor device used to amplify or switch electronic signals
and electrical power.
Figure 3-13: Transistors [photo © Bell Laboratories 1947]
The physics behind transistors is complex, relying on quantum mechanics. This unit
presents the basics. A transistor, like a relay or vacuum tube, is a switch that can be
opened or closed by applying electrical power via a control wire. Typically, transistors
have two electrodes separated by a material that sometimes can conduct electricity, and
other times resist it – a semiconductor. In this case, the control wire attaches to a “gate”
electrode. By changing the electrical charge of the gate, the conductivity of the
semiconducting material can be manipulated, allowing current to flow or be stopped.
The first transistor at Bell Labs could switch between on and off states 10,000 times per
second. The specific improvements or advancements of transistor based computers over
vacuum tube computing can be summarised as follows.
● Unlike vacuum tubes, which require wires, metal plates, a glass capsule, and a
vacuum, the transistor is a solid-state device, made from material called silicon.
● The transistor is also smaller, cheaper, and dissipates less heat than a vacuum
tube. But it can still be used in the same way as a vacuum tube to construct
computers. These characteristics enabled transistors to bring in greater

processing performance, larger memory capacity, and smaller size machines than
the vacuum tube computers.
● Transistor based computers saw the introduction of more complex 65, and control
units. `
The IBM 608 – 1957
Figure 3-14: Photo: From the IBM 608 Calculator Manual of Operation, Form 22-6666-1 (1957). http://www.columbia.edu/cu/computinghistory/608.html
The IBM 608, released in 1957 was the first fully transistor-powered, commercially
available computer. It contained 3000 transistors and could perform 4,500 additions, or
roughly 80 multiplications or divisions, every second. IBM soon transitioned all of its
computing products to transistors, bringing transistor-based computers into offices, and
eventually, homes.
The Challenge of Using Transistors
A single, self-contained transistor is called a discrete component. Throughout the 1950s
and early 1960s, electronic equipment was composed largely of discrete components
such as transistors, resistors, capacitors, and so on. Discrete components were
manufactured separately, packaged in their own containers, and soldered or wired
together onto masonite-like (a type of hardboard) circuit boards, which were then installed
in computers, oscilloscopes, and other electronic equipment. Whenever an electronic
device called for a transistor, a little tube of metal containing a pinhead-sized piece of
silicon had to be soldered to a circuit board. The entire manufacturing process, from
transistor to circuit board, was expensive and cumbersome.
It is no wonder that these facts of life were beginning to create problems in the computer
industry. Early second-generation computers contained about 10,000 transistors. This
figure grew to the hundreds of thousands, making the manufacture of newer, more
powerful machines increasingly difficult. In 1958 came the achievement that
revolutionised electronics and started the era of microelectronics (small electronics): the
invention of the integrated circuit. It is the integrated circuit that defines the third
generation of computers.
3.6.3 The Third Generation: Integrated Circuits
The basic functions of a digital computer, as discussed in the previous unit, are storage,
movement, processing, and control. To perform these functions, only two fundamental
types of components are required: gates and memory cells.
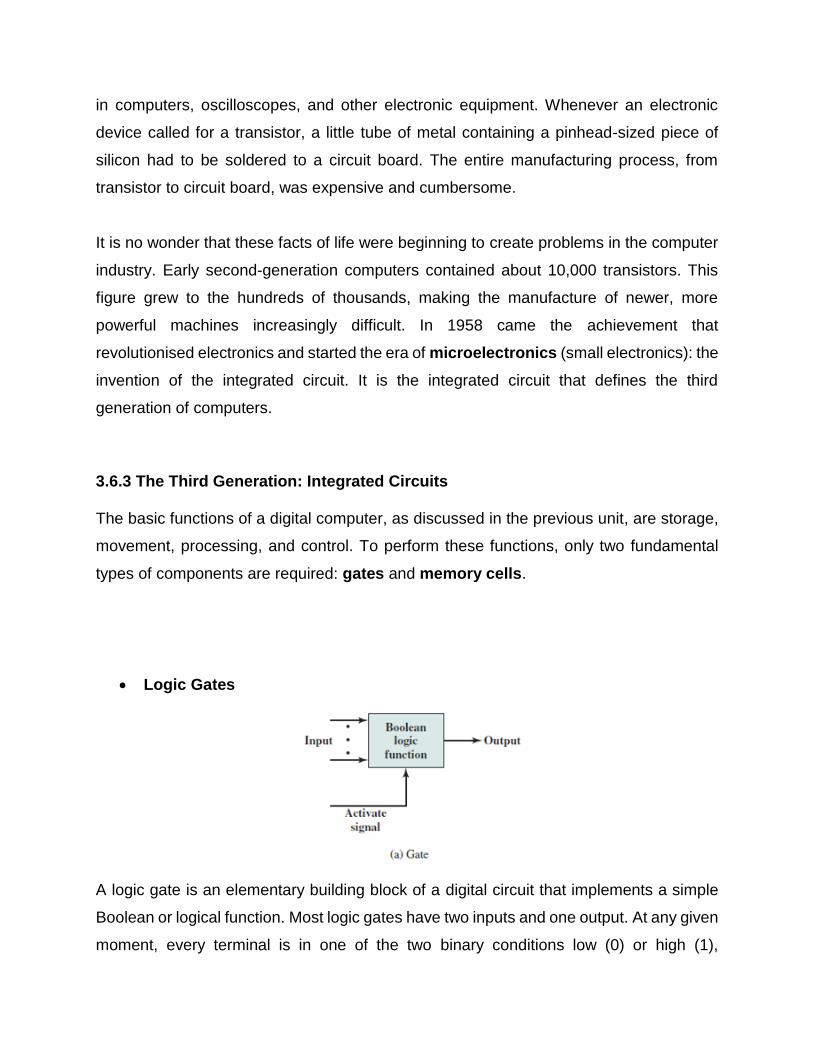
Logic Gates
A logic gate is an elementary building block of a digital circuit that implements a simple
Boolean or logical function. Most logic gates have two inputs and one output. At any given
moment, every terminal is in one of the two binary conditions low (0) or high (1),
represented by different voltage levels. The logic state of a terminal can, and generally
does, change often, as the circuit processes data. In most logic gates, the low state is
approximately zero volts (0 V), while the high state is approximately five volts positive (+5
V).
There are seven basic logic gates: AND, OR, XOR, NOT, NAND, NOR, and XNOR.
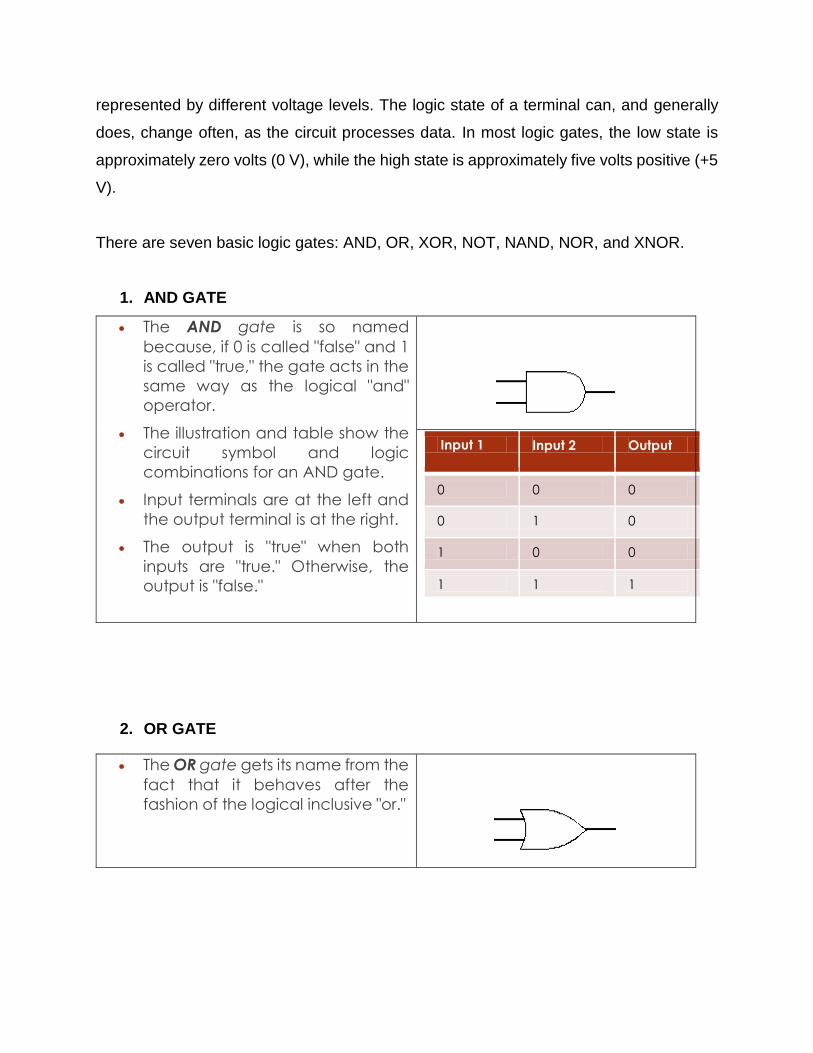
1. AND GATE
The AND gate is so named
because, if 0 is called "false" and 1
is called "true," the gate acts in the
same way as the logical "and"
operator.
The illustration and table show the
circuit symbol and logic
combinations for an AND gate.
Input terminals are at the left and
the output terminal is at the right.
The output is "true" when both
inputs are "true." Otherwise, the
output is "false."
Input 1 Input 2 Output
0 0 0
0 1 0
1 0 0
1 1 1
2. OR GATE
The OR gate gets its name from the
fact that it behaves after the
fashion of the logical inclusive "or."
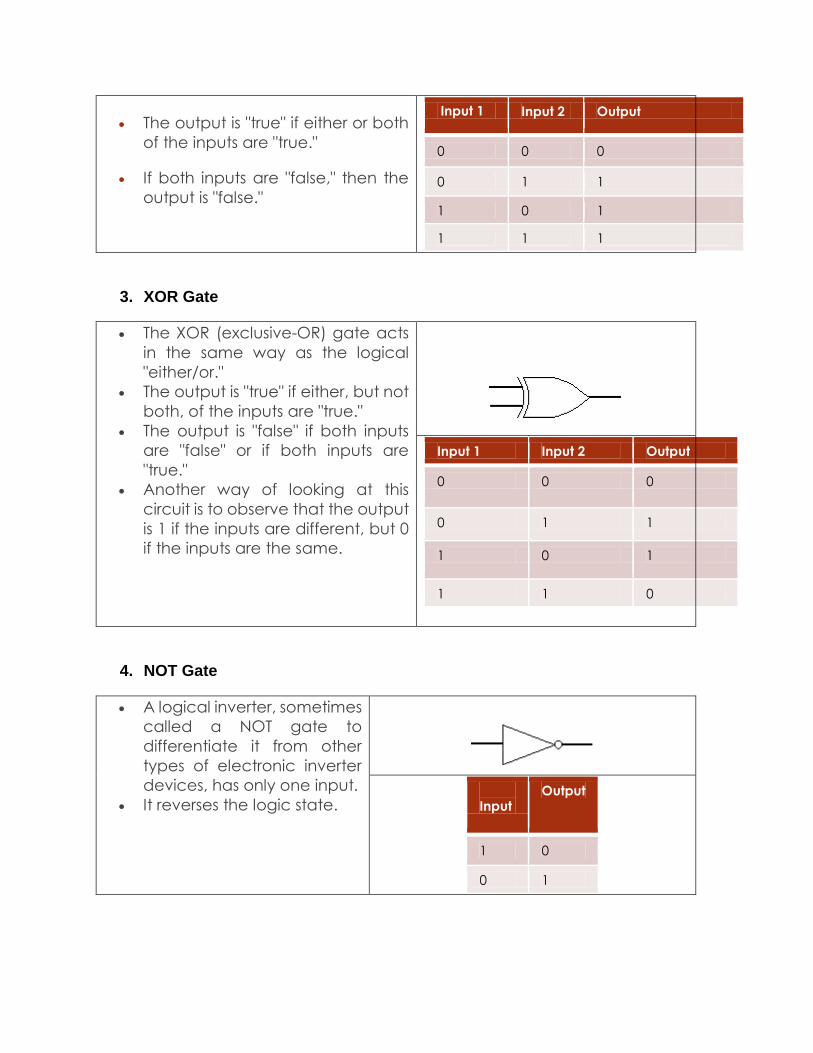
The output is "true" if either or both
of the inputs are "true."
If both inputs are "false," then the
output is "false."
Input 1 Input 2 Output
0 0 0
0 1 1
1 0 1
1 1 1
3. XOR Gate
The XOR (exclusive-OR) gate acts
in the same way as the logical
"either/or."
The output is "true" if either, but not
both, of the inputs are "true."
The output is "false" if both inputs
are "false" or if both inputs are
"true."
Another way of looking at this
circuit is to observe that the output
is 1 if the inputs are different, but 0
if the inputs are the same.
Input 1 Input 2 Output
0 0 0
0 1 1
1 0 1
1 1 0
4. NOT Gate
A logical inverter, sometimes
called a NOT gate to
differentiate it from other
types of electronic inverter
devices, has only one input.
It reverses the logic state.
Input Output
1 0
0 1
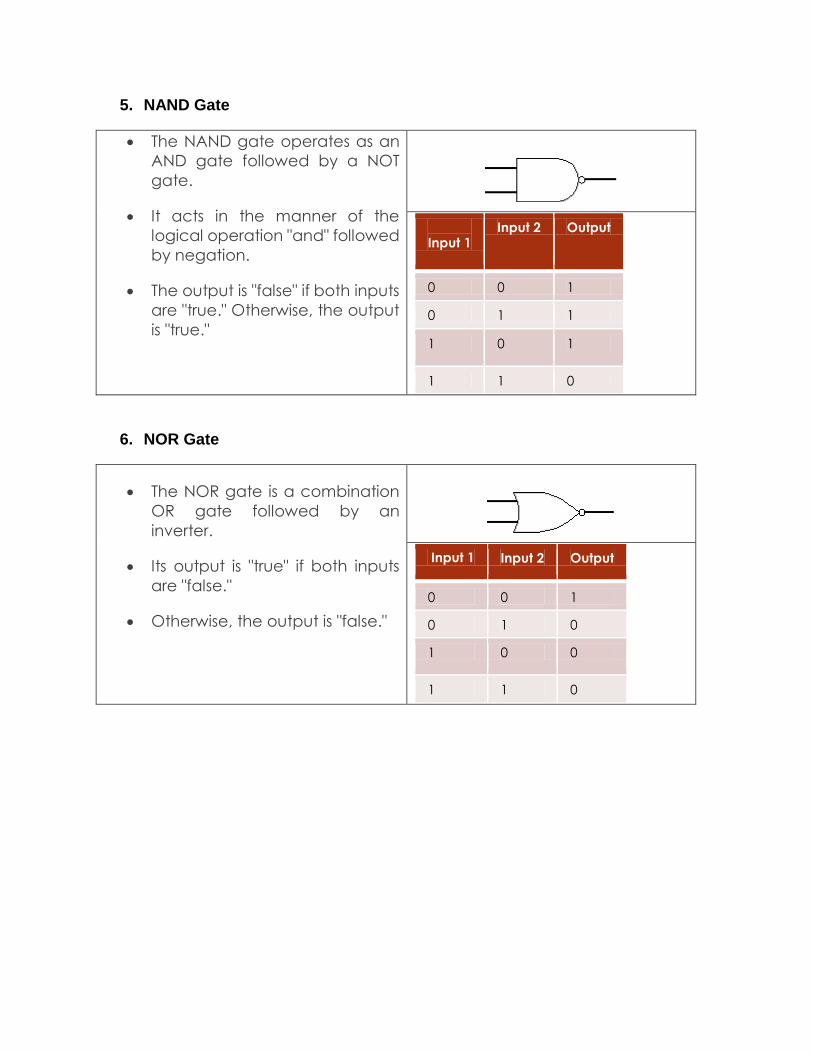
5. NAND Gate
The NAND gate operates as an
AND gate followed by a NOT
gate.
It acts in the manner of the
logical operation "and" followed
by negation.
The output is "false" if both inputs
are "true." Otherwise, the output
is "true."
Input 1
Input 2 Output
0 0 1
0 1 1
1 0 1
1 1 0
6. NOR Gate
The NOR gate is a combination
OR gate followed by an
inverter.
Its output is "true" if both inputs
are "false."
Otherwise, the output is "false."
Input 1 Input 2 Output
0 0 1
0 1 0
1 0 0
1 1 0

7. XNOR GATE
The XNOR (exclusive-NOR)
gate is a combination XOR gate
followed by an inverter.
Its output is "true" if the inputs are
the same, and "false" if the inputs
are different.
Input 1
Input 2 Output
0 0 1
0 1 0
1 0 0
1 1 1
Memory Cells
The memory cell is a device that can store one bit of data. It exhibits two stable (or semi-
stable) states, which can be used to represent binary 1 and 0. It is capable of being written
into (at least once), to set the state. It is also capable of being read to sense the state.

Memory Cell Operation
It has three functional terminals capable of carrying an electrical signal;
Select - selects a memory cell for a read or write operation.
Control - indicates read or write
Data in –
for writing, the other terminal provides an electrical signal that sets the state of the cell to 1 or 0.
for reading, that terminal is used for output of the cell’s state.
To summarise:
Logic Gate
A gate will have one or two data inputs plus a control signal input that
activates the gate.
When the control signal is ON, the gate performs its function on the data
inputs and produces a data output.
Memory Cell
A memory cell will store the bit that is on its input lead when the WRITE
control signal is ON and will place the bit that is in the cell on its output lead
when the READ control signal is ON.
Basic Elements of a Digital Computer
By interconnecting large numbers of logic gates and memory cells, a computer can be
constructed as follows:
Data storage: Provided by memory cells.
Data processing: Provided by gates.
Data movement: The paths among components are used to move data through
gates to memory.
Control: The paths among components can carry control signals.
In this way, a computer can be seen as consisting of gates, memory cells, and
interconnections among these elements. The gates and memory cells are, in turn,
constructed of simple digital electronic components, which are then packaged into
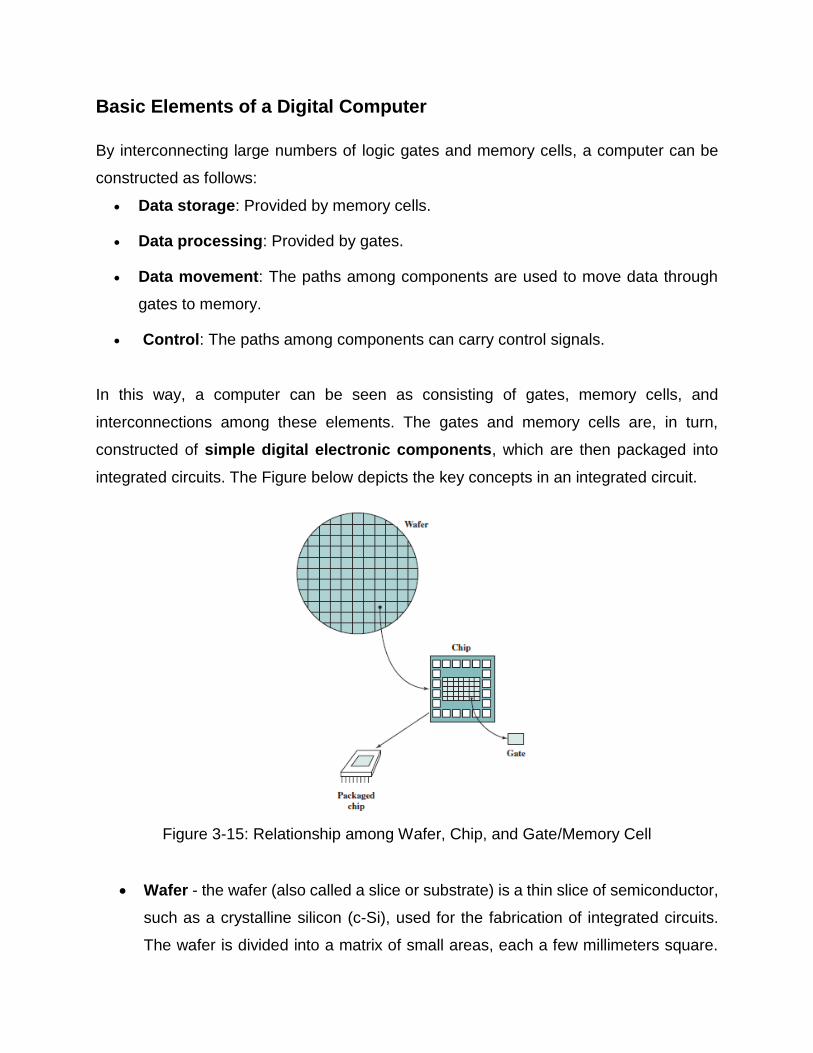
integrated circuits. The Figure below depicts the key concepts in an integrated circuit.
Figure 3-15: Relationship among Wafer, Chip, and Gate/Memory Cell
Wafer - the wafer (also called a slice or substrate) is a thin slice of semiconductor,
such as a crystalline silicon (c-Si), used for the fabrication of integrated circuits.
The wafer is divided into a matrix of small areas, each a few millimeters square.
The identical circuit pattern is fabricated in each area, and the wafer is then broken
up into chips.
Chip (Integrated Circuit) - Each chip consists of many gates and/or memory
cells plus a number of input and output attachment points. This chip is then
packaged in housing that protects it and provides pins for attachment to devices
beyond the chip. A number of these packages can then be interconnected on a
printed circuit board to produce larger and more complex circuits. Follow this link
[https://www.computerhistory.org/revolution/digital-logic/12/288/2220] to watch a
video on integrated circuit design and manufacturing from sand to silicon.
An integrated circuit is an electronic circuit formed on a small piece of semiconducting
material, which performs the same function as a larger circuit made from discrete
components.
Figure 3-16: An integrated circuit ("silicon chip") [photo courtesy of IBM]
The primary advantage of an integrated circuit is not that the transistors (switches) are
very small (that is the secondary advantage), but rather that millions of transistors can be
created and interconnected in a mass-production process. So, unlike the manufacture of
discrete components, all the elements on the integrated circuit are fabricated
simultaneously via a small number of optical masks that define the geometry of each
layer. This speeds up the process of fabricating the computer, and hence reduces its cost.
The two most important members of the third generation, both of which were introduced
at the beginning of that era are the IBM System/360 and the DEC PDP-8 (you may look
up further information on these computers for your own self learning).
3.6.4 Later Generations
At this stage you may be wondering about how many more computer generations there
are. Well actually, beyond the third generation there is less general agreement on defining
generations of computers. As you can see from Table 1.1 below, experts suggest that
there have been a number of later generations, based on advances in integrated circuit
technology.
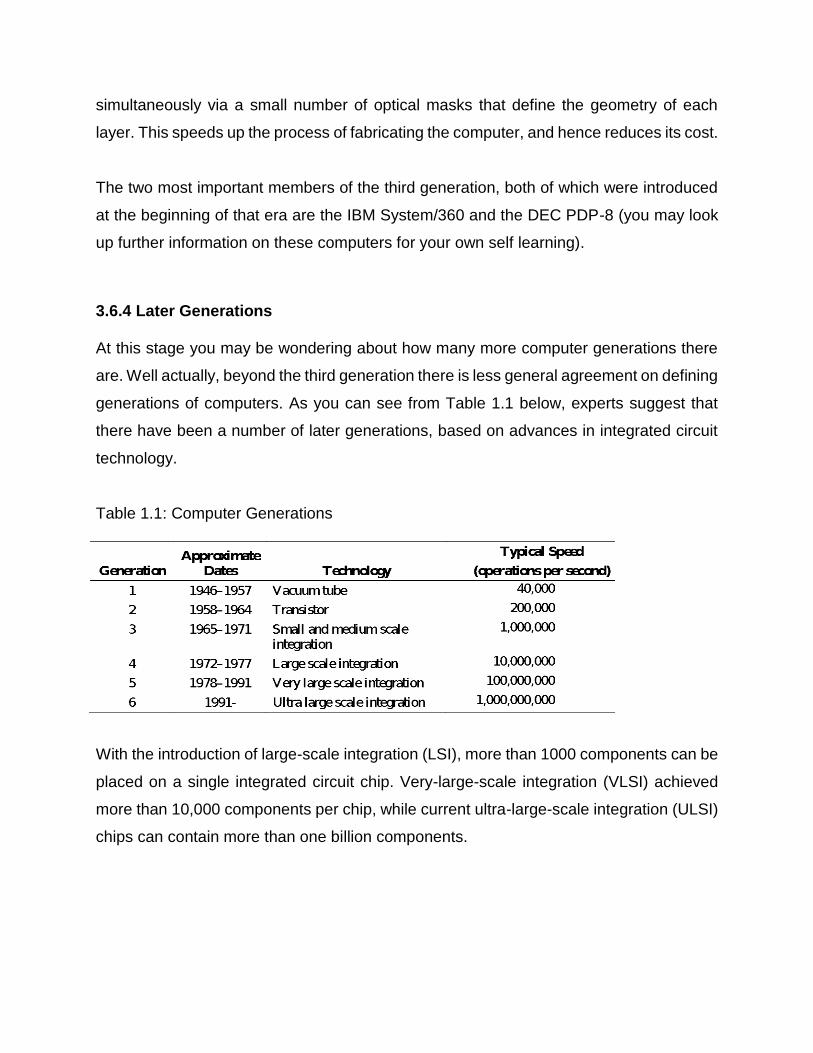
Table 1.1: Computer Generations
With the introduction of large-scale integration (LSI), more than 1000 components can be
placed on a single integrated circuit chip. Very-large-scale integration (VLSI) achieved
more than 10,000 components per chip, while current ultra-large-scale integration (ULSI)
chips can contain more than one billion components.

3.7 The Origins of Computer Architecture
The previous unit introduced computer architecture as comprising the design of a
computer system. However, so far in this unit, our study of the evolution of
computing has provided insight into the development of hardware components
across the history of computing, saying nothing about the origins of computing
architecture. This section fills that gap.
3.7.1 The Stored Programme Concept
The origins of the modern day computer architecture can be traced to the extremely
tedious task of entering and altering programs faced by the ENIAC operators. The ENIAC
designers, most notably the mathematician John von Neumann, who was a consultant
on the ENIAC project proposed a solution to this challenge called the Stored Programme
Concept.
THE VON NEUMANN Architecture
Suppose the sequence of computation steps (programs) could be represented in a form
suitable for storing in memory alongside the values to be operated on (the data). Then, if
information about computation steps was stored in memory, a computer could get its
instructions by reading them from memory. In this way, a program could be set or altered
by setting the values of a portion of memory, rather than a physical modification of all the
patch cords and switches. This idea is known as the stored-program concept.
In 1946, Von Neumann and his colleagues began the design of a new stored-program
computer, referred to as the IAS computer, at the Princeton Institute for Advanced
Studies (IAS). The IAS computer, although not completed until 1952, is the prototype or
template of all subsequent general-purpose computers. Figure 3.17 shows the
general structure of the IAS computer.
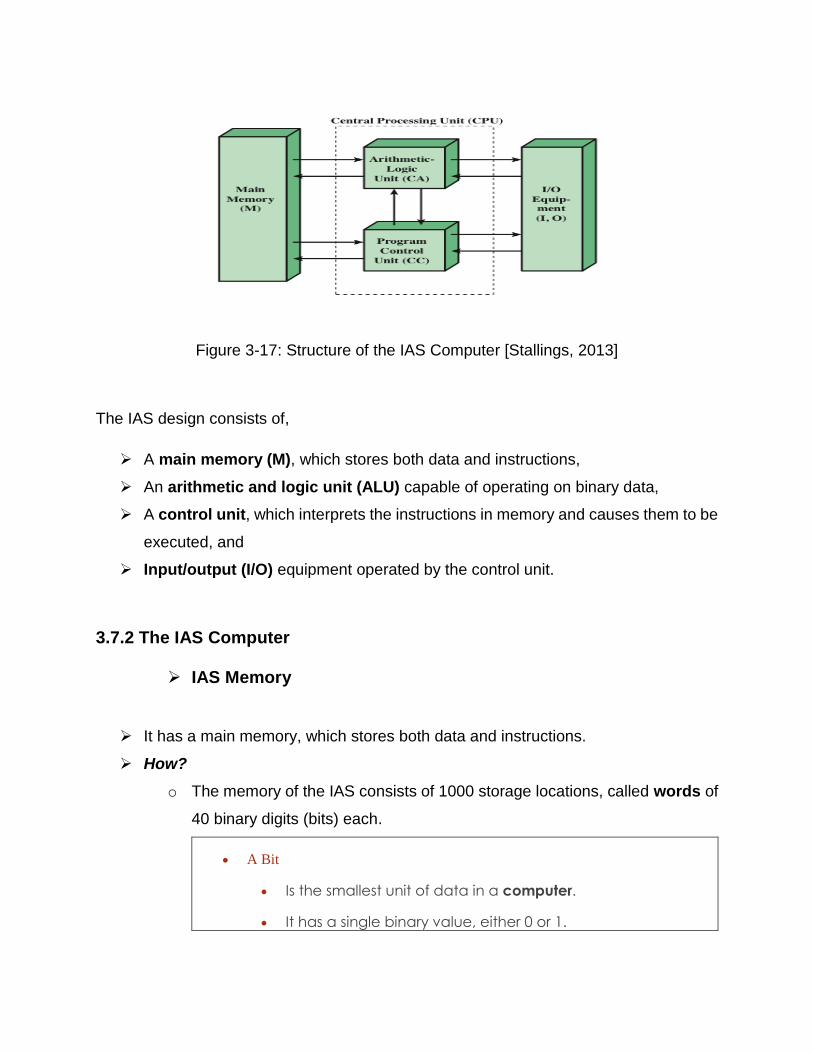
Figure 3-17: Structure of the IAS Computer [Stallings, 2013]
The IAS design consists of,
A main memory (M), which stores both data and instructions,
An arithmetic and logic unit (ALU) capable of operating on binary data,
A control unit, which interprets the instructions in memory and causes them to be
executed, and
Input/output (I/O) equipment operated by the control unit.
3.7.2 The IAS Computer
IAS Memory
It has a main memory, which stores both data and instructions.
How?
o The memory of the IAS consists of 1000 storage locations, called words of
40 binary digits (bits) each.
A Bit
Is the smallest unit of data in a computer.
It has a single binary value, either 0 or 1.
Although computers usually provide instructions that can
test and manipulate bits, they generally are designed to
store data and execute instructions in bit multiples called
bytes (8 bits = 1 byte).
There is no universal definition of the term word. In general, a word
is an ordered set of bytes or bits that is the normal unit in which
information may be stored, transmitted, or operated on within a
given computer.
Typically, if a processor has a fixed-length instruction set, then the
instruction length equals the word length.
o Both data and instructions in the IAS are stored in the memory locations.
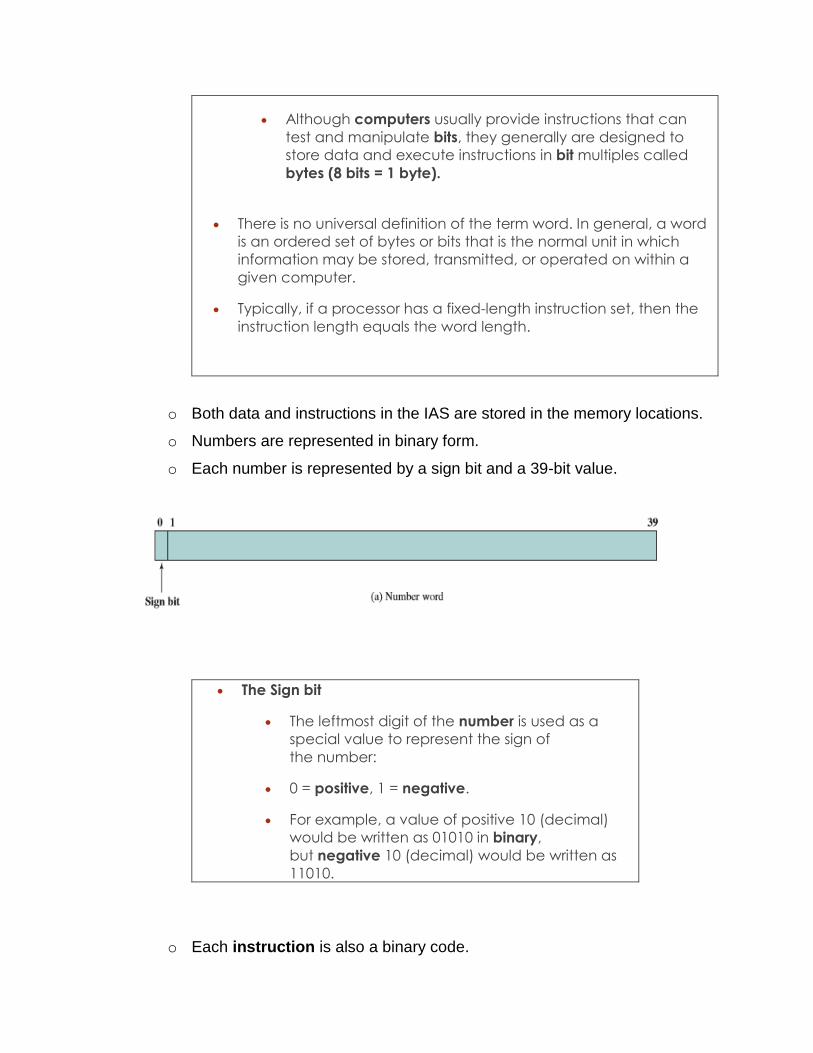
o Numbers are represented in binary form.
o Each number is represented by a sign bit and a 39-bit value.
The Sign bit
The leftmost digit of the number is used as a
special value to represent the sign of
the number:
0 = positive, 1 = negative.
For example, a value of positive 10 (decimal)
would be written as 01010 in binary,
but negative 10 (decimal) would be written as
11010.
o Each instruction is also a binary code.
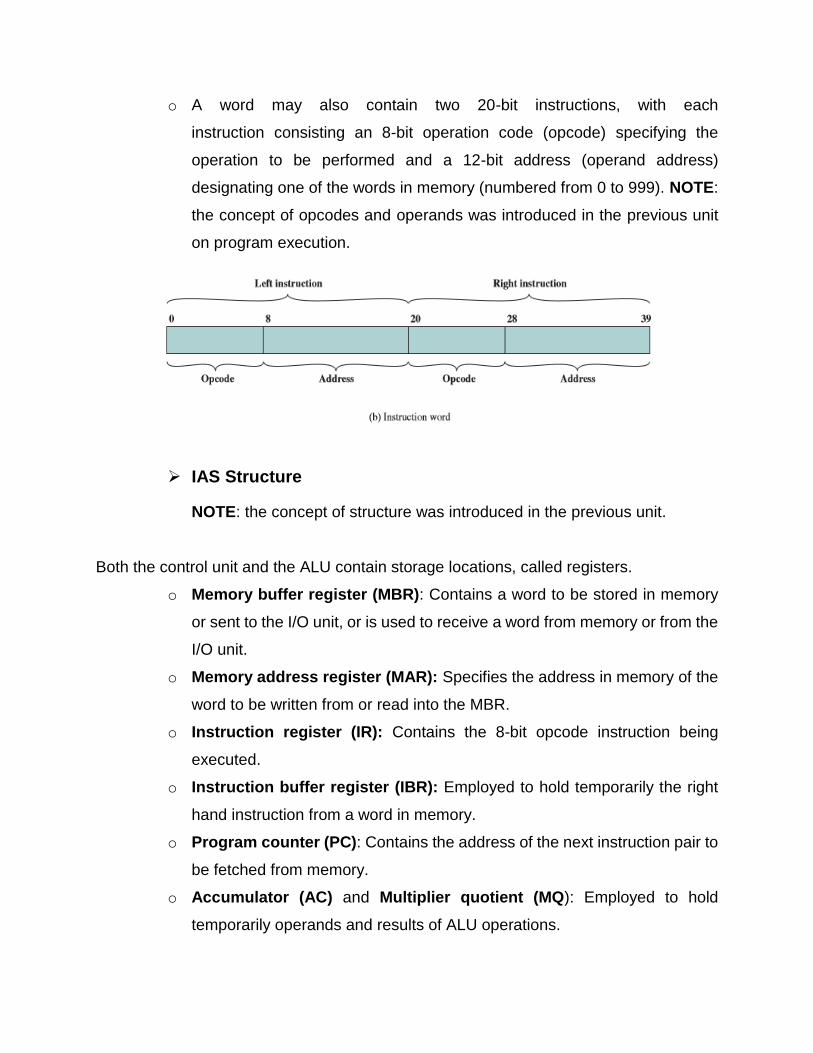
o A word may also contain two 20-bit instructions, with each
instruction consisting an 8-bit operation code (opcode) specifying the
operation to be performed and a 12-bit address (operand address)
designating one of the words in memory (numbered from 0 to 999). NOTE:
the concept of opcodes and operands was introduced in the previous unit
on program execution.
IAS Structure
NOTE: the concept of structure was introduced in the previous unit.
Both the control unit and the ALU contain storage locations, called registers.
o Memory buffer register (MBR): Contains a word to be stored in memory
or sent to the I/O unit, or is used to receive a word from memory or from the
I/O unit.
o Memory address register (MAR): Specifies the address in memory of the
word to be written from or read into the MBR.
o Instruction register (IR): Contains the 8-bit opcode instruction being
executed.
o Instruction buffer register (IBR): Employed to hold temporarily the right
hand instruction from a word in memory.
o Program counter (PC): Contains the address of the next instruction pair to
be fetched from memory.
o Accumulator (AC) and Multiplier quotient (MQ): Employed to hold
temporarily operands and results of ALU operations.
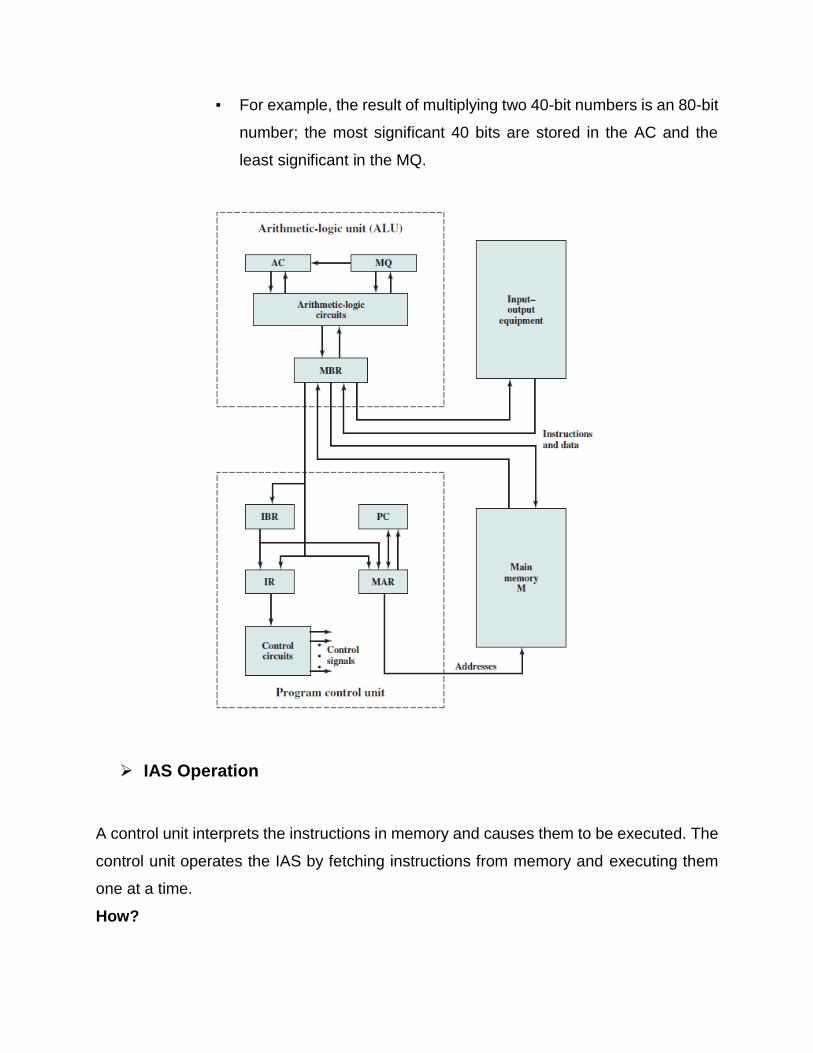
▪ For example, the result of multiplying two 40-bit numbers is an 80-bit
number; the most significant 40 bits are stored in the AC and the
least significant in the MQ.
IAS Operation
A control unit interprets the instructions in memory and causes them to be executed. The
control unit operates the IAS by fetching instructions from memory and executing them
one at a time.
How?

The IAS operates by repetitively performing an instruction cycle. Each instruction cycle
consists of two sub-cycles: Fetch and Execute.
Fetch Cycle
o The opcode of the next instruction is loaded into the IR and the address
portion is loaded into the MAR.
o This instruction may be taken from the IBR, or it can be obtained from
memory by loading a word into the MBR, and then down to the IBR, IR, and
MAR.
o Once the opcode is in the IR, the execute cycle is performed.
o Control circuitry interprets the opcode and executes the instruction by
sending out the appropriate control signals to cause data to be moved or an
operation to be performed by the ALU.
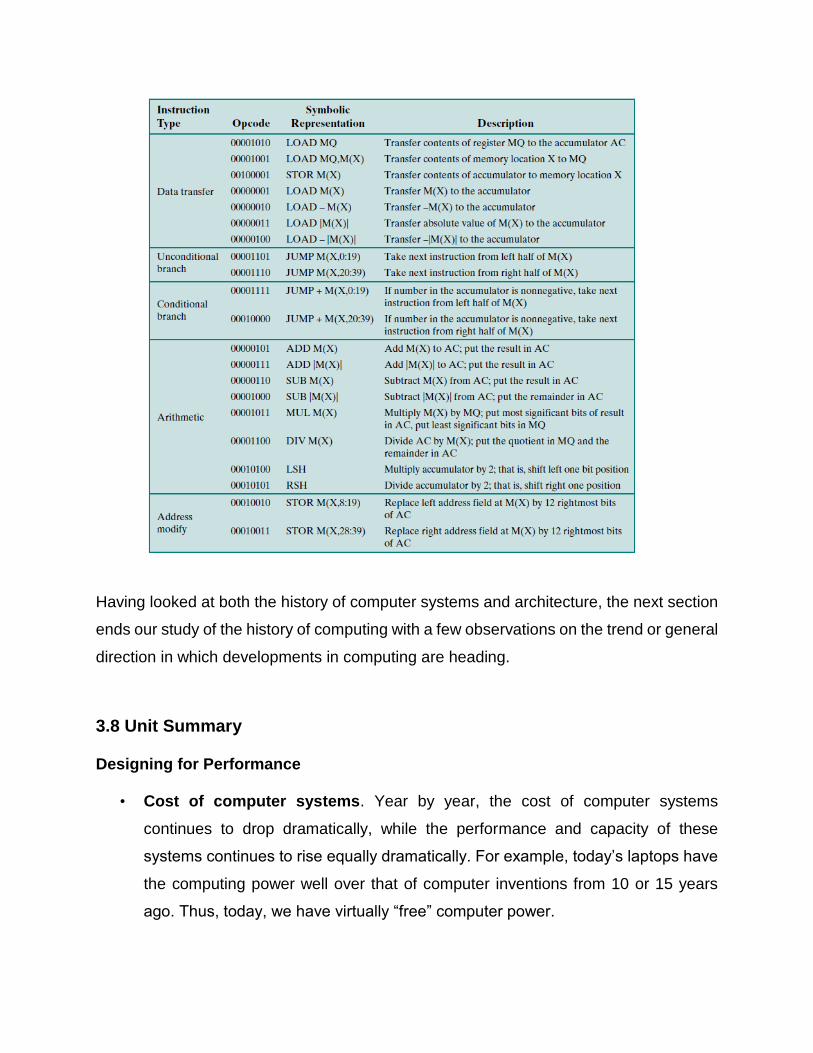
Execute Cycle
The IAS computer had a total of 21 instructions.
o Data Transfer Instructions: Move data between memory and ALU
registers or between two ALU registers.
o Unconditional branch: Normally, the control unit executes instructions in
sequence from memory. This sequence can be changed by a branch
instruction, which facilitates repetitive operations.
o Conditional branch: The branch can be made dependent on a condition,
thus allowing decision points.
o Arithmetic: Operations performed by the ALU.
o Address modify: Permits addresses to be computed in the ALU and
then inserted into instructions stored in memory. This allows a program
considerable addressing flexibility.
Having looked at both the history of computer systems and architecture, the next section
ends our study of the history of computing with a few observations on the trend or general
direction in which developments in computing are heading.
3.8 Unit Summary
Designing for Performance
• Cost of computer systems. Year by year, the cost of computer systems
continues to drop dramatically, while the performance and capacity of these
systems continues to rise equally dramatically. For example, today’s laptops have
the computing power well over that of computer inventions from 10 or 15 years
ago. Thus, today, we have virtually “free” computer power.
• Design of computer systems. What is fascinating about the relationship between
the cost and performance of computers is that, on the one hand, the basic building
blocks for today’s computer miracles are virtually the same as those of the IAS
(Von Neumann) computer from over 50 years ago, while on the other hand, the
techniques for squeezing the last bit of performance out of the materials at hand
have become increasingly sophisticated. Indeed, this observation serves as a
guiding principle for the presentation in this module.
3.9 Unit Activities
i. What is a stored program computer?
ii. What are the four main components of any general-purpose computer?
iii. At the integrated circuit level, what are the three principal constituents of a
computer system?
3.10 Unit References
1. Stallings, William. Computer Organisation and Architecture: Designing for
Performance (2013). ISBN 13: 978-0-13-293633-0. (Ninth edition).
2. Tanenbaum, Andrew. Structured Computer Organisation. ISBN 13: 020435-8
3. An illustrated History of Computing.
Website: http://www.computersciencelab.com/ComputerHistory