transducer elements - unimap portalportal.unimap.edu.my/portal/page/portal30/lecturer notes... ·...
TRANSCRIPT

TRANSDUCER ELEMENTS
Prepared By: Dr Sam Sung Ting

ANALOG TRANSDUCERS
• Electromechanical Types
In such transducers, an electrical output is produced due to an input of mechanical
displacement or strain. The mechanical displacement or strain input in turn may be produced by a
primary sensor due to the input physical variable which may be pressure, flow, etc.
Figure 4.1 shows the scheme for measurement using an electrochemical transducer.

In each case, the input physical variable results in a displacement of an elastic member. In Fig.
4.2 (a), the force applied results in a displacement of the elastic member. In Fig. 4.2 (b), an elastic
diaphragm converts pressure input into deflection or displacement. Similarly, a bimetallic strip of
brass an invar alloys gets deflected due to the change of temperature, due to the different in
coefficient of expansion of the two materials. In each case, an electrochemical transducer may be
employed to convert the displacement into an electrical signal, that can be related to the force,
pressure or temperature input desired.

• Since displacement or motion is an input to an electromechanical transducer, this may be treated
as a basic parameter, derivable from several types of physical inputs. The transducer discussed
here are also known as motion transducers.
• The following factors have to be kept in mind, while considering the selection of motion
transducers, for a given application:
1. Magnitude of motion – whether the transducer is meant for measuring small, medium or large
motions.
2. Type of input – output relation – whether the output is proportional to displacement motion its
rate of change with time, viz. velocity or rate change of velocity, viz. acceleration.
3. Static and dynamic characteristics – whether the transducer can measure static or dynamic or
both types of displacements.
4. Attachment or proximity type – whether the transducer has to be attached to the moving object
or kept in close proximity to it.
5. Self-generating or external power source type – whether a power output is needed to energise
the transducer or the same is generated due to the input motion itself, within the transducer.
6. Type of associated circuit – whether the circuit to be used along with the transducer for
producing a measurable output is of a simple or complicated type.

• Potentiometric Resistance – Type Transducer
A wire-wound potentiometer may be used as a transducer for converting mechanical displacement
to an electrical output.
This may be of linear or angular type.
As shown in Fig. 4.3, the motion of the object changes the effective resistance and hence the
voltage output eo between points b and c.
Thus, the output voltage appears as shown in Fig. 4.3 and is directly proportional to the dynamic
displacement of the moving object.
The value of the potential between points b and c, at the starting position, may be large,
compared to the change in the potential due to the motion.

• Inductive – Type Transducers
In these types of transducers, the magnetic characteristics of an electric circuit change due to the
motion of the object. These may be classified into two types:
1. Self-generating types, in which a voltage signal is generated in the transducer, because of
relative motion of a conductor and a magnetic field. Electrodynamics, electromagnetic and eddy
circuit types of transducers belong to this category.
2. Non-self-generating or external power source types of transducers, in which an external source
is needed to energies a coil/coils, the inductance of which would change due to the motion of the
object. The following types of transducer belong to this category: attachment type inductance
transducer, air gap type, LVDT type and magneto-strictive type of transducer.

• Self-generating types
Figure 4.5 shows an electrodynamic type of transducer. A coil wound on a hollow cylinder of non-
magnetic material moves in the annular space of a fixed magnet.
The voltage generated in the coil is proportional to the rate of change flux and hence the velocity
of the moving object. The coil cylinder has to be attached to the moving object and thus this is a
contact or attachment type transducer.
Figure 4.6 shows an electrodynamic transducer for measuring rotary motion. The coil moves in
the annular space between a magnet and soft iron core, generating a voltage in the coil.

Figure 4.7 shows an electromagnetic transducer, in which a voltage is induced in the coil when
the magnetic flux about it is varied due to the motion of the object, which has to be for a
ferromagnetic material.
This is a proximity type velocity transducer and is linear only for small motions, as the flux
intensity changes due to the change in air gap.
Figure 4.8 shows an eddy-current-type transducer.
A non-ferrous plate moves in a direction perpendicular to the lines of flux of a magnet.
Eddy currents are generated in the plate.
These are proportional to the velocity of the plate. These eddy currents set up a magnetic field in
a direction opposing the magnetic fields that creates them.

• Non-self generating types
An inductance transducer of attachment type is shown in Fig. 4.9 (a).
The core, made of high permeability steel, is attached to the moving object. The motion changes
the length of the core inserted in the coil and thud the inductance of the coil gets changed due to
the change of reluctance of the magnetic flux path.
When the core moves up and down, the inductance of one half increases while that of the other
half decreases. The two inductances L1 and L2 from the adjacent arms of a Wheatstone
bridge, as in Fig. 4.9 (b).

Figure 4.10 shows a variable inductance for measuring angular displacement or torsional motion.
One half of the core is made of magnetic material while the other half of non-magnetic material.
The inductances of the halves of the coil depend upon the amount of magnetic material in their
flux paths. The associated circuit for the same is identical to that Fig 4.9 (b).
In the variable inductance transducer, shown in Fig. 4.11, a small air gap in the magnetic flux path
of an elecromagnet is varied.
The inductance of one coil increases while that of the other decreases.
With the circuit being similar to that of other inductance transducers discussed earlier, the output
is proportional to the displacement of the object.

In linear variable differential transducer (LVDT) type of transducer, shown in Fig. 4.12, a soft
iron core provides the magnetic coupling between a primary coil and two secondary coils,
connected in series opposition.
When the core is central and both secondaries are identical, the voltage across them are equal in
magnitude. However, the output is zero as both the secondaries are in series opposition. As the
core moves up or down, the induced voltage of one secondary coil increases while that of the
other decreases. The output voltage, which is modulated, is the difference of the two, since
secondaries are in opposition. The associated circuit is similar to that discussed ealier. The output
is proportional to the displacement of the iron core. The device is very sensitive and is linear
over a wide range of motion.

Magnetostrictive type of transducer, shown in Fig. 4.14, is based on the principle that the
magnetic permeability of a ferromagnetic material, like Ni, changes when the material is
subjected to mechanical stress.
The magnetic permeability of Ni increases when the material is subjected to compression and
decreases due to the tension. Thus, the inductance of the coil would change, due to compression
or tension of the probe.
The magnitude and frequency of the exciting current determines the coil inductance and a change
in the same can be measured. Such transducer can be used for measurement of force, motion,
etc.
These have high mechanical impedance and thus resonant frequency is high, with a good
dynamic response. However, these transducer need individual calibration due to the fact that
these transducer depend on the change of a physical property of a material, which may differ.

• Capacitive Type Transducer
This is a displacement-sensitive transducer. Due to the motion, there is a change in
the capacitance between two plates. Suitable circuitry is used to generate a voltage,
corresponding to the capacitance change.
The capacitance C between two plates is given by
(4.1)
where C is capacitance, pF
A is area of plates, cm²
d is distance between plates, cm
ɛ is dielectric constant of the medium between the plates (= 1 for air)

Capacitance C between plates A and B may change due to the change of gap as shown in Fig. 4.15 or due to the change in area as shown in Fig. 4.16 as a result of motion of member A. Figure 4.17 shows to top view of an are-change type of capacitive transducer, which can be used measuring rotational motion.

Figure 4.18 shows an associated circuit for capacitive transducer, using an ac
carrier frequency oscillator, with the transducer forming one arm of a Wheatstone
bridge. A change in the capacitance, causes modulation of the oscillator carrier
frequency. A phase-sensitive demodulator is used to eliminate the carrier
frequency signal.


• Piezo-Electric Transducer
This operates on the principle that when a crystalline material like quartz or barium titanate is
distorted, an electrical charge is produced.
Referring to Fig. 4.21, application of a force P causes deformation xi, producing a charge Q, where
Q = K1xi (4.6)
K1 is called the charge sensitivity constant.
The crystal behaves as if it was a capacitor, carrying a charge across it. Voltage eo, across the
crystal, is given by:
(4.7)
C being capacitance of the crystal, and K the voltage sensitivity constant equal to K1/C.

As before, (4.8)
C being the capacitance of the crystal (pF), ɛ the dielectric constant of the crystal material, A its
area (cm²) and t its thickness (cm). If A is in square metre (m²), t in metre (m) and C in farads (F),
Eq. (4.8) becomes:
(4.9)
Relation between force P and deformation xi is:
(4.10)
E being the Young’s modulus of the crystal material.
Table 4.2 gives the properties of some typical piezo-elecric materials.

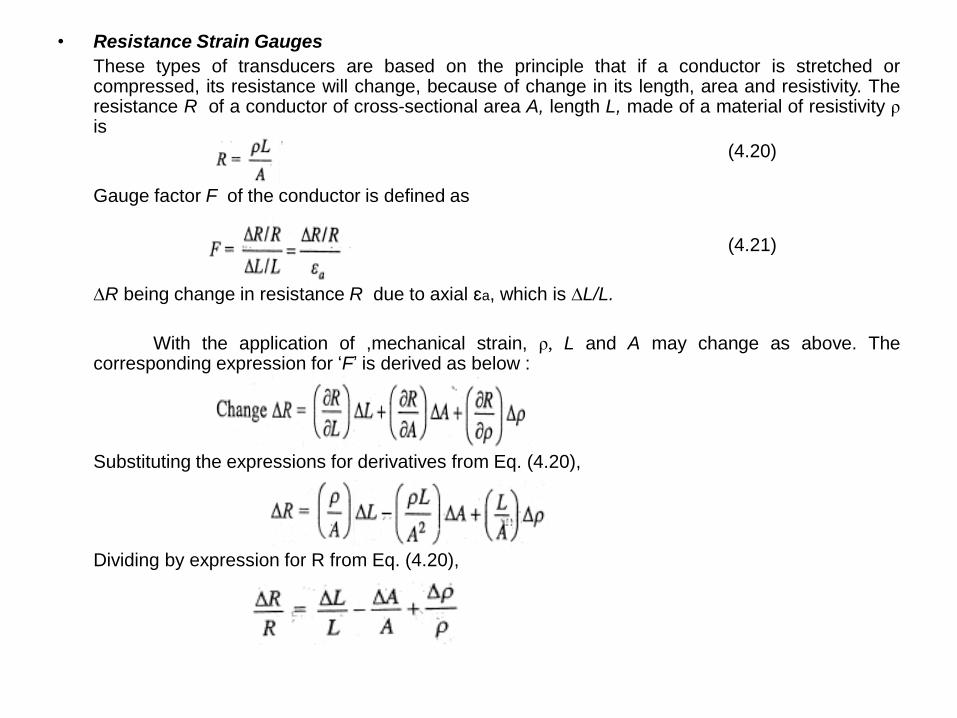
• Resistance Strain Gauges
These types of transducers are based on the principle that if a conductor is stretched or compressed, its resistance will change, because of change in its length, area and resistivity. The resistance R of a conductor of cross-sectional area A, length L, made of a material of resistivity ρ is
(4.20)
Gauge factor F of the conductor is defined as
(4.21)
∆R being change in resistance R due to axial ɛa, which is ∆L/L.
With the application of ,mechanical strain, ρ, L and A may change as above. The corresponding expression for ‘F’ is derived as below :
Substituting the expressions for derivatives from Eq. (4.20),
Dividing by expression for R from Eq. (4.20),

Area A = CB² , where B is geometrical dimension of the strain gauge cross-section, and C
is a constant whose value depends on the section, equal to π/4 for circular section of diameter B
and 1 for square section of sides B each.
or
Thus,
Finally,
For metallic strain gauges, the two terms viz. (1 + 2v) are higher than the third term while
for semi-conductor strain gauges, the third term due to change in resistivity due to strain is much
higher compared to (1 + 2v). The change in resistivity due to the strain is called Piezo-resistivity.
The value of F for Cu-Ni alloy gauge is 2 to 3 while that for semi-conductor is 100 to 200.
In the latter case, the value of F is positive for silicon doped with small amounts of p type
materials while it is negative for silicon doped with N type materials. The negative value implies
decrease resistivity with tensile strain.

In practice, the conductors used are in the form of thin wires or foils. Strain gauge transducers are
of two types:
1. Unbonded strain gauge, and
2. Bonded strain gauge.
• Unbonded strain gauges
In an unbonded strain gauge, a resistance wire is stretched between two frames, one being the
moving frame and the other, the fixed one as in Fig. 4.28. Typical dimensions of the wire are : 25
mm length and 25 µm diameter. The flexure plates act as springs between the two frames. The
wires are under preload, which is greater than any compressive load expected. An input motion as
shown in Fig. 4.28 would stretch wires 1 and 3 and reduce tensions in wires 2 and 4. Motion in the
opposite direction does the reverse. The wires are connected in a Wheatstone bridge
arrangement as shown in Fig 4.28 (b). With this type of transducer one can measure very small
motions, of the order 50 µm and very small forces. These transducers may be used to measure
force, pressure, acceleration, etc.

• Bonded resistance strain gauges
Transducers, using bonded resistance gauges are widely used for measurement
of several physical variables like strain, force, torque, pressure, vibrations,
etc. These gauges may be of metallic or semiconductor materials, and are in the
form of a wire gauge (about 25 µm diameter) or thin metal foil or small rods (in
the case of semiconductor gauges), as shown in Fig. 4.29. These gauges having
paper or some other material backing, are cemented or bonded to the surface,
whose strain is to be measured, as shown in Fig. 4.30. Once bonded, the gauges
undergo the same strain as that in the member surface. These are very sensitive
and when used with electronic equipments, strain as low as 10-7 may be
measured.

Gauges made of copper-nickel alloys have a gauge factor of 2-3 while semiconductor gauges
have gauge factors of 100-200.
Table 4.3
Gauge current is usually limited to 10-30mA, depending on the test duration, in order to
prevent wire damage. Bakelite base gauges can with stand somewhat higher values of current.
Care has to be taken while bonding the gauges. The surface of the member has to be
thoroughly cleaned. Later, the adhesive has to be applied and allowed to set, according to
manufactures’ instructions. Then, the connecting leads are soldered to the gauge and securely
fixed to the test member, as in Fig. 4.30. Finally, the gauge continuity and insulation resistance are
checked.
In the subsequent figures, the strain gauges shown in Fig. 4.29 are represented by
rectangles, with the longer side being along the length of the wire, foil or semiconductor.
Gauge backing
material
Adhesive Wire materials Remarks
Paper or silk
Bakelite
Glass weave
Nitrocellulose
Epoxy
Ceramic cement
Cu-Ni alloy
Cu-Ni alloy
Ni-Cr alloy
Useful up to 60°C
Useful up to 200°C
Useful up to 400°C

• Ionisation Transducer
This works on the principle of development of voltage across two electrodes placed in an ionised
gas, the magnitude of which depend on the electrode spacing and state of balance, which can
change due to the motion to be measured.
The transducer consists of a glass tube (Fig. 4.54) containing gas under reduced pressure.
A dc voltage is developed across the internal electrodes A, when the tube is subjected to an
electric field due to external electrodes B, connected to a radio frequency (RF) voltage source.
The gas in the tube gets ionised and the dc voltage produced depends on the electrode spacing,
being zero at null position. As in Fig. 4.54, the motion xi of the tube relative to the fixed external
electrodes varies the output voltage. The balance between the electrodes may also be changed
as in Fig. 4.55 by changing either capacitance C1 or C2 (C1 in Fig. 4.55 shown), due to the motion
xi, to be measured. This produces an output eo.

• Mechano-Electronic Transducer
This type of transducer, which is of electronic displacement type, depends on the principle
that the plate current depends on the spacing between an anode and a cathode in a diode or a
triode. Figure 4.56 shows such a transducer, consisting of an evacuated tube, in which the
cathode C is fixed and the position of the anode can be changed by the input motion xi, which
causes deformation of an elastic diaphragm producing a change in plate current, which can be
measured. This can be used for measuring displacement, pressure, force, etc.
Table 4.1 compares the above and other features of various motion transducers.


• DIGITAL TRANSDUCERS
Introduction
The transducers described so far are analog ones, i.e. their output varies continuously according
to the input. In digital transducers, however, the output is discrete and may give frequency type
output or a digitally coded output. of binary or some other type: The main advantages of digital
transducers are
l. Use of digital computers, along with the transducers, for data manipulation, is made
easier.
2. Digital signals—pulse count frequency or sequences of digitally codes outputs—are not
dependent on signal amplitudes and are thus easy to transmit without distortion and
external noise.
3. Increased accuracy in pulse count is possible.
4. There are ergonomic advantages in presenting digital data.
Digital transducers range from frequency domain or frequency generating types of
transducers to digital encoders. Alternatively, an instrument may incorporate an analog transducer
and an analog-to-digital (A-D) converter, giving a digital output, Figure 4.61 shows such an
arrangement. Various types of A-D conveners are described in Chapter 5.

• Frequency Domain Transducers
In these transducers, the output is in the form of pulses or sinusoidal wave forms, the
frequency of which is a measure of the magnitude of the physical variable. Frequency can be
measured by a frequency or pulse counter. Three types of frequency domain transducers have
been described below, viz. electro- magnetic frequency domain transducer, opto electrical
frequency domain transducer and vibrating string transducer.
• Electromagnetic Frequency Domain Transducer
This type of transducer can be used for speed measurement, as shown in Fig. 4.62. The
device consists of a permanent magnet or a solenoid. On the rotating shaft whose speed is to
be measured, a gear of ferromagnetic material is attached. As each gear tooth passes in front of
the magnet, the gap length changes. This changes the flux density and a voltage pulse is induced
in the coil. Pulse frequency equals speed N times the number of teeth T. The form of the output
signal is also shown in Fig. 4.62. Thus, pulse frequency is a measure of speed of rotation.

• Opto-Electrical Frequency Domain Transducer
Figure 4.63 shows an opto-electrical frequency domain transducer for the measurement of
speed of rotation of a shaft. The shaft has half dark and half white or shining portions. Every
time the latter portion is Ill front of the light source, the reflected light falling on the photo-electric
transducer, gives an electrical pulse output. The frequency of the pulses is thus a measure of the
speed of rotation.
For measurement of linear motion, an arrangement using the opto-electrical device is
shown in Fig. 4.64. This uses a transparent scale with a grating. The moving object is attached to
the transparent scale. Light from a source passes through the scale and a slit and then falls on a
photo-electric transducer. The slit width is such that a motion equal to the pitch of the grating
produces one complete cycle of light and darkness at the photo-electric cell. Thus, a pulse output
is obtained. From the number of output pulses, the change in motion of the scale and the Object
attached to it can be determined.

• Vibrating String Transducer
This is essentially used to measure the force applied to a metal string, which is kept vibrating, the
frequency of which is dependent on the force applied. The natural frequency f of a string of length
L and area of cross-section a is given by
where P is the force applied and ρ the mass density of the wire material.

The arrangement is shown in Fig. 4.65. One end of the string is fixed and the other
can be moved relative to it, due to the force applied. An electromagnetic transducer
picks up the vibrations; the output of which after amplification is fed to an
electromagnetic vibration generator, which maintains the string vibration at its natural
frequency f. Frequency f gets changed due to change in magnitude of force P. The
frequency is measured by a frequency counter and is a measure of the force applied
on the string. Initial string vibrations are obtained by an electro-magnetic device that
plucks the wire on application of a pulse. The transducer can be used for force and
displacement measurements.