tesis de grado - repositorio digital - epn:...
TRANSCRIPT
ESCUELA POLITÉCNICA NACIONALFACULTAD DE INGENIERÍA ELÉCTRICA
DEPARTAMENTO DE ELECTRÓNICA
TESIS DE GRADO
MÉTODOS Y PROGRAMAS COMPUTACIONALES
P A R A
ANÁLISIS DE ESTABILIDAD
SISTEMAS DISCRETOS
1983
REALIZADA POR:
BERNARDO ISMAEL MORALES B.

Cert i f ico que el p r e s e n t e
t raba jo ha sido rea l i zado
en sirtotalidad por el Sr. -
B e r n oj-'d-o""!"
I n g>-M-or
DIRECTOR DE TESIS

DEDICATORIA
A mi s Pad res :Ce'sar y Olga;
a e l l os debo mi f o r m a c i ó n
A mi Compañera ;
.Ros a r i oy rnis hijos
_ Olga Pa oíay B e rna rdo D*arío

AGRADECIMIENTO
Mi agradecimiento a-la Institución y a todas las
personas q\ie han colaborado en mi formación pro-
fesional y en la elaboración de esta tesis.
Particularmente mi reconocimiento de gratitud, al
señor Ingeniero Marco Barragán, por la conducción
y asesoramiento que me brindó en todo instante y
por ser un guía leal de la educación.

A P É N D I C E A
i
Diogramas de Flujo y Listado de los P rog ramas 130
APÉNDICE B • ... • . . -
Forma de uti l izar los Programas y de P ropo rc i ona r los jpatós .178
REFERENCIAS BIBLIOGRÁFICAS , = ~ """ ' " 182

Í N D I C E
1. INTRODUCCIÓN • - Pag
l.-l I m p o r t a n c i a y O b j e t i v o s • . _ . . 1
2. T E O R Í A
2.1. Sistemas Discretos . . 32.2. La Trans formada Z . - ' . . . " . . . - - I92.3. Funciones de Transferencia de Sis temas D i sc r et.p's 3§ •••
3. E S T A B I L I D A D DE SISTEMAS D ISCRETOS ^..,.f -
3 . 1 In t roducción . , 4 5
3.2"C"ofídiciones de Es tab i l i dad p a r a S is temas D i s c r e t o s 45
3.3 M é t o d o s pa ra Probar |a Estabilidad de Sis temas Discretos 46
3.3.1 Cr i ter io de Es tab i l i dad de Jury . Al
3.3.2 Cr i ter io de E s t a b i l i d a d de Schur-Cohn 51
3.3.3 Criterio do Estábi l j da d de Rputh -Hurwitz M o d i f i c a d o 54
3.3.4 Cr i ter io de Esta bilí d a d d e L i a p u n o v 573.3.5 Cr i te r io de E s t a b i l i d a d de Nyquist 63
3.4 Conc lus iones . 67
4. PROGRAMAS COMPUTACIONALES PARA CADA UNO DE LOS MÉTODOSDE ANÁL IS IS DE E S T A B I L I D A D
4.1 ln f roducc¡ (Dn • 69
4.2 Descr ipción, Anál is is y D i a g r a m a cio'n en bloques de c a d a uno de losP r o g r a m a s 704.2,1. Programa para el Cr i ter io de Jury 704.2.2.Programa p a r a el C r i t e r i o de Schur Cohn 734.2.3. P r o g r a m a para e l C r i t e r i o de R o u t h Hurw i t z M o d i f i c a d o 774.2.4 P r o g r a m a p a r a el Cr i ter io de Liapunov 834.2.5 P r o g r a m a para e! . C r i t e r i o de Nyquist . 87
4.3 Recomendac iones pora el escogimiento de un Programapora lo resolución de un Problema determinado SO
5. EJEMPLOS DE A P L I C A C I Ó N
5.1 I n t r o d u c c i ó n . 915.2 E j e m p l o s de apl icacio"n usando los P r o g r a m a s p r o p u e s t o s 91
5.2..1 E jemplo de a p l i c a c i o ' n N° I 915.2.2 E j e m p l o de a p l i c a c i ó n N° 2 985.2.3 E j e m p l o de a p l i c a c i ó n N° 3 1045.2.4 E j e m p l o de a p l i c a c i o ' n N° 4 1105.2.5 E j e m p l o d e a p l i c a c i ó n N ° 5 . 1165.2.6 E j e m p l o de a p l i c a c i ó n N° 6 1225.2.7 E j e m p l o de a p l i c a c i o ' n K ° 7 . 127
5^3 C o n c l u s i o n e s 129

CAPITULO I
INTRODUCCIÓN
1.1 Importancia y obj etivos: ;
• En toda, época los sistemas de control han desempeñado
un papel muy .importante, para e3 desarrollo de la tecno-
logía de 1.3. civilización. En los últimos años los sis -
temas automáticos cié control han dado un impulso muy
grande para el- avance y utilización de la automatiza -
ción en .la industria y en la ingeniería. Más aún en 'la
actualidad,con el advenimiento de los computadores di-
gitales y de toda clase de equipos gue utilizan seña -
les no continuas en el tiempor .se ha estructurado la
• ' teoría para sistemas discretos y técnicas de simulación
de control discreto.
Asi, lo, importancia del uso de técnicas de datos mués -
treados -en sistemas de control, viene por el incremento
de3. uso de computadores digitales; las señales transmi-
tidas y recibidas por un sistema de comunicaciones son
en la actualidad en forma de tren de pulsos; la medici-
na utiliza técnicas de muestreo para procesar datosretc
Por otro lado la operación de muestreo en sistemas de -
control moderno es con el propósito de dividir el tiem-
po para mejorar la sensibilidad, ejecución y respuesta.
la parte mas importante dentro de un sistema de diseño
de sistemas de control es el análisis de la estabilidad
ya gue de 'ésta depende el buen funcionamiento deü sis-
tema . .
Objetivos:
La presente 'tesis no pretende hacer un estudio detalla-
do de los sistemas discretos, señales discreta.s o técni-
cas de muestreo de señales, sino el estudio de métodos

utilizados para estudiar la estabilidad de un sistema Dis-
creto, si se dispone de su función de transferencia en 55 o
su matriz de estado/ para luego ela.borar' programas computa
.cionales que automaticen el análisis de estabilidad del
sistema.
Descripción de los capitules
EJ segundo capítulo trata sobre las señales y los -sistemas
discretos; tanto en función del tiempo como en términos de
la transformada
Más adelante se
de Laplace S en su parte teórica.
hace un estudio cíe la transformada 2 para.
sistemas discretos; sus alcances, su relación con. el plano
S r su transformada inversa y sus teoremas; pora dejar al -
final el estudio de le. formación de las funciones de trans
ferencia para s
El capitulo ter
que prueban la
dos, ilustrando
En el capítulo
istemas discretos.
ero/- comprende el estudio de los métodos -
estabilidad de sistemas de datos muestrea -
se cada método con ejemplos.
niarto se explica la. forma de generación de
los programas computacionales: para cada método de análisis
de estabilidad, su programa se somete a un análisis, des -
cripcion y diagramacicn. -en bloques.
El capitulo quinto,, analiza, varios ejemplos de aplicación
para los programas, y cómo nacen el análisis de estabili-
dad cada uno de ellos.
El apéndice A presenta los diagramas de flujo y listado -
que corresponden a los programas asi como sus resoecti\as
subrutinas.
En el apéndice B, se tienen instrucciones para el acceso
a los programas y oí sistema empleado.

CAPITULO 2TEORÍA
2.1 Sistemas discretos
2.1.1 .Señales continuas -y discretas :
Una señal continua en el tiempo, esta defi
nida en todo instante, dentro de un in.terva
lo de tiempo.
- Una. señal discreta en el tiempo, está
nida únicamente en instantes discretos de
tiempo f pudiendo estar especificada a Ínter
.valos iguales o desiguales de tiempo. Mate-
máticamente una señal discreta puede ser de_
notada por: f* (t) .,
2.1.2 Muestreo de señales:
En "general, un muestreador convierte una señal
continua en. el tiempo en una señal discreta en
el tiempo. El muestreo básico utiliza un núme-
ro básico de dispositivos (fig,. 2.1), en donde
" f (t) es- cualquier señal continua y f¿' (t) es
la* señal muestreada. Ondas típicas de en_
trada y salida están ilustradas en la (fig 2.2)
f (t) f* (t)p
Fig. 2.1 M.ueatreador básico
flt) ' fD*(0
íb}
Fig. 2.2 onda.s típicas de entrada y salida de*un muestreador

Para este caso se supone que el muéstreo es
uniforme y está referido a un período T uni_
forme, de muestreo.
Si el muestreador es físico; ' el tiemoo de - •
muestreo es finito, as£ como el a.ncho de
pulso de salida del muestreador. Sin embargof__.-•'
los análisis matemátaVcos de sistemas a datos
discretos asumen que el muestreo es infinite_
simal.
Se puede visualizar la operación de muestreo
de una señal f (t) mediante muestreadores
mecánicos' o_electrónicos, los cuales a la en
tráda de la señal continua abren y 'cierran
un conmutador a ciertos intervalos de tiempo;
asi, se tendrá a la; salida del muestreador
un tren de pulsos que corresponden a la se -
ñsl discreta f* (t) (el muestrea,dor se oie~P
rra por p. (Sg) en los instantes t = O, T / 2T
.... KT discretos de tiempo). (Fig. 2.1).
Los métodos posibles de muestreo pueden to -• r
mar gran variedad de formas, entre las que -
se pueden enumerar:
1. Muestreo a razón nniforme
2. Muestreo a razón no uniforme
3. Muestreo aleatorio
4. Muestreo por ancho de pulsos
Como se ver el muestreo puede ser no periódi-
co o 'tener variable la 'razón de muestreo; es
común también tener sistemas discretos con
algunos muestreadores de diferente razón de
muestr-eo que estarán o no sincronizados para
operar'en un mismo instante de tiempo, etc.

Al maestrear una señal a.intervalos de
tiempo dados, de cualquier función f(t)
cuya componente de frecuencia máxima es
W f puede ser completamente determina-
da mediante muestras de su amplitud to-
madas a intervalos de tiempo T= I/ (2\\ ) ,
los valores de amplitud son ".--idénticos a
los que tiene la señal original en cada ,
intervalo de tiempo (Fig. . 2 . 3) . -.ia"dura-
• ción del maestreo debe ser despreciable
respecto al intervalo T de muestreo.
V(t>
Fig. 2,3 ondas de entrada y salida típicas
para muestreo uniforme. . •
•Un muestreador lineal saca muestras de du-
ración igual a intervalos'de tiempo iguales
2.1.3 Sistemas .discretos
Un sistema se dice que es discreto si acepta
una señal discreta en el tiempo como entrada* _ • "
f (t) - y genera una señal discreta en elP
tiempo como salida C* (t).
Estos sistemas difieren de los sistemas con-
tinuos en que la señal en cualquier parte del
sistema se encuentra en forma de un tren de
pulsos o un código numérico. La forma que ten_
dría un sistema discreto puro, estará dado -

por el diagrama en bloques de la (Fig.
•2,4)
f * *P
(t.)fControl .
discreto
Proceso
discreto
- c* ítj
Fig- 2.4: Diagrama en bloques de un siste_
• ma discreto.
2.1, Descripción matemático del muestreo _unifor-
me:
El muestreo de tina' señal f (t) puede irjte_r
preta.rse como una modulación; para esto se
tiene: la señal f (t) y un tren de piil-sos
P (t) como entradas de un modu3.ador de pul-
. sos (Fig- 2.5) y a la salida se tiene la se_
nal muestreada f* (t)F
f (t) Modulador
de oulsos"P
P (t)
Fig. 2.5 Diagrama "en bloques del muestreo
uniforme.
Para un muestreo \iniform.e 3a señal portadora
P (t) r .es un tren de pulsos unitario de perlo_
do T. ( Fig. 2.6) .
.P(0
-1-T-T+p Op T T+p 2T '¿T
Fia. 2.6 Pulsos unitarios ríe Periodo

Sz el tren de-impulsos unitarios tiene como
ecuación:
00
P (t). = E ( U (t - KT) - U t(t-kTv-p)) (P<T)K = -00
Ec, 2.1
En donde u (t) es una función paso, P es la du-
ración del maestreo en tiempo y K . puede tomar
valores enteros..El maestreo uniforme puede ser
descrito por:
f* (t) = f (t) x P (t) Be, 2.2ir
En general, el diagrama en bloques de la ( Fig-,
2.5) ilustra que el muestren nuede hacerse 'no
necesariamente uniforme (lineal) ; pues el -itvues
treo dependerá del tipo de pulsos (señal portel
dora) que se introduce en el modulador.
La función periódica P (t), puede ser expresa-
da como serie de Fourier f como sigue:
00 . « .
p (t) - !>" c e3 s' EC. 2.3n=-oo n
En- d,onó.e W .es la. frecuencia de muestreo (rad/s)
y Cn se describe asi:
-jnW tP (t), 6 s dt Fe- 2.4
Tomando la. transformada de Fourier de f* (t)Pen la, ecuación (2.2) , se tiene:
•-*cn F (Jw + jnws) Ec. 2.5
en" donde n se extiende de -OO a +OO. Para cuan_
do n= O, está última ecuación queda. '

La ecuación (2.6) muestra que el contenido de
frecuencias de la señal original de entrada
f (t) ;estáh presentes a la salida del mués -
t re ador en la. señal f * (t) , con la variante: P ' -
de que la amplitud ésta multiplicada por p/T..
Para n
será:
O Cn es compleja y su magnitud
n_p_T
sen(nW.p/2)
p/2 Kc,.2.7
Para la magnitud de F* (jw). hay que conside._- -Jr*
rar que el esp-ectro de frecuencias de un tren
de pulsos unitarios- P (t) es una simple tramade-
fos coeficientes C' de Fourier como función de• : • n • .
1 s*
F* (jw)P
00
C= -oo n F(jw + jnw ) Ec- 2.8
En la ecuación (2.5) si jw se reemplaza por
se obtiene otra forma de expresar a F* (s)' y
que puede ser obtenida por medio de coiuvolu.'
ción ^compleja.
F*(sj =-00
~jnw PJ
F (S+'jnw£) Ec.2 . 9
n - -oo j nw T
La amplitud del expectro • de C se. muestra a con• c n —•tinuación .en la (Fig, 2.7.a)
Para cuando n asume valores entre -OO y - OO y se
puede ver que la amplitud del expectro no es con
(1) Ver B.C..Kuo, ANAL IRIS AND SYNTHESI.S OF SAMPLED
DADA CONTROL SYSTEMS, Prentice
- Hall Inc. Englewood Chiffs , N.J.
1963 - Pag. 1C a 15
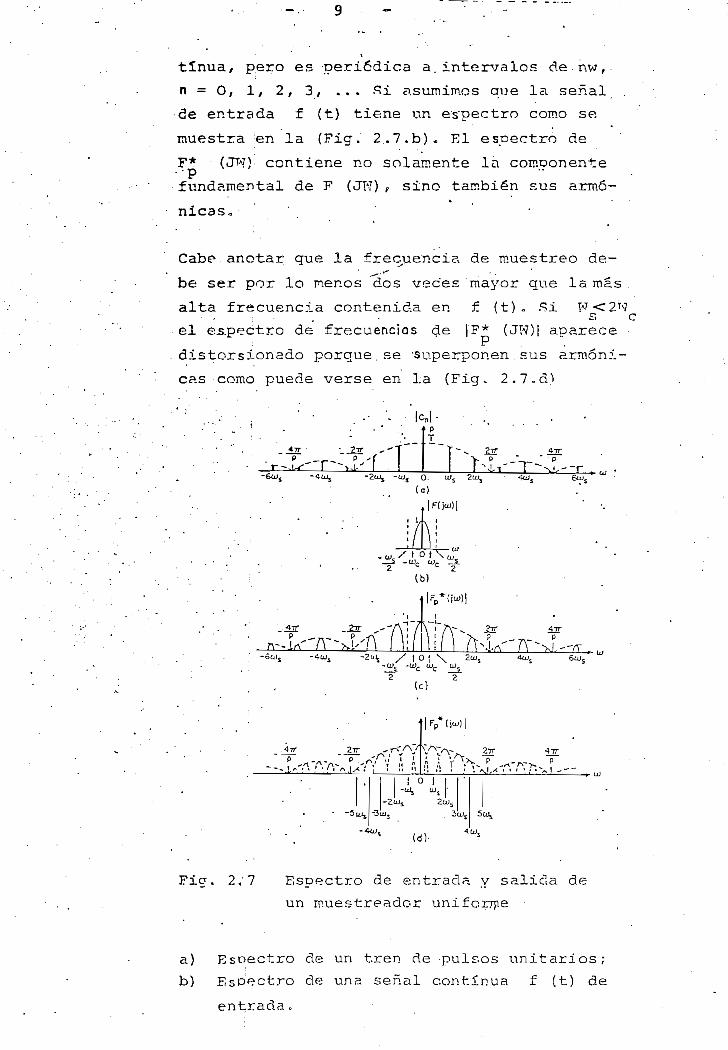
tlnua, pero es -periódica a.intervalos de nw,-
n = O, 1, 2, 3, ... Si asumimos que la señal
-de entrada f (t) tiene un espectro como se
nuestra ¡en 'la (Fig. 2.,7.b). El espectro de
F* (JWV contiene no solamente la componentePfundamental de F (JW) , sino también sus armó-
nicas*
Cabev anotar que la frecuencia de maestreo de-—-•"' ' •
be ser por lo menos dos veces "mayor que lamas.
alta frecuencia contenida en f (t) n Si W^a
el espectro de frecuencias cié |"F* CJT^Jl aparece
distorsionado porque.se -superponen sus armóni-
cas como puede verse en la (Fig. 2.7.d)
•/-^-~n-Jxr I-6tDs -4ÜJJ ~2ü^ -UJj (
(<
• ' • • J
' PT
"~~T"- & ££t ~^ 0 ~ 'O1 f" _ — ~l — .
3. UJ, 2tUj ' 4uJs GÜJS
:)
r.,4TTP
t O
Ib)
t O 1
U)
,
2
27T 27T
(di-
Fig. 2;7 Espectro de entrada y salida de
un muestreador uniforme
a) Espectro de un tren de -pulsos unitarios;
b) Espectro de una señal continua f (t) de
entrada«

10
-c) "Rspectro de la señal de salida (W >2W ). s e .
de un -rnuestreador.
.d) "Espectro de la señal de salida de un mu-
est reador. tWs< 2 W-c)
Aproximación a un mues'treado'r ideal: " " "" '
**" •*"*'.Analizando el m.uestreo (Fig.2.2) si la durac;±6n
de inuestreo p es más -pequeña que el periodo al
cue se muestre a T, es decir P<<<T/ el tren de -
ondas rectangulares1 (Fig. 2.2.b)a la salida del
•rnuestreador- f* (t) puede aproximarse a un tren
impulsor (Fig. 2.3.b) para l-o que se puede ex -
presar:
f* (t) t = f (KT). para' KT t (KT+P) Ec . 2.10
'f*(t.) = - O para KT + P<:t<r(K+l)T Ec, 2.11
en donde;
K - = O. 1, 2 , 3, .
t\) puede ser excrita como:P ^
co .f* (t)' = ]>I f "(KT) ÍU (t - KT)- U (t-KT-PÍl Ec.2.12
en donde:
U (t) es la función paso unitario
Tomando la transformada de Laplace en la ecuación
(?. ,12) y considerando que la duración del muestreo
P es infinitesimal, se tiene:
S) =P ^> f(KT)6 . Ec.2.13

11
Ahora tomamos la transformada inversa de Lapla_
ce:
* ¿2. f(t) = P 2. f (KT) ¿ (t-KT) Ec«
P K=<¿
En donde p (t.) es la función unitaria, impulso.f*"ifr
La ecuación 2.14) representa a un tren de impul-
sos de área. P f (KTY al tiempo t. = KT, esto —
significa que el muestreo puede ser aproximado a
una modulación de impulsos en la cual la señal
portadora es igual al tren de impulsos.
oo ,
-íT(t) = S .Ó(trKT-) = lim lp(t) Ec_ 2_15
K-O P ' .
Con todo esto, el muestreador de la (Fig. 2.1) -
puede idealizarse si se conecta en serie un ate-
nuador (fíg. 2.8) en donde la atenuación es igual
a P.
f ( t ) *^f(t)atenuodor
fp( t)
Fig. 2.8 Muestreador ideal. *
Puesto que un muestreador ideal se defjne como' un
conmutador que se cierra y atare instantáneamente-,,
o i n t e r v a l o s de t i e m p o de T ( s e g u n d o s ) ,- . . la sa-
lid.a del'muestreador ideal se describe como:
íf* ("t-). = .>, f (KT-) O (t-KT) • Ec, 2 .16
Luego por la. ecuación (2.10) f* (t) será igual a
(t) - f (t) . (t) Ec. 2.17
Se asume, que el tiempo, de muestreo comienza en O.
.12
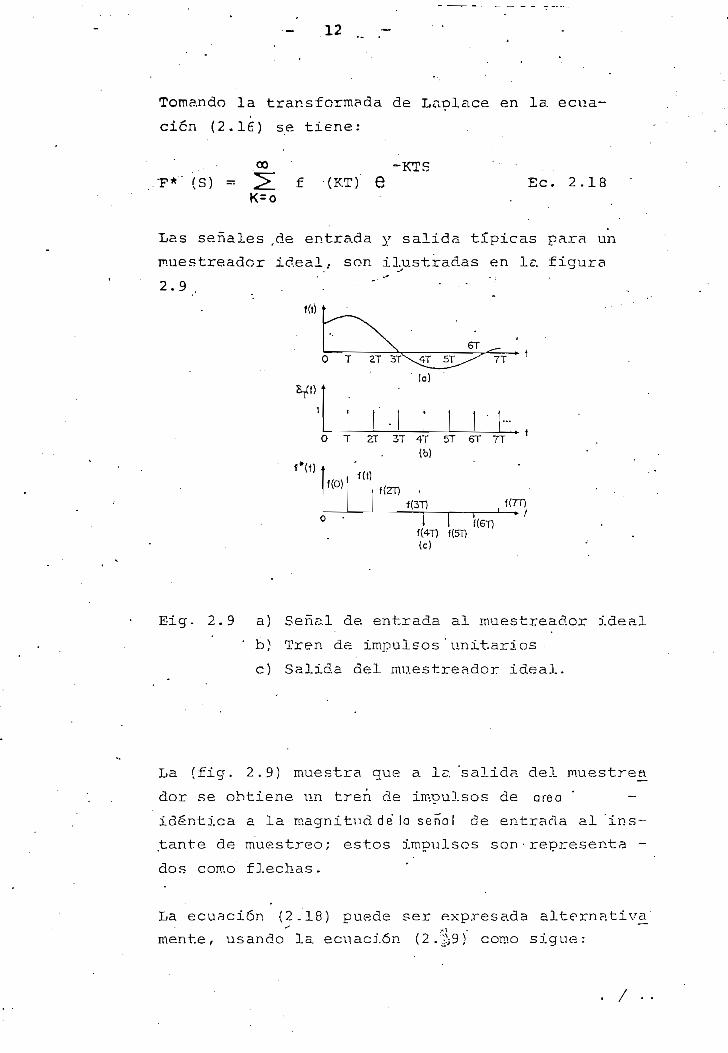
Tomando la transformada de Laplace en la ecxia-
ci6n (2,16) se tiene:
.00 -KTS(S) ~ 2l f (KT) 6
K=oEc. 2.1¡
Las señales ,de entrada y salida típicas para un
muestreador ideal, son ilustradas en IE-. figura
2.9. . '- • "" ' •' ' '
O T 2T 3T 4T 5T 5T 7T
Eig- 2.9 a) Señal de entrada al muestreador ideal
' b) Tren de impulsos'unitarios
c) Salida del muestreador ideal.
La (fig. 2.9) muestra que a le. 'salida del muestre^
dor se obtiene un tren de impulsos de área
idéntica a la magnitud de lo señal de entrada al "ins-
tante de muestreo; estos impulsos son•representa -
dos como flechas.
La ecuación (2.18) puede ser expresada alternativa/
mente, usando la ecuación (2.¿9) como sigue:

13
= Lim P*(s)
Siendo":
T(t) = Lira «t) ;P-*o
Eje.mp.lo
Si se considera que la función de paso unitaria
f (t) = U (t) está muest.reada idealmente" a in-
tervalos de T segundos, entonces a la salida —
del muestreador se tendrá:
03 • rf* (t) = *> f (KT) O ít - KT)
K=o
- íf* (t) = O (t - KT) Ec. 2.21K = o
La' transformada de Laplace de le. ecuación (2.211)
será:
-KTS6 Ec- 2-22
-TC; -2TSP*(S).= 1 + e + e + ... Se. 2.23
paraEc. 2.24
e "',
2.1.6 Teorema de maestreo:
Teóricamente no existen limitaciones para frecuen-
cias altas de maestreo, aunque físicamente un mue_s_
trea.dor tiene una máxima razón de muestre o; cuando
esta f recuen-cia tie'nJ a un valor infinito., se apro_
xima al caso continuo.
En cuanto al límite de la frecuencia más baja de -

muestreo r se conoce que si. una señal continua
cambia, rápidamente respecto a.l tiempo y la ra-
zón de este muestreo es baja, se pierde vital.
información de la señal entre los instantes de
muestreo, consecuentemente no es posible re. -
construir la señal original desdé la informa -• -1
ción contenida en 3_os datos maestreados
Así la más baja frecuencia de muestre o, ---po'si'
Par& poder reconstruir nna señal maestreada es
2 W en donde W es la más alta frecuencia conc c —
tenida en la señal f (t) muestreada; esto pue_
de expresarse en un teorema de muestreo: "fíi
una señal no contiene frecuencias más altas
que W (rad/s) , está completamente definida -• cpor los valeres de la señal medidos a instantes
. . . 2• de tiempo separados por T = 1/2 ( 2 ff /W ) seg"
' cEn la práctica, la estabilidad de sistemas reali
mentados hace que ^ la. frecuencia de maestreo sea
_ más alta que la teóricamente mínima y es iirvposi_
• ble eme se reproduzca exactamente la señal con -
tina a original desde la señal muestreada., según
se entenderá luego en el numeral (2.1.8).
2.1.7 Propiedades de_F'* (S) en_el plano S
Las propiedades que presenta un muestreador ideal,
se pueden deducir de la ecuación (2 c 19 ) y son:
1. F*(S) es una función periódica con periodo
JWS , hecho q\ie puede ser -verificado sustitu -
yendo ( S 4- JMW' ) por S n le. ecuación (2.18)o
y en donde .M es un entero.
°° -KT (S+JMW )F* (S -f JMW) = 2]ffKT)e' ñ Ec, 2.25
[2) Ver, B.C. Kuo, ANÁLISIS AND SYNTHESIS OF
SAMPLED DATA CONTROL SYSTEMS,
Prentice Hall Inc,Englewood Cliff:
N.J. 1963 - Pag- 20 - 21

15-
Siendo:
-JKKW Ts
= 1
ooF* (S + JMW ) =
tenemos
-KTS
Éc. 2.26
En otras palabras, si damos algún valer a S
= S, la función F* (S) toraa el misno valor -
para todos los puntos periódicos.
S = S, + JMWe •Ec. 2.27
?odo esto se ilust'ra en la (Fig. 2.10)
1 franjas" c o m p l e m e n t ó n o s
franjarprimaria [
c o nxp lo m e n1 orí trif~7l"rf3S^*o —
SUJy
ir2
z
TüV
Fig 2-10 ' Per iod ic idad de F (S)
16
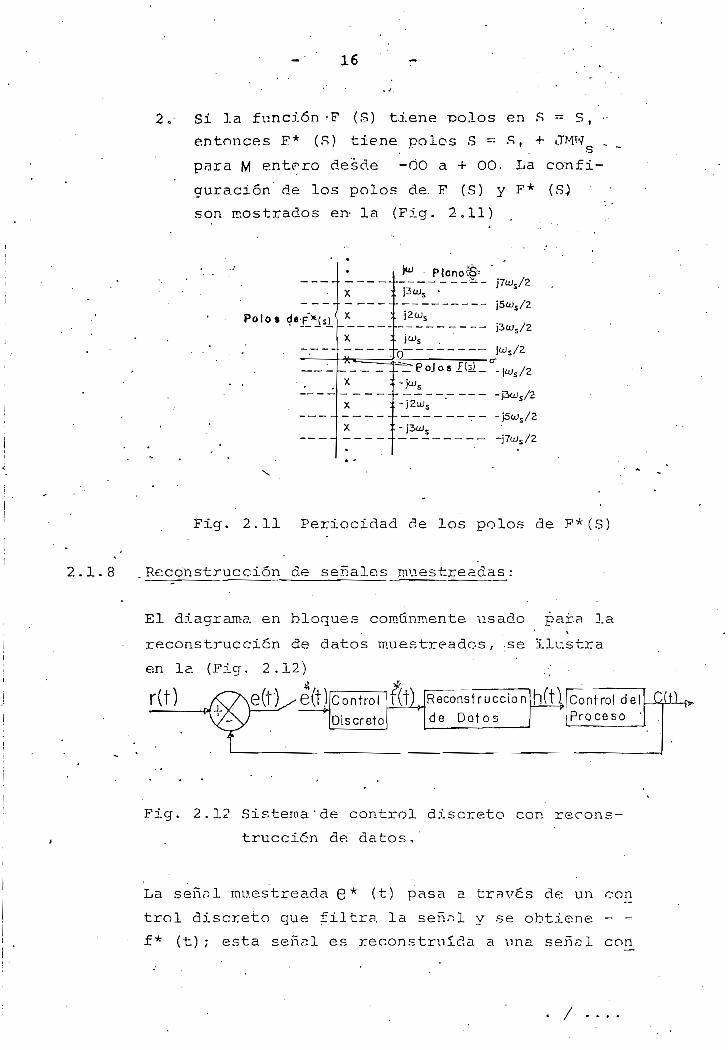
Si la función'F (S) tiene polos en S ~ S,
entonces F* (S) tiene polos S « S, + JMW
para M entero desde -ÓO a + 00. La confi-
guración de los polos de. F (S) y F*
son mostrados en- la (Fig. 2.11)
•F*(s) <
•
x ;
x ;
X :
x :
x :
X :
.
^ PlonoS"
j2üJs
}"s .
0
- }uj_
- J2cus
- ¡3tüs
jws/2
Fig. 2.11 Periocidad cié los polos de F*(S)
2.1 Reconstrucción de señales muestreadas:
El diagrama en bloques coraünraente usado para la
reconstrucción de datos maestreados, -se ilustra
en le. (Fig. 2 .12$•
hft
Fig. 2.1? Sistema'de control discreto con recons-
trucción de datos,'
La señal maestreada Q* (t) pasa a través de. un con
trol discreto que filtra la señnl y se obtiene - -
f* (t); esta señal es reconstruida a una señal con

17
tí mi a
ceso.
(t ) antes de entrar al control del pro-
Para Ja , reconstrucción de datos, se asume que se
tiene un muestreador ideal con una frecuencia de
muestreo igual a W , la cual es por lo menos dos
veces más grande que la componente más alta de -
frecuencia contenida en la señal continua a ser
maestreada; .la (Fig. 2.13) muestra el espectro"'"-
de F* (S) del cual se deduce que para poder re -
construirí la señal continua, la señaí maestreada
deberá pasar -a través de un filtro pasa bajos,
cuya amplitud y forma se muestra en la (Fig, 2. 13]
con linea punteada.
-Coracteristicas del Fütrü
t*V ' O w,.
Fig . 2.12 Reconstrucción de una señal continua ,
desde una señal maestreada, usando un
-filtro pasabajos.
Por consideraciones practicas , se debe anotar que
es imposible la reconstrucción perfecta de una se
nal continua una vez que ha sido maestreada y <3ue
para una mejor aproximación a la señal original,
se requiere un Icirgo retardo de tiempo que no es
deseable por los efectos adversos a la estabilidad de les
sistemar, que crea. Por consiguiente, el diseño cíe
aparatos para la reconstrucción de datos involucra
el compromiso que requiere la estabilidad y el gra_
do de aproximación de la señal continua.

18
Confrontando el problema: se tiene una secuencia
de números: f (O) , f (T) , . . . f (KT) . . .'o un -' -
tren de pulsos ocurridos a t - KT igual a f (KT) ,
K = 0,.l, 2 ... y la señal continua f (t) , t>O
que debe ser reconstruida de la información conte-
nida en la. señal ir.uestre.ada.. • .• /
Así t el', proceso de reconstrucción de- dato.s~.de.be .
ser considerado como un proceso de extrapolación--""
en e! cua] la señal continua a ser r.ecoírs'"f.ruida
se basa so. lamente en la información obtenida en
los instantes de muestreo. Esto es: la señal ori -
ginal f (t) debe ser estimada en todos los instan
tes de muestreo 'KT, (K - 1).TT (K - 2 ) T, ...
O; esto es: f (K - -1) T, f (K - 2 ) T , . . . f (O) .
El método empleado para" obtener una aproximación
deseada, -se basa en la expansión en series de
f (t) con el intervalo entre dos instantes de mue_s_
KT y " (K + 1). T . : .
ni (?i(t) =•• f (KT) + f:x;(KT) ct»KT) + f• ' (KT;
en donde;
Ec- 2.21
f (t) = f (t) • para K1:i\-
(1)d f (t)
dt
(K + 1)T
t = KT
Ec. 2.29
(2 (KT) f (t.)dt' t = KT
Ijas derivadas de la. función f (t) deben ser obteni-
das a los instantes de muestreo y estimadas -del va-

- 19 .... :-
lor de f (KT)* La expresión más simple envuelve
solamente dos datos pulsados. La primera deriva.
da de f(t)a t = KT será:«
f-(KT) = (f -(KT) - f (K-DTj ' Ec. 2.30
Una aproximación'«-a la s.egunda _ derivada, estará
dada por:
(2) .| 'f (KT) - T ~ ( f ( 1 > ( K m ) - f ( 1 ) [(K-l) i].) Ec- 2'31
De la aproximación de f • (KT) y f (KT),'se pue
de ver que para las derivadas de orden alto, a ser
a.proximadas , se_requiere de mayor número de pulsos
retardados y para aproximar al valor de la deriva-
da f ' .(KT) se necesita de (n + 1) pulsos retar -
dados.
Asi, la extrapolación consiste esencialmente de una
serie de pulsos retardados en el tiempo y en el nú-
mero de retardos' dependerá el grado de aproxima. -
ción de la función original estimada.
2.2 La Transformada Zr
2.2.1" Definición:
Una de las herramientas para el análisis y diseño de
sistemas discretos" es la. transformada , Z, asi como le
es la transformada de Laplace para sistemas contí. -
nuos. Sin embargo, esta transformada Z es un método
directo sólo para sistemas discretos de una sola va-
riable con irvuestreo uniforme; pa.ra sistemas muí ti va-
riables, no lineales, variando en el tiempo y de mues_
treo no uniforme, se emplea métodos de variables de
estado por ser más generales. Para el estudio de la
transformada Z, se referirá a la expresión para seña-
les maestreadas:

20
* T 2-• (t)J = F*(S) = . 2T f (KT) '
K=0
Como se ve, F*(S) no es una función racional de S—-KT^
pues contiene el factor Q * , pero puede ser con -
vertida en una f Tinción F (Z)racional en donde Z y S
están relacionados a través de la transformación.
.•7 - P - -•" — * -n n -» -tEc,. 2 . 33
que. resuelta para S se tiene;
i In Z ' Ec,, 2.34T
En. estas dos últimas ecuaciones 55 es una variable
compleja y T es el período de muestreo; ahora, sus-
tituyendo la ecuación (2.34) en la ecuación (2.32) ,
se tiene:
- - * '-' i «L • -K' FT( L Inz) = F (Z) = 2Lf (KT) Z " Ec- 2.35
Asi, la función F (Z), será una función racional de
Z.. Por le que.se puede definir a F (Z) como la trans_
fcrma.da 'Z de f (t) que también puede ser escrita como
F (Z)S ~ (1/T) Ins Be, 2.36
F (z) - (F*(S))S = (1/T) Lnz E. 2.37
No está por demás decir que la función 'f (t), contie
ne la misma información de f*(t) y F*(S) a través de
la transformación S a S.

21
En resumen:
La transformada 2 de una señal continua f (t)
puede ser obtenida,, siguiendo los pasos:
1. f (t) se muestrea para obtener f* (t)
2. Se toma la transformada de Laplace de
f* -(t) ' ' ' ' ' '
TS3. Se reemplaza 6 por Z en T?*(S) para
obtener F (Z)„
00 "
P ( Z ) = ^ f (KT) 2
Ejemplo 2 . 2
^
Encontrar la transformada Z de la función paso
u(t)
1. Se rauestréa la función paso para obtener un
tren "de impulsos unitarios .
r fO(-t-KT) = OU* (t) =•• 2_ O(-t-KT) = O (t) Ec.2.3
2, Se toma la transformada de Laplace
- ~KTSU ' - ¿L e Ec. 2.3
que puede ser . escrito como:
~TS* . 1- para p ' <r \. 2.40uts) = • • -M " •
rpc?3. Reemplazando 6 *" por 2', se tiene:
U (Z)- - Ec" 2'41

22
E jeir.pl o 2 . 3
Encontrar l a transformada Z de le. función
= e-at
Maestreada la función queda: .
oo -akt¿ 6K=0
(t - KT;
lomando la transformada de Laplace
-KTSoo
K=0
Que puede ser expresada como:
•* 1F (S) =• -
para ¡e (S+a|<Cl EO. 2 .43-(s + a) T--"e
Y reemplazando e'n esta última ""ecuación
por 7,, se obtiene F (Z)
T (z y = Ec. 2.44T7
Se puede elaborar una tabla de 'transformadas en
Z- "asociada a las funciones más comunes, esta se
da en la Tabla (2.1).
Tabla 2.1 DE TR AN S FOR M A DA S ZTrans fo rmadas S F u n c i ó n f ( t ) T r o n s f o r m o d a s Z
[
2
4
i
i
*
1
c-*r»
1j
1.\
1s -!• a
as(s r f)
Ü'
->- 1 f í '
in-TJí
5(1}
0(1 - /;T)
l v J
r
f-j t
sin tu/
COS ú)/
1
--*
z .- ~ J
7r(= - 0-
2 — í.'~uíí
(1 » r-n_.
u- uu -<•••")£j!Jn/üV"
z? - 2c eos tJ"/' f"í
r(r — eos (M'D:• — 2c cn.s ti;'/' -j T

23
Entre las propiedades de las transformadas de
Laplace y Z, cabe mencionar una diferencia. -
significativa; la transformada de Laplace y -
su inversa son únicas, o sea que "si'F (S) es
la transformada de Laplace de f (t) entonces
f (t) es la transformada inversa de F (S) - -
mientras que en la transf ormad.a- Z, su trans '-
formada inversa no es única. Así, la transf or_
mada Z de f (t) es F (Z) . La transformada in-
versa Z, no es necesariamente igual a f (t).
.Ejemplo 2.4
La transformada Z en una función paso es:
Z - 1
La transformada inversa de Z puede ser cualZ - 1 ~
quier función que tenga valores unitarios a t =
O, T, 2T, ...
2.2.2 Proyección de los planos S y 2
Es importante visualizar la relación que existe en -
tre los planos S y Z' para la transformación:rpcz ••= . e
El diseño y análisis, de sistemas continuos requiere
de ia configuración de los polos y ceros de su fun-
ción de transferencia en el pls.no fí . Similarmente,
los polos y ceros de la transformada Z,'dé la fnn -
cien de transferencia de un sistema se visualizan
determinando la respuesta muestre.ada del sistema.
Considérese el plano S de la Fio*. ( 2 .14 . a) en donde
S = M- JW y Cl, Í2 son constantes reales, en-
tonces se puede llegar a lo siguiente:

24
1. Considerando el eje imaginario JW, o sea
S - JW que reemplazando en la ecuación
(2.33) , se tiene;
,TWT2 = e
Por lo que se obtiene: Izl = 1 yv . 2 = WT
Que corresponde a una circunferencia un:jLta-"
ría de centro en el origen en el plano Z.
Ahora considérese a la recta y , o sea
S = v + -JW que reemplazando con la ecuación
(2..33), se obtiene:
T ( F 4- JW)2 - 6
en donde:
zi - e
Para: y = [)9 , en donde -00 . Se
obtiene una circunferencia de radio igual aT(T r*0 2 y puesto que yz es negativo.-, su radio
se encuentra, entre O y 1. (Fig. 2.14.b) .
Para (/ = u, , en donde O > \f. >OO se obtiene1 ' r"T uuna circunferencia de radio igual a 6 ' y
por ser "' .v\' positivo su radio, se extiende
desde 1. hasta el OO, (F.ig. 2.14.b)/oí j!m z
Plano S
Conston too
C i r c u l oUn i ta r io
Fig! 2.14 Relación de tos Planos S y 2

25
Todo lo anterior puede ser expresado en pala-
bras como sigue: el eje imaginario del plano
S, se proyecta en el plano Z como una circun-
ferencia unitaria. El serci plano.. izquierdo del
plano S se proyecta en la parte interior del
circulo' unitario del plano Z y el 'semiplano de_
recho del ple.no S se proyecta en la parte ex -
terior del círculo unitario del plazo Z. Toda
esta correspondencia -sé muestra -esquemáticamen_
te en la figura 2.15 _ . . . .
JWPLANO Z
PLANO S
Fig. 2.15 Correspondencia de los planos S y Z
2... 2 . 3 Transformada inversa Z
Aunque como se dijo, la función continua aso -
ciada a le. transformada 'inversa Z,- no es única,
se puede hacer la transformación desde F (Z) a
f* (t) O f (KT) para K = O., 1, 2 , 3 , ...f(KT)
es una función que está especif i ca da solo en
instantes del tiempo y no puede describir a f (f
exactamente en todos les insdS^ffís/S^^Sin embar-
26 •
<^o, para muestreadores que satisfacen el teore_
ma de muestreo -, se puede usar 3 os valeres de
f* (t) para la aproximación de una función
continua f (t). . '
Existen tres métodos para hallar le. transfor-
mada inversa Z.
- Primer método: Expansión en. fracción par -
cíales.
Para encontrar la transformada inversa Z,
y si F (Z) tiene uno o más ceros para Z = O/
F (Z)./Z puede expandirse en una suma1 sim -
pie de términos de fracciones parciales de
primer orden y ^se -usa la tabla de t ranformodas Z
• ' .Para encontrar la función correspondiente
en el tiempo para cada uno de los elementos
de la expansión* Para funciones que no tie_
nen ceros en Z-— O, la fracción parcial a
expandirse será F (Z} .
Ejemplo 2.5
Dada la transformada Z
-aT.• ' ; _ ( 1 - 6 __)_ z Ec. 2.45
En. donde a es 'una constante y T es el perío
do de ir.uestreo. Se desea encontrar sus trans_
formada inversa en Z»
La expansión en fracciones parciales de
F (Z) será:
• 1
Z - 1

en donde;
Z /F(Z) =
z - i - z - e
Usando la tabla de transformadas 2i. Tabla •
(2.1)\ se obtiene como transformada inver-
sa una función evaluada en instantes—de"-
muestreo descritas por:
-aTKf (KT; = l- e ' EC, 2.46
Que de acuerdo a la ecxiaciór. 2.16, se tie-
ne:
f* (t) = > (1 -. e )<3(t~KOM Ec. 2.47K=0 " .
Segundo método: desarrollo en sera e de po-
tencias.
F (Z) puede ser expandida en serie de poten-
cias como sigue:
F (Z) - f (O) + f (T) z"1 f (2T) z"2 + r.
+ f (KT) :Z ~K + . . .
Ec. 2.48
Se puede-ver que la ecuación (2.48) posee un
número infinito de coeficientes de F (Z) enrr
potencias de Z 'y los valores de f (t) se
dan a los instantes de muestreo. Entonces,
si F(Z) está dada por una f\incion racional
de Z:
y-, nv — „ _m-i .. . ~* QJBZ + dm-l-Z . " + . . . + d Z
F(Z) -b(Z
Ec. 2.49
Dividiendo el numerador para el denominador:

m~nF(Z) = A Z ~ + A, Z - - + ... -Ec. 2.50
o J.
Esta última ecuación a] ser comparada con la
ecuación (2.48) se puede notar que: A , A_ ,v ' c -i o í
A ... están relacionadas con los valores 'de
f (t) a los instantes de muestreo como sigue;
A0 = f ((m - n' !
AI = f (m - n - D: T
Para un sistema -realizable físicamente f(KT)=O
para K<T Oí ademas 'n^rin
Como puede verse la función f (t) a t = O,T/
2T . . c KT puede ser determinada por expansion-
en serie de potencias de Z: de la función
F (Z) .
Ejemplo 2.6
Determinar la transformada inversa Z de la fun-
ción da.da por la ecuación (2.45) usando este iné^
todo.
aT ' •Z - EC. 2.51
(i + -e ~aT)
Dividiendo el numerador para el denominador:se
tJene.:
-aT • -2aTF(B) - (i - e ) z 1 + ri - e ) ?r +
3aT ~3 _ _(1 « 6 ) Z H' ••• Ec. 2.52
29
De esta ecuación se. deduce que:
-aTK -
= i - e
y que:
OD -aTKf* (t) - 2 (1 - 6 ) Ó (t - KT)
K=03.
Tercer método:
Tomando la. transformada de Laplc.ce de cual-
quier función f (t)..00
F(S) = <£ ff (t)] = f (t) 6 dt Ec. 2.53
La transformada Z•de . f (t) es:
oo-2 f (KT) Ec. 2.54
La transformada' inversa de Laplace de F (S)
es ;/C 4- Joo
tsEc. 2.55
f(t) = 2 irts
F (S) 6 ds
fc-Oco
En donde C es la abscisa de convergencia.
La transformada inversa Z de F (Z) es:
'f(KT) =
/o dZ Ec. 2.5G
J
En donde f es el.camino cerrado (usualmente -
una circunferencia) en la cual se encierran -
todas las singularidades de . F (Z) . Este contor_
no cerrado puede ser evaluado usando el teore-
(3) Ver demostración, en: B.C.. Kuo ANALYSIS AND
SYNTHESIS OF SAMPLED - DATA CONTROL SYSTEM.
Prentice Hall Inc.Er.gleewood Chiffs M.J.
•\ _ -Dárr ¿1 V 4 fi
30
ma del Residuo, así:
f (KT) =k-1
residuos de F (Z) Z -en los
polos de F (7,) •' - Ec.-2.57
Ejemplo 2.7 .
Determinar la. transformada inversa Z de le. furi
ción dada por Is. ecuación (2.45).. usando este
método; Sustituyendo F (Z) en la ecuación (2.56)
se tiene:
f(kr) - 1 (i-e"aT) Ec. 2,5!
2 ir j -^(3-1) (?-e"aT)
En donde f es la circunferencia que encierra los-. _ -3 rp
polos de F (Z) para Z = J y Z = "
Este contorno puede ser evaluado según el teo -
rema del residuo:
z = 1
- -•• ». fi - e~an z*"1T ( K T ) = 3E Risiduos de ~—A-- '-
- e"aT) = e -oT
Así:
= 1 - 6-aKT
2.2.4 Propiedades de la transformada Z-
1. Adición y substracción:
(4) V é a s e las d e m osí roc iones- de t o d o s los T e o r e m a s en;B . C . Kuo, ANALYSIS AND S Y NT HE SI S O F S AMPLED-D ATA
C O N T R O L S Y S T E M S Prent i ce - Hal 1 ínc .Eng lewood Cl i í fs. N.J. Paga 4 7 - 5 4

31
Si' f. (t) y f (t) tienen transformada 2
ooF-, (Z) = !>" f (KT) Z"K Ec. 2 . 5 91 K=0 1
00
F ~ ( Z ) = 21 f 0 ( K T ) Z~K - Ec. 2.6.0X L/ — /^
(t^ i T 2 ( t ) J^ =>" F 1 ( Z ) + F2 ÍZ)
Bcv 2.61
2. Multiplicación por una constante;
Si f (t) tiene transformada Z y es F (Z) ,
entonces:.
'f (t)]- a [f. (t)] = a F(Z) Ec. 2.62
en donde .a es una constante.
3. Traslación real:
Si f (t) tien'e como transformada 2 a f (Z) ,
entonces: . •
[f (t - nT;>] = z~n F (Z) ' Ec. 2 . 6 3
(t + nT)] - 7n [F(2) - ¿T f (KT) ?• k]K^O
EC. as ^ •
en donde n es entero.
Ejemplo 2 . 8
Encontrar 1.a transformada Z de una función

32
paso., la cuaJ es retardada por un muestrea_
dor de periodo T.
/Vr i — Ivr -iylU(t-T)] = Z ¿[iKt)] Ec. 2.65
Luego:
Ec-
4. Traslación compleja:
Si F (2)' es la transformada Z de f (t) ,
entonces :
a . f (t)]= P(Z 6 ) EC. 2.67
Ejemplo 2.9
Encontrar la transformada 2 de f (t) =~a-t 09 Sen wt
De la tabla de las transformadas Z, tene-
mos que:
Z SenWT: - ~ Ec, 2.6!- ZZCosWT 4- i
Reemplaz ando;
aTzB por Z en la. ecuación anterior, se ob
tiene :
-aT, 1 Z 6 • SenwT
Sen Wt j = -^Z - 2 Z 6 CoswT + 6
Ec.2. 69
33
5. Teorema del valer inicial.:
Si F (Z) es ]a transformada Z de f(t)
entonces, si existe el lim F (Z),
-se tiene:
Lim f (KT) = lim F (Z)Z-*oo
En. otras palabras este teorema:-'puede ex-
presarse como •
El comportamiento de la señal discreta
f*(t) en la vecindad a t - O, es determi-
nada por el comportamiento de F (?.) cuian-
do Z -* oo
'Teorema, del valor final:
Si F (Z) .es la transformada Z de f (t),
entonces si la función (I - Z ) F (Z) no
tiene polos fuera, del círculo unitario
( IZ] 1) en el plano Z se tiene que:
lim f (KT) = 'lim (1-Z ) P (Z) EC. 2.71
7. Teorema de la diferenciación parcial:
Si la transformada de la función f (tra)
puede ser denotada F (Z,á) donde a es una
variable independiente o una constante,
la transformada 2 de 1 a derivada parcial
de f (t,a) con respecto a a, está dado -
por:
Ec. 2.72
Ejemplo 2.10
Determinar la transformada Z def(t)r

34 . .-
= ¿ ( t e~at) Kc. 2.7:
Por el teorema 7:
2 Ec. 2.74
En la tabla de transformadas Z-"*se éncuen-, -u —T-
tra la transformada de 6 f _ •---••-"""
3<Z í-4-e"'-U-,~ -
C/Q ¿?a - 2 -
2 -Qt-1 " c E c . 2 . 7 5
8 . . Convolucicn real :
Si F (Z). y F^ (Z) son las transformadas Zj. *•
de f (t) y de f 2 ít) y f,(t) - f 2 ít) - O
para t <C O , entonces;
(Z). F2 íz)=^ (f^nTlf (kT- nT)] Ec.2.76
2.2.5. Ventajas y- limitaciones de la transformada 2
• La tra.nsformada Z es una herramienta para, el aná^
li's'is de sistemas discretos lineales, pues con
ella se simplifica el estudio de estos sistemas:
La transformada Z proporciona e incluye de ma_
ñera automática, las condiciones -iniciales en
el proceso de solución de sistemas discretos .-
asi como reduce el proceso, de solución de mu-
chos problemas a la utilización de tablar., tal
cerno se hace para la transformación de Laola-
ce, y por último esta tra.nsform.ada intuitiva-
mente evidencia el proceso de maestreo de da-
tos.

35
Las limitaciones que deben ser tomadas en
cuenta en la aplicación o interpretación
de los resultados de le. transformada Z, - -son :
a) El desarrollo de la transformación en
Z, está basado en la suposición de que
la señal nmestreada es representada y
definida cómo un tren de impulsos , cu-
'yas áreas son agúales a la. magnitud de
le. señal, de entrada al muestreador al
instante de muestreo. Esta considera -
ción es válida, so 3 amenté si la duración'
de. muestreo es pequeña, comparada con —
las constantes de tiempo del sistema,
b) La transformada Z de la salida de un sis_
tema lineal C(Z) explica solamente, los
valores de la función del tiempo f(t)
en los instantes de muestreo, C(Z) no
contiene ninguna información concernien-
te al valer de f(t) entre los instantes
de muestreo/ por eso dada C(Z) la inver_
sa de la transformada Z : f (KT) descri_
be el valor de T(t) solamente en esos
instantes .
c) Analizando un sistema lineal por el
do de la transformada Z, la función de
transferencia de], sistema G(S) debe te-
ner más polos que ceros y la respuesta a
un impulso de G,(S) no debe tener una dis_
continuidad .a t = O, en caso contrario,
la respuesta obtenida por el método de la
transformada Z/ no es la correcta.-
36
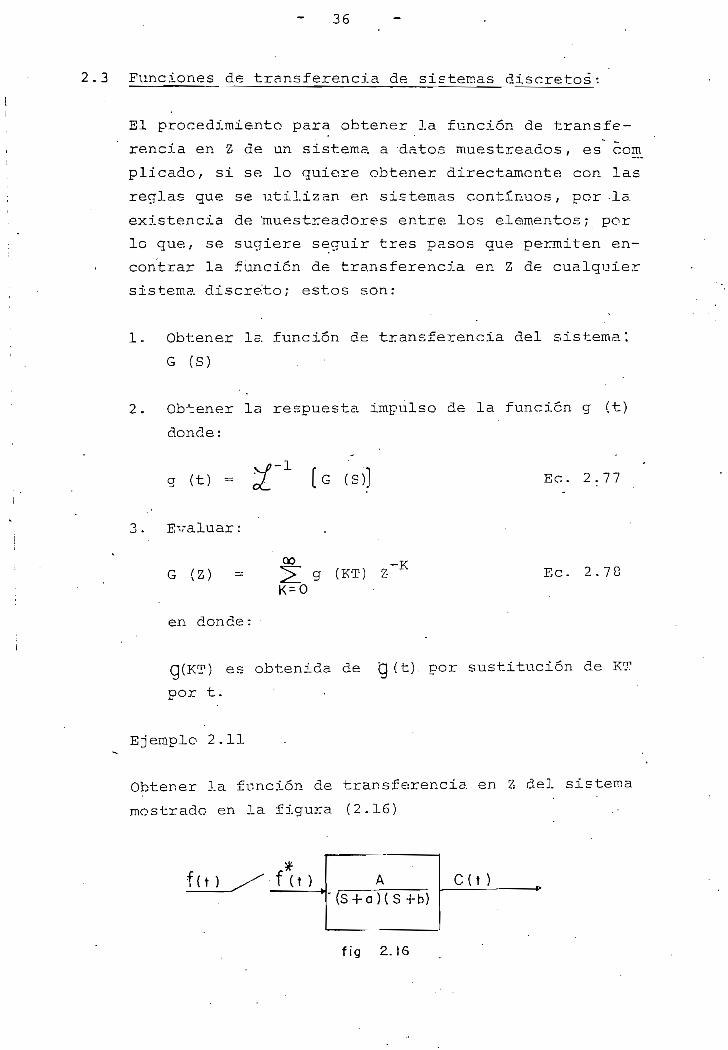
2.3 Funciones de transferencia de sistemas discretos:
El procedimiento para obtener 3.a función de transfe-
rencia en Z de un sistema a datos maestreados, es com
plicado, si se lo quiere obtener directamente con las
reglas que se utilizan en sistemas continuos, por -la,
existencia de 'muestreadores entre los elementos; por
le que t se sugiere seguir tres pasos que permiten en-
contrar la función de transferencia en Z de cualquier
sistema discreto; estos son:
1. Obtener la función de transferencia del sistema.'.
G (S)
2. Obtener la respuesta impulso de la función g (t)
donde:
g (t) =
Evaluar
G (Z)
— 1[G (s)] Ec. 2.77
Ec. 2.7G
en donde: •
Q(KT) es obtenida de Cj (t). por sustitución de KT
por t.
Ejemplo 2.11
Obtener la función de transferencia en Z del sistema
mostrado en la figura (2.16)
A
(S+a)(S 4-b)C(t)
fig 2.16

37
La función de transferencia en' S puede, ser expandí
da en funciones oarciales:-
G(S). = .— - -(__ _ _ _ ) - . . Ec. 2.19- b - a SH- a SH-b
Evaluando la transformada inversa de Laplace, se' ob-
tiene:
A ~at ~kt -o -v on"g(t) =—*— (e " e ) EC. 2.8ob - a
Reemplazando en esta ecuación (2.80) KT por t,
.-aKT -bKT(e - 'evb - a
Por último evaluamos G (Z)
oo A - -aKT -bKT, -K^—, (e - e ) --17
K-O b - a
y puesto que:
^p-oKT -K- eK=0 '
Entonces :.
, -aT -bT.I e . - e ) EC. 2.
~aT- e~a)(z
2.3.1 Funciones de transferencia, de sistemas discre-
tos de lazo abierto:
a) Considérese dos elementos en cascada sepa-
rados por un muestre'ador como se ilustra -
en la figura (2.1)

R(S') R (Zl
1
C(Z),
Fig. 2.17
La transformada 2 a la salida del segun-
do muestreador será:
C, (Z) = K (Z) . Gn (z) Ec". 2.84
Asi la transformada Z a la. salida del ter-
cer muestreador será:
(Z) Ec. 2.85
.Por lo tanto, se puede concluir diciendo
que la transformada Z de elementos en cas-
cada separados por muestreadores es - -
igual al producto de J.as transformadas in-
dividuales de cada elemento. Por lo que la
función de transferencia del sistema, que
se muestra en la fig. (2.17), será:
G (Z) = G (Z) ,~'G2 (Z) Ec. 2.86
b) Ahora, considerándose a dos elementos en -
cascada que no se encuentren separados por
muestreador alguno, fig- (2.18).

39
G,(S)C,(S¿1
G4(S>
Fig. 2.18
Para este caso la transformada Z de la.
salida está dada por:
C U) = .R- (Z) G G (Z) Ec. 2.87
En' donde G G (7.) , representan la trans -
'forinada.Z de la combinación en cascada, co_
rrespondiente a la función de transieren -
cia:
(s) (S)
G (z) = G1 G íz; Ec. 2.88
Es importante enfatizar que en general,
G G (7,) es diferente de G (Z) G (Z) ;.L. Z. J_ f~
el siguiente ejemplo ilustra esta diferen-
cia.
Ejemplo 2.1-2
Sean: G, (?) -S 4- Q Ec. 2.89
Ec, 2.90
Sus transformadas Z, individuales son.*.

40.
- e aTEC. 2.91
- ' ' 1 Ec 2 92/-* / 7 \ ^^'. ¿. * ~> ¿.
V2) - z .. -bT
Reemplazando estas transformadas en .la'.,ecua_
ción (2.86) , se obtiene: " " • .
/•7 c> aj.. , p uu.V ¿i - C ) x Z - C )
De la conexión ilustrada' en la figura 2.18
G (Z) - GX G2 (Z)
que corresponde a la transformada Z de Gn-L
(S) G (S), en donde:
'" G',cs)g2(s.)(S + a) (S + b)
Que expandiéndola en fracciones parciales .
y sacando la transformada 7, / de cada tér-
mino se obtiene por inspección de la. Tabla
de Transformadas:
Simplificada queda:
G i G <•> i \ ) - \- _ ~> m1 z (a-b) z -e T z - e
Ec. 2.95
2.3.2 Funciones de transferencia de lazo cerrado:
a) Considérese el sistema discreto de lazo ce_
rrado en la fig* (2.19) .
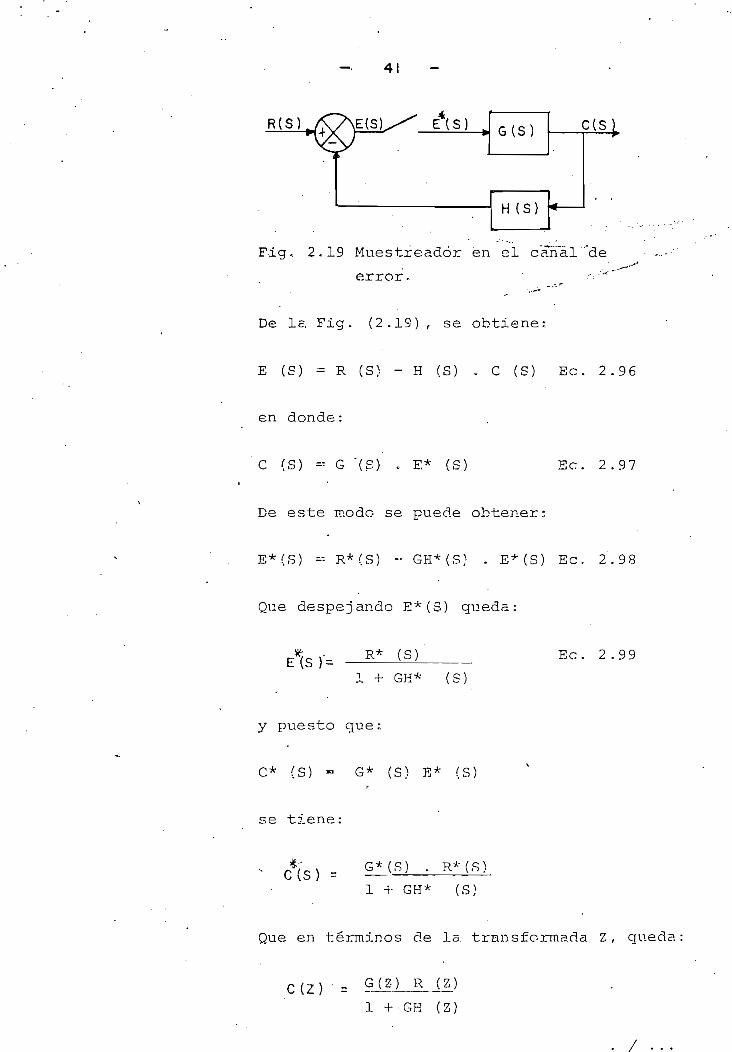
E*(S) G(S
Fig, 2.19 Muestreador en el cánal"de
error» ' _ ••'••''*'
De le. Fig. (2. 13) , se obtiene;
E (S) = R (S) - H (S) . C (S) Ec. 2.96
en donde :
C (S) =--• G "(S) . E* (S)
De este modo se puede obtener:
E*(S) R*(S) " GH*(S) .
Que despejando E*(S) queda:
Ec. 2.97
Ec, 2.98
Ec. 2.99
1 + GK* (S)
y puesto que;
C* (S) « G* (S) E* (S)
se tiene;
*;C(S G*(S) . R*(S
1 4- GH* (S)
Que en términos de la. transformada Z, queda
C(z) • = gjg) R <z)1 +-GH (Z)

42
Asi 1 ai función de transferencia para
el sistema de la Fig.- (2.19) , será:
c (2: ' G (2) Ec. 2.100
R (Z) 1 + GH (Z)
En donde 0 = 1 + GH (Z) es la ecuación.
característica del sistema.. •-- •-•-\ ' ^ •
. „ .•*!•
b) Sea el sistema maestreado'- representado
por la Fig. '(2.20) -
Fig. 2.20 Muestreador en el lazo de-re-
alimentación.
Entonces,:
E (S) = R (S) - H(S) C*(S) Ec,2.101
Y
C(S) = G (S) E(S) Ec.2.102
Sustituyendo la ecuación (2.101) en ecua_
ción (2.102) r se tiene:
C(S) =• R(S) G(,S) " H(S) G(S) C* (,c)
Be'. 2.103

43
Tomando • la. transformada Z de esta últi_'
ma ecuación se obtiene:.
C(Z) =.R G(Z) - HG (Z) . C (Z)
Despejando C (Z):
C(2) = "RG(Z) ....— Ec, 2.104
1+ HG(Z)
La ecuación (2.104) corresponde aJ valor
d.e la salida, a les instantes de muestreo
para. ]a configuración de la Fig. (2.20).
c)' Considérese el sistema de la Fig. 2.21
R(S)
Fig. (2.21) Muestreadores sincronizados
E(S) = R(S) - H(S) . G*(S) E*(S) Ec. '2.10!
y
C*(S) = E*(S) . G*(S) - 2.106
Resolviendo estas dos ecuaciones para
C* (S)'f se obtiene:
R* (S) G*(S)
1+H*(S)G*(S)
Ec. 2.107
Tomando la transí orinada Z de esta última

44
ecuación queda:.
CU) =R(2) ' G(Z)
2+H(Z)G(Z)
Ec* 2.10!
A continuación se da una tabla con las con-
figuraciones típicas de sistemas discretos
de lazo cerrado', a los' cuales—le• correspon:
de su respectiva salida C(Z)
tra," Tabla (2.2)
TABLA 2.2
C o n f i g u r a c i o n e s Típicos de Sistemas Discretos
de lozo C erra do
CAPITULO 3
ESTABILIDAD DE SISTEMAS DISCRETOS
3.1 Introducción;
Como se. d^jo al principio la parte más importante""
dentro de un proyecto o diseño de' un sistema~~de"" -
control, es el análisis de su estabilidad, _ ,. -?••••*"
Un sistema, muestreado se considera estable si al
ser aplicado a su entrada una seña.l de amplitud li-
mitada, la salida muestreada también lo es, o sea,
que la maganitud de la señal de salida es limitada
en todo instante de tiempo cuando la magnitud de la
señal de entrada en todo instante de tiempo es liitii
tada. Ejemplo.: un sistema que genera como señal de
salida el integral en el tiempo de su señal de entra_
da( no es•estable, • puesto que la magnitud de la señal
de salida puede ser ilimitada aunque la magnitud de
la señal de entrada, sea limitada.
En este capitule se estudiará los métodos de prueba
de estabilidad en sistemas discretos, estos según el
orden de estudio son:
1. Criterio de estabilidad de JURY
2. Criterio de estabilidad do SCHUR-COHN
3. Criterio de estabilidad de ROUTH•HURWITZ -• MODIFICADO
4. Criterio de estabilidad deLIAPUNOV
5. Criterio de estabilidad deNYQUiST
Cabe anotar que los métodos se complementan, con ejem-
plos de aplicación que permitan visualizar adecuadamen
. te, cada criterio.
3.2 Condiciones de estabilidad nara sistemas discretos:
La estabilidad de sistemas rea]imentados para, datos
continuos en el tiempo, se puede determinar con la lo-
caliz.aci.6n de las raices de la ecuación característica

46 —
del sistema, en el plano.S. La estabilidad de estos
sistemas requiere que todas las raíces se encuentren
3 ocalizadas- en el semi-plano. izquierdo del ple.no Sr
Este criterio puede ser extendido para determinar la
estabilidad de sistemas a datos muestreados cuando -
estos son analizados usando la transformada Z „
En general, la función de transferencia de un sistema
de control discreto realimentado puede ser escrito cp
mo: . -
^.,-,1 _ c (2) - M (Z) Ec. 3.1
R (Z) . . : 1+N (Z)-
en donde;
M (Z) es la transformada Z de la función de transfe-
rencia directa, y
N (Z) de lazo abierto, es decir N (Z) = GH (Z) ó
N (Z) = G' (Z) . H (Z) dependiendo de le. localizaoión
del muestreador en el sistema de control. (Ver T.2.2.)
Por ejemplo, si el muestreador está localizado en el ca_
nal de. error: M (Z) - G (Z) y N (Z) = GH (Z) que corres_
ponde a la transformada Z de 1 a fuñen ón de transferen-
cia a datos continuos G (S) H(S). Entonces,
T(2)¿ G (Z) C (Z) Ec. 3.2
H-GH/Z) R '(Z)
Así, la ecuación característica para un sistema discre_
to sería:
• GH (Z) + I = O Ec. 3.. 3
Para propósitos de análisis de estabilidad de las fun—~
ciones de transferencia,se estudiará la forma dada en
.la ecuación (3.2 J, aunque, las técnicas usadas son apli-
cadas para cualquier configuración ríe un sistema de —

— 47 —
control a datos maestreados
• Gomo ya se vio, la transformada Z puede ser dáscri ta
como un proceso de correspondencia, de planos r para -
lo cual el eje imaginario del plano S, se-convierte
en una circunferencia de. radio unitario con centro'.--
en el origen en el plano Z, La correpondenci"a rtel se_
m.i -plano 'izquierdo al eje imaginario del plano .g,-es"
el interior del circulo unitario. Toda está" correspcm
ciencia se ilustra en la figura (2,15) del capitulo an-
terior .
En consecuencia, la condición de estabilidad para un
sistema de control lineal muestreado establece que:
Un sistema de control lineal e. datos muestreados es
estable si todas las ra'í.ces de su ecuación caracterl_s_
tica (Ec. 3'. 3) están situadas en el interior del cí.rcu_
lo unitario ( |z) < 1) , del plazo 7..
3 - 3" Métodos para . .probar la estabilidad de sistemas dis-
cretos :
3.3.1 Criterio de estabilidad de Jury.
Este criterio desarrollado por Jury para e] an_a
lisis de sistemas discretos, se basa en la for-
mación de un arreglo a partir de 3 a ecuación ca_
racterístíca (Ec. 3.4) en donde los coeficien -
tes: A , A _-,, ... A^, AQ son rea] es .
F = A n ^ - Be. 3.4

2n-5
2n-4
an-3
A
b
Co
C
— 48 —
ARREGLO DE JURY
FjJa
1
7° 71 72 7n~k 7""1 7n¿J ¿J ¿1 . . « . ¿J t C, , . ¿J ¿1
'A A A A A _ Ao - 1 2 n-k n-1 n
A- —n-1 n-2
n-1 n-2 n-3
C1 . 2
C Cn-2 n-3 n-4
k
Jn-k Jn-l
b. bk o
Cn-2
. Co
F P- P0 P-o 3 . 2 3
O
o
Ao
T.3.1
Nótese, que los elementos de las filas pares (2K>2) para
K = 0,1,2 ... etc. consisten de los' elementos de las 'fi-
las impares (2.K+1) para K = 0/1,2 ... etc. escritos en -
.orden inverso; los elementos del arreglo se definen asi;
b*.A • ' A .o n-k
A A,n k

-n-2
0
'n-k-i
— 49 —
Ec. 3.5
La condición suficiente y necesaria para que las raices
de la ecuación característica (Ec . 3.4 ) estén dentro del
círculo unitario del plano Z, es la de que ésta cumpla
con: - '
F (1) > O
F (-1)O' n Par
O' para n impar
y los coeficientes de la tab.1 a elaborada (T.3.1) cumplan
con :
IA,0
'o IJ>n-
R. 3 - 1 -

— 50 —
A continuación se ilustra este método analizando la
estabilidad de dos sistemas discretos:
Ejemplo: 3.1 Considérese la -siguiente ecuación ca-
racterística: '
- 2F (Z) = Z - 1.22- ' + .32 Be. 3.6 '
Aplicando las do.s primer as-"oond i clones, se obtiene:
F (1) = .12 " que es • " > O
F (-1). = 2.52 que es 70 para n = 2 par
Se satisface con las dos condiciones.
El arreglo de Jury, quedara:
Fila
1 .32 -1.2 1
La única condición será que: A / A esto es-1 l o n
|,321 < 1 que si se -cumple.
Así le. prueba de Jury determina que el sistema que po-
see como ecuación característica laíEc. 3. 6) es asintó-
t i cántente estable puesto que se cumplen -todas las con-
diciones necesarias y suficientes para que las raíces
de la ecuación característica estén dentro del círculo
unitario del plano Z..
Ejemplo 3,2: Considérese la ecuación característica
siguiente:
F (Z) = ZE T Z -.75- - Ec. 3.7
Al aplicar las 'dos primeras condiciones, se obtiene:
F (1) = - .75 que es < O
F T[-l) = 1.25 que es ^ O para n = 2 par

— 51 —
El arreglo de Jury, quedaría:
Fila Zo
- .75 -1
La condición será :
Esto es:
AoAr.
|~.75| < 1 ... •- " que sí se cumple
Puesto que F(1) es menor que cero, no se cumple con 1 a
primera condición y el sistema es inestable.
3.3.2 Criterio de estabilidad de SCHUR-CQHN
Otra de las formas para_determinar la localiza-
ción de Das raíces de un polinomio en Z.r respec_
to al círculo unitario, es el método de Schur-
Cohn. En general, la ecuación característica de
un sistema está dascrlta por la ecuación (3.4^ -
en donde: A r A n / An n-1 n-•2'A. A son coefi -
ocientes reales o complejos.
Así el criterio de Schur-Cohn.- establece:
Las raíces de la ecuación están situadas dentro
del círculo unitario, si y solamente sí la secnen
cia de determinantes de Schur-Cohn tiene n varia-i
clones en signo.
Los determinantes de Schur-Cohn: .1, A ]_' A^''*'
A n se definen como;
A
A0 -° ' • •A| A0
1 «
AR-I VaAn - e>
V, , An
An-2 A(i-'• *• ii
¿Vk-HAn-k,
0 •- -0 - ' '
v- •1
A k^3- '
0 ' • '
0 ' • '
A n ' ' 'i
*
000
,
AO
0
0
'o>.
Án
An0
0
»
0
A"o0
0
*
o .
AnA n ^
0
*0
A,
AO
0^*
0
i An-e.- • - An-M- iAn-i • • - An-k+¿An !,
0 • - • - An
A2 A k _ ,
A, A K_2
AO ' " " "Ak - si
* ,t ,
0 • - • • A0

— 52 —
en donde K toma los - valores de K = 1, 2, 3 ...
n;.y ¿L es el conjugado de A,.
Cuando todos los coeficientes del polinomio son
reales,que es el caso más común el determinante
A ' •K es simétrico respecto a la diagonal princi-
pal. De los sistemas de control discreto''que — ..
tienen por coeficientes de ecuación caracterís-
tica valores realesr se ocupará particularmente
esta tesis.
Este criterio .de estabilidad también puede ser
expresado como:
«.
¿ K < O Para K- imparAK >0 Para K par
Si estas condiciones no se satisfacen, entonces
le. ecuación característica tiene al menos una
raíz fuera del círculo unitario y el sistema ana_
lizado es inestable.
Ejemplo^ de aplicación:
Ejemplo: 3.3 'Considérese la. ecuación caracterí_s
tica descrita por la ecuación (3 . 6)
Z2-l.2Z-4- .32 =0
.de la ecuación se puede obtener
Por lo que los determinantes de Schur-Cohn , serán:
Ao .32 I.-.8976

AQ 0.
A! AO
A2 0<
A, A2
A^ A(
0. A¿
A i-\ i
0. AQ
.32
-1.2
1.
-1.2
0. 1.
.32 0
0, 3
1. 0
-1.2
1.
2-1.2
.32
= .14
Esto es:
A = -.8976 <0 p o r a , K :-~\~ ( i m p a r )
= .14 >0 K - 2 ( - p a r )
Se cumplen las condiciones r luego el sistema
es asintóticamente estable.
Ejemplo: 3.4 Consideérese la ecuación caracte-
rística (3..7')'.v
Z2- Z-.75 = O
Los coeficientes son:
AGÍ los determinantes de Schu-Cohn serían:
. A , = -.75 I.
.75= -.44
.75 O. I. -I,I . -.75 -O. I .1. O. -.75-1.I. I. O - .75
= -2 ,87
A; .o p a r a K - ! ( i m p a r )
= 2 " (pa r )
La secuencia de valoren de los determinantes

— 54 —
de Schur-Cohn, no cumple las con dicíone.s de estabi
lidad; esto es, el sistema es inestable. '
3.3.3" Criterio de estabilidad de Routh-Hurwitz
cado:
La estabilidad de sistemas de control discreto,
puede ser determinada mediante la aplicación del
criterio de Routh-Hurwitz , como se lo utiliza pa_
ra sistemas continuos; sin embargo- debe previa-
mente realizarse una transformación a la ecuación
característica.
Supóngase la ecuación característica, (Ec.3.4) en
donde sus coeficientes son números reales I a es-
ta. ecuación se le" aplica la transformación conoc_i_
da como Bi-llneal que relaciona al plano Z_con un
plano auxiliar W ; transformándola región dentro
del círculo unitario (12! < 1) del p] ano Z en el se_
mi-plano i?.quierdo del plano auxiliar W ,- y la re-
gión fuera del circulo unitario (17.1 > 1) del pla-
no Z "en e 3. semi-plano derecho del plano W .
El plano auxiliar W se define con las siguientes
expresiones :
Be. 3.9W- 1
W *= Ec. 3.10Z - I
La condición cíe estabilidad de un sistema discre-
to sera encontrada en el plano auxiliar W , a cau_
sa de 3a transformación de la ecuación caracterí^
tica en Z al plano .W, Por lo tanto,mediante la
transformación Si-lineal, el crit.prio de Routh pue_
de aplicarse a3 polinomio de la. nueva variable W :

F (W )
— 55
14 G (W) H (W)
.n-i= A nW n+ An_lWn 4- ..'.4- A,W + A0 Re, -3..11
Así el arreglo de Routh-Hurwitz, para el nuevo
polinomio característico 5erÍa:
W1
V"1
wn-2
W
W
n-3
n-4
Wn-5
n.
An-i An-5
B.
T, 3.2
Este arreglo indica .si la ecuación caracterís-
tica contiene raíces con componentes reales" po-
sitivos o no; (como se ve, no es necesario ob-
tener las raíces de la ecuación característica)
Si se encuentra que ésta contiene raí.ces con -
componentes • rea.les positivos, entonces el sis-
tema es inestable.
Los elementos"que no corresponden a los coefi
ci entes de la Ecuación Característica en W
sé define'así:A n^j A
B, =
B2 =
n_3
n-iA n_5
A n_,
Ec. 3.12

— 56 —
El criterio de Routh, afirma que un sistema,
con una ecuación característica en.- la forma de la
•'Ec. 3.11;, es estable si y solamente s.i , to_
dos los elementos déla primera columna del
arreglo tienen el mismo signo (no existen caro
baos de signo en los elementos de la primera
columna). Si existen cambios de signo en la -
primera columna, entonces el número de cambios
de signo es igual al número de raíces con com-
ponentes reales positivos en W _, que equiva-
le -a decir que existen raíces de la ecuación
característica en ?,, que están situados fuera
del círculo unitario ( I Z I <T 1) de] plano Z
y el sistema es inestable.
A continuación se ilustra el criterio con dos
ejemplos:
Ejemplo: 3 . 5 : - .
Sea la ecuación característica del ejemploÍ3.1)
Z2 - 1.2 Z + .32 = O
Aplicando la transformación BdL=llneal de la
ecuación, se "tiene
/ W - M \ £ / W +V w - u \ w -
W24- I1.33W+ 21- = O
Y formando-el arreglo de Routh-en base a los
coeficientes de esta última ecuación:
w
w >
w°
I. 2 1
11.33 0.
21 0.

~T'"~ — ' V I ' '
Se puede ver que la primera columna del arre-
glo r no tiene cambios de signo, por lo que el
sistema es estable'.
Ejemplo 3.6: *
Para la ecuación característica en Z
Z2 - Z - .75 = O
Aplicando le. transformación Bi-líneal, se obtie_
ne la ecuación en W
Formando la tabD.a de. Routh,.
.2W
W1
w°
1. -1.67
-4.67 O
-167 O
Puesto que en la 'primera columna del arreglo
existe un cambio de signo, la ecuación carac-
terística en 'W posee una raíz con componente
real positiva en el plano W , que correspon-
de a tener una raíz- fuera c!el circulo un.ita -
rio del plano Z, por lo que el sistema es
inestable.
3.3.4 C rile rio de estabilidad de. Liapunov:
Este método/ el más completo para determinar
la estabilidad en sistemas lineales y no li-
neales a datos continuos., ha sido aplicado
también para el estudio de 1a. estabilidad de
sistemas de control a datos muestreados.•\l método de I.iapunov, se basa en le. determrL
— 58 — * -
nación de una función V llamada de Liapunov.
De las propiedades de esta función se determi
nará si un sistema es estable o no; sin embar_
go, para sistemas discretos a este método so
lo da- le. condición suficiente mas no la nece-
saria para la determinación de la estabilidad
de .un sistema. ' . '. -"-• -~ ____ ..
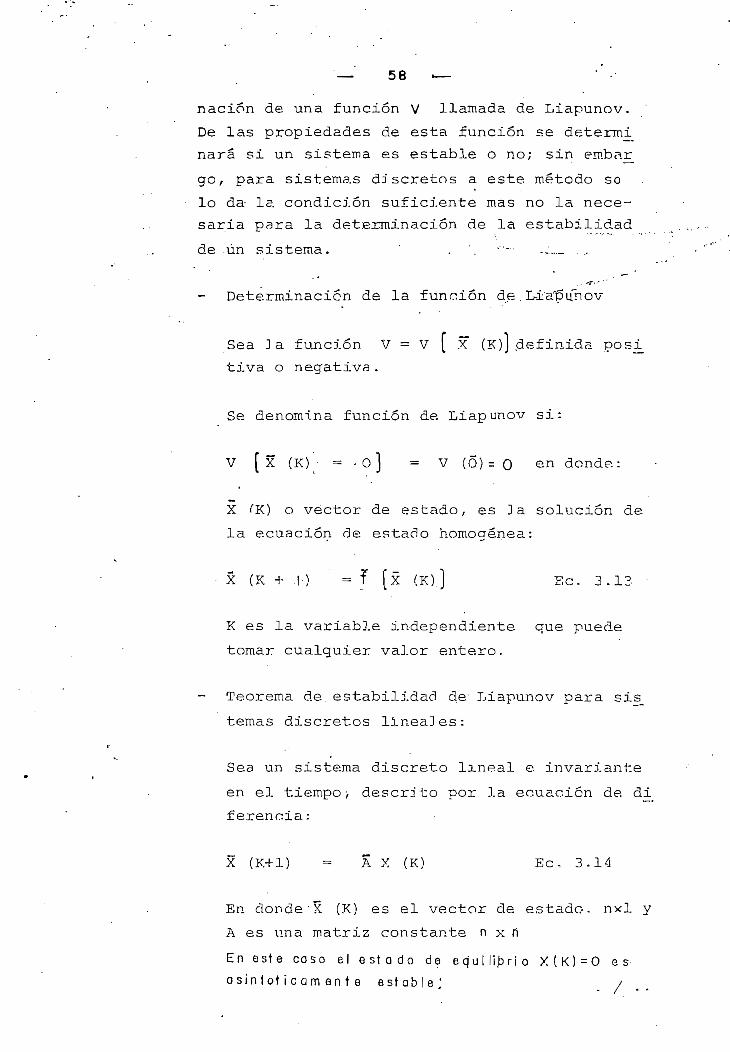
Determinación de la función de . I¿'apiihov
Sea 3a función V = V [ X (K)j .definida
tiva o negativa .
Se denomina función de Liapunov si:
V (x (K) • = -o] = V (0)=Q en donde:
X ÍK) o vector de estado, es 3 a solución de
la ecuación de estado homoaénea :
X (K + .1-) = f (x (K)) Ec. 3.13
K es la variable independiente que puede
tomar cualquier valor entero.
Teorema de, estabilidad de- Liapunov para sis
temas discretos linea]es:
Sea un sistema discreto lineal e. invariante
en el ti empo > descrito por la ecu ao i en de di
ferencia:
X (K+l) = A X (K) Ec, 3.14
En donde•£ (K) es el vector de estado, nwl y
A es una matriz constante n x rl
En es te caso el e s t a d o de equ i l i b r i o X ( K ) = 0 e s
as in lo t ¡ c a m en t e e s t a b l e ; /

-,_ ._. CQ „ _O Í7
si y sólo si, dada cualquier matriz Q
(real simétrica) ' definida positiva,- exis_
te una ma.triz.5 real, definida positiva
tal que:
A P A P = -Q Ec. 3.15
Entonces:
V (X) = X" (K) .P X(K) Ec. 3.16
Que. es una función de L i apuno v para el
tema y además :
AV(X) = -.-XT(K)QX(K) - , -Ec.3.17
Siendo: A V( X) descrita por
6 v(x(K)]= V (X(K-M ).] -VÍX (K)) Ec 3.18
En esta tesis 3 sólo se tratará de sistemas
de control dj-screto lineal e invariantes enc
el tiempo .
Ejemplo: 3:7
Considérese el sistema a datos discretos:
-.8X,(K)
= . 4X2(K) Ec. 3.19
En donde: X (O) = O es el estado de
equilibrio de la ecuación ,
A será:
A =. 8 0,
0. .4
(5) veas^ para la deíer 'min-acion de l a e s t a b i l i d a d . d e s i s i s t e m a sno- 1 ineal es en:B.C.Kuo ANALYSIS AND SYNTHESIS OF S A M P L E D - DATA
- CONTROL S Y S T E T ^ S , Prentice-Hol 1 Inc. 1963Englewoo'd N.J. Pags 137-137

60
Haciendo:
Q =
p = .
i. o.
O. I.
> p *II 12
21 22
Por la ecuación (3 .15 ) se tienen reempl.a---r
zando valores
.8 O.
-O. ,4
P ''12
22
. 8 O.
O. .4
P P'i i > i12
P P( 21 22,
I. O.
O. I.
Que resuelta para la matriz P, se obtiene:
2.78 O.
P =
Como se ve P es . definida positiva,
lo que:
V(X) = 2.
Que es la función de Liapunov y se define
positiva, y &V(X) definida por la ecuación
C3.17J se define negativa, entonces el es-
tado de equilibrio: X (O) = O es asxntó-
ticamente estable.
Para este sistema, la ecuación caracterls_
tica estarla definida así:
Det 2; I ~ A
~* ° 4
0 Z
"".8 0 .'
0 .4
O Er,tó es
- O
- I.2Z =0
Que corresponde a la .ecuación caracterís-
tica ( 3 . 6 ) y a analizada.

para F = J se tiene
= - F0X,(Z) - FIX¿Z)4-U(Z)K
ZX,(Z) -
Luego la matriz A d.e estado del sistema
será:'"o. i,
A =
-F,
Ec. 3.27
La matriz. A de estado asociada -al sistema
descrito para la ecuación característica
Ec. Y 3 . 7J del e j emplo (3.2) será :
A =
O.
-.75
Para la ecuación (3.15jsé hace
Q =
O.
r e m p l a z a n d o eri
A P A = Q
resuelta para la. matri?. P, se obtiene:
P =
La cual, como se ve, es definida negativa.
Por lo que el estado de equilibrio X(O) =0
de.l sistema no es asántóti caraente estable.
P11
pei
P12
Iz
"í. - . 7 5 '
- .75 -.4375

Ejemplo 3 , 8 : . ,
Sea la ecuación' característica del ejem
pío 3,. 2
Z2 - Z - .75 = O '
La ecuación en diferencias que describe-- .....
vin sistema lineal invariante en el-Hrriem-
po puede ser de la siguiente forma: .... •
X ( K 4 - Í ) = AX(K)+BU(K) Ec - 3.20 .
Tomando Ja transformarla 2 r para condicio_
nes iniciales nulas:
ZX(Z) = ÁX(Z)4-BÜ(Z) Ec. 3.21
Y(Z) = CX(Z) Ec. 3.22
Y _(Z) corresponde a la ecuación de la sa-
lida de3. sistema.
La función de transferencia de cualquier
sistema discreto de orden 2, se define de
la siguiente forma:
Y(Z) K
UÍZ) FaZ 4- F|Z+ F0
Despejando
FQ) "KU(Z)
Y si se hace
X.(Z) =Ec. 3.24
X2(Z) = ZY(Z) = ZX, ÍZ)
Que reemplazando * o n la ecuación :
-v F,zY(z)-f FOY(Z) = K ufz")

— 63 —
3.3.5 Criterio de estabilidad de Nyquist:
La función de. transferencia cuyos polos se de
. - • sea examinar está dada por la ecuación(3.2 i.
Puesto que los poDos de la ecuación caracte - .
rística 1+GH (Z) = O, son les mismos de GH
(2); entonces, Si GK (Z) es una función anali
tica en un contorno cie'l plano 2,. también lo -
es 1 + GH (Z) , por lo tanto: la función cuyo
diagrama polar se construye es G H (z) ; asi el
contorno del plano Z que representado en el -
plano GH(Z) permite determinar el criterio
de estabilidad de Nyquist para sistemas diso.re
tos está indicado a contim;iación:(fíg 3.1)
Imagin ario
f i g u r a 3 .1 , .
El criterio de Nyquist. determina-rá. el numero
de raices de la ecuación característica ubica
dos'en la región R; es decir, e3 de ra5ces i-
neatables.

— 64 _
En el plano I + GH(Z) es conveniente desplazar.
el e^e imaginario para que pase por el punto
(1,0) tal como se hacía para sistemas continuos .
Generándose así el nuevo plano GH(Z) y constitu
yéndose el punto (-1,0) del plano GH(Z) en
el punto crítico de estabilidad. En la práctica,
ocurre además que GH(Z) — »• O sobre una circunfe-
rencia de Radio cío * -
En ba.se a lo expuesto , el criterio de estabili -
dad de ÍSJyquist para sistemas discretos puede ex-
presarse. como:
"Dada le. curva C. (fig'3.L)en el plano Z, reco -
rrida sobre sí - mismd en sentido anti horario ,
el número de veces que la curva Y en el plano
GH(Z) • envuelve al punto critico (-lfO) es - -
igual. a la diferencia entre el numero de raices
de | 4- GHÍZ y el número de polos de GH(Z)
internos a C, o sea
N = N N
Ejemplo 3.9: • '
Sea el sistema descrito por la función de trans_
ferencia en Z de le.zo " abierto:
GH(Z) = 7 | •—Ec. 3-2!
Su estabilidad puede ser determinada del análi-
sis del contorno de Nyquist en el plano G H ( Z )
Si se hace una transformación a Z en la ecua
ción 3 . 2 8 , esto es:
r + l r - Ir - i 2 Ec,
(6 ) J.T. T o u , D I G I T A L AND" S A ' M P L E D D A T A C O N T R O LM c G r a w - H í l l Boo l í Com pan y, N ow Y o r k |958, Pago 2^Q

— '-65 —
Para r=]W variando de Joo hasta-joo . se obtie
ne: valores para GH(Z)en modulo y fase para
graficar, como se indica en la tabla (T . 3.. 3)
y en la figura(3.2). ' • . • ,
Tabla de valores de GH(Z)
W ( r a d / t )
100
5.1.
0.
- 1.
-5.- 100
1 G H ( Z ) 1
00.
2,5.71.
.5•7)
2.550.
GH(Z )
90°
101°135°
1 80°
-135°
-101°
-90°
T 3.3.
Imaginario
Real
Figura 3.2
Puesto que el lugar no encierra al punto
(-1,0) , N = O
GH(Z) no posee polos internos a C, N = O
N = N4- N =0 y la función 14GH(Z) no
tiene ceros fuera del circulo unitario
( IZ I = I ) del plano ?i;gil sistema es esta -
ble."
Aprovechando la condición de estabilidad para
sin temas discretos se puede extraer dj rectaioen

_ 66 —
te las raices de la ecuación característica
en Z y chequear si estas están o no situa-
das dentro del círculo unitario del plano Z,
Ejemplo 3.10- "• .. '..
Considérese la ecuación característica:
Z2 - Z - «,75 - O
Sus raíces son:
Z]_ = 1.5
Tomando•el modulo de cada una se tiene:
IZ,I = 1.5 IZ¿ = 0.5
Se ve f que una. de las raíces está Situada fue-
ra del círculo unitario de] plano Z, con lo --
cual el sistema es inestable.

— 67 —
3.4- CONCLUSIONES;•
Luego del estudio de'.los diferentes métodos de análi-
sis de estabilidad de sistemas discretosf se puede
anotar lo siguiente:
Para todos los métodos, la. principal dificultad
del análisis de estabilidad se presenta cuando
los sistemas discretos originan, ecuaciones carac_
terísticas de grado alto.
„ A excepción del criterio de Nyqxiist, el análisis
.de estabilidad para los demás métodos, se lo ha-
ce sin tener- que resolver directamente la ecua -
ción característica, es decir sin extraer sus
raíces.
_ El'criterio de estabilidad de Nyguist, conlleva
el análisis directo de las raices de la ecuación
característica en Z,.- aprovechando la condición
de estabilidad para sistema de control de datos
muestreados.
Para el criterio modificado de Routh-Hurwifz .,
el producto de 3 a transformación Si-lineal, da
una ecuación en- función de la variable W , gue
para sistemas de gran orden, este proceso alcé -
bra.ico puede hacerse bastante complicado y lo n\is_
mo sucede con la formación del arreglo.
El método dé Jury que implica la construcción de
un arreglo teniendo como base la ecuación carac-
terística, puede ser tedioso si 3 a ecuación es de
orden alto y más aún si se realiza en una forma
. . mam:i al.
- Para el criterio de Schur-Cphn, el proceso de for_
mación y evaluación de 3 os determinantes es fácil
si la ecuación característica no pasa de grado 3,
de aquí en adelante el criterio puede ser compli
cado , mis aún si no se utilizan métodos que ayuden
resolver el criterio, ..
Para el método de Liapunov, se supone que será uti
Ü7.ado para el caso de que un sistema esté d.ese-r.í-
to en forma de variables de.estado, aunque como-se
ha podido ver eventualménte se puede' pasar de le.
descripción a entrada - salida, a variables de es-
tado fácilmente.
La resolución de matrices de orden alto es muy com
plicadd, al menos si se realiza en forma manual.

CAPÍTULO 4PROGRAMAS COMPUTACIGNALES PARA CADA
UNO DE LOS MÉTODOS DE
ANÁLISIS DE ESTABILIDAD
•4.1 Introducción: r" ' . • • '
Una vez que .se ' desarrollo la teoría, sobre sistemas
discretos y s.e análi.zoron los diferentes métodos de -
análisis de estabilidad para estos * sistemas, corres -
pende ahora elaborar el objetivo principal de la te -
sis: esto es, los programas computcicionales para cada
uno de los criterios de estabilidad, . - -
Los cuatro métodos estos son: de Jury.- de Schur-Cohn,
de Routh --' Hurwitz y de Nyquist; se basan en el conoci-
miento de :X ecuación característica dada por la fun -
¿ion de transferencia z del sistema, pudiéndose probar
.le. estabilidad de cualquier sistema descrito con su
. función de transferencia en Z por cualquier método y
verificado su resultado si se desea utilizando los de-
más métodos, Para utilizar el método de Liapunov, es
necesario conocer la matriz de estado del sistema; es
decir, el sistema deberá estar descrito en variables -
de estado en Z,;- aunque eventualmente se podría pasar -
desde la ecuación 'característica a variables de estado
y viceversa.
. Cabe señalar que los programas desarrollados contemplan
p.l análisis de la estabilidad de S.D. en forma literal,
es decir, en ningún programa se^hace un análisis gráfi-
co del sistema para de allí deducir su' estabilidad. Aun
que, en un análisis gráfico se puede visualizar 3a si -
tuacxón de un sistema, cosa que es práctica para el diso
ño de sistemas; un análisis literal nos da la estabili-
dad del sistema directamente y es lo que pretenden los
programas que se plantean en esta tesis.

— 70 —
4.2 Descripción, análisis y diagramacion en bloque? de ca-
da uno de los programaos: .
4.2.1 Programa para_el criterio de Jury:
El criterio de estabilidad de Jury, analiza la
estabilidad de sistemas dicretos imponiendo en
primer lugar do's condj cienes sobre la -ecuación
característica del sistema, para luego utilizar! •
do sus coeficientes formar el arreglo de Jury;
este arreglo da el resto de condiciones para de_
terminar si el sistema es o no estable. Como se
ve,- no hay necesidad de obtener las raices de -
la ecuación característica para determinar si -
el sistema contiene o no raíces dentro del - -
círcu]_o unitario del. ple.no 7¡ *• —• • $
Para la ecuación característica de un sistema
descrito de le. siguiente forma:
P (Z) = AT 'Z1'"1 • + A- , 2L~2 + A . . .+A0Z+A. = O 'Jj lj~J- Z
El primer paso del procedimiento es el de evaluar
la F (Z) , para Z = 1 y probar si este valor es po_
sitivo, negativo o cero.
En el segxmdo paso se evalúa a F (Z) para. 7.\ - 1
y considerando si la ecuación característica es -
de grado par o .Impar, se determina sí el valor es
mayor, menor o igual a cero.
En el tercer paso conlleva a formar el- arreglo de
Jury.- visto en la tabla (T. 3.1) basándose en los
coeficientes de la ecuación característica y en
las .ecuaciones (3.5) descritas en el numeral (3,2.
1) del capítulo anterior; con la formación de ca
da fila impar del arreglo se van comparando su
primero y último elemento que de acuerdo a las res_
tracciones expuestas en el (R.3.1) dan el resto de

Y i j .
condiciones para que un sistema sea estable.
En la ecuación característica los coeficientes
se suponen negativos, positivos o ceros; siendo
N el grado de la ecuación característica y L, -
el-número de coeficientes, esto es: ( N + 1 ").
,f*'_•""Describiendo detalladamente el programa se tie-
ne: el c-rado de la ecuación característica se
lee con la. variable N en la linea 6 y los coefi
ciervtes de la misma son leídos en le. linea. 12
con la preposición respectiva en formato 10F8.3
y se almacenan en el vector A (I).
De la linea 18 hasta la 20,. se procede a calcu-
lar el valor de la" función para, el valor de
2 = 4-1; de tal manera que con la. proposición
IP lógica, de la línea 23, se establece si el va_
lor de esta función F (1) es negativa. positiva
o cero; el programa transfiere a la posición 7
si e¿ negativa, a la 9 si es cero, o-a la 11 si
es positiva; en la proposición respectiva se im-
prime el mensaje apropiado-.
La sentencia GoTo 12 traslada al programa a cal-
cular la función para z='- 1, se chequea si este
valor es positivo, negativo o cero, para N impar
con la proposición '25 y si N es par con la propo-
sición 26; para cada una de estas tres alternati_
vas del valor de F . (-1) el programa imprime un men_
saje.•
La proposición GoTc 80 hace que el programa pase a
la sentencia que inicia el cálculo y la formación .
del arreglo de Jury,- siendo M e'3 número de elemen-
tos que tendrá cada fila; ] a primera fila de?. arre_
glp tiene como elementos los coeficientes 'de la
ecuación característica y si M es mayor que 2, la
segunda fila consiste en los mismos elementos escr£_

_ 72
tos en orden inverso. El resto del arreglo (sus
elementos) se calcula.n .de acuerdo al procedimien
to descrito. Cabe anotar que el programa compara
los coeficientes extremos de las filas impares,
junto con su formación y además con la proposi.-
ción 10 se va chequeando si *£ es ".igual a 3, si -
esto sucede/ el programa se transfiere a la pre-
posición 60 e imprime un comentario, y -pcira. F.n
caso contrario seguirá calculando los elementos
del arreglo hasta que M sea igual a 3, la compa--
ración de los elementos se realiza con la propo-
sición lógica. IF de Ic.s lineas 63 y 84.
Nomenclatura:
Variables de entrada:
N grado de la ecuación carcaterístu'ca
L numero de coeficientes de la ecuación carac_
terlstica L- = N -i- 1A vector que almacena les coeficientes de la
ecuación característica.
Variables de salida:
N ' grado de. la ecuación característica
A arreglo de los coeficientes de la ecuación
característica
Fl valor de la función para el valer 1
F valor de la función para el valer -1
A arreglo de las filas pares de le. Tabla de
JuryB arreglo de las filas impares de la Tabla
de Jury. •
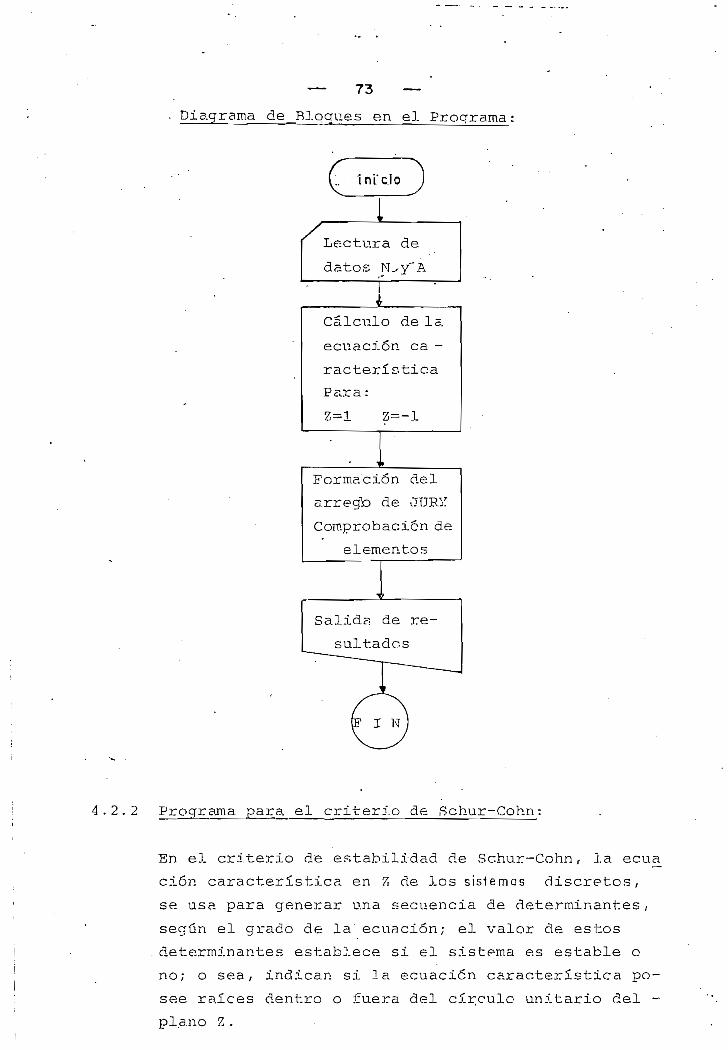
Diagrama de_Bloques en el Programa:
Inl'c.lo
Lectura de
datos N^y"
Cálcxalo de le.
ecuación ca -
racterística
Para:
Z=l Z=-l
Formación del
arreglo de JURY
Comprobación de
elementos
Salida de re-
sultados
4.2.2 Programa para el criterio de Schur-Cohn:
En el criterio de estabilidad de Schur-Cohn,- la ecucí
ción característica en ?-. de los sistemas discretos,
se usa para generar una secuencia de determinantes/
según el grado de la' ecuación; el valor de estos
.determinantes establece si el sistema es estable o
no; o sea, indican si la ecuación característica po-
see raices dentro o fuera del círculo unitario del -
plano Z.

-r A
Para, la ejecución del método y si se supone qu'e la
ecuación característica es de la forma:
nn-"l nn-2B Z ' + B . Z + . ..+ B0 Z+B- = Onn r.n-1 2 • 1
en donde nn"es igual al grado de la ecuación carac
terlstica n 4- 1 y los coeficientes Bnn,, Bnn-1 , , ,B,.•*" .
son números reales positivos"r negativos o ceros.
El primer paso consiste en ir arreglando los coefi
cientes %p|í-s(nn-l) determinantes de orde 2n , ca- •
da uno, definidos "como se ilustra en la ecuación
(3.8) d.el capitulo anterior, para luego calcular el
valor de cada determinante.,: para lo cual se utiliza
la subr utina DETER^dentro del programa. Los valo -
res de los determinantes son chequeados para deter- .
minar si son positivosr negativos o cero. ,- depend.ien_
do de que si el .o r d e.n del determinante formado divi-
dido para dos es par o imoar; puesto que de la secuen
cía de valores en signo de estos determinantes, se de_
terminará la estabilidad del sistema. Con las condi-
ciones que rigen para cada valor en signo de 3.os de-
terminantes vistos en el numeral (3,2).
El- programa, más detalladamente se describe a conti -
nuación; el grado de la ecuación característica se -
lee con la variable N en la línea 6 y sus coeficienr
tes -en la línea 12 con formato 10F8.3 y se almacena
en el vector B (I). ,
Puesto que se -van a forma.r N determinantes el índice
L del ciclo' Do exterior de la línea 20, varía desde
]. hasta N; así desde ls. línea 23 hasta la línea 80.,
se extiende- la. formación de los determinantes de
Schur - Cohn y se .almacenan con el arreglo matricial
A; cada vez que se forme un determinante el programa
llama a la subr utina DETER que es la que calcule, el
valer del determinante; una vez obtenido este valor,
se wuelve al programa principal para, chequear por. -

— 75 —
medio de- la proposición IF lógica de la linea 84 -
si L es par o impar; si L es .par, se transfie-
re a la proposición 50, pero si es impar a la 51,
ambas proposiciones IF lógicas chequean si el va-
lor del determinante calculado es positivo, nega-
tivo o cero y transfieren a proposiciones de es '-"
critura para imprimirse el comentario corréspon -
diente. Una vez terminado 6sto, se regresa a---fór-
mar otro determinante hasta completar los N deter
minantes, reguerido.s para el análisis,
La "Subr- -utina DETER regresa el valor de cada uno
de los determinantes con cada interacción de L,.
al programa principal, el cálculo de un determinan
te se-basa en el método de reducción Gauss-Jordan
para la solución de "sistemas lineales , este méto-
do es co'nfiable/: puesto que se basa en operaciones
elementales con las filas del arregle matricial
del- determinante,- aun—que no se necesita como se -
pudo verf exactitud ai el resultado.
Nomenclatura:
Variables de entrada:
N = grado de la.ecuación característica
NN = número de coeficientes de la ecuación carac-
terística
B = vector que aDmacena los coeficientes de la -
ecuación característica
Variables d.e salida:
N = grado de la ecuación característica
B = vector que contiene los coeficientes de la -
ecuación característica
(7) Luthe, Olivera, Schulz, MÉTODOS NUMÉRICOS
Edit. Llmusa, México 1981 - Pag.101 - 103

— 76 —
A = arreglo matricial de los determinantes de
Schur - Cohn
DET = valor de los determinantes de Schur - Cohn
Subroutina DETER . . . - . . - • •
Calcula el valor del determinante; generáScT'éh:' le.
matriz A. ' ,-.--""""
Su proposición de 3. lama da es
CALL, DETER (L, DET, A)
Siendo les argumentos:
L variable que controla el grado del determinan-
te formado
DET valor del determinante
A arreglo matricial, que contiene les elementos
del determinante.
La Subr utina DETER, regresa 'al programa principal
el valor de cada uno de los determinantes que se
forma.n en cada iteración

— 77 —
Diagrama en Bloques del Programa
Inicio
Lectura del gra.do N*•'
y los coeficientes
de -la^-ecuacion ca -
•racterística.
Formación de los de_terminantes de Schur
Cohn
CALL D£TER
Salida de resultados
Subroutina DETER
Cálculo de los'
determinantes.
4.2.3 Programa para el criterio de Houth-Hurwitz modi-
ficado _para_ S.D.
El criterio de Routh, es otro de los métodos pa-
ra probar la estabilidad de sistemas discretos
retroalimentados; en este método, le. ecuación ca
raoteristica en 7. del sistema se usa para a en e. -
— 78 — .
rar otra ecuación en W, a través de la transfor
mac.ión Bi-llneal; vista en el numeral (3.3.3) -
del capítulo anterior.
.La. nueva ecuación es utilizada para formar un -
arreglo (arregb de Routh - Hurwitz) , Este "arre-
glo'indica si la ecuación característica-del sj)l_s_--
tema contiene c no raices dentro del cír.cvil6 uni
tario del plano Z , sin. necesidad'de obtener las
raíces de la ecuación cara.cteristi.ca, pero si se
encuentra que .ésta contiene raíces fuera del - -
círculo unitario, entonces se dice que el siste-
ma es inestable.. Se supone que la ecuación carac_
terística es completa, es decir no le falta tér-
mino alguno . Si algún término hiciese falta, en_
tonces la ecuación .característica contendría
raíces-, fuera del círculo unitario'cel plano 2 y -
el sistema es inestable.
Con referencia al programa para este criterio su
terminología se describe a continuación: se supo_
ne que la ecuación característica del sistema es
de la. forma:
E^ Z11"1 -r ]3 , Zn~2 + ... +E0Z + E, = On , n -i. • £.• A,
en donde: el subíndice n es igual al grado de le.
ecuación (NGRAD + 1) . Nótese que al usar subíndi_
ees del 1 a n,. el subíndice O del término cons -
tante se evita. Los coeficientes En, En_( ; . . -En •
son nútr.eros reales positivos o negativos . • FJ pri-
mer paso del procedimiento es el de llevar a ca-
bo la transformación Bl-lineal de tal manera que
se obtiene una nueva ecuación de la siguiente. for_
ma:
^ n-2p—1Coe w " H- Coe . w + . . .Coen u/ -f Coe, = On n-1 ¿ " 1

En donde los coeficientes Coe , Coe _-, ,
Coe- r resultan positivos o negativos.
El segundo paso que se lleva a cabo consiste en
arreglar los coeficientes de esta última ecua -
cien en dos filas, en las cuales los coeficien- .
tes aparecen con subíndices .alternados (primara
file, coeficientes impares, segunda, coeficientes*
pares). Luego se procede a calcular. J-as""" filas a
dicionales de acuerdo" al método descrito en las
ecuaciones (3.12)del anterior capítulo y después
de estos cálculos el arregD.o toma la forma des-
crita en la Tabla (T.,3.2), que para efectos del
desarrollo del programa el arreglo se forma co-
mo una matriz de N filas x N/2{o(N/2 -r 1)) colum-
nas dispuestos -sus- elementos como se verá luego
en los. ejemplos prácticos.
A continuación se. pasa a explicar más detallada^
mente, el programa (el lis te do del programa asi
como su diagrama de flujo,- se .encuentran en el
apéndice A).
E3. grado de la ecuacdl&n característica se lee
con la variable NGRAD en la línea 6 y los coefi
cientes de la misma se lee por medio de la pro-'
posición de la lín.ea 12 con formato 10F8.3 y se
almacenan en el vector E (I) en donde;. >7=NGRAP+
1. Se debe, observar que los valores de los coe-
ficientes se deben suministrar en orden para po_
tencias crecientes de 55 y luego sn orocede a
aplicar la transformación Bi-llneal sobre ellos/
obteniéndose el 'nuevo vector COF, (I) que es alira_
cenado y corresponde a los coeficientes de 3-a —
nueva ecuación.
>El valor de K se asigna por medio de la proposi-
ción 10, 'cuando quiera que N os impar; para N
8 0 " —
par se asigna el valor de K en la proposición
11 (Obsérvese que el número máximo de columnas
de arreglo es K) . Las dos primeras- filas del
arreglo se forman desde la proposición 15 has-
ta la proposición 90,- haciéndose notar que para
N impar, ya se asigna el valor de A (2,K) = O
en la linea 59. El resto del arreglo de Routh.•"•"se ca.lciila. de acuerdo al procedimiento descri^
to anteriormente; este procedimiento se extien
dé desde la proposición 950 hasta la 5 del pro_
grama; como se van a calcular un total de (n.~2)
filasf entonces el índice I del ciclo Do exte-
rior de la proposición 950 necesita variar de
3 a "N y el número de elementos que se calculan
por fila,, como se. dijo es de K.
E3 programa determina el número de elementos que
debe calcular para cada fila de acuerdo con el
valor máximo del índice J, del ciclo DO que co-
mienza en la línea 81. El valor máximo de J es
el valor asignado a la. variable M; que a su vez
recibe un valer en la proposición 25 si N es -
impar o en la proposición 26 si N es par. El -
resto de elementos de cada fila se le asigna - .
el valor de O en la proposición 85. E3 programa
calcula, luego los elementos del arreglo fila -
por fila.
Cada vez que se calcule, un elemento con le. pro-
posición de la línea 82, se prueba su valor pa- .
ra determinar si es igual a O,' si el elemento -
es ig-ua3 a O, se aumenta el contenido de la va-
riable CONT en una cantidad igual a 1; el valor
de CONT, se prueba por medio de'la proposición
lógica IF (linea 85.) si éste es ignal a M, toda
le. fila es ignal a O, lo que hace que el progra-
ma transfiera control a Da proposición 40. El -
programa imprime entonces que es necesario vina
ecuación auxiliar y para.
Volviendo a la. proposición lógica IF de la lí-
nea 85 para estudiar otras posibilidades, si -
después de•calcular todos los elementos de una
file, y de comprobar que no todos sus elementos
son cero r entonces el progra.ma prueba al pri -
mér elemento de la fila. Si este primer elemen_s"'
to es diferente a ce.r-o 'el programa se transí: e_
re a la proposición 80 para imprimir el arre -
glo. Si este primer elemento es cero, el pro -
grama se transfiere a la proposición 45 para
incrementar el valor almacenado en IND por una _.
cantidad igual a l . Se imprime entonces un men_
saje que indica el numero -de la- fila que presen
ta el problema y luego -se lleva a cabo una trans_
formación, haciendo uso de las proposiciones que
se extienden desde la linea 93 hasta la 96, lue-
go de ca.lcular la transformación la proposición GO.
To 950 hace que el programa regrese a la proposi_
ción 950 (linea 71) para calcular y formar el arrea
glo aplicable a la nueva ecuación. F,l pa.rámetro
IND sirve para controlar el programa en caso de
que la transformación faDe;yel control se hace
para que el programa, no entre en un ciclo infini_
to.
Cuando la transformación falla., la proposición.
IF lógica de la linea 90 hace que el programa se
transfiera 3 la proposición 50 para imprimir un
mensaje y para el programa.
N ornen cía tur a:
Variables de entrada:
NGRAD grado de la ecuación característica
N número de coeficientes de la ecuación ca-
racterística N - NGKAD + 1
E • vector que almacena los coeficientes de -
la ecuación característica
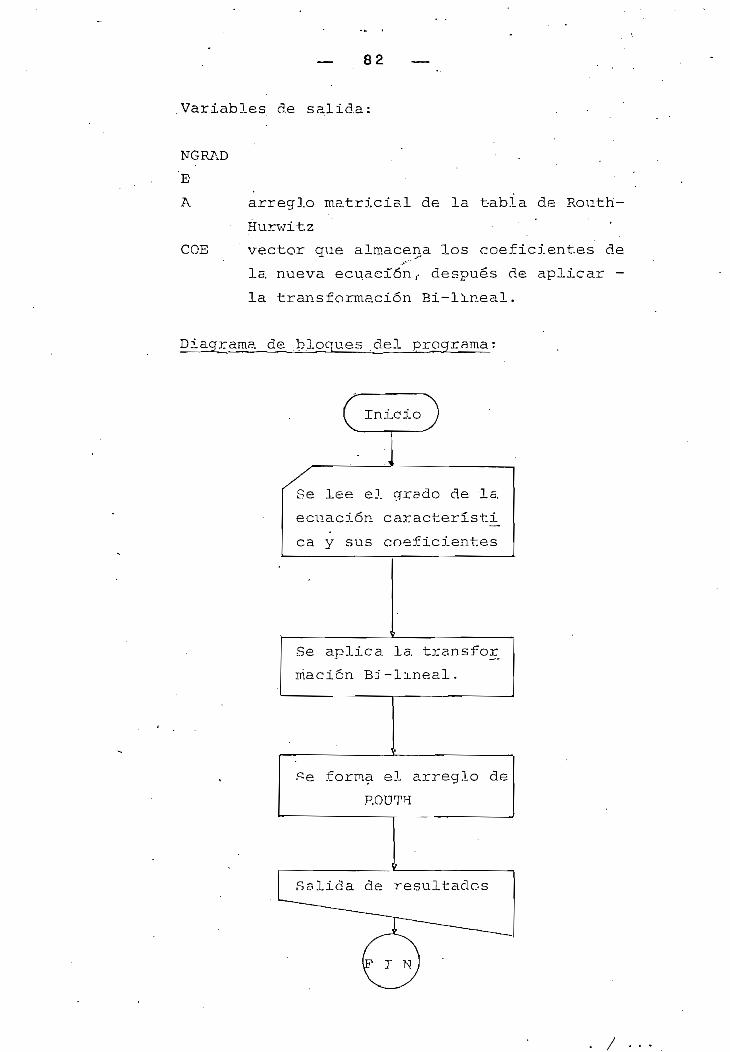
82
, Variab3.es de salida:
NGRAD
'EA
COE
arreglo matricial de la tabla de Routh'-
Hurwitz
vector que almacena los coeficientes de
ls. nueva ecuación,, después de aplicar -
la transformación Hi-llneal.
Diagrama. de_ ,blo_ques _del programa:
Inicio
Se lee el grado de ls.
ecxiación característi_
ca y sus coeficientes
Se aplica la transfor_
macicn B5-lineal.
forma el arreglo de
ROUTH
Salida de resultados

84
Subr- \itina TRASP
11 MULT
11 SUMA
INV
Luego cheque- si le. matriz P, está definida positi-
va, negativa o cero de lo cual deduce si el sistema,
es o no.-, estable. . _, .
El programa comienza leyendo el orden de la matriz
de estado N en la linea 6, luego se J.een los ele -
mentes de la matriz con la proposición 8 del pro -
grama, en formato 10F8.3 y son almacenados en el -
arreglo matricial A, para luego proceder a. formar
la matriz identidad negativa E.
Seguidamente se pasa a calcular le. matriz transpues_
ta de A, mediante la subí: utina TRASP y se almacena
en el arregle matriciaü 3, mediante la su.br: utinaT1
MULT. Se efectúa e.l producto D = A" A y sus elemen -
tos se almacenan en D (arreglo matricial)-
La subr utina SUMA efectúa la operación (D + E) = F
y es almacenada en el arreglo matricial F. para
luego hacer que la matriz F se invierta en la sub -
r- utina IKfV y se almacene sobre el arreglo matricial
F que a su vez es cambiado de signo mediante un bu -
cíe itera t'tvo'. •• Por último el programa chequea si la
matriz P = - -F, -está definida positiva o negativa, o
cero. Para cualquiera de los resultados el programa
imprime un mensaje sobre la estabilidad del sistema.
Terminando ésto, se Dará le. secuencia del programa.
Cabe señalar; la operación con matrices en cada una
de las sutaroutinas son sub-programa s sencillos que
no requieren mayor análisis del que un estudiante
pudo haber efectuado en los- cursos regu3.ares de For_
tran IV. Además para cada cálculo/ mediante una sub
r utina se hace que se imprima la matriz almacenada,
_ 65 —
y por supuesto la matraz P - - F.
Nomenclatura:
Variables de entrada.:
N = grado de le. matriz, de estado
A = arreglo matricial cue almacena la ma-
tri z de estado
E = arreglo matricial que almacena la ma-
triz de identidad negativa
Variables de salida:
N, A
R - arreglo matricial de la matriz trans-
puesta
D — arreglo matricial de la matriz produc_
to,
F = arreglo matricial de la matriz suma,
matriz inversa P.

86 —
DIAGRAMA EN BLOQUES DEL PROGRAMA
N I C I O
Se lee el grado de la matraz
de estado y sus elementos A
Se forma la matriz identidad
CALL
CALL MÜLT
CALL SUMA
CALL INV
Se cambia de signo a la matriz
.inversa y' se chequea, si- es
+ j - y O
S^brutina TRARF,
cálculo de la matriz
Transpuesta B
Subrutina MULO?, cálculo
de la matriz
Multiplicación D
Subrutina SUMA
Cálculo de la matriz
suma F
Subrutina INV
Cálculo de la. matris
inversa F
Salida de resultados

Subrutinas:
Sus proposiciones de llamada son:
CALL TRASP (N, B, A)
CALL MULT (Nr B, A, D)
CALL SUMA (N, DP E, F)
CALL INV (N, F)"
en donde todos sus argumentos han sido ya defi-
nidos.
4*2.5 Programa para el criterio.de Nyquist:
Para el criterio§de Nyguist se aprovecha de la
condición de estabilidad de sistemas discretos
dada en el numeral (3.2) del capitulo anterior,
es decir la determinación de las raices de la -
ecuación característica del sistema en Z, y és-
tas determinan la estabilidad de un sistema.
Siendo la ecuación carácter' ística, descrita co
mo: • . '
An Z»-1 + An_^ Zn-2 + ... + A2 Z + AI = 0
t
Si N - .es el grado de la ecuación característica
-f-1 y A _ ... A coeficientes reales positivos,,
-negativos o cero, . El programa calcula todas las
raices reales o complejas del polinomio en 7,, me_
diante el método de Newton-Raphson (doble divi -o
sien sintética) e .imprime su valor absoluto pa-
ra determinar si éste se encuentra dentro o fue-
ra del circulo unitario del plano Z.
Los arreglos B, C, Dr y las varíales X e Y, son
complejos. El grado de la ecuación característi
(8) Ver: McCracken D.. , Dorn Y!
MÉTODOS NUMÉRICOS Y PROGRAMACIÓN FORTRAN
Editorial, Limusa, México 1975 Pag,150 a 157

ca, se ]ee con la variable NGRAD en la línea 6 y
los coeficientes de la misma en la. linea 13 .con
formato 10F8-3 y son almacenados en la variable
A real, Estos coeficientes son invertidos en su
orden con ayuda de la variable E en la proposi-
ción 10. El vector C complejor se forma de los '
elementos del arreglo de E como parte .real y un
valor imaginario de O-.
'La constante N I, línea 26 dará un número nece-
sario para poder encontrar las ra.lces y APKOX
el grado dé aproximación; con la asignación de-
N = NG.RAD se logra, que cada vez qiie se obtiene
una raíz. N disminuya en una. unidad en la línea
62. La variable NRAIZ es el contador de raíces
y el valor que le corresponde a cad'a raíz ini-
cialmente es ,de X = (O.O, 1.0). Debe nota.rse -
que a pesar de que el cálculo de 'las raíces se
inicia desde un mismo valor no existe peligro
de obtener la misma solución dos veces ? ya que
una vez determinada una raíz se .extrae esta de
la ecuación algebraica por medio de la d.ivisión
sintética. Los resultados que se obtienen siem-
pre ind,ican una componente imaginaria, aunque la.
raíz sea real pura; en este caso, IB. componente
imaginaria es bplen pequeña:
Nomenclatura:
Variables de entrada;
NGRAD = grado de la ecuación característica
1TN = .número de coeficiente de la ecuación
característica • :-
,A *= vector que almacena los coeficientes
de la ecuación característica
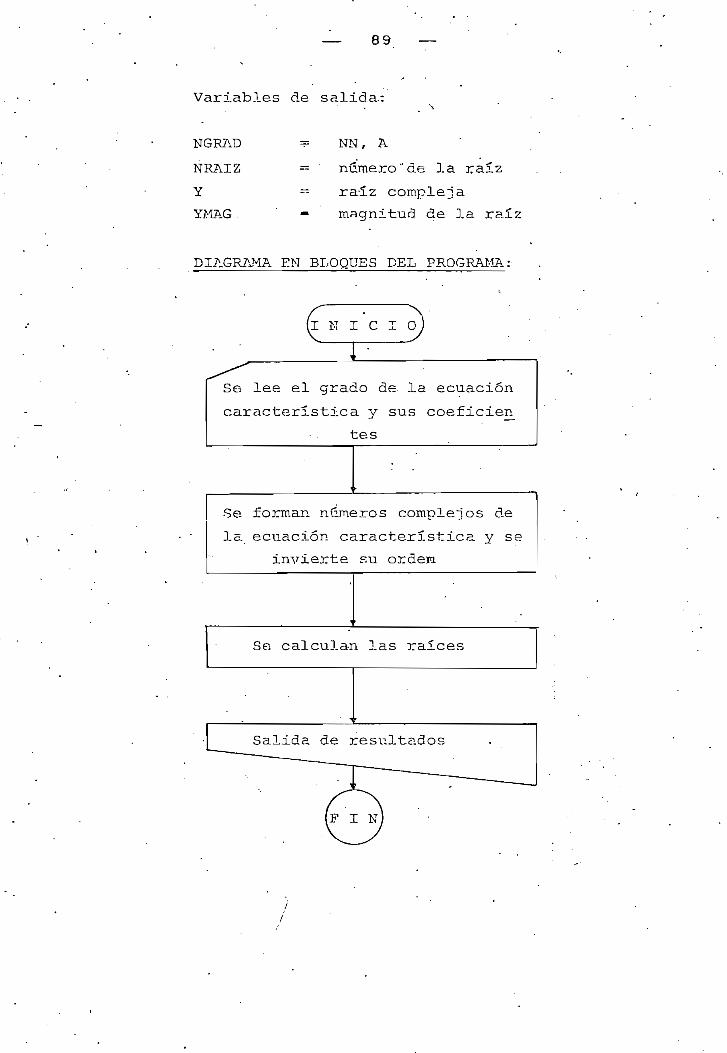
89
Variables de salida:
NGKAD
NRAIZ
Y
YMAG .
NN, A
número"de la raíz
raíz compleja
magnitud de la raíz
DIAGRAMA EN BLOQUES BEL PROGRAMA:-
I N I C I O
Se lee el grado de. la ecuación
característica y sus coeficien
tes
Se formar, números complejos de
la ecuación característica y se
invierte su ordem
Se calculan 3_as raices
Salida de resultados

4.3 ' Recomendaciones para el escogimiento de un progra-
• . ma para la resolución de un problema, det.erira.na.dp;.
- Para los cuatro criterios que "utilizan, la ecua-
ción característica délo función de transferen-
cia de un sistema, no existe preferencia para —
el análisis de estabilidad por un método deter-
minado. Asi, aunque todos los programas reqxiie-
•ren de un breve análisis de 3_os resultados para
la determinación de la estabilidad d'e un . siste-
ma , puede presentarse inconvenientes en algunos
de ellos.
La desventaja del criterio de Routh radica, en
que está limitado, a ecuaciones de grado 2 a 6,
por la dificultad que presenta 3a transformación
'Bi-lineal. Bn. cambio el criterio de Nyguist apro_
yecha directamente 1¿ condición de estabilidad
para.'sistemas discretos analizando la situación
dfe las raices de 3.a ecuación característica, la
cual puede ser la. vía nroV . _ práctica porque no
requiere de la formación de .arreglos ni de mayo-
res 'cálculos,
Para el criterio de Liapunov, se debe tener -cui—
natío en su utilización, puesto que el método s<$-
• lo 6.a la condición suficiente, mas no la necesa-
ria para que tin sistema sea estable, pox lo que
'para matrices de estado linealmente dependientes
el criterio no sirve.

CAPITULO 5
EJEMPLOS DE APLICACIÓN
5 . 1 Introducción:
En este capitulo se da paso, al análisis de varios
ejemplos, para la determinación .de la estabi3,idad
de sistemas discretos; que servirán para visuali-
z-ar coreo se tiene 3.a salida de ' resultados er> cada
uno de los programas .y el como saber interpretar-
los . . . . , - . ' ' .
. • Un mismo ejemplo para todos los programas demostra
r£. ls. capacidad de análisis de estabilidad de fca-
da criterio, mediante la automatización. •
5 . 2 Ejemplos de aplicación usando los programas propues
tos: - '
5.2,1 Ejemplo- de aplicación
Se desea establecer la estabilidad de un sis-
tema discreto, que tiene como ecuación .caracte
rística en Zs
7. ~ 1,2 Z -i- ,32 = O
v matriz de estado A:
..8 O.
Ov . 4
Solución:
a) La ecuación característica dada y su matriz
de. estado, fueron analizadas en los ejemplos
del capítulo tercero. El análisis efectuado
determinó que" el sistema es estable.
.b) Los datos requeridos para, cada programa y
^ la. forma de ser proporcionados, de acuerdo
a lo visto en 3.a seccj'ón cuarta,- son como
s e indican a continuación: . . . .
Grado de leí ecuací.ón característica 2
/Orden y 'coeficientes a ser suministrados: .
,32', - 1/2, 1 que son los datos para elL
programa de JURY, SCEUR-
• COH3S?, OÜTH-H y NYQUIST,
•'. ?•í>ara el programa del criterio de' Lispunov:
•Or&'en de la Tnatri:z:;2
Coeficietites del arreglo matriciál *. . .8, O,
. ,0, .4
Con todo esto., la salida de cada programa,
:se muestra a continuación:
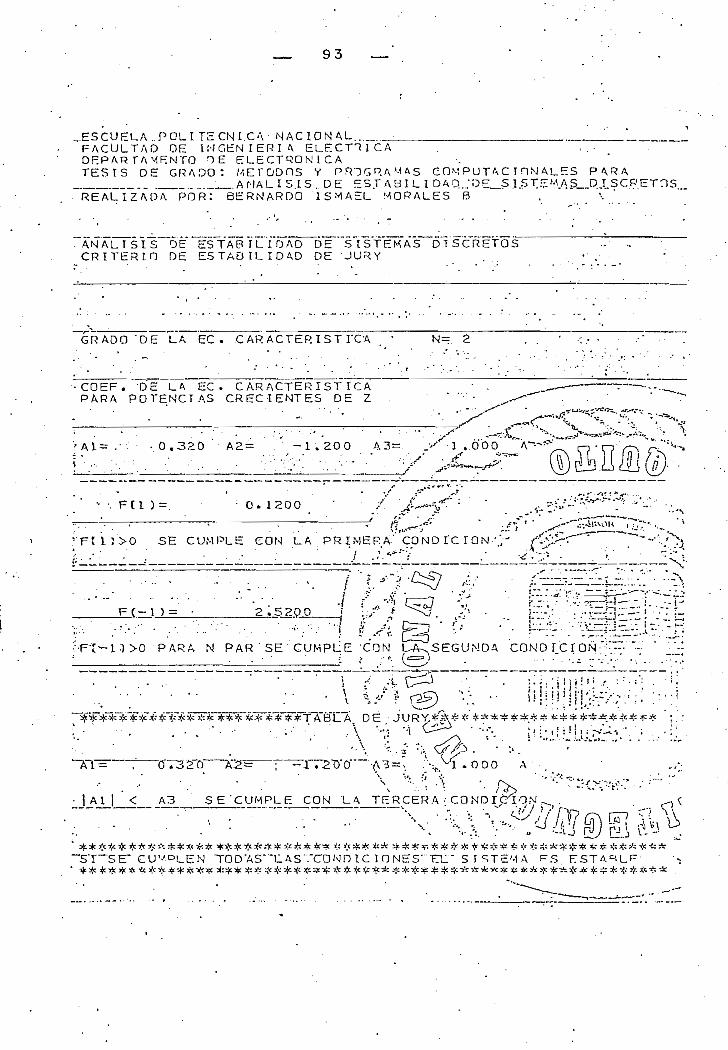
93
«ESCUELA .POLI TÉCNICA- N AC 1D N AL : , „FACULTAD DE INGENIERÍA ELÉCTRICA . , . - . -DEPARTAMENTO O E ELECTRÓNICATESTS DE GRADO: MÉTODOS Y PROGRAMAS COMPUTACTONALES PARA
_; A MAL I 5.15. DE =5 T A B I L I DAQ..;OE__S J.ST M.A.5__pI.5CP.ETnS ._REALIZADA POR: BERNARDO ISMAEL MORALES B
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSCRITERIO DE ESTABILIDAD DE JURY
GRADO "DE LA EC . CARACTERÍSTICA ' N= Z
COEF. DE LA EC » CARACTERÍSTICAPARA POTENCIAS CRECIENTES DE Z
Al--" .0.320VA2= ."" -1.200 A3=. _/ 1 ..OOo' 'fT--*
VF(Í?">0 SE CUMPLE CON LA PRIMER A-'' COND I'C ION •',";- f-^-^"^ ' *""'V
2.*52.0.0.
1 >0 P A R A N PAR " SE CUMPLE "CON UA^SEGUNDA CONO I C I ON - :- — -
DE JURY,\, -.\1 — ., 0~T3'£fO TCS^ ; — .r7T2"0*0" 'A3 = v i"-:^ l .OOO A ' - .
• . • N^ 1''- :"! A * <^>v "v-''"::':'-í'v-v:-o:'.\- : • • / ^> "• - - f - •• i Al! < A3 SE'CUMPLE CON LA TERCER A • CO NDIClON .
ye i-'c ^c^cx<^'.:*: ^ ^-"X "^ *.; * ^ ^^^'T- # ^ -^^=1=* V* •>): X= '•
ST~SE" CÚVOLEN TOD"AS'~LASTCOND I C T O NES" "TL" S I S T E M A FS. E

ESCUELA" P DLTTE ON 1 CA"N ACTO N AUFACULTAD DE INGENIERÍA ELÉCTRICAFACULTAD DE INGENIERÍA E L É C T I A ,4"' :v~'-- __ _ • sD E P A R T A M E N T O DE E L E C T R Ó N I C A . •' ' *"" "^-—^ /7\ U ín] ^T F S Í S DE G R A D O :• METC'DnS Y P R O G R A M A S CQM PUT AC I ON ALES11 'R AR A' < i '' •' " ........ " A N Á L I S I S DE ESTABILIDAD DE SISTEMAS1 DISCRETOS
REAL I Z A D A POR: BERNARDO ISMAEL MORALES O . . ..'..,
A N Á L I S I S DE E S T A B I L I D A D DE SISTEMAS DISCRETOS .•••;'• '¿CRITERIO DE ESTABILIDAD DE SCHUR-CQHN J. ^Z
GRADO DE LA EC . C AR ACTER I-ST/I CA . -\J = ,. 2
. -; DE LA EC . C A R A C T E R Í S T I C A - :'
' PARA • POTENCI AS CRECIENTES DE 2/«. {«y ;-..- -- - i J7J ™.,: C V-' ••-"-"^"r^--' ^»
\? j -^ ' ; "!' !!"¡¡!'¡-!¡!¡¡"; :.¿"'¡r : M' 0 * 3 2 0 B2= -1*20 Ó ^.53= l¿ , 1 .^000 BJ j i] í ¡ ¡ -] i ?C;^xxV ' '' 1' - ' : '
DETERMINANTES DE' •
,. . * ; -•
r-^c? ^\ ' . - • • • • • : " ' : ^ : :-.*^vV • • • " ' : • " • • " • - . X. x^ •« 7"v-tsri--:--.í-^— .; '
1*000 . 0*320
VALOR DEL DETERMINANTE
'DET < O PARA L IMPAR SE CUMLE-LA CONDICIÓN
'Ov,3'20 . 0 . 0 0 0 . ' ' i .000 -1*200
l - . O O O 0 , 0 0 0 O .320 - -i .200
-:i •. 200 i -. oo o o . o o o o . 320
VALOR DEL DETERMINANTE
• O . 1398
L"bef "">~o" PÁR"Á"L""P"A"R" SE "CUMPLE"" LA""cbNb'i'c ION'
SI TODOS LOS OFT EPM INANTES CUMPLEN CON LA, C R M O I C I O NDE FSTAf í í LI HAO EL niSTE'- ' -A 1 S e'STA'M.r

95
ESCUELA POLITÉCNICA NACIONAL ' ' " ' - . 'FACULTAD DE- INGENIERÍA ELÉCTRICA - . -DEDARTA1.'EN!Ta DE ELECTRÓNICA _ • -'TESIS 'DE GRADO : "MÉTODOS Y PROGRAMAS" c'riw PUTA c ION ALES "PAR A"
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSREALIZADA POR: BERNARDO ISMAEL MORALES R . - •
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSCRITERIO DE ESTABILIDAD DE ROUTH-HURWITZ ."MODI"FIC"ADO PARA"S"ISTF.MAS"D'ISCR"F.Tr.ÍS~ ;.,-"
- ' ' *•''*
P A R A POTENCIAS CRECIENTES DE,Z , 1 ;'-'
— . •>*
0.320 1.000
-O"Fr-irA—HCT~C-A-R. ACTETTTST i c A /••P A R A POTENCIAS CRECIENTES DE W.;-''-.APLICADA LA TRANSFORMACIÓN Br-l_INtA"li ó
COE1= ' 2.520
TABLA DE ROUTH-HURW LTZ ;.#'&#
i " 1 .000'
ü • ' l l r ^ i J ^ S ,
3 ' 21 .000
21
• -.0
0
\ ,v".000 . \^ 1 \, ' - • ;\^;-li
.000 . .
O .'1 20! . .COF'. •
' j í iMH i i i&X-V ' - ' i ^H I. ) ' • * t i' . (,- x.-' :- . - . , - - • í* ; . i - ¡ í ' f ' ¡ Ñ. . "- • • • , . . :
- * ' : i 'i i ¡ ¡ í ; iT ': ' : ' • ' í
_ ;o cu OLÍ"S. ' " 'X-- *'-• ' V X'% "^ • " *
**'-*!.. " " '' *••*•'':.-.-..'.V¿~-";---.-•''.' ' "
SI NO E X I S T E - C A M B O S DE S IGNO EN LOS ELEMENTOS~DE"~irA"P:RTMeR"A"-COL.'UMÍvJA"'Eir"S'T'STHHA~"[7S

96
'• • • ". * ' ' / ^' '--^ • /*H*** '. ""'*'/ / '^ .' í' ' ' ' /'-:
.ESCUELA..POLITECNI CA-.NAC IONAU •'FACULTAD DE INGENIERÍA ELÉCTRICA' -.DEPARTAMENTO DE E L E C T R Ó N I C ATFSIS DE GRADO: MÉTODOS r PROGRAMA-S^CQ^PUTAC IONALES PARA • . •
, . . A N Á L I S I S . D E ESTABILIDAD DE SISTEMAS D I S C R E T O S - .REALIZADA POR: BERNARDO ISMAEL MORALES 8 ¡ •-.-;... • .^- \,
' • , ' ; '- ,-•' •' L -J - . • .
ANÁLISIS DE ESTABCRITERIO DE ESTA
GRADO DE 'LA. MATR
_\, tí >^
MATRIZ TRANSPUESTA B
- -Vv, . V \. -V. -"-^v^-^-.v;.-^"----
MAXRJLZ_iERODUCX.C3_D
0.640 : 0 .000
'MATRIZ SUMA F"
, --O. 360 .0 ,000
*'• • . *
MATRIZ
' -SL.7T8
. . . O . OO 0 • . ..:- - ; . : . ' ' - --. • ••'' - ;.: ; • • - . - • ' • • . ' . • • . •-;..; • " , ! • , - .. — 0 . 8^0 ' ' . ' ' . . " . • • " - . - - . - ' ' ' - ' ' ".' - . - - ' :;.;; "* . . : ' . • ' • - ' • ' • , • ' / • . • - • : • ; - ' . • - > ; , • ' - • "> - ! ; ' •—• ' • . ' • . ' . • : " • ,'-.::'' - • • • " • " - ' - - lINVERSA --P • ; . . . . ' . - « . . . ' "
o . o o o - • ' • ' • •- O , 0 0 0 ' -1.19 O -
MATRIZ P .
2.773 ' -O.00 O- • O; 00O - • ' 1 ; 190
. L A ' M < \ T R I Z P ESTA DEFINIDA POSIT IVA
LA FUNCIÓN DE LIAPUNOV'" " ES POSIT IVA P A R A TODO X DIFERENTE DE O
EL SISTEMA ES ESTABLE

• 97
' ' - - - • - • . - • • ' V ^ ff *\*
" * ''_ . . .FACULTAD OE IMGENIEFÍ I4 ELÉCTRICA ' V - - ' • • - . - . . . . , ' ., . . .DEPARTA MfrNTO D ir ELECTRÓNICA ' '- ' - • />> ' ' -TESIS DE GRADO: MÉTODOS Y PROGRAMAS CQMnuTAC'i.QNALES PARA .. r:. •
-------- _ ---- „ ---------- ANÁLISIS •DF"HSTARIL I DAD DE 'S.I:ST/£f4AS O r.SCRETCIS v\A POR: BERNARDO ISMAEL MORALES ._f i - -. Cj ¿ 'j í y / jS í ^ ^- _,
1 . *•., "*"•.''. "' i ' '"'••• L^x L.,...J . ..'
''A N Á L I S I S DE ESTAB!L ID¿\ DE S ISTEMAS DISCRETOS ''*''-•*C R I T E R I O DE ESTADIL IDAD DE N Y Q U I S T - ^---^
GRADO DE LA EC• C A R A C T E R Í S T I C A NGRAD=
COFF, DÉ LA EC» C A R A C T E R Í S T I C APARA P O T E N C t A S CRECIENTES DE Z
0.3HO A2- " - ' ~\ ¿00 A3= . '1 . OOQ A.
R A Í C E S DE LA EC » CARÁCTER IST I C A
R A i Z L 0 * ^ 0 0 0 - 0 ^ 0 0 0 0 J
.MAGNITUD. DE LA'RAÍZ = 0.4000
'DEÑT'RO DEL CÍRCULO UNITARIO DEL PLANO Z.
v'RATZ2 '0 *8000 . ' O . O G ' O O J '
. "MAGNITUD DE LA R A Í Z - • 0 .8000
R A Í Z DENTRO DEL CIRCULO UNITARIO DEL: PL ANO .
* *** ********* * ****** X x*'S I TODAS LAS «AlCtS DEL SISTEMAESTÁN DENTRO DEL CIRCULO U N I T A R I O ,.*"..EL SISTEMA C- S ESTADLE .,. --^
* *Xí_*** ** * i(c*^t AA * ^

98
5 , .2 .2 E~]'emp3o de aplicación NA 2
Para el sistema cuya ecuación característica es:
- Z .71 O v s'u matriz de estado A;
A =
1-1
.75 1
Se desea canalizar.. su estabilidad: la solución es:.
a) En el capitulo cuarto se determinó que el s?ls
tema es inestable y as^ lo con fieman todos los
programas, • . " • . *
b) Datos'que se requiere para los programas:
- Grado de la ecuación 2
Coeficientes de la ecuación en orden cre-
ciente de' Z: - .75, -1. , 1,
Orden de la. matriz '.2 ; -
Elementos del arreglo matricial A: .0, 1.
1 .75, 1.i
•A continuación se muestra la- salida de los -
programas para el análisis de estabilidad del
sistema propuesto:

99
__ESCUELA PDLITECNI CA NAC JONA1 ---- 'FAC-ULTAO DE ' INGEN I EP. I A ELÉCTRICA
1 DEPARTAMENTO DE ELECTRÓNICATESIS DE GRADO: MÉTODOS Y P'^GP^MAS CCH-'PUTACIQNALES P A R A
, ___ „ ____________ ANA1_IJSIS_O.E. ESTABILIDAD. X)E_S1ST.EKAS-.D.J.S.CRETQ5-REAL I Z A D A POP: 3ERNARDO ISMAEL MORALES B
-: ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS:• CRITERIO DE ESTABILIDAD DE JURY
•GRADO DE. LA EC . CARACTERÍSTICA . . ' -N= 2
COEF* DE LA EC . CARACTERÍSTICA 'PARA PQTENCI AS CRECIENTES DE Z
Al = . -.-0.750 A2 = . -1.000 •-A3= .S. I,. 000
Fíl 3= .- . ' -0.7500
' FC1")<0 NO SE CUMPLE CON L A - PR I MERA' CONO ICION .-•'-.••>-'
m
F( —1 »0 PARA N "PAR SE CUMPLE CON LA-. SEGUNDA CONDICIÓN1''
: Í^TABL A DE. JURY?1-1**********j^*±^^^*;&•%%.$<: ; . ;•>" >... lLf,LvJJj.,J .1.' ' ^ '.. '!: • :
\ í'. C\ «. •» \ Al= ' -0.750 A Z~ - - 1 . 0 0 0 \A3 = - :.'.. 1 . 000 A . - -
]_A_lJm< A 3 • SE .CUMPLE .CON....LA-.T-ERCER A'. CQ Nü!/C JpN-
SI "SE CUMPLEN T O D A S LAS C O N D I C I O N E S EL S I S T f T ' - í A ES:£*: A AX: A

ESCUELA POLITÉCNICA N A C I O N A L' .FACULTAD OF INGENIERÍA ELÉCTRICA ,- <, . - - „ , ^ - , , , , , v
DEPARTAMENTO DE ELECTRÓNICA •' • """ < l\ [• \ ¡I - ? ' }TESIS o 5 GRADO; MÉTODOS Y P R O G R A M A S COMPUTAC IONA'LJ¿S—P-APÁ * ' •• ¡
! A N Á L I S I S DE " £ S T A O'I L I DAD DE S I S T E M A S O I-SCM íTTOS• R E A L I Z A D A POR: BERNARDO ISMAEL M O P A L E S ' R ' . - - • - . ' -I
A N A L T S T S OE E S T A B I L I D A D DE SISTEMAS D I SCRETOS i >><"CRITERIO DE ESTABIL IDAD DE: SCHUR-COHN .. ^?':?
GRADO DE LA EC . CARACTERÍSTICA.,^ '
COEF. DE. LA EC . C A R A C T E R Í S T I C A íTFNÍCT AS CPF.C T FNTES' DE-' Z ^'^
'ñl= - -0 .750 'B.2= rJ.jtILCÍ.0 :.,83== v--rr 1-000 8
' '#- DETERMINANTES DE ;;SCHU;^COHN ._**.*ijr**
'\R DEL DETERMINANTE "':
• •- . • } \= -O .4375 . . . . . . . .
DET < O P A R A L IMPAR SE-CUMLE LA CONDICIÓN
DET2
0*000 . 1,000 . '-1.000
ITooo " -MbTT3~o " ~5To"o'ó ; íToTfo"
. 1.». Q,CLO_ 0 . 0.0_0 r-0. ».7.5,0 - I. ..O O.p_
-1 -000 1,000 0 * 0 0 0 -0.750
VALOR DEL DETERMINANTE
-2.071 1
"NO" SE 'cuHPLE~"caÑ" £L"Á" CONDICIÓN' DE" ESTABI'L
. SI TODOS LOS DETERMINANTES CUMPLEN CON LA C O N f O I C T O NDE E S T A B I L I D A D ' EL S T S T f M ^ H^ £"STAnL(T

01
ESCUELA POLITÉCNICA NACIONALFACULTAD Di INGENIERÍA ELÉCTRICA
_^.DEPARTAMENTO~DE .ELECTRÓNICA. _..TES r.5 DE GRADO : MÉTODOS Y. PROGRAMAS CDv.P IJTAC ION ALES PARA
ANÁLISIS DE ESTABILIDAD DE -SISTEMAS DISCRETOS-' REALIZADA POR; BERNARDO ISMAEL MORALES 8
ANALISI S DE ESTÁBIL I DAD D-E- SISTEMAS D ISCR5TQS , ,*-•**>**•" CRlTEñIO..DE_.ESXABlLIDAD_DE_.ri.au.T.H~J-ÍUR>.MJ"Z <.,.-*•." "\
1 • MODIF ICADO P A R A S ISTEMAS DISCRETOS .- .-,^^,, >—r>;—'
'
GRADO DE. LA EC * C A R A C T E R Í S T I C A /NGRAD-,,2'
« COEF. DE LA EC , CARACTERÍSTICA :.;~**7• PARA POTENCIAS CREC IENT ES - DE ' 2 .? " J*
„ ,'
O .750 /'
?' 'COEF. DE LA EC . CARACTERÍST ICA »•- PARA POTENCr AS CRECIENTES DE. '.V /; "APLICADA LA TR ANS FORM AC ION • 8 I--LI N£A1_'; x : • • - • jí j"s• '—i v ff n
.TABLA DE RQUTH-HU^vJ tTZ.v **
* 000
1-. " ". 2
' 3 ' '
•1 * 0 0 0
' . "
-¿(-,667
-1 *667
-1
'. ' 0
' • o
^ - i --^*667 V ' ;= . '£ ,
" " ' ^\v".000 \ v;;*t
«000 ' X
'jS I _NO EXISTE _CAMB IOS DE S1GK"D EN LOS ELEMENTOS""".DE" LA 'PR IMERA CÜL UMNÁ" "ELT'S'l SI EMANES " ESTABLE""'
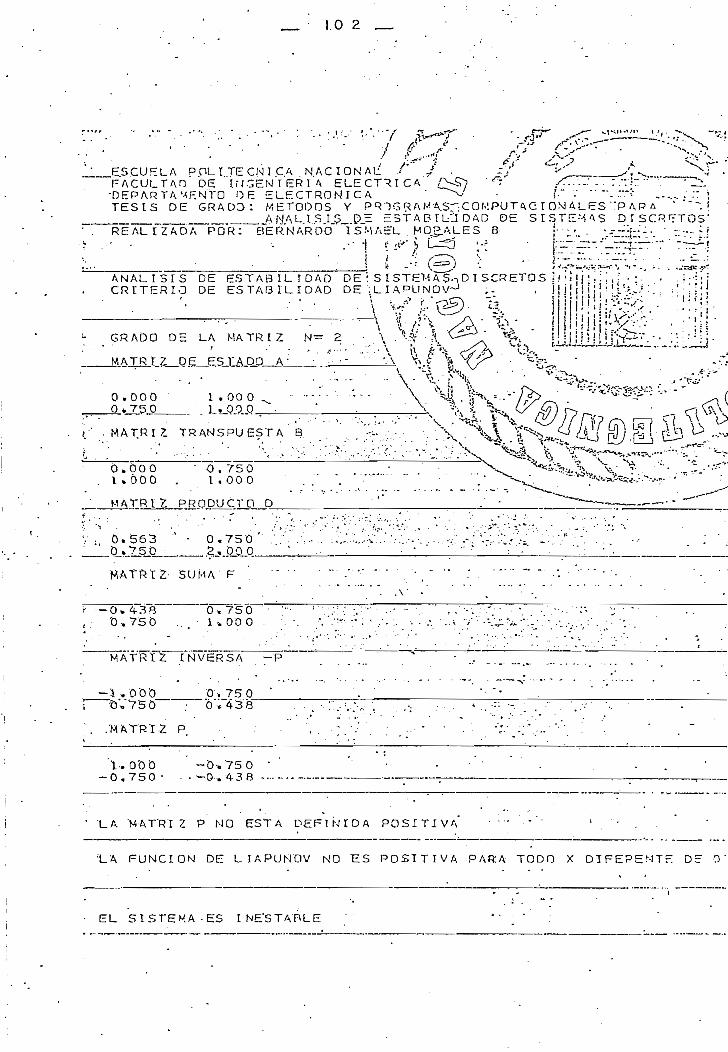
1.0
ESCUELA POLI TECNI CA NACIONAL" /' s
FACULTAD DE UJGEN t ER I ^ ELÉCTRICA- D E P A R T A M E N T O OH ELECTRÓNICA ' """V - { 'TESIS DE GRAO:>: MÉTODOS Y PR")GR AMA.S'-COMPUT AC I ONJ ALES "P AR A ' " *-. í
. A N A L I - S IS_ P_E £5TA[?rLUDAD DE SISTE-MAS DISCRETOS'R E A L I Z A D A POR; BERNARDO ISMAEL MODALES
ANALTsr'S DE (HCRITERIO DE ES
GRADO DH LA MATR
(HSTAB ÍL I DAD DE t S I STE"M ASnD I SCRETQS i í ' \ \ ( - - •ESTABILIDAD DE 'LIAPUNOV^ ;. , } ¡ i { ! í í ¡ ¡i ' V :
• -. - . \ i'rt£). iv í i iü!iiv;:>- - . \ .xA'.% . I í üíl!
MATRIZ N= 2 \ ' : v X *&' U1LÜJÍÜ
M A T R I Z TRANSPUESTA
SUMA F
6T75 0~1*000
-P
1 » O O CL _0 * 4 3 8
-Z P
''U O'OO0.750 •
'0-*750(>-. '4- 3 8
'MATRIZ P NO ESTA DEFINIDA POSITIVA
:LA FUNCIÓN DE LIAPUN'OV NO HS P O S I T I V A PAR:A TODO X DIFERENTH O? O
EL S I S T E M A - E S INE'STA'PLE

1-0 3
" ES CU F L A P OLÍ TE~ CN I C A N A C I O N A L ' -FACULTAD DE . IMGBN IERI A ELÉCTRICA - - *DH^APTAMENTO DE ELECTRÓNICA • " .
_TESIS_ D_E GRADO : MÉTODOS Y P R O G R A M A S COMP'JT/AC TONALES ^ A R A - W""ANAL ISIS" D E ' " S 5 T A R I L I D A D DE STSTE'- I-AS/-DISCrJ^TOS )
R E A L I Z A D A POR: BERNARDO ISMAEL MORALES .R >'""%.. ^ ¿ ( r¡) 1 rtí í '^ ^ '^ -« i ''i->- v""' t~-'/ I. -' *•""'".... .,'.;'
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS "'CRITERIO' DE ESTABILID^iO DE NYOUIST • 'v~ ,
GRADO D^ LA EC .' CARACTERÍSTICA 'NGRAD=-2
CHEF. DE LA EC. CARACTERÍSTICAPARA POTENCIAS CRECIENTES DE Z
-0,750 A2= ' -1*000
RAICES DE LA EC« CARACTERIST I.CA
RATZ1 -0.500O -O.OOOOJ "
.... i . _ - . - -. . ._— . ' . . . «... „..
VAGNITUD DE LA RAÍZ = ' 0.5000.
RAÍZ DENTRO DEL CIRCULO UNITARIO DEL PLANO Z.
R A Í Z a 1 ,500 O - O . O O O O J
MAGNITUD DE LA R A Í Z = 1.5000
R A Í Z ' FUERA -DEL" CIRCULO UNITARIO DEL PL'ANQ Z
j (Ll
Sí TOO AS L '\ R A ICES DEL SI STSMA ;'ESTÁN DENTRO DEL CIRCULO UNITARIOEL SISTEMA ES ESTABLE: >-
I O 4
5. 2..3 Ejemplo de aplicación'N**- 3
Para un sistema discreto que tiene como ecuación
característica:
Z" - 1 - = O '
y su ma.tr3.z de estado A es:
O. 1.A
1. .0,
se desea analizar --su... estabilidad. .
/E3. programa requiere los siguientes datos:
- Grado de la ecuación'. 2 . •
- Orden de la matriz * 2 ' '
- Coeficientes de la ecuación - 1., O., 1
- Elementos del arreglo matriz ; O., 1.• i c ' i«. / j / j.. .
La salida de los programas dan -que el sistema este.
•en el límite de estabilidad, como se .muestra a con-
tinuación:

05
ESCUELA POLITÉCNICA NACIONAL • . . * ' .FACULTAD DE 1NGENIER1A ELÉCTRICA . _ ' ^"DEPARTAMENTCT'DE ELECTRÓNICA ~~ : "TESIS DE GRADO: MÉTODOS Y PROGRAMAS COMPUTACIONALES PARA
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSREALIZADA POR; BERNARDO ISMAEL. MORALES B
ANÁLIS IS DE ESTABILIDAD DE SISTEMAS DISCRETOS"CRITERi"0""DE-""ESTAB ILI'DAD' DE~"~JURY " "
GRADO DE LA E'C , CARACTERÍSTICA N= 2
COEFo DE LA EC . C A R A C T E R Í S T I C A
rorj'D" "^OTO'O'O A3="
Fí1>- . ' 2 . 0000-J¿I@
:rrr>o—SH~CUMPL-E—
2.0000
F C - 1 ) > 0 P A R A N PAR SE CUMPLE-CON LA^SEGUNDA CONDICIÓN .".,-.-.-.
. . ,^ ******** TABLA DE .JURY *
Al- 1.000 A2 = ' 0 .000 A 3 = \- *, 1 i'O O O A,
|Ai I = | A 3 | LA CONDICIÓN DE ESTABILIDAD SE ENCUENTRA EN'VEL L IMITE '
^ X: ****** *^ *******-X* ** 'KX= *SI SE CUMPLEN T O D A S LAS CUNDICIONES EL S I S T E M A ES ESTABLE

06
— ES CU EL A' P OL ITE CN I C A "N AC1 O N A L'~ "• / £„. --FACULTAD DE INGENIERÍA ELÉCTRICA / f" *" /DEPARTAMENTO DE ELECTRÓNICA ' ',-• x'TESIS .DE Gíí'ADO: MÉTODOS Y PROGRAMAS COMPUT AC ION AL ES PARA
— ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSREALIZADA POR: BERNARDO ISMAEL MORALES 8
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS. CRITERIO DE ESTABILIDAD DE SCHUR-COHN--'
GRADO OE LA EC . C A R A C T E R Í S T I C A /' .- "Ñr= 2
. COEF. DE LA, EC . C A R A C T E R Í S T I C A" PARA POTENCIAS CRECIENTES DE L
t'!! ¡ i 1 1 i ••• i'ii i, i ¡ •; i • •. -.!''•!•• . '( i . I i , • • i >-•
'i--¿¿ ':\;í ^ •'.'-t — --V"
1.000 B2= O » 000 33= -.-••" I « 0 0 0 B
*^ DETERMINANTES DE 'SCHUR-COHN ***************J "
"""—l-i-0'00 -1-7-0 O'O
1 .000 1,000
VALOR DEL DETERMINANTE
r™ D ÉT-~ —: : o-i-c oo o-
r' LA CONDICIÓN DE ESTABILIDAD SE ENCUENTRA EN EL LIMITE
DET2
1.000
"-0 .000'
1.000
0*000
1 . 00 0
0.000
1
1 'J
1
.000
* 000
.000
0. 000
1 « 0 u 0
" 0 .000
"OTOGO" ""i roo o"™ "O ".O 00 "!'. 000'
_VALO R_^ D EL_ _D§TE R_M I N AN T E _
DET= -0-0000
"LA" COND-TCtON' DE ESTABILIDAD 'SE 'ENCUENTRA EN ' EL""1_T M r TE"
' ##* ****#****»* >!<*^:'X<***»MeX1í ******* 4:SI TODOS LOS DETERMINANTES CUMPLEN CCN LA CQNOICÍGNDE ESTABILIDAD' . • EL SISTEMA ES ESTAtíLü '
*4 t< >>** ****** * 'í: «-^ f >K*: ***** ** £* *^e ^Jít^^^x-*^ =7 JJ'X' >i

:OT
ESCUELA POLITÉCNICA NACIONAL ' • " .FACULTAD DE INGENÍ.ERIA ELÉCTRICA " - . - -DEPARTAMENTO DE ELECTRÓNICA ' •
___TESI.S._DE._GRADO :_. MÉTODOS ..V PfTJGRAMAS COMP U TAC ION ALES PARAANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS
' REALIZADA POR: BERNARDO • ISMAEL MORALES B - '
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSCRITERIO DE ESTABILIDAD DE ROUTH-HURW IT2
_1MOPIFICADC_P.ARA__S ISTEHA S,_D I SCRETOS ^ >•"
'CQEF.c DE LA EC. C AR ACTERIST ICA_,-Í"PARA" POTENCIAS CRECIENTES DE Z ,
El== 1*000 ó.o"bb- " £3= •••", ,~ * - ' ~\ ¡3'~ r7
COEF» DE LA *EC*. C A R A C T E R Í S T I C A '•- " : — JP A R A P O T E N C I A S CRECIENTES De W ' ' ^
. A P L I C A D A LA TRANSFORMACIÓN 8L-LINEAÍ --- *
V
000
í'-"*. **ij-ti*r*7*-''lt
í - ; f '• i'':" .
CQE3.= 00 G 0. 000 .' CO'E3= 2.000 .'; 'COE.
'l L A~D E "C ERO S'"""ÉS~N EC ES AR'l O""~ÜN A EC . AUXIL IAR
• " < - * * • • • • • • - • - • ..... - - - " - - . . - - . , . --.... - c - . - . : . . . A í, f''f '-"

108
ESCUELA POLITÉCNICA N A C I O N A L •' v ' '' • r^-> "'"'F A C U L T A D - D E INGENIERLA ELÉCTRICA "" X°/
-""DEPARTAMENTO'-DE-ELECTRONICA "' '• ' ^r^' '"' ' ^ i ' i iTESIS DE GRADO: MÉTODOS y PROGRAMAS -CQMPUTACTONALES-
ANÁLISIS DE ESTABILIDAD DE SISTEMAS-- REALIZADA POR: BERNARDO ISMAEL MORALES B •
ANÁLISIS DE ESTABILIDAD DE S ISTEM AS «-DISCRETOS
4:."í
~GR ADO~D E" LW"MATR I'ZTN^
.MATRIZ DE E S T A D O . A
.. 0 .000-1,000
—MATRIZ-TRANSPUESTA
0 . 0 0 0"1V O O O *
-1.000™OVOO O"
MATRIZ PRODUCTO D
I .000O .O O O
0 . 0 0 0- 1 e O O O
KATR I~Z~'S U M A~F"
O» 000-ovooo-
0. 00 O—ovoo o—
MATRIZ INVERSA
0 * 0 0 0oyooo ;M A T R I Z P
0 . 0 3 00 * 0 3 0
• • o ; ooo --0 . 000
-O »"00 O'-0.000
LA FUNCIÓN DE L IAPUNOV ES CEROP A R A TODO X DIFERENTE DE C E R OEL S I S T E M A ESTA EN EL LIMITE DE E S T A B I L I D A D
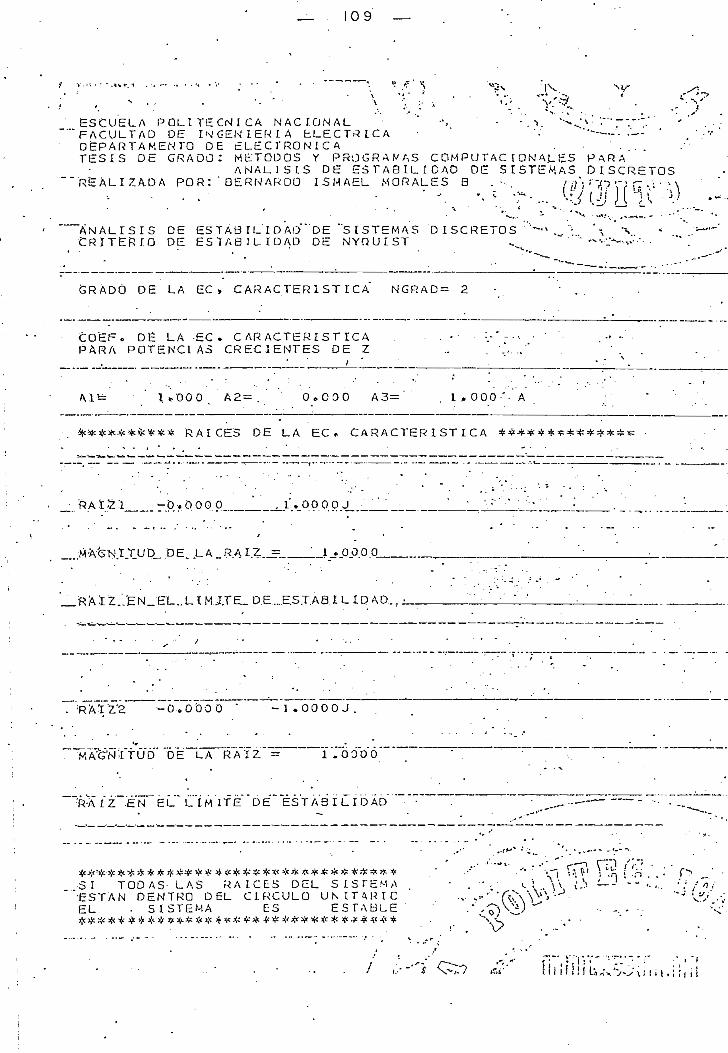
¡09
• • .tu-, t IV
ESCUELA POLITÉCNICA NACIONAL - -,x ^^ '''T'-"'-FACULTAD DE INGENIERÍA hLECTRICA "• '- ----- • —DEPARTAMENTO O E ELECTRÓNICA - ....TESIS DE GRADO; MÉTODOS Y PROGRAMAS COMPUTAC IONAL^S PARA
ANÁLISIS DE: ESTAS IL I DAD DE SISTEMAS DISCRETOSREALIZADA POR: ' OERNARDO ISMAEL MORALES B . -- . !¿r,r~¿l T; P - • ' "' \ C -•-. t// { ¡í H( . 3
l
"ANÁLISIS DE ES TÁB ILI DAD "DE *"S t'STEMAS DISCRETOSCRITERIO DE ESTABILIDAD DE NYQUIST
GRADO DE LA EC» C A R A C T E R Í S T I C A NGRAD= 2
COEF. DE LA -EC * C A R A C T E R Í S T I C APARA P O T E N C I A S CRECIENTES DE 2
I * O O O A2= . 0 * 0 0 0 A3- l > O O O -' - A
RAICES DE LA EC . C A R A C T E R Í S T I C A
.L A „ R A __*.0_0.0
. O.E.._E.S.T.Á8 I L ID AD..: •__.
" ; R r ' 2 - i * o o o o .
" : R - Á I Z " E L L M E ST A I L I D A D
-SI T O D A S - LAS R A I C E S DEL S I S T E M A ."•ESTÁN DENTRO DEL CIRCULO U N I T 4 R I CEL - S ISTEMA ES ESTABLE 'i¡< >}c ^< * i ->}E >> X<>X ***** 4^Xí £ # * £ * # * # # # * -Je # # « *
' "" ^^ r~~"~^ *""~T--"i- . .- r""" \! / í-''" ''-Ti l3. ^' ¡ -n Í n . . • í"> .' •
; t. ! . \3 — - ~ - - -.. '';/'"/ .'fAN J " " V ^ . V ; 1
"

no
5.2.4 Ejemplo de aplicación NA 4
Un sistema de control discreto tiene por ecuación
característica en a:
.,5Z - .045 - O
Y como matriz de estado A:
A —o..1o. .
O.
.9
la estabilidad del sistema se analiza por medio de
los programas propuestos en la tesis para todos —
los criterios de estabilidad de S.D.. Los datos que
se requieren para los programas son:
— Grado de la ecuación! 3 . ;
— Orden de la matriz de estado'. 3
- Orden y coeficientes de la ecuación caracterís-
tica: ' • . ' ¡
, .045, .41, i;
Elementos del arreglo matricial A: .5, .O., O..
' O.,-. 1, O.
O. ,0. ,~ .9 '/ -/
la salida de los programas que analizan al s.ls-
tema muestran que el sistema es estable como se
puede ver a continuación^

ESCUELA POLITÉCNICA NACIONAL •FACULTAD DE INGENIERÍA ELÉCTRICADEPARTAMENTO Ug ELECTRÓNICA. • ' ' - . - - - . ......TESIS DE GRADO: MÉTODOS Y PROGRAMAS COMPUTACIÓN ALES PARA
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS.REALIZADA "POR; BERNARDO ISMAEL MORALES 8 -
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSCRITERIO DE ESTABILIDAD DE JURY
GRADO -DE LA EC e CARACTERÍSTICA '= 3
COEF« DE 'LA EC'* CARACTERÍSTICAP A R A POTENCIAS CRECIENTES DE Z
Al- -0*045 -0*410 A3= O. 500 A4 = 1 , OOO ' A
• Fí1>~ 1.0450 '
_ _"FC'lT>0" "SE C'ÜMPLE'CaÑ LA ~PPri MERA' COND IC I O N
FC-1 )- -0*1350
FC-1'XO PARA N IMPAR SE CUMPLE C.GN '.L "A~.SE CUNO A CONDICIÓN
*v^*^^TABLA DE JURY >MC-*£#*
•0*045" - 0 * 4 1 0 A3- 0 .500 A4= l ' »OOO A
Al] < • A4 • SE CUMPLE CON LA TERCERA - C O N O I C ION
Bi = 1 .000 . BZ = 0 , 5 0 0 . ' B 3 = ' -0 .410 84=
Al = -0.993 AE- ' -0 ,482 A3~
] A l | >'"V-A'3r ' S E CUMPLE'CON ' LA CONDICIÓN
SI SE CUMPLEN T O D A S LAS CONDIC IONES EL S ISTEMA ES E S T A B L E
*^^

12
ESCUELA POLITÉCNICA NACIONAL ' '.. .-" .. "' - '-FACULTAD -DE IN C-LN 1ERI A EuE CTR I C A ' .DEPARTAMENTO D E C LECTRUN IC A .- . ' " - —i . .TESIS DE GRADO: MÉTODOS Y PROGRAMAS COMPUTAC IONALES' PARA T i ' •
A NÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS"REALIZADA POR; BERNARDO ISMAL-L MUR-ALES B
ANÁL IS IS D E ' E S T A B I L I D A D DE "SISTEMAS D ISCRETOSCRITERIO DE E S T A B I L I D A D DE SCHUR-COHN
GRADO DE LA EC « CARACTERÍSTICA
COEF* DE LA EC. C A R A C T E R Í S T I C AP A R A POTENCIAS CRECIENTES DE Z
•*-•/"> . . ,
- O o 4 1 0 B3= - T-a'Q.VSOO 84= '-0*045 DZ-
*** DETERMINANTES DE SCHUR-COHN
;. 1 . O O O 8
• DET1
- VALOR DEL DETERMINANTE
DET = -O .9980
DET < O PARA i- IMPAR SE CUMLE LA CONDICIÓN
~DET2'
VALOR DEL DETERMINANTE
DET- O.8458
DET >'0 PflRA L PAR SE CUMPLE -i_ A CONDICIÓN
DET.3
VALOR DEL DETERMINANTE ..—,';
DET= -0.2708 . _* "*''/ .;-
.DET < O P A R A L IMPAR ^ S E CUML.E LA CONDIC IÓN
jfe* * * * * * * * * j^ .^*^******V*****^ ************ V *SI T O D O S LOS DETüIRMINANTLS CU.MPLhN CON L f\NDF. E S T A U Í L I Ü A D Í L S I S T E M A ES ESTABLE
^

I 13
ESCUELA POLITÉCNICA N A~C ION' A L "" " "" "" " " "'"FACULTAD DE INGENIERÍA ELÉCTRICA ' -DEPARTAMENTO DE ELECTRÓNICA • ''TESIS DE GRADO: MÉTODOS Y PROGRAMAS COMPUTACTONALES PARA
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSREALIZADA POR; BERNARDO ISMAEL MORALES 8
A N Á L I S I S DE E S T A B I L I D A D DE S I S T E M A S D I S C R E T O SC R I T E R I O DE E S T A B I L I D A D DE ROU TH-HUR V¡ ITZ •M O D I F I C A D O P A R A S I S T E M A S D I S C R E T O S ; , '
GRADO DE LA EC . CAR A C T E R Í S T I C A NGRAD= 3.. -
- •' t. c—•- •--\ *C I "H / /Lj (* /' - ' V ¿Jíi V_9 -"'' «J... "i V í.--1 ' --A.J ,
COEF. DE LA EC. CARACTERÍSTICA'PARA POTENCI'AS CRECIENTES DE "Z"
~'0"V'04-'5 ""-OV4TD
COEF« DE LA EC c- C A R A C T E R Í S T I C AP ' A R A ' POTENCIAS CRECIENTES DE tf
• A P L I C A D A LA T R A N S F O R M A C I Ó N B I -L I
: i - 1 .000- E
,0. 135 CUE2 =
í TABLA' "DE" ROUTH-HURW ITZ
2*775 COE.3=.
- . '% "* ."- .í
1.045
'"1"
2
•3
4
1"«.' .
•
3.
.. 2*
0 .
000"
871
622
129
-— -2
. . . . . - .••
0
. : ^ o
0
.656 - . '• ; -,• v • • . *, *i ""-. • '
.129 • ^v " ' ">'
*000 , ' , _
, 000
SI NO E X r S T E CAMBIOS D£ S I G N O EN LOS ELEMENTOSDE LA P R I M E R A CULUMNA EL S K S I E M A KS E S T A B L E

14
ESCUELA' POLI T É C N I C A N A C I O N A L ^•-- * ' •FACULTAD DE INGBNl íuRIA ELÉCTRICA '"'^' . '• 'DEPARTAMENTO OH ELECTRÓNICA- -. • 'TES IS DE£ G R A D O : MCTODÜS Y P R O G R A M A S COMPUTAC ION ALES
ANÁLISIS DE ESTABILIDAD DE SISTEMASR E A L I Z A D A POl?: ULRNARDO ISMAEL MORALES 'B
P A R ADISCRETOS
ANÁLISIS DE ESTABILIDAD DE- SISTEMAS DISCRETOSC R I T E R I O DE E S T A d I L l D A Q DE L IAPUNOV
A G R A D O ' DE L A . M A T R I Z ' N= 3 ' • • * - . ' . " ' " . ' *
MATRIZ D E ESTADO A ' ' . ' * ' -"-••'.
o . s o o o . o o o - - o . o o o , ' - . "•:• - . ' • • '0 » 0 0 0 -0*100 0 * 0 0 0 - : . . - . " • " ' • 'o e o o o o . o o o - 0 . 9 0 0 - " " •• v \
~~ ' "• • " .. ../•' '• -.. • /"/?% CT:J -i r-p *^\-MATRIZ TRANSPUESTA 8 \- • ;- • '-.. • ' \ ,' nf " •• ? \%\. . • - ••"-. ^t ~%^» v-.; - -. > v-^
•"0 .500""™" "13.00 O ' 0 * 0 0 0 ' '"""" - ' " * • • - - , '-.. . .0 * 0 0 0 - O » L O O o .ooo / ' - ••-„• . ." • -'- -~. -0 .000 0 .000 -0*900 • ""--.v.. _- .
" -MATRIZ" PRODUCTO O ' ".:' .— - . ; . - - - - . . . - -_- . -_ . ......_:—_:_....-.^ . . .
0.350 0 * 0 0 0 ,' ' 0 ,000 . - "• • - " - . • ' • •- O r O O O O.010 • ' " " 0 * 0 0 0 " " " ' ~" ~"~ '0 .000 0 . 0 0 0 0.810 • • " . '
MATRIZ ' "SUMA" F ". • ' - * . ^ . •_ ___
-0.750 O.'O 0 0 - - . 0 * 0 0 0 . " . . . W ' < - ' . .O r O O O -0.990 0.000 • . - ' •o .ooo " o . o o o ' * -0,190. " ' • ; . " . *
MATRIZ INVERS.A -P - " _ '_ __ __ ' -
-1.333 0.000 0.000 . . . • ' .O .000 -1. 01 O O .000 - .
- O . O O O -0. 00 O ' -5 .2Í33 ' '•; " " - " " - . - - • • - - - .
K A T R t Z P " • ' . " - - . ' :
, .. . . . . . „ _ , . . . _ ,_, ..-..„- ...... .— , . , , . „ - - . -. . ,. . _„- . . .-„ ... . —.., „. , ...... : . _..-.
1.333 — 0 . 0 0 0 -0.000 ' . ' • ' '-0 .000 1 * 0 1 0 -0 .000 ' T
0 . 0 0 0 f 0 . 0 0 0 _ _ 5.263_ , _ _ • ___; ^ - -
LA M A T R I Z P ' ESTA DEFINIDA P O S I T I V A • . -
LA FUNCIÓN DE L IAPUNOV ' " E S P O S I T I V A P A R A TODO X " D I F C R E K T E DE O
EL SISTEMA ES, . ESTABLE , ....... .„ . „ . . .
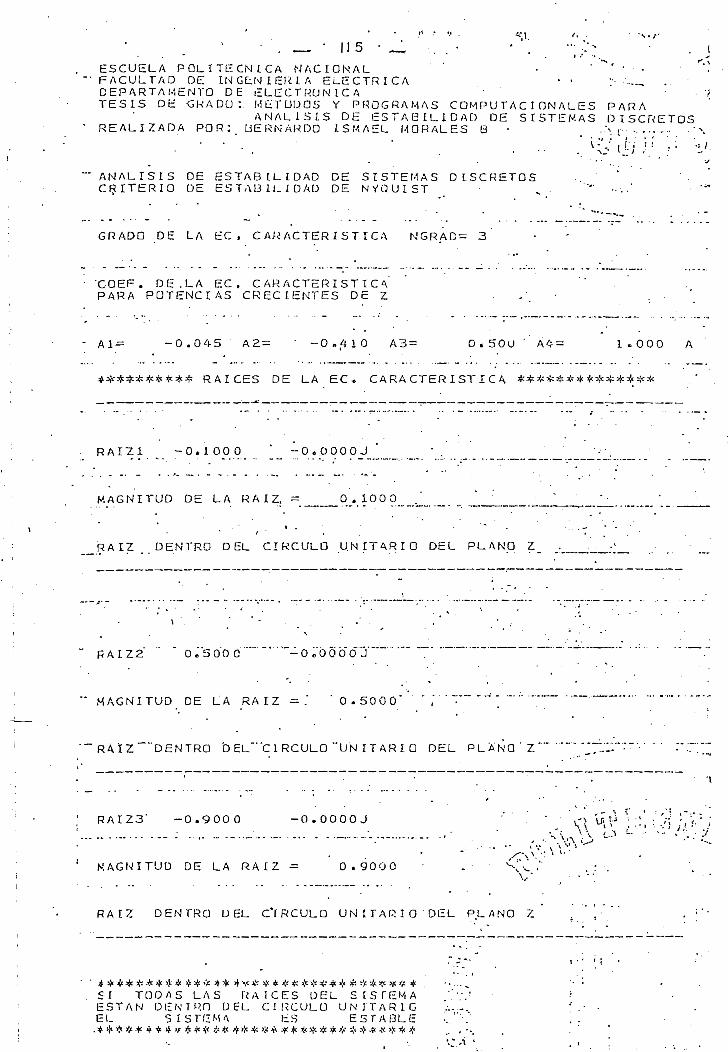
• _ • u 5 • • - .> - .ESCUELA P O L I T É C N I C A N A C I O N A L ' • ' ** ' ' • •FACULTAD DE INGENIERÍA ELÉCTRICA • • - -_D E P A R T A M E N T O DE E L E C T R Ó N I C A - -TESIS DE -GKADO:. MCTUUQS Y PROGRAMAS CQMPU T AC I ON ALES P A R A
A N A L ISIS DE E S T A B I L I D A D DE S I S T E M A S DISCRETOSR E A L I Z A D A PO R : . UE RN ARDO ISMAEL MORALES 13 - , •>-. r ...... - '
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOSCRITERIO DE ESTABILIDAD DE NVQUIST „
GRADO DE LA f£C , C A R A C T E R Í S T I C A NGRAD= 3
• 'CGEF. DE.LA £C , CARACTERÍSTICAPARA POTENCIAS CRECIENTES DE Z
Al-= -0 .045 AE= ' -0>,410 A3= 0 * 5 0 ü ' A¿r~ 1.000 A
RAICES DE LA EC* CARACTERÍSTICA
RAÍZ.I -0 .1000 ~ 0 * . O O O O J
MAGNITUD DE LA RAÍZ, = 0.1000 .
_RAIZ .. DENTRO DEL CIRCULO UNITARIO DEL PLANO Z_
R A I Z 2 0 . 5 0 0 C - O o O O O O J
" MAGNITUD DE LA RAÍZ - ." '0.5000'
RAÍZ "DENTRO D EL""C 1 RCULO "UN I T AR i O DEL PLANQ'Z'
RAIZ3' -0.9000 -O.OOOOJ
1 MAGNITUD DE LA R A Í Z - 0 . 9 0 0 0
R A Í Z DENTRO DEL CIRCULO U N I T A R I O DEL PLANO Z
S I T O D A S LAS R A I C E S DEL S I S T E M AESTÁN DENTRO U6L CIRCULO U N I T A R I GEL S I S T Í Z M ' X bis E S T A Ü L E
* 4**** # #. *
I 16
5.2.5 E templo de aplicación M^ -5
Determinar la estabilidad del sistema discreto que
tiene como ecuación característica:
- 1.75 - .75 . O
Y matriz de estado A
-.5 O.
O,
O.
— 1
O.
O,
O. 1.5
Para.los programas' se requieren los .siguientes
ciatos: . •- .
- Grado de la matrizyde la ecuación caracterís-
tica; 3 • •
- ' Coeficientes de la ecuación característica en
orden creciente ct Z-
• -* .75, - 1.75r • O. , 1.
Elementos del arreglo de la. matricial A:
-.5 O. O. '
O. -1. O. -
O. O. 1.5
El análisis del sistema utilizando los progra -
mas se -ilustra, a continuación y se obtiene que
el sistema es inestable.

117
ESCUELA P O L I T É C N I C A N A C I O N A L • • .FACULTAD DE INGLN IERI A G1LECT3ICAD E P A R T A M E N T O DE E L E C T R Ó N I C A
"TESIS DE G R A D j : MÉTODOS Y P R O G R A M A S C O M ^ U T A C T O N A L E S P A R AA N A L U S 1 S DE ESTABIL IDAD DE SISTEMAS DISCRETOS
R E A L I Z A D A PÜR: BERNARDO ISMAEL MORALES !3
ANÁLISIS DE ESTAÜ Ii_ I DAD DE SISTEMAS DISCRETOSCRITERIO DE E S T A B I L I D A D DE JURY
GRADO DE LA EC* CARACTERÍST ICA • ' N= 3
DE LA EC •> C A R A C T E R Í S T I C APARA POTENCIAS CRECIENTES DE Z
0.000 A4= - 1*000 'A
="p¿i)"r=' ™r.~sooo ~"~ ^T •" _ . (^-A^1'"' ""•" * " . " r'
F( I ><0 ..... NO' S£ , CUMPLE., CON LA PRIMERA CONDICIÓN1 . • "
~F"(=:rV=0"i:'^"5E"GUND"A""CONDICI O'N S E ' ENCUETR A EN EL 'LÍMITE
DE
Al- -0,750 A2= —1*750 A3= - 0.000 :. A4-= - . 1*000 A
:|A1.| < A4 SE CUMPLE CON LA -TERCERA CONDICIÓN . •
61= I . . O O O BZ= 0 * 0 0 0 B3= -1.750 • B4-= . ?j r-O . 750 ' . B'
Al- • -0,433 A2= 1.313 A3= " r.750 "A
| Al | < | A 3 | NO SE CUMPLE CON LA C O N D I C I Ó N
SI SE CUMPLEN T U D A S LAS CONO IC TON'GLS EL S ISTEMA £ S - £ ST

FSCUELA P O L I T É C N I C A N A C I O N A L ' ". .-FACULTAD Ofi" IN GÉlN I l£Fí I A ELECTRI CA . . , '
' O E P A P T A M E N T O DE E L E C T R O N Í C ATESIS DE GríADu: MÉTODOS Y P r t J G U A M A S COMPUTAC IHN ALES P A R A
A N Á L I S I S DE- ES T AH I L I C AD ' DE S ISTEMAS • D I SCRGTOSR E A L I Z A D A POR: DERNAfiOü ISMAEL MORALES 3
A N Á L I S I S DE ESTABIL IDAD DE S ISTEMAS D ISCRETOS"CRITERIO" DE ESTABIL IDAD DE SCHUR-CUHN
"GRADO "DE ' LA EC". ' C'AR ACTER ISTICA
"COEFT"DE "LA EC - CARACTERI'S'T ICAPARA POTENCIAS CRECIENTES De Z
;K= 3
•0 *750 - B2=. -i . 750 - B 3= '.S;-- 0 * 0 0 0 84= i , OOO B
#* DETERMINANTES DE SCHÚR-CQHN
DET1 t • , '
Z ' " vALOú DEL DETERMINANTE / . "''•"'
". .DET.= ' - '-O *^375 ' . .
. DET < O .PARA L IMPAR SE CUML.E LA CONDICIÓN
-2.8.7,11 ^ ._ : ;
NO SE CUMPLE CON LA CONDICIÓN DE EST ABIL I-D AO"
"DET3 ™~~~"".Tr"''l™""7" :". I" ™
V A L O R DEL DETERMINANTE • ' . fr...^¡
DET= •' ." -0 .0000 " • " -:/'
DET < O P A R A L IMPAR-' SE CUf'LE LA ¿ONU í C ION
S T TODOS LOS D E T C R M JN-ANTES CUM^LCN CON L^ C O N D I C I Ó NPE C 5 T A F 3 1 i-ID ^D ' I"L S I S T E M A f-:'S EST^HL-ÍT
'-Je >X >!«: r * >;•:

ESCUELA POLITÉCNICA NACIONALFACULTAD HE INGENIERÍA ELÉCTRICA" "" —7—-- —- -_..DEPARTAMENTO DE ELECTRÓNICA '. . ' ' .TESIS DE GRADO; METODO'S Y PROGRAMAS COMPUTACIONALES PARA
ANÁLISIS DE ESTABILIDAD DE SISTEMAS- DISCRETOS"REVO-IZADA" POR': "BERNARDO" ISMAEL MORALES 3' * ' . ~ "~
S DE "ESTABILIDAD" DE "SISTEMAS DISCRETOS""CRITERIO D E ' E S T Á B I L I D A O DE RDUTH-HURWITZMODIFICADO PARA SISTEMAS DISCRETOS
GRADO DE LA EC* CARACTERÍSTICA 'NGRAD= 3
COEF* DE LA EC » CARACTERÍSTICAPARA POTENCIAS CRECIENTES DE Z
-O ,750 E2= -1 o750 E3= "'0 . 000. E4= - . •• 1 *000 E
DE LA EC « C A R A C T E R Í S T I C A ' -- .P A R A POTENCIAS CRECIENTES DE tf -^'- . :
"APi-tCADA LA TRAWSFORMACIO'N" BI-LINEAL^. " - ' • - '* 1—^ •
:. -'-~ ' '¡ .------ OTWO' COH2"= 2*500 . CO&3= 7»0 '00 ' COE¿t-=- -1 .5C
FILA -DE CEROS ES NECESARIO UNA EC , '. AÜ-X IL I AR
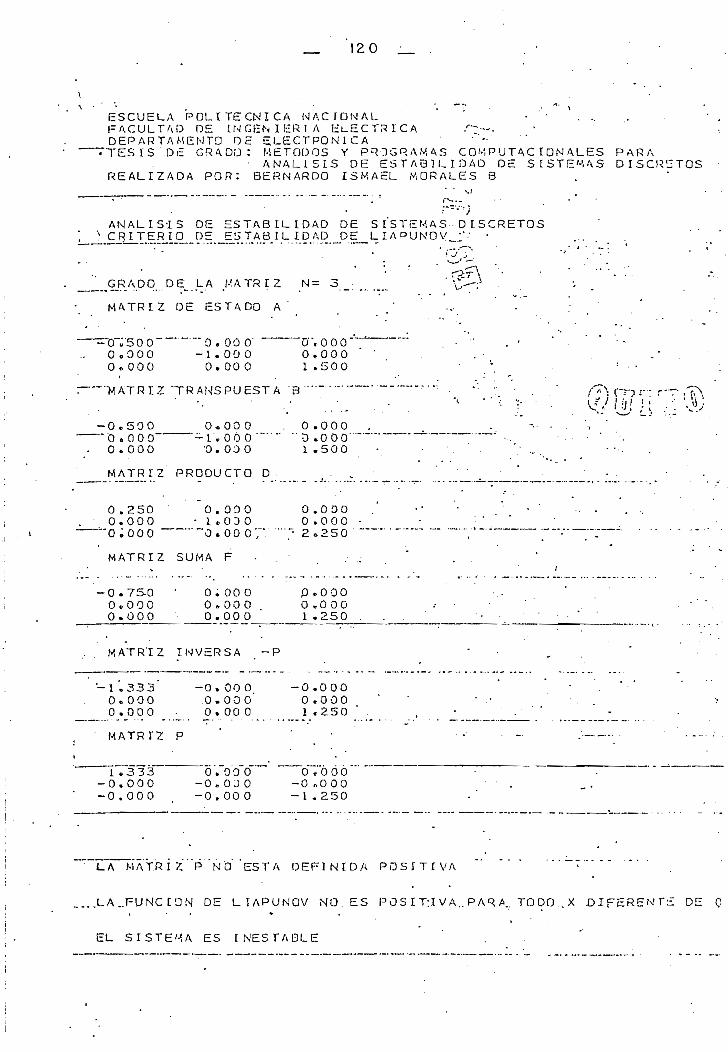
_ 120
\ •
ESCUELA POLITÉCNICA NACIONAL ' - ' ' • ' . . .FACULTAD DE. INGfEN I t£RI A EXECTS ICA f >DEPARTAMENTO DE ELECTRÓNICA '""
•""""."TESIS D£ GRADO : MÉTODOS Y PROGRAMAS CQMPUTACION ALES PARA• ANÁLISIS OE ESTABILIDAD DE SESTEMAS DISCRETOS
REALIZADA POR: BERNARDO ISMAEL MORALES 8
ANÁLISIS OE ESTABILIDAD DE 5 I STEUAS-DISCRETOSSñil.iPJ-S- — .lA.8.1.1: í.?AR..J5.§—L:rADUKIOY-- •' '
GRADO DE LA M A T R I Z N= 3 ' '" ' ^ ' '
M A T R I Z DE ESTADO A ' ' .,
"o~; 5 oo o. o o o" o", o o o"O « 0 0 0 -1.00 O 0*0000 * 0 0 0 0 .00 O 1 .500
"MATRIZ 'TRANSPUESTA '8 """
-0*500 0*00 O . 0 .000"O * O 00 -U 000 " " D .0000.000 '0. OJO 1 .500
M A T R I Z PRODUCTO D . . ,
O.250 0 . 000 O . O O OO . O O O - 1 * 0 3 0 0 . 0 0 0
"o;ooo 0*0007". " a.MATRIZ SUMA F • .
-0.7SO ' 0.000 0*0000*000 O.00 O O *0 000.000 - 0.000 1.250
MATR'IZ INVERSA -P
-1,333 -0.000 -0.0000.00 O .0.000* O.OOO0.000 • O*00 O 1 «250
MATRIZ P '
I .333 0 * 0 0 0 O «000-0.000 - O . O J O -0 *000-o .ooo -o,oo o -i.aso
UA MATRIZ P NO ESTA DEFINIDA P O S I T I V A
LA..FUNCÍDN DE LIAPUNOV NO. ES POS I T:I V A.. P AR/L TODO .. X -DIFERENTE D'E O,
EL S I S T E M A ES INESTABLE . .

121
ESCUELA P O L I T É C N I C A NAC.IONAL.. FACULTAD DE ÍNGEN I E£R I A Ei_t£CTR l 'CA -- . '' DEPARTAMENTO DE ELECTRÓNICA -
TES IS DE G R A D O : MÉTODOS Y P R O G R A M A S C O M P U T A C 1 UNALES P A R AA N Á L I S I S DE E S T A B I L I D A D De. S I S T E M A S DISCRETOS
» REALIZADA POR; BERNARDO ISMAEL MORALES B
ANÁLIS IS 'DE ESTABIL IDAD DE SISTEMAS DISCRETOS"CRITERIO DE ESTABILIDAD DE NYQUIST " '
"" 'GRADO DE LA EC » C AR ACTER I ST I CA"""NGRAD = "3'
~COEF;"'DE "LA" EC ; CARACTERÍSTICA "PARA POTENCIAS CRECIENTES DE Z • ' '- •
0 » 7 5 9 t\Z= -1.75Q A 3 = ' 0 * 0 0 0 . A 4= i . O O Q A
'# •*"~P. A T "CH'S" D E "LA" É CV""C A R'A CT ER I' ST T CA
R A I Z L — 0 . 5 0 0 0 - - O . G O O O J
.MAGNITUD DE LA R A Í Z = 0 « > 5 0 0 0
R A Í Z DENTRO DEL-CIRCULO UNITARIO DEL PLANO Z
.. OQ.O..O J
MAGNITUD DE LA RAÍZ - 1*0000
RAÍZ DENTRO DEL CIRCULO .UN ITARI O DEL PLANO Z
RAIZ3 1.5000 O . O O O O J . *. , : .
\D 'DE LA RAÍZ =' 1.5000
RAÍZ FUERA DEL CIRCULO UNITARIO DEL PLANO 7.
SI TODAS LAS RA ÍC.LS DEL S I S T E M A . ' - - ,ESTÁN DGNTUO D f=L C I RCULU U N I T AR I OEL SISTEMA FU ESÍAULE . . --

1 2 2
5 . 2 . 6 Ejemplo de aplicación. N-^ 6
Un sistema tiene como ecuación característica en Z :
3 2Z 4 .6 Z + .29 2 - .57Z - -189 - O
Y se desea el análisis de su estabilidad.
Solución:
Los datos para-; los programas 'de Jury/- Schur-Cohn,
Bouth-H y Nyquist, son: _ -
Grado de la ecuación característica 4
Coeficientes en orden crecientes a Z:
- .189, - .57, .29, .6, 1.
Los cuatro programas muestran que el sistema
cumple con las condiciones de estabilidad pa-
ra SvD. r ésto se ilustra a continuación:
ESCUELA POLITÉCNICA NAC I O N A L ' - - - .'FACULTAD DE INGENIERÍA ELÉCTRICA '
-DEPARTAMENTO D E " ELECTRÓNICA :-TESIS DE G R A D O S MÉTODOS Y P R O G R A M A S COMPUTACIQNALES P A R A
A N Á L I S I S DE ESTABILIDAD DE SISTEMAS DISCRETOS-REALIZADA POR: BERNARDO ISMAEL - MORALES 8
-ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS-CR-I-TERIO DE ESTABILIDAD DE JURY -
GRADO DE LA EC « C ARACTERÍSTICA N- 4
COEF* OE LA EC«. C A R A C T E R Í S T I C A"PARA POTENCIAS CRECIENTES DE 2
—A'l •=- " -OvlS.9""A2= • •' -0.570 A3= " 0 . 2 9 0 A 4 - ' - 0 ^ 6 0 0
F í l ) = . 1 . 1 3 1 0 _ . . ' " . ' .•• c -
1 J >0 • SE -CUMPLE 'CON LA P R I M E R A CONDIC ION

123
)= . . 1*0710 • ; J / - /;..", ' : •' - '
PARA N PAR SE CUMPLE CON LA:; SEGUNDA CONDICIÓN.
. i '. * " _-- . •##### :$&##>$:#;£ ATABLA DE JURY3!1*^******^**
": AÍ= ' " " -O . 189 A Z- ' -O., 570 A3- O . 290 A4- 0.600 A 5= 1 -C
|AÍ| < A5 SE CUMPLE CO*N LA TERCERA CONDICIÓN
1 » G O O B 2 ~ . ' 0 .600 83- 0 ,290 B4= '-".j -O ..570 • ' R 5= -0.1
-0.345 A 4= • 0,4-57 A
O»-3;4 5—B3 = -^ O
'Ov?51 A^-' 0.632 A3= 0*557 A
•> i'A3.| SE CUMPLE CON- LA CO.NDicrON
^.^^^^^^CUMPLEN TODAS LAS CONDICIONES EL SISTEMA- ES ESTABLE
A 'POLI TÉCNICA NACIONAL ' . :" ... "/- DE*' 1NGEN ÍERI A ELÉCTRICA ....... --- *'. ". ' ;
'DEPARTAMENTO D E ELECTRÓNICA . - - • - •TESIS DE GRADO : MÉTODOS Y P R O G R A M A S COMPUT AC ION ALES ' , P AR A
A N Á L I S I S .DE ESTABIL IDAD DE S ISTEMAS DISCRETOSAL-J ZADA-POR::— BERNARDO ISMAEL MORALES B ;-;-\vit'1 •
f S- DE ES TA:B í L I D AD" DE-S í ST6 MAS DISCRETOS•£'R'ITEH:RIO DE ESTABILIDAD DE SCHUR-COHN •
("GRADO DE -LA EC CARACTERÍSTICA -' -*N~j4
; _ • • - -N.I
'COPF^r DE LA EC . CARACTERÍSTICA ' " '"-"-V.P A R A POTENCIAS CREC1 ££NT ES ' DE Z -. ,,.".;

•o-
O-
• a ,
* "\0
69 '( * 0
o oo.*. c• •
OüO ' T
CÜ9 * O
000*0
OOC * O
. 1
68 T -O-
!/ v-.ccc;o
. OOC *0
000* 1
000*1 .—
000*0
ooc- o
691'0-
0 O O * p
o o 'o * o
009* O
0 0 0 * T
0 0 0 * 0
o¿s;o-
681-0-
o o o r o
06H* O
009* O
000° T
06Z *0
-* O
691 * 0-
eiaa
VT g-ldWfYD 35 . ÜVd 1-VbVd O
: - ----------- -- ------ T3¿'0 ----- : --- •
*— ---- — — -- 3JLNVN-JWbaJ.-3a-^>3Q
- 000*6 t 0 0 0 * 1 . 0 0 9 * 0
6 9 T ' 0 - - O . O O ' O - 0 0 0 - ' 1 _
OQO-I* O O O ' O 68 T " O— 0¿SaO--
_Q 09 •(>•-"" ..... O O O * - T ...... O O O a O - - 6 9 T * 0 --- • - - '—
. NOIDJ-QNOD VI 31WHD .3S ÍWdWJ "7 V^Vd O > JL3Q
• • £1796' O- '•
''••• f . _ - .3J.NVNiwy3j.3a nao
•- • .. -. " . . . 691 • O- 000* t' . " *
' • .' • . 000' T • ' 69 T * O-
3O
0 0 9 * 0 • . =178 =?

125
V A L O R DEL DETERHI NANTE
DET- " . ' -0*2176 '
-. r..._:%
—DET~<-O-PARA-L - IMPAR - SE CUMLE LA CONDICIQN-
DET4-
-O.189 O. 000 O „ 000
-O .,570 -O.-1S9 O .000
-O.-290 • -.— O «,570 O . 189-
o .ooo •• . i . ooo
o 0 o o o (']; 'Hf? 'ó'/bo o
o .ooo ' • - o . o o o
o.
1,
0
1
0..
''., '. -ó
.600
. 000
.600
«570
0.290
O.OOO
1 . 000.. -
0-290
— 0
. 0
0r
0
.570-
* 000
«,000-'
non " . -
.600
-0
0
0
1
. 189
• 000
-000
;ooo
• •'.. . o
-o
0• :
0
.000
. 189
*000
0000
0
' — o
-0
' 0
-
*
*
.VALOR D E L DETERMINANTE " : ' . - - .
_DET^ — -.0 .0496 - ,—" " - - - - —I. ....
DET > O PARA L PAR ' SE CUMPLE LA CONDICIÓN
-ESCUELA POLITÉCNICA N A C I O N A L - ' r : : •FACULTAD DE INGENIERÍA ELÉCTRICA" . - ' • -" . *DEPARTAMENTO D£ ELECTRÓNICA • " . .TESIS DE G R A D O : MÉTODOS Y PROGRAMAS COMPUTACIÓNALcS D A R A
.... ' A N A L ISIS--DE'ESTABILIDAD ' D E SISTEMAS -DISCRETOSREALIZADA POR: BERNARDO ISMAEL MORALES S
ANÁLISIS DE ESTABILIDAD DE S ISTEMAS DISCRETOSCRITERIO DE E5TABIL IDAD DE ROUTH-HURWITZM O D I F I C A D O P A R A S I S T E M A S DISCRETOS
GRADO DE LA EC. CARACTERÍSTICA NGRAD= 4
COEF. DE LA EC. C A R A C T E R Í S T I C AP A R A P O T E N C I A S CRECIENTES DE 2-
_..E1 = o . 139 •0.570 .0 .290 0 .600

\26
COEF. DE LA EC . C A R A C T E R Í S T I C A '-PARA POTENCIAS CRECIENTES DE W- A P L I C A D A LA TRANSFORMACIÓN BI -LI
COE1 = 1*071 COE2 = 2.416 . 4.266 CÜE4- 7.096 CCI
* TABLA DE ROUTH-HURW ITZ
2
3
4
5
-OQO
6 U274
3 . 44 Q
O «.41 4
0.947
3*7-90 -'-.-.0.947 .
2.136 . 0.000 -
0.947 0*000
O «000 . G.OOO
-O .OOO 0*OOO- -
— SI NO EXISTE CAMBIOS DE--SIGNO EN LQS--ELEVENTO S —DE LA PRIMERA 'COLUMNA EL SISTEMA ES ESTABLE
¿£^^^%^^^fy# %^^^3t?£Jf3r3f3;3f.3:%:-3í
ESCUELA POLITÉCNICA NACIONAL - • ' :' . " • - • . ' • " . . . 'FACULTAD DE INGENIERÍA ELÉCTRICA ". .•"'• .. •-•'.•-"••: '. • ••- ...DEPARTAMENTO DE ELECTRÓNICA - ' . . '- ' " •TESIS DE. GRADO: MÉTODOS Y PROGRAMAS COMPUTACIONALES PARA
ANÁLISIS DE ESTABILIDAD DE SISTEMAS DISCRETOS-REAL-IZADA POR: BERNARDO ISMAEL MORALES 3
fr.\- ANÁLISIS. -DE- ESTABILIDAD--' DE-- SISTEMAS- DISCRETOS
CRITERIO DE ESTABILIDAD DE NYQUíST
•GRADO DE LA EC * CARACTERÍSTICA NGRAD='4
COEF. DE LA EC. CARACTERÍSTICAPARA POTENCIAS CRECIENTES DE Z ' ' ''
-0.1.89 A2 = -0*570 O . 390 -'.
RAICES DE LA EC . C A R A C T E R Í S T I C A
O.600
R A Í Z l -0*500 O O . 8 0 6 2 J
- MAGNITUD DE LA RAÍZ = 0«9487
RAÍZ DENTRO DBL CIRCULO UNITARIO DEL PLANO Z

-RAÍ -22 — —O ¿3 00 O 7
~ lar--OvOOOO-J"
-MAGNITUD DE LA R A Í Z — ü . ,3000- - -
- R A I Z DENTRO DEL- C 1 RCULO-UN I T A R I O DEL-PLAMO Z
RAIZ3 0.700 O -O « 0 0 0 0 J -" - - ^ n~.j Te", i ''. '. _ > . V—." •--— •
MAGNITUD DE LA R A Í Z = - 0 * 7 0 0 0 ,
RAÍZ DENTRO DEL CIRCULO UNITARIO DEL,PLANO Z
-RAI-Z4 -0*500 0- -0 .8062J
. O. «943 7"
-DENTRO DEL -CIRCULO UNITARIO DEL^'PLANO Z
f ' :•,
St TODAS LAS RAICES DEL S I S T E M A ' .-ESTÁN DENTRO-DEL-CIRCULO UNITARIO —EL SISTEMA ES ESTABLE /<y n/j ¿j
5.2.7 Ejemplo de aplicación Ng- 7
Analizar 3.a estabilidad de un sistema descrito
en variables de estado cuya matriz de.estado A
es:
A —- .1 O.
O. - .9
O. . O.
O. O.
O. O.
O. . O.
0.7 O."
O. - .3
El orden de la matriz es 4
E] análisis de la estabilidad del sistema por me-
dio del criterio de Liapunov, nos da que es esta-
ble y se ilustra la salida del programa a conti -
nuaoic'n: " ' .

1.28
ESCUELA P O L I T É C N I C A NACIONAL . ^ - , 'FACULTAD DE INGENIERÍA ELÉCTRICA " " ^^ • ;
-DEPARTAMENTO DE ELECTRÓNICATtsis DE GRADO: MÉTODOS Y PROGRAMAS COMPUTACIDNALES
ANÁLISIS DE ESTABILIDAD DE SISTEMASREALIZADA POR: BERNARDO ISMAEL MORALES O
PARADISCRETOS
ANÁLISIS DE•CRITERIO DE
ESTABILIDAD DEESTABIL IDAD DE
S ISTEMAS'"'DTSCRETOSLIAPUNOV -• . .
GRADO : DE LA MATRIZ N~
MATRIZ DE ESTADO A-
-• \0
000,000
0 . 0 0 0
0..00 O-O» 90 O
O. 00 O0 . 0 0 0
0 * 0 0 00*000
.0,700- - - O .000
MATRIZ TRANSPUESTA B
- O » 100o» oooo .• o o o0.000
0 * 0 0 0-0.900
0 ,0000.00 O
MATRIZ PRODUCTO D
0.010O. 000.0.000-O o 000-
0 . 0 0 0O* 81 O
• 0 . 0 0 0--KUOO O
O .000o *ooo0.700o . O Ó Q
O.0000.000O . 0000 .300
O o O O OO* OODo „ o o o
-0 .300
0 .0000.0000*490
Ó. 000 ' . . •O« OOO - -o.ooo • . - • • ; •n ,. non
MATRIZ SUMA F
-0 /990O o O O OO . 000 "
-O. 000--
O. 000-O .190
0 .000-- O..QO 0-
C .000. O o O O O-O .510- O .000
O. 000o .ooo0 .000
•0*910
MATRIZ INVERSA -P
• 1 > O I OO .000
-O--. O O O --O D 000
MATRIZ
-
—
P
0— o
— o-0
. 00
.26-09. 00
03o-0
. 00
... _ — _^. i-0
-
« 0 0 0..000* y 6 i -. 000
' 00r\- 1
.ooo
.000
.000 -•-• OS9 .
. .
-1-vOÍ O—• O . 0 0 0• O . 0000 .000
— U ¿"Ü U U5. aó3
-0 .0000 .00 0
-u ,uuu-0.000
1 * 3610 .000 .
• • - u * uuu " - - . . - . - -»-0 .000 ' --0 * 000
1.099-
LA MATRIZ P ESTA DEFINIDA P O S I T I V A .
LA FUNCIÓN DE LIAPUNOV "ES P O S I T I V A P A R A TODO X DIFERENTE DE O
EL SISTEMA ES ESTABLE

129
5.3 Conclusiones :
Los resultados obtenidos en los siete ejemplos de apli
caci5nr ' expresan claramente la agilidad y precisión de
cada uno de les programas computacionales propuestos -
para los cinco métodos de análisis de estabilidad. To-
dos los programas pueden ser usados para analizar le.
estabj.lldad de un mismo 'sistema con el objeto de che -
quear exhaustivamente los resultados. •
Aun que como se puede ver los resultados de cada progra
•iría no dan lugar a equivocaciones. " - " ..
resultados de cada programa deben ser chequeados
e para determinar la estabilidad o inestabi
'de \in sistema. Los programas también cheq\iea,n
posibilidad de que un sistema se encuentre en el
de estabilidad,
terminar: de un breve análisis de los coeficien_
'ü'e la Ecuación característica en Z , se puede
ñe antemano.* si un si.stema podria ser o no - .
/ esto es, para que un sistema sea estable ne_
©e-fí=-aXiame.nt'e el primer coeficiente ( termino indepen
d'e 7¿) de la ecuación^ debe ser menor que ^ei ulíi_
coeficiente (término de zH) . Caso contrario el
e's inestable .
m

JURY
DIAGRAMA DE FLUJO
I N I C I O
IMPRIME
TÍTULOS
L = N-H
LEA
1= I ,
IMPRIMA
AU) ]>
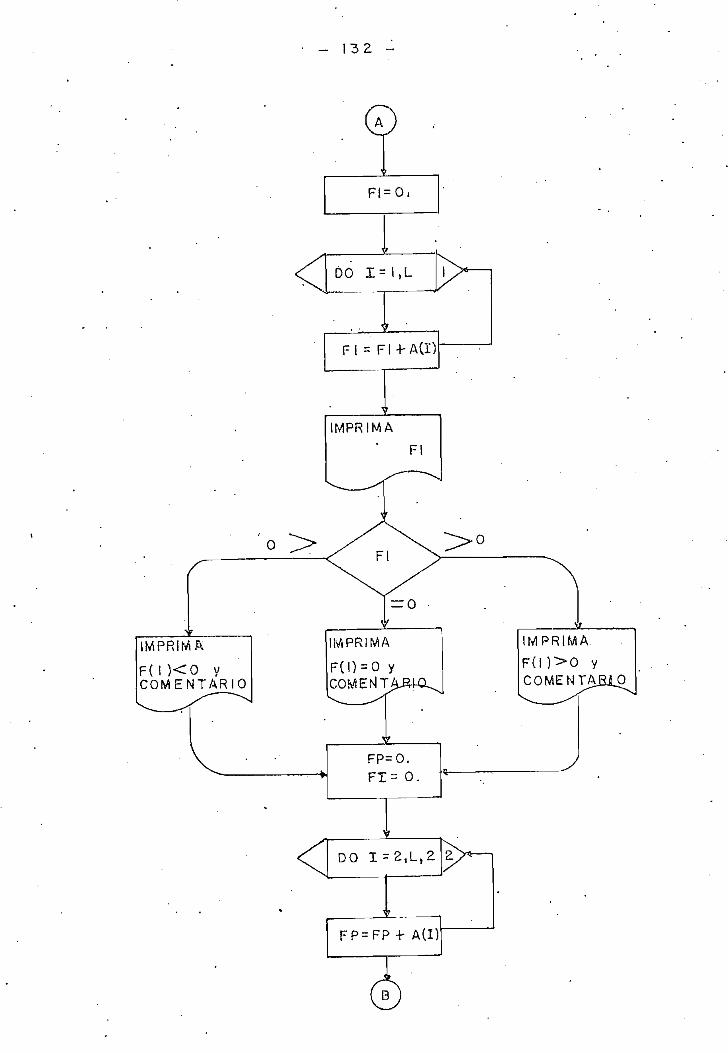
IMPRIMA
F(!)<0 yC O M E N T A R I O
F! = 0,
IMPRIMA
F(0 = 0 y
JfcFP=0,FT^ O.
IMPRIMA.
F(I)>0 yCOMENTARIO
DO

i 33 -
IMPRIMA
F(-l)<0
COMENT
DO 1 = 1,1-, 2
A(T)
F = FI-FP
- t
IMPRIMA
^~1F
IMPRIMAF(-n<oCOMENTARIO
<°
IMPRIMA
F(-0>0
COMENTARIO
IMPRIMA
F(-l) = O
COMENTARIO
O
M ¿ N 4 - I kg—

134 -
IMPRIMATITULO
X, A(I)I=UM
IMPRIME M ,
C O M E N T A R I O
e
/ ^X
'IMPRIME M,
C O M E N T A R I O
^-^r^~^
IMPRIME MI
COMENTAR] 0
^ ^^ •*"•
«, '-*
r
IMPRIME
COMENTARIO
IMPRIME
1 , B ( I ) I = - 1 , M
M=M-I
©

I 3 5
©
A ( d ) s
C O M E N T A R I O
O J = I , M
IMPRIME
I , A ( L ) I = I , M
IMPRIME M IMPRIME M
COMENTARIO

- 136
USÍA DO
SJ08_c_
C * ESCUELA POLITÉCNICA N A C I O N A L 'C * FACULTAD OE INGENIERÍA ELÉCTRICA-* >""*>^ O 0/7C * D E P A R T A M E N T O DE ELECTRÓNICA * :'" ( f t \ r i h J l J í /
_C. _# QUITO . . ECUADOR. _, - ' M*~; * Wl—' <-> 'C . ' / /-,.-»*•<"*''C * TESIS DE GRADO . ' --••-WC * MÉTODOS Y PROGRAMAS COMPUTACIÓN ALES PARA " ''-V.,%C _*_.ANALIS IS_.DE._E.STAQIUI.D4D DE SISTEMAS DISCRETOS V"•;--. .' ' ."C - ' - .- "- .J—"-—::. - ."vt .C * DIRIGÍ DA POR : ING * MARCO.BARRAGAN ' - :^~ " <'-"1.C * .REALIZADA POR: RERNAROO ISMAEL. MORALES. B. • V^£C_ .' ..-. • •' ^ t-v. vc * MÉTODO: CRITERIO DE- ESTASU^&DAD DE JURY * - ': _ _ ; ; ~ • •_—-. rjj
c - NOMENCLATURA: f • ' r n^7 •'-.' ' ¿i '' >:"í.:~i-j- -:• i^"Tl ' ' ^_0" - M .GRADO DE .L A_.EC «».__C A R 4CT * ^v/ t - - , ;-.• v-¡ "T. - ¡:_ , . ' . .'. ^
C - 'lL NUMERO DE COEF. DH EC. TCA-RACT. . : " ' . - • • " . . : - • " " ' • - UC - " A VECTOR EN DONDE SE ALMACSNA'N LOS CDEF* DH 'LA EC* C & P A C T - ^~C" - M NUMERO DE ELEMENTOS DE CADA FILA DEL ARREGLO DE JURY - (^C^ - B VECTOR AUXILIAR. R A R A INVERTIR EL ORDBN OE LOS ELEMENTOS DE CADA-
"C DEL ARREGLO ; - - ^ * r^^ :• , . •: ¡, • i ¡ ¡ } - • . ¡ :;: ¡, • , ¡ j • : - fc
1 ' • . D I M ENS 10 N A C 1 1 } * B í 1 1 ). . -' *' \) > - - * • j i I í i i | j • ¡ 'v-v / x--' j ] i • ;•: I'2 _ V/RI TEt 3y ICO ) r - ' ^—-^^ • ;"1 í ; ' I1 ' : • . , - • - . ' - '• "í
>3 ; 100 FORMATC/ / / / / ! O X » ' ESCUELA POLIT-E^NICA N ACTONAL 0 / 1 O X ,' FACULTAD DE-»I.N: • *GEN-IERIA ELECTRIC A 1 / 1 O X , 'DEPARTAMENTO DE ELECTRON I C A ' /I OX , ' TEES T'.S-CD
• *E GRADO; MÉTODOS Y P R O G R A M A S C.OMP.UTACIONALES PAPA « / 2 6 x , f A N Á L I S I S D••"' *E_ ESTABILIDAD DE -SISTEMAS DISCRE-TOS 8/10Xv 'REALIZADA PQR : BERNARDO ..*
*ISMAEL MORALES B'xJ \- . - -' ,. - * 4-. WRITEt 30 ?CO J ' * ' ' • sv
200 FORMATÍ//10X, 'ANÁLISIS DE' ESTÁBIL IOAD,íCOE SISTEMAS 'DISCRETOS v/1*cp.r.TEfio ..DE, .FST;A-BILIDAD_DE. JURY*/J j-;''.--''\^. -._ ^ o^^'^-'''
. - C SE LEE EL GRADO -'DE LA EC, CAR ACTER TST IC'A "/ /"'/ a? f¿\?' • - 6 , ^ READt 1 , 150 N
7 i 15 ' F O R M A T C I 2 ^ , . ' .. X ""-" '*' ;" --*-,."""' ^ -1 """"^ ,1' 3 WRITEC 7-i, 6)N - - '__ '^ , ' " : • *'~ :-yv/. "' .~"g '6 FORMATÍ //I OX""'GR'ADO D*É"LA"ECo CARACTERÍSTICA-- - N=t.I2/')10 tF(N.LTB 2»OR«.N.GT*9) GO TO 1000 . '•• % •-'-..-.-v.: -.- "'
S- ' C SE LEEN LOS CHEF. DE LA EC » CAR ACTER I STIC A"" — ;-—"""" .T*2 "READC i *i 3) CAC i í ,"i=i.t L) • . " . " " . . -13 13 F Q RMATCL OF8 .3 ) ' .. / - - ' . . • . • - . .14 ' " -: WRITEÍ 3, i7 ) • .' . " .- .' '15. ' 47 F O R M A T Í / / I O X , 'CQEF. _O E L A EC, C AR ACTERIgTICA « X 1 O X, «PARA P OTENC!
__._- — "*CRECri^NTES DE"2 l / 3 " ". " • ""' '" "'C ' SE IMP°(ME LOS COEFICIENTES DE LA EC* CARACTERÍSTICA '
-I 6 | W R I TE ( 3 . 19 ) ( I » A ( I > . I = 1 .1_ >
. -c—. SE 'CALCULA- ¿L- VALOR" DE 'LA""EC¿~CAR'A'CTERT5TICA"P-ARA' T~- '18 ¡ F l = 0 • . . ' • . . " .
1 DO L I — i *L . ' . .: - ' • . ;
• w n T'TE í 3, '20" j F i : : " ~ = ""20 F O R M A T C / ^ / 3 OX T 60 C 3- ' í ^/14Xt « F C l^ = s , F14.4) . • - . - . - .
IF( Fl )7 , 9, 1 1 • • ' ' ' '7 W R I T E Í 3, 250 1 ) •
~2SOÍ"~~FORM4Ti r / /10XT 'FTl")'~<ü ND""S E~C"UMPL7E~'COrr'L7A"~PR T MER"A~CnNO~n:TON1( A/FOX™
GO TO 129 • W R I TEC ^, 240 ) __ . _ -„ '240" FORMAT'í / / lüX," t 'F(rT=0" LA "PRIMERA CONDICIÓN) "SE ENCUENTRA "EM" "ElT"'Cl MI"
ATE ' //I Q X \ 6 0 Í ' - < ) / )GQ TO 12
1 -1 1 W R I TE í 3 f 1 4 J _14 FORMAT f / / I O X , «Fí 1 )>0 SE CUMPLE CON LA ^RIMEPA C O M D r C T G N ' / / l O X i 6 0 (
* ' - ' ) / ) ' / . .C SE CALCULA EL V A L O R DE LA EC. C A R A C T E R Í S T I C A P 4 R A -1
Z FP=FP-»-<U I )DO 3 1 = 1 « L . 2

- 137 - -
F-FI-FP - - . . • ' • j.W R ITEt 3. 30 ) F ' . .
_ 3 O F O R M A T [ / /1 4 X , 'Fí-l ) - ' » Fl 4 . 4 )J ... _. ^I f= ( N/?. #¿-N ) 25 ,26» 25 • .. .
25 IF(F)3ñ,39,40 . • -.38 W R T T E Í 3 . 3 3 )
__33^ FORMAT t / / 1 0 X , * F(-i ) <Q o ARA_N__1 MPAR__SE_ CUMPLE CON LA SEGUNDA CONDIC_# i o N ' / / i o x , & 0 í * - ' } / ) ' " "~ "" " " :
60 TO 63 ' "33 . W R I T E f "U ?40 1 ) ' - ,_240.1_ FORMAT Í//1 OX, «Fí-l )=0- LA S EGUND A_ CONO IC IO N ...SE^ENCUF.NTR A_JH.N _EL_LIMJ_
#Tfr.' // 1 ÜX ,60 í * - ' )/ ) " " ' .,--• - -: • - •GO TO- a O ' ' '^ -:-'""" *"^---
40 WHITE f 3. 2502 ) • - • • ,-^" *- —••>—•-, "~- '_J>5Q2 FORMAT í ' /I O X , ' Fí-l ) >0 RARA__N I'MPAR' NO .SE. CUMPLE CON " L A - SEGUNDA - C Q N _
' . *DIC ION ( /V l 'OX» 60 C 5"- « J /)-" " """""',.-•" ^.rf^ . "v..,.,.", -^.^.-»^-iS. ... *.• GG TO 30 >• X.
2-6 IF( F)69, 39/71 - ' . % • /" . ,59 u/ 5 i TE í 3. 2503) ¿_ ' •'' j.-'"-v^>-
~~25Ó3"7~~FO"RMAT C ^ > 1 0 X » "'"F ("- í Y<0 P Á R Á ' V N PAR. .NO SE CUMPLE CON LA"" SEGUNDA CGNOI*c ro N1 //1 ox e 60 í r - * j /) . . ' • .* >-¡ -.'.-. .-,. ' ^
G O TO- 60 • /.^«r'' ' ..--•* i*-'-* ^-> ' - - -^ ' .. •
71 W R I T E ( 3 , 7 3 ) ^____-'' -':'' -" • ' —;"- ' ' """73 FORMAT Í//10X", 7~FÍ-i-?>0 ^ A R A N'.'PAR SE CUMPLE CON , LA.:. SEGUND A -COWDICT O--1
. " *N '. / /1 O X, 60 í ' - ' ) /) . ' ' .' ..:' , : • f'.' '• v-- " "«,- ',S ' í
SE COM TENSA A C ALCUL AR POR ..F ILA S LA. C _C
;'
DEJUR.Y
222 FORMAT C / / 1 0 X * 23Í f ^ e ), «TARLAr-Oq J U R Y 8 * 2 3 :V/ R I TE ( 3 , 1 S ) : I , A r I ) , I = 1 , A )
)/)-._..:.. -. ^ -~ íFORMAT ( / /8X.To(2xT ¿ A"» , 1 1 5 » =r; -»F i o". 3 ) > }~:\-;- v':v/_-.rJ —;^í::^rcj• IF( A B S Í A ti ) > -A Í Mí ) 34 ,35, 36 f-^ í- -"• ..-•»"-" ,Z^U-^-^.C! -
34-4-1
W R I T E Í •;. 41 ) M = '. !*!A ZÁ £ / iJLLuL, í-. J__<-, A * 'SE CUMPLE CON. LA*"TERCERA CONDICIONA
• GQ TO 10 , ' ', ? -,35 V/SITEÍ 3, P4-02 > M • ^ ;- ./ 724-02 FORMAT Í / / 1 0 X » ' i Al I = ' | A r » I ' l V
GO TO 10V/RI TEÍ 3» 2504) M
LA- CONDICIÓN DE-'-HSTABIL-TOAD SE E
2504 FORMAT ( / / 1QX, _y j Al ] > - A * » I V, / V^J O SE "CUMPLE CON LA TERCERA CONDTC,
Í O IFt M.LE. 3J GO 'TO 60 \ - *"L • " ' ' :" - - ... .. - • - ' ' "' * " ' S\ * .-^DO _ 5 I =1 »M . , . . \^'. '-.'W. />> _ '" -^v ~--V«* --' - ^ f^\>V ' ;¿
' nr? s-^ •—n Cljt.tf u) 1 4° • «\¿ilj aíj fg l ¿.
= í M+1
W R I TE í 3 , 17 ) C C . S í I ) , I = 1 , M 1FORMAT ( / /ÜX , 1 0 ( 2 X t 4 B '", II , ' = ' , F.10.W RI TE ( 3 , 22 ) •
/i o'xvóo ri~"<")~/'")"~: • ~- *17.
~22 FQRMAT C//1
DO 8 J=l ,M
T~L~A~""CONDTCT
8 A í J 3=R C M + l ) *D í M4-2-J )-BÍ 1 ) * T 3 Í J )"C SE' IMPRIME POR"F ILAS" LV T A B L A DE"JUR~V~
' . ' IP( AÍ3SÍÁ f l ) ) -A !3S( A ( M ) ) ) 57 , 58,6157 __ WR I TE í 3 « 250 5 ) M __ ._ -
"2505 "FORMATC/" / L O X , * ["A"f"T <c ~1*V' * i i s f 1 WD "SEGQ TO 10 • . . - " " . -
50 W R I T E C 'a, 2402) M .GT TO 10 * " ___^_
"61 W ^ T T E t 1» 6?. ) M' " ' ' " ' ' '62 F D R M A T Í / / 1 0 X , * | A l J > l A ' » I l « » l SE CUMPLE CON LA CONDICIÓN ' / )
GQ TO 10 • . '60 W R I T E C 3, 55) * / • ',-55 F O R M A T Í / / 1 ú x ; 6 0 t"''*'1")"/ l'O <T"r'S~I ""SE" ClTMprrE"HTTn DAS"L AS" "CONDICIONES -EL " S
SISTEMA ES E S T A B L E 1 / I O X , 5 0 Í ' * ' ) / / )1000 s rnp - -
SENTRY

SCHUR-COHN
I NI CIO
IMPRIMA
TÍTULOS
N N = ,N 4- t
LEA
= l , N N
IMPRIMA
1= I , N N

- 139
IMPRIMA
TITULO
DO L= I,N
' • iIMPRIM A L
S- -N
LL=L-i- 1M' =LI =1
r 'r
DO K = I,L
DO J = l. M
A ( T , J ) = B ( K )
I = I-M

O

^ 3: 1
H 11 H -i-
,!> c_ M u o
o o <L. h r~ r~ "k
<í
o o 11 ro r
(íH
£(i
U
N r i

oa
l-W=l
T
61 oa
-*<8I oa
©3 1 7 1

- i 43
©DO Ü-LL,M
•Ad, J)=0,
.M = M-l
L2-ZL

__ 14
f~~*F
CALL
D E T E R
(L.DE^A)
IMPRIMADET OP A R A L íMPARi
IMPRIMA
DET
IMPRIMA 'DET OP A R A L P AR
IMPRIMACONDICIÓNEN EL LIMITÉ
IMPRIMANO CU M PLELA CONDICIÓN
M PRIMACOMENTARIO
<0

145
S U B R U T I N A DETER
N i C l O
=2 L
D O I = I , N 2
P1VOTE = A(I,I)DET=DETfPiVOTE
I P 1 V O . T E I
0.00000!
:C(l tJ) = C(i,J)/PIVOTE
J
DO K=l , N
DET= PIVOTE

146
•CERO=A(KtI)
DO *J= I, N2

t 47
L I S T A D O
$ JOBCC *. ESCUELA POLITÉCNICA NACIONAL . *-C *»FACULTAD DE INGENIERÍA ELÉCTRICA *C * DEPARTAMENTO DE ELECTRÓNICA *C * QUITO ECUADOR *
-C—' --*—TESIS CE GRADO --- — •- " -.'A- o ~:"";. " ' '-'/ t --.-• ..C # MÉTODOS Y -PROGRAMAS CQMP UTAC ION A LES ;-P ARA' - - • ' • " '--"-'.<.''C * ANÁLISIS DE ESTABILIDAD DE S ISTEM A S-: D ISCRETQS " .CC-~ «--MÉTODO :- CRITERIO D E--EST A E IL I D AD DE SCHUR-COHN *
-C • . , - . ' :
"c - NOMENCLATURA: . r-_ .. ".':-' . - . , :C - N GRADO DE LA EC. C A R A C T * . . '-->T)* ' • '. - " :
-C • NN- -NUMERO DE COEF » DE- LA EC. C A R A C T 0 - ' -'c - 'B V.ECTOR DONDE SE ALMACÉN LOS.COEF. DE LA EC- C A R A C TC - A ARREGLO MATRIC IAL P A R A FORMAR LOS DETERMINANTES DE SCHUR-COHNC - DET VALGR DE CADA DETcRMINANTE DE SCHUR-COHN
"• ' v— _ * •— ~ • .
¿í. _V C~ N * ' D I R I G I D A POR : ING* MARCG B A R R A G A N " ' ' - . . - . ' -~ •'"• ' . - C _ . ^ * R E A L I Z A D A POR: BERNARDO ISMAEL MORALES B« "* ' - • ' .
1 " ' D I M E N S I O N A f 21 ,21.) « B C 11 ) . " • C-¿} . . ' .-' ' . • . '2' • W R I TE (3, 100) ' ' *-.^ . : . . . - ' *.3 100 í r O R M A T ( ^ / / / / l O > ; ,' ESCUELA POLITÉCNICA NAC I ON AL * / IX) X v ' FACULTAD DE I N
._-.—„ , ^M)ííGENIER [A ELECTR C C A ' / 1 O X i «DEPARTAMENTO DE ELECTRON IC A f / 1 O X , « TFSI S D' •*E GRADO: MÉTODOS Y PROGRAMAS CCMPUTACIONALES PARAf/26x, * ANÁLISIS o
" - • • • #E ESTABILIDAD .DE SISTEMAS O I SCRETQ S r / 10 X v T REAL I Z ADA POR: BERNARDO-.. • " • " - ; ' ^ ISMAEL MORALES B 1 / ) • ' . . ."™4 — .- W R I T E Í 3 5 1 1 1 Í - •>-..
•5 .111 FORMAT C / / 1 0 X » T ANALIS IS DE ESTABILIDAD DE SISTEMAS D I SCP-ETCS • /I O X , '. , ' *CRITER 10 DE .ESTÁBIL í DAD DE SCHUR-COHN* /) - -..; -.-.-
1 - C ' - . SE LEE EL GRADO DE LA EC*- C A R A C T E R Í S T I C A " ._..£„. R E A D ( l t 5 ) N . - • ; " " • • - • •- ^\-^.. ._.,:.. "-.-.
8 W R I TE ( "J t 1 12 ) N '• ' • - •'• o' \"'l '• \ ".. '9 .112 FORMAT C / / 1 0 X , « G R A D O DE LA EC * CARACTERÍSTICA .. ' "".N=r , 12/i
—-1-0— IF(NBL-T» 2 . D R . N 0 G T B 9 ) - - G0: -TO -. í 80-- -- . • '
C ' SE LEEN LOS COEF* DE LA EC» C A R A C T E R Í S T I C A ' :
12 ' - R E A O í 1 t 7 ) ( B í I ) » E = l ,NN) • -. .--13 7 ' - - F O R M A T Í i OF3 . J) -.'....™ „ ., ...„' ... •• .'- 1 4- - W RI T E C 3 » 113 ) . - • ''15 113 . F O R M A T Í / / I O X , s coEFo DE LA EC, CAR A C T E R I S T I C A ' / i -ox, * P A R A POTENCIAS
! A C R E C I E N T E S DE Z ' / ) •c SE_. TMDrnME--LGS -COHF I C IENTES--DE-L-A EC-c— G-AR ACTER--I-ST ICA---— ~: ¿...,
16 WR ITE( 3, 3) ( K. Bí KJ ,K=1 rNN 517 3 F O R M A T C / / 8 X * i O t 2X P ' B * P I I , ' =' » F i 0 . 3 ) y } " " ' : ' :"

SE FORMAN LOS DETERMINANTES DE SCHUR-CQMN ----------------------- -•V / R I T E Í 3, 152 )F C R M A T (/- / 1 0 X , 15 C ' * * J t 1 DETERMINANTES DE SCHUR-COHN ' , l 5 ( ' # f ) / )DO 22 L= 1. N ' .W R I T.t C 3 » 40 í L. — — — :* • •• -• •. ••• '• • • "" - - -- ... . ,_._ . ...F O R . V , A T Í / / 1 Q X , Ó Q í f-t J / /10X. 'DET ' , 1 1/ íLL=L+1 • .
• I — 1 •DO 10 K = 1 ,LDO L 1 J= i.MAC r * j )=a Í K >1 = 1+1 .
DO 12. K = l > U .DO 13 J= 1 » MA C I » J) =8 (N-K + 2Í
I = L + I ' " - 'DO 14 K=1,L , .DO 15 J = iJ_,M
"A't "J t I ) — 3 X K )i=r - t - i ' . • - -M = M-1 " .
-IFÍ L-.EQ.-1>- GO- -TO-35 .M = U-1
DO 16 K-2rL .-DO 17 J=l ,M -• --
A C J » I )=0i = t + i • • :I = Í-M ™
„ 1=2DO 18 K=2DO -1.9 J=LlA C L 9 J)=0 oA ( J . I ) =0 .1 = 1 + 1
18 1 = 2 * 1 - C M + I iM=2*L-1 ' / ;• . f^,I=L+2 - ^o
„ . DO-2O • K= 2» L —-——' ' v-DD 21 J=U_»M - ' . ^C??A C I . J) =0 . -.-^
21 £II^jL ' : '_ !^J
C SE IMPRIMEN LOS DETERMINANTES' "'
-ÍF( N.GT. 4) <3'U TO 350-- - "XDO 45 1= 1 ,L2 - ic'rf iW R t T E ( 3 » 65 ) (A ( £ . J } ,J= 1 t u.2)' ' r^F O R M A T C X / I O X » 1 O C 2TX . F 1 O - 3 ) / > .' i-"NN=l -. - .. . • ^'

I 49
— 61 —
828384-™
^ 8586.87
' 89' 90• 91
93• 94
O : :
96' 97
98.Q Or- y •
"100
102
I. 03; n f\5
1 06107108
. 1 09,110 '§11 1-1-1-21 131 141 15-1 I 6™1 17 .1 181 19
~i"20
1-21' "122123124
C 'C
C
1
505133-82 - •
3184
•3242
738622
i. 22
.
' V
i • -
LO- 1
-. .
"*34 "
SUBROUTINA P A R A EL CALCULO DEL VALOR DEL DE TERM [ N ANTE UTILISANDO' EL MÉTODO DE REDUCCIÓN DE GAUSS
• - - C A L L DETEf í í L .OET, A) - 'SE IMPRIME EL VALOR DEL DETERMINANTE
' WRI TE; "j,n DETFORMAT ( / / l O X r * VALOR DEL DETERM ÍNANTE' // L 0 X * e D ET= * * 6 X „ Fl 4 . 4 )
-- IF(L/2*2-L) 51 .50,5! - -- - „ , - s*\ . -—>I F C DET )7 3 , 3 2« 33 ' - " - - . ' ' }\ .' f? •; ?• - '• \F ÍDETJ3 1 , 3 2 » 73 • .. ' Xj L¿; J V ¿ '- •---
W R I T E C 3 , 8 2 ) ' . . ' ' . * *" * . ,,. - F O R M A T £ / / l Q X s * D ET - ->• -0 P ARA--L- PAR SE CUMPLE LA C O N V I C I O N ' / J
GOTO 22 - - • . ' ,WRI TEÍ 3, 64) . ' ' - - 'FORMAT C / / 1 0 X , *DET < 0 PARA L IMPAR. SE CUWLE LA CONDICIÓN1. / )GOTG 2 2 . . . . . . . - — „ . . „ - _ . . .„ . . . ' . ,*W R I T E C 3* 42 ) - . • . ' 'F O R M A T Í / / 1 0 X * ' LA CONDICIÓN DE EST A B IL 1 DAD SE ENCUENTRA EN EL LIMI
* £ * / ) • . . ' , • • . . - • • - .G O T O °° . . • ' . . . . . . . . _ . . . . . - • • ;V / R I T E C 3» 36) . " .FORMAT C / / 1 0 X , «NO SE CUMPLE 'CON LA CONDICIÓN DE ESTABILIDAD6, ' )CONT INUE .- ' 'W R I TEC 3 9 122 ) "- ' ."• •FORMAT Í/ /10X, 60 í e * ? J/1OX , f SI TODOS LOS DETERMINANTES" CUMPLEN CON 1
*A COND-EC ION ' / 1 0 X » « D E ESTABILIDAD • . EL SISTEMA ES EST*3LE r/ l OX.»60 í >** ) / ) •
S T O P • • • • . . . .E N D ' ' • • • • • • : " - . . -"SUBROUTINE DETER( L « DET » A J ' ' '. . ' . 7 • .DIMENSIÓN A ( 2 * - 2 1 1 -- -- . _ _ . , . - - - z _ . . - . - •
DET^I o '' . " . ' " " - . -. . ; - - . - •DO 4 1 = 1 ,N2 ' - . • " ' . , ' • ' . - - ' . - . ' ' - * . . :
* DET = DET*PI VOTE . • . ' . - . .' 'D'O 1 J = l ,N¿ ' . - " - ...
I F C A S S C P I V O T E Í ^ L T ^ O o O O O O O O O L Í G O T O l O '
•GO TO 1 ' .DET^PI VOTE . 1 . " - '-. - . . .'..-' - . - . . -CONTINUÉ . . - • ' . ' - . - • '.DO J K— 1 * M2 - - -
, IFÍ K»EQ. I ) G O T O 3 - - - . - " ' . . • _ . ' - " •
00 2 J = i «Ñ2 ' . . . . . : . . .
' . . - . _ . . - . . . • - . . . .
Cur\ i INÜÍZ •CONTINUÉ • ' ' " ' . .RETURN • • ' ' . : . .END ' ' ' .
SENTRY

- I 50
R'OUTH-HURWiTZ
Di A G A M A DE FUJOG
N1C10
IMPRIMA
T I JULOS
/LEA
NGRAD
IMPRIMA
NGRAD!
N = l i N G R A D
/LEA
E ( I ) I = r , N - .
IMPRIMA
I = ! , N

GENERACIÓN DE
C O E ( 3 ) =COE C 2) =C O E Í 1 ) =
G E N E R A C I Ó N D EC O E { 4 ) ~C Q l £ ( 3 ) =C O E { Z ) =
GENERACIÓN DECOE(5 ) =C O E ( 4 )=
C O E C 1 ?
GENERAQION DE
C O E t !
GENERACIÓN DE
COEÍ7) c
C O E ( ! J a

5 2 -
IMPRIMA
. XCQE(I)
K = N /2 4-
A(2 ÍK) = 0.
A(I.J) = COE(MN)/COE(N)
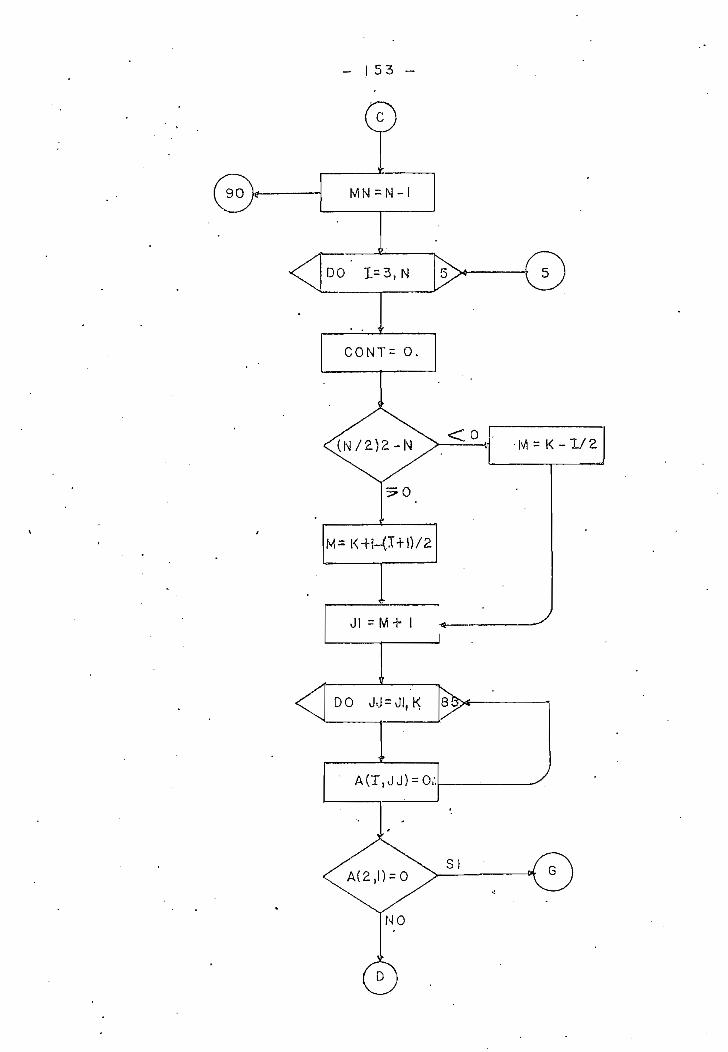
- 1 53
MN=N- !
DO 1=3, N
CONT= 0.
1

CONT = CONT4-i
SIIMPRIM/sFILA DS.,..
k ^
iE CERO
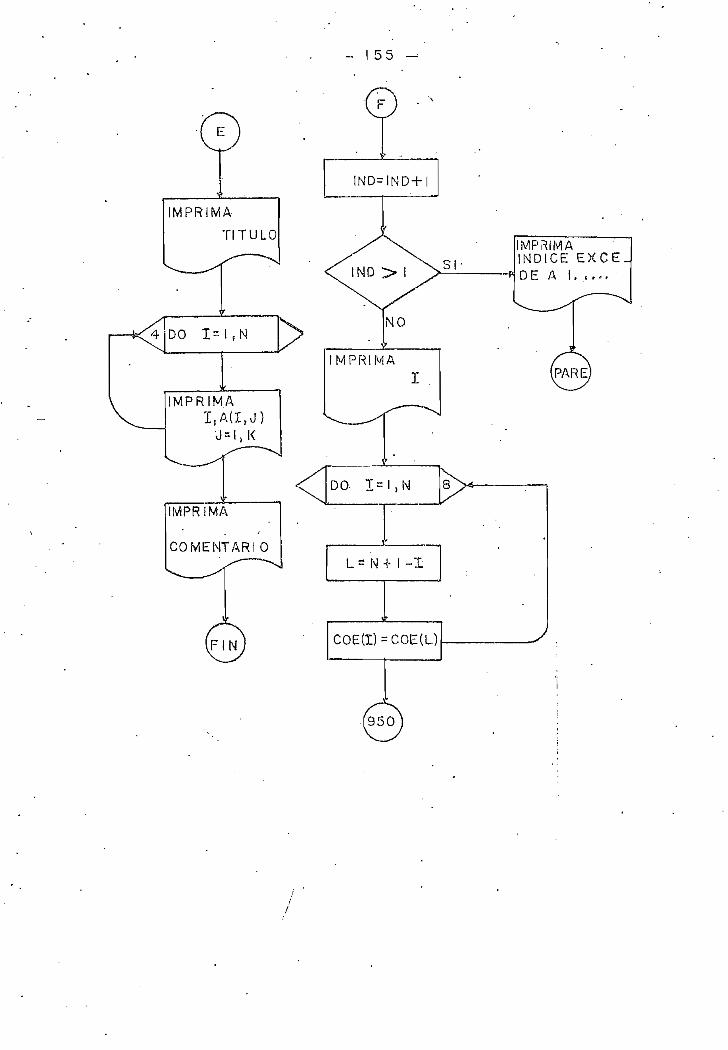
- ! 55
IMPRIMA
TITULO
4IDÓ I=l,N
IMPRIMA
I(Á(IrJ)•J = !, K
JE-IMPRIMA
COMENTARIO
IMPRIMAÍNDICE E X C E ,DE A i. .,,.
1 56 -
LI S T A D O
ESCUELA POLITÉCNICA NACIONAL *FACULTAD DE INGENIERÍA ELÉCTRICA *.
DEPARTAMENTO Dí5 ELECTRÓNICA #•QUITO ECUADOR • *
-TESIS -DE GRADO • 'MÉTODOS Y PROGRAMAS COMPUTACION ALESANÁLISIS DE ESTABILIDAD DE SISTEMAS-
PAPADISCRETOS
V - . : • - • ,-DIRIGIDA POR -:—ÍNG'. -MARCO BARRAGANREALIZADA POR: BERNARDO ISMAEL .MORALES 9» . . , : . „ ' . .MÉTODO: CRITER'IO DE ESTABÍLIDÁPVDE ROUTH-HURWITZ'*MENCLATURA: - " * ^-^f ..•''-.-.. . " , '
NGRAD' GRADO DE LA EC . C AR ACT «,-_J" ' ' - " • ''N NUMERO DE COEF* DE LA ECo CARACT, . • - '= --VECTOR DONDE SE ALMACENAN LOS CCEFO DE LA EC« CARACT,,COE VECTOR'DONDE SE ALMACENA- LOS COEFICIENTES D£ LA NUEVAK NUMERO DE COMUMNAS DEL ARREGLO OE RQUTHA ARREGLO MATRICIAL PARA FORMAR LA TABLA DE'RQUTH
EC.
DIMENSIÓN A C 6 » 3 ) » E ( 7 í « C O E ÍW R I T E Í 3 * 100 ) . . .F O R M A T C / / / / / 1 0 X , ' E S C U E L A P
ENIERIA E L É C T R I C A ' / l O X v 'DG'^ADO: MÉTODOS Y PRQGRAME S T A B I L I D A D DE S ISTEMAS -
*ISMAEI_ MORALES 8 ' / >¿ .... ^— — y p i -fE C "3 » 73 ) • ' — "-•'"•5 73 FORMAT Í//J.OX. ' ANÁLISIS DE
^CRITERIO DE ESTABILIDAD OE: : *TEMAS 01SCRETOS'/)
._. .. .c. -. SE LEE EL GRADO DE LA EC «
. 6 READ (1,3 ÍNGRAD7 ' 3 i FCRMAT íI 2)8 WR ITEÍ 2, 2JNGRAD
-. g -—e-— -•- FORMAT Í//10X t • GRADO - D E LA-10, ' • IFC NGRAD -LT • 2 »OR . NGR AD. GT »11 - - ' N = NGRAD4- 1
C SE LEEN LOS COEF. DE- LA EC-- - READ t 1 »9 í ÍE t I. } t 1=1 ,N)
9 FORMAT C1OF3 6J)14 • WRITEÍ3» 60 í15 60 FORMAT C / - / 1 0 X , ' C O E F . DE LA
- - • ¡ -- ACRECIENTES DE Z ' / >• C SE IMPRIME LOS COEFICIENTE
lo: W R I T E Í 3» 70 ) C I . E( I í , 1 = 1 , N )17 70 FORMAT Í/ /8X f10í 2X» ' E* , I 1 , r
10 . . W R I T E C 3 . 7 ) - - . -19 7 FORMAT(//10X»'CÜEF. DE LA
*CRECIENTIES DE W'/IOX.'APLI
7} ;¿¿ - .' ,- . . - . . - '
QLITÉCNICA NACIONAL»/j OX'5 CFACULTAD DE IIEPARTAMSNí'Q DE ELECTRON IC A'/1 O X ,* TES l S EAS COMPUTACIONALES P ARü, ' 726 X t r AN AL I S-I S lDISCRETOS6/1OX,{REALIZADA POR; BERNARDO
ESTABILIDAD DE SIST.EMAS D I SCRFTQS ' / 1 O X e
ROUTH-HURWITZ1/10X.»MODIFICADO PARA Sí:
CARACTERÍSTICA -: rll , .--. - •
ECc, CARACTERÍSTICA6 ) . Gp' TO 300
c CARACTERÍSTICA
NGRAD-' » t 2 / ) .
EC0 CARACTERÍSTICA'/10X,'PARA POTENCIAS
S DE LA- EC0 CARACTERÍSTICA 0
EC« -CARACTERÍSTICA'/10X,'PARA POTENCIASCADA LA TRANSFORMACIÓN tíI~LINEAL'y)

157
SE -APL I C A - L A TRANS-FORMAC ION- B I-U I NEAU- A- t-A-EC „ • CARÁCTER ISTICAI F Í N o E O . 3 ) GO TO 242 ' -IF CN.EQ- . A] G Q TO 2 4 3 - . . . . .IF ' (N.EO.S) GQ TO' 244 - ' . . • - - - -I F ( Í N . E C 0 6 ) 'GO TO 245'- ...... — ............ ------ - ----------- ---r ------------ ...... ..... -I F (NoEQ . . 7 ) G O T O 2 4 6 ' ' • • ' . . .COEÍ3 Í = E ÍM) -í-ECN-1 )+E<N-a) - . • ' - ' • . • ' .
'COEÍ 1) =EÍN)-ECN-1 J+E Í N-2V - ....... —- — --•.---GO. TO 95 . ...COE(4 )=E (N) +EÍN-1 ) +E í N-2 ) -«-E í N-3 ?COEÍ33 =3'*EÍ N) +ECN-1 ) -E í N-2 )-3#£ÍN-3 )COE t2J=3*EÍ N) -ECN-1 í-ECN-2 )+3#E (N-3 í — -COEC I ) =E CN j -E f N-l } +ECN-2J -EC N-3 ) -G O T O 9 5 4 . 'C O E t S Í =EÍN) +EIN-J. } - * -E ÍN-2) -4-E( N-3 )+E(N-4- JCOEÍ4)=4^E£ N)+2*E(N-L » -2*E C N— 3 }C O E C 3 ) =6*l£( N)-2*E(N-2) +6*E£N-4-)
COE, i) =E ÍNJ-EÍ-N-i ) •*•£( N-2 i- E< N-J ) - * •£ { N-4 '/ •GO T O - 95 - - •' - - - - - ' ~— __COE(6)-E(N) 4-E(N-l J *E C N-2 ) -i-E ( N-3 ) -(-E (N-4 J+EÍN-5)COEt5 )=5*E í N") +3*E(N-1 >+E ( N-2 ) ~E ( N-3 ) -3#E C N- 4 ) -5*=E C N-5 )COE í 4) -1 0*EÍN >-2*EtN- 1 Í-2*EÍN~2 í-2#ECN-3 í -1-2 *E ( N-4) *i G*E í N-5 )C O E £ 3 ) -1 0^=E £ N )-2*E( N-1 }-2*E (N-2 )+2*E( N-3 i -h2 *E ( N-4 J- lO^E (N-ti J -— - " • • -C O E ( 2 ) = 5 * £ £ N ) - 3 * E C N - 1 J + E Í N - 2 ) ^ E í N - 3 5 - 3 * E í N - 4 J + 5 * E í N - 5 i . -C O E C 1 ) =E CN) -frc(N-l í +E(N-a)-E(N-3)-t-E(N-4.3-E(N-5 ) 'G O T O 9 5 . . . . . .COE (7 i =E (N) +E(N-1 } +E ( N-2 J-*-_£( N-3 )+E C N-4 >+E C N-5 )+E( N—6 ) - - : —'-COE(6?=6*E( N)+4*Eí N- I )-4-2*E'í N-2 )-2*E í N-4 J-4-*E í N-5 >-ó*E(N-ó íCOE (5) =1 5*E(N> +5*E(N-1 )- E (• N-?. ) ~ 3* E í N-3 )-EÍ N~4 í +5*EÍ N-5 ) •<-1 5*E C N-6 )COEC4)=20*6 (N) -4 *E(N- I í+4*E(N-4 ) -20*E(N-6 )COE t 3) =1 5*E ÍN Í~5*E( N~ \Í N-2") 4-3*E í N- 3 ) -E C N-4 ) -5 *E-C N—5 1 + 1 5^E í N-6 3 - -C O E C 2 Í =6*E( N)-4*E(N- 1 ) <-&*£< N-2 ) -2*£{N-4> -f-4*E( N-5)-6«EÍN~6 )COEÍ 1) =E ÍN) -EÍN-1 J- í -ECN-a 5-E ( N-3 )-í-E ( N-4 )-E { N-5 ) - í -ECN-6)GO TO 95 . -SE -IMPRIMEN liOS-COEF ICIENTES- DE-L A NUEVA EC . CARACTERÍSTICAWR tTEC 3, 78 í ( I »COE( Z ) » 1 = 1«N)F O R M A T C / / 8 X » 1 0 ( 2X , f CO E 1 * II * f = B vF lO .3} / J • - - rTA v, íñl<rj pv-? ,
-. Cl u\ f4i t in / i v / í ;i . c-v
- 15
0 S(r C A L C U L A - L A T A B L A -DE ROUTH-HURW I TZ ", • C'V^. " f'^ ¿!- . '.: ,57 IF t N/2#2-N) 10t 1 1 »1 i . , \\\ ' -',.;•'/5 8 1 0 K = N / 2 + l . ' ' . . - • CO v- . ' *5 Q A r o u* \n ' , • \l•* / v \ ,¿—*r> - / i i " " ' ' - ' í ' , > ,
-60 — GO TO 15 ' : „ . . " ' "r, 6 i - 1 I K = N / 2 • - . - '6 2 1 5 I N D = 0 - . . ' " - • . . • ' ¿^_ • • - . - • • . .63 - MN = N - > ./' , NW
65 DO 92 J=1,K - .; .. -' C^J.66 I -FCMN.LT. l ) GO TO 92 ^67 A C I , J)=CCE( MN) /COECN>
92 ' CONTINUÉ ' '/ p=-")90 MN = N-1 ' ' """950 DO 5 I=3,N .-' '. " - • ,-;. (£5)
• - CONT^O- ' ' v—73 • IF(N/2*2~N) 25*26^26 . f^S ' ' ^ ; • • ' . . . . .74 25 M = K-I/2 . \ . . ." . - - . - . " ' ' ' - -T5 . ' GO TO 30 . ' . : :, \^\. ' • - '. .".:" ••
77 30 J1=M + 1 ' " l ' " ' • ' ' ' " . ' • •78 DO 85 JJ=JL ,K ' * . . . • .. ' ' • ' . ' • " . - .79 85 A Í I » J J ) = 0. • ' • . " ' - . . . - • ' • •
-80 —• IFC AC 2 »1 ) . E O . O ) • •GO-TO- 40 - - •• ' • • •-81 DO 5 J = l «M ' ' - • - ' • • '82 ' A t I * J ) = ( A ( I - l » l ) * A C I - 2 , J - f - l ) - A { I-"2 « J. ) * A C I.- 1 ,.J¿ I i )'/ A t r- 1 , 1 í83 " IFt ABS í A (I , J í ) —l «»E~04 )36,36,35 -. . . *
-04 36-r—. CQNT=CONT+1 -T--:- • .: : \.. • s¿\ , r^83 I F C C O N T o E Q . M ) GÚ TO 40 . ' : - . o ; ¡ -:f \ -J¡ \¿\'\\\86 ,35 ' IFt J.EQ. ^ .ANOo A B S C A Í It l >.) .LE.l oE-04>GO TO 45-.: :o/ . ' { . -^ '""-'87; 5 CONT INUE . . " - , . . - . . '
. 89 45 I N D = I N D + 1 . • ' " " :90 I F í I NO , G T & I ) G O T O 5 O9 1 ' W R I T E t 3, 5¿5 ) I • ' : . '
-92---:- 55 ....... FORMAT C / / 1 0 X , 'CERO • EN L.-A -F TLA «.«• 12 » IX» r SE- HACE UNA-TRANSF. ' •/ > ..... ------93 ' DO 3 1 = 1 *N • " • • .94 l_ = N + l - I i • ' . . • . •
• 95 8 C O E Í I ) = C C E Í L ) . ... -. . .— 96; ---------- GQ TQ g50 . ...... __.„ ---- „._._ ..... . . . . . . . _ . _ : ------ .„, ......... ........... •
97 40 DO 6 1=3 tN . -98 . DO 6 J = l',K - : .- - . •991 6 . ' A t I t J ) =0 o , . . '. " - -
• 1 0 0 • - W R r T E t 3 , 4 2 ) - - • ......... - ' - - -'- .• — .*..., . ......101 42 F O R M A T C / / 1 Ü X , 'FILA DE CEROS ES .NECESARIO UNA EC 3 A U X I L I A R 1 )1-02 GO .TQ 300 ' - - .103: 50 W R I T E t 3, 52) • " "
-104— — 52 ------ FORMAT C / / I O X , • « EL - IND I CE-EXEDG—A— i- — bA- TR AN SFORM AC í QN FALLA' J -105 GO TU 300' " C SE IMPRIME LA TABLA DE ROUTH-HURW I TZ106, 80 W R I T E t 3, 320 i . ;
-io7r — 3 2 0 - - - FORMAT c / x i o x , 10 ( 7 * • ) , ' .TABLA DE ROUTH-HÜRWITZ ' ^ l o í 1 * ' ) / ) .....ios • D n 4 r = i » N .109! -4 W R I T E C 3, 170 ) !•. t A C 1 , J ) » J= 1, K i . '110 170 F D R M A T Í / / 1 0 X , U , 1 0 ( 2 X , F 1 0 . 3 } / >1 1 1 ------ -1001 - - WR IT£[ 3, 1003) ...................... ..... ...... •• -- ................. - ...... . ' ..112 1003 FORMAT Í / / 1 J X , 46 í ' * ' ) / - 1 0 X » f Sí NO. EXISTE CAMBIOS DE SIGNO Eh4 LOS £L1
' *M'ENTOS '/ lox , ( DE LA. PRIMERA COLUMNA EL si SIEMA ES ESTABLE* / iox,t ' * ' ) / / / ) ' -.. •
1 14!, • END
1 SENTRY

5 9 -
LIAPUNOV -
D I A G R A M A DE FLUJO
I N I C I O
MPRIM A
TÍTULOS

- . 1 6 0
DO 12
IMPRIMA
A(Í,J) J = I , N
'DO I - 1 , N
DO J = t , N
E(I,J)= O.
E(I,I) = 1 -
ií. _ 'C'ALL
TRASSSP
IN.B» A)i
DO 1= 1, N '. 15
IMPRIMA
Btl.J) J=

CA LLMULT
D O I = I , N
C A LLSU MA -
,D, Ef F)
DO I- 1 , N
I M P R I M A
FÍIj J) J =
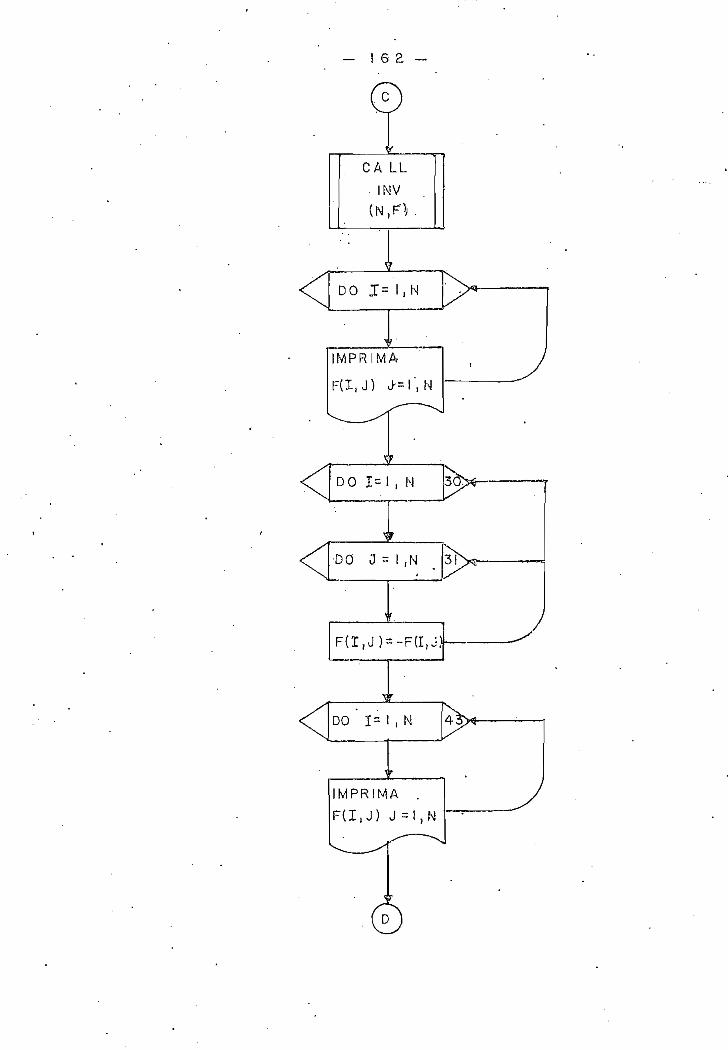
V W I J d d W I
00
N' i = c oa-
N ' 1 = 1 o a
•VWHdWI
oa
ANI
11 V O
o
9

16 3
©M - 0
I 0 = 0
Í M P R í M A
MATIZ ' p>o
IMPRIMA
M A T R I Z P<O
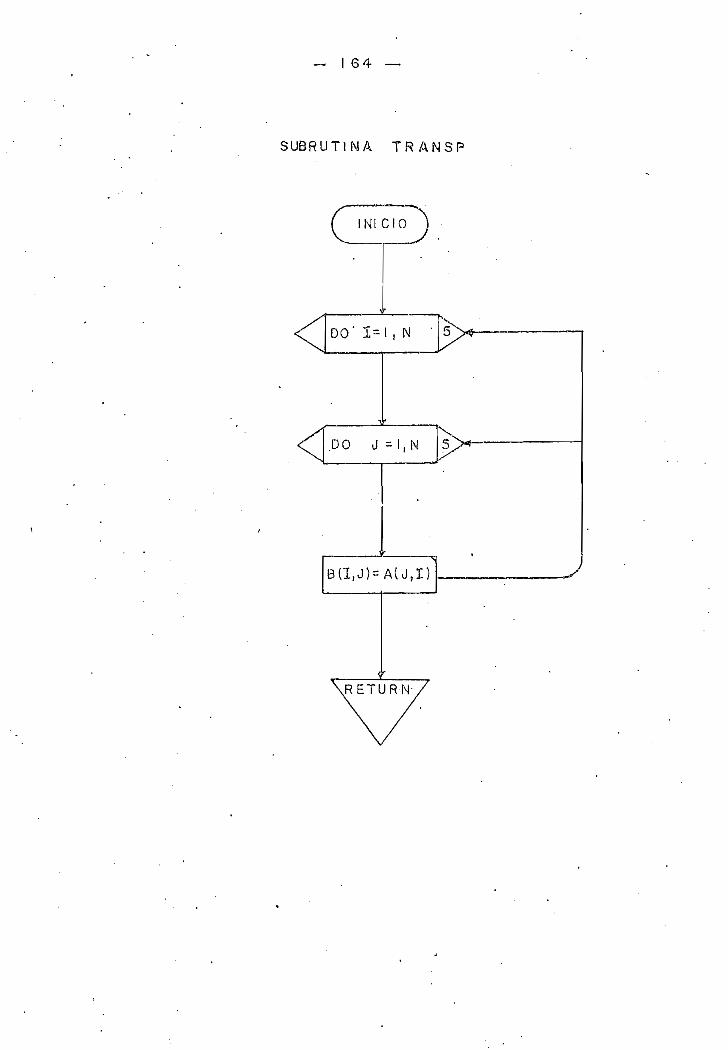
— 1 64
SUBRU TI NA. TR A N S P
NI CIO
DO' 1=1, N
DO
B ( I I J ) = A ( J Í I )

SUBRUTiNA MULT
N I C I O
DO 1=1, N 8X
DO J = !, N
D O K - l . N
D(I ,J)=B(r íK)A(KlJ)- i -Dt I tJ)

16 6
SUBRUT iNA S U M A
t;
I N I C Í O
D O I = Í , N -
DO
F t I í J ) = D { I 1 J )

— !67 V
S U B R U T I N A INV
IP!VOTt\|
,00000]
FUX,J) = -F(IIl.J)./PIVCn
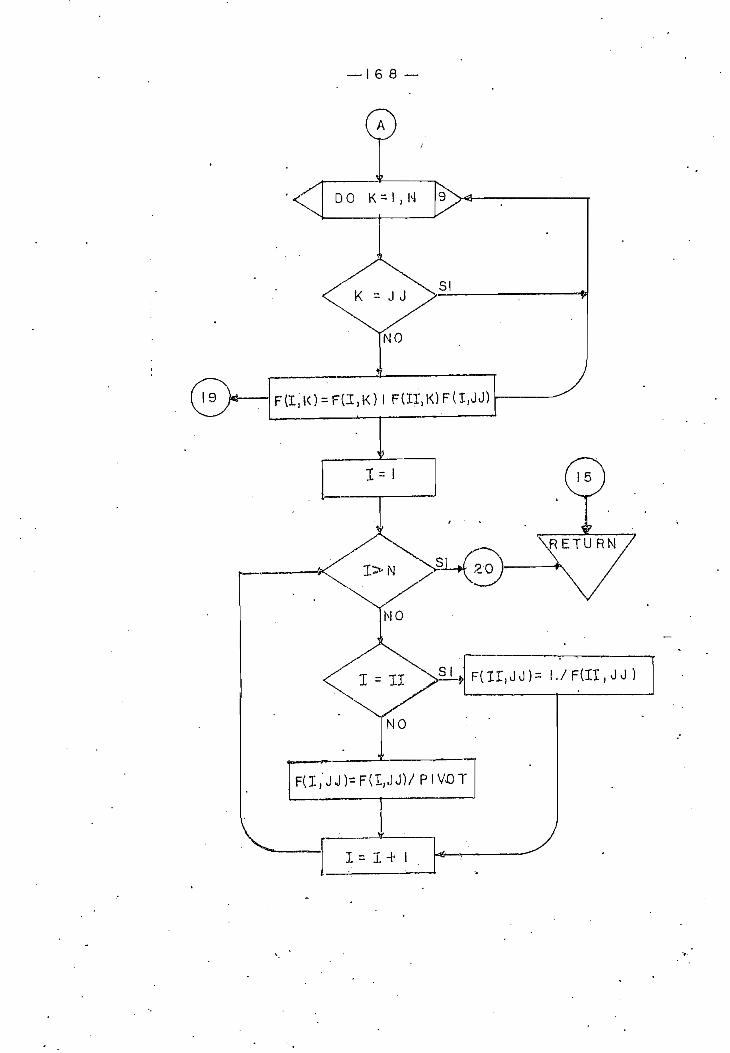
6 8
R E T U R N
F ( 1 L O J ) = l . / F t t l . J J )
F(1)JJ)=F(1,JJ)/P!VOT
1=14 I

- 1 69
L I S T A D O
— -
t
1
c:
— e
- e- -C
1C1 11£
• 1 "3
14
15
1718
—1 q202122
23
252627
SíJQSCC
' CC
.
c •ccc
: c;• c
; ' c -
— c/—
c -c *—C '
>
i: 100
52
C
' 4
C
10
8*=i-D
: 9C
¡ 1213C
•1 114
---•— -o •C
c
19
15
* ESCUELA POLITÉCNICA NACI'ONAL ,#'•-* FACULTAD DE INGENIERÍA ELÉCTRICA *
# DEPARTAMENTO DE ELECTRÓNICA * '* QUITO ECUADOR * _,. u ;. ', ,ti | ,*.! ; ; . , ._
_ T nc_ , - - - , - , • - • " • ' . • '. • -- - v - . . - / • • ,
*• MÉTODOS Y P R O G R A M A S COMPUTAC T O N A L E S P A R A ' -y','* ANAL ISIS DE E S T A B I L I D A D DE .3 1 STGf AS; D 1 SCRETOS - '"'.' •
— - * DIRIGIDA POR : I N.G , MARCO B A R R A G A N " ' • ' A* REAL IZADA POR: BERNARDO ISMAEL MURALES 8, . '.
* MÉTODO: CRITERIO DE ESTABILIDAD/ DE LÍAPUNOV . ' -:
NOMENCLATUR A : . ' l" ? • " . ' - - - . " ' .N GRADO DE LA EC, C A R A C T » .... ^ ' . .- 'A ' ARREGLO DE LA M A T R I Z DE ESTADO* .
— E --ARREGLO DE LA MATRIZ IDENTIDAD NEGATIVA ' '..D ARREGLO DE LA M A T R I Z PRODUCTOB . ARREGLO D E L A M A T R I Z TRANSPUESTA ' • ' • - . . 'F ARREGLO MATRIC1AL DE LA SUMA Y OE LA MATRIZ DE LÍAPUNOV
DIMENSIÓN A í 11 9 1 O .Eí 11, 11 JíBC-'r i , 1 1 > , D ( 1! , 1 1 ) ,F< 11 .,11 } . . - - .W R I T E Í 3? 100 ) "". r - -FORMAT Í//// /10X, ' ESCUELA POLITÉCNICA N A CTQN AL " / 1 0 X , : FACULTAD D? I N
-*GENIERIA ELÉCTRICA* / 10X, * D E^ ART AM'EN TO DE ELECTRON ÍC A '/ 1 0 X ,' TES I S D#E GRADO: MÉTODOS Y P R O G R A M A S COMPU T AC I ON ALES PAR A « y 26 X , ' AN AL I S I S D#E ESTABIL IDAD DE SISTEMAS D I SCRETOS a / 1 OX , « REAL I ZADA POR- BERNARDO^ISMAEL MORALES B'./J . - -.,.. " ./ ,, . . . . . . . ' - . . . ' .
FQRMAT ( / /1-OX, 'ANÁLIS IS DE ESTABILIDAD -DE -SISTEMAS DISCRETOS" /10X» !^C'RI TER.IO DE ESTABILIDAD OE L J A P U N Q V ' / )
SE LEE EL GRADO DE -LA MATRIZ . . . . - • —— R E A D ( 1 , 4 ) N -• - — - • . . ._, ,-- j.^.^" ...-..:, ' :
'FQR.VAT C I 2.) - . . . . - . . • ' '• : V - / / / - ) \1» t V* ?:-, \\ 'IF CN.LT, 2 0 Q R , N 0 G T 0 9 í GQ TO 7 : ' • . -'•.:• - -. • -¡ • ., •'.-•SE L E E LA MATRIZ D E ESTADO • ' - ' " . . ' • , . " . - • •
. FQRMAT Í / /10X, ' GRADO .DE LA MATRIZ . N= * fl I 2 ) ' "' .. 'DO 8 1 = 1 «N •' ' . ' - . 'READ (1 »S ) ( A ( I ,-J ) , J=l , N ) .-' .- " - ' - ' . . - , .- . ' - '
W R I T £ ( 3 , 9 ) ' • ' "~* ' - ' - " ' •"" ' - ' . --FORMAT;/ iox , «MATRIZ D E ESTADO A « y / > • • - . •SE IMPRIME LA MATRIZ O E . ESTADO . .' -
W R I T E ( 3 9 13) (A( I , J) * J=1,N) • '. . . •FORMAT (5X 3 1 OF1Q «3) . . .'/ • ' ' , . ' . • ' , _ . -
U íj i i -J — i. i IN — * — — — .«.-_... . _. " "".--~ •-
£( I * J)=0 » . . • ' ' -' .EC I * I }=- 1 « . ' _ ' - " : . - • • ' - . • . . •
SE CALCULA LA M A T R I Z TRANSPUESTA - . .CALL T R A S P ( N 9 B » A ) -.' 'SE ÍMORIN'E LA MATRIZ TRANSPUESTA
F O R M A T (/ 10X ,-a MATRIZ TRANSPUESTA B'/s}. / ' 'DO 15 1= l^N . 'WR I TEC 3, 13 } <8( I , J ) , J = l 9N ) - -' "— - -~ . - - -
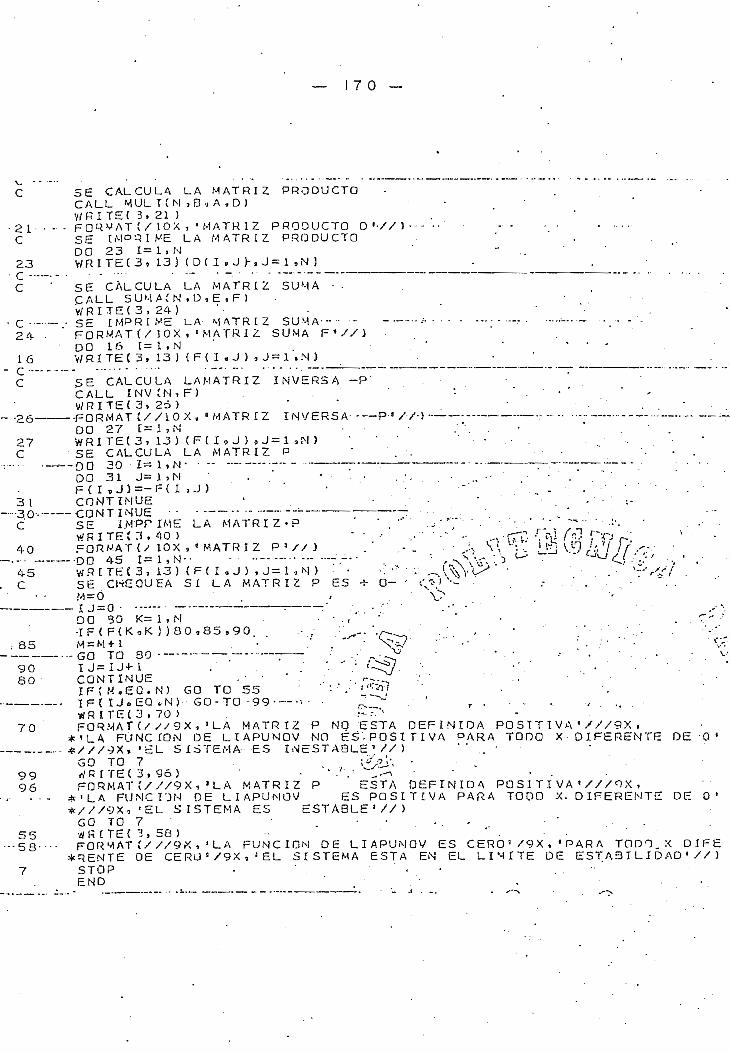
7 O
33
3132
3334_.353637
3839
42
43444546
ÍI
545556.57585960.61
o , .
C
23
r
34
16
26
27C
31
45
.85
9080
5E CALCULA LA M A T R I Z PRODUCTOCALL MUL T Í N 7 Í 3 - J A * D )WRI TE( 3» 21 )FORVATC/iOX,'MATRIZ PRODUCTO O'-//SF I.MDRIV-E LA MATRIZ PRODUCTODO 23 1=1» MWRITEC3. 13 j (D( I , J)-» J=l *N ) _
SE CALCULA LA MATRIZ SUMA - -CALL SUMAÍN*0,EiF)W R X T E t 3, 24)
- S- IMPRIME LA MATRIZ SUMA--- -FORMATÍ/10X,«MATRIZ SUMA F'//)DO 16 1=1.N .WRI TE { 3, 13 ) (F(I.J)9J=S1«N^)
"~5E CALCULA LAMATRIZ INVERSA -P'CALL INV ÍN,F) . .V/RITEÍ 3) 2ó )
-^ORMATÍ//10X, -MATRIZ INVERSA P--DO 27 t=l »N f % ' . .W R I T E ( 3 , 1 3 M F C I 9 J ) 3 J = : 1 3 N )SE CALCULA LA MATRIZ P
--00 3 0 - I = 1 » N * • "OO 31 J= 1 >N ' • . .F ( I , J )= -F( I»J ÍCONTINUÉ
, , ,/-/•>-
. - M A T R I Z P'~i . . . -OO 45 t = l » N - - - - ------ ........ ~. • ,S ñ l T K ( 3 , 13) (F ( I . J ) , J=1 ,N ) • "'. !SE CHEQUEA SI LA M A T R I Z P ES -V OM = 0 __ __ ___ . __ ^ ____ / ,,
DQ 30 K= iiN • • ' . - . ' . "-IFÍ F Í K o K í ) 80 i ,S5 9 90 . . .- .,' .-^- -QMsM-í- l . __ .: .' NGO TO 3 0 - - ...... ~~—t ..... — . ; , r
IJssIJ-H - . - ' -^CONTINUÉ vo ' 0:0: - - • ' .' ' /«¿í?IF ÍH .EO.N) GO TO 55 - - L^5/IFÍ UoEQ *N) GO-TO -99 ----- - • .f
64
" "" ¡ "
67 J
; 'EL SISTEMA ES INESTABLE y / )O TQ 7 ...... '&Z¿'*
Í / / /9X. «EL S ISTEMA ES ESTABLE 1 / / )G O T O 7 - - • -
7071
7 STOPEND

17 !
72 SUBROUTÍNE TRASPÍN,B,A) ' ' . ! '< ' i * ' *> / 73 . DI MENS 10 N- ü [ 1 1 , 1 i ) , A ( i 1 , 1 1 ) ' * v ' ,'> ; \7 4 D O 5 I= 1 »N ' - ' • '
— 75 - - - - 00 5 J = l ,N - ...-..•—-.... t '76 5 S í I , J) =A (J * I }77 RETURN
, 7 8 ENO - . . -
79 ' ' SU8ROÜTI NE MULTí'N, B, A-.D) . ', 80 DIMENSIÓN a(ll,lL),A(ll,11),0(11*11), 8 1 DO 8 1=1 .N--82 '-" 00 3' -J = l «N - --.— - • - — —- -¡ 83 Oí I ,J) -O - ', 8 4 DO 8 K=l,N -
85 8 , Oí I,J)=B II»K)#A(K,J) +0( I «J 3 - ''l« 86 " RETURN . • - -• - .-i _ 87 END ' • . ' '. ' , - . •
88 : - SUBROUTÍNE SUMA(NoD.EtF )' _89 DI MENS ION D ( 1 1 » 1 1-5 » E í 11 r-1-1-) a-F-<-3-l-,-l 1-)-J 90 DO 9 1=1«N - •7 91 DO 9 J = l *N . -. 92 9 F { t « J > =D U , 'J ) +E í I i J .) ' : ''- — 93 RETURN . .- • - ™ •*
1 94 ' END ' . . . 't ' - . ' : .
95 SUSROUTI NE INVÍ N, F ) .' - .3 gó -DIMENSIÓN Ftll',11)- •--'— :—-——-—
9 7 ' ' D O 2 0 11=1, N • - . . . - . ..„,'93 ' ' ' • •- 'JJ^it - . • . .99 PIVOT=F( JI, JJ )
-1-00 f Fí ABSÍP iVOT) .LT-.O o O O O O O O O 01-j-G G—TQ—V5r101 D O 8 J = l V N . . . . .
'. 102 IF ( I I « EQ » J J GO TO 8 • ., i 03 F( U 9J ) = ~ F í I I „ J 5 / P I V O T"104 8 C O N T I N U É ' - ". ' ~~'
' ' 1 0 5 . DO 19 1=1 * N •í Í 0 6 I F d . E Q , II } GO TO 19 • "., 1 0 7 ' DO 9 K = i » N . ' . • * '. "1 OS " IFÍ K o £ G o J J ) G O TO 9 "' *"~ ' '": ™ "'
-,"1"09 " " F í I »K ) =F <I 9 l< )•*•(-( IIwK'J110 9 CONTINUÉ
5 1 1 1 19 .^ .CONTINUÉ¡ 1 1 2 1 = 1 • -"-•I 13— 41-- - I F ( I o G T . N ) G O TO • 20
1 114 I F ? I «EQ. II. ) GU PO 28i US • ' Fí I ,.JJ ) ~ F t I 3 J J ^ / P I V O TT 1 16 I = £ + l ..-1-17 ' - ~~ GO TO 41- - ~"' 118 28 Fí I l o J J )=1 . / F C I I-í JJ )
119 1 = 14-1120 GO TO 41
-121 '¿O -CONT ÍNUE • - • • --. " • -™-122 15 . RETURN
1 123 END
• íENTRY " """" *"" ~ "

1 72
NYQUIST
D I A G R A M A DE FLUJO
INICIO
IMPRIMA
TITULO^
NM- NSRAD-H
/LEA
IMPRIMA
NN

¡73
©DO I=I,NN- 10"
L = NN+J- !
E ( I )=A(L )
DO I- \N
CÍI)=CMPLX(E{I) ,0.)
M-N-Í- !NI = 90
APRQX-. 00001
ENCABEZADO
X = (0MI.
DO J - I ( N /
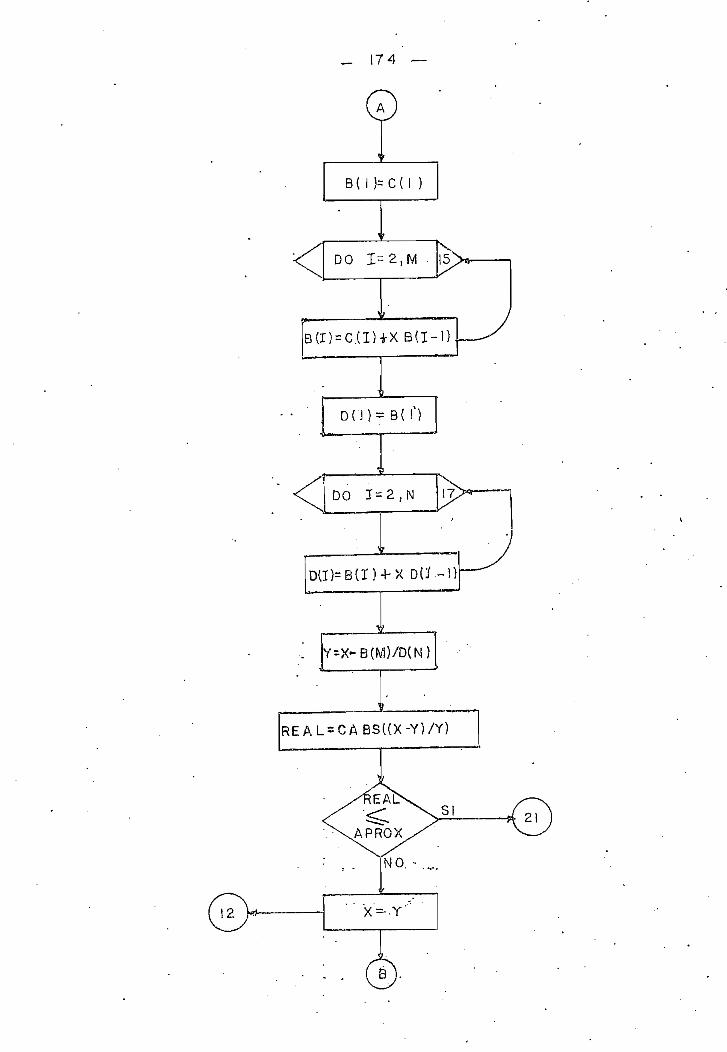
174
B ( I ) = C '
D O I = 2 , M 15X
D(J = B ( f )
' - - • ' •
D O J = 2 , N
D(J}=8(I)4-X D(I.-l)
REAL=CABS((X-Y} /Y)

75
IMPRIMA
YMAG<
©IMPRIMA
NRAIZ ,Y
Y M A G = 1Y I
IMPRIMA
YMAG>
IMPRIMA '
YMAG
IMPRIMA
COMENTARIO
IMPRIMANO CONVERGE
EN NI INTERAdF I N

- 176 -f :
i L ISTADO
5 J O B ' • , - • • " . 'C ." . • -» ' ... ,.. .C * ESCUELA POLITÉCNICA N A C I O N A L # • ' '.- -C ' " " * FACULTAD DE INGENIERÍA ELECTPICA * . . . , ' • .C * D E P A R T A M E N T O DE E L E C T R Ó N I C A * " - " _ , —, , --. " •
^ C * Q U I T O ECUADOR * -r> ú''' { /£ (f..' . ? . - , - • • . '. '
- - , . , c - '^"TESIS C E " ~ G R A D O " ~ r ' <"-"'\VU ~~ ^'-/Ci ///.-'^ x . ,c * MÉTODOS Y PKOGKAMAS CÜMPUTACIONALESPARA - •'.-"//C * ANÁLISIS DE ESTABILIDAD DE S ISTE M AS DI SCRETOS- - ' ^ - ' ."*-)
• c ' - • • - ' " • - . - •... c ._ . Jf D IRIGÍ DA- pQR - - . - i N G . " M A R C C B A R R A G A N ' ' - ; . _./
C * R E A L I Z A D A POR; tíERNAHDO ISMAEL MORALES B» , ,. ,, .- . Vc ; . .--. • • : - • * - • ; " * . " " - ' • • ^C__ ^_METOOq:_ CRITERIO _D_EESXA8 ILI D A D ' DE NYQUIST #. . - ; . , - - _ - ; ; • • : . -
c - N O M E N C L A T U R A : . . -• •*'•->"•' ' . ' - . . - - . - • • • •C - NGRAD GRADO D E L A E C 3 C A R A C T E R Í S T I C A . : ' . " ; '. ( • ' • ; ' -C ~ ' NN NUMERO DE COEF«' DE LA E C a C A R A C T * . : • • » . : :- í; . - . " . ; . • : . . . '
-. . ...£. .._.,.„ Nr . CO|NSTAWTE NUMERO' D5 INTERACCICNS ' '' - - —• • ''. C - APROX CONSTANTE G R A D O DE A P R O X I M A C I Ó N DE '• L A S ' R A ICE 5 " . : ' :¿ .' - ?.'*
¿ C - B 3 C , D VECTORES NECESAR IO S P A R A EL CALCULO DE LAS RAICES " . .' ' •& ' C - E VECTQP A U X I L I A R PARA INVERT.IR LOS CCEF* DE LA EC 0 C A R A C T 0 -•"•:— .. cr---—-y R A Í Z " COMPLEJA .,- - - • , - - .
C - Y M A G MAGNITUD O VALOR ABSOLUTCUDE LAS RAICES - --''•-• ^ , - . - -: • C - r¿£\ . . - . •.•-•-.--/";.; • - - • - • - - . : / : . ; -1 COMPLEX C í B n D í X í Y - • \*-J - - . - " - - • - - -.
- 2..._.. _. D £ M E N 3 I O N . B i l l ) , C í i l 3 9 D í l l > 9 A ( i i ) » E ( l i ) , " ' -; '' - .3- . .' W R I T E Í 3, 100 3 ' ' " '.' *:"^ 100 F O R M A T í / / / / / iox » ! ESCUELA POLITÉCNICA NACIONAL ° / . L O X , - ' F A C U L T A D .DE IN
+ GENIERIA E L E C T R I C A 3 / 1 0 X , 'DEPARTAMENTO DE ELECTRON I C A s / 1 O X t f ' TESIS D——- *E GRADO: MÉTODOS Y"PROGRAMAS CCMPUTACIQNALES PARA»/26xfl «ANÁLISIS D
• • *£ ESTABILIDAD DE SIST-EMAS O I SC RETOS ° / 1 O X , 3 RE ALI ZAD A POR: BERNARDO^ISMAEL MCRALt íS B 3 / 3 ' . . . - -. .
s yai T E ( 3 , 3 0 ) • • -~ 6 30 FORMAT Í / / IO X 9 ' ANAL I S I S "DE"ESTAB IL I CÁD DE SISTEMAS rD I SCRE.TOS fl /I O X , J
g' ' *CRITE«ÍO DE ESTABILIDAD DE NYQL'IS'M/} ^/¡H' i [ - L ' i " \ ' J ix - C " S E LEE EL G R A D O DE LA EC» - C AfMC TER ISTIC A ' ... >' ^ ¿J C-i "- .. - " . • ;
7 READ t 1 ,2 ÍNGRAD - • • - , - . '.""- — . . . - • • - . " '" . •" :,Q 2 —" ' "FORNAT í r 2) ' ' -- • • 'V '"'• ' • "
- 9 . W f t r T G C 3 » 3 5 ) NGRAD ' . . -. ' '""- • ' -10 35 FORMATÍ / /10X, 3 GRADO DE LA ECo CARACTERÍSTICA N G R A D = ' 5 J 2 / ) - *'."
_ L 1 I F X N G R A D . L T « . 2 « Q f 3 9 N G R A p 0 G T _ f l Q ) GC JO_25 ' "__1 '^-: __ • ""'"12 ' "NIS — N G R A D + 1 "" ' " ' " :~ " r "' "~~- -^— - r—1 3 ' R E A D ( l * 3 ) ( A { I ) a I = l d N N } . • . •
' 14 3 - F Q R M A T Í I OF8.J) . - . . . . - • - . . - •15 W R I T E C 3 9 32 > • ' . . ' -
~16' 32 F O R W A T Í / / 10X , 'COEF« ' DE LA ÉC0 CAR ACTER I ST I CA ' /10X 4 * PARA ' PQTENC I AS«CRECIENTES DE Z » / > •
17 W R I T E { 3 , 2 0 ) Í I « A Í I . ) 9 £ = 1 . N N ) - - - - . - . ._18 20 F O R M A T I / /3 X , 1 O í 2X 9 « A *j, J 1 u fl = <J 9 F i O o 3 )./ } ¿ ._•*_-__ _•_; ;
20 L = N N + 1-I . -21 10 E í I ) = A £ L ) - - ' . . . . ' - * \2 . DO 9 1 = 1 « N N • ' . - • • ' " - ; .
23 __g. c$ J, )== - " ' ~

- 177
2425
"26"
? 27
"28"29
C.
C
C
37
C: . C
3435
J?6373839
-4041424344
"45"46'.
48495051
"52"53
_S4_
56-5758"59"
6061
'62'636465
6667.
17
N=NGRAD " " "
SE IMPONE EL NUMERO DE INTERACCIONES '_
SE IMPONE £L GRADO DE A P R O X I M A C I Ó NA P R C X = 0 e C0001 \ . "
' W R I T E C 3 » 3 7 ) "" *v- " " ~ ' "FORMAT C/ /J .OX. 10 I e * ( í 0 e RAICES D E 'L A EC« C A R A C T E R Í S T I C A
# / 1 0 X t 6 C H ' - ' > / )SE CALCULAN LAS R A I C E S DE LA EC « C A R A C T E R Í S T I C A ^
"""MÉTODO DE NEW TON- R APHSQN "" C DOBLE " D I V I S L ON S I N T'E T I~C~Á~>"DO 11 NR /»I¿=1 vNGKAD . ..X = ( Q « . » 1 „ } • . ' - iDO 1 2 J= 1 »N I . „ • =_ _ ' „ '8 t1 )=C E 1 ) : - ' .DO 15 1=2,M . - ' - • • •BC l')=C( t }4 -X#8( E-f.) . •D l i í = B t l > _ _ _ „ „ _J
~"DO 17 1=2, N " - - . , ' ' . " '. 'D E I )=B( I ) > X * D C 1-1 í • " . ' . * '. •Y = X-B( Mí /Dí N) - - . ' . - -REAL=CAOSt C X - Y ) / Y > • "
4(
IFÍREALoLE»APROX)GO TO 2112' X = Y - .- - . "
W R Í T E Í 3 e 19)Nl ' :19 „ „ FORMAT Í / /10X, * EL MÉTODO NO__COÑVERGE EN „
"GO TO 25 .21 " W R I T E C 3, 13) NHAIZ,Y13 F O R N t A T Í / y i ü X t t R A I Z r v I l i ' F I O o 4 T 2 K í . F 1 0 e 4 ^ c J
_C SE CALCULA LA MAGNITUD OE_.LA_R A I Z__
W R I T E C 3 i 5 0 ) Y M A G50 FOHMAT C / / 1 0 X * "MAGNITUD DE Í_A R A Í Z = B c F i C
IFÍ YMAG- 1. J 70,71 *72_ _ ." W P I T E C 3 , 00 > "
INTERACCIONES' /J
7260
"7T74
70-80
6526
1 1
90
25
ÍENTRY
FORMAT C / / 1 0 X * • RA ÍZ FUERA DEL CIRCULO . UNITAR 10 .DEU--PLANO Z ' / - r l O X s 6 í
' G O TO 65 __ - - - - o ^: ' ' • ' •> i-ívi? £ - * • ' , " -^v" W ' R I T E ( 3 f 74) "• ~" ' ' ' /-TVO^-^ " "^'"• • ' • '':
FORMAT Í / /10X, » R A I Z EN EL UIMITE'DE ESTASIL-IDAD « // 1 O X , 60 C ' - « ) '/ \O TO 65 - - Sv ' '
W ÍUTE(3 t SO )" F O R M A T Í / / Í Ü X , " R A Í Z ""DENTRO - D.EL CIRCULO UN ITAR I O DEL. PLANO Z s x / 1 0 X*60 í ' - ' } / >
DO 26 f -2 f N ' ' ' . . ' : * • • . ' >C ( I >=B í I > _ .._.. • ' -'C-'v
W R I T E Í 3 » 90 ) • . ' • . - " " •FORMAT Í / / 10X ,33 t 1 * c ) / L O X . C S 1 T ODAS LAS RAICES DEL S I S T E M A ' / 1 O ;
GESTAN DENTRO DEL CIRCULO UN ITAR 10 c / 1 QX'c B EL ' SISTEMA ESD E S T A B L E 1 / 1 0 X t 3 3 ( p * e ) / / / í . __
S T O P . :. .'. : •E N D -. - - . - - ' . • . • ' -
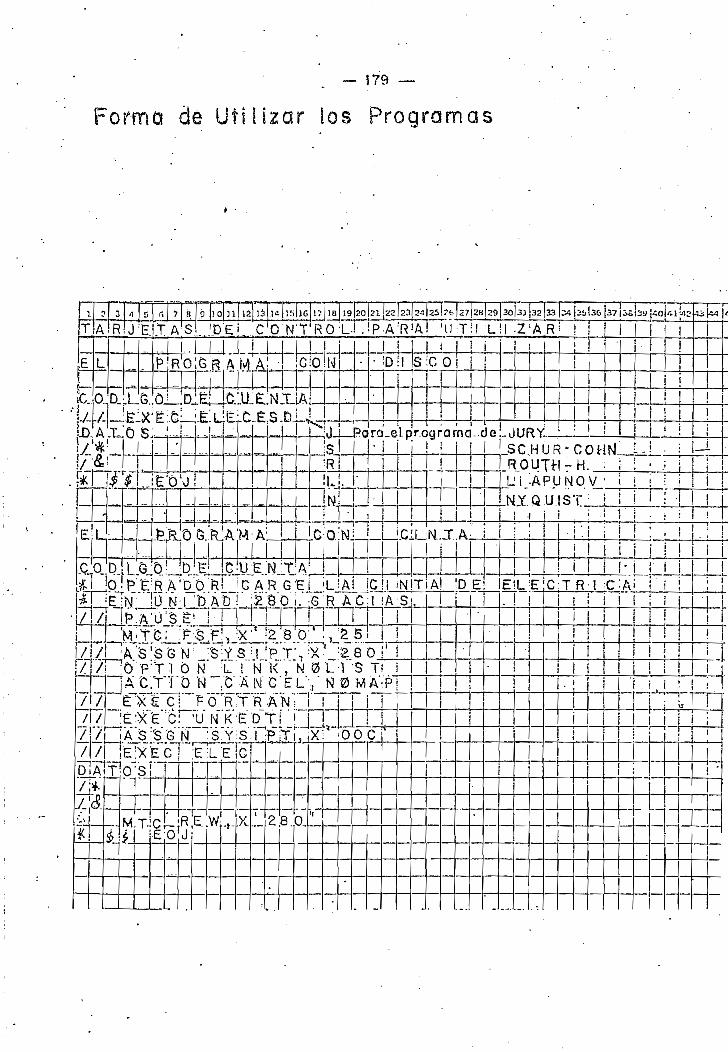
J79
Forma de u t i l i z a r los Programas
T A1 5
R J:'EÍT A SJ O
o NTROU . !p 'A : R ! A!3 0 3 3 3 2 33 CA 3 & 3 6 37 |
LH .¡3 ¡44
L EJR'OIG'RAM Ai~JtJLLElNÜA
y / £":Ví^ • ?>•
KVJCtTs^
EL
B :C O
'•UL"~RI
JjSC.HÜR-COHrLjLL
fiL o e..
c o e o & t o e N T A; i .JpIp '^RA^DRl jGAR Q-EiJUAJJCJI JNjTiAJ. 'D E:...iEiL:E.
Ti"E ;lv"""!ÜN-lD'Áb ! :¿.8 O . L S 'RAg-JiA-S.!. I I i ! I. i I. .FTA'Ul'E' JIIIPZ]J' t i -i
~;0''P:T 'I O hJ4 JL l" N""'l^V'N. 0 V:1 "'S Ti ¡ I I j !
/!7/.fijAjíio^sr"i.*"My'ísn
_/¡ ¡ A_5 i'S G N . j S.YJS/I ¡E;>::E"cT"í:L'EÍG
*1 1
'"T T"T-
¿I -E-0 JLX. 26.a
00 C
T
C;T.R-. I . -C;A! .¡..'. j j |i ! : i i í ' '. ¡ i
!„ .„
! IJLJ-¡ ! ¡ I
4-4—2-4-L\ i 1J j^_ii i ; i r~í

— 1 8 0 —
de Proporcionar los Datos
Los datos que se proporcionan a los programas de los cri-
terios de Jury7 Schur-Cohn, Kouth-Hurwitz y Nyguistr de -
ben ser siiministrados de la siguiente manera: puesto gue
el grado de 3 a ecuación.característica se lee con formato
12r la primera tarjeta, fle datos deberá contener un número
entero gue corresponda al grado de la ecuación gn.e se va- a
analizar.
Los coeficientes de la ecuación característica deben sumi-
nistrarse en orden creciente dé 3_as potencias de -2 r y
puesto gue el formato con e! gue son leídos es de 10P8.3,
deben tener las siguientes restricciones: para rimeros posi
tivo's no deben ser mayores gue 9939.999; y para números ne_
gativos no menores que - 999.999, pudiendo inclusive tener
el valor de cero.
El grado de la ecuación característica debe estar coKipren-
'dido entre 2 y 9,- es decir el número de coeficientes a le-
erse debe ser desde 3 hasta 9, exceptuando para el.crite ~-
rio de Routh - Hurwitz, gue sólo analiza ecuaciones del
grado comprendido entre 2 y 6.
El grado d<~ la ecuación característica se chequea en cada
uno de los programas y si no se cumplen con estas restric-
ciones r el programa imprime el grado de la. misma y para.
A continuación se ilustra la forma de proporcionar datos
con el siguiente ejemplo:
Sea la ecuación característica:
Z2 - 1.2 Z + .32 = O
El grado de la ecuación es 2 y sus c oeficientes en orden

creciente en Z son: .32 1.2, 1, entonces: fjqiira 1,
TARJETAS DE DATOS
í1
tí Z
22 3
3 4
4 5
e C«*
S 6
9 V b
2?
08
^ í 9 nn*• i • • ¡C w v*
9 10 1! !2 Í3 í4 ig Í6
I . . O17 ¡819 2021 22
•
023
024 ..»../
F I S U R A
Para el c riterio cíe Liapunov,. debe considerarse lo si -
guíente* • • . • .
El orden de la matriz de estado se lee con formato 12, y
'los elementos de cada fila de la matriz con-formato 1QF8.3,
siguiendo las mismas consideraciones hechas para los' ante-
riores programas,, con la única variante que puesto que se
tiene una matriz,, tendrá que leerse por filas sin variar
la disposición de sus elementos.
Ejemplo para la. matriz de estado • ;
.8 O.
O. - . 4
riendo 2 el ara.do de la matriz se tiene: Figura 2
T A R J E T A S DE P A T O S
OI 2 3 4 5 6 7 ,8
„ 49 10 I I \ 13 m 15 16 17 F I G U R A £
. 82 3 6 7 8
. o •9. ÍO 1 1 l¿ 13 M 15 16
t 2 3 4 5 6 7 8

REFERENCIAS BIBLIOGRÁFICAS
L_ B .C .Kuo , ANALYS1S AND SYNTHESIS OF SAMPLED DATACONTROL S Y S T E M
• Prentice-Hall, Englewood C l i f fS jN .J . 1967
^.- J.T. Tou DIGITAL AND SAMPLED DATA CONTROL >SYSTEMSMcGraw~"HÍll Book Corripanyy Now York 1958
3,- K .Ogata INGENIERÍA DE-CONTROL MODERNO
Prentice-Holi, Englewood Cl i f fs N. J. 1976
4— StanleyjSchi í tners, CONTROL SYSTEM D E S 1 G NJhon W i l e y y Sons t Inc . - Now York 19GS
5.-. Lu!hGvOI¡verd,Schulz. MÉTODOS NUMÉRICOS
. Ed. L imusa, M é x i c o 1975
6._ James, Smith.Wolfoid, APPLIED NÜM.ERICAL METHODOS FOR" DIGITAL COMPUTATION WITH F O R T R A N AND CSMP.
7._ McCraken, Dorn} METO DOS NUMÉRICOS Y PROGRAMACIÓN FORTRANEd. Limusa M é x i c o 1975
8,-Schich, Merz, F O R T R A N PARA INGENIERÍAMcGraw Hill, M é x i c o ' 1974 .
9..-C..L.LÍU LINEAR S Y S T E M ANALYS1SMcGraw Hill Kogakusha Ltd. 1975