s³lido de poinsot
TRANSCRIPT
Sólido de Poinsot
Mecánica IITema 10
Manuel Ruiz Delgado
Escuela Tecnica Superior de Ingenieros Aeronauticos
Universidad Politecnica de Madrid
Solido de Poinsot– p. 1/15

Sólido de Poinsot
Planteamiento e integrales primeras
Análisis cualitativo mediante las integrales primeras
Interpretación cinemática de Poinsot
Caso simétrico: integración completa
Caso general: integración mediante funciones elípticasDeterminación de la velocidad angularDeterminación de los ángulos
Caso general: condiciones iniciales particularesCasoD = A
CasoD = C
CasoD = B
Estabilidad de los ejes principales
Efecto de la disipación sobre la estabilidad
Solido de Poinsot– p. 2/15

Planteamiento e integrales primeras
Sólido con punto fijo ymomento exterior nulo
MEO = 0 =
d
dtHO ⇒ HO = IIIO · ω =
−−→Cte.= (Hx, Hy, Hz)1
Momento cinético constanteen ejes fijos: EjeOz1
HO =
0
0
H
1
=
H sin θ sinϕ
H sin θ cosϕ
H cos θ
0
=
Ap
Bq
Cr
0
=
=
A(
θ cosϕ+ ψ sin θ sinϕ)
B(
−θ sinϕ+ ψ sin θ cosϕ)
C(
ϕ+ ψ cos θ)
0
Solido de Poinsot– p. 3/15

Planteamiento e integrales primeras
Despejando las derivadas de los ángulos de Euler, se obtienentres integrales primeras:
θ =
(
1
A− 1
B
)
H sin θ cosϕ sinϕ
ψ =
(
1
Asin2 ϕ+
1
Bcos2 ϕ
)
H
ϕ =
(
1
C− 1
Asin2 ϕ− 1
Bcos2 ϕ
)
H cos θ
Paraθ = 0 hay una singularidad: sólo está definida la sumaψ + ϕ, no cada una por separado.Se escogen los ejes sólido de modo queA > B > C
En el estudio teórico es más útil usar combinaciones lineales deestas integrales primeras.
Solido de Poinsot– p. 4/15

Planteamiento e integrales primeras
Módulo del vector momento cinético:
HO · HO = H2 = A2p2 + B2q2 + C2r2 = D2µ2
Energía:
HO · ω = 2T = Ap2 +Bq2 + Cr2 = Dµ2
ConstantesD = H2
2Ty µ = 2T
H, con dimensiones deIx y ω
Para la reducción a cuadraturas, también se usa una de las deEuler:
Ap+ (C − B) qr = 0
Bq + (A− C) pr = 0
Cr + (B − A) pq = 0
Solido de Poinsot– p. 5/15
Planteamiento e integrales primeras
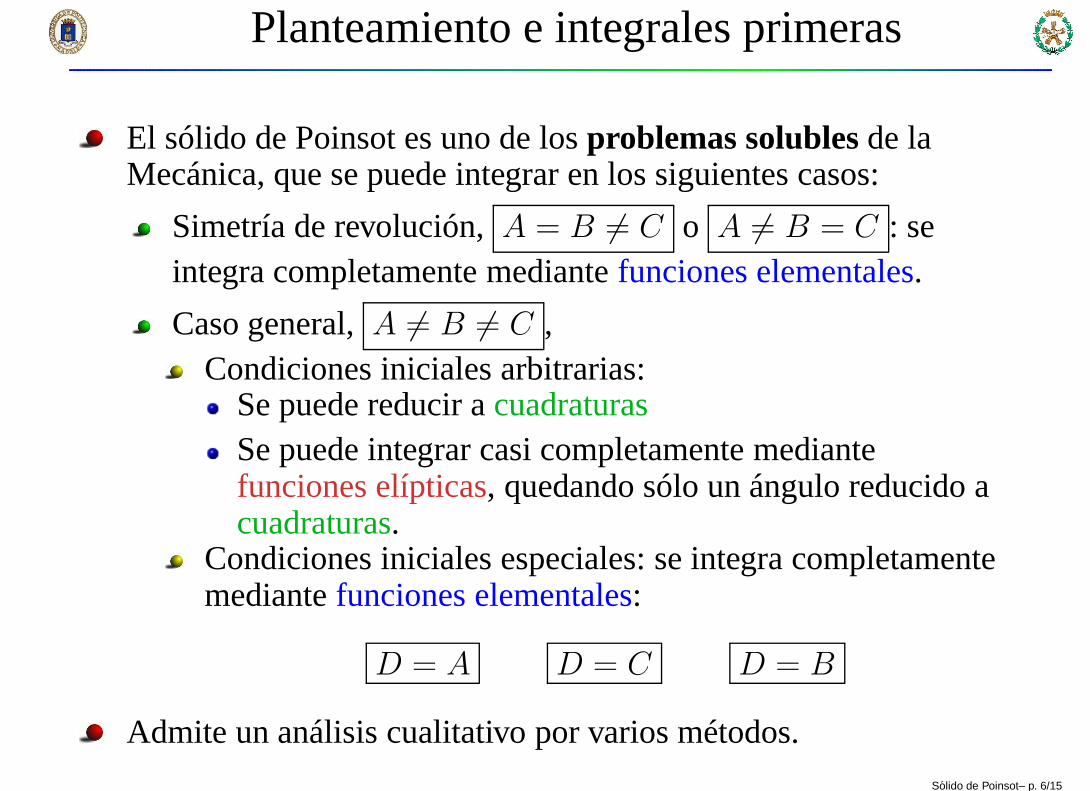
El sólido de Poinsot es uno de losproblemas solublesde laMecánica, que se puede integrar en los siguientes casos:
Simetría de revolución,A = B 6= C o A 6= B = C : seintegra completamente mediantefunciones elementales.
Caso general,A 6= B 6= C ,Condiciones iniciales arbitrarias:
Se puede reducir acuadraturasSe puede integrar casi completamente mediantefunciones elípticas, quedando sólo un ángulo reducido acuadraturas.
Condiciones iniciales especiales: se integra completamentemediantefunciones elementales:
D = A D = C D = B
Admite un análisis cualitativo por varios métodos.Solido de Poinsot– p. 6/15

Análisis cualitativo por integrales primeras
Las integrales primeras|H|2 y 2T son elipsoides enω:
A2p2 +B2q2 + C2r2 = D2µ2
Ap2 +Bq2 + Cr2 = Dµ2 ↔ Ax2 + By2 + Cz2 = 1
El vectorω(p, q, r) en ejes sólido se mueve por la intersección delos dos elipsoides
Energía Momento cinético
(p/µ)2
D/A+
(q/µ)2
D/B+
(r/µ)2
D/C= 1
(p/µ)2
(D/A)2+
(q/µ)2
(D/B)2+
(r/µ)2
(D/C)2= 1
La forma de la curva depende de la constanteD
Solido de Poinsot– p. 7/15

Análisis cualitativo por integrales primeras
Energía Momento cinético
(p/µ)2
D/A=
+(q/µ)2
D/B<
+(r/µ)2
D/C<
= 1(p/µ)2
(D/A)2
=
+(q/µ)2
(D/B)2
>
+(r/µ)2
(D/C)2
>
= 1
CasoD = A : → ENx = MCx
ENy <MCy : A/B < (A/B)2
ENz <MCz : A/C < (A/C)2
El elipsoide del MC recubre completa-mente al de la EN, y sólo son tangentesen el vérticex.La intersección esq = 0, r = 0, y el únicomovimiento posible es un giro alrededordel ejex fijo.
Solido de Poinsot– p. 8/15
Análisis cualitativo por integrales primeras
Energía Momento cinético
(p/µ)2
D/A>
+(q/µ)2
D/B>
+(r/µ)2
D/C=
= 1(p/µ)2
(D/A)2
<
+(q/µ)2
(D/B)2
<
+(r/µ)2
(D/C)2
=
= 1
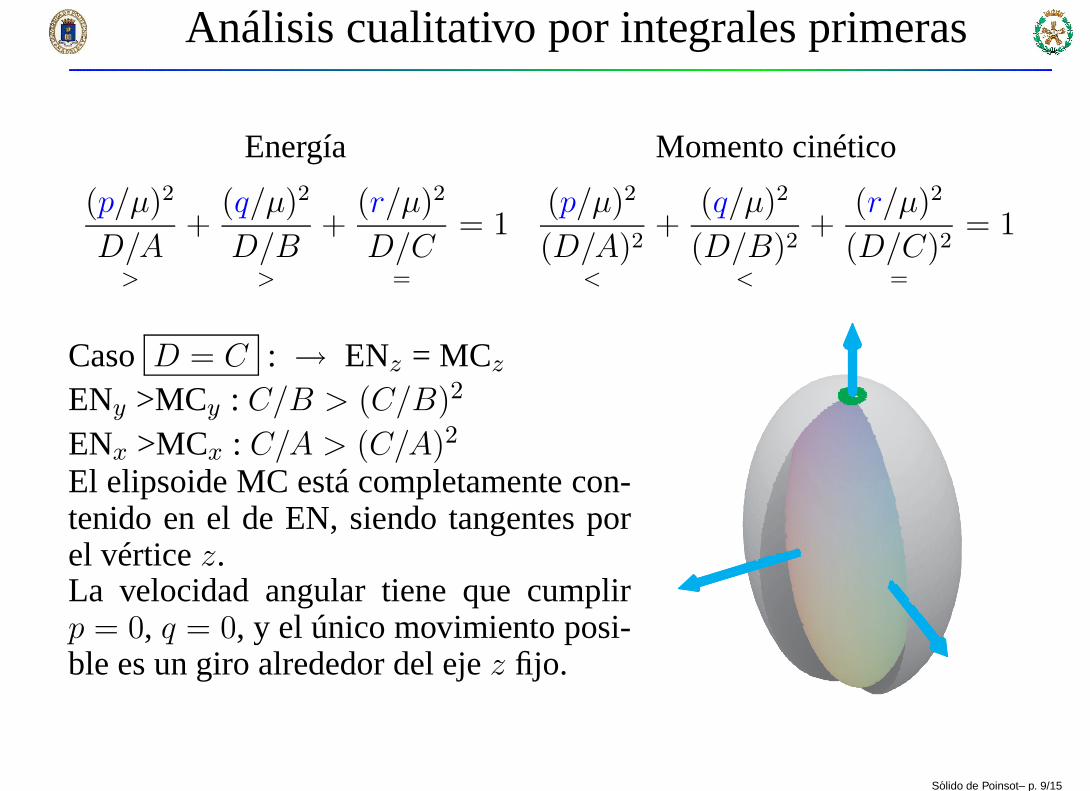
CasoD = C : → ENz = MCz
ENy >MCy : C/B > (C/B)2
ENx >MCx : C/A > (C/A)2
El elipsoide MC está completamente con-tenido en el de EN, siendo tangentes porel vérticez.La velocidad angular tiene que cumplirp = 0, q = 0, y el único movimiento posi-ble es un giro alrededor del ejez fijo.
Solido de Poinsot– p. 9/15
Análisis cualitativo por integrales primeras
Energía Momento cinético
(p/µ)2
D/A>
+(q/µ)2
D/B=
+(r/µ)2
D/C<
= 1(p/µ)2
(D/A)2
<
+(q/µ)2
(D/B)2
=
+(r/µ)2
(D/C)2
>
= 1
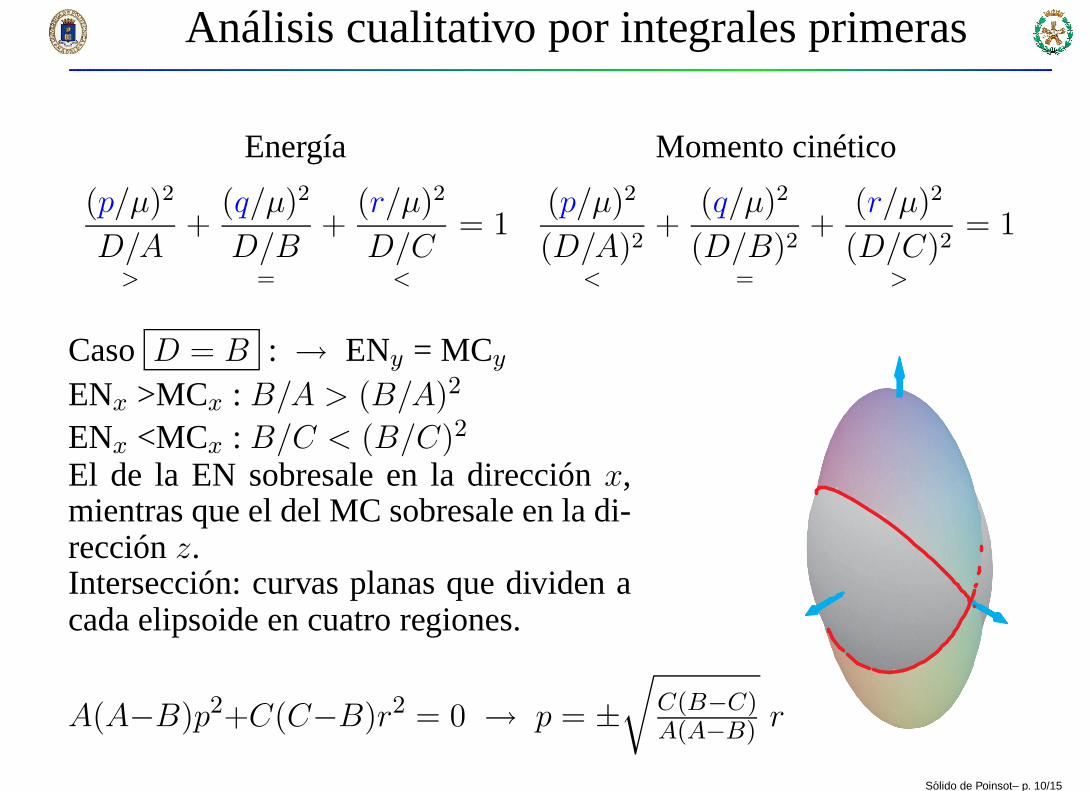
CasoD = B : → ENy = MCy
ENx >MCx : B/A > (B/A)2
ENx <MCx : B/C < (B/C)2
El de la EN sobresale en la direcciónx,mientras que el del MC sobresale en la di-recciónz.Intersección: curvas planas que dividen acada elipsoide en cuatro regiones.
A(A−B)p2+C(C−B)r2 = 0 → p = ±√
C(B−C)A(A−B) r
Solido de Poinsot– p. 10/15

Análisis cualitativo por integrales primeras
Energía Momento cinético
(p/µ)2
D/A>
+(q/µ)2
D/B<
+(r/µ)2
D/C<
= 1(p/µ)2
(D/A)2
<
+(q/µ)2
(D/B)2
>
+(r/µ)2
(D/C)2
>
= 1
CasoA > D > B :ENx >MCx, puesD/A > (D/A)2
ENy <MCy, puesD/B < (D/B)2
ENz <MCz , puesD/C < (D/C)2
El elipsoide EN sobresale segúnxEl del MC sobresale segúnz ey.La ω recorre una curva que rodea al ejex
Solido de Poinsot– p. 11/15

Análisis cualitativo por integrales primeras
Energía Momento cinético
(p/µ)2
D/A>
+(q/µ)2
D/B>
+(r/µ)2
D/C<
= 1(p/µ)2
(D/A)2
<
+(q/µ)2
(D/B)2
<
+(r/µ)2
(D/C)2
>
= 1
CasoB > D > C :ENx >MCx, puesD/A > (D/A)2
ENy >MCy, puesD/B > (D/B)2
ENz <MCz , puesD/C < (D/C)2
El elipsoide EN sobresale segúnx eyEl del MC sobresale segúnz.La ω recorre una curva que rodea al ejez
Solido de Poinsot– p. 12/15
Análisis cualitativo por integrales primeras
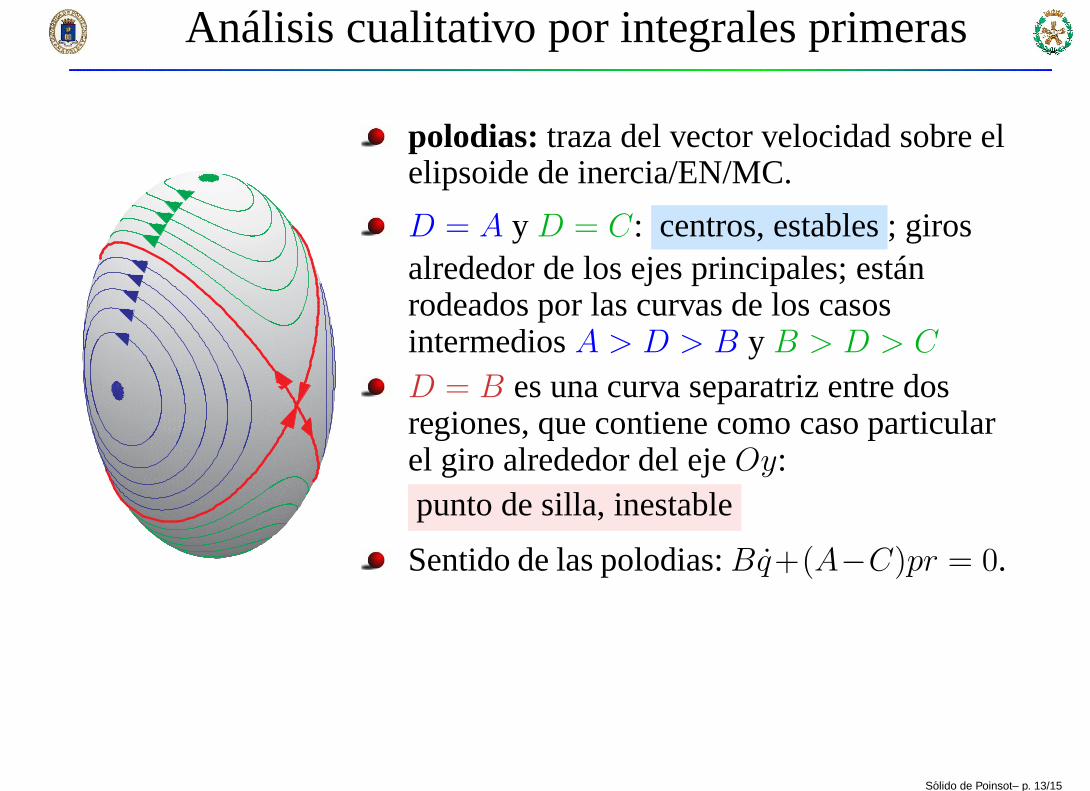
polodias: traza del vector velocidad sobre elelipsoide de inercia/EN/MC.
D = A y D = C: centros, estables ; girosalrededor de los ejes principales; estánrodeados por las curvas de los casosintermediosA > D > B y B > D > C
D = B es una curva separatriz entre dosregiones, que contiene como caso particularel giro alrededor del ejeOy:punto de silla, inestable
Sentido de las polodias:Bq+(A−C)pr = 0.
Solido de Poinsot– p. 13/15

Interpretación cinemática de Poinsot
El movimiento del sólido de Poinsot se desarrolla como si el elipsoidede inercia del sólido rodara y pivotara sin deslizar sobre unplano fijoen el espacio, de dirección normal a la del vector momento cinético.
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
M
O
π′
E.I.R.
M ′
ω
π
HO
Demostración:M ∈ EIR, vM = 0
Plano tangente enM ⊥ HO
Distancia al plano constante
Elipsoide de inerciaAx2 +By2 + Cz2 = 1 = r · IIIO · r.
Polodia: Trayectoria deM sobre el elipsoide
Herpolodia: Trayectoria deM sobre el plano fijo
Solido de Poinsot– p. 14/15
Interpretación cinemática de Poinsot
M
O
x
y
z
ω
HO
n
E.I.R.
d
π
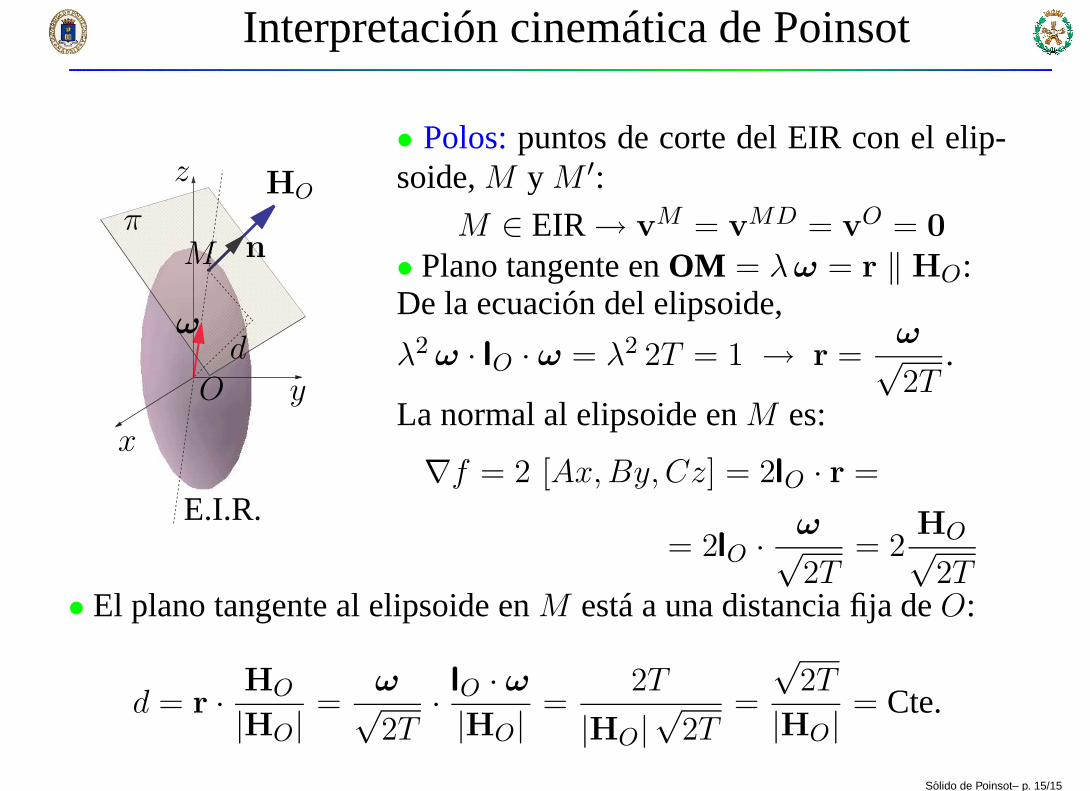
• Polos:puntos de corte del EIR con el elip-soide,M y M ′:
M ∈ EIR → vM = v
MD = vO = 0
• Plano tangente enOM = λω = r ‖ HO:De la ecuación del elipsoide,
λ2ω · IIIO · ω = λ2 2T = 1 → r =
ω√2T
.
La normal al elipsoide enM es:
∇f = 2 [Ax,By,Cz] = 2IIIO · r =
= 2IIIO · ω√2T
= 2HO√2T
• El plano tangente al elipsoide enM está a una distancia fija deO:
d = r · HO
|HO|=
ω√2T
· IIIO · ω|HO|
=2T
|HO|√
2T=
√2T
|HO|= Cte.
Solido de Poinsot– p. 15/15