sinamics g120d simatic et 200s fc product · pdf file06/2007, firmware version 3.0. all...
TRANSCRIPT


Product Information - Function Manual SINAMICS G120, SINAMICS G120D, SIMATIC ET 200S FC, SIMATIC ET 200pro FC
s Product Information
Edition 06/2007
This product information sheet describes the behavior of the above mentioned inverters (Firmware version V3.0), that is not described in the associated documentation, edition 06/2007, Firmware version 3.0.
All inverters
If in sensorless vector control (SLVC) one of the following problems appears
• motor does not ramp up
• setpoint jumps at low frequencies at ramp down
• motor does not ramp down to 0 Hz even if torque limit is set to 0
• the calculated motor temperature (P0621 > 0) shown in r0035 is implausible
this can be caused by faulty values for both, stator and motor cable resistance.
Try the following to solve the problem:
• disconnect the motor from the feeder cable,
• measure the stator resistance and the motor cable resistance with an ohmmeter or better with a wheatstone bridge
• put the values in P0350 (stator resistance) and P0352 (cable resistance),
• then perform "calculation of motor parameters" again with P0340 = 3.
If you don' not get feasible values measuring the stator resistance, use the equivalent circuit data of the motor (this can be can be provided by the motor manufacturer) and write it into the respective parameters (fig 6.1 in Function Manual) or reduce the stator resistance in 5 % steps and perform "calculation of motor parameters" again with P0340 = 3.
Fail-safe inverters
If activating SS1 or SLS, this triggers the STO signal as a pulse. This STO pulse has no influence on the SS1 or SLS function and can be ignored.
CU240S PN
If in HW config of STEP 7 a different telegram type is selected from the telegram type selected in P0922 in the inverter, the inverter trips - by fault - with F00452 (belt failure). If this fault occurs then check the telegram set in HW config and P0922.
Power Modules PM260
With Power Modules PM260 "motor temperature identification" (P0621) only works with a KTY sensor.
SINAMICS G120SINAMICS G120D
SIMATIC ET 200S FCSIMATIC ET 200pro FC

Introduction 1
Safety notes 2
Description 3
Installing/Mounting 4
Commissioning 5
Communication 6
Operation 7
Troubleshooting 8
Service and maintenance 9
Technical data 10
Spare parts/Accessories 11
Appendix A
List of abbreviations B
SINAMICS
G120 Control Units CU240S
Operating Instructions
06/2007 - SW 3.0 A5E00766042B AB
Edition 06/2007, Software version V3.0

Safety Guidelines This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are graded according to the degree of danger.
DANGER indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION with a safety alert symbol, indicates that minor personal injury can result if proper precautions are not taken.
CAUTION without a safety alert symbol, indicates that property damage can result if proper precautions are not taken.
NOTICE indicates that an unintended result or situation can occur if the corresponding information is not taken into account.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to property damage.
Qualified Personnel The device/system may only be set up and used in conjunction with this documentation. Commissioning and operation of a device/system may only be performed by qualified personnel. Within the context of the safety notes in this documentation qualified persons are defined as persons who are authorized to commission, ground and label devices, systems and circuits in accordance with established safety practices and standards.
Prescribed Usage Note the following:
WARNING This device may only be used for the applications described in the catalog or the technical description and only in connection with devices or components from other manufacturers which have been approved or recommended by Siemens. Correct, reliable operation of the product requires proper transport, storage, positioning and assembly as well as careful operation and maintenance.
Trademarks All names identified by ® are registered trademarks of the Siemens AG. The remaining trademarks in this publication may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
Disclaimer of Liability We have reviewed the contents of this publication to ensure consistency with the hardware and software described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the information in this publication is reviewed regularly and any necessary corrections are included in subsequent editions.
Siemens AG Automation and Drives Postfach 48 48 90437 NÜRNBERG GERMANY
A5E00766042B AB 06/2007
Copyright © Siemens AG 2007. Technical data subject to change
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 5
Table of contents 1 Introduction................................................................................................................................................ 9
1.1 Documents for the Inverter ............................................................................................................9 1.2 Description of Document Classes................................................................................................11
2 Safety notes............................................................................................................................................. 13 3 Description............................................................................................................................................... 17
3.1 Accessories for the SINAMICS G120 ..........................................................................................18 3.2 Features and Functions of the CU240S ......................................................................................19 3.3 Layout and Block diagram ...........................................................................................................21 3.4 Interfaces of the Control Units .....................................................................................................26 3.5 Factory Settings of the CU240S Control Units ............................................................................29
4 Installing/Mounting................................................................................................................................... 33 4.1 Fitting the CU to the PM...............................................................................................................33 4.2 Connecting a CU240S via Terminals...........................................................................................35 4.2.1 Setting Frequency Setpoints via the DIP Switches......................................................................37 4.3 Connecting a CU240S via USS on RS485 ..................................................................................40 4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP................................................41 4.4.1 Connecting the PROFIBUS DP ...................................................................................................41 4.4.2 Screening the bus cable and EMC precautions...........................................................................44 4.5 Connecting a CU240S PN via PROFINET ..................................................................................46 4.6 Installation Check List ..................................................................................................................49
5 Commissioning ........................................................................................................................................ 51 5.1 Single Commissioning .................................................................................................................53 5.2 Series Commissioning .................................................................................................................54 5.2.1 Common Information to Series commissioning ...........................................................................54 5.2.2 Upload and Download of Parameter Sets ...................................................................................56 5.3 Common Commissioning Information..........................................................................................59 5.4 Message F00395 .........................................................................................................................60 5.5 Commissioning with the BOP ......................................................................................................61 5.5.1 The Basic Operator Panel (BOP).................................................................................................61 5.5.1.1 Function Keys of the BOP............................................................................................................63 5.5.1.2 Changing Parameters via BOP....................................................................................................64 5.5.2 Overview Commissioning with the BOP ......................................................................................65 5.5.3 Basic Commissioning...................................................................................................................66 5.5.3.1 Quick Commissioning ..................................................................................................................66 5.5.3.2 Motor Data Identification ..............................................................................................................70

Table of contents
Control Units CU240S 6 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.5.3.3 Speed Control Optimization ........................................................................................................ 71 5.5.4 Further Settings for Commissioning............................................................................................ 71 5.5.4.1 Calculating the Motor and Control Data...................................................................................... 71 5.5.4.2 Commissioning the Application................................................................................................... 73 5.5.4.3 Reset Parameters to Factory Settings ........................................................................................ 84 5.5.5 Commissioning the Fail-Safe Functions ..................................................................................... 85 5.5.5.1 Parameters For Fail-Safe Functions ........................................................................................... 87 5.5.5.2 Password for fail-safe functions .................................................................................................. 88 5.5.5.3 Checksums ................................................................................................................................. 89 5.5.5.4 General Steps For Commissioning Fail-Safe Functions............................................................. 89 5.5.5.5 Common Step-by-Step Descriptions For Fail-Safe Functions .................................................... 90 5.5.5.6 Factory Reset of Fail-safe Parameters ....................................................................................... 95 5.5.5.7 Acceptance Test and Acceptance Log ....................................................................................... 95 5.5.6 Series commissioning with the BOP ........................................................................................... 98 5.6 Commissioning with the STARTER .......................................................................................... 100 5.6.1 Single Commissioning with the STARTER ............................................................................... 101 5.6.2 Series Commissioning with the STARTER............................................................................... 102 5.7 Commissioning with the MMC................................................................................................... 103 5.7.1 Parameter Download via MMC ................................................................................................. 103 5.7.2 Series commissioning with MMC .............................................................................................. 104 5.8 Commissioning the Encoder ..................................................................................................... 109 5.8.1 Parameterizing the Encoder Interface ...................................................................................... 111 5.8.2 Encoder Fault Codes ................................................................................................................ 114 5.9 Parameters................................................................................................................................ 115 5.9.1 Write parameters....................................................................................................................... 115 5.9.2 Monitoring parameters .............................................................................................................. 116 5.9.3 Parameter Attributes ................................................................................................................. 116 5.10 Start-up and Swap Behavior of the Inverter.............................................................................. 121 5.10.1 Normal Start-up Behavior of the Inverter .................................................................................. 121 5.10.2 Swap Behavior of the Inverter................................................................................................... 123
6 Communication...................................................................................................................................... 129 6.1 PROFIdrive Profile V4.0............................................................................................................ 129 6.1.1 Use Data Structure as Defined in PROFIdrive Profile 4.0 ........................................................ 129 6.1.2 Data Structure of the Parameter Channel................................................................................. 130 6.2 Cyclic Communication............................................................................................................... 136 6.2.1 Telegrams ................................................................................................................................. 136 6.2.2 Standard Telegram Structure.................................................................................................... 137 6.2.3 VIK/NAMUR Telegram Structure .............................................................................................. 139 6.2.4 PROFIsafe Telegram Structure ................................................................................................ 140 6.2.5 Switch over behavior of Communication telegram.................................................................... 141 6.2.6 Control and status words .......................................................................................................... 143 6.3 Acyclic Communication ............................................................................................................. 148 6.3.1 DPV1 Parameter Channel (DS47) ............................................................................................ 148 6.4 Communication via PROFIBUS ................................................................................................ 154 6.4.1 General Information About PROFIBUS for SINAMICS............................................................. 154 6.4.2 Communication Settings PROFBUS DP................................................................................... 155 6.4.3 Configuration Example with SIMATIC S7 ................................................................................. 160 6.4.3.1 Read Parameters ...................................................................................................................... 163 6.4.3.2 Write Parameters ...................................................................................................................... 168 6.5 Communication via PROFINET ................................................................................................ 170
Table of contents
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 7
6.5.1 Real-Time (RT) Communication ................................................................................................171 6.5.2 Addresses ..................................................................................................................................171 6.5.3 PROFINET Communication Parameters ...................................................................................174 6.5.4 Setting RT Communications With GSDML................................................................................177 6.6 Communication via USS............................................................................................................182 6.6.1 Universal serial interface (USS).................................................................................................182 6.6.2 SUB D connector for RS485 interface .......................................................................................184 6.6.3 Structure of a USS Telegram.....................................................................................................185 6.6.4 Use data area of USS telegram.................................................................................................187 6.6.5 USS Parameter Channel ...........................................................................................................188 6.6.6 Timeouts and other errors..........................................................................................................189 6.6.7 USS Process Data Channel (PZD)............................................................................................192
7 Operation............................................................................................................................................... 193 7.1 ON/OFF commands...................................................................................................................193 7.2 Operation States Displayed via LED .........................................................................................196 7.2.1 LED Display ...............................................................................................................................196
8 Troubleshooting..................................................................................................................................... 201 8.1 Faults and Alarms ......................................................................................................................201 8.2 Diagnostics Display....................................................................................................................203 8.3 Troubleshooting with the BOP ...................................................................................................204 8.4 Troubleshooting via the Control System....................................................................................206
9 Service and maintenance ...................................................................................................................... 209 10 Technical data ....................................................................................................................................... 211 11 Spare parts/Accessories........................................................................................................................ 213
11.1 Basic Operation Panel ...............................................................................................................213 11.2 PC Connection Kit......................................................................................................................214 11.3 Micro Memory Card (MMC) .......................................................................................................215
A Appendix................................................................................................................................................ 217 A.1 Electromagnetic Compatibility....................................................................................................217 A.2 Definition of the EMC Environment and Categories ..................................................................218 A.3 EMC Overall Performance .........................................................................................................219 A.4 Standards...................................................................................................................................221 A.5 Acceptance Log .........................................................................................................................222 A.5.1 Documentation of acceptance test ............................................................................................222 A.5.2 Function test of the acceptance test ..........................................................................................225 A.5.3 Completing the acceptance log..................................................................................................228
B List of abbreviations............................................................................................................................... 231 B.1 Abbreviations .............................................................................................................................231
Index...................................................................................................................................................... 237


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 9
Introduction 11.1 Documents for the Inverter
Available technical documentation Comprehensive information and support tools are available from the Service and Support internet site http://support.automation.siemens.com You find there the following types of documentation: Getting Started Operating Instructions Hardware Installation Manual Function Manual Parameter Manual Product Information
Further internet addresses You can download the respective documents for your inverter under the following links: SINAMICS G110
http://support.automation.siemens.com/WW/view/en/13740464/13740464 SINAMICS G120
http://support.automation.siemens.com/WW/view/en/22339653/133300 SINAMICS G120D
http://www.siemens.com/sinamics-g120d SIMATIC ET 200S FC
http://support.automation.siemens.com/WW/view/en/18698679/133300 SIMATIC ET 200pro FC
http://support.automation.siemens.com/WW/view/en/24622073/133300
Application examples You find various application examples to the inverters under the following link: http://support.automation.siemens.com/WW/view/en/20208582/136000

Introduction 1.1 Documents for the Inverter
Control Units CU240S 10 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Overview about the documents, available for the specific inverter components Product Information Product Information: SINAMICS G120 Control Units CU240S Product Information: SINAMICS G120 Control Units CU240S, Power Modules PM250 / PM260 Hardware Installation Manual Hardware Installation Manual: Power Module PM260 Hardware Installation Manual: Power Module PM250 Hardware Installation Manual: Power Module PM240 Operating Instructions Operating Instructions: Control Unit CU240S, CU240S DP, CU240S DP-F Software version 2.0 Operating Instructions (Compact): Control Unit CU240S, CU240S DP, CU240S DP-F Software version 2.0 Operating Instructions: Control Unit CU240S, CU240S DP, CU240S DP-F Software version 2.1 Operating Instructions: Control Unit CU240S, CU240S DP, CU240S DP-F, CU240S PN Software version 3.0 Operating Instructions: SINAMICS G110 Operating Instructions (Compact): SINAMICS G110 Parameter Manual Parameter Manual: Control Unit CU240S, CU240S DP, CU240S DP-F Software version 2.0 Parameter Manual: Control Unit CU240S, CU240S DP, CU240S DP-F Software version 2.1 Parameter Manual: Control Unit CU240S, CU240S DP, CU240S DP-F, CU240S PN Software version 3.0 Parameter Manual: SINAMICS G110 Getting Started Getting Started: SINAMICS G120 Power Module Getting Started: SINAMICS G120 Control Unit Getting Started Guide SINAMICS G110 Installation Instructions SINAMICS G110/G120 PC Connection Kit SINAMICS G120 Screen Termination Kit PM240 Power Modules SINAMICS G120 DIN Rail Fitting Instructions SINAMICS G120 fan replacement frame sizes A to F SINAMICS G120 Nema 1 Installation Instructions PM 240 Power Modules SINAMICS G120 Input Choke Installation Instructions FS A-C Braking Resistors for SINAMICS G120 Frame Size B (FSB) Instruction Sheet SINAMICS G120 Brake Module Instructions Relay Brake Module, Safe Brake Module

Introduction 1.2 Description of Document Classes
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 11
1.2 Description of Document Classes
Description of the documents The following section describes the available document types for your inverter:
Brochure The Brochure is advertising literature designed to introduce the product to the marketplace. It contains a basic outline of the product with a brief overview of the technical capabilities of the product.
Catalog The Catalog presents information that allows the customer to select an appropriate inverter including all available options. It contains detailed technical specifications, ordering and pricing information to allow the customer to order the appropriate items for their application or plant.
Getting Started The Getting Started presents warnings, dimension drawings and a brief set up information for the customer.
Operating Instructions The Operating Instructions gives information about the features of the inverter. It gives detailed information about commissioning, control modes, system parameters, troubleshooting, technical specifications and the available options of the product.
Hardware Installation Manual The Hardware Installation Manual gives information for the Power Modules regarding the features of the product. It gives detailed information on installation, technical specifications, dimension drawings and the available options from the product.
Function Manual The Function Manual is a list of detailed information about the inverter's functions. It contains descriptions of the internal components, modules and gates as well as examples for usage. Moreover associated parameters and miscellaneous logic operations of the controls are given.
Parameter Manual The Parameter Manual contains a detailed description of all the parameters that can be modified to adapt the inverter to specific applications. The Parameter Manual also contains a series of function diagrams to diagrammatically portray the nature and interoperability of the system parameters.


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 13
Safety notes 2Safety Instructions
The following Warnings, Cautions and Notes are provided for your safety and as a means of preventing damage to the product or components in the connected machines. This section lists Warnings, Cautions and Notes, which apply generally when handling the inverter, classified as General, Transport and Storage, Commissioning, Operation, Repair and Dismantling and Disposal. Specific Warnings, Cautions and Notes that apply to particular activities are listed at the beginning of the relevant sections in this manual and are repeated or supplemented at critical points throughout these sections. Please read the information carefully, since it is provided for your personal safety and will also help prolong the service life of your inverter and the equipment to which it is connected.

Safety notes
Control Units CU240S 14 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
General
WARNING This equipment contains dangerous voltages and controls potentially dangerous rotating mechanical parts. Non-compliance with the warnings or failure to follow the instructions contained in this manual can result in loss of life, severe personal injury or serious damage to property. Protection in case of direct contact by means of SELV / PELV is only permissible in areas with equipotential bonding and in dry indoor rooms. If these conditions are not fulfilled, other protective measures against electric shock must be applied e.g. protective insulation. Only suitably qualified personnel should work on this equipment, and only after becoming familiar with all safety notices, installation, operation and maintenance procedures contained in this manual. The successful and safe operation of this equipment is dependent upon its proper handling, installation, operation and maintenance. The power supply, DC and motor terminals, the brake and thermistor cables can carry dangerous voltages even if the inverter is inoperative. Wait at least five minutes to allow the unit to discharge after switching off the line supply before carrying out any installation work. It is strictly prohibited for any mains disconnection to be performed on the motor-side of the system; any disconnection of the mains must be performed on the mains-side of the Inverter. When connecting the line supply to the Inverter, make sure that the terminal case of the motor is closed. When changing from the ON to OFF-state of an operation if an LED or other similar display is not lit or active; this does not indicate that the unit is switched-off or powered-down. The inverter must always be grounded. Isolate the line supply before making or changing connections to the unit. Ensure that the inverter is configured for the correct supply voltage. The inverter must not be connected to a higher voltage supply.
Static discharges on surfaces or interfaces that are not generally accessible (e.g. terminal or connector pins) can cause malfunctions or defects. Therefore, when working with inverters or inverter components, ESD protective measures should be observed. Take particular notice of the general and regional installation and safety regulations regarding work on dangerous voltage installations (e.g. EN 50178) as well as the relevant regulations regarding the correct use of tools and personal protective equipment (PPE).
CAUTION
Children and the general public must be prevented from accessing or approaching the equipment! This equipment may only be used for the purpose specified by the manufacturer. Unauthorized modifications and the use of spare parts and accessories that are not sold or recommended by the manufacturer of the equipment can cause fires, electric shocks and injuries.

Safety notes
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 15
NOTICE Keep this manual within easy reach of the equipment and make it available to all users. Whenever measuring or testing has to be performed on live equipment, the regulations of Safety Code BGV A2 must be observed, in particular § 8 "Permissible Deviations when Working on Live Parts". Suitable electronic tools should be used. Before installing and commissioning, please read these safety instructions and warnings carefully and all the warning labels attached to the equipment. Make sure that the warning labels are kept in a legible condition and replace missing or damaged labels.
Transport and storage
WARNING Correct transport, storage as well as careful operation and maintenance are essential for the proper and safe operation of the equipment.
CAUTION
Protect the equipment against physical shocks and vibration during transport and storage. It is important that the equipment is protected from water (rainfall) and excessive temperatures.
Commissioning
WARNING Working on the equipment by unqualified personnel or failure to comply with warnings can result in severe personal injury or serious damage to material. Only suitably qualified personnel trained in the setup, installation, commissioning and operation of the product should carry out work on the equipment.
CAUTION
Cable connection The control cables must be laid separately from the power cables. Carry out the connections as shown in the installation section in this manual, to prevent inductive and capacitive interference from affecting the correct function of the system.

Safety notes
Control Units CU240S 16 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Operation
WARNING The SINAMICS G120 inverters operate at high voltages. When operating electrical devices, it is impossible to avoid applying hazardous voltages to certain parts of the equipment. Emergency Stop facilities according to EN 60204, IEC 204 (VDE 0113) must remain operative in all operating modes of the control equipment. Any disengagement of the Emergency Stop facility must not lead to an uncontrolled or an undefined restart of the equipment. Certain parameter settings may cause the SINAMICS G120 inverter to restart automatically after an input power failure, for example, the automatic restart function. Wherever faults occurring in the control equipment can lead to substantial material damage or even grievous bodily injury (that is, potentially dangerous faults), additional external precautions must be taken or facilities provided to ensure or enforce safe operation, even when a fault occurs (e.g. independent limit switches, mechanical interlocks, etc.). Motor parameters must be accurately configured for motor overload protection to operate correctly. This equipment is capable of providing internal motor overload protection according to UL508C. Only Control Units with fail-safe functions can be used as an "Emergency Stop Mechanism" (see EN 60204, section 9.2.5.4).
Repair
WARNING Repairs on equipment may only be carried out by Siemens Service, by repair centers authorized by Siemens or by authorized personnel who are thoroughly acquainted with all the warnings and operating procedures contained in this manual. Any defective parts or components must be replaced using parts contained in the relevant spare parts list. Disconnect the power supply before opening the equipment for access.
Dismantling and disposal
CAUTION The packaging of the inverter is re-usable. Retain the packaging for future use. Easy-to-release screw and snap connectors allow you to break the unit down into its component parts. You can recycle these component parts, dispose of them in accordance with local requirements or return them to the manufacturer.

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 17
Description 3The SINAMICS G120 range
The SINAMICS G120 inverter has been designed for the accurate and efficient control of the speed and torque for three-phase motors. The SINAMICS G120 system comprises two basic modules, the Control Unit (CU) and the Power Module (PM). The Control Units are divided into the following: Standard CUs (CUs without fail-safe functions)
– CU240S – CU240S DP like CU 240S plus PROFIBUS DP interface (PROFIdrive Profile 4.0) – CU240S PN like CU 240S plus PROFINET interface (PROFIdrive Profile 4.0)
CUs with fail-safe functions – CU240S DP-F like CU240S DP plus integrated fail-safe functions
The Power Modules are divided as follows: PM240 Power Module with dc braking functions, supply voltage 3 AC 400 V PM250 Power Module with regenerative mode, supply voltage 3 AC 400 V PM260 Power Module with regenerative mode, supply voltage 3 AC 690 V Control Units and Power Modules are allowed to be combined in any possible configuration. See the respective manual for specific functions and features. This manual describes functions and features of the control units CU240S CU240S-DP CU240S DP-F CU240S PN

Description 3.1 Accessories for the SINAMICS G120
Control Units CU240S 18 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
3.1 Accessories for the SINAMICS G120 The following options are available for the SINAMICS G120 Inverters. A description how to use the individual options or spare parts is part of the option package itself. Ordering information and a brief functional description is given in the SINAMICS G120 catalog.
Control Unit accessories BOP (Basic Operator Panel) PC connection kit MMC (Micro Memory Card) CU Screen termination kit

Description 3.2 Features and Functions of the CU240S
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 19
3.2 Features and Functions of the CU240S
Common features Modular inverter Simple to install Signal interconnection possible via BICO technology Different data sets selectable Fast current limiting (FCL) for trip-free operation Easy exchange of Power Module or Control Unit (swap or hot swap) Rugged EMC design Configurable for a wide range of applications Non-volatile saving of parameter settings - either in the EEPROM of the CU or on an
MMC Status display via LEDs on the Control Unit High pulse frequencies for low noise motor operation EM brake relay
Features in combination with a PM240 Built-in braking chopper for dynamic braking DC-link voltage controller Kinetic buffering
Features in combination with a PM250 or a PM260 Regenerative capability Regenerative braking
Commissioning functions Quick commissioning Motor/control data calculation Motor data identification Application commissioning Series commissioning Parameter reset to the factory setting

Description 3.2 Features and Functions of the CU240S
Control Units CU240S 20 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Operating functions Adjustable setpoint channel Adjustable ramp-function generator (RFG) JOG mode Free function blocks (FFB) Fast free function blocks (Fast FFB) Positioning ramp down Automatic restart (WEA) Flying restart Current limiting Slip compensation Motor holding brake (MHB) Wobble generator
Control functions V/f control with different characteristics SLVC (Sensorless vector control mode) speed and torque VC (Vector control mode with encoder) speed and torque
Protective functions Motor protective functions Inverter protective functions Plant/system protective functions
Fail-Safe Functions (only for CU240S DP-F) Safe Torque Off (STO) Safe Stop 1 (SS1) Safely-Limited Speed (SLS) Safe Brake Control (SBC). The fail-safe functions can be triggered via Digital inputs (FDI0A … FDI1B) or PROFIsafe.

Description 3.3 Layout and Block diagram
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 21
3.3 Layout and Block diagram
Layout characteristics of the CU240S The figure below shows the various interfaces of the different types of Control Units.
Figure 3-1 Control Units CU240S
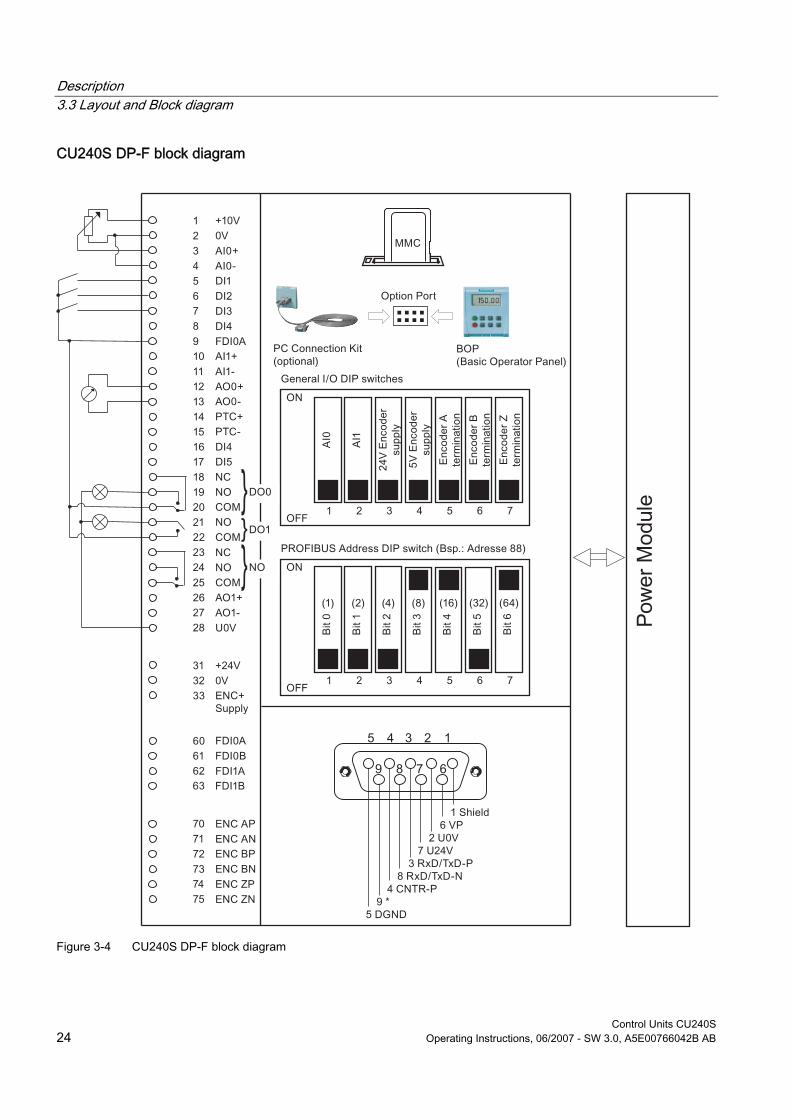
① MMC slot ② General I/O DIP switches ③ PROFIBUS DP address DIP switches ④ Option port ⑤ Inverter status LED ⑥ Inverter status LEDs and fail-safe LEDs ⑦ Bus terminator switch ⑧ Terminals for fail-safe functions ⑨ RS485 interface via SUB-D connector ⑩ PROFIBUS DP interface via SUB-D connector ⑪ PROFIBUS DP (PROFIsafe) interface via SUB-D connector ⑫ PROFINET interface RJ45 ⑬ Power Module interface

Description 3.3 Layout and Block diagram
Control Units CU240S 22 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
CU240S block diagram
Figure 3-2 CU240S block diagram

Description 3.3 Layout and Block diagram
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 23
CU240S DP block diagram
Figure 3-3 CU240S DP block diagram
Description 3.3 Layout and Block diagram
Control Units CU240S 24 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
CU240S DP-F block diagram
Figure 3-4 CU240S DP-F block diagram

Description 3.3 Layout and Block diagram
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 25
CU240S PN block diagram
Figure 3-5 CU240S PN block diagram

x x x x

Description 3.4 Interfaces of the Control Units
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 27
Terminal Designation Function CU240S; CU240S DP; CU240S PN
CU240S DP-F
8 DI3 Digital input 3, isolated x x 9 U24V OUT Isolated output +24 V – max. 100 mA x x 10 AI1+ Analog input 1 positive x x 11 AI1- Analog input 1 negative x x 12 AO0+ Analog output 0 positive
(0/4 mA … 20 mA, 0/2 V … 10 V with 500 Ω load)
x x
13 AO0- Analog output 0 negative x x 14 PTC+ Motor temperature sensor (PTC or KTY84-130) x x 15 PTC- Motor temperature sensor (PTC or KTY84-130) x x 16 DI4 Digital input 4, isolated x x 17 DI5 Digital input 5, isolated x x 18 DO0, NC Digital output relay 0. normally closed,
0.5 A, 30 V DC x x
19 DO0, NO Digital output relay 0. normally open, 0.5 A, 30 V DC
x x
20 DO0, COM Digital output relay 0. common, 0.5 A, 30 V DC
x x
21 DO1, NO Digital output relay 1. normally open, 0.5 A, 30 V DC
x x
22 DO1, COM Digital output relay 1. common, 0.5 A, 30 V DC
x x
23 DO2, NC Digital output relay 2. normally closed, 0.5 A, 30 V DC
x x
24 DO2, NO Digital output relay 2. normally open, 0.5 A, 30 V DC
x x
25 DO2, COM Digital output relay 2. common, 0.5 A, 30 V DC
x x
26 AO1+ Analog output 1 positive (0/4 mA … 20 mA, 0/2 V … 10 V with 500 Ω load)
x x
27 AO1- Analog output 1 negative x x 28 U0V OUT Supply reference (terminal 9) x x 31 +24V IN external 24 V input supply x x 32 0V IN Supply reference (terminal 31) x x 33 ENC+ SUPPLY Power supply for encoder (5 V or 24 V to be
configured by DIP switch, max. 300 mA) x x
40 DI6 Digital input 7, isolated x -- 41 DI7 Digital input 8, isolated x -- 42 DI8 Digital input 9, isolated x -- 60 FDI0A Fail-safe Digital Input 0A -- x 61 FDI0B Fail-safe Digital Input 0B -- x 63 FDI1A Fail-safe Digital Input 1A -- x 64 FDI1B Fail-safe Digital Input 1B -- x

Description 3.4 Interfaces of the Control Units
Control Units CU240S 28 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Terminal Designation Function CU240S; CU240S DP; CU240S PN
CU240S DP-F
70 ENC AP Channel A non-inverting input x x 71 ENC AN Channel A inverting input x x 72 ENC BP Channel B non-inverting input x x 73 ENC BN Channel B inverting input x x 74 ENC ZP Channel 0 (zero) non-inverting input x x 75 ENC ZN Channel 0 (zero) inverting input x x
The control terminals have a maximum tighten torque of 0.25 Nm (2.2 lbf.in) and a nominal cross section of 1.5 mm2 (AWG 14) for cable.
MMC The MMC provides the ability to store parameter sets or firmware versions of an inverter. It is recommended that the SINAMICS-MMC (order number: 6SL3254-0AM00-0AA0) is used for the storage and transfer of parameter sets or firmware versions.
Option port Via the Option port a PC (using the PC Connection Kit) or a BOP is connected to the inverter. With a PC the inverter can be easily parameterized using the commissioning tool STARTER.

Description 3.5 Factory Settings of the CU240S Control Units
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 29
3.5 Factory Settings of the CU240S Control Units
Factory settings for command and setpoint source P0700 = 0 is the same as P0700 = 2 or 6 dependent on type of Control Unit.
Note Setting P0700 = 6 (command source via fieldbus communication) and P1000 = 6 (setpoint source via fieldbus communication) are not possible with a CU240S. Setting P0700 = 5 (command source via USS communication) and P1000 = 5 (setpoint source via USS communication) are not possible with a CU240S DP or a CU240S DP-F.
Table 3-3 Function selection of digital input and digital output
CU240S CU240S DP; CU240S PN
CU240S DP-F Function
P0700 = 2 P0700 = 6 P0700 = 6 ON/OFF1 P0701 = 1
Function of DI0 r2090.00 Bit 0 from control word 1
Reverse P0702 = 12 Function of DI1
r2090.11 Bit 11 from control word 1
Fault acknowledge P0703 = 9 Function of DI2
r2090.07 Bit 7 from control word 1
Fixed frequency selector bit0
P0704 = 15 Function of DI3
r2091.00 Bit 0 from control word 2
Fixed frequency selector bit1
P0705 = 16 Function of DI4
r2091.01 Bit 1 from control word 2
Fixed frequency selector bit2
P0706 = 17 Function of DI5
r2091.02 Bit 2 from control word 2
Fixed frequency selector bit3
P0707 = 18 Function of DI6
r2091.03 Bit 3 from control word 2
---
Drive fault active P0731 = 52.3, Function of DO0 Drive warning active P0732 = 52.7, Function of DO1
Note Digital inputs 7 and 8 and Digital output 2 are disabled per default.

Description 3.5 Factory Settings of the CU240S Control Units
Control Units CU240S 30 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Table 3-4 BICO Command Parameter
CU240S CU240S DP; CU240S DP-F; CU240S PN
Function
P0700 = 2 P0700 = 6 ON/OFF1 / ON/OFF1 P0840 = 722.0
Function of DI0 P0840 = 2090.0 Bit 0 from control word 1
ON reverse/OFF1 not active with default settings
P0842 = 0.0 P0842 = 0.0
First OFF2 source: Coast stop P0844 = 1.0 P0844 = 2090.1 Second OFF2 source: Coast stop
P0845 = 19.1 P0845 = 19.1
First OFF3 source: Quick stop P0848 = 1.0 P0848 = 2090.2 Second OFF3 source: Quick stop
P0849 = 1.0 P0849 = 1.0
Pulse enable P0852 = 1.0 P0852 = 2090.3
Table 3-5 BICO Command Sources for fixed frequencies
CU240S CU240S DP; CU240S DP-F; CU240S PN
Function
P0700 = 2 P0700 = 6 Fixed freq. selection Bit 0 P1020 = 722.3
Function of DI3 P1020 = 722.3 Function of DI3
Fixed freq. selection Bit 1 P1021 = 722.4 Function of DI4
P1021 = 722.4 Function of DI4
Fixed freq. selection Bit 2 P1022 = 722.5 Function of DI5
P1022 = 722.5 Function of DI5
Fixed freq. selection Bit 3 P1023 = 722.6 Function of DI6
P1023 = 722.6 (0.0 for CU240S DP-F)
Table 3-6 Faults, alarms, monitoring
CU240S CU240S DP; CU240S DP-F; CU240S PN
Function
P0700 = 2 P0700 = 6 Fault acknowledgement - first source
P2103 = 722.2 Function of DI2
P2103 = 722.2 Function of DI2
Fault acknowledgement - second source
P2104 = 0.0 P2104 = 2090.7 Fault acknowledge
External fault P2106 = 1.0 P2106 = 1.0
Description 3.5 Factory Settings of the CU240S Control Units
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 31
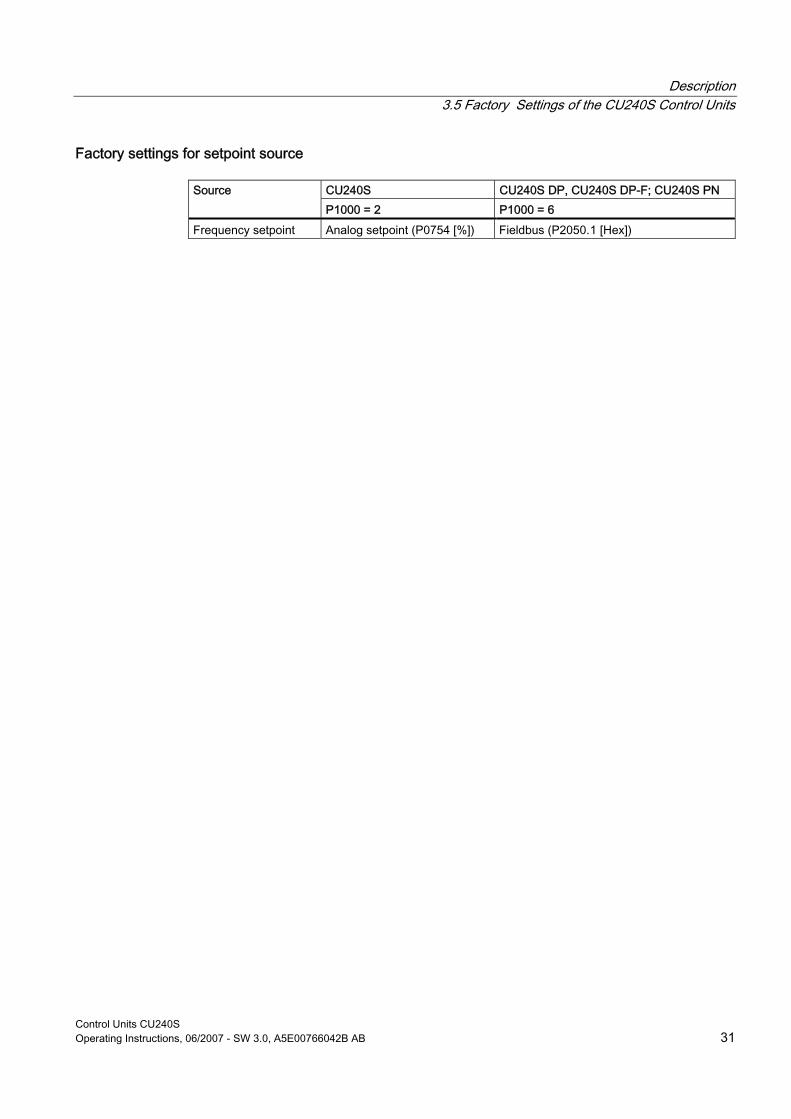
Factory settings for setpoint source
CU240S CU240S DP, CU240S DP-F; CU240S PN Source P1000 = 2 P1000 = 6
Frequency setpoint Analog setpoint (P0754 [%]) Fieldbus (P2050.1 [Hex])

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 33
Installing/Mounting 4Installing the Control Unit
The CU controls the functions of the PM. The CU cannot be used without a PM, also the PM cannot be used without a CU.
WARNING An inverter can be switched on unintentionally if the installation is not performed correctly. The inverter must be started-up by personnel who are qualified and trained in installing systems of this type.
4.1 Fitting the CU to the PM
Description The Control Unit is snapped on to the Power Module as shown in the figure below. To disconnect the CU push the release button on top of the PM. The process of fitting the Control Unit to the Power Module is the same technique independent from the type of G120 control unit or G120 power module.

Installing/Mounting 4.1 Fitting the CU to the PM
Control Units CU240S 34 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Figure 4-1 Fitting the control unit to the power module
24 V power supply Normally the CU is supplied with 24 V from Power Module. But it is also possible to use an external DC 24 V supply (20.4 V … 28.8 V, 0.5 A). It must be connected to the Control Unit terminals 31 (+ 24 V In) and 32 (0 V In). Some reasons for using an external 24 V power supply are: The PROFIBUS DP interface is required to communicate with the Control Unit when the
Power Module mains power is not present Supply for 24 V encoder
CAUTION
Care must be taken to ensure that the 24 V DC power is connected correctly or damage to the Control Unit may occur. Max. cable length on 24 V DC supply and I/O cables connected to CU must not exceed 10 m. Use of unscreened cables is possible, however we recommend the use of screened cables, in order to fulfill the EMC requirements for the CE marking and fail-safe products (CU240S DP-F).
Note If the CU is externally powered with 24 V DC but the power module is disconnected from the mains supply, the faults F0001 … F0028 are not generated.

Installing/Mounting 4.2 Connecting a CU240S via Terminals
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 35
4.2 Connecting a CU240S via Terminals
Description To have access to the control terminals, the terminal cover must be removed, as shown in the figure below. The control terminals have a maximum tighting torque of 0.25 Nm (2.2 lbf.in) and a nominal cable cross section of 1.5 mm2.
Figure 4-2 Removing the Control Unit terminal cover
The terminals of the CU240 control units are combined to terminal blocks. They can be detached from the control unit, as shown in the figure below.This allows the control units to be swapped out for another of the same type without the need for rewiring.

Installing/Mounting 4.2 Connecting a CU240S via Terminals
Control Units CU240S 36 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Figure 4-3 Removing the two-part connectors with a CU240S DP as example
After all the wiring of the control unit is completed - ensure that the terminal cover is replaced.
Terminal wiring examples for the Control Unit CU240S
Note To control the CU240S DP, CU240S DP-F or CU240S PN via terminals is also possible, but in this case the parameter settings for command and setpoint source have to be changed.
In this section examples of controlling a SINAMICS G120 inverter with a CU240S via terminals are shown.
CAUTION Use of unscreened cables is possible, however we recommend the use of screened cables in order to fulfill the EMC requirements for the CE marking and fail-safe products (CU240S DP-F).
Control with the default settings Frequency setpoint and an additional setpoint via terminals
(AI0 and AI1 used as voltage inputs) Frequency setpoint and an additional setpoint via terminals
(AI0 and AI1 used as current inputs)

Installing/Mounting 4.2 Connecting a CU240S via Terminals
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 37
Control with the default settings When shipped from the factory the G120 inverter (Control Unit and Power Module) must not be operated before the values depending on the specific PM are read into the CU. This can be done via: Downloading a valid parameter set (by MMC, STARTER, or BOP) Quick commissioning A factory reset To operate the inverter with the basic settings (e.g. after factory reset, without additional parameterization or DIP switch setting), the following conditions have to be fulfilled: The rated current of the inverter is at least as great as the rated current of the motor. The power range of the inverter matches the power range of the motor. The controlled motor is a 4-pole motor (best Siemens 1LA7). The rated motor frequency is 50 Hz, power dimension unit is kW.
Control settings Digital and analog inputs for commands and setpoints are parameterized for a cabling as shown in the block diagram of the CU240S in the operating instructions. Furthermore the state of the inverter is monitored via digital and analog outputs.
4.2.1 Setting Frequency Setpoints via the DIP Switches
Setting Frequency Setpoints via the DIP Switches The general I/O DIP switches 1 and 2 are used to configure the analog inputs (AI). For using AI0 and AI1 as voltage inputs set DIP switches 1 and 2 to OFF position.
Table 4-1 Settings of the AI DIP switches
DIP switch 1 2 1 2 ON
OFF
1 2 1 2
AI0 and AI1 as voltage input -10 V … + 10 V
-10 V … + 10 V
AI0 and AI1 as current input 0 mA … 20 mA
0 mA … 20 mA

Installing/Mounting 4.2 Connecting a CU240S via Terminals
Control Units CU240S 38 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Parameter settings For failure-free operation, the parameter P0756 must be set according to the DIP switches. The respective parameters and values are given below.
Table 4-2 Parameter settings according to the AI DIP switches
Parameter Description Setting P0003 = 3 User access level*
3: Expert: For expert use only
P1000[0] = 2 Selection of frequency setpoint* 2: Analog setpoint (Default for CU240S)
0 mA … 20 mA P0756[0] = 2 Type of AI
Sets analog input 0 (AI0) to current input = DIP on left (DIP 1)
P0756[1] = 2 Type of AI Sets analog input 1 (AI1) to current input = DIP on right (DIP 2)
4 mA … 20 mA P0757[0] = 4 Value x1 of AI scaling
Sets analog input 0 (AI0) to a minimum of 4 mA.
P0761[0] = 4 Width of AI dead band Sets the dead band width of analog input 0 (AI0).
P0757[1] = 4 Value x1 of AI scaling Sets analog input 1 (AI1) to a minimum of 4 mA.
P0761[1] = 4 Width of AI dead band Sets the dead band width of analog input 1 (AI1).
Note If you use just one analog input, you only need to change the respective index for the specific analog input.
Frequency setpoint and an additional setpoint via terminals AI0 and AI1 used as voltage inputs This type of control wiring allows a main frequency setpoint and an additional setpoint to be established, using potentiometers on analog inputs AI0 and AI1.
The following figure illustrates the wiring that is necessary to accomplish this functionality. DIP switch and parameter settings
The general I/O DIP switches 1 and 2 are used to configure the analog inputs (AI). For using AI0 and AI1 as voltage inputs set DIP switches 1 and 2 to OFF position.
For failure-free operation, the parameter P0756 must be set accordingly.
See also Setting Frequency Setpoints via the DIP Switches (Page 37)

Installing/Mounting 4.2 Connecting a CU240S via Terminals
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 39
Frequency setpoint and an additional setpoint via terminals AI0 and AI1 used as current inputs This type of control wiring allows a main frequency setpoint and an additional setpoint to be established, for example from a PLC. The following figure illustrates the wiring that is necessary to accomplish this functionality.
DIP switch and parameter settings
The general I/O DIP switches 1 and 2 are used to configure the analog inputs (AI). For using AI0 and AI1 as voltage inputs set DIP switches 1 and 2 to OFF position.
For failure-free operation, the parameter P0756 must be set accordingly.
See also Setting Frequency Setpoints via the DIP Switches (Page 37)

Installing/Mounting 4.3 Connecting a CU240S via USS on RS485
Control Units CU240S 40 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
4.3 Connecting a CU240S via USS on RS485
Socket The Control Units CU240S have a 9-pin female sub-D socket for connecting the inverter via an RS485 interface.
Table 4-3 PIN assignment of the 9-pin sub-D socket
Pin Designation Description 1 - Unused 2 - Unused 3 RS485P Receive- and transmit signal (+) 4 - Unused 5 0 V Ground reference 6 - Unused 7 - Unused 8 RS485N Receive- and transmit signal (-) 9 - Unused
X Screen (casing) Potential equilisation
Connector A standard 9 pin sub-D connector can be used for USS connection via RS485.
Table 4-4 Technical data of standard 9-pin sub-D connector for RS485
Standard 9 pin sub D connector PG socket No Max. baud rate 115200 Baud Outgoing cable unit 180°
Bus termination The RS485 termination can be activated via switches on the housing of the SINAMICS G120. The bus termination switch is illustrated in figure "Control Units CU 240S" in section "Layout and Block Diagram".

Installing/Mounting 4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 41
4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP
Description The function of the PROFIBUS DP interface is to provide a PROFIBUS DP-based link between inverters of the SINAMICS G120 product range and higher-level automation systems e.g. SIMATIC S7.
4.4.1 Connecting the PROFIBUS DP
Connecting the Inverter to the PROFIBUS DP network The inverter is to be connected to the PROFIBUS DP network via a sub-D socket on the CU240S DP or CU240S DP-F. The pins of the socket are short-circuit-proof and isolated.
Table 4-5 PIN assignment of the 9-pin sub-D socket
Pin Designation Description Range 1 Shield Ground connection 2 U0V Isolated and user supply reference 3 RxD/TxD-P Receive/send data P (B/B') RS485 4 CNTR-P Control Signal TTL 5 DGND PROFIBUS data reference potential (C/C') 6 VP Supply voltage positive 5 V ± 10 % 7 U24V Isolated user supply +24 V @ 100 mA 8 RxD/TxD-N Receive/send data N (A/A') RS485 9 - Not assigned
Case Cable shield Cable shield
External 24 V supply If the PROFIBUS DP interface is required to communicate with the Control Unit when the Power Module mains power is not present, a 24 V supply must be connected to the Control Unit terminals 31 (+ 24 V In) and 32 (0 V In).
Maximum cable length The PROFIBUS system can handle up to 126 stations. To run all these stations the PROFIBUS system is divided into segments. All segments have to be connected via repeater. The maximum number of stations on any segment must not exceed 32. The maximum cable lengths are dependent on the baud rate (transmission speed). The maximum cable lengths specified in the table below can be guaranteed only with PROFIBUS bus cables (for example, Siemens PROFIBUS bus cable, order number 6XV1830-0EH10).
Installing/Mounting 4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP
Control Units CU240S 42 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
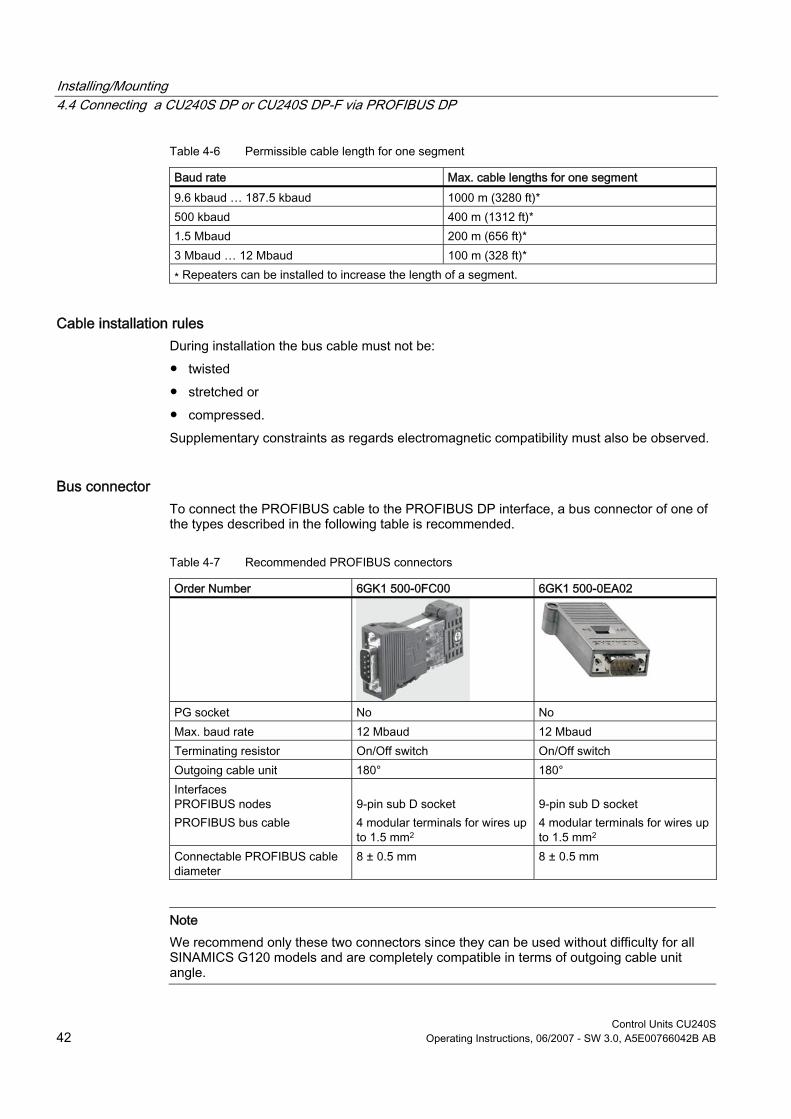
Table 4-6 Permissible cable length for one segment
Baud rate Max. cable lengths for one segment 9.6 kbaud … 187.5 kbaud 1000 m (3280 ft)* 500 kbaud 400 m (1312 ft)* 1.5 Mbaud 200 m (656 ft)* 3 Mbaud … 12 Mbaud 100 m (328 ft)* ∗ Repeaters can be installed to increase the length of a segment.
Cable installation rules During installation the bus cable must not be: twisted stretched or compressed. Supplementary constraints as regards electromagnetic compatibility must also be observed.
Bus connector To connect the PROFIBUS cable to the PROFIBUS DP interface, a bus connector of one of the types described in the following table is recommended.
Table 4-7 Recommended PROFIBUS connectors
Order Number 6GK1 500-0FC00 6GK1 500-0EA02
PG socket No No Max. baud rate 12 Mbaud 12 Mbaud Terminating resistor On/Off switch On/Off switch Outgoing cable unit 180° 180° Interfaces PROFIBUS nodes PROFIBUS bus cable
9-pin sub D socket 4 modular terminals for wires up to 1.5 mm2
9-pin sub D socket 4 modular terminals for wires up to 1.5 mm2
Connectable PROFIBUS cable diameter
8 ± 0.5 mm 8 ± 0.5 mm
Note
We recommend only these two connectors since they can be used without difficulty for all SINAMICS G120 models and are completely compatible in terms of outgoing cable unit angle.

Installing/Mounting 4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 43
PROFIBUS terminator Each bus segment must have a resistor network at both ends as shown in the figure below.
Figure 4-4 PROFIBUS network with bus termination
You have two options to terminate the bus connection: Terminator switch on the recommended PROFIBUS connector The switches of the bus terminator provides both the 220 Ω termination and the 390 Ω biasing. The 390 Ω biasing maintains the potential difference between the signals in the PROFIBUS network cables.
Figure 4-5 PROFIBUS DP bus termination switch
• Terminator switch on the housing of the SINAMICS G120 (see section "Layout and Block diagram")

Installing/Mounting 4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP
Control Units CU240S 44 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Caution Never use both ways to terminate the bus connection. This can interfere the communication.
WARNING
It must be ensured that any node, where the biasing components of the bus are connected, is powered at all times in which the bus is in operation.
Removing a bus connector You can remove the bus connector with looped-through bus cable from the PROFIBUS DP interface at any time without interrupting the data exchange on the bus. Only the final node must be terminated.
A1 B1 A2 B2
R on
off
A1 B1 A2 B2
R on
off
Figure 4-6 Removing a bus connector
4.4.2 Screening the bus cable and EMC precautions
Description The following EMC-related precautions must be taken to ensure interference-free PROFIBUS DP operation.
Screening The screen of the PROFIBUS DP cable must be connected in the bus connector. Additional screening is provided using a screen clamp on the bus cable screen which must make 360° contact with the protective earth. The solid copper core must not be scored when the insulation is removed from the core ends. You must also ensure that the screen of each bus cable is connected to protective earth at both the cabinet entry point and in the inverter housing.

Installing/Mounting 4.4 Connecting a CU240S DP or CU240S DP-F via PROFIBUS DP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 45
Note The bus cables must be internally twisted and screened, and installed separately from power cables with a minimum distance 20 cm (7.8 inches). The braided screen and underlying laminated foil screen (if applicable) must be connected in a 360°, positive connection at both ends, that is, the screen on the bus cable between two inverters must be connected to the inverter housing at both ends. The same applies to the screen of the bus cable between the PROFIBUS DP master and inverter. Crossovers between bus and power cables must be laid at an angle of 90°.
Equipotential bonding Differences in potential (for example, due to different mains supplies) between the inverters and the PROFIBUS DP master must be avoided. Recommended equipotential bonding cables:
– 16 mm2 Cu for equipotential bonding cables up to 200 m long – 25 mm2 Cu for equipotential bonding cables of over 200 m long.
Equipotential bonding cables must be routed as close as possible to signal leads; this means that the area between the bonding conductor and signal lead is as small as possible.
Equipotential bonding cables must be contacted in a 360° connection with the earth electrode/PE conductor.

Installing/Mounting 4.5 Connecting a CU240S PN via PROFINET
Control Units CU240S 46 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
4.5 Connecting a CU240S PN via PROFINET
Control Unit CU240S PN The PROFINET functionality is provided by Control Unit CU240S PN. The CU240S PN is equipped with a two port Ethernet switch. Connection to optical nets is achieved by using switches with both electrical and optical ports, the drive is then connected to an electrical port. Therefore, no power supply for an external electrical/optical inverter is provided.
Industrial Ethernet FC RJ45 The two Ethernet ports are carried out as RJ45 female Sockets. Outlets with straight direction are placed on bottom of control unit, with support for secure collar. The assembly of the SIMATIC NET Industrial Ethernet FastConnect RF45 Plug 180 is described in the product information "Assembly Instructions for SIMATIC NET Industrial Ethernet FastConnect RJ45 Plug". For downloading this document, refer to: http://support.automation.siemens.com/WW/view/en/23175326/130000
Table 4-8 PIN assignment of the RJ45 female socket
Pin Signal Function Core color 1 TX+ Transmission data + Yellow 2 TX Transmission data - Orange 3 RX+ Receiver data + White 4 - 5 - 6 RX- Receiver data - blue
Connector
Table 4-9 Recommended PROFINET connectors
Order Number 6GK1901-1BB10-2Ax0
Label Industrial Ethernet FC RJ45 Plug 180 Max. baud rate 100 Mbit/s; Cat5e Outgoing cable unit 180° Degree of protection IP20 Operating temperature -20 °C … +70 °C
Installing/Mounting 4.5 Connecting a CU240S PN via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 47
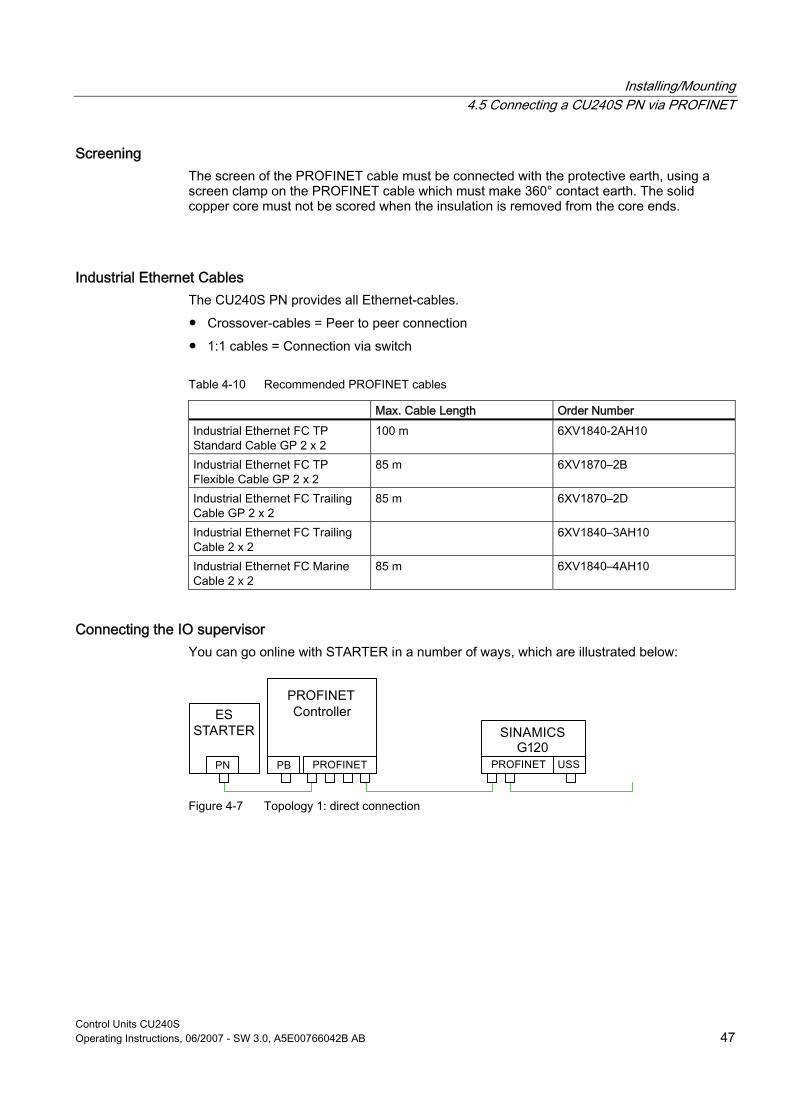
Screening The screen of the PROFINET cable must be connected with the protective earth, using a screen clamp on the PROFINET cable which must make 360° contact earth. The solid copper core must not be scored when the insulation is removed from the core ends.
Industrial Ethernet Cables The CU240S PN provides all Ethernet-cables. Crossover-cables = Peer to peer connection 1:1 cables = Connection via switch
Table 4-10 Recommended PROFINET cables
Max. Cable Length Order Number Industrial Ethernet FC TP Standard Cable GP 2 x 2
100 m 6XV1840-2AH10
Industrial Ethernet FC TP Flexible Cable GP 2 x 2
85 m 6XV1870–2B
Industrial Ethernet FC Trailing Cable GP 2 x 2
85 m 6XV1870–2D
Industrial Ethernet FC Trailing Cable 2 x 2
6XV1840–3AH10
Industrial Ethernet FC Marine Cable 2 x 2
85 m 6XV1840–4AH10
Connecting the IO supervisor You can go online with STARTER in a number of ways, which are illustrated below:
Figure 4-7 Topology 1: direct connection

Installing/Mounting 4.5 Connecting a CU240S PN via PROFINET
Control Units CU240S 48 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Figure 4-8 Topology 2: direct connection
Figure 4-9 Topology 3: Routing
Note Pay attention to the following restrictions: • A ring-type topology is not permissible. • SINAMICS does not support routing from PROFIBUS to PROFINET and vice versa.
See also Assembly Instructions RJ45 Plug (http://support.automation.siemens.com/WW/view/en/23175326/130000)

Installing/Mounting 4.6 Installation Check List
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 49
4.6 Installation Check List
Installation check list Before power is applied to the inverter/motor system, the following checks should be performed:
Check that: 1 The environmental conditions conform to the inverter/motor specifications 2 The inverter and the motor are securely mounted 3 The inverter and motor are correctly installed with adequate cooling provision 4 The motor and the application/equipment are ready to start, i.e. safe state - motor can
rotate
5 The inverter is correctly earthed/grounded 6 The input power (supply) voltage matches the inverter's nominal input voltage 7 The input power (mains) fuses are the correct type and installed correctly 8 The motor connections are connected to ensure the correct direction of rotation of the
motor at start-up
9 The motor and mains connections are connected and tightened to the required specification
10 The motor connections are not reversed - the motor will start but serious damage may occur to the connected equipment
11 The motor cable is routed away from other cables 12 The control connections are connected and tightened to the required specification 13 No tools or other objects that can cause damage to the system are present 14 The inverter is the only power source to the motor


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 51
Commissioning 5Overview
A G120 inverter is composed of the Power Module and the Control Unit. After snapping the Control Unit on to the Power Module for the first time, the devices must identify each other. To indicate, that the Power Module and the Control Unit are not yet identified, F0395 is displayed. For further information to the message F0395, refer to section "Message F00395". The G120 inverter provides two options for commissioning: Single commissioning One inverter is parameterized for commissioning with an individual parameter set. Usually, you use the STARTER or BOP for single commissioning. Series commissioning Several inverters are parameterized for commissioning via download of a complete parameter set. Usually, you use the MMC for series commissioning.
Note We recommend commissioning via STARTER. The commissioning process using STARTER is driven by dialog boxes and will not be interpreted in this manual. This manual describes the parameter related commissioning via BOP.
Interfaces The G120 inverter provides different communication interfaces. The following figure provides you an overview:

Commissioning 4.6 Installation Check List
Control Units CU240S 52 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Figure 5-1 Communications interfaces

Commissioning 5.1 Single Commissioning
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 53
5.1 Single Commissioning
Overview For single commissioning, you set the parameter of the inverter manually. You use BOP (Basic Operator Panel) or STARTER (Commissioning software via PC) for commissioning.
Note We recommend commissioning via STARTER. The commissioning process using STARTER is driven by dialog boxes and will not be interpreted in this manual. This manual describes the parameter related commissioning via BOP.
Settings of commissioning Commissioning the G120 inverter comprises different settings and kinds of single commissioning. The following list provides you an overview: Basic commissioning
– Quick commissioning – Motor data identification – Speed control optimization
Further settings for commissioning – Calculating the motor/control data – Commissioning the application – Reset parameters to factory settings – Commissioning the fail-safe functions (only in fail-safe applications)
For detailed information to the settings of single commissioning, refer to the section "Commissioning with BOP".
Factory settings The inverter is delivered with identical factory settings for all CU240S Control Units; except the following settings: Command source Setpoint source Values depending on the Power Module
The factory settings of the Power Modules are specific for the type of PM. For details to the factory settings, refer to the Parameter Manual.
Note After the first power on, the fault F0395 will appear. This means, no commission is until now implemented. After confirming the message, you can proceed commissioning.

Commissioning 5.2 Series Commissioning
Control Units CU240S 54 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.2 Series Commissioning
5.2.1 Common Information to Series commissioning
Description Series commissioning means transferring the parameter set from one inverter into a number of other inverters. This provides fast commissioning for identical applications, e. g. series machines or group inverters.
Components for series commissioning Commissioning the G120 inverter can be done in different ways. The following list provides you an overview: Series commissioning with MMC Series commissioning with BOP Series commissioning with STARTER For detailed information to series commissioning, refer to the chapters "Commissioning with BOP", Commissioning with MMC", and "Commissioning with STARTER".
Order of series commissioning The series commissioning is divided into the following steps: Creating a valid parameter set Uploading this parameter set Downloading of the uploaded parameter set into the next inverter An appropriate parameter set can be created by parameterizing an inverter via BOP or STARTER.
CAUTION Parameter download between different types of Control Units and of different firmware versions is not recommended. It is possible to download parameter sets from different Control Unit types, however, as the parameter sets might differ, the user is fully responsible for the consistency of the downloaded parameter set. Therefore, the customer has to confirm his responsibility in case of an automatic download by acknowledging F0395. During download of a parameter set from an MMC to the EEPROM of the Control Unit CU240S (e.g. during serial commissioning) you have to note that the LEDs are flashing correctly. If the Control Unit CU240S is in a fault state, the LEDs indicate this fault state with higher priority than the download. It is not sure that the parameter set is downloaded correctly.

Commissioning 5.2 Series Commissioning
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 55
WARNING
For series commissioning, all of the communication interfaces as well as also the digital and analog interfaces are re-initialized. This results in a brief communications failure or causes the digital outputs to switch. Potentially hazardous loads must be carefully secured before starting a series commissioning. Potentially hazardous loads can be secured as follows before starting series commissioning: • Lower the load to the floor, or • Clamp the load using the motor holding brake.
Note
Upload Before the upload starts, the parameters will be copied from RAM to EEPROM Manual and automatic download With a manual download all necessary parameters excluding the fail-safe parameters (only with CUs with fail-safe functions) are downloaded into the inverter. How to perform a manual download is described in the following section. With an automatic download even the fail-safe parameters are downloaded into the inverter. An automatic download can only be performed with an MMC. An automatic download can be performed at Start-up or by swapping an inverter component (CU or PM), details are described in the following sections and in the chapter "Operation" of this manual.
Note
Restrictions to be considered when performing upload and download: • Only the parameter set stored in the EEPROM of the inverter is uploaded. • Fail-safe parameters cannot be uploaded via BOP or STARTER. • Once the upload or download procedure has started, it should not be interrupted. • Parameter download from a standard CUs to a CUs with fail-safe functions and vice
versa is not possible. • During the up or download all LEDs are flashing (the "BF" LED is not relevant). After
finishing that process successfully the "RDY" LED is on. • During the upload process any data already held by the BOP is overwritten. • If the download fails, the inverter will not function correctly and the "SF" LED (red) is on.
– Possible fault messages in case of download failure with BOP F0051, F0055, F0056, F0057 or F0058
– Possible fault messages in case of download failure with MMC F0051, F0061, F0062 or F0063
Commissioning 5.2 Series Commissioning
Control Units CU240S 56 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
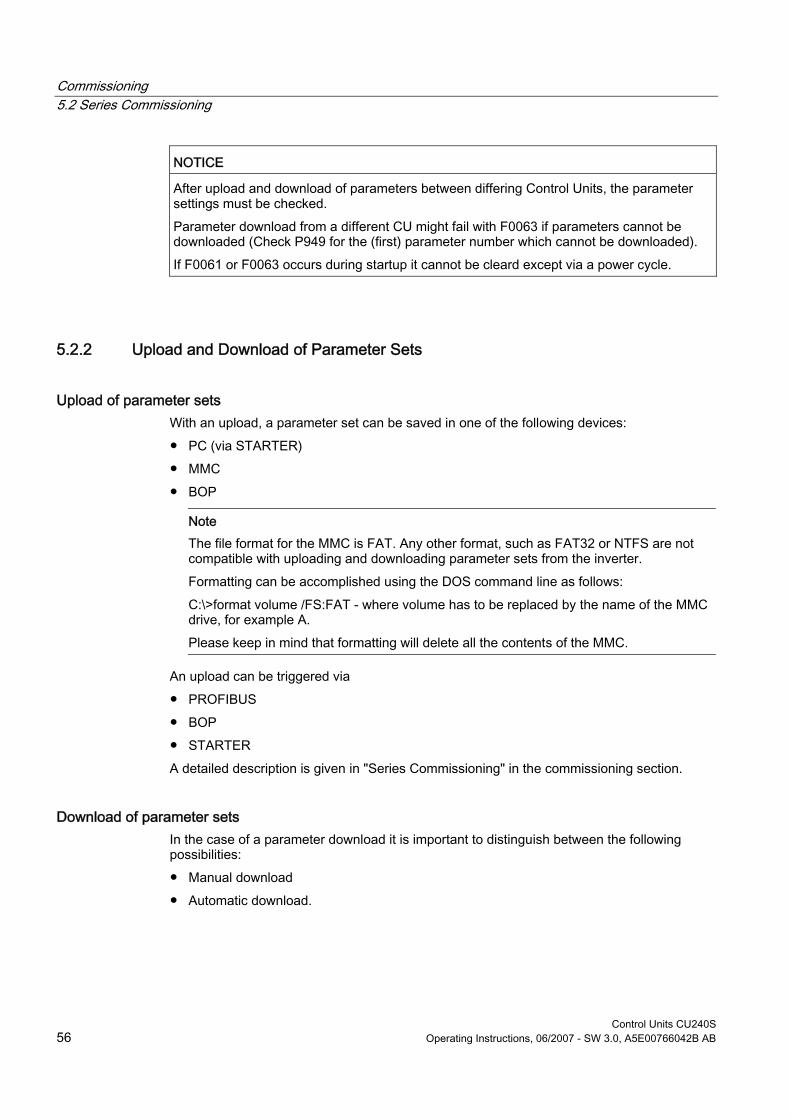
NOTICE After upload and download of parameters between differing Control Units, the parameter settings must be checked. Parameter download from a different CU might fail with F0063 if parameters cannot be downloaded (Check P949 for the (first) parameter number which cannot be downloaded). If F0061 or F0063 occurs during startup it cannot be cleard except via a power cycle.
5.2.2 Upload and Download of Parameter Sets
Upload of parameter sets With an upload, a parameter set can be saved in one of the following devices: PC (via STARTER) MMC BOP
Note The file format for the MMC is FAT. Any other format, such as FAT32 or NTFS are not compatible with uploading and downloading parameter sets from the inverter. Formatting can be accomplished using the DOS command line as follows: C:\>format volume /FS:FAT - where volume has to be replaced by the name of the MMC drive, for example A. Please keep in mind that formatting will delete all the contents of the MMC.
An upload can be triggered via PROFIBUS BOP STARTER A detailed description is given in "Series Commissioning" in the commissioning section.
Download of parameter sets In the case of a parameter download it is important to distinguish between the following possibilities: Manual download Automatic download.

Commissioning 5.2 Series Commissioning
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 57
CAUTION
Parameter download between different types of control units and of different firmware versions is not recommended. Basically, it is possible to download parameter sets off different CU types, however, as the parameter sets might differ, the user is fully responsible for the consistency of the downloaded parameter set. Therefore, the user has to take the responsibility in case of an automatic download by acknowledging F0395. During download of a parameter set from a MMC to the EEPROM of the Control Unit CU240S (e.g. during serial commissioning) you have to note that the LEDs are flashing correctly. If the Control Unit CU240S is in a fault state, the LEDs indicate this fault state with higher priority than the download. It is not sure that the parameter set is downloaded correctly.
Manual download A manual download can be performed similar to an upload via PC (STARTER) MMC BOP It can be triggered like upload via PROFIBUS BOP STARTER With a manual download a parameter set without the fail-safe parameters is downloaded from one of the above mentioned devices into the inverter. The manual download depends as follows on the settings of P8458.
Table 5-1 P8458 settings after a manual parameter download
P8458 setting in CU EEPROM
P8458 setting on download device
P8458 setting after download
Remark
0 0 0 --- 0 1 1 --- 0 2 2 --- 1 0 0 --- 1 1 1 --- 1 2 2 --- 2 0 0 --- 2 1 1 --- 2 2 2 ---
A detailed description is given in "Series Commissioning" in the commissioning section.
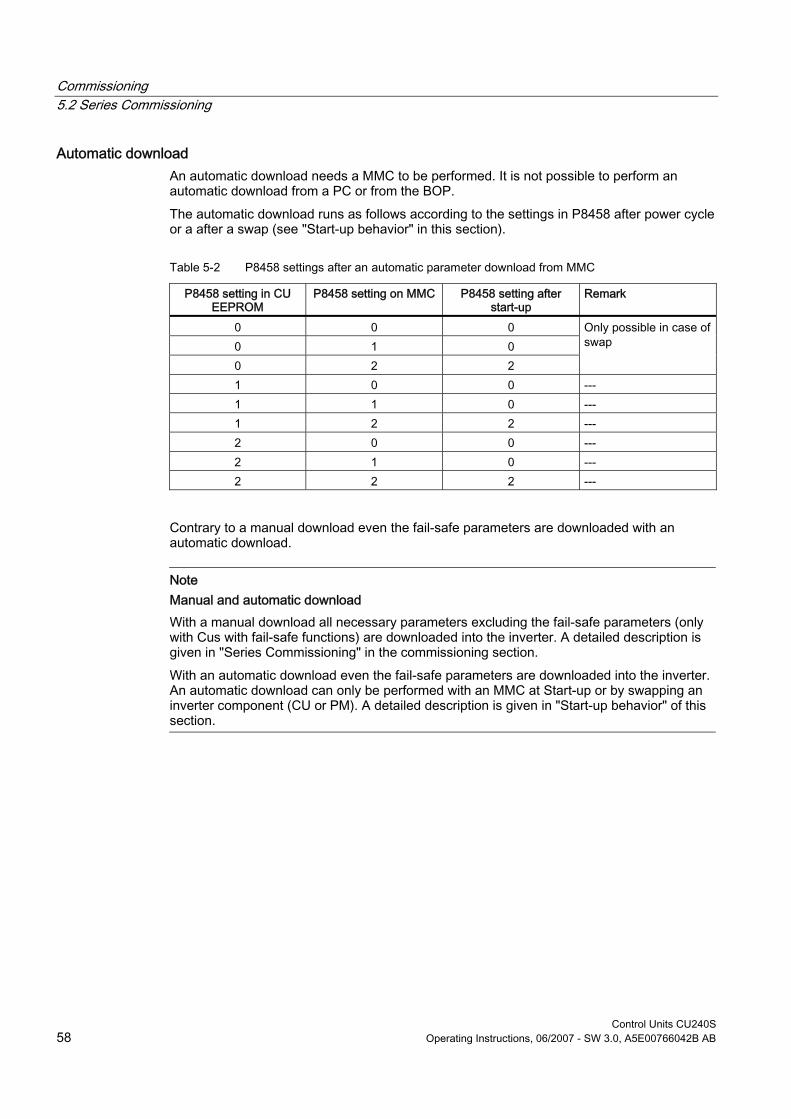
Commissioning 5.2 Series Commissioning
Control Units CU240S 58 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Automatic download An automatic download needs a MMC to be performed. It is not possible to perform an automatic download from a PC or from the BOP. The automatic download runs as follows according to the settings in P8458 after power cycle or a after a swap (see "Start-up behavior" in this section).
Table 5-2 P8458 settings after an automatic parameter download from MMC
P8458 setting in CU EEPROM
P8458 setting on MMC P8458 setting after start-up
Remark
0 0 0 0 1 0 0 2 2
Only possible in case of swap
1 0 0 --- 1 1 0 --- 1 2 2 --- 2 0 0 --- 2 1 0 --- 2 2 2 ---
Contrary to a manual download even the fail-safe parameters are downloaded with an automatic download.
Note Manual and automatic download With a manual download all necessary parameters excluding the fail-safe parameters (only with Cus with fail-safe functions) are downloaded into the inverter. A detailed description is given in "Series Commissioning" in the commissioning section. With an automatic download even the fail-safe parameters are downloaded into the inverter. An automatic download can only be performed with an MMC at Start-up or by swapping an inverter component (CU or PM). A detailed description is given in "Start-up behavior" of this section.
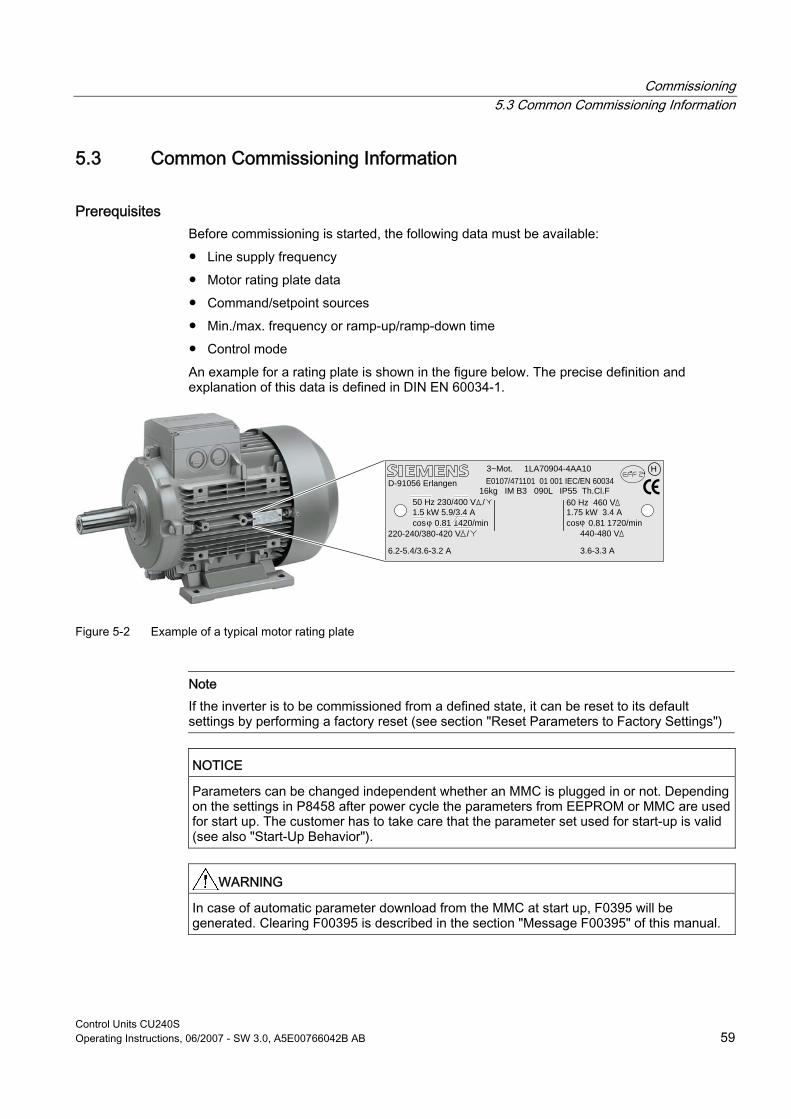
Commissioning 5.3 Common Commissioning Information
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 59
5.3 Common Commissioning Information
Prerequisites Before commissioning is started, the following data must be available: Line supply frequency Motor rating plate data Command/setpoint sources Min./max. frequency or ramp-up/ramp-down time Control mode An example for a rating plate is shown in the figure below. The precise definition and explanation of this data is defined in DIN EN 60034-1.
D-91056 Erlangen
3~Mot. 1LA70904-4AA10E0107/471101 01 001 IEC/EN 60034
16kg IM B3 090L IP55 Th.Cl.F 50 Hz 230/400 V
cos220-240/380-420 V
60 Hz 460 V
cos440-480 V
H
/
/
1.5 kW 5.9/3.4 A 0.81 1420/min
6.2-5.4/3.6-3.2 A
1.75 kW 3.4 A 0.81 1720/min
3.6-3.3 A
Figure 5-2 Example of a typical motor rating plate
Note If the inverter is to be commissioned from a defined state, it can be reset to its default settings by performing a factory reset (see section "Reset Parameters to Factory Settings")
NOTICE Parameters can be changed independent whether an MMC is plugged in or not. Depending on the settings in P8458 after power cycle the parameters from EEPROM or MMC are used for start up. The customer has to take care that the parameter set used for start-up is valid (see also "Start-Up Behavior").
WARNING
In case of automatic parameter download from the MMC at start up, F0395 will be generated. Clearing F00395 is described in the section "Message F00395" of this manual.

Commissioning 5.4 Message F00395
Control Units CU240S 60 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.4 Message F00395
Description The message F00395 is displayed to prompt you to check the parameter set. In case of standard CUs you accept the responsibility for a parameter set by confirming F00395. In case of fail-safe CUs you have to carry out an acceptance test.
F00395 does not indicate an inverter fault.
Confirming F00395 on standard CUs For CUs without fail-safe function, you confirm F00395 in one of the following ways: Via a factory reset Via the function key FN on the BOP Digital input or PLC signal (depends on the settings of P0700) Setting P7844 = 0
Confirming F00395 on fail-safe CUs For CUs with fail-safe functions, it is necessary to do an acceptance test to confirm F00395. For details to the acceptance test (refer to the "Commissioning the Fail-Safe functions" section in this manual. You confirm F00395 on fail-safe CUs in the following way: P0010 = 30 P9761 = safety password P7844 = 0 Carry out acceptance test
Procedures which require a release of a parameter set via F00395 A Control Unit indicates F00395 in the following states: After the first power ON After an automatic download After a swap of the Control Unit

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 61
5.5 Commissioning with the BOP
5.5.1 The Basic Operator Panel (BOP)
Description The Basic Operator Panel (BOP) is available as an option to enhance the effectiveness of parameterizing and control of the inverter. The control signals and speed reference can easily be set by pressing the appropriate buttons. The BOP has the ability to upload and download parameter sets from an inverter to another inverter.
Figure 5-3 Basic Operator Panel (BOP, 6SL3255-0AA00-4BA1)
Fitting the BOP to the Control Unit The BOP is fitted to the Control Unit as shown in the figure below. No matter which type of Control Unit is being used, the process is the same.
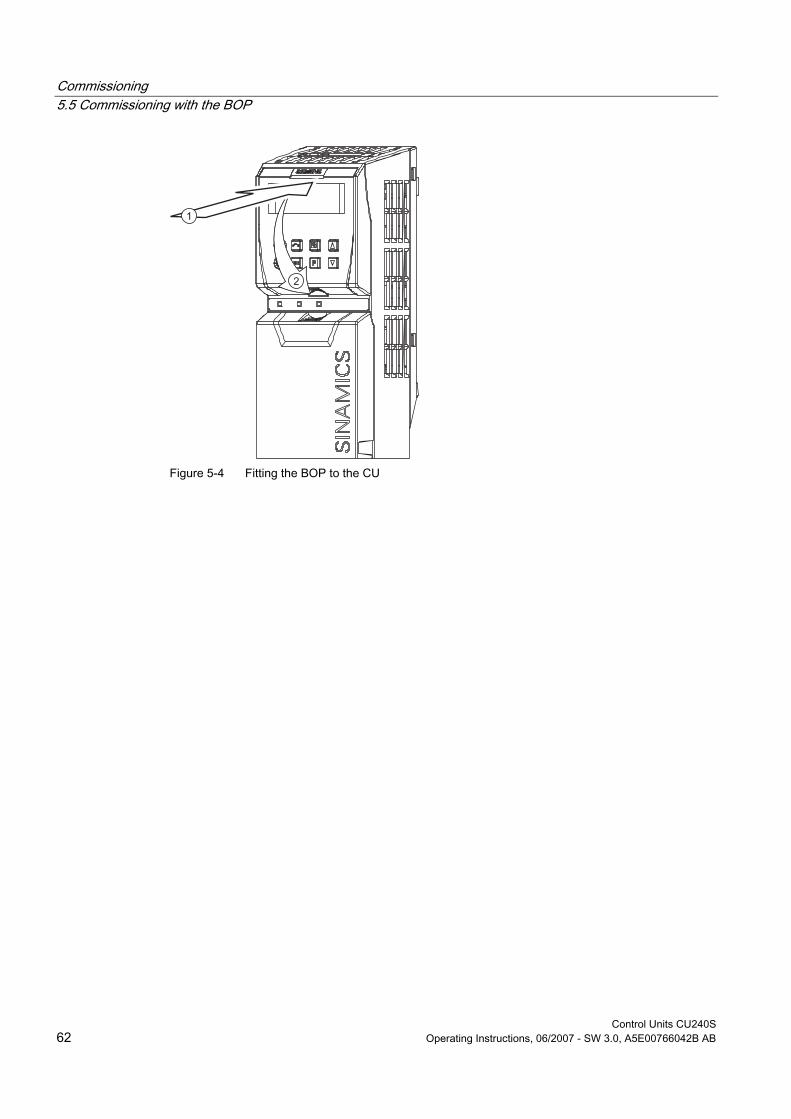
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 62 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Figure 5-4 Fitting the BOP to the CU

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 63
5.5.1.1 Function Keys of the BOP
Basic Operator Panel - function keys
Table 5-3 BOP keys and their functions
Basic Operator Panel Key
Function Effects
Status display
The LCD indicates the settings which the drive inverter is presently using. The display reports faults and alarms.
Start motor The inverter is started by pressing the key. This key is deactivated in the default setting.
Parameter P0700 should be changed as follows to activate the key: BOP: P0700 = 1 OFF1 When this key is pressed, the motor comes to a standstill within the selected
ramp-down time. It is deactivated in the default setting; to activate → refer to the "Start motor" key.
Stop motor
OFF2 The motor coasts down to a standstill by pressing the key twice (or pressing once for a longer period of time). This function is always activated.
Direction reversal
To reverse the direction of rotation of the motor, press this key. The opposing direction is displayed using the minus character (-) or by the flashing decimal point. In the default setting this function is deactivated. To activate it → refer to the "Start motor" key.
Jog motor In the "Ready to run" state, when this key is pressed, the motor starts and rotates with the
pre-set jog frequency. The motor stops when the key is released. When the motor is rotating, this key has no effect.
Function key
This key can be used to display additional information. If you press the key during operation, independent of the particular parameter, for two seconds, the following data will be displayed: 1. Voltage of the DC current link (designated by d – units V). 2. Output current (A) 3. Output frequency (Hz) 4. Output voltage (designated by o – units V). 5. The value, selected in P0005 (if P0005 is configured so that one of the above pieces
of data is displayed (1 to 4), then the associated value is not re-displayed). The displays mentioned above are run-through one after the other by pressing again. Step function Pressing the button briefly makes the display to jump from any parameter (rXXXX or PXXXX) to r0000 and vice versa. After quitting an alarm, r0000 will be displayed and the "jumped from parameter" is forgotten. Acknowledgement If alarm and fault messages are present, then these can be acknowledged by pressing key .
Parameter access
Parameters can be accessed by pressing this key.
Increase value
When this key is pressed, the displayed value is increased.
Reduce value
When this key is pressed, the displayed value is decreased.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 64 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.5.1.2 Changing Parameters via BOP
Changing parameter with the BOP The description below serves as an example that shows how to change any parameter using the BOP.
Table 5-4 Changing P0003 - parameter access level
Step Result on display 1 Press to access parameters 2 Press until P0003 is displayed 3 Press to display the parameter value 4 Press or to set the required value (set to 3) 5 Press to confirm and store the value 6 All level 1 to level 3 parameters are now visible to the user.
Table 5-5 Changing P0700 an index parameter - setting BOP control
Step Result on display 1 Press to access parameters 2 Press until P0719 is displayed 3 Press to access the parameter value 4 Press or to select index 1 5 Press to display actual set value 6 Press or to the required value 7 Press to confirm and store the value 8 Press until r0000 is displayed 9 Press to return the display to the standard drive display (as defined by the customer)
Note The BOP sometimes displays "bUSY" when changing parameter values. This means that the inverter is presently handling another higher-priority task.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 65
5.5.2 Overview Commissioning with the BOP
Commissioning overview A differentiation is made between the following scenarios when commissioning the inverter via BOP:
Single commissioning Basic commissioning
– Quick commissioning – Motor data identification – Speed control optimization
Further settings for commissioning – Calculating the motor/control data – Commissioning the application – Reset parameters to factory settings
Commissioning the fail-safe functions (only in fail-safe applications)
Series commissioning Uploading the parameter set Downloading the parameter set When commissioning, initially, a quick or series commissioning should be performed. If there is no appropriate parameter set available for series commissioning, a quick commissioning must be carried-out. With the function "quick commissioning", the inverter is adapted to the motor and important technological parameters are set. The function "commissioning the application" should only be performed, if the inverter–motor combination provides a satisfactory result.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 66 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.5.3 Basic Commissioning
5.5.3.1 Quick Commissioning
V/f mode For applications using V/f (P1300 = 0 [default]) or Flux Current Control (FCC) (P1300 = 1 or 6), quick commissioning can be accomplished by setting the following parameters:
Table 5-6 Quick commissioning - V/f mode
Parameter Description Setting P0003 = 3 User access level*
1: Standard: Allows access into most frequently used parameters (default)2: Extended: Allows extended access e.g. to inverter I/O functions 3: Expert: For expert use only
P0004 = 0 Parameter filter* 0: All parameters (default)2: Inverter 3: Motor 4: Speed sensor
P0010 = 1 Commissioning parameter filter* 0: Ready (default) 1: Quick commissioning 30: Factory setting Note: P0010 should be set to 1 in order to parameterize the data of the motor rating plate.
P0100 = 0 Europe/North America (enter the motor frequency) 0: Europe [kW], frequency default, 50 Hz (default) 1: North America [hp]. frequency default, 60 Hz 2: North America [kW], frequency default, 60 Hz
P0304 = … Rated motor voltage (enter value from the motor rating plate in volts) The input of rating plate data must correspond with the wiring of the motor (star/delta). This means, if delta wiring is used for the motor, delta rating plate data has to be entered.
P0305 = … Rated motor current enter value from the motor rating plate in ampere
P0307 = … Rated motor power enter value from the motor rating plate in kW or hp Note: if P0100 = 0 or 2, data is in kW and if P0100 = 1, data is in hp.
P0310 = … Rated motor frequency enter value from the motor rating plate in Hz Pole pair number recalculated automatically if parameter is changed.
P0311 = … Rated motor speed enter value from the motor rating plate in RPM) Setting P0311 = 0 causes internal calculation of value. Note: Required for vector control and V/f control with speed controller. Slip compensation in V/f control requires rated motor speed for correct operation.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 67
Parameter Description Setting P0700 = 2 Selection of command source*
0: Factory default setting 1: BOP (keypad) 2: Terminal (Default for CU240S) 4: USS on RS232 5: USS on RS485 6: Fieldbus (Default for CU240S DP and CU240S DP-F)
P1000 = 2 Selection of frequency setpoint* 0: No main setpoint 1: MOP setpoint 2: Analog setpoint (Default for CU240S) 3: Fixed frequency 4: USS on RS232 5: USS on RS485 6: Fieldbus (Default for CU240S DP and CU240S DP-F) 7: Analog setpoint 2
P1080 = … Minimum frequency Enter the lowest motor frequency (in Hz) to which the motor operates independently of the frequency setpoint. The value set here is valid for both clockwise and anticlockwise rotation.
P1082 = … Maximum frequency Enter the maximum frequency (in Hz) to which the motor is limited independently of the frequency setpoint. The value set here is valid for both clockwise and anticlockwise rotation.
P1120 = … Ramp-up time Enter the time (in seconds) in which the motor should accelerate from standstill up to maximum motor frequency P1082. If the ramp-up time is set too short, this can cause alarm A0501 (current limit value) or tripping the inverter with fault F0001(overcurrent).
P1121 = … Ramp-down time Enter the time (in seconds) in which the motor should decelerate (using braking) from the maximum frequency P1082 down to standstill. If the ramp-down time is set too short, this can cause alarm A0501 (current limit value) or A0502 (overvoltage limit value) or tripping the inverter with fault F0001 (overcurrent) or F0002 (overvoltage).
P1300 = 0 Control mode* 0: V/f with linear characteristic (default) 1: V/f with FCC 2: V/f with parabolic characteristic 3: V/f with programmable characteristic 20: Sensorless vector control 21: Vector control with sensor 22: Sensorless vector torque-control
P3900 = … End quick commissioning (QC)* 0: No quick commissioning (no motor calculations, default) 1: Motor calculation and reset of all parameters that haven't been changed while QC process to factory setting. 2: Motor calculation and reset of all I/O settings to factory settings. 3: Only motor calculation - other parameters are not reset. Note: If P3900 = 1, 2, or 3 P0340 is set to 1 and the value from P1082 is written into P2000. The appropriate motor data will be calculated. While end of quick commissioning is performed "bUSY" will be displayed on the BOP. This means that the control data are being calculated and the respective parameter values are stored in the EEPROM. After quick commissioning has been completed, P3900 and P0010 will be set to 0. The actual frequency is displayed.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 68 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Vector Control mode For applications using Vector Control (P1300 = 20 … 23), quick commissioning should be performed as described in the following table: Parameters designated with an "*" offer more settings than are actually shown here. Refer to the Parameter list for additional settings.
Table 5-7 Quick commissioning - Vector Control mode
Parameter Description Setting P0003 = 3 User access level*
1: Standard: Allows access into most frequently used parameters (default)2: Extended: Allows extended access e.g. to inverter I/O functions 3: Expert: For expert use only
P0004 = 0 Parameter filter* 0: All parameters (default)2: Inverter 3: Motor 4: Speed sensor
P0010 = 1 Commissioning parameter filter* 0: Ready (default) 1: Quick commissioning 30: Factory setting Note: P0010 should be set to 1 in order to parameterize the data of the motor rating plate.
P0100 = 0 Europe/North America (enter the motor frequency) 0: Europe [kW], frequency default, 50 Hz (default) 1: North America [hp]. frequency default, 60 Hz 2: North America [kW], frequency default, 60 Hz
P0304 = … Rated motor voltage (enter value from the motor rating plate in volts) The input of rating plate data must correspond with the wiring of the motor (star/delta). This means, if delta wiring is used for the motor, delta rating plate data has to be entered.
P0305 = … Rated motor current enter value from the motor rating plate in ampere
P0307 = … Rated motor power enter value from the motor rating plate in kW or hp Note: if P0100 = 0 or 2, data is in kW and if P0100 = 1, data is in hp.
P0310 = … Rated motor frequency enter value from the motor rating plate in Hz Pole pair number recalculated automatically if parameter is changed.
P0311 = … Rated motor speed enter value from the motor rating plate in RPM) Setting P0311 = 0 causes internal calculation of value. Note: Required for vector control and V/f control with speed controller. Slip compensation in V/f control requires rated motor speed for correct operation.
P0700 = 2 Selection of command source* 0: Factory default setting 1: BOP (keypad) 2: Terminal (Default for CU240S) 4: USS on RS232 5: USS on RS485 6: Fieldbus (Default for CU240S DP and CU240S DP-F)

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 69
Parameter Description Setting P1000 = 2 Selection of frequency setpoint*
0: No main setpoint 1: MOP setpoint 2: Analog setpoint (Default for CU240S) 3: Fixed frequency 4: USS on RS232 5: USS on RS485 6: Fieldbus (Default for CU240S DP and CU240S DP-F) 7: Analog setpoint 2
P1080 = … Minimum frequency Enter the lowest motor frequency (in Hz) to which the motor operates independently of the frequency setpoint. The value set here is valid for both clockwise and anticlockwise rotation.
P1082 = … Maximum frequency Enter the maximum frequency (in Hz) to which the motor is limited independently of the frequency setpoint. The value set here is valid for both clockwise and anticlockwise rotation.
P1120 = … Ramp-up time Enter the time (in seconds) in which the motor should accelerate from standstill up to maximum motor frequency P1082. If the ramp-up time is set too short, this can cause alarm A0501 (current limit value) or tripping the inverter with fault F0001(overcurrent).
P1121 = … Ramp-down time Enter the time (in seconds) in which the motor should decelerate (using braking) from the maximum frequency P1082 down to standstill. If the ramp-down time is set too short, this can cause alarm A0501 (current limit value) or A0502 (overvoltage limit value) or tripping the inverter with fault F0001 (overcurrent) or F0002 (overvoltage).
P1300 = 0 Control mode* 0: V/f with linear characteristic (default) 1: V/f with FCC 2: V/f with parabolic characteristic 3: V/f with programmable characteristic 20: Sensorless vector control 21: Vector control with sensor 22: Sensorless vector torque-control
P3900 = … End quick commissioning (QC)* 0: No quick commissioning (no motor calculations, default) 1: Motor calculation and reset of all parameters that haven't been changed while QC process to factory setting. 2: Motor calculation and reset of all I/O settings to factory settings. 3: Only motor calculation - other parameters are not reset. Note: If P3900 = 1, 2, or 3 P0340 is set to 1 and the value from P1082 is written into P2000. The appropriate motor data will be calculated. While end of quick commissioning is performed "bUSY" will be displayed on the BOP. This means that the control data are being calculated and the respective parameter values are stored in the EEPROM. After quick commissioning has been completed, P3900 and P0010 will be set to 0. The actual frequency is displayed.
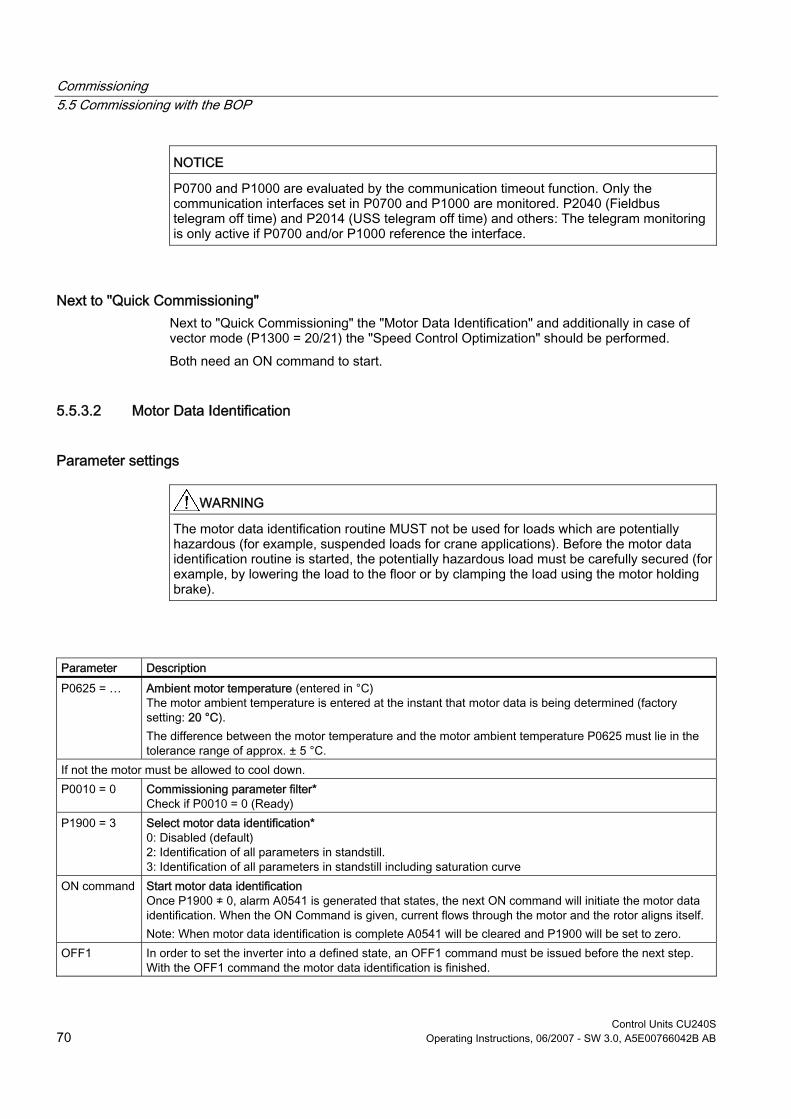
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 70 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
NOTICE P0700 and P1000 are evaluated by the communication timeout function. Only the communication interfaces set in P0700 and P1000 are monitored. P2040 (Fieldbus telegram off time) and P2014 (USS telegram off time) and others: The telegram monitoring is only active if P0700 and/or P1000 reference the interface.
Next to "Quick Commissioning" Next to "Quick Commissioning" the "Motor Data Identification" and additionally in case of vector mode (P1300 = 20/21) the "Speed Control Optimization" should be performed. Both need an ON command to start.
5.5.3.2 Motor Data Identification
Parameter settings
WARNING The motor data identification routine MUST not be used for loads which are potentially hazardous (for example, suspended loads for crane applications). Before the motor data identification routine is started, the potentially hazardous load must be carefully secured (for example, by lowering the load to the floor or by clamping the load using the motor holding brake).
Parameter Description P0625 = … Ambient motor temperature (entered in °C)
The motor ambient temperature is entered at the instant that motor data is being determined (factory setting: 20 °C). The difference between the motor temperature and the motor ambient temperature P0625 must lie in the tolerance range of approx. ± 5 °C.
If not the motor must be allowed to cool down. P0010 = 0 Commissioning parameter filter*
Check if P0010 = 0 (Ready) P1900 = 3 Select motor data identification*
0: Disabled (default) 2: Identification of all parameters in standstill. 3: Identification of all parameters in standstill including saturation curve
ON command Start motor data identification Once P1900 ≠ 0, alarm A0541 is generated that states, the next ON command will initiate the motor data identification. When the ON Command is given, current flows through the motor and the rotor aligns itself. Note: When motor data identification is complete A0541 will be cleared and P1900 will be set to zero.
OFF1 In order to set the inverter into a defined state, an OFF1 command must be issued before the next step. With the OFF1 command the motor data identification is finished.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 71
5.5.3.3 Speed Control Optimization
Parameter settings Parameter Description P0010 = 0 Commissioning parameter filter*
Check if P0010 = 0 (Ready) P1960 = 1 Speed control optimization
0: Disable (default) 1: Enable
ON command
Start Speed control optimization We recommend the Speed control optimization if vector mode (P1300 = 20 or 21) is selected. Once P1960 = 1, alarm A0542 is generated, that states, the next ON command will initiate the optimization. If there is a problem with speed control optimization due to instability the drive may trip with fault F0042, because no stable value has been obtained on the ramp up within a reasonable time. Note: When Speed control optimization is complete A0542 will be cleared and P1960 will be cleared to zero.
5.5.4 Further Settings for Commissioning
5.5.4.1 Calculating the Motor and Control Data
Overview Internal motor/control data is calculated using parameter P0340 or, indirectly using parameter P3900 or P1910. The functionality of parameter P0340 can, for example, be used if the equivalent circuit diagram data or the moment of inertia values are known. The following settings are possible for P0340:
0 No calculation 1 Complete parameterization 2 Calculation of the equivalent circuit diagram data 3 Calculation of V/f and Vector control 4 Calculation of the controller settings
For the complete parameterization (P0340 = 1), in addition to the motor and control parameters, parameters are also pre-assigned which refer to the motor rated data (for example, torque limits and reference quantities for interface signals). A complete list of all of the parameters depending on P0340 is included in the parameter manual.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 72 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Note When exiting quick commissioning with P3900 > 0, internally P0340 is set to 1 (complete parameterization). For the motor data identification, after the measurement has been completed, internally P0340 is set to 3.
Performing the calculation of motor and control data via BOP Parameter Description Setting P0340 = 1 Calculation of motor parameters
This parameter is required during commissioning in order to optimize the operating behavior of the inverter. For the complete parameterization (P0340 = 1), in addition to the motor/control parameters, parameters are pre-assigned which refer to the rated motor data (e.g. torque limits and reference quantities for interface signals). A list of the parameters, which are calculated, depending on the setting of P0340, are included in the parameter list. 0: No calculation 1: Complete parameterization (default) 2: Calculation of equivalent circuit data 3: Calculation of V/f and Vector control data 4: Calculation of controller settings only
If additional catalog data is known enter the data in P0341, P0342 and P0344. P0341 = … Motor inertia [kg*m2] P0342 = … Total/motor inertia ratio P0344 = … Motor weight (entered in kg) If the ECD data is known, enter the data in P0350, P0354, P0356, P0358, P0360. If the ECD data is not known, then: Set P0340 = 4. To calculate the controller settings and skip to END. P0350 = … Stator resistance (line) (entered in Ω)
Stator resistance in Ω of the motor which is connected (line). This parameter value doesn't include the cable resistance.
P0354 = … Rotor resistance (entered in Ω) Defines the rotor resistance of the motor equivalent diagram (phase value).
P0356 = … Stator leakage inductance (entered in mH) Defines the stator leakage inductance of the motor equivalent diagram (phase value).
P0358 = … Rotor leakage inductance (entered in mH) Defines the rotor leakage inductance of the motor equivalent diagram (phase value).
P0360 = … Main inductance (entered in mH) Defines the main (magnetizing) inductance of the motor equivalent diagram (phase value).
P0340 = 3 Calculation of motor parameters 3: Calculation of V/f and Vector control (default) All of the parameters, dependent on the ECD data are calculated and, in addition, the controller settings (P0340 = 4).
END The motor parameters have been calculated and it is now possible to return to the additional parameterization in the Section "Commissioning the Application".

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 73
5.5.4.2 Commissioning the Application
Overview After the motor - inverter combination has been commissioned using quick commissioning, the following parameters should be set according to the requirements of your specific application. As an example, the following points should be considered: Functional requirements of the inverter (for example, closed-loop process control with PID
controller) Limit values Dynamic requirements Starting torques Load surge requirement Overload Diagnostics For information to functions refer to the Function Manual.
Commissioning the application - step-by-step description The parameters designated with an "*" offer more setting options than are listed here. Refer to the Parameter Manual for additional settings. For detailed information refer to the Function Manual.
General settings Parameter Description Setting P0003 = 3 User access level*
1: Standard: Allows access into most frequently used parameters (default) 2: Extended: Allows extended access e.g. to inverter I/O functions 3: Expert: For expert use only
P0014 = … Store mode 0: Volatile (RAM) (default) 1: Nonvolatile (EEPROM)
P0210 = … Supply voltage (enter the voltage in V) This parameter enters the real line supply voltage to which the Inverter is connected. Only necessary if P1254 = 0 (default: P1254 = 1).
P0290 = 2 Inverter overload reaction This defines the response of the Inverter to an internal over temperature. 0: Reduce output frequency 1: Trip (F0004) 2: Reduce pulse frequency and output frequency (default) 3: Reduce pulse frequency then trip (F0004)
P0335 = 0 Motor cooling (enter the motor cooling system) 0: Self-cooled using the shaft mounted fan attached to the motor (default) 1: Force-cooled using the separately powered cooling fan 2: Self-cooled and internal fan 3: Force-cooled and internal fan

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 74 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Note If P0014=0 you can always transfer all parameter values from RAM into EEPROM via P0971. The duration of the data transfer depends on the number of changed parameters. The data transfer can last up to 3 minutes. During the data transfer, BOP displays "bUSY".
Pulse Encoder Parameter Description Setting P0400 = 0 or P0400 = …
Select encoder type * 0: Disabled (no encoder fitted; default) 2 or 12: Two quadrature encoder (two channels)
P0408 = … Number of encoder pulses (Only if encoder is fitted) Enter the number of encoder pulses per revolution. The number of encoder pulses per revolution P0408 is limited by the maximum pulse frequency of the pulse encoder module (fmax = 300 kHz)
Temperature Sensor Parameter Description Setting P0601 = 0 or P0601 = …
Motor temperature sensor 0: No sensor (default;→ P0610) 1: PTC thermistor (→ P0604) 2: KTY84 (→ P0604)
P0604 = … Threshold motor temperature (0 °C … 220 °C, default 130 °C) Enter the warning threshold for motor over temperature protection. The trip temperature threshold (warning threshold + 10 %) is where either the inverter is tripped or Imax is reduced (P0610).
P0610 = 2 Motor I2t temperature reaction Defines the reaction when the motor temperature reaches the warning threshold. 0: No action, only a warning 1: Warning and Imax reduced (this results in a reduced output frequency) 2: Warning and trip (F0011) (default)
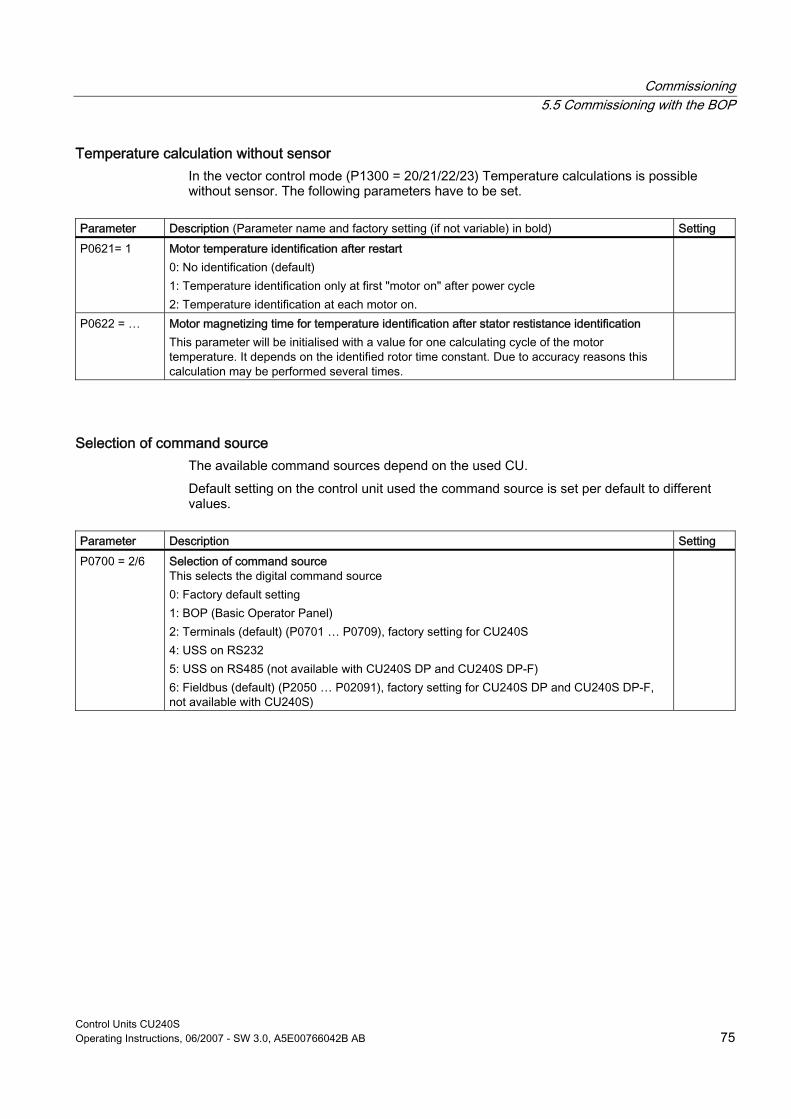
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 75
Temperature calculation without sensor In the vector control mode (P1300 = 20/21/22/23) Temperature calculations is possible without sensor. The following parameters have to be set.
Parameter Description (Parameter name and factory setting (if not variable) in bold) Setting P0621= 1 Motor temperature identification after restart
0: No identification (default) 1: Temperature identification only at first "motor on" after power cycle 2: Temperature identification at each motor on.
P0622 = … Motor magnetizing time for temperature identification after stator restistance identification This parameter will be initialised with a value for one calculating cycle of the motor temperature. It depends on the identified rotor time constant. Due to accuracy reasons this calculation may be performed several times.
Selection of command source The available command sources depend on the used CU. Default setting on the control unit used the command source is set per default to different values.
Parameter Description Setting P0700 = 2/6 Selection of command source
This selects the digital command source 0: Factory default setting 1: BOP (Basic Operator Panel) 2: Terminals (default) (P0701 … P0709), factory setting for CU240S 4: USS on RS232 5: USS on RS485 (not available with CU240S DP and CU240S DP-F) 6: Fieldbus (default) (P2050 … P02091), factory setting for CU240S DP and CU240S DP-F, not available with CU240S)

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 76 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Assigning digital inputs Parameter Description Setting P0701 = 1
Terminal 5: Digital Input 0 (DI0)
P0702 = 12 Terminal 6: Digital Input 1 (DI1)
P0703 = 9 Terminal 7: Digital Input 2 (DI2)
P0704 = 15 Terminal 8: Digital Input 3 (DI3)
P0705 = 16 Terminal 16: Digital Input 4 (DI4)
P0706 = 17 Terminal 17: Digital Input 5 (DI5)
factory settings for CU240S
P0707 = 18 Terminal 40: Digital Input 6 (DI6)
P0708 = 0 Terminal 41: Digital Input 7 (DI7)
P0709 = 0 Terminal 42: Digital Input 8 (DI8)
factory settings for CU240S not availble with CU240S DP-F
Possible values for P0701 to P0709: 0: Digital input disabled 1: ON/OFF1 2: ON reverse /OFF1 3: OFF2 - coast to standstill 4: OFF3 - quick ramp-down 9: Fault acknowledge 10: JOG right 11: JOG left 12: Reverse 13: MOP up (increase frequency) 14: MOP down (decrease frequency) 15: Fixed frequency selector bit0 16: Fixed frequency selector bit1 17: Fixed frequency selector bit2 18: Fixed frequency selector bit3 25: DC brake enable 27: Enable PID 29: External trip 33: Disable additional freq setpoint 99: Enable BICO parameterization
P0724 = 3 Debounce time for digital inputs Defines the debounce time (filtering time) used for digital inputs. 0: No debounce time 1: 2.5 ms debounce time 2: 8.2 ms debounce time 3: 12.3 ms debounce time (default)
P9603 = 00 Terminal 62, 63: SLS via FD1A and FD1B P9603 = 01 Terminal 60, 61: SLS via FD0A and FD0B P9603 = 02 Terminal 62, 63: SS1 via FD1A and FD1B P9603 = 03 Terminal 60, 61: SS1 via FD0A and FD0B P9603 = 04 Terminal 62, 63: STO via FD1A and FD1B P9603 = 05 Terminal 60, 61: STO via FD0A and FD0B
not availble with CU240S and CU240S DP
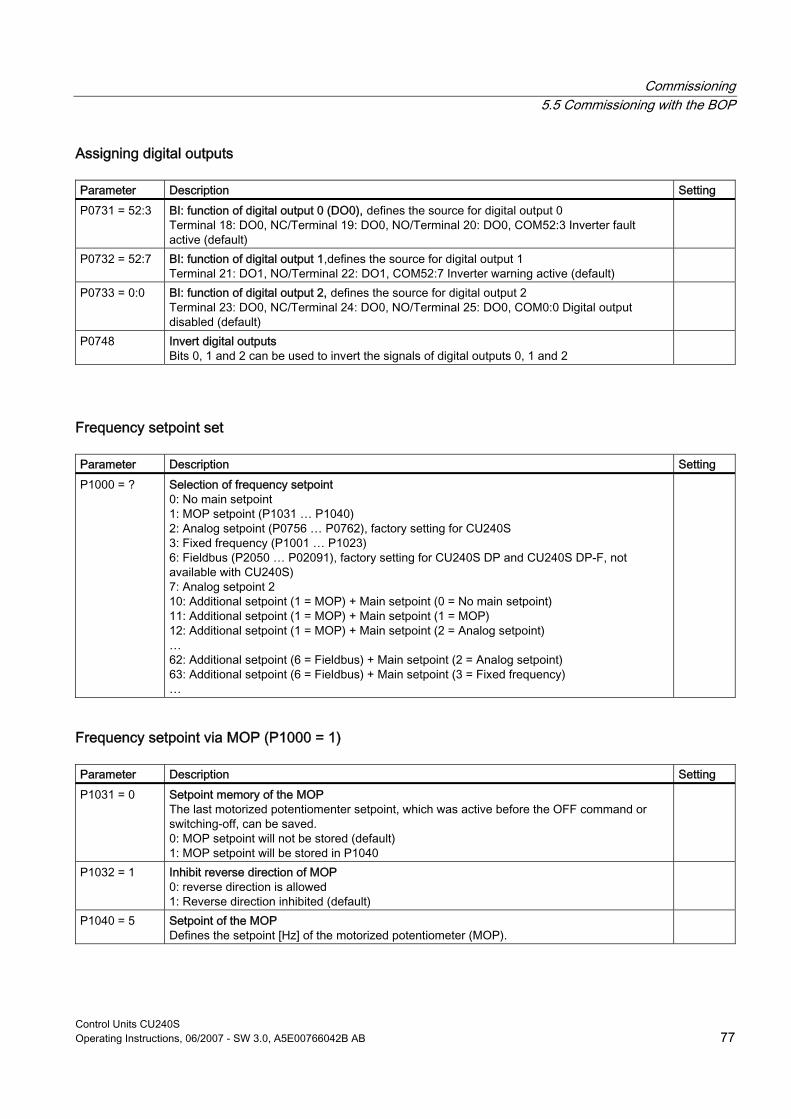
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 77
Assigning digital outputs Parameter Description Setting P0731 = 52:3 BI: function of digital output 0 (DO0), defines the source for digital output 0
Terminal 18: DO0, NC/Terminal 19: DO0, NO/Terminal 20: DO0, COM52:3 Inverter fault active (default)
P0732 = 52:7 BI: function of digital output 1,defines the source for digital output 1 Terminal 21: DO1, NO/Terminal 22: DO1, COM52:7 Inverter warning active (default)
P0733 = 0:0 BI: function of digital output 2, defines the source for digital output 2 Terminal 23: DO0, NC/Terminal 24: DO0, NO/Terminal 25: DO0, COM0:0 Digital output disabled (default)
P0748 Invert digital outputs Bits 0, 1 and 2 can be used to invert the signals of digital outputs 0, 1 and 2
Frequency setpoint set Parameter Description Setting P1000 = ? Selection of frequency setpoint
0: No main setpoint 1: MOP setpoint (P1031 … P1040) 2: Analog setpoint (P0756 … P0762), factory setting for CU240S 3: Fixed frequency (P1001 … P1023) 6: Fieldbus (P2050 … P02091), factory setting for CU240S DP and CU240S DP-F, not available with CU240S) 7: Analog setpoint 2 10: Additional setpoint (1 = MOP) + Main setpoint (0 = No main setpoint) 11: Additional setpoint (1 = MOP) + Main setpoint (1 = MOP) 12: Additional setpoint (1 = MOP) + Main setpoint (2 = Analog setpoint) … 62: Additional setpoint (6 = Fieldbus) + Main setpoint (2 = Analog setpoint) 63: Additional setpoint (6 = Fieldbus) + Main setpoint (3 = Fixed frequency) …
Frequency setpoint via MOP (P1000 = 1) Parameter Description Setting P1031 = 0 Setpoint memory of the MOP
The last motorized potentiomenter setpoint, which was active before the OFF command or switching-off, can be saved. 0: MOP setpoint will not be stored (default) 1: MOP setpoint will be stored in P1040
P1032 = 1 Inhibit reverse direction of MOP 0: reverse direction is allowed 1: Reverse direction inhibited (default)
P1040 = 5 Setpoint of the MOP Defines the setpoint [Hz] of the motorized potentiometer (MOP).

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 78 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Frequency setpoint via analog input (AI) (P1000 = 2) Parameter Description Setting P0756 = 0 AI type
Defines the type of the analog input and also enables analog input monitoring. 0: Unipolar voltage input (0 to +10 V) (default)1: Unipolar voltage input with monitoring (0 V … +10 V) 2: Unipolar current input (0 mA … 20 mA) 3: Unipolar current input with monitoring (0 mA … 20 mA) 4: Bipolar voltage input (-10 V … +10 V) NOTE: The following applies for P0756 … P0760: Index 0: Analog input 0 (AI0), terminals 3 and 4 Index 1: Analog input 1 (AI1), terminals 10 and 11
P0757 = 0 Value x1 of AI scaling [V/mA] P0758 = 0.0 Value y1 of AI scaling
this parameter represents the value of x1 as a percentage of P2000 (reference frequency)
P0759 = 10 Value x2 of AI scaling [V/mA] P0760 = 100 Value y2 of AI scaling
This parameter represents the value of x2 as a percentage of P2000 (reference frequency)
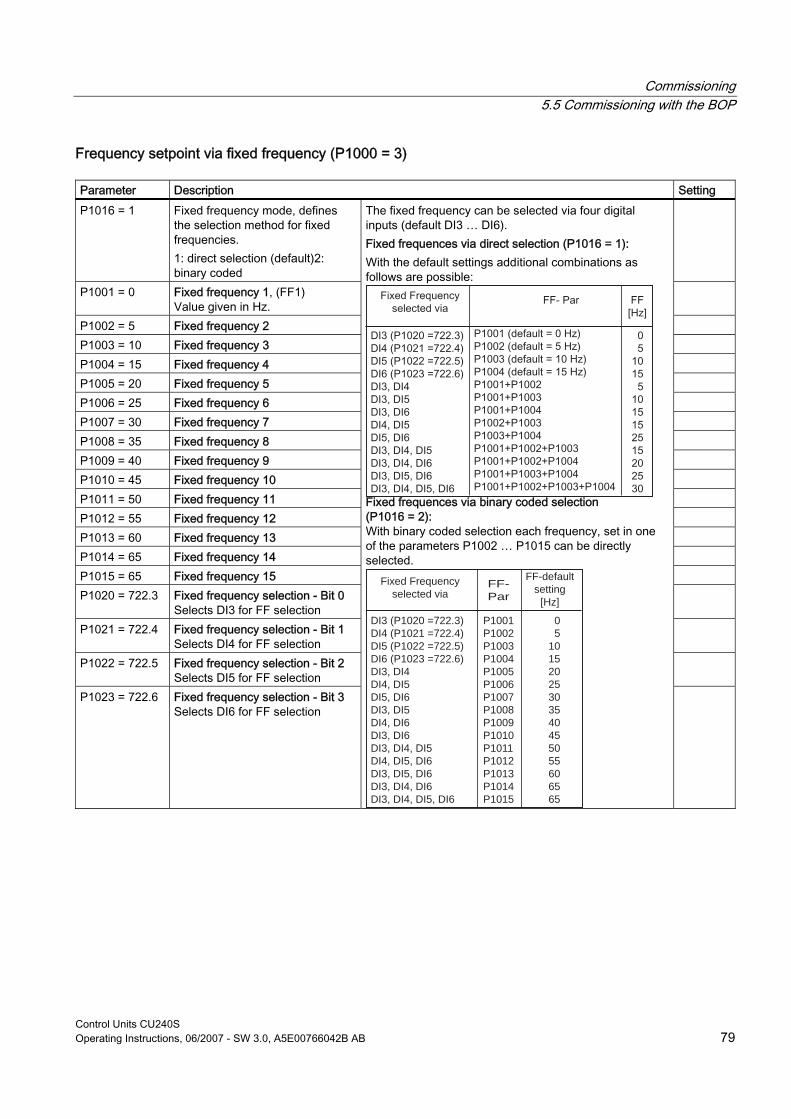
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 79
Frequency setpoint via fixed frequency (P1000 = 3) Parameter Description Setting P1016 = 1 Fixed frequency mode, defines
the selection method for fixed frequencies. 1: direct selection (default)2: binary coded
P1001 = 0 Fixed frequency 1, (FF1) Value given in Hz.
P1002 = 5 Fixed frequency 2 P1003 = 10 Fixed frequency 3 P1004 = 15 Fixed frequency 4 P1005 = 20 Fixed frequency 5 P1006 = 25 Fixed frequency 6 P1007 = 30 Fixed frequency 7 P1008 = 35 Fixed frequency 8 P1009 = 40 Fixed frequency 9 P1010 = 45 Fixed frequency 10 P1011 = 50 Fixed frequency 11 P1012 = 55 Fixed frequency 12 P1013 = 60 Fixed frequency 13 P1014 = 65 Fixed frequency 14 P1015 = 65 Fixed frequency 15 P1020 = 722.3 Fixed frequency selection - Bit 0
Selects DI3 for FF selection
P1021 = 722.4 Fixed frequency selection - Bit 1 Selects DI4 for FF selection
P1022 = 722.5 Fixed frequency selection - Bit 2 Selects DI5 for FF selection
P1023 = 722.6 Fixed frequency selection - Bit 3 Selects DI6 for FF selection
The fixed frequency can be selected via four digital inputs (default DI3 … DI6). Fixed frequences via direct selection (P1016 = 1): With the default settings additional combinations as follows are possible:
Fixed frequences via binary coded selection (P1016 = 2): With binary coded selection each frequency, set in one of the parameters P1002 … P1015 can be directly selected.
P1001P1002P1003P1004P1005P1006P1007P1008P1009P1010P1011P1012P1013P1014P1015
DI3 (P1020 =722.3)DI4 (P1021 =722.4)DI5 (P1022 =722.5)DI6 (P1023 =722.6)DI3, DI4DI4, DI5DI5, DI6DI3, DI5DI4, DI6DI3, DI6DI3, DI4, DI5DI4, DI5, DI6DI3, DI5, DI6DI3, DI4, DI6DI3, DI4, DI5, DI6
05
10152025303540455055606565
Fixed Frequency selected via
FF-Par
FF-default setting
[Hz]
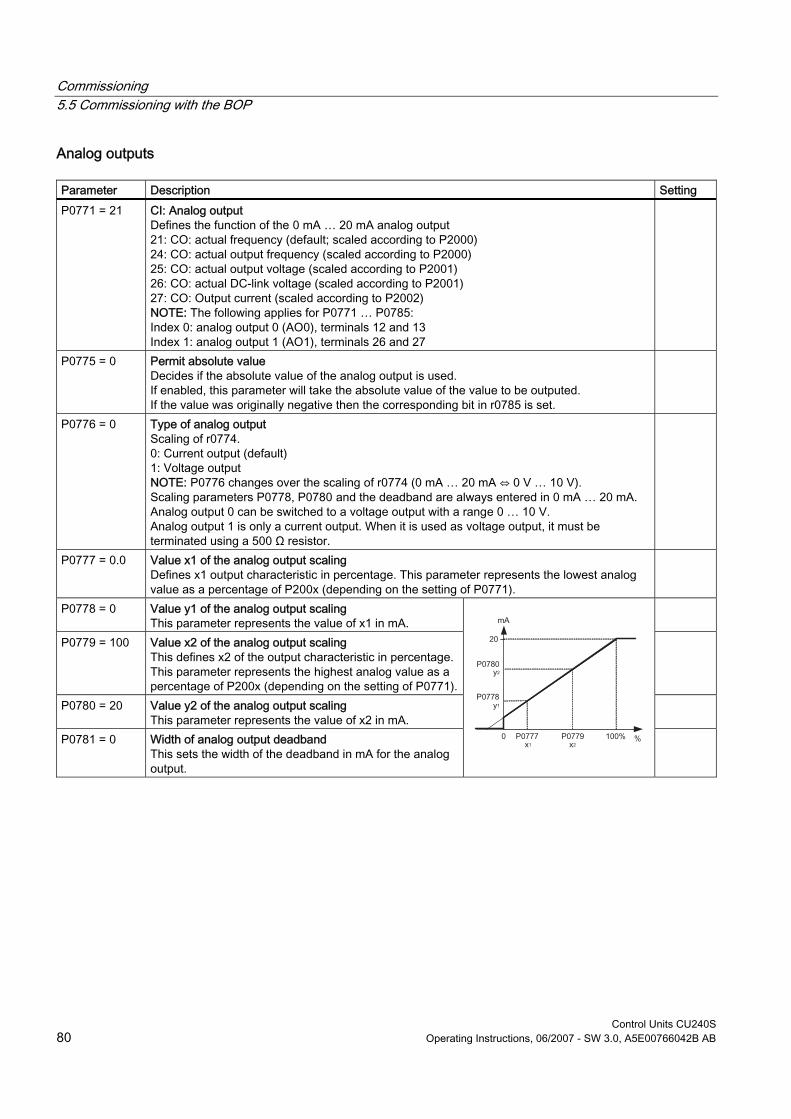
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 80 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Analog outputs Parameter Description Setting P0771 = 21 CI: Analog output
Defines the function of the 0 mA … 20 mA analog output 21: CO: actual frequency (default; scaled according to P2000) 24: CO: actual output frequency (scaled according to P2000) 25: CO: actual output voltage (scaled according to P2001) 26: CO: actual DC-link voltage (scaled according to P2001) 27: CO: Output current (scaled according to P2002) NOTE: The following applies for P0771 … P0785: Index 0: analog output 0 (AO0), terminals 12 and 13 Index 1: analog output 1 (AO1), terminals 26 and 27
P0775 = 0 Permit absolute value Decides if the absolute value of the analog output is used. If enabled, this parameter will take the absolute value of the value to be outputed. If the value was originally negative then the corresponding bit in r0785 is set.
P0776 = 0 Type of analog output Scaling of r0774. 0: Current output (default) 1: Voltage output NOTE: P0776 changes over the scaling of r0774 (0 mA … 20 mA ⇔ 0 V … 10 V). Scaling parameters P0778, P0780 and the deadband are always entered in 0 mA … 20 mA. Analog output 0 can be switched to a voltage output with a range 0 … 10 V. Analog output 1 is only a current output. When it is used as voltage output, it must be terminated using a 500 Ω resistor.
P0777 = 0.0 Value x1 of the analog output scaling Defines x1 output characteristic in percentage. This parameter represents the lowest analog value as a percentage of P200x (depending on the setting of P0771).
P0778 = 0 Value y1 of the analog output scaling This parameter represents the value of x1 in mA.
P0779 = 100 Value x2 of the analog output scaling This defines x2 of the output characteristic in percentage. This parameter represents the highest analog value as a percentage of P200x (depending on the setting of P0771).
P0780 = 20 Value y2 of the analog output scaling This parameter represents the value of x2 in mA.
P0781 = 0 Width of analog output deadband This sets the width of the deadband in mA for the analog output.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 81
JOG frequency Parameter Description Setting P1057 = 1 JOG Enable
P1057 = 0 JOG-function disabled P1057 = 1 JOG-function enabled (default)
P1058 = 5 JOG frequency right Frequency in Hz when the motor is being jogged in the clockwise direction.
P1059 = 5 JOG frequency left Frequency in Hz when the motor is being jogged in the counter-clockwise direction.
P1060 = 45 JOG ramp-up time Ramp-up time in seconds from 0 to the maximum frequency (P1082). The JOG ramp-up is limited by P1058 or P1059.
P1061 = 50 JOG ramp-down time Ramp-down time in seconds from the maximum frequency (P1082) to 0.
Additional Setpoints Parameter Description Setting P1074 = 1.0 BI: disable additional setpoint P1075 = 775 CI: additional setpoint
Defines the source of the additional setpoint which is added to the main setpoint. Common settings: 755: Analog input setpoint 1024: Fixed frequency setpoint 1050: MOP setpoint
P1076 = 1.0 CI: additional setpoint scaling Defines the source to scale the additional setpoint. Common settings: 1: Scaling of 1.0 (100 %)755: Analog input setpoint 1024: Fixed frequency setpoint 1050: MOP setpoint
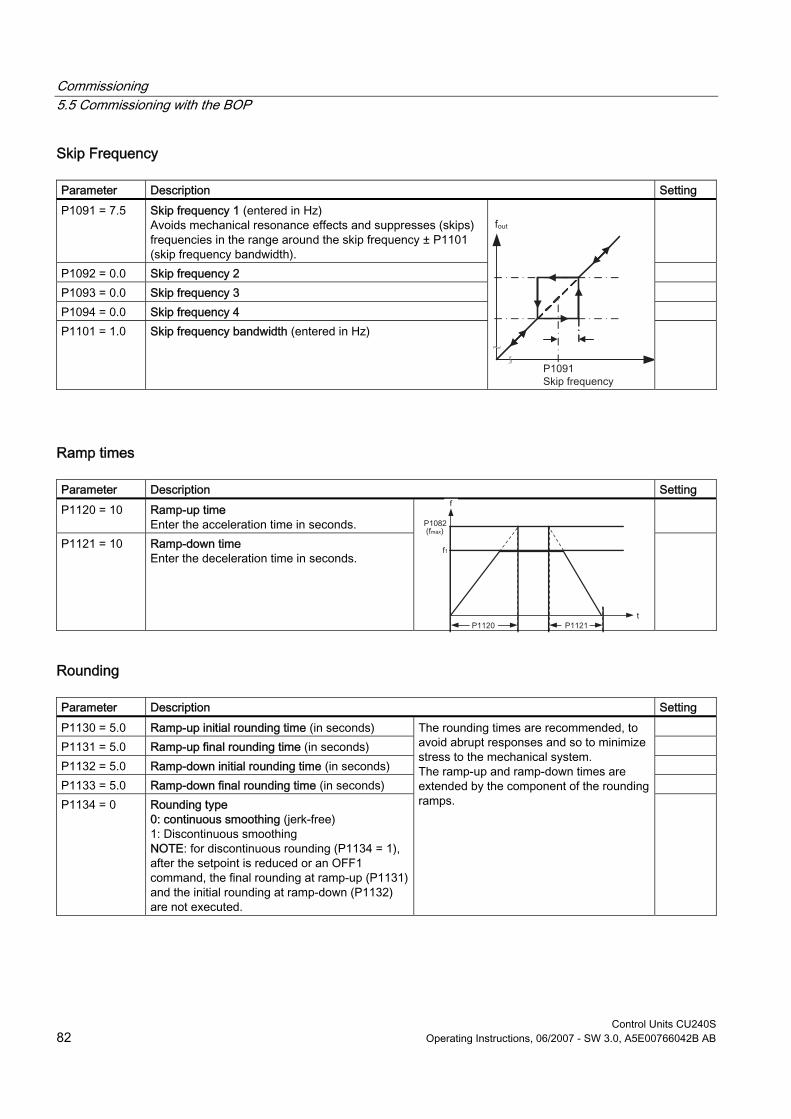
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 82 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Skip Frequency Parameter Description Setting P1091 = 7.5 Skip frequency 1 (entered in Hz)
Avoids mechanical resonance effects and suppresses (skips) frequencies in the range around the skip frequency ± P1101 (skip frequency bandwidth).
P1092 = 0.0 Skip frequency 2 P1093 = 0.0 Skip frequency 3 P1094 = 0.0 Skip frequency 4 P1101 = 1.0 Skip frequency bandwidth (entered in Hz)
Ramp times Parameter Description Setting P1120 = 10 Ramp-up time
Enter the acceleration time in seconds.
P1121 = 10 Ramp-down time Enter the deceleration time in seconds.
Rounding Parameter Description Setting P1130 = 5.0 Ramp-up initial rounding time (in seconds) P1131 = 5.0 Ramp-up final rounding time (in seconds) P1132 = 5.0 Ramp-down initial rounding time (in seconds) P1133 = 5.0 Ramp-down final rounding time (in seconds) P1134 = 0 Rounding type
0: continuous smoothing (jerk-free) 1: Discontinuous smoothing NOTE: for discontinuous rounding (P1134 = 1), after the setpoint is reduced or an OFF1 command, the final rounding at ramp-up (P1131) and the initial rounding at ramp-down (P1132) are not executed.
The rounding times are recommended, to avoid abrupt responses and so to minimize stress to the mechanical system. The ramp-up and ramp-down times are extended by the component of the rounding ramps.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 83
Further parameters to set before finishing the application commissioning The following parameters should be configured for each application.
Parameter Description Setting P1800 = 4 Pulse frequency (kHz)
The pulse frequency can be changed in 2 kHz steps. The range extends from 4 kHz up to 16 kHz. The complete inverter output current at 50 °C is reached with 4 kHz. The maximum output frequency depends on the pulse frequency. Operation up to 266 Hz is possible with a pulse frequency of 4 kHz. If a higher output frequency is required, then the pulse frequency should also be increased (10 kHz pulse frequency - maximum output frequency of 650 Hz) If low-noise operation is not required, then the inverter losses and the high-frequency disturbances emitted by the inverter can be reduced by selecting lower pulse frequencies.
P2000 = 50 Reference frequency (Hz) The reference frequency in Hertz corresponds to a value of 100 %. This setting should be changed if a maximum frequency of higher than 50 Hz is required. NOTE: This scaling acts on the maximum frequency of the analog setpoints, the fixed frequencies and the motorized potentiometer. All these values refer to 100 %.
P2001 = 1000 Reference voltage (V) The reference voltage in Volts (output voltage) corresponds to a value of 100 %. NOTE: This setting should only be changed if it is necessary to output the voltage with another scaling.
P2002 = … Reference current (A) The reference current in Amperes (output current) corresponds to a value of 100 %. Factory setting is 200 % of the rated motor current (P0305). NOTE: This setting should only be changed if it is necessary to output the current with another scaling.
P2003 = … Reference torque (Nm) The reference torque in Newton-meters corresponds to a value of 100 %. Factory setting is 200 % of the rated motor torque, determined from the motor data, for a constant motor torque.NOTE: This setting should only be changed if it is necessary to output the torque with another scaling.
P2004 = … Reference power (kW or hp) The reference power in kW or hp corresponds to a value of 100 %. Factory setting is 200 % of the rated motor power at constant motor torque. This setting should only be changed if it is necessary to output the power with another scaling.
Finishing the application commissioning Parameter Description Setting P0971 = 1 Transfer data from RAM to EEPROM
0: Disabled (default) 1: Start data transfer, RAM → EEPROM All of the parameter changes are transferred from RAM (volatile) into the EEPROM (nonvolatile, settings are not lost with power off). While the transfer is active, "bUSY" will be displayed on the BOP. Once the transfer is completed P0970 will be set internally to "0" and the "P0970" will be displayed. Note: Data transfer RAM → EEPROM is not necessary when the commissioning is performed via the BOP, because all parameter changes via BOP are stored as well in RAM as in EEPROM immediately.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 84 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.5.4.3 Reset Parameters to Factory Settings
Overview With a factory reset via P0970 the initial state of the all the inverter parameters can be re-established. The factory setting values are designated as "Factory setting" in the Parameter Manual. For further information, refer to the section "Factory Settings of the CU240S Control Units" in this manual.
Note When resetting the parameters to the factory setting, the communications memory is re-initialized. This means that communications are interrupted for the time it takes to perform the reset.
WARNING
Parameter reset in case of CUs with fail-safe functions Parameters that don't relate to fail-safe functions are reset with P0970 = 1. To reset parameters that relate to fail-safe functions an additional parameter reset with P0970 = 10 must be performed. This parameter reset is password protected. In case of a parameter reset with P0970 = 10 an acceptance test necessary.
Reset to the factory setting Parameter or action Description P0003 = 1 User access level*
1: Standard: Allows access into most frequently used parameters. P0004 = 0 Parameter filter
0: All parameters P0010 = 30 Commissioning parameter*
30: Factory setting, parameter transfer P0970 = 1 Factory reset*
1: Parameter reset to the default values BUSY (on BOP) Progress bar (STARTER)
When the factory reset has been finished, P0970 and P0010 are set to 0 and the BOP changes back to the standard display.
Note The following parameters will not be changed with a factory reset: • P0014 Store mode • P0100 Europe / North America • P0201 power stack code number • Communication parameters (USS and PROFIBUS settings) • Data depending on actual Power Module
Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 85
5.5.5 Commissioning the Fail-Safe Functions
Available fail-safe functions Safe Torque Off (STO) Safe Stop 1 (SS1) Safely Limited Speed (SLS)
Command source for fail-safe functions As command source for the fail-safe signals STO, SS1 and SLS either the fail-safe terminals (60 … 63) or PROFIsafe can be used (see p9603 and p9803).
WARNING PROFIsafe address The PROFIsafe address is per default identical to the PROFIBUS address. If the PROFIsafe address needs to be changed, it has to be done as well in P9810 of the inverter as in the higher level control system (in case of SIMATIC S7 in HW config), otherwise F1640 will occur.
Note
Via terminals two of the three fail-safe functions (STO, SS1 and SLS) can be used. Via PROFIsafe all three functions are available.
Commissioning parameters regarding fail-safe functions Parameters regarding fail-safe functions can only be accessed on a Control Unit with fail-safe functions, on a Standard CU this parameters are not available. For safety reasons parameters are handled by pairs and stored on two separate processors within the CU with fail-safe functions. When commissioning of fail-safe functions is completed, checksums for each processor data are created. These checksums are permanently compared. If they differ, the inverter initiates a latched safe torque off (LSTO) state and stops the system. The access level of the fail-safe function parameters is 3, therefore set P0003 = 3, when using a BOP. To enter the commissioning mode for fail-safe functions set parameter P0010 = 95. When the safety commissioning mode is initiated a password must be set in parameter P9761. The default password for the system is 12345, it is highly recommended that this password is changed to ensure complete security of the fail-safe function parameters. More detailed description of this process is given in the following flow charts. The commissioning process of fail-safe functions would normally be accomplished with the use of either the STARTER software or the optional Basic Operator Panel (BOP).

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 86 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
When a parameter is modified, the relevant value is transmitted to the relevant processor in the CU. The value is transmitted back to the user interface and can be checked by the processor and the user for correctness. To complete commissioning of fail-safe functions use setting P3900 = 10, which accepts all the changes to the fail-safe parameters. All values stored on both processors are checked and if no discrepancies are found the inverter state will change from "safety commissioning" to "ready". If, however, a discrepancy is found safety commissioning can not be finished. The fault number will be shown in r0947. In this case interrupt the safety commissioning with P3900 = 11 to reload to the former stored settings. To reset all fail-safe parameters to their default values perform a factory reset of fail-safe parameters with P0970 = 10. It is also recommended to perform a factory reset of fail-safe parameters with P0970 = 10, if a fault has been made during safety commissioning, and the system is in an undefined state. When changing fail-safe parameters, each parameter will be written to the P1 processor and its equivalent parameter to the P2 processor, for example: P9603 selects the required safe digital input terminals or PROFIsafe communications for
P1 processor. P9803 selects the selection of the required safe digital input terminals or PROFIsafe
communications for P2 processor. Example Select PROFIsafe communication: To select the PROFIsafe communications, following has to be set: 1. P9603 = 128. 2. The system reads the change and processes the information to the drive processor
memory and verifies that the information has been received correctly. 3. P9803 = 128. 4. The system reads the change and processes the information to the communication
processor memory and verifies that the information has been received correctly. 5. Once both write actions have been verified by the system, a checksum is created. When commissioning has been completed, a checksum for all the data held in both memories is created and continually checked to verify the integrity of the data.
NOTICE Behavior of inverter on completion of commissioning The following behavior should be noted when commissioning the inverter: • After commissioning the fail-safe functions the fail-safe parameters are automatically
stored in the RAM and EEPROM. • If an MMC is plugged into the CU, this is not affected by normal commissioning or
commissioning the fail-safe functions. • To save the EEPROM content on an MMC, an upload from the inverter to the MMC has
to be performed. • After commissioning the fail-safe functions, an acceptance test must be carried out.
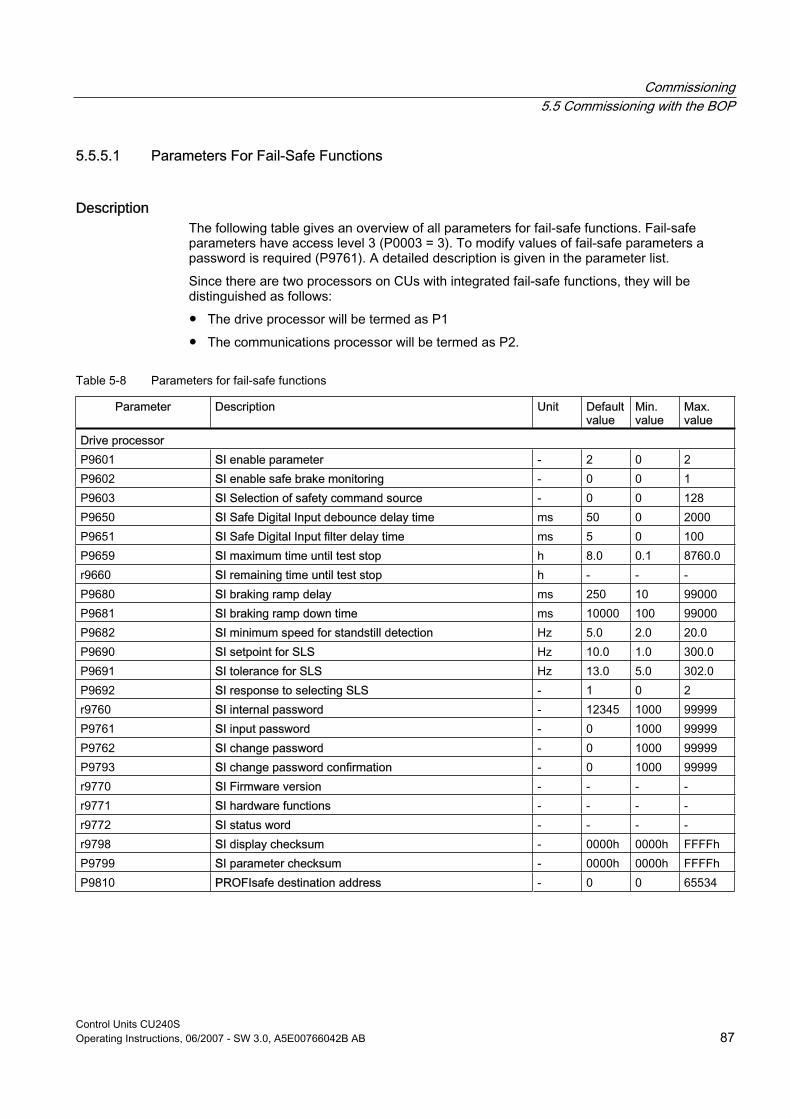
Description
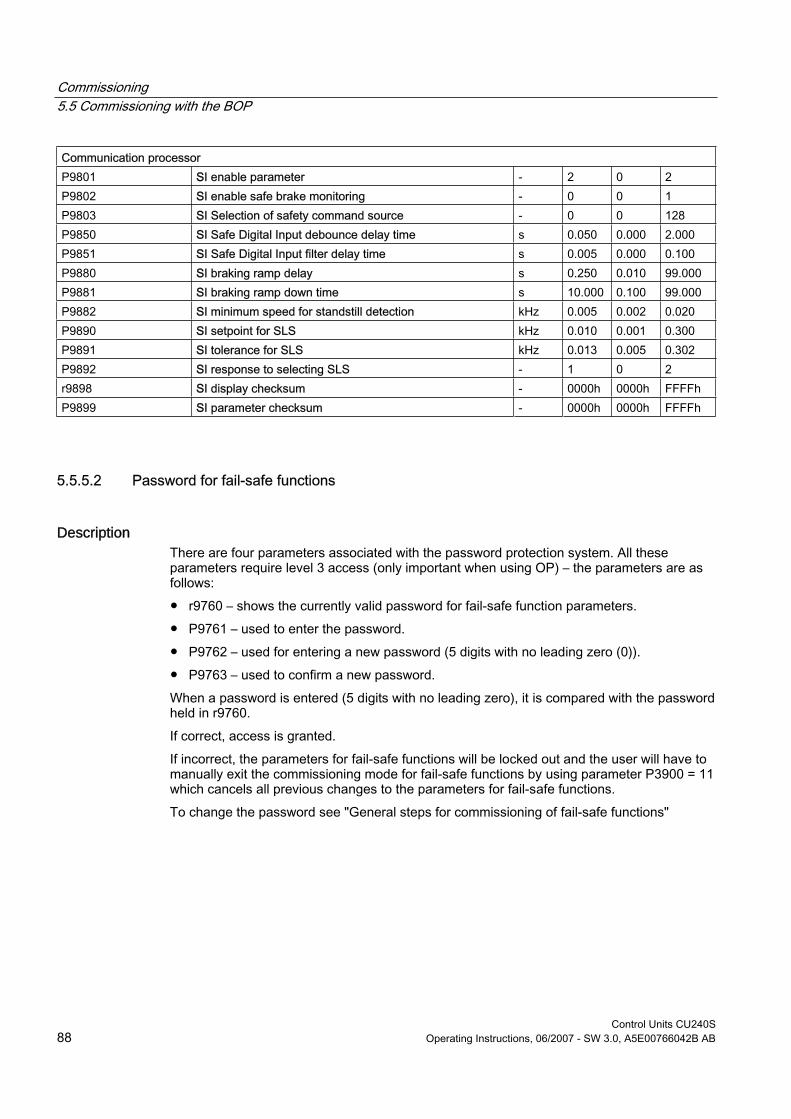
Description
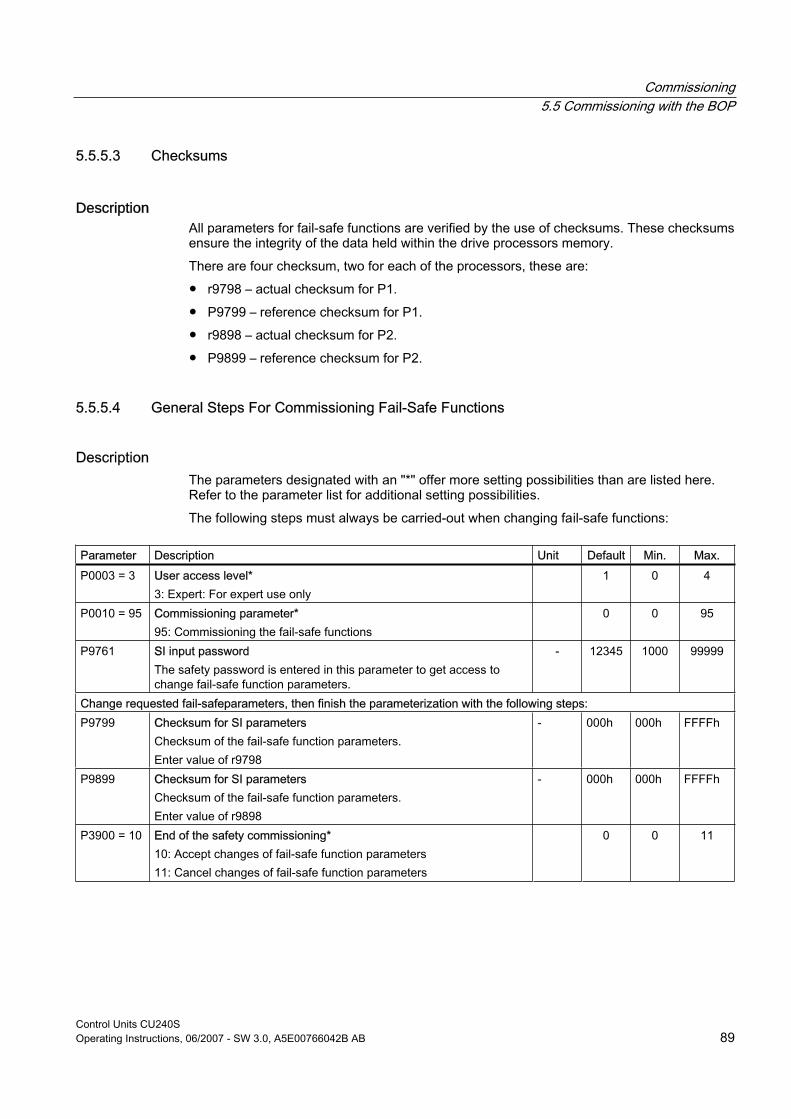
Description

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 90 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.5.5.5 Common Step-by-Step Descriptions For Fail-Safe Functions
Change password Parameter Description Unit Default Min. Max. P9761 SI input password
The safety password is entered in this parameter to get access to change the fail-safe parameters.
- 0 1000 99999
P9762 SI change password Enter the new password. The password must have 5 digits but no leading zero (0).
- 0 1000 99999
P9763 SI change password confirmation The new password must be confirmed here. If P9762 and P9763 are the same, then this value is written into r9760. In the future, fail-safe parameters can be accessed by entering this password into P9761.
- 0 1000 99999
Enabling fail-safe functions Parameter Description Unit Default Min. Max. P9601 = … SI enable parameter
Fail-safe parameter for enabling the individual fail-safe control functions. Bit 00 = 1/0: Reserved Bit 01 = 1/0: Activation/deactivation of the forced dynamisation after STO
- 2 0 2
P9801 = … SI enable parameter Refer to P9601
- 2 0 2
Enable fail-safe brake monitoring Parameter Description Unit Default Min. Max. P9602 = … SI enable safe brake monitoring
0: Disable monitoring of safe brake control 1: Enable monitoring of safe brake control
- 0 0 1
P9802 = … SI enable safe brake monitoring Refer to P9602
- 0 0 1

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 91
Select fail-safe command source Parameter Description Unit Default Min. Max. P9603 = … SI Selection of safety command source
Fail-safe parameter for selection of the fail-safe input signals. As source for the fail-safe functions the fail-safe digital inputs or PROFIsafe can be used. Selects either safe digital inputs or PROFIsafe . • Bit 00 = 1/0: SLS activated/deactivated via FDI1A and FDI1B • Bit 01 = 1/0: SLS activated/deactivated via FDI0A and FDI0B • Bit 02 = 1/0: SS1 activated/deactivated via FDI1A and FDI1B • Bit 03 = 1/0: SS1 activated/deactivated FDI0A and FDI0B • Bit 04 = 1/0: STO activated/deactivated FDI1A and FDI1B • Bit 05 = 1/0: STO activated/deactivated FDI0A and FDI0B • Bit 07 = 1/0: SLS, SS1 and STO activated/deactivated via
PROFIsafe Note: • If Bit 07 = 1, all other bits must be set 0
- 0 0 128
P9803 = … Selection of safety command source Refer to P9603
- 0 0 128
Consistency check time of fail-safe digital inputs Parameter Description Unit Default Min. Max. P9650 = … Safe input debounce delay time
Defines the maximum allowed debounce delay between the two safe digital input pins. If both safe digital inputs are not consistent after this time a fault will be generated (1600.108 or 1600.208).
ms 50 0 2000
P9850 = … Safe input debounce delay time Refer to P9650.
s 0.050 0.000 2.000
Filter time of fail-safe digital inputs Parameter Description Unit Default Min. Max. P9651 = … Safe input filter delay time
Defines the response time delay of the safe digital inputs. Signals that are shorter than the specified time are not processed as fail-safe signals but ignored. Any noise shorter than the parameterised filter time will not trigger a fail safe function at the related fail safe digital input.
ms 5 0 1000
P9851 = … Safe input filter delay time Refer to P9650.
s 0.005 0.000 1.000

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 92 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Test stop interval setting Parameter Description Unit Default Min. Max. P9659 = … SI maximum time until test stop*
The time interval between test stops is specified in this parameter. The remaining time until a test stop is required is shown in r9660. When r9660 reaches zero, the time interval has expired and warning A1699 is activated. The warning solely informs that a test stop is required. The user should activate a test stop on the next occasion. The drive functionality will not be affected by the warning. The test stop is activated in the following cases: • after each power-up • on selecting the STO when Bit 01 in P9601/P9801 is set • when leaving the latched safe torque off (LSTO). During the test stop the shutdown paths are checked and a processor selftest runs. The timer for the forced dynamisation (see r9660) is reset to the default value specified in P9659 and warning A1699 is cleared under the following conditions: • after reducing P9659 below the current value in r9660, • after each power-up • on selecting the STO when Bit 01 in P9601/P9801 is set and the
test is complete • when leaving the LSTO when the test is complete. The default value is 8 hours. Note: For safety reasons, it is necessary to initiate the safe standstill as a test at intervals of maximum one year in order to check the operability of the fail-safe system. Thus, at the latest one year after the last activation of the safe standstill the inverter sets a status bit (r9772, Bit 15) and generates warning A1699. The process control (i.e. PLC) must then initiate the STO at the next opportunity, for example, when the drive has already a short phase with zero speed. Provided the dynamisation has not been deactivated (see parameters P9601/P9801, Bit 01), the fail-safe hardware is tested once the safe standstill is active. If the inverter returns the "Safe torque off (STO) selected" (r9772, Bit 01) status signal, the safe standstill can be released again since part of the test is continued in the background. The immediate switch-on will be inhibited for approximately 2.4 seconds. Once the self test is complete the dynamisation bit (Bit 15 of r9772) is cleared automatically. The higher level control (i.e. PLC) must log the setting and clearing of the status bit and the dynamisation bit. To detect errors while writing and storing safety-relevant data, the control should fetch cyclically at 8 hour intervals all safety-related parameters and compare them with the expected values. Should there be a difference, the fail-safe signals (STO or SS1) should be used to initiate a safe standstill and to issue a fault message. This action must also be logged appropriately.
h 8.0 0.1 8760.0

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 93
Safe Stop 1 setting Parameter Description Unit Default Min. Max. P9680 = … SI braking ramp delay
Time [in ms] between selecting the safe braking ramp (SBR) and the activation of the monitoring ramp. The output frequency is compared to the frequency of the monitoring ramp when the SBR is active. If the output frequency exceeds that of the monitoring ramp, an latched safe torge off (LSTO) is generated. For applications with changing loads, an increase of P9680/P9880 or P9691/P9891 is recommended. A larger deviation of the output frequency from the reference is then acceptable. Note: A value of 99000 would deactivate the SBR monitoring, this value therefore is not allowed. Set P9880 accordingly. The ramping on selection of SLS or SS1 will however still follow the ramping time in P9681/P9881.
ms 250 10 99000
P9880 = … SI braking ramp delay Refer to P9680.
s 0.250 0.010 99.000
P9681 = … SI braking ramp-down time Defines the braking ramp-down time for the dafe braking ramp (SBR) in seconds. The ramp-down time is used for the SBR and the monitoring ramp. The total braking time Tx can be derived where fx is the current frequency according to the following formulas: a) For activation of the SLS: Tx = P9681 * (fx - P9690)/200 Hz b) For activation of SS1: Tx = P9681 * (fx - P9682)/200 Hz Note: In contrast to other ramping times (e.g. p1120, p1121), the SI braking ramp-down time is referred to 200 Hz and not to p1082. See formulas above.
ms 10000 100 99000
P9881 = … SI braking ramp-down time Refer to P9681.
s 10.000 0.100 99.000
P9682 = … SI minimum speed for standstill detection A speed below the threshold of P9682/P9882 is considered as standstill. If the SS1 has been selected, the safe standstill (STO) will be activated.
Hz 5.0 2.0 20.0
P9882 = … SI minimum speed for standstill detection Refer to P9682.
kHz 0.005 0.002 0.020

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 94 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Safely-limited Speed Parameter Description Unit Default Min. Max. P9690 SI setpoint for SLS
Speed setpoint that is used when the safely limited speed (SLS) is selected. Depending on the setting in P9692/P9892 the frequency of P9690/P9890 may also serve as a speed threshold instead of a setpoint (see P9692). Note: For applications with changing loads, an increase of P9680/P9880 or P9691/P9891 is recommended. If the "safely limited speed" (SLS) is selected while the output frequency is below the setpoint value, Bit 04 and Bit 05 will be set simultanously in r9772.
Hz 10.0 2.0 300.0
P9890 SI setpoint for SLS Refer to P9690.
kHz 0.010 0.002 0.300
P9691 SI tolerance for SLS Upper tolerance margin for the SLS. If the output frequency at initiation of the safely limited speed lies below the value of P9691/P9891 and later on exceeds that value an LSTO is generated. The tolerance defined by the difference P9691 to P9690 (or P9891 to P9890) is also used for the monitoring ramp when the SBR is active. For applications with changing loads it is recommended to increase P9691/P9891. Note: The value in P9691 needs to be larger than the value in P9690. This condition is checked when leaving the safety commissioning.
Hz 13.0 5.0 302.0
P9891 SI tolerance for SLS Refer to P9691.
kHz 0.013 0.005 0.302
P9692 SI response to selecting SLS Response if, after the initiation of safely limited speed (SLS), the speed is higher than the limit value: • 0:
Activation of the speed monitoring and disabling the set value channel. If the output frequency at initiation of SLS exceeds the parameterized speed limit an LSTO is initiated.
• 1 Braking to the set speed with safe braking ramp, then activation of the monitoring function and disabling the set value channel.
• 2 The monitoring is activated at once. If the output frequency at initiation of SLS exceeds the parameterized speed limit an LSTO is initiated. The set value channel is not disabled.
- 1 0 2
P9892 SI response to selecting SLS Refer to P9692.
- 1 0 2

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 95
5.5.5.6 Factory Reset of Fail-safe Parameters
Description The factory reset of fail-safe parameters sets all fail-safe parameters to its default value except the following: r9760 SI internal password P9761 SI input password P9762 SI change password P9763 SI change password confirmation
Procedure for resetting the fail-safe related parameters Parameter Description P0003 = 3 User access level*
1: Standard: Allows access into most frequently used parameters. 2: Extended: Allows extended access e.g. to inverter I/O functions 3: Expert: For expert use only
P0004 = 0 Parameter filter* 0: All parameters
P0010 = 30 Commissioning parameter* 0: Ready 30: Factory setting, parameter transfer
P9761 SI input password Enter the safety password
P0970 = 10 Factory reset* 0: Disabled (default)1: Parameter reset 10: Safety reset
BUSY (on BOP) When the factory reset has been finished, P0970 and P0010 are set to 0 and the BOP changes back to the standard display.
5.5.5.7 Acceptance Test and Acceptance Log
Description In order to verify the parameter settings for the fail-safe functions, an acceptance test must be carried-out after the following operations: Commissioning Safety reset Automatic download of a parameter set via MMC This acceptance test must be appropriately logged and documented. An example for an appropriate acceptance log is included in the appendix. The acceptance logs should be adequately archived.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 96 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Acceptance test The machinery construction company (OEM) must carry-out an acceptance test for the fail-safe functions that have been activated at the machine.
Authorized person, acceptance log Appropriately authorized personnel must test each of the fail-safe functions. These must be documented/logged in an acceptance log and must be signed. The acceptance log must be inserted/attached in/to the logbook of the machine Authorized in this case means a person from the machinery construction company (OEM) that as a result of their training and knowledge regarding the fail-safe functions, can appropriately carry-out an acceptance test.
Note The information/instructions and descriptive information regarding commissioning in Section "Commissioning the fail-safe functions" of this m anual must be carefully observed. If parameters for the fail-safe functions are changed, then a new acceptance test must be carried-out and included as acceptance log. The template for the acceptance log is provided in printed form as example or recommendation in this Operating Instructions.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 97
Contents of a complete acceptance test Documentation Documentation of the machine including the fail-safe functions. Machine description and overview/block diagram Fail-safe functions for each drive Description of the fail-safe devices/equipment. Function test Checking the individual fail-safe functions that are used. "Safe Torque Off" (STO) "Safe Stop 1" (SS1) "Safely-Limited Speed" (SLS) "Safe Brake Control" (SBC). Completing the log Document/log the commissioning phase and sign. Check the parameters of the fail-safe functions Document/log the checksums Provide proof that data has been backed-up/archived Sign. Attachment Measuring traces/plots associated with the function test. Alarm logs Trace plots.
Note A form for an acceptance log is attached in the appendix of the operating instructions.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S 98 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.5.6 Series commissioning with the BOP
Upload and download a parameter set with a BOP With a BOP a single parameter set can be uploaded from an inverter and then downloaded into another inverter. To copy a parameter set from one inverter to another, the following procedure should be performed.
Upload a parameter set with a BOP Prerequisites An inverter with an appropriate parameter set is available (upload inverter) Supply voltage is active for the upload inverter The upload inverter is in "Ready to Run".
Parameter Description Setting Fit the BOP to the Inverter - for the parameter set to be uploaded, perform the following
steps:
P0003 = 3 User access level* 1: Standard: Allows access into most frequently used parameters (default) 2: Extended: Allows extended access e.g. to inverter I/O functions 3: Expert: For expert use only
P0010 = 30 Commissioning parameter* 0: Ready (default)1: Quick commissioning 2: Inverter 30: Factory setting, parameter transfer 95: Safety commissioning (for CUs with fail-safe functions only)
P0802 = 1 Transfer data from EEPROM 0: Disabled (default)1: Start BOP transfer 2: Start MMC Transfer While the upload is active "bUSY" will be displayed on the BOP and the inverter will not react to any commands.
If the upload has been completed successfully, P0010 and P0802 will be set to 0 and the BOP display will return to normal. If the upload has failed, F00051 (failure while accessing EEPROM), F00055 (failure while saving parameter on BOP) or F00057 (BOP fault) will be displayed. In this case attempt another upload or perform a power-cycle to confirm F00051.
After a successful upload disconnect the BOP from the upload inverter to connect it to the download inverter.

Commissioning 5.5 Commissioning with the BOP
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 99
Download a parameter set with a BOP Prerequisites Supply voltage is active for the download inverter The download inverter is in "Ready to Run".
Parameter Description Setting Fit the BOP to the inverter and perform the download according the flow chart. P0003 = 3 User access level*
1: Standard: Allows access to the most frequently used parameters (default)2: Extended: Allows extended access e.g. to inverter I/O functions 3: Expert: For expert use only
P0010 = 30 Commissioning parameter* 0: Ready (default)1: Quick commissioning 2: Inverter 30: Factory setting, parameter transfer 95: Safety commissioning (for CUs with fail-safe functions only)
P0803 = 1 Transfer data to EEPROM 0: Disabled (default)1: Start BOP transfer 2: Start MMC Transfer While the download is active "bUSY" will be displayed on the BOP and the inverter will not react to any commands.
If the download has been completed successfully, P0010 and P0803 will be set to 0 and the BOP display will return to normal. If the download has failed, F00051 (failure while accessing EEPROM), F00055 (failure while saving parameter to EEPROM), F00057 (BOP fault) or F00058 (BOP contents incompatible) will be displayed. In this case attempt another download, perform a factory reset to allow the inverter to return to a known state or perform a power-cycle to confirm F00051.
After a successful download the BOP can be removed and connected to another inverter for download. Then perform the download steps again until the series commissioning has been completed for all inverters.

Commissioning 5.6 Commissioning with the STARTER
Control Units CU240S 100 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.6 Commissioning with the STARTER
Interfaces STARTER A PC with STARTER software can be connected via one of the following interfaces - which are Control Unit dependent:
Table 5-9 Connection possibilities for STARTER
Type Option port Sub D connector RJ45 CU240S Peer to peer
via PC Connection Kit Peer to peer Sub D cable & RS485 to RS232 converter
–
CU240S DP Peer to peer via PC Connection Kit
Up to 125 slaves via Sub D cable
–
CU240S DP-F
Peer to peer via PC Connection Kit
Up to 125 slaves via Sub D cable
–
CU240S PN Peer to peer via PC Connection Kit
-- Up to 10 slaves in a line Via switch, the number of slaves is limited by the address range of the higher-level control system
General information for connecting STARTER USS address: see P2011, default setting P2011 = 0 USS baudrate: see P2010, default setting P2010 = 8 (≙ 38400 baud) PROFIBUS DP address: see section "Communication Settings PROFBUS DP" PROFINET address: see P08830 PROFINET IP address: see P08831 PROFINET IP subnetmask: see P08832 PROFINET internal MAC address: see P61002
Commissioning 5.6 Commissioning with the STARTER
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 101
5.6.1 Single Commissioning with the STARTER
STARTER projects Using STARTER either a new project can be created or an already existing project can be opened. To create a new project in STARTER one of the following methods can be used: Search inverter Wizard Select inverter When opening an existing project or creating a new project STARTER is in the offline mode. To go online the button has to be pressed.
Changing parameters with STARTER Parameters can be changed online or offline (online preferred). Online parameter changes are stored in the RAM of the inverter. A manual transfer from RAM to EEPROM can be triggered by pressing the button . When closing STARTER and the contents of the RAM and EEPROM are different, the user is asked whether or not they wish to transfer the RAM data to the EEPROM. Parameter sets that have been changed offline can be transferred to the inverter using the download button.
CAUTION If you use fail-safe applications, pay attention to the following note: • Parameters for fail-safe functions can only be changed in the online mode.
When downloading parameters via STARTER, parameters belonging to fail-safe functions will not be downloaded.

Commissioning 5.6 Commissioning with the STARTER
Control Units CU240S 102 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.6.2 Series Commissioning with the STARTER
Upload a parameter set with STARTER Prerequisites An inverter with an apropriate parameter set is available (upload inverter) STARTER is installed on the PC used for series commissioning Supply voltage is active for the upload inverter The upload inverter is in "Ready to Run". Connect the STARTER PC via the Option Port(USS on RS232, peer to peer)to the upload inverter (PC connection Kit requiered), press the online button and perform the upload by activating the button .
Note Upload with STARTER to MMC If you want to upload a parameter set with STARTER to an MMC, P0010, P0802 must be set via the expert list.
Download a parameter set with STARTER Prerequisites Supply voltage is active for the download inverter The download inverter is in "Ready to Run". Connect the STARTER PC via the Option Port (USS on RS232, peer to peer) to the download inverter (PC connection Kit requiered), press the online button and perform the download by activating the button . The data set must be saved in the EEPROM.
Note If you want to perform an manual download of a parameter set with STARTER from an MMC, P0010, P0803 and P0804 must be set via the expert list.

Commissioning 5.7 Commissioning with the MMC
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 103
5.7 Commissioning with the MMC
5.7.1 Parameter Download via MMC
Overview A G120 inverter can be parameterized by downloading a parameter set from the MMC to the inverter. The download can be performed as Manual Download Automatic Download A detailed download description can be found in the section "Upload and Download of Parameter Sets".
Note The file format for the MMC is FAT. Any other format, such as FAT32 or NTFS are not compatible with uploading and downloading parameter sets from the inverter. Formatting can be accomplished using the DOS command line as follows: C:\>format volume /FS:FAT - where volume has to be replaced by the name of the MMC drive, for example A Please keep in mind that formatting will delete all the contents of the MMC.

Commissioning 5.7 Commissioning with the MMC
Control Units CU240S 104 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.7.2 Series commissioning with MMC
Inserting and removing the MMC Before upload or download can be performed an MMC has to be fitted. How to fit and remove the MMC see the following figure:
Figure 5-5 Fitting and Removing the MMC
WARNING When inserting an MMC during operation Alarm A0564 appears if P8458 is set to 0. This is a hint that with P8458 = 0 no Automatic Download will be performed at startup. If the MMC is inserted to perform an upload this alarm can be quitted without any further action. If the MMC is inserted to perform an Automatic Download P8458 must be set accordingly.

Commissioning 5.7 Commissioning with the MMC
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 105
Upload a parameter set with an MMC
Prerequisites To upload a parameter set the following important conditions must be fulfilled: An inverter with an appropriate parameter set is available (upload inverter). An MMC Type 6SL3254-0AM00-0AA0 is available. Supply voltage is active for the upload inverter. The upload inverter is in "Ready to Run"". The parameters are copied from RAM to EEPROM.
Procedure
Note During a parameter upload from the EEPROM to a MMC (e.g. for serial commissioning) the LEDs are flashing. If the Control Unit is in a faulty state, the fault will be displayed by the LEDs (SF on, RDY off).
Parameter Description (Parameter name and factory setting (if not variable) in bold) Setting Insert the MMC to the inverter - for the parameter set to be uploaded, perform the following
steps:
P0010 = 30 Commissioning parameter* 0: Ready 1: Quick commissioning 2: Inverter 30: Factory setting, parameter transfer 95: Safety commissioning (for CUs with fail-safe functions only)
P0804 = … Select Clone file 0: clone00.bin … 99: clone99.bin Note: Via P0804 the name of the clone file can be selected. Theoretically up to 100 (0 … 99) parameter sets can be stored on an MMC.
Note: Before uploading, the parameters will be copied from RAM to EEPROM.
P0802 = 2 Transfer data from EEPROM 0: Disabled 1: Start BOP Transfer 2: Start MMC Transfer
If the upload has been completed successfully, P0010 and P0802 will be set to 0 and the "RDY" LED is on. If the upload has failed, F0061 (MMC-PS not fitted) or F0051 (failure while accessing EEPROM) will be displayed, LED "SF" (red) is on. In this case insert an MMC and attempt another upload.

Commissioning 5.7 Commissioning with the MMC
Control Units CU240S 106 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Parameter Description (Parameter name and factory setting (if not variable) in bold) Setting After a successful upload remove the MMC from the upload inverter to insert it into the
download inverter.
Manual Download of a parameter set with an MMC
Prerequisites Supply voltage is active for the download inverter The download inverter is in "Ready State". On the MMC the following folder structure must be available:
/USER/SINAMICS/DATA/clonexx.bin
Procedure
Note The following important conditions must be fulfilled when using the download procedure: • During the download the inverter will not react to any commands. • Once the download procedure has started, it cannot be interrupted. • After upload and download of parameters between differing Control Units, parameter
settings must be checked. • Parameter download from a different CU might fail with F0063 if parameters cannot be
downloaded (Check P949 for the (first) parameter number which cannot be downloaded).• If the download fails, the inverter reverts to the previous parameters from the EEPROM.
Parameter Description (Parameter name and factory setting (if not variable) in bold) Setting Insert the MMC to the download inverter and perform the Manual Download according the
flow chart.
P0010 = 30 Commissioning parameter* 0: Ready 1: Quick commissioning 2: Inverter 30: Factory setting, parameter transfer 95: Safety commissioning (for CUs with fail-safe functions only)
P0804 = … Select Clone file (for download) 0: clone00.bin … 99: clone99.bin
P0803 = 2 Transfer data to EEPROM 0: Disabled 1: Start BOP Transfer 2: Start MMC Transfer
Commissioning 5.7 Commissioning with the MMC
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 107
Parameter Description (Parameter name and factory setting (if not variable) in bold) Setting If the download has been completed successfully, P0010 and P0803 will be set to 0 and the
"RDY" LED is on. If the upload has failed, F0061 (MMC-PS not fitted), F0062 (MMC-PS contents invalid) resp. F0063 (MMC-PS contents incompatible) or F0051 (failure while accessing EEPROM) will be displayed, LED "SF" (red) is on. In this case insert a proper MMC and attempt another download or perform a factory reset.
After a successful Manual Download the MMC can be removed from the inverter and inserted into the next download inverter. Then perform the download steps again until the series commissioning has been completed for all inverters.
Automatic Download The Automatic Download at start-up is controlled via P8458. With the Automatic Download all necessary parameters including the parameters regarding fail-safe functions are downloaded into the inverter.
Note MMC for "Automatic Download" For an Automatic Download always the file clone00.bin will be used. The user has to take care, that clone00.bin (saved as "clone00.bin" with STARTER on PC or via setting P0804 = 00 with the BOP) is available on the MMC, used for an automatic parameter download at start-up. Otherwise Automatic Download will not be processed.
Parameter P8458 controls the kind of the Automatic Download. The possible settings for P8458 and their functions are given below.
P8458 = 0: Automatic parameter download from the MMC is inhibited. P8458 = 1: Automatic parameter download from the MMC only once (at the next start-up
of the CU (default setting)). After the download P8458 is set to 0. P8458 = 2: Automatic parameter download from the MMC after each start-up of the
control unit.

Commissioning 5.7 Commissioning with the MMC
Control Units CU240S 108 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Successful Automatic Download After a successful Automatic Download, F0395 will be displayed. Clearing F00395 is described in the section "Message F00395".
WARNING The user is responsible for ensuring that the parameters held in the CU are the correct parameters for their application.
Acceptance test On CUs with integrated fail-safe functions it is necessary to do an acceptance test (refer to the "Fail-safe functions" section in this manual). To clear F0395 on CUs with integrated fail-safe functions the following procedure has to be followed: P0010 = 30 P9761 = fail-safe password P7844 = 0 Carry out acceptance test
Automatic download fault If the Automatic Download process fails, the CU will return to the parameter set previously held in the EEPROM and the following fault codes are generated:
Table 5-10 Automatic download fault codes
Fault code Description F0061 Automatic download of parameters was not successful. (download file not found). F0063 Automatic download of parameters was not successful (download file not compatible). F0051 Failure while accessing EEPROM Clearing of these faults is described in the section "Faults and Alarms" of this manual.
In this case check, whether the MMC is defective or a parameter set clone00.bin is available or the parameter set is valid. For details refer to Parameter List. A valid parameter set means, it is not from a different type (e.g. CU20S DP and CU240S or fail-safe and standard CUs).

Commissioning 5.8 Commissioning the Encoder
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 109
5.8 Commissioning the Encoder
Description
WARNING Before installing and commissioning, please read these safety instructions and warning carefully and all the warning labels attached to the equipment. Make sure that the warning labels are kept in a legible condition and replace missing or damaged labels. This equipment contains dangerous voltages and controls potentially dangerous rotating mechanical parts. Non-Compliance with Warnings or failure to follow the instructions contained in this manual can result in loss of life, severe personal injury or serious damage to property. Only suitably qualified personnel should work on this equipment, and only after becoming familiar with all safety notices and maintenance procedures contained in this manual. The successful and safe operation of this equipment is dependent upon its proper handling, storage, installation, operation and maintenance. National safety regulations are also applicable.
Procedure of encoder commissioning The encoder commissioning differs slightly for HTL and TTL encoder. The following table gives an overview about the single steps depending on the type of encoder.
Table 5-11 Commissioning the Encoder
Step Description TTL HTL 1. Ensure the Inverter is switched off. X X 2. Connect: Encoder Channel A - CU terminal 70 (ENC AP). X X 3. Connect: Encoder Channel A inverted - CU terminal 71 (ENC AN). X X 4. Connect: Encoder Channel B - CU terminal 72 (ENC BP). X X 5. Connect: Encoder channel B inverted - CU terminal 72 (ENC BP). X X 6. Connect: Encoder channel Z - CU terminal 74 (ENC ZP). X X 7. Connect: Encoder channel Z inverted - CU terminal 75 (ENC ZN). X X 8. Connect: Encoder positive power cable - CU terminal 33 (ENC+ SUPPLY). X X 9. Connect: Encoder negative power cable - CU terminal 28 (U0V). X X 10. CU: Set DIP-switch 4 (5 V) to the ON position (TTL)) X 11. CU: set DIP-switch 3 (24 V) to the ON position (HTL) X 12. Check all the Encoder - CU connections and the position of DIP-switches 3
and 4. X X
13. Switch the inverter ON. X X 14. The Encoder interface now requires to be parameterized. A step-by-step
description that shows the required parameters is given in the following section.
X X
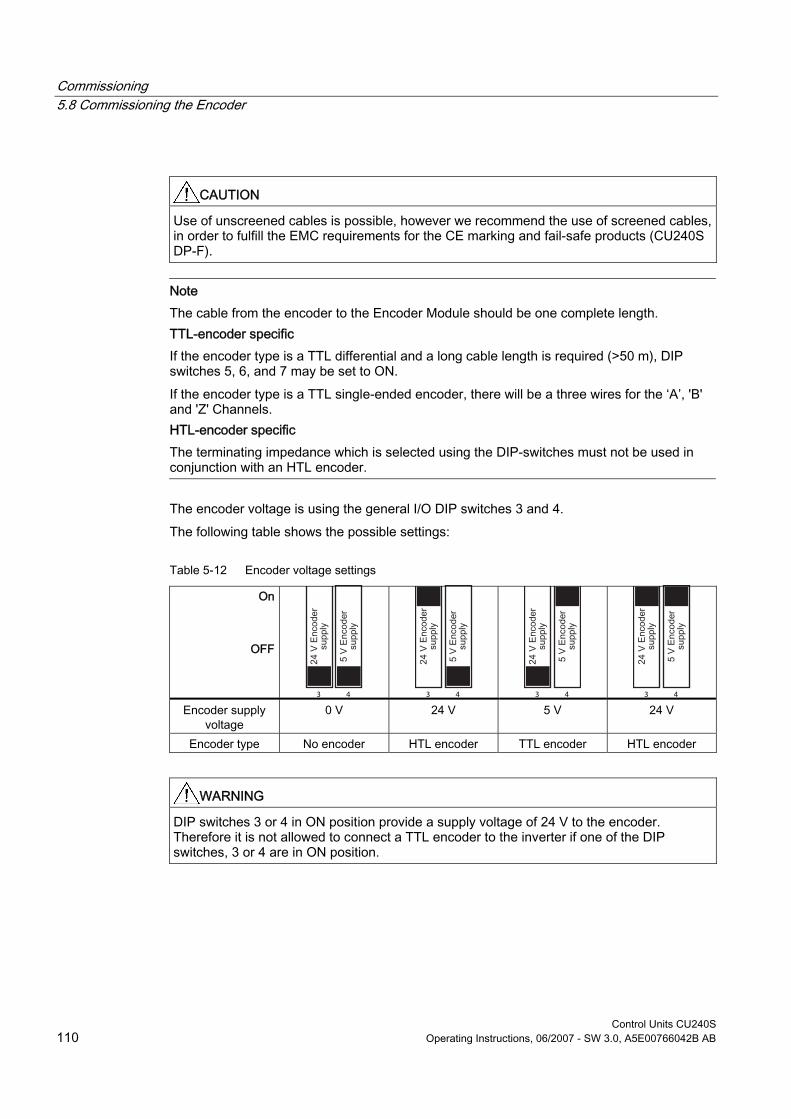
Commissioning 5.8 Commissioning the Encoder
Control Units CU240S 110 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
CAUTION Use of unscreened cables is possible, however we recommend the use of screened cables, in order to fulfill the EMC requirements for the CE marking and fail-safe products (CU240S DP-F).
Note
The cable from the encoder to the Encoder Module should be one complete length. TTL-encoder specific If the encoder type is a TTL differential and a long cable length is required (>50 m), DIP switches 5, 6, and 7 may be set to ON. If the encoder type is a TTL single-ended encoder, there will be a three wires for the ‘A’, 'B' and 'Z' Channels. HTL-encoder specific The terminating impedance which is selected using the DIP-switches must not be used in conjunction with an HTL encoder.
The encoder voltage is using the general I/O DIP switches 3 and 4. The following table shows the possible settings:
Table 5-12 Encoder voltage settings
On
OFF
3 4 3 4 3 4 3 4
Encoder supply voltage
0 V 24 V 5 V 24 V
Encoder type No encoder HTL encoder TTL encoder HTL encoder
WARNING DIP switches 3 or 4 in ON position provide a supply voltage of 24 V to the encoder. Therefore it is not allowed to connect a TTL encoder to the inverter if one of the DIP switches, 3 or 4 are in ON position.
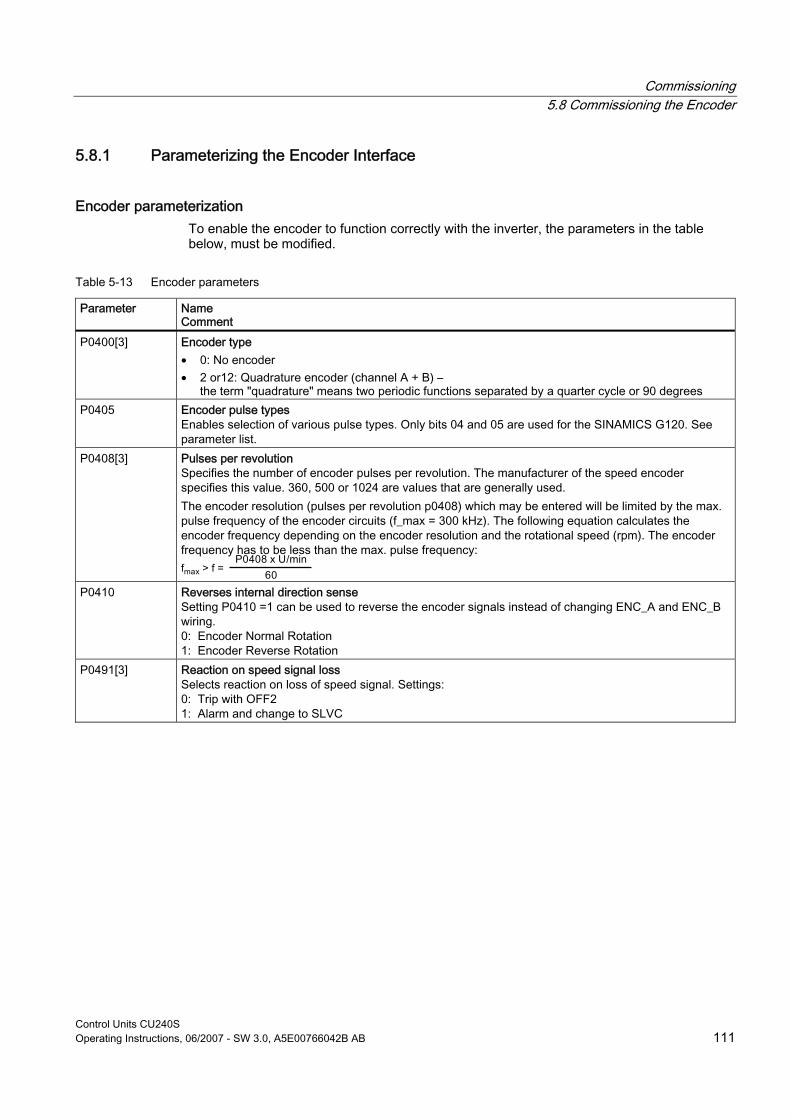
Commissioning 5.8 Commissioning the Encoder
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 111
5.8.1 Parameterizing the Encoder Interface
Encoder parameterization To enable the encoder to function correctly with the inverter, the parameters in the table below, must be modified.
Table 5-13 Encoder parameters
Parameter Name Comment
P0400[3] Encoder type • 0: No encoder • 2 or12: Quadrature encoder (channel A + B) –
the term "quadrature" means two periodic functions separated by a quarter cycle or 90 degrees P0405 Encoder pulse types
Enables selection of various pulse types. Only bits 04 and 05 are used for the SINAMICS G120. See parameter list.
P0408[3] Pulses per revolution Specifies the number of encoder pulses per revolution. The manufacturer of the speed encoder specifies this value. 360, 500 or 1024 are values that are generally used. The encoder resolution (pulses per revolution p0408) which may be entered will be limited by the max. pulse frequency of the encoder circuits (f_max = 300 kHz). The following equation calculates the encoder frequency depending on the encoder resolution and the rotational speed (rpm). The encoder frequency has to be less than the max. pulse frequency:
P0410 Reverses internal direction sense
Setting P0410 =1 can be used to reverse the encoder signals instead of changing ENC_A and ENC_B wiring. 0: Encoder Normal Rotation 1: Encoder Reverse Rotation
P0491[3] Reaction on speed signal loss Selects reaction on loss of speed signal. Settings: 0: Trip with OFF2 1: Alarm and change to SLVC

Commissioning 5.8 Commissioning the Encoder
Control Units CU240S 112 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Parameter Name Comment
P0492[3] Allowed speed difference This parameter defines the frequency threshold for the loss of the encoder signal (fault F0090). The threshold is used both for low as well as also high frequencies. 1. Signal loss at high frequencies:
Fault F0090 is output if the actual frequency and the frequency difference between two sampling periods (t_A) is greater than that specified in parameter p0492: (actual frequency f_act > p0492 and f(t_A2) - f(t_A1) > p0492)
Note A fixed delay time of 40 ms is stored in the frequency converter. Fault F0090 is only activated when the encoder signal is lost at a high frequency after this delay time has expired.
2. Signal loss at low frequencies: Fault F0090 is output if all of the conditions for case 1 or case 2 are simultaneously fulfilled:
Case 1 – actual frequency < p0492 – r0061 = 0 and the torque is limited – r0061 = 0 with setpoint frequency f_set > 0 for a time > p0494
Case 2 - actual frequency < p0492 - f(t_A2) < p0492 and a fault is detected in channel B Inter-dependency This parameter is updated after the motor starting time p0345 has been changed or the speed was optimized (p1960 = 1). Caution p0492 = 0 (no monitoring function): With p0492 = 0, the loss of the encoder signal at high frequency as well as at a low frequency is de-activated. As a result, the system does not monitor for the loss of the encoder signal. If the encoder signal loss is de-activated and the fault occurs, then the closed-loop motor control can become unstable
P0494[3] Delay speed loss reaction Used for low speed encoder loss detection. If the motor shaft speed is less than the value in P0492 then encoder loss is detected using a low speed encoder loss detection algorithm. This parameter selects the delay between loss of encoder at low speed and reaction to the encoder loss. (Default = Calculated from inertia, Range from 0 to 64.000s). Dependency: This parameter is updated when P0345 Motor start-up time is changed or when a speed-loop optimization is performed (P1960 = 1). Caution: When this delay is set to 0, then low speed encoder loss detection is disabled and low speed encoder loss cannot be detected (high speed encoder loss detection will still operate if P0492 > 0). If low speed encoder loss detection is disabled and encoder should be lost at low speed, then operation of motor may become unstable.
P1300 Control Mode 21: Closed loop speed control 23: Closed loop torque control

Commissioning 5.8 Commissioning the Encoder
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 113
Table 5-14 Monitoring parameters
Parameter Name Comment
r0061 CO: Rotor speed Indicates the speed of the rotor. Used to check that the system is working correctly.
r0090 CO: Act. rotor angle Indicates the current angle of the rotor. This function is not available on single input channel encoders.
r0403 CO/BO: Encoder status word Displays status word of speed encoder in bit format: Bit 00 - Encoder active 0 = No 1 = Yes Bit 01 - Encoder fault 0 = No 1 = Yes Bit 02 - Signal OK 0 = No 1 = Yes Bit 03 - Encoder low speed loss 0 = No 1 = Yes
Bit 04 - Single edge measurement 0 = No 1 = Yes
CAUTION When commissioning the closed-loop Vector control with sensor (VC) the frequency inverter should first be operated with V/f control (p1300 = 0). When the motor is spinning and the speed encoder connected (activated using p0400), parameters r0061 and r0021 must match one another as far as the following quantities are concerned: • Sign • Absolute value (a deviation of a few percent is permitted) The closed-loop Vector control with sensor (encoder) (p1300 = 21 or 23) may only be activated if both conditions are fulfilled. Too short ramp times (P1120 and 1121) can cause F90, encoder feedback loss).
Note
If the encoder is incorrectly connected, incorrect values will be displayed in r0061, r0063, r0021 and r0022

Commissioning 5.8 Commissioning the Encoder
Control Units CU240S 114 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.8.2 Encoder Fault Codes
Description The Encoder Interface has only one fault code, – F0090. This condition occurs when the allowed frequency rate of change, set in P0492[3] is exceeded or when low speed encoder loss is detected.
Note The reason for the encoder loss will be given in the level 3 parameter r0949: r0949 = 1 means encoder loss of channel A or channel B, or encoder loss due to high speed (shaft speed > P0492). r0949 = 2 means encoder loss of channel A or channel A and channel B at low speed (shaft < P0492) r0949 = 7 means excessive flux variance which may cause motor instability - possible due to encoder loss.
CAUTION
Take care that signal loss on the inverted channels A and B is not observed by the inverter.
Remedial action on fault condition Should the encoder give a fault message F0090 the following remedial action should be performed: 1. Check that an encoder is fitted. If the encoder is not fitted, set P0400 = 0 and select
SLVC mode (P1300 = 20 or 22). 2. Check the connections between the encoder and the inverter. 3. Check the encoder is not faulty (select P1300 = 0 and run at a fixed speed then check the
encoder feedback signal using r0061). Check for correct magnitude and direction of speed.
4. Increase the encoder loss threshold in P0492. 5. Increase encoder low speed loss detection delay in P0494.

Commissioning 5.9 Parameters
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 115
5.9 Parameters
Overview of parameters The inverter is adapted to a particular application using the corresponding parameters. This means that each parameter is identified by a parameter number and specific attributes (e.g. monitoring parameter, write parameter, BICO attribute, group attribute etc.). Within any one particular inverter system, the parameter number is unique. Parameters can be accessed using the following operator units: BOP PC-based commissioning (start-up) tool STARTER. There are two main types of parameters; those that can be altered and those that are read-only.
Figure 5-6 Parameter types
5.9.1 Write parameters
Description Parameters which can be written into and displayed are indicated by the prefix "P". These parameters directly influence the behavior of a function. The value of this parameter is saved in non-volatile memory (EEPROM) as long as the appropriate option was selected (non-volatile data save). Otherwise, these values are saved in the volatile memory (RAM) of the processor, which are lost after power failure or power-off/power-on operations. Examples of the standard notation used throughout our manuals is given below.
Notation examples: P0970 parameter 970 P0748.1 parameter 748, bit 01 P0819[1] parameter 819 index 1 P0013[0 ... 19] parameter 13 with 20 indices (indices 0 to 19)

Commissioning 5.9 Parameters
Control Units CU240S 116 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
5.9.2 Monitoring parameters
Description Parameters which can only be monitored are indicated by the prefix "r". These parameters are used to display internal quantities, for example states and actual values.
Notation examples: r0002 monitoring parameter 2 r0052.3 monitoring parameter 52, bit 03 r0947[2] monitoring parameter 947 index 2 r0964[0 ... 4] monitoring parameter 964 with 5 indices (indices 0 to 4)
5.9.3 Parameter Attributes
Overview In the Parameter Manual, the header line of each parameter shows all the attributes and groups for that specific parameter. The figure below shows the details for parameter P0700 and r1515.
Figure 5-7 Description of attributes for parameter P0700
Figure 5-8 Description of attributes for parameter r1515
Index Using the index, a parameter (e.g. p0013[20]) is defined with several consecutive elements (in this case, 20). Each individual index is defined using a numerical value. When transferred to a parameter this means that an indexed parameter can have several values. The values are addressed using the parameter number including the index value (e.g. p0013[0], p0013[1], p0013[2], p0013[3], p0013[4], ...).

Commissioning 5.9 Parameters
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 117
Indexed parameters are used, for example: Drive Data Sets (DDS) Command Data Sets (CDS) Sub functions.
BICO The following types of connectable parameters are available. A description of BICO technology is given in the section "BICO Technology".
Table 5-15 Parameter attributes - BICO
BICO Description BI Binector Input BO Binector Output CI Connector Input CO Connector Output CO/BO Connector Output/Binector Output
Access level The access level is controlled using parameter P0003. In this case, only those parameters are visible at the BOP, where the access level is less than or equal to the value assigned in parameter P0003. On the other hand, for STARTER, only access levels 0 and 3 are relevant. For example, parameters with access level 3 cannot be changed, if the appropriate access level has not been set. The following access levels are implemented in the inverters:
Table 5-16 Parameter attributes - access level
Access level Description 0 User-defined Parameter Manual (refer to P0013) 1 Standard access to the most frequently used parameters 2 Extended access, e.g. to inverter I/O functions 3 Expert access only for experienced users 4 Service access only for authorized service personnel – with password
protection.
Note In STARTER, all user parameters (access stage 3) are always displayed using the expert list – independent of the setting p0003 = 0, 1, 2 or 3. When changing parameters using STARTER, or via a high-level control system, parameter value changes always become immediately effective.
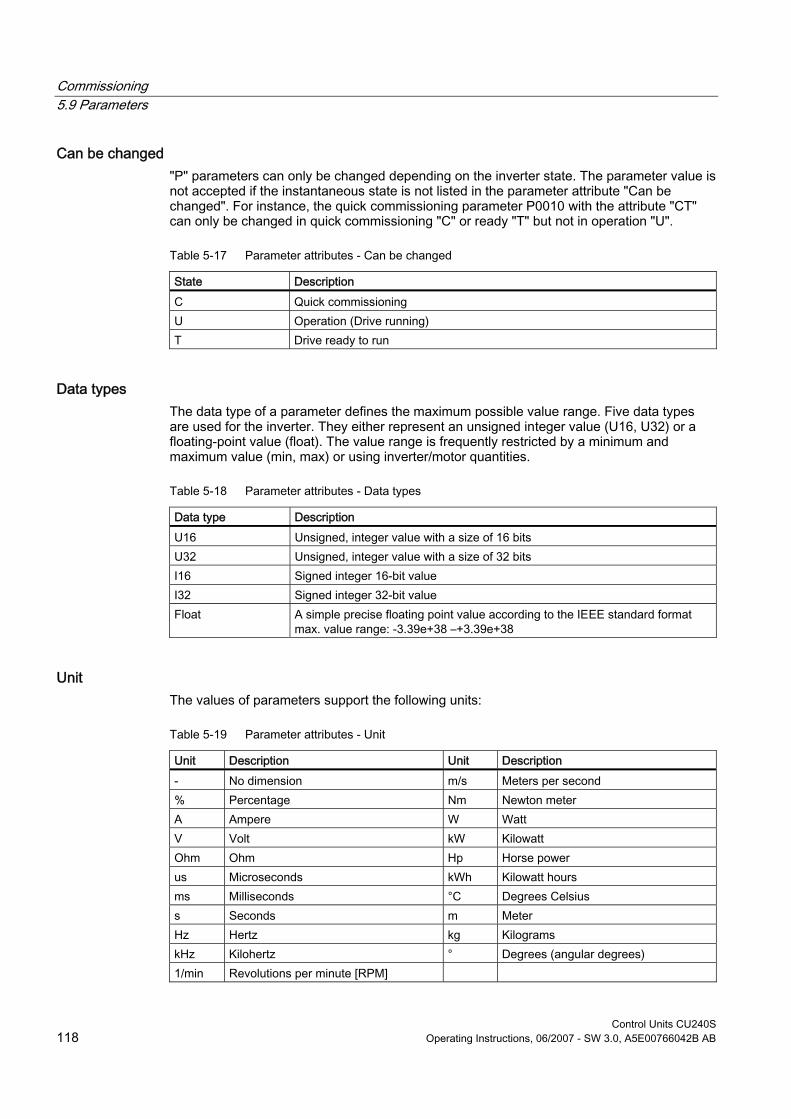
Commissioning 5.9 Parameters
Control Units CU240S 118 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Can be changed "P" parameters can only be changed depending on the inverter state. The parameter value is not accepted if the instantaneous state is not listed in the parameter attribute "Can be changed". For instance, the quick commissioning parameter P0010 with the attribute "CT" can only be changed in quick commissioning "C" or ready "T" but not in operation "U".
Table 5-17 Parameter attributes - Can be changed
State Description C Quick commissioning U Operation (Drive running) T Drive ready to run
Data types The data type of a parameter defines the maximum possible value range. Five data types are used for the inverter. They either represent an unsigned integer value (U16, U32) or a floating-point value (float). The value range is frequently restricted by a minimum and maximum value (min, max) or using inverter/motor quantities.
Table 5-18 Parameter attributes - Data types
Data type Description U16 Unsigned, integer value with a size of 16 bits U32 Unsigned, integer value with a size of 32 bits I16 Signed integer 16-bit value I32 Signed integer 32-bit value Float A simple precise floating point value according to the IEEE standard format
max. value range: -3.39e+38 –+3.39e+38
Unit The values of parameters support the following units:
Table 5-19 Parameter attributes - Unit
Unit Description Unit Description - No dimension m/s Meters per second % Percentage Nm Newton meter A Ampere W Watt V Volt kW Kilowatt Ohm Ohm Hp Horse power us Microseconds kWh Kilowatt hours ms Milliseconds °C Degrees Celsius s Seconds m Meter Hz Hertz kg Kilograms kHz Kilohertz ° Degrees (angular degrees) 1/min Revolutions per minute [RPM]

Commissioning 5.9 Parameters
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 119
Grouping The parameters are sub-divided into groups according to their functionality. This increases the transparency and allows a quicker and more efficient search for specific parameters. Furthermore, parameter P0004 can be used to control the specific group of parameters that are displayed on the BOP.
Table 5-20 Parameter attributes - Grouping
Grouping Description Main parameter area:
ALWAYS 0 all parameters INVERTER 2 inverter parameters 0200 … 0299 MOTOR 3 motor parameters 0300 … 0399 and
0600 … 0699 ENCODER 4 speed encoder 0400 … 0499 TECH_APL 5 technical applications/units 0500 … 0599 COMMANDS 7 control commands, digital I/O 0700 … 0749 and
0800 … 0899 TERMINAL 8 Analog inputs/outputs 0750 … 0799 SETPOINT 10 Setpoint channel and ramp-function gen. 1000 … 1199 Safety integrated 11 Fail-safe functions 9000 … 9999 FUNC 12 Inverter functions 1200 … 1299 CONTROL 13 Motor open-loop/closed-loop control 1300 … 1799 COMM 20 Communications 2000 … 2099 ALARMS 21 Faults, warnings, monitoring functions 0947 … 2199 TECH 22 Technology controller (PID controller) 2200 … 2399
Active This attribute is only of importance in conjunction with an BOP. The "Yes" attribute indicates that this value is immediately accepted when it is changed. Especially parameters which are used for optimization functions have this property (e.g. constant voltage boost P1310 or filter time constants). On the other hand, for parameters with the attribute "First confirm", the value is only accepted after first pressing the key . These include, for example, parameters where the parameter value can have different settings/meanings (e.g. selecting the frequency setpoint source P1000).
Table 5-21 Parameter attributes - Active
Active Description Yes The value becomes valid immediately. First confirm The value becomes valid after pressing
Note Parameter values that are changed using STARTER or a higher-level control do not have to be acknowledged.

Commissioning 5.9 Parameters
Control Units CU240S 120 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Quick commissioning This parameter attribute identifies as to whether the parameter is included in the quick commissioning (QC) (P0010 = 1).
Table 5-22 Parameter attributes - Quick commissioning
QC Description No The parameter is not included in the quick commissioning Yes The parameter is included in the quick commissioning
Value range The value range, which is first specified by the data type, is restricted by minimum and maximum values depending on the quantities of the inverter/motor. The values min and max are permanently saved in the inverter and cannot be changed by the user. To support commissioning each write parameter has a default value called factory setting.
Table 5-23 Parameter attributes - Value range
Value range Description - No value entered (e.g.: "r parameter") Min Minimum value Max Maximum value Def Default value
Data sets A detailed description for the data sets is given in the respective section
Table 5-24 Data sets
BICO Description CDS Command data set DDS Drive data set

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 121
5.10 Start-up and Swap Behavior of the Inverter
Overview When starting-up the inverter checks, whether an MMC is plugged in or not. If it is plugged and no swap has been taken place the start-up runs according the "Normal start-up behavior". If a component (CU or PM) has been replaced, this is called a swap and the start-up will be performed according the "Swap behavior" of the inverter.
5.10.1 Normal Start-up Behavior of the Inverter
Description A normal start-up is a start-up after a power-cycle or a black-out. It can be performed with or without MMC.
Normal start-up behavior without MMC After a power-cycle or a black-out the inverter reads the parameters from EEPROM to RAM.
Normal start-up behavior with MMC The CU detects automatically whether an MMC is present. The start-up behavior is controlled using P8458 as follows:
P8458 = 0: No automatic parameter download from the MMC. P8458 = 1: Automatic parameter download from the MMC only once (at the next start-up
of the CU (default setting)). After the download P8458 is set to 0, to prohibit any further automatic download of parameters.
P8458 = 2: Automatic parameter download from the MMC (if present) after each start-up of the control unit.
Once the download has been finished, the MMC can be withdrawn. If no MMC is plugged in, the inverter will start-up with the parameters stored in the EEPROM without an alarm or fault message, even if P8458 is set to 1 or 2.
Note MMC for "automatic download" For an automatic download always the file clone00.bin will be used. The user has to take care, that clone00.bin (saved as "clone00.bin" with STARTER via PC or via setting P0804 = 00 with the BOP) is available on the MMC under /USER/SINAMICS/DATA/clone00.bin, used for an automatic parameter download at start-up. If clone00.bin does not exist drive will fail with F0061.

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S 122 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Successful automatic download After a successful automatic download, F0395 will be displayed. In case of a standard CU a confirmation is necessary. In the case of CUs with fail-safe functions, an acceptance test must be performed. Confirmation On standard CUs the current parameter set needs to be checked and its correctness confirmed by clearing F0395. This can be done via: Digital input or PLC signal (depends on the settings of P0700) Setting P7844 = 0. Via the key on the BOP
WARNING
The user is responsible for ensuring that the parameters held in the CU are the correct parameters for their application.
Acceptance test On CUs with fail-safe functions it is necessary to do an acceptance test (refer to the "Fail-safe functions" section in this manual). To clear F0395 on CUs with fail-safe functions the following procedure has to be followed: P0010 = 30 P9761 = safety password P7844 = 0 Carry out acceptance test
Download Aborted Another way of clearing F00395 is to set P7844 = 2 (only possible if a MMC clone has been performed). In this case all new parameters from MMC are discarded and the inverter reloads its parameters from the EEPROM.
WARNING
By setting P7844 = 2 the user is responsible for ensuring that the parameters held in the EEPROM are the correct parameters for their application.
In case of standard CUs: – P7844 = 2 – F00395 is acknowledged automatically
In the case of CUs with fail-safe functions, the following procedure is necessary: – P0010 = 95 – P9761 = safety password – P7844 = 2 – Carry out acceptance test

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 123
Automatic download fault If the automatic download process fails, the CU will return to the parameter set previously held in the EEPROM and one of the following fault codes will be generated:
Table 5-25 Automatic download fault codes
Fault code Description F0061 Automatic download of parameters was not successful. F0063 Automatic download of parameters was not successful (e.g. wrong CU).
In this case check, whether the MMC is defective, a parameter set clone00.bin is available, or the parameter set is valid.
NOTICE After upload and download of parameters between differing Control Units, the parameter settings must be checked. Parameter download from a different CU might fail with F0063 if parameters cannot be downloaded (Check r0949 for the (first) parameter number which cannot be downloaded). If F0061 or F0063 occurs during startup it cannot be cleared except via a power cycle.
5.10.2 Swap Behavior of the Inverter
Overview This section describes the possibilities to exchange inverter components, power modules or control units, and the necessary actions, depending on the swap type. The following swaps are allowed: CU swap (neither PM nor CU powered) PM swap (neither PM nor CU powered) PM swap (CU externally powered)
Note A swap is indicated by a F00395. A download fault during swap will be indicated by F00061 or F00063. If F00061 or F00063 occurs during startup it cannot be cleared except via a power cycle.

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S 124 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
CU swap, PM swap (whether PM nor CU powered) Constraints: MMC with valid Parameter set plugged Swap after power on detected, Parameter MMC -> RAM, inverter runs into F00395 Confirmation for standard CU or acceptance test in case of fail-safe CU required After acknowledge of F00395 data are transferred automatically from RAM to EEPROM
(except P7844 = 2) constraints: no MMC Swap after power on detected, Parameter EEPROM -> RAM, inverter runs into F00395 Commissioning recommended - otherwise inverter runs with parameter settings from
EEPROM Confirmation for standard CU or acceptance test in case of fail-safe CU required
PM swap (CU externally powered) Constraints: MMC with valid Parameter set plugged Swap detected, Parameter MMC -> RAM, inverter runs into F00395 Confirmation for standard CU or acceptance test in case of fail-safe CU required After acknowledge of F00395 data are transferred automatically from RAM to EEPROM
(except P7844 = 2) Constraints: no MMC Swap detected, Parameter EEPROM -> RAM, inverter runs into F00395 If the parameters, already held in the EEPROM are ok there is no commissioning
necessary. Confirmation for standard CU or acceptance test in case of fail-safe CU required
Note After a PM swap without MMC the parameter settings only stored in RAM will be lost

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 125
Successful swap After a successful swap, F00395 will be displayed. In case of a standard CU a confirmation is necessary. In the case of CUs with fail-safe functions, an acceptance test must be performed. Confirmation On standard CUs the current parameter set needs to be checked and its correctness confirmed by clearing F00395. This can be done via: Digital input or PLC signal (depends on the settings of P0700) Setting P7844 = 0. Via the key on the BOP
WARNING
The user is responsible for ensuring that the parameters held in the CU are the correct parameters for their application.
Acceptance test On CUs with fail-safe functions it is necessary to do an acceptance test (refer to the "Fail-safe functions" section in this manual). To clear F00395 on CUs with fail-safe functions the following procedure has to be followed: P0010 = 30 P9761 = safety password P7844 = 0 Carry out acceptance test
Download Aborted Another way of clearing F00395 is to set P7844 = 2 (only possible if a MMC clone has been performed). In this case all new parameters from MMC are discarded and the inverter reloads its parameters from the EEPROM.
WARNING
By setting P7844 = 2 the user is responsible for ensuring that the parameters held in the EEPROM are the correct parameters for their application.
In case of standard CUs: – P7844 = 2 – F00395 is acknowledged automatically
In the case of CUs with fail-safe functions, the following procedure is necessary: – P0010 = 95 – P9761 = safety password – P7844 = 2 – Carry out acceptance test

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S 126 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Swap fault A swap fault is indicated if the automatic download fails. In this case, the CU will return to the parameter set previously held in the EEPROM and F00395 as well as one of F00061, F00062 and F00063 will be generated. On standard CUs the current parameter set needs to be checked and its correctness confirmed by clearing F00395. This can be done via: Digital input or PLC signal (depends on the settings of P0700) Setting P7844 = 0. Via the key on the BOP In the next step F00061 / F00062 or F00063 has to be cleared via power cycle.
Note F00395 cannot be cleared via power cycle. F00061, F00062 and F00063 can only be cleared via power cycle.
In case of a swap fault check, whether the MMC is defective or a parameter set clone00.bin is available or the parameter set is valid. A valid parameter set means, it is not from a different type (e. g. CU240S DP and CU240S or fail-safe and standard CUs)
Rules regarding swap and hot swap There are a number of scenarios where a swap or hot swap can take place, each with their own unique set of conditions that must be observed.
DANGER Do not attempt to hot swap a power module (PM) Before attempting to swap a PM it must be fully powered-down. Any attempt to swap-out a PM when power is still applied could result in death of personnel and severe damage to property and equipment.
WARNING
Swap restrictions Before performing a swap take care of the following: • It is the responsibility of the user to ensure that only CUs of the same type are swapped • It is the responsibility of the user to ensure that the MMC contains the correct parameter
set • It is the responsibility of the user to ensure that only PMs of the same type and power
rating are swapped. • It is the responsibility of the user to ensure that the application is in a safe state before
any swap of equipment is performed.

Commissioning 5.10 Start-up and Swap Behavior of the Inverter
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 127
Swapping a CU The following procedure is given as a guide to perform a swap of a CU.
CAUTION Data set compatibility To ensure complete data set compatibility, it is recommended to perform an upload of the parameter set from the CU to a new MMC prior to swapping the CU.
Before performing a CU swap take care of the following: 1. The PM is powered-down and disconnected. 2. Wait 5 minutes to allow the unit to discharge after switching off the line supply. 3. Remove the two-part terminals that are actually wired on the CU. 4. Remove the MMC. 5. Remove the CU from the PM. Before switching on power supply to the inverter take care of that: 1. Fit the new CU to the PM. 2. Reconnect the two-part terminals to the CU. 3. Insert the MMC into the MMC-slot of the CU.
Swapping the PM
CAUTION To ensure complete data set compatibility, make sure that all parameters are stored in the EEPROM of the Control Unit (see P0014 or P0971) prior to swapping the PM).
Before performing a PM swap take care of the following: 1. The PM is powered-down and disconnected. 2. Wait 5 minutes to allow the unit to discharge after switching off the line supply. Before switching on Power supply take care of that: 1. The new PM is properly installed and connected. 2. The CU is fitted back on the PM.


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 129
Communication 66.1 PROFIdrive Profile V4.0
6.1.1 Use Data Structure as Defined in PROFIdrive Profile 4.0
Introduction The SINAMICS G120 range of inverters can be controlled through the cyclical PROFIBUS DP channel or the acyclic DPV1 channel. The structure of use data for the cyclic/acyclic channel for is defined in the PROFIdrive Profile, version 4.0. The PROFIdrive profile defines the inverters, the use data structure with which a master can access the inverters (slaves) using the cyclic or acyclic data communication method.
Note PROFIdrive for drive technology is standardized and described in the following document: References: /P5/ PROFIdrive Profile Drive Technology
Telegram data structure The use data structure for cyclical data traffic is divided into two areas which can be transmitted in each telegram: Process data area (PZD)
Process data includes control words (status information) and setpoints (actual values). Process data are transmitted in the process data area. The transferred process data do not take effect until the bits used in the control words, setpoints, status words and actual values have been routed in the inverter.
Parameter channel This area is reserved for reading/writing parameter values. This telegram section is used to monitor and/or change any parameter in the inverter. For further information to the parameter channel, refer the Function Manual.

Communication 6.1 PROFIdrive Profile V4.0
Control Units CU240S 130 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Parameter channel Process data area (PZD) PKE IND PWE PZD01
STW1 ZSW1
PZD02 HSW HIW
PZD03
PZD04 PZD05 PZD06 PZD07 PZD08 PZD09 PZD10
1st word
2nd word
3rd word
4th word
1st word
2nd word
3rd word
4th word
5th word
6th word
7th word
8th word
9th word
10th word
PZD: Process data PKE: Parameter identifier IND: Index PWE: Parameter value STW: Control word 1 ZSW: Status word 1 HSW: Main setpoint HIW: Main actual value
6.1.2 Data Structure of the Parameter Channel
Description The PROFIdrive profile V4.0 defines for the inverters, the use data structure with which a master can access the inverters (slaves). The parameter channel telegram section can be used to monitor and/or change any parameter in the inverter.
Parameter channel Using the parameter channel process data can be processed and monitored (write/read) as described below. The parameter channel includes always 4 words.
Figure 6-1 Structure of the parameter channel in the telegram structure

Communication 6.1 PROFIdrive Profile V4.0
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 131
Parameter identifier (PKE), 1st word The parameter identifier (PKE) is always a 16-bit value.
Figure 6-2 PKE structure
Bits 0 to 10 (PNU) contain the remainder of the parameter number (value range 1 to 61999).
For parameter numbers ≥ 2000 it is necessary to add an offset which is defined with the high byte bits (acyclic) or the low byte bits (cyclic) of IND. Bit 11 (SPM) is reserved and always = 0. Bits 12 to 15 (AK) contain the request or the response identifier. The meaning of the request identifier for request telegrams (master → inverter) is shown in the table below.
Table 6-1 Request identifier (master → inverter)
Response identifier
Request identifier
Meaning
positive negative0 No request 0 7 / 8 1 Request parameter value 1 / 2 ↑ 2 Modify parameter value (word) 1 | 3 Modify parameter value (double word) 2 | 4 Request descriptive element 1) 3 | 6 Request parameter value (array) 1) 4 / 5 | 7 Modify parameter value (array, word) 1) 4 | 8 Modify parameter value (array, double word) 1) 5 | 9 Request number of array elements 6 | 11 Modify parameter value (array, double word) and store in EEPROM
2) 5 |
12 Modify parameter value (array, word) and store in EEPROM 2) 4 | 13 Modify parameter value (double word) and store in EEPROM 2 ↓ 14 Modify parameter value (word) and store in EEPROM 1 7 / 8 1) The desired element of the parameter description is specified in IND (2nd word) 2) The desired element of the indexed parameter is specified in IND (2nd word)

Communication 6.1 PROFIdrive Profile V4.0
Control Units CU240S 132 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
The meaning of the response identifier for response telegrams (inverter → master) is shown in the table below. The request identifier will determine which response identifiers are possible.
Table 6-2 Response identifier (inverter → master)
Response identifier Meaning 0 No response 1 Transfer parameter value (word) 2 Transfer parameter value (double word) 3 Transfer descriptive element 1) 4 Transfer parameter value (array word) 2) 5 Transfer parameter value (array double word) 2) 6 Transfer number of array elements 7 Cannot process request, task cannot be executed (with error number) 8 No master control status / no parameter change rights for PARAMETER
CHANNEL interface 1) The desired element of the parameter description is specified in IND (2nd word) 2) The desired element of the indexed parameter is specified in IND (2nd word)
If the response identifier is 7 (cannot process request), then one of the fault numbers listed in the next table will be stored in parameter value 2 (PWE2).
Table 6-3 Fault numbers for "Cannot process request" response
No. Meaning 0 Illegal parameter number (PNU) Parameter does not exist 1 Parameter value cannot be modified Parameter is a read-only parameter 2 Minimum/maximum not reached/exceeded – 3 Faulty subindex – 4 No array Single parameter has been accessed
with array request and subindex > 0 5 Parameter type is wrong / incorrect data type Mix-up between word and double
word 6 Setting not allowed (resetting only) – 7 Descriptive element cannot be modified Description can never be modified 11 No status as master control Modification request without status as
master control (see P0927) 12 Key word missing – 17 Request cannot be processed due to operating
state Current inverter status is not compatible with the received request
101 Parameter number currently deactivated Dependent on inverter status 102 Channel not wide enough Communication channel too small for
response 104 Illegal parameter value Parameter permits only certain values 106 Request not implemented / Task not supported After request identifier 5, 10, 15 200/201 Modified minimum/maximum not
reached/exceeded Minimum/maximum can be further limited in operation

Communication 6.1 PROFIdrive Profile V4.0
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 133
No. Meaning 204 Available access authorization does not cover
modification of parameters –
Parameter index (IND) 2nd word The array subindex is in the PROFIdrive Profile referred to simply as "subindex". Structure for acyclical communication
Figure 6-3 IND structure acyclic
The array subindex is an 8-bit value which is in acyclical data exchange mode transferred in the low-order byte (bits 0 to 7) of the parameter index (IND).
The parameter page selection task for additional parameters is performed in this case by the high-order byte (bits 8 to 15) of the parameter index. This structure conforms to the USS specification. Example: Coding for parameter no. in PKE and IND for "P2016, Index 3".
Structure for cyclical communication
Figure 6-4 IND structure cyclic
The array subindex is an 8-bit value which is in cyclical data exchange mode transferred in the high-order byte (bits 8 to 15) of the parameter index (IND).
The parameter page selection task for additional parameters is performed in this case by the low-order byte (bits 0 to 7) of the parameter index.

Communication 6.1 PROFIdrive Profile V4.0
Control Units CU240S 134 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Regulation for the parameter range The bit for parameter page selection functions as follows: If it is set to 1, an offset of 2000 is applied in the inverter to the parameter number (PNU) transferred in the parameter channel request before it is passed on.
Figure 6-5 IND page index acyclic
Figure 6-6 IND page index cyclic
Table 6-4 Regulation for setting the PNU
Page index Bit Parameter range a d c b f e 9 8
Hex value + PNU
0000 – 1999 0 0 0 0 0 0 0 0 0 0 – 7CF 2000 – 3999 1 0 0 0 0 0 0 0 0x80 0 – 7CF 4000 – 5999 0 0 0 1 0 0 0 0 0x10 0 – 7CF 6000 – 7999 1 0 0 1 0 0 0 0 0x90 0 – 7CF 8000 – 9999 0 0 1 0 0 0 0 0 0x20 0 – 7CF … … … … … … … … … … … 64.000 – 65.999 1 1 1 1 0 1 0 0 0x1F 0 – 7CF
Table 6-5 Example coding for parameter no. in PKE and IND for P8820, Index 16
PKE IND decimal xx 820 32 16 hex xx 334 20 10

Communication 6.1 PROFIdrive Profile V4.0
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 135
Parameter value (PWE) 3rd and 4th word In case of PROFIBUS or PROFINET communication the parameter value (PWE) is always transmitted as a double word (32-bit). Only one parameter value at a time can be transferred in a telegram. A 32-bit parameter value comprises PWE1 (high-order word, 3rd word) and PWE2 (low-order word, 4th word). A 16-bit parameter value is transferred in PWE2 (low-order word, 4th word). PWE1 (high-order word, 3rd word) must be set to 0 on the PROFIBUS-DP master in this case.
Note In case of communication via USS, you can configure the word length in P2013. For details, refer the section "Communication via USS".
Rules for processing requests/responses A request or a response can only ever refer to one parameter. The master must repeat a request continuously until it has received the appropriate
response. The master detects the response to a request it has sent by
– evaluating the response identifier, – evaluating the parameter number PNU, – evaluating the parameter index IND if necessary, or – evaluating the parameter value PWE if necessary.
The complete request must be sent in one telegram. Request telegrams cannot be split. The same applies to responses.
In the case of response telegrams which contain parameter values, the drive always returns the current parameter value when repeating response telegrams.
If no information needs to be fetched from the parameter channel interface in cyclical operation (only PZD data are relevant), then the "No request" request telegram must be issued.

Communication 6.2 Cyclic Communication
Control Units CU240S 136 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.2 Cyclic Communication
6.2.1 Telegrams
Telegrams The selection of a telegram via P0922 determines on the drive unit side which process data is transferred between master and slave. From the perspective of the slave, there are receive words and send words. The receive and send words comprise the following elements: Receive words
Control words or setpoints Send words
Status words or actual values
Used telegram types The following telegrams can be set via parameter P0922: Standard telegrams The standard telegrams are structured in accordance with the PROFIdrive Profile. The internal process data links are set up automatically in accordance with the telegram number setting. Telegram 1 Speed control, 2 words Telegram 20 Speed control, VIK/NAMUR Manufacturer-specific telegrams The manufacturer-specific telegrams are structured in accordance with internal company specifications. The internal process data links are set up automatically in accordance with the telegram number setting. Telegram 350 Speed control, 4 words Telegram 352 Speed control, PCS7 Telegram 353 Speed control, PKW 4/4 and PCD 2/2 Telegram 354 Speed control, PKW 4/4 and PCD 6/6 Device-specific telegrams The send and receive telegrams can be configured as required by using BICO technology to interconnect the send and receive process data. Telegram 999 Free interconnection via BICO (up to 8 data words)

Communication 6.2 Cyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 137
6.2.2 Standard Telegram Structure
BICO connection When a telegram is selected, the corresponding BICO connection parameters will be fixed and cannot be changed (except P0701 and the following digital inputs). If P0922 = 999, it keeps the actual BICO connection parameters but now BICO parameters can be changed.

Communication 6.2 Cyclic Communication
Control Units CU240S 138 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Telegram structure and settings of P0922
Table 6-6 Standard telegrams from 1 to 999
Telegramm Parameter channel
Process data area (PZD)
PZD01 STW1 ZSW1
PZD 02 HSW HIW
PZD 03
PZD 04
PZD 05
PZD 06
PZD 07
PZD 08
STW1 NSOLL_A ⇐ Receive telegram from PROFIBUS Telegram 1 Speed control, 2 words
- ZSW1 NIST_A ⇒ Send telegram to PROFIBUS
STW1 NSOLL_A Telegram 20 Speed control, VIK/NAMUR
- ZSW1 NIST_A_
GLATT IAIST MIST PIST <1>
STW1 NSOLL_A M_LIM STW2 Telegram 350 Speed control, 4 words
- ZSW1 NIST_A_
GLATT IAIST_ ZSW2
STW1 NSOLL_A <3> <3> <3> <3> Telegram 352 Speed control, PCS7
- ZSW1 NIST_A_
GLATT IAIST MIST FAULT_
CODE WARN_ CODE
X STW1 NSOLL_A Telegram 353 Speed control, PKW 4/4 and PCD 2/2
X ZSW1 NIST_A_ GLATT
X STW1 NSOLL_A <3> <3> <3> <3> Telegram 354 Speed control, PKW 4/4 and PCD 6/6
X ZSW1 NIST_A_ GLATT
IAIST MIST FAULT_ CODE
WARN_ CODE
STW1 <1>
Receive telegram length is max. 8 words. It can be freely selected via the central PROFIBUS configuring, e. g. HW Config (universal modul in GSD) <2>
Telegram 999 Free interconnection via BICO
-
ZSW1 <1>
Send telegram length is max. 8 words. It can be freely selected via the central PROFIBUS configuring, e. g. HW Config (universal modul in GSD) <2>
<1> In order to comply with the PROFIdrive profile, PZD1 must be used as STW1 or ZSW1 <2> Structure like a standard telegram <3> Placeholder for PCS7 process data STW1/2 (r2090/r2091) ZSW1/2 (r0052/r0053) NSOLL_A *) (P1070) NIST_A *) (r0021) IA_IST (r0027) MIST (r0031) PIST (r0032) M_LIM (P1522) FAULT_CODE (r2131) WARN_CODE (r2132)
Control word 1/2 Status word 1/2 Speed setpoint A (16 bit) Speed actual value A (16 bit) Output current Torque actual value Active Power Torque limit Fault code Warn code
*) NSOLL_A, NIST_A are FSOLL and FIST for SINAMICS G120

Communication 6.2 Cyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 139
6.2.3 VIK/NAMUR Telegram Structure
Description
Table 6-7 VIK/NAMUR telegram structure
Telegram Parameter channel
Process data area (PZD)
PZD01 STW1 ZSW1
PZD 02 HSW HIW
PZD 03
PZD 04
PZD 05
PZD 06
PZD 07
PZD 08
- STW1 NSOLL_A Telegramm 20 Speed control, VIK/NAMUR
- ZSW1 NIST_A_ GLATT
IAIST MIST PIST <1>
<1> In order to comply with the PROFIdrive profile, PZD1 must be used as STW1 or ZSW1 STW1/2 (r2090/r2091) ZSW1/2 (r0052/r0053) NSOLL_A *) (P1070) NIST_A *) (r0021) IA_IST (r0027) MIST (r0031) PIST (r0032)
Control word 1/2 Status word 1/2 Speed setpoint A (16 bit) Speed actual value A (16 bit) Output current Torque actual value Active Power
*) NSOLL_A, NIST_A are FSOLL and FIST for SINAMICS G120
If VIK/NAMUR telegram is selected with P0922 = 20, the parameter P2038 "Selection of actual profile" will be set to VIK/NAMUR automatically. It is also necessary to set the ident number (GSD) via parameter P2042: SIMATIC Object Manager (Slave-OM)
For drives configured with SIMATIC Object Manager (Slave-OM) parameter P2042 has to be set to 0 (default).
VIK/NAMUR GSD (Device Data File) For all other configurations the setting of parameter P2042 must be changed to 1 (NAMUR). That means that the VIK/NAMUR ID of the PROFIBUS Nutzerorganisation (PNO) will be send to the PLC.
Note If changing PROFIBUS standard telegrams to VIK/NAMUR telegram or back (parameters: P0922, P2038 and P2042) the drive ID is changed. A power cycle is necessary for the Control Unit CU240S to take the changed drive ID effective. To change back from VIK/NAMUR to Standard telegrams it is necessary to set P0922 = 999 (Free BICO connection) and then reset P2038 and P2042 to PROFIdrive Profile. If P0922 = 999, it keeps the actual BICO connection parameters but now BICO parameters can be changed.
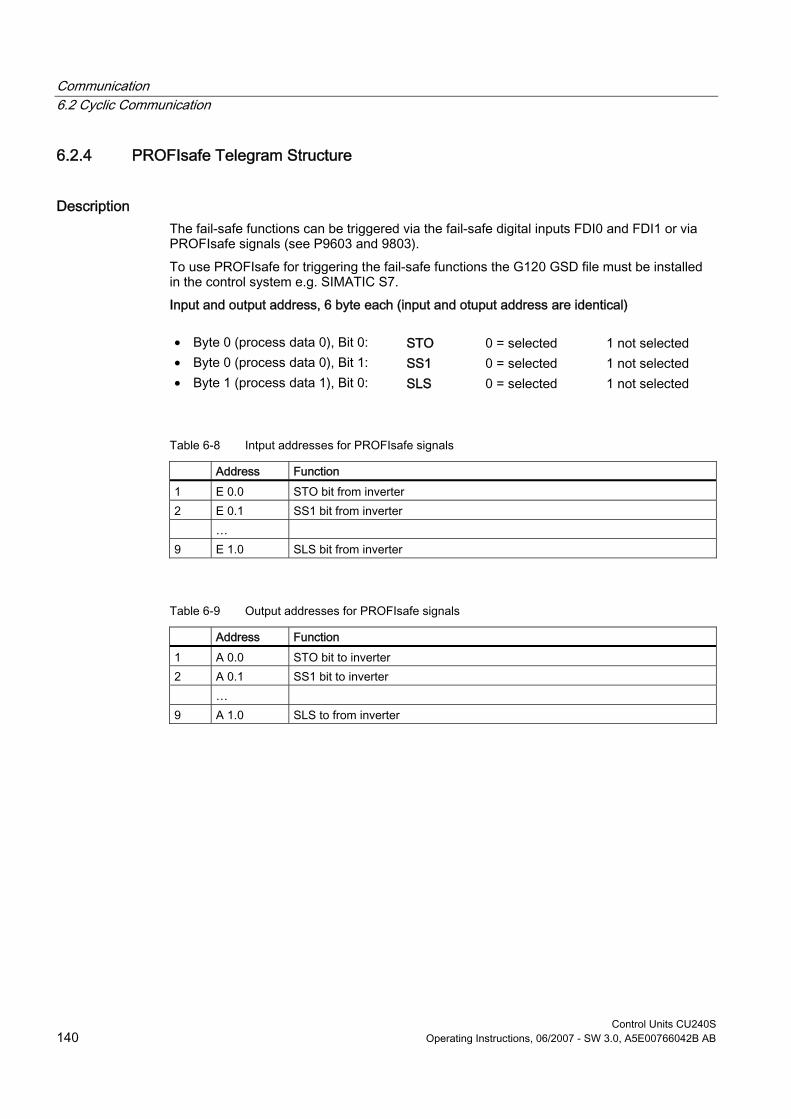
Communication 6.2 Cyclic Communication
Control Units CU240S 140 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.2.4 PROFIsafe Telegram Structure
Description The fail-safe functions can be triggered via the fail-safe digital inputs FDI0 and FDI1 or via PROFIsafe signals (see P9603 and 9803). To use PROFIsafe for triggering the fail-safe functions the G120 GSD file must be installed in the control system e.g. SIMATIC S7. Input and output address, 6 byte each (input and otuput address are identical)
• Byte 0 (process data 0), Bit 0: STO 0 = selected 1 not selected • Byte 0 (process data 0), Bit 1: SS1 0 = selected 1 not selected • Byte 1 (process data 1), Bit 0: SLS 0 = selected 1 not selected
Table 6-8 Intput addresses for PROFIsafe signals
Address Function 1 E 0.0 STO bit from inverter 2 E 0.1 SS1 bit from inverter … 9 E 1.0 SLS bit from inverter
Table 6-9 Output addresses for PROFIsafe signals
Address Function 1 A 0.0 STO bit to inverter 2 A 0.1 SS1 bit to inverter … 9 A 1.0 SLS to from inverter

Communication 6.2 Cyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 141
6.2.5 Switch over behavior of Communication telegram
Overview
Table 6-10 Switch over behavior of telegram structures, Part 1
P0922 = 1 → 20 1 → 350 1 → 352/354 1 → 999/353 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = Unchanged 2090.15 unchanged 2091.4 unchanged unchanged unchanged unchanged P0821 = unchanged unchanged unchanged 2091.5 unchanged unchanged unchanged unchanged P1035 = 19.13 19.13 unchanged 2090.13 unchanged 2090.13 unchanged unchanged P1036 = 19.14 19.14 unchanged 2090.14 unchanged 2090.14 unchanged unchanged
Table 6-11 Switch over behavior of telegram structures, Part 2
P0922 = 20 → 1/353 20 → 350 20 → 352/354 20 → 999 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = 0.0 0.0 unchanged 2091.4 0.0 0.0 unchanged unchanged P0821 = unchanged unchanged unchanged 2091.5 unchanged unchanged unchanged unchanged P1035 = unchanged 2090.13 unchanged 2090.13 unchanged 2090.13 unchanged unchanged P1036 = unchanged 2090.14 unchanged 2090.14 unchanged 2090.14 unchanged unchanged
Table 6-12 Switch over behavior of telegram structures, Part 3
P0922 = 350 → 1/353 350 → 20 350 → 352/354 350 → 999 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = unchanged 0.0 unchanged 2090.15 unchanged 0.0 unchanged unchanged P0821 = unchanged 0.0 0.0 0.0 unchanged 0.0 unchanged unchanged P1035 = unchanged 2090.13 19.13 19.13 unchanged 2090.13 unchanged unchanged P1036 = unchanged 2090.14 19.14 19.14 unchanged 2090.14 unchanged unchanged
Table 6-13 Switch over behavior of telegram structures, Part 4
P0922 = 352 → 1/353 352 → 20 352 → 350 352 → 999/354 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = 0.0 0.0 unchanged 2090.15 unchanged 2091.4 unchanged unchanged P0821 = unchanged unchanged unchanged unchanged unchanged 2091.5 unchanged unchanged P1035 = unchanged 2090.13 19.13 19.13 unchanged 2090.13 unchanged unchanged P1036 = unchanged 2090.14 19.14 19.14 unchanged 2090.14 unchanged unchanged
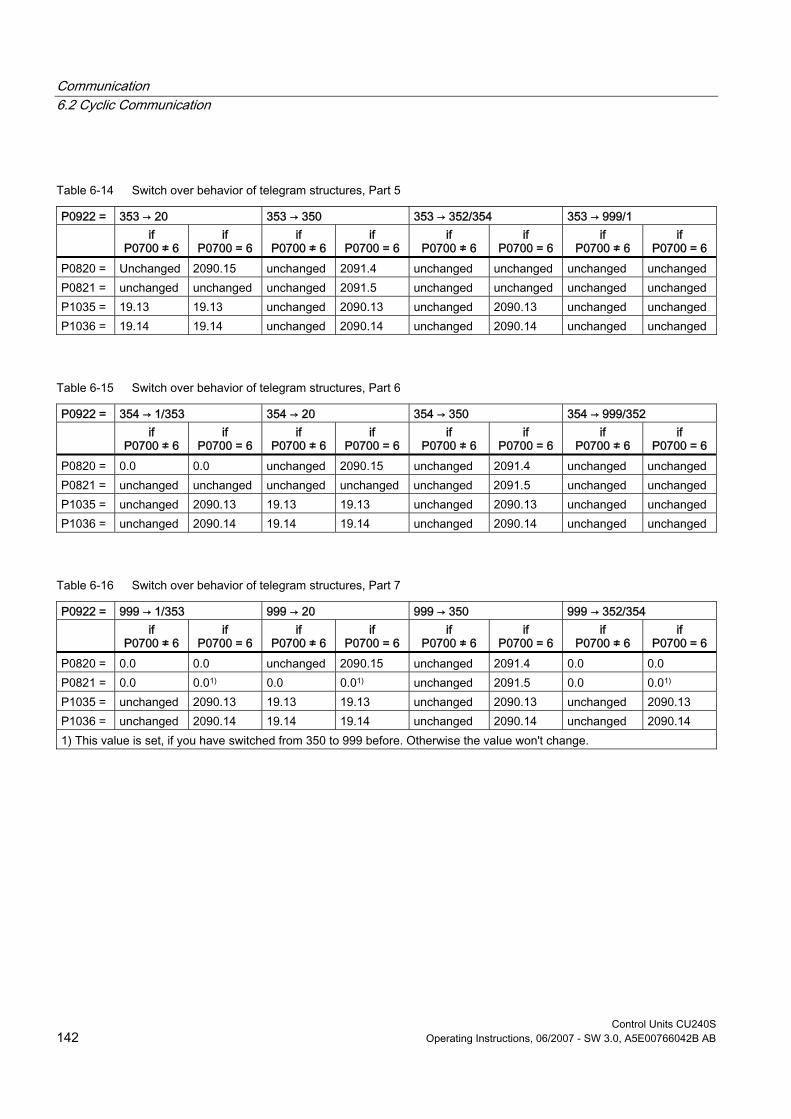
Communication 6.2 Cyclic Communication
Control Units CU240S 142 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Table 6-14 Switch over behavior of telegram structures, Part 5
P0922 = 353 → 20 353 → 350 353 → 352/354 353 → 999/1 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = Unchanged 2090.15 unchanged 2091.4 unchanged unchanged unchanged unchanged P0821 = unchanged unchanged unchanged 2091.5 unchanged unchanged unchanged unchanged P1035 = 19.13 19.13 unchanged 2090.13 unchanged 2090.13 unchanged unchanged P1036 = 19.14 19.14 unchanged 2090.14 unchanged 2090.14 unchanged unchanged
Table 6-15 Switch over behavior of telegram structures, Part 6
P0922 = 354 → 1/353 354 → 20 354 → 350 354 → 999/352 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = 0.0 0.0 unchanged 2090.15 unchanged 2091.4 unchanged unchanged P0821 = unchanged unchanged unchanged unchanged unchanged 2091.5 unchanged unchanged P1035 = unchanged 2090.13 19.13 19.13 unchanged 2090.13 unchanged unchanged P1036 = unchanged 2090.14 19.14 19.14 unchanged 2090.14 unchanged unchanged
Table 6-16 Switch over behavior of telegram structures, Part 7
P0922 = 999 → 1/353 999 → 20 999 → 350 999 → 352/354 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 if
P0700 ≠ 6 if
P0700 = 6 P0820 = 0.0 0.0 unchanged 2090.15 unchanged 2091.4 0.0 0.0 P0821 = 0.0 0.01) 0.0 0.01) unchanged 2091.5 0.0 0.01) P1035 = unchanged 2090.13 19.13 19.13 unchanged 2090.13 unchanged 2090.13 P1036 = unchanged 2090.14 19.14 19.14 unchanged 2090.14 unchanged 2090.14 1) This value is set, if you have switched from 350 to 999 before. Otherwise the value won't change.

Communication 6.2 Cyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 143
6.2.6 Control and status words
Description The control and status words comply with the specifications for PROFIdrive Profile, version 4.0 for "Closed-loop speed control mode".
Control word 1 (STW1) Control word 1 (bits 0 … 10 as per PROFIdrive Profile and VIK/NAMUR, bits 11 … 15 specific to SINAMICS G120).
Table 6-17 Assignment control word 1
Bit Val. Meaning comment
P0922 = 20 (VIK/ NAMUR)
P0922 = 1 / 350 / 352 / 353 / 354 (PROFI drive Profile)
0 OFF1 Shutdown, deceleration along RFG ramp, pulse disable when f < fmin.
0
1 ON Sets the inverter to the "Ready to run" state, direction of rotation must be defined via bit 11.
P0840 = 2090:0
P0840 = 2090:0
0 Coast Stop (OFF2) Instantaneous pulse disable, drive coasts to a standstill
1
1 No Coast Stop All Coast Stop (OFF2) commands are withdrawn.
P0844 = 2090:1
P0844 = 2090:1
0 Quick Stop (OFF3) Rapid stop: Shutdown at fastest possible acceleration rate.
2
1 No Quick Stop All Quick Stop (OFF3) commands are withdrawn.
P0848 = 2090:2
P0848 = 2090:2
0 Disable Operation Closed-loop control and inverter pulses are disabled
3
1 Enable Operation Closed-loop control and inverter pulses are enabled
P0852 = 2090:3
P0852 = 2090:3
0 Reset Ramp Generator Output of RFG is set to 0 (fastest possible braking operation), inverter remains in the ON state.
4
1 Enable Ramp Generator
P1140 = 2090:4
P1140 = 2090:4
0 Freeze Ramp Generator Setpoint currently supplied by the RFG is "frozen".
5
1 Unfreeze Ramp Generator
P1141 = 2090:5
P1141 = 2090:5
0 Disable Setpoint Value selected at the RFG input is set to 0.
6
1 Enable Setpoint Value selected at the RFG input is activated.
P1142 = 2090:6
P1142 = 2090:6
7 1 Fault Acknowledge Fault is acknowledged with a positive edge, inverter then switches to "starting lockout" state.
P1024 = 2090:7
P1024 = 2090:7

Communication 6.2 Cyclic Communication
Control Units CU240S 144 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Bit Val. Meaning comment
P0922 = 20 (VIK/ NAMUR)
P0922 = 1 / 350 / 352 / 353 / 354 (PROFI drive Profile)
0 JOG 1 OFF Drive brakes as quickly as possible.
8
1 JOG 1 ON The drive runs up as quickly as possible to jogging setpoint (direction of rotation: CW).
P1055 = 2090:8
P1055 = 2090:8
0 JOG 2 OFF Drive brakes as quickly as possible.
9
1 JOG 2 ON The drive runs up as quickly as possible to jogging setpoint (direction of rotation: CCW).
P1056 = 2090:9
P1056 = 2090:9
0 No PLCControl Process data not valid, expect Sign-Of-Life.
10
1 PLC Control Control via interface, process data valid.
---- ----
0 No Setpoint Inversion Motor rotates CW in response to positive setpoint.
11
1 Setpoint Inversion Motor rotates CCW in response to positive setpoint.
P1113 = 2090:11
12 Not used Not used Not used 13 1 Motor potentiometer UP Not used P1035 =
2090:13 14 1 Motor potentiometer DOWN P1036 =
2090:14 15 1 Depends on the protocol
On the SINAMICS G120 it is possible, using the function local/remote control, to change between the command data set (CDS) 0 and 1 of the control word 1 bit 15. This results in a switching of the command data sets. The command data set 0 is active in local operation and the command data set 1 for remote operation. Now in both command data sets the application-specific parameters for the command and target value sources can be set. *Note: In PROFIdrive Profile P0810 = 2090:15 must be set manually.
DDS1: P0820 = 2091.15
CDS1: P0810 = 2090:15*
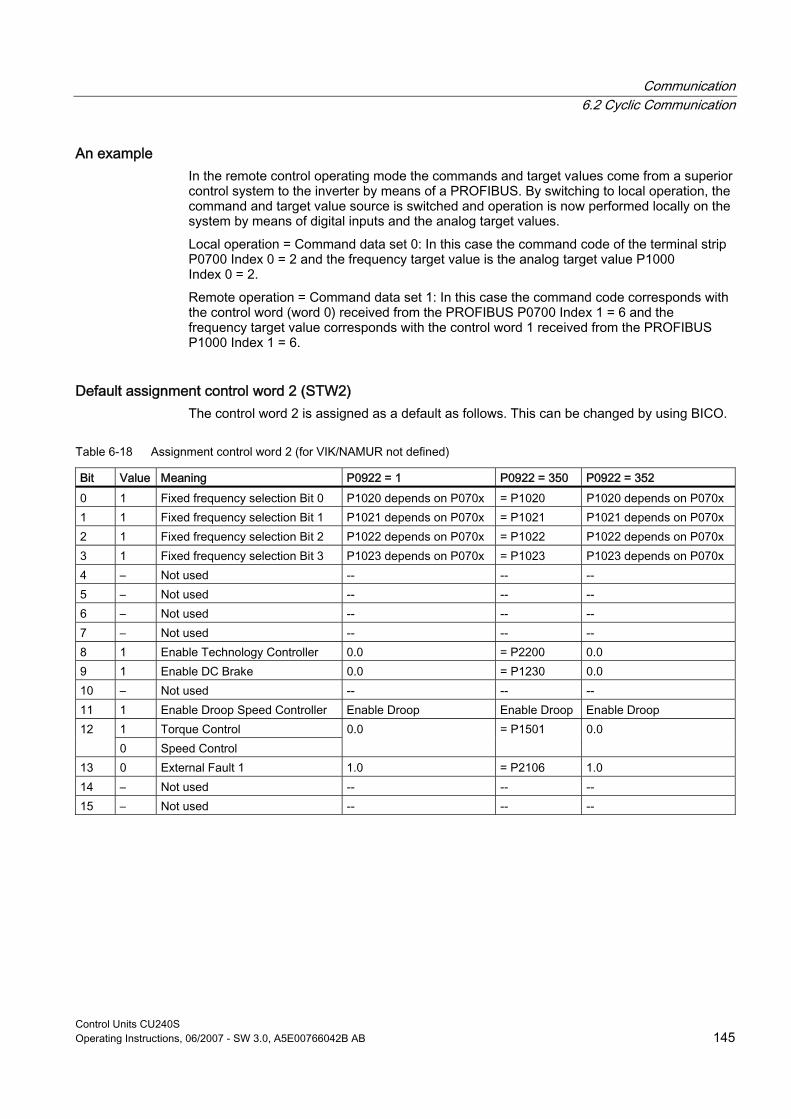
Communication 6.2 Cyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 145
An example In the remote control operating mode the commands and target values come from a superior control system to the inverter by means of a PROFIBUS. By switching to local operation, the command and target value source is switched and operation is now performed locally on the system by means of digital inputs and the analog target values. Local operation = Command data set 0: In this case the command code of the terminal strip P0700 Index 0 = 2 and the frequency target value is the analog target value P1000 Index 0 = 2. Remote operation = Command data set 1: In this case the command code corresponds with the control word (word 0) received from the PROFIBUS P0700 Index 1 = 6 and the frequency target value corresponds with the control word 1 received from the PROFIBUS P1000 Index 1 = 6.
Default assignment control word 2 (STW2) The control word 2 is assigned as a default as follows. This can be changed by using BICO.
Table 6-18 Assignment control word 2 (for VIK/NAMUR not defined)
Bit Value Meaning P0922 = 1 P0922 = 350 P0922 = 352 0 1 Fixed frequency selection Bit 0 P1020 depends on P070x = P1020 P1020 depends on P070x 1 1 Fixed frequency selection Bit 1 P1021 depends on P070x = P1021 P1021 depends on P070x 2 1 Fixed frequency selection Bit 2 P1022 depends on P070x = P1022 P1022 depends on P070x 3 1 Fixed frequency selection Bit 3 P1023 depends on P070x = P1023 P1023 depends on P070x 4 – Not used -- -- -- 5 – Not used -- -- -- 6 – Not used -- -- -- 7 – Not used -- -- -- 8 1 Enable Technology Controller 0.0 = P2200 0.0 9 1 Enable DC Brake 0.0 = P1230 0.0 10 – Not used -- -- -- 11 1 Enable Droop Speed Controller Enable Droop Enable Droop Enable Droop
1 Torque Control 12 0 Speed Control
0.0 = P1501 0.0
13 0 External Fault 1 1.0 = P2106 1.0 14 – Not used -- -- -- 15 – Not used -- -- --

Communication 6.2 Cyclic Communication
Control Units CU240S 146 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Status word 1 (ZSW1) Status word 1 (bits 0 to 10 as per PROFIdrive Profile and VIK/NAMUR, bits 11 to 15 specific to SINAMICS G120).
Table 6-19 Bit assignments status word 1 (for all PROFIdrive and VIK/NAMUR telegrams)
Bit Value Meaning Remarks 1 Ready to switch on Power supply is switched on, electronics initialized, pulses
disabled. 0
0 Not ready to switch on -- 1 Ready to operate Inverter is switched on (ON command is applied), no fault is
active, inverter can start when "Enable operation" command is issued. See control word 1, bit 0.
1
0 Not ready to operate -- 1 Operation enabled Drive follows setpoint. See control word 1, bit 3. 2 0 Operation disabled -- 1 Fault present Drive has faulted. Drive is faulty and thus inoperative,
switches to starting lockout state after successful correction and acknowledgement of fault.
3
0 No fault -- 1 Coast Stop not activated -- 4 0 Coast Stop activated Coast Stop (OFF 2) command is present. 1 Quick Stop not activated -- 5 0 Quick Stop activated Quick Stop (OFF 3) command is present. 1 Switching on inhibited The drive goes only again in the "Switched On" condition
with "No Coast Stop AND No Quick Stop" followed by "ON". 6
0 Switching on not inhibit -- 1 Warning present Drive still works; warning in the service/maintenance para-
meter; no acknowledgement, see alarm parameter r2110. 7
0 No warning There is no warning or the warning has disappeared again. 1 Speed error within tolerance range Setpoint/actual value deviation within tolerance range. 8 0 Speed error out of tolerance range -- 1 Master control requested The automation system is requested to assume control. 9 0 No control requested The master is not currently the master control. 1 Maximum frequency reached or
exceeded Inverter output frequency is higher or equal to the maximum frequency.
10
0 Maximum frequency not reached -- 1 -- -- 11 0 Warning: Motor at current/torque limit -- 1 Motor holding brake active Signal can be used to control a holding brake. 12 0 -- -- 1 -- Motor data indicate overload condition. 13 0 Motor overload -- 1 CW rotation -- 14 0 CCW rotation --

Communication 6.2 Cyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 147
Bit Value Meaning Remarks 1 -- -- 15 0 Inverter overload e.g. current or temperature.
Status word 2 (ZSW2) Status word 2 has the following default assignment: This can be modified using BICO.
Table 6-20 Assignment status word 2 (for VIK/NAMUR not defined)
Bit Value Meaning Description 0 1 DC Braking Active DC current brake active 1 1 n_act < P2167 Drive inverter frequency < Shutdown limit 2 1 n_act ≧ P1080 Actual frequency > min. frequency 3 1 i_act ≧ P2170 Current ≥ Limit 4 1 n_act > P2155 Actual frequency > Reference frequency 5 1 n_act ≦ P2155 Actual frequency < Reference frequency 6 1 Speed Setpoint Reached Actual frequency ≥ Setpoint 7 1 DC Link Voltage < P2172 Voltage < Threshold value 8 1 DC Link Voltage ≧ P2172 Voltage > Threshold value 9 1 Speed Ramp Finished -- 10 1 Techn. Controller Output ≦ P2292 PI frequency < Threshold value 11 1 Techn. Controller Output > P2291 PI saturation 12 1 Vdc_max Controller -- 13 1 Kinetic Buffering and Flexible Response -- 14 1 Not used -- 15 1 Not used --

Communication 6.3 Acyclic Communication
Control Units CU240S 148 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.3 Acyclic Communication
Extended PROFIBUS DP functionality (DPV1) The PROFIBUS DP extensions DPV1 include the definition of an acyclic data exchange which can take place in parallel to cyclic data transmissions. Acyclic data transfer mode allows: Large quantities of use data (up to 240 bytes) to be exchanged Simultaneous accessing by other PROFIBUS masters (class 2 master, e.g. start-up tool).
Conversion of extended PROFIBUS DP functionality The different masters, or different modes of data exchange, are represented by appropriate channels in the SINAMICS G120 range of inverters: Acyclic data exchange with the same class 1 master use of DPV1 functions READ and
WRITE. The content of the transferred data block (DS) corresponds in this case to the structure of the acyclic parameter channel according to PROFIdrive Profile, version 4.0 (http://www.profibus.com/organization.html) (with data block 47 (DS47)).
Acyclic data exchange using a SIEMENS start-up tool (class 2 master) (e.g. STARTER). The start-up tool can acyclically access parameter and process data in the inverter.
Acyclic data exchange with a SIMATIC HMI (second class 2 master). The SIMATIC HMI can acyclically access parameters in the inverter.
Instead of a SIEMENS start-up tool or SIMATIC HMI, an external master (class 2 master) as defined in the acyclic parameter channel according to PROFIdrive Profile version 4.0 (with DS47) can access the inverter.
The order numbers of all hardware components can be read out by an acyclic channel
6.3.1 DPV1 Parameter Channel (DS47)
Properties of the DPV1 parameter channel One 16-bit address each for parameter number and subindex. Concurrent access by several PROFIBUS masters (class 2 master, e.g. commissioning
tool). Transfer of different parameters in one access (multiple parameter request). Transfer of complete arrays or part of an array possible. Only one parameter request is processed at a time (no pipelining). A parameter request/response must fit into a data set (max. 240 bytes). The task or response header are use data.

Communication 6.3 Acyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 149
Structure of parameter request and parameter response A parameter request consists of three segments: Request header
ID for the request and number of parameters which are accessed. Parameter address
Addressing of a parameter. If several parameters are accessed, there are correspondingly many parameter addresses. The parameter address appears only in the request, not in the response.
Parameter value Per addressed parameter, there is a segment for the parameter values. Depending on the request ID, parameter values appear only either in the request or in the reply.
Table 6-21 Parameter request
Word Byte Byte Request Reference Request ID Request header Drive object ID No. of Parameters Attribute No. of elements Parameter Number (PNU)
1st Parameter Address
Subindex …
Attribute No. of elements Parameter Number (PNU)
nth Parameter Address
Subindex Format No. of Values Values
1st Parameter Value(s) (only for request "Change parameter")
… …
Format No. of Values Values
nth Parameter Value(s)
…

Communication 6.3 Acyclic Communication
Control Units CU240S 150 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Table 6-22 Parameter response
Word Byte Byte Request Reference mirrored Response ID Response header Drive object ID mirrored No. of Parameters Format No. of Values Values or Error Values
1st Parameter Value(s) (only after request "Request")
… …
Format No. of Values Values or Error Values
nth Parameter Value(s)
…
Description of fields in DPV1 parameter request and response
Table 6-23 Description of fields in parameter request
Field Data type Values Note Unsigned8 0x01 … 0xFF Request
reference Unique identification of the request/response pair for the master. The master changes the request reference with each new request. The slave mirrors the request reference in its response. Unsigned8 0x01
0x02 Read request Write request
Request ID
Specifies the type of request. In the case of a write request, the changes are made in a volatile memory (RAM). A save operation is needed in order to transfer the data to the non-volatile memory (P0971). Unsigned8 0x00 … 0xFF Number Drive object ID Setting for the drive object number with a drive unit with more than one drive object. Different drive objects with separate parameter number ranges can be accessed over the same DPV1 connection. Unsigned8 0x01 … 0x27 No. 1 … 39
Limited by DPV1 telegram length No. of Parameters
Defines the number of adjoining areas for the parameter address and/or parameter value for multi-parameter requests. The number of parameters = 1 for single requests. Unsigned8 0x10
0x20 0x30
Value Description Text (not implemented)
Attribute
Type of parameter element accessed. Unsigned8 0x00
0x01 … 0x75 Special function No. 1 … 117 Limited by DPV1 telegram length
No. of Elements
Number of array elements accessed. Parameter number
Unsigned16 0x0001 … 0xFFFF
No. 1 … 65535

Communication 6.3 Acyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 151
Field Data type Values Note Addresses the parameter to be accessed. Unsigned16 0x0000 … 0xF
FFF No. 0 … 65535 Subindex
Addresses the first array element of the parameter to be accessed. Unsigned8 0x02
0x03 0x04 0x05 0x06 0x07 0x08 Other values 0x40 0x41 0x42 0x43 0x44
Data type Integer 8 Data type Integer 16 Data type Integer 32 Data type Unsigned 8 Data type Unsigned 16 Data type Unsigned 32 Data type Floating Point See PROFIdrive Profile Zero (without values as a positive subresponse to a write request) Byte Word Double word Error
Format
The format and number specify the adjoining space containing values in the telegram. Data types in conformity with PROFIdrive Profile shall be preferred for write access. Bytes, words and double words are also possible as a substitute. Unsigned8 0x00 … 0xEA No. 0 … 234
Limited by DPV1 telegram length No. of Values
Specifies the number of subsequent values. Unsigned16 0x0000 … 0x0
0FF Values
The values of the parameter for read or write access. If the values make up an odd number of bytes, a zero byte is appended. This ensures the integrity of the word structure of the telegram.

Communication 6.3 Acyclic Communication
Control Units CU240S 152 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Table 6-24 Description of fields in parameter response
Field Data type Values Note Request reference
See Table above
Request positive, status ok Unsigned8 0x01 0x02 0x81 0x82
Read request (+) Write request (+) Read request (–) Write request (–)
Request negative, fault statusResponse ID
Mirrors the request identifier and specifies whether request execution was positive or negative. Negative means: Cannot execute part or all of request. The error values are transferred instead of the values for each subresponse.
Drive object ID See Table above No. of Parameters
See Table above
Format See Table above No. of Values See Table above Values See Table above
Unsigned16 0x0000 … 0x00FF
Meaning of the error values see next Table Error Values
The error values in the event of a negative response. If the values make up an odd number of bytes, a zero byte is appended. This ensures the integrity of the word structure of the telegram.
Note Drive ES SIMATIC provides function blocks for parameter write/read tasks within standard block libraries and some examples.

Communication 6.3 Acyclic Communication
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 153
Error values in DPV1 parameter responses
Table 6-25 Error values in DPV1 parameter responses
Error value
Meaning Note Extra info
0x00 Illegal parameter number Access to a parameter which does not exist. – 0x01 Parameter value cannot be
changed Modification access to a parameter value which cannot be changed.
Subindex
0x02 Lower or upper value limit exceeded
Modification access with value outside value limits.
Subindex
0x03 Invalid subindex Access to a subindex which does not exist. Subindex0x04 No array Access with subindex to an unindexed
parameter. –
0x05 Wrong data type Modification access with a value which does not match the data type of the parameter.
–
0x06 Illegal set operation (only reset allowed)
Modification access with a value not equal to 0 in a case where this is not allowed.
Subindex
0x07 Description element cannot be changed
Modification access to a description element which cannot be changed.
Subindex
0x09 No description data Access to a description which does not exist (the parameter value exists).
–
0x0B No operating priority Modification access with no operating priority. – 0x0F No text array exists Access to a text array which does not exist (the
parameter value exists). –
0x11 Request cannot be executed due to operating status
Access is not possible temporarily for unspecified reasons.
–
0x14 Illegal value Modification access with a value which is within the limits but which is illegal for other permanent reasons (parameter with defined individual values).
Subindex
0x15 Response too long The length of the present response exceeds the maximum transfer length.
–
0x16 Illegal parameter address Illegal or unsupported value for attribute, number of elements, parameter number, subindex or a combination of these.
–
0x17 Illegal format Write request: illegal or unsupported parameter data format.
–
0x18 No. of values inconsistent Write request: a mismatch exists between the number of values in the parameter data and the number of elements in the parameter address.
–
0x19 Drive object does not exist Access to a drive object which does not exist. – 0x20 Parameter text element cannot
be changed Change access to a parameter text element that cannot be changed.
Subindex

Communication 6.4 Communication via PROFIBUS
Control Units CU240S 154 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.4 Communication via PROFIBUS
6.4.1 General Information About PROFIBUS for SINAMICS
General information PROFIBUS is an open international field bus standard for a wide range of production and process automation applications. The following standards ensure open, multi-vendor systems: International standard EN 50170 International standard IEC 61158 PROFIBUS is optimized for high-speed, time-critical data communication at field level.
Note PROFIBUS for drive technology is standardized and described in the following document: Reference: /P5/ PROFIdrive Profile Drive Technology
CAUTION Before synchronizing to the isochronous PROFIBUS, all of the pulses of the drive objects must be inhibited - also for those drives that are not controlled via PROFIBUS.
Technical data To display information about the current operating state of the inverter and the communication link, the PROFIBUS DP has three LEDs on the Standard Control Unit and seven on the Control Unit with fail-safe functions. Its voltage is supplied through the inverter system connector. The PROFIBUS DP is connected to the PROFIBUS system using a 9-pin sub-D type socket according to the PROFIBUS standard. All connections to this interface are short-circuit-proof and isolated. The PROFIBUS DP supports baud rates of 9.6 kbaud to 12 Mbaud.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 155
6.4.2 Communication Settings PROFBUS DP
Setting the PROFIBUS DP address Prior to using the PROFIBUS DP interface, the address of the node (inverter) must be set. There are two methods for setting the PROFIBUS DP address: Using the seven DIP-switches on the Control Unit Using parameter "P0918"
CAUTION
If changing the PROFIBUS DP address, a power cycle is necessary for the Control Unit CU240S to make the new PROFIBUS DP address setting effective. The restart must be initiated by switching the power off and then on again, irrespective of whether the interface is supplied from the inverter mains supply or its own, separate 24 V power supply connection.
Figure 6-7 PROFIBUS DP address DIP-switches
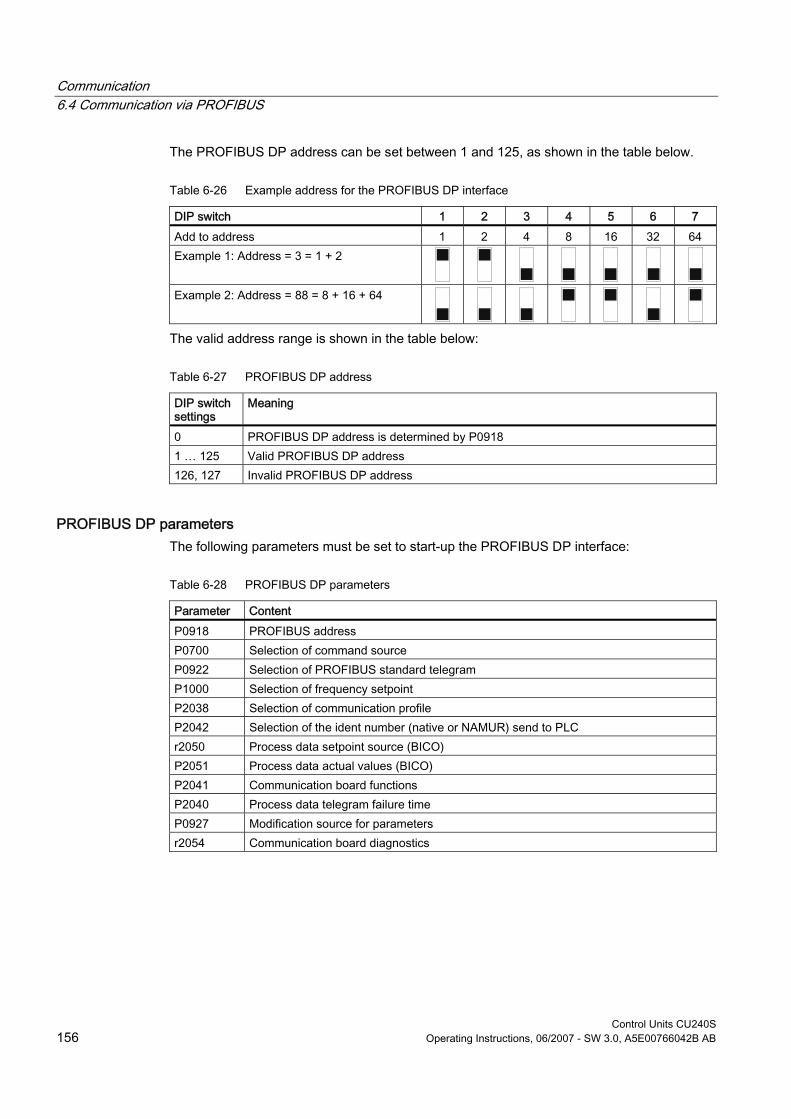
Communication 6.4 Communication via PROFIBUS
Control Units CU240S 156 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
The PROFIBUS DP address can be set between 1 and 125, as shown in the table below.
Table 6-26 Example address for the PROFIBUS DP interface
DIP switch 1 2 3 4 5 6 7 Add to address 1 2 4 8 16 32 64 Example 1: Address = 3 = 1 + 2
Example 2: Address = 88 = 8 + 16 + 64
The valid address range is shown in the table below:
Table 6-27 PROFIBUS DP address
DIP switch settings
Meaning
0 PROFIBUS DP address is determined by P0918 1 … 125 Valid PROFIBUS DP address 126, 127 Invalid PROFIBUS DP address
PROFIBUS DP parameters The following parameters must be set to start-up the PROFIBUS DP interface:
Table 6-28 PROFIBUS DP parameters
Parameter Content P0918 PROFIBUS address P0700 Selection of command source P0922 Selection of PROFIBUS standard telegram P1000 Selection of frequency setpoint P2038 Selection of communication profile P2042 Selection of the ident number (native or NAMUR) send to PLC r2050 Process data setpoint source (BICO) P2051 Process data actual values (BICO) P2041 Communication board functions P2040 Process data telegram failure time P0927 Modification source for parameters r2054 Communication board diagnostics
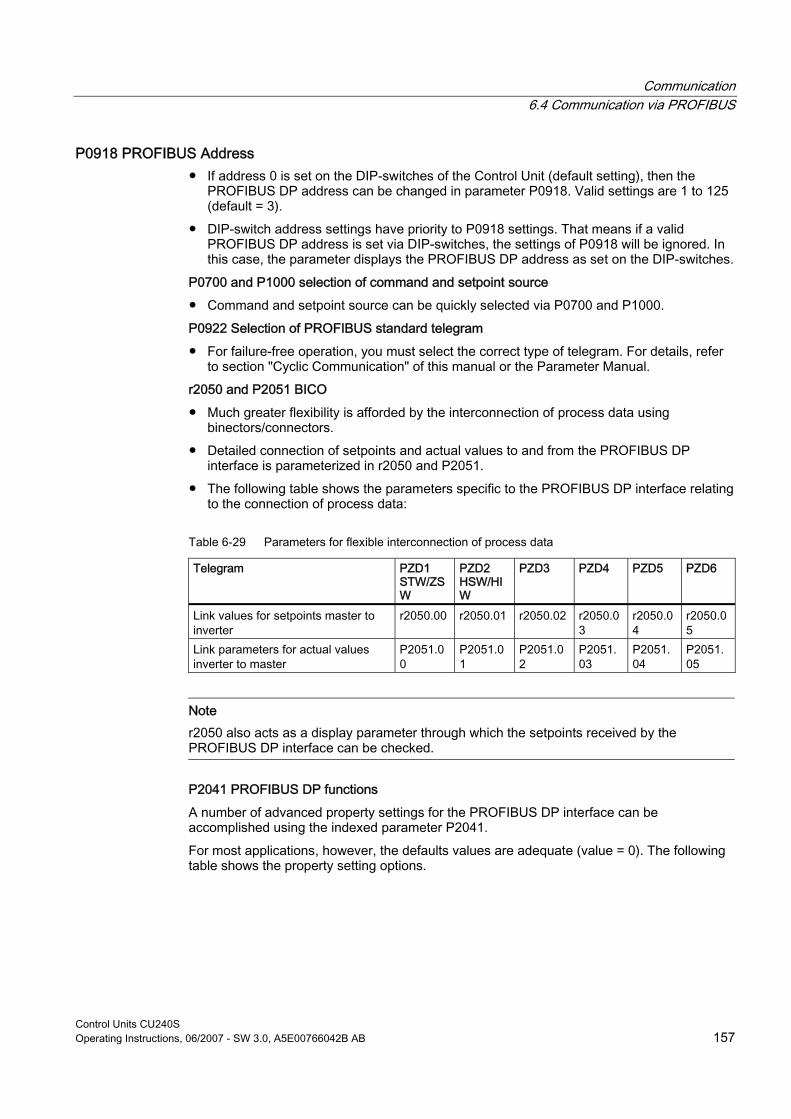
Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 157
P0918 PROFIBUS Address If address 0 is set on the DIP-switches of the Control Unit (default setting), then the
PROFIBUS DP address can be changed in parameter P0918. Valid settings are 1 to 125 (default = 3).
DIP-switch address settings have priority to P0918 settings. That means if a valid PROFIBUS DP address is set via DIP-switches, the settings of P0918 will be ignored. In this case, the parameter displays the PROFIBUS DP address as set on the DIP-switches.
P0700 and P1000 selection of command and setpoint source Command and setpoint source can be quickly selected via P0700 and P1000. P0922 Selection of PROFIBUS standard telegram For failure-free operation, you must select the correct type of telegram. For details, refer
to section "Cyclic Communication" of this manual or the Parameter Manual. r2050 and P2051 BICO Much greater flexibility is afforded by the interconnection of process data using
binectors/connectors. Detailed connection of setpoints and actual values to and from the PROFIBUS DP
interface is parameterized in r2050 and P2051. The following table shows the parameters specific to the PROFIBUS DP interface relating
to the connection of process data:
Table 6-29 Parameters for flexible interconnection of process data
Telegram PZD1 STW/ZSW
PZD2 HSW/HIW
PZD3 PZD4 PZD5 PZD6
Link values for setpoints master to inverter
r2050.00 r2050.01 r2050.02 r2050.03
r2050.04
r2050.05
Link parameters for actual values inverter to master
P2051.00
P2051.01
P2051.02
P2051.03
P2051.04
P2051.05
Note r2050 also acts as a display parameter through which the setpoints received by the PROFIBUS DP interface can be checked.
P2041 PROFIBUS DP functions A number of advanced property settings for the PROFIBUS DP interface can be accomplished using the indexed parameter P2041. For most applications, however, the defaults values are adequate (value = 0). The following table shows the property setting options.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S 158 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Table 6-30 PROFIBUS DP functions
Parameter Meaning Value range P2041.01 OP parameter in EEPROM:
Modifications to parameter settings via SIMATIC HMI are stored permanently in the EEPROM or as volatile data in the RAM.
0: Permanent (EEPROM) 1: Volatile (RAM)
P2041.03 Select displayed diagnostics screen.
0: Standard diagnostics
Process data monitoring Two parameters determine how process data are monitored: Process data monitoring function on the PROFIBUS DP interface (standard slave
function according to PROFIBUS) The process data monitoring function on the PROFIBUS DP interface is normally activated. It can be deactivated by means of the PROFIBUS master configuring tool.
Monitoring of the telegram failure time in the converter with parameter P2040 Parameter P2040 defines the time after which a fault will be generated (F0070) if no telegram is received through the PROFIBUS DP interface. – P2040 = 0 means: No monitoring – P2040 > 0 means: The time in milliseconds after which a fault condition will be
generated if a setpoint telegram has not been received.
CAUTION
The process data monitoring function should not be deactivated! If the monitoring function is deactivated, the inverter will not recognize a PROFIBUS DP communication failure and continue to operate with possibly wrong commands and setpoints.
F0070 is activated if no new setpoints are received by the PROFIBUS DP interface within the telegram failure period.
CAUTION Shutdown on faults can only take place if both monitoring functions are activated!
When the PROFIBUS DP interface is in operation, parameter P2040 should also be set to a value of > 0. The process data monitoring function is thus activated/deactivated solely using the PROFIBUS process data monitoring function. The monitoring time then corresponds to the process data monitoring time setting plus the time set in P2040.
Note Process data whose complete control word (PZD1) is set to zero are not transferred from the PROFIBUS DP interface to the inverter. Result: Alarm A0703 and possibly fault F0070.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 159
P0927 Modification source for parameters This parameter defines the interface through which parameters can be modified.
Bit Description Index 0 Fieldbus (PROFIBUS DP/PROFINET IO) 0: No 1: Yes 1 BOP 0: No 1: Yes 2 PC Connection Kit (STARTER) 0: No 1: Yes 3 RS485 (only CU240S) 0: No 1: Yes
The default setting for all bits is 1, i.e. parameters can be modified from all sources.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S 160 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.4.3 Configuration Example with SIMATIC S7
Installing a G120 GSD file The inverter can be integrated into a higher level control device, e.g. SIMATIC S7 via the GSD file. It can be downloaded from the internet via: http://support.automation.siemens.com/WW/view/de/23450835 The GSD must be installed in the engineering software of the higher level control device. The following example shows how to install the GSD in HW Config of SIMATIC S7.
Figure 6-8 Installing the G120 GSD in HW config SIMATIC S7
Install the *.GS* file in the desired language (english, french, german, italian or spanish) from the folder where you have stored the data. The following figure shows how to integrate an inverter with integrated fail-safe functions and a SIEMENS standard telegram in a SIMATIC S7. The inverter gives the possibility to work with different kind of telegrams. The selection of the telegram is made by the parameter P0922 during drive commissioning. The received telegram is in r2050[8] and transmit telegram is decided by parameter P2051[8].
Note Ensure that the PROFIsafe Module is installed in slot 1 (as shown in the figure above). In the following slot a SIEMENS telegram or a standard telegram can be installed.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 161
Figure 6-9 G120 inverter with fail-safe functions and a standard protocol in HW config of SIMATIC
S7
PROFIsafe Parameters The PROFIsafe parameters are shown in the following dialog box (to be opened eg. via left mouse double click on PROFIsafe module). Only the parameters F_Dest_Add: PROFIsafe address F_WD_Time: control time for the fail-safe functions can be changed.
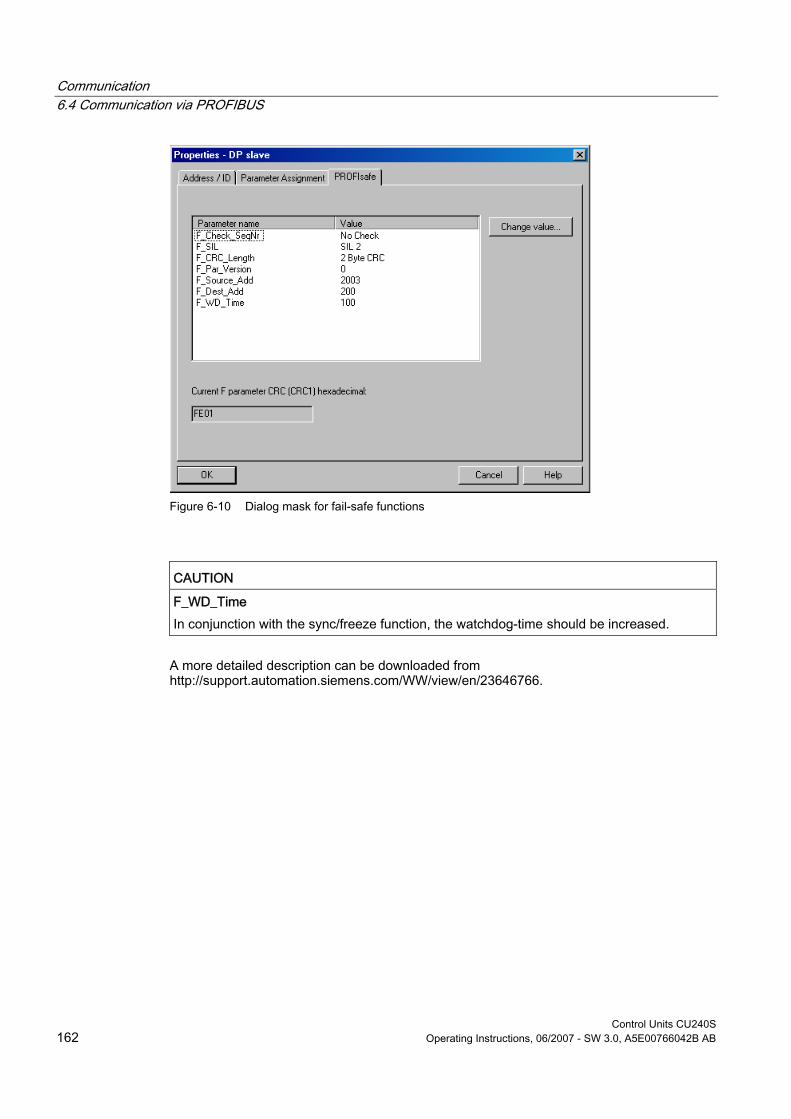
Communication 6.4 Communication via PROFIBUS
Control Units CU240S 162 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Figure 6-10 Dialog mask for fail-safe functions
CAUTION F_WD_Time In conjunction with the sync/freeze function, the watchdog-time should be increased.
A more detailed description can be downloaded from http://support.automation.siemens.com/WW/view/en/23646766.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 163
6.4.3.1 Read Parameters
Requirements The PROFIBUS master has been commissioned and is fully operational. PROFIBUS communication between master and slave is operational. The master can read and write data sets in conformance with PROFIBUS DPV1.
Task description Following the occurrence of at least one fault (ZSW1.3 = 1) the first 8 active fault codes must be read from the fault buffer r0947[0] … r0947[7]. The accompanied faults values of the fault code are important for the user. These must be read from parameter r0949 [0] ...r0949[7]. The request is to be handled using a request and response data block.
Procedure
Create a request data block e.g. DB1 to read the parameters
Figure 6-11 Request data block e.g. DB1 to read the parameters
Table 6-31 Parameter request
Request_reference = 0x01 Request_ID = 0x01 Request header Drive_object_ID = 0x00 No_of_parameters = 0x02 Attribute_parameter_01 = 0x10 No_of_elements_01 = 0x08 parameter_number_01 (PNU) = 03B3 (= 947 dec, P0947)
Parameter Address_01
Subindex_01 = 0x00 Attribute_parameter_02 = 0x10 No_of_elements_02 = 0x08 parameter_number_02 (PNU) = 03B5 (= 949 dec, P0949)
Parameter Address_02
Subindex_02 = 0x00

Communication 6.4 Communication via PROFIBUS
Control Units CU240S 164 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Information about the parameter request: Request_reference:
The value is selected at random from the valid value range. The request reference establishes the relationship between request and response.
Request_ID: 0x01 --> This identifier is required for a read request.
Drive_object_ID: 0x00 -> Device-Representative.
No_of_parameters: 0x02 --> Two parameters are read.
Attribute_parameter_01: 0x10 --> The parameter values are read.
No_of_elements_01: 0x08 --> The current fault incident with 8 faults is to be read.
Parameter_number_01: 03B3 --> P0947 (last fault code) is read.
Subindex_01: 0x00 --> Read access starts at index 0
Attribute_parameter_02: 0x10 --> The parameter values are read.
No_of_elements_02: 0x08 --> The current fault incident with 8 faults is to be read.
Parameter_number_02: 03B5 --> P0949 (last fault code) is read.
Subindex_02: 0x00 --> Read access starts at index 0.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 165
Create a response data block e.g. DB2 for the response
Figure 6-12 Response data block e.g. DB2 for the response
Table 6-32 Parameter response
Request_reference mirror = 0x01 Response_ID = 0x01 Response header Drive_object_ID_mirrored = 0x00 No_of_parameters = 0x02 Format_parameter_1 = 0x06 No_of_values_parameter_1 = 0x08 error_code_01 = 0x054B (= 1355 dec, F1355) error_code_02 = 0x0000 …
Parameter Value(s)
error_code_08 = 0x0000 Format_parameter_2 = 0x06 No_of_values_parameter_2 = 0x08 error_value_01 = 0x054B (= 1355 dec, F1355) error_value_02 = 0x00 …
Parameter Value(s)
error_value_08 = 0x00

Communication 6.4 Communication via PROFIBUS
Control Units CU240S 166 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Information about the parameter response: Request_reference_mirror:
This response belongs to the request with request reference 0x01. Response_ID:
0x01 --> Read request positive, values stored as 1st value. Drive_object_ID_mirrored:
The values correspond to the values from the request. No_of_parameters:
The values correspond to the values from the request. Format_parameter_1:
0x06 --> Parameter values are in Unsigned16 format. No_of_values_parameter_1:
0x08 --> 8 parameter values are available. – 1. value … 8. value:
error_codes_01 … error_codes_08
Format_Parameter_2: 0x06 --> Parameter values are in Unsigned16 format.
No. of values_Parameter_2: 0x08 --> 8 parameter values are available. – 1. value … 8. value:
error_values_01 … error_values_08.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 167
For the acyclic communication in OB1 a read/write request must be send to the drive with RD_REC (SFC 59) and WR_REC (SFC 58)
Figure 6-13 Acyclic communication for request and response data block in OB1

Communication 6.4 Communication via PROFIBUS
Control Units CU240S 168 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.4.3.2 Write Parameters
Requirements The PROFIBUS master has been commissioned and is fully operational. PROFIBUS communication between master and slave is operational. The master can read and write data sets in conformance with PROFIBUS DPV1.
Task description (multiple parameter request) The maximum frequency (parameter P1082) shall change from 50 Hz (default value) to 100 Hz.
Procedure
Create a request data block e.g. DB1 to write the parameter
Figure 6-14 Request data block e.g. DB1 to write the parameter
Information about the parameter request: Request_reference:
The value is selected at random from the valid value range. The request reference establishes the relationship between request and response.
Request_ID: 0x02 --> This identifier is required for a write request.
Drive_object_ID: 0x00 -> Device-Representative (for G120 inverters = 0).
No_of_parameters: 0x01 --> One parameter request.

Communication 6.4 Communication via PROFIBUS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 169
Attribute: 0x10 -> The parameter value are to be written.
No_of_elements: 0x01 -> 1 array element is written.
Parameter_number: 043A -> Parameter P1082 (max. frequency); 043A hex = 1082 dec.
Subindex: 0x00 -> ID for the first array element.
Format: 0x43 -> Floating Point data type (refer to the Parameter List).
No_of_values: 0x01 -> One value is written to the parameter in the specified format.
Value: 1.000000e+002 -> maximum frequency 100 Hz.
For the acyclic communication in OB1 a write request must be send to the drive with WR_REC (SFC 58)
Figure 6-15 Acyclic communication in OB1

Communication 6.5 Communication via PROFINET
Control Units CU240S 170 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.5 Communication via PROFINET
General information PROFINET IO is an open Industrial Ethernet standard for a wide range of production and process automation applications. PROFINET IO is based on Industrial Ethernet and observes TCP/IP and IT standards. The following standards ensure open, multi-vendor systems: International standard IEC 61158 PROFINET IO is optimized for high-speed, time-critical data communication at field level.
PROFINET Within the framework of Totally Integrated Automation (TIA), PROFINET represents a consequent enhancement of the following communication systems: PROFIBUS DP
The established field bus Industrial Ethernet
The communication bus for the cell level Experience gained from both systems was and is being integrated into PROFINET. As an Ethernet-based automation standard defined by PROFIBUS International (PROFIBUS user organization), PROFINET is a manufacturer-independent communication and engineering model. SINAMICS G120 with CU240S PN is an IO device in the sense of PROFINET. With CU240S PN, communications is established via PROFINET IO with RT.
Note PROFINET for drive technology is standardized and described in the following document: References: /P5/ PROFIdrive Profile Drive Technology PROFINET System Description, Order no. 6ES7398-8FA10-8BA0, 6ES7151-1AA10-8AA0

Communication 6.5 Communication via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 171
6.5.1 Real-Time (RT) Communication
Real-time communication If supervisors are involved in communication, this can result in excessively long runtimes for the production automation system. When communicating time-critical IO use data, PROFINET therefore uses its own real time channel, rather than TCP/IP.
Definition: Real Time (RT) and determinism Real time means that a system processes external events over a defined period. Determinism means that a system responds in a predictable manner (deterministically). In industrial networks, both of these requirements are important. PROFINET meets these requirements. PROFINET is implemented as a deterministic real time network as follows: Transmission of time-critical data takes place at guaranteed time intervals. To achieve
this, PROFINET provides an optimized communication channel for real time communication: Real Time (RT).
An exact prediction of the time at which the data transfer takes place is possible. Problem-free communication using other standard protocols is guaranteed within the
same network.
6.5.2 Addresses
MAC address Each PROFINET device is assigned a worldwide unique device identifier in the factory. This 6-byte long device identifier is the MAC address. You can see the MAC address with support of commissioning tools as PST, STEP 7 or STARTER. The MAC address is divided up as follows: 3 bytes manufacturer's ID and 3 bytes device identifier (consecutive number). The MAC address is indicated on the rating plate of the Control Unit. The MAC address is stored in the parameter r61002. Example for a MAC address: 08-00-06-6B-80-C0
IP address The IP address is unique within the network. A PROFINET device also requires an IP address to be addressed as a node on Industrial Ethernet. The IP address is made up of 4 decimal numbers with a range of values from 0 through 255. The digit blocks are separated by points, e g. 192.188.1.1. The IP address is made up of the following: The address of the (sub-) network The address of the node (generally called the host or network node)

Communication 6.5 Communication via PROFINET
Control Units CU240S 172 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
IP address assignment The TCP/IP protocol is a prerequisite for establishing a connection and parameterization. This is the reason that an IP address is required. The IP addresses of IO devices can be assigned by the IO controller and have always the same sub-network mask as the IO controller. The IP addresses can be consecutively assigned from the IP address of the IO controller. If the IP address is set by the IO controller, it is saved in a volatile fashion. Furthermore, you can change the IP address manually. In this case, the IP address is saved in non-volatile fashion. If the IP address is to be stored in a non-volatile memory, the address must be assigned using the Primary Setup Tool (PST). This can also be carried out in HW Config in STEP 7, where the function is called "Edit Ethernet node".
Note If the network is part of an existing Ethernet company network, obtain the information from your network administrator (IP address, sub-network mask and a router that is possibly being used.)
Sub-network mask The bits set in the sub-network define the part of the IP address that contains the address of the (sub-) network. The subnet mask provides a filter function for the Ethernet telegrams. The following generally applies: The network address is obtained by an AND operation on the IP address and sub-
network mask The node address is obtained by an AND NOT operation on the IP address and sub-
network mask.
Example of the sub-network mask Sub-network mask: 255.255.0.0 (decimal) = 11111111.11111111.00000000.00000000 (binary) IP address: 140.80.0.2 significance: The first 2 bytes of the IP address decide the sub-network - in other words 140.80. The last two bytes address the node - in other words 0.2.
Default Gateway The default gateway enables communication via an internal server.

Communication 6.5 Communication via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 173
Module ID A drive unit can be represented by a slot model. The slot model of the CU240S PN provides modules and sub-modules. The module-ID is the ID of a slot module or slot sub-module in this model. The module ID has four digits and is assigned by the system. The slot model of the CU240S PN provides two main module ID: Module ID of slot 0, device access point (DAP)
This module ID is used as a representative of the device. This module ID does not provide access to the drive parameters.
Module ID of slot 1, parameter access point (PAP) This module ID provides access to the following: – All drive parameters via the parameter access point – The cyclic data via defined telegrams
Device name At delivery state, an IO device does not have a device name. You assign a device name with the IO supervisor. Then, the IO device can be addressed by an IO controller. The device name is used to transfer of project engineering data (including the IP address) during startup.
Note The device name must be saved in a non-volatile fashion either using the Primary Setup Tool (PST) or using HW Config from STEP 7.
Device-ID Each PROFINET device has a specific device ID that is issued by device manufacturer. The device ID provides replacing an IO device without configuring in STEP 7. The device-ID for SINAMICS G120 indicates the following table:
Vendor ID Device ID
Class of device Device familiy 002A 05 02
(=Siemens AG) (=Drives) (=SINAMICS G120)
Replacing Control Unit CU240S PN (IO Device) If the IP address and device name are stored in a non-volatile memory, this data are also forwarded by the Micro Memory Card (MMC) of the Control Unit. If an IO device must be completely replaced due to a device or sub-module defect, the Control Unit automatically assigns parameters and configures the new device or sub-module. Following this, cyclic exchange of use data is restarted. The MMC allows module exchange without an IO supervisor when a fault occurs in a PROFINET device.

Communication 6.5 Communication via PROFINET
Control Units CU240S 174 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Default router If data needs to be forwarded by means of TCP/IP to a partner located outside the sub-network, this is carried out via the default router. In the properties dialog in STEP 7 (Properties of Ethernet interface > Parameters > Network transfer), the default router is described as the router. STEP 7 assigns the local IP address to the default router.
6.5.3 PROFINET Communication Parameters
PROFINET parameters The following parameters must be set to start-up the PROFINET interface:
Table 6-33 PROFINET parameters
Parameter Content P0700 Selection of command source P0922 Selection of PROFINET standard telegram P0927 Modification source for parameters P1000 Selection of frequency setpoint P2038 Selection of communication profile P2042 Selection of the ident number (native or NAMUR) send to PLC r8850 Process data setpoint source (BICO) P8851 Process data actual values (BICO) P8841 Communication board functions P8840 Process data telegram failure time r61000 PROFINET name of station r61001 PROFINET IP Of Station r61002 PROFINET MAC Of Station r61003 PROFINET Default Gateway Of Station r61004 PROFINET Subnet Mask Of Station r8858 Communication board diagnostics r8859 Fieldbus identification data display
P0700 and P1000 selection of command and setpoint source Command and setpoint source can be quickly selected via P0700 and P1000. r8850 and P8851 BICO Much greater flexibility is afforded by the interconnection of process data using
binectors/connectors. Detailed connection of setpoints and actual values to and from the PROFINET interface
is parameterized in r8850 and P8851. The following table shows the parameters specific to the PROFINET interface relating to
the connection of process data:
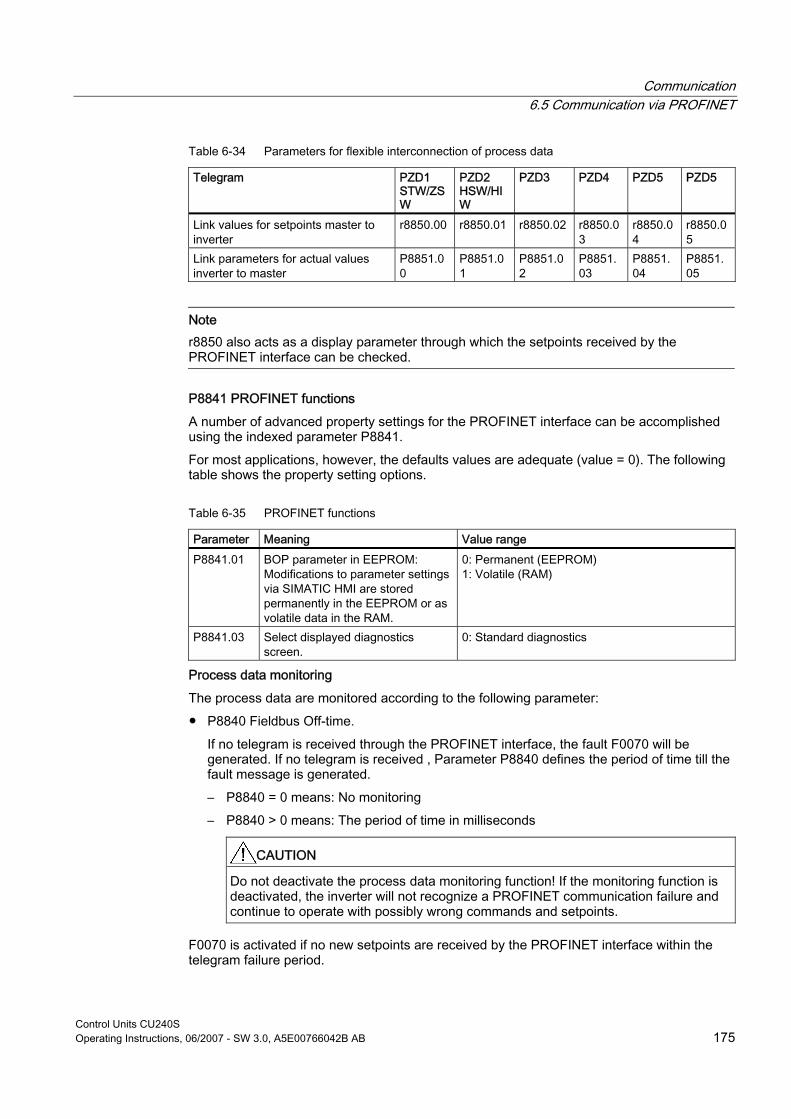
Communication 6.5 Communication via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 175
Table 6-34 Parameters for flexible interconnection of process data
Telegram PZD1 STW/ZSW
PZD2 HSW/HIW
PZD3 PZD4 PZD5 PZD5
Link values for setpoints master to inverter
r8850.00 r8850.01 r8850.02 r8850.03
r8850.04
r8850.05
Link parameters for actual values inverter to master
P8851.00
P8851.01
P8851.02
P8851.03
P8851.04
P8851.05
Note r8850 also acts as a display parameter through which the setpoints received by the PROFINET interface can be checked.
P8841 PROFINET functions A number of advanced property settings for the PROFINET interface can be accomplished using the indexed parameter P8841. For most applications, however, the defaults values are adequate (value = 0). The following table shows the property setting options.
Table 6-35 PROFINET functions
Parameter Meaning Value range P8841.01 BOP parameter in EEPROM:
Modifications to parameter settings via SIMATIC HMI are stored permanently in the EEPROM or as volatile data in the RAM.
0: Permanent (EEPROM) 1: Volatile (RAM)
P8841.03 Select displayed diagnostics screen.
0: Standard diagnostics
Process data monitoring The process data are monitored according to the following parameter: P8840 Fieldbus Off-time.
If no telegram is received through the PROFINET interface, the fault F0070 will be generated. If no telegram is received , Parameter P8840 defines the period of time till the fault message is generated. – P8840 = 0 means: No monitoring – P8840 > 0 means: The period of time in milliseconds
CAUTION
Do not deactivate the process data monitoring function! If the monitoring function is deactivated, the inverter will not recognize a PROFINET communication failure and continue to operate with possibly wrong commands and setpoints.
F0070 is activated if no new setpoints are received by the PROFINET interface within the telegram failure period.

Communication 6.5 Communication via PROFINET
Control Units CU240S 176 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
CAUTION Shutdown on faults can only take place if both monitoring functions are activated!
When the PROFINET interface is in operation, parameter P8840 should also be set to a value of > 0. The process data monitoring function is thus activated/deactivated solely using the PROFIBUS process data monitoring function. The monitoring time then corresponds to the process data monitoring time setting plus the time set in P8840.
Note Process data whose complete control word (PZD1) is set to zero are not transferred from the PROFINET interface to the inverter. Result: Alarm A0703 and possibly fault F0070.
P0927 Modification source for parameters This parameter defines the interface through which parameters can be modified.
Bit Description Index 0 PROFINET 0: No 1: Yes 1 BOP 0: No 1: Yes 2 PC Connection Kit (STARTER) 0: No 1: Yes
The default setting for all bits is 1, i.e. parameters can be modified from all sources.

Communication 6.5 Communication via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 177
6.5.4 Setting RT Communications With GSDML
Prerequisites STEP 7 V5.4, SP1 is installed on the engineering station In HW Config, the following components are disposed:
– One of the following CPUs CPU 315-2 PN/DP with firmware at least 2.5.1 CPU 317-2 PN/DP with firmware at least 2.5.1 CPU 319-3 PN/DP
– A SIMATIC control system with a PROFINET sub-network, e.g. SIMATIC 300 – SINAMICS G120 inverters are available as PROFINET I/O device in the hardware
catalog. If the G120 is not available, the GSDML V2.0 has to be installed. It can be downloaded and installed from the internet under the following link:
http://support.automation.siemens.com/WW/view/de/22339653/133100 Installing the GSDML V2.0 file 1. Save the GSDML V2.0 file on your system and save the path. 2. Choose in the menu "Options > Install GSD File".
A dialog box is displayed. 3. Add the relevant path to the GSDML V2.0 file and confirm with OK.
Procedure To connect the inverter SINAMICS G120 with PROFINET IO, perform the following steps:
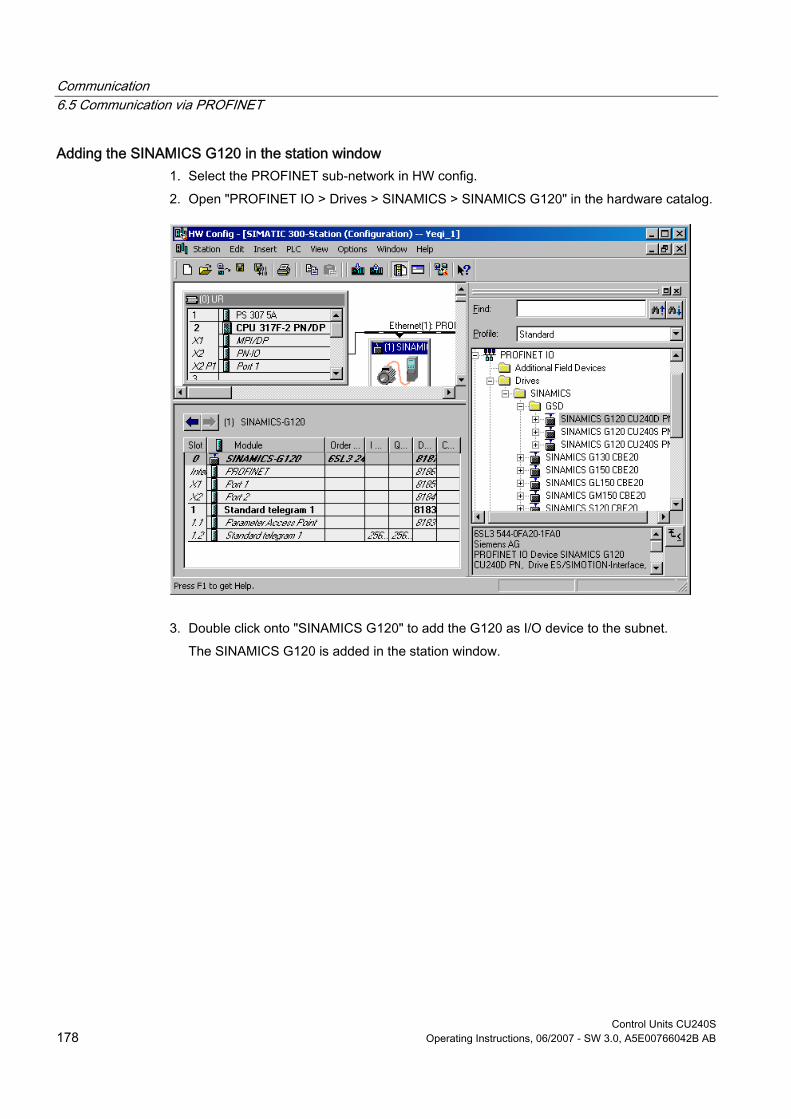
Communication 6.5 Communication via PROFINET
Control Units CU240S 178 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Adding the SINAMICS G120 in the station window 1. Select the PROFINET sub-network in HW config. 2. Open "PROFINET IO > Drives > SINAMICS > SINAMICS G120" in the hardware catalog.
3. Double click onto "SINAMICS G120" to add the G120 as I/O device to the subnet. The SINAMICS G120 is added in the station window.

Communication 6.5 Communication via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 179
Setting the properties of the G120 as PROFINET I/O device 1. Double click SINAMICS G120 in the station window to open the following dialog box:
2. Assign an unique device name or accept the name, the system offers. 3. Assign an unique IP address the ID the systems offers. 4. Confirm your settings with OK. 5. Once all inverters are added to the subnet, save the project and compile

Communication 6.5 Communication via PROFINET
Control Units CU240S 180 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Selecting a telegram 1. Open "PROFINET IO > Drives > SINAMICS > Relevant drive" in the hardware catalog
The list of provided telegrams is displayed. 2. Select the relevant telegram and drag it to the sub-slot in the station window. 3. Double click on the telegram in the station window to open the following dialog:
4. Enter the name of the telegram or accept the name, the systems offers. 5. Confirm your setting with OK.
The system assigns the IO addresses.

Communication 6.5 Communication via PROFINET
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 181
Setting the address of the parameter access point and the cyclic I/O addresses 1. Double click onto the value of the parameter access point (PAP).
A dialog box is displayed 2. Set the address of the PAP in the address tab or accept the address, the systems offers.
This address must correspond with the address that is used for the DS47 parameter transfer.
3. Double click onto the I/O addresses of the cyclic telegram. A dialog box is displayed
4. Set the I/O addresses in the address tab to the appropriated values or accept the values, the systems offers. These addresses must be used in the S7- program for the cyclic data transfer.
See also Download GSDML (http://support.automation.siemens.com/WW/view/en/22339653/133100)

Communication 6.6 Communication via USS
Control Units CU240S 182 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.6 Communication via USS
6.6.1 Universal serial interface (USS)
Data
Parameter range: P2010 … r2037 Warnings: – Faults: F0071, F0072 Function chart number: FP2500, FP2510, FP2600, FP2610
Description Using the Universal Serial Interface (USS) protocol, a user can establish a serial point-to-point data link (RS232 interface) and a serial bus data link between a higher-level master system and several slave systems (RS485 interface). Master systems can be e.g. PLCs (e.g. SIMATIC S7-200) or PCs. The inverters are always the slaves on the bus system. The USS protocol allows the user to implement both automation tasks with cyclical telegram traffic (a fixed telegram length is necessary) as well as visualization tasks. In this case, the protocol with variable telegram length is advantageous, as texts and parameter descriptions can be transferred in one telegram without chopping up the information. With the RS232 interface only direct connections (point-to-point) are possible with cable lengths of 2 m … 5 m typically. This is typically used to commission a drive where the commissioning software (e.g. STARTER) runs on a PC. For this configuration the optional PC Connection Kit is available. With the RS485 interface simple and cheap networks can be constructed. The topology must be that of a line with the first and last devices of the line terminated with termination resistors.
Ω Ω Ω
6620 120
3620
8 5
RS485 connector
Figure 6-16 Termination resistors
Short branches are possible to connect the devices. Up to 31 inverters can be integrated as slaves into a network with a PLC as master.
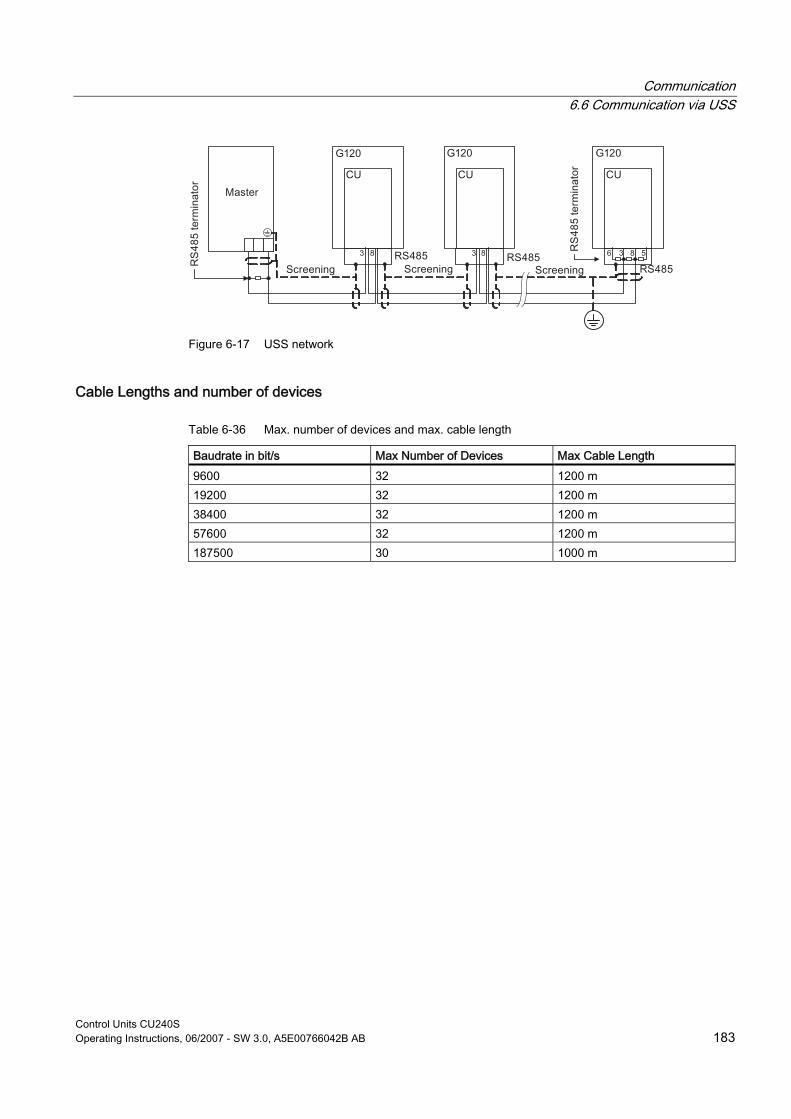
Communication 6.6 Communication via USS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 183
Figure 6-17 USS network
Cable Lengths and number of devices
Table 6-36 Max. number of devices and max. cable length
Baudrate in bit/s Max Number of Devices Max Cable Length 9600 32 1200 m 19200 32 1200 m 38400 32 1200 m 57600 32 1200 m 187500 30 1000 m

Communication 6.6 Communication via USS
Control Units CU240S 184 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.6.2 SUB D connector for RS485 interface
Socket The Control Units CU240S have a 9-pin female sub-D socket for connecting the inverter via an RS485 interface.
Table 6-37 PIN assignment of the 9-pin sub-D socket
Pin Designation Description 1 - Unused 2 - Unused 3 RS485P Receive- and transmit signal (+) 4 - Unused 5 0 V Ground reference 6 - Unused 7 - Unused 8 RS485N Receive- and transmit signal (-) 9 - Unused
X Screen (casing) Potential equilisation
Connector A standard 9 pin sub-D connector can be used for USS connection via RS485.
Table 6-38 Technical data of standard 9-pin sub-D connector for RS485
Standard 9 pin sub D connector PG socket No Max. baud rate 115200 Baud Outgoing cable unit 180°
Bus termination The RS485 termination can be activated via switches on the housing of the SINAMICS G120. The bus termination switch is illustrated in figure "Control Units CU 240S" in section "Layout and Block Diagram".

Communication 6.6 Communication via USS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 185
6.6.3 Structure of a USS Telegram
Description The following figure shows the structure of a typical USS telegram. It consists of a start delay, 4 framing bytes (STX, LGE, ADR and BCC) and the n use data.
STX LGE ADR 1 . 2 . n . BCC : : :
n use data Figure 6-18 Structure of USS telegram
A typical frame consists of: STX 1 Byte LGE 1 Byte ADR 1 Byte BCC 1 Byte PKW 8 Bytes (4 Words: PKE + IND + PWE1 + PWE2) PZD 4 Bytes (2 Words: PZD1 + PZD2) Sum : 16 Bytes
Start Delay The length of the start delay is at least the time of two characters and depends on the baudrate.
Table 6-39 Length of start delay
Baudrate in bit/s Transfer time per character (= 11 bit) Transfer time per bit Min. Start Delay 9600 1.146 ms 104.170 µs > 2.291 ms 19200 0.573 ms 52.084 µs > 1.146 ms 38400 0.286 ms 26.042 µs > 0.573 ms 57600 0.191 ms 17.361 µs > 0.382 ms 187500 0.059 ms 5.340 µs > 0.117 ms
Note: The time between characters must be smaller than the start delay.
STX The STX field is a single byte ASCII STX character (0x02) used to indicate the start of a message.

Communication 6.6 Communication via USS
Control Units CU240S 186 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
LGE The LGE is a single byte field indicating the number of bytes, which follow this in the message. According to the USS specification, the telegram length is variable, and the length must be specified in the 2nd telegram byte (i.e. LGE). Depending on the configuration, fixed telegram lengths can be defined (see description of use data area). Different telegram lengths can be used for different slave nodes on the bus. The maximum total length of a telegram is 256 bytes. The LGE is defined as the use data characters (quantity n), address byte (ADR) and the block check character (BCC). The actual total telegram length will of course be two bytes longer than the LGE as the STX and LGE bytes are not counted in the LGE. Variable length telegrams and fixed length telegrams can both be used. This can be selected using parameters P2012 and P2013 to define the PZD and PKW lengths. Most common fixed length applications will use a 4-word (8-byte) PKW area and a 2-word (4-byte) PZD area giving 12 use data characters. This gives the LGE = 12 + 2 = 14.
ADR The ADR field is a single byte containing the address of the slave node (e.g. inverter). The individual bits in the address byte are addressed as follows:
7 6 5 4 3 2 1 0
Special Mirror Broadcast 5 address bits
Bit 5 is the broadcast bit. If it is set to 1, the message is a broadcast message and will be acted upon by all inverters on the serial link. The node number is not evaluated. The USS protocol specification requires certain settings in the PKW area, refer to the later example on using USS broadcast mode. Bit 6 = 1 indicates a mirror telegram. The node number is evaluated and the addressed slave returns the telegram unchanged to the master. Bit 5 = 0 and bit 6 = 0 and bit 7 = 0 means normal data exchange for units. The node number (bit 0 … bit 4) is evaluated.
BCC BCC means block check character. It is an exclusive OR (XOR) checksum over all telegram bytes except the BCC itself.

Communication 6.6 Communication via USS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 187
6.6.4 Use data area of USS telegram
Basic USS parameters General rule: Index[0] for USS on RS485, Index[1] for USS on RS232.
P2010 USS Baudrate [2400 … 115200] baud P2011 USS Slave Address: [0 … 30] P2012 USS PZD Length: [0 … 2 … 8] words P2013 USS parameter channel length: [0, 3 (3 words), 4 (4 words), 127 (variable
length)] P2014 USS Telegram Off-Time: [0 … 65535] ms. ‘0’ = no timeout check! R2015 Received PZD via USS on RS232 P2016 BICO Selection for PZDs to be sent via USS on RS232 R2018 Received PZD via USS on RS485 P2019 BICO Selection for PZDs to be sent via USS on RS485 r2032 Control Word 1 from USS on RS232 r2033 Control Word 2 from USS on RS232 r2034 Control Word 1 from USS on RS485 r2035 Control Word 2 from USS on RS485
Use data structure The use data area of the USS protocol is used for transferring the application data, which are the parameter channel and process data (PZD). The application data occupies the bytes within the USS frame (STX, LGE, ADR, BCC). The size of the application data can be configured by parameters p2013 and p2012. The following figure shows the structure and order for the parameter channel and process data (PZD).
Figure 6-19 USS Application Data

Communication 6.6 Communication via USS
Control Units CU240S 188 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
The length of the parameter channel is determined by parameter P2013, that for the process data by parameter P2012. If either no parameter channel or no PZD is required, the corresponding parameters can be set to zero ("PKW only" or "PZD only" respectively). It is not possible to transmit "PKW only" and "PZD only" alternatively. If both channels are required they must be transferred together.
6.6.5 USS Parameter Channel
Parameter channel The USS protocol defines for the inverters, the use data structure with which a master can access the inverter slaves. The parameter channel can be used to monitor and/or change any parameter in the inverter. For detailed information, refer the section "Data Structure of the Parameter Channel".
Figure 6-20 Structure of the parameter channel in the telegram structure
Parameter value (PWE) For acyclic communication via USS, the number of PWEs can vary. For 16 bit values one PWE is required. If 32 bit values are exchanged, two PWEs are required.
Note Data types U8 will be transferred as U16 with the upper byte zero. Arrays of U8 will therefore require one PWE per index.
A parameter channel for 3 words is a typical data frame for exchanging 16 bit data or alarm messages. The mode with a fixed word length of 3 is used with p2013 = 3. A parameter channel for 4 words is a typical data frame for exchanging 32 bit data variables and requires p2013 = 4. A parameter channel for a flexible word length is used with p2013 = 127. The length for telegrams between master and slave can have a different number of PWEs. If the length of the parameter channel is fixed (p2013 = 3 or 4), then the Master must always correctly send either 3 or 4 words in the parameter channel. Otherwise, the slave will not respond to the telegram. The slave response will be either 3 or 4 words as well. If a fixed length is used, this should be 4, as 3 would not be sufficient to support many of the parameters (i.e. double words). For variable length of the parameter channel (p2013 = 127) the master sends only the necessary number of words for the task in the parameter channel. The length of the response telegram will also only be as long as necessary.

Communication 6.6 Communication via USS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 189
6.6.6 Timeouts and other errors
Telegram Timeouts For the timeout monitoring, the character run time is important:
Table 6-40 Character run time
Baudrate in bit/s Transfer time per character (= 11 bit) Transfer time per bit Character run time 9600 1.146 ms 104.170 us 1.146 ms 19200 0.573 ms 52.084 us 0.573 ms 38400 0.286 ms 26.042 us 0.286 ms 187500 0.059 ms 5.340 us 0.059 ms
The following figure shows the meaning of the "residual run time":
: : :
: : :
Residual run time(compressed telegram)
50 % of the compressed
Figure 6-21 Residual Run Time and Character Delay Time
The character delay time can be zero and must be smaller than the start delay! The following figure shows the various delays and transmission times:
: : :
: : :
: : :
: : :
Figure 6-22 Start Delay and Response Delay

Communication 6.6 Communication via USS
Control Units CU240S 190 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Character delay time timeout between characters and must be smaller than 2 time the character run time but can be zero
Start delay timeout between USS messages. Must be > 2 * character run time Response delay Processing time of the slave. Must be < 20 ms, but larger than the
start delay! Residual run time < 1.5 * (n + 3) * character run time (where n = number of data bytes) "Slave Transmitting"/ "Master Transmitting"
is the sum of "Start delay", "Response delay" and "Residual run time"
The master must check the following times:
• "Response delay" = reaction time of slave to USS request • "Residual run time" = transmission time of response telegram sent by slave
The slave must check the following times:
• "Start delay" = timeout between USS messages • "Residual run time" = transmission time of request telegram coming from master
: : :
: : :
: : :
Figure 6-23 Timeout Checks on USS Slave
The timeout margins that are verified on the USS slave are shown in the figure above. "crt" stands for "character run time". The factor "1.5" is the maximum margin. The "start delay" and the minimum "response delay" are fixed minimum values in software. The "residual run times" are monitoring values that cause a timeout if they are exceeded by the character reception.
Communication 6.6 Communication via USS
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 191
Process Timeouts Parameter P2014 determines the timeout in ms. A value of zero disables the timeout check. Parameter P2014 checks the cyclic refresh of Bit10 in control word 1. When USS is configured as command source of the drive and P2014 is not zero, Bit10 of the received control word 1 is examined. If the bit is not set, an internal timeout counter is incremented. If the threshold of p2014 is reached, a process timeout fault is set by the drive.
Other errors P2025 = USS rejected P2026 = USS character frame error P2027 = USS overrun error P2028 = USS parity error P2029 = USS start not identified P2030 = USS BCC error P2031 = USS length error
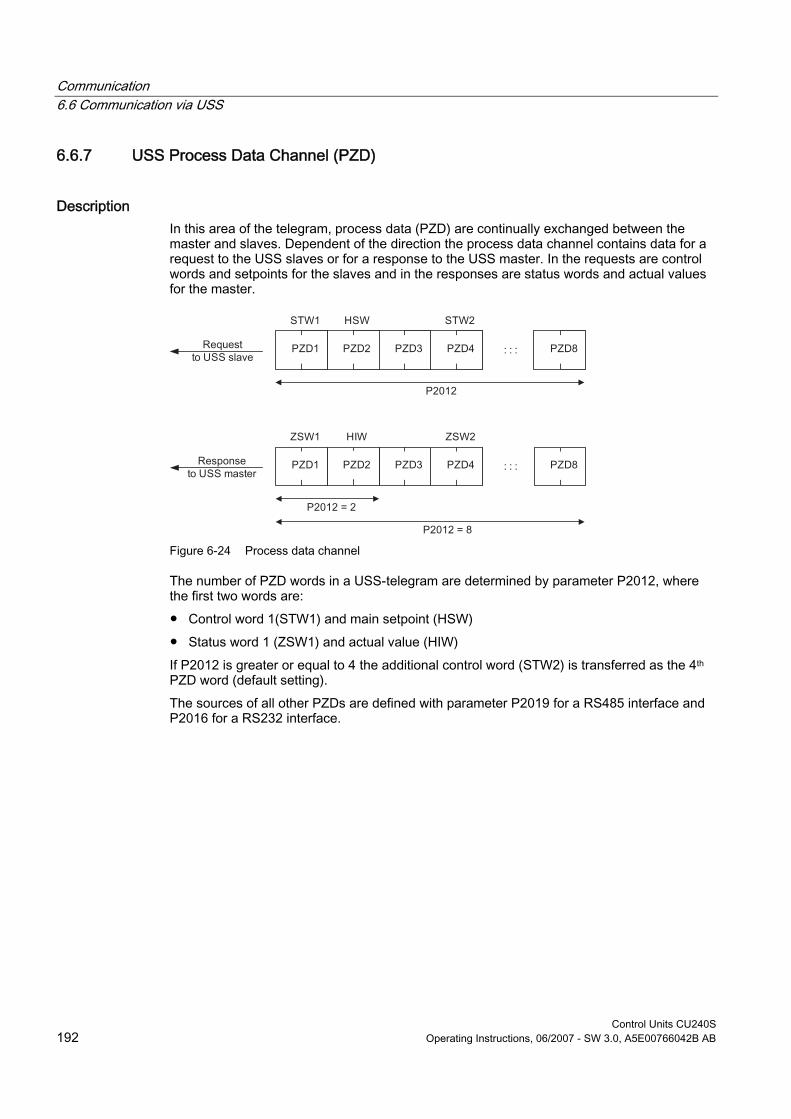
Communication 6.6 Communication via USS
Control Units CU240S 192 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
6.6.7 USS Process Data Channel (PZD)
Description In this area of the telegram, process data (PZD) are continually exchanged between the master and slaves. Dependent of the direction the process data channel contains data for a request to the USS slaves or for a response to the USS master. In the requests are control words and setpoints for the slaves and in the responses are status words and actual values for the master.
Figure 6-24 Process data channel
The number of PZD words in a USS-telegram are determined by parameter P2012, where the first two words are: Control word 1(STW1) and main setpoint (HSW) Status word 1 (ZSW1) and actual value (HIW) If P2012 is greater or equal to 4 the additional control word (STW2) is transferred as the 4th PZD word (default setting). The sources of all other PZDs are defined with parameter P2019 for a RS485 interface and P2016 for a RS232 interface.

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 193
Operation 77.1 ON/OFF commands
OFF functions of SINAMICS G120 The G120 inverter provides the following OFF functions: ON / OFF (ON/OFF1) Coast stop (OFF2) Quick stop (OFF3)
Description ON / OFF (ON/OFF1) The ON/OFF1 function is a closely coupled command. When the ON command is withdrawn, then OFF1 is directly activated. Frequency setpoint = 0
The inverter ramps down to standstill in the period of time set in P1121. If parameterized, the motor holding brake is closed (P1215) when zero speed is detected.
When the brake application time (P1217) expires, the pulses are suppressed. Zero speed is detected, if one of the following events occur: – The actual speed drops below the threshold (P1226). – The monitoring time (P1227), started when the speed setpoint ≤ speed threshold
(P1226), has expired. Coast stop (OFF2) Instantaneous pulse suppression, the drive coasts to a standstill. If parameterized, the motor holding brake is closed immediately. Power-on inhibit is activated.
Before restarting, an OFF2 must be confirmed, e. g. via the OFF key on the BOP(2 times short or longer than 2 s). For certain applications, it is useful to link the confirmation of an OFF2 or an OFF3 to the ON/OFF function.
Note If after a period of time, set in P1227, an OFF1 or an OFF3 has been unable to ramp down the motor to switch-off frequency (P2167), the system forces an immediate OFF2.

Operation 7.1 ON/OFF commands
Control Units CU240S 194 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Quick stop (OFF3) Frequency setpoint = 0 The inverter ramps down to standstill in the period of time set in P1135. If parameterized, the motor holding brake is closed, when zero speed is detected. When
the brake application time (P1217) expires, the pulses are suppressed. Zero speed is detected, if one of the following events occur: – The actual speed drops below the threshold (P1226). – The monitoring time (P1227), started when the speed setpoint ≤ speed threshold
(P1226), has expired. Power-on inhibit is activated.
DANGER
During power off, hazardous loads must be secured by a motor holding brake. To avoid severe personal injury and property damage, make sure, that a motor holding brake is established in the drive system. Use SINAMICS G120 brake sequence control (P1215, P0346, P1216, P1217, P1080) to control the motor holding brake during power off.
Sources for ON/OFF command For standard Control Units (CU240S), the command source for ON/OFF is the digital input 0. For PROFINET or PROFIBUS Control Units, the communication interface is used as command source for ON/OFF The ON/OFF command can be given via the following components: Digital inputs BOP STARTER A higher-leveled control system
ON/OFF command via DI/DO Via DI/DO terminals, you can establish and parameterize a switch for the desired ON/OFF functions in a drive system. The ON/OFF functions require a permanent signal.
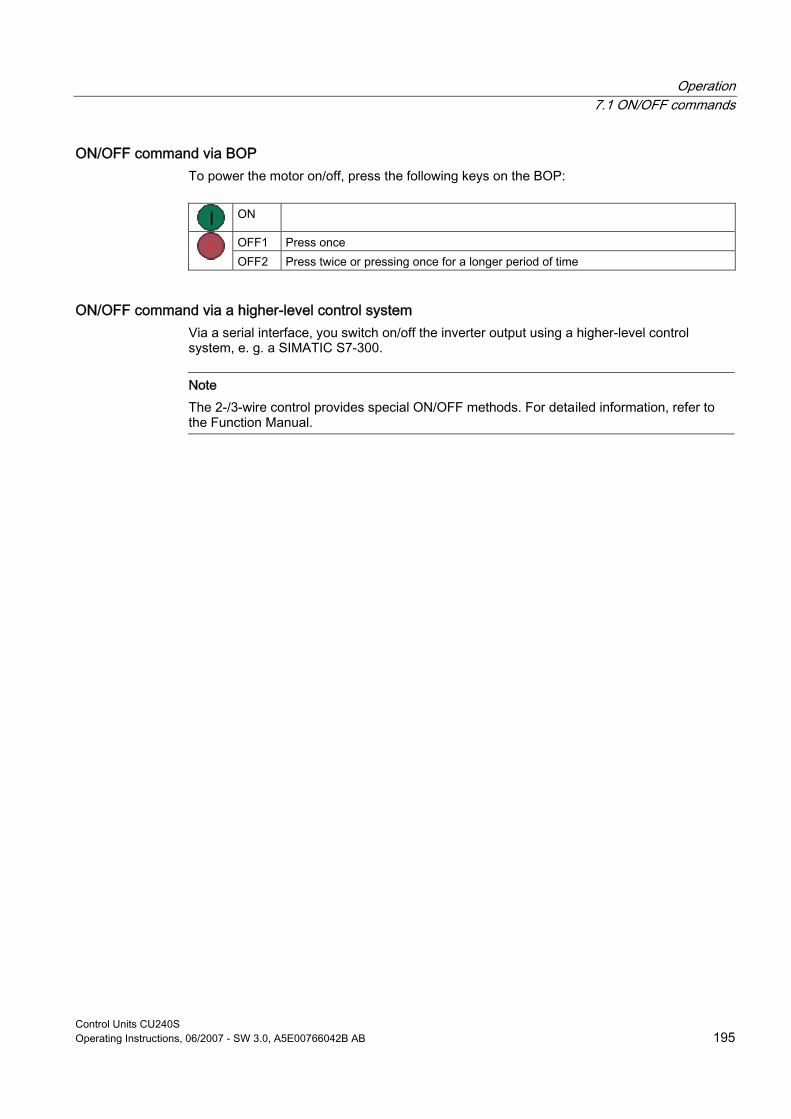
Operation 7.1 ON/OFF commands
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 195
ON/OFF command via BOP To power the motor on/off, press the following keys on the BOP:
ON
OFF1 Press once
OFF2 Press twice or pressing once for a longer period of time
ON/OFF command via a higher-level control system Via a serial interface, you switch on/off the inverter output using a higher-level control system, e. g. a SIMATIC S7-300.
Note The 2-/3-wire control provides special ON/OFF methods. For detailed information, refer to the Function Manual.

Operation 7.2 Operation States Displayed via LED
Control Units CU240S 196 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
7.2 Operation States Displayed via LED
7.2.1 LED Display
Status display The SINAMICS G120 provides LEDs to show the operating states for standard or fail-safe inverters.
Figure 7-1 State LED on the CU240S, CU240S DP, CU240S DP-F, CU240S PN

Operation 7.2 Operation States Displayed via LED
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 197
LEDs on Standard CUs (CU240S) System-Fault LED (SF)
– ON: A general system error either software or hardware related is indicated. – Flashing: Download from MMC runs
Ready LED (RDY) – ON: The inverter is ready to run or running. – Flashing: Commissioning or download from MMC runs
LEDs on PROFIBUS CUs (CU240S DP, CU240S DP-F) The following LEDs are additional to the LEDs of a CU240S: Bus-Failure LEDs (BF)
– ON: Bus failure, no connection to the DP-Master (searching for baud rate) A bus failure is defined as signaling problem on the bus itself. Faults according to the inner data structure of the transmitted communication frames (e.g. CRC check of PROFIsafe telegram) are not denoted as bus failure. Such failures are indicated by the SF LED.
– Flashing: I/O device is not configured or is wrongly configured (baud rate found, no data exchange).
LEDs on Fail-safe PROFIBUS CUs (CU240S DP-F) The following LED are additional to the LED of a CU240S DP: End-state LED (ES)
– ON: The end state of a triggered fail-safe function (flashing LED) has been reached. – Flashing: Safety commissioning or download from MMC runs
Safe Torque Off LED (STO) ; Safe Stop 1 LED (SS1) ; Safely-Limited Speed LED (SLS) – ON: Function parameterized, – Flashing: Activated or – All Safety LEDs are flashing: Safety commissioning or download from MMC runs – Flashing and LED ES ON: End state reached
For details refer to fail-safe functions in the Function Manual.

Operation 7.2 Operation States Displayed via LED
Control Units CU240S 198 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
PROFINET LED (CU240S PN The following LEDs are additional to the LEDs of a CU240S: Link-established LED (LNK)
The link-established LED indicates the following states: – ON: Link established – OFF: No link established
RX/TX LED (ACT) The RX/TX LED indicates the following states: – ON: Data transfer – OFF: No data tansfer – A general overview about the LED indications is given
CU states displayed via LED CU240S Prio SF RDY Commissioning 1 Firmware update from MMC / parameter download 1 General faults 1 Ready 3
CU240S DP Prio SF RDY BF Commissioning 1 / / Firmware update from MMC / parameter download 1 / / General faults 3 / / Bus failure (no data) 3 / / Bus failure (search baud rate) 3 / / Ready 4 / /
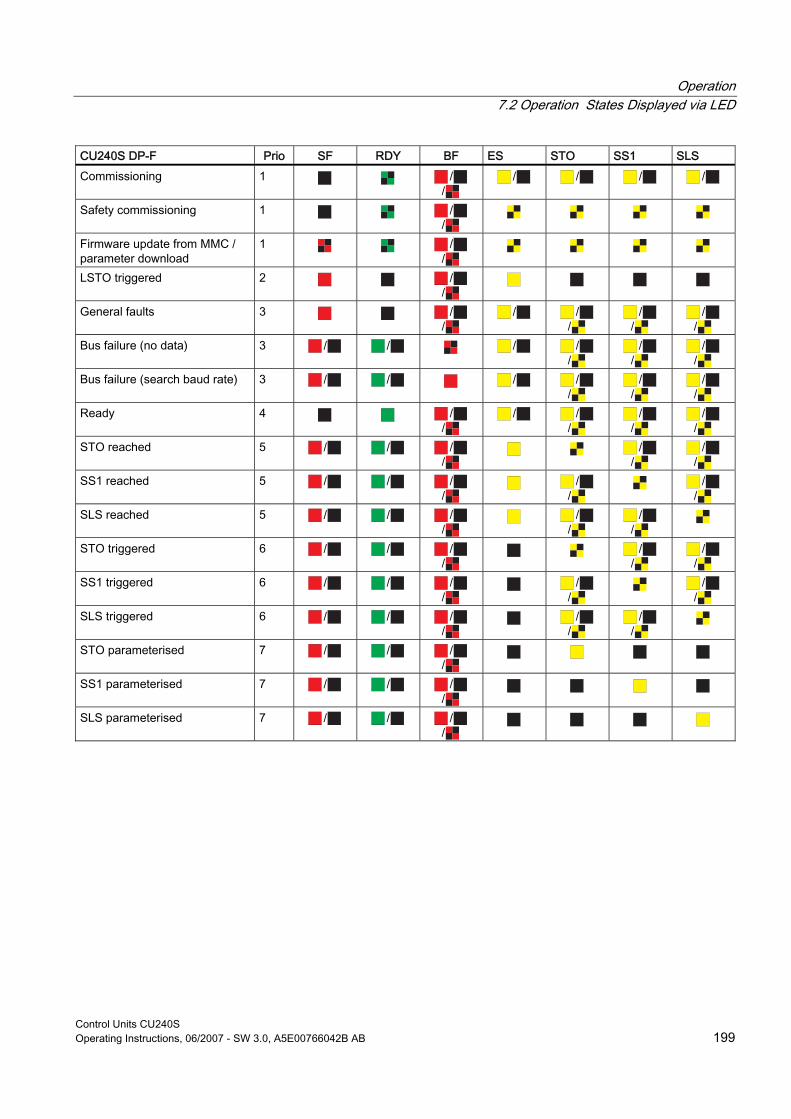
Operation 7.2 Operation States Displayed via LED
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 199
CU240S DP-F Prio SF RDY BF ES STO SS1 SLS Commissioning 1 /
/ / / / /
Safety commissioning 1 //
Firmware update from MMC / parameter download
1 //
LSTO triggered 2 //
General faults 3 //
/ //
//
//
Bus failure (no data) 3 / / / //
//
//
Bus failure (search baud rate) 3 / / / //
//
//
Ready 4 //
/ //
//
//
STO reached 5 / / //
//
//
SS1 reached 5 / / //
//
//
SLS reached 5 / / //
//
//
STO triggered 6 / / //
//
//
SS1 triggered 6 / / //
//
//
SLS triggered 6 / / //
//
//
STO parameterised 7 / / //
SS1 parameterised 7 / / //
SLS parameterised 7 / / //

Operation 7.2 Operation States Displayed via LED
Control Units CU240S 200 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
CU240S PN Prio SF RDY BF LNK ACT Commissioning 1 / / / / Firmware update from MMC / parameter download
1 / / / /
General faults 3 / / / / Bus failure (no data) 3 / / / Bus failure (search baud rate) 3 / / PROFIsafe failure 3 / / / / Link established 3 / / / No link established 3 / / Data receive / transfer 3 / / Ready 4 / / / /

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 201
Troubleshooting 88.1 Faults and Alarms
Description The inverter indicates unfavourable states as faults and alarms. Alarms
Alarms are not displayed via the LEDs on the Control Unit. Alarms require no acknowledgement and cause no systems reaction. The alarm number is displayed on STARTER or a higher-level control system.
Faults Faults indicate a severe unfavourable state. If a fault occurs, the inverter powers off and the LED "SF" on the Control Unit is active. The fault number is displayed on BOP, STARTER or a higher-level control system. You cannot restart the inverter not until the fault is remedied. After remedy the fault requires an acknowledgement.
Note For detailed descriptions of the faults and alarms, refer to the Parameter Manual
Parameterizing faults and alarms
Faults For fault handling, regard the following parameters: Stored in parameter r0947 under their code number, e. g. F0003 = 3 Associated error value stored in parameter r0949 (0 = no error value) Time stamp of the fault stored in r0948 and can be read out Number of fault messages (P0952) is stored in r0947 and can be read out
Troubleshooting
Control Units CU240S 202 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Alarms For alarm handling, regard the following parameter: Stored in parameter r2110 under their code number and can be read out, e. g. A0503 =
503. The value 0 indicates, that no warning is applied. Via the index, you have access to the two actual alarms and the last two historical alarms.
Display Faults and alarms are displayed on the following components: BOP
The status display of the BOP indicates the occurring faults and alarms. If several messages arise, the display scrolls constantly through all active faults.
STARTER The detail view in the alarms tab displays information, faults and alarms in the table. In th.e field "messages" the fault or information/alarm text is displayed in plain text.
A higher-level control system. For detailed information, refer the respective manual of the control system.
General acknowledgement of faults To reset the fault code, one of the following methods can be used: Power cycle the inverter.
(Switch OFF/ON the main supply voltage and the external 24 V supply for the Control Unit.)
Press the key FN on the BOP. Activate the default setting of DI 2. Set bit 7 in control word 1 (r0054).
Special acknowledgement of faults The following faults messages can only be acknowledged by a power cycle: F00051 Parameter EEPROM fault F00052 Power stack fault F00061 Automatic Download, MMC is not fitted F00062 Automatic Download, MMC contents invalid F00063 Automatic Download. MMC contents incompatible F00064 Drive attempted to do an Automatic Download during startup F01601 System startup error
Note The drive cannot resume operation until all active faults have been acknowledged. Clearing F00395 is described in the section "Message F00395" of this manual.

Troubleshooting
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 203
8.2 Diagnostics Display
Overview The G120 inverter provides the following types of diagnostic display: LEDs on the Control Unit
A detailed overview on the LED states is given in section "Operation States displayed via LED" in this manual.
Alarm and fault numbers You use the alarm and fault numbers for troubleshooting via BOP and STARTER. For details for troubleshooting with STARTER, refer to the respective online help.
Diagnostic parameters For troubleshooting via a higher-level control system

Troubleshooting
Control Units CU240S 204 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
8.3 Troubleshooting with the BOP
Diagnostics using alarm and fault numbers The BOP must be fitted to the Control Unit. If an alarm or fault condition occurs, the BOP displays appropriate alarm or fault number. If an alarm occurs the alarm number will be displayed and the inverter will continue to run, although it is possible that it may run in an unexpected manner depending upon the alarm condition. If a fault occurs, the fault number will be displayed and the inverter will be stopped. If a line supply failure interrupts commissioning, then inconsistencies can occur regarding the parameterization. In this case, it is important that the commissioning is re-started with a factory reset to establish the original factory settings.
Table 8-1 Alarm and fault numbers, cause and remedy
Alarm Number
Meaning
Cause The parameter or configuring settings by the PROFIBUS master are invalid. A0700 Remedy Correct the PROFIBUS configuration Cause The link to the PROFIBUS is interrupted. A0702 Remedy Check connector, cable and PROFIBUS master. Cause No setpoints or invalid setpoints (control word = 0) are being received from the
PROFIBUS master. A0703
Remedy Check setpoints from the PROFIBUS master. Switch SIMATIC CPU to "RUN". Cause At least one configured internode transmitter is not yet active, or has failed. A0704 Remedy Activate internode transmitter. Cause No actual values received from inverter. A0705 Remedy None (fault is with the inverter). Cause PROFIBUS DP software error. A0706 Remedy None diagnostic parameter r2041. Cause Inverter has detected failure of PROFIBUS communications link. A0710 Remedy Communication interface on Control Unit may be broken. Cause Invalid value of PROFIBUS parameter. A0711 Remedy Check P0918 address and P2041. Cause No communication via PROFIBUS. Triggered by A0702, A0703 and A0704.
The telegram failure time set in P2040 has run out. Details see section "Faults and Alarms" in the Parameter List.
F0070
Remedy Check connection of the communication devices and ensure that a valid control word is being used.

Troubleshooting
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 205
Motor failure without fault or warning message If the motor fails to start when the ON command has been given: Check that P0010 = 0. Check the inverter state via r0052. Check command and setpoint source (P0700 and P1000). Check, if the motor data relate to the inverter data power range and voltage.
Note For troubleshooting, pay regard to the "Installation Check List" in the chapter "Installation" of this manual.

Troubleshooting
Control Units CU240S 206 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
8.4 Troubleshooting via the Control System
Diagnostics using diagnostic parameters The following diagnostic parameters are set via a higher-level control system. This function is provided by Control Units, which communicate via PROFINET or PROFIBUS.
Identification of the communications components The read-only parameter r2053 shows the information by which the various firmware components of the PROFIBUS DP interface can be identified.
Table 8-2 Identification of communications firmware
Parameter Meaning 0: Inverter cannot identify the communications interface 1: PROFIBUS DP detected 2: Not assigned
r2053.00
56: Undefined communications error r2053.01 Firmware version r2053.02 Constant "0" r2053.03 Firmware date (year) r2053.04 Firmware date (day and month)
Standard diagnostics When the parameter P2041.03 = 0, then by using the read-only parameter r2054 and it’s indices, it is possible to obtain detailed diagnostic information regarding the PROFIBUS DP interface. This information is listed in the table below.
Table 8-3 Standard diagnostics
Parameter Meaning PROFIBUS DP status: 0: Off 1: Baud rate search 2: Baud rate found 3: Cyclical data exchange
r2054.00
(> 100: other diagnostic screen active) r2054.02 Number of acyclical links with class 2 master (PC, BOP): 0 … 2 r2054.03 Error number of last unsuccessful parameter access operation through an acyclical
link. r2054.04 Parameter number of last unsuccessful parameter access operation r2054.05 Sub-index of last unsuccessful parameter access operation
When parameter accessing errors occur, r2054.03 display the appropriate error number, these are listed in table below.

Troubleshooting
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 207
Table 8-4 Parameter accessing error numbers
Number Cause Remedy 0 … 199: Parameter access has been converted to a parameter channel request. Error
detected in the inverter. Additional information is in r2054.05 and r2054.06: Parameter number, index word
0 Parameter number does not exist Check data block number 1 Parameter number cannot be modified -- 2 Minimum/maximum not reached or exceeded -- 3 Sub-index does not exist Check data block offset 4 Access of single value with array identifier Set data block offset = 0 5 Access to word with double word request or vice
versa Use correct data type (e.g. INT for word, DINT for double word)
6 Setting not allowed (resetting only) -- 7 Descriptive element cannot be modified -- 11 No status as master control -- 12 Key word missing -- 17 Request cannot be processed due to operating
state --
101 Parameter number currently deactivated -- 102 Channel not wide enough -- 104 Illegal parameter value -- 106 Request not implemented -- 200/201 Modified minimum or maximum not reached or
exceeded. Minimum or maximum can be further limited in operation
240 … 249: Parameter access is incorrectly formatted. Error detected on the PROFIBUS DP. Additional information in r2054.05 and r2054.06: Parameter number or S7 data block number, sub-index or S7 data block offset.
240 Error in variable address (no additional information)
Legal: "Data block" area
241 Data block number illegally formatted Legal: 1 … 31999 242 Data block offset illegally formatted Legal: 0 … 116 243 Illegal "type" Legal: CHAR, BITE, INT,
WORD, INT, DWORD, REAL 244 Illegal "Number of elements" on accessing
parameter value Legal: Effectively 2 or 4 bytes
248 Illegal text/description modification -- 249 Inconsistency in write request: "Type" and
"Number of elements" does not match "Data type" and "Data length"
Error in communication device
250: Parameter access has been converted to a parameter channel request. Response from inverter is seen as incorrect. Error detected on the PROFIBUS DP. Additional information can be seen in r2054.05 and r2054.06.
250 Parameter channel response does not match request
Error in the inverter
251: Error detected on the PROFIBUS DP; no additional information 251 Response too long for response telegram Error in communication device

Troubleshooting
Control Units CU240S 208 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 209
Service and maintenance 9A&D Technical support
24-hour technical support is provided by four main centres worldwide.
A&D Global service and support
Europe/Africa (Erlangen) Tel: +49 (180) 5050 222 Fax: +49 (180) 5050 223 Email: [email protected]
America (Johnson City) Tel: +1 (423) 262 2552 Fax: +1 (423) 262 2589 Email: [email protected]
Asia/Pacific (Beijing) Tel: +86 (1064) 757 575 Fax: +86 (1064) 747 474 Email: [email protected]

Service and maintenance
Control Units CU240S 210 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
China (Beijing) Tel: +86 (1064) 71 9990 Fax: +86 (1064) 71 9991 Email: [email protected]
Online Service and support Comprehensive information and support tools are available from the Service and Support internet site at: http://support.automation.siemens.com
Contact address Should any questions or problems arise while reading this manual, please contact Siemens at the following address: Siemens AG Automation & Drives A&D SD SPA PM4 Postfach 3269 D-91050 Erlangen Germany Email: [email protected]
Regional contacts For questions regarding services, prices and conditions of technical support, please contact your local Siemens partner.

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 211
Technical data 10SINAMICS G120 Control Unit 240 (CU240)
Table 10-1 CU240 Performance ratings
Feature Specification Operating voltage 24 V DC from Power Module or External 24 V DC (20.4 V … 28.8 V,
0.5 A) supply using the control terminals 31 and 32 Control method (CU type dependent)
V/f control, output frequency between 0 Hz and 650 Hz: Linear V/f control, Linear V/f control with FCC, Parabolic V/f control, Multi-point V/f control, V/f control for textile applications, V/f control with FCC for textile applications, V/f control with independent voltage setpoint, Vector control, output frequency between 0 Hz and 200 Hz: Sensorless Vector Control, Sensorless Vector Torque Control, Speed control with Encoder feedback, Torque control with Encoder feedback.
PFH (only CU240S DP-F)
PFH (probabillity of failures per hour) value = 1 * 10-7
Fixed frequencies 16 programmable Skip frequencies 4 programmable Setpoint resolution 0.01 Hz digital; 0.01 Hz serial; 10 bit analog
(motor potentiometer 0.1 Hz [0.1 % in PID mode]) Digital inputs (CU type dependent)
Up to 9 programmable digital inputs, isolated; PNP, SIMATIC-compatible, low < 5 V, high > 10 V, maximum input voltage 30 V
Analog inputs (CU type dependent)
Up to 2 programmable, both can be configured as additional digital inputs.0 V … 10 V, 0 mA … 20 mA and -10 V … +10 V (AI0) 0 V … 10 V and 0 mA … 20 mA (AI1)
Relay outputs 3 programmable, 30 V DC / 0 A …0.5 A (resistive) Analog outputs 2 programmable
AO0: 0 V … 10 V & 0 mA … 20 mA, AO1: 0 mA … 20 mA Dimensions (BxHxD) 73 mm x 178 mm x 55 mm Weight 0.52 kg


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 213
Spare parts/Accessories 1111.1 Basic Operation Panel
Basic Operator Panel (BOP) The BOP is a parameterization tool that is fitted directly to the SINAMICS G120 inverter via the option port. It can also be used for up and download of parameter sets. For a detailed description refer to chapter "Commissioning with the BOP".

Appendix A.1 Electromagnetic Compatibility
Control Units CU240S 214 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
11.2 PC Connection Kit
PC Connection Kit The PC Connection Kit is used to connect a PC, with STARTER software, to the inverter via the Option Port. It consists of a 9-pin sub-D socket, a null modem cable (3 m) and a PC inverter connector module. So it is possible to provide the followoing operations To parameterize the inverter (Commissioning, optimizing) To monitor the inverter (Diagnosis) To control the inverter (For the purpose of testing, STARTER has the priority to control)
Figure 11-1 PC-Connection-Kit

Appendix A.1 Electromagnetic Compatibility
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 215
11.3 Micro Memory Card (MMC)
Micro Memory Card (MMC) The MMC is used to safe parameters from a Control Unit. Thus saved parameter set can be transferred to another Control Unit. In the case of service, the drive system is immediately ready for use, e. g. after swapping an inverter. The MMC stores up to 100 parameter sets and supports series commissioning without using additional commissioning tools as BOP or STARTER. The commissioning of MMC depends on user settings (Parameter p8458)
Note The inverter can be operated with or without MMC plugged in.
Figure 11-2 MMC

Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 217
Appendix AA.1 Electromagnetic Compatibility
Electromagnetic compatibility All manufacturers/assemblers of electrical apparatus which "performs a complete intrinsic function and is placed on the market as a single unit intended for the end user" must comply with the EMC directive EC/89/336. There are three routes for the manufacturer/assembler to demonstrate compliance:
Self-certification This is a manufacturer's declaration that the European standards applicable to the electrical environment for which the apparatus is intended have been met. Only standards that have been officially published in the Official Journal of the European Community can be cited in the manufacturer's declaration.
Technical construction file A technical construction file can be prepared for the apparatus describing its EMC characteristics. This file must be approved by a ‘Competent Body’ appointed by the appropriate European government organization. This approach allows the use of standards that are still in preparation.
EMC Standards The SINAMICS G120 drives have been tested in accordance with the EMC Product Standard EN 61800-3:2004.

Appendix A.2 Definition of the EMC Environment and Categories
Control Units CU240S 218 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
A.2 Definition of the EMC Environment and Categories
Classification of EMC performance The EMC environment and categories are defined within the EMC Product Standard EN 61800-3, as follows:
First Environment An environment that includes domestic premises and establishments that are connected directly to a public low-voltage power supply network without the use of an intermediate transformer.
Note For example: houses, apartments, commercial premises or offices in a residential building.
Second Environment An environment that includes industrial premises and establishments that are not connected directly to a public low-voltage power supply network.
Note For example: industrial and technical areas of buildings fed from a dedicated transformer.
Category C1 Power Drive System (PDS) of rated voltage less than 1000 V intended for use in the First (Domestic) Environment.
Category C2 Power Drive System (PDS) of rated voltage less than 1000 V, which is neither a plug in device nor a movable device, and when used in the First (Domestic) Environment, is only intended to be installed and commissioned by a professional.
Note A professional is a person or an organization having necessary skills in installing and/or commissioning a Power Drive System (PDS), including their EMC aspects.

Appendix A.3 EMC Overall Performance
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 219
A.3 EMC Overall Performance
EMC Emissions The SINAMICS G120 drives have been tested in accordance with the emission requirements of the category C2 (domestic) environment.
Table A-1 Conducted & Radiated Emissions
EMC Phenomenon Standard Level Conducted Emissions EN 55011 Class A Radiated Emissions EN 55011 Class A
Note To achieve this performance the default switching frequency should not be exceeded. In order to achieve conducted emissions to EN 55011 Class B there is a range of PM240 external filter options available.
Achieving radiated emissions to EN 55011 Class B is largely dependent on the drive being correctly installed inside a metallic enclosure. The limits will not be met if the drive is not enclosed or installed in accordance with good EMC practices.
Harmonic Currents The harmonic current emissions from the SINAMICS G120 drives is as follows:
Table A-2 Harmonic Currents
Rating Typical Harmonic Current (% of rated input current) 5th 7th 11th 13th 17th 19th 23rd 25th FSA … FSF (400 V, 370 W … 90 kW)
73 52 25 23 22 15 12 10
Note Units installed within the category C2 (domestic) environment require connection to the public low-voltage power supply network. Please contact your local supply network provider.
Units installed within the category C3 (industrial) environment do not require connection approval.

Appendix A.3 EMC Overall Performance
Control Units CU240S 220 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
EMC Immunity The SINAMICS G120 drives have been tested in accordance with the immunity requirements of category C3 (industrial) environment:
Table A-3 EMC Immunity
EMC Phenomenon Standard Level Performance Criterion
4 kV Contact discharge A Electrostatic Discharge (ESD) EN 61000-4-2 8 kV Air discharge
Radio-frequency Electromagnetic Field
80 MHz … 1000 MHz 10 V/m
Amplitude modulated
EN 61000-4-3
80 % AM at 1 kHz
A
Fast Transient Bursts EN 61000-4-4 2 kV @ 5 kHz A Surge Voltage 1 kV differential (L-L) 1.2/50 μs
EN 61000-4-5 2 kV common (L-E)
A
Conducted 0.15 MHz … 80 MHz 10 V/rms
Radio-frequency Common Mode
EN 61000-4-6
80 % AM at 1 kHz
A
100 % dip for 3 ms A 30 % dip for 10 ms B 60 % dip for 100 ms C
Mains Interruptions & Voltage Dips
EN 61000-4-11
95 % dip for 5000 ms D Voltage Distortion EN 61000-2-4
Class 3 10 % THD A
Voltage Unbalance EN 61000-2-4 Class 3
3 % Negative Phase Sequence
A
Frequency Variation EN 61000-2-4 Class 3
Nominal 50 Hz or 60 Hz (± 4 %)
A
Depth = 40 % Commutation Notches EN 60146-1-1 Class B Area = 250 % x degrees
A
Note The immunity requirements apply equally to both filtered and unfiltered units.

Appendix A.4 Standards
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 221
A.4 Standards
European Low Voltage Directive The SINAMICS G120 product range complies with the requirements of the Low Voltage Directive 73/23/EEC as amended by Directive 98/68/EEC. The units are certified for complaince with the following standards: EN 61800-5-1 — Semiconductor inverters –General requirements and line commutated inverters EN 60204-1 — Safety of machinery –Electrical equipment of machines
European Machinery Directive
The SINAMICS G120 inverter series does not fall under the scope of the Machinery Directive. However, the products have been fully evaluated for compliance with the essential Health & Safety requirements of the directive when used in a typical machine application. A Declaration of Incorporation is available on request.
European EMC Directive
When installed according to the recommendations described in this manual, the SINAMICS G120 fulfils all requirements of the EMC Directive as defined by the EMC Product Standard for Power Drive Systems EN 61800-3
Underwriters Laboratories UL and CUL LISTED POWER CONVERSION EQUIPMENT for use in a pollution degree 2 environment. Note: UL certification is presently in progress.
ISO 9001
Siemens plc operates a quality management system, which complies with the requirements of ISO 9001.

Appendix A.5 Acceptance Log
Control Units CU240S 222 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
A.5 Acceptance Log
A.5.1 Documentation of acceptance test
Overview Acceptance test No. Date Person carrying-out
Table A-4 Machine description and overview/block diagram
Designation Type Serial No. Manufacturer End customer Block/overview diagram of the machine

Appendix A.5 Acceptance Log
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 223
Table A-5 Fail-safe functions for each drive
Drive No. FW version SI version Fail-safe function r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 = r0018 = r9770 =

Appendix A.5 Acceptance Log
Control Units CU240S 224 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Table A-6 Description of the fail-safe equipment/devices
Drive No. Example: Wiring of the STO terminals (protective door, EMERGENCY STOP), grouping of the STO terminals, etc.

Appendix A.5 Acceptance Log
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 225
A.5.2 Function test of the acceptance test
Description The function test must be carried-out separately for each individual drive (assuming that the machine permits this to be done).
Executing the test
First commissioning Series commissioning
Please mark
Function test "Safe Torque Off" (STO) This test comprises the following steps:
Table A-7 "Safe Torque Off" function (STO)
No. Description Status 1. Initial state
• Drive is "Ready to Run" (P0010 = 0) • No safety faults and alarms • r9772.0 = r9772.1 = 0 (STO de-selected and inactive) • P9659 = time intervals for the forced checking procedure correctly set
2. Operate the drive 3. Check that the expected drive operates 4. Select STO while issuing the command to operate 5. Check the following:
• The drive coasts-down • The drive is braked by the mechanical brake and held if a brake is being
used • No safety faults • r9772.0 = r9772.1 = 1 (STO selected and active), r9772.14 = 1 if Safe
Brake Control is enabled
6. De-select STO 7. Check the following:
• No safety faults • r9772.0 = r9772.1 = 0 (STO de-selected and inactive) , r9772.14 = 0
8. Check that the expected drive operates if so the following is tested: • That the wiring between the control unit and power module is correct • Correct assignment, drive No. – inverter power module – motor • That the hardware is correctly functioning • That the shutdown paths have been correctly wired • Correct assignment of the STO terminals on the control unit • Correct parameterization of the STO function • Routine for the forced checking procedure of the shutdown paths

Appendix A.5 Acceptance Log
Control Units CU240S 226 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Function test "Safe Stop 1" (SS1) This test comprises the following steps:
Table A-8 "Safe Stop 1" function (SS1)
No. Description Status 1. Initial state
• Drive is "Ready to Run" (P0010 = 0) • No safety faults and alarms • r9772.0 = r9772.1 = 0 (STO de-selected and inactive) • r9772.2 = r9772.3 = 0 (SS1 de-selected and inactive)
2. Operate the drive 3. Check that the expected drive operates 4. Select SS1 while issuing the traversing command 5. Check the following:
• Drive speed decreases corresponding to the selected ramp time (if required, use a stop watch)
• After the parameterized minimum speed has been fallen below, the drive coasts-down
• The drive is braked and held by the mechanical brake if a brake is being used
• No safety faults • r9772.1 = 1 (STO active) • r9772.2 = 1 (SS1 selected) • r9772.14 = 1 if safe brake monitoring is enabled
6. De-select SS1 7. Check the following:
• No safety faults • r9772.1 = 0 (STO inactive) • r9772.2 = 0 (SS1 de-selected) • r9772.14 = 0
8. Check that the expected drive operates if so the following is tested: • The wiring between the control unit and power module is correct • Correct assignment, drive No. – inverter power module – motor • Correct functioning of the hardware • Correct wiring of the shutdown paths • Correct assignment, STO terminals on the control unit • Correct parameterization of the SS1 function

Appendix A.5 Acceptance Log
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 227
Function test "Safely-Limited Speed" (SLS) This test comprises the following steps:
Table A-9 "Safely-Limited Speed" function (SLS)
No. Description Status 1. Initial state
• Drive is "Ready to Run" (P0010 = 0) • No safety faults and alarms • r9772.4 = r9772.5 = 0 (SLS de-selected and inactive)
2. Operate the drive (if the machine permits it, at a higher speed than the parameterized safely-limited speed)
3. Check that the expected drive operates 4. Select SLS while issuing the traversing command 5. Check the following:
• r9772.4 = 1 (SLS selected) • Drive speed decreases corresponding to the selected ramp time or SLS
mode (if required, use an oscilloscope) • After the parameterized safely-limited speed has been fallen below, the
speed remains below this limit – In SLS mode 1 à correct, must be no fault – In SLS mode 0 à LSTO (safety fault at ramping end) – In SLS mode 2 à LSTO (immediately)
• r9772.5 = 1 (SLS active)
6. De-select SLS 7. Check the following:
• No safety faults • r9772.4 = r9772.5 = 0 (SLS de-selected and inactive)
8. Check that the expected drive operates if so the following is tested: • The wiring between the control unit and power module is correct • Correct assignment, drive No. – inverter power module – motor • Correct functioning of the hardware • Correct wiring of the shutdown paths • Correct parameterization of the SLS function

Appendix A.5 Acceptance Log
Control Units CU240S 228 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
A.5.3 Completing the acceptance log
Parameters of the fail-safe functions
Specified value checked? Yes No
Control unit
Checksums
Drive Checksums Name Drive No. Control unit (r9798) Control unit (r9898)

Appendix A.5 Acceptance Log
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 229
Data back-up/archiving
Memory medium Type Designation Date
Saved where
Parameters PLC program Circuit diagrams
Signatures Commissioning engineer Confirms that the above listed tests and checks have been correctly carried-out.
Date Name Company/department Signature
Machinery construction OEM Confirms the correctness of the parameterization documented above.
Date Name Company/department Signature


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 231
List of abbreviations BB.1 Abbreviations
Abbreviations
Table B-1 Abbreviations
Abbreviations State A AC Alternating Current A/D Analog digital converter ADR Address AFM Additional frequency modification AG Automation Unit AI Analog input AK Request Identifier AO Analog output AOP Advanced operation panel ASIC Application-specific integrated circuit ASP Analog setpoint ASVM Asymmetric space vector modulation B BCC Block check character BCD Binary-coded decimal code BI Binector input BIA Berufsgenossenschaftliches Institut für Arbeitssicherheit BICO Binector/connector BO Binector output BOP Basic Operator Panel C C Commissioning CB Communication board CCW Counter-clockwise CDS Command data set CE Communauté Européenne CI Connector input

List of abbreviations B.1 Abbreviations
Control Units CU240S 232 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Abbreviations State CM Configuration management CMD Command CO Connector output CO/BO Connector output/Binector output COM Common (terminal is connected to NO or NC) CT Commissioning, ready to run CU Control Unit CUT Commissioning, run, ready to run CW Clockwise D DAP Device Access Point D/A Digital analog converter DC Direct current DDS Drive data set DI Digital input DIP DIP switch DO Digital output DP Distributed I/Os DP-V1 Acyclic data transfer (extended PROFIBUS function) DS Drive state E ECD Equivalent circuit diagram EEC European Economic Community EEPROM Electrical erasable programmable read-only memory ELCB Earth leakage circuit breaker EMC Electromagnetic compatibility EMF Electromagnetic force ES Engineering System FAQ Frequently asked question F Fast FFB Fast freely programmable function blocks FB Function block FCC Flux current control FCL Fast current limiting FF Fixed frequency FFB Freely programmable function blocks FOC Field orientated control FREQ Frequency FSA Frame size A FSB Frame size B FSC Frame size C FSD Frame size D

List of abbreviations B.1 Abbreviations
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 233
Abbreviations State FSE Frame size E FSF Frame size F G GSD Device Data File (Geräte Stamm Datei) GSG Getting Started Guide GUI ID Global unique identifier H HIW Main actual value HMI Human machine interface HO High Overload (Constant Torque) HSW Main setpoint HTL High-voltage transistor logic I I/O In-/output IBN Commissioning IGBT Insulated gate bipolar transistor IND Sub-index J JOG JOG K KIB Kinetic buffering L LCD Liquid crystal display LED Light emitting diode LGE Length LO Light Overload (Variable Torque) LWL Fiber Optic conductor M MHB Motor holding brake MLP Multi-Language Pack MOP Motor operated potentiometer MMC Micro Memory Card N NC Normally closed NEMA National Electrical Manufacturers Association NO Normally open O OLM Optical Link Module OLP Optical Link Plug OM Object Manager OPI Operating Instructions P

List of abbreviations B.1 Abbreviations
Control Units CU240S 234 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
Abbreviations State PAP Parameter Access Point PID Proportional, integral, derivative controller PKE Parameter ID PKW Parameter channel (Parameter/Kennung/Wert) PLC Programmable logic control PM Power module PM-IF Power module interface PNU Parameter Number PNO PROFIBUS Nutzerorganisation PPO Parameter process data object PTC Positive temperature coefficient PWE Parameter value PWM Pulse-width modulation Pxxxx Write parameter PZD Process data area (Prozeßdaten) Q QC Quick commissioning R RAM Random-access memory RCCB Residual current circuit breaker RCD Residual current device RFG Ramp-function generator RFI Radio frequency interference ROM Read-only memory RPM Revolutions per minute rxxxx read-only parameters of analogue signals S SBC Safe Break Control SLVC Sensorless vector control SLS Safe-Limited Speed SOL Serial option link SS1 Safe Stop 1 STO Safe Torque Off STW Control word STX Start of text SVM Space vector modulation T TTL Transistor-transistor logic U USS Universal serial interface V V/f Voltage/frequency

List of abbreviations B.1 Abbreviations
Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 235
Abbreviations State VC Vector control VT Variable torque W WEA Automatic restart Z ZSW Status word ZUSW Additional setpoint


Control Units CU240S Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB 237
Index
A A&D Technical support, 207
America (Johnson City), 207 Asia/Pacific (Beijing), 207 China (Beijing), 208 Europe/Africa (Erlangen), 207 Online Service and support, 208
Acceptance test, 96 Accessories
Basic Operator Panel (BOP), 211 Micro Memory Card (MMC), 213 PC Connection Kit, 212
B BOP, 56, 98, 105
C Calculating the motor/control data, 71 Changing parameters with the Basic Operator Panel, 64 Classification of EMC performance, 216 Commissioning, 34, 109 Commissioning functions, 19 Commissioning the application, 73 Common features, 19 Control functions, 20 Control Wiring, 36 Control word, 141 Conversion of extended PROFIBUS DP functionality, 146
D Description, 41 Device-specific telegrams, 134 Download parameters, 98, 99
E Electromagnetic compatibility, 215 EMC precautions, 44 EMC Standards, 215 European EMC Directive, 219 European Low Voltage Directive, 219 European Machinery Directive, 219 Extended PROFIBUS DP functionality, 146
F Factory setting
Reset to, 84 Fitting the Control Unit to the Power Module, 33
G GSD, 158
I Installation of PROFIBUS DP, 41 Installing a G120 GSD file, 158 ISO 9001, 219
M Manufacturer-specific telegrams, 134 Maximum cable length, 41 MMC
Manual download, 106 Upload, 105, 121
Monitoring parameters, 116 Motor data identification, 70
O Operating functions, 20 Options for SINAMICS G120, 18

Index
Control Units CU240S 238 Operating Instructions, 06/2007 - SW 3.0, A5E00766042B AB
P Parameter
Attributes, 116 Index, 116 upload, 56
Parameter attribute Access level, 117 Active, 119 BICO, 117 Can be changed, 118 Data type, 118 Grouping, 119 Quick commissioning, 120 Unit, 118 Value range, 120
Parameter channel, 128 Parameters
Data sets, 120 Power Modules
Fitting the Control Unit to the, 33 PROFIBUS DP
Extended functionality, 146 PROFIBUS DP
Switch over behavior, 139 PROFIBUS DP
Conversion of extended functionality, 146 PROFIBUS DP
Setting the address, 153 PROFIBUS DP parameters, 154 PROFIBUS terminator, 43 PROFINET parameters, 172 PROFIsafe Parameters, 159 PROFIsafe telegram structure, 138 Properties of the DPV1 parameter channel, 146 Protective functions, 20
R Reset to the factory setting, 84 Rules regarding hot swap, 125
S Safety notes
Commissioning, 15 Dismantling and disposal, 16 General Warnings, Cautions and Notices, 14 Operation, 16 Repair, 16 Safety Instructions, 13 Transport and storage, 15
Self certification, 215 SIMATIC S7
BICO connection, 135 Installing a G120 GSD file, 158 Read parameters, 161
Standard telegram structure, 135 Standard telegrams, 134 Standards, 219 STARTER
Download, 102 Upload, 102
Status display, 194 Status word, 141 Swapping a CU, 126 Swapping the PM, 126 Switch over behavior, 139
T Technical construction file, 215 Telegrams, 134 TTL Encoder, 109
U Underwriters Laboratories, 219 Universal Serial Interface, 180 Upload parameter, 56, 103 Upload parameters, 98 Used telegram types, 134 USS, 180
V VIK/NAMUR telegram structure, 137


Siemens AG
Automation and DrivesStandard DrivesPostfach 32 6991050 ErlangenDeutschland
www.siemens.de/sinamics-g120