sensor de carga (ohca convencional)
TRANSCRIPT

Sensor de Carga (Oleohidráulica Convencional)
Para Bombas de Cilindrada Constante y Válvulas Direccionales Normales

Sensor de Carga (Oleohidráulica Convencional)
Para Bombas de Cilindrada Constante y Válvulas Direccionales Normales
Sensor de
Carga
En la Oleohidráulica Convencional existe el sensor de carga para aquellos casos en que no queremos que el caudal sobrante de una regulación del caudal de tipo entrada se desvíe a tanque a la máxima presión, sino que lo haga tan solo en un incremental P sobre la propia presión de la carga PL.

Sensor de Carga (Oleohidráulica Convencional)
Para Bombas de Cilindrada Constante y Válvulas Direccionales Normales
«Venting»
PM
Todo ello es fácilmente realizable a través del «venting» de una válvula de presión servopilotada.
PPP
P-P P
LM
LM
PL
P
En la Oleohidráulica Convencional existe el sensor de carga para aquellos casos en que, no queremos que el caudal sobrante de una regulación del caudal de tipo entrada se desvíe a tanque a la máxima presión, sino que lo haga tan solo en un incremental P sobre la propia presión de la carga PL.
Válvula de presión
Servopilotada
PM = PL+ P

Sensor de Carga (Oleohidráulica Convencional)
Para Bombas de Cilindrada Constante y Válvulas Direccionales Normales
«Venting»
PM
Todo ello es fácilmente realizable a través del «venting» de una válvula de presión servopilotada.
PPP
P-P P
LM
LM
PL
P
En la Oleohidráulica Convencional existe el sensor de carga para aquellos casos en que, no queremos que el caudal sobrante de una regulación del caudal de tipo entrada se desvíe a tanque a la máxima presión, sino que lo haga tan solo en un incremental P sobre la propia presión de la carga PL.
PM = PL+ P
Válvula piloto de Máxima.
Válvula piloto Incremental.
Válvula Direccional de Descarga

Sensor de Carga (Oleohidráulica Convencional)
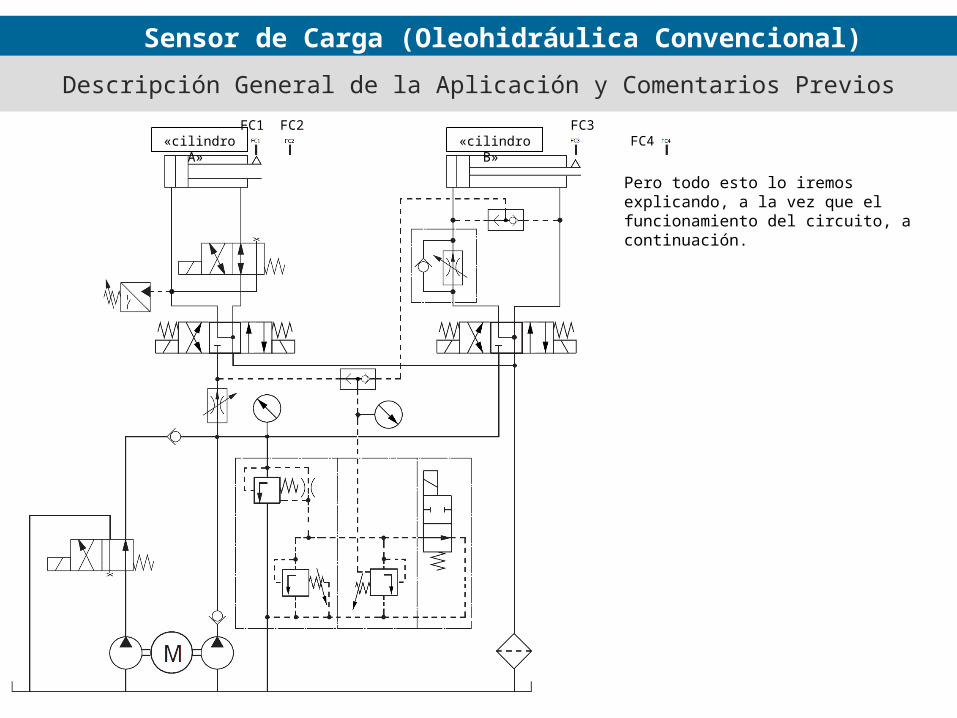
Descripción General de la Aplicación y Comentarios Previos
El «cilindro A» realiza movimientos alternativos con velocidad regulada, siendo dicha velocidad muy aproximada entre el movimiento de salida y el de entrada a causa de que es de =2 funcionando con circuito regenerativo, salvo al final de su recorrido, en cuyo momento realiza una compresión y un esfuerzo máximo.
Para poder ir acoplados sus movimientos alternativos al movimiento del «cilindro B», se regula el caudal antes de su llegada a la válvula direccional.
«cilindro A»
«cilindro B»

Sensor de Carga (Oleohidráulica Convencional)
Descripción General de la Aplicación y Comentarios Previos
El «cilindro A» realiza movimientos alternativos con velocidad regulada, siendo dicha velocidad muy aproximada entre el movimiento de salida y el de entrada a causa de que es de =2 funcionando con circuito regenerativo. Salvo al final de su recorrido, en cuyo momento realiza una compresión y un esfuerzo máximo.
Para poder ir acoplados sus movimientos alternativos al movimiento del «cilindro B», se regula el caudal antes de su llegada a la válvula direccional.
El «cilindro B» avanza constantemente a una velocidad pertinente para el acoplamiento de su movimiento con el «cilindro A» . Ya que su tiempo de movimiento coincide con el movimiento alternativo del cilindro A entre sus finales de carrera. Permaneciendo detenido durante toda la fase de compresión del «cilindro A», en la que este realizará el esfuerzo máximo.
«cilindro A»
«cilindro B»

Sensor de Carga (Oleohidráulica Convencional)
Descripción General de la Aplicación y Comentarios Previos
El «cilindro A» realiza movimientos alternativos con velocidad regulada, estando aproximada entre el movimiento de salida y el de entrada a causa de que es de =2 y funciona como circuito regenerativo salvo al final de su recorrido, en cuyo momento realiza una compresión y un esfuerzo máximo. Obviamente, para poder ir, tal movimiento, acoplado al movimiento del «cilindro B», se regula el caudal de forma previa a la válvula direccional.
El «cilindro B» avanza constantemente a una velocidad pertinente para el acoplamiento de su movimiento con el «cilindro A» . Ya que su tiempo de movimiento coincide con el movimiento alternativo del cilindro A entre sus finales de carrera. Permaneciendo detenido durante toda la fase de compresión del «cilindro A», en la que este realizará el esfuerzo máximo.
En otro orden de cosas las válvulas direccionales 4v/2p retorno muelle, son las dos con tránsitos abiertos. Por lo cual, es factible que una de ellas sirva para poner la bomba en descarga sin que entre ella y la bomba haya ningún tipo de válvula de seguridad.
«cilindro A»
«cilindro B»

Sensor de Carga (Oleohidráulica Convencional)
Todo comienza con el movimiento del «cilindro A» cuando este está sobre su final de carrera FC1 y el «cilindro B» sobre FC3 ; pero, el proceso del movimiento alternativo del «cilindro A», juntado al avance del «cilindro B», realmente se inicia cuando llega el «cilindro A» a la posición FC2 durante el movimiento de retorno del cilindro. [Como veremos]
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Descripción General de la Aplicación y Comentarios Previos

Sensor de Carga (Oleohidráulica Convencional)
Todo comienza con el movimiento del «cilindro A» cuando este está sobre su final de carrera FC1 y el «cilindro B» sobre FC3 ; pero, el proceso del movimiento alternativo del «cilindro A», juntado al avance del «cilindro B», realmente se inicia cuando llega el «cilindro A» a la posición FC2 durante el movimiento de retorno del cilindro. [Como veremos]
Finalizando también, en ese instante, el proceso del movimiento alternativo del «cilindro A» y el avance del «cilindro B».
Cuando se llega a idéntica situación pero habiendo el «cilindro B» alcanzado su máxima posición en FC4 (FC4 pulsado y FC2 activado en el retorno) se inicia el proceso final. Momento en el que, obviamente, continúa retrayéndose el «cilindro A» sobre su final FC1 para dar por finalizados sus movimientos alternativos, mientras el «cilindro B» aguarda.
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Descripción General de la Aplicación y Comentarios Previos

Sensor de Carga (Oleohidráulica Convencional)
Todo comienza con el movimiento del «cilindro A» cuando este está sobre su final de carrera «FC1»; pero, el proceso del movimiento alternativo del «cilindro A», juntado al avance del «cilindro B», realmente se inicia cuando llega el «cilindro A» a la posición «FC2» durante el movimiento de retorno del cilindro. [Como veremos]
Finalizando también, en ese instante, el proceso del movimiento alternativo del «cilindro A» y el avance del «cilindro B».
Cuando se llega a idéntica situación pero habiendo el «cilindro B» alcanzado su máxima posición en FC4 (FC4 pulsado y FC2 activado en el retorno) se inicia el proceso final. Momento en el que, obviamente, continúa retrayéndose el «cilindro A» sobre su final FC1 para dar por finalizados sus movimientos alternativos, mientras el «cilindro B» aguarda.
El proceso terminará cuando el «cilindro A» llegue a FC1 y el «cilindro B» retroceda alcanzando FC3.
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Descripción General de la Aplicación y Comentarios Previos
Sensor de Carga (Oleohidráulica Convencional)
Pero todo esto lo iremos explicando, a la vez que el funcionamiento del circuito, a continuación.
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Descripción General de la Aplicación y Comentarios Previos

Sensor de Carga (Oleohidráulica Convencional)
Inicio
Al arrancar el motor eléctrico, e impulsar las dos bombas iguales su caudal, ese caudal resultante está en descarga.
Con Y1 desexcitada
(Y1=0 )
el «venting» está conectado a tanque. Por tanto, a una presión de 0 bar.
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4

Sensor de Carga (Oleohidráulica Convencional)
Inicio
Al arrancar el motor eléctrico, e impulsar las dos bombas iguales su caudal, ese caudal resultante está en descarga.
Con Y1 desexcitada
(Y1=0 )
el «venting» está conectado a tanque. Por tanto, a una presión de 0 bar.
«cilindro A»
«cilindro B»
Venting
FC1 FC2 FC3 FC4
Y1

Sensor de Carga (Oleohidráulica Convencional)
Inicio
Al arrancar el motor eléctrico e impulsar las dos bombas iguales su caudal, ese caudal resultante está en descarga.
Con Y1 desexcitada
(Y1=0 )
el «venting» está conectado a tanque. Por tanto, a una presión de 0 bar.
Esto quiere decir que por el «chiclé» se escapa un pequeño caudal «qf» que establece una P (de unos 3 bar) que hace que el mando de la válvula principal se abra; por lo que las dos bombas están en descarga al estar el otro lado del «chiclé» («venting») conectado a tanque y, por tanto, hacen una descarga a una presión de unos 3 bars que es la presión del resorte de la válvula de mando principal.
«cilindro A»
«cilindro B»
Y1
VentingChiclé qf
FC1 FC2 FC3 FC4
Presión aprox. del resorte = 3 bar

Sensor de Carga (Oleohidráulica Convencional)
Inicio
Esta es la razón por la que una válvula de presión servopilotada está siempre tarada a la presión a la que está su «venting» (más la pequeña presión del resorte del mando o válvula principal).
Ahora bien, como la regulación siempre la hacemos mirando a la presión del sistema en la que ya viene sumada, no es necesario hacer nada más que leer el manómetro para regular lo deseado.
[Lo único que ocurre es que nunca conseguiremos como descarga mínima un 0 bar, sino la presión del resorte. ]
«cilindro A»
«cilindro B»
VentingChiclé qf
FC1 FC2 FC3 FC4
Presión aprox. del resorte = 3 bar

Sensor de Carga (Oleohidráulica Convencional)
Proceso Inicial
«cilindro A»
«cilindro B»
Con Y1, Y2, e Y3 excitadas:
(Y1=1) (Y2=1) (Y3=1)
El «venting» deja de estar conectado a tanque y, por tanto, se anula la descarga de las bombas. Por lo que las dos juntas pasan a impulsar el sistema.
FC1 FC2 FC3 FC4
Y1=1
Y2=1
Y3=1

Sensor de Carga (Oleohidráulica Convencional)
Proceso Inicial
«cilindro A»
«cilindro B»
Con Y1, Y2, e Y3 excitadas:
(Y1=1) (Y2=1) (Y3=1)
El «venting» deja de estar conectado a tanque y, por tanto, se anula la descarga de las bombas. Por lo que las dos juntas pasan a impulsar el sistema.
B2
B1
R1
R2
PM PLA
P
FC1 FC2 FC3 FC4

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PLA
P
Con el cilindro trabajando con circuito regenerativo y, por tanto, con la sección del vástago
El sensor de carga detecta la presión PLA
La presión PLA actúa como contrapresión en la Válvula Incremental
La Válvula Incremental detecta la presión de la carga PLA + la P y establece la PM = PLA+ P
Con Y1, Y2 e Y3 excitadas:
(Y1=1) (Y2=1) (Y3=1)
El «venting» deja de estar conectado a tanque y, por tanto, se anula la descarga de las bombas. Por lo que las dos juntas pasan a impulsar el sistema.
El caudal QR1 (que pasa a través del regulador R1) establece un circuito regenerativo con el «cilindro A» y este avanza rápidamente generando una presión PLA. Que es la de su movimiento de aproximación rápido a su zona de trabajo.Ahora bien, como QR1 < 2 . QB
Entonces el caudal sobrante eleva la presión del sistema por encima de su presión de trabajo actual PLA hasta conseguir que se abra la válvula piloto incrimental. Lo cual se hará estableciendo una presión manométrica
PM = PLA + P
FC1 FC2 FC3 FC4
Proceso Inicial

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
QB QB
QR1
R2
PM PLA
P
2.QB - QR1
PM = PLA+ P
El incremental P será regulado por nosotros mismos observando los manómetros (o previamente en un banco de pruebas) y será un valor mínimo posible. Garantizando siempre un correcto funcionamiento de R1 y R2 ( para ello la presión del resorte de sus reductoras internas debe ser inferior a la P regulada en la válvula incremental).
FC1 FC2 FC3 FC4
R1
Proceso Inicial

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM = PLA+ P
FC1 FC2 FC3 FC4
Proceso Inicial

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
Proceso Inicial (Avance Rápido)
PM = PLA+ P
FC1 FC2 FC3 FC4

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM = PLA+ P
FC1 FC2 FC3 FC4
Proceso Inicial (Avance Rápido)

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM = PLA+ P
FC1 FC2 FC3 FC4
Proceso Inicial (Avance Rápido)

Sensor de Carga (Oleohidráulica Convencional)
Proceso Inicial (Compresión y Presión Máxima)
«cilindro A»
«cilindro B»
PM = PMx
P =0
Tras el avance rápido al topar con la materia a comprimir, el «cilindro A» se ve detenido. Lo cual, eleva la presión del sistema hasta hacer actuar la presión máxima PMX que activa también el presostato PST.
FC1 FC2 FC3 FC4
PMX PMX
PM = PMX
P = 0
QR1=0Aprox.

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PST
PMX PMX
Tras el avance rápido al topar con la materia a comprimir, el «cilindro A» se ve detenido, lo cual eleva la presión del sistema hasta hacer actuar la presión máxima PMX que activa también el presostato PST.
Al no haber prácticamente circulación de caudal a través de R1 el incremental P desaparece y, por tanto, la válvula piloto incremental se cierra, permaneciendo abierta la válvula piloto de presión máxima.
Inicialmente, al estar trabajando las dos bombas, el caudal que se desaloja a la presión máxima es 2.QB
PM = PMx
P =0
FC1 FC2 FC3 FC4
PM = PMX
P = 0
Proceso Inicial (Compresión y Presión Máxima)
QR1=0Aprox.

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PST
Y3=0
Y4=1
Prácticamente, en el mismo instante de activarse la presión máxima se activa el presostato.
Lo cual hace que el sistema de control: desexcite Y3 y excite Y4.
(Y3=0) (Y4=1)
Esto hace que se deshaga el circuito regenerativo haciendo que (dado que =2) el esfuerzo de compresión se duplique.
Y, por otra parte, que se ponga a tanque una de las bombas, lo que hace que la enorme potencia perdida en el proceso de compresión se reduzca a la mitad.
El periodo de compresión y esfuerzo máximo dura un tiempo controlado por un temporizador T1. Transcurrido el tiempo el «cilindro A» retrocede.
PM = PMx
PMX
FC1 FC2 FC3 FC4
PMX
PM = PMX
P = 0
Proceso Inicial (Compresión y Presión Máxima)
QR1=0Aprox.

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PST
Prácticamente, en el mismo instante de activarse la presión máxima se activa el presostato.
Lo cual hace que el sistema de control: desexcite Y3 y excite Y4.
(Y3=0) (Y4=1)
Esto hace que se deshaga el circuito regenerativo haciendo que (dado que =2) el esfuerzo de compresión se duplique.
Y, por otra parte, que se ponga a tanque una de las bombas, lo que hace que la enorme potencia perdida en el proceso de compresión se reduzca a la mitad.
El periodo de compresión y esfuerzo máximo dura un tiempo controlado por un temporizador T1. Transcurrido el tiempo el «cilindro A» retrocede.
PM = PMx
PMX
FC1 FC2 FC3 FC4
PMX
PM = PMX
P = 0
Proceso Inicial (Compresión y Presión Máxima)
QR1=0Aprox.

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
Y4=0
Proceso Inicial (Retroceso de A)
Transcurrido el tiempo T1, estando desexcitadas Y2 Y3 e Y4, y con la bobina Y5 excitada, el «cilindro A» retrocede.
(Y2=0), (Y3=0), (Y4=0)
(Y5=1)
El sensor de carga detectará la presión del retroceso PRA y la presión manométrica del sistema será PM = PARA
+ P
PM
Y5=1
PRA
PM = PRA+ P
FC1 FC2 FC3 FC4

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
Proceso Continuo
Al coincidir de nuevo en el retroceso sobre el final de carrera FC2 estando el «cilindro B» sobre el FC3, es cuando realmente arranca el proceso continuo al ponerse en marcha el «cilindro B» a una velocidad muy lenta y controlada para que, en el tiempo que el «cilindro A» vaya de FC2 a FC1 y vuelva sobre FC2, en ese tiempo (controlado por la velocidad del «cilindro A») el «cilindro B» debe recorrer un espacio determinado para situar de nuevo al «cilindro A» en una nueva posición de compresión
(Y2=0), (Y3=0), (Y4=0)
(Y5=1)
(FC2=1),(FC3=1)
Es ahora cuando arranca el proceso continuo y se excita Y6.
(Y6=1)
También ahora, al ponerse en marcha el «cilindro B», siendo su presión de trabajo mayor, permuta el selector del sensor de carga a la presión de PLB
PM PLB
PM = PLB+ P
FC1 FC2 FC3 FC4
Y6=1

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
En estas condiciones, el «cilindro A» retrocede hasta llegar al FC1, mientras en todo este tiempo el «cilindro B» continúa con su lento avance regulado para hacer coincidir el tiempo que tarde el «cilindro A» en recorrer FC2 a FC1 y volver a FC2, con un determinado espacio en la carrera del «cilindro B» .
PM PLB
PM = PLB+ P
FC1 FC2 FC3 FC4
Proceso Continuo

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
En estas condiciones, el «cilindro A» retrocede hasta llegar al FC1, mientras en todo este tiempo el «cilindro B» continúa con su lento avance regulado para hacer coincidir el tiempo que tarde el «cilindro A» en recorrer FC2 a FC1 y volver a FC2, con determinado espacio en la carrera del «cilindro B».
Al llegar a FC1 inmediatamente el «cilindro A» permutara el movimiento poniéndose a salir, mientras continua el «cilindro B» saliendo.
PM PLB
PM = PLB+ P
Y2=1
FC1 FC2 FC3 FC4
Proceso Continuo
Y5=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
En estas condiciones, el «cilindro A» retrocede hasta llegar al FC1, mientras en todo este tiempo el «cilindro B» continúa con su lento avance regulado para hacer coincidir el tiempo que tarde el «cilindro A» en recorrer FC2 a FC1 y volver a FC2, con determinado espacio en la carrera del «cilindro B».
Al llegar a FC1 inmediatamente el «cilindro A» permutara el movimiento poniéndose a salir, mientras continua el «cilindro B» saliendo.
PM PLB
PM = PLB+ P
FC1 FC2 FC3 FC4
Proceso Continuo

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PLB
PM = PLB+ P
En estas condiciones, el «cilindro A» retrocede hasta llegar al FC1, mientras en todo este tiempo el «cilindro B» continúa con su lento avance regulado para hacer coincidir el tiempo que tarde el «cilindro A» en recorrer FC2 a FC1 y volver a FC2, con determinado espacio en la carrera del «cilindro B».
FC1 FC2 FC3 FC4
Proceso Continuo

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PLA
PM = PLA+ P
Al llegar de nuevo al FC2 el «cilindro B» se detiene, pues va a comenzar de nuevo el proceso de compresión del «cilindro A».
Cambiando de nuevo el sensor de carga de valor.
FC1 FC2 FC3 FC4
Proceso Continuo
Y6=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
Al llegar de nuevo al FC2 el «cilindro B» se detiene, pues va a comenzar de nuevo el proceso de compresión del «cilindro A».
Cambiando de nuevo el sensor de carga de valor.
Dando comienzo un nuevo proceso de compresión por parte del «cilindro A».
FC1 FC2 FC3 FC4
Proceso Continuo
PMX PMX
PM = PMX
QR1=0Aprox.

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PMX PMX
PM = PMX
Al llegar de nuevo al FC2 el «cilindro B» se detiene, pues va a comenzar de nuevo el proceso de compresión del «cilindro A».
Cambiando de nuevo el sensor de carga de valor.
Dando comienzo un nuevo proceso de compresión por parte del «cilindro A».
Continuando de esta forma todo el proceso de ciclos continuo hasta que el «cilindro B» llegue a su posición más avanzada
FC1 FC2 FC3 FC4
Proceso Continuo
Y4=1
QR1=0Aprox.
Y3=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PRA
PM = PRA+ P
Y5=1
Pasado el tiempo T1 de la compresión, al retroceder el «cilindro A» sobre FC2 tras el proceso de compresión.
FC1 FC2 FC3 FC4
Proceso Continuo
Y4=0
Y2=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PRA
PM = PRA+ P
Al llegar de nuevo al FC2 el «cilindro B» se detiene, pues va a comenzar de nuevo el proceso de compresión del «cilindro A».
Cambiando de nuevo el sensor de carga de valor.
Dando comienzo un nuevo proceso de compresión por parte del «cilindro A».
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición
FC1 FC2 FC3 FC4
Pasado el tiempo T1 de la compresión, al retroceder el «cilindro A» sobre FC2 tras el proceso de compresión.
Proceso Continuo

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PRA
PM = PRA+ P
Al llegar de nuevo al FC2 el «cilindro B» se detiene, pues va a comenzar de nuevo el proceso de compresión del «cilindro A».
Cambiando de nuevo el sensor de carga de valor.
Dando comienzo un nuevo proceso de compresión por parte del «cilindro A».
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición.
Llegando el «cilindro A» sobre el final de carrera FC2 e iniciándose el proceso final.
FC1 FC2 FC3 FC4
Proceso Final

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PRA
PM = PRA+ P
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición
Llegando el «cilindro A» sobre el final de carrera FC2 e iniciándose el proceso final.
El «cilindro B» habrá permanecido quieto y parado mientras el «cilindro A» llega sobre FC1.
FC1 FC2 FC3 FC4
Proceso Final

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición
Llegando el «cilindro A» sobre el final de carrera FC2
El «cilindro B» permanece quieto y parado mientras el «cilindro A» llega sobre FC1.
Entonces el «cilindro A» se detendría y el «cilindro B» iniciaría su movimiento de entrada y retroceso muy rápido.
Y7=1
PM PRB
PM = PRB
P = 0
Proceso Final
QR1=0
Y5=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM PRB
PM = PRB
P = 0
FC1 FC2 FC3 FC4
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición
Llegando el «cilindro A» sobre el final de carrera FC2
El «cilindro B» permanece quieto y parado mientras el «cilindro A» llega sobre FC1.
Entonces el «cilindro A» se detendría y el «cilindro B» iniciaría su movimiento de entrada y retroceso muy rápido.
Como la presión PM y la PLB detectada por el sensor de carga son prácticamente iguales, la P es igual a 0, razón por lo que la válvula piloto incremental no se abre y, puesto que PLB es menor que la PMX, tampoco se abre la válvula piloto de máxima y el caudal de las dos bombas se dirige a hacer meter el «cilindro B» lo más rápidamente posible.
Proceso Final
QR1=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición
Llegando el «cilindro A» sobre el final de carrera FC2
El «cilindro B» permanece quieto mientras el «cilindro A» llega sobre FC1.
Entonces el «cilindro A» se detendría y el «cilindro B» iniciaría su movimiento de entrada y retroceso.
Para, una vez alcanzada su posición retraída por el «cilindro B», detenerse también.
Y esperar el inicio de un nuevo proceso
PM PRB
PM = PRB
P = 0
Como la presión PM y la PLB detectada por el sensor de carga son prácticamente iguales, la P es igual a 0, razón por lo que la válvula piloto incremental no se abre y, puesto que PLB es menor que la PMX, tampoco se abre la válvula piloto de máxima y el caudal de las dos bombas se dirige a hacer meter el «cilindro B» lo más rápidamente posible.
Proceso Final
QR1=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
PM 0
PM = 0+ P
FC1 FC2 FC3 FC4
Si ya hubiese llegado el «cilindro B» a su posición mas avanzada y se hubiese realizado la última compresión en esa posición
Llegando el «cilindro A» sobre el final de carrera FC2
El «cilindro B» permanece quieto mientras el «cilindro A» llega sobre FC1.
Entonces el «cilindro A» se detendría y el «cilindro B» iniciaría su movimiento de entrada y retroceso.Para, una vez alcanzada su posición retraída por el «cilindro B», detenerse también.
Y esperar el inicio de un nuevo proceso.
P
Inicio
Y7=0

Sensor de Carga (Oleohidráulica Convencional)
«cilindro A»
«cilindro B»
FC1 FC2 FC3 FC4
Inicio

Sensor de Carga (Oleohidráulica Convencional)
https://www.facebook.com/pages/OLEOHIDR%C3%81ULICA-INDUSTRIAL/141154685899979?sk=photos_stream&tab=photos_albums
OLEOHIDRÁULICA INDUSTRIAL en facebook
649751794