seminar02 mpe
TRANSCRIPT
8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 1/7
2. Seminar Energy Methods, FEM Class of 2013
Topic Potential of Internal Energy 24.10.2013
A c c e s s
1 Principal of Minimum of Potential Energy (MPE)
postulation:
Π = Πi + Πe → min (1)
Πi ... internal potential energy stored in the body/system
Πe ... potential energy due to external loads, e.g., body forces, traction forces, etc.
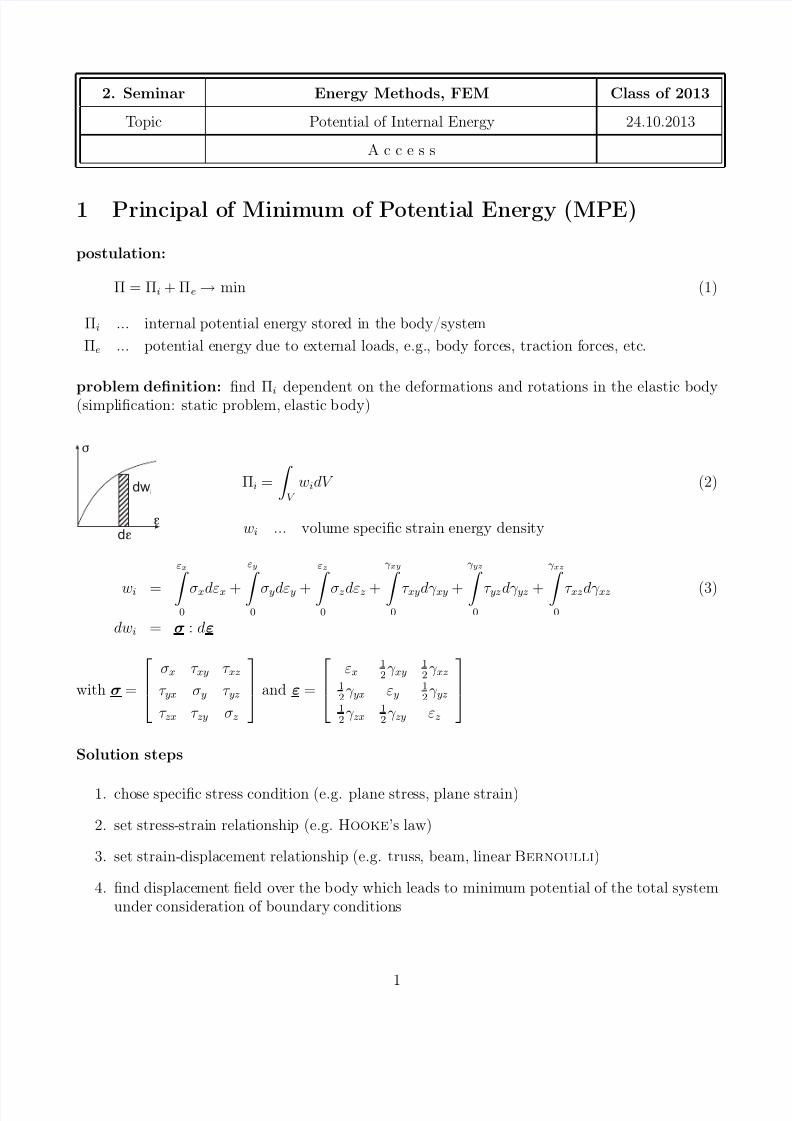
problem definition: find Πi dependent on the deformations and rotations in the elastic body(simplification: static problem, elastic body)
dwi
d
Πi =
V
widV (2)
wi ... volume specific strain energy density
wi =
εx
0
σxdεx +
εy
0
σydεy +
εz
0
σzdεz +
γ xy
0
τ xydγ xy +
γ yz
0
τ yzdγ yz +
γ xz
0
τ xzdγ xz (3)
dwi = σ : dε
with σ =
σx τ xy τ xz
τ yx σy τ yz
τ zx τ zy σz
and ε =
εx1
2γ xy
1
2γ xz
1
2γ yx εy
1
2γ yz
1
2γ zx
1
2γ zy εz
Solution steps
1. chose specific stress condition (e.g. plane stress, plane strain)
2. set stress-strain relationship (e.g. Hooke’s law)
3. set strain-displacement relationship (e.g. truss, beam, linear Bernoulli)
4. find displacement field over the body which leads to minimum potential of the total systemunder consideration of boundary conditions
1
8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 2/7
Minimisation (Extremum) Principal
δ Π = δ (Πi + Πe) = 0 (4)
variation: δ (.) = ∂ (.)
∂u · δu with displacement field u
• exact fulfilment of extremum conditions leads to Eulerian differential equations ≡ stronglocal form of equilibrium conditions
• approximate fulfilment of extremum conditions leads to weak form (Ritz-method)
yN (x) = ϕ0 (x) +ni=1
ai · ϕi (x) (5)
yN (x) ... approximation/ansatz-function for displacement
ϕ0 (x) ... function for particular solution u = 0 at ∂ B (boundary)
ϕi (x) ... homogeneous solution function for u = 0 at ∂ B
ai ... unknowns
• requirements:
– yN needs to fulfil kinematic boundary conditions (displacement boundary conditions)
– yN does’nt necessarily satisfy natural boundary conditions (traction boundary condi-tions)
2 Example
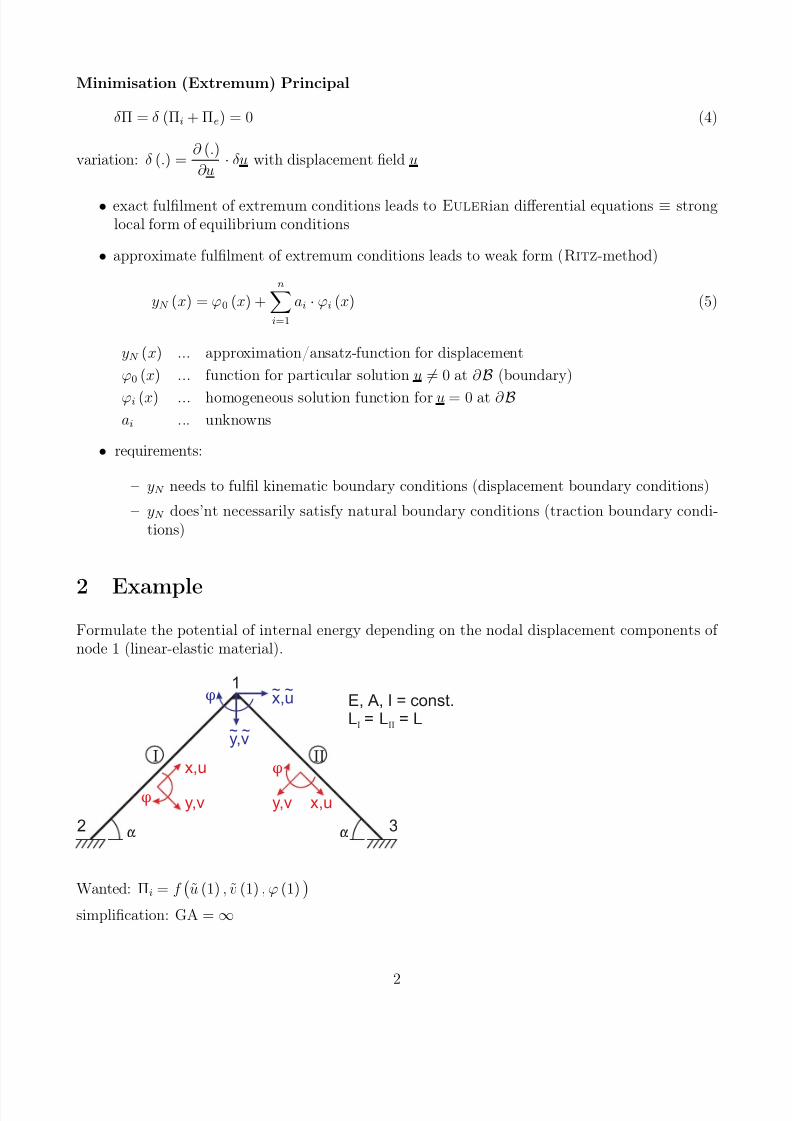
Formulate the potential of internal energy depending on the nodal displacement components of node 1 (linear-elastic material).
x,u
y,v
1
2 3
I II
~
x,u
y,v x,uy,v
~ ~
~E, A, I = const.L = L = L
I II
Wanted: Πi = f
u (1) , v (1) , ϕ (1)
simplification: GA = ∞
2

8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 3/7
3 Solution
Wanted: internal potential energy for a planar Bernoulli-Beam in form of Πi = f
u (1) , v (1) , ϕ (1)
.
specific stress state (solution step 1)
σx = 0 σy = σz = 0
τ xz = τ xy = 0 (no torsion)τ yz = 0 (no shearing)
stress-strain relationship (solution step 2)
σx = E · εx (6)
internal potential for each beam (in local coordinates):
Πi =
V
εx0
σxd εxd V = E
V
εx0
εxd εxd V = 1
2E
V
ε2xd V (7)
strain-displacement relationship (solution step 3)strains in linear regime (small strains):
εx = d u
d x (8)
kinematic hypothesis due to Bernoulli
y,v
u =u(y=0)0
u(y)=u - y0
from u (y) = u0 − ϕ · y and ϕ = d v
d x follows
εx = d
d x
u (y = 0)− ϕ · y
=
d u
d x −
d2 v
d x2 · y = u − v · y (9)
inserting (9) in (7)
Πi = 1
2E
V
(u − v · y)2
d V
= 1
2E
V
u 2 − 2 · u · v · y + (v · y)
2
d V (10)
with dV = dxdA and A
dA = A and A
ydA = 0 and A
y2dA = I z
Πi = 1
2EA
x
u 2 d x + 1
2EI z
x
v 2 d x (11)
3
8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 4/7
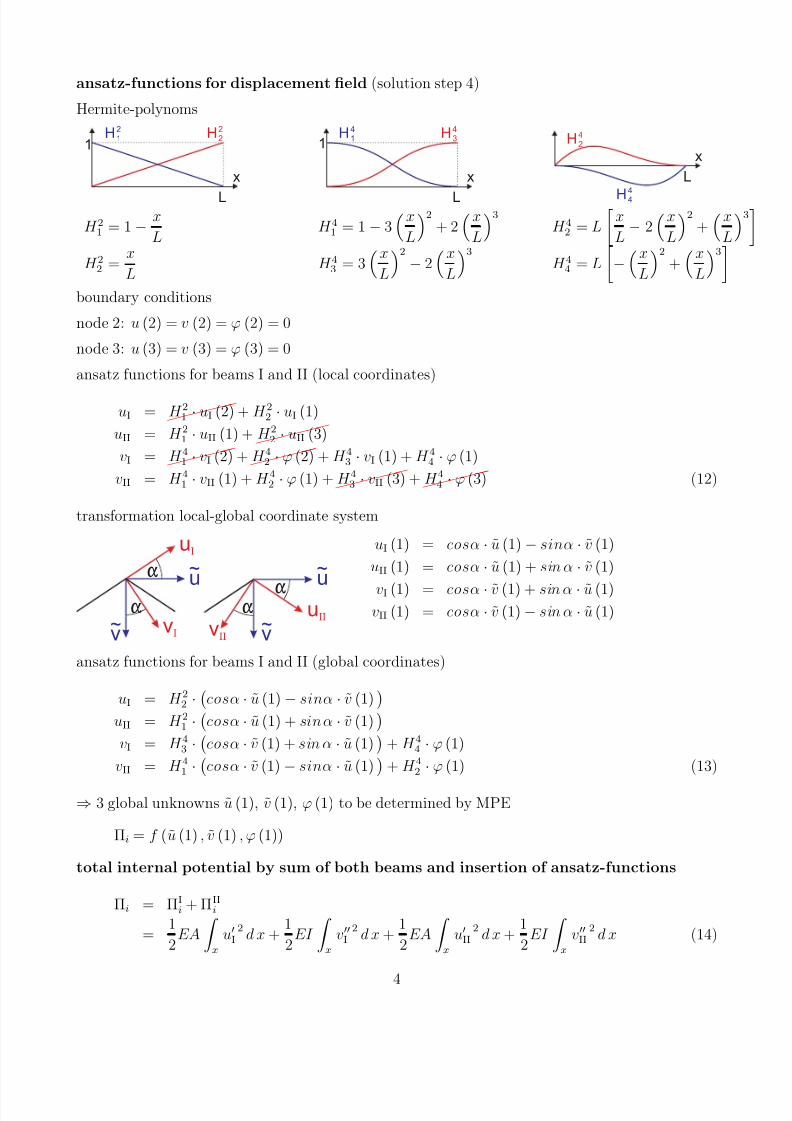
ansatz-functions for displacement field (solution step 4)
Hermite-polynoms
x
1
L
2
1H H
2
2
x
1H
4
3
4
1 H
L
x
H
4
4
4
2
H
L
H 21
= 1− x
L H 4
1 = 1− 3
x
L
2
+ 2x
L
3
H 42
= L
x
L − 2
x
L
2
+x
L
H 22
= x
L H 4
3 = 3
x
L
2
− 2x
L
3
H 44
= L
−x
L
2
+x
L
3
boundary conditions
node 2: u (2) = v (2) = ϕ (2) = 0
node 3: u (3) = v (3) = ϕ (3) = 0
ansatz functions for beams I and II (local coordinates)
uI =
H 21 · uI (2) + H 2
2 · uI (1)
uII = H 21 · uII (1) +
H 22 · uII (3)
vI =
H 41 · vI (2) +
H 42 · ϕ (2) + H 4
3 · vI (1) + H 4
4 · ϕ (1)
vII = H 41 · vII (1) + H 4
2 · ϕ (1) +
H 43 · vII (3) +
H 44 · ϕ (3) (12)
transformation local-global coordinate system
uI
uII
~u
~v
vI
~u
~v
vII
uI (1) = cosα · u (1)− sinα · v (1)
uII (1) = cosα · u (1) + sin α · v (1)
vI (1) = cosα · v (1) + sin α · u (1)vII (1) = cosα · v (1)− sin α · u (1)
ansatz functions for beams I and II (global coordinates)
uI = H 22 ·
cosα · u (1)− sinα · v (1)
uII = H 21 ·
cosα · u (1) + sin α · v (1)
vI = H 43 ·
cosα · v (1) + sin α · u (1)
+ H 44 · ϕ (1)
vII = H 41 · cosα · v (1)− sinα · u (1) + H 4
2 · ϕ (1) (13)
⇒ 3 global unknowns u (1), v (1), ϕ (1) to be determined by MPE
Πi = f (u (1) , v (1) , ϕ (1))
total internal potential by sum of both beams and insertion of ansatz-functions
Πi = ΠI
i + ΠII
i
= 1
2EA
x
u
I
2d x +
1
2EI
x
v
I
2d x +
1
2EA
x
u
II
2d x +
1
2EI
x
v
II
2d x (14)
4

8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 5/7
derivations of ansatz-functions
u
I = H 2
2
·
cos α · u (1)− sin α · v (1)
u
II = H 2
1
·
cos α · u (1) + sin α · v (1)
v
I = H 4
3
·
cos α · v (1) + sin α · u (1)
+ H 4
4
· ϕ3 (1)
v
II = H 4
1
· cos α · v (1)− sinα · u (1) + H 4
2
· ϕ3 (1) (15)
with
H 21
= −1
L
H 22
= 1
L
H 41
= − 6
L2 + 12
x
L3
H
4
2
= −
4
L + 6
x
L2
H 43
= 6
L2 − 12
x
L3
H 44
= −2
L + 6
x
L2 (16)
⇒ insertion into Πi and integration
5

8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 6/7
Appendix: Derivation of an ansatz-function
i
k
u(i)
u(k)
v(k)
v(i)
x(i) (k) Idea: Build up the ansatz-function by power serieswith the nodal displacements as free parameters, i.e.
unknowns.
axial displacement u (x)
two unknowns u (i) and u (k) → linear approach with two parameters a and b
u (x) = a · x + b
boundary conditions:
u (x = 0) = u (i) → b = u (i)
u (x = L) = u (k) → a = u (k)− u (i)
L
lead to
u (x) = u (k)− u (i)
L · x + u (i)
=
1− x
L
H
2
1
·u (i) + x
L
H 2
2
·u (k)
vertical displacement v (x)
4 unknowns v (i), v (k), ϕ (i) and ϕ (k) → cubic approach with 4 parameters
v (x) = a · x3 + b · x2 + c · x + d
ϕ (x) = v (x)
= 3a · x2 + 2b · x + c
boundary conditions
v (x = 0) = v (i) → d = v (i)
ϕ (x = 0) = ϕ (i) → c = ϕ (i)
v (x = L) = v (k) → a · L3 + b · L2 + ϕ (i) · L + v (i) = v (k)
ϕ (x = L) = ϕ (k) → 3a · L2 + 2b · L + ϕ (i) = ϕ (k)
6

8/13/2019 Seminar02 MPE
http://slidepdf.com/reader/full/seminar02-mpe 7/7
lead to
a = ϕ (k) + ϕ (i)
L2 − 2
v (k) − v (i)
L3
b = −ϕ (k) + 2ϕ (i)
L + 3
v (k)− v (i)
L2
finally leads to
v (x) =
ϕ (k)
L2 +
ϕ (i)
L2 − 2
v (k)
L3 + 2
v (i)
L3
· x3 +
−
ϕ (k)
L − 2
ϕ (i)
L + 3
v (k)
L2 − 3
v (i)
L2
· x2
+ϕ (i) · x + v (i)
=
2
x3
L3 − 3
x2
L2 + 1
· v (i) +
−2
x3
L3 + 3
x2
L2
· v (k)
+
x3
L2 − 2
x2
L + x
· ϕ (i) +
x3
L2 +−
x2
L
· ϕ (k)
= H 4
1 · v (i) + H 4
3 · v (k) + H 4
2 · ϕ (i) + H 4
4 · ϕ (k)
7