research article satellite attitude control system design taking...
TRANSCRIPT
Research ArticleSatellite Attitude Control System Design Taking into Accountthe Fuel Slosh and Flexible Dynamics
Alain G. de Souza1 and Luiz C. G. de Souza1,2
1 National Institute for Space Research (INPE), Avenida dos Astronautas 1758, 12227-010 Sao Jose dos Campos, SP, Brazil2 Brasılia University, Campus Gama, Area Especial de Industria-A-UnB, 72444-240 Brasilia, DF, Brazil
Correspondence should be addressed to Luiz C. G. de Souza; [email protected]
Received 31 March 2014; Revised 23 July 2014; Accepted 29 July 2014; Published 10 September 2014
Academic Editor: Antonio F. Bertachini A. Prado
Copyright © 2014 A. G. de Souza and L. C. G. de Souza. This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work isproperly cited.
The design of the spacecraft Attitude Control System (ACS) becomes more complex when the spacecraft has different type ofcomponents like, flexible solar panels, antennas, mechanical manipulators and tanks with fuel. The interaction between the fuelsloshmotion, the panel’s flexiblemotion and the satellite rigidmotion during translational and/or rotational manoeuvre can changethe spacecraft center of mass position damaging the ACS pointing accuracy. This type of problem can be considered as a Fluid-Structure Interaction (FSI) where some movable or deformable structure interacts with an internal fluid. This paper develops amathematical model for a rigid-flexible satellite with tank with fuel. The slosh dynamics is modelled using a common pendulummodel and it is considered to be unactuated. The control inputs are defined by a transverse body fixed force and a moment aboutthe centre of mass. A comparative investigation designing the satellite ACS by the Linear Quadratic Regulator (LQR) and LinearQuadratic Gaussian (LQG) methods is done. One has obtained a significant improvement in the satellite ACS performance androbustness of what has been done previously, since it controls the rigid-flexible satellite and the fuel slosh motion, simultaneously.
1. Introduction
The problems due to fluid-structure interaction (FSI) arecrucial in the design of many engineering systems. Theyappear in the dynamic behaviour of offshore and marinestructures, road, and railroad containers partially filled with afluid [1]. In space applications the problem appears when thedynamics of a rigid satellite with liquid fuel inside interactswith flexible structures [2]. One notes these problems aremore relevant when the slosh unactuated dynamics motionhas to be simultaneously controlled together to the rigid-flexiblemotion of the satellite [3]. In the rigid-flexible satelliteattitude control system (ACS) design the knowledge ofthe interaction between fluid motion (slosh) and flexiblestructure dynamics is important because this interaction candamage the ACS pointing requirements. A space structure,like rockets, geosynchronous satellites, and the space station,usually contains liquid in tanks that can represent more than40% of the initial mass of the system. As a result, the first step
to design its ACS is to obtain a detailed dynamics model ofthe space structure. When the fuel tanks are only partiallyfilled and suffer a transversal acceleration and/or rotationalmotion, large quantities of fuel move uncontrollably insidethe tanks and generate the sloshing effects. It has been shownin [4] that the dynamics interaction between the fuel motionand the rigid and/or flexible body dynamics can result insome kind of control instability. For minimizing these effectsthe ACS must be designed using a robust control methodin order to assure stability and good performance to achievethe attitude control system requirement [5]. The dynamics ofrigid-flexible satellite with fuel tanks when subject to largeangle manoeuvre is only captured by complex nonlinearmathematical model. Besides, the remaining flexible and/orliquid vibration can introduce a tracking error resultingin a minimum attitude acquisition time. The problem ofdesigning satellite nonlinear controller for rigid satellitehas been done in [6] using the state-dependent Riccatiequation (SDRE) method which is able to deal with high
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014, Article ID 820586, 8 pageshttp://dx.doi.org/10.1155/2014/820586

2 Mathematical Problems in Engineering
nonlinear plants. Due to the complexity of modelling thefluid and/or flexible dynamic of the system it is common touse mechanical systems analogies that describe this dynamic.Besides, if one needs to know some physical parametersrelated with the slosh or the flexibility dynamics it is commonto obtain them by experimental apparatus or some kind ofestimating method such as Kalman filter [7]. In [8] a newtechnique to control the attitude of a rigid-flexible satellitehas been developed where a reaction wheel was used forcontrolling the angularmotion and the vibrations are dampedby piezoelectric patches that are symmetrically bonded in thepanel’s surfaces. A multiobjective approach has been usedin [9] to solve the problem of optimal flexible solar sailtrajectories control. A similar investigation has been done in[10] where, besides the design of the controller consideringthe effects of the interaction between the liquid motion(slosh) and the rigid dynamics, the parameters of the fuelslosh dynamicsmodelled by a simple pendulum are identifiedusing the Kalman filter technique.
2. Satellite Model with Slosh
Thephenomenon of sloshing is due to themovement of a freesurface of a liquid that partially fills a compartment and thismovement is oscillating. It depends on shape of the tank, theacceleration of gravity, and the axial/rotational accelerationof the tank. As representative of the behaviour of the totalweight of the system it is accepted that when the mass ofthe liquid oscillates the mass center of the rigid body alsooscillates, thereby disturbing the rigid-flexible part of thevehicle under consideration. As an oscillating movement itis natural to consider the wave generated by the movement ofthe liquid as a stationary wave. Each mode of oscillation hasa special feature of this phenomenon under study, and oneobserves, in a quantitative sense, howmuchmass is displaced.Among all themodes that cause the greatest disruption in thesystem are the first and second modes. Despite the fact thatoscillation has lower frequency it is capable of resulting inviolent shifting of the center of mass of the liquid creating anoscillation in the system as a role.The other oscillationmodesact less aggressive andmay not even vary with the position ofits center of mass due to the symmetry of the wave which onaverage causes no displacement.
Due to its complexity, the sloshing dynamics is usuallyrepresented by mechanical equivalents that describes andreproduces faithfully the actions and reactions due to forcesand torques acting on the system. The main advantage ofreplacing the fluid model with an equivalent oscillatingmodel is simplifying the analysis of motion in the rigidbody dynamics, compared to the fluid dynamics equations.Due to the complexity of establishing an analytical modelfor the fluid moving freely within a closed tank, it is usedas a simplified system, taking into account the followingcriteria [5]: (a) small displacements, (b) a rigid tank, and(c) no viscous, incompressible, and homogeneous liquid.Under these conditions the dynamics of the sloshing can beapproximated by mechanical system consisting of a mass-spring or pendulum.
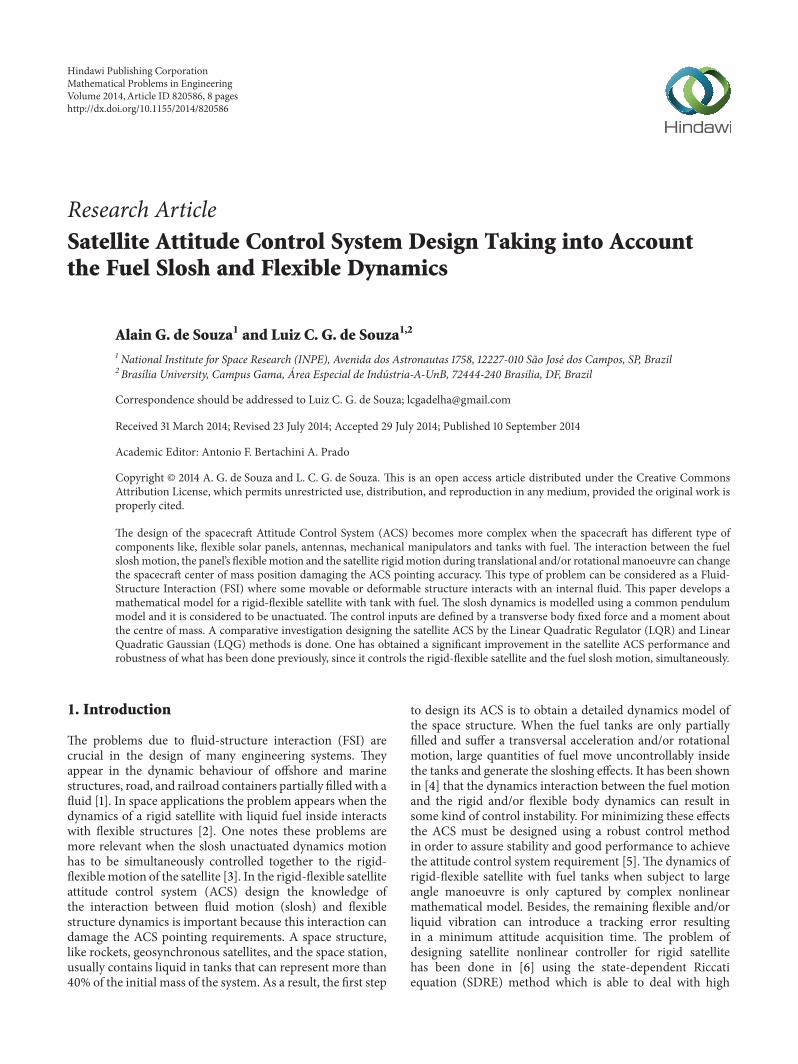
Consider a rigid spacecraft moving in a fixed plane, witha spherical fuel tank and including the lowest frequency sloshmode. Based on the Lagrange equation and the Rayleigh dis-sipation function one can model systems using the mechan-ical mass-spring and pendulum type system, respectively.Figure 1 shows a satellite model where slosh dynamics isrepresented by its pendulum analogous mechanical system.
The mass of the satellite and the moment of inertia,regardless of the fuel, are given by 𝑚 and 𝐼, respectively,and the mass equivalent of fuel and its inertia moment aregiven by𝑀𝑓 and 𝐼𝑓, respectively. It is assumed as a transverseforce 𝑓 and a pitching moment 𝑀. The constant thrust 𝐹is responsible for the orbital transfer of the spacecraft withrespect to the inertial reference system (𝑥, 𝑦, 𝑧) and it actson the center of mass of spacecraft in the longitudinal axis.Also it is given the velocity of the center of the fuel tank 𝜐𝑥,𝜐𝑧 and the attitude angle 𝜃 of the spacecraft with respect to afixed reference (𝑋, 𝑌, 𝑍). Besides, one assumes as generalizedcoordinates that𝑉 represents the linear velocity, 𝜔 representsthe angular velocity of the rigid body, 𝑎 is the length of thependulum rod, 𝑏 is the distance from satellite center of massto the pendulum connected point, and 𝜓 is the angle of thependulum with respect to the spacecraft longitudinal axis,which is assumed in the equilibrium position 𝜓 = 0 aboutthe reference axis. The parameters 𝑚𝑓, 𝜓, and 𝑎 depend onthe shape of the tank, chemical-physical characteristics of thefuel, and the fill ratio of the fuel tank.
The satellite equations of motion for the satellite withsloshing can be derived using the Lagrange equations givenby
𝑑
𝑑𝑡
(
𝜕𝐿
𝜕𝑉
) + 𝜔× 𝜕𝐿
𝜕𝑉
= 𝜏𝑡,
𝑑
𝑑𝑡
(
𝜕𝐿
𝜕𝜔
) + 𝜔× 𝜕𝐿
𝜕𝜔
+ 𝑉× 𝜕𝐿
𝜕𝑉
= 𝜏𝑟,
𝑑
𝑑𝑡
(
𝜕𝐿
𝜕��
) −
𝜕𝐿
𝜕𝜓
+
𝜕𝑅
𝜕��
= 0,
(1)
where 𝐿 is the Lagrangian of the system, 𝑅 is the Rayleighdissipation function, 𝜏𝑟 is the internal torque, and 𝜏𝑡 is theexternal torque. Assume that 𝑅, 𝜏𝑟, 𝜏𝑡, 𝜔, and 𝑉 are given by
𝑅 =
1
2
𝜀��2; 𝑉 =
[
[
V𝑥0
V𝑧]
]
; 𝜔 =[
[
0
𝜃
0
]
]
;
𝜏𝑡 =[
[
𝐹
0
𝑓
]
]
; 𝜏𝑟 =[
[
0
𝑀 + 𝑓𝑏
0
]
]
.
(2)
The position vector of the satellite mass center withrespect to the inertial system is
𝑟 = (𝑥 − 𝑏) 𝑖 + 𝑧𝑘. (3)
Mathematical Problems in Engineering 3
𝜃X
𝜓
Z
M
b
𝜐z
𝜐x
→r
→rf
x
z
a
f
F
Figure 1: Satellite model with slosh dynamics pendulum analogous mechanical system.
Assuming the relations V𝑥 = ��+𝑧 𝜃 and V𝑧 = ��−𝑥 𝜃 the satellite
velocity is given by
𝑟 = V𝑥 �� + (V𝑧 + 𝑏 𝜃) 𝑘. (4)
The position of the mass of fuel is given by
𝑟𝑓 = (𝑥 − 𝑎 cos (𝜓)) �� + (𝑧 + 𝑎 sen (𝜓)) 𝑘. (5)
As a result, the velocity of the fuel mass is
𝑟𝑓 = (V𝑥 + 𝑎 sen (𝜓) ( 𝜃 + ��)) �� + (V𝑧 + 𝑎 cos (𝜓) ( 𝜃 + ��)) 𝑘.
(6)
The Lagrangian of the entire system is given by
𝐿 =
1
2
𝑚𝑟
2+
1
2
𝑚𝑓𝑟
2
𝑓 +1
2
𝐼𝑓(𝜃 + ��)
2+
1
2
𝐼𝜃2. (7)
Substituting (4)–(6) into (7), using the relations given by (2),and performing the derivations of (1), one obtains the satelliteequations of motion given by
(𝑚 + 𝑚𝑓) (V𝑥 + V𝑧 𝜃) + 𝑚𝑏 𝜃 + 𝑚𝑓𝑎 (�� + 𝜃) sen (𝜓)
+ 𝑚𝑓𝑎(𝜃 + ��)
2cos (𝜓) = 𝐹
(8)
(𝑚 + 𝑚𝑓) (V𝑧 − V𝑥 𝜃) + 𝑚𝑓𝑎 ( 𝜃 + ��) cos (𝜓)
− 𝑚𝑓𝑎(𝜃 + ��)
2sen (𝜓)𝑚𝑏 𝜃 = 𝑓
(9)
(𝐼𝑓 + 𝑚𝑏2)𝜃 + 𝑚𝑏 (V𝑧 − V𝑥 𝜃) − 𝜀�� = 𝑀 + 𝑏𝑓 (10)
(𝑚𝑓𝑎2+ 𝐼𝑓)(
𝜃 + ��) + 𝑚𝑓𝑎 ((V𝑥 + V𝑧 𝜃) sen (𝜓)
+ (V𝑧 − V𝑥 𝜃) cos (𝜓)) + 𝜀�� = 0.(11)
Assuming the relations 𝑎𝑥 = V𝑥 + V𝑧 𝜃, 𝑎𝑧 = V𝑧 − V𝑥 𝜃 andsubstituting them into (8) and (9), one can isolate and obtainthe satellite accelerations given by
𝑎𝑥=
𝐹 − 𝑚𝑏𝜃 − 𝑚𝑓𝑎 (�� +
𝜃) sen (𝜓) − 𝑚𝑓𝑎( 𝜃 + ��)
2cos (𝜓)
𝑚 + 𝑚𝑓
𝑎𝑧=
𝑓 − 𝑚𝑓𝑎 (𝜃 + ��) cos (𝜓) + 𝑚𝑓𝑎( 𝜃 + ��)
2sen (𝜓) − 𝑚𝑏 𝜃
𝑚 + 𝑚𝑓
.
(12)
All equations derived previously are nonlinear. However,in order to design LQR and LQGcontrollers one has to get thelinear set of equations of motion, which is obtained assumingthat the system makes small movements around the zeropoint of equilibrium [10]. Now, substituting (12) into (10) and
4 Mathematical Problems in Engineering
𝜃X
Z
𝜓
𝛿
𝓁
M
b
𝜐z
𝜐x
a
f
F
Figure 2: Satellite model with slosh dynamics and a flexible panel.
(11) and assuming the linearization conditions, one has thesatellite equation of motion given by
𝜃 (𝐼𝑓 + 𝑚
∗(𝑎2− 𝑏𝑎)) + 𝜓 (𝐼𝑓 + 𝑚
∗𝑎2) + 𝑎𝑚
∗𝑓𝐹𝜓 + 𝜀��
= −𝑎𝑚∗𝑓𝑓
(13a)
𝜃 (𝐼 + 𝑚
∗(𝑏2− 𝑏𝑎)) − 𝑚
∗𝑎𝑏𝜓 − 𝜀�� = 𝑀 + 𝑏
∗𝑓, (13b)
where 𝑏∗ = 𝑏𝑚𝑓/(𝑚 + 𝑚𝑓), 𝑚∗= 𝑚𝑚𝑓/(𝑚 + 𝑚𝑓) and𝑚
∗𝑓 =
𝑚𝑓/(𝑚 + 𝑚𝑓).
3. Satellite Model with Sloshing and Flexibility
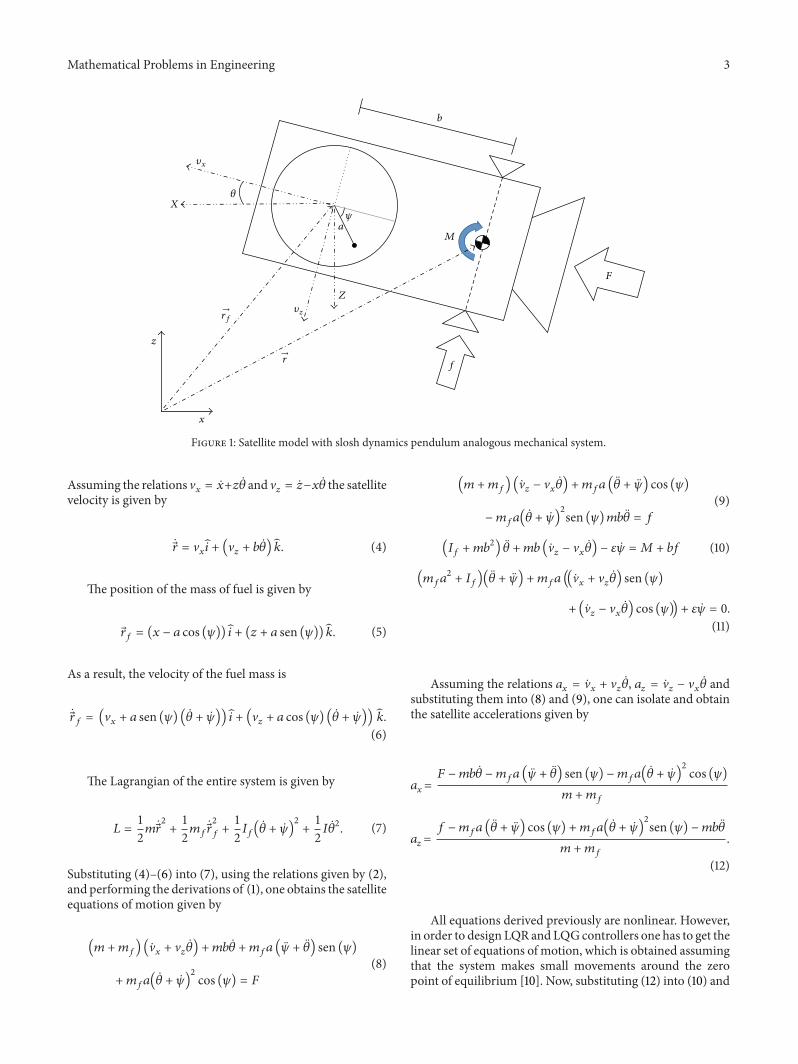
To derive the equations of motion for the satellite model withsloshing and flexibility one considers the same rigid satellitewith tank partially filled plus a flexible appendage connectedto the satellite as shown in Figure 2.
The flexible appendage has mass 𝑚𝑝 and length ℓ and ithas two motions, the angular motion 𝜃, resulting in a linearvelocity ℓ 𝜃 and a flexible deformation 𝛿 with respect to thez-axis resulting in its variation given by
𝛿. Thus, for smalldeformations, the panel velocity is given by
V𝑝 = 𝛿 + ℓ
𝜃. (14)
The panel kinetic, potential energy and the dissipationfunction of energy𝐷 are given by
𝑇𝑝 =1
2
𝑚𝑝(𝛿 + ℓ
𝜃)
2,
𝐸potential =𝛿2
2
𝑘,
𝐷 =
𝛿2
2
𝑘𝑑,
(15)
where 𝑘 and 𝑘𝑑 are the panel elastic constant and thedissipation constant.
Now the Lagrangian considering the slosh and theappen-dices’ flexibility is given by
𝐿 =
1
2
((𝑚 + 𝑚𝑓) (V𝑥2+ V𝑧2) + 𝑚 (2V𝑧𝑏 𝜃 + 𝑏
2 𝜃2)
+ 𝑚𝑓 (𝑎 (𝜃 + ��) (𝑎 (
𝜃 + ��)
+2 (V𝑥sen (𝜓) + V𝑧 cos (𝜓))))
+ 𝐼𝜃2+ 𝐼𝑓(
𝜃 + ��)
2+ 𝑚𝑝 (
𝛿2+ 2ℓ
𝜃𝛿 + ℓ2 𝜃2) − 𝛿2𝑘) .
(16)
In order to obtain the equation of motion for the satellitewith sloshing and flexible panel one uses (1) plus the Lagrangeequation given by
𝑑
𝑑𝑡
(
𝜕𝐿
𝜕𝛿
) −
𝜕𝐿
𝜕𝛿
+
𝜕𝐷
𝜕𝛿
= 0, (17)

Mathematical Problems in Engineering 5
by which after all derivation one obtains the nonlinearequations of motion given by
(𝑚 + 𝑚𝑓) 𝑎𝑥 + 𝑚𝑏𝜃2+ 𝑚𝑓𝑎 (�� +
𝜃) sen (𝜓)
+ 𝑚𝑓𝑎(𝜃 + ��)
2cos (𝜓) = 𝐹,
(18a)
(𝑚 + 𝑚𝑓) 𝑎𝑧 + 𝑚𝑓𝑎 (�� +𝜃) cos (𝜓)
− 𝑚𝑓𝑎(𝜃 + ��)
2sen (𝜓) + 𝑚𝑏 𝜃 = 𝑓,
(18b)
(𝑚𝑏2+ 𝐼𝑓 + 𝑚𝑝ℓ
2)𝜃 +
𝛿𝑚𝑝ℓ + 𝑚𝑏𝑎𝑧 − 𝜀�� = 𝑀 + 𝑓𝑏,
(18c)
(𝑚𝑓𝑎2+ 𝐼𝑓) (�� +
𝜃) + 𝑚𝑓𝑎 (sen (𝜓) 𝑎𝑥 + cos (𝜓) 𝑎𝑧)
+ 𝜀�� = 0,
(18d)
𝛿𝑚𝑝 +
𝜃𝑚𝑝ℓ +
𝛿𝑘𝑑 + 𝛿𝑘 = 0. (18e)
In order to linearize the system of (18a), (18b), (18c), (18d),and (18e), one must first isolate 𝑎𝑥 and 𝑎𝑧 in (18a) and (18b)and replace them in (18c) and (18d). By doing this one obtainsthe system of linear equations given by
𝜃 (𝐼 + 𝑚𝑝ℓ
2+ 𝑚∗(𝑏2− 𝑏𝑎)) + 𝑚𝑝ℓ
𝛿 − 𝑚
∗𝑎𝑏��
− 𝜀�� = 𝑀 + 𝑏∗𝑓,
𝜃 (
𝑚∗𝑏𝑎
𝐼𝑓 + 𝑚∗𝑎2− 1) = �� + �� (
𝜀
𝐼𝑓 + 𝑚∗𝑎2)
+ 𝜓(
𝑎∗𝐹
𝐼𝑓 + 𝑚∗𝑎2) +
𝑎∗𝑓
𝐼𝑓 + 𝑚∗𝑎2,
−𝜃ℓ =
𝛿 +
𝛿
𝑘𝑑
𝑚𝑝
+ 𝛿
𝑘
𝑚𝑝
,
(19)
where 𝑚∗ = 𝑚𝑓𝑚/(𝑚 + 𝑚𝑓), 𝑎∗= 𝑚𝑓𝑎/(𝑚 + 𝑚𝑓), 𝑏
∗=
𝑚𝑓𝑏/(𝑚 + 𝑚𝑓).
4. Linear Quadratic Gaussian (LQG)
The LQG method is the union of the LQR problem with theKalman filter problem. The separation principle [7] ensuresthat each problem can be solved independently of each other.However, if there is any state that is not available one uses theKalman filter to estimate it in order to receive feedback.
Assume a plant described by the linear state equationsgiven by
x (𝑡) = Ax (𝑡) + Bu (𝑡) + Γ𝑤,
y = Cx (𝑡) + 𝜐,(20)
where x is the state vector,A is the state matrix, B is the inputmatrix, y is the output vector, C is the output matrix, 𝜐 and𝑤
are white noise, and u is the control input. Following a similarapproach described before, now the LQR gain is given by
K𝑐 = R−1B𝑇P𝑐, (21)
where R is real symmetric positive definite matrix and P𝑐 isthe symmetrical solution of the LQR Riccati equation givenby
A𝑇P𝑐 + P𝑐A − P𝑐BR−1B𝑇P𝑐 +M𝑇QM = 0. (22)
Similarly the Kalman filter gain now is given by
K𝑓 = P𝑓C𝑇V−1, (23)
where V is real symmetric positive definite matrix and P𝑓 isthe symmetrical solution matrix of the KF Riccati equationgiven by
P𝑓A𝑇+ AP𝑓 − P𝑓C
𝑇V−1CP𝑓 + Γ𝑇WΓ = 0, (24)
where P𝑐 = P𝑇𝑐 ≥ 0 and P𝑓 = P𝑇𝑓 ≥ 0 and Q, R, V, andW are weights matrices which can be regarded as settingparameters (“tuning”) that must be manipulated until theyfind one acceptable response to the system.The LQGmethodis more realistic than the LQR method, since it can estimatethe states that are not available for feedback and it allowsincluding the noise in the model which represents imperfec-tions of the system.
5. Simulations Results
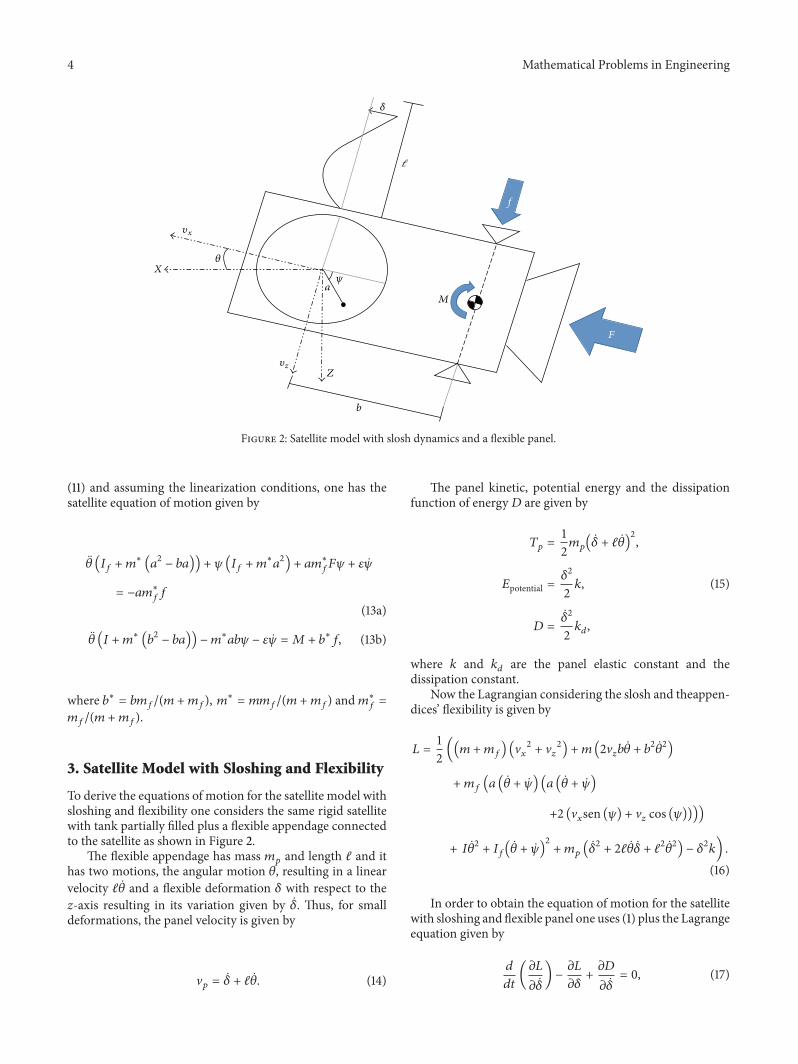
The first simulation is the design comparison between theLQR and LQG control law, for the satellite model withsloshing dynamics given by (13a) and (13b). The parametersvalues used in the simulations are𝑚 = 600Kg,𝑚𝑓 = 100Kg,𝐼 = 720Kg/m, 𝐼𝑓 = 90Kg/m, 𝑎 = 0.3m, 𝑏 = 0.3m,𝐹 = 500N, and 𝜀 = 0.19Kgm2/s. The initial conditions usedare 𝜃 = 2∘, 𝑑𝜃/𝑑𝑡 = 0.57∘/s, 𝜓 = 1∘, and 𝑑𝜓/𝑑𝑡 = 0∘. Figure 3shows that the LQRcontrol lawperformance is better than theLQG, which indicates that considering the sloshing variablesavailable for feedback helps the LQR control law, which is nottrue.
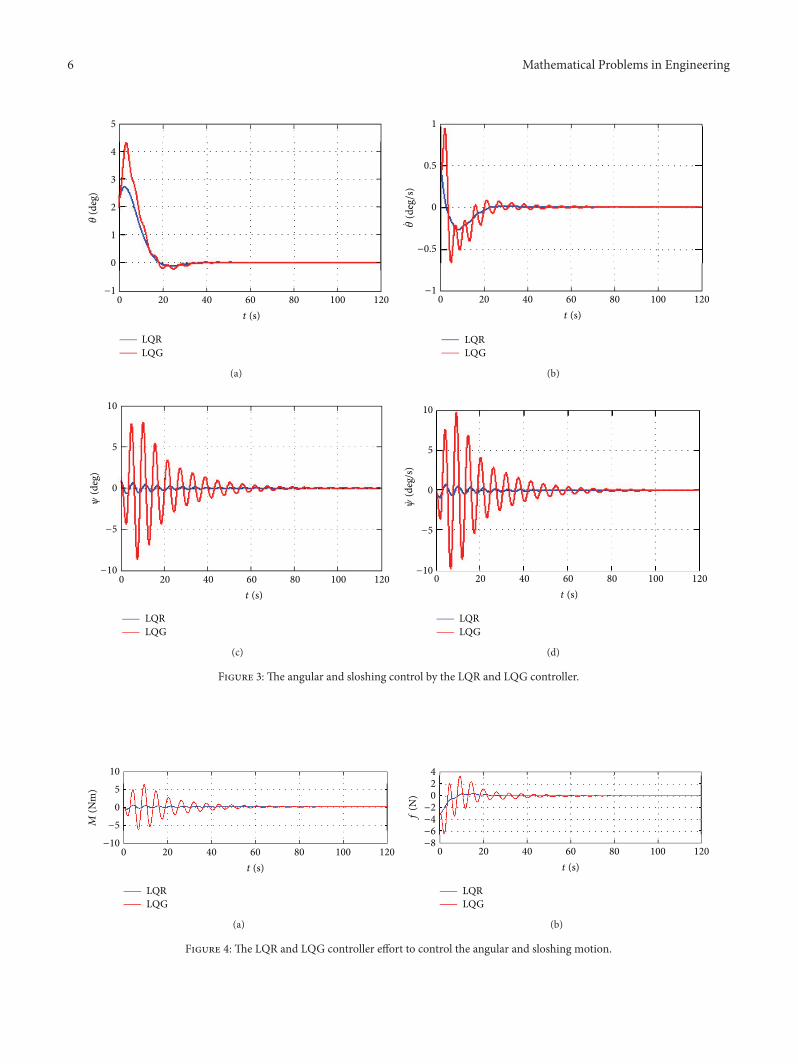
Figure 4 shows that both the torque and the force of theLQR controller are smaller than the LQG controller.
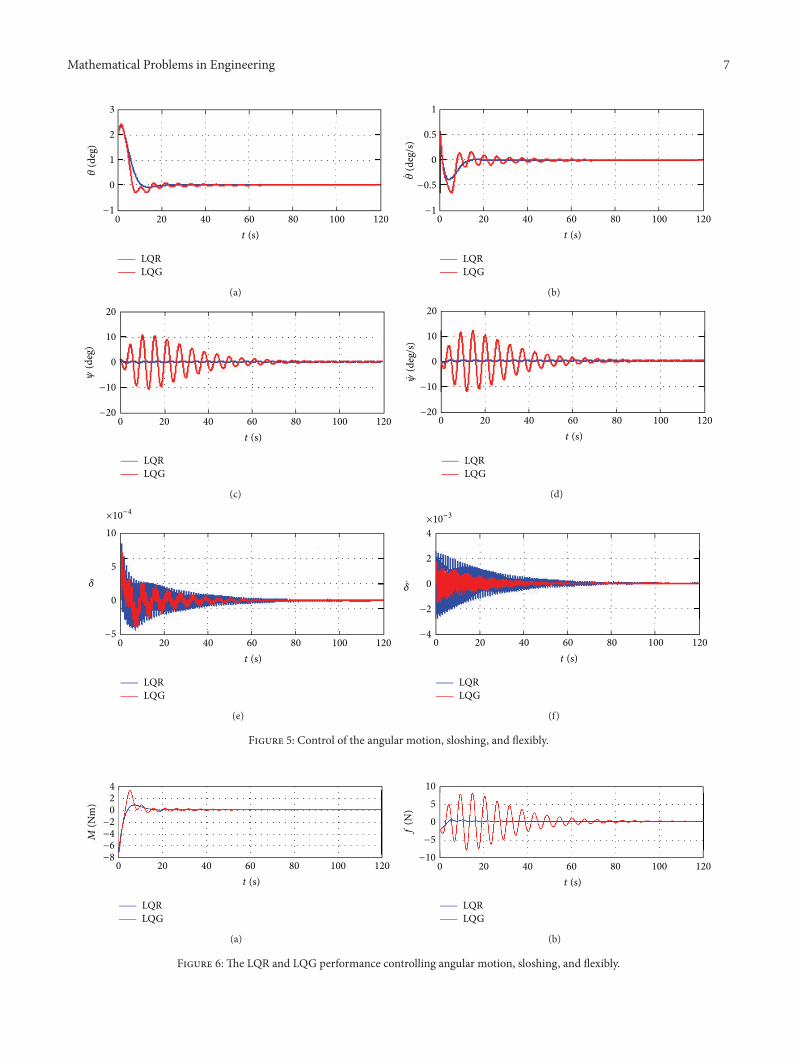
The second simulation is also the comparison betweenthe LQR and LQG control law, but now the satellite modelhas the sloshing dynamics plus the flexible dynamics ofpanel, in which the data values are 𝑚𝑝 = 10 kg, ℓ= 1.5m,𝑘= 320Kgrad2/s2, and 𝑘𝑑 = 0.48Kgrad2/s. The simulationsinitials conditions are 𝜃 = 2
∘, 𝑑𝜃/𝑑𝑡 = 0.57∘/s, 𝜓 = 1
∘,𝑑𝜓/𝑑𝑡 = 0
∘/s, and 𝛿 =
𝛿 = 0.Figure 5 shows that the LQR control law performance is
better than the LQG only for controlling the angular motion.Once, for controlling the flexible motion, the LQR controllerperformance is damaged and it takes more time to damp theflexible motion.
6 Mathematical Problems in Engineering
𝜃(d
eg)
3
2
1
0
−10 20 40 60 80 100 120
5
4
LQRLQG
t (s)
(a)
1
0.5
0
−0.5
−10 20 40 60 80 100 120
𝜃(d
eg/s
)
LQRLQG
t (s)
(b)
𝜓(d
eg)
5
0
−5
−100 20 40 60 80 100 120
LQRLQG
10
t (s)
(c)
𝜓
(deg
/s)
10
5
0
−5
−100 20 40 60 80 100 120
LQRLQG
t (s)
(d)
Figure 3: The angular and sloshing control by the LQR and LQG controller.
10
0
−100 20 40 60 80 100 120
M(N
m)
t (s)
LQRLQG
5
−5
(a)
0 20 40 60 80 100 120
f(N
)
4
2
0
−2
−4
−6
−8
LQRLQG
t (s)
(b)
Figure 4: The LQR and LQG controller effort to control the angular and sloshing motion.
Mathematical Problems in Engineering 7
3
2
1
0
−10 20 40 60 80 100 120
LQRLQG
t (s)
𝜃(d
eg)
(a)
0 20 40 60 80 100 120
1
0.5
0
−0.5
−1
t (s)
𝜃(d
eg/s
)
LQRLQG
(b)
0 20 40 60 80 100 120
20
10
0
−10
−20
LQRLQG
t (s)
𝜓(d
eg)
(c)
0 20 40 60 80 100 120
20
10
0
−10
−20
t (s)
𝜓
(deg
/s)
LQRLQG
(d)
0 20 40 60 80 100 120
10
5
0
−5
×10−4
LQRLQG
t (s)
𝛿
(e)
0 20 40 60 80 100 120
4
2
0
−2
−4
×10−3
t (s)
𝛿
LQRLQG
(f)
Figure 5: Control of the angular motion, sloshing, and flexibly.
0 20 40 60 80 100 120
4
2
0
−2
−4
−6
−8
t (s)
LQRLQG
M(N
m)
(a)
0 20 40 60 80 100 120
10
5
0
−5
−10
LQRLQG
t (s)
f(N
)
(b)
Figure 6: The LQR and LQG performance controlling angular motion, sloshing, and flexibly.

8 Mathematical Problems in Engineering
Figure 6 shows that both the torque and the force ofthe LQR controller are smaller than the LQG controller andagain this suggests that the LQG controller spends moreenergywhile the control system is estimating the sloshing andflexible variables.
6. Summary
In this paper one has developed a new model for the planardynamics of a rigid-flexible satellite, incorporating the axial,transverse, and pitch dynamics of the satellite, plus fuel sloshdynamics, which is considered underactuated. That modelis used to investigate the effects of the interaction betweenthe rigid motion, the liquid motion (slosh), and the flexiblesatellite dynamics in order to predict what the damage to thecontroller performance and robustness is. The control inputsare defined by a transverse body fixed force and a momentabout the centre of mass. The comparative simulations,designing the satellite ACS by the linear quadratic regulator(LQR) and linear quadratic Gaussian (LQG) methods, haveshowed a significant improvement in the satellite ACS per-formance and robustness of what has been done previously,since it simultaneously controls the rigid-flexible satellitemotion and the fuel slosh dynamics. But, one observes thatthe performance of the LQR control is better than and LQGcontrol. The degradation of the LQG control is because thiscontroller spends more energy associated with the force andtorque, suggesting that this is due to the estimation processof the sloshing and flexible variables by the Kalman filter.However, this is the realistic situation since both the sloshand the flexible states are not measured for feedback. Onthe other hand, the LQG controller is more robust than theLQR since it takes into account the noises that represent theimperfections of the models acting over the system. Finally,one observes that flexibility still has small fluctuation, whichis not appropriated when one needs high precise pointing.One way to deal with that problem is to apply a nonlinearcontrol technique considering the nonlinear satellite model.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
References
[1] S. K. Chakrabarti, “Internal waves in a large offshore storagetank,” Journal of Energy Resources Technology, vol. 115, no. 2, pp.134–141, 1993.
[2] D. E. Hill and J. R. Baumgarten, “Control of spin-stabilizedspacecraft with sloshing fluid stores,” Journal of DynamicSystems, Measurement and Control, vol. 114, no. 4, pp. 728–731,1992.
[3] A. Pui-ChunLui and J. Y.K. Lou, “Dynamic coupling of a liquid-tank system under transient excitations,” Ocean Engineering,vol. 17, no. 3, pp. 263–277, 1990.
[4] B. N. Agrawal, “Dynamic characteristics of liquid motionin partially filled tanks of a spinning spacecraft,” Journal of
Guidance, Control, and Dynamics, vol. 16, no. 4, pp. 636–640,1993.
[5] M. J. Sidi, Spacecraft Dynamics and Control, Cambridge Univer-sity Press, New York, NY, USA, 1997.
[6] L. C. G. Souza and R. G. Gonzales, “Application of the state-dependent riccati equation and kalman filter techniques to thedesign of a satellite control system,” Shock and Vibration, vol. 19,no. 5, pp. 939–946, 2012.
[7] L. C. G. Souza, “ Design of satellite control system using optimalnon-linear theory,” Mechanics Based Design of Structures andMachine, vol. 1, pp. 1–20, 2008.
[8] T. P. Sales, D. A. Rade, and L. C. G. de Souza, “Passive vibra-tion control of flexible spacecraft using shunted piezoelectrictransducers,” Aerospace Science and Technology, vol. 29, no. 1,pp. 403–412, 2013.
[9] I. Mainenti-Lopes, L. C. G. Souza, and F. L. de Sousa, “Designof a nonlinear controller for a rigid-flexible satellite usingmulti-objective Generalized Extremal Optimization with realcodification,” Shock and Vibration, vol. 19, no. 5, pp. 947–956,2012.
[10] L. C .G. Souza and A. G. Souza, “Satellite attitude controlsystem design considering the fuel slosh dynamics,” Shock andVibration, vol. 2014, Article ID 260206, 8 pages, 2014.
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of