r15 - gpcet.ac.in filecode: 15a02303 unit ii 4 derive the response of under damped second order...
TRANSCRIPT

Code: 15A02303
B.Tech II Year II Semester (R15) Regular Examinations May/June 2017
CONTROL SYSTEMS ENGINEERING
(Common to ECE and EIE)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question) Use of polar chart, Bode graph sheet and Nyquist chart is allowed in examination hall.
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) List the advantages of negative feedback in control system.
(b) Write the Mason’s gain formula of signal flow graph.
(c) How do you find the type of a control system?
(d) Find the value of position error constant for second order system using ramp input.
(e) Write the necessary and sufficient condition for stability in Routh’s stability criterion.
(f) Define BIBO stability.
(g) Write the expression for resonant peak in frequency response analysis.
(h) What is meant by lag compensation?
(i) Define state and state variable.
(j) What are the properties of state transition matrix?
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 Derive the transfer function of DC servomotor.
OR
3 Find the transfer function C(S) / R(S) for the system using block diagram reduction technique.
UNIT – II
4 (a) Transfer function of unity feedback control system is . Obtain the rise time, peak time,
maximum overshoot and the settling time when the system is subjected to a unity step input.
(b) Derive the time response of first order system for step input.
OR
5 The open loop transfer function of a system with unity feedback . Evaluate the
static error constants of the system. Obtain the steady state error of the system, when subjected to an
input given by the polynomial
Contd. in page 2
Page 1 of 2
R15

Code: 15A02303
UNIT – III
6 Draw the root locus plot for the system whose open loop transfer function is given by:
OR
7 Obtain the Routh array for the system whose characteristic polynomial equation is:
Check the stability.
UNIT – IV
8 Explain in detail about lag-lead compensator technique.
OR
9 The open loop transfer function of a unity feedback system is given by:
Sketch polar plot and determine the gain and phase margin.
UNIT – V
10 Consider a system with state model given below:
Verify, the system is observable and controllable.
OR
11 (a) Obtain the state model of the system described by the following transfer function:
(b) Explain about diagonalization.
*****
Page 2 of 2
R15

Code: 15A02303
B.Tech II Year II Semester (R15) Regular Examinations May/June 2017
CONTROL SYSTEMS ENGINEERING
(Electrical and Electronics Engineering)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question) Use of Polar graph, Bode graph sheet & Nyquist plot chat is allowed.
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) What is meant by synchro?
(b) Differentiate open and closed loop control system.
(c) Find the impulse response of the system H(s) = 4 s/(s+2) with zero initial conditions.
(d) Find the value of velocity error constant for second order system using step input.
(e) What is dominant pole?
(f) Define conditionally stable system.
(g) Write the expression for resonant frequency in frequency response analysis.
(h) What is meant by Nyquist plot?
(i) Define controllability of a system.
(j) What are the advantages of state space representation?
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 Determine the transfer function X(S)/F(S) for mechanical system.
OR
3 Find the transfer function C(S)/R(S) for the system using signal flow graph.
Contd. in page 2
Page 1 of 2
SS

Code: 15A02303
UNIT – II
4 Derive the response of under damped second order system for unit step input.
OR
5 The open loop transfer function of a system with unity feedback , where K and T are
positive constants. By what factor should the amplifier gain K be reduced, so that the peak overshoot of
the unit step response of the system is reduced from 75% to 25%?
UNIT – III
6 Draw the root locus plot for the system whose open loop transfer function is given by:
OR
7 Obtain the Routh array for the system whose characteristic polynomial equation is:
Check the stability.
UNIT – IV
8 Explain in detail about design procedure of lead compensator technique.
OR
9 Sketch the bode plot for the given transfer function: and determine
the value of K for the gain cross over frequency of 5 rad/sec.
UNIT – V
10 (a) Obtain the state transition matrix for state model whose system matrix A is given by:
(b) Write the state equation shown in figure below.
OR
11
A system is represented by the state equation where
. Determine the transfer function of the system.
*****
Page 2 of 2
SS

Code: 9A02503
B.Tech II Year II Semester (R09) Supplementary Examinations May/June 2015
CONTROL SYSTEMS
(Electronics & Instrumentation Engineering)
Time: 3 hours Max. Marks: 70
Answer any FIVE questions
All questions carry equal marks Polar graph may be permitted in the examination hall
*****
1 (a) Distinguish between open loop and closed loop control systems.
(b) Find the transfer function Vo(s)/Vi(s) for the network shown in the figure
2 (a) Derive the transfer functions of an AC servomotor.
(b) Explain the operation and working principle of synchro.
3 Determine position error constant Kp, velocity error constant Kv, acceleration error constant Ka for
Type 0 and Type2 systems.
4 Sketch the root locus of the following unity feedback system with G(s) = K/(s(s + 2)(s2 + 2s + 4)).
Find the value of K and the closed loop poles at which the damping factor is 0.6.
5 (a) Explain how stability can be determined from Bode plot.
(b) Draw the Magnitude Bode plot for the system having the following transfer function:
G(s)= 100/[s(s2+12s+100)].
6 Explain the concept and construction of polar plots.
7 Design a lead compensator for a ufb system with OLTF G(s)=K/s(s+1)(s+10). To satisfy the
following specifications:
(a) The phase margin of the system ≥ 300.
(b) Velocity error constant KV ≥30.
8 (a) Discuss the significance of state space analysis.
(b) Define state variables.
(c) Obtain the state variable representation of an armature controlled D.C servomotor.
*****
SS

Code: 9A19401
B.Tech II Year II Semester (R09) Supplementary Examinations May/June 2015
CONTROL SYSTEMS
(Electronics and Computer Engineering)
Time: 3 hours Max. Marks: 70
Answer any FIVE questions All questions carry equal marks
***** 1 (a) Lag and Lead networks are called compensating networks. Why?
(b) Write the advantages of PID controllers and their applications.
2 (a) Explain the effects of feedback in control systems.
(b) Give a simple example of a translational mechanical system and find it’s transfer function.
3 (a) What is meant by Nyquist contour?
(b) A system is given by: G(s) = . Sketch the Nyquist plot and hence determine the stability
of the system.
4 Draw a signal flow graph, find its closed loop transfer function and verify it using signal flow graph.
5 (a) For an underdamped second order system, define various time domain specifications.
(b) The forward path T.F. of a unity feedback control system is given as G(S) = obtain the
expression for unit step response of the system.
6 (a) Discuss the merits and demerits of R-H stability criterion. Determine the value of K such that the
system is stable for the open-loop transfer function of a control system which is given by:
G(s) H(s) = .
(b) A unity feedback system has an open-loop transfer function: G(s) = . Sketch the
root-locus of the system.
7 (a) Differentiate between Polar and Nyquist plots.
(b) Explain about the Nyquist stability criterion. Write its advantages.
8 (a) Explain about state variable and state transition equation.
(b) Describe the properties of state transition matrix.
*****
R09
R C

Code: 13A02402
B.Tech III Year I Semester (R13) Supplementary Examinations June 2016
CONTROL SYSTEMS ENGINEERING
(Common to ECE and EIE)
(Use of ordinary graph sheets, semi log graphs and polar graphs is permitted in the examination hall)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question)
***** 1 Answer the following: (10 X 02 = 20 Marks)
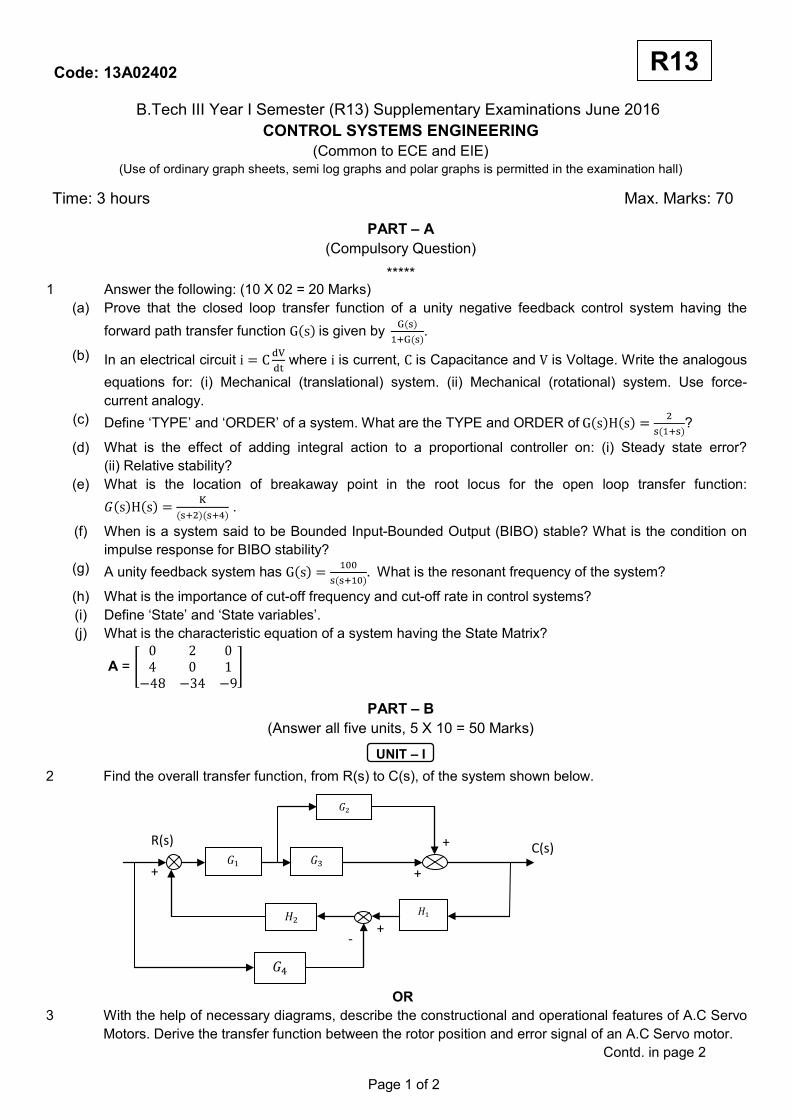
(a) Prove that the closed loop transfer function of a unity negative feedback control system having the
forward path transfer function is given by .
(b) In an electrical circuit where is current, is Capacitance and is Voltage. Write the analogous
equations for: (i) Mechanical (translational) system. (ii) Mechanical (rotational) system. Use force-
current analogy.
(c) Define ‘TYPE’ and ‘ORDER’ of a system. What are the TYPE and ORDER of ?
(d) What is the effect of adding integral action to a proportional controller on: (i) Steady state error?
(ii) Relative stability?
(e) What is the location of breakaway point in the root locus for the open loop transfer function:
.
(f) When is a system said to be Bounded Input-Bounded Output (BIBO) stable? What is the condition on
impulse response for BIBO stability?
(g) A unity feedback system has What is the resonant frequency of the system?
(h) What is the importance of cut-off frequency and cut-off rate in control systems?
(i) Define ‘State’ and ‘State variables’.
(j) What is the characteristic equation of a system having the State Matrix?
A =
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 Find the overall transfer function, from R(s) to C(s), of the system shown below.
OR
3 With the help of necessary diagrams, describe the constructional and operational features of A.C Servo
Motors. Derive the transfer function between the rotor position and error signal of an A.C Servo motor.
Contd. in page 2
Page 1 of 2
R13
C(s) R(s) +
+ +
+ -
Code: 13A02402
UNIT – II
4 (a) A system has the closed loop transfer function . It is required that the unit step response of
the system should have a settling time of 2 sec according to 2% criterion; and the overshoot should be
approximately 5%. What should be the closed loop pole locations?
(b) A unity feedback control system has the closed loop transfer function . Determine the steady
state error in the unit ramp response, in terms of and
OR
5 Derive the expressions for: (i) Rise time. (ii) Peak time. (iii) Maximum overshoot. (iv) Settling time of the
unit-step response of an under damped prototype second order system. Hence determine the quantities
for a system having the closed loop transfer function
UNIT – III
6 (a) How many roots of the characteristic polynomial of a system have positive real parts?
(b) Determine the value of for which the characteristic polynomial of a system
has roots with zero real part.
OR
7 A unity feedback system has the open loop transfer function .
(a) Sketch the root locus for
(b) At what value of does the system become unstable?
(c) What is frequency of sustained oscillations of the system when it just loses stability?
UNIT – IV
8 (a) Draw the Bode plot and determine the Gain Margin and Phase Margin for .
(b) A Unity feedback control system has the Open Loop Transfer Function . What should be the
value of for the system to have Phase Margin of
OR
9 (a) Draw a network of lag-lead compensator consisting of resistors and capacitors and derive its transfer
function.
(b) Draw the Nyquist plot for the open loop transfer function . Applying Nyquist stability
criterion, determine whether the closed loop system is stable or not.
UNIT – V
10 Obtain the state model for the system represented by:
OR
11 The state space representation of a system has the characteristic matrix and output
matrix . Find the zero excitation response of the system for .
*****
Page 2 of 2
R13

Code: 13A02402
B.Tech II Year II Semester (R13) Regular & Supplementary Examinations May/June 2016
CONTROL SYSTEMS ENGINEERING
(Electrical and Electronics Engineering)
Time: 3 hours Max. Marks: 70 PART – A
(Compulsory Question)
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) In Torque-Voltage analogy, what are the analogous electrical quantities for: (i) Torque. (ii) Moment of
Inertia. (iii) Angular displacement. (iv) Stiffness.
(b) Illustrate the following rule in block diagram algebra: Moving a take-off point from the input node to the
output node of a block having the transfer function G(s).
(c) Sketch the unit step response of a first-order system and show how ‘Time Constant’ is defined?
(d) What are the most important advantageous features of: (i) Integral control? (ii) Derivative control?
(e) What is the condition to be satisfied by the real part of the poles of a system for the system to be stable?
(f) The open loop transfer function of a system is given by . What portions of the real axis
contain the branches of the root locus?
(g) Draw the Bode plots for Phase Lead Compensator.
(h) Define: (i) Gain Margin. (ii) Phase Margin with reference to Bode Plots.
(i) Enumerate any four important advantages of state space approach over transfer function approach.
(j) If A, B, and C are the Matrices in the state space model of a system, how is the equivalent transfer
function of the system evaluated using A, B and C? Deduce the relation.
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 (a) Compare and contrast ‘open loop control systems’ and ‘closed loop control systems’.
(b) What are the various ways of classifying control systems? Discuss in detail the effects of feedback on
system performance.
OR
3 (a) Write Mason’s gain formula and explain the meaning of all the terms in the formula.
(b) Draw the circuit diagram of armature-controlled D.C Motor. Derive its transfer function.
UNIT – II
4 (a) Define position error constant Kp. Find the steady state error of Type 0, Type 1, and Type 2 systems to
unit step input
(b) The open loop transfer function of a unity feedback control system is given by . Find the
minimum value of for which the steady state error is less than 0.1 for unit ramp input.
OR
5 (a) What are the important time domain specifications for transient response? Explain.
(b) Obtain the expression for the unit step response of a unity feedback system whose open loop
transfer function is
Contd. in page 2
Page 1 of 2
R13

Code: 13A02402
UNIT – III
6 (a) Determine the stability of the system having the characteristic equation given below:
(b) A certain unity negative feedback system has the open loop transfer function . Find the
value of which makes the closed loop system lose stability. What are the locations of unstable poles
in the s-plane for this value of
OR
7 (a) State and explain the rules for construction of root loci, which are concerned with: (i) Angle of
asymptotes. (ii) Breakaway point on real axis.
(b) Consider the loop transfer function . Construct the root locus and comment on
stability.
UNIT – IV
8 (a) Define and explain various frequency domain specifications with relevant expressions.
(b) Construct the Bode plots for the transfer function . There from, determine the
gain margin and phase margin. Is the closed loop system stable?
OR
9 (a) State and explain the Nyquist Criterion.
(b) Sketch the Nyquist plot for .
UNIT – V
10 Determine the: (i) State Transition Matrix. (ii) State response. (iii) Unit step response of the system
having the following state model.
OR
11 (a) Compare and contrast classical approach and modern approach used for control system analysis and
design.
(b) Derive the solution of:
(i) Homogeneous state equation.
(ii) Non homogeneous state equation.
*****
Page 2 of 2
R13

Code: 13A02402
B.Tech II Year II Semester (R13) Supplementary Examinations December/January 2015/2016
CONTROL SYSTEMS ENGINEERING
(Electrical and Electronics Engineering)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question)
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) List all electrical analogs of rotational mechanical systems using force-current analogy.
(b) A closed loop control system has an open loop gain of 100. Its feedback loop has a gain of 0.005. Find
its sensitivity for negative feedback.
(c) Write the expressions for the response of first order system to the unit step input signal and unit ramp
input signal in time domain.
(d) What is a type 1 system? What is its steady state error for unit ramp input?
(e) Determine the stability of the system with the characteristic equation
(f) Discuss the effect of addition of open loop poles on the root loci.
(g) Define gain margin.
(h) Define gain cross-over point.
(i) Define the state of a system.
(j) Derive the response of unforced system.
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 Find the transfer function matrix for the two input two output system shown in the figure below.
OR
3 Develop a signal flow graph for the motor shown in figure below with the given constants. Find the
transfer function using Mason’s formula.
Where ra is armature resistance; La is armature inductance; J is motor inertia; f is motor friction and km
is motor constant.
Contd. in page 2
Page 1 of 2
R13
G1 G2 G3
G4 G5 G6
H1
H2
-1
-1
C1
C2
x11
x12
x13
x14
x21 x22 x23 x24
1 1
1 1
ra La
Eb
m
Va
Ιa
Ιf =
Constant
km
J f
R1
R2

Code: 13A02402
UNIT – II
4 A unity feedback system has an open loop transfer function Determine its damping ratio,
peak overshoot and time required to reach the peak output. Now a derivative component having transfer
function of is introduced in the system. Discuss its effect on the values obtained.
OR
5 A unity feedback system having open loop transfer function as , determine: (i) Type
of system. (ii) kp, kv and ka. (iii) Steady state error for parabolic input.
UNIT – III
6 Sketch the root locus for a unity feedback system having
OR
7 The open loop transfer function of a unity feedback system is given by . Sketch the
root locus for
UNIT – IV
8 Consider the transfer function . Comment on stability of the system using the
sketch of its Nyquist plot.
OR
9 Explain Nyquist criterion. Write the procedure for determining Nyquist plot.
UNIT – V
10 Consider the electric circuit shown in the figure below, where e1 and e2 are the inputs and v1, v2, v3 are
outputs. Choosing i1, i2 and i3 as the state variables, determine the system equations and write the
state model.
OR
11 Consider the system where Find and the solution for
*****
Page 2 of 2
R13
L2
R2
e2
i2
e1
R1 L1
v1
C v3
v2

Code: 13A02402
B.Tech III Year I Semester (R13) Regular Examinations December 2015
CONTROL SYSTEMS ENGINEERING
(Common to ECE and EIE)
(Use of ordinary graph sheets, semi log graphs and polar graphs are permitted in the examination hall)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question)
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) What is the effect of positive feedback on stability?
(b) What are the differences between Synchro transmitter and control transformer?
(c) The closed loop transfer function of a second order system is . What is the type of
damping in the system?
(d) Why derivative controller is not used alone in control systems?
(e) What is the necessary and sufficient condition for stability in Routh’s stability criterion?
(f) What is meant by damping pole in Root locus diagram?
(g) Define Gain margin and Phase margin.
(h) In minimum phase system, how the start and end of polar plot are identified?
(i) State various properties of state transition matrix.
(j) What are the advantages of state space analysis over transfer function analysis?
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 (a) What is meant by open loop and closed loop control systems? Differentiate them.
(b) Find the closed loop transfer function of the following block diagram using reduction technique.
OR
3 (a) Define transfer function and also derive transfer function for AC Servo motor.
(b) With the help of Mason’s gain formula find the overall transfer function of the following signal flow
graph.
Contd. in page 2
Page 1 of 2
R13

Code: 13A02402
UNIT – II
4 (a) Obtain the response of a first order system for unit step input.
(b) A closed loop servo is represented by the differential equation: . Where ‘c’ is the
displacement of the output shaft, ‘r’ is the displacement of the input shaft and e = r – c. Determine un
damped natural frequency, damping ratio and percentage maximum overshoot for unit step input.
OR
5 (a) What is meant by transient response and steady state response? Explain in detail about various time
domain specifications.
(b) Find the various static error constants for a unity feedback control system whose open loop transfer
function is: .
UNIT – III
6 With the help of Routh’s stability criterion find the stability of the following systems represented by the
characteristic equations:
(i) s4 + 8s
3 + 18s
2 + 16s + 5 = 0.
(ii) s6 + 2s
5 + 8s
4 + 12s
3 + 20s
2 + 16s + 16 = 0.
(iii) s5 + s
4 + 2s
3 + 2s
2 + 3s + 5 = 0.
OR
7 A negative feedback control system has the forward path transfer function: .
Draw the root locus for 0 ≤ K ≤ ∞.
UNIT – IV
8 Sketch the bode plot for the following transfer function and determine phase margin and gain margin:
.
OR
9 The open loop transfer function of a unity feedback system is given by: . Sketch the
polar plot and determine the gain margin and phase margin.
UNIT – V
10 (a) Write the state variable formulation of the following parallel RLC network. The current through the inductor and voltage across the capacitor are the output variables.
(b) Compute the resolvent matrix and state transition matrix of the state matrix: A=0 1
1 2
− −
.
OR
11 (a) Obtain the state model of the transfer function: 2
3 2
( ) 3 4
( ) 2 3 2
Y s s s
U s s s s
+ +=
+ + +
(b) Diagonalize the system matrix, .
*****
Page 2 of 2
R13

Code: 13A02402
B.Tech II Year II Semester (R13) Regular Examinations May/June 2015
CONTROL SYSTEMS ENGINEERING
(Electrical and Electronics Engineering)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question)
*****
1 Answer the following: (10 X 02 = 20 Marks)
(a) What is the feedback? What are the characteristics of negative feedback?
(b) Define transfer function. Write the Mason’s gain formula to find transfer function and explain each term in it.
(c) The open loop transfer function of a unity feedback system is What is the nature of
response of closed loop system for unit step input?
(d) Give the relation between generalized and static error coefficients.
(e) What are asymptotes? How will you find the angle of asymptotes?
(f) In Routh array what conclusions you can make when there is a row of all zeros.
(g) Draw the polar plot of
(h) Mention the advantages of Bode plot.
(i) What is meant by state, state variable and state model?
(j) Define state transition matrix and explain its significance on stability of the system.
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 (a) What are the various types of control systems? Give an example of each. What are the advantages and
disadvantages of open loop and closed loop systems?
(b) Find the transfer function for the figure given below.
OR
3 (a) Derive the transfer function of AC servomotor.
(b) Using block diagram reduction technique, obtain closed loop transfer function of the figure give below.
Contd. in page 2
Page 1 of 2
R13
J2 J1
T
(Applied Torque) (Output)
G2 G1 G3
H1
H2
H3

Code: 13A02402
UNIT – II
4 (a) Obtain the time response of un-damped second order system for unit step input.
(b) A unity feedback system has the forward transfer function: The input is
applied to the system. Determine the value of K1 if the steady error is to be less than 0.1.
OR
5 (a) A unity feedback control system has an open loop transfer function: . Find the time domain
specifications for a step input of 12 units.
(b) Explain the effect of PI and PD controllers on transient response of the system.
UNIT – III
6 (a) The open loop transfer function of a unity feedback system is given by . Determine the
value of K and so that the system oscillates at a frequency of 2 rad/sec.
(b) Explain the effect of adding poles and zeros to characteristic equation on stability of the root loci.
OR
7 Sketch the root locus of the system whose open loop transfer function is . Find th value of
K so that the damping ratio of the closed loop system is 0.5.
UNIT – IV
8 (a) Explain the frequency response specifications.
(b) The transfer function of a phase-lead controller is given as is constant
depending on the circuit parameters. Determine the maximum value of the phase load which can be
obtained from this controller.
OR
9 Sketch the bode plot and find gain margin & phase margin of the systems represented by:
.
UNIT – V
10 (a) Discuss about the properties of state transition matrix.
(b) The state equation of a linear-time invariant system is given:
Determine state transition matrix.
OR
11 (a) Determine the transfer function for following system given below:
(b) A state model of a system is given as:
Determine: (i) The Eigen values. (ii) The state transition matrix.
*****
Page 2 of 2
R13
Code: 13A02402
B.Tech III Year I Semester (R13) Supplementary Examinations June 2016
CONTROL SYSTEMS ENGINEERING
(Common to ECE and EIE)
(Use of ordinary graph sheets, semi log graphs and polar graphs is permitted in the examination hall)
Time: 3 hours Max. Marks: 70
PART – A
(Compulsory Question)
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) Prove that the closed loop transfer function of a unity negative feedback control system having the
forward path transfer function is given by .
(b) In an electrical circuit where is current, is Capacitance and is Voltage. Write the analogous
equations for: (i) Mechanical (translational) system. (ii) Mechanical (rotational) system. Use force-
current analogy.
(c) Define ‘TYPE’ and ‘ORDER’ of a system. What are the TYPE and ORDER of ?
(d) What is the effect of adding integral action to a proportional controller on: (i) Steady state error?
(ii) Relative stability?
(e) What is the location of breakaway point in the root locus for the open loop transfer function:
.
(f) When is a system said to be Bounded Input-Bounded Output (BIBO) stable? What is the condition on
impulse response for BIBO stability?
(g) A unity feedback system has What is the resonant frequency of the system?
(h) What is the importance of cut-off frequency and cut-off rate in control systems?
(i) Define ‘State’ and ‘State variables’.
(j) What is the characteristic equation of a system having the State Matrix?
A =
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 Find the overall transfer function, from R(s) to C(s), of the system shown below.
OR
3 With the help of necessary diagrams, describe the constructional and operational features of A.C Servo
Motors. Derive the transfer function between the rotor position and error signal of an A.C Servo motor.
Contd. in page 2
Page 1 of 2
R13
C(s) R(s) +
+ +
+ -

Code: 13A02402
UNIT – II
4 (a) A system has the closed loop transfer function . It is required that the unit step response of
the system should have a settling time of 2 sec according to 2% criterion; and the overshoot should be
approximately 5%. What should be the closed loop pole locations?
(b) A unity feedback control system has the closed loop transfer function . Determine the steady
state error in the unit ramp response, in terms of and
OR
5 Derive the expressions for: (i) Rise time. (ii) Peak time. (iii) Maximum overshoot. (iv) Settling time of the
unit-step response of an under damped prototype second order system. Hence determine the quantities
for a system having the closed loop transfer function
UNIT – III
6 (a) How many roots of the characteristic polynomial of a system have positive real parts?
(b) Determine the value of for which the characteristic polynomial of a system
has roots with zero real part.
OR
7 A unity feedback system has the open loop transfer function .
(a) Sketch the root locus for
(b) At what value of does the system become unstable?
(c) What is frequency of sustained oscillations of the system when it just loses stability?
UNIT – IV
8 (a) Draw the Bode plot and determine the Gain Margin and Phase Margin for .
(b) A Unity feedback control system has the Open Loop Transfer Function . What should be the
value of for the system to have Phase Margin of
OR
9 (a) Draw a network of lag-lead compensator consisting of resistors and capacitors and derive its transfer
function.
(b) Draw the Nyquist plot for the open loop transfer function . Applying Nyquist stability
criterion, determine whether the closed loop system is stable or not.
UNIT – V
10 Obtain the state model for the system represented by:
OR
11 The state space representation of a system has the characteristic matrix and output
matrix . Find the zero excitation response of the system for .
*****
Page 2 of 2
R13
Code: R7311003
B.Tech III Year I Semester (R07) Supplementary Examinations December 2014 CONTROL SYSTEMS
(Electronics and Instrumentation Engineering)
Time: 3 hours Max Marks: 80 Answer any FIVE questions
All questions carry equal marks *****
*****
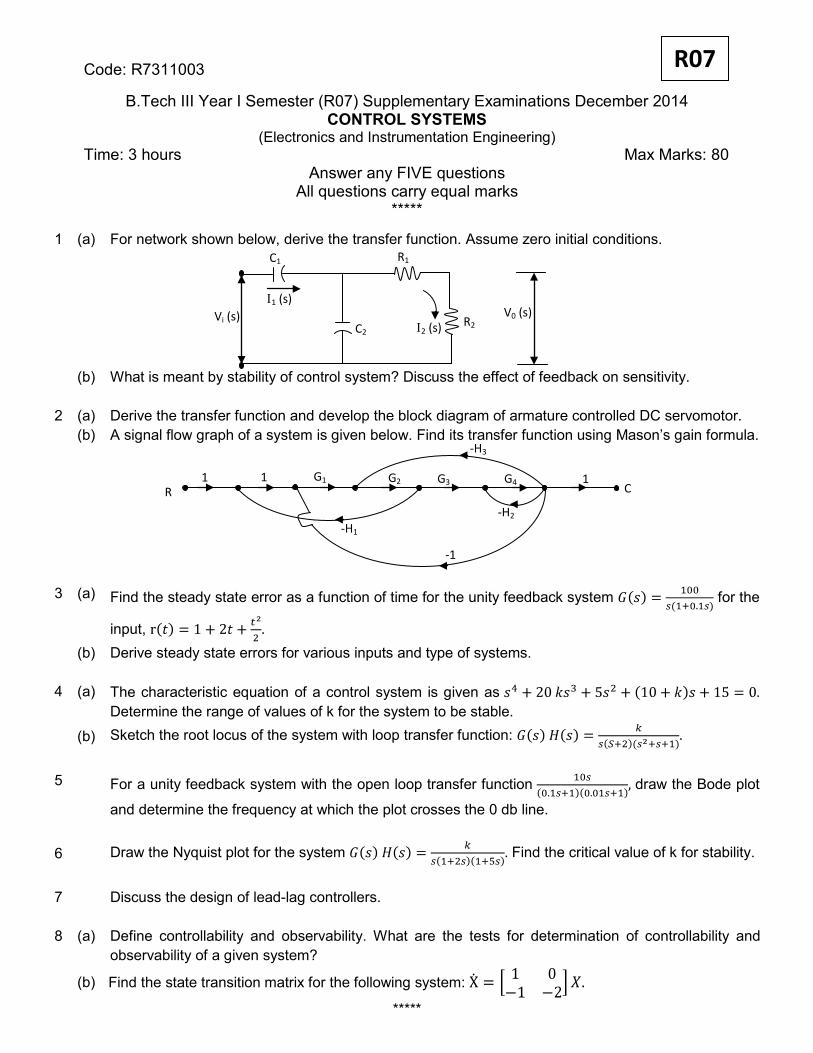
1 (a) For network shown below, derive the transfer function. Assume zero initial conditions.
(b) What is meant by stability of control system? Discuss the effect of feedback on sensitivity.
2 (a) Derive the transfer function and develop the block diagram of armature controlled DC servomotor.
(b) A signal flow graph of a system is given below. Find its transfer function using Mason’s gain formula.
3 (a) Find the steady state error as a function of time for the unity feedback system for the
input,
(b) Derive steady state errors for various inputs and type of systems.
4 (a) The characteristic equation of a control system is given as
Determine the range of values of k for the system to be stable.
(b) Sketch the root locus of the system with loop transfer function:
5 For a unity feedback system with the open loop transfer function draw the Bode plot
and determine the frequency at which the plot crosses the 0 db line.
6 Draw the Nyquist plot for the system Find the critical value of k for stability.
7 Discuss the design of lead-lag controllers.
8 (a) Define controllability and observability. What are the tests for determination of controllability and
observability of a given system?
(b) Find the state transition matrix for the following system:
R07
C1
C2
R1
R2 Vi (s)
Ι1 (s)
Ι2 (s)
V0 (s)
R
G1 G2 G3 G4
-H1
-H3
-H2
-1
1 1 1 C

Code: 13A02402
B.Tech III Year II Semester (R13) Regular Examinations May/June 2016
CONTROL SYSTEM ENGINEERING
(Electrical and Electronics Engineering)
Time: 3 hours Max. Marks: 70 PART – A
(Compulsory Question)
***** 1 Answer the following: (10 X 02 = 20 Marks)
(a) What are the characteristics of servomotor?
(b) What are the properties of signal flow graph?
(c) Why are test signals needed?
(d) For quick response, what type of damping is preferred?
(e) What is an auxiliary polynomial? What is its order?
(f) What is the effect of adding zero’s to G(s) H(s) on the Root Locus?
(g) What is a minimum –phase system?
(h) What is the basis for the selection of a particular compensator?
(i) What is the advantage of canonical form?
(j) What is the significance of state transition matrix?
PART – B
(Answer all five units, 5 X 10 = 50 Marks)
UNIT – I
2 Write the differential equations for the mechanical translational system shown below.
OR
3 Find the transfer function C(s)/R(s) for the system shown below using signal flow graph.
Contd. in page 2
Page 1 of 2
SS

Code: 13A02402
UNIT – II
4 A unity feedback control system has an open-loop transfer function G(s) = 5/(s(s+1)). Find the rise time,
percentage overshoot, peak time and settling time for a step input of 10 units. Also determine peak
overshoot.
OR
5 Derive an expression for the steady state errors of Type-0, Type-1 and Type-2 systems excited by unit
step, unit ramp and unit parabolic inputs.
UNIT – III
6 A system oscillates with frequency ω, if it has poles at S = ± jω and no poles in the right half of the
S-plane. Determine the values of K and ‘a’ so that the system shown below oscillates at a frequency of
2 rad/sec.
OR
7 Draw the root locus plot for G(s) =K/(s(s+1)(s+3)).
UNIT – IV
8 A unity feedback system has a plant transfer function of G(s) H(s) = (K(s+4)) / ((s-1) (s-2)).
(a) For K = 8, draw Bode plot and find phase margin and gain margin.
(b) What should be the value of K for a phase margin of 300 and what is the corresponding gain margin.
OR
9 Write the procedure for the Design of Lag-Lead compensator.
UNIT – V
10 Obtain the state model of the mechanical system shown below and find transfer function.
OR
11 Obtain the State Transition Matrix for the state model whose A matrix is given by:
(a)
(b)
(c)
*****
Page 2 of 2
SS