planejamento automático
DESCRIPTION
Palestra referente a área de Planejamento em Inteligência Artificial apresentada na Seccom 2012.TRANSCRIPT
Planejamento Automatico
Jhonatan [email protected]
15 de outubro de 2012
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 1 / 29
Sequencia
O problema do planejamento automatico
Busca no espaco de estados
STRIPS
Tecnicas de planejamento automatico
Aplicacoes praticas
Conclusoes
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 2 / 29
O problema do planejamento
Planejamento e o processo de escolher um conjunto de acoes edeterminar uma sequencia em que elas devem ocorrer de tal modoque um objetivo seja satisfeito.
A sequencia em que as acoes devem ocorrer e chamada de plano.
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 3 / 29
O problema do planejamento
Existem varios tipos de planejamento, onde cada tipo se aplica a umdomınio especıfico de problemas. Podemos citar, por exemplo:
Planejamento Estrategico
Planejamento Tatico
Planejamento Operacional
Planejamento Urbano
Planejamento Familiar
Planejamento Automatico
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 4 / 29
O problema do planejamento
Planejameno automatico e a area da IA responsavelpor estudar o processo de planejamento atraves do uso do computador.
E atribuıdo a um agente, tambem chamado de agente planejador, aresponsabilidade de:
Encontrar um plano para um problemaExecutar o plano
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 5 / 29
O problema do planejamento
Formalmente, um problema de planejamento e defenido como:
< s0,G ,T >
Onde:
s0 e estado inicialG e o objetivoT e sistema de transicao de estados
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 6 / 29
O problema do planejamento
O sistema de transicao de estados e definido como:
T =< S ,A, γ >
Onde:
S = {s0, s1, ..., sn} e o conjunto de estadosA = {a0, a1, ..., am} e o conjunto de acoesγ = S x A ⇒ S e a funcao de transicao de estados
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 7 / 29
O problema do planejamento
A busca por plano inicia-se aplicando um conjunto de acoes a partirdo estado inicial ate que ocorra uma transicao para um estadosn ≡ G , como segue:
s1 = γ(s0, a0), s2 = γ(s1, a1), ..., sn = γ(sn−1, am)plano = {a0, a1, a2, ..., am}
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 8 / 29
Busca no Espaco de Estados
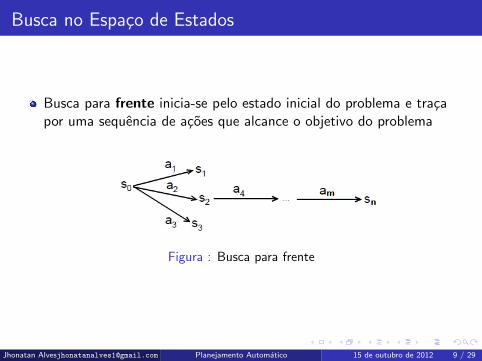
Busca para frente inicia-se pelo estado inicial do problema e tracapor uma sequencia de acoes que alcance o objetivo do problema
Figura : Busca para frente
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 9 / 29
Busca no Espaco de Estados
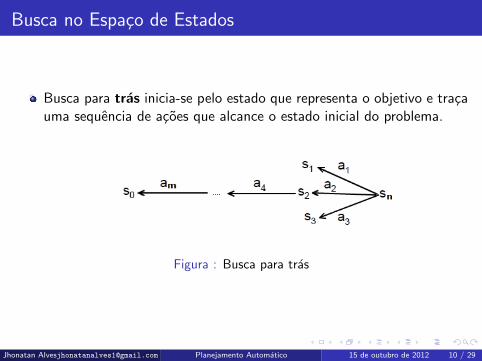
Busca para tras inicia-se pelo estado que representa o objetivo e tracauma sequencia de acoes que alcance o estado inicial do problema.
Figura : Busca para tras
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 10 / 29
Busca no Espaco de Estados
Para que um problema seja resolvido de modo automatico e necessariorepresenta-lo em alguma linguagem de modelagem de problemas:
Calculo SituacionalSTRIPSADLPDDL
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 11 / 29
STRIPS
STRIPS e uma linguagem formal derivada da logica de primeiraordem usada para decompor problemas de planejamento automaticoem condicoes logicas.
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 12 / 29

STRIPS
Em STRIPS um problema e definido como:
< s0, L,A,G >Onde:
s0 e o estado inicialL e o conjunto de literaisA e o conjunto de acoesG e o objetivo
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 13 / 29
STRIPS
Uma acao ai possui a seguinte estrutura:
ai : nome((a0, a1, ...an), PRE, ADD, DEL)
Um estado si e representado por uma conjuncao dos literaisverdadeiros:
si : l1 ∧, l2 ∧, . . . ,∧ln
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 14 / 29
STRIPS
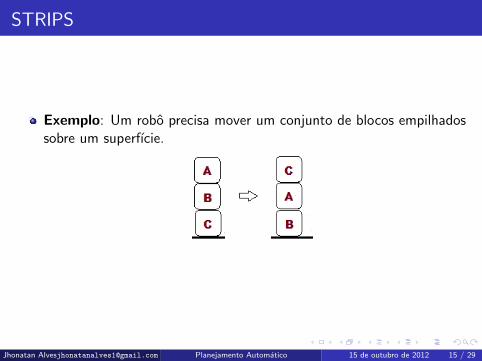
Exemplo: Um robo precisa mover um conjunto de blocos empilhadossobre um superfıcie.
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 15 / 29
STRIPS
Modelando o problema:
Literais:Sobre(x,y): O bloco x esta sobre o bloco yLivre(x): Nao ha outro bloco sobre x
Acoes:Mover((x,y,z),PRE: Sobre(x,y) ∧ Livre(x) ∧ Livre(z),ADD: Sobre(x,z)DELL: ¬Sobre(x,y) ∧ ¬Livre(z))
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 16 / 29
STRIPS
Estado inicial:s0 :Sobre(A,B)∧Sobre(B,C )∧Sobre(C ,Mesa)∧Livre(A)∧Livre(Mesa)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 17 / 29
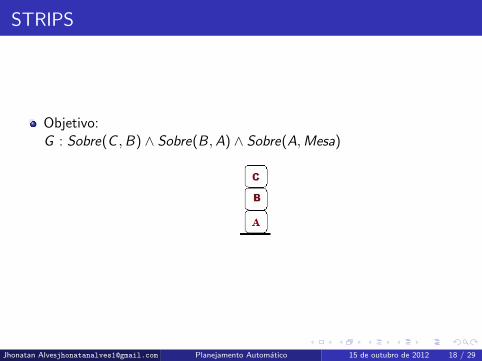
STRIPS
Objetivo:G : Sobre(C ,B) ∧ Sobre(B,A) ∧ Sobre(A,Mesa)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 18 / 29
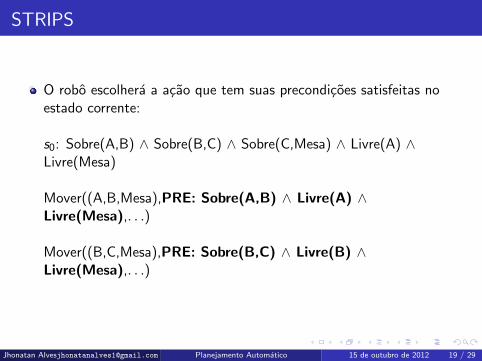
STRIPS
O robo escolhera a acao que tem suas precondicoes satisfeitas noestado corrente:
s0: Sobre(A,B) ∧ Sobre(B,C) ∧ Sobre(C,Mesa) ∧ Livre(A) ∧Livre(Mesa)
Mover((A,B,Mesa),PRE: Sobre(A,B) ∧ Livre(A) ∧Livre(Mesa),. . .)
Mover((B,C,Mesa),PRE: Sobre(B,C) ∧ Livre(B) ∧Livre(Mesa),. . .)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 19 / 29
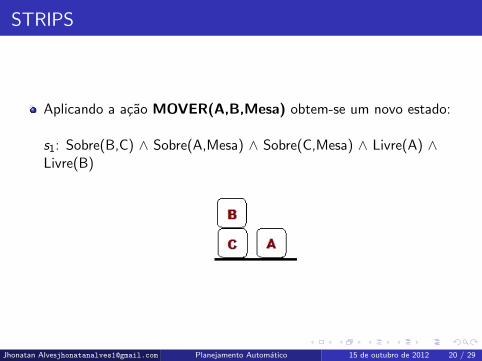
STRIPS
Aplicando a acao MOVER(A,B,Mesa) obtem-se um novo estado:
s1: Sobre(B,C) ∧ Sobre(A,Mesa) ∧ Sobre(C,Mesa) ∧ Livre(A) ∧Livre(B)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 20 / 29
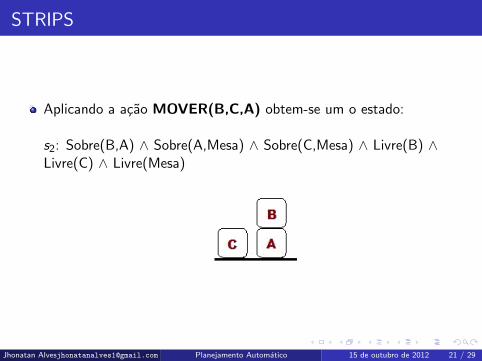
STRIPS
Aplicando a acao MOVER(B,C,A) obtem-se um o estado:
s2: Sobre(B,A) ∧ Sobre(A,Mesa) ∧ Sobre(C,Mesa) ∧ Livre(B) ∧Livre(C) ∧ Livre(Mesa)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 21 / 29
STRIPS
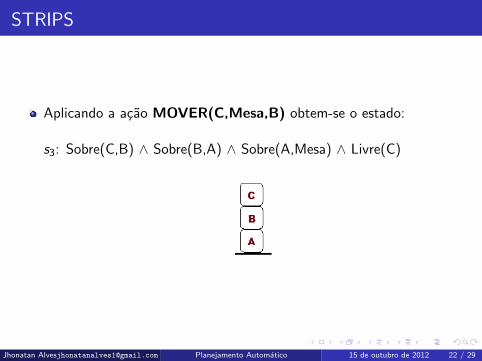
Aplicando a acao MOVER(C,Mesa,B) obtem-se o estado:
s3: Sobre(C,B) ∧ Sobre(B,A) ∧ Sobre(A,Mesa) ∧ Livre(C)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 22 / 29
STRIPS
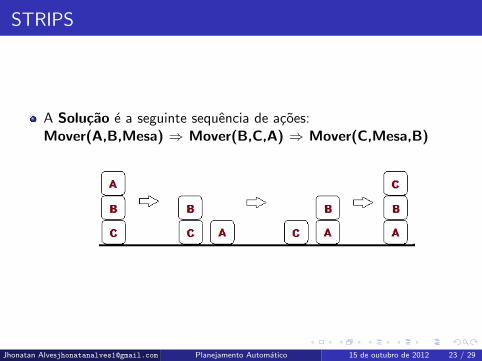
A Solucao e a seguinte sequencia de acoes:Mover(A,B,Mesa) ⇒ Mover(B,C,A) ⇒ Mover(C,Mesa,B)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 23 / 29
Tecnicas de planejamento automatico
Existem varias tecnicas para o problema do planejamento automatico:
GRAPHPLANSATPLAN
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 24 / 29
Aplicacoes praticas
Uma das principais areas de aplicacao do planejamento automatico ea robotica:
Arquitetura NHC (Nested Hierarchical Controller): robo coletainformacoes obtidas por seus sensores e gera uma estrutura de dadosque representa o domınio do problema. A partir do modelo o robodetermina as acoes a serem executadas.
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 25 / 29
Aplicacoes praticas
NASA: desenvolveu um ambiente de planejamento automaticovoltado para missoes espaciais - ASPEN.
UFC: Planejamento automatico voltada a administracao de recursoshıdricos no Estado do Ceara
Petrobras: em parceria com a USP esta estudando como usarplanejamento automatico para otimizar problemas que exijam tempoe recursos.
INPE: junto com institutos europeus vem estudando planejamentoautomatico para testes espaciais - SPAAS
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 26 / 29
Conclusoes
Problemas de planejamento sao complexos.
E muito importante modelar bem o problema.
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 27 / 29
Conclusoes
Planejamento automatico e uma area de grande importancia dentroda IA.
Existem varias competicoes internacionais:
Competicao Internacional de Planejamento (IPC)Conferencia Europeia de Planejamento (ECP)Conferencia Internacional de Planejamento e Escalonamento (ICAPS)
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 28 / 29
Fim
Obrigado! Perguntas?
Jhonatan [email protected] Planejamento Automatico 15 de outubro de 2012 29 / 29