performance analysis of fft filter to measure …ijcee.org/papers/731-et0006.pdf · performance...
TRANSCRIPT

Abstract—In the application of pavement roughness test,
accelerometer sensors are used to measure vertical
acceleration of a vehicle body. The displacement of that object
is then determined by using double integrating acceleration
data from the accelerometer sensor. High pass filters are used
to remove DC components to avoid integrated errors. Fast
Fourier Transform (FFT) Filter is known to provide a higher
accuracy compared to Infinite Impulse Response (IIR) Filter
and Finite Impulse Response (FIR) Filter. In this research, we
analyze the performance of FFT Filter with experiment in
MATLAB. The results show that FFT filters give results more
accurate than do FIR and IIR not only for single frequency
signal but also for multi-frequency signal. The standard error
and peak error of FFT Filter are less than those of FIR and
IIR Filter. Moreover the error of FFT Filter can be reduced
when increasing the cut frequency of FFT filter but it is
remained less than the frequency of acceleration signal.
Index Terms—Road profiler, FFT, accelerometer, double
integration.
I. INTRODUCTION
In a road profiler it is important to increase the accuracy
and the reliability of the road profile signal. Because of
earth gravity effect, DC component signal always exist at
the same 1-g constant. Furthermore, the two initial
conditions (velocity and position) must be known to avoid
integration errors. However, the only way to get these initial
conditions is thought direct measurement which is often
impractical [1]. The small DC bias in the acceleration signal
will result in drift associated with accelerometer. This paper
will describe an accurate algorithm which is developed to
measure displacement from acceleration signal without
initial conditions. In the simple way, HPFs is used to
remove DC component signal after each integrator.
A. Road profiler system
High-speed profilers(usually referred to as inertial
profilers demonstrated in Fig. 1) combine reference
elevation, height relative to the reference and longitudinal
distance to produce the true road surface profile [2]. A third
device used to measure road roughness is known as a road
roughness profiling device which measures the longitudinal
profile of the road. This particular profilometer uses an
accelerometer to create an inertial reference that defines the
height of the accelerometer located on the vehicle. A height
sensor which is most commonly a laser sensor is used to
determine the height to the pavement surface from the
Manuscript received December 19, 2012; revised March 9, 2013.
The authors are with Faculty of Electrical & Electronics Engineering,
Ho Chi Minh City University of Technology, VNU-HCM, Ho Chi Minh
City, Viet Nam (e-mail: [email protected],
vehicle. Distance encoder is used to pick up distance road.
The processing is done on a computer located inside the
vehicle. The computations are performed in real time as the
vehicle is moving. It can operate at speeds between 10 and
70 miles per hour [3].
Fig. 1. A van equipped with an inertial profilometer [4]
In Fig. 2, The road profile is reconstructed from laser and
accelerometer readings according to the following equation:
( ) ( ) ( )w t z t dtdt h t
(1)
where:
( )z t is the acceleration.
( )h t is the height measured by the laser sensor.
Fig. 2. The relationship among quantities of interest in a road profile [5]
The w (t) road profile signal is then simulated in a quarter
car model at speed 80 km/h. The parameters of this car
must be set to represent the Golden Car. The IRI is
calculated in (2).
/ . .
0
1| |
L V
s uIRI Z Z dtL
(2)
where: .
sZ : springmass velocity, .
uZ : unspring mass velocity
L: length profile, V: speed (80 km/h, 50 mph)
Performance Analysis of FFT Filter to Measure
Displacement Signal in Road Roughness Profiler
Thai Minh Do and Thong Chi Le
356
International Journal of Computer and Electrical Engineering, Vol. 5, No. 4, August 2013
DOI: 10.7763/IJCEE.2013.V5.731

B. Double Integration Process
A block diagram of the double integration process is
shown in Fig. 3.
( )a t ( )fa t ( )v t ( )fv t ( )x t
Acceleration Displacement
( )fx tHigh-Pass
Filter0
( )t
a d High-Pass
Filter0
( )t
v d High-Pass
Filter
Fig. 3. Block diagram of double integration process
This diagram shows displacement calculating process
from acceleration which is received from accelerometer.
Fig. 3Included with two stages of integration are three
stages of high-pass filtering. The other way measures
displacement that is used optical or laser [6].
II. DIGITAL FILTERING FOR DOUBLE INTEGRATION
A. FIR Filter
The Equation (3) describes a FIR Filter described in [7]:
0 1 1 ... My n h x n h x n h x n M
(3)
where y is the output, x is the input and M is the order of the
filter. h(t) is impulse response vector
0, 1[ ,..., ]Mh h h h (4)
In Fig. 4, this is a demonstrated frequency response of
FIR Filter.
Fig. 4. Frequency response of FIR filter [1]
This type of Filter is commonly used inside the double
integration process in road roughness profiler, and it is
recommended by Ribeiro [8]. The advantage of this Filter is
linear phase response and real time calculating. But, its
disadvantage is the order can be very high to achieve
requirement.
B. IIR Filter
IIR Filter, an alternative approach, uses a recursive
difference equation to represent the filter.
1 0
M L
i j
i j
y n a y n i b x n j
(5)
where y is the output, x is the input and M is order of IIR
filter.
Fig. 5. Frequency response of an IIR filter [1]
Because the order of IIR Filter is lower than FIR Filter’s
order, it can reduce the number of calculations. In other
hand, this filter has a nonlinear phase response (Fig. 5) thus
it will cause distortion of output signal.
C. FFT Filter
FFR filtering technique uses the FFT to remove low
frequency content near DC. This method is suggested firstly
by Ribeiro [9] and improved secondly by Slifka [1].Both
The low frequency coefficients located at the beginning and
the ones at the end of the FFT sequence must be changed to
equal the conjugate together, because the FFT sequence
must be conjugate symmetric for the signal of interest to
remain real.
The modification algorithm can be described below [1]:
0
;
;
0 ;
1: 1
; ;
;
i
X fft x
Xf X
Xf Xf k
for i k
Xf i Xf k Xf N i conj Xf i
xf Real IFFT Xf
(6)
where N is the size of the FFT, k is the index number of the
FFT coefficient representing the cutoff frequency, and the
i’s are filtering coefficients specified by the user.
This Filter can be demonstrated in Fig. 6.
Fig. 6. Illustrate FFT filters
The DC component of magnitude spectrum X(f) in Fig.
6.b must be set equal zero. After that, The inversion of FFT
is performed on that signal to receive the output signal
similar with original signal x(t) without DC components.
III. INTEGRATION METHODS
A. Analog Integration
At the first times, analog integration is used to calculate
displacement signal. Basic principle is processing double
357
International Journal of Computer and Electrical Engineering, Vol. 5, No. 4, August 2013

integrator with RC or opamp circuit demonstrated in Fig. 7,
but all of them have a number of errors. Ribiero did a study
using analog circuitry to perform the double integration and
found that the errors were unacceptable [10].
Fig. 7. Double integrator amplifier used to obtain displacement from
acceleration data [10]
B. Digital Integration
Currently, the development of computer and chip
technologies helps to calculate integration accurately with
using digital integrator. Analog signals is sampled and
digitalized by high speed ADCs.
In this research, Trapezoidal method is used to calculate
integration signal in Fig. 3. This method can be described in
(7).
11 1 , 0
2 s
y n y n x n x n nf
(7)
Trapezoidal method is chosen to calculate in integrators
because real time road surface analyzer will be performed in
future work. These integrated methods are supported by
MATLAB.
IV. ANALYSIS OF ERRORS
To estimate quantify and accuracy of filters, it is
important to compare the ideal displacement signal and the
results. The signals created in MATLAB with different
frequencies and multi harmonicsare imported into the
integrated processing. Standard error and peak error are
used to estimate the calculated displacement data.
A. Standard Error
This parameter is used to indicate the accuracy of double
integration processing. It is given by (8) described in [1].
21 ^
0% 1001
n
i i
i
X X
en
(8)
where:
N is the number of data points.
Xi is the double integrated position data ^
iXis the ideal data.
From above equation, it is easy to show that Standard
error is smaller, that method is better.
When measuring standard error, the two signals, Ideal
and calculated signal, must be matched very well. However,
the calculated signal commonly meets delay causing filter
and integrated process. When this happens, the calculated
signal is desired to synchronize with the reference signal.
So, a little standard error value can be accepted about less
than 10 % suggested by Slifka [1].
B. Peak Error
This is another method to estimate number of errors in
the calculated displacement signal, and it is also valuable.
Therefore, it is important to determine the peaks and valleys
in the position waveform.
For the peak error, the peak points higher than a certain
threshold will be measured and calculated. Usually, a
threshold of 50% of the maximum peak that is suggested by
Slifka[1]is used in this paper.
There are two parameters in the peak errors that are
maximum and average peak error. The maximum peak error
is calculated from two peaks having the most distant
together, and the average of peak error is measured
between all peaks.
V. EXPERIMENTAL RESULTS
We assumed that the original acceleration signal is
0( ) ( )A t a t d
(9)
Mathematically, the calculation of displacements x(t)
from a measured acceleration a(t) is simple described in
[11]:
0 0
2
0 0 0
1( )
2
t
t t
x t x t v t t d t dt a d
(10)
where:
x(t0) is the initial displacement, v(t0) is the initial
velocity, d0is the acceleration drift, x(t) is the calculated
displacement
From (10), we can see that the output signal can be
unbounded over time because of ramp (v0) and parabola (d0)
components. In this paper, the signals, single and multi-
frequency signal which are created in MATLAB, are
imported into Fig. 3. After that, the output displacement
signal is compared to the ideal position signal which is
calculated from theory.
A. Experiment with a Single Frequency Signal
Experiment ideas:
We have an original acceleration signal:
tAta 1sin (11)
After the 1st integrating, the velocity (assuming no initial
conditions) is
tA
tv 1
1
cos
(12)
After the 2nd integrating, the displacement (assuming no
initial conditions) is
tA
tx 12
1
sin
(13)
R3
R2R1
R4
-
+
U1
3
26
C2
C1
C3
VoVi
358
International Journal of Computer and Electrical Engineering, Vol. 5, No. 4, August 2013
To reject delay of the output signal, filtfiltfunction which
is supported in MATLAB is used to replace filter function
in double integrated process.
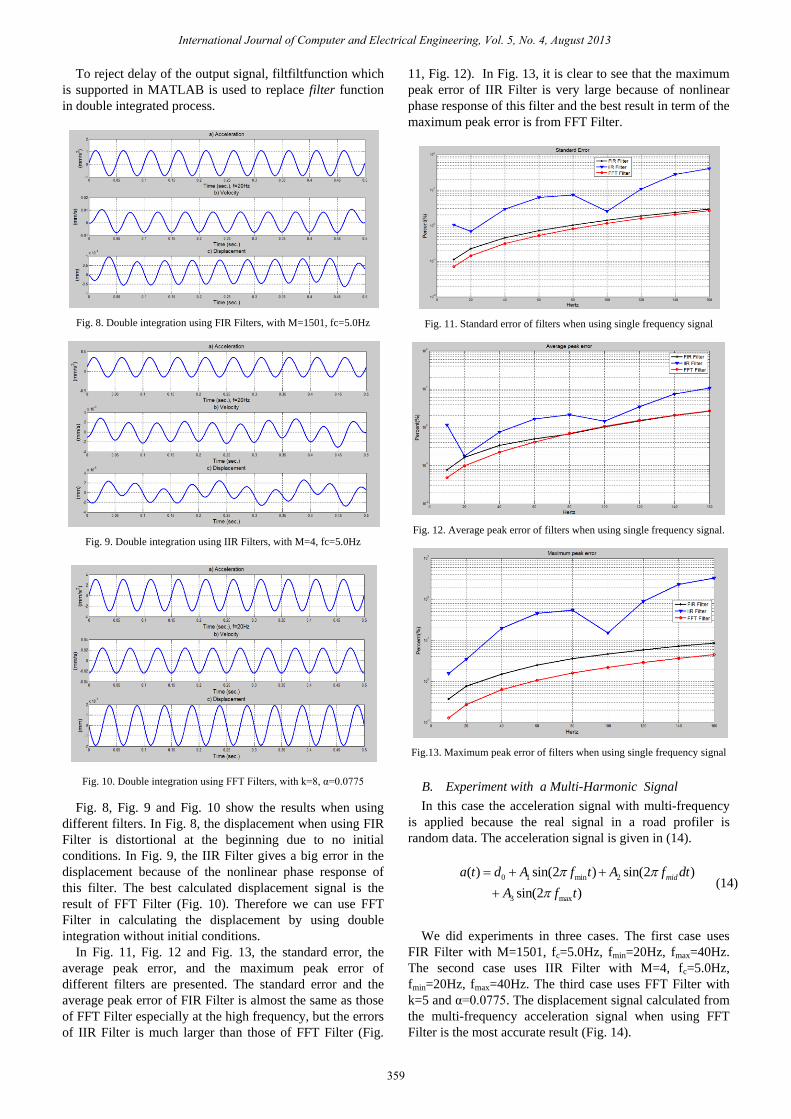
Fig. 8. Double integration using FIR Filters, with M=1501, fc=5.0Hz
Fig. 9. Double integration using IIR Filters, with M=4, fc=5.0Hz
Fig. 10. Double integration using FFT Filters, with k=8, α=0.0775
Fig. 8, Fig. 9 and Fig. 10 show the results when using
different filters. In Fig. 8, the displacement when using FIR
Filter is distortional at the beginning due to no initial
conditions. In Fig. 9, the IIR Filter gives a big error in the
displacement because of the nonlinear phase response of
this filter. The best calculated displacement signal is the
result of FFT Filter (Fig. 10). Therefore we can use FFT
Filter in calculating the displacement by using double
integration without initial conditions.
In Fig. 11, Fig. 12 and Fig. 13, the standard error, the
average peak error, and the maximum peak error of
different filters are presented. The standard error and the
average peak error of FIR Filter is almost the same as those
of FFT Filter especially at the high frequency, but the errors
of IIR Filter is much larger than those of FFT Filter (Fig.
11, Fig. 12). In Fig. 13, it is clear to see that the maximum
peak error of IIR Filter is very large because of nonlinear
phase response of this filter and the best result in term of the
maximum peak error is from FFT Filter.
Fig. 11. Standard error of filters when using single frequency signal
Fig. 12. Average peak error of filters when using single frequency signal.
Fig.13. Maximum peak error of filters when using single frequency signal
B. Experiment with a Multi-Harmonic Signal
In this case the acceleration signal with multi-frequency
is applied because the real signal in a road profiler is
random data. The acceleration signal is given in (14).
0 1 min 2
3 max
( ) sin(2 ) sin(2 )
sin(2 )
mida t d A f t A f dt
A f t
(14)
We did experiments in three cases. The first case uses
FIR Filter with M=1501, fc=5.0Hz, fmin=20Hz, fmax=40Hz.
The second case uses IIR Filter with M=4, fc=5.0Hz,
fmin=20Hz, fmax=40Hz. The third case uses FFT Filter with
k=5 and α=0.0775. The displacement signal calculated from
the multi-frequency acceleration signal when using FFT
Filter is the most accurate result (Fig. 14).
359
International Journal of Computer and Electrical Engineering, Vol. 5, No. 4, August 2013

360
International Journal of Computer and Electrical Engineering, Vol. 5, No. 4, August 2013
Fig. 14. Double integration with multi-harmornic signal
Fig. 15. Standard error of filters when using multi- frequency signal
Fig. 16. Average peak error of filters when using multi-frequency signal
Fig. 17. Maximum peak error of filters when using multi-frequency signal
From the results presented in Fig. 15, Fig. 16 and Fig. 17,
it is easy to see that the errors when using FFT Filter for the
case of multi-harmonic signal are the least, and the position
signals of filtering methods are more fail at higher
frequencies.
Fig. 18. Standard errors of FFT Filter when altering filter cut frequency
At higher frequencies in Fig. 18, the error appears to
increase with frequency. When cut frequency of FFT Filters
is bigger, the error seems smaller. However, this cut
frequency must be set much less than the smallest frequency
of acceleration signal.
VI. CONCLUSIONS
In this paper we analyzed the performance of FFT Filter
which is applied to calculate the displacement from the
signal measured from the accelerometer. The experiments
showed that FFT filters give results more accurate than do
FIR and IIR not only for single frequency signal but also for
multi-frequency signal. The standard error, the average peak
error, and the maximum peak error of FFT Filter are less
than those of FIR Filter and IIR Filter.
Moreover the error of FFT Filter can be reduced when
increasing the cut frequency of FFT filter, but it is remained
much less than the frequency of acceleration signals.
REFERENCES
[1] L. D. Slifka, "An accelerometer based approach to measuring
displacement of a vehicle body," M.S. thesis, Dept. Elect. Comput.
Eng., Michigan Univ., USA, 2004.
[2] J. H. A. Qader, "High performance real-time embedded systems:
design and implementation of road surface analyzer system," Ph.D.
dissertation, Dept. Comput. Sci. and Eng.,Univ. Texas at Arlington ,
USA, 2010.
[3] A. DeMarco and C. Stedman, "Automated GPS Mapping of Road
Roughness," Bachelor thesis, Worcester Polytechnic Inst., USA,
2007.
[4] M. W. Sayers and S. W. Karamihas, The Litte Book of Profiling,
Michigan, USA: Michigan Univ., 1996.
[5] S. A. Dyer et al., "Refinement of Measurement Techniques of Road
Profile and International Roughness Index to Support The KDOT
Pavement Management System Annual Road-Condition Survey
Research," Kansas State Univ., 2005.
[6] M. Harris and G. Piersol, Shock and Viration HandBook, 5th, Ed.
New York: McGraw-Hill Book Company, 2002.
[7] S. J. Orfanidis, Introduction to Signal Processing, Prentice Hall,
2009.
[8] J. G. T. Ribeiro et al., "New improvements in the digital double
integration filtering method to measure displacements using
accelerometers," in Proc. 19th Int. Modal Analysis Conf., vol. 3727,
Orlando, Florida, 2001, pp. 538-542.
[9] J. G. T. Ribeiro et al., "Using the FFT- DDI method to measure
displacements with piezoelectric, resistive and ICP accelerometers,"
in Conf. Exposition on Structural Dynamics, 2003.
[10] J. G. T. Ribeiro et al., "Problems in analogue double integration to
determine displacements from acceleration data," in Proc. 15th Int.
Modal Analysis Conf., vol. 3089, Orlando, Florida, 1997, pp. 930-
934.
[11] M. Arraigada el al., "Calculation of displacements of measured
A. Experiment with Changing Cut Frequency of Filters

361
International Journal of Computer and Electrical Engineering, Vol. 5, No. 4, August 2013
accelerations analysis of two accelerometers and application in road ,"
in STRC, 2006.
Thai Minh Do was born in Dong Nai District, Viet
Nam in 1988. He received Bachelor’s Degree in
Electronics and Telecommunications Engineering
from University of Technical Education Ho Chi
Minh City, Viet Nam in 2011. Now, he is studying
for Master’s Degree in Electronics Engineering from
Ho Chi Minh City University of Technology. His
thesis focuses on the development and evaluation of
road roughness profiler system.
Since 2011, he has been an instructor in Ho Chi
Minh City Vocational College. He is really interested in Signal Processing,
Embedded System, and Road Profiler System.
Mr. Do received certificated top student graduated Bachelor’s Degree
in 2011, ODON VALLET Scholarship for Excellent Students in 2009,
NGUYEN THAI BINH Scholarship in 2008.
Thong Chi Le is faculty member of Ho Chi Minh
City University of Technology, Vietnam for several
years is a Ph.D. candidate in the Electrical
Engineering Department at University of Arkansas.
He is interested in digital electronics,
microcontroller, and control system. His research
includes using microcontroller to develop automatic
control systems, and using HDL to design digital
systems. He is also interested in embedded sensors
using nanotechnology for industrial applications. He
received his B.S. degree in Electronic Engineering from Ho Chi Minh City
University of Technology, Vietnam in 1993 and M.S. degree in Electronic
Engineering from Ho Chi Minh City University of Science, Vietnam in
1998. He got his PhD degree in Electrical Engineering from University of
Arkansas, United States in 2009.