operating systems1 11. i/o systems 11.1 basic issues in device management 11.2 a hierarchical model...
TRANSCRIPT
Operating Systems 1
11. I/O Systems11.1 Basic Issues in Device Management
11.2 A Hierarchical Model
11.3 I/O Devices
11.4 Device Drivers– Memory-Mapped vs Explicit Device Interfaces – Programmed I/O with Polling – Programmed I/O with Interrupts – Direct Memory Access (DMA)
11.5 Device Management– Buffering and caching– Error Handling – Disk Scheduling

Operating Systems 2
Basic Issues• I/O devices:
– Communication devices• Input only (keyboard, mouse, joystick, light pen)• Output only (printer, visual display, voice
synthesizers…)• Input/output (network card…)
– Storage devices• Input/output (disk, tape, writeable optical disks…)• Input only (CD-ROM…)

Operating Systems 3
Basic Issues• Every device type/model is different
– input/output/both, block/char oriented, speed, errors, …• Main tasks of I/O system:
– Present logical (abstract) view of devices• Hide details of hardware interface• Hide error handling
– Facilitate efficient use• Overlap CPU and I/O
– Support sharing of devices• Protection when device is shared (disk)• Scheduling when exclusive access needed (printer)

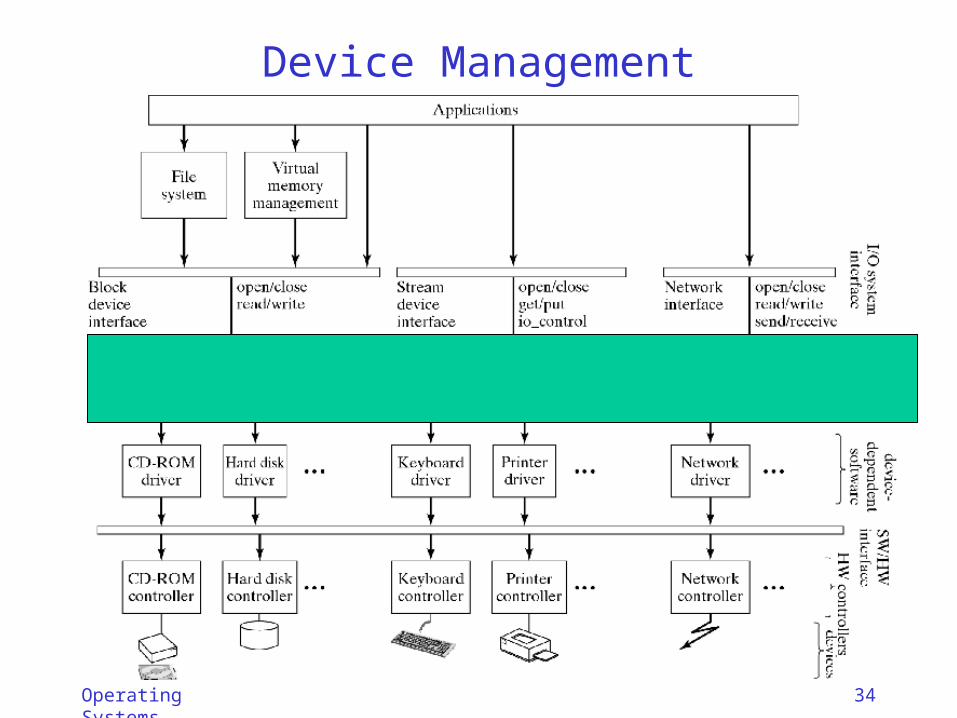
Hierarchical Model of the I/O System
Operating Systems 4

I/O System Interface
Operating Systems 6

Operating Systems 7
I/O System Interface• Block-Oriented Device Interface
– direct access– contiguous blocks– usually fixed block size
– Operations: • Open: verify device is ready, prepare it for access• Read: Copy a block into main memory • Write: Copy a portion of main memory to a block• Close: Release the device• Note: these are lower level than those of the FS
– Used by File System and Virtual Memory System– Applications typically go through the File System

Operating Systems 8
I/O System Interface• Stream-Oriented Device Interface
– character-oriented – sequential access
– Operations: • Open: reserve exclusive access• Get: return next character of input stream• Put: append character to output stream• Close: release exclusive access
• Note: these too are different from those of the FS but some systems try to present a uniform view of files and devices

Operating Systems 9
I/O System Interface• Network Interface
– key abstraction: socket– endpoints of a “line” between two processes– once established, use protocol to communicate
• Connection-less protocols– send messages, called datagrams–Operations: send, receive (to/from sockets)
• Connection-based protocols– establish a connection called virtual circuit–Operations: connect, accept, read, write

I/O Devices
Operating Systems 10

Operating Systems 11
I/O Devices – Output • Display monitors
– character or graphics oriented
– Different data rates:• 25 x 80 characters vs
800 x 600 pixels (1B allows 256 colors)
• Refresh 30-60 times/s for video
• Printers (ink jet, laser)• Interface
– write to controller buffer
– wait for completion– handle errors

Operating Systems 12
I/O Devices – Input • Keyboards
– most common: “QWERTY”• Pointing devices
– Mouse– Trackball– Joystick
• Scanners • Interface
– device generates interrupt when data is ready– read data from controller buffer – low data rates, not time-critical
Operating Systems 13
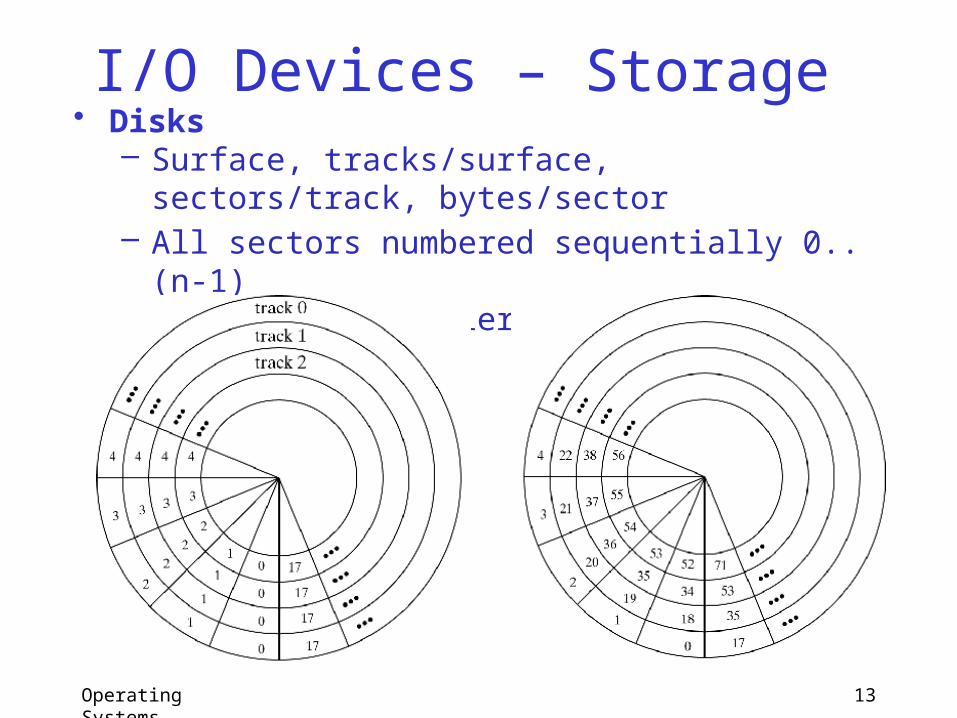
I/O Devices – Storage • Disks
– Surface, tracks/surface, sectors/track, bytes/sector– All sectors numbered sequentially 0..(n-1)
(device controller provides mapping)

Operating Systems 14
I/O Devices – Storage • Track skew
– Account for seek-to-next-track to minimize rotational delay

Operating Systems 15
I/O Devices – Storage • Double-sided or multiple surfaces
– Tracks with same diameter = cylinder– Sectors are numbered within cylinder consecutively to
minimize seek time
Operating Systems 16
I/O Devices – Storage • Optical disks
– CD-ROM, CD-R (WORM), CD-RW– Originally designed for music– Data stored as continuous spiral,
subdivided into sectors– Higher storage capacity: 0.66 GB/surface– Constant linear speed (200-530 rpm), high data rate

Operating Systems 17
I/O Devices – Storage • Critical issue: data transfer rates of disks
– Sustained rate: continuous data delivery– Peek rate: transfer once read/write head is in place
• depends on rotation speed and data density
• Example:
7200 rpm, 100 sectors/track, 512 bytes/sector.
What is the peak transfer rate?– 7200 rpm: 60,000/7200=8.3 ms/rev– 8.3/100 = 0.083 ms/sector– 512 bytes transferred in 0.083 ms: ~6.17 MB/s
What is the Sustained rate?–Depends on file organization

Hierarchical Model of the I/O System
Operating Systems 19

Operating Systems 20
Device Drivers• accept command from
application– get/put character– read/write block– send/receive
packet
• interact with device controller (hardware) to carry out command
• driver-controller interface:
set of registers
Operating Systems 21
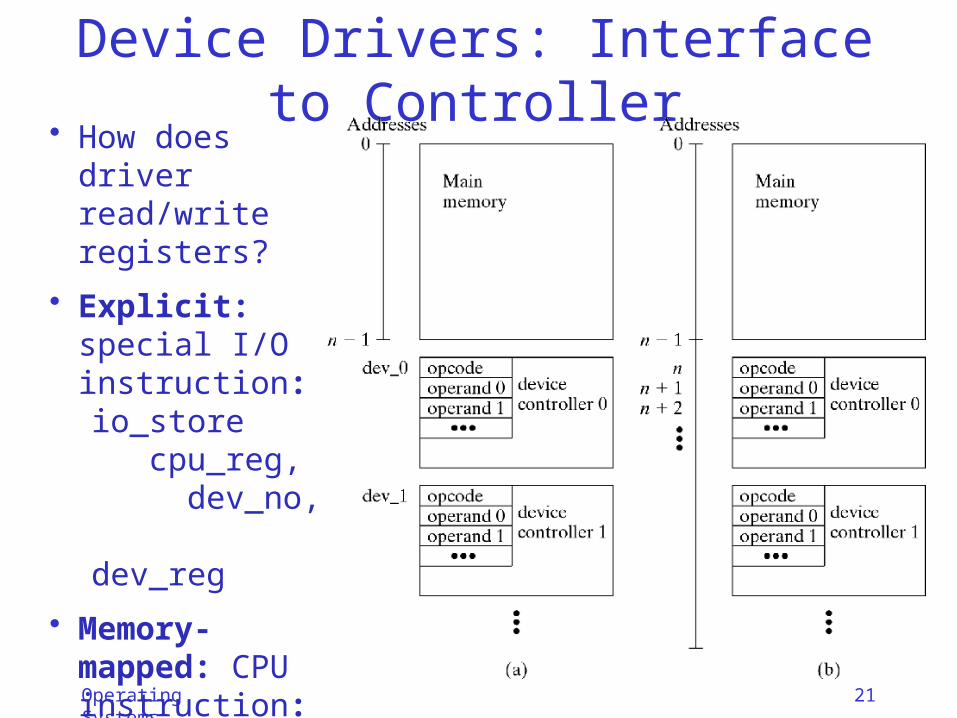
Device Drivers: Interface to Controller• How does driver
read/write registers?
• Explicit: special I/O instruction: io_store cpu_reg, dev_no, dev_reg
• Memory-mapped: CPU instruction: store cpu_reg, n
(n is memory address)
Operating Systems 22
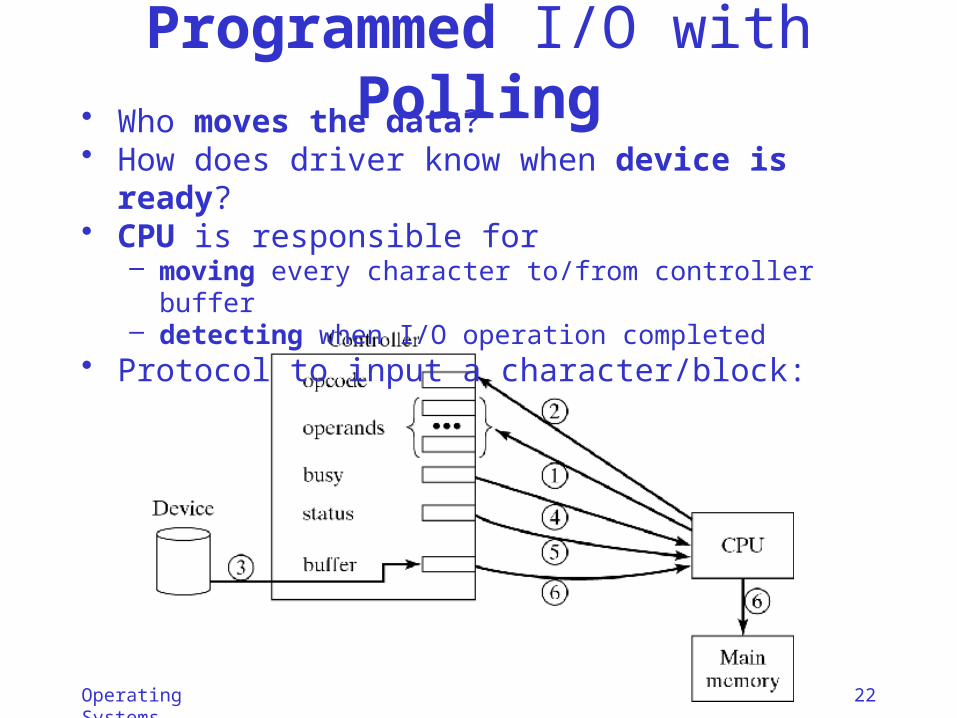
Programmed I/O with Polling• Who moves the data? • How does driver know when device is ready?• CPU is responsible for
– moving every character to/from controller buffer– detecting when I/O operation completed
• Protocol to input a character/block:

Operating Systems 23
Programmed I/O with Polling• Driver operation to input sequence of characters or blocks:
i = 0;do { write_reg(opcode, read); while (busy_flag == true) {…??...}; //waiting mm_in_area[i] = data_buffer; increment i; compute;} while (…)
Operating Systems 24
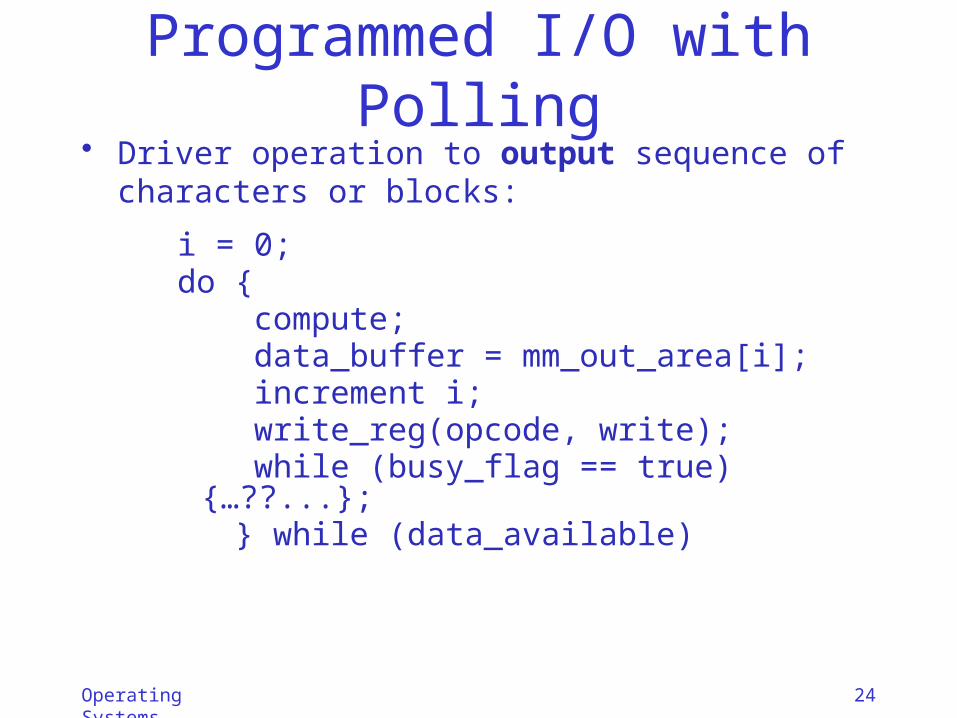
Programmed I/O with Polling• Driver operation to output sequence of characters or
blocks:
i = 0;do { compute; data_buffer = mm_out_area[i]; increment i; write_reg(opcode, write); while (busy_flag == true) {…??...}; } while (data_available)

Operating Systems 25
Programmed I/O with Polling• What to do while waiting?
– Idle (busy wait)– Some other computation (what?)
• How frequently to poll?
– Give up CPU• Device may remain unused for a long time• Data may be lost

Operating Systems 26
Programmed I/O with Interrupts• CPU is responsible for moving data, but• Interrupt signal informs CPU when I/O operation completes• Protocol to input a character/block:
Operating Systems 27
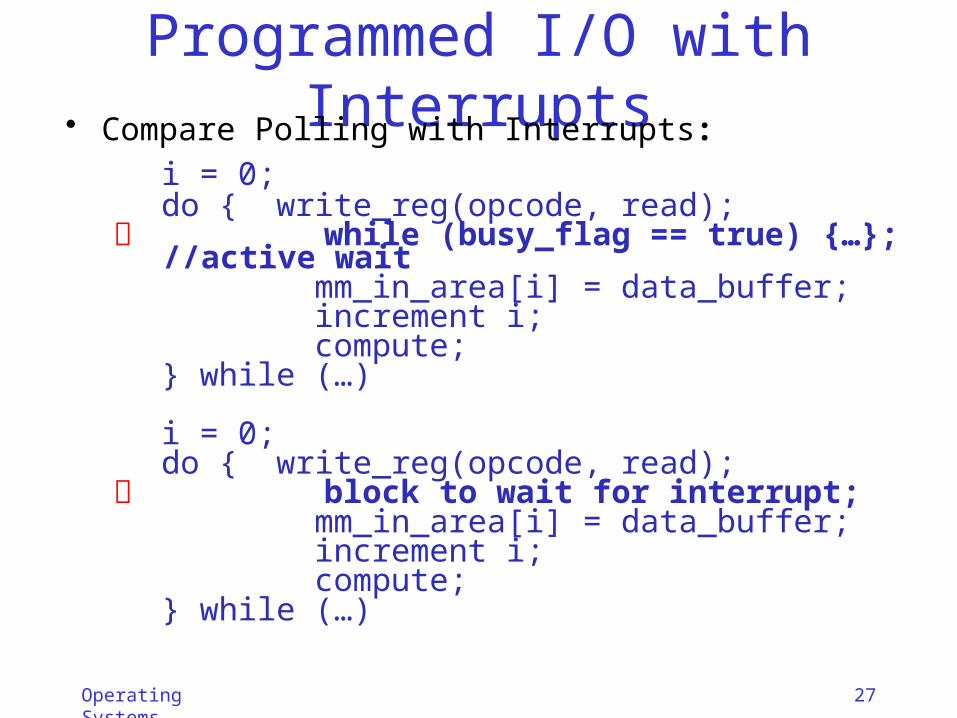
Programmed I/O with Interrupts• Compare Polling with Interrupts:
i = 0;do { write_reg(opcode, read);
while (busy_flag == true) {…}; //active wait mm_in_area[i] = data_buffer; increment i; compute;} while (…)
i = 0;do { write_reg(opcode, read);
block to wait for interrupt; mm_in_area[i] = data_buffer; increment i; compute;} while (…)
Operating Systems 28
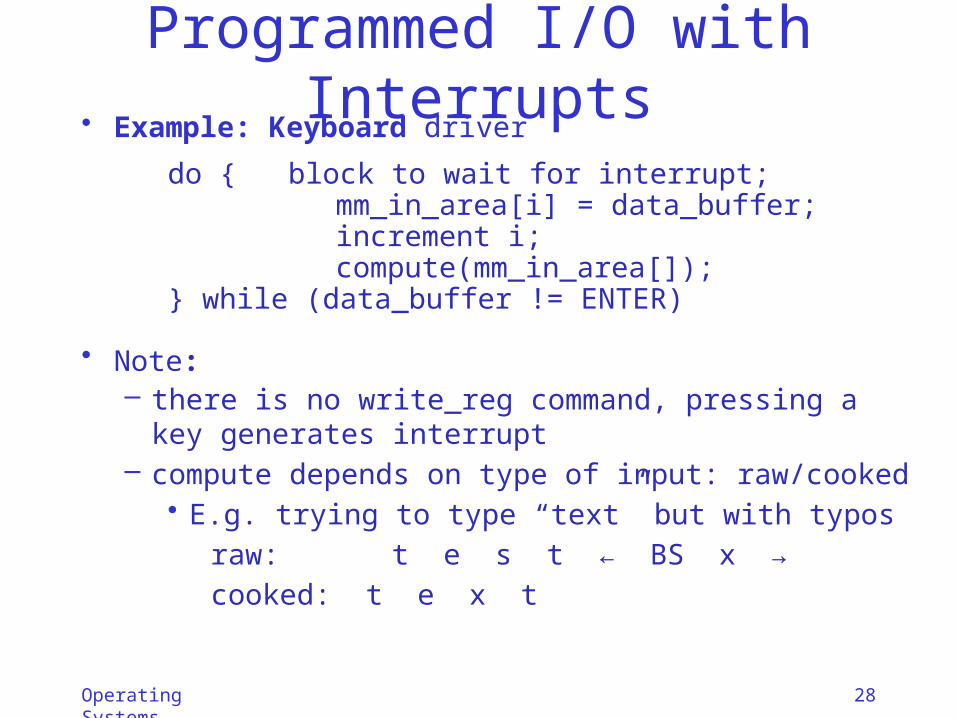
Programmed I/O with Interrupts• Example: Keyboard driver
do { block to wait for interrupt; mm_in_area[i] = data_buffer; increment i; compute(mm_in_area[]);} while (data_buffer != ENTER)
• Note: – there is no write_reg command, pressing a key generates
interrupt– compute depends on type of input: raw/cooked
• E.g. trying to type “text” but with typos
raw: t e s t ← BS x →
cooked: t e x t
Operating Systems 29
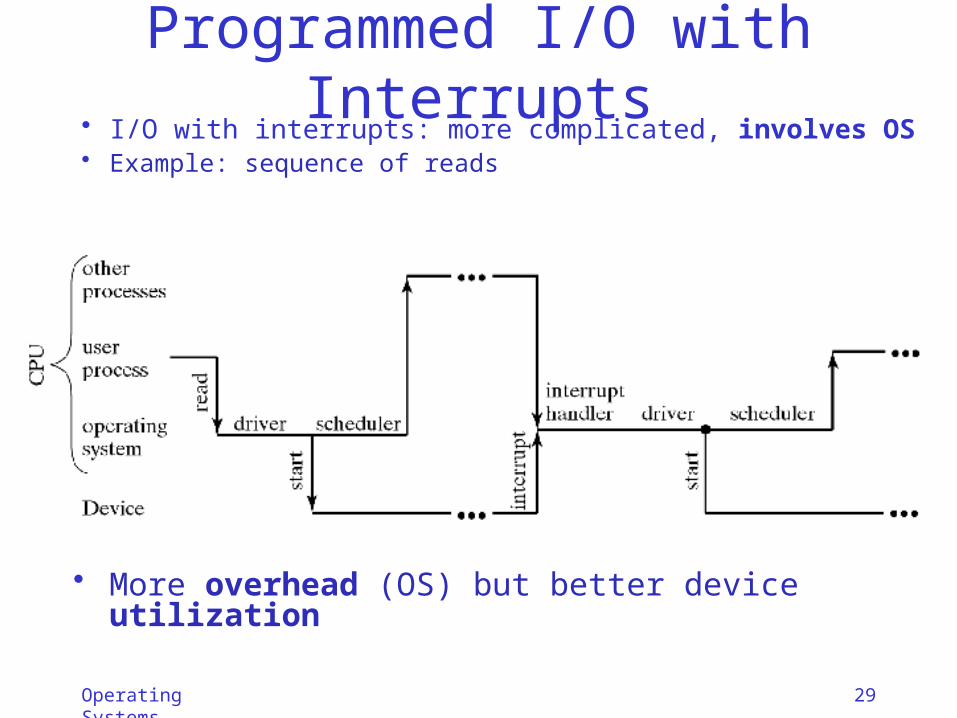
Programmed I/O with Interrupts• I/O with interrupts: more complicated, involves OS• Example: sequence of reads
• More overhead (OS) but better device utilization
Operating Systems 31
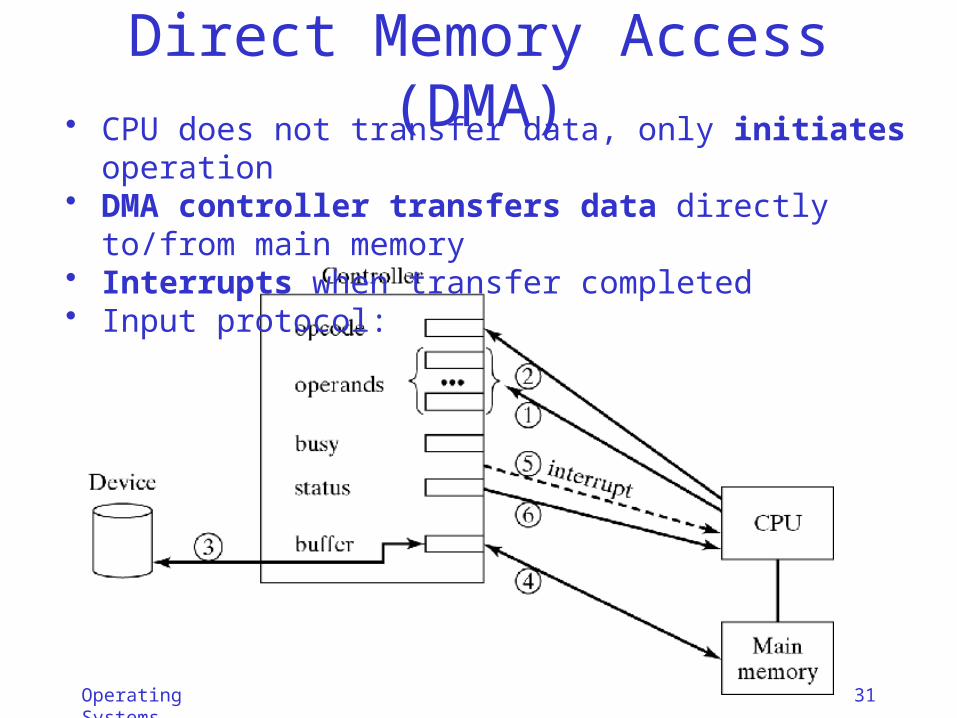
Direct Memory Access (DMA)• CPU does not transfer data, only initiates operation• DMA controller transfers data directly to/from main memory• Interrupts when transfer completed• Input protocol:

Operating Systems 32
DMA• Driver (CPU) operation to input sequence of bytes:
write_reg(mm_buf, m); // give parameterswrite_reg(count, n);write_reg(opcode, read); // start opblock to wait for interrupt;
– Writing opcode triggers DMA controller– DMA controller issues interrupt after n chars in memory
• Cycle Stealing – DMA controller competes with CPU for memory access – generally not a problem because:
• Memory reference would have occurred anyway• CPU is frequently referencing data in registers or
cache, bypassing main memory
Device Management
Operating Systems 34
Operating Systems 35
Device Management• Device-independent techniques:
– Buffering/caching– Error Handling– Device Scheduling/Sharing

Operating Systems 36
Buffering• Reasons for buffering
– Allows asynchronous operation of producers and consumers
– Allows different granularities of data
– Consumer or producer can be swapped out while waiting for buffer fill/empty

Operating Systems 37
Buffering• Single buffer operation • Double buffer (buffer swapping)
– Increases overlap– Ideal when: time to fill = time to empty = constant– When times differ, benefits diminish

Operating Systems 38
Buffering• Circular Buffer (bounded buffer from Ch. 2)
– Producer and consumer each use an index• nextin gives position of next input• nextout gives position of next output• Both are incremented modulo n at end of operation
– When average times to fill/empty are comparable but vary over time: circular buffer absorbs bursts
• Buffer Queue– Variable size buffer to prevent producer blocking– Implement as linked list –
needs dynamic memory management• Buffer Cache: pool of buffers for repeated access

Operating Systems 39
Error Handling• Types of error
– Persistent vs Transient– SW vs HW– Persistent SW error
• Repair/reinstall program– Transient SW/HW errors:
• Error detecting/correcting codes – e.g., Hamming code (separate lecture)
• Retry operation, e.g. disk seek/read/write– Persistent HW errors:
• Redundancy in storage media

Operating Systems 45
Bad block detection/handling• Block may be bad as a manufacturing fault or during use• Parity bit is used to detect faulty block• The controller bypasses faulty block by renumbering• A spare block is used instead
Two possiblere-mappings:
a) simple
b) preserves contiguityof allocation

Operating Systems 46
Stable storage• Some applications cannot tolerate any loss of data (even
temporarily)• Stable storage protocols:
– Use 2 independent disks, A and B– Write: write to A; if successful, write to B; if either
fails, go to recovery– Read: read from A and B; if A!=B, go to Recovery– Recovery from Media Failure: A or B contains correct
data (parity); remap failed disk block – Recovery from Crash:
• if while reading, just repeat the read• if while writing A, B is correct; if while writing B, A
is correct; recover from whichever is correct
Operating Systems 47
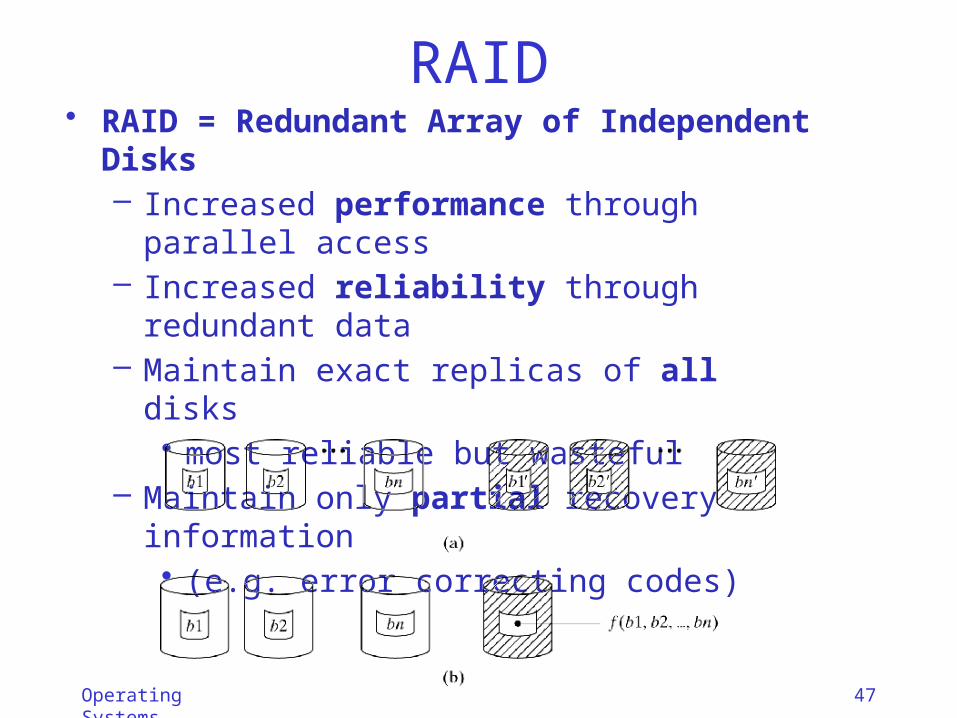
RAID• RAID = Redundant Array of Independent Disks
– Increased performance through parallel access– Increased reliability through redundant data– Maintain exact replicas of all disks
• most reliable but wasteful– Maintain only partial recovery information
• (e.g. error correcting codes)

Operating Systems 48
Device Management• Disk Scheduling
– Requests for different blocks arrive concurrently from
different processes– Minimize rotational delay:
• re-order requests to blocks on each track to access in one rotation
– Minimize seek time:– Conflicting goals:
• Minimize total travel distance
• Guarantee fairness
Operating Systems 49
Device Management• Algorithms
– FIFO: requests are processed in the order of arrival• simple, fair, but inefficient
– SSTF (Shortest Seek Time First): always go to the track that’s nearest to the current positions• most efficient but prone to starvation
– Scan (Elevator): – maintain a direction of travel– always proceed to the nearest track in the current
direction of travel– if there is no request in the current direction,
reverse direction• fair, acceptable performance
Operating Systems 50
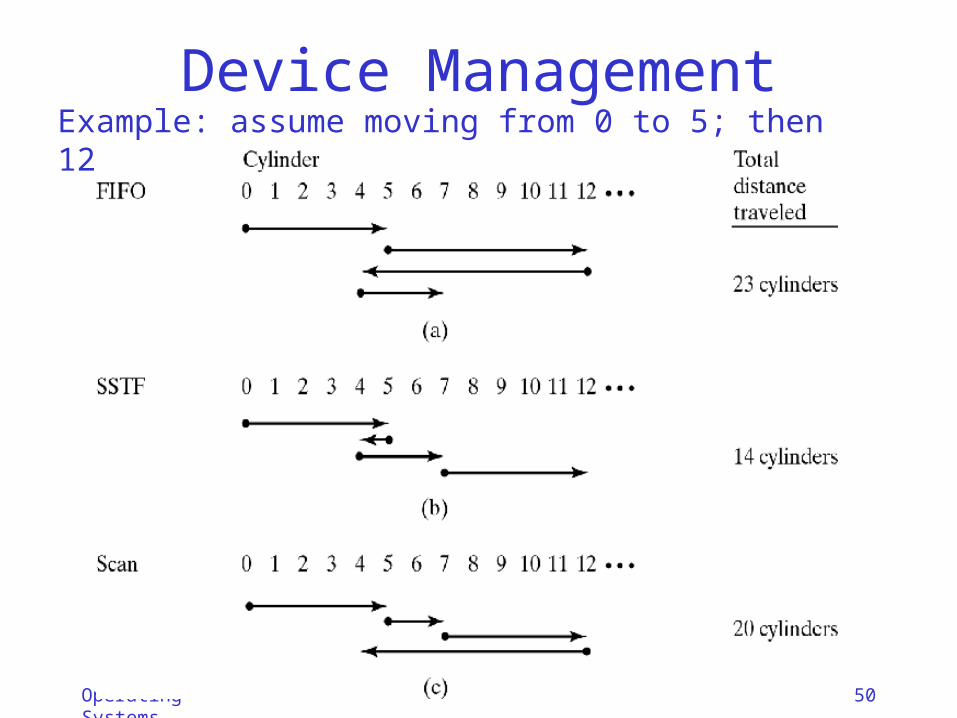
Device ManagementExample: assume moving from 0 to 5; then 12,4,7 arrive