multiple human objects tracking in crowded scenes yao-te tsai, huang-chia shih, and chung-lin huang...
Post on 20-Dec-2015
216 views
TRANSCRIPT
Multiple Human Objects Tracking in Crowded Scenes
Yao-Te Tsai, Huang-Chia Shih,and Chung-Lin HuangDept. of EE, NTHU
International Conference on Pattern Recognition (ICPR’06)

Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion

Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion

Introduction human objects tracking systems
Pfinder Utilize stochastic, region-based feature
McKenna et al. Adaptive Gaussian mixture to model color distributi
on M2Tracker
Combine presence probability with color model to classify each pixel
Tsutsui et al. Exchange the optical flow information within multip
le cameras

Multiple human objects tracking system
System consist of Model-based object segmentation Remove noise of segmented region Optical flow-based position estimation Occlusion detection Object separation from occlusion
Contribution Track occlusion, separate object and
track it individually afterwards
Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion

Gaussian Mixture Color Model Condition probability for pixel i belong to
object O is
Parameters:mean , and covariance matrix
Expectation-maximization (EM) algorithm To determine the maximum likelihood
parameters of a mixture of m Gaussian
1)(,0)( jj j
m
j
ii
j
jeOipjj
Tj
1
)()(2
1
)(2
1)(
1

Color Model Use HIS space to reduce ambient illumination change
Each pixel i has 2-D feature vectorwhere hi is the hue, si is the saturation
Likelihood pixel i belonging to torso (n=0) or the bottom (n=1) of a person O is
),( iii shv
m
j
vv
j
n jeOipjij
Tji
1
)()(2
1
)(2
1)(
1

Color similarity
The color of the torso of object 1 is similar to the color of the bottom of object 2
(b) is the result of applying the torso color model of object 2 for all pixels

Initialize Presence Map Presence map
The set of presence probabilities of the pixels inside the object
Head line Scan the torso projection profile H0(yi) yHL=arg minyiH0(yi)
Torso line Central vertical axis
Probabilities of the pixels will be larger

Bayesian Classification Only consider pixels in the neighborhood of an object
Pposteriori(Ok|i) : posterior prob. of pixel i belong to object Ok P(i|Ok) : probability defined by torso or bottom model Ppriori(Ok) : presence probability of Ok
Relative coordinate Defined by the head line and central axis
Color model selection for torso or bottom If Pposteriori(Ok|i) >=0.05, then i classified to Ok
)()()( ),(,nkkyxprior
nkposterior OiPOPiOP
rr

Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion

Single Object Tracking Flow chart of single object tracking
Newcomer detection By using background subtraction

Tracking process Calculate angles and magnitudes of the flow vectors in the
neighborhood of window Quantize the direction into 12 bins (30 degree/bin) and det
ermine which bin object belong to Find the most significant bin and calculate average flow Shift object window by average flow
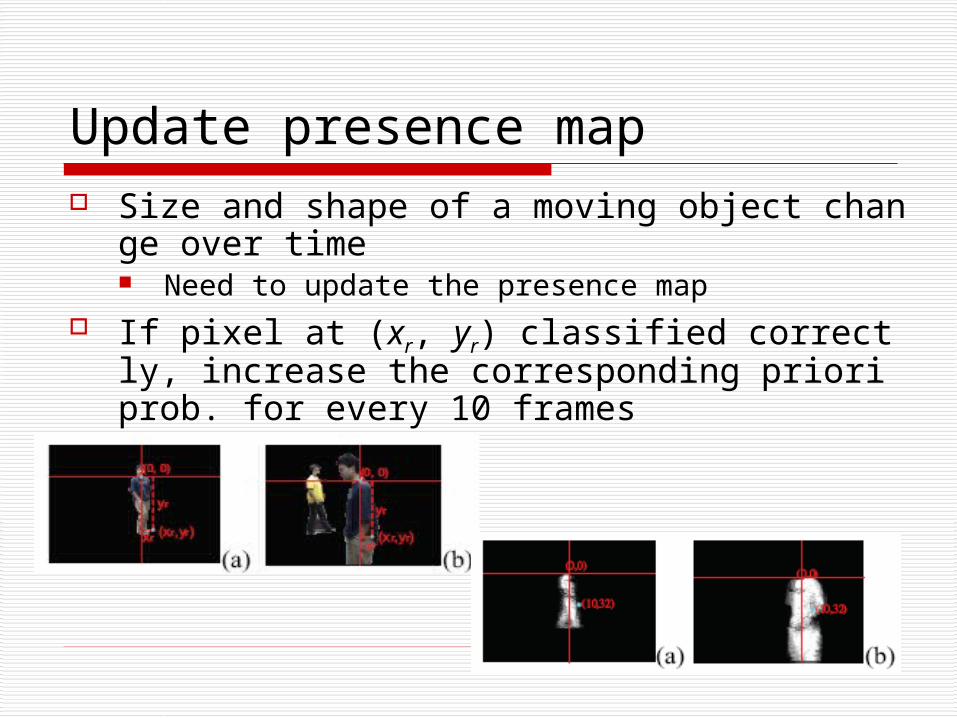
Update presence map Size and shape of a moving object change over ti
me Need to update the presence map
If pixel at (xr, yr) classified correctly, increase the corresponding priori prob. for every 10 frames

Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion

Tracking Occluded Objects
Optical flow and presence probability are unreliable
Only use color models to estimate object’s central vertical axis
Use distance between central axes to determine object becomes separable

Occlusion detection Each individual object has five attributes
based on its activity
Two object windows touch and form an occlusion window
Two object windows overlap and form an occlusion window
A single object joins an occlusion and form a new occlusion window

Occlusion group separation Compute distance between every two objects i
n an occlusion group as
If Two extreme objects Oi and Oi+1
If |di| > threshold, then determine Oi or Oi+1 can be separate from the original occlusion
kc
kck xxd 1
ki dd max

Object separation example
separate separate
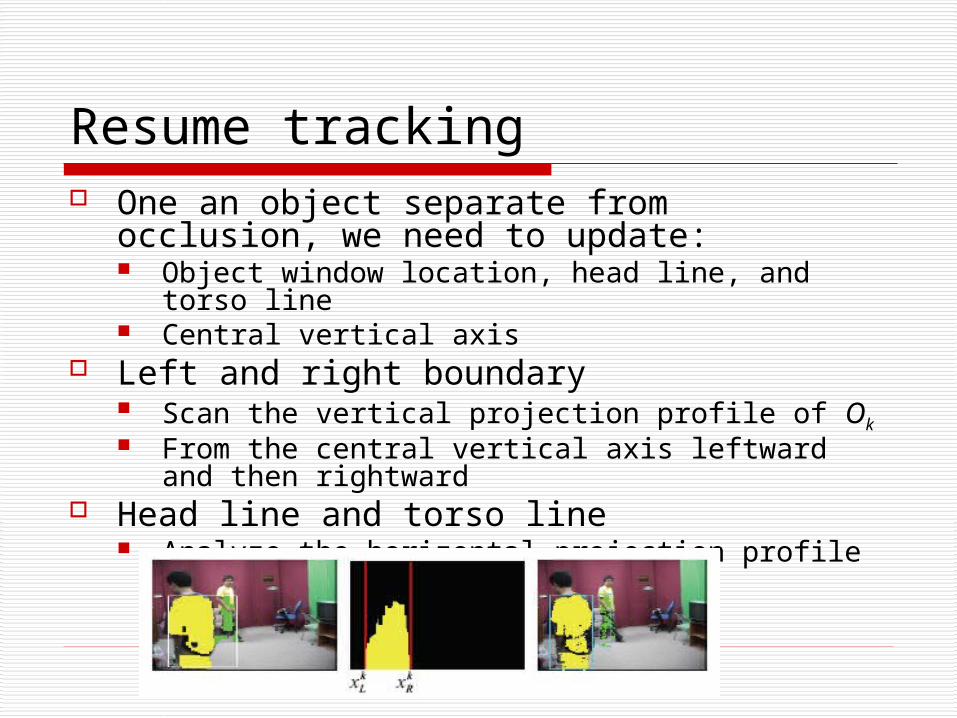
Resume tracking One an object separate from occlusion, we
need to update: Object window location, head line, and torso line Central vertical axis
Left and right boundary Scan the vertical projection profile of Ok From the central vertical axis leftward and then
rightward Head line and torso line
Analyze the horizontal projection profile

Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion

Tracking example 1 Format:
Image frame is 160x120x24 bits, 15 frames/sec
Occlusion 1
Occlusion 2
Object 2 separate and join occlusion 1 single object 4
occlusion 1

Tracking example 2 Two occlusion groups merge as one and then separate
to another two occlusion groups

System evaluation and error analysis Three separation events:
2-object, 3-object, and 4-object separation event Define separation occurs’ accuracy based on:
A single object leaves an occlusion and track him correctly afterward
If an occlusion splits into two, system identify the correct objects in the two pairs.
More 2-object separation events

Outline
Introduction Initialization and Pixel Classification Single Object Tracking Tracking Occluded Objects Experimental Results Conclusion
Conclusion Object tracking consists of:
Gaussian mixture model Presence probability Optical flow
Objects under occlusion Use color model to distinguish each object and
locate central vertical axes Object separation
Determine by distances between the central vertical axes of objects