matematika1zafizike - fmf.uni-lj.simrcun/preprints/mat1.pdf · množicolahkokonkretnonavedemo,...
TRANSCRIPT

Matematika 1 za fizike
J. Kališnik in J. Mrčun
zapiski predavanj na FMF UL2008-2019

Zadnja sprememba: 18. december 2019

UvodTo so zapiski predavanj pri predmetu Matematika 1 za fizike, ki ga preda-vam od leta 2008 dalje. Vsebina predmeta je večinoma standardna in pokrivavektorje v R3, zaporedja, številske ter potenčne vrste, funkcijska zaporedjater vrste in zveznost, odvod ter integral funkcij ene realne spremenljivke.Nestandardno je zadnje poglavje, v katerem le na kratko nakažemo, kakopojma zveznosti in odvedljivosti posplošimo na funkcije več spremenljivk.Posebej tu vključimo verižno pravilo za parcialne odvode in Taylorjevo for-mulo za funkcije več spremenljivk, pa tudi zadostni pogoj za ekstrem funk-cije dveh spremenljivk. Natančnejšo obravnavo diferencialnega računa zafunkcije več spremenljivk, vključno z izrekom o implicitni funkciji in obrav-navo ekstremov ter vezanih ekstremov, študenti slišijo kasneje pri predmetuMatematika 2 za fizike, pri katerem se najprej spoznajo z osnovnimi pojmilinearne algebre.
Rad bi se zahvalil Juretu Kališniku, asistentu pri predmetu, ki je zapiskenatipkal in ob tem vključil mnogo lepih slik, komentarjev in izboljšav.
Ljubljana, 2016J. Mrčun

Kazalo1 Osnove teorije množic 6
1.1 Zapis množic in osnovne operacije med množicami . . . . . . 61.2 Funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3 Moč množic . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Števila 212.1 Naravna števila . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2 Realna števila . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.3 Kompleksna števila . . . . . . . . . . . . . . . . . . . . . . . . 38
3 Trirazsežni evklidski prostor 493.1 Vektorski prostor R3 . . . . . . . . . . . . . . . . . . . . . . . 503.2 Skalarni, vektorski in mešani produkt v R3 . . . . . . . . . . 513.3 Premice in ravnine v R3 . . . . . . . . . . . . . . . . . . . . . 60
4 Zaporedja števil 714.1 Stekališča zaporedja . . . . . . . . . . . . . . . . . . . . . . . 744.2 Limita zaporedja . . . . . . . . . . . . . . . . . . . . . . . . . 774.3 Podzaporedja . . . . . . . . . . . . . . . . . . . . . . . . . . . 854.4 Cauchyjev kriterij za konvergenco zaporedij . . . . . . . . . . 89
5 Številske vrste 915.1 Vsota številske vrste . . . . . . . . . . . . . . . . . . . . . . . 915.2 Testi za konvergenco številskih vrst . . . . . . . . . . . . . . . 99
6 Funkcije ene realne spremenljivke 1076.1 Limita funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.2 Zveznost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1226.3 Eksponentna funkcija . . . . . . . . . . . . . . . . . . . . . . 134
7 Odvod 1477.1 Analiza funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . 1587.2 L’Hospitalovo pravilo . . . . . . . . . . . . . . . . . . . . . . . 1707.3 Risanje grafov funkcij . . . . . . . . . . . . . . . . . . . . . . 173
8 Nedoločeni integral 1768.1 Integrali racionalnih funkcij . . . . . . . . . . . . . . . . . . . 1848.2 Integrali nekaterih iracionalnih funkcij . . . . . . . . . . . . . 1898.3 Integrali nekaterih kotnih funkcij . . . . . . . . . . . . . . . . 192

9 Določeni integral 1949.1 Lastnosti določenega integrala . . . . . . . . . . . . . . . . . . 2069.2 Numerična integracija . . . . . . . . . . . . . . . . . . . . . . 2229.3 Izlimitirani integral . . . . . . . . . . . . . . . . . . . . . . . . 225
10 Uporaba integrala 23010.1 Dolžine krivulj . . . . . . . . . . . . . . . . . . . . . . . . . . 23010.2 Ploščine likov . . . . . . . . . . . . . . . . . . . . . . . . . . . 23510.3 Volumni teles . . . . . . . . . . . . . . . . . . . . . . . . . . . 24110.4 Površina rotacijskega telesa . . . . . . . . . . . . . . . . . . . 24410.5 Krivulje v R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
11 Taylorjeva vrsta in potenčne vrste 25511.1 Taylorjeva formula . . . . . . . . . . . . . . . . . . . . . . . . 25511.2 Taylorjeva vrsta . . . . . . . . . . . . . . . . . . . . . . . . . . 26211.3 Potenčne vrste . . . . . . . . . . . . . . . . . . . . . . . . . . 26911.4 Enakomerna konvergenca . . . . . . . . . . . . . . . . . . . . 277
12 Funkcije večih spremenljivk 28612.1 Povezanost s potmi in kompaktnost . . . . . . . . . . . . . . . 29212.2 Parcialni odvodi funkcij večih spremenljivk . . . . . . . . . . 29412.3 Totano odvedljive funkcije večih spremenljivk . . . . . . . . . 29812.4 Verižno pravilo . . . . . . . . . . . . . . . . . . . . . . . . . . 30112.5 Višji parcialni odvodi . . . . . . . . . . . . . . . . . . . . . . . 30512.6 Taylorjeva formula za funkcije večih spremenljivk . . . . . . . 30812.7 Ekstremi funkcij večih spremenljivk . . . . . . . . . . . . . . . 31212.8 Integral s parametrom . . . . . . . . . . . . . . . . . . . . . . 317

1 Osnove teorije množicJezik teorije množic je osnovni jezik, v katerem lahko opisujemo matema-tiko. Množico si intuitivno predstavljamo kot skupek reči, ki imajo običajnokakšno skupno lastnost. Kot primer lahko vzamemo množico študentov fi-zike ali pa množico knjig v knjižnici. V fiziki so pogosto zanimive množicemožnih konfiguracij kakšnega mehanskega sistema, na primer množica vsehmožnih položajev točke v prostoru ali pa množica vseh možnih položajevnekega togega telesa v prostoru. Položaj točke v prostoru lahko preprostoopišemo s tremi realnimi parametri, opisati položaj togega telesa v prostorupa je že nekoliko težje. Pri matematiki bodo za nas najbolj zanimive množiceštevil in pa množice, ki jih lahko iz množic števil konstruiramo.
Omeniti velja, da imamo v matematiki pogosto opravka z množicami,ki so opremljene še s kakšno dodatno strukturo. Realna števila znamo se-števati in množiti, zato pravimo, da je množica realnih števil opremljena zdodatno algebraično strukturo (matematična veja, ki se ukvarja s posploši-tvami računskih operacij med števili, se imenuje algebra). Po drugi strani sirealna števila lahko predstavljamo kot točke na premici, med temi točkamipa lahko merimo razdaljo. Ker z merjenjem razdalje lahko povemo, kakoblizu sta si dve realni števili, pravimo, da so realna števila opremljena tudiz dodatno topološko strukturo (matematična veja, ki se ukvarja s posploši-tvami pojma “bližine”, se imenuje topologija). Ta topološka struktura igraključno vlogo pri študiju zveznosti funkcij.
1.1 Zapis množic in osnovne operacije med množicami
Množico si intuitivno predstavljamo kot skupino nekih reči. Vsako reč, kispada v neko množico, imenujemo element te množice. Poznati neko mno-žico pomeni natanko vedeti, kateri so njeni elementi. Množice običajnooznačujemo z velikimi črkami A,B,X, Y, . . . ali z velikimi pisanimi črkamiA,B,X ,Y, . . ., njihove elemente pa z malimi črkami a, b, x, y, . . .. Pri tej in-tuitivni predstavi in oznakah si moramo sicer dovoliti nekoliko več svobode.Tudi množice so namreč lahko elementi drugih množic. V bolj formalnemopisu teorije množic bi v resnici lahko tudi vse reči, ki so elementi množic,prav tako šteli za množice.
Teorija množic temelji na pojmu “biti element” ali na odnosu pripadno-sti. Če je a element množice A, to zapišemo
a ∈ A,
v nasprotnem primeru pa pišemo
a /∈ A.
Množic, ki imajo natanko iste elemente, ne ločimo. Drugače povedano,množici A in B sta enaki če, in samo če, imata natanko iste elemente. Če
6

sta množici A in B enaki, to seveda zapišemo z
A = B.
Naj bosta A in B množici. Če je vsak element množice B hkrati tudielement množice A, potem pravimo, da je množica B podmnožica množiceA, in označimo
B ⊂ A.Tako od tod sledi, da je A = B če, in samo če, velja B ⊂ A in A ⊂ B.
Množico lahko konkretno navedemo tako, da naštejemo vse njene ele-mente eksplicitno. Tako nam na primer oznaka
A = {1, 3, 5, 7}
pove, da množica A vsebuje natanko prva štiri liha naravna števila in ničdrugega. Najlažje je opisati prazno množico, ki jo označimo z ∅. Za njovelja, da nima elementov, torej
∅ = { }.
Omenimo, da iz našega dogovora o enakosti množic sledi
{1, 3, 7, 9} = {1, 7, 3, 9, 9, 1},
vendar pa∅ 6= {∅},
saj velja ∅ /∈ ∅ in ∅ ∈ {∅}. Množico vseh naravnih števil bi lahko zapisali
N = {1, 2, 3, 4, 5, . . .}.
Ker ima ta množica neskončno elementov, seveda nismo eksplicitno naštelivseh, si pa lahko relativno dobro predstavljamo, kateri so elementi te mno-žice. O natančnejšem opisu naravnih števil s tako imenovanimi Peanovimiaksiomi bomo govorili kasneje. Prav tako bomo z aksiomi kasneje opisalineskončno množico vseh realnih števil R.
Množico lahko navedemo tudi kot podmnožico neke druge, poznane mno-žice. Ta način opisa množice je še posebej primeren, kadar imamo opravkaz neskončnimi množicami, za katere ne moremo eksplicitno našteti vseh nji-hovih elementov. Naj bo A dana množica in naj bo ` neka lastnost, ki jesmiselna za elemente množice A. Tedaj imamo množico
B = {a ∈ A ; a ima lastnost `}
vseh elementov množice A, ki imajo lastnost `. Množica B je seveda pod-množica množice A. Kot primer lahko vzamemo množico vseh sodih narav-nih števil
2N = {n ∈ N ; n je sodo število} ⊂ N.Oglejmo si nekatere osnovne operacije med množicami. Za poljubni mno-
žici A in B imamo naslednji množici, ki jih lahko opišemo kot podmnožici:
7

(i) (presek množic A in B)
A ∩B = {a ∈ A ; a ∈ B} = {b ∈ B ; b ∈ A}
(ii) (razlika množic A in B)
A \B = {a ∈ A ; a /∈ B}
Presek A ∩ B vsebuje vse elemente, ki ležijo v obeh množicah in je zatopodmnožica tako množice A kot tudi množice B. Zapisali bi lahko tudiA∩B = {a ; a ∈ A in a ∈ B}. Za množici A in B rečemo, da sta disjunktni,če velja
A ∩B = ∅.
Razlika A \ B je podmnožica množice A, a ne nujno tudi množice B. Zapoljubni množici A in B pa imamo tudi množici:
(iii) (unija množic A in B)
A ∪B = {a ; a ∈ A ali a ∈ B}
(iv) (kartezični produkt množic A in B)
A×B = {(a, b) ; a ∈ A, b ∈ B}
Ti dve množici nista nujno podmnožici množice A ali množice B. Unija A∪Bvsebuje vse elemente množice A in poleg njih še vse elemente množice B.Kartezični produkt A×B je množica urejenih parov (a, b), pri čemer je prvakomponenta tega para, torej a, element množice A, druga komponenta tegapara, torej b, pa je element množice B. Dva takšna urejena para sta enakače, in samo če, imata enaki prvi komponenti in tudi enaki drugi komponenti.
Ker za poljubni dve množici A in B velja
A ∩B = B ∩A,
pravimo, da je presek množic komutativna operacija. Presek množic je tudiasociativna operacija, saj za vse množice A, B in C velja
A ∩ (B ∩ C) = (A ∩B) ∩ C.
Če torej zaporedoma računamo presek večih množic, lahko to naredimo vpoljubnem vrstnem redu. Za poljubne množice A1, A2, . . . , An bomo označili
n⋂k=1
Ak = A1 ∩A2 ∩ · · · ∩An−1 ∩An = A1 ∩ (A2 ∩ . . . (An−1 ∩An) . . .).
8

Ker za vse množice A, B in C velja tudi
A ∪B = B ∪A,
A ∪ (B ∪ C) = (A ∪B) ∪ C,je tudi unija množic komutativna in asociativna operacija. Za poljubnemnožice A1, A2, . . . , An zapišimo
n⋃k=1
Ak = A1 ∪A2 ∪ · · · ∪An−1 ∪An = A1 ∪ (A2 ∪ . . . (An−1 ∪An) . . .).
Na podoben način za poljubne množice A1, A2, . . . , An definiramo njihovkartezični produkt
n∏k=1
Ak = A1 ×A2 × · · · ×An
= {(a1, a2, . . . , an) ; a1 ∈ A1, a2 ∈ A2, . . . , an ∈ An},
katerega elementi so urejene n-terice (a1, a2, . . . , an), pri čemer je k-ta kom-ponenta te n-terice, torej ak, element množice Ak. Dve takšni urejeni n-tericista enaki če, in samo če, imata enaki k-ti komponenti za vsak k = 1, 2 . . . , n.Zgled 1.1. Položaje točke na premici lahko opišemo z množico realnih šte-vil R, položaje točke na ravnini z množico R2 = R × R, položaje točke vprostoru pa z množico R3 = R × R × R. Možne položaje sistema dvehrazličnih točk v prostoru lahko opišemo z množico (R3 × R3) \ ∆, kjer je∆ = {((x, y, z), (x′, y′, z′)) ∈ R3 × R3 ; (x, y, z) = (x′, y′, z′)}.
Naj bo J neprazna množica in naj bo za vsak element j ∈ J dana množicaAj . V tem primeru pravimo, da imamo indeksirano družino množic, ki jooznačimo
(Aj)j∈J .Množica J je indeksna množica te družine, njenim elementom rečemo inde-ksi. Presek in unija takšne indeksirane družine sta množici⋂
j∈JAj = {a ; a ∈ Aj za vsak j ∈ J},
⋃j∈J
Aj = {a ; a ∈ Aj za vsaj en j ∈ J}.
MnožiciA = {Aj ; j ∈ J},
ki ima za elemente vse množice Aj , j ∈ J , včasih pravimo tudi družinamnožic, in označimo
∩A =⋂j∈J
Aj ,
∪A =⋃j∈J
Aj .
9

Zgled 1.2. (1) Naj bo n ∈ N in naj bo J = {1, 2, . . . , n} ⊂ N. Za poljubnemnožice A1, A2, . . . , An je tedaj
⋂j∈J
Aj =n⋂j=1
Aj = A1 ∩A2 ∩ · · · ∩An,
⋃j∈J
Aj =n⋃j=1
Aj = A1 ∪A2 ∪ · · · ∪An.
(2) Naj bo J = N in naj bo
Aj = {n ∈ N ; n ≥ j} ⊂ N
za vsak indeks j ∈ N. Potem velja N = A1 ⊃ A2 ⊃ A3 ⊃ · · · ter⋂j∈J
Aj = ∅,
⋃j∈J
Aj = N.
Včasih nas zanimajo samo tiste množice A, ki so podmnožice neke vna-prej dane množice U . V tem kontekstu množici U pravimo univerzum inuporabljamo krajšo oznako za razliko
Ac = U \A = { a ∈ U ; a /∈ A},
ki ji pravimo tudi komplement podmnožice A v množici U . Opazimo lahko,da velja (Ac)c = A. Za nas bo univerzum pogosto množica števil.
Trditev 1.3 (De Morganova zakona). Naj bo (Aj)j∈J indeksirana družinapodmnožic množice U . Potem veljata enakosti
⋃j∈ J
Acj =( ⋂j∈ J
Aj
)c,
⋂j∈ J
Acj =( ⋃j∈ J
Aj
)c.
Dokaz. Dokažimo prvo enakost. Vzemimo poljuben element a ∈⋃j∈ J A
cj .
Tedaj obstaja nek tak indeks j ∈ J , da je a ∈ Acj . Od tod sledi, da a /∈ Ajin zato a /∈
⋂j∈ J Aj , torej je a ∈ (
⋂j∈ J Aj)c. S tem smo dokazali, da
velja⋃j∈J A
cj ⊂ (
⋂j∈J Aj)c. Za dokaz prve enakosti iz trditve se moramo
še prepričati, da velja tudi (⋂j∈J Aj)c ⊂
⋃j∈J A
cj . V ta namen vzemimo
poljuben a ∈ (⋂j∈ J Aj)c. Ker velja a /∈
⋂j∈ J Aj , mora obstajati nek tak
j ∈ J , da a /∈ Aj , torej je a ∈ Acj in zato a ∈⋃j∈ J A
cj .
Drugo enakost dokažemo na podoben način.
10

1.2 Funkcije
Če želimo o množicah povedati kaj več, jih moramo med seboj primerjati, into storimo s funkcijami. Funkcija ali preslikava f iz množice A v množico Bje predpis, ki poljubnemu elementu a ∈ A priredi natanko določen elementf(a) ∈ B. Takšno funkcijo označimo na naslednji način:
f : A→ B
Pri tem množico A imenujemo domena ali definicijsko območje funkcije f ,množico B pa imenujemo kodomena funkcije f . Pravimo, da funkcija felement a ∈ A preslika v element f(a), kar označimo tudi z
f : a 7→ f(a).
Element f(a) imenujemo slika elementa a vzdolž funkcije f , včasih pa tudivrednost funkcije f v elementu a.
a1
a2
a3
f Ha1L
f Ha2L=f Ha3L
A B
Dve funkciji sta enaki, če imata enaki domeni, enaki kodomeni ter enakpredpis.
Funkcijo f : A→ B navadno ponazorimo z njenim grafom
Graf(f) = {(a, b) ∈ A×B ; b = f(a)} ⊂ A×B.
Slika ali zaloga vrednosti funkcije f : A→ B je množica vseh elementovv kodomeni, ki so slika kakšnega elementa domene,
Im(f) = {b ∈ B ; b = f(a) za vsaj en a ∈ A} ⊂ B.
Bolj splošno definiramo sliko poljubne podmnožice X ⊂ A vzdolž funkcijef , ki je množica
f(X) = {b ∈ B ; b = f(a) za vsaj en a ∈ X} ⊂ B.
Posebej je Im(f) = f(A). Za množico f(X) bi lahko uporabili tudi nekolikopoenostavljen zapis f(X) = {f(a) ; a ∈ X}. Splošneje, za poljubno lastnost`, ki je smiselna za elemente množice A, bi lahko zapisali
{f(a) ; a ∈ A, a ima lastnost `} = f({a ∈ A ; a ima lastnost `}).
Za poljubno podmnožico Y ⊂ B definiramo njeno inverzno sliko aliprasliko vzdolž funkcije f : A→ B, ki je množica
f−1(Y ) = {a ∈ A ; f(a) ∈ Y } ⊂ A.
11

Pri tem opazimo, da velja f−1(B) = A. Prasliki f−1({b}) rečemo vlaknofunkcije f nad dano točko b ∈ B. Funkcija f torej domeno razdeli na družinovlaken, po eno za vsako točko v sliki funkcije. V sliki funkcije so ravno tistetočke, katerih vlakna so neprazna.
b1 b2 b3 b4 b5
A
B
f
Zgled 1.4. (1) Funkcija f : N→ N naj bo dana s predpisom
f(n) = 2n.
Domena in kodomena te funkcije je množica vseh naravnih števil, njena slikapa je množica vseh sodih naravnih števil,
Im(f) = 2N = {2, 4, 6, 8, . . .}.
Graf funkcije f dobimo z vzorčenjem linearne funkcije po naravnih številih:
1 2 3 4 51
2
3
4
5
6
(2) Kadar je domena funkcije f končna množica, lahko funkcijo opišemotako, da za vsak element domene posebej povemo, kam se preslika. Defini-rajmo na primer funkcijo f : {1, 3, 7} → {0, 1} s predpisom
f(1) = 1,f(3) = 0,f(7) = 0.
(3) Večino časa bomo posvetili funkcijam, katerih domene in kodomeneso podmnožice realnih števil. Takšnim funkcijam pravimo tudi (realne) funk-cije ene realne spremenljivke. Definirajmo funkcijo
f : R \ {0} → R
12

s predpisomf(x) = 1
x.
Graf te funkcije je krivulja v ravnini R2:
x
y
f HxL =1
x
-4 -2 2 4
-4
-2
2
4
Slika funkcije f je množica R \ {0}. Lahko bi definirali še funkcijo g :R \ {0} → R \ {0} s predpisom g(x) = 1
x , ki ima enak graf kot f , a ni enakafunkciji f , saj ima drugačno kodomeno.
(4) Za poljubno množico A definiramo identično funkcijo idA : A→ A spredpisom
idA(a) = a
za vsak a ∈ A.(5) Naj bo f : A → B funkcija in naj bo X podmnožica domene A.
Zožitev ali restrikcija funkcije f na množico X je funkcija f |X : X → Bdana s predpisom
(f |X)(a) = f(a)
za vsak a ∈ X.Zaradi enostavnosti se dogovorimo za naslednjo terminologijo: Rekli
bomo, da ima funkcija f : A → B neko lastnosti ` na podmnožici X ⊂ A,če ima zožitev f |X lastnost `.
Kot primer si še enkrat oglejmo funkcijo f : R \ {0} → R s predpisomf(x) = 1
x . Naj bo X množica vseh tistih realnih števil, ki so strogo večja od1. Graf restrikcije f |X funkcije f na množico X dobimo tako, da pogledamosamo tisti del grafa funkcije f , ki leži nad množico X:
x
y
f X
-1 1 2 3 4
-1
1
2
13

(6) Naj bo X podmnožica množice A. Vložitev ali inkluzija množice Xv množico A je preslikava incX,A : X → A dana s predpisom
incX,A(a) = a
za vsak a ∈ X.(7) Naj bodo A1, A2, . . . , An dane množice. Za poljubno funkcijo f z
domeno A1×A2×· · ·×An in za vsako n-terico (a1, a2, . . . , an) iz te domenepogosto krajše označimo
f(a1, a2, . . . , an) = f((a1, a2, . . . , an)).
Naj bo k ∈ {1, 2, . . . , n}. Projekcija na k-to komponento kartezičnega pro-dukta A1 ×A2 × · · · ×An je funkcija
prk : A1 ×A2 × · · · ×An → Ak,
dana s predpisomprk(a1, a2, . . . , an) = ak
za vse (a1, a2, . . . , an) ∈ A1 ×A2 × · · · ×An.
Definicija 1.5. (i) Funkcija f : A → B je injektivna, če za vsaka dvarazlična elementa a, a′ ∈ A velja f(a) 6= f(a′).
(ii) Funkcija f : A→ B je surjektivna, če velja f(A) = B.(iii) Funkcija je bijektivna, če je hkrati surjektivna in injektivna.
Zgled 1.6. Graf funkcije ene realne spremenljivke f : D → R, definirane napodmnožici D ⊂ R, si predstavljamo kot neko krivuljo v ravnini. Funkcijaf je injektivna, če njen graf seka vsako vodoravno premico v ravnini največenkrat. Funkcija f je surjektivna, če njen graf seka vsako vodoravno premicov ravnini vsaj enkrat.
Na primer, funkcija f : R \ {0} → R s predpisom f(x) = 1x je injektivna,
ni pa surjektivna. Če bi vzeli funkcijo z istim predpisom in isto domeno, zakodomeno pa bi vzeli množico R \ {0}, bi dobili bijektivno funkcijo.
Funkcije v določenih primerih lahko sestavljamo ali komponiramo. Zafunkciji f : A → B in g : B → C definiramo njuno kompozicijo, ki jefunkcija g ◦ f : A→ C, dana s predpisom
(g ◦ f)(a) = g(f(a))
za vsak a ∈ A. Kompozicija dveh funkcij je definirana le v primeru, da jekodomena prve funkcije enaka domeni druge funkcije.
Operacija kompozicije funkcij je asociativna: za poljubne funkcije f :A→ B, g : B → C in h : C → D velja
(h ◦ g) ◦ f = h ◦ (g ◦ f).
14

Ni torej pomembno, kako postavimo oklepaje, ki nam določajo, v kakšnemvrstnem redu računamo kompozicije, če je le vrstni red funkcij enak. Polegtega velja tudi
f ◦ idA = f,
idB ◦ f = f,
zato pravimo, da se identične funkcije pri komponiranju obnašajo kot nev-tralni elementi.
Pri komponiranju funkcij je zelo pomemben vrstni red, saj v splošnemoperacija kompozicije ni komutativna. Včasih kompozicijo v enem vrstnemredu lahko izračunamo, v drugem pa ne, ker se v tem drugem vrstnemredu domena in kodomena ne ujemata. A tudi tedaj, ko kompozicijo lahkoizračunamo v obeh vrstnih redih, se lahko zgodi, da sta predpisa za ti dvekompoziciji različna:
Zgled 1.7. Oglejmo si funkciji f : R → R in g : R → R, definirani spredpisoma f(x) = x2 ter g(x) = 2x. Tedaj je
(f ◦ g)(x) = f(g(x)) = f(2x) = 4x2,
(g ◦ f)(x) = g(f(x)) = g(x2) = 2x2.
Definicija 1.8. (i) Funkcija g : B → A je levi inverz funkcije f : A → B,če velja
g ◦ f = idA.
(ii) Funkcija h : B → A je desni inverz funkcije f : A→ B, če velja
f ◦ h = idB.
(iii) Neka funkcija je inverz funkcije f , če je hkrati levi in desni inverzfunkcije f .
Recimo, da ima funkcija f : A→ B levi inverz g in desni inverz h. Potemiz asociativnosti komponiranja sledi
(g ◦ f) ◦ h = g ◦ (f ◦ h),idA ◦ h = g ◦ idB,
h = g.
V splošnem se lahko sicer zgodi, da ima neka funkcija več levih ali pa večdesnih inverzov, a kakor hitro ima hkrati levi in desni inverz, se morata tidve funkciji, kot smo ravnokar pokazali, ujemati. Vsaka funkcija ima torejnajveč en (obojestranski) inverz.
Definicija 1.9. Funkcija f : A → B je obrnljiva, če ima inverz. V temprimeru inverz funkcije f označimo z f−1 : B → A.
15

Prvi primer obrnljive funkcije je identična funkcija na poljubni množiciA, saj je ta funkcija sama sebi inverz, torej
(idA)−1 = idA.
Inverz obrnljive funkcije f : A→ B je prav tako obrnljiva funkcija in velja
(f−1)−1 = f.
Če sta f : A→ B in g : B → C obrnljivi funkciji, je tudi njuna kompozicijaobrnljiva funkcija in velja
(g ◦ f)−1 = f−1 ◦ g−1.
Trditev 1.10. (i) Če je funkcija f : A → B je injektivna in je A 6= ∅,potem ima funkcija f levi inverz.
(ii) Če ima funkcija f levi inverz, potem je injektivna.(iii) Funkcija f je surjektivna če, in samo če, ima desni inverz.(iv) Funkcija f je bijektivna če, in samo če, je obrnljiva.
Dokaz. (i) Vsak b ∈ f(A) je slika natanko enega elementa iz množice A, kiga označimo z g(b). Ker je množica A neprazna, lahko izberemo nek elementa0 ∈ A in za vse elemente b ∈ B \ f(A) definiramo g(b) = a0. S tem smodefinirali funkcijo g : B → A, ki je levi inverz funkcije f .
(ii) Naj bo g nek levi inverz funkcije f . Za poljubna različna a, a′ ∈ Apotem velja g(f(a)) = a 6= a′ = g(f(a′)), od tod pa sledi f(a) 6= f(a′), zatoje f injektivna.
(iii) (⇐) Naj bo h nek desni inverz funkcije f . Ker vsak element b ∈ Blahko zapišemo v obliki b = f(h(b)), je b v sliki funkcije f .
(⇒) Predpostavimo, da je funkcija f surjektivna. Za poljuben elementb ∈ B je praslika f−1({b}) neprazna, zato lahko izberemo nek element izf−1({b}), ki ga označimo s h(b). S tem smo definirali funkcijo h : B → A,ki je desni inverz funkcije f .
(iv) Ekvivalenca sledi direktno iz prejšnih točk te trditve.
1.3 Moč množic
Množice lahko med seboj primerjamo glede na to, koliko elementov imajo.Pri končnih množicah lahko elemente preštejemo, pri neskončnih množicahpa so stvari nekoliko bolj zapletene in včasih tudi presenetljive.
Definicija 1.11. Množica A je ekvipolentna množici B, če obstaja kakšnabijekcija iz A v B.
Brez težav se lahko prepričamo, da za relacijo ekvipolence množic veljajonaslednje tri lastnosti:
16
(i) (refleksivnost) vsaka množica A je ekvipolentna sama sebi,
(ii) (simetričnost) če je neka množica A ekvipolentna neki množici B,potem je tudi množica B ekvipolentna množici A, in
(iii) (tranzitivnost) če je neka množica A ekvipolentna neki množici B inje množica B ekvipolentna neki množici C, potem je tudi množica Aekvipolentna množici C.
Zaradi teh treh lastnosti pravimo, da je ekvipolenca ekvivalenčna relacijamed množicami. Če sta si množici A in B ekvipolentni, potem označimo
|A| = |B|
in pravimo, da sta množici A in B enako močni.
Definicija 1.12. (i) Množica A ima n elementov, če je ekvipolentna množici{1, 2, . . . , n} za nek n ∈ N.
(ii) Množica A je končna, če je bodisi prazna ali pa ima n elementov zanek n ∈ N.
(iii) Množica A je neskončna, če ni končna.(iv) Množica A je števno neskončna, če je ekvipolentna množici naravnih
števil N.(v) Množica A je števna, če je bodisi končna ali pa števno neskončna.
Množica A ima torej n elementov, kadar obstaja bijekcija
{1, 2, . . . , n} → A,
s katero pravzaprav preštejemo elemente množice A. Dve neprazni končnimnožici sta si ekvipolentni natanko takrat, ko imata enako število elemen-tov. Prazna množica je ekvipolentna le sama sebi. Množica A je števnoneskončna, kadar obstaja bijekcija
f : N→ A,
s takšno bijekcijo pa elemente množice A pravzaprav uredimo v neskončnozaporedje
f(1), f(2), f(3), f(4), . . .
v katerem vsak element množice A nastopa natanko enkrat.
Zgled 1.13. (1) Oglejmo si množico 2N vseh sodih naravnih števil. Poobčutku bi rekli, da ima množica 2N manj elementov kot množica N, sajje pol manjša. Kljub temu pa sta ti dve množici enako močni, saj obstajabijekcija f : N→ 2N, definirana s predpisom
f(n) = 2n.
17

Njen inverz je funkcija f−1 : 2N→ N, definirana s predpisom f−1(m) = m2 .
(2) Množica N×N je števno neskončna. Elemente množice N×N namrečlahko razporedimo v tabelo
(1, 1) (1, 2) (1, 3) . . .(2, 1) (2, 2) (2, 3) . . .(3, 1) (3, 2) (3, 3) . . ....
...... . . .
in definiramo bijekcijo N→ N×N tako, da elemente množice N×N štejemopo diagonalah v vrstnem redu
(1, 1), (2, 1), (1, 2), (3, 1), (2, 2), (1, 3), (4, 1), . . . .
Inverz tako definirane bijekcije preslika par (m,n) ∈ N×N v naravno številon+ (m+ n− 2)(m+ n− 1)/2.
Trditev 1.14. Vsaka podmnožica števne množice je števna množica.
Dokaz. Vsako števno množico si lahko s pomočjo bijekcije predstavimo karkot podmnožico naravnih števil, zato je trditev dovolj dokazati za podmno-žice množice N.
Naj bo A poljubna neskončna podmnožica množice N. Pokazati moramo,da je množica A tedaj števno neskončna. V ta namen bomo definirali bijek-cijo f : N→ A na naslednji način: Najprej definiramo, da je f(1) najmanjšenaravno število iz množice A. V naslednjem koraku definiramo, da je f(2)najmanjše naravno število iz množice A \ {f(1)}. Na ta način nadaljujemo.Če smo torej že definirali vrednosti f(1), f(2), . . . , f(n), potem definiramo,da je f(n+1) najmanjše število iz množice A\{f(1), f(2), . . . , f(n)}. To naj-manjše število prav gotovo obstaja, saj je A neskončna podmnožica množicenaravnih števil. Z opisanim rekurzivnim postopkom torej dobimo funkcijof , ki je po definiciji očitno injektivna. Ker pa je vsak element množice Avečji od le končno mnogo naravnih števil, je funkcija f tudi surjektivna.
Trditev 1.15. (i) Če je funkcija f : A → B injektivna in je množica Bštevna, potem je tudi množica A števna.
(ii) Če je funkcija f : A→ B surjektivna in je množica A števna, potemje tudi množica B števna.
Dokaz. (i) Ker je f injektivna, nam da bijekcijo A → f(A). Ker je f(A)podmnožica števne množice B, je tudi sama števna, od tod pa sledi, da jetudi množica A števna.
(ii) Ker je funkcija f surjektivna, ima desni inverz h : B → A. Funkcijah ima torej levi inverz f , zato je injektivna. Množica B je torej števna potočki (i).
Kot direktno posledico dobimo:
18

Posledica 1.16. (i) Množica A je števna če, in samo če, obstaja injektivnafunkcija A→ N.
(ii) Neprazna množica A je števna če, in samo če, obstaja surjektivnafunkcija N→ A.
Trditev 1.17. Kartezični produkt dveh števnih množic je števna množica.
Dokaz. Naj bosta A in B števni množici. Po Posledici 1.16(i) lahko izberemoinjektivni funkciji f : A → N in g : B → N. Zdaj definiramo funkcijof × g : A×B → N× N,
(f × g)(a, b) = (f(a), g(b)).
Ker je očitno tudi funkcija f × g injektivna in je množica N × N števnoneskončna, je po Trditvi 1.15(i) množica A×B števna.
Zadnja trditev velja splošneje tudi za kartezični produkt končno mnogoštevnih množic. Za poljubne množice A1, A2, . . . , An imamo namreč naravnobijekcijo
A1 ×A2 × · · · ×An−1 ×An → A1 × (A2 × . . . (An−1 ×An) . . .),
(a1, a2, . . . , an−1, an) 7→ (a1, (a2, . . . (an−1, an) . . .).Če torej zadnjo trditev uporabimo večkrat zapored, smo s tem pokazali:
Posledica 1.18. Kartezični produkt končno mnogo števnih množic je števnamnožica.
Trditev 1.19. Unija števno mnogo števnih množic je števna množica.
Dokaz. Naj bo (Aj)j∈J družina števnih množic, indeksirana s števno mno-žico J . Dokazati moramo, da je množica A =
⋃j∈J Aj števna. Brez izgube
splošnosti lahko predpostavimo, da je množica A neprazna in da so tudivse množice Aj neprazne. Po Posledici 1.16(ii) lahko izberemo surjektivnefunkcije fj : N → Aj , za vse j ∈ J . Definirajmo funkcijo g : J × N → A spredpisom
g(j, n) = fj(n).Ker so funkcije fj vse surjektivne, je tudi funkcija g surjektivna. Poleg tegaje množica J ×N števna, saj je kartezični produkt dveh števnih množic. PoTrditvi 1.16(ii) je torej tudi množica A števna.
Posledica 1.20. Množica celih števil Z je števno neskončna.
Dokaz. Spomnimo se, da je
Z = {. . . ,−2,−1, 0, 1, 2, 3, . . .} ⊂ R.
Zapišimo Z = −N ∪ {0} ∪ N, kjer je
−N = {−1,−2,−3, . . .}.
Množica Z je torej unija treh števnih množic in je zato števno neskončna.
19

Posledica 1.21. Množica racionalnih števil Q je števno neskončna.
Dokaz. Spomnimo se, da je množica racionalnih števil podmnožica množicerealnih števil R, sestavljena iz vrednosti ulomkov celih števil
Q ={k
n∈ R ; k ∈ Z, n ∈ N
}.
Zapišimo Q =⋃n∈NAn, kjer je
An ={k
n∈ R ; k ∈ Z
}.
S tem smo Q zapisali kot števno unijo števnih množic.
Spoznali smo nekaj primerov števnih množic. Obstajajo pa tudi ne-skončne množice, ki niso števne. Realnih števil je na primer neštevno mnogo:
Trditev 1.22. Množica realnih števil R ni števna.
Dokaz. Trditev bomo dokazali s protislovjem. Predpostavimo, da je mno-žica R števna. Po Trditvi 1.14 bi bila tedaj tudi množica
A = {x ∈ R ; 0 ≤ x < 1}
števna, kar pomeni, da bi lahko vse elemente množice A našteli v zaporedju
x1, x2, x3, . . .
Zdaj bomo uporabili dejstvo, da lahko vsako realno število iz A enolično za-pišemo v decimalni obliki 0, c1c2c3 . . ., kjer je ck ∈ {0, 1, 2, . . . , 9}, z dodatnozahtevo, da se cifra 9 v tem decimalnem zapisu ne ponavlja od nekod dalje.Vsa števila xn torej lahko zapišemo na ta način v decimalnem zapisu:
x1 = 0, a1,1a1,2a1,3 . . .
x2 = 0, a2,1a2,2a2,3 . . .
x3 = 0, a3,1a3,2a3,3 . . .
...xn = 0, an,1an,2an,3 . . .
...
Definirajmo zdaj število y = 0, b1b2b3 . . . ∈ A v decimalnem zapisu s predpi-som
bk ={
1 ; ak,k 6= 12 ; ak,k = 1
za vsak k ∈ N. Število y se od vsakega števila xn razlikuje vsaj na n-tidecimalki, zato je torej različno od vseh števil xn. Obstoj takšnega številay pa je v nasprotju z enakostjo A = {x1, x2, x3, . . .}. Naša predpostavka, daje množica R števna, je torej napačna.
20

2 ŠtevilaMarsikdo ob besedi matematika najprej pomisli na števila in na računanje znjimi. Za preštevanje objektov zadostujejo naravna števila, ker pa naravnihštevil v splošnem ne moremo niti odštevati niti deliti, iz praktičnih razlogovuporabljamo tudi cela in racionalna števila. Vsa ta števila si grafično naj-lažje predstavljamo kot točke na številski premici, vendar pa na tej premiciobstajajo tudi točke, ki jih racionalna števila ne popišejo. Te pomanjkljivostiracionalnih števil ne moremo prezreti, če želimo reševati polinomske enačbeali zgraditi matematično teorijo diferencialnega in integralskega računa. Šte-vila, ki popišejo celotno številsko premico in vsebujejo znana števila kot so√
2 in π, imenujemo realna števila. Poleg realnih števil se v matematiki infiziki uporablja še precej drugih struktur, ki imajo zelo podobne lastnostikot realna števila, na primer kompleksna števila, kvaternioni in matrike.
2.1 Naravna števila
Najbolj preprosta izmed števil so naravna števila. Množico naravnih številoznačimo z
N = {1, 2, 3, . . .}.
Pri tem zapisu seveda nismo našteli vseh naravnih števil, saj je je množicaN neskončna. Naravna števila lahko opišemo tudi tako, da naštejemo nekajnjihovih osnovnih lastnosti, ki naravna števila določajo enolično, do preime-novanja natančno. Primer nabora takšnih osnovnih lastnosti naravnih številje naslednjih pet Peanovih aksiomov:
(P1) 1 je naravno število.
(P2) Vsako naravno število n ima svojega natanko določenega naslednika,ki ga označimo z n+.
(P3) Različni naravni števili imata različna naslednika.
(P4) 1 ni naslednik kakšnega naravnega števila.
(P5) Če je A podmnožica množice naravnih števil, če je 1 ∈ A in če za vsakn ∈ A velja n+ ∈ A, potem so v množici A vsa naravna števila.
Vse lastnosti naravnih števil sledijo iz teh petih aksiomov. Posebej izteh petih aksiomov sledi, da naravna števila lahko med seboj seštevamo inmnožimo: označimo 2 = 1+, 3 = 2+, 4 = 3+, ... in za poljubno naravnoštevilo n definiramo n+ 1 = n+, n+ 2 = (n+ 1)+, n+ 3 = (n+ 2)+, ... tern · 1 = n, n · 2 = (n · 1) + n, n · 3 = (n · 2) + n, ...
Petemu Peanovemu aksiomu pravimo tudi princip popolne indukcije. Po-gosto ga uporabljamo za dokazovanje, da neka lastnost ` naravnih števil velja
21

za vsa naravna števila. Po petem Peanovem aksiomu je v ta namen namrečdovolj dokazati dvoje:
(začetni korak) naravno število 1 ima lastnost `, in(indukcijski korak) za vsako naravno število z lastnostjo ` ima tudi na-
slednik tega naravnega števila lastnost `.
Zgled 2.1. Z indukcijo pokažimo, da enakost
1 + 2 + 3 + . . .+ n = 12n(n+ 1)
velja za vsa naravna števila n.(začetni korak) Za n = 1 imamo enakost 1 = 1.(indukcijski korak) Privzemimo sedaj, da za nek n ∈ N velja
1 + 2 + 3 + . . .+ n = 12n(n+ 1).
Potem od tod sledi
1 + 2 + 3 + . . .+ n+ (n+ 1) = 12n(n+ 1) + (n+ 1) = 1
2(n+ 1)(n+ 2),
kar smo želeli dokazati.
2.2 Realna števila
Osnovne lastnosti realnih števil
Iz naravnih števil lahko enostavno konstruiramo cela in racionalna števila,z nekoliko več truda pa tudi realna števila. Namesto tega bomo v tem po-glavju realna števila opisali z aksiomi, podobno kot smo to storili za naravnaštevila. Drugače povedano, realna števila bomo opisali tako, da bomo na-šteli nekaj njihovih osnovnih lastnosti, ki realna števila določajo enolično,do preimenovanja natančno.
Realna števila so množica R, skupaj z dano podmnožico R+ ⊂ R in zdvema operacijama, seštevanjem
+ : R× R→ R, (x, y) 7→ x+ y,
in množenjem
· : R× R→ R, (x, y) 7→ x · y = xy,
za katere velja naslednjih trinajst osnovnih lastnosti A1-A13:Prve štiri od teh osnovnih lastnosti ali aksiomov govorijo le o seštevanju:
(A1) Za vse x, y, z ∈ R velja x+ (y + z) = (x+ y) + z.
(A2) Za vse x, y ∈ R velja x+ y = y + x.
22

(A3) Obstaja takšno število 0 ∈ R, da za vsak x ∈ R velja x+0 = 0+x = x.
(A4) Za vsak x ∈ R obstaja takšno število −x ∈ R, da velja x + (−x) =(−x) + x = 0.
Lastnosti A1 in A2 povesta, da je seštevanje realnih števil asociativnooziroma komutativno. Lastnost A3 pove, da je število 0, ki ga imenujemoštevilo nič, nevtralni element za seštevanje. Ni se težko prepričati, da ještevilo nič z lastnostjo A3 enolično določeno. Podobno je z lastnostjo A4 zavsak x ∈ R enolično določeno število −x, ki mu pravimo nasprotno številoštevila x. Z njim lahko smiselno definiramo operacijo odštevanja, in sicer spredpisom
y − x = y + (−x) ∈ R
za vse x, y ∈ R. Rezultatu seštevanja pravimo vsota, rezultatu odštevanjapa razlika.
Ker za seštevanje realnih števil veljajo lastnosti A1-A4, pravimo, da sorealna števila za seštevanje Abelova grupa. Splošneje vsaki množici, opre-mljeni z neko (notranjo binarno) operacijo, ki zadošča lastnostim A1-A4,pravimo Abelova grupa. Poleg realnih števil so primeri Abelovih grup tudicela in pa racionalna števila za operacijo seštevanja. Po drugi strani na-ravna števila za seštevanje niso Abelova grupa, saj ne izpoljujejo lastnostiA4. Poglejmo si nekaj lastnosti, ki so posledica lastnosti A1-A4 in zato torejveljajo tudi v vsaki Abelovi grupi:
Trditev 2.2. (i) Realno število 0 je enolično določeno s pogojem, da jex+ 0 = 0 + x = x za vsak x ∈ R.
(ii) Za vsak x ∈ R je realno število −x enolično določeno s pogojem, daje x+ (−x) = (−x) + x = 0.
(iii) Velja enakost −0 = 0.(iv) Za vse x, y ∈ R velja −(x+ y) = (−y) + (−x).(v) Za vse x ∈ R velja −(−x) = x.(vi) (pravilo krajšanja) Če za števila x, y, z ∈ R velja x + y = z + y,
potem je x = z.(vii) Za vse a, b ∈ R ima enačba x + a = b za neznano realno število x
enolično rešitev x = b− a.
Dokaz. (i) Če je 0′ ∈ R takšno število, da je x + 0′ = 0′ + x = x za vsex ∈ R, od tod dobimo 0′ = 0′ + 0 = 0.
(ii) Če je y ∈ R takšno število, da je x + y = y + x = 0, z uporabolastnosti A1, A3 in A4 dobimo
y = y + 0 = y + (x+ (−x)) = (y + x) + (−x) = 0 + (−x) = −x.
(iii) Ker velja 0 = 0 + 0, iz točke (ii) sledi 0 = −0.
23

(iv) Z uporabo lastnosti A1, A3 in A4 vidimo, da velja
(x+ y)+((−y) + (−x)) = x+ (y + (−y)) + (−x)= x+ 0 + (−x) = x+ (−x) = 0 = (−y) + y = (−y) + 0 + y
= (−y) + ((−x) + x) + y = ((−y) + (−x)) + (x+ y).
Po točki (ii) od tod sledi (−y) + (−x) = −(x+ y).(v) Ker je x+ (−x)) = (−x) + x = 0, po točki (ii) sledi −(−x)) = x.(vi) Iz enakosti x+ y = z+ y, in z uporabo lastnosti A1, A3 in A4, sledi
x = x+ 0 = x+ (y + (−y)) = (x+ y) + (−y) = (z + y) + (−y)= z + (y + (−y)) = z + 0 = z.
(vii) Iz enakosti
(b− a) + a = (b+ (−a)) + a = b+ ((−a)) + a) = b+ 0 = b
sledi, da je x = b − a res rešitev enačbe x + a = b. Tudi pri tem sklepusmo uporabili lastnosti A1, A3 in A4. Pokazati moramo še, da je b − aedina rešitev enačbe. Naj bo y ∈ R poljubna rešitev enačbe. Velja torejy + a = b = (b− a) + a. Po pravilu krajšanja od tod sledi y = b− a.
Na podoben način naslednji štirje aksiomi govorijo o množenju:
(A5) Za vse x, y, z ∈ R velja x · (y · z) = (x · y) · z.
(A6) Za vse x, y ∈ R velja x · y = y · x.
(A7) Obstaja takšno število 1 ∈ R, da za vsak x ∈ R velja x · 0 = 0 · x = x.
(A8) Za vsak x ∈ R \ {0} obstaja takšno število x−1 ∈ R, da velja x · x−1 =x−1 · x = 1.
Tudi množenje je torej asociativno in komutativno. Lastnost A7 pove,da je število 1, ki ga imenujemo število ena, nevtralni element za množe-nje. Spet se ni težko prepričati, da je število ena z lastnostjo A7 enoličnodoločeno. Podobno je z lastnostjo A8 za vsak x ∈ R \ {0} enolično določenoštevilo x−1, ki mu pravimo obratno ali recipročno število števila x. Z njimlahko smiselno definiramo operacijo deljenja, in sicer s predpisom
y/x = y
x= y · x−1 ∈ R
za vse x ∈ R\{0} in y ∈ R. Rezultatu množenja pravimo produkt, rezultatudeljenja pa kvocient. Piko, s katero označujemo množenje, v zapisu običajnoizpuščamo.
Za vsako število x ∈ R označimo x1 = x, x2 = x · x, x3 = x2 · x, . . . Zavsak n ∈ N je torej xn+1 = xn · x. Če je x 6= 0, nam zapis x−1 označuje
24

obratno število števila x, označimo pa lahko tudi x0 = 1, x−2 = x−1 · x−1,x−3 = x−2 · x−1, . . . Tako je x−(n+1) = x−n · x−1 za vsak n ∈ N.
Aksiomi A5-A8 so zelo podobni aksiomom A1-A4, a ker število nič nimasvojega obratnega števila, realna števila za množenje niso Abelova grupa.Kljub temu lahko večino lastnosti, ki jih poznamo za seštevanje, na podobennačin izpeljemo tudi za množenje, pri tem pa moramo biti le pozorni, danikjer ne delimo s številom nič.
Tretja skupina aksiomov povezuje seštevanje in množenje:
(A9) Velja 1 6= 0.
(A10) Za vse x, y, z ∈ R velja x · (y + z) = (x · y) + (x · z).
Lastnost A9 pove, da sta realni števili nič in ena različni, lastnosti A10 papravimo distributivnost. Izraz (x·y)+(x·z) krajše zapišemo tudi kot x·y+x·z;v splošnem množenje ali deljenje v izrazih izvedemo pred seštevanjem inodštevanjem, razen če ni z oklepaji to drugače določeno.
Ker za seštevanje in množenje realnih števil veljajo lastnosti A1-A10,pravimo, da so realna števila za seštevanje in množenje (komutativen) ob-seg. V splošnem vsaki množici, opremljeni z dvema (binarnima notranjima)operacijama, ki zadoščata lastnostim A1-A10, pravimo (komutativen) obseg.Poleg realnih števil sta dobro znana tudi obsega racionalnih in pa komple-ksnih števil.
Prva pomembna posledica aksiomov A1-A10 je naslednja:
Trditev 2.3. (i) Za vsako število x ∈ R je x · 0 = 0.(ii) Če za števili x, y ∈ R velja x · y = 0, potem je x = 0 ali y = 0,
Dokaz. (i) Iz enakosti
x · 0 + x · 1 = x · (0 + 1) = x · 1 = 0 + x · 1
po pravilu krajšanja dobimo x · 0 = 0.(ii) Predpostavimo, da je x · y = 0 in x 6= 0. Pokazati moramo, da je
tedaj y = 0. Ker je x 6= 0, obstaja obratno realno število x−1, po točki (i)pa velja
0 = x−1 · 0 = x−1 · (x · y) = (x−1 · x) · y = 1 · y = y.
Trditev 2.3 in aksiomi A5-A8 povedo, da je množica R \ {0} Abelovagrupa za množenje in da za množenje veljajo naslednje lastnosti, ki so po-dobne lastnostim seštevanja iz Trditve 2.2:
Trditev 2.4. (i) Realno število 1 je enolično določeno s pogojem, da jex · 1 = 1 · x = x za vsak x ∈ R.
(ii) Za vsak x ∈ R\{0} je realno število x−1 enolično določeno s pogojem,da je x · x−1 = x−1 · x = 1.
25

(iii) Velja 1−1 = 1.(iv) Za vse x, y ∈ R \ {0} je x · y 6= 0 in (x · y)−1 = y−1 · x−1.(v) Za vse x ∈ R \ {0} je x−1 6= 0 in velja (x−1)−1 = x.(vi) (pravilo krajšanja) Če za števila x, z ∈ R in y ∈ R \ {0} velja
x · y = z · y, potem je x = z.(vii) Za vse a ∈ R \ {0} in b ∈ R ima enačba x · a = b za neznano realno
število x enolično rešitev x = b/a.
Iz aksiomov A1-A10 lahko izpeljemo tudi naslednje enostavne lastnosti,ki torej veljajo v vsakem obsegu:
Trditev 2.5. Za vse x, y, z ∈ R velja:(i) x · (y − z) = x · y − x · z,(ii) x · (−z) = −(x · z), in(iii) če je y 6= 0, potem je x/y + z/y = (x+ z)/y.
Dokaz. (i) Ker je
x · (y − z) + x · z = x · ((y − z) + z) = x · y,
po Trditvi 2.2(vii) sledi x · (y − z) = x · y − x · z.(ii) Ta del trditve sledi iz točke (i), v kateri vzamemo y = 0.(iii) Izračunamo
x/y + z/y = x · y−1 + z · y−1 = (x+ z) · y−1 = (x+ z)/y.
Četrta skupina aksiomov se nanaša na dano podmnožico R+ ⊂ R, katereelementom pravimo pozitivna realna števila:
(A11) Velja 0 /∈ R+, za poljubno realno število x ∈ R \ {0} pa je bodisix ∈ R+ ali pa x /∈ R+, ne pa oboje.
(A12) Za vsa realna števila x, y ∈ R+ velja x+ y ∈ R+ in x · y ∈ R+.
Števila iz množice R− = {−x ; x ∈ R+} ⊂ R imenujemo negativna realnaštevila. Iz aksioma A11 sledi, da velja
R = R+ ∪ R− ∪ {0}
in da so množice R+, R− in {0} paroma disjunktne. Drugače povedano,za vsako realno število x velja natanko ena naslednjih od možnosti: številox je bodisi pozitivno bodisi negativno ali pa je enako nič. Zaradi lastnostiA12 pravimo, da je množica pozitivnih realnih števil zaprta za seštevanje inmnoženje.
S pomočjo množice pozitivnih realnih števil R+ realna števila uredimopo velikosti na naslednji način: Če za realni števili x, y ∈ R velja
y − x ∈ R+,
26

potem pravimo, da je število x manjše od števila y in označimo
x < y.
V tem primeru tudi pravimo, da je število y večje od števila x. Iz definicijetorej direktno sledi, da je realno število w ∈ R pozitivno če, in samo če, je0 < w, in da je realno število z ∈ R negativno če, in samo če, je z < 0. Čeza realni števili x, y ∈ R velja
y − x ∈ R+ ∪ {0},
potem pravimo, da je število x manjše ali enako številu y in označimo
x ≤ y.
V tem primeru tudi pravimo, da je število y večje ali enako številu x.Ker za realna števila veljajo lastnosti A1-A12, pravimo, da so realna
števila urejen obseg. Opazimo lahko, da so tudi racionalna števila urejenobseg. Naslednje enostavne lastnosti urejenosti realnih števil so posledicaaksiomov A1-A12 in zato veljajo tudi v vsakem urejenem obsegu:
Trditev 2.6. Za vsa realna števila x, y, z, w ∈ R velja:(i) Če je x < y in y < z, potem velja x < z.(ii) Velja natanko ena izmed naslednjih možnosti: bodisi je x < y bodisi
je y < x ali pa je x = y.(iii) Če je x < y, potem velja x+ z < y + z.(iv) Če je x < y in z < w, potem velja x+ z < y + w.(v) Če je x < y in 0 < z, potem velja x · z < y · z.(vi) Če je x < 0 in y < 0, potem velja 0 < x · y.(vii) Če je x < 0 in 0 < y, potem velja x · y < 0.(viii) Če je x 6= 0, potem velja 0 < x · x.(ix) Velja 0 < 1.
Dokaz. (i) Po predpostavki je y− x ∈ R+ in z− y ∈ R+, iz aksioma A12 papotem sledi z − x = (z − y) + (y − x) ∈ R+.
(ii) Ta lastnost sledi direktno iz aksioma A11.(iii) Po predpostavki je y − x ∈ R+, iz aksioma A12 pa potem sledi
(y + z)− (x+ z) = y − x ∈ R+.(iv) Po točki (iii) iz predpostavk sledi x+ z < y+ z in y+ z < y+w, po
točki (i) pa od tod dobimo x+ z < y + w.(v) Po predpostavkah je y − x ∈ R+ in z ∈ R+, zato je po aksiomu A12
y · z − x · z = (y − x) · z ∈ R+.(vi) Po predpostavkah je −x ∈ R+ in −y ∈ R+, zato iz aksioma A12
sledi (−x) · (−y) ∈ R+. S pomočjo Trditve 2.5(ii) vidimo, da velja
x · y = −(−(x · y)) = −((−x) · y) = (−x) · (−y) ∈ R+.
27

(vii) Po predpostavkah je −x ∈ R+ in y ∈ R+, zato iz aksioma A12sledi (−x) · y ∈ R+. S pomočjo Trditve 2.5(ii) vidimo, da velja −(x · y) =(−x) · y ∈ R+.
(viii) Če je 0 < x, je 0 < x ·x po aksiomu A12. Če je x < 0, velja 0 < x ·xpo točki (vi).
(ix) Po točki (viii) sledi 0 < 1 · 1 = 1.
Točka (i) iz trditve pove, da je realcija urejenosti realnih števil tranzi-tivna, lastnosti iz točke (ii) pa pravimo tudi zakon trihotomije.
Preden navedemo še zadnji, trinajsti aksiom realnih števil, moramo de-finirati še nekaj pojmov, ki so smiselni v vsakem urejenem obsegu:
Naj bo A podmnožica množice realnih števil R.
(i) Podmnožica A je navzgor omejena, če obstaja tako število M ∈ R, daje x ≤M za vsak x ∈ A. Če to velja, potem pravimo, da je število Mzgornja meja podmnožice A.
(ii) Podmnožica A je navzdol omejena, če obstaja tako število m ∈ R, daje m ≤ x za vsak x ∈ A. Če to velja, potem pravimo, da je število mspodnja meja podmnožice A.
(iii) Podmnožica A je omejena, če je navzgor in navzdol omejena.
Če je množica A navzgor omejena z zgornjo mejoM , je tudi vsako število,ki je večje od M , zgornja meja za A. Zato nas zanima predvsem število, kije najmanjše izmed vseh zgornjih mej, če to obstaja:
(iv) Število M ∈ R je najmanjša zgornja meja množice A, če velja:
(1) število M je zgornja meja množice A, in(2) če je M ′ ∈ R zgornja meja množice A, potem velja M ≤M ′.
Množica A ima seveda lahko največ eno najmanjšo zgornjo mejo. Naj-manjšo zgornjo mejo množice A, če ta obstaja, imenujemo tudi na-tančna zgornja meja ali supremum množice A, in jo označimo z
sup(A).
(v) Število m ∈ R je največja spodnja meja množice A, če velja:
(1) število m je spodnja meja množice A, in(2) če je m′ ∈ R spodnja meja množice A, potem velja m′ ≤ m.
Množica A ima seveda lahko največ eno največjo spodnjo mejo. Najve-čjo spodnjo mejo množice A, če ta obstaja, imenujemo tudi natančnaspodnja meja ali infimum množice A, in jo označimo z
inf(A).
28

Komentar. Če ima podmnožica A ⊂ R supremum in je sup(A) ∈ A, potemje sup(A) največji element ali maksimum množice A in označimo
sup(A) = max(A).
Če ima podmnožica A ⊂ R infimum in je inf(A) ∈ A, potem je inf(A)najmanjši element ali minimum množice A in označimo
inf(A) = min(A).
Zgled 2.7. (1) Množica A = {x ∈ R ; 0 < x < 1} je omejena: zgornjemeje množice A so vsa realna števila, ki so večja ali enaka 1, spodnje mejemnožice A pa so vsa realna števila, ki so manjša ali enaka 0. Posebej je torejsup(A) = 1 in inf(A) = 0. Množica A nima niti največjega niti najmanjšegaelementa.
Realna števila si grafično ponazorimo kot točke na realni številski pre-mici. Navadno to naredimo tako, kot sugerira naslednja slika, na kateri smoponazorili tudi množico A:
R
m MA
0.0 0.5 1.0 1.5 2.0
(2) Množica B = {x ∈ R ; 0 ≤ x} ni navzgor omejena, je pa navzdolomejena in inf(B) = min(B) = 0.
R
m B
-1 0 1 2 3 4
(3) Prazna množica ∅ je hkrati navzgor in navzdol omejena, vsako realnoštevilo je hkrati njena zgornja in spodnja meja. Posebej torej prazna množicanima niti supremuma niti infimuma.
(4) Z poljubno podmnožico A ⊂ R označimo −A = {−x ; x ∈ A}. Oči-tno je množica A navzgor oziroma navzdol omejena če, in samo če, je mno-žica −A navzdol oziroma navzgor omejena. Če ima množica A supremumoziroma infimum, ima množica −A infimum oziroma supremum in veljainf(−A) = − sup(A) oziroma sup(−A) = − inf(A).
Zdaj lahko formuliramo še zadnji aksiom realnih števil, ki se imenujetudi Dedekindov aksiom:
(A13) Vsaka neprazna navzgor omejena podmnožica realnih števil ima naj-manjšo zgornjo mejo.
Aksiomom A1-A13 zadošča, do preimenovanja natančno, le en urejen ob-seg, obseg realnih števil. Realna števila lahko predstavimo na več različnihnačinov. Najbolj znana je predstavitev realnih števil z neskončnimi deci-malnimi števili, ki jo bomo spoznali nekoliko kasneje. V matematiki sicerrealna števila lahko modeliramo tudi s Cauchyjevimi zaporedji racionalnihštevil ali pa s tako imenovanimi rezi.
Direktna posledica aksioma A13 je naslednja:
29

Trditev 2.8. Vsaka neprazna navzdol omejena podmnožica realnih številima največjo spodnjo mejo.
Dokaz. Naj bo A ⊂ R neprazna navzdol omejena podmnožica. Potem jemnožica −A neprazna in navzgor omejena, zato ima po aksiomu A13 naj-manjšo zgornjo mejo sup(−A). Tedaj je − sup(−A) infimum množice A.
Znotraj realnih števil lahko najdemo naravna števila. Prvo naravno šte-vilo predstavimo z nevtralnim elementom za množenje 1 ∈ R, operacijonaslednika naravnega števila pa znotraj realnih števil definiramo kot pri-števanje števila 1 ∈ R v realnih številih. S tem dobimo običajno definicijo2 = 1+1 ∈ R, 3 = 2+1 ∈ R, 4 = 3+1 ∈ R, . . . Tako definirana podmnožica
N = {1, 2, 3, . . .} ⊂ R
ustreza Peanovim aksiomom, ki smo jih navedli v prejšnjem razdelku. S po-močjo nasprotnih in pa obratnih realnih števil lahko iz podmnožice naravnihštevil znotraj realnih števil konstruiramo tudi cela števila
Z = −N ∪ {0} ∪ N = {. . . ,−2,−1, 0, 1, 2, . . .} ⊂ R
in racionalna števila
Q ={k
n∈ R ; k ∈ Z, n ∈ N
}⊂ R.
Za celi števili k, k′ in naravni števil n, n′ ulomka kn in k′
n′ določata isto racio-nalno število če, in samo če, velja k ·n′ = k′ ·n. Cela števila so za seštevanjeAbelova grupa, racionalna števila pa so urejen obseg.
Poglejmo si sedaj nekaj posledic Dedekindovega aksioma.
Trditev 2.9. Množica naravnih števil N ⊂ R ni navzgor omejena.
Dokaz. Če bi bila množica naravnih števil N navzgor omejena, bi obstajalanjena najmanjša zgornja meja M v R. Iz definicije potem sledi, da bi obsta-jalo tako naravno število n ∈ N, da bi veljalo M − 1 < n, torej M < n+ 1.Ker pa je tudi n+ 1 naravno število, bi bilo to v protislovju s predpostavko,da je M zgornja meja množice N.
Trditev 2.10. Množica celih števil ni niti navzgor niti navzdol omejena.
Dokaz. Ker množica N ni navzgor omejena, množica −N ni navzdol omejena,zato množica Z = −N ∪ {0} ∪ N ni niti navzgor niti navzdol omejena.
Trditev 2.11. (i) Za vsak x ∈ R obstaja tak n ∈ N, da velja x < n.(ii) Za poljubna a, b ∈ R+ obstaja tak n ∈ N, da velja b < na.(iii) Za vsak a ∈ R+ obstaja tak n ∈ N, da velja 1
n < a.
30
Dokaz. (i) Ker množica N ni navzgor omejena, število x ni njena zgornjameja, zato obstaja tak n ∈ N, da je x < n.
(ii) Po točki (i) obstaja tak n ∈ N, da velja b/a < n. Ker je 0 < a, odtod sledi b < na.
(iii) Ta točka je poseben primer točke (ii), v kateri vzamemo b = 1.
Zgled 2.12. Množica C = {1/n ∈ R ; n ∈ N} je omejena in sup(C) = 1.Število 0 je očitno spodnja meja množice C, po točki (iii) iz zadnje trditvepa je 0 tudi največja spodnja meja, inf(C) = 1.
R
inf HCL supHCLC-0.5 0.0 0.5 1.0
(2) Naj bo q realno število, ki je večje od 1. Tedaj množica
{qn ; n ∈ N}
ni navzgor omejena. Res, če bi bila ta množica navzgor omejena, bi imelasupremum M ∈ R+. Ker je M/q < M , bi tedaj obstajal tak n ∈ N, da jeM/q < qn ≤M . Odtod bi sledilo M < qn+1, kar pa ne more biti res.
(3) Naj bo q pozitivno realno število, ki je manjše od 1. Tedaj velja
inf{qn ; n ∈ N} = 0.
Res, po točki (2) je množica {1/qn ; n ∈ N} navzgor neomejena, zato za vsakε ∈ R+ obstaja tak n ∈ N, da je 1/ε < 1/qn in torej qn < ε.
(4) Za poljubni podmnožici A,B ⊂ R označimo
A+B = {a+ b ; a ∈ A, b ∈ B} ⊂ R.
Če sta množici A in B navzgor omejeni ter neprazni, je tudi množicaA+B navzgor omejena ter neprazna in velja
sup(A+B) = sup(A) + sup(B).
Res, za vse a ∈ A in za vse b ∈ B velja a ≤ sup(A) in b ≤ sup(B), od todpa sledi, da je a+ b ≤ sup(A) + sup(B). To pomeni, da je sup(A) + sup(B)zgornja meja množice A + B. Naj bo zdaj c ∈ R poljubno število, ki jemanjše od vsote sup(A) + sup(B). Ker je torej c − sup(A) < sup(B), izdefinicije števila sup(B) sledi, da obstaja tak b ∈ B, da je c − sup(A) < boziroma c − b < sup(A). Iz definicije števila sup(A) zdaj sledi, da obstajatak a ∈ A, da je c − b < a oziroma c < a + b. Število c torej ni zgornjameja množice A+B. S tem smo pokazali, da je število sup(A) + sup(B) resnajmanjša zgornja meja množice A+B.
Na podoben način pokažemo naslednje: Če sta množici A in B navzdolomejeni ter neprazni, je tudi množica A+B navzdol omejena ter nepraznain velja
inf(A+B) = inf(A) + inf(B).
31

Če sta množici A in B neprazni in če velja a ≤ b za vse a ∈ A in vseb ∈ B, potem se ni težko prepričati, da je množica A navzgor omejena, daje množica B navzdol omejena in da je
sup(A) ≤ inf(B).
Predstavitev realnih števil v decimalnem zapisu
V tem razdelku si bomo ogledali, kako lahko realna števila predstavimoz decimalnim zapisom. Decimalni zapis nenegativnega realnega števila jezapis oblike
a0, a1a2a3 . . . ,
kjer je a0 ∈ N ∪ {0} in kjer so a1, a2, a3, . . . ∈ {0, 1, . . . , 9} decimalke v temzapisu.
Vsak tak decimalni zapis a0, a1a2a3 . . . nam določa neko nenegativnorealno število. Res, za vsak k ∈ N označimo
rk = a0 + a110 + a2
102 + · · ·+ ak10k ∈ Q,
sk = a0 + a110 + a2
102 + · · ·+ ak + 110k ∈ Q,
A = {rk ; k ∈ N} ⊂ R,
B = {sk ; k ∈ N} ⊂ R.
Ker je rk < sk, sk − rk = 10−k in inf{10−k ; k ∈ N} = 0, sta množici A in Bomejeni in velja sup(A) = inf(B). Decimalni zapis a0, a1a2a3 . . . nam torejdoloča realno število
x = sup(A) = inf(B),
in to na kratko označimo z
x = a0, a1a2a3 . . . .
Vsako nenegativno realno število lahko predstavimo s takšnim decimal-nim zapisom. Res, naj bo x poljubno nenegativno realno število. Tedajobstaja natanko določeno celo število a0 ∈ N ∪ {0}, za katerega velja
a0 ≤ x < a0 + 1.
Število a0 je celi del realnega števila x in je največje celo število, ki ni večjeod x. Nadalje, obstaja natanko eno število a1 ∈ {0, 1, . . . , 9}, za katerega je
a0 + a110 ≤ x < a0 + a1 + 1
10 .
Tako dobljeni a1 je prva decimalka v decimalnem zapisu števila x. Na-slednje decimalke določimo na podoben način: če smo že določili števila
32

a1, a2, . . . , ak−1 ∈ {0, 1, . . . , 9}, potem je k-ta decimalka ak števila x tistonatanko določeno število iz množice {0, 1, . . . , 9}, za katero velja
a0 + a110 + a2
102 + · · ·+ ak10k ≤ x < a0 + a1
10 + a2102 + · · ·+ ak + 1
10k .
Na ta način smo induktivno konstruirali vse decimalke a1, a2, a3, . . . in dobilidecimalni zapis števila x,
x = a0, a1a2a3 . . . .
Pri tem opazimo, da se v zaporedju a1, a2, a3, . . . število 9 ne ponavlja odnekje dalje. Decimalnemu zapisu nenegativnega realnega števila, za kate-rega velja omenjeni pogoj, bi rekli standardni decimalni zapis nenegativnegarealnega števila.
Vsak decimalni zapis nenegativnega realnega števila nam torej predsta-vlja natanko eno nenegativno realno število, in vsako nenegativno realnoštevilo lahko na en sam način predstavimo s standardnim decimalnim za-pisom nenegativnega realnega števila. Poljubno negativno realno število ypredstavimo z decimalnim zapisom
y = −b0, b1b2b3 . . .
pri čemer je b0, b1b2b3 . . . decimalni zapis nenegativnega realnega števila −y.Celim številom pri tej konstrukciji ustrezajo natanko decimalni zapisi,
ki imajo za decimalno vejico same ničle, racionalnim številom pa decimalnizapisi, ki so od nekod dalje periodični, na primer 1
3 = 0, 333 . . . = 0, 3 ali111 = 0, 090909 . . . = 0, 09.
Realna števila bi lahko konstruirali s pomočjo standardnih decimalnih za-pisov, ta pristop pa je tehnično nekoliko nepregleden, saj je za dva decimalnazapisa, ki predstavljata iracionalni števili, nekoliko težje opisati decimalnizapis njune vsote in produkta.
Ob tem še opazimo, da sta omenjeni množici A in B podmnožici ra-cionalnih števil. Če x ni racionalno število, ga torej lahko zapišemo kotsupremum podmnožice A racionalnih števil. Vsa števila iz množice B so ra-cionalna in so zgornje meje množice A, infimum množice B pa je prav takoenak x in torej ni racionalno število. Množica A je torej primer omejenemnožice racionalnih števil, ki nima najmanjše zgornje meje v racionalnihštevilih. Za racionalna števila aksom A13 torej ne velja, o čemer pa se bomov nadaljevanju prepričali še na drugačen način.
Obstoj kvadratnega korena
Izberimo si poljubno realno število a in si oglejmo enačbo
x2 = a
33

za neznano realno število x.Če je a < 0, ta enačba nima realnih rešitev, v primeru a = 0 pa je x = 0
njena edina rešitev.Naj bo zdaj a > 0. Če je x1 rešitev zgornje enačbe, je tudi število −x1
rešitev iste enačbe. V tem primeru sta to tudi edini rešitvi. Res, če za nek yvelja y2 = a, sledi y2 = x2
1 oziroma (y−x1)(y+x1) = 0, od tod pa y = ±x1.Naslednja trditev pove, da ima zgornja enačba vsaj eno realno rešitev za
vsak a ≥ 0:
Trditev 2.13. Za vsako nenegativno realno število a ima enačba x2 = a zaneznanko x natanko eno nenegativno realno rešitev, ki jo označimo x =
√a.
Dokaz. Predpostavimo, da je a > 0 in definirajmo podmnožico realnih števil
S = {x ∈ R+ ; x2 < a}.
Najprej pokažimo, da je množica S neprazna. Iz neenakosti a2 < (1 + a)2a
sledi(
a1+a
)2< a. Ker je a
1+a ∈ R+, je torej a1+a ∈ S.
Poleg tega je 1 + a zgornja meja množice S, zato je množica S navzgoromejena. Res, za vsak x ∈ S velja x2 < a < (1 + a)2, od tod pa sledix < 1 + a.
Ker je torej množica S neprazna in navzgor omejena, ima supremum
b = sup(S) ∈ R.
Pokazali bomo, da je b2 = a in da je torej b rešitev enačbe iz trditve.(i) Predpostavimo, da velja b2 > a in si oglejmo število c = b − b2−a
2b =12(b+ a
b ). Iz zapisa je razvidno, da je 0 < c < b, poleg tega pa je
c2 = b2 − (b2 − a) + (b2 − a)2
4b2 = a+ (b2 − a)2
4b2 > a,
zato za vsak x ∈ S velja c2 > a > x2 in torej c > x. Od tod sledi, da je czgornja meja za množico S, ker pa je c < b, to ni mogoče, saj je b najmanjšazgornja meja množice S. Predpostavka, da je b2 > a, je torej napačna.
(ii) Pa predpostavimo, da je b2 < a. Tedaj lahko izberemo takšno realnoštevilo d, da velja 0 < d < b in d < a−b2
3b . Sledi
(b+ d)2 = b2 + d(2b+ d) < b2 + d(2b+ b) < b2 + (a− b2) = a,
zato je b + d ∈ S, a ker je b + d > b, to ni mogoče, saj je b zgornja mejamnožice S. Tudi predpostavka, da je b2 < a, je torej napačna.
(iii) Ker sta predpostavki iz točk (i) in (ii) obe napačni, mora veljati to,kar edino preostane: b2 = a.
34

Na podoben način bi lahko pokazali, da ima za vsako naravno število nin za vsako nenegativno realno število a enačba xn = a natanko eno nenega-tivno realno rešitev x, ki jo imenujemo n-ti koren števila a in označimo z n
√a.
Ta rezultat pa bomo raje pokazali kasneje, in sicer s pomočjo poznavanjalastnosti zveznih funkcij, ki nam bodo dokaz bistveno olajšale.
Pri dokazu obstoja kvadratnih korenov pozitivnih števil je bila ključna la-stnost realnih števil Dedekindov aksiom. V naslednji trditvi bomo pokazali,da kvadratne enačbe zgornjega tipa niso vedno rešljive v obsegu racional-nih števil, kar pomeni, da racionalna števila ne zadoščajo Dedekindovemuaksiomu in da je realnih števil res več kot racionalnih.
Trditev 2.14. Enačba x2 = 2 za neznanko x nima racionalnih rešitev.
Dokaz. Pa predpostavimo, da je (mn )2 = 2, kjer je mn okrajšan ulomek dveh
naravnih števil. Sledi, da je m2 = 2n2, zato je m sodo število. Zapišemolahko torej m = 2k za neko naravno število k in dobimo enakost m2 = 4k2 =2n2 oziroma n2 = 2k2. Zadnja enakost nam pove, da je tudi n sodo število,kar pa je v protislovje s predpostavko, da je ulomek m
n okrajšan.
Realnim številom, ki niso racionalna, pravimo tudi iracionalna števila.Kvadratni koren števila 2 je torej primer iracionalnega števila. Kvadratnikoreni naravnih števil so posebni primeri algebraičnih števil, to je števil, kiso rešitev kakšne polinomske enačbe s celimi koeficienti. Algebraična številavsebujejo vsa racionalna števila in tudi sama tvorijo urejen obseg, ki paspet ne zadošča Dedekindovemu aksiomu. Realnim številom, ki niso nitiracionalna niti algebraična, pravimo transcendentna števila. Kljub temu,da dobro poznamo le nekaj transcendentnih števil, na primer π in e, patranscendentna števila tvorijo veliko večino realnih števil: množica vsehalgebraičnih realnih števil je števna, množica vseh transcendentnih števil paje ekvipolentna množici vseh realnih števil.
Intervali, okolice in absolutna vrednost
V prejšnjih poglavjih smo se večinoma ukvarjali z algebraičnimi lastnostmirealnih števil. Dejstvo, da realna števila tvorijo urejen obseg, pa nam omo-goča, da lahko govorimo tudi o tem, katera realna števila so danemu real-nemu številu bližja in katera so bolj oddaljena. S pomočjo te topološke struk-ture realnih števil lahko definiramo ključne pojme v matematični analizi kotso zveznost in odvedljivost. Ker si pri tem števila navadno predstavljamogeometrično, je v navadi, da številom pravimo tudi točke.
Bistveno vlogo pri obravnavi topološke strukture realnih števil igrajointervali, ki so podmnožice množice R naslednje oblike, za poljubni realni
35

števili a, b ∈ R, a ≤ b:
La, bM = {x ∈ R ; a < x < b}Ja, bK = {x ∈ R ; a ≤ x ≤ b}La, bK = {x ∈ R ; a < x ≤ b}Ja, bM = {x ∈ R ; a ≤ x < b}
L−∞, bM = {x ∈ R ; x < b}L−∞, bK = {x ∈ R ; x ≤ b}
La,∞M = {x ∈ R ; a < x}Ja,∞M = {x ∈ R ; a ≤ x}
L−∞,∞M = R
Ra b c d e f
Ha,bL @c,dL @e,f D
Prvi od naštetih intervalov se imenuje odprt omejen interval od a do b,drugemu pa pravimo zaprt omejen interval od a do b. V prvih štirih primerihje a največja spodnja meja, b pa najmanjša zgornja meja intervala.
Razdaljo med dvema realnima številoma merimo s pomočjo absolutnevrednosti. Za vsak x ∈ R definiramo absolutno vrednost |x| ∈ R števila x spredpisom
|x| ={
x ;x ≥ 0,−x ;x < 0.
Absolutna vrednost je torej funkcija R→ R,
x 7→ |x|,
katere graf v R× R narišemo v ravnini na naslednji način:
x
y
f HxL = ÈxÈ
-4 -2 2 4
-2
2
4
Za vsak x ∈ R očitno velja |x| ≥ 0. Poleg tega je |x| = 0 če, in samo če, jex = 0.
Realna števila si geometrično predstavljamo kot točke na realni premici,število 0 igra vlogo koordinatnega izhodišča, število 1 pa je na enotski od-daljenosti desno od izhodišča:
R10x y
Èx-yÈ
36

Razdalja med točkama x, y ∈ R na realni premici je dana s predpisom
d(x, y) = |x− y|.
Naj bo a ∈ R in naj bo ε ∈ R+. Odprt interval
La− ε, a+ εM = {x ∈ R ; a− ε < x < a+ ε}= {x ∈ R ; −ε < x− a < ε}= {x ∈ R ; |x− a| < ε}
je množica vseh tistih realnih števil, ki so od točke a oddaljena manj kot ε.Naj bo A ⊂ R poljubna podmnožica in naj bo a ∈ R.
(i) Točka a je notranja točka podmnožice A ⊂ R, če obstaja tak ε ∈ R+,da je La− ε, a+ εM ⊂ A.
(ii) Podmnožica A ⊂ R je okolica točke a, če je a notranja točka podmno-žice A ⊂ R.
(iii) Podmnožica A je odprta v R, če je okolica vsake točke iz podmnožiceA ⊂ R.
(iv) Podmnožica A je zaprta v R, če je podmnožica R \A odprta v R.
(v) Točka a je zunanja točka podmnožice A ⊂ R, če je notranja točkapodmnožice R \A ⊂ R.
(vi) Točka a je mejna točka podmnožice A ⊂ R, če ni niti notranja nitizunanja točka podmnožice A ⊂ R.
Ni se težko prepričati, da sta množici ∅ in R hkrati odprti in zaprti v R,da so intervali oblike Lc, dM, L−∞, dM in Lc,∞M odprte podmnožice v R in daso intervali oblike Jc, dK, L−∞, dK in Jc,∞M zaprte podmnožice v R, za vsec, d ∈ R, c ≤ d. Intervala Jc, dM in Lc, dK nista niti odprta niti zaprta v R.Interval Jc, dM je okolica vseh točk a ∈ Lc, dM, ni pa okolica točke c. Res, zavsak, še tako majhen ε ∈ R+, so v intervalu Lc− ε, c+ εM tudi števila, ki somanjša od c, zato interval Lc− ε, c+ εM ni podmnožica intervala Jc, dM.
Rc a d
@c,dL
Trditev 2.15. Za poljubni realni števili x, y ∈ R velja
(i) |xy| = |x||y|,
(ii) |x+ y| ≤ |x|+ |y| (trikotniška neenakost) in
(iii)∣∣|x| − |y|∣∣ ≤ |x+ y|.
37

Dokaz. Točka (i) sledi direktno iz definicije absolutne vrednosti.(ii) V primeru, ko je x = 0 ali y = 0, ali pa sta x in y istega predznaka,
očitno velja celo enakost |x+y| = |x|+ |y|. Dovolj si je torej ogledati primer,ko je x < 0 in y > 0. Pri tem imamo dve možnosti: Če je x + y ≥ 0, seneenakost |x + y| ≤ |x| + |y| prevede v neenakost x + y ≤ −x + y, ki drži,saj je x < 0. Če je x + y < 0, se neenakost |x + y| ≤ |x| + |y| prevede vneenakost −x− y ≤ −x+ y, ki pa spet drži, ker je y > 0.
(iii) Z uporabo trkotniške neenakosti dobimo
|y| = |x+ y − x| ≤ |x+ y|+ | − x| = |x+ y|+ |x|,
kar nam da −|x+ y| ≤ |x| − |y|, podobno pa je
|x| = |x+ y − y| ≤ |x+ y|+ | − y| = |x+ y|+ |y|
in zato |x| − |y| ≤ |x+ y|. Od tod sledi∣∣|x| − |y|∣∣ ≤ |x+ y|.
2.3 Kompleksna števila
Videli smo že, da znamo v obsegu realnih števil rešiti enačbo x2 = a, če jea nenegativno realno število, vendar pa v realnih številih ni rešljiva že takopreprosta enačba kot je
x2 + 1 = 0.
Rešitve te enačbe pa lahko najdemo med kompleksnimi števili.Kompleksna števila so množica
C = R× R = {(a, b) ; a, b ∈ R},
opremljena z operacijama seštevanja in množenja, ki sta definirani na nasle-dnji način: za vse (a, b), (a′, b′) ∈ R× R = C je vsota (a, b) + (a′, b′) dana spredpisom
(a, b) + (a′, b′) = (a+ a′, b+ b′) ∈ R× R = C,
produkt (a, b) · (a′, b′) pa je dan s predpisom
(a, b) · (a′, b′) = (a, b)(a′, b′) = (aa′ − bb′, ab′ + ba′) ∈ R× R = C.
Brez težav lahko preverimo, da tako definirani operaciji zadoščata aksi-omom A1-A10, ki smo jih našteli v razdelku o realnih številih. Nevtralnielement za seštevanje je kompleksno število (0, 0), nasprotno število kom-pleksnega števila (a, b) je kompleksno število −(a, b) = (−a,−b), nevtralnielement za množenje je kompleksno število (1, 0), obratno število komple-ksnega števila (a, b), različnega od (0, 0), pa je kompleksno število
(a, b)−1 =(
a
a2 + b2,−b
a2 + b2
).
38

Kompleksna števila so torej (komutativen) obseg.Od tod sledi, da imajo kompleksna števila vse lastnosti, ki smo jih doka-
zali v prejšnjih razdelkih kot posledico aksiomov A1-A10 in ki zato veljajov vsakem obsegu. Posebej imamo med kompleksnimi števili poleg operacijseštevanja in množenja tudi operaciji odštevanja in deljenja s kompleksnimištevili, različnimi od (0, 0). Za vse te operacije uporabljamo podobne oznake,kot smo jih uporabljali pri realnih številih, podobno označimo tudi potencekompleksnih števil. Velja pa opozoriti, da med kompleksnimi števili nimamorelacije urejenosti; kompleksna števila niso urejen obseg.
Realna števila so v obsegu C predstavljena s podmnožico števil oblike
{(a, 0) ; a ∈ R} = R× {0} ⊂ C,
kjer realnemu številu a ustreza kompleksno število (a, 0). Množenje in se-števanje na tej podmnožici se ujema z ustreznima operacijama na množicirealnih števil, saj za vse a, b ∈ R velja:
(a, 0) + (a′, 0) = (a+ a′, 0)(a, 0) · (a′, 0) = (aa′, 0)
Navadno zato realna števila R kar identificiramo s podmnožico R × {0} inpišemo R = R× {0} ⊂ C ter
a = (a, 0)
za vsak a ∈ R.Kompleksno število z = (a, b) ∈ C ima torej dve komponenti: njegovi
prvi komponenti pravimo realna komponenta ali realni del kompleksnegaštevila z = (a, b) in jo označimo
<(z) = a,
njegovi drugi komponenti pa pravimo imaginarna komponenta ali imagi-narni del kompleksnega števila z = (a, b) in jo označimo
=(z) = b.
Posebno vlogo ima kompleksno število
i = (0, 1).
Velja namreč i2 = (−1, 0) = −1, torej
i2 + 1 = 0.
Poljubno kompleksno število z = (a, b) lahko zapišemo na en sam način vobliki
z = (a, 0) + (0, 1) · (b, 0) = a+ ib.
39

To je zapis kompleksnih števil, ki ga bomo zaradi enostavnosti največkratuporabljali. Primeren je tudi za računanje, če upoštevamo, da velja
i2 = −1, i3 = −i, i4 = 1.
Tako na primer iz distributivnosti sledi
(a+ ib)(a′ + ib′) = (a+ ib) · (a′ + ib′)= aa′ + iba′ + aib′ + i2bb′ = (aa′ − bb′) + i(ba′ + ab′),
kar se sklada z definicijo množenja kompleksnih števil.Konjugirano število poljubnega kompleksnega števila z = a+ib z realnim
delom a ∈ R in z imaginarnim delom b ∈ R je kompleksno število
z = a− ib.
Preprosto je preveriti, da za vse z, w ∈ C in za vse x ∈ R velja:
z + w = z + w
zw = zw
x = x
i = −i
Za poljubno kompleksno število z = a + ib z realnim delom a ∈ R inz imaginarnim delom b ∈ R velja zz = a2 + b2 ≥ 0, zato lahko definiramoabsolutno vrednost števila z s predpisom
|z| =√zz =
√a2 + b2 ≥ 0.
Tako definirana absolutna vrednost se ujema z absolutno vrednostjo na real-nih številih, o kateri smo že govorili. Podobno kot pri realnih številih velja,da je |z| = 0 če, in samo če, je z = 0.
Zgled 2.16. (1) S pomočjo konjugacije si lahko pomagamo tudi pri deljenjukompleksnih števil. Naj bosta z in w kompleksni števili in naj velja w 6= 0.Tedaj je
z
w= zw
ww= zw
|w|2.
Ker pa je |w|2 pozitivno realno število, z njim kompleksnega števca v ulomkuni težko deliti: enostavno posebej delimo realni del in posebej imaginarnidel,
z
w= <(zw)|w|2
+ i=(zw)|w|2
.
(2) Za kompleksno število z = a+ia−i , kjer je a ∈ R, izračunajmo njegovo
realno in imaginarno komponento, konjugirano kompleksno število in paabsolutno vrednost. Iz enakosti
z = a+ ia− i = (a+ i)(a+ i)
(a− i)(a+ i) = a2 + 2ai− 1a2 + 1
40

sledi<(z) = a2 − 1
a2 + 1 , =(z) = 2aa2 + 1 .
Poleg tega jez = a− i
a+ iin zato
zz =(a+ ia− i
)(a− ia+ i
)= 1,
torej |z| = 1.
Trditev 2.17. Za poljubni kompleksni števili z in w velja
(i) |zw| = |z||w|,
(ii) |z + w| ≤ |z|+ |w| (trikotniška neenakost) in
(iii)∣∣|z| − |w|∣∣ ≤ |z + w|.
Dokaz. Točka (i) sledi iz enakosti
|zw|2 = zwzw = zzww = |z|2|w|2 = (|z||w|)2.
Naj bo z = x+ iy in w = a+ ib, za x, y, a, b ∈ R. Potem velja
|z + w| = |(x+ a) + i(y + b)| =√
(x+ a)2 + (y + b)2
=√x2 + 2xa+ a2 + y2 + 2yb+ b2
=√|z|2 + |w|2 + 2(xa+ yb).
Poleg tega velja tudi
|xa+ yb| =√
(xa+ yb)2 =√
(x2 + y2)(a2 + b2)− (xb− ya)2,
kar nam da oceno
|xa+ yb| ≤√
(x2 + y2)(a2 + b2) = |z||w|.
Ker torej velja−|z||w| ≤ xa+ yb ≤ |z||w|,
iz enakosti |z + w| =√|z|2 + |w|2 + 2(xa+ yb) sledi√
|z|2 + |w|2 − 2|z||w| ≤ |z + w| ≤√|z|2 + |w|2 + 2|z||w|.
Tako smo prišli do neenakosti iz točk (ii) in (iii).
Komentar. Za poljubni kompleksni števili z in w velja tudi neenakost∣∣|z| − |w|∣∣ ≤ |z − w|,ki sledi direktno iz neenakosti (iii) iz zadnje trditve. Res, velja namreč∣∣|z| − |w|∣∣ =
∣∣|z| − | − w|∣∣ ≤ |z + (−w)| = |z − w|.
41

Geometrična upodobitev kompleksnih števil
Geometrično si kompleksno število z predstavljamo kot točko v kompleksniravnini
Re
Im
1
i
-1
-i
0
ib
a
z = a+ib
ÈzÈ sinΦ
ÈzÈ cosΦ
ÈzÈ
Φ
ali kot vektor v tej ravnini, torej kot usmerjeno daljico v kompleksni ravniniod izhodišča 0 to točke z. Absolutna vrednost |z| je dolžina tega vektorja,argument kompleksnega števila z
arg(z) = φ ∈ J0, 2πM
pa je kot φ med realno osjo in tem vektorjem, merjen v pozitivni smeri. Izdefinicije kotnih funkcij sledi, da velja
z = |z|(cosφ+ i sinφ) = |z|eiφ,
temu zapisu pa pravimo polarni zapis kompleksnega števila z. Pri tem smouporabili tako imenovan Eulerjev zapis
eiφ = cosφ+ i sinφ,
ki je smiseln za vsak φ ∈ R.Vsota kompleksnih števil z in w ustreza vsoti vektorjev, torej diagonali
paralelograma, ki je določen s pripadajočima vektorjema:
Re
Im
1
i
0
z
w
z+w
42

Da bi geometrično razumeli produkt kompleksnih števil z in w, ti dveštevili zapišimo v polarni obliki z = |z|eiφ in w = |w|eiψ. Iz adicijskih formulza kotne funkcije tedaj dobimo polarni zapis produkta zw:
zw = |z|eiφ|w|eiψ
= |z||w|(cosφ+ i sinφ)(cosψ + i sinψ)= |z||w|(cosφ cosψ − sinφ sinψ + i cosφ sinψ + i sinφ cosψ)= |zw|(cos(φ+ ψ) + i sin(φ+ ψ))= |zw|ei(φ+ψ).
Vektor, ki ponazarja produkt zw, dobimo torej tako, da vektor, ki predsta-vlja število z, pomnožimo s skalarjem |w| in ga zavrtimo za kot ψ v pozitivnismeri okoli izhodišča. Tako množenje s številom i ustreza ravno vrtenju zapravi kot v pozitivni smeri okoli izhodišča. Na sliki je prikazano množenještevila z s kompleksnim številom i/2.
Re
Im
1
i
0
z
0.5ziz
0.5iz
Z večkratno uporabo izpeljane enakosti zw = |zw|ei(φ+ψ) posebej dobimo
z2 = zz = |z|eiφ|z|eiφ = |z|2ei2φ,
z3 = z2z = |z|2ei2φ|z|eiφ = |z|3ei3φ
in torej, po indukciji,
zk+1 = zkz = |z|keikφ|z|eiφ = |z|k+1ei(k+1)φ
za vsak k ∈ N. S tem smo izpeljali de Moivrovo formulo
zn = (|z|eiφ)n = |z|neinφ
alizn = (|z|(cosφ+ i sinφ))n = |z|n(cos(nφ) + i sin(nφ)),
ki velja za vsa kompleksna števila z = |z|eiφ, φ ∈ R, in za vsa naravna številan.
43

Koreni kompleksnih števil
Kot zgled uporabe de Moivrove formule si poglejmo, kako lahko računamokorene kompleksnih števil. Izberimo poljuben neničeln w ∈ C ter naravnoštevilo n in si oglejmo enačbo
zn = w
za kompleksno neznanko z.Najprej zapišimo števili z in w v polarnem zapisu zapisu, z = |z|eiφ in
w = |w|eiψ. Z uporabo de Moivrove formule se zgornja enačba prevede venačbo
|z|neinφ = |w|eiψ.
Ker sta dve neničelni kompleksni števili enaki, če imata enako absolutnovrednost in enak argument, iz enačbe sledi, da je |z|n = |w| in nφ = ψ+2kπza nek k ∈ Z, torej
|z| = n
√|w|,
φ = ψ
n+ 2kπ
n.
Različne rešitve dobimo za k ∈ {0, 1, 2, . . . , n− 1}, zapišemo pa jih lahko vobliki
zk = n
√|w| ei(ψn+ 2kπ
n ), k ∈ {0, 1, 2, . . . , n− 1}.
Rešitve enačbe torej ležijo na krožnici s središčem v izhodišču in s polmeromn√|w| ter tvorijo oglišča pravilnega n-kotnika. Enačba ima torej natanko n
rešitev, ki jih imenujemo n-ti koreni neničelnega kompleksnega števila w.Na sliki je primer n = 5:
z0
z1
z2
z3 z4
w
Φ
Φ�5
2Π�5
Poseben, pomemben primer so koreni števila 1, ki jim pravimo koreni enote.Množica n-tih korenov enote
{ei 2kπn ; k = 0, 1, 2, . . . , n− 1} ⊂ C
je Abelova grupa za množenje.
44

Zgled 2.18. (1) Rešimo enačbo
z2 = 2i
v kompleksnih številih. Naj bo z = x + iy za realni števili x in y. Enačboz2 = 2i tedaj prepišemo v obliko
x2 − y2 + 2ixy = 2i,
kar je enačba za dve realni neznanki x in y. Od tod dobimo sistem dvehenačb v realnih številih
x2 − y2 = 0,2xy = 2.
Iz druge enačbe sledi, da sta x in y neničelni števili in da je y = 1/x. Četo vstavimo v prvo enačbo, dobimo enačbo x4 = 1, ki ima realni rešitvix = ±1. Odtod sledi y = ±1, zato sta rešitvi enačbe z2 = 2i kompleksništevili
z1,2 = ±(1 + i).
(2) Rešimo enačboz2 = u+ iv
za kompleksno neznanko z, kjer sta u, v ∈ R realni konstanti, od katerih jevsaj ena neničelna. Z zapisom z = x + iy, x, y ∈ R, dobimo sistem dvehrealnih enačb za realni neznanki x in y
x2 − y2 = u,
2xy = v.
Zdaj imamo naslednje možnosti:(i) Če je u > 0 in v = 0, je y = 0 in x 6= 0, x = ±
√u. Rešitvi enačbe
z2 = u+ iv sta v tem primeru
z1,2 = ±√u.
(ii) Če je u < 0 in v = 0, je x = 0 in y 6= 0, y = ±√−u. Rešitvi enačbe
z2 = u+ iv sta v tem primeru
z1,2 = ±i√−u.
(iii) Predpostavimo zdaj, da je v 6= 0. Potem iz druge realne enačbesledi, da sta x in y neničelni realni števili in da velja y = v/(2x). Če tovstavimo v prvo realno enačbo, dobimo po preureditvi enačbo
4x4 − 4x2u− v2 = 0.
45

Ob uvedbi nove spremenljivke s = x2 > 0 pridemo do kvadratne enačbe
4s2 − 4us− v2 = 0
za spremenljivko s, katere rešitvi sta
s1,2 = 4u±√
16u2 + 16v2
8 = u±√u2 + v2
2 .
Ker pa je√u2 + v2 > u in s > 0, je za nas prava le pozitivna rešitev
s = u+√u2 + v2
2 .
Z upoštevanjem enakosti x = ±√s in y = v/(2x) dobimo rešitvi enačbe
z2 = u+ iv:
z1,2 = ±
√u+√u2 + v2√
2+ i v√
2√u+√u2 + v2
Še enkrat smo se torej prepričali da ima zgornja enačba z2 = u + iv
dve kompleksni rešitvi, ki ju označimo ±√u+ iv. Za razliko od situacije pri
realnih številih tukaj nimamo ene odlikovane rešitve.(3) Oglejmo si sedaj še splošno kvadratno enačbo
αz2 + βz + γ = 0
za kompleksno neznanko z, kjer so α, β, γ kompleksne konstante in je α 6= 0.To enačbo lahko rešujemo podobno kot v realnih številih:
αz2 + βz + γ = 0
z2 + 2 β2αz + γ
α= 0(
z + β
2α
)2− β2
4α2 + γ
α= 0(
z + β
2α
)2= β2 − 4αγ
4α2
Tako smo prišli do primera enačbe iz točke (2). Sledi
z + β
2α = ±
√β2 − 4αγ
4α2 = ±√β2 − 4αγ
2α ,
od tod pa dobimo dve rešitvi enačbe αz2 + βz + γ = 0
z1,2 = −β ±√β2 − 4αγ
2α .
46

Še enkrat opozorimo, da v tej formuli nastopa kvadratni koren v kompleksnihštevilih, kot smo ga definirali v točki (2).
(4) Opišimo množico rešitev neenačbe |z − w| < R za kompleksno ne-znanko z, kjer je w kompleksna konstanta in R ∈ R+. Označimo z = x+ iyin w = a+ ib, za x, y, a, b ∈ R. Tedaj je
|z − w| = |(x− a) + i(y − b)| =√
(x− a)2 + (y − b)2.
Rešitve neenačbe |z − w| < R so torej tiste točke z = x + iy v kompleksniravnini, x, y ∈ R, za katere je
|z − w|2 = (x− a)2 + (y − b)2 < R2.
To so točke z = x+ iy v kompleksni ravnini, ki ležijo znotraj kroga s sredi-ščem v točki w = a+ ib in s polmerom R.
Re
Im
1
i
0
2+1.5i
ÈzÈ < 0.5
Èz-2-1.5iÈ<1
Naj bo z kompleksno število in naj bo r nenegativno realno število. Odprtkrog v C s središčem v točki z in s polmerom r je podmnožica
K(z, r) = {w ∈ C ; |z − w| < r} ⊂ C.
Zaprt krog v C s središčem v točki z in s polmerom r je podmnožica
K(z, r) = {w ∈ C ; |z − w| ≤ r} ⊂ C.
Re
Im
1
i
zr
KHz,rL
47

Podmožica A množice kompleksnih števil je omejena, če obstaja tako velikM ∈ R+, da je
A ⊂ K(0,M).
V tem primeru so vse točke iz množice A od koordinatnega izhodišča od-daljene za največ M , od tod pa med drugim sledi, da sta poljubni točki izmnožice A med seboj oddaljeni za največ 2M .
Re
Im
1
i
KH0,ML
A
Vsaka podmnožica realnih števil je hkrati tudi podmnožica komleksnihštevil. Opazimo lahko, da je takšna podmnožica omejena kot podmnožicarealnih števil če, in samo če, je omejena kot podmnožica kompleksnih števil.
Tudi za podmnožice kompleksnih števil lahko v splošnem definiramo la-stnosti odprtosti in zaprtosti ter pojem okolice, podobno kot smo to narediliza realna števila. Naj bo A poljubna podmnožica množice kompleksnihštevil C in naj bo z ∈ C.
(i) Točka z je notranja točka podmnožice A ⊂ C, če obstaja tak ε ∈ R+,da je K(z, ε) ⊂ A.
(ii) Podmnožica A ⊂ C je okolica točke z, če je z notranja točka podmno-žice A ⊂ C.
(iii) Podmnožica A je odprta v C, če je okolica vsake točke iz podmnožiceA ⊂ C.
(iv) Podmnožica A je zaprta v C, če je podmnožica C \A odprta v C.
Ni se težko prepričati, da sta množici ∅ in C hkrati odprti in zaprti vC, da so odprti krogi odprte podmnožice v C in da so zaprti krogi zaprtepodmnožice v C. Pozorni pa moramo biti na to, da so lastnosti odprtosti inzaprtosti ter pojmi okolice in notranjih točk relativni glede na to, v katerihštevili te lastnosti in te pojme opazujemo. Na primer, interval L0, 1M je odprtapodmnožica množice realnih števil R, ni pa odprta podmnožica množicekompleksnih števil C. Še več, ta interval kot podmnožica kompleksnih številnima notranjih točk.
48

3 Trirazsežni evklidski prostorV tem razdelku bomo spoznali osnovne operacije med vektorji v trirazsežnemprostoru R3 in se naučili opisati ravnine ter premice v tem prostoru. Boljobširno in abstraktno bomo vektorske prostore obravnavali pri predmetuMatematika 2.
O prostoru, ki ga zaznavamo okoli sebe, imamo dobro intuitivno in geo-metrijsko predstavo. Če si v tem prostoru izberemo izhodišče in koordinatnisistem, vsako točko v tem prostoru opišemo s tremi koordinatami, torej zurejeno trojko iz množice
R3 = R× R× R = {(x, y, z) ; x, y, z ∈ R}.
V tem poglavju bomo spoznali strukturo množice R3, podano z nekaterimiračunskimi operacijami, zaradi katere pravimo, da je R3 trirazsežni evklidskiprostor. Pri predmetu Matematika 2 bomo spoznali, kako se ta strukturatransformira pri spremembi koordinatnega sistema.
Element (x, y, z) množice R3 lahko gledamo kot točko A v prostoru R3,ki jo pogosto zapišemo kar z A(x, y, z), števila x, y in z pa imenujemo tudikartezične koordinate točke A.
x
y
z
1
12
A H1,2,1L
rÓ
Izhodišče v prostoru R3 je točka O(0, 0, 0). Element (x, y, z) množice R3 pasi lahko predstavljamo tudi kot usmerjeno daljico od izhodišča O(0, 0, 0) dotočke A(x, y, z). Taki usmerjeni daljici pravimo krajevni vektor točke A injo označimo z
~rA = −→OA.
Ta vektor je seveda popolnoma določen s končno točko A(x, y, z), zato točkoA(x, y, z) pogosto identificiramo z njenim krajevnim vektorjem in označimo
~rA = −→OA = (x, y, z) =
xyz
.49

Iz tega razloga bomo elemente množice R3 imenovali tudi vektorji, poljubenvektor iz R3 bomo pogosto označili z
~v = (v1, v2, v3) ∈ R3.
Realnim številom bomo v tem kontekstu rekli tudi skalarji.
3.1 Vektorski prostor R3
Na množici R3 lahko definiramo seštevanje vektorjev po komponentah in pamnoženje vektorjev s skalarji:
(seštevanje vektorjev) Za poljubna vektorja ~u = (u1, u2, u3) ∈ R3 in~v = (v1, v2, v3) ∈ R3 je njuna vsota vektor ~u+ ~v v R3, dan s predpisom
~u+ ~v = (u1 + v1, u2 + v2, u3 + v3) ∈ R3.
u
vu + v
x
y
z
(množenje vektorja s skalarjem) Produkt vektorja ~v = (v1, v2, v3) ∈ R3 spoljubnim skalarjem α ∈ R je vektor α~v v R3, dan s predpisom
α~v = (αv1, αv2, αv3) ∈ R3.
u
-u
2 u
x
y
z
Označimo vektor nič ~0 = (0, 0, 0) ∈ R3 in nasprotni vektor −~v = (−1)~v ∈R3 poljubnega vektorja ~v ∈ R. Za vse vektorje ~u,~v, ~w ∈ R3 in za vse skalarjeα, β ∈ R veljajo naslednje lastnosti:
(i) (~u+ ~v) + ~w = ~u+ (~v + ~w)
(ii) ~u+ ~v = ~v + ~u
(iii) ~v +~0 = ~v
(iv) ~v + (−~v) = ~0
50

(v) α(~u+ ~v) = α~u+ α~v
(vi) (α+ β)~v = α~v + β~v
(vii) α(β~v) = (αβ)~v
(viii) 1~v = ~v
Posebej je množica R3 torej Abelova grupa za seštevanje. Ker za operacijiseštevanja in množenja skalarjev veljajo lastnosti (i-viii), pravimo, da je R3
vektorski prostor nad obsegom R.Označimo še vektorje
~i = (1, 0, 0) ∈ R3,
~j = (0, 1, 0) ∈ R3,
~k = (0, 0, 1) ∈ R3.
Ker poljuben vektor ~v = (v1, v2, v3) ∈ R3 lahko na en sam način zapišemokot vsoto s skalarji pomnoženih vektorjev ~i,~j,~k, namreč
~v = v1~i+ v2~j + v3~k,
pravimo, da vektorji~i,~j,~k sestavljajo bazo vektorskega prostora R3. Vektorji~i,~j,~k kažejo v smereh koordinatnih osi in jih imenujemo standardni baznivektorji vektorskega prostora R3.
Zgled 3.1. Naj bosta A in B točki v R3 s krajevnima vektorjema ~rA =(x, y, z) ∈ R3 in ~rB = (x′, y′, z′) ∈ R3. Če usmerjeno daljico od točke A dotočke B vzporedno prenesemo v usmerjeno daljico, ki se začne v izhodišču,smo s tem dobili vektor v R3, ki ga izračunamo kot
−−→AB = ~rB − ~rA = (x′ − x, y′ − y, z′ − z) ∈ R3.
Dogovorimo se, da nam usmerjena daljica od točke A do točke B ponazarjata vektor −−→AB = ~rB − ~rA ∈ R3. Vsaka usmerjena daljica med poljubnimadvema točkama nam torej ponazarja vektor, dve takšni usmerjeni daljici panam ponazarjata isti vektor če, in samo če, je ena od njih vzporedna tran-slacija druge. S takšno ponazoritvijo vektorjev lahko bistveno poenostavimoskice, s katerimi si pomagamo pri računanju z vektorji.
3.2 Skalarni, vektorski in mešani produkt v R3
Skalarni produkt v R3
Za poljubna vektorja ~u = (u1, u2, u3) ∈ R3 in ~v = (v1, v2, v3) ∈ R3 defini-ramo njun skalarni produkt ~u · ~v, ki je realno število dano s predpisom
~u · ~v = u1v1 + u2v2 + u3v3 ∈ R.
51

Iz te definicije očitno sledi, da za vse vektorje ~u,~v, ~w ∈ R3 in za vse skalarjeα ∈ R velja(i) ~u · ~v = ~v · ~u,
(ii) ~u · (~v + ~w) = ~u · ~v + ~u · ~w,
(iii) (~u+ ~v) · ~w = ~u · ~w + ~v · ~w,
(iv) α(~u · ~v) = (α~u) · ~v = ~u · (α~v),
(v) ~v · ~v ≥ 0, in
(vi) ~v · ~v = 0 če, in samo če, je ~v = 0.Omenjene lastnosti nam pogosto pomagajo pri računanju z vektorji. La-
stnost (i) pove, da je skalarni produkt vektorjev komutativen. Lastnost (ii)oziroma (iii) pove, da je skalarni produkt distributiven glede na seštevanjevektorjev, medtem ko lastnost (iv) podaja zvezo med skalarnim produk-tom in množenjem vektorjev s skalarji, ki ji pravimo homogenost skalarnegaprodukta. Zaradi lastnosti (ii-iv) pravimo, da je skalarni produkt biline-arna operacija. Lastnosti (v-vi) povesta, da je skalarni produkt pozitivnodefiniten.
Skalarni produkt je tesno povezan z dolžino vektorja. Dolžina |~v| po-ljubnega vektorja ~v = (v1, v2, v3) ∈ R3 je namreč enaka
|~v| =√~v · ~v =
√v2
1 + v22 + v2
3 ∈ R.
Očitno velja, da je |~v| ≥ 0 in da je |~v| = 0 če, in samo če, je ~v = ~0. Polegtega za vsak α ∈ R velja
|α~v| = |α||~v|.Zgled 3.2. Naj bosta A in B točki v R3 s krajevnima vektorjema ~rA =(x, y, z) ∈ R3 in ~rB = (x′, y′, z′) ∈ R3. Razdalja med točkama A in B jeenaka
AB = d(A,B) = |~rB − ~rA| =√
(x′ − x)2 + (y′ − y)2 + (z′ − z)2.
Trditev 3.3. Za poljubna vektorja ~u,~v ∈ R3 velja:(i) |~u · ~v| ≤ |~u||~v| (Cauchy-Schwartzova neenakost)
(ii) |~u+ ~v| ≤ |~u|+ |~v| (trikotniška neenakost)Dokaz. (i) Če je vsaj eden izmed vektorjev ~u, ~v enak nič, je trditev očitna,zato predpostavimo, da sta oba vektorja neničelna. Označimo krajše α =|~v|2, β = ~u · ~v in ~w = α~u− β~v. Ker velja ~w · ~w ≥ 0, dobimo
~w · ~w = (α~u− β~v) · (α~u− β~v)= α2~u · ~u− αβ~u · ~v − βα~v · ~u+ β2~v · ~v= α2~u · ~u− 2αβ~u · ~v + β2~v · ~v ≥ 0.
52

Velja torej
|~v|4|~u|2 − 2|~v|2(~u · ~v)2 + (~u · ~v)2|~v|2 ≥ 0|~v|4|~u|2 − |~v|2(~u · ~v)2 ≥ 0|~v|2|~u|2 − (~u · ~v)2 ≥ 0
oziroma|~u · ~v| ≤ |~u||~v|.
Ob tem opazimo, da v tej neenakosti velja enakost natanko takrat, ko je~w = ~0 oziroma ko je α~u = β~v.
(ii) Po točki (i) dobimo
|~u+ ~v|2 = (~u+ ~v) · (~u+ ~v) = ~u · ~u+ 2~u · ~v + ~v · ~v≤ |~u|2 + 2|~u||~v|+ |~v|2 = (|~u|+ |~v|)2.
Naj bosta ~u in ~v poljubna vektorja v R3. Ta dva vektorja določatatrikotnik, ki ima za stranico tudi vektor ~u + ~v. Vektorja ~u in ~v sta si medseboj pravokotna, kadar za ta trikotnik velja enakost iz Pitagorovega izreka
|~u+ ~v|2 = |~u|2 + |~v|2.
x
y
z
u
u + v
v
Ker pa je
|~u+ ~v|2 = (~u+ ~v) · (~u+ ~v) = ~u · ~u+ 2~u · ~v + ~v · ~v = |~u|2 + 2~u · ~v + |~v|2,
enakost iz Pitagorovega izreka velja natanko tedaj, ko je ~u · ~v = 0.Pojem pravokotnosti med vektorji torej lahko izrazimo s skalarnim pro-
duktom: Vektorja ~u,~v ∈ R3 sta si med seboj pravokotna ali ortogonalna,kadar velja
~u · ~v = 0.V tem primeru označimo ~u ⊥ ~v. Opazimo lahko, da je vsak vektor pravoko-ten na vektor nič.
Naj bo ~v vektor v R3, ~v 6= ~0. Želeli bi izračunati pravokotno projekcijopoljubnega vektorja ~u ∈ R3 na vektor ~v. Ta pravokotna projekcija, ki jooznačimo z pr⊥~v (~u) ali z Proj~v(~u), je tak skalarni večkratnik vektorja ~v, daje razlika ~u− pr⊥~v (~u) pravokotna na vektor ~v.
53

v
u
0
u - Projv u
Projv u
Φ
Velja torej pr⊥~v (~u) = α~v za nek α ∈ R in (~u − α~v) · ~v = 0, od tod pa slediα = ~u·~v
~v·~v . Pravokotno projekcijo vektorja ~u na vektor ~v torej izračunamo poformuli
pr⊥~v (~u) = Proj~v(~u) =(~u · ~v~v · ~v
)~v.
Zgornja slika ilustrira primer, ko je ~u · ~v ≥ 0. Primer, ko je ~u · ~v < 0,bolje ilustrira naslednja slika:
v
u
0Projv u
Φ
Naj bosta ~u in ~v neničelna vektorja v R3. Iz zadnjih dveh slik in pravkarizpeljane formule za pravokotno projekcijo vidimo, da kot φ med vektorjema~u in ~v zadošča enakosti
cosφ = ~u · ~v|~u||~v|
.
Iz te enakosti lahko torej izračunamo kot φ ∈ J0, πM med neničelnima vek-torjema. Posebej velja:
(i) kot φ je oster, če velja ~u · ~v > 0,
(ii) kot φ je top, če velja ~u · ~v < 0, in
(iii) kot φ je pravi kot, torej φ = π/2, če velja ~u · ~v = 0.
Zgornjo enakost lahko zapišemo tudi v obliki
~u · ~v = |~u||~v| cosφ.
Če je ~u = ~0 ali ~v = ~0, potem kot med takšnima vektorjema ni definiran, azadnja enakost vendarle velja za vsako izbiro števila φ.
Zgled 3.4. Dana sta vektorja ~u = (1, 2, 3) in ~v = (1, 0,−1). Izračunajmodolžine vektorjev ~u, ~v in ~u + ~v, kot med vektorjema ~u in ~v ter pravokotno
54

projekcijo vektorja ~u na vektor ~v. Ker je ~u+~v = (2, 2, 2), so dolžine vektorjevenake
|~u| =√
1 + 4 + 9 =√
14,|~v| =
√1 + 0 + 1 =
√2,
|~u+ ~v| =√
4 + 4 + 4 =√
12.
Iz ~u · ~v = 1 + 0− 3 = −2 dobimo, da za kot φ med vektorjema ~u in ~v velja
cosφ = ~u · ~v|~u||~v|
= −2√28
= − 1√7,
kar posebej pomeni, da je kot φ top. Projekcija vektorja ~u na vektor ~v jevektor
pr⊥~v (~u) =(~u · ~v~v · ~v
)~v =
(−22
)~v = (−1, 0, 1).
Za vektor ~u ∈ R3 pravimo, da je enotski ali normiran, če je |~u| = 1.Poljuben neničeln vektor ~v ∈ R3 lahko normiramo, kar pomeni, da iz njegakonstruiramo nov, normiran vektor
1|~v|~v,
ki kaže v isto smer kot vektor ~v. Če je ~u normiran vektor, je
~u = (cosα, cosβ, cos γ),
kjer so α, β, γ koti med vektorjem ~u in standardnimi baznimi vektorji~i,~j,~k.Komponente cosα, cosβ in cos γ imenujemo tudi smerni kosinusi normira-nega vektorja ~u.
Vektorski produkt v R3
Za poljubna vektorja ~u = (u1, u2, u3) ∈ R3 in ~v = (v1, v2, v3) ∈ R3 defini-ramo njun vektorski produkt ~u× ~v, ki je vektor v R3 dan s predpisom
~u× ~v = (u2v3 − u3v2,−u1v3 + u3v1, u1v2 − u2v1) ∈ R3.
To definicijo vektorskega produkta si je lažje zapomniti, če jo zapišemo spomočjo tako imenovane determinante:
~u× ~v = (u2v3 − u3v2)~i− (u1v3 − u3v1)~j + (u1v2 − u2v1)~k
=∣∣∣∣∣ u2 u3v2 v3
∣∣∣∣∣~i−∣∣∣∣∣ u1 u3v1 v3
∣∣∣∣∣~j +∣∣∣∣∣ u1 u2v1 v2
∣∣∣∣∣~k=
∣∣∣∣∣∣∣~i ~j ~ku1 u2 u3v1 v2 v3
∣∣∣∣∣∣∣= u2v3~i+ u3v1~j + u1v2~k − u3v2~i− u1v3~j − u2v1~k
55

Posebej je
~i×~j = ~k, ~i×~i = ~0,~j × ~k =~i, ~j ×~j = ~0,~k ×~i = ~j, ~k × ~k = ~0.
S preprostim izračunom lahko pokažemo, da za vse vektorje ~u,~v, ~w ∈ R3
in za vse skalarje α ∈ R velja:
(i) ~v × ~v = ~0
(iv) ~u× ~v = −(~v × ~u)
(iii) ~u× (~v + ~w) = ~u× ~v + ~u× ~w
(iv) (~u+ ~v)× ~w = ~u× ~w + ~v × ~w
(v) α(~u× ~v) = (α~u)× ~v = ~u× (α~v)
(vi) ~u · (~u× ~v) = ~v · (~u× ~v) = 0
Lastnost (ii) pravi, da je vektorski produkt antikomutativen. Iz nje av-tomatično sledi lastnost (i). Lastnost (iii) oziroma (iv) pove, da je vektorskiprodukt distributiven glede na seštevanje, lastnost (v) pa, da je vektorskiprodukt homogen. Zaradi lastnosti (iii-v) je vektorski produkt bilinearnaoperacija. Ob upoštevanju bilinearnosti je vektorski produkt določen že zvektorskimi produkti med standardnimi baznimi vektorji:
~u× ~v = (u1~i+ u2~j + u3~k)× (v1~i+ v2~j + v3~k)= u1v2(~i×~j) + u1v3(~i× ~k) + u2v1(~j ×~i)
+ u2v3(~j × ~k) + u3v1(~k ×~i) + u3v2(~k ×~j)= u1v2~k + u1v3(−~j ) + u2v1(−~k ) + u2v3~i+ u3v1~j + u3v2(−~i )= (u2v3 − u3v2)~i− (u1v3 − u3v1)~j + (u1v2 − u2v1)~k
Lastnost (vi) pravi, da je vektorski produkt ~u× ~v pravokoten na vektorja ~uin ~v:
(~u× ~v) ⊥ ~u, (~u× ~v) ⊥ ~v.
Trditev 3.5. Za poljubne vektorje ~u,~v, ~w ∈ R3 velja:
(i) ~u · (~v × ~w) = (~u× ~v) · ~w
(ii) ~u× (~v × ~w) = (~u · ~w)~v − (~u · ~v)~w
(iii) ~u× (~v × ~w) + ~v × (~w × ~u) + ~w × (~u× ~v) = ~0 (Jacobijeva identiteta)
56

(iv) Če sta vektorja ~u in ~v neničelna in je φ kot med njima, potem je|~u× ~v| = |~u||~v| sinφ.
Dokaz. Točke (i-iii) pokažemo s preprostim izračunom. Direktno iz definicijetudi sledi, da velja
|~u× ~v|2 = |~u|2|~v|2 − (~u · ~v)2.
Točko (iv) zdaj dobimo iz enakosti
|~u× ~v|2 = |~u|2|~v|2 − (~u · ~v)2
= |~u|2|~v|2 − |~u|2|~v|2 cos2 φ
= |~u|2|~v|2(1− cos2 φ)= |~u|2|~v|2 sin2 φ.
Naj bosta ~u in ~v neničelna vektorja v R3 in naj bo φ kot med njima.Paralelogram s stranicama ~u in ~v ima osnovnico dolžine |~u| in višino |~v| sinφ,torej je ploščina tega paralelograma enaka produktu |~u||~v| sinφ. Po točki (iv)iz zadnje trditve je torej velikost
|~u× ~v|
vektorskega produkta vektorjev ~u in ~v enaka ploščini paralelograma s stra-nicama ~u in ~v. To velja tudi v primeru, če je kakšen od vektorjev ~u in ~venak nič, saj je tedaj paralelogram izrojen in ima ploščino enako nič.
Na ta način dobimo geometrijsko interpretacijo vektorskega produkta:Vektorski produkt ~u×~v poljubnih vektorjev ~u,~v ∈ R3 je vektor, ki je pravo-koten na vektorja ~u in ~v, njegova dolžina pa je enaka ploščini paralelograma,ki ga napenjata vektorja ~u in ~v. Če je vektorski produkt ~u×~v neničeln, po-tem je usmeritev vektorja ~u×~v takšna, da vektorji ~u,~v, ~u×~v v tem vrstnemredu zadoščajo pravilu desnega vijaka. Drugače povedano, trojica vektor-jev ~u,~v, ~u × ~v določa enako orientacijo prostora R3 kot trojica standardnihbaznih vektorjev ~i,~j,~k, torej naravno pozitivno orientacijo prostora R3. Toorientacijo si lahko predstavljamo s pomočjo pravila desnega vijaka, kerstandardne bazne vektorje ~i,~j,~k praviloma geometrijsko predstavimo tako,da ti zadoščajo pravilu desnega vijaka.
h
Φu
v
u�v
Neničelna vektorja iz R3 sta si vzporedna, če je kot med njima enak 0ali π. Vektor nič je po definiciji vzporeden vsakemu vektorju. Vzporednostimed vektorji pravimo tudi kolinearnost.
57

Vektorja iz R3 sta med seboj linearno odvisna, če je eden od njiju skalarnivečkratnik drugega. Ekvivalentno, vektorja ~u,~v ∈ R3 sta med seboj linearnoodvisna če, in samo če, obstajata takšna skalarja α, β ∈ R, da je vsaj edenod njiju neničeln in da velja α~u+ β~v = ~0.
Trditev 3.6. Za poljubna vektorja ~u,~v ∈ R3 so ekvivalentne naslednje trdi-tve:
(i) Vektorja ~u in ~v sta si vzporedna.
(ii) Vektorja ~u in ~v sta med seboj linearno odvisna.
(iii) |~u · ~v| = |~u||~v|
(iv) ~u× ~v = ~0
Dokaz. Če je kakšen od vektorjev ~u,~v enak nič, očitno veljajo vse štiri trdi-tve, zato lahko predpostavimo, da sta oba vektorja neničelna. Naj bo φ kotmed tema vektorjema.
Ekvivalenca med točkama (ii) in (iii) sledi iz dokaza Cauchy-Schwartzeveneenakosti. Iz točke (ii) očitno sledi točka (iv).
Iz točke (iv) sledi točka (i). Res, če je ~u × ~v = ~0, sledi je 0 = |~u × ~v| =|~u||~v| sinφ, zato je tedaj sinφ = 0. V tem primeru je torej φ enak 0 ali π.
Na koncu pokažimo še, da iz točke (i) sledi točka (iii). Če je kot φ enak0 ali π, velja cosφ = ±1, zato je |~u · ~v| = |~u||~v|| cosφ| = |~u||~v|.
Zgled 3.7. Izračunajmo ploščino trikotnika z oglišči P (1, 3,−2), Q(2, 1, 4)in R(−3, 1, 6) v R3. Ker je ploščina S tega trikotnika je enaka poloviciploščine paralelograma, ki ga napenjata vektorja −−→QP = (−1, 2,−6) in −−→QR =(−5, 0, 2), velja
S = 12 |−−→QP ×
−−→QR| = 1
2 |(4, 32, 10)| = 12√
16 + 1024 + 100 =√
285.
Mešani produkt v R3
Za poljubne vektorje ~u,~v, ~w ∈ R3 lahko izračunamo skalar
(~u× ~v) · ~w ∈ R,
ki mu pravimo mešani produkt vektorjev ~u,~v, ~w. Za mešani produkt včasihuporabimo tudi oznako
(~u,~v, ~w) = (~u;~v; ~w) = (~u× ~v) · ~w.
Prva navedena oznaka je sicer pogosta v literaturi, a je nekoliko dvoumna,saj bi jo lahko pomotoma interpretirali kot urejeno trojko. Ker je skalarniprodukt komutativen, ker je vektorski produkt antikomutativen in ker po
58

Trditvi 3.5(ii) velja ~u · (~v × ~w) = (~u × ~v) · ~w, za mešani produkt veljajoenakosti:
(~u× ~v) · ~w = (~v × ~w) · ~u = (~w × ~u) · ~v− (~v × ~u) · ~w = −(~w × ~v) · ~u = −(~u× ~w) · ~v
Če torej argumente mešanega produkta ciklično permutiramo, se rezultat nespremeni. Ker sta skalarni in vektorski produkt oba homogena in distribu-tivna glede na vsoto v obeh argumentih, je tudi mešani produkt homogenin distributiven glede na vsoto v vsakem od svojih argumentov.
Mešani produkt najhitreje izračunamo s pomočjo determinante: za po-ljubne vektorje ~u = (u1, u2, u3), ~v = (v1, v2, v3) in ~w = (w1, w2, w3) v R3
velja
(~u× ~v) · ~w = ~u · (~v × ~w)
= ~u ·(∣∣∣∣∣ v2 v3
w2 w3
∣∣∣∣∣~i−∣∣∣∣∣ v1 v3w1 w3
∣∣∣∣∣~j +∣∣∣∣∣ v1 v2w1 w2
∣∣∣∣∣~k)
= u1
∣∣∣∣∣ v2 v3w2 w3
∣∣∣∣∣− u2
∣∣∣∣∣ v1 v3w1 w3
∣∣∣∣∣+ u3
∣∣∣∣∣ v1 v2w1 w2
∣∣∣∣∣=
∣∣∣∣∣∣∣u1 u2 u3v1 v2 v3w1 w2 w3
∣∣∣∣∣∣∣= u1v2w3 + u2v3w1 + u3v1w2 − u1v3w2 − u2v1w3 − u3v2w1.
Mešani produkt ima seveda tudi svoj geometrijski pomen. Oglejmo siparalelepiped, ki je napet na vektorje ~u,~v, ~w ∈ R3:
Φ
u
v
w
u�v
Če sta vektorja ~u × ~v in ~w neničelna, naj φ označuje kot med njima, sicerpa za φ lahko vzamemo poljubno realno število. Osnovna ploskev paralele-pipeda je paralelogram s ploščino S = |~u × ~v|, višina paralelepipeda pa jeenaka h = |~w|| cosφ|. Ker je
|(~u× ~v) · ~w| = |~u× ~v||~w|| cosφ| = S h,
59

je absolutna vrednost |(~u×~v) · ~w| mešanega produkta vektorjev ~u,~v, ~w ∈ R3
enaka volumnu paralelepipeda, napetega na vektorje ~u,~v, ~w.Opazimo še, da vektorji ~u,~v, ~w v tem vrstnem redu zadoščajo pravilu
desnega vijaka, če, in samo če, velja (~u× ~v) · ~w > 0.Če je mešani produkt (~u×~v) · ~w enak nič, potem pravimo, da so vektorji
~u,~v, ~w koplanarni. Geometrijsko to pomeni, da so ti trije vektorji vzporedniisti ravnini. O ravninah v R3 bomo sicer natančneje govorili v nadaljevanju.
Zgled 3.8. Paralelepiped, napet na vektorje (2, 1, 0), (−1, 2, 1) in (0, 1, 3),ima prostornino
V = |
∣∣∣∣∣∣∣2 1 0−1 2 10 1 3
∣∣∣∣∣∣∣ | = |12− 2 + 3| = 13.
Prostornina tristrane piramide, ki je napeta na te tri vektorje, je enaka enišestini prostornine paralelepipeda, torej 13/6.
3.3 Premice in ravnine v R3
V tem poglavju si bomo pogledali, kako z enačbami opišemo premice inravnine v trorazsežnem prostoru ter njihovo medsebojno lego.
Enačba ravnine v R3
Naj bosta ~r0 in ~n vektorja v R3 in naj velja ~n 6= ~0. Ravnina Σ v R3, vkateri leži točka s krajevnim vektorjem ~r0 in ki je pravokotna na vektor ~n,je podmnožica
Σ = {~r ∈ R3 ; (~r − ~r0) ⊥ ~n} ⊂ R3.
Drugače povedano, ravnina Σ je množica rešitev enačbe
(~r − ~r0) · ~n = 0
za neznani vektor ~r ∈ R3.
O
rÓ0 rÓ
n
rÓ - rÓ0
S
Neničelnemu vektorju ~n, ki je pravokoten na ravnino Σ, pravimo normalnivektor ravnine Σ.
60

Označimo ~r = (x, y, z), ~r0 = (x0, y0, z0) in ~n = (a, b, c). S temi oznakamilahko enačbo (~r−~r0) ·~n = 0 zapišemo kot a(x−x0)+b(y−y0)+c(z−z0) = 0ali v obliki
ax+ by + cz = d,
kjer je d = ax0 + by0 + cz0. To je enačba za neznana realna števila x, y, z,ki jo imenujemo standardna ali normalna enačba ravnine. Pri tem so toreja, b, c, d realne konstante, vsaj ena od konstant a, b, c pa mora neničelna.
Da bi opisali ravnino Σ, lahko namesto vektorja ~r0 izberemo poljubenvektor ~r0
′ ∈ Σ in namesto vektorja ~n poljuben neničeln vektor ~n ′, ki jepravokoten na Σ. Ker je ~r0
′ ∈ Σ, velja (~r0′ − ~r0) · ~n = 0. Ker je vektor ~n ′
pravokoten na ravnino Σ, je ~n ′ = η~n za neko neničelno realno število η. Odtod dobimo
(~r − ~r0′) · ~n ′ = (~r − ~r0 + ~r0 − ~r0
′) · η~n= η(~r − ~r0) · ~n+ η(~r0 − ~r0
′) · ~n= η ((~r − ~r0) · ~n) .
Z drugačno izbiro točke in normalnega vektorja dobimo torej drugačnoenačbo
(~r − ~r0′) · ~n ′ = 0
iste ravnine Σ. Ta nova enačba pa se vendarle ne razlikuje preveč od prvotneenačbe, je namreč kar η-kratnik prvotne enačbe
(~r − ~r0) · ~n = 0
ravnine Σ. Dve enačbi ravnine torej določata isto ravnino če, in samo če, jeena neničeln večkratnik druge.
Zgled 3.9. Dane so tri točke s krajevnimi vektorji ~r1, ~r2 in ~r3 v R3. Če sivektorja ~r2 − ~r1 in ~r3 − ~r1 nista vzporedna, obstaja natanko ena ravnina Σv R3, ki gre skozi te tri dane točke. V tem primeru je (~r2 − ~r1) × (~r3 − ~r1)normalni vektor ravnine Σ, ravnina Σ pa je dana z enačbo
(~r − ~r1) · ((~r2 − ~r1)× (~r3 − ~r1)) = 0
za neznani vektor ~r = (x, y, z) ∈ R3. V tej enačbi torej nastopa mešaniprodukt in bi jo lahko drugače zapisali kot enačbo∣∣∣∣∣∣∣
x− x1 y − y1 z − z1x2 − x1 y2 − y1 z2 − z1x3 − x1 y3 − y1 z3 − z1
∣∣∣∣∣∣∣ = 0
za realne neznanke x, y, z.
61

Enačba premice v R3
Naj bosta ~r0 in ~s vektorja v R3 in naj velja ~s 6= ~0. Premica p v R3, vkateri leži točka s krajevnim vektorjem ~r0 in ki je vzporedna vektorju ~s, jepodmnožica
p = {~r0 + t~s ∈ R3 ; t ∈ R} ⊂ R3.
Premica p je torej sestavljena iz vektorjev oblike
~r = ~r0 + t~s, t ∈ R.
S tem smo premico podali parametrično, s parametrom t, ki nam določa,kje na premici je točka s krajevnim vektorjem ~r.
O
rÓ0 rÓ
sÓ
pt = 0
t = 1t > 1
t < 0
Če si mislimo, da je parameter t čas, nam ta parametrizacija opisuje giba-nje točke po premici s konstantno hitrostjo ~s in z začetnim položajem ~r0.Neničelnemu vektorju ~s, ki je vzporeden premici p, pravimo smerni vektorpremice p.
Z oznakami ~r = (x, y, z), ~r0 = (x0, y0, z0) in ~s = (α, β, γ) parametrizacijopremice p s parametrom t ∈ R zapišemo v obliki po komponentah
x = x0 + tα,
y = y0 + tβ,
z = z0 + tγ.
Pri tem so torej x0, y0, z0 in α, β, γ realne konstante, pri čemer je vsaj enaod konstant α, β, γ neničelna, x, y, z so realne neznanke, t pa je parameter,ki lahko zavzame poljubno realno vrednosti. Če iz teh enakosti izrazimoparameter t, dobimo standardno ali kanonsko enačbo premice p. Gledena to, katere od konstant α, β, γ so neničelne, moramo pri tem ločiti večmožnosti:
(i) Če so vse konstante α, β, γ neničelne, se standardna enačba premicep glasi:
x− x0α
= y − y0β
= z − z0γ
(ii) Če je α = 0 in sta konstanti β, γ neničelni, potem je standardnaenačba premice p podana z enačbama
x = x0,y − y0β
= z − z0γ
.
62

Podobno obliko enačbe dobimo, če je kakšna druga izmed konstant α, β, γenaka nič, ostali dve pa sta neničelni.
(iii) Če je α = β = 0 in je konstanta γ neničelna, standardno enačbopremice p zapišemo
x = x0, y = y0.
Podobno obliko enačbe dobimo, če je kakšna druga izmed konstant α, β, γneničelna, ostali dve pa sta enaki nič.
Opazimo lahko, da je standardna enačba premice v vseh teh primerihpravzaprav sistem dveh enačb za tri realne neznanke x, y, z.
Da bi opisali premico p, lahko namesto vektorja ~r0 izberemo poljubenvektor ~r0
′ ∈ p, namesto vektorja ~s pa poljuben neničeln vektor ~s ′, ki jevzporeden premici p. Ker je ~r0
′ ∈ p, je ~r0′ = ~r0 + t0~s za nek t0 ∈ R. Ker je
neničeln vektor ~s ′ vzporeden premici p, je ~s ′ = θ~s za neko neničelno realnoštevilo θ. Nova izbira točke in smernega vektorja nam da novo parametri-zacijo premice p in sicer
~r = ~r0′ + t′~s ′, t′ ∈ R.
Zvezo med obema parametrizacijama nam da enakost
~r = ~r0′ + t′~s ′ = (~r0 + t0~s) + t′θ~s = ~r0 + (t0 + t′θ)~s = ~r0 + t~s,
iz katere vidimo, da je zveza med parametroma t in t′ dana z enakostjot = t0 + t′θ. Pri takšni reparametrizaciji premice se torej spremenita začetnipoložaj in pa hitrost gibanja po premici. Standardna enačba premice iztočke (i) se po reparametrizaciji glasi
x− (x0 + t0α)θα
= y − (y0 + t0β)θβ
= z − (z0 + t0γ)θγ
oziroma1θ
(x− x0α
− t0)
= 1θ
(y − y0β− t0
)= 1θ
(z − z0γ− t0
).
Novo standardno enačbo premice p torej dobimo iz prvotne s translacijo inmnoženjem z neničelnim skalarjem. Dve standardni enačbi premice namtako določata isto premico, če lahko eno dobimo iz druge s translacijo inmnoženjem z neničelnim skalarjem.
Zgled 3.10. Premica p1 v R3 naj bo dana z enačbo
x− 52 = y − 7
3 = z
5 ,
premica p2 v R3 pa z enačbo
x− 14 = y − 1
6 = z + 1010 .
63

Smerna vektorja teh dveh premic sta torej
~s1 = (2, 3, 5)
oziroma~s2 = (4, 6, 10).
Ker je ~s2 = 2~s1, sta smerna vektorja vzporedna, zato sta tudi premici p1in p2 vzporedni. Zdaj imamo dve možnosti: premici sta lahko enaki ali pase ne sekata. Na prvi premici zagotovo leži točka (5, 7, 0) in če pa to točkovstavimo v drugo enačbo, vidimo, da ta točka leži tudi na drugi premici.Premici p1 in p2 sta torej enaki.
Zgled 3.11. Premico lahko podamo tudi kot presek dveh ravnin Σ1 in Σ2v prostoru R3, če le ti dve ravnini nista vzporedni. Naj bo ravnina Σ1 danaz enačbo
a1x+ b1y + c1z = d1,
ravnina Σ2 pa z enačbo
a2x+ b2y + c2z = d2.
Označimo z ~n1 = (a1, b1, c1) in ~n2 = (a2, b2, c2) normalna vektorja ravnin Σ1oziroma Σ2. Predpostavimo torej, da ravnini nista vzporedni. To pomeni,da normalna vektorja teh dveh ravnin nista vzporedna, zato je ~n1× ~n2 6= ~0.Premica p = Σ1 ∩ Σ2 je tedaj množica vseh rešitev sistema dveh enačb
a1x+ b1y + c1z = d1
a2x+ b2y + c2z = d2
za realne neznanke x, y, z. Za smerni vektor premice p lahko vzamemo karvektor ~s = ~n1×~n2, za vektor ~r0 ∈ p pa vzamemo poljubno rešitev zgornjegasistema dveh enačb.
n1
n2
sÓrÓ0
S1
S2
Kot konkreten primer si oglejmo sistem enačb:
3x− 2y + 4z = 04x− y + z = 5
64

Potem je ~n1 = (3,−2, 4), ~n2 = (4,−1, 1) in ~s = ~n1 × ~n2 = (2, 13, 5). Zatočko na premici lahko vzamemo (2, 3, 0). Standardna enačba premice, ki jesestavljena iz rešitev danega sistema dveh enačb, je torej
x− 22 = y − 3
13 = z
5 .
Zgled 3.12. Naj bosta ~s,~a ∈ R3 med seboj pravokotna vektorja in naj bo~s 6= ~0. Oglejmo si enačbo
~s× ~r = ~a
za neznani vektor ~r ∈ R3. Pokazali bomo, da so rešitve te enačbe natankovsi vektorji oblike
~r = 1|~s |2
~a× ~s+ t~s,
za poljuben t ∈ R. Rešitve torej sestavljajo premico p v R3 s smernimvektorjem ~s.
(i) Najprej dokažimo, da je za vsak t ∈ R vektor (1/|~s |2)~a × ~s + t~s resrešitev naše enačbe. V to se prepričamo z izračunom
~s×( 1|~s |2
~a× ~s+ t~s
)= ~s× 1
|~s |2(~a× ~s) + ~s× t~s
= 1|~s |2
(~s× (~a× ~s ))
= 1|~s |2
((~s · ~s )~a− (~s · ~a)~s )
= ~a.
(ii) Pokažimo še, da je vsaka rešitev naše enačbe oblike (1/|~s |2)~a×~s+ t~sza nek t ∈ R. Označimo ~r0 = (1/|~s |2)~a × ~s. Iz točke (i) vemo, da velja~s× ~r0 = ~a. Če je ~r poljubna rešitev naše enačbe, velja torej tudi ~s× ~r = ~a,zato je
~s× (~r − ~r0) = ~s× ~r − ~s× ~r0 = ~a− ~a = ~0.
Od tod sledi, da sta vektorja ~s in ~r − ~r0 linearno odvisna. To pomeni, dares obstaja tak t ∈ R, da je
~r − ~r0 = t~s.
(iii) Poglejmo si še, kako bi geometrijsko utemeljili zgornji rezultat. Čeje vektor ~a enak nič, so rešitve enačbe natanko vsi vektorji, ki so vzporednivektorju ~s, zato rešitve tedaj sestavljajo premico skozi izhodišče s smernimvektorjem ~s. Predpostavimo torej, da je vektor ~a neničeln. Vsaka rešitev ~rnaše enačbe je vzporedna ravnini Σ, ki gre skozi izhodišče in ima normalnivektor ~a. Ker je |~s × ~r | = |~a| konstanta, imajo paralelogrami, napeti navektorja ~s in ~r, vsi enako ploščino, za vse rešitve ~r. Od tod lahko sklepamo,da našo enačbo rešijo krajevni vektorji točk na premici p, ki leži v ravniniΣ in je vzporedna vektorju ~s.
65

p
d
sÓ
rÓ
aÓ
rÓ0
aÓ�sÓ
Rešitev ~r0 je krajevni vektor presečišča premice p in premice skozi izhodiščes smernim vektorjem ~a × ~s. To presečišče je tista izmed točk iz premice p,ki je najbližja izhodišču.
Medsebojna lega točk, premic in ravnin v R3
Poznavanje operacij med vektorji in lastnosti teh operacij nam zelo pomagapri računanju razdalj med točkami, premicami in ravninami ter kotov medpremicami in ravninami.
(1) Razdalja med dvema točkama: Naj bosta ~r1, ~r2 ∈ R3 krajevna vek-torja dveh točk. Razdalja med tema točkama je tedaj enaka
d(~r1, ~r2) = |~r2 − ~r1|.
(2) Razdalja med točko in premico: Naj bo ~r1 ∈ R3 krajevni vektor točkein naj bo p premica v R3 s parametrizacijo ~r = ~r0 + t~s. Razdalja medtočko s krajevnim vektorjem ~r1 in premico p je enaka razdalji med točkos krajevnim vektorjem ~r1 in tisto izmed točk na premici p, ki je točki skrajevnim vektorjem ~r1 najbližja. Iz slike lahko razberemo, da je ta razdaljaenaka višini d paralelograma z osnovnico ~s in s stranico ~r1 − ~r0:
rÓ0
rÓ1
dsÓ
rÓ1 - rÓ0
p
Ploščina paralelograma je po eni strani enaka dolžini |~s × (~r1 − ~r0)|, podrugi strani pa tudi produktu |~s | d. Od tod sledi, da razdaljo med točko skrajevnim vektorjem ~r1 in premico p lahko izračunamo s formulo
d(~r1, p) = |~s× (~r1 − ~r0)||~s |
.
(3) Razdalja med točko in ravnino: Naj bo ~r1 ∈ R3 krajevni vektor točkein naj bo Σ ravnina v R3 z enačbo (~r − ~r0) · ~n = 0.
66
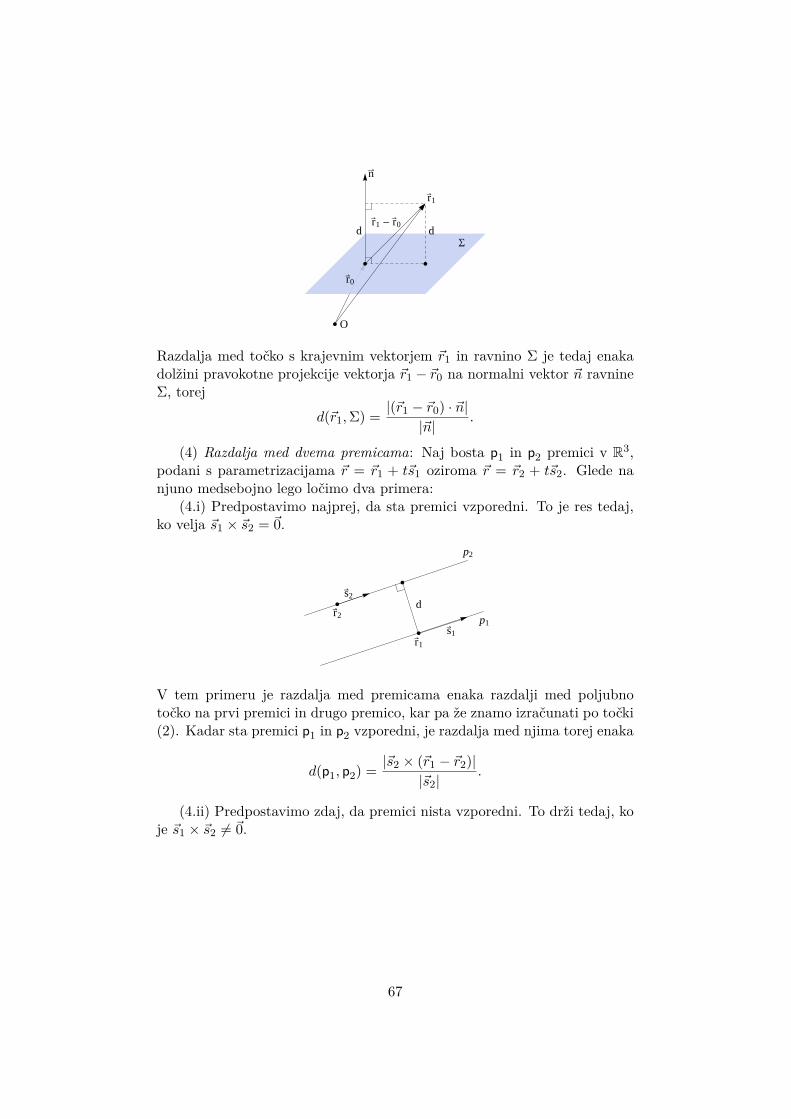
O
rÓ0
rÓ1
n
rÓ1 - rÓ0
S
d d
Razdalja med točko s krajevnim vektorjem ~r1 in ravnino Σ je tedaj enakadolžini pravokotne projekcije vektorja ~r1 − ~r0 na normalni vektor ~n ravnineΣ, torej
d(~r1,Σ) = |(~r1 − ~r0) · ~n||~n|
.
(4) Razdalja med dvema premicama: Naj bosta p1 in p2 premici v R3,podani s parametrizacijama ~r = ~r1 + t~s1 oziroma ~r = ~r2 + t~s2. Glede nanjuno medsebojno lego ločimo dva primera:
(4.i) Predpostavimo najprej, da sta premici vzporedni. To je res tedaj,ko velja ~s1 × ~s2 = ~0.
rÓ2
rÓ1
dsÓ2
p2
p1sÓ1
V tem primeru je razdalja med premicama enaka razdalji med poljubnotočko na prvi premici in drugo premico, kar pa že znamo izračunati po točki(2). Kadar sta premici p1 in p2 vzporedni, je razdalja med njima torej enaka
d(p1, p2) = |~s2 × (~r1 − ~r2)||~s2|
.
(4.ii) Predpostavimo zdaj, da premici nista vzporedni. To drži tedaj, koje ~s1 × ~s2 6= ~0.
67

rÓ1
rÓ2 p2
sÓ1
p1
sÓ2
V tem primeru je razdalja med premicama enaka višini h paralelepipeda,ki ima za osnovno ploskev paralelogram, napet na vektorja ~s1 in ~s2, in kiima stranico ~r2 − ~r1. Volumen tega paralelepipeda je po eni strani enakabsolutni vrednosti mešanega produkta (~s1 × ~s2) · (~r2 − ~r1), po drugi stranipa je tudi enak produktu |~s1×~s2|h. Kadar premici p1 in p2 nista vzporedni,je razdalja med njima torej enaka
d(p1, p2) = |(~s1 × ~s2) · (~r2 − ~r1)||~s1 × ~s2|
= |(~s1, ~s2, ~r2 − ~r1)||~s1 × ~s2|
.
(5) Razdalja med premico in ravnino, razdalja med dvema ravninama:Razdalja med premico in ravnino je neničelna le, če se premica in ravninane sekata. V tem primeru je ta razdalja enaka razdalji med katerokoli točkona premici in ravnino. Podobno velja za razdaljo med dvema ravninama.
(6) Kot med dvema premicama: Naj bosta p1 in p2 premici v R3, podanis parametrizacijama ~r = ~r1 + t~s1 oziroma ~r = ~r2 + t~s2.
sÓ2
p2
p1sÓ1
Φ
Če je kot med vektorjema ~s1 in ~s2 oster ali pravi, potem je ta kot tudi kotmed premicama p1 in p2. Če pa je kot med vektorjema ~s1 in ~s2 top, potemje kot med premicama p1 in p2 enak kotu med vektorjema ~s1 in −~s2, ki jeoster. Kot φ ∈ J0, π/2K med premicama p1 in p2 zato lahko izračunamo izenakosti
cosφ = |~s1 · ~s2||~s1||~s2|
.
(7) Kot med premico in ravnino: Kot med premico p s parametrizacijo~r = ~r1 + t~s in ravnino Σ z enačbo (~r − ~r2) · ~n = 0 je kot φ med premico pin njeno pravokotno projekcijo na ravnino Σ. Iz slike vidimo, da je kot medpremico s smernim vektorjem ~n in premico p enak kotu π
2 − φ.
68

sÓ
n
p
S
Φ
Iz točke (6) in iz enakosti sinφ = cos(π2 − φ) sledi, da kot φ ∈ J0, π/2K medpremico p in ravnino Σ lahko izračunamo iz enakosti
sinφ = |~s · ~n||~s ||~n|
.
(8) Kot med dvema ravninama: Kot med dvema ravninama Σ1 in Σ2,podanima z enačbama (~r − ~r1) · ~n1 = 0 oziroma (~r − ~r2) · ~n2 = 0, je kotφ ∈ J0, π/2K med premicama s smernima vektorjema ~n1 oziroma ~n2 in gatorej lahko izračunamo iz enakosti
cosφ = |~n1 · ~n2||~n1||~n2|
.
Zgled 3.13. (1) Izračunajmo razdaljo med točko s krajevnim vektorjem~r1 = (4, 4,−5) in ravnino Σ z enačbo
3x− 4y + 12z = 1.
Ravnina ima normalni vektor ~n = (3,−4, 12) in vsebuje točko s krajevnimvektorjem ~r0 = (−1,−1, 0). Sledi
d(~r1,Σ) = |(~r1 − ~r0) · ~n||~n|
= |(5, 5,−5) · (3,−4, 12)||(3,−4, 12)| = | − 65|
13 = 5.
(2) Izračunajmo razdaljo med premicama p1 in p2 z enačbama
x− 12 = y
2 = z + 13
oziromax = y + 3, z = 0.
Smerna vektorja premic sta ~s1 = (2, 2, 3) in ~s2 = (1, 1, 0), točki na njihpa imata krajevna vektorja ~r1 = (1, 0,−1) ter ~r2 = (0,−3, 0). Od todizračunamo, da velja ~s1 × ~s2 = (−3, 3, 0), zato premici nista vzporedni.Razdalja med premicama p1 in p2 je torej enaka
d(p1, p2) = |(~s1 × ~s2) · (~r2 − ~r1)||~s1 × ~s2|
= |(−3, 3, 0) · (−1,−3, 1)||(−3, 3, 0)| = 6√
18=√
2.
69

(3) Izračunajmo kot med premico p z enačbo
x+ 13 = y − 2
2 = z
in ravnino Σ z enačbo−2x+ y + z = 5.
Smerni vektor premice je ~s = (3, 2, 1), normalni vektor ravnine pa je ~n =(−2, 1, 1). Kot φ med premico p in ravnino Σ izračunamo iz enakosti
sinφ = |~s · ~n||~s ||~n|
= | − 3|√14√
6=√
2114 .
70

4 Zaporedja številV matematiki in fiziki pogosto računamo s približnimi vrednostmi neke ko-ličine. Na primer, število π pogosto aproksimiramo s števili, ki imajo vdecimalnem zapisu le končno mnogo neničelnih decimalk, in če število tehneničelnih decimalk povečujemo, dobimo čedalje boljše približke a1 = 3.1,a2 = 3.14, a3 = 3.141, a4 = 3.1415, . . . Čeprav števila π ne moremo predsta-viti z decimalnim zapisom, ki bi imel le končno mnogo neničelnih decimalk,pa število π s števili a1, a2, a3, . . . poljubno dobro aproksimiramo. Kot bomospoznali v tem poglavju, smo s tem postopkom pravzaprav konstruirali zapo-redje, ki konvergira k številu π. V klasični fiziki pridemo v podobno situacijopri merjenju kakšne količine. Rezultati meritev nam predstavljajo zaporedjepribližnih vrednosti dane količine. Če bi lahko eksperiment izvedli poljubnonatančno, bi bila dejanska vrednost količine limita zaporedja čedalje boljšihpribližkov.
Zaporedje kompleksnih števil je funkcija N → C, n 7→ an, takšno zapo-redje pa navadno zapišemo na enega od naslednjih načinov:
(a1, a2, a3, . . .) = (an)n∈N = (an)∞n=1 = (an)n = (an).
Zaporedje ima števno neskončno komponent ali členov: n-ti člen poljubnegazaporedja kompleksnih števil (an)n∈N je število an, za vsak n ∈ N.
Slika zaporedja kompleksnih števil (an)n∈N je množica
{a1, a2, a3, . . .} = {an ; n ∈ N} ⊂ C.
Re
Im
1
i
Zaporedje kompleksnih števil je omejeno, če je njegova slika omejena pod-množica množice C.
Če so vsi členi zaporedja (an)n∈N realna (oziroma racionalna, cela, na-ravna) števila, potem pravimo, da je (an)n∈N zaporedje realnih (oziromaracionalnih, celih, naravnih) števil. Slika zaporedja realnih števil je sevedapodmnožica množice realnih števil R.
Zaporedje realnih števil (an)n∈N je navzgor omejeno, če je njegova slikanavzgor omejena podmnožica množice R, in v tem primeru številu
sup(an)n∈N = sup{an ; n ∈ N}
71

pravimo supremum zaporedja (an)n∈N. Zaporedje realnih števil (an)n∈N jenavzdol omejeno, če je njegova slika navzdol omejena podmnožica množiceR, in v tem primeru številu
inf(an)n∈N = inf{an ; n ∈ N}
pravimo infimum zaporedja (an)n∈N. Opazimo lahko, da je zaporedje realnihštevil omejeno, če, in samo če, je navzgor in navzdol omejeno.
Naj bo (an)n∈N zaporedje realnih števil.
(i) Zaporedje (an)n∈N je naraščajoče, če za vsak n ∈ N velja
an+1 ≥ an.
(ii) Zaporedje (an)n∈N je padajoče, če za vsak n ∈ N velja
an+1 ≤ an.
(iii) Zaporedje (an)n∈N je monotono, če je ali naraščajoče ali padajoče.
(iv) Zaporedje (an)n∈N je strogo naraščajoče, če za vsak n ∈ N velja
an+1 > an.
(v) Zaporedje (an)n∈N je strogo padajoče, če za vsak n ∈ N velja
an+1 < an.
(vi) Zaporedje (an)n∈N je strogo monotono, če je ali strogo naraščajoče alistrogo padajoče.
Komentar. Zaporedja so po naši definiciji funkcije, ki imajo za domenonaravna števila, zato pravimo, da so takšna zaporedja indeksirana z množicoN. Nekoliko splošneje bi za množico indeksov sicer lahko vzeli poljubnoneprazno podmnožico J ⊂ Z. Zaporedje kompleksnih števil, indeksirano stakšno podmnožico J , je funkcija J → C, j 7→ uj , ki jo zapišemo v obliki
(uj)j∈J .
Praviloma za množico J vzamemo množico naravnih števil N, zato v temprimeru množico N v zapisu tudi izpuščamo. Včasih pa je smiselno uporabititudi kakšno drugo množico indeksov, na primer množico {0}∪N ali množicoZ ∩ Jp,∞M za nek p ∈ Z. V teh primerih bi lahko označili:
(uj)j∈{0}∪N = (uj)∞j=0 = (a0, a1, a2, . . .)(uj)j∈Z∩Jp,∞M = (uj)∞j=p = (ap, ap+1, ap+2, . . .)
Za nas bodo zanimivi le primeri, v katerih je množica J neskončna in navzdolomejena podmnožica množice Z. Obravnava zaporedij, indeksiranih s takšnomnožico J , je zelo podobna obravnavi zaporedij, indeksiranih z množico N.
72

Zgled 4.1. (1) Za vsak a ∈ C imamo konstantno zaporedje z vrednostjo a,(a, a, a, . . .).
Konstantno zaporedje ima neskončno členov, vsak člen tega zaporedja imavrednost a.
(2) Zaporedje(1, 2, 3, 4, 5, . . .)
je dano s splošnim členom ali predpisom an = n, za vsak n ∈ N. Tozaporedje je strogo naraščajoče in navzdol omejeno, ni pa navzgor omejeno.To zaporedje ni enako zaporedju
(1, 1, 2, 3, 4, 5, . . .)in tudi ne zaporedju
(2, 1, 3, 4, 5, . . .).(3) Izberimo poljubni kompleksni števili a in d. Aritmetično zaporedje
z začetnim členom a in z razliko d je zaporedje s splošnim členom an =a+ (n− 1)d,
(a, a+ d, a+ 2d, a+ 3d, . . .).Aritmetično zaporedje lahko podamo tudi rekurzivno s predpisom
a1 = a,
an+1 = an + d, n ∈ N.
Po indukciji je s takšnim rekurzivnim predpisom zaporedje natanko dolo-čeno.
(4) Izberimo poljubni kompleksni števili a in q. Geometrijsko zaporedjez začetnim členom a in s količnikom q je dano s predpisom an = aqn−1,
(a, aq, aq2, aq3, . . .).Podamo ga lahko tudi z rekurzivnim predpisom
a1 = a,
an+1 = anq, n ∈ N.
(5) Zaporedje(1, i,−1,−i, 1, i,−1,−i, 1, . . .)
je dano s splošnim členom an = in−1, zato je to geometrijsko zaporedje zzačetnim členom 1 in s količnikom i. To zaporedje je omejeno.
(6) Naj bo a nenegativno realno število. Zaporedje(a/n)n
je tedaj padajoče z infimumom 0. Če je q pozitivno realno število, ki jemanjše od 1, potem je tudi zaporedje(
aqn−1)n
padajoče z infimumom 0.
73

4.1 Stekališča zaporedja
Točkam v kompleksni ravnini, okrog katerih se kopičijo členi zaporedja kom-pleksnih števil, rečemo stekališča zaporedja. To so tiste točke, ki jih lahkopoljubno dobro aproksimiramo z neskončno mnogimi členi zaporedja.
Re
Im
1
i
Formalno lahko definiramo stekališča zaporedja na naslednji način:
Definicija 4.2. Točka a ∈ C je stekališče zaporedja kompleksnih števil (an),če je za vsako okolico V ⊂ C točke a množica {n ∈ N ; an ∈ V } neskončna.
Drugače povedano, točka a je stekališče zaporedja (an), če, in samo če,v vsaki okolici točke a leži neskončno mnogo členov zaporedja.
Intuitivno si okolico V predstavljamo kot natančnost, glede na kateroželimo aproksimirali stekališče, množica {n ∈ N ; an ∈ V } pa nam pove,kateri členi zaporedja (an) stekališče dovolj dobro aproksimirajo glede na toizbrano natančnost.
Pri preverjanju, ali je neka točka a stekališče zaporedja, se lahko omejimona okolice, ki so odprti krogi s središčem v točki a. Drugače povedano, točkaa je stekališče zaporedja, če, in samo če, za vsak ε ∈ R+ v odprtem krogu ssrediščem v točki a in s polmerom ε leži neskončno mnogo členov zaporedja.Res, vsak odprt krog s središčem v točki a je primer okolice točke a, podrugi strani pa za vsako okolico V ⊂ C točke a obstaja tako majhen ε ∈ R+,da je K(a, ε) ⊂ V . Od tod dobimo naslednji ekvivalentni opis stekališč:
Trditev 4.3. Točka a ∈ C je stekališče zaporedja kompleksnih števil (an),če, in samo če, za vsak ε ∈ R+ in za vsak N ∈ N obstaja tak n ∈ N, da veljan ≥ N in |an − a| < ε.
Dokaz. (⇒) Naj bo a stekališče zaporedja (an). Izberimo poljuben ε ∈ R+
in poljuben N ∈ N. Odprt krog K(a, ε) je okolica točke a, zato je po definicijistekališča množica {n ∈ N ; an ∈ K(a, ε)} neskončna. Od tod sledi, da so vtej množici tudi elementi, ki so večji ali enaki številu N . Drugače povedano,najdemo lahko tak n ∈ N, da je n ≥ N in da je an ∈ K(a, ε), torej |an−a| < ε.
74

(⇐) Izberimo poljubno okolico V ⊂ C točke a. To pomeni, da obstajatako majhen ε ∈ R+, da je K(a, ε) ⊂ V . Po predpostavki za vsak N ∈ Nobstaja tak n ∈ N, da je n ≥ N in da velja an ∈ K(a, ε). V množici K(a, ε)torej leži neskončno mnogo členov zaporedja, zato tudi v množici V ležineskončno mnogo členov zaporedja.
Zgled 4.4. (1) Stekališča zaporedja realnih števil so očitno lahko le realnaštevila. Ker za vsako realno število a in za vsak ε ∈ R+ velja K(a, ε) ∩ R =La − ε, a + εM, se lahko pri preverjanju, ali je neka točka a ∈ R stekališčezaporedja realnih števil, omejimo na okolice, ki so odprti omejeni intervali ssrediščem v točki a. Drugače povedano, točka a ∈ R je stekališče zaporedjarealnih števil, če, in samo če, za vsak ε ∈ R+ v intervalu La − ε, a + εM ležineskončno mnogo členov zaporedja.
(2) Zaporedje (1, 2, 3, 4, . . .) nima stekališč, saj poljuben omejen intervalvsebuje samo končno mnogo členov tega zaporedja.
Zaporedje s splošnim členom an = (−1)n,
{−1, 1,−1, 1,−1, 1, . . .},
ima stekališči −1 in 1. V poljubni okolici točke −1 so namreč vsi členizaporedja z lihimi indeksi, medtem ko so v poljubni okolici točke 1 vsi členizaporedja s sodimi indeksi.
(3) Točka a ∈ C je edino stekališče konstantnega zaporedja z vrednostjoa. Geometrijsko zaporedje
(1, i,−1,−i, 1, i,−1,−i, 1, . . .)
s splošnim členom an = in−1 ima štiri stekališča, namreč 1, i, −1 in −i.(4) Če je (an) zaporedje racionalnih števil, katerega slika je cela množica
Q, potem je vsako realno število stekališče zaporedja (an).
Zaporedje (1, 2, 3, 4, . . .) je brez stekališč, a ob tem tudi ni omejeno. Intu-itivno se zdi, da se morajo členi omejenega zaporedja nekje zgostiti. Da je tores, nam pove tako imenovani Bolzano-Weierstrassov izrek, ki ga bomo naj-prej dokazali le za zaporedja realnih števil. Kasneje bomo ta izrek dokazalitudi za zaporedja kompleksnih števil.
Izrek 4.5. Vsako omejeno zaporedje realnih števil ima vsaj eno stekališče.
Dokaz. Naj bo (an) omejeno zaporedje realnih števil. Označimom = inf(an)ter M = sup(an). Naj bo
U = {x ∈ R ; x > an za le končno mnogo naravnih števil n}.
V množici U so tista realna števila x, ki imajo na realni premici levo od sebele končno mnogo členov zaporedja (an).
75

Rm M
U
x
Zagotovo je v množici U točka m, saj levo od nje sploh ni členov zaporedja.Posebej to pomeni, da množica U ni prazna. Poleg tega lahko opazimo,da točke, ki so večje od M , niso v množici U , saj so levo od njih vsi členizaporedja. Množica U je torej navzgor omejena in številoM je njena zgornjameja. Naj bo
a = sup(U).
Pokazali bomo, da je točka a stekališče zaporedja (an). Po Trditvi 4.3 jedovolj pokazati, da za poljuben ε ∈ R+ v intervalu La−ε, a+εM leži neskončnočlenov zaporedja (an).
Izberimo torej poljuben ε ∈ R+. Točka a je natančna zgornja mejamnožice U , zato obstaja tak x ∈ U , da je a − ε < x ≤ a. Ker je x ∈ U , jelevo od x le končno mnogo členov zaporedja. Ker je a zgornja meja množiceU , točka a+ε zagotovo ni v U , od tod pa sledi, da levo od a+ε leži neskončnočlenov zaporedja. Izmed teh jih je hkrati levo od točke x le končno mnogo,kar pomeni, da je v intervalu Jx, a + εM neskončno členov zaporedja (an).Ker je Jx, a+ εM ⊂ La− ε, a+ εM, tudi v intervalu La− ε, a+ εM leži neskončnočlenov zaporedja (an)
Komentar. Zadnji izrek lahko dokažemo tudi s pomočjo metode, imeno-vane bisekcija. Naj bo (an) omejeno zaporedje realnih števil in kot prejoznačimo m = inf(an) ter M = sup(an).
Definirali bomo zaporedji realnih števil (mn) in (Mn), za kateri bo ve-ljalo:
(i) zaporedje (mn) je naraščajoče, zaporedje (Mn) je padajoče,
(ii) Mn −mn = (1/2)n−1(M −m) za vsak n ∈ N, in
(iii) na intervalu Jmn,MnK leži neskončno mnogo členov zaporedja, za vsakn ∈ N.
Zaporedji bomo podali rekurzivno. Najprej definiramo m1 = m inM1 = M .Predpostavimo, da smo že konstruirali števila m1,m2, . . . ,mk in številaM1,M2, . . . ,Mk z želenimi lastnostmi. Označimo ck = (Mk +mk)/2. Če naintervalu Jmk, ckK leži neskončno členov zaporedja (an), definiramo mk+1 =mk in Mk+1 = ck, v nasprotnem primeru pa na intervalu Jck,MkK leži ne-skončno členov zaporedja in tedaj definiramo mk+1 = ck in Mk+1 = Mk. Stem smo dobili zaporedji (mn) in (Mn) z lastnostmi (i-iii).
Zaporedje (mn) je naraščajoče in navzgor omejeno z vsakim členom za-poredja (Mn), zaporedje (Mn) pa je padajoče in navzdol omejeno z vsakim
76

členom zaporedja (mn). Za a = sup(mn) in b = inf(Mn) zato velja a ≤ b.Ob tem je mk ≤ a ≤ b ≤Mk in zato
b− a ≤Mk −mk = 12k−1 (M −m)
za vsak k ∈ N. Ker je ((1/2)k−1(M −m))k padajoče zaporedje nenegativnihrealnih števil z infimumom 0, od tod sledi, da je a = b. Pokazali bomo, daje točka a stekališče zaporedja (an).
Naj bo ε ∈ R+ poljuben. Ker je a = sup(mn) = inf(Mn), obstaja takonaravno število n, da velja
a− ε < mn ≤Mn < a+ ε.
V intervalu La− ε, a + εM so torej vsi členi zaporedja (an), ki so v intervaluJmn,MnK, teh pa je po konstrukciji neskončno.
4.2 Limita zaporedja
Definicija 4.6. Točka a ∈ C je limita zaporedja kompleksnih števil (an),če je za vsako okolico V ⊂ C točke a množica {n ∈ N ; an 6∈ V } končna.
Drugače povedano, točka a je limita zaporedja (an), če, in samo če, vvsaki okolici točke a ležijo vsi členi zaporedja z izjemo končno mnogih.
Podobno kot pri stekališčih se tudi pri preverjanju, ali je neka točka alimita zaporedja, lahko omejimo na okolice, ki so odprti krogi s središčem vtočki a. Drugače povedano, točka a je limita zaporedja, če, in samo če, zavsak ε ∈ R+ v odprtem krogu s središčem v točki a in s polmerom ε ležijo vsičleni zaporedja z izjemo končno mnogih. Podobno kot v primeru stekališčtako dobimo tudi naslednji ekvivalentni opis limite:
Trditev 4.7. Točka a ∈ C je limita zaporedja kompleksnih števil (an), če,in samo če, za vsak ε ∈ R+ obstaja tak N ∈ N, da za vsak n ∈ N, za kateregaje n ≥ N , velja |an − a| < ε.
Dokaz. (⇒) Za vsak ε ∈ R+ so v odprtem krogu K(a, ε) vsi členi zaporedjaz izjemo končno mnogih. Najdemo lahko torej tako velik N ∈ N, da za vsakn ∈ N, za katerega je n ≥ N , velja an ∈ K(a, ε).
(⇐) Za poljubno okolico V ⊂ C točke a lahko najdemo tako majhenε ∈ R+, da je K(a, ε) ⊂ V . Po predpostavki so v odprtem krogu K(a, ε) vsičleni zaporedja z izjemo končno mnogih, zato so tudi v okolici V vsi členizaporedja z izjemo končno mnogih.
Trditev 4.8. Če je a ∈ C limita zaporedja kompleksnih števil (an), potem jea edino stekališče tega zaporedja. Posebej ima vsako zaporedje kompleksnihštevil največ eno limito.
77

Dokaz. Očitno je limita a tudi stekališče zaporedja (an). Pa predpostavimo,da je b ∈ C poljubna točka, različna od a, in označimo ε = |b− a|/2 > 0. Vodprtem krogu K(a, ε) so vsi členi zaporedja (an) z izjemo končno mnogih.Ker sta odprta kroga K(a, ε) in K(b, ε) disjunktna, je torej v K(b, ε) le končnomnogo členov zaporedja (an), zato točka b ni stekališče tega zaporedja.
Definicija 4.9. Zaporedje kompleksnih števil (an) je konvergentno, če imalimito. Če je a ∈ C limita zaporedja (an), potem pravimo, da zaporedje (an)konvergira k točki a. Limito konvergentnega zaporedja (an) označimo z
limn→∞
(an) = limn→∞
an ∈ C.
Če zaporedje ni konvergentno, je divergentno.
Trditev 4.10. (i) Vsako naraščajoče omejeno zaporedje realnih števil (an)je konvergentno in velja limn→∞ an = sup{an ; n ∈ N}.
(ii) Vsako padajoče omejeno zaporedje realnih števil (bn) je konvergentnoin velja limn→∞ bn = inf{bn ; n ∈ N}.
Dokaz. (i) Naj bo (an) naraščajoče omejeno zaporedje realnih števil in ozna-čimo a = sup(an). Vzemimo poljuben ε ∈ R+. Število a je najmanjša zgor-nja meja zaporedja (an), zato lahko najdemo tak N ∈ N, da je a− ε < aN ≤a. Ker je zaporedje (an) naraščajoče, za vsa naravna števila n ≥ N takovelja a− ε < aN ≤ an ≤ a.
Ra1 a2 a3 a4 a
Ha-Ε,a+ΕL
Točko (ii) pokažemo na podoben način.
Zgled 4.11. (1) Konstantno zaporedje (a, a, a, a, . . .) z vrednostjo a ∈ Cima limito a.
(2) Zaporedje s splošnim členom an = 1n je strogo padajoče z infimumom
0, zato je konvergentno inlimn→∞
1n
= 0.
(3) Za vsako pozitivno realno število q, ki je manjše od 1, je zaporedje(qn) strogo padajoče z infimumom 0. Zaporedje (qn) je v tem primeru torejkonvergentno in
limn→∞
qn = 0.
(4) Zaporedje s splošnim členom an = (−1)n ima dve stekališči, −1 in 1,kar pomeni, da nima limite in je divergentno.
(5) Naj bo (an)n∈N zaporedje kompleksnih števil in naj bo k poljubnonaravno število. Iz definicije limite direktno sledi, da je kompleksno številoa limita zaporedja (an)n∈N, če, in samo če, je število a limita zaporedja(ak+n)n∈N. Drugače povedano, končno mnogo členov zaporedja nima nika-kršnega vpliva na konvergenco.
78

Limite konvergentnih zaporedij v praksi pogosto izračunamo s pomočjoosnovnih pravil za računanje z limitami:
Trditev 4.12 (Pravila za računanje z limitami zaporedij). Naj bosta (an)in (bn) konvergentni zaporedji kompleksnih števil in naj bo α ∈ C. Tedajvelja:
(i) Zaporedje (an + bn)n je konvergentno in
limn→∞
(an + bn) = limn→∞
(an) + limn→∞
(bn).
(ii) Zaporedje (αan)n je konvergentno in
limn→∞
(αan) = α limn→∞
(an).
(iii) Zaporedje (anbn)n je konvergentno in
limn→∞
(anbn) =(
limn→∞
(an))·(
limn→∞
(bn)).
(iv) Če je bn 6= 0 za vsak n ∈ N in če je limn→∞
bn 6= 0, potem je tudi zaporedje(an/bn)n konvergentno in
limn→∞
(anbn
)=
limn→∞
(an)limn→∞
(bn) .
(v) Zaporedje (an)n je konvergentno in
limn→∞
(an) = limn→∞
(an).
(vi) Zaporedje (|an|)n je konvergentno in
limn→∞
(|an|) = | limn→∞
(an)|.
Dokaz. Označimo a = limn→∞
(an) in b = limn→∞
(bn).(i) Pokazali bomo, da je število a+b limita zaporedja (an+bn)n. Izberimo
poljuben ε ∈ R+. Ker je a limita zaporedja (an), obstaja tako velik N1 ∈ N,da za vsako naravno število n ≥ N1 velja
|an − a| <ε
2 .
Ker je b limita zaporedja (bn), obstaja tako velik N2 ∈ N, da za vsakonaravno število n ≥ N2 velja
|bn − b| <ε
2 .
79

Naj bo N večje izmed števil N1, N2, torej N = max{N1, N2}. Za vsakonaravno število n ≥ N tedaj velja
|(an + bn)− (a+ b)| = |an − a+ bn − b| ≤ |an − a|+ |bn − b| <ε
2 + ε
2 = ε.
To pomeni, da je število a+ b limita vsote (an + bn) zaporedij (an) in (bn).(iii) Naj bo ε ∈ R+ poljuben in naj bo δ manjše od števil ε/(1 + |a|+ |b|)
in 1, torej δ = min{ε/(1 + |a| + |b|), 1} > 0. Podobno kot v točki (i) lahkonajdemo tak N ∈ N, da za vsako naravno število n ≥ N velja |an − a| < δin |bn − b| < δ. Od tod dobimo
|anbn − ab| = |(an − a)(bn − b) + a(bn − b) + b(an − a)|≤ |an − a||bn − b|+ |a||bn − b|+ |b||an − a|< δ2 + |a|δ + |b|δ≤ δ + |a|δ + |b|δ= δ(1 + |a|+ |b|) ≤ ε.
Število ab j je torej limita produkta (anbn) zaporedij (an) in (bn).Točka (ii) sledi iz točke (iii), če za (bn) izberemo konstantno zaporedje
z vrednostjo α.(v-vi) Izberimo poljuben ε ∈ R+. Obstaja tako velik N ∈ N, da za vsako
naravno število n ≥ N velja |an − a| < ε. Za vsak tak n tedaj dobimo
|an − a| = |an − a| = |an − a| < ε
in ∣∣|an| − |a|∣∣ ≤ |an − a| < ε.
Zaporedje (an) ima torej limito a, zaporedje (|an|) pa limito |a|.(iv) Najprej opazimo, da je infimumm = inf(|bn|) pozitivno število. Res,
po točki (vi) je pozitivno število |b| limita zaporedja pozitivnih števil (|bn|),zato obstaja tak l ∈ N, da za vsako naravno števil n ≥ l velja |b|/2 < |bn|.Od tod sledi 0 < min{|b1|, . . . , |bl|, |b|/2} ≤ m.
Izberimo poljuben ε ∈ R+ in definirajmo δ = ε|b|m. Obstaja tak N ∈ N,da za vsako naravno število n ≥ N velja |bn − b| < δ, od tod pa sledi∣∣∣∣1b − 1
bn
∣∣∣∣ =∣∣∣∣bn − bbbn
∣∣∣∣ < δ
|b||bn|≤ δ
|b|m= ε.
S tem smo dokazali, da je 1/b limita zaporedja (1/bn).Po točki (iii) sledi, da je tudi produkt zaporedij (an) in (1/bn) konver-
gentno zaporedje in da velja
limn→∞
(anbn
)= lim
n→∞
(an
1bn
)= lim
n→∞(an) · lim
n→∞
( 1bn
)=
limn→∞
(an)limn→∞
(bn) .
80

Preprosta posledica zgoraj naštetih pravil za računanje z limitami nampove, da so konvergentna zaporedja kompleksnih števil pravzaprav le parikonvergentnih zaporedij realnih števil:
Posledica 4.13. Zaporedje kompleksnih števil (zn) je konvergentno, če, insamo če, sta zaporedji (<(zn))n in (=(zn))n obe konvergentni, in v tem pri-meru velja
limn→∞
(zn) = limn→∞
(<(zn)) + i limn→∞
(=(zn)).
Dokaz. (⇐) Ta del sledi iz Trditve 4.12(i-ii).(⇒) Predpostavimo, da je zaporedje (zn) konvergentno. Tedaj je po
Trditvi 4.12(v) tudi zaporedje (zn) konvergentno, po Trditvi 4.12(i-ii) pasta konvergentni tudi zaporedji(
zn + zn2
)= (<(zn)),
(zn − zn
2i
)= (=(zn)).
Če je zaporedje kompleksnih števil (an) konvergentno, potem je po Trdi-tvi 4.12(vi) tudi zaporedje absolutnih vrednosti (|an|) konvergentno. Obra-tno seveda v splošnem ne velja, vendarle pa direktno iz definicije limite sledinaslednja trditev:
Trditev 4.14. Število 0 je limita zaporedja kompleksnih števil (an), če, insamo če, je število 0 limita zaporedja (|an|).
Zgled 4.15. (1) Oglejmo si geometrijsko zaporedje s splošnim členom an =aqn−1, kjer sta a in q dani kompleksni števili. Za geometrijsko zaporedjevelja rekurzivni predpis
an+1 = anq,
za vsak n ∈ N.Če je geometrijsko zaporedje (an) konvergentno, je konvergentno tudi
zaporedje (an+1)n, iz rekurzivnega predpisa pa dobimo
limn→∞
(an) = limn→∞
(an+1) = limn→∞
(anq) = q limn→∞
(an),
torej(1− q) lim
n→∞(an) = 0.
Od tod torej vidimo: Če je geometrijsko zaporedje (aqn−1)n konvergentnoin če je kvocient q različen od 1, potem to zaporedje konvergira k točki 0.
Glede na to, kakšni sta števili a in q, imamo zdaj nekaj možnosti:(i) Naj bo a = 0. Tedaj je geometrijsko zaporedje (aqn−1)n konstantno
z vrednostjo 0, zato je konvergentno in konvergira k točki 0.(ii) Naj bo a 6= 0 in q = 1. Tedaj je geometrijsko zaporedje (aqn−1)n
konstantno z vrednostjo a, zato je konvergentno in konvergira k točki a.
81

(iii) Naj bo a 6= 0, q 6= 1 in |q| ≥ 1. V tem primeru je geometrijskozaporedje (aqn−1)n divergentno. Res, tedaj za vsak n ∈ N velja
|aqn−1| = |a||q|n−1 ≥ |a| > 0.
Od tod sledi, da zaporedje (|aqn−1|)n ne konvergira k točki 0, zato tudizaporedje (aqn−1)n ne konvergira k točki 0. Ker pa že vemo, da zaporedje(aqn−1)n prav gotovo ne konvergira h kakšni drugi točki, od tod sledi, da jeto zaporedje divergentno.
(iv) Naj bo a 6= 0 in |q| < 1. V tem primeru je geometrijsko zaporedje(aqn−1)n konvergentno in
limn→∞
(aqn−1) = 0.
Res, v tem primeru za vsak n ∈ N velja
|aqn| = |a||q|n < |a||q|n−1 = |aqn−1|.
Zaporedje (|aqn−1|)n je torej strogo padajoče zaporedje pozitivnih realnihštevil, zato je konvergentno. Ker je tudi zaporedje (|aqn−1|)n geometrijsko skvocientom |q| 6= 1, mora biti limita tega zaporedja enaka 0. Od tod sledi,da tudi zaporedje (aqn−1)n konvergira k 0.
(2) V naslednjih dveh primerih vnaprej ne vemo, ali zaporedje konver-gira, pač pa se to pokaže šele na koncu izračuna, ko hkrati izračunamo tudilimito zaporedja:
limn→∞
(n
n+ 1 −n+ 1n
)= lim
n→∞
(1
1 + 1n
−1 + 1
n
1
)
= limn→∞
11 + 1
n
− limn→∞
1 + 1n
1
= 11 + lim
n→∞1n
−(
1 + limn→∞
1n
)
= 11 + 0 − (1 + 0) = 0.
limn→∞
n2 + 3n− 25n2 = lim
n→∞
1 + 3n −
2n2
5= 1
5
(1 + 3 lim
n→∞1n− 2 lim
n→∞1n2
)= 1
5
(1 + 3 · 0− 2
(limn→∞
1n
)2)
= 15(1− 2 · 02
)= 1
5
82

(3) Poseben primer divergentnih zaporedij realnih števil so zaporedja, ka-terih členi so od nekega člena dalje poljubno veliki oziroma poljubno majhni.Naj bo (an) zaporedje realnih števil. Oznaka
limn→∞
(an) =∞
pomeni, da za vsak M ∈ R obstaja tak N ∈ N, da za vsako naravno številon ≥ N velja an ≥M . Podobno označimo
limn→∞
(an) = −∞,
če za vsak m ∈ R obstaja tak N ∈ N, da za vsako naravno število n ≥ Nvelja an ≤ m.
Ni se težko prepričati, da velja na primer
limn→∞
(n3 − n+ 2) =∞
inlimn→∞
(1− n2
1 + n
)= −∞.
Zgled 4.16. Zaporedji realnih števil (an)∞n=1 in (bn)∞n=2 naj bosta dani spredpisoma
an =(
1 + 1n
)n, bn =
(1− 1
n
)−n.
Pokazali bomo, da je zaporedje (an)∞n=1 strogo naraščajoče, da je zaporedje(bn)∞n=2 strogo padajoče, da sta obe ti dve zaporedji konvergentni in da imataisto limito. Dokaz bomo razdelili na več delov.
(i) V prvem koraku bomo pokazali, da za vsak x ∈ R, za katerega je0 < |x| < 1, in za vsak k ∈ Z, za katerega je |k| ≥ 2, velja neenakost
(1 + x)k > 1 + kx. (1)
Za primer k = 2 to očitno drži. Če za neko celo število k ≥ 2 neenakost (1)velja, potem velja tudi
(1 + x)k+1 = (1 + x)k(1 + x) > (1 + kx)(1 + x)= 1 + (k + 1)x+ kx2
> 1 + (k + 1)x.
Po indukciji torej vidimo, da neenakost (1) velja za vsa cela števila k ≥ 2 inza vsa realna števila x, za katera je 0 < |x| < 1.
Naj bo zdaj k negativno celo število, ki je manjše ali enako −2. Zapoljuben x ∈ R, za katerega je 0 < |x| < 1, velja (1 +x)(1−x) = 1−x2 < 1in torej
11 + x
> 1− x.
83

Od tod sledi
(1 + x)k =( 1
1 + x
)−k> (1− x)−k > 1 + (−k)(−x) = 1 + kx,
pri čemer druga neenakost sledi in neenakosti (1), ki smo jo že dokazali zaeksponent −k ≥ 2. Ugotovili smo torej, da neenakost (1) velja tudi za vsakocelo število k, za katero je k ≤ −2, in za vsako realno število x, za kateregaje 0 < |x| < 1.
(ii) Kot posledico neenakosti (1) dobimo(1 + 1
k
)k (1− 1
k
)k=(
1− 1k2
)k> 1 + k
(− 1k2
)= 1− 1
k,
zato velja neenakost (1 + 1
k
)k>
(1− 1
k
)1−k(2)
za vsak k ∈ Z, za katerega je |k| ≥ 2.(iii) Iz neenakosti (2) sledi, da za vsako naravno število n ≥ 2 velja
an =(
1 + 1n
)n>
(1− 1
n
)1−n
=(n− 1n
)1−n=(
n
n− 1
)n−1
=(
1 + 1n− 1
)n−1= an−1.
S tem smo se prepričali, da je zaporedje (an)∞n=1 strogo naraščajoče.(iv) Iz neenakosti (2) sledi, da za vsako naravno število n ≥ 2 velja
bn =(
1− 1n
)−n=(
1 + 1(−n)
)−n>
(1− 1
(−n)
)1−(−n)
=(
1 + 1n
)1+n=(n+ 1n
)1+n=(
n
n+ 1
)−(1+n)
=(
1− 1n+ 1
)−(n+1)= bn+1.
S tem smo pokazali, da je zaporedje (bn)∞n=2 strogo padajoče.(v) Za vsako naravno število n velja
bn+1 =(
1− 1n+ 1
)−(n+1)=(
n
n+ 1
)−(n+1)
=(n+ 1n
)n+1=(
1 + 1n
)n+1=(
1 + 1n
)an (3)
84

in zatoan < bn+1.
Od tod, in iz točk (iii-iv), sledi, da velja
2 = a1 < a2 < . . . < an < bn+1 < bn < . . . < b2 = 4
za vsako naravno število n.a1 a2 a3 b2b3b4e2.0 2.5 3.0 3.5 4.0
Zaporedje (an)∞n=1 je torej strogo naraščajoče in omejeno, zato je konvergen-tno. Podobno je zaporedje (bn)∞n=2 strogo padajoče in omejeno, torej tudikonvergentno. Iz enakosti (3) sledi tudi
limn→∞
(bn) = limn→∞
(bn+1) = limn→∞
((1 + 1
n
)an
)= lim
n→∞
(1 + 1
n
)· limn→∞
(an) = limn→∞
(an).
Limito teh dveh zaporedij imenujemo Eulerjevo število in označimo
e = limn→∞
(1 + 1
n
)n= lim
n→∞
(1− 1
n
)−n.
Eulerjevo število e je iracionalno, njegova približna vrednost na dvanajstdecimalk natančno je 2.718281828459.
4.3 Podzaporedja
Če v danem zaporedju izberemo neskončno členov, vse preostale pa iz zapo-redja izpustimo, dobimo podzaporedje danega zaporedja. Naj bo (an)n∈Npoljubno zaporedje kompleksnih števil in naj bo (nk)k∈N poljubno strogonaraščajoče zaporedje naravnih števil. Podzaporedje zaporedja (an)n∈N, do-ločeno z zaporedjem (nk)k∈N, je zaporedje
(ank)k∈N.
Na ta način dobimo vsa podzaporedja zaporedja (an)n∈N .
Zgled 4.17. (1) Naj bo (an) zaporedje s splošnim členom an = 1/n,(1, 1
2 ,13 ,
14 ,
15 ,
16 , . . .
).
Podzaporedje zaporedja (an), ki je določeno s strogo naraščajočim zapored-jem naravnih števil (2k)k∈N, je zaporedje(1
2 ,14 ,
16 , . . .
).
85

Zaporedje (1, 1
2 ,14 ,
18 ,
116 , . . .
)je podzaporedje zaporedja (an), ki je določeno s strogo naraščajočim zapo-redjem naravnih števil (2k−1)k∈N. Če v zaporedju (an) zamenjamo vrstnired prvih dveh členov, dobimo zaporedje(1
2 , 1,13 ,
14 ,
15 ,
16 , . . .
),
ki pa ni podzaporedje zaporedja (an).(2) Naj bo (an) zaporedje kompleksnih števil. Tedaj imamo podzapo-
redje(a2k)k∈N
zaporedja (an), ki je sestavljeno iz vseh členov zaporedja (an) s sodimi in-deksi, in tudi podzaporedje
(a2k−1)k∈Nzaporedja (an), ki je sestavljeno iz vseh členov zaporedja (an) z lihimi in-deksi. Iz definicije limite direktno sledi, da je število a ∈ C limita zapo-redja (an), če, in samo če, je število a limita obeh podzaporedij (a2k)k∈N in(a2k−1)k∈N.
Direktno iz definicije stekališča, limite in omejenosti dobimo naslednjotrditev:
Trditev 4.18. Naj bo (an) zaporedje kompleksnih števil.
(i) Če je a ∈ C limita zaporedja (an), potem je a tudi limita vsakegapodzaporedja zaporedja (an).
(ii) Če je b stekališče nekega podzaporedja zaporedja (an), potem je b tudistekališče zaporedja (an).
(iii) Če je zaporedje (an) omejeno, potem je tudi vsako podzaporedje zapo-redja (an) omejeno.
Trditev 4.19. Naj bo (an) zaporedje kompleksnih števil. Število b ∈ C jestekališče zaporedja (an) če, in samo če, obstaja podzaporedje zaporedja (an),ki konvergira k točki b.
Dokaz. (⇐) Ta del trditve sledi direktno iz definicij limite in stekališča.(⇒) Naj bo b stekališče zaporedja (an). Rekurzivno bomo konstruirali
takšno strogo naraščajoče zaporedje naravnih števil (nk)k∈N, da bo za vsakk ∈ N veljalo
ank ∈ K(b, 1/k).
86

Za začetek izberemo poljuben n1 ∈ N, za katerega je an1 ∈ K(b, 1). Tolahko storimo, saj v odprtem krogu K(b, 1) leži neskončno mnogo členovzaporedja (an).
Zdaj predpostavimo, da smo že izbrali števila n1, n2, . . . , nk z želenimilastnostmi. Ker odprtem krogu K(b, 1/(k+ 1)) leži neskončno mnogo členovzaporedja (an), lahko izberemo nk+1 ∈ N tako, da je nk+1 > nk in da veljaank+1 ∈ K(b, 1/(k + 1)).
Re
Im
1
i
an1
an2
b
KHb,1L
KHb,1�2L
Na ta način dobimo podzaporedje (ank)k∈N zaporedja (an). Izberimopoljuben ε ∈ R+. Tedaj obstaja tak l ∈ N, da je 1/l < ε. Za vsako naravnoštevilo k ≥ l tedaj velja
ank ∈ K(b, 1/k) ⊂ K(b, 1/l) ⊂ K(b, ε).
S tem smo torej pokazali, da podzaporedje (ank)k∈N konvergira k točki b.
Zdaj bomo dokazali Bolzano-Weierstrassov izrek tudi za omejena zapo-redja kompleksnih števil:
Izrek 4.20. Vsako omejeno zaporedje kompleksnih števil ima vsaj eno ste-kališče.
Dokaz. Naj bo (zn) omejeno zaporedje kompleksnih števil in označimo an =<(zn) ter bn = =(zn) za vsak n ∈ N. Ker za vsak n ∈ N velja
|an| ≤ |zn|, |bn| ≤ |zn|,
sta tudi zaporedji realnih števil (an) in (bn) omejeni. Po Izreku 4.5 ima za-poredje (an) neko stekališče a. Po Trditvi 4.19 lahko izberemo podzaporedje
(ank)k∈N
zaporedja (an), ki konvergira k točki a. Podzaporedje (bnk)k∈N zaporedja(bn) je omejeno in ima zato po Izreku 4.5 neko stekališče b. Po Trditvi 4.19torej lahko izberemo podzaporedje zaporedja (bnk)k∈N, ki konvergira k točki
87

b. Drugače povedano, izberemo lahko takšno podzaporedje (nkl)l∈N strogonaraščajočega zaporedja naravnih števil (nk)k∈N, da podzaporedje
(bnkl )l∈N
zaporedja (bnk)k∈N konvergira k točki b. Ker pa je zaporedje (ankl )l∈N pod-zaporedje zaporedja (ank)k∈N in ker zaporedje (ank)k∈N konvergira k točkia, tudi podzaporedje
(ankl )l∈Nkonvergira k točki a.
Našli smo torej strogo naraščajoče zaporedje naravnih števil (nkl)l∈N, zakaterega velja
liml→∞
(ankl ) = a, liml→∞
(bnkl ) = b.
Od tod sledi, da podzaporedje (znkl )l∈N zaporedja (zn) konvergira k točkia+ ib, zato je a+ ib stekališče zaporedja (zn).
Oglejmo si še povezavo med omejenostjo in konvergenco zaporedij:
Trditev 4.21. (i) Vsako konvergentno zaporedje kompleksnih števil je ome-jeno.
(ii) Vsako omejeno zaporedje kompleksnih števil, ki ima le eno stekališče,je konvergentno.
Dokaz. (i) Naj bo (an) zaporedje kompleksnih števil, ki konvergira k točkia ∈ C. Obstaja torej tak N ∈ N, da za vsako naravno število n ≥ N veljaan ∈ K(a, 1). Z uporabo trikotniške neenakosti vidimo, da je odprt krogK(a, 1) podmnožica odprtega kroga K(0, |a|+ 1). Naj bo
M = max{|a1|, |a2|, . . . , |aN |, |a|+ 1}.
Tedaj vsi členi zaporedja (an) ležijo v zaprtem krogu K(0,M), to pa pomeni,da je zaporedje omejeno.
Re
Im
1
i
aN
a1
a2
a
a3
aN-1
KHa,1L
KH0,ÈaÈ+1L
KH0,ML
88

(ii) Naj bo (an) omejeno zaporedje kompleksnih števil z le enim stekali-ščem a ∈ C. Pokazali bomo, da je točka a tedaj limita zaporedja (an).
Trditev bomo dokazali s protislovjem. Pa predpostavimo, da točka a nilimita zaporedja (an). Tedaj bi obstajal tak ε ∈ R+, da bi neskončno členovzaporedja (an) ležalo izven odprtega kroga K(a, ε). V tem primeru bi poTrditvi 4.19 lahko izbrali takšno podzaporedje (ank)k∈N zaporedja (an), dabi vsi členi tega podzaporedja ležali izven odprtega kroga K(a, ε).
Re
Im
1
i
an1
an2
an3
a
an4
KHa,ΕL
KH0,ML
Posebej to pomeni, da točka a ni stekališče takšnega podzaporedja (ank)k∈N.Ker pa je vsako stekališče takšnega podzaporedja (ank)k∈N tudi stekališčezaporedja (an) in ker je točka a edino stekališče zaporedja (an), od todlahko zaključimo, da je takšno podzaporedje (ank)k∈N brez stekališč. To pani mogoče, saj je vsako podzaporedje omejenega zaporedja (an) omejeno,vsako omejeno zaporedje kompleksnih števil pa ima vsaj eno stekališče.
4.4 Cauchyjev kriterij za konvergenco zaporedij
Definicija 4.22. Zaporedje kompleksnih števil (an) je Cauchyjevo, če zavsak ε ∈ R+ obstaja tak N ∈ N, da za poljubni naravni števili m,n ≥ Nvelja |am − an| < ε.
Zaporedje je torej Cauchyjevo, če so poljubno blizu skupaj vsi členi za-poredja od nekega člena dalje. Definicija je zelo podobna definiciji limitezaporedja, le da nam tukaj limite ni treba poznati.
Trditev 4.23. Zaporedje kompleksnih števil je konvergentno, če, in samoče, je Cauchyjevo.
Dokaz. (⇒) Predpostavimo, da zaporedje kompleksnih števil (an) konver-gira k številu a ∈ C. Za poljuben ε ∈ R+ obstaja tak N ∈ N, da za vsakonaravno število n ≥ N velja |an − a| < ε
2 . Za poljubni naravni številim,n ≥ N tedaj velja
|am − an| = |am − a+ a− an| ≤ |am − a|+ |a− an| <ε
2 + ε
2 = ε,
89

kar dokazuje, da je zaporedje (an) Cauchyjevo.(⇐) Naj bo (an) Cauchyjevo zaporedje kompleksnih števil. Pokazali
bomo, da je zaporedje (an) konvergentno.Najprej bomo pokazali, da je zaporedje (an) omejeno. Ker je zaporedje
(an) Cauchyjevo, lahko najdemo tak l ∈ N, da za vsa naravna števila n,m ≥l velja |am − an| < 1. Posebej od tod sledi, da je an ∈ K(al, 1) za vsakonaravno število n ≥ l, odprt krog K(al, 1) pa je podmnožica odprtega krogaK(0, |al|+ 1). Naj bo
M = max{|a1|, |a2|, . . . , |al|, |al|+ 1}.
Tedaj vsi členi zaporedja (an) ležijo v zaprtem krogu K(0,M), to pa pomeni,da je zaporedje omejeno.
Ker je torej zaporedje (an) omejeno, ima vsaj eno stekališče. Dokazalibomo, da ima to zaporedje le eno stekališče. Po Trditvi 4.21(ii) od tod sledi,da je zaporedje (an) konvergentno.
Pa predpostavimo, da ima zaporedje (an) več stekališč. V tem primerulahko izberemo dve različni stekališči tega zaporedja, recimo a in b, in ozna-čimo
ε = |b− a|3 > 0.
Ker je zaporedje (an) Cauchyjevo, obstaja takN ∈ N, da za poljubni naravništevili m,n ≥ N velja |am− an| < ε. Ker pa sta po naši predpostavki a in bstekališči zaporedja (an), lahko najdemo tako naravno število n ≥ N , da je|an − a| < ε, in tako naravno število m ≥ N , da je |am − b| < ε.
Re
Im
1
iΕ
Ε
Ε
a
b
am
anKHb,ΕL
KHa,ΕL
Od tod bi sledilo
|b− a| = |b− am + am − an + an − a|≤ |b− am|+ |am − an|+ |an − a|< ε+ ε+ ε
= |b− a|,
kar pa seveda ni mogoče. Naša predpostavka, da ima zaporedje več stekališč,je torej napačna.
90

5 Številske vrstePoljubni dve števili lahko seštejemo, za rezultat pa dobimo vsoto, ki je spetštevilo. Drugače povedano, seštevanje števil je binarna notranja operacija.Ker je operacija seštevanja tudi asociativna in komutativna, lahko brez te-žav seštejemo tudi končno mnogo števil. Stvari pa se nekoliko zapletejo,ko poskusimo sešteti neskončno mnogo števil. Nekatera zaporedja števillahko seštejemo, druga pa ne. V nekaterih primerih lahko zaporedje številseštejemo, a je rezultat odvisen od vrstnega reda seštevanja.
5.1 Vsota številske vrste
Vrsta kompleksnih števil ali številska vrsta je funkcija N → C, n 7→ an,takšno številsko vrsto pa navadno zapišemo na enega od naslednjih načinov:∑
(an)∞n=1 =∑
(an)n∈N
Število an je n-ti člen takšne vrste∑
(an)∞n=1, za vsak n ∈ N. Poljubna šte-vilska vrsta
∑(an)∞n=1 je torej podana z zaporedjem njenih členov (an)n∈N.
Poljubnemu zaporedju kompleksnih števil (an)n∈N lahko priredimo šte-vilsko vrsto
∑(an)∞n=1. To storimo tedaj, ko imamo namen člene tega zapo-
redja sešteti. Zapisu ∑(an)∞n=1,
s katerim označimo prirejeno številsko vrsto, pravimo tudi formalna vsotazaporedja (an)n∈N.
Za vsako vrsto kompleksnih števil∑
(an)∞n=1 in za vsako naravno številok lahko izračunamo kompleksno število
a1 + a2 + · · ·+ ak =k∑
n=1an ∈ C,
ki mu pravimo k-ta delna vsota številske vrste∑
(an)∞n=1. Na ta način do-bimo zaporedje kompleksnih števil( k∑
n=1an)k∈N
,
ki ga imenujemo zaporedje delnih vsot pridruženo številski vrsti∑
(an)∞n=1.Definicija 5.1. Vrsta kompleksnih števil
∑(an)∞n=1 je konvergentna, če je
njej pridruženo zaporedje delnih vsot (∑kn=1 an)k∈N konvergentno. V tem
primeru limiti pridruženega zaporedja delnih vsot pravimo vsota številskevrste
∑(an)∞n=1 in jo označimo
∞∑n=1
an = a1 + a2 + a3 + . . . = limk→∞
( k∑n=1
an).
Če številska vrsta ni konvergentna, je divergentna.
91

Zgled 5.2 (Geometrijska vrsta). Naj bosta a in q poljubni kompleksni šte-vili. Geometrijska vrsta z začetnim členom a in kvocientom q je številskavrsta ∑
(aqn−1)∞n=1.
Drugače povedano, členi geometrijske vrste so členi ustreznega geometrij-skega zaporedja. Za poljuben k ∈ N je k-ta delna vsota geometrijske vrsteštevilo
k∑n=1
aqn−1 = a+ aq + aq2 + · · ·+ aqk−1 = a(1 + q + q2 + · · ·+ qk−1).
V primeru, da je q 6= 1, lahko to delno vsoto zapišemo tudi v obliki
k∑n=1
aqn−1 = a(1− qk)1− q .
Konvergenca geometrijske vrste je odvisna od izbire števil a in q:(i) Naj bo a = 0. Tedaj so vsi členi geometrijske vrste enaki nič, zato so
tudi vse delne vsote te vrste enake nič. V tem primeru je torej geometrijskavrsta konvergentna in njena vsota je enaka nič.
(ii) Naj bo a 6= 0 in q = 1. Tedaj so vsi členi geometrijske vrste enakia, odtod pa sledi, da je k-ta delna vsota te vrste enaka ka, za vsak k ∈ N.To zaporedje delnih vsot divergira, zato v tem primeru geometrijska vrstadivergira.
(iii) Naj bo a 6= 0, q 6= 1 in |q| ≥ 1. Ker je tedaj zaporedje (qk)kdivergentno, je tudi zaporedje delnih vsot(
a(1− qk)1− q
)k
divergentno, zato je v tem primeru geometrijska vrsta divergentna.(iv) Naj bo |q| < 1. V tem primeru je geometrijska vrsta
∑(aqn−1)∞n=1
konvergentna, njena vsota pa je
∞∑n=1
aqn−1 = limk→∞
( k∑n=1
aqn−1)
= limk→∞
a(1− qk)1− q = a
1− q .
Kot konkreten primer si oglejmo številsko vrsto∑( 12n−1
)∞n=1
.
To je geometrijska vrsta z začetnim členom a = 1 in kvocientom q = 12 . Ta
vrsta je torej konvergentna, njena vsota pa je∞∑n=1
12n−1 = 1 + 1
2 + 14 + 1
8 + . . . = 11− 1
2= 2.
92

Delne vsote te vrste
Sk = 1 + 12 + 1
4 + · · ·+ 12k−1 =
1− (12)k
1− 12
= 2−(1
2)k−1
strogo naraščajo in se približujejo vsoti vrste, torej številu 2. Na vsakemkoraku se razlika med delno vsoto in vsoto vrste prepolovi.
S1 S2 S3 S4 S5
1.0 1.2 1.4 1.6 1.8 2.0
Komentar. (1) Številska vrsta je torej podana z zaporedjem števil, vsota∑∞n=1 an konvergentne številske vrste
∑(an)∞n=1 pa je število. Vendar je v
literaturi številska vrsta∑
(an)∞n=1 pogosto označena kar z oznako∑∞n=1 an,
čeprav morda ta vrsta celo divergira. V tem primeru moramo iz kontekstarazbrati, ali oznaka predstavlja vrsto ali pa njeno vsoto.
(2) Po naši definiciji so številske vrste indeksirane z množico naravnihštevil. Splošneje bi za množico indeksov lahko vzeli poljubno neprazno pod-množico J ⊂ Z. Vrsta kompleksnih števil, indeksirana s takšno podmnožicoJ , je funkcija J → C, j 7→ uj , ki jo zapišemo v obliki∑
(uj)j∈J .
Zaporedje členov (uj)j∈J takšne vrste je torej indeksirano s podmnožico J .Podobno kot pri zaporedjih tudi pri vrstah praviloma za množico J vza-memo množico naravnih števil N, zato v tem primeru množico N v zapisupogosto izpuščamo, včasih pa je smiselno uporabiti tudi kakšno drugo mno-žico indeksov, na primer množico {0} ∪ N ali množico Z ∩ Jp,∞M za nekp ∈ Z. Ustrezne številske vrste bi tedaj zapisali tudi v naslednji obliki:∑
(uj)j∈{0}∪N =∑
(uj)∞j=0∑(uj)j∈Z∩Jp,∞M =
∑(uj)∞j=p
Obravnava številskih vrst, indeksiranih z neskončno navzdol omejeno mno-žico J ⊂ Z, je zelo podobna obravnavi številskih vrst, indeksiranih z množiconaravnih števil N.
Iz definicije konvergence vrst in iz Cauchyjevega kriterija za konvergencozaporedij sledi:
Trditev 5.3 (Cauchyjev kriterij za konvergenco vrst). Vrsta kompleksnihštevil
∑(an)∞n=1 je konvergentna, če, in samo če, za vsak ε ∈ R+ obstaja tak
N ∈ N, da za poljubna m,n ∈ N, za katera je m ≥ n ≥ N , velja
|an + an+1 + · · ·+ am| < ε.
93

Dokaz. Naj bo (Sk)k∈N zaporedje delnih vsot številske vrste∑
(an)∞n=1. Podefiniciji je vrsta konvergentna, če, in samo če, je zaporedje (Sk) konvergen-tno, kar pa je res natanko tedaj, ko je zaporedje (Sk) Cauchyjevo.
Zaporedje (Sk) je Cauchyjevo, če, in samo če, za vsak ε ∈ R+ obstaja takN ′ ∈ N, da za poljubna k, l ∈ N, za katera je k > l ≥ N ′, velja |Sk−Sl| < ε.Po vpeljavi oznak m = k, n = l + 1 in N = N ′ + 1 odtod direktno sledi, daje zaporedje (Sk) Cauchyjevo, če, in samo če, za vsak ε ∈ R+ obstaja takonaravno število N ≥ 2, da za poljubna m,n ∈ N, za katera je m ≥ n ≥ N ,velja |Sm − Sn−1| < ε. Ker pa je
Sm − Sn−1 = an + an+1 + · · ·+ am,
je trditev s tem dokazana.
Številska vrsta torej konvergira, kadar so vsote njenih dovolj poznihzaporednih členov poljubno majhne. Posledica Cauchyjevega kriterija jenaslednji potrebni pogoj za konvergenco vrst:
Posledica 5.4. Če je vrsta kompleksnih števil∑
(an)∞n=1 konvergentna, po-tem velja lim
n→∞an = 0.
Dokaz. Izberimo poljuben ε ∈ R+. Po Cauchyjevem kriteriju obstaja takN ∈ N, da za poljubna m,n ∈ N, za katera je m ≥ n ≥ N , velja
|an + an+1 + · · ·+ am| < ε.
Posebej lahko pri tem izberemo, da je m = n, zato velja
|an − 0| = |an| < ε
za vsako naravno število n ≥ N . S tem je trditev dokazana.
Pogoj, da členi številske vrste konvergirajo k nič, je torej potreben zakonvergenco vrste, a v splošnem ni zadosten:
Zgled 5.5. (1) Harmonična vrsta je številska vrsta∑( 1n
)∞n=1
.
Njeni členi sicer konvergirajo k 0, kljub temu pa je ta vrsta divergentna. Dabi se v to prepričali, označimo najprej
ck = 12k + 1 + 1
2k + 2 + · · ·+ 12k+1 ∈ R
za vsak k ∈ N. Število ck je vsota 2k zaporednih členov harmonične vrste,vsakega od teh pa lahko navzdol ocenimo s številom 1
2k+1 . Od tod slediocena
ck >1
2k+1 + 12k+1 + · · ·+ 1
2k+1 = 2k 12k+1 = 1
2 .
94

Za vsak N ∈ N lahko najdemo tako velik k ∈ N, da je 2k+1 ≥ N , ob tem paje ck > 1
2 . Po Cauchyjevem kriteriju za konvergenco vrst harmonična vrstatorej divergira.
Če torej seštejemo dovolj mnogo členov harmonične vrste, lahko dobimopoljubno veliko vsoto. Divergenca harmonične vrste je sicer relativno poča-sna: njena 1015-delna vsota je približno 35.1, njena 1080-delna vsota pa jepribližno 184.8.
(2) Naj bo∑
(an)∞n=1 divergentna vrsta realnih števil. Če velja
limk→∞
( k∑n=1
an)
=∞ ali limk→∞
( k∑n=1
an)
= −∞,
potem označimo∞∑n=1
an =∞ oziroma∞∑n=1
an = −∞.
Definicija 5.6. Vrsta kompleksnih števil∑
(an)∞n=1 je absolutno konver-gentna, če je vrsta
∑(|an|)∞n=1 konvergentna. Vrsta
∑(an)∞n=1 je pogojno
konvergentna, če je konvergentna in ni absolutno konvergentna.
V naslednji trditvi bomo pokazali, da je vsaka absolutno konvergentnavrsta tudi konvergentna. Konvergentne vrste so lahko absolutno konvergen-tne ali pa le pogojno konvergentne. Videli bomo, da se absolutno konver-gentne vrsto obnašajo podobno kot končne vsote števil, medtem ko so pripogojno konvergentnih vrstah stvari lahko bolj zapletene.
Trditev 5.7. Če je vrsta kompleksnih števil∑
(an)∞n=1 absolutno konver-gentna, potem je tudi konvergentna in velja∣∣∣ ∞∑
n=1an∣∣∣ ≤ ∞∑
n=1|an|.
Dokaz. Naj bo∑
(an)∞n=1 absolutno konvergentna vrsta kompleksnih števil.Izberimo poljuben ε ∈ R+. Po Cauchyjevem kriteriju obstaja tak N ∈ N,da za vsaki naravni števili m,n ∈ N, za kateri je m ≥ n ≥ N , velja
|an|+ |an+1|+ · · ·+ |am| =∣∣|an|+ |an+1|+ · · ·+ |am|
∣∣ < ε.
Ker tedaj velja
|an + an+1 + · · ·+ am| ≤ |an|+ |an+1|+ · · ·+ |am| < ε,
nam Cauchyjev kriterij pove, da je številska vrsta∑
(an)∞n=1 konvergentna.Naj bo Sk k-ta delna vsota vrste
∑(an)∞n=1 in naj bo Tk k-ta delna vsota
vrste∑
(|an|)∞n=1, za vsak k ∈ N. Po trikotniški neenakosti za vsak k ∈ Nvelja |Sk| ≤ Tk, zato je∣∣∣ ∞∑
n=1an∣∣∣ = | lim
k→∞Sk| = lim
k→∞|Sk| ≤ lim
k→∞Tk =
∞∑n=1|an|.
95

Trditev 5.8. Naj bosta∑
(an)∞n=1 ter∑
(bn)∞n=1 konvergentni vrsti komple-ksnih števil in naj bo α kompleksno število. Tedaj velja:
(i) Vrsta∑
(an + bn)∞n=1 je konvergentna in velja∞∑n=1
(an + bn) =∞∑n=1
an +∞∑n=1
bn.
(ii) Vrsta∑
(αan)∞n=1 je konvergentna in velja∞∑n=1
αan = α∞∑n=1
an.
(iii) Vrsta∑
(an)∞n=1 je konvergentna in velja
∞∑n=1
an =∞∑n=1
an.
(iv) Če sta vrsti∑
(an)∞n=1 ter∑
(bn)∞n=1 absolutno konvergentni, potemso tudi vrste∑
(an + bn)∞n=1,∑
(αan)∞n=1,∑
(an)∞n=1
absolutno konvergentne.
Dokaz. (i-iii) Naj bosta (Sk) in (Rk) zaporedji delnih vsot vrst∑
(an)∞n=1oziroma
∑(bn)∞n=1. Tedaj je (Sk +Rk) zaporedje delnih vsot številske vrste∑
(an + bn)∞n=1, (αSk) je zaporedje delnih vsot vrste∑
(αan)∞n=1, (Sk) paje zaporedje delnih vsot vrste
∑(an)∞n=1. Ker sta zaporedji (Sk) in (Rk)
po predpostavki konvergentni, so tudi zaporedja (Sk + Rk), (αSk) in (Sk)konvergentna in po pravilih za računanje z limitami zaporedij dobimo
∞∑n=1
(an + bn) = limk→∞
(Sk +Rk) = limk→∞
Sk + limk→∞
Rk =∞∑n=1
an +∞∑n=1
bn,
∞∑n=1
αan = limk→∞
αSk = α limk→∞
Sk = α∞∑n=1
an,
∞∑n=1
an = limk→∞
Sk = limk→∞
Sk =∞∑n=1
an.
(iv) Predpostavimo, da sta vrsti∑
(an)∞n=1 in∑
(bn)∞n=1 absolutno kon-vergentni. V primeru, da je α = 0, trditev za vrsto
∑(αan)∞n=1 očitno velja,
zato lahko privzamemo, da je α 6= 0. Vzemimo poljuben ε ∈ R+ in naj boδ = min{ε/2, ε/|α|}. Po Cauchyjevem kriteriju obstaja tak N ∈ N, da zavsaki naravni števili m,n ∈ N, za kateri je m ≥ n ≥ N , velja
|an|+ |an+1|+ · · ·+ |am| < δ,
96

in|bn|+ |bn+1|+ · · ·+ |bm| < δ.
Od tod sledijo ocene
|an + bn|+|an+1 + bn+1|+ · · ·+ |am + bm|≤ |an|+ |bn|+ |an+1|+ |bn+1|+ · · ·+ |am|+ |bm|
< δ + δ ≤ ε
2 + ε
2 = ε,
|αan|+ |αan+1|+ · · ·+ |αam| = |α|(|an|+ |an+1|+ · · ·+ |am|)< |α|δ ≤ ε,
|an|+ |an+1|+ · · ·+ |am| = |an|+ |an+1|+ · · ·+ |am| < δ < ε,
kar pomeni, da za vrste∑(|an + bn|)∞n=1,
∑(|αan|)∞n=1,
∑(|an|)∞n=1
velja Cauchyjev pogoj za konvergenco.
Seštevanje števil je komutativno, kar pomeni, da vrstni red seštevanjani pomemben. Podobno velja za absolutno konvergentne vrste, za pogojnokonvergentne vrste pa ne.
Trditev 5.9. Naj bo∑
(an)∞n=1 absolutno konvergentna vrsta kompleksnihštevil in naj bo σ : N→ N poljubna bijekcija. Tedaj je tudi vrsta
∑(aσ(n))∞n=1
absolutno konvergentna in velja∞∑n=1
aσ(n) =∞∑n=1
an.
Dokaz. Za vsak k ∈ N označimo
Sk = a1 + a2 + · · ·+ ak,
Sσk = aσ(1) + aσ(2) + · · ·+ aσ(k),
Rk = |a1|+ |a2|+ · · ·+ |ak|,Rσk = |aσ(1)|+ |aσ(2)|+ · · ·+ |aσ(k)|.
Izberimo poljuben ε ∈ R+. Po Cauchyjevem kriteriju obstaja tak N ∈ N,da za vsaka m,n ∈ N, za katera je m ≥ n ≥ N , velja
|an|+ |an+1|+ · · ·+ |am| < ε.
Ker je množica {1, 2, . . . , N} končna, lahko najdemo tako naravno številop > N , da je
{1, 2, . . . , N} ⊂ {σ(1), σ(2), . . . , σ(p)}.
97

Za vsako naravno število k ≥ p velja∣∣Sk − Sσk ∣∣ =∣∣∣(a1 + · · ·+ aN + · · ·+ ak)− (aσ(1) + · · ·+ aσ(k))
∣∣∣.V množici {σ(1), . . . , σ(k)} so vsebovani vsi indeksi iz množice {1, . . . , N},zato se na desni strani zgornje enakosti členi a1, . . . , aN krajšajo, vsi preostaličleni v vsoti pa imajo indeks večji od N in manjši ali enak številu M =max{σ(1), σ(2), . . . , σ(k)}. Od tod sledi, da lahko po trikotniški neenakostiocenimo ∣∣Sk − Sσk ∣∣ ≤ M∑
n=N+1|an| < ε.
S tem smo dokazali, da zaporedje (Sk − Sσk )k konvergira k nič. Ker jezaporedje (Sk)k konvergentno, je torej tudi zaporedje (Sσk )k konvergentnoin konvergira k isti limiti. Vrsta
∑(aσ(n))∞n=1 je torej konvergentna in njena
vsota je enaka vsoti vrste∑
(an)∞n=1.Ob tem velja tudi∣∣Rk −Rσk ∣∣ =
∣∣∣(|a1|+ · · ·+ |aN |+ · · ·+ |ak|)− (|aσ(1)|+ · · ·+ |aσ(k)|)∣∣∣
in po enakem sklepu kot zgoraj od tod sledi ocena
∣∣Rk −Rσk ∣∣ ≤ M∑n=N+1
|an| < ε.
S tem smo se prepričali, da tudi zaporedje (Rk − Rσk )k konvergira k nič.Ker je zaporedje (Rk)k konvergentno, je tudi zaporedje (Rσk )k konvergentno.Vrsta
∑(aσ(n))∞n=1 je torej absolutno konvergentna.
Komentar. V primeru pogojno konvergentnih vrst je situacija popolnomadrugačna. Če je namreč
∑(an)∞n=1 pogojno konvergentna vrsta realnih števil
in je α poljubno realno število, potem lahko izberemo takšno bijekcijo σ :N→ N, da velja
∞∑n=1
aσ(n) = α.
Če želimo, da nam takšna preureditev σ spremeni vsoto vrste, mora ta nujnopreurediti neskončno število členov vrste. Prerazporeditev le končno mnogočlenov v poljubni konvergentni vrsti vsote seveda ne spremeni.
Številske vrste lahko med seboj tudi množimo, vendar je bolj kot pro-dukt po členih smiseln tako imenovani Cauchyjev produkt vrst, ki ga bomospoznali kasneje. Pri tem produktu moramo vsak člen prve vrste množitiz vsakim členom druge vrste in nato iz končnih vsot dobljenih produktovnarediti številsko vrsto. Ta operacija spominja na množenje polinomov inje povezana s posplošitvijo distributivnosti na neskončne vsote.
98

5.2 Testi za konvergenco številskih vrst
Računanje vsote številske vrste je v splošnem težak problem, nekoliko lažjepa je v danem primeru ugotoviti, ali vrsta konvergira ali ne. Ogledali sibomo nekaj testov, ki jih lahko uporabimo v ta namen. Najprej lahko opa-zimo, da podobno kot pri zaporedjih tudi pri številskih vrstah prvih končnomnogo členov vrste ne vpliva na njeno konvergenco. Po drugi strani pa velja,da vsaka sprememba že enega samega člena v konvergentni številski vrstipovzroči, da se enako spremeni tudi vsota te vrste.
Trditev 5.10 (Primerjalni test). Naj bo∑
(an)∞n=1 vrsta kompleksnih števil.Če ostajata takšna konvergentna vrsta nenegativnih realnih števil
∑(cn)∞n=1
in tak N ∈ N, da je|an| ≤ cn
za vsa naravna števila n ≥ N , potem je vrsta∑
(an)∞n=1 absolutno konver-gentna.
Dokaz. Izberimo poljuben ε ∈ R+. Ker je vrsta∑
(cn)∞n=1 konvergentna,obstaja tako naravno število N ′ ≥ N , da za vsaki naravni števili m,n ∈ N,za kateri je m ≥ n ≥ N ′, velja
|cn + cn+1 + · · ·+ cm| < ε.
Odtod sledi
|an|+ |an+1|+ · · ·+ |am| ≤ cn + cn+1 + · · ·+ cm
= |cn + cn+1 + · · ·+ cm| < ε.
Po Cauchyjevem kriteriju je torej vrsta∑
(|an|)∞n=1 konvergentna.
Če za vrsto kompleksnih števil∑
(an)∞n=1 in za vrsto nenegativnih realnihštevil
∑(cn)∞n=1 obstaja tak N ∈ N, da je |an| ≤ cn za vsa naravna števila
n ≥ N , potem pravimo, da je vrsta∑
(cn)∞n=1 majoranta vrste∑
(an)∞n=1 odN -tega člena dalje in da je vrsta
∑(an)∞n=1 minoranta vrste
∑(cn)∞n=1 od N -
tega člena dalje. Za to, da bi pokazali, da dana številska vrsta konvergira, jepo primerjalnem testu torej dovolj poiskati kakšno njeno konvergentno ma-joranto. S primerjalnim testom pa lahko dokazujemo tudi divergenco vrst,če ga preberemo v nasprotni smeri: Če želimo dokazati, da je vrsta nenega-tivnih realnih števil divergentna, je dovolj poiskati kakšno njeno divergentnominoranto.
Zgled 5.11. (1) Pokazali smo že, da je harmonična vrsta
∑( 1n
)∞n=1
99

divergentna. Z uporabo primerjalnega testa od tod sledi, da je divergentnatudi vrsta ∑( 1
nα
)∞n=1
za vsak α ∈ R, za katerega je α ≤ 1. Res, v tem primeru za vsak n ∈ Nnamreč velja
1n≤ 1nα.
(2) Po primerjalnem testu vrsta∑( 1n5n−1
)∞n=1
konvergira, saj za vsak n ∈ N velja ocena
1n5n−1 ≤
15n−1 ,
geometrijska vrsta∑
( 15n−1 )∞n=1 pa je konvergentna.
Trditev 5.12 (Korenski test). Naj bo∑
(an)∞n=1 vrsta kompleksnih števil.(1) Če obstajata tako nenegativno realno število q in tak N ∈ N, da je
q < 1 in da za vsa naravna števila n ≥ N velja
n
√|an| ≤ q,
potem je vrsta∑
(an)∞n=1 absolutno konvergentna.(2) Če obstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja
n
√|an| ≥ 1,
potem je vrsta∑
(an)∞n=1 divergentna.(3) Predpostavimo, da obstaja limita
L = limn→∞
n
√|an|.
Tedaj velja:(i) Če je L < 1, potem je vrsta
∑(an)∞n=1 absolutno konvergentna.
(ii) Če je L > 1, potem je vrsta∑
(an)∞n=1 divergentna.
Dokaz. (1) Za vsa naravna števila n ≥ N velja n√|an| ≤ q in zato
|an| ≤ qn.
Vrsta∑
(an)∞n=1 je torej majorizirana s konvergentno geometrijsko vrsto∑(qn)∞n=1, zato je po primerjalnem testu absolutno konvergentna.(2) Za vsa naravna števila n ≥ N velja n
√|an| ≥ 1 in zato
|an| ≥ 1.
100

Zaporedje (an) torej ne konvergira k nič, zato je vrsta∑
(an)∞n=1 divergentna.(3)(i) Vzemimo q = (L+ 1)/2. Tedaj je L < q < 1, in po definiciji limite
obstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja
n
√|an| < q.
Po točki (1) torej vrsta∑
(an)∞n=1 absolutno konvergira.(ii) Po definiciji limite obstaja tak N ∈ N, da za vsa naravna števila
n ≥ N veljan
√|an| > 1.
Po točki (2) je zato vrsta∑
(an)∞n=1 divergentna.
Trditev 5.13 (Kvocientni test). Naj bo∑
(an)∞n=1 vrsta neničelnih komple-ksnih števil.
(1) Če obstajata tako nenegativno realno število q in tak N ∈ N, da jeq < 1 in da za vsa naravna števila n ≥ N velja∣∣∣an+1
an
∣∣∣ ≤ q,potem je vrsta
∑(an)∞n=1 absolutno konvergentna.
(2) Če obstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja∣∣∣an+1an
∣∣∣ ≥ 1,
potem je vrsta∑
(an)∞n=1 divergentna.(3) Predpostavimo, da obstaja limita
L = limn→∞
∣∣∣an+1an
∣∣∣.Tedaj velja:
(i) Če je L < 1, potem je vrsta∑
(an)∞n=1 absolutno konvergentna.(ii) Če je L > 1, potem je vrsta
∑(an)∞n=1 divergentna.
Dokaz. (1) Ker končno mnogo členov vrste ne vpliva na njeno konvergenco,lahko brez izgube splošnosti predpostavimo, da je N = 1. Po predpostavkitorej za vse n ∈ N velja
∣∣an+1an
∣∣ ≤ q in zato |an+1| ≤ q|an|. Od tod sledi
|an+1| ≤ q|an| ≤ q2|an−1| ≤ . . . ≤ qn|a1|.
Vrsta∑
(an)∞n=1 je torej majorizirana s konvergentno geometrijsko vrsto∑(|a1|qn−1)∞n=1, zato je po primerjalnem testu absolutno konvergentna.(2) Za vsa naravna števila n ≥ N velja
∣∣an+1an
∣∣ ≥ 1 in zato
|an+1| ≥ |an|.
101

Zaporedje (|an|) torej ne konvergira k nič in zato tudi zaporedje (an) nekonvergira k nič, odtod pa sledi, da je vrsta
∑(an)∞n=1 divergentna.
(3)(i) Vzemimo q = (L+ 1)/2. Tedaj je L < q < 1, in po definiciji limiteobstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja∣∣∣an+1
an
∣∣∣ < q.
Po točki (1) torej vrsta∑
(an)∞n=1 absolutno konvergira.(ii) Po definiciji limite obstaja tak N ∈ N, da za vsa naravna števila
n ≥ N velja ∣∣∣an+1an
∣∣∣ > 1.
Po točki (2) je zato vrsta∑
(an)∞n=1 divergentna.
Trditev 5.14 (Raabejev test). Naj bo∑
(an)∞n=1 vrsta neničelnih komple-ksnih števil.
(1) Če obstajata tako nenegativno realno število q in tak N ∈ N, da jeq > 1 in da za vsa naravna števila n ≥ N velja
n(∣∣∣ anan+1
∣∣∣− 1)≥ q,
potem je vrsta∑
(an)∞n=1 absolutno konvergentna.(2) Če obstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja
n(∣∣∣ anan+1
∣∣∣− 1)≤ 1,
potem vrsta∑
(an)∞n=1 ni absolutno konvergentna.(3) Če obstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja
n(∣∣∣ anan+1
∣∣∣− 1)≤ 0,
potem je vrsta∑
(an)∞n=1 divergentna.(4) Predpostavimo, da obstaja limita
L = limn→∞
n(∣∣∣ anan+1
∣∣∣− 1).
Tedaj velja:(i) Če je L > 1, potem je vrsta
∑(an)∞n=1 absolutno konvergentna.
(ii) Če je 0 ≤ L < 1, potem vrsta∑
(an)∞n=1 ni absolutno konvergentna.(iii) Če je L < 0, potem je vrsta
∑(an)∞n=1 divergentna.
Dokaz. (1) Ker končno mnogo členov vrste ne vpliva na njeno konvergenco,lahko brez izgube splošnosti predpostavimo, da je N = 1. Po predpostavkitorej za vse n ∈ N velja
n(∣∣∣ anan+1
∣∣∣− 1)≥ q.
102

Označimo r = q − 1. Iz zadnje neenakosti dobimo
n|an| − n|an+1| ≥ (1 + r)|an+1|
in odtodn|an| − (n+ 1)|an+1| ≥ r|an+1|.
Če označimo še b1 = 0 in bn+1 = n|an| − (n+ 1)|an+1|, za vsak n ∈ N torejvelja
bn+1 ≥ r|an+1| > 0.
Po primerjalnem testu je zato dovolj dokazati, da je številska vrsta∑
(bn)∞n=1konvergentna. Za delne vsote te vrste velja
Sk = b1 + b2 + · · ·+ bk
= 0 + (|a1| − 2|a2|) + (2|a2| − 3|a3|) + · · ·+ ((k − 1)|ak−1| − k|ak|)= |a1| − k|ak| ≤ |a1|.
Zaporedje delnih vsot (Sk) je torej navzgor omejeno, poleg tega pa je tudinaraščajoče, saj je
∑(bn)∞n=1 vrsta nenegativnih realnih števil. Odtod sledi,
da je zaporedje (Sk) konvergentno, zato je vrsta∑
(bn)∞n=1 konvergentna.(2) Spet lahko brez izgube splošnosti predpostavimo, da je N = 1. Za
vsak n ∈ N torej veljan(∣∣∣ anan+1
∣∣∣− 1)≤ 1
in zaton|an| ≤ (n+ 1)|an+1|.
Dobimo torej
|a1| ≤ 2|a2| ≤ 3|a3| ≤ . . . ≤ n|an| ≤ (n+ 1)|an+1| ≤ . . .
in posebej|a1|n≤ |an|.
Vidimo torej, da je s številom |a1| pomnožena harmonična vrsta divergen-tna minoranta za vrsto
∑(|an|)∞n=1, zato je po primerjalnem testu vrsta∑
(|an|)∞n=1 divergentna.(3) Iz predpostavke sledi, da za vsako naravno število n ≥ N velja∣∣∣an+1
an
∣∣∣ ≥ 1,
zato je po kvocientnem testu vrsta∑
(an)∞n=1 divergentna.(4)(i) Vzemimo q = (L+ 1)/2. Tedaj je 1 < q < L, in po definiciji limite
obstaja tak N ∈ N, da za vsa naravna števila n ≥ N velja
n(∣∣∣ anan+1
∣∣∣− 1)> q.
103

Po točki (1) torej vrsta∑
(an)∞n=1 absolutno konvergira.(ii) Po definiciji limite obstaja tak N ∈ N, da za vsa naravna števila
n ≥ N veljan(∣∣∣ anan+1
∣∣∣− 1)< 1.
Po točki (2) je zato vrsta∑
(|an|)∞n=1 divergentna.(iii) Po definiciji limite obstaja tak N ∈ N, da za vsa naravna števila
n ≥ N veljan(∣∣∣ anan+1
∣∣∣− 1)< 0.
Po točki (3) je zato vrsta∑
(an)∞n=1 divergentna.
Zgled 5.15. (1) Po korenskem testu je vrsta pozitivnih realnih števil∑(e−n2)∞
n=1
konvergentna, saj je
limn→∞
n√
e−n2 = limn→∞
(e−n2) 1
n = limn→∞
e−n = limn→∞
(1e)n
= 0 < 1.
(2) Po kvocientnem testu je vrsta pozitivnih realnih števil
∑( n!nn
)∞n=1
konvergentna, saj velja
limn→∞
(n+1)!(n+1)n+1
n!nn
= limn→∞
( n
n+ 1)n
= limn→∞
1(1 + 1
n
)n = 1e < 1.
(3) Po kvocientnem testu je vrsta pozitivnih realnih števil
∑( (n!)2
(2n)!)∞n=1
konvergentna, kajti
limn→∞
((n+1)!)2
(2n+2)!(n!)2
(2n)!
= limn→∞
(n+ 1)2
(2n+ 2)(2n+ 1) = limn→∞
n+ 14n+ 2 = 1
4 < 1.
(4) Naj bo α ∈ R. Poglejmo, kaj Raabejev test pove o vrsti pozitivnihrealnih števil ∑( 1
nα
)∞n=1
.
104

Naj bo funkcija f : R+ → R dana s predpisom f(x) = xα. Spomnimose, da za odvod f ′ funkcije f velja f ′(x) = αxα−1. S pomočjo tega lahkoizračunamo
limn→∞
n
( 1nα
1(n+1)α
− 1)
= limn→∞
n
((n+ 1n
)α− 1
)
= limn→∞
n
((1 + 1
n
)α− 1
)= lim
h→0
1h
((1 + h)α − 1
)= lim
h→0
f(1 + h)− f(1)h
= f ′(1) = α1α−1 = α.
Po Raabejevem testu je torej vrsta∑
( 1nα )∞n=1 konvergentna, če je α > 1,
in divergentna, če je α < 1. V primeru, ko je α = 1, nam točka (4) izRaabejevega testa sicer ne pove ničesar, pač pa po točki (2) iz tega testasledi, da je vrsta divergentna. V tem zadnjem primeru je dana vrsta sevedaharmonična.
Vse vrste v zadnjem zgledu imajo pozitivne člene. Pri takšnih vrstahse absolutna konvergenca seveda ujema s konvergenco. Poleg vrst s pozi-tivnimi členi pa se pogosto srečamo tudi z vrstami, katere členi izmenjujejopredznak. Vrste realnih števil oblike∑(
(−1)n+1an)∞n=1 ali
∑((−1)nan
)∞n=1,
kjer je an ≥ 0 za vsak n ∈ N, imenujemo alternirajoče vrste.
Trditev 5.16 (Leibnizov test). Naj bo∑
((−1)n+1an)∞n=1 alternirajoča vrstarealnih števil, kjer je an ≥ 0 za vsak n ∈ N. Če je zaporedje (an) padajočein konvergira k številu nič, potem je vrsta
∑((−1)n+1an)∞n=1 konvergentna
in velja ∣∣∣ ∞∑n=1
(−1)n+1an −k∑
n=1(−1)n+1an
∣∣∣ ≤ ak+1
za vsako naravno število k.
Dokaz. Za vsak k ∈ N naj bo
Sk =k∑
n=1(−1)n+1an
k-to delna vsota vrste∑
((−1)n+1an)∞n=1. Ker je zaporedje (an) padajoče,imamo za vsak m ∈ N oceno
S2m ≤ S2m + (a2m+1 − a2m+2) = S2m+2
= S2m+1 − a2m+2 ≤ S2m+1
= S2m−1 − (a2m − a2m+1) ≤ S2m−1.
Odtod sledi, da je zaporedje (S2m)m naraščajoče in navzgor omejeno, zapo-redje (S2m−1)m pa padajoče in navzdol omejeno.
105

S1S2 S3S4 S5S6 S
R
Zaporedji (S2m)m in (S2m−1)m sta torej konvergentni, poleg tega pa konver-girata k isti limiti, saj velja
limm→∞
S2m = limm→∞
(S2m−1 − a2m) = limm→∞
S2m−1 − limm→∞
a2m = limm→∞
S2m−1.
Ker torej podzaporedje členov z sodimi indeksi in podzaporedje členov zlihimi indeksi obe konvergirata k isti limiti, je tudi zaporedje (Sk)k konver-gentno. S tem smo dokazali, da je vrsta
∑((−1)n+1an)∞n=1 konvergentna.
Označimo z S vsoto te vrste.
S2 m+1S2 m S
a2 m+1
R
Ker podzaporedje delnih vsot s sodimi indeksi narašča proti S, podzaporedjedelnih vsot z lihimi indeksi pa pada proti S, za vsako naravno številom velja
S2m ≤ S ≤ S2m+1 ≤ S2m−1,
odtod pa sledi, da za vsak k ∈ N velja
∣∣∣ ∞∑n=1
(−1)n+1an −k∑
n=1(−1)n+1an
∣∣∣ = |S − Sk| ≤ |Sk+1 − Sk| = ak+1.
Zgled 5.17. (1) Oglejmo si številsko vrsto
∑((−1)n+1
n
)∞n=1
.
Vrsta je alternirajoča, njeni členi pa po absolutni vrednosti monotono padajoproti 0. Po Leibnizovem testu je torej vrsta konvergentna. Kasneje bomopokazali, da je njena vsota enaka naravnemu logaritmu števila 2. Vrsta izabsolutnih vrednosti členov te alternirajoče vrste je harmonična vrsta, ki jedivergentna. Zgornja alternirajoča vrsta je torej pogojno konvergentna.
(2) Vrsta iz točke (1) je poseben primer alternirajoče vrste
∑((−1)n+1
nα
)∞n=1
,
kjer je α ∈ R. Če je α > 0, potem členi te vrste po absolutni vredno-sti monotono padajo proti 0, zato je po Leibnizovem testu v tem primeruvrsta konvergentna. V primeru, da je α > 1, je ta vrsta celo absolutnokonvergentna, če pa je 0 < α ≤ 1, je vrsta le pogojno konvergentna. Če jeα ≤ 0, potem členi te vrste ne konvergirajo k 0 in zato vrsta v tem primerudivergira.
106

6 Funkcije ene realne spremenljivkeFunkcije, ki jih uporabljamo za opis fizikalnih količin, so največkrat skalarneali vektorske funkcije ene ali več realnih spremenljivk. V tem poglavju bomonajprej spoznali nekaj lastnosti skalarnih funkcij ene realne spremenljivke.
Realna funkcija ene realne spremenljivke je funkcija
f : U → R, x 7→ f(x),
katere domena je neka podmnožica U ⊂ R. Takšni funkciji včasih pravimotudi skalarna funkcija ali enostavno funkcija ene realne spremenljivke x.Graf takšne funkcije je podmnožica v ravnini R× R = R2.
Funkcijo ene realne spremenljivke navadno podamo z eksplicitnim pred-pisom, ob tem pa moramo določiti tudi njeno domeno U ⊂ R. Če te domeneposebej ne določimo, potem po dogovoru privzamemo, da je domena mno-žica vseh tistih realnih števil, za katere predpis lahko izračunamo.
Naj bo f : U → R funkcija ene realne spremenljivke, definirana napodmnožici U ⊂ R.
(i) Točka ξ ∈ U je ničla funkcije f , če velja f(ξ) = 0.
x
y
-4 -2 2 4
-4
-2
2
4
(ii) Funkcija f je naraščajoča, če za poljubna x, y ∈ U , za katera je x < y,velja
f(x) ≤ f(y).
(iii) Funkcija f je padajoča, če za poljubna x, y ∈ U , za katera je x < y,velja
f(x) ≥ f(y).
(iv) Funkcija f je monotona, če je bodisi naraščajoča ali padajoča.
(v) Funkcija f je strogo naraščajoča, če za poljubna x, y ∈ U , za katera jex < y, velja
f(x) < f(y).
107

(vi) Funkcija f je strogo padajoča, če za poljubna x, y ∈ U , za katera jex < y, velja
f(x) > f(y).
(vii) Funkcija f je strogo monotona, če je bodisi strogo naraščajoča alistrogo padajoča.
(viii) Funkcija f je navzgor omejena, če je njena slika f(U) navzgor omejenapodmnožica množice R.
(ix) Funkcija f je navzdol omejena, če je njena slika f(U) navzdol omejenapodmnožica množice R.
(x) Funkcija f je omejena, če je hkrati navzgor in navzdol omejena.
Komentar. Naj bo f : U → R funkcija ene realne spremenljivke, definiranana neprazni podmnožici U ⊂ R.
Če je funkcija f navzgor omejena, potem supremumu množice f(U) pra-vimo supremum funkcije f in označimo
sup(f) = sup(f(U)).
Če poleg tega velja sup(f) ∈ f(U), potem supremumu funkcije f pravimotudi največja vrednost ali maksimum funkcije f in označimo
sup(f) = max(f).
Če je funkcija f navzdol omejena, potem infimumu množice f(U) pra-vimo infimum funkcije f in označimo
inf(f) = inf(f(U)).
Če poleg tega velja inf(f) ∈ f(U), potem infimumu funkcije f pravimo tudinajmanjša vrednost ali minimum funkcije f in označimo
inf(f) = min(f).
Zgled 6.1. (1) Identična funkcija idR : R → R, x 7→ x, je primer funkcijeene realne spremenljivke, ki je strogo naraščajoča in ni niti navzgor omejenaniti navzdol omejena.
(2) Naj bo f : U → R funkcija ene realne spremenljivke, definirana napodmnožici U ⊂ R. Tedaj je zožitev f |V na poljubno podmnožico V ⊂ Uprav tako funkcija ene realne spremenljivke.
(3) Naj bo U podmnožica množice R. Funkcija f : U → R je konstantnaz vrednostjo c ∈ R, če velja f(x) = c za vsak x ∈ U . Vsaka konstantnafunkcija ene realne spremenljivke je omejena ter hkrati naraščajoča in pa-dajoča. Če ima množica U vsaj dva elementa, potem konstantna funkcijaf : U → R ni niti strogo naraščajoča niti strogo padajoča.
108

(4) Naj bo f funkcija ene realne spremenljivke x, podana s predpisomf(x) = x3. Ker ta predpis tako izračunamo za vsak x ∈ R, za domeno Ufunkcije f vzamemo množico R. Graf te funkcije je naslednja krivulja:
x
y
fHxL = x3
-4 -2 2 4
-4
-2
2
4
Funkcija f je strogo naraščajoča, a ni niti navzgor niti navzdol omejena.(5) Linearna realna funkcija ene realne spremenljivke je dana s predpi-
som f(x) = kx + n, za poljubni konstanti k, n ∈ R. Definirana je za vsakx ∈ R in je strogo naraščajoča, če je k > 0, in strogo padajoča, če je k < 0.
x
y
k > 0
-4 -2 2 4
-4
-2
2
4
x
y
k < 0
-4 -2 2 4
-4
-2
2
4
Ta funkcija je omejena le, če je k = 0. V tem primeru je f konstantnafunkcija z vrednostjo n.
(6) Kvadratna realna funkcija ene realne spremenljivke je dana s pred-pisom f(x) = ax2 + bx+ c, za poljubne konstante a, b, c ∈ R. Definirana jeza vsak x ∈ R in je navzgor omejena, če je a < 0, in navzdol omejena, če jea > 0.
109

x
y
fHxL = -x2+2x
-4 -2 2 4
-4
-2
2
4
(7) Funkcija sin : R→ R je primer omejene funkcije ene realne spremen-ljivke.
x
y
fHxL = sinHxL
-4 -2 2 4
-4
-2
2
4
(8) Naj bo f funkcija ene realne spremenljivke x, dana s predpisomf(x) = 1/x. Ta predpis lahko izračunamo za vsak neničeln x, zato zadomeno U te funkcije vzamemo množico R\{0}. Graf te funkcije je naslednji:
x
y
fHxL =
1
x
-4 -2 2 4
-4
-2
2
4
Funkcija f ni padajoča, je pa strogo padajoča na intervalu L−∞, 0M in tudina intervalu L0,∞M.
(9) Funkcije ene realne spremenljivke z domeno N ⊂ R so zaporedjarealnih števil.
110

Za poljubno podmnožico U ⊂ R je −U = {−x ; x ∈ U}. Če velja−U = U , potem je množica U simetrična glede na izhodišče.
Naj bo f : U → R realna funkcija ene realne spremenljivke, definiranana podmnožici U ⊂ R, za katero je −U = U .
(i) Funkcija f je soda, če je f(−x) = f(x) za vsak x ∈ U .
(ii) Funkcija f je liha, če je f(−x) = −f(x) za vsak x ∈ U .
Graf sode funkcije je simetričen glede na ordinatno os, graf lihe funkcije paje simetričen glede na koordinatno izhodišče.
Zgled 6.2. Primeri lihih funkcij so polinomi z le lihimi potencami ter si-nusna funkcija, primeri sodih funkcij pa polinomi z le sodimi potencami inkosinusna funkcija.
x
y
soda funkcija
-4 -2 2 4
-4
-2
2
4
x
y
liha funkcija
-4 -2 2 4
-4
-2
2
4
S funkcijami ene realne spremenljivke lahko računamo. Za poljubni funk-ciji ene realne spremenljivke f : U → R in g : V → R, definirani na pod-množicah U, V ⊂ R, definiramo naslednje funkcije ene realne spremenljivke:
(i) (vsota)
f + g : U ∩ V → R, x 7→ (f + g)(x) = f(x) + g(x)
(ii) (produkt)
f · g = fg : U ∩ V → R, x 7→ (fg)(x) = f(x)g(x)
(iii) (kvocient)
f
g= f/g : U ∩ g−1(R \ {0})→ R, x 7→
(f
g
)(x) = f(x)
g(x)
(iv) (kompozicija)
f ◦ g : g−1(U)→ R, (f ◦ g)(x) = f(g(x))
111

Če je funkcija f injektivna, potem definiramo tudi njej inverzno funkcijo enerealne spremenljivke, ki je določena s predpisom:
(v) (inverz)f−1 : f(U)→ R, f−1(x) ∈ f−1({x})
Pri tem moramo biti pozorni na domene tako definiranih funkcij. Te sov vseh zgornjih primerih sestavljene iz vseh tistih točk, za katere se ustreznipredpis da izračunati.
Zgoraj definirano kompozicijo funkcij ene realne spremenljivke g in fsmo označili nekoliko poenostavljeno: bolj natančno bi funkcijo ene realnespremenljivke f ◦g zapisali kot običajno kompozicijo funkcij med množicami
f |U∩g(V ) ◦ g|U∩g(V )g−1(U) : g−1(U)→ R,
kjer je funkcija g|U∩g(V )g−1(U) : g−1(U)→ U ∩ g(V ) dana z enakim predpisom kot
funkcija g.Tudi inverz injektivne funkcije ene spremenljivke f smo označili neko-
liko poenostavljeno: bolj natančno bi funkcijo ene realne spremenljivke f−1
zapisali kot običajno kompozicijo funkcij med množicami
idR|U ◦(f |f(U))−1
,
kjer je(f |f(U))−1 inverz bijekcije f |f(U) : U → f(U), x 7→ f(x), funkcija
idR|U pa je zožitev identične funkcije idR na podmnožico U .Takoj lahko opazimo, da je vsaka strogo monotona funkcija ene spremen-
ljivke injektivna in da je njen inverz prav tako strogo monotona funkcija enespremenljivke:
Trditev 6.3. Naj bo f : U → R funkcija ene realne spremenljivke, defini-rana na podmnožici U ⊂ R. Tedaj velja:
(i) Če je funkcija f strogo naraščajoča, potem je injektivna in njena in-verzna funkcija ene realne spremenljivke f−1 : f(U)→ R je prav takostrogo naraščajoča.
(ii) Če je funkcija f strogo padajoča, potem je injektivna in njena inverznafunkcija ene realne spremenljivke f−1 : f(U) → R je prav tako strogopadajoča.
Dokaz. (i) Predpostavimo, da je funkcija f strogo naraščajoča. Od todočitno sledi, da je funkcija f injektivna. Vzemimo poljubni dve točki u, v ∈f(U). Če velja f−1(u) ≥ f−1(v), potem je u = f(f−1(u)) ≥ f(f−1(v)) = v,saj je funkcija f strogo naraščajoča. Če torej velja u < v, potem mora veljatitudi f−1(u) < f−1(v).
Točko (i) pokažemo podobno.
112

Če sta dve funkciji ene realne spremenljivke definirani na isti podmno-žici U ⊂ R, potem sta tudi njuna vsota in produkt definirani na podmnožiciU . Množica vseh funkcij iz množice U v množico R je Abelova grupa zaseštevanje, nevtralni element za seštevanje je konstantna funkcija v vredno-stjo 0, nasprotni element funkcije f : U → R pa je funkcija −f : U → R,(−f)(x) = −f(x). Tudi množenje takih funkcij je komutativno in asocia-tivno, konstantna funkcija z vrednostjo 1 pa je nevtralni element za množe-nje.
Zgled 6.4. Naj bo f : U → R poljubna funkcija ene realne spremenljivke,definirana na podmnožici U ⊂ R, za katero je −U = U . Definirajmo funkcijifs : U → R in fl : U → R s predpisoma
fs(x) = f(x) + f(−x)2 , fl(x) = f(x)− f(−x)
2 .
Opazimo lahko, da je funkcija fs soda, da je funkcija fl liha in da velja:
f = fs + fl
Vsako funkcijo ene realne spremenljivke, ki je definirana na simetrični do-meni, lahko torej zapišemo kot vsoto sode in lihe funkcije. Ni se težkoprepričati, da je tak zapis enoličen.
6.1 Limita funkcije
Naj bo A poljubna podmnožica množice realnih števil R. Točka a ∈ R jestekališče podmnožice A ⊂ R, če za vsak δ ∈ R+ velja
La− δ, a+ δM ∩ (A \ {a}) 6= ∅.
Vsaka notranja točka podmnožice A je seveda njeno stekališče, medtemko zunanje točke podmnožice A prav gotovo niso stekališča podmnožice A.Točka a je izolirana točka podmnožice A ⊂ R, če je a ∈ A in hkrati točka a nistekališče podmnožice A. Vsaka mejna točka podmnožice A je torej bodisistekališče ali pa izolirana točka podmnožice A. Naslednja karakterizacijapove, da je točka a stekališče podmnožice A če, in samo če, se točki a lahkopoljubno natančno približamo s točkami iz množice A \ {a}:
Trditev 6.5. Točka a ∈ R je stekališče podmnožice A ⊂ R, če, in samo če,obstaja takšno zaporedje realnih števil (an), da je an ∈ A\{a} za vsak n ∈ Nin da velja limn→∞ an = a.
Dokaz. (⇒) Za vsak n ∈ N je po predpostavki množica La − 1n , a + 1
nM ∩(A \ {a}) neprazna, zato lahko izberemo točko an iz te množice. Dobljenozaporedje (an) konvergira k točki a.
(⇐) Naj bo (an) takšno zaporedje realnih števil, da je an ∈ A \ {a} zavsak n ∈ N in da velja limn→∞ an = a. Po definiciji limite so za vsak δ ∈ R+
v okolici La− δ, a+ δM vsi členi zaporedja z izjemo končno mnogih.
113

Zgled 6.6. (1) Oglejmo si podmnožico A = {1/n ; n ∈ N} ⊂ R. Pod-množica A ne vsebuje nobenega odprtega nepraznega intervala, zato nimanotranjih točk. Zunanje točke podmnožice A so vse točke v R \ A z izjemotočke 0. Točka 0 je edino stekališče podmnožice A. Vse točke iz podmnožiceA so njene izolirane točke.
(2) Naj bo A = J0, 1M∪ {2} ⊂ R. Notranje točke podmnožice A so točkeiz odprtega intervala L0, 1M. Mejne točke podmnožice A so števila 0, 1 in2. Stekališča podmnožice A so točke iz zaprtega intervala J0, 1K, torej tudištevilo 1, ki sicer ni vsebovano v podmnožici A. Število 2 je izolirana točkapodmnožice A.
Definicija 6.7. Naj bo f : U → R funkcija ene realne spremenljivke, de-finirana na podmnožici U ⊂ R, in naj bo a ∈ R stekališče podmnožice U .Število L ∈ R je limita funkcije f v točki a, če za vsak ε ∈ R+ obstaja takomajhen δ ∈ R+, da za vsak x ∈ La− δ, a+ δM ∩ (U \ {a}) velja
|f(x)− L| < ε.
V tem primeru označimoL = lim
x→af(x).
Komentar. (1) Limita funkcije, če obstaja, je torej število, ki se mu pribli-žujejo vrednosti funkcije f(x), če se točka x približuje točki a. Pri tem nipotrebno, da bi bila funkcija f definirana v točki a, pa tudi če je, nas pridefiniciji limite v točki a vrednost funkcije v tej točki ne zanima.
Definicijo limite si lahko predstavimo na grafu funkcije. Naj bo ε ∈ R+
poljuben. Če je δ ∈ R+ tako majhen, da za vsak x ∈ La−δ, a+δM∩ (U \{a})velja |f(x) − L| < ε, to pomeni, da graf zožitve funkcije f na podmnožicoLa− δ, a+ δM ∩ (U \ {a}) cel leži znotraj pasu med vodoravnima premicamana višinah L− ε in L+ ε.
x
y
aa-∆ a+∆
L
L-Ε
L+Ε
D=Ha,¥L
(2) Funkcija f : U → R ima v stekališču a podmnožice U ⊂ R lahkonajveč eno limito. V to se prepričamo na naslednji način: Naj bo L limitafunkcije f v točki a in naj bo L′ poljubno realno število, ki je različno od L.
114

Izberimo poljubno pozitivno realno število ε, ki je manjše od |L−L′|/2. Potrikotniški neenakosti sledi, da sta intervala LL− ε, L+ εM in LL′ − ε, L′ + εMdisjunktna. Po definiciji limite obstaja takšen δ ∈ R+, da za vsak x ∈La − δ, a + δM ∩ (U \ {a}) velja |f(x) − L| < ε. Za vsak tak x tedaj velja|f(x) − L′| ≥ ε. Za poljubno pozitivno realno število δ′ < δ obstaja točkax ∈ La − δ′, a + δ′M ∩ (U \ {a}) in za to točko velja |f(x) − L′| ≥ ε, to papomeni, da število L′ ni limita funkcije f v točki a.
x
y
aa-∆ a+∆
L
L-Ε
L+Ε
L’
L’-Ε
L’+Ε
(3) Naj bo f : U → R funkcija ene realne spremenljivke, definirana napodmnožici U ⊂ R. Če je točka a ∈ R stekališče podmnožice U∩La,∞M ⊂ Rin če obstaja limita funkcije f |U∩La,∞M v točki a, potem to limito imenujemodesna limita funkcije f v točki a in jo označimo
limx→a+
f(x) = limx↓a
f(x) = limx→a
(f |U∩La,∞M
)(x).
Če je točka a ∈ R stekališče podmnožice U ∩ L−∞, aM ⊂ R in če obstajalimita funkcije f |U∩L−∞,aM v točki a, potem to limito imenujemo leva limitafunkcije f v točki a in jo označimo
limx→a−
f(x) = limx↑a
f(x) = limx→a
(f |U∩L−∞,aM
)(x).
Predpostavimo, da je točka a stekališče tako podmnožice U ∩ La,∞Mkot tudi podmnožice U ∩ L−∞, aM. Očitno je tedaj realno število L limitafunkcije f v točki a če, in samo če, je L hkrati leva in desna limita funkcijef v točki a.
Leva in desna limita funkcije sta torej posebna primera limite funkcije.Posebej to pomeni, da tudi za leve in desne limite veljajo vse lastnosti, ki vsplošnem veljajo za limite funkcij.
(4) Namesto obnašanja funkcije v okolici neke točke nas pogosto zanimatudi obnašanje funkcije, ko spremenljivko povečujemo čez vse meje. Naj bof : U → R funkcija ene realne spremenljivke, definirana na navzgor neome-jeni podmnožici U ⊂ R. Realno število L je limita funkcije f v neskončnosti,če za vsak ε ∈ R+ obstaja tak B ∈ R, da za vsak x ∈ LB,∞M ∩ U velja
|f(x)− L| < ε.
115

V tem primeru označimoL = lim
x→∞f(x).
Med vodoravnima premicama na višinah L− ε in L+ ε v ravnini tedaj ležicel graf zožitve funkcije f na množico LB,∞M ∩ U . Vodoravna premica navišini L je vodoravna asimptota funkcije f v neskončnosti.
x
y
M
L-Ε
L+Ε
L
Limita funkcije f v neskončnosti je poseben primer limite funkcije v točkinič, saj očitno velja
limx→∞
f(x) = limx→0+
f(1/x).
Za limite v neskončnosti zato veljajo vse lastnosti, ki v splošnem veljajo zalimite funkcij.
(5) Naj bo f : U → R funkcija ene realne spremenljivke, definirana nanavzdol neomejeni podmnožici U ⊂ R. Realno število L je limita funkcijef v minus neskončnosti, če za vsak ε ∈ R+ obstaja tak b ∈ R, da za vsakx ∈ L−∞, bM ∩ U velja
|f(x)− L| < ε.
V tem primeru označimoL = lim
x→−∞f(x).
Vodoravna premica na višini L je tedaj vodoravna asimptota funkcije f vminus neskončnosti.
Tudi limita funkcije f v minus neskončnosti je poseben primer limitefunkcije v točki nič, saj je
limx→−∞
f(x) = limx→0−
f(1/x).
Za limite v minus neskončnosti zato veljajo vse lastnosti, ki v splošnemveljajo za limite funkcij.
Zgled 6.8. (1) Definirajmo funkcijo signum, sgn : R→ R, s predpisom
sgn(x) =
1 ; x > 0,0 ; x = 0,−1 ; x < 0.
116

x
y
-4 -2 2 4
-4
-2
2
4
x
y
2Ε
-4 -2 2 4
-4
-2
2
4
Iz grafa te funkcije sklepamo, da ima funkcija limito v vseh točkah z izjemotočke 0. V točki 0 velja
limx→0+
sgn(x) = 1,
limx→0−
sgn(x) = −1,
zato limita funkcije sgn v točki 0 ne obstaja.(2) Oglejmo si funkcijo f(x) = sinx
x . Funkcija f je soda in definirana namnožici R \ {0}. Pokazali bomo, da je
limx→0
sin xx
= 1.
x
y
-4 -2 2 4
-1.0
-0.5
0.5
1.0
1.5
Pri tem so bomo pomagali z geometrično definicijo trigonometričnih funkcij.Naj bo x poljuben pozitiven kot, ki je manjši od π/2.
x
tg x
A
NT
1
1O
117

Iz slike vidimo, da je ploščina trikotnika z oglišči OAT manjša od ploščinekrožnega izseka z oglišči OAT , ta pa je manjša od ploščine trikotnika zoglišči OAN . Velja torej
1 · 1 · sin x2 <
x
2π · π · 12 <
1 · tg x2
in zatosin x < x < tg x.
Zadnji neenakosti lahko zapišemo tudi v obliki
cosx < sin xx
< 1.
Od tod sledi, da za vsak x ∈ R, za katerega je 0 < x < 1, velja
0 < 1− sin xx
< 1− cosx = 2 sin2 x
2 <x2
2 < x.
Desna limita funkcije f v točki 0 torej obstaja in je enaka 1. Ker je funkcija fsoda, je tudi njena leva limita v točki 0 enaka 1, zato je tudi (obojestranska)limita funkcije f v točki 0 enaka 1.
(3) Naj bo f : U → R funkcija, definirana na podmnožici U ⊂ R, in najbo c ∈ U .
(i) Če je funkcija f naraščajoča in je c stekališče podmnožice U∩L−∞, cM,potem je f(c) zgornja meja za množico {f(x) ; x ∈ U, x < c}, supremum temnožice pa je leva limita funkcije f v točki c, torej
limx→c−
f(x) = sup{f(x) ; x ∈ U, x < c} ≤ f(c).
(ii) Če je funkcija f naraščajoča in je c stekališče podmnožice U ∩Lc,∞M,potem je f(c) spodnja meja za množico {f(x) ; x ∈ U, x > c}, infimum temnožice pa je desna limita funkcije f v točki c, torej
limx→c+
f(x) = inf{f(x) ; x ∈ U, x > c} ≥ f(c).
(iii) Če je funkcija f padajoča in je c stekališče podmnožice U ∩ L−∞, cM,potem je f(c) spodnja meja za množico {f(x) ; x ∈ U, x < c}, infimum temnožice pa je leva limita funkcije f v točki c, torej
limx→c−
f(x) = inf{f(x) ; x ∈ U, x < c} ≥ f(c).
(iv) Če je funkcija f padajoča in je c stekališče podmnožice U ∩ Lc,∞M,potem je f(c) zgornja meja za množico {f(x) ; x ∈ U, x > c}, supremum temnožice pa je desna limita funkcije f v točki c, torej
limx→c+
f(x) = sup{f(x) ; x ∈ U, x > c} ≤ f(c).
118

Limite funkcij lahko karakteriziramo s pomočjo limit zaporedij:
Trditev 6.9. Naj bo f : U → R funkcija ene realne spremenljivke, defini-rana na podmnožici U ⊂ R, in naj bo a ∈ R stekališče podmnožice U . ŠteviloL ∈ R je limita funkcije f v točki a, če, in samo če, za vsako zaporedje števil(xn) iz množice U \ {a}, ki konvergira k točki a, velja L = limn→∞ f(xn).
Dokaz. (⇒) Naj bo L limita funkcije f v točki a. Vzemimo poljubno za-poredje števil (xn) iz množice U \ {a}, ki konvergira k točki a. Pokazatimoramo, da zaporedje (f(xn)) konvergira k točki L.
Izberimo poljuben ε ∈ R+. Po definiciji limite funkcije obstaja tak δ ∈R+, da za vsak x ∈ La − δ, a + δM ∩ (U \ {a}) velja |f(x) − L| < ε. Kerzaporedje (xn) konvergira k točki a, lahko najdemo tako velik N ∈ N, da zavsako naravno število n ≥ N velja xn ∈ La − δ, a + δM ∩ (U \ {a}). Za vsaktak n torej velja |f(xn)− L| < ε.
(⇐) Zdaj predpostavimo, da L ni limita funkcije f v točki a. Pokazatimoramo, da tedaj obstaja takšno zaporedje števil (xn) iz množice U \ {a},da je točka a njegova limita in da število L ni limita zaporedja (f(xn))n.
Po definiciji limite funkcije lahko najdemo tak ε ∈ R+, da za poljubenδ ∈ R+ obstaja neka točka x ∈ La − δ, a + δM ∩ (U \ {a}), za katero je|f(x) − L| ≥ ε. Posebej torej za vsak n ∈ N lahko izberemo točko xn ∈La − 1
n , a + 1nM ∩ (U \ {a}), za katero velja |f(xn) − L| ≥ ε. S tem smo
konstruirali želeno zaporedje (xn).
Komentar. Ker so limite funkcije v neskončnosti in minus neskončnostiposeben primer limit funkcij v točki nič, podobna trditev velja tudi za takšnelimite. Velja torej:
(i) Naj bo f : U → R funkcija ene realne spremenljivke, definirana nanavzgor neomejeni podmnožici U ⊂ R. Število L ∈ R je limita funkcije fv neskončnosti, če, in samo če, za vsako zaporedje števil (xn) iz množiceU \ {a}, za katerega je limn→∞ xn =∞, velja L = limn→∞ f(xn).
(ii) Naj bo f : U → R funkcija ene realne spremenljivke, definirana nanavzdol neomejeni podmnožici U ⊂ R. Število L ∈ R je limita funkcije f vminus neskončnosti, če, in samo če, za vsako zaporedje števil (xn) iz množiceU \ {a}, za katerega je limn→∞ xn = −∞, velja L = limn→∞ f(xn).
Trditev 6.9 nam omogoča, da s pomočjo že znanih pravil za računanje zlimitami zaporedij izpeljemo tudi pravila za računanje z limitami funkcij:
Trditev 6.10. Naj bosta f : U → R in g : V → R funkciji ene realne spre-menljivke, definirani na podmnožicah U, V ⊂ R, in naj bo a ∈ R stekališčepodmnožice U ∩ V ⊂ R. Če imata funkciji f in g limiti v točki a, potemvelja:
(i) Funkcija f + g ima limito v točki a in
limx→a
(f(x) + g(x)) = limx→a
f(x) + limx→a
g(x).
119

(ii) Funkcija f · g ima limito v točki a in
limx→a
(f(x)g(x)) = limx→a
f(x) · limx→a
g(x).
(iii) Če je limita funkcije g v točki a različna od nič, potem je točka astekališče podmnožice U ∩ g−1(R \ {0}) ⊂ R, funkcija f/g ima limitov točki a in
limx→a
f(x)g(x) = limx→a f(x)
limx→a g(x) .
Dokaz. Dokaz je posledica Trditve 6.9 in pravil za računanje z limitamizaporedij.
(iii) Ker je limx→a g(x) 6= 0, po definiciji limite funkcije lahko najdemotako majhen δ ∈ R+, da je g(x) 6= 0 za vsak x ∈ La−δ, a+δM∩(V \{a}). Kerje poleg tega točka a stekališče podmnožice U ∩ V , je torej tudi stekališčepodmnožice U ∩ g−1(R \ {0}).
Izberimo poljubno zaporedje (xn) točk iz množice (U∩g−1(R\{0}))\{a},ki konvergira k točki a. Po Trditvi 6.9 velja
limn→∞
f(xn) = limx→a
f(x),
limn→∞
g(xn) = limx→a
g(x).
Po pravilu za računanje limite kvocienta dveh zaporedij sledi
limn→∞
f(xn)g(xn) = limn→∞ f(xn)
limn→∞ g(xn) = limx→a f(x)limx→a g(x) .
Ker to velja za poljubno zaporedje (xn) točk iz množice (U ∩ g−1(R\{0}))\{a}, ki konvergira k točki a, po Trditvi 6.9 sledi
limx→a
f(x)g(x) = limx→a f(x)
limx→a g(x) .
Točki (i) in (ii) dokažemo podobno.
Komentar. Ker so leve limite, desne limite in limite v neskončnosti ter vminus neskončnosti poseben primer limit funkcij, lahko na podoben načinračunamo tudi s takšnimi limitami.
Zgled 6.11. Včasih funkcija v dani točki a nima limite, se pa njene vre-dnosti povečujejo čez vse meje, ko se argument približuje točki a. To se naprimer zgodi v polu racionalne funkcije, kjer ima funkcija navpično asimp-toto. Za poljubno funkcijo f : U → R, definirano na podmnožici U ⊂ R, sedogovorimo za naslednje oznake:
(i) Če je a ∈ R stekališče podmnožice U in če za vsako število M ∈ Robstaja tak δ ∈ R+, da za vsak x ∈ La− δ, a+ δM∩ (U \{a}) velja M ≤ f(x),potem to zapišemo z oznako
limx→a
f(x) =∞.
120

x
y
a-∆ a+∆a
M
Podobno definiramo pomen oznak limx→a+ f(x) =∞ in limx→a− f(x) =∞.(ii) Če je a ∈ R stekališče podmnožice U in če za vsako število m ∈ R
obstaja tak δ ∈ R+, da za vsak x ∈ La− δ, a+ δM∩ (U \ {a}) velja f(x) ≤ m,potem to zapišemo z oznako
limx→a
f(x) = −∞.
Podobno definiramo oznaki limx→a+ f(x) = −∞ in limx→a− f(x) = −∞.(iii) Če množica U ni navzgor omejena in če za vsako število M ∈ R
obstaja tak B ∈ R, da za vsak x ∈ LB,∞M ∩ U velja M ≤ f(x), potem tozapišemo z oznako
limx→∞
f(x) =∞.
(iv) Če množica U ni navzgor omejena in če za vsako število m ∈ Robstaja tak B ∈ R, da za vsak x ∈ LB,∞M ∩ U velja f(x) ≤ m, potem tozapišemo z oznako
limx→∞
f(x) = −∞.
(v) Če množica U ni navzdol omejena in če za vsako število M ∈ Robstaja tak b ∈ R, da za vsak x ∈ L−∞, bM ∩ U velja M ≤ f(x), potem tozapišemo z oznako
limx→−∞
f(x) =∞.
(vi) Če množica U ni navzdol omejena in če za vsako število m ∈ Robstaja tak b ∈ R, da za vsak x ∈ L−∞, bM ∩ U velja f(x) ≤ m, potem tozapišemo z oznako
limx→−∞
f(x) = −∞.
Tako na primer velja
limx→−∞
1x
= 0, limx→∞
1x
= 0,
limx→0+
1x
=∞, limx→0−
1x
= −∞.
121

6.2 Zveznost
Definicija 6.12. Naj bo f : U → R funkcija ene realne spremenljivke,definirana na podmnožici U ⊂ R. Funkcija f je zvezna v točki a ∈ U , če zavsak ε ∈ R+ obstaja tak δ ∈ R+, da za vsak x ∈ La− δ, a+ δM ∩ U velja
|f(x)− f(a)| < ε.
Funkcija f je zvezna, če je zvezna v vsaki točki a ∈ U .
Komentar. Definicija zveznosti funkcije v točki je zelo podobna definicijilimite v tej točki. Če je a ∈ U stekališče podmnožice U ⊂ R, potem jefunkcija f : U → R zvezna v točki a, če, in samo če, je vrednosti f(a) limitafunkcije f v točki a. Če je a ∈ U izolirana točka podmnožice U , potem jepogoj zveznosti funkcije f v tej točki avtomatično izpolnjen.
x
y
D
a
Lastnost zveznosti funkcije v točki je smiselna le za točke, v katerih jefunkcija definirana. Funkcija sgn je zvezna povsod razen v točki 0. V tejtočki je funkcija definirana, graf funkcije pa je nad njo pretrgan.
x
y
-4 -2 2 4
-4
-2
2
4
x
y
-4 -2 2 4
-4
-2
2
4
Na desni sliki je graf funkcije sgn|R\{0}, ki je zvezna. Graf te zožitve funkcijeje sicer sestavljen iz dveh kosov, a je nepretrgan nad vsako točko iz domenete zožitve.
Iz zgornjih opažanj in iz Trditve 6.9 direktno sledi:
122

Trditev 6.13. Naj bo f : U → R funkcija ene realne spremenljivke, de-finirana na podmnožici U ⊂ R, in na bo a poljubna točka iz podmnožiceU .
(i) Če je a izolirana točka podmnožice U , potem je f zvezna v točki a.
(ii) Če je točka a stekališče podmnožice U , potem je f zvezna v točki a, če,in samo če, je vrednosti f(a) limita funkcije f v točki a.
(iii) Funkcija f je zvezna v točki a, če, in samo če, za vsako zaporedje (xn)točk iz podmnožice U , ki konvergira k točki a, velja
f(a) = limn→∞
f(xn).
Enakost iz točke (iii) v zadnji trditvi bi lahko zapisali v tudi obliki
f( limn→∞
xn) = limn→∞
f(xn).
Formalno gledano torej vrstni red zvezne funkcije in limite zaporedja lahkozamenjamo. Podobno lahko zamenjamo tudi vrstni red zvezne funkcije inlimite funkcije:
Trditev 6.14. Naj bosta f : U → R in g : V → R funkciji, definirani napodmnožicah U, V ⊂ R, naj bo a stekališče podmnožice g−1(U) ⊂ R in najobstaja limita funkcije g v točki a. Če je limx→a g(x) ∈ U in je funkcija fzvezna v točki limx→a g(x), potem obstaja tudi limita funkcije f ◦ g v točki ain velja
limx→a
f(g(x)) = f( limx→a
g(x)).
Dokaz. Za poljubno zaporedje (xn) točk iz g−1(U)\{a}, ki konvergira k točkia, po Trditvi 6.9 zaporedje (g(xn))n konvergira k številu limx→a g(x), zatopo Trditvi 6.13 zaporedje (f(g(xn)))n konvergira k vrednosti f(limx→a g(x)).Trditev je zdaj posledica Trditve 6.9.
Zgled 6.15. Naj bosta f : U → R in g : V → R funkciji, definirani napodmnožicah U, V ⊂ R, naj bo a stekališče podmnožice g−1(U) ⊂ R in najbo b ∈ R \ U limita funkcije g v točki a.
Najprej opazimo, da je točka b stekališče podmnožice U . Res, ker jea stekališče podmnožice g−1(U), obstaja zaporedje (xn) točk iz množiceg−1(U) \ {a}, ki konvergira k točki a. Ker je b limita funkcije g v točki a,zaporedje (g(xn))n konvergira k točki b. Za vsak n ∈ N je g(xn) ∈ U ing(xn) 6= b, saj b 6∈ U . Od tod sledi, da je točka b stekališče podmnožice U .
Če od tem obstaja limita funkcije f v točki b, potem obstaja tudi limitafunkcije f ◦ g v točki a in velja
limx→a
f(g(x)) = limt→b
f(t).
123

Res, definirajmo funkcijo h : U ∪ {b} → R tako, da je h|U = f in da jeh(b) = limt→b f(t). Po definiciji je funkcija h zvezna v točki b, zato poTrditvi 6.14 obstaja limita limx→a h(g(x)). Poleg tega iz definicije funkcijeh sledi, da je število limx→a h(g(x)) tudi limita funkcije f ◦ g v točki a. Zuporabo Trditve 6.14 od tod dobimo
limx→a
f(g(x)) = limx→a
h(g(x)) = h( limx→a
g(x)) = h(b) = limt→b
f(t).
Iz Trditve 6.13 in iz pravil za računanje z limitami direktno sledi:
Posledica 6.16. Naj bosta f : U → R in g : V → R funkciji, definirani napodmnožicah U, V ⊂ R, in naj bo a ∈ U ∩ V .
(i) Če sta funkciji f in g zvezni v točki a, potem sta tudi funkciji f + g infg zvezni v točki a.
(ii) Če sta funkciji f in g zvezni v točki a in velja g(a) 6= 0, potem je tudifunkcija f/g zvezna v točki a.
Posledica 6.17. Naj bosta f : U → R in g : V → R funkciji, definiranina podmnožicah U, V ⊂ R, in naj bo a ∈ g−1(U). Če je funkcija g zveznav točki a in je funkcija f zvezna v točki g(a), potem je tudi funkcija f ◦ gzvezna v točki a.
Dokaz. Naj bo (xn) poljubno zaporedje točk iz g−1(U), ki konvergira k točkia. Ker je funkcija g zvezna v točki a, zaporedje (g(xn))n konvergira k točkig(a) ∈ U . Ker je funkcija f zvezna v točki g(a), zaporedje (f(g(xn)))nkonvergira k točki f(g(a)). Po Trditvi 6.13 je zato funkcija f ◦ g zvezna vtočki a.
Zgled 6.18. (1) Konstantna funkcija f : R → R z vrednostjo c ∈ R jezvezna. Za vsak ε ∈ R+ in za poljubna a, x ∈ R namreč velja
|f(x)− f(a)| = |c− c| = 0 < ε.
(2) Linearna realna funkcija f : R→ R ene realne spremenljivke, f(x) =kx+ n, je zvezna, za poljubni konstanti k, n ∈ R. Res, najprej opazimo, daje funkcija f konstantna v primeru, ko je k = 0, konstantna funkcija pa jezvezna po točki (1). Predpostavimo torej, da je k 6= 0. Izberimo poljubenε ∈ R+ in vzemimo δ = ε/|k|. Za poljubna a, x ∈ R, za katera je |x−a| < δ,zdaj velja
|f(x)− f(a)| = |kx+ n− (ka+ n)| = |kx− ka| = |k||x− a| < |k|δ = ε.
(3) Zožitve zveznih funkcij so zvezne funkcije. Naj bo f : U → R funkcija,definirana na podmnožici U ⊂ R, in naj bo V podmnožica množice U . Čeje funkcija f zvezna v točki a ∈ V , potem je očitno tudi funkcija f |V zveznav točki a.
124

(4) Potenčna funkcija f : R → R, f(x) = xn, je zvezna za vsak n ∈ N.Zapišemo jo namreč lahko v obliki produkta funkcij
f(x) = x · x · · · · · x,
identična funkcija x 7→ x pa je zvezna po točki (2).(5) Realen polinom stopnje n ∈ N ∪ {0} je funkcija ene realne spremen-
ljivke P : R→ R s predpisom
P (x) = anxn + an−1x
n−1 + · · ·+ a1x+ a0,
za neke konstante a0, a1, . . . , an ∈ R, an 6= 0. Polinom je vsota produktovpotenčnih funkcij in konstant, torej vsota produktov zveznih funkcij. Vsakpolinom je zato zvezna funkcija.
(6) Racionalna funkcija je kvocient dveh polinomov, zato je zvezna.
V nadaljevanju bomo spoznali nekaj pomembnih in uporabnih lastnostizveznih funkcij. Najprej si bomo ogledali izrek o obstoju ničel zveznih funk-cij. Graf zvezne funkcije na nekem intervalu si geometrično predstavljamokot neprekinjeno krivuljo.
x
y
a b
fHaL
fHbL
Če ima funkcija v krajiščih intervala nasprotno predznačeni vrednosti, botorej graf funkcije moral povezati dve točki, ki ležita na različnih bregovihabscisne osi. Intuitivno se nam zdi jasno, da mora tedaj graf nekje sekatiabscisno os, kar pa pomeni, da ima funkcija na danem intervalu vsaj enoničlo. To dejstvo bomo dokazali v naslednji trditvi.
Trditev 6.19. Naj bosta a in b realni števili, a < b, in naj bo f : Ja, bK→ Rzvezna funkcija. Če je f(a)f(b) < 0, potem obstaja vsaj ena točka ξ ∈ La, bM,za katero velja f(ξ) = 0.
Dokaz. Trditev bomo dokazali s pomočjo bisekcije, ki je tudi sicer zelo upo-rabna metoda za približno iskanje ničel funkcij. Ničlo funkcije f bomo poi-skali z zaporednimi razpolovitvami intervala.
125

x
y
a ba2 b3
Če bomo po končno mnogo korakih naleteli na ničlo funkcije f , bo dokazs tem končan, sicer pa bomo induktivno konstruirali zaporedji (an) in (bn)realnih števil z naslednjimi lastnostmi:
(i) zaporedje (an) je naraščajoče, zaporedje (bn) pa padajoče,
(ii) a ≤ an < bn ≤ b ter bn − an = (b− a)/2n−1 za vsak n ∈ N, in
(iii) f(an)f(bn) < 0 za vsak n ∈ N.
Najprej definiramo a1 = a in b1 = b. Predpostavimo, da smo že definiralištevila a1, a2, . . . , an in b1, b2, . . . , bn z zgornjimi lastnostmi. Označimo cn =(an + bn)/2. Če je f(cn) = 0, smo torej našli ničlo ξ = cn funkcije f in stem je dokaz končan. V primeru, da velja f(cn) 6= 0, definiramo točki an+1in bn+1 na naslednji način:
(1) če je f(an)f(cn) < 0, naj bo an+1 = an in bn+1 = cn,
(2) če pa je f(an)f(cn) > 0, naj bo an+1 = cn in bn+1 = bn.
V primeru (2) velja f(an)2f(cn)f(bn) = (f(an)f(cn))(f(an)f(bn)) < 0, zatoje tedaj f(cn)f(bn) < 0.
Po konstrukciji je zaporedje (an) naraščajoče in navzgor omejeno s šte-vilom b, zato je konvergentno. Prav tako je konvergentno zaporedje (bn),saj je padajoče in navzdol omejeno s številom a. Iz enakosti
limn→∞
bn − limn→∞
an = limn→∞
(bn − an) = limn→∞
b− a2n−1 = 0
sledi, da imata obe zaporedji isto limito, ki jo bomo označili z
ξ = limn→∞
an = limn→∞
bn.
126

Pokazali bomo, da je točka ξ ničla funkcije f . Pri tem bomo uporabilipredpostavko, da je funkcija f zvezna. Z uporabo Trditve 6.13 dobimo
f(ξ)2 = f(ξ)f(ξ) = f(
limn→∞
an)· f(
limn→∞
bn)
= limn→∞
f(an) · limn→∞
f(bn)
= limn→∞
f(an)f(bn).
Ker je f(an)f(bn) < 0 za vsak n ∈ N, je limn→∞ f(an)f(bn) ≤ 0. Velja torejf(ξ)2 ≤ 0, od tod pa sledi f(ξ) = 0.
Naslednji trditvi povesta, da je na omejenem zaprtem intervalu vsakazvezna funkcija omejena in da tam tudi doseže svojo največjo in najmanjšovrednost.
x
y
a b
supHfL
infHfL
Trditev 6.20. Vsaka zvezna funkcija f : U → R, definirana na omejenizaprti podmnožici U ⊂ R, je omejena.
Dokaz. S protislovjem bomo najprej pokazali, da je funkcija f navzgor ome-jena. Pa recimo, da funkcija f ni navzgor omejena. To bi pomenilo, za vsakn ∈ N lahko izberemo takšno točko xn ∈ U , da je f(xn) ≥ n. Ker je množicaU omejena, je tako dobljeno zaporedje (xn) omejeno. To zaporedje ima torejneko stekališče c ∈ R. Ker je množica U zaprta, je c ∈ U . Ker je funkcija fzvezna v točki c, obstaja tak δ ∈ R+, da za vsak x ∈ Lc− δ, c+ δM ∩ U velja
|f(x)− f(c)| < 1.
Število c je stekališče zaporedja (xn), zato lahko najdemo tako naravnoštevilo n, da je xn ∈ Lc − δ, c + δM in n > f(c) + 1. Od tod sledi, da velja|f(xn)− f(c)| < 1, a hkrati tudi
f(xn)− f(c) ≥ n− f(c) > f(c) + 1− f(c) = 1,
kar pa je protislovje. Funkcija f je torej navzgor omejena.Ker je funkcija −f zvezna, je po pravkar dokazanem navzgor omejena,
to pa pomeni, da je funkcija f tudi navzdol omejena.
127

Naslednja trditev pove, da vsaka zvezna realna funkcija ene realne spre-menljivke na neprazni omejeni zaprti množici doseže svojo največjo in naj-manjšo vrednost.
Trditev 6.21. Naj bo f : U → R zvezna funkcija, definirana na neprazniomejeni zaprti podmnožici U ⊂ R. Tedaj obstajata takšni točki u, v ∈ U , davelja
f(u) = sup(f) = max(f) in f(v) = inf(f) = min(f).
Dokaz. Po Trditvi 6.20 je funkcija f omejena. Označimo M = sup(f) indefinirajmo zvezno, nenegativno funkcijo g : U → R s predpisom
g(x) = M − f(x).
Pokazali bomo, da ima funkcija g vsaj eno ničlo. Pa predpostavimo, dafunkcija g nima ničel. V tem primeru je funkcija 1/g zvezna in definirana naceli množici U , zato je po Trditvi 6.20 omejena. Obstaja torej tako pozitivnorealno število A, da za vsak x ∈ U velja 1/g(x) = 1/(M − f(x)) ≤ A, torej
f(x) ≤M − 1A.
To pomeni, da jeM−1/A zgornja meja množice f(U), kar pa je protislovje.S tem smo pokazali, da ima funkcija g neko ničlo u ∈ U , od tod pa dobimof(u) = M = sup(f).
Če pravkar dokazano uporabimo za funkcijo −f , s tem dobimo še točkov ∈ U , za katero je −f(v) = sup(−f) = − inf(f).
V zadnjih dveh trditvah je pomembno, da je funkcija f definirana naomejeni zaprti podmnožici. Na naslednji sliki vidimo grafa zveznih funk-cij, definiranih na odprtem omejenem intervalu La, bM, od katerih je prvaneomejena, druga pa je omejena, a nikjer ne zavzame minimalne oziromamaksimalne vrednosti:
x
y
a b x
y
a b
supHfL
infHfL
128

Poleg minimalne in maksimalne vrednosti zavzame zvezna funkcija nazaprtem omejenem intervalu tudi vse vrednosti med minimumom in maksi-mumom:
Trditev 6.22. Naj bosta a in b realni števili, a ≤ b, in naj bo f : Ja, bK→ Rzvezna funkcija. Tedaj velja
f(Ja, bK) = Jinf(f), sup(f)K.
Dokaz. Očitno velja f(Ja, bK) ⊂ Jinf(f), sup(f)K. Po Trditvi 6.21 obstajatatočki u, v ∈ Ja, bK, za kateri je f(u) = sup(f) in f(v) = inf(f). To pomeni,da velja inf(f), sup(f) ∈ f(Ja, bK). Vzemimo poljubno realno število A, zakaterega je inf(f) < A < sup(f). Definirajmo zvezno funkcijo g : Ja, bK→ Rs predpisom
g(x) = f(x)−A.
Ker velja
g(u)g(v) = (f(u)−A)(f(v)−A) = (sup(f)−A)(inf(f)−A) < 0,
po Trditvi 6.19 obstaja točka x na intervalu med u in v, za katero je g(x) = 0in torej f(x) = A. S tem smo pokazali, da je A ∈ f(Ja, bK).
Zadnja trditev nam pove, da je za poljubno zvezno funkcijo f : Ja, bK→ Renačba f(x) = A rešljiva, če, in samo če, je A ∈ Jinf(f), sup(f)K. Če teenačbe ne znamo rešiti eksplicitno, pa lahko poljubno natančen približek zarešitev poiščemo z metodo bisekcije.
Posledica 6.23. Naj bosta a in b realni števili, a ≤ b.(i) Naraščajoča funkcija f : Ja, bK→ R je zvezna če, in samo če, velja
f(Ja, bK) = Jf(a), f(b)K.
(ii) Padajoča funkcija g : Ja, bK→ R je zvezna če, in samo če, velja
g(Ja, bK) = Jg(b), g(a)K.
Dokaz. Obe točki sledita direktno iz Trditve 6.22 in Zgleda 6.8(3).
Posledica 6.24. Naj bo f : U → R zvezna funkcija, definirana na intervaluU ⊂ R. Tedaj je slika f(U) funkcije f interval.
Dokaz. Ker je množica U interval, za poljubni dve točki a, b ∈ U , za katerije a < b, velja Ja, bK ⊂ U . Iz Trditve 6.22 sledi, da funkcija f na intervaluJa, bK zavzame vse vrednosti med f(a) in f(b). S tem smo dokazali, da zapoljubni dve točki iz slike f(U) cel interval med tema dvema točkama ležiznotraj množice f(U), to pa pomeni, da je množica f(U) interval.
129

Kot konkreten primer uporabe Posledice 6.24 lahko pokažemo obstojkorenov nenegativnih realnih števil:
Posledica 6.25. Naj bo n ∈ N in naj bo A poljubno nenegativno realnoštevilo. Tedaj obstaja natanko eno nenegativno realno število x, za katerovelja xn = A. To število x označimo z n
√A in ga imenujemo n-ti koren
števila A.
Dokaz. Potenčna funkcija f : J0,∞M → R, dana s predpisom f(x) = xn,je zvezna, strogo naraščajoča in navzgor neomejena. Po Posledici 6.24 jeslika funkcije f interval J0,∞M, zato za vsak A ∈ J0,∞M zagotovo obstajatak x ∈ J0,∞M, da je f(x) = A. Ker je funkcija f strogo naraščajoča, jeinjektivna, zato je rešitev enačbe f(x) = A ena sama.
Komentar. (1) Naj bo n sodo naravno število in A ∈ R. Če je A ≥ 0,potem ima enačba xn = A dve realni rešitvi in sicer n
√A in − n
√A. Če
je A < 0, potem enačba xn = A nima realnih rešitev. Korenska funkcijaJ0,∞M→ R, t 7→ n
√t, je strogo naraščajoča, njena slika je interval J0,∞M.
x
y
fHxL = x2
fHxL = x
-1 1 2 3 4
-1
1
2
3
4
(2) Naj bo n liho naravno število in A ∈ R. Enačba xn = A imatedaj natanko eno realno rešitev. Če je A ≥ 0, potem je ta rešitev n
√A
nenegativna. Če je A < 0, potem je ta rešitev enaka številu − n√−A, in v
tem primeru označimon√A = − n
√−A.
Korenska funkcija R→ R, t 7→ n√t, je strogo naraščajoča bijekcija.
Trditev 6.26. Naj bo f : U → R zvezna funkcija, definirana na intervaluU ⊂ R.
(i) Funkcija f je injektivna, če, in samo če, je strogo monotona.(ii) Če je funkcija f injektivna, potem je njena inverzna funkcija ene
realne spremenljivke f−1 : f(U)→ R zvezna.
Dokaz. (i) Če je funkcija f injektivna, potem iz Trditve 6.22 sledi, da jefunkcija f strogo monotona.
(ii) Po točki (i) je funkcija f strogo monotona, zato je tudi inverz f−1
strogo monotona funkcija. Po Posledici 6.24 je slika f(U) interval.
130

Predpostavimo, da je funkcija f strogo naraščajoča. Izberimo poljubnitočki u, v ∈ f(U), za kateri je u < v. Ker je funkcija f zvezna, po Posledici6.23 sledi, da je
f(Jf−1(u), f−1(v)K) = Jf(f−1(u)), f(f−1(v))K = Ju, vK
in torejf−1(Ju, vK) = Jf−1(u), f−1(v)K.
Po Posledici 6.23 od tod sledi, da je funkcija f−1 zvezna na intervalu Ju, vK.Ker to velja za vse u, v ∈ f(U), za katere je u < v, je funkcija f−1 zvezna.
Če je funkcija f strogo padajoča, trditev dokažemo na podoben način.
Posledica 6.27. Naj bo f : U → R zvezna injektivna funkcija, definirana naodprti podmnožici U ⊂ R. Slika f(U) funkcije f je tedaj odprta podmnožicamnožice R, inverzna funkcija ene realne spremenljivke f−1 : f(U) → Rfunkcije f pa je zvezna.
Dokaz. Iz zveznosti in injektivnosti funkcije f ter Trditve 6.22 sledi, da jemnožica f(U) odprta, preostalo pa je posledica Trditve 6.26, ki jo uporabimona vsakem intervalu znotraj odprte množice U .
Zgled 6.28. (1) (zveznost korenskih funkcij) Potenčna funkcija f(x) = xn
je zvezna za poljuben n ∈ N.Če je število n sodo, je funkcija f strogo naraščajoča na intervalu L0,∞M,
po Trditvi 6.26 pa je tudi korenska funkcija
L0,∞M→ L0,∞M ⊂ R, t 7→ n√t,
zvezna strogo naraščajoča funkcija.Če je število n liho, je funkcija f strogo naraščajoča na celi domeni R,
po Trditvi 6.26 pa je tudi korenska funkcija
R→ R, t 7→ n√t,
zvezna strogo naraščajoča funkcija.(2) (zveznost kotnih funkcij) Sinusna funkcija sin : R → R je zvezna.
Res, za poljubno točko a ∈ R in za vsak h ∈ R velja
| sin(a+ h)− sin(a)| =∣∣∣∣2 cos
(a+ h
2
)sin h2
∣∣∣∣≤ 2
∣∣∣∣sin h2∣∣∣∣ ≤ 2
∣∣∣∣h2∣∣∣∣ = |h|.
Pri tem smo uporabili adicijski izrek in neenakost | sin x| ≤ |x|. Zadnjoneenakost smo geometrično dokazali v primeru, da je 0 < x < π/2, a od todočitno sledi, da ta neenakost velja za vsak x ∈ R.
131
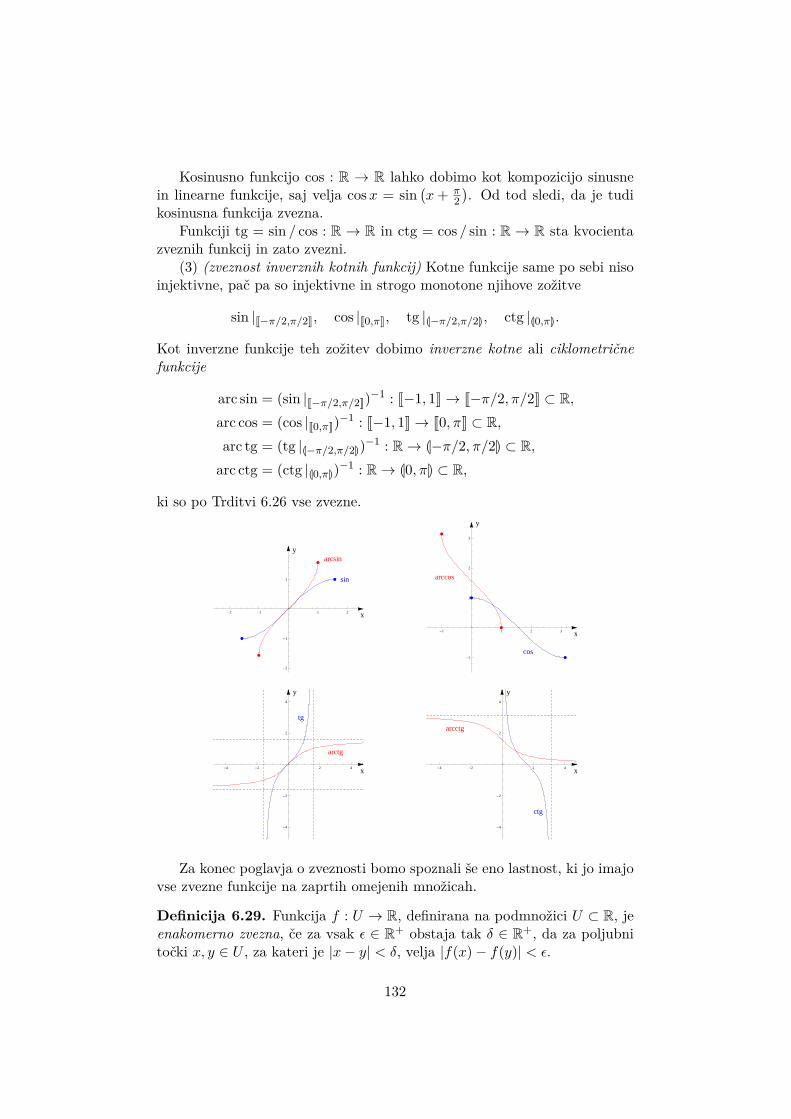
Kosinusno funkcijo cos : R → R lahko dobimo kot kompozicijo sinusnein linearne funkcije, saj velja cosx = sin
(x+ π
2). Od tod sledi, da je tudi
kosinusna funkcija zvezna.Funkciji tg = sin / cos : R → R in ctg = cos / sin : R → R sta kvocienta
zveznih funkcij in zato zvezni.(3) (zveznost inverznih kotnih funkcij) Kotne funkcije same po sebi niso
injektivne, pač pa so injektivne in strogo monotone njihove zožitve
sin |J−π/2,π/2K, cos |J0,πK, tg |L−π/2,π/2M, ctg |L0,πM.
Kot inverzne funkcije teh zožitev dobimo inverzne kotne ali ciklometričnefunkcije
arc sin = (sin |J−π/2,π/2K)−1 : J−1, 1K→ J−π/2, π/2K ⊂ R,arc cos = (cos |J0,πK)−1 : J−1, 1K→ J0, πK ⊂ R,arc tg = (tg |L−π/2,π/2M)−1 : R→ L−π/2, π/2M ⊂ R,
arc ctg = (ctg |L0,πM)−1 : R→ L0, πM ⊂ R,
ki so po Trditvi 6.26 vse zvezne.
x
y
sin
arcsin
-2 -1 1 2
-2
-1
1
x
y
cos
arccos
-1 1 2 3
-1
1
2
3
x
y
arctg
tg
-4 -2 2 4
-4
-2
2
4
x
y
arcctg
ctg
-4 -2 2 4
-4
-2
2
4
Za konec poglavja o zveznosti bomo spoznali še eno lastnost, ki jo imajovse zvezne funkcije na zaprtih omejenih množicah.
Definicija 6.29. Funkcija f : U → R, definirana na podmnožici U ⊂ R, jeenakomerno zvezna, če za vsak ε ∈ R+ obstaja tak δ ∈ R+, da za poljubnitočki x, y ∈ U , za kateri je |x− y| < δ, velja |f(x)− f(y)| < ε.
132

Zveznost funkcije je definirana v vsaki točki posebej, enakomerno zveznapa je lastnost funkcije na celem definicijskem območju. Vsaka enakomernozvezna funkcija je očitno zvezna, obratno pa v splošnem ne drži. V definicijizveznosti v neki točki y je δ lahko odvisen od izbire števila ε in od točke y,v definiciji enakomerne zveznosti pa je δ lahko odvisen le od izbire števila ε.Enostaven primer funkcije, ki je zvezna, a ni enakomerno zvezna, je funkcijaf(x) = 1/x, definirana na množici R \ {0}.
x
y
2∆2∆’
2Ε
2Ε
Ko se približujemo polu v točki 0, postaja graf funkcije vse bolj strm, karpomeni, da moramo pri fiksnem ε izbirati čedalje manjši δ, da bomo graffunkcije f nad intervalom dolžine 2δ lahko zajeli v pravokotnik z višino 2ε.
Kaj takšnega pa se ne more zgoditi, če je domena zvezne funkcije zaprtain omejena:
Trditev 6.30. Vsaka zvezna funkcija f : U → R, definirana na omejenizaprti podmnožici U ⊂ R, je enakomerno zvezna.
Dokaz. Trditev bomo dokazali s pomočjo protislovja. Pa predpostavimo,da zvezna funkcija f ni enakomerno zvezna. V tem primeru obstaja takε ∈ R+, da za vsak n ∈ N lahko najdemo točki xn, yn ∈ U , za kateri velja|xn − yn| < 1/n in
|f(xn)− f(yn)| ≥ ε.
Ker je podmnožica U omejena, je tudi zaporedje (xn) omejeno, zato imavsaj eno stekališče c ∈ R. Ker je množica U zaprta in vsi členi zaporedja(xn) ležijo v množici U , tudi stekališče c tega zaporedja leži v množici U .
Ker je funkcija f zvezna v točki c, lahko najdemo tak δ ∈ R+, da za vsakx ∈ U , za katerega je |x− c| < δ, velja |f(x)− f(c)| < ε/2.
Ker je točka c stekališče zaporedja (xn), lahko najdemo tak n ∈ N, daje n ≥ 2/δ in da velja |xn − c| < δ/2. Tedaj velja tudi
|yn − c| = |yn − xn + xn − c| ≤ |yn − xn|+ |xn − c| <1n
+ δ
2 ≤ δ.
Točki xn in yn sta torej obe oddaljeni of točke c za manj kot δ, zato iz
133

zveznosti funkcije f v točki c sledi
|f(xn)− f(c)| < ε
2 ,
|f(yn)− f(c)| < ε
2 .
Po trikotniški neenakosti od tod sledi
|f(xn)− f(yn)| ≤ |f(xn)− f(c)|+ |f(c)− f(yn)| < ε,
kar pa je protislovje, saj smo točki xn in yn izbrali tako, da je razdalja medtočkama f(xn) in f(yn) vsaj ε.
6.3 Eksponentna funkcija
V tem poglavju bomo spoznali natančno definicijo eksponentne funkcije innekatere njene lastnosti. Najprej se spomnimo definicijo potenc z naravnimeksponentom. Za poljuben a ∈ R in poljuben n ∈ N definiramo an kotprodukt n kopij števila a, torej
an = a · a · · · a.
Drugače povedano, definiramo a1 = a in induktivno an+1 = ana. Za takodefinirane potence očitno veljajo enakosti
anam = an+m
anbn = (ab)n
(an)m = anm
za vse a, b ∈ R in za vse m,n ∈ N.Predpostavimo, da je a 6= 0. Tedaj lahko definicijo potence smiselno
razširimo tako, da zgornje enakosti veljajo tudi za eksponente, ki so poljubnacela števila. To naredimo lahko na en sam način. Če namreč želimo smiselnodefinirati potenco a0 tako, da bodo zgornje enakosti veljale tudi za ničelnieksponent, mora torej veljati ana0 = an+0 = an in zato
a0 = 1.
Če želimo za poljuben n ∈ N smiselno definirati potenco a−n tako, dabodo zgornje enakosti veljale tudi za negativne cele eksponente, mora veljatiana−n = an−n = a0 = 1 in zato
a−n = 1an.
134

S tem smo definirali potenco ak za vsak a ∈ R \ {0} in za vsak k ∈ Z tako,da velja
akal = ak+l
akbk = (ab)k (4)(ak)l = akl
za vse a, b ∈ R \ {0} in za vse k, l ∈ Z. Iz teh enakosti direktno sledi, da zavse a, b ∈ R+, za vse m,n ∈ N in za vsak k ∈ Z velja:
n√a m√a = nm
√an+m
n√ab = n
√an√b
n√
m√a = nm
√a (5)
n√ak =
(n√a)k
Predpostavimo, da je a > 0. Tedaj lahko definicijo potence smiselnorazširimo tako, da enakosti (4) veljajo tudi za eksponente, ki so poljubnaracionalna števila. Če želimo za poljuben n ∈ N smiselno definirati potencoa1/n tako, da bodo enakosti (4) veljale tudi eksponent 1/n, mora veljati(a1/n)n = a(1/n)n = a1 = a, kar pa pomeni, da mora biti
a1/n = n√a.
Naj bo r poljubno racionalno število. Zapišimo ga v obliki ulomka r = p/q,kjer je p ∈ Z in q ∈ N. Če želimo definirati potenco ap/q tako, da bodoenakosti (4) veljale tudi eksponent p/q, mora veljati (ap/q)q = a(p/q)q = ap
in zatoap/q =
(q√a)p.
Vendar pa racionalno število r lahko zapišemo v obliki ulomka na več raz-ličnih načinov. Predpostavimo, da velja r = p/q = p′/q′ tudi za neki številip′ ∈ Z in q′ ∈ N. Tedaj je pq′ = p′q in((
q√a)p)qq′ =
(q√a)pqq′ = apq
′ = ap′q =
(q′√a)p′q′q =
((q′√a)p′)qq′
,
zato velja ( q√a )p = ( q′
√a )p′ .
Za poljubno racionalno število torej lahko definiramo potenco ar s pred-pisom
ar =(q√a)p,
kjer smo zapisali r v obliki ulomka r = p/q, za neki števili p ∈ Z in q ∈ N.Pravkar smo namreč pokazali, da je rezultat odvisen le od racionalnega
135

števila r, ne pa od izbire števil p ∈ Z in q ∈ N, za kateri je r = p/q. Izenakosti (4) in (5) sledi, da za vse a, b ∈ R+ in za vse r, s ∈ Q velja:
aras = ar+s
arbr = (ab)r (6)(ar)s = ars
Za vsako pozitivno realno število a smo s tem konstruirali funkcijo
φa : Q→ R, φa(r) = ar.
Iz definicije lahko razberemo, da je φa(r) > 0 za vsak r ∈ Q in da je funkcijaφa monotona:
(i) če je a = 1, potem je funkcija φa konstantna z vrednostjo 1,
(ii) če je a > 1, potem je funkcija φa strogo naraščajoča, in
(iii) če je 0 < a < 1, potem je funkcija φa strogo padajoča.
Graf funkcije φa sicer ni nepretrgana črta, si pa ga lahko ponazorimo znaslednjo sliko za primer a > 1:
x
y
1
Poleg tega je funkcija φa zvezna:
Trditev 6.31. Za vsak a ∈ R+ je funkcija φa : Q→ R, φa(r) = ar, zvezna.
Dokaz. Če je a = 1, je funkcija φa konstantna in zato tudi zvezna. Predpo-stavimo, da je a > 1. Najprej bomo pokazali, da je funkcija φa zvezna v točki0. Izberimo poljuben ε ∈ R+. Ker velja limn→∞ n
√a = limn→∞
n√
1/a = 1,lahko najdemo tak N ∈ N, da za vsako naravno število n ≥ N velja
| n√a− 1| < ε in
∣∣∣ n√1/a− 1∣∣∣ < ε.
Ker je funkcija φa strogo naraščajoča, za poljuben h ∈ Q ∩ J0, 1/NK velja
|ah − 1| ≤ |a1/N − 1| = | N√a− 1| < ε.
136

x
y
1
-1�N 1�Nh
aN
- 1
ah-1
Podobno lahko vidimo, da za poljuben h ∈ Q ∩ J−1/N, 0K velja
|ah − 1| ≤ |a−1/N − 1| =∣∣∣ N√1/a− 1
∣∣∣ < ε.
Pokazali smo torej, da za poljuben h ∈ Q ∩ J−1/N, 1/NK velja
|ah − 1| < ε,
kar pomeni, da je funkcija φa zvezna v točki 0.Zdaj bomo dokazali, da je funkcija φa zvezna v poljubni točki s ∈ Q.
Spet naj bo ε ∈ R+ poljuben. Ker je funkcija φa v točki 0 zvezna, lahkonajdemo tak δ ∈ R+, da za vsak h ∈ Q ∩ L−δ, δM velja
|ah − 1| < ε
as.
Za vsak tak h potem velja tudi
|as+h − as| = as|ah − 1| < asε
as= ε.
Drugače povedano, za vsak r ∈ Q ∩ Ls− δ, s+ δM velja
|ar − as| < ε,
kar pa pomeni, da je funkcija φa res zvezna v točki s.Oglejmo si še primer, ko je 0 < a < 1. Tedaj lahko zapišemo
φa(r) = ar = (1/a)−r = φ1/a(−r).
Funkcijo φa smo tako zapisali kot kompozicijo linearne funkcije in funkcijeφ1/a, ki sta obe zvezni, zato je tudi φa zvezna funkcija.
Definicijo potence bomo zdaj razširiti tudi na realne eksponente. Pritem želimo, da bi bila tako definirana potenca ax zvezna funkcija realnegaeksponenta x. Posebej bi torej za vsako zaporedje racionalnih števil (rn),ki konvergira k realnemu številu x, zaporedje (arn)n konvergiralo k številuax. Ta opis lahko uporabimo kot definicijo števila ax, ker velja naslednjatrditev:
137

Trditev 6.32. Naj bo a ∈ R+.(i) Če je (rn) zaporedje racionalnih števil, ki konvergira k nekemu real-
nemu številu, potem je tudi zaporedje realnih števil (arn)n konvergentno.(ii) Če sta (rn) in (sn) zaporedji racionalnih števil, ki obe konvergirata k
istemu realnemu številu, potem velja
limn→∞
(arn) = limn→∞
(asn).
Dokaz. (i) Ker je zaporedje racionalnih števil (rn) konvergentno, je tudiomejeno, zato lahko izberemo takšna p, q ∈ Q, da je p ≤ rn ≤ q za vsakn ∈ N. Označimo M = max{ap, aq}. Ker je funkcija φa : Q → R, r 7→ ar,monotona, za vsak n ∈ N velja arn ≤M .
Naj bo ε ∈ R+ poljuben. Ker je po prejšni trditvi funkcija φa zvezna vtočki 0, obstaja tak δ ∈ R+, da za vsak h ∈ Q ∩ L−δ, δM velja
|ah − 1| < ε
M.
Ker je zaporedje (rn) Cauchyjevo, lahko najdemo tak N ∈ N, da za poljubninaravni števili m,n ≥ N velja |rm − rn| < δ, od tod pa sledi
|arm − arn | = |arn(arm−rn − 1)| = arn |arm−rn − 1| < Mε
M= ε.
S tem smo pokazali, da je zaporedje (arn)n Cauchyjevo in zato konvergentno.(ii) Po predpostavki zaporedji (rn) in (sn) konvergirata k istemu real-
nemu številu, zato veljalimn→∞
(rn − sn) = 0
in torejlimn→∞
arn−sn = a0 = 1,
saj je funkcija φa zvezna. Od tod sledi
limn→∞
arn = limn→∞
(arn−snasn) = limn→∞
arn−sn · limn→∞
asn = limn→∞
asn .
Definicija 6.33. Naj bo a ∈ R+. Za vsak x ∈ R definiramo
ax = limn→∞
(arn),
kjer je (rn) poljubno zaporedje racionalnih števil, ki konvergira k številu x.
Zgornja definicija je smiselna, saj za vsak x ∈ R lahko najdemo vsaj enozaporedje racionalnih števil (rn), ki konvergira k x, po prejšnji trditvi paje zaporedje (arn)n konvergentno in njegova limita je neodvisna od izbirezaporedja (rn), ki konvergira k x. Če je x racionalno število, se ta definicijaštevila ax očitno ujema z definicijo števila φa(x), ki smo jo spoznali nazačetku tega razdelka.
138

Trditev 6.34. Za vse a, b ∈ R+ in za vse x, y ∈ R velja ax > 0 in
(i) axay = ax+y,
(ii) axbx = (ab)x,
(iii) (ax)y = axy.
Za vsak a ∈ R+ je funkcija ψa : R→ R, ψa(x) = ax, zvezna, in zanjo velja:
(iv) če je a > 1, potem je funkcija ψa strogo naraščajoča,
(v) če je 0 < a < 1, potem je funkcija ψa strogo padajoča,
(vi) če je a = 1, potem je funkcija ψa konstantna z vrednostjo 1,
(vii) če je a 6= 1, potem je ψa(R) = R+.
Komentar. Funkciji R → R, x 7→ ax, pravimo eksponentna funkcija zosnovo a. Obliko njenega grafa že poznamo.
x
y
1
a > 1a < 1
a = 1
Za osnovo eksponentne funkcije pogosto vzamemo Eulerjevo število e. Vnadaljevanju bomo spoznali, zakaj je ta izbira še posebej naravna. Ekspo-nentno funkcijo z osnovo e označimo tudi z exp, torej exp(x) = ex.
Dokaz. (i-ii) Izberimo zaporedje racionalnih števil (rn), ki konvergira k šte-vilu x, in zaporedje racionalnih števil (sn), ki konvergira k številu y. Tedajzaporedje racionalnih števil (rn + sn)n konvergira k številu x+ y, zato je
ax+y = limn→∞
(arn+sn) = limn→∞
(arnasn) = limn→∞
(arn) · limn→∞
(asn) = axay.
Poleg tega velja tudi
(ab)x = limn→∞
(ab)rn = limn→∞
(arnbrn) = limn→∞
(arn) · limn→∞
(brn) = axbx.
(iv) Predpostavimo, da je a > 1. Izberimo poljubni realni števili x in y,za kateri je x < y, in izberimo strogo naraščajoči zaporedji racionalnih števil(rn) in (sn) tako, da velja x < s1, da zaporedje (rn) konvergira k številu xin da zaporedje (sn) konvergira k številu y. Za vsako naravno število n ≥ 2velja torej
r1 < rn < x < s1 < sn < y.
139

Rx y
rn sn
Ker je funkcija φa = ψa|Q strogo naraščajoča, sta tudi zaporedji (arn)n in(asn)n strogo naraščajoči, za vsako naravno število n ≥ 2 pa velja
0 < ar1 < arn < as1 < asn .
Od tod sledi
0 < ar1 < limn→∞
arn = ax ≤ as1 < limn→∞
asn = ay.
(v) Predpostavimo, da je 0 < a < 1. Ker za vsak x ∈ R velja ψa(x) =ψ1/a(−x) in ker je po točki (iv) funkcija ψ1/a strogo naraščajoča, je zatofunkcija ψa strogo padajoča. Poleg tega velja ax = (1/a)−x > 0.
Točka (vi) je očitna.(zveznost) Pokažimo zdaj, da je za poljuben a ∈ R+ funkcija ψa zvezna.
Zveznost funkcije ψa v točki 0 sledi iz zveznosti funkcije ψa|Q in iz monotono-sti funkcije ψa. Res, izberimo poljuben ε ∈ R+. Ker je funkcija ψa|Q zveznav točki 0, obstaja takšen N ∈ N, da je |a1/N − 1| < ε in |a−1/N − 1| < ε. Kerje funkcija ψa monotona, za vsak x ∈ L−1/N, 1/NM zato velja
|ax − 1| < ε,
kar pomeni, da je funkcija ψa res zvezna v točki 0.Pokažimo zdaj, da je funkcija ψa zvezna tudi v poljubni točki u ∈ R.
Spet izberimo poljuben ε ∈ R+. Ker je funkcija ψa v točki 0 zvezna, lahkonajdemo tak δ ∈ R+, da za vsak h ∈ L−δ, δM velja
|ah − 1| < ε
au.
Za vsak tak h tedaj velja tudi
|au+h − au| = au|ah − 1| < auε
au= ε.
Drugače povedano, za vsak x ∈ Lu− δ, u+ δM velja
|ax − au| < ε,
kar pa pomeni, da je funkcija ψa zvezna v točki u.(iii) Najprej privzemimo, da je y ∈ Q. Izberimo zaporedje racionalnih
števil (rn), ki konvergira k realnemu številu x. V tem primeru je (rny)nzaporedje racionalnih števil, ki konvergira k številu xy, in velja
(ax)y =(
limn→∞
arn)y = lim
n→∞
((arn)y
)= lim
n→∞(arny) = axy.
Tu smo pri drugi enakosti upoštevali, da je potenčna funkcija t 7→ ty zracionalnim eksponentom zvezna, zato smo lahko zamenjali vrstni red tefunkcije in limite.
140

Naj bo zdaj y poljubno realno število in izberimo zaporedje racionalnihštevil (sn), ki konvergira k številu y. Tedaj velja
(ax)y = limn→∞
(ax)sn = limn→∞
(axsn) = alimn→∞(xsn) = axy.
Pri tem smo uporabili enakost (ax)sn = axsn , ki smo jo že dokazali, saj jesn racionalno število. Pri tretji enakosti smo upoštevali, da je funkcija ψazvezna.
(vii) Ta točka sledi iz monotonosti ter zveznosti funkcije ψa in iz dejstva,da v primeru a > 1 velja limn→∞ a
n = ∞ in limn→∞ a−n = 0 ter da v
primeru 0 < a < 1 velja limn→∞ an = 0 in limn→∞ a
−n =∞.
Logaritemska funkcija
Naj bo a ∈ R+ \ {1}. Eksponentna funkcija z osnovo a je strogo monotonain zato injektivna funkcija, njena slika pa je množica R+. Od tod sledi:
Trditev 6.35. Naj bo a ∈ R+ \ {1}. Tedaj za vsako pozitivno realno številoA obstaja natanko eno realno število x, za katerega velja ax = A. To realnoštevilo x označimo z logaA.
Drugače povedano, kot inverz eksponentne funkcije z osnovo a ∈ R+\{1}dobimo funkcijo ene realne spremenljivke
loga : R+ → R,
ki ji pravimo logaritemska funkcija z osnovo a. Posebej je torej funkcijaloga : R+ → R bijekcija in velja aloga(t) = t za vsak t ∈ R+ ter loga(ax) = xza vsak x ∈ R. Podobno kot eksponentna funkcija je tudi logaritemskafunkcija z osnovno a strogo naraščajoča, če je a > 1, in strogo padajoča,če je 0 < a < 1. Graf logaritemske funkcije dobimo z zrcaljenjem grafaeksponentne funkcije preko simetrale lihih kvadrantov:
x
y
1
a > 1
a < 1
Trditev 6.36. Za poljubno število a ∈ R+ \{1}, za vse x, y ∈ R+ in za vsakα ∈ R velja:
141

(i) loga(xy) = loga x+ loga y
(ii) loga(x/y) = loga x− loga y
(iii) loga(xα) = α loga x
Poleg tega za poljubni realni števili a, b ∈ R+ \ {1} in za vsak x ∈ R+ velja
(iv) logb x = loga xloga b
.
Dokaz. Iz osnovnih lastnosti eksponentne funkcije sledi
aloga x+loga y = aloga xaloga y = xy = aloga(xy).
Ker je eksponentna funkcija injektivna, od tod sledi točka (i). Na podobennačin točka (ii) sledi iz enakosti
aloga x−loga y = aloga xa− loga y = aloga x(aloga y)−1 = x
y= aloga(x/y),
točka (iii) pa iz enakosti
aα loga x = (aloga x)α = xα = aloga(xα).
Točka (iv) je posledica enakosti
x = aloga x = blogb x = (aloga b)logb x = a(loga b)(logb x).
Enakosti iz točke (iv) v zadnji trditvi pravimo tudi formula za prehodna novo osnovo. Ta nam pove, da so logaritemske funkcije z različnimiosnovami med seboj proporcionalne. Najpogosteje uporabljamo osnovi e in10. Logaritem z osnovo e imenujemo tudi naravni logaritem in označimo:
ln = loge
Logaritem z osnovo 10 imenujemo tudi Briggsov logaritem. V računalništvuje pogost tudi logaritem z osnovo 2. Oznaka log, v kateri osnovo izpustimo,v matematiki največkrat označuje naravni logaritem, na drugih področjihznanosti pa praviloma Briggsov logaritem, zato moramo biti pri uporabi teokrajšave previdni.
Potenčna funkcija
V definiciji eksponentne funkcije je osnova konstanta, eksponent pa spre-menljivka. Če pa pri tem vzamemo eksponent za konstanto ter osnovo zaspremenljivko, za vsak fiksen α ∈ R dobimo potenčno funkcijo z eksponen-tom α
R+ → R, x 7→ xα.
142

To funkcijo lahko zapišemo kot kompozicijo logaritemske, linearne in ekspo-nentne funkcije, saj za vsak x ∈ R+ velja
xα = eln(xα) = eα lnx.
Posebej od tod sledi, da je tudi potenčna funkcija x 7→ xα zvezna, za vsakα ∈ R. Potenčna funkcija x 7→ xα je strogo naraščajoča za α > 0 in strogopadajoča za α < 0. Slika te funkcije je množica R+, če je α 6= 0. Grafepotenčnih funkcij pri različnih eksponentih prikazuje naslednja slika:
x
y
1
1
Α > 1
0 < Α < 1
Α = 0
Α < 0
Α = 1
Vaja 6.37. Pokaži, da velja limx→0(1 + x)1/x = e.
Hiperbolične funkcije
V hiperbolični geometriji igrajo ključno vlogo hiperbolične funkcije. Izra-zimo jih sicer lahko z eksponentno funkcijo, kljub temu pa imajo zaradipomembnosti svoje ime. Hiperbolični sinus sh : R → R je definiran s pred-pisom
sh x = ex − e−x
2 .
Hiperbolični sinus je zvezna, liha, strogo naraščajoča bijekcija.
x
y
sh
-4 -2 2 4
-4
-2
2
4
Podobno definiramo hiperbolični kosinus ch : R→ R,
ch x = ex + e−x
2 ,
ki je zvezna, soda funkcija s sliko J1,∞M.
143

x
y
ch
-4 -2 2 4
-4
-2
2
4
Z deljenjem teh dveh funkcij dobimo hiperbolični tangens
th : R→ R, th x = sh xch x,
ki je zvezna, liha, injektivna funkcija funkcija s sliko L−1, 1M. Hiperboličnikotangens
cth : R \ {0} → R, cth x = ch xsh x,
je zvezna, liha, injektivna funkcija s sliko L−∞,−1M ∪ L1,∞M.
x
y
th
-3 -2 -1 1 2
-3
-2
-1
1
2
x
y
cth
-3 -2 -1 1 2
-3
-2
-1
1
2
Med hiperboličnimi funkcijami veljajo zveze
ch2 x− sh2 x = 1,
1− th2 x = 1ch2 x
,
1− cth2 x = −1sh2 x
(x 6= 0),
144

poleg teh pa imamo še adicijske izreke
sh(x+ y) = sh x ch y + sh y ch x,ch(x+ y) = ch x ch y + sh x sh y,
th(x+ y) = th x+ th y1 + th x th y ,
cth(x+ y) = 1 + cth x cth ycth x+ cth y (x 6= 0, y 6= 0, x+ y 6= 0).
Inverzne hiperbolične funkcije
Inverzne hiperbolične ali area funkcije so inverzne funkcije ustreznih zožitevhiperboličnih funkcij. Funkcija area sinus
arsh : R→ R
je inverz hiperboličnega sinusa, zato je zvezna, liha, strogo naraščajoča bi-jekcija. Izrazimo jo lahko eksplicitno s predpisom
arsh x = ln(x+√x2 + 1),
za vsak x ∈ R.
x
y
arsh
sh
-4 -2 2 4
-4
-2
2
4
Funkcija ch |J0,∞M je injektivna s sliko J1,∞M, njen inverz pa je funkcijaarea kosinus
arch : J1,∞M→ J0,∞M ⊂ R,
ki je zvezna, injektivna, strogo naraščajoča funkcija s sliko J0,∞M. Izrazimojo lahko s predpisom
arch x = ln(x+√x2 − 1)
za vsak x ∈ J1,∞M.
145
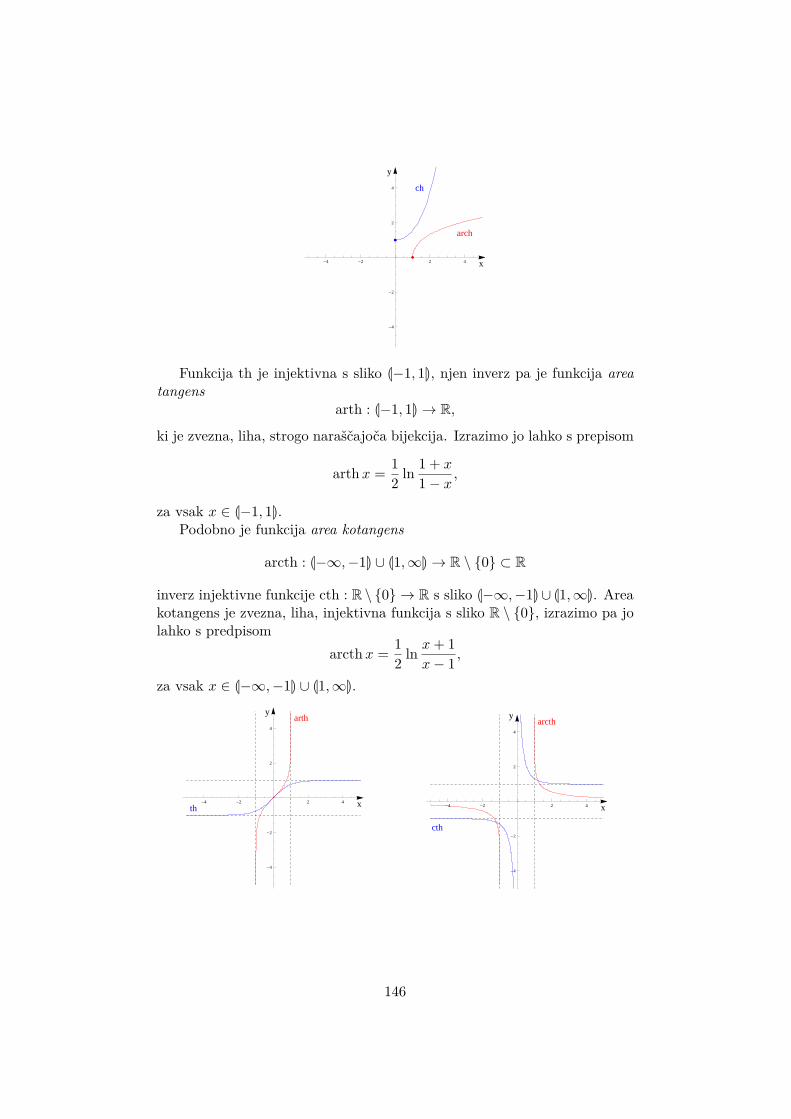
x
y
arch
ch
-4 -2 2 4
-4
-2
2
4
Funkcija th je injektivna s sliko L−1, 1M, njen inverz pa je funkcija areatangens
arth : L−1, 1M→ R,
ki je zvezna, liha, strogo naraščajoča bijekcija. Izrazimo jo lahko s prepisom
arth x = 12 ln 1 + x
1− x,
za vsak x ∈ L−1, 1M.Podobno je funkcija area kotangens
arcth : L−∞,−1M ∪ L1,∞M→ R \ {0} ⊂ R
inverz injektivne funkcije cth : R \ {0} → R s sliko L−∞,−1M∪ L1,∞M. Areakotangens je zvezna, liha, injektivna funkcija s sliko R \ {0}, izrazimo pa jolahko s predpisom
arcth x = 12 ln x+ 1
x− 1 ,
za vsak x ∈ L−∞,−1M ∪ L1,∞M.
x
yarth
th-4 -2 2 4
-4
-2
2
4
x
yarcth
cth
-4 -2 2 4
-4
-2
2
4
146

7 OdvodOdvod je eden izmed najpomembnejših matematičnih pojmov v fiziki, sajz njim opišemo spremembe fizikalnih količin. Osnovni količini v dinamiki,hitrost in pospešek, sta odvoda ustrezne funkcije ene spremenljivke, ki je vtem primeru čas. Odvod igra ključno vlogo v mnogih fizikalnih zakonih, kijih matematično zapišemo z diferencialnimi enačbami.
V najenostavnejšem primeru se delec giblje po premici. Položaj delca sespreminja v odvisnosti od časa. Če izberemo izhodiščni trenutek in enotoza merjenje časa, lahko čas gledamo kot realno spremenljivko t, ki teče ponekem časovnem intervalu Lα, βM ⊂ R. Če tudi na dani premici izberemoizhodiščno točko in enoto za merjenje razdalje, položaj delca na premici vtrenutku t opišemo z realnim številom r(t). Gibanje delca po premici torejopišemo z realno funkcijo ene realne spremenljivke
r : Lα, βM→ R.
Povprečno hitrost delca na časovnem intervalu med t0 ∈ Lα, βM in t ∈ Lα, βMizračunamo kot kvocient
vt0,t = r(t)− r(t0)t− t0
.
Če je časovni interval med t0 in t relativno velik, nam povprečna hitrostpogosto ne pove veliko o gibanju delca, zato si želimo to hitrost izmeriti načim krajšem časovnem intervalu. Če časovni interval skrajšujemo in se torejštevilo t približuje številu t0, se povprečna hitrost morda približuje limiti
v(t0) = limt→t0
r(t)− r(t0)t− t0
.
Če ta limita obstaja, potem jo imenujemo hitrost delca v trenutku t0. To jemotivacija za naslednjo definicijo:
Definicija 7.1. Naj bo f : U → R realna funkcija ene realne spremenljivke,definirana na podmnožici U ⊂ R, in naj bo a notranja točka množice U .Funkcija f je odvedljiva v točki a, če obstaja limita
limx→a
f(x)− f(a)x− a
∈ R.
V tem primeru to limito imenujemo odvod funkcije f v točki a in označimo
f ′(a) = df
dx(a) = lim
x→af(x)− f(a)
x− a.
Komentar. (1) Če v definiciji odvoda označimo h = x − a ∈ R, potemlahko zapišemo tudi
f ′(a) = limh→0
f(a+ h)− f(a)h
.
147

Za odvod funkcije f v točki a smo pri tem uporabili Lagrangevo oznako f ′(a),namesto nje pa bi lahko uporabili tudi Leibnizovo oznako df
dx(a). Kadarneodvisno spremenljivko označimo s t, za odvod funkcije r(t) v točki t0uporabljamo tudi Newtonovo oznako
r(t0).
(2) Naj bo funkcija f : U → R odvedljiva v notranji točki a podmnožiceU ⊂ R. Kvocient
f(x)− f(a)x− a
je naklonski koeficient premice v ravnini R2, ki gre skozi točki (a, f(a))in (x, f(x)) na grafu funkcije f . Ko se število x približuje številu a, seta premica približuje tangenti na graf funkcije f v točki (a, f(a)), katerenaklonski koeficient je torej
k = limx→a
f(x)− f(a)x− a
= f ′(a).
Drugače povedano, odvod f ′(a) funkcije f v točki a je naklonski koeficienttangente na graf funkcije f v točki (a, f(a)), ki je torej dana z enačbo
y = f ′(a)(x− a) + f(a).
Tangenta na graf funkcije f v točki (a, f(a)) je tista premica, ki se grafuv točki (a, f(a)) kar najbolje prilega. Vrednost linearne funkcije
f ′(a)(x− a) + f(a)
lahko torej gledamo kot linearen približek za funkcijo f blizu točke a. Na-pako tega približka kot funkcijo razlike h = x− a označimo z
α(h) = f(a+ h)− f(a)− f ′(a)h.
Za dovolj majhne h ∈ R je torej
f(a+ h) = f(a) + f ′(a)h+ α(h),
pri čemer je
limh→0
α(h)h
= limh→0
f(a+ h)− f(a)− f ′(a)hh
= 0,
po definiciji odvoda.(3) Zadnja enakost iz točke (2) nam karakterizira odvedljivost funkcije
in njen odvod v točki a. Naj bo f : U → R poljubna funkcija, definirana napodmnožici U ⊂ R, in naj bo a notranja točka podmnožice U . Če obstajatakšno realno število v ∈ R, da velja
limh→0
f(a+ h)− f(a)− vhh
= 0,
potem je funkcija f očitno odvedljiva v točki a in velja f ′(a) = v.
148

Trditev 7.2. Naj bo f : U → R realna funkcija ene realne spremenljivke,definirana na podmnožici U ⊂ R, in naj bo a notranja točka množice U . Čeje funkcija f odvedljiva v točki a, potem je tudi zvezna v točki a.
Dokaz. Za poljuben dovolj majhen neničeln h ∈ R lahko zapišemo
f(a+ h) = f(a) + h
(f(a+ h)− f(a)
h
).
Ker je funkcija f odvedljiva v točki a, velja
limh→0
f(a+ h) = limh→0
f(a) + limh→0
h · limh→0
f(a+ h)− f(a)h
= f(a) + 0 · f ′(a) = f(a).
Vrednosti f(a) je torej limita funkcije f v točki a, kar pomeni, da je funkcijaf zvezna v točki a.
Definicija 7.3. Naj bo f : U → R realna funkcija ene realne spremenljivke,definirana na odprti podmnožici U ⊂ R. Funkcija f je odvedljiva, če jeodvedljiva v vsaki točki iz množice U . V tem primeru definiramo novofunkcijo
f ′ = df
dx: U → R, x 7→ f ′(x),
ki jo imenujemo odvod funkcije f .
Zgled 7.4. (1) Funkcija f(x) = |x| je zvezna, a ni odvedljiva v točki 0.
x
y
f HxL = ÈxÈ
Res, v tem primeru je
f(0 + h)− f(0)h
= |h|h,
ta kvocient pa kot funkcija realnega parametra h v točki 0 nima limite.(2) Konstantna funkcija f(x) = c je odvedljiva v vsaki točki x ∈ R in
veljaf ′(x) = lim
h→0
f(x+ h)− f(x)h
= limh→0
c− ch
= 0.
(3) Za poljubna k, n ∈ R je linearna funkcija f(x) = kx+n odvedljiva vvsaki točki x ∈ R in velja
f ′(x) = limh→0
(k(x+ h) + n)− (kx+ n)h
= limh→0
kh
h= k.
149

(4) Za vsako naravno število n je potenčna funkcija f(x) = xn odvedljivav vsaki točki x ∈ R in velja
f ′(x) = nxn−1.
Res, za primer n = 1 ta rezultat že poznamo iz točke (3), za n ≥ 2 paizračunamo
f ′(x) = limh→0
(x+ h)n − xn
h
= limh→0
(xn + nxn−1h+
(n2)xn−2h2 + · · ·+ hn
)− xn
h
= limh→0
(nxn−1 +
(n
2
)xn−2h+ · · ·+ hn−1
)= nxn−1.
(5) Funkcija f(x) = sin x je odvedljiva v vsaki točki x ∈ R in velja
f ′(x) = limh→0
sin(x+ h)− sin xh
= limh→0
2 cos(x+ h2 ) sin h
2h
= limh→0
cos(x+ h
2)· limh→0
sin h2
h2
= cosx.
(6) Funkcija f(x) = cosx je odvedljiva v vsaki točki x ∈ R in velja
f ′(x) = limh→0
cos(x+ h)− cosxh
= limh→0
sin(x+ h+ π
2)− sin
(x+ π
2)
h
= cos(x+ π
2)
= sin(x+ π
2 + π
2)
= − sin x.
Pri tem izračunu smo uporabili enakost cosx = sin(x+ π2 ) in točko (5).
Odvode funkcij pogosto ne računamo po definiciji, pač pa s pomočjo pra-vil za odvajanje. Za začetek si oglejmo pravila za odvajanje vsote, produktain kvocienta funkcij:
Trditev 7.5 (Pravila za odvajanje vsote, produkta in kvocienta). Naj bostaf : U → R in g : V → R funkciji ene realne spremenljivke, definirani napodmnožicah U, V ⊂ R, in naj bo a notranja točka podmnožice U ∩ V . Česta funkciji f in g odvedljivi v točki a, potem velja:
(i) Funkcija f + g je odvedljiva v točki a in
(f + g)′(a) = f ′(a) + g′(a).
(ii) Funkcija fg je odvedljiva v točki a in
(fg)′(a) = f ′(a)g(a) + f(a)g′(a).
150

(iii) Če je g(a) 6= 0, potem je a notranja točka podmnožice U∩g−1(R\{0}),funkcija f/g je odvedljiva v točki a in(
f
g
)′(a) = f ′(a)g(a)− f(a)g′(a)
g(a)2 .
Dokaz. (i-ii) V dokazu uporabimo pravila za računanje limite funkcije.
(f + g)′(a) = limh→0
(f + g)(a+ h)− (f + g)(a)h
= limh→0
f(a+ h) + g(a+ h)− f(a)− g(a)h
= limh→0
f(a+ h)− f(a)h
+ limh→0
g(a+ h)− g(a)h
= f ′(a) + g′(a).
(fg)′(a) = limh→0
(fg)(a+ h)− (fg)(a)h
= limh→0
f(a+ h)g(a+ h)− f(a)g(a)h
= limh→0
f(a+ h)g(a+ h)− f(a)g(a+ h) + f(a)g(a+ h)− f(a)g(a)h
= limh→0
(f(a+ h)− f(a)
hg(a+ h)
)+ limh→0
(f(a) g(a+ h)− g(a)
h
)= f ′(a) lim
h→0g(a+ h) + f(a)g′(a)
= f ′(a)g(a) + f(a)g′(a).
Zadnja enakost velja, ker je funkcija g odvedljiva v točki a in po Trditvi 7.2torej tudi zvezna v točki a.
(iii) Ker je a notranja točka podmnožice U ∩ V , obstaja tako majhenδ ∈ R+, da je La−δ, a+δM ⊂ U∩V . Ker je g(a) 6= 0 in ker je funkcija g zveznav točki a, lahko izberemo δ tudi tako majhen, da na intervalu La− δ, a+ δMfunkcija g nima ničel. To pomeni, da je La − δ, a + δM ⊂ U ∩ g−1(R \ {0}),torej je a notranja točka podmnožice U ∩ g−1(R \ {0}). Zdaj po pravilih zaračunanje limit funkcij izračunamo(
f
g
)′(a) = lim
h→0
(f/g)(a+ h)− (f/g)(a)h
= limh→0
f(a+h)g(a+h) −
f(a)g(a)
h
= limh→0
f(a+ h)g(a)− f(a)g(a+ h)h g(a+ h)g(a)
151

= limh→0
f(a+ h)g(a)− f(a)g(a) + f(a)g(a)− f(a)g(a+ h)h g(a+ h)g(a)
=limh→0
(f(a+h)−f(a)
h
)g(a)− f(a) limh→0
(g(a+h)−g(a)
h
)limh→0 g(a+ h)g(a)
= f ′(a)g(a)− f(a)g′(a)g(a)2 .
Trditev 7.6 (Verižno pravilo). Naj bosta f : U → R in g : V → R funkcijiene realne spremenljivke, definirani na podmnožicah U, V ⊂ R, in naj bo atakšna notranja točka podmnožice V , da je njen slika g(a) notranja točkapodmnožice U . Če je funkcija g odvedljiva v točki a in če je funkcija f odve-dljiva v točki g(a), potem je a notranja točka podmnožice g−1(U), funkcijaf ◦ g je odvedljiva v točki a in velja
(f ◦ g)′(a) = f ′(g(a)) · g′(a).
Dokaz. Ker je g(a) notranja točka podmnožice U , lahko izberemo tak ε ∈R+, da je Lg(a) − ε, g(a) + εM ⊂ U . Ker je a notranja točka podmnožiceV , lahko najdemo tak δ ∈ R+, da je La − δ, a + δM ⊂ V . Ker je funkcija godvedljiva v točki a, je tudi zvezna v točki a, zato lahko vzamemo δ takomajhen, da velja tudi g(La − δ, a + δM) ⊂ Lg(a) − ε, g(a) + εM. Posebej topomeni, da je a notranja točka podmnožice g−1(U).
Definirajmo funkcijo Q : U → R s predpisom Q(g(a)) = f ′(g(a)) in
Q(t) = f(t)− f(g(a))t− g(a)
za vsak t ∈ U \ {g(a)}. Po definiciji odvoda je Q(g(a)) limita funkcijeQ v točki g(a), zato je funkcija Q zvezna v točki g(a). Ker je funkcijag odvedljiva v točki a, je tudi zvezna v točki a. Odtod sledi, da je tudikompozicija Q ◦ g : g−1(U)→ R zvezna v točki a in zato velja
limx→a
Q(g(x)) = Q(g(a)) = f ′(g(a)).
Zdaj lahko izračunamo
limx→a
f(g(x))− f(g(a))x− a
= limx→a
(Q(g(x))g(x)− g(a)
x− a
)= lim
x→aQ(g(x)) · lim
x→ag(x)− g(a)x− a
= f ′(g(a)) · g′(a).
Trditev 7.7 (Pravilo za odvajanje inverzne funkcije). Naj bo f : U → Rzvezna injektivna funkcija, definirana na podmnožici U ⊂ R, in naj bo anotranja točka podmnožice U . Če je funkcija f odvedljiva v točki a in je
152

f ′(a) 6= 0, potem je f(a) notranja točka podmnožice f(U), inverz f−1 :f(U)→ R funkcije f je odvedljiv v točki f(a) in velja(
f−1)′(f(a)) = 1f ′(a) .
Dokaz. Brez izgube splošnosti lahko predpostavimo, da je U interval. IzTrditve 6.26 sledi, da je funkcija f strogo monotona, odtod pa tudi vidimo,da je f(a) notranja točka slike f(U). Poleg tega iz Trditve 6.26 sledi, daje inverz f−1 zvezna strogo monotona funkcija. Označimo še b = f(a) inizračunajmo
(f−1)′(b) = limy→b
f−1(y)− f−1(b)y − b
= limy→b
f−1(y)− f−1(b)f(f−1(y))− f(f−1(b))
= limx→a
x− af(x)− f(a)
= 1f ′(a) .
V predzadnji enakosti smo zapisali x = f−1(y) ter upoštevali, da je f−1
zvezna funkcija in da zato velja limy→b f−1(y) = f−1(b) = a.
Z uporabo pravil za odvajanje, ki smo jih spoznali, lahko izračunamoodvode mnogih znanih funkcij:
Zgled 7.8. (1) Naj bo f : U → R funkcija, definirana na podmnožici U ⊂ R,in naj bo c poljubna realna konstanta. Če je funkcija f odvedljiva v notranjitočki a podmnožice U , potem je tudi funkcija cf odvedljiva v točki a in velja
(cf)′(a) = cf ′(a).
Res, konstantna funkcija z vrednostjo c je odvedljiva in njen odvod je vvsaki točki enak 0, zato je tudi produkt cf odvedljiv v točki a in (cf)′(a) =(c)′f(a) + cf ′(a) = cf ′(a), po pravilu za odvod produkta.
(2) (Polinomi) Realen polinom stopnje n ∈ N∪ {0} je funkcija ene spre-menljivke P : R→ R oblike
P (x) = anxn + an−1x
n−1 + · · ·+ a1x+ a0,
kjer so a0, a1, . . . , an realne konstante in velja an 6= 0. Konstantni funkcijiz vrednostjo 0 pravimo tudi polinom stopnje −∞. Polinom je torej vsotas konstantami pomnoženih potenčnih funkcij, za katere že vemo, da so od-vedljive. Po pravilu za odvajanje vsote ter po točki (1) je torej polinom Podvedljiva funkcija in za vsak x ∈ R velja
P ′(x) = nanxn−1 + (n− 1)an−1x
n−2 + · · ·+ 2a2x+ a1.
153

Odvod polinoma stopnje n ≥ 1 je torej polinom stopnje n − 1. Odvodpolinoma stopnje 0 je konstantna funkcija z vrednostjo 0.
(3) (Racionalne funkcije) Racionalna realna funkcija je kvocient dvehrealnih polinomov, zato je odvedljiva, njen odvod pa lahko izračunamo spravilom za odvajanje kvocienta. Posebej to pomeni, da je odvod racionalnefunkcije spet racionalna funkcija.
(4) (Potenčna funkcija s celim eksponentom) Vemo že, da je potenčnafunkcija x 7→ xn z naravnim eksponentom n odvedljiva in da je njen odvodspet potenčna funkcija (xn)′ = nxn−1. Enaka formula velja tudi v primeru,ko je n = 0 in x 6= 0, potenčna funkcija x 7→ x0 pa je seveda odvedljiva tudiv točki 0 in njen odvod je enak 0.
Oglejmo si zdaj funkcijo x 7→ x−n, ki je definirana na množici R \ {0}.Po pravilu za odvod kvocienta je tudi ta funkcija odvedljiva in velja
(x−n)′ =( 1xn
)′= −nx
n−1
x2n = (−n)x−n−1.
Za poljuben eksponent p ∈ Z je torej potenčna funkcija x 7→ xp odve-dljiva v vseh točkah x ∈ R \ {0} in
(xp)′ = pxp−1.
(5) (Korenska funkcija) Naj bo n ∈ N, n ≥ 2. Potenčna funkcija x 7→ xn
je odvedljiva in njen odvod je neničeln v vsaki točki x 6= 0. Po pravilu zaodvod inverzne funkcije je torej tudi korenska funkcija x 7→ n
√x odvedljiva
in velja
( n√x)′ = 1
n( n√x)n−1 =
n√x
nx.
Če je število n sodo, je korenska funkcija definirana na intervalu J0,∞Min odvedljiva na R+, ni pa odvedljiva v točki 0, ki niti ni notranja točkadefinicijskega območja. Če je število n liho, je korenska funkcija definiranana R in odvedljiva na R\{0}, ni pa odvedljiva v točki 0, ki pa v tem primeruje notranja točka definicijskega območja.
(6) (Kotne funkcije): Vemo že, da sta kotni funkciji sin in cos odvedljiviin da velja
(sin x)′ = cosx,(cosx)′ = − sin x.
Po pravilu za odvajanje kvocienta sta torej tudi kotni funkciji tg in ctgodvedljivi in velja
(tg x)′ =( sin x
cosx
)′= cosx cosx− sin x(− sin x)
cos2 x= 1
cos2 x,
(ctg x)′ =(cosx
sin x
)′= − sin x sin x− cosx cosx
sin2 x= −1
sin2 x.
154

(7) (Inverzne kotne funkcije) Funkcija arc sin je inverz ustrezne zoži-tve funkcije sin. Odvod funkcije sin je neničeln v vseh točkah iz intervalaL−π/2, π/2M, zato je po pravilu za odvajanje inverzne funkcije tudi funkcijaarc sin odvedljiva v vseh točkah iz intervala L−1, 1M in na tem intervalu velja
(arc sin x)′ = 1sin′(arc sin x) = 1
cos(arc sin x)
= 1√1− sin2(arc sin x)
= 1√1− x2
.
V točkah 1 in −1 funkcija arc sin ni odvedljiva.Podobno je funkcija arc cos inverz ustrezne zožitve funkcije cos. Odvod
funkcije cos je neničeln v vseh točkah iz intervala L0, πM, zato je po praviluza odvajanje inverzne funkcije tudi funkcija arc cos odvedljiva v vseh točkahiz intervala L−1, 1M in na tem intervalu velja
(arc cosx)′ = 1cos′(arc cosx) = 1
− sin(arc cosx)
= −1√1− cos2(arc cosx)
= −1√1− x2
.
Po pravilu za odvajanje inverzne funkcije tudi sledi, da sta funkciji arc tg inarc ctg odvedljivi in da velja
(arc tg x)′ = 11
cos2(arc tg x)= 1
1 + tg2(arc tg x)= 1
1 + x2
(arc ctg x)′ = 1−1
sin2(arc ctg x)= −1
1 + ctg2(arc ctg x)= −1
1 + x2 .
Vidimo, da so odvodi inverznih kotnih funkcij kombinacije racionalne inkorenske funkcije. Funkcij arc sin in arc cos nista odvedljivi na robu njunegadefinicijskega območja, torej v točkah 1 in −1.
(8) (Logaritemska funkcija) Tudi logaritemska funkcija f(x) = loga x zosnovo a ∈ R+ \ {0} je odvedljiva. Res, njen odvod v poljubni točki x ∈ R+
izračunamo po definiciji:
(loga x)′ = limh→0
loga(x+ h)− loga xh
= limh→0
loga x+hx
h
= limh→0
(1x· xh· loga
(1 + h
x
))= 1x
limh→0
loga(
1 + h
x
)x/h= 1x
loga
(limh→0
(1 + h
x
)x/h)
= 1x
loga(
limu→0
(1 + u)1/u)
= 1x
loga e = 1x ln a.
155

Pri izračunu smo upoštevali, da je logaritemska funkcija zvezna in da veljalimu→0 (1 + u)1/u = e, kje smo označili u = h/x.
V posebnem primeru, ko je a = e, dobimo
(ln x)′ = 1x.
(9) (Eksponentna funkcija) Eksponentna funkcija f(x) = ax z osnovoa ∈ R+ \ {0} je odvedljiva, saj je inverz logaritemske funkcije, katere odvodje brez ničel. Po pravilu za odvajanje inverzne funkcije dobimo
(ax)′ = 1log′a(ax) = 1
1ax ln a
= ax ln a.
Končen rezultat velja tudi v primeru a = 1, v katerem je eksponentnafunkcija konstantna. Posebej velja
(ex)′ = ex.
Eksponentna funkcija x 7→ ex je torej enaka svojemu odvodu, kar je edenizmed razlogov, zakaj je število e v znanosti tako zelo pomembno.
(10) (Potenčna funkcija) Za poljuben realen eksponent α ∈ R lahkopotenčno funkcijo x 7→ xα z domeno R+ zapišemo v obliki
xα = eα lnx.
Odtod sledi, da je potenčna funkcija odvedljiva, njen odvod pa lahko izra-čunamo po verižnem pravilu
(xα)′ = (eα lnx)′ = eα lnx · (α ln x)′ = eα lnx · αx
= αxα−1.
Spoznali smo torej pravila za odvajanje, ki jih lahko na kratko nakažemoz naslednjimi enakostmi:
(f + g)′ = f ′ + g′
(fg)′ = f ′g + fg′(f
g
)′= f ′g − fg′
g2
(f ◦ g)′ = (f ′ ◦ g) · g′
(f−1)′ = 1f ′ ◦ f−1
Izračunali smo tudi odvode nekaterih pomembnih funkcij:
156

funkcija odvod
xα αxα−1
sin x cosx
cosx − sin x
tg x 1(cosx)2
ctg x −1(sinx)2
ax ax ln a
ex ex
loga x 1x ln a
ln x 1x
arc sin x 1√1−x2
arc cosx −1√1−x2
arc tg x 11+x2
arc ctg x −11+x2
Za natančne predpostavke, ob katerih veljajo ta pravila in formule za od-vode, je seveda potrebno pogledati ustrezne trditve v tem razdelku.
Višji odvodi
Naj bo f : U → R realna funkcija ene realne spremenljivke, definirana naodprti podmnožici U ⊂ R. Če je funkcija f odvedljiva, potem je tudi njenodvod
f ′ : U → R
funkcija ene spremenljivke. Funkciji f ′ pravimo tudi prvi odvod funkcije fin označimo f ′ = f (1). Če je tudi funkcija f ′ odvedljiva, je njen odvod
(f ′)′ = f ′′ = f (2) : U → R
spet funkcija ene realne spremenljivke, ki jo imenujemo drugi odvod funkcijef . V tem primeru pravimo, da je funkcija f dvakrat odvedljiva.
Na ta način lahko nadaljujemo in definiramo višje odvode funkcije f .Označimo f (0) = f in naj bo k poljubno naravno število. Funkcija f jek-krat odvedljiva, če obstajajo funkcije
f (j) : U → R, j = 1, . . . , k,
tako da je funkcija f (j−1) odvedljiva in velja(f (j−1))′ = f (j)
157

za vsak j = 1, 2, . . . , k. V tem primeru funkciji f (k) pravimo k-ti odvodfunkcije f in zapišemo tudi
f (k) = dkf
dxk.
Če je ob tem funkcija f (k) tudi zvezna, potem pravimo, da je funkcija fk-krat zvezno odvedljiva. Množico vseh k-krat zvezno odvedljivih funkcijU → R označimo z
Ck(U).
Množico vseh zveznih funkcij U → R označimo z
C(U) = C0(U).
Če je funkcija f k-krat odvedljiva, za nek k ∈ N, potem so funkcijef, f ′, . . . , f (k−1) vse odvedljive in torej tudi zvezne. Posebej odtod sledi, davelja:
C0(U) ⊃ C1(U) ⊃ C2(U) ⊃ · · · ⊃ Ck(U) ⊃ Ck+1(U) ⊃ · · ·
Funkcijam v presekuC∞(U) =
⋂k∈N
Ck(U)
pravimo gladke funkcije.
Zgled 7.9. Vemo že, da so polinomi, kotne funkcije in eksponentna funkcijaodvedljive funkcije. Te funkcije lahko med seboj kombiniramo s seštevanjem,množenjem, deljenjem, komponiranjem ter invertiranjem na odprtih dome-nah, na katerih je funkcija injektivna in ima odvod brez ničel. Po pravilihza odvajanje so vse te funkcije spet odvedljive, njihov odvod pa je spet nekakombinacija takšnih funkcij. Od tod sledi, da je vsaka takšna kombinacijagladka funkcija.
7.1 Analiza funkcij
S pomočjo odvoda lahko analiziramo obnašanje funkcije: iščemo ekstreme inugotovimo, ali funkcija narašča ali pada. če je odvod pozitiven ali negativen,funkcija narašča oziroma pada, med ničlami odvoda pa iščemo morebitnekandidate za ekstremne vrednosti funkcije.
Definicija 7.10. Naj bo f : Dodp → R funkcija ene realne spremenljivke.
· Funkcija f ima v a ∈ D (strogi) lokalni minimum, če obstaja δ > 0,da za vsak x ∈ (a− δ, a+ δ) ∩ (D \ {a}) velja:
f(x) ≥ f(a) (f(x) > f(a)).
158
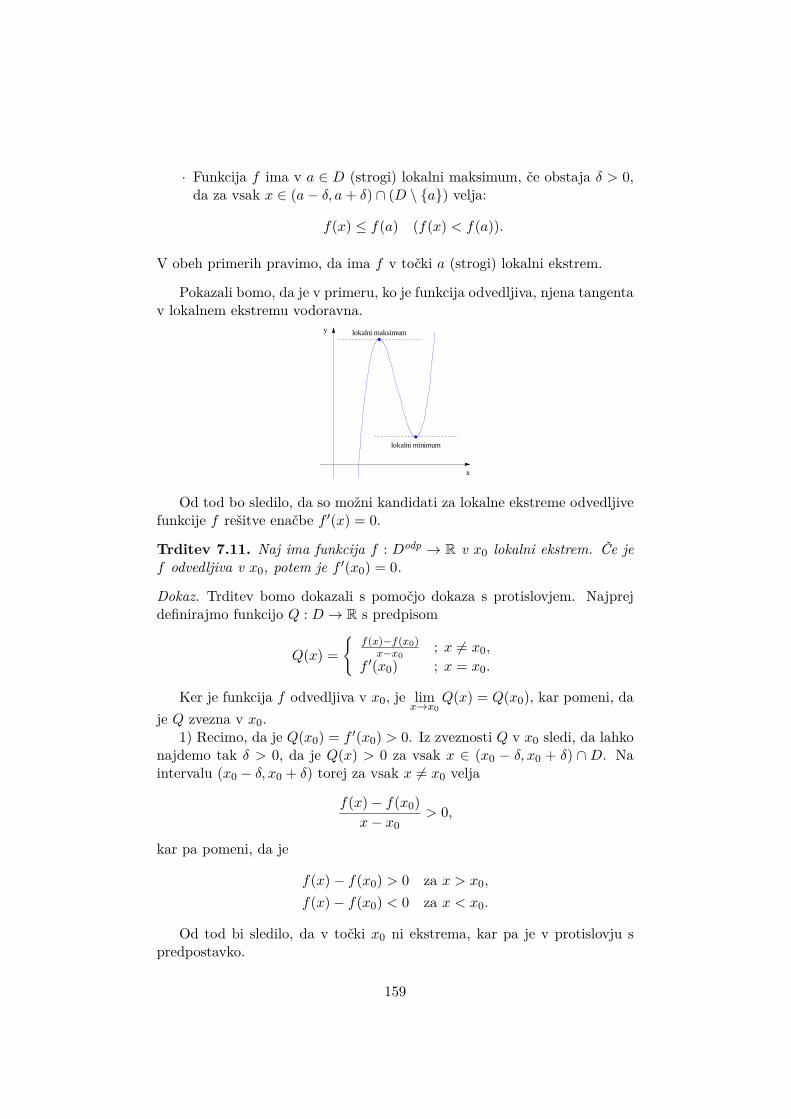
· Funkcija f ima v a ∈ D (strogi) lokalni maksimum, če obstaja δ > 0,da za vsak x ∈ (a− δ, a+ δ) ∩ (D \ {a}) velja:
f(x) ≤ f(a) (f(x) < f(a)).
V obeh primerih pravimo, da ima f v točki a (strogi) lokalni ekstrem.
Pokazali bomo, da je v primeru, ko je funkcija odvedljiva, njena tangentav lokalnem ekstremu vodoravna.
x
y
lokalni minimum
lokalni maksimum
Od tod bo sledilo, da so možni kandidati za lokalne ekstreme odvedljivefunkcije f rešitve enačbe f ′(x) = 0.
Trditev 7.11. Naj ima funkcija f : Dodp → R v x0 lokalni ekstrem. Če jef odvedljiva v x0, potem je f ′(x0) = 0.
Dokaz. Trditev bomo dokazali s pomočjo dokaza s protislovjem. Najprejdefinirajmo funkcijo Q : D → R s predpisom
Q(x) ={
f(x)−f(x0)x−x0
; x 6= x0,
f ′(x0) ; x = x0.
Ker je funkcija f odvedljiva v x0, je limx→x0
Q(x) = Q(x0), kar pomeni, daje Q zvezna v x0.
1) Recimo, da je Q(x0) = f ′(x0) > 0. Iz zveznosti Q v x0 sledi, da lahkonajdemo tak δ > 0, da je Q(x) > 0 za vsak x ∈ (x0 − δ, x0 + δ) ∩ D. Naintervalu (x0 − δ, x0 + δ) torej za vsak x 6= x0 velja
f(x)− f(x0)x− x0
> 0,
kar pa pomeni, da je
f(x)− f(x0) > 0 za x > x0,
f(x)− f(x0) < 0 za x < x0.
Od tod bi sledilo, da v točki x0 ni ekstrema, kar pa je v protislovju spredpostavko.
159

2) Če je Q(x0) = f ′(x0) < 0, podobno kot prej dokažemo, da to vodi vprotislovje.
3) Ostane nam le še možnostQ(x0) = f ′(x0) = 0, kar smo želeli dokazati.
Pogoj f ′(x0) = 0 je potreben pogoj, ki mu mora zadoščati ekstremnatočka odvedljive funkcije, ni pa zadosten. Protiprimer je funkcija f(x) = x3,za katero velja f ′(0) = 0, vendar pa x = 0 ni ekstremna točka funkcije f .Ima pa funkcija f vodoravno tangento v točki x = 0.
x
y
fHxL = x3
-4 -2 2 4
-4
-2
2
4
Zgled 7.12. (1) Poglejmo si funkcijo f(x) = sin(x2).
x
yf HxL = sinHx2L
-4 -2 2 4
-2
-1
1
2
3
Funkcija f je kompozicija sinusne in kvadratne funkcije, zato je odve-dljiva, njen odvod pa je
f ′(x) = 2x cos(x2).
V točki x = 0 ima funkcija f strogi lokalni minimum, ostali ekstremi paso v točkah
x = ±√π
2 + kπ, k ∈ N ∪ {0}.
(2) Funkcija f(x) = |x| ima v točki x = 0 strogi lokalni minimum, vendarpa tam ni odvedljiva.
x
y
f HxL = ÈxÈ
To pomeni, da so lahko lokalni ekstremi doseženi tudi v točkah, kjer funkcijani odvedljiva.
160

V poglavju o zveznih funkcijah smo pokazali, da vsaka zvezna (odve-dljiva) funkcija na zaprtem intervalu zavzame svoj maksimum in svoj mini-mum. Lahko se zgodi, da sta ta ekstrema dosežena v robnih točkah intervala,če je na primer funkcija monotona. Če pa vrednosti funkcije v obeh robnihtočkah sovpadata, pa ima funkcija nujno ekstrem v notranjosti intervala.V tej točki je potem tangenta na graf funkcije vodoravna. Temu rezultatuponavadi rečemo Rolleov izrek.
x
y
a bc
fHaL=fHbL
Trditev 7.13 (Rolleov izrek). Naj bo f : [a, b] → R zvezna funkcija, kije odvedljiva na intervalu (a, b). Če je f(a) = f(b), obstaja takšna točkac ∈ (a, b), da je f ′(c) = 0.
Dokaz. Funkcija f je zvezna na intervalu [a, b], zato je omejena, najdemo palahko tudi takšna u, v ∈ [a, b], da velja:
f(u) = sup(f),f(v) = inf(f).
Od tod sledi, da sta u in v lokalna ekstrema funkcije f , ker pa je funkcija fodvedljiva, je f ′(u) = f ′(v) = 0 po Trditvi 7.11.
· Če je u ∈ (a, b), vzamemo c = u. Potem je f ′(c) = f ′(u) = 0.· Če je v ∈ (a, b), vzamemo c = v. Potem je f ′(c) = f ′(v) = 0.· Če je u ∈ {a, b}, je inf(f) = sup(f), kar pomeni, da je f konstantnafunkcija. Potem za vsak c ∈ (a, b) velja f ′(c) = 0.
Posplošitev Rolleovega izreka je Lagrangeev izrek. Če vrednosti funkcijev robnih točkah intervala [a, b] nista enaki, zveznica skozi ustrezni točki nivodoravna. Lagrangeev izrek potem pove, da obstaja točka c ∈ (a, b), da jenaklon tangente na graf funkcije f v točki (c, f(c)) enak naklonu zvezniceskozi točki (a, f(a)) in (b, f(b)).
161
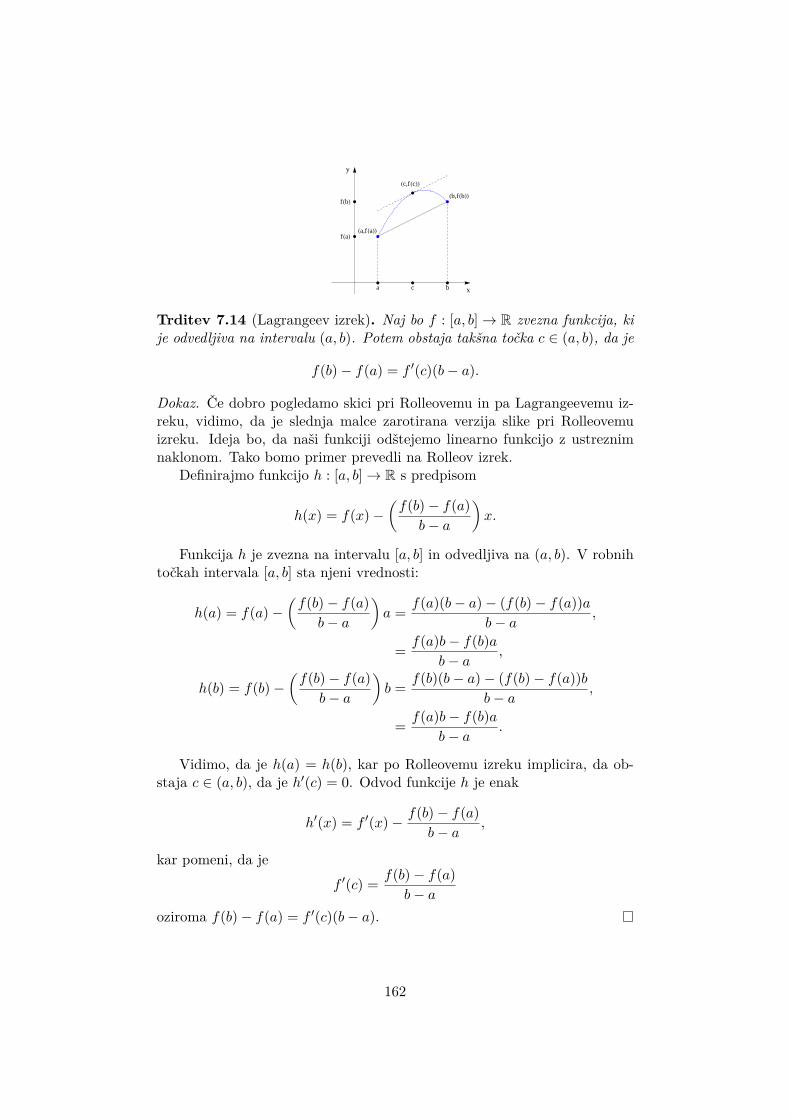
x
y
a bc
fHaL
fHbL
Ha,fHaLL
Hb,fHbLLHc,fHcLL
Trditev 7.14 (Lagrangeev izrek). Naj bo f : [a, b]→ R zvezna funkcija, kije odvedljiva na intervalu (a, b). Potem obstaja takšna točka c ∈ (a, b), da je
f(b)− f(a) = f ′(c)(b− a).
Dokaz. Če dobro pogledamo skici pri Rolleovemu in pa Lagrangeevemu iz-reku, vidimo, da je slednja malce zarotirana verzija slike pri Rolleovemuizreku. Ideja bo, da naši funkciji odštejemo linearno funkcijo z ustreznimnaklonom. Tako bomo primer prevedli na Rolleov izrek.
Definirajmo funkcijo h : [a, b]→ R s predpisom
h(x) = f(x)−(f(b)− f(a)
b− a
)x.
Funkcija h je zvezna na intervalu [a, b] in odvedljiva na (a, b). V robnihtočkah intervala [a, b] sta njeni vrednosti:
h(a) = f(a)−(f(b)− f(a)
b− a
)a = f(a)(b− a)− (f(b)− f(a))a
b− a,
= f(a)b− f(b)ab− a
,
h(b) = f(b)−(f(b)− f(a)
b− a
)b = f(b)(b− a)− (f(b)− f(a))b
b− a,
= f(a)b− f(b)ab− a
.
Vidimo, da je h(a) = h(b), kar po Rolleovemu izreku implicira, da ob-staja c ∈ (a, b), da je h′(c) = 0. Odvod funkcije h je enak
h′(x) = f ′(x)− f(b)− f(a)b− a
,
kar pomeni, da jef ′(c) = f(b)− f(a)
b− aoziroma f(b)− f(a) = f ′(c)(b− a).
162

Enakost iz Lagrangeevega izreka včasih zapišemo v obliki
f ′(c) = f(b)− f(a)b− a
,
kjer imamo na levi strani naklon tangente na graf v točki c, na desni stranipa naklon zveznice med krajiščema grafa.
Fizikalna interpretacija Lagrangeevega izreka pove, da med gibanjemtočke zmeraj obstaja nek trenutek, v katerem je trenutna hitrost točke enakanjeni povprečni hitrosti med celotnim gibanjem.
Še bolj splošen kot Lagrangeev izrek je Cauchyjev izrek:
Trditev 7.15 (Cauchyjev izrek). Naj bosta f, g : [a, b]→ R zvezni funkciji,ki sta odvedljivi na intervalu (a, b). Potem obstaja točka c ∈ (a, b), da je
f ′(c)(g(b)− g(a)) = g′(c)(f(b)− f(a)).
Dokaz. Ideja dokaza je podobna kot pri dokazu Lagrangeevega izreka.Definirajmo funkcijo h : [a, b]→ R s predpisom
h(x) = f(x)(g(b)− g(a))− g(x)(f(b)− f(a)).
Funkcija h je potem zvezna na intervalu [a, b] in odvedljiva na (a, b). Vrobnih točkah intervala [a, b] je:
h(a) = f(a)(g(b)− g(a))− g(a)(f(b)− f(a)) = f(a)g(b)− g(a)f(b),h(b) = f(b)(g(b)− g(a))− g(b)(f(b)− f(a)) = f(a)g(b)− g(a)f(b).
Spet je h(a) = h(b), zato po Rolleovemu izreku obstaja c ∈ (a, b), da jeh′(c) = 0. Ker je odvod funkcije h enak
h′(x) = f ′(x)(g(b)− g(a))− g′(x)(f(b)− f(a)),
jef ′(c)(g(b)− g(a)) = g′(c)(f(b)− f(a)).
Če v Cauchyjevemu izreku vzamemo funkcijo g(x) = x, dobimo enakost
f ′(c)(b− a) = f(b)− f(a)
iz Lagrangeovega izreka, kar pomeni, da je Lagrangeov izrek posebna verzijaCauchyjevega izreka.
Oglejmo si nekaj enostavnih, a zelo uporabnih posledic Lagrangeovegaizreka:
163

Trditev 7.16. Naj bo f : D → R funkcija ene spremenljivke, definirana naodprti podmnožici D ⊂ R, in naj bo a ∈ D. Predpostavimo, da je funkcija fodvedljiva na množici D \ {a}, da je f zvezna v točki a in da obstaja limitafunkcije f ′ : D \ {a} → R v točki a. Tedaj je funkcija f odvedljiva tudi vtočki a in velja
f ′(a) = limx→a
f ′(x).
Dokaz. Ker je množica D odprta, lahko izberemo tako majhen δ > 0, davelja (a− δ, a+ δ) ⊂ D. Za poljuben x ∈ (a− δ, a+ δ)\{a} nam Lagrangeovizrek pove, da obstaja takšna točka ξx iz odprtega intervala med x in a, davelja
f(x)− f(a) = f ′(ξx)(x− a).
Zdaj po definiciji odvoda funkcije f v točki a izračunamo
limh→0
f(a+ h)− f(a)h
= limx→a
f(x)− f(a)x− a
= limx→a
f ′(ξx)(x− a)x− a
= limx→a
f ′(ξx) = limx→a
f ′(x).
Zadnja enakost velja, ker je točka ξx bližja točki a kot točka x.
S pomočjo Lagrangeovega izreka lahko izpeljemo povezavo med odvodomfunkcije in pa naraščanjem oziroma padanjem funkcije:
Trditev 7.17. Naj bo f : [a, b] → R zvezna funkcija, ki je odvedljiva naintervalu (a, b). Potem velja:
(1) Če je f ′(x) > 0 za vsak x ∈ (a, b), je f strogo naraščajoča na [a, b].
(2) Če je f ′(x) < 0 za vsak x ∈ (a, b), je f strogo padajoča na [a, b].
(3) Če je f ′(x) = 0 za vsak x ∈ (a, b), je f konstantna na [a, b].
Dokaz. (1) Izberimo poljubna x, y ∈ [a, b], tako da je x < y. Pokazati želimo,da je potem f(x) < f(y). Če uporabimo Lagrangeev izrek za zožitev funkcijef na interval [x, y], lahko najdemo tak c ∈ (x, y), da je
f(y)− f(x) = f ′(c)(y − x).
Ker je odvod funkcije f pozitiven in x < y, je torej
f(y)− f(x) = f ′(c)(y − x) > 0,
kar pomeni, da je f(y) > f(x).(2) Dokaz je podoben kot pri točki (1).(3) Recimo sedaj, da je f ′(c) = 0 za vsak c ∈ (a, b). Izberimo poljuben
x ∈ (a, b]. Po Lagrangeevem izreku za zožitev funkcije f na interval [a, x]lahko najdemo nek c ∈ (a, x), da je
f(x)− f(a) = f ′(c)(x− a) = 0.
164

Torej je f(x) = f(a) za vsak x ∈ (a, b] (jasno tudi za x = a), kar pa pomeni,da je funkcija f konstantna.
Če ima funkcija ničeln odvod na celem intervalu, je torej konstantna.Pri tem je ključna predpostavka, da je funkcija definirana na intervalu. Čeje domena funkcije sestavljena iz večih intervalov, trditev več ne drži. Od-vod zožitve funkcije sgn na (−∞, 0) ∪ (0,∞) je na primer povsod enak nič,funkcija pa ni konstantna.
x
y
-4 -2 2 4
-4
-2
2
4
Je pa funkcija konstantna na vsakem intervalu posebej. Takšnim funkcijamrečemo lokalno konstantne funkcije. Bolj splošno bi lahko trditev formuliraliv smislu, da je funkcija, ki ima ničeln odvod, lokalno konstantna.
Spoznali smo že potreben pogoj za obstoj ekstremov odvedljivih funkcij.Če je točka x0 ekstremna točka odvedljive funkcije f , mora biti f ′(x0) = 0.Točkam, ki zadoščajo temu pogoju, rečemo stacionarne točke.
Definicija 7.18. Točka a je stacionarna točka funkcije f : Dodp → R, če jef odvedljiva v a in je f ′(a) = 0.
Vsaka ekstremna točka odvedljive funkcije je torej stacionarna, obratnopa ni nujno res, kot smo že videli v primeru funkcije f(x) = x3.
Če najdemo neko stacionarno točko, nas seveda zanima, ali obstajajokakšni preprosti kriteriji, ki nam povedo, ali je ta točka tudi ekstremna. Vnadaljevanju si bomo pogledali tri kriterije, ki nam zagotavljajo da imamov dani točki lokalni ekstrem funkcije.
Trditev 7.19 (Zadostni pogoj za ekstrem 1). Naj bo f : [a, b] → R zveznafunkcija, ki je odvedljiva na (a, c) ∪ (c, b) za nek c ∈ (a, b). Potem velja:
(1) Če je f ′(x) < 0 za vsak x ∈ (a, c) in f ′(x) > 0 za vsak x ∈ (c, b), imaf v točki c strogi lokalni minimum.
(2) Če je f ′(x) > 0 za vsak x ∈ (a, c) in f ′(x) < 0 za vsak x ∈ (c, b), imaf v točki c strogi lokalni maksimum.
Dokaz. (1) Iz predpostavk in iz Trditve 7.17 sledi, da f strogo pada naintervalu [a, c] ter strogo narašča na intervalu [c, b]. Torej za vsak x ∈ [a, c)
165

velja f(x) > f(c), za vsak x ∈ (c, b] pa f(c) < f(x). Oboje skupaj pomeni,da ima f v c strogi lokalni minimum.
(2) Dokaz je analogen kot pri (1).
Pri tej karakterizaciji ekstremne točke smo potrebovali samo prvi odvodfunkcije f . Lahko pa si pomagamo tudi z višjimi odvodi.
Najprej uvedimo še nekaj oznak. Naj bo f : Dodp → R funkcija, zakatero obstajajo vsi odvodi f ′, f ′′, . . . , f (n). Potem rečemo, da je f n-kratodvedljiva funkcija. Če je funkcija f (n) zvezna, rečemo, da je f n-krat zve-zno odvedljiva funkcija. Množico vseh n-krat zvezno odvedljivih funkcij naodprti množici D označimo z
Cn(D).
Neskončnokrat odvedljivim funkcijam rečemo gladke funkcije. Primerigladkih funkcij so polinomi, racionalne funkcije, kotne funkcije, logaritemskein eksponentne funkcije,... Množico gladkih funkcij na odprti množici Doznačimo z
C∞(D) =⋂n∈NCn(D).
Trditev 7.20 (Zadostni pogoj za ekstrem 2). Naj bo f : [a, b] → R zveznafunkcija, ki je dvakrat zvezno odvedljiva na (a, b), in naj bo c stacionarnatočka funkcije f (oziroma f ′(c) = 0).
(1) Če je f ′′(c) < 0, ima f v točki c strogi lokalni maksimum.
(2) Če je f ′′(c) > 0, ima f v točki c strogi lokalni minimum.
Dokaz. (1) Naj bo f ′′(c) < 0. Ker je drugi odvod f ′′ zvezen, lahko najdemotak δ > 0, da je (c− δ, c+ δ) ⊂ (a, b) in f ′′(x) < 0 za vsak x ∈ (c− δ, c+ δ).To pa po Trditvi 7.17 pomeni, da je funkcija f ′ strogo padajoča na intervalu(c− δ, c+ δ). Ker je f ′(c) = 0, je torej
f ′(x) > 0 za x ∈ (c− δ, c),f ′(x) < 0 za x ∈ (c, c+ δ).
Z uporabo prvega zadostnega pogoja za ekstrem od tod sledi, da imafunkcija f v c strogi lokalni maksimum.
(2) Dokaz je analogen kot pri (1).
Drugi zadostni pogoj za ekstrem nam nič pove, kaj se zgodi, ko je hkratif ′(c) = 0 in f ′′(c) = 0. V tem primeru namreč lahko nastopita tako lokalnimaksimum kot lokalni minimum, lahko pa ekstrema sploh ni. Primerov ta-kšnih funkcij ni težko najti, saj so dobre že kar potenčne funkcije. Potenčnafunkcija f(x) = x2n+1 z lihim eksponentom ima v točki x = 0 stacionarnotočko, ki pa ni ekstrem. Potenčna funkcija f(x) = ±x2n s sodim ekspo-nentom pa ima v x = 0 lokalni ekstrem, ki je lahko ali minimum ali pamaksimum, odvisno od predznaka.
166

x
yfHxL = x3fHxL = x6
fHxL = -x6
-4 -2 2 4
-4
-2
2
4
Če smo našli točko, za katero je f ′(c) = 0 in f ′′(c) = 0, nadaljujemo zodvajanjem, dokler ne pridemo do neničelnega odvoda (če seveda funkcijolahko tolikokrat odvajamo). Prvi neničelni odvod nam potem pove, kakšenje tip stacionarne točke. Ta kriterij bomo zaenkrat samo navedli, dokazalipa ga bomo v poglavju o Taylorjevi vrsti.
Trditev 7.21 (Zadostni pogoj za ekstrem 3). Naj bo funkcija f : Dodp → Rvsaj n-krat zvezno odvedljiva (n ≥ 2) in naj bo x0 ∈ D stacionarna točkafunkcije f . Privzemimo, da je f ′(x0) = 0, f ′′(x0) = 0, . . . , f (n−1)(x0) = 0 inf (n)(x0) 6= 0. Potem velja:
(1) Če je n = 2k, ima f v točki x0 strogi lokalni ekstrem. In sicer:
· če je f (n)(x0) < 0, ima f v točki x0 strogi lokalni maksimum,· če je f (n)(x0) > 0, ima f v točki x0 strogi lokalni minimum.
(2) Če je n = 2k + 1, funkcija f v točki x0 nima ekstrema.
S tem kriterijem lahko klasificiramo skoraj vse stacionarne točke gladkihfunkcij. Teoretično pa obstajajo tudi funkcije, ki imajo v kakšni točki vseodvode enake nič, a so zelo redke.
V drugem izmed kriterijev zgoraj smo že spoznali, da predznak drugegaodvoda neposredno vpliva na tip stacionarne točke. Ima pa drugi odvod tudisvoj geometrijski pomen. Velikost drugega odvoda vpliva na ukrivljenostgrafa funkcije. Kot primer iz fizike lahko navedemo drugi Newtonov zakon,ki pove, da skupek zunanjih vplivov na neko točkasto telo določa ukrivljenosttira točke. V tem kontekstu igra vlogo drugega odvoda seveda pospešektočke. Z ukrivljenostjo se v tem trenutku ne bomo ukvarjali, spoznali pabomo pojma konveksnosti in konkavnosti, ki sta neposredno povezana spredznakom drugega odvoda funkcije.
Za motivacijo si poglejmo grafa naslednjih funkcij:
167

x
y
x y x
y
x y
V prvem primeru leži graf funkcije nad zveznico med dvema točkama nagrafu, v drugem primeru pa pod zveznico. Tema dvema lastnostima funkcijerečemo konkavnost oziroma konveksnost.
Še drugače si lahko stvar predstavljamo na naslednji način. Recimo,da se po grafu funkcije sprehajamo od leve proti desni. Če graf zavija vlevo (pozitivna ukrivljenost), je funkcija konveksna, če pa zavija v desno(negativna ukrivljenost), je funkcija konkavna. V točkah, kjer je drugi odvodničeln, lahko funkcija preide iz območja konveksnosti v območje konkavnostiin obratno.
Definicija 7.22. Naj bo f : [a, b]→ R funkcija ene realne spremenljivke.
· Funkcija f je (strogo) konveksna, če za poljubna x, y ∈ [a, b], x < y,in za vsak α ∈ (0, 1) velja
f(αy + (1− α)x)(<)≤ αf(y) + (1− α)f(x).
· Funkcija f je (strogo) konkavna, če za poljubna x, y ∈ [a, b], x < y, inza vsak α ∈ (0, 1) velja
f(αy + (1− α)x)(>)≥ αf(y) + (1− α)f(x).
Izrazu oblikez = αy + (1− α)x,
kjer je α ∈ [0, 1], rečemo konveksna kombinacija točk x in y. Ko α pretečeinterval [0, 1], preteče z daljico med x in y (ko je α = 0, je z = x, ko pa jeα = 1, je z = y). Podobno lahko vidimo, da izrazi oblike
(αy + (1− α)x, αf(y) + (1− α)f(x)), α ∈ [0, 1]
določajo ravno zveznico med točkama (x, f(x)) in (y, f(y)). Neenakosti izdefinicije torej ne pomenijo nič drugega, kot da leži graf pod (konveksnost)ali pa nad (konkavnost) zveznico med poljubnima dvema točkama na grafu.
168

x
y
x yz = Αy+H1-ΑLxa b
fHΑy+H1-ΑLxL
fHxL
fHyL
ΑfHyL+H1-ΑLfHxL
V naslednji trditvi bomo dokazali, da je pozitivnost drugega odvodapovezana s konveksnostjo, negativnost drugega odvoda pa s konkavnostjofunkcije.
Trditev 7.23. Naj bo f : [a, b] → R zvezna funkcija, ki je odvedljiva na(a, b). Potem velja:
(1) Če je funkcija f ′ (strogo) naraščajoča na (a, b), je f (strogo) konveksna
na [a, b]. Če je f slučajno 2-krat odvedljiva na (a, b) in je f ′′(x)(>)≥ 0
za vsak x ∈ (a, b), je f (strogo) konveksna na [a, b].
(2) Če je funkcija f ′ (strogo) padajoča na (a, b), je f (strogo) konkavna
na [a, b]. Če je f slučajno 2-krat odvedljiva na (a, b) in je f ′′(x)(<)≤ 0
za vsak x ∈ (a, b), je f (strogo) konkavna na [a, b].
Dokaz. (1) Izberimo poljubna x, y ∈ [a, b], x < y, in denimo, da je funkcijaf ′ naraščajoča na (a, b). Dokazati moramo, da za vsak z = αy + (1 − α)x,kjer je α ∈ (0, 1), velja
f(z) ≤ αf(y) + (1− α)f(x).
Po Lagrangeevem izreku lahko najdemo c ∈ (x, z) in d ∈ (z, y), da velja:
f(z)− f(x) = f ′(c)(z − x),f(y)− f(z) = f ′(d)(y − z).
Po drugi strani pa imamo enakost
(1−α)(z−x) = z−x−αz+αx = (αy+x−αx)−x−αz+αx = α(y− z).
Ker je funkcija f ′ naraščajoča, iz x < c < z < d < y sledi f ′(c) ≤ f ′(d).Skupaj z zgornjimi enakostmi lahko od tod izpeljemo neenakost:
(1− α)(f(z)− f(x)) = (1− α)f ′(c)(z − x),≤ (1− α)f ′(d)(z − x),= αf ′(d)(y − z),= α(f(y)− f(z)).
169

To neenakost lahko prepišemo v neenakost
f(z) ≤ αf(y) + (1− α)f(x),
ki smo jo želeli dokazati.Če je f 2-krat odvedljiva na (a, b) in je f ′′(x) ≥ 0 za vsak x ∈ (a, b), je
po Trditvi 7.17 funkcija f ′ naraščajoča na (a, b). Po že dokazanem od todsledi, da je f konveksna na [a, b].
(2) Dokažemo podobno kot (1).
7.2 L’Hospitalovo pravilo
Z odvodi lahko izračunamo tudi limite nekaterih kvocientov funkcij. Primereuporabe najdemo pri študiju asimptotskega obnašanja funkcij. Pokazalibomo na primer, da logaritemska funkcija narašča počasneje kot poljubnapotenčna funkcija, eksponentna funkcija pa hitreje kot poljubna potenčnafunkcija.
Trditev 7.24 (L’Hospitalovo pravilo). Naj bosta f, g : (a, b)→ R odvedljivifunkciji in naj bo x0 ∈ (a, b) skupna ničla funkcij f in g (to pomeni, da jef(x0) = g(x0) = 0). Privzemimo dodatno še, da je g(x) 6= 0 in g′(x) 6= 0 zavsak x ∈ (a, b)\{x0}. Če obstaja limita lim
x→x0
f ′(x)g′(x) , potem obstaja tudi limita
limx→x0
f(x)g(x) in velja
limx→x0
f(x)g(x) = lim
x→x0
f ′(x)g′(x) .
Dokaz. V dokazu bomo definirali nekaj pomožnih funkcij, ki nam bodoomogočale izpeljati enakost iz trditve. Najprej bomo definirali funkcijok : (a, b) \ {x0} → R s predpisom
k(x) = f(x)g(x) .
Iz predpostavk v trditvi sledi, da je funkcija k zvezna in odvedljiva na odprtimnožici (a, b) \ {x0}.
Nadalje definirajmo družino funkcij hx : (a, b)→ R s predpisi
hx(t) = f(t)− k(x)g(t).
Za vsak fiksen x ∈ (a, b) \ {x0} je hx zvezna in odvedljiva funkcija, odvisnaod spremenljivke t na intervalu t ∈ (a, b). Različne vrednosti spremenljivkex lahko seveda določajo različne funkcije hx.
Izberimo sedaj poljuben x ∈ (a, x0). Potem velja:
hx(x0) = f(x0)− k(x)g(x0) = 0− 0 = 0,
hx(x) = f(x)− k(x)g(x) = f(x)− f(x)g(x) g(x) = 0.
170

Funkcija hx torej zavzame isti vrednosti v točkah x in x0, zato lahko poRolleovemu izreku najdemo nek cx ∈ (x, x0), da je h′x(cx) = 0. V tej enakostije s h′x mišljen odvod funkcije hx(t) = f(t)− k(x)g(t) po spremenljivki t, kipa je enak
h′x(t) = f ′(t)− k(x)g′(t).
Če vstavimo t = cx, se enakost h′x(cx) = 0 prepiše v f ′(cx)− k(x)g′(cx) = 0,oziroma
f ′(cx)g′(cx) = f(x)
g(x) .
Za vsak x ∈ (a, x0) lahko torej najdemo nek cx ∈ (x, x0) (odvisen od x),da velja zgornja enakost.
x cx x0a b
Ko se x z leve približuje proti x0, se mora hkrati tudi cx približevati k x0,kar pa pomeni, da je
limx→x0−
f(x)g(x) = lim
x→x0−
f ′(cx)g′(cx) = lim
x→x0−
f ′(x)g′(x) .
Analogno lahko dokažemo, da podobna enakost velja tudi za desni limiti,od koder pa sledi, da se limiti v trditvi ujemata.
Ta verzija L’Hospitalovega pravila je uporabna za računanje limit tipa 00
v okolici neke točke. Podobno pa dokažemo tudi variante L’Hospitalovegapravila za računanje limit tipa ∞∞ v okolici dane točke in pa za računanjelimit tipa 0
0 in ∞∞ v neskončnosti.
(1) Naj bosta f, g : (a, x0) ∪ (x0, b) → R odvedljivi funkciji in naj veljalimx→x0
f(x) = ±∞ ter limx→x0
g(x) = ±∞ (funkciji f in g imata skupni
pol). Če obstaja limita limx→x0
f ′(x)g′(x) , potem obstaja tudi limita lim
x→x0
f(x)g(x) ,
in limiti sta enaki.
(2) Naj bosta f, g : (a,∞)→ R odvedljivi funkciji in naj bo limx→∞
f(x) = 0ter lim
x→∞g(x) = 0. Privzemimo dodatno še, da velja g(x) 6= 0 in
g′(x) 6= 0 za vsak x ∈ (a,∞). Če obstaja limita limx→x0
f ′(x)g′(x) , potem
obstaja tudi limita limx→x0
f(x)g(x) , in limiti sta enaki.
(3) Naj bosta f, g : (a,∞)→ R odvedljivi funkciji, ki zadoščata pogojemalimx→∞
f(x) = ±∞ ter limx→∞
g(x) = ±∞. Če obstaja limita limx→x0
f ′(x)g′(x) ,
potem obstaja tudi limita limx→x0
f(x)g(x) , in limiti sta enaki.
L’Hospitalovo pravilo praviloma uporabljamo pri iskanju odpravljivihsingularnosti funkcij in pa pri analizi asimptotskega obnašanja funkcij.
171

Zgled 7.25. (1) Poglejmo si za začetek racionalno funkcijo f(x) = x3−1x2−1 .
Njen predpis sicer ni definiran v točki x = 1, je pa točka x = 1 skupnaničla števca in imenovalca, zato domnevamo, da bi se dalo funkcijo f zveznorazširiti tudi skozi točko x = 1. Limita funkcije f v točki x = 1 je enaka
limx→1
x3 − 1x2 − 1 = lim
x→1
3x2
2x = 32 .
Če sedaj dodatno definiramo f(1) = 32 , smo tako odpravili singularnost
funkcije v točki x = 1. Ima pa funkcija f še vedno singularnost (pol) v točkix = −1, ki pa je ne moremo odpraviti.
x
y
-4 -2 2 4
-4
-2
2
4
(2) Pri funkciji f(x) = eax−1x imamo v točki x = 0 nedoločenost tipa 0
0 .Z uporabo L’Hospitalovega pravila dobimo
limx→0
eax − 1x
= limx→0
aeax
1 = a.
(3) Limito limx→0
sinxx smo že izračunali na dolgo v poglavju o funkcijah.
Precej hitreje pa s pomočjo L’Hospitalovega pravila dobimo
limx→0
sin xx
= limx→0
cosx1 = 1.
x
y
-4 -2 2 4
-4
-2
2
4
(4) Analizirajmo sedaj obnašanje funkcije f(x) = x ln x za majhne x.V točki x = 0 ima funkcija nedoločenost tipa 0 · (−∞), zato jo moramo
172

malce preoblikovati, da dobimo eno izmed nedoločenosti, ki smo jih navedliv L’Hospitalovemu pravilu. Računajmo
limx→0
(x ln x) = limx→0
ln x1x
= limx→0
1x−1x2
= limx→0
(−x) = 0.
To pomeni, da za majhne vrednosti linearna funkcija x pada hitreje protinič, kot gre logaritemska funkcija ln x proti minus neskončnosti.
x
yfHxL = x
fHxL = ln x
1 2 3 4
-2
-1
1
2
(5) Za konec si poglejmo še primerjavo med obnašanjem potenčne in paeksponentne funkcije v neskončnosti. Funkcija f(x) = xn
ex ima v neskončnostinedoločenost tipa ∞∞ . Limito v neskončnosti izračunamo z L’Hospitalovimpravilom, ki ga bomo morali v tem primeru uporabiti večkrat
limx→∞
xn
ex= lim
x→∞nxn−1
ex= lim
x→∞n(n− 1)xn−2
ex= . . . = lim
x→∞n!ex
= 0.
Od tod sklepamo, da eksponentna funkcija raste hitreje kot poljubnapotenčna funkcija.
x
y
f HxL = xn
f HxL = ex
-2 -1 1 2
1
2
3
4
7.3 Risanje grafov funkcij
Če imamo možnost, si pri risanju grafov funkcij pomagamo z računalniškimiorodji, ki nam grafe elementarnih funkcij narišejo s precejšno natančnostjo.Sicer pa lahko z uporabo matematičnih orodij, ki smo jih spoznali v temrazdelku, vsaj približno skiciramo graf funkcije tudi sami.
173

Pri skiciranju grafa funkcije si pomagamo z naslednjimi opornimi toč-kami:
(1) Najprej določimo definicijsko območje funkcije. Če ni že eksplicitnodoločeno, ponavadi za domeno vzamemo kar množico vseh točk, zakatere je definiran predpis funkcije.
(2) Poiščemo ničle in pole funkcije ter analiziramo obnašanje funkcije vrobnih točkah domene ter v neskončnosti.
(3) Izračunamo odvod funkcije ter poiščemo stacionarne točke, intervalenaraščanja in intervale padanja funkcije.
(4) Izračunamo drugi odvod funkcije in nato poiščemo prevoje, intervalekonveksnosti in intervale konkavnosti funkcije.
Zgled 7.26. Poskusimo na primer skicirati graf funkcije f(x) = x ln x.
• Logaritemska funkcija ln x je definirana samo za pozitivna realna šte-vila, zato je naravna domena funkcije f enaka D = (0,∞).
• Funkcija f ima ničlo x = 1. Polov funkcija f nima, saj smo že izraču-nali, da je limita funkcije f v robni točki domene x = 0 enaka
limx→0
(x ln x) = 0.
Ker sta tako linearna funkcija kot logaritemska funkcija naraščajoči inrasteta čez vse meje, je
limx→∞
(x ln x) =∞.
• Odvod funkcije f je enak
f ′(x) = ln x+ x · 1x
= ln x+ 1.
Funkcija f torej pada na intervalu (0, 1e ) in narašča na intervalu (1
e ,∞).V točki x0 = 1
e ima funkcija f strogi lokalni minimum. Limita odvoda,ko gre x proti 0, je enaka
limx→0
f ′(x) = −∞,
kar pomeni, da se graf funkcije f približuje točki (0, 0) v skoraj nav-pični smeri.
• Drugi odvod funkcije f je enak
f ′′(x) = 1x
in je torej povsod pozitiven, kar pomeni, da je funkcija f konveksna.Prevojev ni.
174

Na koncu s pomočjo vseh teh podatkov skiciramo graf funkcije.
x
y
f HxL = x ln x
-1 1 2 3
-1
1
2
3
175

8 Nedoločeni integralV tem razdelku si bomo pogledali operacijo, ki je na nek način inverznaodvajanju. Za dano funkcijo bomo poskušali poiskati neko drugo funkcijo,katere odvod bo ravno dana funkcija.
Nekatere fizikalne zglede verjetno že poznamo, ne da bi se dejansko za-vedali, da v ozadju stoji integriranje. Pri študiju enakomerno pospešenegagibanja ali pa pri obravnavi gibanja pri poševnem metu znamo natankoopisati, kako se spreminja položaj točke. V obeh primerih dobimo rešitevz dvakratnim integriranjem pospeška (ki je v omenjenih primerih konstan-ten). Bolj splošno lahko v preprostih primerih iz klasične mehanike gibanjesistemov določimo z integriranjem ustreznih funkcij, ki nastopajo v Newto-novem zakonu, v bolj kompliciranih primerih pa je treba rešiti diferencialnoenačb.
V splošnem je integriranje precej težje kot odvajanje, zato si v praksipomagamo z računalniki, ki nam omogočajo numerično integracijo funkcijin diferencialnih enačb.
Za motivacijo si poglejmo še geometrijsko interpretacijo nedoločenegaintegrala. Vemo že, da nam odvod funkcije pove, kakšen je njen naklonv dani točki. Če torej hočemo dano funkcijo integrirati, moramo poiskatineko drugo funkcijo, ki ima v vsaki točki predpisan naklon. Takšna funkcijani ena sama, saj lahko s prištetjem poljubne konstante dobimo neko drugofunkcijo, ki ima v vsaki točki isti naklon. Če želimo, da je naklon funkcijekonstanten, že vemo, da temu pogoju ustrezajo linearne funkcije.
-4 -2 2
-4
-2
2
-4 -2 2
-4
-2
2
V bolj kompliciranih primerih si lahko mislimo, da dana funkcija določaneko polje silnic, naša naloga pa je, da poiščemo družino funkcij, katerih grafise dotikajo polja silnic. Iskanje trajektorij mehanskih sistemov večinomatemelji na tem geometrijskem principu, le da se stvari dogajajo v višjihdimenzijah.
Definicija 8.1. Naj bo f : Dodp → R funkcija. Funkcija F : Dodp → R jeprimitivna funkcija funkcije f , če je odvedljiva in če velja F ′ = f .
Trditev 8.2. Če sta F in G dve primitivni funkciji funkcije f : (a, b)→ R,je F −G konstantna funkcija.
176

Dokaz. Po predpostavki je
(F −G)′ = F ′ −G′ = f − f = 0.
Iz razdelka o odvodu že vemo, da je funkcija, ki ima ničeln odvod na intervalu(a, b), konstantna. Torej obstaja konstanta C, da je F (x) = G(x) + C zapoljuben x ∈ (a, b).
Če je funkcija f v zgornji trditvi namesto na intervalu (a, b) definirana naodprti množici D, funkcija F −G ni nujno konstantna, ampak samo lokalnokonstantna na D.
Dve primitivni funkciji neke dane funkcije se torej razlikujeta kvečjemuza lokalno konstantno funkcijo. Ker pa je odvod lokalno konstantne funkcijeenak nič, lahko primitivni funkciji prištejemo poljubno lokalno konstantnofunkcijo, pa bomo spet dobili primitivno funkcijo.
Trditev 8.3. Naj bo F primitivna funkcija funkcije f : Dodp → R. Zapoljubno lokalno konstantno funkcijo C : Dodp → R je potem tudi funkcijaF + C primitivna funkcija funkcije f .
Če ima funkcija f kakšno primitivno funkcijo, jih ima torej neskončno,parametriziramo pa jih lahko z množico vseh lokalno konstantnih funkcij.Množico vseh primitivnih funkcij funkcije f imenujemo nedoločeni integralfunkcije f in jo označimo z ∫
f(x) dx.
Naš cilj pri integriranju funkcij se tako zreducira na iskanje ene sameprimitivne funkcije dane funkcije f . Če nam jo uspe najti, rezultat zapišemov obliki ∫
f(x) dx = F (x) + C,
kjer je F neka konkretna primitivna funkcija funkcije f , C pa poljubnalokalno konstantna funkcija.
Pri računanju nedoločenih integralov si pomagamo z raznimi metodamioziroma algoritmi. S pomočjo našega predznanja o odvodih elementarnihfunkcij lahko takoj napišemo tabelo elementarnih integralov, ki se jih veljazapomniti na pamet. Za integriranje bolj kompliciranih funkcij lahko natouporabimo metodo integracije po delih ali pa si pomagamo z uvedbo novespremenljivke. V splošnem je to vse, kar imamo na razpolago, res pa je,da obstajajo posebni algoritmi za integracijo racionalnih, iracionalnih, ek-sponentnih in pa kotnih funkcij. Če kakšne funkcije ne znamo integriratianalitično (kar se zgodi dokaj pogosto), lahko vsaj približno izračunamointegral z numeričnimi metodami.
Najprej si poglejmo tabelo nedoločenih integralov, ki jo lahko prepišemoneposredno iz tabele odvodov.
177

Zgled 8.4 (Tabela elementarnih integralov).
1)∫xr dx = xr+1
r + 1 + C, r ∈ R \ {−1},∫dx
x= ln |x|+ C,
2)∫ax dx = ax
ln a + C, a ∈ (0,∞) \ {1},∫ex dx = ex + C,
3)∫
sin x dx = − cosx+ C,∫cosx dx = sin x+ C,
4)∫
dx
cos2 x= tg x+ C,∫
dx
sin2 x= − ctg x+ C,
5)∫
dx√1− x2
= arc sin x+ C,
6)∫
dx
1 + x2 = arc tg x+ C,
7)∫
dx√x2 + a2
= ln(x+
√x2 + a2
)+ C, a > 0,∫
dx√x2 − a2
= ln∣∣∣x+
√x2 − a2
∣∣∣+ C, a > 0.
Pravilnost vseh teh integralov lahko preverimo z odvajanjem, malce boljpodrobno pa si poglejmo samo integral funkcije f(x) = 1
x . Iz razdelka oodvodu že vemo, da za x > 0 velja (ln x)′ = 1
x . Ker naravni logaritemni definiran za negativna realna števila, si poglejmo funkcijo F (x) = ln |x|,katere domena je odprta množica R\{0}.
x
y
fHxL = lnÈxÈ
-3 -2 -1 1 2 3
-2
-1
1
2
Na intervalu (−∞, 0) je F (x) = ln(−x), zato je tam
F ′(x) = 1(−x) · (−x)′ = 1
x.
178

To pomeni, da je F primitivna funkcija funkcije f na odprti množiciR\{0}, zato je ∫
dx
x= ln |x|+ C.
Ker je v tem primeru množica R\{0} unija intervalov (−∞, 0) in (0,∞),je lokalno konstantna funkcija C oblike
C ={C1 ; x < 0,C2 ; x > 0,
kjer sta C1 in C2 poljubni konstanti.Situacija je podobna tudi v primerih 4) in 7), kjer je treba upoštevati,
da domene funkcij niso intervali.V večini primerov želimo seveda integrirati funkcijo, ki je ni v zgornji
tabeli. Pri tem nam je v pomoč nekaj pravil za integriranje. Dobili jihbomo, tako da bomo pravila za odvod vsote, produkta in pa kompozitumaprebrali v obratni smeri.
Trditev 8.5 (Linearnost nedoločenega integrala). Če imata f, g : Dodp → Rprimitivni funkciji, potem ima za poljubna α, β ∈ R tudi funkcija αf + βgprimitivno funkcijo in velja∫
(αf(x) + βg(x)) dx = α
∫f(x) dx+ β
∫g(x) dx.
Dokaz. Dokazi pri trditvah o integralih so praviloma lažji kot pri podobnihtrditvah o odvodih. Če sta F in G primitivni funkciji funkcij f oziroma g,potem iz enakosti
(αF + βG)′ = αf + βg
sledi, da je αF +βG primitivna funkcija funkcije αf +βg. Od tod sledi tudilinearnost nedoločenega integrala.
Zgled 8.6. Iz linearnosti nedoločenega integrala sledi, da je nedoločeni in-tegral polinoma P (x) = anx
n + an−1xn−1 + . . .+ a1x+ a0 enak∫
P (x) dx = an
∫xn dx+ an−1
∫xn−1 dx+ . . .+ a1
∫x dx+ a0
∫1 dx,
= anxn+1
n+ 1 + an−1xn
n+ . . .+ a1
x2
2 + a0x+ C.
Primitivna funkcija polinoma stopnje n je polinom stopnje n+1 (določendo prostega člena natančno).
Iz formule za odvod produkta
(fg)′ = f ′g + fg′
lahko izpeljemo pravilo za integracijo po delih oziroma ’per partes’.
179

Trditev 8.7 (Integracija po delih). Naj bosta f, g : Dodp → R dve odvedljivifunkciji. Če ima funkcija f ′g primitivno funkcijo, potem ima tudi funkcijafg′ primitivno funkcijo in velja∫
f(x)g′(x) dx = f(x)g(x)−∫f ′(x)g(x) dx.
Dokaz. Za dokaz enakosti iz trditve je dovolj pokazati, da sta odvoda leve indesne strani enaka. Odvod leve strani enakosti je po definiciji nedoločenegaintegrala enak (∫
f(x)g′(x) dx)′
= f(x)g′(x).
Po drugi strani pa iz pravila za odvod produkta sledi(f(x)g(x)−
∫f ′(x)g(x) dx
)′= (f(x)g(x))′ − f ′(x)g(x),
= f ′(x)g(x) + f(x)g′(x)− f ′(x)g(x),= f(x)g′(x).
Pravilo za integracijo po delih pogosto pišemo v obliki z diferenciali∫u dv = uv −
∫v du.
Pri tem uporabljamo oznake u = f(x), v = g(x), du = f ′(x)dx in padv = g′(x)dx. Če želimo uporabiti pravilo integracije po delih, moramotorej integrand zapisati v obliki u dv. Intuicijo, kaj se splača vzeti za u inkaj za dv, si pridobimo z integracijsko prakso, ponavadi pa se pri izbiri u indv ravnamo po načelu:
· u . . . funkcija, ki se pri odvajanju poenostavi.· dv . . . izraz, ki ga znamo integrirati.
Tipični primeri funkcij, ki jih lahko integriramo po delih, so produktipolinomov s kotnimi, eksponentnimi in logaritemskimi funkcijami. Sevedapa lahko s to metodo rešimo tudi kakšen bolj kompliciran integral.
180

Zgled 8.8.
(1)∫xn ln x dx :
Vzemimo u = ln x in dv = xn dx. Potem sledi du = dxx in v = xn+1
n+1 +C. Kerpotrebujemo nek konkreten v, lahko zaradi enostavnosti izberemo C = 0.Tako dobimo∫
xn ln x dx = xn+1 ln xn+ 1 −
∫xn+1
n+ 1 ·1xdx = xn+1 ln x
n+ 1 −∫
xn
n+ 1 dx,
= xn+1 ln xn+ 1 − xn+1
(n+ 1)2 + C,
= xn+1
n+ 1
(ln x− 1
n+ 1
)+ C.
Zgornji izračun je veljaven za vse n 6= −1. V primeru n = −1 lahko integralizračunamo z uvedbo nove spremenljivke, še posebej pa izpostavimo primern = 0, ki nam pove, da je integral logaritemske funkcije enak∫
ln x dx = x (ln x− 1) + C.
(2)∫x sin x dx :
V tem primeru znamo obe funkciji tako integrirati kot odvajati. Se palinearna funkcija pri odvajanju poenostavi, zato bomo raje vzeli u = x indv = sin x dx, kar nam da du = dx in v = − cosx. Sledi∫
x sin x dx = −x cosx+∫
cosx dx = −x cosx+ sin x+ C.
(3)∫x2ex dx :
V tem primeru bomo dvakrat uporabili pravilo integracije po delih. Obakratbomo odvajali polinom, integrirali pa eksponentno funkcijo:∫
x2ex dx = x2ex −∫
2xex dx,
= x2ex −(
2xex −∫
2ex dx),
= ex(x2 − 2x+ 2) + C.
181

Zadnje pravilo, ki ga bomo obravnavali, je formula za uvedbo nove spre-menljivke v nedoločeni integral. Formalno je to analog verižnega pravila priodvajanju.
Trditev 8.9 (Uvedba nove spremenljivke). Če je F : Dodp → R primitivnafunkcija funkcije f : D → R in je g : Eodp → D odvedljiva funkcija, potemima tudi funkcija (f ◦ g) · g′ primitivno funkcijo in sicer∫
f(g(x))g′(x) dx = F (g(x)) + C.
Dokaz. Z uporabo verižnega pravila dobimo, da je odvod desne strani ena-kosti enak
(F (g(x)) + C)′ = F ′(g(x))g′(x) = f(g(x))g′(x),
in je torej enak odvodu leve strani.
Intuitivno si lahko predstavljamo, da nam funkcija g določa zamenjavokoordinat (bolj bo to jasno, ko bomo spoznali integrale funkcij večih spre-menljivk). Če uvedemo novo spremenljivko t = g(x), je potem dt = g′(x)dx,enakost iz trditve pa se prepiše v∫
f(t) dt = F (t) + C.
Enakost iz trditve ni nič drugega kot definicija nedoločenega integrala,pogledana v ustreznih koordinatah. Če sumimo, da bi lahko dano funkcijointegrirali z uvedbo nove spremenljivke, najprej pogledamo, kako izgledafunkcija v novih koordinatah. Če znamo, dobljeno funkcijo integriramo,rezultat pa na koncu prepišemo v prvotnih koordinatah. Podobno kot priintegraciji po delih pa moramo tudi pri uvedbi nove spremenljivke najprejsami rešiti nekaj primerov, da dobimo dober občutek.
Zgled 8.10.
(1)∫
dx
x− a:
Ta integral bi sicer lahko kar uganili, formalno pa ga izračunamo z uvedbonove spremenljivke t = x− a, kar nam da dt = dx. Sledi∫
dx
x− a=∫dt
t= ln |t|+ C = ln |x− a|+ C.
182

(2)∫
dx
a2 + x2 :
Uvedimo novo spremenljivko t = xa . Potem je dt = dx
a in∫dx
a2 + x2 = 1a2
∫dx
1 +(xa
)2 = 1a
∫dt
1 + t2= 1a
arc tg(t) + C,
= 1a
arc tg(x
a
)+ C.
Zgornji rezultat je veljaven za a 6= 0. V primeru a = 0 pa že vemo, da je∫dx
x2 = −1x
+ C.
Vidimo, da je odvisnost nedoločenega integrala od parametra a precejnestabilna v okolici vrednosti a = 0. Če vrednost le malo spremenimo, senedoločeni integral precej spremeni.
(3)∫
tg x dx :
Tokrat vzemimo t = cosx, kar nam da dt = − sin x dx. Dobimo∫tg x dx =
∫ −dtt
= − ln |t|+ C = − ln | cosx|+ C.
Domena funkcije tangens je neskončna unija odprtih intervalov, zato jelokalno konstantna funkcija C v tem primeru določena s števno družinokonstant {Ck} (po eno za vsak interval).
Pravila, ki smo jih spoznali do zdaj, so bolj ali manj vse, s čimer silahko v splošnem pomagamo pri integraciji funkcij. Čeprav v tem trenutkuto morda še ni razvidno, je integriranje precej težje kot odvajanje. Kasnejebomo pokazali, da ima vsaka zvezna funkcija primitivno funkcijo, kljub temupa večine funkcij ne znamo integrirati z analitičnimi metodami. Najboljznan primer je Gaussova funkcija f(x) = e−x
2 , katere primitivne funkcije nemoremo izraziti z elementarnimi funkcijami. Zaradi njene pomembnosti paustrezen večkratnik primitivne funkcije Gaussove funkcije označimo z erf inji rečemo ’Gaussova funkcija napake’.
x
y
fHxL = e-x2
-2 -1 1 2
-0.5
0.5
1.0
1.5
x
y
fHxL = erfHxL
-3 -2 -1 1 2
-2
-1
1
V nadaljevanju razdelka si bomo pogledali nekaj razredov funkcij, ki jihlahko integriramo s pomočjo znanih algoritmov.
183

8.1 Integrali racionalnih funkcij
Racionalne funkcije lahko v principu vedno integriramo, je pa lahko to dokajhitro precej zamudno početje.
(I) Integrali tipa∫ Adx
(x−a)k
V tem primeru je k poljubno naravno število, a pa poljubno realno število.Ločimo primera k = 1 in pa k ≥ 2, ki ju lahko oba izračunamo z uvedbonove spremenljivke t = x− a, da dobimo∫
Adx
(x− a)k = − A
(k − 1)(x− a)k−1 + C, k ≥ 2,∫Adx
x− a= A ln |x− a|+ C.
(II) Integrali tipa∫ Mx+Nx2+px+q dx
Predpostavimo sedaj, da je imenovalec racionalne funkcije nerazcepen kva-dratni polinom Q(x) = x2 + px + q. To pomeni, da je D = p2 − 4q < 0.Zapišimo najprej imenovalec Q v temenski obliki
x2 + px+ q =(x+ p
2
)2− p2
4 + q,
=(x+ p
2
)2+ 4q − p2
4 ,
=(x+ p
2
)2+ −D4 ,
= t2 + k2,
kjer smo uvedli oznaki
k =
√4q − p2
4 ,
t = x+ p
2 .
Z uvedbo nove spremenljivke v integral dobimo∫Mx+N
x2 + px+ qdx =
∫Mt− p
2M +N
t2 + k2 dt,
= M
∫t dt
t2 + k2 +(N − p
2M)∫
dt
t2 + k2 .
Spomnimo se, da je desni integral enak(N − p
2M)∫
dt
t2 + k2 =(N − p
2M) 1k
arc tg(t
k
)+ C,
184

medtem ko lahko levi integral izračunamo z uvedbo s = t2 +k2 (ds = 2t dt),ki nam da
M
∫t dt
t2 + k2 = M
2
∫ds
s= M
2 ln |s|+ C.
Rezultat je torej enak∫Mx+N
x2 + px+ qdx = M
2 ln(x2 + px+ q) + 2N − pM√4q − p2 arc tg
(2x+ p√4q − p2
)+C.
Te formule se seveda nima smisla učiti na pamet, splača pa se zapomnitiglavne ideje v izpeljavi rezultata.
(III) Integral splošne racionalne funkcije∫ P (x)Q(x) dx
Za integracijo bolj kompliciranih racionalnih funkcij imamo na voljo dvapostopka. Lahko jih s pomočjo razcepa na parcialne ulomke prevedemona bolj preproste funkcije in nato integriramo vsak del posebej, lahko pauporabimo nastavek.
1. korak: V vsakem primeru moramo najprej števec in imenovalec zdelitiin nato racionalno funkcijo zapisati v obliki
P (x)Q(x) = S(x) + R(x)
Q(x) .
Pri tem je S kvocient polinomov P in Q, R pa ostanek pri deljenju P s Q,kar pomeni, da je stopnja polinoma R manjša od polinoma stopnje Q. Takodobimo ∫
P (x)Q(x) dx =
∫S(x) dx+
∫R(x)Q(x) dx.
Polinom S že znamo integrirati, racionalno funkcijo RQ , ki ima števec nižje
stopnje kot imenovalec, pa integriramo po postopku, ki ga bomo spoznali vnadaljevanju.
2. korak: Pomagali si bomo z osnovnim izrekom algebre, ki pove, dalahko vsak polinom zapišemo kot produkt linearnih funkcij s kompleksnimikoeficienti. Posledica tega je, da lahko vsak realen polinom razcepimo kotprodukt linearnih in pa nerazcepnih kvadratnih členov (obojih z realnimikoeficienti). To pomeni, da lahko imenovalec Q razcepimo v obliki
Q(x) = A(x− x1)α1 · · · (x− xn)αn · (x2 + p1x+ q1)β1 · · · (x2 + pmx+ qm)βm ,
kjer so {x1, x2, . . . , xn} različne realne ničle polinoma Q, ak stopnja ničle xk,polinomi x2 + plx + ql pa so nerazcepni kvadratni realni polinomi. Na temkoraku se nam že lahko pojavijo prve težave, saj je v splošnem polinometežko razcepiti. V odvisnosti od oblike razcepa imamo sedaj na voljo dvapostopka. Oba sicer zmeraj delujeta, ponavadi pa se splača ravnati ponaslednjem načelu. Če ima polinomQ samo linearne faktorje ali pa kvečjemu
185

kvadratne faktorje na prvo potenco, poskusimo z razcepom na parcialneulomke. Če imaQ kvadratne faktorje na višje potence, poskusimo racionalnofunkcijo integrirati s pomočjo nastavka.
Razcep na parcialne ulomke
Recimo, da je m = 0, kar pomeni, da polinom Q nima nerazcepnih kvadra-tnih faktorjev in je torej oblike
Q(x) = A(x− x1)α1 · · · (x− xn)αn .
Racionalno funkcijo R(x)Q(x) lahko potem zapišemo kot vsoto parcialnih
ulomkov oblike
R(x)Q(x) = A11
(x− x1) + A12(x− x1)2 + · · ·+ A1α1
(x− x1)α1+
+ A21(x− x2) + A22
(x− x2)2 + · · ·+ A2α2
(x− x2)α2+
+ · · ·
+ An1(x− xn) + An2
(x− xn)2 + · · ·+ Anαn(x− xn)αn .
Brez dokaza omenimo, da zmeraj obstajajo enolično določene konstante{Aij}, ki zadoščajo zgornji enakosti. Izračunamo pa jih lahko, tako da damodesno stran na skupni imenovalec, nato pa primerjamo števca leve in desnestrani. Pri tem dobimo sistem linearnih enačb, ki se ga da enolično rešiti. Konam uspe racionalno funkcijo razcepiti na parcialne ulomke, lahko zapišemo∫
R(x)Q(x) dx =
∫A11x− x1
dx+ · · ·+∫
Anαn(x− xn)αn dx.
Integrale na desni smo že izračunali v (I), kar pomeni, da v principuznamo integrirati racionalne funkcije, katerih števci razpadejo na linearnefaktorje. Lahko pa to opravilo postane dokaj zamudno, če moramo integraleračunati na roke.
Če ima racionalna funkcija R(x)Q(x) v imenovalcu tudi nerazcepne kvadratne
faktorje, lahko uporabimo podobno shemo, le da moramo dodati še analognesumande za kvadratne faktorje, konstante Aij v števcih pa zamenjamo zlinearnimi členi Bijx+ Cij .
186

Zgled 8.11.∫ 4x+ 1(x+ 1)2(x− 2) dx :
V tem primeru je racionalna funkcija takšne oblike, da deljenje ni potrebno,prav tako pa je imenovalec že zapisan v obliki produkta linearnih členov.
Razcepimo najprej dano funkcijo na parcialne ulomke
4x+ 1(x+ 1)2(x− 2) = A11
x+ 1 + A12(x+ 1)2 + A21
x− 2 ,
= A11(x+ 1)(x− 2) +A12(x− 2) +A21(x+ 1)2
(x+ 1)2(x− 2) ,
= x2(A11 +A21) + x(−A11 +A12 + 2A21) + (−2A11 − 2A12 +A21)(x+ 1)2(x− 2) .
S primerjavo koeficientov polinomov v števcu pridemo do sistema treh enačbza tri neznanke:
A11 +A21 = 0,−A11 +A12 + 2A21 = 4,−2A11 − 2A12 +A21 = 1.
Sistematično rešujemo sisteme linearnih enačb z Gaussovim algoritmom,ki ga bomo spoznali v drugem semestru. Če pa neznank ni prav veliko, palahko sisteme rešujemo tudi z zaporedno eliminacijo spremenljivk. V našemprimeru dobimo rešitev A11 = −1, A12 = 1 in A21 = 1. Sledi∫ 4x+ 1
(x+ 1)2(x− 2) dx = −∫
dx
x+ 1 +∫
dx
(x+ 1)2 +∫
dx
x− 2 ,
= − ln |x+ 1| − 1x+ 1 + ln |x− 2|+ C.
Integracija s pomočjo nastavka
Kot smo videli v dosedanjih primerih, dobimo pri integraciji racionalnihfunkcij kot rezultat neko kombinacijo racionalnih funkcij, logaritmov in pafunkcije arc tg. V splošnem uporabimo to idejo, da uganemo obliko rešitvedo konstant natančno, nato pa z odvajanjem in reševanjem sistema enačbše poračunamo te konstante.
Naj bo kot prej
Q(x) = A(x− x1)α1 · · · (x− xn)αn(x2 + p1x+ q1)β1 · · · (x2 + pmx+ qm)βm .
187

Nedoločeni integral∫ R(x)Q(x) dx potem izračunamo s pomočjo nastavka
∫R(x)Q(x) dx = Asx
s +As−1xs−1 + · · ·+A1x+A0
(x− x1)α1−1 · · · (x− xn)αn−1(x2 + p1x+ q1)β1−1 · · · (x2 + pmx+ qm)βm−1
+B1 ln |x− x1|+ · · ·+Bn ln |x− xn|+ U1 ln(x2 + p1x+ q1) + · · ·+ Um ln(x2 + pmx+ qm)
+ V1 arc tg
2x+ p1√−p2
1 + 4q1
+ · · ·+ Vm arc tg(
2x+ pm√−p2
m + 4qm
)+ C.
Pri tem je
s = (α1 − 1) + · · ·+ (αn − 1) + 2(β1 − 1) + · · ·+ 2(βm − 1)− 1,
kar pomeni, da ima polinom v števcu racionalne funkcije v nastavku za enamanjšo stopnjo kot polinom v imenovalcu. V nastavku dobimo od vsakegalinearnega faktorja polinoma Q po en logaritem, od vsakega kvadratnegafaktorja pa po en logaritem in po en arc tg. Izkaže se, da je integral poljubneracionalne funkcije takšne oblike, seveda pri primernih vrednostih konstantA1, . . . , As, B1, . . . , Bn, U1, . . . , Um, V1, . . . , Vm.
Te konstante izračunamo, tako da desno stran najprej odvajamo, dobljeniodvod izenačimo z R(x)
Q(x) in nato rešimo sistem enačb.
Zgled 8.12.
(1)∫
dx
(1 + x2)2 :
Deljenje in faktorizacija tudi v tem primeru nista potrebna. Glede na našeoznake je n = 0, m = 1 in β1 = 2, zato bomo uporabili nastavek∫
dx
(x2 + 1)2 = Ax+B
x2 + 1 +D ln(1 + x2) + E arc tg( 2x√
4
)+ C.
Če konstant ni veliko, jih ponavadi označimo kar s črkami z začetkaabecede. Z odvajanjem zgornje enakosti dobimo
1(1 + x2)2 = A(x2 + 1)− 2x(Ax+B)
(1 + x2)2 + 2Dx1 + x2 + E
1 + x2 ,
= −Ax2 +A− 2Bx+ 2Dx(1 + x2) + E(1 + x2)
(1 + x2)2 ,
= x3(2D) + x2(−A+ E) + x(−2B + 2D) + (A+ E)(1 + x2)2 .
188

Dobimo sistem štirih enačb za štiri neznanke:
2D = 0,−A+ E = 0,
−2B + 2D = 0,A+ E = 1,
ki ima rešitev A = 12 , B = 0, D = 0 in E = 1
2 . Sledi∫dx
(x2 + 1)2 = x
2(1 + x2) + 12 arc tg x+ C.
(2)∫ 2x3 + 7x2 + 8x+ 4
(x2 + 2x+ 2)2 dx :
Tokrat uporabimo nastavek∫ 2x3 + 7x2 + 8x+ 4(x2 + 2x+ 2)2 dx = Ax+B
x2 + 2x+ 2+D ln(x2+2x+2)+E arc tg(2x+ 2
2
)+C.
Z odvajanjem zgornje enakosti dobimo
2x3 + 7x2 + 8x+ 4(x2 + 2x+ 2)2 = A(x2 + 2x+ 2)− (Ax+B)(2x+ 2)
(x2 + 2x+ 2)2 + D(2x+ 2)x2 + 2x+ 2 + E
x2 + 2x+ 2 ,
= A(x2 + 2x+ 2)− (Ax+B)(2x+ 2) + (D(2x+ 2) + E)(x2 + 2x+ 2)(x2 + 2x+ 2)2 ,
= x3(2D) + x2(−A+ 6D + E) + x(−2B + 8D + 2E) + 2(A−B + 2D + E)(x2 + 2x+ 2)2 .
Od tod dobimo sistem štirih enačb za štiri neznanke:
2D = 2,−A+ 6D + E = 7,
−2B + 8D + 2E = 8,2A− 2B + 4D + 2E = 4,
ki ima rešitev A = 0, B = 1, D = 1 in E = 1. Sledi∫ 2x3 + 7x2 + 8x+ 4(x2 + 2x+ 2)2 dx = 1
x2 + 2x+ 2 +ln(x2+2x+2)+arc tg (x+ 1)+C.
8.2 Integrali nekaterih iracionalnih funkcij
Izmed iracionalnih funkcij se bomo omejili na takšne, ki imajo v imenovalcukvadratni koren kvadratnega polinoma. Takšne funkcije se pogosto pojavijopri integraciji enačb gibanja fizikalnih sistemov z eno prostostno stopnjo.
189

(I) Integrali tipa∫ dx√
x2+px+q
Integrand f(x) = 1√x2+px+q
je definiran, kjer je kvadratni polinom x2+px+q
pozitiven. Če je le-ta nerazcepen, je to povsod, sicer pa sestoji domenafunkcije f iz dveh polneskončnih intervalov. Podobno kot pri integracijiracionalnih funkcij tudi tukaj najprej zapišimo
x2 + px+ q =(x+ p
2
)2+ 4q − p2
4 ,
= t2 + h,
kjer je h = 4q−p2
4 in t = x + p2 . Če je h = 0, je izraz pod korenom popoln
kvadrat, zato nas bo bolj zanimal primer h 6= 0. Iz tabele nedoločenihintegralov v tem primeru preberemo, da je∫
dx√x2 + px+ q
=∫
dt√t2 + h
= ln∣∣∣t+
√t2 + h
∣∣∣+ C,
= ln∣∣∣∣x+ p
2 +√x2 + px+ q
∣∣∣∣+ C.
(II) Integrali tipa∫ dx√
−x2+px+q
V tem primeru ima kvadratni polinom pod korenom negativno predznačenvodilni člen, zato bo integrand definiran kvečjemu na enem intervalu, če bodiskriminanta kvadratnega polinoma pozitivna. Rezultat bo precej drugačenkot v prejšnjem primeru.
Predpostavimo, da je D = p2 + 4q > 0 in pišimo
−x2 + px+ q = −(x− p
2
)2+ p2 + 4q
4 ,
= −(x− p
2
)2+ e2,
= e2(1− t2),
kjer je e =√
p2+4q4 in t = x− p2
e . Od tod dobimo∫dx√
−x2 + px+ q=∫
e dt√e2(1− t2)
=∫
dt√1− t2
,
= arc sin t+ C = arc sin(2x− p
2e
)+ C,
= arc sin(
2x− p√p2 + 4q
)+ C.
190

(III) Integrali tipa∫ P (x) dx√
ax2+bx+c
Za konec si poglejmo še malo bolj splošen primer, ko je P polinom stopnjen ≥ 1. Ta integral lahko izračunamo s pomočjo nastavka∫
P (x) dx√ax2 + bx+ c
= T (x)√ax2 + bx+ c+K
∫dx√
ax2 + bx+ c,
kjer je T nek polinom stopnje n− 1, K pa konstanta. Koeficiente polinomaT in pa vrednost konstante K dobimo z odvajanjem zgornje enakosti in pa zreševanjem tako dobljenega sistema linearnih enačb. Nato nam še preostane,da izračunamo integral ∫
dx√ax2 + bx+ c
.
Ta integral lahko prevedemo na enega izmed že obravnavanih integralov. Čeje a > 0, izpod korena izpostavimo a, če pa je a < 0, pa |a| = −a. V primerua = 0 je člen pod korenom linearen, integral pa lahko izračunamo z uvedbonove spremenljivke t = bx+ c.
Zgled 8.13.∫ √α2 − x2 dx :
Integral najprej prepišemo v obliko∫ √α2 − x2 dx =
∫α2 − x2√α2 − x2
dx,
ki nam omogoča, da uporabimo nastavek. V tem primeru se nastavek glasi∫α2 − x2√α2 − x2
dx = (Ax+B)√α2 − x2 +K
∫dx√
α2 − x2.
Z odvajanjem te enakosti dobimo
α2 − x2√α2 − x2
= A√α2 − x2 + (Ax+B)(−2x)
2√α2 − x2
+ K√α2 − x2
,
= A(α2 − x2)− x(Ax+B) +K√α2 − x2
,
= x2(−2A) + x(−B) + (Aα2 +K)√α2 − x2
S primerjavo koeficientov polinomov v števcu pridemo do sistema treh enačbza tri neznanke
−2A = −1,−B = 0,
Aα2 +K = α2,
191

ki ima rešitev A = 12 , B = 0 in K = 1
2α2. V primeru (II) smo že izračunali,
da je ∫dx√
α2 − x2= arc sin
(x
α
)+ C.
Rezultat se torej glasi∫ √α2 − x2 dx = x
2√α2 − x2 + 1
2α2 arc sin
(x
α
)+ C.
8.3 Integrali nekaterih kotnih funkcij
Za konec si poglejmo še nekaj enostavnih zgledov integralov kotnih funkcij.
(I) Integrali tipa∫
sinm x dx in∫
cosm x dx
Izračunali bomo samo integral potence funkcije sinus. Podobno idejo lahkouporabimo tudi za integriranje potenc funkcije kosinus. Ločili bomo dvaprimera.
1) m = 2k + 1 je liho število: Integral bomo rešili z uvedbo spremen-ljivke t = cosx, kar pomeni, da je dt = − sin x dx. Sledi∫
sinm x dx =∫ (
sin2 x)k
sin x dx =∫
(1−cos2 x)k sin x dx = −∫
(1−t2)k dt,
kar pomeni, da smo integral prevedli na integral polinoma, ki pa ga znamointegrirati.
2) m = 2k je sodo število: V tem primeru bomo uporabili adicijski izrekza kotne funkcije. Zapišemo lahko namreč
sinm x = (sin2 x)k =(1− cos 2x
2
)k.
S tem smo integral prevedli v obliko∫sinm x dx =
∫ (1− cos 2x2
)kdx,
kjer kotna funkcija cos nastopa z najvišjo potenco k = m2 . Z uvedbo nove
spremenljivke t = 2x dobimo integral linearne kombinacije potenc funkcijecos. Lihe potence lahko integriramo kot v primeru 1), pri sodih potencahpa induktivno razpolavljamo potence, dokler je potrebno.
Zgled 8.14.∫cos4 x dx :
192

Računajmo∫cos4 x dx =
∫ (1 + cos 2x2
)2dx = 1
4
∫(1 + 2 cos 2x+ cos2 2x) dx,
= 14
∫dx+ 1
4
∫2 cos 2x dx+ 1
4
∫cos2 2x dx,
= 14x+ 1
4 · 2 sin 2x · 12 + 1
4
∫ (1 + cos 4x2
)dx,
= 14x+ 1
4 sin 2x+ 18
∫dx+ 1
8
∫cos 4x dx,
= 14x+ 1
4 sin 2x+ 18x+ 1
8 ·14 sin 4x,
= 3x8 + sin 2x
4 + sin 4x32 + C.
Integrala funkcij cos 2x in cos 4x bi lahko rešili z uvedbo nove spremenljivke,lahko pa jih tudi kar uganemo.
(II) Integrali tipa∫
sinm x cosn x dx
V tem primeru se ravnamo po naslednjih navodilih:
· Če je m lih, uporabimo substitucijo t = cosx.· Če je n lih, uporabimo substitucijo t = sin x.· Če sta m in n oba soda, z uporabo formul za dvojne kote znižamo potence.
Zgled 8.15.
(1)∫
sin3 x cos3 x dx :
Uporabili bomo substitucijo t = sin x (dt = cosx dx), od koder sledi∫sin3 x cos3 x dx =
∫t3(1− t2) dt = t4
4 −t6
6 + C = sin4 x
4 − sin6 x
6 + C.
(2)∫
sin2 x cos2 x dx :
V tem primeru bomo uporabili formulo sin 2x = 2 sin x cosx. Računajmo∫sin2 x cos2 x dx = 1
4
∫sin2 2x dx = 1
4
∫ 1− cos 4x2 dx = 1
8
∫(1− cos 4x) dx,
= x
8 −sin 4x
32 + C.
193

9 Določeni integralDoločeni in nedoločeni integral sta, navkljub skoraj identičnima imenoma,precej različna objekta. Pri nedoločenem integralu iščemo funkcijo, katereodvod je dana funkcija. To pomeni, da je rezultat našega računanja spetfunkcija, določena do lokalno konstantne funkcije natančno. Motivacija zaštudij določenega integrala pa po drugi strani izvira iz problema računanjaploščin likov. Intuitivno si lahko predstavljamo, da je ploščina pravokotnikaenaka produktu njegovih stranic, težje pa je na primer določiti ploščinokroga. Da bi lahko smiselno definirali ploščino ravninskih likov, omejenihs krivočrtnimi krivuljami, in nato ploščine tudi računali, uvedemo pojemdoločenega integrala. Določeni integral dane funkcije bo neko realno šte-vilo, ki bo, ob izpolnjenih nekaterih pogojih, predstavljalo ploščino lika medgrafom funkcije in pa abscisno osjo. Oba integrala povezuje osnovni izrekanalize, ki nam omogoča efektivno računanje določenega integrala s pomočjonedoločenega integrala.
Za uvod si poglejmo, kako bi lahko približno izračunali ploščino kroga.Najprej si izberimo enoto za dolžino. S tem je enota za ploščino že natankodoločena.
1
1
1
enotskadolzinaÇ
enotskaploscinaÇÇ
Vzemimo krog s polmerom r = 4 in s središčem v koordinatnem izhodi-šču. Ravnino tlakujmo s kvadrati s stranico a = 1. Kvadrati, ki celi ležijoznotraj kroga, tvorijo nek lik s približno enako ploščino kot jo ima krog. Vnašem primeru je to S1 = 32. Če kvadrate s stranico a = 1 zamenjamo s kva-drati s stranico a = 1
2 , dobimo nek mnogokotnik, ki malce bolje aproksimirakrog, saj je ploščina tega lika enaka S1/2 = 41.
11
11
Od dejanske ploščine kroga S = 16π ≈ 50, 27 se ta aproksimacija šekar precej razlikuje. Videti pa je, da bi s čedalje finejšimi tlakovanji dobili
194

mnogokotnike, ki bi čedalje bolje aproksimirali krog. Limita ploščin tehmnogokotnikov pri čedalje finejših tlakovanjih je enaka ploščini kroga.
To idejo bomo sedaj uporabili za računanje ploščine lika med grafomfunkcije in pa abscisno osjo. Namesto tlakovanja s kvadrati bomo naš likrazrezali na navpične rezine, vsako rezino pa aproksimirali s pravokotnikom.Zanimala nas bo limita ploščin takšnih aproksimacij, ko bomo rezine čedaljebolj tanjšali. Če ta limita obstaja, ji rečemo določeni integral dane funkcije.Obstajajo sicer primeri neintegrabilnih funkcij, pokazali pa bomo, da sozvezne, odsekoma zvezne in pa tudi monotone funkcije integrabilne.
Lik bi lahko aproksimirali tudi z vodoravnimi rezinami. Tej močnejšiverziji integrala se reče Lebesgueov integral. Pri zveznih funkcijah, ki soza nas najbolj zanimive, se oba pristopa ujemata. Matematična disciplina,ki se ukvarja s posplošitvami določenega integrala, se imenuje teorija mere.Njeni rezultati se med drugim uporabljajo v teoriji verjetnosti, matematičnianalizi in fiziki.
Začnimo sedaj s pregledom osnovnih pojmov, ki jih potrebujemo za de-finicijo določenega integrala. Naj bo f : [a, b]→ R omejena funkcija.
· Delitev intervala [a, b] je končna podmnožica D ⊂ [a, b], za katerovelja: a, b ∈ D.
· Točke v delitvi D običajno uredimo po velikosti, tako da je
D = {a = x0 < x1 < x2 < · · · < xn = b}.
Uporabljamo tudi oznako D = {xk}k=nk=0 .
· Delitev D = {xk}k=nk=0 razdeli interval [a, b] na n intervalov [xk−1, xk]
(za k = 1, 2, . . . , n). Dolžina k-tega intervala je ∆xk = xk−xk−1. Ma-ksimum dolžin teh intervalov je max ∆xk = max{∆x1,∆x2, . . . ,∆xn}.
· Pri aproksimaciji bodo za nas zanimive predvsem ekstremne vrednostifunkcije na teh intervalih. Uporabljali bomo oznake
mk = inf{f(x) |x ∈ [xk−1, xk]},m = inf{f(x) |x ∈ [a, b]}
in
Mk = sup{f(x) |x ∈ [xk−1, xk]},M = sup{f(x) |x ∈ [a, b]}.
Če bi privzeli, da je funkcija f zvezna, bi lahko infimum in supre-mum zamenjali z minimumom oziroma maksimumom. V bolj splošnihprimerih pa ni nujno, da funkcija f na ustreznem intervalu zavzameekstremni vrednosti. Kljub temu pa za vsak k ∈ {1, 2, . . . , n} velja
m ≤ mk ≤Mk ≤M.
195

Poglejmo si sedaj dva primera aproksimacije lika, ki je navzgor omejenz grafom funkcije, s pravokotniki. Na levi sliki aproksimiramo k-to rezino spravokotnikom višine mk, na desni sliki pa s pravokotnikom višine Mk.
x0 x1 x2 x3 x4 x
y
m1 m2
m3
m4
x0 x1 x2 x3 x4 x
y
x0 x1 x2 x3 x4 x
y
x0 x1 x2 x3 x4 x
yM1 = M2 M3
M4
Iz konstrukcije sledi, da je ploščina mnogokotnika na levi manjša, plo-ščina mnogokotnika na desni pa večja od ploščine lika. V nadaljevanju bomopokazali, da nam čedalje finejše rezine dajo čedalje boljšo aproksimacijo plo-ščine lika. Namesto teh dveh robnih primerov bi k-to rezino seveda lahkoaproksimirali s pravokotnikom višine hk ∈ [mk,Mk]. Ploščina tako doblje-nega mnogokotnika bi bila med obema mejnima vrednostima, v limiti pričedalje finejših delitvah pa ploščine še vedno konvergirajo k ploščini lika.
V zgornjem primeru smo vzeli ekvidistančno delitev intervala, kar po-meni, da so vse rezine enako široke. Takšen pristop je najbolj pogost, ni pavedno najlažji za računanje.
Formalno lahko naše razmišljanje strnemo v naslednjo definicijo.
Definicija 9.1. Naj bo f : [a, b] → R omejena funkcija in D = {xk}k=nk=0
delitev intervala [a, b]. Številu
s(f,D) =n∑k=1
mk∆xk
rečemo spodnja integralska vsota za funkcijo f pri delitvi D, številu
S(f,D) =n∑k=1
Mk∆xk
pa zgornja integralska vsota za funkcijo f pri delitvi D.
Spodnja in zgornja integralska vsota sta ravno ploščini mnogokotnikov,ki ju dobimo z aproksimacijo rezin s pravokotniki višin mk oziroma Mk (kotv zgornjem primeru). Kot smo že omenili, velja
m(b− a) ≤ s(f,D) ≤ S(f,D) ≤M(b− a),
ploščina lika (če obstaja) pa leži nekje med s(f,D) in S(f,D). RazlikaS(f,D)− s(f,D) nam da približno oceno za natančnost aproksimacije.
196

Definicija 9.2. Naj bosta D in D′ delitvi intervala [a, b]. Rečemo, da jedelitev D′ finejša od delitve D, če je D ⊂ D′.
Z besedami to pomeni, da delitev D′ dobimo tako, da delitvi D dodamoše nekaj točk.
x0 x1 x2 x3 x4 D
x0 x1 x2 x3 x4 x5 x6 x7 x8 D’
V nadaljevanju bomo pokazali, da pri čedalje finejših delitvah intervalaspodnje integralske vsote dane funkcije naraščajo, zgornje integralske vsotepa padajo. Če je funkcija dovolj lepa, obe zaporedji konvergirata k ploščinilika med grafom funkcije in abscisno osjo.
Trditev 9.3. Naj bosta D in D′ delitvi intervala [a, b] in predpostavimo, daje delitev D′ finejša od delitve D. Potem je
s(f,D) ≤ s(f,D′) ≤ S(f,D′) ≤ S(f,D).
Dokaz. Dokazali bomo samo neenakost med spodnjima integralskima vso-tama. Neenakost med zgornjima vsotama lahko dokažemo podobno. Brezškode za splošnost se lahko omejimo tudi na poseben primer, ko ima D′
natanko eno točko več kot D. Če ima namreč D′ m točk več kot D, lahkokonstruiramo verigo delitev
D = D0 ⊂ D1 ⊂ · · · ⊂ Dm = D′,
v kateri se poljubni sosednji delitvi razlikujeta za natanko eno točko. Dokazsplošnega primera potem dobimo z induktivno uporabo dokaza posebnegaprimera na zaporednih parih delitev.
Pa denimo sedaj, da je D = {xk}k=nk=0 in D′ = D ∪ {x′}. Potem je
x′ ∈ (xi−1, xi) za nek natanko določen 1 ≤ i ≤ n. Spodnji integralski vsotiprirejeni delitvama D in D′ se potem ujemata na vseh rezinah, razen na i-tirezini delitve D, ki v delitvi D′ razpade na dva dela.
x0 xi-1 xi xn x
y
mi
x0 xi-1 xi xnx’ x
y
m’’m’
S slike je razvidno, da bo spodnja integralska vsota prirejena delitviD′ praviloma malce večja kot vsota prirejena delitvi D, formalno pa to
197

pokažemo na naslednji način. Najprej označimo
m′ = inf f |[xi−1,x′] ≥ mi,
m′′ = inf f |[x′,xi] ≥ mi.
V izrazu s(f,D′) − s(f,D) se odštejejo skoraj vsi členi, razen tistih, kipripadajo rezinam, v katerih leži točka x′:
s(f,D′)− s(f,D) = m′(x′ − xi−1) +m′′(xi − x′)−mi(xi − xi−1),≥ mi(x′ − xi−1) +mi(xi − x′)−mi(xi − xi−1) = 0,
oziromas(f,D′) ≥ s(f,D).
Trditev 9.4. Za poljubni delitvi D in D′ intervala [a, b] velja
s(f,D) ≤ S(f,D′).
Dokaz. Pri dokazu te trditve si bomo pomagali z naslednjim trikom. Vzelibomo delitevD′′ = D∪D′, ki je finejša od obeh delitevD inD′. Z dvakratnouporabo Trditve 9.3 potem dobimo
s(f,D) ≤ s(f,D′′) ≤ S(f,D′′) ≤ S(f,D′).
Zgornja trditev nam pove, da je poljubna spodnja integralska vsota danefunkcije manjša od poljubne zgornje integralske vsote. Od tod sledi, da jemnožica spodnjih integralskih vsot funkcije f
M = {s(f,D) |D delitev [a, b]}
navzgor omejena, množica zgornjih integralskih vsot funkcije f
M = {S(f,D) |D delitev [a, b]}
pa navzdol omejena. Zato obstajata
supM =∫ b
af(x) dx spodnji integral funkcije f na [a, b] in
infM =∫ b
af(x) dx zgornji integral funkcije f na [a, b].
MnožiciM inM nam predstavljata približke za ploščino lika med grafomfunkcije f in pa abscisno osjo. Kasneje bomo spoznali primer funkcije, prikateri spodnji oziroma zgornji integral ne sovpadata. V takem primeruploščine dobljenega lika pač ne moremo definirati na ta način. Če je funkcijadovolj lepa (zvezna in pozitivna), pa oba integrala sovpadata, njuno vrednostpa lahko vzamemo za definicijo ploščine lika med grafom funkcije in abscisnoosjo.
198

Definicija 9.5. Naj bo f : [a, b] → R omejena funkcija. Funkcija f jeintegrabilna. če je ∫ b
af(x) dx =
∫ b
af(x) dx.
Spodnji oziroma zgornji integral integrabilne funkcije f imenujemo določeniintegral funkcije f in ga označimo z∫ b
af(x) dx.
Če smo povsem natančni, se tej verziji integrabilnosti reče Darbouxovaintegrabilnost. Kasneje bomo spoznali še ekvivalenten pojem Riemannoveintegrabilnosti.
Še enkrat poudarimo, da je določeni integral dane funkcije realno število,nedoločeni integral pa množica vseh primitivnih funkcij dane funkcije.
Zgled 9.6. Večina funkcij, ki jih obravnavamo pri tem predmetu, je integra-bilnih. Tokrat pa si poglejmo primer neintegrabilne funkcije. Definirajmofunkcijo f : [0, 1]→ R s predpisom
f(x) ={
0 ; x ∈ Q ∩ [0, 1],1 ; sicer.
Funkcija f zavzame samo vrednosti 0 in 1, prasliki obeh vrednosti pa stagosto posejani na intervalu [0, 1]. Njen graf nima oblike krivulje, izgleda papribližno takole
1
1
R�Q
Q
Vzemimo sedaj poljubno delitev D = {xk}k=nk=0 intervala [0, 1]. Ker na
poljubnem intervalu obstajata vsaj eno racionalno in vsaj eno iracionalnoštevilo, za vsak k ∈ {1, 2, . . . , n} velja mk = 0 in Mk = 1. Od tod sledi, daje
s(f,D) =n∑k=1
mk∆xk = 0,
S(f,D) =n∑k=1
Mk∆xk =n∑k=1
∆xk = 1.
199

Spodnja in zgornja integralska vsota sta torej neodvisni od delitve, karpomeni, da je spodnji integral funkcije f enak 0, zgornji integral funkcije fpa enak 1. To pa pomeni, da funkcija f ni integrabilna.
Omenimo še, da je funkcija f Lebesgueovo integrabilna. Graf funkcijef sicer ne omejuje kakšnega lepega lika, je pa bolj zanimiva interpretacijafunkcije f v verjetnosti. Funkcija f namreč zavzame vrednost 1 v natankovseh iracionalnih številih na intervalu [0, 1]. Lebesgueov integral funkcijef lahko potem interpretiramo kot verjetnost, da je naključno izbrano re-alno število na intervalu [0, 1] iracionalno. Ta integral pride enak 1, ker jeiracionalnih števil bistveno več kot pa racionalnih števil.
Sama definicija integrabilnosti funkcije je precej bolj komplicirana kotpa definicija nekaterih drugih pojmov, kot sta na primer zveznost in paodvedljivost. Zato nam bodo prišli prav naslednji kriteriji za prepoznavanjeintegrabilnih funkcij.
Trditev 9.7. Funkcija f : [a, b] → R je integrabilna natanko takrat, ko jeomejena in ko za vsak ε > 0 obstaja takšna delitev D intervala [a, b], da je
S(f,D)− s(f,D) < ε.
Dokaz. (⇐=) Po definiciji spodnjega in zgornjega integrala funkcije imamoza vsako delitev D verigo neenakosti
s(f,D) ≤∫ b
af(x) dx ≤
∫ b
af(x) dx ≤ S(f,D).
To pomeni, da je razlika med spodnjim in zgornjim integralom kvečjemumanjša kot pa razlika med spodnjo in zgornjo integralsko vsoto pri poljubnidelitvi. Iz predpostavke potem sledi, da je∫ b
af(x) dx−
∫ b
af(x) dx < ε
za poljuben ε > 0, kar pa pomeni, da je∫ ba f(x) dx =
∫ ba f(x) dx.
(=⇒) Denimo sedaj, da je funkcija f integrabilna in izberimo poljubenε > 0. Potem je ∫ b
af(x) dx =
∫ b
af(x) dx =
∫ b
af(x) dx.
Ker je spodnji (in zato tudi določeni) integral supremum spodnjih inte-gralskih vsot, lahko najdemo takšno delitev D′, da je∫ b
af(x) dx− s(f,D′) < ε
2 .
200

Na podoben način lahko najdemo tudi delitev D′′, da velja
S(f,D′′)−∫ b
af(x) dx < ε
2 .
Definirajmo sedaj delitev D = D′ ∪D′′, ki je finejša od obeh delitev D′in D′′. Z uporabo Trditve 9.3 lahko potem pokažemo, da je
S(f,D)− s(f,D) ≤ S(f,D′′)− s(f,D′),
<
(ε
2 +∫ b
af(x) dx
)+(ε
2 −∫ b
af(x) dx
)= ε,
kar smo želeli pokazati.
Trditev 9.8. Vsaka zvezna funkcija f : [a, b]→ R je integrabilna.
Dokaz. Pri dokazu si bomo pomagali s Trditvijo 9.7. Izberimo poljubenε > 0. Potem moramo najti takšno delitev D intervala [a, b], da je
S(f,D)− s(f,D) < ε.
Iz razdelka o zveznosti funkcij že vemo, da je vsaka zvezna funkcijana intervalu [a, b] omejena in enakomerno zvezna. To pomeni, da lahkonajdemo tak δ > 0, da za poljubna x, y ∈ [a, b], za katera je |x − y| < δ,velja |f(x) − f(y)| < ε
b−a . Izberimo sedaj poljubno delitev D = {xk}k=nk=0
intervala [a, b], za katero je max ∆xk < δ (njeni intervali so torej ožji odδ). Ker je funkcija f zvezna, zavzame na vsakem izmed intervalov v delitviD svojo maksimalno in minimalno vrednost. To pomeni, da lahko za vsak1 ≤ k ≤ n najdemo števili uk, vk ∈ [xk−1, xk], da je
Mk = sup f |[xk−1,xk] = f(uk),mk = inf f |[xk−1,xk] = f(vk).
Ker so intervali delitve ožji od δ, je |uk−vk| < δ za vsak k, iz enakomernezveznosti funkcije f pa od tod sledi
Mk −mk = f(uk)− f(vk) <ε
b− a.
Sedaj lahko pokažemo, da delitev D ustreza pogoju, ki ga želimo poka-zati:
S(f,D)− s(f,D) =n∑k=1
Mk∆xk −n∑k=1
mk∆xk,
=n∑k=1
(Mk −mk)∆xk <n∑k=1
ε
b− a∆xk,
= ε
b− a
n∑k=1
∆xk = ε
b− a(b− a) = ε.
201
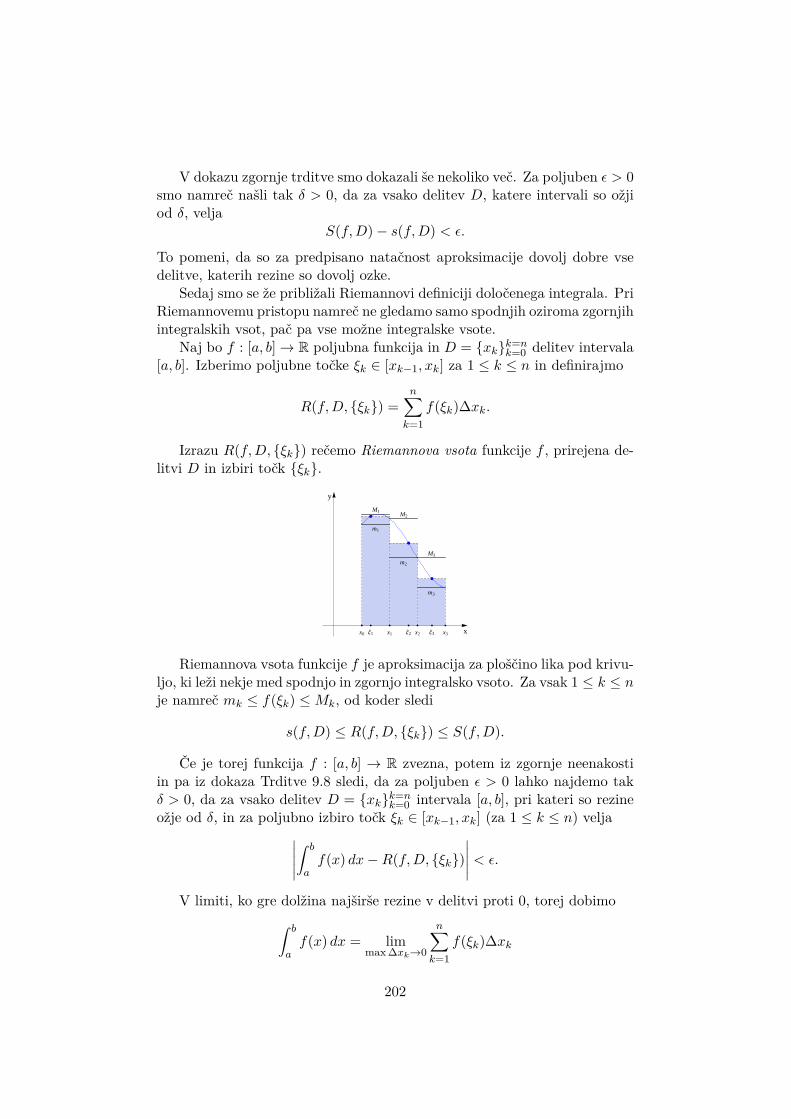
V dokazu zgornje trditve smo dokazali še nekoliko več. Za poljuben ε > 0smo namreč našli tak δ > 0, da za vsako delitev D, katere intervali so ožjiod δ, velja
S(f,D)− s(f,D) < ε.
To pomeni, da so za predpisano natačnost aproksimacije dovolj dobre vsedelitve, katerih rezine so dovolj ozke.
Sedaj smo se že približali Riemannovi definiciji določenega integrala. PriRiemannovemu pristopu namreč ne gledamo samo spodnjih oziroma zgornjihintegralskih vsot, pač pa vse možne integralske vsote.
Naj bo f : [a, b]→ R poljubna funkcija in D = {xk}k=nk=0 delitev intervala
[a, b]. Izberimo poljubne točke ξk ∈ [xk−1, xk] za 1 ≤ k ≤ n in definirajmo
R(f,D, {ξk}) =n∑k=1
f(ξk)∆xk.
Izrazu R(f,D, {ξk}) rečemo Riemannova vsota funkcije f , prirejena de-litvi D in izbiri točk {ξk}.
x0 x1 x2 x3Ξ1 Ξ2 Ξ3 x
y
M1M2
M3
m1
m2
m3
Riemannova vsota funkcije f je aproksimacija za ploščino lika pod krivu-ljo, ki leži nekje med spodnjo in zgornjo integralsko vsoto. Za vsak 1 ≤ k ≤ nje namreč mk ≤ f(ξk) ≤Mk, od koder sledi
s(f,D) ≤ R(f,D, {ξk}) ≤ S(f,D).
Če je torej funkcija f : [a, b] → R zvezna, potem iz zgornje neenakostiin pa iz dokaza Trditve 9.8 sledi, da za poljuben ε > 0 lahko najdemo takδ > 0, da za vsako delitev D = {xk}k=n
k=0 intervala [a, b], pri kateri so rezineožje od δ, in za poljubno izbiro točk ξk ∈ [xk−1, xk] (za 1 ≤ k ≤ n) velja∣∣∣∣∣
∫ b
af(x) dx−R(f,D, {ξk})
∣∣∣∣∣ < ε.
V limiti, ko gre dolžina najširše rezine v delitvi proti 0, torej dobimo∫ b
af(x) dx = lim
max ∆xk→0
n∑k=1
f(ξk)∆xk
202

To pomeni, da lahko določeni integral zvezne funkcije poljubno dobroaproksimiramo z Riemannovo vsoto, če je le delitev intervala dovolj fina(neodvisno od izbire točk {ξk}).
Bolj splošno definiramo, da je realno število I Riemannov integral funk-cije f : [a, b] → R, če za poljuben ε > 0 obstaja tak δ > 0, da za poljubnodelitev D = {xk}k=n
k=0 intervala [a, b], pri kateri so rezine ožje od δ, in zapoljubno izbiro točk ξk ∈ [xk−1, xk] (za 1 ≤ k ≤ n) velja
|I −R(f,D, {ξk})| < ε.
Funkcija f je Riemannovo integrabilna, če ima Riemannov integral. Brezdokaza omenimo, da je Riemannova integrabilnost ekvivalentna naši defini-ciji integrabilnosti. Če je funkcija integrabilna, potem Riemannov integralin določeni integral funkcije sovpadata.
Iz praktičnih razlogov je dobro poznati obe verziji integrabilnosti, saj sis tem olajšamo delo pri dokazovanju ključnih izrekov integralskega računa.
Malce bolj splošne od zveznih so odsekoma zvezne funkcije. Tudi te sepogosto pojavljajo v fiziki in pa v tehniških vedah.
Definicija 9.9. Funkcija f : D → R je odsekoma zvezna, če je zvezna vvseh točkah iz D, z izjemo morda končno mnogo točk.
Graf odsekoma zvezne funkcije, definirane na intervalu, je sestavljen izkončnega števila krivulj.
a z1 z2 b x
y
V točki nezveznosti lahko vrednost funkcije pripada k levi ali k desni krivulji,lahko pa tudi k nobeni. Primer odsekoma zvezne funkcije, ki jo že poznamo,je funkcija sgn. Za opisovanje nihanja in valovanja pa se uporabljajo tudifunkcije, katerih grafi imajo obliko stopničastega ali pa kvadratnega vala.
Trditev 9.10. Vsaka omejena, odsekoma zvezna funkcija f : [a, b] → R jeintegrabilna in ∫ b
af(x) dx = lim
max ∆xk→0
n∑k=1
f(ξk)∆xk
Dokaz. Dokaz trditve je podoben kot dokaz analogne trditve za zvezne funk-cije, le malce bolj tehnično zahteven. Spet si bomo pomagali s Trditvijo 9.7,
203

tako da bomo za poljuben ε > 0 našli delitev D intervala [a, b], za katero boveljalo
S(f,D)− s(f,D) < ε.
Konstrukcija ustrezne delitve intervala [a, b] bo podobna kot v primeruzvezne funkcije, razen v okolici točk nezveznosti. Proč od točk nezvezno-sti lahko namreč konstruiramo delitev, pri kateri bosta zgornja in spodnjaintegralska vsota poljubno blizu. Po drugi strani pa je lahko na interva-lih, ki vsebujejo točke nezveznosti, razlika med infimumom in supremumomfunkcije precej velika.
a zk-Α zk+Αzk b x
y
Temu problemu se izognemo, tako da te intervale zelo zožimo. Takobo razlika ploščin ustreznih pravokotnikov majhna, čeprav imata načelomalahko pravokotnika precej različni višini.
Dokažimo sedaj trditev še formalno. Izberimo ε > 0 in označimo zz1, z2, . . . , zp točke na intervalu [a, b], v katerih funkcija f ni zvezna. Ker jef omejena funkcija, obstajata
m = inf{f(x) |x ∈ [a, b]},M = sup{f(x) |x ∈ [a, b]}.
Privzamemo lahko, da je M > m, saj bi sicer imeli opravka s konstan-tno funkcijo, za katero pa že vemo, da je integrabilna. Okoli vsake točkenezveznosti z1, z2, . . . , zp vzemimo odprt interval (zi − α, zi + α), kjer jeα = ε
8p(M−m) . Na množici
A = [a, b] \p⋃i=1
(zi − α, zi + α)
je f enakomerno zvezna, saj je A končna unija končnih zaprtih intervalov.Zato obstaja δ > 0, δ < α, da za poljubna x, y ∈ A, |x− y| < δ, velja
|f(x)− f(y)| < ε
2(b− a) .
Vzemimo zdaj poljubno delitev D = {xk}k=nk=0 intervala [a, b], pri kateri je
max ∆xk < δ. Označimo Ik = [xk−1, xk], Mk = sup f |Ik in mk = inf f |Ik .
204

Sledi
S(f,D)− s(f,D) =n∑k=1
(Mk −mk)∆xk,
=∑Ik⊂A
(Mk −mk)∆xk +∑Ik 6⊂A
(Mk −mk)∆xk,
<∑Ik⊂A
ε
2(b− a)∆xk +∑Ik 6⊂A
(M −m)∆xk.
Po konstrukciji je skupna dolžina intervalov, ki ne ležijo v A, največ 4αp,zato je
S(f,D)− s(f,D) <∑Ik⊂A
ε
2(b− a)∆xk +∑Ik 6⊂A
(M −m)∆xk,
<ε
2(b− a)(b− a) + 4αp(M −m),
= ε.
Trditev 9.11. Vsaka monotona funkcija f : [a, b]→ R je integrabilna in∫ b
af(x) dx = lim
max ∆xk→0
n∑k=1
f(ξk)∆xk
Dokaz. Trditev bomo dokazali samo za primer, ko je f naraščajoča funkcijana [a, b]. Dokaz za padajoče funkcije je analogen. Predpostavimo sevedalahko tudi, da je f nekonstantna funkcija.
Izberimo poljuben ε > 0 in definirajmo δ = εf(b)−f(a) . Naj bo sedaj
D = {xk}k=nk=0 delitev intervala [a, b], za katero velja max ∆xk < δ. Ker je f
naraščajoča, za vsak 1 ≤ k ≤ n velja mk = f(xk−1) in Mk = f(xk).
a xk-1 xk b x
y
mk
Mk
205

Od tod dobimo
S(f,D)− s(f,D) =n∑k=1
(Mk −mk)∆xk =n∑k=1
(f(xk)− f(xk−1))∆xk,
<n∑k=1
(f(xk)− f(xk−1))δ = δn∑k=1
(f(xk)− f(xk−1)),
= δ ((f(x1)− f(x0)) + · · ·+ (f(xn)− f(xn−1))) ,= δ(f(xn)− f(x0)) = δ(f(b)− f(a)),
= ε
f(b)− f(a)(f(b)− f(a)) = ε.
Za konec uvedimo še naslednjo oznako. Množico vseh integrabilnih funk-cij na intervalu [a, b] bomo označili z
R([a, b]).
Zapomnimo si, da množica R([a, b]) vsebuje vse (odsekoma) zvezne inmonotone funkcije. Integrabilne so tudi še kakšne druge funkcije, ki pa zanas ne bodo tako zanimive.
9.1 Lastnosti določenega integrala
Sedaj, ko smo dodobra spoznali definicijo določenega integrala, je čas, da sipogledamo še nekatere njegove lastnosti, predvsem pa metode za računanjedoločenega integrala. Pri tem bo igral ključno vlogo fundamentalni izrekanalize, ki nam omogoča, da določeni integral dane funkcije izračunamodokaj preprosto, če le poznamo kakšno njeno primitivno funkcijo.
Za začetek razčistimo povezavo med integralom in ploščino, ki smo joomenili kot motivacijo za uvedbo določenega integrala. Če za integrabilnofunkcijo f : [a, b] → R velja f(x) ≥ 0 za vsak x ∈ [a, b], lahko vrednost∫ ba f(x) dx vzamemo za definicijo ploščine lika med grafom funkcije f inabscisno osjo.
a b x
y
a b x
y
206

V splošnem primeru je ploščina lika med grafom funkcije in abscisnoosjo enaka
∫ ba |f(x)| dx, medtem ko je integral
∫ ba f(x) dx enak razliki med
ploščino lika pod grafom funkcije in nad abscisno osjo ter ploščino lika podabscisno osjo in nad grafom funkcije.
a b x
y
+
-
a b x
y
+
-
Iz praktičnih razlogov se še dogovorimo, da je:∫ a
af(x) dx = 0,∫ a
bf(x) dx = −
∫ b
af(x) dx.
Na ta način bomo lahko nekatere formule zapisali v večji splošnosti.Sedaj si poglejmo tehnično trditev, ki nam bo kasneje omogočila razširitinabor znanih integrabilnih funkcij.
Trditev 9.12. Naj bo φ : [m,M ] → R zvezna funkcija in f ∈ R([a, b])funkcija, za katero je f([a, b]) ⊂ [m,M ]. Potem je φ ◦ f ∈ R([a, b]).
Dokaz. Funkcija φ ◦ f je omejena in definirana na intervalu [a, b]. Izberimopoljuben ε > 0. Najti moramo delitev D intervala [a, b], pri kateri se bostaspodnja in zgornja integralska vsota funkcije φ ◦ f razlikovali za manj kot ε.
Ker je funkcija φ zvezna, je enakomerno zvezna. Zato lahko najdemotak δ ∈ (0, ε), da za poljubna s, t ∈ [m,M ] velja
|φ(t)− φ(s)| < ε,
kakor hitro je |t− s| < δ. Ker pa je funkcija f integrabilna, lahko najdemodelitev D = {xk}k=n
k=0 intervala [a, b], za katero je
S(f,D)− s(f,D) < δ2.
207

Uvedimo sedaj oznake
mk = inf f |[xk−1,xk],
Mk = sup f |[xk−1,xk],
m′k = inf φ ◦ f |[xk−1,xk],
M ′k = supφ ◦ f |[xk−1,xk].
Indeksno množico {1, 2, . . . , n} delitve D bomo razbili na dva disjunktnadela na naslednji način:
A = {k |Mk −mk < δ},B = {k |Mk −mk ≥ δ}.
V A so torej tisti indeksi, pri katerih se višini pravokotnikov v obehintegralskih vsotah za funkcijo f razlikujeta za manj kot δ, v B pa preostaliindeksi, v katerih sta višini narazen za vsaj δ. V nadaljevanju bomo zaintervale, ki pripadajo indeksom iz vsake množice posebej, ocenili razlikomed višinami pravokotnikov obeh integralskih vsot, le da tokrat za funkcijoφ ◦ f namesto f .
k ∈ A: V tem primeru je Mk − mk < δ. Ker se ekstremni vrednostifunkcije f na k-tem intervalu razlikujeta za manj kot δ, od tod sledi, daza poljubna s′, t′ ∈ [xk−1, xk] velja |f(t′) − f(s′)| < δ. Po predpostavkienakomerne zveznosti φ sedaj sklepamo, da je |φ(f(t′)) − φ(f(s′))| < ε zapoljubna s′, t′ ∈ [xk−1, xk]. Potem pa tudi za ekstremni vrednosti funkcijeφ ◦ f na k-tem intervalu velja
M ′k −mk′ ≤ ε.
Enačaj je možno doseči zato, ker lahko supremum in infimum funkcije lepoljubno dobro aproksimiramo z vrednostmi v točkah, ne obstajata pa nujnotočki, v katerih bi bila zavzeta.
k ∈ B: Razlike med ekstremnima vrednostima funkcije na intervalu sedajne moremo navzgor omejiti z ε. Ker pa je funkcija φ zvezna, pa obstaja
K = supt∈[m,M ]
|φ(t)|.
Od tod potem sledi, da je
M ′k −mk′ ≤ 2K.
Ta K je lahko načeloma zelo velik, vendar pa so intervali, ki pripadajoindeksom iz množice B ozki. Za vsak k ∈ B namreč velja δ ≤Mk −mk, odkoder dobimo
δ∑k∈B
∆xk =∑k∈B
δ∆xk ≤∑k∈B
(Mk −mk)∆xk,
≤n∑k=1
(Mk −mk)∆xk = S(f,D)− s(f,D) < δ2.
208

S krajšanjem dobimo, da je skupna dolžina intervalov, ki pripadajo in-deksom iz B, manjša od δ.
Za funkcijo φ ◦ f sedaj dobimo oceno
S(φ ◦ f,D)− s(φ ◦ f,D) =n∑k=1
(M ′k −m′k)∆xk,
=∑k∈A
(M ′k −m′k)∆xk +∑k∈B
(M ′k −m′k)∆xk,
≤ ε∑k∈A
∆xk + 2K∑k∈B
∆xk,
≤ ε(b− a) + 2Kδ ≤ ε(b− a) + 2Kε,= ε(b− a+ 2K).
Če bo ε dovolj majhen, bo tudi izraz ε(b−a+2K) poljubno majhen, karpomeni, da je funkcija φ ◦ f integrabilna.
Tokrat za spremembo nismo že na začetku delt in epsilonov definiraliz nekimi za lase privlečenimi formulami, zato na koncu nismo dobili lepeocene. Iz rezultata pa bi lahko sklepali, kakšne vrednosti delt in epsilonamoramo vzeti tekom dokaza, da bi na koncu dobili željeno oceno.
Zgornjo trditev bomo sedaj uporabili, da bomo pokazali, da je množicaintegrabilnih funkcij zaprta za seštevanje, odštevanje, množenje in še kakšnooperacijo.
Trditev 9.13. Naj bosta f, g ∈ R([a, b]) in naj bo c ∈ R poljubna konstanta.Potem velja:
(1) Če je f(x) ≤ g(x) za vsak x ∈ [a, b], je∫ b
af(x) dx ≤
∫ b
ag(x) dx.
(2) Funkcije f + g, c · f in |f | so integrabilne in∫ b
a(f(x) + g(x)) dx =
∫ b
af(x) dx+
∫ b
ag(x) dx,∫ b
a(c · f)(x) dx = c
∫ b
af(x) dx,∣∣∣∣∣
∫ b
af(x) dx
∣∣∣∣∣ ≤∫ b
a|f(x)| dx.
(3) Če je |f(x)| ≤M za vsak x ∈ [a, b], je∣∣∣∣∣∫ b
af(x) dx
∣∣∣∣∣ ≤M(b− a).
209

Dokaz. (1) Naj bo D poljubna delitev intervala [a, b]. Ker je f(x) ≤ g(x) zavsak x ∈ [a, b], na vsakem intervalu delitve D velja
inf f |[xk−1,xk] ≤ inf g|[xk−1,xk].
Od tod dobimo oceno
s(f,D) ≤ s(g,D)
za spodnji integralski vsoti funkcij f in g, prirejenih delitvi D. Ker velja taocena za vsako delitev posebej, velja tudi za supremum po vseh delitvah,kar pa nam da∫ b
af(x) dx = sup{s(f,D) |D} ≤ sup{s(g,D) |D} =
∫ b
ag(x) dx.
(2) f + g ∈ R([a, b]): Najprej dokažimo, da je funkcija f+g integrabilna.Ker je vsaka omejena funkcija navzdol omejena s svojim infimumom, za vsakx ∈ [a, b] velja inf f + inf g ≤ f(x) + g(x), od koder pa dobimo oceno
inf f + inf g ≤ inf(f + g).
Analogna neenakost v obratni smeri velja tudi za supremum. Od todsklepamo, da za poljubno delitev D intervala [a, b] velja
s(f,D) + s(g,D) ≤ s(f + g,D),S(f,D) + S(g,D) ≥ S(f + g,D).
Če je sedaj D tako fina delitev intervala [a, b], da je S(f,D)−s(f,D) < ε2
in S(g,D)− s(g,D) < ε2 , lahko iz zgornjih neenakosti izpeljemo
S(f + g,D)− s(f + g,D) ≤ (S(f,D) + S(g,D))− (s(f,D) + s(g,D)),= (S(f,D)− s(f,D))− (S(g,D)− s(g,D)),< ε,
kar pomeni, da je funkcija f + g integrabilna.Dokažimo sedaj še aditivnost določenega integrala. Za poljubni delitvi
D in D′ intervala [a, b] imamo neenakosti
s(f,D) + s(g,D′) ≤ s(f,D ∪D′) + s(g,D ∪D′) ≤ s(f + g,D ∪D′).
Če pogledamo supremum po vseh delitvah na levi in na desni strani zgornjeneenakosti, od tod dobimo neenakost
sup{s(f,D) |D}+ sup{s(g,D) |D} ≤ sup{s(f + g,D) |D}.
210

Ker so funkcije f , g in f+g integrabilne, pa je ta neenakost ekvivalentnaneenakosti ∫ b
af(x) dx+
∫ b
ag(x) dx ≤
∫ b
a(f(x) + g(x)) dx.
Podobno lahko z ocenjevanjem zgornjih integralskih vsot danih trehfunkcij izpeljemo, da je∫ b
a(f(x) + g(x)) dx ≤
∫ b
af(x) dx+
∫ b
ag(x) dx.
Iz obeh zgornjih neenakosti skupaj sledi pravilo za določeni integral vsote∫ b
a(f(x) + g(x)) dx =
∫ b
af(x) dx+
∫ b
ag(x) dx.
c · f ∈ R([a, b]): Produkt funkcije s konstanto c · f lahko zapišemo tudiv obliki kompozituma c · f = φ ◦ f , kjer je φ(t) = ct linearna funkcija. Kerje linearna funkcija zvezna, od tod po Trditvi 9.12 sledi, da je funkcija φ ◦ fintegrabilna.
Pokazati moramo še enakost integralov. Če je c ≥ 0, potem za vsakoomejeno funkcijo f velja inf(c · f) = c · inf f . Torej za vsako delitev Dintervala [a, b] velja tudi
s(c · f,D) = c · s(f,D).
Če vzamemo na obeh straneh te enakosti supremum po vseh delitvah,dobimo ∫ b
a(c · f)(x) dx = c
∫ b
af(x) dx.
Naj bo sedaj c < 0. V tem primeru za poljubno omejeno funkcijo f veljainf(c · f) = c · sup f , kar pomeni, da je za poljubno delitev D intervala [a, b]
s(c · f,D) = c · S(f,D).
Torej je∫ b
a(c · f)(x) dx = sup{s(c · f,D) |D} = sup{c · S(f,D) |D},
= c · inf{S(f,D) |D} = c
∫ b
af(x) dx.
|f | ∈ R([a, b]): V tem primeru funkcijo |f | zapišimo kot kompozicijo|f | = φ ◦ f , kjer je φ(t) = |t|. Ker je funkcija φ zvezna, je po Trditvi9.12 funkcija φ ◦ f integrabilna.
Po definiciji absolutne vrednosti imamo za vsak x ∈ [a, b] neenakosti
−|f(x)| ≤ f(x) ≤ |f(x)|.
211

Z uporabo že dokazane neenakosti v (1) od tod sledi, da je∫ b
a(−|f(x)|) dx ≤
∫ b
af(x) dx ≤
∫ b
a|f(x)| dx.
Ker lahko po že dokazanem predznak v levem integrandu nesemo predintegral, je torej ∣∣∣∣∣
∫ b
af(x) dx
∣∣∣∣∣ ≤∫ b
a|f(x)| dx.
(3) Naj bo |f(x)| ≤M za vsak x ∈ [a, b]. Z uporabo ravnokar dokazaneneenakosti in pa neenakosti iz (1) dobimo, da je∣∣∣∣∣
∫ b
af(x) dx
∣∣∣∣∣ ≤∫ b
a|f(x)| dx ≤
∫ b
aM dx = M
∫ b
adx = M(b− a).
Sedaj pokažimo še, da je tudi produkt integrabilnih funkcij integrabilen.
Trditev 9.14. Naj bosta f, g ∈ R([a, b]). Potem je tudi f · g ∈ R([a, b]).
Dokaz. Pri dokazu si bomo pomagali z naslednjim trikom. Ker je funkcijaφ(t) = t2 zvezna, je po Trditvi 9.12 za vsako integrabilno funkcijo h tudifunkcija h2 = φ ◦ h integrabilna. Od prej pa že vemo, da se integrabilnostohranja pri seštevanju, odštevanju in množenju funkcij s konstantami. Sedajlahko zapišemo
f · g = (f + g)2 − (f − g)2
4 .
Ker smo funkcijo f · g izrazili s funkcijama f in g s pomočjo operacij, kiohranjajo integrabilnost, je torej funkcija f · g integrabilna.
Naslednja lastnost določenega integrala, ki jo bomo spoznali, je formulaza seštevanje ploščin.
a b c x
y
A B
a b c x
y
A B
Če seštejemo ploščini likov pod grafom funkcije na dveh intervalih, kise dotikata, dobimo ploščino lika pod grafom funkcije na uniji intervalov,oziroma
pl(A ∪B) = pl(A) + pl(B).
212

Trditev 9.15. Naj bodo a ≤ b ≤ c realna števila in naj bo f : [a, c] → Rfunkcija. Potem je f ∈ R([a, c]) natanko takrat, ko sta f |[a,b] ∈ R([a, b]) inf |[b,c] ∈ R([b, c]). V tem primeru velja∫ c
af(x) dx =
∫ b
af(x) dx+
∫ c
bf(x) dx.
Dokaz. Če je f integrabilna, je omejena na [a, c], zato je omejena tudi na[a, b] in [b, c]. Če pa sta integrabilni obe zožitvi, sta obe zožitvi omejeni,zato je potem omejena tudi sama funkcija f .
(=⇒) Privzemimo sedaj, da je f ∈ R([a, c]). Vzemimo poljuben ε > 0.Ker je f integrabilna, lahko najdemo takšno delitev D intervala [a, c], da je
S(f,D)− s(f,D) < ε.
Brez škode lahko predpostavimo, da je b ∈ D (če ni, ga dodamo in dobimofinejšo delitev, za katero zgornja ocena še vedno velja). Sedaj definiramodelitvi obeh podintervalov s krajiščima v b
D1 = D ∩ [a, b] delitev [a, b],D2 = D ∩ [b, c] delitev [b, c].
Spodnja in zgornja integralska vsota funkcije f glede na delitev D staenaki vsoti spodnjih oziroma zgornjih integralskih vsot obeh zožitev funkcijef glede na delitvi D1 in D2. Zato je
S(f,D)−s(f,D) = (S(f |[a,b], D1)−s(f |[a,b], D1))+(S(f |[b,c], D2)−s(f |[b,c], D2))
Ker je vsota obeh nenegativnih sumandov na desni manjša od ε, je vsakčlen posebej manjši od ε, od koder pa sledi, da sta obe zožitvi f |[a,b] in f |[b,c]integrabilni.
(⇐=) Denimo sedaj, da sta zožitvi f |[a,b] in f |[b,c] integrabilni. Potemlahko najdemo delitev D1 intervala [a, b] in delitev D2 intervala [b, c], da je
S(f |[a,b], D1)− s(f |[a,b], D1) < ε
2 ,
S(f |[b,c], D2)− s(f |[b,c], D2) < ε
2 .
Za delitev D = D1 ∪D2 intervala [a, c] potem velja
S(f,D)− s(f,D) = (S(f |[a,b], D1)− s(f |[a,b], D1)) + (S(f |[b,c], D2)− s(f |[b,c], D2)),
<ε
2 + ε
2 = ε.
Enakost integralov: Tekom dokaza smo že večkrat uporabili dejstvo, daza delitev D = D1 ∪D2 velja
s(f,D) = s(f |[a,b], D1) + s(f |[b,c], D2).
213

Če pogledamo supremum po vseh delitvah na obeh straneh te enakosti,dobimo enakost integralov∫ c
af(x) dx =
∫ b
af(x) dx+
∫ c
bf(x) dx.
Glede na naš dogovor, da je∫ a
af(x) dx = 0,∫ a
bf(x) dx = −
∫ b
af(x) dx,
velja enakost ∫ c
af(x) dx =
∫ b
af(x) dx+
∫ c
bf(x) dx
tudi če a ≤ b ≤ c ne drži. Torej so lahko a, b in c poljubna realna števila.Preden se posvetimo glavni temi tega razdelka, si za trenutek poglejmo
še, kako lahko s pomočjo določenega integrala izračunamo povprečje funkcijena danem intervalu.
a bΞ x
y
f
f
a bΞ x
y
f
f
Definicija 9.16. Naj bo f ∈ R([a, b]). Povprečna vrednost funkcije f naintervalu [a, b] je število
f = 1b− a
∫ b
af(x) dx.
Dobro znan je primer iz fizike, pri katerem je v = v(t) hitrost točke načasovnem obdobju [t1, t2],
v = 1t2 − t1
∫ t2
t1v(t) dt
pa povprečna hitrost točke na tem časovnem intervalu.Z zgornje skice že lahko slutimo, da zvezna funkcija vsaj enkrat zavzame
svojo povprečno vrednost.
214

Trditev 9.17 (Izrek o povprečni vrednosti). Za poljubno zvezno funkcijof : [a, b]→ R obstaja takšna točka ξ ∈ [a, b], da je
f(ξ) = 1b− a
∫ b
af(x) dx.
Dokaz. Ker je funkcija f zvezna, je tudi omejena in zavzame svoji ekstremnivrednosti. Naj bo m = min f in M = max f . Potem velja m ≤ f(x) ≤ Mza vsak x ∈ [a, b]. Če ti dve neenakosti integriramo, dobimo po Trditvi 9.13neenakosti
m(b− a) ≤∫ b
af(x) dx ≤M(b− a),
oziromam ≤ 1
b− a
∫ b
af(x) dx ≤M.
Ker zavzame zvezna funkcija vse vrednosti med svojo minimalno in svojomaksimalno vrednostjo, torej obstaja točka ξ ∈ [a, b], da je
f(ξ) = 1b− a
∫ b
af(x) dx.
Trditev 9.18. Naj bo f : [a, b] → R zvezna funkcija in naj velja f(x) ≥ 0za vsak x ∈ [a, b]. Če je
∫ ba f(x) dx = 0, je f(x) = 0 za vsak x ∈ [a, b].
Dokaz. Uporabili bomo dokaz s protislovjem. Zaradi zveznosti mora bitinenegativna funkcija, ki ni ničelna, pozitivna na nekem intervalu. Od todpa sledi, da ima lik med grafom funkcije in abscisno osjo pozitivno ploščino.
Recimo torej, da obstaja x ∈ [a, b], da je f(x) > 0. Če bi bil x enoizmed krajišč, bi lahko dovolj blizu našli še neko drugo točko, v kateri bibila vrednost funkcije f prav tako pozitivna. Torej smemo predpostaviti,da je x notranja točka intervala [a, b]. Ker je f zvezna v x, lahko najdemotak δ > 0, da je [x − δ, x + δ] ⊂ [a, b] in da velja f(t) ≥ f(x)
2 za vsakt ∈ [x− δ, x+ δ].
a bxx-∆ x+∆ x
y
f HxL
f Hx-∆L f Hx+∆Lf HxL2
a bxx-∆ x+∆ x
y
f HxL
f Hx-∆L f Hx+∆Lf HxL2
Definirajmo sedaj delitev D = {a, x − δ, x + δ, b} intervala [a, b]. Ker jefunkcija f na podintervalu [x− δ, x+ δ] navzdol omejena z f(x)
2 , je ploščinasrednje rezine pozitivna in imamo oceno
s(f,D) ≥ f(x)2 (2δ) = δ · f(x) > 0.
215

Našli smo torej delitev, pri kateri je spodnja integralska vsota pozitivna.Potem pa bi moral biti tudi integral, ki je supremum spodnjih integralskihvsot, pozitiven. Torej smo prišli do protislovja.
Sedaj smo prišli do dveh ključnih izrekov integralskega računa. Najprejbomo pokazali, da ima vsaka zvezna funkcija primitivno funkcijo, nato paše, kako lahko s pomočjo nedoločenega integrala računamo določeni integral.
Izrek 9.19. Naj bo f ∈ R([a, b]) integrabilna in c ∈ [a, b]. Tedaj je funkcijaF : [a, b]→ R, definirana s predpisom
F (x) =∫ x
cf(t) dt
zvezna. Če je funkcija f zvezna v točki x0 ∈ (a, b), potem je F odvedljiva vtočki x0 in velja F ′(x0) = f(x0).
Dokaz. Dokazali smo že, da iz integrabilnosti funkcije f na intervalu [a, b]sledi integrabilnost zožitve funkcije f na vsakem podintervalu. Od tod sledi,da je funkcija F dobro definirana.
Zveznost funkcije F : Ker je f integrabilna, je omejena, zato obstaja takM ∈ R, da velja |f(x)| ≤ M za vsak x ∈ [a, b]. Vzemimo sedaj poljubnax, y ∈ [a, b], za katera je x < y. Z uporabo lastnosti določenega integralapotem lahko izpeljemo neenakost
|F (y)− F (x)| =∣∣∣∣∫ y
cf(t) dt−
∫ x
cf(t) dt
∣∣∣∣ =∣∣∣∣∫ c
xf(t) dt+
∫ y
cf(t) dt
∣∣∣∣ ,=∣∣∣∣∫ y
xf(t) dt
∣∣∣∣ ≤M(y − x).
Ker je M fiksen, bosta vrednosti funkcije F poljubno blizu skupaj, čebosta le argumenta dovolj blizu. To pomeni, da je funkcija F enakomernozvezna in zato tudi zvezna.
Odvedljivost funkcije F : Denimo sedaj, da je f zvezna v točki x0. Potemželimo pokazati, da je
lims→x0
F (s)− F (x0)s− x0
= f(x0),
oziroma, da lahko za poljuben ε > 0 najdemo tak δ > 0, da je∣∣∣∣F (s)− F (x0)s− x0
− f(x0)∣∣∣∣ < ε
za vsak s ∈ [a, b], za katerega je |s − x0| < δ. Ker je limita diferenčnihkoličnikov ravno odvod, bo od tod sledilo F ′(x0) = f(x0).
216

Izberimo torej poljuben ε > 0. Ker je f zvezna v x0, lahko najdemo takδ > 0, da za vsak s ∈ [a, b], za katerega je |s−x0| < δ, velja |f(s)−f(x0)| < ε.Za tak s > x0 potem velja:∣∣∣∣F (s)− F (x0)
s− x0− f(x0)
∣∣∣∣ =∣∣∣∣ 1s− x0
∫ s
x0f(t) dt− f(x0)
s− x0
∫ s
x0dt
∣∣∣∣ ,= 1s− x0
∣∣∣∣∫ s
x0(f(t)− f(x0)) dt
∣∣∣∣ .Ker integriramo po intervalu t ∈ [x0, s], je za vsak t na tem intervalu
t− x0 ≤ s− x0 < δ, od koder pa sledi |f(t)− f(x0)| < ε. Sedaj dobimo∣∣∣∣F (s)− F (x0)s− x0
− f(x0)∣∣∣∣ = 1
s− x0
∣∣∣∣∫ s
x0(f(t)− f(x0)) dt
∣∣∣∣ ,≤ 1s− x0
∫ s
x0|f(t)− f(x0)| dt,
<1
s− x0
∫ s
x0ε dt = 1
s− x0· ε(s− x0),
= ε.
Analogen dokaz deluje tudi v primeru, ko je s < x0.
Funkciji F rečemo funkcija zgornje meje. Če je f integrabilna, je Fzvezna. Če pa je f zvezna, je F celo odvedljiva. Vidimo torej, da namintegriranje funkcijo polepša, medtem ko nam jo odvod na drugi strani lahkomalce pokvari. Med drugim iz zgornjega izreka sledi, da ima poljubna zveznafunkcija f : [a, b]→ R primitivno funkcijo
F (x) =∫ x
cf(t) dt.
Izbira spodnje meje c v določenem integralu ustreza izbiri konstante Cpri nedoločenem integralu. Dejstvo, da je F primitivna funkcija funkcije fje zanimivo teoretično, v praksi pa nam še vedno ostane problem, kako bifunkcijo F dejansko izračunali.
Poglejmo si še fizikalno interpretacijo te formule. Denimo, da se točkagiblje po premici in da je ob času t0 v koordinatnem izhodišču. S funkcijov : [t0, t1]→ R opišimo njeno hitrost. Položaj točke ob času t je potem enak
s(t) =∫ t
t0v(t) dt,
iz izreka pa sledi, da jes = v,
kar pa že vemo od prej, saj smo tako definirali hitrost.To pomeni, da ploščina lika pod grafom funkcije hitrosti pove, kolikšno
pot je opravila točka. Podobnih primerov uporabe določenega integrala jev fiziki še veliko.
217

t0 t1t t
vHtL
sHtL
t0 t1t t
vHtL
sHtL
Izrek 9.20. Naj bo f ∈ R([a, b]) in naj bo F : [a, b]→ R zvezna funkcija, kije odvedljiva na (a, b) in za katero je F ′(x) = f(x) za vsak x ∈ (a, b). Potemje ∫ b
af(x) dx = F (b)− F (a).
Dokaz. Dokazali bomo, da za vsak ε > 0 velja∣∣∣∣∣F (b)− F (a)−∫ b
af(x) dx
∣∣∣∣∣ < ε.
Od tod bo sledila enakost v izreku.Izberimo sedaj poljuben ε > 0. Ker je funkcija f integrabilna, lahko
najdemo delitev D = {xk}k=nk=0 intervala [a, b], da je S(f,D) − s(f,D) < ε.
Funkcija F je zvezna na vsakem izmed intervalov [xk−1, xk] in odvedljiva vnjihovih notranjostih. Zato lahko po Lagrangeevem izreku za vsak 1 ≤ k ≤ nnajdemo točko ξk ∈ [xk−1, xk], da je
F (xk)− F (xk−1) = F ′(ξk)(xk − xk−1) = f(ξk)∆xk.
Od tod lahko izpeljemo, da je Riemannova vsota funkcije f , prirejenadelitvi D in izbiri točk {ξk}, enaka:
n∑k=1
f(ξk)∆xk =n∑k=1
(F (xk)− F (xk−1)) = F (xn)− F (x0) = F (b)− F (a).
Ker imamo neenakosti
s(f,D) ≤n∑k=1
f(ξk)∆xk ≤ S(f,D)
ins(f,D) ≤
∫ b
af(x) dx ≤ S(f,D),
je ∣∣∣∣∣F (b)− F (a)−∫ b
af(x) dx
∣∣∣∣∣ =∣∣∣∣∣n∑k=1
f(ξk)∆xk −∫ b
af(x) dx
∣∣∣∣∣ ,< S(f,D)− s(f,D) < ε.
218

Terminologija glede imen izrekov se od vira do vira razlikuje. Nekateriavtorji rečejo prvemu izreku osnovni izrek analize, drugemu pa Newton-Leibnizova formula. Spet drugi pa obema izrekoma rečejo kar prvi in drugiosnovni izrek analize.
Kar se tiče uporabe, je zanimiva predvsem formula, ki nam omogočaanalitično računati določene integrale s pomočjo primitivnih funkcij. Dabi izračunali določeni integral dane funkcije, praviloma najprej izračunamonedoločeni integral s pomočjo metod, ki smo jih spoznali v razdelku o ne-določenem integralu, nato pa uporabimo formulo. Pravili za integracijo podelih in pa uvedbo nove spremenljivke pa lahko uporabimo tudi direktno nadoločenem integralu.
Trditev 9.21 (Integracija po delih za določeni integral). Naj bosta funkcijif, g ∈ R([a, b]). Nadalje naj bosta F,G : [a, b] → R zvezni funkciji, ki staodvedljivi na (a, b), in za kateri velja F ′(x) = f(x) ter G′(x) = g(x) za vsakx ∈ (a, b). Tedaj je∫ b
aF (x)g(x) dx = F (b)G(b)− F (a)G(a)−
∫ b
af(x)G(x) dx.
Dokaz. Definirajmo funkcijo H = F ·G. Potem je H zvezna na [a, b], odve-dljiva na (a, b), kjer velja
H ′ = F ′G+ FG′ = fG+ Fg.
Ker lahko H ′ izrazimo s seštevanjem in množenjem integrabilnih funkcij,je H ′ ∈ R([a, b]). Z uporabo fundamentalnega izreka analize od tod dobimo∫ b
a(f(x)G(x) + F (x)g(x)) dx = H(b)−H(a) = F (b)G(b)− F (a)G(a),
oziroma∫ b
aF (x)g(x) dx = F (b)G(b)− F (a)G(a)−
∫ b
af(x)G(x) dx.
Trditev 9.22 (Uvedba nove spremenljivke v določeni integral). Naj bostafunkciji α : Eodp → R in F : Dodp → R zvezno odvedljivi in denimo, daje [a, b] ⊂ E ter α([a, b]) ⊂ D. Označimo f = F ′. Potem je funkcija(f ◦ α) · α′ ∈ R([a, b]) in velja∫ b
af(α(x))α′(x) dx = F (α(b))− F (α(a)).
Dokaz. Funkcija F ◦α je zvezna na [a, b] in odvedljiva na (a, b). Njen odvodje enak
(F ◦ α)′(x) = F ′(α(x))α′(x) = f(α(x))α′(x),
219

zato po fundamentalnem izreku analize sledi∫ b
af(α(x))α′(x) dx = F (α(b))− F (α(a)).
Pravilo za uvedbo nove spremenljivke v določeni integral uporabljamo nanaslednji način. Spremenljivka x teče po intervalu med a in b. Če uvedemonovo spremenljivko t = α(x), bomo vzeli, da t teče po intervalu med α(a)in α(b), diferencial spremenljivke t pa bo enak dt = α′(x) dx. Pravilo zauvedbo nove spremenljivke potem zapišemo v obliki∫ b
af(α(x))α′(x) dx =
∫ α(b)
α(a)f(t) dt.
Če smo bili uspešni, smo si s tem poenostavili integrand, zamenjali pasta se meji integracije. To, da smo formalno zamenjali ime spremenljivke,nas sploh ne zanima več. Sedaj lahko spet uporabimo kakšno izmed pravil,ali pa poskusimo izračunati nedoločeni integral.
Pri računanju bomo pogosto uporabljali oznako
F (b)− F (a) = F (x)∣∣∣ba.
Zgled 9.23. (1) Začnimo z določenim integralom potenčne funkcije f(x) =xn. Za majhne n bi lahko ta integral izračunali tudi po definiciji, s pomočjofundamentalnega izreka analize pa dobimo:∫ b
axn dx = xn+1
n+ 1
∣∣∣ba
= bn+1 − an+1
n+ 1 .
V posebnem primeru dobimo, da je ploščina lika pod grafom potenčnefunkcije na intervalu [0, 1] enaka
pl =∫ 1
0xn dx = 1
n+ 1 .
220

Poglejmo še skico tega lika.
x
y
0.2 0.4 0.6 0.8 1.0
0.2
0.4
0.6
0.8
1.0
(2) Poglejmo sedaj določeni integral sinusne funkcije:∫ b
asin x dx = − cosx
∣∣∣ba
= cos a− cos b.
Ploščina lika med enim lokom sinusoide in abscisno osjo je enaka
pl =∫ π
0sin x dx = cos 0− cosπ = 2.
Po drugi strani pa je∫ 2π
0sin x dx = cos 2π − cos 0 = 0.
V tem primeru imata lika nad in pod osjo enaki ploščini, ki pa se odšte-jeta.
x
y
1 2 3 4 5 6
-1.0
-0.5
0.5
(3) Za konec izračunajmo še ploščino kroga s polmerom r. Ta je enakadvakratniku ploščine med grafom funkcije f(x) =
√r2 − x2 in abscisno osjo
na intervalu [−r, r].
x
y
rr
221

Integral bomo izračunali z uvedbo nove spremenljivke x = r sin t, ki namda dx = r cos t dt. Integracijski interval se pri tem spremeni v [−π
2 ,π2 ].
pl = 2∫ r
−r
√r2 − x2 dx,
= 2∫ π
2
−π2
√r2 − r2 sin2 tr cos t dt,
= 2r2∫ π
2
−π2cos2 t dt,
= 2r2∫ π
2
−π2
1 + cos 2t2 dt,
= r2(t+ sin 2t
2
) ∣∣∣π2−π2,
= πr2.
9.2 Numerična integracija
Newton-Leibnizeva formula je močno orodje za eksaktno računanje določe-nih integralov. Če pa je ne moremo uporabiti (ker na primer ne znamo najtiprimitivne funkcije), lahko določeni integral dane funkcije aproksimiramoz Riemannovo vsoto. Pri tem gre pravzaprav za aproksimacijo lika podkrivuljo z navpičnimi pravokotniki. Če pravokotnike nadomestimo z boljkompliciranimi liki, dobimo nekaj metod za približno računanje določenihintegralov. Pri vseh teh metodah je računalnik nepogrešljiv pripomoček.
Najprej si poglejmo trapezno metodo. Izberimo funkcijo f : [a, b] → Rin razdelimo interval [a, b] na n enakih podintervalov za nek n ∈ N. Pritrapezni metodi na vsakem podintervalu lik med krivuljo in abscisno osjoaproksimiramo s trapezom, ki ima dve stranici navpični, eno vodoravno, enastranica pa povezuje točki na grafu funkcije nad krajiščema podintervala.
a b x
y
y0
y1 y2
y3
y4
Ker lik aproksimiramo s trapezi, bomo pri enakem številu podinterva-lov pri trapezni metodi praviloma dobili boljšo aproksimacijo kot pa z Rie-mannovo vsoto. Če večamo število podintervalov, bo aproksimacija čedaljeboljša, napako pa lahko tudi ocenimo, kot nam pove naslednja trditev.
222

Trditev 9.24 (Formula trapezov). Naj bo f : Eodp → R dvakrat zveznoodvedljiva funkcija in [a, b] ∈ E. Izberimo poljuben n ∈ N in definirajmoyk = f(a+ k b−an ) za k = 0, 1, . . . , n. Potem velja∫ b
af(x) dx = b− a
n
(yn + y0
2 + y1 + y2 + . . .+ yn−1
)− (b− a)3
12n2 f ′′(c)
za nek c ∈ [a, b].
Trditve ne bomo dokazali, pripomnimo pa, da je izraz
b− an
(yn + y0
2 + y1 + y2 + . . .+ yn−1
)ravno enak vsoti ploščin vseh trapezov, medtem ko je (b−a)3
12n2 |f ′′(c)| napakaaproksimacije. Ker je funkcija f dvakrat zvezno odvedljiva, je vrednost|f ′′(c)| omejena z neko konstanto, kar pa pomeni, da napaka aproksimacijepada sorazmerno s kvadratom števila podintervalov.
V praksi lahko torej izračunamo približno vrednost določenega integralas seštevanjem vrednosti funkcije v ustreznih točkah. To je seveda pravilomaprecej lažje kot pa iskanje primitivne funkcije.
Če namesto s trapezi lik aproksimiramo z liki, ki so na eni strani omejenis kvadratnimi parabolami, pridemo do Simpsonove metode.
a b x
y
y0
y1 y2
y3
y4
a b x
y
y0
y1 y2
y3
y4
V tem primeru na vsakem podintervalu graf interpoliramo s kvadratnofunkcijo, ki seka graf v obeh krajiščih in pa v središču podintervala. Če jeintervalov n, moramo torej izračunati vrednosti funkcije v 2n točkah. Kerlahko s parabolo bolje aproksimiramo graf kot pa z daljico, je aproksimacijapri Simpsonovi metodi boljša kot pa pri trapezni metodi.
Trditev 9.25 (Simpsonova formula). Naj bo f : Eodp → R štirikrat zveznoodvedljiva funkcija in [a, b] ∈ E. Izberimo poljuben n ∈ N in definirajmoyk = f(a+ k b−a2n ) za k = 0, 1, . . . , 2n. Potem velja∫ b
af(x) dx = b− a
6n
(y0 + 4
n∑k=1
y2k−1 + 2n−1∑k=1
y2k + y2n
)− (b− a)5
2880n4 f(4)(c)
za nek c ∈ [a, b].
223

Če upoštevamo, da na vsakem podintervalu parabole interpolirajo graffunkcije f , lahko z nekoliko dela lahko preverimo, da je
b− a6n
(y0 + 4
n∑k=1
y2k−1 + 2n−1∑k=1
y2k + y2n
)
ravno vsota ploščin likov pod parabolami. Napaka aproksimacije je v temprimeru enaka (b−a)5
2880n4 |f (4)(c)|, kar pomeni, da pada proti nič sorazmerno sčetrto potenco števila delilnih intervalov.
Zgled 9.26. Kot primer si poglejmo določeni integral Gaussove funkcije
1√2π
∫ 1
0e−
x22 dx.
Ta funkcija predstavlja gostoto standardne normalne porazdelitve in igraključno vlogo v statistiki in verjetnosti, zelo pomembna pa je tudi v fiziki.Vrednost tega konkretnega integrala je enaka verjetnosti, da standardnonormalno porazdeljena spremenljivka zavzame vrednost na intervalu [0, 1].
x
y
-3 -2 -1 1 2
0.1
0.2
0.3
0.4
Gaussova funkcija sicer ima primitivno funkcijo, ki pa ni elementarnafunkcija, zato si ne moremo pomagati z fundamentalnim izrekom analize.
Pokazali bomo, kako lahko s pomočjo trapezne metode izračunamo taintegral na dve decimalki natančno. Naj bo
f(x) = 1√2πe−
x22 .
Potem je f ′′(x) = (x2 − 1)f(x), od koder dobimo za x ∈ [0, 1] oceno
|f ′′(x)| = |x2 − 1|√
2πe−
x22 ≤ 1√
2π· 1.
Želimo najti tak n, da bo napaka manjša od 0, 005, oziroma da bo
(1− 0)3
12n2 |f′′(c)| ≤ 0, 005.
Ker je |f ′′(c) ≤ 1√2π , je dovolj najti n, ki zadošča
112n2
√2π≤ 0, 005.
224

Hitro se lahko prepričamo, da je dober že n = 3.V formuli trapezov je predpostavljeno, da znamo vrednosti y0, y1, . . . , yn
natančno izračunati. Pri bolj kompliciranih funkcijah to ni vedno mogoče,zato poskušamo vrednosti funkcije čimbolj natančno aproksimirati s pomo-čjo računalnika. V našem primeru je
y0 = f(0) = 0, 3989,y1 = f(1/3) = 0, 3774,y2 = f(2/3) = 0, 3194,y3 = f(1) = 0, 2420,
od tod pa dobimo aproksimacijo
1√2π
∫ 1
0e−
x22 dx ≈ 1
3
(0, 2420 + 0, 39892 + 0, 3774 + 0, 3194
)= 0, 34.
Dejanska vrednost integrala, zaokroženega na štiri decimalke, je 0, 3413, karpomeni, da smo dobili dokaj dobro aproksimacijo že z zelo malim številomračunskih operacij. Za boljšo aproksimacijo bi morali vzeti večji n, ali pauporabiti Simpsonovo metodo.
9.3 Izlimitirani integral
Riemannov integral, ki smo ga dodobra spoznali v tem razdelku, obstaja leza omejene funkcije, definirane na končnem zaprtem intervalu. Kakor hitroje funkcija neomejena, ali pa je interval neskončen, Riemannove vsote nekonvergirajo. Kljub temu pa si je smiselno zastaviti vprašanje, kako integri-rati neomejene funkcije, oziroma kako integrirati po neskončnem intervalu.Posplošitvi Riemannovega integrala, ki zajema tudi te primere, rečemo izli-mitirani oziroma nepravi integral.
Za motivacijo si poglejmo naslednji primer. Zanima nas ploščina lika podgrafom funkcije f(x) = 1√
xna intervalu (0, 1]. Ker je funkcija f neomejena,
je tudi lik neomejen, zato ni takoj jasno, če sploh lahko smiselno definiramoploščino tega lika.
x
y
0.2 0.4 0.6 0.8 1.0
2
4
6
Pri tem si bomo pomagali s podobno idejo kot pri računanju vsot vrst.Za vsak ε ∈ (0, 1) je lik, ki leži pod grafom funkcije na intervalu [ε, 1], omejen,njegova ploščina pa je enaka∫ 1
ε
dx√x
= 2√x∣∣∣1ε
= 2(1−√ε).
225

Sedaj bomo z omejenimi liki aproksimirali naš neomejen lik. Domnevamo,da bo aproksimacija čedalje boljša, čim manjši bo ε. Ploščino neomejenegalika definiramo kot limito (če obstaja) ploščin teh omejenih likov, ko gre εproti nič, oziroma∫ 1
0
dx√x
= limε→0+
∫ 1
ε
dx√x
= limε→0+
2(1−√ε) = 2.
Poglejmo sedaj, kako definiramo izlimitirani integral poljubne zveznefunkcije. Ločili bomo več primerov.
Neomejena funkcija na končnem intervalu
Naj bo f : [a, b)→ R zvezna funkcija. Izlimitirani integral funkcije f defini-ramo z limito ∫ b
af(x) dx = lim
ε→0+
∫ b−ε
af(x) dx,
če ta limita obstaja.
b0 x
y
a b-Ε b0 x
y
a b-Ε
Analogno definiramo izlimitirani integral zvezne funkcije f : (a, b]→ R∫ b
af(x) dx = lim
ε→0+
∫ b
a+εf(x) dx,
če limita obstaja.
Integracija po neomejenem intervalu
Naj bo f : [a,∞) → R zvezna funkcija. Potem definiramo izlimitiraniintegral funkcije f z limito∫ ∞
af(x) dx = lim
b→∞
∫ b
af(x) dx.
0 x
y
a b
226

Analogno definiramo izlimitirani integral zvezne funkcije f : (−∞, b]→ R∫ b
−∞f(x) dx = lim
a→−∞
∫ b
af(x) dx.
Integracija poljubne odsekoma zvezne funkcije
Naj bo f : R → R odsekoma zvezna funkcija in naj bodo p1, p2, . . . , pntočke, kjer f ni zvezna. Izberimo poljubne točke r1, r2, . . . , rn+1, tako davelja r1 < p1 < r2 < p2 < r3 < . . . < rn < pn < rn+1.
p1 p2 p3r1 r2 r3 r4 R
S temi točkami smo realna števila razdelili na dva polneskončna intervala inpa na končno število omejenih intervalov. Na vsakem izmed teh intervalovje funkcija bodisi zvezna, ali pa je nezvezna kvečjemu v enem izmed krajišč,zato že znamo definirati izlimitirani integral funkcije f na vsakem izmed tehintervalov. Sedaj definiramo∫ ∞−∞
f(x) dx =∫ r1
−∞f(x) dx+
∫ p1
r1f(x) dx+. . .+
∫ rn+1
pnf(x) dx+
∫ ∞rn+1
f(x) dx.
Izlimitirani integral funkcije f obstaja, če obstajajo vsi integrali na desnistrani. Rezultat ni odvisen od izbire točk r1, r2, . . . , rn+1.
Zgled 9.27. (1) Za začetek si poglejmo lik pod grafom funkcije f(x) = 1x
na intervalu (0, 1]. Račun∫ 1
0
dx
x= lim
ε→0+
∫ 1
ε
dx
x= lim
ε→0+ln |x|
∣∣∣1ε
= limε→0+
(ln 1− ln ε) =∞
nam pove, da ta izlimitirani integral ne obstaja. To pomeni, da ima naš likneskončno ploščino.
x
y
0.2 0.4 0.6 0.8 1.0
5
10
15
(2) Poglejmo sedaj še enkrat lik pod grafom funkcije f(x) = 1x , a tokrat
na intervalu [1,∞).∫ ∞1
dx
x= lim
b→∞
∫ b
1
dx
x= lim
b→∞ln |x|
∣∣∣b1
= limb→∞
(ln b− ln 1) =∞.
227

x
y
2 4 6 8
0.5
1.0
Tudi tokrat ima lik neomejeno ploščino.(3) V obeh prejšnjih primerih je problem nastopil v krajišču intervala ali
pa v neskončnosti. Bolj pazljivi pa moramo biti pri obravnavi integrala∫ 1
−1
dx
x.
S slike bi lahko uganili, da imata lika levo in desno od ordinatne osi enakoveliki, a nasprotno predznačeni, ploščini.
x
y
-1.0 -0.5 0.5 1.0
-20
-10
10
Od tod bi zmotno sklepali, da je ta integral enak nič. Po naši definiciji jenamreč ∫ 1
−1
dx
x=∫ 0
−1
dx
x+∫ 1
0
dx
x.
Če hočemo, da naš integral obstaja, bi morala obstajati oba integrala nadesni, kar pa že vemo, da ni res. Naš integral torej ne obstaja.
Opomnimo še, da obstaja še bolj splošna verzija izlimitiranega integrala,ki se ji reče Cauchyjeva glavna vrednost. Po tej verziji bi zgornji integralobstajal in bil enak nič.
(4) Pri prejšnjih primerih je bil vzrok za divergenco integrala v tem, da seje graf funkcije prepočasi približeval navpični oziroma vodoravni asimptoti.Če hitrost približevanja povečamo, pa dobimo kot rezultat like s končnoploščino. Kot primer vzemimo integral funkcije f(x) = ex na (−∞, 0].∫ 0
−∞ex dx = lim
a→−∞
∫ 0
aex dx = lim
a→−∞ex∣∣∣0a
= lima→−∞
(e0 − ea) = 1.
Eksponentna funkcija pada pri x→ −∞ tako hitro proti nič, da ima lik podnjenim grafom končno ploščino.
x
y
-5 -4 -3 -2 -1
0.2
0.4
0.6
0.8
228

(5) Poglejmo si še primer potenčne funkcije, ki omejuje neomejen lik skončno ploščino.∫ ∞
1
dx
x3 = limb→∞
∫ b
1
dx
x3 = limb→∞
− 12x2
∣∣∣b1
= limb→∞
(− 1
2b2 + 12
)= 1
2 .
229

10 Uporaba integralaIdeje, povezane z integracijo, se pojavljajo na mnogih različnih področjih.Od matematike in fizike, pa do uporabnih ved kot sta na primer strojništvoin gradbeništvo. S pomočjo integralov lahko računamo površine in volumneteles, dolžine krivulj, središča in težišča likov oziroma teles, vztrajnostnemomente... Pri tem predmetu se bomo omejili na računanje dolžin, ploščin,površin in volumnov. Za računanje težišč in vztrajnostnih momentov pa jebolj elegantno uporabiti večkratne integrale.
10.1 Dolžine krivulj
Krivulja kot graf funkcije
Pričeli bomo s študijem dolžine ravninskih krivulj. Recimo, da bi radi izra-čunali dolžino grafa zvezno odvedljive funkcije f : [a, b]→ R (odvedljivost vrobnih točkah pomeni, da je f zvezno odvedljiva na nekem večjem intervalu(c, d), ki vsebuje [a, b]). Aproksimacijo za dolžino grafa bomo dobili na na-slednji način. Najprej si izberimo delitev D = {xk}k=n
k=0 intervala [a, b]. Graffunkcije f potem razpade na unijo n lokov (po en lok nad vsakim izmedpodintervalov). Vsakega izmed teh lokov aproksimiramo z daljico s krajiščiv robnih točkah loka, cel graf pa s poligonalno črto, ki jo tvorijo te daljice.
x0 x1 x2 x3 x4 x
y
f Hx0Lf Hx1L
f Hx2L
f Hx3L
f Hx4L
S pomočjo Pitagorovega izreka dobimo dolžino te črten∑k=1
√(xk − xk−1)2 + (f(xk)− f(xk−1))2.
Dolžina te črte se ne ujema natančno z dolžino grafa funkcije, saj je v splo-šnem nekoliko manjša. Pri tej aproksimaciji smo namreč vzeli nekaj točkna grafu in jih povezali z najkrajšimi možnimi potmi med njimi. Če nanjenapnemo ukrivljene loke, pa bomo s tem kvečjemu povečali skupno dolžinolokov. Pri čedalje finejši delitvi se bodo loki čedalje bolj ujemali z daljicami,zato pričakujemo, da bomo v limiti, ko bodo šle dolžine podintervalov protinič, dobili ravno dolžino grafa funkcije. To nas že spominja na definicijo do-ločenega integrala, malce pa se moramo še potruditi, da ugotovimo, kateriizraz moramo pravzaprav integrirati.
230

Po Lagrangeevem izreku lahko na vsakem intervalu [xk−1, xk] najdemotakšno točko ξk, da velja
f(xk)− f(xk−1) = f ′(ξk)(xk − xk−1).
Potem pa lahko zapišemon∑k=1
√(xk − xk−1)2 + (f(xk)− f(xk−1))2 =
n∑k=1
√(∆xk)2 + (f ′(ξk)∆xk)2,
=n∑k=1
∆xk√
1 + (f ′(ξk))2.
V tem izrazu prepoznamo Riemannovo vsoto zvezno odvedljive funkcije√1 + f ′2 na intervalu [a, b], prirejeno delitvi D in izbiri točk {ξk}. Limita
Riemannovih vsot je enaka določenemu integralu te funkcije, kar pomeni,da je dolžina grafa K funkcije f na intervalu [a, b] enaka
s(K) =∫ b
a
√1 + f ′(x)2 dx.
Zgled 10.1. Izračunajmo z zgornjo formulo obseg krožnice s polmerom r.Cele krožnice sicer eksplicitno ne moremo podati z grafom funkcije, lahkopa definiramo polkrožnico kot graf funkcije f(x) =
√r2 − x2.
r
x
y
Odvod funkcije f je enak
f ′(x) = 12√r2 − x2
· (−2x) = −x√r2 − x2
,
od tod pa dobimo
s(K) = 2∫ r
−r
√1 + f ′(x)2 dx = 2
∫ r
−r
√1 + x2
r2 − x2 dx,
= 2∫ r
−r
r√r2 − x2
dx,
= 2r arc sin(x
r
) ∣∣∣r−r,
= 2r(π
2 −(−π2
)),
= 2πr.
231

Parametrično podana krivulja
Predvsem v fiziki krivulje (trajektorije delcev) podajamo v parametričniobliki. Za opis ravninske krivulje potrebujemo par funkcij oziroma vektorskofunkcijo
~r(t) = (x(t), y(t))za t ∈ [α, β]. Vsaka vrednost parametra t določa neko točko v ravnini,ko t preteče cel interval [α, β], pa tako dobimo neko krivuljo. V fiziki sparametrom t označujemo čas, vektorska funkcija ~r pa določa gibanje točkepo ravnini. Lahko si mislimo, da je dolžina krivulje, ki jo bomo izračunali,enaka dolžini poti, ki jo opravi točka.
x
y
t0
t1
t2
t3
t4
t5 t6
t7
t8t9
t10
t11
Najprej si izberimo delitev D = {tk}k=nk=0 intervala [α, β] in podobno kot prej
našo krivuljo aproksimirajmo z lomljeno črto. Dolžina lomljene črte je vtem primeru
s(L) =n∑k=1
√(x(tk)− x(tk−1))2 + (y(tk)− y(tk−1))2.
Lagrangeev izrek za funkciji x oziroma y nam potem pove, da obstajataξk, ζk ∈ [tk−1, tk], da velja
x(tk)− x(tk−1) = x(ζk)∆tk,y(tk)− y(tk−1) = y(ξk)∆tk.
Izraz za dolžino poligonalne črte se tako poenostavi vn∑k=1
√(x(tk)− x(tk−1))2 + (y(tk)− y(tk−1))2 =
n∑k=1
∆tk√x(ζk)2 + y(ξk)2.
V limiti, ko gredo dolžine podintervalov proti nič, sta si ξk in ζk čedalje boljblizu, zato lahko vzamemo kar ζk = ξk in dobimo
limmax ∆tk→0
n∑k=1
∆tk√x(ζk)2 + y(ξk)2 = lim
max ∆tk→0
n∑k=1
∆tk√x(ξk)2 + y(ξk)2.
V tem izrazu prepoznamo limito Riemannovih vsot za funkcijo√x2 + y2
na intervalu [α, β], od koder sklepamo, da je dolžina parametrično podanekrivulje K enaka
s(K) =∫ β
α
√x2(t) + y2(t) dt.
232

Graf funkcije je poseben primer parametrično podane krivulje. Če jefunkcija f : [a, b] → R zvezno odvedljiva, lahko njen graf opišemo tudi sparametrizacijo
x(t) = t,
y(t) = f(t),
za t ∈ [a, b]. Potem je x(t) = 1 in y(t) = f ′(t), od tod pa sledi∫ b
a
√x2(t) + y2(t) dt =
∫ b
a
√1 + f ′(t)2 dt
Podoben račun velja tudi v primeru, ko x koordinate ne parametriziramolinearno, ampak z neko naraščajočo funkcijo x = x(t).
Zgled 10.2. Kot primer uporabe zgornje formule izračunajmo dolžino enegaloka cikloide. Podamo ga lahko parametrično s predpisom
x(t) = a(t− sin t),y(t) = a(1− cos t),
kjer je a pozitivna konstanta, parameter t pa teče po intervalu [0, 2π].
x
y
a
t = 0
t = Π
t = 2Π
Geometrično lahko opišemo cikloido kot krivuljo, ki jo opiše točka na obodukrožnice s polmerom a pri kotaljenju po premici.
Za odvoda te parametrizacije velja x(t) = a(1 − cos t) in y(t) = a sin t,od koder lahko izpeljemo
x2(t) + y2(t) = a2(1− cos t)2 + a2 sin2 t = 2a2(1− cos t) = 4a2 sin2 t
2 .
Torej je dolžina enega loka cikloide enaka
s =∫ 2π
0
√x2(t) + y2(t) dt =
∫ 2π
02a sin t
2 dt = −4a cos t2
∣∣∣2π0
= 8a.
Krivulja, podana v polarnih koordinatah
V posebnem primeru lahko za parameter ravninske krivulje vzamemo polarnikot. Spomnimo se, da imamo naslednjo zvezo med kartezičnimi in polarnimikoordinatami točke
x = r cosφ,y = r sinφ.
233

Namesto, da bi podali koordinati x in y kot funkciji spremenljivke t, bomopodali razdaljo točke od izhodišča r = r(φ) kot funkcijo polarnega kota φ.Ko rišemo graf takšne krivulje, po eni strani enakomerno krožimo okoli izho-dišča, zraven pa se mu približujemo oziroma oddaljujemo od njega, odvisnood funkcije r(φ). Polarni kot je klasično sicer definiran samo za φ ∈ [0, 2π],pri risanju pa nimamo problemov tudi če φ prekorači meje tega intervala. Vtem primeru namreč samo odštejemo ustrezen večkratnik 2π in nadaljujemoz risanjem.
x
y
rH ΒL
rHΑLrHΦL
Φ
Formalno krivuljo v polarnih koordinatah podamo z zvezno odvedljivofunkcijo r : [α, β]→ R. Če upoštevamo, da je
x(φ) = r(φ) cosφ,y(φ) = r(φ) sinφ,
od tod sledi
x′(φ) = r′(φ) cosφ− r(φ) sinφ,y′(φ) = r′(φ) sinφ+ r(φ) cosφ.
Za izračun dolžine krivulje moramo najprej izraziti vsoto kvadratov teh dvehodvodov
x′(φ)2 + y′(φ)2 = (r′(φ) cosφ− r(φ) sinφ)2 + (r′(φ) sinφ+ r(φ) cosφ)2,
= r(φ)2 + r′(φ)2.
Od tod dobimo formulo za dolžino krivulje K, podane v polarnih koordina-tah
s(K) =∫ β
α
√r(φ)2 + r′(φ)2 dφ.
Zgled 10.3. Izračunajmo dolžino krivulje, ki je podana v polarnih koordi-natah s predpisom r(φ) = a(1 + cosφ) za nek a > 0. Graf funkcije r imaobliko
234

a
2a
Φ
r
-2 0 2 4 6 8
Vidimo, da je funkcija r 2π-periodična, kar pomeni, da je naša krivuljasklenjena. Skiciramo jo tako, da si izberemo nekaj točk na njej, potem paskoznje poskusimo narisati krivuljo, upoštevajoč, kako se spreminja razdaljatočke od izhodišča.
-a
-a
a
a 2a x
y
Zaradi njene oblike tej krivulji rečemo kardioida. Gladka je povsod, razen vkoordinatnem izhodišču, kjer ima ost. To je posledica singularnosti polarnihkoordinat pri r = 0.
Za izračun obsega kardioide najprej opazimo, da je r′(φ) = −a sinφ. Odtod sledi √
r(φ)2 + r′(φ)2 =√a2(1 + cosφ)2 + a2 sin2 φ,
=√
2a2(1 + cosφ),
=
√4a2 cos2 φ
2 .
Pri korenjenju moramo biti pozorni, saj je√
4a2 cos2 φ2 = 2a cos φ2 samo za
φ ∈ [0, π], v splošnem pa velja√
4a2 cos2 φ2 = 2a
∣∣∣cos φ2∣∣∣. Da bi se izognili in-
tegriranju absolutnih vrednosti, bomo upoštevali, da je kardioida simetričnaglede na abscisno os, zato je dovolj izračunati dolžino njene zgornje polovice.
s(K) = 2∫ π
0
√r(φ)2 + r′(φ)2 dφ = 2
∫ π
02a cos φ2 dφ = 8a sin φ2
∣∣∣π0
= 8a.
10.2 Ploščine likov
Ploščina lika med grafoma funkcij
Ta primer smo pravzaprav že obravnavali v poglavju o določenem integralu.Naj bosta f, g : [a, b] → R zvezni funkciji. Zanima nas lik, ki je omejen zosema x = a, x = b in pa z grafoma funkcij f in g.
235

a b x
y
f
g
a b x
y
f
g
Ploščina tega lika je enaka
pl =∫ b
a|f(x)− g(x)| dx.
V praksi ta integral izračunamo z razbitjem integracijskega intervala [a, b] nadva kosa, glede na predznak funkcije f − g. Nato izračunamo vsak integralposebej.
Ploščina lika, ki ga omejuje parametrično podana krivulja
Naj bo sedaj ~r : [α, β] → R2 parametrizacija neke krivulje v ravnini. Medgibanjem opišejo zveznice točk na krivulji s koordinatnim izhodiščem neklik. Za začetek bomo privzeli, da dana parametrizacija opisuje gibanje točkev pozitivni smeri okoli izhodišča.
Izberimo poljubno delitev D = {tk}k=nk=0 intervala [α, β]. Naš lik bomo
aproksimirali s trikotniki z oglišči v točkah {0, ~r(tk−1), ~r(tk)}. Označimoxk = x(tk) in yk = y(tk). Ploščina enega takšnega trikotnika je potemenaka
|~r(tk−1)× ~r(tk)|2 = xk−1yk − xkyk−1
2 = xk−1(yk − yk−1)− (xk − xk−1)yk−12 .
Z uporabomo Lagrangeevega izreka za funkciji x oziroma y lahko najdemoξk, ζk ∈ [tk−1, tk], da velja
xk − xk−1 = x(ζk)∆tk,yk − yk−1 = y(ξk)∆tk.
236

Ploščina aproksimacije našega lika je tako enakan∑k=1
x(tk−1)y(ξk)− x(ζk)y(tk−1)2 ∆tk.
Podobno kot pri računanju dolžine krivulj se tudi tu izkaže, da lahko vza-memo pri računanju limite, ko gredo dolžine podintervalov proti nič, da jetk−1 = ζk = ξk. Tako dobimo, da je ploščina lika, ki ga opišejo zveznice točkna krivulji s koordinatnim izhodiščem, enaka
S = 12
∫ β
α(x(t)y(t)− x(t)y(t)) dt.
IzrazS(t) = 1
2(x(t)y(t)− x(t)y(t))
fizikalno interpretiramo kot ploščinsko hitrost gibanja točke okoli izhodišča.Pomembno vlogo igra v Keplerjevem zakonu pri opisu gibanja točke v poljugravitacijske sile. V našem primeru nam zgornja formula pove, da je in-tegral ploščinske hitrosti po času enak ploščini lika, ki ga opiše točka. Čeje ploščinska hitrost konstantna, od tod sledi, da točka v enakih časovnihintervalih opiše like z enakimi ploščinami.
Ploščinska hitrost točke je pozitivna natanko takrat, ko se točka gibljev pozitivni smeri okoli izhodišča. Če se giblje v negativni smeri, dobimonegativno predznačeno ploščino lika, ki ga opiše med gibanjem. V splošnempa je zgornji integral enak razliki ploščin likov, ki ju opiše med gibanjem vpozitivni oziroma v negativni smeri.
V primeru, ko je krivulja sklenjena, nam zgornji integral predstavljaploščino lika, ki ga krivulja omejuje, če točka obkroži lik v pozitivni smeri.
Če nas zanima ploščina lika med krivuljo in abscisno osjo, postopamona naslednji način. Recimo, da je na [α, β] ves čas y(t) > 0 in x(t) > 0 (topomeni, da se točka premika v desno). Potem je dx = x dt, od koder sledi
S =∫ β
αy(t)x(t) dt.
Če je x(t) < 0, se točka premika v levo, ta integral pa predstavlja negativnopredznačeno ploščino lika. V kolikor je krivulja sklenjena, pa je integral enaknegativno predznačeni ploščini lika, ki ga krivulja omejuje, če lik obkrožimov pozitivni smeri.
237
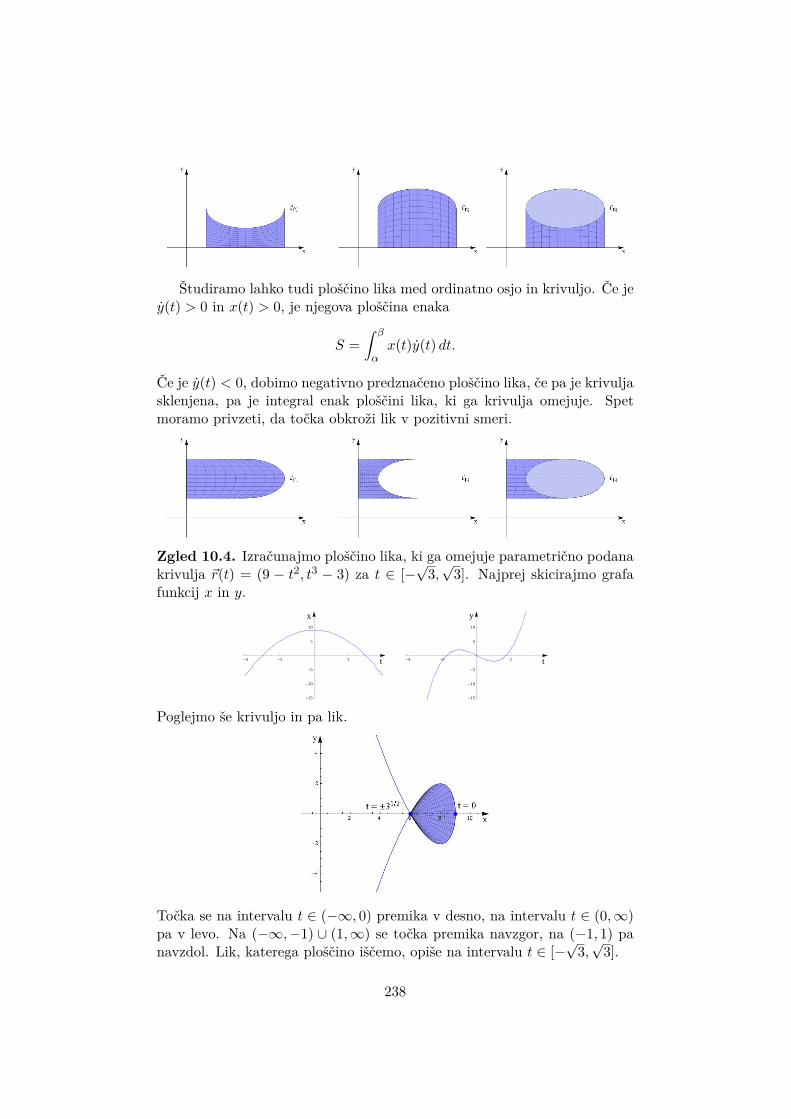
Študiramo lahko tudi ploščino lika med ordinatno osjo in krivuljo. Če jey(t) > 0 in x(t) > 0, je njegova ploščina enaka
S =∫ β
αx(t)y(t) dt.
Če je y(t) < 0, dobimo negativno predznačeno ploščino lika, če pa je krivuljasklenjena, pa je integral enak ploščini lika, ki ga krivulja omejuje. Spetmoramo privzeti, da točka obkroži lik v pozitivni smeri.
Zgled 10.4. Izračunajmo ploščino lika, ki ga omejuje parametrično podanakrivulja ~r(t) = (9 − t2, t3 − 3) za t ∈ [−
√3,√
3]. Najprej skicirajmo grafafunkcij x in y.
t
x
-4 -2 2
-15
-10
-5
5
10
t
y
-4 -2 2
-15
-10
-5
5
10
Poglejmo še krivuljo in pa lik.
Točka se na intervalu t ∈ (−∞, 0) premika v desno, na intervalu t ∈ (0,∞)pa v levo. Na (−∞,−1) ∪ (1,∞) se točka premika navzgor, na (−1, 1) panavzdol. Lik, katerega ploščino iščemo, opiše na intervalu t ∈ [−
√3,√
3].
238

Odvoda koordinat x in y sta x = −2t in y = 3t2 − 3. Od tod dobimo
yx = (t3 − 3t)(−2t) = 6t2 − 2t4,xy = (9− t2)(3t2 − 3) = −3t4 + 30t2 − 27.
Ker imamo opravka s sklenjeno krivuljo, lahko ploščino izračunamo na večnačinov. Z integracijo v vodoravni smeri dobimo
S =∫ √3
−√
3yx dt = 2
∫ √3
0(6t2 − 2t4) dt =
(4t3 − 4t5
5
) ∣∣∣√3
0= 24
√3
5 .
Če integriramo v navpični smeri, pa dobimo
S =∫ √3
−√
3xy dt = 2
∫ √3
0(−3t4 + 30t2 − 27) dt,
=(−6t5
5 + 20t3 − 54t) ∣∣∣√3
0,
= −24√
35 .
Vidimo, da dobimo pri integraciji po x pozitiven predznak, pri integraciji poy pa negativen predznak. To je obratno kot v formulah, ki smo jih omenilizgoraj. Razlog pa je v tem, da točka obkroži lik v negativni smeri.
Ploščina lika, podanega v polarnih koordinatah
Za konec si poglejmo še primer, ko imamo v polarnih koordinatah podanokrivuljo s predpisom r : [α, β]→ R. Zanima nas ploščina lika, ki ga opišejozveznice točk na krivulji s koordinatnim izhodiščem.
Za izračun ploščine tega lika si najprej izberimo neko delitev D = {φk}k=nk=0
intervala [α, β] in pa neko izbiro točk ξk ∈ [φk−1, φk]. Poltraki iz izhodišča,ki ustrezajo točkam delitve D, razdelijo naš lik na n rezin. Sedaj bomovsako izmed teh rezin aproksimirali s krožnim izsekom (k-ti izsek ima polmerr(ξk)). Ploščina k-tega izseka je tako enaka
r(ξk)2 · ∆φk2 ,
239

ploščina aproksimacije našega lika pan∑k=1
12r(ξk)
2∆φk.
V tem izrazu prepoznamo Riemannovo vsoto funkcije 12r
2 na intervalu [α, β],prirejeno delitvi D in izbiri delilnih točk {ξk}. Ko pošljemo dolžine podin-tervalov v delitvah proti nič, dobimo v limiti, da je ploščina lika enaka
S = 12
∫ β
αr(φ)2 dφ.
Zgled 10.5. Izračunajmo ploščino lika, ki ga omejuje krivulja, ki je v po-larnih koordinatah podana s predpisom r(φ) = a| sin 2φ|, za nek a > 0.
x
y
a
Najprej opazimo, da je lik sestavljen iz štirih enako velikih delov, zato jedovolj izračunati ploščino lika, ki ga omejuje krivulja pri φ ∈ [0, π2 ]. Na temintervalu se namreč lahko izognemo absolutnim vrednostim. Sledi
pl = 4 · 12
∫ π2
0a2 sin2 2φdφ,
= 2a2∫ π
2
0
1− cos 4φ2 dφ,
= a2(φ− sin 4φ
4
) ∣∣∣π20,
= πa2
2 .
240

10.3 Volumni teles
Za računanje volumnov teles je najprimerneje uporabiti trojne integrale.Če pa lahko dano telo razdelimo na rezine v obliki preprostih geometrijskihlikov (na primer krogov, trikotnikov ali kvadratov), pa lahko njegov volumenizračunamo tudi s pomočjo enojnega integrala.
Denimo, da imamo telo v prostoru, ki leži med ravninama x = a in x = b.
x
yz
a b
x = Ξk
Ξk
Za vsak x0 ∈ [a, b] je prerez tega telesa z ravnino x = x0 nek lik, kateregaploščino označimo z S(x0). V lepih primerih tako pridemo do zvezne funkcijeS : [a, b] → R. Izberimo sedaj neko delitev D = {xk}k=n
k=0 intervala [a, b] inneko izbiro delilnih točk {ξk}. Našo telo bomo sedaj aproksimirali z unijorezin, ki jih dobimo tako, da lik, pripadajoč točki ξk odebelimo na cel interval[xk−1, xk]. Volumen tako dobljene aproksimacije je enak
n∑k=1
S(ξk)∆xk.
Če izberemo čedalje finejše delitve, bomo lahko naše telo poljubno dobroaproksimirali z unijo rezin, v limiti pa dobimo, da velja
V =∫ b
aS(x) dx.
Rotacijska telesa oziroma vrtenine so telesa, katerih volumne najlažjeračunamo s pomočjo enojnih integralov. Vrtenina je telo, katerega plaščdobimo z vrtenjem grafa zvezne funkcije f : [a, b] → R okoli abscisne osi.Prerez pri dani x koordinati je v tem primeru krog s ploščino S(x) = πf(x)2.Za volumen vrtenine pa dobimo formulo
V = π
∫ b
af(x)2 dx.
Zgled 10.6. (1) Za začetek izračunajmo volumen štiristrane piramide, kiima višino h, njena osnovna ploskev pa je pravokotnik s stranicama dolžinea in b. Postavimo koordinatni sistem, tako da bo osnovna ploskev piramideležala v xy-ravnini, vrh piramide pa na z-osi.
241

x
y
zh
0a
b
SHzLaHzL
bHzL
Če piramido presekamo z ravninami, ki so vzporedne xy-ravnini, dobimospet pravokotnike. Dolžina njihovih stranic linearno pada od a oziroma bdo 0. Na višini z sta ustrezni stranici dolgi
a(z) = a
(1− z
h
),
b(z) = b
(1− z
h
),
pravokotnik na višini z pa ima ploščino
S(z) = ab
(1− z
h
)2= ab(h− z)2
h2 .
Tako smo prišli do zvezne funkcije S : [0, h] → R. Za izračun volumnapiramide moramo izračunati določeni integral te funkcije. Tako dobimo
V =∫ h
0S(z) dz =
∫ h
0
ab(h− z)2
h2 dz = − ab
3h2 (h− z)3∣∣∣h0
= abh
3 .
(2) Krogla s polmerom R je primer vrtenine, ki jo dobimo z vrtenjemgrafa funkcije f : [−R,R] → R, dane s predpisom f(x) =
√R2 − x2, okoli
abscisne osi.
242

Od tod sledi, da je volumen krogle s polmerom R enak
V = π
∫ R
−Rf(x)2 dx = π
∫ R
−R(R2 − x2) dx = π
(R2x− x3
3
) ∣∣∣R−R
= 43πR
3.
Ta formula je seveda zelo znana, mi pa smo jo sedaj tudi izpeljali.(3) Za konec izračunajmo še volumen torusa z velikim polmerom b in s
polmerom cevi a.
x
y
b
a f HxL
gHxL
Torus dobimo z vrtenjem kroga, ki ga od spodaj omejuje graf funkcijeg(x) = b−
√a2 − x2, od zgoraj pa graf funkcije f(x) = b+
√a2 − x2. Sledi
V = π
∫ a
−af(x)2 dx− π
∫ a
−ag(x)2 dx,
= π
∫ a
−a
((b+
√a2 − x2
)2−(b−
√a2 − x2
)2)dx,
= 4πb∫ a
−a
√a2 − x2 dx,
= 4πab∫ π
2
−π2
√a2 − a2 sin2 t cos t dt; x = a sin t,
= 4πa2b
∫ π2
−π2cos2 t dt,
= 4πa2b
∫ π2
−π2
1 + cos 2t2 dt,
= 2πa2b
(t+ sin 2t
2
) ∣∣∣π2−π2,
= 2π2a2b.
243

10.4 Površina rotacijskega telesa
Spet vzemimo krivuljo y = f(x), kjer je f zvezna pozitivna funkcija, in jorotirajmo okoli osi x na intervalu [a, b].
x
yz
a bxk-1 xk
Vzemimo delitev D = {xk}k=nk=0 intervala [a, b] in naj bo yk = f(xk). Krivuljo
y = f(x) bomo, podobno kot pri izračunu dolžine loka, aproksimirali spoligonalno črto. Pri rotaciji te poligonalne črte okoli abscisne osi bomodobili telo, katerega plašč je sestavljen iz n plaščev prisekanih stožcev.
Najprej bomo izračunali površino enega takšnega prisekanega stožca, takoda ga bomo prerezali in razgrnili v ravnino.
u sΦ
a
b
Označimo k0 = φ2π . Pri oznakah s slike je potem
a = 2πyk−1 = 2πuk0,
b = 2πyk = 2π(u+ s)k0.
244

Od tod sledi yk−1 = uk0, yk = (u+ s)k0 in
yk − yk−1 = (u+ s)k0 − uk0 = sk0.
Površina plašča prisekanega stožca je tako enaka
S = (π(u+ s)2 − πu2)k0,
= π
(y2k
k20−y2k−1k2
0
)k0,
= π(y2k − y2
k−1
) 1k0,
= π (yk + yk−1) yk − yk−1k0
,
= π(yk + yk−1)s.
Stranica k-tega prisekanega stožca je s =√
(xk − xk−1)2 + (yk − yk−1)2. Čespet uporabimo Lagrangeev izrek, lahko najdemo točke ξk ∈ [xk−1, xk], zakatere je yk − yk−1 = f ′(ξk)∆xk. Skupna površina aproksimacije je takoenaka
P (D) =n∑k=1
π(f(xk) + f(xk−1))√
1 + f ′(ξk)2∆xk.
Ker je funkcija f zvezna, bodo v limiti, ko gre ∆xk → 0, točke xk, xk−1in ξk čedalje bolj skupaj, zato se bo limita izrazov P (D) ujemala z limitoRiemannovih vsot funkcije 2πf(x)
√1 + f ′(x)2. Zato lahko definiramo
P = 2π∫ b
af(x)
√1 + f ′(x)2 dx.
Recimo sedaj, da je krivulja podana v parametrični obliki ~r(t) = (x(t), y(t))za t ∈ [α, β]. Privzemimo še, da je y(t) ≥ 0 na [α, β]. Površina vrtenine, kijo dobimo pri vrtenju krivulje okoli abscisne osi, je v tem primeru enaka
P = 2π∫ β
αy(t)
√x(t)2 + y(t)2 dt.
Če za parameter vzamemo polarni kot, krivuljo pa imamo podano v polarnihkoordinatah r = r(φ) za 0 ≤ α ≤ φ ≤ β ≤ π, je x(φ) = r(φ) cosφ iny(φ) = r(φ) sinφ. V tem primeru je x(φ)2 + y(φ)2 = r(φ)2 + r′(φ)2 in
P = 2π∫ β
αr(φ) sinφ
√r(φ)2 + r′(φ)2 dφ.
245

Zgled 10.7. (1) Kroglo s polmerom R lahko dobimo z vrtenjem grafa funk-cije f(x) =
√R2 − x2 okoli abscisne osi na intervalu [−R,R]. Odvod funkcije
je enak f ′(x) = −x√R2−x2 , od koder dobimo, da je površina krogle s polmerom
R enaka
P = 2π∫ R
−R
√R2 − x2
√1 + x2
R2 − x2 dx = 2π∫ R
−RRdx = 2πRx
∣∣∣R−R
= 4πR2.
(2) Izračunajmo sedaj površino plašča vrtenine, ki jo dobimo, če okoliabscisne osi zavrtimo del kardioide r(φ) = a(1 + cosφ), ki ustreza kotomφ ∈ [0, π].
-a
-a
a
a 2a x
y
Pri računanju obsega kardioide smo že izračunali, da velja
√r(φ)2 + r′(φ)2 =
√4a2 cos2 φ
2 .
Ker je φ ∈ [0, π], je√
4a2 cos2 φ2 = 2a cos φ2 . Površina vrtenine je tako enaka
P = 2π∫ π
0a(1 + cosφ) sinφ · 2a cos φ2 dφ,
= 4πa2∫ π
02 cos2 φ
2 · 2 sin φ2 cos φ2 · cos φ2 dφ,
= 16πa2∫ π
0cos4 φ
2 sin φ2 dφ.
Vzemimo sedaj novo spremenljivko u = cos φ2 . Sledi du = −12 sin φ
2 dφ in
P = 16πa2∫ π
0cos4 φ
2 sin φ2 dφ = −32πa2∫ 0
1u4 du = −32πa2u
5
5
∣∣∣01
= 32πa2
5 .
246

(3) Poglejmo si še torus z velikim polmerom b in s polmerom cevi a.Dobimo ga z vrtenjem krožnice ~r(t) = (a cos t, b + a sin t), za t ∈ [0, 2π],okoli abscisne osi.
x
y
b
arÓHtL
V tem primeru je x2 + y2 = (−a sin t)2 + (a cos t)2 = a2. Sledi
P = 2π∫ 2π
0(b+ a sin t)a dt = 2πa (bt− a cos t)
∣∣∣2π0
= 4π2ab.
10.5 Krivulje v R3
Podobno kot krivulje v ravnini lahko študiramo tudi krivulje v prostoru.Denimo, da je
r(t) = (x(t), y(t), z(t))neka pot v R3. Mislimo si lahko, da nam ta pot določa premikanje neketočke po prostoru. Hitrost te točke je enaka v(t) = r(t). Da bo trajektorijatočke predstavljala neko krivuljo, bomo privzeli, da je |v(t)| > 0, kar pomeni,da se točka nikoli ne ustavi. Ločna dolžina, ki jo opiše točka med začetnimčasom t0 in časom t, je enaka
s(t) =∫ t
t0|r(u)| du.
Ker je s = |r| > 0, je funkcija s strogo naraščajoča in obrnljiva, zato lahkonašo krivuljo reparametriziramo
r(s) = r(t(s))
s parametrom s. Parametru s rečemo naravni parameter, po fizikalno panam predstavlja gibanje točke po krivulji s konstantno enotsko hitrostjo. Čeodvajamo položaj točke po naravnem parametru, dobimo
T = dr
ds= dt
dsr = 1
sr = r
|r|,
247

kar pomeni, da je |T | = 1. Vektor
T = dr
ds
je enotski tangentni vektor na krivuljo. Če je vektor T konstanten, je našakrivulja premica. V splošnem pa nam odvod vektorja T pove, v katerosmer in koliko se naša krivulja ukrivlja. Ukrivljenost krivulje definiramo spredpisom
κ =∣∣∣∣dTds
∣∣∣∣ .Če je κ 6= 0, lahko definiramo normalni vektor na krivuljo
N =dTds∣∣∣dTds ∣∣∣ = T ′
κ.
Po definiciji je torej |N | = 1 indT
ds= κN.
Z odvajanjem identitete T · T = 1 dobimo, da velja 2T ′ · T = 0 oziroma2κN ·T = 0, od koder sledi, da sta vektorja T in N pravokotna. Ker sta obaenotska vektorja, je enotski tudi vektor binormale, definiran s predpisom
B = T ×N.
Ortonormirano trojico vektorjev (T,N,B) imenujemo spremljajoči trirobkrivulje. Poglejmo si še nekaj zvez med temi tremi vektorji. Najprej je
B′ = dB
ds= T ′ ×N + T ×N ′ = κN ×N + T ×N ′ = T ×N ′.
Iz definicije vektorskega produkta od tod sledi, da je B′ · T = 0. Ker je Benotski vektor, je B ·B = 1, od koder pa z odvajanjem dobimo 2B′ ·B = 0.Vektor B′ je torej pravokoten na vektorja T in B, zato mora biti vzporedenvektorju N . Torzijo krivulje definiramo implicitno s predpisom
B′ = −τN
oziroma eksplicitno s τ = −B′·N . Za konec si poglejmo še odvod normalnegavektorja. Velja N = B × T , od tod pa sledi
N ′ = B′×T+B×T ′ = −τN×T+B×κN = −τ(−B)+κ(−T ) = −κT+τB.
Izpeljane rezultate lahko povzamemo s Frenet-Serretovimi formulamidT
ds= κN,
dN
ds= −κT + τB,
dB
ds= −τN,
248

oziroma v matrični obliki
d
ds
TNB
=
0 κ 0−κ 0 τ0 −τ 0
· TNB
.Ukrivljenost in torzija krivulje pa sta
κ =∣∣∣∣dTds
∣∣∣∣ ,τ = −dB
ds·N.
Zgled 10.8. Poglejmo si krožnico s polmerom R in s središčem v koor-dinatnem izhodišču. Običajno jo parametriziramo s polarnim kotom φ zaφ ∈ [0, 2π), lahko pa jo tudi z naravnim parametrom s = Rφ za s ∈ [0, 2πR).Potem je
x(s) = R cos(s
R
),
y(s) = R sin(s
R
).
Če upoštevamo, da je r(s) = (x(s), y(s)), dobimo z odvajanjem po naravnemparametru
r′(s) =(−R sin
(s
R
)· 1R,R cos
(s
R
)· 1R
)=(− sin
(s
R
), cos
(s
R
)).
Vidimo, da je |r′(s)| = 1, enotski tangentni vektor na krožnico pa je
T =(− sin
(s
R
), cos
(s
R
)).
Smer normale dobimo z odvajanjem vektorja T po naravnem parametru
T ′ =(− cos
(s
R
)· 1R,− sin
(s
R
)· 1R
).
Od tod sklepamo dvoje. Velikost vektorja T ′ je enaka ukrivljenosti krožnice,njegova smer pa kaže v smeri normale na krožnico. Torej je
N =(− cos
(s
R
),− sin
(s
R
))in
κ = 1R.
Poglejmo si še skico.
249

T
N s
T
N
R
Vektor binormale je enak
B = T×N =(− sin
(s
R
), cos
(s
R
), 0)×(− cos
(s
R
),− sin
(s
R
), 0)
= (0, 0, 1)
in je, kot vidimo, konstanten. Od tod sledi, da je B′ = 0, kar pa pomeni, daje τ = 0. Nekaj podobnega velja v splošnem za ravninske krivulje. Vektorbinormale je konstanten in kaže v smeri normale na ravnino, v kateri ležikrivulja. Torzija ravninskih krivulj pa je ničelna.
Ukrivljenost krožnice s polmerom R je κ = 1R . Za splošno krivuljo pa
lahko v vsaki točki (x, y, z) na krivulji, kjer je κ 6= 0, definiramo pritisnjenokrožnico. To je krožnica s polmerom R in s središčem v točki (x, y, z)+R·N ,ki se najbolje prilega krivulji v dani točki v smislu, da ima enako tangentoin normalo kot krivulja v dani točki.
V splošnem je krivulja podana kot r = r(t), reparametrizacija z naravnimparametrom pa je pogosto nepraktična in težko izračunljiva. Tedaj lahko vsezgoraj omenjene količine izračunamo kar v dani parametrizaciji. Privzemimokot prej, da je r(t) 6= 0 ter
s(t) =∫ t
t0|r(u)| du.
Če si mislimo, da je s predpisom r = r(t) podano gibanje točke po prostoruin da spremenljivka t označuje čas, je v(t) = r(t) hitrost točke, s(t) = |v(t)|pa velikost hitrosti točke. Z uporabo verižnega pravila za odvajanje dobimo
r(t) = s(t)r′(s(t)) = s(t)T (s(t)).
Z besedami to pomeni, da hitrost točke kaže v smeri enotskega tangentnegavektorja, njena velikost pa je s(t). Če zgornjo enakost še enkrat odvajamo,dobimo
r(t) = s(t)T (s(t)) + s(t) ddtT (s(t)),
= s(t)T (s(t)) + (s(t))2κ(s(t))N(s(t)).
250

Pri računu smo uporabili, da velja ddtT (s(t)) = T ′(s(t)) · s(t) = κN · s(t). Iz
rezultata lahko razberemo, da leži pospešek točke, ki se giblje po krivulji,v ravnini, ki jo napenjata tangentni in normalni vektor. Komponenta vtangencialni smeri s nam pove, kako se spreminja velikost hitrosti, normalnakomponenta s2κ pa, kako se spreminja smer hitrosti. Le-ta je lahko prisotna,četudi se točka giblje enakomerno, kot na primer pri enakomernem kroženju.Iz teh enakosti bi sedaj radi izrazili ukrivljenost krivulje. Najprej je
r(t)× r(t) = sT × (sT + s2κN) = s3κ(T ×N) = s3κB.
Absolutni vrednosti vektorjev na obeh straneh morata biti torej enaki. Čeupoštevamo, da je |B| = 1, je torej
|r × r| = |s|3κ = |r|3κ,
od koder dobimo formulo za ukrivljenost
κ = |r × r||r|3
.
Če je krivulja ravninska, se stvari še malce poenostavijo. V tem primeru jenamreč z(t) = 0, od koder sledi
r × r = (x, y, 0)× (x, y, 0) = (0, 0, xy − xy)
in zatoκ = |xy − xy|
(x2 + y2)32.
V primeru ravninskih krivulj lahko definiramo tudi predznačeno ukrivljenosts predpisom
k = xy − xy(x2 + y2)
32.
Jasno je κ = |k|, predznak k pa nam pove, v katero smer se vrti tangenta nakrivuljo. Če je k > 0, se tangenta vrti v pozitivno smer, sicer pa v negativno.
Izpeljimo sedaj še podobno formulo za torzijo krivulje. Z odvajanjempospeška dobimo
...r = d
dt
(sT + s2κN
)= ...s T + s
dT
dt+ d
dt
(s2κ
)N + s2κ
dN
dt.
Izračunali smo že, da je dTdt = sκN , podobno pa lahko izpeljemo, da je tudi
dNdt = sN ′ = s(−κT + τB). Ko to vstavimo v zgornjo enakost, dobimo
...r = ...
s T + ssκN + d
dt
(s2κ
)N + s3κ(−κT + τB).
251

Vektor na desni strani imamo izražen glede na ortonormirano bazo (T,N,B).Če celo enakost skalarno pomnožimo z vektorjem B, dobimo komponento vsmeri vektorja B, ki je enaka
...r ·B = s3κτ.
Ker je r × r = s3κB in |r × r| = |s3κ|, pa po drugi strani dobimo
(r × r) · ...r = (s3κB) · ...r = s3κ(...r ·B) = (s3κ)2τ = |r × r|2τ.
Od tod dobimo formulo za izračun torzije prostorske krivulje
τ = (r × r) · ...r|r × r|2
.
Zgled 10.9. Kot primer prostorske krivulje bomo vzeli vijačnico s parame-trizacijo
r(t) = (R cos t, R sin t, Rkt),
kjer sta R in k pozitivni konstanti. Tloris vijačnice je krožnica s polmeromR, parameter k pa nam pove, kako strmo se vijačnica dviga.
TN
B
T
N
B
sHtL
TN
B
T
N
B
sHtL
Z odvajanjem dobimo
r(t) = (−R sin t, R cos t, Rk),
od koder sledi
|r(t)|2 = (−R sin t)2 + (R cos t)2 + (Rk)2 = R2(1 + k2).
Sedaj lahko z integriranjem izračunamo naravni parameter
s(t) =∫ t
0|r(u)| du =
∫ t
0R√
1 + k2 du = R√
1 + k2t.
252

Podobno kot pri krožnici je tudi tu zveza med naravnim parametrom in papolarnim kotom linearna:
s = R√
1 + k2 t,
t = s
R√
1 + k2.
Naravna parametrizacija vijačnice je torej
x(s) = R cos(
s
R√
1 + k2
),
y(s) = R sin(
s
R√
1 + k2
),
z(s) = k√1 + k2
s.
Enotski tangentni vektor je
T =(− sin
(s
R√
1 + k2
)· 1√
1 + k2, cos
(s
R√
1 + k2
)· 1√
1 + k2,
k√1 + k2
),
= 1√1 + k2
(− sin
(s
R√
1 + k2
), cos
(s
R√
1 + k2
), k
),
njegov odvod pa
T ′ = 1√1 + k2
(− cos
(s
R√
1 + k2
)· 1R√
1 + k2,− sin
(s
R√
1 + k2
)· 1R√
1 + k2, 0),
= 1R(1 + k2)
(− cos
(s
R√
1 + k2
),− sin
(s
R√
1 + k2
), 0).
Od tod dobimo, da je ukrivljenost vijačnice enaka
κ = |T ′| = 1R(1 + k2) ,
enotski normalni vektor pa
N =(− cos
(s
R√
1 + k2
),− sin
(s
R√
1 + k2
), 0).
Opazimo, da je normalni vektor vodoraven in da kaže proti navpični osi.Za izračun torzije moramo najprej izračunati binormalo
B = T ×N = 1√1 + k2
(k sin
(s
R√
1 + k2
),−k cos
(s
R√
1 + k2
), 1).
Od tod dobimo
B′ = k
R(1 + k2)
(cos
(s
R√
1 + k2
), sin
(s
R√
1 + k2
), 0)
253

inτ = −B′ ·N = k
R(1 + k2) .
Vidimo, da sta tako ukrivljenost kot torzija vijačnice konstantna. Velja patudi obrat tega rezultata. Vsaka prostorska krivulja, ki ima konstantnoukrivljenost in torzijo, ima obliko vijačnice.
254

11 Taylorjeva vrsta in potenčne vrsteVečino funkcij, ki se uporabljajo v praktičnih problemih, smo že spoznali,nismo pa nič govorili o tem, kako računamo njihove vrednosti. Brez kalkula-torja namreč najbrž ne bi znali računati vrednosti eksponentne, logaritemskeali pa trigonometričnih funkcij. V tem poglavju bomo spoznali, kako lahkopribližno računamo vrednosti takšnih funkcij in na kakšen način lahko oce-nimo napako pri takšni aproksimaciji.
11.1 Taylorjeva formula
Naj bo f : D → R zvezno odvedljiva funkcija, definirana na odprti podmno-žici D ⊂ R, in naj bo a ∈ D. Iz poglavja o odvodu že vemo, da je blizutočke a tangenta na graf funkcije približek funkcije.
x
y
a+ha
To pomeni, da imamo za majhne vrednosti h linearno aproksimacijo
f(a+ h) ≈ f(a) + f ′(a) · h.
Zgled 11.1. Vzemimo funkcijo f(x) = 3√x. Zanimajo nas vrednosti te
funkcije v okolici točke a = 1000. Odvod funkcije f je enak f ′(x) = 13x− 2
3 ,vrednost v točki a pa je f(1000) = 3√1000 = 10. Če aproksimiramo funkcijov okolici točke a s tangento, dobimo
f(1000 + h) ≈ f(1000) + f ′(1000) · h = 10 + 131000−
23 · h = 10 + 1
300h.
Tako s pomočjo linearne aproksimacije dobimo približek
3√1003 ≈ 10 + 3300 = 10, 01.
Prava vrednost, zaokrožena na pet mest decimalk, je 10, 00999.
Zgornji zgled nam kaže, da je lahko linearna aproksimacija dokaj dobra.Problem pa je, da zaenkrat ne vemo vnaprej, ali je natančnost dovolj dobraza naše potrebe, in kaj storiti, če temu ni tako. Da bi rešili ta dva problema,
255

bomo najprej na aproksimacijo s tangento pogledali še z drugega zornegakota. Če pišemo x = a+ h, je
f(x) ≈ f(a) + f ′(a) · (x− a)
aproksimacija funkcije f v okolici točke a s polinomom prve stopnje. Ključnalastnost tega polinoma je, da ima v točki a isto vrednost in isti odvod kotfunkcija f . Odtod dobimo idejo za aproksimacijo funkcije s polinomi višjihstopenj. Za aproksimacijo reda n bomo izbrali polinom stopnje največ n,katerega prvih n odvodov v dani točki se ujema z odvodi funkcije. V mnogihprimerih dobimo z višanjem reda čedalje boljšo aproksimacijo funkcije.
Trditev 11.2. Naj bo P polinom stopnje največ n in naj bo a ∈ R. Tedajvelja
P (x) = P (a) + P ′(a)(x− a) + P ′′(a)2 (x− a)2 + · · ·+ P (n)(a)
n! (x− a)n
za vsak x ∈ R.
Dokaz. Naj bo
P (x) = anxn + an−1x
n−1 + · · ·+ a1x+ a0.
Ker nas zanima obnašanje polinoma P v okolici točke a, bomo označilix = a + h in si mislili, da je h neodvisna spremenljivka. Če polinom Prazvijemo po potencah spremenljivke h, dobimo izraz
P (a+ h) = an(a+ h)n + an−1(a+ h)n−1 + · · ·+ a1(a+ h) + a0
= bnhn + bn−1h
n−1 + · · ·+ b1h+ b0.
Koeficienti b0, b1, . . . , bn so odvisni od koeficientov polinoma P in pa odtočke a. Z uporabo binomske formule bi jih lahko eksplicitno izračunali, zaobčutek pa si poglejmo na primer samo prva dva:
b0 = a0 + a1a+ a2a2 + · · ·+ ana
n
b1 = a1 + 2a2a+ 3a3a2 + · · ·+ nana
n−1
Krajše lahko ti dve enakosti zapišemo v obliki b0 = P (a) in b1 = P ′(a). Vnadaljevanju bomo pokazali, da lahko pravzaprav vse koeficiente bk izrazimoz vrednostmi odvodov polinoma P v točki a. Ker je P (a + h) = P (x) indxdh = 1, iz verižnega pravila za odvod sledi enakost
dP (a+ h)dh
= dP (x)dx
dx
dh= P ′(x).
256

Od tod dobimo
(P (a+ h))′ = nbnhn−1 + (n− 1)bn−1h
n−2 + · · ·+ b1 + 0,(P (a+ h))′′ = n(n− 1)bnhn−2 + (n− 1)(n− 2)bn−1h
n−3 + · · ·+ 0 + 0,...
(P (a+ h))(n) = n(n− 1)(n− 2) · · · (n− (n− 1))bn + 0 + · · ·+ 0 + 0.
Če izračunamo te odvode v točki h = 0 oziroma x = a, dobimo P (k)(a) =k!bk in torej
bk = P (k)(a)k! .
Odtod sledi
P (x) = bnhn + bn−1h
n−1 + · · ·+ b0
= P (n)(a)n! (x− a)n + P (n−1)(a)
(n− 1)! (x− a)n−1 + · · ·+ P (a).
Zgornja trditev nam pove, da je polinom P stopnje n enolično določens števili P (a), P ′(a), P ′′(a), . . . , P (n)(a) za nek a ∈ R. Za poljubno gladkofunkcijo to ni nujno res. Vrednosti odvodov v neki točki funkcije namreč vsplošnem ne določajo natanko. Obstaja pa poseben razred tako imenovanihanalitičnih funkcij, ki so v okolici dane točke enolično določene z vrednostmivseh odvodov v tej točki.
V bolj splošni situaciji lahko poskusimo najti polinom, katerega odvodido vključno reda n se v dani točki ujemajo z odvodi dane funkcije. Taenolično določen polinom interpretiramo kot polinomsko aproksimacijo redan dane funkcije v okolici dane točke. Kot direktno posledico prejšne trditvedobimo:
Trditev 11.3. Naj bo D ⊂ R odprta podmnožica, naj bo f : D → R n-kratodvedljiva funkcija in naj bo a ∈ D. Tedaj obstaja natanko en polinom Pstopnje največ n, za katerega velja
P (a) = f(a),P ′(a) = f ′(a),P ′′(a) = f ′′(a),
...P (n)(a) = f (n)(a).
Polinomu iz zgornje trditve pravimo Taylorjev polinom reda n funkcije
257

f , razvit okoli točke a, in ga označimo
Tnf(x; a) =n∑k=0
f (k)(a)k! (x− a)k
= f(a) + f ′(a)(x− a) + · · ·+ f (n)(a)n! (x− a)n.
Funkcija f in polinom Tnf(x; a) se v okolici točke a obnašata zelo podobno:če je f kar polinom stopnje največ n, se popolnoma ujemata, v splošnempa se razlikujeta za neko razliko Rn(x). V mnogih primerih lahko ocenimovelikost razlike Rn(x), kar nam omogoča, da v okviru željene natančnostifunkcijo f aproksimiramo s polinomom.Zgled 11.4. (1) Vzemimo polinom f(x) = x3− 2x2− 4x+ 8. V tej obliki jerazvit po potencah x, torej okoli točke a = 0. Radi bi ga razvili po potencahx − 2 oziroma okoli točke a = 2. Ker je f polinom stopnje 3, moramoizračunati njegove prve tri odvode:
f ′(x) = 3x2 − 4x− 4f ′′(x) = 6x− 4f ′′′(x) = 6
Od tod dobimo f(2) = 0, f ′(2) = 0, f ′′(2) = 8 in f ′′′(2) = 6, kar nam da
f(x) = 0 + 0(x− 2) + 82(x− 2)2 + 6
3!(x− 2)3 = 4(x− 2)2 + (x− 2)3.
Izračunajmo še prvih nekaj Taylorjevih polinomov funkcije f :T0f(x; 2) = 0T1f(x; 2) = 0T2f(x; 2) = 4(x− 2)2
T3f(x; 2) = 4(x− 2)2 + (x− 2)3
T4f(x; 2) = 4(x− 2)2 + (x− 2)3
Ker je f polinom stopnje 3, pa za vse n ≥ 3 velja f(x) = Tnf(x; 2).(2) Razvijmo funkcijo f(x) = ex okoli točke a = 0. Ker velja f (k)(x) =
ex, je f (k)(0) = 1 za vsak k ≥ 0. Od tod dobimo
Tnf(x; 0) =n∑k=0
xk
k! = 1 + x+ x2
2 + x3
3! + · · ·+ xn
n! .
(3) Za razvoj funkcije f(x) = sin x okoli točke a = 0 najprej izračunajmoprve štiri odvode:
f ′(x) = cosxf ′′(x) = − sin xf ′′′(x) = − cosxf ′′′′(x) = sin x
258

Vidimo, da je f ′′′′ = f , od koder lahko sklepamo, da se odvodi funkcijef ponavljajo periodično s periodo 4. Vrednosti odvodov so f (4k)(0) = 0,f (4k+1)(0) = 1, f (4k+2)(0) = 0 in f (4k+3)(0) = −1. Od tod za vsak m ≥ 0dobimo razvoj
T2m+1f(x; 0) = 0 + 11x+ 0
2x2 − 1
3!x3 + 0
4!x4 + · · ·+ (−1)mx2m+1
(2m+ 1)!
= x− x3
3! + x5
5! −x7
7! + · · ·+ (−1)mx2m+1
(2m+ 1)! .
V razvoju nastopajo le členi pri lihih potencah, kar je posledica lihosti si-nusne funkcije, in posebej velja T2m+2f(x; 0) = T2m+1f(x; 0). Kompaktnolahko Taylorjeve polinome sinusne funkcije zapišemo v obliki
T2m+1f(x; 0) =m∑k=0
(−1)kx2k+1
(2k + 1)! .
(4) Podobno lahko izračunamo tudi razvoj funkcije f(x) = cosx okolitočke a = 0. Ker je cosx = (sin x)′, moramo samo prestaviti za ena odvodesinusne funkcije, da dobimo odvode kosinusne funkcije. Ker je funkcija fsoda, njeni Taylorjevi razvoji vsebujejo samo sode potence, zapišemo pa jihlahko s formulo
T2mf(x; 0) =m∑k=0
(−1)kx2k
(2k)! = 1− x2
2 + x4
4! −x6
6! + · · ·+ (−1)mx2m
(2m)! .
Naj bo sedaj f : D → R poljubna (n + 1)-krat odvedljiva funkcija,definirana na odprti podmnožici D ⊂ R, in izberimo točko a ∈ D. Za vsakx ∈ D \ {a} imamo Taylorjevo aproksimacijo
f(x) ≈ f(a) + f ′(a)(x− a) + · · ·+ f (n)(a)n! (x− a)n.
Pričakujemo, da bo z višanjem reda napaka aproksimacije čedalje manjša,zanima pa nas, kako velik n mora biti n, da bo napaka v okviru naše tole-rance. V ta namen bomo najprej izpeljali oceno za napako aproksimacije.Pišimo
f(x) = f(a) + f ′(a)(x− a) + · · ·+ f (n)(a)n! (x− a)n +Rn(x).
Ta formula je sedaj natančna, problem pa je v tem, da ne poznamo natančnevrednosti ostanka Rn(x). Da bi ga lahko vsaj ocenili, bomo najprej definiralipomožno funkcijo F s predpisom:
F (t) = f(x)− f(t)− f ′(t)(x− t)− · · · − f (n)(t)(x− t)n
n! −Rn(x)(x− tx− a
)p259

Pri tem je p poljubno naravno število, ki nam bo pri različnih izbirah dalorazlične oblike ostanka. Predpostavimo, da je izbrana točka x tako blizutočke a, da cel interval med a in x leži znotraj množice D. Funkcija Fspremenljivke t je torej definirana v vseh točkah med a in x.
Najprej opazimo, da je funkcija F zvezna na zaprtem intervalu med a inx in hkrati odvedljiva v notranjosti tega intervala. V robnih točkah intervalavelja
F (a) = f(x)− f(a)− · · · − f (n)(a)(x− a)n
n! −Rn(x)(x− ax− a
)p= 0,
F (x) = f(x)− f(x)− · · · − f (n)(x)(x− x)n
n! −Rn(x)(x− xx− a
)p= 0.
Torej je F (a) = F (x) = 0, od tod pa po Rolleovem izreku sledi, da obstajatočka ξ na odprtem intervalu med a in x, v kateri je F ′(ξ) = 0. Če odvajamočlen f (k)(t)(x−t)k
k! po parametru t, dobimo(f (k)(t)(x− t)k
k!
)′= f (k+1)(t)(x− t)k
k! − kf (k)(t)(x− t)k−1
k! .
Od tod sledi
F ′(t) =(f(x)−
n∑k=0
f (k)(t)(x− t)k
k! −Rn(x)(x− tx− a
)p)′
= 0−n∑k=0
f (k+1)(t)(x− t)k
k! +n∑k=1
f (k)(t)(x− t)k−1
(k − 1)!
+ pRn(x)x− a
(x− tx− a
)p−1
=−n∑k=0
f (k+1)(t)(x− t)k
k! +n−1∑l=0
f (l+1)(t)(x− t)l
l!
+ pRn(x)x− a
(x− tx− a
)p−1
=− f (n+1)(t)(x− t)n
n! + pRn(x)x− a
(x− tx− a
)p−1.
Če upoštevamo, da je F ′(ξ) = 0, dobimo
f (n+1)(ξ)(x− ξ)n
n! = pRn(x)x− a
(x− ξx− a
)p−1,
od tod pa lahko izrazimo ostanek v obliki
Rn(x) = (x− ξ)n−p+1f (n+1)(ξ)p · n! (x− a)p.
260

Pri tem je torej ξ neka točka med a in x. Različne izbire števila p namdajo različne oblike ostankov, vidimo pa, da je ostanek odvisen od (n+ 1)-vega odvoda funkcije f . Če znamo oceniti velikost funkcije f (n+1), lahkonavzgor ocenimo velikost ostanka. Preden spoznamo nekaj konkretnih oblikostankov, bomo daljico med a in x parametrizirali na standardni način.Število ξ lahko na enoličen način zapišemo v obliki
ξ = a+ θ(x− a)
za nek θ ∈ (0, 1). Vrednost θ = 0 bi ustrezala točki a, vrednost θ = 1 patočki x. Parameter θ nam pove, kje na daljici med a in x se nahaja točka ξ.Od tod dobimo, da je
x− ξ = x− a− θ(x− a) = (x− a)(1− θ),
zato lahko zapišemo formulo za ostanek tudi v obliki
Rn(x) = (1− θ)n−p+1f (n+1)(a+ θ(x− a))p · n! (x− a)n+1.
Pri izbiri p = n+ 1 dobimo tako imenovano Lagrangeovo obliko ostanka,po kateri je
Rn(x) = f (n+1)(a+ θ(x− a))(n+ 1)! (x− a)n+1.
za nek θ ∈ (0, 1).Če izberemo p = 1, dobimo Cauchyjevo obliko ostanka, po kateri je
Rn(x) = (1− θ)nf (n+1)(a+ θ(x− a))n! (x− a)n+1
za nek θ ∈ (0, 1).Opozoriti velja, da so pri različnih izbirah števila p ustrezna števila θ
lahko med sabo različna. Prav tako je θ seveda odvisen od izbire točke x. Zzgornjo izpeljavo smo torej pokazali:
Izrek 11.5 (Taylorjeva formula z ostankom v Lagrangeovi obliki). Naj boD ⊂ R odprt interval, naj bo f : D → R poljubna (n + 1)-krat odvedljivafunkcija in naj bo a ∈ D. Potem za vsak x ∈ D \ {a} obstaja tak θ ∈ (0, 1),da velja
f(x) =n∑k=0
f (k)(a)k! (x− a)k + f (n+1)(a+ θ(x− a))
(n+ 1)! (x− a)n+1.
Izrek 11.6 (Taylorjeva formula z ostankom v Cauchyjevi obliki). Naj boD ⊂ R odprt interval, naj bo f : D → R poljubna (n + 1)-krat odvedljivafunkcija in naj bo a ∈ D. Potem za vsak x ∈ D \ {a} obstaja tak θ ∈ (0, 1),da velja
f(x) =n∑k=0
f (k)(a)k! (x− a)k + (1− θ)nf (n+1)(a+ θ(x− a))
n! (x− a)n+1.
261

11.2 Taylorjeva vrsta
Naj bo f : D → R gladka funkcija, definirana na odprti podmnožici D ⊂ R,in naj bo a ∈ D. Taylorjeva formula z ostankom nam pomaga oceniti ostanekRn pri aproksimaciji funkcije s Taylorjevim polinomom reda n. Če funkcijaf ni polinom, ostanek Rn običajno ni enak nič, lahko pa se zgodi, da pridanem x vrednosti Rn(x) konvergirajo proti nič, ko gre n čez vse meje. Čeje limn→∞Rn(x) = 0, potem velja
f(x) =∞∑k=0
f (k)(a)k! (x− a)k.
Izraz na desni je vsota vrste
∑ f (k)(a)k! (x− a)k =
∑(f (k)(a)k! (x− a)k
)∞k=0
= f(a) + f ′(a)(x− a) + f ′′(a)2 (x− a)2 + · · · ,
ki ji pravimo Taylorjeva vrsta gladke funkcije f , razvita okoli točke a, izraču-nana v točki x. Ta vrsta oziroma zaporedje njenih členov se začne s členompri indeksu k = 0 in ne pri k = 1, kot je to bolj običajno pri številskihvrstah, a razlika je seveda zgolj formalna. V mnogih primerih Taylorjevavrsta funkcije konvergira k vrednosti te funkcije, ni pa to vedno res. Lahkose zgodi, da Taylorjeva vrsta sploh ne konvergira, ali pa da konvergira hkakšni drugi vrednosti.
Zgled 11.7. (1) (Eksponentna vrsta)Najprej si poglejmo eksponentno vrsto,ki jo dobimo kot Taylorjevo vrsto eksponentne funkcije f(x) = ex, razvitookoli točke a = 0. Izračunali smo že, da je
Tnf(x; 0) =n∑k=0
xk
k! = 1 + x+ x2
2! + x3
3! + · · ·+ xn
n! .
Od tod dobimo eksponentno vrsto
∑ xk
k! =∑(
xk
k!
)∞k=0
= 1 + x+ x2
2! + x3
3! + · · · .
Sedaj nas zanima, za katere x ∈ R eksponentna vrsta konvergira k eksponen-tno funkciji. Če upoštevamo, da je f (n+1)(x) = ex in a = 0, iz Lagrangeoveoblike ostanka sledi, da je
Rn(x) = xn+1
(n+ 1)!eθx
za nek θ ∈ (0, 1). Število eθx je neka konstanta, neodvisna od n. Če je|x| ≤ 1, hitro vidimo, da gre Rn(x) → 0 pri n → ∞. V primeru, ko je
262

|x| > 1, gre Rn(x) prav tako proti nič, ker narašča (n + 1)! hitreje kotpa |x|n+1 pri n → ∞. To lahko dokažemo induktivno na naslednji način.Izberimo tak N , da velja N > |x|. Za n ≥ N potem velja
|x|n+1
(n+ 1)! =( |x|nn!
)· |x|n+ 1 <
|x|n
n! .
Zaporedje |Rn(x)| je torej od N dalje padajoče. Hkrati pa je kvocient dvehzaporednih členov manjši od |x|N , kar pomeni, da lahko zaporedje navzgoromejimo s konvergentnim geometrijskim zaporedjem. Od tod sklepamo, daje limn→∞Rn(x) = 0 za vsak x ∈ R, zato imamo za vsak x ∈ R enakost
ex =∞∑k=0
xk
k! = 1 + x+ x2
2! + x3
3! + · · · .
Pri x = 1 dobimo vrsto za Eulerjevo število
e =∞∑k=0
1k! = 1 + 1 + 1
2! + 13! + · · · .
Z uporabo Taylorjeve formule lahko ocenimo, kako hitro ta vrsta konvergira.Imamo namreč oceno
Rn(1) = eθ
(n+ 1)! <3
(n+ 1)! .
Ostanek hitro pada proti nič. Pri n = 5 je Rn(1) = 1240 , pri n = 14 pa je
aproksimacija natančna že na 11 decimalk.(2) (Sinusna vrsta) Taylorjeva vrsta funkcije f(x) = sin x, razvita okoli
točke a = 0, je sinusna vrsta
∑ (−1)kx2k+1
(2k + 1)! =∑(
(−1)kx2k+1
(2k + 1)!
)∞k=0
= x− x3
3! + x5
5! −x7
7! + · · · .
Odvodi sinusne funkcije so do predznaka natančno sinusne ali pa kosinusnefunkcije, zato so po absolutni vrednosti omejeni z 1. Od tod dobimo ocenoza velikost ostanka
|Rn(x)| =∣∣∣∣∣f (n+1)(θx)
(n+ 1)! xn+1∣∣∣∣∣ ≤ |x|n+1
(n+ 1)! .
S podobnim sklepom kot pri eksponentni vrsti je
limn→∞
Rn(x) = limn→∞
|x|n+1
(n+ 1)! = 0,
263

kar pomeni, da za vsak x ∈ R sinusna vrsta konvergira k sinusni funkciji,torej
sin x =∞∑k=0
(−1)kx2k+1
(2k + 1)! = x− x3
3! + x5
5! −x7
7! + · · · .
(3) (Kosinusna vrsta) Podobno dobimo kosinusno vrsto kot Taylorjevovrsto kosinusne funkcije okoli točke a = 0, ki konvergira h kosinusni funkcijiv vsaki točki x ∈ R,
cosx =∞∑k=0
(−1)kx2k
(2k)! = 1− x2
2! + x4
4! −x6
6! + · · · .
(4) (Logaritemska vrsta) Kot naslednjo si bomo pogledali vrsto za logari-temsko vrsto. Ker logaritemska funkcija ni definirana v točki 0, bomo vzelifunkcijo f(x) = ln(x+ 1) in in to funkcijo razvili okoli točke a = 0.
x
y
lnH1+xL
-3 -2 -1 1 2
-3
-2
-1
1
2
Funkcija f ima pol pri x = −1, zato v tem primeru ne moremo pričakovati,da bo Taylorjeva vrsta konvergirala na celi realni osi. Najprej izračunajmoodvode funkcije f :
f ′(x) = 1x+ 1 = (x+ 1)−1
f ′′(x) = −(x+ 1)−2
f ′′′(x) = 2(x+ 1)−3
f ′′′′(x) = −3!(x+ 1)−4
Od tod lahko induktivno izpeljemo, da za vsak k ∈ N velja
f (k)(x) = (−1)k−1(k − 1)!(x+ 1)−k.
V točki a = 0 dobimo
f(0) = 0,f (k)(0) = (−1)k−1(k − 1)!, k ∈ N,
264

kar nam da Taylorjevo vrsto za logaritemsko funkcijo
∑ f (k)(0)k! xk =
∑((−1)k−1xk
k
)∞k=1
= x− x2
2 + x3
3 −x4
4 + · · · .
Iz Lagrangeove oblike ostanka dobimo, da je
Rn(x) = f (n+1)(θx)(n+ 1)! xn+1 = (−1)nn!(1 + θx)−n−1
(n+ 1)! xn+1
= (−1)n
n+ 1
(x
1 + θx
)n+1
za nek θ ∈ (0, 1). Če je 0 ≤ x ≤ 1, je 1 + θx ≥ 1, kar nam da oceno
|Rn(x)| =∣∣∣∣∣(−1)n
n+ 1
(x
1 + θx
)n+1∣∣∣∣∣ ≤ xn+1
n+ 1 .
Odtod sledi, da za 0 ≤ x ≤ 1 velja limn→∞
Rn(x) = 0.Če je −1 < x < 0, si z Lagrangeovo obliko ostanka ne moremo pomagati,
zato si v tem primeru poglejmo še Cauchyjevo obliko ostanka:
Rn(x) = (1− θ)nf (n+1)(θx)n! xn+1
= (1− θ)n(−1)nn!(1 + θx)−n−1
n! xn+1
= (−1)nx1 + θx
·((1− θ)x
1 + θx
)nSedaj bomo ocenili ulomek na desni strani zadnje vrstice. Ker je−1 < x < 0,je 1 + θx > 1− θ, zato velja∣∣∣∣(1− θ)x1 + θx
∣∣∣∣ < ∣∣∣∣(1− θ)x1− θ
∣∣∣∣ = |x|,
odtod pa sledi
|Rn(x)| =∣∣∣∣(−1)nx
1 + θx·((1− θ)x
1 + θx
)n∣∣∣∣ < |x|1− |x| · |x|
n.
Na desni strani imamo konvergentno geometrijsko zaporedje, kar pomeni,da je spet lim
n→∞Rn(x) = 0. Zaenkrat smo torej pokazali, da za −1 < x ≤ 1
velja
ln(x+ 1) =∞∑k=1
(−1)k−1xk
k= x− x2
2 + x3
3 −x4
4 + · · · .
Pri izbiri x = 1 lahko od tod izračunamo vsoto znane alternirajoče vrste
ln 2 = 1− 12 + 1
3 −14 + · · · .
265

Pri x = −1 dobimo divergentno harmonično vrsto, medtem ko logaritemskavrsta prav tako divergira pri |x| > 1, saj v tem primeru absolutne vrednostičlenov rastejo čez vse meje.
Zgoraj izračunana vrsta nam omogoča izračunati logaritme števil med 0in 2. Za izračun logaritmov večjih števil pa si lahko pomagamo z naslednjimtrikom. Za |x| < 1 velja
ln(1 + x) = x− x2
2 + x3
3 −x4
4 + · · · ,
ln(1− x) = −x− x2
2 −x3
3 −x4
4 − · · · .
Če ti dve vrsti odštejemo, dobimo:
ln(1 + x)− ln(1− x) = 2x+ 2x3
3 + 2x5
5 + 2x7
7 + · · ·
ln(1 + x
1− x
)= 2x
(1 + x2
3 + x4
5 + x6
7 + · · ·)
Ta vrsta nam omogoča, izračunamo logaritem poljubnega pozitivnega šte-vila, saj funkcija x 7→ 1+x
1−x zavzame pri |x| < 1 vsako vrednost na intervalu(0,∞) natanko enkrat.
x
y
1 + x
1 - x
-3 -2 -1 1 2
-3
-2
-1
1
2
(5) (Binomska vrsta) Podobno kot pri logaritemski bomo izračunali tudiTaylorjevo vrsto potenčne funkcije. Spet bomo zaradi definiranosti v okolicitočke a = 0 vzeli funkcijo f(x) = (1 + x)α, za nek α ∈ R. Odvodi funkcijef so tedaj:
f ′(x) = α(1 + x)α−1
f ′′(x) = α(α− 1)(1 + x)α−2
...f (k)(x) = α(α− 1) · · · (α− k + 1)(1 + x)α−k
Posebej je f (k)(0) = α(α−1) · · · (α−k+1). Definirajmo posplošeni binomskisimbol (
α
n
)= α(α− 1) · · · (α− k + 1)
n! .
266

Definiran je za poljuben α ∈ R in za vsak n = 0, 1, 2, . . .. Taylorjevo vrstopotenčne funkcije f , razvito okoli točke a = 0, lahko sedaj zapišemo v obliki∑(
α(α− 1) · · · (α− k + 1)n! xn
)∞n=0
=∑((
α
n
)xn)∞n=0
.
Tej vrsti pravimo binomska vrsta. Pri obravnavi njene konvergence bomoločili dva primera:
(i) Če je α = m ∈ N∪{0}, je funkcija f pravzaprav polinom. Posplošenibinomski simbol se v tem primeru ujema z običajnim binomskim simbolom,saj je (
m
n
)= m(m− 1) · · · (m− k + 1)
n! = m!n!(m− n)!
za vsak n = 0, 1, . . . ,m, medtem ko je(mn
)= 0 za n > m. Binomska vrsta
je v tem primeru torej končna, za vse x ∈ R konvergira k vrednosti f(x) injo zapišemo v dobro znani obliki
(1 + x)m =m∑n=0
(m
n
)xn.
(ii) Naj bo sedaj α ∈ R poljuben. Zanima nas ocena ostanka. Če je0 ≤ x < 1, si bomo pomagali z Lagrangeovo obliko ostanka
Rn(x) = f (n+1)(θx)(n+ 1)! xn+1 =
(α
n+ 1
)(1 + θx)α−(n+1)xn+1
= (1 + θx)α · α · (α− 1) · (α− 2) · · · (α− n)1 · 2 · 3 · · · (n+ 1)
(x
1 + θx
)n+1.
Ker je 0 ≤ x < 1 in 0 < θ < 1, je x1+θx ≤ x, zato lahko ocenimo
|Rn(x)| ≤ (1 + θx)α ·∣∣∣∣α1∣∣∣∣ · ∣∣∣∣α− 1
2
∣∣∣∣ · ∣∣∣∣α− 23
∣∣∣∣ · · · ∣∣∣∣α− nn+ 1
∣∣∣∣xn+1
= (1 + θx)α ·∣∣∣∣α1 x
∣∣∣∣ · ∣∣∣∣α− 12 x
∣∣∣∣ · ∣∣∣∣α− 23 x
∣∣∣∣ · · · ∣∣∣∣α− nn+ 1 x∣∣∣∣ .
Iz limitelimn→∞
∣∣∣∣α− nn+ 1 x∣∣∣∣ = lim
n→∞
∣∣∣∣∣ αn − 11 + 1
n
x
∣∣∣∣∣ = |x| < 1
sledi, da lahko od nekega člena dalje zaporedje (|Rn(x)|) majoriziramo skonvergentnim geometrijskim zaporedjem, zato velja lim
n→∞Rn(x) = 0.
V primeru, ko je −1 < x < 0, si bomo pomagali s Cauchyjevo oblikoostanka:
Rn(x) = (1− θ)nα(α− 1) · · · (α− n)n! (1 + θx)α−(n+1)xn+1
=(α · α− 1
1 · α− 22 · · · α− n
n
)((1− θ)x1 + θx
)nx(1 + θx)α−1
267

Ker je −1 < x < 0, imamo podobno kot pri logaritemski vrsti oceno∣∣∣∣(1− θ)x1 + θx
∣∣∣∣ < ∣∣∣∣(1− θ)x1− θ
∣∣∣∣ = |x|.
Sledi
|Rn(x)| = |αx|(1 + θx)α−1∣∣∣∣α− 1
1 x
∣∣∣∣ · ∣∣∣∣α− 22 x
∣∣∣∣ · · · ∣∣∣∣α− nn x
∣∣∣∣ .Ker je
limn→∞
∣∣∣∣α− nn x
∣∣∣∣ = |x| < 1,
je zaporedje (|Rn(x)|) spet majoriziramo s konvergentnim geometrijskimzaporedjem, zato je tudi v tem primeru lim
n→∞Rn(x) = 0.
Kot rezultat dobimo formulo
(1 + x)α =∞∑n=0
(α
n
)xn,
ki velja za vse |x| < 1.(6) Omenimo še Leibnizovo formulo za izračun višjih odvodov produkta
dveh funkcij. Naj bosta f in g gladki funkciji. Potem je
(f · g)′ = f ′g + fg′,
(f · g)′′ = f ′′g + f ′g′ + f ′g′ + fg′′ = f ′′g + 2f ′g′ + fg′′,
(f · g)′′′ = f ′′′g + 3f ′′g′ + 3f ′g′′ + fg′′′.
Z indukcijo lahko hitro pokažemo, da za poljuben m ∈ N velja
(f · g)(m) =m∑k=0
(m
k
)f (k)g(m−k).
Kot zgled uporabe si poglejmo še dokaz tretjega zadostnega pogoja zaekstrem funkcije ene spremenljivke.
Trditev 11.8 (Zadostni pogoj za ekstrem 3). Naj bo f : D → R funkcijaene spremenljivke, definirana na odprti podmnožici D ⊂ R. Naj bo n ∈ Ntakšno naravno število in naj bo c ∈ D takšna točka, da je n ≥ 2, da jefunkcija f vsaj n-krat zvezno odvedljiva in da je
f ′(c) = f ′′(c) = . . . = f (n−1)(c) = 0
terf (n)(c) 6= 0.
Potem velja:
268

(1) Če je n sodo število, potem ima funkcija f v točki c strogi lokalniekstrem, in sicer:
(i) Če je f (n)(c) < 0, ima f v točki c strogi lokalni maksimum;(ii) Če je f (n)(c) > 0, ima f v točki c strogi lokalni minimum.
(2) Če je n liho število, potem funkcija f v točki c nima ekstrema.
Dokaz. Izberimo interval (a, b) ⊂ D, ki vsebuje točko c in je tako majhen,da je f (n) na tem intervalu brez ničel in torej vseskozi istega predznaka.Takšen interval lahko najdemo zato, ker je f (n) zvezna funkcija in ker veljaf (n)(c) 6= 0. Za poljuben x ∈ (a, b) nam Taylorjeva formula z ostankom vLagrangeovi obliki za funkcijo f okoli točke c pove, da velja
f(x) = f(c) + f (n)(c+ θ(x− c))n! (x− c)n
za nek θ ∈ (0, 1). Po predpostavkah iz trditve so namreč vsi ostali vmesničleni enaki nič. Izraz f (n)(c + θ(x − c)) ima na (a, b) ves čas isti predznak,zato je obnašanje funkcije v okolici točke c odvisno od člena (x−c)n. Če je nsod, bo ta člen ves čas pozitiven, kar pomeni, da ima f v c lokalni ekstrem.Če je n lih, bo ta člen levo od c negativen, desno od c pa pozitiven, zatoekstrema v tem primeru f v točki c nima.
11.3 Potenčne vrste
V tem poglavju bomo nekoliko posplošili pojem Taylorjeve vrste. Potenčnavrsta je vrsta oblike∑
anzn =
∑(anzn)∞n=0 = a0 + a1z + a2z
2 + · · ·+ anzn + · · · ,
kjer so a0, a1, a2, . . . ∈ C konstante, z pa je kompleksna spremenljivka. Toje posplošitev pojma polinoma: lahko si mislimo, da je potenčna vrsta poli-nom neskončne stopnje. Takšna potenčna vrsta je realna, če so vse konstantea0, a1, a2, . . . realna števila; v tem primeru navadno predpostavimo, da tudispremenljivka z lahko zavzame le realne vrednosti in jo zato pogosteje ozna-čimo z x.
V tej osnovni obliki je potenčna vrsta razvita okoli točke a = 0. Boljsplošno pa lahko gledamo tudi potenčne vrste, ki so razvite okoli poljubnetočke a ∈ C in so oblike ∑
an(z − a)n.
Če za vrednost spremenljivke z v potenčno vrsto vstavimo neko poljubnokompleksno število, dobimo številsko vrsto. Če je tako dobljena številskavrsta konvergentna, pravimo, da potenčna vrsta konvergira v točki z k vsotite številske vrste, v nasprotnem primeru pa pravimo, da potenčna vrsta di-vergira v točki z. Območje konvergence potenčne vrste je množica točk z
269

v kompleksni ravnini, v katerih ta potenčna vrsta konvergira. Videli bomo,da je območje konvergence potenčne vrste praviloma nek krog v komple-ksni ravnini s središčem v točki a. Včasih bo območje konvergence celakompleksna ravnina, včasih pa bo vrsta konvergirala samo v točki a.
Ker je Taylorjeva vrsta primer potenčne vrste, poznamo torej že večkonkretnih primerov: eksponentna vrsta, sinusna vrsta, kosunusna vrsta,logaritemska vrsta in binomska vrsta so realne potenčne vrste razvite okolitočke a = 0.
Trditev 11.9. Če potenčna vrsta∑anz
n konvergira v neki točki z0 ∈ C,potem absolutno konvergira v vsaki točki z ∈ C, za katero je |z| < |z0|.
Dokaz. Predpostavimo lahko, da je z0 6= 0. Ker je številska vrsta∑anz
n0
konvergentna, njeni členi konvergirajo proti nič, zato je zaporedje (anzn0 )omejeno. Obstaja torej tak M > 0, da je |anzn0 | ≤ M za vsak n. Vzemimopoljuben z ∈ C, za katerega je |z| < |z0|. Nenegativno realno število
q =∣∣∣∣ zz0
∣∣∣∣je torej strogo manjše od 1. Ker velja
|anzn| =∣∣∣∣anzn0 ( zz0
)n∣∣∣∣ = |anzn0 | qn ≤Mqn,
ima vrsta∑anz
n0 konvergentno majoranto
∑Mqn, zato je absolutno kon-
vergentna.
Iz zgornje trditve lahko sklepamo naslednje: če vrsta∑anz
n konvergira vneki točki z0 ∈ C, potem absolutno konvergira v v vseh točkah iz notranjostikroga s polmerom |z0| in s središčem v koordinatnem izhodišču.
Re
Im
1
i
0
z0
Želeli bi dobiti največji možni krog, za katerega je to res. V ta namen sioglejmo množico
C = {|z| ; z ∈ C, vrsta∑
anzn konvergira v točki z} ⊂ R.
Ta množica je neprazna, saj je v njej število 0. Če je množica C navzgoromejena, definiramo
R = supC,
270

če pa množica C ni navzgor omejena, definiramo
R =∞.
Tako definiran R imenujemo konvergenčni polmer potenčne vrste∑anz
n.Če je R = 0, vrsta
∑anz
n konvergira le v točki 0, točko 0 pa lahkogledamo kot neke vrste izrojen krog s polmerom nič.
V primeru, ko je R =∞, konvergenčni polmer sicer ni realno število, sepa dogovorimo, da je element ∞ strogo večji od vsakega realnega števila.V tem primeru vrsta
∑anz
n absolutno konvergira v vseh točkah z iz kom-pleksne ravnine, celo kompleksno ravnino pa lahko gledamo kot neke vrsteizrojen krog z neskončnim polmerom.
Konvergenčni polmer torej lahko karakteriziramo na naslednji način:
Posledica 11.10. Konvergenčni polmer potenčne vrste∑anz
n je tisti ele-ment R ∈ [0,∞) ∪ {∞}, za katerega velja:
(i) v vsaki točki z ∈ C, za katero je |z| < R, vrsta∑anz
n absolutnokonvergira, in
(ii) v vsaki točki z ∈ C, za katero je |z| > R, vrsta∑anz
n divergira.
To pomeni, da vsaka potenčna vrsta konvergira v notranjosti kroga spolmerom R. V zunanjosti tega kroga vrsta divergira, na robu kroga palahko ali konvergira ali pa divergira.
V primeru realne potenčne vrste to pomeni, da vrsta konvergira na ne-kem simetričnem intervalu. Logaritemska vrsta ima na primer konvergenčnipolmer enak R = 1. Konvergira namreč na intervalu (−1, 1), kot smo že pre-mislili pa v točki x = 1 konvergira in v točki x = −1 divergira. Eksponentna,sinusna in kosinusna vrsta imajo konvergenčni polmer enak R = ∞. Opa-zimo tudi, da je konvergenčni polmer binomske vrste
∑(αn
)xn enak R = 1,
če α 6∈ N ∪ {0}, v nasprotnem primeru pa je R =∞.Rezultate, ki veljajo za potenčne vrste razvite okoli točke 0, lahko brez
težav posplošimo na potenčne vrste razvite okoli poljubne točke a ∈ C. Pritem moramo uporabiti le translacijo v kompleksni ravnini za kompleksnoštevilo a. Območje konvergence potenčne vrste
∑an(z − a)n, ki je razvita
okoli poljubne točke a ∈ C, je torej nek krog s središčem v točki a.
Re
Im
1
i
0
aR
271
Konvergenčni polmer potenčne vrste∑an(z − a)n je enak konvergenčnemu
polmeru potenčne vrste∑anz
n.Konvergenčni polmer potenčne vrste lahko izračunamo s pomočno testov
za konvergenco številskih vrst. V ta namen se dogovorimo še za naslednjooznako:
Definicija 11.11. Naj bo (rn) zaporedje realnih števil in naj bo E množicavseh stekališč zaporedja (rn). Potem definiramo
lim supn→∞
(rn) ∈ R ∪ {−∞,∞}
na naslednji način:
(i) če je zaporedje (rn) navzgor neomejeno, definiramo
lim supn→∞
(rn) =∞,
(ii) če je zaporedje (rn) navzgor omejeno in je E 6= ∅, potem definiramo
lim supn→∞
(rn) = supE,
(iii) če je zaporedje (rn) navzgor omejeno in je E = ∅, pa definiramo
lim supn→∞
(rn) = −∞.
Številu lim supn→∞(rn) pravimo limes superior danega zaporedja in galahko poenostavljeno interpretiramo kot največje stekališče zaporedja (rn).Limes superior konvergentnega realnega zaporedja je seveda kar enak limititega zaporedja. Ob tem omenimo, da lahko definiramo tudi limes inferiorpoljubnega realnega zaporedja (rn) s predpisom
lim infn→∞
(rn) = − lim supn→∞
(−rn),
ki poenostavljeno pomeni najmanjše stekališče zaporedja (rn). Pri tem sedogovorimo, da je seveda −(∞) = −∞ in −(−∞) = ∞. Če se poleg tegadogovorimo tudi, da velja x/∞ = 0 in x/0 = ∞ za vsako pozitivno realnoštevilo x, lahko konvergenčni polmer potenčne vrste izračunamo z naslednjoenostavno formulo:
Trditev 11.12. Konvergenčni polmer poljubne potenčne vrste∑anz
n jeenak
R = 1lim supn→∞ n
√|an|
.
272

Dokaz. Pri dokazu si bomo pomagali s korenskim testom za številske vrste.Označimo najprej
α = 1lim supn→∞ n
√|an|
.
Tedaj očitno velja
lim supn→∞
n
√|anzn| = lim sup
n→∞|z| n√|an| = |z| lim sup
n→∞n
√|an| =
|z|α.
Če je |z| < α, je torej največje stekališče zaporedja ( n√|anzn|) strogo
manjše od 1, zato obstaja takšno realno število q, da je
n
√|anzn| ≤ q < 1
za vse n od nekod dalje. S pomočjo korenskega testa torej vidimo, da vrsta∑anz
n absolutno konvergira.Če je |z| > α, je torej največje stekališce zaporedja ( n
√|anzn|) strogo
večje od 1 ali pa je zaporedje ( n√|anzn|) navzgor neomejeno. Obstajajo
torej poljubno velika števila n, za katera je n√|anzn| ≥ 1, odtod pa očitno
sledi, da vrsta∑anz
n divergira.
Če bi namesto korenskega testa uporabiti kvocientni test, bi enak načinizpeljali še naslednjo formulo:
Trditev 11.13. Naj bo∑anz
n potenčna vrsta, za katero je an 6= 0 za vsen = 0, 1, 2, . . .. Konvergenčni polmer takšne potenčne vrste je enak
R = 1lim supn→∞
∣∣∣an+1an
∣∣∣ .Podobno kot polinome lahko množimo tudi potenčne vrste. Denimo, da
sta∑anz
n in∑bnz
n potenčni vrsti. Produkt teh dveh vrst je potenčnavrsta ∑
cnzn,
katere koeficienti so dani s predpisi
cn = a0bn + a1bn−1 + · · ·+ anb0 =n∑k=0
akbn−k.
Splošneje, naj bosta∑
(un)∞n=0 in∑
(vn)∞n=0 dve kompleksni številskivrsti. Cauchyjev produkt teh dveh vrst je številska vrsta∑
(wn)∞n=0 =∑
(un)∞n=0 ·∑
(vn)∞n=0,
kjer je
wn =n∑k=0
ukvn−k.
273

Opazimo lahko, da je Cauchyjev produkt številskih vrst komutativen. Vpra-šamo se lahko, ali je Cauchyjev produkt konvergentnih vrst tudi konvergen-ten. V splošnem je odgovor negativen, velja pa naslednja trditev:
Trditev 11.14. Če sta številski vrsti∑
(un)∞n=0 in∑
(vn)∞n=0 konvergen-tni in če je vsaj ena izmed njiju tudi absolutno konvergentna, je tudi njunCauchyjev produkt konvergentna številska vrsta, za vsote teh vrst pa tedajvelja
∞∑n=0
(n∑k=0
ukvn−k
)=( ∞∑n=0
un
)( ∞∑n=0
vn
).
Dokaz. Denimo, da je vrsta∑
(un)∞n=0 absolutno konvergentna. OznačimoU =
∑∞n=0 un ter V =
∑∞n=0 vn in
wn =n∑k=0
ukvn−k,
Un = u0 + u1 + · · ·+ un,
Vn = v0 + v1 + · · ·+ vn,
Wn = w0 + w1 + · · ·+ wn
za vsak n. Prepričamo se lahko, da velja
Wn = u0Vn + u1Vn−1 + · · ·+ unV0
oziroma
Wn+m = u0Vn+m + · · ·+ umVn + um+1Vn−1 + · · ·+ um+nV0
za vse n in m. Naš cilj je pokazati, da zaporedje (Wn) konvergira proti UV .Izberimo poljuben ε > 0. Ker je vrsta
∑(vn)∞n=0 konvergentna, je njeno
zaporedje delnih vsot konvergentno in torej tudi omejeno, zato lahko iz-beremo tako veliko realno število B > 0, da za vsak k = 0, 1, 2, . . . velja|Vk| ≤ B. Poleg tega lahko izberemo tako veliko naravno število n, da zavsak p = 0, 1, 2, . . . velja |Vn+p − V | < ε. Če označimo ηp = Vn+p − V , je
u0Vn+m + · · ·+ umVn = (u0 + · · ·+ um)V + u0ηm + · · ·+ umη0.
Ker so vsi ηp po absolutni vrednosti manjši od ε, lahko ocenimo izraz
|u0ηm + · · ·+ umη0| < (|u0|+ |u1|+ · · ·+ |um|) ε ≤ Aε,
kjer je
A = |u0|+ |u1|+ |u2|+ · · · =∞∑k=0|uk| ≥ 0.
274

Vsota A obstaja, ker je po predpostavki vrsta u0 + u1 + u2 + · · · absolutnokonvergentna. Poleg tega lahko najdemo tudi tako veliko naravno številom0, da za vsak m ≥ m0 in za vsak l ∈ N velja
|um+1|+ · · ·+ |um+l| < ε.
Med drugim od tod po trikotniški neenakosti sledi, da je |Um − U | ≤ ε zavsak m ≥ m0. Zdaj lahko napravimo oceno
|Wn+m − UV | = |u0Vn+m + · · ·+ umVn
+ um+1Vn−1 + · · ·+ um+nV0 − UV |= |(u0 + · · ·+ um)V + u0ηm + · · ·+ umη0
+ um+1Vn−1 + · · ·+ um+nV0 − UV |= |(Um − U)V + u0ηm + · · ·+ umη0
+ um+1Vn−1 + · · ·+ um+nV0|≤ |(Um − U)V |+ |u0ηm + · · ·+ umη0|
+ |um+1Vn−1|+ · · ·+ |um+nV0|≤ |V |ε+Aε+B(|um+1|+ · · ·+ |um+n|)≤ (|V |+A+B)ε.
Za dovolj velik m se torej delna vsota Wn+m in število UV razlikujeta po-ljubno malo.
Če zadnjo trditev uporabimo za primer potenčnih vrst, dobimo:
Posledica 11.15. Če sta potenčni vrsti∑anz
n in∑bnz
n obe konvergentniv točki z ∈ C in če je vsaj ena izmed njiju v točki z tudi absolutno konver-gentna, je tudi produkt teh dveh potenčnih vrst konvergenten v tej točki, zavsote teh vrst pa velja( ∞∑
n=0anz
n
)( ∞∑n=0
bnzn
)=∞∑n=0
(n∑k=0
akbn−k
)zn.
Posebej to pomeni, da konvergenčni polmer produkta dveh potenčnihvrst ne more biti manjši od obeh konvergenčnih polmerov teh dveh vrst.
Eksponentna funkcija v C
Teorija potenčnih vrst nam omogoča, da nekatere znane funkcije realne spre-menljivke razširimo na kompleksna števila. Kompleksno eksponentno funk-cijo
exp : C→ Cdefiniramo s predpisom:
exp(z) = ez =∞∑n=0
zn
n!
275

Vemo namreč, da ima eksponentna vrsta neskončen konvergenčni polmer inje torej v vsaki točki absolutno konvergentna. Podobno lahko definiramotudi sinus in kosinus kompleksne spremenljivke:
sin z =∞∑k=0
(−1)kz2k+1
(2k + 1)!
cos z =∞∑k=0
(−1)kz2k
(2k)!
Tudi ti dve potenčni vrsti konvergirata na celi kompleksni ravnini.Oglejmo si nekaj enostavnih lastnosti teh treh funkcij in zvezo med njimi.
Za poljuben y ∈ R je
cos y + i sin y =∞∑k=0
(−1)ky2k
(2k)! + i∞∑k=0
(−1)ky2k+1
(2k + 1)!
=∞∑k=0
(iy)2k
(2k)! +∞∑k=0
(iy)2k+1
(2k + 1)! =∞∑n=0
(iy)n
n! = eiy.
Tako smo izpeljali Eulerjevo formulo
eiy = cos y + i sin y.
Za poljubna z, w ∈ C velja
ez · ew =( ∞∑k=0
zk
k!
)( ∞∑k=0
wk
k!
)=∞∑k=0
k∑j=0
zj
j! ·wk−j
(k − j)!
,po drugi strani pa je
ez+w =∞∑k=0
(z + w)k
k! =∞∑k=0
1k!
k∑j=0
(k
j
)zjwk−j
=∞∑k=0
k∑j=0
1k! ·
k!j!(k − j)!z
jwk−j
.Oboje skupaj nam pove, da enakost
ez+w = ez · ew
velja tudi za vsa kompleksna števila z, w ∈ C. Če zapišemo z = x+ iy, kjersta x in y realni oziroma imaginarni del števila z, dobimo
ez = ex+iy = ex · eiy = ex(cos y + i sin y).
S pomočjo zadnje formule si lahko eksponentno funkcijo tudi bolje geome-trijsko predstavljamo.
276

11.4 Enakomerna konvergenca
Videli smo, da potenčna vrsta lahko v nekaterih točkah konvergira, v drugihpa divergira. Pri tem smo torej opazovali konvergenco v vsaki točki posebej.V tem razdelku pa bomo spoznali še en način konvergence potenčnih vrst,pri kateri opazujemo konvergenco v večih točkah hkrati. Takšnemu tipukonvergence pravimo enakomerna konvergenca in jo lahko definiramo ne leza potenčne vrste, ampak tudi bolj splošno za zaporedja in vrste poljubnihfunkcij ene realne spremenljivke.
Zaporedje funkcij ene realne spremenljivke je preslikava, ki vsakemu na-ravnemu številu priredi neko funkcijo ene spremenljivke, n 7→ fn. Običajnose omejimo na primer, ko so vse te funkcije fn definirane na isti podmnožiciD ⊂ R. Takšno zaporedje bomo označili
(f1, f2, f3, . . .) = (fn)∞n=1 = (fn)n = (fn) = (fn : D → R).
Takšnemu zaporedju lahko pridružimo tudi vrsto funkcij
f1 + f2 + f3 + · · · =∑
(fn)∞n=1 =∑
(fn)n =∑
(fn) =∑
(fn : D → R)
ter zaporedje delnih vsot (sn) te vrste, katerega členi so funkcije sn =∑nk=1 fk. Kot vemo je v nekaterih primerih bolj smiselno, da indeks n za-
vzame vrednosti iz množice N ∪ {0} namesto iz množice N, kar je sevedale formalna sprememba. Tako je (realna) potenčna vrsta primer funkcijskevrste, v kateri so členi potenčne funkcije pomnožene s konstantami, in tavrsta pa se naravno začne s členom pri n = 0.
Definicija 11.16. Naj bo (fn : D ⊂ R→ R) zaporedje funkcij.
(i) Zaporedje (fn) konvergira v točki x ∈ D, če je zaporedje števil (fn(x))nkonvergentno.
(ii) Zaporedje (fn) konvergira po točkah k funkciji f : D → R, če jekonvergentno v vsaki točki iz D in velja
f(x) = limn→∞
fn(x)
za vsak x ∈ D. V tem primeru pravimo, da je funkcija f limitazaporedja (fn) in označimo f = limn→∞ fn.
(iii) Zaporedje (fn) konvergira enakomerno na množici D k funkciji f :D → R, če za vsak ε > 0 obstaja tako velik N ∈ N, da za vsak n ≥ Nin za vsak x ∈ D velja |fn(x)− f(x)| < ε.
Vrsta števil konvergira, kadar konvergira njej pridruženo zaporedje del-nih vsot. Podobno lahko definiramo konvergencno po točkah oziroma ena-komerno konvergenco vrste funkcij kot konvergenco po točkah oziroma ena-komerno konvergenco pridruženega zaporedja delnih vsot:
277

Definicija 11.17. Naj bo∑
(fn : D ⊂ R→ R) vrsta funkcij.
(i) Vrsta∑fn konvergira v točki x ∈ D, če je vrsta števil
∑(fn(x))n
konvergentna.
(ii) Vrsta∑fn konvergira po točkah k funkciji s : D → R, če zaporedje
delnih vsot (sn =∑nk=1 fk)n konvergira po točkah k funkciji s. V
tem primeru pravimo, da je funkcija s vsota vrste∑
(fn) in označimos =
∑∞n=1 fn.
(iii) Vrsta∑fn konvergira enakomerno na množici D k funkciji s : D → R,
če zaporedje delnih vsot (sn =∑nk=1 fk)n konvergira enakomerno na
množici D k funkciji s.
Drugače povedano, vrsta∑fn konvergira po točkah k funkciji s : D → R
če, in samo če, za vsak x ∈ D velja
s(x) =∞∑n=1
fn(x).
Enakomerna konvergenca nam intuitivno pove, da zaporedje konvergirapri vseh točkah približno enako hitro ali še hitreje. Iz definicije sledi, daje vsako enakomerno konvergentno zaporedje tudi konvergentno po točkah.Da obratno v splošnem ne velja nam pove naslednji zgled:
Zgled 11.18. Kot primer funkcijskega zaporedja, ki konvergira po točkah,vendar ne enakomerno, si poglejmo zaporedje funkcij fn : [0, 1]→ R, fn(x) =xn. To zaporedje po točkah na intervalu [0, 1] konvergira k funkciji
f(x) ={
0 ; x ∈ [0, 1),1 ; x = 1,
vendar pa konvergenca ni enakomerna.
-Ε
Ε
1-Ε
1+Ε
0.2 0.4 0.6 0.8 1.0
0.2
0.4
0.6
0.8
1.0
Na sliki lahko vidimo, da konvergira zaporedje v točkah blizu x = 1 zelopočasi.
278

Trditev 11.19 (Cauchyjev kriterij za enakomerno konvergenco). Zaporedjefunkcij (fn : D ⊂ R → R) konvergira enakomerno na množici D natankotakrat, ko za vsak ε > 0 obstaja tako velik N ∈ N, da za vsaka m,n ≥ N inza vsak x ∈ D velja
|fn(x)− fm(x)| < ε.
Dokaz. (⇒) Predpostavimo, da zaporedje (fn) konvergira enakomerno naD k funkciji f : D → R. Izberimo poljuben ε > 0. Po definiciji obstaja takN ∈ N, da za vsak n ≥ N in za vsak x ∈ D velja |fn(x) − f(x)| < ε/2. Zapoljubna m,n ≥ N je potem po trikotniški neenakosti
|fn(x)− fm(x)| = |fn(x)− f(x) + f(x)− fm(x)|
≤ |fn(x)− f(x)|+ |f(x)− fm(x)| < ε
2 + ε
2 = ε.
(⇐) Iz pogoja v trditvi sledi, da je zaporedje (fn(x)) Cauchyjevo zavsak x ∈ D. To pomeni, da je konvergentno, zato zaporedje funkcij (fn) potočkah konvergira k neki funkciji f : D → R. Izberimo sedaj poljuben ε > 0.Po predpostavki obstaja tak N ∈ N, da za vsaka m,n ≥ N in za vsak x ∈ Dvelja |fn(x)− fm(x)| < ε/2. Za vsak x ∈ D in za vsak n ≥ N torej velja
|fn(x)− f(x)| = limm→∞
|fn(x)− fm(x)| ≤ ε
2 < ε.
Dostikrat je uporaben naslednji enostaven test za enakomerno konver-genco vrst:
Trditev 11.20 (Weierstrassov M-test za enakomeno konvergenco). Naj bo∑(fn : D ⊂ R → R) vrsta funkcij in naj bo
∑(Mn) takšna konvergentna
vrsta nenegativnih realnih števil, da za vsak n ∈ N in za vsak x ∈ D velja
|fn(x)| ≤Mn.
Tedaj vrsta∑
(fn) konvergira enakomerno na množici D in absolutno v vsakitočki iz D.
Dokaz. Naj bo (sn) zaporedje delnih vsot vrste∑
(fn). Vzemimo poljubenε > 0. Ker je vrsta
∑(Mn) konvergentna, po Cauchyjevem kriteriju za
konvergenco številskih vrst obstaja tako velik N ∈ N, da za vsaka n,m ≥ N ,m > n, velja
m∑k=n+1
Mk < ε.
Za vsak x ∈ D je tedaj
|sm(x)− sn(x)| = |m∑
k=n+1fk(x)| ≤
m∑k=n+1
|fk(x)| ≤m∑
k=n+1Mk < ε.
Cauchyjev kriterij za enakomerno konvergenco nam zdaj pove, da zaporedjedelnih vsot (sn) konvergira enakomerno na množici D.
279

Trditev 11.21. Naj bo (fn : D ⊂ R → R) zaporedje zveznih funkcij, kikonvergira enakomerno na množici D k funkciji f : D → R. Tedaj je tudifunkcija f zvezna.
Dokaz. Pokazali bomo, da je funkcija f zvezna v poljubni točki x ∈ D.Izberimo poljuben ε > 0. Ker zaporedje (fn) enakomerno konvergira k f ,lahko najdemo tako velik n, da za vsak y ∈ D velja |fn(y)−f(y)| < ε/3. Kerje fn zvezna v točki x, lahko nadalje najdemo tak δ > 0, za vsak y ∈ D, kizadošča pogoju |x−y| < δ, velja |fn(x)−fn(y)| < ε/3. Z uporabo trikotniškeneenakosti tako dobimo, da za vsak y ∈ (x− δ, x+ δ) ∩D velja
|f(y)− f(x)| ≤ |f(y)− fn(y)|+ |fn(y)− fn(x)|+ |fn(x)− f(x)|
<ε
3 + ε
3 + ε
3 = ε.
Posledica 11.22. Naj bo∑
(fn : D ⊂ R → R) vrsta zveznih funkcij, kienakomerno konvergira na množici D. Tedaj je vsota
∑∞n=1 fn : D → R
zvezna funkcija.
Dokaz. Prejšno trditev uporabimo za zaporedje delnih vsot dane vrste.
Trditev 11.23. Naj bo (fn : [a, b] → R) zaporedje integrabilnih funkcij, kina intervalu [a, b] enakomerno konvergira k funkciji f : [a, b]→ R. Tedaj jetudi funkcija f integrabilna in velja∫ b
af(x) dx = lim
n→∞
∫ b
afn(x) dx.
Dokaz. Ker so vse funkcije fn integrabilne, so omejene, zato je tudi njihovaenakomerna limita f omejena. Če označimo
εn = supx∈[a,b]
|fn(x)− f(x)|,
za vsak x ∈ [a, b] velja
fn(x)− εn ≤ f(x) ≤ fn(x) + εn.
Od tod sledi∫ b
afn(x) dx− εn(b− a) =
∫ b
a(fn(x)− εn) dx ≤
∫ b
af(x) dx
≤∫ b
af(x) dx ≤
∫ b
a(fn(x) + εn) dx =
∫ b
afn(x) dx+ εn(b− a),
kar nam da oceno
0 ≤∫ b
af(x) dx−
∫a
b
f(x) dx ≤ 2εn(b− a).
280

Ker zaporedje (fn) konvergira k f enakomerno, je limn→∞
εn = 0, zato jefunkcija f integrabilna in velja∫ b
af(x) dx = lim
n→∞
∫ b
afn(x) dx.
Zgornja trditev nam pove, da je enakomerna limita integrabilnih funkcijspet integrabilna funkcija in da lahko v tem primeru zamenjamo vrstni redlimite in integrala, saj lahko enakost iz trditve zapišemo tudi v obliki∫ b
a
(limn→∞
fn(x))dx = lim
n→∞
∫ b
afn(x) dx.
Posledica 11.24. Naj bo∑
(fn : [a, b] → R) vrsta integrabilnih funkcij, kienakomerno konvergira na intervalu [a, b]. Tedaj je tudi vsota
∑∞n=1 fn :
[a, b]→ R integrabilna funkcija in velja∫ b
a
( ∞∑n=1
fn(x))dx =
∞∑n=1
∫ b
afn(x) dx.
Zgled 11.25. Vzemimo zaporedje funkcij (fn : R → R), danih s predpisifn(x) =
√x2 + 1
n . To zaporedje konvergira enakomerno k funkciji f(x) =|x|.
-1.0 -0.5 0.5 1.0
0.2
0.4
0.6
0.8
1.0
Čeprav so vse funkcije fn odvedljive in konvergirajo enakomerno k f , funk-cija f ni odvedljiva v točki x = 0. Izkaže se, da zaporedje odvodov (f ′n)konvergira po točkah (vendar ne enakomerno) k funkciji
g(x) =
1 ; x > 0,−1 ; x < 0,
0 ; x = 0.
Naslednja trditev nam pove, da lahko zamenjamo vrstni red odvoda inlimite pod pogojem, da tudi zaporedje odvodov konvergira enakomerno:
Trditev 11.26. Naj bo (fn : (a, b)→ R) zaporedje odvedljivih funkcij, ki jekonvergentno v neki točki x0 ∈ (a, b), in predpostavimo, da zaporedje odvodov(f ′n) konvergira enakomerno na intervalu (a, b) k neki funkciji g : (a, b)→ R.Tedaj zaporedje funkcij (fn) enakomerno konvergira k neki odvedljivi funkcijif : (a, b)→ R, za katero velja f ′ = g.
281

Dokaz. Izberimo ε > 0. Ker zaporedje (fn) konvergira v točki x0 in kerzaporedje (f ′n) enakomerno konvergira, obstaja tako velik N ∈ N, da zavsaka m,n ≥ N velja
|fn(x0)− fm(x0)| < ε
2in
|f ′n(t)− f ′m(t)| < ε
2(b− a)in za vsak t ∈ (a, b). Za poljubni različni točki x, t ∈ (a, b) in poljubnam,n ≥ N lahko uporabimo Lagrangeov izrek za funkcijo fn−fm na intervalumed x in t, ki pove, da obstaja takšen ξ med x in t, da je
|(fn(x)− fm(x))− (fn(t)− fm(t))| = |f ′n(ξ)− f ′m(ξ)||x− t|
<ε|x− t|2(b− a) <
ε
2 . (7)
Odtod sledi, da je
|fn(x)− fm(x)| ≤ |(fn(x)− fm(x))− (fn(x0)− fm(x0))|+ |fn(x0)− fm(x0)|
<ε
2 + ε
2 = ε
za vsak x ∈ (a, b) in za vsaka m,n ≥ N . Cauchyjev kriterij za enakomernokonvergenco nam zdaj pove, da zaporedje (fn) konvergira enakomerno naintervalu (a, b) k neki funkciji f : (a, b)→ R.
Pokazati moramo še, da je funkcija f odvedljiva in da velja f ′ = g.Izberimo x ∈ (a, b). Za vsak t ∈ (a, b) \ {x} definiramo
φn(t) = fn(t)− fn(x)t− x
,
φ(t) = f(t)− f(x)t− x
.
Iz ocene (7) sledi, da za vsak t ∈ (a, b) \ {x} in za poljubna n,m ≥ N velja
|φn(t)− φm(t)| < ε
2(b− a) ,
zato zaporedje (φn) konvergira k funkciji φ enakomerno na (a, b)\{x}. Naj-demo torej lahko tako velik n ≥ N , da za vsak t ∈ (a, b) \ {x} velja
|φ(t)− φn(t)| < ε
3 .
Ker zaporedje odvodov (f ′1, f ′2, f ′3, . . .) konvergira k funkciji g, lahko vza-memo n tako velik, da velja tudi
|f ′n(x)− g(x)| < ε
3 .
282

Ker po definiciji odvoda velja limt→x φn(t) = f ′n(x), lahko najdemo takomajhno odprto okolico V ⊂ R točke x, da za vsak t ∈ (V ∩ (a, b)) \ {x} velja
|φn(t)− f ′n(x)| < ε
3 .
Zadnje tri neenakosti nam skupaj povedo, da za vsak t ∈ (V ∩ (a, b)) \ {x}velja
|φ(t)− g(x)| ≤ |φ(t)− φn(t)|+ |φn(t)− f ′n(x)|+ |f ′n(x)− g(x)| < ε,
kar pa pomeni, da je limt→x
φ(t) = g(x). Od tod sledi
f ′(x) = limt→x
f(t)− f(x)t− x
= limt→x
φ(t) = g(x),
kar smo želeli pokazati.
V primeru, ko so izpolnjeni pogoji iz trditve, lahko torej zamenjamovrstni red odvoda in limite, saj tedaj velja(
limn→∞
fn(x))′
= limn→∞
f ′n(x).
Posledica 11.27. Naj bo∑
(fn : (a, b) → R) vrsta odvedljivih funkcij, kikonvergira v neki točki x0 ∈ (a, b), in predpostavimo, da vrsta odvodov
∑f ′n
konvergira enakomerno na intervalu (a, b). Tedaj tudi vrsta∑fn konvergira
enakomerno na intervalu (a, b) in velja
(∞∑n=1
fn)′ =∞∑n=1
f ′n.
Rezultate iz tega poglavja bomo zdaj uporabili na konkretnem primerurealnih potenčnih vrst. Realna potenčna vrsta
∑anx
n s konvergenčnimpolmerom R konvergira v vsaki točki iz intervala (−R,R), a v splošnem nekonvergira enakomerno na celem intervalu (−R,R).
Trditev 11.28. Naj bo∑anx
n realna potenčna vrsta s konvergenčnim pol-merom R. Za poljubno realno število r, za katerega je 0 ≤ r < R, je vrsta∑anx
n enakomerno konvergentna na intervalu [−r, r].
Dokaz. Izberemo lahko tako realno število x0, da je r < x0 < R. Za številoq = r/x0 tako velja 0 ≤ q < 1. Ker potenčna vrsta konvergira v točki x0, jezaporedje (|anxn0 |)n konvergentno in torej omejeno, zato lahko najdemo takM > 0, da za vsak n velja
|anxn0 | ≤M.
Poleg tega za vsak x ∈ [−r, r] velja
0 ≤∣∣∣∣ xx0
∣∣∣∣ ≤ r
x0= q < 1.
283

Ti dve oceni nam omogočata, da potenčno vrsto na intervalu [−r, r] majo-riziramo s konvergentno geometrijsko vrsto,
|anxn| =∣∣∣∣anxn0 ( x
x0
)n∣∣∣∣ ≤Mqn.
Po Weierstrassovem M-testu je torej potenčna vrsta enakomerno konvergen-tna na intervalu [−r, r].
Trditev 11.29. Naj bo∑anx
n realna potenčna vrsta s konvergenčnim pol-merom R in naj bo s : (−R,R) → R vsota te vrste na intervalu (−R,R),torej s(x) =
∑∞n=0 anx
n za vsak x ∈ (−R,R). Potem velja:
(i) Potenčna vrsta∑
(nanxn−1)∞n=1 ima konvergenčni polmer R.
(ii) Funkcija s je odvedljiva na intervalu (−R,R).
(iii) Za vsak x ∈ (−R,R) velja
s′(x) =∞∑n=1
nanxn−1.
Dokaz. Točka (i) sledi iz enakosti
lim supn→∞
n
√|nan| = lim sup
n→∞
(n√n n
√|an|
)= lim
n→∞n√n · lim sup
n→∞n
√|an|
= 1 · lim supn→∞
n
√|an| =
1R.
Točki (ii) in (iii) sta direktni posledici Trditve 11.28 in Posledice 11.27.
Zgled 11.30. (1) Če eksponentno vrsto
ex =∞∑n=0
xn
n!
členoma odvajamo, dobimo
(ex)′ =∞∑n=1
nxn−1
n! =∞∑n=1
xn−1
(n− 1)! =∞∑k=0
xk
k! = ex,
kot smo pričakovali.(2) Logaritemska vrsta
ln(1 + x) = x− x2
2 + x3
3 −x4
4 + · · ·
284

ima konvergenčni polmer R = 1. Enakomerno konvergira na vsakem zapr-tem podintervalu intervala (−1, 1), vendar pa ne konvergira enakomerno nacelem intervalu. To je posledica tega, da je njena vsota neomejena, vsakakončna delna vsota pa je omejena. Pri odvajanju logaritemske vrste počlenih dobimo geometrijsko vrsto
11 + x
= 1− x+ x2 − x3 + x4 − x5 + · · · ,
ki konvergira za |x| < 1.(3) Sinusna vrsta
sin x = x− x3
3! + x5
5! −x7
7! + · · ·
ima konvergenčni polmer R =∞. Z odvajanjem po členih dobimo vrsto
(sin x)′ = 1− x2
2! + x4
4! −x6
6! + · · · ,
ki jo lahko prepoznamo kot kosinusno vrsto.(4) Za konec si poglejmo še binomsko vrsto
(1 + x)α =∞∑n=0
(α
n
)xn
za |x| < 1 in α 6= 0. Če to vrsto odvajamo po členih, dobimo
α(1 + x)α−1 =∞∑n=1
n
(α
n
)xn−1
oziroma(1 + x)α−1 =
∞∑n=1
n
α
(α
n
)xn−1 =
∞∑k=0
(α− 1k
)xk.
285

12 Funkcije večih spremenljivkPri opisu fizikalnih pojavov pogosto uporabljamo funkcije večih realnih spre-menljivk. Osnovni primeri količin, ki jih lahko tako opišemo, so temperatura,gostota in tlak. Videli bomo, da lahko mnoge pojme, ki smo jih spoznali prifunkcijah ene realne spremenljivke, brez težav posplošimo na funkcije večihspremenljivk. Bolj podrobno si bomo pogledali zveznost, odvod, Taylorjevoformulo ter ekstreme funkcij večih realnih spremenljivk.
Čeprav so v fiziki najbolj uporabne funkcije dveh, treh ali štirih spre-menljivk, bomo zaradi enostavnosti študirali kar n-dimenzionalni evklidskiprostor
Rn = R× R× . . .× R︸ ︷︷ ︸n
,
za poljubno naravno število n. Elementu v prostora Rn pravimo vektor alitočka, predstavimo pa ga z urejeno n-terico realnih števil
v = (v1, v2, . . . , vn),
ki jih imenujemo komponente vektorja v. Realnim številom v tem kontekstupravimo tudi skalarji.
Dodobra smo že spoznali prostor R3. Nekatere operacije med vektorji vR3 lahko brez težav posplošimo na Rn. Na prostoru Rn definiramo seštevanjevektorjev po komponentah in pa množenje s skalarji: za v, w ∈ Rn in α ∈ Rdefiniramo
v + w = (v1 + w1, v2 + w2, . . . , vn + wn),αv = (αv1, αv2, . . . , αvn).
S tem postane Rn vektorski prostor. Skalarni produkt vektorjev v, w ∈ Rnje definiran s predpisom
v · w = v1w1 + v2w2 + . . .+ vnwn ∈ R,
dolžina vektorja v ∈ Rn pa je
|v| =√v · v =
√v2
1 + · · ·+ v2n.
Podobno kot v R3 tudi v Rn veljata trikotniška in Cauchy-Schwartzeva ne-enakost, ki ju dokažemo natanko tako kot v prostoru R3:
|v + w| ≤ |v|+ |w|,|v · w| ≤ |v||w|.
Opazimo lahko, da za vsak i = 1, . . . , n velja
|vi| ≤ |v| ≤√nmax{|v1|, . . . , |vn|}.
286

Vektorja v, w ∈ Rn sta si pravokotna, če je v · w = 0. Razdaljo medvektorjema v, w ∈ Rn definiramo s predpisom
d(v, w) = |v − w|.
Razdalja med točkami nam omogoča, da tudi v Rn definiramo odprte krogle,odprte množice, zaprte množice, okolice in limite zaporedij na podoben načinkot v R. Za poljubno točko a ∈ Rn je odprta krogla s središčem v a in spolmerom R > 0 množica
K(a,R) = { v ∈ Rn | |a− v| < R} ⊂ Rn.
Naj bo A ⊂ Rn poljubna podmnožica in naj bo a ∈ Rn.
(i) Množica A je okolica točke a, če obstaja tak δ > 0, da je K(a, δ) ⊂ A.
(ii) Točka a je notranja točka množice A, če je A okolica točke a. Točkaa je zunanja točka množice A, če je Rn \ A okolica točke a. Če točkaa ni niti notranja niti zunanja točka množice A, potem je robna točkamnožice A.
(iii) Množica A je odprta, če je okolica vsake svoje točke.
(iv) Množica A je zaprta, če je množica Rn \A odprta.
(v) Množica A je omejena, če obstaja tak M > 0, da je A ⊂ K(0,M).
(vi) Točka a je stekališče množice A, če za vsak ε > 0 velja A ∩K(a, ε) \{a} 6= ∅.
Ε a
y
x
rob
notranjost
zunanjost
A
Zaporedje v Rn je funkcija N → Rn, k 7→ ak. Takšno zaporedja bomonavadno zapisali kot
(a1, a2, . . .) = (ak)∞k=1 = (ak)k = (ak).
(i) Točka a ∈ Rn je stekališče zaporedja (ak), če je v vsaki okolici točke aneskončno členov zaporedja (ak).
287

(ii) Točka a ∈ Rn je limita zaporedja (ak), če v vsaki okolici točke aležijo vsi členi zaporedja (ak) z izjemo končno mnogih. V tem primerupišemo
a = limk→∞
ak.
Zaporedje je konvergentno, če ima limito, sicer pa je divergentno.
Vse lastnosti limit in stekališč zaporedij števil veljajo tudi za zaporedjavektorjev v Rn. Če ima zaporedje limito, ima natanko eno stekališče. Pod-zaporedje zaporedja (ak) v Rn je zaporedje (akl)l, kjer je (kl)l poljubnostrogo narašajoče zaporedje naravnih števil. Vsako stekališče podzaporedja(akl)l je tudi stekališče zaporedja (ak). Vsako podzaporedje konvergentnegazaporedja je konvergentno. Točka a ∈ Rn je stekališče zaporedja (ak) če, insamo če, obstaja podzaporedje zaporedja (ak) ki konvergira k a.
Če je (ak) zaporedje vektorjev v Rn, lahko vsak člen tega zaporedjazapišemo po komponentah kot
ak = (ak,1, ak,2, . . . , ak,n).
Komponente tvorijo zaporedje realnih števil (ak,i)k, za vse i = 1, 2, . . . , n.Zaporedje vektorjev je konvergentno natanko takrat, ko so konvergentna vsazaporedja njegovih komponent in pri tem velja
limk→∞
ak = a
če, in samo če, jelimk→∞
ak,i = ai
za vse i = 1, 2, . . . , n.Realna (ali skalarna) funkcija n spremenljivk, definirana na podmnožici
U ⊂ Rn, je preslikavaf : U → R.
Vsakemu vektorju (x1, x2 . . . , xn) ∈ U ⊂ Rn funkcija f torej priredi realnoštevilo
f(x1, x2, . . . , xn) ∈ R.
Glede na ta zapis pravimo, da je f realna funkcija n realnih spremenljivkx1, . . . , xn.
Vektorska funkcija n spremenljivk, definirana na podmnožici U ⊂ Rn, jepreslikava
g : U → Rm,
za neko naravno število m. Vsakemu vektorju (x1, x2 . . . , xn) ∈ U funkcijag torej priredi vektor
g(x1, . . . , xn) = (g1(x1, . . . , xn), g2(x1, . . . , xn), . . . , gm(x1, . . . , xn)) ∈ Rm.
288

Komponente g1, g2, . . . , gm funkcije g so realne funkcije n spremenljivk, inpišemo
g = (g1, g2, . . . , gm).
Zgled 12.1. (1) V primeru, ko je n = 2, neodvisni spremenljivki x1 in x2navadno označimo z x in y. Poglejmo si funkcijo
f(x, y) = 1x2 + y2 .
Njena domena je množica
U = { (x, y) ∈ R2 | (x, y) 6= (0, 0)} = R2 \ {(0, 0)},
njen graf pa množica
graf(f) ={(
x, y,1
x2 + y2
)| (x, y) ∈ U
}⊂ R2 × R = R3.
Geometrično si graf funkcije dveh spremenljivk predstavljamo kot ploskev vprostoru R3.
Če graf prerežemo z ravnino x = x0 ali y = y0, dobimo krivuljo, ki ustrezagrafu funkcije ene spremenljivke y 7→ f(x0, y) oziroma x 7→ f(x, y0). Če tekrivulje zložimo skupaj, dobimo ploskev, ki predstavlja graf funkcije dvehspremenljivk. Risanje grafov funkcij dveh spremenljivk je lahko zahtevno,zato si pri tem pomagamo z računalniškimi orodji.
(2) Namesto grafa včasih raje skiciramo izohipse oziroma nivojske krivu-lje funkcije dveh spremenljivk. To so krivulje, ki jih dobimo, če graf funkcijepresekamo z ravninami oblike z = z0 in dobljeni presek nato projeciramoravnino z = 0. Če si predstavljamo graf funkcije kot relief neke pokrajine,sestavljajo nivojsko krivuljo točke, ki so na isti nadmorski višini.
Poglejmo si nivojske krivulje funkcije f(x, y) = x2 − y2. To so krivulje,ki so implicitno določene z enačbami
x2 − y2 = c
za c ∈ R. Če je c 6= 0, imajo nivojske krivulje obliko hiperbol, pri c = 0 padobimo izrojen primer x = ±y, ki sestoji iz dveh premic. Graf funkcije fima obliko sedla.
289

-4 -2 2 4
-4
-2
2
4
Podobno kot pri funkcijah ene spremenljivke lahko definiramo tudi limitofunkcije večih spremenljivk. Naj bo g : U ⊂ Rn → Rm funkcija n spremen-ljivk in naj bo a stekališče množice U . Vektor L ∈ R je limita funkcije g vtočki a, če za vsak ε > 0 obstaja tak δ > 0, da za vsak v ∈ K(a, δ)∩U \ {a}velja g(v) ∈ K(L, ε). V tem primeru označimo
L = limv→a
g(v).
Opazimo lahko, da je L = limv→a g(v) če, in samo če, velja Li = limv→a gi(v)za vse i = 1, 2, . . . ,m, kjer je g = (g1, . . . , gm).
Lastnosti limit funkcij ene spremenljivke veljajo smiselno tudi za limitefunkcij večih spremenljivk. Te lastnosti v resnici pokažemo na popolnomaenak način kot smo to naredili pri funkcijah ene spremenljivke.
Vaja 12.2. Ugotovi, ali obstajajo limite naslednjih funkcij dveh spremen-ljivk v točki (0, 0):
(i) f(x, y) = xy
(ii) f(x, y) = x2+y2
x+y
(iii) f(x, y) = xyx2+y2
(iv) f(x, y) = x2−y2
x2+y2
(v) f(x, y) = y x2−y2
x2+y2
Definicija 12.3. Funkcija g : U ⊂ Rn → Rm je zvezna v točki a ∈ U ,če za vsak ε > 0 obstaja tak δ > 0, da za poljuben v ∈ K(a, δ) ∩ U veljag(v) ∈ K(g(a), ε). Funkcija g je zvezna, če je zvezna v vsaki točki iz U .
Drugače povedano, funkcija g : U ⊂ Rn → Rm je zvezna v točki a ∈ U ,če za vsak ε > 0 obstaja tak δ > 0, da za vsak v ∈ U , za katerega je|v − a| < δ, velja
|g(v)− g(a)| < ε.
290

V tej obliki je definicija zveznosti funkcije večih spremenljivk enaka kotdefinicija zveznosti funkcije ene spremenljivke, le da moramo absolutne vre-dnosti realnih števil nadomestiti z dolžinami vektorjev. Ni težko preve-riti, da je funkcija g zvezna v točki a natanko takrat, ko so vse njenekomponente g1, g2, . . . , gm zvezne v točki a. Množico vse zveznih funkcijg : U → Rm označimo z C(U,Rm) ali tudi z C0(U,Rm). Posebej označimoC(U) = C0(U) = C(U,R).
Iz definicije direktno sledi, da je funkcija g zvezna v stekališču množice Uče, in samo če, je limita funkcije g v tem stekališču enaka vrednosti funkcijev tem stekališču. Enako kot pri funkcijah ene spremenljivke lahko tudi zafunkcije večih spremenljivk pokažemo, da je funkcija g zvezna v točki anatanko takrat, ko za vsako zaporedje (ak) točk iz U , ki konvergira k a,zaporedje (g(ak))k konvergira k g(a). V tem preimeru torej velja
limk→∞
g(ak) = g( limk→∞
ak).
Če sta g : U ⊂ Rn → Rm in h : V ⊂ Rn → Rm zvezni funkciji, sta tudinjuna vsota in skalarni produkt
g + h : U ∩ V → Rm, (g + h)(v) = g(v) + h(v),g · h : U ∩ V → R, (g · h)(v) = g(v) · h(v),
zvezni funkciji. Če je še f : E ⊂ Rm → Rp zvezna funkcija, je tudi kompo-zicija
f ◦ g : g−1(E)→ Rp, (f ◦ g)(v) = f(g(v)),
zvezna funkcija. Dokazi vseh teh lastnosti so enaki kot pri realnih funkcijahene spremenljivke.
Zgled 12.4. (1) Projekcije so funkcije pri : Rn → R, za i = 1, 2, . . . , n,definirane s predpisi
pri(x1, x2, . . . , xn) = xi.
Iz neenakosti|vi − ai| ≤ |v − a|
sledi, da velja |vi − ai| < δ, če je |v − a| < δ. Če torej v definiciji zveznostivzamemo δ = ε, vidimo, da so projekcije zvezne funkcije.
(2) Ker so projekcije zvezne in ker sta vsota in produkt zveznih funkcijspet zvezni funkciji, sta na primer zvezni tudi funkciji
f(x, y, z) = xyz3,
g(x, y, z) = xy + 3yz3 + 12yz4 − xz5.
Bolj splošno so vse polinomi n spremenljivk zvezne funkcije. Projekcije soprimeri polinomov stopnje ena.
291

Vaja 12.5. Naj bo funkcija g : U ⊂ Rn → Rm zvezna v točki a ∈ U . Pokaži:
(i) Za poljubno podmnožico E ⊂ U , ki vsebuje točko a, je zožitev g|Ezvezna v točki a.
(ii) Če je U okolica točke a in če je V ⊂ Rm okolica točke g(a), potem jeg−1(V ) okolica točke a.
12.1 Povezanost s potmi in kompaktnost
Naj bo A podmnožica prostora Rn. Pot v A od točke v ∈ A do točke w ∈ Aje zvezna funkcija γ : [0, 1] → Rn, za katero velja γ([0, 1]) ⊂ A, γ(0) = v inγ(1) = w. Pot v A si lahko predstavljamo kot zvezen sprehod po množici Amed začetno in končno točko.
Definicija 12.6. Množica A ⊂ Rn je povezana s potmi, če za poljubni točkiv, w ∈ A obstaja pot v A od v do w.
Iz osnovnih lastnosti zveznih funkcij ene realne spremenljivke sledi, daso s potmi povezane podmnožice realnih števil natanko vsi intervali.
Trditev 12.7. Naj bo f : U ⊂ Rn → R zvezna funkcija in naj bo U povezanas potmi. Če sta v, w ∈ U točki, za kateri velja f(v)f(w) < 0, potem obstajatakšna točka ξ ∈ U , da je f(ξ) = 0.
Dokaz. Ker je U povezana s potmi, obstaja pot γ v U od v do w. Tedaj jef ◦ γ : [0, 1]→ R zvezna funkcija, za katero je
(f ◦ γ)(0) · (f ◦ γ)(1) = f(v) · f(w) < 0.
Zvezna funkcija f◦γ torej zavzame različno predznačeni vrednosti v krajiščihintervala [0, 1], zato obstaja tak c ∈ [0, 1], da je f(γ(c)) = 0. Za ξ = γ(c)torej velja f(ξ) = 0.
Trditev 12.8. Naj bo g : U ⊂ Rn → Rm zvezna funkcija in naj bo Upovezana s potmi. Potem je tudi množica g(U) je povezana s potmi.
Dokaz. Vzemimo poljubni točki a, b ∈ g(U). Tedaj obstajata točki v, w ∈ U ,da velja a = g(v) in b = g(w). Ker je množica U povezana s potmi, obstajapot γ v U od v do w. Kompozicija g ◦ γ je zvezna funkcija g ◦ γ : [0, 1] →g(U) ⊂ Rm in je torej pot od a do b v g(U). To pomeni, da je množica g(U)povezana s potmi.
Definicija 12.9. Podmnožica A ⊂ Rn je kompaktna, če ima vsako zaporedjetočk iz A vsaj eno stekališče, ki leži v A.
Trditev 12.10. Podmnožica A ⊂ Rn je kompaktna natanko takrat, ko jezaprta in omejena.
292

Dokaz. (=⇒) Naj bo A ⊂ Rn kompaktna podmnožica. Najprej vidimo, daje A omejena. Če namreč A ne bi bila omejena, bi lahko za vsak k ∈ N našlitak ak ∈ A, da je |ak| > k. Tako dobljeno zaporedje (ak) potem ne bi imelostekališča, kar pa je v protislovju s predpostavko.
Pokažimo še, da je A zaprta množica. Privzeli bomo, da A ni zaprta inpokazali, da nas to vodi v protislovje. Če A ne bi bila zaprta, bi lahko našlitočko b ∈ Rn \ A, ki ni notranja točka množice Rn \ A. To bi pomenilo, daza vsak k ∈ N velja K(b, 1/k) ∩A 6= ∅, zato bi lahko izbrali tak bk ∈ Rn, dabi veljalo
bk ∈ K(b, 1/k) ∩A.
Tako konstruirano zaporedje (bk) točk iz A bi konvergiralo k b. Ker b ni v A,bi to pomenilo, da zaporedje (bk) nima stekališča v A, kar pa je v nasprotjus kompaktnostjo množice A.
(⇐=) Prepričamo se lahko, da ima vsako omejeno zaporedje v Rn vsajeno stekališče. V primeru n = 1 smo to že pokazali, v višjih dimenzijah palahko uporabimo podoben sklep za vsako komponento posebej in korak zakorakom najdemo podzaporedje, ki konvergira na vseh komponentah. Najbo (ak) poljubno zaporedje v omejeni zaprti podmnožici A ⊂ Rn. Ker jeA omejena, je tudi zaporedje (ak) omejeno in ima torej vsaj eno stekališčea ∈ Rn. Ker pa je A tudi zaprta, mora biti a ∈ A.
Interval v R je kompakten natanko takrat, ko je zaprt in omejen oziroma,ko je oblike [a, b]. Polodprti in odprti intervali niso kompaktni, prav takoniso kompaktni neomejeni intervali.
Trditev 12.11. Naj bo U ⊂ Rn kompaktna množica in naj bo g : U → Rmzvezna funkcija. Tedaj je tudi množica g(U) kompaktna.
Dokaz. Vzemimo poljubno zaporedje (bk) v g(U). Radi bi pokazali, da imato zaporedje vsaj eno stekališče v g(U).
Najprej lahko izberemo takšno zaporedje (ak) v U , da za vsak k ∈ Nvelja bk = g(ak). Ker je množica U kompaktna, ima zaporedje (ak) stekali-šče a ∈ U , zato lahko najdemo neko podzaporedje (akl)l zaporedja (ak), kikonvergira k a. Zaradi zveznosti funkcije g podzaporedje (bkl)l = (g(akl))lkonvergira k g(a) ∈ g(U), kar pa pomeni, da je točka g(a) stekališče zapo-redja (bk).
Vaja 12.12. Podobno kot pri funkcijah ene spremenljivke lahko definiramopojem enakomerne zveznosti funkcije večih spremenljivk. Za zvezne funkcijeene spremenljivke, definirane na zaprtem omejenem intervalu, smo dokazali,da so enakomerno zvezne. Na podoben način se prepričaj, da je vsaka zve-zna funkcija, definirana na kompaktni podmnožici prostora Rn, enakomernozvezna.
293

12.2 Parcialni odvodi funkcij večih spremenljivk
Poglejmo si še enkrat graf funkcije dveh spremenljivk, podane s predpisomf(x, y) = 1
x2+y2 . Če graf funkcije f presekamo z ravninama x = x0 iny = y0, dobimo dve krivulji, ki se sekata v točki (x0, y0, f(x0, y0)). Naklonateh dveh krivulj sta lahko različna, njuna tangentna vektorja pa napenjatatangentno ravnino na ploskev v dani točki.
Naklone ploskve v različnih smereh na dani ploskvi bomo računali s pomočjoparcialnih odvodov.
Naj bo f : U ⊂ Rn → R funkcija n spremenljivk in naj bo a =(a1, . . . , an) notranja točka množice U . Izberimo poljuben j ∈ {1, 2, . . . , n}.Če vse spremenljivke razen j-te v funkciji f postavimo za konstantne ingledamo funkcijo f le kot funkcijo spremenljivke xj , dobimo funkcijo enespremenljivke
xj 7→ f(a1, a2, . . . , aj−1, xj , aj+1, . . . , an).
Graf te funkcije ustreza krivulji, ki poteka po grafu funkcije f v smeri j-tekoordinate skozi točko (a, f(a)) ∈ Rn × R = Rn+1, njen odvod (če obstaja)pa je naklon te krivulje v smeri j-te koordinate.
Definicija 12.13. Naj bo f : U ⊂ Rn → R funkcija n spremenljivk, naj boa notranja točka množice U in naj bo j ∈ {1, 2, . . . , n}. Če obstaja limita
limh→0
f(a1, . . . , aj−1, aj + h, aj+1, . . . , an)− f(a1, . . . , aj−1, aj , aj+1, . . . , an)h
,
jo označimo z∂f
∂xj(a)
in imenujemo parcialni odvod funkcije f na j-to spremenljivko xj v točkia. V tem primeru pravimo, da je funkcija f parcialno odvedljiva na j-tospremenljivko xj v točki a.
Funkcija f je parcialno odvedljiva v točki a, če je v točki a parcialnoodvedljiva na vse spremenljivke x1, . . . , xn. V tem primeru vektor
(∇f)(a) =(∂f
∂x1(a), ∂f
∂x2(a), . . . , ∂f
∂xn(a))
imenujemo gradient funkcije f v točki a.
294

Funkcija f : U → R, definirana na odprti podmnožici U ⊂ Rn, je parci-alno odvedljiva na j-to spremenljivko xj , če je parcialno odvedljiva na j-tospremenljivko xj v vseh točkah iz U . V tem primeru je parcialni odvodfunkcije f na j-to spremenljivko xj funkcija n spremenljivk
∂f
∂xj: U → R.
Funkcija f je parcialno odvedljiva, če je parcialno odvedljiva na vse spremen-ljivke x1, . . . , xn. V tem primeru je gradient funkcije f vektorska funkcija nspremenljivk
∇f : U → Rn.
Definicija 12.14. Funkcija f : U → R, definirana na odprti podmnožiciU ⊂ Rn, je zvezno odvedljiva, če je zvezna in parcialno odvedljiva ter so vsinjeni parcialni odvodi
∂f
∂xj: U → R, j = 1, 2, . . . , n,
zvezne funkcije n spremenljivk. Množico vseh zvezno odvedljivih funkcijf : U → R označimo z C1(U).
Če označimo ej = (0, . . . , 0, 1, 0, . . . , 0), kjer je enica na j-tem mestu,lahko parcialni odvod zapišemo tudi v vektorski obliki
∂f
∂xj(a) = lim
h→0
f(a+ hej)− f(a)h
.
Za parcialni odvod uporabljamo tudi naslednje alternativne oznake:
∂f
∂xj(a) = ∂
∂xj(f)(a) = fxj (a) = (Djf)(a) = (Dejf)(a).
Parcialni odvod smo torej definirali kot odvod funkcije, ki jo dobimoz zožitvijo funkcije na premico v smeri ene izmed koordinatnih osi. Čebi namesto standardnega baznega vektorja ej izbrali nek poljuben vektoru ∈ R, bi dobili smerni odvod funkcije f v smeri u:
Definicija 12.15. Naj bo funkcija f : U ⊂ Rn → R funkcija n spremenljivk,naj bo a notranja točka množice U in naj bo u ∈ Rn. Če obstaja limita
limh→0
f(a+ hu)− f(a)h
,
jo označimo z(Duf)(a)
in imenujemo smerni odvod funkcije f v smeri vektorja u v točki a.
295

Vektorska funkcija g : U → Rm, g = (g1, . . . , gm), definirana na odprtipodmnožici U ⊂ Rn, je parcialno odvedljiva, če so vse komponente g1, . . . , gmparcialno odvedljive. V tem primeru označimo
∂g
∂xj=(∂g1∂xj
, . . . ,∂gm∂xj
): U → Rm.
Vektorska funkcija g je zvezno odvedljiva, če so vse komponente g1, . . . , gmzvezno odvedljive. Množico vseh zvezno odvedljivih funkcij g : U → Rmoznačimo z C1(U,Rm).
Zgled 12.16. Vzemimo polinom dveh spremenljivk, definiran s predpisom
f(x, y) = x2 + 2xy3 + 4x.
Njegova parcialna odvoda sta
∂f
∂x= 2x+ 2y3 + 4,
∂f
∂y= 6xy2.
Naj bo f : U → R zvezno odvedljiva funkcija dveh spremenljivk, de-finirana na odprti podmnožici U ⊂ R2. Prva parcialna odvoda funkcije fomogočata izračunati enačbo tangentne ravnine v dani točki (x0, y0) ∈ U .
Naklona krivulj, ki jih dobimo, če graf funkcije f presekamo z ravninamaoblike y = y0 in x = x0, sta enaka ∂f
∂x (x0, y0) in ∂f∂y (x0, y0). Smerna vektorja
tangent na ti dve krivulji sta torej
s1 =(
1, 0, ∂f∂x
(x0, y0)),
s2 =(
0, 1, ∂f∂y
(x0, y0)).
Normala tangentne ravnine mora biti pravokotna na oba ta dva vektorja,zato lahko vzamemo za normalo kar vektor
s2 × s1 =(∂f
∂x,∂f
∂y,−1
).
296

Od tod dobimo normalno obliko enačbe tangentne ravnine na graf funkcijef v točki (x0, y0)
∂f
∂x(x0, y0)(x− x0) + ∂f
∂y(x0, y0)(y − y0)− (z − z0) = 0,
kjer je z0 = f(x0, y0). Normalno premico na graf v točki (x0, y0) opišemo zenačbo
x− x0∂f∂x (x0, y0)
= y − y0∂f∂y (x0, y0)
= z − z0−1 ,
seveda v primeru, ko je ∂f∂x (x0, y0) 6= 0 in ∂f
∂y (x0, y0) 6= 0.
Zgled 12.17. Izračunajmo tangentno ravnino in normalno premico na graffunkcije f(x, y) = x2 + 2xy3 + 4x v točki (x0, y0) = (1, 0). Izračunali smože, da je fx = 2x + 2y3 + 4 in fy = 6xy2. Od tod dobimo fx(1, 0) = 6 infy(1, 0) = 0. Ker je f(1, 0) = 5, je enačba tangentne ravnine
6(x− 1) + 0(y − 0)− (z − 5) = 0
oziroma6x− z = 1,
enačba normalne premice pa je
x− 16 = z − 5
−1 , y = 0.
Konstrukcijo tangentne ravnine lahko posplošimo tudi na funkcije več kotdveh spremenljivk. Naj bo f : U → R zvezno odvedljiva funkcija n spremen-ljivk, definirana na odprti podmnožici U ⊂ Rn, in naj bo a = (a1, . . . , an) ∈U . Za vsak j = 1, . . . , n imamo vektor
sj = (0, . . . , 0, 1, 0, . . . , 0, ∂f∂xj
(a)) = (ej ,∂f
∂xj(a)) ∈ Rn+1,
ki je tangenten na graf funkcije f v točki (a, f(a)) ∈ Rn+1. Vektor(∂f
∂x1(a), . . . , ∂f
∂xn(a),−1
)= ((∇f)(a),−1) ∈ Rn+1
je pravokoten na vse vektorje sj in je normala tangentne hiper-ravnine nagraf funkcije f v točki (a, f(a)). Tangentna hiper-ravnina je sestavljena izvseh vektorjev r = (x1, . . . , xn, z) ∈ Rn+1, za katere velja
((∇f)(a),−1) · (r − (a, f(a)) = 0,
njena normalna enačba je torej:
∂f
∂x1(a)(x1 − a1) + · · ·+ ∂f
∂xn(a)(xn − an)− (z − f(a)) = 0
297

12.3 Totano odvedljive funkcije večih spremenljivk
Poleg parcialne odvedljivosti lahko definiramo tudi pojem totalne odvedlji-vosti. Videli bomo, da pojma nista ekvivalentna, je pa med njima tesnazveza.
Definicija 12.18. Funkcija f : U ⊂ Rn → R je totalno odvedljiva v notranjitočki a množice U , če obstaja tak vektor v ∈ Rn, da je
limw→0
f(a+ w)− f(a)− v · w|w|
= 0.
Vektorska funkcija g : U ⊂ Rn → Rm je totalno odvedljiva v notranji točki amnožice U , če so vse njene komponente totalno odvedljive v točki a.
Funkcija f : U → R, definirana na odprti podmnožici U ⊂ Rn, je totalnoodvedljiva, če je totalno odvedljiva v vsaki točki iz U . Vektorska funkcijag : U → R, definirana na odprti podmnožici U ⊂ Rn, je totalno odvedljiva,če so vse njene komponente totalno odvedljive.
Hitro lahko vidimo, da je pojem totalne odvedljivosti strožji tako odparcialne odvedljivosti kot tudi od zveznosti:
Trditev 12.19. Naj bo funkcija f : U ⊂ Rn → R totalno odvedljiva vnotranji točki a množice U . Tedaj velja:
(i) Funkcija f je zvezna v točki a.
(ii) Funkcija f je parcialno odvedljiva v točki a.
(iii) Za vsak vektor u ∈ Rn obstaja smerni odvod (Duf)(a) in velja
(Duf)(a) = (∇f)(a) · u.
(iv) Obstaja natanko en vektor v ∈ Rn, za katerega je
limw→0
f(a+ w)− f(a)− v · w|w|
= 0,
in sicer v = (∇f)(a).
Dokaz. Po definiciji totalne odvedljivosti obstaja tak vektor v ∈ Rn, da je
limw→0
f(a+ w)− f(a)− v · w|w|
= 0.
Označimo α(w) = f(a+ w)− f(a)− v · w.(i) Ker velja
limw→0
(f(a+ w)− f(a)) = limw→0
(α(w) + v · w) = limw→0
(|w|α(w)|w|
+ v · w)
= 0,
298

je funkcija f zvezna v točki a.(ii,iii,iv) Naj bo u ∈ Rn in h ∈ R. Najprej pokažimo, da velja
limh→0
α(hu)h
= 0.
Res, za primer u = 0 to sledi iz dejstva, da je α(0) = 0, za neničelne vektorjeu pa iz enakosti
1|u|
limh→0
α(hu)|h|
= limh→0
α(hu)|hu|
= limw→0
α(w)|w|
= 0.
Zdaj lahko izračunamo smerni odvod
(Duf)(a) = limh→0
f(a+ hu)− f(a)h
= limh→0
α(hu) + v · huh
= limh→0
α(hu)h
+ v · u = v · u.
Odtod sledi, da vsi smerni odvodi v točki a obstajajo, zato tudi vsi parcialniodvodi v točki a obstajajo. Poleg tega za vektorje ej = (0, . . . , 1, . . . , 0),j = 1, 2, . . . , n, dobimo
∂f
∂xj(a) = (Dejf)(a) = v · ej = vj ,
zato je v = (∇f)(a).
Trditev 12.20. Vsaka zvezno odvedljiva funkcija f : U → R, definirana naodprti podmnožici U ⊂ Rn, je totalno odvedljiva.
Dokaz. Izberimo poljuben ε > 0. Ker so vsi parcialni odvodi funkcije fzvezni, lahko najdemo tak R > 0, da je K(a,R) ⊂ U in da je∣∣∣∣∣ ∂f∂xj (v)− ∂f
∂xj(a)∣∣∣∣∣ < ε
n
za vsak v ∈ K(a,R) in za vsak j = 1, 2, . . . , n. Izberimo sedaj poljubenvektor w ∈ K(0, R) ⊂ Rn s komponentami w = (w1, w2, . . . , wn) in označimo
b0 = 0,b1 = (w1, 0, 0, . . . , 0) = w1e1,
b2 = (w1, w2, 0, . . . , 0) = w1e1 + w2e2,
...bn = (w1, w2, . . . , wn) = w.
Iz definicije sledi, da je |bj | < |w| < R za vsak j = 1, 2, . . . , n, zato sovse točke oblike a + bj vsebovane v K(a,R), v K(a,R) pa je vsebovana
299

tudi pot, ki jo dobimo tako, da zaporedoma z daljicami povežemo točkea = a + b0, a + b1, a + b2, . . . , a + bn = w. Zožitev funkcije f na daljicomed točkama a + bj−1 in a + bj je odvisna samo od spremenljivke xj , kiteče od 0 do wj . Ker je ta zožitev odvedljiva funkcija spremenljivke xj , sajje f zvezno odvedljiva, lahko na intervalu med 0 in wj zanjo uporabimoLagrangeov izrek, ki nam pove, da je
f(a+ bj)− f(a+ bj−1) = wj∂f
∂xj(a+ bj−1 + ϑjwjej)
za nek ϑj ∈ (0, 1). Ker velja
f(a+ w)− f(a) =n∑j=1
(f(a+ bj)− f(a+ bj−1)) ,
odtod dobimo
f(a+ w)− f(a)−(∇f)(a) · w = f(a+ w)− f(a)−n∑j=1
wj∂f
∂xj(a)
=n∑j=1
(f(a+ bj)− f(a+ bj−1))−n∑j=1
wj∂f
∂xj(a)
=n∑j=1
wj∂f
∂xj(a+ bj−1 + ϑjwjej)−
n∑j=1
wj∂f
∂xj(a)
=n∑j=1
wj
(∂f
∂xj(a+ bj−1 + ϑjwjej)−
∂f
∂xj(a)).
Ker velja tudi |wj | ≤ |w|, odtod sledi ocena
|f(a+ w)− f(a)−(∇f)(a) · w|
=
∣∣∣∣∣∣n∑j=1
wj
(∂f
∂xj(a+ bj−1 + ϑjwjej)−
∂f
∂xj(a))∣∣∣∣∣∣
≤n∑j=1|wj |
∣∣∣∣∣ ∂f∂xj (a+ bj−1 + ϑjwjej)−∂f
∂xj(a)∣∣∣∣∣
≤n∑j=1|w| ε
n= |w|ε.
Velja torej|f(a+ w)− f(a)− (∇f)(a) · w|
|w|< ε,
s tem pa smo trditev dokazali.
300

Vaja 12.21. Izračunaj parcialne ter smerne odvode v točki (0, 0) naslednjihfunkcij dveh spremenljivk in ugotovi, ali so te funkcije totalno odvedljive:
(i) f(x, y) ={
xyx2+y2 ; (x, y) 6= (0, 0)
0 ; x = y = 0
(ii) f(x, y) ={
x3
x2+y2 ; (x, y) 6= (0, 0)0 ; x = y = 0
12.4 Verižno pravilo
Ker parcialne odvode računamo enako kot odvode funkcije ene spremen-ljivke, le da vse spremenljivke razen ene postavimo za konstante, so tudipravila za parcialno odvajanje vsote, produkta in kvocienta enaka kot zaodvajanje funkcij ene spremenljivke. Posebej pa si moramo ogledati veri-žno pravilo za izračun odvoda kompozicije funkcij večih spremenljivk, ki jenekoliko bolj zapleteno.
Trditev 12.22 (Verižno pravilo za funkcije večih spremenljivk). Naj bofunkcija g : U ⊂ Rn → Rm totalno odvedljiva v notranji točki a množiceU in naj bo funkcija f : E ⊂ Rm → R totalno odvedljiva v notranji točkig(a) množice E. Tedaj je a notranja točka množice g−1(E), kompozicijaf ◦ g : g−1(E) → R je totalno odvedljiva v točki a in za vse j = 1, 2, . . . , nvelja
∂(f ◦ g)∂xj
(a) = (∇f)(g(a)) · ∂g∂xj
(a).
Dokaz. Ker je a notranja točka množice U , ker je g zvezna v točki a in kerje E okolica točke g(a), je a notranja točka množice g−1(E).
Označimo b = g(a) in zapišimo g = (g1, . . . , gm). Spremenljivke funkcijeg bomo označili z x1, . . . , xn, spremenljivke funkcije f pa z u1, . . . , um. Najbo v ∈ Rn vektor s komponentami
vj = (∇f)(b) · ∂g∂xj
(a).
Za poljuben vektor w = (w1, . . . , wn) ∈ Rn velja
v · w =n∑j=1
((∇f)(b) · ∂g
∂xj(a))wj =
n∑j=1
m∑i=1
∂f
∂ui(b) ∂gi
∂xj(a)wj
=m∑i=1
∂f
∂ui(b)
n∑j=1
∂gi∂xj
(a)wj
=m∑i=1
∂f
∂ui(b) ((∇gi)(a) · w)
= (∇f)(b) · η(w),
kjer smo označili η(w) = ((∇g1)(a) · w, . . . , (∇gm)(a) · w). Izberimo takšenM > 0, da velja |(∇f)(b)| ≤M in |(∇gi)(a)| ≤M za vsak i = 1, . . . ,m.
301

Naj bo ε > 0 poljuben in izberimo tako majhen ν > 0, da velja ν < 1in ν√n(1 + 2M) < ε. Ker je funkcija f totalno odvedljiva v točki b, lahko
najdemo tako majhen µ > 0, da je K(b, µ) ⊂ E in da za vsak r ∈ K(b, µ)velja
|α(r)| ≤ ν|r|,
kjer smo označili α(r) = f(b + r) − f(b) − (∇f)(b) · r. Ker je funkcija gtotalno odvedljiva v točki a, je tudi zvezna v točki a in lahko najdemo takomajhen δ > 0, da je K(a, δ) ⊂ U in g(K(a, δ)) ⊂ K(b, µ) ter da za vsakw ∈ K(a, δ) velja
|βi(w)| ≤ ν|w|
za vse i = 1, . . . ,m, kjer smo označili βi(w) = gi(a+w)−gi(w)−(∇gi)(a)·w.Za β(w) = (β1(w), . . . , βm(w)) velja torej
|β(w)| ≤√nν|w|.
Vzemimo zdaj poljuben w ∈ K(0, δ) ⊂ Rn, w 6= 0, in naj bo
r = r(w) = g(a+ w)− g(a).
Posebej je torej r ∈ K(b, µ), za komponente vektorja r pa velja tudi
|ri| = |gi(a+ w)− gi(a)| = |βi(w) + (∇gi)(a) · w|≤ |βi(w)|+ |(∇gi)(a)||w| ≤ ν|w|+M |w| < (1 +M)|w|
in zato|r| <
√n(1 +M)|w|.
Iz enakosti
f(g(a+ w))− f(g(a))− v · w = f(b+ r)− f(b)− v · w= α(r) + (∇f)(b) · r − (∇f)(b) · η(w)= α(r) + (∇f)(b) · (r − η(w))= α(r) + (∇f)(b) · β(w)
dobimo oceno|f(g(a+ w))− f(g(a))− v · w|
|w|= |α(r) + (∇f)(b) · β(w)|
|w|
≤ |α(r)||w|
+ |(∇f)(b)| |β(w)||w|
≤ ν|r||w|
+ |(∇f)(b)| |β(w)||w|
< ν√n(1 +M) +M
√nν < ε.
Odtod sledi, da je funkcija f ◦ g totalno odvedljiva v točki a in da so njeniparcialni odvodi enaki komponentam vektorja v.
302

Če označimo z x1, x2, . . . , xn spremenljivke funkcije g = (g1, . . . , gm), zu1, u2, . . . , um pa spremenljivke funkcije f , lahko verižno pravilo na dolgozapišemo v obliki:
∂(f ◦ g)∂xj
(a) =m∑i=1
∂f
∂ui(g(a)) ∂gi
∂xj(a)
= ∂f
∂u1(g(a))∂g1
∂xj(a) + · · ·+ ∂f
∂um(g(a))∂gm
∂xj(a)
Kot posledico dobimo:
Trditev 12.23. Kompozicija zvezno odvedljivih funkcij večih spremenljivkje zvezno odvedljiva funkcija.
Zgled 12.24. (1) Vzemimo funkcijo g : R2 → R2, definirano s predpisom
g(r, φ) = (r cosφ, r sinφ).
Ta funkcija nam predstavlja prehod iz polarnih v kartezične koordinate,saj bi lahko pisali tudi g = (g1, g2) = (x, y), kjer je x(r, φ) = r cosφ iny(r, φ) = r sinφ.
Naj bo sedaj f : R2 → R funkcija dveh spremenljivk. Mislimo si, daje f = f(x, y) odvisna od kartezičnih koordinat, zanima pa nas, kakšniso parcialni odvodi te funkcije, če jo podamo v polarnih koordinatah. Zuporabo verižnega pravila dobimo
∂(f ◦ g)∂r
(r, φ)
= ∂f
∂x(r cosφ, r sinφ)∂x
∂r(r, φ) + ∂f
∂y(r cosφ, r sinφ)∂y
∂r(r, φ)
= ∂f
∂x(r cosφ, r sinφ) cosφ+ ∂f
∂y(r cosφ, r sinφ) sinφ,
∂(f ◦ g)∂φ
(r, φ)
= ∂f
∂x(r cosφ, r sinφ)∂x
∂φ(r, φ) + ∂f
∂y(r cosφ, r sinφ)∂y
∂φ(r, φ)
= ∂f
∂x(r cosφ, r sinφ)(−r sinφ) + ∂f
∂y(r cosφ, r sinφ)r cosφ.
Poglejmo si še čisto konkreten zgled. Vzemimo funkcijo
f(x, y) = x2 + y2.
Potem je
(f ◦ g)(r, φ) = f(r cosφ, r sinφ) = r2 cos2 φ+ r2 sin2 φ = r2.
303

Vidimo, da je v polarnih koordinatah funkcija f odvisna od spremenljivker, ne pa od spremenljivke φ. Zato pričakujemo, da bo njen parcialni odvodna spremenljivko φ enak nič. Ker je fx = 2x in fy = 2y, je po verižnempravilu res
∂(f ◦ g)∂r
(r, φ) = 2r cos2 φ+ 2r sin2 φ = 2r,
∂(f ◦ g)∂φ
(r, φ) = −2r2 cosφ sinφ+ 2r2 sinφ cosφ = 0.
(2) Naj bo γ : J → Rn zvezno odvedljiva vektorska funkcija ene spre-menljivke, definirana na odprtem intervalu J ⊂ R, γ(t) = (γ1(t), . . . , γn(t))za t ∈ J . Funkcija γ nam predstavlja parametrizirano krivuljo v Rn, njenodvod
dγ
dt(t0) = γ(t0) = (γ1(t0), . . . , γn(t0)) ∈ Rn
v poljubni točki t0 ∈ J pa predstavlja hitrost te parametrizacije in je vektor,tangenten na krivuljo v točki γ(t0).
Naj bo f : U → R zvezno odvedljiva funkcija, definirana na odprtipodmnožici U ⊂ Rn, in naj bo a = γ(t0) ∈ U . Po verižnem pravilu dobimo
d(f ◦ γ)dt
(t0) = (∇f)(a) · γ(t0) = (Dγ(t0)f)(a).
Če parametrizirana krivulja γ leži znotraj množice točk, kjer je funkcijaf konstantna (takšne množice imenujemo nivojske hiper-ploskve funkcije f),je funkcija f ◦ γ torej konstantna in zato velja
d(f ◦ γ)dt
(t0) = (∇f)(a) · γ(t0) = 0.
To pomeni, da je gradient funkcije f v točki a pravokoten na nivojsko hiper-ploskev funkcije f , ki gre skozi točko a.
(3) Videli smo že, da je naklon grafa funkcije večih spremenljivk v raz-ličnih smereh lahko različen. Naj bo f : U → R zvezno odvedljiva funkcija,definirana na odprti podmnožici U ⊂ Rn, naj bo a ∈ U in predpostavimo,da je (∇f)(a) 6= 0. Za vsak vektor u ∈ Rn dolžine 1 velja
(Duf)(a) = (∇f)(a) · u = |u||(∇f)(a)| cosφ = |(∇f)(a)| cosφ,
kjer je φ kot med vektorjem u in gradientom (∇f)(a). Ta izraz bo maksima-len, ko bo cosφ = 1 oziroma, ko bo vektor u kazal v smeri gradienta funkcijef v točki a. Odtod sledi, da gradient (∇f)(a) kaže v smeri najhitrejšeganaraščanja funkcije f v točki a.
304

12.5 Višji parcialni odvodi
Definiramo lahko tudi višje parcialne odvode. Naj bo f : U → R funkcija nspremenljivk, definirana na odprti podmnožici U ⊂ Rn. Če je f parcialnoodvedljiva na spremenljivko xi, je parcialni odvod ∂f
∂xi: U → R spet funkcija
n spremenljivk. Če je ta parcialni odvod parcialno odvedljiva funkcija naspremenljivko xj , dobimo drugi parcialni odvod funkcije f na spremenljivkixi in xj :
∂2f
∂xj∂xi= ∂
∂xj
(∂
∂xi(f))
=∂(∂f∂xi
)∂xj
.
Dobimo ga torej tako, da funkcijo f najprej odvajamo na spremenljivkoxi, nato pa dobljeno funkcijo odvajamo še na spremenljivko xj . Zaradienostavnosti včasih uporabljamo krajše oznake
∂2f
∂xj∂xi= (fxi)xj = fxixj = DjDif = Djif.
Na podoben način lahko definiramo tudi parcialne odvode višjih redov, četi seveda obstajajo. Z oznako
∂kf
∂xik . . . ∂xi2∂xi1= ∂
∂xik
(. . .
(∂
∂xi2
(∂
∂xi1(f)))
. . .
)označimo k-ti parcialni odvod funkcije f na spremenljivke xi1 , xi2 , . . . , xik .Če dvakrat ali večkrat odvajamo na isto spremenljivko, to krajše zapišemoz oznako
∂2f
∂x2i
= ∂2f
∂xi∂xi.
Tako na primer za funkcijo treh spremenljivk f(x, y, z) lahko zapišemo
∂7f
∂z∂z∂z∂x∂y∂x∂x= ∂7f
∂z3∂x∂y∂x2 = fxxyxzzz
= D3D3D3D1D2D1D1f = D33D1D2D
21f = D3 3 3 1 2 1 1f.
Definicija 12.25. Naj bo f : U → R funkcija spremenljivk x1, x2, . . . , xn,definirana na odprti podmnožici U ⊂ Rn, in naj bo k ∈ N∪ {0}. Funkcija fje k-krat zvezno odvedljiva, če je zvezna in če vsi (višji) parcialni odvodi
∂pf
∂xip . . . ∂xi2∂xi1
obstajajo v vseh točkah iz množice U ter so ti zvezni kot funkcije večihspremenljivk U → R, za vse p ∈ N, p ≤ k, in za vse možne izbire indeksovi1, i2, . . . , ip ∈ {1, 2, . . . , n}. Množico vseh k-krat zvezno odvedljivih funkcijU → R označimo z
Ck(U).
305

Vektorska funkcija g : U → Rm, definirana na odprti podmnožici U ⊂Rn, je k-krat zvezno odvedljiva, če so vse njene komponente g1, g2, . . . , gmk-krat zvezno odvedljive. Množico vseh k-krat zvezno odvedljivih funkcijU → Rm označimo z
Ck(U,Rm).
Funkcije v preseku
C∞(U) =∞⋂k=0
Ck(U)
oziroma v preseku
C∞(U,Rm) =∞⋂k=0
Ck(U,Rm)
imenujemo gladke funkcije.
Zgled 12.26. Drugi parcialni odvodi funkcije f(x, y) = x2 + 2xy3 + 4x so:
∂2f
∂x2 (x, y) = 2
∂2f
∂x∂y(x, y) = 6y2
∂2f
∂y∂x(x, y) = 6y2
∂2f
∂y2 (x, y) = 12xy
Vidimo, da sta mešana druga parcialna odvoda enaka. To ni slučaj, ni pavedno res. V nadaljevanju bomo pokazali, da ni važno, v kakšnem vrstnemredu računamo višje parcialne odvode, v kolikor vsi ti višji parcialni odvodiobstajajo in so zvezne funkcije.
Trditev 12.27. Naj bo f : E → R funkcija n spremenljivk, definirana naodprti podmnožici E ⊂ Rn, in naj bosta i, j ∈ {1, 2, . . . , n}, i 6= j. Predpo-stavimo, da parcialna odvoda Dif in Djif obstajata v vseh točkah iz E, daje a ∈ E in da sta h, k ∈ R \ {0} takšni števili, da je a+ tei + sej ∈ E za vset med 0 in h in za vse s med 0 in k. Tedaj obstajata takšen t0 strogo med 0in h ter takšen s0 strogo med 0 in k, da velja
f(a+ hei + kej)− f(a+ hei)− f(a+ kej) + f(a)= hk(Djif)(a+ t0ei + s0ej).
Dokaz. Definirajmo funkcijo u(t) = f(a+ tei + kej)− f(a+ tei) za t med 0in h. Po Lagrangeovem izreku obstaja t0 strogo med 0 in h, da je
u(h)− u(0) = u(t0)(h− 0) = h((Dif)(a+ t0ei + kej)− (Dif)(a+ t0ei)).
306

Podobno naj bo v(s) = (Dif)(a + t0ei + sej) za s med 0 in k. Po Lagran-geovem izreku potem obstaja s0 strogo med 0 in k, da velja
v(k)− v(0) = k(DjDif)(a+ t0ei + s0ej).
Po eni strani je tako
u(h)− u(0) = f(a+ hei + kej)− f(a+ hei)− f(a+ kej) + f(a),
po drugi strani pa iz zgornjih enakosti sledi
u(h)− u(0) = h((Dif)(a+ t0ei + kej)− (Dif)(a+ t0ei))= h(v(k)− v(0))= hk(Djif)(a+ t0ei + s0ej).
Posledica 12.28. Naj bo f : E → R funkcija n spremenljivk, definirana naodprti podmnožici E ⊂ Rn, in naj bosta i, j ∈ {1, 2, . . . , n}. Predpostavimo,da parcialni odvodi Dif , Djf in Djif obstajajo v vseh točkah iz E in da jefunkcija Djif : E → R zvezna v točki a ∈ E. Tedaj obstaja drugi parcialniodvod (Dijf)(a) in velja
(Dijf)(a) = (Djif)(a).
Dokaz. Predpostavimo lahko, da velja i 6= j, kajti sicer je trditev trivialna.Označimo A = (Djif)(a) in naj bo ε > 0 poljuben. Izberimo h, k 6= 0 takomajhna, da je a+ tei + sej ∈ E in
|A− (Djif)(a+ tei + sej)| < ε
za vse tmed 0 in h ter za vse smed 0 in k. Zadnjemu pogoju lahko zadostimozaradi zveznosti funkcije Djif v točki a. Po prejšnji trditvi od tod dobimooceno ∣∣∣∣f(a+ hei + kej)− f(a+ hei)− f(a+ kej) + f(a)
hk−A
∣∣∣∣ < ε.
Sedaj poglejmo limito zgornje neenakosti, ko gre k proti nič pri fiksnem h.Ker parcialni odvod Djf obstaja, je∣∣∣∣(Djf)(a+ hei)− (Djf)(a)
h−A
∣∣∣∣ ≤ ε.Odtod sledi, da je funkcija Djf parcialno odvedljiva na spremenljivko xi vtočki a in da je
(Djif)(a) = A = limh→0
(Djf)(a+ hei)− (Djf)(a)h
= (DiDjf)(a).
307

Ta posledica je v praksi zelo uporabna, saj pove, da sta za poljubnofunkcijo f ∈ C2(E) mešana odvoda Dijf in Djif enaka. Pravkar doka-zano trditev seveda lahko uporabimo tudi za višje parcialne odvode. Čeimamo torej opravka z gladko funkcijo, nam pri računanju višjih parcialnihodvodov ni potrebno skrbeti, v kakšnem vrstnem redu odvajamo funkcijopo posameznih spremenljivkah.
Vaja 12.29. Ugotovi, ali sta naslednji funkciji dveh spremenljivk dvakratzvezno odvedljivi:
(i) f(x, y) ={
xy3
x2+y2 ; (x, y) 6= (0, 0)0 ; x = y = 0
(ii) f(x, y) ={
xy(x2−y2)x2+y2 ; (x, y) 6= (0, 0)
0 ; x = y = 0
12.6 Taylorjeva formula za funkcije večih spremenljivk
V tem poglavju bomo Taylorjev razvoj funkcije ene spremenljivke posplošilina funkcije večih spremenljivk. Funkcije večih spremenljivk bomo aproksi-mirali s polinomi večih spremenljivk.
Naj bo f : U → R (m+1)-krat zvezno odvedljiva funkcija n spremenljivk,definirana na odprti podmnožici U ⊂ Rn, in naj bo a = (a1, . . . , an) ∈ U .Ker je U odprta, lahko najdemo tak R > 0, da je K(a,R) ⊂ U . Iz-berimo poljubno točko (x1, . . . , xn) ∈ K(a,R) \ {a} ⊂ Rn in označimow = (w1, . . . , wn) = (x1 − a1, . . . , xn − an). Cela daljica med a in a + wleži znotraj K(a,R).
xa
U
R
Premico, na kateri ležita točki a in a + w, parametriziramo z vektorskofunkcijo γ : R→ Rn s predpisom
γ(t) = a+ tw.
Funkcija γ je gladka in velja γ(0) = a, γ(1) = a+w in γ(t) = w. Če zožimofunkcijo f na daljico med a in a+w, bomo dobili funkcijo ene spremenljivke,za katero pa že poznamo Taylorjevo formulo.
Definirajmo funkcijo ene realne spremenljivke g : γ−1(U)→ R kot kom-pozicijo
g(t) = f(γ(t)).
308

Ker je funkcija γ zvezna, je množica γ−1(U) ⊂ R odprta, poleg tega pavelja [0, 1] ⊂ γ−1(U). Množica γ([0, 1]) je daljica med a in a + w. Ker jefunkcija f (m+ 1)-krat zvezno odvedljiva in ker je funkcija γ gladka, je poverižnem pravilu tudi funkcija g (m+ 1)-krat zvezno odvedljiva, ob tem paje g(0) = f(a) ter g(1) = f(a + w). Taylorjeva formula za funkcijo enespremenljivke g nam pove, da obstaja tak ϑ ∈ (0, 1), da velja
g(1) =m∑k=0
g(k)(0)1k
k! + g(m+1)(ϑ)(m+ 1)! 1m+1 =
m∑k=0
g(k)(0)k! + g(m+1)(ϑ)
(m+ 1)! .
Da bi zapisali Taylorjevo formulo za funkcijo f moramo le še izračunatiodvode funkcije g in jih izraziti s pomočjo parcialnih odvodov funkcije f .
Če pišemo γ = (γ1, γ2, . . . , γn), je γj(t) = wj za vsak j = 1, 2, . . . , n inza vsak t ∈ R. Z uporabo verižnega pravila zdaj za vsak t ∈ g−1(U) dobimo
g′(t) =n∑i=1
∂f
∂xi(γ(t))γi(t) =
n∑i=1
∂f
∂xi(a+ tw)wi =
n∑i=1
(Dif)(a+ tw)wi.
V zgornji vsoti so wi konstante, medtem ko je funkcija (Dif)(a+tw) kompo-zicija funkcije γ s funkcijo večih spremenljivk Dif , podobno kot je funkcijag kompozicija funkcije γ s funkcijo f . S ponovno uporabo verižnega pravilatako dobimo
g′′(t) =n∑i=1
n∑j=1
(Dj(Dif))(a+ tw)wj
wi =n∑
i,j=1(Djif)(a+ tw) wjwi,
v splošnem pa
g(k)(t) =n∑
i1,...,ik=1(Dii...ikf)(a+ tw)wi1 · · ·wik .
Če te odvode vstavimo v zgornjo Taylorjevo formulo za funkcijo g, dobimo,da velja
f(a+ w) =m∑k=0
1k!
n∑i1,...,ik=1
(Di1...ikf)(a)wi1 · · ·wik
+ 1
(m+ 1)!
n∑i1,...,im+1=1
(Di1...im+1f)(a+ ϑw)wi1 · · ·wim+1
za nek ϑ ∈ (0, 1). To je Taylorjeva formula za funkcijo f reda m razvitaokoli točke a z ostankom v Lagrangeovi obliki.
V zgornjem izrazu tečejo indeksi i1, i2, . . . , ik od 1 do n, ob tem pa selahko vsak indeks ponovi večkrat. Ker je funkcija f (m+ 1)-krat zvezno od-vedljiva, vrstni red odvajanja ni pomemben, zato lahko privzamemo, da pri
309

vsakem odvodu najprej nekajkrat odvajamo na prvo spremenljivko, nato ne-kajkrat na drugo spremenljivko, in tako dalje. Vzemimo na primer parcialniodvod
Di1...ikf = ∂kf
∂xi1∂xi2 · · · ∂xik.
Med indeksi i1, . . . , ik naj bo r1 enakih 1, r2 enakih 2 in v splošnem rj enakihj, za 1 ≤ j ≤ n. Potem je
∂kf
∂xi1∂xi2 · · · ∂xik= ∂kf
∂xr11 ∂x
r22 · · · ∂x
rnn.
Vidimo torej, da različna zaporedja i-jev lahko dajo isto zaporedje r-jev.Zdaj nas zanima, koliko različnih zaporedij i-jev nam da iste r-je. Z nekajkombinatorike lahko preverimo, da je takšnih možnosti natanko
k!r1!r2! · · · rn! .
Če so vsi indeksi i1, . . . , ik med saboj različni, je imenovalec enak 1, različnihmožnosti pa je toliko, kot je permutacij k elementov. Če pa se kakšen indeksponovi, pa moramo upoštevati, da istih indeksov ne ločimo med sabo, zatoje izraz treba deliti s številom ustreznih permutacij. Sedaj lahko pišemo
n∑i1,...,ik=1
(Di1...ikf)(a)wi1 · · ·wik
=∑
0≤r1,...,rn≤kr1+···+rn=k
k!r1! · · · rn!
∂kf
∂xr11 · · · ∂x
rnn
(a)wr11 · · ·w
rnn ,
odtod pa sledi, da Taylorjevo formulo za funkcijo f reda m, razvito okolitočke a, lahko zapišemo tudi v obliki
f(a+ w) =m∑k=0
∑0≤r1,...,rn≤kr1+···+rn=k
∂kf
∂xr11 · · · ∂x
rnn
(a)wr11r1! · · ·
wrnnrn!
+
∑0≤r1,...,rn≤m+1r1+...+rn=m+1
∂kf
∂xr11 · · · ∂x
rnn
(a+ ϑw)wr11r1! · · ·
wrnnrn! ,
za nek ϑ ∈ (0, 1).
Zgled 12.30. Zgornja formula izgleda precej zapletena, zato si bomo pogle-dali nekaj najpogostejših posebnih primerov. Taylorjev razvoj funkcije f dočlenov prvega reda (Taylorjev polinom reda 1) je polinom v spremenljivkahw1, . . . , wn
f(a) +(∂f
∂x1(a)w1 + · · ·+ ∂f
∂xn(a)wn
)= f(a) + (∇f)(a) · w
310

oziroma v spremenljivkah x1, . . . , xn
f(a) +(∂f
∂x1(a)(x1 − a1) + · · ·+ ∂f
∂xn(a)(xn − an)
).
Taylorjev razvoj funkcije f do členov drugega reda oziroma Taylorjev poli-nom reda 2 je polinom
f(a) +(∂f
∂x1(a)(x1 − a1) + · · ·+ ∂f
∂xn(a)(xn − an)
)
+
12
∑1≤i,j≤n
∂2f
∂xi∂xj(a)(xi − ai)(xj − aj)
.V primeru n = 2 spremenljivki ponavadi označimo z x in y. Če razvijamo
okoli točke (x0, y0), je Taylorjev polinom reda 2 v tem primeru
f(x0, y0) +(∂f
∂x(x0, y0)(x− x0) + ∂f
∂y(x0, y0)(y − y0)
)+ 1
2
(∂2f
∂x2 (x0, y0)(x− x0)2 + ∂2f
∂y2 (x0, y0)(y − y0)2
+ 2 ∂2f
∂x∂y(x0, y0)(x− x0)(y − y0)
),
Taylorjev polinom reda m pa lahko zapišemo tudi v oblikim∑k=0
1k!
(k∑r=0
(k
r
)∂kf
∂xr∂yk−r(a)(x− x0)r(y − y0)k−r
).
Zgled 12.31. Poglejmo si še konkreten zgled. Razvijmo funkcijo dveh spre-menljivk f(x, y) = x3 + y2 + xy do členov reda 3 okoli točke (1, 2).
Parcialni odvodi funkcije f so: fx = 3x2 + y, fy = 2y + x, fxx = 6x,fxy = fyx = 1, fyy = 2 in fxxx = 6. Preostali odvodi reda tri in vsi še višjiparcialni odvodi so ničelni. Ko izračunamo vrednosti teh odvodov v točki(1, 2), za Taylorjev razvoj prvega reda dobimo
7 + 5(x− 1) + 5(y − 2),
ki je linearen približek za f(x, y). Taylorjev polinom drugega reda oziromakvadraten približek za f(x, y) je
7 + 5(x− 1) + 5(y − 2) + 6(x− 1)2
2 + 2(y − 2)2
2 + (x− 1)(y − 2),
Taylorjev polinom tretjega reda
7 + 5(x− 1) + 5(y − 2)+ 3(x− 1)2 + (y − 2)2 + (x− 1)(y − 2)
+ 6(x− 1)3
3!
311

pa je kar natančno enak f(x, y), torej
x3 + y2 + xy = 7 + 5(x− 1) + 5(y − 2)+ 3(x− 1)2 + (y − 2)2 + (x− 1)(y − 2)+ (x− 1)3.
12.7 Ekstremi funkcij večih spremenljivk
V tem poglavju si bomo ogledali potrebni pogoj za nastop ekstrema funk-cije večih spremenljivk ter zadostni pogoj za nastop ekstrema funkcije dvehspremenljivk. Videli bomo, da so ti pogoji posplošitev ustreznih pogojevza funkcije ene spremenljivke. Poleg lokalnih maksimumov in minimumovv večih spremenljivkah obstajajo tudi stacionarne točke sedlastega tipa, kiniso ekstremi, a imajo kljub temu netrivialne druge parcialne odvode.
Definicija 12.32. Naj bo f : U ⊂ Rn → R funkcija n spremenljivk in najbo in a ∈ U .
(i) Funkcija f ima v točki a (strogi) lokalni maksimum, če obstaja takδ > 0, da za vsak v ∈ K(a, δ) ∩ U \ {a} velja
f(v) ≤ f(a) (oziroma f(v) < f(a)).
(ii) Funkcija f ima v točki a (strogi) lokalni minimum, če obstaja takδ > 0, da za vsak v ∈ K(a, δ) ∩ U \ {a} velja
f(v) ≥ f(a) (oziroma f(v) > f(a)).
Če velja bodisi (i) ali (ii), pravimo, da ima funkcija f v točki a (strogi)lokalni ekstrem.
V primeru funkcij dveh spremenljivk izgleda lokalni minimum na grafukot dno kotanje, lokalni maksimum pa kot vrh gore.
Definicija 12.33. Naj bo f : U → R totalno odvedljiva funkcija, definiranana odprti podmnožici U ⊂ Rn. Točka a ∈ U je stacionarna točka funkcijef , če je (∇f)(a) = 0.
312

Trditev 12.34 (Potrebni pogoj za ekstrem). Naj bo f : U → R totalno od-vedljiva funkcija, definirana na odprti podmnožici U ⊂ Rn. Če ima funkcijaf lokalni ekstrem v točki a ∈ U , potem je a stacionarna točka funkcije f .
Dokaz. Vzemimo poljuben vektor u ∈ Rn in definirajmo gladko vektorskofunkcijo γ : R→ Rn s predpisom
γ(t) = a+ tu.
Funkcija f ◦γ : γ−1(U) ⊂ R→ R je odvedljiva in velja γ(0) = a ter γ(t) = u.Ker ima f v točki a lokalni ekstrem, ima f ◦ γ v točki 0 lokalni ekstrem,zato je (f ◦ γ)′(0) = 0. Velja torej
(∇f)(a) · u = (∇f)(γ(0)) · γ(0) = (f ◦ γ)′(0) = 0.
Ker je bil vektor u poljuben, lahko izberemo u = (∇f)(a) in iz zadnjeenakosti dobimo (∇f)(a) = 0.
Za totalno odvedljive funkcije je torej ničeln gradient potreben pogoj zanastop ekstrema. Pri funkcijah ene spremenljivke smo videli, da je zadostenpogoj za nastop ekstrema neničeln drugi odvod, medtem ko so pri funkcijahvečih spremenljivk stvari nekoliko bolj zapletene. Nastop ekstrema dvakratzvezno odvedljive funkcije je odvisen od Hessejeve matrike drugih odvodov,ki jo bomo spoznali pri Matematiki 2.
Za dvakrat zvezno odvedljivo funkcijo f : U → R dveh spremenljivk xin y, definirano na odprti podmnožici U ⊂ R2, je situacija nekoliko enostav-nejša: v tem primeru nam ekstreme pomaga klasificirati naslednja pomožnafunkcija, ki ji pravimo determinanta Hessejeve matrike funkcije f :
K(f)(x, y) = ∂2f
∂x2 (x, y)∂2f
∂y2 (x, y)−(∂2f
∂x∂y(x, y)
)2
Trditev 12.35 (Zadostni pogoj za ekstrem funkcije dveh spremenljivk). Najbo f : U → R dvakrat zvezno odvedljiva funkcija dveh spremenljivk x in y,definirana na odprti podmnožici U ⊂ R2, in naj bo (x0, y0) ∈ U stacionarnatočka funkcije f . Potem velja:
(i) Če je K(f)(x0, y0) > 0, ima f v točki (x0, y0) strogi lokalni ekstrem insicer
(a) strogi lokalni maksimum, če je ∂2f∂x2 (x0, y0) < 0, oziroma
(b) strogi lokalni minimum, če je ∂2f∂x2 (x0, y0) > 0.
(ii) Če je K(f)(x0, y0) < 0, funkcija f v točki (x0, y0) nima lokalnegaekstrema. (V tem primeru pravimo, da ima f v točki (x0, y0) sedlo.)
313

Dokaz. Ker je (x0, y0) stacionarna točka funkcije f , nam Taylorjev razvojfunkcije f okoli te točke pove, da za vse dovolj majhne pare (h, k) ∈ R2
obstaja tak ϑ ∈ (0, 1), da velja
f(x0 + h,y0 + k) = f(x0, y0) + 12
(∂2f
∂x2 (x0 + ϑh, y0 + ϑk)h2+
+ 2 ∂2f
∂x∂y(x0 + ϑh, y0 + ϑk)hk + ∂2f
∂y2 (x0 + ϑh, y0 + ϑk)k2).
Označimo zaradi enostavnosti
α = α(h, k) = ∂2f
∂x2 (x0 + ϑh, y0 + ϑk),
β = β(h, k) = ∂2f
∂x∂y(x0 + ϑh, y0 + ϑk),
γ = γ(h, k) = ∂2f
∂y2 (x0 + ϑh, y0 + ϑk).
Potem lahko pišemo
f(x0 + h, y0 + k) = f(x0, y0) + 12(α(h, k)h2 + 2β(h, k)hk + γ(h, k)k2
).
Zanima nas predznak izraza B = B(h, k) v oklepaju na desni strani. Čeje ta pozitiven ali pa negativen v vsaki drugi točki iz neke majhne okolicetočke (x0, y0), ima f v točki (x0, y0) strogi lokalni ekstrem.
Po predpostavkah je K(f)(x0, y0) 6= 0. Ker je f ∈ C2(U), so vsi drugiparcialni odvodi funkcije f zvezni, zato je zvezna tudi funkcija K(f). Torejje K(f) neničelna in istega predznaka kot K(f)(x0, y0) na neki majhni okolicitočke (x0, y0).
(i) Predpostavimo, da je K(f)(x0, y0) > 0. Posebej to pomeni, da zadovolj majhne (h, k) velja α(h, k)β(h, k) > 0, zaradi zveznosti funkcije α paje za dovolj majhne (h, k) tudi α(h, k) istega predznaka kot α(0, 0).
Če je k 6= 0, lahko pišemo
B = αh2 + 2βhk + γk2 = k2(αt2 + 2βt+ γ),
kjer je t = h/k. Izraz B je kvadratna funkcija spremenljivke t z diskrimi-nanto
D = (2β)2 − 4αγ = 4(β2 − αγ) = −4K(f)(x0 + h, y0 + k).
Za dovolj majhne (h, k) je torej diskriminanta negativna in izraz B je istegapredznaka kot α. Tudi v primeru, ko je k = 0 in je h 6= 0 dovolj majhen, jeizraz
αh2 + 2βhk + γk2 = αh2
314

istega predznaka kot α. Za dovolj majhne (h, k) 6= (0, 0) je torej izraz
αh2 + 2βhk + γk2
ves čas negativen ali pa ves čas pozitiven. Odtod sledi, da ima funkcija fv točki (x0, y0) ekstrem. Tip ekstrema je odvisen od predznaka funkcije αoziroma od predznaka števila
α(0, 0) = ∂2f
∂x2 (x0, y0).
(ii) Naj bo K(f)(x0, y0) < 0. Radi bi pokazali, da potem obstajajopoljubno majhni pari (h1, k1) in (h2, k2), da velja
f(x0 + h1, y0 + k1) > f(x0, y0),f(x0 + h2, y0 + k2) < f(x0, y0).
Iz pogoja K(f)(x0, y0) < 0 sledi, da ima kvadratna funkcija
α(0, 0)t2 + 2β(0, 0)t+ γ(0, 0)
pozitivno diskriminanto, zato obstajata takšna t1, t2 ∈ R, da velja
α(0, 0)t21 + 2β(0, 0)t1 + γ(0, 0) > 0,α(0, 0)t22 + 2β(0, 0)t2 + γ(0, 0) < 0.
Zaradi zveznosti drugih parcialnih odvodov veljata za dovolj majhne pare(h, k) tudi neenakosti
α(h, k)t21 + 2β(h, k)t1 + γ(h, k) > 0,α(h, k)t22 + 2β(h, k)t2 + γ(h, k) < 0.
Izberimo sedaj h1 in k1 tako, da velja t1 = h1/k1. Množica takšnih parovtvori premico v ravnini. Če sta h1 in k1 dovolj majhna in k1 6= 0, velja
α(h1, k1)t21 + 2β(h1, k1)t1 + γ(h1, k1) > 0
oziromaα(h1, k1)h2
1 + 2β(h1, k1)h1k1 + γ(h1, k1)k21 > 0.
Našli smo torej poljubno majhne pare (h1, k1), za katere je
f(x0 + h1, y0 + k1) = f(x0, y0)
+ 12(α(h1, k1)h2
1 + 2β(h1, k1)h1k1 + γ(h1, k1)k21
)> f(x0, y0).
Na podoben način lahko najdemo tudi poljubno majhne pare (h2, k2), kizadoščajo pogoju t2 = h2/k2 in zato za njih velja
f(x0 + h2, y0 + k2) < f(x0, y0).
Oboje skupaj nam pove, da v točki (x0, y0) funkcija f nima ekstrema.
315

Zgled 12.36. (1) Poiščimo najprej ekstreme funkcije f(x, y) = x3+y3−3xy.Parcialna odvoda sta fx = 3x2 − 3y in fy = 3y2 − 3x. Stacionarne točkemorajo torej zadoščati sistemu enačb
fx = 3x2 − 3y = 0,fy = 3y2 − 3x = 0.
Iz prve enačbe dobimo x2 = y, iz druge pa y2 = x. Če drugo enačbokvadriramo in nato upoštevamo prvo enačbo, dobimo, da je y4 = y. Taenačba ima realni rešitvi y = 0 in y = 1, zato ima funkcija f dve stacionarnitočki T1(0, 0) in T2(1, 1).
Drugi parcialni odvodi so fxx = 6x, fxy = −3 in fyy = 6y. Sledi
K(f)(x, y) = 6x · 6y − (−3)2 = 36xy − 9.
V stacionarnih točkah je
K(f)(0, 0) = −9 < 0,K(f)(1, 1) = 27 > 0,
zato v točki T1 ni ekstrema in imamo sedlo, v točki T2 pa imamo strogilokalni minimum, saj je fxx(1, 1) = 6 > 0.
V okolici stacionarne točke T1 ima graf obliko sedla, v točki T2 pa je dnokotline.
(2) Poglejmo si sedaj funkcijo f(x, y) = 2x2+3y2−4x+2 = 2(x−1)2+3y2.Nivojske krivulje funkcije f so elipse, preseki grafa funkcije f z ravninamioblike x = x0 in y = y0 pa so parabole. Parcialna odvoda funkcije f stafx = 4x− 4 in fy = 6y. Stacionarna točka je ena sama, in sicer T (1, 0).
Drugi parcialni odvodi so fxx = 4, fxy = 0 in fyy = 6, zato je
K(f)(x, y) = 4 · 6− 0 = 24 > 0.
V točki T je torej strogi lokalni minimum, ker je fxx = 4 > 0. Graf funkcijef ima obliko paraboloida.
316

(3) Za konec si poglejmo še funkcijo f(x, y) = y2−x2. Parcialna odvodasta fx = −2x in fy = 2y, kar pomeni, da imamo stacionarno točko T (0, 0).
Drugi parcialni odvodi so fxx = −2, fxy = 0 in fyy = 2, od koder dobimo
K(f)(x, y) = (−2) · 2− 0 = −4 < 0.
V točki T torej ni ekstrema, pač pa sedlo.
12.8 Integral s parametrom
Trditev 12.37 (Integral s parametrom). Naj bo φ : E → R zvezno odve-dljiva funkcija, definirana na odprti podmnožici E ⊂ R2, in naj bo [a, b] ×(c, d) ⊂ E. Tedaj je ∫ b
aφ(x, t) dx
odvedljiva funkcija parametra t ∈ (c, d) in velja
d
dt
∫ b
aφ(x, t) dx =
∫ b
a
∂φ
∂t(x, t) dx
za vse t ∈ (c, d).
Dokaz. Izberimo fiksen s ∈ (c, d) in poljuben ε > 0 ter označimo
ψ(x, t) = φ(x, t)− φ(x, s)t− s
za vse x ∈ [a, b] in t ∈ (c, d) \ {s}. Ker je ∂φ∂t zvezna funkcija, je enakomerno
zvezna na kompaktni množici [a, b]×[α, β], za poljuben zaprt omejen interval[α, β] ⊂ (c, d). To posebej pomeni, da obstaja tak δ > 0, da je [s−δ, s+δ] ⊂(c, d) in da za vsak x ∈ [a, b] ter za vsak t ∈ [s− δ, s+ δ] velja∣∣∣∣∂φ∂t (x, t)− ∂φ
∂t(x, s)
∣∣∣∣ < ε.
317

Za vse x ∈ [a, b] ter t ∈ [s − δ, s + δ] \ {s} Lagrangeov izrek za funkcijoφ(x,−) na intervalu med t in s pove, da je
φ(x, t)− φ(x, s) = ∂φ
∂t(x, ux,s,t)(t− s)
za nek ux,s,t ∈ R med t in s. Torej je
ψ(x, t) = ∂φ
∂t(x, ux,s,t),
odtod pa sledi∣∣∣∣ψ(x, t)− ∂φ
∂t(x, s)
∣∣∣∣ =∣∣∣∣∂φ∂t (x, ux,s,t)−
∂φ
∂t(x, s)
∣∣∣∣ < ε. (8)
Ta ocena velja za vse x ∈ [a, b] in vse t ∈ (c, d), za katere je 0 < |t− s| < δ.Označimo sedaj
f(t) =∫ b
aφ(x, t) dx
za t ∈ (c, d). Potem je
f(t)− f(s)t− s
=∫ ba φ(x, t) dx−
∫ ba φ(x, s) dx
t− s=∫ b
aψ(x, t) dx.
Izberimo poljubno zaporedje (tk) števil iz (s− δ, s + δ) \ {s}, ki konvergirak točki s. Iz ocene (8) sledi, da zaporedje funkcij
ψk = ψ(−, tk) : [a, b]→ R
na [a, b] enakomerno konvergira k funkciji ∂φ∂t (x, s) spremenljivke x. Ker sofunkcije ψk zvezne in zato integrabilne, je torej tudi limitna funkcija zveznain integrabilna ter velja∫ b
a
∂φ
∂t(x, s) dx = lim
k→∞
∫ b
aψk(x) dx = lim
k→∞
f(tk)− f(s)tk − s
.
Ker torej obstaja limita limk→∞f(tk)−f(s)
tk−s za vsako zaporedje točk (tk) iz(s−δ, s+δ)\{s}, ki konvergira k točki s, obstaja tudi limita limt→s
f(t)−f(s)t−s
in velja ∫ b
a
∂φ
∂t(x, s) dx = lim
k→∞
f(tk)− f(s)tk − s
= limt→s
f(t)− f(s)t− s
= d
dt
∣∣∣t=sf(t) = d
dt
∣∣∣t=s
∫ b
aφ(x, t) dx.
318

Zgled 12.38. Naj bo
I =∫ 2π
0ecosx cos(sin x) dx.
Da bi izračunali ta določeni integral, v integral uvedemo nov parametert ∈ R,
f(t) =∫ 2π
0et cosx cos(t sin x) dx.
Ker je funkcija pod zadnjim integralom zvezno odvedljiva funkcija dvehspremenljivk, lahko uporabimo prejšnji izrek, po katerem je f odvedljiva, inzato tudi zvezna, in odvod funkcije f lahko izračunamo z odvajanjem podintegralom. Odtod dobimo
df
dt(t) =
∫ 2π
0
∂
∂t
(et cosx cos(t sin x)
)dx
=∫ 2π
0et cosx (cosx cos(t sin x)− sin(t sin x) sin x) dx.
Zdaj opazimo, da je
tet cosx (cosx cos(t sin x)− sin(t sin x) sin x) = ∂
∂x
(et cosx sin(t sin x)
).
Za vsak t 6= 0 lahko torej izračunamo
df
dt(t) =
∫ 2π
0
1t
∂
∂x
(et cosx sin(t sin x)
)dx
= 1t
(et cosx sin(t sin x)
) ∣∣∣x=2π
x=0= 0.
Odtod sledi, da je funkcija f konstantna tako na intervalu (−∞, 0) kot tudina intervalu (0,∞). Ker je poleg tega f zvezna na R, je torej konstantna nacelem R. Posebej velja
I = f(1) = f(0) =∫ 2π
01 dx = 2π.
319