mafijaški način da se stvari urade :)
DESCRIPTION
xxxTRANSCRIPT

Vanr.prof.dr Mirsad Kapetanovi
OSNOVE MEHATRONIKEšifra predmeta: ETF EEI OMT 2460
primjeri mehatroni kih sistema u elektroenergetici
Nastavnik: Vanr.prof.dr Mirsad KAPETANOVI ,dipl.el.ing
Elektrotehni ki fakultet Univerziteta u Sarajevu
2
Vanr.prof.dr Mirsad Kapetanovi
primjeri mehatroni kih sistema u elektroenergetici
Enkoderi (encoders)

3
Vanr.prof.dr Mirsad Kapetanovi
Enkoderi
Enkoderi su ure aji koji na svom izlazu proizvode
signal kao kao rezultat vlastitog linearnog ili
rotacionog kretanja.
Kada enkoderi proizvode signal u vidu niza digitalnih
impulsa onda se obi no nazivaju digitalni enkoderi. Jenostavnim brojanjem pojedina nih
bitova ili dekodiranjem niza bitova, impulsi se
mogu pretvoriti u relativno ili apsolutno mjerenje
pozicije, brzine, ubrzanja i odre ivanje smjera
kretanja.
Enkoderi se generalno mogu podijeliti na:
mehani ke (enkoderi kontaktnog tipa)
magnetne (linearni diferencijalni
transformatori) i
opti ke (fotoelektri ni enkoderi).
Ve ina današnjih enkodera radi na principu foto-
elektri nog skeniranja odre ene skale tokom
kretanja, zbog ega ih esto nazivamo i digitalni opti ki enkoderi.
4
Vanr.prof.dr Mirsad Kapetanovi
Enkoderi
Enkoderi mogu biti:
rotacioni ili
linearni.Rotacioni enkoderi proizvode digitalne impulse kada se osovina na koju su pri vrš eni
rotira. Time se omogu ava mjerenje relativnog ili apsolutnog ugla zakretanja osovine.
Linearni enkoderi proizvode digitalne impulse kada se dio na koji su pri vrš eni translatorno pomjera u odre enom pravcu. Time se omogu ava mjerenje relativnih ili apsolutnih koordinata odre ene ta ke. eš e se koriste rotacioni enkoderi.
Enkoderi se mogu podijeliti u dvije osnovne grupe:
apsolutni enkoderi
relativni enkoderi (inkrementalni enkoderi ili enkoderi priraštaja)
Kod apsolutnih enkodera jedinstveni niz bitova (jedinstvena digitalna rije ) odgovara svakoj ugaonoj poziciji osovine kod rotacionih enkodera, odnosno podužnoj koordinati u odgovaraju em mjernom opsegu kod linearnih enkodera. Oni mogu ponovo o itati ta nu poziciju i nakon eventualnog gubitka napajanja.
Relativni enkoderi su jednostavniji jer generišu pojedina ne digitalne impulse ijim se brojanjem, uz poznatu rezoluciju, može pratiti relativno rotaciono ili translatorno kretanje. U slu aju prestanka napajanja, oni ne mogu ponovo o itati svoju poziciju, ve pokazuju nulu. Zbog toga se moraju ponovo dovesti na referentnu poziciju.

5
Vanr.prof.dr Mirsad Kapetanovi
Rotacioni enkoderi
Ve ina rotacionih enkoderaradi na principu foto-elektri nog skeniranja.
Sastoje se od stakleniog ili plasti nog, opti kog diska za kodiranje (optical code disk) na kojem su ugravirane ili foto grafi ki nanesene radijalne skale(scale, pattern) raspore ene u više staza (tracks).
Tokom rotacije osovine, radijalne linije skala u stazama prekidaju zrak svjetlosti izme u fotoemitera (LED dioda –Light Emitting Diode) i fotodetektora(fototranzistor –phototransistor).
Fiksni senzori (par fotoemiter-fotodetektor) detektuju kod na osnovu kojeg se generišu digitalni izlazni signali.
6
Vanr.prof.dr Mirsad Kapetanovi
Dispozicija elemenata kod rotacionih enkodera
skala na disku
relativnog
enkodera
skala na disku
apsolutnog
enkodera
doboš sa skalom
na traci rotacionog
enkodera
Na slici je prikazana tipi na dispozicija elemenata, neovisno od toga da li se radi o rotacionim ili ugaonimaenkoderima i neovisno od toga da li se radi o apsolutnim ili relativnimenkoderima.

7
Vanr.prof.dr Mirsad Kapetanovi
Razlika izme u rotacionih i ugaonih enkodera
ugaoni enkoderi
rotaconi enkoderi
Kada rotacioni enkoder ima veliku ta nost (bolju od 5’’
ili broj linija ve i od 10000) onda se obi no naziva ugaoni enkoder (umjesto rotacioni enkoder).
Osnovna veli ina koju mjere ugaoni enkoderi je ugaona pozicija, za razliku od rotacionih enkodera kod kojih je osnovna veli ina koju mjere ugaona brzina.
Podru je primjene rotacionih enkodera uklju uje: elektri ne motore, alatne mašine, mašine za obradu drveta, proizvodnju tekstila, robote i mašine za manipulisanje teretom, te razne vrste mjernih i ispitnih ure aja...
Podru je primjene ugaonih enkodera uklju uje: navojna vretena sa preciznom uglovnom podjelom na alatnim mašinama, rotacione plo e na alatnim mašinama, precizna ugaona mjerenja kod teleskopa, antena i drugih ure aja...
segmentna izvedba ugaonog enkodera
8
Vanr.prof.dr Mirsad Kapetanovi
Spajanje rotacionih enkodera
Rotacioni enkoderi saspajanjem preko osovine
Rotacioni enkoderi saspajanjem na stator
Rotacioni enkoderi se koriste kao mjerni senzori za rotaciono kretanje, ali i za linearno kretanje kada se spregnu sa navojnim vretenom (spindle).
Mogu se spajati na ure aj na dva na ina:
preko osovine i
preko statoraU slu aju spajanja preko osovine, obi no se
koriste fleksibilne spojnice.
Spojnica

9
Vanr.prof.dr Mirsad Kapetanovi
Opti ki disk apsolutnog rotacionog enkodera
Opti ki disk apsolutnog rotacionog enkodera je dizajniran tako da proizvodi N jedinstvenih digitalnih rije i prema odgovaraju oj ugaonoj poziciji osovine na kojoj je pri vrš en. Naprimjer, enkoder koji ima 8 staza može razlikovati N=28=256 ugaonih pozicija, što odgovara širini sektora (ugaonoj rezoluciji) od 1.406o (360o/256).
Kod apsolutnih enkodera naj eš e se koriste sljede a dva tipa numeri kog kodiranja:
gray kod i
binarni kodPrednost gray koda je minimalna neta nost na prelaznim pozicijama, gdje greška ne može biti ve a od 1,
za razliku od binarnog koda kod kojeg ta greška može biti mnogo ve a.
I pored ve e neta nosti, binarni kod se esto preferira zbog mogu nosti direktnog interfejsa sa digitalnim ra unarima, bez potrebe za dodatnim digitalnim ure ajima za konvertovanje gray koda u binarni.
Da bismo uo ili razliku u ponašanju ova dva tipa numeri kog kodiranja, ilustrova emo ih na primjeru jednostavnog 4-bitnog enkodera.
10
Vanr.prof.dr Mirsad Kapetanovi
Gray kod
Kao što se vidi sa slike, grey kod je karakteristi an po tome što se na svakom prelazu istovremeno može
mijenjati samo jedan bit u digitalnoj rije i. Dakle, na istoj ugaonoj poziciji samo se u jednoj stazi može
mijenjati stanje.
10001111337.5-360.015
10011110315.0-337.514
10111101292.5-315.513
10101100270.0-292.512
11101011247.5-270.011
11111010225.0-247.510
11011001202.5-225.09
11001000180.0-202.58
01000111157.5-180.07
01010110135.0-157.56
01110101112.5-135.05
01100100090.0-112.54
00100011067.5-090.03
00110010045.0-067.52
00010001022.5-045.01
00000000000.0-022.50
Gray
kodBinarni
kodUgaona pozicija
Decimalni kod

11
Vanr.prof.dr Mirsad Kapetanovi
Binarni kod
Za razliku od gray koda, binarni kod može mijenjati stanje u više staza istovremeno, što zna i da se
istovremeno može mijenjati i više bitova u digitalnoj rije i. Zbog toga je posebno izrazen problem neta nosti
binarnog koda na pozicijama gdje dolazi do prelaza iz jednog stanja u drugo u više staza istovremeno.
10001111337.5-360.015
10011110315.0-337.514
10111101292.5-315.513
10101100270.0-292.512
11101011247.5-270.011
11111010225.0-247.510
11011001202.5-225.09
11001000180.0-202.58
01000111157.5-180.07
01010110135.0-157.56
01110101112.5-135.05
01100100090.0-112.54
00100011067.5-090.03
00110010045.0-067.52
00010001022.5-045.01
00000000000.0-022.50
Gray
kodBinarni
kodUgaona pozicija
Decimalni kod
12
Vanr.prof.dr Mirsad Kapetanovi
Neta nost binarnog koda na prelaznim pozicijama
Primjena binarnog koda nije uvijek zgodna zbog problema koji se mogu javiti na prelaznim pozicijama izme u dvije digitalne rije i. Ako se opti ki enkoder disk zaustavi izme u dva susjedna sektora (ili ako prelazi nisu perfektno poravnati u istoj liniji) može se desiti da je u potpunosti nemogu e odrediti ugaoni položaj osovine.
Da bismo ilustrovali ovaj problem, posmatrajmo šta se dešava kada se ugao mijenja sa 179.9o na 180.1o (sa sektora 7 na sektor 8). U odre enom trenutku, digitalna rije 0111 mijenja se u 1000. Dakle, na ovoj poziciji istovremeno se mijenjaju sva etiri bita da bi se promijenila samo jedna digitalna rije . Me utim, to se tako ne dešava u stvarnosti. U realnom enkoderu prelazi u razlicitim stazama nikada nisu perfektno poravnati, tako da e se stanje u svakoj stazi mijenjati u razli itom trenutku.
Naprimjer, neka se promjena stanja dešava sljede im redom: prvo se mijenja bit 3, onda bit 1, zatim bit 2 i na kraju bit 0. Enkoder ce u ovom vremenskom intervalu registrovati sljede i niz digitalnih rije i:
0111 (po etna pozicija)
1111 (nakon promjene samo bita 3)
1101 (nakon promjene i bita 1)
1001 (nakon promjene i bita 2)
1000 (kona na pozicija nakon promjene i bita 0)
Kada u tabeli pogledamo ugaone pozicije koje odgovaraju ovim rije ima, dobi emo sljede e sektore u nizu: 7, 15, 13, 9, pa tek na kraju sektor 8. U mnogim slu ajevima, ovakvo ponašanje realnog enkodera je nepoželjno i može uzrokovati nepravilan rad ili otkaz sistema.
Naprimjer, ako se enkoder koristi na ruci robota, kontroler e zaklju iti da je ruka u pogrešnoj poziciji i pokuša e napraviti korekciju zakre u i je za cijelih 180o i tako možda oštetiti ruku. Da bi se riješio ovaj problem, koristi se gray kod umjesto binarnog koda.
1111337.5-360.015
1110315.0-337.514
1101292.5-315.513
1100270.0-292.512
1011247.5-270.011
1010225.0-247.510
1001202.5-225.09
1000180.0-202.58
0111157.5-180.07
0110135.0-157.56
0101112.5-135.05
0100090.0-112.54
0011067.5-090.03
0010045.0-067.52
0001022.5-045.01
0000000.0-022.50
Binarni kod
Ugaona pozicijaDecimalni
kod

13
Vanr.prof.dr Mirsad Kapetanovi
Stvarni izgled opti kih diskova apsolutnog rotacionog enkodera
14
Vanr.prof.dr Mirsad Kapetanovi
Opti ki disk relativnog enkodera
Opti ki disk relativnog enkodera je
jednostavniji od apsolutnog. Sastoji
se od dvije ravnomjerne skale
smještene u dvije staze (na slici
ozna ene sa A i B). Kada osovina sa
diskom rotira, senzorski parovi
fotoemiter-fotodetektor izme u kojih
je smješten disk, proizvode niz
impulsa frekvencijom koja je
proporcionalna brzini rotacije.
Fazni pomak izme u signala A i B, koji
iznosi 1/4 rezolucije skale,
omogu ava odre ivanje smjera obrtanja.
Brojanjem impulsa, uz poznavanje
rezolucije skale, može se mjeriti
ugaona pozicija.
Obi no se koristi i tre a staza (na slici
ozna ene sa INDEX), koja služi za
pra enje broja okretaja osovine,
tako što proizvodi jedan impuls po
okretaju. Ovaj impuls se koristi i kao
referenca za odre ivanje nulte
(polazne) pozicije.
Na gornjoj slici je, radi jasno e, prikazana konfiguracija
sa dvije odvojene staze A i B, ali se u praksi
redovno koristi samo jedna staza sa dva senzora
me usobno pomjerena za 1/4 rezolucije skale.
Opti ki enkoder diskovi sa jednom stazom su
jednostavniji i jeftiniji u proizvodnji.

15
Vanr.prof.dr Mirsad Kapetanovi
Prepoznavanje smjera i pove anje rezolucije relativnog enkodera
Signali A i B koje generiše relativni
enkoder, osim za odre ivanje ugaonog
pomjeranja i ugaone brzine, koriste se i
za odre ivanje smjera rotacije.
Smjer rotacije se odre uje na osnovu
vrijednosti jednog signala u trenutku
kada se mijenja vrijednost drugog.
Naprimjer:
slu aj A= kada je B=1 u modu 1Xdešava se samo ako je rotacija osovine
u smjeru kretanja kazaljke na satu (CW
– clockwise), a nikada ako je rotacija u
suprotnom (CCW – counterclockwise).
Ovaj slu aj zbog toga može biti
indikator rotacije naprijed (CW).
slu aj B= kada je A=1 u modu 1X, po istoj logici može biti indikatorrotacije nazad (CCW).
A= kada je B=1
zna i rotaciju naprijed
B= kada je A=1
zna i rotaciju nazad
16
Vanr.prof.dr Mirsad Kapetanovi
Šema dekodera signala sa relativnog enkodera
Na slici je prikazana šema kola koje prati
ulazne pravougaone signale A i B koje
generiše relativni enkoder u modu 1X.
Kolo proizvodi impulse na specifi nim
negativnim ivicama oba ulazna
signala.
Flip-flop D dešifruje smjer rotacije (CW - u
smjeru kretanja kazaljke na satu, CCW
- u smjeru suprotnom kretanju kazaljke
na satu). Na bazi te informacije
proslje uje se impuls broja u na gore
ili na dole.
Impuls broja u na gore traje od trenutka
kada opadne vrijednost pravougaonog
signala A, do trenutka kada opadne
vrijednost pravougaonog signala B.
Impuls broja u na dole traje od trenutka
kada opadne vrijednost pravougaonog
signala B, do trenutka kada opadne
vrijednost pravougaonog signala A.
Sli na šema može se napraviti i za signale
A i B generisane u modovima 2X i 4X.

17
Vanr.prof.dr Mirsad Kapetanovi
Stvarni izgled opti kih diskova relativnog rotacionog enkodera
18
Vanr.prof.dr Mirsad Kapetanovi
Linearni enkoderi
Ve ina savremenih linearnih enkodera radi na istom principu kao i rotacioni enkoderi, tj. na principu fotoelektri nog skeniranja.
Osnovni elementi linearnih enkodera su:
staklena ili plasti na traka na kojoj je ugravirana vrlo fina, linearna skalazaslon sa etverodijelnom referentnom skalom
izvor svjetlosti (LED dioda)
sabirno so ivofoto elije smještene na suprotnoj strani linearne skale
Generalno gledaju i, linearni enkoderi se od rotacionih enkodera razlikuju samo po pravolinijskoj izvedbi i
na inu interpolacije i digitaliziranja izlaznih signala. Svjetlost koju emituje LED dioda prolazi kroz sabirno
so ivo da bi se dobio snop paralelnih zraka, koje na svom putu nailaze na zaslon i linearnu skalu što stvara
sjenu razli itog intenziteta na svakoj od etiri naspramno postavljene foto elije.
Foto elije generišu etiri sinusoidalna signala me usobno pomaknuta za 90oe.
Kada se linearna skala kre e, generisani signali se koriste za odre ivanje pre enog puta, kao i smjera kretanja. Tako odre enu poziciju prikazuje digitalni pokaziva položaja postavljen na vidno mjesto.
Referentni znakovi kod apsolutnih enkodera omogu avaju ponovno o itanje ta ne pozicije i nakon eventualnog gubitka napajanja, dok kod relativnih, referentni znak samo definiše
referentnu, odnosno nultu poziciju.

19
Vanr.prof.dr Mirsad Kapetanovi
Princip fotoelektri nog skeniranja
Odgovaraju e foto elije generišu sinusoidalne signale koji su me usobno fazno pomaknuti za 90oe (dva zelena i dva plava signala na slici desno). Ovako generisani signali nisu simetri ni u odnosu na nultu liniju. Zbog toga su foto elije spojene u tzv. push-pull spoj koji proizvodi dva signala I1 i I2 koji su simetri ni u odnosu na nultu liniju sa me usobnim faznim pomakom od 90oe (dva crvena signala).
Osnovni princip foto-elektri nog skeniranjakod opti kih enkodera sa
4-dijelnom referentnom
skalom i etiri foto elije
prikazan je na slici.
Zaslon ima 4 referentne skale
ija je podjela me usobno
smaknuta za po 1/4
koraka podjele, koji se
blago razlikuje u odnosu
na linearnu skalu.
Na nekim mjestima linije se preklapaju i tako dozvoljavaju prolaz svjetlosti, dok se na drugim mjestima preklapaju linije i procjepi, što stvara sjenu.
20
Vanr.prof.dr Mirsad Kapetanovi
Fotoelektri no skeniranje sa jednodjelnom referentnom skalom
Da bi se popravio kvalitet izlaznih signala i da bi se smanjila osjetljivost opti kih enkodera na opti ku kontaminaciju, u novije vrijeme se koristi fotoelektri no skeniranje sa jednodjelnom referentnom skalom na zaslonu, koja je nešto šira (slika gore).
Njen korak podjele se tako e blago razlikuje od podjele na linearnoj skali, što stvara sjenu razli itog intenziteta, kao što je ilustrovano na slici. Ovakav sistem predstavlja opti ki filter koji homogeni snop svjetlosti pretvara u opti ki signal sa sinusnom modulacijom.
Umjesto pojedina nih foto elija, ovdje se koristi specijalno strukturirani fotosenzor koji generiše etiri elektri na, sinusoidalna signala, me usobno fazno pomaknuta za 90oe.
I ovdje se, na isti na in kao kod skeniranja sa etverodjelnom referentnom skalom, etiri signala koriste za generisanje
samo dva izlazna signala (I1 i I2), koji su simetri ni u odnosu na nultu liniju sa me usobnim faznim pomakom od 90oe
(dva crvena signala). Izlazni signali se mogu digitalizirati po potrebi.

21
Vanr.prof.dr Mirsad Kapetanovi
Izvedbe opti kih linearnih enkodera
Prema fizi koj izvedbi linearne skale, opti ki linearni enkoderi se mogu podijeliti u dvije osnovne grupe:
linearni enkoderi sa otvorenom skalom (exposed scale) i
linearni enkoderi sa oklopljenom skalom (enclosed scale)
22
Vanr.prof.dr Mirsad Kapetanovi
Linearni enkoderi sa oklopljenom skalom
Kod linearnih enkodera sa oklopljenom skalom, skener je smješten na malim kolicima vo enim na ležajevima duž linearne skale. Kolica su pri vrš ena na kliza mašine preko fleksibilne veze koja kompenzira eventualno loše poravnanje izme u vo ica kliza a na mašini i linearne skale.
Par zaptivnih usana štiti linearnu skalu od raznih vrsta kontaminacije i prljanja.
Ovakva fizi ka izvedba linearnih enkodera sa oklopljenom skalom, odre uje njihovu primjenu. Redovno se koriste na alatnim i reznim mašinama, gdje su izloženi vodi, ulju i raznim drugim ne isto ama. Obavezno se koriste na svim sli nim mjestima gdje su uslovi teški i prljavi.
Danas alatne mašine zahtijevaju enkodere koji imaju sve ve u ta nost, brzinu i pove anu trajnost. Zato su razvijeni opti ki linearni enkoderi sa mjernom skalom i rezolucijom manjom od jednog mikrona!
Mikronska rezolucija zahtijeva se naprimjer u pouprovodni koj i elektronskoj industriji, zatim kod mikroskopskih mjerenja, kod ultrapreciznog brušenja dijamanata i sli no.

23
Vanr.prof.dr Mirsad Kapetanovi
Linearni enkoderi sa otvorenom skalom
Linearni enkoderi sa otvorenom skalom se sastoje od linearne skale u obliku trake i skener glave koja radi bez mehani kog kontakta sa skalom. Linearna skala se pri vrš uje direktno za montažnu površinu zbog ega ona mora biti ravna. Vrlo se lako i brzo montiraju.
Koriste se za mjerenje pozicije duž linearnih osa bez dodatnih mehani kih prenosnih elemenata, što eliminiše brojne potencijalne izvore grešaka.
Zbog toga su pogodni za primjenu na mjestima gdje se zahtijeva i velika ta nosti velika brzina ( ak do 8 m/s).
Koriste se za mjerenje pozicije duž linearnih osa bez dodatnih mehani kih prenosnih elemenata, što eliminiše brojne potencijalne izvore grešaka.
Uprkos izvedbi sa otvorenom skalom, postiže se veoma velika neosjetljivost na razne vrste kontaminacije, zahvaljuju i kako veoma visokoj, mikronskoj rezoluciji linearne skale, tako i fotoelektri nom skeniranju sa jednodjelnom referentnom skalom. Za razliku od skeniranja sa everodijelnomreferentnom skalom, lokalna kontaminacija mjerne skale (otisci prstiju tokom montaže, ulje sa vo ica, prašina i sli no) uti e na intenzitetsvjetlosti, ali sa jednakom mjerom u sva etiri signala. Zbog toga se dešava
samo promjena amplitude signala, ali ne i faznog stava, tako da signali u potpunosti zadržavaju svojuinterpolabilnost, pa time i veoma mala poziciona greška.
24
Vanr.prof.dr Mirsad Kapetanovi
Princip skeniranja kod linearnih enkodera sa otvorenom skalom

25
Vanr.prof.dr Mirsad Kapetanovi
Mjera i dužine
Mjera i dužine su ustvari posebna konstruktivna izvedba
linearnih enkodera, koji koriste isti princip fotoelektri nog
skeniranja.
Linearna skala je povezana sa klipom na ijem vrhu se nalazi
mjerni kontakt. Klip vode vo ice koje ini veliki broj
kuglica. Takvo vo enje omogu ava relativno velike radijalne
sile uz zanemarivo malo trenje. Fotoelektri no skeniranje
vrši se bez mehani kog kontakta skenerom koji se nalazi
fiksiran na drža u.
Montaža mjera a dužine je vrlo jednostavna uz pomo dva vijka.
Mjerni kontakt se obi no izvodi sa kuglicom. Kod pokretnih
površina se koristi to ki (roller) radi smanjenja trenja.
26
Vanr.prof.dr Mirsad Kapetanovi
Mjerna petlja sa mjera em dužine
Pored samog mjera a dužine, za ta no mjerenje, veoma je važno da cijela mjerna petlja koju ine:
mjera ,
mjerni objekat,baza na koju se postavlja mjerni objekat,
stalak na koji se montira mjera i
displejmora biti veoma stabilna, neosjetljiva na
vibracije, udarce, na temperaturne promjene i ne smije se deformisati pod dejstvom kontaktne sile. Baza mora biti ravna i okomita na mjera .
Kontaktna sila se obi no ostvaruje oprugom ugra enom na klipu mjera a. Sila ne smije biti prevelika tako da izazove deformaciju površine mjernog objekta, ali ne smije biti ni previše mala jer je potreban potpuni kontakt sa mjernim objektom.

27
Vanr.prof.dr Mirsad Kapetanovi
Digitalni pokaziva pozicije - displej
Digitalni pokaziva pozicijedekodira elektri ne signale koje
generišu linearni i rotacioni
enkoderi postavljeni na alatnim
mašinama, te pokazuje o itanje
na displeju.
Sastoje se od dvije komponente:
displej
digitalni enkoder
Klasi ne skale za o itanje pozicije
postaju suvišne kada se koristi
digitalni pokaziva pozicije sa
displejom.
28
Vanr.prof.dr Mirsad Kapetanovi
Displej mjera a dužine
Displej mjera a dužine može pokazivati razli ite
parametre, ovisno od namjene:
a) maksimalnu i minimalnu vrijednost tokom serije mjerenja: Vrijednost prvog mjerenja
pohranjuje se u memoriju i kao maksimalna i kao
minimalna. Svako naredno mjerenje poredi se sa
pohranjenim vrijednostima. U slu aju ve e ili
manje vrijednosti mijenja se pohranjena
maksimalna, odnosno minimalna vrijednost.
b) sortiranje i provjera tolerancije: Displej
pokazuje dimenzionu ta nost mjerenih dijelova i
sortira ih po klasama. Tokom mjerenja pore enje
se vrši sa donjom i gornjom tolerancijom koje se
prethodno unesu preko tastature. Rezultat su tri
klase: =, < i >.
c) o itanje razlike ili sume pokazivanja dva mjera a: Na osnovu pokazivanja dva mjera a
ra una se razlika ili suma koju pokazuje displej.
Obje vrijednosti mogu se prikazivati i pojedina no.
a)
b)
c)
29
Vanr.prof.dr Mirsad Kapetanovi
Primjena: obrada struganjem (turning)
30
Vanr.prof.dr Mirsad Kapetanovi
Primjena: obrada glodanjem (milling)

31
Vanr.prof.dr Mirsad Kapetanovi
Primjena: obrada bušenjem (drilling)
32
Vanr.prof.dr Mirsad Kapetanovi
Primjena: obrada brušenjem (grinding)

33
Vanr.prof.dr Mirsad Kapetanovi
Primjena: obrada erozijom (eroding)
34
Vanr.prof.dr Mirsad Kapetanovi
Primjena: mjerenje i kontrola (measuring and inspection)

35
Vanr.prof.dr Mirsad Kapetanovi
primjeri mehatroni kih sistema u elektroenergetici
Enkoderi na prekida ima VN
36
Vanr.prof.dr Mirsad Kapetanovi
Enkoderi na prekida ima VN
Prekida i VN su dinami ki aparati iji pogonski mehanizam tokom operacija uklopa i isklopa, velikom brzinom pokre e kontakte sklopnog elementa.
Tokom operacije isklopa, pokretne mase od nekoliko desetina kilograma, u vremenu od desetak milisekundi ubrzavaju se do brzina od preko 10 m/s, da bi se, nakon gašenja luka koji traje prosje no petnaestak ms, zaustavile.
Vrijeme prekidanja ne smije biti duže od 60 ms.
Dinami ki parametri prekida a:
hodogram kretanja kontakata,
brzine uklopa i isklopa,
vremena uklopa i isklopa,
asinhronizam,
amortizacija, ...
moraju biti ispravno podešeni, pa je u tu svrhu je neophodno imati ure aje za njihovo mjerenje (circuit breaker test system – travel recorder).
Postoje razne vrste tih ure aja, ali svaki od njih mora imati neku vrstu rotacionog ili linearnog enkodera.
rotacioni enkoder
linearni enkoder
37
Vanr.prof.dr Mirsad Kapetanovi
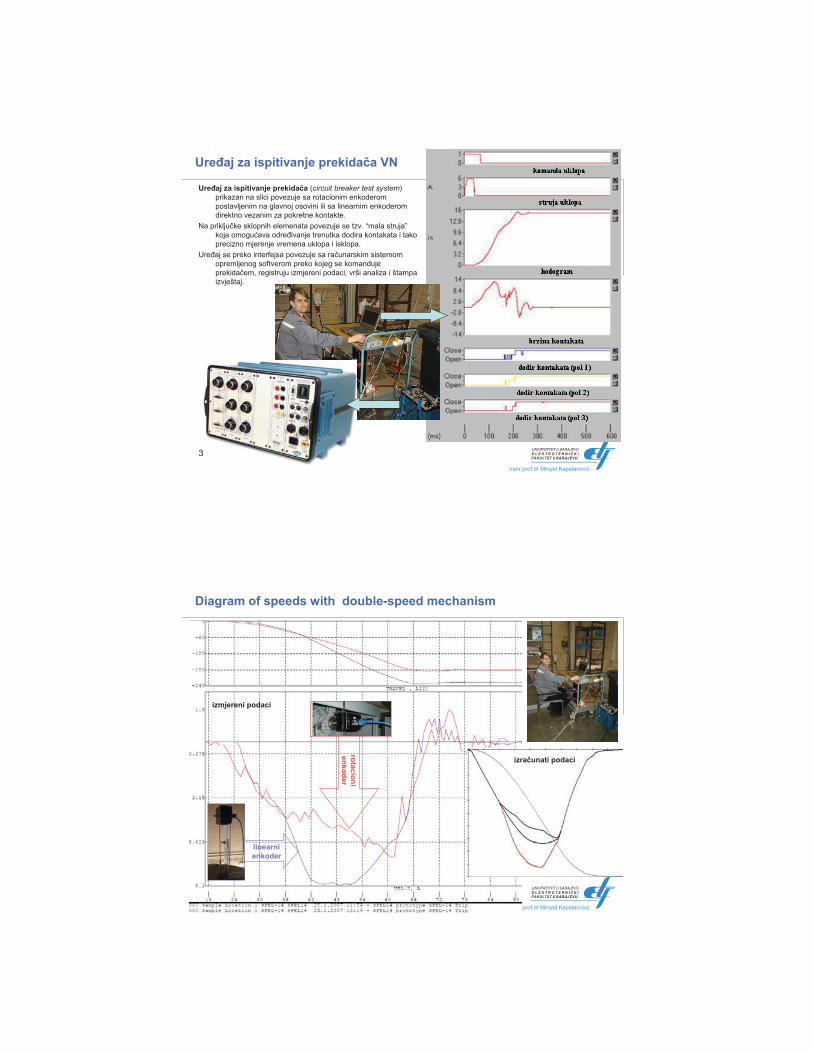
Ure aj za ispitivanje prekida a VN
Ure aj za ispitivanje prekida a (circuit breaker test system)
prikazan na slici povezuje sa rotacionim enkoderom
postavljenim na glavnoj osovini ili sa linearnim enkoderom
direktno vezanim za pokretne kontakte.
Na priklju ke sklopnih elemenata povezuje se tzv. “mala struja”
koja omogu ava odre ivanje trenutka dodira kontakata i tako
precizno mjerenje vremena uklopa i isklopa.
Ure aj se preko interfejsa povezuje sa ra unarskim sistemom
opremljenog softverom preko kojeg se komanduje
prekida em, registruju izmjereni podaci, vrši analiza i štampa
izvještaj.
38
Vanr.prof.dr Mirsad Kapetanovi
Diagram of speeds with double-speed mechanism
linearnienkoder
rota
cio
ni
en
ko
de
r
izra unati podaci
izmjereni podaci

39
Vanr.prof.dr Mirsad Kapetanovi
Enkoderi laboratorije KEMA na prekida ima VN
40
Vanr.prof.dr Mirsad Kapetanovi
Enkoderi sa mehani kim pisa emna prekida ima VN
LINEARNI
ROTACIONI