lezioni di aerodinamica -...
TRANSCRIPT
1/286
Back
Close
Universita di Napoli Federico IIDipartimento di Ingegneria Aerospazialehttp://www.dias.unina.it
Lezioni di AerodinamicaA.A. 2010-2011
Renato TognacciniDipartimento di Ingegneria AerospazialeUniversita di Napoli Federico IIPiazzale V. Tecchio 80, 80125 Napoliemail: [email protected]

2/286
Back
Close
Introduzione• Aerodinamica: ramo della Meccanica dei fluidi (Fluidodinamica)che si concentra sull’analisi dell’interazione tra una corrente fluidaed un corpo immerso in essa.
• Fluido: materia senza una forma propria; caratterizzato da unproprio volume (liquido), o senza volume proprio (gas), assumecioe il volume del suo contenitore.
• Ipotesi del continuo: il fluido e un mezzo continuo, cioe si assumeche una qualsiasi parte di esso, comunque piccola, contenga unnumero molto grande di molecole.
• Particella di fluido: un elemento di volume infinitamente picco-lo nella scala di lunghezze (macroscopica) di nostro interesse, macomunque grande nella scala di lunghezza delle molecole (micro-scopica).

3/286
Back
Close
Le forze aerodinamicheSi sceglie un sistema di riferimento (inerziale) O(x, y, z) solidale con
l’aeromobile, che e quindi investito da una corrente uniforme di velocitaV∞, alla quota h, caratterizzata dalla pressione p∞ e densita ρ∞.
Equilibrio dell’aeromobile in vololivellato uniforme:
L = W (1)T = D (2)
F = [L,D]: forza aerodinamica
L: portanza (Lift) ⊥V∞D: resistenza (Drag) V∞
W : peso (Weight)a
T : spinta (Thrust)aG e il baricentro

4/286
Back
Close
I coefficienti delle forze aerodinamicheForza aerodinamica di riferimento: 1
2ρ∞V 2
∞S.
S: superficie di riferimento (in genere la superficie alare SW ).
Coefficiente di portanza
CL =L
12ρ∞V 2
∞S(3)
Coefficiente di resistenza
CD =D
12ρ∞V 2
∞S(4)
Efficienza aerodinamica
E =L
D=
CL
CD
(5)
5/286
Back
Close
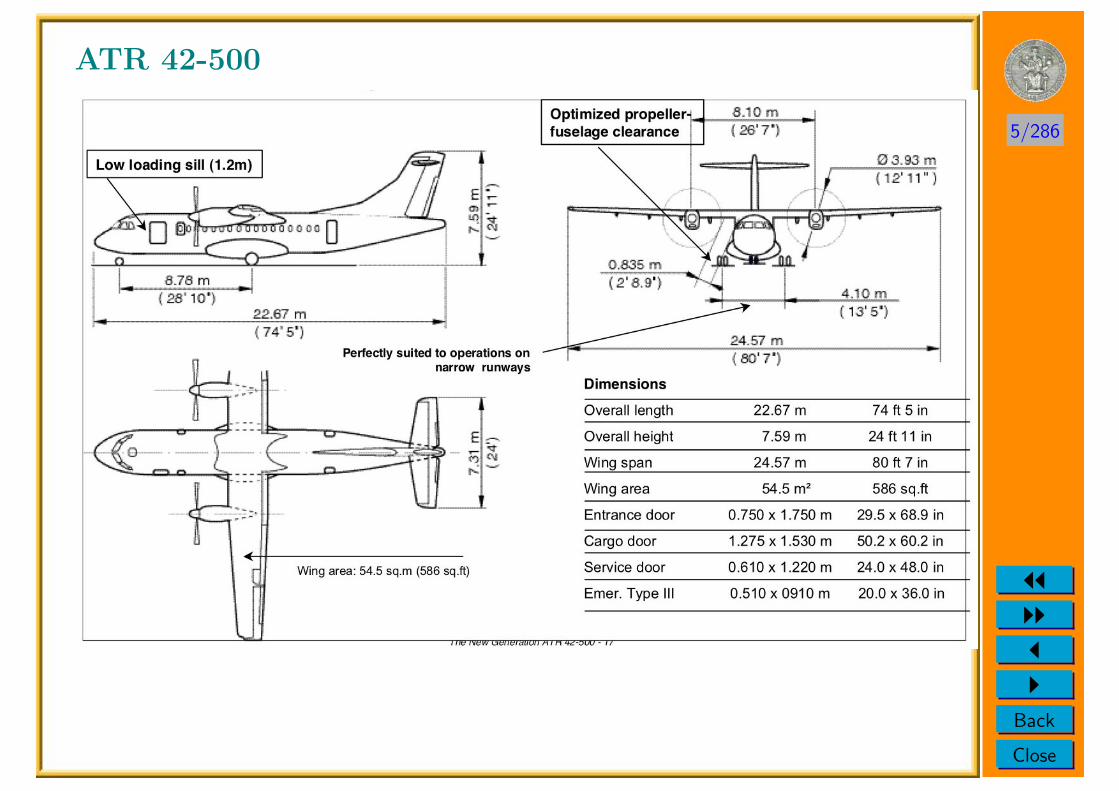
ATR 42-500
6/286
Back
Close
Alcune prestazioni dell’ATR 42-500
WTOmax = 18600 Kgp WOEmax = 11250 Kgp Payload= 5450 KgpVmax = 556 Km/h TO-length= 1165 m P = 2× 1610 KWCeiling= 5485 m Max Range= 2963 Km SW = 54.50 m2
Alcuni dati geometrici e aerodinamici
SW = 54.50 m2 b = 24.57 mW/S = 341.3 Kgp/m2 AR = 11.1CLmax = 1.75 (δf = 00) CLmax = 2.61 (δf = 150)CLmax = 3.15 (δf = 270)

7/286
Back
Close
Prob. n. 1: determinazione del CL di un aeromobile involo livellato
CL =1
12ρ∞V 2
∞
W
S(6)
Occorre:quota, velocita di volo, peso e superficie di riferimento del velivolo.
Prob. n. 2: determinazione della velocita minima disostentamento (velocita di stallo)
Vs =
1
CLmax
W
S
2
ρ∞(7)
Occorre:quota, peso e superficie di riferimento del velivolo, coefficiente diportanza massimo del velivolo (CLmax).

8/286
Back
Close
I parametri fondamentali della correnteIl numero di Mach (della corrente asintotica)
M∞ =V∞
a∞, (8)
V∞: velocita asintotica della corrente;a∞: velocita del suono asintotica.
• Un flusso a densita costante in tutto il campo si dice incomprimi-bile o incompressibile.
In un flusso incomprimibile:
M∞ = 0 . (9)
• In certe condizioni anche i fluidi comprimibili (gas) si comportanocome incomprimibili (liquidi):
per M∞ → 0 il flusso tende a diventare incomprimibile.
9/286
Back
Close
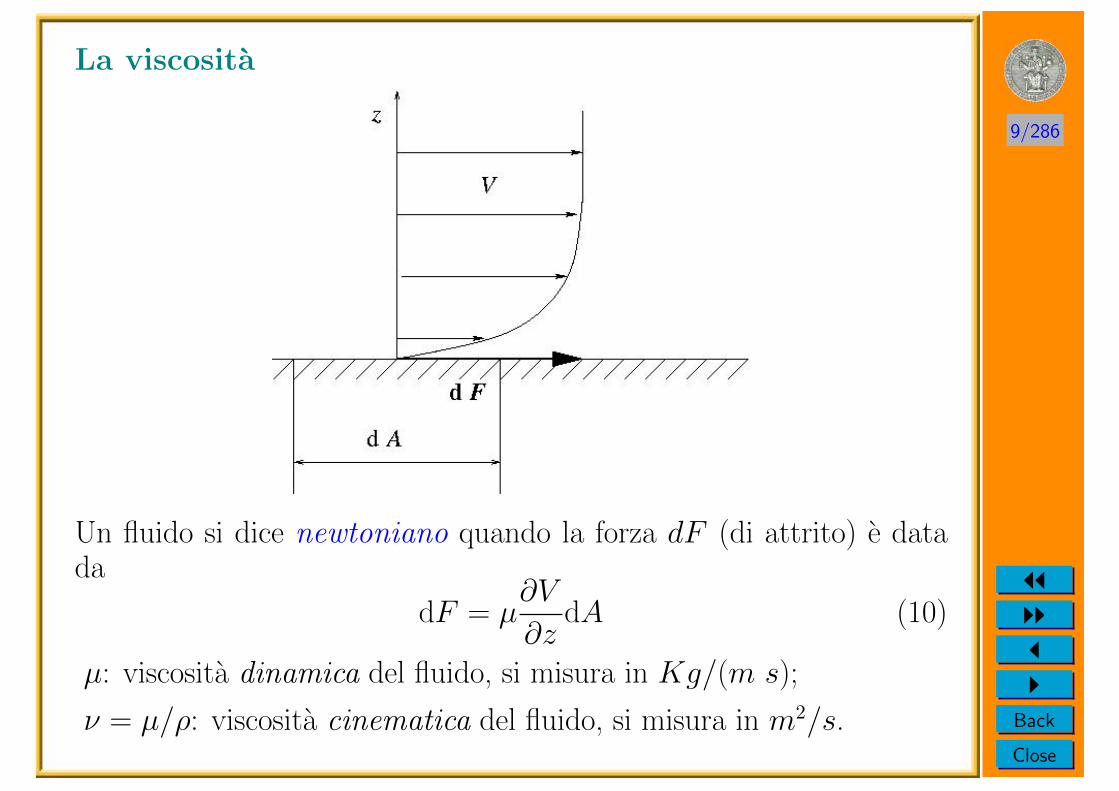
La viscosita
Un fluido si dice newtoniano quando la forza dF (di attrito) e datada
dF = µ∂V
∂zdA (10)
µ: viscosita dinamica del fluido, si misura in Kg/(m s);
ν = µ/ρ: viscosita cinematica del fluido, si misura in m2/s.

10/286
Back
Close
Il numero di Reynolds
Re∞ =ρ∞V∞L
µ∞(11)
L: lunghezza di riferimento caratteristica del problema in studio,
• Il numero di Reynolds misura l’importanza relativa delle for-ze di natura dinamica (convettive), associate alla quantita dimoto delle particelle, e le forze di natura viscosa.
• Un fuido o un flusso non dissipativo si dice ideale.
• Vedremo che un un fluido o un flusso caratterizzato da viscositanulla (Re∞ → ∞) e ideale.
• Nei flussi ideali la viscosita e trascurabile.

11/286
Back
Close
Regimi di motoClassificazione in base al numero di Mach
M∞ = 0: flusso incomprimibile
M 1 ovunque: flusso iposonico
M < 1 ovunque: flusso subsonico
M < 1 e M > 1: flusso transonico
M > 1 ovunque: flusso supersonico
M∞ 1: flusso ipersonico
Classificazione in base al numero di Reynolds
Re → 0: flusso alla Stokes (creeping flow)
Re → ∞: flusso ideale

12/286
Back
Close
• Mach critico inferiore (M
∞,cr): numero di Mach subsonico minimo
della corrente asintotica per il quale esiste almeno un punto nelcampo di moto in cui M = 1 (limite del regime subsonico).
• Mach critico superiore (M
∞,cr): numero di Mach supersonico mi-
nimo della corrente asintotica per il quale tutti i punti nel campodi moto sono supersonici (limite del regime transonico).
Per un dato fluido, le equazioni adimensionali della dinamica delflusso dipendono solo da M∞ e Re∞.

13/286
Back
Close
Prob. n. 3: determinazione di M∞
M∞ =V∞
a∞
Per un gas perfetto a∞ =√γRT∞.
γ e il rapporto dei calori specifici a pressione e volume costanti (perl’aria γ = 1.4).
R = 287 J
Kg Ke la costante del gas aria nel modello di gas perfetto.
T∞ e la temperatura assoluta della corrente asintotica (espressa ingradi Kelvin) che dipende dalla quota.
Prob. n. 4: determinazione di Re∞
Re∞ =ρ∞V∞L
µ∞
Occorre:La quota, la velocita di volo e la lunghezza caratteristica dell’aeromo-bile.

14/286
Back
Close
Genesi di portanza e resistenzaTeoria globale
Principio di azione e reazione: la forza aerodinamica agente sull’aero-mobile e pari all’azione dell’aeromobile sulla portata d’aria m intera-gente; in virtu della II legge della dinamica:
F = m∆V (12)
• ∆V: variazione media della quantita di moto;
• m = eρ∞V∞πb2/4 (b e l’apertura alare, e ≈ 1).
La portanza e data dalla componente perpendicolare a V∞ di ∆V:
L = m∆Vv (13)
Dalla definizione di CL:
∆Vv
V∞=
2CL
πeAR(14)
AR = b2/S e l’allungamento alare.

15/286
Back
Close
La resistenza indotta (dalla portanza)
L’energia cinetica della portata d’aria m e aumentata dopo l’interazio-ne con l’aeromobile:
∆E =1
2m
V 2∞ +∆V 2
v− V 2
∞=
1
2m∆V 2
v. (15)
Per il principio di conservazione dell’energia deve esserci una forza checompie un lavoro equivalente che non puo che essere T = D:
∆E = DV∞ , (16)
per cui, ricordando l’espressione del CD e di ∆Vv/V∞ si ottiene:
CDi =C2
L
πeAR, (17)
espressione del coefficiente di resistenza indotta.e e il fattore di Oswald; in genere e < 1. e = 1 nel caso di ala con
distribuzione di carico ellittica.
• Un caso particolare di distribuzione di carico ellittica: distribuzione dicorde ellittica, svergolamento aerodinamico nullo, profilo alare costante.

16/286
Back
Close
La resistenza totale di un aeromobile
D = Di +Dp +Dw (18)
• Di, resistenza indotta (dalla portanza);
• Dp, resistenza di profilo, associata all’azione diretta delle forzeviscose (attrito e forma);
• in regime transonico e supersonico si aggiunge anche Dw, la re-sistenza d’onda, legata alla probabile presenza di onde d’urto nelcampo di moto.
La polare di un aeromobile
Le curve CD = CD(CL) si chiamano curve polari.Per ogni aeromobile esistono infinite polari, al variare di Re∞, M∞
e della configurazione del velivolo.

17/286
Back
Close
Espressione approssimata della polare
CD = CD0 +C2
L
πARe(19)
CD0: coefficiente di resistenza a portanza nulla.
L’espressione parabolica della polare costituisce una buona approssi-mazione della polare reale nell’intorno della crociera del velivolo.Errori insiti in questa approssimazione:
• in generale il coefficiente di resistenza non e minimo per CL = 0;
• la resistenza di profilo varia al variare di CL;
• in condizioni di alta portanza la polare del velivolo si discosta moltodall’andamento parabolico che addirittura non prevede lo stallodell’aeromobile.
18/286
Back
Close
Prob. n. 5: determinazione del CDidi un aeromobile in
volo livellato
Tra l’altro occorre conoscere il fattore di Oswald dell’aeromobile.
Prob. n. 6: confronto delle resistenze indotte di unaeromobile in crociera ed in atterraggio
Attenzione resistenza non e equivalente a coefficiente di resistenza.

19/286
Back
Close
Geometria dell’ala
η = y
b/2, λ = ct/cr, c = cr[1− η(1− λ)], S = 2
b/20 c(y)dy
Corda media aerodinamica (m.a.c.): c = 2S
b/20 c2(y)dy

20/286
Back
Close
La curva CL = CL(α) (curva di portanza)
Definizione di angolo di attacco:
Sezione dell’ala alla radice
Polare, curva di portanza e dei momenti per un ala di AR = 10

21/286
Back
Close
Caratteristiche della curva di portanza
• E presente un tratto lineare nell’intorno delle basse incidenze:
CL ≈ CLαα ; (20)
• si evidenzia il fenomeno dello stallo;
• dipende da M∞ e Re∞.

22/286
Back
Close
Il profilo alare
Sezione di un’ala parallela a V∞.
c: corda; t: spessore; τ = t/c: spessore percentuale;
F : fuoco, posto ad 1/4 della corda.
• Nel caso di un’ala rettangolare dritta di allungamento infinito ilcampo di moto risulta bidimensionale nel piano del profilo.
• AR → ∞ ⇒ CDi = 0, quindi D = Dp +Dw.

23/286
Back
Close
Caratteristiche aerodinamiche di un profilo alare
Portanza:l = Cl
12ρ∞V 2
∞c
Resistenza:d = Cd
12ρ∞V 2
∞c;
Momento di beccheggio rispetto al bordo di attacco:mle = Cmle
12ρ∞V 2
∞c2.
Momento di beccheggio rispetto al fuoco:m1/4 = Cm1/4
12ρ∞V 2
∞c2.
• I momenti sono positivi se cabranti.

24/286
Back
Close
Profilo NACA 2412 (flusso iposonico)
25/286
Back
Close
Portanza di un’ala finita e di un profilo
Per un profilo poco spesso e curvo a piccoli angoli di attacco:
Cl = Clα(α− αzl) , (21)
Clα ≈ 2π,
αzl: angolo di portanza nulla del profilo.
AR 1 : CLα ≈ Clα
1 + Clα
πAR
(22)
AR < 1 : CLα ≈ π
2AR (23)

26/286
Back
Close
IdrostaticaSi assume che in tutto il campo fluido V = 0.
La pressione
∆S: superficie elementare di inclinazione generica nel fluido.
∆F : modulo della forza che agisce sulla superficie ∆S dovuta alloscambio di quantita di moto a livello molecolare.
In un fluido in quiete ∆F e perpendicolare a ∆S (Principio diPascal).
p = lim∆S→0
∆F
∆S(24)
Su una superficie infinitesima dS di normale n agisce la forza
dF = −pndS (25)

27/286
Back
Close
Legge di Stevino
Si consideri un volume infinitesimo dxdydz di un fluido in quiete. zindica la quota (asse verticale e diretto verso l’alto).Forza di pressione totale:
p dxdy −p +
dp
dzdz
dxdy = −dp
dzdxdydz (26)
Equilibrio tra forza di gravita e forza di pressione:
− dp
dzdxdydz − ρgdxdydz = 0 (27)
dp = −ρgdz (28)
Integrando tra le quote z1 e z2 in un fluido a densita costante:
∆p = −ρg∆h (29)
∆h = z2 − z1
∆p = p2 − p1

28/286
Back
Close
Prob. n. 7: ricavare il Principio di Archimede
La forza di galleggiamento che agisce su un corpo immerso in unfluido in quiete e pari al peso del fluido spostato dal corpo.
Prob. n. 8: descrivere il funzionamento del barometro acolonna di liquido

29/286
Back
Close
Atmosfera standard (ISA)Ipotesi
1. L’aria e secca e si comporta come un gas piu che perfetto: p =ρRT ;
2. l’aria e in quiete ed e valida la legge di Stevino: dp = −ρgdz.
In base alle ipotesi:dp
p= − g
RTdz . (30)
Per deteminare p = p(z) occorre un modello per la distribuzione ditemperatura al variare della quota T = T (z).
0–11 Km: troposfera, la temperatura decresce linearmente di 6.5gradi per chilometro;
11–20Km: stratosfera, la temperatura rimane costante con la quota;
> 20 Km: esosfera, la temperatura aumenta con la quota.
• Questo modello descrive bene l’atmosfera nelle zone temperate.

30/286
Back
Close
Troposfera
ρSL = 1.23 Kg/m3, TSL = 288 K, Tz = 6.50 · 10−3 K/m.
T = TSL − Tzz . (31)
Integrando la (30) si ottiene
p
pSL=
T
TSL
gRTz
,ρ
ρSL=
T
TSL
gRTz
−1
. (32)
Stratosfera
T = TST . (33)
Integrando la (30) si ottienep
pST=
ρ
ρST= e−
gRTz
(z−zST ) , (34)
dove zST = 11000 m, TST = T (zST ), pST = p(zST ) e ρST = ρ(zST ).
Prob. n. 9: diagrammare T , p e ρ al variare della quota
31/286
Back
Close
Elementi di calcolo tensorialeSia f una grandezza in generale funzione (in un determinato domi-
nio) dello spazio e del tempo f = f (x, y, z, t).
• f e una grandezza scalare quando e completamente individuataunicamente da un numero reale. Uno scalare viene anche denomi-nato tensore di ordine 0.
• f e una grandezza vettoriale quando e completamente individuatada un numero reale e da una direzione orientata. Un vettore vie-ne anche denominato tensore di ordine 1 (lo indicheremo con ilsimbolo f).
• f e un tensore di ordine 2 quando la sua individuazione richiede laconoscenza di due direzioni orientate (lo indicheremo con il simbolof).
In questo corso con i termini scalare, vettore e tensore ci riferiremorispettivamente al tensore di ordine 0, 1 e 2.

32/286
Back
Close
Algebra dei vettori
Sia O(x1, x2, x3) una terna di riferimento cartesiana levogira di versoriσ1, σ2 e σ3.
f = (f1, f2, f3) = σifi , (35)
dove fi sono le componenti di f e σifi =3
i=1 σifi (convenzionedell’indice ripetuto di Einstein).
Eguaglianza
a = b ⇔ ai = bi ∀i . (36)
Vettore nullo
a = 0 ⇔ ai = 0 ∀i . (37)
Prodotto scalare
a · b = a b cos θ = aibi , θ : angolo tra a e b. (38)

33/286
Back
Close
In particolare:σi · σj = δij , (39)
dove δij = 1 se i = j altrimenti δij = 0.
fi = σi · f . (40)
Intensita o modulo del vettore
a = |a| =√aiai . (41)
Versore v di V
v =V
|V| . (42)

34/286
Back
Close
Prodotto vettoriale
a× b = c ; (43)
il vettore c e dato da:
c = ab sin θ , (a, b, c) terna ortogonale levogira ; (44)
c e quindi perpendicolare sia ad a che b. Si dimostra che
c =
σ1 σ2 σ3
a1 a2 a3b1 b2 b3
, (45)
dove il determinante simbolico e calcolato con la regola di Laplace perla prima riga. Inoltre
c = σici = σiεijkajbk , (46)
dove εijk = 0 se i = j, oppure i = k, oppure j = k; εijk = ±1 se laterna (i, j, k) costituisce una permutazione di classe pari (+) o dispari(-) dei numeri 1, 2, 3.

35/286
Back
Close
Si nota cheb× a = −a× b . (47)
Doppio prodotto vettoriale
c× (a× b) = a(b · c)− b(a · c) . (48)
36/286
Back
Close
Calcolo differenziale vettorialeIl vettore nabla
In un riferimento cartesiano:
∇ ≡ σi
∂
∂xi
. (49)
In un riferimento cilindrico O(R, θ, z) di versori (a1, a2, a3):
∇ ≡ a1∂
∂R+ a2
1
R
∂
∂θ+ a3
∂
∂z. (50)
Gradiente di uno scalare
∇f = σi
∂f
∂xi
. (51)

37/286
Back
Close
Proprieta del gradiente di uno scalare
1. n ·∇f =∂f
∂n; derivata direzionale di f nella direzione n, misura la
variazione (unitaria) di f nella direzione orientata n.
2. |∇f |, modulo di ∇f , da la variazione (unitaria) massima di f .
3. Il versore di ∇f da la direzione in cui la variazione di f e massima.
4. Data la superficie f (r) = cost1, ∇f e perpendicolare ad essa ed eorientato nel verso delle f crescenti.
Divergenza di un vettore
∇ · V =∂Vi
∂xi
(52)
1r = σixi e il vettore posizione.
38/286
Back
Close
Rotore di un vettore
∇× V =
σ1 σ2 σ3∂
∂x1
∂
∂x2
∂
∂x3V1 V2 V3
= σiεijk
∂Vk
∂xj
. (53)
Un campo V con rotore identicamente nullo e detto irrotazionale.
Operatori differenziali di ordine superiore
Il rotore del gradiente di uno scalare e identicamente nullo:
∇× (∇f ) = 0 . (54)
La divergenza del rotore di un vettore e identicamente nulla:
∇ · (∇× V) = 0 . (55)
La divergenza del gradiente di uno scalare si chiama laplaciano:
∇2f = ∇ ·∇f . (56)

39/286
Back
Close
Le funzioni scalari con laplaciano identicamente nullo si dicono ar-moniche.Vale infine la seguente identita:
∇× (∇× V) = ∇(∇ · V)−∇2V . (57)
Campi potenziali
Un campo vettoriale V(r) si dice potenziale se esiste una funzionescalare φ(r) tale che
V = ∇φ . (58)
Se un campo V(r) e potenziale allora un qualsiasi integrale di lineaP2
P1V · dl dipende solo dagli estremi di integrazione.
Condizione necessaria e sufficiente affinche V sia a potenzialein R3 e che V sia irrotazionale, cioe ∇× V = 0.
Se V(r) e a potenziale allora
∇ · V = ∇2φ . (59)
40/286
Back
Close
Campi solenoidali
Un campo vettoriale V(r) si dice solenoidale se esiste un altro campovettoriale A (potenziale vettore) tale che
V = ∇× A . (60)
Condizione necessaria e sufficiente affinche V sia solenoidale e∇ · V = 0.
Il potenziale di un campo solenoidale ed a potenziale e armonico; inquesto caso il campo si dice laplaciano.
Il teorema fondamentale dell’analisi vettoriale
Sia V(r) un campo vettoriale continuo con divergenza e rotore continui,tale che per r → ∞ V si comporta come 1/r1+ε mentre |∇ · V| e|∇ × V| si comportano come 1/r2+ε dove ε > 0. Allora, a meno diun vettore costante (c1), V puo essere espresso come la somma di uncampo potenziale e di uno solenoidale, cioe:
V = ∇φ +∇× A + c1 . (61)

41/286
Back
Close
Calcolo tensorialeIntroduzione (diadi)
Si chiama diade la coppia di vettori
a b . (62)
• Una diade e associata a due direzioni orientate (ma non identificatada esse).
• La diade a b costituisce il risultato dell’operazione prodotto ten-soriale tra i vettori a e b.
• Il prodotto tensoriale non e commutativo: b a = a b.
• Rappresentazione cartesiana della diade: a b = σiaibjσj, la diade equindi rappresentata nel riferimento cartesiano dalle 9 componentiscalari (ai bj).

42/286
Back
Close
Tensore (di ordine 2)
Il tensore A e definito in un riferimento cartesiano come
A = σiAijσj . (63)
• A e stato individuato come la somma di 9 diadi coordinate.
• A differenza della diade, le due direzioni orientate associate altensore A non sono esplicite.
• Il tensore e rappresentato nel riferimento cartesiano dalle 9 com-ponenti scalari Aij.
Un tensore e esprimibile con la matrice quadrata (3× 3):
A =
A11 A12 A13
A21 A22 A23
A31 A32 A33
(64)
Aii sono le componenti normali, Aij (j = i) sono le componentitangenziali.

43/286
Back
Close
Tensore trasposto
(A)ij = Aji . (65)
Tensore simmetrico
A = A ⇔ Aji = Aij . (66)
Tensore antisimmetrico
Aji = −Aij . (67)
Un tensore antisimmetrico ha necessariamente nulle le componentilungo la diagonale principale.

44/286
Back
Close
Algebra dei tensori
Eguaglianza
A = B ⇔ Aij = Bij . (68)
Tensore nullo
A = 0 ⇔ Aij = 0 . (69)
Prodotto di uno scalare per un tensore
fA = σifAijσj . (70)

45/286
Back
Close
Prodotto scalare di un vettore per un tensore a sinistra
V · A = ViAijσj . (71)
Prodotto scalare di un vettore per un tensore a destra
A · V = σiAijVj . (72)
Componente vettoriale sinistra o destra
σi · A = Aijσj = di ; (73)
A · σj = σiAij = sj . (74)
I 3 vettori di sono le componenti vettoriali destre di A nel riferimen-to O(x1, x2, x3), mentre i 3 vettori sj sono le componenti vettorialisinistre.
A = σidi = siσi . (75)

46/286
Back
Close
Prodotto scalare di due tensori
A · B = C = σiAikBkjσj . (76)
Il prodotto scalare di due tensori e equivalente al prodotto di duematrici (3× 3) e non commuta.
˜(A · B) = B · A . (77)
Doppio prodotto scalare di due tensori
A : B = AikBki . (78)
Prodotti vettoriali
V × A = σiεilmVlAmjσj , (79)
A× V = σiεmljAimVlσj . (80)

47/286
Back
Close
Traccia di un tensore
Tr(A) = Aii . (81)
La traccia del tensore e invariante (non dipende dal sistema di riferi-mento).
Tensore unitario
U =
1 0 00 1 00 0 1
(82)
Si nota che, ad esempio:
V · U = U · V = V . (83)
Tensore isotropo
Si dice isotropo un tensore del tipo fU con f ∈ R.
48/286
Back
Close
Applicazione: il tensore degli sforzi in un fluido in quiete
tn = n · τ . (84)
τ : tensore degli sforzi;
tn: sforzo (vettore forza per unita di superficie) agente su una super-ficie elementare di normale generica n, positivo se di trazione.
Nel caso di un fluido in quiete
τ = −pU ; (85)
il tensore degli sforzi e isotropo. Infatti:
dF = n · (−pU)dS = −pndS , (86)
che e appunto la definizione di pressione idrostatica in un fluido inquiete.
• Riformulazione del Principio di Pascal: il tensore degli sforzi inun fluido in quiete e isotropo.

49/286
Back
Close
Parte simmetrica, antisimmetrica e isotropa di un tensore
E sempre possibile decomporre un tensore in una parte simmetricaed una antisimmetrica A = A(s) + A(a):
A(s) =A + A
2, A(a) =
A− A
2. (87)
13Tr(A)U: parte isotropa di A.
13Tr(A) e la media aritmetica delle 3 componenti normali del tensoreed e invariante.
A = 13Tr(A)U+A
0, dove A
0e detto parte deviatorica di A (e a traccia
nulla).
• V · A = V · 13Tr(A)U + V · A
0= 1
3Tr(A)V + V · A
0.
• A = 13Tr(A)U + A(s)
0+ A(a)
0.
50/286
Back
Close
Calcolo differenziale tensorialeGradiente di un vettore
∇ V = σi
∂Vj
∂xi
σj . (88)
Derivata direzionale (in n) di V:
n ·∇ V = ni
∂V
∂xi
. (89)
Tr(∇ V) = ∇ · V . (90)
(∇ V) · V = ∇V 2
2
. (91)
Un’identita particolarmente notevole:
V ·∇ V = ∇V 2
2
+ (∇× V)× V . (92)
• Dividendo la (92) per V : v ·∇ V = ∇ (V ) + (∇× V)× v .
51/286
Back
Close
Divergenza di un tensore
∇ · A =∂Aij
∂xi
σj . (93)
∇ · (fA) = f∇ · A +∇f · A . (94)
52/286
Back
Close
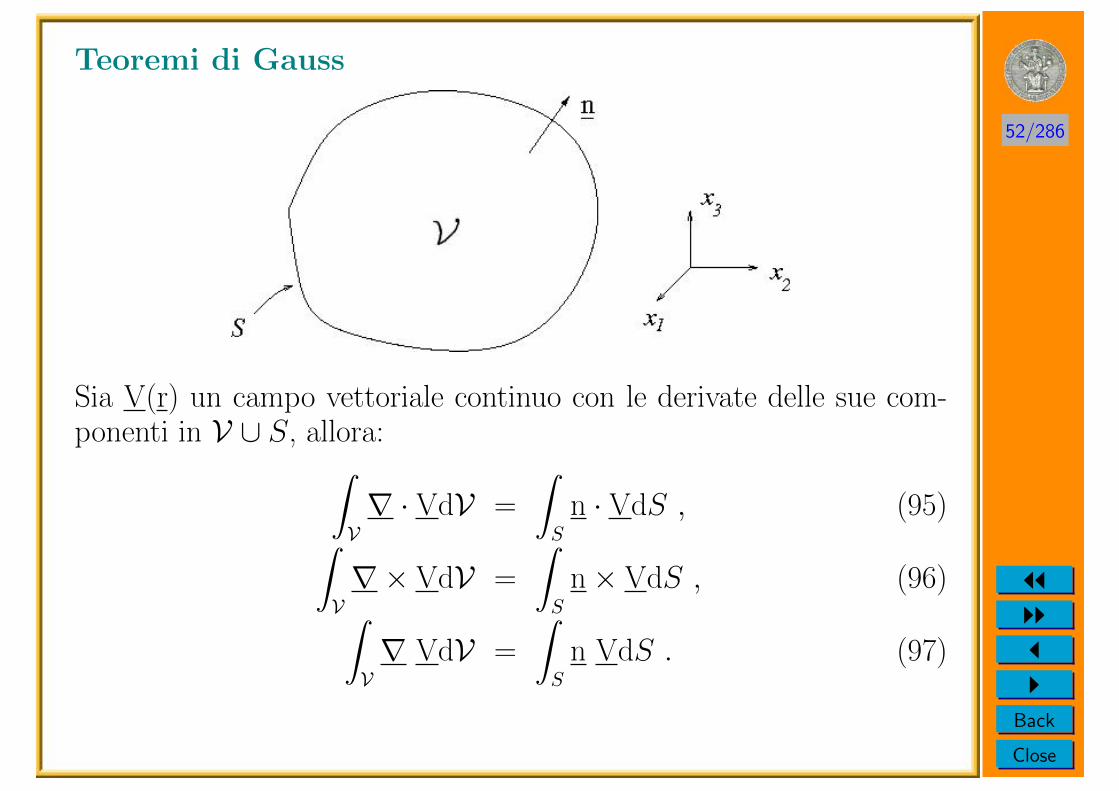
Teoremi di Gauss
Sia V(r) un campo vettoriale continuo con le derivate delle sue com-ponenti in V ∪ S, allora:
V∇ · VdV =
S
n · VdS , (95)
V∇× VdV =
S
n× VdS , (96)
V∇ VdV =
S
n VdS . (97)

53/286
Back
Close
Sia f (r) una funzione scalare continua con le sue derivate in V ∪ S,allora:
V∇fdV =
S
n fdS . (98)
Una definizione di ∇ indipendente dal riferimento
∇ = limV→0
1
V
S
n( )dS . (99)
∇f = limV→0
1
V
S
nfdS . (100)
∇ · V = limV→0
1
V
S
n · VdS . (101)
54/286
Back
Close
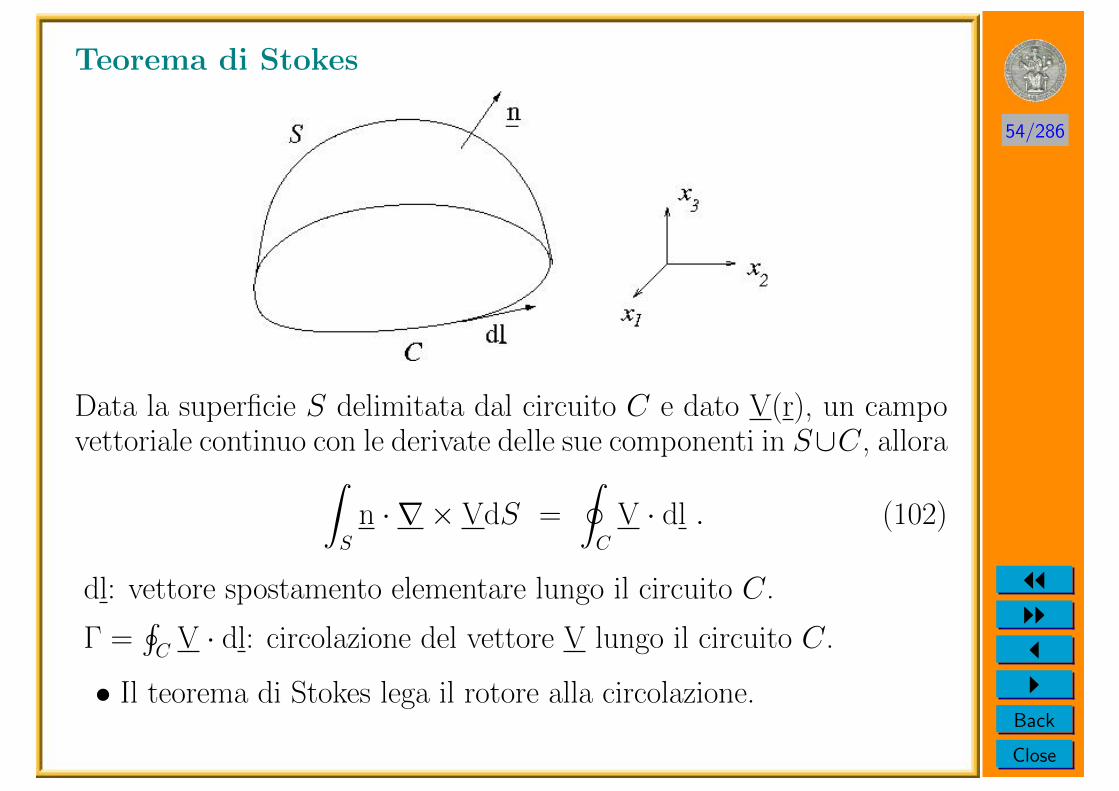
Teorema di Stokes
Data la superficie S delimitata dal circuito C e dato V(r), un campovettoriale continuo con le derivate delle sue componenti in S∪C, allora
S
n ·∇× VdS =
C
V · dl . (102)
dl: vettore spostamento elementare lungo il circuito C.
Γ =CV · dl: circolazione del vettore V lungo il circuito C.
• Il teorema di Stokes lega il rotore alla circolazione.

55/286
Back
Close
Equazioni di bilancio
V : volume di controllo (per ora lo si suppone fisso rispetto al riferi-mento inerziale), e il volume che contiene il sistema che si intendestudiare;
S: superficie di controllo;
n: versore localmente normale alla superficie di controllo orientatoverso l’esterno del volume.

56/286
Back
Close
Una grandezza G si dice estensiva quando e associata (proporzionale)alla massa.
Una grandezza G si dice intensiva quando non e associata alla massaed e funzione solo del punto.
Massa, quantita di moto, energia, entropia sono esempi di grandezzeestensive.
Temperatura, pressione, viscosita sono esempi di grandezze intensive.
Per una grandezza estensiva e possibile formulare un’equazione di bi-lancio all’interno del volume di controllo:
Variazione di Gnell’unitadi tempo
= Scambio di G conl’esterno
+Produzione di Gnel volume dicontrollo
57/286
Back
Close
M: massa all’interno di un volume V ;
g = limV→0
G
M: grandezza G specifica (per unita di massa);
g+ = limV→0
G
V : grandezza G per unita di volume.
• La densita ρ e la massa per unita di volume.
g+ = limV→0
G
MMV = ρg . (103)
Variazione nell’unita di tempo di G in V :
d
dt
VρgdV =
V
∂
∂t(ρg)dV .

58/286
Back
Close
Il flusso di una grandezza
Il flusso ϕGdi una grandezza G da, in intensita e direzione, la quantita
di G che attraversa una superficie elementare, per unita di tempo e disuperficie.
• ϕGe un vettore se G e uno scalare;
• ϕGe un tensore se G e un vettore.
[ϕG] =
[G]
[L2][t]=
[G]
[L3]
[L]
[t], (104)
quindi e possibile esprimere il flusso come
ϕG= g+W = ρgW , (105)
con W un vettore velocita opportuno.Nel caso della massa M:
ϕM ≡ ρV. (106)

59/286
Back
Close
Scambio di G con l’esterno:
S
n · ϕGdS .
Produzione
g+ = [G][L3][t]
: produzione di G nell’unita di volume e di tempo;
g = [G][M ][t]
: produzione specifica di G;
g+ = ρg.
Produzione di G nel volume di controllo:
VρgdV .

60/286
Back
Close
Equazione di bilancio integrale
V
∂
∂t(ρg)dV = −
S
n · ϕGdS +
VρgdV . (107)
Equazione di bilancio differenziale
Applicando il teorema di Gauss all’integrale del flusso nella (107):
V
∂
∂t(ρg) +∇ · ϕ
G− ρg
dV = 0 . (108)
Questo integrale e nullo qualunque sia la scelta di V se e soltanto sel’integrando e nullo, da cui l’equazione di bilancio in forma differenziale:
∂
∂t(ρg) +∇ · ϕ
G= ρg . (109)
• La fisica del problema e racchiusa nella determinazione dell’espres-sione del flusso e della produzione.
61/286
Back
Close
Equazione di bilancio della massa (continuita)
g = 1, g+ = ρ;
ϕM = ρV;
g = 0: la massa si conserva.
Forma integrale dell’equazione di conservazione della massa:
V
∂ρ
∂tdV +
S
n · ρVdS = 0 . (110)
Forma differenziale:∂ρ
∂t+∇ · (ρV) = 0 . (111)
62/286
Back
Close
Rappresentazione euleriana e lagrangiana
Rappresentazione euleriana:si assumono come variabili indipendenti le coordinate dello spazio edil tempo (x1, x2, x3, t) = (r, t); il problema fluidodinamico consistenell’individuazione della generica grandezza g(r, t) in ciascun puntodel campo al variare del tempo.
Rappresentazione lagrangiana:Individuazione al variare tempo dell’evoluzione della generica grandez-za di una data particella. Indicando con R = σiXi la posizione chela data particella assume al tempo iniziale t0, le variabili indipendentidiventano (R, τ ) con τ = t.
Per passare da una rappresentazione all’altra occorre conoscere latrasformazione
∀i = 1, 2, 3 xi = xi(X1, X2, X3, τ ), t = τ ; (112)
in forma vettoriale:r = r(R, t), t = τ . (113)
63/286
Back
Close
Si assume che:
1. nessuna regione di volume finito si trasforma nel tempo in unaregione di volume nullo o infinito;
2. nel tempo volumi si trasformano in volumi, superfici in superfici,curve in curve, costituiti sempre dalle stesse particelle.
Nota l’evoluzione di una grandezza in una rappresentazione lagran-giana g(R, τ ), la rappresentazione euleriana si ottiene tramite le (112)o (113):
g(r, t) = g[R(r, τ ), t] . (114)

64/286
Back
Close
Derivata sostanziale
Definizione di velocita di una particella:
V = V(R, τ ) =∂r
∂τ(R, τ ) =
∂r
∂τ
R=cost
= σi
∂xi
∂τ
R=cost
. (115)
Definizione di derivata sostanziale:
D
Dt=
∂
∂τ
R=cost
. (116)
Tenendo conto della (113), della regola di derivazione delle funzionidi funzioni:
Dg
Dt=
∂g
∂t
∂t
∂τ+
∂g
∂xi
t=cost
∂xi
∂τ
R=cost
. (117)
Essendo ∂t/∂τ = 1, e possibile ottenere la seguente rappresentazioneeuleriana della derivata sostanziale:
D
Dt=
∂
∂t+ V ·∇ . (118)

65/286
Back
Close
Flusso convettivo e diffusivo
ϕG≡ ρgV + JG (119)
1. ρgV: flusso convettivo, associato al trasporto della grandezza gcon la velocita di massa V.
2. JG: flusso diffusivo, associato al trasporto della grandezza con lavelocita molecolare relativa al moto del baricentro della particella.
E possibile definire il flusso diffusivo o con leggi fenomenologiche oricorrendo alla Teoria cinetica dei gas.

66/286
Back
Close
Equazioni del bilancio in forma lagrangiana
d
dt
Vm(t)(ρg)dVm = −
Sm(t)n · JGdSm +
Vm(t)ρgdVm . (120)

67/286
Back
Close
Essendo (ρdVm = dM):
d
dt
Vm(t)(ρg)dVm =
d
dt
Mg(R, τ )dM =
M
∂g(R, τ )
∂τdM , (121)
si ha ched
dt
Vm(t)(ρg)dVm =
Vm(t)ρDg
DtdVm , (122)
allora, sempre applicando il teorema d Gauss:
Vm(t)
ρDg
Dt+∇ · JG − ρg
dVm = 0 , (123)
valida comunque si sceglie Vm(t), per cui:
ρDg
Dt+∇ · JG − ρg = 0 , (124)
equazione di bilancio differenziale in forma lagrangiana.
• Nell’equazioni di bilancio in forma lagrangiana compare soloil flusso diffusivo.
68/286
Back
Close
Le equazioni della FluidodinamicaConservazione della massa (continuita)
Forma integrale dell’equazione di conservazione della massa:
V
∂ρ
∂tdV +
S
n · ρVdS = 0 . (125)
Forma differenziale:∂ρ
∂t+∇ · (ρV) = 0 . (126)
Svolgendo la divergenza nella (126) si ottiene (v = 1/ρ, volumespecifico):
∇ · V =1
v
Dv
Dt; (127)
la divergenza della velocita misura la variazione percentuale nel-l’unita di tempo del volume di una particella.

69/286
Back
Close
Se il flusso e incomprimibile:
∇ · V = 0 ; (128)
la conservazione della massa assicura che un campo di moto in-comprimibile e solenoidale.Se il flusso e stazionario:
∇ · (ρV) = 0 ; (129)
la conservazione della massa assicura che in un campo di motocomprimibile e stazionario e solenoidale il vettore ρV.
Prob. n. 10: dimostrare che in flusso stazionario laportata di un condotto e costante
Occorre scrivere l’equazione di conservazione della massa in formaintegrale per un condotto con pareti laterali impermeabili (n ·V = 0).

70/286
Back
Close
Bilancio della quantita di moto
g = V, g+ = ρV;
flusso diffusivo JV = −τ ;
produzione per unita di volume f+ = ρg;
g = −∇Ψ, Ψ = gz energia potenziale del campo gravitazionale.
Forma integrale del bilancio di quantita di moto:
d
dt
VρVdV +
S
n ·ρVV − τ
dS =
VρgdV . (130)
Forma differenziale:
∂ρV
∂t+∇ · (ρVV − τ ) = ρg . (131)
Forma integrale lagrangiana:
d
dt
Vm(t)ρVdVm =
Sm(t)n · τdSm +
Vm(t)ρgdVm . (132)

71/286
Back
Close
Forma differenziale lagrangiana:
ρDV
Dt−∇ · τ = ρg . (133)
• L’espressione di τ dipende dal tipo di fluido.
Modello di fluido newtoniano:
τ = −pU + µ2(∇ · V)U + 2µ(∇ V)(s)0 (134)
µ2: secondo coefficiente di viscosita del fluido.
Per i fluidi di nostro interesse µ2/µ 1, per cui lo trascureremo:
τ = −pU + τd, (135)
τd= 2µ(∇ V)(s)0 . (136)
• Nel modello newtoniano, cosı come nella maggior parte dei proble-mi di nostro interesse, il tensore degli sforzi e simmetrico.

72/286
Back
Close
Prob. n. 11: determinare le 9 componenti del tensoredegli sforzi di un fluido newtoniano
Prob. n. 12: determinare l’espressione della forza (aero-dinamica) che agisce su un corpo immerso in una correntefluida
(Non e altro che il flusso di quantita di moto attraverso il corpo).
73/286
Back
Close
Conservazione dell’energia
Principio dell’equilibrio evolutivo: si assume che i tempi caratte-ristici del problema fluidodinamico siano molto maggiori del tempocaratteristico con cui il sistema termodinamico particella raggiun-ge il proprio equilibrio per cui, istante per istante, la particella e inequilibrio termodinamico.
g = e , g+ = ρe;
e = u + V 2/2 + Ψ, u e l’energia interna specifica;
flusso diffusivo Je = Ju + Jc;
legge di Fourier: Ju = −λ∇T (flusso di energia nel modo calore);
λ: conducibilita termica, si misura in J/(m s K);
Jc = −τ · V (flusso di energia nel modo lavoro);
e = 0, l’energia totale si conserva.

74/286
Back
Close
Forma differenziale lagrangiana
ρD
Dt
u +
V 2
2+ Ψ
−∇ · (λ∇T )−∇ · (τ · V) = 0 . (137)
Identita vettoriale:
∇ · (τ · V) = (∇ · τ ) · V + τ : ∇ V . (138)
Il flusso di energia nel modo lavoro consta di due contributi:
1. (∇ · τ ) · V: lavoro compiuto sulla particella per effetto dello spo-stamento V;
2. τ : ∇ V: contributo dovuto alla deformazione della particella.
Bilancio dell’energia cinetica
ρD
Dt
V 2
2
−∇ · (τ · V) = ρεc . (139)

75/286
Back
Close
Questa equazione si puo riottenere moltiplicando scalarmente per Vil bilancio di quantita di moto:
ρDV
Dt· V − (∇ · τ ) · V = ρg · V . (140)
In base alle identita vettoriali (138) e (91):
ρD
Dt
V 2
2
−∇ · (τ · V) = ρg · V − τ : ∇ V . (141)
La produzione di energia cinetica e quindi:
ρεc = ρg · V − τ : ∇ V . (142)
• Il bilancio di energia cinetica non e un’equazione indipendente.
76/286
Back
Close
Bilancio dell’energia potenziale
ρDΨ
Dt= ρεp . (143)
• Il flusso diffusivo di energia potenziale e nullo.
• Il potenziale (gravitazionale) dipende solo dallo spazio e non daltempo.
• ∇Ψ = −g.
DΨ
Dt= V ·∇Ψ , (144)
per cui
ρDΨ
Dt= −ρg · V (145)
eρεp = −ρg · V , (146)
da confrontare con la produzione di energia cinetica.
• Il bilancio di energia potenziale non e un’equazione indipendente.

77/286
Back
Close
Bilancio dell’energia interna
Si ottiene sottraendo i bilanci di energia cinetica e potenziale a quellodi energia totale:
ρDu
Dt+∇ · Ju = τ : ∇ V (147)
eρεu = τ : ∇ V , (148)
da confrontare con la produzione di energia cinetica.
• Nulla possiamo ancora dire sul segno della produzione di energiainterna.

78/286
Back
Close
Bilancio dell’entropia
ρDs
Dt+∇ · Js = ρs . (149)
Du
Dt= T
Ds
Dt− p
Dv
Dt. (150)
Il bilancio di entropia si ottiene combinando il bilancio di energiainterna e di volume specifico. Si ottiene:
ρDs
Dt=
1
Tτ : ∇ V − 1
T∇ · Ju +
p
T∇ · V . (151)
Confrontando con la (149):
Tρs− T∇ · Js = +τ : ∇ V −∇ · Ju + p∇ · V , (152)
Tρs−∇ · (TJs) = −Js ·∇T + τ : ∇ V −∇ · Ju + p∇ · V , (153)
da cui:
Js =JuT
; Tρs = −Js ·∇T + τ : ∇ V + p∇ · V . (154)

79/286
Back
Close
Per un fluido newtoniano e fourieriano si ottiene2
τ : ∇ V = −p(∇ · V) + Φ , (155)
Φ = 2µ(∇ V)(s)0 : (∇ V)(s)0 . (156)
Φ: funzione di dissipazione.
Tρs =λ
T∇T ·∇T + Φ . (157)
Affinche sia soddisfatto il II principio della termodinamica (la produ-zione di entropia e positiva):
λ > 0 , µ > 0 ; (158)
il flusso termico va da zone a temperatura maggiore a zone a tem-peratura minore e l’energia cinetica (parte) si “dissipa” in energiainterna, processi entrambi irreversibili.
2Si sfruttano le seguenti identita: A0: U = 0, A(s) : A(a) = 0.
80/286
Back
Close
Le equazioni di Navier-Stokes
Caso di fluido newtoniano e foureriano.Continuita:
∂ρ
∂t+∇ · (ρV) = 0 ; (159)
quantita di moto:
ρDV
Dt+∇p = 2∇ · [µ(∇ V)(s)0 ] + ρg ; (160)
energia:
ρD
Dt
u +
V 2
2+ Ψ
= ∇ · (λ∇T )−∇ · (pV) + 2∇ · [µ(∇ V)(s)0 ·V] .
(161)La chiusura del sistema richiede la conoscenza delle relazioni di stato:
p = p(ρ, T ), u = u(ρ, T ), (162)µ = µ(p, T ), λ = λ(p, T ). (163)
81/286
Back
Close
Condizioni iniziali e al contorno
V(r, t0) = Vi(r), p(r, t0) = pi(r), ρ(r, t0) = ρi(r). (164)
Parete impermeabile fissa: V = 0, p =?.
• Nel caso di proprieta costanti (ρ e µ), la temperatura non comparenell’equazioni di continuita e quantita di moto.
Continuita e quantita di moto possono essere integrate indipenden-temente dall’equazione dell’energia.
L’equazione dell’energia puo essere risolta, se necessario, successi-vamente, con il campo di velocita gia noto.
Prob. n. 13: scrivere le equazioni scalari di Navier-Stokes nel caso 2D a proprieta costanti (ρ, µ,λ)

82/286
Back
Close
Equazioni di bilancio adimensionaliIl problema consiste nella scelta di opportune grandezze di riferi-
mento delle variabili indipendenti e dipendenti.
g = g/gr;
g: grandezza adimensionale;
gr: grandezza di riferimento.
• La scelta di gr e appropriata quando g ≈ O(1).

83/286
Back
Close
Continuita
Si assuma il flusso isoentropico (ds = 0) per cui
Dρ
Dt=
∂ρ
∂p
s
Dp
Dt=
1
a2Dp
Dt, (165)
a: velocita del suono.Scegliendo tr = Lr/Vr e pr = ρrV 2
ril bilancio di volume specifico
(127) diventaM 2
r
ρa2Dp
Dt+ ∇ · V = 0 . (166)
M 2r= V 2
r/a2
r: numero di Mach di riferimento.
• Mr → 0 ⇒ ∇ · V = 0 ⇒ flusso incomprimibile.

84/286
Back
Close
Quantita di moto
Lr
Vrtr
∂(ρV)
∂ t+ ∇ · (ρVV) + ∇p =
µr
ρrVrLr
2∇ · [µ(∇ V)(s)0 ] +LrgrV 2r
ρg .
(167)
Str =trVr
Lr
⇒ convezione di V
instazionarieta‘, numero di Strouhal.
Rer =ρrVrLr
µr
⇒ convezione di V
effetti viscosi, numero di Reynolds.
Frr =V 2r
Lrgr⇒ convezione di V
gravita‘, numero di Froude.
1
Str
∂(ρV)
∂ t+ ∇ · (ρVV)+ ∇p =
1
Rer2∇ · [µ(∇ V)(s)0 ]+
1
Frrρg . (168)
Scegliendo pr = ρra2r il termine di pressione diventa1
M 2r
∇p che impli-
ca un secondo significato a Mr:
85/286
Back
Close
Mr ⇒convezione di V
diffusione reversibile di V.
• Combinando questi numeri caratteristici si possono misurare leimportanze relative tra tutti i vari contributi.

86/286
Back
Close
Energia
er = ur = a2r, Ψr = grLr:
e = u + M 2r
V2
2+
M 2r
FrrΨ . (169)
• Ulteriore significato di M 2re Frr.
Tr = a2r/cpr, pr = ρra2r:
1
Str
∂(ρe)
∂ t+∇·(ρeV) = 1
Per∇·(λ∇T )−∇·(pV)+M 2
r
Rer2∇·[µ(∇ V)(s)0 ·V] .
(170)
Prr =µrcprλr
⇒ flusso lavoro viscoso
flusso termico, numero di Prandtl.
Per = RerPrr ⇒convezione di energia
flusso termico, numero di Peclet.
M 2r
Rer⇒ flusso lavoro viscoso
convezione di energia.
87/286
Back
Close
Aerodinamica dei flussi non dissipativi(ideali)Le equazioni di Eulero
Ipotesi: Rer → ∞, Prr ≈ O(1) (almeno), per cui anche Per → ∞.
1
Str
∂ρ
∂ t+ ∇ · (ρV) = 0 ; (171)
1
Str
∂(ρV)
∂ t+ ∇ ·
ρVV + pU
=
1
Frrρg ; (172)
1
Str
∂(ρe)
∂ t+ ∇ ·
ρe +
p
ρ
V= 0 . (173)
• Scompaiono dalle equazioni tutti i termini che portano a produzio-ne di entropia: il fenomeno e non dissipativo; queste equazionigovernano la dinamica di un fluido (o di un flusso) ideale.
• Si abbassa l’ordine di derivazione (scompaiono tutte le derivateseconde): attenzione alle condizioni al contorno.

88/286
Back
Close
• In molte applicazioni aerospaziali Frr 1, per cui puo esseretrascurato sia il temine di produzione nel bilancio di quantita dimoto (che pure diventa un’ equazione di conservazione) sia l’energiapotenziale gravitazionale nel bilancio dell’energia.

89/286
Back
Close
Cinematica della particella
Traiettoria: luogo delle successive posizioni assunte da una particelladurante il suo moto, al variare del tempo.
Linea di corrente: curva inviluppo del vettore velocita nella rappre-sentazione euleriana.
Linea tracciante: luogo delle posizioni assunte, al variare del tempo,dalle successive particelle che passano per uno stesso punto.
• In regime instazionario, in generale, traiettorie, linee di correntee linee traccianti sono diverse.
• In regime stazionario traiettorie, linee di corrente e linee trac-cianti coincidono.

90/286
Back
Close
Visualizzazione delle linee di corrente intorno ad un profilo NACA
tramite bolle d’aria, M∞ ≈ 0, Re∞ ≈ 6000.

91/286
Back
Close
Visualizzazione (con tracciante) della formazione del vortice di distacco
al bordo di uscita di un profilo alare, M∞ ≈ 0, ReS ≈ 1000.

92/286
Back
Close
Deformazione lineare della particella
uQ = uP +∂u
∂x∆x ; (174)
uP∆t +∆x = ∆x + uQ∆t ; (175)
εx =∆x −∆x
∆x=
∂u
∂x∆t ,
dεxdt
=∂u
∂x. (176)
εx: deformazione lineare (percentuale) nella direzione x;
dεxdt
: velocita di deformazione.

93/286
Back
Close
Velocita angolare di rotazione della particella
α1 =∂v
∂x∆t , α2 = −∂u
∂y∆t ; (177)
Ωz =1
2
(α1 + α2)
∆t=
1
2
∂v
∂x− ∂u
∂y
. (178)
Ω =1
2(∇× V) , ∇× V = ζ (vorticita‘) . (179)

94/286
Back
Close
Deformazione angolare della particella
γxy =1
2
α + β
∆t=
1
2
∂v
∂x+
∂u
∂y
= [(∇ V)(s)0 ]xy (180)
• Una particella trasla con velocita V, ruota con velocita angolare12∇×V, si dilata secondo ∇ ·V e si deforma secondo (∇ V)(s)0 .
• E’ newtoniano un fluido in cui sforzi tangenziali e deformazionidella particella da essi provocati sono proporzionali tra loro.

95/286
Back
Close
Il teorema di Crocco
Accelerazione della particella:
DV
Dt=
∂V
∂t+ V ·∇ V ; (181)
V ·∇ V = ∇V 2
2
+ (∇× V)× V ; (182)
relazione di Gibbs:1
ρ∇p = ∇h− T∇s . (183)
Sostituendo queste relazioni nel bilancio di quantita di moto e definen-do l’entalpia totale come H = h + V 2/2 + Ψ si ottiene il teorema diCrocco:
∂V
∂t+∇H + (∇× V)× V = T∇s + fd . (184)
fd e la forza dissipativa per unita di massa che agisce sulla particella.

96/286
Back
Close
Bilancio dell’energia cinetica:
∂
∂t
V 2
2
+ V ·∇H = TV ·∇s + V · fd . (185)
Ipotesi:
1. flusso ideale (Re → ∞ e Pe → ∞);
2. regime stazionario.
Il bilancio dell’entropia diventa:
Ds
Dt= V ·∇s = 0 , (186)
in un flusso ideale e stazionario l’entropia e costante lungo unalinea di corrente (flusso isoentropico).Il bilancio dell’energia cinetica diventa:
DH
Dt= V ·∇H = 0 , (187)
in un flusso ideale e stazionario l’entalpia totale e costante lungouna linea di corrente (flusso isoentalpico).

97/286
Back
Close
Il teorema di Bernoulli (generalizzato)
Se l’entropia a monte e uniforme (s = s∞) allora s e costante in tuttoil campo (flusso omoentropico).Se l’entalpia totale a monte e uniforme (H = H∞) allora H e
costante in tutto il campo (flusso omoentalpico).Il risultato
h +V 2
2+ Ψ = cost (188)
e noto come teorema di Bernoulli (generalizzato).Il teorema di Crocco per un flusso stazionario ed ideale:
∇H + (∇× V)× V = T∇s (189)
mostra che se il flusso e anche omoentalpico ed omoentropico:
(∇× V)× V = 0 . (190)
Cioe e verificata una delle seguenti possibilita:
1. ∇× V = 0, il campo e irrotazionale ⇒ ∃ φ | V = ∇φ;
2. ∇× V V, campo alla Beltrami.
98/286
Back
Close
Il teorema di Bernoulli (incomprimibile)
Sia M → 0 ⇒ ρ = cost.In un fluido isoentropico, incomprimibile la relazione di Gibbs di-
venta dh = d(p/ρ), cioe dell’entalpia puo variare solo la parte legataalla pressione, mentre l’energia interna rimane costante:in un flusso incomprimibile isoentropico la temperatura non va-
ria.Il teorema di Bernoulli generalizzato assume allora la forma
p +1
2ρV 2 + ρΨ = cost . (191)

99/286
Back
Close
Flusso incomprimibile quasi-unidimensionale
Ipotesi:
1. regime stazionario;
2. condotto orizzontale (gravita trascurabile) con deboli variazionidell’area della sezione;
3. regime incomprimibile;
4. flusso ideale (isoentropico).
V1: velocita media alla sezione di area A1;
p1: pressione media alla sezione di area A1.
Conservazione della massa:
V1A1 = V2A2 . (192)
Teorema di Bernoulli:
p1 +1
2ρV 2
1 = p2 +1
2ρV 2
2 . (193)

100/286
Back
Close
Prob. n. 14: determinazione della portata di un condottotramite il tubo Venturi
Occorre collegare le sezioni 1 e 2 con un manometro per misurare ladifferenza di pressione ∆p = p1 − p2.
Prob. n. 15: determinazione della velocita di un aero-mobile con il tubo di Pitot (facoltativo)
101/286
Back
Close
Il teorema di Bernoulli instazionario (generalizzato)
Ipotesi:
1. regime ideale omoentropico;
2. campo di moto irrotazionale.
Dal teorema di Crocco si ricava:
∇∂ϕ
∂t
+∇H = 0 ; (194)
integrando:∂ϕ
∂t+ h +
V 2
2+ Ψ = f (t) . (195)
102/286
Back
Close
Equazione di bilancio della vorticita ζ = ∇× V
Si ottiene effettuando il rotore dell’equazione di bilancio della quantitadi moto:
Dζ
Dt= ζ ·∇ V − (∇ · V)ζ + 1
ρ2∇ρ×∇p +∇×
∇ · τd
ρ
(196)
Se ρ = ρ(p) il fluido si dice barotropico.
• Un flusso incomprimibile e barotropico: ρ = k.
• Un flusso omoentropico e barotropico: ρ = k/p1/γ.
Equazione di bilancio di vorticita per un flusso incomprimibile:
Dζ
Dt= ζ ·∇ V − (∇ · V)ζ + ν∇2ζ . (197)
Equazione di bilancio di vorticita per un flusso omentropico (comprimibile):
Dζ
Dt= ζ ·∇ V − (∇ · V)ζ . (198)
• Non compare la pressione!

103/286
Back
Close
Circuiti
Un circuito C di una regione V si dice riducibile se puo essere tra-sformato con continuita in un punto senza abbandonare la regione,altrimenti il circuito e detto irriducibile.Una regione V si dice semplicemente connessa se contiene tut-
ti circuiti riducibili, altrimenti la regione e detta molteplicementeconnessa.Teorema di Stokes:
S
n · ζ dS =
C
V · dl . (199)
• La validita del teorema richiede che V sia regolare in S, cioe ilcircuito C deve essere riducibile.
• Un importante corollario del teorema di Stokes e che se V e ir-rotazionale in una regione semplicemente connessa V allora lecircolazioni di V su qualsiasi circuito di V sono nulle.
104/286
Back
Close
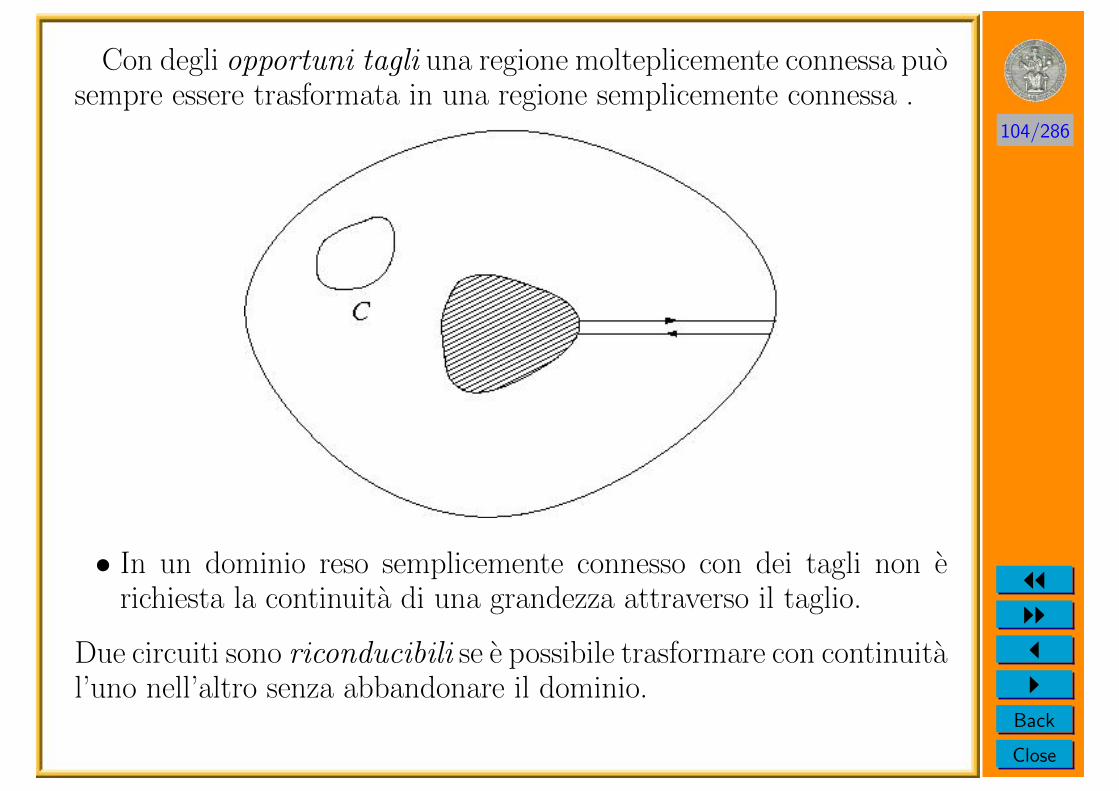
Con degli opportuni tagli una regione molteplicemente connessa puosempre essere trasformata in una regione semplicemente connessa .
• In un dominio reso semplicemente connesso con dei tagli non erichiesta la continuita di una grandezza attraverso il taglio.
Due circuiti sono riconducibili se e possibile trasformare con continuital’uno nell’altro senza abbandonare il dominio.

105/286
Back
Close
I teoremi di Helmholtz
Linea vorticosa: una curva tangente in ogni punto a ζ = ∇× V.
Superficie vorticosa: una superficie con il vettore ζ tangente in ognisuo punto.
Tubo vorticoso: L’insieme delle linee vorticose passanti per una curvachiusa che racchiude un’area finita.
Filetto vorticoso: L’insieme delle linee vorticose passanti per unacurva chiusa che racchiude un’area infinitesima.
Si definisce intensita di un tubo vorticoso il flusso di ζ attraversouna sua sezione:
Γ =
S
n · ζdS . (200)
I teorema di Helmholtz: l’intensita di un tubo vorticoso e lastessa in tutte le sue sezioni trasversali.

106/286
Back
Close
La dimostrazione del I teorema di Helmoltz e immediata applicandoil teorema di Gauss al vettore vorticita nel volume indicato in figurae tenendo conto della solenoidalita di ζ e della definizione di tubovorticoso per cui il flusso di ζ sulla superficie laterale del cilindro enullo.
• Conseguenze del I teorema di Helmholtz: un tubo vorti-coso o e chiuso o inizia e finisce su un confine del dominio.
Tubo vorticoso isolato: quando all’esterno del tubo il campo e irro-tazionale.

107/286
Back
Close
II teorema di Helmholtz: la circolazione presa nello stessosenso intorno a due qualsiasi circuiti irriducibili e riconciliabiliche circondino un tubo vorticoso isolato una sola volta e la stessaed e uguale, in valore assoluto, all’intensita del tubo vorticoso.
Basta collegare i due circuiti con un taglio per ottenere un unico cir-cuito riducibile in un campo irrotazionale che avra quindi circolazionetotale nulla. Essendo il contributo del taglio alla circolazione nullo(percorso 2 volte con verso contrario) ed essendo i due circuiti percorsiin verso opposto ne risulta che la loro circolazione deve coincidere.Se si sceglie uno dei due circuiti lungo il tubo vorticoso si ottiene
anche che la circolazione e pari all’intensita del tubo vorticoso che nonvaria in base al I teorema di Helmholtz.
108/286
Back
Close
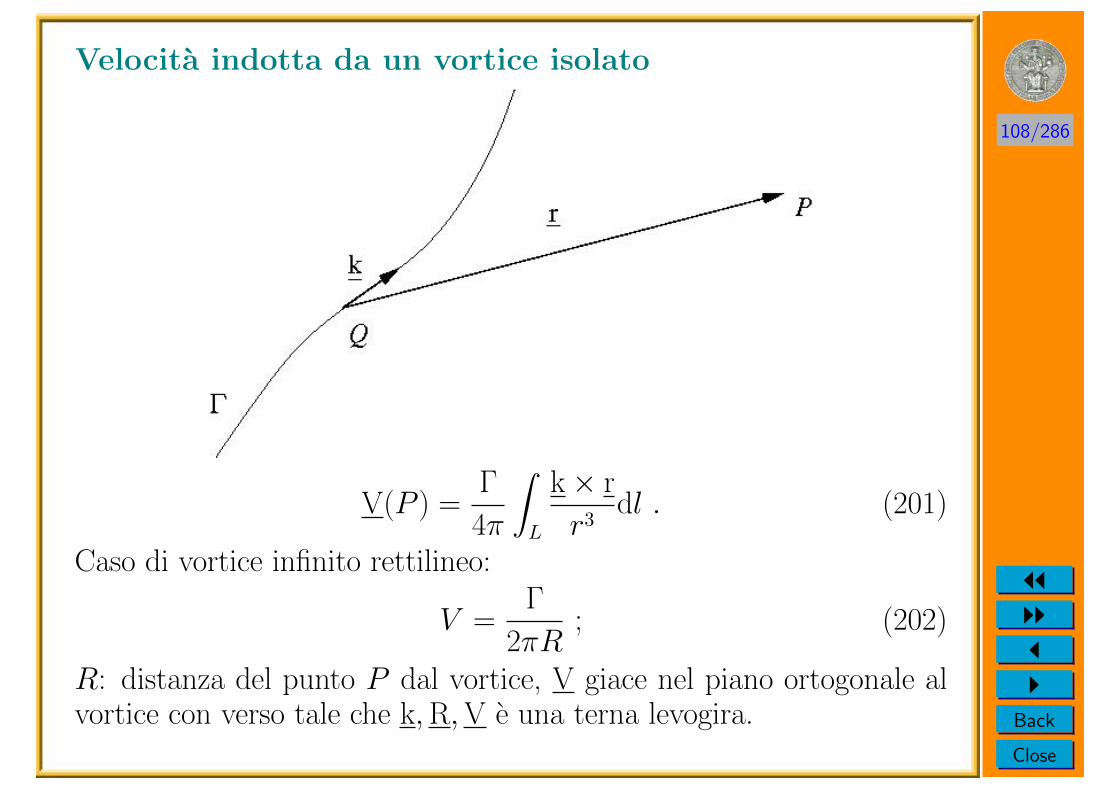
Velocita indotta da un vortice isolato
V(P ) =Γ
4π
L
k× r
r3dl . (201)
Caso di vortice infinito rettilineo:
V =Γ
2πR; (202)
R: distanza del punto P dal vortice, V giace nel piano ortogonale alvortice con verso tale che k,R,V e una terna levogira.
109/286
Back
Close
Il teorema di Kelvin
Γ(t) =
Cm
V · dl , (203)
Cm: circuito materiale.
DΓ
Dt=
D
Dt
Cm
V · dl=
Cm
D
Dt(V · dl) =
Cm
DV
Dt· dl +
Cm
V · dV =
Cm
DV
Dt· dl +
Cm
dV 2
2
=
Cm
DV
Dt· dl . (204)
Dal bilancio di quantita di moto:
DV
Dt= −∇(h + Ψ) + T∇s + fd ; (205)

110/286
Back
Close
quindi:DΓ
Dt=
Cm
T∇s · dl +
Cm
fd · dl . (206)
Teorema di Kelvin: in un flusso ideale e omoentropico lacircolazione di un circuito materiale non varia nel tempo.Corollari
1. Tubi vorticosi, superfici vorticose e filetti vorticosi so-no costituiti sempre dalle stesse particelle. Si consideriun arbitrario circuito materiale giacente su una superficie vor-ticosa, avra quindi circolazione nulla e per il teorema di Kel-vin la circolazione rimarra nulla al variare del tempo e datal’arbitrarieta della scelta la superficie su cui giace il circuitocontinuera ad essere tangente alla vorticita ne segue che essae ancora superficie vorticosa.
2. L’intensita di un tubo vorticoso non varia con il tempo.E un’ovvia conseguenza del precedente corollario.

111/286
Back
Close
Flussi incomprimibili ideali
L’equazione di continuita ci assicura che il campo di velocita di unflusso incomprimibile e solenoidale quindi
∇ · V = 0 (207)
Se il campo e anche irrotazionale in un dominio semplicemente con-nesso esiste il potenziale cinetico φ : ∇φ = V.La continuita diventa:
∇2φ = 0 (208)
• Il campo di velocita e governato dall’equazione di Laplace conuna sola incognita!

112/286
Back
Close
Flussi incomprimibili ideali 2DL’equazione di continuita ci assicura che il campo di velocita di un
flusso incomprimibile e solenoidale quindi
∇ · V = 0 (209)
ed inoltre esiste il potenziale vettore A tale che
V = ∇× A . (210)
La funzione di corrente
Per campi di moto bidimensionali (ci si concentra qui sul caso piano)deve risultare V3 = 0, che implica in termini di A (definizione di rotore):
∂A2
∂x1− ∂A1
∂x2= 0 ; (211)
soddisfatta per A1 = A2 = 0.

113/286
Back
Close
Si definisce funzione di corrente ψ(r) l’unica componente diversa dazero del potenziale vettore di un campo bidimensionale:
ψ(r) = A3 . (212)
In un riferimento cartesiano O(x, y) le componenti (u, v) di V sonodate da
u =∂ψ
∂y; v = −∂ψ
∂x. (213)
In un riferimento polare O(r, θ) le componenti (Vr, Vθ) di V sono dateda
Vr =1
r
∂ψ
∂θ; Vθ = −∂ψ
∂r. (214)
• Un campo di cui e data la funzione di corrente e certamente sole-noidale ma non irrotazionale;
irrotazionalita ⇒ ∇2ψ = 0.
• Un campo di cui e dato il potenziale φ e certamente irrotazionalema non solenoidale;
solenoidalita ⇒ ∇2φ = 0.

114/286
Back
Close
Proprieta della funzione di corrente
1. L’equazione di una linea di corrente e data da
dy
dx=
v
u, (215)
in termini di ψ questa relazione diventa:
∂ψ
∂xdx +
∂ψ
∂ydy = dψ = 0 ; (216)
la funzione di corrente e costante lungo una linea di corrente.
2. Il flusso di V attraverso una curva che congiunge due punti A eB di versore tangente t = (t1, t2) (quindi versore normale dato dan = (t2,−t1) e dato da:
B
A
V · ndt =
B
A
∇ψ · dt =
B
A
dψ = ψ(B)− ψ(A) . (217)

115/286
Back
Close
Il problema matematico
Ipotesi:
1. flusso 2D piano e stazionario ⇒ f = f (x, y);
2. ρ = cost ⇒ ∇ · V = 0;
3. flusso ideale;
4. corrente uniforme.

116/286
Back
Close
• Le ipotesi ci assicurano che il campo di velocita e solenoidale (in-comprimibilita) ed irrotazionale (ideale e corrente uniforme).
• Il problema e governato dall’equazione di continuita (equazione diLaplace):
∇2φ = 0 . (218)
In coordinate cartesiane:
∂2φ
∂x2+
∂2φ
∂y2= 0 . (219)
In coordinate polari:
∂2φ
∂r2+
1
r2∂2φ
∂θ2+
1
r
∂φ
∂r= 0 . (220)
117/286
Back
Close
Condizioni al contorno
1. All’infinito:limr→∞
∇φ = V∞ ; (221)
2. sul corpo di equazione nota y = yu(x), y = yl(x):
∇φ · n = 0. (222)
Problema ben posto: esiste una soluzione unica per φ continua intutto il campo (a meno di una costante inessenziale).

118/286
Back
Close
Il problema in termini di ψ
L’equazione da risolvere e ancora l’equazione di Laplace (con significatodiverso!). Si impone l’irrotazionalita del campo.
∇2ψ = 0 ; (223)
cambiano le condizioni al contorno. All’infinito deve verificarsi
limr→∞
∂ψ
∂y= V∞ · cosα , lim
r→∞
∂ψ
∂x= −V∞ · sinα . (224)
Sul corpoψ = cost. (225)
Campo di pressione
Noto il campo delle velocita e possibile determinare il campo di pres-sione utilizzando il teorema di Bernoulli:
p− p∞ = −1
2ρ(V 2 − V 2
∞) . (226)

119/286
Back
Close
Soluzioni elementari dell’equazione di Laplace
Le soluzioni dell’equazione di Laplace vengono dette funzioni armoni-che. Essendo quest’equazione lineare la somma di due funzioni armo-niche e ancora armonica.
• E possibile ottenere soluzioni complesse sommando piu solu-zioni elementari.
Corrente uniforme
φ = V∞ cosα · x + V∞ sinα · y ; (227)ψ = V∞ cosα · y − V∞ sinα · x . (228)
Sorgente (o pozzo)
In coordinate polari:
φ =Q
2πln r ; ψ =
Q
2πθ . (229)

120/286
Back
Close
Doppietta
Si ottiene dalla sovrapposizione al limite di una sorgente e di un pozzodi intensita uguali ed opposte mantenendo costante il prodotto k =Q∆l.
φ =k
2π
cos θ
r; ψ = − k
2π
sin θ
r. (230)
121/286
Back
Close
Flusso non portante intorno al cilindro
Si sovrapponga una corrente uniforme parallela all’asse x ad una dop-pietta con asse parallelo ad x:
ψ = V∞r sin θ −k
2π
sin θ
r= V∞r sin θ
1− k
2πV∞r2
. (231)
Ponendo R =k/2πV∞:
ψ = V∞r sin θ
1−R
r
2
. (232)
r → ∞ ⇒ ψ → V∞r sin θ = ψ∞ . (233)
ψ(R, θ) = 0 . (234)
Abbiamo trovato la soluzione potenziale incomprimibile di unacorrente uniforme che investe un cilindro di raggio R.

122/286
Back
Close
Campo di velocita:
Vr =1
r
∂ψ
∂θ= V∞ cos θ
1−R
r
2
; (235)
Vθ = −∂ψ
∂r= −V∞ sin θ
1 +R
r
2
. (236)
Punti di ristagno:
V = (0, 0) ⇒P1 = (R, 0)P2 = (R, π) (237)
Velocita sul corpo:
V (R) = |v(R)| = 2V∞| sin θ| . (238)
Velocita massima:
V = 2V∞ ⇒
θA =π
2
θB =3π
2
(239)

123/286
Back
Close
Prob. n. 16: disegnare le linee di corrente intorno alcilindro non portante
Esistono fondamentalmente due tecniche:
1. risolvere l’equazione differenziale che le definisce (in coordinatecartesiane): dy
dx= v
ucon condizione iniziale (x0, y0);
2. disegnare le curve ψ = cost con diversi valori della costante.
Campo di pressione sul cilindro non portante
Definizione del coefficiente di pressione
Cp =p− p∞12ρ∞V 2
∞. (240)
Caso di flusso incomprimibile governato dal teorema di Bernoulli:
Cp = 1−V
V∞
2
. (241)

124/286
Back
Close
Coefficiente di pressione sul cilindro:
Cp(R, θ) = 1− 4 sin2 θ . (242)
La forza aerodinamica (per unita di lunghezza) agente sulcilindro
f = −1
2ρV 2
∞
2π
0irCp(R, θ)Rdθ , (243)
ir = (cos θ, sin θ).Portanza (per unita di lunghezza):
l = −1
2ρV 2
∞
2π
0(1− 4 sin2 θ) sin θRdθ = 0 , (244)
risultato scontato, per la simmetria del campo di moto.

125/286
Back
Close
Resistenza (per unita di lunghezza):
d = −1
2ρV 2
∞
2π
0(1− 4 sin2 θ) cos θRdθ
= −1
2ρV 2
∞R 2π
0cos θdθ − 4
2π
0sin2 θ cos θdθ
= 0 . (245)
Incontriamo per la prima volta il Paradosso di D’Alembert:la resistenza aerodinamica agente su un corpo immerso in unacorrente bidimensionale ideale e nulla.

126/286
Back
Close
Vortice isolato
In coordinate polari (Γ > 0 verso orario):
φ = − Γ
2πθ ; ψ =
Γ
2πln r . (246)
Flusso portante intorno al cilindro
Alla precedente soluzione intorno a cilindro non portante si aggiunga ilcampo indotto da un vortice isolato posto nell’origine del riferimento:
ψ = V∞r sin θ1− R2
r2
+
Γ
2πln
r
R. (247)
Condizioni al contorno soddisfatte:
ψ(R, θ) = 0 ; (248)
r → ∞ ⇒ V → V∞ . (249)

127/286
Back
Close
Sono stati ottenuti infiniti campi di moto (al variare di Γ) intor-no al cilindro tutti ugualmente plausibili dal punto di vista teorico.
Velocita sul corpo:
V =
2V∞ sin θ +Γ
2πR
. (250)
E possibile ottenere nella pratica un campo simile facendo ruotare ilcilindro ad una velocita angolare Ω = Γ/(2πR2) (Effetto Magnus).
Circolazione sul cilindro:
V(R) · dl = Γ . (251)
In termini del potenziale φ:
∇φ(R) · dl =
dφ = Γ ⇒ φ discontinuo! (252)

128/286
Back
Close
Il dominio e doppiamente connesso!
B
A
∇φ · dl = φ(B)− φ(A) . (253)
φ(B)−φ(A) e costante lungo il taglio (la circolazione lungo il circuito(ABED) deve essere nulla).

129/286
Back
Close
Campo di velocita:
Vr =1
r
∂ψ
∂θ= V∞ cos θ
1−R
r
2
; (254)
Vθ = −∂ψ
∂r= −V∞ sin θ
1 +R
r
2
− Γ
2πr. (255)
Punti di ristagno, |Γ/4πV∞R| ≤ 1:
V = (0, 0) ⇒
P1 = (R, θ1), θ1 = arcsin
− Γ
4πV∞R
IV quadrante
P2 = (R, θ2), θ2 = arcsin− Γ
4πV∞R
III quadrante
(256)Punti di ristagno, |Γ/4πV∞R| > 1:
V = (0, 0) ⇒
P1 = (r1,−π
2), r1 =
Γ4πV∞
−
Γ4πV∞
2−R2
P2 = (r2,−π
2), r2 =
Γ4πV∞
+
Γ
4πV∞
2−R2
(257)

130/286
Back
Close
Linee di corrente e punti di ristagnoal variare della circolazione sul cilindro.
131/286
Back
Close
Campo di pressione sul cilindro portante
Coefficiente di pressione sul cilindro:
Cp = 1−
4 sin2 θ +2Γ sin θ
πV∞R+
Γ
2πV∞R
2
. (258)
La forza aerodinamica (per unita di lunghezza) agente sulcilindro
Portanza (per unita di lunghezza):
l = −1
2ρV 2
∞
2π
0Cp sin θRdθ = ρV∞Γ . (259)
Resistenza (per unita di lunghezza):
d = −1
2ρV 2
∞
2π
0Cp cos θRdθ = 0 ; (260)
vale ancora il Paradosso di D’Alembert.

132/286
Back
Close
Il teorema di Kutta-Zukovskij
Ipotesi: 2D, ∂
∂t= 0, Re∞ → ∞, Pe∞ → 0, M∞ = 0, Fr → ∞,
∇× V = 0, corpo impermeabile.

133/286
Back
Close
Forza aerodinamica per unita di lunghezza:
f =
Sb
pndS (campo vicino) . (261)
Dal bilancio di q.d.m. integrale:
f = −
Sfar
pndS −
Sfar
ρV V · n dS (campo lontano) .(262)
V = V∞ +∆V, p = p∞ +∆p . (263)
Sia Sfar → S∞; su Sfar: ∆V → 0, ∆p → 0. Andremo quindi atrascurare i termini O(∆V 2) e O(∆p2). Dal teorema di Bernoulli:
∆p =1
2ρ(V 2
∞ − V 2) =1
2ρ(V∞ · V∞ − V · V) ≈ −ρV∞ ·∆V . (264)
Inoltre:
V V = (V∞+∆V)(V∞+∆V) ≈ V∞V∞+V∞∆V+∆V V∞ . (265)

134/286
Back
Close
Quindi, essendoSfar
p∞ndS = 0,Sfar
V∞ · ndS = 0:
f = ρ
Sfar
[(V∞ ·∆V)n− (n · V∞)∆V − (n ·∆V)V∞] dS . (266)
Dalla conservazione della massaSfar
(n ·∆V)dS = 0, per cui
f = ρ
Sfar
[(V∞ ·∆V)n− (n · V∞)∆V] dS . (267)
Identita: c× (a×b) = (b · c)a− (a · c)b. Con a = n, b = ∆V, c = V∞:
f = ρV∞ ×
Sfar
n×∆VdS . (268)
Dal teorema di GaussSfar
n× V∞dS = 0, per cui
Sfar
n×∆VdS =
Sfar
n× VdS . (269)
Inoltre, essendo n = (−t2, t1):
n× V = −V · t k (270)

135/286
Back
Close
per cui:in un flusso stazionario, subsonico, bidimensionale generato da
una corrente uniforme ideale che investe un corpo impermeabile,la forza aerodinamica e data da:
f = ρV∞ × Γ . (271)
1. La resistenza e nulla (Paradosso di D’Alembert).
2. La portanza e proporzionale alla circolazione intorno al corpo (Γ >0 se oraria).

136/286
Back
Close
La condizione di Kutta
Cosı come per il cilindro anche per un corpo arbitrario immerso in unacorrente ideale e possibile ottenere infinite soluzioni potenziali variandola circolazione Γ intorno al corpo.
E possibile selezionare tra queste infinite soluzioni quella che haun reale significato fisico?
La risposta e affermativa per i corpi caratterizzati da un bordod’uscita aguzzo o cuspidato.
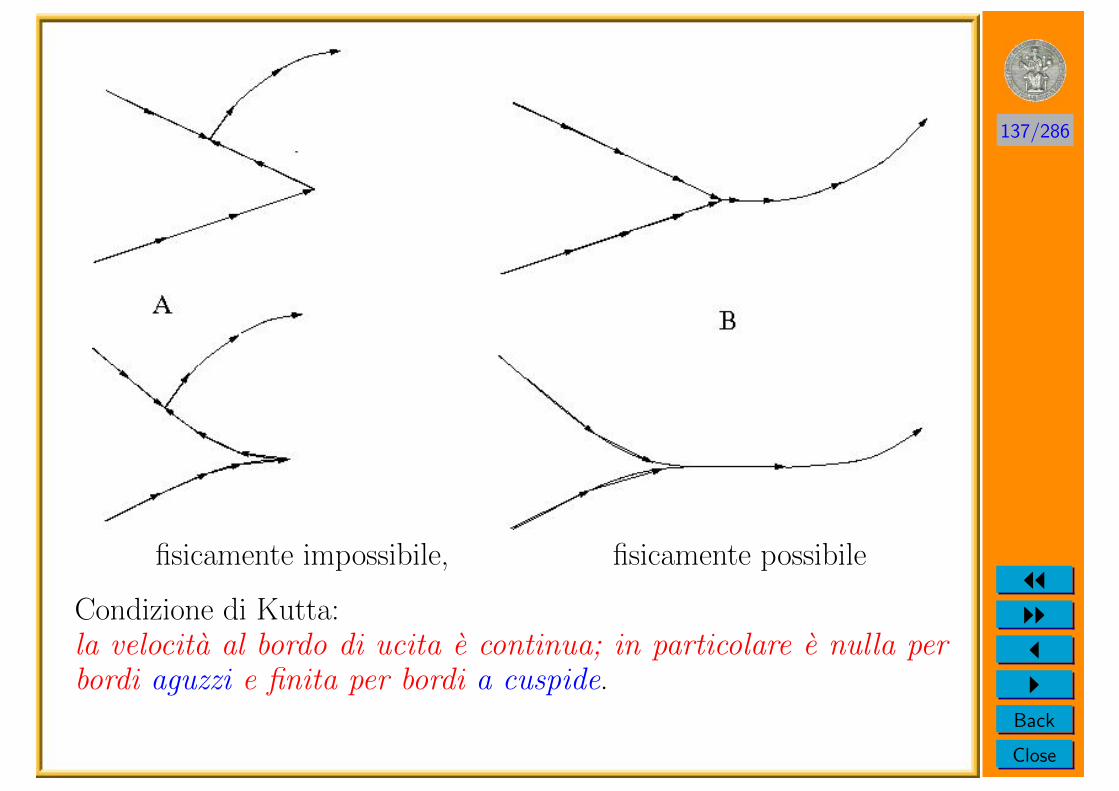
bordo d’uscita aguzzo, bordo d’uscita a cuspide
137/286
Back
Close
fisicamente impossibile, fisicamente possibile
Condizione di Kutta:la velocita al bordo di ucita e continua; in particolare e nulla perbordi aguzzi e finita per bordi a cuspide.

138/286
Back
Close
Tra gli infiniti valori della circolazione Γ deve essere scelto l’u-nico che consente di soddisfare la condizione di Kutta.
Risulta univocamente determinato il campo di moto intorno alprofilo e la corrispondente portanza individuata dal teorema diKutta-Zukovskij.
Genesi della circolazione e della portanza
Si consideri un campo fluido in quiete intorno ad un profilo alare.
• V = 0 ⇒ Γ = 0 intorno a qualsiasi circuito materiale, in particolarerispetto ad un circuito lontano dal profilo e che lo racchiude.
• Quando il profilo comincia a muoversi, per il teorema di Kelvin, lacircolazione intorno al circuito materiale deve rimanere nulla.
Come e possibile allora che si generi circolazione e quindi portanzasul profilo che si mette in moto rispetto al fluido?

139/286
Back
Close
Γ = Γ1 − Γ2 = 0 ⇒ Γ2 = Γ1 . (272)
Il vortice che si stacca all’avvio dal bordo di uscita compensa lacircolazione che si genera intorno al profilo.
140/286
Back
Close
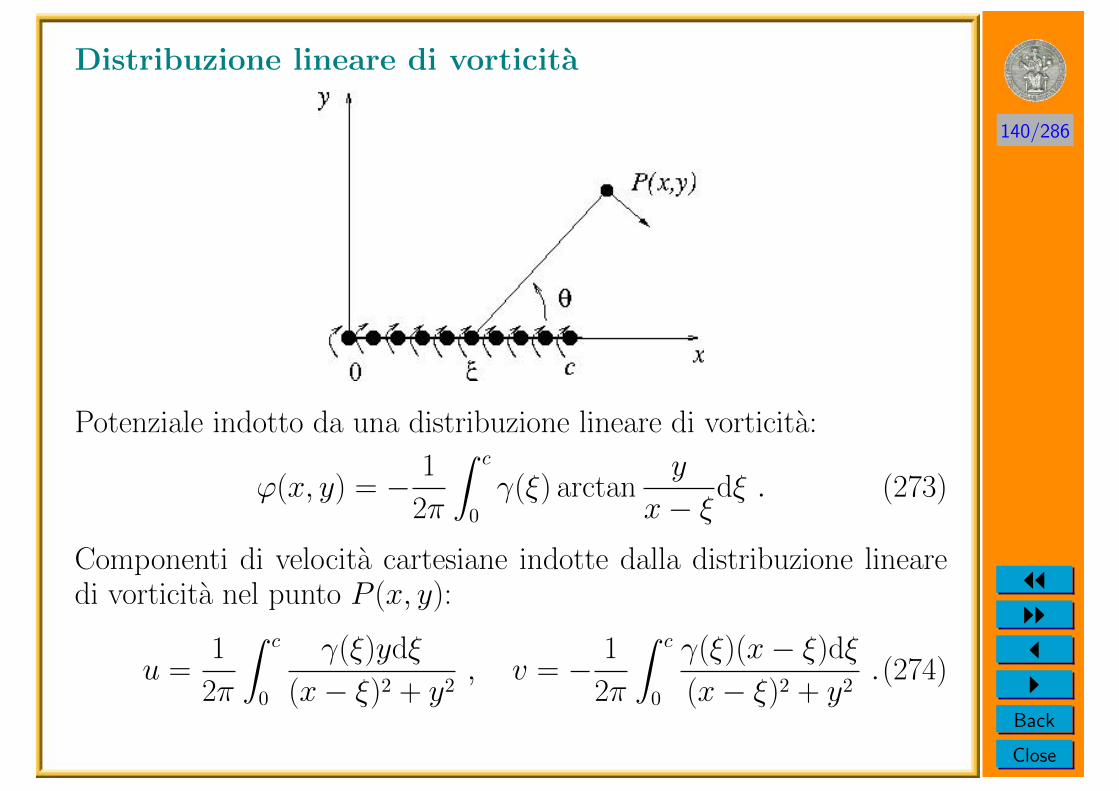
Distribuzione lineare di vorticita
Potenziale indotto da una distribuzione lineare di vorticita:
ϕ(x, y) = − 1
2π
c
0γ(ξ) arctan
y
x− ξdξ . (273)
Componenti di velocita cartesiane indotte dalla distribuzione linearedi vorticita nel punto P (x, y):
u =1
2π
c
0
γ(ξ)ydξ
(x− ξ)2 + y2, v = − 1
2π
c
0
γ(ξ)(x− ξ)dξ
(x− ξ)2 + y2.(274)

141/286
Back
Close
Lungo il segmento (0, c) il campo di velocita e discontinuo.
lim∆n→0
V · dl = (u+ − u−)dξ = γdξ ⇒ γ = u+ − u− . (275)
Per simmetria (il campo non puo cambiare se capovolgiamo la figura):
u+ = u(x, 0+) = −u− = −u(x, 0−) =γ
2. (276)

142/286
Back
Close
Teoria di Glauert del profilo infinitamente sottile a piccoliangoli di attacco
Ipotesi:
1. si assegna un profilo infinitamente sottile di equazione y = C(x);
2. la curvatura del profilo e piccola: |C(x)|/c 1 e |C (x)| 1;
3. il profilo e immerso in una corrente ideale, stazionaria, incompri-mibile ad un piccolo angolo di attacco |α| 1.
Bisogna risolvere il problema di Laplace con le condizioni al contornodi corpo linea di corrente e corrente uniforme all’infinito. L’eventualecircolazione deve essere tale da soddisfare la condizione di Kutta.
143/286
Back
Close
Si pongaφ(x, y) = φ∞(x, y) + ϕ(x, y) , (277)
dove φ∞ e il potenziale della corrente asintotica uniforme e ϕ e dettopotenziale di disturbo.
Glauert ha trovato la soluzione esprimendo ϕ come il potenziale diuna distribuzione lineare di vorticita lungo la corda del profilo:
ϕ(x, y) = − 1
2π
c
0γ(ξ) arctan
y
x− ξdξ . (278)
• Questa funzione e certamente armonica per cui, con le posizionifatte, l’equazione di Laplace e risolta.
• La condizione al contorno all’infinito e certamente soddisfatta inquanto il campo indotto all’infinito dalla distribuzione lineare divorticita e nullo.
• Deve solo essere verificata la condizione di corpo impermeabile.
• Essendo il disturbo piccolo rispetto alla corrente uniforme si tra-scureranno termini quadratici del disturbo (del II ordine).
144/286
Back
Close
|α| 1 ⇒ φ∞ ≈ V∞x + V∞αy . (279)
Per le ipotesi fatte sulla piccolezza sia di α che di C(x) il disturbo in-trodotto dal profilo sulla corrente e piccolo, cioe la velocita di disturboindotta dalla distribuzione di vorticita e piccola rispetto alla velocitaasintotica:
|u| V∞ , |v| V∞ . (280)
|C(x)|/c 1 per cui la condizione al contorno sul dorso e sul ventredel profilo puo essere imposta, con errore trascurabile, direttamentelungo la corda del profilo:
∀x ∈ (0, c) :V∞α + v(x, 0±)
V∞ + u(x, 0±)= C (x) . (281)
(x, 0+) indica un punto del dorso del profilo, mentre (x, 0−) un puntodel ventre. Si ottiene:
∀x ∈ (0, c) : V∞α + v(x, 0±) = C (x)V∞ + C (x)u(x, 0±) . (282)
L’ultimo termine (del II ordine) puo essere trascurato rispetto aglialtri.
145/286
Back
Close
La condizione sul corpo diventa:
∀x ∈ (0, c) : α +v(x, 0±)
V∞= C (x) . (283)
In termini della distribuzione di vorticita:
∀x ∈ (0, c) : α− 1
2πV∞
c
0
γ(ξ)dξ
x− ξ= C (x) . (284)
Per determinare l’incognita γ(ξ) occorre risolvere questa equazioneintegrale.
• In questo caso la condizione di Kutta e γ(c) = 0.

146/286
Back
Close
Trasformazione di Glauert:
ξ =c
2(1− cos θ0) , dξ = c
2sin θ0dθ0 ; x =
c
2(1− cos θ) . (285)
Si assume che C (x) sia sviluppabile in serie di Fourier rispetto a θ:
C (x) =∞
n=0
An cos(nθ) ; (286)
dove
A0 =1
π
π
0C (x)dθ , n ≥ 1 : An =
2
π
π
0C (x) cos(nθ)dθ. (287)
147/286
Back
Close
La soluzione del problema e:
γ(θ) = 2V∞
(α− A0) cotθ
2+
∞
n=1
An sin(nθ)
. (288)
Prob. n. 17 (facoltativo): verificare che la relazione (288)e soluzione dell’equazione integrale (284)
Integrale di Glauert:
π
0
cos(nθ0)
cos θ0 − cos θdθ0 = π
sin(nθ)
sin θ∀n = 0, 1, 2, . . . (289)
(si ricorda inoltre che, dalle formule di prostaferesi, sin(nθ0) sin θ0 =12cos[(n− 1)θ0]− 1
2cos[(n + 1)θ0]).
• Bisogna verificare che
∀x ∈ (0, c) :1
2πV∞
c
0
γ(ξ)dξ
x− ξ= α− C (x) . (290)

148/286
Back
Close
Lastra piana ad incidenza
La soluzione e (C(x) = C (x) = 0):
γ(θ) = 2V∞α cotθ
2= 2V∞α
1− x/c
x/c. (291)
VerificaDeve essere soddisfatta l’equazione integrale:
∀x ∈ (0, c) :1
2πV∞
c
0
γ(ξ)dξ
x− ξ= α . (292)
1
2πV∞
c
0
γ(ξ)dξ
x− ξ=
α
π
π
0cot
θ02
sin θ0cos θ0 − cos θ
dθ0
=α
π
π
0
1 + cos θ0cos θ0 − cos θ
dθ0 = α . (293)
C.V.D.
149/286
Back
Close
Il campo di pressione
V
V∞
2
=1 +
u
V∞
2
+α +
v
V∞
2
≈ 1 + 2u
V∞, (294)
trascurando, al solito, i termini del II ordine.
Cp = 1−V
V∞
2
= −2u
V∞. (295)
Un’attenta analisi della soluzione del problema di Glauert γ(θ) mettein luce che:
γ(θ) = γα(θ) + γC(θ) , (296)
γα(θ): soluzione del caso lastra piana ad incidenza α;
γC(θ): soluzione del caso linea media ad incidenza nulla.
Data la linearita del problema lo stesso risultato e valido per u, v eCp:
u(x, y) = uα + uC , v(x, y) = vα + vC ; (297)Cp(x, y) = Cpα
+ CpC. (298)

150/286
Back
Close
Nelle ipotesi di piccoli disturbi (profilo infinitamente sottile con pic-cola curvatura ed a bassa incidenza) e valido il principio di sovrap-posizione degli effetti: il campo di moto e ottenibile per sovrappo-sizione delle soluzioni lastra piana ad incidenza e linea media adincidenza nulla.

151/286
Back
Close
Analisi della soluzione lastra piana
u
V∞(x, 0±) = ±γ(x)
2V∞= ±α
1− x/c
x/c; (299)
Cp(x, 0±) = −2
u
V∞(x, 0±) = ∓γ(x)
V∞= ∓2α
1− x/c
x/c. (300)
Coefficiente di pressione su una lastra piana a α = 50; soluzione di Glauert.
152/286
Back
Close
• Al bordo di attacco la soluzione e singolare (dove il disturbo inrealta non e piccolo).
• Al bordo d’uscita Cp = 0 (condizione di Kutta verificata).
I coefficienti di forza aerodinamica
n: componente della forza aerodinamica (per unita di lunghezza) iny (forza normale); n = Cn
12ρ∞V 2
∞c;
a: componente della forza aerodinamica (per unita di lunghezza) inx (forza assiale); a = Ca
12ρ∞V 2
∞c;
s: ascissa curvilinea lungo il profilo C(x) (dx = cos δds).
153/286
Back
Close
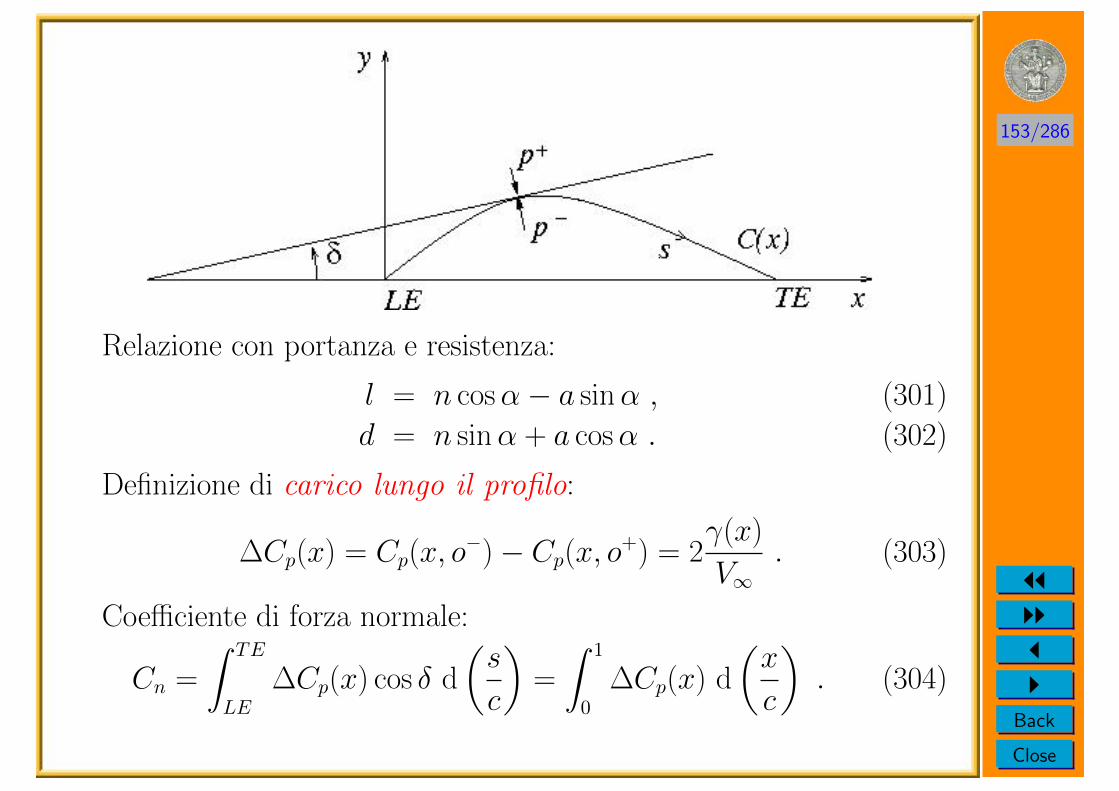
Relazione con portanza e resistenza:
l = n cosα− a sinα , (301)d = n sinα + a cosα . (302)
Definizione di carico lungo il profilo:
∆Cp(x) = Cp(x, o−)− Cp(x, o
+) = 2γ(x)
V∞. (303)
Coefficiente di forza normale:
Cn =
TE
LE
∆Cp(x) cos δ ds
c
=
1
0∆Cp(x) d
x
c
. (304)

154/286
Back
Close
• Il contributo della forza assiale alla portanza e del II ordine e puoessere trascurato.
Cl ≈ Cn cosα ≈ Cn = 2 1
0
γ(x)
V∞dx
c
=
2Γ
V∞c; (305)
l =2Γ
V∞c
1
2ρ∞V
2∞c = ρ∞V∞Γ . (306)
• Il teorema di Kutta-Zukovskij e verificato.
Cl ≈ 2 1
0
γ(x)
V∞dx
c
= 4
π
0
(α− A0) cotθ
2+
∞
1
An sin(nθ)
1
2sin θdθ
= 4
(α− A0)
π
0cos2
θ
2dθ +
1
2
∞
1
An
π
0sin(nθ) sin θdθ
(307)

155/286
Back
Close
π
0cos2
θ
2dθ =
π
2;
π
0sin(nθ) sin θdθ =
π
2n = 1
0 n > 1
Cl ≈ 4(α− A0)
π
2+
π
4A1
= 2π
α− A0 +
A1
2
(308)
Cl ≈ Clα (α− αzl) (309)
• Per profili sottili a piccoli angoli d’attacco la curva Cl = Cl(α) euna retta.
• Clα = 2π e il coefficiente angolare della retta di portanza ed eindipendente dal profilo.
• αzl = A0 − A1/2 e l’angolo di portanza nulla, dipende solo dallacurvatura del profilo ed e proporzionale ad essa.

156/286
Back
Close
In modo analogo si calcola il momento di beccheggio (per unita dilunghezza) rispetto al bordo di attacco (positivo se cabrante) ed ilrelativo coefficiente:
mle = Cmle
1
2ρ∞V
2∞c
2 . (310)
Cmle= −
TE
LE
∆Cp(x) cos δx
cds
c
= −
1
0∆Cp(x)
x
cdx
c
= −2 1
0γ(x)
x
cdx
c
=
π
4(A2 − A1)−
Cl
4. (311)
Il centro di pressione e il punto di applicazione della risultantedelle forze aerodinamiche:
− Cl
xcp
c= Cmle
⇒ xcp
c= −Cmle
Cl
. (312)
157/286
Back
Close
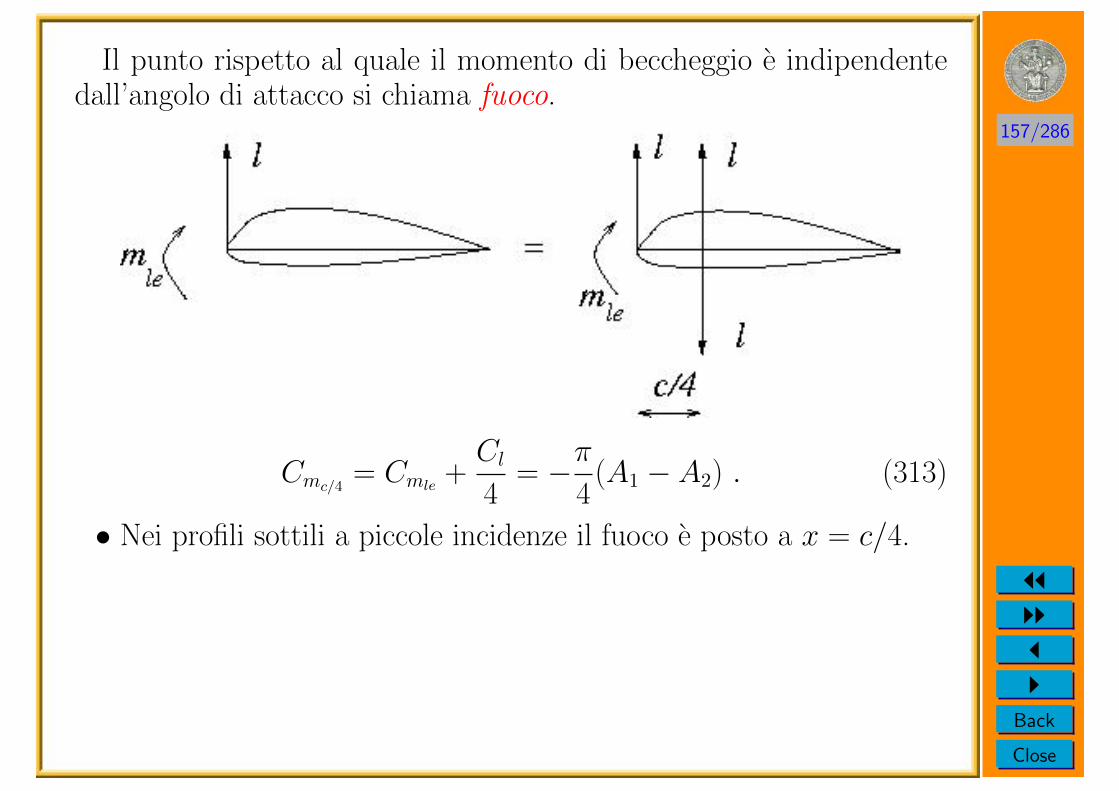
Il punto rispetto al quale il momento di beccheggio e indipendentedall’angolo di attacco si chiama fuoco.
Cmc/4= Cmle
+Cl
4= −π
4(A1 − A2) . (313)
• Nei profili sottili a piccole incidenze il fuoco e posto a x = c/4.
158/286
Back
Close
Le forze aerodinamiche nel caso di lastra piana
• αzl = 0;
• Cl = 2πα;
• Cmle= −Cl/4;
• xcp = c/4;
• Cmc/4= 0.

159/286
Back
Close
• Re∞ 1, M∞ 1;
• esiste un ampio intervallo de-gli angoli di attacco in cui i ri-sultati della teoria di Glauertsono in ottimo accordo con idati sperimentali.
• Clα = 2π;
• αzl puo essere facilmentecalcolato nota la linea media;
• Cmc/4puo essere facilmente
calcolato nota la linea media.

160/286
Back
Close
Il profilo sottile simmetrico a incidenza nulla
Equazione del profilo:y = ±T (x) , (314)
T (x) 1, +: dorso, −: ventre.
φ(x, y) = V∞x + ϕ(x, y) ; (315)
ϕ(x, y) =1
2π
c
0σ(ξ) ln
(x− ξ)2 + y2 dξ , (316)
Il potenziale del disturbo e dato da una distribuzione lineare di sorgentilungo la corda di intensita
σ(x) = 2V∞T(x) . (317)

161/286
Back
Close
Come nel caso linea media ad incidenza, occorre verificare che lacondizione al contorno sul corpo sia verificata (imposta lungo la corda):
∀x ∈ (0, c) :v
V∞(x, 0±) = ±T (x) . (318)
Poiche i campi indotti da un vortice e da una sorgente sono ortogonalirisulta3:
v(x, 0±) = ±σ(x)
2; (319)
con σ(x) = 2V∞T (x) la condizione (318) e ovviamente soddisfatta.
• Il campo di moto e singolare al bordo d’attacco (dove il disturbo egrande).
• ∆Cp(x) = 0, Cl = 0 e Cmle= 0.
• Campi di moto non portanti possono essere descritti con distribu-zioni di sorgenti e pozzi.
3le componenti di velocita sono uguali ma scambiate.

162/286
Back
Close
Campo intorno ad un profilo sottile di spessore finito apiccole incidenze
Ipotesi
1. ρ = cost, ∂/∂t = 0, flusso ideale.
2. Corrente asintotica uniforme con |α| 1.
3. Equazione del profilo: y = C(x) ± T (x), con |C(x)|, |C (x)|,|T (x)|, |T (x)| 1.
C(x): equazione della linea media;
T (x): equazione del semispessore del profilo simmetrico.
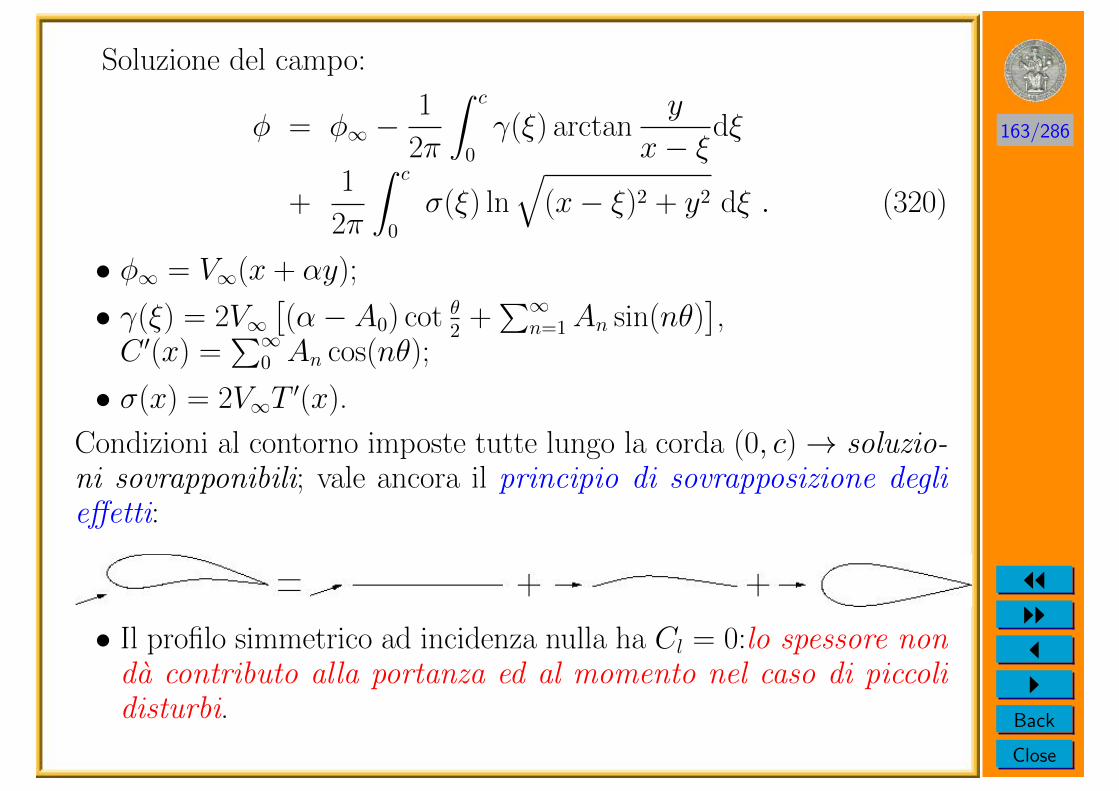
163/286
Back
Close
Soluzione del campo:
φ = φ∞ − 1
2π
c
0γ(ξ) arctan
y
x− ξdξ
+1
2π
c
0σ(ξ) ln
(x− ξ)2 + y2 dξ . (320)
• φ∞ = V∞(x + αy);
• γ(ξ) = 2V∞(α− A0) cot
θ
2+
∞n=1An sin(nθ)
,
C (x) =∞
0 An cos(nθ);
• σ(x) = 2V∞T (x).
Condizioni al contorno imposte tutte lungo la corda (0, c) → soluzio-ni sovrapponibili; vale ancora il principio di sovrapposizione deglieffetti:
• Il profilo simmetrico ad incidenza nulla ha Cl = 0:lo spessore nonda contributo alla portanza ed al momento nel caso di piccolidisturbi.
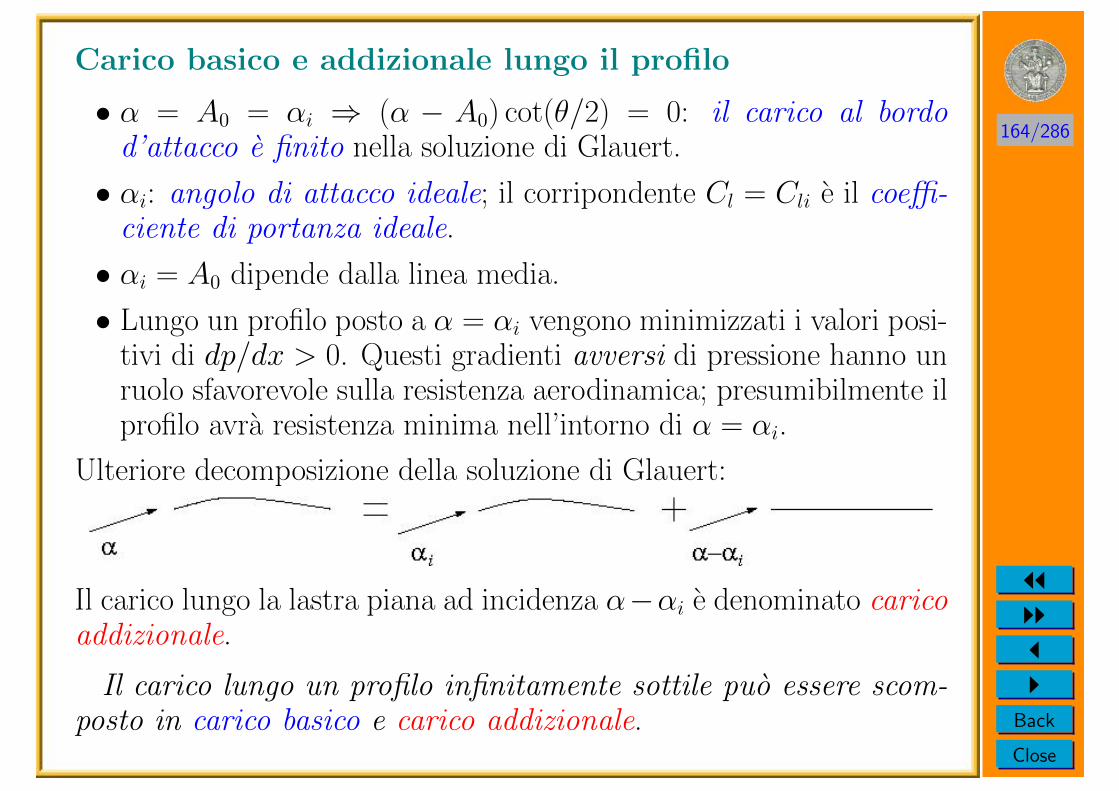
164/286
Back
Close
Carico basico e addizionale lungo il profilo
• α = A0 = αi ⇒ (α − A0) cot(θ/2) = 0: il carico al bordod’attacco e finito nella soluzione di Glauert.
• αi: angolo di attacco ideale; il corripondente Cl = Cli e il coeffi-ciente di portanza ideale.
• αi = A0 dipende dalla linea media.
• Lungo un profilo posto a α = αi vengono minimizzati i valori posi-tivi di dp/dx > 0. Questi gradienti avversi di pressione hanno unruolo sfavorevole sulla resistenza aerodinamica; presumibilmente ilprofilo avra resistenza minima nell’intorno di α = αi.
Ulteriore decomposizione della soluzione di Glauert:
Il carico lungo la lastra piana ad incidenza α−αi e denominato caricoaddizionale.
Il carico lungo un profilo infinitamente sottile puo essere scom-posto in carico basico e carico addizionale.

165/286
Back
Close
I profili NACADefinizione della geometria
x ∈ (0, 1);
y = yc(x): equazione della linea media;
y = yt(x): equazione del semispessore (profilo simmetrico);
tan θ = dyc/dx.

166/286
Back
Close
Coordinate dei punti del dorso (upper):
xU = x− yt sin θ , (321)yU = yc + yt cos θ . (322)
Coordinate dei punti del ventre (lower):
xL = x + yt sin θ , (323)yL = yc − yt cos θ . (324)
Profili NACA a 4 cifre
Semispessore:
yt = ± t
0.20
0.29690
√x− 0.12600x− 0.35160x2
+ 0.28430x3 − 0.10150x4. (325)
t: spessore percentuale del profilo, il punto di spessore massimo eposizionato al 30% della corda, bordo d’uscita aguzzo.
rt = 1.1019t2: raggio di curvatura del bordo di attacco.

167/286
Back
Close
Linea media:
∀x ≤ p : yc =m
p2(2px− x2) ; (326)
∀x > p : yc =m
(1− p)2(1− 2p + 2px− x2) ; (327)
p: posizione in x del punto di ordinata massima della linea media;
m: ordinata massima della linea media.
Sistema di numerazioneIl profilo e individuato da 4 cifre D1D2D3D4.
D1/100 = m, curvatura massima;
D2/10 = p, posizione del punto di curvatura massima;
D3D4/100 = t, spessore massimo percentuale.
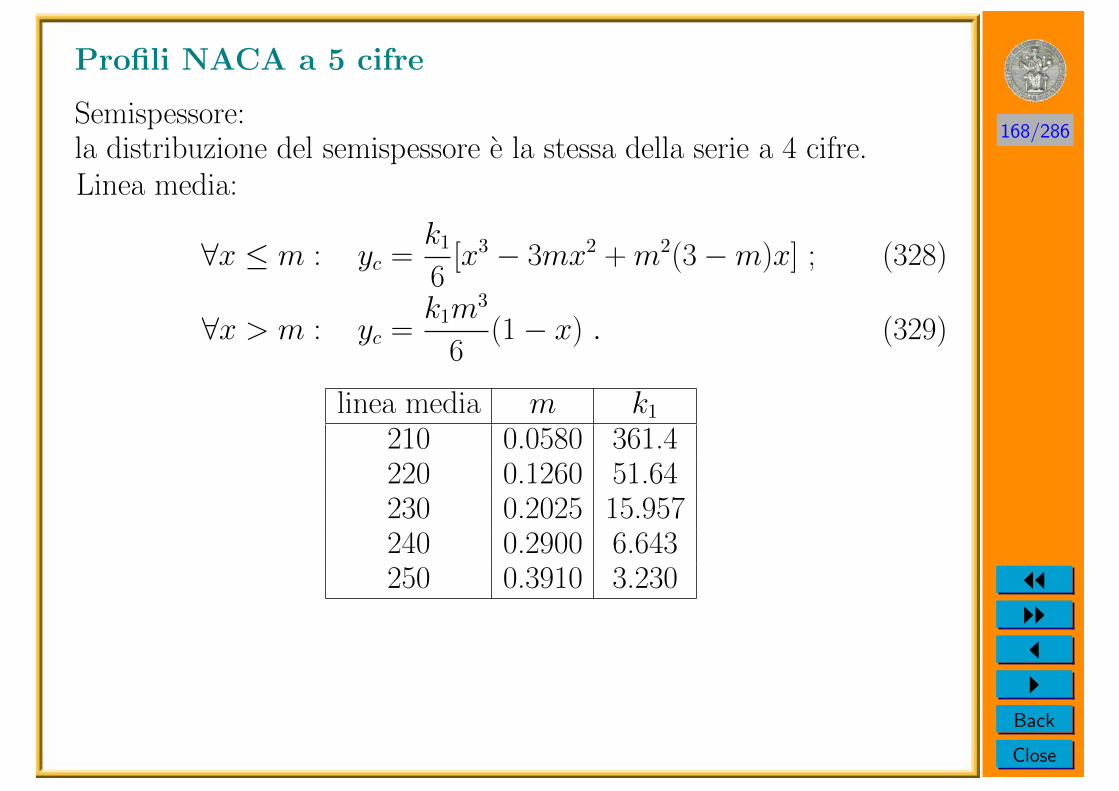
168/286
Back
Close
Profili NACA a 5 cifre
Semispessore:la distribuzione del semispessore e la stessa della serie a 4 cifre.Linea media:
∀x ≤ m : yc =k16[x3 − 3mx2 +m2(3−m)x] ; (328)
∀x > m : yc =k1m3
6(1− x) . (329)
linea media m k1210 0.0580 361.4220 0.1260 51.64230 0.2025 15.957240 0.2900 6.643250 0.3910 3.230

169/286
Back
Close
Sistema di numerazioneIl profilo e individuato da 5 cifre D1D2D3D4D5.
D1D2D3 individuano la linea media;
D4D5/100 = t, spessore massimo
NACA 2412
NACA 23012

170/286
Back
Close
Il metodo ingegneristico NACA
• assegnato il Cl, consente la determinazione delle velocita e dellepressioni lungo un profilo delle famiglia NACA in condizioni diflusso ideale e incomprimibile;
• non ha una solida base scientifica;
• si basa sulla sovrapposizione dei campi di velocita ottenuti da risul-tati esatti ed approssimati (teoricamente non possibile) disponibilisotto forma di tabelle.
1. Profilo simmetrico ad incidenza nulla; soluzione ottenuta con unmetodo esatto.
2. Linea media a Cl = Cli; soluzione di Glauert.
3. Profilo simmetrico ad incidenza α − αi; soluzione esatta ottenutaper Cl = 1 (valore di riferimento) ed assunta variabile linearmentecon il Cl (assunzione approssimata).

171/286
Back
Close
• Le soluzioni 1 e 3 (per Cl = 1) sono esatte e quindi non hannosingolarita al bordo di attacco.
• La soluzione 2 e il carico basico, per definizione, finito al bordo diattacco.
• La soluzione completa, ottenuta con il metodo NACA, non hasingolarita al bordo d’attacco.
Velocita sul profilo
V
V∞=
Vt
V∞± ∆v
V∞± ∆va
V∞(Cl − Cli) . (330)
Vt/V∞: profilo simmetrico a α = 0o.
∆v/V∞: linea media a α = αi.
∆va/V∞: profilo simmetrico a Cl = 1.

172/286
Back
Closee

173/286
Back
Close
Confronto del metodo NACA con dati sperimentali.

174/286
Back
Close

175/286
Back
Close
Applicazione del metodo NACA
1. Assegnare il profilo (spessore + linea media).
2. Assegnare Cl.
3. Consultare la tabella della linea media per determinare Cli. Solole linee medie 6X dei profili a 4 cifre sono dispobili in forma ta-bulare; per determinare i dati della linea media 2X, ad esempio,occorre moltiplicare per 2/6 = 1/3 i dati della linea 6X (linearitadell’effetto della linea media).
4. Calcolare il fattore moltiplicativo per il carico addizionale: f (Cl) =Cl − Cli.
5. Compilare la tabella per il profilo. Il coefficiente di pressione sicalcola con la formula Cp = 1− (V/V∞)2.
x
c
Vt
V∞
∆vaV∞
∆vaV∞
f(Cl)∆v
V∞
Vl
V∞
Vu
V∞Cpl Cpu ∆Cp
6. Ricalcolare Cl = 10 ∆Cpd(x/c) per verifica.

176/286
Back
Close
L’ala finita in regime idealeIpotesi:
1. corrente uniforme V∞ che investe un corpo tridimensionale;
2. regime stazionario;
3. regime ideale (Rer → ∞);
4. regime incomprimibile (M∞ → 0).
Il campo di moto e a potenziale e l’equazione che governa il problemae ancora quella di Laplace:
∇2φ = 0 ; (331)
condizioni al contorno:
limr→∞
φ = φ∞ ; sul corpo:∂φ
∂n= 0 . (332)

177/286
Back
Close
Esiste la possibilita che in piani paralleli al piano (x, z), in cui lasezione dell’ala e un profilo alare, il campo di moto sia pratica-mente bidimensionale?Si, nel caso di ali caratterizzate da AR 1 e freccia Λ → 0.

178/286
Back
Close
Come mai in regime ideale 2D la resistenza aerodinamica risultanulla, mentre la teoria globale ha messo in luce, in 3D, l’esistenzadella resistenza indotta dalla portanza?

179/286
Back
Close
• La differenza di pressione ventre-dorso tende a far ruotare l’ariaattorno alle estremita alari: alle estremita si formano due vorticicontrorotanti detti vortici liberi.

180/286
Back
Close
• I vortici liberi tendono a far scendere l’aria per −b/2 < y < b/2(downwash), mentre fanno salire l’aria per y < −b/2 e y > b/2(upwash).

181/286
Back
Close
• Per effetto del downwash (w) i profili alari si trovano a lavorare adun angolo di attacco effettivo αeff = α− αi piu piccolo.
• αi e l’angolo di incidenza indotto.
• La velocita effettiva a cui lavora il profilo (Veff) ha cambiato di-rezione: la portanza ad essa perpendicolare ha una componenteparallela a V∞: la resistenza indotta.
• Il downwash e proprio la componente di velocita associata allavariazione di quantita di moto verticale causa (per la II legge delladinamica) della portanza.

182/286
Back
Close
Il sistema vorticoso dell’ala
• Se AR 1 e Λ ≈ 0 l’esperienza mostra che, a parte le estremita,il flusso e bidimensionale in piani paralleli a (x, z).
• La teoria di Glauert mostra che un’ala infinita infinitamente sot-tile e poco curva a bassa incidenza e descritta da una superficievorticosa di intensita Γ =
c
0 γG(x)dx.
• Se l’ala e finita, in generale Γ = Γ(y), in particolare Γ(−b/2) =Γ(b/2) = 0.
• La distribuzione di vorticita γG con asse parallelo a y costituisceil sistema di vortici aderenti. Se AR 1 il sistema di vorticiaderenti puo essere schematizzato con un unico vortice di intensitaΓ(y).
• L’intensita di un tubo vorticoso non puo variare e la circolazione siconserva: per una variazione lungo y pari a dΓ = dΓ/dy dy devenascere un vortice di pari intensita diretto come le linee di corrente.
• Questi vortici, sostanzialmente allineati a V∞, costituiscono il si-stema di vortici liberi.

183/286
Back
Close
Il sistema vorticoso dell’ala.

184/286
Back
Close
Il downwash
• Il downwash w e la velocita indotta lungo l’asse y (x = 0) dalsistema di vortici liberi (w > 0 ⇒ verso il basso).
• I vortici liberi sono semi-infiniti.
Downwash indotto da un vortice elementare infinito:
dw =dΓ
2π(y − y0). (333)
Downwash indotto da un vortice elementare semi-infinito:
dw =dΓ
4π(y − y0). (334)

185/286
Back
Close
Downwash indotto da una distribuzione di vortici liberi lungo l’ala:
w(y) =1
4π
+b/2
−b/2
1
(y − y0)
dΓ
dy0(y0)dy0 . (335)

186/286
Back
Close
La teoria del filetto portante di Prandtl
Nelle ipotesi di piccoli disturbi, l’incidenza indotta e piccola:
αi(y) ≈w
V∞(y) =
1
4πV∞
+b/2
−b/2
1
(y − y0)
dΓ
dy0(y0)dy0 . (336)
αg(y) = α(y)−αzl(y): angolo d’attacco della sezione misurato rispet-to alla retta di portanza nulla del profilo;
αeff(y) = αg(y)−αi(y): angolo di incidenza effettiva αeff a cui lavorala generica sezione dell’ala (rispetto alla retta di portanza nulla delprofilo).
dL = ρV∞Γ(y)dy = Clα(y)αeff(y)1
2ρV 2
∞c(y)dy , (337)
2Γ(y)
V∞c(y)= Clα(y)[αg(y)− αi(y)] . (338)

187/286
Back
Close
Sostituendo l’espressione integrale di αi(y):
2Γ(y)
Clα(y)V∞c(y)+
1
4πV∞
+b/2
−b/2
1
(y − y0)
dΓ
dy0(y0)dy0 = αg(y) . (339)
Noto V∞ e la geometria dell’ala (c(y), svergolamento, profili utilizzatie quindi Clα(y)) quest’equazione integrale e nell’unica incognita Γ(y).
Il carico lungo l’ala
γ =Γ
V∞b=
cCl
2b; (340)
Con η = y/(b/2) l’equazione integrale (339) diventa:
2b
Clα(η)c(η)γ(η) +
1
2π
+1
−1
1
(η − η0)
dγ
dη0(η0)dη0 = αg(η) . (341)

188/286
Back
Close
Posto η = − cos θ:
γ(θ) =∞
n=1
An sin (nθ) ; (342)
si ottiene4:w
V∞(θ) =
∞
n=1
n
2An
sin(nθ)
sin θ(343)
e l’equazione da risolvere diventa
2b
Clα(θ)c(θ)
∞
n=1
An sin(nθ) +∞
n=1
n
2An
sin(nθ)
sin θ= αg(θ) . (344)
4Ricordando l’integrale di Glauert e che dγdη = dγ
dθdθdη

189/286
Back
Close
La portanza
Assumendo piccoli disturbi: Veff ≈ V∞.
L = +b/2
−b/2l(y)dy = ρ∞V∞
+b/2
−b/2Γ(y)dy . (345)
CL =L
12ρ∞V 2
∞S= AR
+1
−1γ(η)dη . (346)
Sostituendo γ =∞
1 An sin(nθ):
CL =π
2ARA1 . (347)
• Il coefficente di portanza dipende solo da A1.

190/286
Back
Close
La resistenza indotta
Di = +b/2
−b/2ρ∞V∞Γ(y)αi(y)dy = ρ∞
+b/2
−b/2Γ(y)w(y)dy . (348)
CDi =Di
12ρ∞V 2
∞S= AR
+1
−1γ(η)αi(η)dη . (349)
π
0sin(nθ) sin(mθ)dθ =
π/2 per n = m0 per n = m
CDi = AR
π
0
∞
n=1
An sin(nθ)
∞
n=1
n
2An sin(nθ)
dθ
=π
4AR
A2
1 + 2A22 + 3A2
3 + . . . + nA2n+ . . .
. (350)
CDi =C2
L
πAR(1 + δ2) , dove δ2 =
∞
n=2
nA2n
A21
. (351)
191/286
Back
Close
Ala con distribuzione di carico ellittica:
γ(θ) = A1 sin θ = γ0 sin θ , (352)
dove γ0 = Γ(0)/(V∞b).
w
V∞= αi =
A1
2=
CL
πAR. (353)
Se la distribuzione del carico e ellittica:
1. il downwash, quindi αi, e costante lungo l’apertura;
2. CDi =C2
L
πARe minimo (δ2 = 0) nell’ambito di validita della teoria
del filetto portante.

192/286
Back
Close
L’ala ellittica
Si puo avere come soluzione dell’equazione del filetto portante (344) ilcarico ellittico?Deve essere verificato che
A1 =2αg(θ)
1 +4b sin θ
Clα(θ)c(θ)
= cost . (354)
• Esistono infiniti modi di combinare forma in pianta, svergola-mento e profilo (Clα) per ottenere il carico ellittico.
Uno dei modi, particolarmente interessante, e:
1. αg(θ) = cost, ala non svergolata aerodinamicamente;
2. stesso profilo lungo l’apertura, quindi Clα(θ) = cost, αzl(θ) = cost(ala non svergolata anche geometricamente).
3. c(θ) = c0 sin θ, forma in pianta ellittica.

193/286
Back
Close
Per l’ala ellittica S = πbc0/4.
CL =Clα
1 +Clα
πAR
(α− αzl) . (355)
• CL = CLα(α− αzL);
• CLα =Clα
1 +Clα
πAR
; quindi CLα < Clα;
• αzL = αzl; l’angolo di portanza nulla dell’ala coincide con quellodel profilo.
Prob. n. 18: determinare per un’ala di assegnato AR eper un dato CL l’ordine di grandezza di γ
Dall’equazione CL = AR +1−1 γdη si puo calcolare il valor medio di γ.

194/286
Back
Close
Reggiane Re. 2001

195/286
Back
Close
Carico basico e addizionale lungo l’ala
Decomposizione del carico lungo l’ala:
γ(η) = γb(η) + γa(η) ; (356)
• γb(η): carico basico, distribuzione del carico per CL = 0; dipendeessenzialmente dallo svergolamento aerodinamico dell’ala;
• γa(η) = γ(η)− γb(η): carico addizionale, differenza tra la distri-buzione attuale e basica del carico; dipende essenzialmente dallaforma in pianta dell’ala.

196/286
Back
Close
Il metodo ingegneristico di Schrenk
Permette il calcolo della distribuzione del carico basico e del caricoaddizionale.Dati:
1. c/(b/2) = f (η): forma in pianta;
2. Clα = Clα(η), αzl = αzl(η): caratteristica di portanza nell’inter-vallo di funzionamento lineare del profilo;
3. εa = εa(η): svergolamento aerodinamico.
• CL = AR +1
−1 γbdη + +1−1 γadη
= AR
+1−1 γadη;
• nel tratto lineare della curva di portanza γa e proporzionale a CL.
γ = γb + CLγa1 , (357)
γa1: carico addizionale per CL = 1.

197/286
Back
Close
Determinazione del carico addizionale
• AR → ∞: il carico e proporzionale alla corda (αi → 0, γ =cCl/(2b)).
• AR → 0: l’esperienza mostra che, per ali di basso allungamento, ilcarico diventa ellittico;
• ipotesi di Schrenk: per AR intermedi il carico addizionale perCL = 1 e dato dalla media tra la distribuzione delle corde ef-fettiva e quella di un’ala a forma in pianta ellittica e di parisuperficie alare.
γa1(η) =1
2
c(η)
2b+
cell(η)
2b
; (358)
cell(η) = c0√1− η2 = c0 sin θ;
c0 =4S
πb.
AR +1
−1γa1dη =
AR
4b
+1
−1c(η)dη +
4S
πb
+1
−1
1− η2dη
= 1 .
(359)

198/286
Back
Close
Carico addizionale con il metodo di Schrenk
• Il metodo di Schrenk e in errore alle estremita alari dove il caricodovrebbe essere nullo.
• Si puo tenere conto della variazione del profilo lungo l’aperturautilizzando la corda effettiva dell’ala ce = cClα/Clα con Clα =2b/20 Clαc dy/S.

199/286
Back
Close
Determinazione del carico basico
1. Si calcola αzL con la formula approssimata
αzL =2
S
b/2
0cεa(y) dy . (360)
2. Si calcola l’angolo di attacco basico con la formula
αb = αzL − εa(y). (361)
3. Si assume il carico basico pari alla media tra il carico basico dell’alasvergolata e quello della stessa ala non svergolata:
γb(η) =cClb
2b=
cClααb
4b, (362)
per tenere conto dell’effetto di contrasto dello svergolamento dovu-to al maggior carico in mezzeria dell’ala svergolata.