la robotizaciÓn aplicada en prÓtesis, su avance
TRANSCRIPT

LA ROBOTIZACIOacuteN APLICADA EN PROacuteTESIS SU AVANCE
TECNOLOacuteGICO Y BENEFICIOS
NELSON FERNANDO EUGENIO PENtildeA
KATHERIN PAOLA RATIVA YEPES
UNIVERSIDAD ECCI
FACULTAD DE INGENIERIacuteAS
COORDINACIOacuteN DE INGENIERIacuteA BIOMEacuteDICA
TECNOLOGIacuteA EN ELECTROMEDICINA
BOGOTAacute DC
2017
LA ROBOTIZACIOacuteN APLICADA EN PROacuteTESIS SU AVANCE
TECNOLOacuteGICO Y BENEFICIOS
NELSON FERNANDO EUGENIO PENtildeA
KATHERIN PAOLA RATIVA YEPES
Informe de Monografiacutea como opcioacuten de grado para optar el tiacutetulo de
Tecnologiacutea en Electromedicina
Asesor
LUIS FERNANDO FAJARDO SIERRA
Ing Electroacutenico
UNIVERSIDAD ECCI
FACULTAD DE INGENIERIacuteAS
COORDINACIOacuteN DE INGENIERIacuteA BIOMEacuteDICA
TECNOLOGIacuteA EN ELECTROMEDICINA
BOGOTAacute DC
2017
TABLA DE CONTENIDO
Paacuteg
1 PLANTEAMIENTO DEL PROBLEMA helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
11 CRITERIOS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
12 FORMULACIOacuteN DEL PROBLEMAhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
2 JUSTIFICACIOacuteN helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
3 OBJETIVOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
31 OBJETIVO GENERAL helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
32 OBJETIVOS ESPECIacuteFICOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
4 ESTADO DE LOS CONOCIMIENTOS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphellip16
411 TIPOS DE PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip19
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIORhelliphelliphellip39
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIORhelliphelliphelliphelliphellip40
414 INDICACIONES Y CONTRAINDICACIONEShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
42 OacuteRTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
421 TIPOS DE OacuteRTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICAhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIShelliphelliphelliphelliphelliphelliphellip49
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
451 COSTOS PROMEDIO DE UNA PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip58
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphellip59
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIShellip helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip61
48 MANTENIMIENTO DE LAS PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip64
5 METODOLOGIacuteA helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip68
6 CONCLUSIONEShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip74
7 DISCUSIOacuteNhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip75
REFERENCIAS ELECTROacuteNICAS77
ANEXOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip78
LISTA DE FIGURAS
Paacuteg
Figura 1 proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
Figura 2 Historia de las proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazohelliphelliphelliphellip20
Figura 4 Desarticulacioacuten de hombrohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
Figura 5 Amputacioacuten trans-humeral helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
Figura 6 Amputacioacuten de desarticulacioacuten de codo helliphelliphelliphelliphelliphelliphelliphellip 21
Figura 7 Niveles de amputacioacuten de antebrazo helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 8 Amputacioacuten trans-radial helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca 23
Figura 10 Amputacioacuten parcial de pulgar 23
Figura 11 Amputacioacuten de dedos trifalaacutengicos 24
Figura 12 Amputacioacuten pluridigital 24
Figura 13 Amputacioacuten del carpo25
Figura 14 Proacutetesis cosmeacuteticas 25
Figura 15 Proacutetesis funcionales 26
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea 27
Figura 17 Proacutetesis trans-femoral 29
Figura 18 Proacutetesis trans-tibial 29
Figura 19 Proacutetesis de desarticulacioacuten de cadera 30
Figura 20 Proacutetesis de desarticulacioacuten de rodilla 30
Figura 21 Proacutetesis de desarticulacioacuten de tobillo 31
Figura 22 Proacutetesis parcial de pie 31
Figura 23 Proacutetesis dentales 32
Figura 24 Proacutetesis auditivas 35
Figura 25 Proacutetesis oculares 37
Figura 26 Proacutetesis ocular de doble pared helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
Figura 27 Componentes de proacutetesis de miembro superior helliphelliphelliphelliphelliphellip39
Figura 28 Oacutertesis estabilizadora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 29 Oacutertesis funcional helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 30 Oacutertesis correctora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 31 Oacutertesis protectora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 32 Oacutertesis de miembro inferior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 33 Oacutertesis de miembro superior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 34 Oacutertesis de columna helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 35 Oacutertesis craneales helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 36 Oacutertesis de sedestacioacuten helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
Figura 37 Roboacutetica helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
Figura 38 Mano Blackfingers helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
Figura 39 Mano Lowa helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
Figura 40 Mano Otto Bock helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip53
Figura 41 Codo-antebrazohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
Figura 42 Piernas Elegs Berkeley Bionicshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip55
Figura 43 Proacutetesis de rodilla power kneehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip56
Figura 44 propio foothelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
Figura 45 Mantenimiento y Desarrollohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip67
Figura 46 Encuesta con el mayor puntajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip70
Figura 47 Encuesta con el menor porcentajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip72
LISTA DE ANEXOS
Paacuteg
Anexo A Encuesta aplicadahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip79
Anexo B Encuesta de persona de 18 antildeos de edad helliphelliphelliphelliphelliphelliphelliphelliphellip81
Anexo C Encuesta de persona de 19 antildeos de edad helliphelliphelliphelliphelliphelliphelliphellip83
Anexo D Encuesta de persona de 17 antildeos de edad 85
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia 87
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute 88
GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
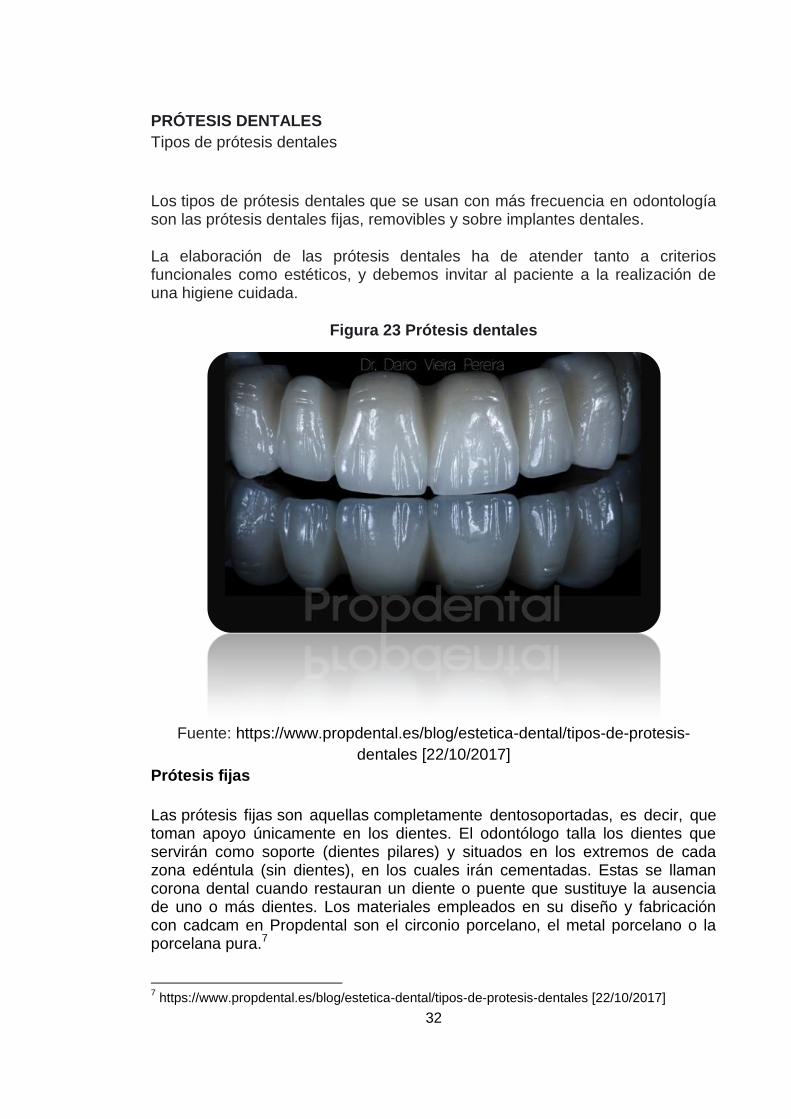
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

LA ROBOTIZACIOacuteN APLICADA EN PROacuteTESIS SU AVANCE
TECNOLOacuteGICO Y BENEFICIOS
NELSON FERNANDO EUGENIO PENtildeA
KATHERIN PAOLA RATIVA YEPES
Informe de Monografiacutea como opcioacuten de grado para optar el tiacutetulo de
Tecnologiacutea en Electromedicina
Asesor
LUIS FERNANDO FAJARDO SIERRA
Ing Electroacutenico
UNIVERSIDAD ECCI
FACULTAD DE INGENIERIacuteAS
COORDINACIOacuteN DE INGENIERIacuteA BIOMEacuteDICA
TECNOLOGIacuteA EN ELECTROMEDICINA
BOGOTAacute DC
2017
TABLA DE CONTENIDO
Paacuteg
1 PLANTEAMIENTO DEL PROBLEMA helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
11 CRITERIOS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
12 FORMULACIOacuteN DEL PROBLEMAhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
2 JUSTIFICACIOacuteN helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
3 OBJETIVOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
31 OBJETIVO GENERAL helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
32 OBJETIVOS ESPECIacuteFICOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
4 ESTADO DE LOS CONOCIMIENTOS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphellip16
411 TIPOS DE PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip19
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIORhelliphelliphellip39
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIORhelliphelliphelliphelliphellip40
414 INDICACIONES Y CONTRAINDICACIONEShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
42 OacuteRTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
421 TIPOS DE OacuteRTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICAhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIShelliphelliphelliphelliphelliphelliphellip49
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
451 COSTOS PROMEDIO DE UNA PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip58
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphellip59
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIShellip helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip61
48 MANTENIMIENTO DE LAS PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip64
5 METODOLOGIacuteA helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip68
6 CONCLUSIONEShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip74
7 DISCUSIOacuteNhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip75
REFERENCIAS ELECTROacuteNICAS77
ANEXOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip78
LISTA DE FIGURAS
Paacuteg
Figura 1 proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
Figura 2 Historia de las proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazohelliphelliphelliphellip20
Figura 4 Desarticulacioacuten de hombrohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
Figura 5 Amputacioacuten trans-humeral helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
Figura 6 Amputacioacuten de desarticulacioacuten de codo helliphelliphelliphelliphelliphelliphelliphellip 21
Figura 7 Niveles de amputacioacuten de antebrazo helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 8 Amputacioacuten trans-radial helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca 23
Figura 10 Amputacioacuten parcial de pulgar 23
Figura 11 Amputacioacuten de dedos trifalaacutengicos 24
Figura 12 Amputacioacuten pluridigital 24
Figura 13 Amputacioacuten del carpo25
Figura 14 Proacutetesis cosmeacuteticas 25
Figura 15 Proacutetesis funcionales 26
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea 27
Figura 17 Proacutetesis trans-femoral 29
Figura 18 Proacutetesis trans-tibial 29
Figura 19 Proacutetesis de desarticulacioacuten de cadera 30
Figura 20 Proacutetesis de desarticulacioacuten de rodilla 30
Figura 21 Proacutetesis de desarticulacioacuten de tobillo 31
Figura 22 Proacutetesis parcial de pie 31
Figura 23 Proacutetesis dentales 32
Figura 24 Proacutetesis auditivas 35
Figura 25 Proacutetesis oculares 37
Figura 26 Proacutetesis ocular de doble pared helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
Figura 27 Componentes de proacutetesis de miembro superior helliphelliphelliphelliphelliphellip39
Figura 28 Oacutertesis estabilizadora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 29 Oacutertesis funcional helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 30 Oacutertesis correctora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 31 Oacutertesis protectora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 32 Oacutertesis de miembro inferior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 33 Oacutertesis de miembro superior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 34 Oacutertesis de columna helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 35 Oacutertesis craneales helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 36 Oacutertesis de sedestacioacuten helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
Figura 37 Roboacutetica helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
Figura 38 Mano Blackfingers helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
Figura 39 Mano Lowa helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
Figura 40 Mano Otto Bock helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip53
Figura 41 Codo-antebrazohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
Figura 42 Piernas Elegs Berkeley Bionicshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip55
Figura 43 Proacutetesis de rodilla power kneehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip56
Figura 44 propio foothelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
Figura 45 Mantenimiento y Desarrollohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip67
Figura 46 Encuesta con el mayor puntajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip70
Figura 47 Encuesta con el menor porcentajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip72
LISTA DE ANEXOS
Paacuteg
Anexo A Encuesta aplicadahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip79
Anexo B Encuesta de persona de 18 antildeos de edad helliphelliphelliphelliphelliphelliphelliphelliphellip81
Anexo C Encuesta de persona de 19 antildeos de edad helliphelliphelliphelliphelliphelliphelliphellip83
Anexo D Encuesta de persona de 17 antildeos de edad 85
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia 87
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute 88
GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

TABLA DE CONTENIDO
Paacuteg
1 PLANTEAMIENTO DEL PROBLEMA helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
11 CRITERIOS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
12 FORMULACIOacuteN DEL PROBLEMAhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
2 JUSTIFICACIOacuteN helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
3 OBJETIVOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
31 OBJETIVO GENERAL helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
32 OBJETIVOS ESPECIacuteFICOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip15
4 ESTADO DE LOS CONOCIMIENTOS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphellip16
411 TIPOS DE PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip19
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIORhelliphelliphellip39
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIORhelliphelliphelliphelliphellip40
414 INDICACIONES Y CONTRAINDICACIONEShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
42 OacuteRTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
421 TIPOS DE OacuteRTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICAhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIShelliphelliphelliphelliphelliphelliphellip49
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
451 COSTOS PROMEDIO DE UNA PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip58
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphellip59
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIShellip helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip61
48 MANTENIMIENTO DE LAS PROacuteTESIShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip64
5 METODOLOGIacuteA helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip68
6 CONCLUSIONEShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip74
7 DISCUSIOacuteNhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip75
REFERENCIAS ELECTROacuteNICAS77
ANEXOShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip78
LISTA DE FIGURAS
Paacuteg
Figura 1 proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
Figura 2 Historia de las proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazohelliphelliphelliphellip20
Figura 4 Desarticulacioacuten de hombrohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
Figura 5 Amputacioacuten trans-humeral helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
Figura 6 Amputacioacuten de desarticulacioacuten de codo helliphelliphelliphelliphelliphelliphelliphellip 21
Figura 7 Niveles de amputacioacuten de antebrazo helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 8 Amputacioacuten trans-radial helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca 23
Figura 10 Amputacioacuten parcial de pulgar 23
Figura 11 Amputacioacuten de dedos trifalaacutengicos 24
Figura 12 Amputacioacuten pluridigital 24
Figura 13 Amputacioacuten del carpo25
Figura 14 Proacutetesis cosmeacuteticas 25
Figura 15 Proacutetesis funcionales 26
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea 27
Figura 17 Proacutetesis trans-femoral 29
Figura 18 Proacutetesis trans-tibial 29
Figura 19 Proacutetesis de desarticulacioacuten de cadera 30
Figura 20 Proacutetesis de desarticulacioacuten de rodilla 30
Figura 21 Proacutetesis de desarticulacioacuten de tobillo 31
Figura 22 Proacutetesis parcial de pie 31
Figura 23 Proacutetesis dentales 32
Figura 24 Proacutetesis auditivas 35
Figura 25 Proacutetesis oculares 37
Figura 26 Proacutetesis ocular de doble pared helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
Figura 27 Componentes de proacutetesis de miembro superior helliphelliphelliphelliphelliphellip39
Figura 28 Oacutertesis estabilizadora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 29 Oacutertesis funcional helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 30 Oacutertesis correctora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 31 Oacutertesis protectora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 32 Oacutertesis de miembro inferior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 33 Oacutertesis de miembro superior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 34 Oacutertesis de columna helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 35 Oacutertesis craneales helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 36 Oacutertesis de sedestacioacuten helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
Figura 37 Roboacutetica helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
Figura 38 Mano Blackfingers helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
Figura 39 Mano Lowa helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
Figura 40 Mano Otto Bock helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip53
Figura 41 Codo-antebrazohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
Figura 42 Piernas Elegs Berkeley Bionicshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip55
Figura 43 Proacutetesis de rodilla power kneehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip56
Figura 44 propio foothelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
Figura 45 Mantenimiento y Desarrollohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip67
Figura 46 Encuesta con el mayor puntajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip70
Figura 47 Encuesta con el menor porcentajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip72
LISTA DE ANEXOS
Paacuteg
Anexo A Encuesta aplicadahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip79
Anexo B Encuesta de persona de 18 antildeos de edad helliphelliphelliphelliphelliphelliphelliphelliphellip81
Anexo C Encuesta de persona de 19 antildeos de edad helliphelliphelliphelliphelliphelliphelliphellip83
Anexo D Encuesta de persona de 17 antildeos de edad 85
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia 87
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute 88
GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

LISTA DE FIGURAS
Paacuteg
Figura 1 proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
Figura 2 Historia de las proacutetesishelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazohelliphelliphelliphellip20
Figura 4 Desarticulacioacuten de hombrohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
Figura 5 Amputacioacuten trans-humeral helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 21
Figura 6 Amputacioacuten de desarticulacioacuten de codo helliphelliphelliphelliphelliphelliphelliphellip 21
Figura 7 Niveles de amputacioacuten de antebrazo helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 8 Amputacioacuten trans-radial helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 22
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca 23
Figura 10 Amputacioacuten parcial de pulgar 23
Figura 11 Amputacioacuten de dedos trifalaacutengicos 24
Figura 12 Amputacioacuten pluridigital 24
Figura 13 Amputacioacuten del carpo25
Figura 14 Proacutetesis cosmeacuteticas 25
Figura 15 Proacutetesis funcionales 26
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea 27
Figura 17 Proacutetesis trans-femoral 29
Figura 18 Proacutetesis trans-tibial 29
Figura 19 Proacutetesis de desarticulacioacuten de cadera 30
Figura 20 Proacutetesis de desarticulacioacuten de rodilla 30
Figura 21 Proacutetesis de desarticulacioacuten de tobillo 31
Figura 22 Proacutetesis parcial de pie 31
Figura 23 Proacutetesis dentales 32
Figura 24 Proacutetesis auditivas 35
Figura 25 Proacutetesis oculares 37
Figura 26 Proacutetesis ocular de doble pared helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
Figura 27 Componentes de proacutetesis de miembro superior helliphelliphelliphelliphelliphellip39
Figura 28 Oacutertesis estabilizadora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 29 Oacutertesis funcional helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
Figura 30 Oacutertesis correctora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 31 Oacutertesis protectora helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
Figura 32 Oacutertesis de miembro inferior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 33 Oacutertesis de miembro superior helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
Figura 34 Oacutertesis de columna helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 35 Oacutertesis craneales helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
Figura 36 Oacutertesis de sedestacioacuten helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
Figura 37 Roboacutetica helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
Figura 38 Mano Blackfingers helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
Figura 39 Mano Lowa helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
Figura 40 Mano Otto Bock helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip53
Figura 41 Codo-antebrazohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
Figura 42 Piernas Elegs Berkeley Bionicshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip55
Figura 43 Proacutetesis de rodilla power kneehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip56
Figura 44 propio foothelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
Figura 45 Mantenimiento y Desarrollohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip67
Figura 46 Encuesta con el mayor puntajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip70
Figura 47 Encuesta con el menor porcentajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip72
LISTA DE ANEXOS
Paacuteg
Anexo A Encuesta aplicadahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip79
Anexo B Encuesta de persona de 18 antildeos de edad helliphelliphelliphelliphelliphelliphelliphelliphellip81
Anexo C Encuesta de persona de 19 antildeos de edad helliphelliphelliphelliphelliphelliphelliphellip83
Anexo D Encuesta de persona de 17 antildeos de edad 85
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia 87
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute 88
GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

Figura 39 Mano Lowa helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
Figura 40 Mano Otto Bock helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip53
Figura 41 Codo-antebrazohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
Figura 42 Piernas Elegs Berkeley Bionicshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip55
Figura 43 Proacutetesis de rodilla power kneehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip56
Figura 44 propio foothelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip57
Figura 45 Mantenimiento y Desarrollohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip67
Figura 46 Encuesta con el mayor puntajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip70
Figura 47 Encuesta con el menor porcentajehelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip72
LISTA DE ANEXOS
Paacuteg
Anexo A Encuesta aplicadahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip79
Anexo B Encuesta de persona de 18 antildeos de edad helliphelliphelliphelliphelliphelliphelliphelliphellip81
Anexo C Encuesta de persona de 19 antildeos de edad helliphelliphelliphelliphelliphelliphelliphellip83
Anexo D Encuesta de persona de 17 antildeos de edad 85
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia 87
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute 88
GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

LISTA DE ANEXOS
Paacuteg
Anexo A Encuesta aplicadahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip79
Anexo B Encuesta de persona de 18 antildeos de edad helliphelliphelliphelliphelliphelliphelliphelliphellip81
Anexo C Encuesta de persona de 19 antildeos de edad helliphelliphelliphelliphelliphelliphelliphellip83
Anexo D Encuesta de persona de 17 antildeos de edad 85
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia 87
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute 88
GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

GLOSARIO
Discapacidad Teacutermino general que abarca las deficiencias las limitaciones
de la actividad y las restricciones de la participacioacuten Las deficiencias son
problemas que afectan a una estructura o funcioacuten corporal las limitaciones de
la actividad son dificultades para ejecutar acciones o tareas y las restricciones
de la participacioacuten son problemas para participar en situaciones vitales
Evolucioacuten Esta accioacuten estaacute vinculada con un cambio de estado o a un
despliegue o desenvolvimiento y su resultado es un nuevo aspecto o forma del
elemento en cuestioacuten
Ingenieriacutea Biomeacutedica Disciplina capaz de integrar la ingenieriacutea con las
Ciencias Bioloacutegicas Meacutedicas y Ambientales con la finalidad de desarrollar y
adaptar nuevas tecnologiacuteas en salud con criterio humaniacutestico cientiacutefico y eacutetico
Legislacioacuten Se denomina legislacioacuten al cuerpo de leyes que regularaacuten
determinada materia o ciencia o al conjunto de leyes a traveacutes del cual se
ordena la vida en un paiacutes es decir lo que popularmente se llama ordenamiento
juriacutedico y que establece aquellas conductas y acciones aceptables o
rechazables de un individuo institucioacuten empresa entre otras
Oacutergano Conjunto de tejidos de origen animal o vegetal que forman una unidad
anatoacutemica y funcional es decir se trata de una serie de tejidos que realizan
una o varias funciones de forma conjunta Existen multitud de oacuterganos distintos
seguacuten su origen forma etc algunos de ellos son el cerebro el corazoacuten el
pulmoacuten los rintildeones entre otros
Oacutertesis Una ortesis es cualquier dispositivo aplicado externamente sobre el
cuerpo humano que se utiliza para modificar las caracteriacutesticas estructurales o
funcionales del sistema neuromuacutesculo-esqueleacutetico con la finalidad de
mantener mejorar o recuperar la funcioacuten Ademaacutes estaacute en contacto
permanente con el cuerpo humano diferenciaacutendola de los demaacutes productos de
apoyo
Proacutetesis Es un elemento que se adapta al organismo para reemplazar una
estructura faltante o que no funciona adecuadamente Generalmente se trata
de dispositivos que son colocados mediante procedimientos quiruacutergicos
Rehabilitacioacuten El concepto de rehabilitacioacuten dispone de un uso extendido en
nuestro idioma En su uso maacutes general y amplio el teacutermino nos permite
expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

expresar la habilitacioacuten o el restablecimiento de una funcioacuten o de alguien en el
estado que supieron ostentar en alguacuten momento
Roboacutetica La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el
disentildeo y construccioacuten de maacutequinas capaces de desempentildear tareas realizadas
por el ser humano o que requieren del uso de inteligencia Las ciencias y
tecnologiacuteas de las que deriva podriacutean ser el aacutelgebra los autoacutematas
programables las maacutequinas de estados la mecaacutenica o la informaacutetica
Robotizacioacuten Aplicacioacuten de maacutequinas automaacuteticas a un proceso de
fabricacioacuten o a una industria Este concepto tambieacuten puede ser comprendido al
ser expresado como el uso de maacutequinas en procesos de produccioacuten
Tecnologiacutea La tecnologiacutea es un concepto amplio que abarca un conjunto de
teacutecnicas conocimientos y procesos que sirven para el disentildeo y construccioacuten
de objetos para satisfacer necesidades humanas En la sociedad la tecnologiacutea
es consecuencia de la ciencia y la ingenieriacutea aunque muchos avances
tecnoloacutegicos sean posteriores a estos dos conceptos
RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

RESUMEN
En este documento mostraremos la importancia que tiene la robotizacioacuten sobre
las proacutetesis lo que dichas proacutetesis pueden tener o llegar a tener lo que implica
y lo que no asiacute como la complejidad y desarrollo de cada proacutetesis ya que las
proacutetesis que no cuentan con esta tecnologiacutea no otorgan todas las funciones
necesarias para sustituir una parte del cuerpo y mucho menos cubren todas
las necesidades que tiene cada persona Es importante conocer los avances
tecnoloacutegicos que han tenido las proacutetesis el disentildeo y proceso de cada una asiacute
como el mantenimiento o control perioacutedico que se debe tener con cualquier
tipo Hablaremos de los costos que conlleva la creacioacuten distribucioacuten y venta de
cada proacutetesis y que tan accesibles son para la poblacioacuten que la necesita La
robotizacioacuten que se ha estado manejando en las proacutetesis es muy importante
darla a conocer para esto tomaremos varios ejemplos uno de ellos es en el
caso de una proacutetesis de brazo tiene como mucho tres grados de libertad se
puede abrir y cerrar el gancho se puede extender y retraer el codo y con los
modelos maacutes sofisticados se puede rotar la muntildeeca en cambio en una proacutetesis
que posee la robotizacioacuten no solo es maacutes faacutecil su uso y manejo si no tambieacuten
tendremos un mayor grado de movilidad y una mayor estabilidad psicoloacutegica de
la persona En este documento encontraremos una ampliacioacuten de las diversas
proacutetesis que existen los tipos su historia y que diferencia tienen con las
oacutertesis puesto que no se tiene muy claro el significado de oacutertesis y suele
confundirse con una proacutetesis Al realizar una encuesta a (38 miacuteas) personas
mostraremos que tanto conocimiento se tiene en cuanto a los conceptos
cuidados y acceso de las proacutetesis Con esto nos enteraremos queacute opinioacuten tiene
la poblacioacuten frente a situaciones o casos de personas de bajos recursos y que
aportariacutean para resolver algunos de los casos plateados
Palabras clave Roboacutetica reparacioacuten artificial oacutergano evolucioacuten proteacutetica
oacutertesis proacutetesis
INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

INTRODUCCIOacuteN
Las proacutetesis estaacuten definidas como una nocioacuten que procede de la lengua griega
El teacutermino se emplea en el campo de la medicina para nombrar la reparacioacuten
artificial de un oacutergano o de una porcioacuten de eacutel que se encuentra ausente en el
cuerpo del paciente
Considerando la definicioacuten citada en el paacuterrafo anterior podemos definir a una
proacutetesis roboacutetica como un elemento artificial dotado de cierta autonomiacutea e
inteligencia capaz de realizar una funcioacuten de una parte faltante del cuerpo
Dicha autonomiacutea e inteligencia se logra al integrar actuadores sensores
procesadores y complejos algoritmos de control
De acuerdo a esta definicioacuten las proacutetesis de uso cosmeacutetico quedan
completamente excluidas como por ejemplo los ojos de vidrios las piernas de
madera etc
La necesidad de crear proacutetesis se dio por consecuencias de accidentes
caacutencer males formaciones etc Pero lo que impulsoacute a la creacioacuten de dichas
proacutetesis es el querer mejorar las condiciones de vida de los sobrevivientes en
guerra
Por otra parte la roboacutetica es la rama de varias ingenieriacuteas como lo pueden ser
la ingenieriacutea mecatroacutenica la ingenieriacutea electroacutenica la ingenieriacutea eleacutectrica la
ingenieriacutea mecaacutenica y la Ingenieriacutea Biomeacutedica tambieacuten es la rama de la
ciencia de computacioacuten que se puede aplicar en los robots En este caso la
veremos aplicada en las proacutetesis Esta tecnologiacutea ha avanzado a pasos
agigantados y siempre con el mismo objetivo el de facilitar de alguna manera
la vida del ser humano es asiacute que surge la necesidad de reemplazar con
aparatos roboacuteticos alguna extremidad del cuerpo o mejorar la movilidad del
mismo
Sin embargo no todas las personas tienen el conocimiento suficiente acerca de
que beneficios le pueden traer cierto tipo de proacutetesis y de queacute manera Este
tema aquiacute en Colombia no es algo que abarque la atencioacuten suficiente del
Estado por lo que las personas de bajos recursos se ven directamente
afectadas el conocimiento de lo que es una proacutetesis tal vez sea claro para
algunos pero la mayoriacutea no sabe ni entiende cuales o que tipos de proacutetesis
hay suelen confundirse mucho En este documento mostraremos algunas de
las opiniones de personas de diferentes edades acerca de lo que es una
proacutetesis cuales son los tipos que es una oacutertesis que diferencia existe entre una
proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

proacutetesis y una oacutertesis entre otras alliacute nos daremos cuenta que tan enteradas
estaacuten las personas que tanto saben que tanto conocen y lo maacutes importante que
aportariacutean para encontrar soluciones que sean favorables para todas las
personas incluidas las de bajos recursos
1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

1 PLANTEAMIENTO DEL PROBLEMA
En el transcurso de los antildeos la creacioacuten de proacutetesis roboacuteticas ha resultado de
querer mejorar las condiciones de las personas sin embargo no todas las
personas que necesitan de esta tecnologiacutea tienen conocimiento de todas las
capacidades y beneficios que tienen estas proacutetesis Ademaacutes de esto es
importante recalcar que se necesita una solucioacuten para aquellas personas que
han sufrido una amputacioacuten que tienen alguacuten tipo de malformacioacuten han sufrido
alguacuten tipo de accidente etc y que necesitan sustituir una parte de su cuerpo
para esto es importante conocer queacute proacutetesis existen cual sirve o se adapta
mejor para cada caso coacutemo afecta esto a nivel social y coacutemo pueden hacer
para acceder a ellas
Las personas de bajos recursos necesitan del apoyo absoluto del Estado no
siempre cuentan con centros que le brinden las proacutetesis que necesitan o con la
rehabilitacioacuten correspondiente a su proceso Ahora una persona que no tenga
la ayuda de un centro de rehabilitacioacuten y que no tenga ninguacuten tipo de recurso
para comprar una iquestCoacutemo accede a una proacutetesis En algunos casos tienen
que esperar mucho tiempo para que les donen una y mientras eso pasa
iquestComo hacen para su sustento Si no poseen todas las capacidades del
cuerpo humano se les hace muy difiacutecil sostenerse y sostener a las personas
que tal vez esteacuten a su cargo
Por otra parte hay personas que no tienen ni idea de que es una oacutertesis a
pesar de ser un elemento que muchos de nosotros en alguna ocasioacuten hemos
tenido que utilizar su concepto no es muy conocido en nuestra poblacioacuten Asiacute
que dar a conocer lo que es una oacutertesis que diferencia tiene con una proacutetesis
cuaacuteles son los cuidados que se le deben tener a cada tipo de proacutetesis los tipos
que hay lo cual tambieacuten es un tema que no todos conocen o lo suelen
confundir Las legislaciones y centros que hay aquiacute en Colombia y como es el
manejo de las oacutertesis y proacutetesis Todos estos aspectos son muy importantes
darlos a conocer para que las personas ampliacuteen y aclaren los conocimientos
que ya poseen y para que elijan las mejores opciones o lo que mejor se
acomode ante la necesidad de cada caso
11 CRITERIOS
La roboacutetica es una ciencia o rama de la tecnologiacutea que estudia el disentildeo y
construccioacuten de maacutequinas capaces de desempentildear tareas realizadas por el ser
13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

13
humano o que requieren del uso de inteligencia Esta tecnologiacutea se estaacute
empleando en proacutetesis y se pretende entregar para que las condiciones de las
personas que necesitan una de ellas sean oacuteptimas sin embargo estas proacutetesis
no estaacuten al alcance de las personas que no tienen los suficientes recursos para
adquirirlas son unas proacutetesis de sumas muy altas y aunque se han querido
reducir los costos auacuten hay muchas personas por ejemplo en zonas rurales que
no han podido acceder a proacutetesis que claramente les va a mejorar no solo la
condicioacuten de ellos mismos sino tambieacuten de todo su entorno social y familiar
Tenemos toda la intencioacuten de que las personas obtengan el conocimiento de
todo lo que implican las proacutetesis y las oacutertesis las situaciones que se viven
porque el conseguir una proacutetesis es tan difiacutecil aquiacute en Colombia lo maacutes
importante concientizar a las personas de lo que estaacute situacioacuten nos puede
traer pero no solo a nosotros sino tambieacuten a todas las personas que nos
rodean ya que al no ver estaacute situacioacuten tan cerca la vemos ajena a nosotros A
pesar de esto con este documento no abarcamos toda la poblacioacuten lo que
quiere decir que son muy pocas las personas a las cuales podemos dar a
conocer nuestra opinioacuten nuestro punto de vista y los conocimientos que hemos
obtenido al realizar este trabajo de grado
12 FORMULACIOacuteN DEL PROBLEMA
iquestPorque es importante conocer las proacutetesis que existen como y porque se han
desarrollado y que tan accesibles son para las personas que las necesitan
14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

14
2 JUSTIFICACIOacuteN
Las proacutetesis antiguas teniacutean la forma de gancho que podiacutea ser cerrado o abierto encogiendo los hombros y mediante una cuerda que pasaba por la espalda Si tomamos una proacutetesis de brazo o de pierna en el caso del brazo tienen como mucho tres grados de libertad lo que contrasta por completo con un brazo humano que tiene maacutes de 25 grados de libertad y por lo tanto una mayor destreza ademaacutes de la habilidad de determinar si algo estaacute friacuteo o caliente Por esta razoacuten el hombre ha querido mejorar las condiciones de las proacutetesis y permitir que muchas maacutes personas las puedan adquirir usar y manejar Sin embargo a pesar de todas las proacutetesis que se han venido creando no todas las personas tienen el conocimiento de coacutemo se establecen las proacutetesis roboacuteticas por lo tanto con este documento no solo queremos dar a conocer lo importante que es estaacute tecnologiacutea en las proacutetesis sino coacutemo beneficia a las personas que las pueden utilizar y a todo su entorno con esta tecnologiacutea se puede mejorar mucho la calidad de vida de miles de personas teniendo en cuenta que las personas de bajos recursos no pueden adquirir una por el costo tan alto que tienen Las personas no tienen el conocimiento suficiente no existen los medios necesarios para que toda la poblacioacuten se entere de las opciones que tienen no solo pensando en el bienestar propio sino tambieacuten en las personas que estaacuten a su alrededor personas que nos importan al tener un viacutenculo familiar o social es necesario estar enterados de las funciones de estas proacutetesis de su mantenimiento de su avance y desarrollo es importante que tengamos en cuenta la tecnologiacutea que se estaacute implementando en las nuevas proacutetesis y tambieacuten el concepto que no se tiene muy claro de una oacutertesis Estamos cegados es increiacuteble ver como personas que viven en una pobreza absoluta y necesitan una proacutetesis tienen que esperar meses y tal vez hasta antildeos para acceder a una y todo porque las proacutetesis en este paiacutes son casi que intocables ahora para una persona que no tiene los recursos se vuelve una situacioacuten casi que imposible Es justo que empecemos a abrir los ojos que tengamos conciencia de las cosas que ocurren en nuestro alrededor simplemente porque sentimos que no nos afecta directamente pensamos que es un tema ajeno a nosotros y no Debemos empezar a interesarnos maacutes por este tipo de temas y darnos cuenta que esto es importante y que podemos aportar para mejorar la situacioacuten en este paiacutes
15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

15
3 OBJETIVOS
31 OBJETIVO GENERAL
Dar a conocer los diferentes tipos de proacutetesis roboacuteticas que existen en este
momento La importancia que tienen en la ayuda de la rehabilitacioacuten de las
personas que sufren de alguna discapacidad y carecen de alguna parte del
cuerpo analizando la viabilidad desde el punto de vista social y econoacutemico
32 OBJETIVOS ESPECIacuteFICOS
Analizar los riesgos que puede traer el uso de las proacutetesis en diversos
casos o situaciones
Conocer y dar a conocer por queacute se debe utilizar maacutes esta tecnologiacutea en
las proacutetesis y coacutemo puede mejorar las condiciones de vida de las
personas si se adquiere una de estas
Investigar algunos casos de proacutetesis que no estaacuten al alcance de las
personas identificando las razones apropiadas seguacuten el caso
Revisar el desarrollo avance o evolucioacuten que han tenido estas proacutetesis y
coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo de
personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentar un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

16
4 ESTADO DE LOS CONOCIMIENTOS
41 DEFINICIOacuteN E HISTORIA DE LAS PROacuteTESIS
CONCEPTO
Las proacutetesis son sustitutos hechos por el hombre para las partes faltantes del
cuerpo A veces es necesaria la extirpacioacuten de ciertas partes del cuerpo que
contienen caacutencer que podriacutea crecer y propagarse Las proacutetesis son utilizadas
para ayudar a que la persona luzca como si no se le hubiera extraiacutedo cierta
parte de su cuerpo lo cual le ayuda a desempentildearse lo maacutes naturalmente
posible
Figura 1 Proacutetesis
Fuente httpwwwmedicalexpoesprodrslsteeperproduct [15102017]
HISTORIA
A lo largo de los antildeos el hombre ha desarrollado cada vez maacutes mejoras en las
proacutetesis buscando soluciones a cada eventualidad que se presenta
Los egipcios fueron los primeros pioneros de la tecnologiacutea proteacutesica
Elaboraban sus extremidades proteacutesicas rudimentarias con fibras y se cree
que las utilizaban por la sensacioacuten de ldquocompletitudrdquo antes que por la funcioacuten en
siacute Sin embargo recientemente los cientiacuteficos descubrieron en una momia
egipcia lo que se cree que fue el primer dedo del pie proteacutesico que parece
haber sido funcional
17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

17
En 1858 se desenterroacute en Capua Italia una pierna artificial que data de
aproximadamente 300 a C Estaba elaborada con hierro y bronce y teniacutea un
nuacutecleo de madera aparentemente perteneciacutea a un amputado por debajo de la
rodilla Sin embargo en la Alta Edad Media hubo pocos avances en el campo
de la proteacutesica ademaacutes del gancho de mano y la pata de palo La mayoriacutea de
las proacutetesis elaboradas en esa eacutepoca se utilizaban para esconder deformidades
o heridas producidas en el campo de batalla A un caballero se le colocaba una
proacutetesis disentildeada solamente para sostener un escudo o para calzar la pata en
el estribo y se prestaba poca atencioacuten a la funcionalidad Fuera del campo de
batalla solamente los ricos teniacutean la suerte de contar con una pata de palo o
un gancho de mano para las funciones diarias
En el Renacimiento surgieron nuevas perspectivas para el arte la filosofiacutea la
ciencia la medicina Retomando los descubrimientos meacutedicos relacionados con
la proteacutesica de los griegos y los romanos se produjo un renacer en la historia
de la proteacutesica Durante este periacuteodo las proacutetesis generalmente se elaboraban
con hierro acero cobre y madera
En 1508 se elaboroacute un par de manos de hierro tecnoloacutegicamente avanzadas
para el mercenario alemaacuten Gotz Von Berlichingen despueacutes de que perdioacute su
brazo derecho en la batalla de Landshut Era posible manejar las manos
fijaacutendolas con la mano natural y moverlas soltando una serie de mecanismos
de liberacioacuten y resortes mientras se suspendiacutean con correa de cuero
En 1696 Pieter Verduyn desarrolloacute la primera proacutetesis por debajo de la rodilla
sin mecanismo de bloqueo lo que maacutes tarde sentariacutea las bases de los actuales
dispositivos de articulacioacuten y corseacute
En 1800 el londinense James Potts disentildeoacute una proacutetesis elaborada con una
pierna de madera con encaje una articulacioacuten de rodilla de acero y un pie
articulado controlado por tendones de cuerda de tripa de gato desde la rodilla
hasta el tobillo Se hizo famosa como la ldquoPierna de Angleseyrdquo por el marqueacutes
de Anglesey que perdioacute su pierna en la batalla de Waterloo y fue quien utilizoacute
esta pierna Maacutes tarde en 1839 William Selpho trajo la pierna a los EE UU
donde se la conocioacute como la ldquoPierna Selphordquo1
1 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

18
Figura 2 Historia de las proacutetesis
Fuente httpsrehabilitacionymedicinafisicawordpresscom20100925
[15102017]
A pesar de la falta de avances tecnoloacutegicos el Cirujano General del Ejeacutercito en
ese momento comprendioacute la importancia del debate sobre tecnologiacutea y
desarrollo de proacutetesis con el tiempo esto dio lugar a la creacioacuten de la
Asociacioacuten Estadounidense de Ortoproacutetesis (AOPA por sus siglas en ingleacutes)
Despueacutes de la Segunda Guerra Mundial los veteranos estaban insatisfechos
por falta de tecnologiacutea en sus dispositivos y exigiacutean mejoras El gobierno de los
EE UU cerroacute un trato con compantildeiacuteas militares para que mejoraran la funcioacuten
proteacutesica en lugar de la de las armas Este acuerdo allanoacute el camino para el
desarrollo y la produccioacuten de las proacutetesis modernas Los dispositivos
actuales son mucho maacutes livianos se elaboran con plaacutestico aluminio y
materiales compuestos para proporcionar a los amputados dispositivos maacutes
funcionales
Ademaacutes de ser dispositivos maacutes livianos y estar hechos a la medida del
paciente el advenimiento de los microprocesadores los chips informaacuteticos y la
roboacutetica en los dispositivos actuales permitieron que los amputados recuperen
el estilo de vida al que estaban acostumbrados en lugar de simplemente
proporcionarles una funcionalidad baacutesica o un aspecto maacutes agradable Las
proacutetesis son maacutes reales con fundas de silicona y pueden imitar la funcioacuten de
una extremidad natural hoy maacutes que nunca 2
2 httpswwwamputee-coalitionorgspanishinmotionnov_dec_07 [15102017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]
19
Al explorar la historia de la proteacutesica podemos apreciar todo lo que implicoacute la
elaboracioacuten de un dispositivo y las perseverantes generaciones que hicieron
falta para garantizar que el hombre pueda tener no solo las cuatro
extremidades sino tambieacuten la funcioacuten
411 TIPOS DE PROacuteTESIS
Las proacutetesis son clasificadas de varias maneras hay dos clasificaciones
principales y otros tipos
MIEMBRO SUPERIOR
Tipos de proacutetesis de miembro superior
Seguacuten nivel de amputacioacuten
Desarticulados (hombro codo y muntildeeca)
Transhumerales
Transradiales
Parciales de mano
Seguacuten funcioacuten
Pasivas (Cosmeacuteticas)
Activas (Funcionales)
Seguacuten la fuente de energiacutea que utilizan
Mecaacutenicas o de energiacutea corpoacuterea (Convencionales)
Mioeleacutectricas o de energia extracorpoacuterea
Hibridas o de energia mixta3
3 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [16102017]
20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

20
SEGUacuteN NIVEL DE AMPUTACIOacuteN
Niveles de amputacioacuten de brazo
Figura 3 Especificacioacuten de nivel de amputacioacuten de brazo
1
2
3
Fuente httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas
[16102017]
1 Tercio proximal o intradeltoideas
2 Tercio medio
3 Tercio distal o supracondiacutelea
DESARTICULACIOacuteN DE HOMBRO
Figura 4 Desarticulacioacuten de hombro
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[16102017]
21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]

21
TRANS ndash HUMERALES
Figura 5 Amputacioacuten trans- humeral
Fuente httpsesslidesharenetmarckamstel [16102017]
DESARTICULACIOacuteN DE CODO
Figura 6 Amputacioacuten desarticulacioacuten de codo
Fuente httpsesslidesharenetmarckamstel [16102017]
22
Niveles de amputacioacuten de antebrazo
Figura 7 Niveles de amputacioacuten de antebrazo
Fuente httpsesslidesharenetmarckamstel [16102017] 1 Tercio Proximal 2 Tercio Medio 3 Tercio distal
TRANS-RADIAL
Figura 8 Amputacioacuten trans- radial
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
23
DESARTICULACIOacuteN DE MUNtildeECA
Figura 9 Amputacioacuten desarticulacioacuten de muntildeeca
Fuente httpwwwottobockesprotesicainformacion-para-amputados
[18102017]
PARCIALES DE MANO
Pulgar
Figura 10 Amputacioacuten parcial de pulgar
Fuente httpcolombiamedicaunivalleeducoindexphpcomedica [18102017]
24
DEDOS TRIFALAacuteNGICOS
Figura 11 Amputacioacuten de dedos trifalaacutengicos
Fuente httpwwwmanosydedoscomindex_sel_dedoshtml [18102017]
PLURIDIGITALES
Figura 12 Amputacioacuten pluridigital
Fuente httpsesslidesharenetmarckamstel [18102017]
25
CARPO
Figura 13 Amputacioacuten del carpo
Fuente httpwwwmagentartcomprotesisprotesis-manosphp [18102017]
SEGUacuteN FUNCIOacuteN
Proacutetesis Pasivas
Las proacutetesis pasivas cumplen una funcioacuten baacutesica y es la esteacutetica o la
cosmeacutetica sirven para restablecer el aspecto exterior y son proacutetesis que deben
satisfacer las exigencias de cada paciente con respecto a la conformacioacuten
aspecto confort y peso de la proacutetesis
Figura 14 Proacutetesis cosmeacuteticas
Fuente httpsgabriel1711utplwordpresscom20130904avances-
tecnologicos-en-las-protesis [18102017]
26
Proacutetesis Activas
Estas proacutetesis estaacuten indicadas para todo tipo de amputacioacuten en una proacutetesis
de brazo activada por traccioacuten que son llamadas proacutetesis activas de fuerza
propia se utilizan sistemas de cables comandados por movimientos del muntildeoacuten
o de la cintura escapular Baacutesicamente este tipo de proacutetesis utiliza cierta
tecnologiacutea que ayuda a mejorar las funciones de cada proacutetesis4
Figura 15 Proacutetesis funcionales
Fuente httpsistemasbiomecanicosblogspotcomco201103informacion-del-
estado-del-arte-dehtml [18102017]
4 httpprotesislizanitablogspotcomco201209protesis-pasivas-cosmeticas-protesishtml
[18102017]
27
SEGUacuteN LA FUENTE DE ENERGIacuteA
Figura 16 Esquema de tipos de proacutetesis seguacuten fuente de energiacutea
Fuente httpwwwarceswcompms1htm [19102017]
Mecaacutenicas o de energiacutea corpoacuterea Son proacutetesis convencionales activas
de fuerza propia
Mioeleacutectricas o de energia extracorpoacuterea Son denominadas proacutetesis
activas de fuerza ajena En el control mioeleacutectrico se utilizan
potenciales eleacutectricos (microvoltios) detectables en la superficie de la
piel cuando existe una contraccioacuten del muacutesculo del muntildeoacuten Estos
potenciales son recogidos por electrodos amplificados y enviados como
sentildeales de control a los elementos funcionales En el caso de las
proacutetesis de antebrazo se colocan los electrodos de tal forma que los
extensores abren la mano y los flexores la cierran En las proacutetesis de
brazo los electrodos se colocan de tal modo que el triacuteceps abre la mano
y el biacuteceps la cierra Estas proacutetesis utilizan como fuente de energiacutea un
acumulador de 6V (48V en nintildeos) este se encuentra incorporado en el
encaje proteacutesico5
5 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
28
Hiacutebrida o de energiacutea mixta (Fuerza propia + Fuerza ajena) En estas
proacutetesis se encuentra una combinacioacuten de fuerza propia (corpoacuterea) y de
la fuerza ajena (extracorpoacuterea) comuacutenmente son utilizados por
amputados transhumerales Este tipo de proacutetesis utiliza un codo de
control mecaacutenico y un dispositivo terminal (garfio o mano) de control
mioeleacutectrico o un codo controlado eleacutectricamente y un dispositivo
terminal de control mecaacutenico
MIEMBRO INFERIOR
Tipos de proacutetesis de miembro inferior
Seguacuten nivel de amputacioacuten
Hemipelvectomia (Proacutetesis de arriba de la rodilla (transfemorales)
proacutetesis bajo rodilla (transtibial))
Desarticulados (cadera rodilla y tobillo)
Parciales de pie
Seguacuten material constitutivo
Convencionales (Standard)
Modulares
Seguacuten caracteriacutesticas estructurales
Endoproacutetesis (Proacutetesis articulares rodilla ndash cadera)
Exoproacutetesis (Proacutetesis de miembros superiores ndash inferiores)6
6 httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [19102017]
29
SEGUacuteN NIVEL DE AMPUTACIOacuteN
HEMIPELVECTOMIA
Proacutetesis de arriba de la rodilla (Transfemorales)
Figura 17 Proacutetesis trans- femoral
Fuente httpsesslidesharenetSamfrado [19102017]
Proacutetesis bajo la rodilla (Transtibial)
Figura 18 Proacutetesis trans-tibial
Fuente httpsmixcoallbizprtesis-transtibiales-g7220 [21102017]
30
DESARTICULADOS
Cadera
Figura 19 Proacutetesis de desarticulacioacuten de cadera
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-cadera-g7225
[21102017] Rodilla
Figura 20 Proacutetesis de desarticulacioacuten de rodilla
Fuente httpsmixcoallbizprtesis-para-desarticulado-de-rodilla-g7223
[21102017]
31
Tobillo (Syme)
Figura 21 Proacutetesis de desarticulacioacuten de tobillo
Fuente httpswwwslidesharenetchris9201amputados-60192045
[21102017]
PARCIALES DE PIE
Figura 22 Proacutetesis parcial de pie
Fuente httpwwwarceswcompmi2htm [22102017]
32
PROacuteTESIS DENTALES
Tipos de proacutetesis dentales
Los tipos de proacutetesis dentales que se usan con maacutes frecuencia en odontologiacutea son las proacutetesis dentales fijas removibles y sobre implantes dentales
La elaboracioacuten de las proacutetesis dentales ha de atender tanto a criterios funcionales como esteacuteticos y debemos invitar al paciente a la realizacioacuten de una higiene cuidada
Figura 23 Proacutetesis dentales
Fuente httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-
dentales [22102017]
Proacutetesis fijas
Las proacutetesis fijas son aquellas completamente dentosoportadas es decir que toman apoyo uacutenicamente en los dientes El odontoacutelogo talla los dientes que serviraacuten como soporte (dientes pilares) y situados en los extremos de cada zona edeacutentula (sin dientes) en los cuales iraacuten cementadas Estas se llaman corona dental cuando restauran un diente o puente que sustituye la ausencia de uno o maacutes dientes Los materiales empleados en su disentildeo y fabricacioacuten con cadcam en Propdental son el circonio porcelano el metal porcelano o la porcelana pura7
7 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
33
Proacutetesis removibles
Tambieacuten llamadas de quita y pon porque pueden colocarse y retirarse por el paciente Existen dos grandes grupos que son
Proacutetesis removible metaacutelicas Conocidas con el nombre de esqueleacutetico Son proacutetesis parciales dentomucosoportadas es decir se sujetan tanto en los dientes como en la mucosa y se realizan cuando el paciente auacuten conserva algunos de sus dientes naturales Se realizan cuando el paciente tiene alguacuten diente remanente que contribuiraacute a la retencioacuten de la proacutetesis retenedores forjados o colados siendo por tanto dentomucosoportada
Proacutetesis removible acriacutelica o completas Conocidas comuacutenmente como ldquodentaduras postizasrdquo Se realizan cuando el paciente no tiene ninguna pieza dental y estaacuten fabricadas con resina siendo por tanto mucosoportadas al carecer de pilares para la sujecioacuten
Proacutetesis sobre implantes
Para el disentildeo y colocacioacuten de una proacutetesis sobre implantes el paciente debe someterse previamente a una operacioacuten quiruacutergica de implantologiacutea
Las proacutetesis implanto soportadas suelen ser fijas aunque tambieacuten pueden ser removibles es decir que el paciente puede extraerlas de la boca para su higiene Al reponer los dientes perdidos con implantes se conserva mayor cantidad de hueso alveolar ya que este se reabsorbe al no recibir ninguacuten tipo de estiacutemulo
La rehabilitacioacuten oral mediante proacutetesis implanto soportadas representa uno de los mayores avances en odontologiacutea de los uacuteltimos veinte antildeos y cuando indicadas son sin duda el tratamiento maacutes aconsejado por su fiabilidad funcionalidad y durabilidad8
PROacuteTESIS AUDITIVAS
Gracias a los grandes e importantiacutesimos avances en la medicina actual es
posible detectar precozmente cualquier tipo de deficiencia auditiva en la
infancia Del mismo modo y como consecuencia de los diferentes grados de
peacuterdidas auditivas que pueden producirse existen diferentes tipos de proacutetesis
auditivas con unas determinadas caracteriacutesticas
8 httpswwwpropdentalesblogestetica-dentaltipos-de-protesis-dentales [22102017]
34
Estas proacutetesis auditivas tambieacuten conocidas como audiacutefonos variaraacuten en
funcioacuten de cada persona en particular con el fin de adaptarse mejor a ellos y
lograr el maacuteximo beneficio a la hora de llevar a cabo una rehabilitacioacuten auditiva
especiacutefica
Asiacute una proacutetesis auditiva podriacutea beneficiar al nintildeo en aquellos casos de
deficiencia auditiva donde el tratamiento no pudiera ser meacutedico o quiruacutergico
como pueden ser las hipoacusias de transmisioacuten y la gran mayoriacutea de las
hipoacusias neurosensoriales
Los audiacutefonos han experimentado una enorme evolucioacuten a lo largo del tiempo
ya que se ha pasado de los primeros audiacutefonos analoacutegicos al audiacutefono digital
pasando por el audiacutefono analoacutegico programable por programador digital
Todo audiacutefono tiene unas caracteriacutesticas eleacutectricas y acuacutesticas determinadas
(ganancia de audicioacuten consumo y duracioacuten de la pila dispositivo de entrada
del audio) asiacute como una serie de ajustes de cara a lograr el mayor resultado
oacuteptimo posible
EL AUDIacuteFONO DIGITAL
El maacutes actual y moderno funciona de la siguiente manera capta la sentildeal
acuacutestica por medio del microacutefono y la convierte en una sentildeal eleacutectrica
Despueacutes las diferentes frecuencias se van filtrando (dejando pasar las
frecuencias del habla) y la convierte en una sentildeal digital
Esta sentildeal digital se procesa en la unidad central del audiacutefono y es en el
auricular o en el vibrador donde se convierte finalmente esta sentildeal en sonido o
en vibracioacuten respectivamente
Tambieacuten se deben tener en cuenta una serie de factores que nos orientaraacuten a
la hora de decidirnos por un tipo u otro de adaptacioacuten proteacutesica Estos
paraacutemetros son
Edad una peacuterdida auditiva en la infancia es criacutetica y es necesaria su
rehabilitacioacuten lo maacutes raacutepido posible No debemos olvidar que en las
etapas tempranas es cuando se adquiere el lenguaje siendo
importantiacutesimo proporcionar al pequentildeo con deficiencia auditiva una
correcta amplificacioacuten de los sonidos que recibe del entorno (en especial
los sonidos del habla)9
9 httpswwwbebesymascomdesarrollo [22102017]
35
Tipo de peacuterdida auditiva las actuales pruebas para diagnosticar
deficiencias auditivas permiten adaptar proacutetesis durante los primeros
seis meses de vida De este modo podremos averiguar si la peacuterdida
afecta a uno o a los dos oiacutedos asiacute como queacute parte del oiacutedo se ve
afectada
Grado de peacuterdida auditiva este paraacutemetro tambieacuten determinaraacute cuaacutendo
se deberaacute realizar una adaptacioacuten proteacutesica
Figura 24 Proacutetesis auditivas
Fuente httpswwwbebesymascomdesarrolloprotesis-auditivas-
caracteristicas-y-diferentes-tipos [22102017]
TIPOS DE AUDIacuteFONOS
Existen gran variedad de audiacutefonos y es necesario valorarlos todos para
encontrar aquel que puede dar el mayor beneficio a nuestro hijo con alguacuten tipo
de deficiencia auditiva y asiacute lograr aprovecharlo lo maacutes posible Entre las
proacutetesis auditivas maacutes destacadas nos encontramos10
10
httpswwwbebesymascomdesarrollo [22102017]
36
AUDIacuteFONOS RETROAURICULARES Son los maacutes conocidos y tradicionales
Se colocan detraacutes de la oreja y se adaptan para conseguir evitar el
acoplamiento acuacutestico (es decir evitar que el sonido sea captado por el
microacutefono para ser amplificado de nuevo) Este tipo de audiacutefono es el maacutes
indicado para las peacuterdidas severas y profundas Tal vez el mayor
inconveniente que tiene es su aspecto esteacutetico que puede ser rechazado en
algunos casos en especial en nintildeos pequentildeos Para los nintildeos se realizan
algunas adaptaciones como por ejemplo realizar moldes blandos de silicona
con el fin de eliminar las lesiones por golpes mejorar la adaptacioacuten y ayudar a
evitar mejor el acoplamiento acuacutestico
AUDIacuteFONOS INTRAURICULARES Son los audiacutefonos cuyo tamantildeo y
fabricacioacuten suele ser personalizada ya que van dentro del oiacutedo externo El
inconveniente es que no cuenta con las caracteriacutesticas de potencia y
amplificacioacuten necesarias para cubrir peacuterdidas graves Tambieacuten podemos
encontrarnos los audiacutefonos que van dentro del conducto auditivo siendo
mucho maacutes esteacuteticos y con un mayor rendimiento aunque tampoco son
aconsejables para peacuterdidas graves
GAFAS AUDITIVAS Se usan cuando es necesario coordinar bien la correccioacuten
visual con la acuacutestica Ademaacutes actualmente se adaptan los audiacutefonos en
formato de gafa auditiva tambieacuten cuando existe un problema de audicioacuten muy
considerable entre ambos oiacutedos Otro tipo de adaptacioacuten es el audiacutefono por viacutea
oacutesea la cual se emplea para casos en los que no se puede poner un molde
adaptador
Existen tambieacuten otro tipo de ayudas teacutecnicas auditivas que seguacuten el fin que
persigan ayudaraacuten al nintildeo con deficiencia auditiva grave o profunda en el
ambiente escolar como tambieacuten el implante coclear para casos maacutes severos11
11
httpswwwbebesymascomdesarrollo [22102017]
37
PROacuteTESIS OCULARES
Tipos de proacutetesis oculares de vidrio
Figura 25 Proacutetesis oculares
Fuente httpswwwsb-ocularservicecomespa [22102017]
PROacuteTESIS DE DOBLE PARED Uso general Para una cavidad ocular normal hasta una grande despueacutes de una enucleacioacuten o evisceracioacuten sin o con un implante ocular Ese tipo es de doble pared con un cuerpo hueco Asiacute se puede llenar y dar el volumen adecuado con menor peso12
12
httpswwwsb-ocularservicecomespa [22102017]
38
Figura 26 Proacutetesis ocular de doble pared
Fuente httpswwwsbocularservicecomespa [23102017]
CASCARILLA ESCLERAL DE UNA PARED Uso general Para pacientes con ojos ciegos y en casos de un globo ocular muy contraiacutedo Las cascarillas esclerales son proacutetesis con un espesor muy fino esto permite una coacutemoda y adecuada adaptacioacuten La proacutetesis se ajusta perfectamente al globo ocular por lo que en la mayoriacutea de los casos presenta un movimiento similar al del otro ojo Para cubrir bulbos ciegos fitiacutesticos Para cavidad ocular ldquoanormalrdquo atrofiada (ej reducida cicatrizada deformada) Graves dantildeos de la cavidad ocular y de los paacuterpados como cauterizaciones quemaduras o accidentes de tiro Para cavidades con implantes13
13
httpswwwsb-ocularservicecomespa [22102017]
39
412 COMPONENTES DE PROacuteTESIS DE MIEMBRO SUPERIOR
Elementos de suspensioacuten
Arneacutes en forma de ocho (8)
Encaje
Socket
Cuenca en material sinteacutetico o cono de enchufe
Articulaciones Seguacuten nivel de amputacioacuten
Elementos de control
Sistemas de cables (cable Bowden) sistemas eleacutectricos o mioeleacutectrico
Dispositivo terminal
Mano cosmeacutetica
Gancho metaacutelico funcional
Mano mioeleacutectrica14
Figura 27 Componentes de proacutetesis de miembro superior
Fuente httpwwwmonografiascomtrabajos109estado-del-arte-
protesis-manosestado-del-arte-protesis-manosshtml [23102017]
14
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
40
413 COMPONENTES DE PROacuteTESIS DE MIEMBRO INFERIOR
Encaje
Socket o cuenca
Elementos de suspensioacuten
Cinturoacuten silesiano
Banda peacutelvica
Vaacutelvula de succioacuten
Liners
Articulaciones (Seguacuten nivel de amputacioacuten)
Dispositivos terminales (Diversos tipos de pies)
414 INDICACIONES Y CONTRAINDICACIONES
INDICACIONES
Prescripcioacuten del aparato proteacutesico
Caracteriacutesticas exigencias y necesidades del paciente
Existen dos elementos de importancia baacutesica que es necesario valorar
ya que inciden fundamentalmente en el proceso de aplicacioacuten de las
proacutetesis y son La adecuacioacuten del muntildeoacuten y las condiciones generales del
usuario
Se debe valorar muy atentamente
El estado psiacutequico y la motivacioacuten del paciente
El tipo y nivel de la amputacioacuten
La edad del paciente
Equilibrio visioacuten peso y estado fiacutesico
El ambiente en el cual vive el paciente
Las condiciones del muntildeoacuten
(El muntildeoacuten como oacutergano destinado a encajarse en la proacutetesis e impulsarla debe
reunir ciertas caracteriacutesticas especiacuteficas que lo califican como adecuado para
estas funciones)15
15
httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas [23102017]
41
Nivel adecuado
Muntildeoacuten estable
Potencia muscular
Buen estado de la piel
Cicatriz correcta
Buena circulacioacuten arterial y venosa
Biselado correcto de los segmentos oacuteseos
Ausencia de edema en el muntildeoacuten
CONTRAINDICACIONES
Hematomas
Infeccioacuten
Necrosis de piel
Miembro fantasma
42 OacuteRTESIS
CONCEPTO
La palabra oacutertesis es utilizada para definir todos aquellos aparatos externos
que sirven como ayuda soporte y se utilizan en el campo de la ortopedia El
significado de ortesis proviene del teacutermino griego ldquoorthosrdquo que quiere decir
recto
Dentro de la oacutertesis encontramos todos aquellos elementos que corrigen alguacuten
movimiento o alguna posicioacuten anormal deficiente del cuerpo y ademaacutes facilitan
desplazamientos actividades de articulaciones y partes del cuerpo humano con
deficiencias o dificultades Incluyen feacuterulas aparatos dispositivos objetos
teacutecnicos cuya utilizacioacuten estaacute indicada con pacientes necesitados de alguna
ayuda para moverse como consecuencia de dolores deformacioacuten o
deficiencias en articulaciones dificultades locomotrices y patologiacuteas similares16
421 TIPOS DE OacuteRTESIS
Las ortesis pueden ser clasificadas de diferentes formas
16
httpsortopedia1comortesis [23102017]
42
DE ACUERDO A SU FUNCIOacuteN
ESTABILIZADORAS Mantienen una posicioacuten e impiden movimientos indeseados lo que se pueden utilizar en paraacutelisis flaacutecidas o espaacutesticas asiacute como en fracturas estables si el objetivo es actuar como soporte de un segmento paralizado o para disminuir la amplitud articular de un segmento inflamado yo doloroso El grado de inmovilizacioacuten deseado variacutea seguacuten el tipo de oacutertesis utilizado
Figura 28 Oacutertesis estabilizadora
Fuente httpswwwgouralesairloc-ortesis-estabilizadora-para-estabilizar-el-tobillo [24102017]
FUNCIONALES Tambieacuten llamadas dinaacutemicas ya que llevan incorporado un elemento elaacutestico mecaacutenico o articular que permite movilizar un segmento de un miembro
Figura 29 Oacutertesis funcional
43
Fuente httpswwwortopedialopezcomtiendaortesis-funcionales-de-rodilla [24102017]
CORRECTORAS Indicadas para corregir una deformidad esqueleacutetica Son
maacutes efectivas sin se utilizan durante el desarrollo infantil
Figura 30 Oacutertesis correctora
Fuente httpclmelinterestcom [24102017]
PROTECTORAS Mantienen la alineacioacuten de un miembro enfermo o lesionado
Algunas veces se utilizan para cuidar una cirugiacutea (postquiruacutergicas)
Figura 31 Oacutertesis protectora
44
Fuente httpwwwortopediajribascom [24102017]
DE ACUERDO A LA REGIOacuteN CORPORAL
ORTESIS DE MIEMBRO INFERIOR
Figura 32 Oacutertesis de miembro inferior
Fuente httpswwwcidoportopediacomortesis [24102017]
ORTESIS DE MIEMBRO SUPERIOR
Figura 33 Oacutertesis de miembro superior
45
Fuente httpswwwortopediamimascomortesis-deporteortesis-de-miembro-
superiorhtml [24102017]
ORTESIS DE COLUMNA
Figura 34 Oacutertesis de columna
Fuente httpopticasanferminjumillaesortopedia [24102017]
ORTESIS CRANEALES
Figura 35 Oacutertesis craneales
46
Fuente httpconacytprensamxindexphpcienciasalud [24102017]
ORTESIS DE SEDESTACIOacuteN
Figura 36 Oacutertesis de sedestacioacuten
Fuente httpalmacenortopedicoolayacom [24102017]
43 DEFINICIOacuteN E HISTORIA DE LA ROBOacuteTICA
CONCEPTO
La roboacutetica es la ciencia y la teacutecnica que estaacute involucrada en el disentildeo la
fabricacioacuten y la utilizacioacuten de robots Un robot es por otra parte una maacutequina
que puede programarse para que interactuacutee con objetos y lograr que imite en
cierta forma el comportamiento humano o animal
La informaacutetica la electroacutenica la mecaacutenica y la ingenieriacutea son soacutelo algunas de
las disciplinas que se combinan en la roboacutetica El objetivo principal de la
roboacutetica es la construccioacuten de dispositivos que funcionen de manera
automaacutetica y que realicen trabajos dificultosos o imposibles para los seres
humanos17
17
httpsroboticawordpresscom [27102017]
47
Figura 37 Roboacutetica
Fuente httpsdefinicionderobotica [27102017]
HISTORIA
FECHA DESARROLLO
Siglo XVIII A mediados del J de Vaucanson construyoacute varias muntildeecas
mecaacutenicas de tamantildeo humano que ejecutaban piezas de muacutesica
1805 H Maillardet construyoacute una muntildeeca mecaacutenica capaz de hacer
dibujos 1959 Se introdujo el primer robot comercial por Planet Corporation
estaba controlado por interruptores de fin de carrera
1960 Se introdujo el primer robot bdquoUnimate‟‟ basada en la transferencia
de articulacioacuten programada de Devol Utilizan los principios de control numeacuterico para el control de manipulador y era un robot de
48
transmisioacuten hidraacuteulica
1968 Un robot moacutevil llamado bdquoShakey‟‟ se desarrolloacute en SRI (standford
Research Institute) estaba provisto de una diversidad de sensores18 asiacute como una caacutemara de visioacuten y sensores taacutectiles y podiacutea desplazarse por el suelo
1973 Se desarrolloacute en SRI el primer lenguaje de programacioacuten de robots
del tipo de computadora para la investigacioacuten con la denominacioacuten WAVE Fue seguido por el lenguaje AL en 1974 Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Victor Scheinman y Bruce Simano
1974 ASEA introdujo el robot Irb6 de accionamiento completamente
eleacutectrico
1974 Kawasaki bajo licencia de Unimation instaloacute un robot para
soldadura por arco para estructuras de motocicletas
1978 El robot T3 de Cincinnati Milacron se adaptoacute y programoacute para
realizar operaciones de taladro y circulacioacuten de materiales en componentes de aviones bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing)
1981 Se desarrolloacute en la Universidad de Carnegie- Mellon un robot de
impulsioacuten directa Utilizaba motores eleacutectricos situados en las articulaciones del manipulador sin las transmisiones mecaacutenicas
habituales empleadas en la mayoriacutea de los robots
1982 IBM introdujo el robot RS-1 para montaje basado en varios antildeos
de desarrollo interno Se trata de un robot de estructura de caja que utiliza un bazo constituido por tres dispositivos de desplazamiento ortogonales El lenguaje del robot AML desarrollado por IBM se introdujo tambieacuten para programar el robot SR-1
1984 Robots 8 La operacioacuten tiacutepica de estos sistemas permitiacutea que se
desarrollaran programas de robots utilizando graacuteficos interactivos en una computadora personal y luego se cargaban en el robot
18
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017]
49
Sin embrago la tecnologiacutea sigue avanzando y en la actualidad se estaacute
trabajando por conseguir mejores resultados19
44 APLICACIOacuteN DE LA ROBOTIZACIOacuteN EN PROacuteTESIS
Al verse la necesidad de mejorar las condiciones de vida de las personas que
sufren alguacuten tipo de amputacioacuten yo tienen alguna discapacidad se estaacute
implementando una nueva tecnologiacutea que permita al ser humano acercarse
mucho maacutes a la realidad No se sabe de aquiacute en algunos antildeos cuanto pueda
avanzar esta tecnologiacutea pero se estaacute trabajando para mejorar cada vez maacutes la
eficacia y funcioacuten de cada proacutetesis a la cual se le implemente la robotizacioacuten
En esta subsuncioacuten se presentan algunas proacutetesis robotizadas que ya son comerciales y otras que estaacuten en fase de investigacioacuten Aquiacute se caracterizan como proacutetesis roboacuteticas aquellas que tiene una fuente de energiacutea propia un actuador y sensores que permiten leer los movimientos deseados por el usuario Por lo tanto tambieacuten se requiere un sistema de procesamiento de esas sentildeales (aun en su forma maacutes baacutesica) para poder convertir esas sentildeales en movimientos de los actuadores En esta definicioacuten no es necesario que el sistema provea de retroalimentacioacuten al usuario
Proacutetesis roboacutetica de miembro superior
Las proacutetesis de miembro superior han tenido un gran desarrollo a partir de los
antildeos 60 sin embargo algunos estudios sentildealan que alrededor del 70 de la
poblacioacuten afectada en los Estados Unidos utiliza simples ganchos pasivos
(Yang et al 2004) Este porcentaje es auacuten mayor en los paiacuteses del Tercer
Mundo donde muchas veces ni siquiera se utiliza proacutetesis alguna De otra
parte seguacuten el censo del DANE antildeo 2005 (Dane 2005) en nuestro paiacutes
existiriacutean alrededor de 385000 personas con discapacidad de miembro
superior (aunque el informe no especifica en detalle el grado de discapacidad)
A diferencia de los citados ganchos pasivos existen las proacutetesis activas las
cuales por medio de cuerdas o maacutes sofisticadamente sensores ubicados en
alguna parte del cuerpo del paciente permiten mover una mano mecaacutenica con
mayor o menor grado de funcionalidad20
19
httpwwwprofesormolinacomartecnologiaroboticahistoriahtm [27102017] 20
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
50
Un anaacutelisis detallado de los uacuteltimos avances en el aacuterea puede hallarse en
(Lunteren et al 1983 Shimoga 1996 Bicchi 2000 Yang et al 2004) Sin
embargo el desarrollo de una proacutetesis de mano que pueda ser sentida por el
paciente como parte integrante de su cuerpo estaacute lejos auacuten de convertirse en
una realidad De hecho las proacutetesis comerciales actuales son incapaces de
proveer suficiente funcionalidad en los movimientos de agarre de objetos
presentaacutendose tambieacuten la peacuterdida de grados de libertad en las soluciones
propuestas Diversas soluciones han sido propuestas con el fin de dar
respuesta a los retos cientiacuteficos y tecnoloacutegicos que el problema representa
Entre las maacutes innovadoras se tienen
MANO DLR
Mano desarrollada en Alemania para aplicaciones de tele-operacioacuten o para
tareas autoacutenomas desarrolladas por un robot industrial o de servicios Consta
de cuatro dedos con movimientos totales que proveen 20 grados de libertad
(Borst et al 2003)
MANO TUATKARLSRUHE
Mano desarrollada por un laboratorio japoneacutes y otro alemaacuten consta de cinco
dedos con un total de 20 grados de libertad Estaacute accionada por motores
esfeacutericos a ultrasonidos y fue disentildeada para servir de mano al robot humanoide
ARMAR (Fukaya et al 2000)
MANO BLACKFINGERS
Esta mano construida en Italia estaacute constituida por muacutesculos flexibles las
articulaciones estaacuten hechas de un material parecido al nylon y los tendones son
cables de hierro recubiertos de tefloacuten Esta compleja estructura permite 18
grados de libertad (tres por cada dedo y tres para la muntildeeca) y tiene un peso
muy similar al de la mano humana aunque su costo es auacuten bastante alto
(Folgheraiter y Gini 2000)21
21
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
51
Figura 38 Mano Blackfingers
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
MANO ROBOacuteTICA CON MECANISMO EXTENSOR
Esta mano desarrollada en Estados Unidos es similar a la anterior pero en vez
de utilizar muacutesculos flexibles utiliza bandas elaacutesticas desde el antebrazo para
mover cada uno de los dedos Su funcionamiento es pues similar a la mano
humana (Wilkinson et al 2003)
MANO COMPUESTA DE SENSORES PROPIOCEPTIVOS
Mano desarrollada en Italia compuesta por tres dedos y dos motores los
cuales permiten nueve grados de libertad Estaacute compuesta por sensores de
posicioacuten y de fuerza en los dedos para proveer las complejas funciones de
agarre de una mano natural Los motores son controlados a partir de sensores
electromiograacuteficos colocados en el brazo del paciente lo cual la hace bastante
adaptable a los discapacitados de mano (Carrozza et al 2003)
MANO IOWA
52
Esta mano fruto de un trabajo entre universidades americanas espantildeolas y
suecas consta de cuatro dedos compuestos por resortes los cuales proveen un
total de 15 grados de libertad Su disentildeo estaacute orientado especiacuteficamente a los
amputados de mano (Yang et al 2004)22
Figura 39 Mano lowa
FuentehttpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboti
capdf [28102017]
Sin embargo las proacutetesis comerciales distan auacuten mucho de las propuestas
mostradas anteriormente dudan la complejidad de la tarea y el costo que esto
involucra para el paciente Uno de los mayores fabricantes de proacutetesis a nivel
mundial es la empresa alemana Otto Bock (Otto Bock 2006)
Esta mano tiene el Control Dinaacutemico de Modo (DMC en ingles) la velocidad y la
fuerza de aprehensioacuten se regulan de forma proporcional a la fuerza de la sentildeal
muscular Este control tambieacuten se caracteriza por un nuevo tipo de modo
de seguridad Despueacutes de agarrar una vez con la maacutexima fuerza se requiere
una sentildeal EMG ligeramente mas alta para abrir la mano Esto evita que la
mano se abra debido a una contraccioacuten involuntaria del musculo
22
httpwwwunicaucaeducoaipublicacionesAplicaciones_de_la_Roboticapdf [28102017]
53
Figura 40 Mano Otto Bock
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanos
[28102017]
CODO-ANTEBRAZO ERGOARM (OTTO BOCK)
ErgoArmR ErgoArmR plus ErgoArmR Hybrid plus y ErgoArmR Electronic plus
son cuatro componentes de codo que facilitan el tratamiento mioeleacutectrico en
altos niveles de amputacioacuten
Cuanto maacutes alto es el nivel de amputacioacuten mayores son las demandas en la teacutecnica de protetizacion El montaje tanto del ErgoArmR Electronic plus como del ErgoArmR Hybrid facilitan la poetizacioacuten mioeleacutectrica en niveles altos de amputacioacuten El 12K44 ErgoArmR Hybrid plus se recomienda para proacutetesis hibridas con una mano mioeleacutectrica y una articulacioacuten de codo con cable de traccioacuten Gracias a la conexioacuten faacutecil EasyPlug todos los cables eleacutectricos desaparecen en el interior de la proacutetesis para que pasen desapercibidos y esteacuten protegidos23
23
httpwwwmonografiascomtrabajos87protesis-roboticas-humanosprotesis-roboticas-
humanosshtml [28102017]
54
Figura 41 Codo-antebrazo
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
Proacutetesis roboacuteticas de miembro inferior
Las actuales proacutetesis de miembros inferiores requieren que los amputados gasten esfuerzo importante al realizar movimientos coordinados de varias articulaciones Normalmente las articulaciones de las rodillas y tobillos en los seres humanos generan fuerza cuando uno camina o realiza otras funciones de locomocioacuten como el subir escaleras o cuestas Desafortunadamente hasta las proacutetesis de pierna maacutes sofisticadas y modernas no generan energiacutea durante el movimiento en vez estos aparatos pasivos deben confiar en efectos de fuerzas de tierra y componentes mecaacutenicos como las vaacutelvulas hidraacuteulicas o articulaciones deslizantes para el funcionamiento adecuado Para controlar la proacutetesis los usuarios deben hacer movimientos extra con las caderas y el muntildeoacuten Al caminar los amputados de pierna pueden llegar a gastar hasta un 60 maacutes de energiacutea metaboacutelica en comparacioacuten con una persona sana24
Las limitaciones de los dispositivos pasivos se vuelven auacuten maacutes intensas cuando los amputados usan escaleras y cuestas Los amputados deben subir cuestas o escaleras una pierna a la vez con la pierna ortopeacutedica a zaga El bajar las escaleras es auacuten maacutes limitado y potencialmente peligroso Los individuos con dos piernas sanas gastan mucha fuerza cuando bajan un tramo de escaleras pisando primero con los dedos del pie lo cual permite que la articulacioacuten de la rodilla absorba la energiacutea esto evita el impulso excesivo al descender las escaleras En contraste los amputados deben bajar por las escaleras pisando primero con el taloacuten y esto causa que con frecuencia no puedan controlar su aceleracioacuten lo que les puede causar una caiacuteda De hecho
24
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
55
los amputados se caen con tanta frecuencia como las personas mayores que viven en instituciones
Elegs Berkeley Bionics
Figura 42 Piernas eLegs Berkeley Bionics
Fuente Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
Exoesqueleto roboacutetico que ayuda a los parapleacutejicos con el suentildeo de levantarse de su silla y caminar Esta realizado en acero y fibra de carboacuten y tan solo pesa 20 kilos Tiene una capacidad de duracioacuten de 6 horas y permite caminar a un maacuteximo de 3kmh Esta asombrosa tecnologiacutea es controlada atreves de unas muletas con sensores que al mover la muleta derecha adelante la pierna izquierda hace un paso ayudando a la persona tener un caminado natural ldquoLo maacutes excitante para mi es poderlo probar en el mundo realrdquo dice Amanda Boxtel la cual fue paralizada en 1993 en un accidente de ski y ahora trabaja como motivadora para gente parapleacutejica ldquoYo no naciacute para estar sentada en una silla de ruedas Quiero poder estar a la altura de la genterdquo25
PROacuteTESIS DE RODILLA POWER KNEE (OSSUR)
Es la primera proacutetesis de rodilla que remplaza la funcioacuten muscular perdida a traveacutes de una fuente activa de potencia (un actuador eleacutectrico) que permite
25
Documento Word Estado del arte UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS [01112017]
56
generar la propulsioacuten necesaria para el caminado y tambieacuten en actividades como lo son levantarse de una silla de ruedas o subir las escaleras La Power Knee contiene un arreglo de sensores incluyendo giroscopios ceacutelulas de presioacuten celdas de cargas sensores angulares y el Moacutedulo de propia recepcioacuten Artificial en la Pierna de sonido (utiliza un sensor de sonido que permite conocer el ritmo de la pierna sana) El sistema contiene un microprocesador que utiliza la informacioacuten de los sensores para lograr un caminado similar al humano La informacioacuten proveida por sistema sensorial del sonido lateral permite regenerar la verdadera cinemaacutetica del caminado mientras anticipa la funcioacuten requerida cuando las condiciones de caminado cambian
Figura 43 Proacutetesis de rodilla power knee
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
PROacuteTESIS DE PIE PROPIO FOOT (OSSUR)
Los aceleroacutemetros miden en tiempo real el movimiento a una velocidad de 1600 ciclos por segundo Siguiendo la ruta del tobillo a traveacutes del espacio el sistema define las caracteriacutesticas del caminado y los eventos incluyendo el golpe del taloacuten y el movimiento para dejar el suelo Una tarjeta de control recibe un flujo constante de sentildeales del sistema de inteligencia artificial El controlador comanda a un actuador lineal para que las fuerzas y posiciones del pie se adecuen durante el caminado Existen 5 elementos principales del sistema mecaacutenico un motor de DC una transmisioacuten un resorte en serie un resorte en paralelo unidireccional y una
57
proacutetesis del pie de plaacutestico Los tres primeros elementos son combinados forman un sistema llamado Actuador Elaacutestico en Serie
Figura 44 Propio foot
Fuente wwwprotesis-roboticas-humanosprotesis-roboticas-humanosshtml
[01112017]
45 DIFICULTADES PRESENTADAS EN LA ELABORACIOacuteN DE LAS
PROacuteTESIS
Hacer una proacutetesis roboacutetica de una calidad aceptable requiere de un enorme
esfuerzo no solo en el campo de la mecatroacutenica sino tambieacuten en neurociencia
ingenieriacutea electroacutenica ciencias cognitivas procesamiento de sentildeales disentildeo
de bateriacuteas nano-tecnologiacutea y ciencias del comportamiento
Para obtener una proacutetesis que emule en buena forma la dinaacutemica del miembro
amputado es necesario que el disentildeo satisfaga ciertas especificaciones como
lo son
Tamantildeo y Masa Las dimensiones de la proacutetesis deben ser las mismas que las
del miembro que sustituyen Por otro lado la masa debe ser igual o menor a la
del miembro amputado para que el portador pueda manipularla con facilidad y
no haga esfuerzos extraordinarios que puedan dantildear los muacutesculos que
soportan la proacutetesis
Velocidad y Torque La proacutetesis debe capturar completamente el
comportamiento torque velocidad del miembro que sustituye
Bateriacuteas La duracioacuten de las bateriacuteas de una proacutetesis roboacutetica debe permitir un
funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de
insuficiencia de energiacutea durante las actividades diarias
58
Ancho de Banda del Torque El ancho de banda de una proacutetesis es la
frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de
accionamiento de tal manera que el caminado sea natural
Una de las principales limitaciones por la cual el desarrollo de proacutetesis
roboacuteticas comerciales no se ha realizado se debe al pequentildeo nuacutemero de
personas que lo necesitan Debido a eso puede resultar que una proacutetesis de
elevado nuacutemero de grados de libertad sea muy costosa y praacutecticamente
incosteable para la mayoriacutea de la gente26
451 COSTOS PROMEDIO DE UNA PROacuteTESIS
En el mercado colombiano una proacutetesis para cualquier extremidad tiene costos
muy levados tanto asiacute que para personas de bajos recursos es casi que
imposible acceder a una proacutetesis que cumpla con todas sus necesidades a
continuacioacuten veremos algunos precios promedio de proacutetesis
PROacuteTESIS DE MANO COMPLETAS
Alrededor de US $6000 lo que en peso colombiano equivale a $17rsquo972253
PROacuteTESIS DE MANO CON CONTROL EN LOS DEDOS
Oscilan entre
US$20000 a US$60000 Lo que en peso colombiano equivale a
COP $59rsquo872030 a $149rsquo680090
PROacuteTESIS PARA DEDO DE MANO
US $750 lo que en peso colombiano equivale a COP $2rsquo262135
PROacuteTESIS PABELLON AURICULAR
US $1500 en peso colombiano equivale a COP $4rsquo52427027
PROacuteTESIS DE NARIZ
US $1500 en peso colombiano equivale a COP $4rsquo524270
PROacuteTESIS DE ANTEBRAZO
26
httpwwwmonografiascomtrabajos87protesis-roboticas-humanos [10112017] 27
httpwwwmanosydedoscomprecioshtml [10112017]
59
US $9750 este valor en peso colombiano equivale a COP $29rsquo407755
PROacuteTESIS DE BRAZO COMPLETO
US $11000 lo que en peso colombiano equivale a COP $33rsquo177980
PROacuteTESIS DE PIERNA
MXN $3200 este valor estaacute en moneda mexicana y en peso colombiano
equivale a COP $509743
46 ENTIDADES QUE DONAN YO VENDEN PROacuteTESIS
MAHAVIR KNIMA
La Corporacioacuten Mahavir Kmina la uacutenica institucioacuten en Colombia que fabrica
proacutetesis de piernas para brindarlas gratuitamente ha logrado en 2017 dos
grandes certificaciones oficiales buenas praacutecticas de manufactura e
importaciones y almacenamiento Los certificados otorgados por el Instituto
Nacional de Vigilancia de Medicamentos y Alimentos (INVIMA) de la Repuacuteblica
de Colombia elevaraacuten los estaacutendares de la Corporacioacuten le brindaraacuten un mayor
estatus y le permitiraacuten desarrollar nuevos convenios con instituciones dentro
del sistema de salud colombiano
ldquoEstas certificaciones son reconocimientos que le brindan seguridad y
confiabilidad a nuestros beneficiarios y benefactoresrdquo comenta Karen Cano
coordinadora de los Sistemas de Gestioacuten Humana de la Corporacioacuten y parte
del equipo que ha liderado ambos procesos de certificacioacuten ldquoQue una
institucioacuten sin aacutenimo de lucro como esta se ponga en la tarea de implementar
sistemas de gestioacuten es un gran logro son las grandes empresas las que suelen
hacerlordquo continuacutea
Las acreditaciones por otro lado se han obtenido como respuesta a las
imposiciones legales que surgieron a raiacutez de las resoluciones 4002 de 2007 y
2968 de 2015 que obligaban a los fabricantes a cumplir con ciertos criterios de
calidad para operar conforme a la ley Hoy Mahavir Kmina cumple con esos
criterios por lo que cuenta con el respaldo del INVIMA como institucioacuten
reguladora
En el futuro la Corporacioacuten pretende certificarse en otros aspectos importantes
de los sistemas de gestioacuten humana como calidad salud y seguridad en el
60
trabajo y gestioacuten ambiental Seguacuten Cano estos logros no son de obligatorio
cumplimiento pero elevaraacuten auacuten maacutes los estaacutendares de la Corporacioacuten por
encima de la media28
FUNDACIOacuteN CIREC
Somos una Fundacioacuten colombiana sin aacutenimo de lucro con la que trabajamos
por la discapacidad fiacutesica y neuroloacutegica desde hace 39 antildeos Operamos
corporativamente con visioacuten social y lo hacemos a traveacutes de tres unidades
misionales auto-sostenibles que permiten la reinversioacuten de nuestros
excedentes en favor de nuestra poblacioacuten sin acceso al sistema de salud
1 Proability producimos y comercializamos proacutetesis oacutertesis sillas de ruedas
especializadas y ortopedia de liacutenea blanda
2 IPS con un equipo de meacutedicos y terapeutas rehabilitamos integralmente a
nuestros pacientes con discapacidad y los llevamos nuevamente al mundo
laboral
3 Proyectos Especiales viajamos a los municipios maacutes pobres del paiacutes
donando nuestros tratamientos meacutedicos cientiacuteficos para apadrinar pacientes
con difiacutecil acceso al sistema de salud
Nuestro gran diferenciador es la Rehabilitacioacuten de la A a la Z todo en un mismo
lugar29
FUNDAFE
Con mucho sentido social y con la calidad humana que nos caracteriza porque
vivimos para dar evitamos traacutemites largos y burocracias sin sentido
Sencillamente recibimos la solicitud hacemos una visita domiciliaria para
conocer la familia y el entorno del beneficiario para involucrarlos en los
procesos teacutecnicos psicosociales y de consecucioacuten de recursos como parte de
nuestro modelo de rehabilitacioacuten psicosocial RBC (Rehabilitacioacuten basada en
comunidad) y una vez esteacuten los recursos disponibles comenzamos la
fabricacioacuten de la proacutetesis que se entrega al beneficiario a los 8 diacuteas siguientes
28
httpmahavir-kminaorgs [15112017] 29
httpwwwcirecorg [15112017]
61
Amamos el medio ambiente y transformando la chatarra contribuimos a
cuidarlo por eso el 70 de nuestra materia prima es chatarra Todo objeto de
metal (Hierro acero aluminio cobre) que no utilicemos que nos estorba que
no queremos tener nosotros lo ponemos a caminar30
Estas fundaciones mencionadas realizan una labor maravillosa devuelven
sonrisas esperanzas suentildeos devuelven vida Sin embargo siguen siendo
muy pocas las entidades que realizan esta labor son miles de personas que diacutea
a diacutea padecen una amputacioacuten y no alcanzan a cubrir las necesidades de toda
la poblacioacuten
47 LEGISLACIONES COLOMBIANAS QUE APLICAN AL DISENtildeO DE
PROacuteTESIS U OacuteRTESIS
Ministerio de Salud y Proteccioacuten Social
La Resolucioacuten 1319 de 2010 ldquoMediante la cual se adopta el Manual de
Buenas Praacutecticas de Manufactura para la elaboracioacuten y adaptacioacuten de
dispositivos meacutedicos sobre medida de proacutetesis y oacutertesis ortopeacutedica externa y se
dictan otras disposicionesrdquo presenta inconvenientes teacutecnicos que dificultan la
adecuada implementacioacuten razoacuten por la cual la Direccioacuten de Medicamentos y
Tecnologiacuteas en Salud del Ministerio de Salud y Proteccioacuten Social lideroacute un
proceso de revisioacuten y consulta de esta norma que permitioacute la participacioacuten
amplia y deliberativa de sectores instituciones gubernamentales instituciones
no gubernamentales actores instituciones de salud asociaciones de
pacientes sociedades meacutedicas academia y poblacioacuten en general que se
abordoacute en cinco fases
FASES
I Consulta a representantes de Direcciones del MSPS Ministerio
de Educacioacuten instituciones de educacioacuten superior instituciones
de formacioacuten para el trabajo sociedades meacutedicas asociaciones
de profesionales de salud organizaciones no gubernamentales
asociaciones de pacientes profesionales de la salud instituciones
prestadoras de servicios de salud investigadores acadeacutemicos
prestadores de servicios o usuarios relacionados con el tema de
proacutetesis y oacutertesis en Colombia
II Consulta con actores directos establecimientos donde se
elaboran y adaptan proacutetesis y oacutertesis Consulta nacional todos los
30
httpfundafecolombiaorg [15112017]
62
actores especialmente IPS EPS ARP Secretarias de Salud IPS
de Reacutegimen Especial
III Elaboracioacuten de consolidado del proceso divulgacioacuten de
resultados
IV Disentildeo del borrador de norma modificatoria socializacioacuten y
concertacioacuten con actores
V Traacutemite de expedicioacuten socializacioacuten e implementacioacuten de norma
modificatoria
Por lo anterior la articulacioacuten en la prestacioacuten es tarea de las EPS por cuanto
ellas dentro de su competencia tienen la conformacioacuten de la red de prestadores
y por cuanto son ellas las que lideran la contratacioacuten con los prestadores para
conseguir ese objetivo anterior Pregunta iquestA quieacuten le corresponde la
contratacioacuten de los establecimientos de elaboracioacuten y adaptacioacuten de proacutetesis y
oacutertesis Respuesta Tal y como se enuncia el artiacuteculo 62 de la Ley 1438 de
2011 en el numeral 1 es la EPS la que garantiza la contratacioacuten de los
prestadores que hacen parte de la red que prestaraacute atencioacuten con integralidad
continuidad coordinacioacuten y eficiencia con portabilidad calidad y oportunidad a
traveacutes de las redes Pregunta iquestQueacute instrumento o bajo que protocolo se debe
constituir el Grupo Interdisciplinario en las IPS Respuesta La Resolucioacuten
1043 en su anexo teacutecnico 1 para el estaacutendar de Procesos Prioritarios
Asistenciales el cual se encuentra con un alcance como sigue a asiacute ldquoEstaacuten
documentados los principales procesos asistenciales guiacuteas cliacutenicas internas o
definidas por normas legales
La documentacioacuten incluye acciones para divulgar su contenido entre los
responsables de la ejecucioacuten y para controlar su cumplimientordquo Y establece en
el criterio 52 ldquoCada institucioacuten estableceraacute procedimientos bajo la metodologiacutea
de medicina basada en evidencia para determinar el contenido de las guiacuteas
cliacutenicas de atencioacuten y los procesos de atencioacuten prioritarios incluidos en los
criterios del estaacutendar de procesos y procedimientosrdquo
En conclusioacuten si bien cada Institucioacuten define los protocolos de atencioacuten para
los principales procedimientos que realiza la conformacioacuten del grupo
interdisciplinario debe ser garantizada en uacuteltimas por la EPS definiendo en
protocolos basados en evidencia la conformacioacuten de la red de prestadores
para que sea atendida la patologiacutea de eacutesta clase de pacientes sin embargo
seraacute atractivo para una EPS si la oferta de atencioacuten de una IPS cuenta con un
grupo interdisciplinario que abarque la atencioacuten integral Pregunta iquestDe quieacuten
es la responsabilidad de prestar el servicio de rehabilitacioacuten funcional al
paciente usuario de proacutetesis u ortesis Respuesta La responsabilidad de una
63
atencioacuten en salud es necesariamente a cargo de un profesional de salud que
para efectos de la Resolucioacuten 1043 de 2006 en su anexo teacutecnico 1 cuando el
servicio es ofertado para Medicina Fiacutesica y Rehabilitacioacuten el responsable
seguacuten el criterio 178 es de Meacutedico especialista en Medicina fiacutesica y
rehabilitacioacuten
Ademaacutes los establecimientos donde se elaboran y adaptan las ayudas
teacutecnicas de las proacutetesis y oacutertesis al no ser prestadores de servicios de salud
no pueden tener la responsabilidad de la rehabilitacioacuten en su conjunto lo que
incluye adaptacioacuten de la proacutetesis y oacutertesis y entrenamiento con supervisioacuten del
equipo interdisciplinario Direccioacuten de Promocioacuten y Prevencioacuten Asiste la
doctora Janeth Solano Se solicita recomendaciones sobre programas de
promocioacuten y prevencioacuten para la poblacioacuten usuaria de proacutetesis y oacutertesis
normatividad vigente sobre manejo de residuos liacutequidos y soacutelidos normatividad
vigente uso del suelo para establecimientos donde se atiende personas en
discapacidad Se recibe Memorando 02 de marzo de 2012 del Dr Lennis
Urquijo Director de Promocioacuten y Prevencioacuten en el que recomienda lo siguiente
Aacutembito de aplicacioacuten Paraacutegrafo En este artiacuteculo la norma sentildeala que el
establecimiento dedicado a la elaboracioacuten de dispositivos meacutedicos debe
establecer una articulacioacuten con un servicio de medicina fiacutesica y rehabilitacioacuten
sin involucrar o hacer alusioacuten en los considerandos o en el cuerpo de la norma
a la Resolucioacuten 1043 de 2006 ldquopor la cual se establecen las condiciones que
deben cumplir los Prestadores de Servicios de Saludrdquo para habilitar sus
servicios e implementar el componente de auditoriacutea para el mejoramiento de la
calidad de la atencioacuten y se dictan otras disposiciones ni a la circular 047 de
2007 y sus modificaciones en cuanto a los requisitos que debe cumplir una
Institucioacuten para contratar con una Entidad Prestadora de Servicios de Salud
Definiciones Revisada la definicioacuten para establecimiento que elabora y adapta
dispositivos meacutedicos sobre medida para proacutetesis y oacutertesis ortopeacutedicas la
misma no es clara en cuanto a las acciones de adaptacioacuten para este tipo de
productos por cuanto esta actividad involucra el ajuste y acople de los mismos
a los pacientes ni en su relacioacuten con los servicios de salud que permita una
clasificacioacuten del establecimiento dentro de funciones inherentes a la atencioacuten
en salud y asiacute mismo orientar el manejo de los residuos31
31 wwwminsaludgovco [15112017]
46
48 MANTENIMIENTO DE LAS PROacuteTESIS
Es fundamental tener en cuenta que todos los dispositivos proteacutesicos de calidad estaacuten hechos a medida No existe nada que sea lo mejor para todo el mundo La eleccioacuten deberiacutea basarse en lo que es mejor para una determinada persona en un determinado momento Al cambiar las situaciones tambieacuten cambian las opciones El proceso proteacutesico evolucionaraacute al mismo tiempo que cambian las necesidades y la tecnologiacutea Como teacutermino medio un nintildeo en crecimiento necesitaraacute una nueva proacutetesis cada dos antildeos Asiacute pues han de tomarse decisiones con frecuencia y el proceso de aprendizaje ha de ser muy raacutepido
Lo positivo de todo esto es que eso le brinda la oportunidad de valorar nuevas tecnologiacuteas y de aprender de los aciertos o equivocaciones de anteriores elecciones proteacutesicas Dichas decisiones podriacutean concebirse como etapas Lo que es mejor en un momento determinado puede no ser la decisioacuten maacutes adecuada la siguiente vez O algo que puede ser demasiado grande o complejo ahora podriacutea ser una buena opcioacuten la proacutexima vez o la siguiente
CUANDO Y COacuteMO AJUSTAR LA PROacuteTESIS
La edad y el desarrollo del nintildeo o adolescente son los primeros aspectos que deben tenerse en cuenta a la hora de decidir cuaacutendo y coacutemo ajustar la proacutetesis Es mejor ajustar una proacutetesis de extremidad inferior a un nintildeo cuaacutendo eacuteste comienza a ponerse de pie lo que suele ocurrir entre los 9 y 12 meses de edad Cuando se ajusta la proacutetesis se deberiacutea animar al nintildeo a ponerse de pie lo que tambieacuten le ayudaraacute a aprender a caminar Si la amputacioacuten se produce a una edad posterior deberiacutea iniciarse el proceso tan pronto como el nintildeo o adolescente esteacute fiacutesicamente preparado Aun cuando el adolescente ha perdido la rodilla la primera proacutetesis no suele incluir dicha articulacioacuten para que todo sea maacutes faacutecil durante el proceso de aprendizaje No obstante se debe incorporar una rodilla tan pronto como sea seguro y posible hacerlo
Con nintildeos que presentan amputaciones de extremidad superior la regla es ajustar la proacutetesis cuando ya pueden sentarse Esto facilitaraacute un desarrollo normal al permitirles realizar tareas con ambas manos como gatear sostener una botella o jugar con una pelota Esta primera proacutetesis suele ser pasiva y da buenos resultados teniendo en cuenta las cosas que un nintildeo necesita hacer Entre los 18 meses y los dos antildeos de edad el nintildeo suele estar preparado para utilizar un dispositivo terminal que funciona gracias al movimiento corporal o mediante el control mioeleacutectrico El meacutetodo tradicional consiste en ajustar primero un dispositivo de control corporal y posteriormente un dispositivo mioeleacutectrico a la edad de 3 oacute 4 antildeos cuando el nintildeo es capaz de soportar un mayor peso y complejidad Se deberiacutea incorporar un codo una vez se haya utilizado y comprendido el funcionamiento del dispositivo terminal lo que suele suceder a los 3 antildeos de edad Independientemente del nivel de la amputacioacuten cuando se alcanza algo de madurez esqueleacutetica y el crecimiento no se produce
65
a un ritmo muy raacutepido (entre los 13 y 15 antildeos de edad) el nintildeo o adolescente debe ser tratado desde un punto de vista proteacutesico como un adulto
EL MOTOR
En teacuterminos generales las piezas proteacutesicas maacutes cercanas al cuerpo se consideran las maacutes importantes y pierden relevancia cuanto maacutes lejos estaacuten del mismo De hecho el aspecto maacutes importante de la proacutetesis es ldquoel motorrdquo es decir el amputado Desgraciadamente a veces este ldquocomponenterdquo no recibe la suficiente consideracioacuten Cuando sea necesario y posible deberiacutea optimizarse el estado de la extremidad residual asiacute como la fortaleza y amplitud de movimiento del amputado
Las operaciones quiruacutergicas de rectificacioacuten y los programas terapeacuteuticos pueden ayudar a la persona a maximizar el uso de su proacutetesis Para los joacutevenes con amputacioacuten de huesos largos se puede anticipar el crecimiento excesivo Aunque los proteacutesicos pueden utilizar a menudo estrategias que ayudan a posponer y minimizar la necesidad de realizar operaciones la rectificacioacuten podriacutea ser necesaria cuando el dolor asiacute lo dictamine
EL ENCAJE
Una vez que el motor estaacute preparado es el momento de elaborar el encaje Eacutesta es la pieza de la proacutetesis donde se coloca la extremidad residual Debido a la necesidad de obtener un iacutentimo ajuste para esta parte de la proacutetesis deben tenerse en cuenta muchos aspectos y deben tomarse muchas decisiones
Lo primero y principal es la comodidad Cuando el proteacutesico disentildea el encaje para obtener un oacuteptimo ajuste debe tener en cuenta la forma del mismo y los materiales que utilizaraacute Todo es posible si un encaje se adapta con la miacutenima incomodidad
El proteacutesico tambieacuten deberiacutea tener en cuenta el potencial de crecimiento de la persona que utilizaraacute la proacutetesis los problemas de higiene y la necesidad de garantizar la durabilidad de la proacutetesis Elaborar un encaje proteacutesico que permita el crecimiento puede suponer todo un reto Generalmente el crecimiento es maacutes longitudinal entre el primer antildeo y los siete antildeos de edad y maacutes circunferencial entre los 8 y los 14
Puede antildeadirse un almohadillado distal en el interior del encaje y ajustarlo a medida que los huesos crezcan a lo largo Igualmente pueden utilizarse calcetines o fundas proteacutesicas gruesas o muacuteltiples que ofrecen a los pacientes la posibilidad de reducir el grosor o nuacutemero a medida que crece la extremidad
Las fundas pueden estar hechas de diferentes tipos de gomaespuma faacutecilmente reemplazables o de silicona Actualmente estas fundas de silicona estaacuten disponibles en varios grosores y los fabricantes las estaacuten haciendo en tamantildeos mucho maacutes pequentildeos para que puedan adaptarse a los maacutes joacutevenes
66
Sin embargo algunas personas deciden no utilizar fundas porque son difiacuteciles de mantener limpias no son muy duraderas y resulta algo caro reemplazarlas
Aunque el uso de fundas con pestillo favorece la adhesioacuten de la extremidad residual al encaje (suspensioacuten) son maacutes difiacuteciles de ajustar cuando se desea permitir el crecimiento longitudinal Sin embargo si se utiliza el almohadillado distal desde el principio se puede quitar maacutes adelante para permitir que el encaje se ajuste durante maacutes tiempo
Los encajes de termoplaacutestico flexible incorporados a una especie de molde riacutegido tambieacuten pueden mejorar la comodidad y la adaptabilidad de la proacutetesis Estos encajes interiores pueden estirarse o reemplazarse por otros maacutes delgados o se pueden cortar y ensanchar los moldes para permitir modificaciones en su circunferencia
Estos disentildeos y materiales pueden utilizarse para casi cualquier nivel de amputacioacuten dependiendo de las necesidades individuales del amputado Aunque algunos amputados necesitan dejar mucho espacio en el encaje para permitir el crecimiento puede que otros no lo necesiten Aquellas personas con desarticulaciones por ejemplo tendraacuten menos problemas con el crecimiento longitudinal porque cargan su peso corporal sobre el extremo del hueso Por consiguiente el disentildeo de sus encajes puede ser maacutes sencillo
SUSPENSIOacuteN
La suspensioacuten es otro aspecto importante del encaje que hay que tener en cuenta Cuanto mejor se ajuste al cuerpo mejor funcionaraacute Las correas y los cinturones fabricados de diversos de materiales como el algodoacuten el Dacroacuten y el cuero que se colocan alrededor de la cintura suelen dar mejores resultados a los amputados transfemorales (por encima de la rodilla)
Las fundas con pestillo suelen utilizarse con los maacutes joacutevenes pero deberiacutea tenerse en cuenta el crecimiento lineal Si se utilizan los sistemas de correaje o de cierre de lenguumleta dan buenos resultados porque permiten introducir maacutes almohadillado en la base y hacen posible el crecimiento Los encajes de succioacuten por otra parte son difiacuteciles de ajustar si se desea permitir el crecimiento y para los joacutevenes son maacutes difiacuteciles de poner sin ayuda Debido a estos problemas no suelen utilizarse los encajes de succioacuten hasta que se alcanza una mayor madurez esqueleacutetica
Las proacutetesis transtibiales (por debajo de la rodilla) tambieacuten pueden sujetarse con correas y cinturones que normalmente se ajustan sobre la roacutetula Estaacuten hechas de cuero o Dacroacuten y son duraderas y faacuteciles de reemplazar
Las rodilleras fabricadas con neopreno goma o silicona tambieacuten dan muy buenos resultados Normalmente sirven los sencillos modelos que pueden adquirirse en tiendas locales de artiacuteculos deportivos
67
A veces tambieacuten puede utilizarse la suspensioacuten anatoacutemica ―un tipo de suspensioacuten donde el encaje se ajusta sobre una parte oacutesea del cuerpo para evitar que la proacutetesis se deslice― Desgraciadamente aunque este tipo de suspensioacuten funciona bien y puede antildeadir estabilidad ofrece poca capacidad de adaptacioacuten al crecimiento Como resultado es posible que tenga que reemplazarse el encaje con maacutes frecuencia32
Figura 45 Mantenimiento y Desarrollo
Fuente wwwamputee-coalitionorg [18112017]
32 httpswwwamputee-coalitionorg [18112017]
68
5 METODOLOGIacuteA
En la propuesta establecida para la elaboracioacuten de esta monografiacutea fue
indispensable realizar investigacioacuten de tipo documental que manejen proacutetesis
roboacuteticas para indagar mucho maacutes sobre el tema conocer maacutes sobre estas
proacutetesis entender su funcionamiento y asiacute aportar todo lo necesario para que el
documento quede completo entendible y muy concreto Ademaacutes de ello para
que nosotros como futuros Tecnoacutelogos en Electromedicina reforcemos el
conocimiento sobre el tema por el cual posiblemente nos especializaremos ya
que nos apasiona y nos parece un tema de suma importancia para nuestra
sociedad
CRONOGRAMA DE ACTIVIDADES
Antildeo 2017 OCTUBRE NOVIEMBRE DICIEMBRE
Durac Semana 2
Semana 3
Semana 4
Semana 1
Semana 2
Semana 3
Semana 4
Semana 1
Planteamiento del problema
Justificacioacuten
Objetivos
Estado de los conocimientos
Metodologiacutea
Discusioacuten
Conclusiones
Bibliografiacutea
Fuente Autores [01122017]
Realizamos una encuesta en la cual personas de diferentes edades
participaron se encuestaron a algunos estudiantes de la Universidad ECCI
familiares y amigos cercanos A partir de esta encuesta se mide que tanto
conocimiento tienen estas personas sobre una proacutetesis u oacutertesis y todo lo que
implica
Activ
69
Grafica 1 Agrupacioacuten por edades
Fuente Autores [22112017]
Graacutefica 2 Porcentaje de conocimiento
69
23
4 4
Encuesta
11 - 20 antildeos 21 - 30 antildeos 31 - 40 antildeos 41 - 50 antildeos
37
52
11
Porcentaje de conocimiento
Tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que ello implica
Tienen conocimiento de proacutetesis pero ninguno acerca de las oacutertesis
No tienen conocimiento acerca de proacutetesis oacutertesis roboacutetica y todo lo que elloimplica
70
Fuente Autores [23112017]
Figura 46 Encuesta con el mayor puntaje
71
Fuente Autores [25112017]
72
Figura 47 Encuesta con el menor porcentaje
73
Fuente Autores [25112017]
74
6 CONCLUSIONES
Analizamos los riesgos que puede traer el uso de las proacutetesis en
diversos casos o situaciones investigando acerca de las indicaciones y
contraindicaciones que esto puede traer
Conocimos y dimos a conocer por queacute se debe utilizar maacutes esta
tecnologiacutea en las proacutetesis y coacutemo puede mejorar las condiciones de vida
de las personas si se adquiere una de estas Esto lo logramos
indagando acerca de las proacutetesis roboacuteticas que hay y las necesidades
que cubren
Investigamos algunos casos de proacutetesis que no estaacuten al alcance de las
personas exponiendo algunos costos aproximados de ellas
observamos que las proacutetesis tiene un costo muy elevado y claramente
esto va seguacuten las funciones de cada proacutetesis sin embargo una persona
de bajos recursos que necesite una proacutetesis con funciones especiacuteficas y
no cuente con el apoyo de algunas de las fundaciones mencionadas en
este documento o cualquier otra no va a tener la posibilidad de adquirir
una proacutetesis debido a su costo Para ello se estaacuten tratando de
implementar materiales de bajo costo que permita que las proacutetesis bajen
sus costos
Revisamos el desarrollo avance y evolucioacuten que han tenido las proacutetesis
y coacutemo se han presentado aquiacute en Colombia beneficiando a cierto tipo
de personas asiacute mismo algunas desventajas y dificultades que tiene la
elaboracioacuten de estas
Presentamos un documento o monografiacutea como opcioacuten de grado de
Tecnologiacutea en Electromedicina cumpliendo los lineamientos
metodoloacutegicos establecidos por la Universidad ECCI
75
6 DISCUSIOacuteN
KATHERIN PAOLA RATIVA YEPES
En un ambiente de economiacutea no todas las personas tienen la posibilidad de
adquirir una proacutetesis roboacutetica que les permita ayudar con su sostenimiento en
algunas ocasiones pueden llegar a obtener proacutetesis que solo les da de un 10
a 40 de movilidad Por este motivo es necesario implementar una tecnologiacutea
que cubra las necesidades de las personas que no tienen una parte de su
cuerpo sin embargo hay una gran problemaacutetica en este tema de las proacutetesis
ya que tiene unos costos muy elevados que no permiten a las personas adquirir
una con facilidad En mi opinioacuten el Estado deberiacutea apoyar mucho maacutes a las
entidades que con mucho sacrificio ayudan a las personas de bajos recursos a
obtener una proacutetesis o a hacer una como en el caso de la fundacioacuten llamada
FUNDAFE que por medio de algunos materiales crean proacutetesis a muchas
personas Se podriacutean implementar maacutes meacutetodos de donacioacuten y crear muchos
maacutes institutos fundaciones entidades etc capaces de ayudar a las personas
que maacutes lo necesitan
En este documento tratamos de mostrar que no porque este tema sea ajeno a
nosotros nos debemos quedar sin enterarnos de los procesos que siguen estaacutes
proacutetesis de coacutemo podemos ayudar a estas personas de los diferentes
conceptos sea de oacutertesis roboacutetica robotizacioacuten y hasta de las mismas proacutetesis
y sus tipos
Esta muestra no termina aquiacute como futura Tecnoacuteloga en Electromedicina e
Ingeniera Biomeacutedica pienso especializarme en la creacioacuten de estaacutes proacutetesis
para asiacute ayudar a muchas personas y tambieacuten optar por un proyecto que refleje
este documento de la mejor manera
NELSON FERNANDO EUGENIO PENtildeA
Lo que se aspira con esta monografiacutea es poder lograr aprender y saber muy
bien las diferentes problemaacuteticas y beneficios que tiene una persona con
discapacidad Tambieacuten se quiere lograr entender por queacute tantas personas en
nuestro paiacutes no pueden acceder a una proacutetesis ya que en Colombia maacutes de
850000 personas son discapacitados y aproximada mente el 40 de esta
76
poblacioacuten cuenta con una proacutetesis digna la cual le permite sobre llevar una
vida casi normal por lo que con esta monografiacutea queremos exponer la
problemaacutetica que tiene nuestra poblacioacuten al querer adquirir una proacutetesis por
este motivo la solucioacuten para poder mejorar la calidad de vida de estas personas
propongo el poder apoyar financiera mente entidades como lo son fundaciones
y cooperativas de salud que son las que por medio del ministerio de salud y
entidades privadas que donan los diferentes materiales y proacutetesis u oacutertesis que
garantizan la mejor calidad de vida de una persona la cual necesita un apoyo
para poder ser mejor persona y sentirse maacutes segura de siacute misma
Afortunadamente en general los maacutes joacutevenes se adaptan muy faacutecilmente y
por consiguiente con o sin dispositivo proteacutesico suelen conseguir cosas que
no esperaban o creiacutean que fuesen posibles
Como futuro tecnoacutelogo en electromedicina aspiro poder ayudar a crear y
reparar los diferentes componentes roboacuteticos que existen en las proacutetesis los
cuales pueden garantizar una calidad de vida excelente ya que con estas
proacutetesis tiene una gran movilidad que le garantiza un mejor vivir
77
REFERENCIAS ELECTROacuteNICAS
1 Diccionario de la Real Academia Espantildeola [httpdleraees]
2 Evolucioacuten [httpsdefiniciondeevolucion]
3 Fundacioacuten CIREC [httpwwwcirecorg]
4 Historia de las proacutetesis [httpswwwamputee-coalitionorg]
5 Ingenieriacutea Biomeacutedica
[httpsesslidesharenetOthonielHernandezOvando]
6 Legislacioacuten [httpswwwdefinicionabccom]
7 Mahavir Knima [httpmahavir-kminaorgs]
8 OMS Organizacioacuten Mundial de la Salud
[httpwwwwhointtopicsdisabilities]
9 Oacutergano [httpwwwdoctissimocom]
10 Oacutertesis y tipos [httpsortopedia1com]
11 Proacutetesis roboacuteticas [httpwwwmonografiascom]
12 Roboacutetica [httpsroboticawordpresscom]
13 Tecnologiacutea [httpwwwalegsacomar]
14 TIPOS DE PROacuteTESIS INDICACIONES Y CONTRAINDICACIONES
[httpsesslidesharenetmarckamstelprotesis-tipos-y-caracteristicas]
15 UV Universitat de Valencia ES [httpswwwuves]
16 Viacutea Definicioacuten ABC [httpswwwdefinicionabccomsaludprotesisphp]
78
ANEXOS
79
Anexo A Encuesta realizada
80
Fuente Autores [02122017]
81
Anexo B Encuesta de persona de 18 antildeos de edad
82
83
Fuente Autores [02122017]
84
Anexo C Encuesta de persona de 19 antildeos
85
Fuente Autores [02122017]
86
Anexo D Encuesta de persona de 17 de edad
87
Fuente Autores [02122017]
88
Anexo E Noticia del disentildeo de proacutetesis de bajo costo en Colombia
Fuente httpwwwportafolioco [02122017]
89
Anexo F Ingeniero fabrica proacutetesis en Ibagueacute
Fuente httpwwwelolfatocom [03122017]