implementing the national weather service global workflow
TRANSCRIPT
Implementing the National Weather Service Global Workflow (GWF)
on the Azure CloudUsing the cloud to predict cloudiness
This work was part of the Azure HPC Collaboration Center funded by Microsoft in partnership with Intel.
Authors: Steve Bongiovanni • Andrew Qualkenbush • Chris Young • Don Avart

2
Table of Contents
1. Executive Summary .............................................................................................................................. 3
2. RedLine Lab .......................................................................................................................................... 5
2.1. Global Workflow Build and Configure - Redline HPC Lab ......................................................... 5
2.1.1. Operating System Choice ...................................................................................................... 5
2.1.2. Standard Linux Software Stack ............................................................................................. 5
2.1.3. RedLine Lab Configuration .................................................................................................. 6
2.1.4. Support Libraries and Applications for GWF ....................................................................... 6
2.2. Initial GWF Run Attempts ............................................................................................................ 8
2.3. Running GWF in the RedLine HPC Lab ...................................................................................... 9
3. Azure Setup ......................................................................................................................................... 10
3.1. Azure Lustre® Build and Test .................................................................................................... 10
3.2. Azure CycleCloud Setup and Test .............................................................................................. 11
3.3. Moving Global Workflow to Azure ............................................................................................ 13
4. Azure Execution .................................................................................................................................. 14
4.1. Running Low Resolution Forecast on Azure .............................................................................. 14
4.2. Increasing Forecast Resolution ................................................................................................... 14
4.3. Running at Full Resolution Using Only Publicly Available Data .............................................. 15
4.3.1. Cold Start Data from the NOAA NOMADS FTP Site ......................................................... 15
4.3.2. Warm Start Data from the NOAA AWS Data Store ............................................................ 16
4.3.3. Currently Insufficient Publicly Available Data for Full GWF Forecast Cycles ................. 16
5. Summary ............................................................................................................................................. 17
6. About RedLine .................................................................................................................................... 17

3
Implementing the National Weather Service
Global Workflow (GWF) on the Azure Cloud
1. Executive Summary
NOAA/NCEP’s Global Workflow (GWF) is a complex and interconnected series of batch jobs
that cycles through the global forecast system (GFS). Additional job steps include the analysis
(GSI), Hybrid EnKF (Ensemble Kalman Filter), POST and verification. The various components
have dependencies on other components of the workflow, all of which are controlled by one of
two workflow managers: ecFlow (when run in production) or Rocoto (when run by developers).
A flowchart and description of the steps can be found here: https://github.com/NOAA-
EMC/global-workflow/wiki/Global-Workflow-System-Jobs
In production, the GWF runs, or cycles, four times daily (00, 06, 12, and 18 UTC). In development,
it can be configured to run for a single cycle or, more often than not, 4 cycles a day to perform a
specific meteorological experiment or to develop future enhancements. These experiments and
enhancements are primarily run on a handful of systems either owned by or in cooperation with
NOAA. Access to these systems is limited to NOAA scientists and a relatively small number of
non-NOAA collaborators. These systems are physically limited to their existing hardware
resources, and individuals must receive the proper security credentials to gain access to some of
these systems. This unfortunately limits the amount of scientific and development work, as well
as collaboration, that can be accomplished. The ability to run the full GWF in the cloud opens
significant opportunities for NOAA to achieve the objectives of improving forecast skill and
testing new scientific algorithms from government, academic and commercial entities as being
envisioned by the establishment of NOAA's Earth Prediction Innovation Center (EPIC) and their
Big Data project to place more data in the cloud.
RedLine Performance Solutions (RedLine), working with Microsoft and Intel corporations, set out
to determine the feasibility of running the GWF in the Azure cloud. Our scope included building
all of the required executables and libraries, collecting and formatting the required data, and
cycling through a data assimilation loop to deliver the required input data to the GFS forecast
model, which produces forecast output. The forecast output from each cycle, along with current
observational data, feeds into the next forecast cycle. Achieving this goal of GWF operation on
Azure presented a number of challenges detailed throughout this paper. At a high level, two of the
most challenging aspects of the project were:
• Configuration: As stated above, the GWF is supported by NOAA on a select few
computing systems. Each of these systems are unique with a number of differences (e.g.,

4
parallel filesystems, job schedulers, processor configurations). The GWF, which is
accessible to the public on GitHub, assumes a standard configuration based on one of these
supported systems. To be best utilized by the public it needs to be more easily configured
and documentation improved.
• Data: There are two ways to start the GWF: a cold-start or warm-start. A warm-start means
that data from a previous cycle is used as input for the next cycle, while a cold-start
generally uses data that has been archived or created from a source other than the GWF
itself. Each of these methods requires specific data to be available. We are aware of two
locations that provide data for running the GWF: the NOAA public FTP site, inclusive of
NOMADS, and the NOAA Big Data project hosted by AWS. While neither site has all the
data required to either cold-start or warm-start the GWF, we had access to the additional
data needed.
The approach adopted for this project had three distinct steps:
• Step 1: Build and run the GWF in the RedLine lab. Building all of the code and running
at low resolution on lab resources avoids any charges against a fixed number of Azure
credits allotted by Microsoft while we worked through build and machine configuration
issues.
• Step 2: Build and test a parallel filesystem on the Azure cloud. Running the GWF requires
a robust parallel filesystem such as Lustre. Given that we did not have specific filesystem
requirements defined for the project, the approach was to define a base configuration for
Lustre and perform scaling tests to show linear scalability. We assumed we could scale to
a level that would meet our performance requirements.
• Step 3: Migrate data and executables to Azure and run GWF. Once GWF executables and
libraries had been built and tested in the lab, and a well-defined parallel filesystem was
established, integrating the components and running on Azure would be the final step.
Despite the challenges we encountered, we achieved our objectives, successfully cycling the GWF
through multiple iterations, at low-resolution and cold-starting the GWF at full-resolution on the
Azure cloud, opening doors to more collaboration and scientific innovation. The details of how
the executables and libraries were built, issues encountered and how they were resolved, and
ultimately the results of running GWF on the Azure cloud follow in the remainder of this paper.
5
2. RedLine Lab
RedLine decided to conserve the Azure resource allotment by initially building and executing the
Global Workflow in the RedLine lab.
2.1. Global Workflow Build and Configure - Redline HPC Lab
The Global Workflow is a collection of software that includes all applications required to produce
weather forecasts on a cycling basis. The GWF runs in production 4 times daily, using varying
resources, depending on the job that is running. In operations, the workflow has a highwater mark
of 800 Intel Broadwell (28 core) nodes. In development, it is used at varying resolutions, with
significantly fewer compute resources, to perform meteorological experiments and develop future
enhancements. NOAA uses a variety of machines in its production and development environments.
These machines use several different operating systems.
2.1.1. Operating System Choice
For portability, consistency, and compatibility with available Azure instances, we selected CentOS
for the operating system in our internal lab configuration.
• Linux version in Redline HPC lab: CentOS Linux 7 3.10.0-862.el7.x86_64
• Linux version in Azure: CentOS Linux 7 3.10.0-1127.19.1.el7.x86_64
We found that these versions are close enough to be able to produce binary compatible
applications. This enabled us to go through the build and configure process without impacting the
fixed Azure credits allotted for this project.
2.1.2. Standard Linux Software Stack
In addition to a typical Linux server installation, we needed to install the following packages from
the EPEL repositories and other sources:
hdf5-1.8.12-12.el7.x86_64.rpm
libaec-1.0.4-1.el7.x86_64.rpm
lua-bitop-1.0.2-3.el7.x86_64.rpm
lua-posix-32-2.el7.x86_64.rpm
netcdf-4.3.3.1-5.el7.x86_64.rpm
openblas-serial-0.3.3-2.el7.x86_64.rpm
openblas-threads-0.3.3-2.el7.x86_64.rpm
python36-Cython-0.28.5-1.el7.x86_64.rpm
python36-netcdf4-1.2.7-4.el7.x86_64.rpm
python36-numpy-1.12.1-3.el7.x86_64.rpm

6
In addition to the packages available in the standard repositories, we also directly downloaded and
installed:
● Spack - https://spack.io/
● LMOD (Lua Modules) - https://lmod.readthedocs.io/en/latest/
● Rocoto - http://christopherwharrop.github.io/rocoto/
Some of the build processes for GWF required newer versions of software than were available
from repositories. Using Spack, we built and installed the latest versions of the following packages:
● Ruby
● Python
● Cmake.
2.1.3. RedLine Lab Configuration
The Azure instance selected uses the Slurm Workload Manager. We adjusted the Redline Lab
Slurm configuration to match the Azure configuration, with the exception of some node
instantiation options that were specific to the Azure instance. The RedLine Lab consists of 24 Intel
Haswell compute nodes each with 2 Intel(R) Xeon(R) CPU E5-2680 v3 @ 2.50GHz and 128GB
RAM per node. Other features of the lab include a 28 TB Lustre parallel filesystem, Mellanox
FDR Infiniband high-speed interconnect, and the Slurm batch scheduler.
2.1.4. Support Libraries and Applications for GWF
The GWF is a diverse collection of applications written over a period of years by many individuals,
groups, and organizations. At various times during the process, different support libraries were
either popular, appropriate, or necessary. These support libraries came from several sources, but
over time many fell under the purview of NOAA. There have been several attempts to consolidate
these libraries, culminating in what is now referred to as hpc-stack, which is part of the NCEPLIBS
project. We selected hpc-stack for building the required GWF support libraries and applications.
2.1.4.1. HPC-STACK
Currently, all of the GWF library dependencies can be satisfied by the hpc-stack build process
and is exclusively being used by the UFS weather model (the core of the GFS) and the GWF now.
At the time the project was implemented, it did not appear that any of the then “configured” NCEP
machines made exclusive use of the hpc-stack build modules and libraries. They instead seemed
to use other pre-built versions of the required libraries in custom locations. To enhance portability
despite the unintended incompatibility amongst the “configured” machines, we opted to
consolidate all prerequisites for the GWF into a single path. As with the “build” portion of the
GWF, hpc-stack is a consolidation of numerous libraries and applications that have been brought
together under a single script-based build system. To the credit of those that developed this
system, it worked very well. We easily built the requisite libraries with both Intel ics/2018.4 and
Intel ics/2020.0 compiler suites. The main web location for hpc-stack is on github:
https://github.com/NOAA-EMC/hpc-stack.

7
HPC-STACK components used in this project:
NCEPLIBS Third Party Libraries
● NCEPLIBS-bacio ● NCEPLIBS-sigio ● NCEPLIBS-sfcio ● NCEPLIBS-gfsio ● NCEPLIBS-w3nco ● NCEPLIBS-sp ● NCEPLIBS-ip ● NCEPLIBS-ip2 ● NCEPLIBS-g2 ● NCEPLIBS-g2c ● NCEPLIBS-g2tmpl ● NCEPLIBS-nemsio ● NCEPLIBS-nemsiogfs ● NCEPLIBS-w3emc ● NCEPLIBS-landsfcutil ● NCEPLIBS-bufr ● NCEPLIBS-wgrib2 ● NCEPLIBS-prod_util ● NCEPLIBS-grib_util ● NCEPLIBS-ncio ● NCEPLIBS-wrf_io ● EMC_crtm ● EMC_post
● udunits ● PNG ● JPEG ● Jasper ● SZip ● Zlib ● HDF5 ● PNetCDF ● NetCDF ● ParallelIO ● nccmp ● nco ● CDO ● FFTW ● GPTL ● Tau2 ● Boost ● Eigen
2.1.4.2. Global Workflow Software Stack
The diversity of GWF applications, tools, and languages used makes the task of creating a unified
script-based build environment very difficult. There are a variety of build paradigms from simple
shell-based build scripts, to conventional makefile-based builds, to Cmake-based builds, all under
the control of a set of high-level shell scripts. Making this task even more challenging is the process
of making this future-compatible. GWF pulls or clones particular versions of the various
applications during the build process. With multiple git subprojects, tracking changes made to
facilitate our build was very difficult as the subdirectories were subject to different git repositories.
To make changes to the GWF, one needs to push changes to many different projects and git
repositories. This significantly complicated tracking changes we made to the GWF for this project.
8
We were able to establish the essential specifications of the “configured” machines to determine
which one most closely matched our configuration and was the most generic. We opted to use that
as our model for the code modifications required to do the porting to the RedLine Lab environment.
This might not seem like it should be a requirement, but the GWF code is infused with very specific
“special case code” that is unique to each of the machines. In some cases, it operates by checking
hostnames and in other cases, by checking the existence of a particular filesystem path - which is
assumed to be unique. Given this method of the prior “porting,” it is not hard to imagine the
difficulties encountered in doing a new “port.” Nearly 120 files needed to be changed or created
anew to facilitate the GWF build process.
We experimented with potential schemes to simplify the porting process by “externalizing” much
of the machine-specific configurations. This included applying the LMOD collection capability to
allow upgrades to module versions without editing tens of files if support libraries were updated.
We also created a single highest-level run script to define and map the needed environment
variables, module versions, and compiler arguments. However, we encountered apparent
shortcomings in the LMOD collection feature that prevented conditional redefinition of
environment variables in module files. After many iterations, and under significant time
constraints, we elected to abandon the porting process simplifications.
At the time the project was implemented, none of the NOAA supported machines make exclusive
use of the hpc-stack built libraries and applications, but instead have locally built versions of the
support libraries in different locations. Given that none of the GWF predefined configurations for
the supported machines seemed to work using only hpc-stack out of the box, significant effort was
required to integrate the hpc-stack versions of all the libraries with GWF. However, this effort was
worthwhile as it will greatly simplify running GWF in the cloud. Given that there is still no uniform
specification regarding which environment variables are defined in the different hpc-stack module
files, and there is a similar situation on the GWF side with its build process requiring different
environment variables, we needed to experimentally and iteratively determine the required
mapping from what was defined by hpc- stack to what was required by the GWF. Our objective
was to determine the viability of running the GWF outside of the configured NOAA environment
and that part of the project proved to be difficult.
However, we were eventually able to overcome these challenges and did complete the build of the
entire GWF in our “generic” Linux environment.
2.2. Initial GWF Run Attempts
After the build was completed, we moved to the testing phase of the project. This involved
configuring the running environment with the specific configuration of our cluster and gathering
the necessary data to perform a complete forecast cycle. We anticipated some difficulty in this
process. As we worked through the porting process, it became clear the differently configured
machines kept their required input and static data in different locations. This static data
requirement does not seem to be documented anywhere. The initial iterations in this regard were
slow as it took time to identify what the static data was and subsequently obtain it. The GWF run
scripts used by the Rocoto workload manager are well-instrumented, most of them have shell
tracing enabled, which makes tracking backward to determine failure causes straightforward.

9
Once we worked through the failures in the run scripts caused by the missing data, we were able
to start running the GWF applications. This started well, but we quickly encountered some
segmentation faults dealing with GDAS/ENKF (Global Data Assimilation System/Ensemble
Kalman Filter). After extensive experimentation and investigation, we learned that NOAA has not
yet upgraded to the Intel 2020.0 compiler suite on their supported machines and that it was not
officially supported by the GWF. To the best of our knowledge, we were the first to attempt to
build with this version. Since debugging GDAS/ENKF was not in the scope for this project, we
opted to roll back to the 2018.4 version of the Intel compiler suite. The downgrade went perfectly
smoothly and only required a redefinition of a few environment variables in our highest-level build
scripts to rebuild both the hpc-stack and the GWF. With this new build, we had no further issues
with application failures of this nature.
2.3. Running GWF in the RedLine HPC Lab
In our lab environment, we utilized a 24-node cluster and ran the GWF at a low resolution
(C192/C96). We had some issues with the initial node configuration since the naming of some
settings in the configuration files was not obvious. We were able to do a cold-start run at this
resolution in the lab. What follows is a portion of a ‘rocotostat’ output for our test run in the
RedLine Lab environment:
CYCLE TASK JOBID STATE EXIT STATUS TRIES DURATION
===============================================================================================================================
202009011800 gdasfcst 5508 SUCCEEDED 0 1 371.0
202009011800 gdaspost000 5519 SUCCEEDED 0 1 301.0
202009011800 gdaspost001 5520 SUCCEEDED 0 1 193.0
202009011800 gdaspost002 5521 SUCCEEDED 0 1 196.0
202009011800 gdaspost003 5522 SUCCEEDED 0 1 194.0
202009011800 gdaspost004 5523 SUCCEEDED 0 1 196.0
202009011800 gdaspost005 5524 SUCCEEDED 0 1 189.0
202009011800 gdaspost006 5525 SUCCEEDED 0 1 196.0
202009011800 gdaspost007 5526 SUCCEEDED 0 1 189.0
202009011800 gdaspost008 5527 SUCCEEDED 0 1 196.0
202009011800 gdaspost009 5528 SUCCEEDED 0 1 187.0
202009011800 gdaspost010 5529 SUCCEEDED 0 1 197.0
Getting to the point of being able to run sequential full cycles did require several iterations and
restarts to figure out some of the “quirks” of the Rocoto workflow manager.
10
3. Azure Setup
Once we had a stable, successful GWF build and execution in the RedLine lab, we built the Azure
environment.
3.1. Azure Lustre® Build and Test
High-speed interconnects are a central component of parallel filesystems used in weather forecast
operations. Azure offers a variety of interconnect and filesystem options. With the goal of a cost-
effective, high-speed, scalable solution, we selected an InfiniBand interconnect for the compute
cluster and 30 Gbps high-speed Ethernet for the Lustre storage solution. Given that we did not
have targeted filesystem performance metrics defined, the design goal for the Lustre filesystem
was to show scalability in the I/O solution. With this design in mind, we started with a basic/cost
effective filesystem with the ability to scale performance when and if required. The Lustre parallel
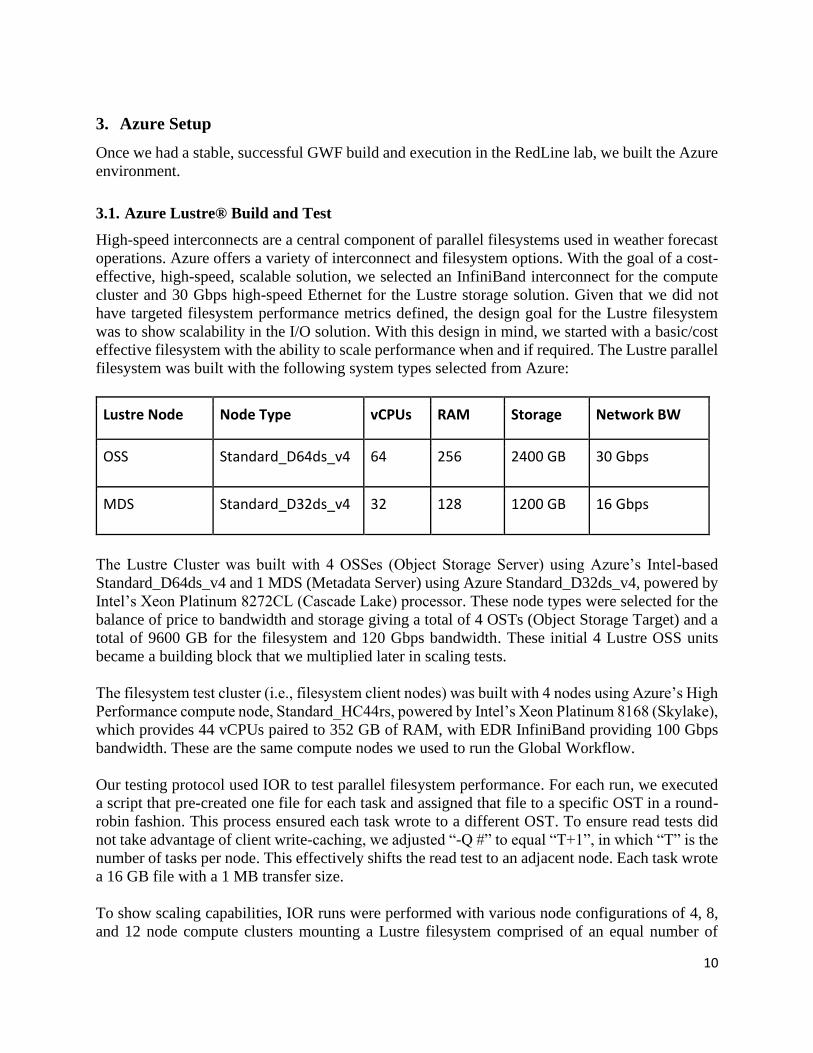
filesystem was built with the following system types selected from Azure:
Lustre Node Node Type vCPUs RAM Storage Network BW
OSS Standard_D64ds_v4 64 256 2400 GB 30 Gbps
MDS Standard_D32ds_v4 32 128 1200 GB 16 Gbps
The Lustre Cluster was built with 4 OSSes (Object Storage Server) using Azure’s Intel-based
Standard_D64ds_v4 and 1 MDS (Metadata Server) using Azure Standard_D32ds_v4, powered by
Intel’s Xeon Platinum 8272CL (Cascade Lake) processor. These node types were selected for the
balance of price to bandwidth and storage giving a total of 4 OSTs (Object Storage Target) and a
total of 9600 GB for the filesystem and 120 Gbps bandwidth. These initial 4 Lustre OSS units
became a building block that we multiplied later in scaling tests.
The filesystem test cluster (i.e., filesystem client nodes) was built with 4 nodes using Azure’s High
Performance compute node, Standard_HC44rs, powered by Intel’s Xeon Platinum 8168 (Skylake),
which provides 44 vCPUs paired to 352 GB of RAM, with EDR InfiniBand providing 100 Gbps
bandwidth. These are the same compute nodes we used to run the Global Workflow.
Our testing protocol used IOR to test parallel filesystem performance. For each run, we executed
a script that pre-created one file for each task and assigned that file to a specific OST in a round-
robin fashion. This process ensured each task wrote to a different OST. To ensure read tests did
not take advantage of client write-caching, we adjusted “-Q #” to equal “T+1”, in which “T” is the
number of tasks per node. This effectively shifts the read test to an adjacent node. Each task wrote
a 16 GB file with a 1 MB transfer size.
To show scaling capabilities, IOR runs were performed with various node configurations of 4, 8,
and 12 node compute clusters mounting a Lustre filesystem comprised of an equal number of
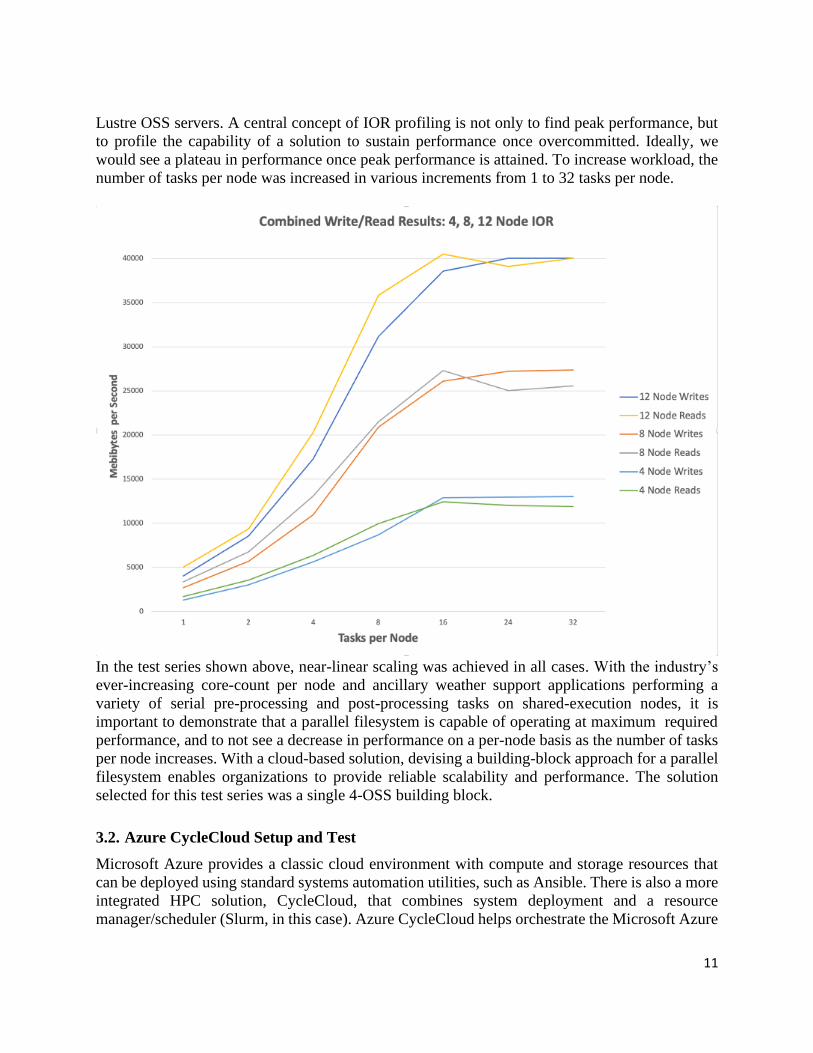
11
Lustre OSS servers. A central concept of IOR profiling is not only to find peak performance, but
to profile the capability of a solution to sustain performance once overcommitted. Ideally, we
would see a plateau in performance once peak performance is attained. To increase workload, the
number of tasks per node was increased in various increments from 1 to 32 tasks per node.
In the test series shown above, near-linear scaling was achieved in all cases. With the industry’s
ever-increasing core-count per node and ancillary weather support applications performing a
variety of serial pre-processing and post-processing tasks on shared-execution nodes, it is
important to demonstrate that a parallel filesystem is capable of operating at maximum required
performance, and to not see a decrease in performance on a per-node basis as the number of tasks
per node increases. With a cloud-based solution, devising a building-block approach for a parallel
filesystem enables organizations to provide reliable scalability and performance. The solution
selected for this test series was a single 4-OSS building block.
3.2. Azure CycleCloud Setup and Test
Microsoft Azure provides a classic cloud environment with compute and storage resources that
can be deployed using standard systems automation utilities, such as Ansible. There is also a more
integrated HPC solution, CycleCloud, that combines system deployment and a resource
manager/scheduler (Slurm, in this case). Azure CycleCloud helps orchestrate the Microsoft Azure

12
infrastructure to auto-scale compute resources as needed. It integrates with most popular
schedulers to keep the user/researcher/scientist job submission process the same.
CycleCloud was used to deploy the clusters in this project, for both the Slurm compute and the
Lustre filesystem cluster outlined above. CycleCloud required a server to be built (Standard D3 v2
VM, (Virtual Machine) was selected) in the Azure environment, that interacted with the Azure
API to deploy and configure servers into a Slurm cluster. Once the CycleCloud server was
deployed, a browser or the CycleCloud CLI could be used to interact with the CycleCloud
application.
CycleCloud included a variety of built-in templates for different schedulers and filesystems, but
we used customized templates for both of our deployed clusters. The Slurm template was
customized to provide support for mounting a Lustre filesystem, while the Lustre filesystem
template was customized to support the hardware configuration we decided to use for the Lustre
environment. This was required since the standard “LFS Community” template did not support the
specific disk attached to the VMs. It also needed customization to start a separate HSM
(Hierarchical Storage Management) node instead of running this function on the MDS in the
cluster. The HSM node was required to enable push and pull of the Lustre filesystem data to blob
storage so the Lustre cluster can be shut down when not needed, but the data can be easily restored
when it is re-deployed.
The Slurm cluster had the option of using standard images for the head node and compute nodes,
but we created a customized version of a Centos 7.7 HPC-based image available in Azure. The
customized Slurm template installed Lustre client packages on the nodes as they are deployed, but
we installed these and other needed packages into our image. This has the added benefit of
speeding up the node deployment process, since these customizations do not have to be performed
on every node at deployment time. We used the following software stack on the Slurm cluster:
• CentOS Linux release 7.7.1908 (kernel - 3.10.0-1127.19.1.el7.x86_64)
• Mellanox OFED-5.2-1.0.4
• Lustre client 2.12.5.
The HC44 VM was chosen for both head node and compute nodes and consists of:
• 44 Intel Xeon Platinum 8168 processor cores
• 8 GB of RAM per CPU core
• No hyperthreading
• AVX-512 extensions
• 100 Gb/sec Mellanox EDR InfiniBand.
When the CycleCloud cluster was started, a head node was deployed and configured as a Slurm
master. The CycleCloud deployment process generated a Slurm configuration with references for
the future compute nodes expected to be placed into service. This expected node count is calculated
from the “Max HPC Cores” configuration item in the Slurm template and requires a cluster restart
to modify. The compute nodes could either be started manually from the CycleCloud web or CLI
interfaces, or started when a user submitted a job. An idle time could be set to stop the nodes if a

13
job had not been run on them in a certain period of time or they could also be stopped manually
via the CycleCloud web interface or command line. We manually started and stopped compute
resources in the Slurm cluster, and excluded our Slurm partition from terminating nodes after a
pre-defined idle time. This allowed us to better control cost/usage of the nodes and enabled easier
debugging of application runtime issues.
An important configuration item to note is the “VM Scale Set” limit in CycleCloud. By default, it
only permits CycleCloud to run 100 VMs, too few for our test. We opened a support ticket with
Azure to increase this limit to 300 VMs.
CycleCloud had basic user and group configuration options to add userids (including ssh keys)
and groups that would be added to all of the nodes on deployment. This negated the need to add
any user/group information in the image itself. Once the CycleCloud cluster was deployed, users
could log into the head node using their own user accounts (password or public key authentication)
to compile code, submit jobs, etc. Once deployed, the cluster would be recognizable and
comfortable for users with a general HPC background.
3.3. Moving Global Workflow to Azure
To make our implementation and deployment of the GWF as portable as possible, we opted to
force the entire workflow including builds, installations, support data, input data and run
directories into a single directory tree. This simplified the process of moving the workflow from
the RedLine lab to Azure. Since we had binary compatibility, we could confidently copy that single
directory tree to the parallel filesystem we had configured on Azure, make some minor changes to
the system shell setup scripts, and run in place. If the Azure cluster had a different chip architecture
than our lab, the process of rebuilding for an alternate architecture would be a straightforward
process with the changes we had made to the build scripts.
Once we had the Lustre filesystem running (see below for a detailed description), we simply
synchronized our single directory tree between the lab and Azure using ‘rsync.’ We took care to
preserve symbolic links, which are used heavily in the GWF and LMOD, as well as other packages
in the tree.
We encountered some unexpected behavior when saving our Lustre filesystem to a “blob” in
Azure. In some cases, file ownership was lost and some symbolic links were broken. This was
easily fixed with a second ‘rsync’ command from the Redline Lab and a simple reinstallation of
the Intel compiler suite. The total size of the GWF and the low-resolution data was about 240GB.

14
4. Azure Execution
Once we created the Azure environment and migrated the GWF from the RedLine lab to Azure,
we were ready to run the GWF at first low-, then at the operational resolution.
4.1. Running Low Resolution Forecast on Azure
After the move to Azure and working out the few issues we encountered in that process, we were
able to rerun the low resolution forecasts with no issues. Given that we did not change the
resolution, and the configuration of the nodes was similar, we re-used the same configuration from
the RedLine lab in the Azure environment and instantiated a 24-node cluster to mimic what we
used in the lab.
On “spinning up” the cluster in Azure, we noted several issues that we expect will be resolved in
the future on Azure. The time to bring up the cluster was longer than expected, ranging from 5 to
15 minutes. We also found that nodes occasionally did not complete the configuration phase of the
startup, requiring a terminate-node action and subsequent restart before the node was available as
part of the cluster. We also occasionally observed the entire cluster become available, only to
immediately and spontaneously self-terminate. However, once all the nodes in the cluster were up
and running, we had no further problems with either stability, availability, or performance.
Given that we had a known working configuration for GWF with all required data for the low-
resolution run, we were able to repeat our lab run on Azure with similar results. Due to the limited
Azure budget, we shut down the cluster to work on preparing for a full-resolution run once we
confirmed the ability to run a single cycle at low resolution.
4.2. Increasing Forecast Resolution
The next step in the process was to increase the resolution to (C768/C384) using a maximum of
150 nodes, 44 cores each for a total of 6600 processors, and run that full resolution forecast on
Azure. To run at this resolution, we needed to gather not only the full resolution startup and input
data but also additional corresponding support data at that resolution. We were able to obtain the
cold-start data, subsequent observational input data, and the support data required to run at full
resolution. Using this data, we were able to “cycle” the GWF at full resolution. We did encounter
some of the same “quirks” in running via Rocoto that were resolved by reinitializing its internal
run database. What follows is a portion of a ‘rocotostat’ for our first successful run of GWF at full
resolution on the Azure platform. It can be seen that this is a clean run with exit statuses of zero
and only a single attempt at execution for each application.
SUCCESSFUL FULL RESOLUTION CYCLE CYCLE TASK JOBID STATE EXIT STATUS TRIES DURATION
================================================================================================================================
202103021800 gdasfcst 128 SUCCEEDED 0 1 2254.0
202103021800 gdaspost000 148 SUCCEEDED 0 1 304.0
202103021800 gdaspost001 139 SUCCEEDED 0 1 289.0
202103021800 gdaspost002 140 SUCCEEDED 0 1 314.0
202103021800 gdaspost003 141 SUCCEEDED 0 1 294.0
202103021800 gdaspost004 142 SUCCEEDED 0 1 305.0
202103021800 gdaspost005 143 SUCCEEDED 0 1 317.0

15
202103021800 gdaspost006 144 SUCCEEDED 0 1 299.0
202103021800 gdaspost007 145 SUCCEEDED 0 1 304.0
202103021800 gdaspost008 146 SUCCEEDED 0 1 314.0
202103021800 gdaspost009 147 SUCCEEDED 0 1 296.0
202103021800 gdaspost010 149 SUCCEEDED 0 1 305.0
202103021800 gdasvrfy 150 SUCCEEDED 0 1 7.0
202103021800 gdasarch 151 SUCCEEDED 0 1 5.0
202103021800 gdasefcs02 130 SUCCEEDED 0 1 2248.0
202103021800 gdasefcs03 131 SUCCEEDED 0 1 2244.0
202103021800 gdasefcs04 132 SUCCEEDED 0 1 2272.0
202103021800 gdasefcs05 133 SUCCEEDED 0 1 2273.0
202103021800 gdasefcs06 134 SUCCEEDED 0 1 2279.0
202103021800 gdasefcs07 135 SUCCEEDED 0 1 2225.0
202103021800 gdasefcs08 136 SUCCEEDED 0 1 2230.0
202103021800 gdasefcs09 137 SUCCEEDED 0 1 2239.0
202103021800 gdasefcs10 138 SUCCEEDED 0 1 2217.0
202103021800 gdasechgres 152 SUCCEEDED 0 1 205.0
202103021800 gdasepos000 153 SUCCEEDED 0 1 466.0
202103021800 gdasepos001 154 SUCCEEDED 0 1 467.0
4.3. Running at Full Resolution Using Only Publicly Available Data
Since a secondary objective of this project was to establish the viability of running GWF on Azure
using only publicly available input data, we attempted to start a new forecast run using only this
data. The primary data stores used by NOAA that are intended to provide the required data for
GWF runs are:
• NOMADS - https://ftp.ncep.noaa.gov/data/nccf/com/gfs/prod/
• AWS S3 Data Store - noaa-gfs-warmstart-pds.s3.amazonaws.com
4.3.1. Cold Start Data from the NOAA NOMADS FTP Site
We referenced the NOMADS (NOAA Operational Model Archive and Distribution System)
website, which makes non-restricted data for running GWF at full scale available to the public for
research and collaboration purposes. Using the available documentation as a guide, we set out to
initialize and run a new forecast cycle using only this publicly available data. Due to the volume
of the “cold-start” portion of the data, specifically the ENKF/GDAS data, NOAA only retains data
for the prior 4 cycles. The NOMADS site has somewhat limited bandwidth, and throttles access to
a single IP address that has heavy usage and eventually will block that IP address if there are too
many requests or connections in a short period of time. This caused unexpected delays in
downloading the required data. Unfortunately, we opted to start pulling the GFS data first, but by
the time its download completed, the ENKF data cycle we needed had rolled off the system,
requiring us to download the GFS data again to match the ENKF data that was then available.
On attempting to start a forecast using only this data, we quickly realized that not all of the required
data was available on the NOMADS site. We discovered there might be some workarounds that
we could attempt (e.g., renaming certain files, in some cases using the “wrong” files to fill in the
cold-start data). The workarounds would allow the model to run, but would impact the first few
cycle’s forecast results. This was a long, iterative, and somewhat tedious process, that in the end
was unsuccessful. It might not be impossible, but it was impractical given our time constraints.

16
4.3.2. Warm Start Data from the NOAA AWS Data Store
NOAA also has a big data initiative in which other data is being provided to the public via multiple
AWS S3 data stores. The data located here is different from that on the NOMADS site. This site
includes “warm-start” data to bootstrap a forecast cycle based on the output of a prior run.
However, at the time we attempted the run it did not appear that this site had all of the data needed
to do a complete forecast cycle. It was an iterative process to attempt a forecast cycle using only
this data. We were informed that at one point all of the required data for a restart was on the site,
but it was not clear that it had ever been run on anything other than a NOAA-configured machine,
which typically has other required run data or direct access to the remainder of the required data
already available in its local file systems. It is possible that the version of GWF that we were using,
which was the latest version as of May 2021, may require a different data layout or different files
than a prior version which might have run in the past. At this time, we were unable to achieve a
successful run using only the data available on the AWS data store but we are confident that NOAA
will address these issues in the future.
4.3.3. Currently Insufficient Publicly Available Data for Full GWF Forecast Cycles
In the end, we were unable to achieve a complete successful run using only publicly available data
sources. This does not mean that it is impossible, or that there might be other data of which we are
unaware, but to the best of our knowledge, the current data is insufficient. This is by no means a
permanent condition, as NOAA is actively engaged in collaboration efforts and is aware of these
limitations.

17
5. Summary
The magnitude of the various efforts by many people at NOAA and elsewhere should not be
underestimated. To unify a build process for diverse code bases for a wide variety of applications
is a significant undertaking. We applaud the efforts of NOAA and others in this regard. There are
still areas that can be improved in the GWF build process to ease this effort, especially related to
consolidating all machine-specific code to a unified location. Even this, which sounds simple, is
complicated by the fact that the changes need to be made in a way that would not adversely affect
the integrity of the stand-alone build processes of the component applications.
Regardless of these various difficulties, our goal was to assess the viability of running full
resolution weather forecasts on the Azure platform. To that end, this was a major success. We were
able to “port” the code to machines that are not NOAA-maintained and we were able to
successfully run full resolution weather forecasts on the Azure platform.
6. About RedLine
RedLine has been working with National Weather Service (NWS) and National Centers for
Environmental Prediction (NCEP) for over 20 years on both the operational and research high
performance computing contracts, administration of operational workflows, and scientific support
development. We have optimized the models at both the hardware and software levels, helped
establish the NGGPS (Next Generation Global Prediction System), are participating in the JEDI
(Joint Effort for Data assimilation Integration) project to develop the next generation data
assimilation system and contributed to the NOAA RDHPCS cloud pilot study. Our RedLine team
continues to staff HPC operations on the WCOSS II (Weather and Climate Operational
Supercomputing System) contract and will be supporting NOAA on the recently awarded EPIC
contract. RedLine’s unique experience gives us insight into how the models are developed and
implemented into operations, and how this process for research to operations could be managed in
a more unified modeling environment.