ieee transaction on education 2 syrotek - distance
TRANSCRIPT

IEEE TRANSACTION ON EDUCATION 2
SyRoTek - Distance Teaching of Mobile RoboticsMiroslav Kulich, Jan Chudoba, Karel Kosnar, Tomas Krajnık, Jan Faigl, Libor Preucil
Abstract—E-learning is a modern and effective approach fortraining in various areas and at different levels of education. Thispaper gives an overview of SyRoTek - an e-learning platform formobile robotics, artificial intelligence, control engineering andrelated domains. SyRoTek provides a remote access to a set offully autonomous mobile robots placed in a restricted area withdynamically reconfigurable obstacles, which enables solving ofa huge variety of problems. A user is able to control the robots inreal-time by his own developed algorithms as well as to analysegathered data and observe activity of the robots by providedinterfaces. The system is currently used for education at CzechTechnical University in Prague and at University of Buenos Airesand it is freely accessible to other institutions. In addition to thesystem overview, the paper presents the gained experience fromthe real deployment of the system in teaching activities.
Index Terms—Mobile robots, Telerobotics, Educational tech-nology
I. INTRODUCTION
ARTIFICIAL intelligence and mobile robotics play anincreasingly important role in our everyday life and are
becoming an inseparable part of many industrial applications.This creates higher demands on education of new professionalswho not only operate advanced robotic systems but who alsounderstand behaviors of these systems so that they are ableto design them and their particular components. Accordingto nowadays trends in education, already young children inkindergartens get familiarized with the world of science andtechnology by playing with robotic toys like Bee-Bot [1], [2].Older children at basic and secondary schools use constructionkits like Lego Mindstorms or Fischertechnik to design andbuild their own robots and program and control these modelsmaking use of a graphical software [3], [4]. These initialtraining activities introduce them to the basic principles ofrobotics and motivated to further study of technical domains.
On the other hand, these robotic toys suffer from poorsensor equipment and fragile construction and these prop-erties disqualify the use of them for real-world and long-term experiments. Universities teaching robotics use morepowerful platforms like Videre Erratic, Pioneer and build theirown robots equipped with state-of-the-art sensors. The maindrawbacks of this approach are initial cost and a necessityof a continuous maintenance that can be costly and time-consuming. This is even more significant when more than onerobot is used.
An alternative to acquisition and maintenance of the equip-ment lies in sharing the required robotic hardware amongseveral institutions. Altin [5] presents a robotic theater, wherea project team equipped with Lego Mindstorms robots visits
The authors are with the Department of Cybernetics, Faculty of ElectricalEngineering, Czech Technical University in Prague, Technicka 2, 166 27Prague, Czech Republic.(email:{kulich,imr}@labe.felk.cvut.cz)
schools in Estonia to attract them to join a national educationalrobotic project. Furthermore, virtual laboratories that allow tocontrol real robots over Internet have been investigated anddeveloped by several robotic labs. Early systems developed innineties allow to view and interact with a single hardwaredevice (either a robotic arm or a mobile robot) in a tele-operating manner [6], [7], [8], [9]. One of the first integrated,remotely controlled robotic systems is the project ARL Netro-lab [10], started at the University of Reading in 1993. It allowsto control a robotic arm and provides access to the selectedsensor equipment (sonars, infrared range finders, and a set ofcameras). The project of e-laboratory [11] combines a remoterobotic platform with a virtual laboratory.
While there exist many remote labs with robotic arms, re-motely controlled mobile robots are not so often. One of mostpopular systems has been developed in the project RobOn-Web at Swiss Federal Institute of Technology in Lausanne(EPFL) [12], [13]. Five fundamental services of the web inter-face have been defined: chat, video, robot control, virtual robotrepresentation, and logging. Several setups were developedwithin the project varying mainly in the used robot platformsand sensors: TeleRoboLab, AliceOnWeb, Koala on the Web,and Pygmalion on the Web. In the project REAL [14], fourframes are used to provide a remote access to an autonomousmobile robot. The first frame provides the basic access to thelaboratory and reservation system. The second frame realizesa tele-operated access to the robot. The additional frame allowsto use a user’s navigation module (written in C programminglanguage) to control the robot. During the autonomous robotnavigation, sensor data are collected by the user’s module andstored in the dedicated user space for a further processing. Thelast frame represents a distance learning module.
A web-based remote laboratory that gives an opportunityto remotely experiment with different navigation algorithmson a mobile robot is described in [15]. The system consistsof a web interface that allows uploading the program to therobot, access the on-board video camera, and monitor differentstate variables. The provided software framework is built ontop of the Microsoft Robotics Studio.
A combination of a simulated environment with realityhas been applied in the LearnNet project [16]. The VRMLtechnology has been used to model the real environment atthe user side, while only coordinates of objects are transmittedover the Internet. A set of robots has been accessible forusers in the Virtuallab project [17]. Several cameras monitoreda play-field and an user can use a combination of several viewsto get better overview of the robots movements. The robotscan be controlled remotely via the ActiveX technology or bya program in C++, Delphi or Java. An open source solutionbased on the Player/Stage framework [18] has been planned inanother project of a virtual robotic laboratory [19], which un-

IEEE TRANSACTION ON EDUCATION 3
fortunately seems to be no longer active. Teleworkbench [20]is a complex system that allows multi-robot experiments withKhepera and Bee-Bot robots in an environment automaticallybuilt and controlled by a gripper. It provides precise robotlocalization based on image processing, on-line video streamand video recording, GUI with augmented reality for robotcontrol, and a tool for experiment analysis. However, thissystem is currently unavailable.
The design of the presented SyRoTek (http://syrotek.felk.cvut.cz) system is inspired by the aforementioned projects,so it is similar to them in many ways. Modern technologies,tools, hardware and software components used in the systemincrease its robustness and usability and allow it to outperformthe foregoing systems at least in the following aspects:
1) Number of robots. SyRoTek offers 13 robots that arepermanently (except time when they are charged) avail-able to users. All these robots can be used at the samemoment allowing multi-robot experiments.
2) Sensor equipment. The robots are equipped with a hugeset of standard sensors used in robotics. To the best ofour knowledge, the SyRoTek system is the only sys-tem providing access to robots with laser range-finders.A modular architecture of SyRoTek robot hardwaredesign provides an opportunity to easily equip them withnew additional sensors in future.
3) Interfaces to robotic frameworks. SyRoTek providesinterfaces to Player/Stage and ROS that are softwareframeworks widely used in the robotic community. Sy-RoTek is probably the only virtual laboratory providinginterfaces for these two widely used frameworks Inour best knowledge, there is no other virtual laboratoryconnected to at least one of these frameworks. Thecurrent systems provide their own interfaces or are basedon a close-source and commercial software (Webots).
The rest of the paper is organized as follows. The nextsection gives an overview of the systems and describes itskey components. Section III describes courses taught with thesupport of the SyRoTek system, while Section IV discussesstatistics gathered when using the system for educationalpurposes. Concluding remarks are presented in Section V.
II. SYSTEM OVERVIEW
SyRoTek is a complex system consisting of many hardwareand software components that are connected together andcommunicate using defined interfaces as it is shown in Fig. 1.The main components are 13 mobile robots operating in anenclosed space – the Arena. The robots communicate throughWiFi with the Control computer that mediates a user’s accessto the robots. Moreover, it provides key functionalities ofthe system – manages the actual state of the robots and theArena, prepares the robots according to reservations, managesinformation about users and tasks they solve, stores teachingmaterial and users’ files, etc. The Video server processesvideo streams from the cameras placed over the Arena andLocalization provides information about the positions of therobots in the Arena.
The key feature of the system is a possibility to controlthe robots with applications developed by the user. The
Robots in the Arena
Video Server
WiFi
SyRoTek system
Localization of Robots
Main Control
ComputerUser’s Workstation
Localization camera
Visualization Cameras
1
0
EMMI Audio In
Audio Out
Video In1
Video In3
Video In2
Video Out
Fig. 1: SyRoTek overview.
Player/Stage framework has been selected as the main pro-gramming interface, because it is widely used in the roboticcommunity; it supports a variety of mobile robots and sensors,and contains a huge library of state-of-the-art algorithms forobstacle avoidance, planning, localization, etc. The Stage isa simulator, which substitutes a real hardware with the sameinterface. The user can therefore develop his/her code with thesimulator and the same code with no or few modifications canbe used for a real robot. Player drivers for SyRoTek have beendeveloped, which provide access to the individual robots. Theuser can therefore use these robots in the same way as anyother robots/devices via standard Player proxies.
With the increasing popularity of ROS (Robot OperatingSystem) [21], the users requested support also for this frame-work. The internal communication within the SyRoTek isbased on a developed efficient middle-ware for real-time datacollection, which does not add overheads typically causedby the message marshaling. Therefore, an additional interfacecan be easily developed and the ROS interface was addedinto SyRoTek recently; thus, the robots are accessible as ROSnodes providing all robots’ sensors.
A. Robots
The SyRoTek robot is called S1R and its body consistsof the main chassis and an optional sensor module [22]. Therobot is based on a differential drive with the maximal velocitydesigned to 0.35 m/s and operating time 8 hours. The on-boardcomputer (OBC) is the Gumstix Overo Fire module with theARM Cortex-A8 OMAP3530 processor unit operating at 600MHz and running the Linux kernel. The connection with thecontrol computer is provided by the integrated WiFi moduleof the Overo board.
The chassis serves as a carrier of basic sensors: five infraredrange finders (Sharp GP2D120), three sonars (DevantechSRF10), floor sensors (12 infrared sensors) and a compass(Philips KMZ51). A camera module based on Gumstix Caspawill be added in the next revision. In addition, temperaturesare measured in various places of the robot body. Currentsto the motors are measured to provide the so-called softwarebumpers.

IEEE TRANSACTION ON EDUCATION 4
Additional sensors can be connected as a so-called frontsensor module to the sensor bus, or directly to the OBC. Twotypes of the mountable front sensor module are available. Thefirst module is equipped with three sonars and three infraredrange sensors and it is connected to the sensor bus. The secondmodule is the laser range finder Hokuyo URG-04LX and it isconnected to the OBC via the USB interface.
B. Arena
The Arena is an enclosed space where the robots operatetogether with supporting subsystems: charging, lighting, andlocalization and visualization cameras. The size of the Arena isconstrained by an available space of the dedicated computerlab where it is located (see Fig. 2), resulting in dimensions3.5 m ×3.8 m. The Arena contains a wide open area for multi-robot exercises (e.g., formation control, flocking behaviors,etc.) and a maze-like area intended for localization, mappingand navigation tasks, see Fig. 3.
The Arena is designed to be reconfigurable without need ofhuman attendance. This feature is achieved by installing 37movable obstacles, allowed to be retracted under the surfacein less than 10 seconds. The presence of movable obstaclesallows to prepare various configurations of the Arena beforean user starts solving his/her task, and to define tasks witha dynamically changing environment. The arena workspacemay also be divided into several mutually separated closedareas to create independent working spaces. The other fiftyobstacles are fixed, but manually removable; so, a majorreconfiguration of the Arena is possible by a human. Theretractable obstacles are controlled through Player interface,and therefor an user can modify the environment even duringthe experiment (if it is permitted for the current task).
When a robot finishes the user’s task (i.e., the user’s reser-vation is finished) it autonomously navigates into a dockingstation – a dedicated place at one side of the Arena containingthirteen boxes. Each box is equipped with a charging connectorallowing the robots to be automatically recharged. A com-pletely discharged robot is fully charged in about 1-2 hours.
Fig. 2: SyRoTek Arena in the university lab (left) and S1Rrobot (right).
C. Localization
The purpose of the localization system is to determinepositions and headings of individual robots in the Arena.
The system consists of a camera mounted above the Arena,a dedicated PC, and identification patterns attached on topof each robot. The pattern consists of a black arc used forposition and heading determination, and a circular binary codeused for robot identification. An image processing is basedon convolution filtering and runs at 12.5 Hz. The system hasproven to be capable of continuous and errorless operation forextended periods of time (e.g. for weeks) with precision up±1 cm in robot position and ±3◦ in robot orientation.
Information provided by the localization system is usedmainly for system purposes (docking and preparation ofrobots) and for visualization. Users can access this informationonly, when it is explicitly allowed in the task definition bythe task creator (teacher). Knowledge of the position cansignificantly increase the development process in the casewhen the task in not primarily focused on localization butposition information is necessary for the task solution. Whenthe position determination is the aim of the task, then providedlocalization can be used as a reference.
D. Visualization
The visualization subsystem provides information about theactual situation in the Arena and allows to monitor a runningexperiment on-line. In addition, it facilitates creation of off-line videos for demonstration, archiving, and evaluations (see[23] for the detailed discussion).
The hardware part of the subsystem consists of three IPcameras placed above the Arena, one camera provides anoverview and two cameras scan the opposite sides of theArena. The video streams are transmitted to the video server,from which they are streamed to users over the Internetin several formats and resolutions. Furthermore, the streamsare stored on the server for a further download and off-line editing and viewing. A user can watch the video on-line with GStreamer, an open source video player [24], orfrom the SyRoTek web pages, through embedded viewer. Thelast possibility is to use so called “schematic view” – thehtml5 canvas in which the robots and obstacles are drawnaccording to the positions from the localization subsystemand information about a state of the retractable obstacles (seeFig. 3). This technique avoids the necessity to transmit largevideo files, therefore it is suitable for low-bandwidth networks.
Moreover, Stage has been modified to be a stand-aloneapplication, with fully customizable multi-view support andwith possibility of playing embedded video and visualizationof real sensor data. This provides another way, how users canwatch the current situation in the Arena.
E. User Interfaces
A user can access SyRoTek by three interfaces: web pages,NetBeans integrated development environment (IDE), and thecommand line interface. The web facilitates first steps with thesystem, and helps with administration and pedagogical tasks. Itprovides links to documentation, news about the system, videofiles, live video streams from the Arena, and serves as themain source of information about taught courses. At this time,the system offers several standard courses each consisting of

IEEE TRANSACTION ON EDUCATION 5
Fig. 3: Schematic (left) and real (right) view of the Arena.The movable obstacles (squares and rectangles) are in red, thefixed obstacles in black.
three types of objects: lectures, tasks, and quizzes. The lecturescontain supporting material like slides, references, etc., whilethe task specifies a particular problem to be solved togetherwith its software and hardware requirements. The quizzes areweb forms consisting of several questions that the studentsare requested to answer to prove their understanding of thepresented topic. Passing the quiz can be a mandatory conditionfor allowing the student to solve practical tasks with the robots.Moreover, one special course has been created to allow theusers (mainly researches and students solving seminar works)to work on problems not covered by the standard courses.This dedicated course is organized as a set of tasks providingdiverse configurations of the robots and sensors.
The aforementioned materials are accessible for both non-registered and registered users. Registered users can moreoverenroll the courses, solve prepared tasks, fill quizzes to thesetasks, and especially make reservation of the Arena and therobots. These users can also communicate with teachers,system administrators, and other users by provided forums.
The web also supports teacher’s activities: course creationand editing, course copying from an existing course, quiz andtask creation and automatic evaluation. A teacher can displaya list of students in a course, evaluation of particular tasks andquizzes, and manually modify the evaluation. The web (withinformation about student’s reservations) provides an overviewof student’s activities and progress and gives a teacher a fullcontrol of the teaching process.
A substantial part of student’s work with SyRoTek is relatedto writing, compiling, and debugging of source codes. PresentIDEs are powerful tools supporting the development processespecially to inexperienced users. Therefore, a set of plug-insfor the NetBeans IDE have been developed, which allows toeasily start with developing applications for SyRoTek withinthis IDE. The provided plug-ins bring the comfort of codecompleting, context help, visual debugging, and the access tocomponents of the SyRoTek system.
SyRoTek provides its own project template, which allowsthe user to choose the course and the task to be solved. Thetemplate prepared by the teacher for the given task is loadedto the IDE automatically as a new project with a skeletoncode and settings of the application to be developed as wellas Player/Stage configuration files for both simulation runs andexperiments with real robots.
The plug-ins integrate Player and Stage into the IDE.A visualization window provided by the modified Stage isintegrated into the IDE that allows to easily monitor thecurrent state of the experiment. Moreover, user’s applicationand Player can be run from the IDE either locally or at thecontrol computer at one click (with a preset configuration),while their output is redirected into the Output window withinthe IDE. The user can test the code in the Stage simulatorfirst, and after that run the application with real robots.
The plug-ins also provide access to live video streamsfrom visualization cameras, SyRoTek web, and the reservationforms. To simplify the reservation process, the course and taskare preselected as they correspond to the current project; so,the user selects a reservation time and a required duration only.
Advanced users, who prefer command-line environment,can use standard Unix tools and a set of SyRoTek scripts.These scripts provide the same functionality as the SyRoTekNetBeans plug-ins. The only exception is the reservation,which is not supported from the command-line yet.
III. COURSES
In last two years, the SyRoTek system has been used incourses taught at Czech Technical University in Prague (CTU),Czech Republic and University of Buenos Aires (UBA), Ar-gentina. The Introduction to Mobile Robotics course, as a partof School of Informatics at UBA in July 2011, was attended by70 students with different a priory knowledge of robotics (frombeginners to postgraduate students studying robotics). The aimof the course was to introduce the students to main problemsand solutions necessary to control an autonomous mobilerobot. Eight lessons providing a theoretical overview of thefield have been accompanied by practical labs, where studentssolved wall following, obstacle avoidance or wandering prob-lems independently in teams of two or three under teacher’ssupervision in a dedicated time of 180 minutes. During thewhole course, the students worked with SyRoTek as a sourceof teaching materials, communication channel with the teacher,for quizzes filling and mainly as an experimental platform. Thework in the lab was scheduled at the end of the course. Thelabs were performed in the university computer laboratory,where SyRoTek client software (NetBeans with SyRoTekplug-ins, and the extended Player/Stage) was installed.
Although majority of students had no previous experiencewith development of a robotic application and some of themalso a little programming experience, all the teams were ableto control the robot in the simulator in the dedicated time. Ofcourse, some applications were not perfect as the controlledrobots were colliding with obstacles. Three teams run theirapplication on the SyRoTek server that controlled the realrobots in Prague. The teacher projected a live video showingan actual situation in the Arena on the wall to attract thestudents. So, the students were able to see real behavior ofthe robots under control of their applications.
Students at CTU worked with the SyRoTek system inPractical Robotics course in the winter semester 2011/2012.The course is designed as introductory and its aim is to createan interest in the intelligent mobile robotics. Therefore, the
IEEE TRANSACTION ON EDUCATION 6
emphasis is given to individual student’s work under teacher’ssupervision in the laboratories. The course consists of sixtheoretical lectures lasting 90 minutes each at the beginningof the semester and fourteen lab sessions, where there is onesession per week and lasts 135 minutes. The task to be solvedis an exploration problem – control the robot in order tocreate a map of the environment. The course was attendedby 12 students split into teams of two or three. After first fewsessions, in which the students became familiarized with thesystem, they were able to work with the system individually.At the end of the semester, all the students were able toperform the exploration using the real robots.
Moreover, about ten students utilized SyRoTek during bach-elor or diploma theses in the areas of multi-robot exploration,formation control and swarm robotics.
IV. EVALUATION
The users/students of SyRoTek-based courses are encour-aged to use Subversion [25] – a version control systemfor a comfortable and convenient management of sourcecodes. Beside simplification and organization of a developmentprocess, Subversion supports code sharing among studentsworking in the same team and with a teacher, who canreview student’s code and suggests corrections by adding notesto the source codes. This absolves a teacher from tediousmanagement of e-mail correspondence and attachments.
It is also a powerful tool for plagiarism detection andavoidance - it generates different statistics of user’s usageof the system that can reveal non-standard behaviors. Forexample, it is suspicious, when there is no activity in student’srepository during the whole semester and an almost finalsolution appears just before a submission deadline.
0
20
40
60
80
100
120
2011/40
2011/41
2011/42
2011/43
2011/44
2011/45
2011/46
2011/47
2011/48
2011/49
2011/50
2011/51
2011/52
2012/01
2012/02
2012/03
2012/04
2012/05
# o
f co
mm
its
time [week]
group Agroup Bgroup Cgroup D
PAR course deadline
Fig. 4: Subversion activity of the selected teams of Practicalrobotics course in the winter semester 2011/2012.
Presentation of Subversion statistics to students can be usedto emphasize an importance of a continuous work. Fig. 4demonstrates activity in Subversion repository (a number ofcommits) of selected teams attending Practical robotics coursein the winter semester 2011/2012. It is not surprising thatactivity of all teams increased significantly before the deadline.
0
10
20
30
40
50
2011/41
2011/42
2011/43
2011/44
2011/45
2011/46
2011/47
2011/48
2011/49
2011/50
2011/51
2011/52
2012/1
2012/2
2012/3
2012/4
2012/5
2012/6
2012/7
2012/8
2012/9
2012/10
2012/11
2012/12
2012/13
2012/14
2012/15
2012/16
2012/17
2012/18
2012/19
2012/20
re
se
rva
tio
n t
ime
[h
ou
rs]
time [week]
PAR course deadlineend of semester
deadline for theses
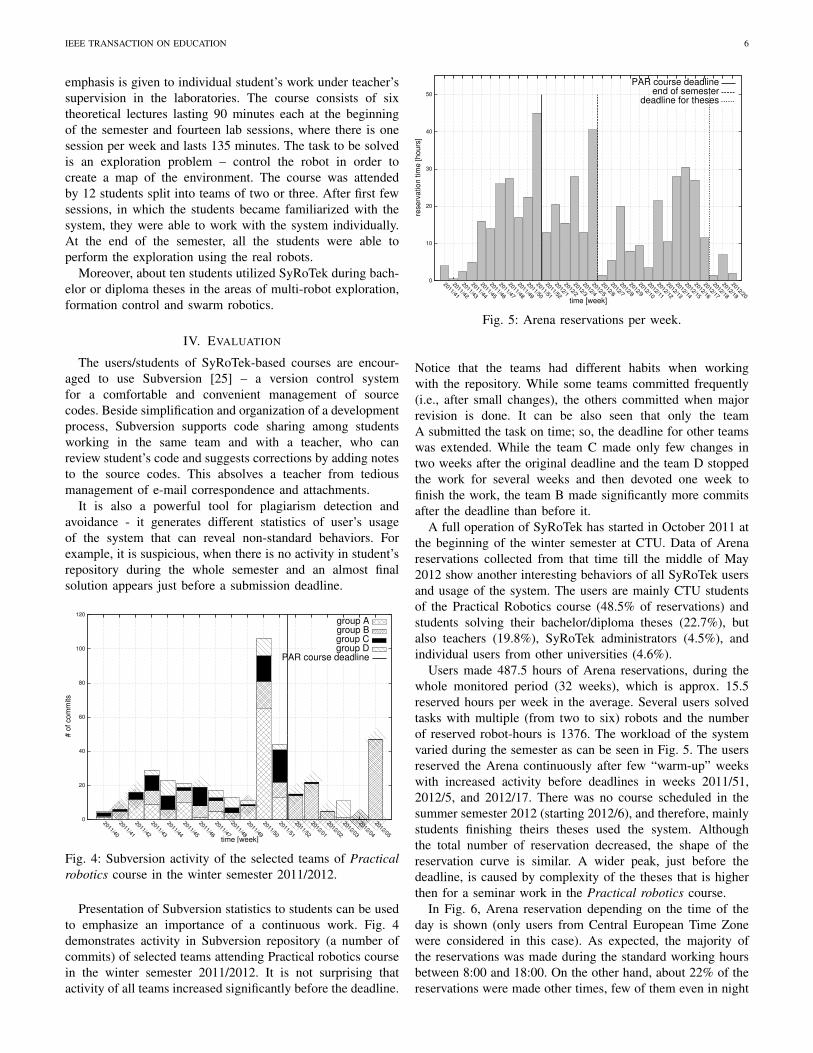
Fig. 5: Arena reservations per week.
Notice that the teams had different habits when workingwith the repository. While some teams committed frequently(i.e., after small changes), the others committed when majorrevision is done. It can be also seen that only the teamA submitted the task on time; so, the deadline for other teamswas extended. While the team C made only few changes intwo weeks after the original deadline and the team D stoppedthe work for several weeks and then devoted one week tofinish the work, the team B made significantly more commitsafter the deadline than before it.
A full operation of SyRoTek has started in October 2011 atthe beginning of the winter semester at CTU. Data of Arenareservations collected from that time till the middle of May2012 show another interesting behaviors of all SyRoTek usersand usage of the system. The users are mainly CTU studentsof the Practical Robotics course (48.5% of reservations) andstudents solving their bachelor/diploma theses (22.7%), butalso teachers (19.8%), SyRoTek administrators (4.5%), andindividual users from other universities (4.6%).
Users made 487.5 hours of Arena reservations, during thewhole monitored period (32 weeks), which is approx. 15.5reserved hours per week in the average. Several users solvedtasks with multiple (from two to six) robots and the numberof reserved robot-hours is 1376. The workload of the systemvaried during the semester as can be seen in Fig. 5. The usersreserved the Arena continuously after few “warm-up” weekswith increased activity before deadlines in weeks 2011/51,2012/5, and 2012/17. There was no course scheduled in thesummer semester 2012 (starting 2012/6), and therefore, mainlystudents finishing theirs theses used the system. Althoughthe total number of reservation decreased, the shape of thereservation curve is similar. A wider peak, just before thedeadline, is caused by complexity of the theses that is higherthen for a seminar work in the Practical robotics course.
In Fig. 6, Arena reservation depending on the time of theday is shown (only users from Central European Time Zonewere considered in this case). As expected, the majority ofthe reservations was made during the standard working hoursbetween 8:00 and 18:00. On the other hand, about 22% of thereservations were made other times, few of them even in night

IEEE TRANSACTION ON EDUCATION 7
0
10
20
30
40
50
60
2 4 6 8 10 12 14 16 18 20 22 24
rese
rve
d t
ime
[h
ou
r]
time of day [hour]
Fig. 6: Arena reservations depending on a daytime.
hours. It is also shown that users made reservations accordingto theirs preferences and not according to availability ofthe teacher. Moreover, they work not only from universitylaboratories, but also from their homes and dormitories, whichis more comfortable for them. This is impossible with standardsystems, where an assistance of a teacher is needed and robotichardware has to be used in dedicated laboratories.
V. CONCLUSION
SyRoTek is a complex robotic e-learning system. Besidesstandard single-robot tasks, it allows its users to perform multi-robot experiments with robots having a rich sensor equipmentin a high variety of scenarios. The users especially appreciatethat they are able to develop a robotic application in a shorttime and run it on a real hardware without having to solveproblems with hardware management, robot charging, andenvironment preparation. They welcome, too, that they canperform experiments not only from dedicated places in work-ing hours but also at a time and places that suit them the most.Moreover, NetBeans IDE with the prepared code templatesincrease the speed of the development process (especially atthe beginning of development) as it provides all modern toolsfor writing, debugging, and running a code and allows theusers to focus on solving the task itself.
Contrary to the previous mobile robotics courses taught atthe CTU, where less than 20% of the students have beenable to implement and test their assignments with real robotswithin a given deadline, all the students using the SyRoTeksystem completed their assignments entirely. SyRoTek alsoincreased student’s interest about mobile robotics courses.While the attendance of the Practical robotics course and itspredecessors was almost stable (around 10 students) in the lastfive years, 24 students enrolled the course for the next year.
ACKNOWLEDGMENT
This work has been supported by the Technology Agencyof the Czech Republic under the project No. TE01020197, byMinistry of Education of the Czech Republic under the ProjectNo. 7AMB12AR022. The Ministry of Science of Argentinasupported this work by project ARC/11/11.
REFERENCES
[1] J. Pekarova, “Using a programmable toy at preschool age: Why andhow,” in Int. Conf. Simulation Modeling and Programming for Au-tonomous Robots, 2008, pp. 112–121.
[2] K. Stockelmayr, M. Tesar, and A. Hofmann, “Kindergarten childrenprogramming robots: A first attempt,” in Conf. Robotics in Education,2011, pp. 185–192.
[3] A. Kazerouni, B. Shrewsbury, and C. Padgett, “Using the NXT as aneducational tool in computer science classes,” in 49th Annual SoutheastRegional Conf., ser. ACM-SE ’11. New York, NY, USA: ACM, 2011,pp. 67–69.
[4] P. D. Cristoforis, S. Pedre, M. Nitsche, T. Fischer, F. Pessacg, andC. Di Pietro, “A behavior-based approach for educational roboticsactivities,” IEEE Trans. Edu., to be published in Special Issue onRobotics Education, February 2013.
[5] H. Altin, M. Pedaste, and A. Aabloo, “Robotics in education : Methodsof getting schools involved in robotics project in Estonia,” in Int.Conf. Simulation, Modeling, and Programming for Autonomus Robots,Workshop Teaching Robotics, Teaching with Robotics, 2010, pp. 421–428.
[6] M. L. McLaughlin, K. K. Osborne, and N. B. Ellison, “Virtual commu-nity in a telepresence environment,” in Virtual culture, S. G. Jones, Ed.Thousand Oaks, CA, USA: Sage Publications, Inc., 1997, pp. 146–168.
[7] Telescope. (2010, July 27). [Online]. Available: http://www.telescope.org[8] W. Burgard. (2012, September 12) RHINO-Project. [Online]. Available:
http://www.iai.uni-bonn.de/∼rhino/tourguide[9] Robotoy. (2012, March 7). [Online]. Available: http://robotoy.elec.uow.
edu.au[10] G. McKee and R. Barson, “NETROLAB: a networked laboratory for
robotics education,” IEE Colloq. Robotics and Education, April 1995.[11] C. Tzafestas, N. Palaiologou, and M. Alifragis, “Virtual and remote
robotic laboratory: comparative experimental evaluation,” IEEE Trans.Edu., vol. 49, no. 3, pp. 360 –369, August 2006.
[12] R. Siegwart, P. Balmer, C. Portal, C. Wannaz, R. Blank, and G. Caprari,“RobOnWeb: a setup with mobile mini-robots on the web,” in Beyondwebcams. Cambridge, MA, USA: MIT Press, 2002, pp. 117–135.
[13] R. Siegwart and P. Sauc, “Interacting mobile robots on the web,” inIEEE Int. Conf. on Robotics and Automation, May 1999.
[14] E. Guimaraes, A. Maffeis, J. Pereira, and et. al, “REAL: A virtuallaboratory for mobile robot experiments,” IEEE Trans. Edu., vol. 46,February 2003.
[15] I. Dinulescu, D. Popescu, and A. Predescu, “Remote learning environ-ment for visual based robot navigation,” in EAEEIE Annual Conf., July2008, pp. 26 –30.
[16] I. Mas’r, A. Bischoff, and M. Gerke, “Remote experimentation in dis-tance education for control engineers,” in Virtual University, Bratislava,Slovakia, December 2004.
[17] P. Petrovic and R. Balogh, “Deployment of remotely-accessible roboticslaboratory,” Int. Journal of Online Engineering, vol. 8, Special Issue 2:”exp.at’11”, pp. 31–35, March 2012.
[18] B. P. Gerkey, R. T. Vaughan, and A. Howard, “The Player/Stage project:Tools for multi-robot and distributed sensor systems,” in Int. Conf.Advanced Robotics, 2003, pp. 317–323.
[19] Vlab. (2006, September 26). [Online]. Available: http://vlab.pjwstk.edu.pl
[20] A. Tanoto, U. Ruckert, and U. Witkowski, “Teleworkbench: A tele-operated platform for experiments in multi-robotics,” in Web-BasedControl and Robotics Education, ser. Intelligent Systems, Control andAutomation: Science and Engineering, S. Tzafestas and S. G. Tzafestas,Eds. Springer Netherlands, 2009, vol. 38, pp. 267–296.
[21] M. Quigley, K. Conley, B. P. Gerkey, J. Faust, T. Foote, J. Leibs,R. Wheeler, and A. Y. Ng, “ROS: an open-source robot operatingsystem,” in ICRA Workshop on Open Source Software, 2009.
[22] J. Chudoba, J. Faigl, M. Kulich, K. Kosnar, T. Krajnık, and L. Preucil,“A Technical Solution of a Robotic E-learning System in the SyRoTekproject,” in Int. Conf. Computer Supported Education. Setubal:INSTICC Press, 2011, pp. 412–417.
[23] M. Kulich, J. Faigl, J. Chudoba, and K. Kosnar, “A VisualizationSystem for Teaching Intelligent Mobile Robotics in SyRoTek,” in Int.Conf. Simulation, Modeling, and Programming for Autonomus Robots,Workshop Teaching Robotics, Teaching with Robotics. Berlin: Springer,2010.
[24] GStreamer. (2012, September 10). [Online]. Available: http://gstreamer.freedesktop.org/
[25] M. Pilato, Version Control With Subversion. Sebastopol, CA, USA:O’Reilly & Associates, Inc., 2004.