horizontal wells
DESCRIPTION
a small project give an idea about horizontal wells in frenchTRANSCRIPT
Prepared By :
NADJIBHAS
THANK YOU
1. Introduction
2. Définition d’un puits horizontal
3. Les types de puits horizontaux
4. Pourquoi on fore des drains Horizontaux ?
5. Les réservoirs candidats pour les puits horizontaux
6. Ingénierie du forage horizontal
7. Le moteur PDM (Positive Displacement Motor)
8. Equipements amagnétiques
9. Equipements de mesure
10. Comparaison technique entre un puits vertical et
un puits horizontal
11. conclusion
1
1. Introduction
Le forage horizontal est réellement né en Juin 1980 avec le forage
du puits Elf Aquitaine Lacq-90 dans le sud de la France.
Il est probable que quelques puits horizontaux avaient été forés
avant cette date, entre autre en Russie, volontairement ou non, mais sans
réel succès ni développement jusqu'aux années 80. Lacq-90 fut suivi par
Lacq-91, Casteralou toujours en France puis Rospomare-6d en Italie et
Pélican lake au Canada.
A la fin des années 80 des centaines puis des milliers de puits
horizontaux étaient forés chaque année.
Dans notre pays, c’est en 1992 qu’a eu lieu le premier forage
horizontal. Ce premier puits horizontal a été réalisée à Hassi R’mel pour
l’exploitation de l’anneau d’huile dont le débit est de deux à trois fois plus
élevé que les puits verticaux voisins.
Un tel succès ne s'explique que par les excellents résultats obtenus
grâce à la technique du forage horizontal, malgré quelques ratés, surtout
au début. Ce succès a été rendu possible par une rapide évolution
technologique des équipements, à savoir
développement des outils de mesures en temps réel
développement d'une nouvelle génération de moteurs de fond
évolution des fluides de forage et développement de nouveau
équipement de contrôle des solides
meilleure compréhension du comportement du train de tiges.
2
2. Définition d’un puits horizontal:
Un puits horizontal peut être définit comme étant l’assemblage des
parties suivantes:
une partie verticale ou inclinée qui s’étend de la surface jusqu’au
point où l’inclinaison augmente, plus communément appelé "kick-
off point".
une partie l’inclinaison ne cesse d’augmenter formant ainsi un arc
se terminant généralement par un point d’entrée (entry point)
symbolisant l’atterrissage dans le réservoir.
un partie tangente à l’arc appelée « drain horizontal » et qui se
prolonge jusqu’à ce que le point ciblé dans le réservoir soit atteint.
3. Les types de puits horizontaux La terminologie de puits horizontaux couvre les puits où le réservoir est
percé par une section horizontale ou subhorizontale (80 à 100 degrés).
Trois variantes peuvent être considérées selon le gradient de montée et
donc le rayon de courbure de l’arc reliant la partie verticale à la parie
horizontale, mais aussi selon la longueur du drain traversant la formation:
Court rayon (gradients < 10 deg/m)
Moyen rayon (gradients de 3 à 10 deg/10m)
Long rayon (gradients de 1 à 2 deg/10m)
a.Les puits à rayon court ou ultra court :
Ces puits ont un rayon de courbure < 50m et peuvent atteindre même
5m, et nécessitent des équipements spécifiques tells que des moteurs
articulés et des garnitures articulées. En raison de difficultés de contrôle
de la trajectoire la longueur de drain est limitée à environ
300m, et de tels puits sont difficiles à compléter, limitant l’utilisation de
cette technique.
b.Les puits à moyen rayon :
Ces puits ont un rayon de courbure entre 50m et 200m (3 < deg/10m <
7), et nécessitent des équipements adaptés tels que des moteurs de
fond coudés et ajustables en surface.
Avec un tel rayon de courbure on peut aller jusqu’à 600m de drain
horizontal si la trajectoire est bien réalisée (affinée).
c.Les puits à long rayon :
Ces puits ont un rayon de courbure >200m, (gradients < 3 deg/10m) et
permettent l’utilisation de toutes les procédures de forage
conventionnelles, forage avec rotary, carottage, tubage, etc.…et
ceci avec des équipements standards et pour des puits sans restriction
3
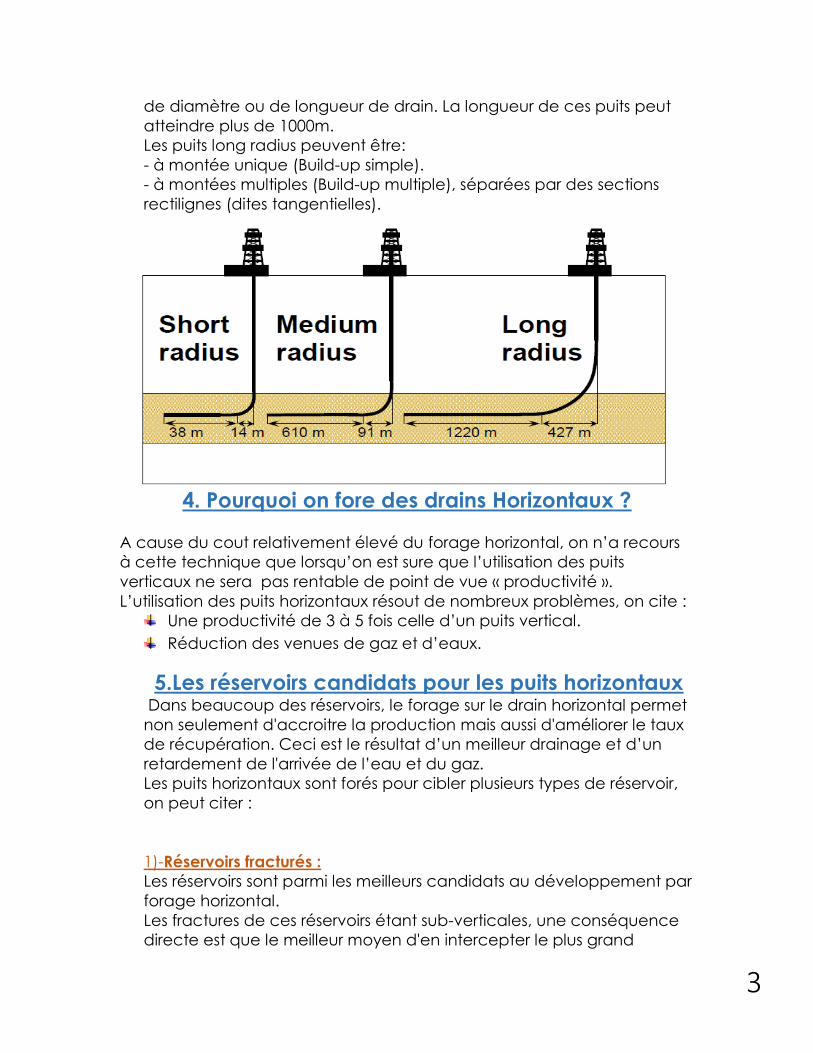
de diamètre ou de longueur de drain. La longueur de ces puits peut
atteindre plus de 1000m.
Les puits long radius peuvent être:
- à montée unique (Build-up simple).
- à montées multiples (Build-up multiple), séparées par des sections
rectilignes (dites tangentielles).
4. Pourquoi on fore des drains Horizontaux ?
A cause du cout relativement élevé du forage horizontal, on n’a recours
à cette technique que lorsqu’on est sure que l’utilisation des puits
verticaux ne sera pas rentable de point de vue « productivité ».
L’utilisation des puits horizontaux résout de nombreux problèmes, on cite :
Une productivité de 3 à 5 fois celle d’un puits vertical.
Réduction des venues de gaz et d’eaux.
5.Les réservoirs candidats pour les puits horizontaux Dans beaucoup des réservoirs, le forage sur le drain horizontal permet
non seulement d'accroitre la production mais aussi d'améliorer le taux
de récupération. Ceci est le résultat d’un meilleur drainage et d’un
retardement de l'arrivée de l’eau et du gaz.
Les puits horizontaux sont forés pour cibler plusieurs types de réservoir,
on peut citer :
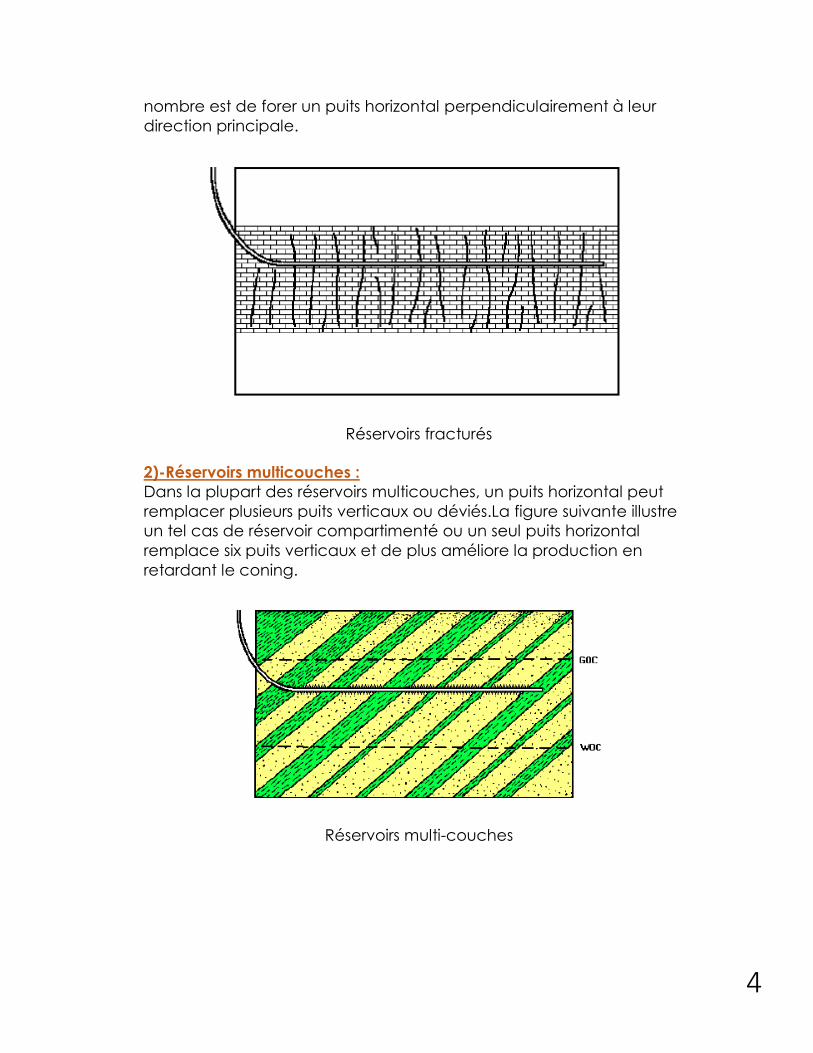
1)-Réservoirs fracturés :
Les réservoirs sont parmi les meilleurs candidats au développement par
forage horizontal.
Les fractures de ces réservoirs étant sub-verticales, une conséquence
directe est que le meilleur moyen d'en intercepter le plus grand
4
nombre est de forer un puits horizontal perpendiculairement à leur
direction principale.
Réservoirs fracturés
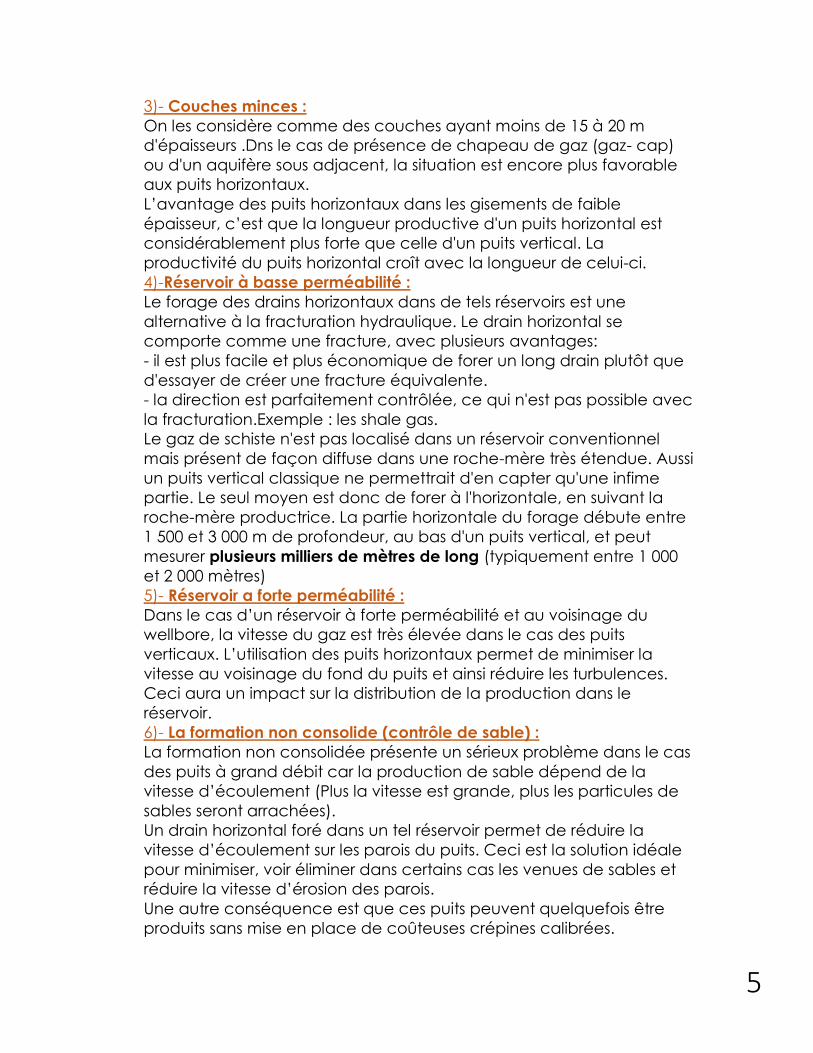
2)-Réservoirs multicouches :
Dans la plupart des réservoirs multicouches, un puits horizontal peut
remplacer plusieurs puits verticaux ou déviés.La figure suivante illustre
un tel cas de réservoir compartimenté ou un seul puits horizontal
remplace six puits verticaux et de plus améliore la production en
retardant le coning.
Réservoirs multi-couches
5
3)- Couches minces :
On les considère comme des couches ayant moins de 15 à 20 m
d'épaisseurs .Dns le cas de présence de chapeau de gaz (gaz- cap)
ou d'un aquifère sous adjacent, la situation est encore plus favorable
aux puits horizontaux.
L’avantage des puits horizontaux dans les gisements de faible
épaisseur, c’est que la longueur productive d'un puits horizontal est
considérablement plus forte que celle d'un puits vertical. La
productivité du puits horizontal croît avec la longueur de celui-ci.
4)-Réservoir à basse perméabilité :
Le forage des drains horizontaux dans de tels réservoirs est une
alternative à la fracturation hydraulique. Le drain horizontal se
comporte comme une fracture, avec plusieurs avantages:
- il est plus facile et plus économique de forer un long drain plutôt que
d'essayer de créer une fracture équivalente.
- la direction est parfaitement contrôlée, ce qui n'est pas possible avec
la fracturation.Exemple : les shale gas.
Le gaz de schiste n'est pas localisé dans un réservoir conventionnel
mais présent de façon diffuse dans une roche-mère très étendue. Aussi
un puits vertical classique ne permettrait d'en capter qu'une infime
partie. Le seul moyen est donc de forer à l'horizontale, en suivant la
roche-mère productrice. La partie horizontale du forage débute entre
1 500 et 3 000 m de profondeur, au bas d'un puits vertical, et peut
mesurer plusieurs milliers de mètres de long (typiquement entre 1 000
et 2 000 mètres)
5)- Réservoir a forte perméabilité :
Dans le cas d’un réservoir à forte perméabilité et au voisinage du
wellbore, la vitesse du gaz est très élevée dans le cas des puits
verticaux. L’utilisation des puits horizontaux permet de minimiser la
vitesse au voisinage du fond du puits et ainsi réduire les turbulences.
Ceci aura un impact sur la distribution de la production dans le
réservoir.
6)- La formation non consolide (contrôle de sable) :
La formation non consolidée présente un sérieux problème dans le cas
des puits à grand débit car la production de sable dépend de la
vitesse d’écoulement (Plus la vitesse est grande, plus les particules de
sables seront arrachées).
Un drain horizontal foré dans un tel réservoir permet de réduire la
vitesse d’écoulement sur les parois du puits. Ceci est la solution idéale
pour minimiser, voir éliminer dans certains cas les venues de sables et
réduire la vitesse d’érosion des parois.
Une autre conséquence est que ces puits peuvent quelquefois être
produits sans mise en place de coûteuses crépines calibrées.
6
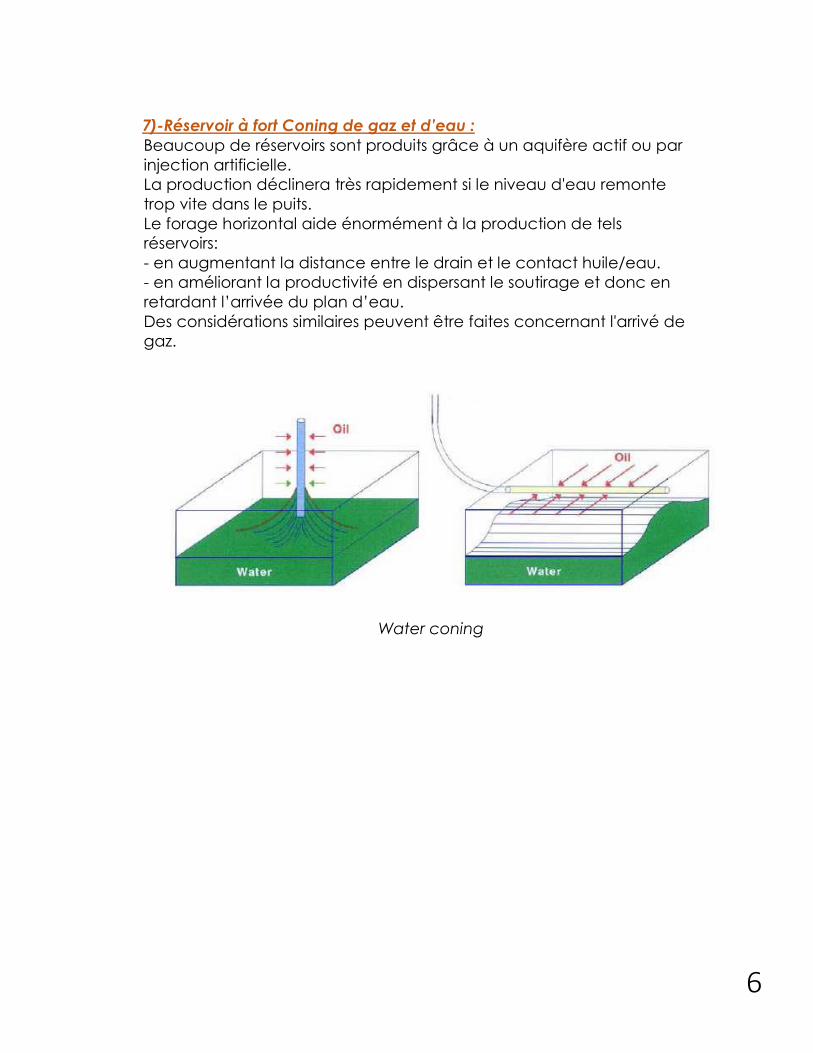
7)-Réservoir à fort Coning de gaz et d’eau :
Beaucoup de réservoirs sont produits grâce à un aquifère actif ou par
injection artificielle.
La production déclinera très rapidement si le niveau d'eau remonte
trop vite dans le puits.
Le forage horizontal aide énormément à la production de tels
réservoirs:
- en augmentant la distance entre le drain et le contact huile/eau.
- en améliorant la productivité en dispersant le soutirage et donc en
retardant l’arrivée du plan d’eau.
Des considérations similaires peuvent être faites concernant l'arrivé de
gaz.
Water coning
7
6. Ingénierie du forage horizontal
6.1 Programme de forage
a. Détermination du profil du puits
La détermination du profil du puits dépend de nombreux paramètre et
doit répondre à des impératifs à la fois géométriques et techniques,
quelquefois contradictoires. On peut citer:
• Le déplacement horizontal requis au point d'entrée :
En particulier le déplacement horizontal minimum est égal au rayon de
courbure d'un puits à build-up simple.
Un long déplacement rendra obligatoire le forage d'une section
tangentielle et donc un Kick-off relativement haut.
• La profondeur verticale du réservoir
Un réservoir peu profond peut imposer des conditions géométriques
sévères:
utilisation de rayons moyens ou même courts
utilisation de rigs inclinés
• La précision de la connaissance de la profondeur verticale au point
d'entrée
Une incertitude de quelques mètres oblige à prévoir un atterrissage à
inclinaison limitée (70 à 80 degrés)
• L'épaisseur du réservoir
Un réservoir peu épais nécessite un atterrissage à haute inclinaison (> 85
deg)
• La longueur du drain
La longueur du drain dépend essentiellement des caractéristiques de
production mais peut être techniquement limitée, par exemple dans le
cas de réservoirs peu profonds (Rayon de courbure petit = déplacement
horizontal réduit).
• La nature des formations traversées
- stabilité à haute inclinaison
La stabilité de certaines formations diminue fortement lorsque l'inclinaison
augmente.
8
En fonction de l'inclinaison, la stabilité d'une formation peut être
complètement différente selon l'inclinaison à laquelle elle est traversée. Les
problèmes d'instabilité augmentent avec l'inclinaison.
Des études géotechniques préliminaires sont recommandées lorsqu'un tel
risque existe. On essaye toujours d’anticiper le comportement des
formations.
- capacité à permettre des gradients importants et le risque de formation
de key seats.
- les pertes
Des pertes importantes ou totales peuvent conduire à modifier le
programme du puits en raison de leur influence sur le fonctionnement des
moteurs de fond et des MWD à Mud pulses.
• La nature du réservoir
b. Définition de la cible
La cible est déterminée par les géologues et ingénieurs réservoirs.
Il est quelquefois demandé d'atteindre plusieurs cibles lors d'un même
forage, ceci pouvant conduire à la réalisation de trajectoires tri
dimensionnelles.
Les coordonnées X, Y & Z de chacune des cibles demandées devront être
fournies dans le système déterminé.
La préparation d'un puits horizontal nécessite une définition plus élaborée
que celle des autres puits, cela inclut les paramètres suivants :
o définition du point d'entrée
o tolérance verticale
o direction du drain et tolérance 3-d autour du drain.
En forage conventionnel, les cibles sont le plus souvent données comme
des surfaces dans un plan horizontal, tandis que pour les puits déviés, on
utilise plutôt un système tridimensionnel.
Les définitions les plus courantes sont des
secteurs ("part de tarte")
parallélépipèdes
cylindres
c.Détermination du fluide de forage
Ce paramètre est important car il influe sur plusieurs facteurs :
-le nettoyage du puits
-les risques de colmatage ou d'endommagement
9
- la stabilité des parois
- la longueur du drain
La longueur optimum du drain doit être déterminée.
d.Détermination du type de complétion
Le type de complétion à mettre en place peut conditionner:
- le diamètre du drain (et donc des phases précédentes)
- la nécessité de limiter les gradients de montée
- la présence d'une phase tangentielle d'inclinaison limitée ou le maintien
de la verticalité aussi bas que possible.
e. Détermination du (des) rayon(s) de courbure
Le choix du rayon de courbure de la ou des phases de montées en
inclinaison doit être fait en tenant compte des objectifs du puits, y compris
sa complétion.
Les éléments suivants doivent être pris en compte:
• La faculté des formations à permettre la déflexion
Certaines formations ne permettent pas d'obtenir des gradients importants.
• La méthode de forage dirigé choisie
Un gradient important dans la première phase rendra la rotation impossible.
• Les différents équipements qui seront descendus dans le puits
Certains équipements pourraient ne pas accepter une flexion importante,
particulièrement si leur diamètre extérieur est proche du diamètre intérieur
du puits (par exemple un hanger ou un packer).
• Les phases de montée sont généralement plus lentes et plus difficiles que
les sections droites. Il peut être intéressant de réduire la longueur des phases
de montée en utilisant des gradients importants.
Important : Il faut remarquer que certaines des considérations ci-dessus
sont contradictoires et les meilleurs compromis possibles doivent être
trouvés.
1) Long rayon (long radius) :
Les courbures à long rayon permettent l'utilisation de toutes les
procédures de forage conventionnelles, forage rotary, carottage,
tubages, etc.., ceci avec des équipements standards et pour des puits
sans restriction de diamètre ou de longueur de drain.
10
2) Rayon moyen (medium radius) :
Les courbures à rayon moyen nécessitent des équipements adaptés tels
que des moteurs à double coude. La rotation du train de tiges est
impossible pendant les phases d'utilisation de ces moteurs obligeant à
réaliser les phases de montée uniquement en sliding.
La majorité des équipements standards peuvent être utilisés.
3) Rayon court (short radius) :
Les courbures à court moyen nécessitent des équipements spécifiques
tels que moteurs articulés et garnitures articulées. Divers équipements sont
disponibles selon les compagnies de services.
En raison des difficultés de contrôle de la trajectoire la longueur des drains
est limitée à environ 300 mètres et de tels puits sont difficiles à compléter,
limitant l'utilisation de cette technique
f.Détermination de la profondeur du Kick-off
• Choisir une formation favorable
Toutes les formations ne sont pas favorables au démarrage de la montée
en inclinaison. Des formations trop dures ou trop tendres de permettent pas
une montée efficace.
• Tenir compte du système de mesure
L'orientation d'un puits est une procédure qui peut être longue.
A grande profondeur les divers frottements rencontrés et la torsion
nécessaire du train de tiges rendent l'orientation plus longue sinon plus
difficile.
Si un MWD est utilisé la profondeur du kick-off n'aura que peu d'influence
sur la durée de la procédure d'orientation. Par contre si un système single-
shot est utilisé la durée de l'orientation sera proportionnelle à la profondeur.
• Si le puits fait partie d'une plate-forme multipuits le choix de la profondeur
du kick-off doit tenir compte des trajectoires des autres puits.
g.Profil théorique d’un puits horizontal
La trajectoire théorique d’un puits horizontal est composée de deux plans
11
-Un plan vertical dans lequel en trouve la profondeur et le déplacement
-Un plan horizontal qui représente la direction du puits par rapport au
nord.
6.2 Contrôle et suivi de la trajectoire
Introduction :
La détermination précise de la position d'un puits est nécessaire à la fois
pour des raisons techniques et administratives. Un contrôle continu de la
trajectoire d'un puits dévié est donc nécessaire afin d'établir sa position
réelle:
En cours de forage :
Pour établir la position du puits ;
Pour contrôler son cheminement et éventuellement corriger sa
trajectoire de manière à atteindre l'objectif, ceci particulièrement en
forage horizontal ou sur tout forage où il est nécessaire de suivre la
trajectoire théorique au plus près ;
Pour rester dans le réservoir en cas de forage horizontal.
Il n'existe pas d'outil de mesure permettant de déterminer directement la
position d'un puits, les seuls paramètres pouvant être mesurés étant
l'inclinaison et l'azimut, la détermination possible étant alors un calcul
mathématique utilisant ces paramètres.
Divers outils existent permettant de mesurer ces paramètres, plus ou moins
sophistiqués, installés au fond de manière permanente ou temporaire.
La détermination de la position du puits de même que la conduite de la
trajectoire peuvent être améliorées par l'utilisation d'outils permettant la
mesure et la transmission en temps réel (MWD), les plus sophistiqués
mesurant également certains paramètres d'évaluation de la formation
(LWD) et conduisant au "GeoSteering", c'est à dire à un contrôle de
trajectoire, non plus seulement géométrique, mais tenant compte des
caractéristiques de la formation.
En fin de puits :
Pour rapports administratifs ;
12
Pour archivage permettant le forage d'autres puits ;
Pour contrôle de la production du champ.
Ce contrôle peut et doit être effectué en temps réel, il est quelquefois
complété pour confirmation par des mesures à posteriori. Ce suivi doit être
continu pendant tout le forage du puits et met en œuvre des techniques
variées. Il peut être résumé comme suit:
La mesurer des trois paramètres est nécessaires pour déterminer les
coordonnées X,Y,Z représentant la position du puits. L'azimut et
l'inclinaison sont mesurés en fond de puits, le troisième paramètre étant
la profondeur mesurée des instruments de mesure, obtenue par mesure
de la longueur du train de tiges.
Le type d'outil à mettre en œuvre est déterminé par le programme de
forage, de même que la fréquence des mesures. Cette fréquence peut
être adaptée en fonction des besoins des opérations.
Le calcul de la position du puits sera effectué dès l'obtention des
mesures et selon la méthode de calcul déterminée dans le programme
de forage.
Représenter et extrapoler : Les résultats obtenus seront utilisés pour
interpréter le comportement de la trajectoire et extrapoler en anticipant
les tendances naturelles et si nécessaire en considérant les possibilités
de correction "raisonnable".
Les éléments ci-dessus permettront alors de décider de la suite des
opérations, continuité ou mise en oeuvre des moyens de correction.
IV-1- Calculs de trajectoire :
Le but est d'établir la position du puits dans un repère géométrique (et
donc géographique) donné.
IV-1-1- Principe du calcul :
Le calcul est un calcul point par point, dont l'origine est le point de
surface.
La méthode utilisée consiste à effectuer des mesures à intervalles réguliers,
et à l'aide des paramètres obtenus, de déterminer de proche en proche
et par le calcul la position du puits.
Cette position sera considérée comme la position réelle du puits. Si
nécessaire les erreurs dues aux opérations de mesure seront prises en
13
compte pour évaluer le domaine d'incertitude dans lequel se situe
réellement le puits.
A une profondeur x du puits, les paramètres de base sont:
La profondeur verticale V x = 0 x (V)
La coordonnée Est/Ouest X x = 0 x (X)
La coordonnée Nord/Sud Y x = 0 x (Y)
Avec:
TVD : Variation de la profondeur verticale entre deux mesures
consécutives ;
Est : Variation de coordonnée Est/Ouest entre deux mesures
consécutives ;
Nord : Variation de coordonnée Nord/Sud entre deux mesures
consécutives.
Ces trois paramètres ne sont pas directement mesurables. Il faut donc faire
appel à des paramètres mesurables et à un calcul de transformation.
Les paramètres physiquement mesurables sont la profondeur mesurée
(longueur du train de tiges), l'inclinaison et l'azimut (outil de mesures de
fond).
MDx : Profondeur mesurée à la station x mètre
Ix : Inclinaison à la station x degré
Ax : Azimut à la station x degré
Soit une longueur et deux angles à transformer en trois longueurs.
Le calcul de transformation devra fournir les paramètres élémentaires V,
X et Y.
Les autres paramètres tel que le déplacement horizontal seront déduits de
ces éléments.
- Méthodes de calcul :

14
Il n'existe pas de solution purement mathématique pour répondre au
problème de calcul de trajectoire. Un grand nombre de méthodes ont été
établies pour déterminer la position du puits dans l'espace géométrique.
Elles dérivent toutes de considérations trigonométriques et sont plus ou
moins précises en fonction des hypothèses de bases effectuées quand à la
forme de la section joignant deux points consécutifs (segment de droite,
arc de cercle, etc.).
Méthode d’angle moyenne (average angle method) ;
Méthode tangentielle ;
Méthode de rayon de courbure (radius of curvate method) ;
Méthode de courbure minimum (minimum curvate méthod) ;
Méthode tangentielle moyennée ;
Méthode l’accélération compensée (mercury).
Les méthodes les plus utilisées sont la méthode d’angle moyen (en cas de
calcul manuel), la méthode du rayon de courbure et de courbure
minimum.
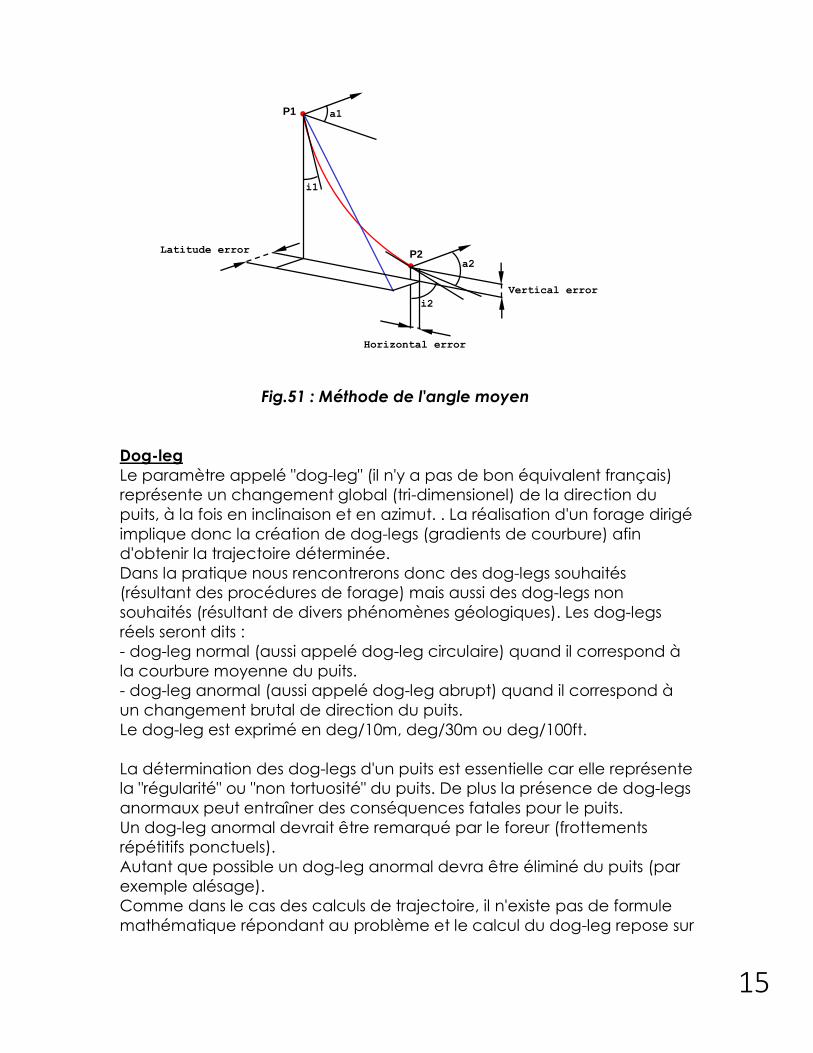
- Méthode d’angle moyenne (average angle method) :
La méthode d’angle moyenne utilise la moyenne des mesures
d’inclinaison et d’azimut effectuées dans les extrémités de chaque palier
de la longueur forée.
La section forée entre deux stations consécutives est assimilée à un
segment de droite ayant pour inclinaison la moyenne des inclinaisons et
pour azimut la moyenne des azimuts. Cette méthode est très simple et juste,
exécutée à l’aide d’une calculatrice, elle nécessite pas des manipulations
mathématiques sophistiquées (Fig.51).
Les calculs élémentaires sont obtenus par les formules suivantes:
TVD = MD x cos ((I1+I
2) / 2) mètres ou pieds
H = MD x sin ((I1+I
2) / 2) mètres ou pieds
Est = MD x sin ((I1+I
2) / 2) x sin ((A
1+A
2) / 2) mètres ou pieds
Nord = MD x sin ((I1+I
2) / 2) x cos ((A
1+A
2) / 2) mètres ou pieds
15
Fig.51 : Méthode de l'angle moyen
Dog-leg
Le paramètre appelé "dog-leg" (il n'y a pas de bon équivalent français)
représente un changement global (tri-dimensionel) de la direction du
puits, à la fois en inclinaison et en azimut. . La réalisation d'un forage dirigé
implique donc la création de dog-legs (gradients de courbure) afin
d'obtenir la trajectoire déterminée.
Dans la pratique nous rencontrerons donc des dog-legs souhaités
(résultant des procédures de forage) mais aussi des dog-legs non
souhaités (résultant de divers phénomènes géologiques). Les dog-legs
réels seront dits :
- dog-leg normal (aussi appelé dog-leg circulaire) quand il correspond à
la courbure moyenne du puits.
- dog-leg anormal (aussi appelé dog-leg abrupt) quand il correspond à
un changement brutal de direction du puits.
Le dog-leg est exprimé en deg/10m, deg/30m ou deg/100ft.
La détermination des dog-legs d'un puits est essentielle car elle représente
la "régularité" ou "non tortuosité" du puits. De plus la présence de dog-legs
anormaux peut entraîner des conséquences fatales pour le puits.
Un dog-leg anormal devrait être remarqué par le foreur (frottements
répétitifs ponctuels).
Autant que possible un dog-leg anormal devra être éliminé du puits (par
exemple alésage).
Comme dans le cas des calculs de trajectoire, il n'existe pas de formule
mathématique répondant au problème et le calcul du dog-leg repose sur
a1
i2
P2 a2
i1
P1
Horizontal error
Vertical error
Latitude error
16
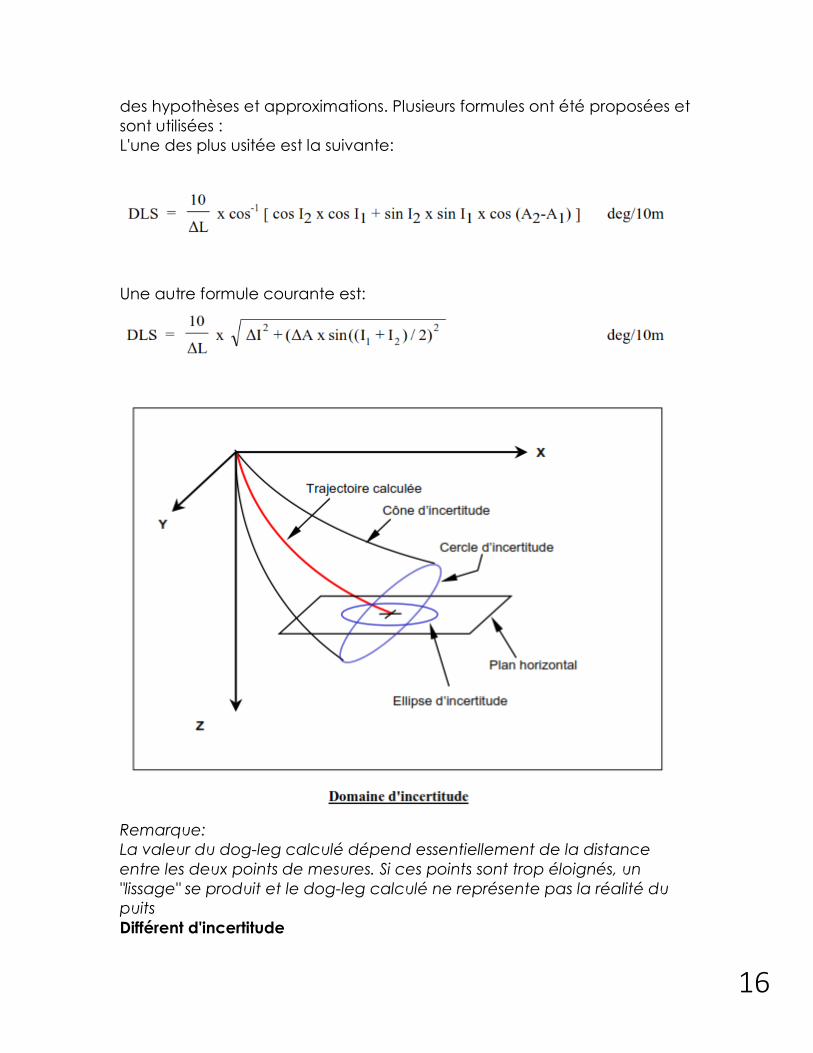
des hypothèses et approximations. Plusieurs formules ont été proposées et
sont utilisées :
L'une des plus usitée est la suivante:
Une autre formule courante est:
Remarque:
La valeur du dog-leg calculé dépend essentiellement de la distance
entre les deux points de mesures. Si ces points sont trop éloignés, un
"lissage" se produit et le dog-leg calculé ne représente pas la réalité du
puits
Différent d'incertitude

17
Résultant de mesures physiques le calcul de trajectoire est soumis à
différentes erreurs dues aux outils et procédures utilisées.
Sources d'erreur
De nombreuses sources d'erreur peuvent être identifiées:
- erreurs dues à la position de l'outil de mesure
- erreurs dues à l'équipement de mesure
- erreurs dues au facteur humain
- erreurs dues aux calculs

18
Introduction :
Les moteurs de fond désignent soit des PDM (Positive Displacement
Motors), moteurs volumétriques qui ne sont autres que des pompes
Moyneau à l'envers, soit des turbines courtes NEYRFOR. Pour des raisons
techniques et aujourd'hui essentiellement commerciales, les PDM sont
beaucoup plus employés que les turbines.
7. LE MOTEUR PDM (Positive Displacement Motor): 7.1 Principe de fonctionnement
Les éléments clés d'un moteur de fond sont son rotor et son stator:
rotor: pièce hélicoïdale fabriquée en acier inoxydable.
stator: élastomère moulé en forme d'hélice interne, avec une spire
supplémentaire par rapport au rotor
Le rotor et le stator correspondent étroitement et engendrent des
cavités étanches les unes des autres.
Quand le fluide de forage est pompé à travers le moteur, une montée
de pression apparaît entraînant la rotation du stator et permettant le
passage du fluide dans la cavité voisine. Le fluide progresse alors de
cavité en cavité entraînant ainsi une rotation régulière du rotor.
La vitesse de rotation est proportionnelle au débit à travers le moteur.
Principe de fonctionnement du PDM
7.2 Description d’un moteur PDM
Les éléments constituants un PDM sont les suivants :
Section motrice (Power Section).
Section transmission (Transmission Unit).
Section d’appui (Bearing Section).
Vanne de remplissage automatique (Dump valve)

19
7.2.1. Section motrice :
La section motrice consiste en un rotor en acier et un stator en
élastomère (elastic polymer) collé au corps du moteur. Le stator moulé
a un profil multi-lobe hélicoïdal sur toute sa longueur. L'hélice a son pas
en sens inverse des aiguilles d'une montre. Le rotor a un profil usiné se
mariant parfaitement aux lobes du stator, mais avec un lobe en moins,
et évidemment le même pas d'hélice. L'assemblage rotor/stator crée
une cavité puisque le rotor a un lobe de moins. La pression hydraulique
force la boue à s'écouler à travers la cavité hélicoïdale, ce qui oblige le
rotor à tourner par rapport au stator.
L'efficacité et donc la puissance des PDM reposent entièrement sur
l'étanchéité entre le rotor métallique et le stator élastomère.
La section motrice d'un moteur de fond est indiquée par sa
configuration de lobe de rotor/stator. Par exemple, une section motrice
de 4:5 c'est-à-dire quatre lobes dans le rotor et cinq dans le stator.
Généralement, plus le nombre de lobes est haut, plus le rendement de
couple du moteur est haut et plus la vitesse est lente.
Le couple délivré par la section motrice est proportionnel à la
différence de pression à travers cette section. Le couple maximum est
limité par la résistance mécanique de l'élastomère du stator. Or cette
résistance mécanique est affaire de compromis. En effet l'élastomère
doit être suffisamment rigide pour résister à l'abrasion des solides de la
boue, mais en même temps il doit être suffisamment flexible pour
procurer une étanchéité sous pression entre le rotor et le stator. Si on
augmente le nombre de lobes ainsi que la longueur de la section
motrice, on augmente le volume de la cavité hélicoïdale et le couple
délivré, mais on diminue la vitesse de rotation.
20
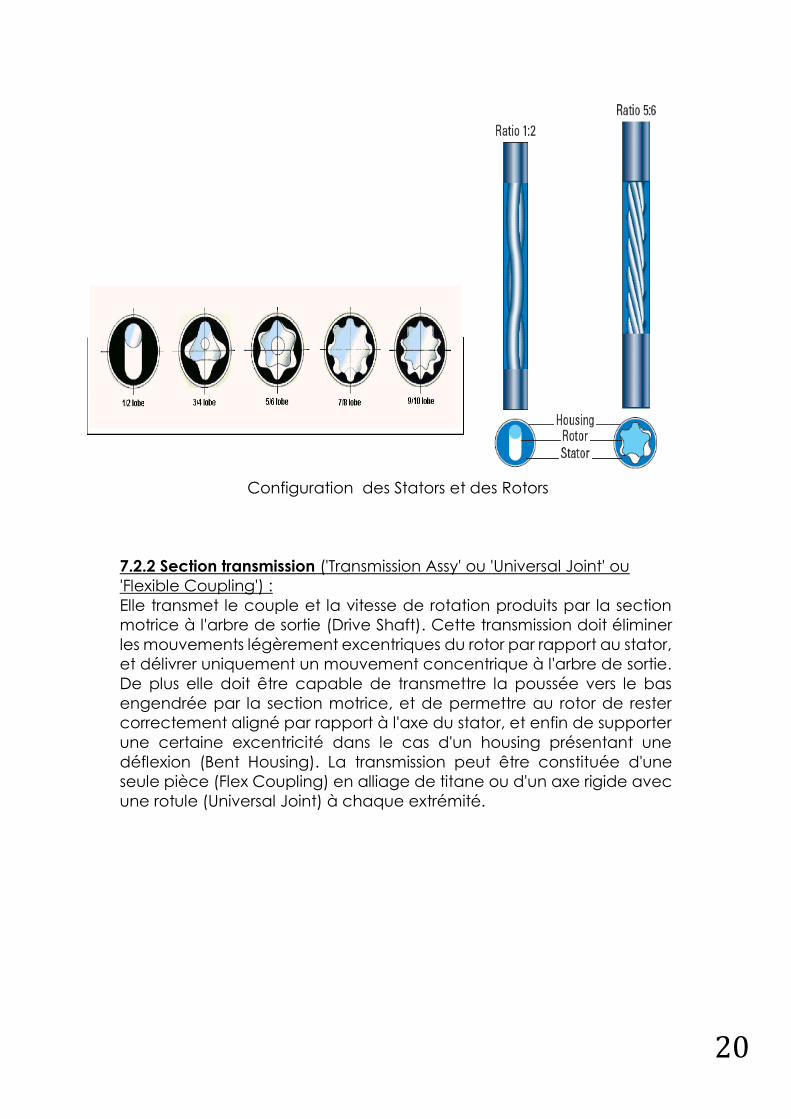
Configuration des Stators et des Rotors
7.2.2 Section transmission ('Transmission Assy' ou 'Universal Joint' ou
'Flexible Coupling') :
Elle transmet le couple et la vitesse de rotation produits par la section
motrice à l'arbre de sortie (Drive Shaft). Cette transmission doit éliminer
les mouvements légèrement excentriques du rotor par rapport au stator,
et délivrer uniquement un mouvement concentrique à l'arbre de sortie.
De plus elle doit être capable de transmettre la poussée vers le bas
engendrée par la section motrice, et de permettre au rotor de rester
correctement aligné par rapport à l'axe du stator, et enfin de supporter
une certaine excentricité dans le cas d'un housing présentant une
déflexion (Bent Housing). La transmission peut être constituée d'une
seule pièce (Flex Coupling) en alliage de titane ou d'un axe rigide avec
une rotule (Universal Joint) à chaque extrémité.
21
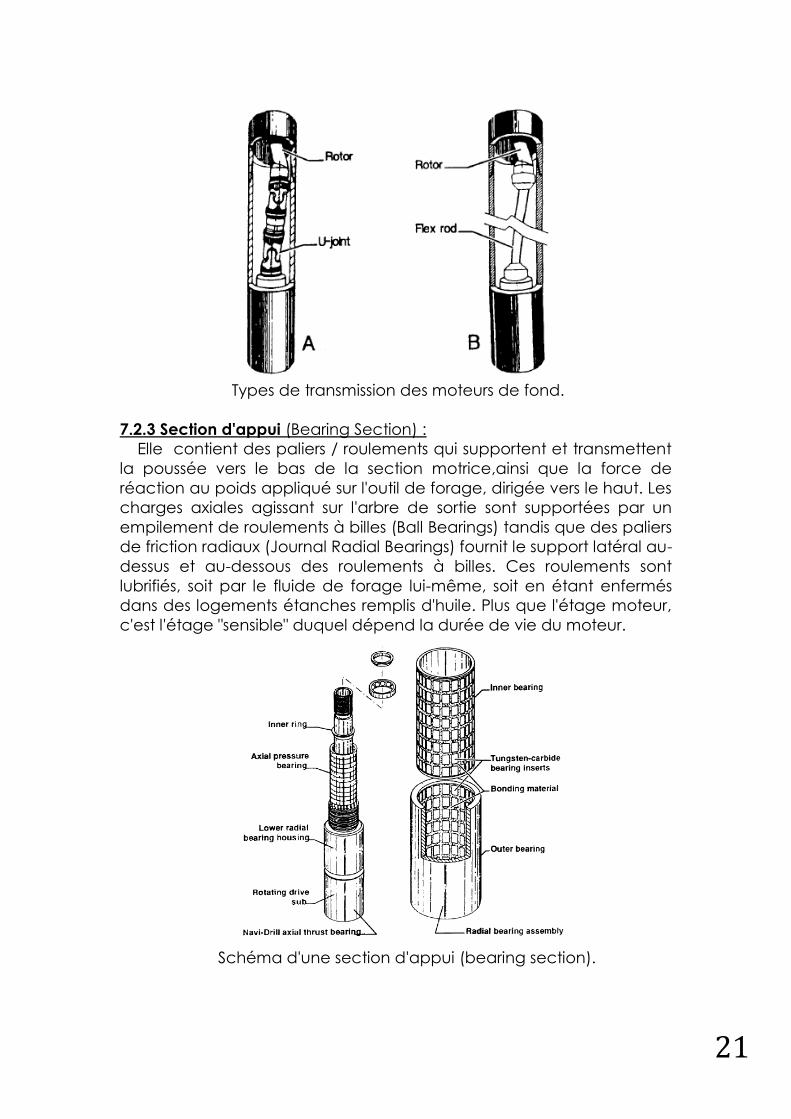
Types de transmission des moteurs de fond.
7.2.3 Section d'appui (Bearing Section) :
Elle contient des paliers / roulements qui supportent et transmettent
la poussée vers le bas de la section motrice,ainsi que la force de
réaction au poids appliqué sur l'outil de forage, dirigée vers le haut. Les
charges axiales agissant sur l'arbre de sortie sont supportées par un
empilement de roulements à billes (Ball Bearings) tandis que des paliers
de friction radiaux (Journal Radial Bearings) fournit le support latéral au-
dessus et au-dessous des roulements à billes. Ces roulements sont
lubrifiés, soit par le fluide de forage lui-même, soit en étant enfermés
dans des logements étanches remplis d'huile. Plus que l'étage moteur,
c'est l'étage "sensible" duquel dépend la durée de vie du moteur.
Schéma d'une section d'appui (bearing section).
22
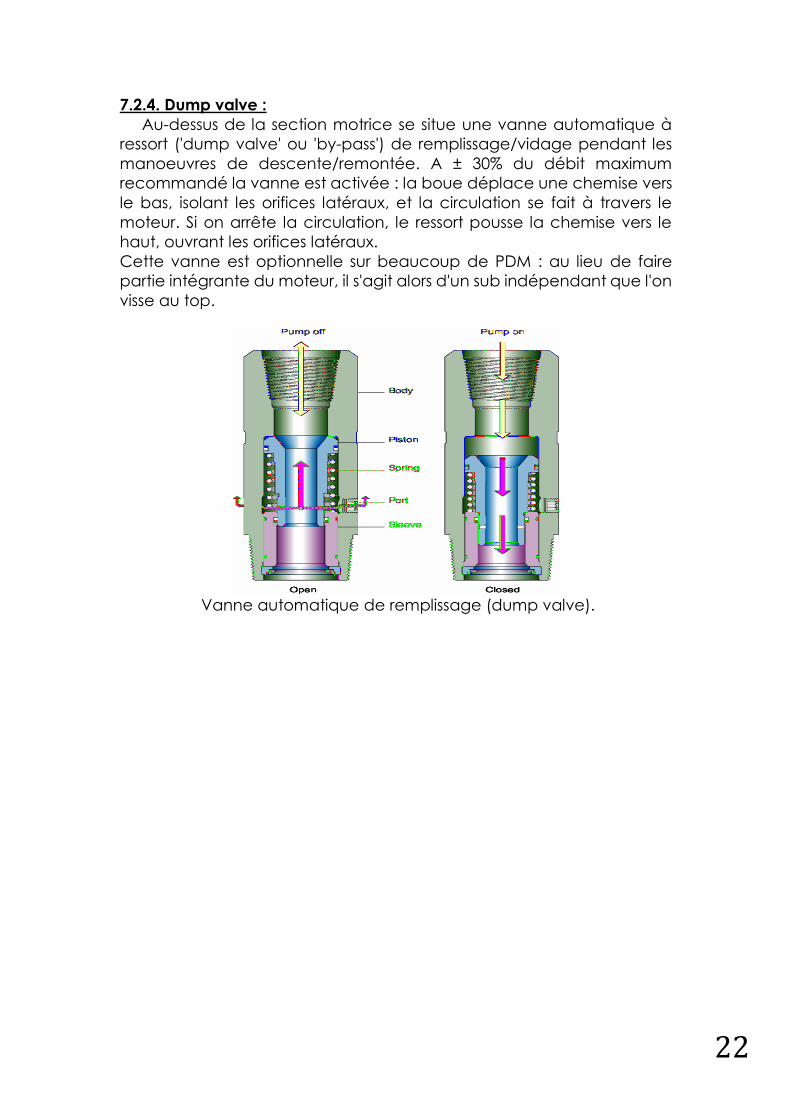
7.2.4. Dump valve :
Au-dessus de la section motrice se situe une vanne automatique à
ressort ('dump valve' ou 'by-pass') de remplissage/vidage pendant les
manoeuvres de descente/remontée. A ± 30% du débit maximum
recommandé la vanne est activée : la boue déplace une chemise vers
le bas, isolant les orifices latéraux, et la circulation se fait à travers le
moteur. Si on arrête la circulation, le ressort pousse la chemise vers le
haut, ouvrant les orifices latéraux.
Cette vanne est optionnelle sur beaucoup de PDM : au lieu de faire
partie intégrante du moteur, il s'agit alors d'un sub indépendant que l'on
visse au top.
Vanne automatique de remplissage (dump valve).

23
Différents types de moteurs / Puissance, Couple et Vitesse
7.3 Différents types de moteurs
7.3.1.Puissance, couple & vitesse
Les moteurs diffèrent et sont souvent caractérisés par le nombre de
circonvolutions du rotor et du stator, appelé "lobes".
Le stator possède nécessairement un lobe de plus que le rotor.
On parlera donc, par exemple, de moteur 1/2, 4/5 ou 9/10.
La multiplication des lobes augmente la puissance du moteur et réduit
sa vitesse de rotation. On peut donc distinguer:
- les moteurs à lobe unique (1/2 lobes) > grande vitesse & couple faible
Ces moteurs génèrent des couples relativement faibles ( 2000 ft x lb ) à
des vitesses pouvant atteindre 500 rpm.
Le faible couple réactif généré permet un bon contrôle du tool face.
- les moteurs multilobes > vitesse & couple moyenne > basse vitesse &
couple élevé
Le nombres de lobes peut atteindre 9/10
De tels moteurs délivrent un couple important ( 10000 ftxlb ) à des vitesses
inférieures à 100 rpm.
24
Le couple développé par de tels moteurs peut rendre problématique le
contrôle du tool face. Ils sont préférés pour le forage des sections droites
plutôt que pour les phases de montée en inclinaison
Un moteur 5/6 délivre un couple moyen ( 8000 ftxlb ) à des vitesses
variant autour de 120 rpm, préservant donc la vie des outils de forage.
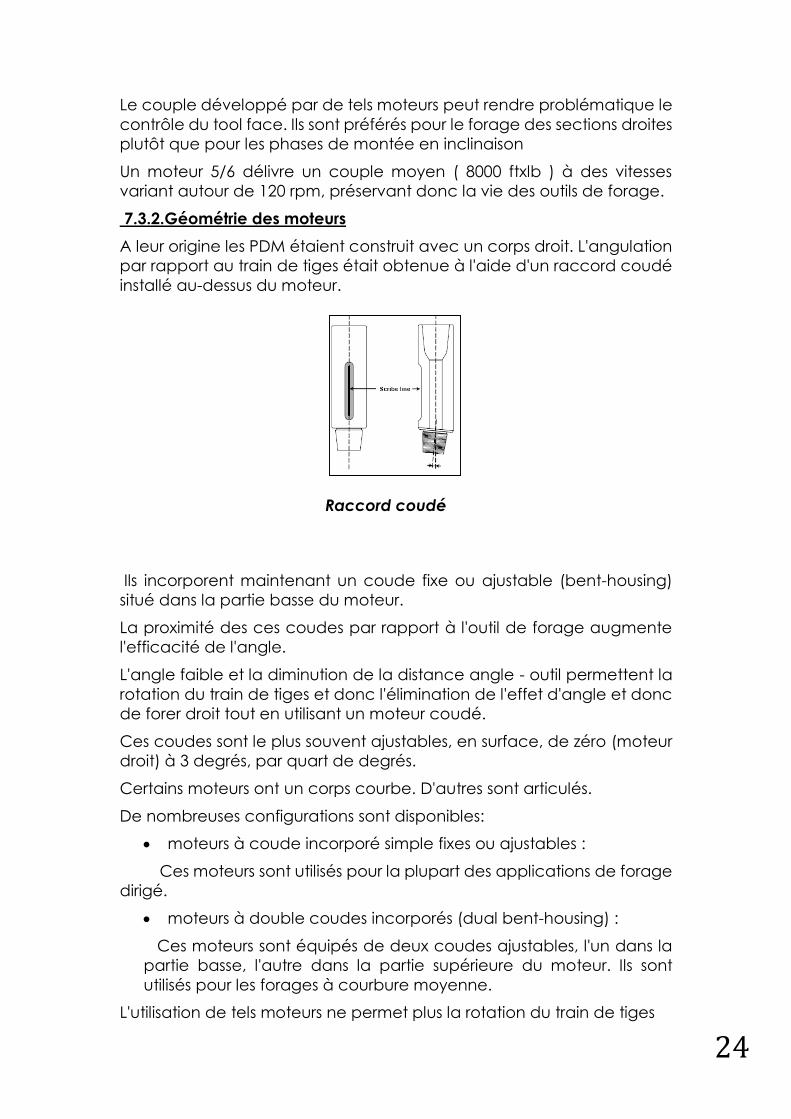
7.3.2.Géométrie des moteurs
A leur origine les PDM étaient construit avec un corps droit. L'angulation
par rapport au train de tiges était obtenue à l'aide d'un raccord coudé
installé au-dessus du moteur.
Raccord coudé
Ils incorporent maintenant un coude fixe ou ajustable (bent-housing)
situé dans la partie basse du moteur.
La proximité des ces coudes par rapport à l'outil de forage augmente
l'efficacité de l'angle.
L'angle faible et la diminution de la distance angle - outil permettent la
rotation du train de tiges et donc l'élimination de l'effet d'angle et donc
de forer droit tout en utilisant un moteur coudé.
Ces coudes sont le plus souvent ajustables, en surface, de zéro (moteur
droit) à 3 degrés, par quart de degrés.
Certains moteurs ont un corps courbe. D'autres sont articulés.
De nombreuses configurations sont disponibles:
moteurs à coude incorporé simple fixes ou ajustables :
Ces moteurs sont utilisés pour la plupart des applications de forage
dirigé.
moteurs à double coudes incorporés (dual bent-housing) :
Ces moteurs sont équipés de deux coudes ajustables, l'un dans la
partie basse, l'autre dans la partie supérieure du moteur. Ils sont
utilisés pour les forages à courbure moyenne.
L'utilisation de tels moteurs ne permet plus la rotation du train de tiges

25
moteurs DTU (Double Tilted Unit) :
Ces moteurs possèdent un système composé de deux angles fixes
et opposés.
Coude adjustable incorporé au moteur (en position débloquée)
Les moteurs de navigation les plus utilisés (PDM)
26
7.4 Problèmes de Moteur de Fond
1/Calage
Si un poids excessif est appliqué à l'outil de forage, le moteur calera
(stall-out) c'est à dire stoppera brutalement de tourner.
Des calages répétitifs risquent d'endommager le moteur, en particulier
son stator, et doivent être évités.
Le calage est en général du à un excès de poids sur l'outil, lui-même dû
à un excès de "delta P".
Il peut également être dû à une usure du moteur résultant en une perte
de puissance et une impossibilité de forer.
En cas de calage le foreur doit dégager l'outil du fond, remonter
quelques mètres en stoppant la circulation, puis redémarrer la
circulation et reprendre le fond doucement en n'excédant pas le "delta
P" nominal.
2/Chute de pression à l'outil de forage
La perte de pression à travers l'outil de forage affecte le débit de
circulation et donc la quantité de fluide traversant les roulements et
donc leur lubrification.
Il est donc quelquefois nécessaire de limiter cette perte de pression en
utilisant soit des duses de gros diamètre soit un outil sans duses.
3/ Bouchage
Dans les formations tendres ou dans les formations ou l'accumulation de
déblais est un problème, le moteur peut avoir tendance à se remplir et
se boucher.
Ce problème peut être résolu par l'introduction d'une valve anti-retour
entre l'outil et le moteur.
4/Quantité de solides dans le fluide de forage
Un excès de solides dans le fluide de forage aura un effet abrasif
accélérant l'usure du stator et même du rotor.
5/Température
Les élastomères constituants les stators supportent mal les hautes
températures réduisant la durée de vie des moteurs.
Cependant des élastomères dits "hautes températures" sont apparut
dans les années récentes repoussant les limites d'utilisation des moteurs.
6/ Boues à l'huile
De même les boues à base d'huile ont un effet corrosif sur les
élastomères et réduisent la durée de vie des moteurs.
27
Là aussi des progrès récents améliorent les performances des moteurs.
7/ Durée de vie des outils de forage
La durée de vie des outils de forages à molettes est limitée par un
nombre total de rotation des roulements et donc inversement
proportionnelle à la vitesse de rotation des outils.
Un outil utilisé avec un moteur à grande vitesse verra sa durée de vie
réduite, limitant la longueur forable en une seule descente.
8. Equipements amagnétiques
L'acier des éléments du train de tiges perturbe les lignes du champ
magnétique terrestre. Cette perturbation est proportionnelle à la masse
et inversement proportionnelles à la distance.
Pour la bonne utilisation d'instruments de mesures magnétiques il est
donc nécessaire d'éloigner les équipements de mesure des éléments
perturbants. Ceci est réalisé en utilisant des matériaux dits non-
magnétiques ou amagnétiques au voisinage des capteurs de mesure.
Ces matériaux amagnétiques peuvent être:
- de l'aluminium
- des aciers inoxydables de haute qualité
- des alliages tels que le "Monel" (70% nickel + 30% cuivre)
Les équipements amagnétiques les plus courants sont:
- des masse-tiges
- des masse-tiges courtes
- des tiges de forage compressives
- des tiges de forage
- des stabilisateurs
- des raccords
Et bien sur les équipements de mesure eux-mêmes:
- MWD
- steering tools
8.1 Masse-tiges amagnétiques
Les masse-tiges amagnétiques sont les éléments les plus utilisés pour
éliminer les perturbations du champ magnétique dues à la présence
train de tiges.
La longueur nécessaire varie en fonction de la position géographique et
peut être déterminée à l'aide de tables ou cartes.
28
Les masse-tiges amagnétiques sont trois à quatre fois plus chères que les
masse-tiges en acier standard.
8.2 Tiges de forage amagnétiques
Les tiges de forage amagnétiques ou tiges compressives amagnétiques
sont utilisées en forage horizontal où les masse-tiges n'ont plus de
justification de poids.
8.3 stabilisateurs amagnétiques
Des stabilisateurs amagnétiques peuvent être nécessaires en lieu et
place de stabilisateurs standards lorsqu'ils doivent être situés près des
équipements de mesure.
8.4 Raccords amagnétiques
De même des raccords amagnétiques peuvent être nécessaires en
lieu et place de raccords standards lorsqu'ils doivent être situés près
des équipements de mesure.
9. Equipements de mesure
Le besoin de connaître la position de la trajectoire d'un puits dévié
conduit au besoin de mesurer régulièrement l'inclinaison et l'azimut du
puits. En mode orienté ces mesures permettent de plus de contrôler le
tool face du moteur et donc la direction du puits.
Ces mesures peuvent être effectuées par des instruments de mesures en
fond de trou. Ils diffèrent par le type des capteurs utilisés mais surtout par
leur type de transmission de l'information qui peut être:
en temps différé: l'information est remontée avec l'outil lui-même
en temps réel: l'information est transmise du fond vers la surface
par l'intermédiaire d'un système de télémétrie
Les mesures sont faites à l'aide de capteurs plus ou moins sophistiqués:
• Mesure de l'inclinaison:
- pendules
- inclinomètres
- accéléromètres
• Mesure de l'azimut
La mesure de l'azimut peut être effectuée soit à l'aide
d'instruments repérant le Nord magnétique:
- compas
- magnétomètres
Ou s'alignant dans une direction référencée:
- gyroscopes
- plates-formes inertielles
29
9.1 Outils de mesures en temps différé
Les outils de mesures en temps différé sont conçus pour effectuer une
ou plusieurs mesures de l'inclinaison et de l'azimut du puits, les enregistrer
et les conserver jusqu'à leur lecture après remontée de l'outil en surface.
Ils sont descendus dans le trou soit par l'intermédiaire d'un câble ou jetés
à travers les tiges ("go-devil") puis récupérés au câble ou lors de la
manoeuvre de remontée.
Ils sont composés:
- d'un ensemble de capteurs de mesures
- d'un système d'horlogerie capable de déclencher les mesures
et leur enregistrement après un délai programmé
- d'un système d'enregistrement
On distingue les:
- Inclinomètres
- Single-shots magnétiques
- Multi-shots magnétiques
- Gyroscopes
1/ Inclinomètres
Les inclinomètres sont les plus simples des instruments de mesures
directionnelles en ne mesurant que l'inclinaison du puits.
Ils utilisent un pendule qui n'est affecté que par le champ gravimétrique
terrestre.
Ces outils sont essentiellement utilisés pour vérifier l'inclinaison des puits
verticaux.
2/ Single-shots magnétiques
Un Single-shot magnétique est conçu pour effectuer une unique mesure
de l'inclinaison et de l'azimut du puits (par mesure du champ
magnétique), l'enregistrer et la conserver jusqu'à sa lecture. Ils
nécessitent donc d'être installés dans au moins une masse-tige
amagnétique.
Utilisé conjointement avec un raccord d'orientation indexé avec le
raccord coudé, ils fournissent simultanément une mesure du tool-face,
permettant ainsi l'orientation et le contrôle de la direction du puits.
Les outils plus anciens (1) utilisent un pendule et un compas associés à
une horloge mécanique et un système d'enregistrement
photographique.
Les outils modernes (2) utilisent des accéléromètres et des
magnétomètres, associés à une horloge et une mémoire électronique.
Un Single-shot magnétique est constitué des composants suivants:
un système de mesure, incluant les systèmes nécessaires à la
mesure de l'inclinaison et de l'azimut, et permettant le repérage
du tool-face.

30
(1) appelé unité d'angles. L'inclinaison est mesurée à l'aide d'un pendule
ou d'un peson flottant, l'azimut est mesuré à l'aide d'un compas flottant
Différents modèles existent, différant par leurs instruments de mesures et
leurs plages de fonctionnement: de 0 à 10/20 degrés ou de 10 à 90
degrés d'inclinaison.
(2) constitué par un ensemble d'accéléromètres et de magnétomètres
un système d'enregistrement des mesures
(1) appelé caméra, conçu pour photographier une image de
l'instrument de mesure, incluant une lentille et une lampe permettant
d'exposer un disque sensible (diamètre un pouce).
(2) constitué d'une mémoire électronique
un système de déclenchement,
Conçu pour déclencher la prise de vue à un instant donné, quand l'outil
est en position pour la mesure.
Ce peut être:
une horloge, mécanique ou électronique, permettant de
déclencher la prise de vue après un délai ajustable en surface
selon le temps nécessaire pour amener l'outil en position de
mesure.
un détecteur de mouvement, déclenchant la prise de vue après
une période déterminée sans aucun mouvement.
un détecteur de Monel, détectant la présence de l'outil dans un
environnement non magnétique et déclenchant la prise de vue
après une période déterminée dans cet environnement.
-un système d'alimentation
Procurant l'énergie nécessaire au bon fonctionnement de l'outil,
habituellement constitué d'un ensemble de piles de 1.5 Volts.
3/ Multi-shots magnétiques
Les multi-shots sont similaires aux single-shots mais capables d'effectuer
et de stocker plusieurs mesures déclenchées à un intervalle régulier
programmé en surface.
La manière la plus courante de mettre en oeuvre un multi-shot est de
le descendre dans une masse-tige amagnétique avant une
manoeuvre, puis de remonter le train de tiges en arrêtant à chaque
longueur le temps nécessaire à l'obtention d'une bonne mesure.
31
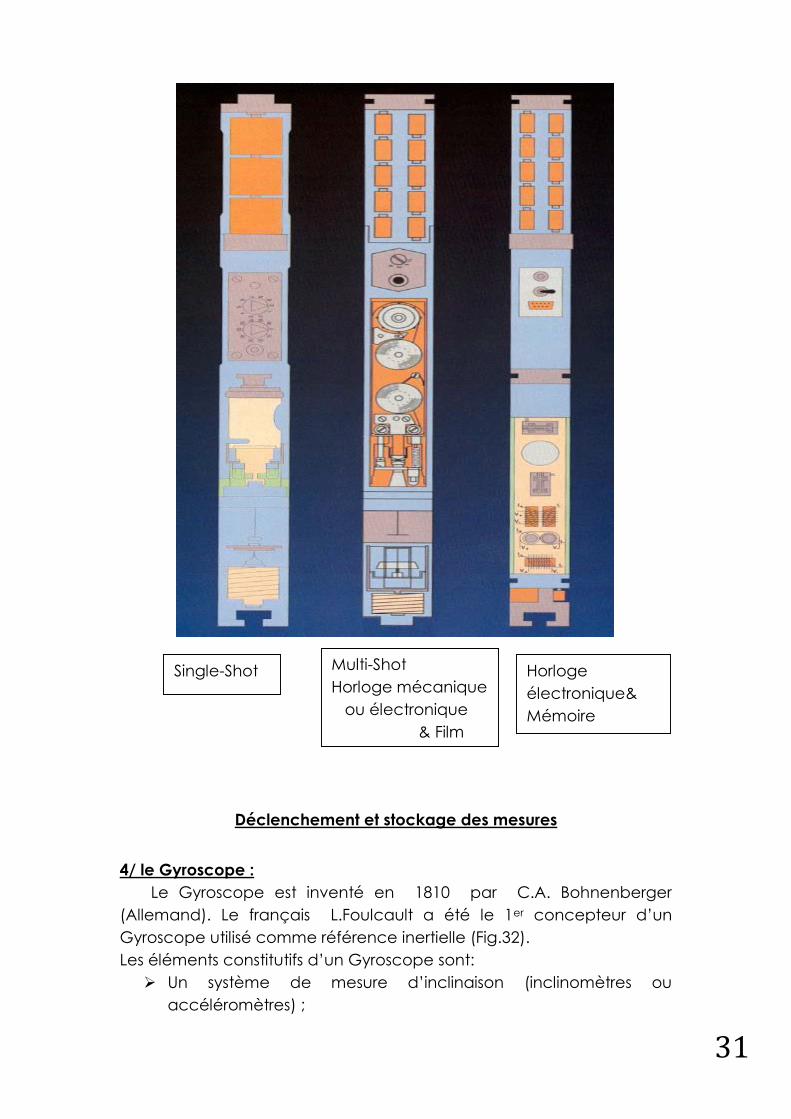
Déclenchement et stockage des mesures
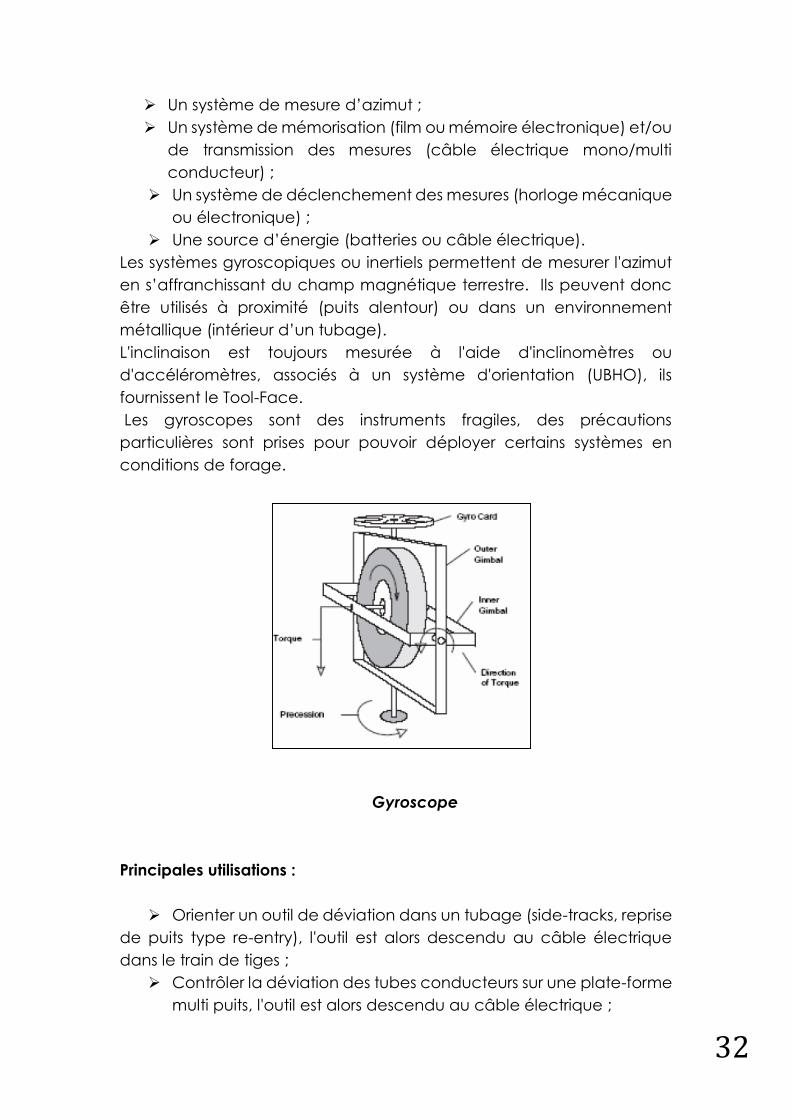
4/ le Gyroscope :
Le Gyroscope est inventé en 1810 par C.A. Bohnenberger
(Allemand). Le français L.Foulcault a été le 1er concepteur d’un
Gyroscope utilisé comme référence inertielle (Fig.32).
Les éléments constitutifs d’un Gyroscope sont:
Un système de mesure d’inclinaison (inclinomètres ou
accéléromètres) ;
Single-Shot Horloge
électronique&
Mémoire
Multi-Shot
Horloge mécanique
ou électronique
& Film
32
Un système de mesure d’azimut ;
Un système de mémorisation (film ou mémoire électronique) et/ou
de transmission des mesures (câble électrique mono/multi
conducteur) ;
Un système de déclenchement des mesures (horloge mécanique
ou électronique) ;
Une source d’énergie (batteries ou câble électrique).
Les systèmes gyroscopiques ou inertiels permettent de mesurer l'azimut
en s’affranchissant du champ magnétique terrestre. Ils peuvent donc
être utilisés à proximité (puits alentour) ou dans un environnement
métallique (intérieur d’un tubage).
L'inclinaison est toujours mesurée à l'aide d'inclinomètres ou
d'accéléromètres, associés à un système d'orientation (UBHO), ils
fournissent le Tool-Face.
Les gyroscopes sont des instruments fragiles, des précautions
particulières sont prises pour pouvoir déployer certains systèmes en
conditions de forage.
Gyroscope
Principales utilisations :
Orienter un outil de déviation dans un tubage (side-tracks, reprise
de puits type re-entry), l'outil est alors descendu au câble électrique
dans le train de tiges ;
Contrôler la déviation des tubes conducteurs sur une plate-forme
multi puits, l'outil est alors descendu au câble électrique ;
33
En fin de forage ou de tubage on effectue une mesure complète
de contrôle afin de détecter une contradiction entre le fond et
la surface, l'outil est alors descendu au câble électrique et centré
dans le tubage de production.
Il existe deux types principaux de gyroscopes:
- Gyroscopes Conventionnels ou Libres ;
-Centrales Inertielles (Rate Integrated Gyro) ou Gyroscope à recherche
automatique du Nord (North Seeking Gyro).
Les gyroscopes sont disponibles en différents diamètres, de 1"3/4 à une
dizaine de pouces, leur précision augmentant avec le diamètre. Ils
peuvent être single ou multi-shot.
Les gyroscopes sont réputés avoir une meilleure précision que les outils
de mesures magnétiques. Leurs mesures ont longtemps été utilisées
comme référence pour établir la position du puits.
9.2 Outils de mesures en temps réel
Les outils de mesures en temps réel sont conçus pour effectuer une ou
plusieurs mesures de l'inclinaison et de l'azimut du puits et les transmettre
vers la surface. Les outils les plus sophistiqués ont de plus des capteurs
permettant la mesure, la transmission et le stockage de paramètres
d'évaluation des formations.
Ils sont composés:
- d'un ensemble de capteurs de mesures
- d'une électronique de contrôle
- d'un système de télémétrie
On distingue les:
1 - Steering tools
2 - MWD et LWD
3 - Gyroscopes
1. Steering tools
Les Steering tools mesurent l'inclinaison et l'azimut du puits (et donc le
tool face) et transmettent l'information à travers un câble électrique.
Associés à un système d'orientation ils transmettent une visualisation
instantanée du tool face.
Les steering tools sont les seuls instruments fournissant une information
permanente, permettant en particulier l'observation de l'effet du couple
réactif sur le moteur et de l'évolution résultante du tool face.
Les capteurs et l'électronique associée sont installés dans un tube d'acier
amagnétique et descendus et mis en place dans une masse tige
amagnétique.
34
Le câble est connecté à l'outil à l'aide d'un "wet connector" et remonte
en surface à travers les tiges de forage jusqu'à un raccord d'entrée
latérale (side-entry sub) lui permettant de passer de l'intérieur à
l'extérieur des tiges. A partir de ce raccord le câble passe entre les tiges
et le tubage permettant l'ajout des tiges mais excluant toute rotation du
train de tiges.
Hors l'existence du câble de liaison et des inconvénients associés, un
steering tool serait l'instrument idéal de contrôle du forage dirigé.
2. Les MWD (Measurement While Drilling) et LWD (Logging While
Drilling)
Les premiers MWD sont apparus dans les années 70, apportant au
forage dirigé l'un des instruments qui allait lui permettre une
évolution sans précédent, en particulier le développement du
forage horizontal et de ses séquelles.
Ils mesurent et transmettent l'inclinaison, l'azimut et le tool face, à l'aide
de capteurs ultra sensibles, accéléromètres et des magnétomètres, leur
conférant une précision inégalée par les instruments de mesure
classiques.
Diverses mesures d'évaluation des formations peuvent être ajoutées,
transformant les MWD en LWD (Logging While Drilling) et permettant un
contrôle de la déviation tenant compte de la nature de la formation
forée et/ou évitant les mesures électriques toujours difficiles à mettre en
oeuvre en forage horizontal.
Les paramètres mesurés sont transmis vers la surface après avoir été
codés sous forme binaire. Deux systèmes de transmission sont utilisés:
- la transmission par impulsions à travers le fluide de forage
("mud pulses")
- la transmission électromagnétique
Les composants d'un MWD sont:
- l'étage de mesure
- l'étage de télémétrie
- l'étage de puissance
a/ le(s) étage(s) de mesures
A leur origine les MWD ont été conçus pour fournir les mesures
nécessaires aux opérations de déviation et sont donc équipés de
capteurs permettant les mesures d'inclinaison et d'azimut, et de tool-
face si le système est indexé à l'outil de déviation.
Au fur et à mesure de leur évolution des mesures nouvelles ont été
ajoutées, permettant l'évaluation des formations traversées et une
meilleure compréhension des problèmes de forage.
• Mesures directionnelles
35
Les capteurs utilisés sont des accéléromètres et des magnétomètres
mesurant respectivement les champs gravitationnel et magnétique
terrestres avec une résolution très supérieure à celle des instruments
utilisés précédemment, compas et inclinomètres.
• Mesures d'évaluation des formations
- Gamma ray
- Résistivité
- Porosité
• Autres mesures
- Pression annulaire
- Paramètres de forage
- vibrations
b/ l'étage de télémétrie
L'étage de télémétrie a pour fonction de transmettre les mesures depuis
le fond de trou vers la surface.
Deux systèmes de télémétrie sont couramment utilisés:
- la transmission par impulsions à travers le fluide de forage
("mud pulses")
- la transmission électromagnétique utilisant les formations
en tant que conducteur.
Pour être transmis les paramètres mesurés doivent préalablement être
transformés en information binaire
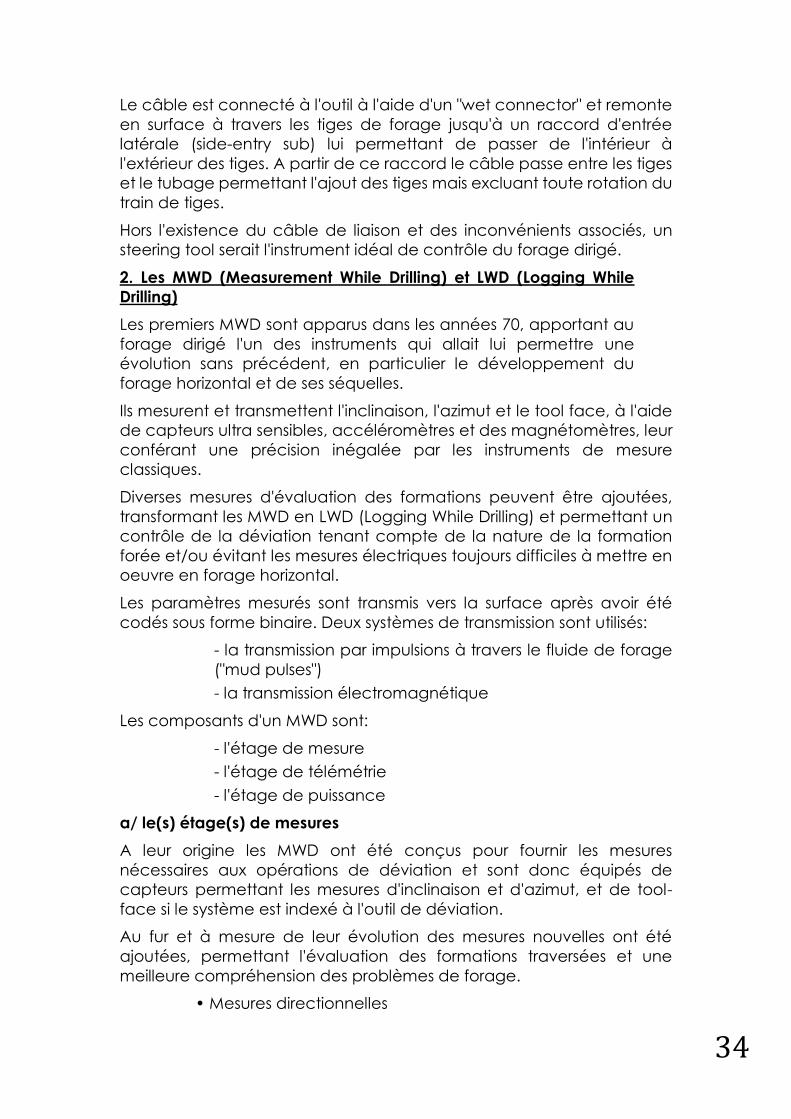
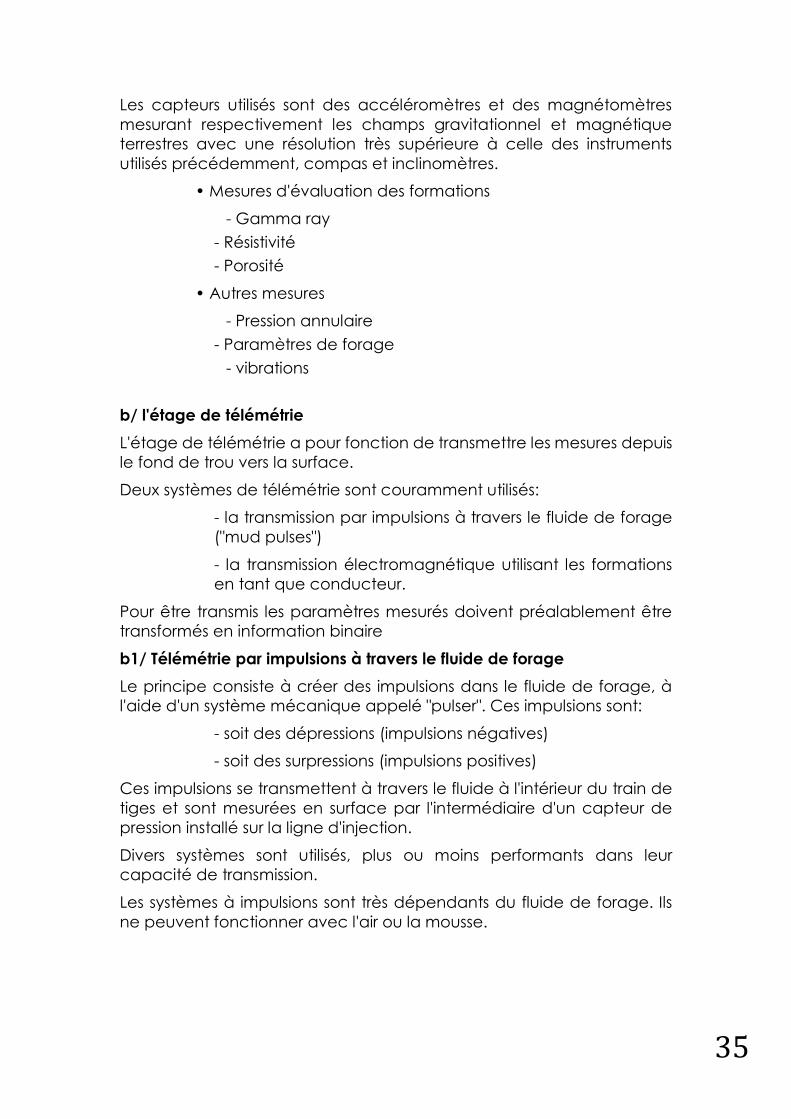
b1/ Télémétrie par impulsions à travers le fluide de forage
Le principe consiste à créer des impulsions dans le fluide de forage, à
l'aide d'un système mécanique appelé "pulser". Ces impulsions sont:
- soit des dépressions (impulsions négatives)
- soit des surpressions (impulsions positives)
Ces impulsions se transmettent à travers le fluide à l'intérieur du train de
tiges et sont mesurées en surface par l'intermédiaire d'un capteur de
pression installé sur la ligne d'injection.
Divers systèmes sont utilisés, plus ou moins performants dans leur
capacité de transmission.
Les systèmes à impulsions sont très dépendants du fluide de forage. Ils
ne peuvent fonctionner avec l'air ou la mousse.
36
System a Mud Pulses
Transmission a Mud Pluse
37
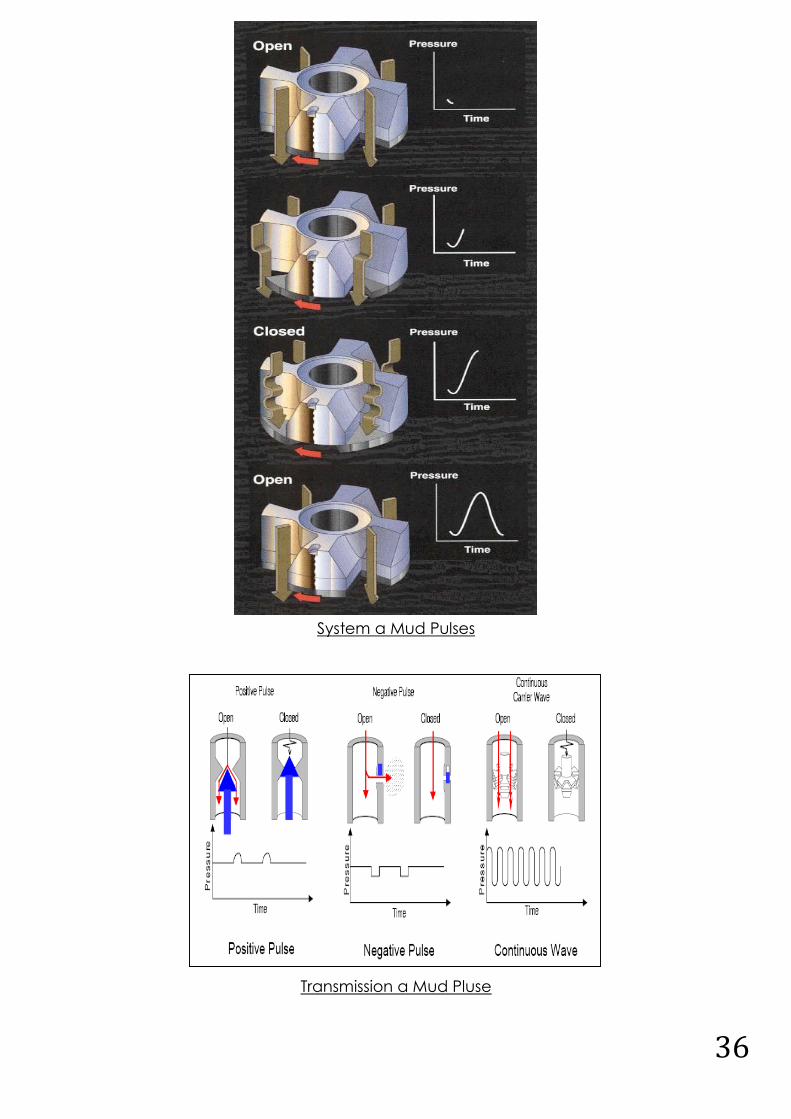
b2/ Transmission électromagnétique
Un courant électrique est injecté dans la formation et mesuré en surface.
Ce type d'outil à l'avantage d'être totalement indépendants du fluide
de forage. Ils peuvent donc transmettre en permanence (y compris
pendant les arrêts de circulation) ou dans les puits forés en dépression.
Les possibilités d'opération de ces outils sont limitées par la résistivité des
formations traversées.
Transmission électromagnétique
c/ l'étage de puissance
Les différents composants d'un MWD nécessitent une alimentation
électrique fournie soit:
- par des batteries
- par une turbine entraînant un alternateur
- une combinaison batteries - turbine
38
d/ Construction des MWD
Les outils MWD se présentent en différentes configurations plus ou moins
lourdes:
- sous forme de masse-tiges :
Les divers composants et capteurs de l'outil sont fixés dans des tubes en
acier amagnétique ayant le même diamètre extérieur que les masses-
tiges ordinaires (9"1/2, 8", 6"3/4, 4"3/4, etc).
- sous forme de tube intérieur :
Tous les composants de l'outil sont installés dans un tube de petit
diamètre (de l'ordre de 2 pouces), lui-même mis en place dans une
masse-tige amagnétique standard ou spécifique.
3. Gyroscopes
Des gyroscopes à recherche automatique du Nord géographique et
transmettant les informations à l'aide d'un câble électrique sont
également disponibles.
En raison de leur relative fragilité, ils ne peuvent pas être utilisés en
cours de forage.
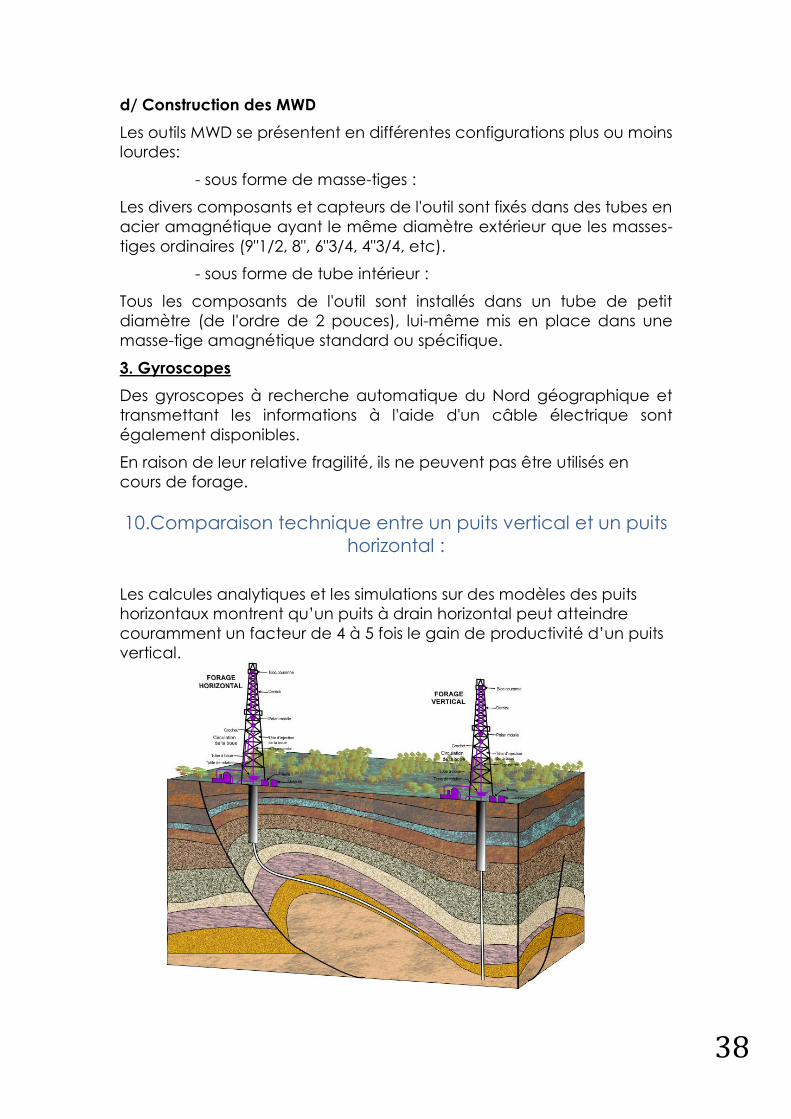
10.Comparaison technique entre un puits vertical et un puits
horizontal :
Les calcules analytiques et les simulations sur des modèles des puits
horizontaux montrent qu’un puits à drain horizontal peut atteindre
couramment un facteur de 4 à 5 fois le gain de productivité d’un puits
vertical.
39
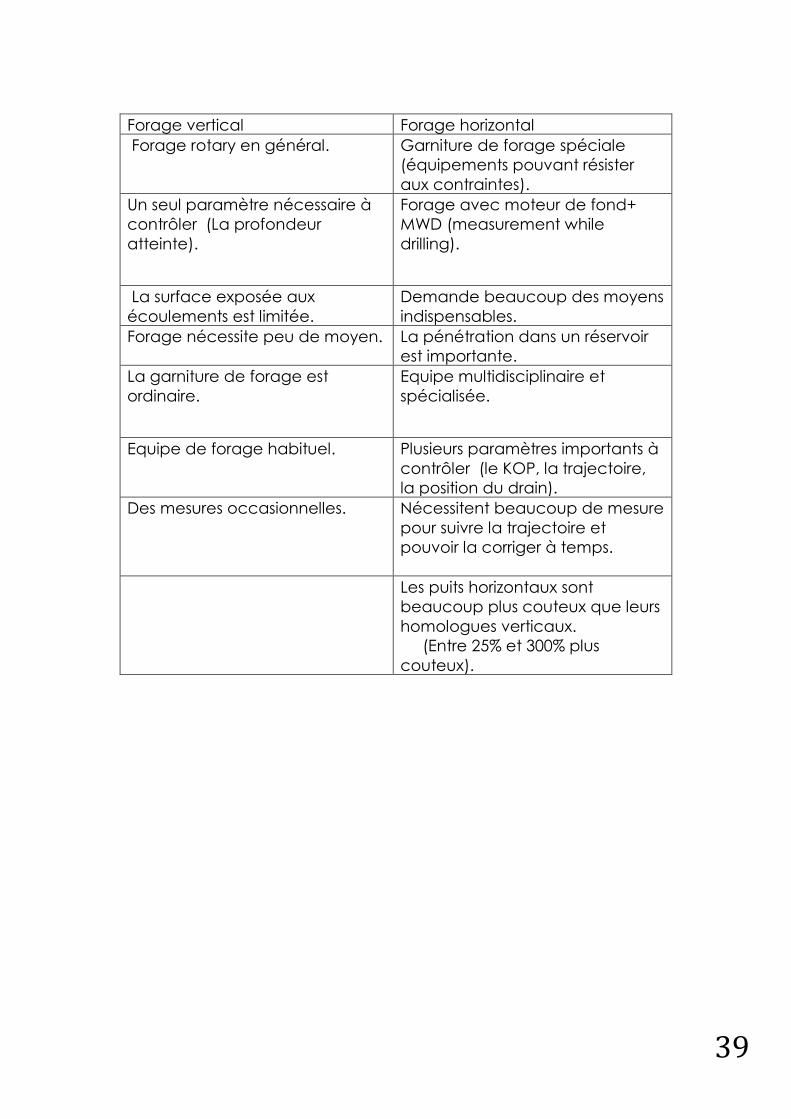
Forage vertical Forage horizontal
Forage rotary en général.
Garniture de forage spéciale
(équipements pouvant résister
aux contraintes).
Un seul paramètre nécessaire à
contrôler (La profondeur
atteinte).
Forage avec moteur de fond+
MWD (measurement while
drilling).
La surface exposée aux
écoulements est limitée.
Demande beaucoup des moyens
indispensables.
Forage nécessite peu de moyen. La pénétration dans un réservoir
est importante.
La garniture de forage est
ordinaire.
Equipe multidisciplinaire et
spécialisée.
Equipe de forage habituel. Plusieurs paramètres importants à
contrôler (le KOP, la trajectoire,
la position du drain).
Des mesures occasionnelles.
Nécessitent beaucoup de mesure
pour suivre la trajectoire et
pouvoir la corriger à temps.
Les puits horizontaux sont
beaucoup plus couteux que leurs
homologues verticaux.
(Entre 25% et 300% plus
couteux).
40
Conclusion
Des architectures de puits sophistiquées permettent
aujourd’hui de réaliser des prouesses inconcevables il y a
quelques années encore, comme le développement HP/HT
(haute pression/haute température) ou les puits sous-marins
en grands fonds.
Si les puits complexes sont l’une des clés de ressources
nouvelles, leur réalisation pèse très lourd sur les coûts d’un
développement.
Il s’ensuit que le nombre de ces puits complexes devra être
minimisé et qu’ils devront assurer par conséquent une
productivité élevée, au moins de deux à cinq fois celle d’un
puits vertical de même diamètre.
En dehors du développement de gisements majeurs, ces
nouvelles techniques de forage permettent aussi d’exploiter
de façon rentable des gisements difficiles d’accès.
41
Bibliographies
Directional drilling - Wikipedia, the free
encyclopedia
Forage dirigé Ingénierie et
méthodes (ENSPM)
Mémoire fin d’étude
Forage dirigé et UBD (Sonatrach)