hata kuramı ve parametre kestirimigalileo.selcuk.edu.tr/~aydin/docs/matrisler.pdfgiri¸s matris...
TRANSCRIPT
GirisMatris HesabıHata Kuramı
Hata Kuramı ve Parametre KestirimiLisans Ders Notları
Doc. Dr. Aydın USTUNSelcuk Universitesi
e-posta: [email protected]
24.09.2012
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Icerik
1 GirisTemel kavramlarKonu ve kapsamTarihce
2 Matris HesabıMatris ozellikleriMatris hesabı
3 Hata KuramıHata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
Bilinmesi gereken gercekler
Olcme uzunluk, agırlık, zaman vb. fiziksel bir niceliginbuyuklugunun belirlenmesi icin yapılan islemdir.
Dogada, bu niceliklerden her hangi birinin “kesin” ya da“gercek” degerini veren olcme teknigi yoktur.
Bir olcme islemi sonucunda elde edilen gozlem degeri mutlakahatalarla yukludur.
Gozlem degerlerinin gercek degerden ne kadar saptıgı kesinolarak bilinmez.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
Tanımlar
Hata kuramı
Bir ya da birden fazla hata kaynagının olculmus veya hesaplanmısbir buyukluk uzerindeki etkisini incelemek ve hata buyuklugu ilemeydana gelme olasılıgı arasındaki iliskiyi acıklamak icin kullanılanbir kavramdır.
Parametre kestirimi
Deneysel yollarla elde edilmis ve belirli bir dagılım kumesinden(ornegin normal) cıktıgı varsayılan verilerden bilinmeyenparametrelerin veya fonksiyonlarının belirlenmesini ifade eder.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
Dengeleme hesabının amacı
Bir olcme isleminde, gereginden fazla olcu arasındakitutarsızlıkları (olcme sırasında ortaya cıkan hatalardankaynaklı) gidermek
Dengeleme hesabı oncesi, yapılan olculerin onsel (a priori)hatalarını onceden tahmin etmek
Dengeleme hesabı sonrası, hataların kestirilen parametreleruzerindeki yayılma etkilerini, baska bir deyisle sonsal (aposteriori) hatalarını hesaplamak
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
Dersin amacı
Olcu ve hata kavramlarını tanımlama ve aralarındaki iliskiyiacıklama,
Gereginden fazla yapılmıs olculeri kullanarak bilinmeyenparametrelerin en uygun degerlerini belirleme,
Jeodezik uygulamalar icin en kucuk kareler yonteminikullanma,
Kestirilmis parametreler icin duyarlık ve guven olcutlerinihesaplama
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
Ders notu ve diger kaynaklar
Demirel, H. (2005) Dengeleme Hesabı, 2. Baskı, YTUBasım-Yayın Merkezi, Istanbul.
Ozturk, E. (1987) Dengeleme Hesabı, Cilt I, KTU Basımevi,Trabzon.
Ozturk, E., Serbetci, M. (1989) Dengeleme Hesabı, Cilt II,KTU Basımevi, Trabzon.
Koch, K. R. (1999) Parameter Estimation and Hypothesis
Testing in Linear Models, Springer-Verlag, Berlin.
Ghilani, C. D. ve Wolf, P. R. (2006) Adjustment
Computations: Spatial Data Analysis, John Wiley & Sons,Hoboken, New Jersey.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
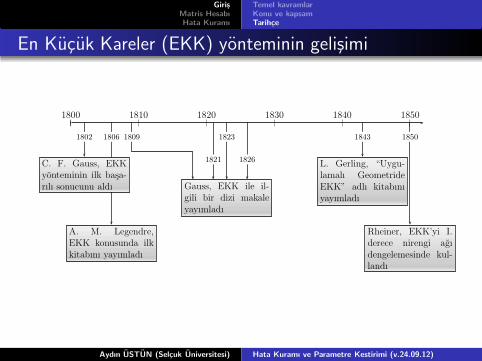
En Kucuk Kareler (EKK) yonteminin gelisimi
1800 1810 1820 1830 1840 1850
A. M. Legendre,EKK konusunda ilkkitabını yayımladı
1806
C. F. Gauss, EKKyonteminin ilk basa-rılı sonucunu aldı
1802
Gauss, EKK ile il-gili bir dizi makaleyayımladı
1823
L. Gerling, “Uygu-lamalı GeometrideEKK” adlı kitabınıyayımladı
1843
Rheiner, EKK’yi I.derece nirengi agıdengelemesinde kul-landı
18501809
1821 1826
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Temel kavramlarKonu ve kapsamTarihce
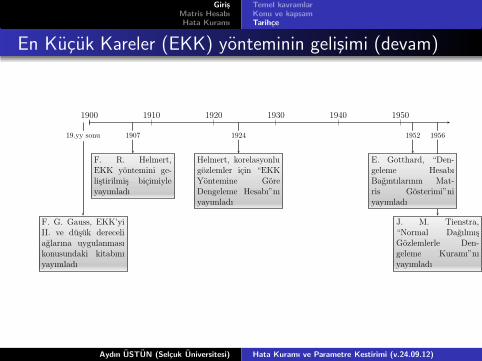
En Kucuk Kareler (EKK) yonteminin gelisimi (devam)
1900 1910 1920 1930 1940 1950
F. G. Gauss, EKK’yiII. ve dusuk dereceliaglarına uygulanmasıkonusundaki kitabınıyayımladı
19.yy sonu
F. R. Helmert,EKK yontemini ge-listirilmis bicimiyleyayımladı
1907
Helmert, korelasyonlugozlemler icin “EKKYontemine GoreDengeleme Hesabı”nıyayımladı
1924
J. M. Tienstra,“Normal DagılmısGozlemlerle Den-geleme Kuramı”nıyayımladı
1956
E. Gotthard, “Den-geleme HesabıBagıntılarının Mat-ris Gosterimi”niyayımladı
1952
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matris
A = Am,n
=
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n
......
.... . .
...
am1 am2 am3 . . . amn
Sutun sayısı=n
Satır
sayısı=m
Matris elemanı:italik, kucuk harf
Matris gosterimi:kalın, buyuk harf
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
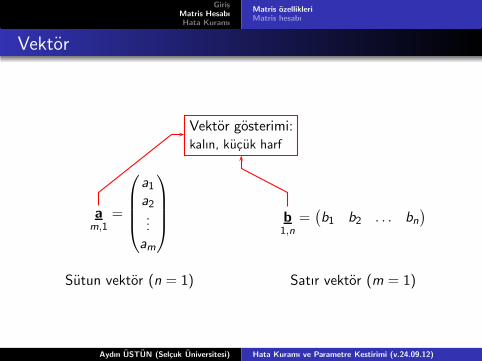
Vektor
Vektor gosterimi:kalın, kucuk harf
am,1
=
a1
a2...
am
b1,n
=(
b1 b2 . . . bn
)
Sutun vektor (n = 1) Satır vektor (m = 1)
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matris turleri
Dikdortgen matris (m 6= n)
A3,4
=
−1 0 5 −22 1 0 13 4 −1 −3
Kosegen matris (ci ∈ R)
Cn,n
=
c1 0 . . . 00 c2 . . . 0...
.... . . 0
0 0 0 cm
Kare matris (m = n)
B3,3
=
−3 −1 25 4 −13 −2 3
Skaler matris (d 6= 0)
Dn,n
=
d 0 . . . 00 d . . . 0...
.... . . 0
0 0 0 d
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matris turleri (devam)
Alt ucgen matris
Ln,n
=
l11 0 . . . 0l21 l22 . . . 0...
.... . .
...ln1 ln2 . . . lnn
Birim matris
En,n
=
1 0 . . . 00 1 . . . 0...
.... . . 0
0 0 0 1
Ust ucgen matris
Un,n
=
u11 u12 . . . u1n
0 u22 . . . u2n...
.... . .
...0 0 . . . unn
Sıfır matris
0n,n
=
0 0 . . . 00 0 . . . 0...
.... . . 0
0 0 0 0
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matris turleri (devam)
Simetrik matris(aij = aji)
B3,3
=
−3 −1 2−1 4 −1
2 −1 3
Ters simetrik matris(aij = −aji , aii = 0)
B3,3
=
0 −1 21 0 3
−2 −3 0
A11 A12
A21 A22
Blok matris
A =
(
A11 A12
A21 A22
)
=
1 4 −3 0 13 2 2 1 00 1 −8 0 5
−1 3 7 −1 −6
−2 0 −3 7 55 −1 −6 4 3
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Ozel vektorler
Sıfır vektoru
0 =
00...0
Bir vektoru
1 =
11...1
Birim vektor: elemanlarından sadece biri bire esit, digerleri sıfır
e1 =
1000
, e2 =
0100
, e3 =
0010
, e4 =
0001
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Determinant
n × n boyutlu kare matrisin determinantı,
detA = |A| = det
a11 a12 . . . a1n
a21 a22 . . . a2n...
.... . .
...an1 am2 . . . ann
biciminde gosterilir ve i . satır elemanları icin yazılan,
det A = |A| =n∑
k=1
(−1)i+kaik |Aik | =n∑
k=1
aikcik
esitligi ile hesaplanır. Burada |Aik |, aik elemanının minoru;cik = (−1)i+k |Aik | ise kofaktorudur. |Aik |, A’nın i . satır ve k.
sutun elemanları cizilerek elde edilen alt matristir (n − 1 boyutlu).
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Determinant (devam)
Kofaktor kuralına gore 3 boyutlu bir matrisin determinantı,
|A| = det
a11 a12 a13
a21 a22 a23
a31 a32 a33
= a11
∣
∣
∣
∣
a22 a23
a32 a33
∣
∣
∣
∣
− a12
∣
∣
∣
∣
a21 a23
a31 a33
∣
∣
∣
∣
+ a13
∣
∣
∣
∣
a21 a22
a31 a32
∣
∣
∣
∣
= a11(a22a33 − a23a32) − a12(a21a33 − a23a31) + a13(a21a32 − a22a31)
2 × 2 boyutlu alt matrislerin determinatları yardımıyla kolaycahesaplanabilir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
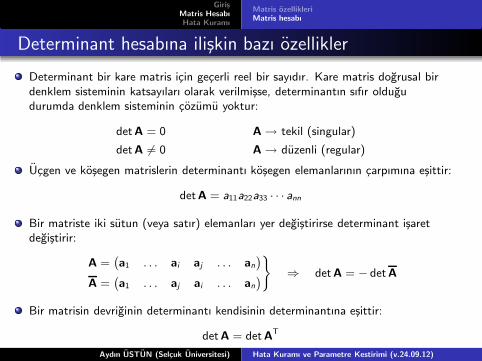
Determinant hesabına iliskin bazı ozellikler
Determinant bir kare matris icin gecerli reel bir sayıdır. Kare matris dogrusal birdenklem sisteminin katsayıları olarak verilmisse, determinantın sıfır oldugudurumda denklem sisteminin cozumu yoktur:
detA = 0 A → tekil (singular)
detA 6= 0 A → duzenli (regular)
Ucgen ve kosegen matrislerin determinantı kosegen elemanlarının carpımına esittir:
detA = a11a22a33 · · · ann
Bir matriste iki sutun (veya satır) elemanları yer degistirirse determinant isaretdegistirir:
A =`
a1 . . . ai aj . . . an
´
A =`
a1 . . . aj ai . . . an
´
)
⇒ detA = − detA
Bir matrisin devriginin determinantı kendisinin determinantına esittir:
detA = det AT
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
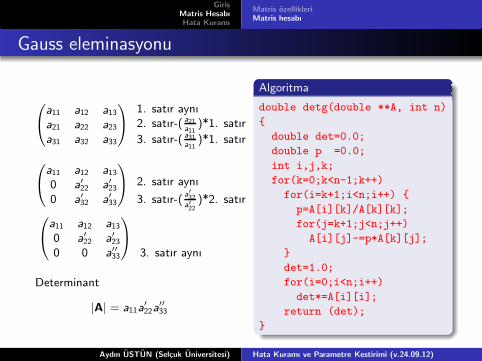
Gauss eleminasyonu
0
@
a11 a12 a13
a21 a22 a23
a31 a32 a33
1
A
1. satır aynı2. satır-( a21
a11)*1. satır
3. satır-( a31a11
)*1. satır
0
@
a11 a12 a13
0 a′
22 a′
23
0 a′
32 a′
33
1
A 2. satır aynı
3. satır-(a′32a′22
)*2. satır
0
@
a11 a12 a13
0 a′
22 a′
23
0 0 a′′
33
1
A
3. satır aynı
Determinant
|A| = a11a′
22a′′
33
Algoritma
double detg(double **A, int n)
{
double det=0.0;
double p =0.0;
int i,j,k;
for(k=0;k<n-1;k++)
for(i=k+1;i<n;i++) {
p=A[i][k]/A[k][k];
for(j=k+1;j<n;j++)
A[i][j]-=p*A[k][j];
}
det=1.0;
for(i=0;i<n;i++)
det*=A[i][i];
return (det);
}
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
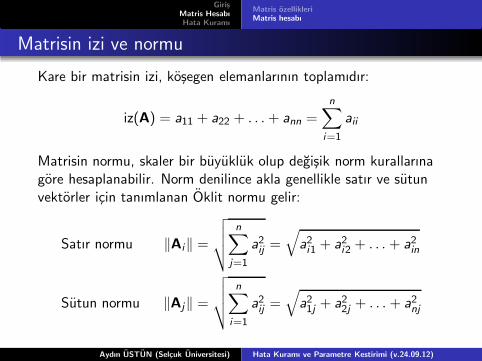
Matrisin izi ve normu
Kare bir matrisin izi, kosegen elemanlarının toplamıdır:
iz(A) = a11 + a22 + . . . + ann =
n∑
i=1
aii
Matrisin normu, skaler bir buyukluk olup degisik norm kurallarınagore hesaplanabilir. Norm denilince akla genellikle satır ve sutunvektorler icin tanımlanan Oklit normu gelir:
Satır normu ‖Ai‖ =
√
√
√
√
n∑
j=1
a2ij =
√
a2i1 + a2
i2 + . . . + a2in
Sutun normu ‖Aj‖ =
√
√
√
√
n∑
i=1
a2ij =
√
a21j + a2
2j + . . . + a2nj
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
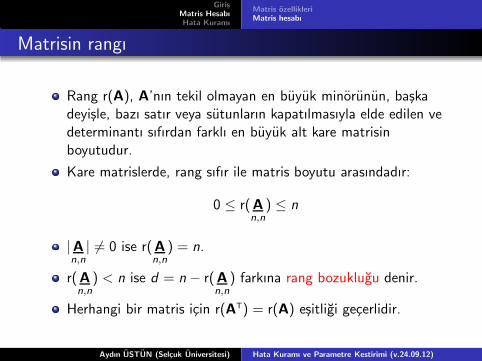
Matrisin rangı
Rang r(A), A’nın tekil olmayan en buyuk minorunun, baskadeyisle, bazı satır veya sutunların kapatılmasıyla elde edilen vedeterminantı sıfırdan farklı en buyuk alt kare matrisinboyutudur.
Kare matrislerde, rang sıfır ile matris boyutu arasındadır:
0 ≤ r(An,n
) ≤ n
|An,n
| 6= 0 ise r(An,n
) = n.
r(An,n
) < n ise d = n − r(An,n
) farkına rang bozuklugu denir.
Herhangi bir matris icin r(AT) = r(A) esitligi gecerlidir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
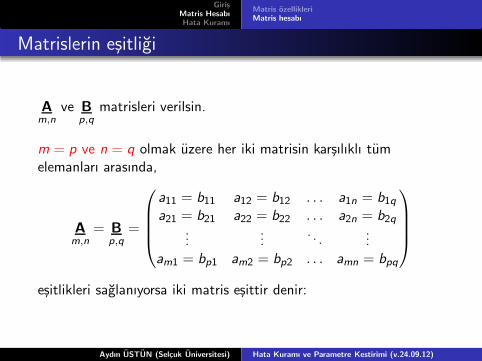
Matrislerin esitligi
Am,n
ve Bp,q
matrisleri verilsin.
m = p ve n = q olmak uzere her iki matrisin karsılıklı tumelemanları arasında,
Am,n
= Bp,q
=
a11 = b11 a12 = b12 . . . a1n = b1q
a21 = b21 a22 = b22 . . . a2n = b2q...
.... . .
...am1 = bp1 am2 = bp2 . . . amn = bpq
esitlikleri saglanıyorsa iki matris esittir denir:
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matrisin devrigi (transpozesi)
Am,n
matrisinin devrigi denildiginde satırları sutunlara, sutunları
satırlara donusturulmus matris anlasılır:
Am,n
=
a11 a12 . . . a1n
a21 a22 . . . a2n...
.... . .
...am1 am2 . . . amn
⇒ AT
n,m=
a11 a21 . . . am1
a12 a22 . . . am2...
.... . .
...a1n a2n . . . amn
Burada T ust indisi A’nın devrik oldugunu isaret eder (bununyerine A∗ veya A′ bicimleriyle de gosterilebilir).
A = (AT)T
A = AT (A simetrik ise)
Algoritma
for(i=0;i<m;i++)
for(j=0;j<n;j++)
T[j][i]=A[i][j];
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
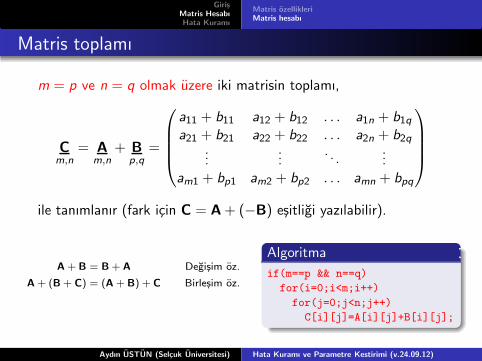
Matris toplamı
m = p ve n = q olmak uzere iki matrisin toplamı,
Cm,n
= Am,n
+ Bp,q
=
a11 + b11 a12 + b12 . . . a1n + b1q
a21 + b21 a22 + b22 . . . a2n + b2q...
.... . .
...am1 + bp1 am2 + bp2 . . . amn + bpq
ile tanımlanır (fark icin C = A + (−B) esitligi yazılabilir).
A + B = B + A Degisim oz.
A + (B + C) = (A + B) + C Birlesim oz.
Algoritma
if(m==p && n==q)
for(i=0;i<m;i++)
for(j=0;j<n;j++)
C[i][j]=A[i][j]+B[i][j];
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
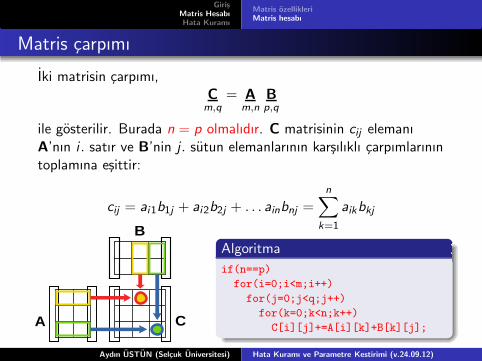
Matris carpımı
Iki matrisin carpımı,C
m,q= A
m,nBp,q
ile gosterilir. Burada n = p olmalıdır. C matrisinin cij elemanıA’nın i . satır ve B’nin j . sutun elemanlarının karsılıklı carpımlarınıntoplamına esittir:
cij = ai1b1j + ai2b2j + . . . ainbnj =
n∑
k=1
aikbkj
A
B
C
Algoritma
if(n==p)
for(i=0;i<m;i++)
for(j=0;j<q;j++)
for(k=0;k<n;k++)
C[i][j]+=A[i][k]+B[k][j];
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matris carpımının ozellikleri
Matris carpımı icin asagıdaki ozellikler gecerlidir:
A(BC) = (AB)C Birlesim oz.
A(B + C) = (AB) + AC Dagılma oz.
A ve B matrislerinin sagdan ve soldan carpımları mumkun olsa bile matriscarpımının degisim ozelligi genellikle yoktur:
AB 6= BA
E birim matris olmak uzere Am,n
ile carpımı asagıdaki sonucu verir:
Am,n
En,n
= Em,m
Am,n
= Am,n
Bir matris carpımının devrigi, ters sırada matris devriklerinin carpımına esittir:
(ABC)T = CTBTAT
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Matris carpımının ozellikleri (devam)
Esit dereceli A ve B matrislerinin determinantı icin asagıdaki esitlikler gecerlidir:
det(AB) = det A detB = detB detA = det(BA)
A2 = AA = A esitligini saglayan matrise esguclu (idempotent) matris denir.
Bir matris soldan devrigi ile carpılırsa simetrik matris elde edilir (Gauss donusumu):
ATA =
0
@
a1 a2 . . . an
b1 b2 . . . bn
c1 c2 . . . cn
1
A
0
B
B
B
@
a1 b1 c1
a2 b2 c2
......
...an bn cn
1
C
C
C
A
=
0
@
[aa] [ab] [ac][ab] [bb] [bc][ac] [bc] [cc]
1
A
Koseli parantezler toplam anlamındadır: [aa] = a21 + a2
2 + . . . + a2n.
a ve b sutun vektorleri tanımlansın. Iki vektor arasında iki farklı carpım sozkonusudur.
aTb = c = a1b1 + a2b2 + . . . + anbn Ic carpım (sayı)
abT = C Dıs carpım (matris)
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
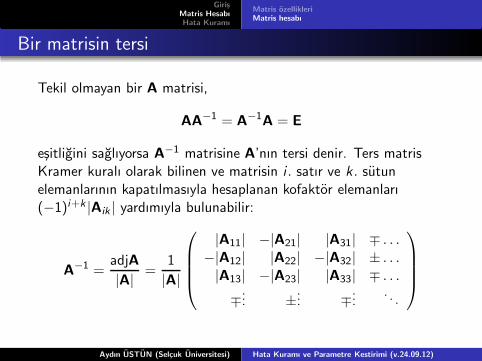
Bir matrisin tersi
Tekil olmayan bir A matrisi,
AA−1 = A−1A = E
esitligini saglıyorsa A−1 matrisine A’nın tersi denir. Ters matrisKramer kuralı olarak bilinen ve matrisin i . satır ve k. sutunelemanlarının kapatılmasıyla hesaplanan kofaktor elemanları(−1)i+k |Aik | yardımıyla bulunabilir:
A−1 =adjA
|A| =1
|A|
|A11| −|A21| |A31| ∓ . . .
−|A12| |A22| −|A32| ± . . .
|A13| −|A23| |A33| ∓ . . .
∓... ±... ∓.... . .
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
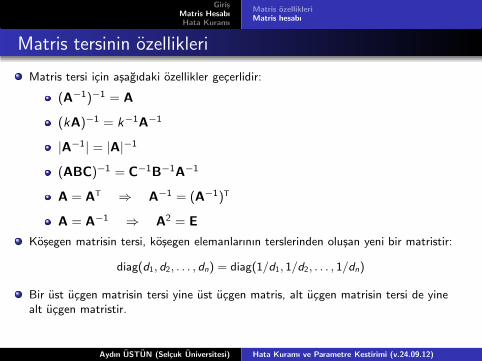
Matris tersinin ozellikleri
Matris tersi icin asagıdaki ozellikler gecerlidir:
(A−1)−1 = A
(kA)−1 = k−1A−1
|A−1| = |A|−1
(ABC)−1 = C−1B−1A−1
A = AT ⇒ A−1 = (A−1)T
A = A−1 ⇒ A2 = E
Kosegen matrisin tersi, kosegen elemanlarının terslerinden olusan yeni bir matristir:
diag(d1, d2, . . . , dn) = diag(1/d1, 1/d2, . . . , 1/dn)
Bir ust ucgen matrisin tersi yine ust ucgen matris, alt ucgen matrisin tersi de yinealt ucgen matristir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Gauss-Jordan yontemi ile ters matris hesabı
Yontem, tersi alınacak matrisin (A) sagına aynı boyutlu birimmatrisin yazılmasına ve soldaki matrisin birim matriseindirgenmesine dayanır. Indirgeme islemleri sonucunda sagdakibirim matris ters matrise donusmus olur (B = A−1):
(
A E)
=
a11 a12 . . . a1n 1 0 . . . 0a21 a22 . . . a2n 0 1 . . . 0...
.... . .
......
.... . .
...an1 an2 . . . ann 0 0 . . . 1
⇓
1 0 . . . 0 b11 b12 . . . b1n
0 1 . . . 0 b21 b22 . . . b2n...
.... . .
......
.... . .
...0 0 . . . 1 bn1 bn2 . . . bnn
=(
E B)
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Gauss-Jordan eleminasyonu (ornek)
2 0 −1 1 0 0−1 3 −2 0 1 0
0 −1 1 0 0 1
2 0 −1 1 0 0 1.satır aynı0 3 − 5
212
1 0 12*1.satır+2.satır
0 −1 1 0 0 1
2 0 −1 1 0 00 3 − 5
212
1 0 2.satır aynı0 0 1
616
13
1 13*2.satır+3.satır
2 0 0 2 2 6 6*3.satır+1.satır0 3 0 3 6 15 15*3.satır+2.satır0 0 1
616
13
1 3.satır aynı
1 0 0 1 1 3 12*1.satır
0 1 0 1 2 5 13*2.satır
0 0 1 1 2 6 6*3.satır
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
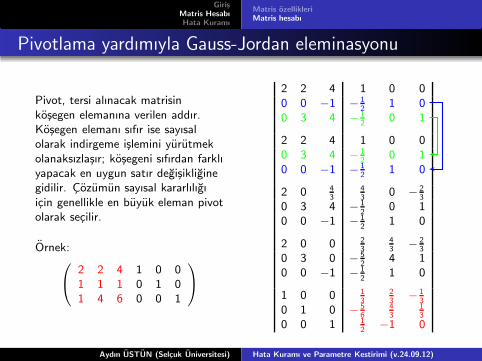
Pivotlama yardımıyla Gauss-Jordan eleminasyonu
Pivot, tersi alınacak matrisinkosegen elemanına verilen addır.Kosegen elemanı sıfır ise sayısalolarak indirgeme islemini yurutmekolanaksızlasır; kosegeni sıfırdan farklıyapacak en uygun satır degisikliginegidilir. Cozumun sayısal kararlılıgıicin genellikle en buyuk eleman pivotolarak secilir.
Ornek:0
@
2 2 4 1 0 01 1 1 0 1 01 4 6 0 0 1
1
A
2 2 4 1 0 00 0 −1 − 1
21 0
0 3 4 − 12
0 1
2 2 4 1 0 00 3 4 − 1
20 1
0 0 −1 − 12
1 0
2 0 43
43
0 − 23
0 3 4 − 12
0 10 0 −1 − 1
21 0
2 0 0 23
43
− 23
0 3 0 − 52
4 10 0 −1 − 1
21 0
1 0 0 13
23
− 13
0 1 0 − 56
43
13
0 0 1 12
−1 0
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Simetrik bir matrisin tersi
Simetrik bir matris icin tanım daha once A = AT esitligiyleyapılmıstı. En Kucuk Kareler, simulasyon, Kalman filtreleme vb.uygulamalarda pozitif tanımlı simetrik matrisler ile igilihesaplamalar cogu kez kacınılmaz olur. Boylesi matrislerinterslerinin alınması sıradan matrislere gore daha kolaydır.
Simetrik bir matrisin tersi denilince akla gelen ilk yontem Choleskyayrıstırmasıdır. Bunun dısında daha once anlatılan Gaussalgoritması da kullanılabilir. Aslında bu yontem matrisin simetrikozelliginden yararlanılarak kısaltılmıs (ucgene indirgenmis) bircozumdur. Bu nedenle modernlestirilmis Gauss yontemi olarak dabilinir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
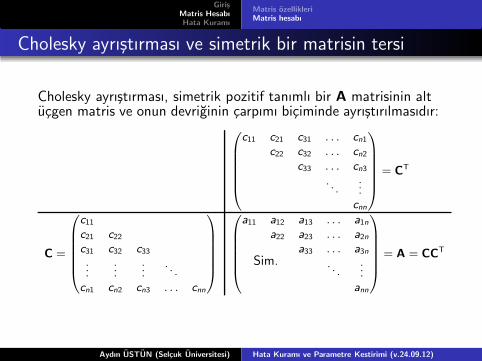
Cholesky ayrıstırması ve simetrik bir matrisin tersi
Cholesky ayrıstırması, simetrik pozitif tanımlı bir A matrisinin altucgen matris ve onun devriginin carpımı biciminde ayrıstırılmasıdır:
0
B
B
B
B
B
@
c11 c21 c31 . . . cn1
c22 c32 . . . cn2
c33 . . . cn3
. . ....
cnn
1
C
C
C
C
C
A
= CT
C =
0
B
B
B
B
B
@
c11
c21 c22
c31 c32 c33
......
.... . .
cn1 cn2 cn3 . . . cnn
1
C
C
C
C
C
A
0
B
B
B
B
B
@
a11 a12 a13 . . . a1n
a22 a23 . . . a2n
a33 . . . a3n
. . ....
ann
1
C
C
C
C
C
A
= A = CCT
Sim.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Cholesky ayrıstırması (kosegen elemanları)
a11 = c211 ⇒ c11 =
√a11
a22 = c221 + c2
22 ⇒ c22 =√
a22 − c221
a33 = c231 + c2
32 + c233 ⇒ c33 =
√
a33 − c231 − c2
32
......
ann = c2n1 + c2
n2 + . . . + c2nn ⇒ cnn =
√
ann − c2n1 − c2
n2 − . . . − c2nn−1
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Cholesky ayrıstırması (kosegen olmayanlar)
a12 = c11c21 ⇒ c21 = a12/c11
a13 = c11c31 ⇒ c31 = a13/c11
. . .
a1n = c11cn1 ⇒ cn1 = a1n/c11
a23 = c21c31 + c22c32 ⇒ c32 = (a23 − c21c31)/c22
a24 = c21c41 + c22c42 ⇒ c42 = (a24 − c21c41)/c22
. . .
a2n = c21cn1 + c22cn2 ⇒ cn2 = (a2n − c21cn1)/c22
a34 = c31c41 + c32c42 + c33c43 ⇒ c43 = (a34 − c31c41 − c32c42)/c33
a35 = c31c51 + c32c52 + c33c53 ⇒ c53 = (a35 − c31c51 − c32c52)/c33
. . .
a3n = c31cn1 + c32cn2 + c33cn3 ⇒ cn3 = (a3n − c31cn1 − c32cn2)/c33
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Cholesky ayrıstırması
cii =
√
√
√
√aii −i−1∑
k=1
c2ik i = j icin
cji =1
cii
(
aij −i−1∑
k=1
cikcjk
)
j > i icin
Algoritma
for(i=0;i<n;i++)
for(j=i;i<n;j++)
{
sum=A[i][j];
for(k=0;k<i;k++)
sum-=A[i][k]*A[j][k];
if(i==j)
{
A[j][i]=sqrt(sum);
cii=A[j][i];
}
else
A[j][i]=sum/cii;
}
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
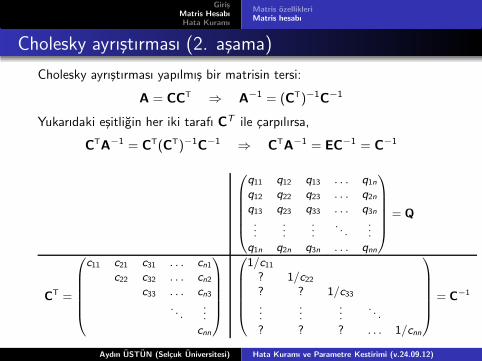
Cholesky ayrıstırması (2. asama)
Cholesky ayrıstırması yapılmıs bir matrisin tersi:
A = CCT ⇒ A−1 = (CT)−1C−1
Yukarıdaki esitligin her iki tarafı CT ile carpılırsa,
CTA−1 = CT(CT)−1C−1 ⇒ CTA−1 = EC−1 = C−1
0
B
B
B
B
B
@
q11 q12 q13 . . . q1n
q12 q22 q23 . . . q2n
q13 q23 q33 . . . q3n
......
.... . .
...q1n q2n q3n . . . qnn
1
C
C
C
C
C
A
= Q
CT =
0
B
B
B
B
B
@
c11 c21 c31 . . . cn1
c22 c32 . . . cn2
c33 . . . cn3
. . ....
cnn
1
C
C
C
C
C
A
0
B
B
B
B
B
@
1/c11
? 1/c22
? ? 1/c33
......
.... . .
? ? ? . . . 1/cnn
1
C
C
C
C
C
A
= C−1
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Cholesky yontemine gore matris tersi
Ornegin 3 × 3’luk bir matris icin cozum:
c33q33 =1
c33⇒ q33 =
1
c233
c22q23 + c23q33 = 0 ⇒ q23 = − 1
c22c23q33
c11q13 + c12q23 + c13q33 = 0 ⇒ q13 = − 1
c11(c12q23 + c13q33)
c22q22 + c23q23 =1
c22⇒ q22 =
1
c22(
1
c22− c23q23)
c11q12 + c12q22 + c13q23 = 0 ⇒ q12 = − 1
c11(c12q22 + c13q23)
c11q11 + c12q12 + c13q13 =1
c11⇒ q11 =
1
c11(
1
c11− c12q12 − c13q13)
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
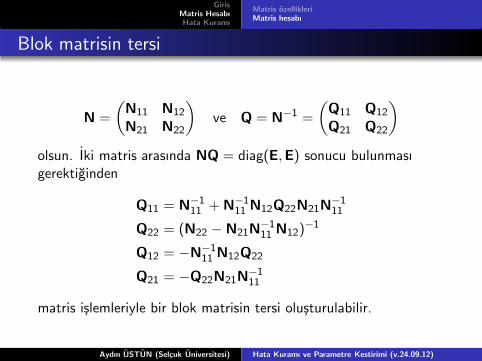
Blok matrisin tersi
N =
(
N11 N12
N21 N22
)
ve Q = N−1 =
(
Q11 Q12
Q21 Q22
)
olsun. Iki matris arasında NQ = diag(E,E) sonucu bulunmasıgerektiginden
Q11 = N−111 + N−1
11 N12Q22N21N−111
Q22 = (N22 − N21N−111 N12)
−1
Q12 = −N−111 N12Q22
Q21 = −Q22N21N−111
matris islemleriyle bir blok matrisin tersi olusturulabilir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Bir matrisin turevi
Skaler degiskene gore turev:
B =dA(t)
dt⇒ bij(t) =
daij(t)
dt
y = f (x1, x2, . . . , xn) = f (x) fonksiyonunun x’e gore turevi,
aT =∂y
∂x=(
∂y∂x1
∂y∂x2
· · · ∂y∂xn
)
dx = (dx1, dx2, . . . , dxn)T olmak uzere y ’nin diferansiyeli,
dy = aTdx
skaler bir sayıdır.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Matris ozellikleriMatris hesabı
Bir matrisin turevi (devam)
Aynı vektor elemanlarına baglı birden fazla fonksiyondan(yi = fi (x1, x2, . . . , xn)) olusan y = f(x) vektorunun x’e gore turevi,
∂y
∂x=
∂y1
∂x1
∂y1
∂x2· · · ∂y1
∂xn∂y2∂x1
∂y2∂x2
· · · ∂y2∂xn
......
. . ....
∂ym
∂x1
∂ym
∂x2· · · ∂ym
∂xn
= Fm×n
ve diferansiyeli,dy = Fdx
ile gosterilir. Burada F Jacobi matris olarak bilinir; dengelemehesabında hata yayılma kuralının uygulanması ve duzeltmedenklemlerinin olusturulması asamasında karsımıza cıkar.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Hata turleri
Kaba hatalar: Dikkatsizlik ve ozensizlik sonucu olusurlar, isaret olarakduzensiz ancak beklenen hata miktarının cok uzerindedirler, cogu kezkolay farkedilirler ve olcu kumesinden cıkartılmaları gerekir, standarthatanın uc ile altı katı arasındakileri belirlemek zordur, istatiksel karartestleriyle uyusumsuz olup olmadıklarına karar verilebilir.
Duzenli (sistematik) hatalar: Olcme donanımından veya olcmeteknigindeki eksikliklerden kaynaklanırlar, esit cevresel kosullarda yakınbuyukluktedirler (genellikle aynı yonlu), olculerin ve bilinmeyenparametrelerin kestirim degerlerinde model hatalarına neden olurlar,baska olcme donanımı veya olcme teknikleri kullanılarak buyukluklerikestirilebilirler ve olculere duzeltme olarak getirilebilirler.
Duzensiz (rasgele) hatalar: Dengeleme hesabının konusudurlar, isaret vebuyuklukleri onceden kestirilemezler, olcme donanınımlarının ve insanduyularının yetersizlikleri ile modellenemeyen cevresel kosulların toplametkisi olarak olculere yansırlar.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
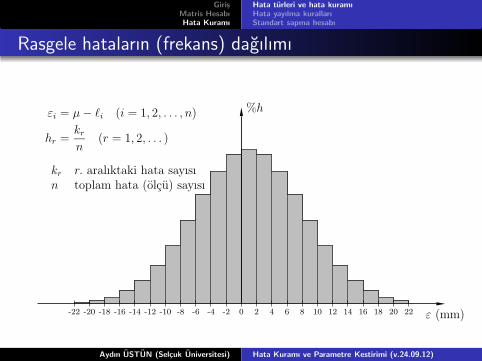
Rasgele hataların (frekans) dagılımı
ε (mm)
%h
-22 -20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 20 22
εi = µ − ℓi (i = 1, 2, . . . , n)
hr =kr
n(r = 1, 2, . . . )
kr r. aralıktaki hata sayısın toplam hata (olcu) sayısı
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
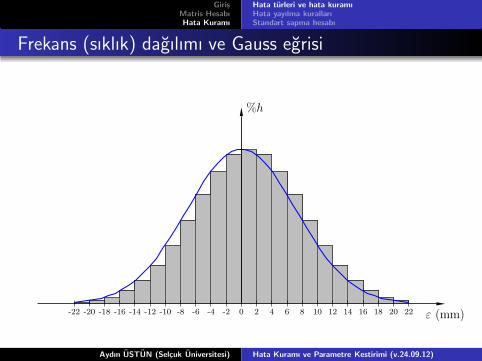
Frekans (sıklık) dagılımı ve Gauss egrisi
ε (mm)
%h
-22 -20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 20 22
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Normal (Gauss) dagılım
ξ
f(ξ)
f(ξ) =1
σ√
2πe−
ξ2
2σ2
−σ σ0
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Dogruluk olcutleri
ξ
f(ξ)
σ1
σ2
µ − σ1 µ + σ1µ − σ2 µ + σ2µ
Yuksek dogruluk
Dusuk dogruluk
σ2 > σ1
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
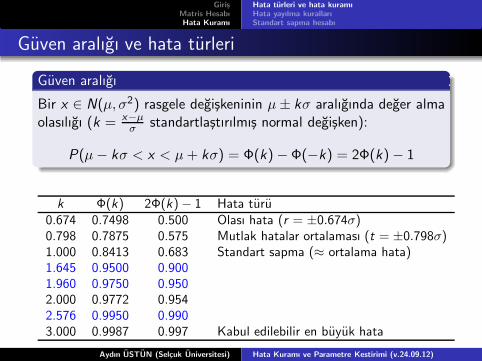
Guven aralıgı ve hata turleri
Guven aralıgı
Bir x ∈ N(µ, σ2) rasgele degiskeninin µ ± kσ aralıgında deger almaolasılıgı (k = x−µ
σstandartlastırılmıs normal degisken):
P(µ − kσ < x < µ + kσ) = Φ(k) − Φ(−k) = 2Φ(k) − 1
k Φ(k) 2Φ(k) − 1 Hata turu0.674 0.7498 0.500 Olası hata (r = ±0.674σ)0.798 0.7875 0.575 Mutlak hatalar ortalaması (t = ±0.798σ)1.000 0.8413 0.683 Standart sapma (≈ ortalama hata)1.645 0.9500 0.9001.960 0.9750 0.9502.000 0.9772 0.9542.576 0.9950 0.9903.000 0.9987 0.997 Kabul edilebilir en buyuk hata
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Istatistiksel buyuklukler
ℓ rasgele degisken (olcu) icin εi = µ− ℓi hata, vi = x − ℓi duzeltme olsun.
Beklenen deger µ = E (ℓ) n → ∞Varyans σ2 = E ((ℓ − µ)2) n → ∞
Ortalama deger x =[ℓ]
nn 6= ∞ (n → ∞ icin x → µ)
Standart sapma s =
√
[εε]
nn 6= ∞ (n → ∞ icin s → σ)
Ortalama hata m =
√
[vv ]
n − 1n 6= ∞
Olculerde sistematik hata yoksa: m = s
Olculerde sistematik hata varsa: m > s , m2 = s2 + (sistematik hata)2
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
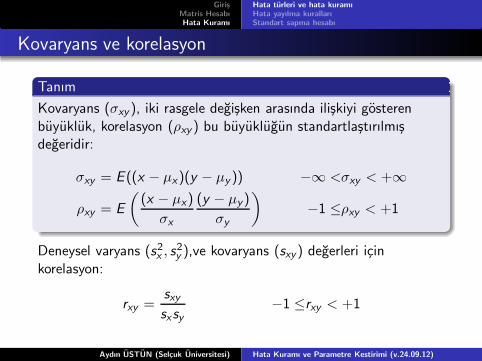
Kovaryans ve korelasyon
Tanım
Kovaryans (σxy ), iki rasgele degisken arasında iliskiyi gosterenbuyukluk, korelasyon (ρxy ) bu buyuklugun standartlastırılmısdegeridir:
σxy = E ((x − µx)(y − µy )) −∞ <σxy < +∞
ρxy = E
(
(x − µx)
σx
(y − µy)
σy
)
−1 ≤ρxy < +1
Deneysel varyans (s2x , s2
y ),ve kovaryans (sxy) degerleri icinkorelasyon:
rxy =sxy
sxsy−1 ≤rxy < +1
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
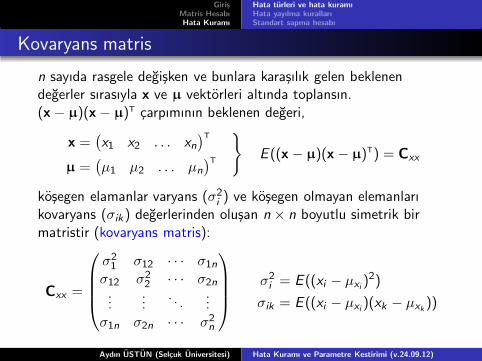
Kovaryans matris
n sayıda rasgele degisken ve bunlara karasılık gelen beklenendegerler sırasıyla x ve µ vektorleri altında toplansın.(x − µ)(x − µ)T carpımının beklenen degeri,
x =(
x1 x2 . . . xn
)T
µ =(
µ1 µ2 . . . µn
)T
}
E ((x − µ)(x − µ)T) = Cxx
kosegen elamanlar varyans (σ2i ) ve kosegen olmayan elemanları
kovaryans (σik) degerlerinden olusan n × n boyutlu simetrik birmatristir (kovaryans matris):
Cxx =
σ21 σ12 · · · σ1n
σ12 σ22 · · · σ2n
......
. . ....
σ1n σ2n · · · σ2n
σ2i = E ((xi − µxi
)2)
σik = E ((xi − µxi)(xk − µxk
))
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Hata yayılımı
Jeodezide konum parametereleri (orn. x , y ve z), genellikleyeryuzunde olculen dogrultu, uzunluk ve acılardandonusturulen buyukluklerdir.
Olculerdeki gozlem hataları, olculerin bir matematiksel birfonksiyonu olarak ifade edilmeleri nedeniyle istenilenbuyukluklere de yayılırlar:
y1 = f1(ℓ1, ℓ2, . . . , ℓn)
y2 = f2(ℓ1, ℓ2, . . . , ℓn)
......
ym = fm(ℓ1, ℓ2, . . . , ℓn)
=⇒ y = f(l) (1)
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Dogrusal modellerde hata yayılımı
Ornegin l =(
ℓ1 ℓ2 ℓ3
)Tolculeri ile bilinmeyen y1, y2
parametreleri arasında asagıdaki gibi dogrusal bir iliski tanımlıolsun:
y1 = a0 + a1ℓ1 + a2ℓ2 + a3ℓ3
y2 = b0 + b1ℓ1 + b2ℓ2 + b3ℓ3(2)
Hatasız olarak bilinen a ve b katsayılarına karsılık ℓi olculeri εi
duzeltme degerleriyle birlikte (ℓi + εi : beklenen deger) elealınırsa hata yayılma etkisi,
y1 + εy1 = a0 + a1(ℓ1 + ε1) + a2(ℓ2 + ε2) + a3(ℓ3 + ε3)
y2 + εy2 = b0 + b1(ℓ1 + ε1) + b2(ℓ2 + ε2) + b3(ℓ3 + ε3)(3)
biciminde gorulur.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Dogrusal modellerde hata yayılımı (devam)
(3)’te olcu ve hata terimleri ayrıstırılırsa (2) nedeniyle,
εy1 = a1ε1 + a2ε2 + a3ε3
εy2 = b1ε1 + b2ε2 + b3ε3(4)
sonucu ortaya cıkar.
(2) ve (4) esitliklerinden, fonksiyonel modelin olculere goreturevleri oranında olcu hatalarının kestirilen buyuklukleruzerine yayıldıgı kolayca gorulebilir:
εyi=
∂fi
∂ℓ1ε1 +
∂fi
∂ℓ2ε2 +
∂fi
∂ℓ3ε3 = aT
ε (5)
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Dogrusal olmayan modellerde hata yayılımı
Genellikle olculer ile aranan buyuklukler arasındaki fonksiyonel iliskidogrusal olmaz:
yi = fi(ℓ1, ℓ2, . . . , ℓn) (6)
Olculerin beklenen degerlerine (ℓi + εi ) gore yi ’nin beklenen degeri,
yi + εyi= fi (ℓ1 + ε1, ℓ2 + ε2, . . . , ℓn + εn) (7)
Taylor serisi kullanılarak (εi degerlerinin kucuk olması kosuluyla),
yi + εyi= fi(ℓ1, ℓ2, . . . , ℓn) +
∂fi
∂ℓ1ε1 +
∂fi
∂ℓ2ε2 + · · · + ∂fi
∂ℓn
εn
εyi=
∂fi
∂ℓ1ε1 +
∂fi
∂ℓ2ε2 +
∂fi
∂ℓ3ε3 + · · · + ∂fi
∂ℓn
εn = aTε
(8)
dogrusallastırılabilir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Varyans-kovaryans yayılımı
ℓ1, ℓ2, . . . , ℓn olculerinin her biri γ kez yinelendigi varsayılsın. Budurumda y1 ve y2 buyuklukleri icin γ sayıda (8) hata denklemiyazılabilir:
εy1 = a1ε1 + a2ε2 + a3ε3
εy2 = b1ε1 + b2ε2 + b3ε3(9)
εy1 ve εy2 vektorlerinin kendisiyle (auto) ve capraz (cross)carpımlarından,
εTy1
εy1 = a21ε
T1 ε1 + a
22ε
T2 ε2 + a
23ε
T3 ε3 + 2a1a2ε
T1 ε2 + 2a1a3ε
T1 ε3 + 2a2a3ε
T2 ε3
εTy2
εy2 = b21ε
T1 ε1 + b
22ε
T2 ε2 + b
23ε
T3 ε3 + 2b1b2ε
T1 ε2 + 2b1b3ε
T1 ε3 + 2b2b3ε
T2 ε3
εTy1
εy2 = a1b1εT1 ε1 + a2b2ε
T2 ε2 + a3b3ε
T3 ε3 + (a1b2 + a2b1)ε
T1 ε2+
+ (a1b3 + a3b1)εT1 ε3 + (a2b3 + a3b2)ε
T2 ε3
(10)
cıkar.Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Varyans-kovaryans yayılımı (devam)
(10) esitliklerinin her terimi bagımsız olculerin sayısına (γ)bolunurse,
εTy1
εy1
γ= σ2
y1,
εTy2
εy2
γ= σ2
y2,
εTy1
εy2
γ= σy1y2
εTi εi
γ= σ2
i ,ε
Ti εk
γ= σik
(11)
oldugu goz one alınarak,
σ2y1
= a21σ
21 + a
22σ
22 + a
23σ
23 + 2a1a2σ12 + 2a1a3σ13 + 2a2a3σ23
σ2y2
= b21σ
21 + b
22σ
22 + b
23σ
23 + 2b1b2σ12 + 2b1b3σ13 + 2b2b3σ23
σy1y2 = a1b1σ21 + a2b2σ
22 + a3b3σ
23 + (a1b2 + a2b1)σ12+
+ (a1b3 + a3b1)σ13 + (a2b3 + a3b2)σ23
(12)
bulunur.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Varyans-kovaryans yayılımı (devam)
l =(
ℓ1 ℓ2 ℓ3
)Tolcu vektorunun varyans-kovaryans matrisi ve y1,
y2 fonksiyonlarının dogrusal terimlerinin katsayıları,
Cℓℓ =
0
@
σ21 σ12 σ13
σ12 σ22 σ23
σ13 σ23 σ23
1
A ,a =
“
a1 = ∂y1∂ℓ1
a2 = ∂y1∂ℓ2
a3 = ∂y1∂ℓ3
”T
b =“
b1 = ∂y2∂ℓ1
b2 = ∂y2∂ℓ2
b3 = ∂y2∂ℓ3
”T(13)
ise (14) varyans-kovaryans esitlikleri,
σ2y1
= aTCℓℓa
σ2y2
= bTCℓℓb
σy1y2 = aTCℓℓb = bTCℓℓa
(14)
bicimine donusturulebilir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Genel hata yayılma kuralı
Hata yayılımı (1) esitliginde verilen m sayıda fonksiyon icin eldeedilecekse bu fonksiyonların diferansiyeli dy = Fd l ve onunkatsayılar matrisi,
F =
∂y1∂ℓ1
∂y1∂ℓ2
· · · ∂y1∂ℓn
∂y2
∂ℓ1
∂y2
∂ℓ2· · · ∂y2
∂ℓn
......
. . ....
∂ym
∂ℓ1
∂ym
∂ℓ2· · · ∂ym
∂ℓn
(15)
olmak uzere genel varyans-kovaryans kuralı,
Cyy = FCℓℓFT (16)
matris esitligi ile ozetlenebilir.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)
GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Agırlık katsayısı ve agırlık yayılma kuralları
(16) esitligininin her iki yanı birim agılıklı varyans degerinebolunurse,
1
σ20
Cyy =1
σ20
FCℓℓFT
Qyy = FQℓℓFT (17)
agırlık katsayıları matrisi elde edilir. (17) esitligine agırlık yayılmakuralı adı verilir.
n sayıda olcu icin agırlık matrisi, agırlık katsayıları (kofaktor) vevaryans-kovaryans matrisi arasında,
Pℓℓ = Q−1ℓℓ
= σ20C
−1ℓℓ
(18)
iliskisi vardır.
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)

GirisMatris HesabıHata Kuramı
Hata turleri ve hata kuramıHata yayılma kurallarıStandart sapma hesabı
Sonlu olcu dizilerinden standart sapma hesabı
Beklenen deger: µ = E(ℓ), Varyans: σ2 = E((ℓ − µ)2), olculer korelasyonsuz
Ortalama deger x =[ℓ]
nn 6= ∞ (n → ∞ icin x → µ)
Standart sapma s =
r
[εε]
nn 6= ∞ (n → ∞ icin s → σ)
Ortalama hata m =
r
[vv ]
n − 1n 6= ∞
Ortalama degerinortalama hatası
mx =
s
[vv ]
n(n − 1)=
m√n
Olcu ciftlerininortalama hatası
m =
r
[dd ]
2ndi = ℓ′i − ℓ′′i
Olcu cifti ortala-masınınortalama hatası
mx =
r
[dd ]
4n=
m√2
Aydın USTUN (Selcuk Universitesi) Hata Kuramı ve Parametre Kestirimi (v.24.09.12)