gewohnlichedifferentialgleichungen¨ und dynamische systeme · wir zeitliche und ra¨umliche...
TRANSCRIPT

Gewohnliche Differentialgleichungenund Dynamische Systeme
Dynamische SystemeVorlesung
Reiner Lauterbach
Universitat Hamburg, SS 2009

2

Inhaltsverzeichnis
Einleitung 4
1 Dynamische Systeme – Grundlegendes 91.1 Einfuhrende Beispiele . . . . . . . . . . . . . . . . . . . . . . 9
1.1.1 Das Collatz-Problem . . . . . . . . . . . . . . . . . . . 101.1.2 Wachstum und Zerfall . . . . . . . . . . . . . . . . . . 111.1.3 Diskrete Dynamik mit kontinuierlichen Zustandsraum 141.1.4 Das Pendel . . . . . . . . . . . . . . . . . . . . . . . . . 151.1.5 Wortspiele . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.2 Grundlegende Begriffe . . . . . . . . . . . . . . . . . . . . . . 181.2.1 Metrische Raume . . . . . . . . . . . . . . . . . . . . . 181.2.2 Vollstandige metrische Raume . . . . . . . . . . . . . 191.2.3 Eingebettete Mannigfaltigkeiten . . . . . . . . . . . . 231.2.4 Halbgruppen von Selbstabbildungen . . . . . . . . . 271.2.5 Diskrete Dynamik von Selbstabbildungen . . . . . . . 29
1.3 Geometrische Begriffe . . . . . . . . . . . . . . . . . . . . . . 291.3.1 Spezielle Orbits und ihre Grenzmengen . . . . . . . . 291.3.2 Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.4 Diskrete versus kontinuierliche Dynamik . . . . . . . . . . . 351.4.1 Zeit–1–Abbildungen . . . . . . . . . . . . . . . . . . . 351.4.2 Poincare–Abbildungen . . . . . . . . . . . . . . . . . . 361.4.3 Suspensionen . . . . . . . . . . . . . . . . . . . . . . . 37
1.5 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2 Stabilitat 412.1 Lineare Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . 412.2 Lineare ebene Systeme . . . . . . . . . . . . . . . . . . . . . . 43
2.2.1 |λ1,2| < 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3

4 INHALTSVERZEICHNIS
2.2.2 Ein Eigenwert vom Betrag hochstens 1, mindestensein Eigenwert von Betrag 1 . . . . . . . . . . . . . . . 45
2.3 Stabilitat von Ruhelagen . . . . . . . . . . . . . . . . . . . . . 452.4 Lineare Differentialgleichungen und Stabilitat . . . . . . . . 47
2.4.1 Jordan Form . . . . . . . . . . . . . . . . . . . . . . . . 472.4.2 Die Matrixexponentialfunktion . . . . . . . . . . . . . 502.4.3 Ebene lineare Systeme . . . . . . . . . . . . . . . . . . 54
2.5 Newtons Methode als dynamisches System . . . . . . . . . . 59
3 Klassifikation dynamischer Systeme 613.1 Konjugation und Orbit-Aquivalenz . . . . . . . . . . . . . . . 613.2 Hufeisen und Buroklammer . . . . . . . . . . . . . . . . . . . 643.3 Symbolische Dynamik . . . . . . . . . . . . . . . . . . . . . . 69
4 Fraktale und Dimension 794.1 Selbstahnlichkeit . . . . . . . . . . . . . . . . . . . . . . . . . 794.2 Selbstahnlichkeitsdimension . . . . . . . . . . . . . . . . . . . 874.3 Hausdorff-Dimension . . . . . . . . . . . . . . . . . . . . . . 894.4 Box-Dimension . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Literaturverzeichnis 93
Index 93

Einleitung
In dieser Vorlesung wollen wir uns dem Studium gewohnlicher Differen-tialgleichungen widmen, dabei werden wir dies aus der Perspektive derTheorie dynamischer Systeme tun. Dieser Zugang ist relativ neu, hat sichaber weitgehend durchgesetzt. Er ist dabei so erfolgreich, dass sich diesePerspektive auch fur das Studium vieler weiterer Gleichungstypen durch-gesetzt hat. Dabei sind dynamische Systeme allgemein Systeme, die einezeitliche Evolution beschreiben, wir werden gleich Beispiele betrachten.Anwendungen gibt es reichlich, dies sogar aus praktisch allen Wissen-schaften. Methoden sind ebenfalls weitgefachert, wir konnen Methodenaus dem Bereich der Analysis verwenden, aber auch die lineare Alge-bra wird eine Rolle spielen. oft kann man sich mit numerischen Verfah-ren einen raschen Uberblick uber das Verhalten in einem dynamischenSystem verschaffen. Methoden der Zahlentheorie spielen in dem Gebietebenso eine Rolle wie Stochastik und Topologie. Keine Angst, wir wollenuns nur mit der Einfuhrung in das Gebiet befassen, dazu gehort, dass wiruns grundlegende Fragestellungen ansehen, einige wichtige Begriffe undMethoden kennenlernen, aber auch beispielhaft sehen wir die Methodenaus anderen Bereichen das Studium dynamischer Syteme fordern konnen.
Grundsatzlich stellt man in der Theorie dynamischer Systeme Fragen,die einen sehr langen Zeithorizont betreffen: gibt es ein Gleichgewicht,gibt es periodische Orbits, sind diese global asymptotisch stabil, konnenwir einen globalen Attraktor angeben, welche Dimension hat dieser, konnenwir zeitliche und raumliche Mittelwerte angeben, gibt es dazwischen Zu-sammenhange. Im ersten Semester werden wir naturlich nur einige weni-ge dieser Punkte behandeln. Aufbauend auf diese Vorlesung wird es eineFortsetzung (von Herrn Gunesch) geben, die weiterfuhrende Aspekte be-handelt.
Literatur zu den in der Vorlesung behandelten Themen gibt es reich-
5

6 INHALTSVERZEICHNIS
haltig, hier ist eine unvollstandige Auswahl, die Werke dieser Liste habenauch in der einen oder anderen Weise, die Auswahl und Behandlung derhier vorgestellten Themen beeinflusst.
• Abraham & Robbin [2] geben eine moderne auch unendlich dimen-sionale Darstellung der Theorie. Fur die im Werk behandelten The-men eine hervorragende Einfuhrung, zum Selbststudium vielleichtetwas abstrakt mit wenig Beispielen.
• Amann [3] gibt eine moderne, sehr vollstandige Darstellung der Theo-rie gewohnliche rDifferentialgleichungen. Wir konnen nur einen Bruch-teil des Materials bearbeiten. Das Werk eigente sich auch gut fur wei-erfuhrende Studien.
• Arnold [4] gibt eine knappe Darstellung der wesentlichen Aspekteeiner modernen Theorie von gewohnlichen Differentialgleichungen.
• Denker [6]
• Devaney [7]
• Gunesch [9]
• Gunesch [10]
• Hale [11] ist der Klassiker der englich sprachigen Literatur. Jack Halehat mit diesem und vielen anderen Werken, die Grundlagen fur denvon uns verfolgten Zugang gelegt.
• Hartman [12] hat ein umfangreiches und heute klassiches Werk ver-fasst, viele Themen findet man nur hier. Als Werk zum Lernen we-niger geeignet, sehr gutes und umfangreiches nachschlagewerk zuden behandelten Themen. Moderne Themen fehlen teilweise.
• Hasselblatt & Katok [13]
• Harro Heuser [14] hat hiermit auch einen deutschen Klassiker vor-gelegt. Eine sehr umfangreiche Themenauswahl und viele Geschich-ten rund um das Thema Differentialgleichungen machen es zu einerFundgrube, zum Lernen und als Begleitlekture eher nicht geeignet.Es ist mehr ein Erganzungsbuch, das aber auch Begeisterung fur dasfach verrat und wecken kann.
INHALTSVERZEICHNIS 7
• Katok & Hasselblatt [15]
• Lauterbach [17] wurde von mir Als Skript zur Vorlesung Gewohn-liche Differentialgleichungen verfasst, liegt auch der jetzigen Vorle-sung teilweise zu Grunde.
• Palis & de Melo [18] haben hiermit eine hervoragende Einfuhrungin wichtige Aspekte dynamischer Systeme und ihrer Anwendungenauf gewohnliche Differentialgleichungen geschrieben. Fur die The-men der engen Themenauswahl ist es auch zum Selbststudium sehrgut geeignet, als einzige lekture zum Thema ist es wohl etwas eng.
• Knobloch & Kappel [16] war lange Zeit ein deutsches grundlegendesWerk, ist inzwischen etwas in die Jahre gekommen.
• Wolfgang Walter [19] hat mit diesem Werk einen vielzitierten deut-schen Klassiker verfasst. Viele Ideen aus der Funktionalanalysis undAnwendungen auf Randwertprobleme sind hier enthalten. der geo-metrische Zugang zu Anfangswertproblemen und dynamisches Ver-halten kommt zu kurz. Als das Buch geschrieben wurde, war dieserZugang auch noch nicht entwickelt.
Fur die historischen Anmerkungen wurden folgende Quellen genutzt:
1. Die Internetseite von St. Andrews College:http://www-gap.dcs.st-and.ac.uk/ history/Indexes/HistoryTopics.html
2. Die Brockhaus Enzyklopadie [1]
3. Lexikon bedeutender Mathematiker [8]

8 INHALTSVERZEICHNIS

Kapitel 1
Dynamische Systeme –Grundlegendes
Wir wollen das Studium dynamischer Systeme durch eine kleine Zahl vonBeispielen motivieren, Ziel soll sein, eine Fulle moglicher Anwendungenzu sehen. dabei werden wir genauso auf unbekanntes Terrain vorstoßen,wie auch erkennen, wie man mit einfachen Methoden Aussagen gewinnenkann, die wir spater verfeinern werden.
1.1 Einfuhrende Beispiele
In diesem kurzen Abschnitt wollen wir einige motivierende Beispiele be-trachten, die vielleicht auf den ersten Blick auch etwas ungewohnlich sind.
Kurz gesagt, besteht ein dynamisches System aus einer einem Zustands-raum, an den wir bei der prazisen Definition gewisse Forderungen stel-len, z.B. soll der Begriff, dass zwei Zustande nahe beieinander sind, sinn-voll sein und aus einer Vorschrift, wie aus einem Zustand sich zukunftigeZustande entwickeln. Wesentlich soll dabei sein, dass allein der Zustand(und vielleicht die Anfangszeit) die zukunftige Entwicklung determinie-ren. An dieser Stelle, wollen wir zumindest im Moment keine zufalligenEinflusse zualssen, obwohl man an anderer Stelle auch lernen kann, wieman zufallige Einflusse behandelt. Fur manche Anwendungen in der Phy-sik sind diese zufalligen Einflusse sehr wichtig, sie fuhren trotzdem weituber den uns gesteckten Rahmen hinaus.
9

10 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
1.1.1 Das Collatz-Problem
Nach Lothar Collatz1 ist das ist das folgende Problem benannt, obwohlman es auch unter anderen Bezeichnungen findet. Die Losung ist offen,jede(r) der die Losung findet, wird wohl sofort sehr bekannt werden.
Der Zustandsraum ist die Menge der naturlichen Zahlen N, die Zeitwird hier auch als diskrete Zeit mit der Menge der naturlichen Zahlenmodelliert. Ein Folge naturlicher Zahlen
ann∈Ngibt dann die Evolution des Zustandes a1 an. Jedes Bildungsgesetz fureine Folge wurde nun ein diskretes dynamisches System definieren, furdas Collatz Problem betrachten wir das Gesetz
an+1 = Ψ(an),
wobei Ψ durch
Ψ : N→ N : n 7→
2n+ 1 if n is odd,n2
if n is even.
Wir betrachten einige spezielle Anfangswerte: beginnen wir mit 1, so er-halten wir die periodische Folge
1, 4, 2, 1, 4, 2, 1, . . .
mit Periode 3, d.h. an+3 = an. Wenn wir mit einem beliebigen Wert ausder Folge starten, erhalten wir bis auf eine Verschiebung die gleiche Folgezuruck:
4, 2, 1, 4, 2, 1, · · · = sh−(1, 4, 2, 1, . . . ).
Dabei ist sh− der Verschiebeoperator (nach links) auf dem Raum c allerreeller Folgen, der sich in naturlicher Weise auch auf alle Unterraume vonc ubertragt (und naturlich auch auf dem Raum der beidseitigen Folgen de-finiert ist und Anlass zu interessanten dynamischen Verhalten ist). Startenwir mit einem anderen Wert, z.B. 7, so erhalten wir die Folge
7, 22, 11, 34, 17, 52, 26, 13, 40, 20, 10, 5, 16, 8, 4, 2, 1, 4, 2, 1
1Lothar Collatz (6.7.1910-26.9.1990) war ein weltweit bekannter angewandter Mathe-matiker, der vor allem die Entwicklung der angewandten Mathematik in Hamburg sehrbestimmt hat. Er hat in vielen Bereichen der angewandten Mathematik gearbeitet.

1.1. EINFUHRENDE BEISPIELE 11
und so bis auf eine Verschiebung die ursprungliche periodische Folge, also
(sh−)16(7, 22, 11, 34, 17, 52, 26, 13, 40, 20, 10, 5, 16, 8, 4, 2, 1, 4, 2, 1, . . .) = (1, 4, 2, 1, . . . ).
Das Collatz-Problem besteht nun darin zu beweisen, dass es zu jedemStartwert n eine Verschiebung (sh−)j gibt, so dass
shj(n,Ψ(n),Ψ2(n), . . . ) = (1, 4, 2, 1, 4, 2, 1, . . . ).
Man kann leicht ein Computer-Programm schreiben, dass die Korrektheitdieser Behauptung fur n < 10p nachpruft, aktuelle Werte von p findet manin der Literatur, weiteres zum Collatz-Problem findet man z.B. bei Wir-sching [].
1.1.2 Wachstum und Zerfall
Wir betrachten eine Population, der Zustand sei die momentane Anzahlder Individuen der Population. Wir nehmen an, dass die Population sichin einer festen Generationenfolge entwickelt, d.h. wir konnen die Beschrei-bung reduzieren auf die Anzahl der Individuen in der n-ten Generati-on. Die einfachste Annahme zur Beschreibung einer Population ist, dassGeburten und Todesfalle proportional zum gegenwartigen Zustand sind.Dann gibt es eine Zahl b > 0, die sogenannte Geburtsrate und ein Zahl1 > d > 0, die Sterberate, so dass sich die Anzahl der Individuen an+1 inder n+1-Generation, sich aus der der n-ten Generation an errechnet durch
an+1 = (1 + b− d)an.
Nun ist es sehr einfach, das Verhalten zu diskutieren. Ist a0 der Ausgangs-zustand, β = 1 + b− d, so ergibt sich
an = βna0.
Der Zustandsraum einer solchen Bevolkerung N0. Dies ist vielleicht un-naturlich, weil die Angabe einer reellen Wachstumsrate β /∈ Q aus demZustandsraum herausfuhrt. Eine Moglichkeit diese Problematik zu umge-hen besteht darin mit Populationsdichten zu arbeiten, diese sind in naturli-cher Weise reelle Zahlen.
Auch wenn es keine naturliche Zahl geben muss mit
βn = 2
12 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
konnen wir doch feststellen, dass nach circa ln 2ln β
Zeiteinheiten eine Ver-doppelung der Population eingetreten ist. Entsprechendes findet man beiradioaktiven Zerfall als Halbwertszeit. Hier gibt es allerdings keine strenge
”Generationenfolge“, so dass es gunstiger ist mit einem zeitlich kontinu-
ierlichen System zu arbeiten.
Der radioaktive Zerfall
Beim radioaktiven Zerfall betrachtet man folgenden Vorgang. Man hatzum Zeitpunkt 0 eine gewisse Masse u0 einer radioaktiven Substanz. Mitu(t) bezeichnen wir die zum Zeitpunkt t verbleibenden Masse der Sub-stanz. Durch Beobachtungen erhalt man, dass die Anzahl der Zerfalle pro-portional zur Menge der Substanz ist. Sei α diese Rate. Dann lautet diezugehorige Gleichung(VERANDERUNG=ZERFALLSRATE∗MENGE)
u′(t) = −αu(t). (1.1)
Man kann eine Losung sofort hinschreiben:
u(t) = ce−αt. (1.2)
Nachdem zum Zeitpunkt t = 0 gelten muss, dass u(0) = u0 erhalt manc = u0. Aus dieser Beziehung leitet man leicht ab, wielange es dauert, bissich die Menge der radioaktiven Substanz halbiert hat. Ist namlich u(T ) =12u0, so rechnet man daraus T = ln(2)/α. Dieser Wert ist unabhangig vonu0 und daher gilt immer
u(t+ T ) = u(t)/2. (1.3)
T wird als Halbwertszeit bezeichnet. Sie charakterisiert, wie wir eben ge-sehen haben, den Zerfallsprozess. Wiederum haben wir es hier mit ei-nem Anfangswertproblem zu tun. Allgemein fuhren Wachstums- oderZerfallsprozesse, wobei die Veranderung proportional zur gegenwartigenGroße ist, auf Differentialgleichungen von der Gestalt (1.1).
Das Verhulstsche Modell zur Populationsdynamik
Wir kehren zur Diskussion von Populationen zuruck. Hat man keine stren-ge Generationenfolge, so ist es sinnvoller eine kontinuierliche Zeit zu ver-wenden, wir schreiben dies als Differentialgleichung. Es sei x(t) die Funk-tion, die die Anzahl der Individuen zum Zeitpunkt t ∈ R angibt, dann ist

1.1. EINFUHRENDE BEISPIELE 13
die Veranderung proportional zur Anzahl. Sei b > 0 wieder die Geburten-rate, d > 0 die Rate der Sterbefalle. Dann ist
dx
dt= (b− d)x(t).
Gibt man sich noch die Anzahl x0 zu einem bestimmten Zeitpunkt t0 vor,so schreiben wir mit β = b− d ein Anfangswertproblem
dx
dt= βx
x(t0) = x0.(1.4)
Diese Schreibweise besagt, dass wir eine differenzierbare Funktion x :R → R suchen, deren Ableitung an der Stelle ein konstantes Vielfachesvom Wert x(t) ist, und die an der Stelle t0 den Wert x0 annimmt.
Ob es eine solche Funktion gibt, ist a priori nicht klar. Fur diesen ein-fachen Fall konnen wir das Existenzproblem durch Angabe einer Losungklaren: sei
x(t) = x0eβ(t−t0).
Dann ist x(t0) = x0 und
dx
dt(t) = wx0e
w(t−t0) = wx(t).
Naturlich stellt sich auch die Frage nach der Eindeutigkeit dieser Losung.Dieses Modell fur Wachstum ist naturlich sehr einfach, es gibt nur dreiMoglichkeiten exponentielles Wachstum (w > 0), zeitlich konstantes Ver-halten w = 0 und exponentielles Aussterben (Radioaktivitat) w < 0.
Verhalten, wie z.B. Wachstum bis zu einer Sattigungsgrenze ist dabeinicht moglich.
Ist β positiv, hat man ein Bevolkerungswachstum, ahnlich der Halb-wertszeit gibt es nun eine Verdoppelungszeit T = ln(2)/β. Beobachtet man inder Realitat ein Wachstum, das noch starker ist (Verkurzung der Verdop-pelungszeiten), dann ist (1.4) kein geeignetes Modell. Ein schwerwiegen-der Nachteil dieses Modells ist die Vorhersage grenzenlosen Wachstums.Dies kann wegen der Endlichkeit aller Dinge nicht vorliegen, so gab esschon lange Versuche die Gleichung (1.4) zu modifizieren. Ein solches Mo-dell ist die Einfuhrung eines Stressfaktors S, der proportional zur Anzahl

14 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
der Begegnungen von Individuen der Population ist. Diese ist proportio-nal zu p2. Damit erhalt man
p′ = βp− Sp2. (1.5)
Die hier angegebene Gleichung wird oft als logistische Gleichung bezeich-net. Sie geht auf den belgischen Mathematiker VERHULST2 zuruck.
1.1.3 Diskrete Dynamik mit kontinuierlichen Zustandsraum
In diesem Unterabschnitt sei X = [0, 1] der Zustandsraum. Wir betrachteneine Vorschrift aus dem Zustand zum Zeitpunkt t ∈ N einen Zustand zumZeitpunkt t+ 1 zu erhalten, indem wir eine Funktion f : X → X angeben,also
xn+1 = f(xn).
Um den Anfangswert der Entwicklung anzugeben, schreiben wir nochx0 ∈ X vor.
1. f(x) = x+ bmod 1In diesem Fall unterscheidet sich das Verhalten erheblich, je nach-dem ob b ∈ Q oder b ∈ R \Q ist.
Satz 1.1.3.1 Ist b ∈ Q, so gilt fur alle x0 ∈ X , dass die Folge xnn∈N mitxn+1 = f(xn) periodisch ist.
Ist b /∈ Q, so gibt es kein x0 ∈ X , so dass die zugehorige Folge periodischist. Es gilt sogar, dass fur jedes x ∈ X die zugehorige Folge xnn∈N dichtin X ist, d.h. zu jedem y ∈ X und jedem Anfangswert x0 gibt es eineTeilfolge
xnkk∈N ⊂ xnn∈N,
so dasslim
k→∞xnk
= y.
Beweis. siehe Ubungen.
2Pierre-Francois Verhulst (28.10.1804-15.2.1849) war Professor an der Freien Univer-sitat in Brussel und spater an der koniglichen Militarschule. Seine Arbeiten zum Bevolke-rungswachstum machten ihn zum Begrunder der Bevolkerungsstatistik.
1.1. EINFUHRENDE BEISPIELE 15
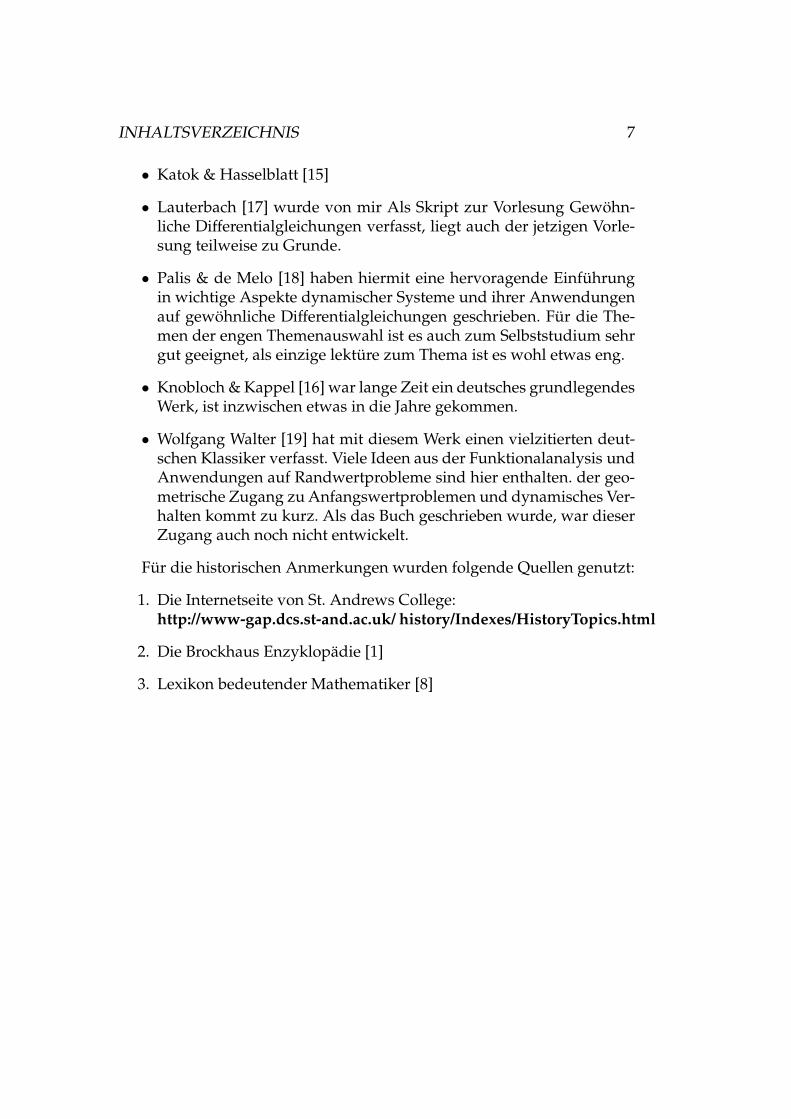
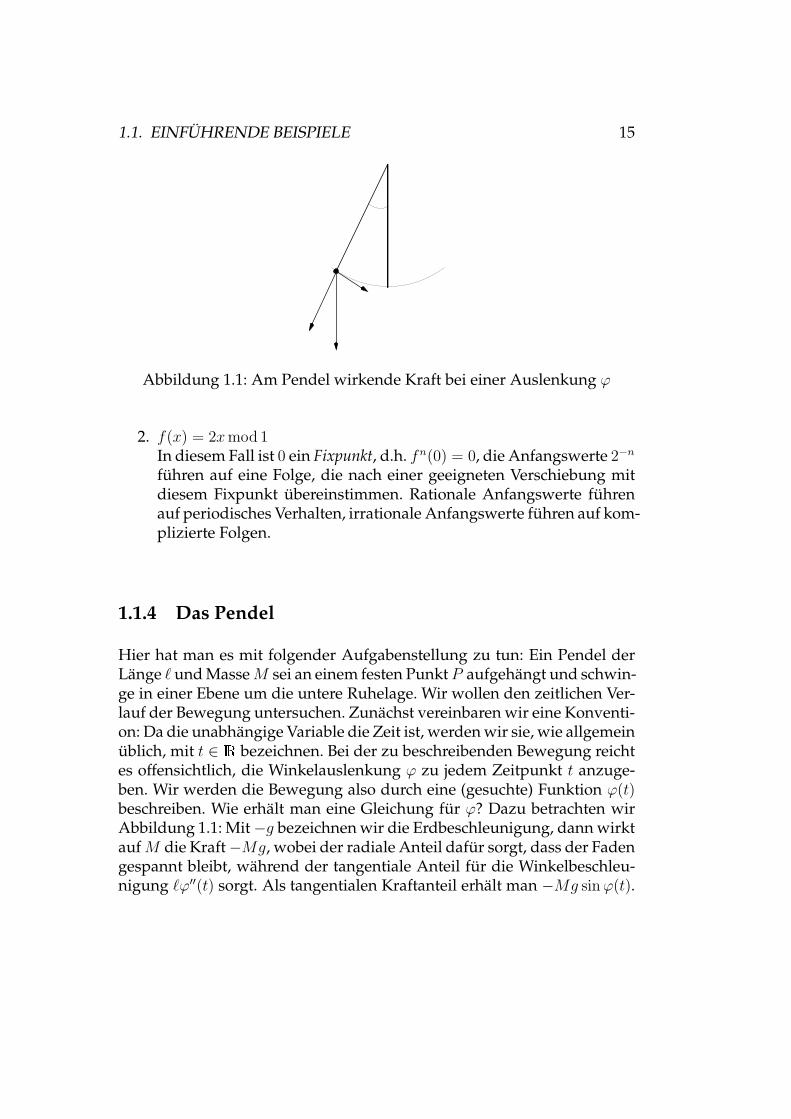
Abbildung 1.1: Am Pendel wirkende Kraft bei einer Auslenkung ϕ
2. f(x) = 2xmod 1In diesem Fall ist 0 ein Fixpunkt, d.h. fn(0) = 0, die Anfangswerte 2−n
fuhren auf eine Folge, die nach einer geeigneten Verschiebung mitdiesem Fixpunkt ubereinstimmen. Rationale Anfangswerte fuhrenauf periodisches Verhalten, irrationale Anfangswerte fuhren auf kom-plizierte Folgen.
1.1.4 Das Pendel
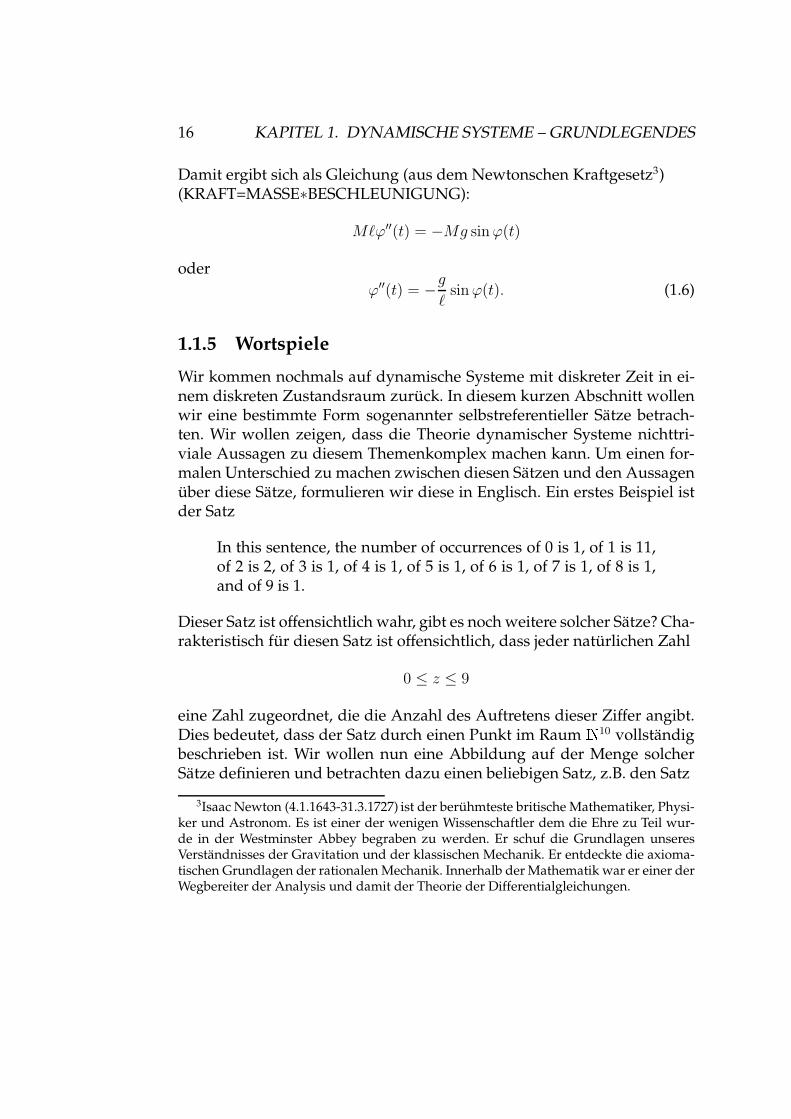
Hier hat man es mit folgender Aufgabenstellung zu tun: Ein Pendel derLange ℓ und MasseM sei an einem festen Punkt P aufgehangt und schwin-ge in einer Ebene um die untere Ruhelage. Wir wollen den zeitlichen Ver-lauf der Bewegung untersuchen. Zunachst vereinbaren wir eine Konventi-on: Da die unabhangige Variable die Zeit ist, werden wir sie, wie allgemeinublich, mit t ∈ R bezeichnen. Bei der zu beschreibenden Bewegung reichtes offensichtlich, die Winkelauslenkung ϕ zu jedem Zeitpunkt t anzuge-ben. Wir werden die Bewegung also durch eine (gesuchte) Funktion ϕ(t)beschreiben. Wie erhalt man eine Gleichung fur ϕ? Dazu betrachten wirAbbildung 1.1: Mit −g bezeichnen wir die Erdbeschleunigung, dann wirktaufM die Kraft −Mg, wobei der radiale Anteil dafur sorgt, dass der Fadengespannt bleibt, wahrend der tangentiale Anteil fur die Winkelbeschleu-nigung ℓϕ′′(t) sorgt. Als tangentialen Kraftanteil erhalt man −Mg sinϕ(t).
16 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Damit ergibt sich als Gleichung (aus dem Newtonschen Kraftgesetz3)(KRAFT=MASSE∗BESCHLEUNIGUNG):
Mℓϕ′′(t) = −Mg sinϕ(t)
oder
ϕ′′(t) = −gℓ
sinϕ(t). (1.6)
1.1.5 Wortspiele
Wir kommen nochmals auf dynamische Systeme mit diskreter Zeit in ei-nem diskreten Zustandsraum zuruck. In diesem kurzen Abschnitt wollenwir eine bestimmte Form sogenannter selbstreferentieller Satze betrach-ten. Wir wollen zeigen, dass die Theorie dynamischer Systeme nichttri-viale Aussagen zu diesem Themenkomplex machen kann. Um einen for-malen Unterschied zu machen zwischen diesen Satzen und den Aussagenuber diese Satze, formulieren wir diese in Englisch. Ein erstes Beispiel istder Satz
In this sentence, the number of occurrences of 0 is 1, of 1 is 11,of 2 is 2, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,and of 9 is 1.
Dieser Satz ist offensichtlich wahr, gibt es noch weitere solcher Satze? Cha-rakteristisch fur diesen Satz ist offensichtlich, dass jeder naturlichen Zahl
0 ≤ z ≤ 9
eine Zahl zugeordnet, die die Anzahl des Auftretens dieser Ziffer angibt.Dies bedeutet, dass der Satz durch einen Punkt im Raum N10 vollstandigbeschrieben ist. Wir wollen nun eine Abbildung auf der Menge solcherSatze definieren und betrachten dazu einen beliebigen Satz, z.B. den Satz
3Isaac Newton (4.1.1643-31.3.1727) ist der beruhmteste britische Mathematiker, Physi-ker und Astronom. Es ist einer der wenigen Wissenschaftler dem die Ehre zu Teil wur-de in der Westminster Abbey begraben zu werden. Er schuf die Grundlagen unseresVerstandnisses der Gravitation und der klassischen Mechanik. Er entdeckte die axioma-tischen Grundlagen der rationalen Mechanik. Innerhalb der Mathematik war er einer derWegbereiter der Analysis und damit der Theorie der Differentialgleichungen.

1.1. EINFUHRENDE BEISPIELE 17
In this sentence, the number of occurrences of 0 is 0, of 1 is 0, of2 is 0, of 3 is 0, of 4 is 0, of 5 is 0, of 6 is 0, of 7 is 0, of 8 is 0, andof 9 is 0.
Nun zahlen wir in diesem offensichtlich unwahren Satz das Auftreten je-der Ziffer und schreiben dies in den nachsten Satz, damit erhalten wir
In this sentence, the number of occurrences of 0 is 11, of 1 is 1,of 2 is 1, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,and of 9 is 1.
Eine erneute Anwendung dieses Verfahrens liefert
In this sentence, the number of occurrences of 0 is 1, of 1 is 12,of 2 is 1, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,and of 9 is 1.
Nun auch dieser Satz ist unwahr, wir wenden unser Verfahren nochmalsan und erhalten
In this sentence, the number of occurrences of 0 is 1, of 1 is 11,of 2 is 2, of 3 is 1, of 4 is 1, of 5 is 1, of 6 is 1, of 7 is 1, of 8 is 1,and of 9 is 1.
Dies ist unser (wahrer) Satz von oben. Dieser reproduziert sich unter derangegebenen Iteration. Wir halten eine nahezu triviale Beobachtung fest:
Lemma 1.1.5.1 Ein Satz der angegebenen Form bleibt unter der angegebenenAbbildung genau dann erhalten, wenn er wahr ist.
Damit ist das Auffinden weiterer (oder aller) solchen wahren Satze dar-auf zuruckgefuhrt, Fixpunkte unserer Abbildung zu finden. In mathema-tischer Sprache hat die Abbildung die Form
Ψ : N10 → N10 : (z0, . . . , z9)T 7→ (1 + w(0), . . . , 1 + w(9)) (1.7)
wobei w(j) die Anzahl des Auftretens der Ziffer j in den Zahlen z0, . . . , z9angibt. Wir werden im weiteren Verlauf des Semesters alle solchen Satzeangeben und zeigen, dass dies tatsachlich eine vollstandige Liste ist.

18 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
1.2 Grundlegende Begriffe
1.2.1 Metrische Raume
Definition 1.2.1.1 Es sei X eine Menge, d : X × X → R eine Abbildung mitfolgenden Eigenschaften
(M1) Es gilt d(x, y) = 0 genau dann wenn x = y.
(M2) Fur alle Paare (x, y) ∈ X ×X gilt d(x, y) = d(y, x).
(M3) Fur alle Tripel (x, y, z) ∈ X ×X × X gilt
d(x, z) ≤ d(x, y) + d(y, z).
Eine solche Abbildung heißt Metrik, das Paar (X, d) bezeichnen wir als metri-schen Raum.
Aufgabe 1.2.1.2 Zeigen Sie: ist (X, d) ein metrischer Raum, sind x, y ∈ X, sogilt d(x, y) ≥ 0.
Definition 1.2.1.3 1. Es sei (X, d) ein metrischer Raum , U ⊂ X heißt of-
fen, wenn es zu jedem x ∈ U ein ε > 0 mit
y ∈ X∣
∣
∣d(x, y) < ε
=
Bε(x) ⊂ U . Bε(x) heißt metrische Kugel um x vom Radius ε. Dabei istim allgemeinen klar auf welche Metrik wir uns beziehen. Sollte dies nichtklar sein, so schreiben wir Bd
ε (x).
2. Eine Teilmenge A ⊂ X heißt abgeschlossen, wenn X \ A offen ist.
Lemma 1.2.1.4 1. Beliebige Vereinigungen offener Mengen in X sind offen,d.h. ist Uαα∈A eine uber der Menge A parametrisierte Familie offenerMengen, so ist
⋃
α∈AUα offen in X.
2. Auf gleiche Weise folgt, dass beliebige Durchschnitte abgeschlossener Men-gen abgeschlossen sind.
Definition 1.2.1.5 Seien (X, d), (Y, d′) metrische Raume und ist f : X → Y
eine Abbildung, so heißt f stetig, wenn Urbilder offener Mengen in Y offen inX sind, d.h. fur alle offenen Mengen V ⊂ Y ist f−1(V ) eine offene Menge in(X, d).

1.2. GRUNDLEGENDE BEGRIFFE 19
Satz 1.2.1.6 Folgende Bedingungen sind aquivalent zur Stetigkeit von f : X →Y.
1. Urbilder abgeschlossener Mengen sind abgeschlossen.
2. Ist A ⊂ X eine Teilmenge, so ist f(A) ⊂ f(A).
3. Ist x0 ∈ X und xnn∈N eine Folge in X mit
limn→∞
xn = x0
so gilt f(xn)n∈N ist eine konvergente Folge und
limn→∞
f(xn) = f(x0).
Beweis. Ubungsaufgabe.
Definition 1.2.1.7 Eine stetige Abbildung f : X → Y heißt Homoomorphis-mus, falls f injektiv und offen ist, dabei heißt f offen, wenn Bilder offener Men-gen offen sind.
1.2.2 Vollstandige metrische Raume
Definition 1.2.2.1 Es sei (X, d) ein metrischer Raum.(a) Eine Folge xnn∈N ⊂ X nennt man Cauchyfolge4, wenn zu jedem ε > 0eine naturliche Zahl N ∈ N existiert mit
n > N, m > N ⇒ d(xn, xm) < ε.
4Augustin-Louis Cauchy (21.8.1789-22.5.1857) war Sohn eines hohen Beamten und ge-noss demzufolge eine gute Privatausbildung. Nach einem ingenieurwissenschaftlichenStudium eignete er sich nebenbei Werke von Lagrange an. Im Jahr 1811 loste er ein Pro-blem, das Lagrange formuliert hatte. Er arbeitete uber Integrale, Stromungsmechanikund Elastizitatstheorie. Speziell die Arbeiten zum letztgenannten Bereich machten ihnzu einem der bekanntesten Mathematiker seiner Zeit. Im weiteren arbeitete er auf vielenGebieten, sein Hauptarbeitsgebiet wurde die Analysis mit der Theorie von Differential-gleichungen. Nach Gauß begann er mit komplexen Zahlen und der zugehorigen Analysiszu arbeiten. Cauchy war sehr produktiv und dies sehen wir noch heute an vielen Kon-zepten, die seinen Namen tragen.

20 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
(b) Ein metrischer Raum (X, d) heißt vollstandig, wenn zu jeder Cauchyfolgexnn∈N in X ein Element x ∈ X existiert, so dass gilt
x = limn→∞
xn.
Dies bedeutet naturlich: Zu jedem ε > 0 existiert ein N ∈ N, so dass gilt
n > N ⇒ d(xn, x) < ε.
Eine reiche Klasse von metrischen Raumen sind normierte Vektorraume.Wir werfen einen Blick darauf.
Definition 1.2.2.2 Sei X ein reeller Vektorraum.(a) Man nennt (X, ‖.‖) einen normierten Raum, falls ‖.‖X eine Abbildung‖.‖X : X → R ist, so dass
1. ‖x‖X ≥ 0 ∀x ∈ X;
2. ‖x‖X = 0 ⇐⇒ x = 0;
3. ‖x+ y‖X ≤ ‖x‖X + ‖y‖X ∀(x, y) ∈ X ×X;
4. ‖αx‖X = |α|‖x‖X ∀α ∈ R, ∀x ∈ X
gilt.
Ohne Beweis geben wir das folgende (triviale) Lemma an.
Lemma 1.2.2.3 Mitd(x, y) = ‖x− y‖X (1.8)
wird ein normierter linearer Raum (X, ‖.‖X) zum metrischen Raum (X, d).
Definition 1.2.2.4 Ist ein normierter, linearer Raum (X, ‖.‖X) bezuglich derMetrik aus (1.8) vollstandig, so bezeichnet man ihn als Banachraum, nach STE-FAN BANACH5 .
5Stefan Banach (30.3.1892-31.8.1945), polnischer Mathematiker, war der Begrunderder Theorie linearer, normierter Raume und ihren linearen Abbildungen. Seine Arbei-ten sind die Grundlage der modernen Funktionalanalysis. Er und seine Schuler zeigtenviele Anwendungen der Funktionalanalysis auf.

1.2. GRUNDLEGENDE BEGRIFFE 21
In dieser Vorlesung werden wir vor allem den folgenden Banachraumbenotigen.
Lemma 1.2.2.5 1. Es sei I ⊂ R ein kompaktes Intervall. Wir betrachten
C(I;Rn) =
γ : I → Rn∣
∣
∣γ ist stetig
.
Dies wird mit der Norm
‖γ‖C(I;Rn) = supt∈I
‖γ(t)‖Rn
ein Banachraum.
2. Ist U ⊂ Rn eine offene Teilmenge, so ist
C(I;U) =
γ : I → U∣
∣
∣γ ist stetig
ein vollstandiger metrischer Raum bezuglich der Metrik
dC(I;U)(γ1, γ2) = supt∈I
‖γ1(t) − γ2(t)‖Rn
Beweis. Ubungen!
Definition 1.2.2.6 Sei (X, d) ein metrischer Raum. Eine Abbildung T : X → X
heißt Kontraktion, falls fur alle (x, y) in X × X gilt:
d(Tx, Ty) < d(x, y). (1.9)
T nennt man stark kontrahierend, wenn es ein λ ∈ (0, 1) gibt, so dass fur alle(x, y) ∈ X ×X gilt
d(Tx, Ty) ≤ λd(x, y). (1.10)
Satz 1.2.2.7 (Banach) Es sei (X, d) ein vollstandiger metrischer Raum. Jede starkkontrahierende Abbildung T : X → X hat einen eindeutig bestimmten Fixpunktx ∈ X.
Beweis. Wir zeigen zunachst die Eindeutigkeit. Angenommen x1, x2 sindFixpunkte. Dann ist
d(x1, x2) = d(Tx1, Tx2) < λd(x1, x2).

22 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Also ist d(x1, x2) = 0 und wegen folgt x1 = x2.Wir kommen zur Existenz. Sei x0 ∈ X beliebig. Wir konstruieren die Folgexnn∈N ⊂ X durch xn = Txn−1 und behaupten, dass dies eine Cauchy-folge ist. Dazu sei ε > 0 gegeben. Fur m, n ∈ N, m > n ≥ 1 ergibt sich mit(M.3)
d(xm, xn) ≤ d(xm, xm−1) + · · ·+ d(xn+1, xn) =
m−1∑
j=n
d(xj+1, xj)
Fur ein j im angegebenen Bereich schließt man
d(xj+1, xj) = d(T jx1, Tjx0) ≤ λjd(x1, x0).
Also hat man
d(xm, xn) ≤m∑
j=n
λjd(x1, x0) ≤∞∑
j=n
λjd(x1, x0) < ε
solange nur n genugend groß ist. Mit der Vollstandigkeit von (X, d) ergibtsich die Konvergenz der Folge xnn∈N. Mit x bezeichnen wir den Grenz-wert. Der letzte Schritt besteht darin die Fixpunkteigenschaft des Grenz-wertes nachzuweisen. Dazu sei ε > 0 gegeben und N ∈ N, so dass n > Nimpliziert
d(xn, x) <ε
2.
Dann ist fur n > N
d(Tx, x) ≤ d(Tx, xn) + d(xn, x)
= d(Tx, Txn−1) + d(xn, x)
≤ λd(x, xn−1) + d(xn, x)
≤ 2d(xn, x)
< ε.
Da ε > 0 beliebig ist, istd(Tx, x) = 0
und damitTx = x.

1.2. GRUNDLEGENDE BEGRIFFE 23
Bemerkung 1.2.2.8 Ein alternativer Beweis fur die Fixpunkteigenschaft be-steht in der Beobachtung, dass T stetig ist (warum?) und dem Diagramm
xn+1 = Txn → Tx↓x
Satz 1.2.2.9 (Stetige Abhangigkeit) Sei ( X , d) ein vollstandiger metrischerRaum, (Y, d′) ein metrischer Raum. Ferner sei fur jedes y ∈ Y eine starkeKontraktion Ty : X→ X mit Kontraktionskonstante λy gegeben. Es sei s =supy∈Y
λy < 1. Fur jedes x ∈X sei die Abbildung
Fx : Y → X : y 7→ Tyx
stetig. Dann ist auch die Abbildung
G : Y → X : y 7→ xy, (1.11)
stetig, wobei xy durch Tyxy = xy definiert ist.
Beweis. Fixiere y0 ∈ Y. Wir zeigen die Stetigkeit in y0. Sei x0 der zugehori-ge Fixpunkt von Ty0
. Dann gilt fur den Fixpunkt xy von Ty,
d(xy, x0) = d(Tyxy, Ty0x0)
≤ d(Tyxy, Tyx0) + d(Tyx0, Ty0x0)
≤ λyd(xy, x0) + d(Tyx0, Ty0x0).
(1.12)
Es folgt
(1 − s)d(xy, x0) ≤ (1 − λy)d(xy, x0) ≤ d(Tyx0, Ty0x0).
Wegen s < 1 darf man durch (1 − s) teilen und die Behauptung folgt ausder Stetigkeit von Fx0
.
1.2.3 Eingebettete Mannigfaltigkeiten
Mannigfaltigkeiten treten in naturlicher Weise im Kontext von gewohnli-chen Differentialgleichungen auf. Kurz (und vielleicht etwas vereinfacht)gesagt, besteht die Aufgabenstellung in der Theorie der gewohnlichen Dif-ferentialgleichungen darin zu einem (hinreichend glatten) Feld von Ge-schwindigkeitsvektoren eine Bewegung zu finden, so dass an jeder Stelle

24 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
der Bewegung der Tangentialvektor an die Bewegung dem dort vorgege-benen Geschwindigkeitsvektor entspricht. Schon die Bewegung eines Zu-ges macht deutlich, dass der Geschwindigkeitsvektor des Zuges nicht in-nerhalb des Bewegungsraumes liegen muss, sondern, dass eine geeigneteBeschreibung des Problemes die Menge der moglichen Geschwindigkeits-vektoren deutlich von der Menge der Orte der Bewegung unterscheidet.Noch deutlicher wird dies bei einem spharischen Pendel, als einem aneinem gespannten Faden hangenden Gewicht, welches an einem Punktaufgehangt ist und sich nun auf einer 2-dimensionalen Kugeloberflachebewegen kann. Was sind in diesem Fall die moglichen Geschwindigkeits-vektoren?Die geeignete Konstruktion, die mathematisch prazise diese Situation be-schreibt ist die eines Tangentialbundels an einer Mannigfaltigkeit. Da dieganz allgemeine Konstruktion auf gewisse begriffliche Schwierigkeitenfuhrt, die ein wenig von der uns angestrebten Theorie wegfuhrt, wollenwir uns auf eine scheinbar speziellere Situation beschranken, die aber auf-grund des Einbettungssatzes von Whitney, siehe z.B. Brocker & Janich [5]fur eine Formulierung und einen Beweis, sogar der allgemeinsten Situati-on entspricht, aber technisch etwas einfacher ist. Wir erinnern zunachst andie Beschreibung eines k-dimensionalen linearen Unterraumes U des Rn.Wir konnen einen solchen Raum auf zwei Weisen beschreiben:
1. Wir geben k linear unabhangige Vektoren u1, . . . , uk an, die den Raumaufspannen, damit konnen wir jeden Punkt u ∈ U als Linearkombina-tion
u =
k∑
i=1
αkuk, αk ∈ Rschreiben.
2. Wir geben n − k linear unabhangige Vektoren u′1, . . . , u′n−k ∈ Rn an,
so dass fur alle u ∈ U gilt
〈u, u′j〉 = 0, j = 1, . . . , n− k.
Dann haben wir die Punkte in U als Losungen eines Systems von n−kGleichungen realisiert.
Wir wollen uns die letztgemachte Beobachtung zu eigen machen.

1.2. GRUNDLEGENDE BEGRIFFE 25
Definition 1.2.3.1 1. Eine Teilmenge M ⊂ Rn heißt eingebettete Unter-mannigfaltigkeit wenn es zu jedem x ∈ M eine offene UmgebungBδ(x) ⊂Rn und n− k stetig differenzierbare Funktionen
F xi : Bδ(x) → R
gibt, so dass
(a) M ∩Bδ(x) =
y ∈ Bδ(x)∣
∣
∣F x
j (y) = 0, j = 1, . . . , n− k
(b) ∇F xj (x)j=1,...,n−k ist linear unabhangig.
2. Ist M eine eingebettete Untermannigfaltigkeit, x ∈ M und sind F xj Funk-
tionen, wie gerade benannt, so ist
TxM = span[∇F x1 (x), . . .∇F x
n−k(x)]⊥
der Tangentialraum an M im Punkt x.
3. Wir betrachten die disjunkte Vereinigung der Tangentialraume
TM =˙⋃
x∈MTxM
und bezeichnen dies als Tangentialbundel.
Wir konnen hier schon einen Nachteil unserer Konstruktion erkennen.TM ist keine in den Rn eingebettete Untermannigfaltigkeit. Der schon zi-tierte Satz von Whitney garantiert eine Einbettung dieses Tangentialbundelsin den R4n+1. Dies erscheint hochgradig unnaturlich. Arbeitet man mitdem abstrakten Begriff einer Mannigfaltigkeit kann man direkt zeigen,dass TM wieder eine Mannigfaltigkeit ist. Die allgemeine Konstruktionfindet man bei [5], oder auch in dem sehr schonen Buch von Warner [20].
Eingebettete Untermannigfaltigkeiten M erben in naturlicher Weise ei-ne Metrik vom umgebenden Raum Rn, indem man einfach die Metrik ddes Raumes Rn auf M einschrankt. Damit sind dann fur eingebettete Un-termannigfaltigkeiten M ⊂ Rm und N ⊂ Rn auch stetige Abbildungenvon M nach N erklart. Wir wollen noch den Begriff der Differenzierbar-keit von Abbildungen zwischen solchen eingebetteten Untermannigfaltig-keiten einfuhren und zeigen, dass die Ableitung eine lineare Abbildungzwischen entsprechenden Tangentialraumen ist.
Dazu betrachten wir Kurven, als Abbildungen γ : I → M eines reellenIntervalles I ⊂ R.

26 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Definition 1.2.3.2 Die Kurve γ : I → M heißt im Punkt t0 ∈ I differen-zierbar, wenn γ : I → Rn als Funktion in den Rn im Punkt t0 differenzierbarist.
Lemma 1.2.3.3 Ist γ : I → M im Punkt t0 ∈ I differenzierbar, so ist γ′(t0) ∈Tγ(t0)M .
Beweis. γ(t) ∈ M impliziert, wegen x0 = γ(t0), dass es ein δ1 > 0 gibt, sodass |t − t0| < δ1, dass γ(t) ∈ Bδ(x) und F x
j (γ(t)) = 0 fur j = 1, . . . , n− k.Insbesondere impliziert dies
〈∇F xj (x0), γ
′(t0)〉 = 0.
Damit ist γ′(t0) ∈ Tx0M .
Definition 1.2.3.4 Es seien M ⊂ Rm und N ⊂ Rn eingebettete Untermannig-faltigkeiten, f : M → N sei stetig. Dann heißt f : M → N im Punkt x0 ∈ Mdifferenzierbar, wenn fur jede Kurve γ : I →M , die im Punkt t0 mit γ(t0) = x0
differenzierbar ist, die Abbildung f γ : I → N im Punkt t0 differenzierbar ist.
Lemma 1.2.3.5 Sind M ⊂ Rm, N ⊂ Rn eingebettete Untermannigfaltigkeitenund ist f : M → N im Punkt x0 ∈ M differenzierbar, N ∋ y0 = f(x0), so wirddurch
Df(x0) : Tx0M → Ty0
N : γ′(t0) 7→ (f γ)′(t0)eine lineare Abbildung definiert.
Beweis. Istγ1(t0) = γ2(t0)
undγ′1(t0) = γ′2(t0)
so gilt fur t nahe t0 und ℓ = 1, 2
γℓ(t) = γℓ(t0) + (t− t0)γ′ℓ(t0) + o(|t− t0|)
und entsprechend
f γℓ(t) = f(x0) + (t− t0)(f γℓ)′(t0) + o(|t− t0|)

1.2. GRUNDLEGENDE BEGRIFFE 27
Gleichsetzen dieser Terme und Koeffizientenvergleich fuhrt auf
Df(x0)γ′(t0) = (f γ)′(t0).
Naturlich muss gezeigt werden, dass diese Definition unabhangig von dergewahlten Kurve ist, also sind γ1, γ2 zwei Kurven mit
γ1(t0) = γ2(t0) und γ′1(t0) = γ′2(t0).
Eindeutigkeit der Entwicklung ergibt, dass
Df(x0)γ′1(t0) = Df(x0)γ
′2(t0).
Damit ist die Abbildung Df(x0) wohldefiniert, wir mussen noch zeigen,dass diese linear ist. Dies ist leicht zu zeigen.
Definition 1.2.3.6 1. Es sei U ⊂ RN offen. Eine Abbildung V : U → RN
heißt Vektorfeld auf U .
2. Es sei M ⊂ RN eine eingebettete Untermannigfaltigkeit, TM das Tangen-tialbundel auf M . Eine Abbildung V : M → TM heißt Vektorfeld auf M ,falls fur alle x ∈M gilt
V (x) ∈ TxM.
Ist V als Abbildung in den RN stetig differenzierbar, so sprechen wir voneinem C1-Vektorfeld.
Hangt V zusatzlich von der Zeit ab, also I ⊂ R ein Intervall und
V : U × I → RN oder V : M × I → TM
eine Abbildung mit V (x, t) ∈ TxM Fall der eingebetteten Untermannigfaltigkeit,so sprechen wir von einem zeitabhangigen Vektorfeld.
1.2.4 Halbgruppen von Selbstabbildungen
Wir beginnen mit dem Begriff der Zeitmenge T. Dazu dient folgende De-finition. Dazu seien zunachst die folgende Schreibweisen vereinbart. Nbezeichne die Menge der naturlichen Zahlen, also N = 1, 2, 3, . . ., N0 =N ∪ 0,R+ =
r ∈ R ∣∣∣r ≥ 0
.

28 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Definition 1.2.4.1 Es seiT eine der MengenZ,N0,R,R+. Dann bezeichen wirdiese als Zeitmenge. Eine unbestimmte Zeitmenge wird i.A. mit T bezeichnetwerden.
Beachte, dass Zeitmengen als algebraische Struktur Halbgruppen sind. Da-bei heißt eine Menge mit einer assoziativen Verknupfung Halbgruppe, wennes ein (eindeutiges) neutrales Element gibt Die hier als Zeitmengen ein-gefuhrten Halbgruppen tragen in naturlicher Weise auch die Struktur ei-nes metrischen Raumes.
Definition 1.2.4.2 Es seiT eine Zeitmenge, (X, d) ein metrischer Raum. Dannheißt eine stetige Abbildung
ϕ : T×X → X
ein Fluss, falls fur alle x ∈ X
1. gilt ϕ(0, x) = x.
2. und alle s, t ∈ T gilt
ϕ(s+ t, x) = ϕ(s, ϕ(t, x)).
Ist T = Z oder T = N0, so sprechen wir von einem diskreten Fluss,anderweitig von einem (kontinuierlichen) Fluss.
SeiC(X;X) =
Ψ : X → X
∣
∣
∣Ψ ist stetig
die Menge der stetigen Abbildungen auf X. Dann kann man einen Flussfur festes t ∈ T als Element von C(X;X) auffassen und damit induziertein Fluss einen stetigen Halbgruppenhomomorphismus
Φ : T→ C(X;X)
mitΦ(0) = 1lX
undΦ(t+ s) = Φ(t) Φ(s).
Man beachte, ist T eine Gruppe, so ist Φ ein Gruppenhomomorphismus,und fur jedes t ∈ T ist Φ(t) ein Homoomorphismus.
Aufgabe 1.2.4.3 Zeigen Sie, dass im Fall T ist Gruppe, tatsachlich fur t ∈ Tdie Abbildung Φ(t) ein Homoomorphismus ist.

1.3. GEOMETRISCHE BEGRIFFE 29
1.2.5 Diskrete Dynamik von Selbstabbildungen
Wir wollen hier die allgemeine Situation diskreter dynamischer Systemebeschreiben. Das Wort diskret bezieht sich hier auf die Zeit, d.h. als Zeit-mengen kommen also nur N oder Z in Frage. Der Zustandsraum X seijeweils eine metrischer Raum. Dazu sei f : X → X eine (stetige) Abbil-dung. Dann betrachten wir fur x ∈ X und n ∈ N0
Φ(n, x) = fn(x).
Diese Abbildung hat offensichtlich die Eigenschaften eines Flusses. Des-halb konnen wir folgende Definition vereinbaren.
Definition 1.2.5.1 Es sei (X, d) ein metrischer Raum, f : X → X stetig, dannnennen wir das Paar (X, f) ein diskretes dynamisches System mit ZeitmengeT = N0. Ist f zusatzlich bijektiv, d.h. f−1 existiert, so ist die ZeitmengeT = Z.
1.3 Geometrische Begriffe
1.3.1 Spezielle Orbits und ihre Grenzmengen
Im folgenden sei (X, d) ein metrischer Raum, T eine Zeitmenge, ϕ : X ×T → X ein Fluss. Wir wollen nun einige Begriffe einfuhren, die uns indie Lage versetzen uber das Langzeitverhalten einzelner Trajektorien, wieauch des gesamten Systems zu sprechen.
Definition 1.3.1.1 Es sei X ein metrischer Raum, T eine Zeitmenge,
ϕ : T× X → X
ein Fluss. Ist x0 ∈ X so nennen wir die Menge
O(x0) =
ϕ(t, x)∣
∣
∣ t ∈ Tden Orbit des Punktes x0. Entsprechend definieren wir auch die positiven undnegativen Semiorbits von x0 durch
O+(x0) =
ϕ(t, x)∣
∣
∣t ∈ T, t ≥ 0
bzw.O−(x0) =
ϕ(t, x)∣
∣
∣t ∈ T, t ≤ 0
.
30 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Definition 1.3.1.2 Besteht ein Orbit eines Punktes x0 nur aus dem Punkt selbst,so nennen wir diesen ein Gleichgewicht oder auch eine Ruhelage.
Bemerkung 1.3.1.3 In diskreten dynamischen Systemen kann ein Orbit der kei-ne Ruhelage ist, eine Ruhelage enthalten. Betrachte
f : [−1, 1] → [−1, 1] : x 7→ 1 − 2x2.
Dann ist f(−1) = −1, insbesondere ist −1 eine Ruhelage, f(1) = −1 und damitist 1 keine Ruhelage O(1) enthalt aber O(−1).
Definition 1.3.1.4 Wir nennen einen Punkt x0 ∈ X einen periodischen Punkt,wenn es ein t ∈ T, t 6= 0 gibt, mit
ϕ(t, x0) = x0.
Ist x0 keine Ruhelage, so sprechen wir von einem echten periodischen Punkt. Indiesem Fall heißt
min
0 < t ∈ T ∣∣∣ϕ(t, x0) = x0
die minimale Periode von x0. Jedes t > 0, t ∈ T mit ϕ(t, x0) = x0 wird alsPeriode bezeichnet. Die Menge
ϕ(t, x0)∣
∣
∣t ∈ T
wird als periodischer Orbit bezeichnet.
Lemma 1.3.1.5 Es sei x0 ∈ X mit O(x0) enthalt einen periodischen Punkt x1.Fur ein dynamisches System mit T ist Gruppe folgt dann, dass x0 selbst schonperiodischer Punkt ist.
Beweis. Ist x1 eine Ruhelage, so ist fur alle t ∈ Rϕ(t, x1) = x1.
Da es ein t0 gibt, mitϕ(t0, x0) = x1
ist x0 = ϕ(−t0, x1) = x1. Ist x1 keine Ruhelage, so ist ϕ(t1, x1) = x1 unddamit ist fur alle s ∈ R
ϕ(t, ϕ(s, x1)) = ϕ(t+ s, x1) = ϕ(s, ϕ(t, x1)) = ϕ(s, x1)
und jeder Punkt im Orbit von x1 ist periodisch, insbesondere auch x0.

1.3. GEOMETRISCHE BEGRIFFE 31
Bemerkung 1.3.1.6 Eine entsprechende Aussage fur dynamische Systemederen Zeitmenge keine Gruppe ist, ist nicht wahr. Es kann dort Punktegeben, die selbst nicht periodisch sind, deren positiver Halborbit aber pe-riodische Punkte enthalt. Einen solchen Punkt nennen wir schließlich peri-odisch (vgl. engl. eventually periodic).
Gleichgewichtspunkte und periodische Orbits sind Beispiele invarianterMengen, d.h. solcher Mengen, die unter der Dynamik in sich abgebildetwerden. Wir wollen den Begriff zunachst abstrakt einfuhren und dannweitere Beispiele angeben.
Definition 1.3.1.7 Es sei X, d) ein metrischer Raum, T eine Zeitmenge undϕ : T×X → X ein Fluss. Eine TeilmengeA ⊂ X heißt invariant, falls zu jedemx0 ∈ A auch O(x0) ⊂ A. Ist mit x0 auch der positive (negative) Semiorbit in A,so sagen wir, A ist positiv (negativ) invariant.
Definition 1.3.1.8 Gegeben sei ein metrischer Raum (X, d), eine Zeitmenge Tund ein Fluss ϕ : T × X → X. Sei x0 ∈ X . Wir definieren den Begriff derGrenzmenge durch
ω(x0) =⋂
0≤t∈TO+(ϕ(t, x0)),
undα(x0) =
⋂
0≥t∈TO−(ϕ(t, x0)).
Wir nennen ersteres die ω-Grenzmenge von x0 und letzteres die α-Grenzmengevon x0.
Der folgende Satz fasst wesentliche Eigenschaften der jeweiligen Grenz-mengen zusammen.
Satz 1.3.1.9 1. Ist der entsprechende Semiorbit nichtleer∗ und beschrankt∗∗,so ist die entsprechende Grenzmenge nichtleer.
2. Die ω–Grenzmenge besteht aus der Menge der Punkte
x ∈ X
∣
∣
∣es gibt eine Folge tnn∈N ⊂ T mit lim
n→∞tn = ∞ und x = lim
n→∞ϕ(tn, x0)
.
Entsprechendes gilt fur die α–Grenzmenge.

32 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
3. Die ω–Grenzmenge ist positiv invariant.
4. Ist T eine Gruppe, so sind ω–, bzw. α–Grenzmengen invariant.
∗ Der positive Halborbit ist fur jedes x0 definiert, der negative besteht furdie Zeitmengen Z+, R+ nur aus einem Element. Die Voraussetzung nicht-leer soll im Fall des positiven Semiorbits bedeutungslos sein, im anderenFall besagen, dass die Zeitmenge negative Elemente besitzt.∗∗ Beschranktheit ist in allgemeinen metrischen Raumen nicht definiert,wir meinen, dass der Abschluss kompakt ist. Fur Teilmengen vonRn folgtaus der Beschranktheit die Kompaktheit des Abschlusses. Beweis. Wirfuhren alle Beweise fur die ω–Grenzmenge, fur die α–Grenzmenge wer-den sie ganz analog erbracht.
1. Vorbemerkung: Ist
x ∈⋂
0≤t∈TO+(ϕ(t, x0))
so gibt es zu jedem 0 < t0 ∈ T und jedem ε > 0 ein t > t0 und einxn ∈ O+(ϕ(t, x0)) mit d(xn, x) < ε.
Wahle ε > 0 und setzeεn = 2−nε
und wahle induktiv tn+1 > tn + 1 mit
d(ϕ(x0, tn), x) < εn.
Dann konvergiert die Zeitfolge tn gegen unendlich, xn = ϕ(tn, x0) →x. Die Umkehrung ist ebenso einfach. Ist x ein Grenzwert wie be-schrieben, so mussen wir zeigen, zu jedem t > 0 ist
x ∈ O+(ϕ(t, x0)).
Da tn → ∞ gibt es einN ∈ Nmit tn > t fur alle n > N . Offensichtlich
ist x dann in O+(ϕ(t, x0)).
2. Ist x ∈ ω(x0) und t > 0. Dann ist x = limn→∞ ϕ(tn, x0) mit einerunbeschrankten Zeitfolge tnn∈N. Dann ist
ϕ(t, x) = ϕ(t, limn→∞
xn) = limn→∞
ϕ(t, xn) = limn→∞
ϕ(t, ϕ(tn, x0)) = limn→∞
ϕ(t+tn, x0).

1.3. GEOMETRISCHE BEGRIFFE 33
3. Ist T eine Gruppe, so kann das eben verwendete Argument ebensofur negative Zeiten angewendet werden.
Beispiel 1.3.1.10 1. Wir betrachten das dynamische System f : S1 → S1 :φ 7→ φ + β. Ist β ∈ πQ, so ist, wie wir wissen jeder Orbit periodischund die Grenzmenge sind fur den Anfangswert φ0 mit periodischen OrbitO = φ0, φ1, . . . , φk
α(φ0) = ω(φ0) = O.Ist β ∈ (R \Q)π, so ist jeder Orbit O(φ0) dicht und es gilt
α(φ0) = ω(φ0) = S1.
2. Ein etwas allgemeineres Verhalten zeigt die folgende Abbildung 1.2. f bildetjeweils die roten Punkte auf den nachsten im mathematisch positiven Sin-ne ab, entsprechend die blauen Punkte. Dazwischen werden die SegmenteS1 → S2 → S3 → S1 abgebildet. Die nicht bezeichneten Segemente werdengenauso behandelt. Gleichzeitig soll f die Punkte die Punkte in Richtungder roten Punte verschieben. Dann gilt fur jeden roten Punkt xr,i
ω(xr,i) = α(xr,i) = O(xr,i)
und entsprechend fur jeden blauen Punkt
ω(xb,i) = α(xb,i) = O(xb,i).
Fur jeden anderen Punkt x ist
ω(x) = O(xr,i) und α(x) = O(xb,i).
Definition 1.3.1.11 Es sei (X, d) ein metrischer Raum, T eine Zeitmenge undϕ : T × X → X ein Fluss. Ein Punkt x0 ∈ X heißt nichtwandernd, wenn eszu jeder Umgebung U ein 0 < t ∈ T gibt mit
ϕ(t, U) ∩ U 6= ∅.
Die Menge der nichtwandernden Punkte wird mit
Ω(ϕ) =
x ∈ X
∣
∣
∣x ist nichtwandernd
bezeichnet.

34 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
1S
S
S
3
2
Abbildung 1.2: Eine Abbildung auf S1.
Satz 1.3.1.12 Die Menge der nichtwandernden Punkte ist positiv invariant. IstT eine Gruppe, so ist Ω(ϕ) invariant.
Beweis. Ubungsaufgabe.
Lemma 1.3.1.13 Ist (X, d) ein metrischer Raum, T eine Zeitmenge und
ϕ : T×X → X
ein Fluss. Ist M ⊂ X eine (positiv) invariante Teilmenge, so gilt dies auch furden Abschluss M .
Beweis. Folgt sofort aus den Beweisen der vorangehenden Lemmata.
1.3.2 Stabilitat
Definition 1.3.2.1 Es sei (X, d) ein metrischer Raum, T eine Zeitmenge und
ϕ : T×X → X
ein Fluss. Eine kompakte, invariante Menge K heißt attraktiv, falls es eine offeneUmgebung U von K gibt, so dass fur alle x ∈ U gilt
ω(x) ⊂ K.
Sie heißt global attraktiv, wenn dies fur alle x ∈ X gilt.

1.4. DISKRETE VERSUS KONTINUIERLICHE DYNAMIK 35
Definition 1.3.2.2 Es sei (X, d) ein metrischer Raum, T eine Zeitmenge und
ϕ : T× X → X
ein Fluss. Eine kompakte, invariante Menge K heißt stabil, falls zu jeder offenenUmgebung U von K eine Umgebung V von K gibt, so dass fur alle x ∈ V gilt
O+(x) ⊂ U.
Definition 1.3.2.3 Eine kompakte, invariante Menge K wird als Attraktor be-zeichnet, wenn K attraktiv und stabil ist. K wird als globaler Attraktor be-zeichnet, wenn K ein global attraktiver Attraktor ist.
Eine wesentliche Aufgabe in der Theorie dynamischer Systeme ist es (glo-bale) Attraktoren zu finden und die Dynamik auf diesen Attraktoren zubeschreiben. Die eben definierten Begriffe spielen naturlich fur die spe-ziellen invarianten Mengen wie Ruhelagen und periodische Orbits einebesondere Rolle.
Bemerkung 1.3.2.4 Attraktivitat einer invarianten Menge impliziert nicht ihreStabilitat, wir werden dafur noch ein Beispiel in den Ubungen sehen.
Beispiel 1.3.2.5 In unserem Beispiel 1.3.1.10, vgl. Abbildung 1.2 ist die Mengeder roten Punkte ein Attraktor, allerdings kein globaler Attraktor, da die blauenPunkte eine invariante Menge bildet.
1.4 Diskrete versus kontinuierliche Dynamik
1.4.1 Zeit–1–Abbildungen
Die einfachste Moglichkeit aus einem kontinuierlichen Fluss ein diskretesdynamisches System zu gewinnen, ist die sogenannte Zeit–1–Abbildung.Sei (X,d) ein metrischer Raum,T = R und
ϕ : T× X → X
ein Fluss. Wir definieren die Abbildung
F : X → X : x 7→ ϕ(1, x).
Offensichtlich ist F ein Homoomorphismus von X → X. Gleichgewichtefur ϕ sind auch solche fur F , fur periodische Punkte ist dies nicht immerwahr. Man uberzeuge sich von der Richtigkeit dieser Beobachtung.
36 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
1.4.2 Poincare–Abbildungen
Sei ϕ : T×M → M ein differenzierbarer Fluss auf einer MannigfaltigkeitM (insbesondere M = Rn oder M = T n). Das zugehorige Vektorfeld, manuberlege sich, dass es so ein Objekt immer gibt, sei V , also
V (x) =d
dt|t=0ϕ(t, x).
Eine Hyperflache S ist eine Untermannigfaltigkeit von M (also Teil-menge und Mannigfaltigkeit) mit dimS = dimM − 1.
Wenn M = Rn, so ist jeder (n − 1)-dimensionale Unterraum eine Hy-perflache.
Definition 1.4.2.1 Eine Hyperflache S heißt (globaler) (transversaler) Schnittdes Flusses ϕ, wenn gilt:
• Das zu ϕ gehorende Vektorfeld V ist nirgends tangential an S.
• Jeder Orbit von ϕ schneidet S unendlich oft fur t→ ∞ und t→ −∞.
Wir kommen jetzt zur ersten Definition der Poincare-Abbildung:
Definition 1.4.2.2 Sei S ein globaler Schnitt von ϕ. Die Wiederkehrzeit τ :S → R ist definiert durch
τ(x) = mint>0
ϕ(t, x) ∈ S.
Es gilt immer τ(x) > 0, da wir vorausgesetzt haben, dass V nicht tangen-tial an S ist.
Beispiel 1.4.2.3 Wir betrachten den Torus T 2. Diesen erhalten wir algebraischals QutientR2/Z2, geometrisch durch Verkleben der Kanten eines Quadrates. Istv ∈ R2, so konnen wir aufR2 den Fluss ϕ(t, x) = x+ tv betrachten. Ein Geradeorthogonal zu v projiziert nun einem Kreis S auf T 2, der ein globaler tranversalerSchnitt zur Projektion von ϕ ist.
Wir konnen uns die Frage stellen ob wir auf dem globalen Schnitt eine andereAbbildung, z.B. die aus Abbildung 1.2 vorgeben konnen und dazu einen geeigne-ten Fluss konstuieren konnen (mit einer
”roten“ und einer
”blauen“ periodischen
Losung, die vorwarts gegen die rote und ruckwarts gegen die blaue Losung kon-vergiert. Dies werden wir im folgenden Abschniit behandeln.

1.4. DISKRETE VERSUS KONTINUIERLICHE DYNAMIK 37
Definition 1.4.2.4 Sei S ein globaler Schnitt von ϕ. Dann ist die Poincare-Abbildung
P : S → S
definiert durchP (x) = ϕ(τ(x), x).
Das heißt: Der Punkt x wird auf den Punkt abgebildet, der auf dem Orbitvon x liegt und der erste ist, an dem der Orbit von x wieder durch S lauft.
Beispiel 1.4.2.5 Fur die Differentialgleichung
r = r(1 − r),
θ = 1
(in Polarkoordinaten) istS = (x, 0) : x > 0
ein globaler Schnitt. Die Wiederkehrzeit ist
τ = 2π
fur alle Punkte in S. Da die Differentialgleichung gelost wird durch
r(t) =1
1 + (1/r0 − 1)e−t, θ(t) = t+ θ0,
ist die Poincare-Abbildung gegeben durch
P (x, 0) =
(
1
1 + (1/r0 − 1)e−2π, 0
)
.
1.4.3 Suspensionen
Wir beobachten, dass nicht jeder (orientierungserhaltende) Diffeomorphis-mus als Zeit t0-Abbildung eines Flusses auftreten kann. Angenommen x0,. . . , fk(x0) sei ein periodischer Orbit von f mit minimaler Periode k, derisoliert liegt, d.h. fur den es eine Umgebung U gibt, die keinen Orbit derLange k enthalt, so ist dies nicht die Zeit t0-Abbildung eines Flusses. An-genommen, dies ware so, dann gilt
fkϕ(t, x0) = ϕ(t+ k, x0) = ϕ(t, fkx0) = ϕ(t, x0).
Also ist der gesamte Zeitorbit ϕ(t, x0) von x0 periodisch mit (minimaler)Periode k fur f und dies widerspricht der Isoliertheit.

38 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Definition 1.4.3.1 Sei M eine Mannigfaltigkeit und f : M → M ein Diffeo-morphismus. Sei X = (M × [0, 1])/ ∼, wobei die Aquivalenzrelation ∼ definiertwird durch
(x, 1) ∼ (f(x), 0).
Dann ist der Suspensionsfluss von f auf X definiert durch
ψt([(x, θ)]) := [(f ⌊t+θ⌋(x), t+ θ − ⌊t+ θ⌋)].
Hierbei bedeutet ⌊r⌋ = maxs ∈ Z : s ≤ r.
Wir konnen den Suspensionsfluss statt fur Diffeomorphismen einer Man-nigfaltigkeit M auch fur Diffeomorphismen einer offenen Menge U imRn
definieren. Allerdings ist auch in diesem Fall die Menge X, auf der derSuspensionsfluss definiert ist, keine Teilmenge des Rn × [0, 1] sondern ei-ne abstrakte Mannigfaltigkeit.
Beispiel 1.4.3.2 Wenn f : S1 → S1 eine Rotation ist, so ist X ein Torus.
Beispiel 1.4.3.3 Wenn f : S1 → S1 eine Spiegelung ist, so ist X eine Klein-Flasche, eine nicht-orientierbare Mannigfaltigkeit (eine Flache, deren
”Innensei-
te“ gleichzeitig die”Außenseite“ ist).
Beispiel 1.4.3.4 Wenn f : (0, 1) → (0, 1) eine Spiegelung ist, so ist X einMobiusband.
Beispiel 1.4.3.5 In unserem Beispiel mit den roten und blauen Ruhelagen aufder S1 erhalten wir als Suspensionsfluss auf T 2 mit zwei periodischen Orbits undeinem heteroklinen Orbit, der die beiden verbindet.
1.5 Aufgaben
Aufgabe 1.5.0.6 Man uberlege sich, ob ein Zerfallsgesetz u(t), welches derBeziehung (1.3) genugt, auch eine Gleichung der Form (1.1) erfullt.
Aufgabe 1.5.0.7 (a) Man begrunde, dass jede Losung der Gleichung
du
dx= u

1.5. AUFGABEN 39
die Form Cex mit einer reellen Konstante C hat.(b) Man gebe ein entsprechendes Argument fur die Gleichung
ϕ′′(t) = −gℓϕ(t)
und die Losungen A sin(√ωt) +B cos(
√ωt) mit
ω =g
ℓ
an.
Aufgabe 1.5.0.8 Man zeige, dass fur das dynamische System auf [0, 1], das durchf(x) = 2xmod 1 gegeben ist, rationale Anfangswerte zu periodischen Orbitsfuhren.
Aufgabe 1.5.0.9 Man zeige, dass fur das dynamische System auf [0, 1], das durchf(x) = x+bmod 1, gegeben ist, bei irrationalem b jeder Orbit dicht in [0, 1] liegt.
Aufgabe 1.5.0.10 Man lose die Gleichungen(a) u′ = u2 + 1
(b) u′ = −x2
u3
(c) u′ = eu sin(x)mit der Methode der Trennung der Veranderlichen und diskutiere das Ver-halten der Losungen mit u(0) = p0, p0 ∈ R. Darunter verstehen wir dieBeantwortung der folgenden Fragen.
• Fur welche t ∈ R existiert die Losung?
• Wie verhalt sich die Losung fur t → t+, t → t−, wenn (t−, t+) das(maximale) Intervall bezeichnet, auf dem die Losung u(t) existiert?
Aufgabe 1.5.0.11 Man verifiziere die Aussagen uber die logistische Glei-chung:(a) Fur p0 ∈ (0, K) existiert die Losung fur alle Zeiten und strebt fur t→ ∞gegen K, fur t→ −∞ gegen Null.(b) Fur p0 > K existiert die Losung nicht fur alle reellen Zeiten. Man dis-kutiere das Verhalten.(c) Man untersuche das Verhalten der Losungen fur p0 < 0!

40 KAPITEL 1. DYNAMISCHE SYSTEME – GRUNDLEGENDES
Aufgabe 1.5.0.12 Man diskutiere das System
w′′ = −Kwv′′ = −Kv
fur K < 0.
Aufgabe 1.5.0.13 1. Beweisen Sie Satz 1.1.3.1
2.
Aufgabe 1.5.0.14 Man zeige, dass die MengeC([0, 1];Rn) der stetigen Funk-tionen auf dem Intervall [0, 1] mit Werten im Rn, versehen mit der Norm
‖u‖ = supx∈[0,1]
‖u(x)‖Rn,
ein Banachraum ist.
Aufgabe 1.5.0.15 Wir betrachten die Abbildung
T : C([0, 1];Rn) → C([0, 1];Rn) : u 7→1∫
0
f(., y)u(y) dy, (1.13)
wobei f eine auf [0, 1] × [0, 1] stetige, reellwertige Funktion ist. Man zeige,T ist stetig und linear. Ist T eine Kontraktion?
Aufgabe 1.5.0.16 Man beweise das Lemma 1.2.2.3.
Aufgabe 1.5.0.17 Man veranschauliche sich das Tangentialbundel an dieEinheitssphare im R2. Wie sehen typische Vektorfelder aus? Wie hat mansich das entsprechende auf dem Torus T2 vorzustellen.
Aufgabe 1.5.0.18 Fur die Folge xnn∈N aus dem Beweis zum Banach-schen Fixpunktsatz beweise man die Fehlerabschatzung
d(xn+1, x) ≤λn
1 − λd(x1, x0).
Aufgabe 1.5.0.19 Man beweise Satz 1.3.1.12.

Kapitel 2
Stabilitat
In diesem Kapitel beschranken wir uns auf diskrete dynamische Systemeund wir wollen Aussagen uber Stabilitat von gewissen invarianten Men-gen machen, indem wir linearisieren, d.h. eine im Allgemeinen nichtlinea-re Abbildung durtch die Linearisierung approximieren. Dazu muss derZustandsraum das Konzept der Linearisierung zulassen. Wir betrachtendaher als Zustandsraum eine offene Menge im Rn oder eine Mannigfal-tigkeit. Grundlegend ist dabei ein kurzer Blick auf lineare Systeme imRn.
2.1 Lineare Systeme
Im folgenden seiX = Rn der Zustandsraum, A sei eine lineare AbbildungA : X → X , T = Z oder T = N. Wir betrachten das dynamische System(X,A). Ist A injektiv, wahlen wir T = Z, im anderen Fall ist T = N. Mitσ(A) bezeichnen wir das Spektrum von A. Ist λ ∈ σ(A) so sei E(λ) derverallgemeinerte Eigenraum von A zum Eigenwert λ, d.h.
E(λ) =
x ∈ X∣
∣
∣∃r∈N(A− λ1l)rx = 0
.
Entsprechend seiK(λ) = ker(A− λ1l)
der Eigenraum zum Eigenwert λ. Wir notieren das triviale Lemma:
Lemma 2.1.0.20 (Invarianz der Eigenraume) Die Raume E(λ), K(λ) sindinnvariante Mengen fur (X,A).
41

42 KAPITEL 2. STABILITAT
Beweis. Fur x ∈ E(λ) gilt mit r, so dass (A− λ1l)rx = 0
(A−λ1l)rAx = (A−λ1l)r(A−λ1l+λ1l)x = (A−λ1l)r+1x+λ(A−λ1l)rx = 0.
Lemma 2.1.0.21 (Asymptotik in den Eigenraumen) 1. Ist |λ| < 1 undx ∈ E(λ), so gilt
limk→∞
Akx = 0.
2. Ist |λ| > 1, so ist fur 0 6= x ∈ E(λ) die Folge Arr∈Nx unbeschrankt. DieFolge wachst wie |λ|r.
3. Ist λ| = 1, so gilt 0 6= x ∈ K(λ), dass
Arxr∈Neine beschrankte, von Null wegbeschrankte Folge ist mit
‖Arx‖ = ‖x‖
fur alle r ∈ N und eine geeignete Norm auf V .
4. Ist |λ| = 1 und x ∈ E(λ) \K(λ) so ist Arxr∈N unbeschrankt, die Folgewachst polynomial in r.
Beweis.
1. Ist x ∈ K(λ) so ist Akx = λkx → 0 fur k → ∞. Im allgemeinen Fallschreiben wir die Einschrankung auf E(λ) in der Form A = D + N ,wobei D = λ1l und N nilpotent ist, d.h. es existiert ein m ∈ N mitNm = 0. Dann ist
Ar = (D +N)r =
m−1∑
j=1
(
r
j
)
Dr−jN j .
Dann sieht man leicht, dass
limr→∞
Arx = 0.

2.2. LINEARE EBENE SYSTEME 43
2. Der Beweis fur den Fall |λ| > 1 folgt dem vorigen und braucht keineneuen Argumente.
3. Ist |λ| = 1, und VC der komplexifixierte Raum, so ist fur x ∈ K(Λ)CArx = λrx
und damit ist
‖Arx‖ = ‖λrx‖ = |λ|r‖x‖ = ‖x‖.
2.2 Lineare ebene Systeme
Ein ebenes lineares diskretes System hat die Form
xn+1 = Bx
wobei xi ∈ R2 und B ∈ L(R2,R2) ist. Wir unterscheiden mehrere Falle: Bhat Eigenwerte λ1, λ2 mit
1. |λ1,2| < 1
2. |λ1| < 1, |λ2| = 1
3. |λ1| < 1, |λ2| > 1
4. |λ1,2| = 1
5. |λ1| = 1, |λ2| > 1
6. |λ1,2| > 1
In den Fallen mit mindestens einem Eigenwert vom Betrag < 1 ist die Ma-trix eventuell nicht invertierbar und wir mussen die Falle in denen min-destens ein Eigenwert 0 auftritt, getrennt betrachten.

44 KAPITEL 2. STABILITAT
2.2.1 |λ1,2| < 1
Doppelter Eigenwert 0
Ist B = 0, so ist die Dynamik trivial: in einem Iterationsschritt landen wirin 0 und bleiben dort.
Ist B 6= 1, so hat die Jordan-Form von B die Gestalt
B =
(
0 10 0
)
Ein Punkt der Form
x =
(
x1
x2
)
wird auf(
x2
0
)
abgebildet und im nachsten Schritt auf die 0. Auch eine recht einfacheDynamik.
Ein Eigenwert 0
Nun kann B diagonalisiert werden, wir reduzieren in einem Schritt dieDynamik in eine eindimensionale Situation. Dort konvergiert die Folgegegen 0.
0 < |λ1| < |λ2| < 1
Hier konnten wir die Falle ob die Eigenwerte gleiches oder ungleiches Vor-zeichen haben unterscheiden.
Im beiden Fallen gibt es die eindimensionalen Eigenraume E(λi) die in-variant unter der Dynamik sind. In beiden Unterraumen konvergieren dieFolgen gegen 0 mit Raten |λi|n.

2.3. STABILITAT VON RUHELAGEN 45
2.2.2 Ein Eigenwert vom Betrag hochstens 1, mindestens
ein Eigenwert von Betrag 1
Ein Eigenwert 0, ein Eigenwert vom Betrag 1
In diesem Fall sind beide Eigenwerte einfach, und es gibt die zwei Moglich-keiten fur die Jordanform
(
0 00 1
)
oder
(
0 00 −1
)
In einem Schritt erreicht man den Eigenraum zum Eigenwert vom Betrag1, in einem Fall ist dieser gefullt mit Ruhelagen, im anderen mit periodi-schen Orbits der Lange 2.
Ein Eigenwert 0 < |λ| < 1, ein Eigenwert vom Betrag 1
Der Eigenwert vom Betrag 1 ist entweder 1 oder −1. Hier hat man Kon-vergenz gegen eine Familie von Ruhelagen, oder gegen eine Familie peri-odischer Orbits der Lange 2.
Zwei Eigenwerte vom Betrag 1
Hier sind die einfachen Falle aus Kombination von zwei reellen Eigenwer-ten ±1 denkbar, bei geichen Eigewerten geometrisch doppelt, oder geome-trisch einfach. Allerdings gibt es auch den Fall von einem Paar konjugiertkomplexer Eigenwerte, entweder Einheitswurzeln λp = 1, p ∈ Z oder kei-ne Einheitswurzeln. Die ersten Falle mit Eigenwerten λ1,2 = ±1 λ1λ2 = −1fuhren auf periodische Orbits der Lange 2, zwei gleiche Eigenwerte mitgeometrisch doppelten Eigenwerten fuhren ebenfalls auf Ruhelagen oderperiodische Orbits, sind aber keine stabilen Situationen. Im Fall von geo-metrisch einfachen, algebraisch doppelten Eigenwerten ±1 hat man poly-nomiale Divergenz.
2.3 Stabilitat von Ruhelagen
Wir betrachten nun die Situation einer nichtlinearen Abbildung f : U →U , wobei U ⊂ Rn offen ist. Die Situation einer offenen Teilmenge einer

46 KAPITEL 2. STABILITAT
Mannigfaltigkeit M wird ganz entsprechend behandelt. Wir nehmen an,x0 ∈ U sei eine Ruhelage von f , also f(x0) = x0. Wir nehmen an, f seistetig differenzierbar undA = Dxf(x0). OBdA durfen wir annehmen, dassx0 = 0 ist, indem wir
f1(x) = f(x+ x0) − x0
setzen, dann istf1(0) = f(x0) − x0 = 0
und Dxf1(0) = Dxf(x0). Es sei g = f − A und damit gilt
Dg(x0) = 0
und zu jedem ε > 0 und zu jeder Norm auf L(Rn;Rn) gibt es eine Umge-bung V von 0 mit
‖Dg(y)‖L(Rn) < ε
fur y ∈ V .
Definition 2.3.0.1 (Stabilitat von Ruhelagen) 1. Eine Ruhelage heißt sta-bil, wenn sie als kompakte invariante Menge stabil ist.
2. Sie wird als asymptotisch stabil bezeichnet, wenn sie als invariante Men-ge ein Attraktor ist.
3. Ist die Ruhelage nicht stabil, so bezeichnen wir sie als instabil.
Satz 2.3.0.2 (Stabilitat von Ruhelagen) Es sei 0 ∈ U ⊂ Rn offen, f ∈ C1(U ;U)
mit A = Dxf(0). Dann gilt: Ist σ(A) ⊂
z ∈ C ∣∣∣|z| < 1
, dann ist 0 asympto-
tisch stabil.
Beweis. Der Spektralradius ρ(A) < s < 1. Daher gibt es eine Norm, mitzugehoriger Operatornorm, so dass
‖A‖L(Rn,Rn) < s.
Ist ε < 1 − s, so ist auf V , ‖Df‖ < k < 1. Dann ist fur x ∈ Bδ(0) ⊂ V
‖f(x) − f(0)‖ ≤ ‖Df(ξ)‖L(Rn;Rn)‖x‖ ≤ k‖x‖ < δ.
Somit ist 0 stabil, und das gleiche Argument zeigt, dass 0 attraktiv ist.

2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITAT 47
Satz 2.3.0.3 (Storungssatz) Ist f : Rn → Rn stetig differenzierbar auf einerUmgebung W eines Fixpunktes x0 und ist ‖Df(x0)‖ < 1, so gibt es eine abge-schlossene Umgebung U von x0, so dass f(U) ⊂ U und f ist Kontraktion auf U .Ferner ist jede hinreichend nahe an f in gelegene Abbildung g : U → U (f, g na-he inC1(U ;U)), dass g auf U eine Kontraktion ist (und damit einen asymptotischstabilen Fixpunkt besitzt).
Wir erhalten dafur einen zweiten Stabilitatsbegriff: (U, f) ist als System sta-bil (gegen Storungen). Dieser Begriff spielt in der Theorie dynamischerSysteme eine sehr große Rolle.
2.4 Lineare Differentialgleichungen und Stabi-
litat
2.4.1 Jordan Form
In diesem kurzen Abschnitt wiederholen wir einige Begriffe der linearenAlgebra. Sei A : Rn → Rn eine lineare Abbildung mit zugehoriger MatrixA (diese wird durch die Wahl einer Basis bestimmt). Wir gehen immer vonder kanonischen Basis aus und identifizieren auf diese Weise die lineareAbbildung mit der Matrix. Eine Zahl λ ∈ C heißt Eigenwert von A, wennes einen Vektor uc ∈ Cn gibt mit
Auc = λuc.
Dieser Vektor uc wird Eigenvektor genannt. Naturlich mussen wir auch beireellen Matrizen komplexe Eigenwerte und Eigenvektoren zulassen. Des-halb arbeiten wir zunachst im komplexifizierten RaumCn. Die Eigenwertesind Losungen der charakteristischen Gleichung
det(A− λ1l) = 0. (2.1)
Wegen des Fundamentalsatzes der Algebra gibt es (mit Vielfachheiten ge-rechnet) genau nWurzeln dieser Gleichung. Jede Wurzel von (2.1) ist auchEigenwert, jedoch gibt es im allgemeinen weniger als n Eigenvektoren. Seiλ ein Eigenwert, so ist
Kλ = ker(A− λ1l)

48 KAPITEL 2. STABILITAT
ein A-invarianter Unterraum, der Eigenraum von A zum Eigenwert λ. Seim die Dimension von Kλ. Kλ ist enthalten im verallgemeinerten Eigenraum,der gegeben ist durch
Eλ = u ∈ Cn | ∃k ∈ Nmit (A− λ1l)ku = 0.Der verallgemeinerte Eigenraum Eλ zum Eigenwert λ ist invariant unterder Abbildung A. Eine weitere Zerlegung in invariante Unterraume istmoglich. Dazu betrachtet man den minimalen Wert k0, so dass ker(A −λ1l)k0 = Eλ ist. So eine Zahl existiert immer. In Eλ existiert eine Basis B,welches die Vereinigung vonmMengenH1, . . . , Hm ist, wobei jedesHk dieForm
Hk = uk,1, . . . , uk,rk (2.2)
hat mit
(A− λ1l)uk,i+1 = uk,i, i = 1, . . . , rk, (A− λ1l)uk,1 = 0.
Die Einschrankung von A auf Eλ hat in der Basis B dann die Gestalt
B1 0 . . . . . . 00 B2 0 . . . 0...
. . . . . . . . ....
0 . . . 0 00 . . . . . . 0 Bm
, (2.3)
wobei jeder dieser rk × rk Blocke Bk die einfache Form
Bk =
λ 1 0 . . . . . . 0
0 λ 1 0. . . 0
.... . . . . . . . . . . .
......
. . . . . . . . . 0...
. . . λ 10 . . . . . . . . . 0 λ
(2.4)
hat. Damit haben wir die komplexe Jordansche1 Normalform einer Matrixerhalten. In der reellen Jordanschen Normalform hat man auch eine Dar-
1Camille Marie Ennemond Jordan (5.1.1838-21.1.1922) wurde zunachst zum Bergbau-ingenieur ausgebildet. Im Jahre 1916 wurde er Prasident der franzosischen Akademie derWissenschaften. Sein Werk umfasst neben der Normalform Beitrage zur Algebra (u.a. zurGalois-Theorie), zur Analysis, zur Wahrscheinlichkeitsrechnung und zur Topologie derEbene (Kurvensatz).

2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITAT 49
stellung in Blocken wie in (2.3), jedoch sehen die Blocke i.a. anders aus. Istλ reell so bleibt die Form (2.4) erhalten. Fur komplexe Eigenwerte λ = eiα,ergibt sich statt (2.4) die Form
Bk =
cosα − sinα 1 0 . . . . . . . . . 0sinα cosα 0 1 0 . . . . . . 0
0 0 cosα − sinα 1 0 . . . 00 0 sinα cosα 0 1 . . . 0...
.... . . . . . . . . . . . . . .
......
. . . . . . . . . 1 0...
. . . . . . 0 10 . . . . . . . . . . . . 0 cosα − sinα0 . . . . . . . . . . . . 0 sinα cosα
. (2.5)
Eine einfache Begrundung fur diese Form ergibt sich aus der komplexenJordanschen Normalform und der folgenden Uberlegung. Ist λ ∈ C einkomplexer Eigenwert einer reellen Matrix so ist λ ebenso ein Eigenwertund es gibt zu dem zur Menge aus Gleichung 2.2 Hk = uk,1, . . . , uk,rk
eine Menge H∗
k = uk,1, . . . , uk,rk konjugiert komplexer Vektoren die eine
entsprechende Basis zum Eigenwert λ bilden. Wir definieren nun ein Paarreeller Vektoren
vk,j =1
2(uk,j + uk,j), j = 1, . . . , rk
wk,j =1
2i(uk,j − uk,j), j = 1, . . . , rk.
Nun sehen wir leicht
Avk,j =1
2(Auk,j + Auk,j)
= vk,j−1 +
(
cos(α) − sin(α)sin(α) cos(α)
)(
vk,j
wk,j
)
.
Fur Awk,j ergibt eine ahnliche Rechnung ein ganz ahnliches Ergebnis. Furdie Basis, die immer aus Paaren
HRk = vk,1, wk,1, . . . , vk,rk
, wk,rk
besteht ergibt sich dann die obige Abbildungsmatrix.
Wie sieht der Block fur λ = |λ|eiα aus?

50 KAPITEL 2. STABILITAT
2.4.2 Die Matrixexponentialfunktion
Definition 2.4.2.1 Sei A ∈ L(Rn,Rn). Wir setzen ‖A‖ = sup
|Au|∣
∣ u ∈Rn, |u| = 1
.
Lemma 2.4.2.2 ‖ · ‖ ist eine Norm auf dem linearen Raum der linearen Abbil-dungen von Rn in sich. Außerdem gilt ‖AB‖ ≤ ‖A‖‖B‖.
Beweis. Einfaches Nachrechnen!
Definition 2.4.2.3 Sei A eine n×n-Matrix. Die Funktion E : R→ L(Rn,Rn)sei definiert durch
E(A, t) =
∞∑
k=0
tk
k!Ak. (2.6)
Wir nennen E(A, t) die Matrixexponentialfunktion und schreiben dafur auch
E(A, t) = eAt.
Lemma 2.4.2.4 Die Funktion E(A, t) ist fur jedes A ∈ L(Rn,Rn) und jedereelle Zahl t ∈ R definiert.
Beweis. Ubungsaufgabe!
Satz 2.4.2.5 Die Matrixexponentialfunktion E(A, t) lost das Anfangswertpro-blem (??)
C = AC,C(0) = 1l
aus Hilfssatz ??.
Beweis. Zunachst betrachten wir eine Teilsumme der Reihe E(A, t)
Em(A, t) =
m∑
k=0
tk
k!Ak.
Die Ableitung von Em(A, t) ist naturlich
Em(A, t) =
m∑
k=1
tk−1
(k − 1)!Ak = AEm−1(A, t).
Wegen der gleichmaßigen Konvergenz der rechten Seite (auf kompaktenTeilmengen von R) ist E(A, t) differenzierbar und E(A, t) = AE(A, t).Naturlich ist auch E(A, 0) = 1l.
Die Losung des Anfangswertproblems u = Au, u(0) = u0 erhalt manalso durch u(t, u0) = E(A, t)u0.

2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITAT 51
Hilfssatz 2.4.2.6 Kommutieren die beiden Matrizen A,B miteinander, d.h.ist AB = BA, folgt fur alle t ∈ R
BE(A, t) = E(A, t)B,
und es gilt
E(A+B, t) = E(A, t)E(B, t) = E(B, t)E(A, t) ∀t ∈ R.Beweis. Die erste Eigenschaft ist eine unmittelbare Konsequenz der Defi-nition, die zweite erhalt man aus dem Eindeutigkeitssatz fur die Losungvon Anfangswertproblemen, indem man nachpruft, dass E(A+B, t) undE(A, t)E(B, t) das gleiche Anfangswertproblem losen.
A kann durch eine Ahnlichkeitstransformation in die Jordansche Nor-malform gebracht werden. Sei J die Jordansche Normalform von A undC die Transformationsmatrix, also J = CAC−1. Die allgemeine Form desVerhaltens der Losungen unter Koordinatentransformation ist in Aufgabe20, Blatt 5 angegeben. Fur den Spezialfall konnen wir die Losung des Aus-gangsproblems gewinnen, indem wir A in die Jordansche Normalformuberfuhren, fur diese dann die Gleichung losen und zurucktransformie-ren. Wir erhalten
u(t, u0) = E(A, t)u0 = C−1v(t, Cu0) = C−1E(J, t)Cu0.
Aus der Eindeutigkeit der Losung folgt noch
E(A, t) = C−1E(CAC−1, t)C.
Naturlich kann man diese Formel auch unmittelbar aus der Definition vonE(A, t) schließen. Zur allgemeinen Losung linearer Anfangswertproblememussen wir noch E(J, t) ausrechnen. Wir gehen von der Gestalt (2.3) aus.Naturlich gilt fur eine Matrix J in Blockdiagonalgestalt
J = diag(B1, . . . ,Bm)),
dass die Matrixexponentialfunktion auch Blockdiagonalgestalt annimmt,also
E(J, t) = diag(E(B1, t), . . . , E(Bm, t)).
Ist B ein Block der Lange 1, also B = (λ), so ist naturlich E(B, t) = eλt. Ist Bein Block der Lange r > 1 und der zugehorige Eigenwert λ reell, so ergibtsich die Exponentialreihe aus folgenden Betrachtungen.

52 KAPITEL 2. STABILITAT
Definition 2.4.2.7 Eine Matrix N heißt nilpotent, wenn es ein r ∈ N gibt mitN r = 0.
Lemma 2.4.2.8 Ein Block der Gestalt (2.4) ist die Summe einer DiagonalmatrixD und einer nilpotenten Matrix N .
Beweis. Naturlich ist D = diag(λ, . . . , λ). Ubrig bleibt die r × r Matrix
N =
0 1 0 . . . . . . 0
0 0 1 0. . . 0
.... . . . . . . . . . . .
......
. . . . . . . . . 0...
. . . 0 10 . . . . . . . . . 0 0
. (2.7)
Eine einfache Rechnung zeigt, dassN r = 0 ist. Damit istN nilpotent.
Bemerkung 2.4.2.9 Genauer gilt, dass jede Matrix A Summe einer diagonali-sierbaren und einer nilpotenten Matrix ist. Unser Beweis zeigt dies zumindestfur reelle Matrizen mit ausschließlich reellen Eigenwerten.
Lemma 2.4.2.10 Die MatrixexponentialfunktionE(B, t) eines Jordan-Blocks derLange r zum Eigenwert λ hat die Gestalt
E(B, t) = eλt
1 t t2/2 t3/6 . . . tr−1
(r−1)!
0 1 t. . .
. . ....
.... . . . . . . . . . . . t3/6
.... . .
. . .. . . t2/2
.... . . 1 t
0 . . . . . . . . . 0 1
(2.8)
Beweis. Es gilt DN = ND und daher mit dem Hilfssatz 2.4.2.6
E(B, t) = E(D +N, t) = E(D, t)E(N, t).
Nun ergibt E(D, t) = eλt1l und da N nilpotent ist, hat man
E(N, t) = 1l + tN +t2
2N2 + · · ·+ tr−1
(r − 1)!N r−1.

2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITAT 53
Fur einen nichtreellen Eigenwert stellt man die gleiche Betrachtung imKomplexen an und schneidet den Losungsraum mit dem Rn. Wir wollendie entsprechende Formel im Moment nicht angeben.
Satz 2.4.2.11 (Algebraische Struktur des Losungsraumes I) SeiA ∈ L(Rn,Rn).Wirsetzen U = u ∈ C1(R,Rn) | u = Au. U ist ein linearer Raum. Die Dimensionvon U ist n.
Beweis. Offensichtlich ist die Summe zweier Losungen wieder eine Losung.Gleiches gilt fur das Produkt ξu mit ξ ∈ R und u ∈ U . Also bleibt zu zei-gen, dass dimU = n ist. Sei A : U → Rn die Abbildung Au = u(0). Offen-sichtlich ist A linear und wegen der eindeutigen Losbarkeit von Anfangs-wertproblemen injektiv. Wegen des globalen Existenzsatzes ist A surjektiv.Also gilt U ≃ Rn.
Als nachsten Schritt betrachten wir die inhomogene lineare Gleichung,gegeben durch
u = Au+ f(t), (2.9)
wobei f : R → Rn eine stetige Abbildung ist. Wir wissen, aufgrunddes Existenzsatzes, dass diese Gleichung bei Vorgabe eines Anfangswerteslosbar ist. Die algebraische Struktur ist naturlich etwas anders als vorher.Wie in der linearen Algebra besteht die allgemeine Losung aus einer spe-ziellen Losung plus einem beliebigen Element aus U .
Satz 2.4.2.12 (Algebraische Struktur des Losungsraumes II) Sei
Uf = u ∈ C1(R,Rn) | u = Au+ f(t).Uf ist ein n-dimensionaler affiner Unterraum von C1(R,Rn). Es existiert alsoein u0 ∈ C1(R,Rn) mit der Eigenschaft, dass
Uf = u0 + u | u ∈ U.Beweis. Wie schon bemerkt, hat die Gleichung (2.9) immer eine Losung.Sei u0 eine solche Losung. Dann ist naturlich fur u ∈ U auch u0 + u eineLosung. Wir mussen noch zeigen, dass jede Losung diese Form hat. Sei u1
eine weitere Losung der Gleichung (2.9). Dann ist u0 − u1 eine Losung derhomogenen linearen Gleichung (einfaches Nachprufen zeigt dies). Damitist u0 − u1 ∈ U .
Wir wollen uns noch kurz Gedanken machen, wie man eine spezielleLosung u0 findet.

54 KAPITEL 2. STABILITAT
Lemma 2.4.2.13 (Formel der Variation der Konstanten) SeiA ∈ L(Rn,Rn),f : R → Rn stetig. Sei u0 ∈ Rn. Dann ist eine spezielle Losung der Gleichungu = Au+ f(t) gegeben durch
u0(t) = eAtu0 +
∫ t
0
eA(t−s)f(s)ds. (2.10)
Beweis. Differenzieren ergibt
d
dtu0(t) = AeAtu0 + [eA(t−s)f(s)]|s=t
+
∫ t
0
d
dteA(t−s)f(s)ds,
also
d
dtu0(t) = AeAtu0 + f(t) + A
∫ t
0
eA(t−s)f(s)ds = Au+ f(t).
2.4.3 Ebene lineare Systeme
In diesem Abschnitt wollen wir ebene, lineare und autonome Systeme cha-rakterisieren. Wir betrachten also eine Gleichung der Form
u = Au, (2.11)
wobeiA ∈ L(R2,R2) eine lineare Abbildung ist. Seien λ1, λ2 die Eigenwer-te von A. Wir unterscheiden:
1. λ1 > λ2 > 0;
2. λ1 = λ2 > 0;
3. λ1 = λ2,Reλ1 > 0;
4. λ1 > λ2 = 0;
5. λ1 = λ2 = 0;
6. Reλ1 = Reλ2 = 0, λi 6= 0;
7. λ1 > 0 > λ2;

2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITAT 55
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
Abbildung 2.1: Die Trajektorien von E(J, t).
8. λ1 = λ2 < 0;
9. λ1 < λ2 < 0;
10. λ1 = λ2,Reλ1 < 0;
11. λ1 < λ2 = 0.
1. Fall: Dabei hat die Jordan Normalform die Gestalt
J =
(
λ1 00 λ2
)
(2.12)
Seien e1, e2 die Eigenvektoren zu λ1,2. Dann konvergieren alle Losungenfur t→ −∞ gegen Null, fur t→ ∞ verlassen alle Losungen (außer einer!)jedes Kompaktum. Sie schmiegen sich (fur t→ −∞) an die e2-Achse an.
2. Fall: Wir unterscheiden zwei mogliche Formen des Jordan Blocks (Ei-genwerte sind geometrisch einfach oder nicht). Zunachst der Fall der geo-metrisch einfachen Eigenwerte. Hier hat der entsprechende Jordanblockdie Form
J =
(
λ1 00 λ1
)
. (2.13)
Alle Losungen haben dieselben Konvergenzeigenschaften wie zuvor. Nurist die Bewegung langs gerader Linien.Ist der Eigenwert nicht geometrisch einfach, so hat der Jordanblock dieGestalt
J =
(
λ1 10 λ1
)
. (2.14)

56 KAPITEL 2. STABILITAT
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
Abbildung 2.2: Die Trajektorien von E(A, t) mit schiefliegenden Ei-genraumen.
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15
Abbildung 2.3: Die Trajektorien von E(J, t) mit halbeinfachen Eigenwer-ten.

2.4. LINEARE DIFFERENTIALGLEICHUNGEN UND STABILITAT 57
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15
Abbildung 2.4: Die Trajektorien von E(J, t) mit geometrisch einfachem,algebraisch doppelten Eigenwert.
Auch hier hat man die Konvergenzeigenschaften wie im ersten Fall, je-doch schaut das Bild wiederum anders aus.
3. Fall: Wieder ergibt sich die gleiche Konvergenz, jedoch erhalt maneinen Strudel. Sei λ1 = |λ|eiθ. Dann ist λ2 = |λ|e−iθ und die reelle Normal-form hat die Form
J = |λ|(
cos θ − sin θsin θ cos θ
)
. (2.15)
4. Fall: Fur die Jordan Form ergibt sich
J =
(
λ1 00 0
)
. (2.16)
Langs der e2-Achse hat man konstante Losungen (Ruhelagen). Alle anderenLosungen konvergieren fur t → −∞ gegen 0 und verlassen in positiverZeitrichtung jedes Kompaktum.5. Fall: In diesem Fall hat die Jordan Form das Aussehen
J =
(
0 00 0
)
(2.17)
oder
J =
(
0 10 0
)
. (2.18)

58 KAPITEL 2. STABILITAT
Der erste dieser beiden Falle liefert ausschließlich konstante Losungen. Imzweiten hat man eine Bewegung auf Parallelen zur e1-Achse gegen unend-lich.6. Fall: Unsere Abbildung erhalt die Gestalt
J =
(
cos θ − sin θsin θ cos θ
)
. (2.19)
Wir erhalten Losungen, die sich auf Kreislinien um den Ursprung bewe-gen.7. Fall: Ein qualitativ neues Bild ergibt sich hier. Auf der einen Achse be-wegt man sich fur t → ∞ gegen unendlich und fur t → −∞ gegen Null,auf der anderen Achse hat man das gegenteilige Verhalten. Dazwischensind Losungen, die fur beide Zeitrichtungen jedes Kompaktum verlassenund sich fur t→ ±∞ an die jeweilige Eigenwertachse anschmiegen. (Diesist die Motivation fur den Begriff hyperbolisch, den wir noch einfuhren wer-den.)In den anderen Fallen ergeben sich ganz ahnliche Bilder wie bisher, nurdie Zeitrichtungen sind anders. Wir geben nur die Normalformen und dieBilder, keine weiteren Kommentare.
J =
(
λ1 00 λ2
)
(2.20)
8. Fall:
J =
(
λ1 00 λ1
)
(2.21)
oder
J =
(
λ1 10 λ1
)
(2.22)
9. Fall:
J =
(
λ1 00 λ2
)
(2.23)
10. Fall:
J =
(
cos θ − sin θsin θ cos θ
)
(2.24)

2.5. NEWTONS METHODE ALS DYNAMISCHES SYSTEM 59
11. Fall:
J =
(
λ1 00 0
)
(2.25)
2.5 Newtons Methode als dynamisches System
Numerische methoden zur Losung eines (nichtlinearen) Gleichungssys-tems
f(z) = 0.
Iterationsvorschriftx1 = x0 −Df(x0)
−1f(x0).
Fixpunkte diser Gleichung losen
x0 = x0 −Df(x0)−1f(x0)
und damitf(x0) = 0.
Ein Fixpunkt einer Iteration F heißt superattraktiv, falls DF (x0) = 0. AlsAbbildung F erhalten wir
F (x) = x−Df(x)−1f(x).
Nun ergibt sich
DF (x0) = 1l − (Df(x0)−1)2(Df(x0)
2 −D2f(x0)f(x0)) = 0.
Also ist der Fixpunkt super-attraktiv und die Konvergenz gegen den Fix-punkt ist quadratisch.
Allerdings ist das globale Verhalten sehr viel komplizierter: sucht mannach den komplexen Nullstellen von einfachen Gleichungen wie z3 = 1,so sieht man, dass die Einzugsgebiete der einzelnen Losungen, d.h. dieGebiete ω(z) = zi auf komplizierte Weise ineinander verwoben sind.

60 KAPITEL 2. STABILITAT

Kapitel 3
Klassifikation dynamischerSysteme
3.1 Konjugation und Orbit-Aquivalenz
Im Folgenden wollen wir die Analyse von dynamischen Systemen erleich-tern, indem wir gleich ganze Klassen von ,,gleichen”, ,,aquivalenten” usw.Systemen untersuchen. Doch was sind geeignete Konzepte von ,,Gleich-heit”, ,,Aquivalenz” usw.?
Fur Abbildungen hat sich folgendes Konzept als brauchbar herausge-stellt:
Definition 3.1.0.1 Zwei Ck-Diffeomorphismen f : X → X, g : Y → Y , 1 ≤k ≤ ∞, heißen topologisch konjugiert (oder C0-konjugiert), wenn es einenHomoomorphismus h : X → Y gibt mit
f = h−1 g h.
Allgemeiner heißen zwei Ck-Diffeomorphismen f : X → X, g : Y → Y , 1 ≤k ≤ ∞, Cj-konjugiert mit 1 ≤ j ≤ ∞, wenn es einen Cj-Diffeomorphismush : X → Y gibt mit f = h−1 g h.
Beispiel 3.1.0.2 Die Abbildungen f, g : R → R, f(x) = 2x, g(x) = 8x, sindtopologisch konjugiert mittels h(x) = x3, was ein Homoomorphismus ist. h istkein Diffeomorphismus, und es gibt auch keinen solchen, wie wir in Kurze sehen.
Wenn f, g Cj-konjugiert sind, so muss h nicht eindeutig bestimmt sein.
61

62 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
Beispiel 3.1.0.3 Wenn f = g : X → X, dann ist jeder Homoomorphismush : X → X eine Konjugation.
Diese Definition von Konjugation ist zwar leicht auf Flusse zu ubertragen,aber es wird sich gleich herausstellen, dass da ein anderes Konzept brauchbarerist. Zunachst die analoge Definition:
Definition 3.1.0.4 Zwei Ck-Flusse ϕ, ψ auf X, Y mit 1 ≤ k ≤ ∞ heißentopologisch konjugiert (C0-konjugiert), wenn es einen Homoomorphismush : X → Y gibt, so dass fur alle t ∈ R gilt:
ϕt = h−1 ψt h.
Allgemeiner heißen zwei Ck-Diffeomorphismen f : X → X, g : Y → Y , k ≥ 1,Cj-konjugiert mit 0 ≤ j ≤ ∞,wenn es einenCj-Diffeomorphismus h : X → Ygibt mit ϕt = h−1 ψt h.
Hier taucht nun folgendes Problem auf: Sei beispielsweise ϕ der Fluss zudem System
r = r, θ = 1
(in Polarkoordinaten) und ψ der Fluss zu
r = 2r, θ = 2.
Diese beiden Systeme haben dasselbe Phasenportrait, d.h. fur jeden Punktx ∈ R2 durchlauft der Orbit von ϕ genau dieselben Punkte wie der Orbitvon ψ durch x. Der einzige Unterschied ist, dass die Geschwindigkeit ver-schieden ist. Wir brauchen daher ein Konzept von Aquivalenz, das nichtso sensibel bezuglich des Zeitparameters ist. Folgendes ist brauchbar:
Definition 3.1.0.5 Die Ck-Flusse ϕ, ψ auf X, Y mit 1 ≤ k ≤ ∞ heißen Orbit-aquivalent (C0-Orbit-aquivalent), wenn es Homoomorphismen h : X → Yund σ : R → R gibt, so dass σ orientierungserhaltend (d.h. monoton wachsend)ist und fur alle t ∈ R gilt:
ϕt = h−1 ψσ(t) h.
Es gibt auch die Definition von Cj-Orbit-Aquivalenz mit 0 ≤ j ≤ ∞;dabei wird gefordert, dass in der obigen Definition h ein Cj-Diffeomorphismusist. Allerdings wird fur σ nach wie vor nur Homoomorphie gefordert.

3.1. KONJUGATION UND ORBIT-AQUIVALENZ 63
Wenn also zwei Flusse Orbit-aquivalent sind, dann konnen die Orbits zu-sammengestaucht werden.
Unmittelbare Folgerungen der Definition sind:
Lemma 3.1.0.6
• Wenn f zu g Cj-konjugiert ist (0 ≤ j ≤ ∞) und f einen Fixpunkt hat,dann auch g.
• Wenn f zu g Cj-konjugiert ist (0 ≤ j ≤ ∞), gibt es fur jedes periodischesOrbit von f ein periodisches Orbit von g, und zwar mit derselben Periode.
• Eine Identitatsabbildung 1lX ist zu keiner anderen Abbildung außer ande-ren Identitatsabbildungen 1lY konjugiert.
Beweis. Alle Punkte sind direkt einsehbar.Fast alles in diesem Lemma gilt auch fur Konjugation von Flussen und
fur Orbit-Aquivalenz von Flussen; allerdings kann sich die Periode einesperiodischen Orbits bei Orbit-Aquivalenz andern:
Lemma 3.1.0.7
• Wenn ϕ zu ψ Cj-konjugiert ist (0 ≤ j ≤ ∞), gibt es fur jeden periodi-schen Orbit von ϕ einen periodischen Orbit von ψ, und zwar mit derselbenPeriode.
• Wenn ϕ zu ψ Orbit-aquivalent ist, gibt es fur jeden periodischen Orbitvon ϕ einen periodischen Orbit von ψ, aber nicht notwendigerweise mitderselben Periode.
Beweis. Auch dieses Lemma ist direkt einsehbar.In fast allen Fallen kann man nur C0-Konjugation erwarten, auch bei
glatten Abbildungen oder Flussen. Eine Ausnahme macht folgender Satz:
Satz 3.1.0.8 (”flow-box“) Wenn ϕ einC1-Fluss auf einer n-dimensionalen Man-
nigfaltigkeit ist und das zugehorige Vektorfeld
f(x) =d
dt|t=0ϕ(x)

64 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
an der Stelle x0 nicht verschwindet, dann gibt es eine offene Umgebung U von x0,so dass ϕ|U (die Einschrankung von ϕ auf U) C1-konjugiert ist zum konstantenFluss auf einer offenen Teilmenge desRn, definiert durch
ψt(y) = y + te1
(mit e1= der erste Einheitsvektor inRn).
Beweis. Folgt aus einer Konstruktion mittels eines (lokalen) Schnittes. Einenvollstandigen Beweis findet man in jedem Lehrbuch uber GewohnlicheDifferentialgleichungen.
3.2 Hufeisen und Buroklammer
Im Folgenden wollen wir ein Beispiel fur eine”chaotische“ Abbildung
betrachten, ein sogenanntes Hufeisen. Das erste Beispiel eines solchenstammt von Smale; hier studieren wir eine abgewandelte Version, die an-genehmer ist.
Definition 3.2.0.9 Die die G-formige Hufeisen-Buroklammer ist auf U =[0, 1] × [0, 1] definiert durch
G : U → R2, G(x, y) =
(
3x, y3
)
fur x ≤ 1/3(
3x− 2, y+23
)
fur x ≥ 2/3
glatt fortgesetzt fur x ∈ [1/3, 2/3]
Diese Abbildung ist noch keine Abbildung eines Raums auf sich selbst.Um eine geeignete Menge als Definitionsbereich zu finden, betrachten wir:
Definition 3.2.0.10 Sei f : X → X eine Abbildung. Eine Menge A ⊂ X heißtpositiv invariant unter f, wenn f(A) ⊂ A. Fur eine invertierbare Abbildungf heißt A negativ invariant, wenn f−1(A) ⊂ A. Wenn A positiv und negativinvariant ist, heißt A bi-invariant oder einfach invariant. Eine Abbildung H :X → Y heißt invariant unter f , wenn H f = H.
Vorsicht: Manche Bucher benutzen das Wort”invariant“ als Synonym fur
,,positiv invariant” und nicht fur”bi-invariant“.

3.2. HUFEISEN UND BUROKLAMMER 65
Nun suchen wir eine moglichst große Menge im R2, die unter G inva-riant ist. Beachte: Fur eine allgemeine Abbildung von U ⊂ R2 nach R2 gibt es
zwar nicht unbedingt eine maximale invariante Menge. Hierfur bietet sich dieMenge
Λ =⋂
i∈ZGi(U)
an. Sie ist per Definition invariant, und sie ist Teilmenge von U, da U =G0(U).
Definition 3.2.0.11 Die Standard-Cantormenge ist definiert als
C =
∞∑
n=0
an3−n : (an)n∈N0erfullt an ∈ 0, 2 ∀n ∈ N0
.
Lemma 3.2.0.12 Es gilt:a) C ist uberabzahlbar.b) C ist homoomorph zum Cantor-Staub C × C. (Zwei Mengen heißen
homoomorph, wenn es eine stetige Bijektion zwischen ihnen mit stetiger Um-kehrabbildung gibt.)
Beweis. a) Es gibt uberabzahlbar viele unendliche Folgen in 0, 2. Wenn
(an)n∈N 6= (bn)n∈N,dann ist
∑
n∈N an3−n 6=∑
n∈N bn3−n,
denn wenn k die erste Stelle ist, an der sich a und b unterscheiden, dannist
|∑
n∈N an3−n −∑
n∈N bn3−n| ≥ 3−k −∑
n>k
2 · 3−n > 0.
b)
f(∑
n∈N an3−n) = (∑
n∈N a2n3−n,∑
n∈N a2n+13−n)
ist bijektiv, da
f−1((∑
n∈N an3−n,∑
n∈N bn3−n) =∑
n∈N cn3−n

66 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
mit
cn =
an/2 fur n gerade
b(n−1)/2 fur n ungerade.
f ist stetig: Fur ε > 0 sei k so groß, dass 3−k < 2ε und wahle 0 < δ <3−2k −∑n>2k 2 · 3−n > 0. Dann gilt fur x =
∑
n∈N an3−n, y =∑
n∈N bn3−n
mit |x − y| < δ, dass die ersten 2k Stellen von x und y ubereinstimmen.Somit ist
|f(x) − f(y)| ≤ |∑
n∈N(a2n − b2n)3−2n| + |∑
n∈N(a2n+1 − b2n+1)3−(2n+1)|
= |∑
n>k
(a2n − b2n)3−2n| + |∑
n>k
(a2n+1 − b2n+1)3−(2n+1)| < ε.
f−1 ist stetig: Fur ε > 0 sei k so groß, dass 3−k < ε und wahle 0 < δ <3−k −∑n>k 2 · 3−n > 0. Dann gilt fur x = (
∑
n∈N an3−n,∑
n∈N bn3−n), y =(∑
n∈N a′n3−n,∑
n∈N b′n3−n) mit |x − y| < δ in der Summennorm, dass dieersten k Stellen von x und y in beiden Koordinaten ubereinstimmen. Somitist
|f−1(x) − f−1(y)| ≤∑
n∈N |cn − c′n|3−n <∑
n>k
|cn − c′n|3−n < ε.
mit
cn =
an/2 fur n gerade
b(n−1)/2 fur n ungerade,
c′n =
a′n/2 fur n gerade
b′(n−1)/2 fur n ungerade.
Lemma 3.2.0.13 Die Menge Λ =⋂
i∈ZGi(U) ist der Standard-Cantor-StaubC × C, wobei C die Standard-Cantormenge ist.
Beweis. U ∩G(U) ist das Einheitsquadrat mit dem horizontalen”Drittel“-
Rechteck entfernt, also die zwei horizontalen Rechtecke [0, 1] ×[
0, 13
]
und[0, 1] ×
[
23, 1]
. Da G aus zwei linearen Abbildungen besteht, wird bei der

3.2. HUFEISEN UND BUROKLAMMER 67
nachsten Anwendung von G aus jedem dieser Rechtecke wieder ein hori-zontales Drittel entfernt usw. Somit ist
⋂
i∈NGi(U) = [0, 1] × C.
Fur die UmkehrabbildungG−1 gilt, dassU∩G−1(U) aus den zwei verti-kalen Rechtecken
[
0, 13
]
× [0, 1] und[
23, 1]
× [0, 1] besteht. Bei jeder weiterenAnwendung von G wird aus jedem Rechteck wieder ein vertikales Drittelentfernt, und somit ist
⋂
i∈N0
G−i(U) = C × [0, 1].
Damit ist naturlichΛ =
⋂
i∈Z
Gi(U) = C × C.
Diese Abbildung ist, wie wir sehen werden, ein Prototyp einer ,,chao-tischen” Abbildung in folgendem Sinn:
Definition 3.2.0.14 Eine Abbildung f : X → X , wobei X ein topologischerRaum ist, heißt topologisch transitiv, wenn es einen dichten Orbit gibt.
Satz 3.2.0.15 Es sei X ein vollstandiger metrischer Raum, der zusatzlich
• separabel (d.h. er hat eine abzahlbare dichte Teilmenge) sei und
• keine isolierten Punkte besitze.
Es sei f : X → X stetig, dann sind die vier folgenden Bedingungen aquivalent:
1. f ist topologisch transitiv.
2. f besitzt einen dichten Halborbit.
3. Fur nichtleere offene Mengen U, V ⊂ X gibt es ein N ∈ Z mit fN(U) ∩V 6= ∅.
4. Fur nichtleere offene Mengen U, V ⊂ X gibt es ein N ∈ N mit fN(U) ∩V 6= ∅.

68 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
Beweis. Die Implikationen (4) impliziert (3), bzw. (2) impliziert (1) sindklar. Wir beweisen nun (1) ⇒ (3). Sei fn(x) : n ∈ Z dicht und U, V of-fen und nichtleer. Dann existieren n,m ∈ Z mit fn(x) ∈ U , fm(x) ∈ Vunddann ist fm−n(U) ∩ V 6= ∅. (Beachte, hier wird nur die Stetigkeit von fverwendet, die weiteren Voraussetzungen werden nicht verwendet.)(1) ⇒ (4). Wir mussen zeigen, dass wir den Beweis so fuhren konnen, dassm > n. Ist also V offen, der Orbit dicht und besitztX keine isolierten Punk-te, dann gibt es in V Punkte, die nicht im Orbit liegen. (Orbit ist abzahlbar,eine abgeschlossene Umgebung eines jeden Punktes ist ein vollstandigermetrischer Raum und als solcher nicht die Vereinigung nirgends dichterMengen (Satz von Baire) und jeder Punkt ist nirgends dicht.) Sei y ∈ Vund nicht im Orbit von f . Also gibt es eine Folge mk → ∞ mit k → ∞ mitfmk(x) → y. Diese Folgenglieder sind ab eines bestimmten Index alle in Vund demzufolge, kann m > n gewahlt werden.Nun beweisen wir (4) ⇒ (2) und (3) ⇒ (1). Sei also X separabel und eineder Bedingungen (3) oder (4) erfullt. Sei S eine abzahlbar dichte Teilmengein X und es sei fur j ∈ N Uj eine Abzahlung der abzahlbar vielen metri-schen Kugeln
Bq(x) mit x ∈ Sund 0 < q ∈ Qum Punkte x ∈ S mit Radien 0 < q ∈ Q. Wenn wir zeigen, dass es einenOrbit/Halborbit gibt, der jede dieser Mengen Uj trifft, so sind wir fertig.Wir beginnen mit einem N1 ∈ Z oder N1 ∈ N, so dass f(U1) ∩ U2 6= ∅.Sei nun V1 eine metrische Kugel vom Radius kleiner 1
2in U1 mit V1 ⊂
U1∩f−N1(U2). Wahle V2 eine metrische Kugel vom Radius hochstens 14
mit
V 2 ⊂ V1 ∩ f−N2(U3). Setze die Wahl induktiv fort: Vn+1 ist metrische Kugelvom Radius hochstens 1
2n+1 mit V n+1 ⊂ Vn ∩ f−Nn+1(Un+2). Nun bilden die
Mittelpunkte der Kugeln von Vnn∈N eine Cauchyfolge. Sei x ∈ ⋂n∈N Vn.Dann ist fNn−1(x) ∈ Un fur alle Nn oder fur alle n.
Aufgabe 3.2.0.16 Man erganze den letzten Schritt im Falle einer Abbildung f ,die nicht invertierbar ist.
Definition 3.2.0.17 Eine Abbildung f : X → X , wobei X ein topologischerRaum ist, heißt topologisch mischend, wenn es fur alle nichtleeren offenenMengen U, V ⊂ X ein N ∈ N gibt, so dass fur alle n > N gilt: U ∩ fn(V )ist nicht leer.
Diese beiden Begriffe sind eng miteinander verbunden. Wir haben denfolgenden Satz.

3.3. SYMBOLISCHE DYNAMIK 69
Satz 3.2.0.18 Jede topologisch mischende Abbildung ist topologisch transitiv.
Beweis. Folgt aus Satz 3.2.0.15.
Definition 3.2.0.19 Eine Abbildung f : X → X heißt chaotisch, wenn dieMenge der periodischen Punkte dicht ist und die Abbildung topologisch transitivist.
Diese Definition von Chaotizitat stammt von Devaney1; es gibt noch an-dere.
Anstatt diese Eigenschaften fur unsere Hufeisen-Buroklammer direktzu zeigen, studieren wir zuerst ein ganzlich anders aussehendes System,sogenannte symbolische Dynamik. Dann werden wir sehen, dass diese au-genscheinlich sehr verschiedenen Systeme vergleichbare Dynamik haben.
3.3 Symbolische Dynamik
Zunachst definieren wir die Symbolraume:
Definition 3.3.0.20 [Symbolraum] Die Menge
Ω = (ωi)i∈Z : ωi ∈ 0, 1 fur alle i ∈ Zheißt Menge der zweiseitigen Sequenzen (oder zweiseitiger Symbolraum)und
ΩR = (ωi)i∈N0: ωi ∈ 0, 1 fur alle i ∈ N0
heißt Menge der einseitigen Sequenzen (oder einseitiger Symbolraum).
Darauf gibt es ein naturliches dynamisches System, welches alle Folgen-glieder nach links schiebt:
Definition 3.3.0.21 [Shift-Operator] Der Shift-Operator auf Ω (bzw. ΩR) istdefiniert durch
σ(ω)i = ωi+1.
σ wird auch als topologischer Bernoulli-Shift bezeichnet.
1statt einer historischen Bemerkung ein Link:http://math.bu.edu/people/bob/

70 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
Auf der Menge der zweiseitige Sequenzen ist das eine Bijektion; auf derMenge der einseitigen Sequenzen dagegen nicht, denn dort wird der Wertvon ω an der linkesten (0-ten) Koordinaten
”vergessen“ und mit ω1 uber-
schrieben.Die Symbolraume sind metrische Raume:
Definition 3.3.0.22 [Metrik auf Symbolraumen] Auf Ω ist fur jedes λ > 1 eineMetrik wie folgt definiert:
dλ(α, ω) =∑
i∈Z λ−|i|∆(αi, ωi)
mit ∆(a, b) = 0 fur a = b und ∆(a, b) = 1 sonst, bzw. allgemeiner
dλ(α, ω) =∑
i∈Z λ−|i||αi − ωi|.
Naturlich kann man auch Symbolraume mit mehr als zwei Symbolen de-finieren. Dies findet man z.B. in [15]. Eine alternative Weise eine Topologiezu erklaren ist, dass man Ω mit der Menge 0, 1Z identifiziert. Versiehtman nun die Menge 0, 1 mit der diskreten Topologie, so erhalt man aufΩ die Produkttopologie, erinnert man sich noch daran, dass man 0, 1auch mit einer Gruppenstruktur versehen kann, so wird Ω zu einer kom-pakten topologischen Gruppe. Wir betrachten eine weitere Konstruktion.Wahle ein k ∈ N und zu dazu ganzzahlige Werte
n1 < n2 < · · · < nk
und αk ∈ 0, 1.
Definition 3.3.0.23 Ein Zylinder in Ω ist eine Menge der Form
Cn1,...,nkα1,...,αk
=
ω ∈ Ω∣
∣
∣ωni
= αi fur k = 1 . . . n
.
Die Zahl k heißt Rang des Zylinders.
Eine dritte Art und Weise eine Topologie zu erklaren besteht nun darin,dass wir jeden Zylinder als offene Menge betrachten und dies als Basiseiner Topologie. Man beachte, dass die Punkte in einem Zylinder an end-lich vielen Stellen einen vorgegebenen Wert haben, d.h. an endlich vielenStellen sind die Werte vorgegeben.

3.3. SYMBOLISCHE DYNAMIK 71
Aufgabe 3.3.0.24 1. Man zeige Komplemente von Zylindern sind endlicheVereinigungen von Zylindern (also nach der dritten Definition auch offen).
2. Die drei Methoden eine Topologie zu erklaren fuhren auf die gleiche Topo-logie, insbesondere erzeugen fur λ1 6= λ2 die Metriken dλ1
, dλ2die gleichen
Topologien.
Bemerkung 3.3.0.25 Die gleichen Konstruktionen kann man auch mit einseiti-gen Symbolraumen machen.
Satz 3.3.0.26 Periodische Punkte fur σ sind in Ω, bzw. in ΩR dicht. In beidenRaumen ist σ topologisch mischend.
Beweis. Die periodischen Punkte fur σ sind gerade die Fixpunkte einergeeigneten Potenz von σ. Ist σrω = ω, so gilt fur alle Indizes
ωn = ωn+r.
Fur die Dichtheit der periodischen Punkte reicht es daher, in jedem Zy-linder die Existenz eines periodischen Punktes nachzuweisen. In jedemZylinder C gibt es einen Zylinder der Form
Cmα = C−m,...,m
α−m,...,αm,
wobei α fur das 2m+ 1-Tupel
α = (α−m, . . . , αm)
steht. Aber in diesem Zylinder findet man den 2m+ 2 periodischen Punktω, der sich durch Wiederholen der Folge α ergibt, also
ωn = αk, −m ≤ k ≤ m und n− k = 0 mod2m+ 1.
Man beachte, dass es 22m+1 solcher endlichen Folgen α gibt. Um die Ei-genschaft des topologischen Mischens nachzuweisen, muss man die ent-sprechende Eigenschaft fur Zylinder nachweisen. Gegeben seien also zweiZylinder Cm1,...mk
α1,...,αkund Cn1,...,nr
β1,...,βr. Wahle zunachst
ω ∈ Cm1,...mkα1,...,αk
und betrachte n > maxmk + |nr| + |n1|. Setze fur j = 1, . . . r
ω(n+ nj) = βj .
dann ist ω ∈ Cm1,...mkα1,...,αk
und σnω ∈ Cn1,...,nr
β1,...,βr. Dies war zu beweisen.

72 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
Lemma 3.3.0.27 Der Cantor-Staub C×C ist homoomorph zu Ω, die AbbildungG : C × C → C × C ist konjugiert zum Shift σ : Ω → Ω. Insbesondere ist Gtopologisch mischend, die periodischen Punkte liegen dicht und G ist chaotisch.
Beweis. Wir betrachten die Abbildung h : Ω → Λ die Konjugation zwi-schen G und dem Shift auf Ω, definiert durch
ω 7→ h(ω) =⋂
n∈ZG−n(Vωn),
wobei V0 =[
0, 13
]
× [0, 1] und V1 =[
23, 1]
× [0, 1]. Zu zeigen ist:
1. h ist eine Bijektion
2. h und h−1 sind beide stetig und
3. h konjugiert σ und G.
Wir betrachten die folgenden Bilder

3.3. SYMBOLISCHE DYNAMIK 73

74 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME

3.3. SYMBOLISCHE DYNAMIK 75
Wir sehen daran, dass endlich viele Schnitte von Mengen der FormG−n(Vωn)
gerade Schnitte von entsprechenden Rechtecken mit C×C sind. Diese bil-den eine Basis fur die Topologie auf C × C. Betrachten wir also
∩rj=1G
−nj(Vωnj)
so ist dies gerade das Bild des Zylinders
Cn1,...,nrωn1
,...ωnr.
Durch Bilden des Schnitts uber eine Folge von geschachtelten Rechteckender Form
∩mj=−mG
−j(Vωj)
erhalt man genau einen Punkt on C × C, ebensoliefern die Schnitte derentsprechenden Zylinder
C−m,...,mω−m,...,ωm
genau einen Punkt in Ω. Diese werden aufeinander abgebildet und auf-grund der Konstruktion ist h Bijektion und in beiden Richtungen stetig.

76 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
Die Konjugationseigenschaft ist leicht zu sehen:
G
(
⋂
n∈ZG−n(Vωn)
)
=⋂
n∈ZG−n+1(Vωn)
=⋂
n∈ZG−n(Vωn−1)
= h(σω).
Lemma 3.3.0.28 Isometrien sind nicht topologisch mischend.
Beweis. Ist f : X → X eine Isometrie, seien x, y, z verschiedene Punkte inX und
δ =1
4mind(x, y), d(y, z), d(x, z).
SeienU = Bδ(x), V1 = Bδ(y), V2 = Bδ(z).
Sei W ⊂ X eine beliebige nichtleere Teilmenge und
D(W ) = sup
d(w1, w2)∣
∣
∣w1,2 ∈W
der Durchmesser von W . Da f eine Isometrie ist, ist
D(W ) = D(f(W )).
Nun ist D(U) = 2δ und damit gilt
D(fn(U)) = 2δ.
Angenommen fur ein n ∈ N gilt
fn(U) ∩ V1 6= ∅, fn(U) ∩ V2 6= ∅.Seien ui ∈ U mit
fn(ui) ∈ Vi.
Dann ist
2δ > d(u1, u2) = d(fn(u1), fn(u2)) > d(y, z)−(d(y, fn(u1))−d(z, fn(u2))) > 4δ−δ−δ.
Damit kann es kein N ∈ N geben, so dass fur n > N und i = 1, 2 gilt
fn(U) ∩ Vi 6= ∅.Dies ist gerade die Behauptung.

3.3. SYMBOLISCHE DYNAMIK 77
Definition 3.3.0.29 Es sei X ein metrischer Raum, f : X → X stetig. DieAbbildung f heißt expandierend, falls ein λ0 > 1 und ein ε > 0 existiert, sodass
(x 6= y ∧ d(x, y) < ε) ⇒ d(f(x), f(y)) > λ0d(x, y).
Beispiel 3.3.0.30 Die Abbildungen Em : S1 → S1 : z 7→ zm sind fur m > 1expandierend.
Lemma 3.3.0.31 Es sei X eine differenzierbare kompakte Mannigfaltigkeit mitMetrik d. Wir fordern von dieser Metrik, dass es zu jedem x ∈ X ein ε > 0 gibt,so dass fur y ∈ Bε(x) gilt
d(x, y) = infγ∈C1(I,X)
b∫
a
‖γ(s)‖ds.
Eine stetig differenzierbare Abbildung f : X → X ist expandierend, falls es einλ > 1 gibt, so dass fur alle x ∈ X und alle v ∈ TxX gilt
‖Df(x)v‖ ≥ λ‖v‖. (3.1)
Beweis. Die Menge der ε-Kugeln, die im Lemma angegeben sind, bildeneine offene Uberdeckung von X , aufgrund der Kompaktheit von X rei-chen endlich viele X zu uberdecken, dann gibt es ein ε0 > 0 (Lebesgue-zahl), so dass zu jedem x ∈ X die KugelBε0
(x) in einer der uberdeckendenMengen liegt.Unter den Voraussetzungen an f ist die Linearisierung in jedem Punktsurjektiv, d.h. der Satz uber implizite Funktionen garantiert, dass das Bildeiner ε-Kugel um x eine δ(x)-Kugel um f(x) enthalt. Sei δ0 = infδ(x), x ∈X > 0. Dann betrachten wir fur x, y ∈ X mit d(f(x), f(y)) < δ0 C
1-Kurven, die in Bδ0(f(x)) verlaufen f(x) und f(y) verbinden. Sei L(γ) dieLange von γ. Ferner sei γ die eindeutige Kurve, die x mit y verbindet undγ = f γ.Dann ist
L(γ) =
b∫
a
‖γ(t)‖ dt =
b∫
a
‖f ′(γ(t)) ˙˜(t)γ‖ dt > µ
b∫
a
‖ ˙˜(t)γ dt = µL(γ).
Dann istd(f(x), f(y)) = inf
γL(γ) > µ inf
γL(γ) ≥ µd(x, y).
78 KAPITEL 3. KLASSIFIKATION DYNAMISCHER SYSTEME
Korollar 3.3.0.32 Ist X = S1, so reicht anstatt 3.1 die schwachere Bedingung
∀x ∈ S1 : |f ′(x)| > 1
um sicherzustellen, dass f expandierend ist.
Beweis. Statt des Argumentes mit der Bogenlange kann im Eindimensio-nalen mit dem Mittelwertsatz gearbeitet werden, der eine Gleichheit
d(f(x), f(y)) = f ′(ξ)d(x, y)
mit ξ ∈ (x, y) garantiert. Ubergang zum Minimum ergibt die behaupteteUngleichung.
Lemma 3.3.0.33 Expandierende Abbildungen auf S1 sind topologisch mischend.
Beweis. Betrachte die Projektion π : R → S1 : x 7→ [x], die jedem Punktdie Aquivalenzklasse in R/Z zuordnet. Ein Lift von f : S1 → S1 ist eineAbbildung F : R→ R, so dass
f π = π F
ist. Ein Lift ist eindeutig bist auf eine additive ganzzahlige Konstante (Be-weis der Existenz in den Ubungen.) Wir betrachten nun eine offene MengeU in S1. π−1(U) enthalt ein Intervall I positiver Lange. Dann gibt es einF n(I) ein Intervall ist, dessen Lange großer als 1 ist. Dann ist π(F n(I)) =S1 und π(F n(U)) ⊃ π(F n(I)) = S1 = fn(π(I)). Insbesondere schneidetfn(U) jede offene Menge V nichtleer.

Kapitel 4
Fraktale und Dimension
4.1 Selbstahnlichkeit
Was sind Fraktale? Das Wort”fraktal“ kommt von
”zerbrochen“ und steht
fur die nicht-ganzzahlige Dimension. Wir betrachten also Objekte derenDimension keine ganze Zahl ist. Einige solche Objekte sind seit einigenJahren gut bekannt. Oft werden diese als selbstahnlich bezeichnet. Um die-sem Begriff naher zu kommen betrachten wir wieder die Cantormenge Cund eine Abbildung
f : C → C : x 7→ x
3.
Dieses Abbildung bildet die Cantormenge auf den Schnitt der Cantormen-
ge mit dem Intervall [0, 13] ab, genauso kann man die Abbildung x 7→ (x+2)
3
betrachten, die C auf den rechten Teil von C abbildet. Jeder Schnitt derCantormenge mit einem Intervall der Lange 3−n, das bei der Konstruktionvon C auftritt, ist Bild der Cantormenge unter einer (affin linearen) Kon-traktion. Das heißt jeder solcher Teil ist der Menge C ahnlich, dies moti-viert uns C, als selbstahnlich zu bezeichnen. Fur die formale Definition desBegriffes benotigen wir den nachfolgenden Satz, der eine Verallgemeine-rung des Banachschen Fixpunktsatzes ist und auf Hutchinson zuruckgeht.
Satz 4.1.0.34 Es sei X ein vollstandiger metrischer Raum, Ti : X → X sei furi = 1, . . . , m jeweils eine Kontraktion. Dann gibt es genau eine kompakte MengeK ⊂ X mit
K =n⋃
i=1
Ti(K). (4.1)
79

80 KAPITEL 4. FRAKTALE UND DIMENSION
Fur den Beweis benotigen wir einige Hilfsmittel, die wir in Form mehrererLemmata formulieren.
Definition 4.1.0.35 Eine Teilmenge K eines metrischen Raumes X heißt totalbeschrankt, falls es zu jedem ε > 0 eine endliche Teilmenge N ⊂ K gibt mit
K ⊂⋃
x∈N
Bε(x).
Lemma 4.1.0.36 In einem metrischen Raum X sind fur eine Teilmenge K ⊂ Xdie folgenden Aussagen aquivalent:
1. K ist (uberdeckungs) kompakt.
2. K ist folgenkompakt, d.h. jede Folge in K enthalt eine konvergente Teil-folge.
3. K ist total beschrankt und vollstandig.
Beweis. (1) impliziert (2): Sei K kompakt, xnn∈N eine Folge in K, diekeine konvergente Teilfolge besitze. Dann gibt es auch keinen Haufungs-punkt der Folge, d.h. fur jedes x ∈ K gilt, dass es ein ε(x) > 0 gibtmit Bε(x)(x) enthalt nur endlich viele Folgenglieder. Nun bildet die Men-ge Bε(x)(x)x∈K eine endliche Uberdeckung, also gibt es eine endlicheTeiluberdeckung
K ⊂m⋃
i=1
Bε(xi)(xi).
Jede dieser endlich vielen Kugeln enthalt nur endlich viele Folgenglieder,also ist die Folge endlich.(2) impliziert (3): Wir wollen nun zeigen, dass zu jedem ε > 0 endlich vieleElemente xi ∈ K, i = 1, . . . , m existieren mit
K ⊂m⋃
i=1
Bε(xi).
Angenommen, dies ist nicht der Fall. Dann gibt es ein ε > 0, so dass fur jeendlich viele Punkte xi ∈ K, i = 1, . . . , m immer gilt
K 6=m⋃
i=1
Bε(xi).
4.1. SELBSTAHNLICHKEIT 81
Sei ein solches ε > 0 gegeben. Dann ist zu beliebig gewahlten x1 ∈ K dieMenge Bε(x1) 6= K, also gibt es ein
K ∋ x2 /∈ Bε(x1).
Angenommen x1, . . . , xk seien konstruiert mit
K ∋ xj+1 /∈j⋃
i=1
Bε(xi), j = 1, . . . , k − 1.
Dann ist aufgrund der Voraussetzung
K 6=k⋃
i=1
Bε(xi)
und wir finden ein
K ∋ xk+1 /∈k⋃
i=1
Bε(xi).
Damit konstruieren wir induktiv eine Folge xkk∈N, so dass jedes Folgen-glied zu allen vorherigen einen Abstand mindestens ε hat. Also hat dieseFolge keine konvergente Teilfolge, im Widerspruch zur Annahme. Damitist diese Implikation gezeigt.(3) impliziert (1): Wir nehmen an, K sei total beschrankt, aber nicht kom-pakt. Dann gibt es eine Uberdeckung U , so dass
K ⊂⋃
U∈U
U,
aber je endlich viele dieser Mengen U uberdeckenK nicht. Wir nehmen an,dass X total beschrankt sei, also gibt es zu ε1 = 1 eine endliche Teilmengex1
1, . . . , x1r1
mit
K ⊂r1⋃
i=1
B1(x).
Nun uberdeckt U jede der Mengen B1(xi), i = 1, . . . r mindestens eine die-ser Mengen besitzt keine endliche Teiluberdeckung, dies sei oBdA B1(x1).Setze ε2 = 1
2. Dann gibt es x2
1, . . . , x2r2∈ K mit
K ⊂r2⋃
i=1
Bε2(x2
i ).
82 KAPITEL 4. FRAKTALE UND DIMENSION
Insbesondere ist
B1(x1) ⊂r2⋃
i=1
(B1(x1) ∩Bε2(x2
i )).
Eine dieser endlich vielen Mengen ist nicht endlich uberdeckbar, oBdA istdies
(B1(x1) ∩ Bε2(x2
1)).
Wahle ε3 = 14
und wiederhole den Vorgang. Induktiv sei εn = 21−n furn ≥ 1 definiert und Mengen
B1(x11) ∩ · · · ∩ Bεn
(xn1 )
gefunden, die nicht endlich uberdeckbar sind (bzgl. U). Betrachte die Folge
xn1n∈N.
Diese ist eine Cauchyfolge inK. Der Grenzwert (der aufgrund der Vollstandig-keitsannahme fur K) in K existiert, sei x0. Dann gibt es ein U ∈ U mitx0 ∈ U . Da U offen ist, gibt es ein δ > 0 mit Bδ(x0) ⊂ U . Insbesondere gibtes n0 ∈ N mit n > n0 impliziert xn ∈ B δ
2
(x0). Sei n1 > n0, so dass
εn <δ
2.
Dann ist fur n > n1
Bεn(xn) ⊂ B δ
2
(xn) ⊂ Bδ(x0) ⊂ U.
Dies ist ein Widerspruch, dies beweist die Behauptung.Beweis von Satz 4.1.0.34. Wir betrachten die Halbgruppe von Abbil-
dungenG, die von den Kontraktionen T1, . . . , Tm erzeugt wird. Wir wollenim ersten Schritt zeigen, dass ein Orbit eines Punktes x ∈ X unter dieserHalbgruppe, d.h. eine Menge der Form
gx∣
∣
∣g ∈ G
total beschrankt ist. Dazu zeigen wir, dass ein solcher Orbit in einer metri-schen Kugel enthalten ist. Dazu sei x ∈ X gegeben. Sei
r = max
d(x, Tjx)∣
∣
∣j = 1, . . . , m

4.1. SELBSTAHNLICHKEIT 83
undλ = max
λj
∣
∣
∣j = 1, . . . , m
.
Es gilt λ < 1. Jedes g ∈ G ist von der Form
g = Tig(j) Tig(j−1) · · · Tig(1), ig(j) ∈ 1, . . . , m.
Dann ist mit der Bezeichnung
j∏
s=k
Tig(s)x = Tig(j) · · · Tig(k)x
d(gx, x) ≤j−1∑
k=1
d(
j∏
s=k
Tig(s)x,
j∏
s=k+1
Tig(s)x)
≤j−1∑
k=1
λj−k−1d(Tig(k)x, x)
≤ r
j−2∑
k=1
λk
≤ r
1 − λ.
Wir ordnen nun Worten w in m Zeichen α1, . . . , αm Operatoren Tw zu, in-dem wir zunachst Worten aus einem Zeichen αi den Operator Ti zuordnenund bei Worten w der Lange |w| = j, w = (w1, . . . , wn)
Tw = Tw1 · · · Twj
schreiben. Sei nun ε > 0 gegeben. Wir definieren j0 durch die Relation
λj0r
1 − λ< ε.
Dann ist fur x, y ∈ X mit d(x, y) < r1−λ
und fur jedes Wort w der Lange j0,
d(Twx, Twy) < ε.
Wir betrachten nun alle Worte Wj0 = w | |w| ≤ j0 der Lange hochstensj0. Setze
N =
Twx∣
∣
∣w ∈Wj0
.

84 KAPITEL 4. FRAKTALE UND DIMENSION
Dann gilt fur jedes Wort in m Zeichen, dass
w = w1+w2, w1 ∈Wj0 , + steht hier fur das Aneinanderhangen von Worten
wobei |w1| ≤ j0 und |w2| = 0 falls |w1| < j0. Dann ist
Tw = Tw1 Tw2
mit |w1| ≤ j0 und Tw2 = 1l, falls |w1| < j0. Ist nun |w| < j0, so ist Twx ∈ Nund insbesondere in
⋃
ξ∈N
Bε(ξ).
Ist |w1| = j0, so ist
d(Tw2x, x) ≤ r
1 − λ
und
d(Twx, Tw1x) = d(Tw1 Tw2x, Tw1x) ≤ λj0d(Tw2x, x) ≤ λj0r
1 − λ= ε.
Insbesondere istTwx ∈
⋃
ξ∈N
Bε(ξ).
Also ist Gx total beschrankt. Dann ist Gx kompakt und invariant unter al-len Tj, j = 1, . . . , m. Also ist die Menge der kompakten invarianten Men-gen nicht leer. Ist nun K eine durch Inklusion vollstandig geordnete Kettesolcher kompakten invarianten Teilmengen, so besitzt dies ein minimalesElement (den Durchschnitt, der nichtleer kompakt und invariant ist. Da-mit sind die Voraussetzungen des Zornschen Lemmas erfullt und es gibteine untere Schranke, d.h. eine kompakte nichtleere und invariante Men-ge, die minimal bezuglich Inklusion und der Eigenschaften kompakt undinvariant zu sein, ist. SeiK diese Menge. Dann ist offensichtlich Ti(K) ⊂ Kund demzufolge
m⋃
i=1
Ti(K) ⊂ K.
Setze nun
K ′ =
m⋃
i=1
Ti(K).
4.1. SELBSTAHNLICHKEIT 85
Dann ist K ′ kompakt und
Ti(K′) ⊂ Ti(K) ⊂ K ′.
Also ist K ′ invariant und wegen der Minimalitat von K gilt K ′ = K, alsogenugt K der Gleichung (4.1)
Die Eindeutigkeit sieht man leicht. Ist K kompakt und invariant undTix0 = x0, so ist fur x ∈ K die Folge T j
i xj∈N konvergent und aufgrundder Invarianz von K ist jedes Folgenglied in K. K ist kompakt, also ist
K ∋ limj→∞
T ji x = x0.
Insbesondere besitzen je zwei nichtleere invariante und kompakte Men-gen nichtleeren Durchschnitt. Dann nehmen wir an K,K ′ sind kompakt,invariant, erfullen die Gleichung (4.1) undK ist minimales Elemente bezuglichder Halbordnung durch Inklusion. Dann ist
K ∩K ′ 6= ∅, kompakt, invariant
und genugt der Gleichung (4.1). Ist nun K ′ 6= K so erhalten wir aus K ∩K ′ ⊂ K und der Minimalitat von K, dass K ∩K ′ = K und damit folgt dieEindeutigkeit.
Definition 4.1.0.37 Eine kompakte Menge K ∈ Rn heißt selbstahnlich, wennes eine endliche Anzahl von Kontraktionen Ti, i = 1, . . . , m gibt mit
K =
m⋃
i=1
Ti(K),
und zusatzlich gilt, dass das Maß von Ti(K) ∩ Tj(K) fur i 6= j gleich Null ist.
Bemerkung 4.1.0.38 Ersetzt man in der letzten Bedingung das Maß durch an-dere Konstruktionen, so kann man allgemeinere Begriffe von Selbstahnlichkeiterhalten.
Beispiel 4.1.0.39 Mit X = [0, 1] und Tx = 13x, T2x = 1
3x + 2
3erhalt man, wie
gesehen, die Cantormenge C als selbstahnliche Menge.
Weitere Beispiele sind folgende selbstahnliche Objekte:
86 KAPITEL 4. FRAKTALE UND DIMENSION
• Der Cantor-Staub,
• das Sierpinski-Dreieck,
• der Sierpinski-Teppich,
• der Menger-Schwamm,
• die von Koch-Kurve.
Dabei werden diese Objekte durch folgende Konstruktionen erhalten (Cund C × C kennen wir ja bereits):
1. Sierpinski-Dreieck: wir betrachten ein gleichseitiges Dreieck D00 und
verbinden die Kantenmittelpunkte wieder zu einem Dreieck U0 undbetrachten
D1 = D0 \ U0.
D1 besteht aus drei gleichseitigen DreieckenDj1, j = 1, 2, 3. Nun wie-
derholen wir den Schritt, den wir aufD0 angewendet haben fur jedesder Dreiecke Dj
1 und damit neun Dreiecke Dj2, j = 1, . . . 9. Durch Ite-
ration erhalten wir eine selbstahnliche Menge im R2.
2. Sierpinski-Teppich: Wir betrachten ein Quadrat Q0 und teilen diekanten jeweils in drei gleiche Teile. Dadurch zerlegen wir das Qua-drat in 9 Quadrate, das mittlere bezeichnen wir mit U0. Sei
Q1 = Q0 \ U0.
Damit bleiben 8 Quadrate Qj1, j = 1, . . . , 8 ubrig, auf jedes dieser
Quadrate wenden wir wieder den ersten Schritt an und erhalten
Q2 =⋃
Qj2, j = 1, . . . 64.
Wie zuvor ist offensichtlich, dass wir ein selbstahnliches Gebilde er-halten.
3. Der Menger Schwamm ergibt sich als dreidimensionales Analogondes Sierpinski-Teppichs: wir betrachten den Kubus [0, 1]3 in jeder Ko-ordinatenebene konstruieren wir den Sierpinski-Teppich im Quadrat[0, 1]2. Fur jede zu entnehmende Menge U betrachten wir U × [0, 1]

4.2. SELBSTAHNLICHKEITSDIMENSION 87
bzw. [0, 1] × U und die dritte (weniger bequem zu formulierendeMenge. Wir entnehmen aus [0, 1]3 all diese mengen, das verbleiben-de Objekt nennen wir Menger-Schwamm, wiederum durch die Kon-struktion erhalten wir sofort die selbstahnlichkeit.
4. In diesem Fall beginnen wir wieder mit einem Intervall [0, 1]×0 ⊂R2 und ersetzen nun das mittlere Drittel der Strecke durch ein nachoben gerichtetes gleichseitiges Dreieck (ohne Bodenlinie). Durch Ite-ration erhalten wir die von-Koch Kurve.
5. Die von-Kochsche Schneeflocke wird durch den eben beschriebenenProzess mit einem gleichseitigen Dreieck am Anfang definiert
Fur diese Mengen wollen wir einen Begriff der Dimension definieren. Bis-her hat sich kein eindeutigen Dimensionsbegriff fur solche Konstruktio-nen durchgesetzt. Es gibt unter Anderem folgende Definitionen von frak-taler Dimension, die leider nicht aquivalent sind:
1. Selbstahnlichkeitsdimension,
2. Hausdorff-Dimension,
3. Box-Dimension.
Gemeinsame Eigenschaft all dieser Dimensionsbegriffe ist: Der n-dimensionaleEinheitswurfel hat Dimension n. Allgemeiner soll gelten: Wenn wir dieMengeA in jeder Koordinatenrichtung in 10 Scheiben schneiden und dann10d Stucke herauskommen, soll die Dimension gleich d sein. Ebenso mitder Zahl 10 ersetzt durch eine beliebige Zahl.
Fur selbstahnliche Mengen, also solche, die aus verkleinerten Kopienvon sich selbst zusammengesetzt sind, bietet sich die Definition aus demnachfolgenden Abschnitt an.
4.2 Selbstahnlichkeitsdimension
Definition 4.2.0.40 Wenn eine Menge A ⊂ Rn aus k Kopien von Bildern vonsich selbst zusammengesetzt ist, die alle mit dem Faktor s ∈ (0, 1) skaliert sind,so ist die Selbstahnlichkeitsdimension von A gleich
dimS
(A) = − log k
log s.

88 KAPITEL 4. FRAKTALE UND DIMENSION
Das ist dadurch motiviert, dass wir erwarten, dass die Dimension d dieGleichung
(
1
s
)d
= k
erfullt. Auflosen nach d ergibt gerade die Formel in der Definition.
Beispiel 4.2.0.41 1. Die Standard-Cantormenge C besteht aus k = 2 Kopi-en, die mit s = 1/3 skaliert sind. Somit ist
dimS
(C) =log 2
log 3.
2. Das Sierpinski-Dreieck D besteht aus k = 3 Kopien, skaliert mit s = 1/2.Somit ist
dimS
(D) =log 3
log 2.
3. Fur den Sierpinski-Teppich T ist k = 8 und s = 1/3, somit
dimS
(T ) =log 8
log 3.
Aufgabe 4.2.0.42 Was ist die Selbstahnlichkeitsdimension des Menger-Schwamms?
Wenn wir dem n-fachen Cantor-Staub C × · · · × C ⊂ Rn betrachten (dasn-fache Produkt der Standard-Cantormenge C), wie ist dann die Selbstahnlich-keitsdimension?
Was ist die Selbstahnlichkeitsdimension der Cantormenge C(λ), die entsteht,wenn aus [0, 1] das offene mittlere Intervall der Lange λ ∈ (0, 1) entfernt wird,aus jedem verbleibenden Intervall der Lange x wieder das offene mittlere Intervallder Lange λx ∈ (0, 1) entfernt wird usw.?
Naturlich sind solchermaßen selbstahnliche Mengen sehr speziell. Mankann die Definition noch etwas erweitern, um zuzulassen, dass der Skalie-rungsfaktor s bei jeder Kopie anders ist. Wir wollen uns aber gleich die all-gemeinste Definition von Dimension ansehen, namlich die der Hausdorff-Dimension.

4.3. HAUSDORFF-DIMENSION 89
4.3 Hausdorff-Dimension
Definition 4.3.0.43 Fur eine Menge A inRn und d ∈ R und ε > 0 ist
hdε(A) = inf
∑
i∈N diam(Ui)d | (Ui)i∈N Uberdeckung von A,
diam(Ui) < ε ∀i ∈ N.
Das d-dimensionale Hausdorff-Maß ist
hd(A) = limε→0
hdε(A).
Letzterer Limes ist wohldefiniert, da hdε monoton in ε ist. Alle Uberde-
ckungen, die fur ein ε > 0 zugelassen sind, sind auch fur alle großerenε′ > ε > 0 zugelassen. Daher wird in diesem Fall das Infimum fur ε < ε′
uber weniger Uberdeckungen gebildet und daher ist das Infimum fur denkleineren Wert großer und man hat in diesem Fall
hdε(A) ≥ hd
ε′(A).
Also existiert der Grenzwert in diesem Fall in R ∪ ∞. Man kann nunfolgenden Satz zeigen.
Satz 4.3.0.44 Fur jedes A gibt es ein d ∈ [0,∞] mit
hs(A) = ∞ fur s < d
hs(A) = 0 fur s > d.
Definition 4.3.0.45 Die Zahl
dimH
(A) = infs > 0 : hs(A) = 0= sups ≥ 0 : hs(A) = ∞
heißt die Hausdorff-Dimension von A.
Bemerkung 4.3.0.46 Es folgt, dass fur jedes nichtleereA die Hausdorff-Dimensiongleich der Zahl d in dem vorigen Satz ist. Fur die leere Menge kann man wahlwei-se 0 oder −∞ als Dimension festsetzen. Letzteres ist praktisch, da dann Formelnwie dimH(A × B) ≥ dimH(A) + dimH(B) stimmen. In der Literatur wird abertrotzdem oft 0 benutzt.

90 KAPITEL 4. FRAKTALE UND DIMENSION
Bemerkung 4.3.0.47 Fur s = dimH(A) muss hs(A) keineswegs eine Zahl in(0,∞) sein; auch 0 und ∞ sind moglich.
Aufgabe 4.3.0.48 Finden Sie solche Mengen A.
Der Vorteil der Hausdorff-Dimension ist, dass beliebigen Mengen eineDimension zugeordnet werden kann. Das Problem mit der Hausdorff-Dimension ist, dass ihre Berechnung sehr schwer ist, sogar fur ganz ein-fach Mengen wie [0, 1]n oder die Standard-Cantormenge. Daher befassenwir uns jetzt noch mit einer weiteren Dimensionsdefinition, die immernoch reichlich allgemein ist, aber mit wesentlich weniger Aufwand be-rechenbar ist, sogar automatisiert per Computer.
4.4 Box-Dimension
Es gibt verschiedene Berechnungsvorschriften fur die Box-Dimension, diealle dasselbe Ergebnis liefern und daher alle als Definition taugen.
Zunachst eine Definition, die herauskommt, wenn wir in der Definiti-on der Hausdorff-Dimension den Term diam(Ui) ersetzen durch die obereSchranke fur diese Durchmesser, also eine Zahl, die nicht von i abhangt:
Definition 4.4.0.49 Sei A eine kompakte Menge inRn.Sei N(δ) die kleinste Zahl, so dass A mit N(δ) offenen Mengen von Durch-
messer δ uberdeckt werden kann.Definiere die untere Box-Dimension als
dimB(A) := limδ→0
logN(δ)
− log δ= lim inf
δ→0
logN(δ)
− log δ
und die obere Box-Dimension als
dimB(A) := limδ→0logN(δ)
− log δ= lim inf
δ→0
logN(δ)
− log δ.
Wenn diese Zahlen ubereinstimmen, heißt die Zahl die Box-Dimension von A :
dimB
(A) := limδ→0
logN(δ)
− log δ.

4.4. BOX-DIMENSION 91
Diese Definition ist schon leichter zu benutzen, erfordert aber immer nochetwas Gehirneinsatz bei der Berechnung vonN(δ). Daher hier eine weitere(aquivalente Definition), die so einfach ist, dass ein Computer sie benutzenkann:
Definition 4.4.0.50 Die δ-Parkettierung desRn ist die Menge
P (δ) := [k1δ, (k1 + 1)δ] × · · · × [knδ, (kn + 1)δ],
die aus kompakten Wurfel der Kantenlange δ besteht, welche Eckpunkte auf demGitter δZn haben.
Fur eine Menge A sei N2(δ) die Zahl der Wurfel in P (δ), die A schneiden.Dann konnen die untere Box-Dimension, die obere Box-Dimension und bei
Gleichheit die Box-Dimension so definiert werden wie oben mit N ersetzt durchN2.
Definition 4.4.0.51 Sei N3(δ) die minimale Zahl von Wurfeln (der Dimensionn), welche A ⊂ Rn uberdecken, nicht notwendigerweise Elemente der Parkettie-rung P (δ).
Dann konnen die untere Box-Dimension, die obere Box-Dimension und beiGleichheit die Box-Dimension so definiert werden wie oben mit N ersetzt durchN3.
Definition 4.4.0.52 Sei N4(δ) die kleinste Zahl, so dass A mit N(δ) offenenBallen von Durchmesser δ uberdeckt werden kann.
D.h. N4(δ) ist so definiert wie N(δ), außer dass statt beliebigen offenen Men-gen nun Balle genommen werden.
Dann konnen die untere Box-Dimension, die obere Box-Dimension und beiGleichheit die Box-Dimension so definiert werden wie oben mit N ersetzt durchN3.
Satz 4.4.0.53 Die Box-Dimension, untere und obere Box-Dimension sind un-abhangig davon, ob in der Definition N, N2, N3 oder N4 steht.
Beweis. Jede Menge von Durchmesser δ ist enthalten in einem Cluster aus3 × · · · × 3 Elementen der Parkettierung P (δ), also ist N3 ≤ N2 ≤ 3nN.
Ein n-Wurfel der Kantenlange 1 kann mit K(n) Ballen von Durchmes-ser 1 uberdeckt werden, wobei die Konstante K(n) nur von n abhangt.Also ist N ≤ K(n)N3 ≤ K(n)N2.

92 KAPITEL 4. FRAKTALE UND DIMENSION
Offensichtlich ist auch N ≤ N3, da jeder Ball von Durchmesser δ ineinen n-Wurfel von Durchmesser δ passt.
Weiterhin ist N = N4, da jeder offene Ball von Durchmesser δ eine offe-ne Menge von Durchmesser δ ist und jede offene Menge von Durchmesserδ in einen Ball von Durchmesser δ hineinpasst.
Somit andert sich N bei Ubergang zu N2, N3 oder N4 hochstens umeine (von δ unabhangige) multiplikative Konstante und logN hochstensum eine additive. Also hat
logN(δ)
− log δ
nach diesem Ubergang denselben oberen und unteren Grenzwert.Es gibt noch weitere mogliche Modifikationen: Die Balle oder Wurfel
konnen offen oder abgeschlossen gewahlt werden usw. Wir haben bislanggenug Definitionen.
Bemerkung 4.4.0.54 Definition (N2) ist fur maschinelle Auswertung geeignet:Ein Computer kann fur endlich viele Werte von δ (z.B. fur einen einzigen Wertδ0) N2(δ) bestimmen und somit
logN(δ0)
− log δ0
als Naherung der Dimension.

Literaturverzeichnis
[1] Brockhaus Enzyklopadie in 24 Banden. F.A. Brockhaus, Mannheim, 19.teAuflage, 1986.
[2] R. ABRAHAM & J. W. ROBBIN. Transversal Mappings and Flows. Ben-jamin, New York, 1967.
[3] H. AMANN. Gewohnliche Differentialgleichungen. de Gruyter, BerlinNew York, 1995.
[4] V. ARNOLD. Gewohnliche Differentialgleichungen. VEB Deutscher Ver-lag der Wissenschaften, Berlin, 1979.
[5] T. BROCKER & K. JANICH. Differentialtopologie, Heidelberger Ta-schenbucher 98. Springer Verlag, 1973.
[6] M. DENKER. Einfuhrung in die Analysis dynamischer Systeme. SpringerVerlag, 2005.
[7] R. DEVANEY. An Introduction to Chaotic Dynamical Systems. Addison-Wesley, New York, 1989.
[8] S. Gottwald, H.-J. Ilgauds & K.-H. Schlote, editors. Lexikon bedeutenderMathematiker. Verlag Harri Deutsch, Leipzig, Thun, 1990.
[9] R. GUNESCH. Einfuhrung in Dynamische Systeme. Vorlesung, Uni-versitat Hamburg, 2004.
[10] R. GUNESCH. Gewohnliche Differentialgleichungen. Vorlesung, Uni-versitat Hamburg, 2006.
[11] J. K. HALE. Ordinary Differential Equations. John Wiley & Sons, Coorp,1969.
93

94 LITERATURVERZEICHNIS
[12] P. HARTMAN. Ordinary Differential Equations. John Wiley & Sons,Coorp., 1964.
[13] B. HASSELBLATT & A. KATOK. A First Course in Dynamics with a Pan-orama of Recent Developments. Cambridge Univ. Press, 2003.
[14] H. HEUSER. Gewohnliche Differentialgleichungen. B. G. Teubner, 1979.
[15] A. KATOK & B. HASSELBLATT. Introduction to the Modern Theory ofDynamical Systems, Encycl. Math. Appl. 54. Cambridge Univ. Press,1995.
[16] H.-W. KNOBLOCH & F. KAPPEL. Gewohnliche Differentialgleichungen.Teubner, 1974.
[17] R. LAUTERBACH. Gewohnliche Differentialgleichungen. Skriptzur Vorlesung, Universitat Hamburg, 1999. http://www.math.uni-hamburg/lauterbach/scripts/ode.html.
[18] J. PALIS,JR. & W. DE MELO. Geometric Theory of Dynamical Systems.Springer Verlag, New York, 1982.
[19] W. WALTER. Gewohnliche Differentialgleichungen, Heidelberger Ta-schenbucher. Heidelberger Taschenbucher. Springer Verlag, Berlin,1972.
[20] F. W. WARNER. Foundations of Differentiable Manifolds and Lie Groups.Scott Foresman and Company, Glenview, IL, 1971.