geometría vectorial y analítica. abraham asmar
TRANSCRIPT

Geometría Vectorial y Analítica. Una Introducción alAlgebra Lineal.
Abraham Asmar CharrisPatricia Restrepo de Pelaez
Rosa Franco Arbelaez
Fernando Vargas Hernandez
Escuela de Matemáticas. Universidad Nacional de Colombia

2

Contenido
I 1
1 Vectores geométricos en el plano 31.1 Conceptos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Suma de vectores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Producto de un escalar por un vector . . . . . . . . . . . . . . . . . . . . . . 141.4 Descomposición de un vector . . . . . . . . . . . . . . . . . . . . . . . . . . 231.5 Proyección de un vector sobre otro vector . . . . . . . . . . . . . . . . . . . 251.6 Producto escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.7 Vectores geométricos en el plano cartesiano. Descomposición canónica . . . 321.8 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2 Vectores coordenados o algebraicos 532.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532.2 Suma y producto por escalar en R2 . . . . . . . . . . . . . . . . . . . . . . . 552.3 Magnitud, dirección y otros conceptos en R2 . . . . . . . . . . . . . . . . . . 602.4 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3 La línea recta en el plano 753.1 Ecuación vectorial y ecuaciones paramétricas . . . . . . . . . . . . . . . . . 753.2 Ángulo de inclinación y pendiente . . . . . . . . . . . . . . . . . . . . . . . 793.3 Ecuaciones escalares no paramétricas . . . . . . . . . . . . . . . . . . . . . . 833.4 Ecuación en forma normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 883.5 Rectas perpendiculares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.6 Ángulo entre rectas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 913.7 Distancia de un punto a una recta . . . . . . . . . . . . . . . . . . . . . . . 923.8 Ecuaciones lineales, combinaciones lineales, dependencia e independencia
lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 943.9 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4 Transformaciones lineales del plano y matrices 2× 2 1014.1 Transformaciones del plano . . . . . . . . . . . . . . . . . . . . . . . . . . . 1014.2 Transformaciones lineales y matrices . . . . . . . . . . . . . . . . . . . . . . 1074.3 Propiedades básicas de las transformaciones lineales . . . . . . . . . . . . . 1104.4 Imagen de un conjunto bajo una transformación . . . . . . . . . . . . . . . 1134.5 Operaciones con transformaciones lineales y con matrices . . . . . . . . . . 1174.6 Inversas para transformaciones lineales y matrices . . . . . . . . . . . . . . 1284.7 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
3

4 CONTENIDO
5 Sistemas de ecuaciones lineales 2× 2 1435.1 Conceptos y resultados básicos . . . . . . . . . . . . . . . . . . . . . . . . . 1435.2 Sistemas de ecuaciones lineales y matrices . . . . . . . . . . . . . . . . . . . 1505.3 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
6 Determinantes de orden 2 1616.1 Definición. Par orientado de vectores . . . . . . . . . . . . . . . . . . . . . . 1616.2 Transformaciones que preservan la orientación . . . . . . . . . . . . . . . . . 1656.3 Determinantes y áreas de paralelogramos . . . . . . . . . . . . . . . . . . . 1676.4 Fórmulas de Cramer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1696.5 Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1716.6 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
7 Valores propios y vectores propios 1757.1 Definiciones. Cálculo de valores y vectores propios . . . . . . . . . . . . . . 1757.2 Factorización A = PDP−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1797.3 Valores propios y vectores propios de matrices simétricas . . . . . . . . . . . 1817.4 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
8 Secciones Cónicas 1958.1 La circunferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1968.2 Traslación de ejes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2008.3 La parábola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2038.4 La elipse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2168.5 La hipérbola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2318.6 La ecuación Ax2 + Cy2 +Dx+Ey + F = 0 . . . . . . . . . . . . . . . . . . 2518.7 Rotación de ejes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2518.8 Ecuación general de segundo grado . . . . . . . . . . . . . . . . . . . . . . . 2558.9 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
II 269
9 Vectores en el espacio 2719.1 Vectores geométricos. Conceptos básicos y operaciones . . . . . . . . . . . . 2719.2 Sistema de coordenadas cartesianas para el espacio . . . . . . . . . . . . . . 2749.3 Descomposición canónica para vectores geométricos . . . . . . . . . . . . . . 2779.4 Producto cruz o producto vectorial . . . . . . . . . . . . . . . . . . . . . . . 2889.5 Vectores coordenados o algebraicos . . . . . . . . . . . . . . . . . . . . . . . 2969.6 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
10 Rectas y planos 31910.1 La línea recta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31910.2 Ángulo y posiciones relativas entre dos rectas . . . . . . . . . . . . . . . . . 32310.3 Distancia de un punto a una recta . . . . . . . . . . . . . . . . . . . . . . . 32710.4 Planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32910.5 Posiciones relativas entre dos planos y entre una recta y un plano . . . . . . 33410.6 Distancia de un punto a un plano . . . . . . . . . . . . . . . . . . . . . . . . 33810.7 Ecuaciones paramétricas para un plano . . . . . . . . . . . . . . . . . . . . . 340

CONTENIDO 5
10.8 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
11 Transformaciones lineales del espacio y matrices 3× 3 35311.1 Transformaciones del espacio . . . . . . . . . . . . . . . . . . . . . . . . . . 35311.2 Transformaciones lineales y matrices . . . . . . . . . . . . . . . . . . . . . . 35911.3 Operaciones con transformaciones lineales y matrices . . . . . . . . . . . . . 36811.4 Inversa para transformaciones lineales y matrices . . . . . . . . . . . . . . . 37411.5 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386
12 Sistemas de ecuaciones lineales 3× 3 39112.1 Definiciones y algunos resultado básicos . . . . . . . . . . . . . . . . . . . . 39112.2 Método de eliminación de Gauss . . . . . . . . . . . . . . . . . . . . . . . . 39912.3 Otros resultados básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40612.4 Método de Gauss-Jordan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40912.5 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414
13 Determinantes de orden 3 41913.1 Definición y algunos resultados básicos . . . . . . . . . . . . . . . . . . . . . 41913.2 Propiedades básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42613.3 Aplicaciones geométricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43013.4 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437
14 Valores propios y vectores propios 44114.1 Definiciones. Cálculo de los valores y vectores propios . . . . . . . . . . . . 44114.2 Matrices simétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45214.3 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462
15 Superficies cuádricas 46715.1 Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46715.2 Elipsoide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47015.3 Hiperboloide de una hoja . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47315.4 Hiperboloide de dos hojas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47515.5 Cono elíptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47715.6 Cilindro recto elíptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47915.7 Cilindro recto hiperbólico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48015.8 Cilindro recto parabólico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48115.9 Paraboloide elíptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48215.10Paraboloide hiperbólico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48415.11Cambio de sistema de coordenadas . . . . . . . . . . . . . . . . . . . . . . . 48515.12Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499

6 CONTENIDO

Prefacio
A comienzos del año 2001, un grupo de profesores de la Escuela de Matemáticas proponeuna reforma a los distintos programas de las asignaturas de servicio para la Facultad deMinas, incluyendo por supuesto el curso de Geometría. Este curso es quizás el que másrequería de una modificación pues su programa había sido conformado con temas que noestaban articulados entre sí.
El nuevo programa para el curso de Geometría fue elaborado por el profesor Diego MejíaDuque y aprobado por el Consejo de la Facultad de Ciencias según acta No. 2038 de 2 deAgosto de 2001. Se basaba dicho programa en el texto Linear Algebra Through Geometryde Thomas Banchoff y John Werner, editado por Springer-Verlag, el cual se proponía comotexto guía para el curso. Por diversas razones, el cambio en el programa de Geometría nose implementó y se continuó con el programa anterior. Es apenas para el semestre 02de 2002 cuando se conforma un grupo de profesores para analizar el nuevo programa yestudiar el texto guía propuesto; conformaron dicho grupo las profesores Abraham AsmarCharris, Diego Mejía Duque, Patricia Restrepo de Pelaez, Margarita María Toro Villegasy Fernando Vargas Hernandez. Este grupo conceptuó que el texto en consideración no eraapropiado como texto guía, pero recomendó escribir un material para el curso, manteniendola orientación y caracteristicas del mencionado texto, incluyendo ciertos temas ausentes enél y aumentando tanto el número de ejemplos como las colecciones de ejercicios propuestos.
El trabajo de escritura de tal material lo emprendieron, a partir del semestre 01 de 2003,los profesores Abraham Asmar, Patricia Restrepo, Rosa Franco y Fernando Vargas. Setrabajó con la siguiente metodología: Abraham se encargaba de escribir la primera versiónde la teoría con ejemplos, para cada uno de los temas; copia de ello se pasaba a la profesoraPatricia, quien revisaba y hacía observaciones y sugerencias. Con base en esta revisión sedefinía la versión final, la cual era escrita por Abraham. Esa versión final se pasaba a Rosay Fernando, quienes se encargaban de elaborar la correspondiente colección de ejercicios,con sus respuestas. El material se completó, en manuscrito, al final del semestre 02 de 2004.
La transcripción en computador se hizo empleando el procesador de texto ScientificWorkPlace; este trabajo se realizó bajo la coordinación general de la profesora MargaritaToro y se culminó al final del semestre 01 de 2005. La transcripción estuvo a cargo de losestudiantes Juan Pablo Hernandez, Yamir Carvajal, Edison Mauricio Rivera y SantiagoBarrera. El material ya transcrito al computador fue revisado en su totalidad por Abra-ham Asmar y Patricia Restrepo a lo largo del semestre 01 de 2005; todos los cambios ycorrecciones en el computador que surgieron de esta revisión fueron hechos por la profesoraMargarita Toro.
Es así como llegamos al material que aquí se presenta. Se trata de un curso de geometríavectorial y analítica en el cual se aprovechan las ideas geométricas para introducir con-ceptos y temas básicos del álgebra lineal. Está dividido en dos partes: en la primera sólo setrata lo relativo al plano y en la segunda lo relativo al espacio. Además de los temas usuales
i

ii Prefacio
en geometría vectorial y analítica, se estudian en un nivel elemental las transformacioneslineales, se muestra cómo las matrices 2× 2 y 3× 3 surgen de manera natural como repre-sentaciones de transformaciones lineales del plano y del espacio respectivamente, y cómo lasoperaciones con matrices corresponden a las operaciones con transformaciones lineales. Seanalizan los sistemas de ecuaciones lineales 2×2 y 3×3 desde el punto de vista geométrico.Se introducen los conceptos de valor propio y vector propio y se emplean para eliminar lostérminos mixtos en una ecuación de segundo grado, tanto en dos variables como en tres, afin de transformar la ecuación en una que permita identificar el lugar geométrico que ellarepresenta.
Al separar lo relativo al plano de lo relativo al espacio se espera mayor comprensiónpor parte de los estudiantes de los diversos temas ya que, por una parte, casi siempre esmás sencillo trabajar en el plano que en el espacio y por otra, cuando se llega al espaciose cuenta con el conocimiento adquirido en el plano y al replicar lo que ya se ha hecho sereafirman conceptos, resultados y procedimientos.
Consideramos que el material aún no está terminado y que requiere ajustes. Invitamosy solicitamos a los profesores de la asignatura y en general a los lectores a enviarnos todossus comentarios, observaciones y sugerencias que contribuyan a mejorarlo.
Agradecimientos especiales para los profesores Ivan Asmar Charris y Carlos MejíaSalazar, quienes, como directores de la Escuela de Matemáticas, dieron su respaldo alproyecto; el profesor Ivan en el inicio y el profesor Carlos en la etapa final en la cual sudecidido apoyo fue fundamental para llevar el proyecto a su estado actual.
También agradecemos de manera especial a la profesora Margarita Toro Villegas, porsu acompañamiento durante todo el trabajo y por haber dedicado generosamente muchashoras de su valioso tiempo para hacer cambios y correcciones en el computador al materialinicialmente transcrito.
Los autoresMedellín, Agosto de 2005

Parte I
1


1
Vectores geométricos en el plano
1.1 Conceptos básicos
Cantidades tales como la longitud, la temperatura y la masa (por ejemplo) quedan com-pletamente determinadas por su magnitud, expresada por un número real acompañadode unidades apropiadas. Cantidades de tal tipo son llamadas cantidades escalares.Por ejemplo, la longitud de una varilla queda completamente determinada si indicamosel número de unidades de longitud (centímetros, metros, pies,...) que mide dicha varilla.Así mismo, al decir que una temperatura es de 10 grados centígrados, la hemos descritocompletamente. Por otra parte, cantidades como fuerza, velocidad y aceleración que tienenmagnitud y dirección son llamadas cantidades vectoriales. Para determinarlas comple-tamente se requiere dar su magnitud y, además, especificar una dirección. Por ejemplo,para describir la velocidad de un automóvil en un instante dado debemos especificar tantosu magnitud (digamos 50 km por hora) como su dirección (digamos hacia el noroeste). Otroejemplo de una cantidad vectorial es el desplazamiento: el desplazamiento de un cuerpo sedetermina por la distancia que se ha movido o desplazado (digamos 10 metros) y por ladirección en que se ha movido. Así que las cantidades vectoriales son algo más complejasque las escalares.
Las cantidades vectoriales se suelen representar geométricamente mediante segmentosde recta orientados o dirigidos (flechas). Un segmento de recta1 se dice orientadocuando se estipula cuál de sus extremos es su punto inicial y así el otro será el punto final(o terminal) en el cual se dibuja una punta de flecha como se ilustra en la figura 1.1.
Figura 1.1.
Llamaremos vector geométrico a todo segmento de recta orientado. Denotaremos losvectores geométricos mediante letras minúsculas con una flecha encima como −→u , −→v , −→w.
1Se asume que los extremos de un segmento de recta son puntos distintos, es decir, que el segmento nose reduce a un punto.
3

4 1. Vectores geométricos en el plano
Si los puntos inicial y final de un vector son, respectivamente, los puntos A y B (comoen la figura 1.1) también denotaremos dicho vector en la forma
−−→AB. En este capítulo sólo
trataremos con vectores geométricos en el plano.En todo vector geométrico
−−→AB se distinguen dos elementos. Uno es su magnitud,
denotada°°°−−→AB°°° , la cual es la longitud del segmento −−→AB. El otro es su dirección, la cual
expresaremos mediante un ángulo, como se indica a continuación: trazamos a partir delpunto inicial A una semirrecta horizontal y hacia la derecha; convenimos en tomar comodirección de
−−→AB el ángulo θ que se forma al ir de dicha semirrecta al segmento AB en
sentido antihorario. (Figura 1.2) La dirección de un vector−−→AB la denotaremos dir(
−−→AB).
Figura 1.2.
Nótese que 0o ≤ θ < 360o si θ se mide en grados, y que 0 ≤ θ < 2π si θ se mide enradianes.
Cuando se emplea un vector geométrico para representar una determinada cantidadvectorial, la magnitud del vector (tomada a una cierta escala) y la dirección del mismo,representan la magnitud y la dirección, respectivamente, de dicha cantidad vectorial.
Ejemplo 1.1Consideremos un cuerpo que se desplaza desde un punto A hasta un punto B distante 40km de A y hacia el noroeste de A. Si empleamos una escala en la cual 12 cm equivale a 10
km, el desplazamiento de dicho cuerpo se puede representar por el vector geométrico−−→AB
que se muestra en la figura 1.3, para el cual°°°−−→AB°°° = 40 km y dir(
−−→AB) = 135o. ¥
Figura 1.3.
Dos vectores geométricos −→u y −→v se dicen iguales y se escribe −→u = −→v si ellos tienenla misma magnitud y la misma dirección.
Ejemplo 1.2Los vectores −→u y −→v en la figura siguiente son iguales. ¥

1.1. Conceptos básicos 5
Figura 1.4.
Según la definición de igualdad, se puede trasladar un vector geométrico de un lugar aotro y mientras no se cambie ni su magnitud ni su dirección, obtendremos vectores igualesa él. Por esta razón los vectores geométricos se dicen vectores libres.
A continuación se muestra un vector −→v y una colección de vectores geométricos, cadauno de ellos igual a −→v .
Figura 1.5.
Sean −→u y −→v dos vectores geométricos dados.• El ángulo entre −→u y −→v se define como aquel ángulo α, 00 ≤ α ≤ 1800, que forman−→u y −→v una vez que se hacen coincidir sus puntos iniciales. (Figura 1.6)
Figura 1.6.
• −→u y −→v se dicen paralelos si el ángulo entre ellos es α = 00 ó α = 1800. Si α = 00 sedice que −→u y −→v tienen lamisma dirección y si α = 1800 que −→u y −→v tienen direccionesopuestas. (Figura 1.7)
Figura 1.7.
• −→u y −→v se dicen perpendiculares si el ángulo entre ellos es α = 900. (Figura 1.8)

6 1. Vectores geométricos en el plano
Figura 1.8.
1.2 Suma de vectores
En el caso de las fuerzas o de las velocidades la experiencia indica como ellas deben sumarse.Por ejemplo, si sobre un cuerpo M se aplican simultáneamente dos fuerzas −→u y −→v (conlas mismas unidades) en un mismo punto, la experiencia ha mostrado que el efecto esel mismo que si se aplicara en dicho punto la fuerza −→w obtenida como la diagonal delparalelogramo determinado por los vectores −→u y −→v (ver la figura 1.9). Se dice que −→w es lafuerza resultante o que es la suma vectorial de las fuerzas −→u y −→v y se escribe −→w = −→u +−→v .
Figura 1.9.
Análogamente, si una embarcación tiene una velocidad propia −→u y la velocidad delagua es −→v (−→u y −→v con las mismas unidades), el resultado es que la embarcación se mueve,respecto a tierra, con la velocidad −→w obtenida también como la diagonal del paralelogramodeterminado por −→u y −→v (ver la figura 1.10). En este caso se dice que −→w es la suma vectorialde las velocidades −→u y −→v y se escribe −→w = −→u +−→v .
Figura 1.10.
Miremos ahora lo que ocurre con el desplazamiento: si una partícula se desplaza primerodesde el punto A hasta el punto B, lo que se representa por el vector −→u =
−−→AB, y luego
desde el punto B al punto C, que se representa por el vector −→v =−−→BC, el resultado es
equivalente a un solo desplazamiento de A a C, que se representa por el vector −→w =−→AC.
El desplazamiento −→w se dice la suma vectorial de los desplazamientos −→u y −→v y se escribe−→w = −→u +−→v (o
−→AC =
−−→AB +
−−→BC). Esto se ilustra en la figura 1.11.

1.2. Suma de vectores 7
Figura 1.11.
Los ejemplos anteriores conducen a definir la suma −→u +−→v de dos vectores geométricos−→u y −→v , de cualquiera de las dos formas siguientes:
Regla del paralelogramoSi los vectores −→u y −→v no son paralelos, se hacen coincidir sus puntos inicialesy se construye el paralelogramo determinado por dichos vectores. El vector suma−→u +−→v se define como el vector que va desde el punto inicial de −→u y de −→v , hastael vértice opuesto a este punto (figura 1.12).
Figura 1.12.
Regla del triánguloSe dibuja −→v a partir del extremo final de −→u . El vector suma −→u +−→v se define comoel vector que va desde el punto inicial de −→u al punto final de −→v (figura 1.13).
Figura 1.13.
Si los vectores −→u y −→v son paralelos, ellos se suman mediante la regla del triángulo.Nótese que si A,B y C son puntos del plano, distintos dos a dos, entonces
−−→AB +
−−→BC =
−→AC

8 1. Vectores geométricos en el plano
como se aprecia en la figura 1.11.La suma de vectores geométricos es conmutativa, es decir, para todo par de vectores
−→u ,−→v se tiene que−→u +−→v = −→v +−→u
lo cual es evidente si seguimos la regla del paralelogramo. Si seguimos la regla del triángulotambién podemos apreciar tal hecho (ver figura 1.14).
Figura 1.14.
Digamos ahora que queremos hallar la suma (−→u +−→v ) +−→w. Una manera de procederconsiste en aplicar la regla del triángulo dos veces así: primero para hallar −→u +−→v y luegopara obtener (−→u +−→v ) +−→w, como se ilustra en la figura siguiente
Figura 1.15.
Observe que al proceder así el vector (−→u +−→v )+−→w es el vector que va del punto inicialde −→u al punto terminal de −→w ; observe también que
(−→u +−→v ) +−→w = −→u + (−→v +−→w )
de manera que la suma de vectores geométricos también es asociativa.En virtud de la igualdad anterior, los paréntesis en ella pueden omitirse y escribir
simplemente −→u +−→v +−→w para denotar cualquiera de sus dos miembros.De manera similar −→u +−→v +−→w +−→z denotará al vector que va desde el punto inicial de
−→u hasta el punto terminal de −→z cuando se traza −→v a continuación de −→u , −→w a continuaciónde −→v y −→z a continuación de −→w, como se muestra en la figura siguiente
Figura 1.16.

1.2. Suma de vectores 9
Se puede proceder de manera análoga para sumar 5 o más vectores.
Ejemplo 1.3La velocidad de un bote respecto al agua es de 20 millas por hora y hacia el norte, enun lugar donde la velocidad de la corriente es de 5 millas por hora respecto a tierra enla dirección S 60o E. Dibuje la velocidad resultante del bote respecto a tierra y halle sumagnitud y su dirección.
Solución:En la figura siguiente los vectores geométricos −→v b,
−→v c y−→v r representan, respectiva-
mente, la velocidad del bote respecto al agua, la de la corriente respecto a tierra y lavelocidad resultante del bote respecto a tierra.
Figura 1.17.
Hallaremos k−→v rk aplicando ley del coseno en el triángulo APQ :°°°−→AQ°°°2 = °°°−→AP°°°2 + °°°−−→PQ°°°2 − 2°°°−→AP°°°°°°−−→PQ°°° cos 60oes decir,
k−→v rk2 = k−→v ck2 + k−→v bk2 − 2 k−→v ck k−→v bk cos 60o
= 25 + 400− 2(5)(20)12
= 325.
Luego, k−→v rk =√325 = 18, 03 millas por hora.
Por otra parte, dir(−→v r) = α− 30o, donde α es el ángulo (medido en grados) entre losvectores −→v c y
−→v r. Hallaremos α usando ley de seno de nuevo en el triángulo APQ :
senα°°°−−→PQ°°° = sen60o°°°−→AQ°°°

10 1. Vectores geométricos en el plano
senα =
°°°−−→PQ°°° sen60o°°°−→AQ°°° =(20)(
√32 )√
325=10√3√
325= 0.96
Por tanto, α =sen−1(0.96) = 73.74o o α = 180o−sen−1(0.96) = 106.26o.¿Cómo saber cuál de estas opciones es la correcta? Una forma de saberlo es aplicando
la ley del coseno en el triángulo APQ, según la cual debe tenerse que
k−→v ck2 + k−→v rk2 − 2 k−→v ck k−→v rk cosα = k−→v bk2 .
Ahora, si α = 73.74o, el lado izquierdo de esta igualdad nos da
25 + 325− 2(5)√325 cos(73.74o)
número que es menor que 350 y debería dar 400, pues k−→v bk2 = 400.Luego, α = 180o−sen−1(0.96) = 106.26o y en consecuencia
dir(−→v r) = 106.26o − 30o = 76.26o. ¥
Dado un vector −→v se llama opuesto de −→v y se denota −−→v , al vector que tiene lamisma magnitud de −→v y dirección opuesta a la de −→v . (Figura 1.18).
Figura 1.18.
Nótese que si hacemos la suma −→v + (−−→v ) se obtiene como resultado un punto. Así, afin de que la suma de dos vectores sea siempre otro vector, se admite la existencia de unvector cuyos puntos inicial y final coinciden. Tal vector, cuya magnitud es 0 y al cual nose le asigna dirección, es llamado vector nulo o vector cero y se denotará
−→0 . Así, dicho
vector−→0 es tal que −→v + (−−→v ) = −→0 , cualquiera sea el vector −→v , y además él es su propio
opuesto, es decir, −−→0 = −→0 .En adelante consideraremos que el conjunto de los vectores geométricos incluye al vector
nulo y que −→u +−→0 = −→u para todo vector −→u .No definiremos ángulo entre el vector
−→0 y otro vector, pero admitiremos que el vector−→
0 es paralelo y también perpendicular a cualquier vector, incluso a él mismo.A continuación listamos las propiedades básicas de la suma de vectores. En ellas −→u ,−→v
y −→z son vectores geométricos cualesquiera.
1. −→u +−→v es un vector geométrico.2. −→u +−→v = −→v +−→u3.(−→u +−→v ) +−→z = −→u + (−→v +−→z )4. −→u +−→0 = −→u5. −→u + (−−→u ) = −→0

1.2. Suma de vectores 11
Ejemplo 1.4Sean −→u y −→v vectores dados. Expresar en términos de −→u y −→v el vector −→x tal que
−→x +−→v = −→u
Solución:Podemos despejar −→x en la ecuación −→x + −→v = −→u como se indica a continuación:
sumamos −−→v en ambos lados de ella, con lo cual se obtiene
(−→x +−→v ) + (−−→v ) = −→u + (−−→v )
Reagrupando, escribimos esta ecuación en la forma
−→x + (−→v + (−−→v )) = −→u + (−−→v )
Ahora, como −→v + (−−→v ) = −→0 entonces−→x +−→0 = −→u + (−−→v )
Finalmente, como −→x +−→0 = −→x se tiene que
−→x = −→u + (−−→v ) ¥
Ahora nos referiremos a la diferencia de dos vectores.Dados dos vectores −→u y −→v , la diferencia −→u −−→v se define como el vector que sumado
a −→v nos da −→u . (Ver la figura 1.19.) Ahora, según se acaba de ver en el ejemplo anterior,tal vector es −→u + (−−→v ) ; así que
−→u −−→v = −→u + (−−→v )
Figura 1.19.
Ejemplo 1.5Sobre un cuerpo actúan dos fuerzas
−→F1 y
−→F2 en un mismo punto P. La fuerza
−→F1 es de 25
Newtons y su dirección es 60o y la fuerza resultante−→F que actúa sobre el cuerpo es de 30
Newtons y su dirección es 40o. Dibuje la fuerza−→F2 y halle su magnitud y su dirección.
Solución:En la figura siguiente se representan las fuerzas
−→F1,−→F2 y
−→F
Figura 1.20.

12 1. Vectores geométricos en el plano
Como−→F =
−→F1 +
−→F2 entonces
−→F2 =
−→F −−→F1.
Hallaremos°°°−→F2°°° empleando ley del coseno en el triángulo PQR :
°°°−→F2°°°2 =°°°−→F1°°°2 + °°°−→F °°°2 − 2°°°−→F1°°°°°°−→F °°° cos 20o
= (25)2 + (30)2 − 2(25)(30) cos 20o
= 115.46
Luego,°°°−→F2°°° = √115.46 = 10.75 Newtons
Por otra parte, la dirección de−→F2 es 360o − α donde α es el ángulo que aparece en la
figura. Para hallar dicho ángulo α usaremos la ley del seno en el mismo triángulo PQR :
sen(α+ 40o)°°°−→F1°°° =sen20o°°°−→F2°°°
sen(α+ 40o) =
°°°−→F1°°° sen20o°°°−→F2°°° =25sen20o
10.75= 0.8
Como α + 40o < 90o entonces α + 40o =sen−1(0.8) = 52.69o y así α = 12.69o. Por tanto,dir(−→F2) = 360
o − 12.69o = 347.31o. ¥
Ejemplo 1.6Sean −→u ,−→v y −→w como se muestran en la figura 1.21, con k−→u k = 2, k−→v k = 4 y k−→w k = 1.Dibuje −→u +−→v −−→w y halle tanto su magnitud como su dirección.
Figura 1.21.
Solución:Hallaremos primero la magnitud y dirección de −→u +−→v . En la figura 1.22 se muestran
los vectores −→u ,−→v y −→u + −→v como también el ángulo β entre −→u y −→v , y el ángulo α quenecesitamos conocer a fin de usarlo para hallar k−→u +−→v k , aplicando ley de coseno en eltriángulo OQP.

1.2. Suma de vectores 13
Figura 1.22.
Como 2α + 2β = 360o, pues la suma de los ángulos interiores de un paralelogramo es360o, entonces α = 180o − β. Ahora, como β = 180o − 60o + 30o = 150o entonces α = 30o.
Aplicando ley de coseno en el triángulo OQP tenemos:
k−→u +−→v k2 = k−→u k2 + k−→v k2 − 2 k−→u k k−→v k cosα= 22 + 42 − 2(2)(4) cos 30o
= 20− 8√3.
Luego, k−→u +−→v k =p20− 8
√3 = 2.48.
Por otra parte, dir(−→u +−→v ) = dir−→v + γ = 330o + γ (Ver figura 1.22).Procedemos a hallar el ángulo γ, usando ley del seno en el triángulo OQP :
senγk−→u k =
senαk−→u +−→v k
senγ2
=sen30o
2.48
senγ =2sen30o
2.48=
1
2.48.
Y puesto que γ es agudo, como se aprecia en la figura 1.22, entonces
γ = sen−1(1
2.48) = 23.78o
Luego, dir(−→u +−→v ) = 330o + 23.78o = 353.78o.Consideremos ahora el vector −→u +−→v −−→w . (Veala figura 1.23.)
Figura 1.23.
Para hallar k−→u +−→v −−→wk usamos ley de coseno en el triángulo OPR :
k−→u +−→v −−→wk2 = k−→u +−→v k2 + k−→wk2 − 2 k−→u +−→v k k−→wk cos δ

14 1. Vectores geométricos en el plano
Y como δ = dir(−→u +−→v )− dir(−→w ) = 353.78o − 225o = 128.78o entonces
k−→u +−→v −−→wk2 = (2.48)2 + 12 − 2(2.48)(1) cos(128.78o)= 10.26
y así k−→u +−→v −−→w k =√10.26 = 3.20.
Por último, dir(−→u +−→v −−→w ) = φ = 45o − θ, pues φ+ θ = 45o. Calcularemos θ usandoley del seno en el triángulo OPR :
senθk−→u +−→v k =
senδk−→u +−→v −−→w k
senθ =k−→u +−→v k senδk−→u +−→v −−→w k =
(2.48)sen(128.78o)3.20
= 0.6
y como θ es agudo entonces θ = sen−1(0.6) = 36.87o.Así, dir(−→u +−→v −−→w ) = 45o − 36.87o = 8.13o. ¥Para finalizar esta sección nos referiremos a la relación entre k−→u k , k−→v k y k−→u +−→v k.
Si −→u y −→v son vectores no paralelos, considerando el triángulo construido a partir de elloscomo se muestra en la figura 1.13, podemos concluir que
k−→u +−→v k < k−→u k+ k−→v k
basados en un resultado de la Geometría Euclídea, el cual dice que “la longitud de un ladoen cualquier triángulo es menor que la suma de las longitudes de los otros dos lados”.
Por otra parte, es fácil comprobar que si −→u y −→v son paralelos se da la igualdadk−→u +−→v k = k−→u k+k−→v k en unos casos y en otros la desigualdad k−→u +−→v k < k−→u k+k−→v k .Tenemos así que para todo par de vectores −→u y −→v se cumple la desigualdad
k−→u +−→v k ≤ k−→u k+ k−→v k (1.1)
la cual es denominada desigualdad triangular.
1.3 Producto de un escalar por un vector
En adelante llamaremos escalar a todo número real. Vamos a definir el producto a−→u deun escalar a por un vector geométrico −→u .
Empecemos con el caso en que el escalar a es un entero y −→u 6= −→0 , caso en el cual ladefinición de a−→u es natural.
Definimos 1−→u = −→u y 2−→u como el vector que tiene la misma dirección de−→u y magnitudel doble de la de −→u . De manera similar se definen los vectores 3−→u , 4−→u , .... Ahora definimos(−1)−→u = −−→u , (−2)−→u = −2−→u , .... Así, por ejemplo (−2)−→u tiene dirección opuesta a la de−→u y el doble de la magnitud de −→u . Por último definimos 0−→u como el vector nulo
−→0 (ver
figura 1.24)
Figura 1.24.

1.3. Producto de un escalar por un vector 15
En general, el producto a−→u de un escalar a por un vector geométrico −→u sedefine como se indica a continuación:
• Si a > 0 y −→u 6= −→0 entonces a−→u es el vector con la misma dirección de −→u y conmagnitud a k−→u k .
• Si a < 0 y −→u 6= −→0 entonces a−→u es el vector con dirección opuesta a la de −→u y conmagnitud |a| k−→u k , donde |a| es el valor absoluto de a.
• Si a = 0 o −→u = −→0 entonces a−→u = −→0 .
Obsérvese, en la definición anterior, que:
• ka−→u k = |a| k−→u k• a−→u = −→0 si y sólo si a = 0 o −→u = −→0• a−→u es paralelo a −→u
Dado un vector −→u , todo vector de la forma a−→u , con a ∈ R, se dirá unmúltiplo escalarde −→u .
Ejemplo 1.7Considere los vectores −→u ,−→v y −→w tales que k−→u k = 3, k−→v k = 2, k−→w k = 1 y dir(−→u ) = 30o,dir(−→v ) = 120o, dir(−→w ) = 240o. Halle la magnitud y dirección de cada uno de los vectores23−→u , −32
−→v , −74−→w y dibújelos.
Solución:
°°°°23−→u°°°° =
¯2
3
¯k−→u k = 2
3(3) = 2°°°°−32−→v
°°°° =
¯−32
¯k−→v k = 3
2(2) = 3°°°°−74−→w
°°°° =
¯−74
¯k−→wk = 7
4(1) =
7
4
En la figura 1.25 se muestran los vectores 23−→u , −32
−→v , y −74−→w

16 1. Vectores geométricos en el plano
Figura 1.25.
dir(23−→u ) = dir(−→u ) = 30o
dir(−32−→v ) = dir(−→v ) + 180o = 120o + 180o = 300o
dir(−74−→w ) = dir(−→w )− 180o = 240o − 180o = 60o. ¥
El producto de un escalar por un vector tiene las siguientes propiedades básicas, válidascualesquiera sean los vectores −→u y −→v y cualesquiera sean los escalares a y b.
1. a−→u es un vector geométrico2. a(b−→u ) = (ab)−→u3. 1−→u = −→u4. a(−→u +−→v ) = a−→u + a−→v5. (a+ b)−→u = a−→u + b−→u
A continuación nos referiremos a la propiedad 4.Es claro que esta propiedad es válida si a = 0 o −→u = −→0 o −→v = −→0 .Supongamos a > 0, −→u 6= 0 y −→v 6= 0. Consideremos los triángulos ABC y DEF,
mostrados en la figura 1.26, cuyos lados son, respectivamente, −→u , −→v , −→u + −→v y a−→u ,a−→v , a−→u + a−→v . Vamos a probar que a(−→u + −→v ) = a−→u + a−→v , lo cual obtendremos comoconsecuencia de que los triángulos antes mencionados son semejantes.
Figura 1.26.

1.3. Producto de un escalar por un vector 17
Dichos triángulos son semejantes pues α = β (ya que −→u es paralelo a a−→u y −→v lo es aa−→v ) y además °°°−−→EF°°°°°°−−→DE
°°° = ka−→v kka−→u k =
a k−→v ka k−→u k =
k−→v kk−→u k =
°°°−−→BC°°°°°°−−→AB°°° .Como consecuencia de esa semejanza tenemos que°°°−−→DF
°°°°°°−→AC°°° =°°°−−→DE
°°°°°°−−→AB°°° y asíka−→u + a−→v kk−→u +−→v k =
ka−→u kk−→u k = a.
Luego,ka−→u + a−→v k = a k−→u +−→v k = ka(−→u +−→v )k
es decir, los vectores a−→u + a−→v y a(−→u + −→v ) tienen la misma magnitud. Veamos ahoraque también tienen la misma dirección:Por una parte
dir(a(−→u +−→v )) = dir(−→u +−→v ) (pues a > 0)
= θ + φ
y por otra parte,dir(a−→u + a−→v ) = γ + φ.
Ahora, por la semejanza de los triángulos ABC y DEF se tiene que θ = γ, así
dir(a(−→u +−→v )) = dir(a−→u + a−→v )
Por tanto, a(−→u +−→v ) = a−→u + a−→v .De manera análoga se puede verificar la validez de la propiedad 4. si a < 0, −→u 6= −→0 y
−→v 6= −→0 . Esto y la verificación de las propiedades 2. y 5. se dejan como ejercicio. ¨Un vector geométrico se dice unitario si su magnitud es 1. Dado un vector −→v , −→v 6= −→0 ,
es fácil construir un vector unitario con la misma dirección de−→v . Por ejemplo, si −→v es un
vector tal que k−→v k = 4, es claro que el vector 14−→v es unitario y tiene la misma dirección
de −→v . En general, dado cualquier vector −→v , −→v 6= −→0 , el vector
−→u = 1
k−→v k−→v
tiene la misma dirección de −→v pues1
k−→v k > 0, y es unitario ya que
k−→u k =°°°° 1
k−→v k−→v°°°° = µ 1
k−→v k
¶k−→v k = 1
Nos referiremos al proceso de hallar el vector unitario1
k−→v k−→v a partir de un vector no
nulo −→v , como normalización de −→v . A menudo escribiremos−→vk−→v k en vez de
1
k−→v k−→v .
Obsérvese que para todo vector no nulo −→v , se tiene que−→v = k−→v k−→u
donde −→u es el vector unitario con la misma dirección de −→v .

18 1. Vectores geométricos en el plano
Ejemplo 1.8Sean −→v y −→w vectores tales que k−→v k = 3, dir(−→v ) = 40o, k−→w k = 0.5 y dir(−→w ) = 210o.
a) Normalice cada uno de los vectores −→v y −→wb) Halle el vector −→z con dirección opuesta a la de −→w y magnitud 2.5.
Solución:a) El vector −→v normalizado es −→u1 =
1
k−→v k−→v =
1
3−→v , el cual es unitario y con la
misma dirección de −→v (figura 1.27a.) En forma análoga, el vector −→w normalizado es−→u2 =
1
k−→w k−→w =
1
0.5−→w = 2−→w , el cual es unitario y con la misma dirección de −→w (figura
1.27b.)b) −→z = −2.5−→u2 = −2.5 (2−→w ) = −5−→w (figura 1.27b.) ¥
Figura 1.27.
Consideremos ahora dos vectores no nulos −→u y −→v . Ya sabemos que:Si −→v es múltiplo escalar de −→u o −→u es múltiplo escalar de −→v entonces −→u y −→v son
paralelos.Probaremos ahora que el recíproco de dicha afirmación también es cierto, cualesquiera
sean los vectores −→u y −→v .Supongamos que −→u y −→v son vectores paralelos. Si −→u =
−→0 entonces −→u es múltiplo
escalar de −→v , pues −→0 = 0−→v ; análogamente, si −→v = −→0 entonces −→v es múltiplo escalar de−→u .
Consideremos ahora el caso −→u 6= −→0 y −→v 6= −→0 . Si −→u y −→v tienen la misma dirección,
un vector unitario en la dirección tanto de −→u como de −→v es−→uk−→u k y por tanto
−→v = k−→v kµ −→uk−→u k
¶=
µk−→v kk−→u k
¶−→u
Luego, −→v es múltiplo escalar de −→u . Similarmente, si −→u y −→v tienen direcciones opuestas
entonces un vector unitario con la misma dirección de −→v es −−→uk−→u k y por tanto
−→v = k−→v kµ−−→uk−→u k
¶=
µ−k−→v kk−→u k
¶−→u
así que −→v es múltiplo escalar de −→u .Hemos probado así que para todo par de vectores −→u y −→v ,

1.3. Producto de un escalar por un vector 19
−→u y −→v son paralelos si y sólo si −→v es múltiplo escalar de −→uo −→u es múltiplo escalar de −→v .
Ejemplo 1.9Probar, empleando vectores geométricos, lo siguiente: Si A,B y C son los vértices de untriángulo y M,N son los puntos medios de los lados AC y BC respectivamente, entoncesel segmento de recta MN es paralelo al lado AB y la longitud de MN es la mitad de lade AB.
Prueba:En la figura 1.28 se muestra un triángulo con vértices A,B,C y los puntos mediosM,N
de los lados AC y BC.
Figura 1.28.
Vamos a probar que−−→MN = 1
2
−−→AB, de lo cual se concluye lo que se pide probar. En
primer lugar tenemos que−−→MN =
−−→MC +
−−→CN
Ahora, como M y N son los puntos medios de AC y BC, respectivamente, entonces
−−→MC =
1
2
−→AC y
−−→CN =
1
2
−−→CB
Luego,−−→MN =
1
2
−→AC +
1
2
−−→CB =
1
2
³−→AC +
−−→CB
´=1
2
−−→AB. ¨
Ahora nos referiremos a la noción de “punto que divide a un segmento de recta en unaproporción dada”.
Como ejemplo, consideramos la figura 1.29, en la cual el punto P del segmento AB estal que °°°−→AP°°°°°°−−→PB°°° = 2
3(1.2)

20 1. Vectores geométricos en el plano
Figura 1.29.
En este caso diremos que P divide al segmento AB en la proporción 2 : 3. Nótese queen lugar de (1.2) se puede escribir cualquiera de las siguientes igualdades:
−→AP =
2
3
−−→PB,
°°°−→AP°°°°°°−−→AB°°° = 2
5o
−→AP =
2
5
−−→AB
En general, si P es un punto de un segmento AB diremos que P divide al segmentoAB en la proporción m : n (m y n son números positivos) si°°°−→AP°°°°°°−−→PB°°° = m
n
lo cual es equivalente a cualquiera de las igualdades siguientes:°°°−→AP°°°°°°−−→AB°°° = m
m+ n,
−→AP =
m
n
−−→PB o
−→AP =
m
m+ n
−−→AB (1.3)
En relacioón con lo anterior se tiene el siguiente resultado:
Teorema de la proporción: Si P es el punto de un segmento AB que lodivide en la proporción m : n y O es cualquier punto del plano, entonces
−−→OP =
n
m+ n
−→OA+
m
m+ n
−−→OB
Prueba:Consideremos la figura 1.30 en la caul el punto P divide al segmento AB en la propor-
ción m : n.
Figura 1.30.

1.3. Producto de un escalar por un vector 21
En primer lugar tenemos que
−−→OP =
−→OA+
−→AP (1.4)
y como (vea (1.3))−→AP =
m
m+ n
−−→AB
se tiene que−−→OP =
−→OA+
m
m+ n
−−→AB
Como, además,−−→AB =
−−→OB −−→OA
entonces
−−→OP =
−→OA+
m
m+ n
³−−→OB −−→OA
´=
µ1− m
m+ n
¶−→OA+
m
m+ n
−−→OB
=n
m+ n
−→OA+
m
m+ n
−−→OB
Hemos probado así lo que se pedía para el caso en el cual O no es un punto de la rectaque pasa por A y B. El lector puede observar que la prueba dada también es válida en elcaso en que O es un punto de dicha recta. ¨
Como corolario del teorema de la proporción se tiene que:
Si M es el punto medio de un segmento AB y O es cualquier punto del planoentonces
−−→OM =
1
2
−→OA+
1
2
−−→OB
Un resultado de la Geometría Euclidiana afirma que “en todo triángulo, las tres media-nas se cortan en un punto (llamado baricentro) cuya distancia a cada vértice es igual a2/3 de la longitud de la mediana trazada desde dicho vértice”. En el siguiente ejemplo semuestra una manera de probar este resultado empleando vectores geométricos.
Ejemplo 1.10Sean A,B y C los vértices de un triángulo y O cualquier punto del plano.a) Sea P el punto de la mediana relativa al lado BC tal que su distancia al vértice A es2/3 de la longitud de dicha mediana. Probar que
−−→OP =
1
3
³−→OA+
−−→OB +
−−→OC
´.
b) Aplicar el resultado en a) para probar que las tres medianas de un triángulo se cortan enun punto cuya distancia a cada vértice es igual a 2/3 de la longitud de la mediana trazadadesde el respectivo vértice.

22 1. Vectores geométricos en el plano
Prueba:a) Consideremos la figura 1.31
Figura 1.31.
En dicha figura M es el punto medio del lado BC y así el segmento AM es la medianarelativa al lado BC. Por otra parte, el punto P es tal que su distancia al punto A es 2/3de la distancia de A a M , es decir,
−→AP =
2
3
−−→AM.
Ahora, como P divide al segmento AM en la proporción 2 : 1 entonces, según el teoremade la proporción,
−−→OP =
1
3
−→OA+
2
3
−−→OM
De otro lado, como M es el punto medio del segmento CB,
−−→OM =
1
2
−−→OC +
1
2
−−→OB
luego,
−−→OP =
1
3
−→OA+
2
3
µ1
2
−−→OC +
1
2
−−→OB
¶=
1
3
−→OA+
1
3
−−→OC +
1
3
−−→OB
=1
3
³−→OA+
−−→OB +
−−→OC
´.
b) Sea Q el punto de la mediana trazada desde el vértice B tal que la distancia de Q aB es 2/3 de la longitud de dicha mediana. Según lo probado en a) tenemos que
−−→OQ =
1
3
³−→OA+
−−→OB +
−−→OC
´Análogamente, si R es el punto de la mediana trazada desde el vértice C tal que la distanciade R a C es 2/3 de la longitud de dicha mediana, entonces
−−→OR =
1
3
³−→OA+
−−→OB +
−−→OC
´Luego, si P es como en el literal a) entonces
−−→OP =
−−→OQ =
−−→OR
y por tanto los puntos P,Q y R coinciden. ¨

1.4. Descomposición de un vector 23
1.4 Descomposición de un vector
Sean −→u y −→v vectores dados no paralelos. Empezaremos mostrando cómo cualquier vector−→z puede descomponerse en la forma
−→z = −→p +−→q (1.5)
con −→p paralelo a −→u y −→q paralelo a −→v .Consideremos primero el caso en el cual −→z no es paralelo a −→u ni a −→v . Dibujamos −→u ,−→v
y −→z con punto inicial común y trazamos, pasando por el extremo final de −→z , paralelas a−→u y −→v , hasta cortar las rectas que contienen estos vectores.
Figura 1.32.
Si P y Q son los correspondientes puntos de corte y O denota el punto inicial de −→u y−→v , como en la figura 1.27, se tiene que
−→z = −−→OP +−−→OQ
con−−→OP paralelo a −→u y
−−→OQ paralelo a −→v .
Ahora, en el caso −→z paralelo (por ejemplo) a −→u , podemos escribir
−→z = −→z +−→0
dándose que −→z es paralelo a −→u y−→0 es paralelo a −→v . Similarmente, si −→z es paralelo a −→v ,
−→z = −→0 +−→z
donde−→0 es paralelo a −→u y −→z es paralelo a −→v .
Tenemos así que dado un vector −→z cualquiera, −→z se descompone como se dijo inicial-mente, es decir, en la forma (1.5).
Consideremos ahora un vector −→z descompuesto en la forma (1.5). Como −→p es paraleloa −→u y −→q es paralelo a −→v entonces −→p = a−→u y −→q = b−→v para ciertos escalares a y b; portanto, −→z es expresable en la forma
−→z = a−→u + b−→v .
A continuación probaremos que los escalares a y b en la escritura anterior de −→z sonúnicos:
Supongamos que −→z = a1−→u + b1
−→v y también −→z = a2−→u + b2
−→v (Vamos a probar quea1 = a2 y b1 = b2).

24 1. Vectores geométricos en el plano
Entonces
a1−→u + b1
−→v = a2−→u + b2
−→va1−→u − a2
−→u = b2−→v − b1
−→v(a1 − a2)
−→u = (b2 − b1)−→v . (1.6)
Si fuese a1 − a2 6= 0, podríamos escribir −→u como múltiplo escalar de −→v y entonces −→usería paralelo a −→v , pero sabemos que −→u no es paralelo a −→v . Luego a1 − a2 = 0, es decir,a1 = a2. Ahora, como a1 − a2 = 0 entonces (b2 − b1)
−→v =−→0 (ver (1.6)) y como −→v 6= −→0
entonces b2 − b1 = 0 y así b1 = b2.
Resumimos la discusión anterior en el siguiente resultado:
Si −→u y −→v son vectores no paralelos entonces para todo vector −→zexisten únicos escalares a y b tales que
−→z = a−→u + b−→v
(1.7)
Nos referiremos a la escritura en (1.7) de un vector −→z como la descomposición de−→z en las direcciones de los vectores −→u y −→v .
Ejemplo 1.11Sean −→u , −→v y −→z los vectores mostrados en la figura 1.33
Figura 1.33.
Sabiendo que k−→u k = 3, k−→v k = 2 y k−→z k = 4, hallar la descomposición de −→z en lasdirecciones de −→u y −→v , determinando los escalares a y b tales que −→z = a−→u + b−→v .
Solución:Consideremos la figura 1.34 en la cual
−→PR es paralelo a −→v , y −−→RQ es paralelo a −→u .
Figura 1.34.
De acuerdo con la figura tenemos que la descomposición de −→z en las direcciones de −→uy −→v es
−→z = −−→OP +−−→OQ

1.5. Proyección de un vector sobre otro vector 25
donde−−→OP = a−→u para cierto escalar a < 0 y
−−→OQ = b−→v para cierto escalar b > 0.
A continuación determinamos los escalares a y b :Según la ley del seno aplicada al triángulo OPR tenemos que°°°−−→OP°°°
sen105o=
k−→z ksen45o
y como°°°−−→OP°°° = ka−→u k = |a| k−→u k entonces
|a| k−→u ksen105o
=k−→z ksen45o
de donde
|a| = k−→z k sen105ok−→u k sen45o =
4 (0.96)
3¡1/√2¢ ≈ 1.81
y dado que a < 0 entonces a ≈ −1.81.Análogamente, °°°−−→OQ°°°
sen30o=
k−→z ksen45o
y como°°°−−→OQ°°° = kb−→v k = |b| k−→v k entonces
|b| = k−→z k sen30ok−→v k sen45o =
4 (1/2)
2¡1/√2¢ = √2 ≈ 1.41
y puesto que b > 0 entonces b ≈ 1.41.Así, la descomposición del vector −→z en las direcciones de −→u y −→v es
−→z = a−→u + b−→v
con a ≈ 1.81 y b ≈ 1.41 ¥
1.5 Proyección de un vector sobre otro vector
Sea −→u un vector no nulo dado y sea −→z un vector cualquiera. Como caso particular dedescomposición de un vector tenemos que −→z puede descomponerse, de manera única, enla forma
−→z = −→p +−→q (1.8)
con −→p paralelo a −→u y −→q perpendicular a −→u . El vector −→p se dice la componente (vecto-rial) de −→z en la dirección de −→u , en tanto que −→q se dice la componente (vectorial)de −→z perpendicular a −→u .
Para obtener gráficamente las componentes −→p y −→q se dibujan −→z y −→u con el mismopunto inicial y se traza una perpendicular desde el extremo final de −→z hasta cortar larecta que contiene al vector −→u . Si P es el punto de corte y O es el punto inicial de −→z y −→uentonces
−→p = −−→OP y −→q = −→z −−→p
Lo anterior se ilustra en la figura 1.35, en la cual −→z 6= −→0 y α es el ángulo entre −→z y −→u .

26 1. Vectores geométricos en el plano
Figura 1.35.
Nótese que si −→z = −→0 , entonces en (1.8) −→p = −→0 y −→q = −→0 .El vector −→p en (1.8) también se llama proyección de −→z sobre −→u y se denota
Proy−→u−→z . Obsérvese que:
• Si −→z es paralelo a −→u entonces Proy−→u−→z = −→z .
• Si −→z es perpendicular a −→u entonces Proy−→u−→z = −→0 .
Puesto que el vector −→p = Proy−→u−→z es paralelo a −→u , existe un escalar r tal que
−→p = r−→uk−→u k .
Tal escalar r se llama componente escalar de −→z en la dirección de −→u . Nótese queesa componente escalar puede ser positiva, cero o negativa.
Si −→z =−→0 ya sabemos que Proy−→u
−→z =−→0 . Supongamos entonces que −→z 6= −→0 y
sea α el ángulo entre −→z y −→u . A continuación hallaremos una expresión para el vector−→p = Proy−→u
−→z en términos de −→u ,−→z y α.
• Si 0o < α < 900 (figura 1.35, caso a) entonces −→p tiene la misma dirección de −→u y
por tanto −→p = k−→p k−→uk−→u k . Ahora, como
cosα =k−→p kk−→z k , es decir, k
−→p k = k−→z k cosα
entonces −→p = (k−→z k cosα)−→uk−→u k y así
Proy−→u−→z = (k−→z k cosα)
−→uk−→u k .
Nótese que esta fórmula también es válida si α = 0o y si α = 900. En efecto, si α = 0o
los dos miembros en ella son iguales a −→z , y si α = 900 esos dos miembros son igualesa−→0 .

1.5. Proyección de un vector sobre otro vector 27
• Si 900 < α < 1800 (figura 1.35, caso b) entonces −→p tiene dirección opuesta a la de−→u y por tanto −→p = k−→p k
µ−−→uk−→u k
¶. Ahora, en este caso
cos(1800 − α) =k−→p kk−→z k , es decir, k
−→p k = k−→z k cos(1800 − α)
y como cos(1800 − α) = − cosα entonces k−→p k = − k−→z k cosα. Luego
−→p = (− k−→z k cosα)µ−−→uk−→u k
¶y así (como en el caso anterior)
Proy−→u−→z = (k−→z k cosα)
−→uk−→u k .
Nótese que esta fórmula también es válida si α = 1800, pues en tal caso sus dosmiembros son iguales a −→z .
A continuación recogemos lo básico de la discusión anterior.
Sea −→u un vector no nulo y −→z un vector cualquiera.• Si −→z = −→0 , Proy−→u−→z =
−→0 .
En este caso la componente escalar de −→z en la dirección de −→u es 0.• Si −→z 6= −→0 y α es el ángulo entre −→z y −→u ,
Proy−→u−→z = (k−→z k cosα)
−→uk−→u k .
En este caso la componente escalar de −→z en la dirección de −→u esk−→z k cosα.
Ejemplo 1.12Sean −→u y −→z vectores tales que k−→u k = 3 y k−→z k = 4. Hallar la componente escalar de −→zen la dirección de −→u y la proyección de −→z sobre −→u , en cada uno de los siguientes casos:
a) El ángulo entre −→z y −→u es de 60o.b) El ángulo entre −→z y −→u es de 150o.c) −→z es perpendicular a −→u .d) −→z tiene dirección opuesta a la de −→u .
Solución:Si r es la componente de −→z en la dirección de −→u entonces:En el caso a), el cual se ilustra en la figura 1.36a, se tiene
r = k−→z k cos 60o = 4µ1
2
¶= 2 y así Proy−→u
−→z = 2−→uk−→u k =
2
3−→u

28 1. Vectores geométricos en el plano
Figura 1.36.
En el caso b), ilustrado en la figura 1.36b, se tiene
r = k−→z k cos 150o = 4Ã−√3
2
!= −2
√3 y así Proy−→u
−→z =³−2√3´ −→uk−→u k =
−2√3
3−→u
En el caso c), por ser −→z perpendicular a −→u , sabemos que Proy−→u−→z =
−→0 (figura
1.36c), es decir, r = 0. Si se emplea la fórmula para r igualmente se obtiene r = 0, puesr = k−→z k cos 90o = 0.
En el caso d), por ser −→z paralelo a −→u , sabemos que Proy−→u−→z = −→z (figura 1.36d).
Ahora, como −→z tiene dirección opuesta a la de −→u entonces
−→z = − k−→z k−→uk−→u k = −4
−→uk−→u k
y por tanto r = −4. Si se quiere emplear la fórmula para r igualmente se obtiene r = −4,pues r = k−→z k cos 180o = −4. ¥
Ejemplo 1.13Un cuerpo se desliza sobre un plano inclinado un ángulo θ, como se muestra en la figura1.37 en la cual −→u es un vector unitario en la dirección del movimiento y −→v un vectorunitario perpendicular a −→u . Halle, para cada posición del cuerpo en su deslizamiento, lascomponentes de su peso −→w en las direcciones de los vectores −→u y −→v ; expréselas en términosde −→w , θ,−→u y −→v .

1.6. Producto escalar 29
Figura 1.37.
Solución:Para cada posición del cuerpo, las componentes de su peso −→w en las direcciones de −→u
y −→v son respectivamente
−−→DF = Proy−→u
−→w y−−→DE = Proy−→v
−→w
Ahora, el ángulo EDG entre −→w y −→v es igual al ángulo θ (¿por qué?), y por tanto elángulo GDF entre −→w y −→u es 900 − θ. Luego,
Proy−→u−→w =
¡k−→wk cos
¡900 − θ
¢¢−→u = (k−→wk senθ)−→uy
Proy−→v−→w = (k−→wk cosθ)−→v
Así, las componentes del peso −→w en las direcciones de −→u y −→v son respectivamente
Proy−→u−→w = (k−→wk senθ)−→u y Proy−→v
−→w = (k−→wk cosθ)−→v . ¥
1.6 Producto escalar
Hasta el momento hemos sumado dos vectores y multiplicado un escalar por un vector.Ahora consideraremos cierto producto entre dos vectores, el cual es llamado producto es-calar, pues el resultado es un escalar. Como introducción a dicho producto, nos referiremosa continuación al concepto de trabajo en la Física.
Consideremos un cuerpo el cual experimenta un desplazamiento −→u =−−→PQ mientras
actúa sobre él una fuerza constante no nula−→F , que forma un ángulo α con −→u , como se
ilustra en la figura 1.38.
Figura 1.38.

30 1. Vectores geométricos en el plano
Pues bien, el trabajo W realizado por la fuerza−→F se define como el producto de la
componente escalar de−→F en la dirección del vector desplazamiento −→u y la magnitud de
−→u . Es decir,W =
³°°°−→F °°° cosα´ k−→u ko sea
W =°°°−→F °°° k−→u k cosα (1.9)
Observe que el trabajo es una cantidad escalar que puede ser positiva, cero o negativa.Es positiva cuando −→u 6= −→0 y 0 ≤ α <
π
2; es cero cuando −→u = −→0 (el cuerpo no se desplaza)
o cuando α =π
2(−→F es perpendicular al desplazamiento −→u ), y es negativa cuando −→u 6= −→0
yπ
2< α ≤ π. Por ejemplo, cuando se levanta un objeto, el trabajo realizado por la fuerza
aplicada es positivo (en este caso, la fuerza aplicada y el desplazamiento tienen la mismadirección) mientras que el trabajo realizado por la fuerza gravitacional es negativo (lafuerza gravitacional y el desplazamiento tienen direcciones opuestas).
El escalar W en (1.9), que se ha obtenido a partir de los vectores−→F y −→u , se dice el
producto escalar de−→F y −→u y se denota
W =−→F ·−→u
En general, dados dos vectores geométricos cualesquiera −→v y −→u , se define el productoescalar −→v ·−→u así:
• Si −→u = −→0 o −→v = −→0 , −→v ·−→u = 0
• Si −→u 6= −→0 , −→v 6= −→0 y α es el ángulo entre −→v y −→u ,
−→v ·−→u = k−→v k k−→u k cosα (1.10)
Una consecuencia inmediata de la definición dada es que
−→v ·−→u = 0 si y sólo si −→v y −→u son perpendiculares
Además, como −1 ≤ cosα ≤ 1, entonces
− k−→v k k−→u k ≤ k−→v k k−→u k cosα ≤ k−→v k k−→u k
por tanto, para −→u 6= −→0 y −→v 6= −→0 , se tiene que
− k−→v k k−→u k ≤ −→v ·−→u ≤ k−→v k k−→u k
o, equivalentemente,
|−→v ·−→u | ≤ k−→v k k−→u k.
Esta desigualdad, la cual es válida también para −→u =−→0 o −→v =
−→0 , se conoce como
desigualdad de Cauchy-Schwarz.El producto escalar tiene las siguientes propiedades, válidas cualesquiera sean los vec-
tores −→u ,−→v ,−→w y cualquiera sea el escalar r.

1.6. Producto escalar 31
1. −→u ·−→v = −→v ·−→u2. −→u ·−→u = k−→u k23. (r−→u ) ·−→v = r(−→u ·−→v ) = −→u · (r−→v )4. −→u · (−→v +−→w ) = −→u ·−→v +−→u ·−→w y
(−→u +−→v ) ·−→w = −→u ·−→w +−→v ·−→w
Las propiedades 1. y 2. se siguen, en forma inmediata, de la definición del productoescalar. La prueba de las propiedades 3. y 4. se deja como ejercicio.
Ejemplo 1.14Un cubo se desliza entre dos puntos A y B distantes 5 metros sobre un plano inclinadoque forma 30o con la horizontal, como en la figura 1.39. Si el cubo pesa 12 Newtons y lafuerza de fricción que se produce por el rozamiento entre el cubo y el plano inclinado es de3 Newtons, calcule el trabajo realizado por el peso −→w, la fuerza de fricción
−→Ff , la normal−→
N y la fuerza resultante−→F cuando el cubo se desplaza entre los puntos A y B.
Solución:Para cualquier posición del cubo en su desplazamiento entre los puntos A y B, las
fuerzas que actúan sobre él son su peso −→w , la normal−→N y la fuerza de fricción
−→Ff . En
la figura 1.39 se muestra el diagrama de dichas fuerzas, como también la fuerza resul-tante
−→F , el vector desplazamiento −→r = −−→AB y la descomposición vectorial del peso −→w en
una componente −→wr en la dirección del movimiento y una componente−→wn en la dirección
perpendicular al movimiento.
Figura 1.39.
Sean W1,W2,W3 y WT los trabajos realizados, respectivamente, por el peso −→w , lafricción
−→Ff , la normal
−→N y la resultante
−→F cuando el cubo se desplaza de A a B. Como el
ángulo entre −→w y −→r es de 60o entonces
W1 =−→w ·−→r = k−→w k k−→r k cos 60o = (12)(5)
µ1
2
¶= 30 Joules.
De manera similar, como el ángulo entre−→Ff y
−→r es de 180o entonces
W2 =−→Ff ·−→r =
°°°−→Ff°°° k−→r k cos 180o = (3)(5)(−1) = −15 Joules.

32 1. Vectores geométricos en el plano
Observe que el trabajo W2 es negativo ya que la fuerza de fricción−→Ff tiene dirección
contraria a la del vector desplazamiento −→r .Por otra parte, como el ángulo entre
−→N y −→r es de 90o entonces
W3 =−→N ·−→r =
°°°−→N°°° k−→r k cos 90o = 0.Obsérvese que el trabajo W3 es nulo porque la fuerza normal
−→N es perpendicular al
vector desplazamiento −→r . Por último, la fuerza resultante −→F está dada por
−→F = −→w +
−→Ff +
−→N = −→wr +
−→wn +−→Ff +
−→N
pero como la normal−→N tiene la misma magnitud de la componente −→wn del peso y dirección
contraria a la de −→wn, es decir,−→N = − −→wn entonces
−→F = −→wr +
−→Ff .
Ahora, −→wr tiene la dirección del movimiento y
k−→wrk = k−→wk sen30o = (12)µ1
2
¶= 6
mientras que−→Ff tiene la dirección contraria a la del movimiento y
°°°−→Ff°°° = 3. Luego, la
fuerza resultante−→F es tal que
°°°−→F °°° = 3 y su dirección es la misma que la del movimiento.Así que
WT =−→F ·−→r =
°°°−→F °°° k−→r k cos 0o = (3)(5)(1) = 15 Joules.Observe que
WT =W1 +W2. ¥
1.7 Vectores geométricos en el plano cartesiano. Descom-posición canónica
Empecemos por recordar que el conjunto de los puntos sobre una recta L se puede poneren correspondencia biunívoca con el conjunto R de los números reales como se indica acontinuación:
Se elige en L un punto O al que se llama origen y una orientación o dirección,la cual se dice positiva que se indica con una punta de flecha (figura 1.40). En la rectaorientada L se dice que un punto A está a la izquierda de un punto B (o que B está ala derecha de A) si al ir de A a B lo hacemos en sentido positivo. Se escoge una unidadde longitud y luego se hace corresponder un número real x a cada punto X de L así: 0corresponde al origen O, 1 corresponde al punto de L que está una unidad a la derechade O y en general un número positivo x corresponde al punto X situado x unidades a laderecha de O. Por otra parte, −1 corresponde al punto de L que está una unidad a laizquierda de O y en general un número negativo x corresponde al punto X situado −xunidades a la izquierda de O. Si a un punto X de L le corresponde el número real x, de lamanera antes indicada, se dice que x es la coordenada del punto X.

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 33
Figura 1.40.
Establecida dicha correspondencia, la recta L se dice una recta real, una rectanumérica o también un eje coordenado.
Ahora recordemos la gran idea del matemático y filósofo Francés Rene Descartes (1596- 1650) en relación con un sistema de referencia para ubicar puntos en el plano. En ella sehace uso del concepto de par ordenado (o pareja ordenada) de números reales, el cualse refiere a una pareja de números para los cuales importa el orden en que los coloquemos.El par ordenado que consiste de los números a y b, siendo a el primero y b el segundo,
se acostumbra denotarlo en la forma (a, b) o también en la formaµa
b
¶. En este texto
optaremos por emplear la segunda de las notaciones anteriores por simple conveniencia.
Nótese que el parµ1
2
¶es distinto del par
µ2
1
¶pues, aunque los dos están conformados
por los mismos números reales 1 y 2, el orden en que estos números aparecen en el primerpar es diferente al orden en que aparecen en el segundo. En general, se tiene que
µa
b
¶=
µc
d
¶si y sólo si a = c y b = d.
Denotaremos R2 el conjunto de todos los pares ordenadosµa
b
¶de números reales, es
decir,
R2 =½µ
a
b
¶/ a, b ∈ R
¾.
La idea de Descartes consistió en considerar en el plano un par de ejes coordenadosperpendiculares, con la misma unidad de longitud y con un mismo origen O, el cual esel punto de corte de dichos ejes. Se acostumbra tomar uno de los ejes horizontal y conorientación positiva hacia la derecha (éste es llamado eje x), y el otro (llamado eje y) conorientación positiva hacia arriba (Ver figura 1.41).
Una vez escogido un tal sistema de ejes coordenados (al cual nos referiremos como unsistema cartesiano xy) se establece, de manera natural, una correspondencia biunívocaentre el conjunto de puntos del plano y el conjunto R2 de todos los pares ordenados de
números reales. A cada punto P del plano se le hace corresponder un par ordenadoµa
b
¶de
números reales a, b obtenidos de la siguiente manera: desde el punto P se trazan paralelasal eje x y al eje y; el número a es la coordenada del punto donde se corte al eje x, y elnúmero b la coordenada del punto donde se corte al eje y (Ver figura 1.41).

34 1. Vectores geométricos en el plano
Figura 1.41.
Los números a y b se dicen las coordenadas cartesianas o rectangulares del puntoP ; a se dice la abscisa o también coordenada x, y b se dice la ordenada o tambiéncoordenada y del punto P. De esta manera a cada punto P del plano le corresponde la
parejaµa
b
¶de sus coordenadas. Esta correspondencia es biunívoca, ya que si partimos de
una pareja ordenadaµa
b
¶de números reales e invertimos el proceso antes descrito, vemos
que existe un único punto P del plano del cualµa
b
¶es su pareja de coordenadas.
Es necesario tener presente que el plano (cuyos elementos son puntos) es distinto delconjunto R2 (cuyos elementos son pares ordenados de números reales). Sin embargo, unavez se fija un sistema cartesiano en el plano, se usa la correspondencia antes mencionada
entre el plano y R2 para identificar cada punto P del plano con su parµa
b
¶de coordenadas.
Así, diremos “el punto P =µa
b
¶” en vez de “el punto P cuyo par de coordenadas es
µa
b
¶”.
En adelante asumiremos que el plano está dotado de un sistema cartesiano y nos referire-mos a él como plano cartesiano. A continuación consideraremos los vectores geométricosen el plano cartesiano.
Es costumbre denotar−→i al vector unitario que apunta en la dirección positiva del eje
x, y−→j al vector unitario que apunta en la dirección positiva del eje y. En la figura 1.42 se
muestran dichos vectores−→i ,−→j con su punto inicial en el origen.
Figura 1.42.

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 35
Puesto que−→i y−→j no son paralelos se tiene que:
Para todo vector −→u , existen únicos escalares a y b tales que −→u = a−→i + b
−→j . (1.11)
La descomposición
−→u = a−→i + b
−→j
de un vector −→u se llama descomposición canónica de −→u . Los números a y b (los cualesson las componentes escalares de −→u en las direcciones de −→i y −→j respectivamente) se dicenlas componentes escalares de −→u o simplemente las componentes de −→u ; a se dice lacomponente x y b la componente y.
Dado que−→i y−→j son unitarios y apuntan en las direcciones positivas de los ejes x y y,
respectivamente, la descomposición canónica de cualquier vector −→u es bastante sencilla de
obtener. Por ejemplo, el vector −→u que va del origen al puntoµ4
2
¶se expresa claramente
en la forma
−→u = 4−→i + 2−→j
como se aprecia en la figura 1.43.
Figura 1.43.
Recíprocamente, si el vector −→u = 4−→i +2−→j tiene su punto inicial en el origen entoncessu punto final es P =
µ4
2
¶. En general, se tiene que
−−→OP = a
−→i + b
−→j si y sólo si P =
µa
b
¶
En la figura 1.44 se ilustra lo anterior en el caso a < 0 y b > 0.

36 1. Vectores geométricos en el plano
Figura 1.44.
Para cada punto P , el vecto−−→OP se dirá el vector de posición del punto P.
Hallemos ahora la descomposición canónica de un vector cualquiera−−→PQ con punto
inicial P =µa
b
¶y punto final Q =
µc
d
¶(figura 1.45).
Figura 1.45.
Como−−→PQ =
−−→OQ−−−→OP y dado que
−−→OQ = c
−→i + d
−→j y
−−→OP = a
−→i + b
−→j
entonces−−→PQ = (c
−→i + d
−→j )− (a−→i + b
−→j ) = (c− a)
−→i + (d− b)
−→j .
Nótese que si R =µc− a
d− b
¶entonces
−−→OR = (c− a)
−→i + (d− b)
−→j
y por tanto−−→PQ es igual al vector de posición
−−→OR (ver figura 1.45).
Tenemos así que:

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 37
Si P =µa
b
¶y Q =
µc
d
¶entonces la descomposición canónica de
−−→PQ es
−−→PQ = (c− a)
−→i + (d− b)
−→j
y así−−→PQ =
−−→OR donde R =
µc− a
d− b
¶.
Dada la unicidad de la descomposición canónica de cualquier vector −→u se tiene que:
Si −→u = a−→i + b
−→j y −→v = a0
−→i + b0
−→j entonces
−→u = −→v si y sólo si a = a0 y b = b0.
En particular, como−→0 = 0
−→i + 0
−→j ,
Si −→u = a−→i + b
−→j entonces
−→u = −→0 si y sólo si a = 0 y b = 0.
Ejemplo 1.15
Sean P =
µ2
3
¶y Q =
µ−14
¶.
a) Halle la descomposición canónica del vector−−→PQ.
b) Halle el punto R tal que−−→PQ =
−−→OR.
Solución:a) La descomposición canónica del vector
−−→PQ es
−−→PQ = (−1− 2)−→i + (4− 3)−→j = −3−→i +−→j
b) Puesto que−−→PQ = −3−→i +−→j se tiene que
−−→PQ =
−−→OR donde R =
µ−31
¶. (Figura
1.46). ¥
Figura 1.46.

38 1. Vectores geométricos en el plano
Tenemos ahora dos maneras de describir cualquier vector no nulo −→u : una dando lamagnitud k−→u k y la dirección θ, y otra expresándolo en la forma −→u = a
−→i + b
−→j , es decir,
dando su descomposición canónica. Podemos pasar de cualquiera de las dos a la otra, comose muestra a continuación:
Digamos que partimos de −→u = a−→i + b
−→j . (Ver figura 1.47.)
Figura 1.47.
En primer lugar, según Teorema de Pitágoras, es claro que
k−→u k =pa2 + b2.
En cuanto a la dirección θ de −→u se tiene lo siguiente:
• Si a = 0 entonces θ = 90o cuando b > 0, y θ = 270o cuando b < 0.
• Si a 6= 0 entoncestan θ =
b
a.
Así, si θ es agudo entonces θ = tan−1µb
a
¶. Ahora, si θ no es agudo, entonces θ 6=
tan−1µb
a
¶; sin embargo, a partir de tan−1
µb
a
¶siempre podremos obtener la dirección θ.
(Vea ejemplo 1.16).
Digamos ahora que partimos de −→u descrito dando su magnitud k−→u k y su dirección θ,
y supongamos que −→u = a−→i + b
−→j (ver figura 1.47).
Como cos θ =a
k−→u k y senθ =b
k−→u k entonces
a = k−→u k cos θ y b = k−→u k senθ
y por tanto, la descomposición canónica de −→u es
−→u = (k−→u k cos θ)−→i + (k−→u k senθ)−→j
que podemos escribir también como
−→u = k−→u k ((cos θ)−→i + (senθ)−→j ).
Nótese que (cos θ)−→i + (senθ)
−→j es un vector unitario (pues cos2 θ+sen2θ = 1) con la
misma dirección de −→u .

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 39
Ejemplo 1.16Hallar la magnitud y la dirección de cada uno de los vectores−→z1 = 3
−→i +5−→j , −→z2 = −
−→i +2−→j
y −→z3 = 6−→i − 2−→j .
Solución:En la figura 1.48 se muestran los vectores −→z1 ,−→z2 ,−→z3 con punto inicial en el origen y sus
respectivas direcciones θ1, θ2 y θ3.
Figura 1.48.
Como −→z1 = 3−→i + 5
−→j entonces k−→z1k =
√32 + 52 =
√34. De manera similar,
k−→z2k =p(−1)2 + 22 =
√5 y k−→z3k =
p62 + (−2)2 =
√40.
A continuación determinamos θ1, θ2 y θ3 :
• tan θ1 =53 y como 0 < θ1 < 90
o entonces θ1 = tan−1(53) = 59.04o (vea figura 1.48a.)
• tan θ2 = −21 , pero como 90o < θ2 < 180o entonces θ2 6= tan−1(−21). Sin embargo (vea
figura 1.48b.), θ2 = tan−1(−21) + 180o = −63.43o + 180o = 116.57o.
• De manera similar al caso anterior, tan θ3 = −26 = −13 , pero como 270
o < θ3 < 360o
entonces θ3 6= tan−1(−13). En este caso θ3 = tan−1(−13) + 360o = −18.43o + 360o =
341.57o. (Vea figura 1.48c.) ¥
Ejemplo 1.17Halle la descomposición canónica del vector
−−→OP tal que
°°°−−→OP°°° = 52 y dir(
−−→OP ) = 3π
4 rad.
(Figura 1.49).
Solución:

40 1. Vectores geométricos en el plano
Figura 1.49.
La descomposición canónica de−−→OP está dado por−−→OP = a
−→i + b
−→j
donde
a =°°°−−→OP°°° cos 3π
4=5
2
µ− 1√
2
¶= − 5
2√2y b =
°°°−−→OP°°° sen3π4=5
2
µ1√2
¶=
5
2√2.
Así, la descomposición canónica de−−→OP es
−−→OP = − 5
2√2
−→i +
5
2√2
−→j . ¥
Si se conoce la decomposición canónica de vectores −→u y −→v es muy sencillo hallar −→u +−→vy también r−→u , para cualquier r ∈ R, dado que:
Si −→u = a−→i + b
−→j y −→v = c
−→i + d
−→j entonces
• −→u +−→v = (a+ c)−→i + (b+ d)
−→j .
• r−→u = (ra)−→i + (rb)−→j .
La comprobación de lo anterior se deja como ejercicio para el lector.
Ejemplo 1.18Si −→u = 2
−→i +−→j , −→v = −−→i + 3−→j y −→w = 4
−→j , hallar la descomposción canónica de los
vectores 2−→u +−→v , −→u + 3−→v − 2−→w y −6−→v + 4−→w.
Solución:
2−→u +−→v = 2(2−→i +−→j ) + (−−→i + 3−→j )
= (4−→i + 2
−→j ) + (−−→i + 3−→j )
= (4− 1)−→i + (2 + 3)−→j= 3
−→i + 5
−→j.
−→u + 3−→v − 2−→w = (2−→i +−→j ) + 3(−−→i + 3−→j )− 2(4−→j )
= 2−→i +−→j − 3−→i + 9−→j − 8−→j
= (2− 3)−→i + (1 + 9− 8)−→j= −−→i + 2−→j

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 41
−6−→v + 4−→w = −6(−−→i + 3−→j ) + 4(4−→j )= 6
−→i − 18−→j + 16−→j
= 6−→i − 2−→j . ¥
Ejemplo 1.19Sean −→u y −→v los vectores mostrados en la figura 1.50, tales que k−→u k = 2 y k−→v k = 1. Hallela magnitud y dirección del vector −→z = 2−→u + 4−→v .
Figura 1.50.
Solución:Hallemos la descomposición canónica de −→u y −→v , para luego hallar la del vector −→z .
−→u = (k−→u k cos 60o)−→i + (k−→u k sen60o)−→j
= 2
µ1
2
¶−→i + 2
Ã√3
2
!−→j
=−→i +√3−→j .
−→v = (k−→v k cos 150o)−→i + (k−→v k sen150o)−→j= (cos 150o)
−→i + (sen150o)
−→j
= (− cos 30o)−→i + (sen30o)−→j
= −√3
2
−→i +
1
2
−→j .
Por tanto,
−→z = 2³−→i +√3−→j´+ 4
Ã−√3
2
−→i +
1
2
−→j
!= (2− 2
√3)−→i + (2
√3 + 2)
−→j .
Ahora sí hallemos k−→z k y dir(−→z ) :k−→z k =
q(2− 2
√3)2 + (2
√3 + 2)2 = 2
q(1−
√3)2 + (
√3 + 1)2 = 2
√8 = 4
√2.
Sea θ = dir(−→z ). Entonces tan θ = 2√3 + 2
2− 2√3y como 90o < θ < 180o, pues 2− 2
√3 < 0
y 2√3 + 2 > 0, entonces
θ = tan−1Ã2√3 + 2
2− 2√3
!+ 180o = tan−1
Ã√3 + 1
1−√3
!+ 180o = −75o + 180o = 105o. ¥

42 1. Vectores geométricos en el plano
Hemos visto cómo a partir de la descomposición canónica podemos hallar la magnitudy la dirección de un vector. También hemos visto cómo se realizan de manera sencillala suma de vectores y la multiplicación de un escalar por un vector cuando se conoce ladescomposición canónica de los vectores. Ahora obtendremos una expresión muy simplepara el producto escalar −→u · −→v de dos vectores −→u y −→v , en términos de las componentes(escalares) de dichos vectores.
Sean −→u = a−→i + b
−→j y −→v = c
−→i + d
−→j . Supongamos que −→u 6= −→0 , −→v 6= −→0 y que el
ángulo α entre −→u y −→v no es de 0o, ni de 180o, es decir, 0o < α < 180o (Vea figura 1.51).
Figura 1.51.
De la ley del coseno, aplicada al triángulo de la figura 1.51 se obtiene que
k−→u −−→v k2 = k−→u k2 + k−→v k2 − 2 k−→u k k−→v k cosα (1.12)
Ahora, como el lector puede comprobar sin mucha dificultad, esta igualdad también esválida si α = 0o o si α = 180o, casos en los cuales no tendríamos un triángulo como el dela figura 1.51. De manera que la igualdad (1.12) es válida para 0o ≤ α ≤ 180o. Escribamosdicha igualdad en la forma
k−→u k k−→v k cosα = 1
2
³k−→u k2 + k−→v k2 − k−→u −−→v k2
´y sustituyamos en su lado derecho
k−→u k2 = a2 + b2, k−→v k2 = c2 + d2 y k−→u −−→v k2 = (a− c)2 + (b− d)2.
Luego de desarrollar los cuadrados (a − c)2, (b − d)2 y de simplificar, se obtiene laimportante igualdad
k−→u k k−→v k cosα = ac+ bd. (1.13)
Nótese que el lado izquierdo de (1.13) es justamente −→u ·−→v ; nótese, además, que el ladoderecho de (1.13) también es igual a −→u ·−→v cuando −→u = −→0 o −→v = −→0 . Tenemos así que
Si −→u = a−→i + b
−→j y −→v = c
−→i + d
−→j entonces −→u ·−→v = ac+ bd (1.14)
Ahora, ya que el producto −→u · −→v es fácil de calcular a partir de las descomposicionescanónicas de −→u y −→v , resulta de gran utilidad expresar, en términos de −→u · −→v , el ángulo

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 43
entre −→u y −→v , la componente escalar de −→v en la dirección de −→u y la proyección de −→v sobre−→u . Tales expresiones se derivan de la igualdad
k−→u k k−→v k cosα = −→u ·−→v
Por ejemplo, despejando cosα en dicha la igualdad se tiene que
Si −→u 6= −→0 y −→v 6= −→0 , el ángulo α entre −→u y −→v es tal que
cosα =−→u ·−→vk−→u k k−→v k
(1.15)
También podemos despejar k−→v k cosα, que es la componente escalar de −→v en la direc-ción de −→u cuando −→v 6= −→0 . Se obtiene
k−→v k cosα =−→u ·−→vk−→u k .
Nótese que el lado derecho, el cual es 0 cuando −→v = −→0 , también nos da la componenteescalar de −→v en la dirección de −→u si −→v = −→0 . Así que,
Si −→u 6= −→0 , la componente escalar de −→v en la dirección de −→u es−→u ·−→vk−→u k
y así, Proy−→u−→v =
µ−→u ·−→vk−→u k
¶ −→uk−→u k =
Ã−→u ·−→vk−→u k2
!−→u =
µ−→u ·−→v−→u ·−→u
¶−→u
(1.16)
Empleando (1.14) se puede probar rápidamente las propiedades 3. y 4. del productoescalar, que fueron enunciadas luego de la definición de dicho producto. Como ejemplo,probaremos la propiedad 3.:
Digamos que −→u = a−→i + b
−→j y −→v = c
−→i + d
−→j . Entonces
(r−→u ) ·−→v =³(ra)−→i + (rb)
−→j´·³c−→i + d
−→j´
= (ra)c+ (rb)d
= r(ac+ bd)
= r(−→u ·−→v ).
De manera similar se prueba que −→u · (r−→v ) = r(−→u ·−→v ). ¨
Ejemplo 1.20Considere los vectores −→u = 3−→i +−→j y −→v = −→i + 2−→j . Hallar:a) −→u ·−→vb) El ángulo α entre −→u y −→vc) La componente escalar de −→v en la dirección de −→u y el vector Proy−→u
−→v .

44 1. Vectores geométricos en el plano
Solución:En la figura 1.52 se muestran los vectores −→u ,−→v , el ángulo α entre ellos y el vector
Proy−→u−→v , el cual es −−→OP.
Figura 1.52.
a) De acuerdo con (1.14), −→u ·−→v = (3)(1) + (1)(2) = 5b) Para hallar α emplearemos (1.15). Como −→u · −→v = 5, k−→u k =
√32 + 12 =
√10 y
k−→v k =√12 + 22 =
√5 entonces
cosα =5√10√5=
1√2
y como 0o < α < 180o, α = cos−1³1√2
´= 45o.
c) La componente escalar de −→v en la dirección de −→u es−→u ·−→vk−→u k =
5√10, y por tanto
Proy−→u−→v = 5√
10
−→uk−→u k =
5√10
−→u√10=1
2−→u = 1
2
³3−→i +−→j´
¥
Ejemplo 1.21Hallar el área A del paralelogramo cuyos vértices son los puntos A =
µ0
−1
¶, B =
µ4
0
¶,
C =
µ2
2
¶y D =
µ−21
¶.
Solución:En la figura 1.53 se muestra el paralelogramo en consideración, su altura h relativa a
la base AB y el ángulo α entre los vectores−−→BA y
−−→BC.
Figura 1.53.

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 45
El área del paralelogramo esA =
°°°−−→AB°°°hy como h =
°°°−−→BC°°°senα, entoncesA =
°°°−−→AB°°°°°°−−→BC°°° senαo también
A =°°°−−→BA°°°°°°−−→BC°°° senα (1.17)
Procedemos entonces a hallar°°°−−→BA°°° ,°°°−−→BC°°° y senα :
−−→BA = (0− 4)−→i + (−1− 0)−→j = −4−→i −−→j ,
°°°−−→BA°°° =p(−4)2 + (−1)2 = √17−−→BC = (2− 4)−→i + (2− 0)−→j = −2−→i + 2−→j ,
°°°−−→BC°°° =p(−2)2 + 22 = √8.Como α es el ángulo entre
−−→BA y
−−→BC entonces
cosα =
−−→BA ·−−→BC°°°−−→BA°°°°°°−−→BC°°° = (−4)(−2) + (−1)(2)√
17√8
=6√17√8=
3√17√2=
3√34
Ahora, senα = ±√1− cos2 α, pero como α es águdo entonces senα =
√1− cos2 α =r
1− 9
34=
5√34
.
Luego, sustituyendo en (1.17)°°°−−→BA°°° = √17, °°°−−→BC°°° = √8 y senα = 5√
34, tenemos que
el área del paralelogramo es
A =√17√8
µ5√34
¶= 10 (unidades cuadradas). ¥
Ejemplo 1.22Considere el triángulo cuyos vértices son los puntos A =
µ2
1
¶, B =
µ−3−2
¶y C =
µ5
−4
¶.
a) ¿Es el triángulo ABC un triángulo rectángulo?b) Halle los tres ángulos del triángulo ABCc) Calcule el área del triángulo ABC
Solución:En la figura 1.54 se muestra el triángulo ABC.
Figura 1.54.

46 1. Vectores geométricos en el plano
a) El triángulo ABC será un triángulo rectángulo si y sólo si dos de sus lados son per-pendiculares, es decir, si y sólo si alguno de los productos escalares
−−→AB ·−−→BC, −−→AB ·−→AC y−−→
BC ·−→AC es cero. Calculemos, entonces, estos productos:Como
−−→AB = (−3− 2)−→i +(−2− 1)−→j = −5−→i − 3−→j , −→AC = (5− 2)−→i +(−4− 1)−→j =
3−→i − 5−→j y
−−→BC = (5− (−3))−→i + (−4− (−2))−→j = 8−→i − 2−→j entonces
−−→AB ·−−→BC = (−5)(8) + (−3)(−5) = −34 (así
−−→AB ·−−→BC 6= 0)
−−→AB ·−→AC = (−5)(3) + (−3)(−5) = 0.
Como−−→AB · −→AC = 0 entonces los vectores
−−→AB y
−→AC son perpendiculares y por tanto el
triángulo ABC es rectángulo.b) Por el literal a) sabemos que el ángulo\BAC es recto. Sean θ y α, respectivamente, losángulos\ABC y\BCA. Puesto que θ es el ángulo entre los vectores
−−→BA y
−−→BC tenemos que
cos θ =
−−→BA ·−−→BC°°°−−→BA°°°°°°−−→BC°°° .
Ahora, como
−−→BA ·−−→BC =
³−−−→AB
´·³−−→BC
´= −
³−−→AB ·−−→BC
´= 34 y
°°°−−→BA°°° = °°°−−→AB°°°se tiene que
cos θ =34p
(−5)2 + (−3)2p82 + (−2)2
=34√34√68=
1√2
y así θ = cos−1³1√2
´= 45o. Se sigue que α = 45o.
c) Como el ángulo\BAC es recto entonces el área A del triángulo ABC es
A = 1
2
°°°−−→AB°°°°°°−→AC°°° = 1
2
√34√34 = 17 (unidades cuadradas). ¥
Ejemplo 1.23Probar que las diagonales de un rombo son bisectrices de sus correspondientes ángulos.
Prueba:En la figura 1.55 se muestra un rombo OPQR.
Figura 1.55.
Recordemos que un rombo es un paralelogramo con sus lados de igual longitud.Veamos que la diagonal OQ es bisectriz del ángulo\POR, es decir, que los ángulos φ y
θ que se muestran en la figura 1.55 son iguales.

1.7. Vectores geométricos en el plano cartesiano. Descomposición canónica 47
Como θ y φ son, respectivamente, los ángulos entre−−→OP y
−−→OQ y entre
−−→OQ y
−−→OR entonces
cos θ =
−−→OP ·−−→OQ°°°−−→OP°°°°°°−−→OQ°°° =
−−→OP ·
³−−→OP +
−−→OR
´°°°−−→OP°°°°°°−−→OQ°°° =
°°°−−→OP°°°2 +−−→OP ·−−→OR°°°−−→OP°°°°°°−−→OQ°°°cosφ =
−−→OR ·−−→OQ°°°−−→OR°°°°°°−−→OQ°°° =
−−→OR ·
³−−→OP +
−−→OR
´°°°−−→OR°°°°°°−−→OQ°°° =
−−→OR ·−−→OP +
°°°−−→OR°°°2°°°−−→OR°°°°°°−−→OQ°°°Ahora, como el paralelogramo OPQR es un rombo entonces
°°°−−→OP°°° = °°°−−→OR°°° y puestoque−−→OP ·−−→OR = −−→OR·−−→OP, al comparar los miembros derechos de las dos igualdades anteriores,
se concluye que cosφ = cos θ. Se sigue que θ = φ, como se quería probar, pues θ y φ seencuentran entre 0o y 180o.
En forma análoga el lector puede mostrar que la diagonal PR es bisectriz del ángulo\OPQ. ¨Ejemplo 1.24Probar que las diagonales de un paralelogramo son perpendiculares si y sólo si el paralelo-gramo es un rombo.
Prueba:En la figura 1.56 se muestra un paralelogramo OPQR y sus diagonales OQ y PR.
Figura 1.56.
En primer lugar,
OQ y PR son perpendiculares ⇐⇒ −−→OQ y
−→PR son perpendiculares
⇐⇒ −−→OQ ·−→PR = 0
⇐⇒³−−→OP +
−−→OR
´·³−−→OR−−−→OP
´= 0
⇐⇒ −−→OP ·−−→OR−
°°°−−→OP°°°2 + °°°−−→OR°°°2 −−−→OR ·−−→OP = 0⇐⇒
°°°−−→OR°°°2 = °°°−−→OP°°°2⇐⇒
°°°−−→OR°°° = °°°−−→OP°°° .Ahora, como el cuadrilátero OPQR es un paralelogramo entonces°°°−−→OR°°° = °°°−−→OP°°° ⇐⇒
°°°−−→OR°°° = °°°−−→OP°°° = °°°−−→PQ°°° = °°°−−→RQ°°°⇐⇒ el paralelogramo OPQR es un rombo
Así, las diagonales OQ y PR son perpendiculares si y sólo si el paralelogramo OPQRes un rombo. ¨

48 1. Vectores geométricos en el plano
1.8 Ejercicios
1. Para cada literal dibujar el vector con las características descritas.
a)°°°−−→AB°°° = 5 y dir ³−−→AB´ = 20o.
b) k−→v k = 2 y dir (−→v ) = 180o.c) k−→w k = 1
2 y dir (−→w ) = 240o.
2. Sean −→u ,−→v y −→w vectores del plano. Probar que −→u +−→v = −→u +−→w si y sólo si −→v = −→w.
3. Sean A,B,C y D puntos del plano tales que D está sobre el segmento AB y sudistancia al punto A es 2
3 de la distancia entre A y B. Si E es el punto medio del
segmento de recta AC, expresar el vector−−→DE en términos de
−−→AB y
−→AC.
4. Suponiendo que−−→AD = 1
4
−−→AB y
−−→BE = 1
2
−−→BC, expresar
−−→DE en términos de
−−→AB y
−−→BC.
5. Dos remolcadores A y B llevan un barco a un puerto. El remolcador A ejerce unafuerza de 7000 lbf sobre su cable con dirección de 80o. El remolcador B ejerce unafuerza de 5000 lbf con dirección de 20o. Hacer un gráfico que muestre la fuerzaresultante y hallar la magnitud y dirección de dicha fuerza.
6. Un avión viaja a una velocidad de 100 millas por hora (respecto al viento) hacia elsureste y el viento tiene una velocidad de 30 millas por hora (respecto a la tierra)hacia el nordeste. ¿Cuál es la velocidad resultante del avión con respecto a la tierra?.
7. Dos autos parten al mismo tiempo de un punto O. El primero se desplaza a unavelocidad de 40 km/h en dirección S 60o O y el segundo con una velocidad de 30km/h hacia el sureste. Representar gráficamente esta situación y calcular la distanciaentre los dos autos cuando han transcurrido dos horas.
8. Un nadador, con una velocidad de nado de 1.5 km/h con respecto al agua, parte dela rivera de un río y nada hacia el norte a través del río. Si la corriente del río fluyehacia el este a 0.8 km/h, hallar:
a) La velocidad del nadador con respecto a la tierra.
b) Suponga que el ancho del río es 1 km. ¿Qué tan lejos, río abajo, el nadador alcanzala otra orilla?.
9. Sea ABCD un cuadrilátero y sean P,Q,R y S los puntos medios de sus ladosAB,BC,CD yDA respectivamente. Demostrar, utilizando vectores geométricos, queP,Q,R y S son los vértices de un paralelogramo. (Ayuda: Vea ejemplo 1.9.)
10. Demostrar vectorialmente que las diagonales de un paralelogramo se cortan en supunto medio.
11. Tres vectores del plano tienen 6, 5 y 4 unidades de longitud. El ángulo entre el primeroy el segundo es de 50o, mientras que ángulo entre el segundo y el tercero es de 75o.Encontrar la magnitud del vector suma y el ángulo entre dicho vector suma y elvector dado de mayor longitud.
12. Sea −→v un vector tal que k−→v k = 4 y dir (−→v ) = 45o.a) Dibujar un vector −→x tal que k−→x k = 9 y dir (−→x ) = dir (−→v ) .

1.8. Ejercicios 49
b) Dibujar un vector −→y tal que k−→y k = 5 y la dirección de −→y es la opuesta a ladirección de −→v .c) Expresar los vectores −→x y −→y como múltiplos escalares del vector −→v .
13. Considerar los vectores −→u ,−→v ,−→w que se muestran en la figura, donde k−→u k = 2,k−→v k = 3 y k−→w k = 4.
Encontrar la descomposición de −→w en las direcciones de −→u y −→v , determinando losescalares a, b tales que −→w = a−→u + b−→v . Hacerlo de dos formas: primero sin recurrir ala descomposición canónica y luego empleando dicha descomposición.
14. Dados los vectores geométricos −→v ,−→u y −→w tales que k−→v k = 5, k−→u k = 8, k−→wk = 10,dir (−→v ) = 60o, dir (−→u ) = 120o y dir (−→w ) = 180o,a) Dibujar los vectores −→v ,−→u y −→w.
b) Encontrar la descomposición de −→w en las direcciones de −→u y −→v (es decir, hallarescalares a y b tales que −→w = a−→u + b−→v ). Hacerlo de dos formas: primero sin recurrira la descomposición canónica y luego empleando dicha descomposición.
15. Hallar la descomposición canónica de cada uno de los siguientes vectores:
a) −→v tal que k−→v k = 6 y dir (−→v ) = 225o.b) −→u tal que k−→u k = 5 y dir (−→u ) = 270o.c) −→w tal que k−→wk = 3 y dir (−→w ) = π
6 radianes.
16. Sean −→u = 2−→i − 5−→j , −→v = 3
−→i +−→j , −→w = −2−→i + 3−→j . Hallar la descomposición
canónica, la magnitud y la dirección de los siguientes vectores:
a) 2−→u −−→v . b) −→u −−→v +−→w . c) 3−→u + 2−→v −−→w .
17. Si −→u = 3−→i − 4−→j , hallar:a) La magnitud y dirección de −→u .b) La descomposición canónica del vector −→w de magnitud 7 y dirección opuesta a lade −→u .c) La descomposición canónica de cada uno de los vectores de longitud 4
√2 que forma
ángulo de 45o con el vector −→u .

50 1. Vectores geométricos en el plano
18. Sean P =
µ1
−2
¶, Q =
µ0
1
¶y R =
µ2
3
¶.
a) Hallar la descomposición canónica de cada uno de los vectores−−→QP,
−−→QR y
−→PR.
b) Mostrar que los puntos P,Q y R no son colineales.
c) Si M es el punto medio de segmento PR, hallar la descomposición canónica y lamagnitud de
−−→QM.
d) Si B es el baricentro del triángulo PQR, hallar la descomposición canónica y lamagnitud del vector
−−→QB.
e) Encontrar el ángulo entre−−→QP y
−−→QR.
f) Sea S el punto de intersección de la bisectriz del ángulo entre−−→QP y
−−→QR con el
segmento PR. Hallar la descomposición canónica de−→QS.
19. Considerar el diagrama de fuerzas de la siguiente figura.
La fuerza−→F tiene una magnitud de 20Newtons y el sistema se encuentra en equilibrio,
es decir,−→F +
−→T1 +
−→T2 =
−→0 . Hallar la descomposición canónica de
−→F ,−→T1 y
−→T2.
20. Para cada par de puntos dados, encontrar el punto R tal que el cuadrilátero OPRQ esun paralelogramo.
a) P =
µ−35
¶, Q =
µ−4−4
¶. b) P =
µ4
0
¶, Q =
µ2
6
¶.
21. Sean −→u1 =√22
−→i +
√22
−→j , −→u2 = −
√22
−→i +
√22
−→j .
a) Probar que −→u1 y −→u2 son perpendiculares.
b) Hallar la descomposición de cada unos de los los vectores−→i ,−→j y −2−→i + 3−→j en
las direcciones de −→u1 y −→u2.
22. Sea −→w = 7−→i − 5−→j . Para cada par de vectores −→u y −→v dados a continuación
i) Determinar si existen escalares a y b tales que −→w = a−→u + b−→v .ii) Si su respuesta en i) es afirmativa, halle los valores de a y b.
a) −→u = −→i −−→j , −→v = 2−→i − 3−→j .
b) −→u = −→i − 2−→j , −→v = −2−→i + 4−→j .

1.8. Ejercicios 51
23. Calcular −→v ·−→wa) Si k−→v k = 2, k−→wk = 3 y el ángulo entre −→v y −→w es π
3 radianes.
b) Si −→v = 2−→i − 3−→j y −→w = 2−→i .
24. Sean −→u = 3−→i + 4
−→j y −→v = −→i + α
−→j . Encontrar los valores de α para los cuales se
satisface la condición dada en cada caso.
a) −→u es perpendicular a −→v . b) El ángulo entre −→u y −→v es π4 radianes.
25. Sean −→u = 3−→i + 4−→j , −→v = 5−→i −−→j y −→w = 7−→i +−→j . Calcular:
a) −→u · (2−→v −−→w ) . b) k−→u k (−→v ·−→w ) . c) k(−→u ·−→v )−→wk .
26. Para cada par de vectores −→u y −→v dados a continuación, determinar si ellos sonperpendiculares, si el ángulo entre ellos es agudo o si el ángulo entre ellos es obtuso.Calcular la proyección de −→u sobre −→v .a) −→u = 6−→i +−→j , −→v = 2−→i − 3−→j .b) −→u = −6−→i + 4−→j , −→v = 4−→i + 6−→j .c) −→u = 3−→i −−→j , −→v = −→i + 4−→j .
27. Sean −→v y −→w vectores. Probar que:
a) k−→v ±−→w k2 = k−→v k2 ± 2 (−→v ·−→w ) + k−→wk2 .b) (−→v +−→w ) · (−→v −−→w ) = k−→v k2 − k−→wk2 .
28. Calcular −→u ·−→v sabiendo que −→u +−→v +−→w =−→0 , k−→u k = 5, k−→v k = 6 y k−→wk = 7.
29. Sean −→v y −→w vectores. Probar:
a) Teorema de Pitágoras: −→v y −→w son perpendiculares si y sólo si k−→v +−→wk2 =k−→v k2 + k−→w k2
b) Ley del paralelogramo: k−→v +−→w k2+k−→v −−→wk2 = 2 k−→v k2+2 k−→w k2 . (Es decir,la suma de los cuadrados de las longitudes de las diagonales de un paralelogramo esigual a la suma de los cuadrados de las longitudes de sus cuatro lados.)
c) Identidad de polarización: k−→v +−→wk2 − k−→v −−→wk2 = 4 (−→v ·−→w ) .
30. Demostrar, empleando la identidad de polarización, que las diagonales de un parale-logramo tienen igual longitud si y sólo si el paralelogramo es un rectángulo.
31. Sean −→u , −→v y −→w vectores geométricos tales que k−→v k = 4, k−→wk = 1√3y −→u es unitario.
Si k−→u −−→v +−→wk = k−→u +−→v +−→wk y el ángulo entre −→u y −→v es π3 radianes,
a) Calcular el ángulo entre −→v y −→w.
b) Calcular la magnitud de la proyección de −→v sobre −→w.
32. Para el par de vectores −→v y −→w dados en cada literal, calcular el producto escalar, elcoseno del ángulo entre ellos, determinar si son perpendiculares, verificar la desigual-dad de Cauchy-Schwarz y hallar Proy−→w
−→v y Proy−→v−→w.
a) −→v = 4−→i , −→w =−→i +−→j
b) −→v = 4−→i + 3−→j , −→w = 12
−→i − 2
3
−→j
c) −→v = −2−→i + 18−→j , −→w = 32
−→i − 1
6
−→j

52 1. Vectores geométricos en el plano
33. Sean −→u y −→v vectores geométricos no nulos. Mostrar que −→u y −→v son paralelos si ysólo si Proy−→v
−→u = −→u .
34. Sean −→u = a−→i + b
−→j y −→v = c
−→i + d
−→j , −→v 6= 0. Encontrar una condición necesaria y
suficiente sobre a, b, c y d para que −→v y Proy−→v−→u tengan
a) La misma dirección.
b) Dirección contraria.
35. Sea −→u un vector no nulo y se −→z un vector cualquiera. Probar que para cualquierescalar no nulo r se tiene que Proyr−→u
−→z = Proy−→u−→z .
36. Un triángulo tiene como vértices los puntos A =
µ1
3
¶, B =
µ4
−2
¶y C =
µ−36
¶.
Hallar:
a) Cada uno de sus ángulos interiores
b) El área del triángulo ABC
37. Sean P =µ2
3
¶, Q =
µ5
7
¶, R =
µ2
−3
¶y S =
µ1
2
¶puntos de R2. Calcular Proy−−→
PQ
−→RS
y Proy−→RS
−−→PQ.
38. Sean −→u , −→v , −→w vectores tales que k−→u k = 3, k−→v k = 4 y k−→wk = 2 y sea −→z =2−→u − −→v + 3−→w. Calcular −→z · −→v sabiendo que el ángulo entre −→u y −→v es de 60o y elángulo entre −→v y −→w es de 120o.

2
Vectores coordenados o algebraicos
2.1 Introducción
Consideraremos, como ya se había anunciado, al plano provisto de un sistema cartesiano
xy, lo cual permite identificar cada punto del plano con un par ordenadoµa
b
¶de números
reales, según se explicó en el capítulo anterior.
De acuerdo con la definición de igualdad de vectores geométricos, y dado que entre losinfinitos vectores iguales a un vector dado hay uno (y sólo uno) con punto inicial en elorigen O, podemos considerar que el conjunto de todos los vectores geométricos del planose reduce a los que tienen su punto inicial en el origen. (Ver figura 2.1).
Figura 2.1.
Ahora bien, es evidente que cada vector con punto inicial en el origen O determina un
único punto P =µa
b
¶del plano el cual es su extremo final y, recíprocamente, cada punto
P =
µa
b
¶del plano es el extremo final de un único vector con punto inicial en el origen, el
cual es el vector−−→OP , es decir, el vector de posición del punto P . (Ver figura 2.2).
53

54 2. Vectores coordenados o algebraicos
Figura 2.2.
Tenemos así la correspondencia biunívoca
−−→OP ←→ P
entre el conjunto de los vectores de con su punto inicial en el origen y el conjunto de lospuntos del plano, es decir, entre el conjunto de los vectores posición y el conjunto R2.
De acuerdo con dicha correspondencia, las operaciones suma y producto por escalarcon vectores de posición, inducen una suma y un producto por escalar con pares ordenadosde números reales como se indica a continuación.
Consideremos vectores de posición−−→OP y
−−→OQ siendo P =
µa
b
¶y Q =
µc
d
¶. Como
−−→OP +
−−→OQ =
³a−→i + b
−→j´+³c−→i + d
−→j´= (a+ c)
−→i + (b+ d)
−→j
entonces
−−→OP +
−−→OQ =
−−→OR siendo R =
µa+ c
b+ d
¶
lo cual sugiere definir P +Q como el punto R, es decir, definir
µa
b
¶+
µc
d
¶=
µa+ c
b+ d
¶(2.1)
Ilustramos lo anterior en la figura 2.3, en la cual a, b, c y d son todos positivos.

2.2. Suma y producto por escalar en R2 55
Figura 2.3.
Análogamente, como para cada r ∈ R se tiene
r³−−→OP
´= r
³a−→i + b
−→j´= (ra)
−→i + (rb)
−→j
entonces
r³−−→OP
´=−→OS siendo S =
µra
rb
¶lo cual sugiere definir rP como el punto S, es decir definir
r
µa
b
¶=
µra
rb
¶. (2.2)
Por lo anterior se define en R2 (es decir, en el conjunto de puntos del plano) una sumay un producto por escalar, de acuerdo con las igualdades (2.1) y (2.2).
2.2 Suma y producto por escalar en R2
Dados X =
µx
y
¶y U =
µu
v
¶en R2 y el escalar r, definimos la suma X+U y el producto
rX como
X + U =
µx+ u
y + v
¶y rX =
µrx
ry
¶Es necesario insistir en que estas operaciones en R2 han sido definidas de tal modo que
X + U = R ⇔ −−→OX +
−−→OU =
−−→OR
rX = S ⇔ r−−→OX =
−→OS

56 2. Vectores coordenados o algebraicos
y en general,
rX + tU = T ⇔ r−−→OX + t
−−→OU =
−→OT
cualesquiera sean X,U,R, S, T en R2 y r, t en R.En adelante, los elementos de R2 (a los cuales nos veniamos refiriendo como puntos) se
dirán también vectores coordenados o vectores algebraicos.Dado X en R2, todo vector de la forma rX, con r ∈ R, se dirá un múltiplo escalar
de X.
Ejemplo 2.1Sean X =
µ4
−1
¶y U =
µ−22
¶. Hallar X + U y (−1)X.
Solución:
X + U =
µ4
−1
¶+
µ−22
¶=
µ4− 2−1 + 2
¶=
µ2
1
¶(−1)X = (−1)
µ4
−1
¶=
µ(−1) 4
(−1) (−1)
¶=
µ−41
¶. ¥
• El vector algebraicoµ0
0
¶es llamado el vector nulo o vector cero de R2 y se
denotará por la letra O. Este vector es tal que
X +O = X para cualquier X ∈ R2.
• El inverso aditivo del vectorX =
µx
y
¶, denotado −X, se define como −X =
µ−x−y
¶.
Se tiene queX + (−X) = O y −X = (−1)X.
Ejemplo 2.2El inverso aditivo del vector X =
µ1
−2
¶es −X =
µ−12
¶(figura 2.4). ¥
Figura 2.4.
Es claro que la suma y la multiplicación por escalar en R2 heredan las propiedadesalgebraicas de las correspondientes operaciones entre vectores geométricos. A continuación

2.2. Suma y producto por escalar en R2 57
listamos las propiedades básicas, válidas para cualesquiera vectores X,Y,Z de R2 y todopar de números reales r y s.
1. X + Y ∈ R22. X + Y = Y +X3. (X + Y ) + Z = X + (Y + Z)4. X +O = X5. X + (−X) = O6. rX ∈ R27. 1X = X8. r(sX) = (rs)X9. r(X + Y ) = rX + rY10. (r + s)X = rX + sX
Vale la pena señalar que cada una de las propiedades anteriores es de fácil verificaciónrecurriendo únicamente a la definición de las operaciones suma y multiplicación por escalaren R2, y a las propiedades de la suma y el producto entre números reales. Como ejemplo,verificaremos la propiedad 9 :
Si X =
µx1y1
¶y Y =
µx2y2
¶entonces
r(X + Y ) = r
∙µx1y1
¶+
µx2y2
¶¸= r
µx1 + x2y1 + y2
¶=
µr(x1 + x2)
r(y1 + y2)
¶=
µrx1 + rx2ry1 + ry2
¶=
µrx1ry1
¶+
µrx2ry2
¶= rX + rY. ¨
La verificación de las restantes propiedades se deja como ejercicio.
• Sean X =
µx
y
¶y U =
µu
v
¶en R2. Sabemos que
−−→OX −−−→OU = (x− u)
−→i + (y − v)
−→j
es decir,−−→OX −−−→OU = −−→OR con R =
µx− u
y − v
¶.
Definimos, en consecuencia, la diferencia X − U como el vector R. Así,
X − U =
µx
y
¶−µu
v
¶=
µx− u
y − v
¶.
Ahora, sabemos que el vector R =
µx− u
y − v
¶es tal que
−−→UX =
−−→OR y como R = X − U
entonces
−−→UX =
−−→OR con R = X − U

58 2. Vectores coordenados o algebraicos
lo cual nos dice que todo vector−−→UX es igual al vector de posición del punto X − U (ver
figura 2.5).
Figura 2.5.
De lo anterior se sigue, en forma inmediata, que
−−→UX =
−−→Y Z si y sólo si X − U = Z − Y
cualesquiera sean U,X, Y,Z en R2.
Ejemplo 2.3Dados los puntos A =
µ−11
¶, B =
µ0
−1
¶y C =
µ3
2
¶, encuentre el punto D tal que el
cuadrilátero ABDC es un paralelogramo.
Solución:
El cuadrilátero ABDC es un paralelogramo si y sólo si−−→CD =
−−→AB (ver figura 2.6).

2.2. Suma y producto por escalar en R2 59
Figura 2.6.
Ahora,−−→CD =
−−→AB ⇐⇒ D −C = B −A
⇐⇒ D = B −A+C
luego,
D =
µ0
−1
¶−µ−11
¶+
µ3
2
¶=
µ4
0
¶. ¥
Ejemplo 2.4Probar el siguiente resultado:
Teorema de la proporción en R2. El punto P del segmento AB que dividea dicho segmento en la proporción m : n es
P =n
m+ nA+
m
m+ nB. (2.3)
Prueba:El resultado anterior se puede deducir directamente del teorema de la proporción para
vectores geométricos así: Según dicho teorema, si P es el punto del segmento AB que lodivide en la proporción m : n y O es cualquier punto del plano, entonces
−−→OP =
n
m+ n
−→OA+
m
m+ n
−−→OB.
En particular, la igualdad anterior es válida si O es el origen del sistema cartesiano xy,caso en el cual esa igualdad es equivalente, como sabemos, a la igualdad (2.3).
También podemos probar el resultado en consideración de la siguiente manera: si P esel punto del segmento AB que lo divide en la proporción m : n entonces
−→AP =
m
m+ n
−−→AB.
Ahora (vea ejercicio 1 de este capítulo), esta igualdad es equivalente a
P −A =m
m+ n(B −A)

60 2. Vectores coordenados o algebraicos
de lo cual se sigue que
P = A+m
m+ n(B −A) =
n
m+ nA+
m
m+ nB. ¨
Como caso particular del teorema de la proporción se tiene que
Si M es el punto medio de un segmento de recta AB entoncesM = 1
2(A+B).
2.3 Magnitud, dirección y otros conceptos en R2
En esta sección trasladaremos a los vectores algebraicos nociones ya definidas para vectoresgeométricos como magnitud, dirección, descomposición canónica, producto escalar, ánguloentre vectores y proyección de un vector sobre otro; todo ello empleando la correspondencia−−→OP ←→ P ya mencionada.
• Sea X =
µx
y
¶en R2. Llamaremos magnitud de X, denotada kXk , a la magnitud
del vector de posición−−→OX (vea figura 2.7), es decir,
kXk =°°°−−→OX°°° =px2 + y2
Figura 2.7.
Nótese que kXk es la distancia del punto X al origen.Es de esperar que la magnitud en R2 tenga las propiedades que sabemos tiene la mag-
nitud de vectores geométricos. En efecto, cualesquiera sean X,U en R2 y r ∈ R se daque:
1. kXk ≥ 02. kXk = 0 si y sólo si X =
µ0
0
¶

2.3. Magnitud, dirección y otros conceptos en R2 61
3. krXk = |r| kXk4. kX + Uk ≤ kXk+ kUk (Desigualdad triangular).
Cada una de las propiedades 1. a 3. puede probarse remitiéndonos a la correspondientepropiedad para vectores geométricos o bien directamente a partir de que kXk =
px2 + y2
si X =
µx
y
¶. Como ejemplo probaremos de las dos formas la propiedad 3.
Digamos que rX = S, es decir que r−−→OX =
−→OS. Entonces
krXk = kSk =°°°−→OS°°° = °°°r−−→OX°°° = |r|°°°−−→OX°°° = |r| kXk .
En la penúltima de las igualdades anteriores hemos hecho uso de la propiedad°°°r−−→OX°°° =
|r|°°°−−→OX°°° para la magnitud de vectores geométricos. Ahora, sin remitirnos a vectores geo-
métricos y con X =
µx
y
¶tenemos:
krXk =°°°°µrxry
¶°°°° =p(rx)2 + (ry)2 =pr2(x2 + y2) =√r2px2 + y2 = |r| kXk . ¨
En cuanto a la propiedad 4, podemos probarla recurriendo a vectores geométricos, apartir de la desigualdad triangular°°°−−→OX +
−−→OU
°°° ≤ °°°−−→OX°°°+ °°°−−→OU°°° .Más adelante, una vez tengamos la desigualdad de Cauchy-Schwarz y el producto escalar
en R2, se puede probar dicha desigualdad triangular sin recurrir a vectores geométricos.
La distancia entre dos puntos U =
µu
v
¶y X =
µx
y
¶es el escalar
°°°−−→UX°°° , es decir, elescalar kX − Uk . (Ver figura 2.8).
Figura 2.8.
Así que,

62 2. Vectores coordenados o algebraicos
La distancia entre los puntos U =µu
v
¶y X =
µx
y
¶es
kX − Uk =p(x− u)2 + (y − v)2.
Ejemplo 2.5La distancia entre los puntos U =
µ1
−2
¶y X =
µ−34
¶es
kX − Uk =p(−3− 1)2 + (4− (−2))2 =
√16 + 36 =
√52. ¥
• Consideremos X ∈ R2. Si X 6= O llamaremos dirección de X, denotada dir (X) ,
a la dirección del vector de posición−−→OX (En la figura 2.7, el ángulo θ es la dirección del
vector algebraico X).Diremos que un vector U ∈ R2, U 6= O, tiene la misma dirección o que tiene di-
rección opuesta a la de X según que el vector−−→OU tenga la misma dirección o dirección
opuesta a la de−−→OX.
Si r es un escalar no nulo y X 6= O entonces rX tiene la misma dirección de X cuandor > 0 y dirección opuesta a la de X cuando r < 0, pues así ocurre entre r
−−→OX y
−−→OX.
Por último, diremos que X y U son paralelos si los vectores−−→OX y
−−→OU lo son. Ahora,−−→
OX y−−→OU son paralelos si y sólo si alguno de los dos es múltiplo escalar del otro. Por tanto,
Dos vectores de R2 son paralelos si y sólo si uno de ellos es múltiplo escalar del otro.
• Un vector de R2 se dice un vector unitario si tiene magnitud 1. Los vectoresunitarios de R2 conforman la circunferencia de centro en el origen y radio 1. Si X ∈ R2 yX 6= O entonces el vector
1
kXkX es unitario, pues
°°°° 1
kXkX°°°° = 1
kXk kXk = 1,
y tiene la misma dirección de X ya que1
kXk > 0.
Nos referiremos al proceso de hallar el vector unitario1
kXkX, a partir del vector no
nulo X, como normalización del vector X. Al igual que para vectores geométricos, a
menudo escribiremosX
kXk en lugar de1
kXkX.
El vector unitario de R2 con dirección θ, como se muestra en la figura 2.9, esµcos θ
senθ
¶.
Por tanto, si X es cualquier vector no nulo con dirección θ entonces el vector unitario conla misma dirección de X es
X
kXk =µcos θ
senθ
¶

2.3. Magnitud, dirección y otros conceptos en R2 63
de donde
X = kXkµcos θ
senθ
¶
Figura 2.9.
Ejemplo 2.6
Sean X =
µ1/√2
−1/√2
¶y Y =
µ−3√2/2√2
¶.
a) Muestre que X es unitario y halle su dirección.b) Normalice el vector X + Y.
c) Halle el vector Z con dirección opuesta a la del vector X +Y y tal que kZk =√10.
Solución:
a) Como X = 1√2
µ1
−1
¶entonces
kXk = 1√2
°°°°µ 1
−1
¶°°°° = 1√2
p12 + (−1)2 =
√2√2= 1
y por tanto X es unitario.
Si θ es la dirección de X entonces cos θ =1√2y senθ = − 1√
2, de donde tanθ = −1.
Ahora, como X es un punto del cuarto cuadrante, es decir, 270o < θ < 360o entonces
θ = tan−1 (−1) + 360o = −45o + 360o = 315o
b) X + Y =
µ1/√2− 3
√2/2
−1/√2 +√2
¶=
µ−√2√
2/2
¶=
√2
2
µ−21
¶.
Luego,
kX + Y k =√2
2
°°°°µ−21¶°°°° = √22 p(−2)2 + 12 =
√2
2
√5 =
√10
2.
Normalizar el vector X+Y es hallar el vector unitario con la misma dirección de X+Y ;tal vector es
U =1
kX + Y k(X + Y ) =1√102
√2
2
µ−21
¶=
1√5
µ−21
¶.

64 2. Vectores coordenados o algebraicos
c) Z = −√10U donde U es el vector unitario hallado en b), es decir,
Z = −√10
1√5
µ−21
¶= −√2
µ−21
¶=
µ2√2
−√2
¶. ¥
• En la misma medida en que son importantes los vectores geométricos −→i y −→j ,lo sonlos vectores E1 =
µ1
0
¶y E2 =
µ0
1
¶en R2, los cuales llamaremos vectores canónicos de
R2.Todo vector X =
µx
y
¶en R2 se descompone en la forma
X =
µx
0
¶+
µ0
y
¶= x
µ1
0
¶+ y
µ0
1
¶= xE1 + yE2.
Obsérvese que el vector xE1 =µx
0
¶está en el eje x y que el vector yE2 =
µ0
y
¶está
en el eje y. (Ver figura 2.10).
Figura 2.10.
Es más, la única manera de descomponer un vector X =
µx
y
¶como suma de dos
vectores, uno en el eje x y el otro en el eje y, es
X = xE1 + yE2
igualdad que llamaremos descomposición canónica del vector X.
Como resumen de lo anterior tenemos:
La descomposición canónica de un vector X =
µx
y
¶de R2 es
X = xE1 + yE2

2.3. Magnitud, dirección y otros conceptos en R2 65
Ejemplo 2.7La descomposición canónica de X =
µ−23
¶es X = −2E1 + 3E2. (Figura 2.11). ¥
Figura 2.11.
• Llamaremos producto escalar de los vectores X =
µx
y
¶y U =
µu
v
¶de R2, que
denotaremos X · U, al producto escalar −−→OX ·−−→OU. Ahora, como −−→OX = x−→i + y
−→j y−−→OU =
u−→i + v
−→j entonces
−−→OX ·−−→OU = xu+ yv. Así que,
El producto escalar de los vectores X =
µx
y
¶y U =
µu
v
¶es el escalar
X · U = xu+ yv.
El producto escalar entre vectores de R2 tiene, como era de esperarse, las siguientespropiedades, válidas cualesquiera sean X,U,Z en R2 y r ∈ R.
1. X · U es un escalar2. X ·X = kXk23. X · U = U ·X4. (rX) · U = r(X · U) = X · (rU)5. X · (U + Z) = X · U +X · Z y (X + U) · Z = X · Z + U · Z6. |X · U | ≤ kXk kUk (Desigualdad de Cauchy-Schwarz)
Probemos la propiedad 4. sin utilizar vectores de posición: Si X =
µx
y
¶y U =
µu
v
¶,
(rX) · U =µrx
ry
¶·µu
v
¶= (rx)u+ (ry)v = r(xu+ yv) = r(X · U).
Análogamente se prueba que X · (rU) = r(X · U).

66 2. Vectores coordenados o algebraicos
Ahora probemos la propiedad 6., recurriendo a los vectores de posición y a la desigual-dad de Cauchy-Schwarz ya probada para ellos:
|X · U | =¯−−→OX ·−−→OU
¯≤°°°−−→OX°°°°°°−−→OU°°° = kXk kUk .
La verificación de las propiedades 2., 3. y 5. queda como ejercicio. ¨Ejemplo 2.8
Para X =
µ3
−2
¶y U =
µ2
7
¶se tiene:
a) X · U = (3)(2) + (−2)(7) = −8b)¡13X¢· (8U) = 1
3(X · 8U) = 83(X · U) = 8
3(−8) = −643 . ¥
• Si X y U son vectores no nulos de R2, el ángulo entre X y U se define como elángulo entre los vectores
−−→OX y
−−→OU (figura 2.12).
Figura 2.12.
Si α es el ángulo entre−−→OX y
−−→OU sabemos que cosα =
−−→OX ·−−→OU°°°−−→OX°°°°°°−−→OU°°° . Ahora, como
−−→OX ·−−→OU = X · U ,
°°°−−→OX°°° = kXk y °°°−−→OU°°° = kUk entonces se tiene que:Si α es el ángulo entre los vectores no nulos X y U entonces
cosα =X · UkXk kUk
(2.4)
Los vectores X y U se dicen ortogonales, lo cual se denota X ⊥ U, si los vectores−−→OX y
−−→OU son perpendiculares. Ahora, como
−−→OX y
−−→OU son perpendiculares si y sólo si−−→
OX ·−−→OU = 0 entonces
X ⊥ U si y sólo si X · U = 0

2.3. Magnitud, dirección y otros conceptos en R2 67
Ejemplo 2.9
Sean X =
µ1
2
¶y U =
µ−31
¶.
a) Determine si X y U son ortogonales.b) Si X y U no son ortogonales halle el ángulo α entre ellos.
Solución:a) X · U = (1)(−3) + (2)(1) = −1Como X · U 6= 0 entonces X y U no son ortogonales.
b) cosα =X · UkXk kUk =
−1√12 + 22
p(−3)2 + 12
=−1√5√10= − 1
5√2.
Y como 0o ≤ α ≤ 180o entonces α = cos−1µ− 1
5√2
¶= 98.13o. ¥
Ejemplo 2.10Para cualquier vector
µx
y
¶de R2 se tiene que
µx
y
¶yµ−yx
¶son ortogonales pues
µx
y
¶·µ−yx
¶= (x)(−y) + (y)(x) = 0 ¥
• Sean X y U vectores de R2 con U 6= O. La proyección de X sobre U, denotadaProyUX, se define como el vector algebraico P tal que
−−→OP = Proy−−→
OU
−−→OX. (Ver figura
2.13).
Figura 2.13.
Así que
ProyUX = P si y sólo si Proy−−→OU
−−→OX=
−−→OP
Obsérvese que si L es la recta que pasa por los puntos O y U entonces ProyUX es elpunto donde la perpendicular trazada desde X a la recta L, corta dicha recta. De acuerdocon esto es claro que si X =
µx
y
¶entonces ProyE1X =
µx
0
¶y ProyE2X =
µ0
y
¶como se
ilustra en la figura 2.14.

68 2. Vectores coordenados o algebraicos
Figura 2.14.
Si X y U son vectores cualesquiera de R2 con U 6= O, de la ya conocida fórmula
Proy−−→OU
−−→OX =
⎛⎝−−→OX ·−−→OU°°°−−→OU°°°⎞⎠ −−→
OU°°°−−→OU°°°se sigue, pasando a vectores algebraicos, que
ProyUX =
µX · UkUk
¶U
kUk =µX · UkUk2
¶U =
µX · UU · U
¶U (2.5)
Es de resaltar que dado un vector U en R2, U 6= O, todo vector X de R2 se descomponeen la forma
X = ProyUX + (X − ProyUX)
donde ProyUX es paralelo a U y X − ProyUX es ortogonal a U.
Finalizamos este capítulo con el siguiente ejemplo, en el cual se combinan varios de losconceptos introducidos en él.
Ejemplo 2.11
Sean V =
µ−32
¶, W =
µ2
−5
¶, U =
µ3
−14
¶y X = 2V + 3W − U. Halle:
a) El vector X.
b) La magnitud y la dirección de X.
c) La descomposición canónica de X.
d) k−2V k+ 2 kV k .e) El ángulo entre 2V y −3W.
f) La distancia entre los puntos U y W.
g) La proyección de W sobre V.h) Vectores P y Q tales que W = P +Q con P paralelo a V y Q ortogonal a V.i) El área del triángulo cuyos vértices son V,W y el origen.

2.3. Magnitud, dirección y otros conceptos en R2 69
Solución:
a) X = 2V + 3W − U = 2
µ−32
¶+ 3
µ2
−5
¶−µ3
−14
¶=
µ−6 + 6− 34− 15 + 14
¶=
µ−33
¶.
b) kXk =p(−3)2 + 32 = 3
√2.
Figura 2.15.
Si θ es la dirección de X entonces tan θ = 3−3 = −1. Ahora, como 0o < θ < 180o
entonces θ 6= tan−1(−1) (Ver figura 2.15); sin embargo,
θ = tan−1(−1) + 180o = −45o + 180o = 135o.
c) La descomposición canónica del vector X =
µ−33
¶es
X = −3E1 + 3E2.
d) k−2V k+ 2 kV k = |−2| kV k+ 2 kV k = 4 kV k = 4p(−3)2 + 22 = 4
√13.
e) El ángulo α entre los vectores 2V y −3W es el mismo ángulo entre V y −W ; luego(según fórmula (2.4))
cosα =V · (−W )
kV k k−Wk =−(V ·W )
kV k kWk =−((−3)(2) + 2(−5))√
13√29
=16√13√29
.
Y como 0o ≤ α ≤ 180o entonces α = cos−1³
16√13√29
´= 34.51o.
f) La distancia entre los puntos U y W es
d = kW − Uk =p(2− 3)2 + (−5− (−14))2 =
p1 + 92 =
√82.
g) ProyV W =W · VV · V V = −16
13 V = −1613V = −1613µ−32
¶=
µ48/13
−32/13
¶.
h) Como sabemosW = ProyV W + (W − ProyV W )
donde ProyV W es paralelo a V y W − ProyV W es ortogonal a V. Luego, vectores P y Qque cumplen las condiciones exigidas son
P = ProyV W =
µ48/13
−32/13
¶y Q =W − ProyV W =
µ−22/13−33/13
¶.

70 2. Vectores coordenados o algebraicos
i) En la figura 2.16 se muestra el triángulo V OW, el punto ProyV W y la altura hrelativa a la base OV , la cual es h = kW − ProyV Wk .
Figura 2.16.
El área A del triángulo es entonces
A = 1
2
°°°−−→OV °°°h = 1
2kV kh.
Como h = kW − ProyV Wk = 11
13
√13 (verifíquelo) y kV k =
√13 entonces
A =µ1
2
√13
¶µ11
13
√13
¶=11
2(unidades cuadradas). ¥
2.4 Ejercicios
1. Sean S, T, U,X, Y y Z puntos del plano y r y d escalares. Probar que:
a)−−→UX =
−→ST +
−−→Y Z ⇐⇒ X − U = (T − S) + (Z − Y ).
b)−−→UX = r
−→ST ⇐⇒ X − U = r (T − S) .
c)−−→UX = r
−→ST + d
−−→Y Z ⇐⇒ X − U = r (T − S) + d (Z − Y ) .
2. Sean P =
µ1
5
¶, Q =
µ2
0
¶, R =
µ0
−1
¶y S =
µ−61
¶cuatro puntos del plano.
a) Ubicar en el plano cartesiano los puntos dados.
b) Hallar las coordenadas de los puntos medios de los lados del cuadrilátero PQRS.
c) Verificar que los puntos medios de los lados del cuadrilátero PQRS son los vérticesde un paralelogramo.

2.4. Ejercicios 71
3. Sean V =
µ−34
¶, W =
µ1
−2
¶y U =
µ4
3
¶vectores de R2 y sea Z = U − 2W + V.
Hallar:
a) La magnitud y la dirección de Z.
b) La descomposición canónica de Z.
c) Todos los escalares a tales que kaV k = 15.d) La distancia entre los vectores V y U.
e) El ángulo entre los vectores W y −2V.f) El ángulo entre los vectores V y U.
g) El vector unitario con dirección opuesta a la del vector V +W.
h) El escalar b tal que el vectorµ3
b
¶sea ortogonal al vector W.
4. Sean P =
µ1
1
¶, Q =
µ3
2
¶, R =
µ4
0
¶puntos del plano.
a) Probar que P,Q y R son tres de los vértices de un cuadrado PQRS.
b) Hallar las coordenadas del vértice S del cuadrado PQRS.
c) Calcular el área del cuadrado PQRS.
5. Dos vértices de un triángulo equilátero son A =
µ−43
¶y el origen.
a) Hallar el tercer vértice (2 soluciones).
b) Hallar el área del triángulo.
6. Sean P =
µ4
3
¶y Q =
µ1
−3
¶puntos del plano. Hallar:
a) El punto R tal que Q es el punto medio del segmento PR.
b) El punto S que divide al segmento PQ en la proporción 2 : 3.
c) El puntoM sobre el segmento de recta PQ cuya distancia a P es 23 de la distanciade P a Q.
7. Sean V = E1 +E2, W = E1 y U = aV + bW con a, b escalares.
a) Ubicar V y W en el plano cartesiano.
b) Probar que si U =µ0
0
¶entonces a = b = 0.
c) Hallar a y b tales que U = E1 + 2E2.
8. Sean U = −3E1 + E2, V =
µ4
0
¶y W = 6E1 − E2. Encontrar el vector X de R2 tal
que 2U − V +X = 7X +W.
9. Se sabe que para todo vector no nulo X de R2 con dirección θ, se tiene que X =
kXkµcos θ
senθ
¶. Usando este hecho hallar el vector 4U − 5W donde U y W son los
vectores mostrados en la siguiente figura.

72 2. Vectores coordenados o algebraicos
10. Sean X, Y y Z vectores de R2 y sean r y s números reales. Probar que:
a) X + Y = Y +X. b) (X + Y ) + Z = X + (Y + Z) .
c) X +O = O +X. d) r (sX) = (rs)X.
e) (r + s)X = rX + sX.
11. Sean U =
µ1
2
¶, V =
µ−32
¶y W =
µ3
2
¶. Calcular:
a) U · V b) U · (V +W ) c) (2U − V ) · (3W )
d) ProyWU e) kUkV ·W f) k(U · V )Wk
12. Sean U, V y W vectores en R2. En cada una de las expresiones siguientes se puedenintroducir paréntesis de una sola manera para obtener una expresión que tenga sen-
tido. Introducir los paréntesis y efectuar las operaciones si U =
µ−13
¶, V =
µ4
−3
¶y W =
µ−2−1
¶.
a) U · VW b) U · V +W c) U/V ·W
13. En cada caso hallar un vector X de R2 tal que X · V = 0 y kXk = kV k .
a) V =
µ1
1
¶b) V =
µ1
−1
¶c) V =
µ2
−3
¶d) V =
µa
b
¶¿Qué característica adicional tiene el paralelogramo cuyos vértices son O,X, V yX + V ?
14. Sean P =
µ3
5
¶, Q =
µ1
3
¶y R =
µm
10
¶puntos tales que el ángulo QPR es recto.
Hallar el valor de m.
15. Para el triángulo de vértices P =µ7
−7
¶, Q =
µ1
−5
¶y R =
µ3
1
¶,
a) Comprobar que el triángulo es rectángulo e isósceles.
b) Calcular las longitudes de las tres alturas.
c) Comprobar que la longitud de la mediana relativa a la hipotenusa es igual a lamitad de la longitud de la hipotenusa.

2.4. Ejercicios 73
16. Un rombo PQRS es tal que P =µ−3−2
¶, R =
µ2
1
¶y Q está sobre el eje y.
a) Determinar los vértices Q y S.
b) Calcular el área de dicho rombo.
17. Para el triángulo de vértices P =µ−24
¶, Q =
µ−51
¶y R =
µ−65
¶,
a) Comprobar que el triángulo es isósceles.
b) Calcular las longitudes de las tres alturas del triángulo.
c) Calcular las longitudes de las tres medianas del triángulo.
d) Hallar el baricentro del triángulo.
18. Hallar un punto P =µx
y
¶equidistante de los puntos Q =
µ0
1
¶, R =
µ1
0
¶y S =
µ4
3
¶.
Además, calcular el radio de la circunferencia que pasa por los puntos Q, R y S.
19. Sean P0 =
µa
b
¶y r un real positivo. Describir, mediante una ecuación en x, y,
el conjunto de todos los puntos P =
µx
y
¶tales que kP − P0k = r, . Interpretar
geométricamente dicho conjunto.
20. Describir, mediante una ecuación en x, y, el conjunto de todos los puntos P =
µx
y
¶que satisfacen las condiciones indicadas en cada literal.
a) P equidista de los puntos M =
µ1
−1
¶y N =
µ−21
¶.
b) La suma de las distancias de P a F1 =µ0
1
¶y a F2 =
µ0
−1
¶es igual a 4.
c) La distancia de P a R =µ−10
¶es el doble de su distancia al punto Q =
µ2
0
¶.
21. Sean X y U puntos del plano que no están en una misma línea recta que pasa por elorigen.
a) Probar que el área A del paralelogramo cuyos vértices son O,X,U y X + U es
A = kUk kX − ProyUXk = kXk kU − ProyXUk
b) ¿Cuántos paralelogramos se pueden construir de tal manera que tres de sus vérticessean los puntos O,X y U ? ¿Qué relación existe entre las áreas de esos paralelo-gramos?
22. Sean X =
µ2
−3
¶y U =
µ−1−5
¶. Calcular el área del triángulo OXU.
23. Demostrar lo siguiente utilizando vectores coordenados:
a) Las diagonales de cualquier rectángulo tienen igual longitud.
b) La suma de los cuadrados de las longitudes de los lados de un paralelogramo esigual a la suma de los cuadrados de las longitudes de sus diagonales.

74 2. Vectores coordenados o algebraicos
c) En todo triángulo rectángulo la longitud de la mediana relativa a la hipotenusa esigual a la mitad de la longitud de la hipotenusa.
d) Si las longitudes de dos medianas de un triángulo son iguales, entonces dichotriángulo es isósceles.
e) Las diagonales de un rombo son perpendiculares.
Sugerencia: En cada caso, dibujar la figura correspondiente con un vértice en elorigen y al menos un lado sobre uno de los ejes coordenados.
24. Sean U1 y U2 vectores de R2 no nulos y ortogonales, y sea W cualquier vector de R2.Probar que:
a) W = ProyU1W + ProyU2W.
b) Si U1 y U2 son unitarios, entonces W = (W · U1)U1 + (W · U2)U2.
25. Sean X =
µ−32
¶y Y =
µ−1t
¶, t > 0. Hallar el valor de t tal que el ángulo entre X
y Y es de 45o.
26. Sea U un vector no nulo de R2. Probar que para cualquier vector X de R2 el vectorX − ProyUX es ortogonal a U, mostrando que X · (X − ProyUX) = 0.
27. Si X =
µ1
2
¶y U =
µ3
4
¶, hallar dos vectores P y Q de R2 tales que X = P +Q con
P paralelo a U y Q ortogonal a U.
28. Probar la desigualdad triangular en R2, empleando la desigualdad de Cauchy-Schwarzy el producto escalar en R2.
29. Sea U un vector no nulo de R2. Probar que para todo vector X de R2 existen únicosvectores P y Q de R2 tales que X = P +Q, P paralelo a U y Q ortogonal a U.

3
La línea recta en el plano
Una vez dotado el plano de un sistema de coordenadas cartesianas xy, las curvas en élpueden ser descritas a partir de ecuaciones. Se entiende por ecuación para una curva C delplano una igualdad que involucra las variables x, y de tal manera que dicha igualdad la
satisfacen los puntosµx
y
¶de la curva C y solamente ellos. Por ejemplo, una ecuación para
la circunferencia de centro en el origen y radio r es
°°°°µxy¶°°°° = r
ya que un puntoµx
y
¶del plano pertenece a esa circunferencia si y sólo si cumple dicha
ecuación . Es claro que la ecuación anterior es equivalente a la ecuación
x2 + y2 = r2
la cual es también, una ecuación para la circunferencia en consideración.
En este capítulo obtendremos distintas ecuaciones para una línea recta en el plano.
3.1 Ecuación vectorial y ecuaciones paramétricas
Una línea recta queda completamente determinada dando dos puntos distintos por dondeella pasa o también dando un punto sobre ella y un vector geométrico no nulo paralelo a larecta. Se entiende que un vector no nulo
−−→AB es paralelo a una recta L si sus extremos A,B
están sobre L o sobre alguna recta paralela a L. Cualquier vector no nulo −−→AB paralelo auna recta se dirá un vector director de dicha recta.
Consideremos una recta L y sean P0 un punto fijo de L y−−→OD un vector director de L.
75

76 3. La línea recta en el plano
Figura 3.1.
Vemos que L está conformada por los puntos X tales que el vector−−→P0X es paralelo al
vector−−→OD (ver figura 3.1), es decir, L está conformada por los puntos X tales que
−−→P0X = t
−−→OD, t ∈ R (3.1)
Ahora bien, como−−→P0X =
−−→OX −−−→OP0 entonces (3.1) es equivalente a
−−→OX −−−→OP0 = t
−−→OD, t ∈ R
que también podemos escribir como−−→OX =
−−→OP0 + t
−−→OD, t ∈ R
condición que podemos expresar de manera simplificada, usando vectores algebraicos, enla forma
X = P0 + tD, t ∈ R.Así, la recta L que pasa por P0 y tiene vector director
−−→OD consiste de todos los puntos
X de la formaX = P0 + tD (3.2)
con t ∈ R, como se ilustra en la figura 3.2 en la cual se muestran los puntos P0, P0 + 12D y
P0 +D correspondientes, respectivamente, a t = 0, t = 12 y t = 1.
Figura 3.2.

3.1. Ecuación vectorial y ecuaciones paramétricas 77
La ecuación (3.2) se dice una ecuación vectorial paramétrica o simplemente unaecuación vectorial para la recta L; la variable t es el parámetro. A cada valor de t enR corresponde un punto de L, el punto X = P0+ tD; a valores distintos de t correspondenpuntos distintos de L y al dar a t todos los valores en R se obtienen todos los puntos de larecta L.
En adelante diremos indistintamente que−−→OD es un vector director de L o que D es un
vector director de L.Nótese que si la recta L pasa por el origen entonces tomando P0 =
µ0
0
¶en (3.2), esta
ecuación se reduce a
X = tD (3.3)
Como dicha recta consta de todos los múltiplos escalares del vector D (ver figura 3.3)nos referiremos a ella como la recta generada por el vector D.
Figura 3.3.
Retornemos a la ecuación (3.2). Si en ella X =
µx
y
¶, P0 =
µx0y0
¶y D =
µd1d2
¶se
obtiene µx
y
¶=
µx0y0
¶+ t
µd1d2
¶ecuación vectorial que equivale al par de ecuaciones escalares½
x = x0 + td1y = y0 + td2
(3.4)
las cuales son llamadas ecuaciones escalares paramétricas o simplemente ecuaciones
paramétricas de la recta que pasa porµx0y0
¶y que tiene vector director
µd1d2
¶.
Ejemplo 3.1Sea L la recta que pasa por el punto P0 =
µ2
3
¶y tiene vector director D =
µ3
1
¶. (Figura
3.4).a) Halle una ecuación vectorial y ecuaciones paramétricas para L.b) Halle un punto de la recta L distinto de P0.
c) Use las ecuaciones paramétricas para determinar si el puntoµ3
10/3
¶es de L.

78 3. La línea recta en el plano
Figura 3.4.
Solución:a) Una ecuación vectorial para L es X = P0 + tD, es decir,µ
x
y
¶=
µ2
3
¶+ t
µ3
1
¶y unas ecuaciones paramétricas son ½
x = 2 + 3ty = 3 + t
b) Dando a t un valor distinto de 0 en la ecuación vectorial hallada en a) se obtiene unpunto de la recta distinto de P0. Por ejemplo, si t = 1 se obtiene el puntoµ
x
y
¶=
µ2
3
¶+
µ3
1
¶=
µ5
4
¶.
c) El puntoµ3
10/3
¶es de L si y sólo si existe t ∈ R tal que
(3 = 2 + 3t10
3= 3 + t
es decir
(1 = 3t1
3= t
Como se ve, las ecuaciones anteriores se satisfacen con t =1
3, así que
µ3
10/3
¶es un punto
de L. ¥
Ejemplo 3.2a) Demuestre que una ecuación vectorial para la recta L que pasa por dos puntos distintosP y Q es
X = P + t(Q− P ) (3.5)
b) Halle una ecuación vectorial y ecuaciones paramétricas para la recta que pasa por los
puntosµ−13
¶yµ2
−1
¶.
Solución:a) Consideremos la figura siguiente:

3.2. Ángulo de inclinación y pendiente 79
Figura 3.5.
Como P y Q son puntos de L y P 6= Q entonces el vector−−→PQ es un vector director de
L; ahora, como −−→PQ = −−→OD con D = Q− P, entonces D es un vector director para L y portanto una ecuación vectorial para L es
X = P + tD
es decir,X = P + t(Q− P ).
b) De acuerdo con lo hecho en a) y tomando P =
µ−13
¶y Q =
µ2
−1
¶se tiene que
una ecuación vectorial para la recta que pasa por los puntosµ−13
¶yµ2
−1
¶es
X =
µ−13
¶+ t
µµ2
−1
¶−µ−13
¶¶es decir,
X =
µ−13
¶+ t
µ3
−4
¶.
Unas ecuaciones paramétricas para dicha recta son½x = −1 + 3ty = 3− 4t . ¥
Observe que la ecuación (3.5) con 0 ≤ t ≤ 1 describe el segmento de recta PQ. Se tieneasí que:
Dados dos puntos P y Q,
PQ =©X ∈ R2 Á X = P + t(Q− P ), 0 ≤ t ≤ 1
ª
3.2 Ángulo de inclinación y pendiente
Consideremos una recta L no paralela al eje x. En tal caso L corta al eje x formándose cua-tro ángulos con vértice en el punto de corte; entre ellos llamaremos ángulo de inclinación

80 3. La línea recta en el plano
de L al ángulo α que se forma partiendo del eje x y avanzando en sentido antihorario hastaencontrar por primera vez a L. (Ver figura 3.6).
Figura 3.6.
Si L es una recta horizontal diremos que su ángulo de inclinación es de 0o (o 0 radianes).Nótese que el ángulo de inclinación α de cualquier recta es tal que 0o ≤ α < 180o (o
0 ≤ α < π si α se mide en radianes).Es claro que una recta en el plano queda completamente determinada al dar su ángulo
de inclinación y un punto por donde ella pasa, y que dos rectas del plano son paralelas siy sólo si tienen el mismo ángulo de inclinación.
Ahora bien, en lugar de trabajar directamente con el ángulo de inclinación α resultamás conveniente hacerlo con el número
m = tanα
el cual es llamado pendiente de la recta correspondiente. Obsérvese que la pendiente quedadefinida para todas las rectas del plano, exceptuando únicamente las verticales (para lascuales el ángulo de inclinación es de 90o).
Obsérvese, además, que si dos rectas no verticales son paralelas entonces ellas tienenla misma pendiente (pues tienen el mismo ángulo de inclinación). El recíproco de estaafirmación también es cierto. Veámoslo:
Digamos que L1, L2 son dos rectas no verticales con ángulos de inclinación α1, α2 ypendientes m1,m2 respectivamente.
Si m1 = m2 entonces tanα1 = tanα2 y como 0o ≤ α1 < 180o y 0o ≤ α2 < 180o
entonces tiene que ser α1 = α2, así L1 y L2 tienen el mismo ángulo de inclinación y enconsecuencia son paralelas. Se tiene así que:
Dos rectas no verticales son paralelas si y sólo si tienen la misma pendiente.
La pendiente m, al igual que el ángulo de inclinación α, es una medida de la inclinaciónde la recta y se tiene que
m > 0 si y sólo si 0o < α < 90o
m < 0 si y sólo si 90o < α < 180o
m = 0 si y sólo si α = 0o

3.2. Ángulo de inclinación y pendiente 81
como se ilustra en la figura 3.7
Figura 3.7.
Ejemplo 3.3Halle la pendiente de la recta L que pasa por los puntos P1 =
µ1
2
¶y P2 =
µ4
3
¶.
Solución:Consideremos la figura 3.8
Figura 3.8.
Para hallar la pendiente m de L podemos apoyarnos en el triángulo rectángulo P1QP2en el cual (como se muestra en la figura) el ángulo QP1P2 coincide con α, por ser ánguloscorrespondientes. Así, de dicho triángulo se tiene que
m = tanα =longitud de QP2longitud de P1Q
=3− 24− 1 =
1
3. ¥
En el ejemplo anterior se calculó la pendiente m a partir de dos puntos dados sobre
la recta. Ahora, razonando como en dicho ejemplo, se puede probar que si P1 =µx1y1
¶y
P2 =
µx2y2
¶son dos puntos distintos cualesquiera de una recta no vertical L entonces la
pendiente m de dicha recta, como se ilustra en la figura 3.9, es
m =y2 − y1x2 − x1
(3.6)

82 3. La línea recta en el plano
Figura 3.9.
Más aún, no importa cuál punto denotemos P1 y cuál P2, pues
y2 − y1x2 − x1
=−(y1 − y2)
− (x1 − x2)=
y1 − y2x1 − x2
.
Ahora, si en lugar de dos puntos conocemos un vector director D =
µd1d2
¶para una
recta no vertical L, entonces la pendiente m de L es m =d2d1, como se ilustra en la figura
3.10.
Figura 3.10.
Por otra parte, si m es la pendiente de una recta L entonces D =
µ1
m
¶es un vector
director de L, ya que D =
µ1
m
¶es un vector director de la recta L0 que pasa por los puntosµ
0
0
¶yµ1
m
¶y dicha recta L0 es paralela a L porque la pendiente de L0 también es m. (Ver
figura 3.11).

3.3. Ecuaciones escalares no paramétricas 83
Figura 3.11.
3.3 Ecuaciones escalares no paramétricas
Sea L una recta paralela al eje x que pasa por el punto P0 =µx0y0
¶. Es claro que un puntoµ
x
y
¶de R2 pertenece L si y sólo si y = y0; por tanto, una ecuación para L es
y = y0 (3.7)
De manera similar, si L es paralela al eje y y pasa por el punto P0 =µx0y0
¶, entonces
una ecuación para L esx = x0
En la figura 3.12 se ilustran estos dos casos
Figura 3.12.
Supongamos ahora que L es una recta que no es paralela al eje x ni al eje y. Digamosque un punto de esta recta es P0 =
µx0y0
¶y que un vector director es D =
µd1d2
¶. Como
sabemos, unas ecuaciones paramétricas para L son
x = x0 + td1y = y0 + td2
Como d1 6= 0 y d2 6= 0 (pues L no es vertical ni horizontal) despejando el parámetro t encada una de las ecuaciones anteriores e igualando se obtiene la ecuación
x− x0d1
=y − y0d2
(3.8)

84 3. La línea recta en el plano
Así, todo puntoµx
y
¶de L satisface la ecuación (3.8); recíprocamente, si un punto
µx
y
¶satisface la ecuación (3.8) entonces él satisface las ecuaciones paramétricas tomando
t =x− x0d1
=y − y0d2
Por tanto (3.8) es una ecuación para la recta L, de la cual se dice que es una ecuaciónen forma simétrica. Ahora, es claro que dicha ecuación es equivalente a la ecuación
y − y0 =d2d1(x− x0)
es decir, a la ecuación
y − y0 = m(x− x0) (3.9)
donde m = d2/d1 es la pendiente de L, como ya se sabe. De la ecuación (3.9) se dice quees una ecuación para la recta L en la forma punto-pendiente.
Nótese que la ecuación (3.7) para una recta horizontal se puede obtener de la ecuación(3.9) con m = 0.
Si en la ecuación (3.9) se escoge el punto P0 como el puntoµ0
b
¶donde la recta L corta
al eje y, entonces (3.9) se convierte en
y − b = m(x− 0)
o, equivalentemente, en
y = mx+ b (3.10)
El número b, el cual es la ordenada del punto donde la recta L corta al eje y, es llamadointercepto de L con el eje y; por ello, de la ecuación (3.10) se dice que es una ecuaciónpara la recta L en la forma pendiente-intercepto.
Como resumen de lo anterior tenemos:

3.3. Ecuaciones escalares no paramétricas 85
Sea L una recta en el plano que pasa por el punto P0 =µx0y0
¶.
• Si L es horizontal, una ecuación para L es
y = y0
• Si L es vertical, una ecuación para L es
x = x0
• Si L no es horizontal ni vertical y un vector director de L es D =
µd1d2
¶,
una ecuación para L esx− x0d1
=y − y0d2
• Si L tiene pendiente m, una ecuación para L es
y − y0 = m(x− x0)
• Si L tiene pendiente m y corta al eje y en el puntoµ0
b
¶, una ecuación para
L esy = mx+ b
Ejemplo 3.4a) Halle una ecuación en la forma pendiente-intercepto para la recta L1 que pasa por el
punto P0 =µ−32
¶y tiene ángulo de inclinación de 30o.
b) Halle una ecuación para la recta vertical L2 que pasa por el punto P0 =µ−32
¶.
c) Halle una ecuación para la recta horizontal L3 que pasa por el punto P0 =µ−32
¶.
d) Halle una ecuación en la forma punto-pendiente para la recta L4 que pasa por el puntoQ0 =
µ2
−1
¶y es paralela a la recta L1 descrita en el literal a).
e) Halle unas ecuaciones paramétricas para la recta L4 descrita en el literal d).
Solución:a) Como el ángulo de inclinación de L1 es α = 30o entonces la pendiente de L1 es
m = tan 30o = 1/√3. Por tanto, una ecuación para L1 en la forma punto-pendiente es
y − 2 = 1√3(x+ 3)
Ahora, de la ecuación anterior podemos obtener una ecuación en la forma pendiente-intercepto para L1, despejando la variable y así:
y =1√3x+
µ3√3+ 2
¶

86 3. La línea recta en el plano
es decir,
y =1√3x+
³√3 + 2
´la cual es una ecuación para L1 en la forma pendiente-intercepto; en dicha ecuación seobserva que el intercepto con el eje y de la recta es
√3 + 2.
b) Una ecuación para la recta vertical L2 que pasa por P0 =µ−32
¶es x = −3.
c) Una ecuación para la recta horizontal L3 que pasa por P0 =µ−32
¶es y = 2.
d) Como L4 es paralela a L1 y la pendiente de L1 es m = 1/√3 entonces la pendiente
de L4 también es m = 1/√3. Luego, una ecuación en la forma punto-pendiente para la
recta L4 esy − (−1) = 1√
3(x− 2)
es decir,
y + 1 =1√3(x− 2)
e) Como L4 tiene pendiente m = 1/√3 entonces un vector director para L4 es el
vector D =
µ1
1/√3
¶. Ahora bien, otro vector director para L4, más cómodo para su
manejo algebraico, es D0 =√3D =
µ√3
1
¶. Usando este vector D0 y el punto
µ2
−1
¶,
tenemos que unas ecuaciones paramétricas para L4 son½x = 2 +
√3t
y = −1 + t¥
Hemos visto que toda recta en el plano tiene una ecuación de una de las formas si-guientes:
y − y0 = m (x− x0) , y = mx+ d, x = x0 (3.11)
Ahora, como cada una de estas ecuaciones puede llevarse a la forma
ax+ by = c (3.12)
con a, b, c constantes, a 6= 0 o b 6= 0, podemos afirmar que toda recta en el plano tiene unaecuación de la forma (3.12).
Por otra parte, toda ecuación de la forma (3.12) es equivalente a alguna ecuación deltipo de las que aparecen en (3.11). En efecto, si en (3.12) se tiene b 6= 0, despejando lavariable y de ella se obtiene la ecuación equivalente
y = −abx+
c
b
la cual es del tipo y = mx+ d y por tanto corresponde a la recta con pendiente m = −a/by que corta al eje y en el punto
µ0
c/b
¶. Si b = 0, entonces (3.12) se reduce a la ecuación
ax = c con a 6= 0, la cual es equivalente a la ecuación
x =c
a

3.3. Ecuaciones escalares no paramétricas 87
que es del tipo x = x0 y por tanto corresponde a la recta vertical que corta al eje x en el
puntoµc/a
0
¶.
Resumimos la discusión anterior en el siguiente resultado:
Toda recta en el plano tiene una ecuación de la formaax+ by = c
con a, b, c constantes, a 6= 0 o b 6= 0, y toda ecuación de esta formacorresponde a una recta en el plano.
De una ecuación como (3.12) para una recta, se dice que está en forma general. Nóteseque si en la ecuación ax+ by = c se tiene c = 0 entonces la recta correspondiente pasa porel origen ya que a(0)+ b(0) = 0. Recíprocamente, si la recta con ecuación ax+ by = c pasapor el origen entonces tiene que ser c = 0 (pues c = a (0) + b (0) = 0). Así que,
Toda recta que pasa por el origen tiene una ecuación de la formaax+ by = 0
con a, b constantes, a 6= 0 o b 6= 0, y toda ecuación de esta formacorresponde a una recta que pasa por el origen.
Ejemplo 3.5Dada la recta L1 con ecuación
2x+ 3y = 6 (3.13)
obtenga una ecuación en forma general para la recta L2 que es paralela a L1 y pasa por elpunto
µ1
4
¶.
Solución:Empecemos determinando la pendiente de L1, para lo cual basta despejar la variable
y de (3.13). Al hacerlo se obtiene
y = −23x+ 2.
Luego, la pendiente de L1 es m = −2/3. Ahora, como L2 es paralela a L1 entonces lapendiente de L2 también es m = −2/3 y como L2 pasa por
µ1
4
¶entonces (usando la forma
punto-pendiente) una ecuación para L2 es
y − 4 = −23(x− 1).
Llevamos ahora esta ecuación a la forma general:
3(y − 4) = −2(x− 1)3y − 12 = −2x+ 22x+ 3y = 14 (3.14)
Así, una ecuación en forma general para L2 es la ecuación (3.14). ¥

88 3. La línea recta en el plano
3.4 Ecuación en forma normal
Una recta en el plano también queda completamente determinada dando un punto pordonde ella pasa y un vector geométrico no nulo perpendicular a la recta. Se entiende queun vector no nulo −→n es perpendicular a una recta L si −→n es perpendicular a algún vectordirector
−→d de L. Todo vector no nulo −→n perpendicular a una recta L, se dirá un vector
normal a L. Si −→n =−−→ON , en lugar de decir que −→n es un vector normal a L también
diremos que N es un vector normal a L.Consideremos una recta L y sean P0 un punto fijo de L y
−−→ON un vector normal a L,
como se ilustra en la figura 3.13.
Figura 3.13.
Empleando el producto escalar podemos obtener para L una ecuación vectorial muysimple, distinta a la ecuación vectorial (3.2). En efecto, un punto X del plano está en L siy sólo si el vector
−−→P0X es perpendicular al vector
−−→ON (ver figura 3.13), es decir, si y sólo
si −−→P0X ·−−→ON = 0 (3.15)
ecuación que podemos expresar de manera simplificada, usando vectores algebraicos, como
(X − P0) ·N = 0
o bien comoX ·N = P0 ·N (3.16)
Así, (3.16) es una ecuación (vectorial no paramétrica) para L, de la cual se dice que esuna ecuación en forma normal.
Observe que si X =
µx
y
¶y N =
µa
b
¶, al sustituir en la ecuación (3.16) y realizar los
productos escalares indicados en ella, tal ecuación toma la forma
ax+ by = c (3.17)
donde c = P0 ·N .Por otra parte, si (3.17) es una ecuación para una recta L entonces escogiendo un punto
P0 de L, dicha ecuación puede escribirse en la forma (3.16) con N =
µa
b
¶, o equivalen-
temente, en la forma (3.15), de lo cual se sigue que N =
µa
b
¶es un vector norma a L.
Algo más, si N =
µa
b
¶es un vector normal a L, todo vector no nulo ortogonal a él es un

3.4. Ecuación en forma normal 89
vector director de L; en particular, los vectores D1 =
µ−ba
¶y D2 =
µb
−a
¶son vectores
directores de L pues ambos son ortogonales a N.
Se tiene así lo siguiente:
• Si N =
µa
b
¶es un vector normal a una recta L entonces una ecuación
para L esax+ by = c
para cierta constante c.
• Si ax+ by = c es una ecuación para una recta L entonces N =
µa
b
¶es un
vector normal a L y D1 =
µ−ba
¶y D2 =
µb
−a
¶son vectores directores de L.
(Vea figura 3.14).
Figura 3.14.
Ejemplo 3.6Considere la recta L que pasa por P0 =
µ1
1
¶y que tiene vector director D =
µ−23
¶. Halle
una ecuación en forma normal para L y obtenga a partir de ella una ecuación en formageneral para L.
Solución:
Un vector normal a L es N =
µ3
2
¶pues N · D = 0, y como L pasa por el punto
P0 =
µ1
1
¶entonces una ecuación en forma normal para L es
µx
y
¶·µ3
2
¶=
µ1
1
¶·µ3
2
¶Realizando los productos escalares indicados, se obtiene
3x+ 2y = 5
la cual es una ecuación para L en forma general. ¥

90 3. La línea recta en el plano
3.5 Rectas perpendiculares
Ahora nos referiremos a condiciones bajo las cuales dos rectas del plano son perpendicu-lares.
Sean L1,L2 dos rectas dadas. En primer lugar estas rectas son perpendiculares (lo cualdenotamos L1 ⊥ L2) si y sólo si un vector director D1 de L1 es ortogonal a un vectordirector D2 de L2.
Ahora obtendremos un criterio de perpendicularidad en términos de las pendientes,para el caso en que ninguna de las rectas es vertical.
Supongamos entonces que ninguna de las rectas L1,L2 es vertical y que ellas tienenrespectivamente pendientes m1 y m2; recordamos que en tal caso los vectores D1 =
µ1
m1
¶y D2 =
µ1
m2
¶son vectores directores de L1 y L2 respectivamente. Se tiene entonces que:
L1 ⊥ L2 ⇔ D1 y D2 son ortogonales
⇔ D1 ·D2 = 0
⇔ 1 +m1m2 = 0
⇔ m1m2 = −1
Así hemos probado que:
Si las rectas L1,L2 tienen pendientes m1,m2 respectivamente entonces
L1 ⊥ L2 si y sólo si m1m2 = −1.
Ejemplo 3.7Halle una ecuación para la recta mediatriz del segmento de recta PQ donde P =
µ3
−7
¶y
Q =
µ−53
¶.
Solución:La mediatriz del segmento PQ es la recta L1 que pasa por el punto medio de PQ y es
perpendicular a la recta L2 determinada por P y Q.
El punto medio del segmento PQ es M = 12(P +Q) =
µ−1−2
¶y la pendiente de L2 es
m2 =3− (−7)−5− 3 =
10
−8 = −5
4.
así, la recta L1 (que es perpendicular a L2) tiene pendiente m1 = −1/m2 = 4/5; y como
L1 pasa por M =
µ−1−2
¶entonces una ecuación para la mediatriz L1 es
y − (−2) = 4
5(x− (−1))
es decir,
y + 2 =4
5(x+ 1). ¥

3.6. Ángulo entre rectas 91
3.6 Ángulo entre rectas
Cuando dos rectas L1,L2 se cortan se forman cuatro ángulos con vértice en el punto decorte. Dos cualesquiera de esos ángulos o son opuestos por el vértice, y por tanto soncongruentes, o son adyacentes, y por tanto son suplementarios. Llamaremos ángulo deL1 a L2 al ángulo medido en sentido antihorario desde L1 hasta encontrar por primera vezL2. En la figura 3.15 dicho ángulo es θ y 180o − θ es el ángulo de L2 a L1.
Figura 3.15.
A continuación obtendremos una fórmula para el ángulo de L1 a L2 en términos de suspendientes.
Consideremos la figura 3.16 en la cual θ es el ángulo de L1 a L2, φ el de L2 a L1 yθ1, θ2 los ángulos de inclinación de L1 y L2, respectivamente.
Figura 3.16.
De la figura se deduce que θ2 = θ1+ θ, pues θ2 es un ángulo exterior al triángulo ABPy por ello θ2 es la suma de los ángulos interiores no adyacentes θ1 y θ. Así que
θ = θ2 − θ1 (3.18)
Si ninguno de los ángulos θ, θ1 y θ2 es recto entonces
tan θ = tan (θ2 − θ1) =tan θ2 − tan θ11 + tan θ1 tan θ2
Ahora, si m1 y m2 son las pendientes de L1 y L2 respectivamente entonces tan θ1 = m1
y tan θ2 = m2 por lo tanto
tan θ =m2 −m1
1 +m1m2(3.19)

92 3. La línea recta en el plano
igualdad que determina de manera única al ángulo θ, pues 0o ≤ θ < 180o. Nótese el ordende las pendientes en el numerador del lado derecho en (3.19).
Se advierte al lector que la igualdad (3.19) se dedujo de la figura 3.16, y que para unafigura diferente quizás no se cumpla la igualdad (3.18), pero para θ 6= 90o siempre se tendráque
tan θ = tan(θ2 − θ1)
como podrá comprobar el lector considerando otras figuras.En cuanto al ángulo φ tenemos que φ = 180o − θ y por tanto
tanφ = tan (180o − θ) = − tan θ = m1 −m2
1 +m1m2
de manera que la única diferencia entre las fórmulas para tanφ y tan θ está en el orden enque aparecen las pendientes en el numerador, como era de esperarse.
Nótese que la fórmula (3.19) no es aplicable cuando alguna de de las rectas es verticalo cuando las rectas son perpendiculares. Ahora, si por ejemplo L1 es vertical, el ángulo deL1 a L2 puede hallarse fácilmente a partir del ángulo de inclinación de L2.
Ejemplo 3.8Halle el ángulo de la recta L1 a la recta L2 sabiendo que L1 y L2 tienen, respectivamente,ecuaciones
2x+ 3y = 5 y 5x+ y = −3.
Solución:Las pendientes de L1 y L2 son respectivamente m1 = −2/3 y m2 = −5. Aplicando la
fórmula (3.19) tenemos que el ángulo θ de L1 a L2 en sentido antihorario es tal que
tan θ =m2 −m1
1 +m1m2=−5−
¡−23¢
1 + (−5)¡−23¢ = −13313
3
= −1.
Ahora, como tan θ < 0 entonces 90o < θ < 180o y por tanto
θ = tan−1 (−1) + 180o = −45o + 180o = 135o. ¥
3.7 Distancia de un punto a una recta
Consideremos una recta L con ecuación ax+ by = c y un punto X0 =
µx0y0
¶del plano. Se
desea hallar una expresión para la distancia d del punto X0 a L (Figura 3.17).
Figura 3.17.

3.7. Distancia de un punto a una recta 93
Una manera de obtener una tal expresión para d, empleando vectores, es la siguiente:
elijamos un punto cualquiera P =
µe
f
¶de L y consideremos el vector −−→PX0 y también el
vector N =
µa
b
¶, el cual es normal a la recta L. (Ver figura 3.17).
Es claro que la distancia de X0 a L es la magnitud del vector Proy−−→ON
−−→PX0, así que
d =°°°Proy−−→
ON
−−→PX0
°°°= kProy
N (X0 − P )k
=
°°°°N · (X0 − P )
kNk2N
°°°°=
|N ·X0 −N · P |kNk .
Ahora, N · X0 = ax0 + by0 y N · P = ae + bf, y como P es un punto de L entoncesae+ bf = c, luego N · P = c y por tanto
d =|ax0 + by0 − c|√
a2 + b2.
Hemos probado así que:
La distancia d del punto X0 =
µx0y0
¶a la recta L con ecuación
ax+ by = c, es
d =|ax0 + by0 − c|√
a2 + b2.
(3.20)
Ejemplo 3.9Considere la recta L con ecuación
µx
y
¶=
µ−13
¶+ t
µ2
−4
¶y el punto X0 =
µ−1/25
¶.
a) Halle la distancia d de X0 a L.b) Muestre que la recta L0 con ecuación 10x+ 5y = 7 es paralela a L y encuentre la
distancia d0 entre estas dos rectas.
Solución:a) Empecemos por hallar una ecuación en forma general para la recta L. Como D =µ2
−4
¶es un vector director de L entonces N =
µ4
2
¶es un vector normal a esta recta y así
una ecuación en forma general para L es 4x + 2y = c en la cual sólo resta determinar el
valor de la constante c. Ahora, como un punto de L esµ−13
¶entonces 4 (−1) + 2 (3) = c
y así c = 2; luego una ecuación para L es 4x+ 2y = 2, la cual es equivalente a 2x+ y = 1.Según (3.20) la distancia de X0 a L es
d =
¯2¡−12¢+ 1 (5)− 1
¯√22 + 12
=3√5.
b) De las ecuaciones para las rectas L y L0 vemos que para cada una de ellas lapendiente es −2; luego, L y L0 tienen la misma pendiente y por tanto son paralelas. Ahora,

94 3. La línea recta en el plano
para hallar la distancia d0 entre L y L0 basta elegir un punto en L0 y luego calcular ladistancia de él a L. Como un punto de L0 es
µ0
7/5
¶entonces
d0 =
¯2 (0) + 1
¡75
¢− 1¯
√22 + 12
=2
5√5. ¥
3.8 Ecuaciones lineales, combinaciones lineales, dependenciae independencia lineal
Hemos visto que toda ecuación de la forma
ax+ by = c
con a 6= 0 o b 6= 0 (a, b, c constantes) es la ecuación de una línea recta en el plano cartesianoxy. Por ello las ecuaciones de la forma
ax+ by = c
se denominan ecuaciones lineales (en las variables x, y), y también por ello una expresióndel tipo
ax+ by
se dice una expresión lineal en las variables x, y.Es más, si −→u y −→v son vectores geométricos del plano, todo vector de la forma
a−→u + b−→v
con a y b escalares, se dice una combinación lineal de los vectores −→u y −→v . De manerasimilar, si X y Y son vectores de R2, todo vector de la forma
aX + bY
con a y b escalares, se dice una combinación lineal de los vectores X y Y.
Ejemplo 3.10a) ¿Es el vector
µ1
−1
¶una combinación lineal de los vectores
µ2
−1
¶yµ1/2
3
¶?
b) ¿Es el vectorµ7
8
¶una combinación lineal de los vectores
µ1
2
¶yµ3
6
¶?
Solución:a) Veamos si existen escalares a y b tales que
a
µ2
−1
¶+ b
µ1/2
3
¶=
µ1
−1
¶es decir, tales que
2a+1
2b = 1
−a+ 3b = −1.

3.8. Ecuaciones lineales, combinaciones lineales, dependencia e independencia lineal 95
Despejando a en la segunda ecuación y reemplazando en la primera se obtiene b = −2/13;sustituyendo este valor de b en la segunda ecuación se obtiene a = 7/13. Por lo tanto, el
vectorµ1
−1
¶sí es combinación lineal de los vectores dados:
µ1
−1
¶=7
13
µ2
−1
¶− 2
13
µ1/2
3
¶. ¥
b) Veamos si existen escalares a y b tales que
a
µ1
2
¶+ b
µ3
6
¶=
µ7
8
¶
es decir, tales que
a+ 3b = 7
2a+ 6b = 8 (3.21)
Despejando a en la primera ecuación y reemplazando en la segunda se obtiene que
14 = 8. Luego, no existen escalares a, b que satisfagan (3.21), es decir, el vectorµ7
8
¶no es
una combinación lineal de los vectores dados. ¥
Sea L una recta que pasa por el origen y por un punto D, con D 6= O. Recordamosque para X ∈ R2 se tiene que X ∈ L si y solamente si X es múltiplo escalar de D. Sesigue de lo anterior que dos vectores dados de R2 están sobre una misma línea recta quepasa por el origen si y sólo si alguno de los dos vectores es múltiplo escalar del otro. Porello, dos vectores X,Y de R2 se dicen linealmente dependientes (L.D.) si alguno de losdos es múltiplo escalar del otro; si esto último no se da, los vectores se dicen linealmenteindependientes (L.I.). De igual forma, dos vectores geométricos −→u y −→v se dicen lineal-mente dependientes (L.D.) si alguno de los dos es múltiplo escalar del otro, es decir, sison paralelos; en caso contrario los vectores se dicen linealmente independientes (L.I.).
Ejemplo 3.11
Comoµ4
2
¶= 2
µ2
1
¶entonces los vectores
µ4
2
¶yµ2
1
¶son linealmente dependientes (están
sobre una misma línea recta que pasa por el origen).
Por otra parte, los vectoresµ4
2
¶yµ2
3
¶son linealmente independientes (no están sobre
una misma línea recta que pasa por el origen) pues no existe t ∈ R tal queµ4
2
¶= t
µ2
3
¶.
En la figura 3.18 se aprecia lo anterior. ¥

96 3. La línea recta en el plano
Figura 3.18.
3.9 Ejercicios
1. Encontrar una ecuación vectorial para la recta L descrita en cada literal:
a) L pasa por el origen y tiene vector director D =
µ−13
¶.
b) L pasa por los puntos P =µ2
−3
¶y Q =
µ−14
¶.
c) L contiene el punto P0 =µ3
2
¶y es paralela al vector
−−→OD con D =
µ−51
¶.
2. Probar que las ecuaciones vectorialesµx
y
¶=
µ2
5
¶+ t1
µ−43
¶, t1 ∈ R y
µx
y
¶=
µ6
2
¶+ t2
µ8
−6
¶, t2 ∈ R.
son ecuaciones de una misma línea recta.
3. Para cada literal, hallar una ecuación en forma general para la recta que satisface lascondiciones dadas.
a) Tiene pendiente 4 y pasa por el puntoµ−14
¶.
b) Tiene pendiente −2 y corta el eje x en el puntoµ−2/30
¶.
c) Pasa por el puntoµ−35
¶y es paralela al eje y.
d) Pasa por los puntosµ−13
¶yµ4
−5
¶.
e) Intersecta al eje y en el puntoµ0
2
¶y es perpendicular a la recta con ecuación
y = −23x+ 5.
f) Pasa porµ1
3
¶y es paralela a la recta que contiene los puntos
µ−35
¶yµ1
−2
¶.
4. Para cada literal, hallar una ecuación en la forma pendiente-intercepto para la rectaque pasa por el punto P y es paralela a la recta con ecuación dada.

3.9. Ejercicios 97
a)x− 33
=y − 54
, P =
µ−10
¶b) 2x− y − 14 = 0, P =
µ−11
¶c) y = 7, P =
µ−20
¶d)
½x = 1 + ty = 1− t
, P =
µ2
5
¶5. Para cada literal, hallar una ecuación vectorial de la recta que pasa por el punto Py es perpendicular a la recta que tiene la ecuación dada.
a) P =
µ3
4
¶,x
7+
y
7= 1 b) P =
µ−32
¶, 2x− 5y = 4
c) P =
µ−10
¶, x = −5 d) P =
µ0
0
¶, y = 3
e) P =
µ−13
¶, y = 1
3x+ 5
6. Sea L la recta que corta al eje x en P =
µa
0
¶y al eje y en Q =
µ0
b
¶. Probar que si
a 6= 0 y b 6= 0, una ecuación para L es
x
a+
y
b= 1
7. Sean a, b, c y d números reales. Probar que:
a) Las rectas con ecuaciones ax+ by = c y ax+ by = d son paralelas.
b) Las rectas con ecuaciones ax+ by = c y bx− ay = d son perpendiculares.
8. Para cada literal, hallar todos los valores de k para los cuales se satisface la condiciónindicada.
a) Las ecuaciones 3x+ 6ky = 7 y 9kx+ 8y − 15 = 0 representan rectas paralelas.b) Las ecuaciones 3kx+8y−5 = 0 y 6y−4kx = −1 representan rectas perpendiculares.
9. Sea k un número real cualquiera. Hallar una ecuación en forma general para la recta
que pasa por el punto P =µ−17
¶, tiene vector director D =
µ5
k
¶y es perpendicular
a la recta que pasa por los puntosµk
3
¶yµ−62
¶.
10. Determinar el ángulo de L1 a L2 para cada par de rectas dadas.a) L1 :
√3x− y = 5; L2 : x−
√3y = −3
b) L1 : x− y = −1; L2 :√3x− y = 2
c) L1 :½
x = −1− ty = t
, t ∈ R; L2 : x− y = 0
d) L1 :x
2=
y − 14; L2 : x− 2 =
y
4
11. Determinar los valores reales de k y h tales que 3x+ ky+2 = 0 y 5x− y+h = 0 sonecuaciones de la misma recta.

98 3. La línea recta en el plano
12. Estudiar la posición relativa (paralelas, perpendiculares, se cortan) de cada par derectas y si se cortan, hallar el punto de intersección de ellas.
a)
½L1 : 2x− y + 1 = 0L2 : 5x− 3y + 2 = 0
b)
½L1 : y = 2x+ 1L2 : −4x+ 2y + 5 = 0
c)
⎧⎪⎨⎪⎩L1 :
µx
y
¶=
µ1
1
¶+ t
µ−21
¶L2 : x− 2 =
y + 3
2
, t ∈ R.
13. Considere la recta L con ecuación 2y − 3x = 4 y el punto P =µ1
−3
¶.
a) Encontrar unas ecuaciones paramétricas de la recta L1 que pasa por P y es per-pendicular a L. Dibujar L y L1.b) Hallar la distancia del punto P a la recta L.
14. a) Probar que el conjunto de puntos del plano equidistantes de dos puntos dados
P =
µa1b1
¶y Q =
µa2b2
¶es la mediatriz del segmento PQ.
b) Hallar una ecuación en forma general para la mediatriz del segmento PQ con
P =
µ−13
¶y Q =
µ−57
¶.
15. Sea L1 la recta que pasa por el punto P =µ1
1
¶y es paralela al vector D1 =
µ1
2
¶y
sea L2 la recta que pasa por el punto Q =
µ2
1
¶y es paralela al vector D2 =
µ3
8
¶.
Hallar el punto de intersección de L1 y L2.
16. Para cada literal, hallar una ecuación para la bisectriz del ángulo agudo que formanlas rectas con ecuaciones dadas.
a) x−√3y = 5, x = 2 b) y =
3
4x, y = 2
17. Para el triángulo de la figura
a) Encontrar el baricentro (punto de intersección de las medianas).
b) Hallar el circuncentro (punto de intersección de las mediatrices).

3.9. Ejercicios 99
c) Hallar el ortocentro (punto de intersección de las rectas que contienen las alturas).
d) Comprobar que los tres puntos hallados en a), b) y c) son colineales.
18. Sean P =
µ5
8
¶, Q =
µ−110
¶y L la recta con ecuación x+ 2y − 7 = 0.
a) Determinar el punto R de la recta L tal que el triángulo PQR es isósceles.
b) Hallar la longitud de la altura del triángulo PQR relativa al lado PQ.
c) Calcular el área del triángulo PQR.
19. Determinar si los puntos dados en cada caso son colineales.
a) P =
µ1
−4
¶, R =
µ2
6
¶, S =
µ−32
¶b) P =
µ1
−3
¶, R =
µ−14
¶, S =
µ−311
¶
20. Probar que los puntos P =
µ−61
¶, Q =
µ−46
¶, R =
µ4
−3
¶y S =
µ6
2
¶son los
vértices de un rectángulo.
21. Hallar un punto P del eje x tal que la recta que pasa por P y por Q =
µ−34
¶es
perpendicular a la recta que pasa por P y por R =µ1
1
¶.
22. Si L es la recta con ecuación 5x − y = 1, encontrar las ecuaciones de las rectasperpendiculares a L que forman con los ejes coordenados un triángulo de área iguala 5 unidades cuadradas. (Dos soluciones).
23. La gráfica de una ecuación que relaciona la temperatura en grados centígrados conla temperatura en grados fahrenheit es una recta. El agua se congela a 0oC y a 32oFy el agua hierve a 100oC y a 212oF.
a) Si F grados fahrenheit corresponden a C grados centígrados, escribir una ecuaciónque relacione F con C.
b) Dibujar la gráfica de la ecuación del literal a).
c) ¿Cuál es la temperatura en grados fahrenheit que corresponde a 20 grados centí-grados?
d) ¿Cuál es la temperatura en grados centígrados que corresponde a 86 grados fahren-heit?
e) ¿Existe alguna temperatura para la cual sea C = F?
24. Hallar un vector normal a la recta con ecuación dada en cada literal:
a)
µx
y
¶=
µ1
3
¶+ t
µ3
1
¶, t ∈ R b) y = 2x− 5
c)x+ 1
2=
y − 33
d)
½x = 1 + ty = −3t , t ∈ R
e) 2 (x− 1) + 5 (y + 2) = 0 g)x
2+
y
7= 1

100 3. La línea recta en el plano
25. Considere la recta L que pasa por los puntos P =µ−17
¶y R =
µ3
5
¶.
a) Hallar una ecuación en forma normal para L.
b) Encontrar la distancia del punto X0 =
µ2
3
¶a la recta L.
c) Encontrar la distancia del origen a la recta perpendicular a L que pasa por elpunto S =
µ−11
¶.
26. En cada literal, hallar la distancia del punto P a la recta dada:
a) P =
µ0
0
¶, 3x+ 4y − 10 = 0
b) P =
µ3/2
2/3
¶, 2x− y + 5 = 0
27. Considere la recta L1 generada por el vector V =
µ2
3
¶.
a) Encontrar la distancia del punto X0 =µ3
7
¶a la recta L1.
b) Hallar una ecuación en forma general para la recta L2 que es paralela a L1 y pasapor el punto P =
µ3
−4
¶.
c) Encontrar la distancia entre las rectas L1 y L2.
28. Describir mediante ecuaciones el lugar geométrico de todos los puntos P =µx
y
¶del
plano, cuya distancia a la recta con ecuación 3x+ 4y − 15 = 0 es igual a 3.
29. Sea L una recta y N es un punto de L tal que −−→ON es un vector normal a L. Probarque una ecuación para L es
(cosα)x+ (senα) y = ρ.
donde ρ =°°°−−→ON°°° y α es la dirección del vector −−→ON .
30. Sea L1 la recta con ecuación x+ y − 2 = 0 y sea L2 la recta paralela a L1 que pasapor el punto P =
µ5
0
¶. Hallar el área del trapecio limitado por las rectas L1, L2 y
los ejes coordenados.
31. Sea L1 la recta con ecuación ax + by = 0 y sea L2 la recta perpendicular a L1 quepasa por el origen. Demostrar que la suma de los cuadrados de las distancias de unpunto cualquiera X0 a las rectas L1 y L2 es igual al cuadrado de la longitud delvector X0.

4
Transformaciones lineales delplano y matrices 2× 2
4.1 Transformaciones del plano
Empecemos recordando el concepto de función. Una función f de un conjunto A en unconjunto B, es una regla mediante la cual se asigna a cada elemento x de A un únicoelemento de B, el cual es llamado imagen de x bajo f y es denotado f (x) . Los conjuntosA y B se llaman respectivamente, dominio y codominio de la función f.
La notación f : A → B indica que f es una función con dominio A y codominio B,aunque esta notación no indica cómo actúa f, es decir, cómo f asigna imagen a cadaelemento de A. Una notación completa es
f : A → Bx 7→ f (x)
en la cual aparece la ley de asignación de f, x 7→ f (x) . Por ejemplo, al escribir
f : R−©1,−13
ª→ R
x 7→ x2
(x− 1)¡x+ 1
3
¢estamos presentando toda la información relativa a la función f : el dominio, el codominioy la ley de asignación.
Dos funciones
f : A → Bx 7→ f (x)
yg : A → B
x 7→ g (x)
se dicen iguales y se escribe f = g si f (x) = g (x) para todo x ∈ A, es decir, si f y gasignan a cada elemento x ∈ A la misma imagen.
En este capítulo nos interesan solamente funciones del plano en sí mismo, es decir,funciones de R2 en R2 a las cuales nos referiremos como transformaciones del plano.Dichas transformaciones las denotaremos mediante letras mayúsculas como P,Q,R, S, T.
Ejemplo 4.1Sean U un vector no nulo de R2 y L la recta generada por U. Si X es un vector cualquierade R2, el vector ProyUX, el cual está sobre L, lo llamaremos también la proyección deX sobre L. (Ver figura 4.1)
101

102 4. Transformaciones lineales del plano y matrices 2× 2
Figura 4.1.
Denotaremos PU la transformación del plano que asigna a cada vector X de R2, suproyección sobre la recta L. Es decir,
PU : R2 → R2X 7→ PU (X) = ProyUX
La transformación PU la llamaremos proyección sobre la recta L.Tomemos, por ejemplo, el caso particular U =
µ2
1
¶y hallemos para X =
µx
y
¶las
coordenadas del vector PU (X) .
PU (X) = ProyUX =
µX · UU · U
¶U =
2x+ y
5
µ2
1
¶=
µ45x+
25y
25x+
15y
¶es decir,
PU
µx
y
¶=
µ45x+
25y
25x+
15y
¶. (4.1)
Así por ejemplo,
PU
µ5
5
¶=
µ45 (5) +
25 (5)
25 (5) +
15 (5)
¶=
µ6
3
¶.
Siµx0
y0
¶= PU
µx
y
¶, en lugar de la igualdad (4.1) podemos escribir
µx0
y0
¶=
µ45x+
25y
25x+
15y
¶o bien (
x0 = 45x+
25y
y0 = 25x+
15y
ecuaciones que expresan las coordenadas x0,y0 del vector PU (X) en términos de las coor-denadas x, y de X. ¥
Ejemplo 4.2Sea U un vector no nulo de R2 y sea L la recta generada por U. Denotaremos SU latransformación del plano que asigna a cada vector X de R2 la reflexión de X respecto ala recta L. Es decir, para cada X de R2, SU (X) es el otro extremo del segmento de recta

4.1. Transformaciones del plano 103
Figura 4.2.
trazado desde X perpendicularmente a la recta L y cuyo punto medio es el punto PU (X) .(Ver figura 4.2).
Así que
PU (X) =1
2(X + SU (X)) .
Despejando SU (X) de esta igualdad se obtiene que
SU (X) = 2PU (X)−X.
De manera queSU : R2 → R2
X 7→ SU (X) = 2PU (X)−X
A la transformación SU la llamaremos reflexión respecto a la recta L.Si, por ejemplo, U =
µ2
1
¶, X =
µx
y
¶y puesto que
PU (X) =
µ45x+
25y
25x+
15y
¶entonces
SU (X) = 2
µ45x+
25y
25x+
15y
¶−µx
y
¶=
µ35x+
45y
45x−
35y
¶es decir,
SU
µx
y
¶=
µ35x+
45y
45x−
35y
¶(4.2)
Por ejemplo, si X =
µ10
0
¶, su reflexión respecto a la recta L generada por U =
µ2
1
¶es
SU
µ10
0
¶=
µ35 (10) +
45 (0)
45 (10)−
35 (0)
¶=
µ6
8
¶.
Siµx0
y0
¶= SU
µx
y
¶, en lugar de (4.2) podemos escribir
µx0
y0
¶=
µ35x+
45y
45x−
35y
¶

104 4. Transformaciones lineales del plano y matrices 2× 2
o bien las ecuaciones (x0 = 3
5x+45y
y0 = 45x−
35y
. ¥
Ejemplo 4.3Sea D2 : R2 → R2 la transformación que asigna a cada vector X de R2 el vector 2X (Verfigura 4.3). Es decir,
D2 : R2 → R2X 7→ D2 (X) = 2X
Nótese que D2 alarga cada vector X de R2, en la misma dirección de X hasta el doblede su longitud.
Figura 4.3.
Si X =
µx
y
¶entonces D2 (X) = 2X = 2
µx
y
¶=
µ2x
2y
¶, así
D2
µx
y
¶=
µ2x
2y
¶
o bien, siµx0
y0
¶= D2
µx
y
¶,
µx0
y0
¶=
µ2x
2y
¶o, equivalentemente,
½x0 = 2xy0 = 2y
. ¥
Es claro que en el ejemplo anterior, en lugar del número 2 podemos emplear cualquiernúmero real r y considerar la transformación
Dr : R2 → R2X 7→ Dr (X) = rX
Si X =
µx
y
¶, entonces
Dr (X) = rX = r
µx
y
¶=
µrx
ry
¶.
Ejemplo 4.4Fijemos un número real θ, −2π < θ < 2π. Consideremos la transformación Rθ : R2 → R2,la cual llamaremos rotación por el ángulo θ, definida como se indica a continuación:

4.1. Transformaciones del plano 105
para cada X de R2, Rθ (X) es el punto final del vector de posición obtenido al rotar elvector
−−→OX alrededor del origen un ángulo de θ radianes. Convenimos en realizar la rotación
en el sentido contrario al movimiento de las agujas del reloj cuando θ > 0, y en el mismosentido de dicho movimiento cuando θ < 0. (Figura 4.4).
Figura 4.4.
Determinemos las coordenadas del vector Rθ (X) para X =
µx
y
¶, X 6= O.
Sea φ, en radianes, la dirección del vector X como se muestra en la figura 4.4. Como
X = kXkµcosφ
senφ
¶, Rθ (X) = kRθ (X)k
µcos (φ+ θ)
sen (φ+ θ)
¶y kRθ (X)k = kXk
se tiene que,
Rθ (X) = kXkµcos (φ+ θ)
sen (φ+ θ)
¶= kXk
µcosφ cos θ − senφsenθsenφ cos θ + cosφsenθ
¶=
µkXk cosφ cos θ − kXk senφsenθkXk senφ cos θ + kXk cosφsenθ
¶.
Ahora, como kXk cosφ = x y kXksenφ = y entonces
Rθ (X) =
µx cos θ − ysenθy cos θ + xsenθ
¶=
µx cos θ − ysenθxsenθ + y cos θ
¶es decir,
Rθ
µx
y
¶=
µx cos θ − ysenθxsenθ + y cos θ
¶. (4.3)
Siµx0
y0
¶= Rθ
µx
y
¶, en lugar de la igualdad anterior tenemos
µx0
y0
¶=
µx cos θ − ysenθxsenθ + y cos θ
¶o bien las ecuaciones ½
x0 = x cos θ − ysenθy0 = xsenθ + y cos θ

106 4. Transformaciones lineales del plano y matrices 2× 2
a las cuales nos referiremos como ecuaciones de rotación. Ellas expresan las coordenadasx0,y0 del vector Rθ (X) en términos de las coordenadas x, y del vector X.
Por ejemplo, si θ = π/2 entonces cos θ = 0 y senθ = 1 y por tanto, sustituyendo en(4.3),
Rπ2
µx
y
¶=
µ−yx
¶como se ilustra en la figura 4.5.
Figura 4.5.
Por otra parte, si θ = −3π/2 entonces cos θ = 0 y senθ = 1 y así, sustituyendo en (4.3),
R− 3π2
µx
y
¶=
µ−yx
¶.
Obsérvese que
R− 3π2
µx
y
¶= Rπ
2
µx
y
¶para todo
µx
y
¶de R2,
es decir, R−3π2= Rπ
2. ¥
Ejemplo 4.5Fijemos un vector U de R2 y consideremos la transformación TU , definida por TU (X) =X + U, para todo X de R2 (figura 4.6). Es decir,
TU : R2 → R2X 7→ TU (X) = X + U
Figura 4.6.
La transformación TU se llamará traslación por el vector U ya que para cada X deR2, TU (X) es el punto que se obtiene trasladando el punto X en la dirección del vector U(o−−→OU) una distancia kUk .

4.2. Transformaciones lineales y matrices 107
Si X =
µx
y
¶y U =
µx0y0
¶entonces
TU (X) = X + U =
µx
y
¶+
µx0y0
¶=
µx+ x0y + y0
¶es decir,
TU
µx
y
¶=
µx+ x0y + y0
¶o también si
µx0
y0
¶= TU
µx
y
¶entonces
½x0 = x+ x0y0 = y + y0
.
Por ejemplo, si U =µ1
3
¶entonces para cada
µx
y
¶de R2,
TU
µx
y
¶=
µx+ 1
y + 3
¶. ¥
Finalizaremos esta sección refiriéndonos a dos tranformaciones especiales. Una es la
transformación que a cadaµx
y
¶de R2 le asigna como imagen el mismo vector
µx
y
¶; se
llamará la transformación identidad y se denotará I. La otra es la transformación que
a cadaµx
y
¶de R2 le asigna como imagen el vector
µ0
0
¶; se llamará la transformación
nula y se denotará O.Obsérvese que D0 = O, D1 = I, R0 = I y To = I.
4.2 Transformaciones lineales y matrices
En los ejemplos anteriores hemos considerado distintas transformaciones del plano. A con-tinuación recordaremos la forma como actúa cada una de tales transformaciones T dando
x0, y0 en términos de x, y dondeµx0
y0
¶= T
µx
y
¶.
(i) PU : proyección sobre la recta generada por el vector U =µ2
1
¶.
x0 =4
5x+
2
5y
y0 =2
5x+
1
5y
(ii) SU : reflexión respecto a la recta generada por el vector U =µ2
1
¶.
x0 =3
5x+
4
5y
y0 =4
5x− 3
5y

108 4. Transformaciones lineales del plano y matrices 2× 2
(iii) Dr : multiplicación por el escalar r.
x0 = rx
y0 = ry
(iv) Rθ : rotación alrededor del origen por un ángulo θ.
x0 = (cos θ)x− (senθ) yy0 = (senθ)x+ (cos θ) y
(v) TU : traslación por el vector U =µx0y0
¶.
x0 = x+ x0
y0 = y + y0
Obsérvese que cada una de las transformaciones (i) a (iv) es del tipo
x0 = ax+ by (4.4)
y0 = cx+ dy
con a, b, c, d constantes reales. Por ejemplo, la transformación (i) es del tipo (4.4) con a = 45 ,
b = c = 25 y d =
15 , mientras que (iv) lo es con a = d = cos θ, b = −senθ y c =senθ. Nótese
también que la transformación (v) es del tipo (4.4) únicamente cuando U =µ0
0
¶, caso en
el cual ella se reduce a
x0 = x
y0 = y
que es del tipo (4.4) con a = d = 1 y b = c = 0.
Toda transformación T : R2 → R2 del tipo (4.4) es llamada una transformación linealdel plano. La denominación “lineal” tiene que ver con la forma lineal de las expresiones
ax+ by y cx+ dy para las coordenadas x0, y0 del vector Tµx
y
¶.
Cada una de las transformaciones (i) a (iv) es una transformación lineal del plano;la transformación identidad I y la transformación nula O también son transformacioneslineales. En cuanto a la transformación TU podemos observar que ella es transformación
lineal únicamente en el caso U =µ0
0
¶, caso en el cual TU = I.
Sea T : R2 → R2 una transformación lineal definida por las ecuaciones
x0 = ax+ by
y0 = cx+ dy
con a, b, c, d constantes donde, como ya sabemos,µx0
y0
¶= T
µx
y
¶. Es claro que los números
a, b, c, d y sus posiciones en las igualdades anteriores determinan de manera única a T. Puesbien, el símbolo o arreglo µ
a bc d
¶

4.2. Transformaciones lineales y matrices 109
el cual determina a T, se llama matriz de T y se denotará m (T ) .En general, todo arreglo de números como el anterior se dirá una matriz de dos filas
y dos columnas, una matriz 2× 2, o una matriz de orden 2.Dos matrices
µa bc d
¶yµ
a0 b0
c0 d0
¶se dicen iguales, y se escribe
µa bc d
¶=
µa0 b0
c0 d0
¶si a = a0, b = b0, c = c0 y d = d0.
A continuación listamos las matrices de las transformaciones lineales (i) a (iv) antesconsideradas:
(i) m (PU ) =
µ4/5 2/52/5 1/5
¶(ii) m (SU ) =
µ3/5 4/54/5 −3/5
¶
(iii) m (Dr) =
µr 00 r
¶(iv) m (Rθ) =
µcos θ −senθsenθ cos θ
¶
Además,
m (I) =
µ1 00 1
¶y m (O) =
µ0 00 0
¶donde I y O son respectivamente la transformación identidad y la transformación nula.
La matriz m (I) se llamará matriz identidad de orden 2 y se denotará I2, mientrasque la matriz m (O) se llamará matriz nula de orden 2 y se denotrá O.
Obsérvese que cada transformación lineal T determina una matriz 2×2 la cual esm (T )
y recíprocamente, cada matrizµ
a bc d
¶es la matriz de una única transformación lineal
del plano, la cual es la transformación T : R2 → R2 definida por
T
µx
y
¶=
µax+ by
cx+ dy
¶.
Queda así establecida una correspondencia biunívoca entre las transformaciones delplano y las matrices 2× 2.
Ahora introduciremos una notación muy útil. Sea T una transformación lineal del plano
con matrizµ
a bc d
¶, es decir, T es la transformación definida por
T
µx
y
¶=
µax+ by
cx+ dy
¶.
Pues bien, puesto que la matrizµ
a bc d
¶determina la transformación T , es natural
escribir, para cadaµx
y
¶de R2,
µa bc d
¶µx
y
¶= T
µx
y
¶(4.5)

110 4. Transformaciones lineales del plano y matrices 2× 2
notación en la cual la matriz de T aparece sustituyendo al símbolo T.
Así, por ejemplo, si PU es la proyección sobre la recta generada por el vector U =µ2
1
¶entonces µ
4/5 2/52/5 1/5
¶µx
y
¶= PU
µx
y
¶=
µ(4/5)x+ (2/5) y
(2/5)x+ (1/5) y
¶.
De manera que, de acuerdo con (4.5), se tiene queµa bc d
¶µx
y
¶=
µax+ by
cx+ dy
¶(4.6)
igualdad que interpretaremos diciendo que la matrizµ
a bc d
¶transforma al vector
µx
y
¶dando como resultado el vector
µax+ by
cx+ dy
¶. También tomaremos la igualdad (4.6) como
definición del producto de una matriz 2× 2 por un vector de R2.Por ejemplo,µ
3 25 −2
¶µx
y
¶=
µ3x+ 2y
5x− 2y
¶,
µ0 02 1
¶µx
y
¶=
µ0
2x+ y
¶µ1 00 1
¶µx
y
¶=
µx
y
¶,
µ0 00 0
¶µx
y
¶=
µ0
0
¶.
4.3 Propiedades básicas de las transformaciones lineales
La importancia de las transformaciones lineales radica en la forma simple como ellas actúan.Si T : R2 → R2 es una transformación lineal entonces para todo par de vectores X,U
de R2 y todo escalar r se tiene que
T (X + U) = T (X) + T (U) y T (rX) = rT (X) (4.7)
Para probar lo afirmado, digamos que X =
µx
y
¶, U =
µu
v
¶y que la matriz de T esµ
a bc d
¶. Entonces,
T (X + U) = T
µx+ u
y + v
¶=
µa bc d
¶µx+ u
y + v
¶=
µa (x+ u) + b (y + v)
c (x+ u) + d (y + v)
¶=
µ(ax+ by) + (au+ bv)
(cx+ dy) + (cu+ dv)
¶=
µax+ by
cx+ dy
¶+
µau+ bv
cu+ dv
¶= T (X) + T (U) .

4.3. Propiedades básicas de las transformaciones lineales 111
Hemos probado así la primera de las propiedades en (4.7). La prueba de la segunda sedeja como ejercicio.
De manera que toda transformación lineal T del plano tiene las propiedades (4.7). Acontinuación probaremos que entre las transformaciones del plano, únicamente las linealesgozan de esas propiedades, es decir, probaremos que si una transformación T del planotiene dichas propiedades entonces T es una transformación lineal.
Supongamos entonces que T : R2 → R2 tiene las propiedades (4.7). Vamos a probarque T es una transformación lineal probando que existen constantes a, b, c, d tales que para
cualquierµx
y
¶de R2,
T
µx
y
¶=
µax+ by
cx+ dy
¶.
Como sabemos, si E1 =µ1
0
¶y E2 =
µ0
1
¶entonces para cada
µx
y
¶en R2 se tiene que
µx
y
¶= xE1 + yE2
Por lo anterior y aplicando las propiedades (4.7),
T
µx
y
¶= T (xE1 + yE2) = T (xE1) + T (yE2) = xT (E1) + yT (E2) . (4.8)
Así, si T (E1) =µa
c
¶y T (E2) =
µb
d
¶entonces
T
µx
y
¶= x
µa
c
¶+ y
µb
d
¶=
µax+ by
cx+ dy
¶(4.9)
lo cual prueba que T es una transformación lineal.Hemos probado el siguiente resultado:
Una transformación T : R2 → R2 es una transformación lineal si y sólo si
T (X + U) = T (X) + T (U) y T (rX) = rT (X)
para todo par de vectores X,U de R2 y todo escalar r.
Vale la pena señalar que las dos propiedades que aparecen en el recuadro anterior (laspropiedades (4.7)) se pueden sustituir por una sola, por la propiedad
T (rX + sU) = rT (X) + sT (U) (4.10)
cualesquiera sean X,U en R2 y r, s en R. Dejamos la prueba de ello como ejercicio al lector.Además de las propiedades (4.7), toda transformación lineal T : R2 → R2 tiene las
siguientes propiedades:

112 4. Transformaciones lineales del plano y matrices 2× 2
• Para cualquier vectorµx
y
¶de R2,
T
µx
y
¶= xT (E1) + yT (E2) .
Así, una transformación lineal T del plano queda completamente
determinada por los vectores T (E1) y T (E2) , es decir, por las imágenesque ella asigne a los vectores canónicos E1 y E2.
• T (E1) =
µa
c
¶y T (E2) =
µb
d
¶si y sólo si m (T ) =
µa bc d
¶.
• T
µ0
0
¶=
µ0
0
¶.
Para la prueba de la primera afirmación, vea (4.8).
Por otra parte, si T (E1) =µa
c
¶y T (E2) =
µb
d
¶ya probamos (vea (4.9)) que
T
µx
y
¶=
µax+ by
cx+ dy
¶
por tanto m (T ) =µ
a bc d
¶. Recíprocamente, si m (T ) =
µa bc d
¶entonces
T (E1) =
µa bc d
¶µ1
0
¶=
µa
c
¶y T (E2) =
µa bc d
¶µ0
1
¶=
µb
d
¶Por último,
T
µ0
0
¶= 0T (E1) + 0T (E2) =
µ0
0
¶. ¨
Ejemplo 4.6Sea T : R2 → R2 la transformación lineal tal que
T (E1) =
µ√2/2√2/2
¶y T (E2) =
µ−√2/2√2/2
¶.
a) Halle la matriz de T.
b) Halle Tµx
y
¶, cualquiera sea el vector
µx
y
¶de R2.
c) Muestre que T = Rπ4.
Solución:a) T (E1) y T (E2) son respectivamente la primera columna y la segunda columna de
la matriz de T, m (T ) . Así que,
m (T ) =
µ √2/2 −
√2/2√
2/2√2/2
¶.

4.4. Imagen de un conjunto bajo una transformación 113
b)
T
µx
y
¶= m (T )
µx
y
¶=
µ √2/2 −
√2/2√
2/2√2/2
¶µx
y
¶=
µ¡√2/2¢x−
¡√2/2¢y¡√
2/2¢x+
¡√2/2¢y
¶.
c) Obsérvese que para todoµx
y
¶de R2,
T
µx
y
¶=
µ¡cos π4
¢x−
¡senπ4
¢y¡
senπ4¢x+
¡cos π4
¢y
¶= Rπ
4
µx
y
¶
luego T = Rπ4. ¥
Ejemplo 4.7Muestre que la transformación T : R2 → R2 definida por T
µx
y
¶=
µ2x+ y
x2 + 2y
¶no es una
transformación lineal.
Solución:T no tiene la propiedad T (X + Y ) = T (X) + T (Y ) para todo X,Y de R2, ya que por
ejemplo,
T
µµ1
0
¶+
µ−10
¶¶= T
µ0
0
¶=
µ0
0
¶mientras que
T
µ1
0
¶+ T
µ−10
¶=
µ2
1
¶+
µ−21
¶=
µ0
2
¶por tanto T no es una transformación lineal. ¥
4.4 Imagen de un conjunto bajo una transformación
Sea T una transformación del plano y C un conjunto de puntos del plano. Llamaremosimagen de C bajo T al conjunto denotado T (C) y conformado por todos los vectoresT (X) con X ∈ C, es decir,
T (C) = {T (X) / X ∈ C } .
Ejemplo 4.8Bajo la rotación Rπ
4la recta L1 con ecuación y = 0 (el eje x) se transforma en la recta L2
con ecuación y = x, es decir, Rπ4(L1) = L2. (Figura 4.7). ¥

114 4. Transformaciones lineales del plano y matrices 2× 2
Figura 4.7.
Ejemplo 4.9Bajo la transformación nula O, todo subconjunto C del plano, C 6= φ, se transforma en el
conjunto½µ0
0
¶¾. ¥
Como una primera propiedad geométrica de las transformaciones lineales tenemos:
1. La imagen de una recta L bajo una transformación lineal T es una recta oes un conjunto con un solo punto. Más precisamente:
a) Si L es la recta que pasa por los puntos distintos P y Q entonces T (L) es larecta que pasa por T (P ) y T (Q) si T (P ) 6= T (Q) ; si T (P ) = T (Q) entoncesT (L) = {T (P )} .b) Si L pasa por el punto P y tiene vector director U entonces T (L) es larecta que pasa por el punto T (P ) y tiene vector director T (U) si T (U) 6= O;si T (U) = O, entonces T (L) = {T (P )} .2. La imagen de un segmento de recta PQ, bajo una transformación lineal T, esel segmento de recta de extremos T (P ) y T (Q), el cual se reduce al conjunto{T (P )} cuando T (P ) = T (Q) .
Prueba de 1.a): Si L pasa por los puntos distintos P y Q entonces una ecuación para Les
X = P + t (Q− P ) (4.11)
es decir,L = {P + t (Q− P ) / t ∈ R} .
Por tanto,T (L) = {T (P + t (Q− P )) / t ∈ R}
Ahora, dado que T es una transformación lineal tenemos,
T (P + t (Q− P )) = T (P ) + t (T (Q)− T (P ))
luego,T (L) = {T (P ) + t (T (Q)− T (P )) / t ∈ R}
Así, si T (P ) 6= T (Q) entonces T (L) es la recta que pasa por los puntos T (P ) y T (Q) ;mientras que si T (P ) = T (Q) entonces T (L) se reduce al conjunto {T (P )} cuyo únicoelemento es el punto T (P ) . ¨
La prueba de 1.b) se deja como ejercicio al lector.

4.4. Imagen de un conjunto bajo una transformación 115
Prueba de 2.: Sabemos que
PQ = {P + t (Q− P ) / 0 ≤ t ≤ 1}
y como T es lineal, entonces
T¡PQ
¢= {T (P ) + t (T (Q)− T (P )) / 0 ≤ t ≤ 1}
luego T¡PQ
¢es el segmento de recta de extremos T (P ) y T (Q) . ¨
Ejemplo 4.10Sea T la reflexión respecto a la recta L con ecuación y = x y sea L1 la recta que pasa porµ1
0
¶yµ2
2
¶. Halle T (L1) .
Solución:
Dos puntos de L1 distintos sonµ1
0
¶yµ2
2
¶. Puesto que T
µ1
0
¶=
µ0
1
¶, T
µ2
2
¶=
µ2
2
¶y
dado que Tµ1
0
¶6= T
µ2
2
¶, entonces T (L1) es la recta L2 que pasa por
µ0
1
¶yµ2
2
¶. (Figura
4.8). ¥
Figura 4.8.
Ejemplo 4.11Sea P la proyección sobre el eje x y sea L la recta vertical que pasa por
µ2
0
¶. Halle P (L) .
Solución:
Es claro que para todo X ∈ L, P (X) =µ2
0
¶, luego P (L) =
½µ2
0
¶¾. (Figura 4.9). ¥

116 4. Transformaciones lineales del plano y matrices 2× 2
Figura 4.9.
Ahora consideraremos la imagen de un paralelogramo P de vértices O,X,U y X + Udonde X y U son vectores de R2 linealmente independientes, el cual llamaremos parale-logramo determinado por los vectores X y U. (Figura 4.10).
Figura 4.10.
Puesto que
OX = {rX / 0 ≤ r ≤ 1} y OU = {sU / 0 ≤ s ≤ 1}
entonces el paralelogramo P en consideración puede describirse en la forma (ver figura4.10)
P = {rX + sU / 0 ≤ r ≤ 1, 0 ≤ s ≤ 1} .
Si T : R2 → R2 es una transformación lineal entonces
T (rX + sU) = rT (X) + sT (U)
y por tanto la imagen bajo T del paralelogramo P es
T (P) = {rT (X) + sT (U) / 0 ≤ r ≤ 1, 0 ≤ s ≤ 1}
que es el paralelogramo determinado por los vectores T (X) y T (U) si estos son linealmenteindependientes. Si T (X) y T (U) son linealmente dependientes entonces los puntosO,T (X)y T (U) están sobre una misma línea recta y en tal caso T (P) es un segmento de recta oes el conjunto
½µ0
0
¶¾.
Tenemos entonces que:

4.5. Operaciones con transformaciones lineales y con matrices 117
La imagen bajo una transformación lineal T del paralelogramo determinadopor dos vectores X y U linealmente independientes, es el paralelogramodeterminado por T (X) y T (U) , si estos vectores son linealmente independientes.Si T (X) y T (U) son linealmente dependientes entonces dicha imagen es un segmento
de recta o es el conjunto½µ0
0
¶¾.
Ejemplo 4.12Consideremos el paralelogramo P determinado por los vectores X =
µ2
0
¶y U =
µ2
2
¶y
sea S la reflexión respecto al eje y.
Como S (X) =µ−20
¶y S (U) =
µ−22
¶entonces S (X) y S (U) son vectores linealmente
independientes y por tanto la imagen del paralelogramo P bajo S, es el paralelogramo
determinado por los vectores S (X) =µ−20
¶y S (U) =
µ−22
¶(Figura 4.11). ¥
Figura 4.11.
4.5 Operaciones con transformaciones lineales y con matri-ces
Sean T y S dos transformaciones del plano. La suma de T y S, denotada T + S, es latransformación del plano definida, para cada X ∈ R2, por
(T + S) (X) = T (X) + S (X) .
Así,
T + S : R2 → R2X 7→ (T + S) (X) = T (X) + S (X)
Ejemplo 4.13Sean D2 y D3 las transformaciones del plano definidas por D2 (X) = 2X y D3 (X) = 3Xpara cada X ∈ R2. Entonces D2 +D3 es la transformación del plano definida como sigue:
(D2 +D3) (X) = D2 (X) +D3 (X) = 2X + 3X = 5X

118 4. Transformaciones lineales del plano y matrices 2× 2
para cada X ∈ R2. Nótese que D2 +D3 = D5. ¥
Para cada transformación T del plano se tiene la transformación denotada −T ydefinida, para cada X ∈ R2, por
(−T ) (X) = − (T (X)) .
La transformación −T es tal que T + (−T ) = O donde, como se ha convenido, O denotala transformación nula. En efecto, para cualquier X de R2,
(T + (−T )) (X) = T (X) + (−T ) (X) = T (X)− (T (X)) = O.
Ejemplo 4.14Sea T la reflexión respecto al eje x, es decir, T es la transformación definida por
T
µx
y
¶=
µx
−y
¶. Hallemos la transformación −T :
(−T )µx
y
¶= −
µT
µx
y
¶¶= −
µx
−y
¶=
µ−xy
¶.
Así que −T es la transformación del plano definida, para cadaµx
y
¶de R2, por
(−T )µx
y
¶=
µ−xy
¶. Nótese que −T es la reflexión respecto al eje y (figura 4.12). ¥
Figura 4.12.
La suma entre transformaciones del plano goza de las siguientes propiedades. En ellasT, S y R son transformaciones del plano y O es la transformación nula.
1. T + S = S + T.2. (T + S) +R = T + (S +R) .3. T +O = T.4. T + (−T ) = O.

4.5. Operaciones con transformaciones lineales y con matrices 119
Ya se ha probado la propiedad 4. La prueba de las restantes propiedades se deja comoejercicio.
Supongamos ahora que T y S son transformaciones lineales del plano con
m (T ) =
µa bc d
¶y m (S) =
µa0 b0
c0 d0
¶.
Entonces, para cadaµx
y
¶de R2,
(T + S)
µx
y
¶= T
µx
y
¶+ S
µx
y
¶=
µax+ by
cx+ dy
¶+
µa0x+ b0y
c0x+ d0y
¶=
µ(a+ a0)x+ (b+ b0) y
(c+ c0)x+ (d+ d0) y
¶=
µa+ a0 b+ b0
c+ c0 d+ d0
¶µx
y
¶.
Luego T + S es también una transformación lineal y
m (T + S) =
µa+ a0 b+ b0
c+ c0 d+ d0
¶. (4.12)
La igualdad anterior sugiere cómo definir una suma entre matrices 2×2, que correspondaa la suma entre transformaciones lineales. Si A y B son matrices 2 × 2 y T y S son lastransformaciones tales que A = m (T ) y B = m (S) , la suma A + B debe definirse demodo que A + B = m (T + S) . Por ello, teniendo en cuenta (4.12), la suma entre dosmatrices 2× 2 se define de la siguiente manera:µ
a bc d
¶+
µa0 b0
c0 d0
¶=
µa+ a0 b+ b0
c+ c0 d+ d0
¶.
Como resumen tenemos que:
Si T y S son transformaciones lineales del plano, con
m (T ) =
µa bc d
¶y m (S) =
µa0 b0
c0 d0
¶entonces T + S también es una transformación lineal del plano y
m (T + S) =
µa+ a0 b+ b0
c+ c0 d+ d0
¶= m (T ) +m (S) .
Ejemplo 4.15Sean T y S las transformaciones lineales del plano tales que
m (T ) =
µ0 −34 2
¶y m (S) =
µ10 2−5 0
¶.
Hallar m (T + S) y (T + S)
µx
y
¶para cualquier
µx
y
¶en R2.

120 4. Transformaciones lineales del plano y matrices 2× 2
Solución:
m (T + S) = m (T ) +m (S)
=
µ0 −34 2
¶+
µ10 2−5 0
¶=
µ0 + 10 −3 + 24− 5 2 + 0
¶=
µ10 −1−1 2
¶.
Así, para todoµx
y
¶∈ R2,
(T + S)
µx
y
¶=
µ10 −1−1 2
¶µx
y
¶=
µ10x− y
−x+ 2y
¶. ¥
Para cada matriz A =µ
a bc d
¶se tiene la matriz −A =
µ−a −b−c −d
¶la cual es tal
que A+ (−A) = O donde, como se ha convenido, O denota la matriz nula. En efecto
A+ (−A) =µ
a bc d
¶+
µ−a −b−c −d
¶=
µa− a b− bc− c d− d
¶=
µ0 00 0
¶= O.
Es de esperar que la suma entre matrices tenga las mismas propiedades algebraicas dela suma entre transformaciones lineales. En efecto si A,B,C son matrices 2×2 cualesquieray O es la matriz nula 2× 2, se tiene que:
1. A+B = B +A.2. (A+B) + C = A+ (B + C) .3. A+O = A4. A+ (−A) = O.
La propiedad 4. ya ha sido probada. La prueba de las restantes propiedades se dejacomo ejercicio.
Volvamos a la definición de la suma T + S de las transformaciones T y S. Obsérveseque lo que hace posible dicha suma es el hecho de que en R2 (visto como codominio de Ty de S) hay definida una suma, lo cual permite sumar T (X) y S (X) para cada X de R2.Ahora bien, en R2 también hay definido un producto por escalar, así que también podemosconsiderar el producto de un escalar por una transformación del plano.
Sean r un escalar y T : R2 → R2. El producto de r por T, denotado rT, es latransformación del plano definida, para cada X de R2, por
(rT ) (X) = r (T (X)) .
Así,

4.5. Operaciones con transformaciones lineales y con matrices 121
rT : R2 → R2X 7→ (rT ) (X) = r (T (X))
Ejemplo 4.16Consideremos la rotación Rπ
2. En la figura 4.13 se muestra el efecto de la transformación
3Rπ2sobre un vector X. ¥
Figura 4.13.
El lector puede probar fácilmente las siguientes propiedades básicas, las cuales sonválidas, cualesquiera sean las transformaciones T, S del plano y los números r, s.
1. r (sT ) = (rs)T = s (rT ) .2. 1T = T.3. r (T + S) = rT + rS.4. (r + s)T = rT + sT.
Supongamos ahora que T es una transformación lineal del plano conm (T ) =µ
a bc d
¶y sea r un escalar. Entonces, para todo
µx
y
¶de R2,
(rT )
µx
y
¶= r
µT
µx
y
¶¶= r
µax+ by
cx+ dy
¶=
µ(ra)x+ (rb) y
(rc)x+ (rd) y
¶=
µra rbrc rd
¶µx
y
¶.

122 4. Transformaciones lineales del plano y matrices 2× 2
Luego, rT es una transformación lineal y además
m (rT ) =
µra rbrc rd
¶. (4.13)
Ahora, de la misma manera como la igualdad (4.12) lleva a definir la suma entre
matrices como lo hicimos, la igualdad (4.13) lleva a definir el producto r
µa bc d
¶de
un escalar r por una matrizµ
a bc d
¶en la forma
r
µa bc d
¶=
µra rbrc rd
¶.
Tenemos así que:
Si r es un escalar y T es una transformación lineal del plano con
m (T ) =
µa bc d
¶entonces rT también es una transformación lineal del plano y
m (rT ) =
µra rbrc rd
¶= r (m (T )) .
Ejemplo 4.17Sea T la transformación lineal tal que m (T ) =
µ2 −31 8
¶.
Hallar m (5T ) y (5T )µx
y
¶para cualquier
µx
y
¶de R2.
Solución:
m (5T ) = 5 (m (T )) = 5
µ2 −31 8
¶=
µ(5) (2) (5) (−3)(5) (1) (5) (8)
¶=
µ10 −155 40
¶.
Así, la ley de asignación para la transformación 5T es
(5T )
µx
y
¶=
µ10 −155 40
¶µx
y
¶=
µ10x− 15y5x+ 40y
¶. ¥
El producto de un escalar por una matriz 2× 2 hereda las propiedades algebraicas delproducto de un escalar por una transformación lineal. Si A,B son matrices 2× 2 y r, s sonescalares, se tiene que
1. r (sA) = (rs)A = s (rA) .2. 1A = A.3. r (A+B) = rA+ rB.4. (r + s)A = rA+ sA.

4.5. Operaciones con transformaciones lineales y con matrices 123
Consideraremos ahora una tercera operación, la composición entre dos transformacionesT y S del plano.
Se denomina compuesta de T y S, denotada T ◦ S, a la transformación del planodefinida, para cada X de R2, por
(T ◦ S) (X) = T (S (X)) .
El diagrama siguiente ilustra dicha composición
R2 S−→ R2 T−→ R2X 7→ S (X) 7→ T (S (X))
Así,
T ◦ S : R2 → R2X 7→ (T ◦ S) (X) = T (S (X))
Ejemplo 4.18Sea T la reflexión respecto al eje x y sea S la reflexión respecto al eje y. Si X =
µx
y
¶entonces
(T ◦ S) (X) = T (S (X)) = T
µS
µx
y
¶¶= T
µ−xy
¶=
µ−x−y
¶= −X.
En la figura 4.14 se ilustra la composición de T y S. Nótese que T ◦ S = Rπ. ¥
Figura 4.14.
El lector puede comprobar que en el ejemplo anterior T ◦S = S ◦T. Sin embargo, paraotras transformaciones T y S puede darse que T ◦S 6= S ◦T, como se muestra en el ejemplosiguiente.
Ejemplo 4.19Sean T la reflexión respecto al eje x y S = Rπ
4. Como ya sabemos, para cada
µx
y
¶de R2,
T
µx
y
¶=
µx
−y
¶y S
µx
y
¶=
µ¡cos π4
¢x−
¡senπ
4
¢y¡
senπ4
¢x+
¡cos π4
¢y
¶=
√2
2
µx− y
x+ y
¶.

124 4. Transformaciones lineales del plano y matrices 2× 2
Luego,
(T ◦ S)µx
y
¶= T
µS
µx
y
¶¶= T
Ã√2
2
µx− y
x+ y
¶!
=
√2
2
µx− y
− (x+ y)
¶=
√2
2
µx− y
−x− y
¶.
Por otra parte,
(S ◦ T )µx
y
¶= S
µT
µx
y
¶¶= S
µx
−y
¶=
√2
2
µx− (−y)x+ (−y)
¶=
√2
2
µx+ y
x− y
¶.
Se observa que T ◦ S y S ◦ T actúan de distinta manera; por ejemplo,
(T ◦ S)µ1
1
¶=
√2
2
µ1− 1−1− 1
¶=
√2
2
µ0
−2
¶mientras que
(S ◦ T )µ1
1
¶=
√2
2
µ1 + 1
1− 1
¶=
√2
2
µ2
0
¶.
Luego T ◦ S 6= S ◦ T. ¥
En lo que sigue centraremos la atención en la composición de transformaciones lineales.A continuación listamos las propiedades básicas de la composición entre transformacioneslineales; se advierte al lector que algunas de dichas propiedades no son exclusivas de lastransformaciones lineales. Si T, S,R son transformaciones lineales del plano, r es un escalar,I la transformación identidad y O la transformación nula, entonces:
1. T ◦ (S ◦R) = (T ◦ S) ◦R.2. T ◦ I = T = I ◦ T.3. T ◦ (S +R) = (T ◦ S) + (T ◦R) .4. (S +R) ◦ T = (S ◦ T ) + (R ◦ T ) .5. (rT ) ◦ S = r (T ◦ S) = T ◦ (rS) .6. T ◦O = O = O ◦ T.

4.5. Operaciones con transformaciones lineales y con matrices 125
A continuación probaremos la propiedad 3. a modo de ejemplo: Cualquiera sea X enR2 se tiene que
(T ◦ (S +R)) (X) = T ((S +R) (X))
= T (S (X) +R (X))
= T (S (X)) + T (R (X)) (pues T es lineal)
= (T ◦ S) (X) + (T ◦R) (X)= ((T ◦ S) + (T ◦R)) (X) .
Luego,T ◦ (S +R) = (T ◦ S) + (T ◦R) .
La prueba de las otras propiedades se deja como ejercicio.Nótese, observando las propiedades 1. a 6. anteriores, que la composición entre trans-
formaciones lineales se comporta de manera similar al producto entre números (hace faltala propiedad conmutativa y, como veremos más adelante, no toda transformación distintade la nula tiene una transformación inversa). Por tal motivo la compuesta T ◦ S de dostransformaciones lineales T y S es llamada producto de T y S y también se denota TS.De hecho, en adelante, emplearemos frecuentemente esta última notación.
Supongamos que T y S son transformaciones lineales del plano con
m (T ) =
µa bc d
¶y m (S) =
µa0 b0
c0 d0
¶.
Entonces, para todoµx
y
¶de R2,
(TS)
µx
y
¶= T
µS
µx
y
¶¶= T
µa0x+ b0y
c0x+ d0y
¶=
µa bc d
¶µa0x+ b0y
c0x+ d0y
¶=
µa (a0x+ b0y) + b (c0x+ d0y)
c (a0x+ b0y) + d (c0x+ d0y)
¶=
µ(aa0 + bc0)x+ (ab0 + bd0) y
(ca0 + dc0)x+ (cb0 + dd0) y
¶=
µaa0 + bc0 ab0 + bd0
ca0 + dc0 cb0 + dd0
¶µx
y
¶.
Luego, TS también es una transformación lineal y
m (TS) =
µaa0 + bc0 ab0 + bd0
ca0 + dc0 cb0 + dd0
¶. (4.14)
Con base en esta igualdad (4.14) se define el producto de dos matrices 2 × 2 en laforma siguiente: µ
a bc d
¶µa0 b0
c0 d0
¶=
µaa0 + bc0 ab0 + bd0
ca0 + dc0 cb0 + dd0
¶.

126 4. Transformaciones lineales del plano y matrices 2× 2
Este producto entre matrices corresponde al producto entre transformaciones lineales enel mismo sentido en que la suma entre matrices y el producto de un escalar por una matrizcorresponden, respectivamente, a la suma entre transformaciones lineales y al producto deun escalar por una transformación lineal.
Tenemos por tanto que:
Si T y S son transformaciones lineales del plano con
m (T ) =
µa bc d
¶y m (S) =
µa0 b0
c0 d0
¶entonces el producto (la compuesta) TS también es una transformaciónlineal del plano y
m (TS) =
µaa0 + bc0 ab0 + bd0
ca0 + dc0 cb0 + dd0
¶= m (T )m (S) .
Obsérvese cómo se obtiene la matriz producto: digamos que
A =
µa bc d
¶y B =
µa0 b0
c0 d0
¶.
Por ejemplo, el número en el producto AB que está en la 1a fila y en la 2a columna seobtiene a partir de la 1a fila de A y de la 2a columna de B como se ilustra a continuación:
a bb�
d�( ) = ab0 + bd0.
Análogamente se obtienen los otros números que conforman la matriz producto AB.
Ejemplo 4.20Sean T y S las transformaciones lineales del plano tales que
m (T ) = A =
µ2 3−1 0
¶y m (S) = B =
µ4 7−6 5
¶.
Hallar m (TS) y (TS)µx
y
¶para cualquier
µx
y
¶de R2.
Solución:
m (TS) = AB
=
µ2 3−1 0
¶µ4 7−6 5
¶=
µ2 (4) + 3 (−6) 2 (7) + 3 (5)(−1) 4 + 0 (−6) (−1) 7 + 0 (5)
¶=
µ−10 29−4 −7
¶.

4.5. Operaciones con transformaciones lineales y con matrices 127
Luego, para todoµx
y
¶de R2,
(TS)
µx
y
¶= (AB)
µx
y
¶=
µ−10 29−4 −7
¶µx
y
¶=
µ−10x+ 29y−4x− 7y
¶. ¥
El lector puede comprobar que en el ejemplo anterior AB 6= BA, lo cual se debe a queTS 6= ST. De manera que:
El producto entre matrices 2× 2 no es conmutativo.
En general, el producto entre matrices 2 × 2 se comporta algebraicamente como elproducto (compuesta) entre transformaciones lineales del plano. En efecto, se tiene que siA,B,C son matrices 2× 2 y r es un escalar, entonces:
1. (AB)C = A (BC) .2. AI2 = A = I2A.3. A (B + C) = AB +AC.4. (B + C)A = BA+ CA.5. (rA)B = r (AB) = A (rB) .6. AO = O = OA.
A continuación probaremos la propiedad 1. a modo de ejemplo.Digamos que T, S,R son respectivamente las transformaciones lineales del plano deter-
minadas por las matrices A,B,C, es decir, T, S,R son las transformaciones tales que
A = m (T ) , B = m (S) y C = m (R) .
Entonces
(AB)C = (m (T )m (S))m (R)
= m (TS)m (R)
= m ((TS)R)
= m (T (SR)) , pues (TS)R = T (SR)
= m (T )m (SR)
= m (T ) (m (S)m (R))
= A (BC) .
De manera similar se pueden probar las otras propiedades. Claro está que cada unade las propiedades enunciadas se puede probar directamente, sin recurrir a las transforma-ciones lineales.

128 4. Transformaciones lineales del plano y matrices 2× 2
Para finalizar esta sección, haremos un resumen muy breve de lo hecho en ella. Hemosdefinido tres operaciones con transformaciones lineales: la suma, el producto por escalar yel producto. Y en correspondencia con ellas se han definido tres operaciones con matrices:la suma, el producto de un escalar por una matriz y el producto de dos matrices. Tambiénhemos definido el producto de una matriz 2×2 por un vector de R2. A continuación listamosalgunas de las propiedades básicas de este producto. Cualesquiera sean las matrices A,B,los vectores X,U de R2 y r en R se tiene:
1. A (X + U) = AX +AU.2. A (rX) = r (AX) .3. (A+B)X = AX +BX.4. (rA)X = r (AX) .5. (AB)X = A (BX) .
Cada una de estas propiedades puede probarse recurriendo a transformaciones lineales obien sin recurrir a ellas. Por ejemplo, para probar 1. podemos considerar la transformaciónlineal T cuya matriz es A y observar que 1. es una reescritura de la propiedad
T (X + U) = T (X) + T (U)
pues el lado izquierdo de 1. es T (X + U) y el derecho T (X) + T (U) . De manera similar,2. es una reescritura de la propiedad
T (rX) = r (T (X)) .
4.6 Inversas para transformaciones lineales y matrices
Recordemos algunos conceptos sobre funciones, con los cuales el lector probablemente yaha tenido contacto.
Consideremos una funciónf : A → B
x 7→ f (x)
• f se dice inyectiva o uno a uno si para x1, x2 ∈ A,
x1 6= x2 =⇒ f (x1) 6= f (x2)
es decir, elementos distintos del dominio de f no tienen la misma imagen bajo f. Lacondición anterior puede expresarse, de manera equivalente, en la forma
f (x1) = f (x2) =⇒ x1 = x2.
• Se denomina rango o recorrido de f al conjunto de todas las imágenes f (x) conx ∈ A. Denotaremos este conjunto Rf o f (A) ; así,
Rf = f (A) = {f (x) / x ∈ A} .
• f se dice sobreyectiva o simplemente sobre si todo elemento de B es imagen depor lo menos un elemento de A, es decir, si el recorrido de f es todo el conjunto B(o sea si f (A) = B).

4.6. Inversas para transformaciones lineales y matrices 129
• f se dice biyectiva si f es uno a uno y sobre. En otras palabras, f se dice biyectivasi todo elemento de B es imagen bajo f de uno y sólo un elemento de A.
El diagrama siguiente muestra una función biyectiva f con dominio A = {1, 2, 3} ycodominio B = {a, b, c}
1
2
3
a
b
c
BAf
Nótese que para esta función f se puede definir una función de B hacia A “devolviendo”las flechas
1
2
3
a
b
c
A B
Esta función es llamada la inversa de f y se denota f−1.Observe que para cada elementoy de B, f−1 (y) es aquel elemento x de A tal que f (x) = y.
En general, si f : A → B es biyectiva se puede definir una función g : B → A talque para todo y ∈ B, g (y) = x donde x es aquel elemento de A tal que f (x) = y. Eneste caso, es decir cuando f es biyectiva, se dice que f es invertible y la función g antesmencionada se llama la inversa de f y se denota f−1. Así, la función inversa de f , cuandof es biyectiva, es la función f−1 : B→ A tal que para y ∈ B y x ∈ A,
f−1 (y) = x si y sólo si f (x) = y.
De manera que si f envía a x en y entonces f−1 “deshace” lo hecho por f, enviando ay en x, como lo ilustra el siguiente diagrama:
A B
x y
f -1
f
Si f : A→ B no es uno a uno o no es sobre, no podemos hablar de una función inversapara f con dominio B y codominio A.
Obsérvese que si f : A→ B es biyectiva, entonces
f−1 (f (x)) = x para todo x ∈ A y f¡f−1 (y)
¢= y para todo y ∈ B.
Por otra parte, es fácil probar que si para una función f : A → B existe una funcióng : B → A tal que g (f (x)) = x para todo x ∈ A y f (g (y)) = y para todo y ∈ B, entoncesf es invertible y f−1 = g.

130 4. Transformaciones lineales del plano y matrices 2× 2
Por supuesto, los conceptos y resultados anteriores nos interesan en relación con lastransformaciones del plano y particularmente con las que son transformaciones lineales.Para una transformación lineal T : R2 → R2 se tiene lo siguiente:
• Si T es invertible entonces su inversa T−1 también es una transforamción lineal. (Veaejercicio 35 de este capítulo.)
• Si T es invertible, su inversa T−1 es tal que
T−1 (T (X)) = X y T¡T−1 (X)
¢= X, para todo X ∈ R2,
es decir,T−1T = I y TT−1 = I.
• Si S : R2 → R2 es tal que
ST = I y TS = I
entonces T es invertible y T−1 = S.
Ejemplo 4.21Consideremos la transformación Dr con r 6= 0, la cual envía cada vector X de R2 en elvector rX. Vemos que se puede deshacer el efecto de Dr sobre un vector X (y retornar
a X) multiplicando rX por el escalar1
r; de manera que la inversa de Dr debe ser la
transformación D 1r. Veamos que, en efecto, así es:
Si X es cualquier vector de R2,
D 1r(Dr (X)) = D 1
r(rX) =
1
r(rX) =
µ1
rr
¶X = 1X = X
y análogamente, Dr
³D 1
r(X)
´= X, luego
D 1rDr = I y DrD 1
r= I.
Se sigue que Dr es invertible y que D−1r = D 1r. ¥
Ejemplo 4.22Sea P la proyección sobre el eje x, es decir, P es la transformación del plano tal que
P
µx
y
¶=
µx
0
¶para cada
µx
y
¶de R2.
Es claro que P no es uno a uno, pues (por ejemplo) todo vectorµ0
y
¶sobre el eje y es
enviado en el origenµ0
0
¶; por tanto P no es invertible. ¥
Sea T : R2 → R2 una transformación lineal. Sabemos que siX = O entonces T (X) = O.Ahora, si T es invertible entonces T es uno a uno y, en particular,
“ El único vector X tal que T (X) = O es X = O ”.
De manera que este hecho es una condición necesaria para que T sea invertible. Resulta,y ello es sorprendente, que esa sola condición implica que T es invertible, como se establece

4.6. Inversas para transformaciones lineales y matrices 131
en el siguiente resultado, en el cual también se expresa la invertibilidad de T en términosde los números que conforman la matriz de T.
Sea T : R2 → R2 una transformación lineal con m (T ) =
µa bc d
¶.
Las siguientes afirmaciones son equivalentes:1. T es invertible.2. El único vector X de R2 tal que T (X) = O es X = O.
3. Las columnasµa
c
¶yµb
d
¶de m (T ) son linealmente independientes.
4. ad− bc 6= 0.
Probaremos lo anterior demostrando que 1. =⇒ 2., 2. =⇒ 3., 3. =⇒ 4. y 4. =⇒ 1.Para probar que 1. =⇒ 2., supongamos que T es invertible y tomemos X ∈ R2 tal que
T (X) = O. Entonces T−1 (T (X)) = T−1 (O) = O (recuérdese que T−1 es una transfor-mación lineal) y como también T−1 (T (X)) = X, entonces X = O.
Hemos probado así que si T es invertible entonces el único vector X de R2 tal queT (X) = O es X = O.
Ahora probaremos que 2. =⇒ 3. probando su contrarecíproco, es decir, probando quesi 3. no se cumple entonces 2. tampoco se cumple. Supongamos entonces que las columnasde m (T ) son linealmente dependientes y que, por ejemplo,µ
a
c
¶= r
µb
d
¶para cierto escalar r.
Entonces, µa
c
¶− r
µb
d
¶=
µ0
0
¶µa− rb
c− rd
¶=
µ0
0
¶µ
a bc d
¶µ1
−r
¶=
µ0
0
¶T
µ1
−r
¶=
µ0
0
¶.
Así, el vector no nuloµ1
−r
¶es tal que T
µ1
−r
¶=
µ0
0
¶, lo cual muestra que 2. no se
da. De manera similar, siµb
d
¶= r
µa
c
¶para algún r ∈ R, se puede probar que existe un
vector no nulo X0 tal que T (X0) =
µ0
0
¶.
Probemos ahora que 3. =⇒ 4., probando que si 4. no se da entonces 3. tampoco seda. Supongamos entonces que ad − bc = 0 y probemos que las columnas de m (T ) sonlinealmente dependientes: si ad− bc = 0 entonces ad = bc.
Si por ejemplo d 6= 0, entonces a = bc
dy en tal casoµ
a
c
¶=
µbc/d
c
¶=
c
d
µb
d
¶

132 4. Transformaciones lineales del plano y matrices 2× 2
de lo cual se concluye que las columnas de m (T ) son linealmente dependientes. De igualforma se procede si a 6= 0 o b 6= 0 o c 6= 0. Si a = b = c = d = 0, es obvio que las columnasde m (T ) son linealmente dependientes.
Finalmente probemos que 4. =⇒ 1. Supongamos entonces que ad− bc 6= 0; para probarque T es invertible probaremos primero que existe una matriz
µp qr s
¶tal que
µa bc d
¶µp qr s
¶=
µ1 00 1
¶.
Considerando esta igualdad como una ecuación con incógnitas p, q, r, s vemos que ellaes equivalente al sistema
ap+ br = 1
cp+ dr = 0
aq + bs = 0 (4.15)
cq + ds = 1
Usando sus dos primeras ecuaciones tenemos que
dap+ dbr = d
bcp+ bdr = 0
de donde (ad− bc) p = d y como ad− bc 6= 0 entonces
p =d
ad− bc.
Para simplificar, hagamos en lo que sigue ∆ = ad − bc. De manera similar a como se
obtuvo el valor p =d
∆se obtiene, usando las dos primeras ecuaciones de (4.15), que
r = − c
∆
y usando las dos últimas ecuaciones de dicho sistema, que
q = − b
∆y s =
a
∆.
Es sólo cuestión de operaciones comprobar que para dichos valores de p, q, r y s se tieneque µ
a bc d
¶µp qr s
¶=
µ1 00 1
¶Ahora, un hecho notable es que dicha matriz
µp qr s
¶también cumple que
µp qr s
¶µa bc d
¶=
µ1 00 1
¶.
Dejamos al lector que termine la prueba mostrando que la transformación lineal S cuya
matriz esµ
p qr s
¶es tal que TS = I y ST = I, de lo cual se sigue que T es invertible.

4.6. Inversas para transformaciones lineales y matrices 133
Hemos probado así que 4. =⇒ 1., con lo cual concluimos la prueba de lo afirmado en elúltimo recuadro. ¨
Obsérvese que en la prueba de 4. =⇒ 1. se probó que T−1 = S y por tanto
m¡T−1
¢= m (S) =
µp qr s
¶luego, se tiene que:
Sea T : R2 → R2 una transformación lineal con m (T ) =
µa bc d
¶.
Si T es invertible entonces
m¡T−1
¢=
µd/∆ −b/∆−c/∆ a/∆
¶= 1
∆
µd −b−c a
¶donde ∆ = ad− bc.
Por otra parte, del razonamiento empleado en la prueba de 4. =⇒ 1. se deduce losiguiente:
Sea T : R2 → R2 una transformación lineal. Si existe una transformación linealS : R2 → R2 tal que TS = I entonces ST = I y por tanto T es invertible y T−1 = S.
Ejemplo 4.23Sea T : R2 → R2 definida por
T
µx
y
¶=
µx+ 2y
−x+ 3y
¶=
µ1 2−1 3
¶µx
y
¶.
La matriz de T es A =µ
1 2−1 3
¶y ∆ = (1) (3)− (−1) (2) = 5.
a) Como ∆ 6= 0 entonces T es invertible y
m¡T−1
¢=1
∆
µ3 −21 1
¶=
µ3/5 −2/51/5 1/5
¶.
Así, T−1 es la transformación del plano definida por
T−1µx
y
¶=
µ3/5 −2/51/5 1/5
¶µx
y
¶=
µ(3/5)x− (2/5) y(1/5)x+ (1/5) y
¶.
b) Como T es invertible, el único vectorµx
y
¶de R2 tal que
T
µx
y
¶=
µ0
0
¶esµx
y
¶=
µ0
0
¶.
c) Es claro que las columnasµ1
−1
¶yµ2
3
¶de A son linealmente independientes. ¥

134 4. Transformaciones lineales del plano y matrices 2× 2
Ejemplo 4.24Sea T : R2 → R2 definida por
T
µx
y
¶=
µx+ 2y
−2x− 4y
¶=
µ1 2−2 −4
¶µx
y
¶.
La matriz de T es A =µ
1 2−2 −4
¶y ∆ = (1) (−4)− (−2) (2) = 0.
a) Como ∆ = 0 entonces T no es invertible.
b) Como T no es invertible, podemos asegurar que existen vectoresµx
y
¶no nulos tales
que Tµx
y
¶=
µ0
0
¶.
c) Es claro que las columnasµ1
−2
¶yµ2
−4
¶de A son linealmente dependientes. ¥
Trasladamos ahora el concepto de inversa para transformaciones lineales a las matrices2×2. Sea A una matriz 2×2 y sea T : R2 → R2 la transformación lineal tal quem (T ) = A.
Diremos que la matriz A es invertible si la transformación lineal T es invertible. Siéste es el caso, a la matriz m
¡T−1
¢la llamaremos la inversa de A y la denotaremos A−1.
Obsérvese que si A es invertible entonces
AA−1 = I2 y A−1A = I2.
En efecto,AA−1 = m (T )m
¡T−1
¢= m
¡TT−1
¢= m (I) = I2.
Análogamente se prueba que A−1A = I2.
Es fácil probar que si para una matriz A de orden 2 existe una matriz B de orden 2 talque
AB = I2 y BA = I2.
entonces A es invertible y A−1 = B.
Ejemplo 4.25Muestre que la matriz A =
µ2√3
1 0
¶es invertible y halle su inversa.
Solución:Sea T la transformación lineal cuya matriz es A y sea ∆ = (2) (0) −
¡√3¢(1) = −
√3.
Como ∆ 6= 0 entonces T es invertible y
m¡T−1
¢=1
∆
µ0 −
√3
−1 2
¶=
Ã0 11√3− 2√
3
!.
Ahora, como T es invertible entonces A es invertible y
A−1 = m¡T−1
¢=
Ã0 11√3− 2√
3
!. ¥
Podemos trasladar a matrices, sin ninguna dificultad, los resultados obtenidos paratransformaciones lineales respecto al concepto de inversa. Se tiene así el siguiente resultado,cuya prueba se deja al lector.

4.7. Ejercicios 135
Sea A =µ
a bc d
¶.
1. Las afirmaciones siguientes son equivalentes.a) A es invertible.b) El único vector X de R2 tal que AX = O es X = O.c) Las columnas de A son linealmente independientes.d) ad− bc 6= 0.
2. Si ad− bc 6= 0 entonces A−1 = 1
∆
µd −b−c a
¶donde ∆ = ad− bc.
3. Si existe una matriz B de orden 2 tal que AB = I2 entonces BA = I2y por tanto A es invertible y A−1 = B.
4.7 Ejercicios
1. Sean U ∈ R2 y PU la transformación proyección sobre la recta generada por el vectorU. Para el vector U dado en cada literal, hallar PU
µx
y
¶para cada
µx
y
¶de R2.
a) U =
µ1
0
¶b) U =
µ0
1
¶c) U =
µ1
−1
¶d) U =
µ3
1
¶2. Sea L la recta con ecuación 5x − 2y = 0 y sea P : R2 → R2 la transformación
proyección sobre L. Si Pµa
b
¶=
µa0
b0
¶, expresar a0 y b0 en términos de a y b.
3. Sea P : R2 → R2 la transformación proyección sobre el eje x. Encontrar la imagenbajo P de los siguientes conjuntos:
a) La recta L que pasa por el origen y por el puntoµ3
−4
¶b) El paralelogramo determinado por los vectores V =
µ2
1
¶y W =
µ1
1
¶4. Sean U ∈ R2 y SU la transformación reflexión con respecto a la recta L generadapor el vector U. Para el vector U dado en cada literal, encontrar SU
µx
y
¶para cadaµ
x
y
¶∈ R2.
a) U =
µ2
−1
¶b) U =
µ1
1
¶c) U =
µ1
−2
¶5. Para cada literal, obtener la matriz de la transformación reflexión con respecto a larecta dada.
a) y = −x b) y = 2x
6. Para cada literal, si S : R2 → R2 es la transformación reflexión con respecto a larecta L dada, hallar la imagen bajo S de los conjuntos descritos.
a) L : y = −x, C1 =½µ
x
0
¶: x < 0
¾, C2 =
½µx
0
¶: x ≥ 0
¾

136 4. Transformaciones lineales del plano y matrices 2× 2
b) L : y = 2x, C1 =½µ0
y
¶: y < 0
¾, C2 =
½µx
0
¶: x ≥ 0
¾7. a) Para θ = −π/3 y θ = π/3,
i) Hallar la matriz de Rθ.
ii) Hallar Rθ
µx
y
¶para cada
µx
y
¶de R2.
iii) Hallar la imagen bajo Rθ de la recta L con ecuación y = x.
iv) Hallar la imagen bajo Rθ del paralelogramo P determinado por los vectores
V =
µ1
2
¶y W =
µ1
0
¶.
b) Para cada numeral expresar x0, y0 en términos de x y y.
i)
µx0
y0
¶= R(θ+π
2 )
µx
y
¶ii)
µx0
y0
¶= R2θ
µx
y
¶iii)
µx0
y0
¶= R(−θ)
µx
y
¶8. Para r = 1/3 y r = 2,
a) Si Dr
µx
y
¶=
µx0
y0
¶, expresar x0, y0 en términos de x y y.
b) Hallar la imagen bajo Dr de los siguientes conjuntos:
i) S =
½µ2
−1
¶,
µ−13
¶¾ii) El paralelogramo P determinado por
µ2
−1
¶yµ−13
¶.
iii) La circunferencia C con centro en el origen y radio 2.iv) La recta L con ecuación y = 2x− 3.
9. Sean U ∈ R2 y TU la traslación por el vector U . Si P y Q son puntos distintos, probarque:
a) TU (P ) 6= TU (Q)
b) La imagen bajo TU de la recta que pasa por los puntos P y Q es la recta que pasapor los puntos TU (P ) y TU (Q).
c) La imagen bajo TU del segmento de recta PQ es el segmento de recta con extremosTU (P ) y TU (Q) .
10. Para cada literal determinar si la transformación T : R2 → R2 definida en él es unatransformación lineal. En caso afirmativo, hallar la matriz de T .
a) T
µx
y
¶=
µ3x+ y
x− 2y
¶b) T
µx
y
¶= x
µ2
3
¶+ y
µ−12
¶c) T
µx
y
¶=
µx− 1x− y
¶d) T
µx
y
¶=
µ1
1
¶11. Para cada literal, suponga que T : R2 → R2 es la transformación lineal cuya matriz
es la dada. Calcular las imágenes bajo T deµ1
0
¶,
µ−12
¶yµ0
1
¶.

4.7. Ejercicios 137
a)
µ1 −30 1
¶b)1
2
µ1 −1−1 1
¶c)
µ1 −3−3 1
¶d)
µ1 00 0
¶e)
µ3 00 3
¶f)
µ1 00 3
¶g)
µ0 11 0
¶h)
µ √3/2 −1/21/2
√3/2
¶
12. Hallar la imagen del cuadrado con vértices en los puntosµ0
0
¶,
µ1
0
¶,
µ1
1
¶yµ0
1
¶bajo
la transformación T
µx
y
¶=
µ1 −30 1
¶µx
y
¶. ¿Es dicha imagen un cuadrado? ¿Cuál
es su área?
13. Sea T la transformación lineal con matriz m (T ) =µ
2 3−1 0
¶. Encontrar la imagen
bajo T de los siguientes conjuntos:
a) La recta L que pasa por el origen y tiene vector director D =
µ3
1
¶.
b) La recta L0 con ecuación bx− ay = 0.
14. Sea T : R2 → R2 la transformación lineal tal que T (E1 +E2) =
µ3
−1
¶, T (−E1 +E2) =µ
2
−3
¶. Encontrar T
µx
y
¶para cada
µx
y
¶de R2 y T
µ−1015
¶.
15. Sea T : R2 → R2 la transformación lineal tal que Tµ1
−1
¶=
µ5
−8
¶y Tµ2
2
¶=
µ−94
¶.
Hallar:
a) m (T ) b) T
µx
y
¶para cada
µx
y
¶de R2.
c) La imagen bajo T del paralelogramo P determinado porµ1
−1
¶yµ2
2
¶.
16. Sea T : R2 → R2 una transformación lineal y sean X1,X2 vectores linealmenteindependientes de R2. Demostrar que:
T es invertible si y sólo si T (X1) , T (X2) son linealmente independientes.
17. Sea T : R2 → R2 una transformación lineal. Demostrar que si X1,X2 son linealmentedependientes entonces T (X1) , T (X2) también son linealmente dependientes.
18. a) Dar ejemplo de una transformación T : R2 → R2 no lineal tal que Tµ0
0
¶=
µ0
0
¶.
b) Dar ejemplo de una transformación lineal T tal que para X1,X2 linealmente inde-pendientes se tenga que T (X1) , T (X2) sean linealmente dependientes.
19. Probar que:
a) Siµ
a bc d
¶es invertible y
µa bc d
¶µx
y
¶=
µu
v
¶entonces
µx
y
¶=
µa bc d
¶−1µu
v
¶.
b)
µa bc d
¶µx
y
¶= x
µa
c
¶+ y
µb
d
¶.

138 4. Transformaciones lineales del plano y matrices 2× 2
20. Seanµa
c
¶yµb
d
¶vectores de R2 L.I. Probar que todo vector
µu
v
¶de R2 es expresable
de manera única como combinación lineal deµa
c
¶yµb
d
¶, es decir, para todo vectorµ
u
v
¶de R2 existen únicos escalares x y y tales que
µu
v
¶= x
µa
c
¶+ y
µb
d
¶.
Exprese x y y en términos de a, b, c, d, u y v. (Ayuda: Vea ejercicio 19.)
21. Sea T : R2 → R2 una transformación lineal y sean X1,X2 dos vectores linealmenteindependientes de R2.
a) Mostrar que si T (X1) = T (X2) =
µ0
0
¶entonces T es la transformación nula.
b) Mostrar que si T (X1) = X1 y T (X2) = X2 entonces T es la transformaciónidentidad.
22. Encuentre todas las transformaciones lineales T : R2 → R2 que transformen la rectacuya ecuación es y = 0 en la recta con ecuación x = 0.
23. Dadas las transformaciones lineales del plano T1 y T2 definidas por
T1
µx
y
¶=
µx− y
x+ y
¶, T2
µx
y
¶=
µ−5x+ y
x+ 3y
¶, hallar:
a) m (T1) y m (T2) .
b) T1 + T2, m (T1 + T2) , m (T1) +m (T2) , (T1 + T2)
µ−1−3
¶.
c) −4T1, m (−4T1) , −4m (T1) , (−4T1)µ−1−3
¶.
d) 2T1 − 3T2, m (2T1 − 3T2) , 2m (T1)− 3m (T2) , (2T1 − 3T2)µ−1−3
¶.
e) T1 ◦ T2, m (T1 ◦ T2) , m (T1)m (T2) , (T1 ◦ T2)µ−1−3
¶.
f) T2 ◦ T1, m (T2 ◦ T1) , m (T2)m (T1) , (T2 ◦ T1)µ−1−3
¶.
24. Una transformación lineal T : R2 → R2 es tal que T (E1) = E1 + E2 y T (E2) =2E1 −E2.
a) Calcular en términos de E1 y E2 los siguientes vectores:
i) T (3E1 − 4E2) ii) T 2 (3E1 − 4E2)b) Hallar m (T ) y m
¡T 2¢.
25. Hallar m (T ) y m¡T 2¢sabiendo que T es la transformación lineal que transforma
cada vector de R2 en dos veces su simétrico con respecto al eje y. Interpretar T 2
geométricamente.

4.7. Ejercicios 139
26. Sea P la transformación proyección sobre el eje x. Hallar:
a)m (P ) b)m¡PRπ/2
¢c)m
¡Rπ/2P
¢d)¡PRπ/2
¢µxy
¶e)¡Rπ/2P
¢µxy
¶
27. Sean A =
µ1 00 0
¶, B =
µ0 −11 0
¶, C =
µ−1 21 −3
¶, D =
µ−4 12 −3
¶,
E =
µ1 00 −1
¶y F =
µ0 11 0
¶a) Calcular A2, B2, CD,DC,E2, F 2.
b) Para cada numeral, encuentre la transformación lineal T que satisface la condicióndada y cuando sea posible, de una interpretación geométrica.
i) m (T ) = A ii) m (T ) = A2 iii) m (T ) = B iv) m (T ) = B2
v) m (T ) = C vi) m (T ) = D vii) m (T ) = CD viii) m (T ) = DC
ix) m (T ) = E x) m (T ) = E2 xi) m (T ) = F xii) m (T ) = F 2.
28. Sea T : R2 → R2 definida por Tµx
y
¶=
µx− y
x+ y
¶. Calcular:
a) T 3µx
y
¶b) T 3
µ1
−1
¶29. Probar que Rθ ◦Rφ = R(θ+φ), es decir, Rθ ◦Rφ es la rotación por el ángulo θ + φ.
30. Sea T la transformación lineal con m (T ) =
µ1 −12 −2
¶.
a)Mostrar que para todo vectorX perteneciente a la recta y = x, se tiene T (X) = O.
b) Hallar una transformación lineal S : R2 → R2 diferente de la transformación nulatal que ST = O y TS = O.
31. Probar que toda traslación TU es uno a uno y sobre. Hallar T−1U
32. Si U =µ−12
¶, hallar y graficar la imagen del cuadrado S de la figura bajo la traslación
TU .
33. Sean T : R2 → R2 una transformación lineal con m (T ) =
µ1 00 −1
¶y U =
µ0
2
¶.
a) Hallar la transformación TU ◦ T e interpretarla geométricamente.b) Mostrar que todos los puntos de la recta y = 1 permanecen fijos bajo la transfor-mación TU ◦ T.

140 4. Transformaciones lineales del plano y matrices 2× 2
34. Sean U1 =
µ1
0
¶y U2 =
µ−10
¶. Hallar la transformación TU1 ◦Rπ/2 ◦ TU2 .
35. Sea T : R2 → R2 una transformación lineal invertible. Mostrar que T−1 también estransformación lineal.
36. Para la transformación lineal T : R2 → R2 de cada literal, determinar si T es inverti-
ble y, en caso afirmativo, encontrar m¡T−1
¢y T−1
µx
y
¶.
a) m (T ) =
µ1 21 3
¶b) T
µx
y
¶=
µ2x
5y
¶c) m (T ) =
µ5 22 1
¶d) T
µx
y
¶=
µ6x− 3y4x− 2y
¶e) m (T ) =
µ1 12 1
¶f) T
µx
y
¶=
µy
x
¶g) T es la proyección sobre la recta y = x.
h) T es la reflexión respecto al eje x.
i) T = Rθ. j) T
µx
y
¶=
µx
x
¶.
37. Demostrar que si T : R2 → R2 es una transformación lineal uno a uno entonces Ttransforma líneas rectas en líneas rectas.
38. Sea T : R2 → R2 la transformación lineal definida por Tµx
y
¶=
µx+ y
4x+ 7y
¶. Hallar,
si es posible, un vector X de R2 tal que T (X) =µ−25
¶.
39. Demostrar que para cada θ, −2π < θ < 2π, se tiene que R−1θ = R−θ.
40. Sea T : R2 → R2 la transformación lineal definida por Tµx
y
¶=
µx+ cy
−y
¶. Demostrar
que para todo c ∈ R, T es invertible y que T−1 = T.
41. Sean T : R2 → R2 y S : R2 → R2 dos transformaciones invertibles. Demostrar queS ◦ T es invertible y (S ◦ T )−1 = T−1 ◦ S−1.
42. Sean T : R2 → R2 y S : R2 → R2 las transformaciones lineales definidas por
T
µx
y
¶=
µx+ y
x− y
¶y S
µx
y
¶=
µ2x+ y
x− 2y
¶.
a) Demostrar que T y S son invertibles.
b) Hallar:
i) T−1µx
y
¶ii) S−1
µx
y
¶iii) (ST )−1
µx
y
¶.
43. Sea A =µ
a bc d
¶. La matriz
µa cb d
¶se llama la transpuesta de A y se denota
AT .

4.7. Ejercicios 141
a) Probar que si A y B son matrices 2× 2 y α ∈ R entonces:
i)¡AT¢T= A ii) (αA)T = αAT
iii) (A+B)T = AT +BT iv) (AB)T = BTAT
v) Si A esinvertible, AT también es invertible y¡AT¢−1
=¡A−1
¢T.
44. b) Probar que para todo par de vectores X, U de R2 se tiene que:X · (AU) =
¡ATX
¢· U y (AX) · U = X ·
¡ATU
¢.

142 4. Transformaciones lineales del plano y matrices 2× 2

5
Sistemas de ecuaciones lineales2× 2
5.1 Conceptos y resultados básicos
Recordemos que una ecuación lineal en dos variables x, y es una ecuación de la forma
ax+ by = u (5.1)
en la cual a, b y u son números reales dados.
Una solución de una tal ecuación es un par ordenadoµx0y0
¶de R2 tal que al sustituir
x por x0 y y por y0, la ecuación se satisface, es decir
ax0 + by0 = u.
Por ejemplo, una solución de la ecuación x+ 3y = 5 es el parµ2
1
¶pues 2 + 3 (1) = 5.
El conjunto de todas las soluciones de una ecuación del tipo (5.1) se dirá su conjuntosolución. Dos ecuaciones del tipo (5.1) se dirán equivalentes si tienen el mismo conjuntosolución; cuando se multiplica una ecuación por un escalar no nulo se obtiene una ecuaciónequivalente.
Como sabemos, si a 6= 0 o b 6= 0, la ecuación (5.1) corresponde a una línea recta, demanera que en tal caso el conjunto solución de (5.1) es dicha línea recta.
Ejemplo 5.1El conjunto solución de la ecuación
x+ 2y = 4 (5.2)
es la recta L que corresponde a esta ecuación, la cual corta a los ejes coordenados en lospuntos
µ0
2
¶yµ4
0
¶(Figura 5.1).
143

144 5. Sistemas de ecuaciones lineales 2× 2
Figura 5.1.
Ahora, como ya lo sabemos, dicha recta L puede describirse mediante distintas ecua-ciones. A continuación mostramos una manera de pasar de la ecuación (5.2) a una ecuaciónvectorial paramétrica para L: de la ecuación (5.2) se obtiene la ecuación equivalente
y = 2− 12x.
Así, si damos a x cualquier valor en R, digamos t, entonces el valor correspondiente de y
es y = 2− (1/2) t. Por tanto, L consta de los puntosµx
y
¶de R2 tales que
x = t
y = 2− 12t
con t ∈ R o, equivalentemente, L consta de los puntosµx
y
¶de R2 de la forma
µx
y
¶=
µ0
2
¶+ t
µ1
−1/2
¶, t ∈ R. (5.3)
Análogamente, la ecuación (5.2)es equivalente a la ecuación
x = 4− 2y.
Así, si damos a y cualquier valor en R, digamos s, entonces el valor correspondiente de x
es x = 4− 2s. Por tanto, L también puede describirse como el conjunto de puntosµx
y
¶de
R2 tales que
x = 4− 2sy = s
con s ∈ R, o equivalentemente, como el conjunto de los puntosµx
y
¶de R2 de la forma
µx
y
¶=
µ4
0
¶+ s
µ−21
¶, s ∈ R (5.4)
Las ecuaciones (5.3) y (5.4), las cuales son ecuaciones vectoriales paramétricas para larecta L, proporcionan descripciones del conjunto solución de la ecuación (5.2) ¥

5.1. Conceptos y resultados básicos 145
Ejemplo 5.2a) El conjunto solución de la ecuación
0x+ 0y = 0
es todo R2, pues todo puntoµx0y0
¶de R2 es una solución de dicha ecuación.
b) Si u 6= 0, el conjunto solución de la ecuación
0x+ 0y = u
es φ (el conjunto vacío), pues ningún parµx0y0
¶de R2 la satisface. ¥
Consideremos ahora un sistema de dos ecuaciones lineales
ax+ by = ucx+ dy = v
(5.5)
(a, b, c, d, u y v son números reales dados).
Una solución de tal sistema es un par ordenadoµx0y0
¶de R2, el cual es solución de
cada una de las dos ecuaciones del sistema. Por ejemplo, una solución del sistema
x+ y = 42x− y = 5
es el parµ3
1
¶, pues
µ3
1
¶es solución de cada una de las ecuaciones, ya que 3 + 1 = 4 y
2 (3)− 1 = 5. Por otra parte, el sistema
x+ y = 42x+ 2y = −5
carece de soluciones, pues si un parµx0y0
¶satisface la primera ecuación, es decir, si x0+y0 =
4, entonces dicho par no satisface la segunda, pues 2x0 + 2y0 = 2 (x0 + y0) = 2 (4) = 8.
El sistema (5.5) se dice soluble o consistente si tiene al menos una solución; encaso contrario, el sistema se dice no soluble o inconsistente. El conjunto de todas lassoluciones de un sistema del tipo (5.5) se dirá su conjunto solución.
Ejemplo 5.3a) El conjunto solución del sistema
0x+ 0y = 32x− y = 7
es φ, pues la ecuación 0x+ 0y = 3 carece de soluciones.b) El conjunto solución del sistema
0x+ 0y = 02x− y = 7

146 5. Sistemas de ecuaciones lineales 2× 2
es el de la ecuación 2x − y = 7, ya que todo parµx0y0
¶de R2 es solución de la ecuación
0x+ 0y = 0.c) El conjunto solución del sistema
0x+ 0y = 00x+ 0y = 0
es todo R2, pues el conjunto solución de cada ecuación es R2. ¥Como se aprecia en el ejemplo anterior, si en el sistema (5.5) se tiene a = 0 y b = 0 o
se tiene c = 0 y d = 0, entonces el conjunto solución es φ, una recta o todo R2. En lo quesigue centraremos la atención en el caso no trivial
a 6= 0 o b 6= 0 y c 6= 0 o d 6= 0. (5.6)
En este caso el conjunto solución de la primera ecuación es una línea recta L1 y el de lasegunda, una línea recta L2; por tanto, el conjunto solución del sistema es la intersecciónde L1 y L2.
Ahora bien, para dichas rectas L1, L2 se da una y sólo una de las tres posibilidadessiguientes (figura 5.2):
• L1 = L2.
• L1 6= L2 pero L1 y L2 son paralelas.
• L1 y L2 se cortan en un único punto.
Figura 5.2.
Así, admitiendo lo anterior, podemos afirmar lo siguiente:
Para el sistema (5.5), bajo la condición (5.6), se da uno y sólo uno de lossiguientes casos:Caso 1. El sistema tiene infinitas soluciones, siendo su conjunto soluciónuna línea recta. Cualquiera de las dos ecuaciones del sistema es unaecuación para dicha recta.
Caso 2. El sistema carece de soluciones.Caso 3. El sistema tiene solamente una solución, la cual es el punto deintersección de las rectas L1,L2.

5.1. Conceptos y resultados básicos 147
Ejemplo 5.4a) Consideremos el sistema
x+ 2y = 43x+ 6y = 12
Se observa que las dos ecuaciones corresponden a una misma línea recta, la recta L conecuación x + 2y = 4 (las dos ecuaciones son equivalentes). Así, el conjunto solución delsistema es dicha recta L.
b) En el sistemax+ 2y = 43x+ 6y = 7
las ecuaciones corresponden a rectas paralelas pero distintas, luego el sistema carece desoluciones.
c) En el sistemax+ 2y = 02x− 3y = 8
las ecuaciones corresponden a rectas no paralelas, luego el sistema tiene solamente unasolución, la cual es el punto de intersección de tales rectas. ¥
Dos sistemas del tipo (5.5) se dicen equivalentes si tienen el mismo conjunto solución.Cuando se sustituye una de las ecuaciones de un sistema por la suma de esa ecuación y unmúltiplo escalar de la otra, se obtiene un sistema equivalente. Por ejemplo, consideremosel sistema
ax+ by = ucx+ dy = v
(5.7)
Multiplicando la primera ecuación por un escalar λ se obtiene la ecuación λax+λby = λu,y sumando ésta a la segunda ecuación se obtiene
(λa+ c)x+ (λb+ d) y = λu+ v
Sustituyendo en el sistema (5.7) su segunda ecuación por la ecuación anterior se obtiene elsistema
ax+ by = u(λa+ c)x+ (λb+ d) y = λu+ v
(5.8)
Veamos ahora que los sistemas (5.7) y (5.8) son equivalentes:
En primer lugar, siµx0y0
¶es una solución del sistema (5.7) entonces
ax0 + by0 = u y cx0 + dy0 = v
por tanto,λax0 + λby0 = λu y cx0 + dy0 = v
de donde(λa+ c)x0 + (λb+ d) y0 = λu+ v
Luego,µx0y0
¶es solución de cada una de las ecuaciones del sistema (5.8).

148 5. Sistemas de ecuaciones lineales 2× 2
Recíprocamente, siµx0y0
¶es una solución del sistema (5.8) entonces
ax0 + by0 = u y (λa+ c)x0 + (λb+ d) y0 = λu+ v
por tanto,
λax0 + λby0 = λu y (λax0 + λby0) + (cx0 + dy0) = λu+ v
de donde (restando la primera de las igualdades anteriores de la segunda)
cx0 + dy0 = v
Luego,µx0y0
¶es solución del sistema (5.7). ¨
Uno de los procedimientos más empleados para resolver un sistema es el llamadométodo de eliminación, el cual consiste a grandes rasgos en eliminar una de las in-cógnitas en alguna de las ecuaciones sin alterar el conjunto solución del sistema. Por ejem-plo, para eliminar x en la segunda ecuación del sistema (5.7), se escoge λ de modo queλa+ c = 0 con lo cual en el sistema equivalente (5.8) ya no figura la incógnita x. Se ilustraeste procedimiento en los tres ejemplos siguientes.
Ejemplo 5.5Consideremos el sistema
x+ 2y = 02x− 3y = 8
el cual tiene solamente una solución (vea ejemplo 5.4,c)). Hallemos dicha solución medianteel método de eliminación:
Con miras a eliminar la incógnita x en la segunda ecuación, multiplicamos la primeraecuación por−2, y la ecuación resultante (−2x− 4y = 0) la sumamos a la segunda ecuación,lo cual nos conduce a
0x− 7y = 8es decir,
−7y = 8.El sistema inicial es entonces equivalente al sistema
x+ 2y = 0−7y = 8
teniendo este último la ventaja de que de su segunda ecuación se obtiene y = −87como
único valor para y. Sustituyendo este valor de y en la primera ecuación y despejando x se
obtiene x =16
7como único valor para x. Así, la única solución del sistema es
µ16/7
−8/7
¶, es
decir, el conjunto solución es½µ
16/7
−8/7
¶¾. ¥
Ejemplo 5.6Consideremos el sistema
x+ 2y = 4 (5.9)
3x+ 6y = 7

5.1. Conceptos y resultados básicos 149
el cual carece de soluciones (vea ejemplo 5.4,b)). Es ilustrativo ver lo que ocurre si seaplica a este sistema el método de eliminación: para eliminar x en la segunda ecuación,multiplicamos la primera ecuación por −3 y el resultado se suma a la segunda, con lo cualse obtiene la ecuación
0x+ 0y = −5.
El sistema (5.9) es entonces equivalente al sistema
x+ 2y = 4
0x+ 0y = −5
y como este último es inconsistente, entonces el sistema inicial (5.9) es inconsistente. Asíque el método de eliminación también conduce a que el sistema (5.9) es no soluble. ¥
Ejemplo 5.7Consideremos el sistema
x+ 2y = 4
3x+ 6y = 12
(vea ejemplo 5.4,a)). Veamos qué ocurre si aplicamos el método de eliminación: multipli-cando la primera ecuación por −3 y sumando la ecuación resultante (−3x− 6y = −12) ala segunda, se obtiene la ecuación
0x+ 0y = 0.
Así, el sistema inicial es equivalente al sistema
x+ 2y = 4
0x+ 0y = 0.
Como sabemos, este sistema es consistente y su conjunto solución es la recta que tienecomo ecuación x + 2y = 4. De nuevo el método de eliminación nos condujo a lo que yasabíamos. ¥
Ejemplo 5.8Considere el sistema
2x+ y = 2
x+ ay = 3 + b
Hallar los valores de a y b tales que el sistemai) Tenga solución única.ii) Tenga infinitas soluciones.iii) Sea inconsistente.
Solución: Eliminando x en la segunda ecuación del sistema dado, se encuentra que dichosistema es equivalente al sistema
2x+ y = 2µa− 1
2
¶y = 2 + b

150 5. Sistemas de ecuaciones lineales 2× 2
Ahora, este sistema tiene solución única si a− 126= 0 sin importar el valor de b; tiene
infinitas soluciones si a− 12= 0 y 2+ b = 0, y es inconsistente si a− 1
2= 0 y 2+ b 6= 0.
Por tanto, el sistema dado:
i) Tiene solución única si a 6= 1
2sin importar el valor de b.
ii) Tiene infinitas soluciones si a =1
2y b = −2.
iii) Es inconsistente si a =1
2y b 6= −2. ¥
5.2 Sistemas de ecuaciones lineales y matrices
Relacionemos ahora los sistemas con las transformaciones lineales, o lo que es equivalente,con las matrices.
En primer lugar, las dos igualdades en (5.5) son equivalentes a la igualdad en R2µax+ by
cx+ dy
¶=
µu
v
¶y ésta, a su vez, es equivalente a la igualdadµ
a bc d
¶µx
y
¶=
µu
v
¶. (5.10)
Así, el sistema (5.5) puede escribirse, usando matrices 2 × 2 y vectores de R2, en laforma equivalente (5.10), es decir, como
AX = U (5.11)
con A =
µa bc d
¶, X =
µx
y
¶y U =
µu
v
¶.
Nótese que un vector X0 de R2 es una solución del sistema (5.5) si y sólo si AX0 = U,es decir, si y sólo si la matriz A “transforma” a X0 en el vector U.
Obsérvese la semejanza entre la ecuación vectorial (5.11) y la ecuación escalar
αx = β
con α, β ∈ R, de la cual sabemos que si α 6= 0, su única solución es el número x0 = α−1β.De manera similar, si la matriz A es invertible, el vector X0 = A−1U es la única soluciónde (5.11) pues, por una parte,
AX0 = A¡A−1U
¢=¡AA−1
¢U = I2U = U,
lo cual muestra que X0 = A−1U es una solución de (5.11). Por otra parte, si X es unasolución de (5.11), es decir, si AX = U, entonces A−1
¡AX
¢= A−1U ; pero
A−1¡AX
¢=¡A−1A
¢X = I2X = X
por tanto, X = A−1U = X0.Así, si A es invertible el sistema (5.11) tiene solamente una solución (la cual es X0 =
A−1U).

5.2. Sistemas de ecuaciones lineales y matrices 151
Vamos a probar ahora que el recíproco de la afirmación anterior también es cierto.Supongamos entonces que el sistema AX = U tiene una única solución y probemos queA es invertible:
Si U =µ0
0
¶, ya sabemos que el hecho de que el sistema AX = O tenga solución única
equivale a que A es invertible. Supongamos entonces que U 6=µ0
0
¶y denotemos X0 la
única solución de AX = U. Si A no fuese invertible, existiría un vector no nulo X∗ tal que
AX∗ =
µ0
0
¶y en tal caso el vector X0+X∗, el cual es distinto de X0, sería otra solución de
AX = U pues A (X0 +X∗) = AX0 +AX∗ = U +
µ0
0
¶= U, lo cual va contra lo supuesto.
Luego, A tiene que ser invertible. ¨
Nótese que en la discusión anterior no se usó la condición (5.6), por tanto hemos probadoel siguiente resultado:
Sea A cualquier matriz 2× 2 y sea U cualquier vector de R2.El sistema AX = U tiene solamente una solución si y sólo si la matriz Aes invertible.Cuando A es invertible, la única solución del sistema es X0 = A−1U.
Ejemplo 5.9Consideremos el sistema del ejemplo 5.5
x+ 2y = 0
2x− 3y = 8
el cual podemos escribir en la formaµ1 22 −3
¶µx
y
¶=
µ0
8
¶.
La matriz A =µ1 22 −3
¶es invertible y su inversa es la matriz
A−1 =1
∆
µ−3 −2−2 1
¶donde ∆ = 1 (−3)− 2 (2) = −7. Luego, dicho sistema tiene como única solución al vector
X0 = A−1µ0
8
¶=
1
−7
µ−3 −2−2 1
¶µ0
8
¶= −1
7
µ−168
¶=
µ16/7
−8/7
¶solución que ya habíamos encontrado por el método de eliminación. ¥

152 5. Sistemas de ecuaciones lineales 2× 2
Ejemplo 5.10Consideremos el sistema
x+ y = u
5x+ 5y = v (5.12)
el cual podemos escribir en la formaµ1 15 5
¶µx
y
¶=
µu
v
¶.
Puesto que la matrizµ1 15 5
¶no es invertible, para dicho sistema (5.12) no se da que
tiene solución única. Ahora, como se cumple la condición (5.6) podemos afirmar que elsistema (5.12) carece de soluciones o bien su conjunto solución es una recta; que ocurra lo
uno o lo otro depende, por supuesto, de cuál sea el vectorµu
v
¶. Por ejemplo, si
µu
v
¶=
µ2
3
¶el sistema (5.12) carece de soluciones, mientras que si
µu
v
¶=
µ2
10
¶, el conjunto solución
es la recta con ecuación x+ y = 2. ¥
Si en el sistema (5.5) se tiene u = 0 y v = 0 (o, equivalentemente U =µ0
0
¶en (5.11)) el
sistema se dice homogéneo. Cualquiera sea la matriz A, el sistema homogéneo AX = O
es soluble ya que este sistema posee al menos la solución X =
µ0
0
¶, la cual se dirá la
solución trivial.
A continuación nos referiremos a las posibilidades para el conjunto solución de unsistema homogéneo
AX = O. (5.13)
En primer lugar, como ya sabemos, este sistema tiene únicamente la solución trivial siy sólo si la matriz A es invertible.
Supongamos ahora que la matriz A no es invertible y que el sistema (5.13) cumple lacondición (5.6). Puesto que el sistema es soluble y no es de solución única entonces sóloqueda la posibilidad de que su conjunto solución sea una recta, la cual pasa por el origen.Es fácil ver que esto último sigue siendo cierto bajo las hipótesis A no invertible y A 6= O.
Tenemos así que:
Cualquiera sea la matriz A de orden 2,a) El sistema AX = O tiene únicamente la solución trivial X = O
si y sólo si A es invertible.b) Si A no es invertible y A 6= O, el conjunto solución del sistema
AX = O es una línea recta que pasa por el origen.c) Si A = O, el conjunto solución del sistema AX = O es todo R2.
Dado un sistema no homogéneo AX = U, el sistema AX = O se dirá su sistemahomogéneo asociado.
En el siguiente ejemplo se ilustra la relación entre el conjunto solución de un sistemasoluble no homogéneo y el conjunto solución del sistema homogéneo asociado.

5.2. Sistemas de ecuaciones lineales y matrices 153
Ejemplo 5.11Consideremos el sistema no homogéneo del ejemplo 5.7
µ1 23 6
¶µx
y
¶=
µ4
12
¶(5.14)
cuyo conjunto solución es la recta L con ecuación x + 2y = 4, la cual (según vimos en el
ejemplo 5.1) la conforman los puntosµx
y
¶∈ R2 de la forma
µx
y
¶=
µ0
2
¶+ t
µ1
−1/2
¶, t ∈ R. (5.15)
Observe queµ0
2
¶es una solución particular del sistema, la cual se obtiene con t = 0.
El sistema homogéneo asociado al sistema (5.14) es
µ1 23 6
¶µx
y
¶=
µ0
0
¶(5.16)
y su conjunto solución la recta L0 con ecuación x+2y = 0, la cual la conforman los puntosµx
y
¶∈ R2 de la forma µ
x
y
¶= t
µ1
−1/2
¶, t ∈ R. (5.17)
Obsérvese que las rectas L y L0 son paralelas y que L puede obtenerse sumando lasolución particular
µ0
2
¶de (5.14) a los puntos de L0 (compare (5.15) y (5.17)). En otras
palabras, el conjunto solución del sistema no homogéneo (5.14) (la recta L) es la imagenbajo la traslación T(02)
, del conjunto solución del sistema homogéneo asociado.
En la figura 5.3 se ilustra lo anterior. ¥
Figura 5.3.
En general, se tiene el siguiente resultado:

154 5. Sistemas de ecuaciones lineales 2× 2
Sea A una matriz 2× 2 no nula y no invertible y sea U un vector no nulo de R2.Si X0 es una solución particular del sistema AX = U y la recta
L0 = {tD | t ∈ R} (D ∈ R2, D fijo)es el conjunto solución del sistema homogéneo asociado AX = O entoncesel conjunto solución del sistema AX = U es la recta
L = {X0 + tD | t ∈ R}es decir, la recta
L = TX0 (L0)la cual pasa por el punto X0 y es paralela a L0.
Prueba:En primer lugar, todo punto X0+ tD de L es solución del sistema AX = U. En efecto,
se tiene queA (X0 + tD) = AX0 + tAD
y como AX0 = U y AD = O entonces A (X0 + tD) = U + tO = U, es decir, X0 + tD essolución del sistema AX = U.
Se sigue de lo anterior que la recta L está contenida en el conjunto solución del sistemaAX = U y como este conjunto solución también es una recta, entonces L es dicho conjuntosolución. ¨
Retornemos al sistema (5.11), AX = U, y consideremos ahora la siguiente pregunta:Fijada la matriz A, ¿Para cuáles vectores U el sistema es soluble y para cuáles no lo es?
Es de señalar que si A es invertible, ya conocemos la respuesta: el sistema AX = U essoluble (y tiene sólo una solución) cualquiera sea el vector U de R2.
En el caso general (A invertible o no), una respuesta a la pregunta formulada puededarse reescribiendo el sistema AX = U en la forma
x
µa
c
¶+ y
µb
d
¶=
µu
v
¶(5.18)
ya queµ
a bc d
¶µx
y
¶= x
µa
c
¶+y
µb
d
¶. En efecto, de (5.18) se sigue que el sistema AX = U
es soluble si y sólo si existen escalares x0, y0 tales que
x0
µa
c
¶+ y0
µb
d
¶=
µu
v
¶es decir, si y sólo si el vector
µu
v
¶es combinación lineal de las columnas de la matriz A.
Así, una respuesta a la pregunta en consideración es:
El sistema AX = U es soluble si y sólo si el vector U es combinaciónlineal de las columnas de la matriz A.
Ejemplo 5.12Para el sistema µ
1 23 6
¶µx
y
¶=
µu
v
¶(5.19)

5.2. Sistemas de ecuaciones lineales y matrices 155
determinar los vectoresµu
v
¶de R2 tales que dicho sistema es soluble.
Solución: Nótese que la matrizµ1 23 6
¶no es invertible. El sistema dado es soluble
si y sólo siµu
v
¶es combinación lineal de las columnas
µ1
3
¶yµ2
6
¶. Ahora bien, comoµ
2
6
¶es múltiplo escalar de
µ1
3
¶, entonces las combinaciones lineales de
µ1
3
¶yµ2
6
¶son
los múltiplos escalares deµ1
3
¶, es decir, los vectores sobre la recta L generada por
µ1
3
¶(Figura 5.4).
Figura 5.4.
Así, los vectoresµu
v
¶tales que el sistema (5.19) es soluble son los múltiplos escalares
deµ1
3
¶o, equivalentemente, los vectores sobre la recta L.
Por ejemplo, siµu
v
¶= 4
µ1
3
¶, el sistema (5.19) es soluble (y su conjunto solución es la
recta con ecuación x+ 2y = 4). Por otra parte, siµu
v
¶=
µ7
8
¶entonces el sistema (5.19)
no es soluble puesµ7
8
¶no es múltiplo escalar de
µ1
3
¶. ¥
Es de resaltar que los vectoresµu
v
¶para los cuales el sistema (5.19) es soluble conforman
una recta que pasa por el origen, la cual es la recta generada porµ1
3
¶(o por
µ2
6
¶). En
general, se tiene el siguiente resultado, cuya prueba se deja como ejercicio. (Vea ejercicio17 de este capítulo).

156 5. Sistemas de ecuaciones lineales 2× 2
Sea A =
µa bc d
¶. Si A es no nula y no invertible entonces el conjunto de
los vectoresµu
v
¶para los cuales el sistema AX =
µu
v
¶es soluble es la recta
generada porµa
c
¶siµa
c
¶6=µ0
0
¶, o por
µb
d
¶siµb
d
¶6=µ0
0
¶.
5.3 Ejercicios
1. Describir mediante una ecuación vectorial paramétrica el conjunto solución de laecuación
3x− 5 = 2x+ 2y + 6
y dar dos soluciones particulares para ella.
2. Determinar si las dos rectas con ecuaciones dadas en cada literal se cortan y, en casoafirmativo, hallar su punto de intersección.
a) x− y = 2 b) 4x− 6y = 7 c) 3x+ 4y = 22x+ y = 1 6x− 9y = 12 6x− 7y = 0
3. Para cada uno de los sistemas dados a continuación determinar si es soluble y, encaso afirmativo, hallar el conjunto solución e interpretarlo geométricamente.
a) x− 3y = 2 b) 4x− 6y = 0 c) 3x− y = 6−4x+ 2y = −3 −2x+ 3y = 0 −6x+ 2y = −12
d) 2y − 5x = 0 e) x+ 3y = −1 f) x− 2y = 53y + 4x = 0 2x− y = 5 −3x+ 6y = 10
4. Determinar si las tres rectas cuyas ecuaciones se dan en cada literal tienen un puntode intersección común y, en caso afirmativo, hallar dicho punto.
a) 2x+ 3y = −1, 6x+ 5y = 0, 2x− 5y = 7b) x− 4y = 1, 2x− y = −3, −x− 3y = 4
5. Determinar los valores de a y b tales que la recta ax+ by = 10 pase por los puntos
P =
µ−34
¶y Q =
µ3
1
¶.
6. El precio de la boleta para cierto evento es de $2250 para adulto y $1560 para niño.Se vendieron 450 boletas por un total de $796530. ¿Cuántas boletas de cada tipo sevendieron?
7. Dos compuestos se combinan para fabricar dos tipos de fertilizantes. Cada unidad delfertilizante tipo I requiere 10 kg. del compuesto A y 30 kg. del compuesto B. Cadaunidad del fertilizante tipo II requiere 25 kg. del compuesto A y 40 kg. del compuestoB. Se desea hallar el número de unidades de cada tipo de fertilizante que se puedeproducir con 650 kg. del compuesto A y 1250 kg. del compuesto B.
a) Plantear un sistema de ecuaciones lineales que permita resolver el problema.
b) Hallar el número de unidades de cada tipo de fertilizante que se puede producir.

5.3. Ejercicios 157
8. Suponga que la placa de la figura representa una sección transversal de un postemetálico con flujo de calor despreciable en la dirección perpendicular a la placa. SeanT1 y T2 las temperaturas en los nodos interiores de la red de la figura. Suponga que latemperatura en cada nodo interior es el promedio de los cuatro nodos más cercanos(a izquierda, a derecha, arriba, abajo).
a) Plantear un sistema de dos ecuaciones lineales cuya solución produzca las estima-ciones de las temperaturas T1 y T2.
b) Encontrar los valores de T1 y T2.
9. Plantear un sistema de dos ecuaciones lineales con dos incógnitas que satisfaga lacondición dada en cada caso.
a) El sistema tiene infinitas soluciones. b) El sistema tiene solución única.
c) El sistema es inconsistente. d) La única solución del sistema es¡−12
¢.
e) El conjunto solución del sistema es la recta que pasa por el origen y tiene vectordirector D =
¡−12
¢.
10. Considere el sistema
kx+ y = 1
x+ ky = 1
a) Encontrar los valores de k tales que el sistema
i) Tenga solución única.
ii) Tenga infinitas soluciones.
iii) No tenga soluciones.
b) Resolver los sistemas obtenidos en a i) y a ii).
11. Encontrar una relación entre a y b de tal forma que sea soluble el sistema
x+ y = a
5x+ 5y = b

158 5. Sistemas de ecuaciones lineales 2× 2
12. Encontrar condiciones sobre a, b, c y d de tal forma que no sea soluble el siguientesistema
ax− by = c
bx+ ay = d
13. Dado el sistema de ecuaciones lineales
2x+ y = 1
3x− y = 1
a) Escribir la matriz A y el vector U tales que el sistema dado se pueda expresarcomo AX = U .
b) Mostrar que A es invertible y calcular su inversa.
c) Calcular la única solución del sistema, utilizando la inversa de A.
d) Expresar el vector U como combinación lineal de las columnas de A.
14. a) Considere el sistema homogéneoµa bc d
¶µx
y
¶=
µ00
¶
i) Demostrar que siµx0y0
¶es una solución del sistema entonces para todo número
real k, el vector kµx0y0
¶también es solución del sistema.
ii) Demostrar que si X =
µx1y1
¶y Y =
µx2y2
¶son soluciones del sistema, entonces
también el vector X + Y es solución del sistema.
b) Construya un sistema no homogéneo de dos ecuaciones con dos incógnitas tal que
X =
µ2
−1
¶y Y =
µ1
0
¶sean soluciones del sistema. ¿Será 3X solución del sistema?
¿Será X + Y solución del sistema?
15. Para cada uno de los siguientes literales, diga si el sistema AX = U es o no soluble,determinando si el vector U es o no es una combinación lineal de las columnas de A.
a) AX = U con A =
µ2 4−1 3
¶y U =
µ−12−14
¶.
b) AX = U con A =
µ−1 43 −12
¶y U =
µ−515
¶.
c) AX = U con A =
µ2 −6−3 9
¶y U =
µ10
¶.
16. Para cada uno de los siguientes literales, encuentre todos los vectoresµuv
¶tales que
el sistema dado sea soluble.
a)
µ−2 −3/23 4
¶µxy
¶=
µuv
¶b)
µ−5 25−7 35
¶µxy
¶=
µuv
¶

5.3. Ejercicios 159
17. Sea A =µ
a bc d
¶. Probar que si A es no nula y no invertible entonces el conjunto
de los vectoresµu
v
¶para los cuales el sistema AX =
µu
v
¶es soluble es la recta
generada porµa
c
¶siµa
c
¶6=µ0
0
¶, o por
µb
d
¶siµb
d
¶6=µ0
0
¶.
18. Considere un sistema AX = U del cual sabe que una solución esµ2
3
¶y que el
conjunto solución del sistema AX = O es la recta con ecuación x− y = 0. ¿Cuál esel conjunto solución del sistema AX = U?

160 5. Sistemas de ecuaciones lineales 2× 2

6
Determinantes de orden 2
6.1 Definición. Par orientado de vectores
Consideremos una matriz A =µ
a bc d
¶o bien la transformación lineal T : R2 → R2 cuya
matriz es A.
En secciones anteriores hemos visto como el escalar ad − bc proporciona importanteinformación acerca de la matriz A y de la transformación T. Recordamos, por ejemplo,que:
• La matriz A (La transformación T ) es invertible si y sólo si ad− bc 6= 0.
• Si ad− bc 6= 0,
m¡T−1
¢= A−1 =
1
ad− bc
µd −b−c a
¶.
• Las columnas de la matriz A son linealmente independientes si y sólo si ad− bc 6= 0.
• Cualquiera sea el vectorµu
v
¶, el sistema A
µx
y
¶=
µu
v
¶tiene solución única si y sólo
si ad− bc 6= 0.
Tal escalar ad−bc es llamado determinante de la matriz A o también determinantede la transformación T. Lo denotaremos de cualquiera de las formas siguientes:
¯a bc d
¯, det (A) o det (T ) .
Empleando el concepto de determinante, podemos reescribir los resultados antes recor-dados como sigue:
161

162 6. Determinantes de orden 2
Sean A =
µa bc d
¶y T : R2 → R2 la transformación lineal
cuya matriz es A.• A es invertible si y sólo si det (A) 6= 0• T es invertible si y sólo si det (T ) 6= 0.• Si det (A) 6= 0,
m¡T−1
¢= A−1 = 1
det(A)
µd −b−c a
¶.
• Las columnas de la matriz A son linealmente independientessi y sólo si det (A) 6= 0.
• Cualquiera sea el vectorµu
v
¶, el sistema A
µx
y
¶=
µu
v
¶tiene
solución única si y sólo si det (A) 6= 0.
De manera que el concepto de determinante está relacionado con varios de los con-ceptos asociados con matrices y transformaciones lineales. En este capítulo veremos otrosconceptos también relacionados con el determinante; empezaremos con el concepto de “parde vectores orientado”.
Consideremos un par de vectores no nulos X1,X2 de R2 visto como un par ordenadocon X1 primero y X2 segundo. Denotemos α, con 0 ≤ α < 2π, el ángulo de X1 a X2,medido en dirección antihoraria y al cual nos referiremos simplemente como el ángulo deX1 a X2.
Supongamos que los vectores X1,X2 son linealmente independientes, caso en el cual setiene que 0 < α < π o π < α < 2π. (Figura 6.1).
Figura 6.1.
Si 0 < α < π o, equivalentemente, si senα > 0 diremos que el parX1,X2 está orientadopositivamente (figura 6.1(a)), mientras que si π < α < 2π o, equivalentemente, si senα <0 diremos que el par X1,X2 está orientado negativamente (figura 6.1(b)).
Ejemplo 6.1
El par E1 =µ1
0
¶, E2 =
µ0
1
¶está orientado positivamente, pues el ángulo de E1 a E2 es
π
2
y 0 <π
2< π, en tanto que el par E1,−E2 está orientado negativamente ya que el ángulo
de E1 a −E2 es3π
2y π <
3π
2< 2π (Figura 6.2). ¥

6.1. Definición. Par orientado de vectores 163
Figura 6.2.
Sean X1 =
µx1y1
¶y X2 =
µx2y2
¶. ¿Cómo determinar, a partir de las componentes
x1, y1, x2, y2 si el par X1,X2 está orientado positivamente o negativamente?Resulta que así como el coseno del ángulo entre X1 y X2 es expresable en términos de
dichas componentes, también lo es el seno del ángulo α deX1 aX2. En efecto, consideremosel caso en que el par X1,X2 está orientado positivamente y sean θ1, θ2 las direcciones deX1 y X2 respectivamente (Figura 6.3).
Figura 6.3.
En tal caso,α = θ2 − θ1 o α = θ2 − θ1 + 2π
y asísenα = sen (θ2 − θ1) = senθ2 cos θ1 − cos θ2senθ1 (6.1)
Ahora, como
X1 =
µx1y1
¶= kX1k
µcos θ1senθ1
¶y X2 =
µx2y2
¶= kX2k
µcos θ2senθ2
¶entonces
cos θ1 =x1kX1k
, senθ1 =y1kX1k
, cos θ2 =x2kX2k
y senθ2 =y2kX2k
luego, sustituyendo en (6.1),
senα =y2kX2k
x1kX1k
− x2kX2k
y1kX1k

164 6. Determinantes de orden 2
es decir,
senα =x1y2 − x2y1kX1k kX2k
(6.2)
Se puede probar que esta fórmula también es válida si el par X1,X2 está orientadonegativamente.
Es claro que con la fórmula (6.2) es fácil saber, a partir de las componentes x1, y1, x2, y2,cuándo el par X1,X2 está orientado positiva o negativamente, pues según (6.2),
senα > 0 si y sólo si x1y2 − x2y1 > 0
ysenα < 0 si y sólo si x1y2 − x2y1 < 0.
Ahora, como
x1y2 − x2y1 =
¯x1 x2y1 y2
¯entonces se tiene lo siguiente:
Sean X1 =
µx1y1
¶, X2 =
µx2y2
¶vectores linealmente independientes de R2.
• El par X1,X2 está orientado positivamente si y sólo si
¯x1 x2y1 y2
¯> 0.
• El par X1,X2 está orientado negativamente si y sólo si
¯x1 x2y1 y2
¯< 0.
Ejemplo 6.2Consideremos los vectores de R2, X1 =
µ1
1
¶, X2 =
µ−1−0.9
¶los cuales son linealmente
independientes. ¯1 −11 −0.9
¯= (1) (−0.9)− (−1) (1) = 0.1.
Como
¯1 −11 −0.9
¯> 0 entonces el par X1,X2 está orientado positivamente. ¥
Obsérvese que:• La fórmula (6.2) es válida aún en el caso que los vectores X1,X2 son linealmente
dependientes.
• Dado un par cualquiera de vectores no nulos X1 =µx1y1
¶, X2 =
µx2y2
¶, la fórmula
(6.2) no es suficiente para determinar el ángulo α de X1 a X2. Así que si se desea hallardicho ángulo α, es necesario contar con más información acerca de él. Por ejemplo, es fácilverificar que
cosα =x1x2 + y1y2kX1k kX2k
. (6.3)
Conocidos senα y cosα sabremos el cuadrante en el cual se encuentra α y utilizando(6.2) o (6.3) podremos determinar α. De manera que las igualdades (6.2) y (6.3) determinande manera única el ángulo α.

6.2. Transformaciones que preservan la orientación 165
6.2 Transformaciones que preservan la orientación
Sea ahora T : R2 → R2 una transformación lineal invertible. Se dice que T preserva laorientación si siempre que un parX1,X2 está orientado positivamente, el par T (X1) , T (X2)también está orientado positivamente. Y se dice que T cambia la orientación si siem-pre que un par X1,X2 está orientado positivamente, el par T (X1) , T (X2) está orientadonegativamente.
En la definición anterior tenga en cuenta que siX1,X2 son vectores de R2 linealmente in-dependientes y la transformación lineal T es invertible entonces los vectores T (X1) , T (X2)también son linealmente independientes.
Ejemplo 6.3a) Consideremos una rotación Rθ, la cual es una transformación lineal invertible pues
m (Rθ) =
µcos θ −senθsenθ cos θ
¶y así det (Rθ) = cos
2 θ+sen2θ = 1, y por tanto det (Rθ) 6= 0.Es claro que Rθ preserva la orientación pues el ángulo de un vector X1 a un vector X2
es el mismo ángulo de Rθ (X1) a Rθ (X2) .b) Consideremos ahora la reflexión S respecto al eje x, la cual es una transformaciónlineal invertible pues
m (S) =
µ1 00 −1
¶y así det (S) = −1, y por tanto det (S) 6= 0. S no preserva la orientación pues, por ejemplo,el par E1, E2 está orientado positivamente, pero el par S (E1) = E1, S (E2) = −E2 estáorientado negativamente. Veamos que S cambia la orientación; para ello tomemos un par
cualquieraµx1y1
¶,
µx2y2
¶orientado positivamente y probemos que el par S
µx1y1
¶, S
µx2y2
¶está orientado negativamente:
S
µx1y1
¶=
µx1−y1
¶, S
µx2y2
¶=
µx2−y2
¶¯
x1 x2−y1 −y2
¯= x1 (−y2)− x2 (−y1) = − (x1y2 − x2y1) = −
¯x1 x2y1 y2
¯.
Como
¯x1 x2y1 y2
¯> 0, pues el par
µx1y1
¶,
µx2y2
¶está orientado positivamente, entonces¯
x1 x2−y1 −y2
¯< 0 y en consecuencia el par S
µx1y1
¶, S
µx2y2
¶está orientado negativamente,
como se quería probar. ¥
Resulta que el signo del determinante de una transformación lineal invertible, nos dicesi ella preserva o cambia la orientación. En efecto, se tiene que:
Sea T una transformación lineal invertible del plano.a) T preserva la orientación si y sólo si det (T ) > 0.b) T cambia la orientación si y sólo si det (T ) < 0.

166 6. Determinantes de orden 2
Para probar a) empecemos suponiendo que T preserva la orientación y probemos quedet (T ) > 0.
Digamos que m (T ) =µ
a bc d
¶. Como el par E1, E2 está orientado positivamente y T
preserva la orientación entonces el par T (E1) , T (E2) también está orientado positivamente.
Pero T (E1) =µa
c
¶y T (E2) =
µb
d
¶, así que el par
µa
c
¶,
µb
d
¶está orientado positivamente
y por tanto ¯a bc d
¯> 0
es decir, det (T ) > 0. Supongamos ahora que det (T ) > 0, es decir, se da que
¯a bc d
¯> 0
y probemos que T preserva la orientación. Tomemos un par cualquiera de vectores X1 =µx1y1
¶,X2 =
µx2y2
¶orientado positivamente y veamos que el par T (X1) , T (X2) también
está orientado positivamente. Como
T (X1) =
µax1 + by1cx1 + dy1
¶y T (X2) =
µax2 + by2cx2 + dy2
¶para probar que el par T (X1) , T (X2) está orientado positivamente basta probar que¯
ax1 + by1 ax2 + by2cx1 + dy1 cx2 + dy2
¯> 0. (6.4)
Así que nos limitaremos a probar esto último:¯ax1 + by1 ax2 + by2cx1 + dy1 cx2 + dy2
¯= (ax1 + by1) (cx2 + dy2)− (ax2 + by2) (cx1 + dy1)
= ad (x1y2 − x2y1)− bc (x1y2 − x2y1)
= (ad− bc) (x1y2 − x2y1)
=
¯a bc d
¯ ¯x1 x2y1 y2
¯.
Ahora, puesto que
¯x1 x2y1 y2
¯> 0 pues el par X1,X2 está orientado positivamente y
puesto que
¯a bc d
¯> 0 por hipótesis, se tiene lo que se quería probar, es decir, (6.4). Con
esto se completa la prueba de a).La prueba de b) es completamente similar. ¨Del resultado anterior se obtiene como corolario que para una transformación lineal T
invertible, la negación de “T preserva la orientación” es “T cambia la orientación”.
Ejemplo 6.4a) Consideremos una rotación Rθ, de la cual sabemos es una transformación lineal in-vertible. Como det (Rθ) > 0, pues det (Rθ) = 1, entonces Rθ preserva la orientación, comoya lo habíamos afirmado (ver ejemplo 6.3).b) Sea S la reflexión respecto al eje x, de la cual sabemos es una transformación linealinvertible. Como det (S) < 0, pues det (S) = −1, entonces S cambia la orientación, lo cualya habíamos probado (ver ejemplo 6.3). ¥

6.3. Determinantes y áreas de paralelogramos 167
Volvamos a la igualdad¯ax1 + by1 ax2 + by2cx1 + dy1 cx2 + dy2
¯=
¯a bc d
¯ ¯x1 x2y1 y2
¯(6.5)
obtenida en la prueba que precede al ejemplo 6.4. Obsérvese que en dicha igualdadµa bc d
¶yµ
x1 x2y1 y2
¶son matrices cualesquiera y queµ
ax1 + by1 ax2 + by2cx1 + dy1 cx2 + dy2
¶=
µa bc d
¶µx1 x2y1 y2
¶.
Así que en esa igualdad está expresada la siguiente propiedad del determinante
Para cualquier par de matrices A,B de orden 2× 2,det (AB) = det (A) det (B) .
6.3 Determinantes y áreas de paralelogramos
Otra aplicación del determinante tiene que ver con el área de un paralelogramo y con elefecto de una transformación lineal invertible sobre el área de un paralelogramo. Un primerresultado en este sentido es el siguiente:
Si P es el paralelogramo determinado por dos vectores L.I. X1 =µx1y1
¶y
X2 =
µx2y2
¶entonces
Área de P = valor absoluto de¯x1 x2y1 y2
¯(6.6)
Prueba:Consideremos la figura 6.4 en la cual h denota la altura del paralelogramo P, relativa
a la base OX1.
Figura 6.4.

168 6. Determinantes de orden 2
Tenemos así que
Área de P =°°°−−→OX1
°°°h =qx21 + y21 h. (6.7)
Ahora, puesto que h es la distancia de X2 a la recta L que pasa porµ0
0
¶y por
µx1y1
¶,
podemos emplear la fórmula que da la distancia de un punto a una recta, para calcular h.Como una ecuación para L es −y1x+ x1y = 0, entonces
h =|−y1x2 + x1y2|q(−y1)2 + x21
=|x1y2 − x2y1|p
x21 + y21.
Luego, sustituyendo h en (6.7) se tiene que el es
Área de P =qx21 + y21
|x1y2 − x2y1|px21 + y21
= |x1y2 − x2y1| ¥
Sea ahora T : R2 → R2 una transformación lineal invertible con m (T ) =
µa bc d
¶.
Sabemos que la imagen del paralelogramo P bajo T, es el paralelogramo determinado porlos vectores
T (X1) =
µax1 + by1cx1 + dy1
¶, T (X2) =
µax2 + by2cx2 + dy2
¶,
los cuales son linealmente independientes pues T es invertible. Por tanto, según (6.6),
Área de T (P) = valor absoluto de¯ax1 + by1 ax2 + by2cx1 + dy1 cx2 + dy2
¯.
Ahora, según la igualdad (6.5), el determinante en el lado derecho de la igualdad anteriores igual a ¯
a bc d
¯ ¯x1 x2y1 y2
¯luego,
Área de T (P) = valor absoluto de
¯a bc d
¯ ¯x1 x2y1 y2
¯=
µvalor absoluto de
¯a bc d
¯¶µvalor absoluto de
¯x1 x2y1 y2
¯¶= (valor absoluto de det (T ))Área de P= |det (T )|Área de P.
Como resumen de lo anterior tenemos:
Si T : R2 → R2 es una transformación lineal invertible y P es el paralelogramodeterminado por dos vectores L.I. X1 =
µx1y1
¶, X2 =
µx2y2
¶entonces
Área de T (P) = |det (T )|Área de P. (6.8)

6.4. Fórmulas de Cramer 169
Ejemplo 6.5Sea T la transformación lineal (invertible) cuya matriz es A =
µ3 01 1
¶y sea P el parale-
logramo determinado por los vectores X1 =
µ2
1
¶y X2 =
µ1
3
¶. Hallar el área de P y
también el área de T (P) .
Solución: El conjunto T (P) es el paralelogramo determinado por los vectores T (X1) =µ6
3
¶y T (X2) =
µ3
4
¶, los cuales son L.I. En la figura 6.5 se muestran los paralelogramos
P y T (P) .
Figura 6.5.
En primer lugar tenemos, de acuerdo con (6.6), que
Área de P = valor absoluto de¯2 11 3
¯= 5
Ahora, para calcular el área de T (P) podemos emplear la fórmula (6.6) o también(6.8).
Como det (T ) =
¯3 01 1
¯= 3 y Área de P = 5 entonces (usando (6.8)) se tiene
Área de T (P) = |det (T )|Área de P = (3) (5) = 15. ¥
6.4 Fórmulas de Cramer
En lo que va de este capítulo hemos encontrado diversos conceptos relacionados con eldeterminante. Sin embargo, no fue a partir de ninguno de ellos como surgió inicialmenteel concepto de determinante; éste tuvo su origen en la primera mitad del siglo XVIII enrelación con una manera de resolver un sistema de ecuaciones lineales
ax+ by = u (6.9)
cx+ dy = v
como se explica a continuación.

170 6. Determinantes de orden 2
Multiplicando la primera ecuación por d y la segunda por −b, se obtiene
adx+ bdy = ud
−bcx− bdy = −bv.
Sumando ahora estas ecuaciones queda
(ad− bc)x = ud− bv.
Análogamente, multiplicando la primera ecuación del sistema (6.9) por −c, la segundapor a y sumando las ecuaciones resultantes, se obtiene
(ad− bc) y = av − cu.
Así, si ad− bc 6= 0 los únicos valores posibles para x y para y son
x =ud− bv
ad− bcy y =
av − cu
ad− bc. (6.10)
Se verifica fácilmente que si ad− bc 6= 0, los valores de x y de y en (6.10) satisfacen elsistema (6.9).
Se tiene entonces que:Si ad− bc 6= 0, el sistema (6.9) tiene una y sólo una solución (lo cual ya sabemos) dada
por las igualdades en (6.10), cualesquiera sean los escalares u y v.Vemos así cómo apareció el escalar ad − bc, el cual se llamó determinante del sistema
(6.9) y se denotó
¯a bc d
¯.
Es notable el hecho de que los numeradores en las expresiones para x y para y en (6.10)se pueden expresar como determinantes. En efecto,
ud− bv =
¯u bv d
¯y av − cu =
¯a uc v
¯.
Como resumen de lo anterior tenemos que:
Si
¯a bc d
¯6= 0, el sistema
ax+ by = ucx+ dy = v
tiene una y sólo una solución dada por
x =
u bv d
a bc d
y y =
a uc v
a bc d
.
(6.11)
Las fórmulas para x y y en el resultado anterior se conocen como fórmulas de Crameren homenaje al matemático suizo Gabriel Cramer (1704 - 1752).

6.5. Propiedades 171
Ejemplo 6.6Muestre que el sistema
2x− 3y = 1 (6.12)
−x+ 4y = −5
tiene solución única y halle dicha solución empleando las fórmulas de Cramer.
Solución:Si A es la matriz de coeficientes del sistema dado,
det (A) =
¯2 −3−1 4
¯= 8− 3 = 5.
Como det (A) 6= 0 entonces el sistema (6.12) tiene solución única y, según las fórmulas deCramer, dicha solución está dada por
x =
¯1 −3−5 4
¯det (A)
= −115, y =
¯2 1−1 −5
¯det (A)
= −95.
Por tanto, la única solución del sistema (6.12) esµ−11/5−9/5
¶. ¥
6.5 Propiedades
En la sección 6.2 se probó la siguiente propiedad del determinante: Cualesquiera sean lasmatrices A y B de orden 2,
det (AB) = det (A) det (B)
De esta propiedad se sigue que
Si A es una matriz 2× 2 invertible entoncesdet
¡A−1
¢=
1
det (A)
En efecto, si A es una matriz invertible entonces de la igualdad A−1A = I2 se tiene quedet
¡A−1A
¢= det (I2) = 1 y como det
¡A−1A
¢= det
¡A−1
¢det (A) entonces det
¡A−1
¢det (A) =
1, de donde det¡A−1
¢= 1/det (A) . ¨
A continuación listamos otras propiedades del determinante. Probarlas es una tareasencilla que dejamos como ejercicio.
1.
¯a cb d
¯=
¯a bc d
¯.
Es decir, det¡AT¢= det (A) donde AT denota la transpuesta de la matriz A. (Vea
ejercicio 43 del capítulo 4).
2.
¯c da b
¯= −
¯a bc d
¯.

172 6. Determinantes de orden 2
Es decir, cuando se intercambian las filas de una matriz A el determinante de la nuevamatriz es −det (A) .
3.
¯ta tbc d
¯= t
¯a bc d
¯y
¯a btc td
¯= t
¯a bc d
¯.
Es decir, cuando se multiplica una de las filas de una matriz A por un escalar t, eldeterminante de la nueva matriz es tdet (A) .
4.
¯a+ a0 b+ b0
c d
¯=
¯a bc d
¯+
¯a0 b0
c d
¯y¯
a bc+ c0 d+ d0
¯=
¯a bc d
¯+
¯a bc0 d0
¯.
5.
¯a bta tb
¯= 0 y
¯tc tdc d
¯= 0.
Es decir, si las filas de una matriz A son linealmente dependientes entonces det (A) = 0.
6.
¯a b
c+ ta d+ tb
¯=
¯a bc d
¯y
¯a+ tc b+ tdc d
¯=
¯a bc d
¯.
Es decir, si una fila de una matriz A se sustituye por la suma de ella con un múltiploescalar de la otra fila de A, el determinante de la nueva matriz es igual a det (A) .
Nótese que las propiedades 2. a 6. se refieren a movimientos, operaciones o sustitucionesen las filas de la matriz. Se sigue de la propiedad 1. que dichas propiedades 2. a 6. tambiénson válidas si esos movimientos, operaciones o sustituciones se refieren a las columnas dela matriz.
6.6 Ejercicios
1. Para cada par de vectores X1 y X2, determinar si el par está orientado positivamente.
a) X1 =
µ1
−5
¶,X2 =
µ−13
¶b) X1 =
µ3
4
¶,X2 =
µ2
5
¶
c) X1 =
µ1
3
¶,X2 =
µ1
1
¶d) X1 =
µ2
2
¶,X2 =
µ2
6
¶
2. Sea X1 =
µ1
1
¶. Hallar un vector X2 de longitud 2
√2 tal que el par X1, X2 esté
orientado positivamente y el área del paralelogramo determinado por X1 y X2 sea 2unidades cuadradas.
3. Sea X1 =
µ1
−3
¶. Hallar un vector X2 tal que el par X1,X2 esté orientado positiva-
mente, el ángulo de X1 a X2 sea de 30◦ y el área del triángulo de vérticesµ0
0
¶, X1
y X2 sea de 5 unidades cuadradas.
4. Para cada transformación lineal T dada a continuación, determinar si T es invertibley, en caso afirmativo, decir si T preserva o cambia la orientación.
a) T
µx
y
¶=
µx+ y
x− y
¶b) T
µx
y
¶=
µx− y
−3x+ 3y
¶c) T
µx
y
¶=
µ3x− 4y−x+ 7y
¶

6.6. Ejercicios 173
5. Sea T una transformación lineal invertible. Si P es cualquier paralelogramo, no nece-sariamente con un vértice en el origen, probar que
Area de T (P) = |detT | Area de P.
6. Utilice el resultado del ejercicio 5 para probar que si P es cualquier paralelogramo setiene que:
a) Area de Rθ (P) = Area de P, cualquiera sea θ, −2π < θ < 2π.
b) Area de SU (P) = Area de P, cualquiera sea U ∈ R2, U 6=µ0
0
¶.
c) Area de Dr (P) = r2(Area de P), cualquiera sea r ∈ R.
7. Sean P =
µ1
5
¶, Q =
µ2
5
¶, R =
µ1
6
¶y S =
µ2
6
¶. Para cada matriz A, si T es la
transformación lineal tal que m(T ) = A, graficar la imagen bajo T del cuadriláteroPQSR y encontrar su área.
a) A =
µ1 01 1
¶b) A =
µ2 01 3
¶
8. Considere la transformación lineal T : R2 → R2 definida por Tµx
y
¶=
µ4x− 2y2x+ 3y
¶.
Encuentre el área de la imagen bajo T de cada una de las siguientes regiones:
a) El cuadrado 0 ≤ x ≤ 1, 0 ≤ y ≤ 1.b) El rectángulo −1 ≤ x ≤ 1, 1 ≤ y ≤ 2.c) El paralelogramo determinado por 2E1 + 3E2 y 4E1 −E2.
d) El triángulo de vértices P =µ1
−1
¶, Q =
µ3
5
¶, R =
µ1
4
¶.
9. Sean P =
µ1
−2
¶, Q =
µ−53
¶, R =
µ2
5
¶y S =
µ−1−3
¶. Hallar el área de la imagen
bajo la reflexión sobre la recta con ecuación y = 2x, de cada una de las siguientesfiguras:
a) El paralelogramo con vértices enµ0
0
¶, P y Q.
b) El triángulo de vértices P , Q y R.
c) El cuadrilátero PRQS.
10. Para cada una de las siguientes transformaciones lineales T del plano, determinar siT preserva o cambia la orientación.
a) T es la reflexión con respecto a la recta y = x.
b) T
µx
y
¶=
µ2x− y
−8x+ 2y
¶c) T
µx
y
¶=
µx− 2yx+ y
¶d) T = D−5
e) T
µx
y
¶=
µx+ 2y
y
¶f) T
µx
y
¶=
µx
2x+ y
¶

174 6. Determinantes de orden 2
11. Para cada una de las transformaciones lineales T descritas en el ejercicio 10, hallar
el área de la imagen bajo T del triángulo cuyos vértices son P =
µ1
−1
¶, Q =
µ−35
¶y R =
µ5
4
¶.
12. Mostrar que una ecuación de la recta que pasa por dos puntos distintosµx1y1
¶yµx2y2
¶es
det
µx− x1 y − y1x1 − x2 y1 − y2
¶= 0.
13. Muestre, utilizando propiedades de los determinantes, que si el par de vectores X1,X2 está orientado positivamente, entonces:
a) Para todo escalar c no nulo, el par cX2, cX1 está orientado negativamente.
b) El par X1, X1 −X2 está orientado negativamente.
c) El par X1, X1 +X2 está orientado positivamente.
14. Para cada uno de los sistemas dados, probar que tiene solamente una solución y hallardicha solución empleando las fórmulas de Cramer.
a) 5x+ 7y = 9 b) x− 2y = 2−3x+ 2y = 10 2x+ y = 3

7
Valores propios y vectores propios
7.1 Definiciones. Cálculo de valores y vectores propios
En general, la acción de una transformación lineal T : R2 → R2 sobre los vectores de R2puede ser muy variada, es decir, los vectores de R2 pueden ser transformados por T dediversas formas cambiando su magnitud o su dirección o ambas. En particular puede habervectores especiales para los cuales la acción de la transformación sea muy simple.
Ejemplo 7.1Sea L una recta en el plano que pasa por el origen y sea S la reflexión respecto a L.
Es claro que si X está en L entonces S (X) = X. Por otra parte, si Y está en la rectaL0 que pasa por el origen y es perpendicular a L entonces S (Y ) = −Y. (Figura 7.1)
Figura 7.1.
Así, la acción de S sobre los vectores que están en L o en L0 es muy simple. ¥En una amplia gama de aplicaciones en las ciencias exactas y en la ingeniería, en las
que aparece una transformación lineal, digamos T, resultan muy útiles los vectores no nulosX y los escalares λ tales que
T (X) = λX.
Este capítulo lo dedicaremos al estudio de tales vectores y de tales escalares. Iniciaremoscon la siguiente definición:
175

176 7. Valores propios y vectores propios
Sea T : R2 → R2 una transformación lineal y sea λ un escalar. Si existe un vector Xde R2, X 6= O, tal que
T (X) = λX
se dice que λ es un valor propio de T. Si λ es un valor propio de T, cada vector no nuloX de R2 tal que T (X) = λX se dice un vector propio de T correspondiente a λ.
Sea ahora A una matriz 2×2. Por un valor propio o un vector propio de A entenderemosun valor propio o un vector propio de la transformación lineal T cuya matriz es A.
Nótese que un vector no nulo X es un vector propio de una transformación lineal T (deuna matriz A) si y sólo si X y T (X) (X y AX) son linealmente dependientes, es decir,están en una misma línea recta que pasa por el origen (Figura 7.2).
Figura 7.2.
Para la reflexión S del ejemplo 7.1, el escalar λ = 1 es un valor propio y todo vectorno nulo X de la recta L es un vector propio de S correspondiente al valor propio λ = 1pues para cada uno de dichos vectores X se tiene que S (X) = X = 1X; similarmente,λ = −1 es también un valor propio de S y todo vector no nulo X de la recta L0 es unvector propio de S correspondiente al valor propio λ = −1 ya que para tales vectores X setiene S (X) = −X = (−1)X.
Ejemplo 7.2Consideremos la transformación Dr. Puesto que Dr (X) = rX para todo X de R2, tenemosque r es un valor propio de Dr y todo vector no nulo de R2 es un vector propio de Dr
correspondiente al valor propio r. El escalar r es el único valor propio de Dr (¿Por qué?).Lo afirmado para Dr, respecto a valores y vectores propios, es igualmente válido para
la matrizµ
r 00 r
¶, la cual es la matriz de Dr. ¥
Ejemplo 7.3Consideremos la rotación Rπ
2. Es claro que para cualquier vector no nulo X de R2 se
tiene que X y Rπ2(X) no están sobre una misma línea recta que pase por el origen; por
tanto, Rπ2no tiene vectores propios y en consecuencia tampoco tiene valores propios.
Equivalentemente, la matrizµ0 −11 0
¶, la cual es la matriz de Rπ
2, no tiene vectores
propios ni valores propios. ¥
Sea T : R2 → R2 una transformación lineal con matriz A =µ
a bc d
¶. Consideremos
ahora el problema de la determinación de los valores propios y los vectores propios de T

7.1. Definiciones. Cálculo de valores y vectores propios 177
(de A). En primer lugar, si disponemos de un valor propio λ de T, es claro que los vectores
propios de T correspondientes a λ son los vectores no nulosµx
y
¶de R2 tales que
µa bc d
¶µx
y
¶= λ
µx
y
¶(7.1)
es decir, tales que
ax+ by = λx
cx+ dy = λy
o, equivalentemente, tales que
(a− λ)x+ by = 0
cx+ (d− λ) y = 0.
Es decir, los vectores propios de T correspondientes a un valor propio λ de T (de A)son las soluciones no triviales del sistema anterior, o equivalentemente, del sistemaµ
a− λ bc d− λ
¶µx
y
¶=
µ0
0
¶. (7.2)
Por tanto, resolviendo este sistema encontraremos los vectores propios de T, correspon-dientes al valor λ. Veamos ahora cómo se determinan los valores propios. De la definiciónde valor propio vemos que un número real λ es un valor propio de T si y sólo si existe un
vector no nuloµx
y
¶de R2 que satisface (7.1). Ahora, como (7.1) es equivalente al sistema
(7.2), el escalar λ será un valor propio de T si y sólo si el sistema (7.2) tiene alguna soluciónno trivial; pero sabemos que dicho sistema (7.2) tiene alguna solución no trivial si y sólo si¯
a− λ bc d− λ
¯= 0. (7.3)
Luego, un número real λ es un valor propio de T (de A) si y sólo si λ satisface laecuación (7.3).
La ecuación (7.3), con λ como su incógnita, se llama ecuación característica de T(de A); desarrollando el determinante, dicha ecuación (7.3) se convierte en
(a− λ) (d− λ)− bc = 0
que también podemos escribir como
λ2 − (a+ d)λ+ (ad− bc) = 0. (7.4)
Las raíces reales de esta ecuación son entonces los valores propios de T (de A).Ahora, como el lado izquierdo de (7.4) es un polinomio de grado 2 en λ entonces dicha
ecuación (7.4) tiene a lo más dos raíces distintas, así que la transformación T (la matrizA) tiene a lo más dos valores propios distintos. Cuando la ecuación (7.4) tenga dos raícesiguales, diremos que la transformación T (la matriz A) tiene dos valores propios iguales otiene un valor propio de multiplicidad 2
Resumimos la discusión anterior en el siguiente resultado:

178 7. Valores propios y vectores propios
Sea T : R2 → R2 una transformación lineal con matriz A =µ
a bc d
¶y sea
λ un número real.
• λ es un valor propio de T (de A) si y sólo si λ es una raíz de la ecuacióncaracterística de T (de A) ¯
a− λ bc d− λ
¯= 0.
• La transformación T (la matriz A) tiene a lo más dos valores propios distintos.
• Si λ es un valor propio de T (de A), los vectores propios de T (de A)correspondientes a λ son las soluciones no triviales del sistema homogéneoµ
a− λ bc d− λ
¶µx
y
¶=
µ0
0
¶.
Ejemplo 7.4Para la matriz A =
µ3 21 4
¶hallar los valores propios y para cada valor propio hallar los
correspondientes vectores propios.
Solución:La ecuación característica de A es¯
3− λ 21 4− λ
¯= 0
o seaλ2 − 7λ+ 10 = 0.
Sus raíces son los números λ1 = 5 y λ2 = 2, los cuales son los valores propios de A.Hallemos ahora los vectores propios de A correspondientes al valor propio λ1 = 5 :
Según ya se dijo, dichos vectores propios son las soluciones no triviales del sistemaµ3− 5 21 4− 5
¶µx
y
¶=
µ0
0
¶,
es decir, del sistema
−2x+ 2y = 0
x− y = 0.
El conjunto solución de este sistema es la recta L1 con ecuación x − y = 0. Como yasabemos, L1 puede describirse de diversas formas, siendo algunas de ellas las siguientes:
L1 =
½µx
y
¶∈ R2 / x = y
¾=
½µx
y
¶Á µx
y
¶=
µt
t
¶, t ∈ R
¾=
½µx
y
¶Á µx
y
¶= t
µ1
1
¶, t ∈ R
¾.

7.2. Factorización A = PDP−1 179
Así, los vectores propios de A correspondientes al valor propio λ1 = 5 son los vectores
no nulos sobre la recta L1, es decir, los múltiplos escalares no nulos del vectorµ1
1
¶.
De manera similar se encuentra que los vectores propios de A, correspondientes al valorpropio λ2 = 2 son los vectores no nulos sobre la recta L2 con ecuación x+2y = 0, es decir,los múltiplos escalares no nulos del vector
µ−21
¶. (Figura 7.3)
Tener presente que los valores propios y los vectores propios de la matriz A son tambiénlos de la transformación lineal T : R2 → R2 cuya matriz es A. ¥
Figura 7.3.
Ejemplo 7.5Hallar los valores propios de la matriz A =
µ0 −11 0
¶.
Solución:La ecuación característica de A es¯
0− λ −11 0− λ
¯= 0,
es decir,
λ2 + 1 = 0.
Como esta ecuación no tiene raíces reales, entonces la matrizA no tiene valores propios1,lo cual ya sabíamos (ver ejemplo 7.3). ¥
7.2 Factorización A = PDP−1
Uno de los resultados fundamentales acerca de los valores y vectores propios es el siguiente:
1Se puede extender el concepto de valor propio de una matriz, de tal modo que toda raíz (real o no) dela ecuación característica de la matriz sea un valor propio. En tal situación, la matriz A del ejemplo 7.5,cuya ecuación característica es λ2+1 = 0, tendrá dos valores propios (no reales), a saber λ1 = i y λ2 = −i.Sin embargo, como se ha definido el concepto de valor propio de una matriz en este texto, dicha matriz Ano tiene valores propios.

180 7. Valores propios y vectores propios
Sea A una matriz 2× 2. Siµx1y1
¶,
µx2y2
¶son vectores propios de A linealmente
independientes, correspondientes respectivamente a los valores propios λ1, λ2de A (puede ser λ1 = λ2) entonces
A = PDP−1
donde
P =
µx1 x2y1 y2
¶y D =
µλ1 00 λ2
¶.
Prueba:
Siµx1y1
¶,
µx2y2
¶son vectores propios de A correspondientes a los valores propios λ1, λ2
respectivamente, entoncesµx1y1
¶yµx2y2
¶son vectores no nulos de R2 tales que
A
µx1y1
¶= λ1
µx1y1
¶, A
µx2y2
¶= λ2
µx2y2
¶. (7.5)
Ahora bien, dada la forma como se multiplican matrices, las dos igualdades en (7.5)equivalen a la igualdad
A
µx1 x2y1 y2
¶=
µλ1x1 λ2x2λ1y1 λ2y2
¶.
Como, además, µλ1x1 λ2x2λ1y1 λ2y2
¶=
µx1 x2y1 y2
¶µλ1 00 λ2
¶entonces las igualdades en (7.5) equivalen a la igualdad
A
µx1 x2y1 y2
¶=
µx1 x2y1 y2
¶µλ1 00 λ2
¶. (7.6)
Ahora, puesto que los vectoresµx1y1
¶,
µx2y2
¶son linealmente independientes entonces la
matrizµ
x1 x2y1 y2
¶tiene una inversa. Por tanto, podemos despejarA de (7.6) multiplicando
por dicha inversa a ambos lados de (7.6) por la derecha, con lo cual se obtiene la siguientefactorización de la matriz A :
A =
µx1 x2y1 y2
¶µλ1 00 λ2
¶µx1 x2y1 y2
¶−1. (7.7)
Hemos probado así lo afirmado en el recuadro. ¨El lector puede probar fácilmente (reversando los pasos que condujeron de (7.5) a
(7.7)) que si una matriz A admite una factorización como la que aparece en (7.7) entonces
necesariamenteµx1y1
¶yµx2y2
¶son vectores propios de A linealmente independientes que
corresponden a los valores propios λ1, λ2 respectivamente. De manera que:

7.3. Valores propios y vectores propios de matrices simétricas 181
Una matriz A es factorizable en la forma (7.7) si y sólo siA tiene dos vectores propios linealmente independientes.
De una matriz de la formaµ
λ1 00 λ2
¶se dice que es una matriz diagonal.
Ejemplo 7.6Consideremos la matriz A =
µ3 21 4
¶del ejemplo 7.4. Se encontró que λ1 = 5 y λ2 = 2
son los valores propios de A. Correspondiendo a λ1 = 5 podemos tomar, por ejemplo, el
vector propio X1 =
µ1
1
¶y correspondiendo a λ2 = 2 podemos tomar, por ejemplo, el
vector propio X2 =
µ−21
¶(vea la figura 7.3).
Puesto que X1,X2 son linealmente independientes, entonces podemos factorizar A enla forma
A = PDP−1
donde
P =
µ1 −21 1
¶y D =
µ5 00 2
¶. ¥
Ejemplo 7.7Consideremos la matriz A =
µ1 20 1
¶, cuyos valores propios son λ1 = λ2 = 1.
Los vectores propios de A correspondientes al valor propio 1 son las soluciones notriviales del sistema µ
1− 1 20 1− 1
¶µxy
¶=
µ00
¶es decir, del sistema
0x+ 2y = 0
0x+ 0y = 0.
Ahora, como el conjunto solución de este sistema es la recta con ecuación y = 0, en-tonces cualquier par de vectores propios de A están sobre dicha recta y en consecuenciason linealmente dependientes. Así, no existen dos vectores propios de A linealmente inde-pendientes y por ello A no es factorizable en la forma (7.7). ¥
7.3 Valores propios y vectores propios de matrices simétri-cas
Ahora centraremos la atención en una clase de matrices que se presentan en una granvariedad de situaciones y problemas prácticos: las matrices simétricas. Una matriz 2× 2 sedice simétrica si tiene la forma µ
a bb d
¶o equivalentemente, si ella es igual a su traspuesta.

182 7. Valores propios y vectores propios
Por ejemplo, la matrizµ3 44 5
¶es simétrica, pero la matriz
µ1 23 4
¶no lo es.
Consideremos una matriz simétrica A =µ
a bb d
¶. Su ecuación característica es¯
a− λ bb d− λ
¯= 0,
o seaλ2 − (a+ d)λ+
¡ad− b2
¢= 0. (7.8)
Las raíces de esta ecuación (7.8) en los complejos son los números
λ1 =a+ d+
q(a+ d)2 − 4 (ad− b2)
2y λ2 =
a+ d−q(a+ d)2 − 4 (ad− b2)
2
Un hecho notable es que esas raíces siempre son reales, ya que (a+ d)2 − 4¡ad− b2
¢≥ 0,
pues
(a+ d)2 − 4¡ad− b2
¢= a2 + 2ad+ d2 − 4ad+ 4b2
= a2 − 2ad+ d2 + 4b2
= (a− d)2 + 4b2.
Ahora, dada la igualdad
(a+ d)2 − 4¡ad− b2
¢= (a− d)2 + 4b2
las raíces λ1, λ2 pueden expresarse en la forma
λ1 =a+ d+
q(a− d)2 + 4b2
2y λ2 =
a+ d−q(a− d)2 + 4b2
2. (7.9)
Se presentan dos posibles casos.i) (a− d)2 + 4b2 = 0.En este caso λ1 = λ2, es decir, la ecuación (7.8) tiene sólo una raíz. Nótese que este
caso se presenta si y sólo si a = d y b = 0, es decir,
A =
µa 00 a
¶caso en el cual λ1 = λ2 = a.
ii) (a− d)2 + 4b2 > 0.En este caso λ1 6= λ2, es decir, la ecuación (7.8) tiene dos raíces distintas. Nótese que
este caso se presenta si y sólo si a 6= d o b 6= 0.Tenemos así que:
Sea A una matriz simétrica de orden 2.• Las raíces de la ecuación característica de A son ambas reales y por tanto
A siempre tiene valores propios.
• Si A es de la formaµ
a 00 a
¶entonces los valores propios de A son λ1 = λ2 = a.
• Si A no es de la formaµ
a 00 a
¶entonces A tiene dos valores propios distintos.

7.3. Valores propios y vectores propios de matrices simétricas 183
Sea A una matriz 2 × 2 simétrica. Como veremos más adelante, A siempre podráfactorizarse en la forma
A = PDP−1
con P matriz invertible y D matriz diagonal. Pero más importante aún, es que la matrizP podrá escogerse con la propiedad P−1 = PT ; es más, en el caso en que A sea una matrizno diagonal, la matriz P podrá escogerse, además, como la matriz de una rotación Rθ con0 < θ < π
2 . Por el momento veámoslo con una matriz particular.
Ejemplo 7.8Consideremos la matrizA =
µ9 22 6
¶. ComoA es simétrica y no es de la forma
µa 00 a
¶,
podemos predecir que A tiene dos valores propios distintos. Hallémoslos:La ecuación característica de A es¯
9− λ 22 6− λ
¯= 0.
Ahora, como¯9− λ 22 6− λ
¯= (9− λ) (6− λ)− 4 = λ2 − 15λ+ 50 = (λ− 5) (λ− 10)
entonces dicha ecuación característica es
(λ− 5) (λ− 10) = 0
y así los valores propios de A son los números λ1 = 5 y λ2 = 10, los cuales son las raíces dela ecuación anterior. Los vectores propios de A correspondientes a λ1 = 5 son las solucionesno triviales del sistema µ
9− 5 22 6− 5
¶µxy
¶=
µ00
¶,
es decir, del sistema
4x+ 2y = 0
2x+ y = 0.
El conjunto solución de este sistema es la recta L1 con ecuación 2x+y = 0, la cual pasa
por el origen y porµ−12
¶. Así, los vectores propios de A correspondientes al valor propio
λ1 = 5 son los vectores no nulos sobre dicha recta L1, es decir, los múltiplos escalares nonulos del vector
µ−12
¶. Análogamente, los vectores propios de A correspondientes al valor
propio λ2 = 10 son los vectores no nulos sobre la recta L2 con ecuación −x+2y = 0, la cualpasa por el origen y por
µ2
1
¶, es decir, dichos vectores propios son los múltiplos escalares
no nulos del vectorµ2
1
¶. (Figura 7.4)

184 7. Valores propios y vectores propios
Figura 7.4.
Nótese que L1 ⊥ L2, es decir, todo vector propio correspondiente al valor propio λ1 = 5es ortogonal a todo vector propio correspondiente al valor propio λ2 = 10 y viceversa.
Si tomamos dos vectores propios cualesquiera X1 =
µx1y1
¶, X2 =
µx2y2
¶correspondien-
tes a λ1, λ2 respectivamente y conformamos la matriz
P =
µx1 x2y1 y2
¶tendremos que esta matriz es invertible y que
A = P
µλ1 00 λ2
¶P−1.
Pero ¿qué consecuencias tiene para P el hecho de que sus columnas sean ortogonales,es decir, que x1x2 + y1y2 = 0?
Veamos: si x1x2 + y1y2 = 0 entoncesµx1 y1x2 y2
¶µx1 x2y1 y2
¶=
µx21 + y21 00 x22 + y22
¶es decir,
PTP =
µkX1k2 0
0 kX2k2¶.
Inmediatamente se ve que si los vectores propios X1,X2 se escogen unitarios se tendrá
PTP = I2
es decir,P−1 = PT .
Como el lector puede observar hay varias opciones para escoger un par de vectorespropios X1,X2 ortogonales y unitarios. En particular podemos escoger dos vectores propiosde A ortogonales y unitarios así:
Uno de ellos en el primer cuadrante, sobre la recta L2, el cual es
X1 =1√5
µ2
1
¶=
µ2/√5
1/√5
¶=
µcos θ
senθ
¶

7.3. Valores propios y vectores propios de matrices simétricas 185
donde θ = tan−1¡12
¢es el ángulo de inclinación de la recta L2 (vea figura 7.4). El otro
vector, escogido en el segundo cuadrante, es
X2 =1√5
µ−12
¶=
µ−1/√52/√5
¶=
µ−senθcos θ
¶.
Con estos vectores conformamos la matriz
P =
µ2/√5 −1/
√5
1/√5 2/
√5
¶=
µcos θ −senθsenθ cos θ
¶la cual cumple que
A = P
µ10 00 5
¶P−1, (7.10)
tiene la propiedad P−1 = PT y además es la matriz de la rotación Rθ. ¥
Una matriz P de orden 2, invertible y con la propiedad P−1 = PT es llamada unamatriz ortogonal. Esta denominación se debe a que las matrices con tal propiedad sonlas que tienen sus columnas ortogonales y unitarias.
Nótese, en el ejemplo anterior, que la existencia de matrices ortogonales P tales que
A = PDP−1
con D matriz diagonal, se debe a que en dicho ejemplo L1 ⊥ L2, es decir, a que la matrizA tiene la propiedad de que vectores propios correspondientes a valores propios distintos,son ortogonales. Pues bien, esa propiedad la tienen todas las matrices simétricas con dosvalores propios distintos, como se afirma en el siguiente resultado.
Sea A una matriz simétrica de orden 2, con dos valores propios distintos λ1, λ2.Si X1,X2 son vectores propios de A correspondientes a λ1, λ2 respectivamenteentonces
X1 ⊥ X2.
Para probar lo afirmado digamos que A =µ
a bb d
¶, X1 =
µx1y1
¶y X2 =
µx2y2
¶.
Primero supongamos que b = 0. En este caso A =µ
a 00 d
¶y así los valores propios
son los números a y d; podemos suponer que λ1 = a y λ2 = d. Es fácil probar que en este
caso y1 = 0 y x2 = 0, así que X1 =
µx10
¶,X2 =
µ0
y2
¶y en consecuencia X1 ⊥ X2.
Supongamos ahora que b 6= 0. Probaremos en primer lugar que x1 6= 0 y x2 6= 0;luego consideraremos la recta L1 que pasa por el origen y por X1, la recta L2 que pasapor el origen y por X2, y mostraremos que las pendientes m1 = y1/x1 y m2 = y2/x2 dedichas rectas cumplen que m1m2 = −1. Con ello se habrá probado que L1 ⊥ L2 lo cual esequivalente a que X1 ⊥ X2, y se habrá completado así la prueba. Procedemos entonces aprobar lo anunciado:
Como µa bb d
¶µx1y1
¶=
µλ1x1λ1y1
¶

186 7. Valores propios y vectores propios
entonces ax1+ by1 = λ1x1 y así by1 = (λ1 − a)x1. Si fuese x1 = 0 entonces by1 = 0 y como
b 6= 0 entonces y1 = 0 y así X1 =µ0
0
¶, lo cual no puede ser pues X1 es un vector propio.
Luego x1 6= 0 y así
y1x1=
λ1 − a
b.
Similarmente, x2 6= 0 y
y2x2=
λ2 − a
b.
Como ya lo dijimos, y1/x1 y y2/x2 son las pendientes de las rectas L1,L2 a las cualesya nos hemos referido. Sólo resta probar que
µy1x1
¶µy2x2
¶= −1, es decir,
µλ1 − a
b
¶µλ2 − a
b
¶= −1.
Para probar ésto recurriremos a las expresiones de λ1, λ2 dadas en (7.9), según lascuales
λ1 − a =1
2(d− a) +
1
2
q(a− d)2 + 4b2
λ2 − a =1
2(d− a)− 1
2
q(a− d)2 + 4b2.
Se sigue que
(λ1 − a) (λ2 − a) =1
4(d− a)2 − 1
4
h(a− d)2 + 4b2
i= −b2
por lo tanto, µλ1 − a
b
¶µλ2 − a
b
¶=−b2b2
= −1
como se quería probar. ¨
El hecho que se acaba de probar constituye otra de las propiedades notables de lasmatrices simétricas. A partir de esta propiedad podemos probar el siguiente resultado, elcual es fundamental en las aplicaciones de las matrices simétricas.

7.3. Valores propios y vectores propios de matrices simétricas 187
1. Para toda matriz simétrica A, con valores propios λ1, λ2 (no necesariamentedistintos) existe una matriz ortogonal P tal que
P−1AP =
µλ1 00 λ2
¶o, equivalentemente , tal que
PTAP =
µλ1 00 λ2
¶.
2. Si A es una matriz simétrica no diagonal, entonces A siempre tiene dos vectorespropios (unitarios y ortogonales) de la formaµ
cos θ
senθ
¶yµ−senθcos θ
¶con 0 < θ < π
2 . La matriz
Q =
µcos θ −senθsenθ cos θ
¶la cual es la matriz de la rotación Rθ, es una matriz ortogonal tal que
QTAQ =
µλ1 00 λ2
¶donde λ1, λ2 son los valores propios de A y λ1 denota aquel valor propio al
cual corresponde el vector propioµcos θ
senθ
¶.
Prueba de 1. Consideremos una matriz simétrica
A =
µa bb d
¶. (7.11)
Si b = 0, A es una matriz diagonal y así tomando P = I2 y D = A se tiene queA = PDP−1, o equivalentemente, PTAP = D con P ortogonal y D diagonal.
Supongamos ahora que b 6= 0 y que λ1, λ2 son los valores propios de A, los cuales (comosabemos) son distintos.
En primer lugar, podemos afirmar (por ser b 6= 0) que los vectores propios de A corres-pondientes al valor propio λ1 son los vectores no nulos sobre una cierta recta L1, la cualpasa por el origen y no es el eje x ni es el eje y. Similarmente, los vectores propios corres-pondientes a λ2 son los vectores no nulos sobre otra recta L2 que pasa por el origen y noes el eje x ni es el eje y.
Ahora, puesto que A es simétrica, se tiene que L1 ⊥ L2, de acuerdo con la últimapropiedad de las matrices simétricas que hemos probado. Así, una (y sólo una) de lasrectas L1,L2 tiene un ángulo de inclinación θ, 0 < θ < π
2 ; suponiendo que dicha recta esL1, la situación es como se muestra en la figura 7.5.
Es claro (como se mostró en el ejemplo 7.8) que al escoger dos vectores propios unitarios
X1 =
µx1y1
¶, X2 =
µx2y2
¶uno de ellos en L1 y el otro en L2, la matriz
P =
µx1 x2y1 y2
¶tiene la propiedad
PTP = I2

188 7. Valores propios y vectores propios
pues
PTP =
µx1 y1x2 y2
¶µx1 x2y1 y2
¶=
µx21 + y21 x1x2 + y1y2
x1x2 + y1y2 x22 + y22
¶=
µ1 00 1
¶= I2.
Figura 7.5.
Así, una tal matriz P tiene la propiedad P−1 = PT , es decir, es una matriz ortogonal.Además, tal matriz P (como sabemos) cumple que
A = PDP−1
con D =
µλ1 00 λ2
¶si X1 corresponde al valor propio λ1 y X2 corresponde al valor propio
λ2, o D =
µλ2 00 λ1
¶si X1 corresponde al valor propio λ2 y X2 al valor propio λ1.
Prueba de 2. Continuemos con la matriz simétrica A dada en (7.11) en la cual suponemosque b 6= 0. Podemos escoger dos vectores propios de A ortogonales y unitarios así: uno deellos en el primer cuadrante, el cual es
X1 =
µcos θ
senθ
¶donde θ es el ángulo ya considerado (vea figura 7.5). El otro vector propio, el cual se escogeen el segundo cuadrante, es
X2 =
µ−senθcos θ
¶.
Con estos vectores construimos la matriz
Q =
µcos θ −senθsenθ cos θ
¶la cual es la matriz de la rotación Rθ.
Si el vector X1 corresponde al valor propio λ1 (como aparece en la figura 7.5) entoncesel vector X2 corresponde al valor propio λ2, y en este caso
A = Q
µλ1 00 λ2
¶Q−1

7.3. Valores propios y vectores propios de matrices simétricas 189
o, equivalentemente,
Q−1AQ =
µλ1 00 λ2
¶.
Finalmente, como Q−1 = QT entonces
QTAQ =
µλ1 00 λ2
¶. ¨
Ejemplo 7.9Considere la matriz simétrica A =
µ4 33 −4
¶a) Hallar los valores propios de A y por cada valor propio hallar los correspondientesvectores propios.b) Comprobar que vectores propios de A correspondientes a valores propios distintos sonortogonales.c) Hallar una matriz ortogonal Q de orden 2 que sea la matriz de una rotación Rθ con0 < θ < π/2, tal que QTAQ sea una matriz diagonal; indicar cuál es el ángulo θ.
Solución:a) La ecuación característica de A es¯
4− λ 33 −4− λ
¯= 0
es decir,λ2 − 25 = 0
Luego, los valores propios de A son los números λ1 = 5 y λ2 = −5, los cuales son lasraíces de la ecuación anterior. Los vectores propios de A correspondientes a λ1 = 5 son lassoluciones no triviales del sistemaµ
4− 5 33 −4− 5
¶µx
y
¶=
µ0
0
¶es decir, del sistema
−x+ 3y = 0
3x− 9y = 0
El conjunto solución de este sistema es la recta L1 con ecuación −x + 3y = 0, la cual
es la recta generada por el vectorµ3
1
¶. Así, los vectores propios de A son los vectores
no nulos sobre dicha recta L1, es decir, los vectores de la forma t
µ3
1
¶con t ∈ R, t 6= 0.
Análogamente, los vectores propios de A correspondientes a λ2 = −5 son los vectores nonulos sobre la recta L2 con ecuación 3x+ y = 0, la cual es la recta generada por el vectorµ−13
¶; es decir, dichos vectores propios son los vectores de la forma s
µ−13
¶con s ∈ R,
s 6= 0 (vea figura 7.6)
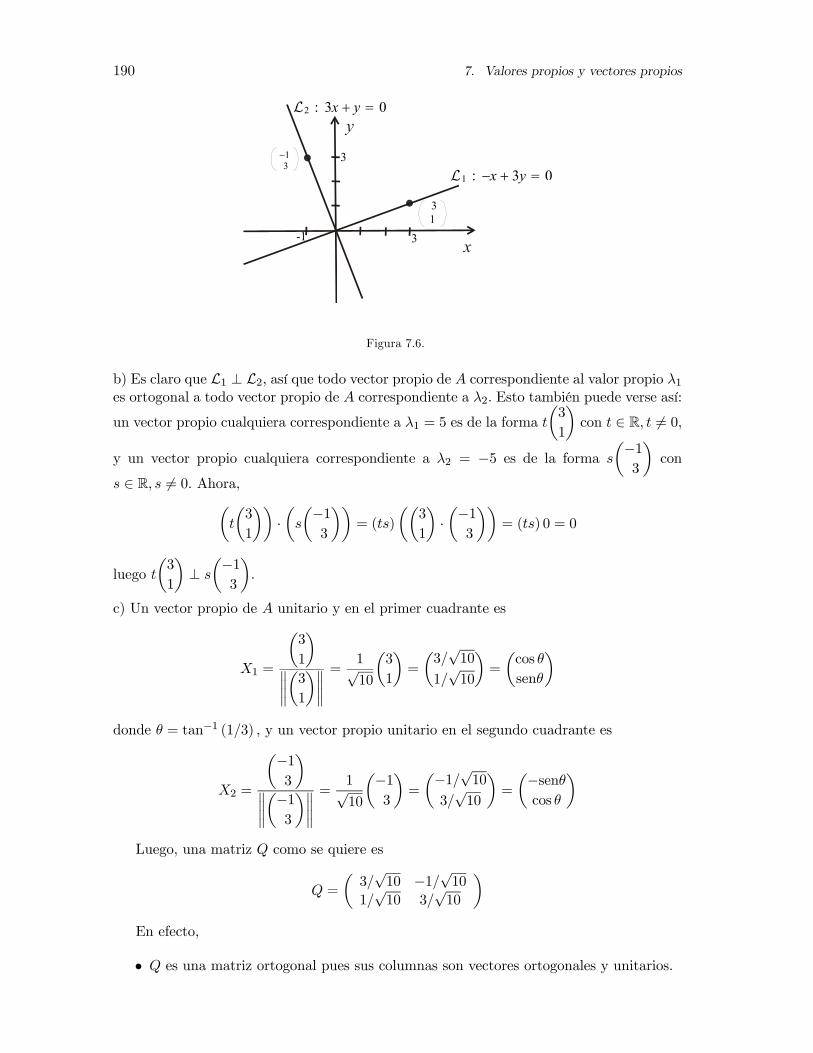
190 7. Valores propios y vectores propios
Figura 7.6.
b) Es claro que L1 ⊥ L2, así que todo vector propio de A correspondiente al valor propio λ1es ortogonal a todo vector propio de A correspondiente a λ2. Esto también puede verse así:
un vector propio cualquiera correspondiente a λ1 = 5 es de la forma tµ3
1
¶con t ∈ R, t 6= 0,
y un vector propio cualquiera correspondiente a λ2 = −5 es de la forma s
µ−13
¶con
s ∈ R, s 6= 0. Ahora,µt
µ3
1
¶¶·µs
µ−13
¶¶= (ts)
µµ3
1
¶·µ−13
¶¶= (ts) 0 = 0
luego tµ3
1
¶⊥ s
µ−13
¶.
c) Un vector propio de A unitario y en el primer cuadrante es
X1 =
µ3
1
¶°°°°µ31
¶°°°° =1√10
µ3
1
¶=
µ3/√10
1/√10
¶=
µcos θ
senθ
¶
donde θ = tan−1 (1/3) , y un vector propio unitario en el segundo cuadrante es
X2 =
µ−13
¶°°°°µ−13
¶°°°° =1√10
µ−13
¶=
µ−1/√103/√10
¶=
µ−senθcos θ
¶
Luego, una matriz Q como se quiere es
Q =
µ3/√10 −1/
√10
1/√10 3/
√10
¶En efecto,
• Q es una matriz ortogonal pues sus columnas son vectores ortogonales y unitarios.

7.4. Ejercicios 191
• Q =
µcos θ −senθsenθ cos θ
¶= m (Rθ) donde θ = tan−1 (1/3) ≈ 0.3222(rad).
• Como las columnas de Q son vectores propios de A linealmente independientes, con laprimera columna correspondiendo a λ1 = 5 y la segunda correspondiendo a λ2 = −5entonces
A = Q
µ5 00 −5
¶Q−1
o, equivalentemente,
Q−1AQ =
µ5 00 −5
¶Finalmente, como Q−1 = QT ya que Q es una matriz ortogonal entonces
QTAQ =
µ5 00 −5
¶¥
El resultado en el numeral 2. del último recuadro se usará al final del capítulo siguiente,para probar (empleando matrices y vectores) que una ecuación de segundo grado
ax2 + bxy + cy2 + dx+ ey + f = 0
con b 6= 0, se puede transformar siempre en una ecuación de segundo grado, de la forma
a0¡x0¢2+ c0
¡y0¢2+ d0x0 + e0y0 + f 0 = 0
(que carece de término en x0y0) mediante una rotación de los ejes coordenados x, y por unángulo θ, el cual puede escogerse de tal modo que 0 < θ < π
2 .
7.4 Ejercicios
1. Para cada una de las siguientes matrices
A1 =
µ3 08 −1
¶A2 =
µ10 −94 −2
¶A3 =
µ0 00 0
¶
A4 =
µ1 00 1
¶A5 =
µ0 21 0
¶A6 =
µ1 22 3
¶a) Encontrar la ecuación característica.
b) Hallar los valores propios.
c) Encontrar los vectores propios correspondientes a cada valor propio y dar unainterpretación geométrica para el conjunto de dichos vectores propios.
2. Sea L la recta generada por un vector no nulo U y sea PU la transformación proyecciónsobre L. Sin emplear m (PU ) , hallar:a) Los valores propios de PU .
b) Los vectores propios de PU correspondientes a cada valor propio.

192 7. Valores propios y vectores propios
3. Para cada transformación lineal dada, hallar su ecuación característica y sus valorespropios.
a) La reflexión sobre el eje y.
b) La reflexión sobre la recta con ecuación y = x.
c) T
µx
y
¶=
µx
−y
¶.
4. Sean T : R2 → R2 una transformación lineal y X ∈ R2. Probar que si T (X) = λ1Xy T (X) = λ2X para ciertos escalares λ1 y λ2 tales que λ1 6= λ2 entonces X = O.Concluya que no existe un vector propio de T correspondiente a dos valores propiosdiferentes.
5. Dar un ejemplo de una transformación lineal con dos vectores propios linealmenteindependientes correspondientes a un mismo valor propio.
6. Sea A =
µ1 1a b
¶. Determinar los valores de a y b de tal modo que los vectoresµ
1
2
¶yµ1
0
¶sean vectores propios de la matriz A.
7. Sea T una transformación del plano cuya matriz es A =µ
a bc d
¶y sean λ1, λ2 los
valores propios de T .
a) La suma a+d de las componentes de la diagonal principal de la matriz A se llamatraza de A y se denota Tr(A). Probar que Tr(A) = λ1 + λ2.
b) Probar que detT = λ1λ2.
c) Probar que la ecuación característica de A se puede expresar como
λ2 − Tr(A)λ+ detA = 0.
d) Verificar lo expuesto en a), b) y c) para las siguientes matrices
A1 =
µ1 11 1
¶, A2 =
µ2 00 3
¶, A3 =
µ0 50 0
¶.
Ayuda para a) y b) : Use las expresiones para λ1, λ2 como raíces de la ecuacióncaracterística de A.
8. Sea T = Rπ2. Mostrar que T no posee valores propios pero que T 2 tiene un valor
propio y todo vector no nulo de R2 es vector propio de T 2 asociado con dicho valorpropio.
9. a) Para cada una de las siguientes matrices Ak,
A1 =
µ1 10 1
¶, A2 =
µ1 01 1
¶, A3 =
µ3 00 −5
¶, A4 =
µ0 70 0
¶,
A5 =
µ0 33 0
¶, A6 =
µ1 22 4
¶, A7 =
µ3 −
√3
−√3 1
¶, A8 =
µ1 22 1
¶i) Hallar los valores propios y los vectores propios correspondientes.

7.4. Ejercicios 193
ii) Encontrar, si existen, una matriz invertible P y una matriz diagonal D tales queAk = PDP−1.
b) Para las matrices dadas en a) que sean simétricas y no diagonales,
i) Verificar que vectores propios correspondientes a valores propios diferentes sonortogonales.
ii) Encontrar una matriz ortogonal Q tal que QTAkQ sea una matriz diagonal yademás Q sea la matriz de una rotación Rθ con 0 < θ < π/2; indicar cuál es el ánguloθ.
10. Sea T una transformación lineal del plano. Decimos que una recta L que pasa por elorigen es invariante bajo la transformación T si para cada vectorX pertenecientea la recta L, el vector T (X) también pertenece a la recta L. Probar que:a) Si U es un vector propio de T entonces la recta L generada por U es invariantebajo T.
b) Si U no es vector propio de T entonces la recta L generada por U no es invariantebajo T.
11. Hallar ecuaciones de las rectas, en caso de existir, que son invariantes bajo la trans-formación lineal cuya matriz se indica en cada literal.
a) m(T ) =
µ4 −12 1
¶b) m(T ) =
µ0 −33 0
¶c) m(T ) =
µ2 30 2
¶d) m(T ) =
µ3 08 −1
¶12. Probar que las únicas matrices que admiten factorización del tipo PDPT con P y
D matrices 2 × 2 y D diagonal son las simétricas. Es decir, probar que si A es unamatriz 2 × 2 que admite factorización A = PDPT con P y D matrices 2 × 2 y Ddiagonal, entonces A es simétrica.
Ayuda: Recuerde que si M y N son matrices 2× 2 entonces (MN)T = NTMT .

194 7. Valores propios y vectores propios

8
Secciones Cónicas
Los antiguos geómetras griegos descubrieron que cortando un cono circular recto de doshojas (o mantos) con planos que no pasan por el vértice del cono, se obtienen tres tiposbásicos de curvas, las cuales se denominan secciones cónicas, o simplemente cónicas.
Un cono circular recto de dos hojas es una superficie en el espacio conformada por todaslas rectas que pasan por un punto fijo P y forman un ángulo constante α, 0 < α < 90◦,con una recta fija L que pasa por P (figura 8.1). La recta L es el eje del cono, el punto Pes el vértice del cono y cada recta que es parte del cono se dice un elemento del cono. Elvértice P separa al cono en dos partes, a las que se llama hojas.
Figura 8.1.
Cuando un plano, que no pasa por el vértice P, corta todos los elementos de unasola hoja, la curva intersección del plano con el cono se llama elipse (figura 8.2.a); si elplano es paralelo a un elemento, la correspondiente curva intersección se llama parábola(figura 8.2.b), y si el plano corta ambas hojas, la curva resultante se llama hipérbola(figura 8.2.c). Cuando se corta el cono con un plano que pasa por el vértice del cono,la intersección resultante puede ser un punto, una recta o dos rectas que se cortan en elvértice. A este tipo de intersecciones se les llama cónicas degeneradas.
195

196 8. Secciones Cónicas
Figura 8.2.
Un caso particular de elipse es la circunferencia, curva que se obtiene cortando al conocon un plano que no pase por el vértice y que sea perpendicular al eje del cono.
Las propiedades fundamentales de las secciones cónicas se conocen desde hace más dedos mil años y es notable el hecho de que dichas curvas continúan jugando en la actualidadun importante papel en la ingeniería con una gran variedad de aplicaciones prácticas enla vida cotidiana (reflectores parabólicos, antenas parabólicas para televisión, etc), comotambién en la formulación de ciertos modelos científicos. En la Física, por ejemplo, es bienconocido lo que ocurre en los campos gravitacional y electrostático, los cuales son camposde fuerza proporcional al inverso del cuadrado de la distancia: cuando una partícula semueve bajo la influencia de uno de estos campos, la trayectoria que ella describe es unacónica. En el campo gravitacional del sol se conoce que las órbitas de los planetas sonelipses y que el sol se encuentra en uno de los focos. Por otra parte, la trayectoria quedescribe una partícula α en el campo eléctrico de un núcleo atómico, es una hipérbola.
Para el campo gravitacional de la tierra, Galileo descubrió a comienzos del siglo XVIIque si un objeto es lanzado cerca de la superficie terrestre, formando un ángulo no rectocon la horizontal, la trayectoria que él describe es un arco de parábola, si no se tiene encuenta la resistencia del aire.
Se ha encontrado que las secciones cónicas se pueden definir (sin hacer referencia a uncono) como ciertos lugares geométricos del plano, es decir, como ciertos conjuntos de puntosdel plano que cumplen determinadas condiciones. En este capítulo definiremos dichas sec-ciones cónicas de esta forma y encontraremos para cada tipo, ecuaciones correspondientes.Empezaremos con la circunferencia que, como ya dijimos, es un caso particular de elipse yademás es, después de la línea recta, el lugar geométrico más sencillo y más familiar.
8.1 La circunferencia
Se denomina circunferencia al conjunto de todos los puntos del plano que equidistan(están a igual distancia) de un punto fijo del plano. Al punto fijo se le llama centro y ala distancia del centro a cualquier punto de la circunferencia se le llama radio. (Figura8.3a.)

8.1. La circunferencia 197
Figura 8.3.
Consideremos ahora el plano dotado de un sistema de coordenadas cartesianas xy, y
en él una circunferencia C con centro en el punto C =µh
k
¶y radio r. (Figura 8.3b.)
Un puntoµx
y
¶del plano está sobre dicha circunferencia C si y sólo si°°°°µxy
¶−µh
k
¶°°°° = r.
Efectuando la diferencia en el lado izquierdo y elevando ambos lados al cuadrado,transformamos la ecuación anterior en la ecuación equivalente°°°°µx− h
y − k
¶°°°°2 = r2
la cual a su vez equivale a la ecuación
(x− h)2 + (y − k)2 = r2.
De manera que un puntoµx
y
¶de R2 pertenece a la circunferencia C si y sólo si sus
coordenadas satisfacen la ecuación anterior. Tenemos así que:
Una ecuación para la circunferencia con centro en el puntoµh
k
¶y radio r es
(x− h)2 + (y − k)2 = r2.(8.1)
Si el centro es el origen (es decir, h = 0 y k = 0), la ecuación en (8.1) adopta la formamás simple
x2 + y2 = r2 (8.2)
la cual es llamada forma canónica de la ecuación de la circunferencia.
Ejemplo 8.1Una ecuación para la circunferencia con centro en
µ−12
¶y radio 4 es
(x− (−1))2 + (y − 2)2 = 42
es decir,(x+ 1)2 + (y − 2)2 = 16. ¥

198 8. Secciones Cónicas
Ejemplo 8.2Encuentre una ecuación para la circunferencia C tal que los extremos de uno de sus diáme-
tros son los puntos P =µ4
−3
¶y Q =
µ−27
¶.
Solución:El centro de la circunferencia C es el punto medio del segmento PQ, pues este segmento
es uno de sus diámetros. Así, el centro de C es el punto
C =1
2(P +Q) =
1
2
µ4− 2−3 + 7
¶=1
2
µ2
4
¶=
µ1
2
¶.
Por otra parte, el radio r de la circunferencia C es la distancia del centro C a cualquierade los puntos P o Q, así que
r = kP − Ck =°°°°µ 4−3
¶−µ1
2
¶°°°° = °°°°µ 3−5¶°°°° =q32 + (−5)2 = √34.
Por tanto, una ecuación para la circunferencia C es
(x− 1)2 + (y − 2)2 = 34. ¥
Si en la ecuación en (8.1),
(x− h)2 + (y − k)2 = r2
se desarrollan los cuadrados, se pasa el término r2 al lado izquierdo y se agrupan lostérminos constantes, se obtiene
x2 + y2 − 2hx− 2ky +¡h2 + k2 − r2
¢= 0.
Haciendo D = −2h, E = −2k y F = h2 + k2 − r2 vemos que esta ecuación toma laforma
x2 + y2 +Dx+Ey + F = 0. (8.3)
Así, toda circunferencia tiene una ecuación de la forma anterior. Ahora, si se parte deuna ecuación de la forma (8.3) para una circunferencia dada, ella puede llevarse a la formaen (8.1), completando los cuadrados en las variables x y y, como se ilustra en el ejemplosiguiente.
Ejemplo 8.3Halle el centro y el radio de la circunferencia con ecuación
x2 + y2 + 2x− 4y − 4 = 0. (8.4)
Solución:Llevemos la ecuación (8.4) a la forma
(x− h)2 + (y − k)2 = r2.
Para ello empezamos por escribirla en la forma¡x2 + 2x
¢+¡y2 − 4y
¢= 4. (8.5)

8.1. La circunferencia 199
Ahora completamos el cuadrado en cada expresión en paréntesis, es decir, adicionamosen cada una la constante apropiada de modo que la primera se convierta en un cuadrado(x− h)2 y la segunda en un cuadrado (y − k)2 . Haciendo lo dicho, tenemos que (8.5) esequivalente a ¡
x2 + 2x+ 1¢+¡y2 − 4y + 4
¢= 1 + 4 + 4
es decir, a(x+ 1)2 + (y − 2)2 = 32
o sea, a la ecuación(x− (−1))2 + (y − 2)2 = 32. (8.6)
Hemos transformado así la ecuación (8.4) en la ecuación equivalente (8.6) de la cual
vemos que el centro de la circunferencia es el punto C =
µ−12
¶y que el radio es r = 3.
(Figura 8.4.) ¥
Figura 8.4.
Se advierte al lector que no toda ecuación de la forma (8.3) representa una circunfe-rencia. En efecto, es posible que al completar los cuadrados en una ecuación dada del tipo(8.3) se obtenga una ecuación de la forma
(x− h)2 + (y − k)2 = d
con d = 0 o con d < 0. Es claro que en el primer caso la ecuación sólo es satisfecha por el
puntoµx
y
¶=
µh
k
¶, mientras que en el segundo caso ningún punto
µx
y
¶de R2 la satisface.
Ejemplo 8.4a) Consideremos la ecuación
x2 + y2 + 2x− 4y + 5 = 0. (8.7)
Al completar cuadrados se obtiene
(x+ 1)2 + (y − 2)2 = 0.
Luego, la ecuación (8.7) no representa una circunferencia y sólo es satisfecha por el
puntoµx
y
¶=
µ−12
¶.

200 8. Secciones Cónicas
b) Consideremos ahora la ecuación
x2 + y2 + 2x− 4y + 6 = 0. (8.8)
Al completar cuadrados se obtiene
(x+ 1)2 + (y − 2)2 = −1.
Así, ningún puntoµx
y
¶de R2 satisface la ecuación (8.8). ¥
8.2 Traslación de ejes
Acabamos de ver que una ecuación para una circunferencia con radio r y centro en el puntoµh
k
¶, respecto a un sistema cartesiano xy (figura 8.5) es la ecuación
(x− h)2 + (y − k)2 = r2
Figura 8.5.
Por otra parte, una ecuación para la misma circunferencia, pero respecto al sistemax0y0 que se muestra en la figura 8.5, cuyo origen coincide con el centro de la circunferencia,es la ecuación más simple ¡
x0¢2+¡y0¢2= r2.
Esto pone de manifiesto el hecho de que la forma de una ecuación para una curva dada,referida a un cierto sistema cartesiano, depende de la ubicación de la curva respecto a loscorrespondientes ejes coordenados.
Como en el caso anterior, en muchos otros es posible transformar una ecuación dadapara una curva, referida a un sistema xy, en una ecuación más simple, cambiando a unnuevo sistema cartesiano x0y0. Debe tenerse presente que cuando se efectúa un tal cambiode sistema, cada punto P del plano con coordenadas x, y relativas al sistema xy, adquierenuevas coordenadas x0, y0 relativas al nuevo sistema x0y0. Y que es necesario disponer de larelación entre las viejas coordenadas x, y y las nuevas x0, y0 para poder pasar de un sistemaal otro.
A continuación nos referiremos al cambio más sencillo de un sistema cartesiano xy aotro sistema cartesiano x0y0: aquel en el cual los nuevos ejes x0, y0 son respectivamente

8.2. Traslación de ejes 201
paralelos a los ejes x, y, están orientados en el mismo sentido y además se conserva en cadauno de ellos la unidad de medida (figura 8.6).
Figura 8.6.
Un cambio de sistema de coordenadas del tipo anterior se dice una traslación de ejes.Consideremos una traslación de ejes y supongamos que el nuevo origen O0 tiene vector
de coordenadasµh
k
¶, respecto al sistema original xy. Sea P un punto cualquiera del plano
con vector de coordenadasµx
y
¶respecto al sistema xy y con vector de coordenadas
µx0
y0
¶respecto al nuevo sistema x0y0 (figura 8.7).
Figura 8.7.
Veamos cómo se relacionan las coordenadas x, y y las coordenadas x0, y0 :Puesto que
−−→OP =
−−→OO0 +
−−→O0P
y puesto que
−−→OP = x
−→i + y
−→j ,−−→OO0 = h
−→i + k
−→j y−−→O0P = x0
−→i + y0
−→j
se tiene que
x−→i + y
−→j =
³h−→i + k
−→j´+³x0−→i + y0
−→j´=¡x0 + h
¢−→i +
¡y0 + k
¢−→j

202 8. Secciones Cónicas
de donde,x = x0 + h y y = y0 + k. (8.9)
o, equivalentemente,
x0 = x− h y y0 = y − k. (8.10)
Tenemos así el siguiente resultado:
Supongamos que se trasladan los ejes coordenados x, y de modo que el
nuevo origen es el punto O0 =µh
k
¶, respecto al sistema xy.
Siµx
y
¶yµx0
y0
¶son, respectivamente, los vectores de coordenadas de un
mismo punto P del plano, respecto al sistema xy y respecto al sistema x0y0
entoncesx = x0 + h y y = y0 + k
o, equivalentemente,x0 = x− h y y0 = y − k.
Ejemplo 8.5Suponga que se efectúa una traslación de ejes y que el nuevo origen es el punto
µ−23
¶.
Hallar las nuevas coordenadas x0, y0 del punto P cuyas coordenadas en el sistema originalson x = 5, y = −8.
Solución:Empleando la fórmula (8.10) con x = 5, y = −8, h = −2 y k = 3, se obtiene que
x0 = 5− (−2) = 7 y y0 = −8− 3 = −11. ¥
Ejemplo 8.6Consideremos la circunferencia C con ecuación
x2 + y2 + 2x− 6y + 6 = 0. (8.11)
Completando los cuadrados en x y en y, esta ecuación se convierte en la ecuación
(x+ 1)2 + (y − 3)2 = 4 (8.12)
la cual nos dice que la circunferencia C tiene radio r = 2 y centro en el puntoµh
k
¶=
µ−13
¶.
Si trasladamos los ejes de tal forma que el nuevo origen sea el centro de la circunferenciaC entonces según las fórmulas (8.10),
x0 = x− (−1) = x+ 1 y y0 = y − 3.
Sustituyendo en (8.12), esta ecuación toma la forma¡x0¢2+¡y0¢2= 4. (8.13)
Así, en el nuevo sistema x0y0, la ecuación dada de la circunferencia C se transforma enla ecuación (8.13), la cual ya no tiene términos lineales y evidentemente es más simple quela ecuación (8.11). ¥

8.3. La parábola 203
8.3 La parábola
Se denomina parábola al conjunto de todos los puntos del plano que equidistan de unpunto fijo (del plano) llamado foco, y de una recta fija (también del plano) llamadadirectriz, la cual no contiene al foco.
En la figura 8.8, el punto F es el foco y la recta L es la directriz.
Figura 8.8.
Una manera de obtener puntos de la parábola es la siguiente: se traza una recta L0paralela a la directriz, como se muestra en la figura 8.8. Haciendo centro en el foco F ycon radio igual a la distancia entre las rectas L0 y L, se trazan arcos de circunferenciaque cortan a L0; es claro que cada uno de los puntos de corte P y P 0 son puntos de laparábola, pues equidistan del foco y de la directriz. La recta que pasa por el foco F y esperpendicular a la directriz L se llama eje focal. El punto en el cual el eje focal intersectala parábola se llama vértice; es claro que este punto (el cual es el punto V en la figura8.8) está ubicado a la mitad de la distancia entre el foco F y la directriz L.
La recta que pasa por el foco F y es paralela a la directriz L corta a la parábola en dospuntos P 0 y P ; el segmento P 0P es llamado lado recto de la parábola. (Figura 8.9)
Figura 8.9.
Se trata ahora de hallar una ecuación para la parábola, respecto a un sistema cartesianoxy para el plano. Como veremos una tal ecuación toma su forma más simple cuando laparábola tiene su vértice en el origen y su eje focal es uno de los ejes coordenados.
Consideremos, por ejemplo, la parábola P con vértice en el origen y foco F =
µ0
p
¶,
p 6= 0. El eje focal de P coincide con el eje y; además, por definición de parábola, la directrizde P es la recta con ecuación y = −p. (Figura 8.10).

204 8. Secciones Cónicas
Figura 8.10.
En estas condiciones, un puntoµx
y
¶de R2 está sobre la parábola P si y sólo si
°°°°µxy¶−µ0
p
¶°°°° = °°°°µxy¶−µ
x
−p
¶°°°° . (8.14)
Efectuando las diferencias indicadas en (8.14) y elevando ambos lados al cuadrado, seobtiene °°°°µ x
y − p
¶°°°°2 = °°°°µ 0
y + p
¶°°°°2es decir,
x2 + (y − p)2 = (y + p)2 .
Finalmente, desarrollando los cuadrados y simplificando se llega a la ecuación
x2 = 4py
que escribimos en la forma
y =1
4px2. (8.15)
Obsérvese que cada uno de los pasos que transformaron la ecuación (8.14) en la ecuación
(8.15) pueden ser reversados. De manera que un puntoµx
y
¶de R2 está sobre la parábola
P si y sólo siµx
y
¶satisface la ecuación (8.15). Así, (8.15) es una ecuación para la parábola
P.Dicha ecuación (8.15) muestra que la parábola es simétrica respecto a su eje focal que
en este caso es el eje y, pues por cada puntoµx
y
¶que la satisface, el punto
µ−xy
¶también
la satisface.Los extremos del lado recto son los puntos de la parábola con ordenada igual a p. Para
hallar sus abscisas, hacemos y = p en la ecuación (8.15) y despejamos x obteniéndose
x = ±2p. Por tanto, los extremos del lado recto de P son los puntos P 0 =µ−2pp
¶y
P =
µ2p
p
¶. En la figura 8.11 se muestra dicho lado recto y sus extremos P 0, P para el caso
p > 0.

8.3. La parábola 205
Figura 8.11.
Se sigue que la longitud del lado recto de P es kP − P 0k = 4 |p| . Así, entre más grandesea |p| , más abierta es la parábola y entre más pequeño sea |p| , más cerrada es la misma.
Vale la pena resaltar que el número p en la ecuación (8.15), es tal que |p| es la distanciadel foco F al vértice, como también del vértice a la directriz.
En la discusión anterior, la parábola P tiene vértice en el origen y foco F =
µ0
p
¶,
p 6= 0; su eje focal es el eje y. Si el vértice continúa en el origen, pero el foco es el puntoF =
µp
0
¶, p 6= 0, entonces su eje focal es el eje x, su directriz la recta con ecuación x = −p
y se intercambiarían los papeles de x y y. (Figura 8.12)
Figura 8.12.
En tal caso una ecuación para la parábola es
x =1
4py2. (8.16)
La longitud del lado recto de la parábola sigue siendo 4 |p| y al igual que en la ecuación(8.15), en la ecuación (8.16), |p| es la distancia del foco al vértice y también del vértice ala directriz.
Las ecuaciones (8.15) y (8.16) son las ecuaciones más simples para la parábola, por talrazón a ellas se les llama formas canónicas para la ecuación de la parábola.
Tenemos así que:

206 8. Secciones Cónicas
• Una ecuación para la parábola con vértice en el origen y foco F =µ0
p
¶, p 6= 0, es
y =1
4px2.
Si p > 0, la parábola abre hacia arriba y si p < 0, la parábola abre hacia abajo.
• Una ecuación para la parábola con vértice en el origen y foco F =µp
0
¶, p 6= 0, es
x =1
4py2.
Si p > 0, la parábola abre hacia la derecha y si p < 0, la parábola abre hacia la izquierda.
Ejemplo 8.7Halle una ecuación para cada una de las siguientes parábolas P.
a) P tiene vértice en el origen y foco F =µ0
3
¶.
b) P tiene vértice en el origen y su directriz es la recta con ecuación x = 4.
c) P tiene vértice en el origen, su eje focal es el eje y y pasa por el punto P =µ4
−5
¶.
Solución:
a) Una ecuación para P es la ecuación (8.15) con p = 3, es decir, y =1
12x2. (Figura
8.13)
Figura 8.13.
b) Dado que P tiene vértice en el origen y su directriz es la recta con ecuación x = 4
entonces una ecuación para P es x =1
4py2 donde el foco es el punto F =
µp
0
¶; además
p < 0 pues la parábola abre hacia la izquierda. Ahora, como |p| = distancia del vértice a
la directriz = 4 entonces p = −4 y así una ecuación para P es x = − 116
y2. (Figura 8.14)

8.3. La parábola 207
Figura 8.14.
c) Como P tiene vértice en el origen y su eje focal es el eje y, entonces P tiene una
ecuación de la forma y =1
4px2. Ahora, como el punto P =
µ4
−5
¶pertenece a la parábola
P entonces dicho punto satisface la ecuación de P, así −5 = 1
4p(4)2 de donde
1
4p= − 5
16.
Luego una ecuación para la parábola P es y = − 516
x2.
En la figura 8.15 se muestra la parábola P, la cual pasa también por el punto P 0 =µ−4−5
¶, dada la simetría de P respecto al eje y. ¥
Figura 8.15.
Consideremos ahora una parábola P con vértice V =
µh
k
¶y foco F =
µh
k + p
¶, p 6= 0;

208 8. Secciones Cónicas
su eje focal es paralelo al eje y. (Figura 8.16)
Figura 8.16.
Efectuando una traslación de ejes de modo que el nuevo origen coincida con el vértice
V =
µh
k
¶, como se muestra en la figura 8.16, tenemos que, respecto al nuevo sistema x0y0,
la parábola P tiene vértice en el origen y foco en el puntoµ0
p
¶y así una ecuación para
dicha parábola, referida al sistema x0y0, es (vea (8.15))
y0 =1
4p
¡x0¢2.
Se sigue, usando las ecuaciones de traslación x0 = x− h, y0 = y − k que una ecuaciónpara la parábola P, respecto al sistema xy, es
y − k =1
4p(x− h)2 . (8.17)
De manera similar, una ecuación para la parábola con vértice V =
µh
k
¶y foco F =µ
h+ p
k
¶, p 6= 0, la cual tiene ahora su eje focal paralelo al eje x, es
x− h =1
4p(y − k)2 . (8.18)
Es claro que en cualquiera de los dos casos anteriores, |p| sigue siendo la distancia delfoco al vértice y de éste a la directriz, y que la longitud del lado recto sigue siendo también4 |p| .
Una parábola se dice vertical, respecto a un sistema cartesiano xy, si su eje focalcoincide con el eje y o es paralelo a dicho eje. Si el eje focal coincide con el eje x o esparalelo a este eje, la parábola se dice horizontal.
Se tiene así que

8.3. La parábola 209
• Una ecuación para la parábola vertical con vértice V =
µh
k
¶y
foco F =µ
h
k + p
¶, p 6= 0, es
y − k =1
4p(x− h)2 .
Si p > 0, la parábola abre hacia arriba y si p < 0, la parábola abre hacia abajo.
• Una ecuación para la parábola horizontal con vértice V =
µh
k
¶y
foco F =µh+ p
k
¶, p 6= 0, es
x− h =1
4p(y − k)2 .
Si p > 0, la parábola abre hacia la derecha y si p < 0, la parábola abre hacia la izquierda.
Ejemplo 8.8Encontrar una ecuación para cada una de las siguientes parábolas P.
a) P tiene foco F =µ−2−4
¶y su directriz es la recta con ecuación y = 1.
b) P tiene vértice V =
µ−42
¶, su eje focal es la recta con ecuación x = −4 y pasa por
el punto P =µ−35
¶.
c) P abre hacia la izquierda y los extremos de su lado recto son los puntos P 0 =µ3
−4
¶y P =
µ3
2
¶.
Solución:a) En la figura 8.17 se muestran los datos dados (el foco y la directriz) y se insinúa en
línea punteada la parábola P.
Figura 8.17.

210 8. Secciones Cónicas
Una ecuación para P esy − k =
1
4p(x− h)2
siendo V =
µh
k
¶el vértice y F =
µh
k + p
¶el foco.
Ahora, puesto que el vértice es el punto medio del segmento de extremos F =µ−2−4
¶y
el punto G =µ−21
¶entonces
V =
µh
k
¶=1
2
∙µ−2−4
¶+
µ−21
¶¸=
µ−2−3/2
¶.
Por otra parte, como
F =
µ−2−4
¶=
µh
k + p
¶=
µ−2−32 + p
¶entonces −3
2+ p = −4 de donde p = −4+ 3
2= −5
2(y así 4p = −10). Luego, una ecuación
para P esy +
3
2= − 1
10(x+ 2)2 .
b) Como el eje focal de P es paralelo al eje y entonces la parábola P es vertical, y
puesto que su vértice es V =
µ−42
¶entonces una ecuación para P es
y − 2 = 1
4p(x+ 4)2 .
Ahora, dado que P =µ−35
¶es un punto de la parábola, él satisface la ecuación anterior,
así que 5− 2 = 1
4p(−3 + 4)2 de donde 1
4p= 3. Luego, una ecuación para P es
y − 2 = 3 (x+ 4)2 .
En la figura 8.18 se muestra la parábola P.
Figura 8.18.

8.3. La parábola 211
c) En la figura 8.19 se insinúa en línea punteada la parábola P y se muestra su ladorecto P 0P.
Figura 8.19.
Puesto que la parábola P es horizontal y abre hacia la izquierda, una ecuación paraella es
x− h =1
4p(y − k)2 (8.19)
donde V =
µh
k
¶es el vértice y F =
µh+ p
k
¶es el foco, siendo p < 0.
Comencemos hallando el valor de p :
4 |p| = longitud del lado recto =°°P − P 0
°° = 6y puesto que p < 0 entonces p = −6
4= −3
2(y así 4p = −6).
Por otra parte, el foco es el punto medio del segmento P 0P, luego
F =1
2
¡P + P 0
¢=1
2
∙µ3
2
¶+
µ3
−4
¶¸=
µ3
−1
¶.
Finalmente, de la igualdad
F =
µ3
−1
¶=
µh+ p
k
¶=
µh− 3
2
k
¶
se obtiene h− 32= 3 y k = −1, es decir, h = 9
2y k = −1.
Sustituyendo los valores hallados para p, h y k en (8.19), tenemos que una ecuaciónpara la parábola P es
x− 92= −1
6(y + 1)2 . ¥

212 8. Secciones Cónicas
Consideremos nuevamente la ecuación (8.17). Desarrollando el cuadrado en su ladoderecho obtenemos
y − k =1
4p
¡x2 − 2xh+ h2
¢o, equivalentemente,
y =1
4px2 − h
2px+
h2
4p+ k.
Así, haciendo a =1
4p, b = − h
2py c =
h2
4p+ k, vemos que la ecuación (8.17) toma la
formay = ax2 + bx+ c, a 6= 0. (8.20)
Por tanto, toda parábola vertical tiene una ecuación de la forma (8.20) con a > 0 si laparábola abre hacia arriba y a < 0 si la parábola abre hacia abajo.
Recíprocamente, toda ecuación de la forma (8.20) representa una parábola vertical queabre hacia arriba si a > 0 y hacia abajo si a < 0. Ello se prueba llevando la ecuación (8.20)a la forma (8.17).
Un resultado similar se obtiene al considerar la ecuación (8.18).Estos hechos se resumen en el siguiente cuadro.
• Toda parábola vertical tiene una ecuación de la formay = ax2 + bx+ c, a 6= 0
con a > 0 si la parábola abre hacia arriba y a < 0 si la parábola abre haciaabajo. Recíprocamente, toda ecuación de la forma anterior representa unaparábola vertical, la cual abre hacia arriba si a > 0 y hacia abajo si a < 0.
• Toda parábola horizontal tiene una ecuación de la formax = ay2 + by + c, a 6= 0
con a > 0 si la parábola abre hacia la derecha y a < 0 si la parábola abre haciala izquierda. Recíprocamente, toda ecuación de la forma anterior representa unaparábola horizontal, la cual abre hacia la derecha si a > 0 y hacia la izquierdasi a < 0.
Ejemplo 8.9Para cada una de las dos ecuaciones dadas a continuación, comprobar que ella representauna parábola. Determinar el vértice, el foco, la directriz y la longitud del lado recto.
a) y = 3x2 − 4x+ 1.b) 6x+ 10y + y2 + 19 = 0.
Solución:a) Para comprobar que la ecuación dada corresponde a una parábola, basta mostrar
que ella es equivalente a una ecuación de la forma
y − k =1
4p(x− h)2 .

8.3. La parábola 213
Para ello empezamos por escribir la ecuación dada en la forma
y = 3
µx2 − 4
3x
¶+ 1.
Ahora completamos el cuadrado en la variable x :
y = 3
Ãx2 − 4
3x+
µ2
3
¶2!− 3
µ2
3
¶2+ 1.
Obtenemos así
y = 3
µx− 2
3
¶2− 13
o, equivalentemente,
y −µ−13
¶= 3
µx− 2
3
¶2.
Hemos mostrado así que la ecuación dada representa una parábola.
De la ecuación anterior vemos que el vértice de dicha parábola es el punto V =
µh
k
¶=µ
2/3
−1/3
¶y que el foco es el punto F =
µh
k + p
¶=
µ2/3
−13 + p
¶siendo p tal que
1
4p= 3, es
decir, siendo p =1
12; así el foco es el punto F =
µ2/3
−13 +112
¶=
µ2/3
−1/4
¶. En cuanto a la
directriz, sabemos que ella es la recta con ecuación y = k−p; y como k−p = −13−112 = −
512 ,
entonces la directriz es la recta con ecuación y = − 512 . Finalmente la longitud del lado recto
es 4 |p| = 4¡112
¢= 1
3 .
b) Para comprobar que la ecuación dada corresponde a una parábola, la transformare-mos en una ecuación de la forma
x− h =1
4p(y − k)2 .
Para ello empezamos escribiendo la ecuación dada en la forma
6x+ 19 = −¡y2 + 10y
¢.
Ahora completamos el cuadrado en la variable y :
6x+ 19 = −¡y2 + 10y + 25
¢+ 25.
Obtenemos así6x− 6 = − (y + 5)2
o, equivalentemente,
x− 1 = −16(y − (−5))2 .
Hemos mostrado así que la ecuación dada representa una parábola.
De la ecuación anterior vemos que el vértice de dicha parábola es el punto V =
µh
k
¶=µ
1
−5
¶y que el foco es el punto F =
µh+ p
k
¶=
µ1 + p
−5
¶siendo p tal que
1
4p= −1
6, es

214 8. Secciones Cónicas
decir, siendo p = −32; así, el foco es el punto F =
µ1− 3
2
−5
¶=
µ−12−5
¶. En cuanto a la
directriz sabemos que es la recta con ecuación x = h−p y como h−p = 1+ 32 =
52 entonces
dicha directriz es la recta con ecuación x = 52 . Finalmente, la longitud del lado recto es
4 |p| = 4¡32
¢= 6. ¥
Volvamos a las ecuaciones (8.17) y (8.18)
y − k =1
4p(x− h)2 y x− h =
1
4p(y − k)2 .
Multiplicando a ambos lados por 4p, desarrollando luego los cuadrados y reuniendo lasconstantes, podemos llevar cada una de las ecuaciones anteriores a la forma
Ax2 + Cy2 +Dx+Ey + F = 0 (8.21)
con A 6= 0 y C = 0 o bien A = 0 y C 6= 0.Podemos afirmar entonces que toda parábola horizontal o vertical tiene una ecuación de
la forma anterior. Ahora, si se parte de una ecuación de la forma (8.21) para una paráboladada, podemos transformarla en una ecuación de la forma (8.17) o en una de la forma(8.18), según corresponda, completando el cuadrado en la variable x si A 6= 0 o en lavariable y si C 6= 0.
Es de señalar que algunas ecuaciones de la forma (8.21), con A y C como se ha indicado,no representan parábolas. Por ejemplo, la ecuación
x2 − x− 6 = 0
es de la forma (8.21) con A = 1, C = 0, D = −1, E = 0 y F = −6, pero ella no representauna parábola, pues dicha ecuación es equivalente a
(x+ 2) (x− 3) = 0
cuyo conjunto solución lo conforman los puntosµx
y
¶de R2 tales que
x+ 2 = 0 o x− 3 = 0
es decir, su conjunto solución es la unión de las rectas verticales
x = −2 y x = 3.
Es fácil ver que los únicos casos en los cuales una ecuación de la forma (8.21), con A yC como se ha indicado, no representa una parábola son aquellos en los que ella se reduce a
Ax2 +Dx+ F = 0, A 6= 0
o bien aCy2 +Ey + F = 0, C 6= 0.
En el primer caso, la ecuación representa un par de rectas paralelas al eje y (como enel ejemplo que acabamos de dar) o una sola recta paralela al eje o ningún lugar geométricosegún que la ecuación Ax2 +Dx+F = 0 tenga raíces reales y distintas, reales e iguales, ono reales. Algo similar ocurre con la ecuación Cy2 +Ey + F = 0, C 6= 0.
Para terminar con la presentación de la parábola mencionaremos a continuación algunasde las aplicaciones de esta cónica.

8.3. La parábola 215
• Cuando un objeto es lanzado cerca de la superficie terrestre, formando un ángulo norecto con la horizontal, la trayectoria que él describe es un arco de parábola, si nose tiene en cuenta la resistencia del aire. (A este hecho ya nos habíamos referido alinicio de esta sección).
• Los arcos de parábola son de uso frecuente en edificaciones y particularmente enpuentes.
• Muchas otras de las aplicaciones de la parábola tienen que ver con dos hechos im-portantes.
El primero de ellos es un hecho de la Física, el cual explicamos a continuación:
Supongamos que un rayo de luz L1 toca una superficie S, la cual refleja la luz, en unpunto P y sea L2 el rayo reflejado, como se muestra en la figura 8.20, en la cual η esla recta normal a la superficie S en el punto P.
Figura 8.20.
Los ángulos α y β mostrados en la figura se llaman, respectivamente, ángulo deincidencia y ángulo de reflexión. Resulta que una ley de la Física establece que lasrectas L1,L2 y η son coplanares (están en un mismo plano) y que el ángulo deincidencia α es igual al ángulo de reflexión β.
El otro hecho es una propiedad geométrica de la parábola, la cual pasamos a explicar:
Consideremos una parábola P y sean Q un punto sobre ella, F su foco y η la rectanormal a P en el punto Q (figura 8.21). Sean, además, α y β los ángulos mostradosen la figura 8.21, en la cual L0 es una semirecta paralela al eje focal de P. Pues bien,se puede probar que la parábola P tiene la propiedad de que α = β.
Figura 8.21.

216 8. Secciones Cónicas
• Los dos hechos anteriores se aplican, por ejemplo, en la construcción de reflectoresparabólicos (farolas de autos, linternas, faros, etc). Tales reflectores tienen la forma deun paraboloide de revolución (superficie que se genera al rotar una parábola alrededorde su eje focal) en el cual se coloca una fuente de luz en el foco. De acuerdo con los doshechos mencionados, todos los rayos de luz emitidos desde la fuente chocan contra lasuperficie del reflector y se reflejan paralelamente al eje focal, produciéndose un hazcilíndrico de luz.
El mismo principio se aplica para telescopios. Si el eje focal del reflector parabólico esdirigido hacia una estrella, los rayos de luz provenientes de ese objeto distante llegan ala superficie del reflector paralelamente al eje focal y todos se reflejan concentrándoseen el foco. Las antenas de radar, las antenas parabólicas de televisión y los micrófonosde campo abierto, también están construidos con base en el mismo principio.
8.4 La elipse
Se denomina elipse al conjunto de todos los puntos P del plano tales que la suma de lasdistancias de P a dos puntos fijos del plano F 0 y F es constante, siendo esa constantemayor que la distancia entre dichos puntos. Los puntos fijos F 0 y F son llamados focos dela elipse (figura 8.22).
Figura 8.22.
La figura 8.22a muestra cómo se puede trazar una elipse: se elige una cuerda conlongitud mayor que la distancia entre los puntos F 0 y F y se fijan sus extremos en estospuntos. Conforme se mueve la punta de un lápiz, manteniendo la cuerda tensa, la curva quese describe es la elipse con focos F 0, F y con la constante que se menciona en la definiciónde elipse igual a la longitud de la cuerda. Nótese que si F 0 = F, la curva resultante es unacircunferencia con centro en F y radio la mitad de la longitud de la cuerda.
Consideremos ahora la figura 8.22b.
La recta L que pasa por los focos se llama eje focal, y los puntos V 0, V donde el ejefocal corta la elipse, se llaman vértices.

8.4. La elipse 217
El segmento V 0V se llama eje mayor.
El punto C, el cual es el punto medio del segmento F 0F, se llama centro.
La recta L0 que pasa por el centro y es perpendicular al eje focal, se llama eje normal.El segmento A0A, donde A0 y A son los puntos de corte del eje normal con la elipse, se
llama eje menor.
Como es de esperar, la forma más simple de una ecuación para la elipse, respecto a unsistema cartesiano xy, se obtiene cuando la elipse tiene su centro en el origen y el eje focales alguno de los ejes coordenados.
Consideremos, por ejemplo, la elipse E con focos F 0 =µ−c0
¶y F =
µc
0
¶, c ≥ 0, y tal
que la suma de las distancias de un punto cualquiera de la elipse a los focos F 0 y F es 2a.Puesto que 2a debe ser mayor que la distancia 2c entre F 0 y F entonces se tiene que a > c.Nótese que la elipse E tiene centro en el origen y su eje focal es el eje x (figura 8.23).
Figura 8.23.
En las condiciones anteriores, un punto P =µx
y
¶de R2 está sobre la elipse E si y sólo
si °°P − F 0°°+ kP − Fk = 2a
es decir, °°°°µxy¶−µ−c0
¶°°°°+ °°°°µxy¶−µc
0
¶°°°° = 2a (8.22)
o equivalentemente, q(x+ c)2 + y2 +
q(x− c)2 + y2 = 2a.
Para simplificar esta ecuación, pasamos el segundo radical al lado derecho, luego eleva-mos ambos lados al cuadrado, simplificamos y agrupamos términos semejantes. Se obtiene¡
a2 − c2¢x2 + a2y2 = a2
¡a2 − c2
¢. (8.23)

218 8. Secciones Cónicas
Ahora, como a > c entonces a2 − c2 > 0. Introduciendo el número b, b > 0, tal queb2 = a2 − c2, la ecuación (8.23) toma la forma más simple
b2x2 + a2y2 = a2b2.
Finalmente, dividiendo a ambos lados por a2b2, se obtiene
x2
a2+
y2
b2= 1. (8.24)
Por el momento tenemos que todo puntoµx
y
¶sobre la elipse E , satisface la ecuación
(8.24). Recíprocamente, todo puntoµx
y
¶de R2 que satisfaga dicha ecuación (8.24) está
sobre la elipse E , lo cual puede ser comprobado por el lector reversando los pasos quecondujeron de la ecuación (8.22) a la ecuación (8.24). Sólo hay que tener cuidado con lasraíces cuadradas que aparecen en este proceso. Así, (8.24) es una ecuación para la elipseE .
De la ecuación (8.24) se ve que la elipse E es simétrica respecto al eje focal (el eje x)pues por cada punto
µx
y
¶que satisface dicha ecuación, el punto
µx
−y
¶también la satisface.
De manera similar, de la ecuación (8.24) se ve que la elipse E es simétrica respecto al ejenormal (el eje y). De estas dos simetrías se sigue que la elipse E también es simétricarespecto a su centro (el origen).
Si y = 0 en (8.24) entoncesx2
a2= 1, es decir, x2 = a2 y por tanto x = ±a, luego los
vértices de E son los puntos V 0 =µ−a0
¶y V =
µa
0
¶. Así, la longitud kV − V 0k del eje
mayor es 2a y por tanto el número a en la ecuación (8.24) es la mitad de la longitud deleje mayor, como también la distancia del centro a cada uno de los vértices.
Similarmente, si x = 0 en (8.24) entoncesy2
b2= 1, es decir, y2 = b2 y por tanto y = ±b.
Luego los extremos del eje menor son los puntos A =µ0
b
¶y A0 =
µ0
−b
¶. Así, la longitud
kA−A0k del eje menor es 2b y por tanto, el número b en la ecuación (8.24) es la mitad dela longitud del eje menor, como también la distancia del centro a cada uno de los extremosdel eje menor.
Nótese que en la ecuación (8.24), b ≤ a pues b2 = a2 − c2.
Por último, de la ecuación (8.24) se puede obtener los focos de la elipse. En efecto,
dichos focos son los puntos F 0 =µ−c0
¶y F =
µ0
c
¶donde c =
√a2 − b2.
Los hechos anteriores se ilustran en la figura 8.24.

8.4. La elipse 219
Figura 8.24.
Supongamos que se mantiene fijo el número a (la mitad de la longitud del eje mayor).Nótese que:
• Si los focos se acercan más y más (es decir, c tiende a 0), el número b tiende al númeroa³pues b =
√a2 − c2
´y la elipse se parece cada vez más a una circunferencia; de
hecho se convierte en una circunferencia cuando F 0 = F (es decir, cuando c = 0).
• Si los focos se alejan más y más (es decir, c tiende al número a), el número b tiendea 0 y la elipse se va achatando cada vez más; de hecho se convierte en un segmentode recta cuando F = V (es decir, cuando c = a). Es de señalar que este caso extremono está contemplado en la definición de elipse.
De manera que la apariencia o forma de la elipse está asociada con la razónc
a, la cual
se llama excentricidad de la elipse; la denotaremos mediante la letra e. Se tiene entoncesque e =
c
ay como 0 ≤ c < a entonces 0 ≤ e < 1. Si e es próxima a 0, pero e 6= 0, la elipse
parece una circunferencia; si e = 0, la elipse es una circunferencia. Si e es próxima a 1, laelipse se asemeja a un segmento de recta.
En la discusión anterior la elipse E tiene sus focos en los puntos F 0 =µ−c0
¶y F =
µc
0
¶,
c ≥ 0, y la constante que se menciona en la definición de elipse igual a 2a. Si dicha constantecontinúa siendo 2a, pero ahora los focos son los puntos F 0 =
µ0
−c
¶y F =
µ0
c
¶, c ≥ 0,
entonces la elipse tiene como eje focal el eje y y se intercambian los papeles de x y y. Ental caso, una ecuación para la elipse es (vea (8.24))
y2
a2+
x2
b2= 1 (8.25)
donde b es, como en (8.24), el número positivo tal que b2 = a2 − c2.En la ecuación (8.25) el número a sigue siendo la distancia del centro a los vértices,
los cuales son ahora los puntos V 0 =
µ0
−a
¶y V =
µ0
a
¶; el número b también sigue

220 8. Secciones Cónicas
siendo la distancia del centro a los extremos del eje menor, los cuales son ahora los puntos
A0 =
µ−b0
¶y A =
µb
0
¶(figura 8.25). Nótese que se mantiene la relación entre los números
a, b y c. La excentricidad sigue siendo e =c
a.
Figura 8.25.
Las ecuaciones (8.24) y (8.25) son las ecuaciones más simples para la elipse, por talrazón se les llama formas canónicas para la ecuación de la elipse.
Es importante tener presente que en cualquiera de las dos ecuaciones (8.24) y (8.25),a2 > b2 y que a2 es el denominador de la variable asociada con el eje focal. Por ejemplo,
x2
4+
y2
9= 1
es de la forma (8.25) con a2 = 9 y b2 = 4, por tanto corresponde a una elipse con centroen el origen y eje focal el eje y. Mientras que
x2
25+
y2
16= 1
es de la forma (8.24), con a2 = 25 y b2 = 16, por tanto corresponde a una elipse con centroen el origen y eje focal el eje x.
Resaltamos a continuación lo básico de la discusión anterior.

8.4. La elipse 221
Sea E una elipse con focos F 0 y F tal que la suma de las distancias de cadauno de sus puntos a los focos es la constante 2a.
• Si F 0 =µ−c0
¶y F =
µc
0
¶, 0 ≤ c < a entonces una ecuación para la
elipse E esx2
a2+
y2
b2= 1
donde b es el número positivo tal que b2 = a2 − c2.
• Si F 0 =µ0
−c
¶y F =
µ0
c
¶, 0 ≤ c < a entonces una ecuación para la
elipse E esy2
a2+
x2
b2= 1
donde b es el número positivo tal que b2 = a2 − c2.
Ejemplo 8.10Halle una ecuación para cada una de las siguientes elipses E .
a) La elipse E tiene vértices V 0 =
µ−7/20
¶, V =
µ7/2
0
¶y uno de sus focos es F =µ√
13/2
0
¶.
b) La elipse E tiene centro en el origen, sus focos en el eje y, la longitud del eje mayor estres veces la del eje menor y pasa por el punto P =
µ1
4
¶.
Solución:a) Como la elipse E tiene sus vértices sobre el eje x, entonces su eje focal es el eje x.
Además, como el centro de la elipse es el punto medio del segmento V 0V , y este punto
medio esµ0
0
¶, entonces E tiene su centro en el origen. Así, E tiene una ecuación de la
formax2
a2+
y2
b2= 1.
Sólo resta determinar el valor de las constantes a y b.En primer lugar, como a es la distancia del centro a cualquiera de los vértices, entonces
a =
°°°°V −µ00¶°°°° = 7
2. Por otra parte, b2 = a2− c2 donde c es la distancia del centro al foco
F, y como esta distancia es c =
°°°°F −µ00¶°°°° = √132 , entonces
b2 =
µ7
2
¶2−Ã√
13
2
!2=49
4− 134=36
4= 9.
Por tanto una ecuación para la elipse E es
x2
494
+y2
9= 1

222 8. Secciones Cónicas
o, equivalentemente,4x2
49+
y2
9= 1.
En la figura 8.26 se muestra la elipse E .
Figura 8.26.
b) Como la elipse E tiene centro en el origen y su eje focal es el eje y, entonces E tieneuna ecuación de la forma
y2
a2+
x2
b2= 1
en la cual a es la mitad de la longitud del eje mayor y b la mitad de la longitud del ejemenor.
Hallemos los valores de las constantes a y b :Como la longitud del eje mayor es tres veces la longitud del eje menor entonces 2a =
3 (2b) , es decir, a = 3b.
Ahora, como P =µ1
4
¶es un punto sobre la elipse E entonces dicho punto satisface la
ecuación de E y por tanto42
9b2+12
b2= 1
de donde16 + 9
9b2= 1 o sea b2 =
25
9. Además, a2 = (3b)2 = 9b2 = 25.
Así, una ecuación para la elipse E es
y2
25+
x2
259
= 1
o, equivalentemente,9x2
25+
y2
25= 1.
La elipse E se muestra en la figura 8.27. ¥

8.4. La elipse 223
Figura 8.27.
Ejemplo 8.11Muestre que la ecuación
144y2 + 25x2 = 225 (8.26)
representa una elipse. Halle los focos, los vértices, los extremos del eje menor y la excen-tricidad de dicha elipse.
Solución:Para mostrar que la ecuación (8.26) representa una elipse basta llevar dicha ecuación
a una de las formas (8.24) o (8.25).Comenzamos por dividir a ambos lados de (8.26) por 225, con lo cual se obtiene
144
225y2 +
25
225x2 = 1
la cual escribiremos comoy2
225144
+x2
22525
= 1
que también puede escribirse como
y2¡54
¢2 + x2
32= 1 (8.27)
ecuación que tiene la forma (8.24) con a = 3 y b =5
4.
Puesto que la ecuación (8.26) es equivalente a la ecuación (8.27) y ésta representa unaelipse, entonces la ecuación (8.26) representa una elipse, la cual tiene centro en el origen yeje focal el eje x.

224 8. Secciones Cónicas
Para tal elipse se tiene que:
Los vértices son los puntos V 0 =µ−30
¶y V =
µ3
0
¶.
Los extremos del eje menor son los puntos A0 =µ
0
−5/4
¶y A =
µ0
5/4
¶.
Los focos son los puntos F 0 =µ−c0
¶y F =
µc
0
¶donde c =
√a2 − b2 =
q9− 25
16 =√1194 ≈ 2.73.
Finalmente, la excentricidad es e =c
a=√11912 ≈ 0.91.
En la figura 8.28 se muestra dicha elipse. ¥
Figura 8.28.
Consideremos ahora una elipse con su centro en el puntoµh
k
¶, focos F 0 =
µh− c
k
¶y
F =
µh+ c
k
¶, c ≥ 0, y suma constante de distancias 2a (a > c) . Nótese que el eje focal es
paralelo al eje x (figura 8.29a).

8.4. La elipse 225
Figura 8.29.
Podemos obtener rápidamente una ecuación para dicha elipse, efectuando una traslación
de ejes con el nuevo origen en el centroµh
k
¶de la elipse. En efecto, una ecuación para la
elipse, referida al nuevo sistema x0y0 (Vea figura 8.29a) es
(x0)2
a2+(y0)2
b2= 1
donde (al igual que en la ecuación (8.24)) b es el número positivo tal que b2 = a2 − c2.
La sustitución x0 = x− h, y0 = y − k en la ecuación anterior, nos lleva de inmediato ala ecuación
(x− h)2
a2+(y − k)2
b2= 1 (8.28)
para la elipse en consideración, referida al sistema original xy.
De manera similar, si la elipse mantiene su centro en el puntoµh
k
¶y también la
suma constante de distancias 2a, pero ahora sus focos son los puntos F 0 =µ
h
k − c
¶y
F =
µh
k + c
¶, c ≥ 0 (figura 8.29b) entonces una ecuación para dicha elipse es
(y − k)2
a2+(x− h)2
b2= 1 (8.29)
donde nuevamente b es el número positivo tal que b2 = a2 − c2.
Es claro que en las ecuaciones (8.28) y (8.29) los números a y b tiene exactamente elmismo significado que en las ecuaciones (8.24) y (8.25).
Una elipse cuyo eje focal coincide con el eje x o es paralelo a este eje se dirá horizontal;si el eje focal coincide con el eje y o es paralelo a este eje, la elipse se dirá vertical.
Tenemos así lo siguiente.

226 8. Secciones Cónicas
Consideremos una elipse con centro en el puntoµh
k
¶, distancia entre los focos 2c (c ≥ 0)
y con la constante mencionada en la definición de elipse igual a 2a (a > c) .• Si la elipse es horizontal, una ecuación para ella es
(x− h)2
a2+(y − k)2
b2= 1
donde b es el número positivo tal que b2 = a2 − c2.• Si la elipse es vertical, una ecuación para ella es
(y − k)2
a2+(x− h)2
b2= 1
donde b es el número positivo tal que b2 = a2 − c2.
Ejemplo 8.12Halle una ecuación para cada una de las siguientes elipses E .
a) La elipse E tiene focos F 0 =µ−3−
√19
2
¶y F =
µ−3 +
√19
2
¶y suma constante de
distancias igual a 16.
b) La elipse E tiene excentricidad 12 , centro en C =
µ−32
¶, el eje focal es la recta x = −3
y pasa por el punto P =µ−16
¶.
Solución:a) Como el eje focal de la elipse E es paralelo al eje x, entonces la elipse E es horizontal
y por tanto una ecuación para ella es de la forma (8.28)
(x− h)2
a2+(y − k)2
b2= 1.
Procedemos a hallar el centro C =µh
k
¶y el valor de las constantes a y b :
El centro es el punto medio del segmento F 0F, así
C =
µh
k
¶=1
2
¡F 0 + F
¢=
µ−32
¶.
Por otra parte, 2a = 16 y por tanto a = 8. Finalmente, b2 = a2 − c2, donde c esla distancia del centro a cualquiera de los focos; como esta distancia es kF − Ck =
√19
entonces c =√19 y así
b2 = 82 −³√19´2= 64− 19 = 45.
Por tanto, una ecuación para la elipse E es
(x+ 3)2
64+(y − 2)2
45= 1.
La elipse E se muestra en el figura 8.30.

8.4. La elipse 227
Figura 8.30.
b) Como el eje focal es paralelo al eje y, la elipse E es vertical y como el centro es elpunto C =
µ−32
¶entonces una ecuación para E es
(y − 2)2
a2+(x+ 3)2
b2= 1 (8.30)
donde a es la mitad de la longitud del eje mayor y b la mitad de la longitud del eje menor.Hallemos los valores de dichas constantes a y b :
Puesto que la excentricidad de la elipse es e =1
2y dado que e =
c
a=
√a2 − b2
a,
tenemos que √a2 − b2
a=1
2.
Elevando ambos lados al cuadrado y simplificando esta igualdad se transforma en
a2 =4
3b2. (8.31)
Por otra parte, como el punto P =
µ−16
¶está sobre la elipse, entonces él satisface la
ecuación (8.30); tenemos así que
(6− 2)2
a2+(−1 + 3)2
b2= 1
es decir,16
a2+4
b2= 1. (8.32)
Sustituyendo en esta ecuación a2 por4
3b2 (de acuerdo con la relación (8.31)) se obtiene
12
b2+4
b2= 1
de donde b2 = 16. Se sigue (vea la relación (8.31)) que
a2 =
µ4
3
¶(16) =
64
3.

228 8. Secciones Cónicas
Así, una ecuación para la elipse E es
(y − 2)2643
+(x+ 3)2
16= 1
o, equivalentemente,3 (y − 2)2
64+(x+ 3)2
16= 1.
En la figura 8.31 se muestra la elipse E ; la mitad de la longitud del eje mayor esa =
q643 ≈ 4.6 y la mitad de la longitud del eje menor es b =
√16 = 4. ¥
Figura 8.31.
Consideremos nuevamente las ecuaciones (8.28) y (8.29)
(x− h)2
a2+(y − k)2
b2= 1 y
(y − k)2
a2+(x− h)2
b2= 1.
Multiplicando por a2b2 a ambos lados, desarrollando los cuadrados y reuniendo lasconstantes al lado izquierdo, cada una de estas ecuaciones se puede llevar a la forma
Ax2 + Cy2 +Dx+Ey + F = 0 (8.33)
donde las constantes A y C son no nulas y del mismo signo.Así, toda elipse horizontal o vertical tiene una ecuación de la forma (8.33), con A y
C como se ha indicado. Ahora, si partimos de una ecuación de la forma (8.33) para unaelipse dada, podemos llevarla a la forma (8.28) o a la forma (8.29) según corresponda,completando los cuadrados en las variables x y y, como se ilustra en el ejemplo siguiente.
Ejemplo 8.13Compruebe que la ecuación
16x2 + 324y2 + 64x− 2592y + 4672 = 0 (8.34)
representa una elipse. Halle el centro, los focos, los vértices, los extremos del eje menor yla excentricidad de dicha elipse.

8.4. La elipse 229
Solución:Escribimos la ecuación (8.34) en la forma
16¡x2 + 4x
¢+ 324
¡y2 − 8y
¢= −4672.
Completando los cuadrados en las variables x y y obtenemos
16¡x2 + 4x+ 4
¢+ 324
¡y2 − 8y + 16
¢= −4672 + 64 + 5184
es decir,16 (x+ 2)2 + 324 (y − 4)2 = 576.
Dividiendo a ambos lados de esta ecuación por 576 y simplificando nos queda
(x+ 2)2
36+9 (y − 4)2
16= 1
o, equivalentemente,(x+ 2)2
36+(y − 4)2
169
= 1. (8.35)
Esta ecuación (8.35) es de la forma (8.28) con a = 6 y b = 43 , por tanto corresponde
a una elipse. Puesto que la ecuación (8.34) es equivalente a la ecuación (8.35) entonces laecuación (8.34) representa una elipse.
Para tal elipse, la cual es horizontal, se tiene que:
El centro es el punto C =µh
k
¶=
µ−24
¶.
Los vértices son los puntos
V 0 =
µh− a
k
¶=
µ−2− 64
¶=
µ−84
¶y V =
µh+ a
k
¶=
µ−2 + 64
¶=
µ4
4
¶.
Los focos son los puntos
F 0 =
µh− c
k
¶=
µ−2− c
4
¶y F =
µh+ c
k
¶=
µ−2 + c
4
¶donde
c =pa2 − b2 =
r36− 16
9=
√308
3.
Los extremos del eje menor son los puntos
A0 =
µh
k − b
¶=
µ−24− 4
3
¶=
µ−283
¶y A =
µh
k + b
¶=
µ−24 + 4
3
¶=
µ−2163
¶.
La excentricidad es
e =c
a=
√308
(3) (6)=
√308
18≈ 0.97.
En la figura 8.32 se muestra dicha elipse. ¥

230 8. Secciones Cónicas
Figura 8.32.
Se advierte al lector que algunas ecuaciones de la forma (8.33), con A y C no nulos ydel mismo signo, no representan elipses, como se muestra en el siguiente ejemplo.
Ejemplo 8.14a) Consideremos la ecuación
9x2 + 5y2 − 36x+ 10y + 41 = 0.
Luego de completar los cuadrados en x y y, esta ecuación se convierte en
9 (x− 2)2 + 5 (y + 1)2 = 0.
Por tanto, la ecuación dada no representa una elipse y el único punto que la satisface
esµx
y
¶=
µ2
−1
¶.
b) Consideremos ahora la ecuación
9x2 + 5y2 − 36x+ 10y + 45 = 0.
Luego de completar los cuadrados en x y y, esta ecuación se convierte en
9 (x− 2)2 + 5 (y + 1)2 = −4.
Luego, ningún puntoµx
y
¶satisface la ecuación dada. ¥
Se puede probar que cuando una ecuación del tipo (8.33), con A y C no nulos y delmismo signo, no representa una elipse, ella representa un único punto o no representa
ningún lugar geométrico, es decir, ningún puntoµx
y
¶de R2 la satisface.
Finalizamos la presentación de la elipse mencionando algunas de las aplicaciones deesta cónica.
• Es bien conocido que los planetas en el sistema solar describen órbitas elípticas ensu movimiento alrededor del sol, con éste en uno de los focos. De la misma forma,la trayectoria de la luna alrededor de la tierra es una elipse, con la tierra en uno delos focos. Las excentricidades de las órbitas de la tierra respecto al sol y de la lunarespecto a la tierra son, respectivamente, 0.017 y 0.056 aproximadamente. El hechode que estas excentricidades sean tan cercanas a cero indica que dichas órbitas soncasi circulares.

8.5. La hipérbola 231
• La elipse también se usa en construcción de edificios, puentes y en engranajes paramaquinarias.
• La elipse goza, como la parábola, de una importante propiedad geométrica, a saber:Si P es un punto cualquiera de la elipse y η es la recta normal a la elipse en el puntoP , entonces los ángulos α y β mostrados en la figura 8.33 son iguales.
Figura 8.33.
Consideremos ahora un reflector elíptico, el cual tiene forma de un elipsoide de revo-lución obtenido al rotar una elipse con focos F 0 y F, alrededor de su eje focal. Supon-gamos que un rayo de luz emitido desde una fuente luminosa ubicada en el foco F 0
toca la superficie reflectora en un punto P, siendo α su ángulo de incidencia. Sabemosque dicho rayo se refleja de tal modo que el ángulo de reflexión es igual al ángulo deincidencia. Así, según la propiedad antes mencionada de la elipse, dicho rayo de luz sereflejará pasando por el foco F. En forma similar, lo que ocurre con la luz ocurre conel sonido: una onda sonora originada en uno de los focos, al chocar con la superficiereflectora elíptica, se refleja pasando por el otro foco. Dos aplicaciones de este hechoson las “galerías de susurros” y la “litotripsia”.
En las galerías de susurros, un sonido originado en uno de los focos del recinto elíptico,no importa que tan débil sea dicho sonido, se escucha claramente en el otro foco. Porotra parte, la litotripsia es un procedimiento muy reciente para la destrucción decálculos renales, el cual consiste en lo siguiente: se coloca un reflector elíptico conel cálculo en uno de los focos y en el otro una fuente emisora de ondas sonorasde alta intensidad, las cuales al chocar contra la superficie se reflejan convergiendoexactamente en el cálculo renal, produciendo su destrucción y sin afectar en el riñónla zona circundante al cálculo.
8.5 La hipérbola
La hipérbola es una cónica cuya definición es similar en muchos aspectos a la de la elipse.Veámosla:
Se denomina hipérbola al conjunto de todos los puntos P del plano tales que el valorabsoluto de la diferencia de las distancias de P a dos puntos fijos del plano F 0 y F esconstante, y esa constante es positiva y menor que la distancia entre estos puntos. Lospuntos F 0 y F se llaman focos de la hipérbola.

232 8. Secciones Cónicas
Denotando 2a la constante mencionada en la definición anterior (como lo hicimos parala correspondiente constante en la definición de elipse) tenemos que la hipérbola consta detodos los puntos P del plano tales que
¯°°°−−→PF 0°°°− °°°−−→PF°°°¯ = 2aes decir, °°°−−→PF 0°°°− °°°−−→PF°°° = 2a o
°°°−−→PF 0°°°− °°°−−→PF°°° = −2ao, equivalentemente,
°°°−−→PF 0°°°− °°°−−→PF°°° = 2a o°°°−−→PF°°°− °°°−−→PF 0°°° = 2a. (8.36)
A continuación indicamos una manera de obtener, con regla y compás, puntos P de lahipérbola que cumplen la primera de las condiciones en (8.36).
Se fijan los focos F 0, F y se determina el punto medio C del segmento F 0F. Luego, acada lado de C se toman puntos V 0 y V a una distancia a de C, como se muestra en lafigura 8.34.
Figura 8.34.
Es claro que V cumple la primera de las condiciones en (8.36), es decir,°°°−−→V F 0°°°−°°°−−→V F°°° =
2a; así que V es un punto de la hipérbola. (Igualmente V 0 cumple la segunda de lascondiciones en (8.36) y por ello V 0 también es un punto de la hipérbola).
Se toma ahora un punto X a la derecha del foco F y sobre la recta que pasa por F 0 y F.Con centro en el foco F 0 y radio la distancia entre X y V 0 se traza un arco de circunferenciacomo se muestra en la figura 8.35. Por último, con centro en el foco F y radio la distanciaentre X y V se traza media circunferencia a la izquierda de F. Los dos puntos P de cortede los arcos de circunferencia trazados (vea figura 8.35) son puntos de la hipérbola quecumplen la condición °°°−−→PF 0°°°− °°°−−→PF°°° = 2apues
°°°−−→PF 0°°° = °°°−−→XV 0°°° , °°°−−→PF°°° = °°°−−→XV
°°° y°°°−−→XV 0
°°°− °°°−−→XV°°° = 2a.

8.5. La hipérbola 233
Figura 8.35.
De manera similar se obtienen puntos P que cumplen la segunda de las condiciones en(8.36), tomando el punto X a la izquierda de F 0 e intercambiando los papeles de F y F 0 ylos de V y V 0 en el procedimiento anterior.
El aspecto de la hipérbola completa es como se muestra en la figura 8.36; las dos curvasque la conforman (correspondientes a las dos condiciones en (8.36)) son llamadas ramasde la hipérbola.
Figura 8.36.
La recta L que pasa por los focos se llama eje focal.Los puntos V 0, V donde el eje focal corta la hipérbola, se llaman vértices.El segmento V 0V se llama eje transverso.El punto C, el cual es el punto medio del segmento V 0V y también del segmento F 0F,
se llama centro.La recta L0 que pasa por el centro y es perpendicular al eje focal se llama eje normal.

234 8. Secciones Cónicas
Al igual que para la elipse, la forma más simple de una ecuación para la hipérbola seobtiene tomando los ejes coordenados de modo que el centro de la hipérbola esté en elorigen y el eje focal sea alguno de los dos ejes coordenados. Consideremos, por ejemplo, la
hipérbola H, con focos F 0 =µ−c0
¶y F =
µc
0
¶, c > 0, y tal que la constante mencionada
en la definición de la hipérbola es 2a. Puesto que 2a debe ser positiva y menor que ladistancia 2c entre los focos F 0 y F entonces se tiene que 0 < a < c. Nótese que la hipérbolaH tiene su centro en el origen y su eje focal es el eje x. (Figura 8.37)
Figura 8.37.
En las condiciones anteriores un punto P =µx
y
¶de R2 está sobre la hipérbola H si y
sólo si ¯°°P − F 0°°− kP − Fk
¯= 2a
es decir, °°°°µxy¶−µ−c0
¶°°°°− °°°°µxy¶−µc
0
¶°°°° = ±2ao, equivalentemente, q
(x+ c)2 + y2 −q(x− c)2 + y2 = ±2a. (8.37)
Los puntos P =µx
y
¶que satisfacen (8.37) con el signo + en el lado derecho, conforman
la rama derecha, mientras que aquellos que satisfacen (8.37) con el signo −, conformanla rama izquierda.
Siguiendo el mismo procedimiento para simplificar la ecuación similar a (8.37) en elcaso de la elipse, se obtiene en primer lugar¡
c2 − a2¢x2 − a2y2 = a2
¡c2 − a2
¢.
Ahora, como c > a entonces c2 − a2 > 0 y así, introduciendo el número b, b > 0, talque b2 = c2 − a2, la ecuación anterior toma la forma más simple
b2x2 − a2y2 = a2b2.

8.5. La hipérbola 235
Finalmente, dividiendo por a2b2, se obtiene la ecuación
x2
a2− y2
b2= 1 (8.38)
Así, todo puntoµx
y
¶sobre cualquiera de las dos ramas de la hipérbola H satisface la
ecuación (8.38). Se deja como ejercicio al lector probar que todo puntoµx
y
¶de R2 que
satisface la ecuación (8.38) está sobre alguna de las dos ramas de la hipérbola H, es decir,está sobre H. Podemos afirmar entonces que (8.38) es una ecuación para la hipérbola H.
De la ecuación (8.38) se ve que la hipérbola H es simétrica respecto a su eje focal (eleje x), respecto a su eje normal (el eje y) y respecto a su centro (el origen).
Si y = 0 en (8.38) entoncesx2
a2= 1, es decir, x2 = a2 y por tanto x = ±a. Luego las
intersecciones de H con el eje x, es decir los vértices de H, son los puntos V 0 =µ−a0
¶y
V =
µa
0
¶. Así, la longitud del eje transverso es kV − V 0k = 2a y por tanto el número a en
la ecuación (8.38) es la mitad de la longitud del eje transverso o también la distancia delcentro a cualquiera de los vértices.
Nótese que la ecuación (8.38) confirma que la hipérbola no corta su eje normal (el eje
y), pues con x = 0 en (8.38) se obtiene −y2
b2= 1 y no existe y ∈ R que satisfaga esta
ecuación.
El segmento A0A con A0 =
µ0
−b
¶y A =
µ0
b
¶(análogo al eje menor en la elipse) se
llama eje conjugado de la hipérbola; su longitud es kA−A0k = 2b. Así, el número b en(8.38) es la mitad de la longitud del eje conjugado.
De la ecuación (8.38) se pueden obtener los focos de la hipérbola H, pues dichos focosson los puntos F 0 =
µ−c0
¶y F =
µc
0
¶con c =
√a2 + b2.
Consideremos ahora la parte de la hipérbola en el primer cuadrante. Despejando y en(8.38) se obtiene, para este caso,
y =b
a
px2 − a2 , x ≥ a.
Obsérvese que cuando x = a, y = 0 y que si x crece, y también crece, lo cual estáde acuerdo con la forma de la curva en la figura 8.38. Pero hay algo más: cuando x esmuy grande (comparado con a),
√x2 − a2 es muy cercano (aunque menor) a
√x2, y como
√x2 = x (pues x > 0) entonces
b
a
√x2 − a2 es muy cercano a
b
ax. Se puede probar que para
y =b
a
√x2 − a2, la diferencia
b
ax− y tiende a 0 (manteniéndose positiva) cuando x→∞.
Así, la recta y =b
ax es una asíntota de la hipérbola H para x > 0 (figura 8.38).

236 8. Secciones Cónicas
Figura 8.38.
Dada la simetría de la hipérbola, lo anterior se extiende a los otros cuadrantes.En la figura 8.39 se muestra la hipérbola completa, los números a y b que aparecen en
la ecuación (8.38) y las asíntotas.
Figura 8.39.
Cuando las asíntotas forman ángulos rectos en su punto de corte, la hipérbola se dice
rectangular. Ello ocurre cuando las pendientesb
ay − b
ade las asíntotas cumplen la condi-
ción µb
a
¶µ− b
a
¶= −1
es decir, b2 = a2 o sea a = b. En tal caso el rectángulo que se muestra en la figura 8.39es un cuadrado y los ejes transverso y conjugado tiene la misma longitud. Por tal razón lahipérbola también se dice equilátera en este caso.

8.5. La hipérbola 237
Así, la ecuación (8.38) con a = b, es decir, la ecuación
x2 − y2 = a2
corresponde a una hipérbola rectangular o equilátera, con vértices V 0 =µ−a0
¶y V =
µa
0
¶.
En la discusión anterior la hipérbola H tiene sus focos en los puntos F 0 =µ−c0
¶y
F =
µc
0
¶, c > 0, y la constante que se menciona en la definición de hipérbola igual a 2a.
Si dicha constante continúa siendo 2a, pero ahora los focos son los puntos F 0 =µ0
−c
¶y
F =
µ0
c
¶, c > 0, entonces la hipérbola tiene todavía su centro en el origen pero su eje
focal es el eje y y se intercambian los papeles de x y y. En tal caso una ecuación para lahipérbola es
y2
a2− x2
b2= 1 (8.39)
donde b es, nuevamente, aquel número positivo tal que b2 = c2−a2. La distancia del centroa los vértices
µlos cuales son ahora los puntos V 0 =
µ0
−a
¶y V =
µ0
a
¶¶sigue siendo a, y
así 2a sigue siendo la longitud del eje transverso; igualmente, 2b sigue siendo la longituddel eje conjugado. Pero las asíntotas son ahora las rectas y =
a
bx y y = −a
bx (figura 8.40).
Figura 8.40.
Las ecuaciones (8.38) y (8.39) son las ecuaciones más simples para la hipérbola, porello se les llama formas canónicas para la ecuación de la hipérbola.
En cualquiera de los casos tratados, la excentricidad de la hipérbola se define comoe =
c
a; puesto que 0 < a < c entonces e > 1, mientras que para la elipse 0 ≤ e < 1.

238 8. Secciones Cónicas
Recogemos a continuación lo básico de la discusión anterior.
• Una ecuación para la hipérbola con focos F 0 =µ−c0
¶y F =
µc
0
¶, c > 0, y con
la constante que se menciona en la definición de hipérbola igual a 2a (0 < a < c) esx2
a2− y2
b2= 1
donde b es el número positivo tal que b2 = c2 − a2.
Las asíntotas de esta hipérbola son las rectas
y =b
ax y y = − b
ax
las cuales conforman el conjunto solución de la ecuaciónx2
a2− y2
b2= 0, es decir, de
³xa− y
b
´³xa+
y
b
´= 0.
• Una ecuación para la hipérbola con focos F 0 =µ0
−c
¶y F =
µ0
c
¶, c > 0, y con
la constante que se menciona en la definición de hipérbola igual a 2a (0 < a < c) esy2
a2− x2
b2= 1
donde b es el número positivo tal que b2 = c2 − a2.
Las asíntotas de esta hipérbola son las rectas
y =a
bx y y = −a
bx
las cuales conforman el conjunto solución de la ecuacióny2
a2− x2
b2= 0, es decir, de
³ya− x
b
´³ya+
x
b
´= 0.
Obsérvese que en las ecuaciones (8.38) y (8.39), el minuendo involucra la variableasociada con el eje focal. Así, la ecuación (8.38) corresponde a una hipérbola cuyo eje focales el eje x, mientras que (8.39) corresponde a una cuyo eje focal es el eje y.
Ejemplo 8.15Halle una ecuación para cada una de las siguientes hipérbolas H.
a) La hipérbola H tiene centro en el origen, uno de sus focos es el punto F 0 =µ−√13
0
¶y
su eje conjugado tiene una longitud de 6 unidades.
b) La hipérbola H tiene como asíntotas las rectas y =12
5x, y = −12
5x y uno de sus focos
es F =µ0
26
¶.
Solución:a) Como H tiene centro en el origen y su eje focal es el eje x (pues su centro y uno de
los focos están sobre el eje x) entonces H tiene una ecuación de la forma
x2
a2− y2
b2= 1.
Hallemos el valor de las constantes a y b.

8.5. La hipérbola 239
En primer lugar, como el eje conjugado de H tiene 6 unidades de longitud entonces2b = 6 y así b = 3.
Por otra parte, a2 = c2 − b2 donde c es la distancia del centro al foco F 0 =µ−√13
0
¶y
como esta distancia es√13 entonces c =
√13 y
a2 =³√13´2− 32 = 13− 9 = 4.
Por tanto, una ecuación para la hipérbola H es
x2
4− y2
9= 1.
En la figura 8.41 se muestra la hipérbola H.
Figura 8.41.
b) Sabemos que las asíntotas de una hipérbola se cortan en el centro de la hipérbola;
luego el centro de la hipérbola H es el origen pues las asíntotas y =12
5x y y = −12
5x se
cortan allí. Ahora como H tiene su centro y uno de sus focos sobre el eje y entonces el ejefocal de H es el eje y y así H tiene una ecuación de la forma
y2
a2− x2
b2= 1.
Ahora, como y =12
5x es una asíntota de H entonces
a
b=12
5y así a =
12
5b. Por otra
parte, b2 = c2 − a2 donde c es la distancia del foco F =
µ0
26
¶al centro, y como esta
distancia es 26 entonces c = 26 y
b2 = (26)2 −µ12
5
¶2b2 =
52 (26)2 − (12)2 b252

240 8. Secciones Cónicas
de donde
52b2 + (12)2 b2 = 52 (26)2
169b2 = 52 (26)2
b2 =(5)2 (26)2
(13)2
b2 =
µ(5) (26)
(13)
¶2= (10)2 .
Por tanto, b = 10 (pues b > 0) y así a =12
5(10) = 24.
Tenemos así que una ecuación para H es
y2
(24)2− x2
(10)2= 1.
En la figura 8.42 se muestra la hipérbola H. ¥
Figura 8.42.
Ejemplo 8.16Muestre que la ecuación
9y2 − 16x2 − 144 = 0 (8.40)
representa una hipérbola. Halle el centro, los focos, los vértices, los extremos del eje con-jugado, las asíntotas y la excentricidad de dicha hipérbola.
Solución:La ecuación (8.40) es equivalente a
9y2 − 16x2 = 144

8.5. La hipérbola 241
y ésta a la ecuación9y2
144− 16x
2
144= 1
la cual podemos escribir comoy2¡1449
¢ − x2¡14416
¢ = 1es decir, como
y2
16− x2
9= 1. (8.41)
La ecuación (8.41) es de la forma (8.39) con a = 4 y b = 3, luego (8.41), y por lo tantola ecuación (8.40), representa una hipérbola, la cual tiene centro en el origen y eje focal eleje y.
Para tal hipérbola se tiene que:
Los vértices son los puntos V 0 =µ0
−4
¶y V =
µ0
4
¶.
Los extremos del eje conjugado son los puntos A0 =µ−30
¶y A =
µ0
3
¶.
Los focos son los puntos F 0 =µ0
−c
¶y F =
µ0
c
¶donde c =
√a2 + b2 =
√16 + 9 = 5,
es decir, son los puntos F 0 =µ0
−5
¶y F =
µ0
5
¶.
La excentricidad es c =c
a=5
4.
Por último, las asíntotas son las rectas y =a
bx y y = −a
bx, es decir, y =
4
3x y y = −4
3x.
En la figura 8.43 se muestra dicha hipérbola. ¥
Figura 8.43.

242 8. Secciones Cónicas
Consideremos ahora una hipérbola con su centro en el puntoµh
k
¶, focos F 0 =
µh− c
k
¶y F =
µh+ c
k
¶, c > 0, y con la constante que se menciona en la definición de hipérbola
igual a 2a (0 < a < c) . Nótese que el eje focal es paralelo al eje x. (Figura 8.44a).
Figura 8.44.
De manera similar a lo hecho en las otras cónicas ya tratadas, tenemos que una ecuaciónpara dicha hipérbola es
(x− h)2
a2− (y − k)2
b2= 1. (8.42)
Los números a y b tiene el mismo significado que en la ecuación (8.38).
Si la hipérbola mantiene su centro en el puntoµh
k
¶y también la constante mencionada
en la definición de hipérbola es 2a, pero los focos son los puntos F 0 =µ
h
k − c
¶y F =µ
h
k + c
¶, c > 0 (Figura 8.44b) entonces en lugar de la ecuación anterior se tiene
(y − k)2
a2− (x− h)2
b2= 1. (8.43)
Los números a y b tienen ahora el mismo significado que en la ecuación (8.39).
Una hipérbola cuyo eje focal coincide con el eje x o es paralelo a este eje se diráhorizontal; si el eje focal es el eje y o es paralelo a este eje, la hipérbola se dirá vertical.
Tenemos así lo siguiente:

8.5. La hipérbola 243
Consideremos una hipérbola con centro en el puntoµh
k
¶, distancia entre los
focos 2c (c > 0) y con la constante mencionada en la definición de hipérbolaigual a 2a (0 < a < c) .• Si la hipérbola es horizontal, una ecuación para ella es
(x− h)2
a2− (y − k)2
b2= 1
donde b es el número positivo tal que b2 = c2 − a2.Las asíntotas son las rectas
y − k =b
a(x− h) y y − k = − b
a(x− h)
las cuales conforman el lugar geométrico de la ecuación
(x− h)2
a2−(y − k)2
b2= 0, es decir, de
µx− h
a− y − k
b
¶µx− h
a+
y − k
b
¶= 0.
• Si la hipérbola es vertical, una ecuación para ella es
(y − k)2
a2− (x− h)2
b2= 1
donde b es el número positivo tal que b2 = c2 − a2.Las asíntotas son las rectas
y − k =a
b(x− h) y y − k = −a
b(x− h)
las cuales conforman el lugar geométrico de la ecuación
(y − k)2
a2−(x− h)2
b2= 0, es decir, de
µy − k
a− x− h
b
¶µy − k
a+
x− h
b
¶= 0.
Ejemplo 8.17Halle una ecuación para cada una de las siguientes hipérbolas H, como también sus asín-totas.
a) La hipérbola H tiene focos F 0 =µ−√29
3
¶, F =
µ√29
3
¶y pasa por el punto P =
µ−23
¶.
b) La hipérbolaH tiene vértices V 0 =µ
2
−4√3
¶, V =
µ2
4√3
¶y la longitud del eje conjugado
es 2.
Solución:a) Como el eje focal de la hipérbola H es paralelo al eje x entonces la hipérbola H es
horizontal. Como, además, su centro es el punto
C =
µh
k
¶=1
2
¡F 0 + F
¢=
µ0
3
¶

244 8. Secciones Cónicas
entonces una ecuación para ella es de la forma
(x− 0)2
a2− (y − 3)
2
b2= 1. (8.44)
Procedemos a determinar el valor de las constantes a y b :
La distancia del centro a cualquiera de los focos es c = kF − Ck =√29, y como
a2 + b2 = c2 entonces
a2 + b2 = 29. (8.45)
Por otra parte, como P =
µ−23
¶es un punto sobre la hipérbola, entonces él satisface
la ecuación (8.44), así que
(−2)2
a2− (3− 3)
2
b2= 1
es decir,4
a2= 1 de donde a2 = 4 (o sea a = 2).
Sustituyendo a2 = 4 en (8.45) se obtiene, finalmente,
b2 = 29− 4 = 25.
Por tanto, una ecuación para la hipérbola H es
x2
4− (y − 3)
2
25= 1.
Las asíntotas de H son las rectas
y − 3 = 5
2x y y − 3 = −5
2x
es decir,
y =5
2x+ 3 y y = −5
2x+ 3
las cuales, como ya se ha dicho, conforman el conjunto solución de la ecuación
x2
4− (y − 3)
2
25= 0, es decir, de
µx
2− y − 3
5
¶µx
2+
y − 35
¶= 0.
En la figura 8.45 se muestra la hipérbola H.

8.5. La hipérbola 245
Figura 8.45.
b) En este caso la hipérbola H es vertical y su centro es el punto
C =
µh
k
¶=1
2
¡V 0 + V
¢=
µ2
0
¶.
Luego, una ecuación para H es de la forma
(y − 0)2
a2− (x− 2)
2
b2= 1
es decir,
y2
a2− (x− 2)
2
b2= 1.
En esta ecuación, a =1
2kV 0 − V k = 4
√3 y b es la mitad de la longitud del eje conjugado
(la cual es 2), es decir, b = 1. Así, una ecuación para H es
y2
48− (x− 2)
2
1= 1
es decir,y2
48− (x− 2)2 = 1.
Las asíntotas de la hipérbola H son las rectas
y = 4√3 (x− 2) y y = −4
√3 (x− 2) .
En la figura 8.46 se muestra la hipérbola H. ¥

246 8. Secciones Cónicas
Figura 8.46.
Consideremos nuevamente las ecuaciones (8.42) y (8.43)
(x− h)2
a2− (y − k)2
b2= 1 y
(y − k)2
a2− (x− h)2
b2= 1.
Como en el caso de las ecuaciones (8.28) y (8.29) para la elipse, cada una de lasecuaciones anteriores puede llevarse a la forma
Ax2 + Cy2 +Dx+Ey + F = 0
donde las constantes A y C son no nulas, pero de signos distintos (en el caso de la elipseA y C son del mismo signo).
Así, toda hipérbola horizontal o vertical tiene una ecuación de la forma anterior, con Ay C como se ha indicado. Al igual que en el caso de la elipse, si se parte de una ecuación dela forma anterior para una hipérbola dada, podemos transformar dicha ecuación en una dela forma (8.42) o en una de la forma (8.43) según corresponda, completando los cuadradosen x y en y.
Ejemplo 8.18Compruebe que la ecuación
4y2 − 9x2 + 16y + 18x− 29 = 0 (8.46)
representa una hipérbola. Halle el centro, los focos, los vértices, los extremos del eje con-jugado, la excentricidad y las asíntotas de dicha hipérbola.

8.5. La hipérbola 247
Solución:Escribimos la ecuación (8.46) en la forma
4¡y2 + 4y
¢− 9
¡x2 − 2x
¢= 29.
Completando los cuadrados en las variables x y y obtenemos
4¡y2 + 4y + 4
¢− 9
¡x2 − 2x+ 1
¢= 29 + 16− 9
es decir,4 (y + 2)2 − 9 (x− 1)2 = 36.
Finalmente, dividiendo a ambos lados de esta ecuación por 36, obtenemos la ecuación
(y + 2)2
9− (x− 1)
2
4= 1 (8.47)
la cual es de la forma (8.43) con a = 3 y b = 2, y por tanto corresponde a una hipérbola.Puesto que la ecuación (8.46) es equivalente a la ecuación (8.47) entonces la ecuación (8.46)representa una hipérbola.
Para tal hipérbola, la cual es vertical, se tiene que:
El centro es el punto C =µh
k
¶=
µ1
−2
¶.
Los vértices son los puntos
V 0 =
µh
k − a
¶=
µ1
−2− 3
¶=
µ1
−5
¶y V =
µh
k + a
¶=
µ1
−2 + 3
¶=
µ1
1
¶.
Los extremos del eje conjugado son los puntos
A0 =
µh− b
k
¶=
µ1− 2−2
¶=
µ−1−2
¶y A =
µh+ b
k
¶=
µ1 + 2
−2
¶=
µ3
−2
¶.
Los focos son los puntos
F 0 =
µh
k − c
¶=
µ1
−2− c
¶y F =
µh
k + c
¶=
µ1
−2 + c
¶donde
c =pa2 + b2 =
p32 + 22 =
√13.
La excentricidad es e =c
a=
√13
3.
Las asíntotas son las rectas
y + 2 =3
2(x− 1) y y + 2 = −3
2(x− 1)
o, equivalentemente,
y =3
2x− 7
2y y = −3
2x− 1
2.
En la figura 8.47 se muestra dicha hipérbola. ¥

248 8. Secciones Cónicas
Figura 8.47.
Es claro que algunas ecuaciones de la forma
Ax2 + Cy2 +Dx+Ey + F = 0
con A y C no nulos y de signos contrarios, no representan hipérbolas. En efecto, digamosque luego de completar los cuadrados en una ecuación del tipo anterior se obtiene
b2 (x− h)2 − a2 (y − k)2 = G.
Si G 6= 0, la ecuación representa una hipérbola, pero si G = 0, ella representa un parde rectas que se cortan, como se ilustra en el ejemplo siguiente.
Ejemplo 8.19Consideremos la ecuación
4y2 − 9x2 + 16y + 18x+ 7 = 0.
Luego de completar cuadrados, esta ecuación se convierte en
4 (y + 2)2 − 9 (x− 1)2 = 0
la cual tiene como conjunto solución el par de rectas distintas
y + 2 =3
2(x− 1) y y + 2 = −3
2(x− 1)
las cuales se cortan en el puntoµ1
−2
¶. ¥
Para finalizar la presentación de la hipérbola mencionaremos algunas de sus aplica-ciones:
• El sistema LORAN, acrónimo de la expresión long range navigation, que significanavegación de largo alcance, es un sistema de navegación por radio desarrollado en laII guerra mundial; es uno entre muchos sistemas que permiten determinar la posiciónde un barco o un avión y está basado en la propiedad que define la hipérbola. Este

8.5. La hipérbola 249
sistema utiliza dos pares de radiotransmisores ubicados en puntos T, T 0 y S, S0 comolo muestra la figura 8.48. Simultáneamente desde T y T 0 se emiten señales que soncaptadas por el receptor de radio del barco (avión) el cual se encuentra en ciertopunto P. Supongamos que la velocidad a la cual viaja la onda (la cual es conocida)es v metros/microsegundo. Si en el barco (avión) se capta primero la señal emitidadesde T y t0 microsegundos después se recibe la señal emitida desde T 0 entonces elbarco (avión) está más lejos de T 0 que de T y además
°°°−−→PT 0°°°− °°°−→PT°°° = v (t+ t0)− vt = vt0
donde t es el tiempo, en microsegundos, que transcurre entre la emisión de la señalen T y la recepción de ésta en el barco (avión). Observe que no interesa conocer elvalor de t. Por tanto, el punto P se encuentra en una de las ramas de la hipérbola H1de focos T 0, T y tal que la constante que se menciona en la definición de hipérbola esigual a vt0.
Si se repite este proceso para otro par de radiotransmisores ubicados en S y S0, seobtiene que el punto P también se encuentra en una de las ramas de la hipérbola H2con focos S, S0 y con la constante que se menciona en la definición de hipérbola iguala vt∗0, donde t
∗0 es el tiempo, en microsegundos, que transcurre entre la recepción en
el barco (avión) de las señales emitidas desde S y S0. Así, el punto P, el cual da laposición del barco (avión) es uno de los puntos de intersección de las hipérbolas H1y H2.
Ahora, con la información que se tiene sobre las hipérbolas H1 y H2 se puede obtenerecuaciones para ellas y determinar los puntos de intersección de dichas hipérbolas,uno de los cuales es el punto P.
Figura 8.48.
• La hipérbola goza de una propiedad geométrica similar a las que hemos presentadopara la parábola y para la elipse. Dicha propiedad es la siguiente:
Si P es un punto cualquiera de la hipérbola y η es la recta normal a la hipérbola enP entonces los ángulos α y β mostrados en la figura 8.49 son iguales.

250 8. Secciones Cónicas
Figura 8.49.
• Consideremos ahora un manto de un hiperboloide de revolución obtenido al rotar,alrededor de su eje focal, una rama de una hipérbola con focos F 0 y F, y supongamosque la superficie convexa de éste refleja la luz. Se sabe que si un rayo de luz incidentey dirigido al foco F choca contra la superficie reflectora, él se refleja de tal forma queel ángulo de reflexión es igual al ángulo de incidencia. Este hecho, combinado con lapropiedad geométrica de la hipérbola antes mencionada, permite concluir que dichorayo se reflejará pasando por el otro foco F 0.
La propiedad de reflexión de la parábola y de la hipérbola manejadas conjuntamentetienen importantes aplicaciones en la construcción de algunos telescopios. Por ejem-plo, consideremos un telescopio que maneja dos espejos, uno parabólico y el otrohiperbólico. Los rayos de luz provenientes del espacio exterior y que llegan parale-lamente al eje focal del espejo parabólico (ver figura 8.50) chocan contra éste, refle-jándose todos en dirección hacia su foco F. Antes de que los rayos coincidan en Fson interceptados por el espejo hiperbólico el cual tiene el mismo eje focal del espejoparabólico y sus focos están en F y F 0. Cuando los rayos de luz chocan contra estesegundo espejo, ellos son reflejados dirigiéndose todos al ocular F 0 del telescopio.
Figura 8.50.

8.6. La ecuación Ax2 + Cy2 +Dx+Ey + F = 0 251
8.6 La ecuación Ax2 + Cy2 +Dx+Ey + F = 0
En lo hecho hasta el momento hemos obtenido ecuaciones para los tres tipos de cónicas,en el caso en que el eje focal de la cónica es paralelo a (o coincide con) alguno de los ejescoordenados x, y. Como ya se ha señalado, cada una de dichas ecuaciones puede llevarse ala forma
Ax2 + Cy2 +Dx+Ey + F = 0, A 6= 0 o C 6= 0 (8.48)
Por tanto, podemos afirmar que toda cónica con el eje focal paralelo a (o coincidentecon) alguno de los ejes coordenados x, y tiene una ecuación de la forma anterior. También seseñaló que algunas ecuaciones del tipo anterior pueden no representar una cónica e inclusopueden no representar ningún lugar geométrico.
Pues bien, se puede probar que salvo casos excepcionales, la ecuación (8.48) representauna cónica con eje focal paralelo a (o coincidente con) alguno de los ejes coordenados x, y.En los casos excepcionales, la ecuación representa una cónica degenerada (un punto, unarecta, un par de rectas distintas paralelas o un par de rectas distintas que se cortan) o norepresenta ningún lugar geométrico. El siguiente resultado precisa lo anterior.
Consideremos la ecuación de segundo grado en las variables x, y (sin términoxy)
Ax2 +Cy2 +Dx+Ey + F = 0, A 6= 0 o C 6= 0.
• Si A 6= 0, C = 0 y E 6= 0, la ecuación representa una parábola vertical. SiA 6= 0, C = 0 y E = 0, la ecuación representa dos rectas distintas paralelas aleje y, una sola recta paralela al eje y o ningún lugar geométrico, según que lasraíces de la ecuación Ax2+Dx+F = 0 sean reales y distintas, reales e igualeso no reales.Similarmente, si A = 0, C 6= 0 y D 6= 0, la ecuación representa una parábolahorizontal. Si A = 0, C 6= 0 y D = 0, la ecuación representa dos rectas distintasparalelas al eje x, una sola recta paralela al eje x o ningún lugar geométrico,según que las raíces de la ecuación Cy2 + Ey + F = 0 sean reales y distintas,reales e iguales, o no reales.
• Si A y C son no nulas y del mismo signo, la ecuación representa una elipsede ejes paralelos a los ejes coordenados o representa un punto o no representaningún lugar geométrico.
• Si A y C son no nulas y de signos contrarios, la ecuación representa unahipérbola de ejes paralelos a los ejes coordenados o representa un par de rectasdistintas que se cortan.
Lo afirmado es fácil de probar si la ecuación no trae términos lineales, es decir, si D = 0y E = 0. Por otra parte, si la ecuación trae términos lineales, para probar lo afirmado bastacompletar el cuadrado en cada una de las expresiones Ax2 +Dx, Cy2 + Ey que figure enla ecuación, como ya se ha ilustrado en cada una de las cónicas.
8.7 Rotación de ejes
Ahora nos referiremos a otro cambio posible de un sistema cartesiano xy a un nuevo sistemacartesiano x0y0 : se mantiene el origen, los nuevos ejes x0, y0 se obtienen rotando los ejes

252 8. Secciones Cónicas
x, y un ángulo θ alrededor del origen y la unidad de medida en los ejes se mantiene (figura8.51). Un cambio de sistema de este tipo se dice una rotación de ejes por el ángulo θ.
Digamos que hemos efectuado una rotación de ejes por un ángulo θ. Como ya se sabe,cada punto P del plano con coordenadas x, y relativas al sistema xy adquiere nuevascoordenadas x0, y0 relativas al nuevo sistema x0y0. (Figura 8.51).
Figura 8.51.
Veamos cómo se relacionan las coordenadas x, y y las nuevas coordenadas x0, y0 decada punto P del plano. Empecemos recordando que decir “las coordenadas del punto Prelativas al sistema xy son los números x, y” equivale a decir que
−−→OP = x
−→i + y
−→j
donde−→i ,−→j son los vectores unitarios y perpendiculares entre sí, asociados con el sistema
xy, ya conocidos.Similarmente −−→
OP = x0−→i0 + y0
−→j0
donde−→i0 ,−→j0 son ahora los vectores unitarios y perpendiculares entre sí, asociados al sistema
x0y0 (figura 8.52).
Figura 8.52.

8.7. Rotación de ejes 253
Luego, las coordenadas x, y, x0, y0 son tales que
x−→i + y
−→j = x0
−→i0 + y0
−→j0 . (8.49)
Ahora, sabemos que
−→i0 = (cos θ)
−→i + (senθ)
−→j
−→j0 = cos
³θ +
π
2
´−→i + sen
³θ +
π
2
´−→j
= (−senθ)−→i + (cos θ)−→j .
Sustituyendo−→i0 y−→j0 en (8.49) tenemos que
x−→i + y
−→j = x0
h(cos θ)
−→i + (senθ)
−→ji+ y0
h(−senθ)−→i + (cos θ)−→j
i=
¡x0 cos θ − y0senθ
¢−→i +
¡x0senθ + y0 cos θ
¢−→j
de dondex = x0 cos θ − y0senθy = x0senθ + y0 cos θ
(8.50)
o, equivalentemente, µxy
¶=
µcos θ −senθsenθ cos θ
¶µx0
y0
¶(8.51)
Hemos obtenido así las coordenadas x, y en términos de las nuevas coordenadas x0, y0.Ahora, como la matriz µ
cos θ −senθsenθ cos θ
¶es invertible (pues su determinante es cos2 θ+sen2θ = 1), podemos obtener también lascoordenadas x0, y0 en términos de las coordenadas x, y a partir de (8.51) así:µ
x0
y0
¶=
µcos θ −senθsenθ cos θ
¶−1µxy
¶y como µ
cos θ −senθsenθ cos θ
¶−1=
µcos θ senθ−senθ cos θ
¶entonces µ
x0
y0
¶=
µcos θ senθ−senθ cos θ
¶µxy
¶o, equivalentemente,
x0 = x cos θ + ysenθy0 = −xsenθ + y cos θ.
(8.52)
Tenemos así el siguiente resultado:

254 8. Secciones Cónicas
Supongamos que se efectúa una rotación de los ejes coordenados x, y un ángulo θ.
Siµx
y
¶yµx0
y0
¶son, respectivamente, los vectores de coordenadas de un mismo
punto P del plano, respecto al sistema xy y respecto al nuevo sistema x0y0 entonces
x = x0 cos θ − y0senθy = x0senθ + y0 cos θ
o, equivalentemente,
x0 = x cos θ + ysenθy0 = −xsenθ + y cos θ
Ejemplo 8.20Consideremos la elipse con ecuación
x2
9+
y2
4= 1 (8.53)
referida a un sistema cartesiano xy. Veamos cómo cambia dicha ecuación si cambiamos alsistema x0y0 que se obtiene al rotar el sistema xy un ángulo de π
4 radianes (figura 8.53a).
Figura 8.53.
Empleando las fórmulas en (8.50) con θ = π4 tenemos
x = x0 cosπ
4− y0sen
π
4=
1√2x0 − 1√
2y0 =
1√2
¡x0 − y0
¢y = x0sen
π
4+ y0 cos
π
4=
1√2x0 +
1√2y0 =
1√2
¡x0 + y0
¢.
Sustituyendo x, y en la ecuación (8.53), ésta se convierte enh1√2(x0 − y0)
i29
+
h1√2(x0 + y0)
i24
= 1.

8.8. Ecuación general de segundo grado 255
Desarrollando los cuadrados y reuniendo términos semejantes, esta ecuación queda enla forma
13
72
¡x0¢2+5
36x0y0 +
13
72
¡y0¢2= 1. (8.54)
Esta última ecuación es entonces una ecuación para la elipse en consideración, referidaal nuevo sistema x0y0. ¥
Nótese, en el ejemplo anterior, que la ecuación (8.53) se convirtió en una ecuación máscomplicada, apareciendo un término en x0y0. Este hecho se debe a la inclinación de losejes coordenados x0, y0 respecto a los ejes de la elipse. Algo similar ocurre con parábolas ehipérbolas. Nótese, además, que podemos transformar la ecuación complicada (8.54) en laecuación sencilla (8.53), simplemente deshaciendo la rotación efectuada, es decir, rotando
el sistema x0y0 un ángulo de −π4o, equivalentemente, un ángulo de
7π
4. Ahora bien, como
lo muestra la figura 8.53b, también se puede simplificar la ecuación (8.54) eliminando su
término en x0y0, rotando el sistema x0y0 un ángulo deπ
4, pues en el nuevo sistema x00y00, la
elipse tiene centro en el origen y el eje focal coincidiendo con el eje y00. Por lo tanto, unaecuación para la elipse referida a dicho sistema x00y00 es
(y00)2
9+(x00)2
4= 1.
En general, como probaremos más adelante, siempre podremos eliminar el término enxy en una ecuación de la forma
Ax2 +Bxy +Cy2 +Dx+Ey + F = 0
con B 6= 0, mediante una rotación de ejes por un ángulo θ que podrá escogerse de tal formaque 0 < θ <
π
2.
8.8 Ecuación general de segundo grado
La ecuación general de segundo grado en dos variables x, y es de la forma
Ax2 +Bxy +Cy2 +Dx+Ey + F = 0 (8.55)
donde A 6= 0 o B 6= 0 o C 6= 0.Un caso particular de la ecuación anterior es la ecuación
Ax2 + Cy2 +Dx+Ey + F = 0
con A 6= 0 o C 6= 0, la cual carece de término en xy. De esta última ecuación ya sabemosque ella representa una cónica con eje focal paralelo a (o coincidente con) alguno de los ejescoordenados, representa una cónica degenerada o no representa ningún lugar geométrico.
Ahora consideraremos la ecuación (8.55) en el caso particular en el cual B 6= 0. Pro-baremos que:

256 8. Secciones Cónicas
La ecuación (8.55) con B 6= 0 puede transformarse siempre en otraecuación de segundo grado de la forma
A0 (x0)2 +C 0 (y0)2 +Dx0 +E0y0 + F 0 = 0(sin término en x0y0) mediante una rotación de ejes por un ángulo θ,
el cual puede escogerse de tal modo que 0 < θ <π
2.
(8.56)
Una manera de probar lo anterior es la siguiente:Sustituyamos en la ecuación (8.55)
x = x0 cos θ − y0senθ
y = x0senθ + y0 cos θ
Se obtiene
A¡x0 cos θ − y0senθ
¢2+B
¡x0 cos θ − y0senθ
¢ ¡x0senθ + y0 cos θ
¢+ C
¡x0senθ + y0 cos θ
¢2+D
¡x0 cos θ − y0senθ
¢+E
¡x0senθ + y0 cos θ
¢+ F = 0
Desarrollando los cuadrados, realizando los productos y agrupando términos seme-jantes, la ecuación anterior toma la forma
A0¡x0¢2+B0x0y0 + C 0
¡y0¢2+Dx0 +E0y0 + F 0 = 0 (8.57)
en donde
A0 = A cos2 θ +Bsenθ cos θ + Csen2θ
B0 = 2 (C −A) senθ cos θ +B¡cos2 θ − sen2θ
¢C 0 = Asen2θ −Bsenθ cos θ + C cos2 θ
D0 = D cos θ +Esenθ
E0 = E cos θ −Dsenθ
F 0 = F.
Ahora probaremos que siempre existe un ángulo θ, 0 < θ <π
2, tal que B0 = 0, es decir,
tal que2 (C −A) senθ cos θ +B
¡cos2 θ − sen2θ
¢= 0.
Usando las identidades trigonométricas
2senθ cos θ = sen2θ y cos2 θ − sen2θ = cos 2θ
la ecuación anterior puede escribirse en la forma
(C −A) sen2θ +B cos 2θ = 0.
Si A 6= C y cos2θ 6= 0, esta ecuación es equivalente a
tan 2θ =B
A− C.(8.58)

8.8. Ecuación general de segundo grado 257
y si A = C ella es equivalente acos 2θ = 0. (8.59)
ya que B 6= 0.Veamos, de (8.58) y (8.59), que siempre es posible escoger un ángulo θ como se desea.
En efecto, en el caso A 6= C y cos2θ 6= 0, podemos escoger θ cumpliendo (8.58) tal que
0 < 2θ < π, es decir, tal que 0 < θ <π
2. Y en el caso A = C, podemos escoger 2θ =
π
2, es
decir, θ =π
4.
Para completar la prueba sólo resta mostrar que si θ se escoge cumpliendo (8.58) en elcaso A 6= C o cumpliendo (8.59) en el caso A = C, entonces al menos uno de los coeficientesA0, C 0 en la ecuación (8.57) es no nulo y así dicha ecuación (en la cual B0 = 0) es de segundogrado. Esto último se deja como ejercicio al lector. ¨
También se puede probar el resultado en el último recuadro, empleando matrices yvectores, como se indica a continuación:
En primer lugar
Ax2 +Bxy + Cy2 =
µAx+ B
2 yB2 x+ Cy
¶·µ
xy
¶=
µµA B
2B2 C
¶µxy
¶¶·µ
xy
¶o sea
Ax2 +Bxy + Cy2 = (MX) ·X
donde
M =
µA B
2B2 C
¶y X =
µxy
¶.
En segundo lugar,
Dx+Ey =
µDE
¶·µ
xy
¶= U ·X con U =
µDE
¶y X =
µxy
¶.
Así, la ecuación (8.55) puede expresarse en la forma
(MX) ·X + U ·X + F = 0. (8.60)
Consideremos ahora la matriz simétrica
M =
µA B
2B2 C
¶
en la cualB
26= 0. Sabemos que M posee dos valores propios diferentes λ1, λ2; también
sabemos que existe 0 < θ <π
2tal que X1 =
µcos θsenθ
¶es vector propio de M (el cual es
unitario) y la matriz ortogonal Q =µcos θ −senθsenθ cos θ
¶, la cual es la matriz de la rotación
Rθ, es tal que
QTMQ =
µλ1 00 λ2
¶(8.61)
siendo λ1 el valor propio al cual corresponde el vector propio X1.

258 8. Secciones Cónicas
Efectuamos ahora una rotación de los ejes x, y por el ángulo θ antes mencionado y sea
X 0 =
µx0
y0
¶el vector de coordenadas en el nuevo sistema x0y0 del punto cuyo vector de
coordenadas en el sistema xy es X =
µxy
¶. Sabemos que la relación entre X y X 0 es
X =
µxy
¶=
µcos θ −senθsenθ cos θ
¶µx0
y0
¶= QX 0.
A continuación veremos que al sustituir X por QX 0 en la ecuación (8.60), se obtieneuna ecuación que no tiene término en x0y0. En efecto, al hacer dicha sustitución se obtiene¡
M¡QX 0¢¢ ·QX 0 + U ·QX 0 + F = 0
es decir, ¡(MQ)X 0¢ ·QX 0 + U ·QX 0 + F = 0. (8.62)
En este punto hacemos uso de la propiedad establecida en el ejercicio 43b del capítulo4, en virtud de la cual ¡
(MQ)X 0¢ ·QX 0 =¡¡QTMQ
¢X 0¢ ·X 0
y como
QTMQ =
µλ1 00 λ2
¶tenemos que la ecuación (8.62) se transforma enµµ
λ1 00 λ2
¶X 0¶·X 0 + U ·QX 0 + F = 0. (8.63)
(Compare las ecuaciones (8.60) y (8.62)). Ahora, comoµµλ1 00 λ2
¶X 0¶·X 0 =
µµλ1 00 λ2
¶µx0
y0
¶¶·µ
x0
y0
¶=
µλ1x
0
λ2y0
¶·µ
x0
y0
¶= λ1
¡x0¢2+ λ2
¡y0¢2
y
U ·QX 0 =
µDE
¶·µ
x0 cos θ − y0senθx0senθ + y0 cos θ
¶= D
¡x0 cos θ − y0senθ
¢+E
¡x0senθ + y0 cos θ
¢= (D cos θ +Esenθ)x0 + (E cos θ −Dsenθ) y0
entonces la ecuación (8.63) es equivalente a la ecuación
λ1¡x0¢2+ λ2
¡y0¢2+D0x0 +E0y0 + F 0 = 0 (8.64)
la cual tiene la forma de la ecuación en (8.56) con
A0 = λ1, C 0 = λ2, D0 = D cos θ+Esenθ, E0 = E cos θ−Dsenθ y F 0 = F.

8.8. Ecuación general de segundo grado 259
Nótese que µD0
E0
¶= QT
µDE
¶Esta vez es más evidente que la ecuación (8.64) es de segundo grado pues λ1 6= 0 o
λ2 6= 0, ya que si λ1 = 0 y λ2 = 0 entonces M = O (vea (8.61)), pero M 6= O ya queB 6= 0.
Tenemos así que la ecuación (8.55) con B 6= 0, se transforma, mediante la rotación porel ángulo θ, 0 < θ <
π
2,en una ecuación de segundo grado de la forma (8.56), la cual es la
ecuación (8.64). ¨
Hemos probado así, de dos maneras, el resultado en el último recuadro. Un corolarioinmediato de dicho resultado es el siguiente:
Una ecuación de segundo gradoAx2 +Bxy +Cy2 +Dx+Ey + F = 0
con B 6= 0, representa una cónica con eje focal no paralelo a(ni coincidente con) ninguno de los ejes coordenados x, y, o representauna cónica degenerada o no representa ningún lugar geométrico.
Ejemplo 8.21Transformar la ecuación
9x2 + 4xy + 6y2 + 12√5x− 4
√5y + 5 = 0 (8.65)
en una ecuación de la forma (8.56) mediante una rotación por un ángulo θ, 0 < θ <π
2, y
luego identificar el lugar geométrico que representa la ecuación dada.
Solución:La ecuación (8.65) es de la forma (8.55) con
A = 9, B = 4, C = 6, D = 12√5, E = −4
√5 y F = 5.
Primer método.Puesto que A 6= C, según la fórmula (8.58), el ángulo agudo θ que permite la transfor-
mación deseada de la ecuación (8.65), está definido implícitamente en la ecuación
tan 2θ =B
A− C=
4
9− 6 =4
3.
En este caso 2θ también es agudo (pues tan 2θ > 0); así de la figura 8.54 se obtiene que
cos 2θ =3
5

260 8. Secciones Cónicas
Figura 8.54.
y, usando las identidades
cos2 θ =1 + cos 2θ
2y sen2θ =
1− cos 2θ2
obtenemos, en nuestro caso (en el cual cos θ > 0 y senθ > 0)
cos θ =
r1 + cos 2θ
2=
s1 + 3
5
2=
r8
10=
2√5
y
senθ =
r1− cos 2θ
2=
s1− 3
5
2=
r2
10=
1√5.
(Se sigue que tan θ = 1/2 y por tanto θ = tan−1 (1/2)). Así, de acuerdo con las ecuacionesde rotación (8.50), tenemos
x = x0 cos θ − y0senθ =1√5
¡2x0 − y0
¢y = x0senθ + y0 cos θ =
1√5
¡x0 + 2y0
¢.
Sustituyendo x, y en la ecuación (8.65), ésta se convierte en
0 = 9
∙1√5
¡2x0 − y0
¢¸2+ 4
µ1√5
¶µ1√5
¶¡2x0 − y0
¢ ¡x0 + 2y0
¢+ 6
∙1√5
¡x0 + 2y0
¢¸2+12
³√5´µ 1√
5
¶¡2x0 − y0
¢− 4
³√5´µ 1√
5
¶¡x0 + 2y0
¢+ 5.
Desarrollando los cuadrados, realizando los productos, agrupando términos semejantes ysimplificando se obtiene finalmente la ecuación
2¡x0¢2+¡y0¢2+ 4x0 − 4y0 + 1 = 0 (8.66)

8.8. Ecuación general de segundo grado 261
la cual es de la forma (8.56). Para identificar el lugar geométrico correspondiente a estaecuación (8.66), empezamos por escribirla en la forma
2³¡x0¢2+ 2x0
´+³¡y0¢2 − 4y0´ = −1
y luego completamos los cuadrados en x0 y en y0. Se obtiene
2³¡x0¢2+ 2x0 + 1
´+³¡y0¢2 − 4y0 + 4´ = −1 + 2 + 4
es decir,2¡x0 + 1
¢2+¡y0 − 2
¢2= 5. (8.67)
Por último, dividiendo a ambos lados de (8.67) por 5, se obtiene
(x0 + 1)2
52
+(y0 − 2)2
5= 1 (8.68)
la cual corresponde a una elipse con centro en el punto C =µ−12
¶referido al sistema x0y0,
eje focal el eje y0, distancia del centro a los vértices a =√5 ≈ 2.2 y distancia del centro a
los extremos del eje menor b =q
52 ≈ 1.58. (Figura 8.55).
Figura 8.55.
Segundo método.Empezamos por escribir la ecuación (8.65), usando matrices y vectores, en la formaµµ
9 22 6
¶µxy
¶¶·µ
xy
¶+
µ12√5
−4√5
¶·µ
xy
¶+ 5 = 0 (8.69)
y consideramos la matriz simétrica
M =
µ9 22 6
¶.

262 8. Secciones Cónicas
Los valores propios de esta matriz son los números λ1 = 5 y λ2 = 10. Los vectores
propios correspondientes a λ1 = 5 son los vectores de la forma tµ−12
¶, t 6= 0 (entre éstos
ninguno está en el primer cuadrante) y los vectores propios correspondientes a λ2 = 10 son
los vectores de la forma t
µ2
1
¶, t 6= 0; entre estos uno que es unitario y está en el primer
cuadrante es
X1 =1√5
µ2
1
¶=
µ2/√5
1/√5
¶.
Sea entonces θ aquel ángulo, 0 < θ <π
2, tal que
X1 =
µ2/√5
1/√5
¶=
µcos θsenθ
¶es decir, tal que
cos θ =2√5
y senθ =1√5
(observe que θ es el mismo ángulo obtenido en el primer método). Como ya sabemos, lamatriz ortogonal
Q =
µcos θ −senθsenθ cos θ
¶=
Ã2√5− 1√
51√5
2√5
!la cual es la matriz de la rotación Rθ, es tal que
QTMQ =
µ10 00 5
¶.
Ahora efectuamos una rotación de los ejes x, y por dicho ángulo θ; si X 0 =
µx0
y0
¶es el
vector de coordenadas, respecto al nuevo sistema x0y0, del punto cuyo vector de coordenadas
respecto al sistema xy es X =
µxy
¶entonces
X = QX 0 =
µ2/√5 −1/
√5
1/√5 2/
√5
¶µx0
y0
¶=
1√5
µ2x0 − y0
x0 + 2y0
¶.
Sustituyendo X por QX 0 en la ecuación (8.69), ésta se convierte (vea (8.63)) enµµ10 00 5
¶µx0
y0
¶¶·µ
x0
y0
¶+
µ12√5
−4√5
¶· 1√5
µ2x0 − y0
x0 + 2y0
¶+ 5 = 0
es decir, en la ecuación
10¡x0¢2+ 5
¡y0¢2+ 20x0 − 20y0 + 5 = 0
que es equivalente a2¡x0¢2+¡y0¢2+ 4x0 − 4y0 + 1 = 0
la cual coincide (como era de esperar) con la ecuación (8.66) obtenida en el primer método.Se continúa ahora exactamente como en dicho primer método. ¥

8.8. Ecuación general de segundo grado 263
Recomendamos al lector emplear preferiblemente el segundo de los métodos presenta-dos, cuando se trate de eliminar el término en xy de una ecuación de la forma
Ax2 +Bxy +Cy2 +Dx+Ey + F = 0, B 6= 0.
Dicho método tiene la ventaja sobre el primero, de poder extenderse a ecuaciones desegundo grado con tres o más variables.
Retornemos a la ecuación (8.64),
λ1¡x0¢2+ λ2
¡y0¢2+D0x0 +E0y0 + F 0 = 0
en la cual λ1, λ2 son los valores propios de la matriz simétrica
M =
µA B/2B/2 C
¶, B 6= 0
asociada con la ecuación (8.55). Teniendo en cuenta que dicha ecuación es de la forma(8.48) podemos afirmar que:
• Si λ1λ2 = 0 (es decir λ1 = 0 o λ2 = 0) entonces la ecuación (8.64)representa una parábola, un par de rectas distintas paralelas, una sola rectao ningún lugar geométrico.
• Si λ1λ2 > 0 (es decir, λ1 y λ2 son no nulos y del mismo signo) entoncesla ecuación (8.64) representa una elipse, un punto o ningún lugar geométrico.
• Si λ1λ2 < 0 (es decir, λ1 y λ2 son no nulos y de signos contrarios) entonces laecuación (8.64) representa una hipérbola o un par de rectas distintas que se cortan.
Ahora bien, teniendo en cuenta la igualdad (8.61)
QTMQ =
µλ1 00 λ2
¶.
Vemos que
λ1λ2 =
¯λ1 00 λ2
¯=¯QTMQ
¯=¯Q−1MQ
¯= |Q|−1 |M | |Q| = |M | = AC − B2
4
es decir,
λ1λ2 =4AC −B2
4
y así, la información λ1λ2 = 0, λ1λ2 > 0, λ1λ2 < 0 viene en el escalar 4AC−B2 o tambiénen B2−4AC. Optaremos por leer esa información en el número B2−4AC, el cual se llamaindicador o discriminante de la ecuación (8.55)
Ax2 +Bxy +Cy2 +Dx+Ey + F = 0
pues él indica o determina el tipo de lugar geométrico que corresponde a dicha ecuación.En términos del discriminante ∆ = B2 − 4AC, el resultado en el recuadro anterior se
puede expresar así:

264 8. Secciones Cónicas
• Si ∆ = 0, la ecuación (8.55) representa una parábola, un par de rectasdistintas paralelas, una sola recta o ningún lugar geométrico.
• Si ∆ < 0, la ecuación (8.55) representa una elipse, un punto oningún lugar geométrico.
• Si ∆ > 0, la ecuación (8.55) representa una hipérbola o un par de rectasdistintas que se cortan.
8.9 Ejercicios
1. Para cada uno de los siguientes literales, encuentre una ecuación de la circunferenciaque satisfaga las condiciones dadas:
a) Centro en C =
µ1
2
¶y pasa por P =
µ3
−1
¶.
b) Centro en C =
µ−25
¶y tangente a la recta x = 7.
c) Centro en C =
µ1
−6
¶y tangente a la recta x− y − 1 = 0.
d) Tangente a la recta 3x+ y + 2 = 0 en el punto P =µ−11
¶y pasa por Q =
µ3
5
¶.
e) Tangente a la recta 3x + 4y − 16 = 0 en el punto P =
µ4
1
¶y con radio 5 (dos
soluciones).
f) Tiene como diámetro la cuerda común de las siguientes circunferencias: x2+ y2+2x− 2y − 14 = 0 y x2 + y2 − 4x+ 4y − 2 = 0.
2. Cada una de las siguientes ecuaciones representa una circunferencia. Hallar el centro,el radio y dibujar la circunferencia.
a) 3x2 + 3y2 + 4y − 7 = 0. b) x2 + y2 − 10x− 10y + 25 = 0.c) x2 + y2 + 6x− 1 = 0. d) 2x2 + 2y2 − 2x+ 2y − 7 = 0.e) x2 + y2 − 2
√3x+ 2
√7y − 15 = 0.
3. Para cada uno de los siguientes literales, hallar una ecuación de la parábola quesatisface las condiciones dadas y graficarla.
a) Vértice en V =
µ0
0
¶y ecuación de la directriz y = −2.
b) Vértice en V =
µ−43
¶y foco en F =
µ−41
¶.
c) Eje focal paralelo al eje x, vértice en V =
µ1
3
¶y pasa por el punto A =
µ−1−1
¶.
d) Pasa por los puntos A =µ0
3
¶, B =
µ3
4
¶y C =
µ4
4
¶y su eje focal es paralelo al
eje y.

8.9. Ejercicios 265
e) La ecuación de su directriz es y = 1 y los extremos del lado recto son A =
µ−4−3
¶y B =
µ4
−3
¶.
4. Cada una de los siguientes ecuaciones representa una parábola. Para cada una de lasparábolas, hallar el vértice V , el foco F , la ecuación de la directriz, la ecuación deleje focal, y la longitud l del lado recto. Graficar la parábola.
a) y2 = −6x. b) x2 = 8y.
c) y2 − 12x− 2y + 7 = 0. d) y = 14(x
2 − 2x+ 5).e) y2 + 4x+ 4 = 0.
5. Los lados rectos de una elipse (hipérbola) son las cuerdas que pasan por los focos yson perpendiculares al eje mayor (eje transversal). Probar que la longitud del lado
recto de una elipse (hipérbola) es2b2
a.
6. Para cada uno de los siguientes literales, hallar una ecuación para la elipse que sa-tisfaga las condiciones dadas y graficarla.
a) Centro en C =
µ0
0
¶, un foco en F1 =
µ0
2
¶y un vértice en V1 =
µ0
3
¶.
b) Centro en C =
µ−34
¶, eje mayor de longitud 8, eje menor de longitud 6 y eje
mayor paralelo al eje x.
c) Vértices en V1 =
µ3
−2
¶y V2 =
µ13
−2
¶, focos en F1 =
µ4
−2
¶y F2 =
µ12
−2
¶.
d) Centro en C =
µ1
2
¶, eje mayor paralelo al eje y, y pasa por los puntos A =
µ1
6
¶y B =
µ3
2
¶.
e) Vértices en V1 =
µ0
8
¶, V2 =
µ0
−8
¶y excentricidad igual a 1
2 .
7. Cada una de las siguientes ecuaciones representa una elipse. Para cada una de laselipses, hallar el centro C, los focos F 0 y F , los vértices V 0 y V , los extremos deleje menor A0 y A, la excentricidad e y la longitud l del lado recto (ver ejercicio 5.)Graficar la elipse.
a)x2
144+
y2
169= 1. b) 16x2 + 25y2 = 1.
c)(x− 1)2
9+(y − 5)2
25= 1. d) 9x2 + 16y2 − 36x+ 96y + 36 = 0.
e) 25x2 + 16y2 + 50x+ 64y − 311 = 0.
8. Para cada uno de los siguientes literales, hallar una ecuación para la hipérbola quesatisface las condiciones dadas. Graficar la hipérbola con sus asíntotas.
a) Focos en F1 =
µ0√2
¶y F2 =
µ0
−√2
¶, vértices en V1 =
µ0
1
¶y V2 =
µ0
−1
¶.

266 8. Secciones Cónicas
b) Vértices en V1 =
µ1
0
¶y V2 =
µ−10
¶y asíntotas y = ±3x.
c) Centro en C =
µ−14
¶, un foco en F1 =
µ−12
¶y un vértice en
µ−13
¶.
d) Centro en C =
µ2
−3
¶, eje transversal paralelo a uno de los ejes coordenados y
pasa por los puntos A =µ3
−1
¶y B =
µ−10
¶.
e) Las asíntotas son las rectas 2x−y = 0 y 2x+y = 0 y pasa por el punto A =µ3
−5
¶.
f) La diferencia entre las distancias de cualquiera de sus puntos a los puntos A =µ2
2
¶y B =
µ10
2
¶es igual al 6.
9. Cada una de las siguientes ecuaciones representa una hipérbola. Para cada una de lashipérbolas, hallar el centro C, los focos F 0 y F , los vértices V 0 y V , los extremos deleje conjugado A0 y A, la excentricidad e, las ecuaciones de las asíntotas y la longitudl del lado recto. Graficar la hipérbola.
a)x2
100− y2
64= 1. b) (y + 6)2 − (x− 2)2 = 1.
c) 4x2 − 5y2 + 20 = 0. d) 9x2 − 4y2 − 18x− 16y − 43 = 0.e) x2 − 4y2 + 6x+ 24y − 31 = 0.
10. a) Hallar la ecuación general de segundo grado de la cónica constituida por todos los
puntos P =
µx
y
¶cuya distancia al punto A =
µ0
2
¶es la mitad de su distancia a la
recta y − 8 = 0.b) Identificar la cónica correspondiente a la ecuación hallada en a) y encontrar suselementos principales: centro, foco(s), vértice(s), ecuación del eje focal.
c) Graficar la cónica descrita en a).
11. Considerar el lugar geométrico de los puntos P =
µx
y
¶del plano para los cuales la
distancia de P al punto A =
µ2
1
¶es igual al doble de la distancia de P a la recta
x+ 1 = 0.
a)Mostrar que la ecuación del lugar geométrico descrito es 3x2−y2+12x+2y−1 = 0.b) Identificar la cónica descrita por la ecuación dada en a) y encontrar sus principaleselementos: centro, foco(s), vértice(s), ecuación del eje focal, ecuación de las asíntotas(si las tiene). Graficar la cónica.
12. a) Encontrar una ecuación de la circunferencia que pasa por el vértice y por lospuntos extremos de lado recto de la parábola cuya ecuación es x2 = −8y.b) Encontrar una ecuación de la elipse cuyos focos son los vértices de la hipérbola11x2 − 7y2 = 77 y cuyos vértices son los focos de esta misma hipérbola.

8.9. Ejercicios 267
c) La directriz de la parábola y2 = 16x es tangente a una circunferencia que tienecomo centro el foco de dicha parábola. Encontrar una ecuación para esta circunfe-rencia y los puntos de intersección de las dos curvas.
13. Para cada una de las siguientes ecuaciones cuadráticas, identificar el lugar geométricoque ella representa y graficar dicho lugar geométrico.
a) x2 + 4y2 − 6x+ 16y + 21 = 0. b) x2 + y2 − 6x+ 4y + 9 = 0.c) 3x2 − 2y2 + 24x− 4y + 46 = 0. d) 4x2 − y2 − 4x = 3.e) y2 − 4y = x+ 5. f) 4x2 + 3y2 + 8x− 30y + 31 = 0.g) 9 (x+ 3)2 = 36− 4 (y − 2)2. h) x2 − 4y − 4x = 0.i) x2 + y2 + 2x+ 10y + 26 = 0. j) 2x (x− y) = y (3− y − 2x).k) 9y2 + 4x2 − 54y + 45 = 0. l) 9x2 − 4y2 = 18
√2x+ 8
√2y + 26.
m) x2 + y2 − 10x+ 6y + 36 = 0.
14. El cable de suspensión de un puente colgante tiene forma de parábola cuando el pesoestá uniformemente distribuido horizontalmente. La distancia entre las dos torres esde 150 metros, los puntos de soporte del cable en las dos torres están a 22 metrossobre la carretera y el punto más bajo del cable está a 7 metros por encima de lacarretera. Calcular la distancia vertical entre el cable y un punto, sobre la carretera,situado a 15 metros del pie de una torre.
15. Suponga que el agua que sale por el extremo de una tubería horizontal que está a25 metros de altura con respecto al suelo, describe una curva parabólica, siendo elvértice de la parábola el extremo del tubo. Si en un punto situado a 8 metros pordebajo del nivel del tubo, el flujo del agua se ha curvado hacia afuera 10 metros másallá de una vertical que pasa por el extremo del tubo, ¿a qué distancia de esta líneavertical entrará al agua en contacto con el suelo?
16. La órbita de la Tierra alrededor del Sol tiene forma de elipse con el Sol en un foco.Si la mitad del eje mayor de dicha órbita mide 14957000 km y la excentricidad de laelipse es 0.0167, hallar la distancia máxima y la distancia mínima de la Tierra al Sol.
17. Un satélite viaja alrededor de la Tierra en una órbita elíptica, donde la Tierra es unfoco y la excentricidad es 13 . La distancia más corta a la que se acerca el satélite a laTierra es 300 millas. Calcular la distancia más grande a la que se aleja el satélite dela Tierra. ¿Cuál es la ecuación de la órbita elíptica?
18. El arco de un puente es semielíptico con eje mayor horizontal. La base del arco tiene30 metros de longitud y su parte más alta con respecto a la Tierra está a 10 metros.determinar la altura del arco a 6 metros del centro de la base.
19. Un segmento de recta, de 9 centímetros de longitud, se mueve de manera que en todomomento un extremo está sobre el eje x y el otro extremo está sobre el eje y. Hallar
e identificar el lugar geométrico que describe un punto P =
µx
y
¶situado sobre el
segmento a 6 centímetros del extremo que está sobre el eje y, cuando el segmento semueve en la forma indicada.

268 8. Secciones Cónicas
20. Transformar cada una de las ecuaciones dadas, mediante una rotación de ejes yempleando matrices y vectores, en una ecuación de la forma A0 (x0)2 + C 0 (y0)2 +D0x0+E0y0+F 0 = 0. Luego clasificar y graficar el correspondiente lugar geométrico.
a) 16x2 − 24xy + 9y2 − 30x− 40y = 0.b) 3x2 − 2
√3xy + y2 + 2x+ 2
√3y = 0.
c) 8x2 − 2xy + 8y2 − 14x− 14y = 49.d) 7x2 − 48xy − 7y2 + 25 = 0.e) 11x2 + 10
√3xy + y2 = 4.
f) x2 − 2xy + y2 + 4√2x+ 4
√2y = 0.
g) xy − y + x = 0.
h) 3x2 − 2xy − 5 = 0.i) 4x2 + 4xy + y2 = 9.
j) xy + y − 2x− 2 = 0.k) 19x2 + 4xy + 16y2 − 212x+ 104y = 356.l) 3x2 − 6xy + 5y2 = 36.m) 3x2 + 4xy − 4 = 0.n) 2x2 + 4xy + 5y2 + 4x+ 13y − 1
4 = 0.
21. Hallar el valor de k tal que la gráfica de la ecuación 2xy− 4x+7y+ k = 0 es un parde rectas que se cortan.

Parte II
269


9
Vectores en el espacio
9.1 Vectores geométricos. Conceptos básicos y operaciones
El concepto de vector geométrico en el espacio es exactamente el mismo de vectorgeométrico en el plano, solo que para un vector geométrico
−−→AB en el espacio, el punto
inicial A y el punto terminal B son puntos del espacio.
La magnitud°°°−−→AB°°° de un vector −−→AB del espacio se define, al igual que en el plano, como
la longitud del segmento AB. En cuanto a la dirección de un vector, recordamos que en elplano basta un ángulo para expresarla, pero en el espacio es claro que un solo ángulo no essuficiente. La dirección de un vector geométrico
−−→AB del espacio se expresa comúnmente
empleando un sistema de tres semirrectas orientadas, mutuamente perpendiculares, queparten del punto inicial A del vector, como se ilustra en la figura 9.1.
Figura 9.1.
La dirección del vector−−→AB queda determinada por los tres ángulos α, β y γ mostrados
en la figura, cada uno de los cuales se considera entre 00 y 1800. Más adelante volveremossobre este concepto.
Los conceptos de igualdad entre vectores, ángulo entre dos vectores, vectores parale-los, vectores perpendiculares, misma dirección, dirección opuesta, vector uni-tario, vector nulo se definen para el espacio de la misma forma que para el plano.
Las operaciones suma y multiplicación por escalar también se definen de igualmanera que para el plano. Dichas operaciones conservan todas las propiedades que ellastienen en el caso del plano.
271

272 9. Vectores en el espacio
Ejemplo 9.1En la figura 9.2 se muestran tres vectores geométricos −→u ,−→v ,−→z del espacio, la suma −→u +−→vy la suma −→u +−→v +−→z = (−→u +−→v ) +−→z .
Figura 9.2.
En la figura 9.2 también se ve (por ejemplo) que
−→v +−−→PQ = −→u +−→zasí que −−→
PQ = −→u +−→z −−→v . ¥El concepto de combinación lineal de dos vectores geométricos del espacio se define exac-
tamente como para dos vectores geométricos del plano. Consideremos ahora tres vectoresdel espacio −→u ,−→v y −→z ; todo vector del espacio de la forma
a−→u + b−→v + c−→zcon a, b, c escalares, se dice una combinación lineal de −→u ,−→v y −→z .
Ejemplo 9.2En la figura 9.3 se muestran tres vectores −→u ,−→v ,−→z y las siguientes combinaciones linealesde ellos:
2
3−→u +−→v + 2−→z , −→u + 1
2−→v y −→v + 2−→z
Figura 9.3.

9.1. Vectores geométricos. Conceptos básicos y operaciones 273
Al igual que para vectores del plano, dos vectores −→u y −→v del espacio se dicen lineal-mente dependientes (L.D.) si alguno de los dos es múltiplo escalar del otro; de lo con-trario los vectores se dicen linealmente independientes (L.I.). Tres vectores −→u ,−→v y −→zdel espacio se dicen linealmente dependientes (L.D.) si alguno de ellos es combinaciónlineal de los otros dos; si esto no sucede los vectores se dicen linealmente independi-entes (L.I.). Por ejemplo, los vectores −→u ,−→v y −→z de la figura 9.3 son L.I., mientras que−→u ,−→v y−→u + (1/2)−→v son L.D.
Para el plano sabemos que si −→u y −→v son vectores L.I. entonces todo vector −→z es ex-presable de manera única como combinación lineal de −→u y −→v . El análogo de este resultadopara el espacio es el siguiente:
Si −→u ,−→v ,−→z son vectores del espacio L.I. entonces todo vector −→w del espacioes expresable de manera única como combinación lineal de −→u ,−→v y −→z ,es decir, existen escalares únicos a, b, c tales que
−→w = a−→u + b−→v + c−→z .
Prueba:Consideremos vectores −→u ,−→v ,−→z del espacio linealmente independientes; al dibujarlos
con punto inicial común O, ninguno de ellos queda contenido en el plano determinado porlas rectas que contienen los otros dos vectores. (Figura 9.4).
Sea −→w un vector cualquiera del espacio, el cual también dibujamos con punto inicialO. (Ver figura 9.4).
Figura 9.4.
Trazamos, pasando por el extremo final Q de −→w, una recta L paralela a la recta quecontiene al vector −→z hasta cortar el plano P determinado por las rectas que contienen losvectores −→u y −→v , como se muestra en la figura 9.4.
Si R es el punto de corte de la recta L con el plano P entonces
−→w =−−→OR+
−−→RQ. (9.1)
Ahora, como−−→RQ es paralelo a −→z entonces existe un escalar c tal que
−−→RQ = c−→z (9.2)

274 9. Vectores en el espacio
y como−−→OR es un vector del plano P y −→u ,−→v son vectores no paralelos de este plano
entonces existen escalares a, b tales que−−→OR = a−→u + b−→v . (9.3)
Luego, sustituyendo (9.2) y (9.3) en (9.1), se tiene que−→w = a−→u + b−→v + c−→z (9.4)
para ciertos escalares a, b, c.Veamos que los escalares a, b, c en (9.4) son únicos: Supongamos que a1, b1, c1, a2, b2, c2
son escalares tales que−→w = a1
−→u + b1−→v + c1
−→z = a2−→u + b2
−→v + c2−→z . (9.5)
Debemos probar que a1 = a2, b1 = b2 y c1 = c2. De (9.5) se sigue que
(a1 − a2)−→u + (b1 − b2)
−→v + (c1 − c2)−→z = −→0 . (9.6)
Si fuese c1 − c2 6= 0 se tendría
−→z =µa2 − a1c1 − c2
¶−→u +
µb2 − b1c1 − c2
¶−→v
y así −→z sería una combinación lineal de −→u y −→v , lo cual no es cierto. Luego c1− c2 = 0, esdecir, c1 = c2. Ahora, como c1 − c2 = 0, (9.6) se reduce a
(a1 − a2)−→u + (b1 − b2)
−→v = −→0
y como −→u y −→v son vectores no paralelos del plano P, de la igualdad anterior se sigue que
a1 − a2 = 0 y b1 − b2 = 0
es decir, a1 = a2 y b1 = b2. ¨Los conceptos de proyección de un vector sobre otro, componente escalar de un
vector en la dirección de un vector dado, como también el producto escalar de dosvectores, se definen para vectores en el espacio de la misma manera que para vectores enel plano.
9.2 Sistema de coordenadas cartesianas para el espacio
Empecemos con el concepto de terna ordenada de números reales, el cual es similar alde par o pareja ordenada de números reales, solo que una terna está conformada por tresnúmeros mientras que un par lo está por dos. La terna ordenada que consta de los números
a, b y c, siendo a el primero, b el segundo y c el tercero se denotará
⎛⎝ abc
⎞⎠ .
Así, la terna
⎛⎝ 123
⎞⎠ es diferente a la terna
⎛⎝ 132
⎞⎠ , pues aunque las dos están confor-
madas por los mismos números 1, 2 y 3, el orden en que éstos aparecen en la primera ternaes distinto al orden en que aparecen en la segunda. En general, se tiene que⎛⎝ a
bc
⎞⎠ =
⎛⎝ a0
b0
c0
⎞⎠ si y sólo si a = a0, b = b0 y c = c0.

9.2. Sistema de coordenadas cartesianas para el espacio 275
Denotaremos R3 el conjunto de todas las ternas ordenadas de números reales, es decir,
R3=
⎧⎨⎩⎛⎝ a
bc
⎞⎠ / a, b, c ∈ R
⎫⎬⎭ .
Ahora nos referiremos a la noción de sistema de coordenadas cartesianas (o rec-tangulares) para el espacio, la cual es un extensión de la noción de sistema de coordenadascartesianas para el plano.
Se consideran tres ejes coordenados (ejex, ejey, ejez) con igual unidad de longitud, conun mismo origen O y mutuamente perpendiculares.
Si las direcciones positivas de dichos ejes son como se muestra en la figura 9.5 a, diremosque se trata de un sistema cartesiano derecho. Este nombre se deriva del hecho de quesi se coloca la mano derecha de modo que el dedo índice apunte en la dirección positivadel eje x y el dedo medio en la dirección positiva del eje y entonces el pulgar apunta en ladirección positiva del eje z. (Vea nuevamente la figura 9.5a).
Figura 9.5.
En la figura 9.5b se muestra un sistema cartesiano izquierdo. Nosotros siempreusaremos un sistema cartesiano derecho, al cual nos referiremos simplemente como unsistema cartesiano xyz.
Dado un sistema cartesiano xyz para el espacio, llamaremos plano coordenado xy osimplemente plano xy al plano que contiene al eje x y al eje y; significado similar tienenlas expresiones plano (coordenado) xz y plano (coordenado) yz. (Figura 9.6).

276 9. Vectores en el espacio
x
y
zPlano xz
Plano xy
Plano yz
Figura 9.6.
Una vez escogido un sistema cartesiano xyz para el espacio, se establece de maneranatural una correspondencia biunívoca entre el conjunto de todos los puntos del espacioy el conjunto R3 de todas las ternas ordenadas de números reales. A cada punto P del
espacio se le hace corresponder una terna ordenada
⎛⎝ abc
⎞⎠ donde los números a, b, c se
obtienen de la manera siguiente:
Se trazan, pasando por el punto P, planos paralelos a los planos coordenados; el númeroa es la coordenada del punto en el eje x donde el plano paralelo al plano yz corta dicho eje;similarmente, el número b es la coordenada del punto en el eje y donde el plano paraleloal plano xz corta a ese eje, y el número c es la coordenada del punto en el eje z donde elplano paralelo al plano xy corta dicho eje. (Figura 9.7).
Figura 9.7.

9.3. Descomposición canónica para vectores geométricos 277
Los números a, b, c se dicen las coordenadas cartesianas o rectangulares delpunto P (respecto al sistema xyz); a se dice la coordenada x, b la coordenada yy c la coordenada z.
De esta manera a cada punto P le corresponde la terna
⎛⎝ abc
⎞⎠ de sus coordenadas.
Esta correspondencia es biunívoca, ya que si partimos de una terna ordenada
⎛⎝ abc
⎞⎠ de
números reales e invertimos el proceso antes descrito, vemos que existe un único punto P
del espacio cuya terna de coordenadas es
⎛⎝ abc
⎞⎠.De la misma manera como se hizo para el plano, cada punto P del espacio se identifica
con su terna de coordenadas
⎛⎝ abc
⎞⎠ . Así, al igual que para el plano, diremos “el punto
P =
⎛⎝ abc
⎞⎠ ” en lugar de “el punto P cuya terna de coordenadas es
⎛⎝ abc
⎞⎠ ”.En adelante supondremos que el espacio está provisto de un sistema cartesiano xyz.
En la figura 9.8 se muestran los puntos P =
⎛⎝ 1−32
⎞⎠ , Q =
⎛⎝ 1−30
⎞⎠ y R =
⎛⎝ 0−32
⎞⎠ .
Figura 9.8.
9.3 Descomposición canónica para vectores geométricos
Es costumbre denotar−→i ,−→j ,−→k los vectores unitarios que apuntan en las direcciones positi-
vas de los ejes x, y, z respectivamente. En la figura 9.9 se muestran dichos vectores−→i ,−→j ,−→k

278 9. Vectores en el espacio
con su punto inicial en el origen.
x
y
z
1
1
1i j
k
Figura 9.9.
Estos vectores juegan en el espacio el mismo papel que juegan en el plano los vectores−→i ,−→j . En particular, puesto que ninguno de ellos es combinación lineal de los otros dos,
se tiene que:
Todo vector −→u del espacio es expresable de manera única como combinaciónlineal de
−→i ,−→j y
−→k , es decir, para todo vector −→u del espacio existen únicos
escalares a, b y c tales que
−→u = a−→i + b
−→j + c
−→k (9.7)
Ahora, como−→i ,−→j ,−→k son unitarios y apuntan en las direcciones positivas de los ejes
x, y, z, respectivamente, la descomposición (9.7) de un vector dado −→u es sencilla de obtener.
Por ejemplo, para el vector −→u con punto inicial en el origen y punto terminal P =
⎛⎝ 123
⎞⎠ ,
es claro que
−→u = 1−→i + 2−→j + 3−→k (9.8)
como se muestra en la figura 9.10.

9.3. Descomposición canónica para vectores geométricos 279
u
x
y
z
P
123
2
3
1
i j
k
2
Figura 9.10.
Recíprocamente, si −→u = 1−→i +2−→j +3−→k y el punto inicial de −→u es el origen O entonces
su punto final es P =
⎛⎝ 123
⎞⎠ .
En general, se tiene que
−−→OP = a
−→i + b
−→j + c
−→k ⇔ P =
⎛⎝ abc
⎞⎠
Consideremos ahora un vector cualquiera−−→PQ del espacio. Procediendo exactamente
como si−−→PQ fuese un vector del plano, se puede probar que:
Si P =
⎛⎝ abc
⎞⎠ y Q =
⎛⎝ a0
b0
c0
⎞⎠ entonces
−−→PQ =
¡a0 − a
¢−→i +
¡b0 − b
¢−→j +
¡c0 − c
¢−→k
y así
−−→PQ =
−−→OR con R =
⎛⎝ a0 − ab0 − bc0 − c
⎞⎠La descomposición
−→u = a−→i + b
−→j + c
−→k

280 9. Vectores en el espacio
de un vector −→u se llama descomposición canónica de −→u . Los números a, b, c se di-cen las componentes escalares o simplemente las componentes de −→u ; a se dice lacomponente x, b la componente y y c la componente z.
Ejemplo 9.3Halle la descomposición canónica de cada uno de los vectores
−−→OR,
−−→OQ,
−−→OP y
−→ST mostrados
en la figura 9.11.
Figura 9.11.
Solución:
Como R =
⎛⎝ 103
⎞⎠ entonces−−→OR = 1
−→i + 0
−→j + 3
−→k =
−→i + 3
−→k . Similarmente, como
Q =
⎛⎝ 123
⎞⎠ entonces
−−→OQ = 1
−→i + 2
−→j + 3
−→k
Por otra parte, como P =
⎛⎝ 020
⎞⎠ y Q =
⎛⎝ 123
⎞⎠ entonces
−−→PQ = (1− 0)−→i + (2− 2)−→j + (3− 0)−→k = −→i + 3−→k
De la misma forma, como S =
⎛⎝ 023
⎞⎠ y T =
⎛⎝ 003
⎞⎠ entonces
−→ST = (0− 0)−→i + (0− 2)−→j + (3− 3)−→k = −2−→j ¥
Dada la unicidad de la descomposición canónica de un vector se tiene que:
Si −→u = a−→i + b
−→j + c
−→k y −→v = a0
−→i + b0
−→j + c0
−→k entonces
−→u = −→v si y sólo si a = a0, b = b0 y c = c0

9.3. Descomposición canónica para vectores geométricos 281
En particular, dado que−→0 = 0
−→i + 0
−→j + 0
−→k ,
Si −→u = a−→i + b
−→j + c
−→k entonces
−→u = −→0 si y sólo si a = 0, b = 0 y c = 0
Para un vector −→u = a−→i + b
−→j del plano, sabemos que k−→u k =
√a2 + b2. De manera
similar se tiene, en el espacio que:
Si −→u = a−→i + b
−→j + c
−→k entonces
k−→u k =√a2 + b2 + c2
En efecto, si −→u = a−→i + b
−→j + c
−→k entonces (ver figura 9.12) −→u = −−→OP con P =
⎛⎝ abc
⎞⎠
Figura 9.12.
Por teorema de Pitágoras
°°°−−→OP°°°2 = °°°−−→OQ°°°2 + °°°−−→QP°°°2 donde Q =
⎛⎝ ab0
⎞⎠Ahora, como
°°°−−→QP°°°2 = °°°c−→k °°°2 y (de nuevo por el teorema de Pitágoras)°°°−−→OQ°°°2 = °°°a−→i °°°2 + °°°b−→j °°°2 entonces°°°−−→OP°°°2 = °°°a−→i °°°2 + °°°b−→j °°°2 + °°°c−→k °°°2 = a2 + b2 + c2

282 9. Vectores en el espacio
es decir,
k−→u k2 = a2 + b2 + c2
de donde
k−→u k =pa2 + b2 + c2 ¨
Observe en la figura 9.12 que si −→u = a−→i + b
−→j + c
−→k entonces
Proy−→i−→u = a
−→i , Proy−→
j−→u = b
−→j y Proy−→
k−→u = c
−→k
por tanto,−→u = Proy−→
i−→u + Proy−→
j−→u + Proy−→
k−→u
Ejemplo 9.4Si −→u = 3−→i − 2−→j +−→k entonces
k−→u k =q(3)2 + (−2)2 + (1)2 =
√9 + 4 + 1 =
√14 ¥
Ahora nos referiremos de nuevo a la dirección de un vector en el espacio. Cuando elespacio está provisto de un sistema cartesiano xyz, la dirección de un vector no nulo −→uqueda determinada por los ángulos α, β y γ entre el vector −→u y los vectores
−→i ,−→j y−→k ,
respectivamente (ver figura 9.13); es entonces natural expresar la dirección del vector −→uempleando dichos ángulos. Esos ángulos α, β y γ se llaman ángulos directores del vector
−→u y diremos que la dirección de −→u , denotada dir (−→u ) , es la terna
⎛⎝ αβγ
⎞⎠. También nosreferiremos a los ángulos directores de un vector −→u como los ángulos entre el vector −→uy los semiejes positivos x, y, z.
u
x
y
z
Figura 9.13.
Como es de esperar, los ángulos directores pueden obtenerse a partir de las componentesa, b, c del vector −→u . En efecto observando la figura 9.14 y teniendo en cuenta el triángulorectángulo OPQ vemos que
cosγ =c
k−→u k =c√
a2 + b2 + c2

9.3. Descomposición canónica para vectores geométricos 283
Figura 9.14.
Similarmente,
cosα =a
k−→u k =a√
a2 + b2 + c2y cosβ =
b
k−→u k =b√
a2 + b2 + c2
Para un vector fijo −→u , las igualdades anteriores determinan de manera única los ángulosdirectores α, β y γ pues cada uno de ellos está entre 0 y π. Observe que dichas igualdadesson equivalentes a las igualdades
a = k−→u k cosα, b = k−→u k cosβ, c = k−→u k cosγ
de las cuales se sigue que
−→u = (k−→u k cosα)−→i + (k−→u k cosβ)−→j + (k−→u k cosγ)−→k
es decir,−→u = k−→u k ((cosα)−→i + (cosβ)−→j + (cosγ)−→k ) (9.9)
Los números cosα, cosβ, cosγ se llaman cosenos directores del vector −→u . Es claroque estos números cumplen la relación
cos2α+ cos2β + cos2γ = 1
así, el vector
(cosα)−→i + (cosβ)
−→j + (cosγ)
−→k
es un vector unitario con la misma dirección del vector −→u .Nótese que la igualdad (9.9) es análoga a la igualdad
−→u = k−→u k³(cosθ)
−→i + (senθ)
−→j´
para un vector −→u del plano con dirección θ.

284 9. Vectores en el espacio
Recogemos a continuación lo básico de la discusión anterior.
Si α, β y γ son los ángulos directores del vector no nulo−→u = a
−→i + b
−→j + c
−→k entonces
• cosα =a
k−→u k , cosβ =b
k−→u k , cosγ =c
k−→u k
• cos2α+cos2β+cos2γ = 1• −→u = k−→u k ((cosα)−→i + (cosβ)−→j + (cosγ)−→k )
(9.10)
Ejemplo 9.5Halle la dirección del vector
−−→PQ donde P =
⎛⎝ 2−10
⎞⎠ y Q =
⎛⎝ 4−45
⎞⎠. Halle además unvector unitario con la dirección de
−−→PQ.
Solución:Puesto que
−−→PQ = (4− 2)−→i + (−4− (−1))−→j + (5− 0)−→k = 2−→i − 3−→j + 5−→k
y°°°−−→PQ°°° = q22 + (−3)2 + 52 = √38 entonces los cosenos directores de
−−→PQ (vea (9.10))
están dados por
cosα =2√38
, cosβ =−3√38
, cosγ =5√38
Tenemos así que los ángulos directores de−−→PQ son
α = cos−1µ
2√38
¶= 71.07o, β = cos−1
µ−3√38
¶= 119.12o y γ = cos−1
µ5√38
¶= 35.8o
Luego,
dir³−−→PQ
´=
⎛⎝ 71.07o
119.12o
35.8o
⎞⎠Un vector unitario con la misma dirección de
−−→PQ es el vector
−→u =−−→PQ°°°−−→PQ°°° = 1√
38(2−→i − 3−→j + 5−→k ) =
µ2√38
¶−→i −
µ3√38
¶−→j +
µ5√38
¶−→k ¥
Ejemplo 9.6
Si
⎛⎝ αβγ
⎞⎠ es la dirección de un vector −→u y se sabe que cosα =1√14
, cosβ = − 2√14
y
900 < γ < 1800,a) Halle los ángulos α, β y γ.b) Halle un vector unitario con la misma dirección de −→u .c) Sabiendo que k−→u k = 3, halle la descomposición canónica de −→u .

9.3. Descomposición canónica para vectores geométricos 285
Solución:a) Como cos2α+cos2β+cos2γ = 1 y como cosα =
1√14
y cosβ = − 2√14tenemos que
cos2γ = 1− cos2α− cos2β = 1− 1
14− 4
14=9
14
de donde
cosγ = ± 3√14
Ahora, puesto que 900 < γ < 1800entonces cosγ < 0 y así cosγ = − 3√14.
Por tanto, los ángulos directores del vector −→u son
α = cos−1µ
1√14
¶= 74.5o, β = cos−1
µ− 2√
14
¶= 122.31o, γ = cos−1
µ− 3√
14
¶= 143.3o.
b) Un vector unitario con la misma dirección de −→u es
−→v = (cosα)−→i + (cosβ)
−→j + (cosγ)
−→k
= 1√14
−→i − 2√
14
−→j − 3√
14
−→k
c) La descomposición canónica de −→u es
−→u = ||−→u ||³(cosα)
−→i + (cosβ)
−→j + (cosγ)
−→k´
= 3
µ1√14
−→i − 2√
14
−→j − 3√
14
−→k
¶=
3√14
−→i − 6√
14
−→j − 9√
14
−→k ¥
Las operaciones suma de vectores y multiplicación de un escalar por un vector son muyfáciles de realizar cuando los vectores están expresados como combinación lineal de losvectores
−→i ,−→j y−→k . En efecto:
Si −→u = a−→i + b
−→j + c
−→k y −→v = a0
−→i + b0
−→j + c0
−→k entonces
• −→u +−→v = (a+ a0)−→i + (b+ b0)
−→j + (c+ c0)
−→k
• r−→u = (ra)−→i + (rb)−→j + (rc)−→k , r ∈ R
Ejemplo 9.7Sean −→u = −→i − 2−→j + 3−→k y −→v = −−→i + 3−→j − 7−→k . Entonces:
−→u +−→v = (1 + (−1))−→i + ((−2) + 3)−→j + (3 + (−7))−→k= 0
−→i + 1
−→j − 4−→k
=−→j − 4−→k

286 9. Vectores en el espacio
−−→u = (−1) (1)−→i + (−1) (−2)−→j + (−1) (3)−→k= −−→i + 2−→j − 3−→k
2−→u = (2) (1)−→i + (2) (−2)−→j + (2) (3)−→k
= 2−→i − 4−→j + 6−→k
5−→v = (5) (−1)−→i + (5) (3)−→j + (5) (−7)−→k= −5−→i + 15−→j − 35−→k
2−→u + 5−→v =³2−→i − 4−→j + 6−→k
´+³−5−→i + 15−→j − 35−→k
´= (2− 5)−→i + (−4 + 15)−→j + (6− 35)−→k= −3−→i + 11−→j − 29−→k ¥
En el plano vimos que si −→u = a−→i +b
−→j y −→v = c
−→i +d
−→j entonces el producto escalar
de −→u y −→v es −→u ·−→v = ac+ bd. De igual forma, en el espacio se tiene que
Si −→u = a−→i + b
−→j + c
−→k y −→v = a0
−→i + b0
−→j + c0
−→k entonces
el producto escalar de −→u y −→v es−→u ·−→v = aa0 + bb0 + cc0
(9.11)
El producto escalar de vectores en el espacio goza de las mismas propiedades que éltiene para vectores en el plano. Empleando (9.11) se hace fácil probar aquellas propiedadesque no se deducen de manera inmediata de la definición de dicho producto.
En términos del producto escalar podemos expresar el coseno del ángulo entre dosvectores, la proyección de un vector sobre otro y, por supuesto, la componente escalar deun vector en la dirección de otro vector. Las fórmulas son exactamente las mismas quepara el plano.
Ejemplo 9.8Sean −→u = −→i +−→j +−→k y −→v = −→i −−→j +−→k .
a) Halle −→u ·−→vb) Halle el ángulo α entre −→u y −→vc) Halle la componente escalar de −→v en la dirección de −→u .d) Halle Proy−→u
−→v
Solución:a) −→u ·−→v = (1) (1) + (1) (−1) + (1) (1) = 1b) k−→u k =
√12 + 12 + 12 =
√3, k−→v k =
q12 + (−1)2 + 12 =
√3
cosα =−→u ·−→vk−→u k k−→v k =
1√3√3=1
3
Luego,
α = cos−1µ1
3
¶≈ 1.23 rad (ó α ≈ 78.37o)

9.3. Descomposición canónica para vectores geométricos 287
c) La componente escalar de −→v en la dirección de −→u es
−→u ·−→vk−→u k =
1√3
d)
Proy−→u−→v = 1√
3
−→uk−→u k =
1
3−→u = 1
3
³−→i +−→j +−→k´
¥
Ejemplo 9.9¿Para cuáles valores de t los vectores −→u = t
−→i − −→j + −→k y −→v = t
−→i + t
−→j − 2−→k son
perpendiculares?
Solución:Sabemos que −→u y −→v son perpendiculares si y sólo si −→u ·−→v = 0. Ahora, como
−→u ·−→v = t2 − t− 2 = (t− 2) (t+ 1)
entonces −→u y −→v son perpendiculares si y sólo si (t− 2) (t+ 1) = 0. Así, −→u y −→v sonperpendiculares solamente para t = 2 y para t = −1. ¥
Ejemplo 9.10Muestre que el triángulo cuyos vértices son los puntos
A =
⎛⎝ −13−1
⎞⎠, B =
⎛⎝ √31
−√3
⎞⎠ y C =
⎛⎝ 010
⎞⎠es un triángulo isósceles y rectángulo.
Solución:Como−−→AB =
¡√3 + 1
¢−→i − 2−→j −
¡1−√3¢−→k
−→AC =
−→i − 2−→j +−→k
−−→BC = −
√3−→i +√3−→k
entonces, las longitudes de los lados AB, AC y BC están dadas respectivamente por°°°−−→AB°°° =
q¡√3 + 1
¢2+ (−2)2 +
¡1−√3¢2=√12°°°−→AC°°° =
q12 + (−2)2 + 12 =
√6°°°−−→BC°°° =
q¡−√3¢2+¡√3¢2=√6
Como los lados AC y BC tienen igual longitud entonces el triángulo ABC es isósceles. Porotra parte, el triángulo ABC es rectángulo pues los lados AC y BC son perpendicularesya que
−→AC ·−−→BC = (1)
³−√3´+ (−2) (0) + (1)
³√3´= 0 ¥

288 9. Vectores en el espacio
9.4 Producto cruz o producto vectorial
Como una introducción al producto cruz de dos vectores nos referiremos al concepto demomento de torsión o torque debido a una fuerza.
Podemos hacer avanzar un tornillo o perno de rosca derecha (en un medio, como madera,por ejemplo) aplicando una fuerza
−→F a una llave, como se ilustra en la figura 9.15a.
Figura 9.15.
El efecto producido por la fuerza−→F se llama momento de torsión o torque de
−→F y
se expresa mediante un vector que se denota −→τ .La magnitud de dicho vector −→τ depende de dos elementos:• De la distancia de la cabeza del tornillo al punto donde se aplica la fuerza. En la
figura esa distancia es k−→r k.• De la magnitud de la componente vectorial de −→F en la dirección perpendicular a −→r .
Esa componente es la única que produce el efecto de rotación. En la figura 9.15b, dichacomponente es
−→F1 y su magnitud es
°°°−→F °°°senθ, donde θ es el ángulo entre −→r y −→F .Se define la magnitud del vector −→τ como
k−→τ k = k−→r k°°°−→F °°° senθ
La dirección del vector −→τ es la mostrada en la figura 9.15a, la cual es la dirección enla cual avanza el tornillo.
El vector −→τ , cuya magnitud y dirección ya han sido definidas, se denota
−→τ = −→r ×−→F
y se dice que es el producto cruz de los vectores −→r y−→F . Vectores con las características
de vector −→τ , obtenidos a partir de dos vectores dados, surgen con frecuencia en diversasáreas de la Física y de la Ingeniería.
A continuación definiremos el producto cruz −→u ×−→v de dos vectores cualesquiera −→u ,−→v del espacio:
a) Si −→u = −→0 o −→v = −→0 , −→u ×−→v = −→0b) Si −→u 6= −→0 y −→v 6= −→0 , −→u ×−→v es aquel vector tal que:i) Su magnitud es
k−→u ×−→v k = k−→u k k−→v k senθdonde θ es el ángulo entre −→u y −→v

9.4. Producto cruz o producto vectorial 289
ii) −→u ×−→v es perpendicular tanto a −→u como a −→v y apunta en la dirección en queavanza un tornillo de rosca derecha cuando gira de −→u hacia −→v siguiendo el ángulo θ. Otraregla, a menudo más convenientemente, para indicar hacia donde apunta −→u × −→v es laRegla de la mano derecha, según la cual −→u × −→v apunta hacia donde apunta el dedopulgar de la mano derecha, cuando los otros dedos se curvan de −→u hacia −→v , siguiendo elángulo θ entre −→u y −→v , como se ilustra en la figura 9.16.
Figura 9.16.
Dado que el producto cruz −→u ×−→v es un vector, a este producto también se le conocecomo producto vectorial.
Una consecuencia inmediata de la definición del producto vectorial −→u × −→v es la si-guiente:
−→u ×−→v =−→0 si y sólo si −→u y −→v son paralelos
En particular−→u ×−→u = −→0
Ejemplo 9.11
• Hallemos−→i ×−→j : Según la definición dada,
−→i ×−→j =
³°°°−→i °°°°°°−→j °°° senπ2
´−→k
Y como°°°−→i °°° = 1, °°°−→j °°° = 1 y sen
π
2= 1 entonces
−→i ×−→j = −→k
• De manera similar,
−→j ×−→i =
³°°°−→j °°°°°°−→i °°° senπ2
´³−−→k
´= −−→k
• En general, para los vectores−→i ,−→j y−→k se tiene que:
−→i ×−→i =
−→0
−→j ×−→j =
−→0
−→k ×−→k =
−→0
−→i ×−→j =
−→k
−→j ×−→k =
−→i
−→k ×−→i =
−→j
−→j ×−→i = −−→k −→
k ×−→j = −−→i −→i ×−→k = −−→j

290 9. Vectores en el espacio
Estas relaciones pueden recordarse a partir del siguiente diagrama
j
k
i
El producto de cualquiera de los vectores−→i ,−→j ,−→k por sí mismo es
−→0 y el de dos consecu-
tivos en el orden indicado por las flechas es el vector siguiente, mientras que el producto dedos consecutivos en el orden contrario al de las flechas, es el opuesto del vector siguienteen dicho orden. ¥
El producto cruz no es conmutativo; por ejemplo,−→i ×−→j 6= −→j ×−→i
El producto cruz tampoco es asociativo; por ejemplo³−→i ×−→i
´×−→j 6= −→i ×
³−→i ×−→j
´ya que ³−→
i ×−→i´×−→j = −→0 ×−→j = −→0
mientras que−→i ×
³−→i ×−→j
´=−→i ×−→k = −−→j
Sin embargo, el producto cruz tiene las siguientes propiedades algebraicas, válidas cua-lesquiera sean los vectores −→u , −→v , −→z del espacio y cualquiera sea el escalar r.
1. −→v ×−→u = − (−→u ×−→v )2. (r−→u )×−→v = r (−→u ×−→v ) = −→u × (r−→v )3. −→u × (−→v +−→z ) = (−→u ×−→v ) + (−→u ×−→z )4. (−→u +−→v )×−→z = (−→u ×−→z ) + (−→v ×−→z )
La propiedad 1. se sigue, de forma inmediata, de la definición de producto cruz; el signomenos lo explica la regla de la mano derecha. (Figura 9.17).
u
v
u v
uv u v
Figura 9.17.

9.4. Producto cruz o producto vectorial 291
La propiedad 2. se puede probar mostrando que los tres vectores (r−→u )×−→v , r (−→u ×−→v )y −→u × (r−→v ) tienen la misma magnitud y la misma dirección. La prueba de 3. es máslaboriosa y no se dará en este texto. En cuanto a la propiedad 4., ella se puede probar apartir de las propiedades 1. y 3.
Veamos ahora que si
−→u = a1−→i + a2
−→j + a3
−→k y −→v = b1
−→i + b2
−→j + b3
−→k
entonces
−→u ×−→v = (a2b3 − a3b2)−→i + (a3b1 − a1b3)
−→j + (a1b2 − a2b1)
−→k (9.12)
En efecto,
−→u ×−→v =³a1−→i + a2
−→j + a3
−→k´×³b1−→i + b2
−→j + b3
−→k´
Utilizando las propiedades 2, 3 y 4 del producto cruz antes mencionadas, tenemos que:−→u ×−→v = (a1b1)
−→i ×−→i + (a1b2)
−→i ×−→j + (a1b3)
−→i ×−→k
+ (a2b1)−→j ×−→i + (a2b2)
−→j ×−→j + (a2b3)
−→j ×−→k
+ (a3b1)−→k ×−→i + (a3b2)
−→k ×−→j + (a3b3)
−→k ×−→k
Ahora usamos los resultados del ejemplo 9.11, con lo cual se tiene que
−→u ×−→v = (a1b2)−→k + (a1b3)
³−−→j
´+ (a2b1)
³−−→k
´+ (a2b3)
−→i + (a3b1)
−→j + (a3b2)
³−−→i
´de donde
−→u ×−→v = (a2b3 − a3b2)−→i + (a3b1 − a1b3)
−→j + (a1b2 − a2b1)
−→k ¨
Antes de usar la fórmula (9.12), expresaremos su lado derecho en una forma más fácilde recordar; ello se hará recurriendo a la notación de determinantes.
Ya sabemos que un determinante de orden 2, es decir, de una matriz de orden 2, sedefine mediante la igualdad ¯
a bc d
¯= ad− bc
Nosotros necesitamos ahora los determinantes de orden 3, los cuales se pueden definiren términos de determinantes de orden 2, como se indica a continuación:¯
¯c1 c2 c3a1 a2 a3b1 b2 b3
¯¯ = c1
¯a2 a3b2 b3
¯− c2
¯a1 a3b1 b3
¯+ c3
¯a1 a2b1 b2
¯(9.13)
La expresión del lado derecho en (9.13) se conoce como el desarrollo del determinante dellado izquierdo por los elementos de la primera fila. Obsérvese que en dicho lado derecho,c1 se multiplica por el determinante de orden 2 que se obtiene del miembro izquierdoluego de borrar la fila y la columna que contienen a c1; del mismo modo se obtienen losdeterminantes que multiplican a c2 y a c3. Note, además, el signo “ − ” en el segundotérmino.
Volvamos ahora a la expresión (9.12), la cual escribimos en la forma
−→u ×−→v = (a2b3 − a3b2)−→i − (a1b3 − a3b1)
−→j + (a1b2 − a2b1)
−→k (9.14)

292 9. Vectores en el espacio
Obsérvese que los coeficientes de−→i ,−→j y−→k en (9.14) se pueden escribir como deter-
minantes de orden 2. En efecto,
−→u ×−→v =¯a2 a3b2 b3
¯−→i −
¯a1 a3b1 b3
¯−→j +
¯a1 a2b1 b2
¯−→k
Ahora note la semejanza entre el lado derecho de esta igualdad y el lado derecho de(9.13). Pues bien, en vista de dicha semejanza se escribe, como una ayuda para recordarcon mayor facilidad la expresión (9.14), −→u ×−→v como un determinante de orden 3 así:
−→u ×−→v =
¯¯−→i−→j−→k
a1 a2 a3b1 b2 b3
¯¯
Tenemos así que:
Si −→u = a1−→i + a2
−→j + a3
−→k y −→v = b1
−→i + b2
−→j + b3
−→k entonces
−→u ×−→v =
¯¯−→i−→j−→k
a1 a2 a3b1 b2 b3
¯¯ = ¯a2 a3
b2 b3
¯−→i −
¯a1 a3b1 b3
¯−→j +
¯a1 a2b1 b2
¯−→k
(9.15)
Ejemplo 9.12Si −→u = 2−→i +−→j − 3−→k y −→v = −→i −−→j + 4−→k
−→u ×−→v =
¯¯−→i−→j−→k
2 1 −31 −1 4
¯¯
=
¯1 −3−1 4
¯−→i −
¯2 −31 4
¯−→j +
¯2 11 −1
¯−→k
= (4− 3)−→i − (8 + 3)−→j + (−2− 1)−→k=−→i − 11−→j − 3−→k
Verifiquemos que el vector −→u ×−→v es perpendicular a −→u y a −→v :−→u · (−→u ×−→v ) = (2) (1) + (1) (−11) + (−3) (−3) = 0 y−→v · (−→u ×−→v ) = (1) (1) + (−1) (−11) + (4) (−3) = 0 ¥
La magnitud de −→u ×−→v tiene una interesante interpretación geométrica: Si los vectores−→u y −→v no son paralelos, cuando se dibujan con el mismo punto inicial ellos determinanun paralelogramo como se ilustra en la figura 9.18.
h sen
u
v
v
Figura 9.18.
Pues bien, el área de dicho paralelogramo es
A = k−→u kh = k−→u k k−→v k senθ = k−→u ×−→v k

9.4. Producto cruz o producto vectorial 293
De manera que:
El área A del paralelogramo determinado por dos vectores no paralelos −→u y −→ves
A = k−→u ×−→v k .
Ejemplo 9.13Considere los puntos
P =
⎛⎝ 1−13
⎞⎠ , Q =
⎛⎝ −201
⎞⎠ y R =
⎛⎝ 42−3
⎞⎠a) Muestre que P, Q y R no son colinealesb) Calcule es área del triángulo PQR.
Solución:Empecemos calculando el vector
−−→PQ×−→PR :
−−→PQ = (−2− 1)−→i + (0− (−1))−→j + (1− 3)−→k = −3−→i +−→j − 2−→k−→PR = (4− 1)−→i + (2− (−1))−→j + (−3− 3)−→k = 3−→i + 3−→j − 6−→k
entonces
−−→PQ×−→PR =
¯¯−→i−→j−→k
−3 1 −23 3 −6
¯¯
=
¯1 −23 −6
¯−→i −
¯−3 −23 −6
¯−→j +
¯−3 13 3
¯−→k
= 0−→i − 24−→j − 12−→k
= −24−→j − 12−→k = −12³2−→j +−→k´
a) Como−−→PQ ×−→PR 6= −→0 entonces −−→PQ y
−→PR no son paralelos y en consecuencia P,Q y
R no son colineales.b) Si P es el paralelogramo determinado por los vectores
−−→PQ y
−→PR entonces el área A
del triángulo PQR es la mitad del área de P. Así,
A = 1
2(Area de P) = 1
2
°°°−−→PQ×−→PR°°° = 12
2
p22 + 12 = 6
√5 (unidades cuadradas) ¥
Los productos escalar y vectorial pueden combinarse para formar un producto del tipo
−→u · (−→v ×−→z ) (9.16)
el cual se llama producto mixto de los vectores −→u , −→v y −→z . Como el resultado es unescalar, dicho producto también se llama triple producto escalar de −→u , −→v y −→z .
Si −→u = a1−→i +a2
−→j +a3
−→k , −→v = b1
−→i +b2
−→j +b3
−→k y −→z = c1
−→i +c2
−→j +c3
−→k
entonces

294 9. Vectores en el espacio
−→u · (−→v ×−→z ) =³a1−→i + a2
−→j + a3
−→k´·µ¯b2 b3c2 c3
¯−→i −
¯b1 b3c1 c3
¯−→j +
¯b1 b2c1 c2
¯−→k
¶= a1
¯b2 b3c2 c3
¯− a2
¯b1 b3c1 c3
¯+ a3
¯b1 b2c1 c2
¯=
¯¯a1 a2 a3b1 b2 b3c1 c2 c3
¯¯
El producto mixto (9.16) tiene una interesante aplicación geométrica. Veamos de quése trata:
Supongamos que ninguno de los vectores −→u , −→v , −→z es combinación lineal de los otrosdos y consideremos el paralelepípedo determinado por ellos, como se ilustra en la figura9.19
Figura 9.19.
El área de su base, como sabemos, es k−→v ×−→z k y su altura es
h = k−→u k |cosθ|
donde θ es el ángulo entre −→u y −→v ×−→z . (En la expresión anterior para la altura h se necesitael valor absoluto que allí aparece, pues puede ocurrir que
π
2< θ < π)
Así, el volumen de dicho paralelepípedo es
V = k−→v ×−→z k k−→u k |cosθ| = |−→u · (−→v ×−→z )|
Nótese que se puede extender el alcance de la fórmula anterior de manera que incluyael caso −→u combinación lineal de −→v y −→z , si admitimos que en tal caso los vectores −→u , −→v ,−→z determinan un paralelepípedo de volumen cero. En forma similar, podemos extenderel alcance de la fórmula en consideración de manera que incluya los casos −→v combinaciónlineal de −→u y −→z , y −→z combinación lineal de −→u y −→v .
El producto mixto tiene, entre otras, la siguiente propiedad
−→u · (−→v ×−→z ) = −→v · (−→z ×−→u ) = −→z · (−→u ×−→v )
cuya prueba dejamos al lector.Como resumen de lo relativo al producto mixto tenemos:

9.4. Producto cruz o producto vectorial 295
Sean −→u , −→v , −→z vectores geométricos cualesquiera del espacio.• Si −→u = a1
−→i + a2
−→j + a3
−→k , −→v = b1
−→i + b2
−→j + b3
−→k y
−→z = c1−→i + c2
−→j + c3
−→k entonces
−→u · (−→v ×−→z ) =
¯¯a1 a2 a3b1 b2 b3c1 c2 c3
¯¯
• El volumen del paralelepípedo determinado por −→u , −→v y −→z esV = |−→u · (−→v ×−→z )|
• −→u · (−→v ×−→z ) = 0 si y sólo los vectores −→u , −→v y −→z son L.D.• −→u · (−→v ×−→z ) = −→v · (−→z ×−→u ) = −→z · (−→u ×−→v )
Dados cuatro puntos P,Q,R y S del espacio, ellos son coplanares (están en un mismoplano) si y sólo si alguno de los vectores
−−→PQ,
−→PR o
−→PS es combinación lineal de los otros
dos, es decir, si y sólo si dichos vectores son L.D. Por tanto se tiene que
Cuatro puntos P,Q,R y S del espacio son coplanaressi y sólo si
−−→PQ ·
³ −→PR×−→PS
´= 0
Ejemplo 9.14Considere los puntos
P =
⎛⎝ 111
⎞⎠, Q =
⎛⎝ 24−1
⎞⎠ , R =
⎛⎝ 356
⎞⎠ y S =
⎛⎝ −2−13
⎞⎠Muestre que los puntos dados no son coplanares y calcule el volumen del paralelepípedo
P determinado por los vectores −−→PQ, −→PR y−→PS.
Solución:Calculemos el producto mixto
−−→PQ ·
³−→PR×−→PS
´:
−−→PQ =
−→i + 3
−→j − 2−→k , −→
PR = 2−→i + 4
−→j + 5
−→k y
−→PS = −3−→i − 2−→j + 2−→k
−−→PQ ·
³−→PR×−→PS
´=
¯¯ 1 3 −22 4 5−3 −2 2
¯¯
= 1
¯4 5−2 2
¯− 3
¯2 5−3 2
¯− 2
¯2 4−3 −2
¯= (8 + 10)− 3 (4 + 15)− 2 (−4 + 12)= 18− 57− 16= −55

296 9. Vectores en el espacio
Como−−→PQ ·
³−→PR×−→PS
´6= 0 entonces los puntos P,Q,R y S no son coplanares y el
volumen V del paralelepípedo P está dado por
V =¯−−→OP ·
³−−→OQ×−−→OR
´¯= |−55| = 55 ¥
Se denomina triple producto vectorial de los vectores −→u , −→v y −→z al vector −→u ×(−→v ×−→z ).
Se deja como ejercicio al lector probar que
−→u × (−→v ×−→z ) = (−→u ·−→z )−→v − (−→u ·−→v )−→z (9.17)
Esta igualdad (9.17) no sólo proporciona una manera rápida de calcular el vector −→u ×(−→v ×−→z ), sino que nos muestra que este vector es combinación lineal de los vectores −→v y−→z .Ejemplo 9.15Exprese el vector −→u × (−→v ×−→z ) como combinación lineal de los vectores −→i , −→j , −→k donde−→u = 2−→i + 3−→j , −→v = −→i −−→j + 2−→k y −→z = 3−→j − 5−→k
Solución:Emplearemos la igualdad (9.17) para calcular el vector −→u × (−→v ×−→z ):
−→u ·−→z = (2) (0) + (3) (3) + (0) (−5) = 9−→u ·−→v = (2) (1) + (3) (−1) + (0) (2) = −1
−→u × (−→v ×−→z ) = (−→u ·−→z )−→v − (−→u ·−→v )−→z= 9−→v − (−1)−→z= 9
³−→i −−→j + 2−→k
´+³3−→j − 5−→k
´= 9
−→i − 6−→j + 13−→k ¥
9.5 Vectores coordenados o algebraicos
En el capítulo 2 se mostró cómo se dota el conjunto R2 de operaciones (suma, productopor escalar, producto escalar) y de conceptos definidos para vectores geométricos del plano.En idéntica forma R3 se dota de operaciones (suma, producto por escalar, producto es-calar, producto vectorial) y de conceptos definidos para vectores geométricos del espacio.Iniciamos con la suma y producto por escalar.
• Dados X =
⎛⎝ x1x2x3
⎞⎠, Y =
⎛⎝ y1y2y3
⎞⎠ en R3 y r ∈ R, se define la suma X + Y y el
producto rX como
X + Y =
⎛⎝ x1 + y1x2 + y2x3 + y3
⎞⎠ y rX =
⎛⎝ rx1rx2rx3
⎞⎠Debe tenerse presente que la suma y el producto por escalar definidas en R3 corres-
ponden a la suma y el producto por escalar para vectores geométricos del espacio, en elsiguiente sentido:
Cualesquiera sean X, Y , Z en R3 y r, s en R,

9.5. Vectores coordenados o algebraicos 297
rX + sY = Z ⇔ r−−→OX + s
−−→OY =
−→OZ
Los elementos de R3 (a los que nos veníamos refiriendo como “puntos”), también sedenominarán en adelante vectores coordenados, vectores algebráicos o simplementevectores con tres componentes.
El vector
⎛⎝ 000
⎞⎠ se dice el vector nulo o vector cero de R3; se denotará (como en
R2) por la letra O. Dicho vector es tal que, para cualquier X de R3,
X +O = X
DadoX =
⎛⎝ x1x2x3
⎞⎠ en R3, el vector −X =
⎛⎝ −x1−x2−x3
⎞⎠ , también en R3, se llama inverso
aditivo del vector X. Este vector es tal que:
X + (−X) = O y −X = (−1)X.
Dados X y Y en R3, la diferencia Y −X se define como el vector Y + (−X). Así, si
X =
⎛⎝ x1x2x3
⎞⎠ y Y =
⎛⎝ y1y2y3
⎞⎠ entonces
Y −X =
⎛⎝ y1 − x1y2 − x2y3 − x3
⎞⎠ .
Se tiene, al igual que en el plano, que
−−→XY =
−−→OR ⇔ R = Y −X (9.18)
lo cual se ilustra en la figura 9.20
Figura 9.20.

298 9. Vectores en el espacio
Es claro que de (9.18) se sigue que, cualesquiera sean X,Y,Z y W en R3,
−−→XY =
−−→ZW ⇔ Y −X =W − Z (9.19)
Ejemplo 9.16
Sean X =
⎛⎝ −541
⎞⎠, Y =
⎛⎝ 2−30
⎞⎠ Z =
⎛⎝ 1−11
⎞⎠a) Calcule el vector 2X + 3Y − 1
2Z
b) Halle el punto R tal que−−→XY =
−−→OR
c) Halle el punto medio del segmento XY
Solución:
a) 2X + 3Y − 12Z = 2
⎛⎝ −541
⎞⎠+ 3⎛⎝ 2−30
⎞⎠− 12
⎛⎝ 1−11
⎞⎠=
⎛⎝ −1082
⎞⎠+⎛⎝ 6−90
⎞⎠+⎛⎝ −1/21/2−1/2
⎞⎠=
⎛⎝ −10 + 6 + 1/28− 9 + 1/22 + 0− 1/2
⎞⎠ =
⎛⎝ −9/2−1/23/2
⎞⎠b) El punto R tal que
−−→XY =
−−→OR es
R = Y −X =
⎛⎝ 2−30
⎞⎠−⎛⎝ −54
1
⎞⎠ =
⎛⎝ 7−7−7
⎞⎠ .
c) Como en el plano, el punto medio M de un segmento AB con A y B en R3, estádado por
M =1
2(A+B)
Por tanto, el punto medio del segmento XY es el punto
M =1
2(X + Y ) =
1
2
⎛⎝⎛⎝ −541
⎞⎠+⎛⎝ 2−30
⎞⎠⎞⎠=
1
2
⎛⎝ −5 + 24− 31 + 0
⎞⎠ =1
2
⎛⎝ −311
⎞⎠ =
⎛⎝ −3/21/21/2
⎞⎠ ¥

9.5. Vectores coordenados o algebraicos 299
Ejemplo 9.17Muestre que los puntos
P =
⎛⎝ 132
⎞⎠, Q =
⎛⎝ 062
⎞⎠, R =
⎛⎝ 235
⎞⎠ y S =
⎛⎝ 165
⎞⎠son los vértices de un paralelogramo.
Solución:
En la figura 9.21 se muestra el cuadrilátero cuyos vértices son los puntos P , Q, R y Sdados
Figura 9.21.
Para mostrar que dicho cuadrilátero es un paralelogramo basta ver que−−→PQ =
−→RS, es
decir, que Q− P = S −R.
Q− P =
⎛⎝ 062
⎞⎠−⎛⎝ 132
⎞⎠ =
⎛⎝ −130
⎞⎠, S −R =
⎛⎝ 165
⎞⎠−⎛⎝ 235
⎞⎠ =
⎛⎝ −130
⎞⎠En efecto, se da que Q− P = S −R. ¥
Al igual que en R2, las operaciones definidas en R3 tienen las siguientes propiedadesbásicas. En ellas X, Y , Z son vectores cualesquiera de R3 y r, s son escalares cualesquiera.

300 9. Vectores en el espacio
1. X + Y ∈ R2. X + Y = Y +X3. (X + Y ) + Z = X + (Y + Z)4. X +O = X5. X + (−X) = O6. rX ∈ R37. 1X = X8. r(sX) = (rs)X9. r(X + Y ) = rX + rY10. (r + s)X = rX + sX
• La magnitud del vector X =
⎛⎝ x1x2x3
⎞⎠ de R3, denotada kXk, se define como la
magnitud del vector−−→OX. Así,
kXk =qx21 + x22 + x23
La magnitud en R3 tiene las siguientes propiedades, las cuales son exactamente lasmismas que listamos para la magnitud en R2:
Si X, Y son vectores de R3 y r ∈ R,
1. kXk ≥ 0
2. kXk = 0 si y sólo si X =
⎛⎝ 000
⎞⎠3. krXk = |r| kXk4. kX + Y k ≤ kXk+ kY k (Desigualdad triangular).
La distancia entre dos puntos X, Y de R3 se define como el número kX − Y k .• Sea X ∈ R3, X 6= O. Llamaremos ángulos directores y cosenos directores de Xa los ángulos directores y cosenos directores, respectivamente, del vector geométrico
−−→OX.
También llamaremos dirección de X, que denotaremos dir (X), a la dirección de−−→OX.
Los conceptos misma dirección, dirección opuesta y paralelismo entre vectoresde R3 se definen de igual forma que en R2. Se tiene, entre otros resultados, lo siguiente:
Para todo par de vectores X, Y de R3,
X y Y son paralelos si y sólo si X es múltiplo escalar de Yo Y es múltiplo escalar de X.

9.5. Vectores coordenados o algebraicos 301
Ejemplo 9.18
Sean X =
⎛⎝ −264
⎞⎠ y Y =
⎛⎝ 0−315
⎞⎠a) Calcule la magnitud del vector 2X − 1
3Yb) Calcule la distancia entre X y Y
Solución:a) Como
2X − 13Y = 2
⎛⎝ −264
⎞⎠− 13
⎛⎝ 0−315
⎞⎠ =
⎛⎝ −4− 012 + 18− 5
⎞⎠ =
⎛⎝ −4133
⎞⎠entonces la longitud del vector 2X − 1
3Y es°°°°2X − 13Y°°°° =p(−4)2 + (13)2 + 32 = √16 + 169 + 9 = √194
b) La distancia entre X y Y está dada por
kX − Y k =p(−2− 0)2 + (6− (−3))2 + (4− 15)2 =
√4 + 81 + 121 =
√206 ¥
Ejemplo 9.19
Sean X =
⎛⎝ −8−3/45/4
⎞⎠, Y =
⎛⎝ 323−5
⎞⎠ y Z =
⎛⎝ 2−14
⎞⎠a) ¿Son los vectores X y Y paralelos? ¿Son los vectores X y Z paralelos?b) Halle un vector unitario con dirección opuesta a la del vector X − Z.c) Halle un vector de magnitud 5/4 y que tenga la misma dirección del vector Z.
Solución:
a) Como Y =
⎛⎝ 323−5
⎞⎠ = −4
⎛⎝ −8−3/45/4
⎞⎠ = −4X
entonces Y es múltiplo escalar de X y así X y Y son paralelos.Veamos ahora si X es múltiplo escalar de Z o Z es múltiplo escalar de X .X es múltiplo escalar de Z si y sólo si existe r ∈ R·tal que X = rZ, es decir,⎛⎝ −8
−3/45/4
⎞⎠ = r
⎛⎝ 2−14
⎞⎠o equivalentemente,
−8 = 2r, − 34= −r y
5
4= 4r.
Es claro que no existe r ∈ R que satisfaga simultáneamente las tres condiciones anteriores;por tanto, X no es múltiplo escalar de Z.
En forma análoga se muestra que Z tampoco es múltiplo escalar de X. Luego, X y Zno son paralelos.

302 9. Vectores en el espacio
b) Un vector unitario con dirección opuesta a la del vector X − Z es
U = − 1
kX − Zk (X − Z)
Como X − Z =
⎛⎝ −101/4−11/4
⎞⎠ entonces
kX − Zk =
s(−10)2 +
µ1
4
¶2+
µ−114
¶2=
r100 +
1
16+121
16=
√1722
4
y así,
U = − 4√1722
⎛⎝ −101/4−11/4
⎞⎠ =1√1722
⎛⎝ 40−111
⎞⎠c) Un vector de magnitud 5/4 y con la misma dirección de Z es V =
5
4
Z
kZk .
Como kZk =q22 + (−1)2 + 42 =
√21 entonces
V =5
4
Z
kZk =5
4√21
⎛⎝ 2−14
⎞⎠ ¥
Ejemplo 9.20Compruebe que el paralelogramo PQSR del ejemplo 9.17 es un rombo.
Solución:Basta ver que
°°°−−→PQ°°° = °°°−→PR°°°, o también que kQ− Pk = kR− Pk. Veámoslo:
Como Q− P =
⎛⎝ −130
⎞⎠ y R− P =
⎛⎝ 103
⎞⎠ entonces
kQ− Pk =q(−1)2 + 33 + 02 =
√10 y kR− Pk =
p12 + 02 + 32 =
√10 ¥
• Los conceptos de combinación lineal y de dependencia e independencia lineal para dosvectores de R3 se definen de la misma forma que para dos vectores de R2. A continuaciónextenderemos estos conceptos a tres vectores de R3.
Sean X,Y y Z vectores de R3. Estos vectores se dicen linealmente dependientes(L.D.) si alguno de ellos es combinación lineal de los otros dos; si esto no sucede losvectores se dicen linealmente independientes (L.I.). Por otra parte, todo vector de laforma
aX + bY + cZ
con a, b, c escalares, se dice una combinación lineal de X,Y y Z.
Para vectores geométricos del espacio vimos que si −→u , −→v y −→z son vectores L.I. entoncestodo vector −→w del espacio es expresable de manera única como combinación lineal de −→u , −→vy −→z . Es claro que a partir de este hecho se deduce en forma inmediata que:

9.5. Vectores coordenados o algebraicos 303
Si X, Y y Z son vectores L.I. de R3 entonces todo vector W de R3es expresable de manera única como C.L. de X, Y y Z.
En el capítulo 10 se dará una prueba de este resultado sin recurrir a vectores geométri-cos.
• Los vectores E1 =
⎛⎝ 100
⎞⎠, E2 =
⎛⎝ 010
⎞⎠ y E3 =
⎛⎝ 001
⎞⎠ son llamados vectores
canónicos de R3.
Cualquiera sea X =
⎛⎝ x1x2x3
⎞⎠ en R3, se tiene que
X =
⎛⎝ x100
⎞⎠+⎛⎝ 0
x20
⎞⎠+⎛⎝ 0
0x3
⎞⎠ = x1
⎛⎝ 100
⎞⎠+ x2
⎛⎝ 010
⎞⎠+ x3
⎛⎝ 001
⎞⎠es decir,
X = x1E1 + x2E2 + x3E3 (9.20)
La igualdad (9.20) se llama descomposición canónica del vector X.
Ejemplo 9.21La descomposición canónica del vector X =
⎛⎝ −123
⎞⎠ es
X = −1E1 + 2E2 + 3E3 (9.21)
(ver figura 9.22)
Figura 9.22.

304 9. Vectores en el espacio
La descomposición en (9.21) es la versión en R3 de la descomposición
−−→OX = −−→i + 2−→j + 3−→k ¥
Ejemplo 9.22
Dados X =
⎛⎝ 50−3
⎞⎠ y Y =
⎛⎝ −124
⎞⎠, halle la descomposición canónica del vector−34X + 5Y .
Solución:Puesto que
−34X + 5Y =
⎛⎝ −15/4− 50 + 109/4 + 20
⎞⎠ =
⎛⎝ −35/41069/4
⎞⎠la descomposición canónica de −34X + 5Y es −34X + 5Y = −354 E1 + 10E2 +
694 E3 ¥
• Se define el producto escalar de dos vectores X =
⎛⎝ x1x2x3
⎞⎠ y Y =
⎛⎝ y1y2y3
⎞⎠ de R3,
denotado X · Y , como el producto escalar −−→OX ·−−→OY . Así,
X · Y = −−→OX ·−−→OY
Ahora, como−−→OX = x1
−→i + x2
−→j + x3
−→k y
−−→OY = y1
−→i + y2
−→j + y3
−→k entonces−−→
OX ·−−→OY = x1y1 + x2y2 + x3y3. Por tanto,
Si X =
⎛⎝ x1x2x3
⎞⎠ y Y =
⎛⎝ y1y2y3
⎞⎠ son vectores de R3,
el producto escalar de X y Y es el escalarX · Y = x1y1 + x2y2 + x3y3
(9.22)
El producto escalar en R3 goza de las mismas propiedades que él posee en el caso deR2. Cualesquiera sean X, Y , Z en R3 y r ∈ R se tiene:
1. X · Y es un escalar2. X ·X = kXk23. X · Y = Y ·X4. (rX) · Y = r(X · Y ) = X · (rY )5. X · (Y + Z) = X · Y +X · Z y (X + Y ) · Z = X · Z + Y · Z6. |X · Y | ≤ kXk kY k (Desigualdad de Cauchy-Schwarz)

9.5. Vectores coordenados o algebraicos 305
• Si X y Y son vectores no nulos de R3, el ángulo entre X y Y se define como elángulo entre los vectores geométricos
−−→OX y
−−→OY . Al igual que en R2, si α es el ángulo entre
X y Y entonces
cosα =X · YkXk kY k
Los vectores X y Y (puede ser X = O o Y = O) se dicen ortogonales, lo cual sedenota X ⊥ Y , si los vectores
−−→OX y
−−→OY son perpendiculares. Se tiene entonces que
X ⊥ Y si y sólo si X · Y = 0
Ejemplo 9.23
Los vectores X =
⎛⎝ 4−57
⎞⎠ y Y =
⎛⎝ 111/7
⎞⎠ son ortogonales ya que
X · Y = (4) (1) + (−5) (1) + (7)µ1
7
¶= 0 ¥
• Sean X y U vectores de R3, U 6= O. La proyección de X sobre U se define y se denotacomo en el caso X y U en R2.
Figura 9.23.
Si L es la recta que pasa por el origen y por U , ProyUX es el punto P donde laperpendicular trazada desde X a la recta L, corta a esta recta, como se ilustra en la figura9.23. Al igual que para vectores de R2, se tiene que
ProyUX =
µX · UkUk
¶U
kUk =µX · UkUk2
¶U =
µX · UU · U
¶U (9.23)
Además, X descompone como
X = ProyUX + (X − ProyUX)

306 9. Vectores en el espacio
donde ProyUX es paralelo a U y X − ProyUX es ortogonal a U.
Ejemplo 9.24
Sea X =
⎛⎝ x1x2x3
⎞⎠ un vector de R3. Sabemos que
X = x1E1 + x2E2 + x3E3
Figura 9.24.
A partir de la figura 9.24, es claro que
ProyE3X = x3E3
pues x3E3 es el punto donde la perpendicular trazada desde X al eje z, corta a este eje,el cual es la recta que pasa por el origen y por E3. Ahora, si aplicamos la formula (9.23),tenemos que
ProyE3X = (X ·E3)E3 =
⎛⎝⎛⎝ x1x2x3
⎞⎠ ·⎛⎝ 001
⎞⎠⎞⎠E3 = x3E3
lo cual confirma lo apreciado en la figura.De manera similar se tiene que
ProyE1X = x1E1 y ProyE2X = x2E2
Así queX = ProyE1X + ProyE2X + ProyE3X
igualdad que es la versión en R3 de la igualdad
−→v = Proy−→i−→v + Proy−→
j−→v + Proy−→
k−→v
donde −→v es un vector geométrico cualquiera del espacio. ¥

9.5. Vectores coordenados o algebraicos 307
Ejemplo 9.25
Sea X =
⎛⎝ 234
⎞⎠ y U =
⎛⎝ 0−21
⎞⎠a) Calcule la proyección de X sobre U .b) Exprese a X como la suma de un vector paralelo a U y un vector ortogonal a U .
Solución:a) La proyección de X sobre U es el vector
ProyUX =
µX · UkUk
¶U
kUk =µX · UkUk2
¶U
Ahora, como
X · U = (2) (0) + (3) (−2) + (4) (1) = −2 y kUk2 = (0) (0) + (−2) (−2) + (1) (1) = 5
entonces
ProyUX = −25U = −2
5
⎛⎝ 0−21
⎞⎠ =
⎛⎝ 04/5−2/5
⎞⎠ (9.24)
b) Sabemos queX = ProyUX + (X − ProyUX)
donde ProyUX es paralelo a U y X − ProyUX es ortogonal a U.
Como ProyUX =
⎛⎝ 04/5−2/5
⎞⎠ y X−ProyUX =
⎛⎝ 234
⎞⎠−⎛⎝ 0
4/5−2/5
⎞⎠ =
⎛⎝ 211/522/5
⎞⎠entonces la expresión pedida para X es
X =
⎛⎝ 04/5−2/5
⎞⎠+⎛⎝ 211/522/5
⎞⎠
donde
⎛⎝ 04/5−2/5
⎞⎠ es paralelo a U y
⎛⎝ 211/522/5
⎞⎠ es ortogonal a U . Es fácil comprobar esto
último. En efecto: La igualdad (9.24) nos muestra que
⎛⎝ 04/5−2/5
⎞⎠ es paralelo a U ; por otra
parte⎛⎝ 211/522/5
⎞⎠ · U =⎛⎝ 211/522/5
⎞⎠ ·⎛⎝ 0−21
⎞⎠ = (2) (0) +
µ11
5
¶(−2) +
µ22
5
¶(1) = 0
lo cual muestra que
⎛⎝ 211/522/5
⎞⎠ es ortogonal a U . ¥

308 9. Vectores en el espacio
• Ahora trasladaremos a R3 el producto vectorial entre vectores geométricos del espacio,como lo hemos hecho con otras operaciones.
Si X y Y son vectores de R3, el producto cruz o producto vectorial de X y Y,
denotado X × Y , es el vector Z de R3 tal que−−→OX ×−−→OY =
−→OZ.
Como el lector puede comprobar,
X × Y =
¯x2 x3y2 y3
¯E1 −
¯x1 x3y1 y3
¯E2 +
¯x1 x2y1 y2
¯E3
Esta última igualdad se recuerda con mayor facilidad escribiendo su lado derecho comoun determinante, en la forma ¯
¯E1 E2 E3x1 x2 x3y1 y2 y3
¯¯
Tenemos así que:
Si X =
⎛⎝ x1x2x3
⎞⎠ y Y =
⎛⎝ y1y2y3
⎞⎠ son vectores de R3, entonces
X × Y =
¯¯E1 E2 E3x1 x2 x3y1 y2 y3
¯¯
(9.25)
El lector puede probar fácilmente cada una de las propiedades del producto cruz que seenuncian a continuación, las cuales son simplemente las versiones en R3 de las propiedadesya presentadas para el producto cruz entre vectores geométricos de espacio.
Cualesquiera sean los vectores X, Y , Z en R3 y cualquiera sea el escalar r, se tiene que:
1. X × Y es ortogonal tanto a X como a Y , es decir,X · (X × Y ) = 0 y Y · (X × Y ) = 0
2. X × Y = O si y sólo si X y Y son paralelos3. Y ×X = − (X × Y )4. (rX)× Y = r(X × Y ) = X × (rY )5. X × (Y + Z) = (X × Y ) + (X × Z)6. (X + Y )× Z = (X × Z) + (Y × Z)7. Si X 6= O y Y 6= O,
kX × Y k = kXk kY ksenθdonde θ es el ángulo entre X y Y .8. Si X y Y no son paralelos, kX × Y k es el área del paralelogramodeterminado por X y Y.
Ejemplo 9.26
E1 ×E2 =
¯¯E1 E2 E31 0 00 1 0
¯¯ = ¯0 0
1 0
¯E1 −
¯1 00 0
¯E2 +
¯1 00 1
¯E3 = E3

9.5. Vectores coordenados o algebraicos 309
Similarmente,E2 ×E3 = E1 y E3 ×E1 = E2
Estas relaciones entre los vectores E1, E2 y E3 son la versión en R3 de las relaciones−→i ×−→j = −→k , −→
j ×−→k = −→i y−→k ×−→i = −→j ¥
Ejemplo 9.27Halle dos vectores unitarios que sean ortogonales tanto al vector
X =
⎛⎝ 232
⎞⎠ como al vector Y =
⎛⎝ −213
⎞⎠Solución:
Un vector ortogonal tanto a X como a Y es el vector
X × Y =
¯¯E1 E2 E32 3 2−2 1 3
¯¯
=
¯3 21 3
¯E1 −
¯2 2−2 3
¯E2 +
¯2 3−2 1
¯E3
= 7E1 − 10E2 + 8E3 =
⎛⎝ 7−108
⎞⎠Luego, dos vectores unitarios y ortogonales a X y Y son
N =X × Y
kX × Y k =1√213
⎛⎝ 7−108
⎞⎠ y −N = − X × Y
kX × Y k = −1√213
⎛⎝ 7−108
⎞⎠ . ¥
Si X, Y , Z son vectores de R3, se llama producto mixto o triple producto escalarde X, Y y Z a
X · (Y × Z)
Para este producto se tiene, de manera completamente análoga a lo obtenido para vectoresgeométricos del espacio, lo siguiente:
Sean X, Y , Z vectores cualesquiera de R3
1. Si X =
⎛⎝ x1x2x3
⎞⎠, Y =
⎛⎝ y1y2y3
⎞⎠ y Z =
⎛⎝ z1z2z3
⎞⎠ entonces
X · (Y × Z) =
¯¯x1 x2 x3y1 y2 y3z1 z2 z3
¯¯
2. El volumen del paralelepípedo determinado por X, Y y Z esV = |X · (Y × Z)|
3. X · (Y × Z) = 0 si y sólo si los vectores X, Y , Z son L.D.4. X · (Y × Z) = Y · (Z ×X) = Z · (X × Y )

310 9. Vectores en el espacio
En el numeral 2. del resultado anterior se entiende que el paralelepípedo determinadopor los vectores X, Y y Z es el paralelepípedo determinado por los vectores geométricos−−→OX,
−−→OY y
−→OZ.
Ejemplo 9.28Para las siguientes ternas de vectores X, Y, Z determine si ellos son L.I. o L.D.
a) X =
⎛⎝ −132
⎞⎠ , Y =
⎛⎝ 25−6
⎞⎠ , Z =
⎛⎝ 3−9−6
⎞⎠b) X =
⎛⎝ −132
⎞⎠ , Y =
⎛⎝ 25−6
⎞⎠ , Z =
⎛⎝ −11028
⎞⎠c) X =
⎛⎝ −132
⎞⎠ , Y =
⎛⎝ 25−6
⎞⎠ , Z =
⎛⎝ 1−12
⎞⎠Solución:a) Es claro que Z = −3X y así Z = −3X +0Y ; luego Z es C.L. de X y Y y por tanto losvectores X, Y y Z son L.D.
b) Observe que en este caso ninguno de los vectores dados es múltiplo escalar de otro deellos, es decir, cualesquiera dos de ellos son L.I. Calculemos entonces X · (Y × Z) :
X · (Y × Z) =
¯¯ −1 3 22 5 −6−11 0 28
¯¯
= −¯5 −60 28
¯− 3
¯2 −6−11 28
¯+ 2
¯2 5−11 0
¯= −140− 3 (56− 66) + 2 (55) = 0
Como X · (Y × Z) = 0 entonces los vectores X,Y,Z son L.D.
c) Como en el literal b), cualesquiera dos de los vectores dados son L.I. Calculemos entoncesX · (Y × Z) :
X · (Y × Z) =
¯¯−1 2 13 5 −12 −6 2
¯¯
= −¯5 −1−6 2
¯− 2
¯3 −12 2
¯+
¯3 52 −6
¯= − (10− 6)− 2 (6 + 2) + (−18− 10) = −4− 16− 28= −48
Como X · (Y × Z) 6= 0 entonces X, Y, Z son L.I. ¥
9.6 Ejercicios
1. Para cada punto P dado, dibujar el vector posición−−→OP.

9.6. Ejercicios 311
a) P =
⎛⎝ 135
⎞⎠ b) P =
⎛⎝ 3−31
⎞⎠ c) P =
⎛⎝ −2−73
⎞⎠ d) P =
⎛⎝ −1−2−3
⎞⎠
2. a) Hallar el punto final del vector −→v cuyo punto inicial es P =
⎛⎝ −13−5
⎞⎠ y tiene
dirección opuesta e igual longitud que el vector −→u = 6−→i + 7−→j − 3−→k
b) Hallar el punto inicial del vector −→v cuyo punto final es Q =
⎛⎝ 30−5
⎞⎠ , su dirección
es la del vector −→u = 4−→i − 2−→j −−→k y su magnitud es cinco veces la del vector −→u .
3. Para cada vector −→v dado, hallar su magnitud y dirección, y dibujarlo.
a) −→v = 4−→k b)−→v = 2−→i − 3−→k c) −→v = −−→i + 4−→j − 6−→kd) −→v = −4−→i +−→j e)−→v = 2−→i − 3−→j − 4−→k
4. Para cada par de vectores −→u ,−→v dado, determinar si el ángulo entre ellos es agudo,obtuso o recto.
a) −→u = 6−→i +−→j + 4−→k , −→v = 2−→i − 3−→k b) −→u = −−→k , −→v = −→i +−→j +−→kc) −→u = −6−→i + 4−→k , −→v = 3−→i +−→j + 6−→k
5. a) Hallar un vector unitario −→u , tal que sus ángulos directores sean iguales y esténentre 0◦ y 90◦.
b) Hallar un vector −→v de magnitud 12 y que tenga la misma dirección que el vector−→u descrito en a)
6. a) ¿Existe un vector geométrico cuyos ángulos directores sean 30◦, 60◦ y 45◦?
b) Hallar un vector de posición −→v que sea unitario y tal que los ángulos entre −→v y lossemiejes positivos x y z sean ambos de 45◦ ¿En cuál plano coordenado está situadodicho vector −→v ?
7. Sea −→v el vector de posición en el espacio con las características descritas en cadaliteral. Hallar sus componentes y dibujarlo.
a) −→v está situado en el plano yz, k−→v k = 2 y el ángulo entre −→v y−→j es de 30◦.
b) −→v está situado en el plano xz, su magnitud es 5 y el ángulo entre −→v y−→k es de
45◦.
c) −→v es un vector unitario, forma una diagonal de un cubo y las coordenadas de supunto terminal son positivas.
8. Sobre un cuerpo O actúan dos fuerzas−→F1 y
−→F2 tales que la magnitud de
−→F1 es 30
Newtons y la de−→F2 es 50 Newtons; además, dir
³−→F1
´=
⎛⎝ 150◦
60◦
γ1
⎞⎠ con 90◦ ≤ γ1 ≤
180◦ y dir³−→F2
´=
⎛⎝ α245◦
90◦
⎞⎠ con 90◦ ≤ α2 ≤ 180◦. Hallar:

312 9. Vectores en el espacio
a) Los ángulos γ1 y α2
b) La descomposición canónica de−→F1 y de
−→F2
c) La magnitud y la dirección de la fuerza resultante que actúa sobre el cuerpo O.
9. La figura muestra una pirámide regular cuya base es cuadrada con centro en el origeny contenida en el plano xy.
a) Hallar el coseno del ángulo entre cada par de vectores dado:
i)−→CA,
−−→CO ii)
−→EA,
−−→EO iii)
−−→AD,
−→AC
b) Calcular el volumen de la pirámide.
10. Hallar los cosenos directores del vector −→u dado en la figura
11. Si −→u tiene ángulos directores α β, γ y −→v tiene ángulos directores α0, β0, γ0 expresar,en términos de estos ángulos, el coseno del ángulo θ entre −→u y−→v .
12. Mostrar que el ángulo entre los vectores −→u = −→i + 2−→j +−→k y −→v = 2−→i +−→j −−→k esel doble del ángulo entre los vectores −→w =
−→i + 4
−→j +−→k y −→z = 2−→i + 5−→j + 5−→k
13. Dados los vectores −→u = 2−→i − −→j − −→k , −→v =
−→i − −→j + 2−→k , −→w =
−→i − 2−→j + 3−→k y
−→y = 3−→i +−→j + 2−→k , hallar:a) 3−→w −−→v +−→yb) El vector −→x tal que 2−→u −−→v +−→x = −→w + 7−→x

9.6. Ejercicios 313
c) La magnitud y la dirección de 2−→v + 5−→y −−→wd) Un vector unitario con la misma dirección de −→v −−→ue) −→y ·−→w +−→u · (2−→v −−→y )f) El ángulo entre −→v y −→wg) Los cósenos directores del vector −→v − 2−→wh) Proy−→u
−→vi) La componente escalar de −→u sobre −→vj) k2−→v ×−→u kk) −→u × (−→v ×−→w ) y (−→u ×−→v )×−→wl) Dos vectores unitarios perpendiculares a los vectores −→v y −→u .m) El área del paralelogramo determinado por −→u y −→vn) Un vector no nulo −→x tal que −→u ·−→x = −→v ·−→x = 0n) El escalar a tal que −→v − a−→u es perpendicular a −→wo) Escalares a y b tales que −→z = a−→w + b−→y es un vector unitario perpendicular a −→y(hay dos soluciones)
p) Escalares a, b y c tales que −→w = a−→u + b−→v + c−→y
14. Dos lados de un triángulo OAB son los vectores−→OA = 3
−→i + 6
−→j − 2−→k y
−−→OB =
4−→i −−→j + 3−→k
a) Hallar la magnitud del tercer lado del triángulo.
b) Mostrar que el triángulo es rectángulo.
c) Hallar los ángulos agudos del triángulo.
15. Sean P =
⎛⎝ 356
⎞⎠ , Q =
⎛⎝ 127
⎞⎠ y R =
⎛⎝ 610
⎞⎠ los vértices de un triángulo.
a) Dibujar el triángulo.
b) Hallar el perímetro del triángulo.
c) Mostrar que el triángulo es un triángulo rectángulo.
d) Hallar los ángulos agudos del triángulo.
e) Calcular el área del paralelogramo determinado por−−→PQ y −2−→PR.
16. Considere una de las diagonales de un cubo y sea P uno de los extremos de esadiagonal. Hallar los ángulos con vértice P entre dicha diagonal y las aristas quetienen a P como uno de sus extremos.
17. Sean P =
⎛⎝ 2−11
⎞⎠ , Q =
⎛⎝ 514
⎞⎠ , R =
⎛⎝ 334
⎞⎠ y S =
⎛⎝ 011
⎞⎠ puntos del espacio.
a) Mostrar que los puntos P, Q, R y S son los vértices de un paralelogramo; dibujarel paralelogramo y hallar su área.
b) Hallar el punto X del segmento SQ tal que X divide al segmento SQ en laproporción 3 : 1.

314 9. Vectores en el espacio
18. Sean −→u = 2−→i −−→j + 2−→k y −→w = 3−→i + 4
−→j −−→k
a) Hallar un vector −→v tal que −→u ×−→v = −→w. ¿Hay más de una solución?
b) Hallar un vector −→v tal que −→u ×−→v = −→w y −→u ·−→v = 1. ¿Hay más de una solución?
19. Hallar escalares a y b tales que el vector −→v = −→i + a−→j + b
−→k sea perpendicular a los
vectores −→u = −−→i + 4−→j + 3−→k y −→w = 2−→i + 5
−→j +−→k
20. Sean −→u = 2−→i +−→j − 3−→k , −→v = −3−→i − 2−→j +−→k y φ el ángulo entre −→u y −→v .a) Utilizar el producto cruz para hallar el seno del ángulo φ.
b) Utilizar el producto escalar para hallar el coseno del ángulo φ.
c) Comprobar que sen2φ+ cos2 φ = 1
21. Hallar el área del triángulo con vértices P , Q y R dados en cada literal.
a) P =
⎛⎝ 7−2−3
⎞⎠ , Q =
⎛⎝ −416
⎞⎠ , R =
⎛⎝ 5−23
⎞⎠b) P =
⎛⎝ a00
⎞⎠ , Q =
⎛⎝ 0b0
⎞⎠ , R =
⎛⎝ 00c
⎞⎠, abc 6= 0
c) P =
⎛⎝ ab0
⎞⎠ , Q =
⎛⎝ a0b
⎞⎠ , R =
⎛⎝ 0ab
⎞⎠ , ab 6= 0
22. Sean −→u y −→v vectores geométricos en el espacio.
a) Probar que k−→u ×−→v k2 = k−→u k2 k−→v k2−(−→u ·−→v )2 . (Esta igualdad es conocida comoIdentidad de Lagange)
b) Probar que k−→u ×−→v k = k−→u k k−→v k si y sólo si −→u y −→v son perpendiculares.
c) Simplificar (−→u +−→v )× (−→u −−→v ) .d) Si k−→u k = 2, −→v es unitario y el ángulo entre −→u y −→v es 45◦, encontrar el escalar λtal que −→u + λ−→v sea perpendicular a −→u .
23. Considerar los vectores −→u = −→i , −→v = −→i +−→j y −→w =−→i +−→j + 3
−→k .
a) Hallar el volumen del paralelepípedo determinado por los vectores −→u , −→v y −→w.
b) Expresar cada uno de los vectores−→j y−→k como combinación lineal de −→u , −→v y −→w.
c) Expresar el vector −→z = 2−→i − 3−→j + 5−→k como combinación lineal de −→u , −→v y −→w
24. Calcular el volumen del paralelepípedo determinado por los vectores dados en cadaliteral.
a) −→u = 2−→i −−→j +−→k , −→v = 3−→i + 2−→j − 2−→k y −→w = 3−→i + 2
−→j
b)−−→OP,
−−→OQ y
−−→OR donde P =
⎛⎝ 1−10
⎞⎠ , Q =
⎛⎝ 302
⎞⎠ y R =
⎛⎝ 0−73
⎞⎠c)−−→PQ,
−→PR y
−→PS donde P =
⎛⎝ 2−34
⎞⎠ , Q =
⎛⎝ 012
⎞⎠ R =
⎛⎝ −120
⎞⎠ y S =
⎛⎝ 2−13
⎞⎠

9.6. Ejercicios 315
25. Determinar si los puntos siguientes son o no coplanares:
P =
⎛⎝ 1−12
⎞⎠ , Q =
⎛⎝ 2−13
⎞⎠ , R =
⎛⎝ 135
⎞⎠ , S =
⎛⎝ 236
⎞⎠26. Hallar todos los escalares t tales que los siguientes tres vectores no determinan un
paralelepípedo:−→i + t
−→j +−→k , t
−→i +−→j ,
−→j + t
−→k
27. Probar que−→u · (−→v ×−→w ) = −→w · (−→u ×−→v ) = −→v · (−→w ×−→u )
cualesquiera sean los vectores −→u , −→v y −→w.
28. Suponiendo que los vectores −→u , −→v , −→w y −→y satisfacen las relaciones
(−→u ×−→w ) ·−→v = 5, (−→u ×−→y ) ·−→v = 3, −→w +−→y = −→i +−→j +−→k y −→w −−→y = −→i −−→k
expresar el vector (−→u ×−→v )× (−→w ×−→y ) como combinación lineal de −→i , −→j y −→k .
29. a) Sean −→u , −→v y −→w vectores no nulos con el mismo punto inicial. Probar que elvolumen V del tetraedro determinado por ellos ( vea la figura) está dado por
V =16|−→u · (−→v ×−→w )|
b) Calcular el volumen del tetraedro determinado por los vectores−→u = 3−→i +2−→j +5−→k ,−→v = −4−→i +−→j + 6−→k y −→w = 2
−→i −−→k.
30. Sean X =
⎛⎝ 1−10
⎞⎠, Y =
⎛⎝ −345
⎞⎠ y Z =
⎛⎝ 213
⎞⎠. Hallar:a) La descomposición canónica de los siguientes vectores:
i) X + Z − Y ii) 7X − 12Y − 3Z
b) Los cosenos directores del vector−−→Y Z.
c) El punto medio del segmento XZ.
d) La distancia entre X y Y .
e) El punto sobre el segmento XY cuya distancia a X es 3/4 de la distancia de X aY .
f) El vector unitario con la misma dirección del vector 2X − 3Z.

316 9. Vectores en el espacio
31. Sean X =
⎛⎝ 2−11
⎞⎠, Y =
⎛⎝ 12−1
⎞⎠ y Z =
⎛⎝ 112
⎞⎠.a) Calcular: (2X · Z)Y − (X · Y ) (2Z)b) Hallar los vectores de la forma aY + bZ ortogonales al vector X y de longitud 1.
c) Determinar vectorialmente los cosenos de los ángulos del triángulo cuyos vérticesson los puntos X, Y y Z.
d) Hallar el baricentro del triángulo de vértices X, Y y Z.
32. Sean X =
⎛⎝ 111
⎞⎠, Y =
⎛⎝ 011
⎞⎠, Z =
⎛⎝ 110
⎞⎠, V =
⎛⎝ 211
⎞⎠ y W = aX + bY + cZ
donde a,b,c,∈ R.a) Expresar el vector W como combinación lineal de los vectores E1, E2 y E3.
b) Demostrar que W = O si y sólo si a = b = c = 0.
c) Hallar a, b y c tales que W = E1 + 2E2 + 3E3.
d) Hallar a, b y c, no todos nulos, tales que aX + bY + cV = O.
e) Demostrar que no existen a, b, c reales tales que E1+2E2+3E3 = aX+ bY + cV .
33. Sean X =
⎛⎝ 2−12
⎞⎠ y Y =
⎛⎝ 12−2
⎞⎠. Descomponer el vector X en la forma X =
W + Z, con W paralelo a Y y Z ortogonal a Y.
34. Sean X =
⎛⎝ 4−13
⎞⎠, Y =⎛⎝ 122
⎞⎠, Z =⎛⎝ 1
2−2
⎞⎠, W =
⎛⎝ 212
⎞⎠ y U =
⎛⎝ 2−2−1
⎞⎠.a) Determinar todos los pares de vectores ortogonales entre sí.
b) Hallar un vector de magnitud 2 paralelo al vector 2X − Y .
c) Hallar ProyYX y ProyXY .
d) Descomponer el vector X como suma de un vector paralelo a W y un vectorortogonal a W .
35. Sean P =
⎛⎝ 211
⎞⎠ y Q =
⎛⎝ 3−4−4
⎞⎠.a) Hallar un punto S de R3 tal que P , Q, S sean los vértices de un triángulo rectán-gulo.
b) Hallar un vector no nulo X de R3 ortogonal a los vectores P y Q.
36. Sean X =
⎛⎝ 2−35
⎞⎠, Y =
⎛⎝ 5/30−1/3
⎞⎠ y Z =
⎛⎝ −1−12
⎞⎠.a) Hallar la descomposición canónica de los siguientes vectores:
i) X × Y ii) X × (Y × Z) iii) (X − Y )× (X − Z)

9.6. Ejercicios 317
b) Hallar la magnitud del vector (X · Z)Y + (X × Z)× Y .
c) Encontrar un vector de longitud 6 y que tenga dirección opuesta a la del vector
2X + (X × Y )− (Y ×X)
d) Determinar si los vectores Y + Z y X son paralelos.
37. Dados dos vectores no paralelos X, Y de R3 y Z = (Y ×X)− Y ,
a) Probar que X es ortogonal a Y + Z.
b) Probar que el ángulo θ entre Y y Z es tal que 90o < θ < 180o.
c) Si kY k = 1 y kY ×Xk = 2, calcular la magnitud de Z.
38. Sean X y Y dos vectores no paralelos de R3, tales que X · Y = 2, X es unitario ykY k = 4. Si Z = (2X × Y )− 3Y , calcular:a) X · (Y + Z).
b) La magnitud de Z.
c) El coseno del ángulo θ entre Y y Z.
39. Sean X y Y vectores de R3. Probar que si X × Y = O y X · Y = 0, entonces X = Oo Y = O.
40. Sean X y Y dos vectores unitarios y ortogonales de R3. Probar que el vector(X × Y )×X es unitario.
41. Mostrar que los puntos P =
⎛⎝ 32−1
⎞⎠, Q =
⎛⎝ 416
⎞⎠, R =
⎛⎝ 7−23
⎞⎠ y S =
⎛⎝ 8−310
⎞⎠son los vértices de un paralelogramo. Calcular el área del paralelogramo.
42. Sean P =
⎛⎝ 101
⎞⎠, Q =⎛⎝ −1−1
1
⎞⎠ y R =
⎛⎝ 2−12
⎞⎠.a) Hallar todos los puntos S tales que P, Q, R y S son los vértices de un paralelo-gramo.
b) Calcular el área del paralelogramo PQRS.
c) Calcular el área del triángulo PQR.
43. Sean P =
⎛⎝ 431
⎞⎠, Q =⎛⎝ 8
1−2
⎞⎠, R =⎛⎝ 101
⎞⎠ y S =
⎛⎝ mn4
⎞⎠.a) Mostrar que los puntos P , Q y R no son colineales.
b) Hallar m y n tales que P , Q y S sean colineales.
44. a) Determinar si los puntos O, P , Q y R son coplanares, siendo O el origen y P , Q,R los puntos dados en cada caso:
i) P =
⎛⎝ 200
⎞⎠, Q =
⎛⎝ 030
⎞⎠, R =
⎛⎝ 004
⎞⎠.

318 9. Vectores en el espacio
ii) P =
⎛⎝ 10−3
⎞⎠, Q =
⎛⎝ 0−21
⎞⎠, R =
⎛⎝ 26−9
⎞⎠.b) Mostrar que los puntos P =
⎛⎝ 10−1
⎞⎠, Q =⎛⎝ 012
⎞⎠, R =⎛⎝ −12
3
⎞⎠ y S =
⎛⎝ 214
⎞⎠no son coplanares y hallar el volumen de la pirámide triangular cuya base es eltriángulo PQR y cuyo cuarto vértice en S.

10
Rectas y planos
10.1 La línea recta
En el espacio, al igual que en el plano, toda recta queda completamente determinadadando dos de sus puntos o bien uno de sus puntos y un vector director, es decir, unvector geométrico no nulo paralelo a la recta.
Si una recta L pasa por el punto P0 y−−→OD es un vector director de L (ver figura 10.1)
entonces L está conformada por los puntos X de R3 tales que−−→P0X = t
−−→OD, t ∈ R (10.1)
Figura 10.1.
Ahora, exactamente como lo hicimos en el plano, la condición (10.1) se puede expresarusando vectores algebraicos en la forma equivalente
X = P0 + tD, t ∈ R
Así que un punto X de R3 está sobre la recta L si y sólo si X es de la forma
X = P0 + tD, t ∈ R (10.2)
Esta ecuación (10.2) se dice una ecuación vectorial paramétrica o simplemente unaecuación vectorial para la recta L; la variable t es el parámetro. Diremos indistintamenteque−−→OD es un vector director de L o que D es un vector director de L.
319

320 10. Rectas y planos
Si X =
⎛⎝ xyz
⎞⎠ , P0 =
⎛⎝ x0y0z0
⎞⎠ y D =
⎛⎝ d1d2d3
⎞⎠ , la ecuación (10.2) es
⎛⎝ xyz
⎞⎠ =
⎛⎝ x0y0z0
⎞⎠+ t
⎛⎝ d1d2d3
⎞⎠ , t ∈ R
la cual es equivalente a las tres ecuaciones escalares
x = x0 + d1ty = y0 + d2tz = z0 + d3t
, t ∈ R (10.3)
que se denominan ecuaciones escalares paramétricas o simplemente ecuaciones paramétri-cas de la recta L.
Si d1, d2, d3 son todos distintos de cero, es fácil ver que un punto
⎛⎝ xyz
⎞⎠ satisface
(10.3) para algún valor de t si y sólo si
x− x0d1
=y − y0d2
=z − z0d3
(10.4)
En efecto, si
⎛⎝ xyz
⎞⎠ satisface (10.3) para cierto valor de t entonces, despejando t
en cada una de las ecuaciones (10.3) e igualando, vemos que
⎛⎝ xyz
⎞⎠ satisface (10.4).
Recíprocamente, si
⎛⎝ xyz
⎞⎠ satisface (10.4) entonces haciendo
t =x− x0d1
=y − y0d2
=z − z0d3
(10.5)
se tiene quex− x0 = d1t , y − y0 = d2t y z − z0 = d3t
y por tanto
⎛⎝ xyz
⎞⎠ satisface (10.3). De manera que un punto
⎛⎝ xyz
⎞⎠ de R3 está sobre la
recta L si y sólo si cumple las igualdades en (10.4). Nos referiremos a la expresión (10.4)como unas ecuaciones simétricas para la recta L.
Si alguna de las componentes d1, d2, d3 del vector director D es cero entonces L notiene ecuaciones simétricas. Sin embargo, si una sola de esas componentes es cero todavíaes posible describir la recta L mediante ecuaciones que no involucran el parámetro t. Porejemplo, si d1 = 0 pero d2 6= 0 y d3 6= 0, en lugar de (10.3) podemos escribir, en formaequivalente,
x = x0,y − y0d2
=z − z0d3

10.1. La línea recta 321
Al igual que en el plano, se tiene que una ecuación vectorial para la recta L que pasapor los puntos P y Q del espacio, con P 6= Q, es
X = P + t (Q− P ) , t ∈ R
pues Q− P es un vector director de L.En particular, el segmento de recta PQ puede describirse en la forma
PQ =©X ∈ R3 | X = P + t (Q− P ) ; 0 ≤ t ≤ 1
ªEs de señalar que, a diferencia de lo que ocurre en el plano, para una recta en el espacio
no se tiene el concepto de pendiente, ni se cuenta con una ecuación análoga a la ecuaciónax + by = c. Así que por el momento (10.2), (10.3) y (10.4) son las únicas maneras dedescribir mediante ecuaciones una recta en el espacio.
Ejemplo 10.1Sea L la recta que pasa por el punto P0 =
⎛⎝ −311
⎞⎠ y es paralela al vector D =
⎛⎝ 1−23
⎞⎠a) Halle para L una ecuación vectorial, ecuaciones paramétricas y ecuaciones simétricas.b) Determine cuáles de los puntos siguientes están en L:
X1 =
⎛⎝ 000
⎞⎠ , X2 =
⎛⎝ 123
⎞⎠ y X3 =
⎛⎝ −43−2
⎞⎠Solución:
a) Una ecuación vectorial para L es
X = P0 + tD
es decir, ⎛⎝ xyz
⎞⎠ =
⎛⎝ −311
⎞⎠+ t
⎛⎝ 1−23
⎞⎠Unas ecuaciones paramétricas para L son
x = −3 + ty = 1− 2tz = 1 + 3t
y unas ecuaciones simétricas para L seránx+ 3
1=
y − 1−2 =
z − 13
(10.6)
b) Para determinar cuáles de los puntos dados X1, X2, X3 están en L usaremos lasecuaciones simétricas (10.6). Empezando con X1 vemos que (10.6) no se satisface conx = 0, y = 0 y z = 0, luego X1 no está en L; de igual forma X2 no está en L ya que(10.6) no se satisface con x = 1, y = 2 y z = 3. En cuanto al punto X3, vemos que(10.6) se satisface con x = −4, y = 3 y z = −2, pues
−4 + 31
=3− 1−2 =
−2− 13
por tanto, el punto X3 está en L. ¥

322 10. Rectas y planos
Ejemplo 10.2Halle una ecuación vectorial y ecuaciones paramétricas para la recta L que pasa por los
puntos P =
⎛⎝ 101
⎞⎠ y Q =
⎛⎝ 011
⎞⎠Solución:
Una ecuación vectorial para L es
X = P + t (Q− P )
es decir, ⎛⎝ xyz
⎞⎠ =
⎛⎝ 101
⎞⎠+ t
⎛⎝⎛⎝ 011
⎞⎠−⎛⎝ 101
⎞⎠⎞⎠o sea ⎛⎝ x
yz
⎞⎠ =
⎛⎝ 101
⎞⎠+ t
⎛⎝ −110
⎞⎠Se sigue que unas ecuaciones paramétricas para L son
x = 1− ty = tz = 1
Nótese que L no tiene ecuaciones simétricas, pues la componente en z del vector director
D =
⎛⎝ −110
⎞⎠ es 0. Sin embargo, despejando el parámetro t en las dos primeras ecuaciones
e igualando, podemos describir la recta L mediante el par de ecuaciones
1− x = y y z = 1
En la figura 10.2 se muestra la recta L, los puntos P, Q y el vector director−−→OD. ¥
Figura 10.2.

10.2. Ángulo y posiciones relativas entre dos rectas 323
Volvamos a la ecuación (10.2) para una recta con vector director−−→OD y que pasa por
un punto dado P0. Si la recta pasa por el origen entonces tomando P0 =
⎛⎝ 000
⎞⎠ en (10.2),
esta ecuación toma la formaX = tD, t ∈ R.
Así, al igual que en el plano, la recta L que pasa por el origen y por un punto dado D,D 6= O, está conformada por los múltiplos escalares de D. Por ello nos referiremos a dicharecta L como la recta generada por D, tal como lo hicimos en el caso del plano.
Nótese que dos vectores de R3 son linealmente dependientes (alguno de los dos esmúltiplo escalar del otro) si y sólo si están en una misma línea recta que pase por el origen,como ocurre con dos vectores de R2.
Ejemplo 10.3a) Los vectores X =
⎛⎝ 2−58
⎞⎠ y Y =
⎛⎝ −1025−40
⎞⎠ son linealmente dependientes, es decir,
X y Y están sobre una misma recta L que pasa por el origen, ya que Y = −5X. Comodicha recta L pasa por el origen y por el punto X, unas ecuaciones simétricas para ella son
x
2= −y
5=
z
8
b) Los vectores X =
⎛⎝ −125
⎞⎠ y Y =
⎛⎝ 30−4
⎞⎠ son linealmente independientes ya que
ninguno de los dos es múltiplo escalar del otro: esto significa que no existe una línea rectaque pase por el origen y contenga simultáneamente los puntos X y Y. ¥
10.2 Ángulo y posiciones relativas entre dos rectas
Sean L1 y L2 dos rectas del espacio y sean D1 y D2 vectores directores de L1 y L2respectivamente.
Para las rectas L1 y L2 destacamos las siguientes posiciones relativas:
• L1 y L2 se cortanEn este caso L1 y L2 están en un mismo plano y tienen un único punto en común, elcual es el punto de corte
• L1 y L2 son paralelas.Se entiende por ello que L1 y L2 están en un mismo plano pero no se cortan. Estoocurre si y sólo si los vectores directores D1, D2 son paralelos. Si las rectas L1 y L2,además de ser paralelas, tienen un punto en común entonces ellas son coincidentes,es decir L1 = L2.
• L1 y L2 son perpendiculares.Se entiende por ello que los vectores D1, D2 son ortogonales (no importa si L1 y L2se cortan o no.)

324 10. Rectas y planos
• L1 y L2 se cruzan (son oblicuas o son ajenas)Se entiende por ello que L1 y L2 no se cortan ni son paralelas. (Vea figura 10.3).Nótese que esta situación se presenta si y sólo si L1 y L2 no están en un mismoplano; es de destacar que en este caso existen planos paralelos (distintos) P1, P2 quecontienen respectivamente las rectas L1, L2.
Figura 10.3.
Continuemos con las rectas L1, L2.Es claro que si L1 y L2 se cortan, el ángulo θ entre los vectores directores D1 y D2 es
uno de los ángulos que se forman en el punto de corte, es decir, es uno de los ángulos entreL1 y L2. Pues bien, dicho ángulo θ se considerará un ángulo entre L1 y L2, aún en el casoen que L1 y L2 no se corten (ver figura 10.4).
Figura 10.4.
Otro de los ángulos entre L1 y L2 será π−θ. Convenimos en tomar como ángulo entreL1 y L2 al menor de los ángulos θ y π − θ si θ 6= π − θ, o a π/2 en caso contrario. Si α esel ángulo entre L1 y L2 entonces 0 ≤ α ≤ π/2 y
cosα =|D1 ·D2|kD1k kD2k

10.2. Ángulo y posiciones relativas entre dos rectas 325
de donde
α = cos−1µ|D1 ·D2|kD1k kD2k
¶Nótese que L1 y L2 son paralelas si y sólo si el ángulo entre L1 y L2 es α = 0, y que
son perpendiculares si y sólo si el ángulo entre ellas es α = π/2.En la figura 10.3, se muestra el ángulo α entre dos rectas L1 y L2 que se cruzan.
Ejemplo 10.4Una recta L1 pasa por el punto P1 =
⎛⎝ 111
⎞⎠ y tiene a D1 =
⎛⎝ 123
⎞⎠ como un vector
director; otra recta L2 pasa por el punto P2 =
⎛⎝ 210
⎞⎠ y tiene a D2 =
⎛⎝ 3813
⎞⎠ como un
vector director. Probar que L1 y L2 se cortan, hallar su punto de intersección y el ánguloentre ellas.
Solución:Unas ecuaciones paramétricas para L1 y para L2 son respectivamente,
x = 1 + ty = 1 + 2tz = 1 + 3t
yx = 2 + 3ry = 1 + 8rz = 0 + 13r
Hemos denotado t al parámetro en las ecuaciones de L1 y r al parámetro de las ecua-ciones de L2 para evitar posibles confusiones. Ahora probaremos que existe un valor para t
y un valor para r que proporcionan un mismo punto
⎛⎝ xyz
⎞⎠, es decir, existen valores parat y r tales que
1 + t = 2 + 3r1 + 2t = 1 + 8r1 + 3t = 0 + 13r
En efecto, resolviendo (para t y r) el sistema conformado por las dos primeras ecuacionesse obtiene como única solución de dicho sistema t = 4 y r = 1, valores que tambiénsatisfacen la tercera ecuación. Hemos probado así que las rectas L1 y L2 tienen un puntoen común y sólo uno, con lo cual queda probado que dichas rectas se cortan. Para obtenerel punto de intersección basta sustituir t = 4 en las ecuaciones para L1 o sustituir r = 1en las ecuaciones para L2; haciendo esto último se obtiene
x = 2 + 3 (1) = 5, y = 1 + 8 (1) = 9 y z = (13) 1 = 13
Así, el punto de intersección de L1 y L2 es P =
⎛⎝ 5913
⎞⎠ .
El ángulo entre L1 y L2 es
α = cos−1µ|D1 ·D2|kD1k kD2k
¶= cos−1
µ58√14√242
¶= cos−1 (0.996 45) ≈ 0.0842 rad. ¥

326 10. Rectas y planos
Ejemplo 10.5Considere las rectas
L1 :x− 11
=y − 2−2 =
z + 1
−3 y L2 :x− 21
=y + 1
3=
z + 3
2
Pruebe que L1 y L2 se cruzan y halle el ángulo entre ellas.
Solución:Para probar que L1 y L2 se cruzan probaremos en primer lugar que L1 y L2 no son
paralelas y luego que no se cortan.
De las ecuaciones dadas vemos que los vectores D1 =
⎛⎝ 1−2−3
⎞⎠ y D2 =
⎛⎝ 132
⎞⎠ son,
respectivamente, vectores directores de L1 y L2; como estos vectores no son paralelos, yaque ninguno de ellos dos es múltiplo escalar del otro, entonces L1 y L2 no son paralelas.
Para probar que L1 y L2 no se cortan emplearemos las ecuaciones paramétricas de L1y L2 que se obtienen de las ecuaciones dadas, las cuales son respectivamente
x = 1 + ty = 2− 2tz = −1− 3t
yx = 2 + ry = −1 + 3rz = −3 + 2r
L1 y L2 se cortan si y sólo si existen valores para t y r que proporcionan el mismo
punto
⎛⎝ xyz
⎞⎠ , es decir, si y sólo si existen valores de t y r tales que
1 + t = 2 + r2− 2t = −1 + 3r−1− 3t = −3 + 2r
(10.7)
Resolviendo el sistema conformado por las dos primeras ecuaciones se obtiene comoúnica solución t = 6/5 y r = 1/5; ahora, como estos valores no satisfacen la tercera ecuaciónentonces no existen valores de t y r que satisfagan simultáneamente las tres ecuaciones en(10.7), por tanto L1 y L2 no tienen ningún punto en común, es decir, no se cortan. Secompleta así la prueba de que las rectas L1 y L2 se cruzan. El ángulo entre L1 y L2 es
α = cos−1µ|D1 ·D2|kD1k kD2k
¶= cos−1
µ|− 11|√14√14
¶= cos−1
µ11
14
¶≈ 0.666 95 rad. ¥
Ejemplo 10.6Considere las rectas L1, L2 y L3 tales que
• L1 pasa por P =
⎛⎝ 2−57
⎞⎠ y Q =
⎛⎝ 0−31
⎞⎠• Unas ecuaciones simétricas para L2 son
x+ 1
3=
y − 2−3 =
z + 14
9

10.3. Distancia de un punto a una recta 327
• Una ecuación vectorial para L3 es⎛⎝ xyz
⎞⎠ =
⎛⎝ −307
⎞⎠+ t
⎛⎝ 32−1/3
⎞⎠Muestre que L1 y L2 son paralelas y que L1 y L3 son perpendiculares.
Solución:
Un vector director para L1 es−−→PQ =
−−→OD1 con D1 = Q − P =
⎛⎝ −22−6
⎞⎠ , un vector
director para L2 es D2 =
⎛⎝ 3−39
⎞⎠ y un vector director para L3 es D3 =
⎛⎝ 32
−1/3
⎞⎠ .
Como D2 = −32D1 entonces los vectores directores de L1 y L2 son paralelos y por tantotambién son paralelas las rectas L1 y L2.
Como D1 · D3 = −6 + 4 + 2 = 0 entonces los vectores directores de L1 y L3 sonortogonales y así las rectas L1 y L3 son perpendiculares (y por tanto L2 y L3 también sonperpendiculares). ¥
10.3 Distancia de un punto a una recta
Consideremos en el espacio una recta L y un punto X1. Queremos hallar una expresiónpara la distancia d de X1 a L. Supongamos que L pasa por el punto P0 y tiene al vectorD como un vector director (ver figura 10.5)
Figura 10.5.
Consideremos el paralelogramo P mostrado en la figura 10.5, en la cual P es el puntode L tal que −−→P0P =
−−→OD.
Nótese que la distancia d de X1 a la recta L es la altura del paralelogramo P, relativaa la base P0P . Por lo tanto, el área A de P es
A =°°°−−→P0P°°° d

328 10. Rectas y planos
Por otra parte, sabemos que también
A =°°°−−→P0P ×−−−→P0X1
°°°luego, °°°−−→P0P°°° d = °°°−−→P0P ×−−−→P0X1
°°°de donde,
d =
°°°−−→P0P ×−−−→P0X1
°°°°°°−−→P0P°°°Ahora, como
−−→P0P =
−−→OD y
−−−→P0X1 =
−−→OR con R = X1 − P0
entonces °°°−−→P0P°°° = kDk y°°°−−→P0P ×−−−→P0X1
°°° = kD × (X1 − P0)ky por tanto
d =kD × (X1 − P0)k
kDk (10.8)
Observe que si X1 es un punto de la recta L entonces el vector X1 − P0 es paralelo avector D y así D × (X1 − P0) = O obteniéndose (de (10.8)) que d = 0 (como debe ser).
Si la recta L pasa por el origen podemos tomar P0 = O en (10.8), con lo cual (10.8) sereduce a
d =kD ×X1kkDk (10.9)
Ejemplo 10.7Calcule la distancia del punto X1 =
⎛⎝ −23−1
⎞⎠ a la recta L con ecuaciones simétricas
−x+ 12
=y − 34
= z + 4 (10.10)
Solución:En primer lugar vemos que X1 no es un punto de la recta L pues este punto no satisface
las ecuaciones (10.10). Por otra parte, la recta L no pasa por el origen, pues el punto
⎛⎝ 000
⎞⎠tampoco satisface las ecuaciones (10.10).
Calcularemos la distancia d del punto X1 a la recta L empleando la fórmula (10.8);para ello necesitamos un vector director D para L y un punto P0 sobre L.
Escribiendo las ecuaciones (10.10), en la forma
x− (−1)−2 =
y − 34
=z − (−4)
1
vemos que un vector director para L es D =
⎛⎝ −241
⎞⎠ y que un punto sobre L es
P0 =
⎛⎝ −13−4
⎞⎠ .

10.4. Planos 329
Ahora, como
X1 − P0 =
⎛⎝ −23−1
⎞⎠−⎛⎝ −13−4
⎞⎠ =
⎛⎝ −103
⎞⎠entonces
D × (X1 − P0) =
¯¯E1 E2 E3−2 4 1−1 0 3
¯¯ = ¯4 1
0 3
¯E1 −
¯−2 1−1 3
¯E2 +
¯−2 4−1 0
¯E3
= 12E1 + 5E2 + 4E3
=
⎛⎝ 1254
⎞⎠Luego (empleando la fórmula (10.8)), la distancia d buscada es
d =
°°°°°°⎛⎝ 12
54
⎞⎠°°°°°°°°°°°°⎛⎝ −24
1
⎞⎠°°°°°°=
q(12)2 + 52 + 42q(−2)2 + 42 + 12
=
√185√21
' 2.97 ¥
10.4 Planos
Un plano en el espacio queda completamente determinado dando tres de sus puntos que nosean colineales (es decir, que no estén sobre una misma línea recta) o también dando unode sus puntos y un vector geométrico no nulo perpendicular al plano. Se entiende que unvector −→n del espacio es perpendicular a un plano P si −→n es perpendicular a todo vector−−→P0X con P0 y X en P (ver figura 10.6)
Figura 10.6.

330 10. Rectas y planos
Todo vector geométrico no nulo y perpendicular al plano P se dirá un vector normala dicho plano.
Consideremos un plano P y sean P0 un punto de P y −→n un vector normal a P. Em-pleando el producto escalar podemos obtener para P una ecuación que es completamenteanáloga a la ecuación en forma normal de una recta en el plano. En efecto, un punto X
del espacio está en el plano P si y sólo si el vector −−→P0X es perpendicular a −→n , es decir, siy sólo si −−→
P0X ·−→n = 0
Ahora, si −→n =−−→ON, esta ecuación se puede expresar, usando únicamente vectores
algebraicos, en la forma(X − P0) ·N = 0 (10.11)
En adelante, convenimos en decir que un vector N de R3 es un vector normal a unplano P siempre que el vector geométrico −−→ON sea un vector normal a P.
La ecuación (10.11) es una ecuación vectorial no paramétrica para P la cual es llamadauna ecuación en forma normal para el plano P.
Si X =
⎛⎝ xyz
⎞⎠ , P0 =
⎛⎝ x0y0z0
⎞⎠ y N =
⎛⎝ abc
⎞⎠ , al sustituir X, P0 y N en (10.11) y
realizar el producto escalar, dicha ecuación (10.11) se transforma en la ecuación escalar
a (x− x0) + b (y − y0) + c (z − z0) = 0 (10.12)
la cual es por tanto una ecuación para el plano P; si realizamos los productos indicados en(10.12), esta ecuación se puede escribir como
ax+ by + cz = d
donde d = ax0 + by0 + cz0.
Podemos afirmar entonces que todo plano en el espacio tiene ecuación de la forma
ax+ by + cz = d (10.13)
donde a, b, c y d son constantes y a 6= 0 o b 6= 0 o c 6= 0.Recíprocamente, toda ecuación de la forma (10.13) con las constantes a, b, c como se
ha indicado, corresponde a un plano. En efecto, si (por ejemplo) a 6= 0, la ecuación (10.13)puede escribirse como
a
µx− d
a
¶+ b (y − 0) + c (z − 0) = 0
la cual corresponde al plano que pasa por el punto
⎛⎝ d/a00
⎞⎠ y tiene al vector
⎛⎝ abc
⎞⎠ como
un vector normal.

10.4. Planos 331
Un plano también queda determinado por tres puntos que no sean colineales. Sean P, Qy R tres puntos del espacio no colineales y sea P el plano determinado por dichos puntos;para escribir una ecuación para P sólo hace falta un vector normal a P. Pues bien, un talvector normal a P lo podemos hallar a partir de los puntos dados, empleando el productovectorial. Por ejemplo, el vector
−→n = −−→PQ×−→PR
es un vector normal al plano P (vea figura 10.7) ya que
• −→n 6= −→0 (pues −−→PQ y−→PR no son paralelos)
• −→n es perpendicular al plano P ( pues −→n es perpendicular tanto a−−→PQ como a
−→PR,
y por ello −→n es perpendicular a todo vector−−→PX con X ∈ P).
Figura 10.7.
Como resumen de lo obtenido acerca de planos, tenemos:

332 10. Rectas y planos
• Si N =
⎛⎝ abc
⎞⎠ es un vector normal a un plano P y P0 =
⎛⎝ x0y0z0
⎞⎠ es un
punto de P entonces una ecuación vectorial para dicho plano P es
N · (X − P0) = 0, X =
⎛⎝ xyz
⎞⎠ecuación que es equivalente a la ecuación escalar
a (x− x0) + b (y − y0) + c (z − z0) = 0
la cual a su vez es equivalente a
ax+ by + cz = d
donde d = ax0 + by0 + cz0.
• Toda ecuación de la forma
ax+ by + cz = d
con a 6= 0 o b 6= 0 o c 6= 0 corresponde a un plano con vector normal
N =
⎛⎝ abc
⎞⎠ . El plano pasa por el origen si y sólo si d = 0.
• Si P, Q y R son puntos no colineales de un plano P entonces un vectornormal a dicho plano es
−→n = −−→PQ×−→PR
Una ecuación de la forma
ax+ by + cz = d
para un plano, se dice una ecuación en forma general.
Ejemplo 10.8Sea P el plano que pasa por los puntos P =
⎛⎝ 100
⎞⎠ , Q =
⎛⎝ 030
⎞⎠ y R =
⎛⎝ 002
⎞⎠a) Halle una ecuación en forma normal para P.b) Halle una ecuación en forma general para P.
Solución:En la figura 10.8 se muestra parte del plano P.

10.4. Planos 333
Figura 10.8.
a) Para dar una ecuación en forma normal para el plano P sólo nos hace falta un vectornormal a P. Ahora, como sabemos, un tal vector normal a P es
−→n = −−→PQ×−→PR
Calculemos −→n : Puesto que−−→PQ = −−→i + 3−→j y
−→PR = −−→i + 2−→k
entonces
−→n =
¯¯−→i−→j−→k
−1 3 0−1 0 2
¯¯ = ¯3 0
0 2
¯−→i −
¯−1 0−1 2
¯−→j +
¯−1 3−1 0
¯−→k
= 6−→i + 2
−→j + 3
−→k
Ahora, como −→n =−−→ON con N =
⎛⎝ 623
⎞⎠ entonces una ecuación en forma normal para
el plano P es(X − P ) ·N = 0
es decir, ⎛⎝⎛⎝ xyz
⎞⎠−⎛⎝ 100
⎞⎠⎞⎠ ·⎛⎝ 623
⎞⎠ = 0 (10.14)
b) Luego de realizar la diferencia y el producto escalar indicados en (10.14), se obtiene laecuación escalar
6 (x− 1) + 2 (y − 0) + 3 (z − 0) = 0o, equivalentemente, la ecuación
6x+ 2y + 3z = 6
la cual es una ecuación en forma general para el plano P. ¥

334 10. Rectas y planos
Ejemplo 10.9La ecuación
2x− y + 4z = 4 (10.15)
representa un plano P con vector normal N =
⎛⎝ 2−14
⎞⎠ . Para precisar de qué plano se
trata sólo resta dar alguno de sus puntos. Uno de ellos se obtiene, por ejemplo, haciendo
y = 0 y z = 0 en la ecuación (10.15), lo cual nos da x = 2. Así
⎛⎝ 200
⎞⎠ es un punto del
plano P.Nótese que dividiendo ambos lados de la ecuación (10.15) por 4 la podemos escribir en
la formax
2− y
4+
z
1= 1
Esta ecuación pone de manifiesto que el plano P corta los ejes coordenados x, y, z en los
puntos
⎛⎝ 200
⎞⎠ ,
⎛⎝ 0−40
⎞⎠ y
⎛⎝ 001
⎞⎠ respectivamente. Por ejemplo, al hacer x = 0 y y = 0
en ella es evidente que z = 1, obteniéndose el punto
⎛⎝ 001
⎞⎠ como punto de corte del plano
P con el eje z. ¥
10.5 Posiciones relativas entre dos planos y entre una rectay un plano
Sean P1, P2 dos planos en el espacio con vectores normales −→n1,−→n2 respectivamente.Para los planos P1 y P2 destacamos las siguientes posiciones relativas:
• P1 y P2 son paralelos.Esto ocurre si y sólo si los vectores normales −→n1,−→n2 son paralelos. Si los planos P1 yP2, además de ser paralelos, tienen un punto común entonces ellos son coincidentes,es decir, P1 = P2.
• P1 y P2 se cortan (no son paralelos o son secantes).En este caso la intersección de P1 y P2 es una línea recta L como se ilustra en lafigura 10.9. Como dicha recta L está contenida en ambos planos entonces todo vector−→d director de L será perpendicular tanto a −→n1 como a −→n2, es decir, será paralelo a−→n1 ×−→n2. Así que un vector director de L es
−→d = −→n1 ×−→n2.
• P1 y P2 son perpendiculares.Esto ocurre si y sólo si los vectores normales −→n1,−→n2 son perpendiculares; nótese queéste es un caso particular de planos que se cortan.

10.5. Posiciones relativas entre dos planos y entre una recta y un plano 335
Figura 10.9.
Si los planos P1, P2 se cortan (como en la figura 10.9) se forman cuatro ángulos diedros,de los cuales hay dos pares de ángulos congruentes y dos pares de suplementarios. Se puedeprobar que la medida del ángulo entre los vectores normales −→n1 y −→n2 es también la de unode esos ángulos diedros; por ello podemos considerar el ángulo θ entre −→n1 y −→n2 como unode los ángulos entre P1 y P2. Otro de los ángulos entre P1 y P2 será π− θ. Convenimos entomar como ángulo entre entre P1 y P2 al menor entre θ y π− θ si θ 6= π− θ, o a π/2 encaso contrario; podemos incluir el caso en el que P1 y P2 son paralelos. Si α es el ánguloentre P1 y P2 entonces 0 ≤ α ≤ π/2 y
cosα =|−→n1 ·−→n2|k−→n1k k−→n2k
de donde
α = cos−1µ|−→n1 ·−→n2|k−→n1k k−→n2k
¶Ejemplo 10.10a) Los planos P1, P2 con ecuaciones
x− 2y + 3z = 1 y 2x− 4y + 6z = 9
son paralelos, pues ellos tienen vectores normales N1 =
⎛⎝ 1−23
⎞⎠ y N2 =
⎛⎝ 2−46
⎞⎠ los
cuales son paralelos ya que N2 = 2N1.
Los planos P1 y P2 son distintos pues si un punto
⎛⎝ xyz
⎞⎠ satisface la ecuación de P1
entonces no satisface la ecuación de P2.b) Los planos P1, P2 con ecuaciones
x+ 2y − 2z = 5 y 2x+ y + 2z = −1

336 10. Rectas y planos
son perpendiculares, pues ellos tienen vectores normales N1 =
⎛⎝ 12−2
⎞⎠ y N2 =
⎛⎝ 212
⎞⎠los cuales son ortogonales ya que N1 ·N2 = 0.
c) Consideremos los planos P1, P2 con ecuaciones
x+ y = 1 y y + z = 2
Un vector normal a P1 es N1 =
⎛⎝ 110
⎞⎠ y un vector normal a P2 es N2 =
⎛⎝ 011
⎞⎠Puesto que N1 y N2 no son paralelos ni ortogonales entonces los planos P1, P2 no son
paralelos (es decir, se cortan) ni son perpendiculares. Hallemos el ángulo α entre P1 y P2 :
α = cos−1µ|N1 ·N2|kN1k kN2k
¶= cos−1
µ1
2
¶= 60◦
En la figura 10.10 se muestran los planos P1, P2 y también la recta L que es la inter-sección de dichos planos.
Unas ecuaciones simétricas para la recta L son
x− 1 = −y = z − 2
Figura 10.10.
Ejemplo 10.11Encuentre una ecuación vectorial y unas ecuaciones simétricas para la recta L intersecciónde los planos P1 : 3x+ 2y − z = 4 y P2 : x− y + 5z = −1.
Solución:
Un vector normal a P1 es N1 =
⎛⎝ 32−1
⎞⎠ y un vector normal a P2 es N2 =
⎛⎝ 1−15
⎞⎠ .
Como L = P1 ∩ P2 entonces un vector director de L es
N1 ×N2 =
¯¯E1 E2 E33 2 −11 −1 5
¯¯ = 9E1 − 16E2 − 5E3 =
⎛⎝ 9−16−5
⎞⎠

10.5. Posiciones relativas entre dos planos y entre una recta y un plano 337
Sólo resta encontrar un punto de L; uno de tales puntos se puede hallar haciendo x = 0 enlas ecuaciones de los planos P1,P2 y resolviendo simultáneamente las ecuaciones resultantes
2y − z = 4 y − y + 5z = −1
con lo cual se obtiene y =19
9y z =
2
9. Así, un punto sobre L es P0 =
⎛⎝ 019/92/9
⎞⎠ y por
tanto una ecuación vectorial para L es⎛⎝ xyz
⎞⎠ =
⎛⎝ 019/92/9
⎞⎠+ t
⎛⎝ 9−16−5
⎞⎠Se sigue que unas ecuaciones simétricas para L son
x
9=
y − 199
−16 =z − 2
9
−5
o, equivalentemente,x
9= −
y − 199
16= −
z − 29
5¥
Consideremos ahora una recta L con vector director −→d y un plano P con vector normal−→n . La recta L puede tener, con relación al plano P, una de las posiciones siguientes:
• L es paralela al plano P.Este caso ocurre si y sólo si
−→d es perpendicular a −→n . En particular, ocurre cuando
L está contenida en P (vea figura 10.11)
Figura 10.11.
• L corta (es secante o no es paralela) al plano P.Este caso ocurre si y sólo si
−→d no es perpendicular a −→n . L y P tienen un único punto
común, el cual es el punto donde L corta a P. En el caso particular en que −→d y −→nsean paralelos, L es perpendicular al plano P.

338 10. Rectas y planos
10.6 Distancia de un punto a un plano
En el capítulo 3 obtuvimos una expresión para la distancia de un punto X0 =
µx0y0
¶del plano a una recta con ecuación ax + by = c. Procediendo de manera completamente
análoga, el lector puede mostrar que la distancia d∗ de un punto X0 =
⎛⎝ x0y0z0
⎞⎠ del espacio
a un plano P con ecuaciónax+ by + cz = d
está dada por
d∗ =|ax0 + by0 + cz0 − d|√
a2 + b2 + c2(10.16)
Ejemplo 10.12Calcule la distancia del punto X0 =
⎛⎝ −12−4
⎞⎠ al plano P que pasa por el punto
P =
⎛⎝ 0−15
⎞⎠ y contiene a la recta L descrita por la ecuación vectorial
⎛⎝ xyz
⎞⎠ =
⎛⎝ 20−4
⎞⎠+ t
⎛⎝ −121
⎞⎠ (10.17)
Solución:Con el fin de aplicar la fórmula (10.16) procedemos a hallar una ecuación en forma
general para el plano P. A partir de (10.17), dando dos valores al parámetro t, por ejemplo
t = 0 y t = 1, obtenemos los puntos Q =
⎛⎝ 20−4
⎞⎠ y R =
⎛⎝ 12−3
⎞⎠ sobre la recta L, los
cuales son también puntos del plano P, pues la recta L está contenida en el plano P.Ahora, puesto que P, Q y R son tres puntos no colineales del plano P , pues P no
es un punto de L, entonces un vector normal al plano P es el vector−−→PQ × −→PR. Como−−→
PQ = 2−→i +−→j − 9−→k y
−→PR =
−→i + 3
−→j − 8−→k entonces
−−→PQ×−→PR =
¯¯−→i−→j−→k
2 1 −91 3 −8
¯¯ = 19−→i + 7−→j + 5−→k
Por tanto, una ecuación para el plano P es
19 (x− 0) + 7 (y + 1) + 5 (z − 5) = 0
y así, una ecuación en forma general para dicho plano es
19x+ 7y + 5z = 18
Luego (empleando la fórmula (10.16)) la distancia d∗ del punto X0 al plano P es
d∗ =|19 (−1) + 7 (2) + 5 (−4)− 18|√
192 + 72 + 52=
43√435
¥

10.6. Distancia de un punto a un plano 339
La distancia entre dos rectas L1 y L2 que se cruzan es la longitud de aquel segmentode recta con un extremo en L1, el otro en L2 y que es perpendicular tanto a L1 como a L2(ver figura 10.12).
Figura 10.12.
Hay varias maneras de obtener dicha distancia; una de ellas consiste en calcularla comola distancia de un punto cualquiera en una de las rectas al plano paralelo a esa recta y quecontiene a la otra, como se ilustra en la figura 10.13, en la cual d∗ es la distancia entre L1y L2, y P es el plano paralelo a L2 que contiene a L1. (Si
−→d1 y
−→d2 son vectores directores
de L1 y L2 respectivamente entonces un vector normal al plano P es−→d1 ×
−→d2)
Figura 10.13.
Ejemplo 10.13Calcule la distancia entre las rectas
L1 :x− 42
=y + 5
4=
z − 1−3 y L2 : x− 2 =
y + 1
3=
z
2
Solución:Es claro que las rectas L1 y L2 no son paralelas pues los vectores directores
D1 =
⎛⎝ 24−3
⎞⎠ y D2 =
⎛⎝ 132
⎞⎠ de L1 y L2 no son paralelos. El lector puede probar que L1
y L2 no se cortan, así que dichas rectas se cruzan. A continuación calcularemos la distanciaentre L1 y L2 como la distancia d∗ de un punto P0 de L2 al plano P que es paralelo L2 ycontiene a L1. (Vea la figura 10.13).

340 10. Rectas y planos
En primer lugar, de las ecuaciones de L2 vemos que un punto de esa recta es
P0 =
⎛⎝ 2−10
⎞⎠. Por otra parte, un punto del plano P y un vector normal a esta plano son⎛⎝ 4−51
⎞⎠ (punto deL1) y N = D1 ×D2 = 17E1 − 7E2 + 2E3
luego, una ecuación para este plano es
17 (x− 4)− 7 (y + 5) + 2 (z − 1) = 0
es decir,17x− 7y + 2z = 105
Así, la distancia d∗ entre el punto P0 y el plano P, es
d∗ =|17 (2)− 7 (−1) + 2 (0)− 105|q
(17)2 + (−7)2 + 22=
64√342
la cual es la distancia entre las rectas L1 y L2. ¥
10.7 Ecuaciones paramétricas para un plano
Hemos visto que una recta con vector director −→u = −−→OU y que pasa por un punto P0, puededescribirse como el conjunto de todos los puntos X de R3 de la forma
X = P0 + tU, t ∈ R
A continuación veremos que un plano en el espacio puede describirse en forma análoga.Un plano en el espacio queda determinado dando un punto por donde pasa y dos
vectores geométricos no paralelos entre si, que sean paralelos al plano. Se entiende que unvector −→u es paralelo a un plano P si −→u es perpendicular a cualquier vector normal a dichoplano. Si −→u =
−−→OU , convenimos en decir que el vector U de R3 es un vector paralelo al
plano P siempre que el vector geométrico −−→OU sea un vector paralelo a ese plano.Sea P0 un punto del espacio y sean
−→u y −→v dos vectores del espacio no paralelos entresi. Consideremos el plano P que pasa por P0 y tal que los vectores −→u y −→v son paralelos aP (figura 10.14); sea, además, X ∈ R3.
Figura 10.14.

10.7. Ecuaciones paramétricas para un plano 341
SiX ∈ P entonces −−→P0X es combinación lineal de los vectores−→u y−→v , pues estos vectoresson L.I. Recíprocamente, si
−−→P0X es combinación lineal de los vectores −→u y −→v entonces
X ∈ P. En efecto, digamos que −→u =−−−→P0X1 y
−→v =−−−→P0X2; si
−−→P0X es combinación lineal
de −→u y −→v , entonces los puntos P0,X,X1 y X2 son coplanares y como el único plano quecontiene a P0,X1 y X2 es P, entonces X ∈ P. Se tiene así que X ∈ P si y sólo si el vector−−→P0X es combinación lineal de los vectores −→u y −→v , es decir, el plano P está conformadopor los puntos X de R3 tales que
−−→P0X = t−→u + s−→v ; t, s ∈ R
Ahora, si −→u = −−→OU y −→v = −−→OV , la igualdad anterior puede expresarse en forma equiva-lente como
X − P0 = tU + sV ; t, s ∈ Ro también como
X = P0 + tU + sV ; t, s ∈ R (10.18)
De manera que (10.18) es una ecuación para el plano P, de la cual diremos que es unaecuación vectorial paramétrica para dicho plano; las variables t y s son los parámetros.
Si X =
⎛⎝ xyz
⎞⎠ , P0 =
⎛⎝ x0y0z0
⎞⎠ , U =
⎛⎝ u1u2u3
⎞⎠ y V =
⎛⎝ v1v2v3
⎞⎠ , la ecuación (10.18)
es ⎛⎝ xyz
⎞⎠ =
⎛⎝ x0y0z0
⎞⎠+ t
⎛⎝ u1u2u3
⎞⎠+ s
⎛⎝ v1v2v3
⎞⎠la cual es equivalente a las tres ecuaciones escalares
x = x0 + tu1 + sv1y = y0 + tu2 + sv2z = z0 + tu3 + sv3
las cuales se llaman ecuaciones (escalares) paramétricas para el plano P.
Si el plano P pasa por el origen, al tomar P0 =
⎛⎝ 000
⎞⎠ en (10.18) esta ecuación se
reduce aX = tU + sV ; t, s ∈ R
Nótese que en este caso el plano P pasa también por los puntos U y V. Así, P es elplano que pasa por los puntos no colineales O,U y V ; nos referiremos a P como el planogenerado por U y V , pues P consta de todas las combinaciones lineales de U y V .
Observe que si tres vectores de R3 están en un mismo plano que pasa por el origenentonces uno de esos vectores tiene que ser combinación lineal de los otros dos y en conse-cuencia los tres vectores son L.D. Recíprocamente, si tres vectores de R3 son L.D. entoncesexiste un plano que pasa por el origen que los contiene a los tres. De manera que tresvectores de R3 son L.D si y sólo si los tres están en un mismo plano que pasa por el origen.
Ejemplo 10.14Halle una ecuación vectorial paramétrica y las correspondientes ecuaciones escalares paramétri-
cas para el plano P que pasa por los puntos E1 =
⎛⎝ 100
⎞⎠ , E2 =
⎛⎝ 010
⎞⎠ y E3 =
⎛⎝ 001
⎞⎠ .

342 10. Rectas y planos
Solución:En la figura 10.15 se muestra parte del plano P. Dos vectores geométricos no paralelos
entre si, paralelos al plano P son, por ejemplo, −−−→E1E2 y−−−→E1E3; así, dos vectores de R3 no
paralelos entre si, paralelos al plano P son
U = E2 −E1 =
⎛⎝ −110
⎞⎠ y V = E3 −E1 =
⎛⎝ −101
⎞⎠Como, además, el plano P pasa por E1 (por ejemplo) entonces una ecuación vectorial
paramétrica para P esX = E1 + tU + sV
es decir, ⎛⎝ xyz
⎞⎠ =
⎛⎝ 100
⎞⎠+ t
⎛⎝ −110
⎞⎠+ s
⎛⎝ −101
⎞⎠Se sigue que unas ecuaciones escalares paramétricas para P son
x = 1− t− sy = tz = s
En la figura 10.15 también se muestra el plano P 0 generado por U y V, el cual es paraleloal plano P. ¥
Figura 10.15.
Ejemplo 10.15Halle una ecuación en forma general y una ecuación vectorial paramétrica para el plano P
que pasa por el punto P0 =
⎛⎝ 1−23
⎞⎠, es perpendicular al plano P1 con ecuación3x+ 2y + 5z = 1

10.7. Ecuaciones paramétricas para un plano 343
y es paralelo a la recta L intersección de los planos
4x− 3y + 2z = 75x+ 2y + 3z = 6
Solución:Como ya se tiene un punto del plano P (el punto P0), para escribir una ecuación de
dicho plano sólo resta hallarle un vector normal −→n . Puesto que los planos P y P1 sonperpendiculares entonces un tal vector −→n debe ser perpendicular al vector −→n1 = 3
−→i +
2−→j + 5
−→k el cual es un vector normal al plano P1.
Por otra parte, como la recta L es paralela al plano P, el vector −→n debe ser perpendi-cular a cualquier vector director de L. Es claro entonces que necesitamos un vector −→n quesimultáneamente sea perpendicular a los vectores −→n1 y
−→d , donde
−→d es un vector director
de L.La figura 10.16 ilustra la situación geométrica expresada en este ejemplo.
Figura 10.16.
Ahora bien, sabemos que un vector director para L lo podemos obtener como el pro-ducto cruz de los vectores 4
−→i − 3−→j + 2−→k y 5
−→i + 2
−→j + 3
−→k normales respectivamente a
los planos 4x− 3y + 2z = 7 y 5x+ 2y + 3z = 6. Luego, un vector director para la rectaL es
−→d =
¯¯−→i−→j−→k
4 −3 25 2 3
¯¯ = −13−→i − 2−→j + 23−→k
Por tanto, un vector normal al plano P es
−→n = −→n1 ×−→d =
¯¯−→i
−→j−→k
3 2 5−13 −2 23
¯¯ = 56−→i − 134−→j + 20−→k
o también el vector 12−→n = 28−→i − 67−→j + 10−→k . Así, una ecuación para el plano P es
28 (x− 1)− 67 (y + 2) + 10 (z − 3) = 0
o, en forma equivalente,28x− 67y + 10z = 192

344 10. Rectas y planos
la cual es una ecuación en forma general.
Sean ahora N1 y D en R3 tales que −→n1 =−−→ON1 y
−→d =
−−→OD, es decir, N1 =
⎛⎝ 325
⎞⎠y D =
⎛⎝ −13−223
⎞⎠. Es claro que N1 y D son linealmente independientes y que el plano
generado por N1 y D es paralelo al plano P. Luego, una ecuación vectorial para P es⎛⎝ xyz
⎞⎠ =
⎛⎝ 1−23
⎞⎠+ t
⎛⎝ 325
⎞⎠+ s
⎛⎝ −13−223
⎞⎠ ¥
Finalizaremos este capítulo presentando una prueba para el siguiente resultado (al cualya nos habíamos referido en la sección 9.5)
Si U, V y Z son vectores L.I. de R3 entonces todo vectorW de R3 es expresablede manera única como combinación lineal de U, V y Z.
Prueba:Supongamos que U, V y Z son vectores L.I. de R3 y sea W un vector cualquiera de
R3. Consideremos el plano P generado por U y V, y también la recta L que pasa por W ytiene con vector director Z. Puesto que Z no es combinación lineal de U y V , la recta Lno es paralela al plano P (ver figura 10.17).
Figura 10.17.
El punto donde la recta L corta el plano P (el punto Y en la figura 10.17) es de laforma W + tZ para algún t en R, por ser un punto de L, y también es de la forma rU +sVcon r, s en R, por estar en el plano P. Así que
W + tZ = rU + sV
Por tanto, existen t, r, s en R tales que
W = rU + sV + (−t)Z

10.8. Ejercicios 345
lo cual prueba que W es combinación lineal de U, V y Z.Para probar la unicidad de la escritura de W como combinación lineal de U, V y Z
supongamos que existen escalares r1, r2, s1, s2, t1, t2 tales que
W = r1U + s1V + t1Z y W = r2U + s2V + t2Z (10.19)
y probemos que r1 = r2, s1 = s2, t1 = t2. De (10.19)
r1U + s1V + t1Z = r2U + s2V + t2Z
es decir,(r1 − r2)U + (s1 − s2)V + (t1 − t2)Z = O (10.20)
Ahora, como U, V y Z son L.I. es fácil probar que la igualdad anterior implica que
r1 − r2 = 0, s1 − s2 = 0 y t1 − t2 = 0
es decir,r1 = r2, s1 = s2 y t1 = t2 ¨
10.8 Ejercicios
1. Una recta L pasa por el punto P =
⎛⎝ 1−10
⎞⎠ y es paralela al vector D =
⎛⎝ 123
⎞⎠ .
Determinar cuáles de los siguientes puntos están sobre la recta L:
P1 =
⎛⎝ 355
⎞⎠ , P2 =
⎛⎝ −1−5−6
⎞⎠ , P3 =
⎛⎝ −110
⎞⎠ y P4 =
⎛⎝ 0−3−3
⎞⎠2. Hallar unas ecuaciones paramétricas para la recta que contiene los puntos
P =
⎛⎝ 1−32
⎞⎠ y Q =
⎛⎝ 2−22
⎞⎠.3. Sea L la recta que pasa por el punto P =
⎛⎝ 42−5
⎞⎠ y es paralela a un vector cuyos
ángulos directores α, β y γ son tales que α = 60◦, β = 60◦ y 0◦ < γ < 90◦. Hallaruna ecuación vectorial para la recta L.
4. Hallar unas ecuaciones paramétricas para la recta L que pasa por el punto
P =
⎛⎝ 3−25
⎞⎠ y tiene como vector director al vectorD =
⎛⎝ 40−2
⎞⎠. Hallar dos puntosdistintos de P que estén en L. Mostrar que L es paralela al plano xz y dibujar larecta L.
5. Unas ecuaciones para las rectas L1 y L2 son respectivamentex+ 1
2=
y + 4
−5 =z − 23
yx− 3−2 =
y + 14
5=
z − 8−3
Mostrar que L1 y L2 son coincidentes, es decir que L1 = L2.

346 10. Rectas y planos
6. Considere las rectas L1:x− 2−1 =
y + 1
2=1− z
3y L2 : x = 3 + t, y = −1 + 2t,
z = −3− t.
a) Determinar si L1 y L2 son paralelas, se cortan o se cruzan.b) Determinar si L1 y L2 son perpendiculares.c) Hallar el punto de intersección de la recta L1 con cada uno de los planos coorde-nados.
d) Calcular la distancia del punto P =
⎛⎝ −51−8
⎞⎠ a la recta L1.
e) Hallar una ecuaciones simétricas para la recta que pasa por el punto Q =
⎛⎝ 315
⎞⎠y es paralela a la recta L2
f) Hallar unas ecuaciones simétricas para la recta L que pasa por el punto
⎛⎝ 31−2
⎞⎠,es perpendicular a L1 y corta a esta recta. ¿Cuál es el punto de intersección de L yL1?
7. Considere las rectas L1 :x+ 1
2=2− y
3=2z + 4
−1 y L2 :x+ 1
4=
y + 2
−6 =z + 2
−1a) Mostrar que L1 y L2 son paralelas no coincidentes.b) Calcular la distancia entre L1 y L2c) Dibujar L1 y L2.
8. Sean P =
⎛⎝ 402
⎞⎠, Q =
⎛⎝ 314
⎞⎠ y R =
⎛⎝ 250
⎞⎠.a) Hallar unas ecuaciones simétricas para cada una de las medianas del triánguloPQR.
b) Hallar el baricentro del triángulo PQR.
9. Para cada par de rectas L1 y L2 dada en cada numeral,a) Determinar si L1 y L2 se cortan, son paralelas, perpendiculares o se cruzan.b) Hallar la distancia entre L1 y L2c) Hallar el ángulo entre L1 y L2
i) L1 : x = −2 + 3t, y = 5− t, z = 8 + 7t; L2 : 10− x =y − 12
=z − 36−3
ii) L1 :x− 1−2 = y − 1 = z + 1
3; L2 : 3− x =
y + 4
5=
z − 12
iii) L1 : x− 1 = y − 1, z = 2; L2 : x = 2t, y = −2t+ 1, z = t+ 2
iv) L1 : x− 2 =y + 1
2= 4− z; L2 :
x− 33
=3y + 4
−3 =3z − 133
v) L1 :x− 13
=y + 2
−1 =z − 45; L2 :
⎛⎝ xyz
⎞⎠ =
⎛⎝ −108
⎞⎠+ t
⎛⎝ −93
−15
⎞⎠

10.8. Ejercicios 347
10. a) Sea L una recta con ecuación vectorial X = P + tD. Encontrar el escalar t tal queel vector X (de L) sea ortogonal al vector D.b) Utilizar el resultado del literal a) para calcular la distancia del origen a la recta Lque pasa por el punto P dado y es paralela al vector D dado.
i) P =
⎛⎝ 21−4
⎞⎠ , D =
⎛⎝ 111
⎞⎠ii) P =
⎛⎝ 12−3
⎞⎠ , D =
⎛⎝ 3−1−1
⎞⎠11. Para cada literal, encontrar una ecuación para la recta que pasa por el punto P dado
y es perpendicular a las rectas L1 y L2 dadas.
a) L1 :x+ 2
−3 =y − 14
=z
−5 , L2 :x− 37
=y + 2
−2 =z − 83; P =
⎛⎝ 1−32
⎞⎠b) L1 : x = 2− 4t, y = −3− 7t, z = −1 + 3t,
L2 : x = −2 + 3s, y = 5− 4s, z = −3− 2s; P =
⎛⎝ −473
⎞⎠c) L1 pasa por los puntos Q =
⎛⎝ 234
⎞⎠ y R =
⎛⎝ −1−32
⎞⎠ , L2 es la recta generada por
el vector D =
⎛⎝ 122
⎞⎠; P =
⎛⎝ 000
⎞⎠
12. Sea L la recta que pasa por los puntos P =
⎛⎝ 125
⎞⎠ y Q =
⎛⎝ 311
⎞⎠ . Hallar el punto
de L más cercano al punto R =
⎛⎝ 2−15
⎞⎠13. Sea L1 la recta con ecuaciones simétricas x + 5 = y =
z + 3
2y sea L2 la recta con
ecuaciones paramétricas x = t, y = 1+2t, z = 2+t. Hallar unas ecuaciones simétricaspara la recta que pasa por el origen, es perpendicular a L1 y corta a L2.
14. Determinar si los vectoresX y Y dados en cada literal son linealmente independientes.
a) X =
⎛⎝ 3/23/2−3/2
⎞⎠ , Y =
⎛⎝ −2/3−2/32/3
⎞⎠b) X =
⎛⎝ 11−1
⎞⎠ , Y =
⎛⎝ 011
⎞⎠

348 10. Rectas y planos
15. Considerar el plano P que pasa por el punto Q =
⎛⎝ 12−3
⎞⎠ y que tiene al vector
N =
⎛⎝ 8−11−2
⎞⎠ como un vector normal. Determinar cuáles de los siguientes puntos
están en P: Q1 =
⎛⎝ 120
⎞⎠ , Q2 =
⎛⎝ 121
⎞⎠ , Q3 =
⎛⎝ 646
⎞⎠ , Q4 =
⎛⎝ 66−5
⎞⎠
16. Sea P el plano determinado por los puntos
⎛⎝ 11−1
⎞⎠ ,
⎛⎝ 101
⎞⎠ y
⎛⎝ 2−13
⎞⎠a) Hallar una ecuación en forma normal para Pb) Hallar una ecuación en forma general para P
17. a) Sea L la recta que pasa por el punto Q =
⎛⎝ −112
⎞⎠ y es paralela al vector
D =
⎛⎝ 1−13
⎞⎠ , y sea R =
⎛⎝ 246
⎞⎠ .
i) Mostrar que R no es un punto de la recta L.ii) Hallar una ecuación en forma general para el plano determinado por la recta Ly el punto R.
b) Considerar las rectas L1 :x− 3−2 =
y − 3/2−3 = z y L2 : x = 5 + t, y =
5
2+3
2t,
z = −12t. Mostrar que L1 y L2 determinan un plano y hallar una ecuación en forma
general para dicho plano.
c) Considerar las rectas L1 :x− 24
= 1 − z, y = 3 y L2 :x− 22
=y − 32
= z − 1.Determinar si L1, L2 se cortan y, en caso afirmativo, hallar una ecuación del planoque las contiene.
18. Sea Q =
⎛⎝ −137
⎞⎠ y P1 el plano con ecuación 2x − 3y + 5z − 4 = 0. Hallar una
ecuación para el plano P que pasa por Q y es paralelo al plano P1.
19. Considerar los siguientes planos:
P1 : x+ 2y − 2z = 5, P2 : 3x− 6y + 3z = 2P3 : 2x+ y + 2z + 1 = 0, P4 : x− 2y + z − 7 = 0a) Mostrar que dos de los planos anteriores son paralelos y los otros dos son perpen-diculares
b) Encontrar el ángulo entre los planos P1 y P2.

10.8. Ejercicios 349
20. a) Hallar una ecuación en forma general para el plano que pasa por el punto
Q =
⎛⎝ 23−7
⎞⎠ y tal que la recta que pasa por los puntos R =
⎛⎝ 123
⎞⎠ y S =
⎛⎝ 2412
⎞⎠es perpendicular a dicho plano.
b) Hallar una ecuaciones paramétricas de la recta L que contiene al punto
Q =
⎛⎝ 21−3
⎞⎠ y es perpendicular al plano con ecuación 4x− 3y + z − 5 = 0.
21. a) Sea L la recta que pasa por el punto
⎛⎝ 111
⎞⎠ y es paralela al vector
⎛⎝ 2−13
⎞⎠. De-terminar si L es paralela al plano P descrito en cada uno de los siguientes numerales:
i) P pasa por los puntos
⎛⎝ 10−1
⎞⎠ ,
⎛⎝ 3−23
⎞⎠ y
⎛⎝ 1/211
⎞⎠ii) Una ecuación para P es 2x+ 4y = 10
iii) Una ecuaciones paramétricas para P son x = 1 + 2t− 34s, y = 1 + t+ s,
z = −2 + 3t+ s
iv) P pasa por el origen y es perpendicular a la recta con ecuaciones simétricasx
5=
y
4= −z
2.
b) Hallar una ecuación vectorial para la recta que contiene al punto Q =
⎛⎝ 123
⎞⎠ y
es paralela a cada uno de los planos x+ 2y + 3z = 4 y 2x+ 3y + 4z = 5.
c) Hallar una ecuación para el plano que pasa por el punto Q =
⎛⎝ −41−1
⎞⎠, es paraleloa la recta con ecuaciones simétricas x− 1
2=
y + 3/2
−1 =z + 1
2y es perpendicular al
plano con ecuación 8x+ 5y + z − 11 = 0.
22. Un plano tiene ecuación x+ 2y − 2z + 7 = 0 Hallar:a) Un vector unitario normal al plano.
b) La distancia del origen al plano.
c) El punto Q del plano más cercano al origen. (Comprobar que kQk es la distanciahallada en b)).
23. a) Hallar una ecuación en forma general para cada plano que es perpendicular a la
recta con ecuaciones y = 2z, x = 0, y dista√5 unidades del punto Q =
⎛⎝ 431
⎞⎠ .
(Dos soluciones).

350 10. Rectas y planos
b) Mostrar que la recta L con ecuaciones x− 3 = y − 2 = 7− z es paralela al planoP con ecuación x+ 2y + 3z = 0. Hallar la distancia de la recta L al plano P.
24. Considerar los planos
P1 :
⎛⎝ xyz
⎞⎠ =
⎛⎝ 00−2
⎞⎠+ t
⎛⎝ 032
⎞⎠+ s
⎛⎝ −102
⎞⎠ y P2 : x+ y + z − 6 = 0
a) Hallar unas ecuaciones paramétricas para el plano P2 y una ecuación en formageneral para el plano P1.b) Hallar el ángulo entre los planos P1 y P2
c) Calcular la distancia del punto X0 =
⎛⎝ 1−35
⎞⎠ al plano que pasa por el punto
R =
⎛⎝ −142
⎞⎠ y contiene a la recta intersección de los planos P1 y P2.
25. Hallar una ecuación en forma general para cada plano que cumpla simultaneamentelas tres condiciones siguientes:
i) Es perpendicular al plano yz
ii) Contiene al punto Q =
⎛⎝ 211
⎞⎠iii) Forma un ángulo φ con el plano 2x− y + 2z = 3 de tal modo que cosφ =
2
3.
26. Hallar la intersección del plano y la recta dados en cada literal. Determinar si la rectaestá contenida en el plano.
a) 2x− 2y + z − 12 = 0; x− 12=
y + 3/2
−1 =z + 1
2
b) 2x+ 3y = 0;x− 13
=y + 1
−2 = z − 3
c) Plano xz;3x− 93
=y + 1
2= 1− z
27. Hallar unas ecuaciones paramétricas para la recta L que contiene el punto de inter-sección de la recta L1 de ecuaciones x = −1− 2t, y = 1+ t, z = 10+ 5t con el planoxy, y que es paralela a la recta L2 intersección de los planos 3x− 2y + z + 1 = 0 y8x− 4y + 5z = 13.
28. Considerar los planos:
P1 : 5x− 3y + 2z = 1, P2 : x+ 3y − z + 11 = 0
P3 : x+ 4y − 3z = 2, P4 : 3x− y + 4z − 9 = 0Hallar una ecuación en forma general y también una ecuación vectorial para el planoque contiene la recta intersección de los planos P1 y P2 y es paralelo a la rectaintersección de los planos P3 y P4.

10.8. Ejercicios 351
29. a) Probar que la distancia entre dos planos paralelos ax+ by + cz + d1 = 0 y
ax+ by + cz + d2 = 0 está dada por|d1 − d2|√a2 + b2 + c2
.
b) Mostrar que los planos 8x − 4y + z = 9 y −16x + 8y − 2z = 72 son paralelos yhallar la distancia entre ellos
30. Considerar el plano P con ecuación x− 2y + 4z = 12 y el punto Q =
⎛⎝ 2−11
⎞⎠a) Calcular la distancia entre el punto Q y el plano P.b) Hallar una ecuación en forma general para el plano P1 tal que P1 y P son paralelosno coincidentes y el punto Q es equidistante de estos dos planos.
31. Considerar las rectas L1, L2 y el plano P1 siguientes:
L1 : x = 2 + 3t, y = 1− 2t, z = t L2 :x+ 1
2=
y + 2
−1 =z − 12
P1 : 2x+ 3y + z − 5 = 0a) Mostrar que L1 y L2 se cruzan.b) Hallar la distancia entre L1 y L2.c) Hallar unas ecuaciones paramétricas para el plano P que es perpendicular al planoP1 y contiene la recta L2.d) Hallar unas ecuaciones simétricas para la recta L que pasa por el origen, es per-pendicular a la recta L1 y es paralela al plano P1.e) Hallar unas ecuaciones paramétricas para la recta L que es perpendicular tanto aL1 como a L2 y las corta a ambas.
32. Considerar las rectas
L1 :x− 15
=y − 2−2 =
z + 1
−3 y L2 : x− 2 =y + 1
−3 =z + 3
2
a) Mostrar que L1 y L2 son ajenas.
b) Hallar unas ecuaciones para la recta que pasa por el punto Q =
⎛⎝ 3−4−5
⎞⎠ y corta
a cada una de las rectas L1 y L2. (Ayuda: La intersección del plano determinadopor L1 y Q, con un plano paralelo a L1 que contiene a L2, es una recta paralela aL1).
33. Para los vectores U, V y Z dados en cada literal, determinar si ellos son linealmenteindependientes o linealmente dependientes. Si ellos son linealmente independientes,
expresar el vector W =
⎛⎝ −321
⎞⎠ como combinación lineal de U, V y Z.
a) U =
⎛⎝ 1−31
⎞⎠ , V =
⎛⎝ 023
⎞⎠ , Z =
⎛⎝ 2−45
⎞⎠

352 10. Rectas y planos
b) U =
⎛⎝ 02−1
⎞⎠ , V =
⎛⎝ 20−1
⎞⎠ , Z =
⎛⎝ −120
⎞⎠c) U =
⎛⎝ 1/21/31/4
⎞⎠ , V =
⎛⎝ 234
⎞⎠ , Z =
⎛⎝ 059
⎞⎠

11
Transformaciones lineales del
espacio y matrices 3× 3
11.1 Transformaciones del espacio
Llamaremos transformaciones del espacio a las funciones de R3 en R3, las cuales de-notaremos mediante letras mayúsculas como P, Q, R, S, T, . . . , al igual que lo hicimoscon las transformaciones del plano.
Ejemplo 11.1
Sean U un vector no nulo de R3 y L la recta generada por U. Si X es un vector cualquierade R3, el vector Proy
UX, el cual está en L, lo llamaremos también la proyección de X
sobre L( ver figura 11.1).
Figura 11.1.
Denotaremos PU la transformación del espacio que asigna a cada vector X de R3, suproyección sobre la recta L. Es decir,
PU : R3 → R
3
X �→ PU (X) = ProyUX
La transformación PU la llamaremos proyección sobre la recta L.
Tomemos, por ejemplo, U =
⎛⎝ 1−23
⎞⎠ y hallemos para X =
⎛⎝ xyz
⎞⎠ las coordenadas
del vector PU (X) :
363

364 11. Transformaciones lineales del espacio y matrices 3× 3
PU (X) = ProyUX =
(X · UU · U
)U =
x− 2y + 3z14
⎛⎝ 1−23
⎞⎠ =
⎛⎝ 1
14x− 1
7y + 3
14z
−1
7x+ 2
7y − 3
7z
3
14x− 3
7y + 9
14z
⎞⎠
es decir,
PU
⎛⎝xyz
⎞⎠ =
⎛⎝ 1
14x− 1
7y + 3
14z
−1
7x+ 2
7y − 3
7z
3
14x− 3
7y + 9
14z
⎞⎠
Para las proyecciones PE1, PE2, PE3 sobre los ejes x, y, z respectivamente se tienen lassiguientes expresiones
PE1
⎛⎝xyz
⎞⎠ =
⎛⎝x00
⎞⎠ , PE2
⎛⎝xyz
⎞⎠ =
⎛⎝0y0
⎞⎠ , PE3
⎛⎝xyz
⎞⎠ =
⎛⎝00z
⎞⎠
las cuales se pueden obtener sin realizar ningún cálculo, dada la sencillez de su significadogeométrico �
Ejemplo 11.2
Como en el ejemplo 11.1, sea L la recta generada por un vector U de R3, U �= O. Deno-taremos SU la transformación del espacio que asigna a cada vector X de R3 la reflexiónde X respecto a la recta L, entendiéndose dicha reflexión de manera idéntica al caso delplano (vea figura 11.2).
Figura 11.2.
De igual forma que en el plano, se tiene que
SU (X) = 2PU (X)−Xasí que,
SU : R3 −→ R
3
X �→ SU (X) = 2PU (X)−XLa transformación SU la llamaremos reflexión respecto a la recta L.
Si X =
⎛⎝ xyz
⎞⎠ y,por ejemplo, U =
⎛⎝ 1−23
⎞⎠ entonces
SU
⎛⎝ xyz
⎞⎠ = 2
⎛⎜⎝
1
14x− 1
7y + 3
14z
−1
7x+ 2
7y − 3
7z
3
14x− 3
7y + 9
14z
⎞⎟⎠−
⎛⎝ xyz
⎞⎠ =
⎛⎜⎝−6
7x− 2
7y + 3
7z
−2
7x− 3
7y − 6
7z
3
7x− 6
7y + 2
7z
⎞⎟⎠ �

11.1. Transformaciones del espacio 365
Ejemplo 11.3
Sean U un vector no nulo de R3 y P el plano que pasa por el origen y con vector normal U.Para cada vectorX de R3, denotaremos QU (X) la proyección de X sobre el plano P, lacual se define como el punto donde la perpendicular trazada desde X al plano P intersectaa este plano, como se ilustra en la figura 11.3. En dicha figura también se muestra laproyección PU (X) del vector X sobre la recta L generada por U.
Figura 11.3.
En la figura 11.3 se aprecia que
X = QU (X) + PU (X)
o equivalentemente, queQU (X) = X − PU (X)
Tenemos así la transformación
QU : R3 −→ R
3
X �→ QU (X) = X − PU (X)la cual llamaremos proyección sobre el plano P.
Si X =
⎛⎝ xyz
⎞⎠ y U =
⎛⎝ 1−23
⎞⎠ se tiene que
QU
⎛⎝ xyz
⎞⎠ =
⎛⎝ xyz
⎞⎠−
⎛⎜⎝
1
14x− 1
7y + 3
14z
−1
7x+ 2
7y − 3
7z
3
14x− 3
7y + 9
14z
⎞⎟⎠ =
⎛⎜⎝
13
14x+ 1
7y − 3
14z
1
7x+ 5
7y + 3
7z
− 3
14x+ 3
7y + 5
14z
⎞⎟⎠
Para la proyección sobre los planos coordenados no es necesario realizar ningún cálculo.
Por ejemplo, es claro que la proyección sobre el plano xy de un vector
⎛⎝ xyz
⎞⎠ está dada
por
QE3
⎛⎝ xyz
⎞⎠ =
⎛⎝ xy0
⎞⎠
lo cual se ilustra en la figura 11.4 �
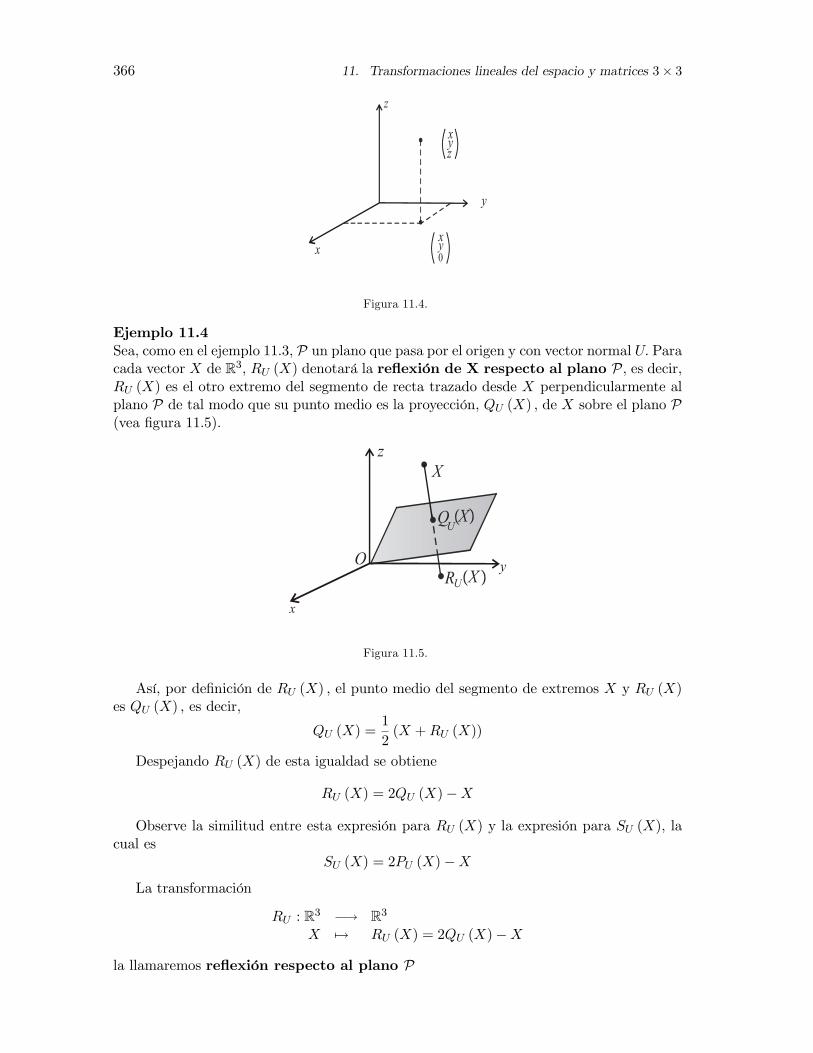
366 11. Transformaciones lineales del espacio y matrices 3× 3
Figura 11.4.
Ejemplo 11.4
Sea, como en el ejemplo 11.3, P un plano que pasa por el origen y con vector normal U. Paracada vector X de R3, RU (X) denotará la reflexión de X respecto al plano P, es decir,RU (X) es el otro extremo del segmento de recta trazado desde X perpendicularmente alplano P de tal modo que su punto medio es la proyección, QU (X) , de X sobre el plano P(vea figura 11.5).
Figura 11.5.
Así, por definición de RU (X) , el punto medio del segmento de extremos X y RU (X)es QU (X) , es decir,
QU (X) =1
2(X +RU (X))
Despejando RU (X) de esta igualdad se obtiene
RU (X) = 2QU (X)−X
Observe la similitud entre esta expresión para RU (X) y la expresión para SU (X), lacual es
SU (X) = 2PU (X)−XLa transformación
RU : R3 −→ R
3
X �→ RU (X) = 2QU (X)−Xla llamaremos reflexión respecto al plano P

11.1. Transformaciones del espacio 367
Si X =
⎛⎝ xyz
⎞⎠ y , por ejemplo, U =
⎛⎝ 1−23
⎞⎠ entonces
RU (X) = 2
⎛⎜⎝
13
14x+ 1
7y − 3
14z
1
7x+ 5
7y + 3
7z
− 3
14x+ 3
7y + 5
14z
⎞⎟⎠−
⎛⎝ xyz
⎞⎠ =
⎛⎜⎝
6
7x+ 2
7y − 3
7z
2
7x+ 3
7y + 6
7z
−3
7x+ 6
7y − 2
7z
⎞⎟⎠
Por supuesto, la reflexión respecto a cualquiera de los planos coordenados no requiereningún cálculo. Por ejemplo, es claro que la reflexión respecto al plano xy de un vector⎛⎝ xyz
⎞⎠ está dado por
RE3
⎛⎝ xyz
⎞⎠ =
⎛⎝ x
y−z
⎞⎠
lo cual se ilustra en la figura 11.6 �
Figura 11.6.
Ejemplo 11.5
Sea r ∈ R. Denotaremos Dr (como en el plano) la transformación del espacio que envíacada vector X de R3 en el vector rX, es decir,
Dr : R3 −→ R3
X �→ Dr (X) = rX
Es claro que para todo
⎛⎝ xyz
⎞⎠ de R3
Dr
⎛⎝ xyz
⎞⎠ =
⎛⎝ rxryrz
⎞⎠
El efecto de Dr sobre los vectores de R3 es similar al de la transformación Dr del plano
sobre los vectores de R2 �

368 11. Transformaciones lineales del espacio y matrices 3× 3
Ejemplo 11.6
Fijemos un número real θ , −2π < θ < 2π. Denotaremos Rzθ la transformación del espacio
que rota cada vector de R3 un ángulo de θ radianes alrededor del eje z. Para cada vector
X =
⎛⎝ x0y0z0
⎞⎠ de R3, esta transformación rota al vector X alrededor del punto
⎛⎝ 0
0z0
⎞⎠ en
el plano z = z0, un ángulo de θ radianes en el sentido antihorario si θ > 0 y en sentidohorario si θ < 0, entendiéndose que el sentido antihorario en el plano z = z0 correspondeal sentido en que se curvan los dedos de la mano derecha cuando el dedo pulgar apunta enla dirección positiva del eje z. En la figura 11.7 se ilustra el efecto de la rotación Rz
θ conθ > 0 sobre un vector X.
Figura 11.7.
Así las cosas, para cualquier vector
⎛⎝ xyz
⎞⎠ de R3,
Rzθ
⎛⎝ xyz
⎞⎠ =
⎛⎝ xcosθ − ysenθxsenθ + ycosθ
z
⎞⎠
La transformación Rzθ se llamará rotación por el ángulo θ, alrededor del eje z.
De manera similar Rxθ y R
yθ denotarán las rotaciones por un ángulo de θ radianes
alrededor del eje x y del eje y, respectivamente. Para cualquier vector
⎛⎝ xyz
⎞⎠ de R3,
se tiene
Rxθ
⎛⎝ xyz
⎞⎠ =
⎛⎝ xycosθ − zsenθysenθ + zcosθ
⎞⎠
y
Ryθ
⎛⎝ xyz
⎞⎠ =
⎛⎝ xcosθ + zsenθ
y−xsenθ + zcosθ
⎞⎠
Note que los signos para Ryθ son diferentes a los signos para R
zθ y R
xθ �
Ejemplo 11.7
Fijemos un vector U de R3. Como en el plano, la transformación del espacio que envíacada vector X de R3 en X +U, se llamará traslación por el vector U y se denotará TU .

11.2. Transformaciones lineales y matrices 369
Es decir,TU : R
3 −→ R3
X �→ TU (X) = X + U
Si U =
⎛⎝x0y0z0
⎞⎠ entonces para cualquier vector
⎛⎝xyz
⎞⎠ de R3,
TU
⎛⎝xyz
⎞⎠ =
⎛⎝xyz
⎞⎠+
⎛⎝x0y0z0
⎞⎠ =
⎛⎝x+ x0y + y0z + z0
⎞⎠ �
De manera similar al caso del plano, se llaman transformación identidad y trans-
formación nula, respectivamente, las transformaciones
I : R3 −→ R3 y O : R3 −→ R
3
X �−→ I (X) = X X �−→ O (X) = O
11.2 Transformaciones lineales y matrices
Obsérvese que para cada una de las transformaciones T : R3 −→ R3, que aparecen en los
ejemplos 11.1 al 11.6, existen constantes ai, bi, ci con i = 1, 2, 3 de tal modo que la imagen
bajo T de cualquier vector
⎛⎝xyz
⎞⎠ de R3 es
T
⎛⎝xyz
⎞⎠ =
⎛⎝a1x+ a2y + a3zb1x+ b2y + b3zc1x+ c2y + c3z
⎞⎠ (11.1)
Como en el caso de las transformaciones del plano, toda transformación T : R3 −→ R3
del tipo (11.1) es llamada una transformación lineal del espacio. De manera que lastransformaciones PU , SU , QU , RU , R
xθ , R
yθ y R
zθ consideradas en este capítulo, como
también las transformaciones I y O, son transformaciones lineales del espacio. En cuanto
a la transformación TU , ésta es una transformación lineal sólo en el caso U =
⎛⎝000
⎞⎠ , caso
en el cual TU = I.Supongamos que T es una transformación lineal del espacio definida por (11.1). El
arreglo de números ⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ (11.2)
se llama matriz de T y se denotará m (T ) . Por ejemplo, si U =
⎛⎝ 1−23
⎞⎠ ,
m (PU ) =
⎛⎜⎜⎜⎝
1
14−1
7
3
14
−1
7
2
7−3
7
3
14−3
7
9
14
⎞⎟⎟⎟⎠

370 11. Transformaciones lineales del espacio y matrices 3× 3
Por otra parte,
m (PE1) =
⎛⎝1 0 00 0 00 0 0
⎞⎠ , m (I) =
⎛⎝1 0 00 1 00 0 1
⎞⎠ y m (O) =
⎛⎝0 0 00 0 00 0 0
⎞⎠
En general todo arreglo de números como el que aparece en (11.2) se dirá una matriz
3×3 (se lee “tres por tres”), una matriz de orden 3 o también unamatriz de tres filas
y tres columnas; los números a1, a2, a3 conforman la primera fila; b1, b2, b3 la segundafila y c1, c2, c3 la tercera fila. Los números a1, b1, c1 conforman la primera columna;a2, b2, c2 la segunda columna y a3, b3, c3 la tercera columna.
Denotaremos las matrices 3 × 3 mediante letras mayúsculas como A, B, C, . . . ; lamatriz m (I) se denotará I3 y se dirá la matriz identidad de orden 3, y la matriz m (O)se denotará O y se dirá la matriz nula de orden 3.
Dos matrices
A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ y B =
⎛⎝a′1 a′
2a′3
b′1b′2b′3
c′1c′2c′3
⎞⎠
se dicen iguales y se escribe A = B si
ai = a′
i, bi = b′
i y ci = c′
i para i = 1, 2, 3
A cada transformación lineal T del espacio hemos asociado una matriz 3 × 3, la cuales m (T ) . Por otra parte, toda matriz 3 × 3 como la que aparece en (11.2) es la matrizde una única transformación lineal del espacio, la cual es la transformación T : R3 −→ R
3
definida por (11.1). De manera que la correspondencia
T −→ m (T )
entre transformaciones lineales del espacio y matrices 3× 3 es biunívoca.
Si A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ y X =
⎛⎝xyz
⎞⎠ , definimos el producto AX de la matriz A por
el vector X de R3 así:
AX =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠⎛⎝xyz
⎞⎠ =
⎛⎝a1x+ a2y + a3zb1x+ b2y + b3zc1x+ c2y + c3z
⎞⎠
De manera que si T es la transformación lineal del espacio con matriz A entonces
T (X) = AX
para todo X de R3.
Ejemplo 11.8
Cualquiera sea X =
⎛⎝ xyz
⎞⎠ en R3,
•⎛⎝2 0 84 −3 56 7 9
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ 2x+ 8z4x− 3y + 5z6x+ 7y + 9z
⎞⎠

11.2. Transformaciones lineales y matrices 371
•⎛⎝1 0 00 1 00 0 1
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ xyz
⎞⎠ y
⎛⎝0 0 00 0 00 0 0
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ 000
⎞⎠
• Si U =
⎛⎝ 1−23
⎞⎠ , PU
⎛⎝ xyz
⎞⎠ =
⎛⎜⎝
1
14x− 1
7y + 3
14z
−1
7x+ 2
7y − 3
7z
3
14x− 3
7y + 9
14z
⎞⎟⎠ =
⎛⎜⎜⎜⎝
1
14−1
7
3
14
−1
7
2
7−3
7
3
14−3
7
9
14
⎞⎟⎟⎟⎠⎛⎝ xyz
⎞⎠ �
Al igual que para las transformaciones del plano, se tiene que:
Una transformación T : R3 −→ R3 es una transformación lineal
si y sólo siT (X + U) = T (X) + T (U) y T (rU) = rT (U)
para todo par de vectores X, U de R3 y todo escalar r
(11.3)
Las dos condiciones en (11.3) se pueden sustituir por la condición
T (rX + sU) = rT (X) + sT (U)
cualesquiera sean X, U en R3 y r, s en R.
Se tiene además que:
Si T : R3 −→ R3 es una transformación lineal, entonces
• T
⎛⎝ 000
⎞⎠ =
⎛⎝ 000
⎞⎠
• Para cualquier vector
⎛⎝ xyz
⎞⎠ de R3,
T
⎛⎝ xyz
⎞⎠ = T (xE1 + yE2 + zE3) = xT (E1) + yT (E2) + zT (E3)
(Por tanto, si se conocen T (E1) , T (E2) , y T (E3) ya se conoce
T
⎛⎝ xyz
⎞⎠ , cualquiera sea el vector
⎛⎝ xyz
⎞⎠)
• m (T ) =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ si y sólo si T (E1) =
⎛⎝ a1b1c1
⎞⎠ , T (E2) =
⎛⎝a2b2c2
⎞⎠
y T (E3) =
⎛⎝a3b3c3
⎞⎠

372 11. Transformaciones lineales del espacio y matrices 3× 3
Ejemplo 11.9
Consideremos la transformación del espacio
T : R3 −→ R3⎛
⎝ xyz
⎞⎠ �−→ T
⎛⎝ xyz
⎞⎠ =
⎛⎝ 2x− z
x+ z/3x− y/2 + 4z
⎞⎠
Es claro que T es una transformación lineal pues su ley de asignación es de la forma(11.1). La matriz de T es
m (T ) =
⎛⎝2 0 −11 0 1
3
1 −1
24
⎞⎠
Comprobemos que T
⎛⎝ 000
⎞⎠ =
⎛⎝ 000
⎞⎠ y que T (E1) , T (E2) , T (E3) son, respectiva-
mente, la primera, segunda y tercera columna de la matriz m (T ) :
T
⎛⎝ 000
⎞⎠ =
⎛⎝ 2 (0)− 0
0 + 0/30− 0/2 + 4 (0)
⎞⎠ =
⎛⎝ 000
⎞⎠
T (E1) =
⎛⎝ 2 (1)− 0
1 + 0/31− 0/2 + 4 (0)
⎞⎠ =
⎛⎝ 211
⎞⎠ = primera columna de m (T )
T (E2) =
⎛⎝ 2 (0)− 0
0 + 0/30− 1/2 + 4 (0)
⎞⎠ =
⎛⎝ 0
0−1/2
⎞⎠ = segunda columna de m (T )
T (E3) =
⎛⎝ 2 (0)− 1
0 + 1/30− 0/2 + 4 (1)
⎞⎠ =
⎛⎝ −1
1/34
⎞⎠ = tercera columna de m (T ) �
Ejemplo 11.10
Sea S una transformación lineal del espacio tal que
S (E1) =
⎛⎝ −2
34
⎞⎠ , S (E2) =
⎛⎝ 0−15
⎞⎠ y S (E3) =
⎛⎝ −2
0−3
⎞⎠
Halle la ley de asignación de S.
Solución:
Sea
⎛⎝ xyz
⎞⎠ un vector cualquiera de R3. Dado que
⎛⎝ xyz
⎞⎠ = xE1 + yE2 + zE3

11.2. Transformaciones lineales y matrices 373
y puesto que S es una transformación lineal,
S
⎛⎝ xyz
⎞⎠ = S (xE1 + yE2 + zE3)
= x S (E1) + y S (E2) + z S (E3)
= x
⎛⎝ −2
34
⎞⎠+ y
⎛⎝ 0−15
⎞⎠+ z
⎛⎝ −2
0−3
⎞⎠
=
⎛⎝ −2x− 2z
3x− y4x+ 5y − 3z
⎞⎠
Así, la ley de asignación de S es
S
⎛⎝ xyz
⎞⎠ =
⎛⎝ −2x− 2z
3x− y4x+ 5y − 3z
⎞⎠
También podemos obtener la ley de asignación de S hallando primero m (S) como seindica a continuación:
Como S es una transformación lineal del espacio, las columnas primera, segunda ytercera de m (S) son respectivamente S (E1) , S (E2) , S (E3) ; por tanto,
m (S) =
⎛⎝−2 0 −23 −1 04 5 −3
⎞⎠
Luego, para cualquier vector
⎛⎝ xyz
⎞⎠ de R3,
S
⎛⎝ xyz
⎞⎠ =
⎛⎝−2 0 −23 −1 04 5 −3
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ −2x− 2z
3x− y4x+ 5y − 3z
⎞⎠ �
Si T : R3 −→ R3 es una transformación del espacio y C es un conjunto de puntos del
espacio, la imagen T (C) del conjunto C bajo T es, como en el plano, el conjunto
T (C) = {T (X) /X ∈ C}
Respecto a la imagen bajo una transformación lineal de una recta, un segmento derecta o un paralelogramo se tienen resultados completamente análogos a los ya conocidosen el caso del plano. Se tiene, además, lo siguiente:

374 11. Transformaciones lineales del espacio y matrices 3× 3
Si T : R3 −→ R3 es una transformación lineal entonces:
1. La imagen T (P) de un plano P bajo T es un plano, una recta o un conjuntocon un solo punto.2. La imagen T
(R3)de todo el espacio R3 bajo T, es todo R3, un plano que
pasa por el origen, una recta que pasa por el origen o es el conjunto
⎧⎨⎩⎛⎝ 000
⎞⎠⎫⎬⎭ .
3. La imagen del paralelepípedo determinado por tres vectores X,Y y Z deR3, es el paralelepípedo determinado por T (X) , T (Y ) y T (Z) si estos vectores
son L.I.1
Para probar 2. partiremos de que
R3 = {xE1 + yE2 + zE3/x, y, z ∈ R}
Por tanto,T(R3)= {T (xE1 + yE2 + zE3) /x, y, z ∈ R}
y como T es una transformación lineal,
T (xE1 + yE2 + zE3) = xT (E1) + yT (E2) + zT (E3)
luego,T(R3)= {xT (E1) + yT (E2) + zT (E3) /x, y, z ∈ R}
Así que T(R3)es el conjunto de todas las combinaciones lineales de los vectores T (E1) ,
T (E2) , T (E3) . Se tiene así que:• Si T (E1) , T (E2) , T (E3) son vectores L.I. entonces
T(R3)= R3
pues en tal caso todo vector de R3 es expresable como C.L. de los vectores T (E1) , T (E2) ,T (E3)
• Si dos de los vectores T (E1) , T (E2) , T (E3) son L.I. y el otro es C.L. de aquellosentonces T
(R3)es el plano generado por esos dos vectores linealmente independientes. A
continuación probaremos esto para el caso en que T (E1) , T (E2) son linealmente indepen-dientes y T (E3) es combinación lineal de T (E1) y T (E2) , es decir,
T (E3) = rT (E1) + sT (E2)
para ciertos escalares r y s. En este caso, toda combinación lineal de T (E1) , T (E2) y T (E3)es también una C.L. de T (E1) y T (E2) ya que si x, y, z son escalares cualesquiera
xT (E1) + yT (E2) + zT (E3) = xT (E1) + yT (E2) + z (rT (E1) + sT (E2))
= (x+ zr)T (E1) + (y + zs)T (E2)
Por otra parte, es claro que toda combinación lineal de T (E1) y T (E2) es tambiéncombinación lineal de T (E1) , T (E2) y T (E3) ya que si x, y son escalares cualesquiera,
xT (E1) + yT (E2) = xT (E1) + yT (E2) + 0T (E3)
1Cuando los vectores T (X) , T (Y ) y T (Z) son L.D., la imagen del paralelepípedo determinado por X, Yy Z no es necesariamente un paralelogramo, un segmento o un punto.

11.2. Transformaciones lineales y matrices 375
De manera que el conjunto de todas las combinaciones lineales de T (E1) , T (E2) y T (E3)(el cual es T
(R3)) es igual al conjunto de todas las combinaciones lineales de T (E1) y
T (E2) (el cual es el plano generado por estos vectores).
Se deja como ejercicio para el lector completar la prueba de la afirmación 2. y tambiénprobar lo afirmado en 1. y 3.
Ejemplo 11.11
Sea T la transformación lineal del espacio tal que
T (E1) =
⎛⎝ 1
0−1
⎞⎠ , T (E2) =
⎛⎝ 011
⎞⎠ , T (E3) =
⎛⎝ 110
⎞⎠
Halle la imagen bajo T de:
a) El segmento AB donde A =
⎛⎝ 100
⎞⎠ y B =
⎛⎝ 0−11
⎞⎠ .
b) La recta L que pasa por los puntos P =
⎛⎝ 2−14
⎞⎠ y Q =
⎛⎝ 013
⎞⎠ .
c) La recta L′ que pasa por el puntoR =⎛⎝ −5
27
⎞⎠ y tiene vector director U =
⎛⎝ −1−11
⎞⎠ .
d) El plano P generado por Y =
⎛⎝ −1
23
⎞⎠ y V =
⎛⎝ 014
⎞⎠ .
e) El espacio R3.
Solución:
Comencemos por hallar la ley de asignación de T :
Si
⎛⎝ xyz
⎞⎠ es un punto cualquiera de R3,
T
⎛⎝ xyz
⎞⎠ = T (xE1 + yE2 + zE3)
= xT (E1) + yT (E2) + zT (E3)
= x
⎛⎝ 1
0−1
⎞⎠+ y
⎛⎝ 011
⎞⎠+ z
⎛⎝ 110
⎞⎠
=
⎛⎝ x+ z
y + z−x+ y
⎞⎠

376 11. Transformaciones lineales del espacio y matrices 3× 3
a) Las imágenes de A y B bajo T están dadas por
T (A) = T
⎛⎝ 100
⎞⎠ =
⎛⎝ 1 + 0
0 + 0−1 + 0
⎞⎠ =
⎛⎝ 1
0−1
⎞⎠ y
T (B) = T
⎛⎝ 0−11
⎞⎠ =
⎛⎝ 0 + 1−1 + 1−0− 1
⎞⎠ =
⎛⎝ 1
0−1
⎞⎠ .
Como T (A) = T (B) entonces
T(AB)= {T (A)} =
⎧⎨⎩⎛⎝ 1
0−1
⎞⎠⎫⎬⎭
b) Se tiene
T (P ) = T
⎛⎝ 2−14
⎞⎠ =
⎛⎝ 2 + 4−1 + 4−2− 1
⎞⎠ =
⎛⎝ 6
3−3
⎞⎠ y
T (Q) = T
⎛⎝ 013
⎞⎠ =
⎛⎝ 0 + 31 + 30 + 1
⎞⎠ =
⎛⎝ 341
⎞⎠ .
Como T (P ) �= T (Q) entonces T (L) es la recta que pasa por T (P ) y T (Q) .
c) Tenemos
T (R) = T
⎛⎝ −5
27
⎞⎠ =
⎛⎝ −5 + 7
2 + 7− (−5) + 2
⎞⎠ =
⎛⎝ 297
⎞⎠ y
T (U) = T
⎛⎝ −1−11
⎞⎠ =
⎛⎝ −1 + 1
−1 + 1− (−1)− 1
⎞⎠ =
⎛⎝ 000
⎞⎠ .
Como T (U) = O, entonces
T(L′) = {T (R)} =
⎧⎨⎩⎛⎝ 297
⎞⎠⎫⎬⎭
d) ComoP = {tY + rV/ t, s ∈ R}
la imagen de P bajo la transformación lineal T es
T (P) = {tT (Y ) + rT (V ) / t, s ∈ R}Ahora, dado que
T (Y ) =
⎛⎝ 253
⎞⎠ y T (V ) =
⎛⎝ 451
⎞⎠

11.2. Transformaciones lineales y matrices 377
entonces
T (P) =⎧⎨⎩t⎛⎝ 253
⎞⎠+ r
⎛⎝ 451
⎞⎠/ t, s ∈ R
⎫⎬⎭
Por último, como los vectores
⎛⎝ 253
⎞⎠ y
⎛⎝ 451
⎞⎠ son linealmente independientes, la
imagen del plano P bajo T es otro plano, el plano generado por dichos vectores.
e) ComoR3 = {xE1 + yE2 + zE3/x, y, z ∈ R}
entonces la imagen de R3 bajo la transformación lineal T es
T(R3)= {xT (E1) + yT (E2) + zT (E3) / x, y, z ∈ R}
donde
T (E1) =
⎛⎝ 1
0−1
⎞⎠ , T (E2) =
⎛⎝ 011
⎞⎠ y T (E3) =
⎛⎝ 110
⎞⎠
Ahora veamos si los vectores T (E1) , T (E2) , T (E3) son L.I.:Es claro que T (E1) y T (E2) son linealmente independientes. Consideremos entonces
el plano generado por estos vectores y veamos si T (E3) es o no un punto de dicho plano.Un vector normal N al plano generado por T (E1) y T (E2) es el vector
N = T (E1)× T (E2) =∣∣∣∣∣∣E1 E2 E31 0 −10 1 1
∣∣∣∣∣∣ = E1 −E2 +E3 =⎛⎝ 1−11
⎞⎠
Luego, una ecuación para dicho plano es
x− y + z = 0
Ahora, como el punto T (E3) =
⎛⎝ 110
⎞⎠ satisface esta ecuación ya que 1 − 1 + 0 = 0,
entonces T (E3) está en el plano generado por T (E1) y T (E2) y por tanto T (E3) es C.L.de T (E1) y T (E2) .
En resumen, T (E1) y T (E2) son linealmente independientes y T (E3) es combinaciónlineal de T (E1) , T (E2).
Se sigue que T(R3)es el plano generado por los vectores T (E1) =
⎛⎝ 1
0−1
⎞⎠ y
T (E2) =
⎛⎝ 011
⎞⎠ , es decir,
T(R3)=
⎧⎨⎩t⎛⎝ 1
0−1
⎞⎠+ s
⎛⎝ 011
⎞⎠/ t, s ∈ R
⎫⎬⎭ =
⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3 : x− y + z = 0
⎫⎬⎭ �

378 11. Transformaciones lineales del espacio y matrices 3× 3
11.3 Operaciones con transformaciones lineales y matrices
Sean T y S transformaciones del espacio y r un escalar. Las transformaciones T + S, rTy T ◦ S se definen exactamente como si T y S fueran transformaciones del plano. Al igualque en el caso del plano, es fácil probar que si T y S son transformaciones lineales entoncesT + S, rT y T ◦ S también lo son.
Por ejemplo, una manera de probar que T +S es una transformación lineal si T y S loson, es probando que
(T + S) (tX + rU) = t (T + S) (X) + r (T + S) (U)
para todo par de vectores X, U de R3 y todo par de escalares t, r, como se muestra acontinuación:
(T + S) (tX + rU) = T (tX + rU) + S (tX + rU)
= tT (X) + rT (U) + tS (X) + rS (U)
= t (T (X) + S (X)) + r (T (U) + S (U))
= t (T + S) (X) + r (T + S) (U)
También se puede probar que T +S es una transformación lineal si T y S lo son, de lasiguiente manera:
Digamos que
m (T ) =
⎛⎝a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠ y m (S) =
⎛⎝b11 b12 b13b21 b22 b23b31 b32 b33
⎞⎠ (11.4)
Por tanto, para cualquier
⎛⎝ xyz
⎞⎠ de R3,
(T + S)
⎛⎝ xyz
⎞⎠ = T
⎛⎝ xyz
⎞⎠+ S
⎛⎝ xyz
⎞⎠
=
⎛⎝ a11x+ a12y + a13za21x+ a22y + a23za31x+ a32y + a33z
⎞⎠+
⎛⎝ b11x+ b12y + b13zb21x+ b22y + b23zb31x+ b32y + b33z
⎞⎠
Luego,
(T + S)
⎛⎝ xyz
⎞⎠ =
⎛⎝ (a11 + b11)x+ (a12 + b12) y + (a13 + b13) z(a21 + b21)x+ (a22 + b22) y + (a23 + b23) z(a31 + b31)x+ (a32 + b32) y + (a33 + b33) z
⎞⎠
Esta última igualdad prueba que T + S es una transformación lineal del espacio yademás que
m (T + S) =
⎛⎝a11 + b11 a12 + b12 a13 + b13a21 + b21 a22 + b22 a23 + b23a31 + b31 a32 + b32 a33 + b33
⎞⎠

11.3. Operaciones con transformaciones lineales y matrices 379
Se hace uso de esta igualdad para definir una suma entre matrices 3× 3 así:⎛⎝a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠+
⎛⎝b11 b12 b13b21 b22 b23b31 b32 b33
⎞⎠ =
⎛⎝a11 + b11 a12 + b12 a13 + b13a21 + b21 a22 + b22 a23 + b23a31 + b31 a32 + b32 a33 + b33
⎞⎠
Se insiste en que, al igual que para matrices 2× 2, la suma entre matrices 3× 3 se hadefinido de modo de que ella corresponda a la suma de transformaciones lineales, es decir,de modo que
m (T ) +m (S) =m (T + S)
De manera similar se demuestra que si T es una transformación lineal del espacio conm (T ) como en (11.4) entonces rT es una transformación lineal y
m (rT ) =
⎛⎝ra11 ra12 ra13ra21 ra22 ra23ra31 ra32 ra33
⎞⎠
Se define el producto de un escalar por una matriz 3× 3 en la forma
r
⎛⎝a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠ =
⎛⎝ra11 ra12 ra13ra21 ra22 ra23ra31 ra32 ra33
⎞⎠
con lo cual se tiene quer (m (T )) = m (rT )
Consideremos ahora la compuesta T◦S de dos transformaciones lineales T y S conm (T )y m (S) como en (11.4). El lector puede probar que T ◦ S también es una transformaciónlineal, sin hacer uso de m (T ) y m (S) .
Cuando T y S son transformaciones lineales, la compuesta T ◦ S también se llamaproducto de T y S y se denota TS. Podemos calcular m (TS) de la siguiente manera:
La primera columna de m (TS) es el vector
(TS) (E1) = T (S (E1))
= T
⎛⎝ b11b21b31
⎞⎠ , pues S (E1) =
⎛⎝ b11b21b31
⎞⎠
=
⎛⎝a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠⎛⎝ b11b21b31
⎞⎠
=
⎛⎝ a11b11 + a12b21 + a13b31a21b11 + a22b21 + a23b31a31b11 + a32b21 + a33b31
⎞⎠
De manera similar se calculan las columnas segunda y tercera de m (TS) , las cualesson respectivamente, los vectores (TS) (E2) y (TS) (E3).
Se obtiene así que
m (TS) =
⎛⎝c11 c12 c13c21 c22 c23c31 c32 c33
⎞⎠

380 11. Transformaciones lineales del espacio y matrices 3× 3
dondec11 = a11b11 + a12b21 + a13b31
y en general, para i = 1, 2, 3 y j = 1, 2, 3
cij = ai1b1j + ai2b2j + ai3b3j (11.5)
Nótese que en m (TS) , el escalar cij, ubicado en la intersección de la fila i y la columnaj se obtiene a partir de la fila i de m (T ) y de la columna j de m (S) como se ilustra acontinuación :
ai1 ai2 ai3
b1j
b2j
b3j
= ai1b1j + ai2b2j + ai3b3j
Se define ahora el producto de dos matrices 3× 3 de modo quem (T )m (S) = m (TS)
es decir, se define el producto de dos matrices 3× 3 de la siguiente manera:⎛⎝ a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠⎛⎝ b11 b12 b13b21 b22 b23b31 b32 b33
⎞⎠ =
⎛⎝ c11 c12 c13c21 c22 c23c31 c32 c33
⎞⎠ (11.6)
donde los escalares cij se calculan como ya se ha indicado. Por ejemplo (vea los elementosencerrados en rectángulos en (11.6)),
c23 = a21b13 + a22b23 + a23b33
Obsérvese que el producto de dos matrices 3 × 3 se obtiene de manera similar al de dosmatrices 2× 2.Ejemplo 11.12
Sea K la reflexión respecto al plano xy y sea J la reflexión respecto al plano yz. Entonces
para cualquier vector X =
⎛⎝ xyz
⎞⎠ de R3 se tiene:
J
⎛⎝ xyz
⎞⎠ =
⎛⎝ −x
yz
⎞⎠ y (KJ)
⎛⎝ xyz
⎞⎠ = K
⎛⎝J⎛⎝ xyz
⎞⎠⎞⎠ = K
⎛⎝ −x
yz
⎞⎠ =
⎛⎝ −x
y−z
⎞⎠
Por otra parte
K
⎛⎝ xyz
⎞⎠ =
⎛⎝ x
y−z
⎞⎠ y (JK)
⎛⎝ xyz
⎞⎠ = J
⎛⎝K
⎛⎝ xyz
⎞⎠⎞⎠ = J
⎛⎝ x
y−z
⎞⎠ =
⎛⎝ −x
y−z
⎞⎠
Observe que en este caso KJ = JK (vea figura 11.8), aunque en general el productode transformaciones lineales no es conmutativo. �

11.3. Operaciones con transformaciones lineales y matrices 381
Figura 11.8.
Ejemplo 11.13
Sean P la proyección sobre el plano xy, Q la proyección sobre el plano yz y X =
⎛⎝ xyz
⎞⎠
un vector cualquiera de R3. Entonces:
P
⎛⎝ xyz
⎞⎠ =
⎛⎝ xy0
⎞⎠ , Q
⎛⎝ xyz
⎞⎠ =
⎛⎝ 0yz
⎞⎠
(PQ)
⎛⎝ xyz
⎞⎠ = P
⎛⎝Q
⎛⎝ xyz
⎞⎠⎞⎠ = P
⎛⎝ 0yz
⎞⎠ =
⎛⎝ 0y0
⎞⎠
(QP )
⎛⎝ xyz
⎞⎠ = Q
⎛⎝P
⎛⎝ xyz
⎞⎠⎞⎠ = Q
⎛⎝ xy0
⎞⎠ =
⎛⎝ 0y0
⎞⎠
(PP )
⎛⎝ xyz
⎞⎠ = P
⎛⎝P
⎛⎝ xyz
⎞⎠⎞⎠ = P
⎛⎝ xy0
⎞⎠ =
⎛⎝ xy0
⎞⎠
(QQ)
⎛⎝ xyz
⎞⎠ = Q
⎛⎝Q
⎛⎝ xyz
⎞⎠⎞⎠ = Q
⎛⎝ 0yz
⎞⎠ =
⎛⎝ 0yz
⎞⎠
Observe que PQ = QP, P 2 = P y Q2 = Q (vea figura 11.9). �

382 11. Transformaciones lineales del espacio y matrices 3× 3
Figura 11.9.
Ejemplo 11.14
Considere las transformaciones lineales del espacio T y S definidas por
T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x− 2yx+ y + z−3x+ z
⎞⎠ y S
⎛⎝ xyz
⎞⎠ =
⎛⎝ xy + zz
⎞⎠
Halle la matriz de transformación lineal (4T + S)T
Solución:m [(4T + S)T ] = m (4T + S)m (T )
= [m (4T ) +m (S)]m (T )= [4m (T ) +m (S)]m (T )
Como
m (T ) =
⎛⎝ 1 −2 0
1 1 1−3 0 1
⎞⎠ y m (S) =
⎛⎝1 0 00 1 10 0 1
⎞⎠
entonces
4m (T ) +m (S) = 4
⎛⎝ 1 −2 0
1 1 1−3 0 1
⎞⎠+
⎛⎝1 0 00 1 10 0 1
⎞⎠
=
⎛⎝ 4 −8 0
4 4 4−12 0 4
⎞⎠+
⎛⎝1 0 00 1 10 0 1
⎞⎠
=
⎛⎝ 5 −8 0
4 5 5−12 0 5
⎞⎠
y así
m [(4T + S)T ] = [4m (T ) +m (S)]m (T )
=
⎛⎝ 5 −8 04 5 5−12 0 5
⎞⎠⎛⎝ 1 −2 0
1 1 1−3 0 1
⎞⎠
=
⎛⎝ −3 −18 −8−6 −3 10−27 24 5
⎞⎠

11.3. Operaciones con transformaciones lineales y matrices 383
Otra manera de hallar la matriz de la transformación lineal (4T + S)T consiste enbuscar primero la ley de asignación de esta transformación, como se muestra a continuación:
Si
⎛⎝ xyz
⎞⎠ es un vector cualquiera de R3 entonces
[(4T + S)T ]
⎛⎝ xyz
⎞⎠ = (4T + S)
⎡⎣T⎛⎝ xyz
⎞⎠⎤⎦
= (4T )
⎡⎣T⎛⎝ xyz
⎞⎠⎤⎦+ S
⎡⎣T⎛⎝ xyz
⎞⎠⎤⎦
= 4T
⎛⎝ x− 2yx+ y + z−3x+ z
⎞⎠+ S
⎛⎝ x− 2yx+ y + z−3x+ z
⎞⎠
= 4
⎛⎝ x− 2y − 2 (x+ y + z)x− 2y + x+ y + z − 3x+ z
−3 (x− 2y)− 3x+ z
⎞⎠+
⎛⎝ x− 2yx+ y + z − 3x+ z
−3x+ z
⎞⎠
=
⎛⎝ −3x− 18y − 8z
−6x− 3y + 10z−27x+ 24y + 5z
⎞⎠
Luego,
m [(4T + S)T ] =
⎛⎝ −3 −18 −8−6 −3 10−27 24 5
⎞⎠ �
Las operaciones suma, multiplicación por escalar y producto, definidas para transfor-maciones lineales del espacio y para matrices 3 × 3, gozan de las mismas propiedadesalgebraicas ya establecidas en el capítulo 4 para dichas operaciones con transformacioneslineales del plano y con matrices 2× 2.
En cuanto al producto de una matriz 3× 3 por un vector de R3, éste tiene también lasmismas propiedades que tiene su similar para matrices 2×2 y vectores de R2. En particularse tiene que:
• Si A =
⎛⎝ a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠ y X =
⎛⎝ xyz
⎞⎠ entonces
AX = x
⎛⎝ a11a21a31
⎞⎠+ y
⎛⎝ a12a22a32
⎞⎠+ z
⎛⎝ a13a23a33
⎞⎠
Nótese que el vector AX es combinación lineal de las columnas de A.
• Cualquiera sea la matriz A =
⎛⎝ a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠ , la matriz transpuesta de A,
denotada AT es

384 11. Transformaciones lineales del espacio y matrices 3× 3
AT =
⎛⎝ a11 a21 a31a12 a22 a32a13 a23 a33
⎞⎠
Cualquiera sea el vector X =
⎛⎝ xyz
⎞⎠ , el transpuesto de X es XT =
(x y z
). Si
X y A son como se ha indicado y U =
⎛⎝ uvw
⎞⎠ , definimos los siguientes productos:
XTU =(x y z
)⎛⎝ uvw
⎞⎠ = xu+ yv + zw = X.U
XTA =(x y z
)⎛⎝ a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠
=(xa11 + ya21 + za31 xa12 + ya22 + za32 xa13 + ya23 + za33
)Como el lector puede comprobar fácilmente, la transpuesta y los productos aquí definidos
tienen las propiedades enunciadas en el ejercicio 30 del capítulo 4 para el caso de matrices2× 2 y vectores de R2.
11.4 Inversa para transformaciones lineales y matrices
La noción de invertibilidad para una transformación del espacio es la misma que para unatransformación del plano y en general la misma que para una función cualquiera.
Ejemplo 11.15
Sea L la recta generada por un vector U de R3, U �= O .
a) La proyección PU sobre la recta L no es una transformación invertible. Para ver esto,basta considerar cualquier recta L′ perpendicular a L que pase por el origen y dos puntosX1, X2 en L′ con X1 �= X2. Es claro que
PU (X1) = O = PU (X2)
luego PU no es uno a uno y por tanto PU no es invertible (ver figura 11.10).
b) La reflexión SU respecto a la recta L es invertible y S−1U = SU . En efecto,
SUSU = I
(ver figura 11.10). �

11.4. Inversa para transformaciones lineales y matrices 385
Figura 11.10.
Ejemplo 11.16
Para r �= 0 la transformación Dr es invertible y D−1r = D1
r
puesto que, como el lector
puede verificar,DrD1
r
= I = D1
r
Dr �
Ejemplo 11.17
Para cada θ, −2π < θ < 2π, las rotaciones Rxθ , R
yθ , R
zθ alrededor de los ejes x, y, z
respectivamente, son invertibles y
(Rxθ )−1 = Rx
−θ,(Ryθ
)−1= Ry
−θ y (Rzθ)−1 = Rz
−θ �
Ejemplo 11.18
Sea T la transformación lineal del espacio tal que
m (T ) =
⎛⎝ 1 −1 0
0 1 −1−1 0 1
⎞⎠
Veamos que la imagen T(R3)del espacio R3 bajo T no es todo R3, es decir, que T no
es sobre.
En efecto, para cada vector
⎛⎝ x0y0z0
⎞⎠ de R3,
T
⎛⎝ x0y0z0
⎞⎠ =
⎛⎝ 1 −1 0
0 1 −1−1 0 1
⎞⎠⎛⎝ x0y0z0
⎞⎠ =
⎛⎝ x0 − y0
y0 − z0−x0 + z0
⎞⎠
y se observa que el punto
⎛⎝ x0 − y0
y0 − z0−x0 + z0
⎞⎠ satisface la ecuación
x+ y + z = 0 (11.7)
pues(x0 − y0) + (y0 − z0) + (−x0 + z0) = 0
Luego, todas las imágenes bajo T de vectores en R3 caen en el plano P cuya ecuaciónes (11.7), es decir, T
(R3) ⊆ P. Así T no es sobre.
Ahora, como T no es sobre entonces T no es invertible. �

386 11. Transformaciones lineales del espacio y matrices 3× 3
A continuación estableceremos para transformaciones lineales del espacio, resultadoscompletamente análogos a los ya establecidos para transformaciones lineales del planorespecto al concepto de invertibilidad. El primero de ellos es:
Sea T : R3 −→ R3 una transformación lineal. Si T es invertible entonces
T−1 es una transformación lineal.
La prueba de este resultado se deja como ejercicio para el lector. En segundo lugartenemos:
Una transformación lineal T : R3 −→ R3 es invertible si y sólo si
el único vector X de R3 tal que T (X) = O es X = O
Es claro que si no se cumple la condición
“El único vector X de R3 tal que T (X) = O es X = O ” (11.8)
entonces T no es uno a uno y en consecuencia T no es invertible. De manera que si T esinvertible entonces debe cumplirse (11.8).
Supongamos ahora que se cumple (11.8) y probemos que T es invertible, probando queT es uno a uno y sobre. Para probar que T es uno a uno, supongamos que X1, X2 sonvectores de R3 tales que T (X1) = T (X2) y probemos que X1 = X2 :
Si T (X1) = T (X2) entonces T (X1) − T (X2) = O, y como T es una transformaciónlineal, T (X1)−T (X2) = T (X1 −X2) , luego T (X1 −X2) = O. Ahora, usando la condición(11.8) concluimos que X1 −X2 = O de donde X1 = X2.
Para probar que T es sobre probemos que T(R3)= R3 :
ComoR3 = {xE1 + yE2 + zE3/ x, y, z ∈ R}
entoncesT(R3)= {xT (E1) + yT (E2) + zT (E3) / x, y, z ∈ R}
es decir, T(R3)es el conjunto de todas las C.L. de los vectores T (E1) , T (E2) , T (E3) .
Si probamos que estos vectores son L.I. tendremos que todo vector de R3 es C.L. de ellos,es decir, que R3 ⊆ T (R3), y como T (R3) ⊆ R3 entonces tendremos T (R3) = R3 como sedesea probar.
Ahora, los vectores T (E1) , T (E2) , T (E3) son L.I., ya que ninguno de los tres esC.L. de los otros dos, pues si (por ejemplo) se diera que T (E3) = tT (E1) + sT (E2) cont, s ∈ R entonces se tendría que T (E3) = T (tE1 + sE2) y como T es uno a uno ocurriráque E3 = tE1 + sE2, lo cual no puede ocurrir ya que E1, E2, E3 son L.I.
Se completa así la prueba de que si se da (11.8) entonces T es invertible �
El turno es ahora para el siguiente resultado:
Sea T : R3 −→ R3 una transformación lineal.
T es invertible si y sólo si las columnas de m (T ) son L.I.

11.4. Inversa para transformaciones lineales y matrices 387
Para probarlo, digamos que
m (T ) =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ (11.9)
Es fácil ver que en la siguiente lista de afirmaciones, cada una (a partir de la segunda)es equivalente a la anterior:
i) T es invertibleii) El único vector X de R3 tal que T (X) = O es X = O
iii) El único vector
⎛⎝ xyz
⎞⎠ de R3 tal que
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ 000
⎞⎠ es
⎛⎝ xyz
⎞⎠ =
⎛⎝ 000
⎞⎠
iv) Los únicos escalares x, y, z tales que
x
⎛⎝a1b1c1
⎞⎠+ y
⎛⎝a2b2c2
⎞⎠+ z
⎛⎝a3b3c3
⎞⎠ =
⎛⎝ 000
⎞⎠
son x = 0, y = 0 y z = 0v) Ninguna de las columnas de m (T ) es combinación lineal de las otras dos (es decir,
las columnas de m (T ) son L.I.)Así que la primera y la última de las afirmaciones anteriores son equivalentes, como se
quería probar �
Otro resultado importante es:
Si T : R3 −→ R3 es una transformación lineal con m (T ) =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠
entonces
T es invertible si y sólo si
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ �= 0
Denotemos ∆ el determinante de m (T ) que aparece en el resultado anterior y sean
U =
⎛⎝ a1a2a3
⎞⎠ , V =
⎛⎝ b1b2b3
⎞⎠ y Z =
⎛⎝ c1c2c3
⎞⎠
En la prueba de dicho resultado usaremos el hecho de que para X =
⎛⎝ xyz
⎞⎠ en R3,
T (X) = O⇔ X es ortogonal a U, V, y Z

388 11. Transformaciones lineales del espacio y matrices 3× 3
En efecto,
T (X) = O ⇔⎧⎨⎩a1x+ a2y + a3z = 0b1x+ b2y + b3z = 0c1x+ c2y + c3z = 0
⇔ U ·X = 0, V ·X = 0 y Z ·X = 0
⇔ X es ortogonal a U, V y Z
También utilizaremos el hecho ya conocido de que
∆ = U · (V × Z)Probaremos el resultado en consideración probando que:
• Si ∆ = 0 entonces T no es invertible (11.10)
• Si ∆ �= 0 entonces T es invertible (11.11)
Para probar (11.10) partamos de que ∆ = 0, es decir,
U · (V × Z) = 0 (11.12)
Supongamos V ×Z �= O. De (11.12) vemos que V ×Z es ortogonal a U ; por otra parte,sabemos que V × Z es ortogonal a V y a Z. Luego, V ×Z es un vector no nulo ortogonala los vectores U, V y Z, es decir, V × Z es un vector no nulo tal que
T (V × Z) = Oy por lo tanto,T no es invertible.
Supongamos ahora que V × Z = O. Entonces V y Z son L.D., luego existe un planoque contiene a los puntos U, V y Z. Así, cualquier vector N normal a dicho plano seráortogonal a U, V y Z, es decir, será tal que T (N) = O, concluyéndose de ello que T no esinvertible.
Hemos probado así (11.10). Ahora probaremos (11.11):Supongamos que ∆ �= 0, es decir,
U · (V × Z) �= 0Probaremos que T es invertible probando que T tiene la propiedad (11.8): Ya sabemos
que T (O) = O. Sea ahora X un vector de R3 tal que T (X) = O, es decir, X es ortogonala U, V y Z. Como X es ortogonal a V y Z entonces X es paralelo al vector V ×Z, es decir,
X = t (V × Z)para algún t ∈ R. Como además X es ortogonal a U entonces U ·X = 0, es decir,
U · (t (V × Z)) = 0o, equivalentemente,
t (U · (V × Z)) = 0Ahora, como U · (V × Z) �= 0 entonces t = 0 y así X = O. Luego, el único vector X de
R3 tal que T (X) = O es X = O, y por tanto T es invertible.Hemos probado así la implicación en (11.11). Finaliza así la prueba del resultado en el
último recuadro. �

11.4. Inversa para transformaciones lineales y matrices 389
Ejemplo 11.19
Considere la transformación
T : R3 −→ R3⎛
⎝ xyz
⎞⎠ �−→ T
⎛⎝ xyz
⎞⎠ =
⎛⎝ −x+ 2z
4x+ yy − 3z
⎞⎠
a) Veamos si T es o no es invertible, calculando el determinante ∆ de m (T ): Como
m (T ) =
⎛⎝−1 0 2
4 1 00 1 −3
⎞⎠
entonces
∆ =
∣∣∣∣∣∣−1 0 24 1 00 1 −3
∣∣∣∣∣∣ = (−1)∣∣∣∣1 01 −3
∣∣∣∣− 0∣∣∣∣4 00 −3
∣∣∣∣+ 2∣∣∣∣4 10 1
∣∣∣∣= − (−3− 0) + 2 (4− 0) = 11
Como ∆ �= 0, concluimos que T es invertible.
b) Dado que T es invertible, el único vector
⎛⎝ xyz
⎞⎠ de R3 tal que T
⎛⎝ xyz
⎞⎠ =
⎛⎝ 000
⎞⎠
es el vector
⎛⎝ xyz
⎞⎠ =
⎛⎝ 000
⎞⎠. Es decir, el único vector
⎛⎝ xyz
⎞⎠ tal que
−x+ 2z = 0
4x+ y = 0
y − 3z = 0
es
⎛⎝ xyz
⎞⎠ =
⎛⎝ 000
⎞⎠ .
c) Como T es invertible, las columnas⎛⎝ −1
40
⎞⎠ ,
⎛⎝ 011
⎞⎠ ,
⎛⎝ 2
0−3
⎞⎠
de m (T ) son linealmente independientes. �
Volvamos a las transformaciones lineales del plano. Recordemos que para una transfor-
mación lineal T : R2 −→ R2 conm (T ) =
(a bc d
), vimos que si T es invertible y∆ =
∣∣∣∣a bc d
∣∣∣∣entonces
m(T−1)=1
∆
(d −b−c a
)
Pues bien, para una transformación lineal T : R3 −→ R3 se tiene un resultado análogo,
solo que el cálculo de m(T−1)es un poco más laborioso. Veamos:

390 11. Transformaciones lineales del espacio y matrices 3× 3
Supongamos que T es invertible y que m (T ) es como en (11.9); continuemos con
∆ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = U · (V × Z)
donde U =
⎛⎝ a1a2a3
⎞⎠ , V =
⎛⎝ b1b2b3
⎞⎠ y Z =
⎛⎝ c1c2c3
⎞⎠
Supongamos además que
m(T−1)=
⎛⎝r1 s1 t1r2 s2 t2r3 s3 t3
⎞⎠
Entonces ⎛⎝r1r2r3
⎞⎠ = T−1
⎛⎝ 100
⎞⎠ , es decir, T
⎛⎝r1r2r3
⎞⎠ =
⎛⎝ 100
⎞⎠
o equivalentemente,
U ·⎛⎝r1r2r3
⎞⎠ = 1, V ·
⎛⎝r1r2r3
⎞⎠ = 0 y Z ·
⎛⎝r1r2r3
⎞⎠ = 0
es decir, la primera columna de m(T−1)es un vector ortogonal a V y a Z y, además,
cumple que
U ·⎛⎝r1r2r3
⎞⎠ = 1
Ahora, como ∆ = U · (V × Z) y V × Z es ortogonal a V y Z tenemos que
U · (V × Z) = ∆, V · (V × Z) = 0 y Z · (V × Z) = 0
y como ∆ �= 0, ya que T es invertible, podemos escribir las igualdades anteriores en laforma
U · 1∆(V × Z) = 1, V · 1
∆(V × Z) = 0 y Z · 1
∆(V × Z) = 0
Luego, el vector1
∆(V × Z) cumple que
T
(1
∆(V × Z)
)=
⎛⎝ 100
⎞⎠
y como también
T
⎛⎝ r1r2r3
⎞⎠ =
⎛⎝ 100
⎞⎠

11.4. Inversa para transformaciones lineales y matrices 391
y T es uno a uno entonces tiene que ser⎛⎝ r1r2r3
⎞⎠ = 1
∆(V × Z)
Hemos determinado así la primera columna de la matriz m(T−1). De manera similar
se determinan sus otras dos columnas, obteniéndose que⎛⎝ s1s2s3
⎞⎠ = 1
∆(Z × U) y
⎛⎝ t1t2t3
⎞⎠ = 1
∆(U × V ) .
Tenemos así lo siguiente:
Sea T : R3 −→ R3 una transformación lineal con matriz
m (T ) =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ y sea ∆ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣Si T es invertible entonces
m(T−1)=1
∆
V × Z Z × U U × V
(11.13)
donde
U =
⎛⎝ a1a2a3
⎞⎠ , V =
⎛⎝ b1b2b3
⎞⎠ y Z =
⎛⎝ c1c2c3
⎞⎠
Ejemplo 11.20
Considere la transformación lineal T del ejemplo 11.19, de la cual ya sabemos que esinvertible.
a) Halle m(T−1)
b) Halle la ley de asignación para T−1
Solución:
a) Tenemos que
m (T ) =
⎛⎝−1 0 24 1 00 1 −3
⎞⎠
y vimos que el determinante ∆ de esta matriz es ∆ = 11. Luego, de acuerdo con la fórmula(11.13),
m(T−1)=1
11
V × Z Z × U U × V

392 11. Transformaciones lineales del espacio y matrices 3× 3
donde
U =
⎛⎝ −1
02
⎞⎠ , V =
⎛⎝ 410
⎞⎠ y Z =
⎛⎝ 0
1−3
⎞⎠
El lector puede verificar que
V × Z = −3E1 + 12E2 + 4E3 =⎛⎝ −3
124
⎞⎠
Z × U = 2E1 + 3E2 +E3 =
⎛⎝ 231
⎞⎠
U × V = −2E1 + 8E2 −E3 =⎛⎝ −2
8−1
⎞⎠
Por tanto,
m(T−1)=1
11
⎛⎝−3 2 −212 3 84 1 −1
⎞⎠
b) La ley de asignación para T−1 es :
T−1
⎛⎝ xyz
⎞⎠ =
1
11
⎛⎝−3 2 −212 3 84 1 −1
⎞⎠⎛⎝ xyz
⎞⎠
=1
11
⎛⎝ −3x+ 2y − 2z12x+ 3y + 8z4x+ y − z
⎞⎠
=
⎛⎜⎝− 3
11x+ 2
11y − 2
11z
12
11x+ 3
11y + 8
11z
4
11x+ 1
11y − 1
11z
⎞⎟⎠ �
Volvamos una vez más a las transformaciones lineales del plano. Vimos que si para unatransformación lineal T : R2 −→ R
2 existe una transformación lineal S : R2 −→ R2 tal que
ST = I (o TS = I) entonces T es invertible y T−1 = S. Pues bien, exactamente lo mismose da para transformaciones lineales del espacio. Es decir, se tiene lo siguiente.
Sea T : R3 −→ R3 una transformación lineal. Si existe una
transformación lineal S : R3 −→ R3 tal que ST = I o TS = I entonces
T es invertible y T−1 = S.
Prueba: Supongamos que S : R3 −→ R3 es una transformación lineal tal que ST = I y
sea X un vector de R3 tal que T (X) = O. Entonces
X = I (X) = (ST ) (X) = S (T (X)) = S (O) = O

11.4. Inversa para transformaciones lineales y matrices 393
Luego, el único vector X de R3 tal que T (X) = O es X = O y por tanto T es invertible.Además,
S = SI = S(TT−1
)= (ST )T−1 = IT−1 = T−1
Supongamos ahora que TS = I. Entonces, según se acaba de probar, S es invertible yS−1 = T ; luego ST = I y por tanto T es invertible y S = T−1. �
Pasemos ahora a las matrices 3 × 3. Para ellas la noción de invertibilidad se defineexactamente como lo hicimos para matrices 2× 2. Veamos:
Sea A una matriz 3 × 3 y consideremos la transformación lineal T : R3 −→ R3 cuya
matriz es A. La matriz A se dice invertible si lo es la transformación lineal T . Si éste es elcaso, la matrizm
(T−1)se dice la inversa de A y se denota A−1, es decir, A−1 = m
(T−1).
Al igual que para matrices 2× 2, la matriz A−1 (cuando existe) es tal que
AA−1 = A−1A = I3.
Por supuesto, todos los resultados establecidos para transformaciones lineales, rela-cionados con invertibilidad, pueden trasladarse a matrices 3× 3. Se tiene así que:
Para cualquier matriz A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ ,
1) Las siguientes afirmaciones son equivalentes:• A es invertible• El único vector X de R3 tal que AX = O es X = O• Las columnas de A son L.I.
•∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ �= 0
2) Si A es invertible y ∆ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ entonces
A−1 =1
∆
V × Z Z × U U × V
(11.14)
donde
U =
⎛⎝ a1a2a3
⎞⎠ , V =
⎛⎝ b1b2b3
⎞⎠ y Z =
⎛⎝ c1c2c3
⎞⎠
3) Si existe una matriz B de orden 3 tal que AB = I3 (o BA = I3) entoncesA es invertible y A−1 = B.
De acuerdo con el resultado 1), podemos determinar si tres vectores dados de R3 sonL.I., considerando la matriz A cuyas columnas son los tres vectores dados (en cualquierorden) y calculando su determinante ∆. Si ∆ �= 0, los vectores son L.I. y si ∆ = 0, ellosson L.D.

394 11. Transformaciones lineales del espacio y matrices 3× 3
Ejemplo 11.21
Sea A =
⎛⎝−1 0 2
4 1 00 1 −3
⎞⎠
Vimos en el ejemplo 11.19 que la transformación lineal T cuya matriz es A, es unatransformación invertible, por tanto la matriz A es invertible. Como además
m(T−1)=1
11
⎛⎝−3 2 −212 3 84 1 −1
⎞⎠
(vea ejemplo 11.20), entonces A−1 es la matriz que aparece al lado derecho en la igualdadanterior. �
Ejemplo 11.22
Muestre que la matriz A =
⎛⎝2 −1 01 1 −10 1 3
⎞⎠ es invertible y halle su inversa.
Solución:
Para ver que A es invertible basta mostrar que su determinante ∆ es distinto de cero.
∆ =
∣∣∣∣∣∣2 −1 01 1 −10 1 3
∣∣∣∣∣∣ = 2
∣∣∣∣1 −11 3
∣∣∣∣− (−1)∣∣∣∣1 −10 3
∣∣∣∣+ 0∣∣∣∣1 10 1
∣∣∣∣= 2 (3 + 1) + (3− 0) + 0= 11.
Como ∆ �= 0, A es invertible. Para hallar A−1 emplearemos la fórmula (11.14) :
A−1 =1
11
V × Z Z × U U × V
donde U =
⎛⎝ 2−10
⎞⎠ , V =
⎛⎝ 1
1−1
⎞⎠ y Z =
⎛⎝ 013
⎞⎠.
Calculando los tres productos cruz que figuran en A−1 se obtiene:
V × Z =⎛⎝ 4−31
⎞⎠ , Z ×U =
⎛⎝ 3
6−2
⎞⎠ y U × V =
⎛⎝ 123
⎞⎠
Por tanto,
A−1 =1
11
⎛⎝ 4 3 1−3 6 21 −2 3
⎞⎠ (11.15)
(Téngase presente que si T es la transformación lineal del espacio cuya matriz es Aentonces T es invertible, pues A lo es, y además A−1 = m
(T−1). �

11.5. Ejercicios 395
Ejemplo 11.23
Para cada una de las siguientes colecciones de vectores, determine si ellos son L.I.
a) X =
⎛⎝ 201
⎞⎠ , Y =
⎛⎝ 0−57
⎞⎠ , Z =
⎛⎝ 1−14
⎞⎠
b) X =
⎛⎝ 121
⎞⎠ , Y =
⎛⎝ 3−14
⎞⎠ , Z =
⎛⎝ −7
7−10
⎞⎠
Solución:
a) Sea A la matriz 3× 3 con X como primera columna, Y como segunda columna y Zcomo tercera columna, es decir,
A =
⎛⎝2 0 10 −5 −11 7 4
⎞⎠
Calculemos su determinante ∆ :
∆ =
∣∣∣∣∣∣2 0 10 −5 −11 7 4
∣∣∣∣∣∣ = 2∣∣∣∣−5 −17 4
∣∣∣∣−0∣∣∣∣0 −11 4
∣∣∣∣+1∣∣∣∣0 −51 7
∣∣∣∣ = 2(−20 + 7)− 0+ (0 + 5) = −21Como∆ �= 0, la matrizA es invertible y así sus columnas son linealmente independientes
Luego, los vectores dados son L.I.
b) Consideremos la matriz
B =
⎛⎝1 3 −72 −1 71 4 −10
⎞⎠
Dejamos al lector verificar que el determinante de esta matriz es cero, de lo cual sesigue que las columnas de B son L.D., es decir, que los vectores X, Y , Z son L.D. �
11.5 Ejercicios
Sección 11.1
1. Considerar la recta L : x = 3t, y = t, z = −2t. Hallar la ley de asignación de latransformación dada en cada literal y hallar también la imagen bajo la transformación
del vector
⎛⎝ 111
⎞⎠ .
a) La proyección sobre la recta L.b) La reflexión respecto a la recta L.

396 11. Transformaciones lineales del espacio y matrices 3× 3
2. Considerar el plano P : x − y + z = 0. Hallar la ley de asignación para cada trans-
formación dada y la imagen del vector
⎛⎝ 1−21
⎞⎠ bajo dicha transformación.
a) Proyección sobre el plano P.b) Reflexión con respecto al plano P.
3. Para cada literal hallar la ley de asignación de la transformación dada y la imagenbajo dicha transformación del vector dado.
a) Rzπ
3
,
⎛⎝ 1√
31
⎞⎠ b) Ry
π
4
,
⎛⎝ 111
⎞⎠ c) Rx
π
6
,
⎛⎝ 1
−√3−1
⎞⎠ .
Sección 11.2
4. Para cada literal determinar si la transformación T definida es una transformaciónlineal y, en caso afirmativo, hallar la matriz de T .
a) T
⎛⎝ xyz
⎞⎠ =
⎛⎝ zxy
⎞⎠ b) T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x0y
⎞⎠
c) T
⎛⎝ xyz
⎞⎠ =
⎛⎝ xy1
⎞⎠ d) T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x+ yy + zx+ z
⎞⎠ .
5. Sea P el plano con ecuaciones paramétricas x = t− 2s, y = 2t− s, z = −t+ s y sea
V =
⎛⎝ 111
⎞⎠ . Hallar:
a) La matriz de la transformación proyección sobre el plano P.b) La proyección del vector V sobre el plano P.c) La matriz de la transformación reflexión respecto al plano P.d) La reflexión del vector V respecto al plano P.
6. Sea T : R3 −→ R3 la transformación lineal tal que T (E1 +E2 +E3) =
⎛⎝ 3−11
⎞⎠ ,
T (−E1 +E2 +E3) =⎛⎝ 2−30
⎞⎠ y T (E1 −E2 +E3) =
⎛⎝ 210
⎞⎠ .
Hallar T
⎛⎝ xyz
⎞⎠ y T
⎛⎝ −10−1525
⎞⎠ .
7. Sea T : R3 −→ R3 la transformación lineal tal que T (E3) = 2E1 + 3E2 + 5E3,
T (E2 +E3) = E1 y T (E1 +E2 +E3) = E2 −E3.a) Hallar la matriz de T.
b) Calcular T (E1 + 2E2 + 3E3) .

11.5. Ejercicios 397
8. Sea T la transformación lineal del espacio tal que m (T ) =
⎛⎝1 −1 20 3 11 −1 2
⎞⎠ . Hallar:
a) T
⎛⎝ 123
⎞⎠ b) T (2E1 − 5E2 +E3)
c) La ley de asignación de T . d) La imagen de R3 bajo T .
9. Sea T : R3 −→ R3 definida por T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x− z−x+ zx− z
⎞⎠
a) Hallar el conjunto de todos los vectores de R3 cuya imagen bajo T es el vectornulo e interpretar geométricamente dicho conjunto.
b) Hallar la imagen de R3 bajo T e interpretarla geométricamente.
10. Sea T la transformación lineal del espacio definida por T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x− y + 2z3x+ y + 4z5x− y + 8z
⎞⎠
a) Hallar la matriz de T.
b) Mostrar que la imagen de R3 bajo T es un plano que pasa por el origen y hallaruna ecuación en la forma general para dicho plano.
c) Mostrar que el conjunto H = {X ∈ R3/T (X) = O} es una recta que pasa por elorigen y hallar unas ecuaciones paramétricas para dicha recta.
11. Sea T la transformación lineal del espacio definida por T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x+ y + z
x− y − z−x+ y + z
⎞⎠ .
Hallar la imagen bajo T del conjunto descrito en cada literal.
a) La recta L perpendicular a la recta L1 : x− 12
=y
−1 =z + 2
3que pasa por el
punto R =
⎛⎝ 1−35
⎞⎠ y además es paralela al plano P : 2x+ 3y − z + 5 = 0
b) El segmento de recta AB donde A =
⎛⎝ 3−21
⎞⎠ y B =
⎛⎝ 110
⎞⎠.
c) El plano P que pasa por el punto Q =
⎛⎝ 111
⎞⎠ y contiene a la recta
L1 : x = 1− t, y = 2 + t, z = −1 + 2t.d) La recta L2 intersección de los planos x+ y − z = 0 y 2x− y + 3z = 2.
12. Hallar una transformación lineal T del espacio tal que la imagen de R3 bajo T es elconjunto descrito en cada literal.
a) El plano con ecuación 2x− y + z = 0

398 11. Transformaciones lineales del espacio y matrices 3× 3
b) La recta generada por el vector
⎛⎝ 2
4−6
⎞⎠ .
Sección 11.3
13. Sean S la reflexión respecto al plano x−y+z = 0 y T la proyección sobre el plano xz.Hallar la matriz y la ley de asignación de cada una de las transformaciones siguientes:
a) T + S b) 3T − 2S c) TS d) ST e) (2S + T )S
14. Sean S y T las transformaciones lineales del espacio definidas por S
⎛⎝ xyz
⎞⎠ =
⎛⎝ zyx
⎞⎠
y T
⎛⎝ xyz
⎞⎠ =
⎛⎝ x
x+ yx+ y + z
⎞⎠ . Hallar la ley de asignación de cada una de las trans-
formaciones siguientes:
a) TS b) ST c) S2 d) (2T − 3S)S
15. Sean T y S las transformaciones lineales del espacio tales quem (T ) =
⎛⎝1 −1 10 1 21 1 −3
⎞⎠
y m (S) =
⎛⎝−1 0 2−1 1 31 1 1
⎞⎠ . Hallar la matriz de la transformación (5T − 3S) (T + S) .
16. Hallar la ley de asignación de la transformación T que asigna a cada vector X deR3 el vector resultante de rotar el vector X en sentido antihorario, un ángulo de π
3
radianes alrededor del eje z y luego un ángulo de π6radianes alrededor del eje y.
Hallar también la imagen del vector
⎛⎝√3√3√3
⎞⎠ bajo T .
17. Hallar la ley de asignación de la transformación T que asigna a cada vector X deR3, el vector obtenido mediante una rotación de π
4radianes en sentido antihorario
alrededor del eje x, seguida de una reflexión respecto al plano yz. Hallar también la
imagen bajo T del vector
⎛⎝ 1√
2√2
⎞⎠ .
Sección 11.4
18. Sea U un vector no nulo de R3 y sea P el plano que pasa por el origen y que tienea U como un vector normal. Sean QU y RU las transformaciones proyección sobre elplano P y reflexión respecto al plano P.a) Probar que QU no es invertible.
b) Probar que RU es invertible y hallar su inversa R−1U .

11.5. Ejercicios 399
19. a) Considerar la recta L : x = 1
3t, y = 2
3t, z = 2
3t y el plano P : x− 2y + 2z = 0.
i) Hallar la inversa de la transformación reflexión respecto a la recta L.ii) Hallar la inversa de la transformación reflexión respecto al plano P.b) Hallar la inversa de la transformación reflexión respecto al plano xz.
20. Sean T y S las transformaciones lineales del espacio definidas por
T
⎛⎝ xyz
⎞⎠ =
⎛⎝ −x+ y
x− zx+ y − z
⎞⎠ y S
⎛⎝ xyz
⎞⎠ =
⎛⎝ −x− y + z
−y + z−x− 2y + z
⎞⎠ .
Probar que T es la inversa de S.
21. Sea T la transformación lineal del espacio tal que m (T ) =
⎛⎝1 2 32 2 33 3 3
⎞⎠ .
a) Mostrar que T es uno a uno y sobre.
b) Hallar m(T−1).
c) Hallar la ley de asignación de T−1.
22. a) Para cada matriz dada determinar si es invertible y, en caso afirmativo, hallar suinversa.
i) A =
⎛⎝ 1 1 02 1 1−1 1 2
⎞⎠ ii) A =
⎛⎝0 1 11 0 11 1 0
⎞⎠ iii) A =
⎛⎝ 1 2 30 1 1−1 −1 −2
⎞⎠
b) Para cada matriz A dada en el literal a) sea T la tranformación lineal del espaciocuya matriz es A. Si A es invertible, hallar la ley de asignación para T−1 y si no loes hallar la imagen de R3 bajo T .
23. Para cada literal, comprobar que la transformación lineal T es invertible mostrandoque el único vector X de R3 tal que T (X) = O es X = O; además, hallar la ley deasignación de T−1.
a) T
⎛⎝ xyz
⎞⎠ =
⎛⎝ −x+ y + z
x− 2z2x− z
⎞⎠ b) T
⎛⎝ xyz
⎞⎠ =
⎛⎝1 3 23 2 13 2 1
⎞⎠⎛⎝ xyz
⎞⎠
c) T
⎛⎝ xyz
⎞⎠ =
⎛⎝ −2x− z−y − 2z−2z
⎞⎠ d) T
⎛⎝ xyz
⎞⎠ = x
⎛⎝ 111
⎞⎠+y
⎛⎝ 126
⎞⎠+z
⎛⎝ −1−11
⎞⎠ .
24. a) Probar que si T y S son transformaciones lineales invertibles del espacio entoncesTS es invertible y (TS)−1 = S−1T−1.
b) Sea T la reflexión respecto a la recta generada por el vector U =
⎛⎝ 1−10
⎞⎠ y sea S
la reflexión respecto al plano que pasa por el origen y tiene al vector N =
⎛⎝ −1
01
⎞⎠
como un vector normal. Empleando el resultado en a) hallar la inversa de TS.

400 11. Transformaciones lineales del espacio y matrices 3× 3
25. a) Sea T la transformación lineal del espacio definida por
T
⎛⎝ xyz
⎞⎠ =
⎛⎝ ax+ y2x+ ay + 2zy + az
⎞⎠
Hallar los valores de la constante a para los cuales T no es invertible.
b) Hallar una condición necesaria y suficiente sobre los números a , b y c de modo que
la transformación T con matriz
⎛⎝a 0 00 b 00 0 c
⎞⎠ tenga inversa. Hallar la ley de asignación
de T−1 cuando T sea invertible.
c) Muestre que la transformación lineal con matriz
A =
⎛⎝a d a+ db e b+ ec f c+ f
⎞⎠
donde a, b, c, d, e, y f son números reales cualesquiera, no es invertible.
d) Hallar una condición necesaria y suficiente sobre los números a, b, c y d, para que
la matriz A =
⎛⎝1 0 00 a b0 c d
⎞⎠ sea invertible. Hallar A−1 cuando A sea invertible.
26. Determinar si los vectores dados en cada literal son linealmente dependientes.
a) X =
⎛⎝ 111
⎞⎠ , Y =
⎛⎝ 012
⎞⎠ , Z =
⎛⎝ 101
⎞⎠
b) X =
⎛⎝ 101
⎞⎠ , Y =
⎛⎝ 111
⎞⎠ , Z =
⎛⎝ 010
⎞⎠

12
Sistemas de ecuaciones lineales
3× 3
12.1 Definiciones y algunos resultados básicos
Se denomina ecuación lineal con tres variables x, y, z a toda ecuación de la forma
ax+ by + cz = u (12.1)
en la cual a, b, c y u son números reales dados. Una solución de tal ecuación es una terna
ordenada
⎛⎝ x0y0z0
⎞⎠ de R3 tal que al sustituir x por x0, y por y0 y z por z0, la ecuación se
satisface, es decir,ax0 + by0 + cz0 = u
Por ejemplo, una solución de la ecuación x + 2y − z = 3 es la terna⎛⎝ 1
0−2
⎞⎠ ya que
1 + 2 (0)− (−2) = 3.El conjunto de todas las soluciones de una ecuación del tipo (12.1) se dirá su conjunto
solución. Dos ecuaciones del tipo (12.1) se dicen equivalentes si tienen el mismo conjuntosolución; cuando se multiplica una de tales ecuaciones por un escalar no nulo se obtieneuna ecuación equivalente. Como sabemos, si a �= 0 o b �= 0 o c �= 0, (12.1) es una ecuaciónpara un plano, así que en tal caso el conjunto solución de (12.1) es dicho plano.
Ejemplo 12.1
Consideremos la ecuaciónx+ 2y − z = 3 (12.2)
Su conjunto solución es el plano P con ecuación (12.2). Nótese que si asignamos
cualquier valor a z y cualquier valor a y, el valor de x para que la terna
⎛⎝ xyz
⎞⎠ sea
solución de (12.2), queda determinada así: x = 3− 2y + z. Por tanto, el conjunto soluciónde (12.2), es decir, el plano P, está dado por
P =⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3
/⎛⎝ xyz
⎞⎠ =
⎛⎝ 3− 2y + z
yz
⎞⎠⎫⎬⎭
401

402 12. Sistemas de ecuaciones lineales 3× 3
o equivalentemente,
P =⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3
/⎛⎝ xyz
⎞⎠ =
⎛⎝ 300
⎞⎠+ y
⎛⎝ −2
10
⎞⎠+ z
⎛⎝ 101
⎞⎠⎫⎬⎭ �
Ejemplo 12.2
a) El conjunto solución de la ecuación
0x+ 0y + 0z = 0
es todo R3, pues todo vector
⎛⎝ x0y0z0
⎞⎠ de R3 la satisface.
b) Si u �= 0, el conjunto solución de la ecuación
0x+ 0y + 0z = u
es φ, pues ningún vector
⎛⎝ x0y0z0
⎞⎠ de R3 la satisface. �
Consideremos ahora un sistema de dos ecuaciones lineales con tres variables (o incóg-nitas):
a1x+ b1y + c1z = u1a2x+ b2y + c2z = u2
(12.3)
Una solución del sistema (12.3) es un vector
⎛⎝ x0y0z0
⎞⎠ de R3 que sea solución de cada
una de las dos ecuaciones. El sistema (12.3) se dice soluble o consistente si tiene almenos una solución; en caso contrario se dice no soluble o inconsistente. El conjuntode todas las soluciones del sistema se dirá su conjunto solución. Dos sistemas del tipo(12.3) se dicen equivalentes si tienen el mismo conjunto solución. Si en el sistema (12.3)
se tiene u1 = 0 y u2 = 0, el sistema se dice homogéneo; en tal caso el vector
⎛⎝ 000
⎞⎠ es
una solución del sistema, la cual es llamada la solución trivial.
Ejemplo 12.3
a) El conjunto solución del sistema
0x+ 0y + 0z = 3x− 2y + 3z = 5
es φ, pues la primera ecuación carece de soluciones.b) El conjunto solución del sistema
0x+ 0y + 0z = 0x− 2y + 3z = 5

12.1. Definiciones y algunos resultados básicos 403
es el de la segunda ecuación (ya que el conjunto solución de la primera es todo R3), esdecir, es el plano con ecuación x− 2y + 3z = 5.c) El conjunto solución del sistema
0x+ 0y + 0z = 00x+ 0y + 0z = 0
es todo R3, pues el conjunto solución para cada una de las dos ecuaciones es R3. �
En general, si en el sistema (12.3) se tiene a1 = 0, b1 = 0 y c1 = 0 o a2 = 0, b2 = 0 yc2 = 0 entonces el conjunto solución del sistema es φ, un plano o todo R
3.Supongamos ahora que en el sistema (12.3)
a1 �= 0 o b1 �= 0 o c1 �= 0 y a2 �= 0 o b2 �= 0 o c2 �= 0 (12.4)
En este caso el conjunto solución de cada ecuación es un plano; si denotamos P1, P2dichos planos entonces el conjunto solución del sistema es P1 ∩ P2.
Ahora, para los dos planos P1, P2 se presenta uno y sólo uno de los tres casos siguientes:Caso 1. P1 = P2.En este caso P1 ∩ P2 = P1.Caso 2.P1 y P2 son paralelos y P1 �= P2.En este caso P1 ∩ P2 = φ.Caso 3. P1 y P2 no son paralelos.En este caso P1 ∩ P2 es una recta.En la figura 12.1 se ilustran estos tres casos.
Figura 12.1.
Admitiendo lo anterior, podemos afirmar que:
Para un sistemaa1x+ b1y + c1z = u1a2x+ b2y + c2z = u2
con
⎛⎝ a1b1c1
⎞⎠ �= O y
⎛⎝ a2b2c2
⎞⎠ �= O, se da uno y sólo uno de los siguientes casos
Caso 1. El conjunto solución es un plano.Caso 2. El conjunto solución es φ.Caso 3. El conjunto solución es una recta.

404 12. Sistemas de ecuaciones lineales 3× 3
Nótese que si el sistema es homogéneo, entonces sólo se dan los casos 1 y 3 : El conjuntosolución es un plano que pasa por el origen o es una recta que pasa por el origen. Lo primeroocurre cuando los planos con ecuaciones
a1x+ b1y + c1z = 0 y a2x+ b2y + c2z = 0
coinciden, es decir, cuando los vectores⎛⎝ a1b1c1
⎞⎠ y
⎛⎝ a2b2c2
⎞⎠
son L.D. Obviamente, el otro caso se da cuando estos vectores son L.I.
Ejemplo 12.4
En el sistema
x− 2y + 3z = 22x− 4y + 6z = 4
las dos ecuaciones representan un mismo plano. Por tanto, el conjunto solución del sistemaes un plano, el plano con ecuación x− 2y + 3z = 2 �
Ejemplo 12.5
En el sistema
x− 2y + 3z = 22x− 4y + 6z = 5
las ecuaciones representan planos paralelos distintos, luego el sistema no es soluble. �
Ejemplo 12.6
En el sistema
x− 2y + 3z = 22x+ y + z = 1
(12.5)
las ecuaciones representan planos no paralelos, luego el conjunto solución del sistema es larecta intersección de esos dos planos. Podemos obtener una ecuación vectorial paramétricapara dicha recta, encontrándole un vector director y un punto por donde ella pasa. Tambiénpodemos obtener lo mismo resolviendo el sistema (12.5) mediante el método de eliminación(el cual ya hemos empleado en sistemas de dos ecuaciones con dos incógnitas) como se mues-tra a continuación: A fin de eliminar la incógnita x en la segunda ecuación, multiplicamosla primera ecuación por −2 y la ecuación resultante (la cual es −2x + 4y − 6z = −4) lasumamos a la segunda ecuación; se obtiene
5y − 5z = −3Así el sistema (12.5) es equivalente al sistema
x− 2y + 3z = 25y − 5z = −3 (12.6)
En este sistema se observa que si
⎛⎝ xyz
⎞⎠ es una solución de él entonces, despejando y de
la segunda ecuación, se tiene y = −3
5+ z, y sustituyendo este valor en la primera y luego

12.1. Definiciones y algunos resultados básicos 405
despejando x se obtiene x = 2 + 2(−3
5+ z) − 3z = 4
5− z. Así, toda solución
⎛⎝ xyz
⎞⎠ del
sistema (12.6) es de la forma ⎛⎝ xyz
⎞⎠ =
⎛⎝ 4
5− z
−3
5+ zz
⎞⎠ (12.7)
Recíprocamente, todo vector
⎛⎝ xyz
⎞⎠ de la forma anterior es solución del sistema (12.6),
lo cual puede comprobarlo el lector sustituyendo x por 45− z y y por −3
5+ z en el sistema
(12.6). Luego, el conjunto solución del sistema (12.6), y por tanto el del sistema (12.5), esla recta
L =⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3
/⎛⎝ xyz
⎞⎠ =
⎛⎝ 4
5− z
−3
5+ zz
⎞⎠⎫⎬⎭
o, en forma equivalente,
L =⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3
/⎛⎝ xyz
⎞⎠ =
⎛⎝ 4/5−3/50
⎞⎠+ z
⎛⎝ −1
11
⎞⎠⎫⎬⎭ �
Nótese que el sistema (12.6) se resolvió así: Se despejó y en términos de z de la segundaecuación; luego se sustituyó esa expresión de y en la primera ecuación y se despejó x entérminos de z. Ello condujo a la expresión (12.7). Esta manera de proceder en sistemasdel tipo (12.6) se conoce como sustitución de abajo hacia arriba o más brevementesustitución regresiva.
Pasemos ahora a considerar un sistema de tres ecuaciones lineales con tres incógnitas
a1x+ b1y + c1z = u1a2x+ b2y + c2z = u2a3x+ b3y + c3z = u3
(12.8)
Para estos sistemas, los conceptos de solución, conjunto solución, sistema soluble,
sistemas equivalentes, sistema homogéneo y solución trivial se definen exactamentecomo para los sistemas del tipo (12.3).
Supongamos por el momento, que los tres vectores⎛⎝ a1b1c1
⎞⎠ ,
⎛⎝ a2b2c2
⎞⎠ ,
⎛⎝ a3b3c3
⎞⎠

406 12. Sistemas de ecuaciones lineales 3× 3
son no nulos. En tal caso las ecuaciones en (12.8) representan planos P1, P2, P3 y elconjunto solución del sistema es precisamente P1 ∩ P2 ∩ P3.
Para los planos P1, P2, P3 se presenta uno y sólo uno de los ocho casos siguientes:
Caso 1. P1 = P2 = P3En este caso P1 ∩ P2 ∩ P3 = P1.
Caso 2. Dos de los planos coinciden y son paralelos al otro, el cual es distinto de losdos primeros.
En este caso P1 ∩ P2 ∩ P3 = φ.
Caso 3. Dos de los planos coinciden y el otro, el cual es distinto a los primeros, loscorta.
En este caso P1 ∩ P2 ∩ P3 es una recta.
Caso 4. Los tres planos son paralelos pero distintos dos a dos.
En este caso P1 ∩ P2 ∩ P3 = φ.
Caso 5. Los tres planos son distintos dos a dos, dos de ellos son paralelos y el otro loscorta.
En este caso P1 ∩ P2 ∩ P3 = φ.
Caso 6. Los tres planos son distintos y no paralelos dos a dos, siendo la intersecciónde cualesquiera dos de ellos una misma recta.
En este caso P1 ∩ P2 ∩ P3 es una recta.
Caso 7. Los tres planos son distintos y no paralelos dos a dos; además, la recta in-tersección de cualesquiera dos de ellos es paralela al otro plano sin estar contenida enél.
En este caso P1 ∩ P2 ∩ P3 = φ.
Caso 8. Los tres planos son distintos y no paralelos dos a dos; además, la recta inter-sección de cualesquiera dos de ellos no es paralela al otro plano y por tanto lo corta en unpunto.
En este caso P1 ∩ P2 ∩ P3 es un conjunto con un solo punto.
En la figura 12.2 se ilustran estos casos.

12.1. Definiciones y algunos resultados básicos 407
Figura 12.2.

408 12. Sistemas de ecuaciones lineales 3× 3
Admitiendo lo anterior, podemos afirmar que:
Para un sistemaa1x+ b1y + c1z = u1a2x+ b2y + c2z = u2a3x+ b3y + c3z = u3
con
⎛⎝ a1b1c1
⎞⎠ �= O,
⎛⎝ a2b2c2
⎞⎠ �= O y
⎛⎝ a3b3c3
⎞⎠ �= O
se da uno y sólo uno de los casos siguientes:Caso 1. El conjunto solución es φ.Caso 2. El conjunto solución es un conjunto con un único punto.Caso 3. El conjunto solución es una recta.Caso 4. El conjunto solución es un plano.
Dejamos al lector determinar cómo es el conjunto solución de un sistema del tipo (12.8)si es nulo al menos uno de los vectores⎛
⎝ a1b1c1
⎞⎠ ,
⎛⎝ a2b2c2
⎞⎠ ,
⎛⎝ a3b3c3
⎞⎠ .
Ejemplo 12.7
Resolvamos el sistema
x+ y + z = 32y − z = 7
2z = 6
De la tercera ecuación se observa que la única opción para z es z = 6
2= 3; sustituyendo
en la segunda ecuación z por 3 y despejando y se obtiene que y sólo puede tomar el valory = 1
2(7 + 3) = 5. Finalmente, sustituyendo en la primera ecuación z por 3 y y por 5 se
obtiene, como único valor posible para x, x = 3− 5− 3 = −5. Por tanto, la única solución
del sistema es
⎛⎝ −5
53
⎞⎠ �
El procedimiento empleado en el ejemplo anterior para resolver el sistema también seincluye en lo que hemos llamado sustitución regresiva.
Ejemplo 12.8
Consideremos el sistema
x− 2y + 3z = 25y − 5z = −3
0x+ 0y + 0z = 0(12.9)
Puesto que el conjunto solución de la tercera ecuación es todo R3, entonces el conjuntosolución del sistema (12.9) es el mismo del sistema
x− 2y + 3z = 25y − 5z = −3 (12.10)

12.2. Método de eliminación de Gauss 409
Ahora, dada la forma de este sistema, él se puede resolver mediante sustitución regre-siva. Esto se hizo en el ejemplo 12.6. Su conjunto solución ( y por tanto el del sistema(12.9)) es la recta con ecuación
⎛⎝ xyz
⎞⎠ =
⎛⎝ 4/5−3/50
⎞⎠+ z
⎛⎝ −1
11
⎞⎠ �
12.2 Método de eliminación de Gauss
En los ejemplos 12.7 y 12.8 fue fácil resolver los sistemas, dada la forma simple de ellos. Porejemplo, en el sistema del ejemplo 12.7, la incógnita x sólo aparece en la primera ecuacióny la incógnita y sólo en las dos primeras.
Para resolver un sistema del tipo (12.8) que no tenga forma simple, es natural intentartransformarlo en otro sistema equivalente a él que si tenga una forma simple, como la delos sistemas de los ejemplos 12.7 y 12.8. Más adelante se precisará que significa tener una“forma simple”. Con miras a transformar un sistema del tipo (12.8) en otro equivalente aél que tenga forma simple, podemos:
i) Intercambiar dos ecuaciones.
ii) Multiplicar ambos lados de una ecuación por un escalar no nulo.
iii) Sustituir una ecuación por la suma de ella con un múltiplo escalar de otra.
Estas manipulaciones de las ecuaciones de un sistema se llaman operaciones elemen-
tales. Para el lector ya debe ser claro que ninguna de estas operaciones altera el conjuntosolución del sistema. Nótese que la operación del tipo iii) es la que permite eliminar in-cógnitas para simplificar el sistema.
En los tres ejemplos siguientes se ilustra lo anterior.
Ejemplo 12.9
Resuelva el sistema
2x− y + z = 42x+ 2y + 3z = 36x− 9y − 2z = 17
(12.11)
Solución:
Nuestro primer propósito es eliminar la incógnita x en la segunda ecuación, lo cual seconsigue sumando a dicha ecuación, la primera multiplicada por (−1). La nueva segundaecuación es
3y + 2z = −1Ahora eliminamos x en la tercera ecuación. Para ello sumamos a esa ecuación, la primera
multiplicada por −3. El resultado es
−6y − 5z = 5
la cual es la nueva tercera ecuación. Así, el sistema (12.11) es equivalente al sistema
2x− y + z = 43y + 2z = −1
−6y − 5z = 5(12.12)

410 12. Sistemas de ecuaciones lineales 3× 3
De este sistema conservamos las dos primeras ecuaciones y eliminamos la incógnita yen la tercera. Para ello sumamos a la tercera ecuación, la segunda multiplicada por 2. Seobtiene así el sistema
2x− y + z = 43y + 2z = −1
−z = 3(12.13)
el cual es equivalente al sistema (12.12) y por tanto al sistema (12.11). Se resuelve ahora elsistema (12.13) mediante sustitución regresiva, obteniéndose como única solución el vector⎛⎝ 13/3
5/3−3
⎞⎠ , el cual es entonces la única solución del sistema inicialmente dado. �
Ejemplo 12.10
Resuelva el sistema
x+ 2y + 3z = 4x+ 3y + 4z = 5−x − z = −2
(12.14)
Solución:
Conservamos la primera ecuación y empezamos por eliminar la incógnita x en las otrasdos ecuaciones. Esto se consigue sumando a la segunda, la primera multiplicada por −1(o equivalentemente, restando la primera ecuación de la segunda) y sumando a la terceraecuación la primera. En esta primera etapa se obtiene el sistema
x+ 2y + 3z = 4y + z = 12y + 2z = 2
(12.15)
el cual es equivalente al sistema (12.14). De él conservamos las dos primeras ecuacionesy eliminamos la incógnita y en la tercera. Para ello sumamos a dicha tercera ecuación, lasegunda multiplicada por −2. En este caso el sistema resultante es
x+ 2y + 3z = 4y + z = 1
0z = 0(12.16)
el cual es equivalente al sistema
x+ 2y + 3z = 4y + z = 1
(12.17)
pues la tercera ecuación en (12.16) (la cual es 0x+0y+0z = 0) la satisface todo vector deR3. Este último sistema se resuelve mediante sustitución regresiva de la siguiente manera:De la segunda ecuación, despejando y en términos de z, se obtiene
y = 1− z
Ahora sustituimos en la primera ecuación y por 1− z y despejamos x. Se obtiene
x = 4− 2 (1− z)− 3z = 2− z

12.2. Método de eliminación de Gauss 411
Luego, las soluciones del sistema (12.17) (y por tanto del sistema (12.14)) son los
vectores
⎛⎝ xyz
⎞⎠ de la forma
⎛⎝ xyz
⎞⎠ =
⎛⎝ 2− z1− zz
⎞⎠ (12.18)
o equivalentemente, de la forma⎛⎝ xyz
⎞⎠ =
⎛⎝ 210
⎞⎠+ z
⎛⎝ −1−11
⎞⎠ (12.19)
Así que, el conjunto solución del sistema (12.14) es la recta que pasa por el punto⎛⎝ 210
⎞⎠ y tiene a
⎛⎝ −1−11
⎞⎠ como vector director. �
Ejemplo 12.11
Resuelva el sistema
x− y + z = 12x− 2y + 2z = 23x− 3y + 3z = 3
(12.20)
Solución:
Es evidente que las tres ecuaciones del sistema representan un mismo plano, así que elconjunto solución de este sistema es el plano con ecuación
x− y + z = 1 (12.21)
Si se aplica al sistema (12.20) el método de eliminación, vemos que al eliminar x en lasdos últimas ecuaciones se obtiene el sistema
x− y + z = 10x+ 0y + 0z = 00x+ 0y + 0z = 0
cuyo conjunto solución es el de la primera ecuación en él.Escribiendo la ecuación (12.21) en la forma
x = 1+ y − z
y considerando y y z como parámetros, vemos que el conjunto solución de (12.21), y portanto del sistema (12.20), también puede escribirse como el conjunto de todos los vectores⎛⎝ xyz
⎞⎠ de R3 de la forma
⎛⎝ xyz
⎞⎠ =
⎛⎝ 1 + y − z
yz
⎞⎠

412 12. Sistemas de ecuaciones lineales 3× 3
es decir, de la forma⎛⎝ xyz
⎞⎠ =
⎛⎝ 100
⎞⎠+ y
⎛⎝ 110
⎞⎠+ z
⎛⎝ −1
01
⎞⎠ �
En los ejemplos 12.9, 12.10 y 12.11 eliminamos incógnitas de una manera metódica y conun propósito claro; en realidad aplicamos elmétodo de eliminación de Gauss. A conti-nuación precisaremos en qué consiste este método y lo presentaremos en forma simplificada,omitiendo las incógnitas y los signos = en las ecuaciones. Necesitamos introducir antesalgunas notaciones y definiciones.
En primer lugar, es claro que el sistema
a1x+ b1y + c1z = u1a2x+ b2y + c2z = u2a3x+ b3y + c3z = u3
(12.22)
puede expresarse en la forma equivalente⎛⎝a1 b1 c1a2 b2 c2a3 b3 c3
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ u1u2u3
⎞⎠
es decir, en la formaAX = U (12.23)
con
A =
⎛⎝a1 b1 c1a2 b2 c2a3 b3 c3
⎞⎠ , X =
⎛⎝ xyz
⎞⎠ y U =
⎛⎝ u1u2u3
⎞⎠
Nos referiremos a la matriz A como la matriz de coeficientes, al vector X comovector de incógnitas, al vector U como vector de términos independientes y alarreglo ⎛
⎝a1 b1 c1 u1a2 b2 c2 u2a3 b3 c3 u3
⎞⎠ (12.24)
como la matriz aumentada o ampliada del sistema (12.22). En lugar de (12.24) es-cribiremos ⎛
⎝a1 b1 c1 | u1a2 b2 c2 | u2a3 b3 c3 | u3
⎞⎠ o
(A... U
)
En general, un arreglo de números como el que aparece en (12.24) se dice una matriz
de 3 filas y 4 columnas o más brevemente, una matriz 3×4.
Ejemplo 12.12
a) En el ejemplo 12.9, la matriz aumentada del sistema inicial (12.11) es⎛⎝2 −1 1 | 42 2 3 | 36 −9 −2 | 17
⎞⎠

12.2. Método de eliminación de Gauss 413
mientras que la del sistema final (12.13) es
2 −1 1 | 4
0 3 2 | −1
0 0 −1 | 3(12.25)
b) En el ejemplo 12.10, la matriz aumentada del sistema inicial (12.14) es⎛⎝ 1 2 3 | 4
1 3 4 | 5−1 0 −1 | −2
⎞⎠
mientras que la del sistema final (12.17) es
(12.26)
c) En el ejemplo 12.11, la matriz aumentada del sistema inicial (12.20) es⎛⎝1 −1 1 | 12 −2 2 | 23 −3 3 | 3
⎞⎠
mientras que la del sistema final (12.21) es
1 −1 1 | 1
0 0 0 | 0
0 0 0 | 0� (12.27)
Obsérvese que en (12.25), (12.26) y (12.27) del ejemplo anterior, las matrices confor-madas por las tres primeras columnas tienen una forma especial, tienen forma escalonada.En general, una matriz 3 × 3 se dice una matriz escalonada si cumple las siguientescondiciones en las que llamamos pivote al primer número distinto de cero de cada fila nonula:• Primero están las filas no nulas (si las hay).• Debajo de cada pivote, en la columna correspondiente a él , todos los números son cero.• Cada pivote está a la izquierda del pivote de la siguiente fila hacia abajo, si ésta es no
nula.
Un sistema cuya matriz de coeficientes sea una matriz escalonada se dirá un sistema
escalonado.
Ya podemos precisar en qué consiste el método de eliminación de Gauss: En trans-formar un sistema dado, mediante operaciones elementales sobre sus ecuaciones, en unsistema equivalente escalonado. A continuación mostramos que tal transformación siemprees posible:

414 12. Sistemas de ecuaciones lineales 3× 3
Partamos del sistemaa1x+ b1y + c1z = u1a2x+ b2y + c2z = u2a3x+ b3y + c3z = u3
(12.28)
y consideremos el caso en el cual al menos uno de los números a1, a2, a3 es distinto decero. Intercambiando ecuaciones si es necesario, podemos suponer que a1 �= 0. Los pasos aseguir en este caso son:
• Se mantiene la primera ecuación y se suma a la segunda ecuación, la primera multipli-
cada por −a2a1; con ello se elimina la incógnita x en la segunda ecuación. Luego se suma a
la tercera ecuación, la primera multiplicada por −a3a1, con lo cual se elimina la incógnita x
de la tercera ecuación.
Lo anterior nos lleva a un sistema equivalente de la forma
a1x+ b1y + c1z = u1b′2y + c′
2z = u′
2
b′3y + c′
3z = u′
3
(12.29)
• Supongamos que b′2�= 0 o b′
3�= 0. Podemos asumir (intercambiando las dos últimas
ecuaciones si es necesario) que b′2�= 0. Sumando a la tercera ecuación en (12.29), la se-
gunda multiplicada por −b′3
b′2
, se elimina la incógnita y en la tercera ecuación en (12.29),
obteniéndose un sistema equivalente al sistema (12.29) de la forma
a1x+ b1y + c1z = u1b′2y + c′
2z = u′
2
c′′3z = u′′
3
el cual es un sistema escalonado.
Si en el sistema (12.29) ocurre que b′2= b′
3= 0, entonces (12.29) es de la forma
a1x+ b1y + c1z = u1c′2z = u′
2
c′3z = u′
3
(12.30)
el cual ya es escalonado cuando c′2�= 0 y c′
3= 0 o también cuando c′
2= 0 y c′
3= 0. El
sistema (12.30) no es escalonado cuando c′2= 0 y c′
3�= 0 o también cuando c′
2�= 0 y c′
3�= 0.
En el primer caso, basta intercambiar sus dos últimas ecuaciones para obtener un sistemaescalonado; en el segundo caso se suma a la tercera ecuación, la segunda multiplicada por
−c′3
c′2
, con lo cual se elimina la incógnita z en la tercera ecuación, obteniéndose un sistema
escalonado. Se obtiene así, en ambos casos, un sistema escalonado equivalente al sistema(12.30) y por tanto al sistema (12.28).
Retornemos al sistema (12.28) y consideremos ahora el caso en el cual a1 = a2 = a3 = 0.En este caso se procede de manera análoga a lo antes descrito, solo que iniciando con b1,b2, b3 en lugar de a1, a2, a3 si al menos uno de los números b1, b2, b3 es distinto de cero.Si ocurre que también b1 = b2 = b3 = 0, pasamos a considerar los números c1, c2, c3. Sial menos uno de estos números es distinto de cero, procedemos como en el caso en el cual

12.2. Método de eliminación de Gauss 415
b1 �= 0 o b2 �= 0 o b3 �= 0. Finalmente, si también c1 = c2 = c3 = 0 entonces la matriz decoeficientes del sistema original es ⎛
⎝0 0 00 0 00 0 0
⎞⎠
la cual ya es una matriz escalonada �
Es claro que en el proceso de pasar de un sistema del tipo (12.28) a un sistema escalona-do, las incógnitas x, y, z y los símbolos = y + no juegan ningún papel. Por tanto lasincógnitas y los mencionados símbolos pueden omitirse durante el proceso, efectuandolas operaciones elementales con las filas de la matriz aumentada del sistema, en lugar deefectuarlas con las ecuaciones. A las operaciones elementales con ecuaciones, correspondenlas siguientes operaciones elementales con filas:• Intercambiar dos filas• Multiplicar una fila por un escalar no nulo• Sustituir una fila por la suma de ella con un múltiplo escalar de otra fila.
Ejemplo 12.13
Consideremos el sistema
2x− y + z = 42x+ 2y + 3z = 36x− 9y − 2z = 17
del ejemplo 12.9. Para transformarlo en un sistema escalonado equivalente, trabajaremoscon su matriz aumentada, la cual es⎛
⎝2 −1 1 | 42 2 3 | 36 −9 −2 | 17
⎞⎠
Sumando a la segunda fila la primera multiplicada por −1, y sumando a la tercera fila,la primera multiplicada por −3, se obtiene la matriz⎛
⎝2 −1 1 | 40 3 2 | −10 −6 −5 | 5
⎞⎠
Ahora conservamos las dos primeras filas de la matriz anterior y sumamos a la tercerafila, la segunda multiplicada por 2. Se obtiene así la matriz⎛
⎝2 −1 1 | 40 3 2 | −10 0 −1 | 3
⎞⎠
en la cual las tres primeras columnas conforman una matriz escalonada.El sistema escalonado correspondiente a esta matriz es
2x− y + z = 43y + 2z = −1
−z = 3
el cual se resuelve por sustitución regresiva, obteniéndose que el conjunto solución consta
únicamente del vector
⎛⎝ 13/3
5/3−3
⎞⎠ �

416 12. Sistemas de ecuaciones lineales 3× 3
12.3 Otros resultados básicos
Ahora estableceremos algunos resultados generales acerca de sistemas del tipo (12.8), resul-tados que son completamente similares a los ya establecidos para sistemas de dos ecuacionescon dos incógnitas. No daremos las pruebas de estos resultados pues ellas son prácticamentelas ya presentadas en el capítulo 5 para sistemas de dos ecuaciones con dos incógnitas.
En en primer lugar tenemos:
El sistema (12.23), AX = U, tiene solamente una soluciónsi y sólo si la matriz A es invertible. Cuando la matriz Aes inverible, la única solución del sistema es X = A−1U.
En cuanto al sistema homogéneo AX = O , se tiene lo siguiente:
a) El sistema homogéneo AX = O tiene únicamente la solucióntrivial si y sólo si la matriz A es invertible.
b) Si A no es invertible y A �= O, el conjunto solución del sistemaAX = O es una línea recta que pasa por el origen o es un planoque pasa por el origen.
c) Si A = O, el conjunto solución del sistema AX = O es todo R3.
En el siguiente resultado se relaciona el conjunto solución de un sistema no homogéneosoluble AX = U, con el conjunto solución del sistema homogéneo asociado AX = O.
Si X0 es una solución particular del sistema no homogéneo AX = Uy SH es el conjunto solución del sistema homogéneo asociado AX = O,entonces el conjunto solución del sistema AX = U es el conjunto
S = {X ∈ R3 / X = X0 +Xh, Xh ∈ SH}
el cual es la imagen del conjunto SH bajo la traslación TX0, es decir,S = TX0 (SH) .
En la figura 12.3 se ilustra lo expresado en este último resultado, en los casos en queSH es una recta o un plano.

12.3. Otros resultados básicos 417
Figura 12.3.
Tenemos por último, lo siguiente:
El sistema AX = U es soluble si y sólo si el vectorU es C.L. de las columnas de la matriz A.
Los ejemplos que siguen a continuación hacen referencia a los resultados anteriores.
Ejemplo 12.14
Consideremos el sistema del ejemplo 12.9,
AX = U
en el cual
A =
⎛⎝2 −1 12 2 36 −9 −2
⎞⎠ y U =
⎛⎝ 4
317
⎞⎠
El lector puede comprobar que la matriz A es invertible y que
A−1 = −16
⎛⎝ 23 −11 −5
22 −10 −4−30 12 6
⎞⎠
Luego, el sistema en consideración tiene como única solución el vector
X = A−1U = −16
⎛⎝ 23 −11 −5
22 −10 −4−30 12 6
⎞⎠⎛⎝ 4
317
⎞⎠ = −1
6
⎛⎝ −26−1018
⎞⎠ =
⎛⎝ 13/3
5/3−3
⎞⎠
la cual ya habíamos obtenido empleando el método de eliminación de Gauss. �
Ejemplo 12.15
Consideremos el sistema ⎛⎝1 −3 21 −3 21 −3 2
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ uvw
⎞⎠ (12.31)

418 12. Sistemas de ecuaciones lineales 3× 3
Sabemos que este sistema es soluble si y sólo si el vector
⎛⎝ uvw
⎞⎠ es C.L. de las columnas
⎛⎝ 111
⎞⎠ ,
⎛⎝ −3−3−3
⎞⎠ ,
⎛⎝ 222
⎞⎠ (12.32)
Ahora, como la segunda y la tercera columnas en (12.32) son múltiplos escalares de laprimera entonces las C.L. de las tres columnas en (12.32) son, en realidad, los múltiplos
escalares del vector
⎛⎝ 111
⎞⎠, es decir, son los vectores de la recta L generada por dicho
vector.
Por tanto, el sistema (12.31) es soluble si y sólo si el vector
⎛⎝ uvw
⎞⎠ es múltiplo escalar
del vector
⎛⎝ 111
⎞⎠ , es decir, si y sólo si
⎛⎝ uvw
⎞⎠ ∈ L.
Por ejemplo, si
⎛⎝ uvw
⎞⎠ =
⎛⎝ −5/4−5/4−5/4
⎞⎠ entonces el sistema (12.31) es soluble ya que
este vector es múltiplo escalar de
⎛⎝ 111
⎞⎠ . Por otra parte, si
⎛⎝ uvw
⎞⎠ =
⎛⎝ 2−47
⎞⎠ entonces
el sistema (12.31) es no soluble pues este vector no es múltiplo escalar de
⎛⎝ 111
⎞⎠. Es de
resaltar que en este caso los vectores
⎛⎝ uvw
⎞⎠ para los cuales el sistema (12.31) es soluble
conforman una recta que pasa por el origen, la cual es la recta L. �
Ejemplo 12.16
Consideremos el sistema
⎛⎝ 1 0 2−1 1 −52 3 −5
⎞⎠⎛⎝ xyz
⎞⎠ =
⎛⎝ uvw
⎞⎠ (12.33)
y denotemos por A su matriz de coeficientes. Este sistema es soluble si y sólo si el vector⎛⎝ uvw
⎞⎠ es C.L. de las columnas de la matriz A, es decir, de los vectores
⎛⎝ 1−12
⎞⎠ ,
⎛⎝ 013
⎞⎠ ,
⎛⎝ 2−5−5
⎞⎠ . (12.34)

12.4. Método de Gauss-Jordan 419
El lector puede comprobar que el determinante de la matriz A es cero y por tanto losvectores en (12.34) son L.D. Ahora, se observa que los dos primeros vectores en (12.34)son L.I. luego debe tenerse que la tercera columna en (12.34) es C.L. de la dos primeras.Así las cosas, las C.L. de las tres columnas en (12.34) son, en realidad, las C.L. de las
dos primeras, es decir, son los vectores del plano P generado por los vectores
⎛⎝ 1−12
⎞⎠ y
⎛⎝ 013
⎞⎠.
Se deja al lector comprobar que una ecuación para dicho plano P es
5x+ 3y − z = 0 (12.35)
En resumen, el sistema (12.33) es soluble si y sólo si el vector
⎛⎝ uvw
⎞⎠ es C.L. de los
vectores
⎛⎝ 1−12
⎞⎠ y
⎛⎝ 013
⎞⎠ , es decir, si y sólo si
⎛⎝ uvw
⎞⎠ ∈ P.
Por ejemplo, si
⎛⎝ uvw
⎞⎠ =
⎛⎝ 118
⎞⎠ entonces el sistema (12.33) es soluble puesto que
este vector pertenece al plano P ya que él satisface la ecuación (12.35). Por otra parte, si⎛⎝ uvw
⎞⎠ =
⎛⎝ −1
26
⎞⎠ entonces el sistema no es soluble ya que este vector no pertenece al
plano P pues no satisface la ecuación (12.35).
Es de resaltar que en este caso los vectores
⎛⎝ uvw
⎞⎠ de R3 para los cuales el sistema
(12.33) es soluble, conforman un plano que pasa por el origen, el cual es el plano P. �
12.4 Método de Gauss-Jordan
Finalizaremos este capítulo refiriéndonos al método de eliminación de Gauss-Jordan
para resolver sistemas de tres ecuaciones lineales con tres incógnitas. En este método (elcual es un refinamiento del método de eliminación de Gauss) el proceso de eliminaciónse lleva hasta el punto en el cual la matriz de coeficientes del sistema, además de serescalonada, tiene todos los pivotes iguales a uno y también ceros encima de cada pivote enla columna correspondiente a éste. Una matriz con estas características se dirá unamatriz
escalonada reducida.
Ejemplo 12.17
Consideremos el sistema
2x− y + z = 42x+ 2y + 3z = 36x− 9y − 2z = 17

420 12. Sistemas de ecuaciones lineales 3× 3
de los ejemplos 12.9 y 12.13. En el ejemplo 12.13 finalizamos el proceso de eliminacióncuando obtuvimos la matriz
2 −1 1 | 4
0 3 2 | −1
0 0 −1 | 3
Continuemos ahora con el proceso de eliminación hasta obtener una matriz escalonadareducida.
Para tener 1 en el lugar de los pivotes 2, 3 y −1, multiplicamos la primera fila por 1
2,
la segunda fila por 13y la tercera fila por −1. Se obtiene así la matriz⎛
⎝1 −1/2 1/2 | 20 1 2/3 | −1/30 0 1 | −3
⎞⎠
Ahora sumamos a la primera fila, la segunda multiplicada por 12, con lo cual obtenemos
la matriz ⎛⎝1 0 5/6 | 11/60 1 2/3 | −1/30 0 1 | −3
⎞⎠
Por último, sumamos a la segunda fila, la tercera multiplicada por −2
3y a la primera
fila, la tercera multiplicada por −5
6. Se obtiene así la matriz⎛⎝1 0 0 | 13/30 1 0 | 5/30 0 1 | −3
⎞⎠
en la cual las tres primeras columnas conforman una matriz escalonada reducida. El sistemacorrespondiente a la matriz aumentada anterior es:
x = 13/3y = 5/3z = −3
Es claro que la única solución del sistema es el vector
⎛⎝ 13/3
5/3−3
⎞⎠ �
Obsérvese en el ejemplo anterior que:• La matriz que se obtuvo al aplicar el método de eliminación de Gauss-Jordan es(
I3... U∗
)
donde U∗ es la única solución del sistema.• Como se obtuvo solución única, la matriz de coeficientes del sistema inicial (y también
la de cada uno de los sistemas en el proceso de eliminación ) es invertible.
En general, se tiene lo siguiente:

12.4. Método de Gauss-Jordan 421
Consideremos un sistema AX = U, donde A es una matriz 3×3 y U un vectorde R3.
a) Si al aplicar el método de eliminación de Gauss-Jordan a la matriz
(A
... U
)
se obtiene la matriz
(I3
... U∗)entonces U∗ es la única solución del sistema
AX = U y además la matriz A es invertible.
b) Si A es invertible entonces al aplicar el método de eliminación de Gauss-
Jordan a la matriz
(A
... U
)se obtiene siempre una matriz de la forma(
I3... U∗
)donde U∗ es la única solución del sistema AX = U .
Sólo es necesario probar lo afirmado en b). Para probarlo digamos que
(A
... U
)=
⎛⎝a1 b1 c1 | u1a2 b2 c2 | u2a3 b3 c3 | u3
⎞⎠ (12.36)
y supongamos que A es invertible.Puesto que A es invertible, al menos uno de los números a1, a2, a3 es no nulo. Inter-
cambiando filas si es necesario, podemos asumir que a1 �= 0.Es claro que siendo a1 �= 0, se pueden conseguir ceros debajo de a1 en la primera
columna, sumando a la segunda y a la tercera fila de la matriz en (12.36), múltiplosapropiados de la primera fila. Si después de obtener dichos ceros, dividimos por a1 la
primera fila, obtendremos una matriz aumentada
(A′
... U ′)de la forma
(A′
... U ′)=
⎛⎝1 b′
1c′1| u′
1
0 b′2c′2| u′
2
0 b′3c′3| u′
3
⎞⎠ (12.37)
Obsérvese que la matriz A′ es invertible (como lo es A) pues el sistema A′X = U ′ tienesolución única ya que este sistema es equivalente al sistema AX = U .
Afirmamos que en A′ al menos uno de los números b′2, b′3es no nulo (si fuera b′
2= b′
3= 0,
entonces la segunda columna de A′ será múltiplo escalar de la primera columna; pero ellono puede ocurrir pues las columnas de A′ son L.I. ya que A′ es invertible). Intercambiandolas filas segunda y tercera en A′, si fuese necesario, podemos suponer que b′
2�= 0. Siendo
b′2�= 0, podemos conseguir ceros en los puestos correspondientes a b′
1y b′
3sumando a la
primera y tercera filas de
(A′
... U ′), múltiplos apropiados de la segunda fila. Si luego
dividimos la segunda fila por b′2se obtiene una matriz aumentada
(A′′
... U ′′)de la forma
(A′′
... U ′′)=
⎛⎝1 0 c′′
1| u′′
1
0 1 c′′2| u′′
2
0 0 c′′3| u′′
3
⎞⎠ (12.38)

422 12. Sistemas de ecuaciones lineales 3× 3
La matriz A′′ en (12.38) es invertible; para ver esto basta dar el mismo argumento quese dio para mostrar la invertibilidad de la matriz A′. Afirmamos que en dicha matriz A′′,c′′3�= 0 (Si fuese c′′
3= 0, la tercera columna de A′′ sería C.L. de las dos primeras columnas
en A′′, pero ello no ocurre ya que las columnas de A′′ son L.I. por ser A′′ una matrizinvertible). Siendo c′′
3�= 0, podemos conseguir ceros en los puestos correspondientes a c′′
1
y c′′2, sumando a la primera y segunda filas de
(A′′
... U ′′)múltiplos apropiados de la
tercera fila. Si luego de ello dividimos por c′′3la tercera fila obtendremos, finalmente, una
matriz de la forma (I3
... U∗)=
⎛⎝1 0 0 | u∗
1
0 1 0 | u∗2
0 0 1 | u∗3
⎞⎠ (12.39)
Es claro que U∗ es la única solución del sistema AX = U . Hemos probado así loafirmado en b). �
El método de eliminación de Gauss-Jordan proporciona otra manera de hallar la inversade cualquier matriz 3× 3 que sea invertible, como se explica a continuación:
Sea A una matriz 3×3 invertible. Sabemos que la primera, segunda y tercera columnasde A−1 son, respectivamente, los vectores
A−1
⎛⎝ 100
⎞⎠ , A−1
⎛⎝ 010
⎞⎠ , A−1
⎛⎝ 001
⎞⎠
los cuales son, respectivamente, las únicas soluciones de los sistemas
A
⎛⎝ xyz
⎞⎠ =
⎛⎝ 100
⎞⎠ , A
⎛⎝ xyz
⎞⎠ =
⎛⎝ 010
⎞⎠ A
⎛⎝ xyz
⎞⎠ =
⎛⎝ 001
⎞⎠ (12.40)
Así que resolviendo estos sistemas encontraremos las columnas de A−1 y por tanto, lamatriz A−1.
Ya sabemos que si aplicamos el método de Gauss-Jordan a las matrices aumentadas⎛⎝A | 1
| 0| 0
⎞⎠ ,
⎛⎝A | 0
| 1| 0
⎞⎠ ,
⎛⎝A | 0
| 0| 1
⎞⎠ (12.41)
de los sistemas en (12.40), obtendremos matrices(I3
... U∗1
),
(I3
... U∗2
),
(I3
... U∗3
)(12.42)
siendo U∗1, U∗
2, U∗
3la primera, segunda y tercera columna de A−1, respectivamente. Así,
A−1 =
(U∗1U∗2U∗3
| | |)
Ahora, es claro que el paso de (12.41) a (12.42) puede hacerse simultáneamente, par-tiendo del arreglo (matriz) ⎛
⎝ | 1 0 0A | 0 1 0
| 0 0 1
⎞⎠

12.4. Método de Gauss-Jordan 423
es decir, partiendo de
(A
... I3
)y realizando operaciones elementales sobre sus filas hasta
obtener una matriz de la forma(I3 | U∗
1U∗2U∗3
| | | |)
Al terminar tendremos que
A−1 =
(U∗1U∗2U∗3
| | |)
En resumen, el procedimiento para calcular A−1 usando operaciones elementales sobrelas filas es:
• Se forma la matriz
(A
... I3
)
• Se realizan operaciones elementales sobre las filas de la matriz
(A
... I3
)hasta obtener(
I3... B
)• La matriz B es A−1
Ejemplo 12.18
Consideremos la matriz
A =
⎛⎝2 −1 31 1 04 −3 2
⎞⎠
la cual es invertible, pues su determinante es distinto de cero. Hallemos ahora su inversaempleando el método de Gauss-Jordan.
Partimos de la matriz(A
... I3
)=
⎛⎝2 −1 3 | 1 0 01 1 0 | 0 1 04 −3 2 | 0 0 1
⎞⎠
Para facilitar el proceso de eliminación intercambiamos la primera y segunda filas, conlo cual obtenemos la matriz ⎛
⎝1 1 0 | 0 1 02 −1 3 | 1 0 04 −3 2 | 0 0 1
⎞⎠
Sumando a la segunda fila la primera multiplicada por −2, y a la tercera fila la primeramultiplicada por −4, se obtiene la matriz⎛
⎝1 1 0 | 0 1 00 −3 3 | 1 −2 00 −7 2 | 0 −4 1
⎞⎠
Ahora sumamos a la tercera fila, la segunda multiplicada por −7
3, y a la primera la
segunda multiplicada por 13, obteniéndose la matriz⎛⎝1 0 1 | 1/3 1/3 00 −3 3 | 1 −2 00 0 −5 | −7/3 2/3 1
⎞⎠

424 12. Sistemas de ecuaciones lineales 3× 3
Sumando a la segunda fila la tercera multiplicada por 3
5, y a la primera la tercera
multiplicada por 15obtenemos la siguiente matriz
⎛⎝1 0 0 | −2/15 7/15 1/50 −3 0 | −2/5 −8/5 3/50 0 −5 | −7/3 2/3 1
⎞⎠
Por último, al multiplicar la segunda fila por −1
3y la tercera por −1
5se obtiene
⎛⎝1 0 0 | −2/15 7/15 1/50 1 0 | 2/15 8/15 −1/50 0 1 | 7/15 −2/15 −1/5
⎞⎠
Por tanto,
A−1 =
⎛⎝−2/15 7/15 1/5
2/15 8/15 −1/57/15 −2/15 −1/5
⎞⎠ = 1
15
⎛⎝−2 7 3
2 8 −37 −2 −3
⎞⎠
El lector puede comprobar que la matriz anterior es efectivamente la inversa de A,mostrando que ⎛
⎝2 −1 31 1 04 −3 2
⎞⎠⎡⎣ 115
⎛⎝−2 7 3
2 8 −37 −2 −3
⎞⎠⎤⎦ = I3 �
12.5 Ejercicios
Sección 12.1
1. Hallar el conjunto solución de cada uno de los siguientes sistemas de ecuacioneslineales e interpretarlo geométricamente.
a) 2x+ 3y − 3z = 2 b)5x+ 2y − 6z = −1x− y + z = −2
c)2x + y − 3z = 3−x− 1
2y + 3
2z = 2
d)x+ 2z = 0
x− 2y − z = 1
e)x− y + z = 0x+ y + z = 0
f)3x− 2y + 2√3z = 1√3x− 2
3
√3y + 2z =
√3
3
Sección 12.2
2. Para cada uno de los siguientes sistemas de ecuaciones lineales,
a) Escribirlo en la forma matricial AX = U
b) Hallar, utilizando el método de eliminación de Gauss, el conjunto solución delsistema e interpretarlo geométricamente.

12.5. Ejercicios 425
i)x− 5
2y + 2z = −3/2
x − y + z = 5x − 4y + 5z = 1
ii)2x+ 3y − 4z = 14x+ 5y − 9z = 4
−2x − y + 4z = −5
iii)x + 2y − z = 52x + 3y + z = −2
−7x − 9y − 8z = 25iv)
3x + y − z = 02x + z = 0x− y + 3z = 0
v)x+ 2y − 5z = 23x + 4z = −12x− 2y + 9z = −2
vi)x − 5y + z = −4
−2x+ 10y − 5z = 22x− 10y + 3z = −6
3. Hallar la intersección de los planos P1, P2 y P3 descritos en cada literal, planteandoy resolviendo un sistema apropiado de tres ecuaciones lineales con tres incógnitas.
a) P1 : x− y + z + 5 = 0, P2 : 3x+ y − 5z − 10 = 0 y P3 : 7x+ 5y − 17z = 40
b) P1 : x + y − 8z = −7, P2 es el plano que pasa por el punto⎛⎝ −7/3
00
⎞⎠ y tiene
vector normal
⎛⎝ 3
1−8
⎞⎠ y P3 es el plano que pasa por el origen y es perpendicular al
rectax
3= y = −z.
c) P1 : 2x − y + 5z = 0, P2 es el plano que pasa por⎛⎝ 005
⎞⎠ y tiene vector normal
⎛⎝ −4
2−10
⎞⎠ y P3 es el plano que contiene las rectas L1 : x = y = z y L2 : x
2= −y = z
2.
4. Resolver el problema planteado en cada uno de los siguientes literales, empleandosistemas de ecuaciones lineales.
a) Hallar una ecuación para la parábola que pasa por los puntos P =
(1
4
),
Q =
(−16
), R =
(2
9
)y es tal que su eje focal es paralelo al eje y.
b) Hallar una ecuación para el plano que pasa por el origen y por los puntos
P =
⎛⎝ 1
1−1
⎞⎠ y Q =
⎛⎝ 2−13
⎞⎠ .
c) Encontrar el polinomio cúbico tal que su gráfica pasa por los puntos P =
(1
1
),
Q =
(−15
)y R =
(−27
).
d) Calcular los números a, b y c tales que los polinomios (a+ 3)x2+(2a− 2c+ 10)x+6c y −2bx2 − 3bx+ (a− 4b+ 9) sean iguales.
5. Calcular las temperaturas x, y y z de los puntos correspondientes de la placa metálicatriangular que se muestra en la figura siguiente, sabiendo que la temperatura en cada

426 12. Sistemas de ecuaciones lineales 3× 3
uno de dichos puntos es el promedio de las temperaturas de los cuatro puntos máscercanos a él entre los señalados en la figura.
6. Una empresa editorial produce tres clases de libros: Con pasta rústica, con pasta duray con pasta de lujo. Para los de pasta rústica la empresa gasta 5 dólares en papel,2 dólares en ilustraciones y 3 dólares en pastas. Para los de pasta dura los gastosson de 10, 4 y 8 dólares en papel, ilustraciones y pastas respectivamente. Para losde pasta de lujo, se gastan 20, 12 y 24 dólares para el papel, ilustraciones y pastasrespectivamente. Si el presupuesto en dólares de la empresa es de 2350 para papel,1100 para ilustraciones y 2000 para pastas. ¿Cuántos libros de cada clase se puedenproducir con este presupuesto?
7. Una nutricionista está planeando una dieta que proporcione ciertas cantidades devitamina C, calcio y magnesio, y que utilice los comestibles I, II y III. La siguientetabla muestra el número de miligramos de cada nutriente que aporta una unidad decada tipo de comestible.
Comestible I Comestible II Comestible III
Vitamina C 10 20 20
Calcio 50 40 10
Magnesio 30 10 40
Suponiendo que el paciente requiere diariamente de un total de 100 mg de vitaminaC, 290 mg de calcio y 180 mg de magnesio, determinar el número de unidades diariasde cada comestible que la nutricionista debe sugerir para que la dieta contenga losnutrientes requeridos.
8. A partir de la siguiente figura,
mostrar que los cosenos de los ángulos α, β y γ, y los lados a, b y c del triángulo

12.5. Ejercicios 427
ABC, se relacionan mediante las siguientes ecuaciones:
c cosα+ a cos γ = bb cosα+ a cosβ = cc cosβ + b cos γ = a
9. a) Para el sistema de ecuaciones lineales
2x+ 3y − z = ax − y + 3z = b3x+ 7y − 5z = c
encontrar una condición necesaria y suficiente sobre a, b y c de tal forma que elsistema sea consistente.
b) Para el sistema de ecuaciones lineales
2x − y + 3z = a3x + y − 5z = b
−5x− 5y + 21z = c
mostrar que el sistema es inconsistente si y sólo si c �= 2a− 3bc) Considerar el sistema
2x − 3y + 5z = 0−x + 7y − z = 04x− 11y + kz = 0
¿Para cuál valor de k este sistema tiene soluciones no triviales? Cuál es el conjuntosolución del sistema obtenido para ese valor de k?
Sección 12.3
10. Sea A una matriz de orden 3 y U un vector no nulo de R3. Para cada uno delos siguientes literales, hallar el conjunto solución S del sistema AX = U y expre-sarlo como una traslación del conjunto solución SH del sistema homogéneo asociadoAX = O, sabiendo que X0 es una solución particular del sistema AX = U.
a) X0 =
⎛⎝ 1−1/23
⎞⎠ , SH =
⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3
/2x− 3y + z = 0
⎫⎬⎭
b) X0 =
⎛⎝ 2
3−5
⎞⎠ , SH es la recta generada por el vector
⎛⎝ 1−36
⎞⎠
c) X0 =
⎛⎝ 0
1−3
⎞⎠ , SH =
⎧⎨⎩⎛⎝ 000
⎞⎠⎫⎬⎭
Sección 12.4
11. Para cada uno de los sistemas dados,
a) Escribirlo en la forma matricial AX = U.

428 12. Sistemas de ecuaciones lineales 3× 3
b) Hallar, utilizando el método de eliminación de Gauss-Jordan, el conjunto solucióndel sistema.
i)2x + y + z = 83x− 2y − z = 14x− 7y + 3z = 10
ii)x + y + z = 0
−2x+ 5y + 2z = 0−7x+ 7y + z = 0
iii)−x+ y − z = 2x+ y + z = −1x− y − z = 2
iv)−3x− 6y + z = 02x+ 5y + 1
3z = 2
x+ 4y + 5
3z = 1
12. Para cada numeral,
a) Determinar si la matriz A es invertible y, en caso afirmativo, hallar la matriz A−1
mediante el método de Gauss-Jordan.
b) Si A es invertible resolver el sistema AX = U utilizando A−1.
i) A =
⎛⎝0 1 11 0 11 1 0
⎞⎠ , U =
⎛⎝ −1
0−1
⎞⎠
ii) A =
⎛⎝2 −5 41 −2 11 −4 5
⎞⎠ , U =
⎛⎝ −2
35
⎞⎠
iii) A =
⎛⎝1/2 1/3 00 1/3 1/21/2 1/3 1/2
⎞⎠ , U =
⎛⎝ 1/31/65/6
⎞⎠
iv) A =
⎛⎝ 0 1 −1−1 0 −11 1 0
⎞⎠ , U =
⎛⎝ 110
⎞⎠
v) A =
⎛⎝cosθ −senθ 0senθ cosθ 00 0 1
⎞⎠ , U =
⎛⎝ −senθ
cosθ−2
⎞⎠

13
Determinantes de orden 3
13.1 Definición y algunos resultados básicos
Consideremos una matriz de orden 3
A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠
o bien la transformación lineal T : R3 −→ R3 cuya matriz es A. Se llama determinante
de A o también determinante de T al escalar
a1
∣∣∣∣b2 b3c2 c3
∣∣∣∣− a2
∣∣∣∣b1 b3c1 c3
∣∣∣∣+ a3
∣∣∣∣b1 b2c1 c2
∣∣∣∣Lo denotaremos de cualquiera de las formas siguientes:∣∣∣∣∣∣
a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ , det (A) o det (T )
Así que ∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = a1
∣∣∣∣b2 b3c2 c3
∣∣∣∣− a2
∣∣∣∣b1 b3c1 c3
∣∣∣∣+ a3
∣∣∣∣b1 b2c1 c2
∣∣∣∣ (13.1)
Nos referiremos a los determinantes de matrices 3× 3 también como determinantes
de orden 3. Observe que la expresión (13.1) es la que empleamos para introducir losdeterminantes de orden 3 en el capítulo 9 y la que hemos usado a lo largo de los capítulos10, 12 y 13.
En la expresión (13.1) cada número ai (i = 1, 2, 3) aparece acompañado de un determi-nante de orden 2 y está precedido por el signo + o por el signo −; dicho determinante es elde la matriz 2× 2 que resulta de omitir en la matriz A la fila y la columna que contienena ai; en cuanto al signo, éste se puede expresar en términos de la posición que ocupa ai:dicho signo es (−1)1+i, donde el 1 en el exponente es por la fila (la fila 1) e i es por lacolumna (la columna i) en las que se encuentra ai. De manera que la igualdad (13.1) puedeescribirse como∣∣∣∣∣∣
a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = a1 (−1)1+1
∣∣∣∣b2 b3c2 c3
∣∣∣∣+ a2 (−1)1+2
∣∣∣∣b1 b3c1 c3
∣∣∣∣+ a3 (−1)1+3
∣∣∣∣b1 b2c1 c2
∣∣∣∣ (13.2)
429

430 13. Determinantes de orden 3
El escalar que acompaña a ai (i = 1, 2, 3) en el lado derecho de la igualdad anterior sellama cofactor de ai; dicho lado derecho se conoce como desarrollo del determinante
mediante cofactores de la primera fila.
Cuando en el lado derecho de la igualdad (13.1) se desarrollan los determinantes deorden 2 y luego se realizan los productos por a1, por a2 y por a3, se obtiene como resultado
a1b2c3 − a1b3c2 + a2b3c1 − a2b1c3 + a3b1c2 − a3b2c1 (13.3)
Es de señalar que fue esta expresión la que dio origen inicialmente al concepto dedeterminante de orden 3; ella apareció de manera natural, como lo veremos más adelante,resolviendo sistemas de ecuaciones lineales de tres ecuaciones con tres incógnitas. Es claroque de la expresión (13.3) se puede obtener el lado derecho de (13.1), simplemente facto-rizando en ella los escalares a1, a2, a3 de la primera fila de la matriz A. Ahora, así comode (13.3) se puede obtener el lado derecho de (13.1), es decir, el lado derecho de (13.2),factorizando los elementos de la primera fila, también de (13.3) se puede obtener otrosdesarrollos para el determinante de A, similares al lado derecho en (13.2), factorizando loselementos de cualquiera de las otras filas de A o también factorizando los elementos decualquiera de las columnas. Por ejemplo, el lector puede comprobar sin ninguna dificultadque factorizando en (13.3) los elementos a3, b3, c3 de la tercera columna de A se obtiene
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = a3 (−1)1+3
∣∣∣∣b1 b2c1 c2
∣∣∣∣+ b3 (−1)2+3
∣∣∣∣a1 a2c1 c2
∣∣∣∣+ c3 (−1)3+3
∣∣∣∣a1 a2b1 b2
∣∣∣∣
siendo el lado derecho de esta expresión el desarrollo del determinante de Amediante
cofactores de la tercera columna.
De manera que:
Para cualquier matriz A de orden 3, hay seis maneras de calcular el determinantede A mediante el desarrollo por cofactores, tres correspondiendo a las filas y trescorrespondiendo a las columnas.
Ejemplo 13.1
Calcular el determinante de la matriz A =
⎛⎝−2 1 4
4 1 01 −1 0
⎞⎠ .
Solución:
Para el cálculo del determinante de A emplearemos su desarrollo mediante cofactoresde la tercera columna:
det (A) = 4 (−1)1+3∣∣∣∣4 11 −1
∣∣∣∣+ 0(−1)2+3∣∣∣∣−2 11 −1
∣∣∣∣+ 0 (−1)3+3∣∣∣∣−2 14 1
∣∣∣∣= 4 (−4− 1) = −20
Observe que como la tercera columna deA tiene dos componentes nulas, el desarrollo deldeterminante de Amediante cofactores de esa columna es más económico operacionalmenteque el desarrollo del determinante mediante cofactores de cualquier otra columna o de

13.1. Definición y algunos resultados básicos 431
cualquier otra fila de A, ya que al usar la tercera columna no se hace necesario calcular loscofactores de las dos componentes nulas de esa columna. �
El hecho de que el determinante de una matriz 3 × 3 se pueda calcular empleandocualquiera de sus filas o cualquiera de sus columnas, sugiere que el determinante decualquier matriz 3 × 3 debe ser igual al de su traspuesta. En efecto, al igual que paradeterminantes de orden 2, se tiene que:
Para cualquier matriz A de orden 3,det
(AT)= det (A)
Para probar lo anterior, sea A una matriz 3×3 como al inicio de este capítulo. Entonces
det(AT)=
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣Empleando el desarrollo de det
(AT)mediante cofactores de la primera columna de AT ,
tenemos que
det(AT)= a1 (−1)
1+1
∣∣∣∣b2 c2b3 c3
∣∣∣∣+ a2 (−1)2+1
∣∣∣∣b1 c1b3 c3
∣∣∣∣+ a3 (−1)3+1
∣∣∣∣b1 c1b2 c2
∣∣∣∣Ahora, dado que los determinantes de orden 2 tiene la propiedad que estamos probando
para los de orden 3, se tiene que
det(AT)= a1 (−1)
1+1
∣∣∣∣b2 b3c2 c3
∣∣∣∣+ a2 (−1)1+2
∣∣∣∣b1 b3c1 c3
∣∣∣∣+ a3 (−1)1+3
∣∣∣∣b1 b2c1 c2
∣∣∣∣Pero, como se puede observar, el lado derecho de la igualdad anterior es precisamente el de-sarrollo de det (A) mediante cofactores de la primera fila de A. Luego,det
(AT)= det (A) . �
A continuación listaremos los resultados más importantes en los que apareció involu-crando el concepto de determinante de una matriz 3 × 3, luego de que este concepto seintrodujo en el capítulo 9.
Sean A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ y T : R3 −→ R
3 la transformación lineal cuya matriz es A.
1. det (A) = U · (V × Z)donde
U =
⎛⎝a1a2a3
⎞⎠ , V =
⎛⎝b1b2b3
⎞⎠ y Z =
⎛⎝c1c2c3
⎞⎠
2. A es invertible ( T es invertible) si y sólo si det (A) �= 0 (det (T ) �= 0).

432 13. Determinantes de orden 3
3. Si det (A) �= 0,
m(T−1
)= A−1 =
1
det (A)
donde U, V y Z son como en 1.
4. Las columnas de la matriz A son L.I. si y sólo si det (A) �= 0.
5. Cualquiera sea el vector
⎛⎝ u1
u2u3
⎞⎠, el sistema A
⎛⎝ x
yz
⎞⎠ =
⎛⎝ u1
u2u3
⎞⎠ tiene solución
única si y sólo si det (A) �= 0.
Ahora, dado que det (A) = det(AT)y puesto que las filas de A son las columnas de
AT , el resultado 4. conduce al siguiente resultado:
Las filas de A son L.I. si y sólo si det (A) �= 0
En efecto,
Las filas de A son L.I. ⇐⇒ Las columnas de AT son L.I.
⇐⇒ det(AT)�= 0
⇐⇒ det (A) �= 0 �
Volvamos a la expresión (13.3). Quizá el lector se pregunte cómo surgió inicialmentetal expresión y por qué ella es la análoga para matrices 3× 3, de la expresión a1b2 − a2b1
para el determinante de una matriz
(a1 a2b1 b2
).
Pues bien, tanto los determinantes de orden 2 como los de orden 3 tuvieron su origenen la primera mitad del siglo XV III, en relación con una manera de resolver sistemasde ecuaciones lineales de dos ecuaciones con dos incógnitas y tres ecuaciones con tresincógnitas.
Para el caso del sistemaa1x+ a2y = ub1x+ b2y = v
(13.4)
cierta manera de proceder, la cual se explicó en el capítulo 6, conduce a que sia1b2 − a2b1 �= 0, entonces el sistema tiene una y sólo una solución dada por
x =ub2 − a2v
a1b2 − a2b1y y =
a1v − b1u
a1b2 − a2b1(13.5)

13.1. Definición y algunos resultados básicos 433
Como ya sabemos, el denominador en las expresiones anteriores se llamó determinante
del sistema (13.4) y se denotó
∣∣∣∣a1 a2b1 b2
∣∣∣∣ . También sabemos que dichas expresiones puedenescribirse en la forma
x =
∣∣∣∣u a2v b2
∣∣∣∣∣∣∣∣a1 a2b1 b2
∣∣∣∣y y =
∣∣∣∣a1 ub1 v
∣∣∣∣∣∣∣∣a1 a2b1 b2
∣∣∣∣(13.6)
igualdades conocidas como fórmulas de Cramer para el sistema (13.4).
Pasemos ahora a mostrar cómo surgió la expresión (13.3). Para ello consideremos elsistema de tres ecuaciones lineales con tres incógnitas
a1x+ a2y + a3z = ub1x+ b2y + b3z = vc1x+ c2y + c3z = w
(13.7)
Con el fin de imitar el procedimiento empleado con el sistema (13.4), escribimos las dosprimeras ecuaciones en (13.7) en la forma
a1x+ a2y = u− a3zb1x+ b2y = v − b3z
Usando las fórmulas en (13.5) y suponiendo que a1b2 − a2b1 �= 0, se tiene que
x =(u− a3z) b2 − a2 (v − b3z)
a1b2 − a2b1y y =
a1 (v − b3z)− b1 (u− a3z)
a1b2 − a2b1
Resulta que sustituyendo estas expresiones en la tercera ecuación del sistema (13.7),se obtiene una ecuación que sólo contiene la incógnita z, y cuando se despeja z de esaecuación queda
z =a1b2w− a2b1w − a1c2v + a2c1v + b1c2u− b2c1u
a1b2c3 − a1b3c2 + a2b3c1 − a2b1c3 + a3b1c2 − a3b2c1(13.8)
En forma similar se obtienen expresiones análogas para x y para y, con el mismodenominador que aparece en (13.8), el cual es el escalar en (13.3). Dicho denominador sellamó determinante del sistema (13.7), y se denotó en la forma
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣
Es más, se encontró que los numeradores en las expresiones para x, para y y para ztambién podían expresarse como determinantes de orden 3, obteniéndose así el siguienteresultado, el cual es completamente análogo a lo obtenido para el sistema (13.4):

434 13. Determinantes de orden 3
Si
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ �= 0, el sistema (13.7) tiene una y sólo una solución dada por
x =
∣∣∣∣∣∣u a2 a3v b2 b3w c2 c3
∣∣∣∣∣∣∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣, y =
∣∣∣∣∣∣a1 u a3b1 v b3c1 w c3
∣∣∣∣∣∣∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣, z =
∣∣∣∣∣∣a1 a2 ub1 b2 vc1 c2 w
∣∣∣∣∣∣∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣(13.9)
Las igualdades en (13.9) son las fórmulas de Cramer para el sistema (13.7).
Es de señalar que las fórmulas (13.9) se pueden deducir más fácilmente, como se muestraa continuación:
Escribamos el sistema (13.7) en la forma
xA1 + yA2 + zA3 = U (13.10)
donde
A1 =
⎛⎝ a1
b1c1
⎞⎠ , A2 =
⎛⎝ a2
b2c2
⎞⎠ , A3 =
⎛⎝ a3
b3c3
⎞⎠ y U =
⎛⎝ u
vw
⎞⎠
Tomando producto escalar en ambos lados de (13.10) por A2 ×A3 se obtiene
xA1 · (A2 ×A3) + yA2 · (A2 ×A3) + zA3 · (A2 ×A3) = U · (A2 ×A3)
Ahora, comoA2 · (A2 ×A3) = 0 y A3 · (A2 ×A3) = 0
entoncesxA1 · (A2 ×A3) = U · (A2 ×A3)
Por tanto, si A1 · (A2 ×A3) �= 0
x =U · (A2 ×A3)
A1 · (A2 ×A3)=
∣∣∣∣∣∣u v wa2 b2 c2a3 b3 c3
∣∣∣∣∣∣∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣y puesto que el determinante de cualquier matriz 3 × 3 es igual al de su transpuesta, setiene que
x =
∣∣∣∣∣∣u a2 a3v b2 b3w c2 c3
∣∣∣∣∣∣∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣

13.1. Definición y algunos resultados básicos 435
la cual es la primera de las fórmulas en (13.9). De manera similar se llega a las otras dosfórmulas en (13.9).
Ejemplo 13.2
Muestre que el sistema
2x− y + z = 42x+ 2y + 3z = 36x− 9y − 2z = 17
(13.11)
tiene solución única y halle dicha solución empleando las fórmulas de Cramer.
Solución:
Sea A la matriz de coeficientes del sistema dado.
det (A) =
∣∣∣∣∣∣2 −1 12 2 36 −9 −2
∣∣∣∣∣∣= 2(−1)1+1
∣∣∣∣ 2 3−9 −2
∣∣∣∣+ (−1) (−1)1+2∣∣∣∣2 36 −2
∣∣∣∣+ 1 (−1)1+3∣∣∣∣2 26 −9
∣∣∣∣= 2(−4 + 27) + (−4− 18) + (−18− 12)
= −6
Como det (A) �= 0 entonces el sistema (13.11) tiene solución única. Según las fórmulasde Cramer dicha solución está dada por:
x =
∣∣∣∣∣∣4 −1 13 2 317 −9 −2
∣∣∣∣∣∣det (A)
, y =
∣∣∣∣∣∣2 4 12 3 36 17 −2
∣∣∣∣∣∣det (A)
, z =
∣∣∣∣∣∣2 −1 42 2 36 −9 17
∣∣∣∣∣∣det (A)
(13.12)
Calculando los determinantes que aparecen en los numeradores de las igualdades en(13.12) se obtiene que
x =−26
−6=13
3, y =
−10
−6=5
3, z =
18
−6= −3
Por tanto, la única solución del sistema es
⎛⎝ 13/3
5/3−3
⎞⎠ .
Se recuerda al lector que en el capítulo 12 se resolvió el sistema (13.11) por el métodode eliminación de Gauss y también empleando la matriz A−1. �
Vale la pena resaltar que cuando se emplean las fórmulas de Cramer, por lo generalhay que realizar muchas más operaciones que con el método de eliminación de Gauss.En realidad, las fórmulas de Cramer adquieren importancia cuando se trata de resolversistemas de ecuaciones lineales en los cuales la matriz de coeficientes del sistema tienealgunas componentes variables.

436 13. Determinantes de orden 3
13.2 Propiedades básicas
A continuación listaremos las propiedades básicas de los determinantes de orden 3, lascuales son completamente análogas a las ya establecidas en el capítulo 6 para los determi-nantes de orden 2. En las propiedades que hacen referencia a una matriz A o una matrizB se entiende que ellas son matrices 3× 3.
1. Si se intercambian dos filas de una matriz A, el determinante sólo cambia de signo,es decir, el determinante de la nueva matriz es −det (A) .
2. Si se multiplica una de las filas de una matriz A por un escalar t, el determinante dela nueva matriz es tdet (A) .
3.
∣∣∣∣∣∣a1 + a′1 a2 + a′2 a3 + a′3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+∣∣∣∣∣∣a′1 a′2 a′3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣Se tienen igualdades análogas si en el lado izquierdo la suma que aparece se realiza en
la segunda fila o en la tercera fila.
4. Si las filas de una matriz A son L.D. entonces el det (A) = 0.En particular, se tiene que:• Si la matriz A posee una fila nula, det (A) = 0.• Si la matriz A posee dos filas iguales, det (A) = 0.• Si una de las filas de A es múltiplo escalar de otra de las filas de A entoncesdet (A) = 0.
5. Si una fila de la matriz A se sustituye por la suma de ella y un múltiplo escalar deotra fila de A, el determinante de la nueva matriz es igual a det (A) .
6. det(AT)= det (A)
7. det (AB) = det (A) det (B)
8.
∣∣∣∣∣∣a1 a2 a30 b2 b30 0 c3
∣∣∣∣∣∣ = a1b2c3 y
∣∣∣∣∣∣a1 0 0b1 b2 0c1 c2 c3
∣∣∣∣∣∣ = a1b2c3
Toda matriz de una de las formas⎛⎝a1 a2 a30 b2 b30 0 c3
⎞⎠ o
⎛⎝a1 0 0b1 b2 0c1 c2 c3
⎞⎠
se dice una matriz triangular. Si es de la primera forma se dice que la matriz es trian-gular superior y si es de la segunda forma se dice que la matriz es triangular inferior.
Un caso particular de matrices triangulares son las de la forma
⎛⎝a 0 00 b 00 0 c
⎞⎠
las cuales son llamadas matrices diagonales. Nótese que una matriz diagonal es tantotriangular superior como triangular inferior.
La propiedad 8. dice entonces que el determinante de cualquier matriz triangular es elproducto de los números en la diagonal principal de la matriz.

13.2. Propiedades básicas 437
La propiedad 4. puede considerarse probada, es más, se tiene que las filas de una matrizA son L.D. si y sólo si det (A) �= 0, pues ya hemos probado que las filas de una matriz Ason L.I. si y sólo si det (A) �= 0. La propiedad 6. ya se probó al inicio de este capítulo. Encuanto a la propiedad 7., su prueba no la daremos por lo laboriosa que es. Para probar lasrestantes propiedades digamos que
A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠
Emplearemos el hecho de que
det (A) =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = U · (V × Z)
donde
U =
⎛⎝a1a2a2
⎞⎠ , V =
⎛⎝b1b2b3
⎞⎠ y Z =
⎛⎝c1c2c3
⎞⎠
con lo cual podremos usar propiedades del producto escalar, del producto cruz y del pro-ducto mixto.
Prueba de 1.
Sólo daremos la prueba para el caso en el cual se intercambian las dos primeras filasde la matriz A. La prueba es análoga si las filas que se intercambian son la primera y latercera o la segunda y la tercera.
∣∣∣∣∣∣b1 b2 b3a1 a2 a3c1 c2 c3
∣∣∣∣∣∣ = V · (U ×Z)
= V · (−Z × U) pues U × Z = −Z × U= −V · (Z × U)= −[U · (V ×Z)] pues V · (Z × U) = U · (V × Z)= −det (A) �
Prueba de 2.
La probaremos para el caso en el cual se multiplica la primera fila de la matriz A porun escalar t. La prueba en los otros casos es similar.
∣∣∣∣∣∣ta1 ta2 ta3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = (tU) · (V × Z)
= t [U · (V × Z)]
= tdet (A) �

438 13. Determinantes de orden 3
Prueba de 3.
Si U ′ =
⎛⎝ a′1
a′2a′3
⎞⎠, la igualdad que aparece en 3. es equivalente a la igualdad
(U + U ′
)· (V ×Z) = U · (V × Z) + U ′ · (V × Z)
la cual sabemos es válida. �
Prueba de 5.
La propiedad 5. puede probarse a partir de las propiedades 3. y 4. Probémosla para elcaso en el cual a la segunda fila de la matriz A se le suma la primera multiplicada por unescalar t. La prueba en los otros casos es similar.
∣∣∣∣∣∣a1 a2 a3
b1 + ta1 b2 + ta2 b3 + ta3c1 c2 c3
∣∣∣∣∣∣ =∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+∣∣∣∣∣∣a1 a2 a3ta1 ta2 ta3c1 c2 c3
∣∣∣∣∣∣La igualdad anterior se debe a la propiedad 3. Ahora, por la propiedad 4.,
∣∣∣∣∣∣a1 a2 a3ta1 ta2 ta3c1 c2 c3
∣∣∣∣∣∣ = 0
pues la segunda fila es múltiplo escalar de la primera. Por tanto,
∣∣∣∣∣∣a1 a2 a3
b1 + ta1 b2 + ta2 b3 + ta3c1 c2 c3
∣∣∣∣∣∣ =∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ �
Prueba de 8.
Probemos la propiedad 8. para el caso en el cual la matriz es triangular superior.Empleando el desarrollo del determinante mediante cofactores de la primera columna setiene que
∣∣∣∣∣∣a1 a2 a30 b2 b30 0 c3
∣∣∣∣∣∣ = a1 (−1)1+1
∣∣∣∣b2 b30 c3
∣∣∣∣ = a1 (b2c3 − 0) = a1b2c3 �
Obsérvese que de la propiedad 6. se sigue que las propiedades 1., 2., 3., 4. y 5., lascuales se refieren a filas, son también válidas si en cada una de ellas se sustituye “fila(s)”por “columna(s)”. Por otra parte, entre las propiedades dadas, las propiedades 1, 2 y 5proporcionan otra forma de calcular determinantes: Se realizan operaciones elementalessobre las filas o sobre las columnas de la matriz a fin de transformar la matriz en otra cuyodeterminante se puede calcular rápidamente, como por ejemplo una matriz triangular. Estamanera de proceder se ilustra en el ejemplo 13.4.

13.2. Propiedades básicas 439
Ejemplo 13.3
• Si A =
⎛⎝−2 3 7
0 0 0−1 4 8
⎞⎠ , det (A) = 0 pues una de las filas de A es nula.
• Si B =
⎛⎝−1 8 −1
3 2 37 0 7
⎞⎠ , det (B) = 0 pues la primera y tercera columnas de B son
iguales.
• Si C =
⎛⎝−2 1 78/3 −4/3 −28/30 −1 2
⎞⎠ , det (C) = 0 pues una de las filas es múltiplo escalar
de otra (la segunda fila es −4
3veces la primera).
• Si D =
⎛⎝−8 0 1
0 2 40 0 1/2
⎞⎠ , det (C) = (−8) (2)
(1
2
)= −8, ya que D es una matriz
triangular. �
Ejemplo 13.4
Halle el determinante de la matriz
⎛⎝ 0 1 −4−3 6 94 −1 2
⎞⎠
empleando las propiedades 1, 2 y 5 hasta obtener el determinante de una matriz triangularsuperior.
Solución:
∣∣∣∣∣∣0 1 −4−3 6 94 −1 2
∣∣∣∣∣∣ = −
∣∣∣∣∣∣−3 6 90 1 −44 −1 2
∣∣∣∣∣∣Por propiedad 1 : Se inter-cambiaron las dos primerasfilas
= −
∣∣∣∣∣∣3 (−1) 3 (2) 3 (3)0 1 −44 −1 2
∣∣∣∣∣∣
= −3
∣∣∣∣∣∣−1 2 30 1 −44 −1 2
∣∣∣∣∣∣ Por propiedad 2.
= −3
∣∣∣∣∣∣−1 2 30 1 −40 7 14
∣∣∣∣∣∣Por propiedad 5 : Se sumóa la tercera fila, la primeramultiplicada por 4.
= −3
∣∣∣∣∣∣−1 2 30 1 −40 0 42
∣∣∣∣∣∣Por propiedad 5 : Se sumóa la tercera fila, la segundamultiplicada por −7
= −3 (−1) (1) (42) Por propiedad 8.
= 126 �

440 13. Determinantes de orden 3
Ejemplo 13.5
Sea A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ . Sabiendo que det (A) = −5, halle el determinante de la matriz
B =
⎛⎝−3a1 a3 − 4a1 a2−3b1 b3 − 4b1 b2−3c1 c3 − 4c1 c2
⎞⎠ .
Solución:
Partiremos de det (B) y emplearemos la propiedad 1, 2 y 5 de los determinantes deorden 3, con el fin de hacer aparecer el det (A) :
det (B) =
∣∣∣∣∣∣−3a1 a3 − 4a1 a2−3b1 b3 − 4b1 b2−3c1 c3 − 4c1 c2
∣∣∣∣∣∣
= (−3)
∣∣∣∣∣∣a1 a3 − 4a1 a2b1 b3 − 4b1 b2c1 c3 − 4c1 c2
∣∣∣∣∣∣ Por propiedad 2.
= (−3)
∣∣∣∣∣∣a1 a3 a2b1 b3 b2c1 c3 c2
∣∣∣∣∣∣Por propiedad 5 : Se sumó a lasegunda columna, la primeramultiplicada por 4
= − (−3)
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣Por propiedad 1 : Se inter-cambian las columnassegunda y tercera.
= 3det (A)
Ahora, como det (A) = −5 entonces det (B) = 3 (−5) = −15. �
13.3 Aplicaciones geométricas
Ahora procederemos a extender a los determinantes de orden 3, los resultados obtenidos enel capítulo 6, respecto a la relación entre determinantes y orientación y entre determinantesy áreas de paralelogramos.
Empezaremos definiendo el concepto de terna orientada de vectores de R3. Conside-remos una terna de vectores linealmente independientes X1, X2, X3 de R3, vista como unaterna ordenada con X1 primero, X2 segundo y X3 tercero. Sea P el plano generado porX1 y X2; sabemos que X1 ×X2 es un vector no nulo normal al plano P y cuya direcciónla da la regla de la mano derecha (ver figura 13.1).

13.3. Aplicaciones geométricas 441
Figura 13.1.
El plano P separa al espacio en dos partes disjuntas; de esas dos partes, llamaremossemiespacio principal determinado por el par ordenado X1, X2 a la parte quecontiene al vector X1 × X2. Nótese que un vector X de R3 está en dicho semiespacio siy sólo si el ángulo α entre X y X1 × X2 es tal que 0 ≤ α < π
2, es decir, si y sólo si
(X1 ×X2) ·X > 0.Pues bien, la terna de vectores X1, X2, X3 se dirá orientada positivamente si el
vector X3 pertenece al semiespacio principal determinado por el par X1, X2, es decir,si (X1 ×X2) · X3 > 0. Si (X1 ×X2) · X3 < 0, la terna X1, X2, X3 se dirá orientada
negativamente.
Ejemplo 13.6
a) La terna E1, E2, E3 está orientada positivamente ya que E3 está en el semiespacioprincipal determinado por el par E1, E2 pues E3 = E1 ×E2. O también, la terna E1, E2,E3 está orientada positivamente ya que (E1 ×E2) ·E3 = E3 ·E3 = 1 y 1 > 0.b) Ya que (E1 ×E2) · (−E3) = E3 · (−E3) = −1 y −1 < 0, la terna E1, E2, −E3 estáorientada negativamentec) Como (E2 ×E1) · E3 = (−E3) · E3 = −1 y −1 < 0, la terna E2, E1, E3 está orientadanegativamente .(Ver figura 13.2). �
Figura 13.2.
Relacionemos ahora el concepto de terna orientada de vectores con el de determinante.Consideremos los vectores de R3
X1 =
⎛⎝x1y1z1
⎞⎠ , X2 =
⎛⎝x2y2z2
⎞⎠ y X3 =
⎛⎝x3y3z3
⎞⎠

442 13. Determinantes de orden 3
Puesto que
(X1 ×X2) ·X3 = X3 · (X1 ×X2)
= X1 · (X2 ×X3)
=
∣∣∣∣∣∣x1 y1 z1x2 y2 z2x3 y3 z3
∣∣∣∣∣∣
=
∣∣∣∣∣∣x1 x2 x3y1 y2 y3z1 z2 z3
∣∣∣∣∣∣= det
(X1 X2 X3
| | |
)
se tiene lo siguiente:
Sean X1, X2, X3 vectores L.I. de R3.
a) La terna X1, X2, X3 está orientada positivamente si y sólo si
det
(X1 X2 X3
| | |
)> 0
b) La terna X1, X2, X3 está orientada negativamente si y sólo si
det
(X1 X2 X3
| | |
)< 0
Ejemplo 13.7
Consideremos la terna de vectores X1 =
⎛⎝ −1
02
⎞⎠ , X2 =
⎛⎝ 3−14
⎞⎠ , X3 =
⎛⎝ 0
1−1
⎞⎠.
Veamos si esta terna de vectores está orientada positivamente o si está orientada negati-vamente. Para ello calculemos el determinante de la matriz
A =
(X1 X2 X3
| | |
)=
⎛⎝−1 3 0
0 −1 12 4 −1
⎞⎠
Empleando el desarrollo del determinante de A mediante cofactores de la primera filatenemos que
det (A) = (−1) (−1)1+1∣∣∣∣−1 14 −1
∣∣∣∣+ 3(−1)1+2∣∣∣∣0 12 −1
∣∣∣∣= − (1− 4)− 3 (0− 2) = 9
Como det (A) > 0 concluimos que la terna X1, X2, X3 está orientada positivamente. �
Sea ahora T : R3 −→ R3 una transformación lineal invertible. Se dice que T preserva la
orientación si siempre que una terna de vectoresX1, X2, X3 está orientada positivamente,la terna T (X1) , T (X2) , T (X3) también está orientada positivamente. Se dice que Tcambia la orientación si siempre que una ternaX1, X2, X3 está orientada positivamente,la terna T (X1) , T (X2) , T (X3) está orientada negativamente.

13.3. Aplicaciones geométricas 443
Ejemplo 13.8
Consideremos la reflexión respecto al plano xy, es decir, la transformación lineal
T : R3 −→ R
3⎛⎝ x
yz
⎞⎠ �−→ T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x
y−z
⎞⎠
de la cual sabemos que es una transformación invertible. Veamos si T preserva o cambiala orientación:
Partamos de la terna E1, E2, E3, de la cual sabemos que está orientada positivamente.Como
T (E1) = E1, T (E2) = E2, T (E3) = −E3
y dado que la terna E1, E2, −E3 está orientada negativamente, concluimos que T nopreserva la orientación.
Veamos que T cambia la orientación. Para ello tomemos una terna cualquiera de vec-tores de R3
X1 =
⎛⎝ x1
y1z1
⎞⎠ , X2 =
⎛⎝ x2
y2z2
⎞⎠ , X3 =
⎛⎝ x3
y3z3
⎞⎠
orientada positivamente y mostremos que la terna
T (X1) =
⎛⎝ x1
y1−z1
⎞⎠ , T (X2) =
⎛⎝ x2
y2−z2
⎞⎠ , T (X3) =
⎛⎝ x3
y3−z3
⎞⎠
está orientada negativamente, lo cual mostraremos probando que
det
(T (X1) T (X2) T (X3)| | |
)< 0 así:
det
(T (X1) T (X2) T (X3)| | |
)=
∣∣∣∣∣∣x1 x2 x3y1 y2 y3−z1 −z2 −z3
∣∣∣∣∣∣ = −∣∣∣∣∣∣x1 x2 x3y1 y2 y3z1 z2 z3
∣∣∣∣∣∣= −det
(X1 X2 X3
| | |
)
Ahora como det
(X1 X2 X3
| | |
)> 0, ya que la terna X1, X2, X3 está orientada
positivamente, entonces
det
(T (X1) T (X2) T (X3)| | |
)< 0
Luego, T cambia la orientación. �
Al igual que para las transformaciones lineales del plano, el signo del determinante deuna transformación lineal del espacio nos dice si la transformación preserva o cambia laorientación. En efecto, se tiene:

444 13. Determinantes de orden 3
Sea T : R3 −→ R3 una transformación lineal invertible.
a) T preserva la orientación si y sólo si det (T ) > 0.b) T cambia la orientación si y sólo si det (T ) < 0.
Para probar a) digamos que m (T ) = A. Supongamos primero que T preserva la orien-tación y probemos que det (T ) > 0, es decir, que det (A) > 0.
Puesto que la terna E1, E2, E3 está orientada positivamente y dado que T preserva laorientación tenemos que la terna T (E1) , T (E2) , T (E3) está orientada positivamente ypor tanto
det
(T (E1) T (E2) T (E3)| | |
)> 0
Pero como (T (E1) T (E2) T (E3)| | |
)=
(AE1 AE2 AE3| | |
)= A
entonces det (A) > 0.Supongamos ahora que det (T ) > 0, es decir, que det (A) > 0 y probemos que T
preserva la orientación. Tomemos una terna cualquiera X1, X2, X3 orientada positivamentey mostremos que la terna T (X1) , T (X2) , T (X3) también está orientada positivamente:Como(
T (X1) T (X2) T (X3)| | |
)=
(AX1 AX2 AX3
| | |
)= A
(X1 X2 X3
| | |
)
entonces
det
(T (X1) T (X2) T (X3)| | |
)= det
[A
(X1 X2 X3
| | |
)]
= detAdet
(X1 X2 X3
| | |
) (13.13)
Ahora, como det (A) > 0 (por hipótesis) y det
(X1 X2 X3
| | |
)> 0 (ya que la terna
X1, X2, X3 está orientada positivamente) entonces
det
(T (X1) T (X2) T (X3)| | |
)> 0
Luego, T (X1) , T (X2) , T (X3) está orientada positivamente, como se quería probar.
La prueba de b) es completamente análoga. �
Ejemplo 13.9
Consideremos la rotación Rzθ por un ángulo de θ radianes (−2π < θ < 2π) alrededor del
eje z. Como sabemos, para cualquier
⎛⎝ x
yz
⎞⎠ ∈ R3,
Rzθ
⎛⎝ x
yz
⎞⎠ =
⎛⎝ xcosθ − ysenθ
xsenθ + ycosθz
⎞⎠

13.3. Aplicaciones geométricas 445
así que
m (Rzθ) =
⎛⎝cosθ −senθ 0senθ cosθ 00 0 1
⎞⎠
Luego,
det (Rzθ) =
∣∣∣∣∣∣cosθ −senθ 0senθ cosθ 00 0 1
∣∣∣∣∣∣ = cos2θ + sen2θ = 1
Tenemos entonces que la transformación lineal Rzθ es invertible ya que det (Rzθ) �= 0 y
que dicha transformación preserva la orientación puesto que det (Rzθ) > 0. �
Ejemplo 13.10
Consideremos, para r �= 0, la transformación
Dr : R3 −→ R
3⎛⎝ x
yz
⎞⎠ �−→ Dr
⎛⎝ x
yz
⎞⎠ =
⎛⎝ rx
ryrz
⎞⎠
de la cual sabemos que es invertible.Como la matriz de Dr es la matriz
⎛⎝r 0 00 r 00 0 r
⎞⎠
entonces
det (Dr) =
∣∣∣∣∣∣r 0 00 r 00 0 r
∣∣∣∣∣∣ = r3
Se sigue que Dr preserva la orientación si y sólo si r > 0 y que Dr cambia la orientaciónsi y sólo si r < 0. �
Ahora relacionaremos el determinante con el volumen de un paralelepípedo .
Sea P el paralelepípedo determinado por los vectores linealmente independientes X1,X2, X3 de R3. Como ya lo sabemos
Volumen de P = |X1 · (X2 ×X3)|
y como
X1 · (X2 ×X3) = det
(X1 X2 X3
| | |
)
entonces
Volumen de P =
∣∣∣∣det(
X1 X2 X3
| | |
)∣∣∣∣Sea ahora T : R3 −→ R
3 una transformación lineal invertible y consideremos la imagenT (P) del paralelepípedo P bajo T . Como el lector puede probar, dicha imagen T (P) es el

446 13. Determinantes de orden 3
paralelepípedo determinado por los vectores linealmente independientes T (X1) , T (X2) ,T (X3); por tanto,
Volumen de T (P) =
∣∣∣∣det(
T (X1) T (X2) T (X3)| | |
)∣∣∣∣
Ahora, según la igualdad (13.13)
det
(T (X1) T (X2) T (X3)| | |
)= det (T ) det
(X1 X2 X3
| | |
)
luego,
Volumen de T (P) = |det (T )|
∣∣∣∣det(
X1 X2 X3
| | |
)∣∣∣∣= |det (T )| Volumen de P
Hemos probado así lo siguiente:
Sea P el paralelepípedo determinado por los vectores linealmente indepen-dientes X1, X2, X3.
• Volumen de P =
∣∣∣∣det(
X1 X2 X3
| | |
)∣∣∣∣ (13.14)
• Si T : R3 −→ R3 es una transformación lineal invertible entonces
Volumen de T (P) = |det (T )| Volumen de P (13.15)
Ejemplo 13.11
Sea T : R3 −→ R3 tal que para cada
⎛⎝ x
yz
⎞⎠ de R3
T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x+ z
y + z2x+ y
⎞⎠
y sean X1 =
⎛⎝ 1−10
⎞⎠ , X2 =
⎛⎝ 0
1−1
⎞⎠ y X3 =
⎛⎝ 2−11
⎞⎠ .
a) Calcule el volumen del paralelepípedo P determinado por los vectores X1, X2, X3.
b) Calcule el volumen del paralelepípedo T (P) .

13.4. Ejercicios 447
Solución:
a) De acuerdo con la fórmula (13.14),
Volumen de P =
∣∣∣∣∣∣det⎛⎝ 1 0 2−1 1 −10 −1 1
⎞⎠∣∣∣∣∣∣
Ahora,
det
⎛⎝ 1 0 2−1 1 −10 −1 1
⎞⎠ = det
⎛⎝1 0 20 1 10 −1 1
⎞⎠ = det
(1 1−1 1
)= 2
por tanto, el volumen del paralelepípedo P es 2 unidades cúbicas.b) De acuerdo con la fórmula (13.15),
Volumen de T (P) = |det (T )| 2
Ahora, como m (T ) =
⎛⎝1 0 10 1 12 1 0
⎞⎠ entonces
det (T ) = det
⎛⎝1 0 10 1 12 1 0
⎞⎠ = det
⎛⎝1 0 10 1 10 1 −2
⎞⎠ = det
(1 11 −2
)= −3
y por tanto,Volumen de T (P) = |−3| 2 = 6 unidades cúbicas.
Observe que el volumen del paralelepípedo T (P) también se puede obtener calculandoprimero las imágenes T (X1) , T (X2) , T (X3) y luego usando la fórmula (13.14), según lacual
Volumen de T (P) =
∣∣∣∣det(
T (X1) T (X2) T (X3)| | |
)∣∣∣∣Se deja como ejercicio para el lector calcular el volumen del paralelepípedo T (P) de
esta manera. �
13.4 Ejercicios
Sección 13.1
1. Para la matriz A, dada en cada literal, calcular el determinante de A desarrollándolopor cofactores de cualquier fila o columna y determinar si A es invertible.
a) A =
⎛⎝1 −1 10 1 32 1 −1
⎞⎠ b) A =
⎛⎝3 −2 42 1 −31 4 −10
⎞⎠
c) A =
⎛⎝1 1 02 1 20 1 1
⎞⎠ d) A =
⎛⎝ 2 −1 31 1 1−1 −2 2
⎞⎠

448 13. Determinantes de orden 3
2. Para cada una de las siguientes transformaciones lineales T : R3 −→ R3 calcular el
determinante de T y decir si T es invertible.
a) T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ −x+ z
y − zx+ y
⎞⎠ .
b) T es tal que T (E1) =
⎛⎝ 2
1−1
⎞⎠ , T (E2) =
⎛⎝ 0−11
⎞⎠ y T (E3) =
⎛⎝ 132
⎞⎠ .
c) T = S ◦R, donde S es la proyección sobre el plano con ecuación 2x− y + z = 0 y
R es la reflexión respecto a la recta generada por el vector
⎛⎝ 101
⎞⎠ .
d) T es la reflexión respecto al plano P generado por los vectores
⎛⎝ 111
⎞⎠ y
⎛⎝ 1−11
⎞⎠ .
3. a) Para la matriz A, dada en cada numeral, hallar todos los valores de λ tales que lamatriz A− λI3 no es invertible.
i) A =
⎛⎝3 2 42 0 24 2 3
⎞⎠ ii) A =
⎛⎝ 1 3 3−3 −5 −33 3 1
⎞⎠
b) ¿Para cuáles valores de α, la matriz
⎛⎝ −α α− 1 α+ 1
1 2 32− α α+ 3 α+ 7
⎞⎠ no es invertible?
4. Considerar el siguiente sistema de ecuaciones lineales
x+ 2y + 3z = 82x− y + 4z = 7− y + z = 1
Mostrar que este sistema tiene solución única y calcular su solución empleando lasfórmulas de Cramer.
5. Los ángulos y los lados del triángulo de la figura se relacionan mediante el sistemadado de tres ecuaciones lineales con las tres incógnitas cosα, cosβ y cos γ (ver ejer-cicio 8 del capítulo 12).
c cosα+ a cos γ = bb cosα+ a cosβ = cc cos β + b cos γ = a
Utilizar las fórmulas de Cramer para expresar cos γ en términos de los lados a, b yc. (Observar que se obtiene la misma expresión al aplicar la ley del coseno).

13.4. Ejercicios 449
Sección 13.2
6. Hallar el determinante de cada una de las siguientes matrices empleando operacioneselementales de fila.
a)
⎛⎝−3 2 41 3 2−1 4 0
⎞⎠ b)
⎛⎝0 −2 31 2 −32 1 3
⎞⎠ c)
⎛⎝1 0 00 1 00 k 1
⎞⎠
7. Sea A =
⎛⎝a b c5 0 21 1 1
⎞⎠ . Si detA = −2, hallar el determinante de cada una de las
siguientes matrices:
a) B =
⎛⎝ 3a 3b 3c5/2 0 11 1 1
⎞⎠ b) C =
⎛⎝ a b c4a+ 5 4b 4c+ 2a+ 2 b+ 2 c+ 2
⎞⎠
c) D =
⎛⎝a− 1 b− 1 c− 1
6 1 31 1 1
⎞⎠ d) E =
⎛⎝5a 5 −45b 0 15c 2 −1
⎞⎠
8. a) Demostrar que det
⎛⎝ 1 1 1
a b ca2 b2 c2
⎞⎠ = (b− a) (c− a) (c− b) . Este determinante es
llamado determinante de Vandermonde de orden 3.
b) Hallar las correspondientes fórmulas para los siguientes determinantes:
i) det
⎛⎝ 1 1 1
a b ca3 b3 c3
⎞⎠ ii) det
⎛⎝ 1 1 1a2 b2 c2
a3 b3 c3
⎞⎠
9. Sea A una matriz de orden 3. Demostrar:
a) Si A es invertible entonces det(A−1
)=
1
detA.
b) Para todo α ∈ R se tiene det (αA) = α3 detA.
c) Para todo k ∈ N se tiene det(Ak)= (detA)k .
d) Si A2 = A entonces detA = 0 o detA = 1.
e) Si AT = −A entonces A no es invertible.
f) Si A es invertible y AT = A−1 entonces detA = ±1.
10. Sean A y B matrices de orden 3 tales que detA = 3 y detB = −4. Calcular:
a) det (−2A) b) det(3A2B−1
)c) det (3AB)−1
d) det(−BTA−1
)e) det
(ABA−1
)11. Para la matriz A, dada en cada literal, mostrar que ella es invertible y calcular
det(A−1
).
a) A =
⎛⎝2 3 40 2 30 0 2
⎞⎠ b) A =
⎛⎝1 1 10 1 11 1 0
⎞⎠ c) A =
⎛⎝0 1 11 0 11 1 0
⎞⎠

450 13. Determinantes de orden 3
12. Sean A y B matrices de orden 3. Mostrar que, en general no es cierto quedet (A+B) = detA+ detB.
Sección 13.3
13. Para la terna de vectores X, Y, Z dada en cada literal determinar si dichos vectoresson linealmente independientes y, en caso afirmativo, decir si la terna X, Y, Z estáorientada positivamente o negativamente.
a) X =
⎛⎝ 0
1−1
⎞⎠ , Y =
⎛⎝ 1−10
⎞⎠ , Z =
⎛⎝ 2
3−1
⎞⎠
b) X =
⎛⎝ 1−13
⎞⎠ , Y =
⎛⎝ −1−37
⎞⎠ , Z =
⎛⎝ 201
⎞⎠
c) X =
⎛⎝ 234
⎞⎠ , Y =
⎛⎝ 110
⎞⎠ , Z =
⎛⎝ −1
03
⎞⎠
d) X =
⎛⎝ 7−4−6
⎞⎠ , Y =
⎛⎝ −8
57
⎞⎠ , Z =
⎛⎝ 7
0−5
⎞⎠
14. Para la terna de vectores X1, X2, X3 dada en cada literal, determinar si X1, X2, X3
son linealmente independientes y, en caso afirmativo, hallar el volumen del paralelepí-pedo determinado por los vectores X1, X2, X3.
a) X1 =
⎛⎝ 1−13
⎞⎠ , X2 =
⎛⎝ −1
35
⎞⎠ , X3 =
⎛⎝ 2−14
⎞⎠
b) X1 =
⎛⎝ 2−54
⎞⎠ , X2 =
⎛⎝ 0
1−3
⎞⎠ , X3 =
⎛⎝ 4−7−1
⎞⎠
15. Considerar la transformación lineal T : R3 −→ R3 dada por T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x+ y
x− yy + z
⎞⎠.
a) Determinar si T preserva la orientación o la cambia.
b) Para cada terna de vectores dada en el ejercicio 14 que resulte linealmente in-dependiente, calcular el volumen del paralelepí-pedo determinado por los vectoresT (X1) , T (X2) y T (X3) sin calcular estos vectores.
16. Sean X1 =
⎛⎝ 5−14
⎞⎠ , X2 =
⎛⎝ −1
01
⎞⎠ , X3 =
⎛⎝ 213
⎞⎠ . Para la transformación lineal
T dada en cada literal, calcular el volumen del paralelepípedo determinado por losvectores T (X1) , T (X2) y T (X3) sin calcular estos vectores.
a) T = Rxπ4
b) T es la reflexión respecto al plano xy.

13.4. Ejercicios 451
c) T es la reflexión respecto a la rectax
2= y = −z.
17. Sean A, B, C y D puntos no coplanares del espacio y sea T la transformacióndada por T (X) = X − A. Es fácil ver que el volumen del paralelepípedo de aristasAB, AC y AD es igual al volumen del paralelepípedo determinado por los vectoresT (B) , T (C) y T (D) .
Si A =
⎛⎝ 1−23
⎞⎠ , B =
⎛⎝ 1
1−1
⎞⎠ , C =
⎛⎝ 011
⎞⎠ y D =
⎛⎝ −1
01
⎞⎠ , calcular utilizando
determinantes:
a) El volumen del paralelepípedo de aristas AB, AC y AD.
b) El volumen del prisma triangular cuya base es el triángulo ABC y tal que AD esuna de sus aristas.
c) El volumen de la pirámide cuadrangular cuyo vértice es el punto D y tiene comobase el paralelogramo tal que dos de sus lados son los segmentos AB y AC.

452 13. Determinantes de orden 3

14
Valores propios y vectores propios
14.1 Definiciones. Cálculo de valores y vectores propios
Los conceptos de valor propio y vector propio para una transformación lineal del espacioy para una matriz 3× 3 se definen exactamente como para una transformación lineal delplano y para una matriz 2× 2.
Sea T : R3 −→ R3 una transformación lineal y sea λ un escalar. Se dice que λ es un
valor propio de T si existe un vector X de R3, X �= O, tal que
T (X) = λX
Si λ es un valor propio de T , cada vector no nulo X de R3 tal que T (X) = λX se diceun vector propio de T correspondiente a λ.
Si A es una matriz 3 × 3, se llama valores propios de A y vectores propios de A a losvalores propios y vectores propios de la transformación lineal del espacio cuya matriz es A.
Al igual que en el caso del plano, un vector no nulo X de R3 es un vector propio deuna transformación lineal T del espacio (de una matriz A de orden 3) si y sólo si X yT (X) ( o X y AX) están en una misma recta que pasa por el origen.
Ejemplo 14.1Sea P un plano que pasa por el origen y sea S la reflexión respecto al plano P.
Es claro que si X es un vector de P entonces S (X) = X; por otra parte, si Y esun vector de la recta L que pasa por el origen y es perpendicular al plano P entoncesS (Y ) = −Y (figura 14.1).
Figura 14.1.
453

454 14. Valores propios y vectores propios
Luego, λ = 1 es un valor propio de S y todo vector no nulo X en el plano P es unvector propio de S correspondiente a λ = 1, ya que para cada uno de dichos vectores X setiene que S (X) = X = 1X. Similarmente, λ = −1 es otro valor propio de S y todo vectorno nulo Y sobre la recta L es un vector propio de S correspondiente a λ = −1, pues paratales vectores Y, se tiene S (Y ) = −Y = −1Y. �
Ejemplo 14.2Consideremos la transformación lineal Dr : R
3 −→ R3. Puesto que para todo X de R3,
Dr (X) = rX, se tiene que r es un valor propio de Dr y todo vector no nulo de R3 es un
vector propio de Dr correspondiente a r. Es más, r es el único valor propio de Dr (¿porqué?).
Lo afirmado para Dr, respecto a valores y vectores propios, es igualmente válido parala matriz de Dr, la cual es ⎛⎝r 0 0
0 r 00 0 r
⎞⎠ �
Ejemplo 14.3Sea T una transformación lineal con matriz diagonal
D =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠
Así, para cualquier
⎛⎝ xyz
⎞⎠ en R3,
T
⎛⎝ xyz
⎞⎠ = D⎛⎝ xyz
⎞⎠ =⎛⎝ λ1xλ2yλ3z
⎞⎠En particular,
T (E1) =
⎛⎝ λ100
⎞⎠ = λ1E1, T (E2) =
⎛⎝ 0λ20
⎞⎠ = λ2E2, T (E3) =
⎛⎝ 00λ3
⎞⎠ = λ3E3Luego λ1, λ2, λ3 son valores propios de T (de D) y E1, E2, E3 son vectores propios
de T (de D) correspondientes a λ1, λ2, λ3 respectivamente. Veamos que T no tiene otrosvalores propios.
Supongamos que λ es un valor propio de T y sea
⎛⎝ xyz
⎞⎠ un vector propio de T corres-
pondiente a λ. Entonces
T
⎛⎝ xyz
⎞⎠ =⎛⎝ λ1xλ2yλ3z
⎞⎠ y T
⎛⎝ xyz
⎞⎠ = λ⎛⎝ xyz
⎞⎠ =⎛⎝ λxλyλz
⎞⎠por tanto,
λx = λ1x, λy = λ2y λz = λ3z

14.1. Definiciones. Cálculo de valores y vectores propios 455
Ahora, como x �= 0 o y �= 0 o z �= 0 (pues⎛⎝ xyz
⎞⎠ �= O) entonces
λ = λ1 o λ = λ2 o λ = λ3
Así que λ1, λ2, λ3 son los únicos valores propios de T (de D). �
Sea T : R3 −→ R3 una transformación lineal con matriz
A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠y sea λ un escalar. De igual forma que para una transformación lineal del plano, se tieneque las siguientes afirmaciones son equivalentes:• λ es un valor propio de T (de A)• Existe X ∈ R3, X �= O, tal que AX = λX• El sistema (A− λI3)X = O tiene solución no trivial.• La matriz A− λI3 no es invertible• det (A− λI3) = 0.
La ecuación det (A− λI3) = 0, es decir,∣∣∣∣∣∣a1 − λ a2 a3b1 b2 − λ b3c1 c2 c3 − λ
∣∣∣∣∣∣ = 0en la cual λ se considera una incógnita, se llama ecuación característica de T (de A).Desarrollando el determinante, dicha ecuación adquiere la forma
−λ3 + dλ2 + eλ+ f = 0 (14.1)
donde d, e y f son ciertas constantes. Las raíces reales de esta ecuación son entonces losvalores propios de T (de A). Como el lado izquierdo de (14.1) es un polinomio de grado 3en λ entonces dicha ecuación tiene exactamente 3 raíces en los complejos, pudiendo ocurrirque esas tres raíces sean iguales, que sólo dos de ellas sean iguales o que las tres seandistintas. Ahora como el grado del mencionado polinomio es 3, podemos asegurar que almenos una de dichas raíces es real. Esto puede probarse así: Sea p (λ) = −λ3+dλ2+eλ+f ;es fácil ver que
limλ→−∞
p (λ) =∞ y limλ−→∞
p (λ) = −∞Además, por ser p una función polinómica, p es continua en todo el intervalo (−∞,∞)
y por tanto la gráfica de p corta al eje λ por lo menos una vez, es decir, existe λ0 ∈ R talque p (λ0) = 0, o sea, existe λ0 ∈ R tal que λ0 es una raíz de la ecuación (14.1).
Si ya sabemos que λ es un valor propio de T (de A), los vectores propios de T (de A)correspondientes a λ son las soluciones no triviales del sistema homogéneo
(A− λI3)X = O
es decir, del sistema ⎛⎝a1 − λ a2 a3b1 b2 − λ b3c1 c2 c3 − λ
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠ (14.2)

456 14. Valores propios y vectores propios
Al conjunto solución de este sistema lo llamaremos espacio propio de T (de A)correspondiente a λ y lo denotaremos por Eλ. Ahora, como la matriz de coeficientes delsistema (14.2) no es invertible (pues λ es valor propio de T (de A)) entonces, como yasabemos, el conjunto solución Eλ de (14.2) es una recta que pasa por el origen, o es unplano que pasa por el origen o es todo R3.
Como resumen de lo anterior tenemos:
Sea T : R3 −→ R3 una transformación lineal con matriz
A =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠• Un número real λ es un valor propio de T (de A) si y sólo si λ es una raízde la ecuación característica de T (de A)∣∣∣∣∣∣
a1 − λ a2 a3b1 b2 − λ b3c1 c2 c3 − λ
∣∣∣∣∣∣ = 0• La transformación T (la matriz A) tiene por lo menos un valor propio y tienea lo más tres valores propios distintos.
• Si λ es un valor propio de T (de A), los vectores propios de T (de A)correspondientes a λ son las soluciones no triviales del sistema homogéneo⎛⎝a1 − λ a2 a3
b1 b2 − λ b3c1 c2 c3 − λ
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠• Si λ es un valor propio de T (de A), el espacio propio Eλ es una recta quepasa por el origen o es un plano que pasa por el origen o es todo R3.
Ejemplo 14.4Sea T la transformación lineal del espacio cuya matriz es
A =
⎛⎝ 1 1 −10 2 0
−1 1 1
⎞⎠Hallar los valores propios de T (de A) y los correspondientes espacios propios.
Solución:La ecuación característica de T (de A) es∣∣∣∣∣∣
1− λ 1 −10 2− λ 0−1 1 1− λ
∣∣∣∣∣∣ = 0Calculando el determinante se encuentra que esta ecuación es
(2− λ) (λ2 − 2λ) = 0

14.1. Definiciones. Cálculo de valores y vectores propios 457
la cual es equivalente a la ecuación
λ (λ− 2)2 = 0
cuyas raíces son los números λ1 = 0 y λ2 = 2, los cuales son los valores propios de T (deA).
El espacio propio de T (de A) correspondiente a λ1 = 0 es, como sabemos, el conjuntosolución del sistema ⎛⎝1− 0 1 −1
0 2− 0 0−1 1 1− 0
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠es decir, del sistema ⎛⎝ 1 1 −1
0 2 0−1 1 1
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠Resolviendo este sistema se obtiene que dicho espacio propio es
E0 =
⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3/ ⎛⎝ x
yz
⎞⎠ =⎛⎝ z0z
⎞⎠⎫⎬⎭=
⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3/ ⎛⎝ x
yz
⎞⎠ = z⎛⎝ 101
⎞⎠⎫⎬⎭Observe que E0 es una recta que pasa por el origen, la recta generada por el vector⎛⎝ 101
⎞⎠ .Por último, el espacio propio de T (de A) correspondiente al valor propio λ2 = 2 es el
conjunto solución del sistema⎛⎝1− 2 1 −10 2− 2 0−1 1 1− 2
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠es decir, del sistema ⎛⎝−1 1 −1
0 0 0−1 1 −1
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠Resolviendo este sistema se encuentra que
E2 =
⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3/ ⎛⎝ x
yz
⎞⎠ =⎛⎝ y − z
yz
⎞⎠⎫⎬⎭=
⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3/ ⎛⎝ x
yz
⎞⎠ = y⎛⎝ 110
⎞⎠+ z⎛⎝ −1
01
⎞⎠⎫⎬⎭

458 14. Valores propios y vectores propios
Observe que E2 es un plano que pasa por el origen, el plano generado por los vectores⎛⎝ 110
⎞⎠ y
⎛⎝ −101
⎞⎠.La situación relativa entre los espacios propios E0 y E2 es como se ilustra en la figura
14.2 �
Figura 14.2.
Ejemplo 14.5Sea θ tal que 0 ≤ θ < 2π. Consideremos la transformación lineal Rz
θ, la cual rota cada
vector de R3 un ángulo de θ radianes alrededor del eje z. Como ya se sabe,
m (Rzθ) =
⎛⎝cos θ −senθ 0senθ cos θ 00 0 1
⎞⎠Hallemos los valores propios y los espacios propios de esta transformación.La ecuación característica de Rz
θes∣∣∣∣∣∣
cos θ − λ −senθ 0senθ cos θ − λ 00 0 1− λ
∣∣∣∣∣∣ = 0Calculando el determinante encontramos que esta ecuación es
(1− λ)[(cos θ − λ)2 + sen2θ
]= 0
la cual es equivalente a la ecuación
(1− λ) (λ2 − 2 (cos θ)λ+ 1) = 0 (14.3)
cuyas raíces son los números
λ = 1 y λ = cos θ ± isenθ
Ahora, λ = cos θ± isenθ es real si y sólo si senθ = 0, es decir, si y sólo si θ = 0 o θ = π.Se presentan entonces los siguientes casos:
Caso 1. θ �= 0 y θ �= πEn este caso la ecuación (14.3) tiene una raíz real, la cual es λ = 1, y dos raíces no
reales, las cuales son λ = cos θ ± isenθ. Por tanto, λ = 1 es el único valor propio de Rzθ.

14.1. Definiciones. Cálculo de valores y vectores propios 459
El espacio propio E1 de Rzθ correspondiente a λ = 1 está conformado por los vectoresX de R3 tales que
Rzθ (X) = 1X
es decir, por los vectores de R3 que Rzθdeja fijos.
Evidentemente esos vectores son los que están sobre el eje z y por lo tanto el espaciopropio E1 es el eje z.Caso 2. θ = 0
Es claro que en este caso Rzθes la transformación identidad I, y como
I (X) = X = 1X
para todo X de R3 entonces λ = 1 es el único valor propio y el espacio propio E1 es todoR3.Nótese que en este caso λ = 1 es la única raíz de la ecuación (14.3); ella se repite tres
veces.Caso 3. θ = π
En este caso la ecuación (14.3) tiene dos raíces reales distintas; una es λ = 1, la cualaparece sólo una vez, y la otra es λ = −1, la cual aparece dos veces. Así que los valorespropios de Rzπ son λ = 1 y λ = −1.
El espacio propio E1 de Rzπ correspondiente a λ = 1 es, como en el caso 1, el eje z, pueslos vectores del eje z son los únicos vectores de R3 que permanecen fijos bajo Rzπ.
¿Y cuál es el espacio propio E−1 de Rzπ correspondiente a λ = −1?Veamos: Como
m (Rzπ) =
⎛⎝−1 0 00 −1 00 0 1
⎞⎠se tiene que E−1 es el conjunto solución del sistema⎛⎝−1− (−1) 0 0
0 −1− (−1) 00 0 1− (−1)
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠es decir, el conjunto solución del sistema⎛⎝0 0 0
0 0 00 0 2
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠el cual es el plano con ecuación z = 0, es decir, el plano xy.
Así que el espacio propio E−1 de Rzπ es el plano xy, como era de esperarse, pues losvectores X de dicho plano son los únicos vectores de R3 tales que
Rzπ (X) = (−1)X
Resumiendo, tenemos que:• Si θ �= 0 y θ �= π, el único valor propio de Rz
θes λ = 1 y E1 es el eje z.
• Si θ = 0 entonces Rzθ= I y así el único valor propio de Rz
θes λ = 1 y E1 es todo R3
• Si θ = π, los valores propios de Rzθson λ = 1 yλ = −1; E1 es el eje z y E−1 es el plano
xy. �

460 14. Valores propios y vectores propios
Recordemos que para una matriz A de orden 2 se tiene que si X1, X2 son dos vectorespropios de A, linealmente independientes, correspondientes a los valores propios λ1, λ2respectivamente, entonces
A = PDP−1
donde
P =
(X1 X2| |
)y D =
(λ1 00 λ2
)Pues bien, para matrices de orden 3 se tiene un resultado completamente análogo:
Sea A una matriz de orden 3. Si X1, X2, X3 son vectores propios de A, linealmente indepen-dientes, correspondientes respectivamente a los valores propios λ1, λ2, λ3(los cuales no tienen que ser distintos dos a dos) entonces
A = PDP−1
donde
P =
(X1 X2 X3| | |
)y D =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠
Prueba.Si X1, X2, X3 son vectores propios de A correspondientes a los valores propios λ1, λ2,
λ3 respectivamente entonces
AX1 = λ1X1, AX2 = λ2X2, AX3 = λ3X3 (14.4)
Luego, (AX1 AX2 AX3| | |
)=
(λ1X1 λ2X2 λ3X3| | |
)Y como (
AX1 AX2 AX3| | |
)= A
(X1 X2 X3| | |
)y (
λ1X1 λ2X2 λ3X3| | |
)=
(X1 X2 X3| | |
)⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠entonces
A
(X1 X2 X3| | |
)=
(X1 X2 X3| | |
)⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠es decir,
AP = PD (14.5)
donde
P =
(X1 X2 X3| | |
)y D =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠ (14.6)

14.1. Definiciones. Cálculo de valores y vectores propios 461
Ahora, si además los vectores X1, X2, X3 son L.I. entonces la matriz P es invertible.En tal caso, multiplicando a la derecha por P−1 en ambos lados de (14.5) se obtiene
A = PDP−1 (14.7)
como se quería probar. �
El lector puede probar, reversando los pasos que condujeron de (14.4) a (14.7), que siuna matriz A de orden 3 admite una factorización del tipo (14.7), con P y D matrices comoen (14.6), entonces las columnas X1, X2, X3 de la matriz P son vectores propios de A,linealmente independientes, correspondientes, a los valores propios λ1, λ2, λ3 respectiva-mente. Así que:
Una matriz de orden 3 es factrorizable en la formaA = PDP−1
con P matriz de orden 3 invertible y D matriz de orden 3 diagonalsi y sólo si A posee tres vectores propios linealmente independientes.
Ejemplo 14.6Consideremos la matriz
A =
⎛⎝ 1 1 −10 2 0
−1 1 1
⎞⎠del ejemplo 14.4. Para esta matriz se encontró que sus valores propios son λ1 = 0 y λ2 = 2,
que el espacio propio E0 es la recta generada por el vector⎛⎝ 101
⎞⎠ y que el espacio propio
E2 es el plano generado por los vectores⎛⎝ 110
⎞⎠ y
⎛⎝ −101
⎞⎠ .Los siguientes vectores propios de A
X1 =
⎛⎝ 101
⎞⎠ , X2 =
⎛⎝ 110
⎞⎠ , X3 =
⎛⎝ −101
⎞⎠son linealmente independientes, ya que
det
(X1 X2 X3| | |
)�= 0
pues
det
(X1 X2 X3| | |
)=
∣∣∣∣∣∣1 1 −10 1 01 0 1
∣∣∣∣∣∣ = 2La situación relativa de los vectores X1, X2, X3 se ilustra en la figura 14.3.

462 14. Valores propios y vectores propios
Figura 14.3.
Ahora como X1 corresponde al valor propio λ1 = 0 y X2, X3 corresponden al valorpropio λ2 = 2 entonces A es factorizable como
A = PDP−1
donde
P =
(X1 X2 X3| | |
)=
⎛⎝1 1 −10 1 01 0 1
⎞⎠ y D =
⎛⎝λ1 0 00 λ2 00 0 λ2
⎞⎠ =⎛⎝0 0 00 2 00 0 2
⎞⎠ �
Ejemplo 14.7Consideremos la matriz
A =
⎛⎝ 4 6 61 3 2
−1 −5 −2
⎞⎠Veamos si esta matriz es o no es factorizable en la forma A = PDP−1 con P matrizinvertible y D matriz diagonal. Como sabemos A es factorizable en dicha forma si y sólo siA tiene tres vectores propios linealmente independientes. Pasemos entonces a determinarlos valores y vectores propios de A.
La ecuación característica de A es∣∣∣∣∣∣4− λ 6 61 3− λ 2
−1 −5 −2− λ
∣∣∣∣∣∣ = 0Calculando el determinante y simplificando se obtiene la ecuación
−λ3 + 5λ2 − 8λ+ 4 = 0 (14.8)
de la cual nos interesan las raíces reales.Sea p (λ) = −λ3 + 5λ2 − 8λ + 4. Como el lector debe saber, las raíces enteras de la
ecuación (14.8), si las hay, se encuentran entre los divisores del término constante 4, esdecir, entre los números ±1, ±2 y ±4 . Ahora, como p (1) = −1 + 5− 8 + 4 = 0, entoncesλ = 1 es una raíz de p (λ) y por tanto λ−1 es un factor de p (λ) ; haciendo la división p (λ)entre λ− 1 se encuentra que
p (λ) = (λ− 1) (−λ2 + 4λ− 4)= − (λ− 1) (λ2 − 4λ+ 4)= − (λ− 1) (λ− 2)2

14.1. Definiciones. Cálculo de valores y vectores propios 463
Luego, la ecuación (14.8) es
− (λ− 1) (λ− 2)2 = 0
ecuación cuyas raíces son los números λ = 1 y λ = 2, los cuales son los valores propios deA.
El espacio propio E1 de A correspondiente a λ = 1 es el conjunto solución del sistemahomogéneo ⎛⎝4− 1 6 6
1 3− 1 2−1 −5 −2− 1
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠es decir, del sistema ⎛⎝ 3 6 6
1 2 2−1 −5 −3
⎞⎠⎛⎝ xyz
⎞⎠ =⎛⎝ 000
⎞⎠Resolviendo este sistema encontramos que
E1 =⎧⎨⎩⎛⎝ xyz
⎞⎠ ∈ R3/ ⎛⎝ x
yz
⎞⎠ = z⎛⎝ −4/3
−1/31
⎞⎠⎫⎬⎭es decir, E1 es la recta generada por el vector
⎛⎝ −4/3−1/31
⎞⎠ o equivalentemente, E1 es la recta
generada por el vector
⎛⎝ 41
−3
⎞⎠ .De manera similar se encuentra que el espacio propio E2 de A correspondiente al valor
propio λ = 2 es la recta generada por el vector
⎛⎝ 31
−2
⎞⎠ .Nótese que en este caso sólo hay dos espacios propios distintos y cada uno de ellos es
una línea recta, como se ilustra en la figura 14.4.
Figura 14.4.
Es claro entonces que A no tiene tres vectores propios linealmente independientes, yaque dados tres vectores propios cualesquiera de A, por lo menos dos de ellos deben estaren la recta E1 o en la recta E2, y por tanto esos tres vectores propios son linealmentedependientes. Luego la matriz A no es factorizable en la forma A = PDP−1 con P matrizinvertible y D matriz diagonal. �

464 14. Valores propios y vectores propios
14.2 Matrices simétricas
Una matriz A de orden 3 se dice simétrica si ella es de la forma
A =
⎛⎝a b cb d ec e f
⎞⎠o equivalentemente, si A tiene la propiedad
AT = A
Ejemplo 14.8La matriz A =
⎛⎝1 0 40 2 −14 −1 3
⎞⎠ es simétrica, pero la matriz B =
⎛⎝1 4 04 2 −83 1 3
⎞⎠ no lo es.
�
Vimos en el capítulo 7 que las matrices simétricas de orden 2 tienen propiedades espe-ciales en cuanto a valores y vectores propios se refiere. Pues bien, las matrices simétricasde orden 3 tienen propiedades completamente análogas. En efecto, se tiene que:
Si A es una matriz 3× 3 simétrica entonces,
1. Las raíces de la ecuación característica de A son todas reales.
2. Vectores propios de A, correspondientes a valores propios distintos, son or-togonales.
3. A posee tres vectores propios mutuamente ortogonales y unitarios.
4. Si X1, X2, X3 son tres vectores propios de A mutuamente ortogonales yunitarios, correspondientes respectivamente a los valores propios λ1, λ2, λ3 (loscuales no tienen que ser distintos dos a dos) entonces la matriz
Q =
(X1 X2 X3| | |
)la cual es invertible y con la propiedad Q−1 = QT , es tal que
Q−1AQ =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠o equivalentemente
QTAQ =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠
La prueba de 1. no se dará, pues ella requiere de conceptos y argumentos que estánfuera de los propósitos de este texto.
En las pruebas de 2. y 3. usaremos el siguiente resultado:

14.2. Matrices simétricas 465
Si A es una matriz simétrica de orden 3 entonces para todo par de vectores X,Y de R3 se tiene que
(AX) .Y = X. (AY ) (14.9)
La prueba de este resultado es inmediata ya que, como sabemos, para toda matriz Ade orden 3, podemos escribir
(AX) .Y = (AX)TY y (AX)T = XTAT
cualesquiera sean los vectoresX y Y de R3. Por tanto, si A es simétrica, es decir, si AT = A,se tiene que
(AX) .Y = (AX)T Y = XTATY = XTAY = XT (AY ) = X.(AY )
para todo par de vectores X, Y de R3
Prueba de 2.Sean X1, X2 dos vectores propios de A, correspondientes a los valores propios λ1, λ2
respectivamente. Supongamos que λ1 �= λ2 y probemos que X1 y X2 son ortogonales, esdecir, X1.X2 = 0.
Por una parte tenemos que
(AX1).X2 = (λ1X1) .X2 = λ1 (X1.X2)
y por otra,X1.(AX2) = X1. (λ2X2) = λ2 (X1.X2)
Ahora, como (AX1).X2 = X1.(AX2), según (14.9), entonces
λ1 (X1.X2) = λ2 (X1.X2)
es decir,(λ1 − λ2) (X1.X2) = 0
y puesto que λ1 − λ2 �= 0 (pues estamos suponiendo que λ1 �= λ2) entonces X1.X2 = 0,como se quería probar. �
Se advierte al lector que la prueba de 3. presenta un grado de dificultad que supera elnivel de este texto; si el lector lo desea, puede omitir su lectura.
Prueba de 3.Ya se sabe que A tiene por lo menos un valor propio λ1. Sea X1 un vector propio de
A, con ‖X1‖ = 1, correspondiente al valor propio λ1 y consideremos el plano P que pasapor el origen y que tiene a X1 como un vector normal (vea figura 14.5).
Figura 14.5.

466 14. Valores propios y vectores propios
Pues bien, probaremos que en el plano P hay dos vectores propios X2 y X3 de Aortogonales y unitarios. Esto se probará considerando la transformación lineal T del espaciocuya matriz es A y procediendo como se indica a continuación:
i) En primer lugar se prueba que
Si X ∈ P entonces T (X) ∈ P (14.10)
ii) Probado lo anterior, se considera la restricción T ∗ de T al plano P, es decir, latransformación
T ∗ : P −→ PX �−→ T ∗ (X) = T (X)
iii) Se identifica el plano P con R2
iv) Identificado el plano P con R2, la transformación T ∗ da lugar (en virtud de dichaidentificación) a una transformación lineal
T : R2 −→ R2
v) Se prueba que la matriz de T es simétrica.
vi) Probado lo anterior ya se puede afirmar que T posee dos vectores propios
(u1u2
),(
v1v2
)ortogonales, pues esto es válido para toda transformación lineal del plano con matriz
simétrica.
vii) Se prueba que los vectores U, V de P que se identifican con
(u1u2
)y
(v1v2
)son
vectores propios de T ortogonalesviii) Finalmente, los vectores
X2 =1
‖U‖U y X3 =1
‖V ‖V
son dos vectores propios de T , es decir de A, ortogonales y unitarios en el plano P.Daremos ahora los detalles del plan anterior.i) Empezaremos por probar (14.10).Sea X ∈ P. Entonces
T (X) ·X1 = AX ·X1= X ·AX1 (por (14.9))
= X · (λ1X1)= λ1 (X ·X1)= 0 (pues X ·X1 = 0 ya que X ∈ P)
luego T (X) ∈ Pii) Consideremos la transformación T ∗. Es claro que para todo par de vectores X, Y
de PT ∗ (X) · Y = X · T ∗ (Y ) (14.11)
ya que
T ∗ (X) · Y = T (X) · Y = AX · Y = X ·AY = X · T (Y ) = X · T ∗ (Y )

14.2. Matrices simétricas 467
iii) Pasamos ahora a identificar el plano P con R2.
Sean F1, F2 dos vectores de P unitarios y ortogonales. Cada vector X de P puede serexpresado de manera única como
X = x1F1 + x2F2
siendo
x1 = X · F1 y x2 = X · F2 (14.12)
Consideremos la función φ : P −→R2 la cual asigna al vector X = x1F1 + x2F2 de P,el par
(x1x2
)de R2. Es claro que esta función es uno a uno y sobre, es decir, φ es biyectiva.
Emplearemos la aplicación φ para identificar cada vector X = x1F1 + x2F2 del plano
P con el par
(x1x2
)de R2 y con ello identificaremos el plano P con R2.
Nótese que F1 se identifica con E1 =
(1
0
)pues F1 = 1F1 + 0F2; similarmente F2 se
identifica con E2 =
(0
1
).
iv) Una vez identificado el plano P con R2, la transformación T ∗ : P −→ P da lugar auna transformación T : R2 −→ R
2 como se explica a continuación:
Sea
(x1x2
)en R2. Como ya sabemos,
(x1x2
)se identifica con el vector X = x1F1+x2F2
de P; por otra parte, como T ∗ (X) es un vector de P, existen escalares x1, x2 tales que
T ∗ (X) = x1F1 + x2F2
y así T ∗ (X) se identifica con el par
(x1x2
)de R2. Pues bien, la transformación T envía(
x1x2
)en
(x1x2
).
Resumiendo, la transformación T ∗ : P −→ P definida por
T ∗(x1F1 + x2F2) = x1F1 + x2F2
da lugar a la transformación
T : R2 −→ R
2(x1x2
)�−→ T
(x1x2
)=
(x1x2
)Téngase presente que
T ∗ (x1F1 + x2F2) = x1F1 + x2F2 ⇔ T
(x1x2
)=
(x1x2
)(14.13)
En la figura 14.6 se ilustra la identificación entre P y R2 y la relación entre las trans-formaciones T ∗ y T .

468 14. Valores propios y vectores propios
Figura 14.6.
Se deja al lector comprobar que T es una transformación lineal.
v) Sea ahora
(a cb d
)la matriz de T . Veamos que esta matriz es simétrica:
Puesto que
T (E1) =
(a
b
)y T (E2) =
(c
d
)entonces (vea (14.13)),
T ∗ (F1) = aF1 + bF2 y T ∗ (F2) = cF1 + dF2
y como sabemos (vea (14.12))
a = T ∗ (F1) · F1, b = T ∗ (F1) · F2c = T ∗ (F2) · F1, d = T ∗ (F2) · F2
Ahora, usando (14.11), tenemos que
b = T ∗ (F1) · F2 = F1 · T ∗ (F2) = T ∗ (F2) · F1 = cluego la matriz de T es simétrica.
vi) Como la matriz de T es simétrica, podemos afirmar que T posee dos vectores propios(u1u2
),
(v1v2
)ortogonales.
vii) Sea U = u1F1+u2F2 el vector de P que se identifica con el par
(u1u2
). Veamos que
U es vector propio de A :Para cierto valor propio λ de T se tiene
T
(u1u2
)= λ
(u1u2
)=
(λu1λu2
)y por tanto (vea (14.13)),
T ∗ (u1F1 + u2F2) = (λu1)F1 + (λu2)F2 = λ (u1F1 + u2F2)
es decir, el vector U = u1F1 + u2F2 del plano P, es tal queT ∗ (U) = λU

14.2. Matrices simétricas 469
o equivalentemente,
T (U) = λU
lo cual prueba que el vector U del plano P es un vector propio de T, y por tanto, de lamatriz A. De manera similar se prueba que el vector V = v1F1 + v2F2 es un vector propiode A en el plano P.
Finalmente, los vectores U y V son ortogonales, pues
U · V = (u1F1 + u2F2) · (v1F1 + v2F2)= u1v1 + u2v2
=
(u1u2
)·(v1v2
)= 0 (ya que
(u1u2
)y
(v1v2
)son ortogonales)
viii) Por último, los vectores
X2 =1
‖U‖U y X3 =1
‖V ‖V
son dos vectores propios de A ortogonales y unitarios en el plano P. Así, los vectores X1,X2, X3 son tres vectores propios de A ortogonales y unitarios. �
Prueba de 4.Sean X1, X2, X3 vectores propios de A ortogonales y unitarios, correspondientes a los
valores propios λ1, λ2, λ3, y sea
Q =
(X1 X2 X3| | |
)Como X1, X2, X3 son vectores propios de A linealmente independientes (pues son
vectores de propios de A ortogonales y no nulos) entonces la matriz Q es invertible y talque
A = Q
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠Q−1o, equivalentemente,
Q−1AQ =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠ (14.14)
Veamos ahora que la matriz Q tiene la propiedad QT = Q−1.Para ello basta probar que
QTQ = I3
Digamos que
X1 =
⎛⎝ x1y1z1
⎞⎠ , X2 =
⎛⎝ x2y2z2
⎞⎠ y X3 =
⎛⎝ x3y3z3
⎞⎠

470 14. Valores propios y vectores propios
Entonces
QTQ =
⎛⎝x1 y1 z1x2 y2 z2x3 y3 z3
⎞⎠⎛⎝x1 x2 x3y1 y2 y3z1 z2 z3
⎞⎠=
⎛⎝X1 ·X1 X1 ·X2 X1 ·X3X2 ·X1 X2 ·X2 X2 ·X3X3 ·X1 X3 ·X2 X3 ·X3
⎞⎠Ahora, como X1, X2, X3 son ortogonales
X1 ·X2 = X1 ·X3 = X2 ·X3 = 0y como X1, X2, X3 son unitarios
X1 ·X1 = X2 ·X2 = X3 ·X3 = 1Luego,
QTQ =
⎛⎝1 0 00 1 00 0 1
⎞⎠ = I3como se quería probar.
Es claro entonces que la igualdad (14.14) es equivalente a la igualdad
QTAQ =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠ �
Una matriz Q invertible y con la propiedad QT = Q−1 es llamada unamatriz ortogo-nal. Observe que en la prueba anterior (prueba de 4.) se ha probado que si las columnas deuna matriz Q son vectores ortogonales y unitarios entonces Q es una matriz ortogonal; ellector puede probar fácilmente que, recíprocamente, si Q es una matriz de orden 3 ortogonalentonces sus columnas son vectores unitarios mutuamente ortogonales.
Observe que de los resultados en el último recuadro se obtiene el siguiente corolario:
Si A es una matriz simétrica 3× 3 entonces existen matrices Q y D, de orden 3,con Q ortogonal y D diagonal, tales que
QTAQ = D
Este resultado se usará en el capítulo siguiente, para probar (empleando matrices yvectores) que toda ecuación de segundo grado
ax2 + by2 + cz2 + dxy + exz + fyz + gx+ hy + iz + j = 0
con d �= 0 o e �= 0 o f �= 0, siempre se puede transformar mediante una rotación del sistemaxyz, en una ecuación de segundo grado de la forma
a′(x′)2+ b′
(y′)2+ c′
(z′)2+ g′x′ + h′y′ + i′z′ + j′ = 0
(que carece de términos cruzados x′y′, x′z′ y y′z′).

14.2. Matrices simétricas 471
Ejemplo 14.9Considere la matriz simétrica
A =
⎛⎝ 3 −1 0−1 2 −10 −1 3
⎞⎠a) Halle los valores propios de A y sus correspondientes espacios propios.b) Halle matrices Q ortogonal y D diagonal tales que QTAQ = D.
Solución:a) La ecuación característica de A es∣∣∣∣∣∣
3− λ −1 0−1 2− λ −10 −1 3− λ
∣∣∣∣∣∣ = 0El lector puede comprobar fácilmente que esta ecuación es
(1− λ) (3− λ) (4− λ) = 0Las raíces de esta ecuación son los números λ1 = 1, λ2 = 3 y λ3 = 4, los cuales son los
valores propios de A.Los espacios propios E1, E3 y E4 son, respectivamente, los conjuntos solución de los
sistemas(A− I3)X = O, (A− 3I3)X = O y (A− 4I3)X = O
Resolviendo estos sistemas se encuentra que
E1 es la recta generada por el vector Y1 =⎛⎝ 121
⎞⎠ ,E3 es la recta generada por el vector Y2 =
⎛⎝ 10
−1
⎞⎠ ,E4 es la recta generada por el vector Y3 =
⎛⎝ 1−11
⎞⎠ .Observe que los vectores Y1, Y2, Y3 son ortogonales dos a dos y por tanto las rectas E1,
E3, E4 son mutuamente perpendiculares, como lo son los ejes coordenados.
b) Considere los vectores Y1, Y2, Y3 indicados en a), los cuales son vectores propios deA ortogonales. Normalizándolos obtenemos los vectores unitarios
X1 =1
‖Y1‖Y1 =1√6
⎛⎝ 121
⎞⎠ , X2 = 1
‖Y2‖Y2 =1√2
⎛⎝ 10
−1
⎞⎠ , X3 = 1
‖Y3‖Y3 =1√3
⎛⎝ 1−11
⎞⎠los cuales siguen siendo vectores propios de A ortogonales dos a dos, correspondientes alos valores propios 1, 3, 4 respectivamente, ya que X1 ∈ E1, X2 ∈ E2 y X3 ∈ E4.
Por tanto, la matriz
Q =
(X1 X2 X3| | |
)=
⎛⎝1/√6 1/
√2 1/
√3
2/√6 0 −1/√3
1/√6 −1/√2 1/
√3
⎞⎠

472 14. Valores propios y vectores propios
es una matriz ortogonal tal queQTAQ = D
donde
D =
⎛⎝1 0 00 3 00 0 4
⎞⎠ �
Ejemplo 14.10Considere la matriz simétrica
A =
⎛⎝5 4 24 5 22 2 2
⎞⎠a) Halle los valores propios de A y los correspondientes espacios propios.b) Halle matrices Q ortogonal y D diagonal tales que QTAQ = D.
Solución:a) El lector puede comprobar que
det (A− λI3) = (1− λ)2 (10− λ)y por tanto la ecuación característica de A es
(1− λ)2 (10− λ) = 0Las raíces de esta ecuación son los números λ1 = 1 (esta raíz se repite, apareciendo dos
veces) y λ2 = 10 (raíz que no se repite). Por tanto, los dos valores propios de A son λ1 = 1(que aparece dos veces) y λ2 = 10 (que aparece una sola vez).
Los espacios propios E1 y E10 son, respectivamente, los conjuntos solución de los sistemas(A− I3)X = O y (A− 10I3)X = O
Resolviendo estos sistemas se encuentra que E1 es el plano generado por los vectores
Y1 =
⎛⎝ −110
⎞⎠ y Y2 =
⎛⎝ −102
⎞⎠ , y E10 es la recta generada por el vector Y3 =⎛⎝ 221
⎞⎠ .Observe que el vector Y3 es ortogonal tanto a Y1 como a Y2, de manera que la recta E10
es perpendicular al plano E1; nótese además, que Y1 y Y2 no son ortogonales. La situaciónde los espacios propios y de los vectores Y1, Y2, Y3 se ilustra en la figura 14.7.
Figura 14.7.

14.2. Matrices simétricas 473
Todos los vectores no nulos en el plano E1 son vectores propios de A correspondientes alvalor propio λ1 = 1; es claro entonces que en E1 hay dos vectores propios de A ortogonalesy unitarios. Una manera de hallarlos es la siguiente:
Fijemos (por ejemplo) el vector Y1 y hallemos en el plano E1 un vector⎛⎝ xyz
⎞⎠ ortogonal
a Y1.Puesto que una ecuación para el plano E1 es
2x+ 2y + z = 0
(pues Y3 =
⎛⎝ 221
⎞⎠ es un vector normal al plano E1) entonces el vector⎛⎝ xyz
⎞⎠ debe
satisfacer esta ecuación y además ser ortogonal a Y1, es decir, debe satisfacer también laecuación
−x+ y = 0Resolviendo el sistema
2x+ 2y + z = 0−x+ y = 0
encontramos que sus soluciones son los vectores
⎛⎝ xyz
⎞⎠ de la forma
⎛⎝ xyz
⎞⎠ =⎛⎝ −z/4
−z/4z
⎞⎠ = z⎛⎝ −1/4
−1/41
⎞⎠Luego, un vector del plano E1 ortogonal al vector Y1 es, por ejemplo, el vector
Y ∗2=
⎛⎝ 11
−4
⎞⎠ el cual se obtiene haciendo z = −4 en la igualdad anterior.
Por tanto, los vectores Y1 y Y ∗2 son dos vectores propios de A, ortogonales, correspon-dientes al valor propio 1.
Tenemos así que los vectores
Y1 =
⎛⎝ −110
⎞⎠ , Y ∗2 =
⎛⎝ 11
−4
⎞⎠ , Y3 =
⎛⎝ 221
⎞⎠son vectores propios de A ortogonales dos a dos. Normalizándolos obtenemos los vectoresunitarios
X1 =1
‖Y1‖Y1 =1√2
⎛⎝ −110
⎞⎠ , X2 = 1
‖Y ∗2‖Y
∗
2 =1
3√2
⎛⎝ 11
−4
⎞⎠ ,X3 =
1
‖Y3‖Y3 =1
3
⎛⎝ 221
⎞⎠

474 14. Valores propios y vectores propios
los cuales siguen siendo vectores propios de A ortogonales, con X1, X2 correspondiendo alvalor propio λ1 = 1 y X3 correspondiendo al valor propio λ2 = 10.
Por tanto, la matriz
Q =
(X1 X2 X3| | |
)=
⎛⎝−1/√2 1/3
√2 2/3
1/√2 1/3
√2 2/3
0 −4/3√2 1/3
⎞⎠es una matriz ortogonal tal que
QTAQ = D
donde
D =
⎛⎝1 0 00 1 00 0 10
⎞⎠ �
14.3 Ejercicios
Sección 14.1
1. Sea A una matriz de orden 3 tal que su ecuación característica es
det (A− λI) = −λ3 + 5λ2 − 3λ− 9 = 0
a) Hallar los valores propios de A.
b) Para cada una de las siguientes matrices determinar si ella es invertible: A + I,A+ 3I, A− 3I.c) Hallar el determinante de A.
2. a) Sea T la transformación lineal del espacio definida por
T
⎛⎝ xyz
⎞⎠ =⎛⎝ 3x+ 7y + 9z
−4x− 5y + z2x+ 4y + 4z
⎞⎠
Determinar si X =
⎛⎝ 4−31
⎞⎠ y Y =
⎛⎝ 2−13
⎞⎠ son vectores propios de T y si alguno
de ellos lo es, decir a cuál valor propio corresponde.
b) Sea A =
⎛⎝1 1 1a b cd e f
⎞⎠ . Sabiendo que X =
⎛⎝ 111
⎞⎠ , Y =⎛⎝ 1
0−1
⎞⎠ y Z =
⎛⎝ 1−10
⎞⎠son vectores propios de A, hallar los escalares a, b, c, d, e y f .
3. a) Probar que si A es una matriz triangular superior o inferior de orden 3 entonceslos valores propios de A son las componentes de su diagonal principal.
b) Para la matriz A dada en cada numeral, hallar los valores propios de A y loscorrespondientes espacios propios.

14.3. Ejercicios 475
i) A =
⎛⎝2 1 00 2 10 0 2
⎞⎠ ii) A =
⎛⎝−2 0 00 3 00 0 −2
⎞⎠4. Para la matriz A dada en cada numeral:
a) Hallar los valores propios de A.
b) Hallar los espacios propios de A e interpretarlos geométricamente.
c) ¿Posee A tres vectores propios linealmente independientes? En caso afirmativo,hallarlos.
i) A =
⎛⎝ 1 3 3−3 −5 −33 3 1
⎞⎠ ii) A =
⎛⎝4 0 01 4 00 0 5
⎞⎠iii) A =
⎛⎝ 1 1 −1/21/2 3/2 −1/2−1/2 −1 1
⎞⎠ iv) A =
⎛⎝−2 −4 −34 6 3
−3 −3 −1
⎞⎠5. Para la transformación lineal T dada en cada numeral:
a) Hallar los valores propios de T.
b) Hallar los espacios propios de T e interpretarlos geométricamente.
i) T es tal que m (T ) =
⎛⎝2 1 31 2 33 3 10
⎞⎠ ii) T
⎛⎝ xyz
⎞⎠ =⎛⎝ z00
⎞⎠iii) T es la transformación nula de R3.
iv) T es tal que T (E1) =
⎛⎝ 001
⎞⎠ , T (E2) =⎛⎝ 1
0−3
⎞⎠ y T (E3) =
⎛⎝ 013
⎞⎠v) T es la transformación identidad de R3.
vi) T = Rxθcon 0 ≤ θ ≤ 2π
6. Hallar una matriz A de orden 3 tal que los vectores X1 =
⎛⎝ 111
⎞⎠, X2 =⎛⎝ −3
01
⎞⎠y X3 =
⎛⎝ −210
⎞⎠ son vectores propios de A correspondientes respectivamente a los
valores propios λ1 = 6, λ2 = 0 y λ3 = 0.
7. Para la matriz A, dada en cada literal, encontrar al menos un valor de c para el cualA tenga tres vectores propios linealmente independientes, en R3.
a) A =
⎛⎝1 0 00 0 10 c 0
⎞⎠ b) A =
⎛⎝1 0 00 2 1c 0 0
⎞⎠8. Para la matriz A, dada en cada literal, determinar si existen matrices P invertible yD diagonal tales que A = PDP−1 y en caso afirmativo, hallar tales matrices.

476 14. Valores propios y vectores propios
a) A =
⎛⎝4 0 12 3 21 0 4
⎞⎠ b) A =
⎛⎝3 0 00 2 00 1 2
⎞⎠c) A =
⎛⎝1 0 00 1 10 1 1
⎞⎠ d) A =
⎛⎝−3 −7 −52 4 31 2 2
⎞⎠9. Sea T una transformación lineal del espacio.
a) Demostrar que todo vector propio de T corresponde a un único valor propio de T ,es decir, un vector propio de T no puede pertenecer a dos espacios propios diferentes.
b) Demostrar que si X es un vector propio de T correspondiente a un valor propioλ entonces para todo c ∈ R, c �= 0, el vector cX también es un vector propio de Tcorrespondiente a λ.
c) Demostrar que si X y Y son vectores propios de T correspondientes a un valorpropio λ entonces X + Y también es un vector propio de T correspondiente a λ,siempre que X + Y �= O.d) Demostrar que si U es un vector propio de T correspondiente a un valor propio λy LU es la recta generada por el vector U entonces la imagen bajo T de cada vectorde LU es también un vector de LU .
Sección 14.2
10. Para la matriz dada, en cada literal, hallar los valores de a, b y c de tal forma que lamatriz sea simétrica.
a)
⎛⎝1 2 1a 2 1b c 3
⎞⎠ b)
⎛⎝1 a 3b 2 43 c 0
⎞⎠c)
⎛⎝ a −2 1−2 3 bc 0 1
⎞⎠ d)
⎛⎝2 a− 2b+ 2c 2a+ b+ c3 5 a+ c0 −2 7
⎞⎠11. Para la matriz A, dada en cada literal, determinar si A es ortogonal y, en caso
afirmativo, hallar su inversa.
a) A =
⎛⎝−1/√2 1/
√6 1/
√3
0 −2/√6 1/√3
1/√2 1/
√6 1/
√3
⎞⎠ b) A =
⎛⎝ cos θ senθ 0−senθ cos θ 00 0 1
⎞⎠
c) A =
⎛⎝0 1 1/√2
1 0 0
0 0 1/√2
⎞⎠ d) A =
⎛⎝1/2 −1/3 01/3 1/2 00 0 1
⎞⎠12. a) Mostrar que la matriz de la rotación Rx
θpor el ángulo θ, alrededor del eje x, es
una matriz ortogonal, cualquiera sea el ángulo θ.
b) Mostrar que la matriz de la reflexión respecto al plano x+y+ z = 0 es una matrizortogonal .

14.3. Ejercicios 477
13. a) Hallar escalares a, b, c tales que la matriz
⎛⎝a 1/√2 −1/√2
b 1/√6 1/
√6
c 1/√3 1/
√3
⎞⎠ sea una matriz
ortogonal.
b) Demostrar que si la matriz de coeficientes del sistema
a1x+ a2y + a3z = d1b1x+ b2y + b3z = d2c1x+ c2y + c3z = d3
es una matriz ortogonal entonces el sistema posee como única solución el vector⎛⎝ xyz
⎞⎠ para el cual
x = a1d1 + b1d2 + c1d3y = a2d1 + b2d2 + c2d3z = a3d1 + b3d2 + c3d3
14. Sean A =
⎛⎝ 5 −4 −2−4 5 2−2 2 2
⎞⎠ , X =
⎛⎝ −221
⎞⎠ y Y =
⎛⎝ 110
⎞⎠ . Sin calcular los espaciospropios de A :
a) Verificar que X y Y son vectores propios de A.
b) Hallar matrices Q ortogonal y D diagonal tales que D = QTAQ.
15. Sean A =
⎛⎝3 1 11 3 11 1 3
⎞⎠ y X =
⎛⎝ −110
⎞⎠. Sin calcular la ecuación característica de A :a) Mostrar que 5 es un valor propio de A y encontrar el espacio propio de A corres-pondiente a dicho valor propio.
b)Mostrar que X es vector propio de A y determinar su valor propio correspondiente.
c) ¿Posee A factorización D = QTAQ con Q matriz ortogonal y D matriz diagonal?En caso afirmativo, encontrar matrices Q y D con las propiedades anteriores.
16. Para la matriz A dada en cada numeral:
a) Hallar los valores propios y su respectivos espacios propios. Interpretar geométri-camente cada espacio propio.
b) Verificar que vectores propios de A correspondientes a valores propios diferentesson mutuamente ortogonales.
c) ¿Posee A tres vectores propios unitarios y ortogonales? En caso afirmativo, ha-llarlos.
d) Hallar matrices Q ortogonal y D diagonal tales que D = QTAQ.
i) A =
⎛⎝−4 0 00 2 30 3 2
⎞⎠ ii) A =
⎛⎝0 1 11 0 11 1 0
⎞⎠

478 14. Valores propios y vectores propios
iii) A =
⎛⎝ 1 −1 1−1 1 −11 −1 1
⎞⎠ iv) A =
⎛⎝1 3 43 1 04 0 1
⎞⎠17. Sea A una matriz de orden 3 tal que sus valores propios son λ1 = −5 y λ2 = 3;
además E−5 es el plano generado por⎛⎝ −1
10
⎞⎠ ,⎛⎝ 0
1−1
⎞⎠ y E3 es la recta generada
por
⎛⎝ 111
⎞⎠ .a) ¿Es la matriz A factorizable en la forma A = PDP−1 con P matriz invertibley D matriz diagonal? En caso afirmativo, hallar matriz P y D con las propiedadesanteriores.
b) ¿Es la matriz A factorizable en la forma A = QDQT con Q matriz ortogonal y Dmatriz diagonal? En caso afirmativo, hallar Q y D con la propiedades anteriores.
c) Hallar la matriz A.
18. Si A es matriz simétrica de orden 3 tal que sus únicos valores propios son λ1 = 2 y
λ2 = −3 y el espacio propio E2 es la recta generada por el vector⎛⎝ 1
−1−1
⎞⎠ :a) Hallar el espacio propio E−3.b) Hallar matrices Q ortogonal y D diagonal tales que D = QTAQ.
c) Hallar la matriz A.

15
Superficies cuádricas
15.1 Definiciones
En el capítulo 8 se estudió la ecuación de segundo grado en dos variables x, y
Ax2 +Bxy +Cy2 +Dx+Ey + F = 0
Vimos allí que si una ecuación de la forma anterior representa algún lugar geométrico,
es decir, si el conjunto de puntos
(x
y
)de R2 que la satisface es no vacío entonces dicho lugar
geométrico es una cónica (parábola, elipse o hipérbola) o es uno de los casos degeneradosde cónicas (un punto, una recta, dos rectas distintas paralelas o dos rectas distintas que secortan).
Ahora nos ocuparemos de la ecuación de segundo grado en tres variables x, y, z
Ax2 +By2 +Cz2 +Dxy +Exz + Fyz +Gx+Hy + Iz + J = 0 (15.1)
en la cual por lo menos uno de los coeficientes A, B, C, D, E y F es no nulo.
Sea S el conjunto de puntos
⎛⎝ x
yz
⎞⎠ de R3 que satisface una ecuación del tipo (15.1).
Exceptuando ciertos casos, S es llamado una superficie cuádrica o también una su-perficie cuadrática. En los casos exceptuados nos referiremos a S como una superficiecuádrica (cuadrática) degenerada; estos casos son los siguientes:
• S es vacío.
• S consta de un solo punto.
• S es una línea recta.
• S es un plano.
• S es la unión de dos planos distintos, los cuales pueden ser paralelos o pueden cortarse.
Por ejemplo, para la ecuación
x2 + y2 + z2 = −1
se da que S = φ y para la ecuación
x2 + y2 + z2 = 0
479

480 15. Superficies cuádricas
S =⎧⎨⎩⎛⎝ 000
⎞⎠⎫⎬⎭. Ahora, para la ecuación
x2 + y2 = 0
vemos que el conjunto de puntos que la satisfacen es
S =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = 0 y y = 0
⎫⎬⎭
el cual es una recta, el eje z. Por otra parte, para las ecuaciones
z2 = 0, x2 − 1 = 0, x2 − y2 = 0
los conjuntos de puntos que las satisfacen son, respectivamente, el plano z = 0, la uniónde los planos distintos x = 1 y x = −1, los cuales son paralelos, y la unión de los planosdistintos x = y y x = −y, los cuales se cortan.
En cuanto a las superficies cuádricas, afirmamos que hay nueve tipos distintos de ellas:elipsoides, hiperboloides de una hoja, hiperboloides de dos hojas, conos, cilindros elípticos,cilindros hiperbólicos, cilindros parabólicos, paraboloides elípticos y paraboloides hiper-bólicos (la esfera es un caso particular de elipsoide, como lo es la circunferencia de laelipse).
Para cada uno de esos nueve tipos daremos la(s) forma(s) canónica(s) o estándar de laecuación y dibujaremos las superficies teniendo en cuenta la siguiente información:• Los interceptos con los ejes coordenados.• Las trazas o intersecciones con los planos coordenados y también con planos paralelosa los planos coordenados.• La simetría respecto a los planos coordenados, a los ejes coordenados y al origen.• Extensión de la superficie: Valor que puede tomar cada una de las variables x, y, z
En muchos casos bastará sólo con parte de la información anterior para dibujar lasuperficie.
En lo que respecta a la simetría, se tiene que una superficies S es (por ejemplo)
simétrica respecto al eje x si cada vez que un punto
⎛⎝ x
yz
⎞⎠ está en S, también lo
está su simétrico respecto al eje x, el cual es el punto
⎛⎝ x
−y−z
⎞⎠ . En otras palabras, si cada
vez que el punto
⎛⎝ x
yz
⎞⎠ satisface la ecuación de S, el punto
⎛⎝ x
−y−z
⎞⎠ también la satisface.
De igual forma, la superficie S es (por ejemplo) simétrica respecto al plano xy si
cada vez que un punto
⎛⎝ x
yz
⎞⎠ está en S, también lo está su simétrico respecto al plano xy,

15.1. Definiciones 481
el cual es el punto
⎛⎝ x
y−z
⎞⎠ ; es decir, si cada vez que el punto
⎛⎝ x
yz
⎞⎠ satisface la ecuación
de S, el punto⎛⎝ x
y−z
⎞⎠ también la satisface. En forma similar se define la simetría de S
respecto a los otros ejes coordenados y respecto a los otros planos coordenados. Por último,
la superficie S es simétrica respecto al origen si cada vez que un punto
⎛⎝ x
yz
⎞⎠ está en
S, también lo está su simétrico respecto al origen, el cual es el punto⎛⎝ −x
−y−z
⎞⎠; es decir,
si cada vez que el punto
⎛⎝ x
yz
⎞⎠ satisface la ecuación de S, el punto
⎛⎝ −x
−y−z
⎞⎠ también la
satisface.
Entre las superficies cuádricas hay algunas que son superficies cilíndricas. A continua-ción explicaremos lo que se entiende por tal tipo de superficies.
Sean C una curva contenida en un plano y L una recta que no está en el plano quecontiene a C y no es paralela a ese plano. Por cada punto de C trazamos una recta paralela aL y consideramos la unión de todas esas rectas así trazadas; dicha unión es una superficiela cual se dice una superficie cilíndrica o también un cilindro. La curva C se llamadirectriz de la superficie y cualquiera de las rectas paralelas a L que conforman la superficiese dice una generatriz de la superficie (vea figura 15.1a).
Figura 15.1.
Cuando las generatrices son perpendiculares al plano de la directriz (como en la figura15.1b), la superficie se dice una superficie cilíndrica recta o un cilindro recto.
Consideremos, por ejemplo, el caso de una superficie cilíndrica recta S que tiene como

482 15. Superficies cuádricas
directriz una curva C del plano xy descrita por f (x, y) = 0 y z = 0. Las generatrices son,por supuesto, paralelas al eje z.
Es claro que un punto
⎛⎝ x
yz
⎞⎠ de R3 está en S si y sólo si el punto
⎛⎝ x
y0
⎞⎠ está en C,
es decir, si y sólo sif (x, y) = 0
como se aprecia en la figura 15.2
Figura 15.2.
Luego, la ecuación f (x, y) = 0, considerada como una ecuación en x, y, z en la cual zpuede tomar cualquier valor en R, es una ecuación para la superficie cilíndrica recta S.
En forma análoga, una ecuación
g (x, z) = 0
corresponde en el espacio a una superficie cilíndrica recta cuyas generatrices son paralelasal eje y y que tiene como directriz la curva del plano xz descrita por
g (x, z) = 0, y = 0
Igualmente, una ecuaciónh (y, z) = 0
corresponde en el espacio a una superficie cilíndrica recta cuyas generatrices son paralelasal eje x y que tiene como directriz la curva del plano yz descrita por
h (y, z) = 0, x = 0
Pasaremos ahora sí a presentar los distintos tipos de superficies cuádricas. Como ya sedijo, para cada tipo daremos la(s) forma(s) canónica(s) de la ecuación, discutiremos unade ellas y la graficaremos; las constantes a, b, c que aparecen en dichas formas canónicaslas asumiremos positivas.
15.2 Elipsoide
La forma canónica de la ecuación de un elipsoide es
x2
a2+
y2
b2+
z2
c2= 1 (15.2)

15.2. Elipsoide 483
Interceptos con los ejes coordenadosHaciendo y = 0 y z = 0 en (15.2) se obtiene x = ±a y por tanto los interceptos de la
superficie con el eje x son los puntos de este eje para los cuales x = ±a. Análogamente, losinterceptos con el eje y son los puntos de este eje para los cuales y = ±b, y los interceptoscon el eje z son los puntos del eje z con z = ±c.
SimetríaEs claro que la superficie es simétrica respecto a cada eje coordenado, respecto a cada
plano coordenado y respecto al origen. Por ejemplo, es simétrica respecto al eje x ya que
cada vez que un punto
⎛⎝ x
yz
⎞⎠ satisface la ecuación (15.2), también el punto
⎛⎝ x
−y−z
⎞⎠ la
satisface puesx2
a2+(−y)2b2
+(−z)2c2
= 1
En forma análoga, la superficie es simétrica respecto al origen pues al sustituir en (15.2)x por −x, y por −y y z por −z, se obtiene la ecuación
(−x)2a2
+(−y)2b2
+(−z)2c2
= 1
la cual es equivalente a (15.2).
TrazasLa traza sobre el plano xy, es decir, sobre el plano z = 0, es la curva conformada por
los puntos
⎛⎝ x
yz
⎞⎠ de R3 con z = 0 y que satisfacen la ecuación (15.2), es decir, por los
puntos
⎛⎝ x
yz
⎞⎠ tales que
x2
a2+
y2
b2= 1 y z = 0
ecuación que corresponde a una elipse contenida en el plano z = 0.Análogamente, las trazas sobre los planos xz y yz son respectivamente, las elipses
x2
a2+
z2
c2= 1, y = 0
y2
b2+
z2
c2= 1, x = 0
Consideremos ahora la traza sobre un plano y = y0, paralelo al plano xz: Al sustituiry por y0 en la ecuación (15.2) se obtiene la ecuación
x2
a2+
z2
c2= 1− y2
0
b2
la cual muestra que si −b < y0 < b entonces dicha traza es una elipse, cuyo tamañodisminuye a medida que el plano y = y0 se aleja del plano xz; es más, tal traza se reduce al

484 15. Superficies cuádricas
punto
⎛⎝ 0
b0
⎞⎠ si y0 = b y al punto
⎛⎝ 0
−b0
⎞⎠ si y0 = −b. Nótese que si |y0| > b, la superficie
no tiene traza sobre el plano y = y0.Para las trazas sobre planos x = x0 y z = z0, la situación es completamente similar.
ExtensiónDe la discusión acerca de las trazas sobre planos paralelos a los planos coordenados se
deduce que la superficie no tiene puntos
⎛⎝ x
yz
⎞⎠ con |x| > a o |y| > b o |z| > c, es decir, si
⎛⎝ x
yz
⎞⎠ es un punto de la superficie entonces
−a ≤ x ≤ a, −b ≤ y ≤ b, y − c ≤ z ≤ c
A esta misma conclusión puede llegarse también así: Si el punto
⎛⎝ x
yz
⎞⎠ satisface la
ecuación (15.2) entoncesx2
a2≤ 1, y2
b2≤ 1 y
z2
c2≤ 1
es decir,x2 ≤ a2, y2 ≤ b2 y z2 ≤ c2
o equivalentemente
−a ≤ x ≤ a, −b ≤ y ≤ b, y − c ≤ z ≤ c
De acuerdo con la información anterior vemos que el elipsoide tiene la forma mostradaen la figura 15.3.
Nótese que si, por ejemplo, a = c entonces el elipsoide es una superficie de revoluciónque se genera al rotar la elipse
y2
b2+
z2
c2= 1, x = 0
(contenida en el plano yz) alrededor del eje y. En general, si cualesquiera dos de los de-nominadores en la ecuación (15.2) son iguales, la superficie es un elipsoide de revolución.
En el caso particular a = b = c, el elipsoide es una esfera, entendiéndose por esfera el
conjunto de puntos
⎛⎝ x
yz
⎞⎠ de R3 que equidistan de un punto fijo llamado centro de la
esfera; la distancia de los puntos de la esfera a su centro se llama radio
Si una esfera tiene centro en el origen y radio r, un punto
⎛⎝ x
yz
⎞⎠ de R3 está en dicha
esfera si y sólo si ∥∥∥∥∥∥⎛⎝ x
yz
⎞⎠∥∥∥∥∥∥ = r

15.3. Hiperboloide de una hoja 485
Figura 15.3.
o equivalentemente, si y sólo si
⎛⎝ x
yz
⎞⎠ satisface la ecuación
x2 + y2 + z2 = r2
la cual es la forma canónica de la ecuación de la esfera. Si en (15.2) se tiene a = b = c,dicha ecuación puede escribirse en la forma
x2 + y2 + z2 = a2
la cual nos dice que en este caso el elipsoide es una esfera con centro en el origen y radio a.
15.3 Hiperboloide de una hoja
Una forma canónica de la ecuación de un hiperboloide de una hoja es
x2
a2+
y2
b2− z2
c2= 1 (15.3)
Las otras dos formas canónicas son:
x2
a2− y2
b2+
z2
c2= 1 y − x2
a2+
y2
b2+
z2
c2= 1 (15.4)
Analizaremos a continuación la ecuación (15.3); el análisis para las otras dos es com-pletamente análogo.
Interceptos con los ejes coordenados
Con el eje x :
⎛⎝ a00
⎞⎠ y
⎛⎝ −a
00
⎞⎠

486 15. Superficies cuádricas
Con el eje y :
⎛⎝ 0
b0
⎞⎠ y
⎛⎝ 0
−b0
⎞⎠
La superficie no corta el eje z ya que al hacer x = 0 y y = 0 en (15.3), se obtiene la
ecuación −z2
c2= 1 la cual no tiene solución para z en R.
SimetríaLa superficie es simétrica con respecto a cada eje coordenado, respecto a cada plano
coordenado y respecto al origen.
TrazasLa traza en el plano xy, es decir, en el plano z = 0 es la elipse
x2
a2+
y2
b2= 1, z = 0
En general, la traza de la superficie sobre un plano z = z0 (paralelo al plano xy) es lacurva descrita por las ecuaciones
x2
a2+
y2
b2= 1 +
z20
c2, z = z0
la cual es una elipse (en el plano z = z0), cuyo tamaño aumenta conforme |z0| crece, esdecir, conforme el plano z = z0 se aleja del plano xy. Por otra parte, las trazas sobre losplanos xz y yz son respectivamente, las hipérbolas
x2
a2− z2
c2= 1, y = 0
y2
b2− z2
c2= 1, x = 0
También son hipérbolas las trazas sobre planos paralelos a los planos xz y yz, cua-lesquiera sean estos planos.
ExtensiónDe lo dicho acerca de las trazas sobre planos paralelos a los planos coordenados se
deduce que cada una de las variables puede tomar cualquier valor en R.
El hiperboloide de una hoja, correspondiente a la ecuación (15.3), tiene la formamostrada en la figura 15.4
El eje z (eje asociado con la variable correspondiente al coeficiente negativo) se llamaeje del hiperboloide. Nótese que si a = b, la traza del hiperboloide sobre cualquier planoparalelo al plano xy es una circunferencia y por tanto, en este caso, el hiperboloide es unasuperficie de revolución que se genera al rotar la hipérbola
x2
a2− z2
c2= 1, y = 0
(contenida en el plano xz) alrededor del eje z, o también al rotar alrededor del mismo eje,la hipérbola
y2
b2− z2
c2= 1, x = 0
(contenida en el plano yz)

15.4. Hiperboloide de dos hojas 487
Figura 15.4.
15.4 Hiperboloide de dos hojas
Una forma canónica para la ecuación de un hiperboloide de dos hojas es
−x2
a2− y2
b2+
z2
c2= 1 (15.5)
Las otras dos formas canónicas son
−x2
a2+
y2
b2− z2
c2= 1 y
x2
a2− y2
b2− z2
c2= 1 (15.6)
Analizaremos la ecuación (15.5); el análisis para las otras dos ecuaciones es completa-mente análogo.
Interceptos con los ejes coordenados
Con el eje z :
⎛⎝ 00c
⎞⎠ y
⎛⎝ 0
0−c
⎞⎠
La superficie no corta el eje x (ya que al hacer y = 0 y z = 0 se obtiene −x2
a2= 1) ni
al eje y (ya que al hacer x = 0 y z = 0 se obtiene −y2
b2= 1)
SimetríaLa superficie es simétrica respecto a cada eje coordenado, respecto a cada plano coor-
denado y respecto al origen.

488 15. Superficies cuádricas
TrazasLas trazas sobre el plano xz y sobre el plano yz son, respectivamente, las hipérbolas
z2
c2− x2
a2= 1, y = 0
z2
c2− y2
b2= 1, x = 0
No hay trazas sobre el plano xy, pues al hacer z = 0 en (15.5) se obtiene
−x2
a2− y2
b2= 1
La traza sobre cualquier plano horizontal z = z0 es la elipse
x2
a2+
y2
b2=
z20
c2− 1, z = z0
siempre y cuando |z0| > c; esta elipse aumenta de tamaño a medida que |z0| aumenta. Para
z0 = c, dicha traza se reduce al punto
⎛⎝ 00c
⎞⎠ y para z0 = −c, al punto
⎛⎝ 0
0−c
⎞⎠ . Para
−c < z0 < c, la superficie no tiene traza sobre el plano z = z0, es decir, la superficie notiene puntos entre los planos horizontales z = c y z = −c.
La traza sobre cualquier plano paralelo al plano xz y sobre cualquier plano paralelo alplano yz es una hipérbola.
ExtensiónDe lo dicho acerca de las trazas sobre planos paralelos a los planos coordenados se
deduce que si un punto
⎛⎝ x
yz
⎞⎠ está sobre la superficie entonces |z| ≥ c, es decir, z ≥ c o
z ≤ −c. Por otra parte, cada una de las variables x, y puede tomar cualquier en R.
La superficie tiene la forma mostrada en la figura 15.5
La superficie consta de dos piezas, llamadas hojas del hiperboloide; el eje z (ejecorrespondiente a la variable con coeficiente positivo en (15.5)) se dice el eje del hiper-boloide.
Cuando a = b, la traza del hiperboloide con cualquier plano horizontal z = z0, con|z0| > c, es una circunferencia y por tanto, en este caso, el hiperboloide es una superficiede revolución que se genera al rotar la hipérbola
z2
c2− x2
a2= 1, y = 0
(situada en el plano xz) alrededor del eje z o también al rotar alrededor de este mismoeje la hipérbola
z2
c2− y2
b2= 1, x = 0
(contenida en el plano yz).

15.5. Cono elíptico 489
Figura 15.5.
15.5 Cono elíptico
Una forma canónica para la ecuación de un cono elíptico es
x2
a2+
y2
b2=
z2
c2(15.7)
Las otras dos formas canónicas son
x2
a2+
z2
c2=
y2
b2y
y2
b2+
z2
c2=
x2
a2(15.8)
A continuación analizaremos la ecuación (15.7); el análisis para las otras dos ecuacioneses similar.
Interceptos con los ejes coordenadosLa superficie corta los ejes coordenados únicamente en el origen.
SimetríaLa superficie es simétrica respecto a cada eje coordenado, respecto a cada plano coor-
denado y respecto al origen.

490 15. Superficies cuádricas
Trazas
La traza sobre el plano xy se reduce al origen. Por otra parte, al hacer y = 0 en (15.7)se obtiene
x2
a2=
z2
c2, y = 0
o equivalentemente, (xa− z
c
)(xa+
z
c
)= 0, y = 0
lo cual nos dice que la traza con el plano xz (plano y = 0) esta formada por el par derectas de este plano
x
a− z
c= 0, y = 0
x
a+
z
c= 0, y = 0
las cuales se cortan en el origen. De manera similar, la traza sobre el plano yz es la uniónde las dos rectas
y
b− z
c= 0, x = 0
y
b+
z
c= 0, x = 0
las cuales también se cortan en el origen.
La traza de la superficie con cualquier plano horizontal z = z0, z0 �= 0, es la elipse
x2
a2+
y2
b2=
z20
c2, z = z0
la cual aumenta de tamaño conforme |z0| crece. Las trazas con planos paralelos a los otrosdos planos coordenados son hipérbolas; por ejemplo, la traza con el plano vertical y = y0,y0 �= 0, es el hipérbola
z2
c2− x2
a2=
y20
b2, y = y0
Extensión
Las variables x, y, z pueden tomar cualquier valor en R.
La superficie tiene la forma mostrada en la figura 15.6

15.6. Cilindro recto elíptico 491
Figura 15.6.
El eje z (eje correspondiente a la variable despejada en (15.7)) se dice el eje del conoy el origen es llamado vértice del cono.
Cuando a = b, las trazas sobre planos horizontales son circunferencias y por tanto eneste caso, el cono es una superficie de revolución que se obtiene al rotar alrededor del eje z
(por ejemplo) la rectaz
c=
x
a; en lugar de cono elíptico la superficie se dice cono circular.
15.6 Cilindro recto elíptico
Una forma canónica para la ecuación de un cilindro recto elíptico es
x2
a2+
y2
b2= 1 (15.9)
Las otras dos formas canónicas son
x2
a2+
z2
c2= 1 y
y2
b2+
z2
c2= 1 (15.10)
A continuación nos referiremos a la ecuación (15.9). Esta ecuación, en la cual no aparecela variable z, corresponde a una superficie cilíndrica recta que tiene como directriz la elipse
x2
a2+
y2
b2= 1, z = 0
contenida en el plano xy. En la figura 15.7 se muestra dicha superficie.

492 15. Superficies cuádricas
Figura 15.7.
El eje z (eje correspondiente a la variable que no figura en la ecuación) es el eje delcilindro.
Cuando a = b, la directriz del cilindro es la circunferencia
x2 + y2 = a2, z = 0
En este caso el cilindro es una superficie de revolución y se dice un cilindro circularrecto.
Para las otras dos ecuaciones en (15.10) la situación es similar.
15.7 Cilindro recto hiperbólico
Cualquiera de las ecuaciones siguientes es una forma canónica para la ecuación de uncilindro recto hiperbólico:
x2
a2− y2
b2= ±1 (15.11)
x2
a2− z2
c2= ±1 y
y2
b2− z2
c2= ±1 (15.12)
Si por ejemplo, la ecuación es de la forma (15.11) con el signo + en el lado derecho, lasuperficie correspondiente es un cilindro recto que tiene como directriz la hipérbola
x2
a2− y2
b2= 1, z = 0
contenida en el plano xy. La superficie tiene la forma mostrada en la figura 15.8

15.8. Cilindro recto parabólico 493
Figura 15.8.
Es de señalar que para cada una de las superficies correspondientes a las ecuaciones(15.2) a (15.12), el origen es un centro de simetría, en el sentido de que la superficiees simétrica respecto al origen. Por ello, dichas superficies son llamadas cuádricas concentro. Las superficies que siguen a continuación son llamadas cuádricas sin centro,porque ellas no poseen un centro de simetría.
15.8 Cilindro recto parabólico
Cualquiera de las ecuaciones siguientes es una forma canónica para un cilindro recto parabó-lico:
y = ±ax2, x = ±by2 (15.13)
z = ±ax2, x = ±cz2, y = ±cz2, z = ±by2 (15.14)
Si por ejemplo, la ecuación es
y = ax2
la superficie correspondiente es un cilindro recto que tiene como directriz la parábola
y = ax2, z = 0
contenida en el plano xy. La superficie tiene la forma mostrada en la figura 15.9

494 15. Superficies cuádricas
Figura 15.9.
15.9 Paraboloide elíptico
Cualquiera de las ecuaciones siguientes es una forma canónica para la ecuación de unparaboloide elíptico:
x2
a2+
y2
b2= ±cz (15.15)
y2
b2+
z2
c2= ±ax, x2
a2+
z2
c2= ±by (15.16)
Analizaremos a continuación la ecuación (15.15) con el signo + al lado derecho y c > 0;el análisis para las restantes ecuaciones es completamente similar.
Interceptos con los ejes coordenados.
La superficie pasa por el origen y no hay otros puntos de intersección entre la superficiey los ejes coordenados.
SimetríaLa superficie es simétrica con respecto al eje z (pues al cambiar en (15.15) x por −x
y y por −y se obtiene una ecuación equivalente), pero no lo es respecto a los otros ejes;también es simétrica con respecto a los planos xz y yz, pero no lo es respecto al plano xy,ni respecto al origen.
TrazasAl hacer z = 0 en (15.15), se obtiene la ecuación
x2
a2+
y2
b2= 0

15.9. Paraboloide elíptico 495
la cual se satisface únicamente cuando x = 0 y y = 0; por tanto, la traza sobre el plano xy
se reduce al origen. Por otra parte, todos los puntos
⎛⎝ x
yz
⎞⎠ que satisfacen la ecuación
x2
a2+
y2
b2= cz
cumplen la condición z ≥ 0, lo cual indica que la superficie está arriba del plano xy,exceptuando únicamente el origen. La traza sobre cualquier plano horizontal z = z0, z0 > 0,es la elipse
x2
a2+
y2
b2= cz0, z = z0
mientras que las trazas sobre los planos xz y yz son respectivamente, las parábolas
x2
a2= cz, y = 0
y2
b2= cz, x = 0
Las trazas sobre planos paralelos a los planos xz y yz también son parábolas.
ExtensiónLas variables x, y pueden tomar cualquier valor, mientras que z sólo puede tomar
valores no negativos.
La forma del paraboloide elíptico es como se muestra en la figura 15.10.
Figura 15.10.
Si a = b, las trazas con planos z = z0, z0 > 0, son circunferencias y por tanto, en estecaso, el paraboloide es una superficie de revolución que se genera al rotar, por ejemplo, laparábola
cz =x2
a2, y = 0
(contenida en el plano xz) alrededor del eje z. En este caso la superficie se dice unparaboloide circular.

496 15. Superficies cuádricas
15.10 Paraboloide hiperbólico
Cualquiera de las ecuaciones siguientes es una forma canónica para la ecuación de unparaboloide hiperbólico:
x2
a2− y2
b2= ±cz (15.17)
y2
b2− z2
c2= ±ax, x2
a2− z2
c2= ±by (15.18)
De ellas analizaremos a continuación la ecuación (15.17) con signo − en el lado derecho,es decir, la ecuación
y2
b2− x2
a2= cz (15.19)
El análisis de las otras ecuaciones es completamente similar.
Interceptos con los ejes coordenadosLa superficie pasa por el origen y no hay otros puntos de intersección entre la superficie
y los ejes coordenados.
SimetríaLa superficie es simétrica respecto al eje z, pero no lo es respecto a los otros ejes;
también es simétrica con respecto a los planos xz y yz, pero no lo es respecto al plano xy,ni respecto al origen.
TrazasSi se hace z = 0 en (15.19) se obtiene
y2
b2− x2
a2= 0
es decir, (yb− x
a
)(yb+
x
a
)= 0
Por tanto, la traza sobre el plano xy está conformada por las rectas
y
b− x
a= 0, z = 0
y
b+
x
a= 0, z = 0
las cuales se cortan en el origen. Por otra parte, las trazas sobre los planos xz y yz son,respectivamente, las parábolas
−x2
a2= cz, y = 0
y2
b2= cz, x = 0
La traza sobre un plano horizontal z = z0, z0 �= 0, es la hipérbolay2
b2− x2
a2= cz0, z = z0
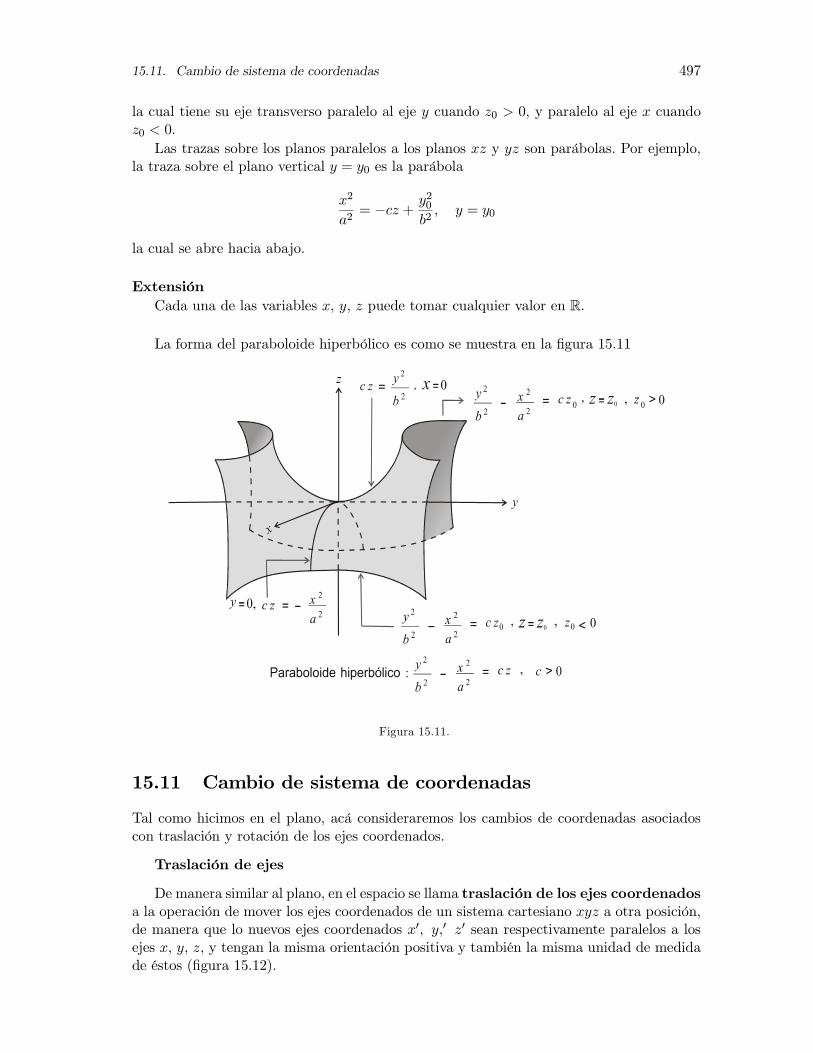
15.11. Cambio de sistema de coordenadas 497
la cual tiene su eje transverso paralelo al eje y cuando z0 > 0, y paralelo al eje x cuandoz0 < 0.
Las trazas sobre los planos paralelos a los planos xz y yz son parábolas. Por ejemplo,la traza sobre el plano vertical y = y0 es la parábola
x2
a2= −cz + y2
0
b2, y = y0
la cual se abre hacia abajo.
Extensión
Cada una de las variables x, y, z puede tomar cualquier valor en R.
La forma del paraboloide hiperbólico es como se muestra en la figura 15.11
Figura 15.11.
15.11 Cambio de sistema de coordenadas
Tal como hicimos en el plano, acá consideraremos los cambios de coordenadas asociadoscon traslación y rotación de los ejes coordenados.
Traslación de ejes
De manera similar al plano, en el espacio se llama traslación de los ejes coordenadosa la operación de mover los ejes coordenados de un sistema cartesiano xyz a otra posición,de manera que lo nuevos ejes coordenados x′, y,′ z′ sean respectivamente paralelos a losejes x, y, z, y tengan la misma orientación positiva y también la misma unidad de medidade éstos (figura 15.12).

498 15. Superficies cuádricas
Figura 15.12.
Supongamos que se ha realizado una traslación de los ejes coordenados x, y, z y
sea P un punto del espacio con terna de coordenadas
⎛⎝ x
yz
⎞⎠ respecto al sistema xyz y
con terna de coordenadas
⎛⎝ x′
y′
z′
⎞⎠ respecto al nuevo sistema x′y′z′. Si el nuevo origen O′
tiene terna de coordenadas
⎛⎝ h
kl
⎞⎠ respecto al sistema xyz, el lector puede comprobar,
razonando exactamente como en el caso de la traslación de ejes en el plano, que las nuevascoordenadas x′, y′, z′ se relacionan con las viejas x, y, z según las ecuaciones
x′ = x− h, y′ = y − k, z′ = z − l (15.20)
o, equivalentemente, según las ecuaciones
x = x′ + h, y = y′ + k, z = z′ + l (15.21)
Al igual que para las ecuaciones de segundo grado en dos variables, algunas ecuacionesde segundo grado en tres variables x, y, z pueden simplificarse mediante una traslación delos ejes x, y, z como se ilustra en el ejemplo siguiente.
Ejemplo 15.1Consideremos la ecuación
x2 + z2 − 2x− 4y − 4z + 17 = 0 (15.22)
Intentemos mediante una traslación de ejes, transformarla en una ecuación con el menornúmero posible de términos lineales.
Primer método. Usando las ecuaciones (15.21), sustituimos en la ecuación (15.22) x, y,z por x′ + h, y′ + k, z′ + l respectivamente. Se obtiene
(x′ + h
)2+(z′ + l
)2 − 2 (x′ + h)− 4 (y′ + k
)− 4 (z′ + l)+ 17 = 0

15.11. Cambio de sistema de coordenadas 499
Desarrollando los cuadrados y agrupando términos semejantes en x′, y′, z′ esta ecuacióntoma la forma(
x′)2+(z′)2+ 2(h− 1)x′ + 2(l − 2) z′ − 4y′ + h2 + l2 − 2h− 4l − 4k + 17 = 0
Se observa que es posible hacer que la nueva ecuación no tenga términos lineales en x′
y en z′ (tomando h = 1 y l = 2), pero que es imposible hacer que ella no tenga términolineal en y′.
Ahora, con el ánimo de simplificar al máximo la ecuación (15.22), tomemos h = 1, l = 2y elijamos k de tal modo que
h2 + l2 − 2h− 4l − 4k + 17 = 0
Sustituyendo en esta ecuación h = 1, l = 2 y despejando k se obtiene k = 3. Por tanto,si escogemos como nuevo origen el punto
O′ =
⎛⎝ h
kl
⎞⎠ =
⎛⎝ 132
⎞⎠
la ecuación (15.22) tendrá, en las nuevas variables x′, y′, z′, la forma más simple
(x′)2+(z′)2 − 4y′ = 0
es decir, (x′)2+(z′)2= 4y′ (15.23)
Nótese que esta ecuación (15.23) está en forma canónica y corresponde a un paraboloidecircular que tiene como eje al eje y′ (ver figura 15.13).
Segundo método. Escribamos la ecuación (15.22) en la forma(x2 − 2x)+ (z2 − 4z)− 4y + 17 = 0
Completando los cuadrados en las expresiones en paréntesis se obtiene(x2 − 2x+ 1)+ (z2 − 4z + 4)− 1− 4− 4y + 17 = 0
es decir,(x− 1)2 + (z − 2)2 − 4y + 12 = 0
o, equivalentemente,(x− 1)2 + (z − 2)2 = 4 (y − 3) (15.24)
Por tanto, haciendo el cambio
x′ = x− 1, y′ = y − 3, z′ = z − 2 (15.25)
y sustituyendo en (15.24), obtenemos de nuevo la ecuación (15.23). Téngase presente quelas ecuaciones en (15.25) corresponden a trasladar el sistema xyz de tal modo que el origen
del nuevo sistema x′y′z′ sea el punto O′ =
⎛⎝ 132
⎞⎠ en el sistema xyz. �

500 15. Superficies cuádricas
Figura 15.13.
Rotación de ejes
Entenderemos por una rotación de ejes en el espacio a la operación de mover losejes coordenados de un sistema cartesiano xyz a una nueva posición, de manera que semantenga fijo el origen y el nuevo sistema x′y′z′ esté orientado según la regla de la manoderecha (figura 15.14).
Figura 15.14.
Supongamos que se ha efectuado una rotación de los ejes x, y, z y sea P un punto
del espacio cuya terna de coordenadas relativa al sistema xyz es
⎛⎝ x
yz
⎞⎠ y cuya terna
coordenada relativa al nuevo sistema x′y′z′ es
⎛⎝ x′
y′
z′
⎞⎠. Veamos cómo se relacionan estas
dos ternas de coordenadas del punto P .Sean E1, E2, E3 los vectores canónicos sobre los ejes x, y, z respectivamente y sean E′
1,
E′2, E′
3sus similares en el sistema x′y′z′. Puesto que
−−→OP = x
−−→OE1 + y
−−→OE2 + z
−−→OE3 y
−−→OP = x′
−−→OE′1 + y′
−−→OE′2 + z′
−−→OE′3
entoncesx−−→OE1 + y
−−→OE2 + z
−−→OE3 = x′
−−→OE′1 + y′
−−→OE′2 + z′
−−→OE′3

15.11. Cambio de sistema de coordenadas 501
o, equivalentemente,xE1 + yE2 + zE3 = x′E′1 + y′E′2 + z′E′3 (15.26)
Digamos ahora que respecto al sistema xyz
E′1 =
⎛⎝ a1
b1c1
⎞⎠ , E′2 =
⎛⎝ a2
b2c2
⎞⎠ , E′3 =
⎛⎝ a3
b3c3
⎞⎠
En estas condiciones la igualdad (15.26) se convierte en⎛⎝ x
yz
⎞⎠ = x′
⎛⎝ a1
b1c1
⎞⎠+ y′
⎛⎝ a2
b2c2
⎞⎠+ z′
⎛⎝ a3
b3c3
⎞⎠
la cual pude escribirse en la forma⎛⎝ x
yz
⎞⎠ =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ (15.27)
igualdad que nos da la relación entre las ternas de coordenadas
⎛⎝ x
yz
⎞⎠ y
⎛⎝ x′
y′
z′
⎞⎠.
Si X =
⎛⎝ x
yz
⎞⎠, X ′ =
⎛⎝ x′
y′
z′
⎞⎠ y Q =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠ la relación (15.27) toma la
formaX = QX ′ (15.28)
Nótese que las columnas de Q son vectores unitarios y ortogonales y por tanto la matrizQ es una matriz ortogonal, es decir, Q tiene la propiedad
Q−1 = QT
y en consecuencia, de (15.28) se obtiene que
X ′ = QTX (15.29)
Algo más, de la igualdad I3 = QTQ resulta que
1 = det(QTQ
)= det
(QT)det (Q) = (det (Q))2
por tanto, det (Q) = ±1. Ahora, como la terna de vectores E′1, E′
2, E′
3está orientada
positivamente y Q =
(E′1
E′2
E′3
| | |)entonces det (Q) = 1.
En virtud de las relaciones (15.28) y (15.29) diremos que la matriz Q es la matriz depaso del sistema x′y′z′ al sistema xyz y que QT es la matriz de paso del sistemaxyz al sistema x′y′z′.
Volvamos a la ecuación
Ax2 +By2 +Cz2 +Dxy +Exz + Fyz +Gx+Hy + Iz + J = 0 (15.30)

502 15. Superficies cuádricas
y supongamos que al menos uno de los coeficientes D, E y F es no nulo.A continuación probaremos que esta ecuación puede transformarse, mediante una rotación
de ejes, en una ecuación de segundo grado de la forma
A′(x′)2+B′
(y′)2+C′
(z′)2+G′x′ +H ′y′ + I ′z′ + J ′ = 0 (15.31)
la cual ya no contiene términos cruzados x′y′, x′z′ ni y′z′.Procederemos, empleando vectores y matrices, de manera completamente análoga a
como lo hicimos en le capítulo 8 para el caso de una ecuación de segundo grado en dosvariables x, y con término en xy.
En primer lugar, como el lector puede verificar, se tiene que
Ax2 +By2 +Cz2 +Dxy +Exz + Fyz =(x y z
)⎛⎝ A D/2 E/2D/2 B F/2E/2 F/2 C
⎞⎠⎛⎝ x
yz
⎞⎠
es decir,Ax2 +By2 +Cz2 +Dxy +Exz + Fyz = XTMX (15.32)
donde
M =
⎛⎝ A D/2 E/2D/2 B F/2E/2 F/2 C
⎞⎠ y X =
⎛⎝ x
yz
⎞⎠
En segundo lugar,Gx+Hy + Iz = UTX
con
U =
⎛⎝ G
HI
⎞⎠ y X =
⎛⎝ x
yz
⎞⎠
Así, la ecuación (15.30) puede expresarse en la forma
XTMX + UTX + J = 0 (15.33)
Ahora bien, dado que la matriz M es simétrica, existe una matriz ortogonal
Q =
⎛⎝a1 a2 a3b1 b2 b3c1 c2 c3
⎞⎠
y existe una matriz diagonal
D =
⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠
tales queQTMQ = D
(Se le pide al lector recordar cómo se obtienen matrices Q y D que cumplan las condicionesanteriores)
Podemos suponer que det (Q) = 1, pues si ello no es así es porque det (Q) = −1 y ental caso bastará intercambiar dos de sus columnas para tener det (Q) = 1.

15.11. Cambio de sistema de coordenadas 503
Teniendo que Q es ortogonal y det (Q) = 1 consideramos la terna ordenada
E′1 =
⎛⎝a1b1c1
⎞⎠ , E′2 =
⎛⎝a2b2c2
⎞⎠ , E′3 =
⎛⎝a3b3c3
⎞⎠
(E′1es la primera columna de Q, E′
2la segunda y E′
3la tercera) la cual está conformada
por vectores unitarios y ortogonales y además está orientada positivamente. Pues bien,dicha terna de vectores determina un nuevo sistema cartesiano x′y′z′, con el mismo origendel sistema xyz, en el cual los vectores canónicos correspondientes a los ejes x′, y′, z′ sonprecisamente dichos vectores E′
1, E′
2, E′
3respectivamente.
Sea X ′ =
⎛⎝ x′
y′
z′
⎞⎠ la terna de coordenadas en el sistema x′y′z′ del punto cuya terna de
coordenadas en el sistema xyz es X =
⎛⎝ x
yz
⎞⎠ .
Como ya sabemos, la relación entre X ′ y X es (vea (15.28))
X = QX ′
Ahora veremos que al sustituir X por QX ′ en la ecuación (15.33), ésta se convierte enuna ecuación que no contiene términos cruzados. En efecto, al hacer dicha sustitución seobtiene (
QX ′)T MQX ′ + UT(QX ′)+ J = 0. (15.34)
En este punto usaremos el hecho de que (QX ′)T = (X ′)TQT y así, la ecuación anteriorpuede escribirse como (X ′)TQTMQX ′ + UT (QX ′) + J = 0 y puesto que QTMQ = D,esta ecuación es equivalente a la ecuación
(X ′)TDX ′ + UTQX ′ + J = 0. (15.35)
Ahora, como
(X ′)TDX ′ =(x′ y′ z′
)⎛⎝λ1 0 00 λ2 00 0 λ3
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ = λ1
(x′)2+ λ2
(y′)2+ λ3
(z′)2
y
UTQX ′ =(G H I
)⎛⎝ a1x′ + a2y
′ + a3z′
b1x′ + b2y
′ + b3z′
c1x′ + c2y
′ + c3z′
⎞⎠
= G(a1x
′ + a2y′ + a3z
′)+H(b1x
′ + b2y′ + b3z
′)+I(c1x
′ + c2y′ + c3z
′)= (a1G+ b1H + c1I)x
′ + (a2G+ b2H + c2I) y′
+(a3G+ b3H + c3I) z′
entonces la ecuación (15.35) es
λ1(x′)2+ λ2
(y′)2+ λ3
(z′)2+G′x′ +H ′y′ + I ′z′ + J = 0 (15.36)

504 15. Superficies cuádricas
donde
G′ = a1G+ b1H + c1I
H ′ = a2G+ b2H + c2I
I ′ = a3G+ b3H + c3I
es decir, ⎛⎝ G′
H ′
I ′
⎞⎠ =
⎛⎝a1 b1 c1a2 b2 c2a3 b3 c3
⎞⎠⎛⎝ G
HI
⎞⎠ = QTU
Hemos probado así que la ecuación (15.30) se transforma mediante una rotación enla ecuación (15.36), la cual es de la forma (15.31). Nótese que el término constante J nocambia.
Puede probarse (y esto está fuera del alcance del texto) que mediante cambios apropia-dos de coordenadas, siempre es posible transformar una ecuación del tipo (15.1) en unaecuación de una de las siguientes formas:
αx2 + βy2 + γz2 = δαx2 + βy2 = γzαx2 + γz2 = βyβy2 + γz2 = αx
De cualquiera de las ecuaciones anteriores es fácil pasar a una forma canónica quepermita identificar el lugar geométrico correspondiente a la ecuación original.
Ejemplo 15.2Para cada una de las ecuaciones dadas realice una rotación de ejes de tal forma que laecuación transformada no tenga términos mixtos (o cruzados). Luego, si fuese necesario,realice una traslación de ejes con el propósito de eliminar o reducir a uno solo los términoslineales. Finalmente identifique el lugar geométrico correspondiente a la ecuación dada.
a) 4x2 + y2 + 4z2 + 2xy + 4xz − 2yz − 6√6x+ 12√
6y + 6√
6z = 0
b) 2x2 + y2 − 4xy − 4yz + 12x+ 6y + 6z = 1c) 2
5x2 + 8
5y2 − 8
5xy + 2√
5x− 1√
5y = 0
Solución a)Empecemos escribiendo la ecuación dada en la forma
XTMX +UTX = 0 (15.37)
donde
M =
⎛⎝4 1 21 1 −12 −1 4
⎞⎠ , X =
⎛⎝ x
yz
⎞⎠ y U =
1√6
⎛⎝ −6
126
⎞⎠
Observe que la matriz M es simétrica. Dejamos que el lector muestre que los val-ores propios de M son los números λ1 = 6, λ2 = 3 y λ3 = 0 y que los espacios pro-pios correspondientes E6, E3 y E0 son, respectivamente, la recta generada por el vector
X1 =
⎛⎝ 101
⎞⎠, la recta generada por el vector X2 =
⎛⎝ 1
1−1
⎞⎠ y la recta generada por el

15.11. Cambio de sistema de coordenadas 505
vector X3 =
⎛⎝ −1
21
⎞⎠, las cuales son perpendiculares dos a dos, como debe ser dado que
la matriz M es simétrica. Por tanto, tres vectores propios de M ortogonales dos a dos yunitarios, correspondientes respectivamente a λ1 = 6, λ2 = 3 y λ3 = 0 son
Y1 =X1
‖X1‖ =1√2
⎛⎝ 101
⎞⎠ , Y2 =
X2
‖X2‖ =1√3
⎛⎝ 1
1−1
⎞⎠ , Y3 =
X3
‖X3‖ =1√6
⎛⎝ −1
21
⎞⎠
El lector puede verificar que la terna ordenada Y1, Y2, Y3 está orientada positivamente.Sean entonces
E′1 = Y1, E′2 = Y2, E′3 = Y3
y formemos la matriz
Q =
(E′1
E′2
E′3
| | |)
Como sabemos, esta matriz Q es ortogonal, es decir, es invertible y Q−1 = QT y además
QTMQ = D
donde
D =
⎛⎝6 0 00 3 00 0 0
⎞⎠
Consideremos ahora el sistema cartesiano x′y′z′ que tiene el mismo origen del sistemaxyz y tal que los vectores canónicos sobre los ejes x′, y′, z′ son, respectivamente, los vectoresE′1, E′
2, E′
3; dicho sistema x′y′z′ está orientado según la regla de la mano derecha, pues la
terna E′1, E′
2, E′
3está orientada positivamente.
Los vectores de coordenadas X =
⎛⎝ x
yz
⎞⎠ y X ′ =
⎛⎝ x′
y′
z′
⎞⎠ de un mismo punto, relativos
a los sistemas xyz y x′y′z′ respectivamente, están relacionados (como sabemos) así:
X = QX ′ (15.38)
Para transformar la ecuación dada en una ecuación en las nuevas variables x′, y′, z′
sustituimos X por QX ′ en la ecuación (15.37), obteniéndose la ecuación
(X ′)TQTMQX ′ + UTQX ′ = 0
Puesto que QTMQ = D entonces la ecuación anterior es equivalente a
(X ′)TDX ′ +UTQX ′ = 0 (15.39)
Ahora, como
(X ′)TDX ′ =(x′ y′ z′
)⎛⎝6 0 00 3 00 0 0
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ = 6 (x′)2 + 3 (y′)2

506 15. Superficies cuádricas
y
UTQX ′ =1√6
( −6 12 6)⎛⎝1/
√2 1/
√3 −1/√6
0 1/√3 2/
√6
1/√2 −1/√3 1/
√6
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ = 6z′
entonces la ecuación (15.39) es equivalente a
6(x′)2+ 3(y′)2+ 6z′ = 0 (15.40)
Hemos transformado así la ecuación dada en la ecuación (15.40), la cual no contienetérminos cruzados y tiene un solo término lineal.
La ecuación (15.40) a su vez es equivalente a la ecuación en forma canónica (en elsistema x′y′z′) (
x′)2+(y′)2
2= −z′
la cual corresponde a un paraboloide elíptico, cuya forma se muestra en la figura 15.15
Figura 15.15.
Solución b)Escribamos primero que todo la ecuación dada en la forma
XTMX +UTX = 1 (15.41)
donde
M =
⎛⎝ 2 −2 0−2 1 −20 −2 0
⎞⎠ , X =
⎛⎝ x
yz
⎞⎠ y U =
⎛⎝ 12
66
⎞⎠
Observe que la matriz M es simétrica. Dejamos que el lector muestre que los valorespropios de M son λ1 = −2, λ2 = 1 y λ3 = 4, y que los correspondientes espacios propios
E−2, E1 y E4 son, respectivamente, la recta generada por el vector X1 =
⎛⎝ 122
⎞⎠, la recta
generada por el vector X2 =
⎛⎝ 2
1−2
⎞⎠ y la recta generada por el vector X3 =
⎛⎝ 2
−21
⎞⎠; las

15.11. Cambio de sistema de coordenadas 507
cuales son perpendiculares dos a dos, como debe ser dado que la matriz M es simétrica.Por tanto, tres vectores propios de M ortogonales dos a dos y unitarios, correspondientesrespectivamente a λ1 = −2, λ2 = 1 y λ3 = 4 son
Y1 =X1
‖X1‖ =1
3
⎛⎝ 122
⎞⎠ , Y2 =
X2
‖X2‖ =1
3
⎛⎝ 2
1−2
⎞⎠ , Y3 =
X3
‖X3‖ =1
3
⎛⎝ 2
−21
⎞⎠
El lector puede verificar que en este caso la terna ordenada Y1, Y2, Y3 está orientadanegativamente; luego (por ejemplo) la terna ordenada Y2, Y1, Y3 está orientada positiva-mente.
Sean entonces
E′1 = Y2 =1
3
⎛⎝ 2
1−2
⎞⎠ , E′2 = Y1 =
1
3
⎛⎝ 122
⎞⎠ , E′3 = Y3 =
1
3
⎛⎝ 2
−21
⎞⎠
y formemos la matriz
Q =
(E′1
E′2
E′3
| | |)
Como ya se sabe, esta matriz Q es ortogonal y
QTMQ = D
donde
D =
⎛⎝1 0 00 −2 00 0 4
⎞⎠
Consideremos ahora el sistema cartesiano x′y′z′ que tiene el mismo origen del sistemaxyz y tal que los vectores canónicos sobre los ejes x′, y′, z′ son, respectivamente, los vectoresE′1, E′
2y E′
3; dicho sistema x′y′z′ está orientado según la regla de la mano derecha, ya que
la terna E′1, E′
2, E′
3se escogió orientada positivamente.
Como sabemos, la relación entre los vectores de coordenadas X =
⎛⎝ x
yz
⎞⎠ y
X ′ =
⎛⎝ x′
y′
z′
⎞⎠ de un mismo punto del espacio, relativos a los sistemas xyz y x′y′z′ res-
pectivamente, está dada porX = QX ′ (15.42)
Sustituyendo X por QX ′ en la ecuación (15.41), esta ecuación se convierte en
(QX ′)T MQX ′ + UTQX ′ = 1
la cual es equivalente a(X ′)TQTMQX ′ + UTQX ′ = 1
Como QTMQ = D entonces la ecuación anterior es equivalente a la ecuación(X ′)T DX ′ + UTQX ′ = 1 (15.43)

508 15. Superficies cuádricas
Ahora,
(X ′)T DX ′ =
(x′ y′ z′
)⎛⎝1 0 00 −2 00 0 4
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ = (x′)2 − 2 (y′)2 + 4 (z′)2
y
UTQX ′ =(12 6 6
)⎛⎝ 2/3 1/3 2/31/3 2/3 −2/3−2/3 2/3 1/3
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ = 6x′ + 12y′ + 6z′
Luego, la ecuación (15.43) es equivalente a
(x′)2 − 2 (y′)2 + 4 (z′)2 + 6x′ + 12y′ + 6z′ = 1 (15.44)
la cual no contiene términos cruzados.
Procederemos ahora a eliminar términos lineales en la ecuación (15.44), para lo cual laescribimos en la forma
[(x′)2+ 6x′
]− 2[(y′)2 − 6y′]+ 4 [(z′)2 + 3
2z′]= 1
Completando los cuadrados en las expresiones entre corchetes, el lector puede compro-bar que la ecuación anterior es equivalente a
(x′ + 3
)2 − 2 (y′ − 3)2 + 4(z′ + 34
)2= −23
4
Por tanto, haciendo el cambio de variables
x′′ = x′ + 3, y′′ = y′ − 3, z′′ = z′ +3
4(15.45)
la ecuación anterior adquiere la forma
(x′′)2 − 2 (y′′)2 + 4 (z′′)2 = −23
4(15.46)
la cual ya no tiene términos cruzados ni lineales.
Téngase presente que el cambio de variables (15.45) corresponde a trasladar el sistema
x′y′z′ de tal modo que el nuevo sistema x′′y′′z′′ tenga como origen el puntoO′′ =
⎛⎝ −3
3−3/4
⎞⎠
respecto al sistema x′y′z′.
Por último, la ecuación (15.46) es equivalente a la ecuación en forma canónica (en elsistema x′′y′′z′′)
−(x′′)2
23
4
+(y′′)2
23
8
− (z′′)2
23
16
= 1 (15.47)
la cual corresponde a un hiperboloide de dos hojas cuya forma en el sistema x′′y′′z′′ semuestra en la figura 15.16

15.11. Cambio de sistema de coordenadas 509
Figura 15.16.
Solución c)Escribamos la ecuación dada en la forma
XTMX + UTX = 0 (15.48)
donde
M =
⎛⎝ 2/5 −4/5 0−4/5 8/5 00 0 0
⎞⎠ , X =
⎛⎝ x
yz
⎞⎠ y U =
1√5
⎛⎝ 2
−10
⎞⎠
Observe que la matriz M es simétrica. Dejamos que el lector muestre que los valorespropios deM son λ1 = 2 y λ2 = 0, y que los espacios propios correspondientes E2 y E0, son
respectivamente, la recta L generada por el vector X1 =
⎛⎝ −1
20
⎞⎠ y el plano P generado
por los vectores X2 =
⎛⎝ 210
⎞⎠ y X3 =
⎛⎝ 001
⎞⎠
Nótese que la recta L es perpendicular al plano P, como debe ser, dado que la matrizM es simétrica. Observe además, que los vectores X2 y X3 son ortogonales (si ésto no fueseasí, habría que obtener dos vectores ortogonales no nulos en el plano P que sustituirían alos vectores X2, X3 en lo que sigue). Por tanto, tres vectores propios de M ortogonales yunitarios son los vectores
Y1 =X1
‖X1‖ =1√5
⎛⎝ −1
20
⎞⎠ , Y2 =
X2
‖X2‖ =1√5
⎛⎝ 210
⎞⎠ , Y3 = X3 =
⎛⎝ 001
⎞⎠
con Y1 correspondiente a λ1 = 2 y Y2, Y3 correspondiendo a λ2 = 0El lector puede verificar que la terna ordenada Y1, Y2, Y3 está orientada negativamente;
así que (por ejemplo) la terna Y1, Y3, Y2 está orientada positivamente.

510 15. Superficies cuádricas
Sean entonces
E′1 = Y1, E′2 = Y3, E′3 = Y2
y formemos la matriz
Q =
(E′1
E′2
E′3
| | |)
la cual, como ya se sabe, es ortogonal y tal que
QTMQ = D
donde
D =
⎛⎝2 0 00 0 00 0 0
⎞⎠
Consideremos ahora el sistema cartesiano x′y′z′ con el mismo origen del sistema xyz y talque E′
1, E′
2, E′
3son los vectores canónicos correspondientes a los ejes x′, y′, z′ respectiva-
mente. Denotando X =
⎛⎝ x
yz
⎞⎠ y X ′ =
⎛⎝ x′
y′
z′
⎞⎠ los vectores de coordenadas de un mismo
punto del espacio, relativos a los sistemas xyz y x′y′z′ respectivamente, tenemos (como essabido) que
X = QX ′
Reemplazando X por QX ′ en la ecuación (15.48), ésta se convierte en
(QX ′)TMQX ′ + UTQX ′ = 0
o, equivalentemente, en (X ′)T (QTMQ
)X ′ + UTQX ′ = 0
Como QTMQ = D, la ecuación anterior es equivalente a
(X ′)T DX ′ + UTQX ′ = 0 (15.49)
Ahora,´como (X ′)T DX ′ = 2
(x′)2
y
UTQX ′ =1√5
(2 −1 0
) 1√5
⎛⎝−1 0 2
2 0 1
0√5 0
⎞⎠⎛⎝ x′
y′
z′
⎞⎠ = −4
5x′ +
3
5z′
la ecuación (15.49) es equivalente a
2(x′)2 − 4
5x′ +
3
5z′ = 0 (15.50)
la cual no tiene términos cruzados.Procederemos ahora a eliminar términos lineales en (15.50), para lo cual la escribimos
en la forma
2
((x′)2 − 2
5x′)+3
5z′ = 0

15.11. Cambio de sistema de coordenadas 511
Completando el cuadrado en la expresión en paréntesis obtenemos
2
((x′)2 − 2
5x′ +
1
25
)− 2
25+3
5z′ = 0
o, equivalentemente,
2
(x′ − 1
5
)2+3
5
(z′ − 2
15
)= 0 (15.51)
Así, haciendo el cambio de variables
x′′ = x′ − 1
5, y′′ = y′, z′′ = z′ − 2
15
la ecuación (15.51) se transforman en la ecuación
2(x′′)2+3
5
(z′′)= 0 (15.52)
la cual no tiene términos cruzados y sólo un término lineal. Por último, la ecuación (15.52)es equivalente a la ecuación en forma canónica
(x′′)2= − 3
10z′′
la cual corresponde (en el sistema x′′y′′z′′) al cilindro parabólico cuya forma se muestra enla figura 15.17.
Figura 15.17.

512 15. Superficies cuádricas
15.12 Ejercicios
Sección 15.1 a sección 15.10
1. Considere la superficie S con ecuación
16y2 + 16z2 − 9x2 + 144 = 0
a) Hallar la forma canónica para la ecuación de S, identificar la superficie S y deter-minar su eje.
b) Hallar los interceptos con los ejes coordenados.
c) Analizar la simetría con respecto a cada eje coordenado, a cada plano coordenadoy al origen.
d) Hallar las trazas con los planos coordenados e identificarlas.
e) Hallar e identificar las trazas de la superficie con planos paralelos a los planoscoordenados.
f) Con base en la información anterior, graficar la superficie.
2. Para la superficie S cuya ecuación está dada en cada literal, hallar la forma canónicapara la ecuación de S, identificar la superficie S y graficarla.
a) 4x2 + 9y2 + z2 = 36 b) 3x2 − 6y2 + 2z2 − 6 = 0c) x2 + 16z2 = 4y2 − 16 d) x2 − y2 + z2 = 0
e) 4y2 + z2 = 12x f) 4x2 − y2 + z = 0
g) 4x2 + y2 = 4 h) x2 − 4z = 0i) 4x2 − 9y2 = 36
Sección 15.11
3. Para cada una de las siguientes ecuaciones cuadráticas, realizar una traslación de ejescoordenados para transformarla en una ecuación con el menor número de términoslineales. Escribir las ecuaciones de traslación y la nueva ecuación. Identificar el lugargeométrico correspondiente.
a) 9x2 + 36y2 + 4z2 − 18x− 144y − 24z + 153 = 0b) 6x2 + 3y2 − 2z2 + 12x− 18y − 8z + 7 = 0c) x2 − y2 − z2 − 4x− 2y + 8z = 14d) 4x2 + 9y2 − z2 − 54y − 10z + 56 = 0e) x2 + 16z2 + 2x− 32z − 16y = 15f) 7x2 − 3y2 + 126x+ 72y + z + 135 = 0
4. Para cada una de las siguientes ecuaciones, realizar una rotación de ejes de tal maneraque la ecuación transformada no tenga términos mixtos. Escribir las ecuaciones derotación. Si es necesario, realizar luego una traslación de ejes con el fin de eliminaro reducir a uno solo los términos lineales y escribir las ecuaciones de traslación.

15.12. Ejercicios 513
Finalmente, hallar la ecuación respecto al último sistema coordenado e identificar lasuperficie.
a) 5x2 + 5y2 + 8xy + 4xz + 4yz + 2z2 = 100
b) 2xy + 2xz + 2yz − 6x− 6y − 4z + 9 = 0c) 144x2 + 100y2 + 81z2 − 216xy − 540x− 720z = 0d) 2x2 + 2y2 + 5z2 − 4xy − 2xz + 2yz + 10x− 26y − 2z = 0e) 2x2 − 2xz + 2z2 = 3f) 5x2 − 8xy + 3y2 + 8yz + z2 = 27

514 15. Superficies cuádricas

Respuestas
Respuestas Ejercicios Capítulo 1
Sección 1.1
2. 111.73 km.
Sección 1.2
3. magnitud 10440.31 libras fuerza, dirección 55.5◦
4. 104.4 millas/hora en dirección S 61.7◦E5. a) 1.7 km/h en dirección N 28.07◦E b) 0.53 km
Sección 1.3
7. c) −→x = 94−→v , −→y = −5
4−→v
8.−−→DE = 1
2
−→AC − 2
3
−−→AB
9.−−→DE = 3
4
−−→AB + 1
2
−−→BC
Sección 1.4
12. −→w =(−1−√3
)−→u − 2√6
3−→v
13. b) −→w = 54−→u − 2−→v
14. −→w = −5√33−→u − 5
√39−→v
15. a) 11.08, 47.67◦
b) a = 0.61, b = 1.12c) −→u = 1.64−→w − 1.84−→z
Sección 1.5
16. a) 2 b) 317. a) −5/6 b) −518. b) ‖−→p ‖ = 1.81, ‖−→q ‖ = 6.7619. 3 libras
Seccion 1.6
20. −1622. −625. a) 150◦ b) 2
√3
Sección 1.7
26. a) −→v = −3√2−→i − 3
√2−→j b)−→u = 0
−→i − 5
−→j = −5−→j c) −→w = 3
√32
−→i + 3
2
−→j
27. a) 5, 306.87◦ b) −→w = −215
−→i + 28
5
−→j
c) 5.6−→i − 0.8
−→j , −0.8−→i − 5.6
−→j
515

516 Respuestas
28. a)−→i − 11
−→j ,
√122, 275.19◦
b) − 3−→i − 3
−→j , 3
√2, 225◦
c) 14−→i − 16
−→j , 2
√113, 311.19◦
29.−→F = −20−→i , −→
T1 = 15−→i + 5
√3−→j ,
−→T2 = 5
−→i − 5
√3−→j
31. a) − 3 b) 170 c) 55√2
32. a) 3 b) 4
33. a) ángulo agudo, 1813
−→i − 27
13
−→j b) perpendiculares, vector cero.
c) ángulo obtuso, − 117
−→i − 4
17
−→j
34. b)−→i =
√22−→u1 −
√22−→u2 , −→
j =√22−→u1 +
√22−→u2 , −2−→i + 3
−→j =
√22−→u1 + 5
√22−→u2
35. a) i) Si existen. ii) a = 11, b = −2b) i) No existen
36. a) α = −34 b) α = 1
7
37. a) 4,√22 , no perpendiculares, 2
−→i + 2
−→j ,
−→i
b) 0, 0, si son perpendiculares,−→0 ,
−→0
c) − 6, − 941 , no perpendiculares, −162
41
−→i + 18
41
−→j , 3
82
−→i − 27
82
−→j
38. a) ac+ bd > 0 b) ac+ bd < 0
39. a) R =
(−71
)b) R =
(6
6
)40. a)
−−→QP =
−→i − 3
−→j ,
−−→QR = 2
−→i + 2
−→j ,
−→PR =
−→i + 5
−→j
c)−−→QM = 3
2
−→i − 1
2
−→j , ||−−→QM || =
√102 d)
−−→QB =
−→i − 1
3
−→j , ||−−→QB|| =
√103
e) 116.57◦ f)−→QS = 1.53
−→i − 0.36
−→j
41. 5125
−→i + 68
25
−→j , −17
26
−→i + 85
26
−→j
42. a) 157.83◦, 10.22◦, 11.94◦ b) 5.5 unidades cuadradas.
Respuestas Ejercicios Capítulo 2
Sección 2.2
1. b) punto medio de PQ :(3/2
5/2
)punto medio de QR :
(1
−1/2)
punto medio de RS :(−3
0
)punto medio de SP :
(−5/23
)
2. a) R =
(−2−9)
b) S =
(14/5
3/5
)c) M =
(2
−1)
Sección 2.3
5. a) ‖Z‖ = √122, dir (Z) = 95.19◦ b) Z = −E1 + 11E2
c) a = 3 ó a = −3 d) 5√2 e) 10.3◦ f) 90◦ g) 1√
2
(1
−1)
h) b = 32
6. X =
(−8/31/2
)
7.
(6√3 + 5
√2
6− 5√2
)8. c) a = 2, b = −19. b) S =
(2
−1)
c) 5 unidades cuadradas.

Respuestas 517
10. a)
((−4− 3
√3)/2
(3− 4√3)/2
),
((−4 + 3
√3)/2
(3 + 4√3)/2
)b) 25
√3
4 unidades cuadradas.
11. a) Q =
(0
−4/3), S =
( −11/3
)b) 17/3 unidades cuadradas.
12. a) (U · V )W =
(26
13
)b) U · (V +W ) = −14, U/(V ·W ) = 1
5
(1
−3)
13. a) 1 b) 8 c) 57 d) 713
(3
2
)e) − 5
√5 f)
√13
14. m = −215. a)
(−11
)ó(
1
−1)
b)
(1
1
)ó(−1−1)
c)
(3
2
)ó(−3−2)
d)
(−ba
)ó(
b
−a)
En todos los casos el paralelogramo es un cuadrado.16. b) 2
√10, 2
√10, 2
√5
17. b) 5√2/2, 3.64, 3.64 c) 5
√2/2,
√53/2,
√53/2, d)
(−13/310/3
)18.
{(x
y
)∈ R2/(x− a)2 + (y − b)2 = r2
},
circunferencia con centro en el punto P0 y radio r.
19. P =
(2
2
),
√5
20. a)
{(x
y
)∈ R2/6x− 4y + 3 = 0
}b)
{(x
y
)∈ R2 /
x2
3+
y2
4= 1
}c)
{(x
y
)∈ R2/x2 + y2 − 6x+ 5 = 0
}21. b) Se pueden construir tres paralelogramos y todos tienen la misma área.22. 6.5 unidades cuadradas.23. t = 5.
27. P = 125
(33
44
)y Q = 2
25
(−43
)
Respuestas Ejercicios Capítulo 3
Sección 3.1
1. a)(x
y
)= t
(−13
), t ∈ R b)
(x
y
)=
(2
−3)+t
(−37
), t ∈ R
c)
(x
y
)=
(3
2
)+ t
(−51
), t ∈ R
3.(5
9
)
Sección 3.2
4. a) No colineales. b) Colineales.5. a)
√3x− y = 3
√3 b) 1
3x− y = −109
Sección 3.3
6. a) 4x− y = −8 b) 2x+ y = −4/3 c) x = −3d) 8x+ 5y = 7 e) 3x− 2y = −4 f) 7x+ 4y = 19
7. a) y = 43x+ 4
3 b) y = 2x+ 3 c) y = 0

518 Respuestas
d) y = −x+ 79. a) F = 9
5C + 32 c) 68◦F d) 30◦C e) Sí, −40oF = −40◦C.10. k = −3/5, h = 10/3
Sección 3.4
11. a)(−1
3
)b)
(2
−1)
c)
(3
−2)
d)
(3
1
)e)
(2/5
1
)f)
(1/2
1/7
).
Sección 3.5
13. a) No paralelas, no perpendiculares, se cortan en P =
(−1−1)
b) Paralelas c) Perpendiculares y se cortan en P =
(17/5
−1/5)
14. a)
(x
y
)=
(3
−4)+ t
(1
1
), t ∈ R b)
(x
y
)=
(−32
)+ t
(2
−5), t ∈ R
c)
(x
y
)=
(−10
)+ t
(1
0
), t ∈ R d)
(x
y
)= t
(0
1
), t ∈ R.
15. a) k = ±2/3 b) k = ±2.16. x+ y = 618. b) x− y = −819. a)
(4/3
1
)b)
(0
7/2
)c)
(4
−4)
21. P =
(−10
)22. a)
(1/7
24/7
)b) 13
√10/7 c) 130/7 unidades cuadradas.
23. x+ 5y = 5√2, x+ 5y = −5√2
Sección 3.6
24. a) 150◦ b) 15◦ c) 90◦ d) 12.53◦
Sección 3.7
25. a) 2 b) 22/3√5
26. a)
(x
y
)·(1
2
)= 13 b)
√5 c) 3/
√5
27. a) x = 1+ t, y = −3− 23t, t ∈ R b)
√13
28. a) 5/√13 b) 3x− 2y = 17 c) 17/
√13
29.{(
x
y
)∈ R2 � 3x+ 4y = 30 o 3x+ y = 0
}30. 10.5 unidades cuadradas.
Sección 3.8
33. No34. a) L.I., X = −Z − 3W b) L.D., No es posible.
Respuestas Ejercicios Capítulo 4
Sección 4.1
1. a). PU(xy
)=(x0
)b) PU
(xy
)=(0y
)

Respuestas 519
c). PU(xy
)= 1
2
(x−y−x+y
)d). PU
(xy
)= 1
10
(3(3x+y)3x+y
)2. a′ = 4a+10b
29 , b′ = 10a+25b29
3. a) SU(xy
)=( (3x−4y)/5(−4x−3y)/5
)b) SU
(xy
)=(yx
)c) SU
(xy
)=((−3x−4y)/5(−4x+3y)/5
)Sección 4.2
4. a)
(0 −1−1 0
)b)15
(−3 44 3
)5. a)
(10
),
(−72
),
(−31
)b)( 1/2−1/2),
(−3/23/2
),
(−1/21/2
)c)(1
−3),
(−75
),
(−31
)d)(10
),
(−10
),
(00
)e)(30
),
(−36
),
(03
)f)(10
),
(−16
),
(03
)g)(01
),
(2
−1),
(10
)h)(√3/21/2
),(−(√3+2)/2(2√3−1)/2
),
(−1/2√3/2
)6. a) T
(xy
)=(x2
y2
)b)T = PU , para cualquier U ∈ R2, U �= O.
Sección 4.3
7. a) Lineal, m (T ) =
(3 11 −2
)b) Lineal, m (T ) =
(2 −13 2
)c) No lineal d) No lineal
8. T(xy
)=((x+5y)/2
x−2y), T
(−1015
)=( 65/2−40)
Sección 4.4
10. a) eje x :{(x
y
) ∈ R2 : y = 0}
b) Segmento de recta entre el origen y el punto(30
), es decir{(
xy
) ∈ R2 : 0 ≤ x ≤ 3, y = 0}.
11. a) S (C1) ={(0
y
): y > 0
}: semieje y positivo sin el origen
S (C2) ={(0
y
): y ≤ 0
}: semieje y negativo con el origen
b) S (C1) ={(x
y
) ∈ R2 : y = 34x, x < 0
}S (C2) =
{(xy
) ∈ R2 : y = −43x, x ≤ 0
}12. Para r = 1
3a) x′ = 1
3x, y′ = 13y
b) i){( 2/3
−1/3),(−1/3
1
)}ii) Paralelogramo determinado por
( 2/3−1/3)y(−1/3
1
), es decir{
r( 2/3−1/3)+ s(−1/3
1
): 0 ≤ r ≤ 1, 0 ≤ s ≤ 1
}iii) Circunferencia con centro en el origen y radio 2
3 .iv) Recta y = 2x− 1.
Para r = 2a) x′ = 2x, y′ = 2y

520 Respuestas
b) i){( 4
−2),(−26
)}ii) Paralelogramo determinado por
( 4−2)y(−26
):{
r(4
−2)+ s(−26
): 0 ≤ r ≤ 1, 0 ≤ s ≤ 1
}iii) Circunferencia con centro en el origen y radio 4.iv) Recta y = 2x− 6
13. a) i) m(R−π
3
)=
(1/2
√3/2
−√3/2 1/2
)ii) R−π
3
(xy
)= 1
2
( x+√3y−√3x+y
)iii) Recta generada por el vector
(1+√31−√3
), es decir R−π
3
(L) ={t(1+√31−√3
); t ∈ R
}iv) Paralelogramo determinado por
((1+2√3)/2(2−
√3)/2
)y( 1/2
−√3/2
):
R−π
3
(P) ={r((1+2√3)/2(2−
√3)/2
)+ s( 1/2
−√3/2
): 0 ≤ r ≤ 1, 0 ≤ s ≤ 1
}.
Para θ = π3
i) m(Rπ
3
)=
(1/2 −√3/2√3/2 1/2
)ii)Rπ
3
(xy
)= 1
2
(x−√3y√3x+y
)iii) Recta generada por el vector
(1−√31+√3
), es decir
Rπ
3
(L) ={t(1−√31+√3
); t ∈ R
}iv) Paralelogramo determinado por
((1−2√3)/2(√3+2)/2
)y( 1/2√
3/2
), es decir
Rπ
3
(P) ={r((1−2√3)/2(√3+2)/2
)+ s( 1/2√3/2
): o ≤ r ≤ 1, 0 ≤ s ≤ 1
}b) i) x′ = −xsenθ − ycosθ, y′ = xcosθ − ysenθ
ii) x′ = xcos2θ − ysen2θ, y′ = xsen2θ + ycos2θiii) x′ = xcosθ + ysenθ, y′ = −xsenθ + ycosθ
15. a){(
xy
) ∈ R2 : y = −13x}
b) Si a = 0 y b �= 0, eje x. Si a �= 0 y 2a+ 3b �= 0, y = −(
a2a+3b
)x.
Si a �= 0 y 2a+ 3b = 0, eje y16. Paralelogramo determinado por
(10
)y(−31
). Su área es 1 unidad cuadrada.
17. a) m (T ) =
(1/4 −19/4−3 5
)b) T
(xy
)=((x−19y)/4−3x+5y
)c) T (P) =
{r( 5−8)+ s(−94
): 0 ≤ r ≤ 1, 0 ≤ s ≤ 1
}Paralelogramo determinado por
( 5−8)y(−94
).
18. T(xy
)=(
bycx+dy
), b, c, d ∈ R; m (T ) =
(0 bc d
), b, c, d ∈ R.
19.a) P ={X ∈ R2 : X = A+ t(B −A) + r(D −A), 0 ≤ t ≤ 1, 0 ≤ r ≤ 1
}20. TU (S) =
{(xy
)∈ R2 : 1 ≤ x ≤ 2, 3 ≤ y ≤ 4
}:
Cuadrado de vértices(13
),(23
),(24
),(14
).

Respuestas 521
Sección 4.5
21. a) m (T1) =
(1 −11 1
), m (T2) =
(−5 11 3
)b) (T1 + T2)
(xy
)=( −4x2x+4y
)m (T1 + T2) =
(−4 02 4
)m (T1) +m (T2) =
(−4 02 4
)(T1 + T2)
(−1−3)=( 4−14)
c) (−4T1)(xy
)=(−4x+4y−4x−4y
)m (−4T1) =
(−4 4−4 −4
)4m (T1) =
(−4 4−4 −4
)(−4T1)
(−1−3)=(−816
)d) (2T1 − 3T2)
(xy
)=(17x−5y−x−7y
)m (2T1 − 3T2) =
(17 −5−1 −7
)2m (T1)− 3m (T2) =
(17 −5−1 −7
)(2T1 − 3T2)
(−1−3)=(−222
)e) (T1 ◦ T2)
(xy
)=(−6x−2y−4x+4y
)m (T1 ◦ T2) =
(−6 −2−4 4
)m (T1)m (T2) =
(−6 −2−4 4
)(T1 ◦ T2)
(−1−3)=(12−8)
f) (T2 ◦ T1)(xy
)=(−4x+6y4x+2y
)m (T2 ◦ T1) =
(−4 64 2
)m (T2)m (T1) =
(−4 64 2
)(T2 ◦ T1)
(−1−3)=(−14−10)
22. a) i) −5E1 + 7E2 ii) 9E1 − 12E2
b) m (T ) =
(1 21 −1
)m(T 2)=
(3 00 3
)23. a) m (P ) =
(1 00 0
)b) m
(P ◦Rπ
2
)=
(0 −10 0
)c) m
(Rπ
2
◦ P)=
(0 01 0
)d)(P ◦Rπ
2
)(xy
)=(−y0
)e)(Rπ
2
◦ P)(
xy
)=(0x
)24. a) A2 =
(1 00 0
), B2 =
(−1 00 −1
), CD =
(8 −7
−10 10
)
DC =
(5 −11−5 13
), E2 =
(1 00 1
), F 2 =
(1 00 1
)b) i) T
(xy
)=(x0
): Proyección sobre el eje x
ii) T(xy
)=(x0
): Proyección sobre el eje x
iii) T(xy
)=(−yx
): Rotación, ángulo π
2 iv) T(xy
)=(−x−y): Rotación, ángulo π
v) T(xy
)=(−x+2yx−3y
)vi) T
(xy
)=(−4x+y2x−3y
)vii) T
(xy
)=( 8x−7y−10x+10y
)viii) T
(xy
)=(5x−11y−5x+13y
)ix) T
(xy
)=(x−y): Reflexión con respecto al eje x
x) T(xy
)=(xy
): Identidad
xi) T(xy
)=(yx
): Reflexión con respecto a la recta y = x
xii) T(xy
)=(xy
): Identidad.
25. m (T ) =
(−2 00 2
), m
(T 2)=
(4 00 4
), T 2 = D4

522 Respuestas
26. a) T 3(xy
)=(−2x−2y2x−2y
)= −2( x+y
−x+y)
b)(04
)28. b) S
(xy
)=(−2x+y−2x+y
)29.
(TU1 ◦Rπ
2
◦ TU2)(x
y
)=(−yx
)+( 1−1).
30. a) (TU ◦ T )(xy
)=( x2−y).
Reflexión con respecto al eje x seguida de la transformación TU con U =(02
)Sección 4.6
32. a) Invertible, m(T−1)=
(3 −2−1 1
), T−1
(xy
)=(3x−2y−x+y
)b) Invertible, m
(T−1)=
(1/2 00 1/5
), T−1
(xy
)=((1/2)x(1/5)y
)c) Invertible, m
(T−1)=
(1 −2−2 5
), T−1
(xy
)=( x−2y−2x+5y
)d) No invertible
e) Invertible, m(T−1)=
(−1 12 −1
), T−1
(xy
)=(−x+y2x−y
)f) Invertible, m
(T−1)=
(0 11 0
), T−1
(xy
)=(yx
), T−1 = T
g) No invertible
h) Invertible, m(T−1)=
(1 00 −1
)T−1(xy
)=(x−y), T−1 = T
i) Invertible, m(T−1)=
(cosθ senθ−senθ cosθ
), T−1
(xy
)=
(xcosθ + ysenθ−xsenθ + ycosθ
)= R−θ
(xy
)j) No invertible
35. b) i) T−1(xy
)=((x+y)/2(x−y)/2
)ii) S−1
(xy
)=((2x+y)/5(x−2y)/5
)iii) (ST )−1
(xy
)=((3x−y)/10(x+3y)/10
)37. X =
(−19/313/3
)Respuestas Ejercicios Capítulo 5
Sección 5.1
1.(xy
)=(110
)+ t(21
), t ∈ R. Dos soluciones particulares son (110 ) y ( 0
−11/2)
2. a) Soluble, única solución( 1/2−1/2)
b) Soluble, el conjunto solución es la recta con ecuación 4x− 6y = 0c) Soluble, el conjunto solución es la recta con ecuación 3x− y = 6d) Soluble, única solución
(00
)e) Soluble, única solución
( 2−1)
f) No soluble.3. a) Se cortan en el punto
( 1−1)
b) No se cortan c) Se cortan en el punto(14/454/15
)4. a) No b) Sí,
(−13/7−5/7
)5. a = 2, b = 46. 137 boletas para adultos y 313 boletas para niños.7. a) i) k �= 1 y k �= −1 ii) k = 1 iii) k = −1
b) i)(1/k +11/k +1
)ii) El conjunto solución es la recta x+ y = 1
Sección 5.2
9. a) A =
(2 13 −1
), U =
(11
)b) A−1 = −1
5
(−1 −1−3 2
)

Respuestas 523
c) X = A−1U = −15
(−2−1)
d) U = 25
(23
)+ 1
5
(1−1)
10. a)10x+ 25y = 65030x+ 40y = 1250
b) 15 unidades del fertilizante tipo I y 20 unidades de fertilizante tipo II
11. a)4T1 − T2 = 50−T1 + 4T2 = 70
b) T1 = 18◦, T2 = 22◦
12. b)x+ y = 1
5x+ 5y = 5, No, No
13. La recta con ecuación x− y = −1.14. a) Soluble, U = 2
(2−1)− 4
(43
)b) Soluble, U = (4y + 5)
( −13
)+ y
(4−12
), para cada y ∈ R
c) No soluble15. b = 5a
16. a) Para todo vector(uv
)de R2 se tiene que el sistema es soluble.
b) Para todo vector(uv
)que sea múltiplo escalar de
(57
)se tiene que el sistema es
soluble.17. En cada uno de los siguientes casos el sistema no es soluble:
i) a = b = 0 y c �= 0 ii) a = b = 0 y d �= 0
Respuestas Ejercicios Capítulo 6
Sección 6.1
1. a) Orientado negativamente b) Orientado positivamentec) Orientado negativamente d) Orientado positivamente.
Sección 6.2
3. a) Invertible y cambia la orientación b) No invertiblec) Invertible y preserva la orientación
4. a) Cambia la orientación b) Cambia la orientación c) Preserva la orientaciónd) Preserva la orientación e) Preserva la orientación f) Preserva la orientación
Sección 6.3
5. X2 =(−1+√31−√3
)o X2 =
(−1−√31−√3
)6. X2 =
( 3+√31−3
√3
)9. a) 22 unidades cuadradas b) 88 unidades cuadradas
c) 66 unidades cuadradas d) 550 unidades cuadradase) 22 unidades cuadradas f) 22 unidades cuadradas.
10. a) 1 unidad cuadrada b) 6 unidades cuadradas.11. a) 16 unidades cuadradas b) 32 unidades cuadradas.
c) 224 unidades cuadradas d) 80 unidades cuadradas.12. a) 7 unidades cuadradas b) 23.5 unidades cuadradas
c) 31.5 unidades cuadradas.
Sección 6.4
13. a)(−52/3177/31
)b)( 8/5−1/5)
14. f(x) = 2, g(x) = cotx− tanx

524 Respuestas
Sección 6.5
16. a) i) 6 ii) −15 iii) 0
b) Sí, detA−1 = −1/3c) −6
Respuestas Ejercicios Capítulo 7
Sección 7.1
1. Para A1 : a) (λ− 3) (λ+ 1) = 0 b) λ1 = 3, λ2 = −1c) Para λ1 = 3 : t
(1
2
), t �= 0; vectores no nulos de la recta generada por el
vector(1
2
). Para λ2 = −1 : t
(0
1
), t �= 0; vectores no nulos del eje y
Para A2 : a) λ2 − 8λ+ 16 = 0 b) λ = 4
c) t
(3
2
), t �= 0; vectores no nulos de la recta generada por el vector
(3
2
)Para A3 : a) λ
2 = 0 b) λ1 = 0 c) Vectores no nulos de R2
Para A4 : a) (λ− 1)2 = 0 b) λ = 1 c) Vectores no nulos de R2
Para A5 : a) λ2 − 2 = 0 b) λ1 =
√2, λ2 = −
√2
c) Para λ1 : t(√
2
1
), t �= 0; vectores no nulos de la recta generada por
el vector(√
2
1
). Para λ2 : t
(−√2
1
), t �= 0; vectores no nulos de la recta
generada por el vector(−√2
1
).
Para A6 : a) λ2 − 4λ− 1 = 0 b) λ1 = 2+
√5, λ2 = 2−√5
c) Para λ1 : t(−1 +√5
2
), t �= 0; vectores no nulos de la recta generada por
el vector(−1 +√5
2
). Para λ2 : t
(−1−√5
2
), t �= 0; vectores no nulos de
la recta generada por el vector(−1−√5
2
)2. a) λ1 = 0, λ2 = 1
b) Para λ1 : vectores no nulos de la recta que pasa por el origen y es perpendiculara L. Para λ2 : vectores no nulos de la recta L
3. a) λ2 − 1 = 0; λ1 = 1, λ2 = −1 b) λ2 − 1 = 0; λ1 = 1, λ2 = −1c) λ2 − 1 = 0; λ1 = 1, λ2 = −1
6. Dr, r �= 0
7. a = 0 y b = 3
8. a) λ1 = 3, vectores no nulos de la recta con ecuación y = x ,
λ2 = 2, vectores no nulos de la recta con ecuación y = 2x
b) No existenc) λ = 2, vectores no nulos de la recta con ecuación y = 0.
d) λ1 = 3, vectores no nulos de la recta con ecuación y = 2x,
λ2 = −1 vectores no nulos de la recta con ecuación x = 0.

Respuestas 525
Sección 7.2
9. Para A1 : a) λ = 1; t
(1
0
), t �= 0 b) No existen.
Para A2 : a) λ = 1; t
(0
1
), t �= 0 b) No existen.
Para A3 : a) λ1 = 3; t
(1
0
), t �= 0; λ2 = −5, t
(0
1
), t �= 0.
b) P = I2, D = A3
Para A4 : a) λ1 = 0; t
(1
0
), t �= 0 b) No existen.
Para A5 : a) λ1 = 3; t
(1
1
), t �= 0; λ2 = −3, t
(−11
), t �= 0.
b) P =
(1 −11 1
), D =
(3 00 −3
).
Para A6 : a) λ1 = 0; t
(−21
), t �= 0; λ2 = 5, t
(1
2
), t �= 0.
b) P =
(1 −22 1
), D =
(5 00 0
).
Para A7 : a) λ1 = 0; t
(1√3
), t �= 0; λ2 = 4; t
(−√3
1
), t �= 0.
b) P =
(1 −√3√3 1
), D =
(0 00 4
).
Para A8 : a) λ1 = 3; t
(1
1
), t �= 0; λ2 = −1, t
(−11
), t �= 0.
b) P =
(1 −11 1
), D =
(3 00 −1
).
Sección 7.3
10. Para A5 : b) Q = 1√2
(1 −11 1
)= m
(Rπ4
)Para A6 : b) Q = 1√
5
(1 −22 1
)= m (Rθ) , θ = tan−1 (2)
Para A7 : b) Q =1
2
(1 −√3√3 1
)= m
(Rπ3
)Para A8 : b) Q = 1√
2
(1 −11 1
)= m
(Rπ4
)
Respuestas Ejercicios Capítulo 8
Sección 8.1
1. a) (x− 1)2 + (y − 2)2 = 13 b) (x+ 2)2 + (y − 5)2 = 81
c) (x− 1)2 + (y + 6)2 = 18 d) (x− 2)2 + (y − 2)2 = 10
e) (x− 7)2 + (y − 5)2 = 25, (x− 1)2 + (y + 3)2 = 25
f) (x− 1)2 + (y + 1)2 = 8
2. a) C =(
0−2/3), r = 5
3 b) C =(55
), r = 5 c) C =
(−30
), r =
√10
d) C =( 1/2−1/2), r = 2 e) C =
( √3−√7
), r = 5

526 Respuestas
Sección 8.3
3. a) y = 18x2 b) y − 3 = −1
8 (x+ 4)2 c) x− 1 = −18 (y − 3)2
d) y = − 112x
2 + 712x+ 3 e) y + 1 = −1
8x2
4. a) V =(00
), F =
(−3/20
), directriz x = 3
2 , eje focal y = 0, l = 6
b) V =(00
), F =
(02
), directriz y = −2, eje focal x = 0, l = 8
c) V =(1/21
), F =
(7/21
), directriz x = −5
2 , eje focal y = 1, l = 12
d) V =(11
), F =
(12
), directriz y = 0, eje focal x = 1, l = 4
e) V =(−10
), F =
(−20
), directriz x = 0, eje focal y = 0, l = 4
5. a) x2 + (y + 5)2 = 25 b) (x− 4)2 + y2 = 64, puntos de intersección(48
)y(4
−8)
6. 16.6 metros7. 25
√2/2
Sección 8.4
8. a)y2
9+
x2
5= 1 b)
(x+ 3)2
16+
(y − 4)2
9= 1
c)(x− 8)2
25+
(y + 2)2
9= 1 d)
(y − 2)2
16+
(x− 1)2
4= 1
e)y2
64+
x2
48= 1
10. a) C =(00
); F ′ =
( 0−5), F =
(05
); V ′ =
( 0−13), V =
( 013
);
A′ =(−12
0
), A =
(120
); e = 5/13; l = 288/13
b) C =(00
); F ′ =
(−3/200
), F =
(3/200
); V ′ =
(−1/40
), V =
(1/40
);
A′ =(
0−1/5), A =
(01/5
); e = 3/5; l = 8/25
c) C =(15
); F ′ =
(11
), F =
(19
); V ′ =
(10
), V =
( 110
);
A′ =(−25
), A =
(45
); e = 4/5; l = 3.6
d) C =(2
−3); F ′ =
(2−√7
−3), F =
(2+√7
−3); V ′ =
(−2−3), V =
(6
−3);
A′ =( 2−6), A =
(20
); e =
√7/4; l = 4.5
e) C =(−1−2); F ′ =
(−1−5), F =
(−11
); V ′ =
(−1−7), V =
(−13
);
A′ =(−5−2), A =
(3
−2); e = 3/5; l = 6.4
11. 2√21
12. Máxima: 15206781.9 Km, Mínimo: 14707218.1 Km.
13. 600 millas,x2
202500+
y2
180000= 1
14. a) 4x2 + 3y2 − 48 = 0b) Elipse; centro C =
(00
), focos F ′ =
( 0−2)y F =
(02
),
vértices V ′ =( 0−4)y V =
(04
), eje focal x = 0
15.x2
36+
y2
9= 1, elipse
Sección 8.5
16. a) y2−x2 = 1 b) x2− y2
9= 1 c) (y − 4)2− (x+ 1)2
3= 1
d)(y + 3)2
27/8− (x− 2)2
27/5= 1 e)
x2
11/4− y2
11= 1 f)
(x− 6)2
9− (y − 2)2
7= 1

Respuestas 527
17. a) C =(00
); F ′ =
(−2√410
), F =
(2√410
); V ′ =
(−100
), V =
(100
);
A′ =( 0−8), A =
(08
); e =
√41/5; asíntotas y = ±4
5x; l = 12.8
b) C =( 2−6); F ′ =
( 2−6−
√2
), F =
( 2−6+
√2
); V ′ =
( 2−7), V =
( 2−5);
A′ =(1
−6), A =
(3
−6); e =
√2; asíntotas y + 6 = ± (x− 2) ; l = 2
c) C =(00
); F ′ =
( 0−3), F =
(03
); V ′ =
( 0−2), V =
(02
);
A′ =(−√5
0
), A =
(√50
); e = 3/2; asíntotas y = ± 2√
5x; l = 5
d) C =( 1−2); F ′ =
(1−√13−2), F =
(1+√13−2); V ′ =
(−1−2), V =
( 3−2);
A′ =( 1−5), A =
(11
); e =
√13/2; asíntotas y + 2 = ±3
2 (x− 1) ; l = 9
e) C =(−33
); F ′ =
(−3−√53
), F =
(−3+√53
); V ′ =
(−53
), V =
(−13
);
A′ =(−32
), A =
(−34
); e =
√5/2; asíntotas (y − 3) = ±1
2 (x+ 3) ; l = 1
18.x2
18+
y2
11= 1
19. b) Hipérbola; centro C =(−21
), focos F ′ =
(−61
)y F =
(21
),
vértices V ′ =(−41
)y V =
(01
), eje focal y = 1, asíntotas y − 1 = ±√3 (x+ 2)
Sección 8.6
20. a) Elipse b) Circunferencia c) Par de rectas que se cortand) Hipérbola e) Parábola f) Elipseg) Elipse h) Parábola i) Punto:
(−1−5)
j) Elipse k) Elipse l) Hipérbolam) Ningún lugar geométrico.
Sección 8.8
21. a) x′ = 12 (y
′)2 , parábola
b) x′ = − (y′)2 , parábola
c)
(x′ −√2
)29
+(y′)2
7= 1, elipse
d) (x′)2 − (y′)2 = 1, hipérbola
e) 4 (x′)2 − (y′)2 = 1, hipérbola
f) x′ = −14 (y
′)2 , parábola
g)
(y′ +
√2)2
2− (x′)2
2= 1, hipérbola
h)(3−
√13)
2 (x′)2 − (3+√13)
2 (y′)2 = 5, hipérbola
i) 5 (x′)2 = 9, par de rectas paralelas
j)(x′ −√2/2
)2 − (y′ − 3√2/2)2
= 0, par de rectas que se cortan
k)
(x′ − 8/
√5)2
60+
(y′ + 14/
√5)2
80= 1 elipse
l)(4−√10
)(x′)2 +
(4 +
√10)(y′)2 = 36, elipse
m) (x′)2 − (y′)2
4= 1, hipérbola

528 Respuestas
n)6(x′ +
√5/2)2
9+
(y′ +
√5/2)2
9= 1, elipse
22. k = −14
Respuestas Ejercicios Capítulo 9
Sección 9.3
2. a) ‖−→v ‖ = 4, dir (−→v ) =⎛⎝ 90◦
90◦
0◦
⎞⎠ b) ‖−→v ‖ = √13, dir (−→v ) =
⎛⎝ 56.37◦
90◦
146.31◦
⎞⎠
c) ‖−→v ‖ = √53, dir (−→v ) =⎛⎝ 97.89◦
56.96◦
145.5◦
⎞⎠ d) ‖−→v ‖ = √17, dir (−→v ) =
⎛⎝ 165.96
◦
75.96◦
90◦
⎞⎠
e) ‖−→v ‖ = √29, dir (−→v ) =
⎛⎝ 68.2◦
123.85◦
137.97◦
⎞⎠
3. a)
⎛⎝ −7−4−2
⎞⎠ b)
⎛⎝ −17
100
⎞⎠
4. a)−→u =
√3
3
(−→i +
−→j +
−→k)
b) 4√3(−→i +
−→j +
−→k)
5. a) no existe b) −→v =
√2
2
−→i +
√2
2
−→k , plano xz
6. a) −→v =√3−→j +
−→k o −→v =
√3−→j −−→k
b) −→v =5√2
2
−→i +
5√2
2
−→k o −→v = −5
√2
2
−→i +
5√2
2
−→k c) −→v =
√3
3
(−→i +
−→j +
−→k)
7. cosα = 0.1294, cosβ = 0.224, cos γ = 0.9659
8. a) γ1 = 90◦, α2 = 135◦ b)−→F1 = −15
√3−→i + 15
−→j ,−→F2 = −25
√2−→i + 25
√2−→j
c)∥∥∥−→F1 +−→F2∥∥∥ = 79.36 Newtons, dir
(−→F1 +
−→F2
)=
⎛⎝ 140.62◦
50.61◦
90◦
⎞⎠
9. cos θ = cosα cosα′ + cosβ cosβ′ + cos γ cos γ′
10. a) recto b) obtuso c) agudo.
12. a = − 7
11, b =
13
1113. a) 5
√3 c) �OBA : 53.93◦, �OAB : 36.07◦
Sección 9.4
14. a) senφ =5√3
14, b) cosφ = −11
1415. a) −→v = (−1− 2b)
−→i + b
−→j + (−3− 2b)
−→k , b ∈ R b) −→v =
−→i −−→j −−→k
16. c) 2 (−→v ×−→u ) d) λ = −2√2
17. a) 3 unidades cúbicas b)−→j = −−→u +−→v + 0−→w,
−→k = 0−→u − 1
3−→v +
1
3−→w
c) −→z = 5−→u − 14
3−→v +
5
3−→w
18. a) 14 unidades cúbicas b) 23 unidades cúbicas c) 6 unidades cúbicas19. t = 0, t =
√2 y t = −√2
21. −3−→i +−→j + 5
−→k
22. b)1
2unidad cúbica

Respuestas 529
23. a) 5−→i − 4
−→j + 9
−→k b) −→x =
1
3
−→i +
1
6
−→j − 7
6
−→k
c) Magnitud:√402 ≈ 20.05, dirección:
⎛⎝ 37.06◦
75.56◦
56.73◦
⎞⎠
d) − 1√10
−→i +
3√10
−→k e) 6 f) 10.89
g) cosα = − 1√26
, cosβ =3√26
, cos γ =−4√26
h)1
3
−→i − 1
6
−→j − 1
6
−→k i)
1√6
j) 2√35
k) i)−→j −−→k ii)− 17
−→i + 8
−→j + 11
−→k
l) ± 1√35
(3−→i + 5
−→j +
−→k)
m)√35 unidades cuadradas.
n) Los múltiplos escalares no nulos del vrctor 3−→i + 5
−→j +
−→k
n) a = 9 o) a = ∓ 2√42
, b = ± 1√42
p) a = 0, b =7
4, c = −1
4q) 4 unidades cúbicas.
Sección 9.5
24. a) i) 6E1 − 4E2 − 2E3 ii) 52E1 − 12E2 − 23
2 E3
b) cosα =5√38
, cosβ =−3√38
, cos γ =−2√38
c)
⎛⎝ 3/2
03/2
⎞⎠ d)
√66 e)
⎛⎝ −2
11/415/4
⎞⎠ f)
1√122
⎛⎝ −4−5−9
⎞⎠
25. a) W = (a+ c)E1 + (a+ b+ c)E2 + (a+ b)E3c) a = 2, b = 1, c = −1d) a = −2c, b = c, c ∈ R, ej.: −2X + Y + V = O
26. b) m = 0, n = 5
27. Cada uno de los ángulos es cos−1(
1√3
)= 54.74◦
28. a)
⎛⎝ 8
14−2
⎞⎠ b) ± 1√
66
⎛⎝ 4
7−1
⎞⎠
c)5
2√21
,9
2√35
,1
2√15
d)
⎛⎝ 4/3
2/32/3
⎞⎠
29. W =
⎛⎝ −4/9−8/98/9
⎞⎠ , Z =
⎛⎝ 22/9−1/910/9
⎞⎠
30. a) Z y W, Z y U , W y U. b)± 2
9
⎛⎝ 7−44
⎞⎠
c) proyYX =8
9
⎛⎝ 1
22
⎞⎠ , proyXY =
4
13
⎛⎝ 4−13
⎞⎠

530 Respuestas
d) X =13
9
⎛⎝ 2
12
⎞⎠
︸ ︷︷ ︸Paralelo a W
+1
9
⎛⎝ 10−22
1
⎞⎠
︸ ︷︷ ︸Ortogonal a W
31. a) S puede ser cualquier punto
⎛⎝ x
yz
⎞⎠ tal que x− 5y − 5z = −8. Por ejemplo
S =
⎛⎝ 7
30
⎞⎠ b) t
⎛⎝ 0
1−1
⎞⎠ , t ∈ R
33. c) ‖Z‖ = √5
35. a) −4 b) ‖Z‖ = 8√3 c) cos θ = −
√3
236. b) 20.21 unidades lineales. d) �PRQ : 25.6◦, �PQR : 64.4◦
e) 2√854 ≈ 58.45 unidades cuadradas.
37. a) Área del paralelogramo:√172 unidades cuadradas b) X =
⎛⎝ 15/4
113/4
⎞⎠
38. a) 3√74 ≈ 25.81 unidades cuadradas.
b)1
2
√a2b2 + a2c2 + b2c2 unidades cuadradas.
c)
√3
2|ab| unidades cuadradas.
39. area = 24√2 unidades cuadradas.
40. a) S1 =
⎛⎝ 0−22
⎞⎠ , S2 =
⎛⎝ 4
02
⎞⎠ , S3 =
⎛⎝ −2
00
⎞⎠ .
b)√14 unidades cuadradas.
c)
√14
2unidades cuadradas.
41. a) i) E1 + 9E2 + 5E3 ii) 20E1 +5
3E2 − 7E3 iii)
5
3E1 + 15E2 +
25
3E3
b)2
3
√1482 c) − 6√
145
⎛⎝ 3
610
⎞⎠ d) Si son paralelos.
42. a) no coplanares b) coplanares
43. a) Son coplanares b) no coplanares, Volumen =2
3unidades cúbicas
44. a) i)2√6
ii)√2
2iii)
1
3b)
4
3unidades cúbicas.
Respuestas Ejercicios Capítulo 10
Sección 10.1
1. Están sobre L los puntos P2 y P42. x = 1 + t, y = −3 + t, z = 2

Respuestas 531
3.
⎛⎝ x
yz
⎞⎠ =
⎛⎝ 4
2−5
⎞⎠+ t
⎛⎝ 1
1√2
⎞⎠
4. x = 3 + 4t, y = −2, z = 5− 2t. Dos puntos de L distintos de P son, por ejemplo,⎛⎝ 7−23
⎞⎠ y
⎛⎝ −1−27
⎞⎠ .
5. a) t = −P ·D‖D‖2 b) i)
√186
3ii)
√1518
116. a) L.D. b) L.I.
Sección 10.2
8. a)x− 1
2=
y + 3
−26 =z − 2
−22 b)x+ 4
26= y − 7 =
z − 3
37c) −x
8=
y
4, z = 0
9. a) 37.79◦ b) 77.53◦ c) 25.21◦
10. a)
⎛⎝ 3
22
⎞⎠
b)x− 4
−3/2 =y
3, z = 2;
y − 1
−3/2 =z − 4
3, x = 3;
x− 2
−3/2 =y − 5
9/2=
z
−311. x = y = −z
Sección 10.3
12. b)4√901
53
13.
⎛⎝ 31/21
37/2185/21
⎞⎠
14. a) Se cruzan b) No son perpendiculares
c) Con el plano xy :
⎛⎝ 5/3−1/3
0
⎞⎠ ; con el plano xz :
⎛⎝ 3/2
0−1/2
⎞⎠ ;
con el plano yz :
⎛⎝ 0
3−5
⎞⎠
d)6√42
7e) x− 3 =
y − 1
2=
z − 5
−1
f)x− 3
13=
y − 1
2=
z + 2
−3 , punto de intersección
⎛⎝ 8/7
5/7−11/7
⎞⎠ .
Sección 10.4
15. Q3 y Q4
16. a)
⎛⎝⎛⎝ x
yz
⎞⎠−
⎛⎝ 1
11
⎞⎠⎞⎠ ·⎛⎝ 0
21
⎞⎠ = 0 b) 2y + z = 1
17. a) ii) 13x− 5y − 6z = −30 b) x− 2y − 4z = 0
c) L1 y L2 se cortan; x− 3y + 4z = −3

532 Respuestas
Sección10.5
18. a) P1 y P3 son perpendiculares; P2 y P4 son paralelos b) φ = 47.12◦
19. 2x− 3y + 5z = 24
20. a) x+ 2y + 9z = −55 b) x = 2 + 4t, y = 1− 3t, z = −3 + t
21. Dos soluciones: 4y − 3z = 1 y z = 1
22. a)
⎛⎝ 2−32
⎞⎠ , no contenida b) Conjunto vacío, no contenida.
c)
⎛⎝ 7/2
01/2
⎞⎠ , no contenida d) La recta dada, sí contenida.
23. x = 3− 6t, y = −1− 7t, z = 4t
24. 11x+ 15y − 4z = −65;25. b) x− 3 =
y + 4
−3 =z + 5
−2
Sección 10.6
26. a)1
3
⎛⎝ 1
2−2
⎞⎠ b)
7
3c) Q =
⎛⎝ −7/9−14/914/9
⎞⎠
27. i) a) Se cortan en
⎛⎝ 10
136
⎞⎠ y no son perpendiculares. b) 0 c) 25.22◦
ii) a) Se cruzan y no son perpendiculares. b)49√251
c) 50.63◦
iii) a) Se cruzan y son perpendiculares. b)
√2
6c) 90◦
iv) a) Se cortan en
⎛⎝ 2−14
⎞⎠ y son perpendiculeres. b) 0 c) 90◦
v) a) No se cortan y son paralelas. b)
√696
35c) 0◦
28. a) 2y + z = 2, 2y + z = 12 b) 2√14
29. b) 5
30. a) 4/√21 b) x− 2y + 4z = 4
Sección 10.7
31. a) i) no paralelas ii) paralelas iii) no paralelas iv) paralelas
b)
⎛⎝ x
yz
⎞⎠ =
⎛⎝ 1
23
⎞⎠+ t
⎛⎝ 1−21
⎞⎠ c) 11x− 15y − 13z = −46
32. a) P1 : 6x− 2y + 3z = −6, P2 : x = 6− t− s, y = t, z = s
b) 54.73◦ c)13√33
11≈ 6.789
33. b) 22/√26 c) x = −1 + 2t+ 2s, y = −2− t+ 3s, z = 1 + 2t+ s
d)x
5= y = − z
13e) x =
2
13− 3t, y =
5
13− 4t, z = t
34. a) L.D. b) L.I., W = 0U − V + Z c) L.D.

Respuestas 533
Respuestas Ejercicios Capítulo 11
Sección 11.1
1. a) PU
⎛⎝ x
yz
⎞⎠ =
1
14
⎛⎝ 9x+ 3y − 6z
3x+ y − 2z−6x− 2y + 4z
⎞⎠ , PU
⎛⎝ 1
11
⎞⎠ =
1
14
⎛⎝ 4
2−4
⎞⎠
b) SU
⎛⎝ x
yz
⎞⎠ =
1
7
⎛⎝ 2x+ 3y − 6z
3x− 6y − 2z−6x− 2y − 3z
⎞⎠ , SU
⎛⎝ 1
11
⎞⎠ =
1
7
⎛⎝ −1
−5−11
⎞⎠
En a) y b) U =
⎛⎝ 3
1−2
⎞⎠
2. a) QU
⎛⎝ x
yz
⎞⎠ = 1
3
⎛⎝ 2x+ y − z
x+ 2y + z−x+ y + 2z
⎞⎠ , QU
⎛⎝ 1−21
⎞⎠ = 1
3
⎛⎝ −1−2−1
⎞⎠
b) RU
⎛⎝ x
yz
⎞⎠ = 1
3
⎛⎝ x+ 2y − 2z
2x+ y + 2z−2x+ 2y + z
⎞⎠ , RU
⎛⎝ 1−21
⎞⎠ = 1
3
⎛⎝ −5
2−5
⎞⎠
En a) y b) U =
⎛⎝ 1−11
⎞⎠ .
3. a) T
⎛⎝ x
yz
⎞⎠ =
⎛⎝(x− y
√3)/2(
x√3 + y
)/2
z
⎞⎠ T
⎛⎝ 1√
31
⎞⎠ =
⎛⎝ −1√
31
⎞⎠
b) T
⎛⎝ x
yz
⎞⎠ =
⎛⎜⎝
√22 (x+ z)
y√22 (−x+ z)
⎞⎟⎠ , T
⎛⎝ 1
11
⎞⎠ =
⎛⎝√210
⎞⎠
c) T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x(√
3y − z)/2(
y +√3z)/2
⎞⎠ , T
⎛⎝ 1
−√3−1
⎞⎠ =
⎛⎝ 1
−1−√3
⎞⎠
Sección 11.2
4. a) Es lineal, m (T ) =
⎛⎝0 0 11 0 00 1 0
⎞⎠ b) Es lineal, m (T ) =
⎛⎝1 0 00 0 00 1 0
⎞⎠
c) No es lineal d) Es lineal, m (T ) =
⎛⎝1 1 00 1 11 0 1
⎞⎠
5. a)1
11
⎛⎝ 10 −1 −3−1 10 −3−3 −3 2
⎞⎠ b)
1
11
⎛⎝ 12
12−8
⎞⎠
c)1
11
⎛⎝ 9 −2 −6−2 9 −6−6 −6 −7
⎞⎠ d)
1
11
⎛⎝ 13
13−5
⎞⎠
6. T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ (x+ y + 4z) /2
x− y − z(x+ y) /2
⎞⎠ T
⎛⎝ −10−1525
⎞⎠ =
⎛⎝ 75/2
−20−25/2
⎞⎠

534 Respuestas
7. a) m (T ) =
⎛⎝−1 −1 2
1 −3 3−1 −5 5
⎞⎠ b)
⎛⎝ 3
44
⎞⎠
8. a)
⎛⎝ 5
95
⎞⎠ b)
⎛⎝ 9−14
9
⎞⎠ c) T
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x− y + 2z
3y + zx− y + 2z
⎞⎠
d) T(R3)=
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x− z = 0
⎫⎬⎭ : plano que pasa por el origen con vector
normal
⎛⎝ 1
0−1
⎞⎠ .
9. a)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x− z = 0
⎫⎬⎭ : plano que pasa por el origen con vector normal
⎛⎝ 1
0−1
⎞⎠
b)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = −y = z
⎫⎬⎭ : recta que pasa por el origen con vector director
⎛⎝ 1−11
⎞⎠
10. a) m (T ) =
⎛⎝1 −1 23 1 45 −1 8
⎞⎠ b) 2x+ 2y − z = 0 c) x = −3t, y = t, z = 2t
11. a)T (L) =⎧⎨⎩⎛⎝ 3−11
⎞⎠+ t
⎛⎝ 1−33
⎞⎠/ t ∈ R
⎫⎬⎭ :
recta que pasa por el punto
⎛⎝ 3−11
⎞⎠ con vector director
⎛⎝ 1−33
⎞⎠ .
b) T(AB): segmento de recta con extremos
⎛⎝ 2
4−4
⎞⎠ y
⎛⎝ 2
00
⎞⎠
c) T (P) : plano con ecuación y + z = 0
d) T (L2) : recta con ecuación x = −6t, y = 43 + 10t, z = −4
3 − 10t
12. a) Hay infinitas respuestas. Para cualquiera de ellas defina T (E1) , T (E2) , T (E3)
de modo que estos tres vectores correspondan a puntos del plano dado y dosde ellos sean L.I.b) Hay infinitas respuestas. Para cualquiera de ellas defina T (E1) , T (E2) , T (E3)
de modo que estas tres imágenes sean múltiplos escalares del vector
⎛⎝ 2
4−6
⎞⎠
y al menos una de las tres sea no nula.
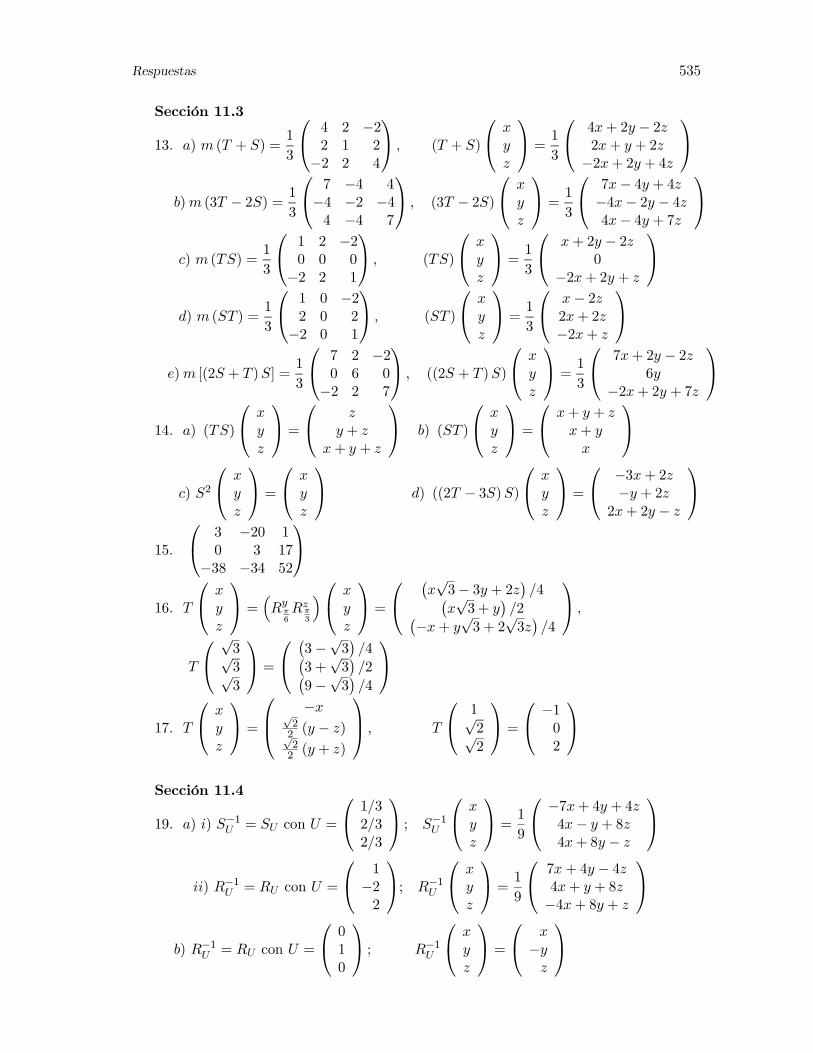
Respuestas 535
Sección 11.3
13. a) m (T + S) =1
3
⎛⎝ 4 2 −2
2 1 2−2 2 4
⎞⎠ , (T + S)
⎛⎝ x
yz
⎞⎠ =
1
3
⎛⎝ 4x+ 2y − 2z
2x+ y + 2z−2x+ 2y + 4z
⎞⎠
b)m (3T − 2S) =1
3
⎛⎝ 7 −4 4−4 −2 −44 −4 7
⎞⎠ , (3T − 2S)
⎛⎝ x
yz
⎞⎠ =
1
3
⎛⎝ 7x− 4y + 4z−4x− 2y − 4z4x− 4y + 7z
⎞⎠
c) m (TS) =1
3
⎛⎝ 1 2 −2
0 0 0−2 2 1
⎞⎠ , (TS)
⎛⎝ x
yz
⎞⎠ =
1
3
⎛⎝ x+ 2y − 2z
0−2x+ 2y + z
⎞⎠
d) m (ST ) =1
3
⎛⎝ 1 0 −2
2 0 2−2 0 1
⎞⎠ , (ST )
⎛⎝ x
yz
⎞⎠ =
1
3
⎛⎝ x− 2z
2x+ 2z−2x+ z
⎞⎠
e)m [(2S + T )S] =1
3
⎛⎝ 7 2 −2
0 6 0−2 2 7
⎞⎠ , ((2S + T )S)
⎛⎝ x
yz
⎞⎠ =
1
3
⎛⎝ 7x+ 2y − 2z
6y−2x+ 2y + 7z
⎞⎠
14. a) (TS)
⎛⎝ x
yz
⎞⎠ =
⎛⎝ z
y + zx+ y + z
⎞⎠ b) (ST )
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x+ y + z
x+ yx
⎞⎠
c) S2
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x
yz
⎞⎠ d) ((2T − 3S)S)
⎛⎝ x
yz
⎞⎠ =
⎛⎝ −3x+ 2z
−y + 2z2x+ 2y − z
⎞⎠
15.
⎛⎝ 3 −20 1
0 3 17−38 −34 52
⎞⎠
16. T
⎛⎝ x
yz
⎞⎠ =
(Ry
π
6
Rzπ
3
)⎛⎝ xyz
⎞⎠ =
⎛⎝
(x√3− 3y + 2z
)/4(
x√3 + y
)/2(−x+ y
√3 + 2
√3z)/4
⎞⎠ ,
T
⎛⎝√3√3√3
⎞⎠ =
⎛⎝(3−√3
)/4(
3 +√3)/2(
9−√3)/4
⎞⎠
17. T
⎛⎝ x
yz
⎞⎠ =
⎛⎜⎝ −x√
22 (y − z)√22 (y + z)
⎞⎟⎠ , T
⎛⎝ 1√
2√2
⎞⎠ =
⎛⎝ −1
02
⎞⎠
Sección 11.4
19. a) i) S−1U = SU con U =
⎛⎝ 1/3
2/32/3
⎞⎠ ; S−1U
⎛⎝ x
yz
⎞⎠ =
1
9
⎛⎝ −7x+ 4y + 4z
4x− y + 8z4x+ 8y − z
⎞⎠
ii) R−1U = RU con U =
⎛⎝ 1−22
⎞⎠; R−1U
⎛⎝ x
yz
⎞⎠ =
1
9
⎛⎝ 7x+ 4y − 4z
4x+ y + 8z−4x+ 8y + z
⎞⎠
b) R−1U = RU con U =
⎛⎝ 0
10
⎞⎠ ; R−1U
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x−yz
⎞⎠

536 Respuestas
21. b)
⎛⎝−1 1 0
1 −2 10 1 −2/3
⎞⎠ c) T−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ −x+ y
x− 2y + zy − 2
3z
⎞⎠
22. a) i) Invertible, A−1 =1
2
⎛⎝ 1 1 −1
1 −1 1−1 1 1
⎞⎠
ii) Invertible, A−1 =1
2
⎛⎝−1 1 1
1 −1 11 1 −1
⎞⎠
iii) No invertible
b) i) T−1
⎛⎝ x
yz
⎞⎠ =
1
2
⎛⎝ x+ y − z
x− y + z−x+ y + z
⎞⎠ ii) T−1
⎛⎝ x
yz
⎞⎠ =
1
2
⎛⎝ −x+ y + z
x− y + zx+ y − z
⎞⎠
iii) T(R3)es el plano x− y + z = 0
23. a) T−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ −1
3y +23z
x+ 13y +
13z
−23y +
13z
⎞⎠ b) T−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ (−x+ 3y − z) /5
−y + z(3x+ 6y − 7z) /5
⎞⎠
c) T−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ −x
2 +z4
−y + z−12z
⎞⎠ d) T−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ 4x− 7
2y +12z
−x+ y2x− 5
2y +12z
⎞⎠
24. b) (TS)−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ −z−x−y
⎞⎠
25. a) a = 0, a = 2, a = −2 b) abc �= 0, T−1
⎛⎝ x
yz
⎞⎠ =
⎛⎝ x/a
y/bz/c
⎞⎠
d) ad− bc �= 0, A−1 =1
ad− bc
⎛⎝ad− bc 0 0
0 d −b0 −c a
⎞⎠
26. a) L.I. b) L.D.
Respuestas Ejercicios Capítulo 12
Sección 12. 1
1. a)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/2x+ 3y − 3z = 2
⎫⎬⎭ :
Plano que pasa por el punto
⎛⎝ 1
00
⎞⎠ y tiene vector normal
⎛⎝ 2
3−3
⎞⎠
b)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ =
⎛⎝ −5/7
9/70
⎞⎠+ z
⎛⎝ 4/7
11/71
⎞⎠⎫⎬⎭ :
Recta que pasa por el punto
⎛⎝ −5/7
9/70
⎞⎠ y tiene vector director
⎛⎝ 4/7
11/71
⎞⎠
c) Conjunto vacío

Respuestas 537
d)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ =
⎛⎝ 0−1/2
0
⎞⎠+ z
⎛⎝ −2−3/2
1
⎞⎠⎫⎬⎭ :
Recta que pasa por el punto
⎛⎝ 0−1/2
0
⎞⎠ y tiene vector director
⎛⎝ −2−3/2
1
⎞⎠
e)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ = z
⎛⎝ −1
01
⎞⎠ , z ∈ R
⎫⎬⎭ : Recta generada por
⎛⎝ −1
01
⎞⎠
f)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/3x− 2y + 2
√3z = 1
⎫⎬⎭ :
Plano que pasa por el punto
⎛⎝ 1/3
00
⎞⎠ y tiene vector normal
⎛⎝ 3
−22√3
⎞⎠
Sección 12.2
2. b) i)
⎧⎨⎩⎛⎝ 47/6
22/39/2
⎞⎠⎫⎬⎭ ii)
⎧⎨⎩⎛⎝ 7/2
−20
⎞⎠⎫⎬⎭
iii)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ =
⎛⎝ −19
120
⎞⎠+ z
⎛⎝ −5
31
⎞⎠ , z ∈ R
⎫⎬⎭ :
Recta que pasa por el punto
⎛⎝ −19
120
⎞⎠ y tiene vector director
⎛⎝ −5
31
⎞⎠
iv)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ = z
⎛⎝ −1/2
5/21
⎞⎠ , z ∈ R
⎫⎬⎭ :
Recta generada por
⎛⎝ −1/2
5/21
⎞⎠
v) Conjunto vacío
vi)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ =
⎛⎝ −6
02
⎞⎠+ y
⎛⎝ 5
10
⎞⎠ , y ∈ R
⎫⎬⎭ :
Recta que pasa por
⎛⎝ −6
02
⎞⎠ y tiene vector director
⎛⎝ 5
10
⎞⎠
3. a) Recta que pasa por el punto
⎛⎝ 5/4
25/40
⎞⎠ y tiene vector director
⎛⎝ 1
21
⎞⎠
b)
⎧⎨⎩⎛⎝ 0
11
⎞⎠⎫⎬⎭ c) Conjunto vacío.
4. a) y = 2x2 − x+ 3 b) − 2x+ 5y + 3z = 0c) p (x) = −4x3 − 8x2 + 2x+ 11 d) a = 1, b = −2, c = 3
5. Temperatura en los puntos x, y, z : 14◦, 17◦ y 14◦, respectivamente.

538 Respuestas
6. 200 libros de pasta rústica, 55 libros con pasta dura, 40 libros con pasta de lujo.7. 4 unidades de comestible I, 2 de comestible II y 1 de comestible III.9. a) − 2a+ b+ c = 0
c) k =95
11
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ = z
⎛⎝ −32/11
−3/111
⎞⎠ , z ∈ R
⎫⎬⎭
Sección 12.3
10. a) S = TX0(SH) =
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/2x− 3y + z =
13
2
⎫⎬⎭
b) S = TX0(SH) =
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ =
⎛⎝ 2
3−5
⎞⎠+ t
⎛⎝ 1−36
⎞⎠ , t ∈ R
⎫⎬⎭
c) S = TX0(SH) =
⎧⎨⎩⎛⎝ 0
1−3
⎞⎠⎫⎬⎭
Sección 12.4
11. b)
i)
⎧⎨⎩⎛⎝ 2
13
⎞⎠⎫⎬⎭ ii)
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/⎛⎝ x
yz
⎞⎠ = z
⎛⎝ −3/7−4/7
1
⎞⎠ , z ∈ R
⎫⎬⎭
iii)
⎧⎨⎩⎛⎝ 1/2
1/2−2
⎞⎠⎫⎬⎭ iv) Conjunto vacío
12. i) a) A es invertible, A−1 = 12
⎛⎝−1 1 1
1 −1 11 1 −1
⎞⎠ b)
⎛⎝ 0−10
⎞⎠
ii) A no es invertible
iii) a) A es invertible, A−1 =
⎛⎝ 0 −2 2
3 3 −3−2 0 2
⎞⎠ b)
⎛⎝ 4/3
−11
⎞⎠
iv) a) A no es invertible
v) a) A es invertible, A−1 =
⎛⎝ cos θ senθ 0−senθ cos θ 0
0 0 1
⎞⎠ = AT b)
⎛⎝ 0
1−2
⎞⎠
Respuestas Ejercicios Capítulo 13
Sección 13.1
1. a) detA = −12, invertible b) detA = 0, no invertiblec) detA = −3, invertible d) detA = 8, invertible
2. a) detT = −2, invertible b) detT = −10, invertiblec) detT = 0, no invertible d) detT = −1, invertible
3. a) i) λ = −1 y λ = 8 ii) λ = −2 y λ = 1
b) Para todo valor de α, A no es invertible.4. x = 0, y = 1, z = 2
5. cos γ =a2 + b2 − c2
2ab

Respuestas 539
Sección 13.2
6. a) 48 b) 9 c) 17. a) detB = −3 b) detC = −4 c) detD = −2 d) detE = −108. b) i) (b− a) (c− a) (c− b) (a+ b+ c) ii) (b− a) (c− a) (c− b) (ab+ ac+ bc)10. a) − 24 b) − 243/4 c) − 1/324 d) 4/3 e) − 4
11. a) det(A−1)=
1
8b) det
(A−1)= −1 c) det
(A−1)=
1
2
Sección 13.3
13. a) L.I., orientada negativamente b) L.D.c) L.I., orientada positivamente d) L.I., orientada negativamente.
14. a) L.I., 12 unidades cúbicas b) No son L.I.15. a) T cambia la orientación b) 24 unidades cúbicas16. a) 14 unidades cúbicas b) 14 unidades cúbicas c) 14 unidades cúbicas17. a) 10 unidades cúbicas b) 5 unidades cúbicas c) 10/3 unidades cúbicas
Respuestas Ejercicios Capítulo 14
Sección 14.1
1. a) λ1 = −1, λ2 = 3b) A+ 3I es invertible, A+ I y A− 3I no son invertibles. c) det (A) = −9
2. a) X es un vector propio de T correspondiente a λ = 0. Y no es vector propio de T .b) a = b = c = d = e = f = 1
3. b) i) λ1 = 2, E2 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/y = z = 0
⎫⎬⎭ : eje x
ii) λ1 = −2, λ2 = 3
E−2 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/y = 0
⎫⎬⎭ : plano xz;
E3 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = z = 0
⎫⎬⎭ : eje y.
4. i) a) λ1 = 1, λ2 = −2
b) E1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = −y = z
⎫⎬⎭ : recta generada por
⎛⎝ 1−11
⎞⎠
E−2 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x+ y + z = 0
⎫⎬⎭ : plano que pasa por el origen y
tiene vector normal
⎛⎝ 1
11
⎞⎠ .
c) Sí;
⎛⎝ 1−11
⎞⎠ ,
⎛⎝ −1
10
⎞⎠ ,
⎛⎝ −1
01
⎞⎠
ii) a) λ1 = 4, λ2 = 5
b) E4 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = z = 0
⎫⎬⎭ : eje y

540 Respuestas
E5 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = y = 0
⎫⎬⎭ : eje z
c) No.iii) a) λ1 = 5/2, λ2 = 1/2
b) E52
=
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = y = −z
⎫⎬⎭ : recta que pasa por el origen y tiene
vector director
⎛⎝ 1
1−1
⎞⎠
E 12
=
⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x+ 2y − z = 0
⎫⎬⎭ : plano que pasa por el origen y tiene
vector normal
⎛⎝ 1
2−1
⎞⎠ .
c) Sí;
⎛⎝ 1
1−1
⎞⎠ ,
⎛⎝ −2
10
⎞⎠ ,
⎛⎝ 1
01
⎞⎠
iv) a) λ1 = −1, λ2 = 2
b) E−1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = −y = z
⎫⎬⎭ : recta generada por
⎛⎝ 1−11
⎞⎠
E2 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = −y, z = 0
⎫⎬⎭ : recta generada por
⎛⎝ 1−10
⎞⎠
c) No.5. i) a) λ1 = 12, λ2 = 1
b) E12 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = y =
z
3
⎫⎬⎭ : recta generada por
⎛⎝ 1
13
⎞⎠
E1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x+ y + 3z = 0
⎫⎬⎭ : plano que pasa por el origen con vector
normal
⎛⎝ 1
13
⎞⎠
ii) a) λ1 = 0 b) E0 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/z = 0
⎫⎬⎭ : plano xy
iii) a) λ1 = 0 b) E0 = R3 : todo el espacio
iv) a) λ1 = 1
b) E1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = y = z
⎫⎬⎭ : recta generada por
⎛⎝ 1
11
⎞⎠
v) a) λ1 = 1 b) E1 = R3 : todo el espacio

Respuestas 541
vi) Si θ �= 0 y θ �= π, λ1 = 1, E1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/y = z = 0
⎫⎬⎭ : eje x
Si θ = 0, Rxθ = I, λ1 = 1, E1 = R3. Si θ = π, Rx
θ = Rxπ, λ1 = 1 y λ2 = −1,
E1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/y = z = 0
⎫⎬⎭ : eje x;
E−1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = 0
⎫⎬⎭ : plano yz.
6. A =
⎛⎝1 2 31 2 31 2 3
⎞⎠
7. a) Para todo c ∈ R, c > 0 b) Para todo c ∈ R
8. a) Sí existen; P =
⎛⎝1 0 12 1 01 0 −1
⎞⎠ , D =
⎛⎝5 0 00 3 00 0 3
⎞⎠ b) No existen.
c) Sí existen; P =
⎛⎝ 0 1 0
1 0 1−1 0 1
⎞⎠ , D =
⎛⎝0 0 00 1 00 0 2
⎞⎠ d) No existen.
Sección 14.2
10. a) a = 2, b = c = 1 b) a y b reales tales que a = b y c = 4
c) c = 1, b = 0 y a cualquier real d) a = 11, b = −9, c = −13
11. a) Es ortogonal, A−1 =
⎛⎝−1/
√2 0 1/
√2
1/√6 −2/√6 1/
√6
1/√3 1/
√3 1/
√3
⎞⎠
b) Es ortogonal, A−1 =
⎛⎝cos θ −senθ 0senθ cos θ 00 0 1
⎞⎠
c) No es ortogonal d) No es ortogonal13. a) a = 0, b = −2/√6, c = 1/
√3 o a = 0, b = 2/
√6, c = −1/√3
14. b) Q =
⎛⎝−2/3 1/
√2 −1/3√2
2/3 1/√2 1/3
√2
1/3 0 −4/3√2
⎞⎠ , D =
⎛⎝10 0 0
0 1 00 0 1
⎞⎠
15. a) E5 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = y = z
⎫⎬⎭ b) λ = 2
c) Sí, ya que A es simétrica.
Q =
⎛⎝1/
√3 −1/√2 1/
√6
1/√3 1/
√2 1/
√6
1/√3 0 −2√6
⎞⎠ , D =
⎛⎝5 0 00 2 00 0 2
⎞⎠
16. i) a) λ1 = −4, λ2 = 5, λ3 = −1
E−4 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/y = z = 0
⎫⎬⎭ : eje x
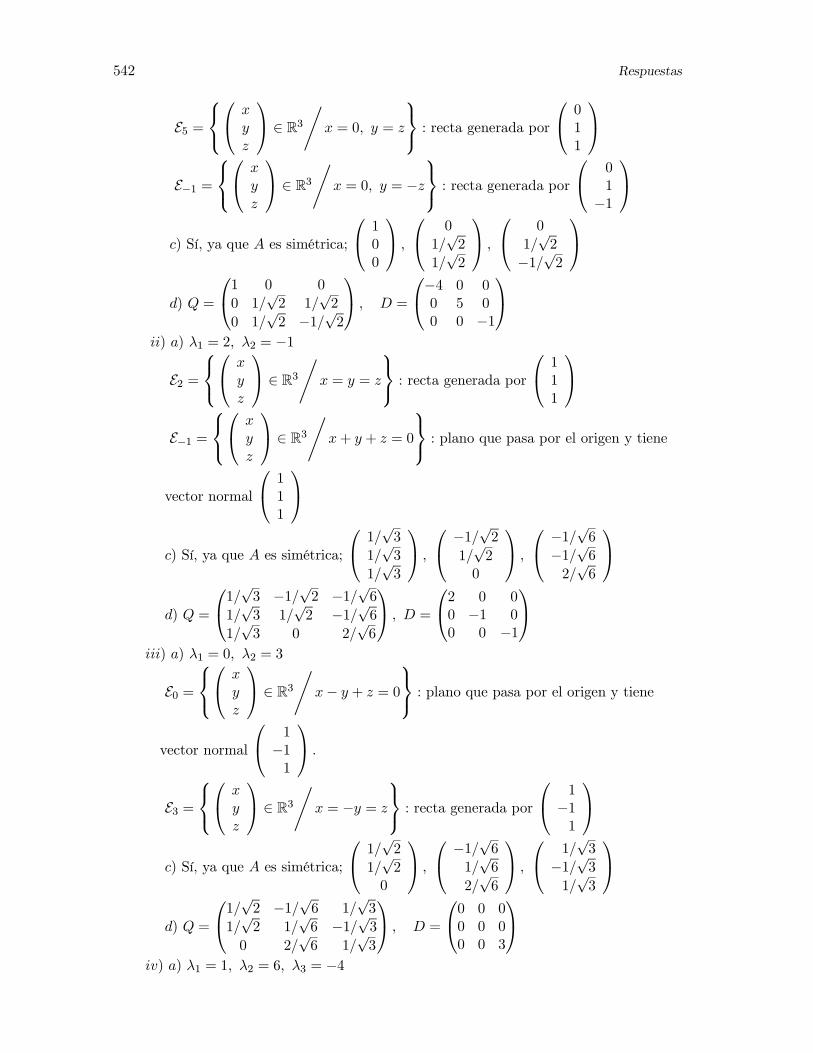
542 Respuestas
E5 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = 0, y = z
⎫⎬⎭ : recta generada por
⎛⎝ 0
11
⎞⎠
E−1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = 0, y = −z
⎫⎬⎭ : recta generada por
⎛⎝ 0
1−1
⎞⎠
c) Sí, ya que A es simétrica;
⎛⎝ 1
00
⎞⎠ ,
⎛⎝ 0
1/√2
1/√2
⎞⎠ ,
⎛⎝ 0
1/√2
−1/√2
⎞⎠
d) Q =
⎛⎝1 0 0
0 1/√2 1/
√2
0 1/√2 −1/√2
⎞⎠ , D =
⎛⎝−4 0 0
0 5 00 0 −1
⎞⎠
ii) a) λ1 = 2, λ2 = −1
E2 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = y = z
⎫⎬⎭ : recta generada por
⎛⎝ 1
11
⎞⎠
E−1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x+ y + z = 0
⎫⎬⎭ : plano que pasa por el origen y tiene
vector normal
⎛⎝ 1
11
⎞⎠
c) Sí, ya que A es simétrica;
⎛⎝ 1/
√3
1/√3
1/√3
⎞⎠ ,
⎛⎝ −1/√2
1/√2
0
⎞⎠ ,
⎛⎝ −1/√6
−1/√6
2/√6
⎞⎠
d) Q =
⎛⎝1/
√3 −1/√2 −1/√6
1/√3 1/
√2 −1/√6
1/√3 0 2/
√6
⎞⎠ , D =
⎛⎝2 0 00 −1 00 0 −1
⎞⎠
iii) a) λ1 = 0, λ2 = 3
E0 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x− y + z = 0
⎫⎬⎭ : plano que pasa por el origen y tiene
vector normal
⎛⎝ 1−11
⎞⎠ .
E3 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = −y = z
⎫⎬⎭ : recta generada por
⎛⎝ 1−11
⎞⎠
c) Sí, ya que A es simétrica;
⎛⎝ 1/
√2
1/√2
0
⎞⎠ ,
⎛⎝ −1/√6
1/√6
2/√6
⎞⎠ ,
⎛⎝ 1/
√3
−1/√3
1/√3
⎞⎠
d) Q =
⎛⎝1/
√2 −1/√6 1/
√3
1/√2 1/
√6 −1/√3
0 2/√6 1/
√3
⎞⎠ , D =
⎛⎝0 0 00 0 00 0 3
⎞⎠
iv) a) λ1 = 1, λ2 = 6, λ3 = −4

Respuestas 543
E1 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x = 0,
y
4= −z
3
⎫⎬⎭ : recta generada por
⎛⎝ 0
4−3
⎞⎠
E6 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x
5=
y
3=
z
4
⎫⎬⎭ : recta generada por
⎛⎝ 5
34
⎞⎠
E−4 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x
5=
y
−3 =z
−4
⎫⎬⎭ : recta generada por
⎛⎝ 5−3−4
⎞⎠
c) Sí, ya que A es simétrica;
⎛⎝ 0
4/5−3/5
⎞⎠ ,
⎛⎝ 1/
√2
3/5√2
4/5√2
⎞⎠ ,
⎛⎝ 1/
√2
−3/5√2
−4/5√2
⎞⎠
d) Q =
⎛⎝ 0 1/
√2 1/
√2
4/5 3/5√2 −3/5√2
−3/5 4/5√2 −4/5√2
⎞⎠ , D =
⎛⎝1 0 00 6 00 0 −4
⎞⎠
17. a) Sí, ya que A posee 3 vectores propios L.I.
Q =
⎛⎝−1 0 1
1 1 10 −1 1
⎞⎠ , D =
⎛⎝−5 0 0
0 −5 00 0 3
⎞⎠
b) Sí, ya que A es simétrica
Q =
⎛⎝−1/
√2 −1/√6 1/
√3
1/√2 −1/√6 1/
√3
0 2/√6 1/
√3
⎞⎠ , D =
⎛⎝−5 0 0
0 −5 00 0 3
⎞⎠
c) A =1
3
⎛⎝−7 8 8
8 −7 88 8 −7
⎞⎠
18. a) E−3 =⎧⎨⎩⎛⎝ x
yz
⎞⎠ ∈ R3
/x− y − z = 0
⎫⎬⎭
b) Q =
⎛⎝ 1/
√3 1/
√2 1/
√6
−1/√3 1/√2 −1/√6
−1/√3 0 2/√6
⎞⎠ , D =
⎛⎝2 0 00 −3 00 0 −3
⎞⎠
c) A =1
3
⎛⎝−4 −5 −5−5 −4 5−5 5 −4
⎞⎠
Respuestas Ejercicios Capítulo 15
Sección 15.1 a sección 15.10
1. a)x2
16− y2
9− z2
9= 1
b)
⎛⎝ ±4
00
⎞⎠ , no hay interceptos con los ejes y y z.
c) Simetría con respecto al origen, a cada eje y a cada plano coordenado.
d) plano xy :x2
16− y2
9= 1, hipérbola
plano xz :x2
16− z2
9= 1, hipérbola

544 Respuestas
No existe traza con el plano yz.
e) plano z = z0 :x2
16− y2
9= 1 +
z209, hipérbola para todo z0 ∈ R
plano y = y0 :x2
16− z2
9= 1 +
y209, hipérbola para todo y0 ∈ R
plano x = x0 :y2
9+
z2
9=
x2016− 1, circunferencia si |x0| > 4,⎛
⎝ x000
⎞⎠ si |x0| = 4 y no existe si |x0| < 4
f)
2. a)x2
9+
y2
4+
z2
36= 1, elipsoide
b)x2
2− y2 +
z2
3= 1, hiperboloide de una hoja, eje y

Respuestas 545
c) − x2
16+
y2
4− z2 = 1, hiperboloide de dos hojas, eje y
d) x2 + z2 = y2, cono circular recto, eje y
e)y2
1/4+ z2 = 12x, paraboloide elíptico, eje x

546 Respuestas
f) z = y2 − x2
1/4, paraboloide hiperbólico, eje z
g) x2 +y2
4= 1, cilindro ecto elíptico, eje z
h) z =1
4x2, cilindro recto parabólico, eje z

Respuestas 547
i)x2
9− y2
4= 1, cilindro recto hiperbólico, eje z
Sección 15.11
3. a) x′ = x− 1, y′ = y − 2, z′ = z − 3;(x′)2
4+ (y′)2 +
(z′)2
9= 1, elipsoide, eje z′
b) x′ = x+ 1, y′ = y − 3, z′ = z + 2;(x′)2
3+
(y′)2
6− (z′)2
9= 1 hiperboloide de
una hoja, eje z′
c) x′ = x− 2, y′ = y + 1, z′ = z − 4; (x′)2 − (y′)2 − (z′)2 = 1 hiperboloide de doshojas, eje x′
d) x′ = x, y′ = y − 3, z′ = z + 5; 4 (x′)2 + 9(y′)2 − (z′)2 = 0 cono elíptico, eje z′
e) x′ = x+ 1, y′ = y + 2, z′ = z − 1; (x′)2 + 16 (z′)2 = 16y′ paraboloide elíptico,eje y′
f) x′ = x+ 9, y′ = y − 12, z′ = z; z′ = 3(y′)2 − 7 (x′)2 paraboloide hiperbólico,eje z′
4. a)
⎛⎝ x′
y′
z′
⎞⎠ = QT
⎛⎝ x
yz
⎞⎠ con Q =
⎛⎝ 1/
√5 −4/3√5 2/3
0 5/3√5 2/3
−2/√5 −2/3√5 1/3
⎞⎠ ;
(x′)2 + (y′)2 + 10 (z′)2 = 100, elipsoide.

548 Respuestas
b)
⎛⎝ x′
y′
z′
⎞⎠ = QT
⎛⎝ x
yz
⎞⎠ con Q =
⎛⎝−1/
√2 −1/√6 1/
√3
1/√2 −1/√6 1/
√3
0 2/√6 1/
√3
⎞⎠ ;
x′′ = x′, y′′ = y′ +2√6, z′′ = z′ − 4√
3− (x′′)2 − (y′′)2 + 2 (z′′)2 = 1, hiperboloide de dos hojas, eje z′′
c)
⎛⎝ x′
y′
z′
⎞⎠ = QT
⎛⎝ x
yz
⎞⎠ con Q =
⎛⎝0 3/5 −4/51 0 00 4/5 3/5
⎞⎠ ;
(x′)2
9+
(z′)2
4= y′, paraboloide elíptico, eje y′
d)
⎛⎝ x′
y′
z′
⎞⎠ = QT
⎛⎝ x
yz
⎞⎠ con Q =
⎛⎝1/
√2 −1/√6 1/
√3
1/√2 1/
√6 −1/√3
0 2/√6 1/
√3
⎞⎠ ;
x′′ = x′ +389√2
144, y′′ = y′ − 20
6√6, z′′ = z′ − 17
3√3;
(y′′)2 +(z′′)2
2=
8
3√2x′′, paraboloide elíptico, eje x′′
e)
⎛⎝ x′
y′
z′
⎞⎠ = QT
⎛⎝ x
yz
⎞⎠ con Q =
⎛⎝0 1/
√2 1/
√2
1 0 0
0 1/√2 −1/√2
⎞⎠ ;
(y′)2 + 3 (z′)2 = 3, cilindro recto elíptico, eje x′
f)
⎛⎝ x′
y′
z′
⎞⎠ = QT
⎛⎝ x
yz
⎞⎠ con Q =
⎛⎝2/3 2/3 1/31/3 −2/3 2/32/3 −1/3 −2/3
⎞⎠ ;
(x′)2
9+
(y′)2
3− (z′)2
9= 1, hiperboloide de una hoja, eje z′