future intelligent machines
TRANSCRIPT
Aarne Halme ECT09
Future Intelligent Machines
Aarne HalmeTKK
GIM research institute
Aarne Halme ECT09
Content of the talk
• Introductory remarks• Intelligent machines• Subsystems technology and modularity• Robots and biology• Robots in homes
Aarne Halme ECT09
Introductory remarks• Mechanical engineering led industrial revolution about
250 years ago.• Mechanization of work started then and led to amazing
increase in the effectiveness of work until automation started about 60 years ago.
• Automation has increased the effectiveness, but particularly freed people from slavery of machines by increasing machines’ own intelligence.
• There are still much room for automation in the society, especially in non-factory applications, like making the machines use by people or the environment where we live, more smart.
Aarne Halme ECT09
Intelligent machines – what they are?
Robotic machines or robots that• replace people in tasks, which are
monotonous or which do not any more fulfill the minimum requirements for human work
• or operate in an environment unfriendly for humans
• or offer help or entertainment services to people in their homes or public places
Aarne Halme ECT09
Challenges for technology
- Task scenarios often include an environment, whichis not well structured, not a priori known in details and may be changing with time.
- In most cases robots must be mobile, because taskscannot be moved to the robots, but robots mustmove to the tasks.
- Often high autonomy is needed meaning thateverything, including energy, must be carried on-board.Requirements are similar to biological species.
Aarne Halme ECT09
Terminology
• Field robotics refers to outdoor applications. Many (but not all) applications are built using existing working machines
• Service robotics refers to mainly indoor applications, but sometime it is also used for light outdoor applications.
• In many cases service robots are intended to consumer markets for use of common people.

Aarne Halme ECT09
Situation in commercial markets
• Unlike industrial robots service robots as new products has not yet notable markets
• However, there is a big market potential. Most of the R&D investment world wide in robotics is today in this new area.
• On the other hand, work machine industry is evolving towards ”intelligent machines” i.e. fieldrobots. These markets are existing and huge.

Aarne Halme ECT09
Aarne Halme ECT09
Main application fields• Working machine technology for farming, construction
and utization of natural resources.• Exploration of planetary system ( moon, planets,
asteroids).• Undersea operations• Services: home services, entertainment, disabled
support, replacing manpower in human-intensive non-industrial work in offices, hospitals, public places, hostile urban environment (cleaning streets, sewers etc).
• Military technology • Rescue operations and katastrophe aftercare• Dismanteling nuclear plants• http://www.service-robots.org/index.htm

Aarne Halme ECT09
Today’s business: Mobile working machines
• Significant role in Finnish economy• 27 biggest exporting companies:
– turnover 4.4 Mrd eur (2006)– export 70%– employ more than 18000 people
• Today’s newest product development transformes classical manually controlled machines gradually “intelligent” , autonomous or remote tele-controllable machines.

Aarne Halme ECT09
Tomorrow’s business: Service robotics
• Robotics research priority in this area already the last15 years.
• Market weight point is gradually moving from industrial robotics to service robotics.
• On the other hand, only few succeeders this far• Roomba from iRobot has been sold globally already 2
million pieces.• Space and military applications speed up
advancement at the moment.• Many applications require high machine intelligence,
because the robots have to operate in disorganizeand badly known environments.
Aarne Halme ECT09
Examples
• Following slides and videos show examples of different field and service robots. There exist much more of them today in web, so you are encouraged to explore web to find more and different type of robots.
• F&S robots have a great variety of appearance depending their utility area.
• One of the best site to look different research projects is on-lineEXPO 22xx site Hall 5:http://www.expo21xx.com/automation21xx/university.htm

Aarne Halme ECT09
Today’s forest machines are computerized and quite ready to be roboticed
• Harvester machine- cuts trees and debrach them
• Forwarder machine- transports trees to roadside
Aarne Halme ECT09
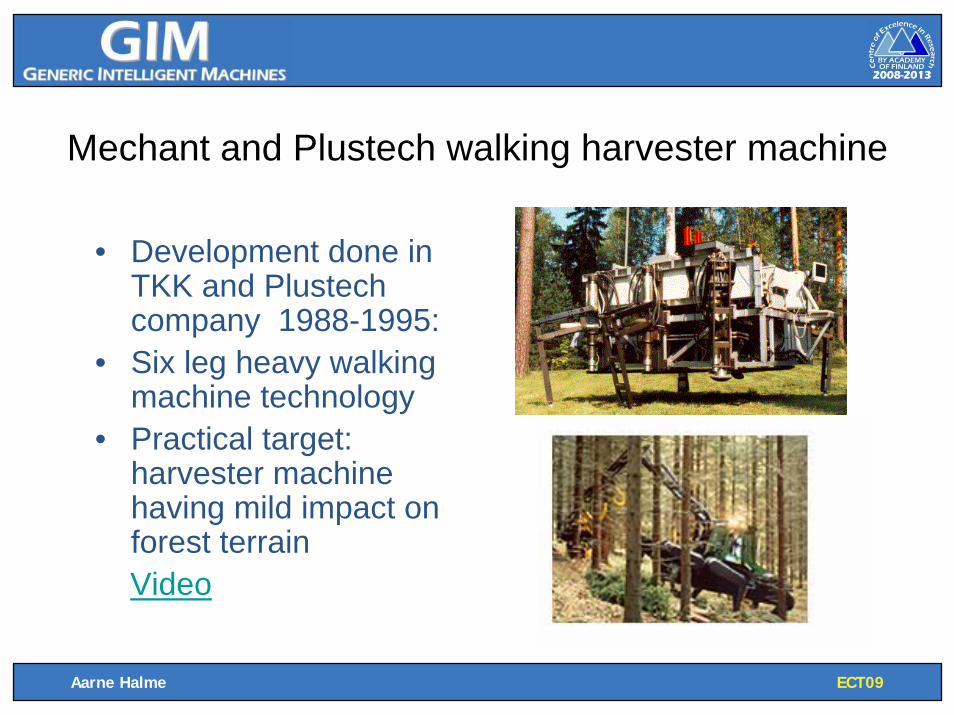
Mechant and Plustech walking harvester machine
• Development done in TKK and Plustechcompany 1988-1995:
• Six leg heavy walking machine technology
• Practical target: harvester machine having mild impact on forest terrainVideo

Aarne Halme ECT09
Semiautonomous and teleoperated robotic vehicles
• Mobile robot test-bead constructed from a standard ATV
• Full scale loader machine instrumented for teleoperation tests
• Practical target: Remove driverfrom machine to remote location
• AutoMine• Arska
Aarne Halme ECT09
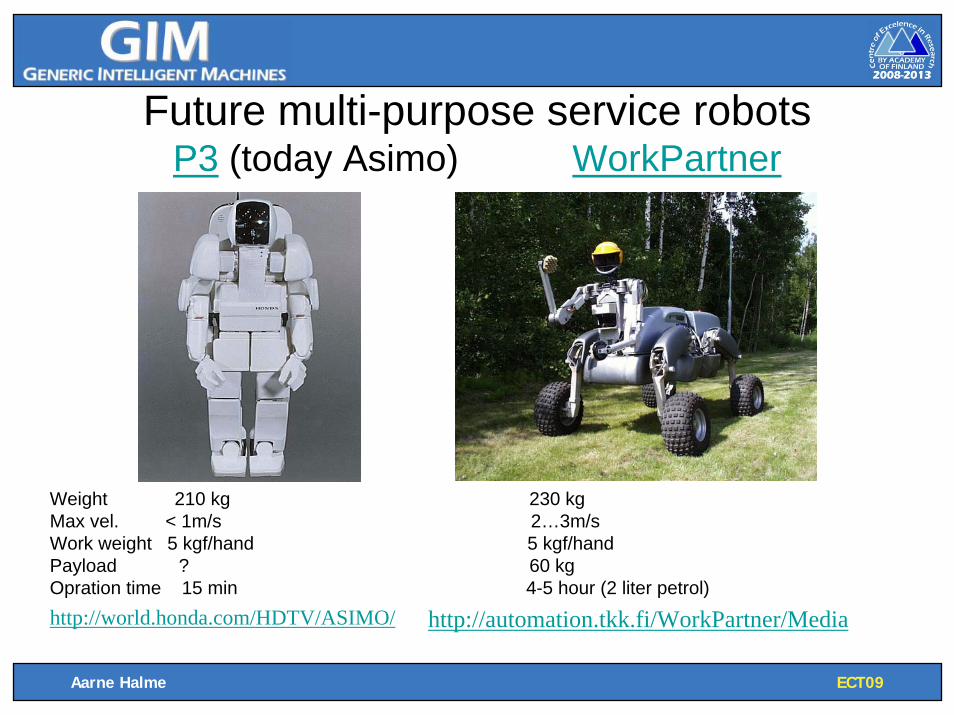
Future multi-purpose service robotsP3 (today Asimo) WorkPartner
Weight 210 kg 230 kg Max vel. < 1m/s 2…3m/sWork weight 5 kgf/hand 5 kgf/handPayload ? 60 kgOpration time 15 min 4-5 hour (2 liter petrol)http://world.honda.com/HDTV/ASIMO/ http://automation.tkk.fi/WorkPartner/Media
Aarne Halme ECT09
Subsystems of F&S robots
• All F&S robots are systems, which consist of subsystems
• There is no standardized way to define the subsystems, but the following is “de facto”standard.
• The subsystems may consist of HW or SW or both. The cropping attribute is the functionality.
Aarne Halme ECT09
Subsystems and their tasks:
• Power and energy system• Motion system• Work tool system (includes possible manipulator,
other tools and their lower level controllers)• Motion control system• Perception and sensing system• Navigation system• Motion and action planning system (mission control)• Human-robot interface (intercommunication)
Aarne Halme ECT09
Academy of Finland
Centre of Excellence in Generic Intelligent Machines Reseach
Aarne Halme ECT09
GIM is joint venture of two host organizations
Automation Technology Laboratory ATLFounded in 1985; director prof. HalmeBelongs to the Department of Automation and Systems Engineering at TKK
Institute of Hydraulics and Automation IHAFounded in 1988; director prof. VileniusBelongs to the Department of Intelligent Hydraulics and Automation at TUT
GIM was founded by a common declaration 17.10.2005 and officially by Finnish Academy 1.1.2008
Aarne Halme ECT09
General research goal • The focus of GIM covers mobile machines, intended to some useful work, from
ordinary working machines to futuristic service robots experienced this far only in Star War movies.
• Vision:
The future development of those machines will take place under a generic framework, which opens up novel possibilities to create new mechatronic machines through a modular design and manufacturing.
The merging properties are the generic subsystem architecture and physical modular structure that such future machines have.
• Mission:
To bring about unique new research results in the methodology and technology of the subsystems infrastructure that support practical long term development of the generic intelligent machines.
Aarne Halme ECT09
Research agenda• RP 1 Internal goal assesment and training• RP 2 Modularity of generic machines• RP 3-4 Power and energy systems • RP 5 Control Architecture• RP 6 Perception and navigation system• RP 7 Human-Robotic Machine Interaction• RP 8 Motion Systems• RP 9 INTEGRATOR – infrastructure for
experimentation and validation of reseach results in multi-machine environment
Aarne Halme ECT09
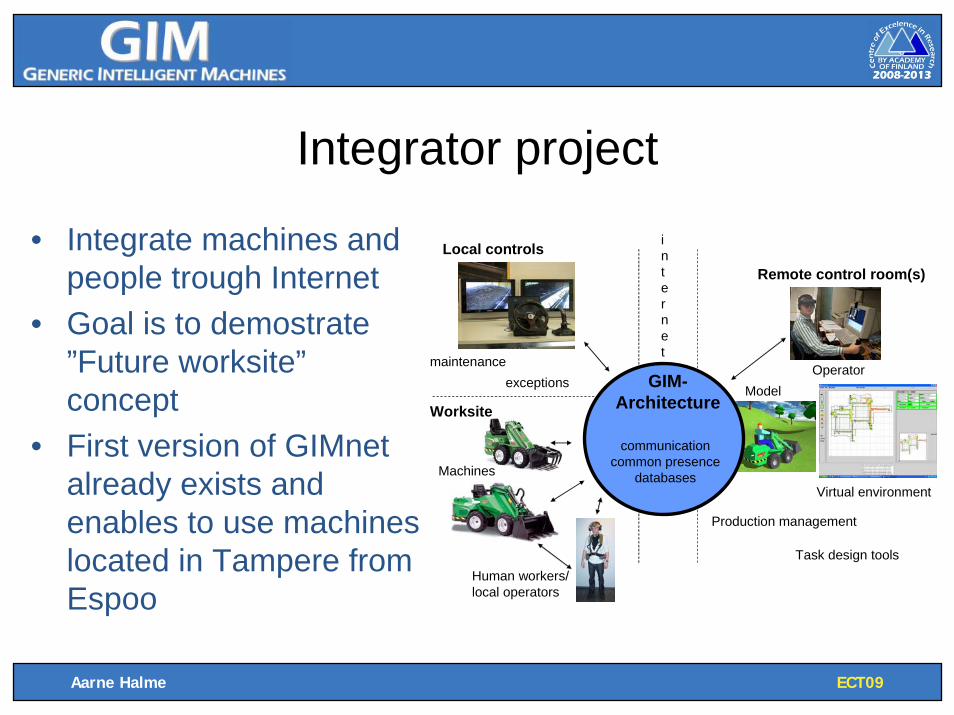
Integrator project
• Integrate machines and people trough Internet
• Goal is to demostrate”Future worksite”concept
• First version of GIMnetalready exists and enables to use machineslocated in Tampere fromEspoo
ModelWorksite
Remote control room(s)
Virtual environment
Operator
internet
GIM-Architecture
communicationcommon presence
databasesMachines
Human workers/local operators
Production management
Task design tools
Local controls
maintenanceexceptions
Aarne Halme ECT09
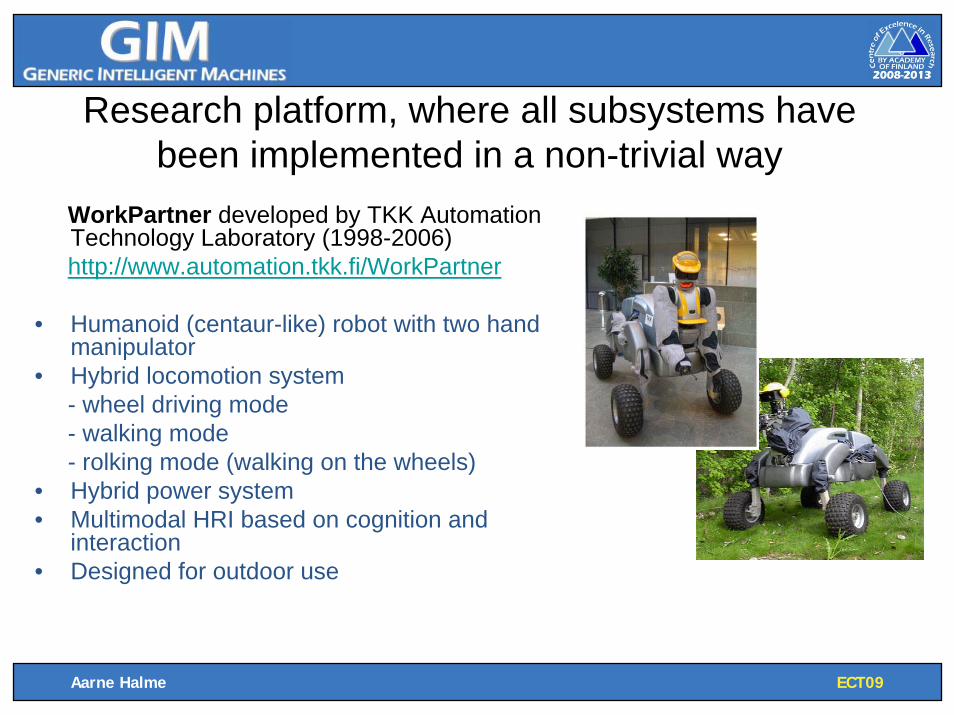
Research platform, where all subsystems havebeen implemented in a non-trivial way
WorkPartner developed by TKK Automation Technology Laboratory (1998-2006)http://www.automation.tkk.fi/WorkPartner
• Humanoid (centaur-like) robot with two hand manipulator
• Hybrid locomotion system - wheel driving mode- walking mode- rolking mode (walking on the wheels)
• Hybrid power system• Multimodal HRI based on cognition and
interaction• Designed for outdoor use
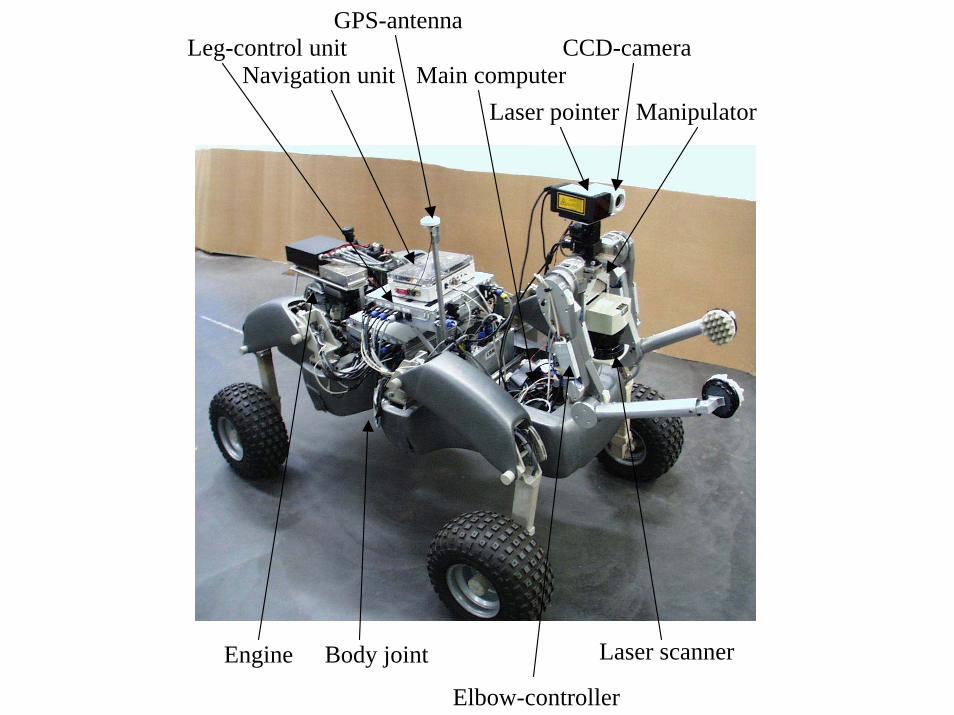
Laser scanner
Laser pointer
CCD-camera
Engine
Navigation unit
GPS-antennaLeg-control unit
Manipulator
Elbow-controller
Main computer
Body joint
Aarne Halme ECT09
General progress in subsystems technology
• There has been tremendous progress within 10-15 last years in several subsystem technology, specifically in
- motion control- navigation
• Still much progress is needed both in methods and technology, specifically in
- perception- motion and action planning (AI)- HRI
Aarne Halme ECT09
Robots and biology
Many problems in robotics can be solved keeping in mind biology and neuro science (bionics, biomimetics):
- Improving mechanical design and energy efficiency. Utilization of the energy stored in the environment <-> animal physiology and anatomy
- Improving mobility, motion control and coordination of task execution <-> neuro-motoric systems
- Improving sensing and environment perception <-> biological sensing and perception system and related neural structures
- Designing cognitive interfaces between robots and human users <-> animal and human cognition mechanisms
Aarne Halme ECT09
Robotics in homes• Robotics is coming as a part of home automation, which
in turn is a part of development of building automation• When and in what form this will happen is still shrounded
in mystery• It is a big potential market, however. • Challenges in R&D are related in one hand price
sensitivity and on the other hand very to the demandingenvironment that home is.
• TKK/GIM Ceilbot student innovation project tries a verydifferent solution making the robot use ceiling instead of floor.
Aarne Halme ECT09
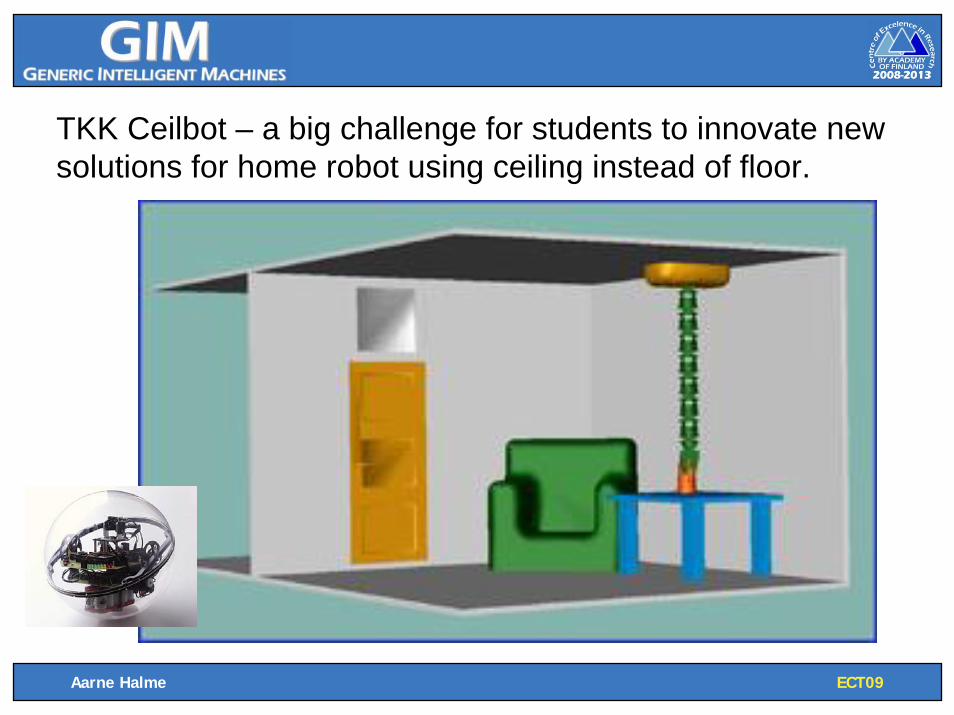
TKK Ceilbot – a big challenge for students to innovate new solutions for home robot using ceiling instead of floor.