finger pad friction and its role in grip and touch by michael j. adams, simon a. johnson, philippe...
TRANSCRIPT

Finger pad friction and its role in grip and touch
by Michael J. Adams, Simon A. Johnson, Philippe Lefèvre, Vincent Lévesque, Vincent Hayward, Thibaut André, and Jean-Louis Thonnard
InterfaceVolume 10(80):20120467
March 6, 2013
©2013 by The Royal Society
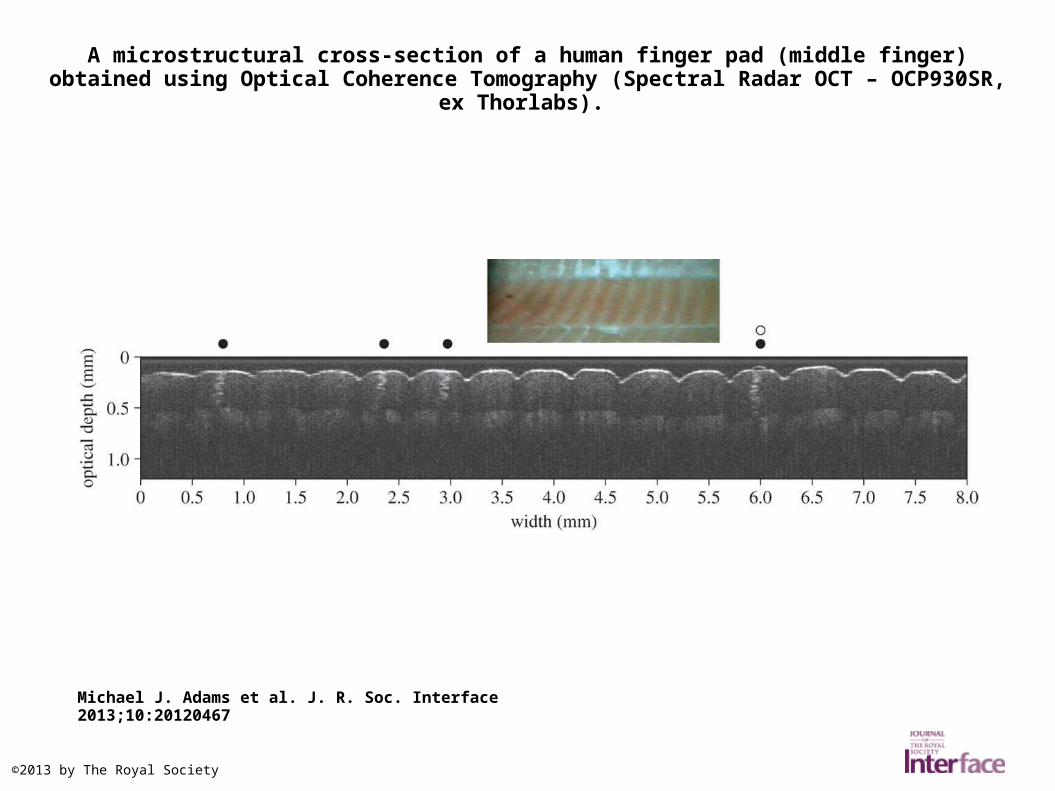
A microstructural cross-section of a human finger pad (middle finger) obtained using Optical Coherence Tomography (Spectral Radar OCT – OCP930SR, ex Thorlabs).
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
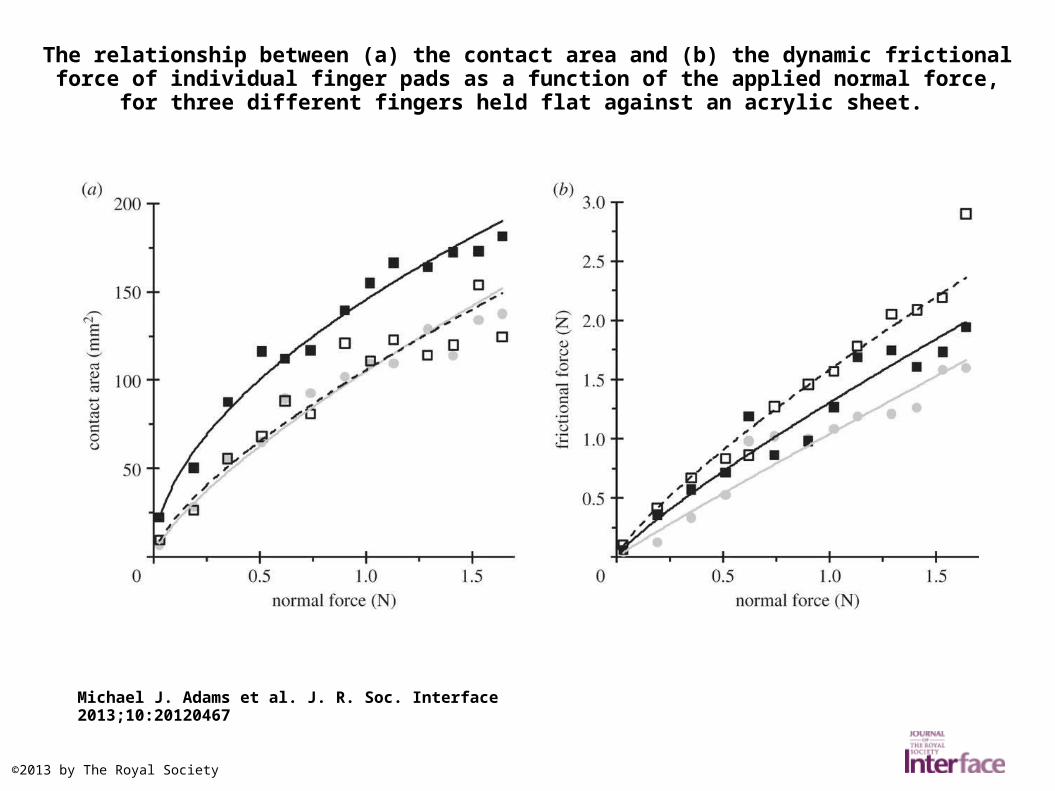
The relationship between (a) the contact area and (b) the dynamic frictional force of individual finger pads as a function of the applied normal force, for three different fingers held flat against
an acrylic sheet.
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
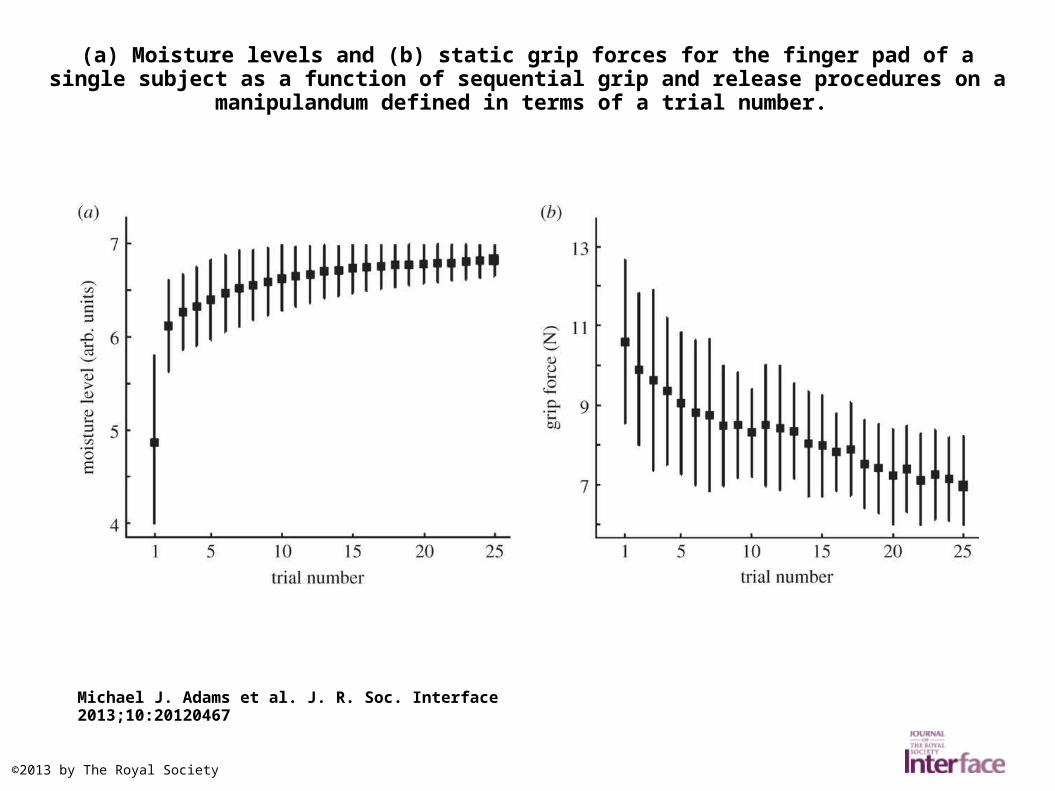
(a) Moisture levels and (b) static grip forces for the finger pad of a single subject as a function of sequential grip and release procedures on a manipulandum defined in terms of a trial number.
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
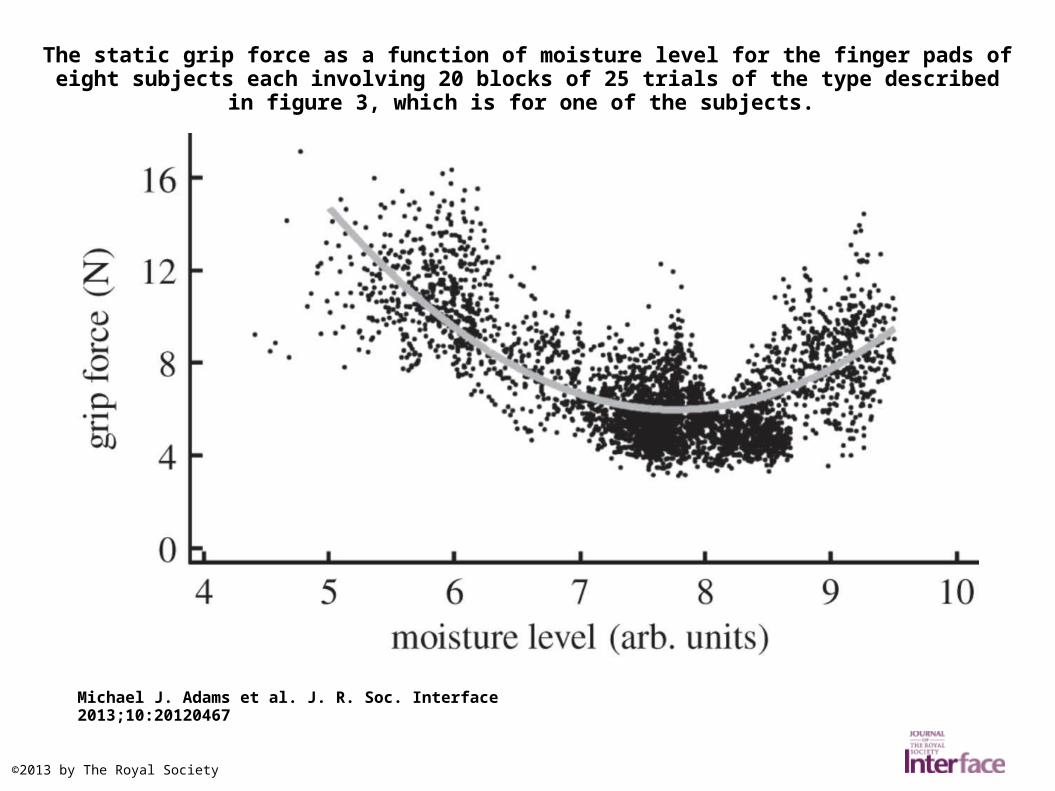
The static grip force as a function of moisture level for the finger pads of eight subjects each involving 20 blocks of 25 trials of the type described in figure 3, which is for one of the subjects.
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society

The dynamic coefficient of friction (W = 0.2 N) as a function of the dynamic occlusion time corresponding to sliding speeds of (a) V = 6 mm s−1 and (b) V = 24 mm s−1 for glass, (c) V = 6
mm s−1 and (d) V = 24 mm s−1 for PP. Best-fit curves to equation (3.1)...
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society

Tangential force data for a dry finger pad sliding against optically smooth glass as a function of the dynamic occlusion time, followed by the addition of water in the contact (W = 0.2 N and V = 6
mm s−1 ).
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
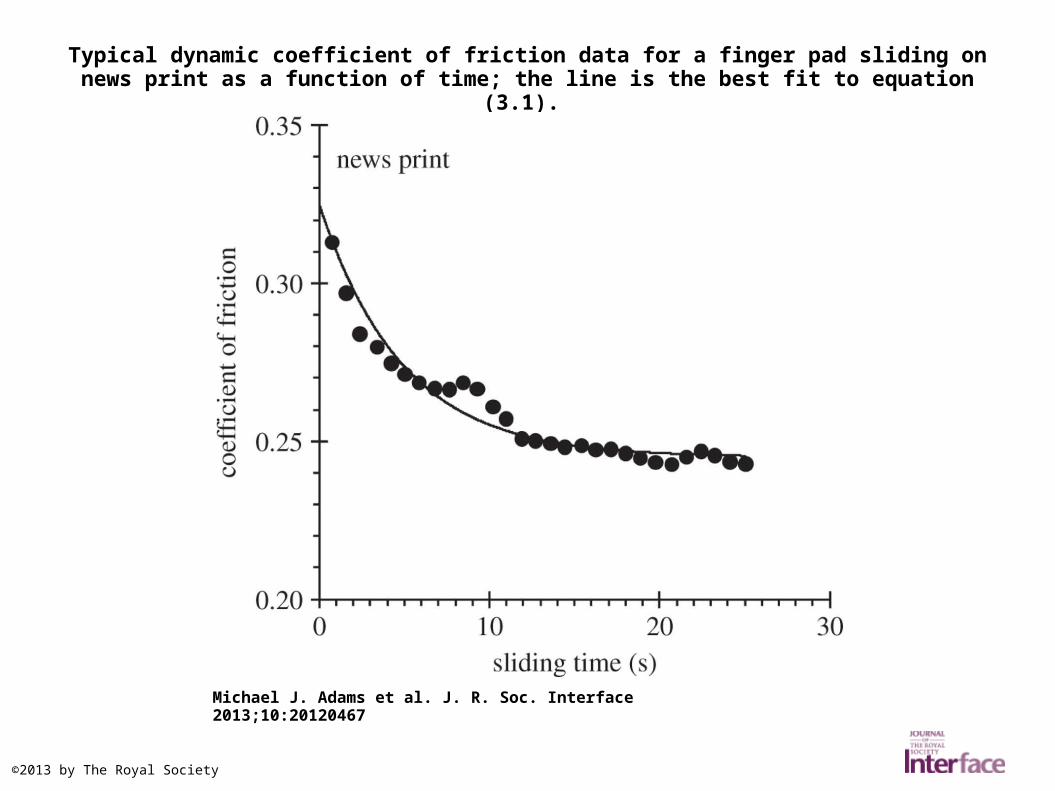
Typical dynamic coefficient of friction data for a finger pad sliding on news print as a function of time; the line is the best fit to equation (3.1).
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
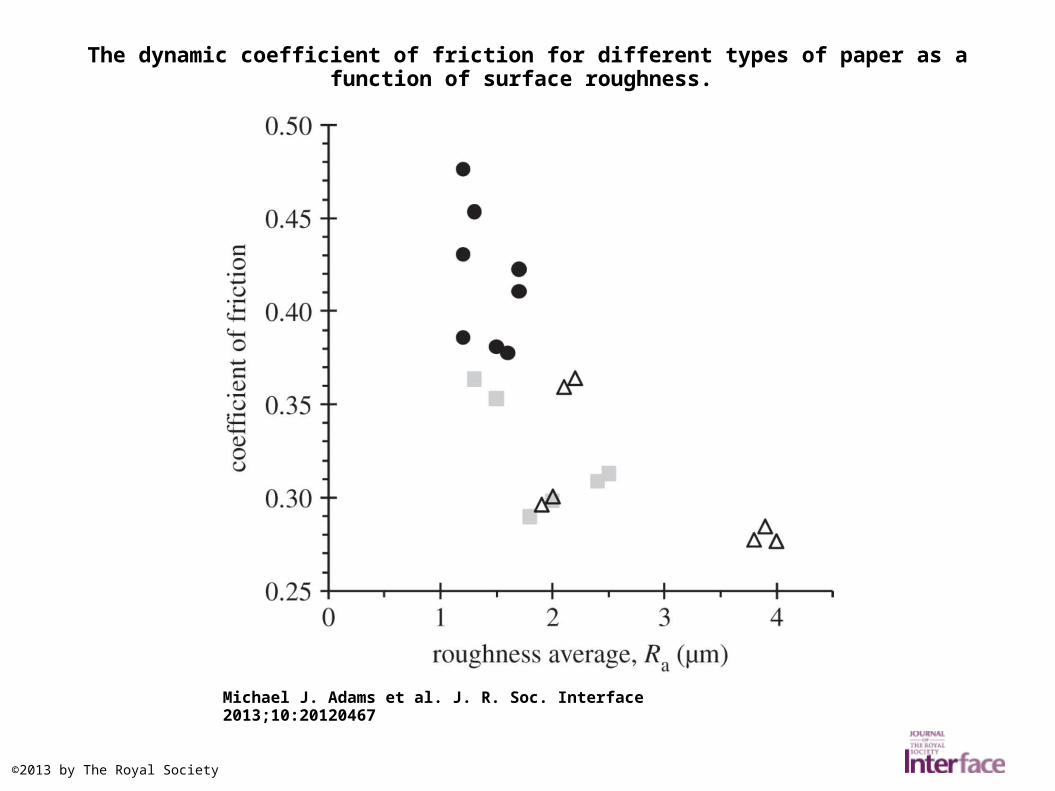
The dynamic coefficient of friction for different types of paper as a function of surface roughness.
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society

(a) Typical data for the time evolution of the normal and tangential forces involving a finger pad in contact with optically smooth glass, (b) associated image frames and (c) derived optical flow
images.
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
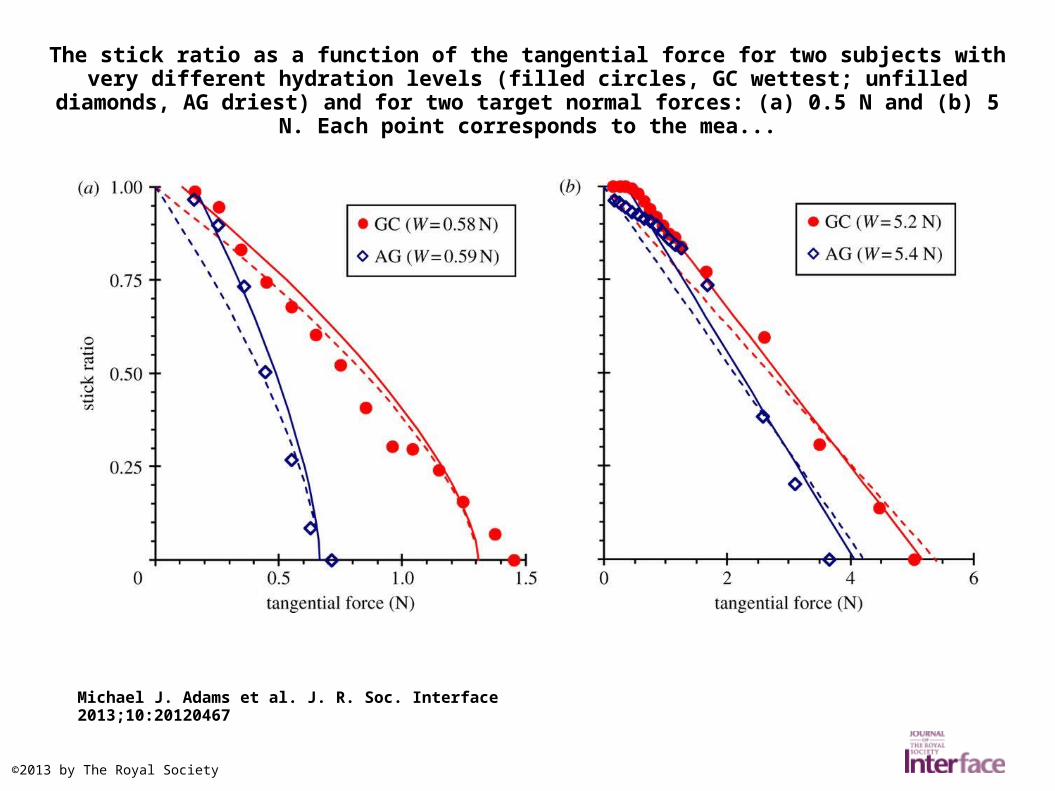
The stick ratio as a function of the tangential force for two subjects with very different hydration levels (filled circles, GC wettest; unfilled diamonds, AG driest) and for two target normal forces:
(a) 0.5 N and (b) 5 N. Each point corresponds to the mea...
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society
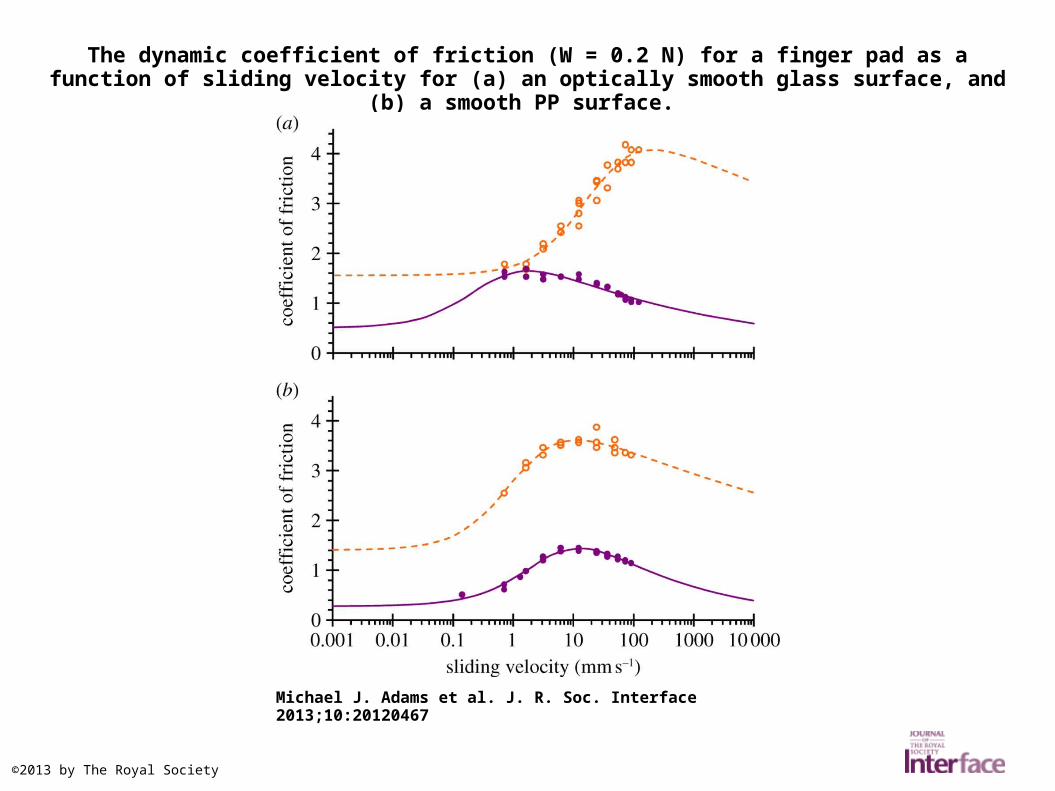
The dynamic coefficient of friction (W = 0.2 N) for a finger pad as a function of sliding velocity for (a) an optically smooth glass surface, and (b) a smooth PP surface.
Michael J. Adams et al. J. R. Soc. Interface 2013;10:20120467
©2013 by The Royal Society