engaging with highly automated driving: to be or not to be in the loop
TRANSCRIPT

Institute for Transport Studies FACULTY OF ENVIRONMENT
ENGAGING WITH HIGHLY AUTOMATED DRIVING: TO BE OR NOT TO BE IN THE LOOP? !
Tyron Louw, Natasha Merat, Hamish Jamson!!
Institute for Transport Studies!University of Leeds !
UK!

• Highly Automated Driving is around the corner (SAE 3/4)!
• BUT! Very little focus on driver state monitoring!
What’s the problem?!• Ergonomics focus role of the human in system
design and functioning!!
Automation doesn't remove the driver from the system, it merely changes its role within it!
Introduction
Introduction
Few studies on transitions in highly automated driving!Focus on attentive drivers, simple scenarios and a
range of time-to-collisions!

The ‘loop’
What is the ‘loop’? Which ‘loop’?!!
Physical control loop? (e.g. Mulder et al., 2012)!Sensory-motor control?!
OR!Cognitive control loop? (e.g. Merat et al., 2012)!
Attention/Situation Awareness?!

In or out?
Should drivers be:!!
Kept in the loop (Merat & Lee, 2012)?!!
OR!!
Remain out of the loop (Jacoby and Schuster, 1997)?!!
!

Scenario complexity
Michon’s (1985) Levels of driving tasks!
!
Control/Operational!
Tactical!
Strategic!
Rule-based decision-making !

To understand how… !
1. driver state before a transition and!
2. driver workload during a transition!
… influence driver performance.!
Objectives
Transition refers to the hand-over of control back and forth between an automated vehicle and the driver
Physical vs. Cognitive loops!
Scenario complexity!
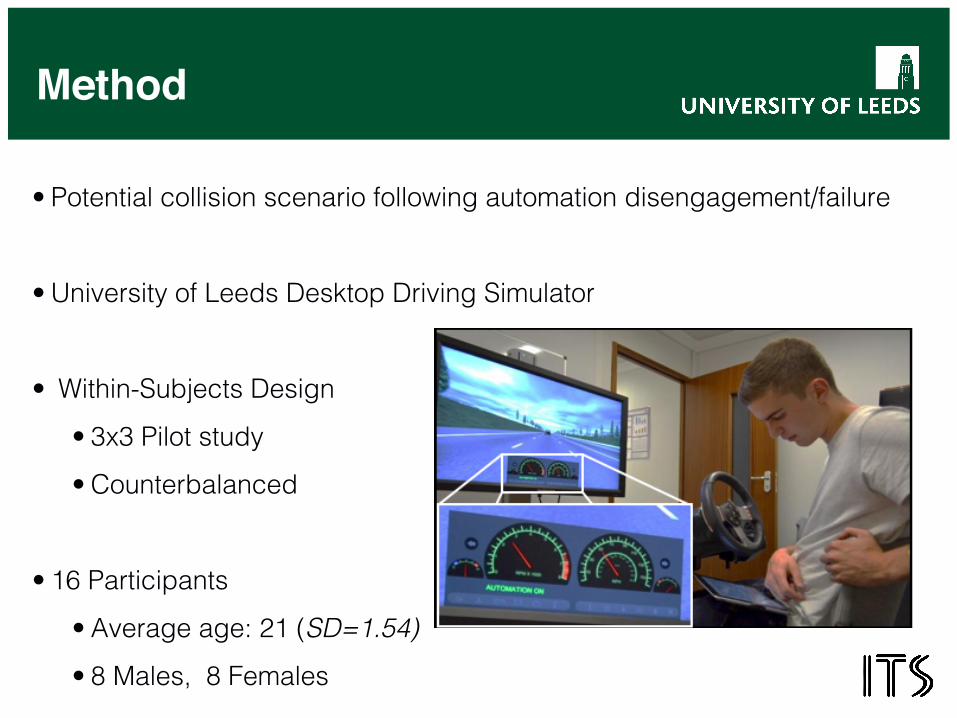
• Potential collision scenario following automation disengagement/failure!
• University of Leeds Desktop Driving Simulator!
• Within-Subjects Design!
• 3x3 Pilot study!
• Counterbalanced!
• 16 Participants !
• Average age: 21 (SD=1.54)!
• 8 Males, 8 Females!!
Method

Method
Beep! “AUTOMATION OFF”
Lead car lane change
!
Figure 1. Schematic representation of the driving scenario
Time-to-contact = 6.5s!!
Obstacle =160m awayLead car = 1 Chevron distance
Method
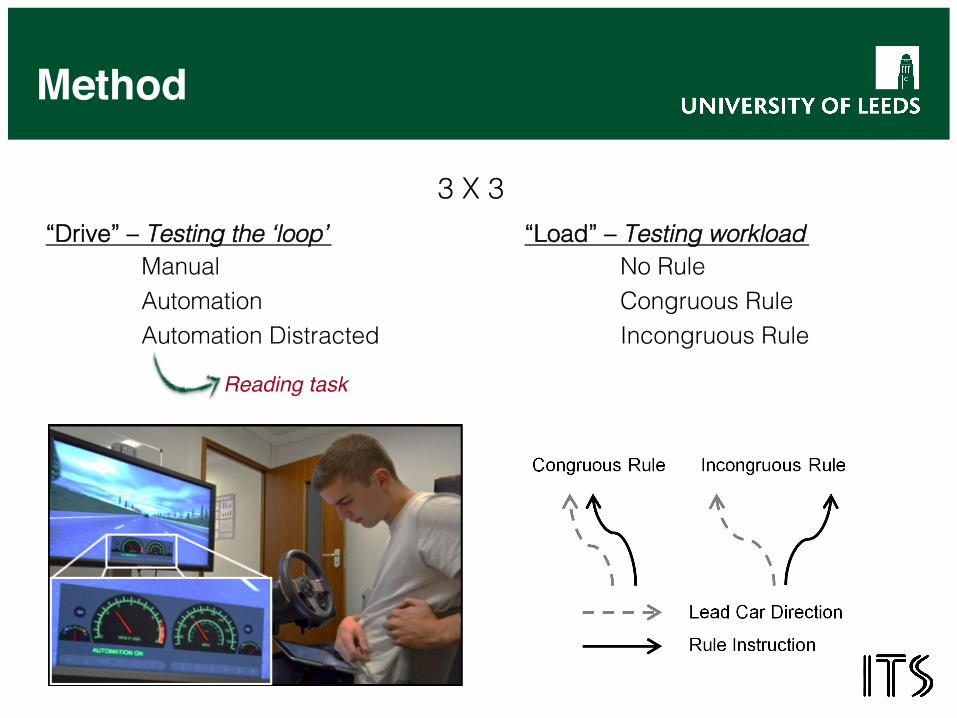
3 X 3!“Load” – Testing workload!
No Rule!Congruous Rule!Incongruous Rule!
“Drive” – Testing the ‘loop’!Manual!Automation!Automation Distracted!
Reading task

• Maximum lateral acceleration and deceleration!• Time to change lane!• Time to first steer (over 2 degrees)!
• Brake and steer combinations!
• Influence of lead car lane change!!• Subjective questionnaire!
Measures

How did drivers steer?
72,90%'
81,25%'
70,80%'
27,10%'
18,75%'
29,20%'
0,00%'
10,00%'
20,00%'
30,00%'
40,00%'
50,00%'
60,00%'
70,00%'
80,00%'
90,00%'
Manual' Engaged'Automa;on' Distracted'Automa;on''
Percen
tage)(%
))
Steer'Only'
Steer'and'Brake'

Where did drivers steer?
No Rule: In 98,5% of cases drivers followed the lead vehicle!
!
Congruent rule: In 100% of cases drivers obeyed the rule!
!
Incongruent rule: In 98% of cases drivers obeyed the rule!
No effect of Load across all variables measured!

Time to first steer
p = .019
p = .037
Main effect: Drive (p=.001, ŋ2= .39)
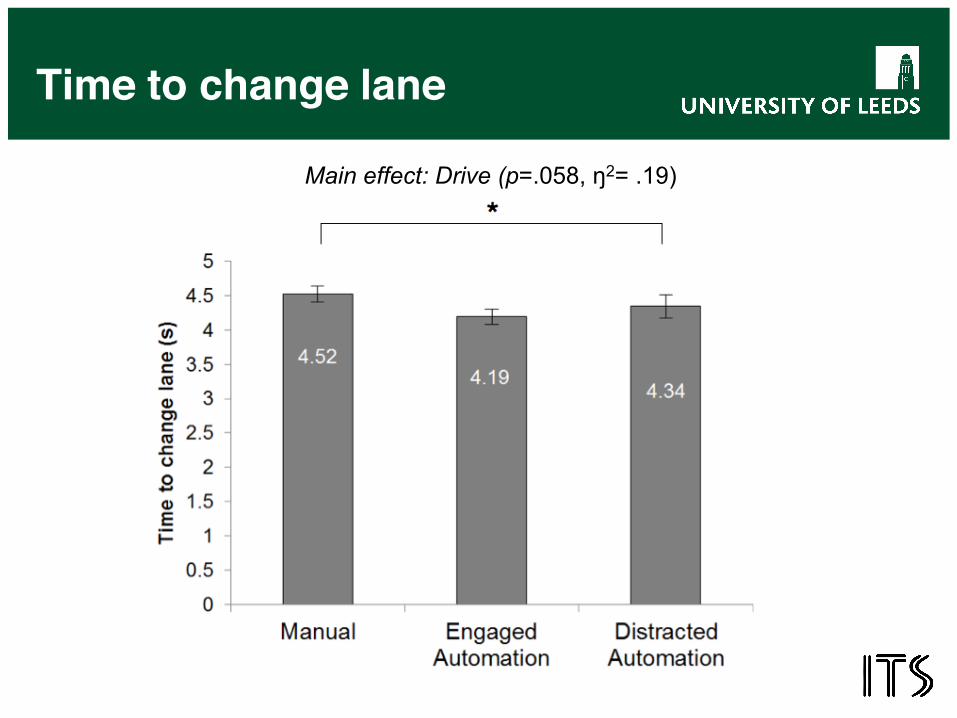
Time to change lane
Main effect: Drive (p=.058, ŋ2= .19)

Lateral Accelerations
p = .008 P < .001
Main effect: Drive (p<.001, ŋ2= .51)

87,50%
56,25% 37,50%
0%
23%
45%
68%
90%
113%
Manual! Automation! Automation Distracted!
Did you have enough time?
Manual Engaged Automation
Distracted Automation

“Communicating the deactivation of automation with the dashboard message would be sufficient”!
88% Disagree
“Communicating the deactivation of automation with the auditory signal would be sufficient”!44% Agree
“When automation was deactivated, I preferred having both the dashboard message and the auditory signal”!
88% Agree
Modality of information for transition

• Automation impacted on speed and quality of lane changes !
• Key factor affecting the response is whether the driver is actively engaged in vehicle control !
• During automation, drivers may react to alarm instead of situation!

• Repeated-measures design means results are conservative!
• Despite self-reports, 6.5s appears to be sufficient time for non-critical situations!
• Multimodal approach key to communicating automation status!
• As for the loop…. For now…. We say IN rather than OUT!!

• What does automation do to strategic level driving performance?!
• How does duration “out-of-the-loop” influence driver performance?!
• How can we simulate/induce the out-of-the-loop phenomenon?!
• Need to develop an objective measure of the quality and safety of a take-over!
What next?
