dynamics - final exam 27.01.2017- type 1 - eth zkiranku/dynamics/files/dynamics-final...dynamics -...
TRANSCRIPT

Dynamics - Final Exam 27.01.2017- Type 1
1. The planar system depicted in the figure consists of six particles of equalmass m connected by linear springs of stiffness ki, with i = 1, . . . , 7 andzero unstretched length, as shown. Four particles slide on a frictionlesscircular rail, while the two internal particles are free to move in any di-rection. Gravity acts downwards, as shown. The particles are given anarbitrary, non-equilibrium initial position and then released from rest toset the system in motion. Which of the following statements is correct?
m
m
mm
m
m
Smooth circular guide
g
k1
k2k3
k4
k5k6
k7
(a) The work done by the internal forces iszero only if the springs have equal stiffnesscoefficients.
(b) The angular momentum of the system isconserved.
(c) The linear momentum of the system isconserved.
(d) The work done by the internal forces isalways zero.
(e) The work done on the masses sliding on the rails can be nonzero.
1

2. Consider a linear, damped, forced oscillator x + 2δx + ω20x = f(t), where
f(t) = f0 sinωt. The figure shows the forcing f(t)f0
as well as the normal-
ized response x(t)
f0/ω20as function of time. Which of the following must hold?
0 2 4 6 8 10 12-2
-1
0
1
2
0 2 4 6 8 10 12-2
-1
0
1
2
t
t
f(t)
f0
x(t)
f0/ω20
(a) δ < 0
(b) ω0 > ω
(c) ω0 = ω
(d) ω0 < ω
(e) f0 < 0
3. Which of the following is not true for a conservative mechanical system?
(a) Change in kinetic energy of the system is equal to negative of the change inpotential energy.
(b) All forces acting on the system are either potential or do no work.
(c) Work done on the system depends on the initial and final configuration only.
(d) Only potential forces in the system do work.
(e) dE(t)dt
= const. > 0, where E(t) denotes the total mechanical energy of thesystem.
2

4. The homogeneous, three-dimensional object depicted in the figure features twoplanes of symmetry. The origin O of the coordinate frame [x, y, z] lays on theobject’s axis of symmetry, and it is offset from the center of mass C. The y axisis aligned with the axis of symmetry while the xy and xz planes coincide withthe symmetry planes, as shown. What is the correct structure of the moment ofinertia tensor I
0w.r.t. the [x, y, z] coordinate frame? Note that all the elements
of I0are nonzero, unless explicitly specified otherwise.
Cr1R1 R2r2
d
h 2h
Symmetry planes
xy
zO
(a) I0=
0 0 00 0 00 0 Izz
(b) I0=
Ixx 0 00 Iyy 00 0 Izz
(c) I0=
Ixx Ixy 0Ixy Iyy 00 0 Izz
(d) I0=
Ixx 0 00 Iyy Iyz0 Iyz Izz
(e) I0=
Ixx Ixy IxzIxy Iyy IyzIxz Iyz Izz
3

5. Consider a particle subjected to a holonomic constraint. Which of the followingis true?
(a) A holonomic constraint is a constraint that can only depend on time.
(b) A holonomic constraint is a constraint that can depend on the current posi-tion of the particle and time.
(c) A holonomic constraint depends on the current position of the particle anddepends on time-derivatives of the motion of the particle.
(d) A holonomic constraint depends on time-derivatives of the motion of theparticle.
(e) A holonomic constraint is a constraint that can only depend on the currentposition of the particle.
6. Consider a rigid body B and an arbitrary point A. The body has an an-gular velocity ω and an angular momentum HA w.r.t. point A. The co-ordinate frame [ex ey ez] is centered in A and I
Ais the moment of in-
ertia tensor of B w.r.t. this frame. If the angular momentum can bewritten as HA = I
Aω, which of the following statements must be true?
ω
HA
A
B
ex
ey
ez
(a) Point A is either fixed or the center ofmass.
(b) ω and HA are parallel.
(c) IAis diagonal.
(d) No forces are applied to the body.
(e) Point A is fixed and coincides with thecenter of mass.
4

7. The system shown in the figure consists of a uniform rigid bar of length L andmass m, hinged at point A to a massless rigid link of length L, connecting thejoints A and B. The system is then hinged to the ground at O, while the tipB is allowed to move horizontally along the x axis. A spring of elastic constantk and zero unstretched length connects points O and B. Gravity act down-wards, as shown. The system is released from rest at θ = 0. What is thevalue of θ when θ = −π
2? For simplicity, let mg = kL. Hint: the centroidal
moment of inertia IC of a thin bar of mass m and length L is IC = 112mL2.
m,Lg
x
y
θO
A
B
L
k
(a) θ = 0
(b) θ =√
15km
(c) θ =√
5km2
(d) θ =√
km
(e) θ =√
12k7m
5

8. Consider a uniform bar of length L and mass m hinged at the pointO on a vertical axis, that rotates at a constant angular velocity Ω.Denote with θ(t) the angle that the bar forms with the vertical axis.The frame [e1 e2 e3] is attached to the bar. The centroidal mo-ment of inertia of a slender bar of mass m and length L is given by
O
m,L
Ω
e2
e1e3
θ
g
IC=
0 0 00 1
12mL2 0
0 0 112mL2
What is the reaction moment M2 acting about the e2axis?
(a) M2 =13mL2Ωsin(θ)θ
(b) M2 =23mL2sin(θ)θ
(c) M2 = mL2Ωcos(θ)θ
(d) M2 =23mL2Ωcos(θ)θ
(e) M2 =13mL2sin(θ)
6
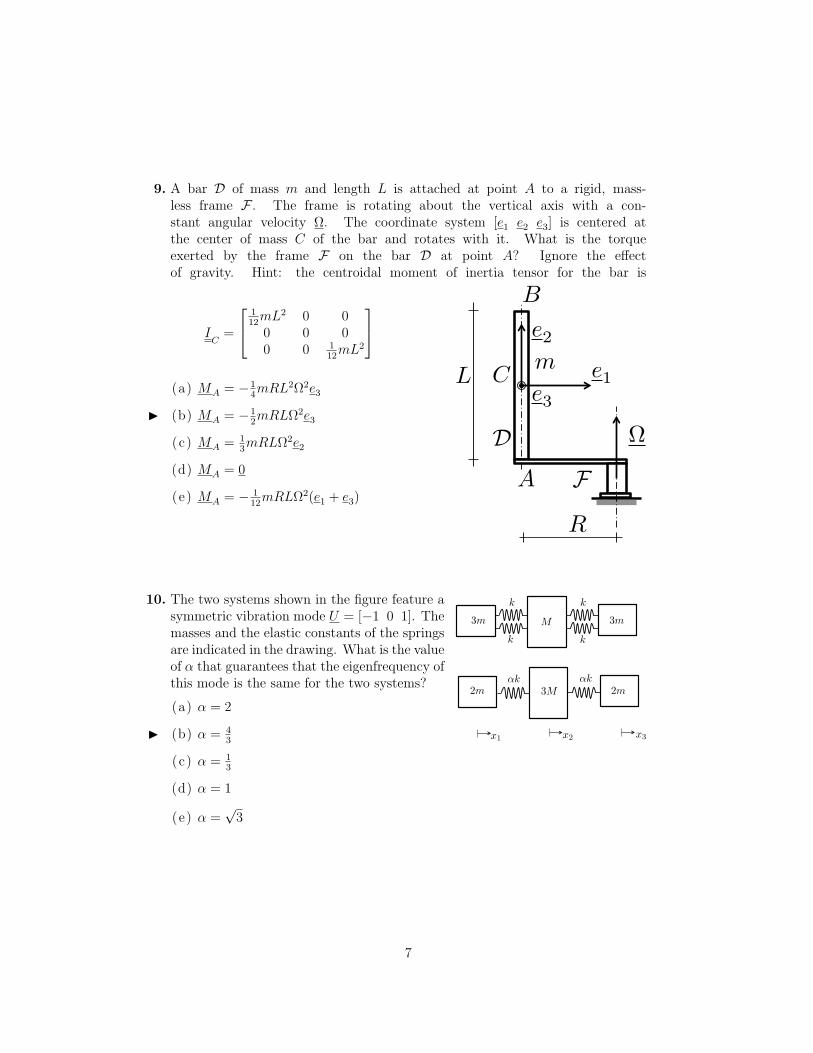
9. A bar D of mass m and length L is attached at point A to a rigid, mass-less frame F . The frame is rotating about the vertical axis with a con-stant angular velocity Ω. The coordinate system [e1 e2 e3] is centered atthe center of mass C of the bar and rotates with it. What is the torqueexerted by the frame F on the bar D at point A? Ignore the effectof gravity. Hint: the centroidal moment of inertia tensor for the bar is
A
B
ΩDF
e1
e2
e3
R
Lm
C
IC=
112mL2 0 00 0 00 0 1
12mL2
(a) MA = −14mRL2Ω2e3
(b) MA = −12mRLΩ2e3
(c) MA = 13mRLΩ2e2
(d) MA = 0
(e) MA = − 112mRLΩ2(e1 + e3)
M3m 3m
kk
2m3M2mαkαk
kk
x1 x2 x3
10. The two systems shown in the figure feature asymmetric vibration mode U = [−1 0 1]. Themasses and the elastic constants of the springsare indicated in the drawing. What is the valueof α that guarantees that the eigenfrequency ofthis mode is the same for the two systems?
(a) α = 2
(b) α = 43
(c) α = 13
(d) α = 1
(e) α =√3
7

rh
m
ex
ey
ez
C
ω
βg
11. A uniform cylinder of mass m, height h and ra-dius r, hinged at its center of mass C, is givenan initial angular velocity ω, which lies on thexz plane of the [ex ey ez] principal coordinateframe. What is the ratio h/r that keeps theangular velocity vector in the xz plane? Grav-ity is the only force acting on the body. Theprincipal inertia tensor I
Cof the cylinder is
IC=
12mr2 0 00 m
12(3r2 + h2) 0
0 0 m12(3r2 + h2)
(a) hr→ ∞
(b) hr=
√3
(c) hr→ 0
(d) hr= 3
(e) hr= 1
8

θ
gk
L/2
L/2F
A
B
O
m
12. The system shown in the figure consists of auniform bar of length L, massm and centroidalmoment of inertia Ic =
112mL2. The center of
mass O is constrained to move in the horizontaldirection by a frictionless guide. Likewise, thetip A moves without friction along the verticalguide, as shown. The spring of elastic constantk is unstretched when θ = π
2. Gravity acts
downward. A constant force F is applied atthe tip B, in the direction shown. What is thevalue of F = |F | such that the system comesto rest at θ = 0, when released at θ = π
4and θ = 0?
(a) F =√2
16kL−mgL
(b) F = 18kL
(c) F → ∞
(d) F =√2
16kL
(e) F = 1√2
(√2
16kL+
√2mgL
)
9
Rotating groove
Ω
v
m
g
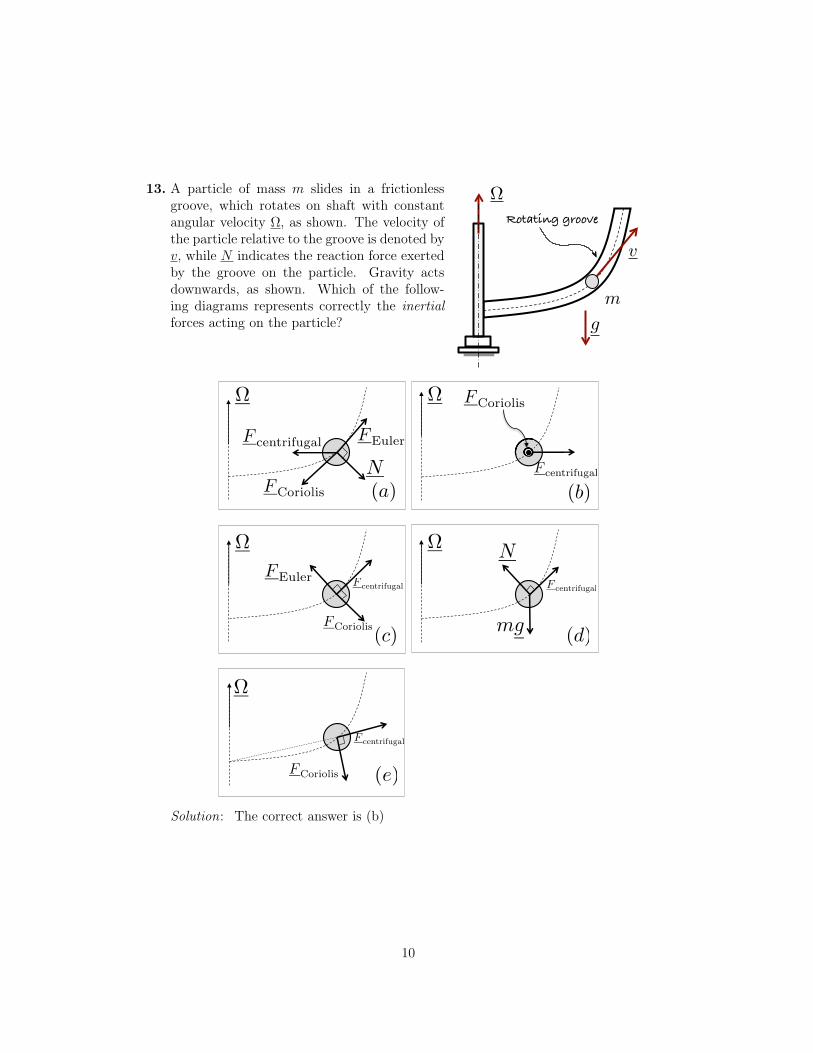
13. A particle of mass m slides in a frictionlessgroove, which rotates on shaft with constantangular velocity Ω, as shown. The velocity ofthe particle relative to the groove is denoted byv, while N indicates the reaction force exertedby the groove on the particle. Gravity actsdownwards, as shown. Which of the follow-ing diagrams represents correctly the inertialforces acting on the particle?
Solution: The correct answer is (b)
10
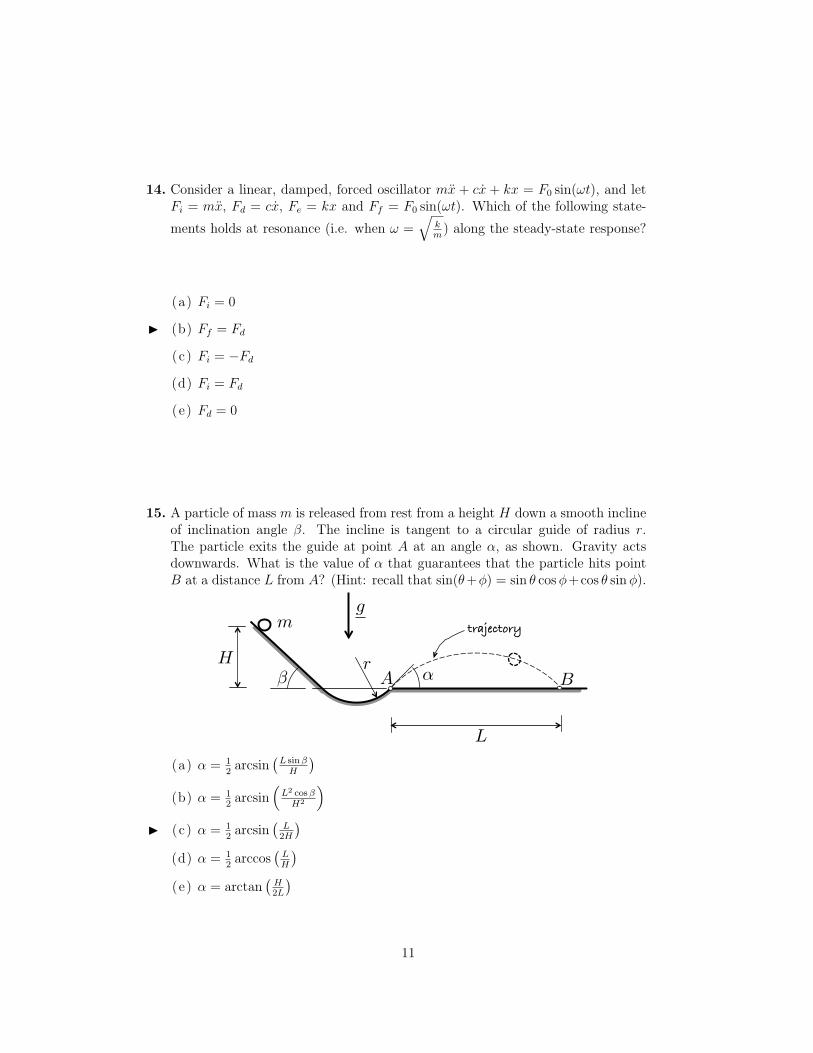
14. Consider a linear, damped, forced oscillator mx + cx + kx = F0 sin(ωt), and letFi = mx, Fd = cx, Fe = kx and Ff = F0 sin(ωt). Which of the following state-
ments holds at resonance (i.e. when ω =√
km) along the steady-state response?
(a) Fi = 0
(b) Ff = Fd
(c) Fi = −Fd
(d) Fi = Fd
(e) Fd = 0
15. A particle of mass m is released from rest from a height H down a smooth inclineof inclination angle β. The incline is tangent to a circular guide of radius r.The particle exits the guide at point A at an angle α, as shown. Gravity actsdownwards. What is the value of α that guarantees that the particle hits pointB at a distance L from A? (Hint: recall that sin(θ+φ) = sin θ cosφ+cos θ sinφ).
g
H
L
m
αβ
trajectory
A Br
(a) α = 12arcsin
(L sinβ
H
)
(b) α = 12arcsin
(L2 cosβ
H2
)
(c) α = 12arcsin
(L2H
)
(d) α = 12arccos
(LH
)
(e) α = arctan(H2L
)
11

16. The planar multibody system depicted in the figure consists of 4 rigidbodies A, B, C and D, connected to each other with rotational hinges,as shown. The bodies A and C are hinged to the ground at oneof their tips. At the instant depicted, point O has a velocity v, asshown. Which is the correct center of instantaneous rotation of body D?
v
A
B
C
P1
P3
P4
P5
O P2D
(a) P5
(b) P4
(c) P2
(d) P1
(e) P3
v
u
gm(t)
17. A rocket of initial mass mi is launched from rest in the verticaldirection. It burns fuel mass according to the law m(t) = mi−αt, where α > 0. When all the fuel is burned at time t = tf ,the mass of the rocket is mf . The gasses are expelled with adownward constant velocity of magnitude u = |u| relative tothe rocket. What is the velocity vf of the rocket at t = tf?Ignore drag effects and assume that gravity act downwards, asshown. The initial velocity of the rocket is null.
(a) vf = gmi−mf
α+ u
(b) vf = g(mf−mi)
2
α+ 2ue
− mimf
(c) vf = gmf
α+ u ln
mf
mi
(d) vf = 0
(e) vf = gmf−mi
α+ u ln mi
mf
12

18. A disk of mass M and radius R is free to rotate about its center of mass O, asshown in the figure. A cable connects two blocks, A and B, of mass 2m and m,respectively, and is wound tightly around the disk. Assume that the mass of thecable is negligible. The centroidal moment of inertia of a disk of radius R andmass M is I = 1
2MR2. Which of the following equations of motion is correct?
Rgθ
B
O ex
ey
M
m
2m
A
(a)(12MR2 +mR2
)θ +mgR sin θ = 0
(b)(12MR2 + 3mR2
)θ + 3mgR = 0
(c) 12MR2θ −mgR = 0
(d)(12MR2 + 3mR2
)θ −mgR = 0
(e)(12MR2 + 3mR2
)θ −mgR cos θ = 0
19. A uniform bar of mass m and length L is supported at its tips A andB as shown. The support at A constraints vertical motion, while thetip B can move along the rigid wall, inclined by the angle α. At theinstant depicted in the figure, point A has a horizontal velocity vA, asshown. What is the kinetic energy T of the system at this instant? (Hint:the centroidal moment of inertia of the bar is given by IC = 1
12mL2.)
gvA A Bm,L
α(a) T = 1
2mv2A
(1− 1
2tan2 α
)
(b) T = 12mv2A
(c) T = 12mv2A
(1 + 1
3cosα
)
(d) T = 12mv2A
(1 + 1
2sinα
)
(e) T = 12mv2A
(1 + 1
3tan2 α
)
13
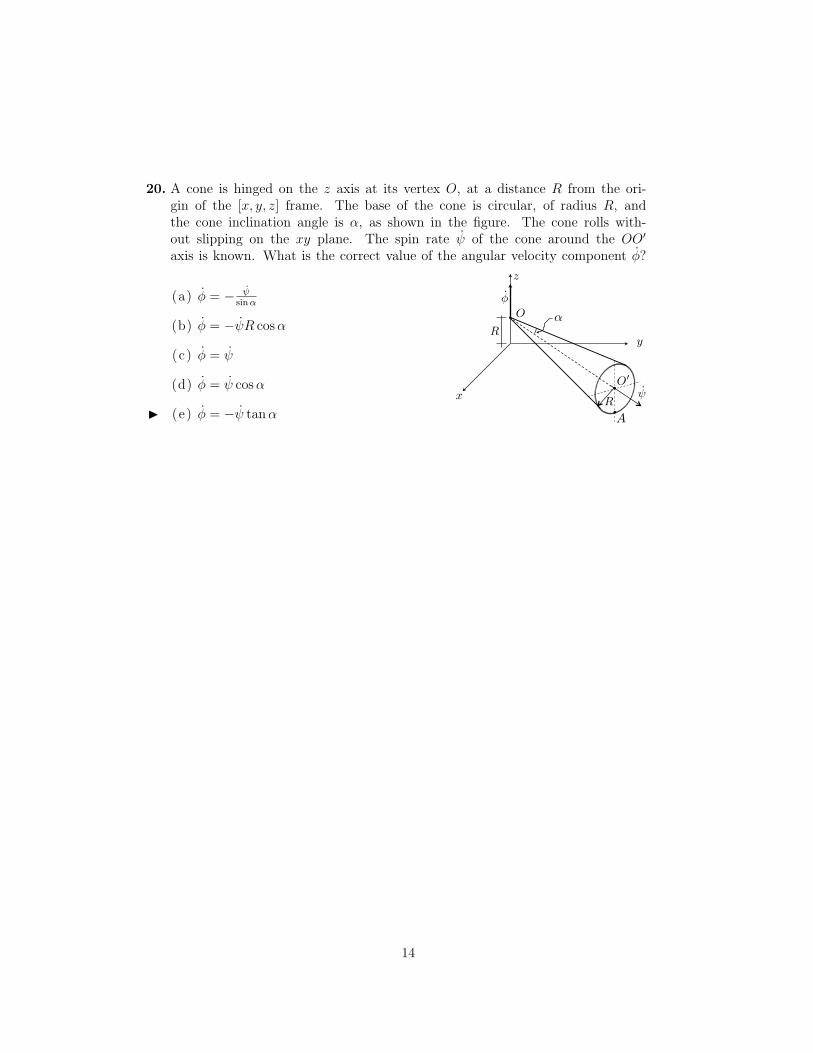
20. A cone is hinged on the z axis at its vertex O, at a distance R from the ori-gin of the [x, y, z] frame. The base of the cone is circular, of radius R, andthe cone inclination angle is α, as shown in the figure. The cone rolls with-out slipping on the xy plane. The spin rate ψ of the cone around the OO′
axis is known. What is the correct value of the angular velocity component φ?
α
A
x
y
z
R
R
φ
ψ
O
O′
(a) φ = − ψsinα
(b) φ = −ψR cosα
(c) φ = ψ
(d) φ = ψ cosα
(e) φ = −ψ tanα
14