Download - Cac He Thong Khong Gian Thoi Gian
1
Tài liệu
Các hệ thống không gian thời gian
GV: nguyễn quốc khươngEmail: [email protected]
Tel:0912016024

2
MỤC LỤC
CHƯƠNG 1. CÁC KHÁI NIỆM CƠ BẢN....................................................10
1.1 Thông tin và tín hiệu........................................................................................101.1.1 Tín hiệu tương tự:...................................................................................101.1.2 Tín hiệu số:............................................................................................11
1.1.2.1 1.2.1 Tín hiệu điều chế PAM..........................................................121.1.2.2 Tín hiệu điều chế QAM:.................................................................13
1.2 Mối quan hệ giữa tốc độ bit và độ rộng băng tần truyền dẫn.....................141.2.1 Công thức Shannol.................................................................................141.2.2 Quan hệ giữa tốc độ bit và số mức điều chế...........................................16
1.3 Nhiễu truyền dẫn và lỗi bit.............................................................................161.3.1 Xây dựng công thức tính tỷ lệ lỗi bit......................................................171.3.2 Ví dụ tính giá trị z cho một số tín hiệu.................................................19
1.4 Sơ đồ khối của hệ thống thông tin..................................................................21
CHƯƠNG 2. KÊNH VÀ KHÔI PHỤC KÊNH VT......................................23
2.1 Hệ thống một anten thu phát - kênh SISO....................................................23
2.2 Hệ thống nhiều anten thu phát - kênh MIMO..............................................27
2.3 Ước lượng kênh và khôi phục dữ liệu trong hệ thống thông tin.................312.3.1 Khái niệm...............................................................................................312.3.2 Ước lượng kênh trong hệ thống OFDM................................................34
2.3.2.1 Ước lượng kênh cho hệ thống SISO-OFDM..................................352.3.2.2 Ước lượng kênh cho hệ thống MIMO-OFDM................................36
CHƯƠNG 3. HỆ THỐNG MIMO..................................................................40
3.1 Phương pháp kết hợp với tỷ lệ tối đa MRC..................................................413.1.1 Giải mã trung bình..................................................................................413.1.2 MRC.......................................................................................................41

3
3.2 Hệ thống nhiều anten phát một anten thu – beamforming..........................44
3.3 Khử nhiễu kênh MIMO..................................................................................453.3.1 MIMO with Zero Forcing Successive Interference Cancellation equalizer
463.3.2 MIMO with ZF SIC and optimal ordering.............................................49
3.4 STBC.................................................................................................................523.4.1 Trường hợp hai phát một thu..................................................................523.4.2 Trường hợp 2 phát 2 thu - Alamuoiti 2x2.............................................55
3.5 Tiền mã hóa – Precoding.................................................................................603.5.1 Tiền mã hóa cho hệ thống SISO.............................................................613.5.2 Tiền mã hóa cho hệ thống MIMO..........................................................623.5.3 Tiền mã hóa cho hệ thống MIMO-OFDM.............................................623.5.4 Thiết kế bảng mã....................................................................................653.5.5 Lựa chọn ma trận tiền mã hóa................................................................66
3.6 Mã hóa không gian-thời gian lưới STTC......................................................69
CHƯƠNG 4. OFDM VÀ MIMO – OFDM....................................................76
4.1 OFDM...............................................................................................................76
4.2 MIMO-OFDM..................................................................................................79
4.3 STBC-MIMO-OFDM......................................................................................80
4.4 ALAMOUTI.....................................................................................................80

4
CÁC TỪ VIẾT TẮT
AMC Adaptive Modulation and Codding Mã hóa và điều chế thích ứng
AWGN Additive White Gaussian Noise Nhiễu trắng (nhiễu cộng)
A/D Analog/Digital Chuyển đổi Tương tự/Số
BER Bit Error Ratio Tỷ lệ bit lỗi
BS Base Station Trạm thu phát gốc
CCI Co-Channel Interference Nhiễu đồng kênh
CDMA Code Division Multiple Access Đa truy nhập phân chia theo mã
CP Cyclic Prefix Tiền tố lặp
CSI Channel State Information Thông tin trạng thái của kênh truyền
CSMA/CD
Carrier Sense Multiple Access with Collision Detect
Đa truy nhập theo cảm nhận sóng mang có phát hiện xung đột
DAB Digital Audio Broadcasting Phát thanh số
DCA Dynamic Channel Allocation Cấp phát kênh động
DSA Dynamic Subcarrier Allocation Cấp phát sóng mang động
DL DownLink Đường xuống
DSP Digital Signal Processing Bộ xử lý tín hiệu số
DVB-T Digital Video Broadcasting – Terrestrial
Truyền hình số mặt đất
FDD Frequency Division Duplex Song công phân chia theo tần số
FDM Frequency Division Multiplexing Ghép kênh phân chia theo tần số
FFT Fast Fourier Transform Chuyển đổi Furier nhanh
GI Guard Interval Khoảng bảo vệ
HIPERLAN/2
High Performance Local Area Network type 2
Mạng cục bộ chất lượng cao kiểu 2
IEEE Institute of Electrical and Electronic Engineers
Viện của các kỹ sư điện và điện tử

5
ISI Inter-Symbol Interference Nhiễu xuyên kí tự
ICI Inter-Channel Interference Nhiễu xuyên kênh
LS Least square Bình phương nhỏ nhất
MAI Multiple Access Interference Nhiễu đa truy nhập
MIMO Multiple Input Multiple Output Hệ thống nhiều đầu vào nhiều đầu ra
MISO Multiple Input Single Output Hệ thống nhiều đầu vào một đầu ra
MMSE Minimum Mean Square Error Trung bình bình phương tối thiểu
MS Mobile Station Trạm di động
OFDM Orthoganal Frequency Division Multiplexing
Ghép kênh phân chia theo tần số trực giao
OFDMA Orthoganal Frequency Division Multiple Access
Đa truy nhập phân chia theo tần số trực giao
QAM Quadrature amplitude modulation Điều chế biên độ cầu phương
RF Radio Frequency Tần số vô tuyến
SER Symbol Error Ratio Tỷ lệ lỗi ký hiệu
SISO Single Input Single Output Hệ thống một đầu vào một đầu ra
SIMO Single Input Multiple Output Hệ thống một đầu vào nhiều đầu ra
SNIR Signal to Interference-plus-Noise Ratio
Tỷ lệ tín hiệu trên tạp âm cộng nhiễu
SNR Signal to Noise Ratio Tỷ lệ tín hiệu trên tạp âm
STC Space-Time Coding Mã hóa không gian thời gian
TDD Time Division Duplex Song công phân chia theo thời gian
TDMA Time Division Multiple Access Đa truy cập phân chia theo thời gian
UL Up Link Đường lên
Wifi Wireless Fidelity Mạng không dây chuẩn 802.11
WF Water Filling Phương pháp đổ nước
WiMax Worldwide Interoperability for Microwave Access
Khả năng khai thác liên mạng trên toàn cầu đối với truy cập vi ba

6
ZF Zero Forcing Bộ lọc ép không
7
CÁC KÝ HIỆU SỬ DỤNG TRONG LUẬN ÁN
ρ Tỷ số giữa công suất tín hiệu trên công suất nhiễu (SNR)
κ Tỷ số giữa bán kính hai vòng trong trong một ô
τ Trễ truyền dẫn của kênh truyền
η Hiệu quả tái sử dụng tần số
λ Giá trị kỳ dị của ma trận
ε Bậc của tổn hao trong không gian tự do
β Biến có giá trị thay đổi tùy thuộc vào môi trường biểu diễn tổn hao kênh
truyền
σ2 Biểu diễn phương sai của nhiễu cộng
Lc Độ dài kênh vô tuyến – tính bằng số mẫu tín hiệu
NFFT Số lượng sóng mang con của hệ thống OFDM
Np Độ dài khoảng bảo vệ mỗi ký hiệu OFDM
Mms Tổng số thuê bao MS trong toàn hệ thống
Nbs Tổng số BS bằng tổng số ô trong toàn hệ thống
MT Số lượng anten phát
MR Số lượng anten thu
|.| Phép tính det của ma trận
||.||p Tính norm cấp p của ma trận
(.)H Chuyển vị và lấy liên hiệp phức cho ma trận hay một biến
⊗ Phép nhân Kronecker cho ma trận
Vec(H) Phép tính biến ma trận thành vector
Ht+ Nghịch đảo Moore-Penrose của ma trận
|M| Đối với tập M thì dùng để tính số phần tử của tập M – Biểu thức cũng
dùng tính giá trị tuyệt đối
CN(0,
σ2)
Biểu diễn phân bố chuẩn có giá trị trung bình bằng không và phương sai
là σ2
8
Giáo trình môn các hệ thống không gian thời gianDành cho sinh viên đại học và cao học
Học phần giới thiệu các kiến thức về lĩnh vực xử lý tín hiệu kết hợp của miền thời gian và không gian bao gồm: Các vấn đề về tính chất kênh truyền ở miền không gian và thời gian, mô hình hệ thống đa ăng ten phát và thu MIMO, mô hình hệ thống kênh MIMO, các phương pháp mã hóa không gian và thời gian cơ bản (sơ đồ mã hóa và giải mã STBC của Alamouti). Sự kết hợp của công nghệ MIMO với các kỹ thuật anten thông minh, kỹ thuật điều chề trựcgiao OFDM. Các ứng dụng của kỹ thuật xử lý tín hiệu không gian và thời gian trong các hệ thống thông tin tiên tiến.
The course introduces the knowledge of the space-time signal processing which include: the charateristics of channels in the space and time domain, the MIMO system with multipe transmit and receive antenna, the methods of space and time encoding and decoding(Scheme of Alamouti STBC). The combination of MIMO with OFDM technology to enhance the channel capacity and spectrum efficiency. The combination of MIMO technology with smart antenna for avanced communication systems. Beamforming technique and antenna array design methods for MIMO sytem
9
Chương 1. Các khái niệm cơ bản
Một số khái niệm cơ bản Đơn vị tính, db, mdb, v, Cts, disc Orthonormal PAM, 1-D 2-D signal Mức năng lượng (Công suất) trung bình trên một tín hiệu Es,Eb,SNR, spectral efficiency Shannol theory Power limited regime, bandwidth limited regime, ultimated shannol limited BER,SER, Q function của kênh AWGN, và RL MAP, ML, MDD,…. TDM,FDM,CDM,OFDM Đồng bộ Ước lượng kênh truyền nhằm đảm bảo tối ưu hóa quá trình thu phát thông tin.
1.1 Thông tin và tín hiệu
Thông tin là những cái mà con người muốn trao đổi với nhau. Trong thực tế thông tin trong các hệ thống thường được chia ra làm ba dạng để thuận tiện cho viêc xử lý và truyền dẫn là âm thanh- hình ảnh và thông tin dữ liệu.
Tín hiệu truyền tin có thể được chia thành hai dạng là tín hiệu tương tự và tín hiệu số.
1.1.1 Tín hiệu tương tự:
Định nghĩa tín hiệu tương tự là tín hiệu có biên độ thay đổi liên tục theo thời gian như hình vẽ 1.
t
X(t)
10
Hình 1-1: Tín hiệu tương tự
Đặc trưng cho tín hiệu tương tự bởi hai tham số là biên độ của tín hiệu và dải tần làm việc W=[fmin-fmax]. Biên độ của tín hiệu cho ta biết cường độ tín hiệu là mạnh hay yếu, còn dải tần làm việc cho ta biết tín hiệu được truyền đi ở tần số cao hay thấp. Ngoài ra ta còn có tham số là độ rộng băng tần của tín hiệu B=fmax-fmin. Độ rộng băng tần thể hiện lượng thông tin mà tín hiệu mang là nhiều hay ít, Ví dụ tín hiệu âm thanh của con người có dải tần từ 16-20000hz. Tuy nhiên tín hiệu điện thoại, là tín hiệu âm thanh khi nói vào máy điện thoại và đã được lọc bớt các thành phần tần số không cần thiết chỉ có dải tần từ 300 – 3400 hz.
1.1.2 Tín hiệu số:
Tín hiệu số trong thông tin được hiểu như là việc truyền đi các bit 0,1. Để truyền tín hiệu số người ta sử dụng các tín hiệu rời rạc, tín hiệu rời rạc là các tín hiệu có sự thay đổi về pha, tần số hoặc biên độ của tín hiệu một cách không liển tục. Hình vẽ
(a) Tín hiệu điều chế pha
(b) Tín hiệu điều chế tần số

11
(c) Tín hiệu điều chế biên độ
Hình 1-2: Một số dạng tín hiệu điều chế số
Đặc trưng cho tín hiệu số bằng hai tham số. Thứ nhất là số mức của tín hiệu tối thiểu bằng 2. Tùy thuộc vào số mức điều chế tín hiệu mà mỗi một tín hiệu có thể đại diện cho log2M bit. Và tham số thứ 2 là tốc độ bit. Trong thông tin, tín hiệu điều chế theo tần số ít được sử dụng do khả năng chống nhiễu và điều chế nhiều mức kém. Các tín hiệu điều chế pha và biên độ được sử dụng nhiều hơn.
Để biểu diễn các tín hiệu và phương thức điều chế, người ta thường đặt chúng trong một không gian tín hiệu N chiều gọi là chòm sao. Thực tế số lượng chiều của không gian N thường bằng 1 hoặc 2. Trường hợp N=1 ta có tín hiệu điều chế PAM còn N=2 ta có tín hiệu điều chế QAM. Tuy nhiên điều chế PAM thực ra là trường hợp đặc biệt của điều chế QAM khi giá trị các tín hiệu theo một chiều là bằng không.
1.1.2.1 1.2.1 Tín hiệu điều chế PAM
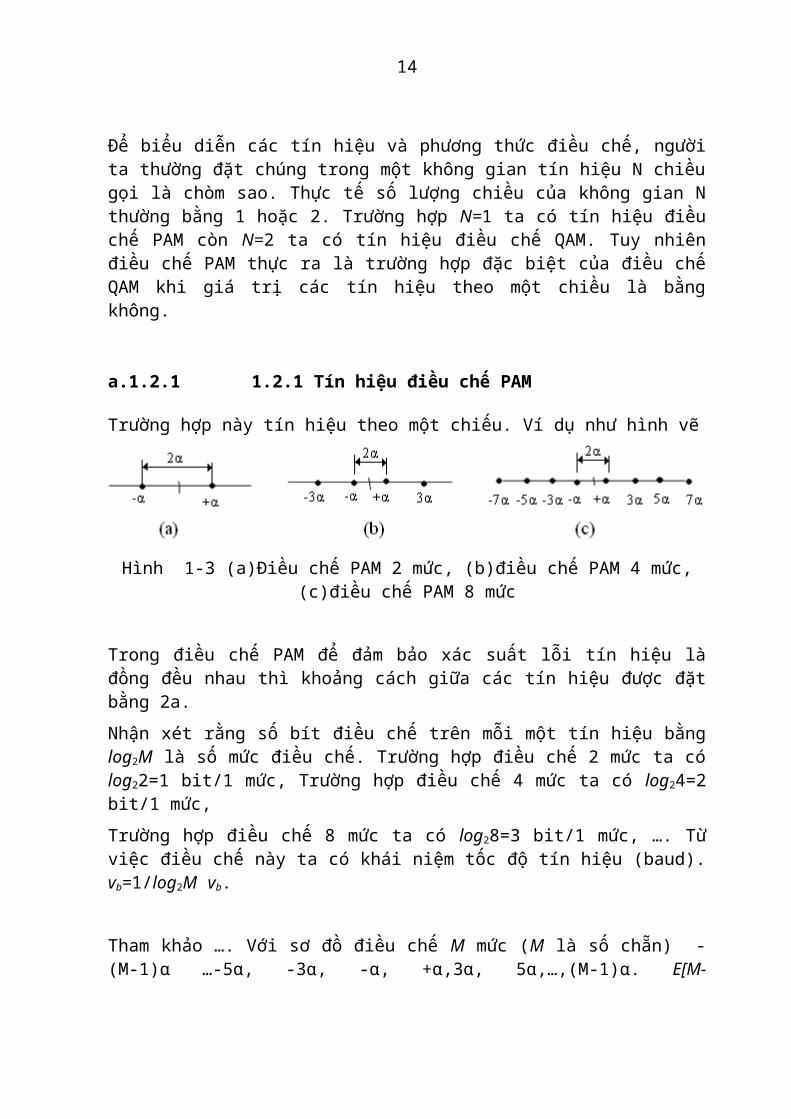
Trường hợp này tín hiệu theo một chiếu. Ví dụ như hình vẽ
Hình 1-3 (a)Điều chế PAM 2 mức, (b)điều chế PAM 4 mức, (c)điều chế PAM 8 mức
Trong điều chế PAM để đảm bảo xác suất lỗi tín hiệu là đồng đều nhau thì khoảng cách giữa các tín hiệu được đặt bằng 2a.

12
Nhận xét rằng số bít điều chế trên mỗi một tín hiệu bằng log2M là số mức điều chế. Trường hợp điều chế 2 mức ta có log22=1 bit/1 mức, Trường hợp điều chế 4 mức ta có log24=2 bit/1 mức,
Trường hợp điều chế 8 mức ta có log28=3 bit/1 mức, …. Từ việc điều chế này ta có khái niệm tốc độ tín hiệu (baud). vb=1/log2M vb.
Tham khảo …. Với sơ đồ điều chế M mức (M là số chẵn) -(M-1)α …-5α, -3α, -α, +α,3α, 5α,…,(M-1)α. E[M-PAM]=(2/M)∑12+32+…+M2). (Công thức tổng quát tính mức năng lượng của một tín hiệu: Es=2α2(M2-1)/3
Ví dụ với M=1, chuẩn hóa giá trị α=1. Trường hợp điều chế 2 mức E=2, M=2 điều chế 4 mức E=10,…..
Đôi khi trong thông tin ta có thể biểu diễn năng lượng của một bit bằng thông số Eb. Vì một tín hiệu có thể là một hoặc nhiều bit thông tin nên quan hệ giữa Eb và Es là
Eb=Es/log2M (1-1)
C/N vs. Eb/No
Eb/No = C/N + 10Log(Symbol Rate/Bit Rate)
Eb is the Energy in a bit - Determines Bit Error Rate (BER)
Bit Rates >= Symbol Rates
Eb/No <= C/N
For C/N = 14.49 dB
BPSK Modulation (1 Bit/Symbol)
Eb/No ≈ C/N = 14.49 dB
Approximation is due different Forward Error Correcting
(FEC) used to correct bit errors
QPSK Modulation (2 Bit/Symbol)
Eb/No ≈ C/N – 3dB = 11.49dB
8PSK Modulation (3 Bit/Symbol)
Eb/No ≈ C/N – 5dB = 9.49 dB -

13
1.1.2.2 Tín hiệu điều chế QAM:
Các tín hiệu này nằm trong mặt phẳng gồm có hai chiều – một chiều là trục thực và một chiều là trục ảo. Do đó mỗi một tín hiệu nằm trong mặt phẳng sẽ được biểu diễn bởi một số phức. Mỗi một điểm được biểu diễn bởi hai tọa độ thực và ảo, khoảng cách từ điểm đến tâm mặt phẳng chinh là biên độ của tín hiệu và góc pha của tín hiệu được tạo bởi đường nối giữa điểm đó với tâm mặt phẳng và trục thực như hình vẽ
BPSK QPSK
8PSK 16QAM
Hình 1-4 Các dạng chòm sao điều chế
Chú ý rằng việc bố trí các chòm sao phù hợp có thể giảm tỷ lệ lỗi bit khi truyền thông tin. Thông thường người ta có thể sử dụng mã gray để đảm bảo hai tín hiệu bất kỳ nằm cạnh nhau chỉ khác nhau một bit.
Cách tính mức năng lượng trung bình tương tự như PAM nhưng trên các chòm sao M-QAM là Es=2(M-1)/3
Ví dụ với QPSK Es=2, 16-QAM thì Es=10, 64-QAM Es=42
14
1.2 Mối quan hệ giữa tốc độ bit và độ rộng băng tần truyền dẫn
1.2.1 Công thức Shannol
Ở đây ta liên hệ với tốc độ tối đa của hệ thống theo công thức shannol
vmax=Blog2(1+SNR) bits/2D (1-2)
Ở đây SNR=Es/N0 là tỷ số giữa công suất của tín hiệu trên tạp âm. Ở đây N0 là nhiễu Gauss có phân bố trung bình bằng không và mật độ phổ công suất N0/2 ký hiệu ℵ(0,N0/2).
Hiệu quả sử dụng phổ truyền dẫn được ký hiệu
ρ=v/B (bit/s/Hz) (1-3)
Như vậy ρ là một hàm phụ thuộc B nghĩa là phụ thuộc SNR. Mối quan hệ giữa ρ và SNR được biểu diễn ở hình …
0 20 40 60 80 1001
2
3
4
5
6
7
p (b
it/s/
Hz)
SNR
Hình 1-5: Quan hệ giữa SNR và ρ
Từ công thức ta có trong trường hợp SNR nhỏ tín hiệu gần gốc tọa độ gần như tuyến tính
C=log2(1+SNR)≈SNRlog2e=Eslog2e (1-4)
Nhận xét rằng dung lượng kênh truyền tỷ lệ thuận với mức công suất phát của tín hiệu
15
SNR/C ≥(2C-1)/C (1-5)
Lấy giới hạn khi cho C tiến đến 0
limC → 0
( 2C−1C )=ln 2=−1.59dB
(1-6)
Như vậy SNR/C≥-1.59dB chính là giới hạn Shannol cuối cùng biểu diễn mối quan hệ giữa tỷ số tín hiệu trên tạp âm và dung lượng của kênh thông tin.
Ta định nghĩa SNR chuẩn hóa
SNRnorm=SNR/(2C-1≥1 =0dB (1-7)
SNRnorm cho ta biết khoảng cách tới dung lượng cực đại
Ví dụ: cho hệ thống băng tần B=1MHz với mức công suất phát tín hiệu P=1, biết nhiễu Gauss N0=10^-6/Hz. Hãy thiết kế tín hiệu truyền 2-PAM để đảm bảo tỷ lệ lỗi bit Pe<10^-3. Và so sánh với giới hạn shannol
Giải:
Giới hạn shannol V=Blog2(1+P/N0W)=106 b/s
Thời gian lấy mẫu tín hiệu T=1/2B, do đó với tín hiệu điều chế PAM 2 mức a=PT thì mức năng lượng Eb/N0=a2/N0
Do đó Pe=Q(sqrt(2Eb/n0)))=Q(1)=0.17
Trong trường hợp cho Pe=10-5 ta có thể tính ngược lại tốc độ bit tối đa là 50kb/s
1.2.2 Quan hệ giữa tốc độ bit và số mức điều chế
Ngoài công thức Shannol biểu diễn dung lượng hệ thống, người ta cũng có thể biểu diễn mối quan hệ giữa tốc độ bit và độ rộng băng tần với số mức điều chế. Trong trường hợp tín hiệu PAM là tín hiệu một chiều (1-D)
vmax=2Blog2M (bits/s) (1-8)
Trong trường hợp tín hiệu QAM, vì tín hiệu QAM thực chất là tổng của hai tín hiệu PAM nên ta có mối quan hệ giữa tốc độ bit và độ rộng băng tần với số mức điều chế
vmax=Blog2M (bits/s) (1-9)

16
1.3 Nhiễu truyền dẫn và lỗi bit.
Tỷ lệ lỗi bit (BER) hoặc lỗi ký tự (SER) là một thông số rất quan trọng trong truyền thông tin. Với mỗi hệ thống, tỷ lệ lỗi có thể tính toán được và nó lá một hàm số biểu diễn mối quan hệ giữa số mức điều chế và tỷ số tín hiệu trên nhiễu.
Trước tiên ta bắt đầu bằng ví dụ với trường hợp tín hiệu hai mức.
Ví du: Truyền hai số nhi phân 0,1 với xác suất lần lượt là 0,6 và 0,4. Biết xác xuất thu đúng tín hiệu là 0,9.
Câu hỏi:
+ Tính xác suất nhận được 0 và 1 ở phía thu tín hiệu
+ Tính xác suất nhận được bit 0 trong trường hợp bên phát phát tín hiệu 0 đi
Giải:
Ta ký hiệu tín hiệu phát đi là x, x bằng 0 hoặc 1 và tín hiệu thu được là y, y cũng bằng 0 hoặc 1.
Xác suất nhận được bit 0 là
P(y=0)=0.6*0.9+0.4*0.1=0.58
Xác suất nhận được bit 1 là
P(y=1)=0.42
Xác suất nhận được bit 0 trong trường hợp bit 0 phát đi
P(y=0|x=0)=0.6*0.9/0.58=0.9310
1.3.1 Xây dựng công thức tính tỷ lệ lỗi bit
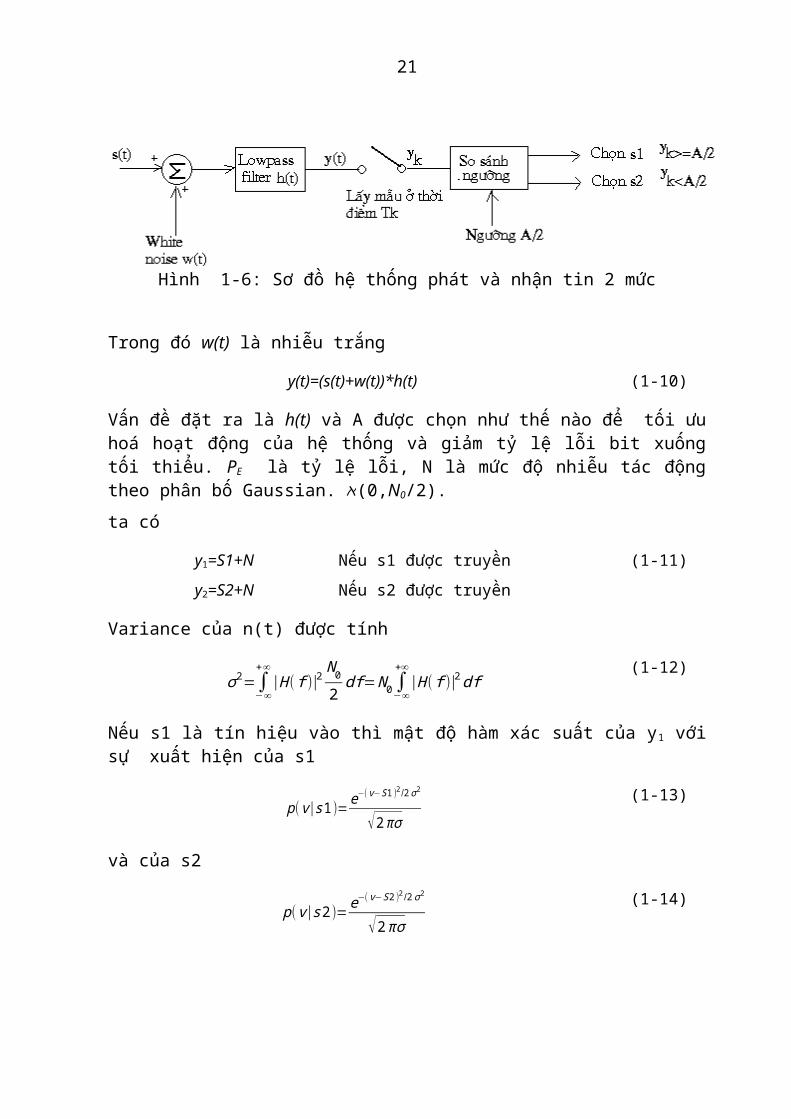
Biết tín hiệu truyền đi s(t) ở một trong hai giá trị s1 hoặc s2. Hình dưới đây là sơ đồ khối bộ thu tín hiệu
Hình 1-6: Sơ đồ hệ thống phát và nhận tin 2 mức
Trong đó w(t) là nhiễu trắng
17
y(t)=(s(t)+w(t))*h(t) (1-10)
Vấn đề đặt ra là h(t) và A được chọn như thế nào để tối ưu hoá hoạt động của hệ thống và giảm tỷ lệ lỗi bit xuống tối thiểu. PE là tỷ lệ lỗi, N là mức độ nhiễu tác động theo phân bố Gaussian. ℵ (0,N0/2).
ta có
y1=S1+N Nếu s1 được truyền
y2=S2+N Nếu s2 được truyền
(1-11)
Variance của n(t) được tính
σ 2=∫
−∞
+∞
|H ( f )|2N 0
2df=N0∫
−∞
+∞
|H ( f )|2 df(1-12)
Nếu s1 là tín hiệu vào thì mật độ hàm xác suất của y1 với sự xuất hiện của s1
p( v|s1)=e−(v−S 1)2 /2 σ2
√2πσ
(1-13)
và của s2
p( v|s2)= e−(v−S 2 )2 /2σ2
√2πσ
(1-14)
Hình 1-7: Quan hệ giữa hai tín hiệu
A là mức ngưỡng dùng để xác định, nếu s1 được gửi v>A hoặc s2 được gửi v<A. Theo hình vẽ thì xác suất lỗi cho bởi s1 là
p(E|s1)=∫
A
+∞
p (v|s1 )dv(1-15)
và cho s2

18
p(E|s2)=∫
−∞
A
p(v|s2)dv(1-16)
Tổng xác suất lỗi sẽ là
PE = pP(E|s1) + qP(E|s2) (1-17)
ở đây p là xác suất s1 được gửi đi và q=1-p là xác suất s2 được gửi đi
Giá trị A tối ưu để nhận được PE min khi hàm đạt cực trị, lấy vi phân PE theo biến A và đặt bằng 0 khi đó nhận được giá trị tối ưu của A
A=Aopt=
σ2
S 2−S 1ln
pq+ S1+S 2
2
(1-18)
Nếu q=p thì A tối ưu sẽ là Aopt = (S1+S2)/2
Nếu p=q và A=Aopt thi xác suất lỗi trung bình có thể biểu diễn dưới dạng hàm
PE=
12
erfc ( S 2−S 12√2 σ )=Q( S 2−S 1
2 σ ) (1-19)
ở đây erfc(x)=1-erf(x)
erf ( x )=(2√ π )∫
0
x
e−t2
dt=1−2Q (√2 x ) (1-20)
Trong trường hợp tổng quát khi H(f) được chọn tối ưu với tín hiệu sô nhị phân
Tỷ số tín hiệu /nhiễu được tính
ξmax2 = 1
N0∫0
T
[ s 2( t )−s1( t )]2dt(1-21)
Thay cho (S1-S2)/ ở công thức PE ở trên ta có
PE=
12
erfc (√z )=Q(√2 z ) (1-22)
ở đây
z=ξmax2 / 4 (1-23)

19
1.3.2 Ví dụ tính giá trị z cho một số tín hiệu
Ví du1: Cho tín hiệu hai mức âm dương s1(t)=-A s2(t)=A Tb là thời gian truyền một bit
s1-s2=2A thì ta sẽ có z=A2Tb/N0=Eb/N0
Ví dụ 2: Tín hiệu PSK-2P ta có trong khoảng 0<t<Tb Tương đương với điều chế PAM hai mức có các mức là [–α,+α]
s1(t)= - α cos2πfct
s2(t)= α cos(2π*fct)
tính tích phân và ta có z= α 2Tb/2N0=Eb/N0
trong trường hợp này α2Tb/2=Eb vì đây là tín hiệu hình sin
Ví dụ 3: tín hiệu ask 2 mức ta có trong khoảng 0<t<tb tương đương với tín hiệu điều chế PAM hai mức có các mức là [0,+α]
s1(t)= 0
s2(t)= α cos(2π*fct)
Tính tích phân và thu được z= α 2Tb/8N0=Eb/2N0
Đây là điểm khác với psk-2p vì tín hiệu chỉ truyển trong một nửa khoảng thời gian tính với sự xuất hiện trung bình của bit 0 và 1 là bằng nhau.
Như vậy nếu so sánh điều chế pha hai mức BPSK với ASK thì hiệu quả của ASK kém BPSK 3dB có cùng tỷ số SNR
Ví dụ 4: tín hiệu FSK có trong khoảng 0<t<tb
s1(t)= - α cosπfct
s2(t)= α cos2π(fc + f)t
ở đây f=m/2tb với m là một số nguyên và s1(t) s2(t) được coi là trực giao nếu thỏa mãn điều kiện
∫0
Tb
s1( t ) s2( t )dt=0
Ta tính được
z= α 2tb/4N0=Eb/2N0
Như vậy FSK cũng giống ASK
20
So sánh tỷ lệ lỗi bit của một số tín hiệu điều chế với cùng mức năng lượng Es/N0
Chú ý rằng nếu tính theo Eb/No thì tỷ lệ lỗi bít BPSK bằng ½ QPSK hay 4-PAM bằng ½ 16QAM. Bởi vì thực chất điều chế QAM chính là 2 tín hiệu PAM
Es/No (DB)
Hình 1-8: Tỷ lệ lỗi của một số tín hiệu
1.4 Sơ đồ khối của hệ thống thông tin
Hình 1-9 Là sơ đồ tổng quát của một hệ thống thông tin điển hình
Wireless channel
Noise
Ước lượng kênh
Giải điều chếGiải mã kênhGiải Mã nguồn
Điều chếMã hóa kênhMã hóa nguồn
21
Hình 1-9: Sơ đồ tổng quát của hệ thống thông tin
Trong đó
Khối mã hóa nguồn có chức năng thay đổi khuôn dạng của tín hiệu gốc cho phù hợp với tín hiệu truyền trong hệ thống. Ví dụ trong trường hợp tín hiệu vào là tín hiệu thoại hoặc video tương tự thì khối mã hóa nguồn có chức năng biến đổi A/D. Còn trường hợp tín hiệu vào là dữ liệu số thì khối mã hóa nguồn có thể thực hiện chức năng mã hóa tín hiệu để bảo mật hoặc đơn giản là không thực hiện chức năng gì
Khối mã hóa kênh: nhằm mục đích phát hiện lỗi và sửa lỗi khi truyền thông tin. Trong truyền thông, kỹ thuật sửa lỗi được chia làm hai loại:
một là kỹ thuật dùng để phát hiện ra lỗi nhưng không tự sửa được lỗi. Việc sửa lỗi được thực hiện đơn giản bằng cách yêu cầu bên phát truyền lại cho đến khi không còn lỗi nữa mới tiếp tục truyền dữ liệu tiếp theo. Ví dụ các mã như kiểm tra chẵn lẻ (parity), hay mã kiểm tra độ dư vòng (CRC), thuộc nhóm này.
Kỹ thuật thứ hai là sử dụng các loại mã có khả năng phát hiện ra lỗi và tự sửa lỗi. Ưu điểm của loại mã này là giảm thời gian truyền do không yêu cầu bên phát phát lại thông tin khi có sai lỗi. Tuy nhiên nhược điểm của nó lại chính là trong trường hợp tự sửa lỗi thì cũng sẽ xảy ra hai khả năng là sửa xong thì đúng mà cũng có khi sửa xong thì vẫn cứ sai mà còn có thể sai nhiều hơn. Những mã thuộc loại này có rất nhiều và có thể được chia mà hai nhóm
Một là mà khối như các mã Hamming, BCH,…
Hai mà mã chập hay mã xoắn như các mã ReedSolomon, turbo, LDPC,..
Việc sử dụng loại mã nào cho phù hợp thì lại tùy thuộc vào yêu cầu của tín hiệu truyền. Ví dụ với các tín hiệu có yêu cầu truyền trong thời gian thực (Real Time) như tín hiệu âm thanh hay hình ảnh thì nhất thiết phải sử dụng các mã có khả năng phát hiện và tự sửa lỗi. Còn với các tín hiệu là dữ liệu không có yêu cầu cao về thời gian trễ nhưng lại đòi hỏi độ chính xác khi truyền tin thì thường sử dụng các loại mã sửa lỗi bằng cách yêu cầu bên phát truyền lại.
Khối điều chế và giải điều chế: Đây là khối chuyển đổi từ tín hiệu số nhị phân ở đầu ra khối mã hóa kênh thành tín hiệu tương tự phù hợp với kênh truyền dẫn. Tín hiệu truyền đi có thể chia thành hai dạng – dạng thứ nhất là ở băng tần cơ bản. Ở dạng này tín hiệu có dạng xung vuông nhiều mức như tín hiệu điều chế PAM, QAM,OFDM,… Các tín hiệu truyền dẫn mã đường dây như HDB3, BnZs,CMI,…. Là một dạng của tín hiệu điều chế PAM. Các tín hiệu này có thể được truyền trực tiếp trên đường truyền có dây. Trong trường hợp truyền vô tuyến, các tín hiệu ở băng tần cơ sở phải được

22
điều chế lên tần số cao bằng cách nhân với sóng mang cao tần. Trường hợp này tín hiệu truyền đi dưới dạng các sóng mang hình sin. Hình …. Mô tả dạng sóng của các tín hiệu

23
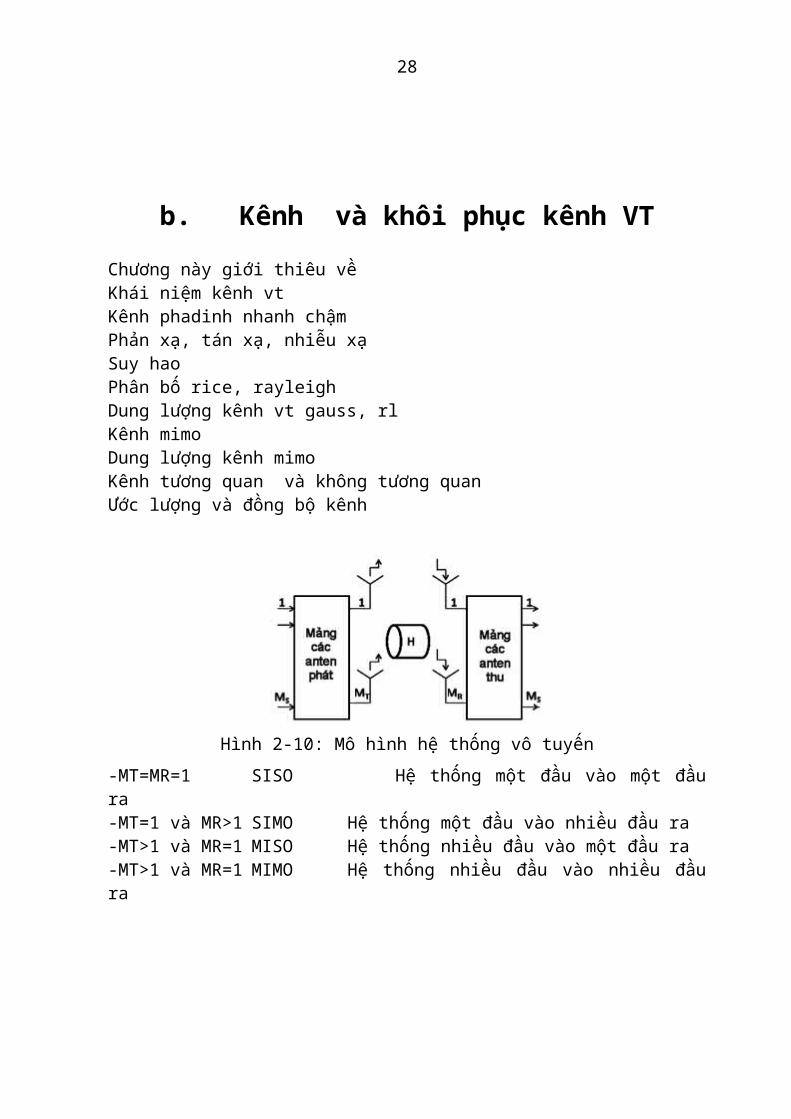
Chương 2. Kênh và khôi phục kênh VT
Chương này giới thiêu về Khái niệm kênh vtKênh phadinh nhanh chậmPhản xạ, tán xạ, nhiễu xạSuy haoPhân bố rice, rayleighDung lượng kênh vt gauss, rlKênh mimoDung lượng kênh mimoKênh tương quan và không tương quanƯớc lượng và đồng bộ kênh
Hình 2-10: Mô hình hệ thống vô tuyến
-MT=MR=1 SISO Hệ thống một đầu vào một đầu ra-MT=1 và MR>1 SIMO Hệ thống một đầu vào nhiều đầu ra-MT>1 và MR=1 MISO Hệ thống nhiều đầu vào một đầu ra-MT>1 và MR=1 MIMO Hệ thống nhiều đầu vào nhiều đầu ra
2.1 Hệ thống một anten thu phát - kênh SISO
Đặc điểm phân bố và dung lượng kênh truyền kênh Gaussian
C=log 2(1+SNR ) ( bps/Hz ) (2-1)
Đặc điểm phân bố và dung lượng kênh truyền kênh Rayleigh
24
Hình 2-11 Minh họa tính chất truyền dẫn đa đường của tín hiệu vô tuyến
Hình 2-12 (a) Đáp ứng xung (b) đáp ứng tần số của kênh truyền
Hàm mật độ xác suất của phân bố Rice
p(ξ ) = { ξ
δ2e−(ξ2+v2)
2 δ2
I 0( vξ
δ2 ) v≥0
0 v<0
(2-2)
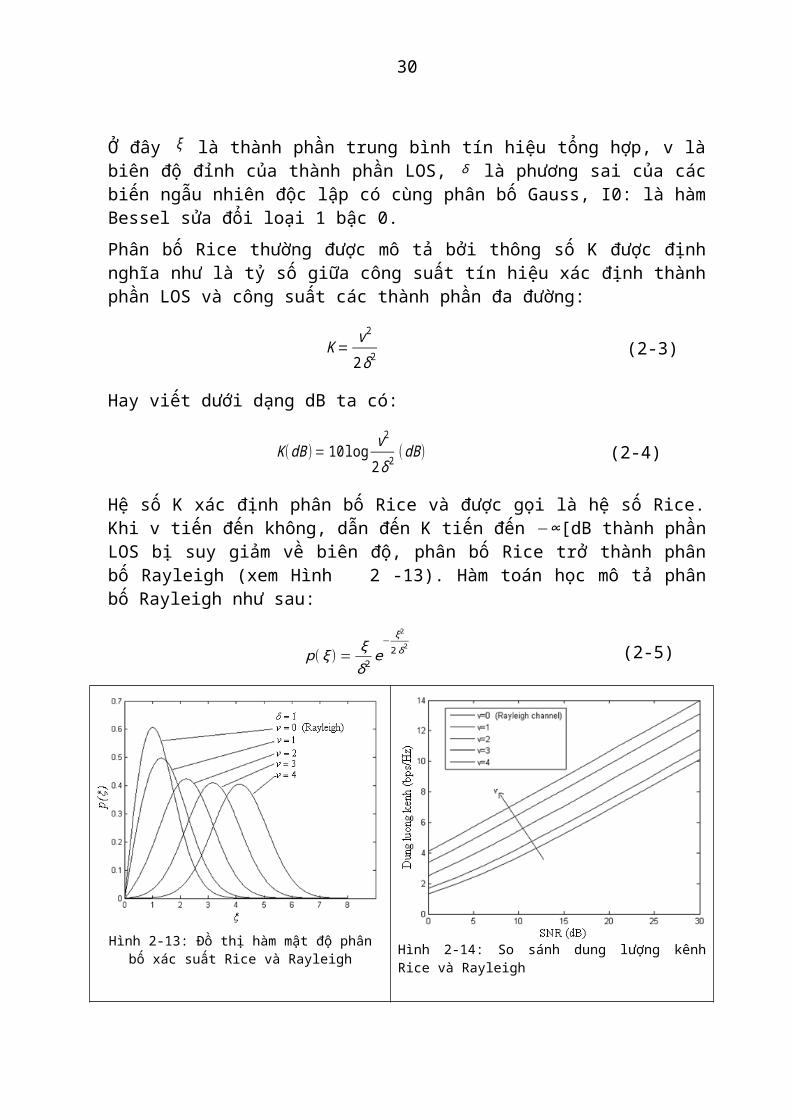
Ở đây ξ là thành phần trung bình tín hiệu tổng hợp, v là biên độ đỉnh của thành phần LOS, δ là phương sai của các biến ngẫu nhiên độc lập có cùng phân bố Gauss, I0: là hàm Bessel sửa đổi loại 1 bậc 0.
Phân bố Rice thường được mô tả bởi thông số K được định nghĩa như là tỷ số giữa công suất tín hiệu xác định thành phần LOS và công suất các thành phần đa đường:
K = v2
2δ2 (2-3)
Hay viết dưới dạng dB ta có:

25
K (dB )= 10 logv2
2δ2(dB ) (2-4)
Hệ số K xác định phân bố Rice và được gọi là hệ số Rice. Khi v tiến đến không, dẫn đến K tiến đến −∞[dB thành phần LOS bị suy giảm về biên độ, phân bố Rice trở thành phân bố Rayleigh (xem Hình 2-13). Hàm toán học mô tả phân bố Rayleigh như sau:
p(ξ ) = ξδ2
e− ξ2
2 δ2 (2-5)
Hình 2-13: Đồ thị hàm mật độ phân bố xác suất Rice và Rayleigh
Hình 2-14: So sánh dung lượng kênh Rice và Rayleigh
dung lượng kênh truyền thông tin được tính
C=∫0
∞
log2 (1+P|h|2
σ2 ) p(h )dh ( bps/Hz ) (2-6)
Trong đó P là công suất tín hiệu nhận được, σ2 là công suất nhiễu Gauss, h là hệ số
của kênh truyền, √P h=ξ , p(h) và p(ξ) có cùng phân bố xác suất. Tỷ số SNR=P/σ 2
gọi là tỷ số giữa công suất tín hiệu trên công suất nhiễu.
Dung lượng các hệ thống đa sóng mang SISO-OFDM
Trong trường hợp các hệ thống đa sóng mang (ví dụ OFDM), dung lượng của toàn bộ hệ thống được tính bẳng tổng dung lượng của tất cả các sóng mang

26
C= ∑k=0
NFFT−1
log2 (1+Pk|H k|2
σ2 ) (bps/Hz ) (2-7)
Thuật toán đổ nước - Dung lượng tối ưu của hệ thống Error: Reference source notfound được tính
Copt= ∑k=0
N FFT−1
log2(1+ Pk¿|H k|
2
σ2 ) ( bps/Hz ) (2-8)
Trong đó Pk¿
là công suất phát trên sóng mang con k được tính theo công thức
Pk¿=( 1μ− σ 2
|H k|2)+
(2-9)
ở đây dấu biểu thức (.)+ tương đương với định nghĩa x+:=max(x,0) nghĩa là x+ được tính bằng giá trị lớn nhất giữa giá trị của x và giá tri không
Trong đó μ được tính theo công thức
1N FFT
∑k=0
N FFT−1
( 1μ− σ2
|H k|2 )+
=P0 (2-10)
Trên Hình 2-15 là kết quả so sánh hiệu quả sử dụng phổ tần của hệ thống trong trường hợp có và không sử dụng thuật toán “đổ nước” (WF)
Hình 2-15 So sánh dung lượng kênh Rayleigh trong trường hợp có và không áp dụng thuật toán “đổ nước- Water filling “ trong trường hợp δ=1

27
2.2 Hệ thống nhiều anten thu phát - kênh MIMO
.
Hình 2-16. Hệ thống nhiều anten thu phát
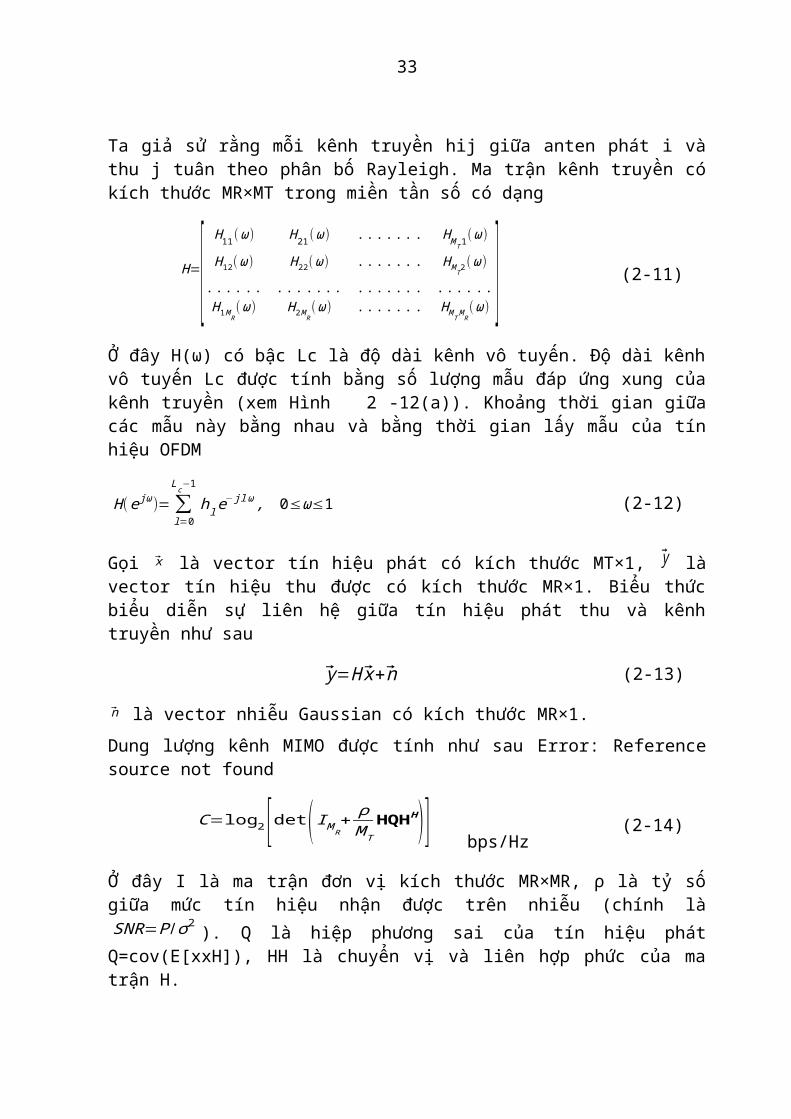
Ta giả sử rằng mỗi kênh truyền hij giữa anten phát i và thu j tuân theo phân bố Rayleigh. Ma trận kênh truyền có kích thước MR×MT trong miền tần số có dạng
H=[H11(ω) H21(ω) . . .. .. . H MT 1 (ω )
H 12(ω ) H 22(ω ) . . .. .. . H MT 2(ω )
.. .. . . .. .. .. . . . .. .. . . .. .. .H 1 M
R(ω ) H 2 M
R(ω ) . . .. .. . H M
TM
R(ω ) ] (2-11)
Ở đây H(ω) có bậc Lc là độ dài kênh vô tuyến. Độ dài kênh vô tuyến Lc được tính bằng số lượng mẫu đáp ứng xung của kênh truyền (xem Hình 2-12(a)). Khoảng thời gian giữa các mẫu này bằng nhau và bằng thời gian lấy mẫu của tín hiệu OFDM
H (e jω )=∑l=0
Lc−1
hl e− jlω , 0≤ω≤1 (2-12)
Gọi x⃗ là vector tín hiệu phát có kích thước MT×1, y⃗ là vector tín hiệu thu được có kích thước MR×1. Biểu thức biểu diễn sự liên hệ giữa tín hiệu phát thu và kênh truyền như sau
y⃗=H x⃗+n⃗ (2-13)
n⃗ là vector nhiễu Gaussian có kích thước MR×1.
Dung lượng kênh MIMO được tính như sau Error: Reference source not found
C=log2[det(I MR+ ρ
M T
HQHH)] bps/Hz
(2-14)
28
Ở đây I là ma trận đơn vị kích thước MR×MR, ρ là tỷ số giữa mức tín hiệu nhận được
trên nhiễu (chính là SNR=P/σ 2). Q là hiệp phương sai của tín hiệu phát
Q=cov(E[xxH]), HH là chuyển vị và liên hợp phức của ma trận H.
H=UVD' (2-15)
Trong đó V là ma trận đường chéo Diag( λ1 , λ2 , . .. . , λmin (MT ,MR )
,0 ,. .. , 0 ) kích thước
MR×MT chứa các giá trị kỳ dị (singular) của H. còn hai ma trận U kích thước MR×MR, ma trận D kích thước MT×MT là các ma trận đơn nhất (unitary matrix) chứa lần lượt các vector các giá trị kỳ dị bên trái và bên phải của H. Như vậy kênh MIMO trong trường hợp này đã được phân tích thành min(MT,MR) kênh truyền đơn lẻ song song với hệ số kênh truyền chính là các giá trị kỳ dị λi.
Tầm quan trọng của giá trị kỳ dị nhỏ nhất
Giá trị kỳ dị nhỏ nhất có một ý nghĩa rất quan trọng trong hệ thống, nó có đặc điểm là
các số dương và giảm dần λ1>λ2>. .. .>λmin(M T , MR )
>0 trong đó giá trị nhỏ nhất là
λmin (MT , M R ) . Theo cách tính đại số về ma trận, với một vector x⃗ bất kỳ ta có Error:Reference source not found:
||H x⃗||≥λmin(MT , MR )||x⃗|| (2-16)
Với {S} là tập hợp gồm {s⃗ i } các vector tín hiệu truyền đi thì tập {R} chứa tập hợp
các {ri=H s⃗i} là vector tín hiệu nhận được. Bằng phương pháp khôi phục tối đa hóa sự giống nhau giữa hai ký hiệu thì khi đó tỷ lệ lỗi bít của hệ thống phụ thuộc vào khoảng cách tối thiểu giữa các thành phần của R. Ký hiệu dmin là khoảng cách tối thiểu giữa các thành phần tín hiệu thu:
dmin=mini≠ j||r⃗ i− r⃗ j||=min
i≠ j||H ( s⃗i− s⃗ j )|| (2-17)
Từ phương trình (2-16) ta có
||H ( s⃗i− s⃗ j )||≥λmin (MT , MR )|| s⃗i− s⃗ j|| (2-18)
Do đó
dmin≥λmin(MT , MR )||s⃗ i− s⃗ j||≥λmin (M
T, M
R)d0 (2-19)
Với d0 là khoảng cách tối thiểu giữa hai từ mã nằm trong tập {S}.
Từ phương trình (2-19) ta thấy rằng tỷ lệ lỗi bít của hệ thống liên quan mật thiết với giá trị kỳ dị nhỏ nhất của kênh truyền. Do vậy việc nghiên cứu đặc tính phân bố của khoàng cách tối thiều giữa hai từ mã là đặc biệt quan trọng trong hệ thống MIMO.

29
Dung lượng hệ thống đóng (Closed loop) - kênh không tương quan
thuật toán Water Filling (WF)
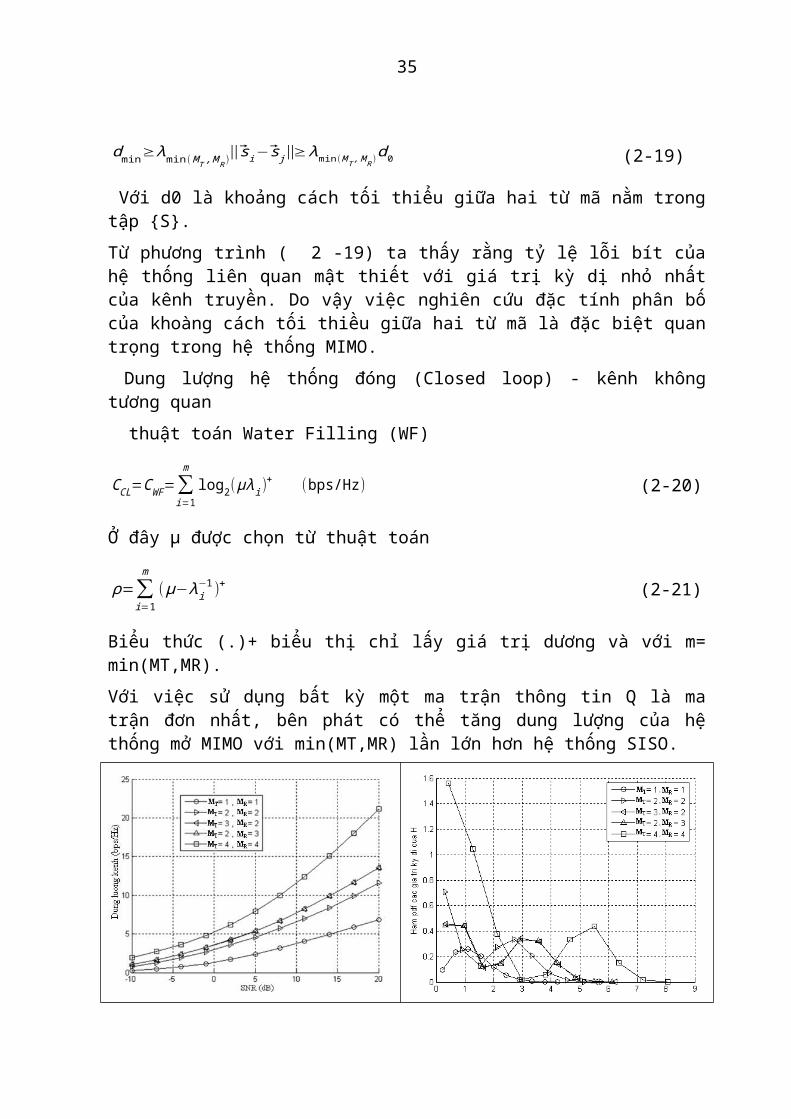
CCL=CWF=∑i=1
m
log2( μλi )+ ( bps/Hz ) (2-20)
Ở đây μ được chọn từ thuật toán
ρ=∑i=1
m
( μ−λi−1 )+ (2-21)
Biểu thức (.)+ biểu thị chỉ lấy giá trị dương và với m= min(MT,MR).
Với việc sử dụng bất kỳ một ma trận thông tin Q là ma trận đơn nhất, bên phát có thể tăng dung lượng của hệ thống mở MIMO với min(MT,MR) lần lớn hơn hệ thống SISO.
Hình 2-17 Dung lượng kênh MIMO Hình 2-18 Hàm mật độ phân bố các giá trị kỳ dị (λi) của ma trận kênh MIMO
Trường hợp kênh có tương quan (Correlated channel)
Một ma trận kênh MIMO có thể phân tích thành 2 thành phần
H=H m+H g (2-22)
Trong đó Hm là thành phần phức trung bình của kênh truyền còn Hg là thành phần biến đổi ngẫu nhiên theo phân bố Gauss. Hiệp phương sai của kênh được tính
R0=[hghgH ] (2-23)
30
Trong đó hg=vec(Hg), R0 là ma trận nửa dương (HPS). Hiệp phương sai R0 thường được giả sử cho đơn giản với cấu trúc Kronecker Error: Reference source not found. Mô hình Kronecker giả sử rằng hiệp phương sai của kênh vô hướng nhìn từ tất cả MT anten phát tới một anten thu đơn (tương ứng với một hàng của H) là giống nhau cho
bất kỳ một anten nhận nào và bằng ma trận Rt kích thước (MT×MT). Đặt hit là hàng i
của Hg thì Error: Reference source not found
Rt=E [ hi hiH ] (2-24)
đối với i bất kỳ. Tương tự với kênh vô hướng nhìn từ một anten đơn phát tới MR
anten thu (tương ứng với các cột của H) là ma trận Rr kích thước (MR×MR). Đặt h j là cột j của Hg thì
Rr=E [ h j h jH ] (2-25)
Cả hai Rt, Rr đều là ma trận nửa dương (HPS). Hiệp phương sai của kênh bây giờ có thể định nghĩa
R0=RtT⊗Rr (2-26)
Ở đây ⊗ được định nghĩa là phép nhân Kronecker Error: Reference source not found. Do đó kênh truyền trên có thể biểu diễn như sau
H=H m+R r1/2 Hw Rt
1 /2 (2-27)
Ở đây Hw là ma trận MR×MT với giá trị trung bình bằng không và phương sai bằng
đơn vị với các giá trị phức Gaussian. Rt1/2
là căn bậc hai của Rt , nghĩa là Rt
1/2 Rt1/2=Rt . Điều này tương tự với Rr
1/2.
Rt=[ 1 r12 r134 ⋯ r1 M T
(MTt−1 )2
r21¿ 1 r 23 ⋯ r2MT
(MT−2)2
(r31¿ )4 r32
¿ 1 ⋯ r3MT
(MT−3 )2
⋮ ⋮ ⋮ ⋯ ⋮
(r MT 1¿ )
(Mt−1 )2
(r MT 2¿ )
(MT−2 )2
(r MT 3¿ )
(MT−3 )2
⋯ 1] (2-28)

31
Rr=[ 1 r12 r134 ⋯ r1 M R
(MR−1 )2
r21¿ 1 r23 ⋯ r2 M R
(M R−2 )2
(r31¿ )4 r32
¿ 1 ⋯ r3 MR
(MR−3 )2
⋮ ⋮ ⋮ ⋯ ⋮
(r MR1¿ )
(MR−1 )2
(r M R2¿ )
(MR−2)2
(r MR3¿ )
(MR−3 )2
⋯ 1] (2-29)
Ở đây (*) là liên hiệp phức. Các giá trị rij thể hiện sự tương quan giữa hai anten i và j, nó có giá trị từ 0 đến 1. Trong trường hợp rij=0 nghĩa là hoàn toàn không tương quan. Trường hợp bằng 1 là tương quan hoàn toàn.
Kết quả trong Hình 2-19 là dung lượng của hệ thống MIMO 2×2 trong trường hợp kênh tương quan có độ tương quan khác nhau. Trong trường hợp kênh có tương quan thì dung lượng của hệ thống sẽ bị giảm đi. Ma trận tương quan Rt, Rr cho hệ thống 2×2 có dạng
Hình 2-19. Dung lượng kênh MIMO có tương quan với ρ =ρ1 =ρ2
Rr=[ 1 ρ1
ρ1 1 ] Rt=[ 1 ρ2
ρ2 1 ]
2.3 Ước lượng kênh và khôi phục dữ liệu trong hệ thống thông tin
2.3.1 Khái niệm
Mục đích của ước lượng kênh là triệt nhiễu ISI gây ra bởi hiệu ứng đa đường. Trong các hệ thống thông tin vô tuyến, nhiễu đa đường là không thể tránh khỏi do tính chất của kênh. Nhiễu này làm méo tín hiệu phát đi khiến bên thu không thể khôi phục được thông tin ban đầu nếu không thực hiện khôi phục lại chính xác thông tin trạng

32
thái kênh truyền (CSI). Việc khôi phục thông tin trạng thái kênh truyền được thực hiện ngay sau khi các khung thông tin được tách ra ở bước đồng bộ.
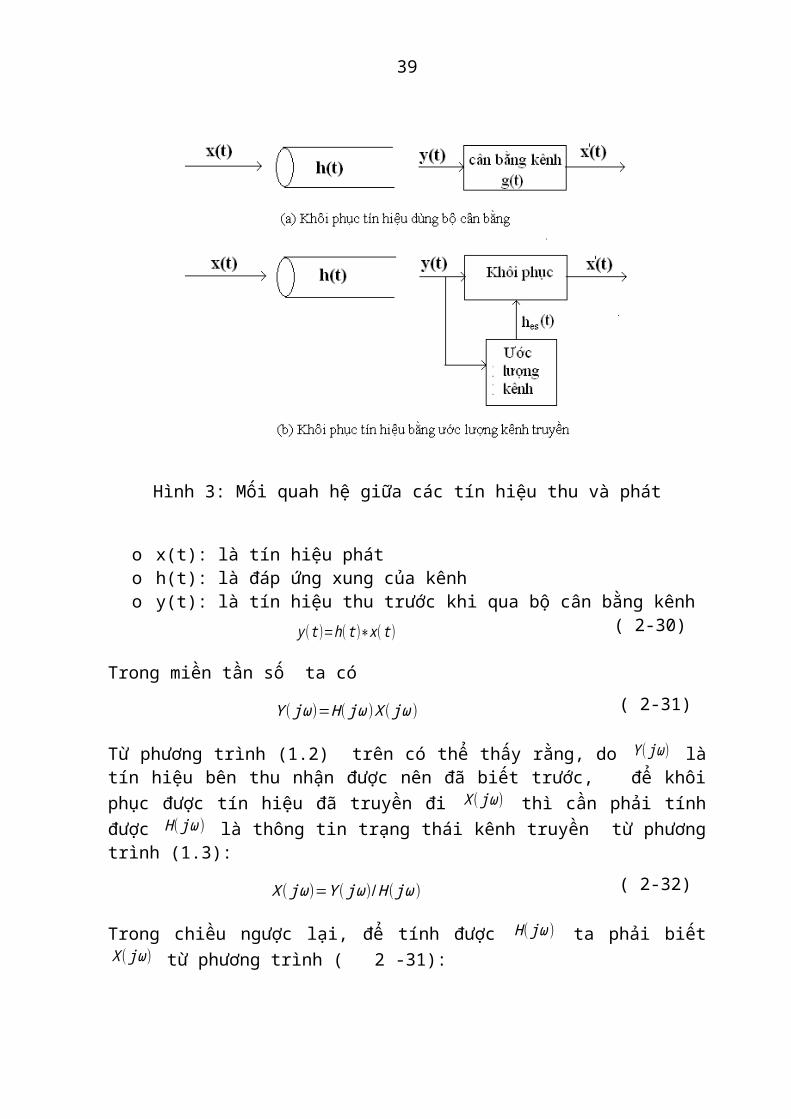
Mối quan hệ giữa thông tin phát thu và kênh truyền được chỉ ra ở hình 3.
Hình 3: Mối quah hệ giữa các tín hiệu thu và phát
o x(t): là tín hiệu pháto h(t): là đáp ứng xung của kênho y(t): là tín hiệu thu trước khi qua bộ cân bằng kênh
y ( t )=h( t )∗x ( t ) ( 2-30)
Trong miền tần số ta có
Y ( jω)=H ( jω)X ( jω ) ( 2-31)
Từ phương trình (1.2) trên có thể thấy rằng, do Y ( jω) là tín hiệu bên thu nhận được
nên đã biết trước, để khôi phục được tín hiệu đã truyền đi X ( jω) thì cần phải tính
được H ( jω) là thông tin trạng thái kênh truyền từ phương trình (1.3):
X ( jω)=Y ( jω)/H ( jω) ( 2-32)
Trong chiều ngược lại, để tính được H ( jω) ta phải biết X ( jω) từ phương trình ( 2-31):
33
H ( jω)=Y ( jω)/X ( jω) ( 2-33)
Đây là một mối liên hệ hai chiều, vì vậy các hệ thống thông tin phải được thiết kế để
có thể tính được cả H ( jω) và X ( jω) một cách lần lượt. Tuy nhiên H ( jω) bao giờ
cũng được tính trước khi tính X ( jω) . Việc sử dụng cấu trúc khung truyền gồm hai phần chứa phân tiêu đề và dữ liệu như hình 2 sẽ cho phép ta thực hiện việc này. Các thông tin nằm trong phần tiêu đề của khung có chứa các thông tin dẫn đường (pilot ký
hiệu là x p ( t )) đã được nhận biết trước bởi bên thu. Tín hiệu thu được tương ứng là Y p ( jω ) sẽ cho phép ta tính được H ( jω) giá trị của kênh truyền qua phương trình
H ( jω)=Y p ( jω )/X p( jω). Phần còn lại của khung là thông tin người sử dụng tương
ứng với dữ liệu X d ( jω)sẽ được tính toán theo phương trình X d ( jω)=Y d ( jω)/H ( jω). Y d ( jω)là tín hiệu thu được tương ứng với tín hiệu phát X d ( jω) của bên phát.
Như vậy khái niệm ước lượng kênh ở đây là công việc bên thu phải tính toán lại các thông tin trạng thái kênh truyền.
Còn thế nào là cân bằng kênh. Như hình vẽ …..
o z(t): là tín hiệu sau khi qua bộ cân bằng kênh
z ( t )=h ( t )∗x ( t )∗g( t ) ( 2-34)
Tín hiệu thu được sau bộ cân bằng z(t) chính là tín hiệu phát đi x(t). Do đó bộ cân bằng kênh lý tưởng phải thỏa mãn điều kiện:
hay ( 2-35)
Như vậy thực chất của bộ cân bằng kênh chính là nghịch đảo của thông tin trạng thái kênh truyền H.
Do đó thực chất của kỹ thuật cân bằng kênh cũng chính là kỹ thuật khôi phục kênh truyền H (channel estimtion). Tuy nhiên khi áp dụng trong các hệ thống thực tế thì có thể hiểu khác một chút. Đối với việc cân bằng kênh là ta tính G còn với kỹ thuật ước lượng kênh thì ta tính trực tiếp giá trị của Heq. Tùy thuộc vào thiết kế của từng hệ thống thông tin mà ta có thể tính G hoặc H cho phù hợp.
Các bộ cân bằng và ước lượng kênh truyền có hai dạng là: Preset (Thiết lập trước) hoặc adaptive(Thích ứng) Trong trường hợp Preset, các tham số của bộ cân bằng được điều chỉnh bởi việc đo dạc đáp ứng xung và giải các phương trình sử dụng kết quả các phép đo. Đối với bộ cân bằng thích ứng thì nó tự động điều chỉnh bằng cách

34
gửi các tín hiệu đã biết thông qua kênh và cho phép bộ cân bằng tự động điều chỉnh các hệ số của nó dựa trên các tín hiệu đã biết.
Hình 4: Các loại bộ cân bằng kênh
Có nhiều phương pháp để ước lượng hoặc cân bằng kênh như
Ước lượng kênh trực tiếp – phương pháp giải chập trong miền thời gian Ước lượng kênh trực tiếp – phương pháp tính toán kênh trong miền tần số Zero forcing MMSE hay lọc Winer LMS RLS Kalman filter
2.3.2 Ước lượng kênh trong hệ thống OFDM
12 f D D t T S
≥1 và1
D f f s τmax
≥1 (2-36)
Ở đây fD là tần số Doppler, Ts là thời gian một ký hiệu OFDM, fs là tần số lấy mẫu của tín hiệu OFDM và τmax là trễ truyền sóng lớn nhất của kênh truyền.
35
Hình 2-20: Cấu trúc tín hiệu truyền trong hệ thống OFDM Error: Reference sourcenot found
2.3.2.1Ước lượng kênh cho hệ thống SISO-OFDM
Ước lượng theo phương pháp bình phương nhỏ nhất (LS)
F=[ W NFFT
00 W N FFT
01 . .. W NFFT
0 (N FFT−1 )
.. .. . . .. . . .. .. . ... .. .. . .. . . .. . .. .. . . .. .. . .. .. . .. .. . .
W N FFT
(NFFT−1)0
W N FFT
(NFFT−1)1
. .. W N FFT
(NFFT−1)(N
FFT−1 ) ] (2-37)
Các thành phần của F: W N FFT
nk = 1N FFT
e− j 2 π nk /NFFT
Phương trình thực hiện ước lượng LS được biểu diễn bởi:
H⃗ LS=diag (X−1 ) y⃗ (2-38)
Ước lượng theo phương pháp tối thiểu hóa sai lỗi bình phương nhỏ nhất (MMSE)
ước lượng kênh h⃗ MMSE được xây dựng từ ma trận tự tương quan Ryy và ma trận tương quan chéo Rhy. Giả sử rẳng ma trận tự tương quan của kênh truyền Rhh và phương sai nhiễu (noise phương sai) σ2 đã được biết. Ta có:
RHH=E {H⃗ H⃗ H}=E {(F h⃗ )(F h⃗ )H}=FRhh FH (2-39)
Rhy=E {h⃗ y⃗H }=E {⃗h(XF { h⃗¿+n⃗ )H}=Rhh FH XH (2-40)
R yy=E { y⃗ y⃗ H }=XFRhh FH XH+σ 2 I (2-41)
36
Ta có công thức để tính ước lượng MMSE như sau:
h⃗ MMSE=Rhy R yy−1 y⃗ (2-42)
Lấy biến đổi IFFT để ta có đáp ứng tần số Error: Reference source not found:
H⃗ MMSE=G h⃗MMSE=RHH [RHH+σ2 (XX H )−1 ] H⃗ LS (2-43)
Trong đó H⃗ LS là ước lượng bình phương cực tiểu LS. Kỹ thuật ước lượng MMSE có hiệu quả tốt hơn so với ước lượng LS đặc biệt dưới điều kiện SNR thấp. Tuy nhiên, MMSE có độ phức tạp tính toán cao hơn do yêu cầu phải lấy ma trận nghịch đảo mỗi lần X thay đổi.
Hình 2-21: So sánh kết quả giữa hai phương pháp ước lượng kênh LS và MMSE
2.3.2.2Ước lượng kênh cho hệ thống MIMO-OFDM
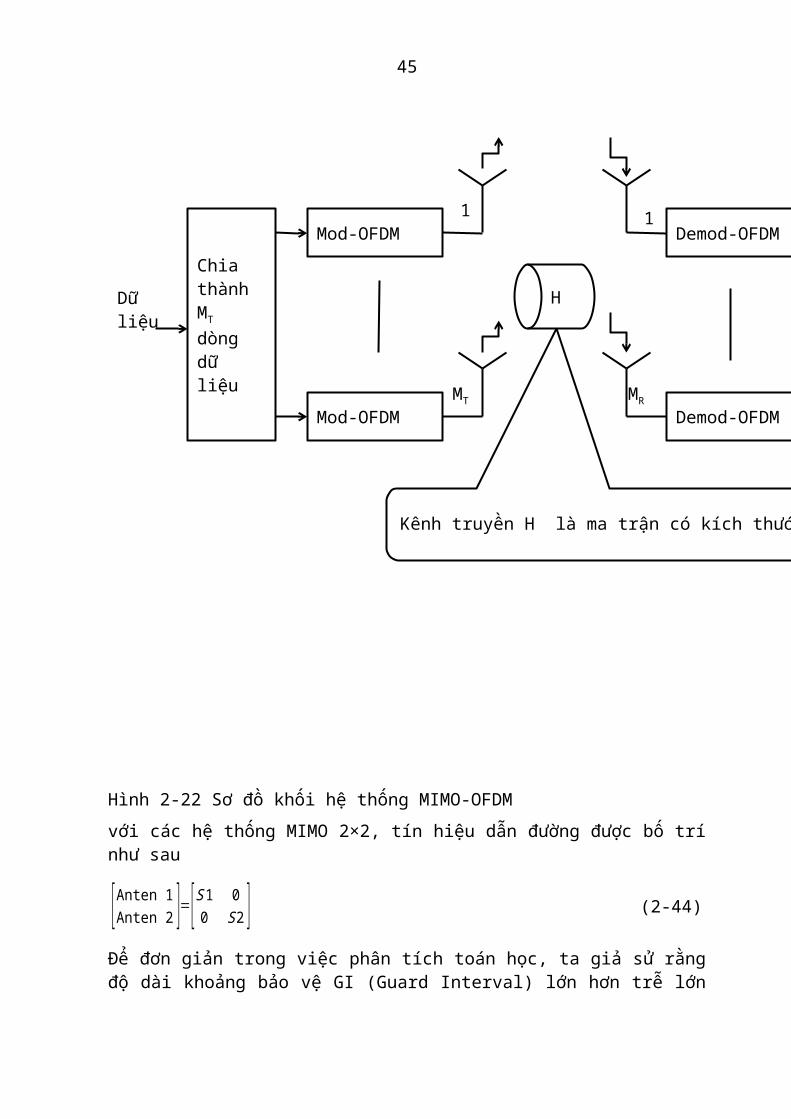
Sơ đồ hệ thống MIMO-OFDM như trên Hình 2-22

37
Hình 2-22 Sơ đồ khối hệ thống MIMO-OFDM
với các hệ thống MIMO 2×2, tín hiệu dẫn đường được bố trí như sau
[Anten 1Anten 2 ]=[S 1 0
0 S 2 ] (2-44)
Để đơn giản trong việc phân tích toán học, ta giả sử rằng độ dài khoảng bảo vệ GI (Guard Interval) lớn hơn trễ lớn nhất của tất cả các đường truyền dẫn giữa anten phát và thu. Ở bên phát, tín hiệu dẫn đường được chèn vào trong dòng dữ liệu ở cả miền thời gian và tần số. Tín hiệu dẫn đường được bên phát truyền đi đều đặn theo chu kỳ
H
1
Demod-OFDM
Demod-OFDM
Mod-OFDM
Chia thành MT dòng
dữ liệu
Mod-OFDM
Kênh truyền H là ma trận có kích thước MR x M
MRMT
1
Dữ liệu

38
thời gian. Ở bên thu, tín hiệu dẫn đường nhận được sẽ được tách ra từ dòng tín hiệu thu được và đưa tới bộ ước lượng kênh. Coi như tín hiệu dẫn đường nhận được trong
miền tần số, nghĩa là sau khi áp dụng biến đổi Furier rời rạc. Ký hiệu Y rk là tín hiệu
dẫn đường nhận được từ sóng mang con phụ k ở anten thu r. Ký hiệu này có thể được viết theo phương trình
Y rk=∑
t=1
MT
H t ,rk X t
k+nrk (2-45)
ở đây H t , rk
là các hệ số kênh truyền trong miền tần số giữa anten phát t và anten thu r.
Trong công thức (2-45), X tk
và nrk tín hiệu dẫn đường và nhiễu trắng Gauss. MT là số
lượng anten phát (xem Hình 2-22).
Để biểu diễn tín hiệu dẫn đường nhận được của tất cả các sóng mang con k
rY , k=0,....,NFFT-1 ta định nghĩa vector tín hiệu dẫn đường nhận được cộng nhiễu ở anten thu r Error: Reference source not found:
Y⃗ r=[Y r [0 ] , .. . ., Y r [N FFT−1 ] ]T (2-46)
n⃗r=[nr [0 ] , .. .. , nr [ N FFT−1 ] ]T (2-47)
Trong phương trình trên, NFFT là số sóng mang con. Toán hạng (.)T là toán hạng chuyển vị ma trận. Các hệ số kênh truyền giữa tất cả anten phát và anten thu thứ r là một vector (MT.NFFT)×1
H⃗ r=[ H⃗1 , r , . .. . , H⃗ t , r ,. . .. H⃗ MT , r ]T
(2-48)
ở đây H⃗ t , r=[H t , r ,. . .. , H t , r ]T
là đáp ứng tần số kênh truyền giữa anten phát t và thu r. Tín hiệu dẫn đường X được kết hợp trong ma trận NFFT× (MT.NFFT) biểu diễn dưới dạng
X=[ diag {X⃗1}, .. . , diag{X⃗ t }, . .. , diag{X⃗ MT}] (2-49)
ở đây X⃗ t=[ X t [ 0 ] ,. .. , X t [ NFFT−1 ] ]T và diag {X⃗ t}là ma trận đường chéo với các thành
phần của vector X⃗ t trên đường chéo của nó.
Cuối cùng vector tín hiệu dẫn đường nhận được có thể viết
Y⃗ r=H r X⃗+ n⃗r (2-50)
39
Quan hệ giữa đáp ứng thời gian h⃗ t , r=[ht , r [ 0 ] ,. . ., ht , r [ L−1 ] ]T và tần số của kênh H⃗ t , r
có thể mô tả bằng phương trình
h⃗ t , r=FL H t , r (2-51)
ở đây FL là ma trận chứa L cột đầu tiên của ma trận F kích thước NFFT×NFFT
F=[ F0,0 F0,1 . .. F0 , N FFT−1
F1,0 F1,1 . .. F1 ,N FFT−1
.. .. . .. .. . . . .. .. .. . . .. . .. . .. .. . .. .. .FN
FFT−1,0 FN
FFT−1,1 . .. FN
FFT−1 , N
FFT−1] (2-52)
Các thành phần của F: Fp,q=e-j2(pq/NFFT). Đáp ứng thời gian của kênh có độ dài Lc tương ứng với độ dài tối đa của trễ phát kênh ở dạng rời rạc nhưng phải nhỏ hơn độ dài NFFT. Bằng việc diễn tả đáp ứng thời gian của kênh (2-51), vector giải điều chế trong (2-45) có thể viết lại
Y⃗ r=Q h⃗r+n⃗r (2-53)
ở đây
Q=[ diag{X⃗1}FL ,. . ., diag {X⃗M T}FL ] (2-54)
và
h⃗r=[ h⃗1 ,r , .. .. , h⃗ t , r , .. . . h⃗NT , r ]T
(2-55)
Việc ước lượng vector đáp ứng thời gian của kênh có thể nhận được bằng ước lượng LS theo Error: Reference source not found
h⃗r=(QH Q)−1 QH Y⃗ r (2-56)
Ở đây (.)H là chuyển đổi Hermitian. Việc ước lượng thành công LS phụ thuộc vào sự tồn tại của ma trận nghịch đảo (QHQ)-1. Nếu ma trận QHQ là singular (hoặc gần singular) thì giải pháp LS không tồn tại hay không tin cậy
Ước lượng kênh ZF được tính theo công thức sau Error: Reference source not found
WZF=(HH H )−1 H H (2-57)
Và trong trường hợp ước lượng kênh MMSE (Minimum Mean Square Error)

40
W MMSE=(HH HT+M
ρI N )
−1 H H (2-58)
Hình 2-23 So sánh các phương pháp ước lượng kênh khác nhau- Trường hợp kênh khôi phục hoàn hảo

41
Chương 3. hệ thống MIMO
Hệ thống nhiều anten thu phát có sự phân tập về không gian giữa các tín hiệu. Tùy thuộc vào số lượng anten thu, phát mà người ta có các phương pháp khác nhau để xử lý tín hiệu thu sao cho có hiệu quả nhất. Trong chương này giới thiệu một số kỹ thuật cơ bản sau
MRC cho hệ thống 1 anten phát nhiều thu
Hệ thống nhiều phat một thu – beamforming
MIMO - MIMO ZF SIC Vblash
Alamouti
Phân tập mã trelils
Precoding
TCM+OSTBC
SOSTTC
KTPT thời gian- xử dụng các kỹ thuật xáo trộn cài xen, lặp bit….

42
3.1 Phương pháp kết hợp với tỷ lệ tối đa MRC
Kỹ thuât này áp dụng cho hệ thống có 1 anten phát nhiều thu như hình vẽ
Maximal Ratio Combining (MRC)
Hình 3-24 Hệ thống một phát nhiều thu
Ta có quan hệ giữa tín hiệu phát thu và kênh truyền
Y=HX+N
Trong đó X là tín hiệu phát, kênh truyền H=[H1…Hmr] và tín hiệu thu được tại Mr anten thu Y=[Y1….Ymr]. N là nhiễu
Có nhiều cách giải mã tín hiệu này
3.1.1 Giải mã trung bình
Là phương pháp giải mã tín hiệu trên từng anten riêng lẻ rồi cộng kết hợp tín hiệu lấy giá trị trung bình
X= 1M r∑i=1
M r Y i
H i
3.1.2 MRC
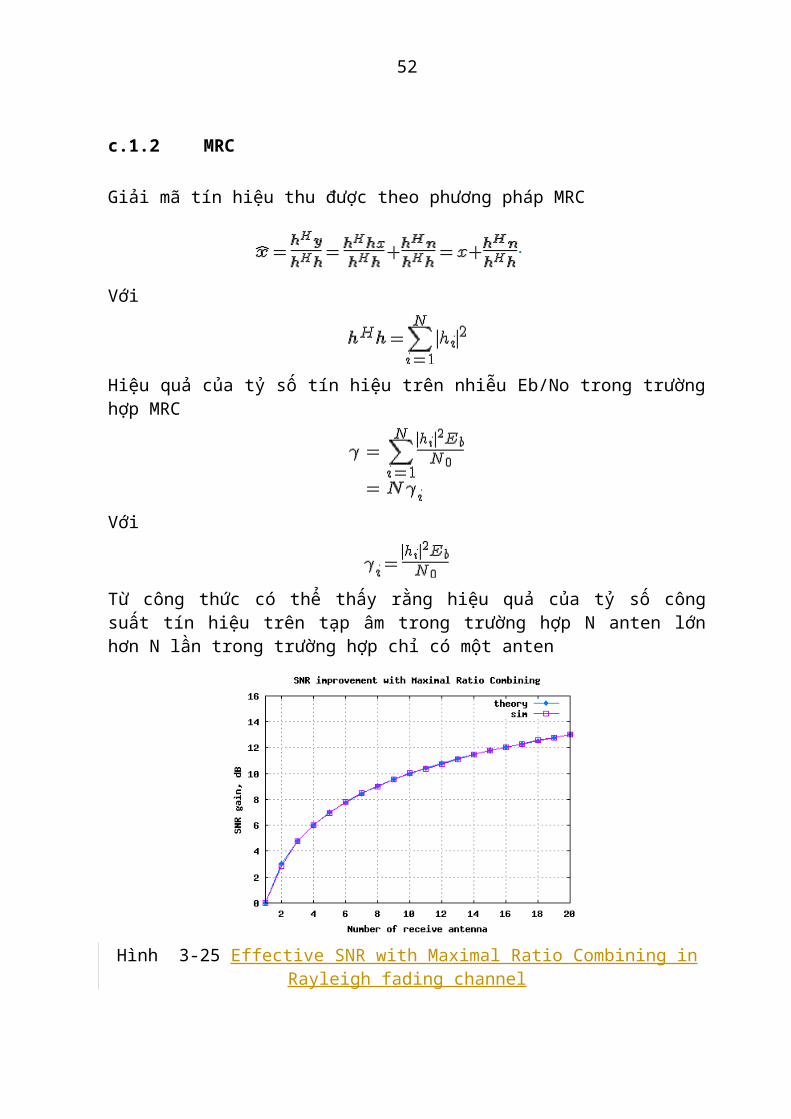
Giải mã tín hiệu thu được theo phương pháp MRC
Với
43
Hiệu quả của tỷ số tín hiệu trên nhiễu Eb/No trong trường hợp MRC
Với
Từ công thức có thể thấy rằng hiệu quả của tỷ số công suất tín hiệu trên tạp âm trong trường hợp N anten lớn hơn N lần trong trường hợp chỉ có một anten
Hình 3-25 Effective SNR with Maximal Ratio Combining in Rayleigh fading channel
Error rate with Maximal Ratio Combining (MRC)
From the discussion on chi-square random variable, we know that, if is a Rayleigh
distributed random variable, then is a chi-squared random variable with two degrees of freedom. The pdf of is
.

44
Since the effective bit energy to noise ratio is the sum of such random variables, the pdf of is a chi-square random variable with degrees of freedom. The pdf of
is,
.
If you recall, in the post on BER computation in AWGN, with bit energy to noise
ratio of , the bit error rate for BPSK in AWGN is derived as
.
Given that the effective bit energy to noise ratio with maximal ratio combining is , the total bit error rate is the integral of the conditional BER integrated over all possible values of .
.
, where
.
Hình 3-26 BER plot for BPSK in Rayleigh channel with Maximal Ratio Combining
Beamforming
45
3.2 Hệ thống nhiều anten phát một anten thu – beamforming
Hình 3-27: hệ thống nhiều phát một thu
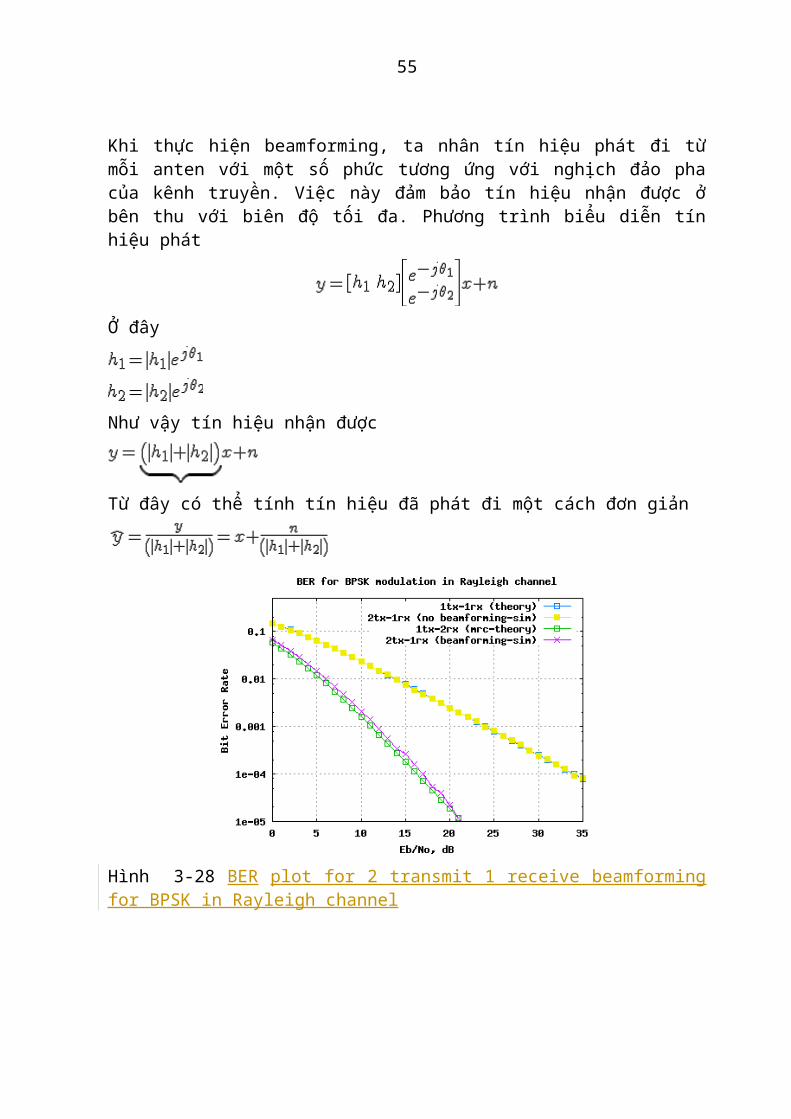
Khi thực hiện beamforming, ta nhân tín hiệu phát đi từ mỗi anten với một số phức tương ứng với nghịch đảo pha của kênh truyền. Việc này đảm bảo tín hiệu nhận được ở bên thu với biên độ tối đa. Phương trình biểu diễn tín hiệu phát
Ở đây
Như vậy tín hiệu nhận được
Từ đây có thể tính tín hiệu đã phát đi một cách đơn giản
46
Hình 3-28 BER plot for 2 transmit 1 receive beamforming for BPSK in Rayleigh channel
3.3 Giải mã kết hợp triệt nhiễu kênh MIMO
2×2 MIMO channel
with and .
7. The channel is known at the receiver.

47
Zero forcing equalizer for 2×2 MIMO channel
Let us now try to understand the math for extracting the two symbols which interfered with each other. In the first time slot, the received signal on the first receive antenna is,
.
The received signal on the second receive antenna is,
.
where
, are the received symbol on the first and second antenna respectively,
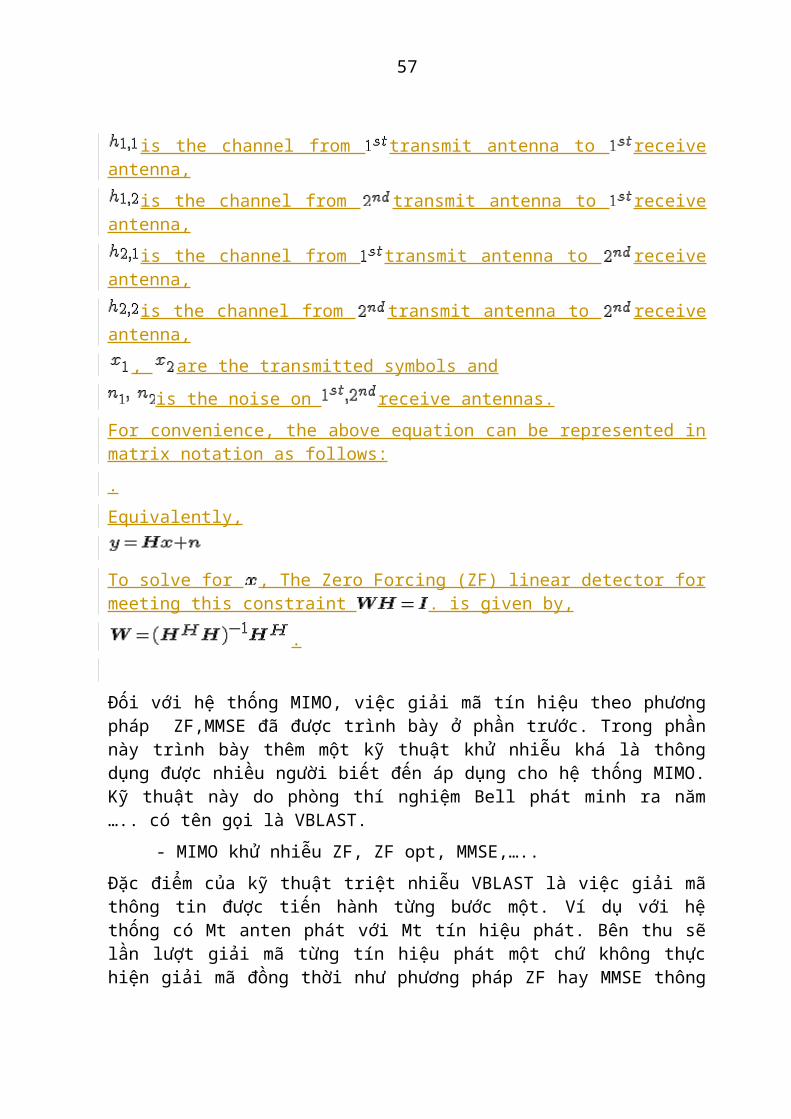
is the channel from transmit antenna to receive antenna,
is the channel from transmit antenna to receive antenna,
is the channel from transmit antenna to receive antenna,
is the channel from transmit antenna to receive antenna,
, are the transmitted symbols and
is the noise on receive antennas.
For convenience, the above equation can be represented in matrix notation as follows:
.
Equivalently,
To solve for , The Zero Forcing (ZF) linear detector for meeting this constraint . is given by,
.
Đối với hệ thống MIMO, việc giải mã tín hiệu theo phương pháp ZF,MMSE đã được trình bày ở phần trước. Trong phần này trình bày thêm một kỹ thuật khử nhiễu khá là thông dụng được nhiều người biết đến áp dụng cho hệ thống MIMO. Kỹ thuật này do phòng thí nghiệm Bell phát minh ra năm ….. có tên gọi là VBLAST.
- MIMO khử nhiễu ZF, ZF opt, MMSE,…..
Đặc điểm của kỹ thuật triệt nhiễu VBLAST là việc giải mã thông tin được tiến hành từng bước một. Ví dụ với hệ thống có Mt anten phát với Mt tín hiệu phát. Bên thu sẽ lần lượt giải mã từng tín hiệu phát một chứ không thực hiện giải mã đồng thời như phương pháp ZF hay MMSE thông thường. Mỗi khi một tín hiệu phát được giải mã

48
xong. Nó sẽ được loại trừ đi ảnh hưởng của nó đến tín hiệu thu tổng hợp. Bên thu lại tiếp tục giải mã tín hiệu tiếp theo cho đến hết. Có hai giải pháp khi thực hiện thuật toán VBLAST : một là giải mã một cách tuần tự, nghĩa là các tín hiệu X1,X2,…XMt sẽ được giải mã lần lượt tại bên thu. Phương pháp này chưa cho hiệu quả tối ưu vì ảnh hưởng của các tín hiệu đến các tín hiệu khác là khác nhau. Trong giải pháp tối ưu, thuật toán VBLAST sẽ lựa chọn tín hiệu có chất lượng tốt nhất để giải mã trước, sau khi loại bỏ ảnh hưởng của tín hiệu này đến hệ thống, nó sẽ lại tiếp tục giải mã tín hiệu tốt nhất trong số những tín hiệu còn lại cho đến tín hiệu cuối cùng.
.
Simulation Model
Figure: BER plot for 2×2 MIMO channel with ZF equalizer (BPSK modulation in Rayleigh channel)
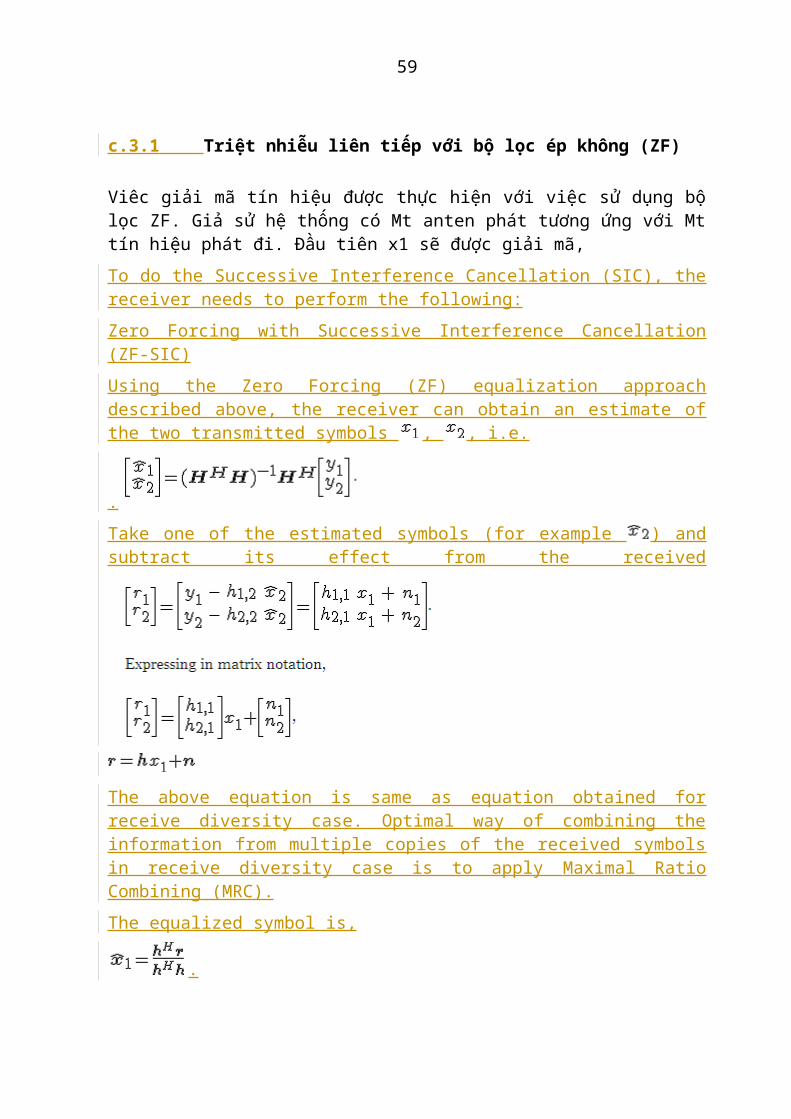
3.3.1 Triệt nhiễu liên tiếp với bộ lọc ép không (ZF)
Viêc giải mã tín hiệu được thực hiện với việc sử dụng bộ lọc ZF. Giả sử hệ thống có Mt anten phát tương ứng với Mt tín hiệu phát đi. Đầu tiên x1 sẽ được giải mã,
To do the Successive Interference Cancellation (SIC), the receiver needs to perform the following:
Zero Forcing with Successive Interference Cancellation (ZF-SIC)

49
Using the Zero Forcing (ZF) equalization approach described above, the receiver can obtain an estimate of the two transmitted symbols , , i.e.
.
Take one of the estimated symbols (for example ) and subtract its effect from the
received
The above equation is same as equation obtained for receive diversity case. Optimal way of combining the information from multiple copies of the received symbols in receive diversity case is to apply Maximal Ratio Combining (MRC).
The equalized symbol is,
.
This forms the simple explanation for Zero Forcing Equalizer with Successive Interference Cancellation (ZF-SIC) approach.
50
Figure: BER plot for BPSK in 2×2 MIMO channel with Zero Forcing Successive Interference Cancellation equalization
3.3.2 MIMO with ZF SIC and optimal ordering

51
Figure: BER plot for BPSK in 2×2 MIMO equalized by ZF-SIC with optimal ordering
Observations
Compared to Zero Forcing equalization with successive interference cancellation case, addition of optimal ordering results in around 2.0dB of improvement for B
3.4 STBC
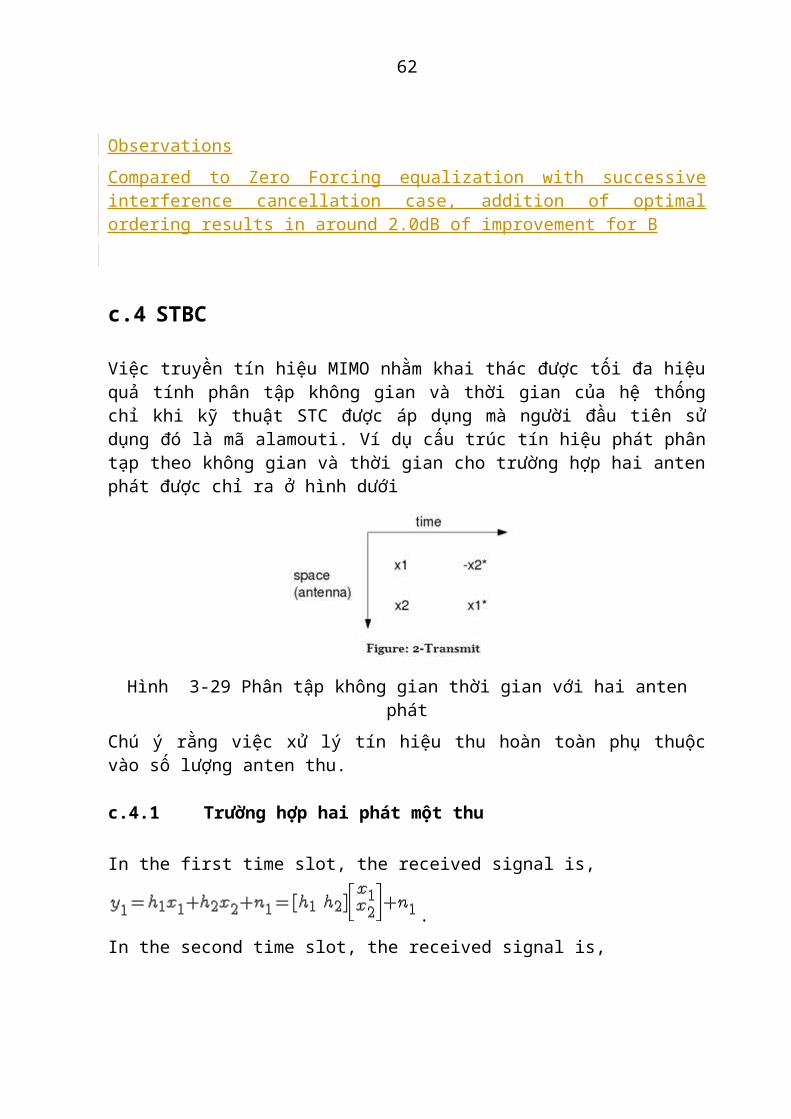
Việc truyền tín hiệu MIMO nhằm khai thác được tối đa hiệu quả tính phân tập không gian và thời gian của hệ thống chỉ khi kỹ thuật STC được áp dụng mà người đầu tiên sử dụng đó là mã alamouti. Ví dụ cấu trúc tín hiệu phát phân tạp theo không gian và thời gian cho trường hợp hai anten phát được chỉ ra ở hình dưới
Hình 3-29 Phân tập không gian thời gian với hai anten phát
Chú ý rằng việc xử lý tín hiệu thu hoàn toàn phụ thuộc vào số lượng anten thu.
52
3.4.1 Trường hợp hai phát một thu
In the first time slot, the received signal is,
.
In the second time slot, the received signal is,
.
where
, is the received symbol on the first and second time slot respectively,is the channel from transmit antenna to receive antenna,is the channel from transmit antenna to receive antenna,, are the transmitted symbols and
is the noise on time slots.
The term,

53
If you compare the above equation with the estimated symbol following equalization in Maximal Ratio Combining, you can see that the equations are identical.
BER with Almouti STBC
Since the estimate of the transmitted symbol with the Alamouti STBC scheme is identical to that obtained from MRC, the BER with above described Alamouti scheme should be same as that for MRC. However, there is a small catch.
With Alamouti STBC, we are transmitting from two antenna’s. Hence the total transmit power in the Alamouti scheme is twice that of that used in MRC. To make the comparison fair, we need to make the total trannsmit power from two antennas in STBC case to be equal to that of power transmitted from a single antenna in the MRC case. With this scaling, we can see that BER performance of 2Tx, 1Rx Alamouti STBC case has a roughly 3dB poorer performance that 1Tx, 2Rx MRC case.
From the post on Maximal Ratio Combining, the bit error rate for BPSK modulation in Rayleigh channel with 1 transmit, 2 receive case is,
, where
.
With Alamouti 2 transmit antenna, 1 receive antenna STBC case,

54
and Bit Error Rate is
.
Key points
The fact that is a diagonal matrix ensured the following:1. There is no cross talk between , after the equalizer.
2. The noise term is still white.
.
55
3.4.2 Trường hợp 2 phát 2 thu - Alamuoiti 2x2

56
57

58
Receive diversity in AWGN
by Krishna Sankar on August 19, 2008
Some among you will be aware that in a wireless link having multiple antenna’s at the receiver (aka receive diversity) improves the bit error rate (BER) performance. In this post, let us try to understand the BER improvement with receive diversity. And, since we are just getting started, let us limit ourselves to additive white Gaussian noise (AWGN) channel (i.e assume that the channel gains are unity).
Single receive antenna case
Effective bit energy to noise ratio in a N receive antenna case is N times the bit energy to noise ratio for single antenna case.
.
So the bit error probability for N receive antenna case is,
.
59
3.4.3 Higher order STBCs
Tarokh et al. discovered a set of STBCs[6][7] that are particularly straightforward, and coined the scheme's name. They also proved that no code for more than 2 transmit antennas could achieve full-rate. Their codes have since been improved upon (both by the original authors and by many others). Nevertheless, they serve as clear examples of why the rate cannot reach 1, and what other problems must be solved to produce 'good' STBCs. They also demonstrated the simple, linear decoding scheme that goes with their codes under perfect channel state information assumption.
3.4.3.13 transmit antennas
Two straightforward codes for 3 transmit antennas are:

60
.
These codes achieve rate-1/2 and rate-3/4 respectively. These two matrices give examples of why codes for more than two antennas must sacrifice rate — it is the only
way to achieve orthogonality. One particular problem with is that it has uneven power among the symbols it transmits. This means that the signal does not have a
constant envelope and that the power each antenna must transmit has to vary, both of which are undesirable. Modified versions of this code that overcome this problem
have since been designed.
3.4.3.24 transmit antennas
Two straightforward codes for 4 transmit antennas are:
.
These codes achieve rate-1/2 and rate-3/4 respectively, as for their 3-antenna
counterparts. exhibits the same uneven power problems as . An
improved version of is[8]
,

61
which has equal power from all antennas in all time-slots.
3.5 Decoding
One particularly attractive feature of orthogonal STBCs is that maximum likelihood decoding can be achieved at the receiver with only linear processing. In order to consider a decoding method, a model of the wireless communications system is needed.
At time , the signal received at antenna is:
,
where is the path gain from transmit antenna to receive antenna , is the signal
transmitted by transmit antenna and is a sample of additive white Gaussian noise (AWGN).
The maximum-likelihood detection rule[7] is to form the decision variables
where is the sign of in the th row of the coding matrix, denotes
that is (up to a sign difference), the element of the coding matrix, for ... and then decide on constellation symbol that satisfies
,
with the constellation alphabet. Despite its appearance, this is a simple, linear decoding scheme that provides maximal diversity.
3.6 Rate limits
Apart from there being no full-rate, complex, orthogonal STBC for more than 2 antennas, it has been further shown that, for more than two antennas, the maximum
62
possible rate is 3/4.[9] Codes have been designed which achieve a good proportion of this, but they have very long block-length. This makes them unsuitable for practical use, because decoding cannot proceed until all transmissions in a block have been received, and so a longer block-length, , results in a longer decoding delay. One particular example, for 16 transmit antennas, has rate-9/16 and a block length of 22 880 time-slots![10]
It has been proven[11] that the highest rate any -antenna code can achieve is
,
where or , if no linear processing is allowed in the code matrix (the above maximal rate proved in [11] only applies to the original definition of
orthogonal designs, i.e., any entry in the matrix is , or , which forces that any variable can not be repeated in any column of the matrix). This rate limit is conjectured to hold for any complex orthogonal space-time block codes even when any linear processing is allowed among the complex variables [9]. Closed-form recursive designs have been found [12].
3.7 Quasi-orthogonal STBCs
These codes exhibit partial orthogonality and provide only part of the diversity gain mentioned above. An example reported by Hamid Jafarkhani is:[13]
.
The orthogonality criterion only holds for columns (1 and 2), (1 and 3), (2 and 4) and (3 and 4). Crucially, however, the code is full-rate and still only requires linear processing at the receiver, although decoding is slightly more complex than for orthogonal STBCs. Results show that this Q-STBC outperforms (in a bit-error rate sense) the fully orthogonal 4-antenna STBC over a good range of signal-to-noise ratios (SNRs). At high SNRs, though (above about 22dB in this particular case), the increased diversity offered by orthogonal STBCs yields a better BER. Beyond this point, the relative merits of the schemes have to be considered in terms of useful data throughput.
Q-STBCs have also been developed considerably from the basic example shown.

63
3.8 Tiền mã hóa – Precoding
Kỹ thuật tiền mã hóa là kỹ thuật mã hóa dữ liệu trước khi truyền đi. Nhược điểm của
kỹ thuật này là đòi hỏi bên phát phải nhận biết được các đặc điểm của kênh truyền.
Trong trường hợp này, bên phát sẽ thực hiện mã hóa dữ liệu phát một cách thích hợp
cho phù hợp với đặc điểm về suy hao cũng như sự biến thiên theo thời gian và tần số
của kênh. Kỹ thuật này có thể áp dụng với tất cả các hệ thống thông tin có MT anten
phát và MR anten thu, (MT,MR có giá trị nguyên dương lớn hơn hay bằng 1).
Để thực hiện được tiền mã hoá thì điều kiện tiên quyết là bên phát phải nhận biết được
đặc điểm trạng thái kênh truyền. Do vậy bên thu sau khi khôi phục lại thông tin trạng
thái của kênh truyền (CSI) sẽ phải truyền trở lại cho bên phát và bên phát dựa vào CSI
nhận được để thực hiện tiền mã hoã cho dữ liệu [Error: Reference source not found].
Phương pháp này có thể cải thiện đáng kể hiệu quả truyền dẫn thông tin tuy nhiên nó
cũng có nhiều nhược điểm, đó là việc truyền lại thông tin trạng thái kênh truyền sẽ
chiếm một dung lượng nhất định của kênh truyền dẫn. Điều này đồng nghĩa với sự
lãng phí băng thông của hệ thống. Sự lãng phí này trở lên vô ích nếu những lợi ích về
tốc độ truyền dẫn thông tin không được cải thiện hơn. Thậm chí trong nhiều trường
hợp việc tiền mã hoá còn làm giảm tốc độ truyền dẫn của kênh. Một nhược điểm khác
của việc sử dụng đặc tuyến kênh truyền mà bên phát vừa nhận được thực tế đã trở nên
lỗi thời theo thời gian và không còn có tính chất thực tế do vậy tiền mã hoá trong thực
tế không bao giờ là hoàn hảo. Tuy nhiên việc tiền mã hoá vẫn có thể được tiến hành
nếu đảm bảo được rằng nó có lợi hơn so với không tiền mã hoá và kỹ thuật này
thường áp dụng với các hệ thống có kênh truyền cố định hay biến đổi chậm theo thời
gian. Vì vậy việc lựa chọn tiền mã hóa có thể được coi là một lựa chọn trong truyền
dẫn thông tin và tuỳ thuộc điều kiện kênh truyền việc áp dụng phải linh hoạt.

64
Ta có thể phân ra thành hai loại tiền mã hóa tùy thuộc vào số lượng anten thu phát –
Tiền mã hóa cho hệ thống một anten thu một anten phát (MT=MR=1) SISO và tiền mã
hóa cho hệ thống nhiều anten thu phát (MT hoặc MR hoặc cả hai>1) MIMO.
3.8.1 Tiền mã hóa cho hệ thống SISO
Đối với hệ thống một anten thu phát SISO, hiệu quả tối ưu của phương pháp tiền mã
hóa chính là kỹ thuật đổ nước (WF) như đã mô tả ở mục . Thuật toán “đổ nước” thực
hiện thay đổi mức công suất phát tín hiệu trên mỗi sóng mang con một cách liên tục
nhằm tối ưu hóa về mặt dung lượng. Tuy nhiên cũng có nhiều phương pháp khác thực
hiện tiền mã hóa [Error: Reference source not found], [Error: Reference source not
found], [Error: Reference source not found], [Error: Reference source not found]
nhằm tối ưu các thông số khác trong hệ thống như đảm bảo tốc độ bit truyền là tối đa
trong khi công suất phát là tối thiểu hay đảm bảo tỷ lệ lỗi bit truyền trên các sóng
mang con là như nhau. Các kỹ thuật nhằm thay đổi mức công suất phát và số mức
điều chế trên mỗi sóng mang con trong các hệ thống OFDM được biết như kỹ thuật
điều chế thích ứng AOFDM (Adaptive-OFDM). Hoặc trong [Error: Reference source
not found] sử dụng phương pháp nghịch đảo kênh truyền kết hợp với việc tiền mã hóa
thích ứng. Trong [Error: Reference source not found] sử dụng kỹ thuật điều chế ghép
kênh các xung chữ nhật trực giao áp dụng cho môi trường kênh Rayleigh pha-dinh
phẳng nhằm tăng hiệu quả sử dụng phổ tần của hệ thống.
3.8.2 Tiền mã hóa cho hệ thống MIMO
Đối với hệ thống nhiều anten thu phát, kỹ thuật tiền mã hóa có thể được chia thành hai
loại thứ nhất là phương pháp lựa chọn tập anten con và phương pháp thứ hai là tiền
mã hóa dữ liệu. Trong kỹ thuật lựa chọn tập anten con, thì người ta chỉ sử dụng MF
trong tổng số MT anten phát (MF≤MT). Đối với kỹ thuật tiền mã hóa dữ liệu, MS dòng
dữ liệu được sắp xếp lên MT anten phát đi.

65
Cả hai kỹ thuật lựa chọn tập anten con hay tiền mã hóa đều được thực hiện bằng cách
nhân vector tín hiệu phát với một ma trận F kích thước MT×MF. Trong trường hợp lựa
chọn tập các anten con thì ma trận F chỉ có hạng bằng MF với các phần tử bằng 0 hoặc
1 và chỉ có duy nhất một số 1 trong hàng tương ứng với số thứ tự của anten được lựa
chọn phát thông tin.
3.8.3 Tiền mã hóa cho hệ thống MIMO-OFDM
Sơ đồ cấu trúc tiền mã hóa cho hệ thống MIMO như Hình 2-1. Hệ thống gồm MS
dòng dữ liệu, MT anten phát, MR anten thu thoả mãn điều kiện MS≤min(MT,MR). Ta ký
hiệu S⃗k=[Sk ,1 , Sk , 2 , .. . Sk , MS ] là véctơ dữ liệu vào của sóng mang con thứ k,
x⃗k=[ xk ,1 , xk ,2 ,. . . xk , MT] là vector dữ liệu sau khi tiền mã hoá sẽ được phát đi trên MT
anten phát. Ta có
x⃗k=Fk S⃗k (3-1)
Fk (k=1..Λ) là ma trận tiền mã hoá có kích thước MT×MS nằm trong bảng mã (trong
trường hợp MT=1 hoặc MS=1 thì Fk là một vector). Bảng mã là tập F chứa các ma trận
tiền mã hóa F = [F1, F2,... FΛ] có kích thước Λ=2q, q là số bít cần thiết để đánh số thứ
tự các ma trận Fk nằm trong bảng mã. Chú ý rằng để đảm bảo điều kiện công suất phát
tín hiệu không thay đổi thì ma trận Fk phải thoả mãn điều kiện
Fk FkH=I (3-2)
Trong đó I là ma trận đơn vị.

66
Hình 3-30 Sơ đồ hệ thống tiền mã hóa MIMO-OFDM
Bảng mã F là một hàm của đặc tuyến phụ thuộc kênh truyền H
F=f (H ) (3-3)
Trong đó H là ma trận mô tả đặc tính của kênh truyền (2-11) có kích thước MR×MT.
Đối với một ma trận bất kỳ, theo cách tính đại số ma trận đều có thể phân tích thành
tích của ba ma trận UVD’ như công thức (2-15). Theo [Error: Reference source not
found], để việc tiền mã hóa được tối ưu hiệu quả hoạt động của hệ thống (nghĩa là
Fk=Ftốiưu) thì ma trận tiền mã hóa Fk phải thỏa mãn điều kiện Fk=DM S ở đây
DMS là
ma trận tạo bởi MS cột đầu tiên của ma trận D trong (2-15) chứa vector các giá trị kỳ
dị bên phải của H.
y⃗k=[ yk , 1 , yk ,2 ,. .. yk , M R] là vector dữ liệu thu được tại MR anten thu sẽ bằng
y⃗k=H k Fk S⃗k+ n⃗ (3-4)
n⃗ là nhiễu Gaussian có phân bố CN(0,σ2).
Dung lượng hệ thống trong trường hợp có tiền mã hóa sẽ được tính

67
C= 1N FFT
∑k=1
N FFT
log2[det( I MR+ ρ
M T
H kH F k
H H k F k)] ( bps/Hz ) (3-5)
Để xử lý tín hiệu thu được, có thể viết
z⃗k=H kH Fk
H y⃗k=F H H H H k Fk S⃗k+ n⃗ (3-6)
Tối thiểu hóa lỗi bit trung bình của tín hiệu - tỷ số SNR được tính
SNRk=ρ|Fk
H H kH H k Fk|
2
‖H kH Fk
H‖22
(3-7)
Theo [Error: Reference source not found] và ta mở rộng ra tổng quát đối với MS dòng
dữ liệu. Trong trường hợp giải điều chế tuyến tính với bộ lọc ZF (Zero Forcing) thì tỷ
số tín hiệu trên nhiễu trên sóng mang con k của dòng dữ liệu thứ m (m=1,..,MS) được
tính
SNRkm ,ZF=
ρ
M T [FkH H k
H H k Fk ]m,m−1 (3-8)
Và cho trường hợp giải điều chế theo phương pháp tối thiểu hóa lỗi trung bình bình
phương MMSE tỷ số SNR trên sóng mang con k của dòng dữ liệu thứ m (m=1,..,MS)
được tính
SNRkm ,MMSE=
ρ
MT [FkH H k
H H k Fk+Mρ
I MS]m, m−1−1
(3-9)
Trong đó Am ,m−1
là phần tử thứ (m,m) và cũng chính là giá trị kỳ dị thứ (m,m) của A-1.
Bởi vì các giá trị kỳ dị của ma trận có xu hướng giảm dần ( λ1>λ2>.. . .. ..> λmin (MT M R
)
nên nhiễu tối thiểu trên sóng mang con k được tính cho giá trị kỳ dị nhỏ nhất λM S
SNRmin=min( SNRkm)=SNRk
M S
m=1. . MS
(3-10)
Thay giá trị SNR vào công thức tính tỷ lệ lỗi bit SER [Error: Reference source not
found]. Ta có tỷ lệ lỗi bit trên sóng mang con k cho dòng dữ liệu thứ m (m=1,..,MS)
trong trường hợp điều chế M-QAM là:

68
Pek (m )≈
4 (1−1/√M )log2 M [Q(√ 3
M−1SNRk
m)] (3-11)
Từ biểu thức (3-11) trên ta thấy rằng trong trường hợp tiền mã hóa với MS dòng dữ
liệu thì tỷ lệ lỗi bít trên các dòng dữ liệu là khác nhau. Điều này giải thích rằng việc
tiền mã hóa đã làm thay đổi chùm tín hiệu phát đi từ các anten phát đến các anten thu.
Phần năng lượng tín hiệu có ích sẽ được tập trung nhiều hơn trên các búp sóng tương
ứng với các giá trị kỳ dị lớn hơn và giảm mức năng lượng trên các búp sóng tương
ứng với các giá trị kỳ dị nhỏ.
3.8.4 Thiết kế bảng mã
Trong thực tế, việc truyền nguyên cả ma trận tiền mã hóa Fk thì sẽ không hiệu quả cho
vấn đề dung lượng của hệ thống do số lượng con số cần phải truyền một ma trận F là
Ms×MT số phức. Nếu truyền giá trị thực các con số ma trận này với thời gian hồi tiếp
bằng đúng thời gian một ký hiệu OFDM thì tốc độ truyền trên kênh hồi tiếp còn lớn
hơn tốc độ truyền dữ liệu trên kênh truyền đi. Do đó hệ thống không thực sự hiệu quả.
Để giảm bớt số bit thông tin dùng để truyền một ma trận Fk người ta cần lượng tử hóa
số liệu. Lượng tử hóa sẽ làm mất thông tin và làm sai lệch thông tin thực sự về kênh
truyền. Có hai cách lượng tử hóa, cách thứ nhất là lương tử hóa từng phần tử của ma
trận và cách thứ hai là lượng tử hóa toàn bộ ma trận Fk. Cách thứ nhất có ưu điểm là
đạt độ chính xác cao nhưng nhược điểm là vẫn chiếm một dung lượng lớn để truyền
một ma trận Fk. Trong trường hợp thứ hai, người ta sử dụng bảng mã dùng để lưu trữ
các ma trận Fk đã được lượng tử hóa. Bảng mã cần được biết trước ở cả bên phát và
bên thu. Do đó thay vì phải truyền lại toàn bộ ma trận Fk thì ta chỉ cần truyền lại chỉ
số của ma trận nằm trong bảng mã. Cách thứ hai cho hiệu quả rõ rệt về số lượng bit
thông tin cần mã hóa cho mỗi ma trận Fk. Tuy nhiên trong trường hợp này Fk sẽ không
hoàn toàn giống DMS . Do đó việc lựa chọn một bảng mã tốt sẽ đảm bảo hệ thống hoạt
động hiệu quả hơn. Gọi bảng mã F là tập hợp của Λ ma trận Fk F={F1,F2,….,FΛ }.
Việc thiết kế bảng mã cần đảm bảo sao cho khoảng cách giữa hai từ mã Fi và Fk trong

69
bảng mã càng xa nhau càng tốt. Việc này sẽ đảm bảo cho việc lựa chọn phân biệt giữa
hai từ mã càng chính xác.
Có nhiều phương pháp thiết kế bảng mã [Error: Reference source not found], [Error:
Reference source not found], các từ mã trong bảng mã phải đảm bảo F là một ma trận
đơn nhất (unitary_matrix). Trong [Error: Reference source not found], bảng mã được
xây dựng bằng cách phát ra một số lượng lớn kênh dùng để kiểm tra. Sau đó phân
chia dữ liệu kiểm tra thành các vùng và tính toán bảng mã mới dựa trên việc tìm kiếm
ma trận tối ưu từ dự phòng méo cho kênh truyền trên mỗi vùng.
+ Trong [Error: Reference source not found] có thể dễ dàng được thiết lập và tạo bảng
mã với khoảng cách lớn tối thiểu. Thuật toán thực hiện bởi coi bảng mã có dạng
F={FDFT,θFDFT,…., θΛ-1FDFT}. Ở đây, FDFT là ma trận MT×MS với các phần tử có giá trị
(1 /√M T ) ej(2 π /MT )kl
ở biến (k,l) và θ là ma trận đường chéo được cho bởi
θ=[ej(2 π / Λ )u1 0 .. . . 0
0 ej (2 π / Λ )u
2 .. . . 0.. . . .. .. . . .. .
0 0 .. . . ej( 2 π / Λ )uMt
] (3-12)
Ở đây 0≤u1 , .. . ,uM T
≤Λ−1 các giá trị cho u1, u2,… được chọn theo vector
u⃗=[u1 ,. .. , uMT]T
, từ tập Z=¿¿ Được cho bởi u=argmax
Z(min d (FDFT , θl FDFT ))
1≤l≤Λ−1(3-13)
Chý ý rằng các bảng mã có thể được lưu trữ trước ở cả bên phát và thu hoặc được tính
toán tại thời điểm thu phát.
Thí dụ: Đối với các hệ thống 802.16 [Error: Reference source not found] bảng mã có
thể tham khảo trong trong các mục 8.4.5.4.10.15.

70
3.8.5 Lựa chọn ma trận tiền mã hóa
Có nhiều cách để lựa chọn ma trận tiền mã hóa từ bảng mã, trong [Error: Reference
source not found] việc lựa chọn ma trận Fk từ bảng mã F được tính theo phương pháp
bình phương tối thiểu
MSE (Fk )=ρ{trace [(I MT+ ρ
M R
FkH H H HFk)
−1]} (3-14)
Và từ mã tối ưu Fopt sẽ được chọn
Fopt= argmink∈{1,2 ,. . . , Λ}
MSE (Fk ) (3-15)
Λ là kích thước của bảng mã F.
Hay trong [Error: Reference source not found] Khương đề xuất phương pháp lựa chọn
ma trận tiền mã hóa dựa trên cách tính khoảng cách giữa hai ma trận.
Ví dụ Trong [Error: Reference source not found] Hệ thống mô phỏng áp dụng cho
trường hợp hệ thống 2×2 matrix với hai dòng dữ liệu.
Bảng mã được lấy trong [Error: Reference source not found] như sau.
V=[e jφ n2 cosθn 1 −e
jφn 2 sin θn 1
sin θn 1 cosθn 1] (3-16)
Ở đây
φn2=2 πn2
N2
, .. .. . .. .n2=0,1 ,. .. .. . .. .. . ,N 2−1
θn 1=2πn1
N1
,. .. . .. ..n1=0,1 , .. .. . .. .. . ., N1−1
Trong đó Λ=N1×N2
Để lựa chọn ma trận tiền mã hóa tối ưu. Tác giả đề xuất phương pháp lựa chọn dựa
trên khoảng cách tối thiếu giữa hai ma trận theo công thức [Error: Reference source
not found].

71
dFk D=∑
i
MT
∑j
MS
√(DM S−Fk ij )⋅(DMS
−Fk ij )' (3-17)
Với k=1....Λ
Fopt sẽ được lựa chọn như sau
Fopt=argk(min(dFk D)) (3-18)
Kết quả được cho trên Hình 3-31 và Hình 3-32
Hình 3-31: Trường hợp kênh truyền được khôi phục hoàn hảo tại bên thu [Error: Referencesource not found]
Hình 3-32: Trường hợp kênh truyền không được khôi phục hoàn hảo tại bên thu [Error:Reference source not found]
Trong trường hợp kênh truyền do bị ảnh hưởng của nhiễu và nhiều nguyên nhân khác như sự không đồng bộ đúng giữa bên phát và thu, ảnh hưởng của bộ biến đổi AD, DA, ảnh hưởng của méo phi tuyến qua các bộ lọc và điều chế, và các bộ khuếch đại

72
hay sự mất cân bằng giữa các nhánh trong bộ điều chế IQ, nên thực tế kênh truyền không bao giờ được khôi phục một cách hoàn hảo. Tuy nhiên để đơn giản hóa, kết quả trong luận án này (xem Hình 3-32) chỉ xét đến sự không hoàn hảo của kênh truyền trong trường hợp có ảnh hưởng của nhiễu trắng Gauss. Việc tính toán ước lượng kênh cho hệ thống MIMO được tính theo công thức (2-56). Trong trường hợp này ma trận tiền mã hóa
Fk=DM S(3-19)
DMS : là ma trận MS cột đầu tiên của ma trận chứa các vector giá trị kỳ dị của H k .
Tín hiệu nhận được tại bên thu khi tiền mã hóa với Fk
y⃗k=H k Fk S⃗k+ n⃗ (3-20)Tín hiệu sau giải mã với việc ước lượng kênh truyền không hoàn hảo
z⃗k=H kH Fk
H y⃗k=F H H H H k Fk S⃗k+ n⃗ (3-21)
Nhận xét rằng trong cả hai trường hợp kênh được và không được khôi phục hoàn hảo tại bên thu thì kỹ thuật tiền mã hóa đều nâng cao dung lượng kênh truyền.
Trong tất cả các trường hợp. Với kích thước bảng mã càng lớn thì kết quả của việc tiền mã hóa càng gần với trường hợp tối ưu.
Hiệu quả của phương pháp tiền mã hóa phụ thuộc nhiều yếu tố. Trong đó việc lựa chọn bảng mã tốt sẽ cho kết quả tiền mã hóa tốt hơn. Tuy nhiên để chọn được một bảng mã tối ưu là một việc khó khăn. Thêm vào đó cùng một bảng mã nhưng với các phương pháp tìm kiếm khác nhau để lấy ra từ mã tốt nhất từ bảng mã cũng sẽ ảnh hưởng đến hiệu quả làm việc của hệ thống.
3.9 Mã hóa không gian-thời gian lưới STTC
STTC cho phép phân tập đầy đủ và độ lợi mã cao, STTC là loại mã chập được mở rộng cho trường hợp MIMO. Cấu trúc mã chập đặc biệt phù hợp với truyền thông vũ trụ và vệ tinh, do chỉ sử dụng bộ mã hóa đơn giản nhưng đạt được hiệu quả cao nhờ vào phương pháp giải mã phức tạp.
Nếu như STBC xử lý độc lập từng khối ký tự đầu vào để tạo ra một chuỗi các vector mã độc lập, thì STTC xử lý từng chuỗi ký tự đầu vào để tạo ra từng chuỗi vector mã phụ thuộc vào trạng thái mã trước đó của bộ mã hóa.
Bộ mã hóa các véc tor mã bằng cách dich chuyển các bít dữ liệu qua thanh ghi dịch qua K tầng mỗi tầng có k bít. Mỗi bộ n ghép cộng nhị phân với đầu vào là K tầng sẽ tạo ra vector mã n bit cho mỗi k bit đầu vào. Tại một thời điểm, k bit dữ liệu đầu vào sẽ được dịch vào tầng đầu tiên của thanh ghi dịch, k bit của tầng đầu sẽ được dịch vào k bit của tầng kế. Mỗi lần dịch k bit dữ liệu vào sẽ tạo ra một vector mã n bit.

73
Tốc độ mã là
K là số tầng của thanh ghi dịch được gọi là constraint length của bộ mã. Hình dưới cho ta thấy rõ mỗi vector mã trong mã lưới phụ thuộc vào kK bit, bộ gồm k bit dữ liệu vào tần đầu tiên và bit của tầng cuối của bộ mã hóa, tầng cuối này gọi là trạng thái của bộ mã hóa, trong khi đó chỉ có k bit dữ liệu đầu vào trong mã khối ảnh hưởng tới vector mã.
Hình 3.8. Sơ đồ mã lưới
Mã lưới được biểu diễn thông qua lưới mã (code trellis) hoặc sơ đồ trạng thái ( state diagram) mô tả sự biến đổi từ trạng thái hiện tại sang trạng thái kế tiếp tùy thuộc k bit dữ liệu đầu vào.
Ví dụ: Bộ mã lưới k=1, K=3 và n=2
Hình 3.9. Bộ mã lưới k=1, K=3 và n=2
Hình 3.9 mô tả sơ đồ mã hóa với k=1, K=3 và n=2, hình 3.9 mô tả lưới mã và sơ đồ trạng thái của bộ mã
74
00 = 0
01 = 1
10 = 2
11 = 3
00 = 0
01 = 1
10 = 2
11 = 3
Traïng thaùi hieän taïi
Traïng thaùi keá tieáp Vector maõ
00, 11
11, 00
10, 01
01, 10
0
1
3
2
00
11 01
10
0111
00 10
Ngoõ vaøo
TX1
TX2
1 1 0 1 1 1
1 1 1 0 1 0
1 0 0 0 0 1
Löôùi maõ Sô ñoà traïng thaùi
Bit vaøo 1
Bit vaøo 0
Hình 3.10. Lưới mã và sơ đồ trạng thái với k=1, K=3 và n=2
Tín hiệu nhận được tại máy thu sẽ được bộ giải mã tương quan tối đa không gian-thời gian STMLD ( space-Time Maximum Likelood Decoder) giải mã. Bộ STMLD sẽ được thực hiện thành giải thuật vector Viterbi, đường mã nào có metric tích lũy nhỏ nhất sẽ được chọn là chuỗi dữ liệu được giải mã. Độ phức tạo của bộ giải mã tăng theo hàm mũ với số trạng thái trên giản đồ chòm sao và số trạng thái mã lưới, một bộ STTC có bậc phân tập là D truyền dữ liệu với tốc độ R bps thì độ phức tạp của bộ giải mã tỉ lệ với hệ số .
STTC cung cấp độ lợi mã tốt hơn nhiều STBC độ lợi của STTC tăng lên khi tăng số trạng thái của lưới mã. Tuy nhiên độ lợi phức tạp của STBC thấp hơn nhiều độ phức tạp của STTC, do STBC được mã hóa và giải mã đơn giản nhờ vào các giải thuật xử lý tuyến tính, nên STBC được mã hóa và giải mã đơn giản nhờ vào các giải thuật xử lý tuyến tính, nên STBC phù hợp với các ứng dụng thực tế trong hệ thống MIMO hơn STTC.
Ví dụ với mã k/n=2/3 với 2 bit vào, 3bit ra theo đa thức sinh G(x) như sau
G(x)= 5 4 7
7 4 2

75
Mạch thiết kế có dạng hai nhánh –Vì số lớn nhất trong mỗi hàng là 7 nên D=2 nghĩa là mỗi nhánh có 2 bộ trễ. Các đầu ra được đấu nối dựa trên các cột của ma trận giữa các hàng. Như hình vẽ dưới đây
Ta có kết quả trạng thái dịch chuyển của mạch và đầu ra
Trạng thái tiếp theo Đầu ra
numInputSymbols: 4
numOutputSymbols: 8
numStates: 16
nextStates: [16x4 double]
outputs: [16x4 double]
Có thể sử dụng lệnh
t = poly2trellis([3 3],[4 5 7;7 4 2]);
trong mathLab để kiểm tra lại
0 8 2 10
0 8 2 10
1 9 3 11
1 9 3 11
0 8 2 10
0 8 2 10
1 9 3 11
1 9 3 11
4 12 6 14
4 12 6 14
5 13 7 15
5 13 7 15
4 12 6 14
4 12 6 14
5 13 7 15
5 13 7 15
0 6 7 1
3 5 4 2
1 7 6 0
2 4 5 3
4 2 3 5
7 1 0 6
5 3 2 4
6 0 1 7
5 3 2 4
6 0 1 7
4 2 3 5
7 1 0 6
1 7 6 0
2 4 5 3
0 6 7 1
3 5 4 2
76
Kỹ thuật đánh thủng bit (Punction).
Để giảm nhỏ số bit thông tin truyền đI –người ta loai bỏ bớt một số bit bằng cách sử dụng một vector gọi là Punction vector.
-Thành phần đầu ra sẽ tương ứng với các bit 1 trong punction vector.
- Đối với mẫu tín hiệu đầu vào, độ dàI của nó phảI bằng với độ dàI Punction vector
Đối với mẫu tín hiệu đầu vào, nếu độ dàI của Punction vector bé hơn độ dàI của nó thì Punction vector sẽ được lặp lạI theo mẫu của nó để phủ lên tất cả các thành phần đầu vào
Để khôI phục lạI tín hiệu ban đầu thì bên thu sẽ sử dụng vector zero giống hệt punction vector. Nó dùng để chỉ ra vị trí các số 0 sẽ được chèn thay thế vào dòng dữ liệu
- Đối với mẫu tín hiệu đầu vào, độ dàI của nó phảI bằng với độ dàI Punction vector
Đối với mẫu tín hiệu đầu vào, nếu số số 1 trong vector zero nhỏ hơn đồ dàI đầu vào thì hệ thống sẽ lặp lạI việc chèn các mẫu 0 tới đầu ra
Trong ví dụ dưới đây Punction sử dung vector [1 1 0 1] cho kết quả tỷ lệ vào/ra=16/12
1
1
0
1
0
1
1
1
1
0
1
1
0
1
1
1
0
1
1
1
0
1
0
0
1
1
1
0
1
0
1
0
1
1
0
0
1
0

77
0
1
1
0
0
1
Về ý nghĩa: Phương pháp này giống như ta mã hoá mã chập với tỷ lệ k/n sau đó cắt bỏ bớt các phần thừa đi để biến đổi thành mã chập k’/n’. Ví dụ để mã thực hiện mã chập tỷ lệ 2/3 có thể thực hiện bằng mã chập 1/2 sau đó dùng mẫu punction để cắt bỏ bớt một số bit thành mã tỉ lệ 2/3
Ví dụ:
Mạch này tương đương với mạch mã hoá tỷ lệ 2/3 như sau:
Hình vẽ: Mạch mã hoá tỷ lệ 2/3
Mã hoá có hồi tiếp
78
Ví dụ lệnh poly2trellis(3,[7;5],7) trong MatLab sẽ tương đương với sơ đồ sau
Hình vẽ mã hoá xoắn có hồi tiếp
Bảng trạng thái
t.nextStates =
2
2 0
3 1
1 3
Bảng ra
t.outputs=
0 3
0 3
1 2
1 2
Kết quả ví dụ
St = 1 0 1 0 1 1 0 0 1 0
Out = 1 1 0 1 1 0 0 1 1 1 1 1 0 1 0 1 1 1 0 0
79
Chương 4. OFDM và MIMO – OFDM
4.1 OFDM
So sánh FDM và OFDM
OFDM khác với FDM nhiều điểm. Tất cả các sóng mang thứ cấp trong tín hiệu OFDM được đồng bộ thời gian và tần số với nhau, cho phép kiểm soát tốt can nhiễu giữa các sóng mang với nhau. Các sóng mang này chồng lấp trong miền tần số nhưng không gây can nhiễu giữa các sóng mang (ICI: inter-carrier interference) do bản chất trực giao của điều chế. Với FDM, tín hiệu truyền cần có khoảng bảo vệ tần số lớn giữa các kênh để đảm bảo không bị chồng phổ, vì vậy không có hiện tượng giao thoa kí tự ISI giữa những sóng mang. Điều này làm giảm hiệu quả phổ. Tuy nhiên với OFDM nhằm khắc phục hiệu quả phổ kém khi có khoảng bảo vệ (guard period) bằng cách giảm khoảng cách các sóng mang và cho phép phổ của các sóng mang cạnh nhau trùng lắp nhau. Sự trùng lắp này được phép nếu khoảng cách giữa các sóng mang được chọn chính xác sao cho đỉnh của sóng mang này sẽ đi qua diểm không của sóng mang kia tức là các sóng mang trực giao nhau để những tín hiệu được khôi phục mà không giao thoa hay chồng phổ.
fi
Si
M-QAM
fi
SiM-QAM
∑
OFDM
FDM
SiM-QAM
SiM-QAM
∑

80
Hình 1.3: Phổ của OFDM và FDM
Tính trực giao
Một tín hiệu được gọi là trực giao nếu nó có quan hệ độc lập với tín hiệu khác. Tính trực giao là một đặc tính cho phép truyền một lúc nhiều thông tin trên một kênh chung mà không gây ra nhiễu. Chính sự mất tính trực giao là nguyên nhân gây ra sự suy giảm tín hiệu trong viễn thông .
OFDM đạt được sự trực giao bằng cách cấp phát cho mỗi nguồn thông tin một số sóng mang nhất định khác nhau. Tín hiệu OFDM đạt được chính là tổng hợp của tất cả các sóng sin này. Mỗi một sóng mang có một chu kì sao cho bằng một số nguyên lần thời gian cần thiết để truyền một ký hiệu (symbol duration). Tức là để truyền một ký hiệu chúng ta sẽ cần mốt số nguyên lần của chu kỳ. Hình 2.4 là trường hợp của tín hiệu OFDM với 4 sóng mang phụ.
Hình 1.4: Cấu trúc của một tín hiệu OFDM
Các hình (1a), (2a), (3a), (4a) là miền thời gian của các sóng mang đơn tần với các chỉ số 1, 2, 3, 4 là số chu kỳ trên mỗi ký hiệu. Các hình (1b), (2b), (3b), (4b) là miền tần số nhờ sử dụng biến đổi Fourier nhanh của tín hiệu. Hình phía dưới cùng là tín hiệu tổng hợp của 4 sóng mang phụ.
Tập hợp các hàm được gọi là trực giao nếu thỏa mãn biểu thức (2.1)

81
∫0
T
Si ( t )S j( t )dt=C∗δ( i− j)=¿ {C <=> i= j ¿ ¿¿¿¿ (1.1)
Những sóng mang này trực giao với nhau vì khi nhân dạng sóng của 2 sóng mang bất kỳ và sau đó lấy tích phân trong khoang thời gian T sẽ có kết quả bằng không.
Sơ đồ hệ thống
Tính toan tín hiệu tại các điểm
St 1011 0001 1100 1001 0001
A A0 1 0 1 1 0
A1 0 0 1 0 0
A2 1 0 0 0 0
A3 1 1 0 1 1
B B0 1-j -1-j
B1 1+j 1-j
B2 1-j 1+j
B3 -1-j -1+j
C C0 0
C1 1-j
C2 1+j
C3 0
C4 0
C5 0
C6 1-j
C7 -1-j
D D0 0.2500 - 0.2500i

82
D1 -0.2500
D2 -0.2500 + 0.2500i
D3 0.2500 + 0.3536i
D4 0.2500 + 0.2500i
D5 -0.2500
D6 -0.2500 - 0.2500i
D7 0.2500 - 0.3536i
E E0 0.2500 + 0.2500i
E1 -0.2500
E2 -0.2500 - 0.2500i
E3 0.2500 - 0.3536i
E4 0.2500 - 0.2500i
E5 -0.2500
E6 -0.2500 + 0.2500i
E7 0.2500 + 0.3536i
E8 0.2500 + 0.2500i
E9 -0.2500
E10 -0.2500 - 0.2500i
E11 0.2500 - 0.3536i
F p/s p/s p/s
G G1
G2
H H1
H2
copy

83
4.2 MIMO-OFDM
4.3 STBC-MIMO-OFDM
4.4 ALAMOUTI
DFSF
OFDM
OFDM
OFDM
OFDM
ALAMOUTI CODE

84
Phụ lục
Một số hàm cơ bản
HH
=
nCr = n!/(r!.(n-r)!)
85
Plot of the error function
In mathematics, the error function (also called the Gauss error function) is a special function (non-elementary) of sigmoid shape which occurs in probability, statistics and partial differential equations. It is defined as:
The complementary error function, denoted erfc, is defined as
\ The error function is essentially identical to the standard normal cumulative distribution function, denoted Φ, also named norm(x) by software languages, as they differ only by scaling and translation. Indeed,
or rearranged for erf and erfc:
Consequently, the error function is also closely related to the Q-function, which is the tail probability of the standard normal distribution. The Q-function can be expressed in terms of the error function as
EbNo = 8:2:20;
M = 16; % Use 16 QAM
L = 1; % Start without diversity
ber = berfading(EbNo,'qam',M,L);
semilogy(EbNo,ber);
text(18.5, 0.02, sprintf('L=%d', L))
hold on

86
% Loop over diversity order, L, 2 to 20
for L=2:20
ber = berfading(EbNo,'qam',M,L);
semilogy(EbNo,ber);
end
text(18.5, 1e-11, sprintf('L=%d', L))
title('QAM over fading channel with diversity order 1 to 20')
xlabel('E_b/N_o (dB)')
ylabel('BER')
grid on
ber = berawgn(EbNo,'pam',M) returns the BER of uncoded PAM over an AWGN channel with coherent demodulation.
ber = berawgn(EbNo,'qam',M) returns the BER of uncoded QAM over an AWGN channel with coherent demodulation.
berub = bercoding(EbNo,'conv',decision,coderate,dspec) berub = bercoding(EbNo,'block','hard',n,k,dmin) berub = bercoding(EbNo,'block','soft',n,k,dmin) berapprox = bercoding(EbNo,'Hamming','hard',n) berub = bercoding(EbNo,'Golay','hard',24) berapprox = bercoding(EbNo,'RS','hard',n,k)
Bit error rate (BER) for imperfect synchronization
Syntax
ber = bersync(EbNo,timerr,'timing') ber = bersync(EbNo,phaserr,'carrier')
berconfint - Bit error rate (BER) and confidence interval of Monte Carlo simulation
Syntax
[ber,interval] = berconfint(nerrs,ntrials)[ber,interval] = berconfint(nerrs,ntrials,level)

87
X Q(x) X Q(x)
0 0.5 2 0.022750132
0.1 0.460172163 2.1 0.017864421
0.2 0.420740291 2.2 0.013903448
0.3 0.382088578 2.3 0.01072411
0.4 0.344578258 2.4 0.008197536
0.5 0.308537539 2.5 0.006209665
0.6 0.274253118 2.6 0.004661188
0.7 0.241963652 2.7 0.003466974
0.8 0.211855399 2.8 0.00255513
0.9 0.184060125 2.9 0.001865813
1 0.158655254 3 0.001349898
1.1 0.135666061 3.1 0.000967603
1.2 0.11506967 3.2 0.000687138
1.3 0.096800485 3.3 0.000483424
1.4 0.080756659 3.4 0.000336929
1.5 0.066807201 3.5 0.000232629
1.6 0.054799292 3.6 0.000159109
1.7 0.044565463 3.7 0.0001078
1.8 0.035930319 3.8 7.2348E-05
1.9 0.02871656 3.9 4.80963E-05
4 3.16712E-05







