x1.gps sistem pemosisi global
TRANSCRIPT
x1.GPS
Sistem Pemosisi GlobalDari Wikipedia bahasa Indonesia, ensiklopedia bebas
Langsung ke: navigasi, cari
Gambaran satelit GPS di orbit
Sistem Pemosisi Global [1] (bahasa Inggris: Global Positioning System(GPS)) adalah sistem untuk menentukan letak di permukaan bumidengan bantuan penyelarasan (synchronization) sinyal satelit. Sistemini menggunakan 24 satelit yang mengirimkan sinyal gelombangmikro ke Bumi. Sinyal ini diterima oleh alat penerima dipermukaan, dan digunakan untuk menentukan letak, kecepatan, arah,dan waktu. Sistem yang serupa dengan GPS antara lain GLONASSRusia, Galileo Uni Eropa, IRNSS India.
Sistem ini dikembangkan oleh Departemen Pertahanan AmerikaSerikat, dengan nama lengkapnya adalah NAVSTAR GPS (kesalahanumum adalah bahwa NAVSTAR adalah sebuah singkatan, ini adalahsalah, NAVSTAR adalah nama yang diberikan oleh John Walsh,seorang penentu kebijakan penting dalam program GPS).[2] Kumpulansatelit ini diurus oleh 50th Space Wing Angkatan Udara AmerikaSerikat. Biaya perawatan sistem ini sekitar US$750 juta pertahun,[3] termasuk penggantian satelit lama, serta riset danpengembangan.
GPS Tracker atau sering disebut dengan GPS Tracking adalahteknologi AVL (Automated Vehicle Locater) yang memungkinkanpengguna untuk melacak posisi kendaraan, armada ataupun mobildalam keadaan Real-Time. GPS Tracking memanfaatkan kombinasiteknologi GSM dan GPS untuk menentukan koordinat sebuah obyek,lalu menerjemahkannya dalam bentuk peta digital.
http://id.wikipedia.org/wiki/Sistem_Pemosisi_Global
Pengertian GPSGPS (Global Positioning System) adalah sistem satelit navigasi
dan penentuan posisi yang dimiliki dan dikelola oleh Amerika
Serikat. Sistem ini didesain untuk memberikan posisi dan
kecepatan tiga-dimensi serta informasi mengenai waktu, secara
kontinyu di seluruh dunia tanpa bergantung waktu dan cuaca, bagi
banyak orang secara simultan. Saat ini GPS sudah banyak digunakan
orang di seluruh dunia dalam berbagai bidang aplikasi yang
menuntut informasi tentang posisi, kecepatan, percepatan ataupun
waktu yang teliti. GPS dapat memberikan informasi posisi dengan
ketelitian bervariasi dari beberapa millimeter (orde nol) sampai
dengan puluhan meter.
Kemampuan GPS
Beberapa kemampuan GPS antara lain dapat memberikan informasi
tentang posisi, kecepatan, dan waktu secara cepat, akurat, murah,
dimana saja di bumi ini tanpa tergantung cuaca. Hal yang perlu
dicatat bahwa GPS adalah satu-satunya sistem navigasi ataupun
sistem penentuan posisi dalam beberapa abad ini yang memiliki
kemampuan handal seperti itu. Ketelitian dari GPS dapat mencapai
beberapa mm untuk ketelitian posisinya, beberapa cm/s untuk
ketelitian kecepatannya dan beberapa nanodetik untuk ketelitian
waktunya. Ketelitian posisi yang diperoleh akan tergantung pada
beberapa faktor yaitu metode penentuan posisi, geometri satelit,
tingkat ketelitian data, dan metode pengolahan datanya.
Produk yang diberikan GPS
Secara umum produk dari GPS adalah posisi, kecepatan, dan waktu. Selain itu ada
beberapa produk lainnya seperti percepatan, azimuth, parameter attitude, TEC (Total
Electron Content), WVC (Water Vapour Content), Polar motion parameters, serta
beberapa produk yang perlu dikombinasikan dengan informasi eksternal dari sistem
lain, produknya antara lain tinggi ortometrik, undulasi geoid, dan defleksi vertikal.
Segmen Penyusun Sistem GPS
Secara umum ada tiga segmen dalam sistem GPS yaitu segmen sistem
kontrol, segmen satelit, dan segmen pengguna.
Satelit GPS dapat dianalogikan sebagai stasiun radio angkasa,
yang diperlengkapi dengan antena-antena untuk mengirim dan
menerima sinyal –sinyal gelombang. Sinyal-sinyal ini selanjutnya
diterima oleh receiver GPS di/dekat permukaan bumi, dan digunakan
untuk menentukan informasi posisi, kecepatan, maupun waktu.
Selain itu satelit GPS juga dilengkapi dengan peralatan untuk
mengontrol attitude satelit. Satelit-satelit GPS dapat dibagi
atas beberapa generasi yaitu ; blok I, blok II, blok IIA, blok
IIR dan blok IIF. Hingga april 1999 ada 8 satelit blok II, 18
satelit blok II A dan 1 satelit blok II R yang operasional.
Secara umum segmen sistem kontrol berfungsi mengontrol dan
memantau operasional satelit dan memastikan bahwa satelit
berfungsi sebagaimana mestinya
Segmen pengguna terdiri dari para pengguna satelit GPS di
manapun berada. Dalam hal ini alat penerima sinyal GPS ( GPS
receiver ) diperlukan untuk menerima dan memproses sinyal -
sinyal dari satelit GPS untuk digunakan dalam penentuan posisi,
kecepatan dan waktu. Komponen utama dari suatu receiver GPS
secara umum adalah antena dengan pre-amplifier, bagian RF dengan
pengidentifikasi sinyal dan pemroses sinyal, pemroses mikro untuk
pengontrolan receiver, data sampling dan pemroses data ( solusi
navigasi ), osilator presisi , catu daya, unit perintah dan
tampilan, dan memori serta perekam data.
Prinsip penentuan posisi dengan GPS
Prinsip penentuan posisi dengan GPS yaitu menggunakan metode
reseksi jarak, dimana pengukuran jarak dilakukan secara simultan
ke beberapa satelit yang telah diketahui koordinatnya. Pada
pengukuran GPS, setiap epoknya memiliki empat parameter yang
harus ditentukan : yaitu 3 parameter koordinat X,Y,Z atau L,B,h
dan satu parameter kesalahan waktu akibat ketidaksinkronan jam
osilator di satelit dengan jam di receiver GPS. Oleh karena
diperlukan minimal pengukuran jarak ke empat satelit.
Tipe alat (Receiver ) GPS
Ada 3 macam tipe alat GPS, dengan masing-masing memberikan tingkat ketelitian
(posisi) yang berbeda-beda. Tipe alat GPS pertama adalah tipe Navigasi (Handheld,
Handy GPS). Tipe nagivasi harganya cukup murah, sekitar 1 – 4 juta rupiah, namun
ketelitian posisi yang diberikan saat ini baru dapat mencapai 3 sampai 6 meter. Tipe
alat yang kedua adalah tipe geodetik single frekuensi (tipe pemetaan), yang biasa
digunakan dalam survey dan pemetaan yang membutuhkan ketelitian posisi sekitar
sentimeter sampai dengan beberapa desimeter. Tipe terakhir adalah tipe Geodetik dual
frekuensi yang dapat memberikan ketelitian posisi hingga mencapai milimeter. Tipe ini
biasa digunakan untuk aplikasi precise positioning seperti pembangunan jaring titik
kontrol, survey deformasi, dan geodinamika. Harga receiver tipe
geodetik cukup mahal, mencapai ratusan juta rupiah untuk 1
unitnya.
Sinyal dan Bias pada GPS
GPS memancarkan dua sinyal yaitu frekuensi L1 (1575.42 MHz) dan L2 (1227.60 MHz).
Sinyal L1 dimodulasikan dengan dua sinyal pseudo-random yaitu kode P (Protected)
dan kode C/A (coarse/aquisition). Sinyal L2 hanya membawa kode P. Setiap satelit
mentransmisikan kode yang unik sehingga penerima (receiver GPS) dapat
mengidentifikasi sinyal dari setiap satelit. Pada saat fitur ”Anti-Spoofing” diaktifkan,
maka kode P akan dienkripsi dan selanjutnya dikenal sebagai kode P(Y) atau kode Y.
Ketika sinyal melalui lapisan atmosfer, maka sinyal tersebut akan terganggu oleh
konten dari atmosfer tersebut. Besarnya gangguan di sebut bias. Bias sinyal yang ada
utamanya terdiri dari 2 macam yaitu bias ionosfer dan bias troposfer. Bias ini harus
diperhitungkan (dimodelkan atau diestimasi atau melakukan teknik differencing untuk
metode diferensial dengan jarak baseline yang tidak terlalu panjang) untuk
mendapatkan solusi akhir koordinat dengan ketelitian yang baik. Apabila bias
diabaikan maka dapat memberikan kesalahan posisi sampai dengan orde meter.
Error Source pada GPS
Pada sistem GPS terdapat beberapa kesalahan komponen sistem yang akan
mempengaruhi ketelitian hasil posisi yang diperoleh. Kesalahan-kesalahan tersebut
contohnya kesalahan orbit satelit, kesalahan jam satelit, kesalahan jam receiver,
kesalahan pusat fase antena, dan multipath. Hal-hal lainnya juga ada yang mengiringi
kesalahan sistem seperti efek imaging, dan noise. Kesalahan ini dapat dieliminir salah
satunya dengan menggunakan teknik differencing data.
Metoda penentuan posisi dengan GPS
Metoda penentuan posisi dengan GPS pertama-tama terbagi dua,
yaitu metoda absolut, dan metoda diferensial. Masing-masing
metoda kemudian dapat dilakukan dengan cara real time dan atau
post-processing. Apabila obyek yang ditentukan posisinya diam
maka metodenya disebut Statik. Sebaliknya apabila obyek yang
ditentukan posisinya bergerak, maka metodenya disebut kinematik.
Selanjutnya lebih detail lagi kita akan menemukan metoda-metoda
seperti SPP, DGPS, RTK, Survei GPS, Rapid statik, pseudo
kinematik, dan stop and go, serta masih ada beberapa metode
lainnya.
Ketelitian Posisi yang diperoleh dari Sistem GPS
Untuk aplikasi sipil, GPS memberikan nilai ketelitian posisi
dalam spektrum yang cukup luas, mulai dari meter sampai dengan
milimeter. Sebelum mei 2000 (SA on) ketelitian posisi GPS metode
absolut dengan data psedorange mencapai 30 – 100 meter. Kemudian
setelah SA off ketelitian membaik menjadi 3 – 6 meter. Sementara
itu Teknik DGPS memberikan ketelitian 1-2 meter, dan teknik RTK
memberikan ketelitian 1-5 sentimeter. Untuk posisi dengan
ketelitian milimeter diberikan oleh teknik survai GPS dengan
peralatan GPS tipe geodetik dual frekuensi dan strategi
pengolahan data tertentu.
Aplikasi-aplikasi Teknologi GPS
GPS (Global Positioning System) adalah sistem satelit navigasi
yang paling populer dan paling banyak diaplikasikan di dunia pada
saat ini, baik di darat, laut, udara, maupun angkasa. Disamping
aplikasi-aplikasi militer, bidang-bidang aplikasi GPS yang cukup
marak saat ini antara lain meliputi survai pemetaan, geodinamika,
geodesi, geologi, geofisik, transportasi dan navigasi, pemantauan
deformasi, pertanian, kehutanan, dan bahkan juga bidang olahraga
dan rekreasi. Di Indonesia sendiri penggunaan GPS sudah dimulai
sejak beberapa tahun yang lalu dan terus berkembang sampai saat
ini baik dalam volume maupun jenis aplikasinyahttp://gaulwahyu.wordpress.com/2008/10/16/pengertian-gps/
2.SNR
S N R : Signal to Noise Ratio : Rasio Antara kekuatan Sinyal
dengan Gangguan (noise)
- Downstream SNR : Menampilkan Nilai kekuatan sinyal pada modem
kabel kita dibanding dengan gangguan(noise) pada line tersebut
(sinyal/noise), semakin besar Gangguan maka nilai SNR semakin
kecil sebagai akibat koneksi akan mengalami banyak hambatan,
Nilai standarnya adalah 30, jika dibawah nilai tersebut hemmmm…
udah pasti lemot dsb dsb dehhhh
- Upstream SNR : Pengertian sederhananya adalah banyaknya sinyal
yang sampai pada ujung kabel modem kita dibandingkan dengan
tingkat kebisingan yang ada, Nilai yang baik adalah diatas 29,
seperti juga Downstream SNR semakin besar noise semakin kecil
nilai Upstream SNRhttp://belitong.wordpress.com/2011/03/21/upstream-snr-downstream-snr/
SNR, SNR Margin, Line Attenuation, Modulation
SNR ( Signal to Noise Ratio ) adalah Perbandingan (ratio) antara
kekuatan Sinyal (signal strength) dengan kekuatan Derau (noise level).
Nilai SNR dipakai untuk menunjukkan kualitas jalur (medium) koneksi.
Makin besar nilai SNR, makin tinggi kualitas jalur tersebut. Artinya,
makin besar pula kemungkinan jalur itu dipakai untuk lalu-lintas
komunikasi data & sinyal dalam kecepatan tinggi. • Nilai SNR suatu
jalur dapat dikatakan pada umumnya tetap, berapapun kecepatan data
yang melalui jalur tersebut.
http://electmania.blogspot.com/2011/03/pengertian-snr-
attenuationqos.html
3.UTM
Pengertian UTM (Universal Transverse Mercator)UTM (Universal Transverse Mercator)
Universal Transverse Mercator(UTM) merupakan Metode grid berbasis
menentukan lokas di permukaan bumi yang merupakan aplikasi
praktis dari 2 dimensi.
Sejarah UTM (Universal Transerve Mercator)
Universal Transerve Mercator sistem koordinat dikembangkan oleh
Amerika Serikat Army Corps of Engineers pada tahun 1940-an.
Sistem ini didasarkan pada model yang ellipsoidal bumi. Untuk
daerah di Amerika Serikat berbatasan, yang Clarke 1866 ellipsoid
digunakan untuk daerah sisa bumi, termasuk Hawai, ellipsoid
internasional digunakan. Saat ini WGS84 ellipsoid digunaka
sebagai model yang mendasari bumi dalam system koordinat UTM.
Sebelum pengembangan system transverse Mercator koordinat
universal. Beberapa Negara Eropa menunjukkan utilitas berbasis
grid peta konformal dengan pemetaan wilayah mereka selama periode
antar perang. Menghitung jarak antara dua titik pada peta ini
dapat dilakukan lebih mudah dilapangan daripada yang dinyatakan
mungkin menggunakan rumus trigonometri yang diperlukan dalam
system graticule berbasis lintang dan bujur.
Melintang proyek si Mercator adalah varian dari proyeksi
Mercator, yang awalnya dikembagkan oleh Flemish geographer dan
kartografer Gerardus Mercator, pada tahun 1570. Proyeksi ini
konformal, sehingga mempertahankan sudut dan mendekati bentuk
tetapi selalu mendistrosi jarak dan daerah. UTM melibatkan non-
linear scaling di kedua Easting dan Northing untuk memastikan
peta proyeksi eliipsoid adalah konformal.
Zona UTM
System UTM membagi permukaan bumi antara 80oS dan 84oLU menjadi
60 zona, masing-masing 6o bujur lebar dan berpusat diatas
meridian bujur. Zona 1 adalah dibatasi oleh bujur 180o sampai
174oB dan berpusat pada 177 barat meridian. Zona penomoran
meningkatkan kea rah timur. Masing-masing dari 60 zona bujur
dalam system UTM didasarkan pada Mercator Melintang proyeksi.
Pemetaan wilayah besar utara-selatan dengan batas jumlah rendah
distori, dengan menggunakan zona sempit dari 6o bujur sampai 800
km lebarnya dan mengurangi skala factor sepanjang meridian
sentral denga hanya 0,0004 – 0,9996 (pengurangan 1:2500), jumlah
distori diselenggarakan dibawah 1 bagian di 1.000 dalam setiap
zona. Distorsi skala meningkat menjadi 1,00010 pada batas luar
zona sepanjang khatulistiwa.
Pada setiap zona factor skala meridian sentral mengurangi
diameter silinder melintang untuk menghasilkan proyeksi garis
potong dengan dua garis standar, atau garis-garis skala
sebenarnya terletak disekitar 180 km dikedua sisi, dan kira-kiran
sejajar, pusat meridian (ARccOs 0,9996 = 1,62o pada
khatulistiwa). Faktor skala kurang dari 1 dalam baris-baris dan
lebih besar dari 1 luar dari garis-garis, tetapi keseluruhan
distorsi skala di dalam zona seluruh diminimalkan
http://yunitafauzia.wordpress.com/2012/09/21/pengertian-utm-universal-
transverse-mercator/
Proyeksi UTM adalah proyeksi yang memiliki mercator dengan
sifat-sifat khusus. UTM merupakan sistem proyeksi
silinder,konform, secant, transversal.
Ketentuan UTM
Bidang silinder memotong bola bumi pada dua buah meridian yang disebut meridian
standar dengan faktor skala 1.
Lebar zone 6° dihitung dari 180° BB dengan nomor zone 1 hingga ke 180° BT dengan
nomor zone 60. Tiap zone mempunyai meridian tengah sendiri.
Perbesaran di meridian tengah = 0,9996.
Batas paralel tepi atas dan tepi bawah adalah 84° LU dan 80° LS.
Ciri Proyeksi UTM
Ciri proyeksi UTM adalah :
a) Proyeksi bekerja pada setiap bidang Ellipshoid yang dibatasi cakupan garis meridian
dengan lebar yang disebut zone.
b) Proyeksi garis meridian pusat (MC) merupakan garis vertikal pada bidang tengah
poyeksi.
c) Proyeksi garis lingkar equator merupakan garis lurus horizontal di tengah bidang
proyeksi.
d) Grid merupakan perpotongan garis-garis yang sejajar dengan dua garis proyeksi pada
butir dua dan tiga dengan interval sama. Jadi garis pembentukan gridn bukan hasil
dari garis Bujur atau Lintang Ellipshoide (kecuali garis Meridian Pusat dan Equator).
e) Penyimpangan arah garis meridian terhadap garis utara grid di Meridian Pusat = ,
atau garis arah meridian yang melalui titik luar Meridian Pusat tidak sama dengan
garis arah Utara Grid Peta yang disebut Konvegerensi Meridian. Dalam luasan dan
skala tertentu tampilan simpangan ini dapat diabaikan karena kecil.
UTM digunakan sebagai sistem Proyeksi Pemetaan Nasional
Universal Transverse Mercator (UTM) merupakan sistem proyeksi yang digunakan
secara nasional di wilayah Indonesia. Berikut ini akan dijelaskan lasan mengapa sistem
UTM dipakai :
a. Kondisi geografi negara Indonesia membujur disekitar garis khatulistiwa atau garis
lintang equator dari barat sampai ke timur yang relative seimbang.
b. Untuk kondisi seperti ini, sistem proyeksi Tansverse Mecator/ Silinder Melintang
Mecator adalah paling ideal (memberikan hasil dengan distorsi mnimal).
c. Dengan pertimbangan kepentingan teknis maka akan dipilih sisatem proyeksi
Universal Transverse Mecator yang memberikan batasan luasan bidang antara dua
garis bujur dan ellipsoide yang dinyatakan sebagai zone.
Keuntungan dan Kerugian
Keuntungan:
a. Proyeksi simetris selebar 6° untuk setiap zone.
b. Transformasi koordinat dari zone ke zone dapat dikerjakan
dengan rumus yang sama untuk setiap zone di seluruh dunia.
c. Distorsi berkisar antara - 40 cm/ 1.000 m dan 70 cm/ 1.000 m.
Kerugian :
a. Karena pembesaran jarak dan konvergensi meridian, maka unsur
ini harus diperhatikan dalam perhitungan.
b. Walaupun satu derajat bagian meliputi daerah luas akan tetapi
masih dibutuhkan hitungan-hitungan pemindahan bagian derajat,
menjadi tidak praktis.
c. Konvergensi meridian pada jarak 15 km maksimum dapat mencapai
lebih kurang 150 meter.
Konvergensi adalah serangkaian garis searah yang menuju suatu
titik pertemuan dan Konvergensi Meridian adalah ukuran lembar
peta dan cara menghitung titik sudut lembar peta
4.MGRSMilitary Grid Reference System (MGRS)[1] adalah standar koordinat
geografi yang digunakan oleh NATO untuk menunjukkan titik lokasi
di bumi. MGRS diturunkan dari sistem grid UTM (Universal
Transverse Mercator) dan UPS (Universal Polar Stereographic),
namun memiliki perbedaan konvensi pelabelan. MGRS digunakan untuk
seluruh permukaan bumi.
http://id.wikipedia.org/wiki/Military_grid_reference_system
Contoh dari MGRS koordinat , atau jaringan referensi , akan
4QFJ12345678 , yang terdiri dari tiga bagian :
4Q (zona jaringan penanda , GZD ) ,
FJ ( pengenal persegi 100.000 meter ) ,
Dan 12345678 ( lokasi numerik , easting adalah 1234 dan Northing
adalah 5678 , dalam hal ini menentukan lokasi dengan resolusi 10
m ) .
Sebuah referensi jaringan MGRS adalah sistem referensi titik .
Ketika istilah ' kotak persegi ' digunakan , dapat merujuk ke
persegi dengan panjang sisi 10 km ( 6 mil ) , 1 km , 100 m ( 328
kaki ) , 10 m atau 1 m , tergantung pada ketepatan koordinat
disediakan. ( Dalam beberapa kasus , kotak berdekatan dengan Grid
Zona Junction ( GZJ ) yang terpotong , sehingga poligon adalah
keterangan yang lebih baik dari daerah-daerah . ) Jumlah digit di
lokasi numerik harus bahkan : 0 , 2 , 4 , 6 , 8 atau 10 ,
tergantung pada presisi yang diinginkan . Ketika mengubah tingkat
presisi , penting untuk memotong daripada putaran arah timur dan
northing nilai untuk memastikan poligon yang lebih tepat akan
tetap dalam batas-batas poligon kurang tepat . Terkait dengan ini
adalah keutamaan sudut barat daya poligon menjadi titik pelabelan
untuk seluruh poligon . Dalam kasus di mana poligon bukan persegi
dan telah dipotong oleh persimpangan zona grid, poligon membuat
label sudut barat daya seolah-olah itu belum dipotong .
4Q ...................GZD only, precision level 6° × 8° (in most cases)
4QFJ .................GZD and 100 km Grid Square ID, precision level 100 km
4QFJ16 ...............precision level 10 km 4QFJ1267 .............precision level 1 km 4QFJ123678 ...........precision level 100 m 4QFJ12346789 .........precision level 10 m 4QFJ1234567890 .......precision level 1 m
Penunjukan zona Grid
Bagian pertama dari koordinat MGRS adalah zona kotak-kotak. Zona UTM 6
° lebar, bernomor 1-60, yang berpotongan dengan garis lintang yang
biasanya 8 ° tinggi, berhuruf C-X (menghilangkan I dan O). garis
lintang northmost, X, adalah 12 ° tinggi. Perpotongan zona UTM dan
garis lintang adalah (biasanya) 6 ° × 8 ° poligon disebut zona
jaringan, yang ditetapkan dalam MGRS dibentuk dengan jumlah zona (satu
atau dua digit - nomor zona 1 sampai 9 adalah hanya satu digit, sesuai
dengan contoh di DMA TM 8.358,1, Bagian 3-2, [1] Gambar 7), diikuti
dengan huruf garis lintang (huruf besar). Notasi ini digunakan dalam
kedua UTM dan MGRS, yaitu Sistem referensi grid UTM, artikel tentang
Universal Transverse Mercator menunjukkan banyak peta zona ini grid,
termasuk penyimpangan untuk Svalbard dan barat daya Norwegia.
5.CH1903
CH1903 adalah sebutan untuk Swiss Corrdinate System.
Merupakan Datum Geodetik yang digunakan di Eropa - Liechtenstein
dan Swiss
Sistem koordinat Swiss (Swiss grid) adalah sistem koordinat
geografis yang digunakan di Swiss untuk peta dan survei oleh
Kantor Federal Swiss Topografi ( Swisstopo ) . Proyeksi peta yang
digunakan adalah Oblique Mercator pada 1841 Bessel ellipsoid.
Datum geodetik CH1903 menggunakan Bern ( 46 ° 57'03 .9 " N 7 °
26'19 .1 " E ( WGS84 ) ) sebagai titik dasar observatorium,
lokasi saat ini dari titik tersebut adalah Institut für exakte
Wissenschaften dari University of Bern . Untuk menghindari
kesalahan selama transmisi koordinat , koordinat titik ini adalah
600'000 m E / 200'000 m N. 0 / 0 dimana koordinat terletak dekat
Bordeaux, Prancis .
Definisi ini memiliki arti sebagai berikut :
Semua koordinat selalu positif , karena Swiss terletak di
kuadran pertama dari sistem koordinat. Selain itu , seluruh
wilayah Swiss berada di bawah y = x garis sistem koordinat .
Jadi, semua E - koordinat selalu lebih besar dari N - koordinat .
Datum CH1903 + adalah perbaikan dan peningkatan CH1903 . Hal
ini didasarkan pada WGS84 , dan itu dirancang untuk survei tanah
nasional 1995 ( LV 95 untuk Landesvermessung 1995 ) . Koordinat
titik referensi baru , Observatorium Zimmerwald , harus menjaga
CH1903 koordinat sejauh mungkin. Pergeseran maksimum antara dua
datum adalah 3 meter di atas tanah , sehingga sebagian besar peta
dan GPS pengguna tidak akan melihat perbedaan apapun. Daerah imur
dan utara meningkat sebesar 2 dan 1 juta , masing-masing,
sehingga 14 digit bukan 12 digit koordinat meteran.
6.NGS84World Geodetic System adalah standar untuk digunakan dalam
kartografi, geodesi, dan navigasi. Terdiri dari bingkai koordinat
standar untuk Bumi, permukaan referensi standar bulat (datum atau
referensi ellipsoid) untuk data ketinggian mentah, dan permukaan
ekuipotensial gravitasi (geoid) yang mendefinisikan permukaan
laut nominal.
Revisi terbaru adalah WGS84 atau NGS84(penanggalan dari tahun
1984 dan terakhir direvisi pada tahun 2004), yang berlaku sampai
sekitar 2010. Skema sebelumnya termasuk WGS 72, WGS 66, dan WGS
60. WGS 84 adalah koordinat sistem referensi yang digunakan oleh
Global Positioning System.
WGS 84 Sebagai Penentuan Posisi
Datum yang digunakan untuk penentuan posisi GPS disebut WGS84
(World Geodetic System 1984). Ini terdiri dari tiga dimensi
sistem koordinat Cartesian dan ellipsoid terkait, sehingga posisi
WGS84 dapat digambarkan sebagai salah koordinat XYZ Cartesian
atau lintang, bujur dan koordinat elipsoid tinggi. Asal usul
datum adalah Geocentre (pusat massa Bumi) dan dirancang untuk
posisi mana saja di Bumi.
Sejalan dengan definisi datum yang diberikan, datum WGS84
tidak lebih dari satu set konvensi, konstanta diadopsi dan
formula. Tidak ada infrastruktur fisik disertakan, dan definisi
tersebut tidak menunjukkan bagaimana Anda dapat memposisikan diri
dalam sistem ini. Definisi WGS84 termasuk item berikut:
Sumbu Cartesian WGS84 ellipsoid dan yang geosentris,
yaitu, asal mereka adalah pusat massa dari seluruh bumi, termasuk
lautan dan atmosfer.
Skala sumbu adalah bahwa dari kerangka Bumi lokal, dalam
arti teori relativistik gravitasi.
Orientasi mereka (yaitu, arah dari sumbu dan, karenanya,
orientasi khatulistiwa elipsoid dan meridian utama dari nol
bujur) bertepatan dengan ekuator dan meridian utama dari
Internationale de l'Heure Biro pada saat ini dalam waktu 1984,0 (
yaitu, tengah malam pada Malam Tahun Baru 1983).
Sejak 1.984,0 orientasi sumbu dan ellipsoid telah berubah
sedemikian rupa sehingga gerak rata-rata lempeng kerak relatif
terhadap ellipsoid adalah nol. Hal ini memastikan bahwa sumbu Z
dari datum WGS84 bertepatan dengan Kutub Referensi Internasional,
dan bahwa meridian utama dari elipsoid (yaitu, pesawat yang
berisi Z dan sumbu X Cartesian) bertepatan dengan International
Reference Meridian.
Bentuk dan ukuran ellipsoid biaksial WGS84 didefinisikan
oleh panjang sumbu semi-mayor dan timbal balik dari
merata. Ellipsoid ini adalah bentuk yang sama dan ukurannya
dengan ellipsoid GRS80.
Nilai-nilai konvensional juga diadopsi untuk kecepatan
sudut standar Bumi, dan untuk Bumi gravitasi konstan. Yang
pertama diperlukan untuk pengukuran waktu dan yang kedua untuk
menentukan skala sistem dalam arti relativistik. Kami tidak akan
pertimbangkan parameter lebih lanjut di sini.
Ada beberapa poin yang perlu diperhatikan pada WGS 84 tersebut :
Pertama, ellipsoid dirancang untuk terbaik sesuai dengan
geoid bumi secara keseluruhan. berarti pada umumnya geoid tidak
cocok di negara tertentu, serta non-geosentris ellipsoid
digunakan untuk pemetaan negara tersebut. Dalam GRS80 Britania
Raya terletak sekitar lima puluh meter di bawah geoid dan lereng
dari timur ke barat ke geoid relatif, sehingga pemisahan geoid-
elipsoid adalah sepuluh meter lebih di barat daripada di timur.
Kedua, perhatikan bahwa sumbu dari sistem Cartesian WGS84
, karena itu, semua lini garis lintang dan bujur dalam data
WGS84, tidak diam terhadap negara tertentu. Karena gerakan
lempeng tektonik, berbagai belahan dunia bergerak relative satu
sama lain dengan kecepatan dari urutan sepuluh sentimeter per
tahun. The International Referensi Meridian dan Kutub dan , data
WGS84, yang diam terhadap rata-rata dari semua gerakan. Tapi ini
berarti mereka berada dalam gerak relatif terhadap wilayah
tertentu atau negara.Di Inggris semua lintang dan bujur WGS84
berubah pada tingkat konstan sekitar 2,5 sentimeter per tahun ke
arah utara-timur. Selama satu dekade atau lebih, efek ini menjadi
nyata dalam skala besar pemetaan.
http://friskanovialestari.blogspot.com/2013/05/datum-wgs-84.html
7.NAD27
North American Datum (NAD) adalah datum yang sekarang
digunakan untuk menentukan jaringan geodetik di Amerika Utara.
Sebuah datum adalah deskripsi formal dari bentuk bumi bersama
dengan "anchor" point untuk sistem koordinat. Dalam survei,
kartografi, dan perencanaan penggunaan lahan, dua datum Amerika
Utara yang digunakan yaitu: Datum Amerika Utara 1927 (NAD27) dan
Datum America Utara 1983 (NAD83). Keduanya adalah sistem
referensi geodetik berdasarkan asumsi yang sedikit berbeda dan
pengukuran.
Seiring dengan semakin banyaknya data yang dikumpulkan,
semakin banyak muncul perbedaan sehingga pada tahun 1927
dilakukan penghitungan ulang dan ditetapkanlah NAD27 dengan
menggunakan spheroid dan asal yang sama seperti pendahulunya.
North American Datum tahun 1927 ( NAD27 ) didasarkan pada
survei dari seluruh benua dari titik referensi umum yang dipilih
pada tahun 1901 karena titik tersebut berbatasan dengan Amerika
Serikat sehingga dapat dihitung : Hal ini didasarkan pada suatu
triangulasi stasiun di persimpangan triangulasi busur benua 1899
pada paralel ke 39 utara dan busur triangulasi sepanjang
meridian barat 98 yang berada di dekat pusat geografis perbatasan
Amerika Serikat. Datum ini menyatakan titik pada Meades Ranch
menjadi 39° 13' 260,686" lintang utara, 98° 32' 300,506" bujur
barat (data NGS ). NAD27 berorientasi dengan menyatakan azimuth
dari Meades Ranch ke Waldo menjadi 255° 28' 14.52" dari utara.
Garis lintang dan bujur dari setiap titik lain di Amerika Utara
kemudian didasarkan jarak dan arah dari Meades Ranch: Jika titik
adalah X meter di azimuth Y derajat dari Meades Ranch, diukur
pada Clarke ellipsoid 1866, maka lintang dan bujur pada ellipsoid
yang didefinisikan dan dapat dihitung .
8.AGD66
Australian Geodetic Datum 1966 (AGD66)Adalah penyesuian terakhir sistem jariangan geodetik
Australia yang dilakukan pada bulan Maret 1966 berdasarkan
Austalian Geodetic Datum sebelumnya. Penyesuain ini menghasilkan
satu set koordinat yang dinyatakan dalam bentuk latitudes and
longitudes (lintang dan bujur) dan dikenal dengan Sistem
Koordinat Datum Geodetik Australia 1966 (the Australian Geodetic
Datum 1966 coordinate set (AGD66)).
Grid coordinates AGD66 berasal dari proyeksi Universal
Transverse Mercator yang menggunakan Spheroid Nasional Australia
yang dikenal dengan nama the Australian Map Grid 1966 coordinate
set (AMG66).
Australian Geodetic Datum disahkan pada 6 Oktober 1966 di
Australian Commonwealth Gazette, pengesahan ini termasuk
disahkannya parameter ellipsoid lokal yang dikenal dengan
Australian National Spheroid (ANS) yang mengadaptasi ukuran dan
bentuk bumi, serta posisi awal Johnston Geodetic Station. Gambar
berikut menampilkan Johnston Geodetic Station Stone Marker (batu
penanda Johnston Geodetic Station) pada S 25° 56' 54.5515", E 133°12' 30.0771", 571.2 meter (tinggi ellipsoid)
Australian National Spheroid Semi-major axis (a): 6 378 160.0 metresSemi-minor axis (b): 6 356 774.719 metres
Flattening (f): 1/298.25
Adaptasi dan penerapan dari local ellipsoid ini berarti bahwa
pusat ANS tidak bertepatan dengan pusat massa bumi, namun
terletak sekitar 200 meter dari titik pusat massa bumi. Saat ini
AGD66 dan AGD 84 sudah digantikan dengan Geocentric Datum of Australia
(GDA94).
9.ED50ED50 (Datum Eropa 1950) adalah datum geodetik yang
didefinisikan setelah Perang Dunia II untuk sambungan
internasional jaringan geodetik. Beberapa pertempuran penting
dari Perang Dunia II yang terjadi di perbatasan Jerman, Belanda,
Belgia dan Perancis, dan pemetaan dari negara-negara tersebut
memiliki posisi lintang dan bujur yang tidak kompatibel . Ini
menyebabkan pengaturan dari ED50 sebagai pemetaan datum yang
konsisten untuk sebagian besar Eropa Barat. Datum ini digunakan
di sebagian besar Eropa Barat terpisah dari Inggris, Irlandia,
Swedia dan Swiss, yang telah memiliki datum sendiri.
ED50 menggunakan Ellipsoid Internasional 1924 ("Hayford-Ellipsoid" of 1909) (radius dari ekuator bumi 6378.388 km, dataran
1/297, keduanya tepat). Spheroid ini merupakan model yang digunakan
secara luas di dunia sampai tahun 1980 sebelum penetapan GRS80 dan
WGS84.
Banyak sistem koordinat nasional Gauss - Kruger ditentukan
oleh ED50 dan berorientasi dengan cara geodetik astronomi .
Sampai sekarang telah digunakan dalam basis data medan
gravitasi , kadaster , survei jaringan kecil di Eropa dan Amerika
, dan oleh beberapa negara berkembang tanpa baseline modern.
Datum geodetik dari ED50 berpusat di Munich Frauenkirche di
Jerman selatan , di mana pusat perkiraan jaringan nasional Eropa
Barat yang terletak di tahun perang dingin . ED50 juga bagian
dari dasar-dasar koordinat NATO ( Gauss - Kruger dan UTM ) sampai
dengan tahun 1980-an
10. MaidenheadMaidenhead Locator System
The Maidenhead Locator System adalah sistem koordinat
geografis yang digunakan oleh operator radio amatir. Dr John
Morris, G4ANB. Nama sistem ini diambil dari tempat pertemuan John
Morris dengan manajer VHF yaitu bertempat di Maidenhead, Inggris
pada tahun 1980. The Maidenhead Locator Sistem menggantikan
sistem lokator lama QRA yang biasa digunakan diluar Eropa.
Maidenhead locator juga sering disebut sebagai QTH Locator,
pencari kotak atau kotak kotak, walaupun memiliki bentuk non-
persegi pada setiap proyeksi kartografi non-persegi panjang.
Penggunaan istilah QTH locator dan QRA locator awalnya tidak
dikenali, karena menyebabkan kebingungan dengan sistem locator
QRA yang lama. Satu-satunya singkatan yang dianjurkan untuk
menunjukkan locator Maidenhead adalah dalam kode Morse dan
transmisi teleprinter radio "LOC", seperti dalam "LOC KN28LH".
Sebuah Maidenhead locator kompres lintang dan bujur menjadi
string pendek karakter , yang mirip dalam konsep sistem GeoRef .
Informasi posisi ini disajikan dalam tingkat terbatas presisi
untuk membatasi jumlah karakter yang dibutuhkan untuk transmisi
dengan menggunakan suara, kode morse , atau modus operasi lain.
Yang dipilih coding menggunakan bolak pasang huruf dan angka
, seperti jadi :
BL11BH16
Dalam setiap pasangan , karakter pertama mengkodekan bujur dan
karakter kedua mengkodekan lintang. Pasangan-pasangan karakter
juga memiliki nama-nama tradisional , dan dalam kasus surat ,
berbagai karakter ( atau " angka dasar encoding " ) yang
digunakan dalam setiap pasangan tidak bervariasi. Untuk
menghindari angka negatif dalam input data , sistem juga
menentukan lintang yang diukur dari Kutub Selatan ke Kutub
Utara , dan bujur timur diukur dari antimeridian Greenwich ,
memberikan Prime Meridian yang easting palsu 180 ° dan
khatulistiwa a northing palsu 90°.
Untuk menyederhanakan encoding manual, dasar untuk pasangan
pertama surat - tradisional disebut medan - terpilih menjadi 18 ,
sehingga membagi dunia menjadi 18 zona bujur 20 ° masing-masing,
dan 18 zona lintang 10 ° masing-masing . Zona ini dikodekan
dengan huruf " A " melalui " R ".
11.AltitudeALTITUDE adalah derajat ketinggian dari suatu bidang
tertentu. Altitude atau tinggi didefinisikan berdasarkan pada
konteks dimana altitude tersebut digunakan (penerbangan,
geometri, survei geografis, olahraga, dan banyak lagi). Sebagai
definisi umum, ketinggian adalah pengukuran jarak, biasanya di
arah atas( vertical) atau, antara datum referensi dan titik atau
objek. Referensi datum juga sering bervariasi sesuai dengan
konteksnya. Meskipun ketinggian istilah umumnya digunakan untuk
berarti ketinggian di atas permukaan laut dari lokasi, dalam
geografi istilah elevasi sering digunakan. Pengukuran jarak
vertikal di arah bawah yang sering disebut sebagai kedalaman.
12.LatitudeLatitude adalah garis yang melintang di antara kutub utara
dan kutub selatan, yang menghubungkan antara sisi timur dan barat
bagian bumi. Garis ini memiliki posisi membentangi bumi, sama
halnya seperti garis equator (khatulistiwa), tetapi dengan
kondisi nilai tertentu. Garis lintang inilah yang dijadikan
ukuran dalam mengukur sisi utara-selatan koordinat suatu titik di
belahan bumi.
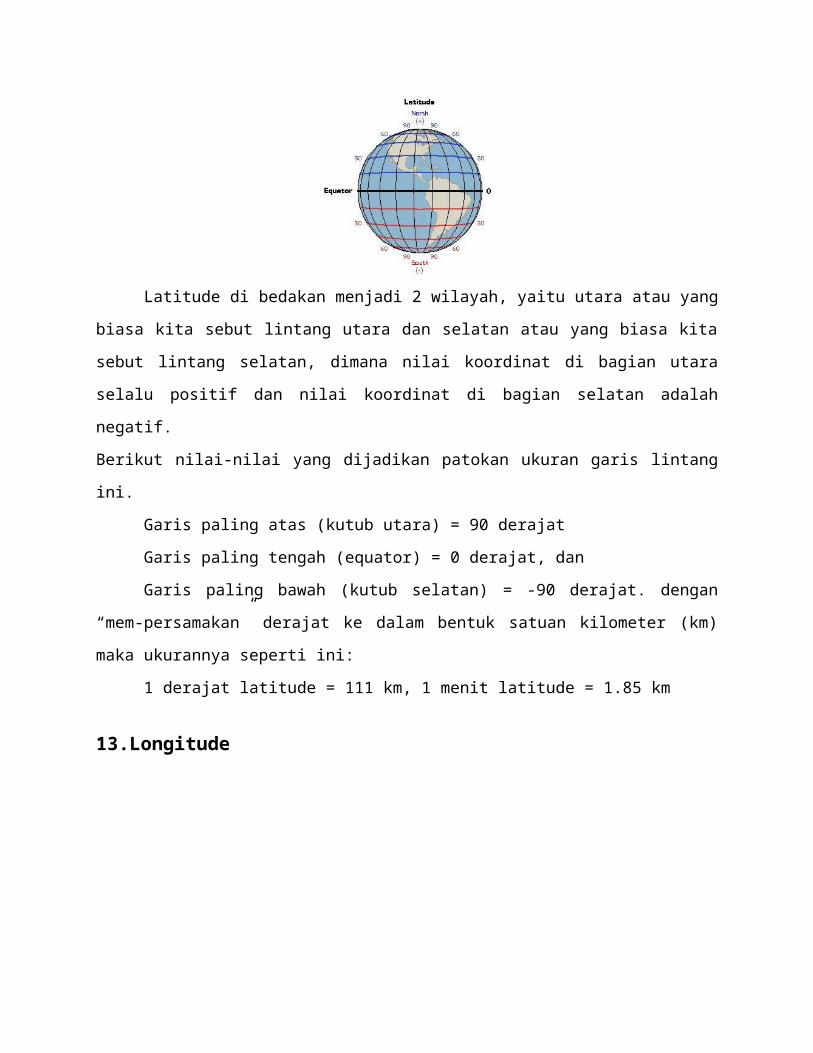
Latitude di bedakan menjadi 2 wilayah, yaitu utara atau yang
biasa kita sebut lintang utara dan selatan atau yang biasa kita
sebut lintang selatan, dimana nilai koordinat di bagian utara
selalu positif dan nilai koordinat di bagian selatan adalah
negatif.
Berikut nilai-nilai yang dijadikan patokan ukuran garis lintang
ini.
Garis paling atas (kutub utara) = 90 derajat
Garis paling tengah (equator) = 0 derajat, dan
Garis paling bawah (kutub selatan) = -90 derajat. dengan
“mem-persamakan” derajat ke dalam bentuk satuan kilometer (km)
maka ukurannya seperti ini:
1 derajat latitude = 111 km, 1 menit latitude = 1.85 km
13.Longitude
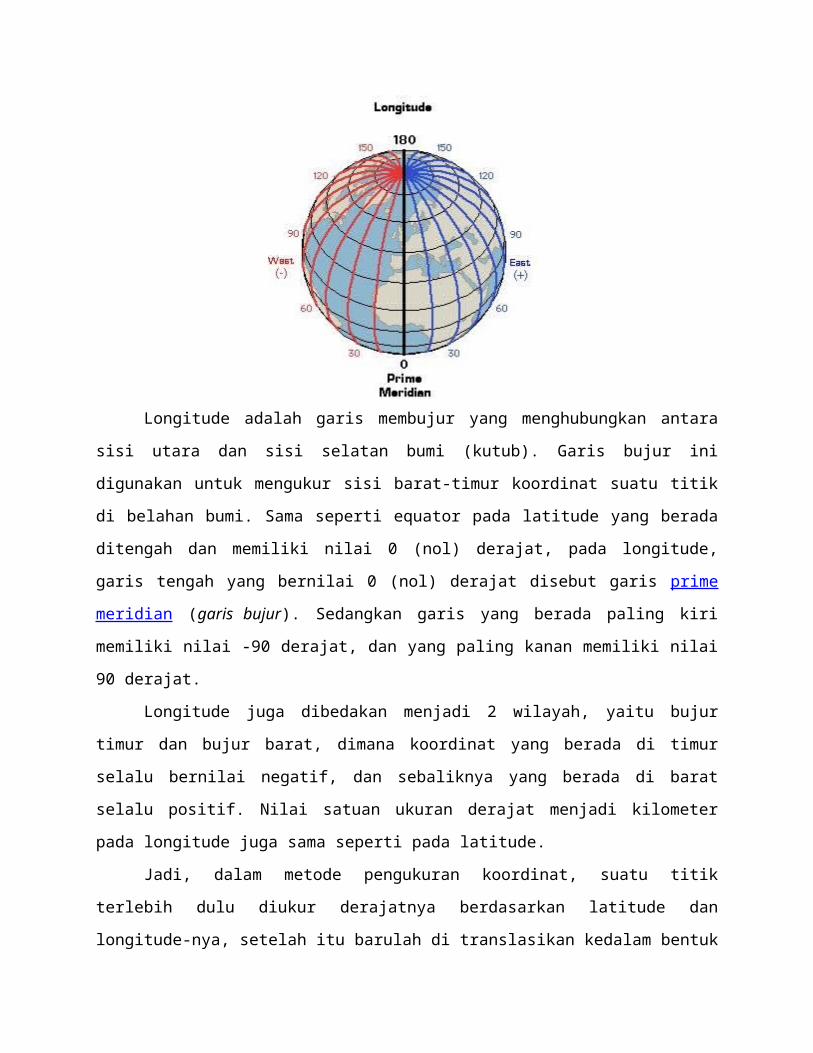
Longitude adalah garis membujur yang menghubungkan antara
sisi utara dan sisi selatan bumi (kutub). Garis bujur ini
digunakan untuk mengukur sisi barat-timur koordinat suatu titik
di belahan bumi. Sama seperti equator pada latitude yang berada
ditengah dan memiliki nilai 0 (nol) derajat, pada longitude,
garis tengah yang bernilai 0 (nol) derajat disebut garis prime
meridian (garis bujur). Sedangkan garis yang berada paling kiri
memiliki nilai -90 derajat, dan yang paling kanan memiliki nilai
90 derajat.
Longitude juga dibedakan menjadi 2 wilayah, yaitu bujur
timur dan bujur barat, dimana koordinat yang berada di timur
selalu bernilai negatif, dan sebaliknya yang berada di barat
selalu positif. Nilai satuan ukuran derajat menjadi kilometer
pada longitude juga sama seperti pada latitude.
Jadi, dalam metode pengukuran koordinat, suatu titik
terlebih dulu diukur derajatnya berdasarkan latitude dan
longitude-nya, setelah itu barulah di translasikan kedalam bentuk
satuan kilometer, baik itu dalam format degree (DDD) maupun
degree-minutes-second (DMS). http://ndank-libel.blogspot.com/2013/01/latitude-dan-longitude.html
14.DeklinasiDeklinasi (bahasa Inggris: Declination (Dec), dengan simbol δ)
adalah istilah astronomi yang dikaitkan dengan sistem koordinat
ekuator. Deklinasi merupalam salah satu dari dua koordinat bola
langit pada sistem koordinat ekuator. Koordinat lainnya adalah
Asensio rekta.
Deklinasi bisa dibandingkan dengan garis lintang, yang
diprojeksikan ke bola langit, dan diukur dalam derajat ke arau
utara dari ekuator langit. Oleh karena itu, titik di utara
ekuator mempunyai deklinasi positif, dan titik di selatan
mempunyai deklinasi negatif.
Contoh:
Suatu objek pada ekuator langit mempunyai deklinasi 0°.
Suatu objek tepat di atas kutub utara mempunyai deklinasi
+90°.
Suatu objek tepat di atas kutub selatan mempunyai deklinasi
−90°.
Tanda pada deklinasi tetap ditulis sekalipun nilainya positif.http://id.wikipedia.org/wiki/Deklinasi
15.GLONASSGLONASS = Globalnaya Navigatsionnaya Sputnikovaya Sistema, mirip
dengan GPS tapi ini milik Angkatan Udara RUSIA. Jumlah satelit mereka
ada 24 buah.
Glonass, yang merupakan singkatan dari ‘Globalnaya
navigatsionnaya sputnikovaya sistema’ atau sistem navigasi satelit
global, adalah sebuah sistem navigasi satelit berbasis radio yang
dioperasikan oleh Russian Space Forces untuk pemerintah Rusia.
Sedikit mengenai berdirinya Global Navigation Satellite
System (GLONASS) ini sebenarnya adalah versi GPS-nya Rusia,
dikarenakan sistem Navigasi yg ada sekarang yaitu GPS(Global
Positioning Service) dikendalikan & dikontrol oleh satu negara
yaitu Amerika/USA, yang mungkin dalam keadaan 'Damai' dunia bisa
memberikan layanan yang akurat dan cuma2 via satelit GPS ,tapi
jika dalam keadaan tertentu seperti 'PERANG' dunia, maka Amerika
bisa saja menolak akses ke satelit GPS atau bahkan mengacak
informasi yang dihasilkan oleh satelit GPS sehingga hanya akan
menghasilkan informasi sampah. Oleh karena itu maka Negara RUSIA
membuat system Navigasi Negaranya sendiri yg kita kenal sekarang
dgn sebutan 'GLONASS'.
GLONASS bisa menyediakan alternatif atau juga menambah
informasi pd GPS. Sekarang ini GLONASS adalah satu-satunya sistem
navigasi dengan cakupan global dan tingkat presisi yang
sebanding, jika tidak lebih baik pada beberapa daerah terutama di
Rusia ketimbang GPS. Karena masalah dana srta keadaan ekonomi,
beberapa kali 'Proyek GLONASS' mengalami kemunduran, namun
semenjak tahun 2011 GLONASS sudah beroperasi penuh dengan 24
satelit yang mengorbit bumi.
Untuk saat ini, konektifitas Glonass sudah terdapat pada
bnyak smartphone atw tablet terbaru,terutama yg ber-Os-Android
v4.0 , perangkat- perangkat lain yg ber-Operasi system dikabarkan
juga akan segera menyusul penggunaan konektifitas ini.
Walaupun demikian tentu saja kebijakan dari masing-masing
'Jaringan Operator' jelas akan ikut mempengaruhi penggunaan
fungsi konektifitas ini.
Jadi untuk sobat yg sudah memiliki smarphone atw tablet
terbaru,sobat sudah memiliki 2 alternative untk mengetahui posisi
sobat via peta yaitu GPS & GLONASS,semuanya hnya tnggal
tergantung sobat ingin menggunakan yg mana,karena ke duany sudah
memiliki keakuratan presisi serta layanan yg luas dlm bidang
navigation system.
http://minerva150r.wordpress.com/2012/09/07/xperia-2011-series-sudah-support-glonass/