[vittore cossalter motorcycle dynamics bookzz
TRANSCRIPT


MotorcycleDynamics
SecondEdition
VittoreCossalter

Importantenotice
Thisbookshouldnotbeseenasaguideformodifying,designingormanufacturingamotorcycle.Anyonewhousesitassuchdoessoathisownriskandperil.Streettestingmotorcyclescanbedangerous.Theauthorandpublisherarenotresponsibleforanydamagecausedbytheuseofanyinformationcontainedinthisbook.

Allrightsreserved.Noparttothisbookmaybereproducedortransmittedinanyformorbyanymeans,electronicormechanical,includingphotocopying,recording,orbyanyinformationstorageandretrievalsystem,withoutpermissioninwritingfromtheauthor.
2ndEnglishedition,2006
Copyright©2006byVittoreCossalter
9781447532767
Designandillustrationsbytheauthor.

ForAnnalia,Fabrizio,Flavio

Acknowledgment
IamdeeplyindebtedparticularlytoRobertoLot,MauroDaLio,AlbertoDoria,whohelpedtomakethisbookpossible.
ThisbookwaswrittenthankstotheenthusiasticparticipationofPhDstudentsoftheMotorcyclesEngineeringCourse:AlessandroBellati,RobertoBerritta,FrancescoBiral,DanieleBortoluzzi,MarioDallaFontana,GiovanniDallaTorre,DavideFabris,PasqualeDeLuca,StefanoGarbin,GiuseppeLisciani,FabianoMaggio,MassimoMaso,MatteoMassaro,LuigiMitolo,MartinoPeretto,NicolayRuffo,JimSadauckas,MauroSalvador,RiccardoToazza………

Foreword
Intoday’sglobalizedandhyper-technologicalworldallyouhavetodotobuyamotorcycleisgoon-lineandgiveyourcreditcardnumberandyou’vegotamotorcycle.However,thistypeoftransactiontakesplacewithouttheemotionsandspecialrelationshipwhichhavealwaysboundmetomotorcycles.
IrememberwatchingmyneighborgethisParillaready.Dressedinblackleather,hewouldslowlyputhisgloveson,pushdownonthepedalandfinallydriveoff.AsthemotorcycledisappearedintothedistanceIcouldhearthesymphonycreatedbyitsengineslowlyfadeawayamongtheclouds:minewastruepassion.
ItwastheSixties.ThereweretheelegantandrefinedModswiththeirshiningscooters,andtheRockers,bothfearedandrespected,withtheirmotorcycles.Englandwasthehomelandofmotorcycles.WhenIgotofftheshipinDover,Irememberseeingagroupofmotorcyclesnexttosomescooters.TheywerethewonderfulEnglishmotorcyclesoftheSixtiesandSeventiesthatleftthesignoftheirpassingwithdropsofmotoroilontheroadwherevertheywent.
IimmediatelyknewthatIwasamotorcyclist.AssoonasIgothome,ImanagedtobuyanoldGuzziFalcone500.Iworkedallwinter,everyevening,toperfectlyrestoreit.Mydesiretoheartheengineroar,tosmelltheairandtofeelthewindblowacrossmycheeksdrovemeinmymissionuntilonedayinearlyspringeverythingwasready.MyFalconeneverbetrayedme,italwaysgavemeincomparableemotions.AsIrodeit,curveaftercurve,theenginepushedonalmostasifitwereahammerstrongenoughtoforgeanytypeofsteelwithviolentblowsofmetalonmetal.
Thisbookistheresultofthispastandpresentpassionofmineformotorcycles.Ihavetriedtoofferanewapproachtotechnical-scientificwritingbycombiningtheexactandoftenasepticnatureofscientificdiscoursewithmypassionforthisperfectvehicle.Irealizethatthisisnosmallchallenge,butitisthisverypassion,ofamanwhofeelsmoreateaseonamotorcyclethanbehindadesk,whichhasmotivatedmyresearchinthefieldofmotorcycles.Togetherwithitsthoroughtechnicaldiscussion,thisbookalsotakesintoaccountthefascinatinghistoryofthemotorcycleandmotorcyclists.Nobusinesswilleverbeabletotakeawaytheadventuresome,andsomewhatcrazy,natureofthemotorcycle.
VittoreCossalter
Padova,spring2002

Tableof Contents
TitlePageImportantenoticeCopyrightPageDedicationAcknowledgmentForeword1KinematicsofMotorcycles2MotorcycleTires3RectilinearMotionofMotorcycles4SteadyTurning5In-PlaneDynamics6MotorcycleTrim7MotorcycleVibration-ModesandStability8MotorcycleManeuverabilityandHandlingListofsymbolsReferencesIndex

MotorcycleBianchi“FrecciaCeleste”350ccof1924
1Kinematicsof Motorcycles
Thekinematicstudyofmotorcyclesisimportant,especiallyinrelationtoitseffectsonthedynamicbehaviorofmotorcycles.Therefore,inthischapter,inadditiontothekinematicstudy,somesimpleexamplesofthedynamicbehaviorofmotorcyclesarereportedinordertoshowhowkinematicpeculiaritiesinfluencethedirectionalstabilityandmaneuverabilityofmotorcycles.
1.1DefinitionofmotorcyclesAlthoughmotorcyclesarecomposedofagreatvarietyofmechanicalparts,includingsome
complexones,fromastrictlykinematicpointofview,byconsideringthesuspensionstoberigid,amotorcyclecanbedefinedassimplyaspatialmechanismcomposedoffourrigidbodies:
therearassembly(frame,saddle,tankandmοtοr-transmissiondrivetraingroup),thefrontassembly(thefork,thesteeringheadandthehandlebars),thefrontwheel,therearwheel.
Theserigidbodiesareconnectedbythreerevolutejoints(thesteeringaxisandthetwowheelaxles)andareincontactwiththegroundattwowheel/groundcontactpointsasshowninFig.1-1.
Eachrevolutejointinhibitsfivedegreesoffreedominthespatialmechanism,whileeachwheel-groundcontactpointleavesthreedegreesoffreedomfree.Ifweconsiderthehypothesisofthepurerollingoftiresontheroadtobevalid,itiseasytoascertainthateachwheel,withrespecttothefixedroad,canonlyrotatearound:
thecontactpointonthewheelplane(forwardmotion),theintersectionaxisofthemotorcycleandroadplanes(rollmotion),

theaxispassingthroughthecontactpointandthecenterofthewheel(spin).
Fig.1-1Kinematicstructureofamotorcycle.
Inconclusion,amotorcycle’snumberofdegreesoffreedomisequalto3,giventhatthe15degreesoffreedominhibitedbythe3revolutejointsandthe6degreesoffreedomeliminatedbythe2wheel-groundcontactpointsmustbesubtractedfromthe4rigidbodies’24degreesoffreedom,assummarizedinFig.1-2.
Amotorcycle’sthreedegreesoffreedommaybeassociatedwiththreeprincipalmotions:forwardmotionofthemotorcycle(representedbytherearwheelrotation);rollmotionaroundthestraightlinewhichjoinsthetirecontactpointsontheroadplane;steeringrotation.
Whilehedrives,theridermanagesallthreemajormovements,accordingtohispersonalstyleandskill:theresultingmovementofthemotorcycleandthecorrespondingtrajectory(e.g.acurve)dependonacombination,inthetimedomain,ofthethreemotionsrelatedtothethreedegreesoffreedom.Thisgeneratesonemaneuver,amongthethousandspossible,whichrepresentsthepersonalstyleofthedriver.
Theseconsiderationshavebeenformulatedassumingthatthetiresmovewithoutslippage.However,inreality,thetiremovementisnotjustarollingprocess.
Thegenerationoflongitudinalforces(drivingandbrakingforces)andlateralforcesrequiressomedegreeofslippageinbothdirections,longitudinallyandlaterally,dependingontheroadconditions.Thenumberofdegreesoffreedomisthereforeseven:
forwardmotionofthemotorcycle,rollingmotion,handlebarrotation,

longitudinalslippageofthefrontwheel(braking),longitudinalslippageoftherearwheel(thrustorbraking),lateralslippageofthefrontwheel,lateralslippageoftherearwheel.
Fig.1-2Degreesoffreedomofamotorcycle.
1.2The geometryofmotorcyclesThiskinematicstudyreferstoarigidmotorcycle,i.e.onewithoutsuspensionswiththewheels
fittedtonondeformabletires,andschematizedastwotoroidalsolidbodieswithcircularsections(Fig.1-3).
Motorcyclescanbedescribedusingthefollowinggeometricparameters:pwheelbase;dforkoffset:perpendiculardistancebetweentheaxisofthesteeringheadandthecenterofthefrontwheel;εcasterangle;Rrradiusoftherearwheel;Rfradiusofthefrontwheel;trradiusofthereartirecrosssection;tfradiusofthefronttirecrosssection.
Someimportantgeometricparameterscanbeexpressedintermsofthesevariables:ρr=(Rr−tr)radiusofthefronttoruscentercircle;ρf=(Rf−tf)radiusofthereartoruscentercircle;an=Rfsinε−dnormaltrail;a=an/cosε=Rftanε−d/cosεmechanicaltrail.
Thegeometricparametersusuallyusedtodescribemotorcyclesarethefollowing:thewheelbasep;thecasterangleε;thetraila.

Theseparametersaremeasuredwiththemotorcycleinaverticalpositionandthesteeringangleofthehandlebarssettozero.
Fig.1.3Geometryofamotorcycle.
Thewheelbasepisthedistancebetweenthecontactpointsofthetiresontheroad.Thecasterangleεistheanglebetweentheverticalaxisandtherotationaxisofthefrontsection(theaxisofthesteeringhead).Thetrailaisthedistancebetweenthecontactpointofthefrontwheelandtheintersectionpointofthesteeringheadaxiswiththeroadmeasuredinthegroundplane.
Togethertheseparametersareimportantindefiningthemaneuverabilityofthemotorcycleasperceivedbytherider.Itisnotpractical,however,toexaminetheeffectsproducedbyonlyonegeometricparameter,independentlyoftheothers,becauseofthestronginteractionbetweenthem.Herewewillpresentsomeconsiderationsregardingthewayinwhichtheseparametersinfluencethekinematicanddynamicbehaviorofmotorcycles.
Thevalueofthewheelbasevariesaccordingtothetypeofmotorcycle.Itrangesfrom1200mminthecaseofsmallscootersto1300mmforlightmotorcycles(125ccdisplacement)to1350mmformediumdisplacementmotorcycles(250cc)upto1600mm,andbeyond,fortouringmotorcycleswithgreaterdisplacement.
Ingeneral,anincreaseinthewheelbase,assumingthattheotherparametersremainconstant,leadsto:
anunfavorableincreaseintheflexionalandtorsionaldeformabilityoftheframe.These

parametersareveryimportantformaneuverability(framesthataremoredeformablemakethemotorcyclelessmaneuverable),anunfavorableincreaseintheminimumcurvatureradius,sinceitmakesitmoredifficulttoturnonapaththathasasmallcurvatureradius,inordertoturn,theremustbeanunfavorableincreaseinthetorqueappliedtothehandlebars,afavorabledecreaseintransferringtheloadbetweenthetwowheelsduringtheaccelerationandbrakingphases,witharesultingdecreaseinthepitchingmotion;thismakesforwardandrearwardflip-overmoredifficult,afavorablereductioninthepitchingmovementgeneratedbyroadunevenness,afavorableincreaseinthedirectionalstabilityofthemotorcycle.
Thetrailandcasterangleareespeciallyimportantinasmuchastheydefinethegeometriccharacteristicsofthesteeringhead.Thedefinitionofthepropertiesofmaneuverabilityanddirectionalstabilityofmotorcyclesdependonthem,amongothers.
Thecasteranglevariesaccordingtothetypeofmotorcycle:from19°(speedway)to21-24°forcompetitionorsportmotorcycles,upto27-34°fortouringmotorcycles.Fromastructuralpointofview,averysmallanglecausesnotablestressontheforkduringbraking.Sincethefrontforkisratherdeformable,bothflexionallyandtorsionally,smallvaluesoftheanglewillleadtogreaterstressandthereforegreaterdeformations,whichcancausedangerousvibrationsinthefrontassembly(oscillationofthefrontassemblyaroundtheaxisofthesteeringhead,calledwobble).
Thevalueofthecasterangleiscloselyrelatedtothevalueofthetrail.Ingeneral,inordertohaveagoodfeelingforthemotorcycle’smaneuverability,anincreaseinthecasteranglemustbecoupledwithacorrespondingincreaseinthetrail.
Thevalueofthetraildependsonthetypeofmotorcycleanditswheelbase.Itrangesfromvaluesof75to90mmincompetitionmotorcyclestovaluesof90to100mmintouringandsportmotorcycles,uptovaluesof120mmandbeyondinpurelytouringmotorcycles.
1.3The importance oftrai lOneofthepeculiaritiesofmotorcyclesisthesteeringsystem,whosefunctionisessentiallyto
produceavariationinthelateralforceneeded,forexample,tochangethemotorcycle’sdirectionorassureequilibrium.
Accordingtothispointofview,thesteeringsystemcouldhypotheticallybemadeupoftwolittlerocketsplacedperpendiculartothefrontwheelwhich,whenappropriatelyactivated,could,althoughnotwithoutsignificantifnotinsurmountabledifficultiesfortherider,generatelateralthrusts,thatis,performthesamefunctionasthesteeringsystem.
Fromageometricalpointofview,theclassicsteeringmechanismisdescribedbythreeparameters:thecasterangleε;theforkoffsetd;theradiusofthewheelRf.
Theseparametersmakeitpossibletocalculatethevalueofthenormaltrailan,whichistheperpendiculardistancebetweenthecontactpointandtheaxisofthemotorcycle’ssteeringhead.Thisisconsideredpositivewhenthefrontwheel’scontactpointwiththeroadplaneisbehindthepointoftheaxisintersectionofthesteeringheadwiththeroaditself,aspresentedinFig.1-4.Aswehave

previouslyseen,thetrailmeasuredontheroadisrelatedtothenormaltrailbytheequation:
a=an/cosε
Thevalueofthetrailismostimportantforthestabilityofthemotorcycle,especiallyinrectilinearmotion.
Fig.1-4Stabilizingeffectofthepositivetrailduringforwardmovement.
Todevelopthisconcept,letusconsideramotorcycledrivingstraightahead,atconstantvelocityV,andletussupposethatanexternaldisturbance(forexample,anirregularityintheroadsurfaceoralateralgustofwind)causesaslightrotationofthefrontwheeltotheleft.Forthetimebeing,letusignorethefactthatthemotorcyclestartstoturntotheleftandthatbecauseofcentrifugalforces,beginsatthesametimetoleantotheright,concentratingourattentioninsteadonthelateralfrictionforceFgeneratedbythecontactofthetirewiththeground.
Inotherwords,letussupposethatthemotorcycleisdrivingatconstantvelocityVandthatthefrontwheelcontactpointalsohasvelocityVinthesamedirection.ThevectorVmaybedividedintotwoorthogonalcomponents:
thecomponentωfRf,whichrepresentsthevelocityduetorolling:itisplacedintheplaneofthewheelandrotatedtotheleftatananglewhichdependsonthesteeringangle;thecomponentVslide,whichrepresentstheslidingvelocityofthecontactpointwithrespecttotheroadplane.
Africtionalforce,F,thereforeactsonthefronttire.Fisparalleltothevelocityofslippagebuthastheoppositesense,asillustratedinFig.1-4.Sincethetrailispositive,frictionforceFgeneratesamomentthattendstoalignthefrontwheel.Thestraighteningmomentisproportionaltothevalueofthenormaltrail.

Fig.1-5Destabilizingeffectofthenegativetrailduringforwardmovement.
Ifthevalueofthetrailwerenegative(thecontactpointinfrontoftheintersectionpointofthesteeringheadaxiswiththeroadplane)andconsideringthatfrictionforceFisalwaysintheoppositedirectionofthevelocityofslippage,amomentaroundthesteeringheadaxisthatwouldtendtoincreasetherotationtotheleftwouldbegenerated.InFig.1-5onecanobservehowfrictionforceFwouldamplifythedisturbingeffect,seriouslycompromisingthemotorcycle’sequilibrium.Figure1-5demonstratesthattheroadprofilecanmakethetrailnegative,forexample,whenthewheelgoesoverasteporbump.
Fig.1-6Motorcyclewithahighvalueoftrail.
Smalltrailvaluesgeneratesmallaligningmomentsofthelateralfrictionforce.Eveniftheriderhastheimpressionthatthesteeringmovementiseasy,thesteeringmechanismisverysensitivetoirregularitiesintheroad.Highervaluesofthetrail(obtainedwithhighvaluesofthecasterangleasshowninFig.1-6)increasethestabilityofthemotorcycle’srectilinearmotion,buttheydrasticallyreducemaneuverability.
Consider,forexample,“chopper”typemotorcycleswhichbecameverypopularfollowingthesuccessofthewell-knownfilm,“EasyRider”.Thesemotorcycleshavecasteranglevaluesupto40°,

makingthemmoreadaptabletostraighthighwaysthantocurvingroads.
Fig1-7Summaryoftheeffectoftrailduringforwardmovement.
Duringcurvilinearmotion,roadgrippingisassuredbythelateralfrictionalforces,whichareperpendiculartothelineofintersectionofthewheelplanewiththeroad.
Thefrontandrearlateralforcescreatemomentsaroundthesteeringheadaxisthatareproportionalrespectivelytodistancesanandbn,whicharerelatedtothewheelbaseandthetrailbytheequations:
an=acosε
bn=(p+a)cosε
whereanrepresentsthenormalfronttrailandbnmaybeconsideredthenormaltrailoftherearwheel.
Thissimpleconsiderationshowshowthewheelbaseandthetrailareintimatelyconnectedtoeachotherandshouldthereforebeconsideredtogether.Itisnotentirelycorrecttodefineatrailassmallorlargewithoutreferencetothemotorcycle’swheelbase.Asacomparisonparameter,wecouldusetheratiobetweenthefrontandrearnormaltrail:
Rn=an/bn
Ingeneralthenormalfronttrailisapproximately4-8%ofthevalueoftherearone.Thevalueofthisratioforracingmotorcyclesisapproximately6%;forsportandsupersportmotorcyclesitisfrom6to6.5%;andfortouringmotorcycles,whicharemoreorlesssimilartosportmotorcycles,itvariesfrom6to8%.
“Cruiser”motorcycles(heavy,slowermotorcycles)arecharacterizedbyvaluesof5-6%andhavetrailsthataremodestincomparisonwiththewheelbase.Thisisprobablyduetothenecessityof

makingthemotorcyclesmaneuverableatlowvelocities.Sincetheloadonthefrontwheelsishighduetotheweightofthemotorcycle,thechoiceofasmalltraillowersthevalueofthetorquethattheridermustapplytothehandlebarstoexecuteagivenmaneuver.Inaddition,itisworthpointingoutthatthesemotorcyclesarenormallyusedatratherlowvelocities,andtheydonotthereforeneedlongtrails,which,aspreviouslynoted,assuresahighdirectionalstabilityathighvelocities.
Thisratioisalsolowforscooterssincetheyareused(orshouldbeused)atlowvelocitiesandthereforemaneuverabilityhasahigherprioritythandirectionalstability.
Strictlyspeaking,theratioshouldtakeintoaccountthedistributionoftheloadonthewheels.Amotorcyclethathasaheavyloadonthefrontwheelneedsashortertrail.Infact,heavierloadsonthefrontwheelgenerategreaterlateralfrictionalforcesinproportiontothelateralmotionofthewheel.Therefore,forthesamealigningtorqueactingaroundtheaxisofthesteeringheadasmallertrailissufficient.
Thecorrectratioonthebasisoftheloaddistribution,isexpressedbytheequation:
Rn=(an/bn)(Nf/Nr)
whereNfistheloadonthefrontwheelandNrtheloadontherearone.
1.4Kinematics ofthe s teeringmechanismItisclearthatwhenturningthehandlebars,keepingthemotorcycleperfectlyvertical,thesteering
headlowersandonlybeginstoriseforveryhighvaluesofthesteeringangle.Wewilldemonstratethisstatementbyconsideringthefollowingcases:
steeringmechanismwithnoforkoffset,d=0;steeringmechanismwithanon-zeroforkoffset,d≠0.
1.4.1Steeringmechanismwithzeroforkoffs e t
Inthecaseoftheforkwithnooffsetthecenterofthewheelisontheaxisofthesteeringhead.Letusaddthefollowingassumptions:
therollangleofthemotorcycleiszero;thewheelshavezerothickness.
AsshowninFig.1-8,whenthesteeringangleδiszero,thewheelisperfectlyverticalandliesinthexzplane.
Thecasterangleε,thesteeringangleδ,thecamberangleofthefrontwheelβ,thekinematicsteeringangleΔ(projectionoftheangleofrotationδontotheroadplane)andtheangleαarerelatedtoeachotherthroughthefollowingtrigonometricequations:
tanα=tanε⋅cosδtanΔ=tanδ⋅cosεsinβ=sinα⋅sinδ
Itispossibletoderivesinαandcosαasfunctionsofδandεfromtheprecedingequations:

Wenowassumethatthewheelcenter(pointO)canneitherrisenorfall.Theδrotationofthefrontwheelcausesittoinclinewithrespecttotheverticalpositionandtodetachitselffromthehorizontalplanexy.ThedistanceODofthewheelcenterfromtheroadplaneisgreaterthantheradiusofthewheelOP.
Actually,thewheelisnotraisedfromthegroundbutratherlowered.Supposingthatwekeeptheaxisofthesteeringheadimmobile,thecenterofthewheelmovesalongthesteeringheadaxistothepointO1.Consequently,thecontactpointP1movesforward,asshowninFig.1-8.InthefinalpositionthedistanceOPisobviouslyequaltotheradiusofthewheelOP.
Fig.1-8Geometryofthesteeringmechanism,withthemotorcycleinverticalpositionandnoforkoffset.
Whenthesteeringangleiszero(Fig.1-8,left),thenormaltrailandthetrailmeasuredontheroadplaneare:
an=EP=Rfsinε
a=CP=Rftanε
HereRfindicatestheradiusofthefrontwheel.Whenthesteeringangleδisnotzero,thenormal

traila=P1E1=Rfsinαbecomes,
Thetrailmeasuredontheroadplaneisrelatedtothenormaltrailandsteeringangleδbytheequation:
Theverticaldisplacementofthewheelcenterisgivenbythedifference:
Expressingtheangleαintermsofδandε,wehave:
1.4.2Steeringwithnon-zeroforkoffs e t
Letusnowconsidertheeffectofoffsetd,i.e.thedistancebetweenthecenterofthewheelandthesteeringheadaxis.Theconsiderationsthathaveallowedustoexpresstheloweringofthesteeringheadasafunctionoftheanglesδandεinthecaseofzero-offsetremainvalid.However,thezero-offsetformulamustbecorrectedsincetheoffsetcausesthecenterOofthewheeltomovetoO*,asisshowninFig.1-9.

Fig.1-9Loweringwheelcenterwithnon-zerooffset.
Withazerosteeringanglethetrailis:
Withanon-zerosteeringangleδthetrailis:
Thepresenceoftheforkoffsetleadstoareduction,d⋅sinε⋅(1−cosδ),intheloweringofthewheel.Thisvaluemustbesubtractedfromtheloweringofthefrontaxle,calculatedwithouttheoffset.
Inconclusion,withoffset,thereislessloweringofthefrontwheelcenterthanwithzerooffset.
ExampleI
Letusconsideramotorcyclecharacterizedbythefollowingsteeringparameters:

•radiusofthefrontwheel: Rf=0.3m;
•offset: d=0.05m;
•casterangle: ε=27°.
Nowcalculatetheeffectsoftwodifferentsteeringangles,9°and45°,onsteeringheadloweringwithandwithoutforkoffset.
Withasteeringangleδ=9°,theloweringis:
•withzerooffset: Δh=0.75mm;
•withoffset: Δh=0.478mm.
Byincreasingthesteeringangletoδ=45°theloweringis:
•withzerooffset: Δh=1.59mm;
•withoffset: Δh=0.92mm.
Theexampleshowsthatignoringtheoffsetcausesasignificanterrorincalculatingtheloweringofthefrontwheelcenter.Itmustbepointedoutthattherangeofsteeringisgenerallylessthan±35°.
Example2
Letusconsidertwomotorcyclesinaverticalposition,withthesamemechanicaltrail(a=101mm),thesameradius(Rf=0.3m)anddifferentcasterangles(ε1=27°,ε2=20°).
Ifthesteeringangleischangedfromδ=0°toδ=9°,calculatetheloweringofthefrontwheelcenterforeachofthecasterangle:
•withε1=27°andδ=9°: Δh=0.50mm;
•withε2=20°andδ=9°: h=0.40mm.
Lowercasteranglesreducetheloweringofthefrontwheelcenter.
Ifthesteeringangleδisequalto9°,calculatethechangeintrailforeachcasterangle.
Thetrailisreducedfromthe101mmto:

•withε1=27°andδ=9°: a=99.5mm;
•withε2=20°andδ=9°: a=99.8mm.
Thevalueofthetrailslightlydependsonthesteeringangle.
Thepreviousconsiderationshaveallowedustofindanalyticalequationsthatexpresstheloweringofthesteeringheadandthevaluesofthetrailintermsoftheanglesδandεandwiththelimitinghypothesesofzerorollangleandzerowheelthickness.Inthefollowingsection,amorecomplicatedkinematicmodelisusedtakingintoaccountboththerollangleandtheradiusofthefronttirecrosssection.
1.5Rol l motionands teeringNotonlyisthekinematicsofatwo-wheeledvehiclesignificantlymorecomplexthanofafour-
wheeledvehicle,butitalsopresentssomeuniqueaspects.
Forexample,letusconsideramotorcycleinrectilinearmotionatvelocityV,whichatacertainpointentersintoacurve.Themotorcyclepassesfromaverticalposition,inwhichthesteeringanglewaszero,toantiltedpositionwitharollangleϕ.Inordertostaybalanced,thehandlebar ’sangleofrotationwilldeviatefromzerodependingontheradiusofthecurveandthevelocity.
Fig.1-10Motorcycleinacurve.
Wehaveseenthattherotationofthesteering,consideringzerowheelthickness,generatesasmallloweringofthesteeringhead,whichcausesasmallforwardrotationoftherearframearoundtheaxisoftherearwheel(pitchrotation).

Wewillnowseehow,inreality,followingtherollmotion,thecontactpointoftherearwheelwiththeroadplaneisdisplaced.Twotriadscanbedefinedasfollows:
amobiletriad(Pr,x,y,z),definedasspecifiedbytheSocietyofAutomotiveEngineers(SAE).TheoriginisestablishedatthecontactpointProftherearwheelwiththeroadplane.Theaxisxishorizontalandparalleltotherearwheelplane.Thezaxisisverticalanddirecteddownwardwhiletheyaxisliesontheroadplane.Theroadsurfaceisthereforerepresentedbytheplanez=0;atriadfixedtotherearframe(Ar,Xr,Yr,Zr)whichissuperimposedontheSAEtriadwhenthemotorcycleisperfectlyverticalandthesteeringangleδzero.
Letusnowsupposethatonlytherearwheelistiltedattherollangleϕ.Consequentlythetriadfixedtotherearaxle(Ar,Xr,Yr,Zr)rotatesatthesameanglearoundthex-axis.Therefore,thetriad’soriginAristranslatedwithrespecttoPr,asillustratedinFig.1-11b.
Fig1-11Rearwheelinacurve:displacementofthecontactpoint.
Itcanbeseenthattheloweringofthesteeringheadcausesasmallpitchingrotationoftherearframeor,inotherwords,anotherrotationofthetriadfixedtotherearframe,asshowninFig.1-11c.ItisimportanttopointoutthattheoriginArofthetriadisfixedtotherearframeandnottotherearwheel:ArcoincideswithPronlywhentherollangleϕandthepitchangleμarebothzero.
Thebehaviorofthefrontwheelisevenmorecomplicated,since,inadditiontotherollingandpitchingmotion,thefrontwheelisalsosubjecttorotationaroundtheaxisofthesteeringhead.Thechangefromaverticaltoatiltedpositionwasassumedtobeapurerollmotionasiftheslippagebetweenthetireandtheroadplanewerezero.Inreality,thebehaviorismorecomplex.Inordertoproducethelateralreactionforcesonthecurve,alateralslippage,whichisexpressedintermsofthesideslipangleλ,mightbenecessary.(Thenextchapter,ontires,willshowthatslippagecanbeeitherpositiveornegativedependingonthevalueoftheforcegeneratedbythecamberangleofthewheel.)

Fig.1-12illustratesthecasesofpurerollingmotionandofmotionwithlateralslippage.Theabsenceofslippagemeansthatthevelocityvectoroftheforwardmotionofthewheel’scontactpointliesinaplaneparalleltothewheelitself,evenwhenthemotorcycleistravelinginacurve.
Fig.1-12Purerollingmotionandwithlateralslippage.
1.6Motorcycle pi tchWehaveshownthatwhenamotorcycleisperfectlyvertical(ϕ=0),therotationofthehandlebars
causesaloweringofthefrontwheelcenterand,therefore,arotationoftherearframearoundtherearwheelaxis.Inotherwords,themovementofthehandlebarscausesapitchingmotion.Nowwewouldliketostudymotorcyclepitchinamoregeneralcase,consideringarollangleϕotherthanzeroandtakingintoaccountthesizeofthetirecrosssections(seeFig.1-10).
Thepitchangleoftheframe,indicatedbyμ,isassumedtobepositiveinacounterclockwisedirection.Therefore,loweringthefrontwheelcenterleadstoanegativevalueofthepitchangle.Akinematicanalysisofmotorcyclesallowsustodetermineanon-linearequation,whichconnectstheunknownpitchangleμtoaseriesofknownquantities:therollangleϕ,thesteeringangleδ,thewheelbasep,theradiiofthecrosssectionsofthetires,tfandtr,theradiiofthetoruscentercirclesρrandρf,andthecasterangleε.
where:c1=dsinε(1−cosδ)+tr−tfc2=ρf[cosεcos(β’−ε)−cosδsinεsin(β−ε)−1]c3=dsinδ+ρfsinδsin(β’−ε)c4=p−dcosε(1−cosδ)c5=ρf[sinεcos(β’−ε)+cosδcosεsin(β’−ε)]

Thephysicalmeaningoftheangleβ’isshownlaterinFig.1-22ofSection1.7.2.
Thepreviousequationwasdeterminedbyignoringthepitchangleμwithrespecttoε,sinceitsvalueisonlyafewdegreescomparedtothecasterangleε,whosevaluenormallyvariesfrom20°to35°.
Oncethevalueofthepitchisknown,itiseasytocalculatetheresultingloweringofthefrontwheelcenter,whichismeasuredintheplaneofthemotorcycle.Agoodapproximationoftheloweringcanbederivedfromtheproductofthepitchangleandthewheelbase.
Fig.1-13Idealtrail.
Theprecedingequationscanbesignificantlysimplifiedifweconsidersmallrotationsofthesteeringangleδ(sinδ≅δ).Theexpressionforthepitchthenbecomes:
Thepitchisproportionaltothegeometricparameter(an−tfsinε),whichcorrespondstoanidealnormaltrail,measuredincorrespondencewiththecircularaxisofthetoruscentercircle,asshowninFig.1-13.Thepitchalsodependsonthedifferencebetweentheradiiofthetiresections(tr−tf):theneedtomountalargertireonthereartoimprovetheadherenceduringthrusting,increasestheeffectofloweringthesteeringhead.Itisworthnotingthatthesecondtermdoesnotdependonthesteeringangleδ,butonlyontherollangleϕ.

Ifwealsoignoretirethickness,i.e.ifweconsiderzerothicknesswheels(tr=tf=0),weobtainthesimpleequation:
Thislatterexpressionshowsthatthenormaltrailistheparameterthathasthegreatestinfluenceonthepitchingmotion.
1.6.1Pitchinterms ofs teeringandrol l angles
Figure1-14showstheeffectofthesteeringangleδandrollangleϕonthepitchangleμ.Itisimportanttostressthatnegativevaluesofthepitchangleμcorrespondtodownwardrotationsofthevehiclearoundtherearwheelaxle.Therefore,anegativevalueofthepitchangleμcausesamotorcycle’scenterofgravitytolower.
Fig.1-14Thepitchangleμasafunctionofsteeringangleδatdifferentrollanglesϕ.[p=1.4m,an=0.1m,ε=30°,Rr=Rf=0.36m,tr=tf=0.06m]
Whentherollangleϕvaluesarenothigh(0°and15°inFig.1-14),anincreaseinthesteeringangleδleadstoacontinuousloweringofthemotorcycle’scenterofgravityG.Sincetheloweringcorrespondstoareductioninpotentialenergy,theincreaseinthesteeringangletakesplacenaturally,evenwithoutapplyingtorquetothehandlebars.
Itiseasytoverifythisbehavior,especiallywithalighttwo-wheeledvehicle,suchasabicycle.Whenthebicycleistilted,therollangleimposeddeterminestheangleatwhichthehandlebarsnaturallyrotate.Forhighvaluesoftherollangle(30°and45°inFig.1-14),thevariationinthepitchangleμintermsofthesteeringangleδstopsdecreasingandpresentsaminimum.Atthispoint,alimitingvalueofthesteeringangleδisreached,beyondwhichthepitchslopereversesitssign.
Letusnowconsidertheminimumconditionofthepitchangleμ.Thiscorrespondstotheminimum

potentialenergy(centerofgravityatitslowestpoint).Fromaphysicalpointofview,thismeansthat,ifadeterminedrollangleϕisimposedandnoexternaltorquesareappliedtothehandlebars,thefrontframetendstorotatenaturallytowardsthevalueofthesteeringangleδwhichcorrespondstotheminimumvalueofthepitchangleμ.
Inconclusion,astheroIlangleϕgraduallyincreases,theminimumvalueofthepitchangleμcorrespondstoalowersteeringangleδ.
1.6.2Pitchas a functionofthe cas terangle
Figure1-15showstheinfluenceofthesteeringangleδandsteeringheadangleε,onthepitchangleμ,forafixedvalueoftherollangleϕ.
Thepitchangleμbecomesmorenegativeasthesteeringangleδincreases.Theinfluenceofthecasterangleismodest.
Fig.1-15Thepitchangleμversusthesteeringangleδforvariousvaluesofthecasterangleεandwitharollangleequalto30°.
1.6.3Pitchas a functionofthe normal trai l
Figure1-16showsthatthenormaltrailistheparameterwhichmostinfluencesmotorcyclepitch.Forexample,whenthesteeringangleδis10°andtheoffsetismodifiedtoobtaina20%variationinthenormaltrail,thevariationinthepitchangleisapproximately35%.

Fig.1-16Thepitchangleμasafunctionofthesteeringangleδforvariousvaluesofnormaltrail.
AsisshowninFig.1-16,whenthenormaltrailincreases,theminimumconditionofthepitchangleμcorrespondstoincreasingvaluesofthesteeringangle.Thisistheoppositeofwhathappenswhentherollangleincreases,asisclearbycomparingFig.1-16withFig.1-14.
1.7The rearwhee l contactpoint
1.7.1The e ffectofcamberandtire cros s s ection
Letusconsideramotorcyclethatisinitiallyinaverticalposition.Thecrosssectionofthereartireislargerthanthatofthefront.Therearframetilts,assumingthatthereislateralrollwithoutslippageontheroadplane,asillustratedinFig.1-17b.
Fig.1-17Lateraldisplacementofthecontactpointswithoutlateralslippage.

Thecontactpointofthereartiremoveslaterally,intheydirection,overadistancetr⋅ϕ,whichisproportionaltotheradiusofthetirecrosssectionandtherollangleoftherearframe.
Letussupposethattherollmotionoftherearframetakesplacewhilethesteeringangleiskeptatzero,andthatthereisnopitchofthemotorcyclearoundtheaxisoftherearwheel.Sincethefrontwheelhasasmallersectionthantherearone,thefrontwheelwouldberaisedfromtheroadplanefollowingtherollmotion.However,contactofthefrontwheelwiththeroadisassuredbythesimultaneouspitchrotationoftheentiremotorcyclearoundtheaxisoftherearwheel.
Oncetherollandpitchrotationshavetakenplace,thefrontwheelcontactpointmovestotheleftoftherearwheelcontactpointbythequantity(tr−tf)tanϕ,asisshowninFig.1-17c.Itisclearthatifthetireshaveequalsections,thelateraldisplacementofthetwocontactpointshavethesamevalue.
1.7.2The combinede ffectof rol l ands teering
Therotationofthehandlebargenerateslateralandlongitudinaldisplacementsofthefrontwheel’scontactpoint.
Letusconsideramotorcyclethatisinitiallyinaverticalposition.Themotorcycleistiltedthroughtherollangleϕandthenthehandlebarsrotatedthroughangleδ.Followingthismaneuver,thefrontwheel’scontactpointPfmovesawayfromtheplaneoftherearframe.
Fig.1-18LateraldisplacementofthecontactpointPf.
ThecoordinatesofthepointPfintheSAEreferencesystem,areexpressedinthefollowing

equations:
xPf=(c1+c2)sinμ+(c4+c5)cosμ
yPf=[−(c1+c2)cosμ+(c4+c5)sinμ]sinϕ+c3cosϕ−(tf−tr)
Thequantitiesc1...c5havebeendefinedpreviouslyinthesection1.6.
Figure1-19showsthelateralandlongitudinaldisplacementsofthefrontcontactpointforfourvaluesoftherollangleandcorrespondingsteeringrotation.
Thepointmovesforwardasthesteeringangleδandpresetrollangleϕincrease.Figure1-19showshowthexcoordinateofPfincreasesfromtheinitialvalue,whichisequaltothewheelbase.
Thepointmovesinitiallytotheleft(theycoordinateofPfisinitiallynegative)andthenreturnstotheright,passingoverthexaxis(theycoordinateofPfchangesitssign).Atthepointwherethepass-overtakesplace,thesteeringangleδdecreasesasthepresetrollangleϕincreases.
Fig.1-19PositionofthefrontcontactpointPf.

Fig.1-20LateralpositionofthefrontcontactpointPfasafunctionofthesteeringangleδ,forrollangleϕ=30°,andforvariousvaluesofthecasterangleε.
ThelateraldisplacementofthecontactpointPfisnotgreatlyaffectedbythecasterangleε,asisseeninFig.1-20,whileitisverysensitivetothevalueofthenormaltrailan,ascanbeobservedinFig.1-21.
Fig.1-21LateralpositionofPfversusthesteeringangleδ,forangleϕ=30°andforvariousvaluesofthenormaltrailan[ε=30°].
Itisinterestingtostudythedisplacementofthefrontcontactpointinatriadfixedtothefrontframe.Forthispurpose,weconsiderazerothicknesswheel(Fig.1-22).Whenthemotorcycleisperfectlyvertical(therollandsteeringanglesbeingzero),thecontactpointislocatedatA,asisshowninFig.1-22.WhileincreasingtherollandthesteeringanglesthecontactpointPfmovesalongthearcACuptoitslimitingpositionC,.ThepointPfreachesthepointConlywhentherollangleϕis

equalto90°,i.e.,ifthemotorcycleishorizontal.
Fig.1-22Thegeometryofsteering(zerothicknesswheel).
Fig.1-23Angularpositionβ’ofthefrontcontactpointofazerothicknesswheelversusthesteeringangleδ,forvariousvaluesoftherollangleϕ.
Asisclear,thefrontcontactpointneverreachespointCwiththevaluesoftherollandsteeringanglesnormallyusedindriving.InfactthecontactpointPfmoveswithinthearcAPo,Pobeingtheintersectionpointofthesteeringaxiswiththeprofileofthewheel.
ThefrontcontactpointPfreachespointPodependingonthesteeringandrollangles,asisshown

inFig.1-22.Whencarryingoutasteeringmaneuvertotherightwithasetrollangle,thecontactpointPfmovesforwardalongthearcAPo,whileitstracemovestotheleftandforwardontheroadsurface.TheeffectivetrailiszerowhenthecontactpointisexactlyatPo.FurtherincreasesintherollandsteeringanglesmovethecontactpointPftowardsthepositionC,whileitstraceontheroadplanemovestotherightandthetrailbecomesnegative.
Theprecedingequations,thatgivethepositionofthefrontcontactpoint,canbesignificantlysimplifiedbyassumingtherotationsofthesteeringangleδtobesmall(sinδ≅δ).TheexpressionforthecontactpointPfthenbecomes:
Ifwealsoignoretirethickness,theseequationsarefurthersimplified:
1.7.3The influence ofcontactpointlateral displacementonrol lmotion
ItisclearfromtheprecedingsectionthattheleftwarddisplacementofthecontactpointPf,followingasteeringmaneuvertotheright,favorsroll.ThisstatementcanbeexplainedbyFig.1-24,whichrepresentsthemotorcycle,schematizedasarigidbodyofmassm,inequilibriumonacurvewitharollangleϕequalto30°.
Assumingthatwemaintainaconstantrollangle,thefrontcontactpointPfmovestotheoutsideofthecurveasthesteeringangleδincreases.Therefore,theweightmomentincreaseswiththeincreaseinthesteeringangleδ.Thismomenttendstotiltthemotorcycleevenmore.Theincreaseintheweightarm,asshowninFig.1-24,isproportionaltotheleftwardlateraldisplacementofthefrontcontactpoint.ThelateraldisplacementΔybeginstodecreasewhenacertainsteeringangleδisreached.
Thecontactpointreachesitsmaximumexternaldisplacementatacertainsteeringangleδ.Thisvalueofδdoesnotcorrespondtotheδvaluethatminimizesthepitchangleμ.Forexample,witharollangleϕequalto30°,themaximumlateraldisplacementΔyoccurswithasteeringangleδequalto12.5°,whilethepitchangleμisataminimumwhenδisequalto22.5°,asshowninFigs.1-19and1-14respectively.

Fig.1-24Lateraldisplacementofthefrontcontactpoint.
1.8Frontwhee l camberangleThecamberangleβofthefrontwheelisdifferentfromtherollangleϕoftherearframe,whenthe
steeringangleδisotherthanzero.Ashasalreadybeenshown,thefrontandrearframerollanglescoincideonlyforzerosteeringangle.

Fig.1-25Pitchofthemotorcycleandcamberanglesofthefrontandrearwheels.
Thecamberangleofthefrontwheelβdependsontherearframerollangleϕ,thesteeringangleδ,thecasterangleεandthepitchangleμ:
Thefrontframeisalwaysmoretiltedwithrespecttotherearframewhensteeringangleisotherthanzero(samesignasrollangle).Asthesteeringangleδincreases,sodoesthecamberangleβ.
Ifthepitchμisignoredwithrespecttothecasterangleε,weobtain:
β=arcsin(cosδsinϕ+cosϕsinδ⋅sinε)
Ifthesteeringandtherollanglesaresmallenoughthefrontcamberanglecanbeapproximatedas:
β=ϕ+δ⋅sinε
Theequationshowsthat,forrollandsteeringangles“inphase”,e.g.withtherollangletotherightandthehandlebarsalsoturnedtotheright,thefrontframerollangleisalwaysgreaterthantherearframerollangle.Thisaspectisimportantbecausethetirelateralforce,aswillbeseeninthenext

chapter,dependsheavilyonthecamberangle.
Fig.1-26Frontwheelcamberangleversustherearframerollangleϕforvariousvaluesofthesteeringangle.
1.9The kinematics teeringangleThekinematicsteeringangleΔdependsontherearframerollangleϕ,steeringangleδ,caster
angleεandpitchangleμ:

Fig.1-27KinematicsteeringangleΔ.
Fromastrictlygeometricpointofview,thesteeringangleδistheanglebetweentherearandfrontwheelplanes,whilethekinematicsteeringangleΔrepresentstheintersectionofthisactualanglewiththeroadplanez=0.
Figure1-28showsthevariationinthekinematicsteeringangleΔasafunctionofthesteeringangleδforfourdifferentvaluesoftherollangleϕ.ThedottedlinerepresentstheconditionΔ=δ.Therefore,itappearsimmediatelyevidentthatthereisatransitionvalueoftherollangle,belowwhichthekinematicsteeringangleΔremainslowerthanthesetvalueδ,andabovewhichΔismorethanthesetvalueδ.Inthespecificcaseexamined,thetransitionvalueisapproximately27.5°.
InFig.1-29thevariationinthekinematicsteeringangleΔisshown,thistimeintermsoftherollangleϕforfourtypicalvaluesofthesteeringangleδ.ThehorizontaldottedlinesrepresenttheconditionΔ=δforeachofthefoursetvaluesofδ.Clearly,itcanbeobservedthatforlowervaluesoftherollangleϕ(25°to30°)thesteeringmechanismis“attenuated”(Δ<δ).Inthiscase,thesteeringmechanismislesssensitivetotherotationofthehandlebarsandthemotorcyclecanbemoreeasilysteered.Theriderexperiencesthesameeaseofsteeringofferedbywidehandlebarseveniftheonesbeingusedarenot.Ontheotherhand,forhighervaluesoftherollangleϕ,thesteeringmechanismis“amplified”(Δ>δ)makingthemotorcyclemoresensitivetochangesindirection.
ThekinematicsteeringangleΔalsodependsonthegeometryofthesteeringmechanism.Figure1-30iscarriedoutwiththerollanglesettoϕ=30°.Thefigure,inwhichthedottedlinerepresentstheconditionΔ=δ,showsthatdecreasingthecasteranglesmakethesteeringmechanismmoresensitive(Δ>δ).Thissensitivityispracticallyindependentofthevalueofthenormaltrail.Infact,itiswellknownthatsmallcasteranglesareneededformotorcyclestobeverysensitivetorapidsteeringandthathighcasteranglesvaluesmakesteeringmorecontrollable.

Fig.1-28KinematicsteeringangleΔasafunctionofthesteeringangleδfοrdifferentvaluesoftherollangleϕ[ε=30°].
Fig.1-29KinematicsteeringangleΔasafunctionoftherollangleϕforvariousvaluesofthesteeringangleδ[ε=30°].
Ifweignorethepitchμwithrespecttothecasterangleεandthetermsinϕsinδsinεwithrespectcosϕcosδ,theapproximateequationforthekinematicsteeringanglethenbecomes:

Thisequationcanalsobeobtainedonthebasisofsimplegeometricconsiderations.
Let’sconsideramotorcycleinaverticalpositionandsupposethatthehandlebarrotates,whilelockingthecontactpointPfofthefrontwheel.
Fig.1-30Kinematicsteeringangleversusthesteeringangleδ,forvariousvaluesofthecasterangleε[ϕ=30°].
TherearcontactpointPrmovesbackslightly,whiletheintersectionpointofthesteeringheadaxiswiththeroadplanemoveslaterally.Thismovementdescribesanapproximatelycirculartrajectory,asshowninFig.1-31.
Therearframerotationangleδpdependsonthesteeringangleδnasthefollowingequationshows:
(p+a)tanδp=atan(δp+δn)
Thesteeringangleδ(whichbydefinitionismeasuredinaplaneorthogonaltothesteeringheadaxis)isrelatedtotheangleδn(whichismeasuredinaplaneorthogonaltothemotorcycleplane),bytheexpression(seealsosection1.4):
tanδn=tanδ⋅cosε
Assumingthattherotationsaresmall,thefollowingsimplifiedequationisobtained:

Therefore,thedisplacementoftherearplanefromthefrontcontactpoint,keepingzerorollangle,is:
yPf≅aδcosε=anδ
ThedisplacementyPfisproportionaltothevalueofthetrailanddecreaseswithanincreaseinthecasterangleasdemonstratedpreviouslyonpage24.
Fig.1-31Steeringgeometry.
Nowthatthesteeringangleδhasbeenfixed,letustiltthemotorcyclethroughasetrollangleϕ,asinFig.1-31and1-32.ThekinematicsteeringangleΔisrepresentedbytheangleformedbythedirectionofforwardmotionofthefrontandrearwheels.Theapproximateequationofthisangleisgivenbytheratioofthewheelbaseandtheradiusofcurvature:

Thesteeringangleδn,measuredintheplanenormaltotherearframeplane,is:
ThekinematicsteeringangleΔ,intermsoftherollangleϕ,casterangleεandsteeringangleδ,isthen:
whichwasshownpreviouslyonpage28.
Fig.1-32Kinematicsteeringangle.
Onthebasisofthisequationwecandrawthefollowingconclusions:onlywhentherollangleϕisequaltothecasterangleε,canthekinematicsteeringangleΔbeequaltotherotationangleofthehandlebarsδ;anattenuation,Δ<δ,occursforlowvaluesoftherollangle,whileanamplification,Δ>δ,occursforlargerollangles:withhighvaluesofthecasterangleε(likechoppers),agreaterrotationofthehandlebaris

neededtoproducethesamevalueofthekinematicsteeringangle.
1.10The pathcurvatureThekinematicstudyofthepathtracedbyamotorcycleiscarriedoutassumingthatthereisno
lateralslippagebetweenthewheelsandtheroadplane(“kinematicsteering”).ThecurvatureCofthepath(theinverseofthepathradius)dependsonthepositionofthefrontcontactpointPfandthekinematicsteeringangleΔ:
Forsmallsteeringangles(sinδ≅δ),thecurvatureCcanbeexpressedintermsoftherollangleϕandthesteeringangleδ:
Fig.1-33Radiusofpath.
SincethedisplacementofthecontactpointPfofthefrontwheelissmallwithrespecttothewheelbase,thecurvaturecanbecomputedwiththefollowingsimplifiedformula:
Itcanbeobservedthatthepath’sradiusisdirectlyproportionaltothewheelbase.Fig.1-34showshowthecurvatureCvarieswiththesteeringangleδ,forvariousvaluesoftherollangleϕ.Themaximumerrorusingtheapproximateformulaisequaltoabout2%.

Fig.1-34CurvatureCversusthesteeringangleδforvariousvaluesoftherollangleϕ.
1.11The e ffective trai l inacurveThetrailisthedistancebetweenthefrontcontactpointandtheintersectionpointofthesteering
headaxiswiththeroadplane.Ontheotherhand,thenormaltrailistheperpendiculardistancebetweenthefrontcontactpointandthesteeringheadaxis(Fig.1-35).
Fig.1-35Effectivetrailwiththefrontwheeltiltedandsteered.
Incorneringconditionsthenormalandmechanicaltraildependonthewheelbase,thecasterangle,theoffsetofthefrontwheel,thegeometricalpropertiesofthetires,thepositionofthefrontcontactpointandthepitchangle.Thenormaltrailincorneringcondition is:

Themechanicaltrailincorneringconditiona*is:
Itisworthhighlightingthatthetraildependsonthegeometryofthefronttirebecausethepitchangleandthefrontcontactpointpositiondependonρfandtf.
Theimportanceofthenormaltrailderivesfromthefactthatthemomentsgeneratedbythetirereactionforces(verticalloadandlateralforce)actingaroundthesteeringheadaxisareproportionaltothevalueofthenormaltrail.
Fig.1-36Forcesactingatthecontactpoint.

Fig.1-37Componentsofthereactionforcesthatgenerateamomentaroundthesteeringheadaxis.
Let’sconsiderthelateralforceandnormalloadappliedatthefrontcontactpoint(Fig.1-36).Eachforcecanbesplitintocomponentsthatactperpendiculartothesteeringaxisandnormaltrail(thereforeinapositiontoproduceamomentaroundtheaxis)andcomponentsparalleltoorintersectingthesteeringaxis(whichdonotproduceamoment).ThisisshownschematicallyinFigs.1-36and1-37.
Thenormaltrailrepresentsthearmoftheusefulcomponents.Theusefulcomponentofthelateralforce,tendstoalignthewheeltotheforwardvelocity,whiletheusefulcomponentoftheverticalload,hasamisaligningeffect,i.e.,ittendstocausethewheeltorotatetowardstheinsideofthecurve.Thevaluesofthemomentsaroundthesteeringhead,generatedbythesetwousefulcomponents,areimportantfortheequilibriumofthefrontsection(aroundthesteeringheadaxis).Thetorquetheridermustapplytomaintainequilibriumdependsonthem.

Fig.1-38Normaltrail[radiusoffrontcrosssectiontf=50mm].
Fig.1-39Normaltrail[radiusoffrontcrosssectiontf=80mm].
Fig.1-40Trail[radiusoffrontcrosssectiontf=50mm].

Fig.1-41Trail[radiusoffrontcrosssectiontf=80mm].
Wewillnowtrytounderstandwhetherandhowthenormaltrailvarieswhenthemotorcycleisinacurve.Figure1-38showsthenormaltrailasafunctionoftherollangleandthesteeringangle.Itcanbenotedthatthenormaltraildiminisheswhentherollangleincreasesandevenmoresowhenthesteeringangleincreases.However,ifweconsidersteeringanglesbelow5°androllanglesbelow40°,thetrailvariationsremainbelow20%.
Fig.1-39showsthatanincreaseintheradiusofthefronttirecrosssectionfrom50mmto80mmfurtherreducesthesevariations.Withasteeringangleof5°andarollangleof40°thereductionofthetrailgoesfrom20%to10%.
Changingthetypeoffronttirecancauseavariationinthecrosssectionradius.Therefore,thenormaleffectivetrailinturning,i.e.thearmofthereactiveforces,varies.Sincetherider“feels”thebehaviorofthefrontsectionthroughthetorqueappliedonthehandlebars,itisclearthatavariationinthecrosssectionradiuscanproduceadifferentfeeling.Ifthecasterangleisvaried,verysimilargraphsareobtained.However,thecasteranglevalueinfluencesthevariationinthenormaltrailtoalesserextent.
Inconclusion,itcanbestatedthatwhencomparingdifferentmotorcyclesitisimportanttorefertothenormaltrailsinceithasaprecisephysicalmeaning.InFig.1-40andFig.1-41thetrailispresentedasafunctionoftherollangleandsteeringangle.Itcanbeobservedthatanincreaseintherollangle,withsmallvaluesofthesteeringangle,producesanincreaseinthetrail.Thisisdifferentfromwhathappenswiththenormaltrail.
Tosummarizewecansaythat:bothtrailandnormaltraildiminishwithanincreaseinthesteeringangleδ,thevalueofthetrail,whethernormalormeasuredontheroadplane,alsodependsontherollangleϕ,areductioninthetrail,withtheincreaseinthesteeringangleδ,isattenuatedasthefronttirecrosssectionradiusandtheexternaltireradiusincrease.

1.12The e ffectoft ire s ize onthe rearframeyawWewouldnowliketostudyanotherparticularaspectofmotorcycleswhichoccurswhenthe
motorcycletiltstotheside:theyawingeffectcausedbydifferentcrosssectionsizesofthetires.
Consideramotorcycleinitiallyinaverticalpositionandwithazerosteeringangle(Fig.1-42a).Ashasalreadybeenstated,accordingtotheSAEreferencesystem,thetriad’soriginisintherearwheelcontactpointPrandthex-axisrepresentsthemotorcycle’sforwardmotion.
Let’ssupposethatthemotorcycletiltswhilethesteeringangleisheldatzero,asshowninFig.1-42b.Ifthetires’cross-sectionshavethesameradii(tr=tf),theintersectionoftherearframeplanewiththeroadplanecoincideswiththedirectionoftheforwardmotion.
Inthiscase,therearplanedoesnotyaw,butrathermoveslaterallyduetothelateralrollingofthetires.Thelateraldisplacement,trϕ=tfϕ,isequaltotheproductoftherollangleϕtimestheradiusofthetire’scross-section.
Iftheradiiofthecrosssectionshavedifferentvalues(tr>tf),alsoshowninFig.1-42b,thetiltingmotion,withthesteeringanglefixedatzero,producesarotationψoftherearframeplane,i.e.,ayawmotionwhosevalueisgivenby:

Fig.1-42Motorcycleyawcausedbytireswithdifferentcrosssections.
Example3
Consideramotorcyclewiththefollowingcharacteristics:wheelbasep=1400mm,theradiiofthetirecrosssectionsaretr=100mmandtf=40mm.
Ifthemotorcyclechangesfromstraightrunning(verticalmotorcycle,ϕ=0)toturning(rollangleϕ=45°),calculatetheyawangleoftherearframe.
Theyawangleoftherearframeplane,duetothedifferenceintheradiiofthecrosssections,isequaltoψ=0.53°.

MotoGuzzi500ccof1924
2MotorcycleTires
Thetireisoneofthemotorcycle’smostimportantcomponents.Itsfundamentalcharacteristicisitsdeformability,whichallowscontactbetweenthewheelandtheroadtobemaintainedevenwhensmallobstaclesareencountered.
Inadditiontoimprovingthecomfortoftheride,thetireimprovesadherence,animportantcharacteristicbothforthetransferoflargedrivingandbrakingforcestotheground,andforthegenerationoflateralforces.Theperformanceofamotorcycleislargelyinfluencedbythecharacteristicsofitstires.Inordertounderstandtheirimportance,onemustconsiderthatcontrolofthevehicle’sequilibriumandmotionoccursthroughthegenerationoflongitudinalandlateralforcesactingbetweenthecontactpatchesofthetireswiththeroadplane.Theforcesoriginateasaresultofactiontakenbytheriderthroughthesteeringmechanism,theacceleratorandthebrakingsystem.
2.1Contactforces betweenthe t ire andthe roadFromthedynamicviewofthemotorcycle,itisfundamentaltoportraytheoverallbehaviorofthe
tireinvariousconditionsofusethroughamodelcapableofrepresentingtheforcesandmomentsofcontactintermsofforwardvelocity,camberangle,longitudinalslip,lateralslipandloadactingonthetireitself.
Fromamacroscopicviewpoint,theinteractionofthetirewiththeroadcanberepresentedbyasystemcomposedofthreeforcesandthreemoments,asinFig.2-1:
alongitudinalforceactingalongtheaxisparalleltotheintersectionofthewheelplanewiththeroadplane,andpassingthroughthecontactpoint(assumedpositiveifdrivingandnegativeifbraking),inxdirection;averticalforceorthogonaltotheroadplane(averticalloadthatactsonthewheel,assumedpositiveinanupwarddirection),alongthezaxis;

alateralforce,intheroadplane,orthogonaltothelongitudinalforce,inydirection;anoverturningmomentaroundthex-axis,arollingresistancemomentaroundthey-axis,ayawingmomentaroundthez-axis.
Fig.2-1Forcesandtorquesofcontactbetweenthetireandtheroadplane.
Fig.2-2Longitudinalandlateralforces.
InFig.2-2typicallongitudinalandlateralforceshavebeendepictedintheconditionofpureslip.Puresliprepresentsthesituationwheneitherlongitudinalorlateralslipoccursinisolation.Thelongitudinalforcedependsonthelongitudinalslipandshowsaclearpeakwhilethelateralforceisafunctionbothofthecamberangleandofthesideslipangle.CurveswhichexhibitashapeliketheforcesdepictedinFig.2-2canberepresentedbyamathematicalformulanamedthe

“MagicFormula”.
2.2The “MagicFormula”forrepresentingexperimental resultsThemodelproposedbyΡacejka(1993)isverymuchinuse.Theapproachissubstantially
empiricalandtheresultsreproducetherealbehaviorofthetireverywell.Theentiremodelrevolvesaroundwhatiscalledthe“magicformula,”thatis,asingleexpressionthatcanbeusedtorepresentthelongitudinaldrivingorbrakingforce,thelateralforceorthemomentaroundthezaxis.Theexpressionisasfollows:
Y(x)=y(x)+Svy(x)=D⋅sin{C⋅arctan[Bx−E(Bx−arctanBx)]}X=x+Sh
whereB,C,DandEarefourparameters,Svindicatesthetranslationofthecurvealongtheyaxis,andShindicatesthetranslationofthecurvealongthexaxis.
Fig.2-3Meaningoftheparametersinthe“magicformula”.
Themagnitudeycanrepresenteitherthelongitudinalthrustorthelateralforce,whilexrepresentsthecorrespondingslipquantity.Figure2-3reproducesthetypicalvariationofthePacejkacurveandiseffectiveinvisualizingthemeaningofthefourparametersappearingthere.
ParameterDrepresentsthepeakvalue(onlywithE<1andC≥1)anddependsontheverticalload.ParameterCcontrolstheasymptoticvalueassumedbythecurveasthesliptendstoinfinity,andinthiswaydeterminestheresultingformofthecurve.ParameterBdeterminestheslopeofthecurvefromtheorigin.ParameterEcharacterizesthecurvaturenearthepeak,andatthesametimedeterminesthepositionofthepeakitself.
ItcanbeshownthatthegradientattheoriginisgivenbytheproductBCD.
2.3Rol l ingres is tance

Considerawheelthatrotateswithoutslippageonaflatsurface.Therollingradiusisdefinedbytheratiooftheforwardvelocitytoitsangularspeed:
Theeffectiverollingradiusinfreemotionis,asshowninFig.2-4,smallerthantheradiusoftheunloadedtirebecauseofthedeformationofthetire.Itsvaluedependsonthetypeoftire,itsradialstiffness,theload,theinflationpressureandtheforwardvelocity.Itcanbedemonstratedthatitsvalueinfreemotionissmallerthanthatoftheradiusoftheunloadedtirebutgreaterthanthedistancefromthecenterofthetiretotheroadplane.Anapproximatevalueisgivenbytheequation:
R0=R−(R−h)/3
Fig.2-4Effectiverollingradiusofthetire.
Duringthetire’srolling,theportionofthecircumferencethatpassesoverthetrackundergoesadeflection.Inthecontactareastressesaregenerated,whicharebothnormal(duetotheload)andshearduetothedifferenceinlengthofthearcofcircumferenceanditstreadchord(thatrepresentsthelengthofthecontacttread).Becauseofthehysteresisofthetirematerial,partoftheenergythatwasspentindeformingthetirecarcassisnotrestoredinthefollowingphaseofrelaxation,orisrestoredlate.Thiscausesachangeinthedistributionofthecontactpressures,whichthereforearenotsymmetric,butarehigherintheareasinfrontofthewheel’saxis.
AsshowninFig.2-5,theresultantofthenormalcontactpressuresisdisplacedforwardwithrespecttothecenterofthewheelbythedistanced.Theforwarddisplacementiscalledtherollingfrictionparameter.Hence,tomovethewheelwithconstantforwardvelocityitisnecessarytoovercomearollingresistancemomentequalto:

Mw=dN
Theresistancetorollingisexpressedviaaresistanceforcethatopposestheforwardmotion,andwhosevalueisgivenbytheproductoftherollingresistancecoefficientfwandtheverticalload.
Inadditiontothetypeoftire(eitherradialorbias-ply),itsdimensions,thecharacteristicsofthetire,thetemperatureandtheconditionsofusetherollingresistancecoefficientdependsprincipallyontheforwardvelocityandontheinflationpressure.Therollingresistancecoefficientincreaseswiththecamberangle.Typicalvaluesareontheorderof0.02.
Fig.2-5Descriptionofcontactpressuresandforcesactingonarollingwheel.
KevinCooper(see[J.Bradley,1996])hasproposedthefollowingempiricalformulaforcalculatinglossesthroughresistanceduetotherollingofthemotorcycletires.Theformulatakesinflationpressureandforwardvelocityintoaccount:

Velocityisexpressedinkilometersperhourandthetirepressurepinbar(1bar≅1atm).Figure2-6showsthevariationoftherollingresistancecoefficientversusthevariationofvelocityatcertainvaluesoftirepressure.Itcanbeobservedthatanincreaseinpressurediminishestheresistancetorolling.
Thepowerthatisdissipatedbecauseoftherollingresistanceforce,isgivenbytheproductoftheresistanceforceandtheforwardvelocity:
HereNrepresentstheloadonthewheel(expressedinNewtons);thepowerdissipatedPisexpressedinkilowatts.
Tosummarizeitmaybesaidthattherollingresistanceforcedependson:inflationpressurethedeformationofthetire(inviewofthehysteresisofthematerial),therelativeslipbetweenthetireandtheroad,theaerodynamicresistanceduetotheventilation.

Fig.2.6Therollingresistancecoefficientversustheforwardvelocityforvariousvaluesoftirepressure.
Ofthesethreecauses,thefirstoneisbyfarthemostimportant.Lossesthroughventilationarecausedbytheinteractionbetweenthewheelandthecirculatingair,whichinturndependsontheformofthewheelitself(armorspokes),theprofileofthetireandtherotationalvelocity.
Example1
Consideramotorcyclewithamassof200kgandtwodifferentvelocities:100km/hand250km/h.Assumingthetirepressureis2.25bar,determinethepowerdissipatedtoovercomerollingresistance.
Thepowerdissipatedinordertoovercometherollingresistanceforcesatavelocityof100km/hisonly1.1kW,whileatavelocityof250km/hthepowerrisesto12kW.
2.4Longitudinal force (driving-braking)Thepresenceofdrivingorbrakingforcesgeneratesfurtherlongitudinalshearstressesalongthe
areaofcontact.Thecircumferentialstress,inthecaseofdrivingforce,compressesthefibersinthecontactarea(Fig.2-7);inthecaseofbrakingforces,thefibersareengagedintension(Fig.2-8).
Theforwardvelocityofthecontactpointisthereforeless,inthecaseoftraction,thanthetire’speripheralvelocity.Alternatively,inthecaseofbraking,itisgreaterthanthetire’speripheralvelocity.Thisisexpressedbythelongitudinalslip,definedbytheratiobetweentheslipvelocity(V−ωR)andtheforwardvelocityV:
Thelongitudinalslipispositiveinthecaseoftractionandnegativeinthecaseofbraking.Inthelattercase,longitudinalshearstresseshavetheoppositesignoftheforwardvelocity.
Inthecaseofdrivingwheel,somelongitudinalshearstressesaregeneratedinthecontactareahavingthesamesignastheforwardvelocityandthereforethetiretreadinthecontactpatchiscompressed.Inthefirstpartofthepatchthecontactisoneofadhesion,butinthesecondpartthecontactoccurswithsliding(Fig.2.7).

Fig.2-7Longitudinalshearstressinthecontactareaandforcesactingonadrivingwheel.
Inbraking,theinstantaneousrollingradius,whichinconditionsofpurerollingislessthantheperipheralradiusofthewheel,increaseswithanincreaseofthebrakingforceuntilitbecomesgreaterthanthewheel’sradius(inasuddenstopthatincludeslockingthewheel,thisradiusisinfinite).Inthefirstpartofthepatch,thecontactisoneofadhesion.Atacertainpoint,thedifferencebetweentheforwardvelocityandtheperipheralvelocityproducesshearstressesgreaterthanthosethatcanbegeneratedinconditionsofadhesion,andforthisreasonaslidingzoneisgenerated.Thelengthoftheslidingzoneisapproximatelyproportionaltothebrakingforce(Fig.2.8).

Fig.2-8Longitudinalshearstressinthecontactareaandforcesactingonabrakingwheel.
2.4.1Non-l inearmodel
Thelongitudinalforceofbothtractionandbrakingisproportionalinafirstapproximationtotheloadapplied;theratioμbetweenthelongitudinalforceandtheload(normalizedlongitudinalforce)iscalledlongitudinalbraking/drivingforcecoefficient.
ThelongitudinalforceatnominalloadNcanbedescribedbymeansoftheMagicFormula:
ThecoefficientDκ=μprepresentsthepeakofthebraking/drivingforcecoefficientwhiletheproductDκCκBκisthelongitudinalslipstiffness.
Fig.2-9showsinqualitativetermstheratioofthelongitudinalforcetothenormalload,versusvariationofthevalueofthelongitudinalslip.Themaximumvalue(braking/drivingtractioncoefficient)dependsstronglyonroadconditions.
2.4.2Linearmodel
Theforce,inbrakingandthrustingphasesrespectively,canbeexpressedbyalinearequation,such

as:
F=Kκκ=(kκN)κS=Kκκ=(kκN)κ
where,
indicatesthedimensionalstiffness(N)oflongitudinalslip,and
thenon-dimensionallongitudinalslipstiffness.
Theorderofmagnitudeofthevalueoflongitudinalstiffnesskκ(gradientofthecurveofzeroslippage)rangesfrom12-30(non-dimensionalvalue).
Fig.2-9Qualitativevariationofthebraking/drivingforcecoefficientversusslip.
Example2
Supposethatavehicleof81kWpower(110HP)attainsamaximumvelocityof270km/h(75m/s).Determinethedrivingthrustrequiredtoattainthisvelocity.Nextassumingmaximumthrustwiththeentireloadonthemotorcycleontherearwheel,determinethedrivingforcecoefficient.

Thenecessarydrivingthrustisequaltotheratiobetweenpowerandvelocity:
S=81*1000/75=1079.5N
Thedrivingforcecoefficientisequalto:
Theslipnecessarytoproducethisnormalizedlongitudinalforcecanbedeterminedifweknowthevariationofthelongitudinalforcecoefficientintermsoftheslip.Thevalueofthenecessaryslipdependsonthetypeoftire.InthetwocurvesgiveninFig.2-10,thevalueofthefrictioncoefficient0.72isobtained,with3.6%slippageinthecaseoftireAand8%withtireB.ItisclearthattireBissubjecttomorerapidwearthantireA,becauseofthegreaterlongitudinalslipnecessaryforgeneratingthesamethrustforce.
Fig.2-10Longitudinalforcecoefficientversuslongitudinalslipfortwodifferenttires.
2.5Lateral forceThelateralforce,whichthetireexertsontheground,dependsonboththesideslipangleλandthe
camberangleϕ.Thesideslipangleisdefinedastheanglemeasuredintheroadplanebetweenthedirectionoftravelandtheintersectionofthewheelplanewiththeroadplane,ascanbeseeninFig.2-11.Sideslipforcesdependontirecarcassdistortionwhilecamberforcesdependprimarilyon

geometry.
Thetireisdeformedoncontactwiththeground,producingapatchofvariableshapeanddimensionsaccordingtothecharacteristicsofthetire,therollangle,thesideslipangle,aswellasexternalfactorssuchastheload,theinflationpressure,etc.Anypresenceoflateralforcesandbrakingordrivingtorquesintroducesfurtherdeformationstothecontactpatch.Ingeneral,thepatchisnotsymmetricalwithrespecttothexandy-axes.
Fig.2-11Thesideslipangle.
2.5.1Lateral force generatedbythe camberangle
Firstletusconsiderthecaseofatireinclinedtoasetcamberangle,whichmovesforwardinthedirectionofitsplaneandhasazerosideslipangle(Fig.2-12).Inthecaseofanundeformabletirecarcass,thepatchisdot-shapedandthegenericpointP,situatedontheexternalsurfaceofthetorusofthewheel,describesacirculartrajectoryinspacewhoseprojectionontheroadplaneisacurveintheformofanellipse.ItthereforetouchestheroadatthesinglecontactpointA.Thereisnolateraldeformationofthetire;therefore,itgeneratesnocamberforce.
Inthecaseinwhichthetire’scarcassisdeformable,thecontactzoneisextended,andpointPatthemomentwhenitenterstheareaofcontactwiththegroundisobligedtoabandonthetheoreticalellipticaltrajectoryandtomovealongarectilineartrajectoryinthedirectionofthewheel’sforwardmotion;thisdirectionisindicatedwiththelinea−ainFig.2-12.
WecanimaginethatthedeformationofthetirecarcassPP”willoccurintwodistinctphases:first,theverticalloadgeneratestheverticaldeformationPP,thenthelateralforceofthecamberthrustgeneratesthedeformationP’P”.Thelateralforceduetocamberisimportant,especiallyatsmallslipangles.

Fig.2-12Originofthecamberthrust.
2.5.2Lateral force generatedbylateral s l ip
Considerawheelthatrotatesandatthesametimeslipslaterally.InthiscasetheformofthecontactpatchisdistortedasshowninFig.2-13.
ConsiderapointPsituatedonatreadthatreachescontactwiththegroundatpointA.WhenpointPmovestoadeterminedpointindicatedwithB,itdescribesarectilineartrajectory.ItsvelocityhasthedirectionoftheforwardvelocityV.WhenitreachespointB,theelasticrestoringshearstress,duetothedeformationofthecarcassandoftherubberelementsinthetiretread,becomesgreaterthantheadhesionforcesandthereforebecomesuchastomakeitdeviateintheoppositedirection,causingittoslideonthegrounduntilthetrailingedgeC.
Twozonesarethereforetobedistinguishedinthecontactarea:afrontzonewhereadhesiontakesplace;arearzoneinwhichthereissliding.
Theslidingzoneismoreextendedthegreatertheslipangleis.Oncealimitingvalueofthelateralforcehasbeenreached,theentirecontactzonebecomesaslidingarea.

Fig.2-13Thepatchofamotorcycletireinthepresenceoflateralslip.
2.5.3Non-l inearmodel
Figure2-14showsinqualitativeterms,thenormalizedlateralforceversustheslipangleandversusthecamberangle.Themaximumvalueoftheforcethatcanbeobtained,givenacertaintire,isstronglydependentonroadconditions.
Theforcesweremeasuredbymeanstherotatingdisktestmachinedescribedin[Cossalteretal.,2003]andshowninFig.2-15.Thediskrotatesaroundaverticalaxisandisequippedwithasafetywalktrack.Thewheelundertestingrollsonthetrackandisplacedinpositionbyanarticulatedarmthatmakesitpossibletosetthecamberandsideslipanglesatassignedvalues.
Fig.2.14Measuredvaluesoflateralforceasafunctionofthesideslipangleλandforvariousvaluesofthecamberangleϕ(left)andasafunctionofthecamberangleϕforvariousvaluesofthe
sideslipangleλ(right)[fronttire120/70/17].

Fig.2.15Therotatingdisktiretestmachine.
Asshowninthefigurethelateralforceisafunctionoftheverticalload,sideslipandcamberangle.Thecouplingbetweenthecorneringandthecambercomponentscanbeexpressedwiththeequivalentforceapproachbymeansofthefollowingexpression:
ThisapproachisthemostrecentofPacejka’sformulationsformotorcycletires[Pacejka,2005].
Ds=μyisthepeakofthelateralforcecoefficient,DλCλBλ=kλisthecorneringstiffnesscoefficientandDϕCϕBϕ=kϕisthecamberstiffnesscoefficient.
2.5.4Linearmodel
Thecontactforcesbetweenthetireandtheroadplanedependontheslipangleandthecamber

angle.Itcanbeseenthatforsmallslipangles,thedependenceontheslipangleisnearlylinearwhilethecambercomponentisalmostalinearfunctionofthecamberangle.
Thelateralforceforsmallslipangleandlimitedcamberanglecanbeexpressedbymeansofthelinearexpression:
F=Kλ⋅λ+Kϕ⋅ϕ=(kλ⋅λ+kϕ⋅ϕ)N
Figure2-16shows,ontheleft,thetypicalvariationofthenormalizedlateralforcewithrespecttotheverticalforce,versustheslipangleforvariousvaluesofthecamberangleand,ontheright,versusthecamberangleforvariousvaluesoftheslipangle.
Fig.2-16Geometricinterpretationofthecorneringkλandcamberkϕstiffness.
Thecharacteristicsofthetire,asfarasthelateralforceisconcerned,aredefinedbythecorneringandcamberdimensionalstiffnesses(N/rad):
Thecorneringstiffnesscoefficientkλvarieswiththevariationofthecharacteristicsofthetires.Itsfieldofvariabilityrangesfromapproximately10rad−1uptovaluesof25rad−1.

Thecamberstiffnesscoefficientkϕisoftheorderofmagnitudeof0.7to1.5rad-
Theratiobetweenthemaximumlateralforceandtheverticalload,canreachvaluesof1.3to1.6whentheroadsurfaceiscleananddry.
2.5.5Lateral force neededformotorcycle equi l ibrium
Consideramotorcycleinacurveinsteadystate.Theequilibriumofthemomentsoftheforcesactingonthecenterofmassshowsthatthenormalizedlateralforcenecessarytoassurethemotorcycle’sequilibriumisequaltothetangentoftherollangle,asrepresentedinFig.2-17.
Fig.2-17Equilibriumofthemotorcycleinacurve.
ConsiderFig.2-18.Therightgraphshows,foracertaintypeoftire,thecomponentoflateralthrustduetocamberalone(thestraightline)andthelateralforcenecessaryfortheequilibriumofthemotorcycleonacurve(dottedline).TheforcesarenormalizedwithrespecttotheverticalloadN.Thegraphontheleftrepresentsthenormalizedlateralforceversusthelateralslipangle.
Itcanbeobservedthatthestraightline,whichapproximatesthevariationofthecamberthrust,intersectsthecurvetanϕincorrespondencewitharollangleof28°.Thismeansthatwithintherange0to28°,thelateralforceneededforequilibriumislessthanthethrustforcegeneratedbycamberalone.Sincethelateralforcegeneratedmustbeexactlyequaltothatneededforequilibrium,thediminutionofthelateralforceisobtainedthroughanegativesideslipangle.Thatis,thewheelpresentsalateralvelocitycomponenttowardstheinteriorofthecurve.
Figure2-18shows,forexample,thatinthecaseofacamberangleof10°,theequalityoftheforcegeneratedwiththatneededisobtainedwhenthereisanegativeslipangleof0.3°(PointA).Withacamberangleof28°thelateralslipiszero(PointB).Forvaluesofthecamberanglegreaterthan28°thelateralforceproducedbycamberaloneisnotsufficientfortheequilibriumofthemotorcycleandthereforetheincreaseinthelateralforceisobtainedwiththelateralslipofthetire(positiveslip).
Thisbehaviorisacharacteristicofmotorcycletiresinwhichthelateralforcegeneratedis,upto

determinedrollangles,almostentirelyduetothecambercomponent.Sincethiscomponentappearsmorerapidlywithrespecttothecomponentduetoslip,itplaysafundamentalroleinsafety.Thecambercomponentappearsmorerapidlybecauseitdependsonthecarcassdeformationwhilethecorneringcomponentdependsontheslipanglewhichneedssometimetooccur.
Fig.2-18Componentsofthelateralforcegeneratedbycamberandslip.TireA.
Fig.2-19Componentsoflateralforcegeneratedbycamberandslip.TireB.

NowconsiderthegraphinFig.2-19,whichreferstoadifferenttypeoftire.Inthiscasethecamberthrustisalwaysinferiortothelateralforceneededforequilibrium.Thismeansthatitisalwaysnecessarytohavelateralslipinordertogeneratetheadditionallateralforcerequiredforequilibrium.Thelateralforces,thewaytheyareproducedandtheirdependenceonthecamberangleandtheslipangle,playafundamentalroleinthemotorcycle’sunder-steeringorover-steeringbehavior.
Ifthegenerationoflateralfrontforcerequiresaslipanglelargerthanthatneededforthegenerationoflateralrearforce,themotorcyclewilltend,astherollangleincreases,toskidmorewiththefrontwheel.Thisbehaviorcausesthevehicletounder-steer.Ontheotherhand,iftheslipintherearwheelisgreaterthanthatofthefrontone,thebehaviorwillbeover-steering.Neutralbehavioroccurswhentheslipanglesareequal.Onthebasisoftheseconsiderations,thetire’sidealbehavioroccurswhentheslipangleiszero,thatis,whenthelateralforcenecessaryforequilibriumisproducedbycamberalone.
2.5.6Dependence of lateral force onload,pres sure ,temperature
Thetire’scapabilityforlateralgripiswellrepresentedbytheplotsoflateralforceversuscamberangleandsideslipangle,asdepictedinFig.2.20forseveralverydifferenttypesoffrontandreartires.

Fig.2-20Anexampleoflateralforceasafunctionofthecamberangleϕ(left)andofthesideslipangleλ(right)fordifferentfront(top)andrear(bottom)tires.

Fig.2-21Anexampleoflateralforceasafunctionofthecamberangleϕ(left)andsideslipangleλ

(right)forvariousvaluesofpressure,loadandtemperature.
Figure2-21showsasanexamplethemeasurednormalizedlateralforceversusboththeslipangleandthecamberangleforvariousvaluesofinflationpressure,ofverticalloadandtemperatureofthecarcass.
Corneringstiffnessisnottobeconfusedwiththetire’slateralorradialstiffness.Lateralstiffnessistheratiobetweenappliedlateralforceandtheresultinglateraldeformationofthetire’scarcass.Itdependsonthetire’sconstructioncharacteristics.Theorderofmagnitudeofitsvalueisof100to200kN/m.Theradialstiffnessofthetireistherelationbetweentheverticalloadandtheverticaldeformationandhasvaluesintherangeof100to350kN/m.Inflationpressureandforwardvelocityinfluencebothofthesestructuralstiffnesses.
Anincreaseinverticalloaddecreasesthecorneringstiffnesscoefficientwhereasthecamberstiffnesscoefficientisalmostnotinfluenced.Anincreaseininflationpressure,decreasesthecorneringstiffnesscoefficientand,toalesserextent,decreasesthecamberstiffnesscoefficient.Tireswithlargersections,orgreatercrosssectionradii,usuallyhavealargercorneringstiffnesscoefficient.Anincreaseintemperaturedecreasesbothcorneringandcamberstiffnesscoefficientsbutincreasesthemaximumvalueoftheratiobetweenthemaximumlateralforceandtheverticalload.
2.5.7Lateral force intrans ients tate
Wehavestatedthatthetirelateralforcedoesnotariseinstantaneously.Toappear,thewheelneedstorollacertaindistance,whichdependsonthetire’scorneringcharacteristicsandlateralstiffness.
Supposethatthemotorcycleisinitiallyinastateofverticalequilibrium.Therollandslipanglesarezerowithcorrespondingzerovaluesofthelateralcontactforces.Ifweinstantaneouslyassignnon-zerovaluestotherollandslipangles,thelateralcontactforcesincreaseexponentially,fromzerotothesteadystatevaluecorrespondingtotheassignedrollandsideslipangles;thecontactforcesthereforefollow,withadelay,thevariationoftheanglesonwhichtheydepend.Thisisduetothefactthatthecarcassdistortiontakessometimetoestablishitself.Thecomponentduetocamber,dependingprimarilyontiregeometry,hasalesserdelaythanthatofthecomponentduetolateralslip.
Thetire’sbehaviorintransientstatecanberepresentedbythemodel(Fig2-22),whichiscomposedofaspring(withstiffnessksexpressedinN/m)anddamperinseries(withdampingcoefficientcexpressedinkg/s).Thespringksrepresentsthetire’slateralstiffnessanddependsmainlyontheformandcharacteristicsofthetire’scarcasswhilethedampercdescribesthebehaviorofthetireunderconditionsoflateralslip.Ifweignoretheinertiaofthetire’scarcass,thecorneringforceisequalandoppositetotheelasticforcegeneratedbythedeformationofthetire:
Fs=cẏ=cλ’V=Kλλ’=−ks(y−yi)
Hereλ’=ẏ/Vrepresentsthetransientslipangle,thatistheslipangleofthecontactpatch(pointP),ythelateraldisplacementofthecontactpatchandyithedisplacementimposedonthewheel.

Fig.2-22Springanddamperconnectedinseriestorepresentthelateralbehaviorofthetire.
Takingintoaccountthedefinitionoftheslipangleandtheapparentdampingcoefficientc=Kλ/V,theequationcanbeexpressedintheform:
Thedifferentialequationcanalsobeexpressedintermsofthelateralforceproduced.Aftersomemanipulation,thefollowingexpression,withtheimposedwheelslipangleλ=ẏi/V,isobtained:
HereL=Kλ/ksrepresentstherelaxationlength.
Supposethatthewheelissuddenlysubjected,atinstantt=0,toalateralmotionwithconstantslipangleλo.Asaresultthelateralforceincreasesexponentially:

Keepinginmindthatthedistancextraversedbythewheelisgivenbytheproductofvelocityandtime,wehave:
Figure2-23showsthevariationofthelateralforce,normalizedwithrespecttothevalueKλλo,whichitassumesinasteadystate,asafunctionofthedistancexcoveredbythewheel.Thetangentconstructedthroughtheoriginisequaltotheratioks/Kλ.Theinverseofthetangentiscalledrelaxationlength:
Therelaxationlengthrepresentsthedistancethewheelhastocoverinorderforthelateralforcetoreach63%ofthesteadystateforce.Integratingthedifferentialequationgivesusthelateralforceoncewehaveassignedatemporalvariationtotheslipangle.
Thevaluesoftherelaxationlengthofthecorneringforcerangesbetween0.12-0.45m.Thesmallvaluescorrespondtolowvelocity(20km/h),thehighervaluestoveryhighvelocity(250km/h).Itincreasesslightlywiththeload.ItisinterestingtohighlightthattherelaxationlengthisalmostconstantwithrespecttotheratiobetweenthefrequencyνofthesideslipangleoscillationandtheforwardvelocityV.Thisratioiscalledthepathfrequencyandrepresentsthenumberofcyclespermeterofforwardmotion.
Ontheotherhandthevaluesoftherelaxationlengthofthecamberforceinsomeexperimentaltestshasbeenfoundtobealmostnegligible.However,furtherexperimentalresultsareneededtoverifythisbehavior.

Fig.2-23Lateralforceasafunctionofthedistancecoveredbythewheel.
2.6Moments actingbetweenthe t ire andthe road
2.6.1Se l f-al ignmentmoment
Thedistributionofthelateralshearstressgeneratedbythelateralslipofthetireisnotsymmetric.Theresultingforceisthereforeappliedatapointsituatedatacertaindistancefromthecenterofthepatch,acenterwhich,inafirstapproximation,canbeassumedtocoincidewiththetheoreticalcontactpointoftherigidtoroidwiththeroadplane.Thedistanceatisdesignatedthetrailofthetireorpneumatictrail.ItisclearfromFig.2-24thatthelateralforcegeneratesamomentthattendstorotatethetireinsuchawayastodiminishtheslipangle.Forthisreasonthismomentiscalledtheself-aligningmomentofthetire.

Fig.2-24Trailofthetire.
Theself-aligningmomentMzisexpressedastheproductofthecorneringforceFsandthetrailofthetireat.
Mz=−atFsExperimentalresultsshowthatthetrailisatamaximumwhentheslipangleiszero;thatitdecreaseswithanincreaseintheslipangleuntilitreacheszero,andthatitincreaseswithincreasesintheverticalload.Itcanbeapproximatelyexpressedintermsoftheslipanglebythefollowinglinearequation:
where atorepresentsthemaximumvalueofthetiretrail( rangesfrom1.5to5cm)andλmaxtheslipangleatwhichthetiretrailbecomeszero.
Figure2-25representsthetypicalvariationofthesideslipforce,ofthepneumatictrailandoftheself-aligningmomentasafunctionoftheslip.Whentheslipanglereachesthevalueλmax(about15°)themomentiszerosincethelateralforcepassesthroughthecenterofthepatchbecausetheslidingzonecoversthewholepatch.

Fig.2-25Exampleofmeasuredvariationofthelateralforce,pneumatictrailandself-aligningmomentversussideslipangle.Camberangle=0°,Frontnominalload=1300N,rearnominal
load=1400N.

2.6.2Twis tingmoment
Consideraninclinedwheelthatrollsovertheroadplanewithangularvelocityωaboutthewheelaxis(Fig.2-26).
Fig.2-26Originofthetwistingmoment.
WeindicatewithCothepointofintersectionofthewheel’saxiswiththeroadplane.Iftheturn

centerpointCofthecirculartrajectorydescribedbythewheelcoincideswiththepointCo,motionoccurswithoutlongitudinalslippage(underkinematicconditions).Infact,theperipheralvelocitiesofthetwopointsAandBofthetire,whicharepartofthepatch,areequaltotheforwardvelocitiesduetotherotationofthewheelaroundthepointCwithangularvelocityΩ.
ωrA=ΩRAωrB=ΩRB
Inreality,atfreerollingthecenterofcurvatureCisalwayslocatedexternallywithrespecttothepointCo.
Supposethatatthemidpointofthepatchtheperipheralvelocityisequaltotheforwardvelocity:
Inthemostexternalareaofthepatchtheperipheralvelocityisgreaterthantheforwardvelocity,whileintheinteriorareaofthepatchthecontraryistrue.Motionthereforeoccurswithslip,andtwozonescanbedistinguishedinthepatch:onewithpositivelongitudinalslipvelocity,andtheotherwithnegativelongitudinalslipvelocity.Therefore,thereareforwarddirectedshearstressintheexternalzoneandbackwarddirectedshearstressintheinternalzone.
Theseshearstressesgenerateatwistingmomentthattendstomovethewheelalongatrajectorywithasmallercurvatureradius,therebyactingtotwistthewheeloutofalignment.Thetwistingmomentisapproximatelyproportionaltothecamberangle.AtypicalvariationisrepresentedinFig.2-27.
Fig.2-27Exampleofmeasuredvariationoftwistingmoment.
Wehaveseenthattwomomentsofoppositesignactonthetire:theself-aligningmomentandthetwistingmoment.Theirsumdefinestheyawingmomentofthetire,whosequalitativevariation

againstthesideslipangle,isshowninFig.2-28.TheyawingmomentMziszerowhentheslipandrollanglesarezero;itincreaseswithincreasesintherollangleandhasaminimumcorrespondingtoaslipangleofλ=2°to6°.
Fig.2-28Exampleoftheyawingmoment.
2.6.3Torque generatedbythe drivingorbrakingforce
Thedrivingforcegeneratesamomentthattendstoaligntheplaneofthetireinthedirectionofvelocity,whilethebrakingforcegeneratesamomentofoppositesignwhichthereforemovesitoutofalignment.Thearmofthelongitudinalforcedependsonthelateraldeformationofthetire.
whereksindicatesthelateralstiffnessofthetire’scarcass.

Fig.2-29Momentsgeneratedbydrivingorbrakingforce.
WithrespecttopointQthearmofthelongitudinalforcealsodependsontheradiusofthecrosssectionandthecamberangle.
wheretindicatestheradiusofthecrosssectionofthetire.
Ingeneral,thelateraldeformationsp,hasanegligiblevaluewithrespecttothelateraldisplacementsofthecontactpointofthetire.
2.7Combinedlateral andlongitudinal forces :the frictione l l ipseThelongitudinalforceFx,eitherdriving(positivevalueofFx)orbraking(negativevalueofFx),is
assumedtobeassignedsinceitiscontrolledbytherider.
ThelateralforceFythatcanbeexercisedisreducedbythesimultaneouspresenceofthelongitudinalforce.

Fig.2-30Thefrictionellipse.
Theirresultantmustbewithinthefrictionellipsethathasthemaximumvalues longitudinal,and,lateralrespectively,whentheyactalone:
where isthelongitudinaltractioncoefficientand isthelateraltractioncoefficient.Forthisreasontheformulathatyieldsthelateralforceismultipliedbyacorrectioncoefficientthatdependsonthelongitudinalforceapplied:
Figure2-31showsthevariationofthenormalizedlateralforcecurveswiththevariationofthelongitudinalforceapplied.

Fig.2-31Variationofthenormalizedlateralforceforvariousvaluesofthelongitudinalforce(rollangle=0°).
Fig.2-32Lateralandlongitudinalforcesforvariousvaluesoflongitudinalslipκandsideslipλ(rollangleϕ=0°).
TheinteractionbetweenthelongitudinalandlateralforcescanbeshownbyrepresentingtheconstantlateralslipcurvesandconstantlongitudinalslipcurvesinadiagramthathasasitsordinatethenormalizedlateralforceFy/NandasitsabscissathenormalizedlongitudinalforceFx/N.
ThecurvesforconstantlongitudinalslippageandconstantlateralsliparerepresentedinFig.2-32.
Example3
Consideramotorcyclebrakingasitentersacurve.Supposethattherearwheelhasanormalizedlongitudinalforceequalto0.75andanormalizedlateralforceequalto0.53(pointA),whichcorrespondtoasideslipangleof3.5°.

Fig.2-33Forceactingonthemotorcycle.
Ifthebrakingissuddenlystopped,thelateralforcecorrespondingtoa3.5°slipangleisincreasedsharply,thereismotionfrompointAtopointC.Thelateralforcegeneratedbytheslipisnowequalto0.78,whichisgreaterthanthe0.53neededforequilibrium.Sincethemotorcycleistilted,thesuddenincreaseinthelateralforcegeneratesanaccelerationofthevehiclethattendstobereturnedtotheverticalpositionandtoprojecttheriderupward(high-sidefall).Thelateralslipdiminishesuntilitreachesthevalueneededforequilibrium(PointB).
2.8The e las tici tyofthe carcas sWhenlateralandverticalforcesareappliedtothetire,bothlateralandradialelasticdeformation
ofthecarcassarise.Additionallythedriving/brakingforcegenerates,inthelongitudinalplane,adeformationthatmainlyconsistsinarelativerotationbetweentherimandthecarcass.Becauseoftiredeformation,thecontactisnolongerdotshaped,butinvolvesacontactpatchsurfacewhoseformdependsonthecamberangle,ontheloadandontheinflationpressure.
Thelengthandwidthofthecontactpatchofmotorcycletireschangeinaratherregularmannerwiththeverticalloadandcamberangleaslongasthecontactpatchisnotverylarge(largeloads)andthecamberangledoesnotapproach40°-45°.Theeffectofinflationpressureoncontactpatchisimportantifitislowerthanthenominalvalue2-2.5bar

Fig.2-34Theeffectofcamberangleoncontactpatchshape.[ReartireFz=2000Nandp=2bar].
IntheroadplanethetirechangesfootprintandthecontactpointmoveslaterallydependingonthegeometryofthecarcassasshowninFig.2-34.
Inthepresenceofcamber,apureverticalloadinducedbothhorizontalandverticaldeflectionofthecarcass.However,byexpressingresultswithrespecttothewheelcamberedreferenceframe,therelationshipsbetweenforcesanddeformationsaresimpler.InfacttheelasticpropertiesofthecarcasscanbeeffectivelydescribedbymeansofapairofspringswhichactintheradialdirectionZandthelateraldirectionY,asshownintheFig.2-35.
Fig.2-35Elasticityofthetirecarcass.
Typicalvaluesofstructurallateralstiffnessesrangesfrom100kN/mto250kN/mwhileradialstiffnessesrangefrom100kN/mto200kN/m.
2.9Model ofthe motorcycle t ire

Nowadaysmulti-bodycodesmakeitpossibletocalculatethepointsofcontactbetweentheroadandthemotorcycleequippedwithrigidorelastictoroidaltires.Henceinthetiremodeltheforcescanbeappliedintheareaaroundthepointofcontactbetweentheroadandthetoroidaltire.
Fig.2-36Forcesandmomentsactingonthetire.
Themodelofthemotorcycletiretakesintoconsiderationtheforcesactingonpointsnearthetheoreticalcontactpointdefinedbythetire’sgeometry.
Theforcesunderconsiderationareasfollows:
Normalforce.Normalforceisappliedatapointthatprecedes,bythedistanced,thepositionofthetheoreticalcontactpoint.Thedistanceddependsontherollingresistancecoefficientandthetire’sradius:
d=fwR
Lateralforce.Lateralforceactsinthedirectionorthogonaltotheintersectionofthewheelplanewiththeroadplane.Theapplicationpointisdisplacedbackwardswithrespecttothetheoreticalcontactpointbyadistanceatthatrepresentsthetire’strail,whichvarieswiththesideslipangle.
Longitudinalforce.Theforceisappliedtoapointdisplacedlaterallyfromthetheoreticalcontactpointbecauseofthetire’slateraldeformability.Thelateraldisplacementsp,dependingonthelateralstiffnessofthetire,isgenerallynegligiblewithrespecttothegeometricdisplacementsderivingfromtherollinclinationofthewheel.
Themomentsactingaroundthex,yandz-axesaregeneratedbytheforcesdescribedaboveandbythetwistingmoment.

Overturningmoment.TheoverturningmomentMxisgeneratedbytheverticalloadNwhosearmisthelateraldeformationsp.
Mx=−spN
Rollingresistancemoment.Rollingresistancemomentisgeneratedbytheasymmetricdistributionofnormalstressesthatcausesaforwarddisplacementofverticalload.Thetire’srollingresistancemomentis:
My=dN
Yawingmoment.Yawingmomentincludestwocontributions.Thefirstterm,duetothelateralforce,tendstoaligntheplaneofthetireinthedirectionofvelocity.Thesecondtermincreaseswiththecamberangleandworksagainstalignment.
Mz=−atFs+Mt
Fig.2-37showsamotorcycletiremodeledwithvirtualprototyping.Thetire,launchedontheroadatacertainvelocityandwithaninitialinclinedorientationdescribesatrajectorythatdependsonthetire’scharacteristicsandinparticular:
onthecomponentofthelateralforceduetocamber(functionofthecamberangle),onthetire’strail(functionofthelateralslip),onthetwistingmoment(functionofthecamberangle).
Fig.2-37Pathofthedifferenttires.
ThegraphinFig.2-37showsthevarioustrajectoriesdescribedbythetire.Ifthecomponentofthelateralforceduetocamberiszero,equilibriumisassuredonlybythecomponentgeneratedbylateral

slip.Lateralslipisthereforealwaysgreaterthanthatpresentinthereferencecase.Becauseofthegreaterlateralslip,thetrajectorycoveredismoreexternalthanthatofthereferencecase.Thereductionofthetire’strailtozeroalsoreducestozerotheself-aligningmomentgeneratedbythelateralforce.Thetrajectorydescribedisthereforemoreinnerwithrespecttothatofthereferencecase.Thetwistingmoment,dependingonthecamberangle,hasasignificantinfluenceonthetire’sbehavior.Sinceitseffectsworkagainstalignment,thatis,ittendstocausethetiretoyawmore,itszeroingcausesalargechangeinthetrajectorycovered.Thetiremovesalongapathcharacterizedbyanotablylargercurvatureradius.
2.10Vibrationmodes ofthe t iresThedynamicpropertiesoftireshaveanimportantinfluenceonseveralfeaturesofmotorcycle
behavioursuchascomfort,shock-absorptionandbraking,whicharerelatedtoin-planedynamics,alongwithstabilityandhandling,whicharerelatedtoout-of-planedynamics.
Motorcycletires’modesofvibrationcanbedividedintoin-planemodes,out-of-planemodesandmixedmodes.In-planemodesarecharacterisedbyradialand/orcircumferentialdisplacementofthepointslocatedinthesymmetryplaneofthewheel.Out-of-planemodesaredominatedbylateraldisplacementofthepointslocatedinthesymmetryplaneofthewheel.Mixedmodesexhibitcombinationsofradial,circumferentialandlateraldisplacement.
Inplanemodescanbeclassifiedaccordingtonumbernofcircumferentialwaves:then=0modedoesnotexhibitanycircumferentialwaveandisabreathmode;then=1modeexhibitsonecircumferentialwaveandisessentiallyadisplacementoftiretreadwithrespecttotherim;then=2modeexhibitstwocircumferentialwavesandthetreadhasanovalshape.
In-planemodesarethemostexcitedmodes,sinceinsteadystateconditions(rectilinearpath)theresultantoftireforces(loadN,brakingforceFanddrivingforceS)staysapproximatelyinthesymmetryplaneofthewheel.Ifacoordinatesystemfixedtothewheelisconsidered,theresultantoftireforcesrotatesaroundthewheelwithangularvelocityω=V/Ro,whereRoisthetirerollingradiusandVisforwardspeed.Therotatingforcemayexciteinresonanceconditionsthecircumferentialmodethatexhibitsncircumferentialwavesifthefollowingconditionissatisfied:
ω=2πνj/n
whereνjisthenaturalfrequencyofthemode.
Thepresenceofroadunevennessandgroovesonthetiresurfaceareothersourcesofexcitationinthehighfrequencyrange.Finally,thetransientmaneuvers(e.g.braking,changinglanes),whichcorrespondtosuddenvariationsintireforcesandtorques,mayexcitebothin-planeandout-of-planemodes.
Generally,thefirstnaturalfrequenciesoftiresareintherange100÷200Hzandcorrespondtoout-of-planemodes,thenthereissometimesabandoffrequencywithmixedmodes,whenthefrequencyishigherthan300÷400Hz,themodeswithlargein-planedisplacementdominate.

Fig.2-38Carcassdeformationsofthetire.

Fig.2-39Exampleofvibrationmodesofthetires(withgroundcontact).
Naturalfrequencies,lossfactorsandmodeshapesstronglydependontiresize,construction(radial-ply,bias-ply)andmaterial.Thecomparisonbetweenthemodalpropertiesofradial-plyandbias-plymotorcycletiresshowsthatnaturalfrequenciesofradial-plytiresarehigherthantheonesofthesimilarmodesofbias-plytires;thedifferenceislargeespeciallyinthecaseofin-planemodes.
Thepresenceofcontactwiththegroundincreasesthecomplexityofmodesand,betweenthemodesthatweremeasuredinfreeconditions,newmodeshavingintermediateshapeandfrequencyappear.Therangeofnaturalfrequenciesandlossfactorsofthemodesincontactwiththegroundarenotverydifferentfromtheonesmeasuredinfreeconditions.
Figure2-39showsthenaturalfrequenciesandmodesofa120/65R17fronttireinflatedto2.2bars.Thistireisahighperformanceradial-plytirewith0°steelbelts.Thefirstout-of-planemodeisthelateraldisplacementofthetiretreadwithrespecttotherim.Thenthereisabanana-shapedmode(with1.5wavesinthelateraldirectionandminordisplacementsintheotherdirections).Thefirstin-planemode(410Hz)isessentiallyanin-planedisplacementoftiretreadandderivesfromthen=1modemeasuredinfreecondition(withoutcontact).
Thefollowingmodes(422and447Hz)derivefromthemodeswithtwocircumferentialwaves(n=2)andthreecircumferentialwaves(n=3)measuredinfreeconditions.Becauseofthehighcircumferentialrigidityofthe0°steelbelt,thebreathmodeisnotidentifiedinthe0-500Hzrangeoffrequencies.Thenaturalfrequenciesarehigherthanthoseofcartires.Lossfactorsofin-planemodesaresimilartothosemeasuredincartires.Lossfactorsofout-of-planemodesarehigherthantheonesofin-planemodes,becausetheyaremainlyinfluencedbythetire’sside-walls.

Benelli250ccof1938
3Recti l inearMotionof Motorcycles
Thebehaviorofmotorcyclesduringrectilinearmotiondependsonthelongitudinalforcesexchangedbetweenthetiresandtheroad,theaerodynamicforcesinducedthroughthismotion,andtheslopeoftheroadplane.Thestudyofrectilinearmotionhighlightscertaindynamicaspectsthatarealsoimportantforsafety,suchasthemotorcycle’sbehaviorduringbrakingwithpossibleforwardoverturning,andinacceleration,withpossiblewheeling.
3.1Res is tance forces actingonmotorcyclesDuringsteadystatemotion,thethrustproducedbytheengineisequatedtotheforcesthatoppose
forwardmotionanddependessentiallyonthreephenomena(Fig.3-1):resistancetotirerolling;aerodynamicresistancetoforwardmotion;thecomponentoftheweightforcecausedbytheslopeoftheroadplane.
Resistancetotirerolling,Fw,wasamplydiscussedinthepreviouschapter.Itwasseenthatitcouldgenerallybeconsideredequaltoabout2%oftheweightforce.

Fig.3.1Resistanceforcesactingonthemotorcycle.
3.1.1Aerodynamicres is tance forces
Alltheaerodynamicinfluencesthatactonthemotorcyclecanberepresentedbythreeforces,whichareassumedtobeappliedonthecenterofgravity,andbythreemomentsactingaroundthecenterofgravityaxesx,y,z,asshowninFig.3-2:
thedragforce,inoppositiontoforwardmotion;theliftforcethattendstoraisethemotorcycle;thelateralforcethatpushesthemotorcyclesideways;thepitchingmoment;theyawingmoment;therollingmoment.

Fig.3-2Aerodynamicforcesandmoments.
Themostimportantcomponentsarethedragandliftforces.Theyareappliedatapoint,calledthepressurecenter,whichdoesnotcoincidewiththecenterofgravity,butratherisgenerallylocatedaboveit.Theresultantofthetwoaerodynamicforcesthereforegeneratesapitchingmomentaroundthey-axis.
Thedragforceinfluencesboththemaximumattainablevelocityandperformanceinacceleration.ThedragforceFDisapproximatelyproportionaltothesquareofthemotorcycle’sforwardvelocity:
ρrepresentsthedensityoftheair(equalto1.167kg/m3atanatmosphericpressureof987mbarandatemperatureof20°C);Aisthefrontalareaofthemotorcycle;CDrepresentsthecoefficientofaerodynamicresistance(dragcoefficient);Vistheforwardvelocityofthemotorcycle.
ThevalueofthecoefficientCDisstronglyinfluencedbytheshapeofthemotorcycle,inparticularbythepresenceorlackofafairing.Ingeneral,itcanbestatedthatthereisasignificantincreaseinaerodynamicresistancewhenvortexwakesareformedandtheboundarylayerbreaksfromthesurfaceofthefairing.

TheinteractionofthemotorcyclewithairalsogeneratesaliftforceFLproportionaltothesquareofthevelocity,whichreducestheloadonthefrontandinsomecasestherearwheel:
whereCLrepresentstheliftcoefficient.
Motorcycleliftisdangeroussinceitreducestheloadonthewheelsand,thus,tireadherence.Thisisespeciallytrueregardingthefronttiresincethecenterofpressureisgenerallyinfrontofandabovethecenterofgravity.Typicalmotorcyclesgeneratepositive(upward)liftforce,however,inordertocounteractthisphenomenonandincreaseloadonthewheels,itwouldbenecessaryaffixsomesortofwingatthefrontofthemotorcycleasinthecaseofracingcars.Tolessentheundesiredlifteffects,modernfairingsaredesignedtoreducelifttoaminimum.
TheaerodynamiccharacteristicsofmotorcyclesaregivenbythedragareaCDA(dragcoefficienttimesthefrontalarea)andbytheliftareaCLA(liftcoefficienttimesthefrontalarea).
ThevalueoftheproductCDAcanvaryfrom0.18m2forspeedrecordcontendersthatarecompletelyfairedto0.7m2formotorcycleswithnofairingandtheriderinanerectposition.Αtypicalvaluefor“superbike”motorcyclesis0.30to0.35m2,while“GrandPrix”motorcyclesreach0.22m2orevensmallervalues.Touringand/orsportingmotorcycleswithasmallfrontfairinghavevaluesaround0.4to0.5m2.ThechangefromanerecttoaproneridingpositionleadstoareductioninthevalueoftheproductCDAthatvariesfrom5to20%,dependingonthetypeofmotorcycleandtherider ’sbodystructure.
Theresistancetoforwardmotionisinfluencedindifferentwaysbythevariousmotorcyclecomponents.Forexample,thefollowingaretheeffectsofsomecomponentsontheproductCDA:
frontfairingsproduceanimprovementrangingfrom0.02to0.08m2;sidefairingsdecreasetheCDAbyaquantityofapproximately0.15m2;sidemirrorsincreasethedragareafrom0.012to0.025m2;thepresenceofarearfairingimprovesitbyafactorof0.015m2;thesaddlebags,ifappropriatelydesigned,improveitby0.02m2;alowerspoilerimprovesitbyafactorthatvariesfrom0.01to0.02m2.
ThefrontalareaAdiffersaccordingtothetypeofmotorcycleandisstronglyinfluencedbythebodyoftheriderandhis/herpositionduringtravel.Referencevaluesmayvaryfrom0.6to0.9m2forlargedisplacementtouringmotorcycles,from0.40to0.6m2forsportingmodelsandfrom0.4to0.5m2forGrandPrixmotorcycles.SmalldisplacementGrandPrixclassmotorcycles(125cc)reachvaluesaround0.32m2.IfthefrontalareaAandtheproductCDAvaluesareknown,theresistancecoefficientCD,whichisusuallyontheorderof0.4to0.5,canbeevaluated.TheproductoftheliftcoefficienttimesthefrontalareaofthesectionCLArangesfrom0.06to0.12m2.

Fig.3-3Dragforceversusvelocity.
Thepitchingmomentcausedbytheaforementionedforcescanbedangerous,sinceitleadstoadecreaseintheloadonthefrontwheelandanincreaseintherearone.Thesevariationscansignificantlymodifythedynamicbehaviorofthemotorcycle.
Inrectilinearmotion,ifthereisnocrosswind,thex-zplaneofthemotorcyclewithrideristheplaneofsymmetryandtheforwardvelocityofthemotorcycleliesinthatplane.Thelateralaerodynamicforceandtherollingandyawingmomentsarezero.However,theyarenotzeroiftheridermovesfromasymmetricposition,ifthereislateralwind,orifthesideslipanglesofthetiresarenotzero.Inparticular,whentheridermovesintothecurve,displacinghisorherbodyandkneetowardstheinsideofthecurve,anaerodynamicyawingmomentisgeneratedhelpingthemotorcyclemoveintothecurve.Duringthecurveiftheriderstaysinthisleanedpositionthelateralaerodynamicforcepersists.
Sincethepowerdissipatedbytheaerodynamicforcesdependsonthecubeofthevelocity,alotofpowerisneededtoattainhighvelocities.Figure3-3showsthevariationofthedragforceagainstvelocityforvariousvaluesofthedragarea.
Theforcesandaerodynamicmomentscanbemeasuredinawindtunnelbymountingthemotorcycleonaforcebalance.Thewindtunneltestsmakeitpossibletoidentifythepresenceofvortices,ifany,andthecurrentlinessurroundingthemotorcycle.Smokeisusedtovisualizethecurrentlines,ascanbeseeninFig.3-4.

Fig.3-4Currentlinessurroundingthewindscreenandrider(UniversityofPerugiawindtunnel).
Ifnowindtunnelisavailable,thedragareaCDAcanbedeterminedinthefollowingways.ThemotorcyclecanbedrivenatitsmaximumvelocityonastraightroadrecordingtheengineRPM(revolutionsperminute)andthemaximumvelocity.Thepower,correspondingtothenumberofrevolutionsmeasured,isdeterminedbythedynamometercurve.Theproductofthedragcoefficienttimesthefrontalareais:
withoutconsideringtherollingresistance.Therecanbesignificanterrorsifthemaximumvelocityisnotdeterminedcorrectlyoriftheactualpowerofthemotorcycledoesnotcorrespondtothedynamometercurveusedforthecalculation..
Asecondapproachisasfollows.Themotorcyclecanbedrivenonaflatroadatasustainedvelocityandthenplacedinneutral.ThetimeΔtthatthemotorcycleneedstoslowdownfromaninitialvelocity(Vinitial)toalowerone(Vend)ismeasuredandthedragareaisgivenby:
Therecanbeacertainoperativedifficultytryingtoidleatasustainedvelocity.Furthermore,the

massmshould,strictlyspeaking,alsotakeintoaccounttherotatinginertia.
Example1
Whatpowerisrequiredtopushasportmotorcycle(CDA=0.35)toavelocityof250km/hand275km/h,takingintoaccountboththerollingresistanceforceandthedragforce?
Thepoweronthewheelforamaximumvelocityof250km/his71.1kW.Toincreasethemaximumvelocityby10%(275km/h),a32%increaseinpowerisnecessary(94.0kW).
3.1.2Res is tantforce causedbyroads lope
TheresistantforceFPcausedbytheslopeoftheroadplaneisequaltothecomponentoftheweightforceinthemotorcycle’sdirection:
FP=mg⋅sinα
whereαrepresentstheslopeoftheroadplane.
ThegraphinFig.3-5displaysthecurvesofdifferentpowerlevelsatthewheelversusthevelocityandtheroadslope.
Fig.3-5Poweratthewheel(kW)asafunctionoftheforwardvelocityandroadslope.
Example2
Consideramotorcyclewiththefollowingcharacteristics:
•mass: m=200kg;

•frontalarea: A=0.6m2;
•dragcoefficient: CD=0.7.
Whatisthedrivingforceandpowernecessarytosustainthevelocityundertheconditionsgiven?
Case1:Flatroadtravelingat200km/h.
Thedrivingforcenecessarytomaintainthemotorcycleataconstantvelocityof200km/hor55.6m/salongahorizontalroad(α=0)mustbeequaltothesumoftheaerodynamicresistanceforceFDandtherollingresistanceforceFw:
•forceofaerodynamicresistance: FD=0.5•1.167•0.6•0.7•55.62=756.4N
•forceofrollingresistance: Fw=0.02•200•9.8=39.2N
Thereforetherequireddrivingforceis: S=FD+Fw=795.6N
Forthisvalueofthedrivingforce,thepoweratthewheel(P)isequalto:
P=796.8N•55.6m/s=44.20kW
Case2:Uphillroadat200km/h.
Ifthemotorcycletravelsatthesamevelocity,butalongaroadwithaconstantslopeof12%(angleα=6.84°)theresistantforcecausedbytheslopeoftheroadplanemustalsobetakenintoaccount.
•resistantforcecausedbytheroadslope: FP=sin(6.84)•200•9.8=233.5N
Inthiscasetherequireddrivingforceis: S=FD+Fw+FP=1029.1N
Forthisvalueofthedrivingforce,thepoweratthewheel(P)isequalto:
P=1029.1N•55.6m/s=57.2kW
3.2The centerofgravityandthe moments of inertia
3.2.1Motorcycle centerofgravity

Thepositionofamotorcycle’scenterofgravityhasasignificantinfluenceonthemotorcycle’sdynamicbehavior.Itspositiondependsonthedistributionandquantityofthemassesoftheindividualcomponentsofthemotorcycle(engine,tank,battery,exhaustpipes,radiators,wheels,fork,frame,etc.).Sincetheengineistheheaviestcomponent(about25%ofthetotalmass),itslocationgreatlyinfluencesthelocationofthemotorcycle’scenterofgravity.
Fig.3-6Thelongitudinalpositionofthecenterofgravity.
Thelongitudinaldistancebbetweenthecontactpointoftherearwheelandthecenterofgravitycaneasilybedeterminedbymeasuringthetotalmassofthemotorcycleandtheloadsonthewheelsunderstaticconditions(frontload ,rearloadNsr):
Ingeneral,amotorcycleischaracterizedbythestaticloadsthatactonthewheels,expressedinapercentageformula:
Thedistributionoftheloadonthetwowheelsunderstaticconditionsisgenerallygreateronthefrontwheelforracingmotorcycles(50-57%front,43-50%rear);andconversely,itisgreaterontherearwheelinthecaseoftouringorsportmotorcycles(43-50%front,50-57%rear).
Whenthecenterofgravityismoreforward(frontload>50%),wheelingthemotorcyclebecomesmoredifficult,orinotherwords,thereisaneasiertransferofthepowertotheground.Thisisonereasonracingmotorcyclesaremoreheavilyloadedinfront.Inaddition,thegreaterloadinthefrontpartiallycompensatesfortheaerodynamiceffectsthatunloadthefrontwheel;thisfactbecomesimportantathighvelocities.Whenthepositionofthecenterofgravityismoretowardstherearofthemotorcycle,brakingcapacityisincreasedreducingthedangerofa“stoppie”orevenforwardflipoverduringasuddenstopwiththefrontbrake.
Modernsportmotorcyclestendtohavea50÷50%distributionsoastoperformwellinboth

accelerationandbrakingphases.Itisimportanttokeepinmindthatitispreferable,asaquestionofsafety,tohavelongitudinalslipoftherearwheelinanaccelerationphase,ratherthanlongitudinalslipofthefrontwheelinabrakingphase.Theratiob/pwithoutridervariesfrom0.35to0.51:thesmallestvaluesforthescooterandthehighestforracingmotorcycles.
Ingeneral,thepositionoftheridermovestheoverallcenterofgravitytowardstherear(Fig.3-7),andtherefore,hisorherpresenceincreasestheloadontherearwheeltherebydiminishingthepercentageofloadonthefrontwheel(forexampletheratiob/pgoesfrom0.53to0.50).
Fig.3-7Thepositionofthecenterofgravityofthemotorcycleandtherider.
Oncethelongitudinalpositionofthecenterofgravityhasbeenfound,itsheightcanbedeterminedbymeasuringtheloadononlyonewheel,forexample,therearonewiththefrontwheelraisedbyaknownamountasinFig.3-8.
Theheightofthecenterofgravityhasasignificantinfluenceonthedynamicbehaviorofamotorcycle,especiallyintheaccelerationandbrakingphases.Ahighcenterofgravity,duringtheaccelerationphase,leadstoalargerloadtransferfromthefronttotherearwheel.Thegreaterloadontherearwheelincreasesthedrivingforcethatcanbeappliedontheground,butthelesserloadonthefrontwheelmakeswheelingmoreprobable.
Inbraking,ahighercenterofgravitycausesagreaterloadonthefrontwheelandaresultinglowerloadontherear.Thegreaterloadonthefrontwheelimprovesbrakingbutitalsomakestheforwardflip-overmorelikely,whichoccurswhentherearwheeliscompletelyunloaded.

Fig.3-8Measureoftheheightofthecenterofgravity.
Theoptimalheightofthecenterofgravityalsodependsonthedriving/brakingtractioncoefficientbetweenthetiresandroadplane.Withlowvaluesofthedriving/brakingtractioncoefficient(whentheroadiswetand/ordirty)itisgoodtohaveahighcenterofgravitytoimproveboththeaccelerationandbrakingcapacities.Withhighvaluesofthedriving/brakingtractioncoefficientitisgoodtohavealowercenterofgravityinordertoavoidthelimitconditionsofwheelingandforwardflipover.
Itisclearthatthechoiceoftheheightofthecenterofgravityanditslongitudinalpositionisacompromisethatmusttakeintoaccounttheintendeduseandpowerofthemotorcycle.All-terrainmotorcyclesarecharacterizedbyratherhighcentersofgravity,whileverypowerfulmotorcyclestypicallyhavealowercenterofgravity.Themaineffectsofthelocationofthecenterofgravitymaybesummarizedinthefollowingdiagram:
Forwardcenterofgravity
Themotorcycletendstoover-steer(incurvestherearwheelslipslaterallytoagreaterextent).
Rearcenterofgravity
Themotorcycletendstounder-steer(incurvesthefrontwheelslipslaterallytoagreaterextent).
Highcenterofgravity
Thefrontwheeltendstoliftinacceleration.Therearwheelmayliftinbraking.
Lowcenterofgravity
Therearwheeltendstoslipinacceleration.Thefrontwheeltendstoslipinbraking.
Theheightofthecenterofgravityofthemotorcyclealonehasvaluesvaryingfrom0.4to0.55m,butthepresenceoftheriderraisesthecenterofgravitytovaluesrangingfrom0.5to0.7m.Obviously,thedisplacementofthecenterofgravityduethepresenceoftheriderdependsonthe

relationbetweenthemassoftheriderandthatofthemotorcycle.
Theratioh/pwithoutriderandwithfullyextendedsuspensionvariesintherange0.3-0.4;thesmallestvaluesforthecruiserandscooterandthehighestfordualsportandendurotypemotorcycles.
Example3
Amotorcyclewithamassof196kghasastaticweightdistribution(50%to50%)anda1390mmwheelbase.A77kgridermasshashisowncenterofgravityat600mmfromthecenteroftherearwheel.Howdoestheriderchangetheoverallpercentageweightdistribution?
Thepercentageloadontherearwheelwithriderincreasesto52%,whilethatonthefrontwheelisreducedto48%.
3.2.2The moments of inertia
Thedynamicbehaviorofamotorcyclealsodependsontheinertiaofthemotorcycleandtherider.Themeasurementofthemomentsofinertiaisbasedoncomplexidentificationmethodologies,whichareoutsidethepurposeofthisbook.Themostimportantmomentsofinertiaaretheroll,pitchandyawmomentsofthemainframe,themomentofinertiaofthefrontframewithrespecttothesteeringaxis,themomentsofthewheelsandtheinertiamomentoftheengine.Inthefollowingtable,thevaluesofthegyrationradiiofthemotorcycleandrider,withrespecttothecenterofgravity,arepresented(themomentofinertiaisgivenbytheproductofthemasstimesthesquareoftheradiusofgyration).
Theyawmomentofinertiainfluencesthemaneuverabilityofthemotorcycle.Inparticular,highvaluesoftheyawmoment(obtained,forexamplebyheavybaggageplacedontheluggagerack)reducehandling.Therollmomentofinertiainfluencesthespeedofthemotorcycleinrollmotion.Highvaluesoftherollinertia,maintainingthesameheightofthecenterofgravity,slowdowntherollmotioninbothentryandexitofacurve.
Fig.3-9Momentsofinertia.

Table3-1.
3.3Motorcycle equi l ibriumins teadys tate recti l inearmotionWewillintroducethefollowingthreehypothesesregardingthemodelofthemotorcycle-rider
systemdepictedinFig.3-10.therollingresistanceforceiszero(Fw=0);theaerodynamicliftforceFLisalsoconsideredzero;sincetheroadsurfaceisflat,theforceresistingtheforwardmotionofthemotorcycleisreducedtojusttheaerodynamicdragforceFD.
Thepressurecenterofthemotorcycle(inwhichthedragforceisapplied)coincideswithitscenterofgravity.
Inadditiontothedragforce,thefollowingforcesactonamotorcycle:theweightmgthatactsatitscenterofgravity;thedrivingforceS,whichthegroundappliestothemotorcycleatthecontactpointoftherearwheel;theverticalreactionforcesNfandNrexchangedbetweenthetiresandtheroadplane.
TheequationsofequilibriumofamotorcycleenableustodeterminetheunknownvaluesofthereactionforcesNfandNr,oncetheweightforcemg,drivingforceS,anddragforceFD_areknown.
(⇒)Equilibriumofhorizontalforces: S−FD=0
(⇑)Equilibriumofverticalforces: mg−Nr−Nf=0
(∩)Equilibriumofmomentswithrespecttothecenterofgravity:
Sh−Nrb+Nf(p−b)=0

Fig.3-10Forcesactingonamotorcycle.
Theverticalforcesexchangedbetweenthetiresandtheroadplanearetherefore:dynamicloadonthefrontwheel:
dynamicloadontherearwheel:
Thesereactionforcesarecomposedoftwoelements.
Thefirstterm(staticloadonthewheel),dependsonthedistributionoftheweightforce.
Thesecondterm(loadtransfer),isdirectlyproportionaltothedrivingforceSandtheheighthofthecenterofgravity,andinverselyproportionaltothemotorcycle’swheelbasep.

Wewillnowfocusonthesecondterm.“Loadtransfer”referstothefactthatthereisadecreaseintheloadonthefrontwheelandacorrespondingincreaseintheloadontherearwheel;“loadistransferredfromthefronttotherearwheel,”hencethedesignation.
Theratiobetweentheheightofthecenterofgravityandthewheelbaseismuchhigherinmotorcyclesthanincars,whereh/pisusuallyintheinterval0.3to0.45.
Theloadsonthewheelscanberepresentedinnon-dimensionalformwithrespecttotheweight:Normalizedloadonthefrontwheel:
Normalizedloadontherearwheel:
whereSaindicatestheratiobetweenthedrivingforceSandthetotalweightmg(non-dimensionaldrivingforce).
Figure3-11illustratesthephenomenonofloadtransfer.Thevariationsinthenormalizedloadsareindicatedasafunctionofthenormalizeddrivingforcefortwomotorcycleswiththefollowingcharacteristics.
The1stmotorcycleb/p=0.45andh/p=0.3.The2ndmotorcycleb/p=0.45andh/p=0.43.
Itcanbeobservedthatthevariationsintheloadsonthewheelsaregreaterforthemotorcyclehavingthehigherh/pvalue.

Fig.3-11Normalizedloadsonthewheelsasafunctionofnormalizeddrivingforce(b/p=0.45).
Nowlet’sconsidertheforcesactingonthemotorcycle,illustratedinFig.3-12.Theweightmgisequaltothesumofthestaticloadsactingonthewheels and .ThedrivingforceSandtheforcecausedbythetransferoftheloadNtr,turnedupwardbecauseithasapositivesign,areappliedattherearwheelcontactpoint.
Fig.3-12Loadtransferangleτ.
Thedirectionoftheresultantofthesetwoforcesisinclinedwithrespecttotheroadbytheangle:
whichisthereforecalledtheloadtransferangle.
Inorderforamotorcycletomaintainequilibrium,thisresultantforcemustbeequaltoandoppositeinsigntotheresultantofthedragforceFDandtheloadtransferNtr,whichactsonthefrontwheel(directeddownwardbecauseithasnegativesign).
Example4
Whatmaximumvelocitycanbereachedbya200kgmotorcycle(CDA=0.3)withadrivingtractioncoefficientequalto1.0,ignoringtheliftandrollingresistanceforces?
Themaximumhypotheticalforwardvelocityofthemotorcycledependsontheloadtransferfromthefronttotherearwheel.Whenthefrontwheeliscompletelyunloaded,andthusthewholeloadmovestotherearwheel,thelimitingconditionisreachedwhenmaximumvelocityisattained.Undertheseconditions,themaximumdrivingforcethatcanbeappliedwithadrivingforcecoefficientequal

to1.0isequalto1962Ν.Thisforceisequaltothedragforceandgeneratesavelocityof381km/h.Thepowerontherearwheelis208kW.
Example5
Calculatethemaximumvelocityatamotorcycle’slimitconditionrepresentedbythewheelingphenomena,supposingthatthecenterofthepressurescoincideswiththecenterofgravity.
•mass: m=200kg;
•dragarea: CDA=0.3m2;
•liftarea: CLA=0.1m2;
•aerodynamicpitchingmoment=0;
•longitudinaldistanceofthecenterofgravity: b=0.7m;
•heightofthecenterofgravity: h=0.65m;
•wheelbase: p=1.40m.
Inconditionsapproachingthelimitofwheelingphenomena,thefrontverticalloadbecomeszero.Thesumoftheloadtransfergeneratedbythedragforceandthefrontcomponentoftheliftforceareequaltothefrontstaticload.Ifweconsiderthatthecenterofpressurecoincideswiththecenterofgravity,theliftforceisdistributedequallybetweenthetwowheelsinthemotorcycleunderconsideration.Wethereforehave:
Thevelocity,correspondingtothisequation,is:
ThemaximumvelocityisthereforeV=339km/h.Thepowerattherearwheel,ignoringtherollingresistanceforceshouldbeatleast147kW.Atthisvelocitythefrontwheelistotallyunloaded,sothatitbecomesimpossibletocontrolthemotorcycle.Thisvalueshouldthereforebeconsidereda

maximumlimitnevertobereached.
3.4Motorcycles intrans i toryrecti l inearmotionWewouldliketoconsideramotorcycleintransitoryrectilinearmotionassumingthehypotheses
presentedintheprecedingparagraphtobevalid.Themotorcycle’sequilibriumequationswhichwerewrittenforsteadystatemotioncanstillbeconsideredvalidforverticaltranslationandrotation.
(⇑)Equilibriumoftheverticalforces: mg−Nr−Nf=0
(∩)Equilibriumofthemomentswithrespecttothecenterofgravity:
Sh−Nrb+Nf(p−b)=0
whereSindicatesthedrivingforceduringacceleration(+)orthebrakingforceduringdeceleration(-).
Theequationofequilibriumforamotorcycleinhorizontalmotiontakesoncertaincharacteristicsaccordingtowhetherthemotorcycleisinanaccelerationorbrakingphase.
3.4.1Acce leration
Inthiscase,thedrivingforceisequaltothesumoftheinertialandresistanceforces.
(⇒)Equilibriumofthehorizontalforces:S*=FD+m*ẍ
whereS*=T(ωm/V)istheequivalentdrivingforceobtainedbymultiplyingT,theenginetorque,byωm/V,theratiobetweentheenginespeedandtheforwardvelocity,andm*indicatestheequivalentmassofamotorcycle,whichalsotakesintoaccounttheelementsofrotationalinertia.Thelatteriscalculatedbyequatingthetotalkineticenergyofthemotorcycle(thesumofrotationalkineticenergyoftherotatingpartsandthekineticenergyoftranslation)tothekineticenergyofan
equivalentsystemconstitutedbyonemassm*(equivalentmass).Fromtheviewpointofdynamics,themotionlawoftheequivalentmassisequaltothatofarealmotorcycle(Fig.3-13).

Fig.3-13Rotatingpartsofamotorcycle.
Equatingthekineticenergies,wehavethefollowingexpression.
Where:
•m isthemassofthemotorcycle;
• istheinertiaoftherearwheel;
• istheinertiaofthefrontwheel;
• istheinertiaoftheprimaryshaft(includingclutch);
• istheinertiaofthesecondaryshaft;
•τ isthevelocityratio.
istheinertiaoftheengine(crankshaft,counter-rotationshafts),reducedtothecrankshaft.

• Thisinertiacanbeconsideredconstantinaninitialapproximationifweignorethefluctuatingtermsofthemasseshavingreciprocatingmotion.
Theratiooftheangularvelocityoftherearwheelandamotorcycle’sforwardvelocityis:
Theratiobetweentheangularvelocityofthefrontwheelandamotorcycle’sforwardvelocityis:
Theratiobetweentheangularvelocityofthesecondaryshaftandamotorcycle’sforwardvelocityis:
whereτs,rindicatesthetransmissionratiobetweenthepinionandrearsprockets.
Theratiobetweenthevelocityoftheprimarygearshaftandthevelocityofamotorcycleis:
whereτp,sisthetransmissionratiobetweentheprimaryandsecondarygearshafts.Thedrivesprocketiskeyedonthesecondaryshaft.
Theratiobetweenthevelocityoftheengineshaftandamotorcycle’sforwardvelocityis:
whereτm,pindicatesthetransmissionratiobetweentheenginecrankshaftandprimaryshaft.
Asisthecaseofsteadystatemotion,thedynamicloadsonthewheelsaregivenbytheequations:dynamicloadonthefrontwheel:

dynamicloadontherearwheel:
Example6
Consideraracingmotorcyclewiththefollowingcharacteristics.Whatistheequivalentmass?
• totalmass(motorcycle+rider): m=205kg;
• frontwheelradius: Rf=0.30m;
• rearwheelradius: Rr=0.32m;
• frontwheelmomentofinertia: Iwf=0.6kgm2;
• rearwheelmomentofinertia: Iwr=0.8kgm2;
• enginemomentofinertia: Iwm=0.05kgm2;
• primaryshaftmomentofinertia: Iwp=0.005kgm2;
• secondaryshaftmomentofinertia: Iws=0.007kgm2;
• transmissionratioforthedriving-wheelsprockets: τs,r=2.6;
• transmissionratiofortheprimary-secondarygearshafts: τp,s=0.9(inIVgear);
• transmissionratiofortheengine-primaryshafts: τm,p=2.
Thevelocityratiosthusbecome:τr=3.125;τf=3.33;

Oncethevelocityratiosareknown,itispossibletocalculatetheequivalentmassm*asfollows:
Itisworthpointingoutthattheengineplaysaveryimportantrolesincethevelocityratioishigh,evenifthevalueinthemomentofinertiaislow.
Theequivalentmassobviouslydependsonthegearengaged.Thetransmissionratioofthegearshiftvariesfromvaluesequaltoabout3forthefirstgear(thegearshiftfunctionsasareductiongear),tovaluesthatcanapproachorbeslightlylowerthanunity(downtoabout0.7)inthetallestgear.Themaximumvalueofreducedinertiaisreachedwhenfirstgearisengaged.
Figure3-14showsthevariationofthedrivingforceonthewheelversusvelocity,inthevariousgears,foraracingmotorcycle.Thecurvetracedalsoshowsthevariationintheresistanceforce(thesumofaerodynamicandrollingresistanceforces)intermsofthemotorcycle’svelocity.
Fig.3-14Drivingforceasafunctionofvelocity.
Let’ssupposethatthemotorcycleproceedsinthirdgearatadeterminedvelocity,asgiveninthefigure.Thedrivingforce,thoughlowerthanthemaximumavailableinthatgear,isgreaterthantheresistanceforce,sothattheremainingdrivingforcecanbeusedtoaccelerateorgoupaslopeatthesamevelocity.Ifweconsiderthesamesetvelocitywithhigherratios,weseethatthereislessdrivingforceavailableforaccelerating.Asthevelocitygraduallyincreases,thepassagetothehigherratiomakesalowerquotaavailable.Maximumvelocityisobviouslyreachedwhentheresistantforceisthesameasthedrivingforceinthehighestgear.
Thecomparisonbetweenthedrivingforcecurvesandtheresistancecurvecanalsobemadeintermsofpower.Adiagramofusefulpowertothewheelcanbeobtainedforeachratiobymultiplyingeachcurvebyitscorrespondingforwardvelocity.Fig.3-15showsthecurvesofusefulpowertothe

wheelandtheresistancepowerintermsofforwardvelocity.Inthiscaseaswell,theintersectionpointoftheresistancepowercurvewiththeusefulpowercurve,inthehighestgear,determinesthemaximumvelocitythatcanbereached.
Let’snowsupposethattheenginepowerremainsconstantunderanincreaseinvelocity.Thisisanidealcaseinwhichtheefficienciesareindependentofthevelocities,representedinFigure3-15byahorizontalline.Maximummotorcycleaccelerationcanbedeterminedbyintegratingthefollowingdifferentialequation:
wherePmaxindicatesthemaximumpoweroftheengine.Bycarryingoutthenumericalintegrationoftheprecedingdifferentialequation,wecancalculatethemaximumaccelerationthemotorcycleiscapableofreaching.Thisisclearlyanidealvalue,sincethemaximumaccelerationofthemotorcyclecanactuallybelimitedbothbythereartire’sadherence,thepossiblewheelingofthemotorcycleandthefinitenumberofgearsetc.
Fig.3-15Poweratthewheelasafunctionofvelocity.
Example7
Consideramotorcyclewiththefollowingcharacteristics.Letuseexaminehowchangingthemassaffectsthevelocityandacceleration.
•Equivalentmass: m*=230.9kg;
•frontalarea: A=0.6m2;
•dragcoefficient: CD=0.7.

ThemaximumpoweroftheengineisequaltoPmax=70kWwhilethemaximumtransmissibledrivingforcetotheroadisequalto4000Ν.
Thecurveofthevelocityversustime,obtainedbycarryingoutanumericalintegrationofthedifferentialequationofmotion,isgiveninFig.3-16.A30%lightermotorcyclepresentsagreateraccelerationbutthemaximumvelocityremainsthesame.
Fig.3-16Anexampleofacceleration.
Inrealitytheaccelerations(thegradientofthecurve)areactuallylowerbecauseofthetimeintervalsneededtochangegears,duringwhichtheusefuldrivingforceiszero.Furthermore,intheinitialphase,aspreviouslyanticipated,itisnotalwayspossibletoapplytheentiredrivingforcebecauseofreartireslippageand/orpossiblewheeling.
3.4.2Traction-l imitedacce leration
IfwetakeintoconsiderationamotorcycleacceleratingasinFig.3-17andassumeitispossibletoignoretherollingresistanceforceFw,thenthemotionequationcanbewrittenasfollows:
S=mẍ+FD
whereSindicatesthedrivingforceonthewheelandFDthedragforce.Presumingthattheenginehasadequatepower,thedrivingforcemustbelower,oratmost,equaltothemaximumforcegivenbytheproductofthedrivingtractioncoefficientμpwiththeverticalloadNr.
S≤μp⋅NrIfwerememberthat

wenowhave:
Fig.3-17Accelerationlimitedbythedrivingtractioncoefficient.
MaximumaccelerationisreachedwhentheresistanceforceFDiszero,i.e.startingfromlowspeed.Asthevelocityincreases,theaccelerationunderlimitingfrictionconditionsdiminishes.Thishappensbecausepartofthedrivingforceisequatedtotheresistanceforceandthereforecannotbeusedtoaccelerate.
3.4.3Wheel ing-l imitedacce leration
Thelimitingconditionattheonsetofwheelingisachievedwhentheloadonthefrontwheelisreducedtozero,asseeninFig.3-18.Thissituationisexpressedbythefollowingrelation:
fromwhichwehave

Accelerationwhichcorrespondstoimpendingwheeliethereforedependsontheratiob/h.
Astheforwardvelocitygraduallyincreases,theaccelerationatwhichthewheelingphenomenonbegins,decreases.ThisisthecasesincethemotionofwheelingisalsofavoredbythedragforceFD,thevalueofwhichincreaseswithvelocity.
Fig.3-18Accelerationlimitedbywheeling.
Example8
Consideramotorcyclewiththefollowingproperties.Determinethewheelinglimitedaccelerationatinitialspeed0km/hand100km/h.
•totalmass: m=200kg;
•frontalarea: A=0.7m2;
•dragcoefficient: CD=0.6;
•liftcoefficient: CL=0;
•longitudinaldistanceofthecenterofgravity: b=0.58m;
•heightofthecenterofgravity: h=0.62m;
•wheelbase: p=1.35m.

Themaximumaccelerationofthemotorcycle,attherearwheelfrictionlimit,isrepresentedinthegraphinFig.3-19intermsofthedrivingforcecoefficientbetweenthetireandtheroadatavelocityofzeroand100km/h.Asthevelocityincreases,themaximumaccelerationdecreases,sincepartofthedrivingforceisequatedtotheresistanceforceandcannotbeusedtoaccelerate.
Fig.3-19Maximumaccelerationatlimitconditions.
Theaccelerationatthemotorcycle’swheelinglimitatzerokm/hand100km/hisalsoshowninthegraph.Thehorizontallinerepresentingwheeling-limitedaccelerationisexplainedbythefactthataccelerationdoesnotdependonthedrivingforcecoefficient.
Thewheeling-limitedaccelerationisequaltothetraction-limitedaccelerationwhenthedrivingtractioncoefficientis:
Accelerationis:
Forvaluesofthecoefficientbelowtheratiob/h,themotorcycle,initsaccelerationmaneuver,willnotliftthefrontwheel,sincerearwheelslippagepreventsitfromreachingwheelingacceleration.Analogously,forvaluesofthecoefficientabovetheratiob/h,themotorcyclecannotreachmaximumaccelerationatthedrivingtractioncoefficientsincethefrontwheelrisesbeforereachingthatlimitingvalue.Theseconsiderationssuggestthatitisappropriatetolimitthemaximumtorquetheenginecandeliver,iftheintentionistoavoidmotorcyclewheelingandrearwheelslippage.

Inthecaseunderconsideration,theaccelerationasshowninFig.3-19isequalto9.18m/s2.Thisvalueisobtainedbyapplyingadrivingforceequalto1835Νtothemotorcycle.Wheneverthemotorcycle’sengineisunabletodeliverausefulforcetothewheelofthatmagnitude,wheelingcannotoccurnaturally(nonetheless,theridercouldcausethefrontwheeltorisebymovingandmakinguseofthepitchingmotion).
3.4.4Braking
Drivingsafetyrequires,inadditiontoanefficientbrakingsystem,thattheriderbeabletojudgethestoppingdistancerequiredundervariousconditionsandbrakeinthebestway,usingallofthebrakingsystem’spossibilitiesandinparticularthoseoftherearbrake.Infact,manymotorcycleriderstendtoforgettherearbrake,whichincertaincircumstancesprovidesausefulcontribution.Itscorrectuseisimportantbothinbrakingwhenenteringacurveandinbrakingduringrectilinearmotionwhenanunforeseenobstacleappearsinfrontofthemotorcycle(especiallywhenroadadherenceisprecarious).
Role ofthe rearbrake insuddens tops
Duringcurveentrytheuseoftherearbrakecanbequiteuseful.Expertridersusetherearbrakenotonlytodeceleratethemotorcyclebutalsotocontroltheyawmotion.Rearbrakinginenteringthecurveincreasesthesideslipangleandthereforetheyawmotionofthemotorcycle.
Insuddendecelerationadangerousconditioncouldariseespeciallywhentheloadontherearwheeldiminishestowardzeroduetoloadtransfer.
Ifthemotorcycleisnotinperfectlystraightrunningtheforceofthefrontbrakeandtheinertialforceofdecelerationgenerateamomentthattendstocausethemotorcycletoyaw.ThisisillustratedinFig.3-20.
Fig.3-20Motorcycleinacurvewithabrakingforceappliedonlyinthefront.
AsshownintheinFig.3-20,thetorquegeneratedbythefrontbrakingforceandtheinertialforcetendstoyawthevehicle.Onthecontrary,thepresenceofarearbrakingforcegeneratesatorquewhichtendstoalignandstabilizethevehicleascanbeseenintuitivelyinFig.3-21.

Fig.3-21Motorcycleinacurvewithabrakingforceappliedonlyintherear.
Thesesimpleconsiderationssuggestthatproperutilizationoffrontandtherearbrakeshasapositiveeffectonvehiclestability.
Loadtrans ferduringbraking
Inordertoevaluatetheroleoftherearbrakeduringabrakingeventatthelimitofslippage,weneedtobringupsomepointsregardingtheforcesactingonamotorcycle.Duringdeceleration,theloadonthefrontwheelincreases,whilethatontherearwheeldecreasesandthusthereisaloadtransferfromthereartothefrontwheel.Ifweconsideramotorcycleinabrakingphase(Fig.3-22)andapplyNewton’slawtothemotorcycle,wecancalculatetheloadtransferfromthereartothefrontwheel.
(⇒) Equilibriumofthehorizontalforces: mẍẍ=−Ff−Fr
(⇑) Equilibriumoftheverticalforces: mg−Nr−Nf=0
(∩) Equilibriumofthemomentsaroundthecenterofgravity: −Fh−Nrb+Nf(p−b)=0
whereF(overallbrakingforce)indicatesthesumofthefrontbrakingforceFfandtherearbrakingforceFr.Thedynamicloadonthefrontwheelisequaltothesumofthestaticloadandtheloadtransfer:
whilethedynamicloadontherearwheelisequaltothedifferencebetweenthestaticloadandtheloadtransfer:

ItcanbeseenthattheloadtransferFh/pisproportionaltotheoverallbrakingforce,andtotheheightofthecenterofgravity,andisinverselyproportionaltothewheelbase.Topreventatirefromslippingduringbraking,thevalueofthebrakingforceappliedtoitmustnotexceedtheproductofthedynamicloadactingonthattiretimesthelocalbrakingtractioncoefficient.Thislatterproductrepresentsthemaximumbrakingforceapplicabletothetire,thatis,thebrakingforceatthelimitofslippage.
Fig.3-22Αmotorcycleunderbraking.
Given and ,thebrakingtractioncoefficientsrelative,respectively,tothefrontwheelandtherearwheel,theoverallbrakingforceatthelimitofslippageisgivenbythefollowingexpression:
Thelimitsofslippagearenotusuallyattainedduringbrakingandthereforethebrakingforcedependsonthebrakingforcecoefficientsused(indicatedbyμanddefinedastheratiosofthelongitudinalforceandthecorrespondingverticalload)ofthefrontandrearwheels.
F=Ff+Fr=μfNf+μrNrFigure3-23showsthevariationofdynamicloadsonthewheelsintermsofthebrakingforce.Both
theloadsonthewheelsandthebrakingforcehavebeenreducedtonon-dimensionalstatuswithrespecttotheweight.Themotorcycleunderconsiderationhasa50%to50%staticloaddistributiononitstwowheels,i.e.thecenterofgravityfallsinthecenterlineofthewheelbase.
Let’ssupposethatthebrakingforcecoefficientusedisverylow,μ=0.2forbothwheels.Wecannotefromthegraphthatthedynamicloadsonthewheelsareapproximatelyequalto0.4ontherearwheeland0.6onthefrontone.Undertheseconditions,iftherearbrakeisnotused,40%ofthemaximumattainablebrakingforceisnotused.However,ifthebrakingforcecoefficientusedisveryhigh,forexampleμ=0.9,asshowninFig.3-23,theloadonthefrontwheelis0.95,whiletheloadontherearwheelisonly0.05.Inthiscase,thepossiblecontributionoftherearbrakingforceisnearly

negligible.
Inconclusion,thefollowinggeneralprinciplescanbestated.Theoptimaldistributionofthebrakingforcevariesaccordingtothebrakingtractioncoefficient.Therearbrakeisoflittleuseonoptimalroadsandwithhighgriptires(highcoefficientoffriction),butbecomesindispensableonslipperysurfaces(reducedcoefficientoffriction).
Fig.3-23Non-dimensionalloadsonthewheelsversustheoverallbrakingforcecoefficient.
3.4.5Forwardfl ipoverofthe motorcycle
Fig.3.23showsthat,withanincreaseintheoverallbrakingforce,theloadontherearwheelbecomeszero.Thislimitingconditionrepresentstheforwardflipoverofthemotorcyclewhenthedynamicloadontherearwheelgoestozero.
Inthissituation,thedynamicloadonthefrontwheelisequaltotheweightofthemotorcycleandthedirectionoftheresultantofthedynamicloadandbrakingforcepassesthroughthemotorcycle’scenterofgravity.Theequationofequilibriumofthemomentswithrespecttothecenterofgravityprovidestheexpressionforthebrakingforceatthepointofturnover:
Alowvalueofthislimitbrakingforceindicatesanincreasedpropensityforaforwardflipover.Itcanthereforebeconcludedthatforwardfallisfavoredwhenamotorcycleislightandwhenithasahighandforwardpositionofthecenterofgravity.

Themotionequation,inconditionswhereafallisimminent,ignoringtheaerodynamicresistance,is:
Themaximumdeceleration,expresseding’s,isproportionaltothelongitudinaldistancefromthecenterofgravitytothecontactpointofthefrontwheel,andisinverselyproportionaltotheheightofthecenterofgravity.
Fig.3-24Motorcycleatthepointoffallingforward.
Itisimportanttonotethatthedecelerationattheflipoverlimitdependsonlyonthepositionofthecenterofgravity,andnotontheweightofamotorcycle.Toincreasethevaluethislimit,itisnecessarytoloweramotorcycle’scenterofgravityandplaceitasfarbackaspossible.Takingintoaccounttheaerodynamicresistantforce:
mẍ=−F−FD
themaximumdecelerationdependsonboththemassandthevelocity:

Example9
Whatisthemaximumdecelerationinbrakingtothelimitofflipover,witha50%to50%distributionoftheloadsonthewheels,awheelbaseof1400mmandaheightofthecenterofgravityof700mm?
Itiseasytoverifythatthemaximumdecelerationisequaltogravity.Ifthevelocityisalsotakenintoaccount,decelerationincreasesasthevelocityincreasesduetotheeffectoftheaerodynamicresistanceforce.Withavelocityof100km/h,adragareaequalto0.4m2andamassof200kg,themaximumdecelerationisequalto1.26gwhileatavelocityof200km/hthemaximumdecelerationincreasesto1.54g.Obviouslyitisverydifficult,ifnotimpossible,tobrakeattheflipoverlimitwithazeroloadontherearwheel.Inthisconditionnearingthelimit,thebestridersareabletoattaindecelerationsequalto1.1to1.2g’s.
3.4.6Optimal braking
Theequilibriumequationofthehorizontalforces:mẍ=−Ff−Frandoftheverticalforces.mg−Nr−Nf=0:allowsustoexpressthebrakingdecelerationasafunctionofthefrontandrearbrakingforcecoefficientsusedduringtheevent:
Itcanbeobservedthatdecelerationdependsonthegeometriccharacteristics(wheelbasep,heightofthecenterofgravityh,longitudinaldistanceofthecenterofgravityb)andthebrakingforcecoefficientsused,anddoesnotdependonthemotorcycle’smass.
Thebrakingforceofthefrontandrearwheels,withrespecttothetotalbrakingforce,alsodependsonlyonthegeometricmagnitudes,andthebrakingforcecoefficientsofthetwowheels:
Inthelimitingconditionsoffriction,withequalbrakingtractioncoefficientsforthetwowheels,thevalueofthemaximumpossibledecelerationbecomes:
ẍmax=μg
Therelationbetweenthebrakingforces,toattainthelimitconditionatbothwheels(equalbrakingtractioncoefficients),simultaneouslymustbeequalto:

Thisrelationindicateshowtodistributethebrakingforcesinordertohaveoptimalbraking,giventhevalueofthebrakingforcecoefficientμ.
ThedistributioncurvesforbrakinganddecelerationareshowninFig.3-25(consideringtheaccelerationofgravitytobeg=9.81m/s2)intermsofthebrakingforcecoefficientsusedoneachwheel.InFig.3-25wecanseethatdecelerationincreasesasthebrakingforcecoefficientsincrease,especiallywithregardtothefrontwheel.Thisbehaviorisunderstandablesince,ashasalreadybeenexplained,duringbrakingthereisaloadtransferfromthereartothefrontwheel.Thesolidlinesrepresentthedistributionofbrakingbetweenthefrontandrearwheels.
Thehorizontalaxiscorrespondstobrakingwiththerearwheelalone(0/100)whiletheverticalaxisrepresentsthecaseofbrakingwiththefrontwheelalone(100/0).Thefiguresshowtheutilityofusingtherearbrake,especiallywhenthebrakingtractioncoefficientislow.Itsusefulnessdiminishesuntilitbecomesalmostnegligibleinthepresenceofveryhighbrakingtractioncoefficients.
Fig.3-25Curvesofdecelerationanddistributionofbraking.
[p=1.4m;h=0.7m;b=0.7m]

Consideringthisdata,itcanbeseenthatthelimitingconditionofaflipoveroccurswhendecelerationiscloseto1.0g.Inthiscase,thecurve(1.0g)is,thereforethemaximumattainabledeceleration.
Supposewewantedtobrakethemotorcyclewithadecelerationequalto0.5g.Thepossiblecombinationsofuseofthefrontandrearbrakesthatcouldprovidethedesireddecelerationareinfinite.Forexample,brakingonlywiththefrontbrake,thedecelerationof0.5gisobtainedbyusingabrakingforcecoefficientinfrontequalto0.68(pointA).Ontheotherhand,withadistributionofthebrakingforcesof80%frontand20%rear,abrakingforcecoefficientof0.55infrontand0.4inbackmustbeused(pointB).AnotherpossibilityisgivenbypointCwhichshowsadistributionofthebrakingforceof60%frontand40%rear,inwhichthereisagreateruseofthereartireandacorrespondinglesseruseofthefrontone.
Let’snowsupposethatthebrakingtractioncoefficientsofthefrontandreartiresarethesame.Figure3-26showsthatbyusingthesamebrakingcoefficientforthetwotires,weobtainthemaximumpossibledeceleration.Forexample,ifthebrakingforcecoefficientisequalto0.8forboththefrontandrearwheels,themaximumdeceleration(equalto0.8g)isobtainedwitha90/10brakingdistribution.Themaximumuseofthetwotiresisattainedwiththisdistribution.Thefigurefurthershowsthatusingonlythefrontbrakegivesadecelerationthatislowerat0.67gandthatusingonlytherearbrakeyieldsonly0.29g.Iftheroadismoreslipperyandthebrakingtractioncoefficientofboththewheelsis0.4,theoptimalbrakingoccurswithadifferentdistribution(70/30)andgivesadecelerationof0.4g.
Fig.3-26Exampleofbrakingondryandwetsurfaces.

Thisexampleshowsthatoptimalbrakingrequiresadifferentdistributionofbrakingbetweenthetwowheelswhenvaryingthedesireddeceleration.Infact,the45°linecorrespondingtoμf=μr,whichrepresentstheconditionforoptimalbraking,intersectsdifferentcurvesofbrakingdistributionwhenvaryingthedesireddeceleration.Thismeansthatthedevicesforautomaticdistributionofbrakingthatarepresentonsomemotorcycles,shouldadaptthedistributiontotheconditionsoftheroad.
Furthermore,itisworthpointingoutthatintheexampleconsidereditisnotagoodideatousearearbrakingforcegreaterthanthefrontone.Figure3-27showsthattheoptimaldistributionofbraking(dottedline)istangentatthepointoforigintothecurveof50%to50%distribution;butitdoesnotintersectthecurvesofdistributioncharacterizedbygreaterforcetotherear.
Thisisalsovalidformotorcycleswithadifferentdistributionofthestaticloadonthetwowheels,forexample45%onthefrontand55%ontherearwheel.Theoptimallineofbrakingisalwaystangentattheorigintothebrakingdistributionlinehavingthesamedistributionbetweenthestaticloadsonthetwowheels.Forexample,withaloaddistributed45%tothefrontand55%totherear,theoptimalbrakinglineistangenttothedistributioncurveofthebrakingforce45%tothefrontand55%totherear.
Fig.3-27Optimalbraking.
[p=1.4m;h=0.7m;b=0.7m]

Parilla250ccof1946
4Steady Turning
Duringsteadyturningmotionthemotorcyclecanhaveneutral,underorover-steeringbehavior.Tomaintainequilibriumtheriderappliesatorquetothehandlebarsthatcanbezero,positive,inthesamedirectionofthehandlebarrotation,ornegative,i.e.,appliedinthedirectionoppositetotherotationofthehandlebar.Thesecharacteristicsareimportantandconcurtodefinethesensationofthemotorcycle’shandling.
4.1The motorcycle rol l ins teadyturning
4.1.1Ideal rol l angle
Themotorcycle,insteadyturning,issubjecttobotharestoringmoment,generatedbythecentrifugalforcethattendstoreturnthemotorcycletoaverticalposition,andtoatiltingmoment,generatedbytheweightforce,thattendstoincreasethemotorcycle’sinclination,orrollangle(Fig.4-1).
Weintroducethefollowingsimplifyinghypotheses:themotorcyclerunsalongaturnofconstantradiusatconstantvelocity(steadystateconditions);thegyroscopiceffectisnegligible.
Consideringthecrosssectionthicknessofthetirestobezero,theequilibriumofthemomentsallowsustoderivetherollangleintermsoftheforwardvelocityVandtheradiusoftheturnRc(theradiusoftheturninthiscaseismeasuredfromthecenterofgravitytotheturningaxis):

whereΩindicatestheangularyawrate,whileV=ΩRcindicatesthevehicle’sforwardvelocity.
Fig.4-1Steadyturning:rollangleofthemotorcycleequippedwithzerothicknesstires.
Inconditionsofequilibriumtheresultantofthecentrifugalforceandtheweightforcepassesthroughthelinejoiningthecontactpointsofthetiresontheroadplane.Thislineliesinthemotorcycleplaneifthewheelshavezerothicknessandthesteeringangleisverysmall.
Inreality,ifanon-zerosteeringangleisassigned,thefrontcontactpointisdisplacedlaterallywithrespecttothex-axisoftherearframeandthelinejoiningthecontactpointsofthetiresisnotcontainedintheplaneoftherearframe.
4.1.2Effective rol l angle
Nowconsideramotorcyclewithtiresofthickness2twhichdescribesthesameturnradiusRcatthesameyawvelocityΩ.Sincethethicknessofthetiresisnotzero,therollangleϕthatisnecessaryfortheequilibriumofthemomentsexertedbytheweightforceandthecentrifugalforce,isgreaterthantheidealoneϕi(Fig.4-2):
ϕ=ϕi+Δϕ
TheincreaseΔϕoftherollangleisgivenbytheequation:

Theeffectiverollangleis:
TheprecedingequationshowsthatΔϕincreasesbothastherollangleandthecrosssectionradiusincreaseandastheheightofthecenterofgravityhdecreases.Therefore,theuseofwidetiresforcestheridertousegreaterrollangleswithrespecttotheanglenecessarywithamotorcycleequippedwithtiresthathavesmallercrosssections.Furthermore,withequalcrosssectionsofthetires,todescribethesameturnwiththesameforwardvelocity,amotorcyclewithalowcenterofgravityneedstobetiltedmorethanamotorcyclewithahighercenterofgravity.
Fig.4-2Steadyturning:rollangleofthemotorcycleequippedwithrealtires.
Themotorcyclerollangleonaturnisinfluenced,inasignificantway,bytherider ’sdrivingstyle.Byleaningwithrespecttothevehicle,theriderchangesthepositionofthehiscenterofgravitywithrespecttothemotorcycle.Figure4-3illustratesthepossiblesituations.
Iftheriderremainsimmobilewithrespecttothechassis(Fig.4-3a),thecenterofgravityofthemotorcycle-ridersystemremainsinthemotorcycleplane.Undoubtedly,thisisanelegantwayof

handlingtheturns,butnotthebest.Infact,inthiscase(andonlyinthiscase),theactualrollanglecorrespondsexactlytothetheoreticalrollangleϕthatwaspreviouslycalculated.
Iftheriderleanstowardstheexterioroftheturn(Fig.4-3b),thecenterofgravityisalsomovedtotheexterioroftheturnwithrespecttothemotorcycle.Asaresult,heneedstoinclinethemotorcyclefurthersothatthetires,beingmoreinclinedthannecessary,operateunderlessfavorableconditions.Certainlythisriderisnotanexpert.
Iftheriderleanshistorsotowardstheinterioroftheturnandatthesametimerotateshislegsoastonearlytouchthegroundwithhisknee,hemanagestoreducetherollangleofthemotorcycleplane(Fig.4-3c).
Whenracing,theridersmovetheirentirebodiestotheinterioroftheturn,bothtoreducetherollangleofthemotorcycleandtobettercontrolthevehicleontheturn.Thedisplacementofthemotorcycle-ridersystem’scenterofgravitytowardstheinterioriscarriedoutbothbymovingthelegandbythemovementofthebodyinthesaddle(Fig.4-3d).Thedisplacementofthebodytowardstheinteriorandinparticular,therotationofthelegcauseanaerodynamicyawingmomentthatfacilitatesenteringandroundingtheturn.

Fig.4-3Influenceofdrivingstyleontherollangle.
4.1.3Wheel ve loci tyinaturn
Thevelocityofthevehicleisrepresentedbytheforwardvelocityofthecontactpointoftherearwheel.Therefore,theyawvelocityΩis:
Ifwesupposenolongitudinalslippagebetweenthetiresandtheroadsurface(intheforwarddirectionofthewheels),thespinvelocityofthewheels,intermsofthevehicleforwardvelocity,rollangleandkinematicsteeringangle,isthen:
Inreality,itmustbeobservedthatduringthethrustandbrakingphasesthereisalwaysalongitudinalslippagebetweentherearwheelandtheroadplane.Inthefrontwheelthereislongitudinalslippageinthebrakingphase,whileundersteadystateconditionstheslippageisnegligiblebecauseitisonlyduetorollingresistance.
Itisimportanttonotethat,withthesameforwardvelocity,theangularvelocityofthewheelsincreasesduringturningwithrespecttotheangularvelocityofthewheelsinstraightrunning,becausecontactdoesnotoccuronthelargestcircumferenceofthewheels.
4.2Directional behaviorofthe motorcycle inaturnLetusnowconsideramotorcycleinasteadyturningcondition.Ifeachwheeladvancesideallywith
apurerollingmotion,thevelocityvectorofthewheel’scenterwouldbecontainedintheplaneofthewheel.
Thelateralslipisexpressedbythesideslipangleλ,definedastheangleformedbythedirectionofforwardmotionandtheplaneofthewheel.Whensideslipanglesapproachzero,steeringiscalledkinematicsteering.
Thelateralreactionforcesdependonthesideslipanglesofthetires,rollangleandverticalloads.Theforcescanbeexpressedbythefollowinglinearexpressions,whenslipandrollanglesaresmall:
Theconstantk(expressedinradians-1)representthestiffnesscoefficientsofthetires:

kϕ=camberstiffnesscoefficient;kλ=corneringstiffnesscoefficient.
Thelargerthesideslipandcamberstiffnessesare,thesmallerthesideslipanglenecessarytogeneratethelateralforceonthetireis.
4.2.1Effective s teeringangle andpathradius
Theeffectivesteeringangleofamotorcycle(Fig.4-4)alsodependsonsideslipangles;itsvalueisgivenbytheequation:
whereΔindicatesthekinematicsteeringanglethatdependsonthesteeringangleδ,casterangleεandrollangleϕ.
Theturningradiusofthetrajectorydescribedbytherearwheelisalsoafunctionofthesideslipanglesandofthekinematicsteeringangle:
Ifthesideslipanglesandthekinematicsteeringanglearesmall,theradiuscanbecalculatedwiththefollowingapproximateformula:
wherepindicatesthemotorcyclewheelbase(Fig.4-4).
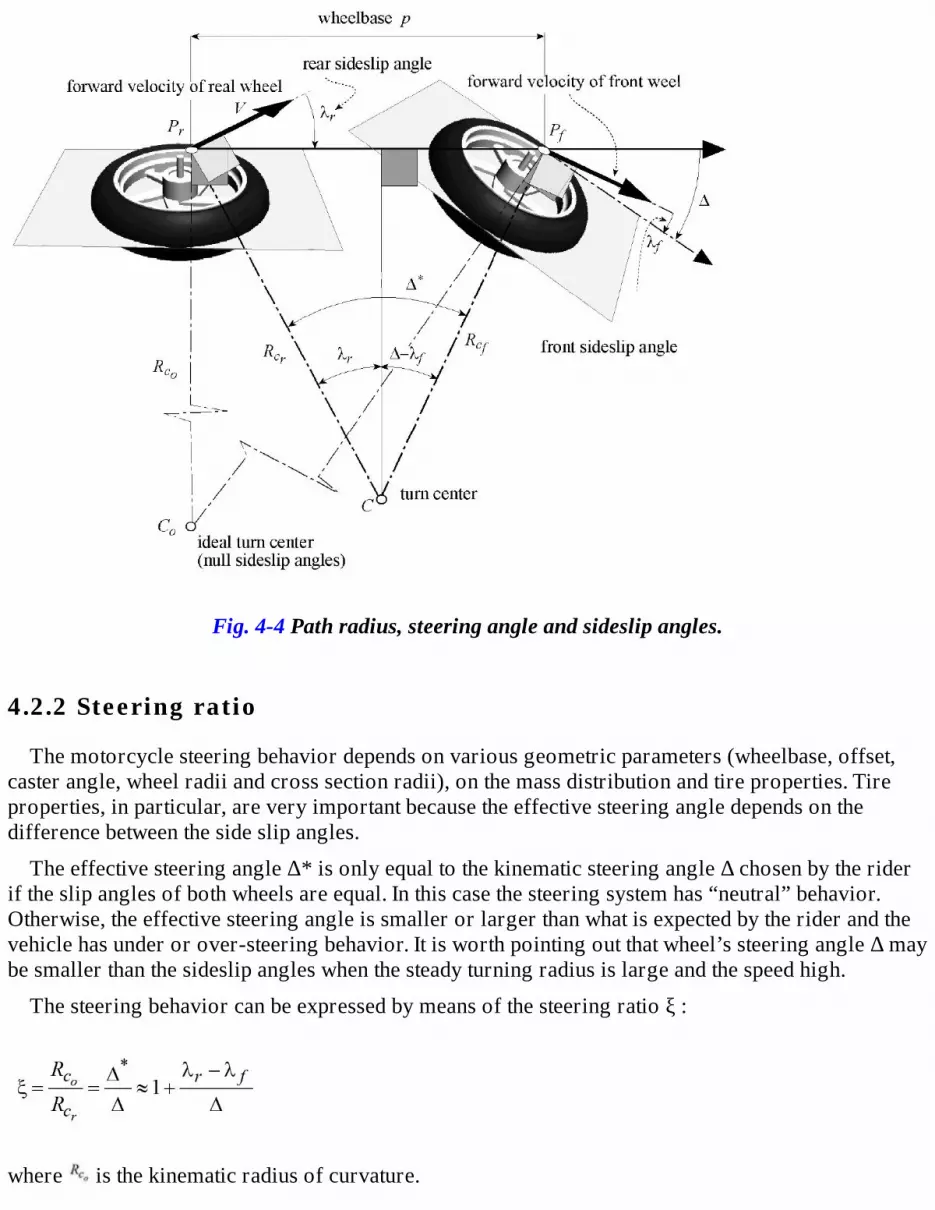
Fig.4-4Pathradius,steeringangleandsideslipangles.
4.2.2Steeringratio
Themotorcyclesteeringbehaviordependsonvariousgeometricparameters(wheelbase,offset,casterangle,wheelradiiandcrosssectionradii),onthemassdistributionandtireproperties.Tireproperties,inparticular,areveryimportantbecausetheeffectivesteeringangledependsonthedifferencebetweenthesideslipangles.
TheeffectivesteeringangleΔ*isonlyequaltothekinematicsteeringangleΔchosenbytherideriftheslipanglesofbothwheelsareequal.Inthiscasethesteeringsystemhas“neutral”behavior.Otherwise,theeffectivesteeringangleissmallerorlargerthanwhatisexpectedbytheriderandthevehiclehasunderorover-steeringbehavior.Itisworthpointingoutthatwheel’ssteeringangleΔmaybesmallerthanthesideslipangleswhenthesteadyturningradiusislargeandthespeedhigh.
Thesteeringbehaviorcanbeexpressedbymeansofthesteeringratioξ:
where isthekinematicradiusofcurvature.

Thevehicle’sbehavioris:neutralifξ=1:thesideslipanglesareequal(λf=λr);over-steeringifξ>1:thedifferenceofthesideslipanglesispositive(λr>λf);under-steeringifξ<1:thedifferenceisnegative(λr<λf).
Neutralbehavior
Figure4-5showsavehicleinaturn,inthespecialcasewherethesideslipanglesofthetwowheelsareequal(λf=λr).Ifthesideslipangleswerezero,theturncenter(pointCo)wouldbedeterminedbytheintersectionofthelinesperpendiculartotheplanesofthewheelsandpassingthroughthecontactpoints.Sincethesideslipanglesofthetwotiresareequal,theeffectivesteeringangleΔremainsconstantasthevaluesofthesideslipanglesvary,whilethecenterofrotationCmovestowardsthefrontandalongapathpassingthroughthepointCo.Theradiusofcurvatureremainsapproximatelyconstantandequaltothatrelatingtokinematicsteering.Thisbehaviorisdefinedasneutral,sincethecurvatureradiusdependsonlyonthesteeringangleselectedbytheriderandnotonthevalueofthesideslipangles.
Under-steering
Ifthesideslipangleofthereartireislessthanthefronttire(λr<λf)thecenterofcurvatureCisdisplacedtotheexteriorofthepathoftheneutralcenter(Fig.4-6a).Heretheradiusofcurvature isgreaterthantheidealone associatedwiththekinematicsteering.Thevehicle’sbehavioristhereforedefinedasunder-steering.
Fig.4-5Neutralbehaviorofthemotorcycleinaturn(λr=λf).

Fig.4-6Under-steeringandover-steeringbehaviorofthemotorcycleinaturn.
Over-steering
Ifthesideslipangleofthereartireisgreaterthanthatofthefronttire(λr>λf),thecenterofcurvatureCisinsidethepathoftheneutralcenter,sothatthecurvatureradius islessthantheidealradius associatedwiththekinematicsteering(Fig.4-6b).Thevehicleinthiscasehasanover-steeringbehavior.
Nowconsideramotorcyclethatisunder-steeringwhileitisroundingaturn.Sincethevehicletendstoexpandtheturn,inordertocorrectthetrajectorytheriderisobligedtoincreasethesteeringanglesothatthelateralreactionforceofthefrontwheelwillbeincreased.
Whentherotationofthehandlebarsbecomesconsiderable,theforceneededforequilibriumcanovercomethemaximumfrictionforcebetweenthefronttireandtheroadplane,withtheresultthatthewheelslipsandtheriderfalls.
Αmotorcyclethatisunder-steeringisthereforedangerous,sincetheridercannotcontrolthevehicleoncethefrontwheelhaslostadherence.

Ontheotherhand,withanover-steeringmotorcycle,iftheforceneededforequilibriumovercomesthemaximumfrictionforcebetweenthetireandtheroadplane,therearwheelslips,buttheexpertrider,withacountersteeringmaneuver,hasabetterchanceofcontrollingthevehicleequilibriumandavoidingafall.
4.3CorneringforcesFigure4-7showsthemotorcycleinkinematicturningwithoutdrivingforce,rotatingaboutthe
idealturncenterCo.Rollingresistanceandaerodynamicforcesareneglected.Thetirelateralforcesareperpendiculartothewheelsandtheirresultantisequaltothedesiredcentripetalforcedirectedtowardstheturncenterpoint.
Figure4-8showsamotorcyclewithsideslipanglesnotequaltozeroandwiththedrivingforcerequiredtogivesteadytangentialvelocity.Frontrollingresistanceisconsideredwhereasaerodynamicforcesareneglected.TheturncenterCistheintersectionofthelinesperpendiculartothedirectionsoftheforwardvelocityofthetwowheels.ForequilibriumtheintersectionofthetotalfrontandrearforcesmustintersectthelineGC.TheresultantofthetwotireforcesgivesthecentripetalcomponentdirectedtowardstheturncenterC.
Iftheaerodynamicforceisincludedthedrivingforcenecessaryfortheequilibriumwillincrease.
Theaerodynamicforcealsoinfluencestheverticalloadsonthewheels:
Thefrontverticalloadisequaltothestaticloadlesstheloadtransferduetotheaerodynamicforce.Alternatively,therearloadisequaltothesumofthestaticloadandloadtransfer.

Fig.4-7Planview:Forcesactingonthemotorcyclewithzerosideslipangles.

Fig.4-8Planview:Forcesactingonthemotorcyclewithnon-zerosideslipangles.
Theverticalloadonthefrontwheelincreasesslightlyinthepassagefromrectilinearmotiontotheturn,whileitdecreasesontherearwheel,duetothedependenceoftheloadtransferontherollangle.
Itisworthhighlightingthat,evenifrollingresistanceisneglected,adrivingforceisnecessaryforequilibriuminsteadyturningwhensideslipanglesarepresent.
4.4Linearizedmodel ofthe motorcycle inaturnNowconsideramotorcycleroundingaturnwithlargeradius,withrespecttothemotorcycle’s
wheelbase,andsupposethattheaerodynamicforceisnegligiblesothattheloadtransferisnegligiblewithrespecttotheverticalloadsonthewheels.
Ifweconsidersmallroll,steeringandsideslipanglesthelateralforcesactingonthewheelsareequalto(seeFig.4-7):

Thelateralforcesdependonthedistributionofthestaticloadsonthetwowheels,whilethefrontlateralforcealsodependsontheeffectivesteeringangle.Theratiosbetweenthelateralforcesactingonthewheels,andtheverticalloadsareequalto:
Keepinginmindtheexpressionsforthelateralforcesintermsofthesideslipandrollangles,thesideslipanglescanbewritteninthefollowingway:
Itcanbenotedthatthesideslipanglesdependontwotermsofoppositesign.Thenegativetermisproportionaltothecamberstiffnessanditsincreasebringsaboutareductioninthesideslipanglethatcanalsobecomenegative,aswehaveseeninthechapterontires.Thefirst,remainingtermdependsonthelateralforce(numerator)andtheverticalload(denominator).
Thesideslipanglescanthereforebeexpressedintheform:
Itcanbenotedthatthesideslipanglesareinverselyproportionaltothecorneringstiffnessandthattheydependonboththecamberstiffnessandtherollangle(andthereforeontheforwardvelocityandtheradiusofcurvature).Observethatifthecamberstiffnesscoefficientisgreaterthanonethesideslipangleisnegative.
Nowletusconsiderthesteeringratioξthatcharacterizesthedirectionalbehaviorofthevehicle:
Takingintoaccountthesideslipexpressionsweobtain:

Fig.4-9Steeringratioξasthecamberstiffnessvaries .
Thedirectionalbehaviorisneutralifthefollowingrelationissatisfied:
Inthiscase,thevehicle’sresponseatanyvelocitycoincideswiththatpresentunderidealconditionsofkinematicsteering.
Thedirectionalbehaviorisover-steeringiftheratioξisgreaterthanone:
Inthiscase,thecurvatureradiusdiminisheswithanincreaseinvelocity.
Thedirectionalbehaviorisunder-steeringiftheratioξislessthanone:
Inthiscase,asthevelocitygraduallyincreases,theradiusofcurvaturealsoincreasesandthereby,increasinglygreatersteeringanglesarerequiredtogothroughthesametrajectory.
Figure4-9showsthesteeringratioundervariationinthecamberstiffnesses,inthecaseinwhich

thecorneringstiffnessesareequal.Thegraphshowsthatforneutralbehaviorthetwotiresmusthaveequalcamberstiffnesscoefficientvalues.
Example1
Consideramotorcyclewithawheelbasep=1.4m,equippedwithdifferenttires.Thetireshavethefollowingthreecombinationsofthecorneringstiffnesscoefficientwhilethecamberstiffnesscoefficientisassumedtobeconstant
Motorcycle1:
Motorcycle2:
Motorcycle3:
Figure4-10showsthesteeringratioversustheforwardvelocity.Itcanbeobservedthatthebehaviorofthevehicleis:
over-steeringwhenthefrontcorneringstiffnesscoefficientisgreaterthanthatofthereartire();
neutralwhenthestiffnessesareequal( );under-steeringwhentherearcorneringstiffnesscoefficientisgreaterthanthatofthefronttire(
).
Thisisduetothefactthatthesideslipangleofatireisgreatertotheextentthatitsstiffnessisless;withhighvaluesofthecorneringstiffness,thesideslipanglescouldbezero(kinematicsteering).
Itisinterestingtoobservehow,onthebasisofthislinearmodel(expressedintermsofstiffnesscoefficients),neitherthesteeringanglenorthelongitudinalpositionofthecenterofgravityinfluencethevehicle’sdirectionalbehavior.
Actually,asthesideslipangleincreases,thelateralforcesincreaseatanincreasinglylowerratethanthatpredictedbythelinearlawformingthebasisofthetiremodel.
Furthermore,inrealitythedirectionalbehaviorofthemotorcycleisalsoinfluencedbythelongitudinalpositionofthecenterofgravityandbythevalueofthedrivingforce.

Fig.4-10Steeringratioξversusthevelocity[ ].
4.4.1Critical ve loci ty
Thepreviousexamplehasshownthattheunder/over-steerbehaviorinaturndependsmainlyonthecamberandcorneringstiffnesses.Theirinfluenceisimportantespeciallyifthestiffnessvaluesofthefrontandreartiresaredifferent.
Consideragainamotorcyclethatroundsaturnwithalargeradiuswithrespecttoitswheelbase.
Whenthebehaviorofthemotorcycleisover-steering,thesteeringratioξapproaches∞atacertainvalueofthevelocity,calledcriticalvelocity:
Thecontrolofthemotorcycleoverthecriticalvelocityispossiblebyperformingcounter-steeringmaneuvers.Thisstrategyisadoptedbyridersinspeedwayandmotardracing.
Example2
Consideramotorcyclewithawheelbasep=1.4m,characterizedbythefollowingtireproperties:
Themotorcycleisover-steeringbecausethesteeringratioisgreaterthanone.Thecriticalvelocityisequalto50.6m/s.
Figure4-11givestheprogressoftheratioξasafunctionofthevelocity.Itcanbeobservedhere

thatthevalueofξincreasesrapidly.Thismeansthatathighvelocitiesevensmallvaluesofthesteeringanglesufficetoturnthevehicle.
Fig.4-11Over-steeringmotorcycleandcriticalvelocity.
Figure4-12illustratesthevariationofcriticalvelocityintermsofthecorneringstiffnesscoefficientofthetires.Itcanbenotedintheleftplotthatif ,inthefieldofvalues( )criticalvelocitydoesnotexist;theequationshowsthatcriticalvelocityisimaginary.
Therightplotreferstoamotorcyclewithcamberstiffnesscoefficientinthefronttiregreaterthanthatofthereartire.Inthiscasethevehicleisalwaysinover-steering.Criticalvelocityincreasesbyincreasingthereartirecorneringstiffnessanddecreasingthefronttirecorneringstiffness.

Fig.4-12Criticalvelocityasafunctionofthestiffnessesofthetires.
4.5Multi -bodymodel ofmotorcycles ins teadyturningAmotorcyclecanbedescribedasasystemofsixrigidbodies:sprungsteeringcomponents,
unsprungsteeringcomponents,rearframe(includingframe,engine,tankanddriver),rearswingingarmandthetwowheels.
Thedriverisconsideredtobearigidbodyfirmlyattachedtotheframe.ThefollowingFig.4.13showsasketchofamotorcycleinsteadyturningmotion.
ThespeedoftravelVisthespeedofthecontactpointoftherearwheel.Whennoslipispresent,Visdirectlyproportionaltotheangularvelocityoftherearwheelandisdirectedalongthewheelsymmetryplane.
Thedistributedaerodynamicforceswhichairexertsonthemotorcyclearetakenintoaccountbyconsideringdrag,liftandlateralforcesactingatthecenterofmassoftherearframe(FD,FL,FS)andthreeaerodynamictorques( ).
Theinteractionbetweeneachtireandtheroadisrepresentedbythreeforces(verticalload,longitudinalandlateralforces)actingatthegeometriccontactpointandbythreetorques(overturning,rollingresistanceandyawtorque),actingalongthethreeindependentaxes.Thetireforcesandtorquesarenon-linearlydependentontherollangleandslipquantities.
4.5.1Mathematical model ofmotorcycle
Theequationsofmotionofthemotorcycleinsteadyturningmotionaredescribedinthepaper[Cossalteretal.,1999].
Theequilibriumconditionsgivesixequations:threeforceequilibriumequations;threemomentequilibriumequations:equilibriumaroundtheX-axis(roll),the
Y-axis(pitch)andtheZ-axis(yaw).
Inadditionwehavetwoequationsthatgivethelateralforcesasfunctionsofsideslipandcamberangles.
Oncetherollangleϕandthesteeringangleδareassigned,theeightequationsallowustoobtaintheeightunknowns:
forwardvelocityV;verticalforcesNfandNrappliedrespectivelytothefrontandrearwheels;lateralforces and appliedrespectivelytothefrontandrearwheels;sideslipanglesλf,λr,thedrivingforceS.
Finally,theequilibriumofthefrontand/ortherearframearoundthesteeringaxisgivesthetorqueexertedbytheriderandappliedtothehandlebars,whichprovidesandequalandoppositereactionontherearframe.

Fig.4-13Forcesandmomentsactingonthemotorcycle.
TheinertialandgeometricalpropertiesaredefinedwithrespecttothecoordinatesystemsrepresentedinFig.4-14.
Letusexaminetherearframe:ithasmassMr;itischaracterizedbythecenterofgravityGrhavingcoordinates(br,0,−hr)withrespecttotherearcoordinatesystem(Ar,Xr,Yr,Zr);itisconsideredsymmetricalwithrespecttothex−zplane,henceitsinertialcharacteristicsarerepresentedbythefollowingfourterms:− =masscentermomentofinertiaaboutxraxis(rollmomentofinertia);− =masscentermomentofinertiaaboutyraxis(pitchmomentofinertia);

− =masscentermomentofinertiaaboutzraxis(yawmomentofinertia);− =masscenterinertiaproductaboutxr-zr-axes.
Letusexaminethefrontframe:ithasmassMf;itischaracterizedbythecenterofgravityGfhavingcoordinates(bf,0,−hf)withrespecttothefrontcoordinatesystem(Af,Xf,Yf,Zf);
Thecoordinatesystemaxes(Af,Xf,Yf,Zf)areassumedtobeprincipalaxesofinertiasothattheinertiatensorisdiagonal.
Fig.4-14Sketchofthemotorcycle.
4.5.2Simpli fiedmodel ofmotorcycles
Ignoringthesmalldisplacementsofthewheels’contactpoints(withrespecttotheradiusofcurvature)which,aswehaveseeninthechapteronkinematics,dependontheanglesofpitch,rollandsteeringaswellasthegeometryofthewheels,thesixequationsofequilibriumforthemotorcycleinaturncanbeeasilyderived(Fig-4-15):
(⇒)equilibriumoftheforcesalongtheXaxis:
(⇒)equilibriumoftheforcesalongtheYaxis:

(⇑)equilibriumoftheforcesalongtheZaxis:
−Nf−Nr+mg=0
equilibriumofthemoments:
(∩)aroundtheXaxis:
(∩)aroundtheYaxis:
−IXZΩ2−Nf(p+Xr)+mg⋅XG+FA⋅ZG−NrXr=0
(∩)aroundtheZaxis:
Themeaningofthesymbolsasthefollows:
•S thethrustwhichisnecessaryforholdingthemotorcyclestationaryinaturn;
•FA theaerodynamicresistantforceassumedtobeappliedtothecenterofgravity;
• thelateralforcesappliedtothetiresbytheroad;
•Nf,Nr theverticalloads;
• spinmomentsofinertiaofthewheels;
•ωf,ωr angularvelocitiesofthewheels;
•Ω yawvelocity;
•Δ kinematicsteeringanglemeasuredontheroadplane.
•XG,YG,
coordinatesofthemotorcyclecenterofgravitywithrespecttothereferencesystem(C,X,Y,Z):

ZG
ZG=−hcosϕ
Xr,Yr
coordinatesofthecontactpointoftherearwheelwithrespecttothereferencesystem(C,X,Y,Z);
Xr=−Rcrsinλr
Yr=−Rcrcosλr
IXZ,IYZproductsofinertiaofthemotorcyclewithrespecttotheaxesX−ZandY−Z.Theseproductsofinertiadependonthemasscentermomentsofthemotorcycle, ,massm,rollangleϕ,andonthecoordinatesXG,YG,ZGofthemotorcyclemasscenter:
Thesixequationsconstituteanon-linearsystem.ExpressingtherollangleϕasafunctionoftheyawvelocityΩandoftheradius ,andexpressingthelateralforcesofthetiresaslinearfunctionsofthesideslipanglesλf,λrandrollangleϕ,wecancalculatethesixunknowns.

Fig.4-15Motorcycleinsteadyturning.
ForexamplesettingthesteeringangleδandtheyawvelocityΩthesixunknownsare:thesideslipanglesλf,λr;theradius :theverticalloadsNf,Nr;thethrustSnecessaryforassuringmotionataconstantvelocity.
Ifthesideslipanglesλf,λr,therollangleϕandtheeffectivesteeringangleΔareknown,itispossibletocalculatetheradiusofthecirculartrajectorycoveredbytherearwheel .
4.6Rol l , s teeringands ides l ipanglesWewillshowhowamotorcycleinaturn,withassignedforwardvelocity,rollandsteeringangles,
describesatrajectorywhosepathradiusdependsonthesideslipanglesofthetires.Ifthesideslipanglesarezero,thetrajectorycoincideswiththekinematicone.
Theconditionsofstationaryequilibriumofamotorcycleinaturn,inthecurvature-forward

velocitydiagram,arerepresentedbymeansofthecontourlinesofthesteeringangleδandtherollangleϕ.Thesecurvesprovidethenecessaryvaluesforequilibriumonaturn,oncetheradiusofthetrajectoryandthevelocityofthemotorcyclehavebeenset(Fig4-16).
Therollanglecontourlinesshowhowthevelocityandtheturningradiushavetovarytoassurevehicleequilibrium,maintainingtherollangleconstant.Thesteeringangleneededundervariousstationaryequilibriumconditionsisrepresentedbytheintersectionoftherollcurvewiththesteeringcurve.
Inthesamewaywecanconsideramotorcyclethatroundsaturnholdingthesteeringangleconstant.Thesteeringcontourlinesshowhowtheforwardspeedandtheradiusoftheturnneedtovaryinordertoassurethevehicle’sequilibrium.Therollanglenecessaryundervariousequilibriumconditionsisrepresentedbytheintersectionofthesteeringcontourlinewiththerollline.
Threemotorcycleshavingthesamegeometryandinertialpropertiesbutequippedwithdifferenttiresareconsidered.Thedifferentbehaviorofthethreemotorcyclesdependsonthevarioussideslipanglesofthetiresrequiredtogeneratethelateralforcesthatarenecessaryforequilibrium.Itshouldbenotedthattheradiusoftheturndependsonthedifferenceinthesideslipanglesaswellasonthesteeringangle.
4.6.1Case 1:re ference motorcycle
Rollandsteeringangles
Figure4-16representsthecaseofamotorcyclewithtireshavingequalcamberandcorneringstiffness.
Thehorizontalstraightlinesrepresenttheequilibriumconditionsofamotorcycleroundingturnsofincreasingradius,atconstantvelocity.Thegraphshowshowtherollandsteeringanglesvaryintermsofthecurvature.
Theverticallinesrepresentmotorcyclesroundingturnsofconstantradiuswithvariablevelocity.Thegraphshowshowtherollandsteeringanglesneedtovaryintermsofvelocity.Toroundaturnwithconstantradius,thesteeringanglemustdiminishasvelocityincreases.Thisphenomenonderivesfromthefactthattheeffectivesteeringanglealsodependsontherollangle(seechapter1).
Itmustberecalledthattherangeofsteeringanglesusedisnormallymuchmorerestrictedthanthatindicatedinthefigure,especiallyathighvelocities.
Wecanseeinthefigurethatevenifϕ=0asteadystateturningmotion,atlowvelocity,ispossible.Ifweconsideraperfectlyverticalmotorcycle(rollangleϕ=0)withthehandlebarsturnedtotheright,weareledtosupposethatitcannotattainanequilibriumvelocitysinceweimaginethatthecentrifugalforcegeneratedastheturnisroundedtotheright,tendstomakethemotorcyclefalloutsidetheturn,i.e.,totheleft.

Fig.4-16Rollandsteeringanglesasfunctionsofvelocityandcurvature.
Fig.4-17Sideslipanglesintermsofvelocityandcurvature.Referencemotorcycle.
Actually,itmustberecalledthatthepresenceofthemotorcycletrailcausesadisplacementtotheleftofthefrontwheel’scontactpointandthat,furthermore,therollangleofthefrontsectionisnotzero,butincreaseswiththesteeringangleeveniftherolloftherearsectioniszero.Itfollowsintuitivelythatboththecenterofgravityofthefrontsectionandthatoftherearsectionaredisplacedtotherightofthestraightlinejoiningthecontactpoints.Non-zeroequilibriumvelocitiesarethereforepossible,sincetheoverturningmomentduetothecentrifugalforceisbalancedoutbythemomentsgeneratedbytheweightforces.

Sideslip angles.
ThesideslipanglesrequiredforamotorcyclewithtiresofequalstiffnessarerepresentedinFig.4-17.Notethatthevehiclehasnearlyneutralbehavior,withnearlyequalfrontandrearsideslipangles(λr−λf=0.25°foravelocityof15m/sandturnradiusof30m).
4.6.2Case 2:frontt ire s ti ffnes s (+10%),reart ire s ti ffnes s (-10%)
Rollandsteeringangles
Ifthevaluesofboththecamberandcorneringstiffnessesofthetwotiresarechanged,thevehiclebehavesdifferentlyintheturn.Ifthefronttirehaslarger(+10%)stiffnessvaluesandthereartiresmaller(-10%)thantheprecedingcase,thebehaviorwillbedifferent,ascanbeobservedinFig.4-18.
Fig.4-18Rollandsteeringanglesasfunctionsofvelocityandcurvature.
Atthesamevelocityandcurvatureradius,thesteeringanglenecessaryforequilibriumonaturnisnotablysmaller(forexample,atavelocityofabout15m/sandwithacurvatureratioof30m,thesteeringanglediminishesfromapproximately2°toapproximately1°).
Furthermore,asinthepreviouscase,toroundaturnwithconstantradius,thesteeringanglemustdiminishasthevelocityincreases.
Sideslip angles.
Withafronttirehavinghighercamberandcorneringstiffnesses,i.e.,withafronttireperforming

morethantherearone,thesideslipangleschangesignificantly.Thefrontsideslipangleisverysmallorevennegative,whiletherearsideslipangleincreases(Fig.4-19).Thedifferencebetweenthesideslipangleshaspositivesignandbecomes:λr−λf=1.9°.
Fig.4-19Sideslipanglesasfunctionsofvelocityandcurvature.Over-steeringmotorcycle.

Fig4-20Motorcyclewithnegativefrontsideslipangle.
Fig.4-20showstheplanviewofamotorcyclewithanegativevalueofthefrontsideslipangle.Inthiscasethefrontlateralforceisthesumofapositivecomponentduetothecamberangleandanegativecomponentduetothesideslipangle.Suchaconditionwouldexistbelowtheλf=0curveforthefronttireinFig.4-19.
4.6.3Case 3:frontt ire s ti ffnes s (-10%),reart ire s ti ffnes s (+10%)
Rollandsteeringangles
Considerathirdvehiclewithlargerstiffnessvaluesofthereartire(+10%)andsmallerstiffnessvaluesofthefronttire(-10%).Inthiscase(Fig.4-21)thevehiclebehavesverydifferentlyfromtheprevioustwocases:toroundaturnofequalradius,greatersteeringanglesarenecessary.Forexampletoroundaturnofradius30matavelocityof15m/s,requiresasteeringangleabout3°greaterthanthatofthepreviouscases.
Thegreaterdifferencebetweenthiscaseandtheprevioustwoishighlightedbytheplotofthesteeringanglecontourlines.Considerforexamplethevehiclewhileitroundsaturnof50mwithincreasingvelocity.Withanincreaseinvelocityofuptoapproximately15m/s,thesteeringanglenecessaryforequilibriummustincreaseslightly,while,forgreatervelocitiesthesteeringanglehastodiminish.
Sideslip angles.
Inthiscasethereartirehasbettercharacteristicsthanthefrontone,thefrontsideslipangleincreaseswhilethereardiminishessignificantly(Fig.4-22).Thedifferencebetweenthesideslipangleshasanegativesignandbecomes:λr−λf=-1.8°.

Fig.4-21Case3:rollandsteeringangleintermsofvelocityandcurvature.
Fig.4-22Sideslipanglesintermsofvelocityandcurvature.Under-steeringmotorcycle.
4.7SteeringratioCase1.
Letusexamineamotorcycleinsteadyturningequippedwithfrontandreartireswhichhavethesamecorneringstiffnesscoefficient( )andcamberstiffnesscoefficient().

Fig.4-23Steeringratio:frontandreartireswithcorneringstiffnesskλ=15rad-1andcamberstiffnesskϕ=0.8rad-1.
Thiscaseisnotrealisticbecausethefrontandreartiresusuallyhavedifferentproperties,butithelpsusunderstandtheeffectoftirepropertiesonsteeringbehavior.Thecontourplotofξ,representedinFig.4-23,showsthatthevehicle’sbehaviorisalmost“neutral”whenthespeedisverylowandbecomesover-steeringwhenthespeedincreases.
Thesideslipangleofthefrontwheelissmallerthatoftherearwheelforatleasttworeasons.Firstofall,thedrivingforcethatactsonthereartirenecessitatesalargersideslipangletogeneratethelateralforce.Thiseffectbecomesmoreimportantwhenthespeedincreasesbecausetheaerodynamicforce(andthedrivingforce)increases.Secondly,frontwheelcamberangleβislargerthanrearwheelcamberangleϕ,hence,theeffectofcamberangleonthelateralforceismoresignificantonthefrontwheel.
Case2.
Inthiscasethemotorcycleisequippedwiththesamefronttire( and )butwiththereartirehavingdifferentproperties:therearcamberstiffnesscoefficientisincreased(
)whilethecorneringstiffnesscoefficientisthesameasthefronttire.
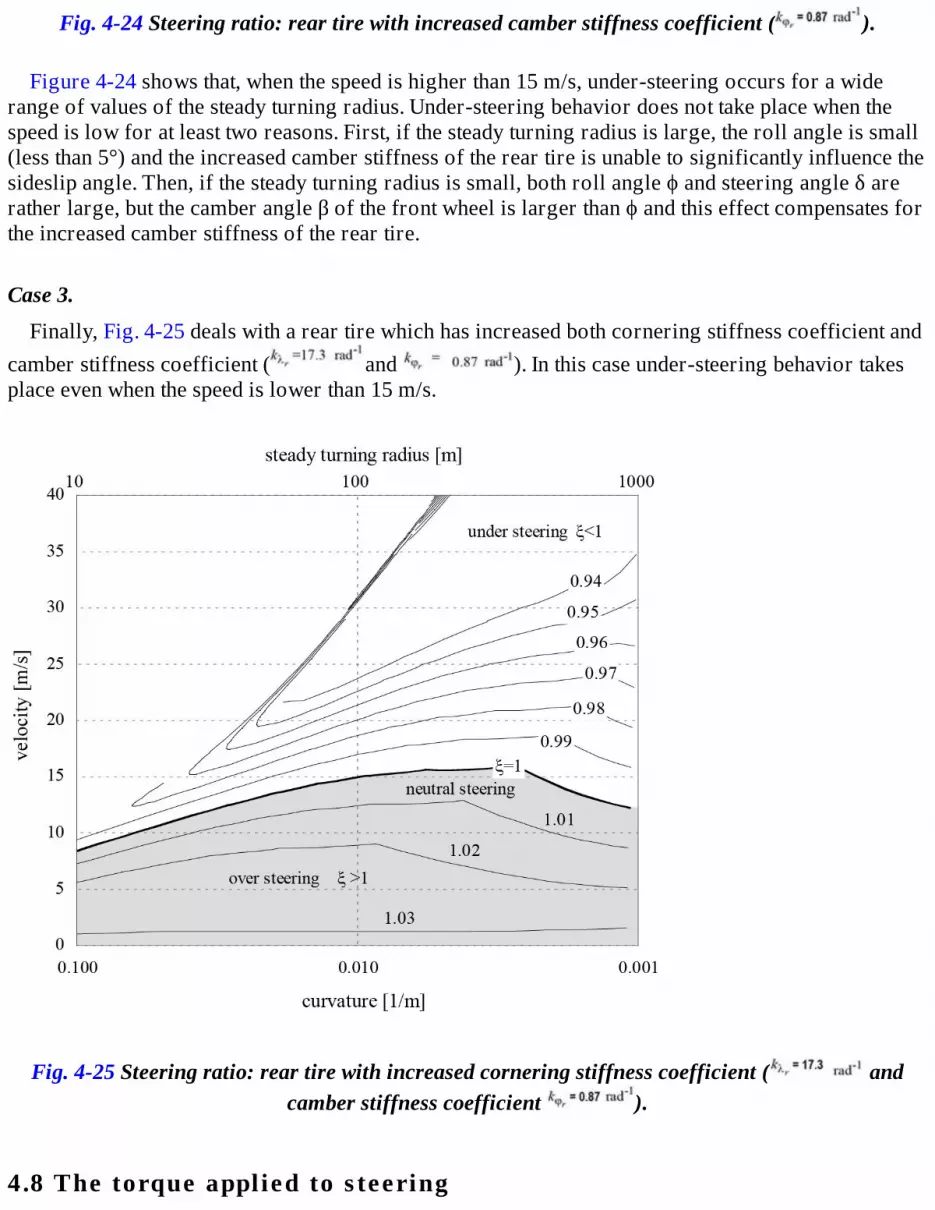
Fig.4-24Steeringratio:reartirewithincreasedcamberstiffnesscoefficient( ).
Figure4-24showsthat,whenthespeedishigherthan15m/s,under-steeringoccursforawiderangeofvaluesofthesteadyturningradius.Under-steeringbehaviordoesnottakeplacewhenthespeedislowforatleasttworeasons.First,ifthesteadyturningradiusislarge,therollangleissmall(lessthan5°)andtheincreasedcamberstiffnessofthereartireisunabletosignificantlyinfluencethesideslipangle.Then,ifthesteadyturningradiusissmall,bothrollangleϕandsteeringangleδareratherlarge,butthecamberangleβofthefrontwheelislargerthanϕandthiseffectcompensatesfortheincreasedcamberstiffnessofthereartire.
Case3.
Finally,Fig.4-25dealswithareartirewhichhasincreasedbothcorneringstiffnesscoefficientandcamberstiffnesscoefficient( and ).Inthiscaseunder-steeringbehaviortakesplaceevenwhenthespeedislowerthan15m/s.
Fig.4-25Steeringratio:reartirewithincreasedcorneringstiffnesscoefficient( andcamberstiffnesscoefficient ).
4.8The torque appl iedtos teering

Theequilibriumofmomentsaroundthesteeringaxisenablestheevaluationofthetorqueτthattheridermustapplytothehandlebarstoassurethemotorcycle’sequilibriuminaturn(Fig.4-26).Itmustbespecifiedthatthisreferstosteadyturning,i.e.,toamotorcycleataconstantvelocityandturnradius.Intransitorymovement,inaturnwithvariablevelocityandcurvatureradius,thetorquetheridermustexercisewillbesubstantiallydifferentfromthatcalculatedinasteadystate,especiallyifthevariationsinvelocityandtrajectoryoccursuddenly.
Thetorqueappliedbytheriderisequal,butofoppositesign,totheresultantofallthemomentsgeneratedbytheforcesactingonthefrontsection.Theresultanttorqueiscomposedofsixterms:
disaligninginfluence(sign+)duetotheweightforceofthefrontsection,
aligninginfluence(sign-)duetothecentrifugalforceofthefrontsection,
disaligninginfluence(sign+)duetothenormalloadonthefrontwheel,
aligninginfluence(sign-)duetothelateralforceonthefrontwheel,
aligninginfluence(sign-)duetothegyroscopiceffectofthefrontwheel(Fig.4-27),
disaligninginfluence(sign+)duetothetwistingtorqueofthefronttire,

τM=Mzfcosεcosϕ
Fig.4.26Equilibriumofthefrontframe.
PointAindicatestheintersectionofthesteeringaxiswiththenormallinepassingthroughthefronttirecontactpoint.ThedistancebetweenpointAandcontactpointPfrepresentstheeffectivetrailofthetire.
Fig.4.27Genesisofthegyroscopicmomentonthefrontsection.

4.8.1Torque components
InFig.4-28thevariationsofthetorqueappliedbytheridertothehandlebarsofthesamplemotorcycleisshown.Itisusefultorecallthatthetorqueexercisedbytherideris,bydefinitionpositiveifittendstoincreasethesteeringangleintotheturn.
Fig.4-28Torquesappliedtothehandlebarsversustheturnradiusandthevelocity.
Thismeansthatthereareessentiallytwopossiblesituations:atlowvelocitiesthesteeringtorqueisnegative.Therefore,insteering,theridermustblockthehandlebars,whichotherwisetendtorotatefurther.Whenthevaluesofthesteeringtorquebecomestronglynegative,theinclinationandtheentryintotheturnbecomeeasier;withanincreaseinvelocity,thetorquetobeappliedtothehandlebarsbecomespositive.Thiscircumstance,ifthevalueofthetorqueremainshigh,generatesintheridertheunpleasantsensationofdrivingamotorcyclethatishardtoinclineandtoinsertintotightturns.
Figure4-29showsthevariouscomponentscombiningtodefinetheresultingcouplethatactsonthesteeringaxis,intermsoftherollangle.Thevariouscontributionshavethefollowingeffect:
verticalload:theverticalreactiveforcegeneratesapositivemomentofhighvalue;lateralforce:thelateralreactiveforcegeneratesahighvaluenegativemomentofthesameorderofmagnitudegeneratedbytheverticalload;frontweightforce:themomentispositive;centrifugalforce:themomentisnegative,ofthesameorderofmagnitudeasthatgeneratedbytheweightforce;gyroscopicmoment:itgeneratesanaligningeffect;twistingmoment:itgeneratesadisaligningeffectthatincreaseswiththerollangle.

Fig.4-29Momentsexercisedaroundthesteeringaxis.
Fig.4-30Torqueappliedbytheriderandmomentsexercisedaroundthesteeringaxis.
Itshouldbeobservedthatboththetwoforcesappliedtothecenterofgravityofthefrontsection(weightforceandcentrifugalforce)andthetworeactionforcesappliedatthecontactpoint(lateralforceandverticalload)eachcontaininfluencesofoppositesign.
Figure4-30showsthevariationinthetorqueappliedbytheriderastherollanglevaries.Thetorqueisequaltothesum,withsignschanged,ofthefollowinginfluences:
massforces(vectorsumofthemomentsofweightforceandcentrifugalforce);reactionforces(vectorsumofthemomentsofverticalloadandlateralforce);gyroscopicmoment;

twistingtorqueofthetire.
Figure4-30alsoshowsanexampleinwhichforsmallrollanglestheriderneedstoexerciseanegativecouple,whileforlargerollangles,hemustapplyapositivecouple.
Themaximummaneuverabilityisobtainedwhenthecouplenecessaryforassuringequilibriumiszeroornearlyso.Infactundertheseconditions,iftheriderletsgoofthehandlebarsthemotorcyclecontinuestoroundthesetturn.
4.8.2The influence ofmotorcycle geometryonthe s teeringtorque
Thesteadyturningbehaviorofamotorcycleisafunctionofvehiclegeometry,inertiaandtireproperties.
Fig.4-31Steeringtorqueagainstturnradiusandvelocity.
Normaltrail
Fig.4-31showsthereferencecase,whileFig.4-32showstheeffectofapositiveincrementinthenormaltrail:thesteeringtorquecontourplotshiftstowardslowervaluesinthewholeareaunderconsideration,whereasthereisnosignificantchangeintheshapeofthecurves.
Thisresultcanbeexplainedbyconsideringthefactthatwhenthetrailincreases,thedisaligningeffectduetothefronttireverticalloadincreasesmorethanthealigningeffectduetothelateralforce.Theresultisamorestablesteeringbehavior,intheareaofinterest.
Steeringheadangle

Onthecontrary,theincreaseinthecasterangle(Fig.4-33)hasanaligningeffect,sincethesteeringtorqueincreases(asithasnegativevalues,itsmagnitudedecreases).Itisworthnotingthattheeffectofthesteeringheadangleisrelevant.Consideringthattherealsteeringheadangleisinfluencedbythemotorcycle’sattitude,dependingonspeed,massdistributionandsuspensionbehavior,particularattentionshouldbepaidtothisparameter.
Fig.4-32Influenceofanincreaseinthenormaltrail.

Fig.4-33Influenceofanincreaseinthesteeringheadangle.

Fronttirecrosssectionradius
Thepositiveincrementinfronttiresectionradiushasastrongaligninginfluence(Fig.4-34):thiseffectiscausedbythedisplacementofthefrontwheelcontactpointduetotherollangle.Itcanbeseenthatthezerosteeringtorquecurveshiftstowardslowervaluesoftheforwardspeed,andtheresultingbehaviorisquitedifferentfromthereferencecase.
Fig.4-34Influenceofanincreaseofthecrosssectionradius.
Riderposition
Aforwarddisplacementoftherider ’scenterofmasshasaslightself-steeringeffect.Theverticalpositionoftherider ’scenterofmasshasaverysmallaligningeffect.Theresultisthatiftheridermoves,alwaysremainingintheplaneofsymmetryofthemotorcycle,thesteeringbehaviordoesn’tchangesignificantly.Onthecontrary,alateraldisplacementoftheridertowardtheinsideofthecurvehasastrongaligningeffect.Consideringthatsportridersusuallymovesidewaysconsiderablyitisobviousthatthesteeringcharacteristicsofthemotorcyclearestronglyinfluencedbydrivingstyle.Anexpertridercantakeadvantageofthisphenomenonandshiftthezoneoflowsteeringtorquetomatchthecurrentsteeringconditionsandthusgainbetter,easiersteeringcontrol.
Thepresenceofapassengeraltersmassdistributionofthemotorcycle.Theresultingeffectisslightlyaligning,butthesteadyturningsteeringtorqueisnotsubstantiallychanged.
Theinfluenceoftherider ’slateralpositiononthesteeringbehaviorofthemotorcycleis

representedinFig.4-35.A0.05mlateraldisplacementoftherider ’scenterofmassintowardsthecurvewasconsidered,thiscorrespondstoadecreaseintherollangleofabout1°.Thefigureshowstheaccelerationindex(ratiobetweenthetorqueandthelateralacceleration)bothinthepresenceoflateraldisplacementandundernormalconditions(withoutlateraldisplacement).
Inthepresenceoflateraldisplacementtheaccelerationindexispositiveforeveryvalueofforwardspeedifthesteadyturningradiusislargerthan25m.Foreachvalueofthesteadyturningradiusthecurve,whichiscalculatedbytakingintoaccountthelateraldisplacementoftherider,liesabovethecurvecalculatedinnominalconditions.Thedifferencebetweenthetwocurvesbecomesverylargewhenlateralacceleration(V2/R)islow.
Thisbehaviorcanbeexplainedbytakingintoaccounttheeffectduetothedecreaseinrollanglecausedbytherider ’slateraldisplacement.Thefirsteffectisthedecreaseofthedisaligningeffectofthetiretwistingtorque.Thesecondisthevariationinthemomentoftireforcesaboutthesteeringaxis.Inparticularthedisaligningeffectofthetireload,whichtendstorotatethewheeltowardstheinsideofthecurve,decreases.
Fig.4-35Influenceofrider’slateraldisplacementontheaccelerationindex.
Tireproperties
Alldriversknowthattireshaveanimportanteffectonthebehaviorofthemotorcycle.Thesamemotorcycleequippedwithdifferenttiressometimesbehavesasacompletelydifferentmotorcycle.Anincreaseinthecorneringstiffnessorinthecamberstiffnessofthefronttirecausesonlysmallvariationsintheaccelerationindex.
Themoreimportanttireparameteristheyawtorqueofthefronttirewhich,aswehaveseeninthesecondchapter,includestwoterms:
atermwhichtendstoalignthewheelwiththeforwardspeedandisduetothelateralforceandpneumatictrail(whichdependsonsideslipangleλ);

aterm,whichisnamedtwistingtorque,thattendstodisalign.
Figure4-36showstheyawmomentofthefronttireinthereferencecase(ontheleft)andwithatirehavingadecreasedtrail(-20%)andanincreasedtwistingtorque(+11%).
Figure4-37highlightsthatthedecreaseinthetiretrailandtheincreaseinthetwistingtorquemakethesteeringtorquenegativeinthewholerangeofvelocitiesandsteadyturningradii.Neverthelessthetwofamiliesofcurvesshowthesamegeneraltrends,liketheincrementofaccelerationindexwhenforwardspeedincreasesandsteadyturningradiusdecreases.
Fig.4-36Yawtorquecharacteristics.
Fig.4-37Influenceoftheyawtorqueontheaccelerationindex.

Wehaveseenthatthetorquetobeappliedtothehandlebarscanhavezerovaluetoassureequilibrium,positive(atorqueinaccordancewiththesteeringangle)ornegative(atorquenotinaccordancewiththesteeringangle).
Anymodificationstothemotorcyclewillbringvariationsinthetorquetobeappliedtothehandlebars;theinfluenceofthemaingeometricandinertialparametersonthesteeringtorqueisbroughttolightinFig.4-38.
Itcanbeobservedthatthesteeringheadangle,thefronttirecrosssectionradius,theheightofthecenterofgravityandthenormaltrailaretheparametersthatmostinfluencethevalueoftorque.
Fig.4-38Influenceofsomeparametersonthesteeringtorque.
Aligningeffect:thesteeringangletendstodecrease.Theridermuststeerintotheturn(+)tocounteractthiseffect.Ifthetorquewasnegativeitmustbecomeslessnegative.
Disaligningeffect:thesteeringangletendstoincrease.Theridermuststeeroutoftheturn(-)tocounteract.Ifthetorquewasnegativeitbecomesmorenegative.

GileraSaturno“Sanremo”500ccversion1947
5In-PlaneDynamics
Amotorcyclewithoutsuspensionmovingoverunevengroundpresentsdifficultiesinsteeringbecauseofthelossofwheelgripontheroad,andbecauseofriderdiscomfort.Smallbumpsonthegroundareeasilyabsorbedbythetires,butforadequateabsorptionoflargerbumps,themotorcycleneedsappropriatesuspension.
Amotorcyclewithsuspension,fromadynamicspointofview,canbeconsideredasarigidbodyconnectedtothewheelswithelasticsystems(frontandrearsuspension).Therigidbodyconstitutesthesprungmass(chassis,engine,steeringhead,rider),whilethemassesattachedtothewheelsarecalledunsprungmasses.
Suspensionhastosatisfythefollowingthreepurposes:allowthewheelstofollowtheprofileoftheroadwithouttransmittingexcessivevibrationtotherider.Thispurposeconcernsridercomfort,thatistheisolationofthesprungmassfromthevibrationgeneratedbytheinteractionofthewheelswithroadirregularities;ensurewheelgripontheroadplaneinordertotransmittherequireddriving,brakingandlateralforces;ensurethedesiredtrimofthevehicleundervariousoperatingconditions(acceleration,braking,enteringandexitingturns).
Thedegreeofrequiredcomfortvariesaccordingtotheuseofthevehicle.Forexample,withracingvehicles,comfortislessimportantthanthemotorcycle’scapacitytokeepthewheelsincontactwiththegroundandtoassumethedesiredtrim.
However,inothervehiclesthesuspensionisexpectedtoserveotherpurposes.Forexample,inoff-

roadvehiclesthesuspensionservestoisolatethesprungmassfromcontinuousimpactgeneratedbyvehiclejumps.Forthisreason,suspensioninoff-roadvehicleshasgreaterwheeltravelthanintouringvehicles,andmoresothaninracingvehicles.
Asforthetrim,itshouldbehighlightedthatitdependsonthestiffnessofthesuspensionandontheloads.Theloadcanbequitevariableinmotorcycles(oneortwopassengers,possiblywithbaggage);andfurthermore,loadtransferbetweenthefrontandrearwheeloccursinbothaccelerationandbraking.
5.1Pre l iminarycons iderationsInthestudyofin-planedynamics,themotorcycleisconsideredasanelasticallysuspendedrigid
body.Ithasthreedegreesoffreedom:onedegreeoffreedomisassociatedwiththevehicle’sforwardmotion,whiletheothertwoareassociatedwithtwovibratingmodesandare,therefore,characterizedbytheirrespectivenaturalfrequencies.
Thecombinationofdistancebetweenbumpsontheroadplaneandforwardvelocitycausesexcitationsofthevehicleinarangeoffrequencythatcanbeevaluatedfrom0.25Hzto20Hz.Sincethetireshaveradialstiffnessmuchgreaterthanthatofthesuspension(6-12timesgreater),theirinfluenceatlowfrequencies(belowapproximately3Hz)becomesnegligible.
Fig.5-1Wavelengthofadisturbance.
Nowletusseewhenresonanceconditionscanbegeneratedasaresultofirregularitiesintheroadsurface.SupposethemotorcycleadvanceswithconstantvelocityVonaroadprofilepresentingequidistantirregularities-forexample,thebaysofaviaduct(Fig.5-1).ThetimerequiredforthemotorcycletocoverthedistanceLwavebetweenthetwoirregularities(lengthofthebay)isequalto:
Tthereforerepresentstheperiodofexternalexcitationofthemotorcycle.
Theresonanceconditionoccurswhentheexcitationfrequencyisequaltothenaturalfrequencyofoneofthevibrationmodesofthevehicleintheplane.
Criticalforwardmotorcyclevelocityisdefinedastheforwardvelocityatwhichthemotionimposedbytheroaddisturbancehasthesamefrequencyasoneofthevibrationmodesofthevehicle

intheplane.
IfLwaveisthewavelengthofthedisturbanceandνnisthefrequencyofoneofthemotorcyclemodes,(Tnisthenaturalperiod),thecriticalforwardvelocityisgivenbythefollowingexpression:
Forexample,withanaturalfrequencyνnequalto2HzandaperturbationwithwavelengthLwaveequalto6m,theresonanceconditionoccursatavelocityof12m/s(criticalvelocity).
Ifthemotorcycleproceedsatavelocitybelowcriticalvelocity,thefrequencyνofthemotionimposed:
islowerthanthenaturalfrequencyνn.Alternatively,itisabovethevehicle’scriticalvelocityforvelocitiesgreaterthanthecriticalvelocity.
Itisalsopossibletofollowadifferentapproach.Assumingthatthemotorcycleforwardvelocityis50m/s.Giventhenaturalfrequencyνn,atthisvelocitytheresonanceconditionoccurswhentheperturbationhasa(critical)wavelengthequalto:
which,undertheassumptionmade(νn=2Hz,V=50m/s),correspondstoacriticalwavelengthof25m.Criticalwavelengthsthereforediminishinproportiontotheforwardvelocity.
5.2Suspens ionoverviewSuspensionsystemswereintroducedonmotorcyclesinthe1930sand1940sandnumerous
architecturesandkinematicmodelshavebeenproposed.Wewillbrieflyanalyzethekinematicschemesofthefrontandrearsuspensionthatarenowmostcommon.
5.2.1Frontsuspens ion
Themostwidespreadfrontsuspensionis,undoubtedly,thetelescopicfork.Itismadeupoftwotelescopicsliderswhichrunalongtheinnertubeoftheforkandformaprismaticjointbetweentheunsprungmassofthefrontwheelandthesprungmassofthechassis.
Theconstructivesolutionwiththetwotelescopicslidersattachedtothesteeringheadisreferredtoas“conventional,”andiscurrentlythemostcommonconstructionforstreetmotorcycles(Fig.5-2).
Thesolutionwiththetwoforktubesfixedtothesteeringheadandthetwoslidertubesonthelower

end,called“upsidedown”,istheonemostcommonlyusedinsportmotorcycles,especiallysinceithasmorebendingandtorsionalstiffness.
Fig.5-2Schemesofclassicandupside-downtelescopicforks.
Thetelescopicforkischaracterizedbylowinertiaaroundtheaxisofthesteeringhead.Itsgreatestdisadvantageisrepresentedbythehighfrictionforcesencounteredwhenforcesareappliedorthogonaltotheaxisalongwhichtheslidersrun-forexample,inbrakingandoncurves.
Inbraking,becauseoftheloadtransfer,thetelescopicforkcompressesastherearsuspensionisunloaded;thus,thevehiclepitchesforward.Thepitchingchangesthetrimofthevehicleandfurtherdiminishesthesteeringheadangle.Asmallerangleofinclinationoftheforkcausesareductionofthevalueofthetrail.
Twolimitationsofthetelescopicforkaretheimpossibilityofachievingprogressiveforce/displacementandtheratherhighvaluesoftheunsprungmassthatisanintegralpartofthewheel.
Toovercomethetypicaldefectsofthetelescopicfork,differentsuspensionsystemshavebeenused.Thesecanbeclassifiedfromakinematicpointofviewas:
pusharm;trailingarm;four-barlinkage.
Inanarmfrontsuspension,thearmcanbe“pushed”(Earles-typefork)orpulledback(aschemeusedbythePiaggioVespa),asillustratedinFig.5-3.
Thefour-barlinkagecanalsobeusedinafrontsuspension.Inthiscasetheaxisofthesteeringheadcanbeattachedtothechassis,ortotheconnectinglink,asshowninFig.5-4.
Thefrontarmsuspensionandfour-barlinkagesuspensioncanbedesignedsoastoprovidetotalorpartialanti-divebehaviorinbraking.Inaddition,nothavingprismaticjointsthedryfrictionproblemstypicaloftelescopicforksareeliminatedfromthestart.
Thetorsionalstiffness(withrespecttothesteeringaxisandanaxisnormaltoit)ofthese

suspensionsystemsdependsonthedesignbutingeneralitiseasiertoobtaingreatervalueswiththetelescopicfork.Furthermore,theseelaboratedesignscanalsoreducetheunsprungmass.Anappropriatepositionofthespringorsprings,especiallyinthecaseofthefour-barlinkagesuspension,makesprogressivesuspensionpossible.
Fig.5-3Schemesoffrontsuspensionwithpushedandpulledwishbones.
Fig.5-4Schemesoffrontfour-barlinkagesuspension.

Fig.5-5Schemesoffour-barlinkagefrontsuspensionwithprismaticpairs.
Avariantofthefour-barlinkagefrontsuspensionisobtainedbysubstitutingarevolutejointwithaprismaticjoint,asillustratedinthediagramontheleftinFig.5-5.Thiskinematicdesignhasthedisadvantagethattheverticalmovementofthewheelinrelationtothechassiscausesrotationinthehandlebarsaroundtheupperrevolutejointfastenedtothechassis.ThisdisadvantageisgreatlyreducedinthedesignontherightinFig.5-5,whichisobtainedbymovingtherevolutejointfastenedtothechassisinrelationtothesteeringheadaxis.ThisdesignsolutionisusedintheBMW“Telelever”suspension.
5.2.2Rearsuspens ion
Theclassicrearsuspensioniscomposedofalargeforkmadeupoftwotrailing-ingarmswithtwospring-damperunits,oneoneachside,inclinedatacertainanglewithrespecttotheswingingarm.(Fig.5-6).
Theprincipaladvantagesofthetraditionalrearsuspensionare:simplicityofconstruction;easeofdissipationoftheheatproducedbytheshockabsorbers;largeamplitudeofthemotionofspring-damperunitswhichisnearlyequaltotheverticalamplitudeofthewheelmotionandwhichthereforecauseshighcompressionandextensionvelocitiesoftheshockabsorbers;thelowreactionforcestransmittedtothechassis.
Thegreatestdisadvantagesare:limitationoftheverticaloscillationamplitudeofthewheel;notveryprogressiveforce-displacementcharacteristic;possibilitythatthetwospring-damperunitsgeneratedifferentforcesduetodifferencesinthespringpreloadsorthecharacteristicsoftheshockabsorbers,withconsequentmalfunctioningofthesuspension,duetothegenerationofmomentsthattorsionallystresstheswingingarm.
Onevariantofthedual-strutsuspensionisthecantilevermono-shocksystem,characterizedbyonlyonespring-damperunit.Ithasthefollowingadvantagesoverthetwinshockarm:
easeofadjustmentsincethereisonlyoneshockabsorber;

smallerunsprungmass;hightorsionalandbendingstiffnesses;highverticalwheelamplitude.
Thissuspensiondoesnotenableaprogressiveforce-displacementcharacteristicandthepositioningofthespring-shockabsorberunitaboveorbehindtheenginecancauseheatdissipationproblemsfortheshockabsorber.
Intheclassicandcantileversystemtheintroductionofalinkageintherearsuspensionmakesiteasiertoobtainthedesiredstiffnesscurves.Thesedesignsaregenerallybasedonthefour-barlinkage.Theyaredistinguishedonlybythedifferentattachmentpointsofthespring-damperunit,whichcanbeinsertedbetweenthechassisandtherocker(UnitrakdesignofKawasaki)orbetweentheconnectinglinkandthechassis(Pro-LinkdesignofHonda)orbetweentheswingingarmandtherocker(FullFloaterdesignofSuzuki)asshowninFig.5-7.Modestunsprungmassesareobtained,aswellaslargewheelamplitude,butgreatreactionforcesareexchangedamongthevariouspartsofthefour-barlinkage.
Fig.5-6Schemesofrearsuspensionwithswingingarm.

Fig.5-7Schemesofrearsuspensionwithswingingarmandfour-barlinkage.
Thefour-barlinkageisalsocommonlyusedtoaccommodateashaft-drivewithuniversaljoints.Thewheelisattachedtotheconnectingrodofthefour-barlinkage.Itscenterofrotationwithrespecttothechassisisthereforethepointofintersectionoftheaxesofthetworockers.Thepositionoftherotationcenterdependsontheanglesofinclinationofthetworockers.Thesuspensionactsasifitwerecomposedofaverylongforkfastenedtothechassisinthecenterofrotation.ThiskinematicdesignisusedintheBΜW“Paralever”suspensionandintheGuzzimotorcyclesmodifiedbyMagni(withparallelrockers).
Αsuspensionbasedonasix-barlinkagehasalsobeentried(Morbidelli500GP).Thiscanpotentiallygeneratecurveswithmoreuniqueprogressionofsuspensionstiffness.Thispotentialadvantage,however,doesnotjustifythehighlycomplexconstruction.

Fig.5-8Schemesofrearsuspensionswithfour-barandsix-barlinkages.
5.3Reducedsuspens ions ti ffnes sThechoiceoffrontandrearsuspensioncharacteristics(stiffness,damping,preload)dependson
manyparameters:theweightoftheriderandthemotorcycle,thepositionofthecenterofgravityorthedistributionoftheloadsonthewheels,thecharacteristicsofstiffnessandverticaldampingofthetires,thegeometryofthemotorcycle,theconditionsofuse,theroadsurface,thebrakingperformance,themotorpower,thedrivingtechnique,etc..
Fig.5-9Equivalentfrontandrearsuspension.
Forthestudyofin-planedynamics,itisappropriatetoreducetherealsuspensiontoequivalentsuspension,representedbytwoverticalspring-damperunitsthatconnecttheunsprungmassestothesprungmass.
Theparametersdefiningequivalentsuspensionare:

reducedstiffness,reduceddamping,dependenceofthereducedstiffnessontheverticaldisplacement(progressive/degressivesuspension),maximumtravelandpreload.
5.3.1Reducedfrontsuspens ions ti ffnes s
NowconsiderthefrontforksuspensionasdepictedinFig.5-10.
Fig.5-10Reducedfrontsuspensionstiffness.
Ifsubjectedtothesameverticalload,therealfrontforkandtheequivalentverticalsuspensionhaveequalverticaldisplacements.Hence,thereducedstiffnesskfandtherealstiffnesskhavetosatisfythefollowingequation:
Considernowtheforkandtheequivalentsuspensionwithjustthedampingdevices.Ifthesameverticalvelocityonthewheelhubisimposed,theviscousverticalforcesareequal.Then,theequivalentdampingofthefrontsuspensioncfmustsatisfytheequation:

wherecrepresentsthedampingconstantofthefork.Sincetherearetwogroupsofspringdampersarrangedinparallelinthefork,thestiffnesskisequaltothesumofthestiffnessesofthetwosprings,andthedampingcisequaltothesumofthedampingofthetwodampers.Itshouldbenotedthattheincreaseinthesteeringheadangleofinclinationcausesareductioninthestiffnessanddampingcoefficientsofthereducedsuspension.
Example1
Αfrontsuspensionisrequiredwithreducedverticalstiffnesskf=14N/mm.Theangleofinclinationoftheforkisequalto30°.Determinetheactualstiffnessofeachforkspring.
Theoverallstiffnessoftheforkisequalto:
k=kfcos2ε=10.5N/mm
Thestiffnessofthesinglespringmustthereforebeequalto5.25N/mm.Ifthecasterangleisless,andequalto24°,thestiffnessofthesinglespringmustbegreaterorequalto5.84N/mm.
5.3.2Reducedrearsuspens ions ti ffnes s
NowconsidertheclassicrearsuspensionrepresentedinFig.5-11.TheelasticforceFeis
proportionaltothedeformationofthespring: wherekindicatesthestiffnessofthespring, itsinitiallengthandLmthelengthofthedeformedspring(itisafunctionoftheswingingarmangleofinclinationϑ).
TheelasticmomentMeexertedontheswingingarmisgivenbytheproductoftheforceandthevelocityratioτm,ϑ.
Me=Feτm,ϑτm,ϑistheratiobetweenthespring’sdeformationvelocityandtheswingingarmangularvelocity:
Wecanconsiderthattheswingingarmhas,inplaceoftheeffectivespring,atorsionalspringthatgeneratesamomentequaltotheonegeneratedbytheeffectivespring.Thederivativeoftheelasticmoment,withrespecttotheangleofrotationoftheswingingarm,representsthereducedstiffnessofthetorsionalspring:

fromwhich,throughsubstitution:
Thesecondtermislessimportantthanthefirst,and,inafirstapproximation,itcanbeignored.
Fig.5-11Reducedstiffnessoftherearsuspension.
Therearsuspensioncanalsobesubstitutedbyaverticalspringattachedtothewheelhub,ratherthanatorsionalspring.
ThereducedelasticforceFisequaltotheproductoftheelasticforceexertedbythespringandthevelocityratio :
where representstheratiobetweenthedeformationvelocityofthespring(whichisobviouslyequaltothevelocityofthedamper)andtheverticalvelocityofthewheel.

Inthiscase,thereducedverticalstiffnessisequaltothederivativeoftheverticalforceappliedtothewheelpinwithrespecttotheverticaldisplacementofthewheel:
Thevelocityratiodependsonthegeometriccharacteristicsoftherearsuspensionmechanismandvarieswiththeverticalwheeltravel.
Inthecaseoftheclassicswingingarm,thevelocityratiois:
wherexT,yTindicatethecoordinatesofthespring-damperpinattachedtothechassis.
Nowconsiderthedampingforce:
cindicatesthedampingconstantofthedamper.
Thedampingmomentactingontheswingingarmisgivenbytheproductoftheforceandthevelocityratioτm,ϑ:
Ms=Fsτm,ϑ
Thereduceddampingofthetorsionaldamperisobtainedbytheratiobetweenthedampingmomentandtheangularvelocity:
Substituting,weobtain:

Thereducedverticalforceis:
Thereducedverticaldamping,ontheotherhand,is:
Itshouldbenotedthattheverticalforcedependsonthevelocityratio,whilethereducedstiffnessanddampingdependonthesquareofthevelocityratio.Thevelocityratio insuspensionsystemsbasedonthefour-barlinkagevariesfrom0.25to0.5.Thismeansthatthestiffnessandthedampingofthespring-shockabsorbergroupmustbebetween4and16timesgreaterthanthevaluesofthereducedspring-shockabsorbergroup.
5.3.3Sti ffnes s curve
Thecurverepresentingtheelasticforceagainsttheverticaldisplacementofthewheelcanhavealineartrace,oraprogressivelyincreasingordecreasingone,towhichaconstant,increasingordecreasingreducedstiffnesscorresponds,asshowninFig.5-12.Thesecasesarereferredto,respectively,aslinear,progressiveordegressivesuspension.
Fig.5-12Elasticforceandstiffnessofthesuspensionversustheverticalwheeltravel.
Forthesakeofcomfortinmotion,itwouldbeappropriateforthestiffnesstobeaslowaspossible,soastominimizenaturalfrequenciesofthemotorcyclevibrationmodes,inrelationtotheexcitationfrequenciesofthemotionimposedonthewheelsbyirregularitiesintheroadplane.Verysoftsprings,however,causewidevariationsinvehicleheightastheloadvaries,aswellassignificantvariationsintrim,inthepassagefromrectilineartocurvedmotion,andduringtheaccelerationand

brakingphases.
Ontheotherhand,withirregularitiesintheroadsurface,veryhardspringscancause,besidesdrasticallyreducedcomfort,tireadherenceproblemsintherearsectionduringaccelerationandinthefrontsectioninbraking.
Toavoidthesedifficulties,moreorlessprogressivesuspensionsystemsareemployedinaccordancewiththetypeofuseofthevehicle.Substantially,progressivesuspensionprovidestwoimportantadvantages:
anincreaseinstiffnesstogetherwithanincreaseindeformation,whichenablesthemaintenanceofmoreorlessconstantfrequencyofthemodesofvibrationintheplaneasthevehiclemassincreases(anincreasecaused,forexample,bythepassengerortheluggage);thesuspensionissoftinthecaseofsmalldisturbancesandthusinthecaseofsmallwheeltravel,whileitisrigidinthecaseofhighwheeltravelduetomoreseveredisturbances.Ridingcomfortistherebyincreased.
5.3.4Pre load
Toregulatethetrimofthemotorcycle,forexample,undervariationoftheload,preloadingofthespringscanbeused.Preloadingconsistsofapre-compressionofthespring.Ifthespringisstressedwithforcesthatarelowerthanorequaltothatofpreloading,itisnotdeformed.
Theforceexertedbythespring,withpreload,is:
F=kΔy+ky
whereΔyindicatesthedeformationduetopreload.
Preloadingalsomakesitpossibletolimitdeformationincompressionofthespring-shockabsorbergroup.ThegraphofFig.5-13showsthatwithpreloading,inordertoobtainmaximumamplitudegreaterforcesmustbeappliedorconversely,thatwiththesameforceappliedtheamplitudewillbeless.

Fig.5-13Characteristicsofthesuspensionasthepreloadvaries.
Figure5-14ashowsasuspensionwithaspringthatisnotpreloaded.Thestaticloadofthesprungmasscompressesthespring-shockabsorbergroupbyanamountthatdependsonthestiffnessofthespring,assumingthatduringforwardmotionthesprungmassisnotdisplacedintheverticaldirection,i.e.itideallydoesnotencounterirregularitiesintheroadsurface.
Inorderforthewheeltofollowtheprofilewhenpassingoverahole,thespring-shockabsorbergroupneedstobeabletoextendbyaquantityequaltothedepthofthehole.Inthecaseofsuspensionwithoutpreload,theextension,orbetterthehole’sdepth,canatmostbeequaltotheratiobetweentheweightforceofthesprungmassandthestiffnessofthesuspension.
However,inthecaseofsuspensionwithapreloadedspring,illustratedinFig.5-14b,themaximumextensionofthespring-shockabsorbergroupisless,inthisexample,byaquantityequaltothepreload.
Thepreloadthereforegovernsthemaximumvalueofthewheeltravelinextension.Thecapacityofthesuspensiontofollowtheirregularitiesbelowtheroadplanedependsonthisvalue.Theseirregularitiesarecalled“negative”.Forexample,ifapreloadisappliedthatisequaltothestaticload,thewheelwillnotbeabletofollowthenegativeirregularities.Infact,inFig.5-15itcanbeobservedthat,withanincreaseintheforceofthepreload,thefieldoftheamplitudesofthesuspensionforthenegativeirregularitiesdiminishes.

Fig.5-14Suspensionwithpreloadedspring.
Anapproximatevalueofthereducedstiffnessofasuspensioncanbedeterminedonthebasisofsimplestaticconsiderations.Themaximumloadoneitherthefrontorrearwheelscanbeequaltothetotalweightofthemotorcycleplustherider.Suchcircumstancescanoccurunderthelimitingconditionofawheelingorforwardfallofthemotorcycle,respectively.Stiffnessdependsonthevalueofthewheeltravelrequiredinthiscondition:

Fig.5-15Characteristicsofthesuspensionasthepreloadvaries.
Ifitisrequiredthatforasetload(forexample,thestaticloadactingonawheelduetotheweightofthemotorcycleplustherider)thesamepreloadamplitudeapplies,thendifferentpreloadsmustbeadoptedbyvaryingthevaluesofthesuspensionstiffness,asillustratedinFig.5-16.
Fig.5-16Characteristicsofthesuspensionwithvaryingstiffness.

5.3.5Frontsuspens ions ti ffnes s
Thefrontforkshaveaslightlyprogressivebehaviorbecauseoftheinfluenceofaircontainedinthesleeves,whichactslikeapneumaticspringpositionedinparallelwiththehelicoidalspring.
Theelasticforce,withtheinfluenceofthepneumaticspring,isgivenbytheequation:
where:
kΔyrepresentstheforcegeneratedbythepreload;
kyrepresentsthelinearforceofthemetalspring.
Thethirdtermrepresentstheinfluenceofthepneumaticspring;p1indicatestheinitialairpressurecontainedinthesleeveofthefork;V1theinitialvolumeofairandAtheareaofthesectionofthecylindricalchamberthatcontainstheair.Theeffectofthecompressedairincreaseswiththedecreaseoftheinitialairvolumecontainedintheforkandtheincreaseinwheeltravely.
Thevalueofthereducedforkstiffnessvariesaccordingtotheweightofthemotorcycleanditsuse.Values(foroneforkleg)rangefromabout10N/mmforlightmotorcyclestovaluesofabout20N/mmforheavymotorcycles.Theprogressivebehaviorduetotheuseofvariablesprings,ortotheuseofseveralspringsplacedinseriesandhavingdifferentrigidities,and/ortotheinfluenceofair,causesanincreaseinthestiffnessattheendofthestroke,whichcanbeevaluatedas30to50%.
Example2
Consideramotorcyclewithatotalmass(includingtherider)of200kgandwithadistributionoftheloadsat50%-50%.Lettheunsprungmassinfrontbe18kgandtheangleofinclinationofthesteeringhead24°.
Calculatethestiffnessofthereducedspringsothatwithaloadequaltotheweightofthemotorcycletheforkiscompressedby80mm.
Themaximumweightonthespringisequaltotheweightforceofthemotorcycleminustheweightforceofthefrontunsprungmass.Theequivalentverticalstiffnessis:
Theoverallstiffnessoftheforkmustthereforebeequalto:
k=kfcos2ε=9.18N/mm

Finally,letuscalculatethedeflectionofthespring,underconditionsofstaticequilibrium,supposingthatthespringoftheforkispreloadedby20mm:
Example3
Nowletusevaluatethestiffnessofaforktakingintoaccounttheinfluenceofair.
•initialvolumeofair:casea)
•initialvolumeofair:caseb)
•crosssectionareaofthecylindricalchamber: A=10cm2;
•initialpressure: p1=1bar;
•linearstiffnessofthemetalspring: k=8N/mm;
•preload: Δy=10mm.
Figure5-17showstheincreaseinelasticforcesandstiffness,underthevariationofthedeformationofthespringfortwodifferentinitialvolumesofair.
Fig.5-17Influenceofthepneumaticspringonoverallstiffness.
Theinfluenceofthepneumaticspringbecomesimportantwhentheairvolumeisstronglycompressed.Forhighwheeltravelthevalueofthestiffnesscanevenbedoubled.Theinitialvolume

ofairinthesleevedependsonthequantityofoilcontainedinthesleeve.Alargequantityofoilcorrespondstoalowerinitialvolumeandthereforetoanincreaseintheinfluenceofthepneumaticspring.StiffnessvaluesandtheloadspresentedinFig.5-17refertoonlyonespring;thereforetheforkasawholewillhaveastiffnesstwicethatindicated.
5.3.6Rearsuspens ions ti ffnes s
Havingthecurveofdesiredprogressivebehavior,thesynthesisofthemechanismscanbecarriedoutbymeansofnumericaloptimizationalgorithms.Generally,theratiobetweentheverticalvelocityofthewheelandthedeformationvelocityofthespring-shockabsorbergroup(theinverseoftheratio
)hasvaluesvaryingfrom2to4.Thehighervalues,withequalwheeltravelrate,causesmalldeformationvelocitiesoftheshockabsorberandthereistheneedtouseshockabsorbersoflargerdimensions.
Figure5-18showsthekinematicschemeandthemovementofarearfour-barlinkagesuspension,withthespring-shockabsorbergroupfastenedbetweenthechassisandtherocker.Thismechanismmakesitpossibletogeneratecurveswithasignificantprogressiverate.Asillustratedinthecurvesofthethreeexamplesshownontherightinthefigure,thedegreeofthestiffnessrising-ratedependsonthepositionsofthespringattachmentpoint.Thegreatestvalueofthevelocityratio,andthereforethegreatestraisingrate,isattainedwhenthespringisorthogonaltotherocker.
Figure5-19representsakinematicdiagramwiththespringfastenedbetweenthechassisandtheconnectinglink.Withthisarrangementweattainverydifferentcurvesofstiffness,asthepositionofthepointtowhichthespringisattachedvaries.Theright-handfigureshowshowitispossibletoobtaindegressive,progressiveandapproximatelyconstantstiffness.
Fig.5-18Rearsuspensionwiththespringattachedtotherockerarm.

Fig.5-19Rearsuspensionwiththespringattachedtotheconnectinglink.
Example4
Consideraclassicrearsuspensionwithaswing-armhavingthefollowingcharacteristics:
•lengthofswingingarm: L=0.6m;
•distancefrompivottospring: L1=0.4m;
•lengthofundeformedspring:
Intheinitialposition,correspondingtoy=0theaxisofthewheelisloweredby100mminrelationtothepivotoftheswingingarm.
InthegraphinFig.5-20,thevariationofthereducedverticalstiffness(madedimensionlesswithrespecttotheinitialvaluecalculatedincorrespondencetoy=0)undervariationoftheverticaldisplacementofthewheelpiny,isshownforvariousvaluesoftheinitialinclinationangleofthespring.

Fig.5-20Stiffnesscurveforvariousinclinationvaluesofthespring-shockabsorbergroup.
Fig.5-21Stiffnesscurveforvariousvaluesoftheratiobetweenthespringdistanceandthelengthoftheswingingarm.
Onecanobservethatwhenincreasingtheinitialinclinationofthespring,thecurvesobtainedarecharacterizedbyagreaterstiffnessrising-rate.
Figure5-21showstheinfluenceofthepositionofthespringattachmentpoint,expressedbytheratiobetweenthearmL1andthelengthoftheswingingarmL.Itcanbeobservedthatpositioningthespringattachmentpointclosetotheswingingarmpivotcausesanincreaseinthestiffnessrate.Theprogressivebehaviorattainablewiththeclassicsuspension,withlongspringsthataregreatlyinclinedandfastenedneartheswingingarmpivot,canreach50-60%atmost.
Example5
Considerthesuspensionintheprecedingexampleandevaluatethetorsionalstiffnesswhenthe

springsareinclined135°tothehorizontal.Takethestiffnessofthespringask=80kN/m.
Thereducedtorsionalstiffnessisequalto:kϑ=4.30kΝm/radfory=0:kϑ=5.67kNm/radfory=150mm.
Inthelattercase,theprincipaltermk givesavalueof5.31kNm/rad,whilethesecondarytermgivesalowervalueof0.46kNm/rad.
5.4Cons iderations oncl imbingas tepConsideramotorcycletravelingatconstantvelocityVwhichatacertaininstantencountersastep
withheighth.Toclimbthestep,thewheelmustadvancebyadistances:
Considerfirstthecaseofamotorcyclewithnosuspensionsystems.Thetimethewheeltakestoclimbthestepisequaltotheratio:
Inthatcase,theadvancementsofthewheelcorrespondsexactlytotheadvancementofthemotorcycle.Thevelocityandverticalaccelerationofthewheelare:
Example6
Atavelocityof10m/s,awheelofradiusR=0.307mtravelsoveranobstacle50mmhighinanintervalequalto0.0168s.Inthattimethewheelclimbstoaheightequaltothestepsothattheaverageverticalliftspeedis3.3m/s.Themaximumvalueofthevelocityisreachedattheinitialinstantandisequalto6.5m/s.
Themaximumverticalaccelerationalsooccursattheinitialinstant(assumingthatthetireisinfinitelyrigid),andis555m/s2,whichis55timestheaccelerationduetogravity.Actually,theaccelerationismuchlower,sincethetireisdeformedandpartiallyabsorbstheimpulse.
Thissimpleexampleshowstheimportanceofthesuspension.
Inthecaseofamotorcyclewithsuspension,thetimetakenbythewheeltoclimbthestepdependsonthetypeofsuspensionandnolongerjustonthedimensionsoftheobstacle.
Whenthefrontwheelprovidedwithsuspensionclimbsasteptheforcetransmittedtothechassis

dependsonboththeelasticandthedampingcharacteristicsofthesuspension(Fig.5-22).Atlowvelocities,theelasticforceprevailswhileatmediumandhighvelocitiesthedampingforceisdominant.
Fig.5-22Thefrontwheelatthebeginningandendofclimbingthestep.
Example7
Letusconsiderafrontsuspensionwiththefollowingproperties:k=8000N/mandc=500Ns/m,andsupposethatwhileclimbingthesamestepofexample6thechassis(sprungmass)doesnotraise.Determinetheelasticanddampingforcesataforwardvelocityof1m/sand10m/s.
Case1:ε=27°
Theelasticforcedependsonlyonthedeformationofthespring.Itsmaximumvalueis356N.Iftheforwardvelocityislow(1m/s),theelasticforceisgreaterthanthedampingforcewhichisequalto291m/s.Atavelocityof10m/sthedampingforceprevails(2916N)andisatamaximumatthebeginningofclimbingthestep.
Case2:ε=33°.
Astheangleofinclinationoftheforkincreases,boththemaximumvalueoftheelasticforce(335N)andthatoftheviscousforce(2740N)diminish.
Letusnowconsidertherearwheelprovidedwithasuspension.Letusassumethattheverticalpositionofthevehiclechassisdoesnotchangewhileovercomingtheobstacle,orthattheswingingarmpivotmovesalongthex-axis(Fig.5-23).
Thetimenecessaryfortherearwheeltopassfromtheinitialtothefinalpositiondependsonthevelocityofthevehicleandthegeometryofthesuspension(lengthofthefork,radiusofthewheel,initialangleofinclinationofthefork).Thetimeneededtorunovertheobstacleisgivenbythefollowingexpression:

where:
ϑ1indicatestheinitialangleofinclination;ϑ2indicatesthefinalangleofinclination;sindicatesthedistancebetweenthepinofthewheelandthestep.
ThetimeΔtemployedbythewheeltoclimbthestepcandifferfromthetimeusedbythevehicletotravelthedistances:whenthewheelclimbsthestepandadvancesbydistancesinthesametimeusedbythevehicletoadvancebythesamedistances,thebehaviorofthesuspensionisdefinedasneutral.InthecaseofclimbingtimesΔtthatexceedthoseoftheneutralsuspension,thebehaviorofthesuspensionisreferredtoaspositive.
Fig.5-23Therearwheelatthebeginningandendofclimbingthestep.
Thesuspensionhaspositivebehaviorwhenthefork,inboththeinitialandfinalpositions,remainsbelowthexaxis(Fig.5-24);inthecaseofclimbingtimesΔtthatarelowerthantheneutralsuspension,thebehaviorofthesuspensionisreferredtoasnegative.Thesuspensionbehavesnegativelywhentheforkremainsabovethexaxisinboththeinitialandthefinalposition(Fig.5-25).
Thecirculartrajectorydescribedbythecenterofthewheelinclimbingthestepisthereforecoveredindifferingtimesaccordingtothetypeofbehaviorofthesuspension.Inthecaseofsuspensionwithpositivebehavior,thetrajectoryistraversedinagreatertimeinterval.Thissubjectsthewheeltolowerverticalaccelerations.Inparticular,thedeformationlawofthespring-shockabsorbergroupshowsloweracceleration.
Fig.5-24Rearsuspensionwithpositivebehavior(s<VΔt).

Fig.5-25Rearsuspensionwithnegativebehavior(s>VΔt).
Example8
Letusconsiderarearwheelwiththefollowingproperties:
•wheelradius: Rr=0.307m;
•swingingarmlength: L=0.6m;
•obstacleheight: h=0.05m;
•velocity: V=10m/s.
Thepeakvalueofverticalaccelerationdependsonthebehavioroftherearsuspension:

Asmentionedearlier,peakaccelerationislowerinthecaseofpositivesuspension.Thepeakvalueincreasesastheradiusofthewheeldecreases.Adiminutionof10%inthewheelradiuscausesa5%increaseinthepeakaccelerationvalue.
Adiminutionofthedeformationvelocityoftheshockabsorberisobtainedbyincreasingtheinclinationofthespring-shockabsorberunit.Forexample,passingfromtheverticalpositiontoanangleof45°reducestheviscousforcemaximumby35%.
Thesameconsiderationscanalsobeextendedtothefrontsuspension.Theclassictelescopicforksuspensionispositivewhilethepulledorpushedarmsuspensioncanbepositiveornegativeaccordingtothearm’sangle.
Fig.5-26Frontsuspensionwithforwardarmswithnegativeandpositivebehavior.
5.5Sl ippingofthe rearwhee l contactpointConsideramotorcycletravelingatconstantvelocityunderathrustthatisalsoconstant.
Actually,thetransmissionofthethrustforcealwaysoccursinthepresenceofarelativeslipbetweenthetireandtheroad(theperipheralvelocityofthetireisgreaterthantheforwardvelocityofthemotorcycle).Supposethethrustforceisconstantandthereforetherelativeslipisalsoconstant.
Ifthereisrelativemotionbetweenthechassisandtheswingingarm(forexample,becauseofirregularitiesintheroadplane),therewillbeextraslipthatwillbeaddedto,orsubtractedfrom,thenecessaryslipduetothethrust.
Toevaluatetheamountofslipduetotheoscillationsoftheswingingarm,weneedtoconcentrateourattentionontherelativemotionofthereararmwithrespecttothechassis.

Themodelcanbesimplifiedbyassumingthatthedrivingsprocketconcentricwiththeaxisoftheswingingarmandthatthemotorcycleisstoppedwithitsengineoff(Fig.5-27).
Letussupposethatinitiallythesprocketislocktogroundwiththeswingingarmandwheelfreetorotate(Fig5-27b).IftheswingingarmisrotatedbytheangleΔϑ,thepointofcontactofthechainonthedrivesprocketisrotatedbythesameanglewhileaportionofthechainoflengthΔϑrp,equaltotheproductoftheangleofrotationbytheradiusofthesprocket,doesnotrotate.
Inthissituation,thewheelissubjectto:acounterclockwiserotationΔϑ,duetotherotationoftheswingingarm(Fig.5-27b),aclockwiserotationΔβ,causedbytheextensionofaportionofthechainfromthelargerwheelsprocket(Fig.5-27c).
TheclockwiserotationΔβisequalto:
indicatesthetransmissionratiobetweenthedrivingsprocketandtherearsprocket.

Fig.5-27Slippageofthecontactpointoftherearwheel.
LetΡbethepointbelongingtothetirewhichattheinitialinstantrepresentsthecontactpointbetweenthetireandtheground.Followingtheoscillationofthefork,itisrotatedthroughtheangle:
Δα=(1−τcp)Δϑ
αthereforerepresentstheslideangleduetotherotationoftheswingingarm.ΑslidelengthofαRrcorrespondstotheslippageangle(Rrindicatestheradiusofthewheel).
Inconclusion,givingacounterclockwiserotationontheswingingarm,i.e.,compressingtherearsuspension,causesaslipthatisaddedtothatneededtotransmitthethrust.Therefore,itiscorrecttostatethattheslipbetweenthewheelandthegroundincreasesduringthecompressionofthesuspensionanddiminishesduringitsextension.
Ifwesupposethattheswingingarmissubjecttoanoscillatorymotion:
Δϑ(t)=ϑo+Δϑsinωt
theangularvelocityofslippageofthecontactpointis:
ThismeansthatduringforwardmotionatconstantvelocityV,afluctuatingcomponentissuperimposedontheconstantangularvelocityofrotationofthewheelΩ=V/Rr.Actually,theslippageduetotheswingingarmoscillationstransmitsfluctuationstothesprocketmotionaswell,sothattheirregularityofthemotor ’srotationisincreased.Inthesameway,thepullonthechainiscomposedofaconstanttension,towhichafluctuatingtensiongeneratedbyswingingarmoscillationisadded.
Inthemoregeneralcaseinwhichthesprocketisnotconcentricwiththeswingingarmpivot(Fig.5-28),theexpressionfortheslippageofpointPrisslightlymodified.

Fig.5-28Theslippageofthecontactpointoftherearwheelwithasprocketkeyedinagenericposition.
Infact,thechainrotatesthroughanangleΔηwhichissmallerthantherotationangleΔϑimposedontheswingingarm.Furthermore,thedistancebetweenthepointsoftangencyofthechainwiththerearsprocketandthedrivingsprocketvarieswiththevariationoftheswingingarmrotationangle.
Thelengthoftheupperbranchofthechainisatamaximumwhentheaxisofthedrivingsprocketisalignedwiththeswingingarmaxis(Fig.5-29).
Fig.5-29Maximumlengthoftheupperbranchofthechain.

ThewheelrotatesinacounterclockwisedirectionequaltoΔϑandasimultaneousclockwiserotationequaltoΔβ:
ΔLcrepresentsthevariationinlengthoftheupperbranchofthechain(areductionhasanegativesign).ThepointPofthetirethereforerotatesthroughtheangle:
Δα=Δϑ−Δβ
SincethetermΔLcisnegligiblewithrespecttotheproductΔηrp,theslidingvelocitydependssubstantiallyonthetransmissionratiobetweenrearsprocketanddrivingsprocketandontheangleΔϑwhichdependsonthelengthoftheswingingarm.
5.6Models withone degree offreedomThemotorcycle,instraightrunning,ischaracterizedbyfivedegreesoffreedom(oneofwhichis
associatedwiththevehicleforwardmotion),andismadeupofthreerigidbodies:thesprungmass(chassis,engineandrider);therearunsprungmass(wheel,brakeandpartoftheswingingarm);thefrontunsprungmass(wheel,brakeandpartofthefork).
Ingeneralthein-planemotionofthemotorcyclecanbeconsideredasthecombinationofaverticalmotion(bounce)andarotatingmotion(pitch).Thesetwomotionscorrespondtothevibrationmodesofthemotorcycleintheplane.
Onlybyignoringtheunsprungmasses,andconsideringthesystemoftwodegreesoffreedomasuncoupled,wecantreatthemotorcycleintheplanewithtwomodelseachhavingonedegreeoffreedom:onefortheverticalbounceandtheotherforthepitchingmotion(Fig.5-30).Consideringthemotorcycleasanuncoupledsystemisthesameasassumingthat,imposingaverticaldisplacementofthechassis,theconsequentmovementiscomposedonlyofverticaloscillationsorthat,imposingarotationofthechassisaroundanaxispassingthroughthecenterofgravity,theresultingmotionisoneofpurepitch.

We,therefore,considerthatthemotorcycleintheplaneiscomposedofonlyonesprungmass,sustainedbytwosprings,whichrepresenttheactionofthesuspensionandthetires.Thereducedstiffnessofthesuspensionisconnectedinserieswiththestiffnessofthetires,sothattheequivalentelasticconstantsKfandKrforthefrontandrearsectionsrespectively,are:
where:
kfisthereducedstiffnessofthefrontsuspension;kristhereducedstiffnessoftherearsuspension;istheradialstiffnessofthefronttire;istheradialstiffnessofthereartire.
Fig.5-30Principalvibrationmodesintheplane.
Example9
Consideramotorcyclewithareducedrearsuspensionstiffnessofkr=20N/mm.
Comparetheoverallstiffnessofthesystemwitharatherstiff( )andaratherdeformabletire( )reartire.
WitharadiallystiffreartiretheoverallstiffnessisKr=18.5N/mm(-7.4%),whilewitharatherdeformablereartiretheresultisKr=17.1N/mm(-14.3%).

5.6.1Bounce andpitchmotion
Theequilibriumequationsofverticalforcesandthemomentaboutthehorizontalaxis:
providetheexpressionsfornaturalfrequenciesoftheverticalbouncemode,andforthepitchingmode,where isthepolarmomentofinertiaaroundtheyaxis.
Thenaturalfrequenciesνb,νprespectively,fortheverticalbouncemotionandthepitchmotionare:
Ingeneral,theradiusofinertiaρislessthanthedistancesband(p−b)sothatthefrequencyofthepitchingmotionνpisgreaterthanthatoftheverticalbouncemotionνb.
Inthissection,wehaveassumedthatthetwomainvibrationmodesareuncoupled.Thisisanidealconditionthatisnotmetinrealitybecausethesetwomodesaregenerallycoupledtoeachother.Thecouplingofthemodescanbeexperiencedbyuniformlyloweringtheentiremotorcycle,withoutallowingittorotateandthenleavingitfreetovibrate.Itiseasytoverifythatboththeverticalandthepitchmotionsareexcited.Inthesameway,byimposingarotationofthemotorcyclearoundthecenterofgravityboththepitchandtheverticalmotionsareexcited.
Fig.5-31Modesofvibrationintheplane.

Inconclusion,becauseoftheroadirregularities,themotorcycleoscillateswithamotionthatisacombinationoftwovibrationmodes;i.e.,themotorcycleoscillatesverticallyandpitchesatthesametime.
Example10
Consideramotorcyclewiththefollowingcharacteristics:
•wheelbase: p=1.4m;
•distancefromthecenterofgravitytotherearwheel: b=0.7m;
•sprungmass m=200kg;
•pitchmomentofinertia:
•reducedstiffnessofthefrontsuspension: kf=15kN/m;
•reducedstiffnessoftherearsuspension: kr=24kN/m;
•radialstiffnessofthetires:
Determinetheequivalentstiffnessofthefrontandrearsections.Thendeterminethebounceandpitchfrequencies.
Theequivalentstiffnessesare:
•frontstiffness: Kf=13.85kN/m;
•rearstiffness: Kr=21.18kN/m.
Thenaturalfrequenciesofthetwomodesofvibrationare:
•bouncemotion: νb=2.11Hz;
•pitchmotion: νp=3.38Hz.
Thefrequencyoftheverticalbouncemotionislessthanthatofthepitchmotion(νb<νp).Resonanceoccursincorrespondencewiththefollowingvaluesofthevehiclevelocityinthepresenceofanirregularityontheroadplanewithawavelengthof6m,

•bouncemotion: criticalvelocity=12.64m/s;
•pitchmotion: criticalvelocity=20.29m/s.
5.6.2Wheel hopresonance
Thesuspensionstiffnessvaluesaresignificantlylowerthanthosefortirestiffness(tirestiffnessisapproximately6-12timessuspensionstiffness).Theunsprungmassmis,therefore,connectedtothegroundwithahardspringandtothesprungmasswithasoftspring.Inafirstapproximation,theinfluenceoftheconnectiontothesuspendedmasscanbeignored.Inthisway,theunsprungmass,elasticallysupportedbytheverticalstiffnessofthetirealone,canberepresentedbyasimplesystemwithonedegreeoffreedom.Thereforethenaturalfrequencyoftheverticalmotionoftheunsprungmassis(Fig.5-32):
Fig.5-32Modelwithonedegreeoffreedomoftheverticalmovementofthewheel.
Example11
Considerthemotorcycleofthepreviousexample.
Withtheunsprungmasses,15kgonthefrontand18kgontherear.Determinethenaturalfrequencies.
Thenaturalfrequenciesare:
•verticalmotionofthefronttire:
•verticalmotionofthereartire:
Withanirregularityintheroadplanewithawavelengthof3m,theconditionofresonanceoccursin

correspondencewithavehicleforwardvelocityof52.3and47.5m/s,respectively,forthefrontandrearwheels.
5.7Twodegree offreedommodelIfweignoretheunsprungmasses,thesystemhastwodegreesoffreedom.Theycanbeassociated
withtheverticaldisplacementofthemotorcyclecenterofgravity(sprungmass),andwithitspitchrotationaboutahorizontalaxis(Fig.5-33).
Fig.5-33Modelofthemotorcycleintheplanewithtwodegreesoffreedom.
Whenstudyingthemodesofvibration,havingignoredtheunsprungmasses,doesnotleadtosignificantinaccuraciessincethestiffnessofthesuspensionis6to12timessmallerthantheverticalstiffnessofthetires.Theinfluenceoftheunsprungmassesbecomesimportantatmediumandhighfrequenciesoftheirregularitiesintheroadplane,i.e.,athighvelocitiesandshortwavelengths.
Thefreeoscillations,ignoringthedampingeffect,aredescribedbythefollowingequations:
Thefrequencyequationisthen:
Thetworootsoftheequationaretheundampedsystem’stwonaturalfrequencies.Theratiobetweentheamplitudesoftheverticaloscillationandthepitchoscillationisgivenbytheequation

ωiindicatesthenaturalfrequencyofthevibrationmodeconsidered.
Theseexpressionsrepresentthedistancefromthecenterofrotationtothecenterofgravity.
Example12
Considerthemotorcycleinexample10.
Thenaturalfrequenciescalculatedwiththetwodegreesoffreedommodel,are:
•verticalbouncemotion: νb=2.02Hz;
•pitchingmotion: νp=3.42Hz.
Thesevaluesdifferatmostby4%withrespecttothecorrespondingvaluescalculatedwhenconsideringtwouncoupledsystemswithonedegreeoffreedomeach.
Thefirstmodeofvibration,representedinFig.5-34,isbasicallyaverticalbouncemotionofthemotorcycle.Theinstantaneousrotationcenterislocatedbehindthemotorcycleatadistances1=2.08mfromthecenterofgravity.
Fig.5-34Firstmodeofmotorcyclevibrationintheplane(verticalbouncemode,i=1).
Thesecondmode,representedinFig.5-35,isessentiallyapitchmode,itsrotationcenterislocatedimmediatelyinfrontofthecenterofgravity,atadistanceofonlys2=0.09m.

Fig.5-35Secondmodeofmotorcyclevibrationintheplane(pitchingmodei=2).
Onlyifthefollowingconditionbetweenstiffnessesanddistancesisfulfilledcanthetwomotionequations,forzandμrespectively(p.174),beuncoupled:
−Krb+Kf(p−b)=0
Therefore,thenaturalfrequencieswillbeequaltothosepreviouslydeterminedinthemodelswithonedegreeoffreedom.
Inthiscasethefirstmode,calledthebouncemode,nowbecomesapureverticaltranslationwhilethesecondmode,calledthepitchmode,becomesapurerotationaroundthecenterofgravity.Inthiscasewherethemodesarenotcoupled,thedistances1fromtherotationcenterofthefirstmodetendstowardsinfinity,whilethedistances2fromthecenterofrotationofthesecondmodeiszero.
Example13
Considerthemotorcycleofthepreviousexample.Determinethevalueofbneededtouncouplethebounceandpitchmodes.
Theuncouplingofthepitchmotionfromthebouncemotioncanbeaccomplishedbyreducingthedistancebtoavalueof0.55m.Consequentlythedistributionoftheweightsbecomes40%onthefrontsectionand60%ontherear.
Theuncouplingcanalsobeobtainedbymodifyingthestiffnessofthesuspensions.Sincethedistances(p−b)andbareequal,thestiffnessofthefrontsuspensionneedstobeequaltothatoftherearsuspension,i.e.,equalto24kN/m.
5.8Fourdegrees offreedommodelAsmentionedearlier,themotorcycleinitsplaneofsymmetrycanberepresentedasthreerigid
bodieswhosevibratingmotionisdescribedbyfourindependentcoordinates,asillustratedinFig.5-

36:theverticaldisplacementofthesprungmasscenter;thepitchingrotationofthesprungmass;theverticaldisplacementsofthetwounsprungmasses(theequivalentmassesatthecenterofthewheels).
Fig.5-36Diagramofthemotorcyclewithfourdegreesoffreedom.
Theequationsoffree,undampedmotionaresummedupinthefollowingmatrixequation:
Thenaturalfrequenciesarecalculatedbysolvingtherelatedeigenvalueproblemnumerically.Rewritingtheequationsoffreemotion,usingcoordinateszf,Zf,zr,Zr,bringssomeinterestingpointstolight.

Observingthemassmatrix,wenotethatthefirsttwoequationsareuncoupledfromtheothertwoifthefollowingtermiszero:
Thatis,theproductofthedistances(p−b)andbequalsthesquareoftheinertiaradius .
Inthiscase,thefourequationsrepresenttwomono-suspensionswithtwodegreesoffreedomthatareindependentofeachother,asshowninFig.5-37.Thefirsttwoexpressionsdescribethebehaviorofthefrontmono-suspension,whilethelasttwodescribetherearone.

Fig.5-37Mono-suspensionsofthefrontandrearsections.
Fromaphysicspointofview,thismeansthatthesuspendedmasscanberepresentedbyanequivalentdynamicsystemcomposedoftwomassesplacedattheextremitiesincorrespondencewiththetwowheels:
Thesuspendedmassmisdistributedbetweenthefrontsection(Mf)andtherearsection(Mr)inthesameproportioninwhichthestaticloadsonthewheelsaredistributed.
Itisvitaltospecifythatthisconditionisdifficulttoaccomplishunderrealconditions(withreferencetothesuggestedexample,theproductofthedistances(p−b)bisequalto0.49,whilethesquareoftheinertiaradiusis0.44),neverthelessitisimportantfromaphysicspointofview.Therefore,inassumingthatthisconditiondoesapply,itispossibletoconcludethattheverticaldisplacementsofthefrontandrearsectionswilloccurindependentlyofeachother,andthat,therefore,thepitchingmotiondependsonthevalueofthephasebetweenthetwoverticalmotions.
Ignoringtheunsprungmasses,thenaturalfrequenciesofthetwosystemscanbeeasilycalculated.Forthefrontandrearsections,wehave:

ThesefrequenciesareequalifthenecessaryconditionfortheuncouplingoftheverticalmotionfromthepitchingKrb=Kf(p−b)issatisfied.
Inthiscase,thebouncehasthesamefrequencyasthepitchmotion,sothateachfreemotionismadeupofacombinationofverticalandrotationaloscillationswiththesamefrequency.
Generally,thefrontsuspensionhasarelativelylowerstiffnessthantherearsuspensionand,therefore,thefrequencyofthefrontsectionislowerthanthefrequencyoftherearsection.Inpercentagetermsνfisequalto70to80%ofνr.
Thesuspensionstiffnessrequirementcanbeevaluatedonthebasisofconsiderationsonthefrequenciesofthefrontandrearsections.Forgoodridingcomfort,thetwofrequenciesshouldhavevaluesaround1.5Hz,andthepitchrotationcentershouldbelocatedintheareaoftherider ’sseat.
Inracingvehicles,knownfortheirratherrigidsuspensions,thenaturalfrequenciesvaryfrom2Hzto2.6Hz.
Usuallyinstreetmotorcyclesandinscooters,thedistance(p−b)isgreaterthanb,andthereforeinordertoobtainthesamenaturalfrequencyatboththefrontandrearsections,thestiffnessatthefrontshouldbeassumedtobelessthantherear.
Toevaluatetheapproximatevaluesofthefrequenciesofthefrontandrearsectionsexperimentally,thestaticdeflectionsΔf,Δr,duetotheweightpressingonthetwowheelsneedtobemeasured.Assuchthecorrespondingfrequenciesaregivenbytheequations:
Hence,forafrequencyof2Hzastaticdeflectionof60mmisrequired.
Example14
Considerthevehicledescribedpreviouslyandsupposethattheunsprungmasseshavethefollowingvalues:
•frontmass: mf=15kg;
•rearmass: mr=18kg.

Determinethefournaturalfrequenciesofthesystem.
Thefournaturalfrequenciesare:2.03,3.42,16.98,18.18Hz;itisusefultorecallthatthenaturalfrequenciesofthesprungmass,calculatedwhiletheunsprungmassesareignored,areequalto2.11,3.38Hz,whilethoseoftheunsprungmassesareequalto15.91and17.43Hz.
Example15
Thesprungmassesonthefrontandrearsectionsare,inthecaseofloaddistribution50%-50%,equaltoMf=Mr=100kg.Determinethenaturalfrequenciesofthefrontandrearsections.
Ignoringtheunsprungmasses,thenaturalfrequenciesare:
•frontsectionfrequency: νf=1.87Hz;
•rearsectionfrequency: νr=2.32Hz.
Inpercentageterms,νfisequalto81%ofνr.
Example16
Αmotorcyclewithaweight(includingtherider)of1970Νhasafrontunsprungmassof14kgandarearoneof16kg.Witha50%-50%distributionoftheloads,calculatethefrontandrearreducedstiffnessesinsuchawaythatthefrontfrequencyisequalto1.9Hzandthatoftherear2.3Hz.
Themassespressingdownonthesuspensionsare:
Theoverallfrontandrearstiffnessesare:
Thereducedstiffnessesofthesuspensions,takingintoaccountthetirestiffnesses,havethevalues:

InFig.5-38thein-planemodesofvibrationofthemotorcyclearegiven,calculatedwithamathematicalmodelthattakesintoaccountthemotorcyclegeometry.Themeaningofthedampingratiowillbeexplainedinthenextsection.
Fig.5-38Modesofvibrationintheplane.
5.9Onedegree offreedommono-suspens ion
5.9.1Osci l latorymotionimposedbyroadirregulari ties
ConsideramotorcyclerunningonasinusoidalprofileroadatconstantvelocityVandsupposethatthemotorcyclecanberepresentedbytwoseparatemono-suspensions.Supposefurthermorethattheunsprungmassesarenegligible.Themodelofthemono-suspensionwithonedegreeoffreedomcan

representeitherthefrontorrearsuspensions.
Fig.5-39Suspensionexcitedbytheroadplane.
Considerthefrontsuspensionaffectedbythemotioncausedbyroadirregularities,representedinFig.5-39.Thecontactpointofthewheelwiththeroadprofilemovesinharmonicmotionaccordingtothelaw:
y=yosin2πνt
ν=V/Lrepresentsthefrequencyofthemotionimposedonthesystembytheroadirregularities:
Itcaneasilybedemonstratedthatinsteadystate(periodicresponse)theratiobetweentheamplitudeZooftheverticalmotionofthesprungmassandtheamplitudeyooftheimposedmotionis:
νnrepresentsthefrequencyofthemono-suspension.TheratioTiscalledtransmissibility.InFig.5-40thetransmissibilitycurvesTforvariousvaluesofthedampingratioζaregiven.Itisusefultorecallthatthedampingratioisgivenbytheequation:

Fromthegraphitisclearthatthetransmissibility,foranyvalueofthedamping,isalwaysequaltooneatthevalue ofthefrequencyratio.Thisvalueappearswhentheforwardvelocitysatisfiestherelationship:
Ifthewavelengthisequalto6mandthenaturalfrequencyisequalto2Hz,thetransmissibilityhasavalueofunitywhentheforwardvelocityisequaltoapproximately17m/s.
Theplotclearlyhighlightsthat:forvaluesofthefrequencyratiolessthan (velocityV<17m/s),theintroductionofsuspensionincreasestheoscillationamplitude(T>1).Therefore,theapplicationofsuspensionisuseful(T<1)onlyforvaluesofthefrequencyratiogreaterthan (velocityV>17m/s);highvaluesofthedampingratioattenuatetheincreaseintransmissibilityforratiosofthefrequencieslessthan (velocityV<17m/s),buttheyworsentheresponsivenessofthesystemathighvelocities(velocityV>17m/s).
Forthestudyofridingcomfort,theverticalaccelerationgraphofthemotorcycleismoreinteresting.Therider(whichinthismodelisassumedtobefixedtothemotorcycleandforcedtomovealongtheverticalaxis),perceivesasensationofcomfort,whichisrelatedtotheaccelerationstowhichhisbodyissubjected.
Fig.5-40Displacementtransmissibilityversusthefrequencyratio.
Figure5-41representsthetransmissibilityofverticalacceleration,asafunctionoftheratioofthe

frequencyforvariousvaluesofthesuspensiondampingratio.
Fig.5-41Transmissibilityofaccelerationsversusthefrequencyratio.
Allthecurvesassumethevalueof2,whenthefrequencyratioisequalto ,butwithdifferentslopes.Theslopeiszerowhenthevalueofthedampingratioisequalto:
Thecurvecharacterizedbysuchaslopeensuresminimumaccelerationsaroundthepointν/νn=2.Theratioζ=0.354representstheoptimalvaluearoundthepointconsidered.Thegraphallowsustodrawthefollowingimportantconclusions:
thesuspensionbehaveslikeafilterthatcutsthehighfrequenciesandamplifiesthosefoundinanarrowbandaroundtheconditionofresonance.asignificantincreaseinridingcomfortcanbeobtainedbyreducingthemotorcycle’snaturalfrequencyvalues.Thisreductioncanbeobtainedbydiminishingsuspensionstiffness,thatisbyusingsoftersprings.Itmustbenoted,however,thatexcessivelysoftspringscancompromisethevehicletrimespeciallyinphasesofrapidaccelerationorsuddenstops.
5.9.2Optimal value ofthe dampingratio
Considerthemono-suspensionillustratedinFig.5-42,andsupposethatthemassisoscillatingfreelyandthat,attheinitialinstant,itpassesthroughthepositionofstaticequilibriumatvelocityZo.
Thelawofharmonicmotion,assumingzerodamping,is:
Themaximumvalueofaccelerationis:

Fig.5-42Mono-suspension.
Inordertoreducemaximumacceleration,itisnecessarytoattachaviscousshockabsorbertothespring;hence,themassoscillatesfreelyafteradisturbanceaccordingtothefollowinglaw:
whereqnindicatesthenaturalfrequencyofthedampedmono-suspension.
Theevaluationofridingcomfortcanbeassociatedwiththemaximumpeakofverticalaccelerationofthesprungmass.Thebestcomfortoccurswhenpeakaccelerationisataminimum.
ThegraphofFig.5-43showsthecourseoftheverticalaccelerationofthesprungmassforseveralvaluesofthedampingratio.Theidealconditiontoprovideacomfortablerideiswithadampingratiovalueof0.35,atwhichtheaccelerationbecomesminimal.
Itisimportanttonotethattheoptimalvalueofthedampingratiocoincideswiththatderivedpreviouslyonthebasisoftheperiodicresponseinsteadystate.

Fig.5-43Accelerationafteraroadbumpforvariousvaluesofthedampingratio.
5.9.3Cons iderations ons ingle anddouble e ffectshockabsorbers
Supposethatthemono-suspensionmovesalongacosinusoidalshapedbumpandassumethatthetimenecessaryforthevehicletotransittheirregularityissmallcomparedtotheinverseofthenaturalfrequencyofthesystem(Fig.5-44).
Theviscousshockabsorberaffectsthemotionofthesprungmassduringthepassageovertheroadirregularity.Weevaluateitsinfluenceinthreecases:
ashockabsorberwithconstantcactinginboththecompressionandextensionphases(doubleeffect);ashockabsorberwithconstant2cactingonlyinthecompressionphase(singleeffect);ashockabsorberwithconstant2cactingonlyintheextensionphase(singleeffect).
Fig.5-44Mono-suspensiontravelingoverabumpandoverastep.

Example17
Consideramono-suspensionwiththefollowingproperties:
•sprungmass: M=140kg;
•stiffness: K=20kN/m;
•dampinginextensionandcompression C=1171Ns/m,ζ=0.35;
•dampingonlyinextension: C=2342Ns/m;
•dampingonlyincompression: C=2342Ns/m.
Determinethenaturalfrequency.
Thenaturalfrequencyνnisequalto1.9Hz.
Passingoverabump
Thebumphasaheightof0.008mandalengthof0.6m.Withaforwardvelocityof15m/s,thebumpispassedoverin0.04s;itisassumedthatthewheelneverdepartsfromtheroadprofile.
Figure5.45showsthecourseofthedisplacementofthesprungmassversusthetime.Itcanbenotedthatadoubleeffectdamperbehavesoptimally,sinceithaslessdisplacementfromthepositionofstaticequilibrium.
Fig.5-45Travelingoverabump:evolutionofthedisplacementofthesprungmass.
Thebehaviorofthedoubleeffectshockabsorbercanbeeasilyexplainedifthetimeemployedindrivingoverthebumpiscomparedwiththenaturalperiodofthesuspension.Sincethenaturalperiod

isofalargerorderofmagnitude,analmostimpulsiveforceonthesprungmassisexertedontheshockabsorber,firstwithapositivesignandthenwithanegativesign,whichproducesoverallequaleffectsofoppositesign.
However,inthecaseofashockabsorberactingonlyinthecompressionorextensionphase,thesprungmassundergoes,respectively,apositiveornegativeimpulse.
Fig.5-46Travelingoverabump:evolutionoftheaccelerationofthesprungmass.
Theaccelerationgraph(Fig.5-46)highlightsanimportantaspect.Theshockabsorberwithdampingonlyinextensionhasthecharacteristicofdrasticallyreducingthepositiveaccelerationofthesprungmass,sothattheriderisnotsubjectedtoannoyingaccelerationsupwardthatcouldthrowhimoffthesaddle.
Passageoverastep
Nowconsiderthemono-suspensionpassingoverastep.Figure5-47highlightsthedifferentbehaviorofthemono-suspensioningoingoverthestepcomparedtothepassageoverabump.Thesuspensionwiththeshockabsorber,whichoperatesonlyinextension,enablesapassageoverthestepwithoutharmfuloscillationsofthesprungmass.

Fig.5-47Passageoverastep:evolutionofthedisplacementofthesprungmass.
Theshockabsorberthatisactiveonlyincompressionisstressed(theforceisproportionaltovelocity)atalevelsuchastocompromiseitsintegrity.
Fig.5-48Passageoverastep:evolutionofaccelerationofthesuspendedmass.
Forthepurposeofridingcomfort,thegraphrepresentingtheaccelerationofthesprungmassagainsttime(Fig.5-48)clearlyshowsthattheshockabsorbermustactprimarilyinextension.
5.10Characteris tics ofshockabsorbersWehaveseenthatthedampingcoefficientincompressionshouldbelowerthanthatinextension,
becausewhenawheelencountersasteporabump,itmustfollowtheprofileoftheobstaclewithoutgeneratingtoomuchopposingforce.Whileifitencountersarutorapothole,itcanjumpoveritwithonlyatemporarylossofwheelcontactwiththeroadplane.

Theshockabsorbercharacteristicsarerepresentedinatypicalgraphthatshowstheforceontheordinateandthedisplacementoftheimposedharmonicmotionontheabscissa,asillustratedinFig.5-49.
Fig.5-49Diagramoftheforcegeneratedbyashockabsorber.
Asthefrequencyoftheimposedmotionincreases,wideclosedcurvesarise,theareaofwhichrepresentstheenergydissipatedbythedamping.Theenergydissipatedbythedouble-effectshockabsorberisproportionaltothefrequencyandtothesquareoftheamplitudeΔoftheimposedharmonicmotion:
ceandccindicatetheconstantdampingcoefficientsrespectivelyinextensionandcompression.
Inadditiontoitsnon-linearity,duetotheasymmetryofthedampingcoefficientinrebound(deformationvelocity>0)andincompression(deformationvelocity<0),theshockabsorberwillhave

adampingcoefficientthatvarieswiththevelocity.Dependingonhowmuchthedampingcoefficientdependsonthevelocity,wecanhaveprogressiveordegressivebehavior.
linearshockabsorber
progressiveshockabsorber
degressiveshockabsorber
Theexponentngivesthedegreeofdependenceofthedampingcoefficientonthevelocity.
Theareaoftheforce-displacementgraphrepresentstheenergydissipated.Itcanbeobservedthatwithequalmaximumforce,thedegressiveshockabsorberdissipatesmoreenergythanthelinearandprogressiveones.Fig.5-50givesacomparisonofthecharacteristicgraphsforthreecases:
lineardamping;progressivedamping;degressivedamping.
Thechoiceoftheshockabsorberanditscalibrationaremadewiththefollowingfeaturesinmind:theoverallenergytobedissipatedinacycle;thedistributionoftheenergytobedissipatedinthetwophasesofextensionandcompression;thevalueoftheprogressiveordegressivepropertyoftheshockabsorber.Asfarasthequantityofenergytobedissipatedisconcerned,wehaveseenthat,forthesakeofacomfortableride,theaverageofthecompressionandextensioncoefficientsmustgenerallyhaveavalueofaround30-35%withrespecttothecriticaldamping.
Ingeneral,thedampinginthecompressionphaseislessthanhalfofthatinextension.Thedistributiondependsonthemotorcycletypeaswellassuspensionstiffness.Someridersprefersomewhatrigidsuspensionwithlittledampingincompression;otherspreferadditionaldampingincompression,andsoftersuspension.
Degressivedampinghastheadvantagethatitdissipatesagreaterquantityofenergyatanequalmaximumforcelevel.ItcanbenotedinFig.5-50thattheareaoftheforce-strokegraphisgreaterinthecaseofdegressivedamping.
Wehaveseenthatthereduceddampingisequaltotheproductoftheactualdampingcoefficientandthesquareofthevelocityratio.Therefore,ifweusealinearshockabsorber(constantcoefficient)andaprogressivesuspension(τm,ycincreasingwiththeamplitudeofthewheel),thereduceddampingisprogressivebecauseofthegeneralprogressivebehaviorofthesuspensionmechanism.
Thechoiceoftheshockabsorber ’sdegreeofdegressiveratemust,therefore,bemadebytakingintoaccountthecontraryeffectgeneratedbyanyprogressiverateofthesuspension.

Fig.5-50Shockabsorberwithdoublelinear,progressiveanddegressivecharacteristics.
5.11The influence ofthe unsprungmassTheonedegreefreedom,mono-suspensionmodelhasallowedustobringtolightsomeinteresting
considerationsregardingthemostappropriatevalueofthedampingratio.However,itmustbehighlightedthatthemodelwithonedegreeoffreedomdisregardstheinfluenceoftheunsprungmass.Wehaveseenthatthehopfrequencyofthesystemcomposedofonlytheunsprungmassandthetireradialspringisintherange12-18Hz.
Nowforexample,letusconsideramono-suspensionwithtwodegreesoffreedom,representingtherearsection,andobservetheinfluenceofthevalueoftheunsprungmassoncomfortandroadadherence.
Supposeamotorcycleproceedsatconstantvelocityalongaroadwithaprofilethatimposesaharmonicmotiononthewheel,asshowninFig.5-51.

Theequationsofthemotionofthesprungmassandunsprungmassare:
whereMrepresentsthesprungmass,mtheunsprungmass,ctheshockabsorberdamping,cpthetiredamping,kthesuspensionspringstiffness,andkpthetireradialstiffness.
Fig.5-51Mono-suspensionwithtwodegreesoffreedom.
Theimposedmotioncanbedescribedas:
whereν=V/Lrepresentsthefrequencyoftheimposedmotion,dependingbothontheforwardvelocityandtheroadprofilewavelength.
Inasteadystateperiodicmotion,themassesoscillatewiththesamefrequencyastheimposedmotion.Thecomplexamplitudesofthesprungandunsprungmassesnormalized,inrelationtotheamplitudeoftheimposedmotion,aregivenbythefollowingequation:

Thedynamicloadonthewheeliscomposedofaconstantcomponent,equaltothestaticload,andofafluctuatingcomponent.Theminimumdynamicloadonthewheel,normalizedinrelationtothestaticload,isgivenby:
Themaximumnormalizeddynamicloadisgivenby:
Example18
Considerasuspensionwiththefollowingcharacteristics:
•sprungmass: M=110kg;
•tirestiffness: kp=130kN/m;
•reducedstiffnessofthesuspension: k=30kN/m;
•unsprungmass: m=15kg.
Determinethenaturalfrequenciesofthesuspension,consideredasasystemwithtwodegreesoffreedom:
1stmode(displacementofthesprungandunsprungmasses,inphase):ν1=2.29Hz;2ndmode(displacementofthesprungandunsprungmasses,inoppositephase):ν2=14.88Hz.
Bywayofexample,comparethesetwovalueswiththefrequenciescalculatedwiththeonedegreefreedommodels:
asystemcomposedofonlysprungmassMandsuspensionstiffnessk:νs=2.63Hz(seeexample15);asystemcomposedofunsprungmassmandtirestiffnesskp:νt=15.92Hz(seeexample11).
Itcanbeobservedthat:thefirstfrequency(ν1=2.29Hz),isnearthenaturalfrequencyofthesprungmass(νs=2.63Hz);thesecondfrequency(ν2=14.88Hz),isnearthevalueofthenaturalfrequencyoftheunsprungmass(νt=15.92Hz).

Nowletusintroducethenon-dimensionalratioofthefrequencies:
where:
νrepresentsthefrequencyoftheimposedmotion;
νsrepresentsthefrequencyofthesystemcomposedofonlysprungmassMandsuspensionstiffnessk.

Fig.5-52Periodicresponseamplitudeofthesprung(solidline)andunsprungmasses(dottedline)versusthefrequencyratio.
Fig.5-53Accelerationofthesprung(solidline)andunsprungmasses(dottedline)versusthefrequencyratio.
Fig.5-52showsthesystem’sresponseasafunctionofthefrequencyratioΩ,inthethreefollowingcases:
rigidsuspension;suspensionwithoutashockabsorber;suspensionwithdampingratioof0.3.

Thecalculatednaturalfrequenciesofthetwovibrationmodesofthesuspension(ν1=2.29Hz,ν2=14.88Hz)correspond,respectively,toΩ=0.87andΩ=5.66.Withoutsuspension,i.e.,withinfinitesuspensionstiffness,thenaturalfrequencydependsonlyonthetirestiffnessandthesumofthemasses:
Itsvalue,withthedataoftheprecedingexercise,isequalto4.5Hz(Ω=1.71).
Thedampingratioiscalculatedinrelationtothecriticaldamping ofthesystemwithonedegreeoffreedom,whichisobtainedbyassumingthattheunsprungmassiszeroandthetirestiffnessinfinite.
Forthepurposesofridingcomfort,theaccelerationgraphscanbeobtainedfromthepreviousonesbymultiplyingthedisplacementbythesquareofthefrequencyratio.Thefollowinginterestingconclusionscanbedrawn:
allthecurvesforthesprungmassdisplacementamplitudepassthroughthepointsA,B,CandD;inthefrequencyrangesA−BandC−Dthemaximumaccelerationofthesprungmassdiminisheswithanincreaseindamping,whileforvaluesofthefrequencyratio,betweenBandC,orhigherthanD,theincreaseindampingcausesanincreaseinaccelerationofthesprungmass;intherangeoflowfrequencies,theoptimalcurveistheonethatgivestheminimumvalueofaccelerationincorrespondencewiththefirstresonance.SincethecurvemustpassthroughpointB,theoptimalcurveistheonethathasitsmaximumatB.Itcanbeshownthatthiscurveisobtainedwithavalueofthedampingratioequaltoaboutζ=0.35.ThisvalueofζalsomakestheaccelerationapproximatelyminimalintherangeC−D;intheintermediatefieldofthefrequencyratioA−BandforvaluesbeyondpointD,forcomfortpurposesitwouldbeappropriatetoadoptlowerdampingvalues,butthatwouldmeananincreaseinthemaximumvaluesofaccelerationsunderresonanceconditions;theaccelerationtowhichtheunsprungmassissubjectedisnotsignificantlyinfluencedbythevalueofthedampingratio.

Fig.5-54Sprungmassaccelerationforvariousvaluesoftheunsprungmassversusthefrequencyratio.
Figure5-54showstheinfluenceoftheunsprungmassontheamplitudeofaccelerationofthesprungmass.Dividingtheunsprungmassinhalf(m=7.5kg),theaccelerationofthesuspendedmassdiminishesatlowfrequencies,butincreasesathighones.Alternatively,indoublingtheunsprungmass(m=30kg),thereisanetaccelerationdecreaseathighfrequenciesandanincreaseatthelowones.
Nowletusanalyzethefluctuationsoftheloadsonthewheels.Asmentionedearlier,theloadiscomposedofaconstanttermtowhichafluctuatingharmoniccomponent,withfrequencyequaltothatoftheimposedmotion,isadded.Itsamplitudenormalizedwithrespecttothestaticloadisgivenby:
Itisclearthatthefluctuatingcomponentworksagainstroad-holding.Furthermore,ifthefluctuatingtermexceedsthestaticload,thetirewilllosecontactwiththeroadplane.
InFig.5-55,thefluctuatingcomponentisplottedagainstthefrequencyratio.Thefluctuatingcomponentisnormalizedinrelationtothestaticloadanddividedbytheamplitudeofthesinusoidalprofileoftheroad.Itcanbeobservedthatthevalueofthedampingratioequalto0.3ensuresgoodgripatlowfrequencies;athighfrequencies,itwouldbeappropriatetohaveagreatervalueofζwhich,however,couldreduceridingcomfortandadherenceintheB-Cfieldofthelowfrequencies.ThelossofadherencehappenswhenΔNaisequaltoone.Forexample,atafrequencyof5Hzandwithadampingratioζ=0.1separationoccursforvaluesoftheprofileheightgreaterthanyo=1/142m.
Thereductionoftheunsprungmassesbenefitsroad-holdingespeciallyatlowfrequencies;moreoverthevalueofthesecondfrequencyofthemono-suspensionincreasesasthevalueoftheunsprungmassdecreasesasshowninFig.5-56.

Fig.5-55Amplitudeofthefluctuatingpartoftheverticalloadonthewheelforvariousvaluesofthedampingratio.
Fig.5-56Amplitudeofthefluctuatingpartoftheverticalloadonthewheelforvariousvaluesoftheunsprungmass.
5.12The rearsuspens ionofthe s cooterThescootercanberegardedasaspecialcaseofthemotorcycleinwhichtheengineisanintegral
partoftheswing-arm.Thisconstructionsolutionfacilitatesthetransmissionofmotionfromtheenginetotherearwheel,butinterfereswithitsdynamicbehaviorintheverticalplaneforthefollowingreasons:
theunsprungrearmassofthevehicle(massofthewheelandpartofthemassoftheengine),withrespecttothesprungmass(chassis+rider)hasasignificantlyhighervaluethanthatofaconventionalmotorcycle;theunbalancedalternatingforces(theenginesofscootersarenotusuallyprovidedwithequilibratingcountershafts)generatedbytheenginearetransmittedtothechassisandarethe

causeofunwantedvibrations,whicharefeltbytheriderinthehandlebars,saddleandfootrest.
5.12.1Cons iderations onthe pos i tionofthe attachmentpointoftheengine
Considerascooterwiththeengineconnecteddirectlytothechassiswithapivot,asshowninFig.5-57.
WesetagoalofseekingthebestpositionfortheattachmentpointPoftheenginewiththechassis,inordertominimizetheforcestransmittedtothechassis,generatedbyroadunevenness.Forthispurpose,wesubstitutethe“engine”withanequivalentsystemfromadynamicpointofview,composedofamomentofinertiaandtwomassesplacedincorrespondence:
totheintersectionpointOofthehorizontallinepassingthroughthecenterofgravitywiththeverticallinepassingthroughthewheelcontactpoint;tothepointPwheretheengineisattachedtothechassis,whosepositionisunknown.ThereducedmassesatthepointsOandPandthemomentofinertiaare:
where:IGrepresentsthemomentofinertiaaroundthecenterofgravity;mindicatesthemassoftheengine;a,barethedistancesindicatedinFig.5-57.
ThemomentofinertiaIoiszerowhenthedistancebsatisfiestheequation:
ThedistancebetweenthetwopointsOandPisthereforeequalto:
InthiscasethepointOisthecenterofpercussioninrelationtopointP.TheverticalforcesactingonOdonotgeneratereactionforcesatP.
Itisinterestingtonotethattheenginesuspendedatthepercussionpointpresentsinterestingbehaviorfromthedynamicpointofview.
Theswingingarm-enginesystem,attachedatPandelasticallysupportedatthepointO,constitutesavibratingsystemwithonedegreeoffreedom.Givenkr,whichisthereducedverticalsuspensionstiffnessatthepointO,thenaturalfrequencyofthesystemis:

Fig.5-57Classicsuspensionofthescooter.
Ifthedistancecisvariedwithaconstant,thenaturalfrequencychanges.ItcanbeshownthatitreachesitsmaximumvaluewhenthedistancecsatisfiesthenecessaryconditionformakingthepointOthecenterofpercussionwithrespecttothepointofattachmentoftheengineP.
Thefrequencyinthiscaseis:
Fig.5-58.Reducedsystem.

Atthemaximumvalueofthefrequencywiththesamereducedstiffness,theequivalentunsprungmasscorrespondstothatoftheminimumfrequency;thusprovidingbenefitsforbothridingcomfortandroad-holding.
Thedirectattachmentoftheenginetothechassishassomedisadvantagesfortheisolationofvibrations.Infact,theenginegeneratesalternatingforcesofimbalance,withfrequencyequaltoanddoublethatoftheengine’srotation,whichvaryinthe50to400Hzrange.Theunbalancingforcesaretransmittedtothechassisthroughtheattachmentpointoftheengineandalsothroughthespring-shockabsorbergroup.Theseforcesgeneratevibrationsthatarefeltbytherideronthehandlebars,footrestandsaddle.Toreducethevibrationstransmittedtothechassisthroughthemounts,thejunctionwiththechassiscanbeaccomplishedelasticallywithasystemconsistingofasimplerockerarmorarockerarmwithalinkrod.
5.12.2Attachmentofthe engine witharockerarm(twodegrees offreedom)
Theengineconnectedtothechassis(assumedlocked),withasimplerockerarmconstitutesasystemwithtwodegreesoffreedom,asshowninFig.5-59.
Thetwovibrationmodesofthesystemhavetheircentersofrotationalignedalongtheaxisoftherockerarm.Theirpositiondependsontheinertialcharacteristicsoftheengine,thetireradialstiffness,thespringstiffnessandthemountstiffnessoftherockerarm.
Forthepurposesofoperatingasasuspension,pointΡ,wheretherockerarmisattached,shouldbethecenterofpercussionwithrespecttothepointO,sothattheverticalforcesgeneratedbytheirregularitiesintheroaddonotstressthemountsoftherockerarm,butareopposedbythespring-shockabsorbergroup.
Sincetheshockabsorberbehavesathighfrequenciesalmostlikeastrut,theenginewiththespring-shockabsorbergroupandwiththerockerarmmakesupafour-barlinkage.Thecenterofrotationoftheengineinrelationtothechassiscaneasilybefound.Itistheintersectionpointoftheaxesoftherockerarmandtheshockabsorber.
Thelargestcomponentoftheunbalancingforceshouldbenormaltotheaxisoftherockerarm.
Thecomponentoftheunbalancingforceparalleltotheaxis,however,iscompletelytransmittedtothechassisandthisisthedisadvantageofsuchasuspension.Forthisreason,therockerarmisjoinedelasticallytothechassisbyanelastomerplug,toreducethetransmissionofvibrations.
Ifthebalancingoftheengineisaccomplishedinsuchawayastohaveanormalcomponentequalto100%ofthealternateunbalancingforce,thistypeofsuspensionassuresanexcellentisolationofthevibrations.Suchadistributionofthealternateforcecangenerateexcessivelyhighloadsonthedriveshaftbearings.

Fig.5-59Rearsuspensionofthescooterwitharockerarm.
Fig.5-60Centersofinstantaneousrotationofthescooterwitharockerarm.
Fromatheoreticalpointofview,foranoptimaldynamicperformance,thissuspensionarrangementshouldhavethefollowingproperties:
thedistributionoftheunbalancingforceequalto:100%normalcomponentinrelationtotherockerarmand0%inthetangentialdirection;thepointofattachmentPoftheenginecoincidingwiththecenterofpercussionwithrespecttoO;thecenterofrotationincorrespondencewiththecontactpoint;thecenterofrotationofonevibrationmodeincorrespondencewithpointP(modeexcitedbyroadirregularity);thecenterofthesecondvibrationmodeincorrespondencewiththecontactpoint(modeexcitedbyunbalancedforce).
5.12.3Rockerarmandl inkrodattachmentofthe engine (threedegrees offreedom)

Theswingingarm-engineassemblyattachedtothechassiswitharockerarmandwithalinkrod,representedinFig.5-61,hasthreedegreesoffreedomandthereforethreemodesofvibration.Theintroductionofanadditionaldegreeoffreedomrespondstotheneedtoisolatebothcomponentsofthealternateunbalancingforce.
Fig.5-61Suspensionofthescooterwithrockerarmandlinkrod.
Thepositionoftherotationcentersofthethreevibratingmodesdependsontheinertialcharacteristicsoftheengine,thestiffnesscharacteristicsofthemounts,thetireandthesuspensionspring.
Theenginebehaviorcanbestudiedbysubstitutingthesystem,madeupoftherockerarm,linkrodandtherelativeelasticplugs,withanappropriatestiffnessmatrixasshowninFig.5-61.Thismatrixisgenerallynotdiagonal:aforceappliedtotheswingingarm-enginesystemalongthexdirectionbringsonadisplacementalongtheydirectionandviceversa.
Inprinciple,thelocationofthecentersofrotationofthethreemodesissetupintheidealdiagram,illustratedinFig.5-62.
Fig.5-62Suspensionofthescooterwithrockerarmandlinkrod.
5.13Roadexcitation

Themotorcycle’sin-planeresponse,excitedbyanunevenroad,isimportantforhumanperception(ridercomfort)andalsofortireadherencewiththeroad.Suchexcitationisrandomandisdescribedbytheroadprofile’sstatisticalproperties.
Fig.5-63Thein-planemotorcycledynamicsystem.
Consideramotorcyclewithaforwardvelocityequalto20m/s.Forlongundulationsexceeding40mtheequilibriumofthemotorcyclemaybeconsideredwithastaticanalysis.Infactthefrequencyoftheexcitations(lessthan0.5Hz)arelowenoughinrelationtothepitchandbouncefrequenciestoconsiderthemotorcycleaquasi-staticsystem.Theexcitationfrequencyrange0.5-25Hzmaybedefinedastheriderange.Inthisrangethedynamicresponsedependsprimarilyonthesuspension.Withaforwardvelocityof20m/sthisfrequencyrangecorrespondstowavelengthsfrom40mto0.8m.Theexcitationsabove25Hzareinthenoisefield.
Toevaluatetherider ’sindexofcomfortitisimportanttoconcentrateonaccelerationsratherthan

displacements:infactthehumanbodyisespeciallysensitivetotheRMSvalueofaccelerations.Discomfortisfeltmoreinarangeoffrequenciesthatliebetween4Hzand8HzasshowninFig.5-64.ThisfigureshowsthelinesofmaximumtolerablelevelsfordifferentdurationsofthevibrationexposureestablishedbytheISO2631Standards[Mechanicalvibrationandshock,Evaluationofhumanexposuretowhole-bodyvibration,InternationalOrganizationforStandardization,1997].
Fig.5-64Discomfortthresholdfordifferentexposuretimes.
Ofcourseaccelerationlimitsarerelatedtothetimeofexposure:highaccelerationsaretoleratedforashortertimewhilelowaccelerationsaretoleratedforalongertime.
5.13.1Powerspectral dens i tyofthe road
TheelevationprofilemeasuredoveralengthofroadcanbedecomposedintoaseriesofsinewavesvaryinginamplitudeandphaserelationshipbymeansofthePowerSpectralDensityfunction.Thisfunctionrepresentstheamplitudedensityversuspathfrequency.Pathfrequencyistheinverseofthewavelengthandisexpressedincycles/mandthusthePSDfunctionoftheroadelevationprofileisexpressedins.
FromexperimentalmeasurementsoftheroadprofilesomelawsregardingthePSDfunctionhavebeenproposed.
AccordingtoISOstandard[ISO2631,ISO5349,ISO,DraftStandardISO/TC108/WG9]thepowerspectraldensityofaroadprofileisdescribedbythefollowingequation:

where:n1=2,n2=1.5areexponents;PSD0istheroughnessmagnitudeparameterthatdependsonthequalityoftheroad(m2/(cycle/m));υ=1/Lw=ν/Visthepathfrequency(cycle/m);υ0isthecutoffpathfrequency(cycle/m).
PSD0valuesliebetween4*10−6and1024*10−6(m2/(cycle/m)).SomeexamplesofPSDfunctionsareplottedasafunctionofpathfrequencyυinFig.5-65.
Fig.5-65Powerspectraldensityofsomeroad[ISO,DraftStandardISO/TC108/WG9].
5.13.2In-plane frequencyresponse function
Thein-planefrontandreartransferfunctionofthemotorcycleistheratiobetweenthebounceorpitchaccelerationamplitudeofthemotorcyclecenterofmassandthedisplacementofthecontactpointofthewheelsversusfrequency.
Figure5.66showsanexampleoftransferfunctions.Itcanbeseenthatthebounceresonanceismorevisibleinrelationtothepitchresonance,whichismoredamped.Alsothewheelhopresonancesareclearlyvisible;itshouldbehighlightedthattheradialdampingofthetiresarenegligibleinrelationtothedampingoftheshockabsorbers.

Fig.5-66Exampleoffrontandreartransferfunction.
5.13.3Motorcycle response
Oncethepowerspectraldensityoftheroadprofileisknownitispossibletocalculatethesprungmassaccelerationspectrumbymultiplyingtheroadspectrumbythesquareofthemotorcycletransferfunction.Thepowerspectraldensityissimply:
where:
PSDsprungmassisthePSDoftheaccelerationofthesprungmass;
PSDroadisthePSDoftheroadinput;
|H(ω)|sprungmassisthemagnitudeofthein-planecomplextransferfunctionofthemotorcycle.
Theisolationpropertiesofthesuspensiongenerateanaccelerationspectrumofthesprungmasswithhighamplitudesatthesprungmassresonances,withamoderateattenuationintherangeofthewheels’resonancesandarapidattenuationthereafter.
ThemotorcycleresponsestotheroadexcitationwithtwodifferentforwardvelocitiesarerepresentedinFig.5-67foranaverageroadprofile.Inthiscasethebounceandpitchmodesofvibrationarecoupled.Thebounceresponseismorepronouncedatlowfrequencieswhilethepitchaccelerationofthesprungmassismorepronouncedatmiddlefrequencies.Thefiguresalsohighlight

thewheelbasefilteringphenomenon(dipsinthecurves).
Wheelbasefilteringiscloselyrelatedtotheratiop/Vbetweenthevehiclewheelbaseandforwardvelocity.Infacttherearwheelseesthesameroadprofileasthefrontwheel,onlywithatimedelaywhichisequaltotheratiobetweenthewheelbaseandtheforwardvelocity.Wheelbasefilteringcausescharacteristiclobes(inbetweenthedips)intheseplots:whenthespeedincreases(astheratiop/Vdecreases)thenumberoflobesdiminishesandonlythepeakcharacteristicsofthesystemresponsetotheroadsurfacePSDremainintheplots.Thefirstfrequencyoftheminimumbounceaccelerationresponseisequaltothevelocitydividedbytwicethewheelbasewhilethepitchaccelerationpresentsthefirstminimumwhentheratiobetweenthevelocityandthewheelbaseisequaltoone.Thecouplingofthebounceandpitchmodemakesthefilteringphenomenonlessclear.Themotorcyclehasa1.5mwheelbase,withaspeedof20m/snullresponse(dip)occursatapproximately6.5Hzforthebounceand11Hzforthepitch.
Fig.5-67Exampleofsprungmassresponse.

Fig.5-68Exampleofverticalloadresponse.
Thesuspensionsarealsoimportantfortireadherence,whichdiminisheswiththeincreaseoftheverticalloadfluctuations.ThePSDoftheverticalloadsinducedonthewheelareshowninFig.5-68.Atlowspeedsthefrontwheelissubjectedtohigherloadvariationscomparedwiththerearwheel,whileasthespeedincreasestherearwheelloadfluctuationsbecomemoreimportantandaredistributedoveralargefrequencyrange.
Theloadfluctuationriseswiththeincreaseoftheunsprungmassinrelationtothesprungmassandwiththeincreaseofthetires’radialstiffness.

MVGrandPrix125ccof1953
6MotorcycleTrim
Inthepreviouschapters,theforcesactingonthemotorcyclewerecalculated:resistanceforces,drivingforceanddynamicloadsonthewheels,indifferentconditionsofbothstationaryandnon-stationarymotion,inaccelerationandinbraking.Inthischapter,variationsinthetrimexhibitedbythemotorcycleundervariousdrivingconditionswillbestudied,andtheimportanceofthechainforcewillbehighlighted.
Thetermvehicletrimimpliesthegeometricconfigurationthatthemotorcycleacquiresindifferentconditionsduringtransientandsteadymotion,inaccelerationandinbraking.
Asshownbelow,themotorcycletrimdependsonthestiffnesscharacteristicsofthefrontandrearsuspensions,ontheforcesoperatingonthemotorcycle,andontheinclinationangleofthechainandtheswingingarm.
6.1Motorcycle trimins teadys tate motionFigure6-1illustratesthesystemofforcesoperatingonthemotorcycleinsteadystateconditions.In
thiscase,thestudyofthetrimisspecificallydesignedtodeterminetheattitudeandconfigurationofthemotorcycle,andinparticular,thatoftherearsuspension.

Fig.6-1Motorcycletriminthethrustphase.
6.1.1Rearsuspens ionequi l ibrium
NowletusconsidertherearswingingarmwithitswheelrepresentedinFig.6-2,assumingtheforwardmotionofthevehicletobeatconstantspeed.Thefollowingforcesareappliedtotherearswingingarmandwheelsystem:
thethrustforceS;theverticaldynamicloadNr;thechainforceT;theelastictorqueM.
Fig.6-2Rearsuspensionbalancewithchaintransmission.
Thebalanceofthemomentsontheswingingarmpivotgivesthefollowingexpression:

Mv=NtrLcosφ−S(Rr+Lsinφ)+T[rc−Lsin(φ−η)]
TheequilibriumequationdoesnotreportthestaticelasticmomentMsexertedbythesuspensionspringandthemomentgeneratedbythestaticverticalloadNsrwhichisequalto−Ms.
Thefourmomentsactingontheswingingarmare:themomentgeneratedbytheloadtransferNtrthatcompressesthesuspension;themomentgeneratedbythedrivingforceSthattendstoextendthesuspension;themomentgeneratedbythechainforceTthatcompressesthesuspension.theadditionalelasticmomentgeneratedbythesuspensionmovementMvthatcanbepositiveornegative.
Thedrivingforceisassumedtobeconstantandisrelatedtothechainforce,exertedbythechainonthewheel,throughtheequation:
Fig.6-3Rearsuspensionbalancewithtransmissionshaft.
Ifthereisnothrust,thechainforceandtheloadtransferarenull,sothemomentexertedthestaticloadbalancestheelasticmoment:
Conversely,ifthereisathrustforce,thetrimoftherearsuspension(armpositionwithrespecttotheframe),dependsonthevaluesofthethreeaforementionedcomponents.Expressingthedrivingforceasafunctionofthechainforce,theequilibriumequation,withrespecttotheswingingarmpivot,can

berearrangedasfollows:
whereMvisthepartoftheelasticmoment,necessarytobalancethemomentsgeneratedbytheloadtransfer,chainforceanddrivingforce.
Ifthetermduetotheloadtransferislargerthanthatduetothechainforceanddrivingforce,thesuspensionisfurthercompressed,withrespecttothedeflectioncausedbyonlythestaticload(Mv>0).Viceversa,ifthecomponentduetothechainforceanddrivingforceprevailsovertheloadtransfercomponent,thenthesuspensionisextended(Mv<0).
Itisinterestingtonotethatthechainforcedisappearsforboththeshaft-drivetransmission,asshowninFig.6-3,andinthecaseofscooters(withengineintegratedontheswingingarm).Therefore,onlytheloadtransferforceandthethrustforceexertamomentontheswingingarm.
Inthiscase,thebalanceofthemomentsresultsin:
Mv=NtrLcosφ−S(Rr+Lsinφ)
6.1.2Incl inationangle ofchain
Inordertostudythebalanceofthemoments,itisnecessarytoexpresstheinclinationangleofchainη,asafunctionoftheangularinclinationφoftheswingingarm.
Fig.6-4Geometryoftherearswingingarmwithchaintransmission.
WithreferencetoFig.6-4,wemaywritethefollowingequation:
b−(rc−rp)cosη=Lcsinη

whererpandrcrepresenttheradiiofthedrivesprocketandtherearsprocket,brepresentstheverticaldistancebetweentheaxesofthesprockets,Lcisthelengthofthestraightlinesectionofthechain.Theequationgivestheinclinationangleasafunctionoftheswingingarmangle.
Forpracticalpurposes,thefollowingapproximateexpression(assumingcosη≅1)issufficient:
whereyPistheverticalcoordinateofthedrivesprocketshaft.
6.1.3Squatratioandsquatangle
Chaintransmission
ConsidertheintersectionpointA,betweentheaxisoftheupperchainbranchandthestraightlinepassingthroughthecenterofthewheelandthroughtheswingingarmpivot,showninFig.6-5.ThestraightlinethatconnectsthepointofcontactbetweentherearwheelPrandpointAiscalledthesquatline.Itsinclinationtothehorizontalplaneiscalledthesquatangleσ.
Fig.6-5Squatandloadtransferlines.
TheresultantFr,fromthesumoftheloadtransferforceandthedrivingforce,appliedtothepointofcontactoftherearwheel,isinclinedwithrespecttohorizontalbyananglenamedtheangleofloadtransferτ.ThelineofactionoftheresultantFriscalledthestraightlineoftheloadtransfer.
Wedefinethesquatratioℜastheratiobetweenthemomentgeneratedbytheloadtransferandthe

momentgeneratedbythesumofthechainforceandthedrivingforce:
Expressingtheloadtransferasafunctionofthedrivingforce,theratioisafunctionofonlythegeometriccharacteristics,andinparticular,itisequaltotheratiobetweenthetangentoftheloadtransferangleandthetangentofthesquatangle:
Theratiovariesaccordingtothevariationoftheswingingarminclinationangleanddependsonthedifferencebetweenthearminclinationangleandthechaininclinationangle.Suchadifferenceissensitivetothepositionoftheaxisofthedrivesprocketinrelationtothepositionoftheswingingarmpivot.
Threecasescanoccur:PointAliesonthestraightlineoftheloadtransfer,thatisσ=τ;inthiscaseℜ=1.Duringthethrustphasetherearenoadditionalmomentsoperatingontheswingingarm,sothesuspensionspringisnolongerstressedcomparedwiththestaticcondition;PointAliesunderthestraightlineoftheloadtransfer,thatisσ<τ;inthiscaseℜ>1:themomentgeneratedbytheresultantFrcausesacompressionofthespringinadditiontotheonecreatedbythestaticload;PointAliesabovethestraightlineoftheloadtransfer,thatisσ>τ;inthiscaseℜ<1.ThemomentgeneratedbytheresultantFrcausestheextensionofthespring.
Transmissionshaftwithuniversal joints
Inthecaseoffinaltransmissionshaftandalsoinscooters,thesquatratiois:

Fig.6-6Swingingarmbalancewithtransmissionshaft.
Theratiocanbeexpressedasafunctionofthegeometriccharacteristicsofthesuspensionandalsoasaratiobetweenthetangentoftheloadtransferangleandthetangentofthesquatangle.InthiscasethesquatlinepassesthroughthepointofcontactandtheswingingarmpivotascanbeseeninFig.6-6:
Ingeneraltheloadtransferangleτwiththetransmissionshaft,issmallerthantheangleσ,thustheratioℜislessthanone,i.e.,thesuspensionisalwaysextendedinthethrustphase.Inordertoobtainratiosclosetounitaryvaluesswingingarmsofgreatlengthshouldbeused.
Four-barsuspensionwithtransmissionshaft
AsshowninFig.6-7,inthiscasetheratioℜcanbeexpressedasafunctionofboththeloadtransferangleτandthesquatangle.Inthiscasethesquatlineisthestraightlinepassingthroughthecenterofrotationwithrespecttotheframe(pointA)ofthesuspensionconnectinglinksandthepointofcontactoftherearwheel.

Fig.6-7Motorcyclebalancewithfour-barrearsuspension.
Example1
Wewillnowmakesomeremarksregardingamotorcyclewiththefollowingproperties:
•motorcyclewheelbase: p=1370mm;
•heightofgravitycenter: h=600mm;
•swingingarmlength: L=590mm;
•rearwheelradius: Rr=317mm;
•rearsprocketradius: rc=111.3mm;
•drivesprocketradiusof: rp=43.2mm;
•sprockethorizontalpositioncomparedwithswingingarmpivot: xP=75mm;
•sprocketverticalpositioncomparedwithswingingarmpivot: yP=0mm.
Letusexaminethemotionoftheswingingarminrelationtotheframe(assumedtobefixed).
Figure6-8depictsthedeviationofsquatratioversusthevariationoftheverticalpositionycoftherearaxlewithrespecttotheframe.Itisworthpointingoutthatinthisexampletheloadtransfertendstocompressthesuspensionspring,whereasthechainforceandthedrivingforcetendtoextendit.

Itispossibletoobservethatinthereferencecase,forthosevaluesregardingthewheelverticalpositionsthatarelowerthanapproximately-65mm,theeffectofthechainforceandthrustprevailsasthevalueofthesquatratioislessthanone(ℜ<l),whereasforthehigherycvalues,theeffectoftheloadtransferforceprevailssincethevalueoftheratioisgreaterthanone(ℜ>1).
Fig.6-8Typicaldeviationofthesquatratioℜasycvaries.
Thefigurealsoillustratesacomparisonamongthevaluesoftheratioℜ,obtainablewhenonlyonesinglegeometricparametervariesatatime:itisinterestingtoobservethatasthegeometryvaries(radiiofthedrivesprocketandoftherearsprocket,positionofthedrivesprocketaxiswithrespecttotheswingingarmpivot)thevaluesalsovary,however,thecurvesstillmaintainanincreasingdeviationastheverticalpositionoftherearwheelaxlevaries.
6.1.4Motorcycle trimas the squatratiovaries
Letusnowcontinuewithafewobservationsonthetrimofthevehicleinmotionataconstantspeedandinthepresenceofathrust(balancedbytheaerodynamicresistantforce).
Withtheincreaseofthechainforceand,thus,ofthedrivingforce,thefrontaxleliftsupbecauseofthefrontwheelloaddecrease,whilethebackoftherearframeliftsuporlowersasafunctionofthesquatratio.
Theverticalextensionofthefrontsuspensionisequaltotheratiobetweentheloadtransferandthereducedverticalstiffness:
AscanbeseeninFig.6-9,inthecaseofaunitaryratio(ℜ=1),asthechainforcevariestheforceoperatingontherearsuspensionspringdoesnotundergoanyvariationastheactionoftheloadtransferisperfectlybalancedbythechainforce.Underthesespecificconditionsvariationsinthe

thrustaffectonlythefrontsuspension.
Fig.6-9Motorcycletrimwithunitarysquatratio.
Iftheratioisgreaterthanone(ℜ>1),therearsuspensionspringwillbecompressedcomparedtotheconditionofbalancewithanullchainforce.Withtheincreaseofthechainforcevalue,thefrontaxleliftsupwhilethebackoftherearframelowersproportionaltothevalueoftheratio.Furthermore,iftheratioincreaseswiththeincreasingyc(suchasthecaseinexample1),withtheincreaseofthechainforceand,therefore,ofthedrivingforce,themovementbecomesmoreappreciableasrepresentedinFig.6-10.
Iftheratioislessthanone(ℜ<1)therearsuspensionspringwillbeextendedcomparedwiththeconditionofbalancewithanullchainforce.Withtheincreaseofthechainforce,boththefrontaxleandtherearaxleareextended,causingthemotorcyclecenterofgravitytoraise,alsoillustratedinFig.6-11.
ThedeformationofthespringΔLr,reducedtotherearwheelaxle(whichbecomesnegativeduringcompression),isprovidedbythefollowing(approximate)expression:
Thepreviousobservationsallowustoconcludethatthetrimofthevehicledependsonthevalueofthesquatratio.
Thevariationinthetrim,causedbythedrivingforce,canalsobeexpressedbythevariationoftheframepitchangle:

Fig.6-10Motorcycletrimwithsquatratiogreaterthanone.
Fig.6-11Motorcycletrimwithsquatratiolessthanone.
Example2
Consideramotorcyclewiththefollowingcharacteristics:

•motorcyclewheelbase: p=1370mm;
•heightofcenterofgravity: h=600mm;
•reducedstiffnessoftherearsuspension: kr=20kN/m;
•reducedstiffnessofthefrontsuspension: kf=13kN/m.
TheaimistodeterminethevariationsinthemotorcycletrimafterapplyingachainforceTequalto4000N,asthesquatratiovaluevaries:
ℜ=0.7;ℜ=1.0;ℜ=1.3.
Theloadtransferisequalto615Νand,therefore,thevariationΔμofthepitchangleis:1.42°,foravalueoftheratioℜ=0.7;1.98°,foravalueoftheratioℜ=1.0;2.27°,foravalueoftheratioℜ=1.3.
Wecanseethat,asthesquatratioℜincreases,thevariationinthetrimalsoincreases.Thisisrepresentedbythevariationoftheframepitchangle.Itisworthpointingoutthatthepositivedirectionofthepitchiscounter-clockwise.
6.2Motorcycle triminacurveAsrepresentedinFig.6-12,themotorcyclethatrunsataconstantspeedfromastraightlinetoa
corneringmotionlowersandalsoslightlypitchesforward.
Fig.6-12Loweringofthemotorcyclecenterofgravityinacurve.

Theloweringiscausedbytheincreaseinloadthatactsinthemotorcycleplanethatincreasesininverseproportiontothecosineoftherollangleϕ.Thepitchforwardisduetothefactthatthereducedstiffnessofthefrontsuspensionislessthanthatoftherearsuspension.
TheloweringofthecenterofgravityΔh,andthevariationofthepitchangleΔμ,inthechangefromastraightlinetoacurve,isprovidedbytheexpressions(Fig.6-13):
anditispossibletonotethat,ifbkr>(p−b)kf,thepitchanglewillbenegative,and,thus,forward.
Fig.6-13Variationsofthemotorcycletriminacurve.
6.2.1Squatratioinacurve
Thesquatratio,inthechangefromastraightlinetoacurve,decreasesbecauseoftheloweringofthecenterofgravity:
Actually,inthechangefromstraightrunningtocornering,theratiodecreaseslessthanthechainforceangleσbecausepointAisalsolowered.

6.2.2Triminenteringacurve
Inordertoevaluatethevariationsofamotorcycletriminthechangefromastraightlinetoacurveweshouldconsidertheexampleshownbelow.
Example3
Consideramotorcyclewiththefollowingcharacteristics:
•motorcyclemass: m=200kg;
•wheelbase: p=1.4m;
•longitudinaldistanceofthecenterofgravity: b=0.6m;
•reducedstiffnessoftherearsuspension: kr=25kN/m;
•reducedstiffnessofthefrontsuspension: kf=13kN/m;
•tirestiffness:
•rollangle: ϕ=45°.

Fig.6-14Motorcycletriminastraightlineandinacurve.
Case1:Straightlinemotion.
Theloweringofthevehiclecenterofgravity,duetoitsweight,andinthehypothesisofnospringpreload,isequalto60mm(loweringof52mmwithrespecttotherearwheeland70mmtothefrontwheel),whiletheclockwisepitchrotationisequalto-0.73°.Obviouslyifthespringsarepreloadedtheloweringwillbeless.Forexampleiftherearsuspensionispreloadedat28mmtheloweringoftherearframeshouldbe24mminsteadof52mm.
Case2:Changefromstraightlinemotiontocorneringmotion.
Inthechangefromastraightlinetoacurvetheloadonthewheelsincreasesgraduallyaccordingtotheincreaseinthemotorcycleangleofinclination.Atarollangleϕthatisequalto45°theloweringΔhofthegravitycenter,causedbytheincreaseofthewheelload,isequalto24mm.
Thevehiclefrontframelowerstoagreaterextentcomparedwiththerearframe(29and22mmrespectively)becausethefrontsuspensionspringissofterthantherearone,andtheresultingforwardpitchrotationΔμisequaltoanadditional-0.3°.
Theaboveexamplesuggestssomeinterestingconsiderationsregardingthemotorcyclepitchmotion,inthechangefromastraightlinetoacurve:
themotorcyclepitchisfurtherincreasedinthebrakingphasewhileenteringthecurve,theforwardpitchrotationcausesadecreaseinthefronttrail,whichpotentiallyhelpsenteringacurve.Infact,thelateralforcemomentthattendstoalignthefrontframedecreases.
6.2.3Triminexi tingacurve
Ifathrustforceisappliedinacurve,andintheexitingphase,anothervariationofthetrimappearsduetoseveralfactorsthatcomeintoplay:
theloadtransferfromthefrontwheeltotherearone,duetothethrust,determinesadecreaseoftheloadoperatingonthefrontwheelandhence,causesapositiverearwardpitchrotation;thechangefromthecorneringmotiontothestraightlinemotiondeterminesadecreaseintheloadoperatingonthewheelsand,therefore,themotorcycle,withthetypicalvaluesofsuspensionstiffness,undergoesapositivecounter-clockwisepitchrotation.Letusnowillustrate,withanexample,anothereventrelatedtothesquatratio.
Example4
Considerthemotorcyclefromthepreviousexample.
Inthecurvebalanceconfiguration,theloweringofthegravitycenterisequaltoΔh=24mm.
Let’snowtakealookattheeffectsofapplyingthethrustforce.Fig.6-15depictsthedeviationofthesquatratio,bothinastraightlineandinacurve(angleofrollϕ=45°)versusvariationintheverticalpositionofthewheelcomparedwiththeframe.

Fig.6-15Squatratioinastraightlineandinacurve.
Itispossibletoobservethatinthebalancepositions,bothinastraightrunningandinacurve,thesquatratiowillbedifferent.
Applyingathrustinacurvecausesavariationinthetrim,inthesamewaynotedforthestraightline:
withℜ=1therearsuspensiondoesnotchangetrim;withℜ1therearsuspensionisextended;withℜ>1therearsuspensioniscompressed.Inthisexample,thesquatratiointhechangefromacurvetoastraightlinedecreasesfrom1.02to0.95.Thisdecrease,therefore,causestherearsuspensionspringtoextend.
Letusnowexaminetheparametersthatcanbemodifiedinordertolimitthevariationsofthemotorcycletriminthethrustphase:
thevariationofthetrimduetothedifferenceinstiffnessbetweenthefrontandrearsuspensionisunavoidablebecauseofthelowerstiffnessofthefrontsuspension;thevariationofthetrimcausedbytheloadtransferisalsoinevitableinthethrustphase;conversely,sinceinthethrustphasethetrimvariesdependingonthevalueofthesquatratio,itispossibletomodifythisparameterbychangingthesuspensiongeometry.
6.3Motorcycle triminacce leratedmotionOneofthemostimportantcharacteristicsofmotorcycledynamicbehaviorintheacceleration
phase,isits,moreorless,easetomountuporwheeliewhenitissubjectedtoahighdrivingforce.
Asidefromtheamountoftorqueprovidedbytheenginethemotorcyclewheeliedependsontherearsuspensioncharacteristicsandthetransmissionsystemthatlinkstheenginetotherearwheel.

Fig.6-16Motorcycleswithdifferenttypologiesofrearsuspensions.
Considerthreemotorcycleswithequalinertialandgeometriccharacteristics,subjecttothesamedrivingforce,butfeaturingdifferentrearsuspensionsandfinaldrivesystems:
motorcyclewithaclassicswingingarmwithchain;motorcyclewithaclassicswingingarmandtransmissionshaft;motorcyclewithafour-barlinkagerearsuspensionandtransmissionshaft.
Ifintheinitialinstant,motorcycleshaveaconstantspeedequalto100km/h,andsuddenlytheenginegeneratesahightorquetransmittedtotherearwheel,thewheelacceleratesandtransfersthethrustforcetothegroundbymeansoflongitudinalslipbetweenthewheelandtheground.
Firstofall,considerthreemotorcycleswithaclassicswingingarmrearsuspensionandwithchaintransmission,butwithdifferentsquatratiovalues:
ℜ=1referenceconfiguration;ℜ=0.7obtainedbymovingthedrivesprocketdown;ℜ=1.3obtainedbymovingthedrivesprocketup.
Highratiovaluescauseacompressionoftherearsuspensionduringthethrustphaseandthusreducesthetendencyforthevehicletomountup,asshowninFig.6-17.Asquatratiolessthanone,whilecausingtherearsuspensiontoextend,facilitatesmountup.Thefiguredemonstratesthat,whereℜ=1andℜ=1.3,thefrontwheelliftsupandreturnstothegroundafteratimeintervalof0.8-1seconds,whereasinthecaseoftheratiobeingℜ=0.7,thevehicletravelswithitsfrontwheelskyward.

Fig.6-17Motorcyclemountupasthesquatratiovaries.
Fig.6-18Motorcyclemountupwithfinalshaftdrive.
Let’snowseehowmotorcyclesfeaturingdifferentrearsuspensionsystemsbehave.Figure6-18showsthatthemotorcyclewithshafttransmissionmountsupeasily,andinthenumericalsimulationrepresentedhere,iftheappliedtorqueisnotcontrolleditreachesthepointwherethevehicleoverturns.Theeasetomountupisproportionaltotheswingingarmlength.Thefour-barlinkagesuspension,inthecaseofshafttransmission,behavesmuchbetter.Thefigureillustratesthattheconfigurationtakenintoconsideration,thathasthecenterofrotationoftheconnectingrodapproximatelyabovethefrontwheel,showsabehaviorwhichissimilartothatofthemotorcyclewithaclassicswingingarmandwithahighsquatratio.TheBMW“Paralever”suspensionisbasedonthiskinematicscheme.
6.4Influence ofrearwhee l s l ippage onthe trimConsideramotorcycleinstraightlinemotion,withaconstantspeed,thatsuddenlylosesitsgripon
anoilyoricyspot.
Instraightrunningathrustforce,equalandoppositetotheresultantoftheresistantforces,isappliedtotherearwheel.Thelossandthesuddenpickupofgripcreateaviolentvariationofthedrivingforcethatimpulsivelyexcitesboththesuspensionandtherearpartofthemotorcycle.The

behaviorofthemotorcyclecanbeunderstoodbyconsideringthiseventasbeingconstitutedoffivedifferentsequentialphases,representedinFig.6-19:
steadystatewiththemotorcycletravelingataconstantspeed,suddenslippageoftherearwheel,rearwheelaccelerationduetopoorgrip,suddenpickupofgrip,dampedtransientoscillation.
Steadystatewiththemotorcycletravelingataconstantspeed.
TheelasticmomentMvdependsontheverticaltransferloadNtr,drivingforceSandchainforceT:
Mv=NtrLcosφ−S(Rr+Lsinφ)+T[rc−Lsin(φ−η)]
Itisimportanttorememberthatifℜisequalto1,themomentexertedbythechainforceT,thedrivingforceSandtheloadtransferNtrbalancethemselvesout,therefore,thevariablecomponentMvisequaltozero(thestaticelasticmoment
MsbalancesthestaticloadNsr).Ifℜ<1,thespringisslightlyextended,converselyifℜ>1,itwillbeslightlycompressed.
Suddenslippageofthedrivingwheel.
Thelossofgripsuddenlynullifiesthedrivingforce,sothattheswingingarmandwheelsystemarenolongerbalanced.
Theswingingarmissubjecttoasuddenangularaccelerationinaclockwisedirection(negativevalue),thatistransmittedthroughthespringandshockabsorberassemblyandeventheframe.Theimpulsive,upwardsaccelerationoftherearpartofthemotorcycletendstothrowthedriverforward.
Rearwheelaccelerationduetopoorgrip.
Therearwheel,subjecttothetorquegeneratedbythedrivingforce,acceleratesand,furthermore,themotorcyclepitchesforwarduntilitnullifiestheloadtransfer.Thisforce,insteadystate,isproportionaltothedrivingforce.Ontheotherhand,intransientconditionsitoccurswithadelaycomparedwiththedrivingforce,asitislinkedtothevehiclepitch.Onlyintheabsenceofsuspension,theloadtransferisperfectlyinphasewiththethrust.
Inthisphase,therearsuspensionisextendedbecauseoftheslowdecreaseintheloadtransferforceand,therefore,therearframetendstoliftupwhilethefrontframelowers.
Suddenpickupofgrip.
Thehighvalueofthelongitudinalslippagecreatesalargeandsuddendrivingforce,theswingingarmissubjecttoasuddenmomentthatcausesanacceleration(whichispositive)inacounter-clockwisedirection(towardsextension)thattransmitsthroughthespringandshockabsorber

assemblytotheframe.
Fig.6-19Rearsuspensiontrimduringrearwheelslippage.
Dampedtransientoscillation.
Αdampedtransientoscillationoftheframepitchoccursandafteracertaintimeintervaltheinitialsteadyconditionisattained.
Figure6-20showsthedeviationofthedrivingforceandtheverticalloadontherearwheel.Aswecansee,theloadtransferforceinthelowgripzoneslowlydecreasesandthedrivingforcebecomesveryhighwhenthepickupofthegripoccurs.

Fig.6-20Deviationoftheverticalloadanddrivingforce.
Figure6-21illustratesthedeviationoftheverticalaccelerationabouttherearaxleandtheframepointtowhichthespringandshockabsorberassemblyisattached.Theupwardaccelerationpeakatthebeginningofthelowgripsection,andthedownwardaccelerationpeakatthegrippickuppointarequitenoticeable.
Fig.6-21Verticalaccelerationoftherearpartofmotorcycle.
Themomentbalancefortheswingingarminsteadyconditions,asrepresentedinFig.6-22:
0=Mv−NtrLcosφ+S(Rr+Lsinφ)−T[rc−Lsin(φ−η)]
allowsustoexpressafewobservationsregardingthechainforceandthedrivingforce.Aswecansee,theelasticmomentbecomesindependentofthechainforceandthedrivingforceifthefollowing

fourconditionsareverified:thechainangleofinclinationηisequaltotheswingingarmangleofinclinationφ;theinclinationangleoftheswingingarmφisequaltotheloadtransferangleτ=h/p;theloadtransferisproportionaltothedrivingforce,asitwasforthestationaryconditionNtr=Sh/p=Stanτ;thewheelangularspeedisconstantinordertohaveadirectproportionalitybetweenthedrivingforceandthechainforceT=SRr/rc.
Fig.6-22Geometricconfigurationoftherearsuspensionthatshouldensure,insteadyconditions,atrimindependentoftheforcesapplied.
Infact,themotionequationcanbesimplifiedinthefollowingway:
Mv=NtrLcosφ−SLsinφ
ThevariableelasticmomentumMvisnullandtherefore,asthechainforceandthenthedrivingforcevarytheswingingarmremainsinequlibrium.
Twonewarchitectureshavebeenproposed[Romevaetal.,1993]thatmeettheconditionsnecessarytokeepthesquatratioconstantandunitaryundersteadyconditions.Thefunctionalschemesofthetwosolutions,respectivelynamedthe“Bilever”and“Tracklever”systems,areshowninFig.6-23.

Fig.6-23Rearsuspensions“Βileνer”and“Tracklever”.
Unfortunately,aswehavealreadyseen,intransientconditions,theloadtransfer(functionofthedrivingforce)occurswithacertaindelaycomparedwiththedrivingforceand,therefore,theseinnovativesuspensionschemesdonotpresentanyadvantagesovertheclassicswingingarmsuspension.Infact,Fig.6-24showsthateveniftheη=φconditionismetinthetransienteventbothinthechangefromdrytowetgroundandviceversa,thedrivingforce,theloadtransferandthechainforcemomentsontheswingingarmarenotinequilibrium.Thisbehavioristhuslikethatofatraditionalswingingarmsuspension.
Fig.6-24Forcesoperatingonthesuspensionduringslippageandgrippickup.
6.4.1Rearsuspens ionwiththe pinionattachedtothe swingingarm
Anothervalidsolutiondesignedtoimprovethesuspensiondynamicbehaviorinthepresenceofthechainforceisrepresentedbytheintroductionofasecondsprocketontheswingingarm(ATKSystem:AntiTensionChainSystem).
Intheoriginalversion,thechaininclinationangleisequaltotheangleoftheswingingarm.Thesecondsprocket,integraltotheswingitself,ispositionedsothatthelineofactionofthereactionforceexertedbythepinionontheswingingarmwouldpassthroughtheswingingarmpivotwithoutcausinganyadditionalmoment.
Letusconsiderthemoregeneralcasewhichpresentsaconstantvaluebetweenthechaininclinationangleandtheswingingarminclinationangle(Fig.6-25):
ν=φ−η
Ifthereactionforcegeneratedbythesecondsprocketontheswingingarmdoesnotgenerateamoment,duetothefactthatthelineofactionpassesthroughtheswingingarmpivot,theequilibriumbetweenthemomentsactingonthewheel-swingingarmsysteminrelationtotheswingingarmaxle,willbe:

Letusanalyzetheaboveequilibriumequation:themomentcausedbytheloadtransfercompressesthesuspension;thedrivingforcecompressesthesuspensionifφ<0,orextendsitifφ>0;themomentgeneratedbythechainforceextendsthesuspensionifν>0,orcompressesitifν<0.
Inordertoobtainvaluesofthechainratio,veryclosetotheunit,thechainmustbemoreinclinedinrelationtotheswingingarm,thatis:ν=(φ−η)>0.
ThecurvesinFig.6-26showthegrowingtrendofthechainforceratioastheverticalwheeltravelycbecomeshigher.
Fig.6-25Suspensionwithasecondsprocketattachedtotheswingingarm.

Fig.6-26Chainforceratiovaryingwiththeycdisplacementforseveralvaluesoftheνangle.
Thecurveshapecanbemodifiedbyvaryingthesprocketpositioninrelationtotheswingingarmpivot.Todothis,placingthesecondpinioninvariouspositionsontheswingingarm(seeFig.6-27),itispossibletotakeadvantageofthereactionforcethusgeneratingamomentwhichwillextendorcompressthesuspension.
Fig.6-27Influenceofthesprocketpositiononthechainforceratio.
6.5The brakingactionTheloadtransferduringthebrakingactionisdirectlyproportionaltothetotalforceofthebraking
action,totheheightofthemasscenter,andinverselyproportionaltothewheelbase(seeFig.6-28):
whereFindicatesthesumofthefrontandrearbrakingaction.

Fig.6-28Motorcycleequilibriumduringbraking.
Thebrakingactiongeneratesapitchingmotioninthemotorcycle,especiallyatthebeginning,whenthebrakingforceissuddenlyapplied.Duringtheresidualtimeofthebrakingaction,assumedtobeuniform,thefrontandrearsuspensionstakeadifferenttrimdependingonthetypeofsuspension.
Inthefollowingparagraphtheeffectsofthebrakingforceonthefrontandrearsuspensionsareexamined.
6.5.1The frontsuspens ion
Duringbrakingthefrontsuspensionissubject,inadditiontothestaticverticalload,totwoadditionalforces:
thefrontbrakingforceFf,theloadtransferNtrgeneratedbythetotalbrakingforceF.
Thesetwoforcesdefinetheloadtransferangleofthefrontwheelτf,i.e.,theinclinationangleofthelineofactionoftheresultingforceactingonthefrontwheelinrelationtotheroad(Fig.6-29).

Fig.6-29Forcesactingonthefrontsuspension.
Thete lescopicforks
Inthecaseoftelescopicforks,thecontactpointtrajectoryofthefrontwheelinrelationtotheframecanbepresumedtobestraightandparalleltothesteeringaxis.Duringthebrakingaction,theforkiscompressed,duetotheloadtransfercomponentNtrandtheeffectgeneratedbythebrakingforcecomponentFf,asshowninFig.6-30.Themagnitudeofthecompressiondependsprimarilyontheforkinclinationangleγ=π/2−ε(trajectoryangle).
Fig.6-30Forcescompressingthesuspension.
Letussupposethatthebrakingforceappliedtotherearwheeliszero.Inthiscase,thenormalizedcompressionforceonthefork,expressedbytheratiobetweenthesumofthecompressing

componentsonthesuspensionandthefrontbrakingforce,dependsonlyonthesteeringinclinationangleandontheloadtransferangle:
Thedivebehaviorofthesuspensionismaximumwhentheloadtransferangleτfcorrespondstotheforkinclinationangleγ.
Fig.6-31Normalizedcompressionforceonthetelescopicfork[h/p=0.5].
Figure6-31showsthatthedivedisplacement,proportionaltothecompressionforce,isatitsmaximumwhentheforkhasaninclinationangleofabout63°.Wecanobservethatundernormalusage,thedivebehaviorismorepronouncedastheinclinationangleoftheforkbecomeshigher.
Anothertypicaleffectofthetelescopicforkisthedecreaseinthetrailasforkcompressionincreases.

Fig.6-32Trailvarianceduringbrakingaction(telescopicfork).
Let’ssupposethatthewheelshavethesameradiusandthatwecanignoretherearsuspensiondeformation.Itiseasytodetermineaformula,whichwouldindicatethetrailvariation,asaconsequenceofthefrontsuspensioncompression.Thesteeringinclinationangleduringbrakingis,therefore:
whereΔs=s−sorepresentsthefrontsuspensioncompression.
Thetrailduringbrakingisexpressedbythefollowingformula:
Fig.6-33showsanexampleofthevariationoftrailandsteeringinclinationdirectlyrelatedtothevariationofthefrontsuspensioncompression.

Fig.6-33Trailandcasterangleversusthefrontsuspensioncompression.[p=1.4m,a=0.116m,ε=27°,Rr=Rf=0.36m]
Neutral suspens ionandanti -dive suspens ion
Ifthebrakingbehaviorofthefrontsuspensionhastobeneutral,thatis,withoutanyeffectfromthebrakingforce,thetrajectorydescribedbythecontactpointshouldbeaverticalline(seeFig.6-34).Inthiscasecompressionofthesuspensioniscausedonlybytheloadtransfer.
Fig.6-34Neutralfrontsuspensionandanti-divesuspension.
Verticalaxlepathsduringbrakingareeasilyobtainedbyapplyingfour-barlinkagesuspensionswiththewheelattachedtotheconnectinglinkofthefour-baritselforwithasimpleleadingortrailingarm.
Ifthetrajectoryofthewheelisnormalinrelationtotheforcegeneratedbythesumoftheloadtransferandthebrakingforce(Fig.6-34),thefrontsuspensionspringwillnotbestressedduring

braking.Thisfunctionaldiagramisalsoobtainedbyapplyingafour-barlinkagesuspension,orwiththesuspensionpush-arm.
Suspensionsystems,whichdiminishthesuspensioncompressionduetotheloadtransfer,arecalledanti-divesuspensions.
Four-barl inkage suspens ion
The“Telelever ’suspension(seeFig.6-35),appliedasweallknowbyBMW,isgeneratedbythefour-barlinkage.Themechanismisinfactaspatialmechanismwithtwodegreesoffreedom:
the1stdegreeoffreedom,givenbytherotationofthetwocomponentsconnectedtotheprismaticcouplearoundtheaxisthatpassesthroughthecenterofthetwosphericalcouples.Itcorrespondstothesteeringaction.the2nddegreeoffreedom,whichimpliesthemotionofallthecomponentsofthemechanism,correspondstothefrontsuspensionmovement.
Fromakinematicpointofview,thebehaviorshowninthisdiagramisquitedifferentfromthatofatraditionalsuspensionwithtelescopicfork.Oneoftheadvantagesofthisschemeisthatitallowsacertaindegreeofanti-divesuspension.
Fig.6-35Teleleverfrontsuspensionbasedonaspatialmechanism.

Fig.6-36Varianceofwheelbase,trailandinclinationangleversusthesuspensionmovement.
ThediagramsofFig.6-36showthevarianceofthewheelbase,thetrailandthesteeringheadangle,fortwomotorcycles,geometricallysimilarinstaticequilibriumthoughequippedwithdifferentfrontsuspensions.Forthetwosuspensionswecanobserveadifferent,almostoppositebehavior:withthetraditionalsuspensiontheincreaseofthesuspensioncompressioncausesadecreaseinthewheelbase,thetrailandthecasterangle,whereaswiththeTeleleversuspension,thewheelbasestaysalmostconstantandtheothertwoparametersaugment.
Push-armsuspens ion
Ifthepivottrajectoryofthefrontwheeliscircular(asforexamplewiththe‘Earles’fork)theloadtransfercompressesthesuspension,whilethebrakingforceextendsit,asshowninFig.6-37.

Fig.6-37Frontpush-armsuspensionandfour-barsuspension.
Ifweapplyonlythefrontbrake(Fr=0),theequationofthemomentsaroundtherotationcenterchangesto:
Thesuspensionisthereforeeithercompressedorextended,dependingonitsgeometricalcharacteristics,andinparticulardependingonthedistancescandb.Ifthemomentispositive,thesuspensioniscompressed.Ifthemomentisnegative,thesuspensionisextended.
Ifthebrakecaliperisnotapartofthearm,butconnectedtotheframewitharod,thepreviousformulaisstilltrue.Inthiscasethevaluescandbwillrepresentthedistancesmeasuredalongthexandyaxesbetweenthewheelaxleandtheintersectionpointofthestraightlines(seeFig.6-37).
6.5.2The rearsuspens ion
Letusconsidertherearsuspensionandsupposethatthechaindoesnottransferanyforce(duringbrakingthelowersectionofthechainisslack).
ThedirectionofthesumoftherearbrakingforceFr,withtheloadtransferNtr,maybemoreorlessinclinedinrelationtothestraightlinewhichconnectsthecontactpointwiththeswingingarmpivot,dependingonthevaluesofthetwocorrespondingforces.

Fig.6-38Swingingarmsuspensionduringbraking.
Theangleoftheloadtransferduringrearbrakingτrcorrespondstotheinclinationofthestraightlineoftheforceactingontherearwheelinrelationtotheroadplane(seeFig.6-38).
IftheloadtransferNtrishigh,duetothebrakingactionofboththefrontandrearbrakes(Ff≠0)andiftherearbrakingforceFrislow,theresultingforcewillgenerateamomentthatwilltendtoextendtherearsuspension(Fig.6-38a).Inthiscase,theloadtransferangleislargerthantheγangle.Thisangleisformedbythestraightlinewhichconnectsthecontactpointwiththeswingingarmpivotandthexaxis.
Onthecontrary,ifweapplyonlytherearbrake,andthereforetherearbrakingforceFrhasahighvalue,theangleγcouldbelargerthantheloadtransferangle.Inthiscase,therearsuspensionwillbecompressed(Fig.6-38b).

Intheabovediagram,wehavesupposedthatthebrakecaliperisconnectedtotheswingingarm.Thismeansthattheforcesexchangedbythebrakingelementswillreactwithintherearswingingarm-wheelassembly.
Fig.6-39Four-barlinkagerearsuspensionduringbraking.
Thebrakinganglewillchangeifthesupportofthebrakecaliperisfreetorotatearoundthewheelaxleandisfixedtotheframebymeansofarod.Theswingingarm,theconnectingrod,thesupportandtheframeformafour-barlinkage.Theintersectingpointoftheswingingarmaxisandtherodcorrespondstotheinstantaneouscenterofrotationoftheconnectingrodinrelationtotheframe.Thewheel-swingingarmequilibrium,inrelationtothispoint,showsthatthesuspensioniscompressedorextendeddependingonitsposition,asshowninFig.6-39.

MotorcycleDucati125cc.of1956
7MotorcycleVibration
ModesandStabili tyAseveryoneknows,thefrontand/orrearendofamotorcycleinmotioncanstarttooscillate
aroundthesteeringaxis,evenifthewheelsarewellbalanced.Thisphenomenoniseasytoobserveexperimentally,forexamplebygraduallyslowingdownthemotorcyclefromafairlyhighspeed.Oscillationscanbeobservedatcertainspeedsespeciallyifthefrontwheelisoutofbalance.Theyreachtheirmaximumamplitudeandthendecreaseasspeeddecreasesuntiltheydisappearcompletely.Rear-endoscillationscanbeobservedwhentravelingoveratransversebumporbyexcitingtherearframewithanimpulsivemovementoftherider ’strunk.Atalowspeeditcanalsobeeasilyobservedthatthemotorcycletendstofalloversideways,regardlessofwhattheriderdoes.Theseexperimentalobservationsofmotorcycledynamicsshowthattherearethreemajormodes:
capsize,anon-oscillatingmodeusedandcontrolledbytherider;weave,anoscillationoftheentiremotorcycle,butmainlytherearend;wobble,anoscillationofthefrontendaroundthesteeringaxiswhichdoesnotinvolvetherearendinanysignificantway.
Therider ’scontroltaskcanbeconsideredtoinvolveeitherfixedcontrolorfreecontrol,i.e.withorwithouttheirhandsgraspingthehandlebar,respectively.Withthesteeringrotationfixedthemotorcycle-ridersystemisunstableinrollatallspeeds,likeacapsizingship,whereasintheunconstrainedconditionthesteeringsystemisfreetosteeritself,potentiallyrelievingtherideroftheneedtoapplysteeringcontrolactionforstabilization.Aviablemotorcycleneedstoself-steereffectively,thuscontributingtoautomaticstabilization,withoutbecomingtoooscillatoryunder

certainrunningconditions.
Atverylowspeedsamotorcycleisunstablebecauseofcapsize,twonon-oscillatingmodesinvolvingrespectivelyrollandsteermotionofthevehicle.Around1m/stheserealpolesmeet,coalesceandbecomethecomplexpolepairassociatedwiththeweavevibrationmode.Weavemodeisusuallyunstableupto7-8m/s.Overthisspeedmotorcyclesusuallyenterintoastablezone,suchthattheridermayremovehishandsfromthehandlebarwithoutfalling.Asspeedincreases,theweave,wobble,orcapsizemodesmaybecomeunstable,dependingonthemotorcyclecharacteristics,andtheriderhastocounteractthesemodeswithatorqueappliedatthehandlebar.Weavemodeisusuallypoorlydampedorunstableathighspeeds,whereaswobbleispoorlydampedorunstableinthemid-rangeofspeeds.Capsizeinstabilityatmidtohighspeedsistypicallynotverysignificant.
Inthischapter,wewillfirststudythesemodesusingsimplifiedmodelsandlaterthein-planeandout-of-planemodeswillbestudiedbymeansofanelevendegreeoffreedommodel.Finally,theeffectofframecomplianceandridermobilityonmotorcyclestabilitywillbepresented.
7.1Simpli fiedmodel
7.1.1Caps ize
Thismodeisdeeplyinfluencedbyrideractiononthehandlebar,i.e.bythemechanicalimpedance(inertia,stiffness,damping)whichtheriderprovides.Thereforethemodeeasilyshiftsfromtheunstablezonetothestablezone.
Capsizeisamodeactuallyusedbytheridertorollthemotorcycle.Thisrollingactionisachievedthroughtherider ’sefforttoholdormovethesteeringheadrotationtosomenon-equilibriumposition(fixed-control).Asmentioned,thismodeisalwaysunstable,sinceinessencemotorcycleexistsasaninvertedpendulum.Thismodeisalsopresentinfree-controlcondition(i.e.withouttherider ’shandsonthehandlebar)ashighlightedbyeigenvalueanalysis.Inthelattercasethemodeisusuallysomewhatstableatlowspeedsbecauseofthesteeringmodalcomponentofitseigenvector;whereasathigherspeedsitmaybecomeslightlyunstable.
Thecapsizemodeconsistsmainlyofarollmotioncombinedwithalateraldisplacementplussomelessimportantsteeringandyawmovements(Fig.7.1).Itdependsonanumberoffactors:
speedofthemotorcycle;wheelinertia(gyroscopiceffect);positionofthecenterofgravity;motorcyclemass;motorcyclerollinertia;casterangle;mechanicaltrail;propertiesofthetires,primarilycrosssectionalsizeofthetires,twistingtorqueandpneumatictrailofthefronttire.

Fig.7-1Capsize.
Tohighlighttheinfluenceofsomegeometricalandinertialpropertiesofthemotorcycleonthecapsizemodeitisusefultoanalyzethefallmotionofamotorcyclewiththesteeringheadlocked.
Inthishypotheticalcase,withinthelimitsoflinearapproximation,capsizecanbeexpressedasanexponentiallaw:
whereτisapositivetimeconstant,therefore,thecapsizeisalwaysunstable.
Basicallythetimeconstantisameasureofhoweasilythemotorcyclewillleanover.Forexample,racingmotorcyclesneedasmalltimeconstantsotheycancornerandchangetrajectoryquickly.Touringmotorcyclesneedtorollmoreslowly,makingthemeasierfortheridertocontrol.
Capsizeinstabilityshouldnotbeviewedasadrawback,however,sinceitispreciselythisphenomenonthat,givenpropercontrolaction,enablesthemotorcycletoleanintoandexecutecurvescorrectly.Thesmallerthetimeconstant(i.e.,thegreaterthecapsizeinstability),thelessleadtimeisneededtostartleaningthemotorcycleintoacurve.
Thesimplifiedmodels,withthesteeringheadlockedandnegligiblegyroscopiceffects,yieldsmallertimeconstantvaluesthantheoneswhichcanbeobtainedbystudyingthecompletemodelofthemotorcycle.Thesimplifiedmodelsclearlyshowhowgeometricandinertialpropertiesaffectthe

capsizetimeconstant.
Modelusingthindiskwheels
Mathematicalmodelingofmotorcyclecapsizeiscomplicatedbythepresenceofthesteeringhead,gyroscopiceffects,andtirecontactforcesarisingfromtheslipandcamberangles.Herewewillconcentrateonaverysimplemodeltounderstandaspecificaspectofcapsize,thefallingtime.
Fig.7-2Capsizeforamotorcyclewiththindiskwheels.
Thissimplifiedmodelmakesthefollowingassumptions:themotorcycleismovingindirectionxatspeedV;thethicknessofthecrosssectionofthetiresisnull;thereisnoslippagebetweenthetiresandtheroad;thesteeringheadislockedinplace;gyroscopiceffectsarenegligible.
Basedontheseassumptions,capsizeisasimplerotationofthemotorcyclearoundtheaxisdefinedbythepointsinwhichthetirescomeintocontactwiththeroadway(Fig.7-2).
Theequilibriumofmomentswithrespecttothecontactpointgivesthefollowingequation:
Linearizingtheequationaroundtheverticalequilibriumposition:

andintroducingthesolution:
ϕ=ϕoest
yieldsthefollowingfrequencyequation:
Itssolutionisarealnumberandthereforecorrespondstoanon-oscillatingmotion:
Thetimeconstantofinterestτisgivenbytheinverseofthepositiverealeigenvalue:
Notethatthetimeconstantisdeterminedbytheheightofthecenterofgravity,themassofthemotorcycle,andthemotorcycle’smomentofinertiaaboutthex-axisthroughitscenterofmass.
Usingtheradiusofgyrationρ(IxG=mρ2)toexpressthemotorcycle’smomentofinertia,thetimeconstantτtakesonthefollowingform:
Nowletusassumethattheheightofthecenterofgravityandthemassofthemotorcycleareconstant,butthatthemasscanbedistributeddifferentlytovarythemomentofinertia ,i.e.theradiusofgyrationρ.

Fig.7-3Normalizedtimeconstantforcapsizeasafunctionoftheratioofgyrationradiustocenterofgravityheight.
Fig.7-4Timeconstantforcapsizeasafunctionofradiusofgyrationandheightofcenterofgravity.
Thevalueofthetimeconstantτincreasesastheradiusofgyrationρincreases(masslocatedfurtherawayfromthecenterofgravity).Figure7-3showsthenormalizedtimeconstantcurvewithrespecttotheminimumvaluefortheidealcaseofallthemassbeingconcentratedatthecenterofgravity
Figure7-4isacontourplotthatshowshowthetimeconstantvariesasafunctionoftheheightofthecenterofgravityandtheradiusofgyration.

Notethat,foragivenradiusofgyrationvalue,thetimeconstantdecreasesastheheightofthecenterofgravityincreasesuntilitreachesaminimumvalue,andthenincreases.Thismeansthatoncetheradiusofgyrationρisset,thetimeconstantisatitslowestvaluewhentheheightofthecenterofgravityisequaltotheradiusofgyration,ascanreadilybeshownanalytically.
Example1
Basedonthefollowingdata,determinethecapsizetimeconstant.
•totalmassofmotorcycle: m=248kg
•heightofmasscenter: h=0.648m
•momentofinertiaaboutthex-axisthroughitscenterofmass:
(radiusofgyrationρ=0.284meters)
Theresultingtimeconstantis:τ=0.281s.Intheidealcaseofallthemassbeingconcentratedatthecenterofgravity( )thetimeconstantdecreasesto0.257s.
Modelusingtireswithcircularcrosssection
Αsecondsimplifiedmodelcanbebuiltfromthefirst,byremovingtheassumptionthatthewheelsarethindisks,andinsteadassumingamotorcyclewithcirculartirecrosssectionswhichdonotsliplaterallyontheroadwayduringcapsize(Fig.7-5).Onceagain,thesystemhasonlyonedegreeoffreedom.
Theresultingequationsareasfollows:
wherethethirdequationistheequilibriumofmomentswithrespecttothemasscenter.
Underpureforwardrollingconditionsthesystemstillhasjustonedegreeoffreedom,andthereforey,yGandzGcanbeexpressedasafunctionofϕ:
y=ϕt
yG=ϕt+hosinϕ

zG=−t−hocosϕ
Simplemathematicalsubstitutionyieldsthefollowingfrequencyequation:
[IxG+m(ho+t)2]s2−mgho=0]
Theresultingtimeconstantisgivenby:
Thisequationshowsthatthetimeconstantincreaseswiththeradiusofthetirecrosssection.Therefore,enteringacurve,amotorcyclewithlargetirestakeslongertoleanthanonewithsmalltires.
Fig.7-5Capsizewithpurelateralrollingonthetire.

Fig.7-6Capsizetimeconstantasafunctionoftheratiobetweenthetirecrosssectionradiusandtheheightofcenterofgravity.
Figure7-6showstheratiobetweenthetimeconstantforamotorcyclewithtiresofnon-zerothicknessandthetimeconstantforthesamemotorcyclewiththindisktiresasafunctionoftheratiobetweenthetirecrosssectionradiusandtheheightofthecenterofgravity.
Example2
UsingthemotorcycleinExample1butreplacingeachthindisktire(t=0)withatirehavingcrosssectionradius(t=0.10m).Determinethetimechangeinthecapsizetimeconstant.
Thetimeconstantincreasesfromτ=0.281stoτ=0.305s.
Modelusingtireswithlateralsideslip
Thismodelisthesameasthepreviousone,exceptthatthepurelateralrollingconditiononthetire-to-roadhasbeenremoved.Inotherwords,thetirescanslipsidewaysontheroadwaywhenthemotorcycleleansover.Thissimplifiedmodelhastwodegreesoffreedom:
rotationϕaroundthex-axis(leaningthemotorcycle);displacementindirectiony(thecontactpointsideslips).
Themotorcycleequilibriumequationsthatassumepureforwardrollingmotionarevalidevenwhenthetireshowssideslip.

Fig.7-7Capsizewithtireslippage.
Inthiscase,however,thelateralforceexertedonthetiresbytheroadwayisdefinedbyboththesideslipangleandthecamberangle.Thislateralforcecanbedescribedbylinearlawasafunctionofthetiressideslipandcamberangles:
F=(kλλ+kϕϕ)mg
wherethesideslipangleisgivenbyλ=−ẏ/V
Thelinearizationaroundtheverticalequilibriumpositionyields:
Manipulationoftheequationstoeliminatetimedependenceyieldsthefollowingcharacteristicequation:
Itcanbeshownthatjustoneofthefourroots(eigenvalues)ofthecharacteristicpolynomialhasapositiverealpart.Αsecondrootiszero,andtheothertwohavenegativerealparts.

Thepositiverootrelatestocapsizeinstability,whereasthetwonegativeonesrepresenttwostablemotions.Rememberthatthetimeconstantforcapsizeisgivenbytheinverseoftherealeigenvalue.InthismodelthetimeconstantdependsonthespeedofforwardmotionV.
Example3
AssumethatthemotorcycleinExample2hastireswiththefollowingstiffnessvalues:
•corneringstiffnesscoefficient: kλ=11.0rad−1;
•camberstiffnesscoefficient: kϕ=0.93rad−1;
Determinetheeffectonthecapsizetimeconstantasafunctionofspeed.
Figure7-8showsthetimeconstantforcapsizeasafunctionofspeed.Thetimeconstantincreaseswithspeed.Thecamberstiffnesskϕhasatowingeffectoncapsize(increasingthetimeconstant)bygeneratingasortofelasticresistingtorquewhichactsagainstrollkϕϕNt.Withoutthecambercomponenttherewouldbemoresideslipandthecapsizetimewouldbeshorterasaresult.
Fig.7-8Timeconstantforcapsizeasafunctionofspeed.
Figure7-8alsoshowstheborderlinecaseofzerocamberstiffnessinwhichthetimeconstantdecreasesasspeedincreases.Thisisduetothefactthattomaintainthesideslipangleorratherthesideslipforceconstant,thelateralvelocityincreasesasspeedVincreases.Thus,higherspeedcontributestothelateraldisplacementofthecontactpoint,therebydecreasingthetimeconstant.
Example4
Intheborderlinecaseofzerostiffnessvaluesforbothkλandkϕ(thatis,asiftheroadsurfacewereasheetofice)determinethetimeconstantforthemotorcycledescribedinExample3.

Inthiscasethereisnoforcecounteractingtiresideslipandthetimeconstantdecreasestoitslimitvalueof:
whichisobtainedbyputtingkλ=0andkϕ=0intothecharacteristicequation.
Substitutingnumericalvaluesyieldsτ=0.122s,whichistheminimumvaluethatcanbeobtainedwiththesteeringheadlockedinplacewithouttakinggyroscopiceffectsintoconsideration.
7.1.2Wobble
Wobbleisanoscillationofthefrontassemblyaroundthesteeringaxisthatcanbecomeunstableatfairlylowtomiddlespeeds(Fig.7-9).
Fig.7-9Wobblemode.
Wobbleoscillationsresembleshimmyofacar ’sfrontwheelsorairplanelandinggear.Typicalfrequencyvaluesrangefrom4Hzforheavymotorcyclesto10Hzforlightweightmotorcycles.
Wobblefrequencygoesupastrailincreasesandfront-frameinertiadecreases,andisdeterminedmainlybythestiffnessanddampingofthefronttire,althoughthelateralflexibilityofthefrontforkalsoplaysapart.
Intheforwardspeedrangefrom10to20m/s(40to80km/h),wobbleisonlyslightlydampedandcanthereforebecomeunstable.Addingasteeringdamperincreasesthedampingeffectand,consequently,thestability.
Modelofwobblewithonedegreeoffreedom
Wobblecanfirstbethoughtofincompleteisolationfromrear-assemblymotionandroll.Thus,the

front-endisarigidbodythatcanrotatearoundthesteeringaxiswhiletherearframeisfixed(Fig.7-10).
Fig.7-10Frontassemblygeometry.
Theequilibriumequationaroundthesteeringaxisleadstothefollowingrelationship:
where:isthefrontassemblymomentofinertia(includingthefrontwheel)aroundthe
steeringaxis;cisthedampingcoefficientofthesteeringdamper;isthelateralforceactingonthetire.
Thislasttermisassumedproportionaltothesideslipangleλaccordingtothefollowingequation:
withnullvalueoftherelaxationlength.Forsmalldisplacementsthefollowingequationcanbeused

tocalculatethesideslipangle:
Thesideslipangleisthereforethesumoftwocomponents:thefirstdependsonthelateralspeedofthecontactpointduetosteeringvelocity ;thesecondonthesteeringanglemeasuredattheroadsurface.
Theeffectsduetothefronttirenormalloadandfrontframeweightforcearesignificantlysmallerthanthatduetotirelateralforce.So,makingthepropersubstitutionsthemotionequationforsmalloscillationsbecomes:
Introducinganoscillatingsolutionintotheequationandeliminatingtime-dependencegivesthefollowingcharacteristicequation:
whichyieldsthefollowingroots:
Thesystemisoscillatingwhenthediscriminantisnegative,i.e.,neglectingthedampingc,forforwardspeedsgreaterthan:
Thefrequencyforthedampedsystemνis:

Thedampingratioζisgivenby:
Notethatζdecreasesastheforwardspeedofthemotorcycleincreases.
Figures7-11and7-12showhowthenaturalfrequencyanddampingratio,respectively,ofthewobblemodevarywithspeed.Specifically,Fig.7-12showshowasteeringdamperaffectsthedampingratioofthewobblemode,especiallyathighspeeds.
Fig.7-11Naturalfrequencyofwobbleasafunctionofspeed.
Fig.7-12Dampingratioforwobbleasafunctionofspeed.

7.1.3Weave
Weaveisanoscillationoftheentiremotorcycle,butmainlytherearend,asshowninFig.7-13.
Fig.7-13Weave.
Thenaturalfrequencyofthisside-to-sidemotioniszerowhentheforwardspeedisalsozeroandrangesfrom0to4Hzathighspeed.Weaveisdeterminedbymanyfactors:
positionofthecenterofgravityoftherearassembly(andsecondarilythatofthefrontassembly);wheelinertia;casterangle;trail;corneringstiffnessofthereartire.
Thedampingofweavecanbeshowntodecreaseasspeedincreases.
Weaveisusuallyunstableatalowspeed(upto7-8m/s).Itisgenerallystableinthemiddlespeedrange,butitmaybeuncontrollablefromthepracticalstandpointathighspeedsinceitsdampingmaydecreasesubstantiallyanditsnaturalfrequencymaybetoohighfortheridertocontrol..
Theweavemodeisgeneratedbythecoalescence,atverylowspeeds,oftwounstablenon-oscillatingmodes:body-capsizeandsteering-capsize(Fig.7-14).
Bodycapsize
Body-capsizeindicates–capsizeoftheentiremotorcycle,andcanbeestimatedwithoneofthethreesimplemodelspresentedinsection7.1.1.Thetimeconstantwiththesteeringfreedecreasesslightly.Infact,supposethemachinebeginstofalltotherider ’sright.Inbodycapsizemode,steering

geometrycausesthemachinetosteerlefttherebymovingthefrontwheelcontactpointtowardstherider ’sright.Consequently,thegroundcontactlinethatjoinsthefrontandrearwheelgroundcontactpointsrotatestotherider ’sright.Thismeansthegravitationaltorqueincreasesandsothevehiclecapsizeslessquickly.
Fig.7-14Weavecoalescence.
Steeringcapsize
Steering-capsizeisacapsizeofthesteeringhead,duetothedisaligningeffectofboththefronttirenormalloadandfrontframeweightforce.Onceagainconsiderthesimplifiedsituationinwhichtherearframeisfixedwhereasthefrontframeisfreetosteer.Theequilibriumequation,neglectingthesteeringdamperandthetirelateralforce,whichdoesnotactatthebeginningofmotion,becauseofitslag,yieldsthefollowingrelationship:
Therootsare:
Thetimeconstantofthesteeringcapsizehasvaluesintherange0.1-0.2sforspeedlessthen1m/s.
Modelofweavewithonedegreeoffreedom

Weavecanfirstbeseenasanoscillationoftherearendaroundthesteeringheadaxisalmostindependentoffront-assemblymotionandrollmotion.Thismodelofweavewithonedegreeoffreedomisbasedonthefollowingassumptions:
therollvalueforthemotorcycleisnull;thesteeringheadislockedinplace.
Thisassumptionarisesfromtheobservationofrealweaveoscillations,inwhichlateraldisplacementofthesteeringheadaxisissubstantiallylowerthanthelateraldisplacementofthereartire.
Fig.7-15Weave.
Themotionequationisobtainedbyimposingequilibriumonrotationaroundthesteeringheadaxis.Therelationshipobtainedisonceagainthesamerelationshippresentedintheprevioussteering-capsizesection,wherenormalreartraillsubstitutesnormaltrailan.Theeffectsduetothefronttirenormalloadandfrontframeweightforcearesignificantlysmallerthanthatduetotirelateralforce,soweassumethefollowingsimplifiedexpressionofsteeringequilibrium:

where(Fig.7-15):istherearassemblymomentofinertia(includingtherearwheel)aroundthe
steeringaxis;cisthedampingconstantforthesteeringheadrotation;isthelateralforceactingonthetire.
Thislasttermisassumedproportionaltotherearsideslipangleλaccordingtothefollowingequation:
withnullvalueoftherelaxationlength.Forsmalldisplacementsthefollowingequationcanbeusedtocalculatethesideslipangle:
Thesideslipangleisthereforethesumoftwocomponents:thefirstresultsfromthelateralspeedofthecontactpointduetoyawvelocity ;thesecondfromtherearframeyawanglemeasuredattheroadsurface.
Makingthepropersubstitutionsthemotionequationforsmalloscillationsbecomes:
Introducinganoscillatingsolutionintotheequationandeliminatingtime-dependencegivesthefollowingcharacteristicequation:
whichyieldsthefollowingroots:
Thesystemisoscillatingwhenthediscriminantisnegative,i.e.,forforwardspeedsgreaterthan:

Inthiscase,thefrequencyforthedampedsystemνandthedampingratioζaregivenby:
Thus,wecandrawthefollowingconclusions:thedampingratioζfallsrapidlyandasspeedincreasesitapproachesalimitvalue:
thedampednaturalfrequencyνdecreasesasinertiaincreasesandincreaseswithspeedandtirestiffness;withnegligibledampingc,increasingthespeeditapproachesthevalue:
thislastequationconfirmsthattheweavemodefrequencyincreaseswithtirestiffnessandthelengthofthewheelbase,butdecreasesasthecasterangleandinertiaofthemotorcycleincrease.
Example5
Letusconsideramotorcyclewiththefollowingdata:
•casterangle ε=27°
•rearframeinertiaaboutsteeringaxis
•distancebetweenrearcontactpointandsteeringaxis l=1.38m
•distancebetweenmasscenterandsteeringaxis l1=0.67m
•steeringdamper c=6.8Nm/rad/s
•tirecorneringstiffnes

Wewillinvestigatehowthecharacteristicsoftheweavemodechangewithspeed.Figures7-16and7-17showhowthenaturalfrequencyanddampingratio,respectively,oftheweavemodevarywithspeed.
Theweavefrequencytendstotheundampednaturalfrequencyvalueasthevelocityincreases.Thesimplifiedmodelshowsthatthesteeringdamperincreasestheweavedampingratio.Inthiscasethesimplifiedmathematicalresultsarenottruebecauseinrealitythesteeringdampinghasanegativeeffectonweavestability.
Fig.7-16Naturalfrequencyofweaveasafunctionofforwardspeed.
Fig.7-17Dampingratioforweaveasafunctionofforwardspeed.
7.1.4Combinedmodel forweave andwobble
Uptothispoint,wehavelookedatweaveandwobbleinisolationassumingthatthesteeringheaddoesnotdisplacelaterallyineithervibrationmode.Nowwewilluseasystemwiththreedegreesoffreedomtorepresentthemotorcycle.Lookingatthemotorcycleinthedirectionofthesteeringaxis,itiseasytoseethatthethreedegreesoffreedomaretheabsoluterotationsofthefrontassemblyθf,

andrearassemblyθraroundthesteeringaxis,andthelateraldisplacementyofthesteeringaxis(Fig.7-18).
Theresultingequationsofmotionareasfollows:
where[M]ismassand[Κ]isstiffnessmatrix:
[C]isthedampingmatrix:

Fig.7-18Front-endandrear-endgeometry.
Figures7-19and7-20confirmthat:thetwomodesofvibrationaresubstantiallyindependentofeachother;therearenosignificantdifferencesbetweenthemodelwithonedegreeoffreedomandtheonewiththreedegreesoffreedomwithrespecttothefrequencyvaluesordampingratios.

Fig.7-19Naturalfrequenciesofweaveandwobbleasafunctionofspeed.
Fig.7-20Dampingratiosforweaveandwobbleasafunctionofspeed.
7.2Multi -bodyModel
7.2.1Introduction
Themotorcyclehastwokindsofmodes:thein-planemodes,whichinvolveframe,suspensionandwheelmotionintheverticalplane,theout-of-planemodes,whichinvolveroll,yaw,steeringangleandsteeringheadlateraldisplacement.
Thein-planemodesarerelatedtoridecomfortandroad-holding,whereastheout-of-planemodesarerelatedtovehiclestabilityandhandling.Instraightrunning,in-planeandout-of-planemodesareuncoupledandtheycanbeexaminedseparately.
Theeigenvaluesofthein-planeandout-of-planemodesarecomplex:

s=sr+isi
Thenaturalfrequencyoftheoscillatingmodescorrespondstotheimaginarypartoftheeigenvalue:
Therealpartoftheeigenvaluesgivesinformationonthedampingofthemodes.Inthecaseoftheout-of-planemodes,therealpartoftheeigenvaluesprovidesinformationonthestabilityofthemotorcycle.Themotionisunstableiftherealpartispositive,anddampediftherealpartisnegative.
Thedampingratioisgivenby:
Iftheimaginarypartiszerothemodeisanon-oscillatingoneandthetimeevolutionofthegenericmodalcomponentcanberepresentedbyadecreasingorincreasingexponentiallaw:
whereτisthetimeconstant,positiveforunstablemodesandnegativeforthestableones.
Thepropertiesoftheeigenvaluesareclearlyrepresentedintherootlocusgraph,asshowninFig.7-21.Thepositionoftheeigenvaluesinthecomplexplanerepresentsdifferentcases.Theeigenvalueslocatedontheright,inrelationtotheverticalaxis,representunstablemodeswhiletheeigenvalueslocatedontheleftarestablemodes.Toclarifythemeaningoftheeigenvalues,thetimeevolutionlawscorrespondingtodifferenteigenvaluesareshowninthesamefigure.

Fig.7-21Rootlocusandexamplesoftimeevolutionlawsfordifferenteigenvalues.
Thefirstout-of-planemotorcycleequations,linearizedaroundtheverticalequilibriumposition,weredevelopedbyR.S.Sharpinaninfluentialarticle[Sharp,1971].
Sharp’smodelofthemotorcyclehasfourdegreesoffreedom(Fig.7-22):rear-frameroll;rear-frameyaw;rotationofthefrontframearoundthesteeringaxis;lateraldisplacementoftherearframe.
Thetire-to-roadcontactforcesaretakenaslinearfunctionsofthesideslipandcamberangles.Thelagintheforceswithregardstothesideslipanglesisintroducedinthemodelusingtwofirst-orderdifferentialequations.

Fig.7-22Motorcyclemodelwithfourdegreesoffreedom.

Table7-1.
Fig.7.23Motorcyclediagram.
Figure7-24showsthefrequenciesandrealpartsofvibrationmodesasafunctionoftheforwardvelocity,derivedwithSharp’smodel.

Fig.7-24Frequenciesandrealpartsofvibrationmodesasafunctionofspeed.
Thewobblecoversthefrequencyrange8.5to9.6Hz;thespeedofthemotorcyclehaslittleeffectonwobblefrequency.
Themaximumrearwobblefrequencyisapproximately6.5Hzattheminimumvelocity;therearwobblefrequencydropsoffmarkedlyatspeedsof18m/sandaboveandceasestovibrate.
Themaximumweavefrequencyisapproximately3.6Hzatthemaximumvelocity.Infacttheweavemodefrequencyincreaseswithspeed.
TheFig.7-24alsoshowshowtherealpartoftheeigenvaluesvarieswithspeed.Notethat:weavemodeisunstableatlowspeed,dampedinthemediumspeedrange,andweaklydampedathighspeed;rearwobblemodebycontrastisstronglydampedandbecomesovercriticalaboveacertainspeed;frontwobbleisdampedinthemediumandlowspeedranges,butbecomesalittleunstableathighspeed.Infact,theoscillationsassociatedwithwobblearethemostdangeroussincetheirhighfrequencymakesthemhardfortheridertocontrol.
Aboveapproximately18m/stherearwobblebecomessupercriticalandsplitsintotwomodes.Thefirstoneisverystableandcharacterizedbynearlyconstantdamping,whilethesecondoneischaracterizedbyadecreasingrealpartwhichgraduallybecomesmorestable.
Figure7-24showsthattherealpartofthecapsizeeigenvalueisalwaysnegative,itisverystableatlowvelocityandtendstobecomeborderlineunstableathighvelocity.Stabilityatlowvelocityisin

contrastwiththeexperimentalevidence.However,itisworthrememberingthatthefirstSharpmodelisbasedonwheelswithzerothickness;sincethecapsizemodedependsonthelocationofthefrontcontactpoint,theevaluationofthecapsizemodeneedsamoreaccuratetiremodel.
Thefrequenciesanddampingsoftheout-of-planemodesinstraightrunningarequitewellvalidatedbyexperimentresults.Incornering,thefrequenciesandthedampingratios,ofbothin-planeandout-of-planemodes,varywithrespecttothestraightrunningcondition.Furthermore,thetwotypesofmodesarecoupledtoeachother.
7.2.2Motorcycle multi -bodymodel
Amorecomplexmathematicalmodelisneededtogiveamoreaccuratedescriptionofmotorcyclebehaviorthanthecurrentone.ForthisreasonthefirstSharpmodelcanbedevelopedfurther,byaddingthesuspension’sdegreesoffreedomanddescribingthetirepropertiesaccurately.
Themulti-bodymodelofthemotorcyclefromwhichtheremarksincludedinthischapterariseiscomposedofsixrigidbodies,respectively:(formoreinformationsee[CossalterandLot,2002]):
therearframe(whichincludeschassis,engine,tank,rider,partoftherearsuspensionandpartofswingingarm),thefrontframe(whichincludeshandlebars,sprungforkcomponentsandthesteeringhead),therearunsprungmass(whichincludespartoftheswingingarmandtherearbrakecaliper),thefrontunsprungmass(whichmainlyincludespartoftheforksandthefrontbrakecalipers),therearwheelandthefrontwheel.
Thissetofbodieshaselevendegreesoffreedominall,ascanbeseeninFig.7-25,theyare:thepositionoftherearframecenterofmass(threecoordinates);theorientationoftherearframegivenbypitch,rollandyawangles;thetravelofbothsuspensions(thefrontoneistelescopic,therearoneisaswinging-type);thespinanglesofthewheels;thesteeringangle.
Thedynamicsofthismulti-bodysystemisverycomplexbecauseofthelargenumberofbodiesandforces.Theaerodynamiceffectsarereducedtoonlythreeforces(drag,lift,andlateral)whichactonthecenterofpressureoftherearframe.Thebraketorquesareappliedontherespectivewheelaxes,whereasthepropulsiveforceistransmittedfromtheenginetotherearwheelbyachaintransmission.Thesteeringtorqueactsbetweenthefrontandrearframealongthesteeringaxis.

Fig.7-25Motorcyclemodelwithelevendegreesoffreedom.
Thetiremodelaccuratelydescribesthegeometryofthetreadwhichisfundamentalinevaluatingthetirebehavioratlargecamberangles.Thecarcassisthoughtofaselasticallydeformablealongradial,lateralandtangentialdirections.Thecontactforces(seealsochapter2)areappliedonapointwhosepositionisdefinedbytheequilibriumbetweentheexternalforces(duetothecamberangle,thelongitudinalslipandthesideslip)andtheinternalelasticreactions.Thispointrepresentsthecenterofthecontactpatch.Thecontactyawtorqueisappliedonthesamepointandactsaroundtheverticalaxis,whereastherollingresistanceactsinthewheelplaneandtendstoslowthewheel’srotation.
7.2.3Modes ofvibrationins traightrunning
Fig.7-26showstherootlocusplotofbothin-planeandout-of-planemodesforasportmotorcycleinstraightrunning.Thedirectionofthearrowsshowstheincreaseofthevelocityfrom3to60m/s.Thegreylinesstartingfromtheoriginareconstantdampingratioloci.

Fig.7-26Root-locusplotinstraightrunningatdifferentspeeds,(speedfrom3to60m/s).
Thein-planemodes,pitchandbounce,arealsodiscussedinchapter5.Inthecaseplottedherethepitchandbouncearecoupledtogether,thepitchmodeinvolvesanotnegligibleverticaldisplacementofthemotorcyclemasscenterwhilethebouncemodeinvolvesanotnegligiblepitchrotation.Generallythepitchmodeismoredampedthanthebouncemode.Infact,duetothedampingselectedfortheshockabsorbers,thebouncemodehasadampingratioofabout0.3-0.5whereasthepitchmodegenerallyhasadampingratioofabout0.9andcanalsobeoverdamped.Thefrequencyofthebouncemodeisintherange1.4-2.0Hz;thepitchfrequencyincreasesfrom2Hzto2.9Hzat60m/s.
Thefronthopmode(around10-11Hz)andtherearhopmode(around13-14Hz),respectively,ofthefrontandrearunsprungmassarecharacterizedbynegligiblemotionofthesprungmass.
Moreover,Fig.7-26highlightsthevaluesandthedependenceoftherealandimaginarypartsofthemainoutofplainmodesonthevelocity:
capsize;wobble;weave;rearwobble.
Thewobbleandweavemodesarevibratingmodesintheentirerangeofvelocityconsideredherewhiletherearwobblebecomesovercriticalwhenvelocityincreases.Thecapsizemodeisanon-

vibratingmodethatisquiteunstableintheexampleconsidered.Thewobblemodebecomesunstablewhenincreasingthevelocityduetothefactthatinthismodelthesteeringdamperwassettozero.Figure7-27showsthefrequenciesandthedampingpropertiesofthemainout-of-planemodesasafunctionoftheforwardvelocity.
Fig.7-27Frequenciesandrealpartsofvibrationmodesasafunctionofspeed.
Thespeedofthemotorcyclehaslittleeffectonwobblefrequency;themaximumwobblefrequencyisapproximately11Hzattheminimumvelocityandafter15m/sremainsconstantandequalto7.8Hz.Thewobblemodeisdampedinthelowandmediumspeedrangesbutbecomesunstableathighspeed.
Therearwobbleceasestovibrateatavelocityofabout14m/s;itisastronglydampedmodethatbecomesovercritical.
Theweavemodefrequencyincreaseswithspeed;itsmaximumvalueisapproximately3.0Hzatthemaximumvelocity.Theweavemodeiswelldampedinthemediumspeedrange,andweaklydampedathighspeed.
Thecapsizeeigenvalueisalwayspositive.Itisunstableatlowvelocityandtendstobecomelessunstableathighvelocityduetothegyroscopiceffects.
Inthefollowingsectionsdetailsoftheout-of-planemodesinstraightrunningarepresented.
Capsize
Simplifiedmodelswithlockedsteeringshowthatcapsizeisalwaysunstable.Actuallythecapsizemodemaybeunstableormoderatelystabledependingonvelocityandonmotorcycleandtireproperties.

Adetailedanalysisshowsthatcapsizebecomesmoreunstablebyreducingthemechanicaltrailofthemotorcycleandincreasingthecasterangle.Asfarastiresareconcerned,wecansummarizethatonlythefrontonehasappreciableinfluenceduetothepresenceofthesteeringmechanism.Anincreaseofthecrosssectionsize(sectionradius)reducesthestability,butdoesnotmakethemodeunstable.Onthecontrary,theyawtorqueparameterscanalterthesignoftherealpartoftheeigenvalue:twistingtorquetendstostabilizewhereastheself-aligningtorquetendstodestabilizethecapsize.Figure7-28showsthetimeevolutionofastablecapsizeatlowvelocity,whereasFig.7-29showsthecaseofanunstablecapsizeatthesamevelocity.Wecanobservethatinthestablecase,rollandsteeringmotionhaveoppositephases.
Fig.7-28Exampleofamotorcyclewithstablecapsize(speed4m/s).
Figure7-30highlightsthetimeevolutionofastablecapsizeathighvelocity.Fromthesethreefiguresonecanobservethatatthelowervelocityof4m/sthesteering,roll,andyawvariationsaremuchmorepronouncedthananyvariationinlateraldisplacement.Converselyat30m/sthelateraldisplacementisthedominatemodalcontentwithmuchsmallervariationsintheothersignals.Thisisduetothewheelgyroscopiceffectsthatbecomeimportantathighvelocity.Therefore,thecorneringmaneuverathighspeedinvolvesotherout-of-planemodestoagreaterextentthanthecapsizemode.

Fig.7-29Exampleofamotorcyclewithunstablecapsize(speed4m/s).
Fig.7-30Capsizeataspeedof30m/s.
Figure7-31showshowtherealpartoftheeigenvalueofthecapsizemodechangeswhenthevaluesofseveralgeometricandinertialparametersofthemotorcycleandseveraltirepropertiesarechanged.Ineachcaseonlyoneparameterwaschangedby10%andalltheotherparametersweremaintainedconstant.Inrealityitwouldbedifficult,inseveralcases,tovaryjustoneparameteratatime.Forexample,theincreaseintheradiusofthefrontwheel,causesvariationsinthetrail,thecasterangle,andotherparametersatthesametime.
Thefigureshowsthatthestabilityofthecapsizemodecanbeimprovedinthefollowingways:-decreasing:
thecasterangle;thecrosssectionradiusofthefronttire;theheightofthemotorcyclemasscenter;thefrontwheelspininertia;thetrailofthefronttire;thecamberstiffnessofthefronttire.
-increasing:thetwistingtorqueofthefronttire;themechanicaltrail;thedistancebetweenthemotorcyclemasscenterandtherearwheelaxis;thecrosssectionradiusofthereartire;themotorcyclerollinertia;thefrontwheelradius;thecamberstiffnessofthereartire.
Thefigurealsoshowsthattheinfluenceofalltheparametersdecreaseswhenthespeedincreases;infactasthespeedincreasesthegyroscopiceffectsbecomedominant.

Fig.7-31Predictedchangeincapsizemodeat10m/s(lightgray)at30m/ss(gray),at60m/s(darkgray)forparameterincreased10%withrespecttothereferencecase.
Wobble
AsshowninFig.7-32,wobbleischaracterizedbyrotationsofthefront-framewhiletherearframeisonlyslightlyaffected.Thelateraldisplacementofthemotorcycleandtheyawandrolloscillationsaresubstantiallysmallerthanthesteeringoscillations.
Figure7-33showssensitivitiesofthewobblemodedampingtothevariationinthemotorcycleandtireparameters.Thefigureshowsthatthestabilityofthewobblemodecanbeimprovedinthefollowingways:-increasing:
thelateralstiffnessofthecarcassofthefronttire;

thevalueofthesteeringdamper;thefrontwheelradius;
-decreasing:thedistancebetweenthemotorcyclemasscenterandtherearwheelaxis;thecorneringstiffnessofthefronttire;thefrontwheelspininertia.
Fig.7-32Wobbleataspeedof30m/s.
Theneedtoincreasethelateralstiffnessand,atthesametime,todecreasethecorneringstiffnessofthefronttiremeansthattherelaxationlengthofthefronttiresideslipforceshouldbeshortertoobtainstrongimprovementsinstability.
Notethatanincreasein:theheightofthemotorcyclemasscenter;thecasterangle;therearwheelradius;
givesadvantagesatlowvelocityanddisadvantagesathighvelocity.
Theincreaseoftherollinertiaofthemotorcycleandofthemechanicaltrailgivesanoppositebehavior,i.e.,givesadvantagesathighvelocityanddisadvantagesatlowvelocity.
Notethatincreasingthedampingconstantofthesteeringdamperisaveryeasywaytoincreasethedampingratioforthewobblemode,althoughithastheundesiredeffectofslightlyreducingtheweavemodedamping.

Fig.7-33Predictedchangeinwobbledampingat10m/s(lightgray)at30m/ss(gray),at60m/s(darkgray)forparameterincreased10%withrespecttothereferencecase.
Weave
Figure7-34showstheweavemodewiththemotorcyclemovingataforwardspeedof10m/s.
Notethatthismodeischaracterizedbysizableoscillationsinroll,yawandsteeringangle.Therotationofthesteeringheadisoppositeinphasewithrespecttotheyawoscillation,whichisinturn90°outofphasewiththerolloscillation.Thelateraldisplacementofthemotorcyclelagsbehindroll.
Asspeedincreases,thelateraldisplacementbecomesmorepronounced,asdoestherotationofthesteeringheadwithrespecttotherollandyawoscillations(seeFig.7-35).

Fig.7-34Weavemode(V=10m/s).
Fig.7-35Weavemode(V=30m/s).
Figure7-36showshowthedampingratiofortheweavemodevarieswhenthevaluesofseveralparametersofthemotorcyclearechanged.Notethattheincreaseofthedampingconstantofthesteeringdamperhastheundesiredeffectofslightlyreducingdampingoftheweavemode.
Thefigureshowsthatforthemotorcycleusedinthisexampletheweavemodestabilityathighvelocitycanbeimprovedinthefollowingways:-increasing:
thedistancebetweenthemotorcyclemasscenterandtherearwheelaxis;thecasterangle;thefrontwheelspininertia;thelateralstiffnessofthecarcassofthereartire;
-decreasing:

thefrontwheelradius;themotorcycleyawinertia.
Fig.7-36Predictedchangeinweavedampingat10m/s(lightgray)at30m/ss(gray),at60m/s(darkgray)forparameterincreased10%withrespecttothereferencecase.
Theincreasesintheheightofthemotorcyclemasscenterandoftherearwheelradiusgiveadisadvantageatlowvelocityandanadvantageathighvelocity.Onthecontrary,theincreaseofrollinertiaisadvantageousatlowvelocityandprovesadisadvantageathighvelocity.
Theincreaseofthemechanicaltrailgivesaslightadvantageatmediumvelocitiesbutadisadvantageathighvelocity.Anincreaseinthecorneringstiffnessofthereartireproducessimilarbehavior.
Itisworthpointingoutthattheincreaseinfrontwheelspininertiaisstabilizingduetotheincrease

ofthegyroscopicphenomenon.Onthecontrary,theincreaseinthefrontwheelradius(keepingfrontwheelspininertiaconstant)isdestabilizingbecauseitcausesareductioninfrontwheelspinangularvelocityand,hence,areductioningyroscopiceffects.
Inthesimulationtheriderisassumedtoberigidandattachedtothemainframe.Effectivelytherideractslikeadamperthatimprovesbothwobbleandweavestability.Forexample,apillionpassengerimprovesstabilitywhereasthesamerigidmassattachedinthesamepositioncausesadecreaseofthestability.
Rearwobble
Rearwobbleischaracterizedbyrollandyawfluctuationsthatarealmostinphasewitheachother,andinphaseoppositiontothelateraldisplacementofthemotorcycleandthesteeringangle(Fig.7-37).
Fig.7-37Rearwobble(V=10m/s).
7.2.4Modes ofvibrationincornering
Instraightrunningthein-planeandtheout-of-planemodesareuncoupled.Sincetherollangleisnull,thetireverticalloadslieinthemotorcyclesymmetryplanetowhichthetirelateralforcesareorthogonal.Forthisreasonthenormalloadsonlyexcitethein-planemodes,whereasthelateralforcesonlyactontheout-of-planevibration.
Whenthemotorcyclecorners,itisinclinedbysomerollangleandeachofthepreviousforceshascomponentsinbothdirections.Itshouldnowbeclearthatinsomemodesbothin-planeandout-of-planedegreesoffreedomareinvolved.Thisphenomenoniscalled“modalcoupling”.
InFig.7-38therootlocusplotincorneringatconstantspeedispresented.Inthesamefigure,forcomparison,therootlocusinstraightrunningisplottedingrey.
Forthemotorcycleconsideredherethemaindifferencesbetweenthelociare:therearhopmovesalittletowardsamorestableregion;thefronthopdoes-notpresentsignificantmodifications;

thereisaninteractionbetweenthebounceandtheweavemodesatmediumspeed;therearetwopitchmodesthatdifferinphasebetweenthepitchmotionandtheyawandsteeringmotions;thecapsizemodebecomesmoreunstable.thefrequencyofthewobblemodeincreasesslightly.
Inthefollowingsectionsthetimeevolutionofsomemodesincorneringarepresented.
Fig.7-38Root-locusplotincorneringatdifferentspeeds,(speedfrom3to60m/s,centripetalacceleration=0.5g).
Capsize
Whenthemotorcycleisrolledthecapsizemodeinvolvesbothin-planeandout-of-planedegreesoffreedom,asFig7-39shows.
Inthisconfiguration(thatiswithaspeedof4m/sandacamberangleof30degrees)themodeshowsapronouncedinstability;infact,themotioncomponentsdepartfromthesteadystatevalueasthetimeincreases.

Wobble
Theplotofthewobble(Fig7-40)showsonlyslightcoupling,becauseonlytheout-of-planecomponentsareinvolvedintheoscillation,whereasthein-planequantitieskeeptheirconstanttrimvalues.
Weave
Theweaveisthemodeshowingthemaincouplingeffect:allcomponentsoftheeigenvectorareinvolved.Figure7-41showsthatthemodeisstableandtheoscillationvanishesafter1second.
Fig.7-39Unstablecapsizeincorneringataspeedof4m/s.
Fig.7-40Wobbleincorneringataspeedof25m/s;rollangle=30°.

Fig.7-41Weaveincorneringataspeedof25m/s;rollangle=30°.
Bounce
Thetimeevolutionofthemotioncomponentsforthebouncemodeshowsthestronginteractionbetweenin-planeandout-of-planeoscillations.
Fig.7-42Bounceincorneringataspeedof25m/s;rollangle=30°.
7.2.5Effectofframeflexibi l i ty onmodes ofvibration
Theassumptionsofrigidbodiesandafixedriderinmotorcyclemodelingarenotstrictlytrue,particularlyforalessrigidchassisasinthecaseofascooter.Therefore,inordertohighlighttheeffectofflexibility,ascooterwasconsidered.Asiscommoninscooterslow-pricefrontforkshaveanon-negligiblebendingandtorsioncompliance;theengineiselasticallyconnectedtothemainchassisandthelow-slung,cradleshapeoftheframedoesnotmakeitpossibletodesignahigh,stiffchassis.Inadequatestructuralstiffnessmaynotablyreducestabilityandhandlingofthesevehicles.Inordertoinvestigatethesephenomena,amathematicalmodelofthescooterwhichalsoincludes

vehiclecompliancesandridermobilityisused(Fig.7-43).
Thevehiclecompliancesaretakenintoaccountbymeansofaforkbendingstiffness(25-75kN-m/rad),aforktorsionstiffness(4-10kN-m/rad),aswingarmbendingstiffness(30-70kN-m/rad)andaswingarmtorsionstiffness(10-20kN-m/rad).Rider-vehiclemobilityistakenintoaccountaccordingtothesuggestionofthereference,[Katayamaetal.,1997].
Simulationresultsarepresentedintermsoftheroot-lociinFig.7-44.Thewell-knownweave,wobbleandcapsizemodesareclearlyvisible,anddifferencesbetweentherigidandlumpedstiffnessmodelestimationarealsoevident.Moreoverthelumpedstiffnessmodelshowstwoadditionalmodesthatcorrespondtotheriderleanandshake.
Fig.7-43Flexiblebodiesmodel.

Fig.7-44Root-locusplotinstraightrunningatdifferentspeeds:rigidmodelvs.flexiblemodel(speedfrom1to40m/s).
Inmoredetail,therigidmodelestimatesawobblefrequencythatdecreasesfrom8to7.5Hzasthespeedincreases;onthecontrarythelumpedstiffnessmodelpredictsafrequencywhichrisesfrom6to8Hz.Moreover,atlowspeedsthewobblestabilityoftherigidmodelisgreaterthanthatofthelumpedstiffnessmodel,whereasathighspeedsthewobbleinstabilityoftherigidmodelisgreaterthanthatofthelumpedstiffnessmodel.
Themaindifferencesintheweavemodeareduetothemodebranchinginthelumpedstiffnessmodel,whichgivesrisetotwomodescoupledwiththeriderleanmotion.Bothmodelsshowthattheweavemodehasaverylowfrequencyatlowspeeds;thisfrequencyclimbsto3Hzasthespeedincreases.Weavemodeisunstableatverylowspeeds,becomesverystableinthemediumspeedrangeanditsdampingratiodecreasesathighspeeds.
Thecapsizemodeisnonoscillatoryinthewholespeedrangeandtherearenodifferencesbetweenthetwomodels.Theridershakemodeisverystableanddoesnotappeartoinfluenceothermodes.
Figure7-45presentsthesimulationresults,obtainedtakingintoaccountonlythefrontforkbendingcompliance.Thewobblemodeisdeeplyinfluencedbyforkcompliance.Inparticularaflexibleforkdecreaseslowspeedstability,butincreasesstabilityintheupperspeedrange.Thisbehaviourcanbeattributedtoapairofopposingeffects:theincrementofforkflexibilitytendstoreducestability,atthesametimethecombinationofwheelspinandforkbendinggeneratea

gyroscopictorquearoundthesteeringaxiswhichtendstostabilizethewobble.Atalowspeedthefirstnegativeeffectispredominant.Athighspeedthesecondpositiveeffectdominates.
Fig.7-45Frequencyandstabilityofthewobblemodetakingintoaccountonlytheforkbendingcompliance.
Theweavemodeisonlyslightlyaffectedbyforkcompliance.Figure7-46showstheeffectoftheswingarmbendingcomplianceontheweavemode:theflexibilitymayincreaseweavestabilityslightlyathighspeeds.
Finally,Fig.7-47showsthatthetorsionalcomplianceoftheswingarmalwaysworsenstheweavestabilityatmedium-highspeeds.
Fig.7-46Frequencyandstabilityofweavemodetakingintoaccounttheswingarmbendingcomplianceonly.

Fig.7-47Frequencyandstabilityoftheweavemodetakingintoaccountonlytheswingarmtorsionalcompliance.

MotoGuzziFalconetouringmotorcycle,1957(ownedbyVittoreCossalter)
8MotorcycleManeuverabil i ty andHandling
Amotorcycle’sdynamicpropertiesaredescribedusingtermslikemaneuverability,handlingandstability.Maneuverabilityandhandlingdescribethemotorcycle’sabilitytoexecutecomplicatedmaneuvers,andhowdifficultitisfortheridertoperformthem.Stability,ontheotherhand,meansamotorcycle’sabilitytomaintainequilibriuminresponsetooutsidedisturbanceslikeanunevenroadsurfaceorgustsofwind.
8.1Directional s tabi l i ty ofmotorcyclesMotorcyclesinmotionneedtobecontrolledbytherideratalltimes.Riderinputaffectsthe
motorcycle’sequilibriumanddirectionofforwardmotion.
Inrectilinearmotion,amotorcycleiscalled“directionallystable”ifitiseasytocontrolornaturallytendstomaintainitsequilibriumandfollowarectilinearpath.
Itiseasytosee,however,thatalargetendencytowardsdirectionalstabilitymakesamotorcyclehardtohandle,i.e.,cumbersometoturnandcontrolthroughtwistsandturns.
Thissectiondiscussesthedirectionalstabilityofmotorcycles,whichisdeterminedbyanumberoffactors:
inertialpropertiesofthemotorcycle;forwardspeed;geometricpropertiesofthesteeringhead(whichcollectivelydeterminethealigningeffectofthetrail);gyroscopiceffects;

tireproperties.
Obviously,thegreaterthemotorcycle’squantityofmotion(mV),thelessitwilldeviatefromitsrectilineartrajectoryasaresultofoutsidedisturbances.
Takingagustofwindasanexample(Fig.8-1).SupposetheaerodynamicpressuregeneratedbythegustactsonthemotorcycleforshorttimeintervalΔtthattendstozero.Thedisturbancecausesanangulardeviationofthemotorcyclefromtherectilineartrajectoryequalto:
Theangleofdeviationisinverselyproportionaltothemassofthemotorcycleanditsforwardspeed,anddirectlyproportionaltothelateralaerodynamicforce.Thelengthofthemotorcycle’swheelbasealsoplaysaratherimportantroleindeterminingdirectionalstability.Figure8-2showshowamotorcyclewithashortwheelbasebehavesdifferentlyfromonewithalongwheelbase.Ifadisturbancecausesadisplacementofthefrontwheel,theangleofdeviationfromtherectilineartrajectoryisinverselyproportionaltothelengthofthewheelbase.
Fig.8-1Directionalbehaviorofamotorcyclestruckbyagustofwind.
Fig.8-2Directionalbehaviorofamotorcycleasafunctionoflengthofwheelbase.
Intermsoftheeffectofmotorcyclegeometry,wehavealreadyseenthatthemomentexertedbyresistanceonthefronttirehasanaligningeffectthatincreaseswithforwardspeedandthelengthof

thetrail.
Wecancalculatethisaligningeffectusingasimplifiedmodel:amotorcycleinrectilinearmotiontravelingatconstantspeed.Supposethatanoutsidedisturbancecausesthefrontendtorotatetotheright,andthereforethemotorcyclebeginstofollowacurvedtrajectorytotherightwithalargeradius.Letusalsoassumethattherollangleisnegligible.Basedonthesesimplifyingassumptions,wecancalculatethemomentexertedaroundthesteeringheadaxis.
Thefollowingforcesareactingonthevehicleasawhole:thrustS,exertedatthecontactpointoftherearwheel;dragFD,whichisassumedtobeexertedatthecenterofgravity;rollingresistance exertedatthecontactpointofthefrontwheel;lateralforces ,exertedatthecontactpointsofthewheels;verticalloadsNf,Nsexertedatthecontactpointsofthewheels.
Fig.8-3Corneringmotorcyclewithnegligiblerollangle.

Theequilibriumequationsforforcesandmoments(Fig.8-3):
givethedynamicverticalloads:
thefrontlateralforce:
andthethrustneededtomakethemotorcycletravelthroughtheturnatconstantspeed:
Amomentisexertedaroundthesteeringheadaxis(Fig.8-4)through:thecomponentoftheverticalloadNfperpendiculartothesteeringheadaxiswhichhastheeffectofincreasingthesteeringangle:Nfsinβ,thecomponentoflateralforce perpendiculartothesteeringheadaxis,whichhastheeffectofaligningthewheel: cosβ.
Theresultingmomentexertedbythetwoforces,neglectingtherollingresistance,isgivenby:

Sincethepositivetermisproportionaltothesquareofthespeed,thealigningmomentincreaseswithspeed.Thelongerthenormaltrailis,themoremarkedtheeffectis.Asexpected,motorcyclestabilityisstronglyinfluencedbythelengthofthetrail.
Fig.8-4Forcesactingonthefrontwheel.
Wehavesuggestedthatgyroscopiceffectsplayanespeciallyimportantroleindirectionalstabilityandmaneuverability.Manygyroscopiceffectsareexperiencedwhilecornering,andenteringorexitingturns.Therotationofthesteeringhead,wheelsandrotaryenginepartsgenerategyroscopicmomentsasaresultofmotorcyclerolland/oryawmotions.
8.2Gyroscopice ffects onthe motorcycleAgyroscopiceffectisgeneratedbyarigidbodyrotatingaroundanaxisa−a,whichinturnis
rotatingaroundasecondaxisb−baskew(notparallel)tothefirstaxisa−a.Thegyroscopiceffecttakestheformofacoupleexertedaroundanaxisperpendiculartobotha−aandb−b.ThevalueofthegyroscopicmomentisequaltothevectorproductoftheangularmomentumIωofthebodyaroundaxisa−aandthespeedofrotationΩaroundthesecondaxisb−b.AngularmomentumisequaltothepolarmomentofinertiaofthebodyIaroundaxisa−amultipliedwiththespeedofrotationωaroundthesameaxis.
Motorcycledynamicsincorporateavarietyofgyroscopiceffects,whichmaybebrokendown

accordingtothesecondaxisofrotationb−b:yawgyroscopiceffects:whereaxisb−bpassesthroughtheturncenterofthepathandisperpendiculartotheroadway;rollgyroscopiceffects:whereaxisb−bisthestraightlinelyingintheplaneoftheroadwaywhichpassesthroughthetirecontactpoints;steeringgyroscopiceffects:whereaxisb−bisthesteeringheadaxis.
8.2.1Gyroscopice ffects generatedbyyawmotion
Gyroscopiceffectgeneratedbythewheelsduringcornering(wheelrotation- yawmotion)
Letusconsiderthefrontwheelalone,rotatingataconstantspeedωfasthemotorcycletravelsthroughaturnofradiusRcataconstantyawvelocityΩ(Fig.8-5).
Fig.8-5Gyroscopiceffectgeneratedbythefrontwheelduringcornering(thecoordinatesystemwithsubscriptmisattachedtotheforkofthemotorcycle).
Themotionofthewheelasitcornersgeneratesagyroscopicmomentaroundthehorizontalaxis,whichhastheeffectofstraighteningthewheel:
ThesecondapproximateexpressionisvalidiftheyawvelocityΩcanbeconsideredsmallwith

respecttothespeedofrotationωf.Thisassumptionisverifiedinpracticebecausetheturningradiusismuchgreaterthanthewheelradius.Axisxmisfixedtothefork,andtherefore,itisamobileaxis.
Lookingnowattheeffectofbothwheelsandsettingasidethefactthatthewheelshaveslightlydifferentrollanglesanddirectionsduringcornering,theirgyroscopiceffectscanbeaddedtogether:
Motorcycleequilibriumoccurswhentheresultantoftheweightforceandthecentrifugalforceintersectsthelinejoiningthecontactpointsofthetwowheels.Disregardingthegyroscopiceffectandassumingzerothicknesswheels,theidealrollangleforamotorcycleinsteadystatecorneringisgivenbythefollowingsimpleequation:
Aswehaveseen,thegyroscopiceffectofthewheelsduringcorneringismanifestedbyarightingmoment.Tocounteractthegyroscopiceffectofthetwowheelsandtherebymaintainequilibrium,theridercanleanintotheturninsuchawaythattheresultantoftheweightforceandthecentrifugalforcegeneratesamomentequalandoppositetothegyroscopicmomentofthetwowheels,asshowninFig.8-6.

Fig.8-6Influenceonequilibriumofgyroscopiceffectgeneratedbywheelsduringcornering.
Ofcourse,theridercanachieveequilibriumwithoutdisplacinghistrunkinordertoproduceadisplacementofthemasscentertowardsinsideofthecurve,buttheleanangleofthemotorcyclewillbegreaterthantheidealrollanglecalculatedontheassumptionthatthegyroscopiceffectiszero(Fig.8-7).
Inthiscase,therightingmomentgeneratedbythecentrifugalforceandthemomentgeneratedbythegyroscopiceffect(whichalsohasarightingeffect)arebothoffsetbytheoverturningmomentoftheweightforce.Thegyroscopiceffectmakestheactualrollanglegreaterthantheidealrollanglethatwouldbeachievedifthegyroscopiceffectwereabsent.
TheincreaseintherollangleΔϕneededtocounterbalancethegyroscopiceffectisgivenby:
SinceΔϕissmallwithrespecttoϕ,itcanbedisregardedinthenumeratorontherighthandside,thefollowingsimplerequationholds:
Here,thenumeratorrepresentsthegyroscopicmomentgeneratedbythetwowheelsofthemotorcycle.ThemomentMwhichcounterbalancesthegyroscopicmomentisgeneratedbytheresultantoftheweightforceandthecentrifugalforce.TheincreaseΔϕmakesthemotorcyclelessmaneuverable,sincethemotorcycletakesmoretimetoreachtheincrementallylargerequilibriumrollangle(whichisgreater).

Fig.8-7Increaseinrollanglecausedbyyawgyroscopiceffect.
Example1
Assumeamotorcycleinstationarymotionduringcornering:
•turningradius: Rc=200m;
•forwardspeed: V=40m/s;
Thepropertiesofthemotorcycleareasfollows:
•mass: m=200kg;
•heightofcenterofgravity: h=0.6m;
•wheelradius: Rf=Rr=0.32m;
•spininertiaoffrontandrearwheels:
Nowdeterminethegyroscopicmomentgeneratedbythemotionofthetwowheels,andtheresultingincreaseintherollangle.
Sinceweknowtheturningradiusandforwardspeed,wecancalculatetheangularvelocityvalues:
•yawvelocityofthemotorcycle: Ω=0.2rad/s;

•angularvelocityofthewheel: ω=125rad/s;
andtherefore:
•idealrollangle: ϕideal=39.20°;
•gyroscopicmomentgeneratedbythemotionofthetwowheels: Mg=23.25Nm.
Theridercanachieveequilibriuminoneoftwoways:eitherdisplacingthemasscentertowardtheinsideoftheturnby:d=9.2mm;orincreasingtherollangleby:Δϕ=0.88°.
Gyroscopiceffectgeneratedbytransversallymountedengine(enginerotation- yawmotion)
Thegyroscopiceffectgeneratedbytheengineisdeterminedbytheengine’sspeedofrotation,whichdependsonwhatgearthemotorcycleisin.
Letusassumeamotorcycleinsteady-statecorneringmotionanddisregardtheinertiaofthewheels.Inotherwords,wearegoingtolookatthegyroscopiceffectgeneratedbytherotationoftheengineonly.Themainshaftoftheenginegenerallyrotatesinthesamedirectionasthewheels,asshowninFig.8-8.

Fig.8-8Gyroscopiceffectgeneratedbyatransverseengineduringcornering.
Asbefore,thegyroscopiceffectgeneratedbytheenginecausesequilibriumtobeachievedbyleaningthemotorcycleoveratanactualrollanglegreaterthantheidealanglethatwouldbenecessaryifthegyroscopiceffectwereabsent.
Theresultingincreaseintherollangleisequalto:
Thesignispositivewhentheenginerotatesinthesamedirectionasthetiresandnegativeforacounter-rotatingengine.
Theterm expressestheengine’stotalangularmomentum,incorporatingtheangularmomentumofthedriveshaft,transmissionshaftsandanyotherrotatingshaftparalleltorearwheelaxisandrotatingwithsamesense:
Incalculatingtheresultingangularmomentum,thesignoftheangularvelocityisassumedtobepositiveifthedirectionofshaftrotationagreeswiththedirectionofrotationofthewheels.Otherwise,itisassumedtobenegative:
Forexample,iftheengine’srotationisinthesamesenseasconcordantwiththewheelspinthemaingearshaftrotateswithanopposingvelocity,anditscontributionisthereforenegative.
Ofcourse,theengine’scontributionmustbeaddedto,orsubtractedfrom,thecontributionofthewheels,dependingonthedirectionofrotationfollowingtheconventionestablishedabove(addedifthedirectionofrotationisconcordantwiththewheelspin,andsubtractedifnot).
Toreducethegyroscopiceffect,themomentumoftherotatingbodiesmustbereduced.Sincelightweightmaterialscanonlybeusedtoreducethemomentofinertia,anattractiveoptionistoreducetheangularmomentumoftheengine,oreventogiveitanegativesign,bychoosingarotationinthedirectionoppositetothewheelspin.
Forexample,insometwo-cylinderracingenginesthetwodriveshaftsrotateinoppositedirections.Thus,thegyroscopiceffectsofthetwocrankshaftscanceleachotherout,leavingonlytheeffectofthetransmissionshafts.
However,themaingearshaftandtransmissioncontributelesstothegyroscopiceffectthanthedriveshaftdoes,sincetheyhavelessinertiaandrotateatslowerangularvelocities;thevelocityratiobetweenthedriveshaftandthemaintransmissionshaftisoftheorderof2to2.5.
Example2

UsingthemotorcycleinExample1insteady-statecorneringmotion,determinethegyroscopiceffectofanenginewiththefollowingproperties:
•momentofinertiaofcrankshaft:
•primaryshaftinertiamoment(includingclutch):
•secondaryshaftinertiamoment:
•engine-primaryshafttransmissionratio: τm,p=3;
•primary-secondarygearshafttransmissionratio: τp,s=2;
•enginerpm: n=12,000rpm.
Addingupthevariouscomponents,theengine’stotalangularmomentumisequalto:
Thegyroscopicmomentis:Mg=2.66Nm;theincreaseinrollanglesolelyduetothegyroscopiceffectgeneratedbytheengineisΔϕ=0.1°.
Notethatthegyroscopiceffectgeneratedonlybytheengineislessthanthatgeneratedbythewheels(Mengineisabout8%ofMwheels);theengine’scontributiongenerallyfallswithintherangeof5%to15%ofthegyroscopiceffectgeneratedbythewheels.Ifthecontributionbythewheelsistakenintoaccountaswell,theincreaseintherollanglegoesuptoΔϕ=0.97°.
Gyroscopiceffectgeneratedbylongitudinallymountedengine(enginerotation- yawmotion)
Nowconsideramotorcycleequippedwithalongitudinaldriveshaftcorneringatconstantspeed,asshowninFig.8-9.

Fig.8-9Gyroscopiceffectgeneratedbyanenginewithalongitudinalaxis.
Iftheturnistotheleftwithrespecttothedirectionofforwardmotionthemotorcycleleansovertotheleft.Assumingthatthelongitudinaldriveshaftisrotatingtowardtheoutsideoftheturn,thegyroscopicmomentactingaroundtheymaxisisequalto:
Thegyroscopicmomenthastheeffectofextendingthefrontsuspensionandcompressingtherearsuspensiontoagreaterdegreemakingthemotorcyclepitchbackwards.
Thegyroscopicmomenthastheoppositeeffectswhencorneringtotheright,i.e.,thefrontsuspensioncompressesandtherearsuspensionextends.
Nowconsiderthemotorcyclecorneringtotheleftagain,butthistimeassumethatthedriveshaftrotatestowardtheinsideoftheturn.
Thegyroscopicmomentactingaroundtheymaxisreversessign:
Inthisinstance,thegyroscopicmomenthastheeffectofreducingtheloadontherearsuspensionandincreasingtheloadonthefrontsuspension.Themomentgeneratedbythesuspensions’forcesbalancesoutthegyroscopicmoment,withtheendresultofthemotorcyclecharacteristicallypitching

forwardslightly.
Example3
Nowassumethattheengineinexample2ismountedlongitudinally.
Thestiffnessvaluesforthefrontandrearsuspensionsare:kf=9kN/mandkr=2kN/m,respectively.Wewanttocalculatethechangeintrimgeneratedbythegyroscopiceffectoftheengine.
Thegyroscopicmomentoftheengineisequalto:Mg=2.43Nm.
Fig.8-10Motorcycleridingtrim.
Tocalculatethepitchangle,weneedtotakeintoaccounttheequilibriumofthemotorcycleonwhichthegyroscopicmomentisacting(Fig.8-10).Thestaticequilibriumequationseasilyyieldtheverticaldisplacementofthecenterofgravityandthepitchangle:
Boththepitchangleof0.01°andtheincreaseinheightofthecenterofgravityareentirelynegligible.
8.2.2Gyroscopice ffects generatedbyrol l motion
Gyroscopiceffectgeneratedbythefrontwheel(frontwheelrotation–rollmotion)

Fig.8-11Frontwheelrotation-rollmotioninduceagyroscopicmomentactingonthefrontend.
Nowwewilllookatthefrontwheelwhilethemotorcycleisrollingtotheright.Thefront-wheelspin,coupledwiththerolltotheright,generatesagyroscopicmomentMgthatactsonthefrontframearoundanaxislyingintheplaneofthemotorcycleandperpendiculartothelongitudinalrollaxis,asshowninFig.8-11:
Theprojectionalongthesteeringaxisprovidesthebeneficialmomentaroundthesteeringaxis:
Thus,thegyroscopicmomenthastheeffectofturningthesteeringheadtotheright,therebyhelpingthemotorcycleentertheturn(increasingthesteeringanglereducestheturningradius).Analogously,whentherollvelocitychangessignasthemotorcyclereturnstotheverticalpositionthegyroscopicmomenthastheeffectofreducingthesteeringangle,therebyhelpingthemotorcycleexittheturnandreturntorectilinearmotion.
Example4
Nowconsideramotorcyclerollingfromlefttoright.Tocalculatethegyroscopicmomentactingon

thesteeringhead,assumethatthemotorcycleisrollingfromthelefttotherightatavelocityof0.5rad/s.
Thepropertiesofthemotorcycleareasfollows:
•momentofpolarinertiaoffrontwheel:
•motorcyclerollvelocity:
•spinvelocityofwheel: ω=100rad/s;
•rakeangle: ε=25°;
ThegyroscopicmomentaroundthesteeringaxisisequaltoMg=27Nm.
Itcanbedemonstratedthatintransientmaneuverssuchasthelanechangemostofthesteeringtorqueappliedbytheriderisusedtoovercomethisgyroscopicmoment.
Gyroscopiceffectgeneratedbywheels(wheelsrotation- rollmotion)
Ifthemotorcycleisassumedtobearigidbody(i.e.,withthesteeringheadlockedinplace),thegyroscopiceffectofthewheelspinduringrollcaneasilybeshowntogenerateayawingmoment,asshowninFig.8-12.
Fig.8-12Gyroscopiceffectgeneratedbymotorcyclerollmotion-wheelsrotation.

Again,consideramotorcyclerollingfromlefttoright.Thegyroscopicmomentactingonthemotorcycleisequalto:
Thegyroscopicmomenttendstomakethemotorcycleyawtotheright,andisbalancedbythelateralresistanceexertedonthewheelsbytheground.Thus,thefrontlateralforceincreasesslightlyΔF,whiletherearlateralforcedecreasesbythesameamount:
Whenexitingtheturnthemotorcyclerollsfromrighttoleft.Thegyroscopicmomentreversessign,and,hence,alsothevariationintirelateralforceschangessign.
Example5Nowconsideramotorcyclerollingfromlefttorightatarollvelocityof0.5rad/s.Thepropertiesofthemotorcycleareasfollows:
•momentofpolarinertiaofwheels:
•spinvelocityofwheels: ω=100rad/s;
•lengthofwheelbase: p=1.37m;
•motorcyclerollvelocity:
Determinethegyroscopiceffectgeneratedbythewheelsandthechangeinlateralforce.
Thegyroscopicmomentactingonthemotorcycleisequalto60Nm.
ThechangeΔFinlateralforceneededtocounterbalancethegyroscopicmomentis44Nwhenthemotorcycleisintheverticalposition.
Thisisafairlyhighvaluecomparedtothevaluesforthelateralforceneededtomaintainequilibriumundersteady-statecornering.ForexamplewithspeedV=30m/s,turningradiusRc=200m,andmassm=180kgthesumofthetwolateralforcesmustbeequalto872Ν.
Ifthetotallateralforceisdistributedevenlybetweenthetwowheels,therebyexertingatransverseforceof436Νoneachwheel,thevariationduetothegyroscopiceffectisontheorderof10%.
8.2.3Gyroscopice ffects generatedbys teering
Sincethewheel’sdirectionofspinisperpendiculartothesteeringheadaxis,turningthehandlebarsfromrighttoleftgeneratesagyroscopicmomentaroundanaxisperpendiculartoboththesteering

headaxisandtheaxisofthefrontwheel,asshowninFig.8-13:
Thishastheeffectofleaningthemotorcycleovertowardstheright.Theprojectionofthegyroscopicmomentontherollaxis(thelineconnectingthecontactpointsofthetwowheels)isasfollows:
Fig.8-13Gyroscopiceffectgeneratedbythefrontwheelandsteeringheadrotations.
Basedonthesegyroscopiceffects,onemightconcludethatamotorcyclewithzerowheelinertiaisideal.Itisimportanttopointout,however,thatthegyroscopiceffectgeneratedbythefrontwheelandsteeringmotionplaysanimportantpartinmotorcyclestabilityduringrectilinearmotion.
8.3Motorcycle equi l ibriuminrecti l inearmotionatlowspeedSincethesameprinciplesgoverncontrolofanytwo-wheeledvehicleatlowspeed,amotorcyclist
alsoknowshowtorideabicycle.
Achildlearningtorideabicyclebeginsbyrollingdownagentlehill,andquicklylearnsthat,ifthebicyclebeginstoleantotherightandheturnsthehandlebarsinthesamedirection,thebicycleeasilyreturnstotheverticalpositionafterturningright.Ifthebicycleleanstotheleft,theequilibriumisachievedbyasimilarmaneuver.
Thepaththebicyclefollowsisinfluencedbythecontrolactionscontinuallymadebythecyclisttokeepthebicyclevertical.Therefore,asaresultthebicyclefollowsaweavingpath,andhowmuchitweavesisdeterminedbytheskilloftherider.
Thesameprinciplesareusedtocontrolthemotorcycle’sverticalequilibriumatlowspeed.

Asamotorcycleleanstotherightitsfalliscounteractedbyturningthehandlebarstotheright.Themotorcyclebeginstoturnright,creatingacentrifugalforcethatstraightensthemotorcyclebackup,asshowninFig.8-14.
Fig.8-14Motorcyclebalanceinrectilinearmotionatlowspeed.
8.4Motorcycle equi l ibriuminrecti l inearmotionathighspeedLetussupposeanexternaldisturbancethatcausesthemotorcycletorolltotheright,asshownin
phase1ofFig.8-15andthattheriderdoesnotapplyanytorquetothehandlebars;inotherwords,he/sheremainspassive.Letωbetheangularvelocityofthefrontwheel, therollvelocity,and thesteeringvelocity.
Duetothefrontwheel-spinandrollvelocitiesagyroscopicmomentisgenerated(phases2)thathastheeffectofturningthehandlebarstotheright(phases3).

Thehandlebarssteertotherighttherebyreducingtheturningradius(phase3).
Astheturningradiusdecreases,thecentrifugalforceincreases,therebystraighteningupthemotorcycle(phases3-4).
Atthesametime,duetothefrontwheelspinandsteeringandyawvelocitiesanoverturninggyroscopicmomentisgeneratedthatcounteractstherollmotiontowardstheright(phase3-4).
Themotorcyclestopsrollingtotheright(phase4).ThecentrifugalforcehastheeffectofstraighteningthemotorcycleupandreversingtheroIlmotion(phase5-6).
Theroll-inducedgyroscopicmomenthastheeffectofturningthehandlebarstotheleft,therebysteeringthemotorcycletotheleft.
Finally,themotorcyclereturnstotheverticalpositionshowninphase6,butitcontinuestorolltotheleft,andtheresultinggyroscopicmomentturnsthesteeringheadtotheleft.Whenrollingtotheleftthemotorcyclegoesthroughasimilarsequence.

Fig.8-15Motorcyclebalanceinrectilinearmotionathighspeed.
8.5SlowenteringinaturnAfterlearninghowtokeepatwo-wheeledvehicleinverticalequilibriuminrectilinearmotionone
mustlearnhowtoturn.
Thebeginnerriderofabicyclefindsagentlehillandsetsoff,worryingonlyaboutkeepingthebicycleupright.Atacertainpointhespiesanobstaclee.g.,apotholetohisleft,anddecidestochangedirection,soheturnsthehandlebarstotheright.Thebicyclebeginstofollowacurvedtrajectoryto

theright.Thecentrifugalforce,generatedasthebicycleroundsthecurve,rapidlyleansthebicycleandridertowardtheleft,makingafallinevitable.
Afterseveralunsuccessfulattempts,theridercomesupwithastrategythatisneithersimplenorintuitive.Ifhewantstochangehisorherdirectiontowardtherighthemustfirstapplyleftwardtorquetothehandlebars(“youturnlefttogoright”).Thatmakesthesteeringheadturntotheleft,andthebicyclebeginstoturnleft,creatingacentrifugalforcethatleansthebicycletotheright.Oncethebicyclehasbegunrollingtotherighttheridercanturnthehandlebarstotherighttocontinuehisentranceintoarightwardturn.
Letusnowconsideramotorcycletravelingat20m/senteringaturnwithaslowmaneuver.Theriderbeginsthemaneuverwellbefore(approx.14m)theturninordertoreachthesteadystateconditionslowly(Fig.8-16).
Fig.8-16Trajectorywhenenteringslowlyinaturn.
Initiallytheriderappliesatorquetowardsleftcausingthefrontwheeltosteertowardsthesameside(Fig.8-17).Thelateralforcegeneratedatthefronttirecontactpoint,causesayawmotiontotheleftandthebeginningofarollmotiontotheright.

Fig.8-17Steeringangle,steeringtorque,lateralforce,rollandyawwhenenteringslowlyinaturn(computedwithFastBikecode).
Thevehiclefollowsaheadingtowardtheleft,oppositethedirectionofthedesiredtrajectory.
Afterabout5mfromtheinitiationofthemaneuver(atapprox.19m),thelateralforcechangesdirectionfromtheoutsidedirectiontowardtheinsideofthecurve.Afteranadditional4m(atapprox.23m),withthemotorcyclealreadyrolledtowardtheright,theleftwardsyawmotionendsandthemotorcyclestartstoyawinthedesireddirection.Nowthepathistowardstheright.
Nowtheriderfollowsthedesiredpathcontrollingthevehiclewiththesteeringtorque.Afterabout

13mfromtheinitiationofthemaneuver(atapprox.27m)thesteeringanglechangesfromlefttoright.Themotorcyclereachesthesteady-stateturningconditionabout70mafterthebeginningofthemaneuver.Inthesteadystateconditionthecentripetalaccelerationisequalto0.9g.Itisworthnotingthatthesteeringtorquevalueinthesteadyconditionissmallwithrespecttothemaximumvalueofthetorqueappliedduringtheentrancephase.
8.6Fas tenteringinaturnToenterfastinaright-handturn,theriderappliesaquicktorqueonthehandlebarstotheleft.The
movementofthefrontwheelaroundthesteeringheadgeneratesafronttirelateralforcethathastheeffectofleaningthemotorcycletotheright.Thegyroscopiceffectgeneratedbythefrontwheelandthesteeringrotationalsohasanimportanteffectonfastenteringinaturn.Thisgyroscopicmomenthastheeffectofleaningthemotorcycletotheright.Oncethemotorcyclehasbeguntorolltotherighttheridercanslowlyturnthehandlebarstotheright,andthemotorcycleenterstheturn.
Fig.8-18Trajectorywhenenteringfastinaturn.
Figure8-18showsthemotorcycletravelingat22m/sandexecutingarelativelyquickenteringinaturnmaneuver.Theaverageturningradiusoftheroadis50mandtheroadwidthis16m.
Therider(atapprox.14m)quicklysteerstowardstheleftandthemotorcycleimmediatelyyawstothesamesidefollowingapathtowardstheleft.Theminimumturningradiusinthisphaseisabout100m.Atthesametimethemotorcyclestartstorollrightwards.Theleftwardlateralforcereachesamaximumvalueof50Nafterabout2-3m.Itstiltingmomentwithrespecttothemasscenter(height=

0.6m)isequaltoabout30Nm.
Fig.8-19Steeringangle,steeringtorque,lateralforce,rollandyawwhenenteringfastinaturn(computedwithFastBikecode).
Letuscomparethismomentwiththegyroscopicmomentduetofrontwheelspin-steeringmotion.Thesteeringratereachesitsmaximumvalueafterabout1mbeforethelateralforcereachesitsmaximum.Ifthefrontwheelspininertiaisequalto0.6kgm2thegyroscopicrollmomentisabout3.5Nm.
Thismomentcontributestothegenerationoftherollmotionduetothefactthatitispresentsince

theinitiationofthemaneuverwhile,dependingontherelaxationlengthofthetire,thelateralforcerequiresmoretimetoreachitsmaximumvalue.
Obviously,thegyroscopiccontributionbecomesmoreimportantasthefrontwheelspeedandthesteeringrateincrease.
Thisexamplehighlightsthe“out-tracking”techniquesthatconsistofenteringarightturnsteeringforashorttimetowardstheleft.Theenteringphasecanbeimprovedbythelateraldisplacementsoftherider ’sbodyintotheturnneglectedinthepreviousexample.Riderlateraldisplacementcausesthemotorcycletoleanandcanbeusedtoreducetheinitialcounter-steer.
8.7TheoptimalmaneuvermethodforevaluatingmaneuverabilityandhandlingMotorcycledynamicsisanotoriouslythornytopictodealwith,mainlyduetothefollowing
problems:firstofalltheprecisedescriptionofvehiclekinematicsiscomplexbecauseofthepresenceofthesteeringhead;secondly,dependingontheridingconditions,suchasspeedforexample,motorcyclesarenaturallyunstablevehicles(aswehaveseeninpreviouschapters)andthedriver ’sactionsarealwaysneededtoprovidecontrol;moreoverthepersonaldrivingstyle,thedriver ’sskillandtheirexperiencealsoaffectthevehicle’sperformance.
Thus,itisclearthatthewholedriver-motorcyclesystemmustbestudiedifwewishtounderstandwhatdesignparametersinfluencethevehicle’sperformanceandhandling.
Aclearwayofdealingwiththemotorcycledynamicsproblemistoanalyzeitusingasystematicapproach.Thismeanssplittingtherider-motorcyclesystemintosubsystems,asshowninFig.8-20.Itispossibletoconsiderthreemainsubsystems.
Thedriver,whocontrolsthemotorcycleviathesteeringtorque,thebrakelever,thethrottle,andthemovementofhisbody.Theseareinputstothemotorcyclesystem.Itisobviousthatthereexistsomelimitsontheseactions.Forexamplethedrivercannotexertaninfinitevalueforthesteeringtorque,normayheexertitwithoutsomedelay.
Themotorcycleitselfcanbeconsideredasbeingmadeupofmanyothersubsystems,dependingonthecase.Forvehiclelateraldirectionalcontrol(usuallyreferredtoas“lateraldynamics”)twosubsystemsmaybeidentified:
thesteeringsubsystem,whichisamechanismthattransformssteeringtorqueintoalateralforcethatactsonthefrontwheel;thevehiclesubsystem,whichistreatedasarigidbodyandincludesthegyroscopiceffectofthewheels,onwhichwheel-to-groundcontactforcesareexerted.
LetussupposethatwewouldliketoaccomplishagivenmaneuversuchasaU-shapedcurveorS-shapedchicane,forexample,intheleasttimepossible(minimumtimeistheobjective).Theinitialandfinalpositionsonthetrackareknown,buttherearealotofpossibletrajectoriesthatcanleadthevehiclefromthestartingpointtothefinalone.Wearelookingforthefastestone,whichbestexploitstheintrinsicmotorcyclecharacteristics.

Fig.8-20Functionaldiagramofamotorcycle.
Furthermore,letussupposethatweobserveonlythemotorcyclesystemwithoutconsideringthedriver ’sphysicalandpsychologicallimitssuchasthemaximumtorqueheisabletoapply,orthemaximumsteeringrateheisabletoachieve.Thissituationcorrespondstohavingamotorcycledrivenbyanidealperfectdriver.Thebestperformancethatwegetfromthemotorcyclequantifiesitsmaneuverability.Inthissensemaneuverabilityisrelatedtotheabilityofthemotorcycletodocomplexmaneuversintheshortesttimepossible.Ifwealsoconsiderthedriver ’sperformancelimits(wehavearealdriverridingthemotorcycle),thebestperformancewegetfromthemotorcyclequantifiesitshandling.Thus,handlingmeanstheabilityofthemotorcycletodocomplexmaneuverstakingintoconsiderationthedriver ’slimits.Inotherwords,amotorcycle,whichhasbetterhandlingthananother,isfasterandatthesametimethedrivercanrideitwithlessphysicalandphysiologicaleffort.
Itispossibletolookatthesameproblemfromthesafetypointofview.Infact,amotorcycle,whichismoremaneuverablethananotherone,isabletoaccomplishthesamemaneuverwithoutreachingitslimits,forexamplethetireadherencelimits.Thismeansthatsomemarginsremain,forexampleadditionallateralforceisavailable,thatcanbeusedshouldadangeroussituationarise.
However,theextraeffortthatthedriverhastoexertinordertousetheseleftovermargins(forexampletheadditionaltireforces)tellsushoweasyorhowdifficultthemotorcycleistodrive.
Thediscussionsofarwouldseemtoindicatethatwithappropriateconstraintsplacedonthesystem,maneuverabilityandhandlingareintrinsicvehiclecharacteristics,thatqualifynotonlyitsbestperformancebutalsohoweasilythedriverrealizesthisperformance.
Anotherquestionthatmayarisewhentalkingaboutmaneuverabilityandhandlingisthatthespecifictrajectoryfollowed,andthereforetheforcesneededtoproducethattrajectory,dependonchoicesmadebytherider.Fromthisstandpoint,itwouldnotbeentirelycorrecttotalkaboutmaneuverabilityasanintrinsicpropertyofthemotorcycle.Instead,weshouldtalkabouttheoverallperformanceofthemotorcycle/ridersystem.Theperformanceofthesystemcouldonlybeassessedifweassumeaspecificmodelfortherider.
However,ontheotherhand,itseemsequallyclearthatsomemotorcyclesareintrinsicallybetter

thanothers,independentoftherider ’sdrivingskills.Sohowcantheintrinsicmaneuverabilityofmotorcyclesbedefined?Theansweristoassumeaperfect,oridealrider,capableofchoosingthebestpossibletrajectoryforagivenvehicle.Thebesttrajectoryandthenecessarydriveractiontogetherarecalledtheoptimalmaneuver.
8.7.1Optimal maneuver
Letusseehowitispossibletodefinetheconceptoftheoptimalmaneuverwithanexample.Letussupposethatthedesiredmaneuverisenteringaturnwhere:
thestartingstateissteady,rectilinearmotion;thedesiredendstateissteady,circularmotioncharacterizedbyagiventurningradius.
Tomovefromthestartingstatetotheendstate,thelateralforceappliedtothefrontwheel(whichisassumedtobecontrolledbytheriderthroughthesteering)mustvaryinspecificwaysovertime.Ofcourse,therearemanypossiblewaysofgettingthemotorcycletothedesiredendstate,buteachsolutionischaracterizedbyadifferentseriesofinputsovertime,whichaffectthesystemindifferentwaysintransit.Ofallpossiblesolutions,theonly“optimal”solutionisthemost“efficient”one,i.e.,theonethatminimizesagivenperformanceobjective.
Ifthetotaltimerequiredtocompletethemaneuverisusedastheindexofefficiency,the“optimal”maneuverwillbetheonethatminimizesthatobjective.Intheexample,thesolutiontotheproblem(enterastateofsteadycircularmotionasquicklyaspossible)isgivenbythetimetakentoexecutethatparticularmaneuver.
Obviously,the“optimal”solutionwillbedifferentfordifferentmotorcycles,aswilltheminimumtimeittakesthebestpossibleridertoenteraturn.Inshort,theperformanceindexassociatedwiththeobjectivetobeoptimizedduringthemaneuver(time,inthisexample)canbeusedtomeasuretheperformanceofthemotorcycle,whichquantifiesthemotorcycle’smaneuverability.Ifwealsoaddsomeconstraintsonthedriver ’sphysicalandpsychologicalefforttotheobjective,theperformanceindexquantifiesmotorcyclehandling.
8.7.2Anexample ofanoptimal maneuverforan“S”trajectory(chicane)
Forourfirstexampleofapplyingtheoptimalmaneuverprinciple,wewilllookatamotorcyclefollowingan“S”trajectory(chicane),asshowninFig.8-21.
Thefollowingconstraintsareplacedontheproblem:thevehiclemustcoverthesectionoftrackfromthecenterlineatthestartingpointtothecenterlineattheendpoint;thestartingspeedisknown,butnottheendingspeed,sinceitisdeterminedbythesolutionforthemaneuverwhichoptimizesthespecifiedperformanceindices.
Thefollowingcriteriamustallbeoptimizedatthesametime,intheorderofimportancegiven:minimizethetimetocompletethemaneuver;preventthetirereactionsfromsurpassingtheedgesofthefrictionellipse;preventthemotorcyclefromgoingovertheedgesofthetrack.
Figure8.21showsthe“optimal”trajectorysolutiontotheproblemasasolidlineplottedagainsta

dottedlineindicatingthecenterlineofthesectionoftrack.Notehowthesolutiontrajectory“shaves”theturnswithoutovercomingthem.
Fig.8-21“S”trajectory(chicane).
Fig.8-22“S”trajectory:motorcyclespeed,normalizedlongitudinalforce(thrustorbraking)andverticalforceswithrespecttotheweightforce.
InFig.8.22,notehowthespeedofthemotorcycledecreasesbeforethechicane,andthenincreasesagainattheexit.Inotherwords,the“optimal”solutioncallsforbrakingwhenenteringthefirstturnandaccelerationwhenexitingthesecond.
Theverticalreactionsexertedonthewheels(Fig.8-23)illustratethephenomenonofloadtransfer,

movingfirstfromtherearendtothefrontend(brakingphase),andthenintheoppositedirection(accelerationphase).Itisnecessarytohighlightthatinthemiddleofthechicane,quicklytiltingfromonesidetotheother,thewheelloadsdiminishforashorttimebecauseofcentrifugalaccelerationduetorollmotion.
Fig.8-23“S”trajectory:steeringangle,steeringtorque,lateralforces,rollangleandrollvelocity,yawangleandyawvelocity.
Theevolutionsofthesteeringtorqueandofthesteeringangleillustratethemaneuvercarriedoutbytherider(Fig.8-23).Initiallytheridersteersquicklytowardtherightinordertomovefromthecenteroftheroadtotheleftsideoftheroad.Havingreachedtheleftsideinabout40m,theridersteersleftwardstoinsertthemotorcycleintothefirstturnofthechicane.Thesteeringangleneeded

forequilibriumduringthefirstturnisverysmallduetothehighvalueoftherollangle.Inthemiddleofthechicanethequasi-impulsivemovementofthehandlebarsinducesthemotorcycletorollquicklyfromonesidetotheotherandyawintheoppositedirection.
Theexitfromthesecondturnisperformedmoresmoothlycomparedtotheenteringphase.Increasingthedrivingforcecausesagradualincrementintheforwardvelocityandconsequentlytheincreasedcentrifugalforcetiltsthemotorcycletotheverticalposition.Inthisphasetheridercontrolsthepathtobefollowedbymeansofthesteeringangle.
Thefigureshowswhathappenstothelateralforcesactingonthetires,whichhavebeennormalizedwithrespecttocurrentverticalload;inotherwords,itshowstheinclinationoftheresultingreactionforcesonbothwheels.Thisisoneoftheparameterstheoptimalmaneuverisdesignedtocontrol.Notethattheratiooflateraltoverticalforcereachesmaximumvaluesofabout1.5forbothfrontandrearwheels,andisslightlylesspronouncedforthefrontwheel.Inthisspecificexample,therefore,themotorcycleiswellbalancedbecausethefrontwheelandtherearwheelreachcriticalgripforceatthesametime.
Intermsofrollangleandrollvelocity,Fig.8-23clearlyshowsthemotorcyclefirstleaningovertotheleft(ϕ<0)andthentotheright(ϕ>0),totravelthroughthefirstturn,andthenbacktothelefttocompletethesecondturn.Notethattherollmaneuverbeginsrightawaywhenthemotorcycleisstillfarfromthefirstturn.Anticipatingthemaneuverreducesthelateralforcesonthetirestosomeextentandslightlydecreasestheturningradiusofthefirstturn.
Thechangeinyawangleandyawvelocityovertimeshows,especiallyearlyon,howcomplexamaneuverisrequiredtobetostartfromaninitialstateofperfect,steady,rectilinearmotionandgetreadyforthenextmaneuver.Thistransitionoccursinanextremelyshortspaceoftime,inordertoleaveasmuchtimeaspossiblefortherestofthemaneuver(whichisthemostimportantsegment).
8.7.3Anexample ofanoptimal maneuverfora“U”trajectory
Asasecondexampleofapplyingtheoptimalmaneuverprinciple,wewilllookata“U”trajectorywiththesameconstraintsandoptimizationcriteriaasabove(Fig.8-24).
The“optimal”trajectorysolutiongivesrelativelylittleweighttothedistancetobekeptfromtheedgesofthetrack.Asaresult,themotorcycletendstotravelonatrajectorywhichminimizesthecurvature(and/orkeepsthecurvatureconstantforaslongaspossible)usingtheentireroadwidth.Infact,themotorcyclemovesawayfromthecenterlinetomakeasmoothertransitionwherethetrackturnssharplyatthebeginningandendofthearc.
Thespeedandlongitudinalthrustgraph(Fig.8-25)showsthemotorcyclebrakinghardbeforetheturnandreacceleratingoutofit.Asinthefirstexample,theverticalforcecurvesillustratetheloadtransferphenomenoncausedbyinitialbrakingandsubsequentacceleration.

Fig.8-24“U”trajectory.
Fig.8-25“U”trajectory:motorcyclespeed,normalizedlongitudinalforce(thrustorbraking)andverticalforceswithrespecttotheweightforce.

Theinclinationoftheresultingreactionforces(Fig.8-26)againshowsthemotorcycletravelingthroughtheU-bendinthetrackwithanearlysteady,circularmotion.Hereaswell,thefirstpartofthegraphshowsaninitialmaneuvertowardstheoutsideoftheturn.
TherollanglegraphinFig.8-26showsthatthe“optimal”solutioncallsforthemotorcycletoleanawayfromdirectionoftheturninthefirstpartofthemaneuver(“entryphase”).Themotorcyclethenleansoverinthedirectionoftheturnandholdssteadyforalmosttheentire“U”.
Thegraphofyawangleandyawvelocityshowshowthemotorcycletravelsthroughtheturngradually,withalinearincreaseinyawangle.Italsoshowsaninitialmaneuvertowardstheoutsideoftheturnaspartofthe“optimal”solution.
Fig.8-26“U”trajectory:steeringangle,steeringtorque,lateralforces,rollangleandrollvelocity,

yawangleandyawvelocity.
8.7.4Influence ofthe adherence onthe trajectory
InthissectiontheeffectofdifferenttireadherenceisstudiedconsideringaU-turnmaneuver.Theothermaneuversarenotreportedbecausetheyshowsimilarconclusions.
Figure8-27isveryinterestingasitshowsthedifferentpathsfollowedbyavehicleasthelimitofadherencedecreases.Asisshown,withreducedadherencethevelocityatwhichthecurveistakendecreases.Inthiscase,itmakesmoresensetodrivestraightduringbrakingandaccelerationphasesyieldingapathwithasharpcurve.
Iftheadherencebecomessmallerthan0.5,thetrajectorycannolongertouchtheinnerborder.Infact,whenadherenceis0.31themotorcyclegoesstraightonandtouchestheexternallaneborderatverylowspeed.
Figure8-28showsthatduringtheapproachwithhighadherencethemotorcycleaccelerateswhilewithlowadherencethemotorcyclebeginstobrakeimmediately.Figure8-29showsthatdecreasingtheadherencedecreasesthetimeduringwhichthemotorcycleistilted.
Fig.8-27Trajectorycomparisoncarriedoutwithdifferenttireadherence.
Fig.8-28Velocitycomparisoncarriedoutwithdifferenttireadherence.

Fig.8-29Rollanglecomparisoncarriedoutwithdifferenttireadherence.
8.8Handl ingtes tsInpracticedefiningthemotorcycle’shandlingqualityisnotaneasytaskbecauseitconstitutesan
overallcharacteristicdeterminedbydifferentcomponentsofthevehicle(engine,brakes,aerodynamics,frame,tires).Moreover,thereisastrongsubjectiveinvolvementintheuseandratingofthemotorcycleonbehalfofthedriver,accordingtothedrivingstyleandsensitivity.
Handlingisusuallyassociatedwiththevehicle’sresponsetothecontrolaction.First,apromptresponsetothecontrolactionisrequiredintermsoflateralaccelerationandyawrate.Thispropertyhowevermustnotdecreasethestabilityandthecapabilityofdampingtheoscillationsthatmightariseduringcertainmaneuvers.Alowsideslipofthemotorcycleisalsorequired.Alowsensitivitytoexternaldisturbancesisneeded,aswellasauniformresponsetothecontrolactionatdifferentspeeds,differenttiresandroadsurfaces.Finally,constantfeedbackbetweenthevehicleandthedriverisrequired,sothatthedriveriscontinuallyawareofthevehicle’sdynamicstate.
Experimentalandsimulationtestssupplyusefuldataforthecomprehensionoftheactualdynamicbehaviorofthevehicle.Themotorcycleisassumedtobeasystemwithsomecontrolinputs(steeringangleortorque,forwardvelocity)andsomekinematicanddynamicoutputs.Thebehaviorofthemotorcycleisthusdescribedbythefunctionthatlinksinputstooutputsinperformingtypicalmaneuvers,suchasslalom,transientandsteadyturning,lanechange,obstacleavoidanceandsoon.
Theneedfordifferentkindsoftestsonthemotorcycleisaconsequenceofthefactthatitisnotpossibletodivideagenerictrajectoryintoasimplesequenceofcurvesandstraights,becausethecommandsgivenbythedrivertoperformamaneuveralsodependonthepreviousones.Forexample,thecommandsgiven(throughthesteeringandthethrottle)duringacurveofaslalomtestarecompletelydifferentfromthosegivenduringasteadyturningmaneuverperformedwiththesamespeedandturningradius.Inaddition,thewaythemotorcycleisdrivenalongaknownpathisdifferentfromthewayitisdrivenperformingthesamepathforthefirsttime,additionallyapremeditatedmaneuverisdifferentfromanemergencyoneeventhoughtheresultisthesame(forexample,theavoidanceofaknownvs.anunexpectedobstacle).Asaconsequence,differenttestshavetobeplannedtostudymotorcyclebehaviorintransientandsteadystateconditions.
8.8.1Steadyturningtes t
Thesteadystateturningtesthasproventobeanefficientandquantitativewaytoassesslow

frequencyandnon-transienthandlingpropertiesofmotorcyclesandothertwo-wheelers.Inputandoutputquantitiesareindeedconstantandthesteadystatevehicleresponseratiosandgainscanbemeasuredinarepeatableandusefulway.
Thequantitiesdescribingthedriver ’scontrolactionarethesteeringtorqueandthedriverleanangle,sincebothtrajectory(i.e.radiusofcurvature)andforwardvelocityaregiven.Inmostcasesdrivercontrolmainlyconsistsofthesteeringtorque,whereasleanangleandbodylateraldisplacementcanbeconsideredassecondarycontrolinputs(Fig.8-30).
Fig.8-30Steadyturningtest.
Vehiclemaneuverabilityandsteeringbehaviorcanbequantitativelyinvestigatedinsteadyturningtests.
Ingeneral,driverhandlingfeelingisrelatedtothesteeringeffortneededtoperformacertainmaneuver.Insteadyturningsuchfeelingisrelatedtothesteeringtorquenecessarytofollowtherequiredpathwiththegivenforwardvelocity.Foragoodfeeling,littletorqueshouldbeappliedtothehandlebarandpreferablyitshouldbenegative(i.e.awayfromthecurve).
Therelationbetweendriveractionandvehicleresponsecanbequantifiedbytheratiobetweenthesteeringtorqueandrollangle:
rollindex=τ/ϕ
orbetweenthesteeringtorqueandlateralacceleration:
Figure8-31showsexperimentalresultsintermsoftheaccelerationindexasafunctionofforwardspeedforasportmotorcycle.Theaccelerationindexismainlynegative(i.e.negativesteeringtorque,awayfromthecurve).Characteristicallyforagivenradiusittransitionsfromnegativetopositive(i.e.positivesteeringtorque,towardsthecurve)asspeedincreases.

Fig.8-31Accelerationindexversusvelocityforseveralturningradii.
Negativeappliedsteeringtorqueispreferablebecauseinthissituationthemotorcycle’sturningbehaviortendstobestable(Fig.8-32).Infact,atasufficientvelocity,ifthecontrolofthedriverissuddenlyremoved,themotorcycleaftersomelateraloscillationstendstofollowastraightpathwithoutcapsizing(i.e.thecapsizemodeisstable).Onthecontrary,withpositivetorque,ifthecontrolsuddenlystoppedapplyingtorquethesteeringanglewoulddecreaseandthemotorcyclecapsizes(i.e.thecapsizemodeisunstable).
Fig.8-32Positiveandnegativesteeringtorque.
Withregardtomotorcyclesteeringbehavior,theratiobetweentheactualturningradiusRcandtheidealturningradiusRc0(i.e.associatedwiththeidealtirebehavior)isconsidered:

Inparticular:
ξ<1
under-steering:theactualcorneringradiusisgreaterthantheidealoneandthemotorcycletendstorunonalargertrajectory(i.e.thefrontsideslipisgreaterthantherear);
ξ=1
neutralsteering:theactualcorneringradiusisequaltotheidealoneandthemotorcyclefollowsthekinematictrajectory(i.e.therearsideslipisalmostthesameasthefront);
ξ>1
over-steering:theactualcorneringradiusissmallerthantheidealoneandthemotorcycletendstorunonasmallertrajectory(i.e.therearsideslipisgreaterthanfront);
ξ=∞
criticalcondition:thevehicleturnsevenifthesteerangleisnull(i.e.Δ=0):thiscorrespondstocriticalspeed;
ξ<0
counter-steering:inthisconditionthehandlebarmustbesteeredawayfromthecurve(i.e.therearsideslipismuchgreaterthanfrontandnegativesteeringanglemustbeadoptedtocompensate).
Correlationswithexperttestriders’subjectiveopinionshaveshownthatthebestratingsoccurforvehicleswithneutralormodestover-steeringproperties(thistrendisinsharpcontrasttotypicalresultsforautomobiles,wheresmallamountsofunder-steerareuniversallypreferred).
Letusconsideranunder-steeringmotorcycle:sincethevehicletendstoexpandthecurve,therider,tocorrectthetrajectory,isobligedtoincreasetherollanglewhichinturnincreasesthesteeringangle(inordertoincreasethelateralreactionforceofthefrontwheel).Whentherotationofthehandlebarbecomesconsiderable,thereactionforceneededcanexceedthefrictionlimitbetweenthefronttireandtheroadsurface,withtheresultthatthewheelslidesandtheriderfalls.Amotorcyclethatisunder-steeringisthereforedangerous,sincevehiclecontrolisverydifficultafterthefrontwheelhaslostadherence.Ontheotherhand,withanover-steeringmotorcycle,incaseswheretheneededreactionforceovercomesthemaximumfrictionforcebetweenthereartireandtheroadplane,therearwheelslips,butanexpertrider,throughacounter-steeringaction,hasabetterchanceofcontrollingthevehicle’sequilibriumandavoidingafall.
Figure8-33showsthesteeringratioasafunctionofvelocityfordifferentturningradiifrom10to50m.Itcanbeobservedthatthesportmotorcyclehasawell-definedover-steeringbehaviorwhichbecomesmoreandmoremarkedasspeedincreases.Anywaycriticalspeedisnotreachedandnocounter-steeringisevident.Steeringratiofittinghasbeenperformedbythesimplifiedexpression

wheretheconstantγdependsonthecorneringandcamberstiffnessofthetires.Criticalspeedisnotreachedexperimentallybutisextrapolatedbylinearfitting(≃20m/s).
Fig.8-33Steeringratioversusvelocityforseveralturningradii.
Figure8.34showsexperimentaltestsofthesportmotorcycleconsideredaboveinaspeed–lateralaccelerationdiagram.Zerosteeringtorque(τ=0),zerosteeringtorquegradient(∂τ/∂A=0)andzerosteeringangle(ξ=∞)linesareplottedasforwardspeedandlateralaccelerationvaryanddifferentover-steeringandcounter-steeringzonescanbeidentified.

Fig.8-34Drivingzones.
Withregardtoover-steering,theO1zoneischaracterizedbynegativesteeringtorque,positivesteeringtorquegradientandpositivesteeringratio.Basedontheconsiderationsoftheprevioussections,theseconditionsarecorrelatedtogoodhandling:thecapsizemodeisinfactstable,thesteeringtorquedecreasesapproachingzeroaslateralaccelerationincreases(thusrequiringlighterridereffortasrollangleincreases),andfavorableover-steeringbehaviorisachieved.Itfollowsthatthesecombinationsofspeedandlateralaccelerationcanbeconsidereda“preferabledrivingzone”.
TheO2zoneissimilartothepreviouswiththeexceptionthatthesteeringtorquegradientisnegative.Thismeansthatsteeringtorquebecomesmorenegative(approachingitsrelativeminima)aslateralaccelerationincreases,thusrequiringgreaterridereffortasrollangleincreases.
TheO3zoneisalsosimilartotheO1butthesteeringtorqueispositive.Thismeansthecapsizemodeisunstable,thusrequiringevenmorerollstabilizationtobeachievedbytherider.Evenifthisconstitutesaninappreciablefractionoftheglobalcontrolbeingexerted,iteffectivelymakesdrivingevenmoredifficultandunsafe.Furthermoreinthiszonethepositivesteeringtorquebecomesunfavorablylargerasthelateralaccelerationincreases,thusrequiringgreaterriderefforttoperformvehiclecontrolathighrollangles.
Thesethreeover-steeringzonesarefullyaccomplishedexperimentally.
TheC1,C2,C3zonesaresimilarrespectivelytotheO1,O2andO3over-steeringzones,withtheexceptionthatsteeringratioisnegative.Thatiscounter-steeringanglebehaviorisachieved(i.e.steeringanglenotinaccordwithturningdirection),whichmayrequireacertainamountofexperienceandskilltobepracticedsafelyandmayormaynotbeperceptibletotherider.
Thesethreecounter-steeringzonesarenotaccomplishedexperimentally.
8.8.2“U”turntes t
Thecharacteristicsofamotorcycle’shandlingarenotdefinedsolelyonthebasisofthevalueof

thetorquetobeappliedunderconditionsofmovementonastationaryturn,butalsoonthebasisofotherparameters,suchasthetorqueneededtoleanthevehicletoasetanglefromthevertical,andthetimeusedtoreachthedesiredangle.
Fig.8-35“U”turntest.
J.Koch(1978),afterexperimentaltestsin“U”turns,proposedthefollowingindextoevaluatethevehicle’scapacitytoenteraturn:
Whereτpeakisthepeakvalueofsteeringtorque,ϕpeakisthepeakvalueofrollvelocity,andVistheforwardvelocity.
Fig.8-36Kochindexfordifferentmotorcyclesversusvelocity.
AstheforwardvelocityincreasestheKochindextendstowardsalimitvaluewhichdependsonthekindofmotorcycleandontheturnradius.Itisworthnotingthatallthepeakvaluesarereachedintransientphasesandnotinsteady-stateconditions.

AlowvalueofKochindexhighlightsthatwithahighforwardvelocitythereisahighrollspeedwithalowpeakinsteeringtorque;thesearethecharacteristicsofmotorcycleswithgoodhandling.
Thetransientbehaviorwhenenteringaturnismainlyinfluencedbycenterofmassheight,frontwheelinertia,frontframeinertiawithrespecttosteeringaxis,frameinertiawithrespecttorollingaxisandyawaxis.Figure8-36showsKochindexwhenenteringa“U”turnhavingaradiusequalto100mfordifferenttypesofmotorcycles.ThefigureshowsthatwhileincreasingthevelocitytheKochtendstoalimit.Theindexhighlightsandquantifiesthefactthatitiseasiertomaneuverwithalightscooterinsteadofaheavytouringmotorcycle.
8.8.3Slalomtes t
Insteady-slalomingconditionstheridercontrolsthemotorcyclethroughaperiodicactiononthesteeringsystemandthevehiclereactswithperiodicroll,yawandlateralmotion.Theslalomfrequencyis:
wherePisthespacingofthecones.
Thereforetheslalomtestconstitutesastudyoftheforcedresponseofthesystem,wheretheforcingexcitationisrepresentedbythesteeringtorqueand/orthesteeringangle.Themotorcycle’sresponsechangesbothinamplitudeandphaseasafunctionofspeedandslalomingfrequency.
Fig.8-37Slalomtest.
Figure8-38showsasampleoftheacquiredsignals’timehistoriesfora14mspacingslalomtestperformedatlowspeed.Thesteeringtorqueistendentiallyoppositetothepathcurvature.

Fig.8-38Slalomtestatlowvelocity:V=4.8m/s.
Figure8-39showsthesamesignals’timehistoriesforaslalomtestperformedatmediumspeed.Atthisparticularfrequencythesteeringtorqueis180°outofphasewithrespecttotherollangle.Thesteeringtorqueamplitudeisalmostunchangedifcomparedtothepreviousplot.
Figure8-40showstheslalomingbehaviorathighspeed.Itcanbeobservedthatthephasebetweensteeringtorqueandrollangleshiftsto90°.Thesteeringtorqueamplitudeismuchincreased.

Fig.8-39Slalomtestatmiddlevelocity:V=7.2m/s.
Fig8-40Slalomtestathighvelocity:V=15.2m/s.
Themostsuitablemathematicaltooltointerprettheresultsofaslalomtestisthetransferfunction,whichmakesitpossibletodescribethesystemresponse(rollangle)inrelationtotheinput

characteristic(steeringtorque)asafunctionofthefrequency:
Boththeamplitudeandthephaseofrolltransferfunctionareveryinteresting.Highratiobetweenrollangle|ϕ|andsteeringtorque|τ|meansthatalargemotorcyclerollmotionisobtainedwithlittlesteeringeffort,whilealargephasemeansthattherollanglefollowsthesteeringtorquewithatimelag.
Increasingthefrequency,thatisincreasingthespeediftheconespacingisfixed,themotorcyclesneedanincreasedsteeringefforttofollowtheslalompath.However,thedriverfeelingisdeterminedbythephaselagbetweenrollangleandsteeringtorqueratherthanthemaximumsteeringtorque:betterhandlingisassociatedwithmotorcycleshavingaquickresponsetothesteeringinput.Fig.8-41showsanexperimentaltransferfunction.Themagnitudeexhibitsamaximumvalueatabout8m/sthenincreaseswithfrequency.Themaximuminthemagnitudeoftherolltransferfunctioncorrespondstotheminimumeffortonthehandlebar;atthisvelocitytheweavemodeswitchesfromtheinstabilitytothestabilityzone.
Fig.8-41Frequencyresponsefunction.
8.8.4Lane change tes t
Thelanechangemaneuverrepresentsatypicaltransientmaneuver,andstronglydependsondriverskillandridingstyle.Variousdrivingstrategiesamongridersdifferfromeachotherdependingontheinitialcounter-steercarriedoutandonthemovementoftherider ’sbodywithrespectthemotorcycle.
Expertriderscarryoutthismaneuverwithahighinitialout-trackingandusetheirbodyinclination

toremainverticaloreventogenerateanadditionalinputwithrespecttosteeringtorque.
Inveryfastmaneuvers,inrealityriderstendtoapplynotonlysteeringtorques(i.e.torquesparalleltothesteeringaxis),butalsorollingtorques(i.e.perpendiculartosteeringaxis)tothesteeringsystem.
Fig.8-42Lanechangetest.
Thephasebetweenyawvelocityandsteeringtorqueseemstobethequantitymorehighlyperceivedbytheriderwhencarryingoutsuchamaneuver.
Basicallytheriderimpartssomecontrolaction,torque,causingthevehicletorollandyaw.Theratioofthepeak-to-peakmagnitudeofsteeringtorquetothepeak-to-peakrollrateisagoodindicatorofamotorcycle’smaneuverability.NormalizingthisquantitybyvelocityweobtaintheLaneChangeRollIndex:
wherethesubscriptp-pindicatespeak-to-peakvalues.

Fig.8-43ParametereffectsonLaneChangeRollIndexfordifferentgeometriesandspeed.
Thisindexrepresentstheeffortrequiredoftheriderintheformofsteeringtorquetoobtainadesiredvehicleresponseinrollrate.Figure8-43showstheresultsofnumericalsimulationvaryingcriticaldesignparameters.
Wecanseethatbyorientingtheengineinacounter-rotatingdirectionorbyreducingthefrontwheelspininertiathevalueofLCRollindexisdecreased.Thelowervaluesmeanthatlesseffortisneededtoperformthelanechange,inthiscaseduetothelessergyroscopiceffects.
AlsoobservetheasymptoticnatureoftheLCRollindexwithspeed.Atlowspeedsallfourvehicleconfigurationsaresimilarbutasspeedincreasesweapproacharegionwherethegyroscopiceffectsbecomedominant.Inthisregionthedifferencesbetweentheconfigurationsareobvious.InasimilarmannertheLCRollindexcanbeusedtocontrastthebehaviorofdifferentclassesofmotorcycles:touring,sport,cruiser,etc.Typicallyascooterwillexistatorbelow1whileatouringmotorcyclecanreachorexceed2.5N/(rad/s2).
8.8.5Obs tacle avoidance tes t
Atypicalmaneuverwhichcauseshighrollandyawspeedsistheobstacleavoidancetest.Insuchamaneuverthegyroscopiceffectofthefrontwheelcombinedwiththerollmotionhasafundamentalroleindeterminingthesteeringtorquethathastobeappliedbythedriver.
Thegyroscopiceffectcausesatorquearoundsteeringaxiswhosevalueis:

Fig.8-44Obstacleavoidancetest.
Intheprevioussectionswehavehighlightedthatthetotalsteeringtorqueisdeterminedbyalotoffactorsactingonthefrontframe,particularlybyverticalandlateralforces.Neverthelessinrapidmaneuversalmostthewholeeffortappliedbythedriveropposesthegyroscopicmomentcausedbyfrontwheelandrollmotion.
ThiscanbeeasilyseeninFig.8-45,wherethesteeringtorqueappliedbythedriveriscomparedwiththegyroscopiceffectcalculatedbymeansofthepreviousformula.
Firstofallweobservetheout-trackingtechnique;thedriverinitiallyappliesahighsteeringefforttotherighttomakethevehiclerollrapidlytowardstheleft.Afterthis,thereisasteeringtorquepeaktotheleft,correspondingtothenecessaryrotationofthesteeringsystem,andfinallyapositivepeakcorrespondingtothefinallineupofthesteeringsystemitself.
Themotorcyclehandlingsensationinsuchamaneuverisrepresentedbythetimelagbetweenthesteeringtorqueandtheyawvelocity;theshorterthistimelagis,thebettervehiclehandlingis.
Fig.8-45Steeringtorqueappliedinaobstacleavoidancetest.
8.9Dangerous dynamicphenomena

8.9.1Highs ide
Thisdangerousphenomenonisduetotheinteractionbetweenthesideslipforcewiththelongitudinalforceappliedontherearwheel.Itcanhappenduringabrakingmaneuverwhileenteringacurveorduringathrustingmaneuverwhileexitingfromacurve.Thehighsideduetothebrakinghasalreadybeenexplainedinthe2ndchapterwithreferencetothefrictionellipse.
Figure8-46showshowthe“high-side”fallduetothedrivingforcecomesabout.Toexitfromthecurvetheriderstartstothrusttherearwheel,thereforethelongitudinaldrivingforceincreasesasdoesthetotalfrictionforce(phase1).Thetotalfrictionforcereachesthelimitvalue,therearwheellosesgripandthereforetherearofthemotorcyclemovesoutwards(phase2),Theriderstopsaccelerating,reducingthethrustingforcesuddenly,andtherearwheeltakesgripagain(phase4),Thelargesideslip,whichisstillpresent,generatesalateralforceimpulsethatisnotbalanced.Theresultisthatthemotorcycleisviolentlytwistedandthrownupwards(phase5).
Tirebehaviorduringa“high-side”maybebetterunderstoodbylookingatFig.8-47,whichshowstheavailablelateraltireforcewhenalongitudinaldrivingtireforceispresent.Inbothdiagrams,theenvelopeofthefamiliesofcurvesisthefrictionellipse.TheinitialconditionisrepresentedbypointAinwhichalateralforceispresentandthesideslipangleisabout1.5°.Whenthedriverstartstoacceleratethemotorcycle,thepointmovesinthehorizontaldirectionandthesideslipangleincreasesinordertokeepthelateralforceconstantinthepresenceofanincreasinglongitudinalforce.

Fig.8-46Exampleofphenomenonknownas“highside”duetothrustingmaneuver.
Fig.8-47Lateralandlongitudinalforcesforvariousvaluesoflongitudinalslipκandsideslipλ.
ThelossofgriptakesplaceatpointBwhentheboundaryofthefrictionellipseisreached;alargesideslipangle(ofabout5°)ispresent.Whentheriderreleasestheacceleratortherearwheeltakesgripagain.
ThenewconditionisrepresentedbypointC,wherethereisstillalargesideslipanglebutwherethelongitudinalslipisnegligible.
Therefore,thelateralforceimpulsetakesplacebecausethelateralforceincreasessuddenlyfromthevalueofpointBtothevalueofpointC.Theimpulsetorque,producedbythelateralforce,isnotbalanced,consequentlythemotorcyclefalls.
Fig.8-48Exampleofsimulationofthephenomenonknownas“highside”.
8.9.2Kickback
Thesocalled“kickback”effectisaphenomenonthatconcernsmotorcyclestability.

Fig.8-49Exampleof“kickback”phenomena.
Roadundulationsortransversejointsontheroadsurfaceduringhighspeedriding(150-200km/h)canunloadthefrontwheelcausingittoliftfromtheroadsurface(phase1).Whenthefrontwheelisunloadedthefrontassemblyisnotinequilibriumaroundthesteeringaxis.Theridermovesthehandlebarinstinctivelyandthefrontwheelplanemovesoutoflinewithrespecttotheforwarddirectionofthemotorcycle(phase2).
Whenthefrontwheelmakescontactwiththeroadsurfaceagain(phase3)thefrontframeisnotinequilibriumwithrespecttothesteeringaxis.Duetothesteeringanglealargelateralforceisgenerated.Thissideforcekicksbackthehandlebarintheoppositedirectionwithrespecttothesteeringangle(phase4).Consequentlytheridercanlosecontrolofthemotorcyclewithdramaticeffects.
Thekickbackeffectdecreaseswhenusingfrontandreartireswithlowercorneringstiffness.Frameswithhighstructuralstiffnessmakethemotorcycle’sbehaviorworse.
8.9.3Chattering
Thechatterofmotorcyclesappearsduringbrakingandconsistsofavibrationoftherearandfrontunsprungmassesatafrequencyintherange17-22Hzdependingonthemotorcycles.Itappearsnearlyexclusivelyintheracingmotorcyclesandonlyinsometracksandinsomekindofmaneuvers.Thisvibrationcanbeverystrongandtheunsprungmassesaccelerationcanreach5g.Itisoftenobservedthatthewheelrotationfrequencyisclosetothechatterfrequency,whichsuggestsatirenonuniformity;forcevariationorrun-out,ormaybeimbalance.Thiswouldnormallyoccurinthemid-corner.

Fig.8-50Exampleof“chattering”phenomenon.
Thechatterisanauto-excitedvibrationandthisfactexplainswhyitappearssuddenlywhenthemechanismofauto-excitationisgenerated.
Thesuspensionsshockabsorbersarenotabletodampthesevibrations.Inthepresenceofchatteringmotorcycleguidanceinlimitconditionsbecomesverydifficult.
Themechanismofself-excitationofthesevibrationsisduetothecouplingoftherearwheelunsprungmassresonanceoscillationswiththefluctuationofthelongitudinalfrictionalforceinthecontactpatchofthetire.Thechattervibrationsbeginontherearandappearalmostinstantaneouslyonthefrontduetoenergytransferfromthereartothefrontwhichoccurswhentherearandfronthopresonancefrequenciesarecloseeachother.
Figure8-50showsabrakingmaneuverofaracingmotorcycle.Thefigurehighlightsthatthespeedofthefrontwheelislessoftherearwheelspeed,duringthebraking.Duringthebrakingtherearandfrontunsprungmassesbegintooscillateatafrequencyofabout20Hz.Theoscillationsdecreasedecreasingthebrakingrateanddisappearcompletelyduringthefollowingaccelerationphase.
8.9.4Bounce andweave coupl ingincornering

Thecouplingbetweentheout-of-planemode“weave”andthein-planemode“bounce”hasbeenpreviouslyanalyzed.Aswehaveseenthetwomodeshavesimilarvaluesfortheirfrequenciesandsimilarmodalshapes.
Fig.8-51Exampleof“bounce-weavecoupling”phenomena.
Thisphenomenonisvisibleinsomeracingbikeswhenexitingturnsduringtheaccelerationphase.Wideoscillationsoftherearframeandmovementsoftheswingingarmarevisible.Theriderisinclinedtoslowdowntodampoutthisphenomenon.Fluctuationsofthelongitudinalslip,dependingontheangularpositionoftheswingingarm,canincreasethebounceandweavecoupling.
8.10Structural s ti ffnes sStructuralstiffnessofthemotorcycleasawholeandofeverysinglecomponent(inessencefront
forks,chassisandswingarm)isakeyfactorindefiningtheperformancewithregardtohandlingandmaneuverabilityofthemotorcycle.
Modernmotorcycleshaveframes,swingingarmsandforksstifferthanoldervehicles.Beyondcertainvaluesoflateralandtorsionalstiffnessoftheframe,themotorcyclestabilitypropertiesnolongerdependinasignificantwayonthestructuralcharacteristics.Highvalueofstiffnessguaranteesprecisioninthetrajectoryandquickresponsetotheinputoftheriderbutalsopresentssomedisadvantages.
Forexample,vehicleswithgreatframestiffnessaresometimesfelttobenervousbytherider,especiallywhenpassingonatransversebumpsandalsoonwetroads.
Simulationresultsshowthatthelateralflexibilityofthefrontfork(orthetorsionalflexibilityoftheupperpartoftheframenearthesteeringhead)stabilizesthewobblemodeathighspeedandhasanoppositeeffectatlowspeed,whereasthetorsionalflexibilityoftheforkdoesnotappeartohavearemarkableinfluence.
Thelateralflexibilityoftheswinging-armoroftherearframeslightlystabilizestheweavemodeatveryhighspeedwhereasthetorsionalflexibilityoftheswinging-armoroftherearframehasacontraryeffect.
Themotorcycleinsteadyconditions,bothinlinearmotionandwhencornering,issubjectedtoforcesactinginitsplaneofsymmetrywhereasintransientconditionsitissubjectedtolateralforces

appliedonthewheelcontactpointwiththeroadandtoinertialforcesduetolateralaccelerations.Asanexample,whenthevehicleisinlinearmotionandencountersabumpinclinedwithrespecttothesurfaceroad,impulsivelateralforcesactingonthecontactpointoccur.Consequentiallyitseemstobeappropriate,whenmeasuringthestructuralstiffness,toapplyforcesonthecontactpointbetweenthetireandthesurfaceroad.
Lateralforcescausedeformationsofthevehiclethatgeneratelateraldisplacementsofthewheelsandalsorotationsofthewheelplane.Thelateraldisplacementsandthecomponentoftherotationofthewheelaroundtheverticalaxis,causeanincreaseofthetiresideslipandthisincreasesthedampingofthestructuralvibrationexcited.
If,instead,thedeformationofthewheelisatorsion,whichcouldbethoughtasatorsionalrotationabouttheaxisconnectingthetwocontactpointswiththeroad,thestructuralvibrationwillbelessdampedsincetherotationofthewheelplanedoesnotincreasethedampingofthevibrationexcited.
Asaresult,itisdesirabletohavemoderatelateralflexibilityandahighdegreeoftorsionalstiffness.
Measurementofthestiffnesspropertiesmaybecarriedoutusingmanydifferentapproaches.
8.10.1Structural s ti ffnes s ofthe whole motorcycle
Thestructureofthemotorcycleisexcitedmainlybytheforcesgeneratedinthecontactpatchofthetires.Theseforcesinclude:thelongitudinalforce,theverticalload,andthelateralforce.Inordertohighlighttheactualbehaviourthemotorcycle,stiffnessshouldbemeasuredbyapplyingtheforceinthisregion,asshowninFig.8.52.
Lateralandtorsionalstiffness,respectively,areexpressedbytheratios:
Therotationaxisistheintersectionofthesymmetryplaneoftherearassemblywiththerearwheelplaneinthedeformedposition.Iftherotationaxisisvertical(angleβ=0)thedeformationispredominantlytheflexuraltypewhileiftherotationaxisisratherhorizontal(angle≈90)thedeformationismainlytorsion.
Therotationalaxisclosetotherearcontactpatch(smallvalueofthearmb)meansthatthereismoreplanerotationwithrespecttolateraldeformation.Onthecontrarytherotationalaxisfarfromtherearwheel(largevalueofthearmb)meansmorelateraldeformationwithrespecttorotation.
Thevaluesformodernmotorcycles,withoutthecomplianceofthetire,varyintherangeof:lateralstiffness:Krear=0.1-0.2kN/mmtorsionalstiffness:Ktrear=1.5-3.0kN/°
Withtheenginelockedinsteadofthesteeringheadtheconceptsremainthesame.Inthiscasethevaluesofthestiffnessarelargerwithrespecttotheprevious.

Fig.8-52Loadingconditionforevaluatingtorsionalandlateralstiffnessoftherearassemblyofthemotorcycle.
ThestiffnessofthefrontframecanbemeasuredasshowninFig8-51.Alsointhiscasetherearetwopossibilities:
lockthesteeringhead,locktheengine.
Inthelattercasetheupperpartoftheframecontributestothedeformationofthefrontassembly.
Theinclinationoftherotationalaxisistypicallytiltedbyaboutβ≈2εtowardsfrontofthemotorcyclewithrespecttoaplaneperpendiculartothesteeringaxis.Alsointhiscaselateralandtorsionalstiffnessareexpressedbytheratios:
Thevaluesofmodernmotorcyclevaryintherange:lateralstiffness:Kfront=0.08-0.16kN/mm;torsionalstiffness:Ktfront=0.7-1.4kN/°.

Fig.8-53Loadingconditionforevaluatingtorsionalandlateralstiffnessofthefrontassemblyofthemotorcycle.
8.10.2Structural s ti ffnes s ofthe frame
Thetorsionalstiffnessoftherearframememberisgenerallymeasuredwiththeenginefitted.Itiscalculatedaboutanaxisatarightangletothesteeringheadandpassingthroughtheswingingarmpivotaxisandapplyingacouple(torque)aroundthisaxis.
Thelateralstiffnesscanalsoberepresentedbytheratiobetweentheforceappliedalongtheswingingarmpivotaxisandthelateraldeformationmeasuredinthatdirection.Theforcecanbeappliedwithanoffsetinordertoavoidtorsionaldeformation.
Lateralstiffnesstypicallyvariesdependingonthetypeofframeandonthemethodofengineattachment.
Insomecasesthemomentisappliedonthesteeringheadandthepivotaxisoftheswingingarmislocked.Therearesomesmalldifferencesinthetwodifferentmeasurementproceduresduetotheasymmetryoftheframe.
Thevaluesofmodernmotorcycle(sport1000cc.)varyintherange:lateralframestiffness:Kf=1–3kN/mm;torsionalframestiffness:Ktf=3-7kNm/°.verticalframestiffness:Kzf=5-10kNmm.

Fig.8-54Loadingconditionforevaluatingtorsionalstiffnessoftheframe.
Fig.8-55Loadingconditionforevaluatinglateralstiffnessoftheframe.

Fig.8-56Loadingconditionforevaluatinglongitudinalstiffnessoftheframe.
8.10.3Structural s ti ffnes s ofthe swingarm
Thevaluesofswingarmstiffnessareintherange:swingingarmlateralstiffnessKs=0.8-1.6kN/mm.swingingarmtorsionalstiffnessKts=1-2kNm/°;
Themono-shockswingingarmischaracterizedbyagreaterlateralandasmallertorsionalstiffnesscomparedwiththeclassicswingingarm.
Fig.8-57Loadingconditionforevaluatingtorsionalandlateralstiffnessoftheswingarm.
8.10.4Structural s ti ffnes s ofthe frontfork
Thefrontforkisthemostflexiblepartofthestructuralmotorcycle.

Fig.8-58Loadingconditionforevaluatingtorsional,lateralandlongitudinalstiffnessofthefork.
Thestiffnessesareintheranges:forklateralstiffnessKff=0.07-0.18kN/mm.forktorsionalstiffnessKtff=0.1-0.3kNm/°;
Example6
Calculatethelateralandtorsionalstiffnessofamotorcycle(withoutthetirecompliance)whichcomponentshavethefollowingvalues:
•lateralframestiffness: Kf=2.2kN/mm;
•torsionalframestiffness: Ktf=6.0kNm/°;
•swingarmlateralstiffness: Ks=1.4kN/mm.;
•swingarmtorsionalstiffness: Kts=1.0kNm/°;
•wheellateralstiffness: Ks=0.8kN/mm.
Thegeometryofrearassemblyisthefollowing:
•framelength: Lf=0.85m,ΔLf=Lf/3;
•swingarmlength: Ls=0.6m,ΔLs=Ls/3;
•wheelradius: Lw=0.3m,ΔLw=Lw/3;
•swingarminclination: αs=8°;

•frameinclination: αf=30°;
•torsionalaxisinclination: α=-12°.
Fig.8-59Compositionofthestructuralstiffnessofthemotorcyclecomponents.
TheequivalentlateralstiffnessatthecontactpointisequaltoKrear=0.16kN/mmTherotatingaxisisinclined,respecttotheground,ofanangleequalto45°andthedistanceoftherotatingaxiswithrespecttothecontactpatchisequalto0.76m.Thetorsionalstiffnesssplitalongthexaxisandzaxisare: and respectively.Intheexperimentaltestthevalueshouldbelessbecausetheconstraintscompliancesarenotinfinitive.
8.11Experimental modal analys isExperimentalmodalanalysiswasdevelopedintheaeronauticalfieldduringtheseventiesand
nowadaysithasfoundanapplicationintwo-wheeledvehicles.

Fig.8-60Structuralmodesofamodernsportingmotorcycle(massequalto190kg).
Themodalpropertiesofastructureareindependentfromtheexcitationandtheacquisitionpoint,soaseriesofexperimentalFRFs(FrequencyResponseFunctions)canbeacquiredinlaboratory,usinganexcitationsystemlikeanimpacthammerwithaloadcellorashakerabletogenerateafrequencysweep,andanacquisitionsystemthatusuallyincludesthree-axisaccelerometers.
Theacquisitionpointsaredisplacedalongthewholevehicle,creatingameshthatcanbeanimatedafterthatthemodalidentification(obtainedusingspecificalgorithmsabletoanalyzealltheacquiredFRFsatthesametime)hasbeenperformed.
Experimentalmodalanalysisisanimportanttechniquethatmakesitpossibletoobtainthemodalmodelofcomplexstructuresformedbydifferentparts,likeamotorcycle(frontandrearframe,wheels).Thismodelisgivenasresonancefrequencies,dampingandeigenvectors,startingfromexperimentalacquisitionsandnotfromavirtualmodellikeFEMcodes.

Figure8-60showsthefirstfourstructuralmodesforamodernsportingmotorcycle.Thefirstmodeshowslateralbendingofbothfrontforkandswingarminthesamedirection.Thesecondmodeshowsabendingdeformationoftherearpartofthechassisandoftheforkinthesamedirection;thereisalsoaremarkableinplaneandlateraldeformationoftheswingarm.Thethirdandthefourthmodesaremorecomplicatedandinvolvebendingandtorsionoftheswingarm,oftheforkandoftherearpartofthechassiswhilethemainpartofthechassishassmallerdeformations.
8.12Rigidbodyproperties andMozzi axisIfweconsiderthemotorcycleasasinglerigidbodymovinginspace,subjecttotranslationinthe
groundplaneandrotationsaboutitsrollandyawaxes,anumberofinterestingobservationscanbemade.
Motorcyclemotiondependsonthekindofmaneuverandontheridingstyle.Everymaneuverstartswithavariationofthefrontlateralforcegeneratedbythesteeringmotion.Ifarightwardimpulsiveforceisappliedtothefronttirecontactpoint,themotorcyclemoveswiththefollowingleaningandyawvelocity:
Thefrontwheelcontactpointlateralvelocityis:
Therollvelocityisnegative(leftwardmotion)whiletheyawingvelocityispositive(rightwardmotion).Therollvelocityincreasesiftherollmomentofinertia isdecreased,whiletheyawingvelocityincreases,iftheyawmomentofinertia isdecreased.Bothvelocitiesincreaseifthecorrespondingproductsofinertia(intheinertiatensor)becomemorenegative.

Fig.8-61Instantaneousrotationaxis.
Knowingtheforwardvelocity,theyawvelocity,andtherollvelocityofmotorcycleonecandefineavectorquantityknowastheMozziaxis,ortheinstantaneousaxisofrotationfortherigidbody.TheMozziaxiscanbeusedtodescribedifferenttransientmaneuversmadebythemotorcycle.
TheMozziaxis(Fig.8-61)isdescribedintheSAEcoordinatesystemby:
andxiscoincidentwiththebody’scenterofmasslocation.Theanglethattheaxismakeswiththegroundplaneis:
Intermsoftherigidbodypropertiestheslopeoftheinstantaneousaxisofrotationwithrespecttotheroadplanexyis:

Theangleincreases,increasingtherollinertiaanddecreasingtheyawone(i.e.lessrollmotionandmoreyaw).
Theverticaldistanceoftheaxisfromthemotorcyclecenterofmassincreases,astherollinertiaincreasesandproductofinertiatermsdecrease.
Peopleinvolvedinmotorcycledesignandracingoftenaskthemselvesthefollowingquestions:Whereistheinstantaneousaxisofthevehicleinmotion?Howdoyawandrollratecombine?
AnswerstothesequestionsmaybefoundinamathematicalwaybymakinguseoftheconceptoftheMozziaxis.TheplotsderivedfromtheMozziaxistheoryareusefulinhighlightingtheeffectsofvariationsinpath,vehicleproperties,andridingstyle.
ThegeometriclocioftheMozzitrace(thepointwheretheaxisintersectsthegroundplane)andthatoftheturncenterduringaslalommaneuverarepresentedinFig.8-62.
Fig.8-62Mozzitraceinaslalommaneuver.

Fig.8-63Mozzitraceinaenteringturnmaneuver.
Thelocusoftheturncenterisclosetoapiecewiselinear.Itisworthhighlightingthattheturncentercoordinatestendtoinfinityiftheyawvelocitytendstozero.Inthesinusoidalslalomthisconditionhappenswhenthetrajectorycrossesthexaxis.
ThelocusoftheMozzitraceisacurvewithperiodiccusps,whichalwayslieoninnersideofthepath.ThelocioftheMozzitraceandtheturncentershowperiodicintersectionpointsthattakeplacewhentheradiusofcurvatureisclosetotheminimumvalue.
Figure8.63dealswithamotorcyclethatisenteringarightcurvewithacounter-steertechnique.InthismaneuvertheMozziaxismovesfromtheoutsideofthepathtothecenterofthecurve.
Theyawrateisnegative(counter-yaw)atthebeginningofthemaneuverandpositiveduringtherestofthemaneuver.Therollratereachesamaximumafterthebeginningoftherotationtowardstherightandthentendstozero.TheMozzitracecomesfrom-∞,becausethepathisalmoststraightandtheyawrateisnegative,thenitcrossesthepathwhentheyawrateiszero.Finally,inthesteadyturningportionofthepath,theMozzitracetendstocoincidewiththeturncenter,becausetherollrateisclosetozero.
8.13Dynamicanalys is withmulti -bodycodesNowadays“multi-body”codesmakepossiblethepreciseandcompletedynamicanalysisofa
vehicle’soperationontheroadthroughtheuseofcomputersimulation.MSA(Multi-bodySystemAnalysis)representsthecomputerstudyofmovementsinmechanicalsystemsasaresultoftheapplicationofexternalforcesorstressesthatactonthesystem.Thespatialsystemsformingthesubjectofthestudyaresimulatedwithrigidbodiesand/orflexibleelementsconnectedtoeachotherwithvarioustypesofkinematicanddynamicconnections.Theexternalforcesandresultingreactionsleadtomovementsofthesystem’scomponentsthatsatisfyconstraintconditions.TheMSAcodesplayarolewhoseimportanceisonlydestinedtoincreasethroughtheuseofmodernintegratedcomputer-aideddesign.Theymakeitpossibletoevaluateandoptimizethecharacteristicsandperformanceofa

productevenbeforetheprototypephase,therebyassuringthereductionofdevelopmentcostsandthesystematicevaluationofalternativedesigns,andespeciallyreducingthetimetomarketforanewproduct.
Figure8-64illustratesbyexampleamodelofascooterthatrunsinrectilinearmotionalongaroadwayandencountersastep.Thechassisofthescooterisfurtheraffectedbytheunbalancingforceofthemotor.
Thecomputersimulationenablesustorepresentthecharacteristicsofthespringsandtheshockabsorbersevenwithnon-linearlaws.Inthesameway,thetirescanbemodeledemployingvariouslevelsofsophistication.
Figure.8-65showsaracingvehicleperformingawheelieduringacceleration,generatedbyahighthrustforce.Thein-planemodelingcanbeveryaccurateandcantakeaccountof,forexample,thecharacteristicsoftheenginetorque,theelasticcontributionofthegaspresentintheshockabsorbers,theslipcharacteristicsofthetiresintermsoftheload,etc.
Three-dimensionalmultibodycodeshavetobeusedtosimulatetheoperationsofthevehicleout-of-plane.Sincethevehicleisunstable,themodelrequiresacontrolsystembothfortheequilibriumofthevehicleandfortheexecutionofthedesiredmaneuver(Fig.8-66).
Recentadvancesinbothmulti-bodysoftwareandincontrolstrategiesandimplementationhaveyieldedmodelscapableofin-depthstudiesofdesignchangesandparametervariations,whichalsoprovidesignificantinsightintodrivertechniqueandskill-level.Inthenearfuturethevalidationofaparticularvehicledesignscanbesubstantiatedbeforeanymetalhasbeencutorwheelshavebeenlaced.
Fig.8-64Exampleofmodelingascooterwithamulti-bodycode.

Fig.8-65Exampleofmodelingofaracingvehiclewithamultibodycode.
Fig.8-66Exampleof3Dsimulationofthedynamicbehaviorofamotorcycle.

List of symbols
Coordinatesystems
(Pr,x,y,z) mobiletriadwiththeoriginintherearcontactpointPr,accordingtoSAEJ670
x forwardandparalleltothelongitudinalplaneofsymmetry
y lateralontherightsideofthevehicle
z downwardwithrespecttothehorizontalplane
(C,X,Y,Z) mobiletriadwiththeoriginintheturncenterpointC
X paralleltoxaxis
Y paralleltoyaxis
Z paralleltozaxis
(Ar,Xr,Yr,Zr) triadattachedtorearframe
(Af,Xf,Yf,Zf) triadattachedtofrontframe
r suffixforparametersofrearframe
f suffixforparametersoffrontframe
Kinematicsanddynamicsparameters
C turningcenterpoint
C pathcurvature
pathradiusofrearwheel
pathradiusoffrontwheel
V forwardvelocity

ξ steeringratio
δ steeringangle
Δ kinematicsteeringangle
Δ* effectivesteeringangle
μ pitchangleofthemainframe
ψ yawangleofthemainframe
σ thrustchainanglerespecttothegroundplane
τ transferloadanglerespecttothegroundplane
τi,j velocityratio
Ω yawangularvelocityaboutthez-axis
ν frequency
νp naturalfrequencyofpitchvibration
νb naturalfrequencyofbouncevibration
Motorcycleparameters
A frontalareaofthemotorcycle
a mechanicaltrail(trail)
an normaltrail
b longitudinaldistancefromrearaxistothemotorcyclemasscenter
c viscousdampingcoefficientofsuspension
c viscousdampingcoefficientofsteeringdamper
CD aerodynamicdragcoefficient
CL aerodynamicliftcoefficient
d forkoffset:distancefromthecenterofthefrontwheeltothesteeringaxis

h heightofmotorcyclemasscenter
momentofinertiaofmotorcycleaboutthex-axisthroughitscenterofmass(rollinertia)
productofinertiaofmotorcycleaboutthex-z-axesthroughitscenterofmass
momentofinertiaofmotorcycleaboutthey-axisthroughitscenterofmass(pitchinertia)
momentofinertiaofmotorcycleaboutthez-axisthroughitscenterofmass(yawinertia)
k suspensionstiffness
L swingingarmlength
m motorcyclemass
p wheelbase
P tirecontactpointwiththeground
G motorcyclecenterofmass
rp radiusofdrivesprocket
rc radiusofrearsprocket
Δh loweringofthesteeringhead
ε casterangle
φ swingingarmanglerespecttothegroundplane
ϕ rollangleoftherearframe(camberangleoftherearwheel)
β rollangleofthefrontframe(camberangleoftherearwheel)
η chainanglerespecttothegroundplane
Frontframeparameters
bf distanceofthemasscenteroffrontframefromsteeringaxis
hfdistanceofthemasscenteroffrontframefromthelinepassingthroughtherearwheelcenterandperpendiculartothesteeringaxis
Gf masscenteroffrontframe

kf effective(reduced)frontsuspensionstiffness
mf frontunsprungmass
Mf frontframemass
momentofinertiaofthefrontwheel
momentofinertiaoffrontframeaboutthexf-axisthroughitscenterofmass
productofinertiaoffrontframeaboutthexf-zf-axesthroughitscenterofmass
momentofinertiaoffrontframeabouttheyf-axisthroughitscenterofmass
momentofinertiaoffrontframeaboutthezf-axisthroughitscenterofmass
Rearframeparameters
br longitudinaldistanceofthemasscenterofrearframefromrearwheelaxis
hr heightofthemasscenterofrearframe
Gr masscenterofrearframe
kr effective(reduced)rearsuspensionstiffness
mr rearunsprungmass
Mr rearframemass
momentofinertiaoftherearwheel
momentofinertiaofrearframeaboutthexr-axisthroughitscenterofmass
productofinertiaofrearframeaboutthexr-zr-axesthroughitscenterofmass
momentofinertiaofrearframeabouttheyr-axisthroughitscenterofmass
momentofinertiaofrearframeaboutthezr-axisthroughitscenterofmass
ForcesandMoments

Ns staticloadonthewheel
N dynamicloadonthewheel
Na normalizeddynamicloadonthewheel:ratioofthedynamicloadtothemotorcycleweight
Ntr dynamicloadtransfer
FD aerodynamicdragforce
Fw rollingresistanceforce
FP resistantforceduetothesloperoad
F brakingforce
Fs lateralforceonthetire
M elasticmomentappliedtotheswingingarm
MX overturningmoment
MY rollingresistancemoment
MZ yawingmoment
Mt twistingmoment
P power
S drivingforce
Sa normalizeddrivingforce:ratioofthedrivingforcetothemotorcycleweight
T chainthrustforce
τ steeringtorqueappliedbytherider
ℜ squatratio:
μ braking/drivingforcecoefficient(normalizedlongitudinalforce):ratioofthebraking/drivingforcetotheverticalload
braking/drivingtractioncoefficient:themaximumvalueofthebraking/drivingforcecoefficient
lateraltractioncoefficient:themaximumvalueofthelateralforcecoefficient

Tiresandwheels
at tiretrail
d rollingfrictionparameter
fw rollingresistancecoefficient
R outsideradiusofthetire
ρ radiusoftorusrevolutionofthetire
t radiusofcrosssectionofthetire
L relaxationlengthofthetire
kp radialstiffnessofthetire
ks lateralstiffnessofthetire
kκ longitudinalslipstiffnesscoefficient:ratiooflongitudinalslipstiffnesstotheverticalload
kλ cornering(sideslip)stiffnesscoefficient:ratioofcorneringstiffnesstotheverticalload
kϕ camberstiffnesscoefficientofthetire:ratioofcamberstiffnesstotheverticalload
Kκ longitudinalslipstiffnessofthetire
Kλ cornering(sideslip)stiffnessofthetire
Kϕ camber(roll)stiffnessofthetire
Ro effectiverollingradius
λ sideslipangleofthetire
ω spinvelocityofthewheelaboutitsaxis
κ longitudinalslipofthetire

References
F.J.W.Whipple,TheStabilityofthemotionofaBicycle,Quart.JournalofPureandAppliedMathematics,30,1899.
D.E.H.Jones,TheStabilityoftheBicycle,PhysicsToday,pp.34-40,1970.
R.S.Sharp,TheStabilityandControlofMotorcycles,JournalofMechanicalEngineeringScience,13,1971.
G.E.Roe,T.E.Thorpe,ExperimentalInvestigationoftheParametersaffectingtheCastorStabilityofRoadWheels,JournalMechanicalEngineeringScience,Vol.15,n°5,1973.
T.R.Kane,FundamentalKinematicalRelationshipsforSingle-TrackVehicles,Int.J.Mech.Sci.,17,1975.
R.S.Sharp,AReviewofMotorcycleSteeringBehaviouronStraightLineStabilityCharacteristics,SAEPapern°780303,1978.
D.H.Weir,J.W.Zellner,DevelopmentofHandlingTestProceduresforMotorcycles,SAEpaper780313,1978.
H.Sakai,O.Kanaya,H.Lijima,EffectofMainFactorsonDynamicPropertiesofMotorcycleTyres,SAEpapern°790259,1979.
M.K.Verma,R.A.Scott,L.Segel,EffectOfFrameComplianceontheLateralDynamicsofMotorcycles,VehicleSystemDynamics,V.9,1980.
K.Riedl,P.Lugner,Naehereuntersuchungenzurstationarenkurvenfahrtvoneinspurfahrzeugen,VehicleSystemDynamics,V.11,pp.175-193,1982.
R.S.Sharp,TheLateralDynamicsofMotorcyclesandBicycles,VehicleSystemDynamics,V.14,1985.
G.E.Roe,T.E.Thorpe,TheInfluenceofFrameStructureontheDynamicsofMotorcycleStability,SAEpapern.891772,1989.
A.Wiedele,M.Schmieder,ResearchonthePowerTransferofMotorcycleTyresonRealRoadSurfaces,Proc.SocietyofAutomotiveEngineersEighteenthFISITACongress,Turin,Italy,1990.
H.B.Pacejka,RS.Sharp,ShearForceDevelopmentbyPneumaticTyresinSteadyStateConditions:aReviewofModellingAspects,VehicleSystemDynamics,V.20,1991.
H.B.Pacejka,TyreModelsforVehicleDynamicsAnalysis,Swets&Zeitlenger,Amsterdam,1991.
R.Romeva,F.Piera,B.Creixell,EffectofSuddenSlippageoftheDrivingWheeloveraSwingingArminHighPoweredMotorcycles.MechanicalSolutionstoavoidtheseEffects,Inter.Cong.TechnischeUniversitatGraz,1993.
H.B.Pacejka,J.M.Besselink,MagicFormulaTyreModelwithTransientProperties,VehicleSystem

Dynamics,V.27,1997.
Katayama,T.Nishimi,T.Okayama,Takumi,ASimulationModelForMotorcycleRider’sControlBehavior,SAE1997.
E.J.HdeVries,H.B.Pacejka,MotorcycleTyreMeasurementsandModels,VehicleSystemDynamics,V.28,Suppl.,1998.
V.Cossalter,A.Doria,R.Lot,SteadyTurningOfTwoWheelVehicles,VehicleSystemDynamics,V.31,n°3,pp.157-181,1999.
V.Cossalter,A.Doria,R.Lot,SteadyTurningofTwoWheelVehicles,VehicleSystemDynamics,V.31,n°3,pp.157-181,1999.
R.Berritta,V.Cossalter,A.Doria,R.Lot,ImplementationofaMotorcycleTyreModelinaMulti-BodyCode,TireTechnologyInternational,UK&InternationalPress,UnitedKingdom,1999.
V.Cossalter,A.Doria,R.Lot,OptimumSuspensionDesignforMotorcycleBraking,VehicleSystemDynamics,Vol.34,2000.
D.Bortoluzzi,A.Doria,R.Lot,L.Fabbri,ExperimentalInvestigationandSimulationofMotorcycleTurningPerformance,3°InternationalMotorcycleConference,Munchen,Germany,pp.344-365,2000.
FajansJ.,Steeringinbicyclesandmotorcycles,AmericanJournalofPhysics,Volume68,Number7,pp.654-659,2000.
R.S.Sharp,StabilityControlandSteeringResponsesofMotorcycles,VehicleSystemDynamics,V.35,2001.
B.R.Davis,A.GThompson,Powerspectraldensityofroadprofiles,VehicleSystemDynamics,V.35,pp.409-415,2001.
D.Bortoluzzi,R.Lot,N.Ruffo:MotorcycleSteadyTurning:theSignificanceofGeometryandInertia,7thInternationalConferenceandExhibition,ATA,Florence,2001.
R.Berritta,V.Cossalter,A.Doria,N.Ruffo,IdentificationofMotorcycleTirePropertiesbymeansofaTestingMachine,2002SEMAnnualConference&ExpositiononExperimentalandAppliedMechanics,Milwaukee,2002.
V.Cossalter,A.Doria,L.Mitolo,InertialandModalPropertiesofRacingMotorcycles,MotorsportsEngineeringConference&Exhibition,,Indianapolis,Indiana,USA,SAEPapern°2002-01-3347,2002.
V.Cossalter,R.Lot:AMotorcycleMulti-BodyModelforRealTimeSimulationsBasedontheNaturalCoordinatesApproach,VehicleSystemDynamics,V.37,n°6,pp.423-448,2002.
V.Cossalter,R.Lot,F.Maggio,AMultibodyCodeforMotorcycleHandlingandStabilityAnalysiswithValidationandExamplesofApplication,Meeting:SmallEngineTechnologyConference&Exhibition,Madison,WI,USA,SAEPaper2003-32-0035,2003.
V.Cossalter,A.Doria,R.Lot,N.Ruffo,M.Salvador,DynamicPropertiesofMotorcycleandScooterTires:MeasurementandComparison,VehicleSystemDynamics,V.39,n°5,pp.329-352,2003.
V.Cossalter.,R.Lot,F.Maggio,TheModalAnalysisofaMotorcycleinStraightRunningandonaCurve,MeccanicaKluwerAcademicPublishersV.39,pp.1-16,2004.

V.CossalterR.Lot,F.Maggio,OntheStabilityofMotorcycleDuringBraking.SmallEngineTechnologyConference&Exhibition,Graz,Austria,SAEPapern°2004-32-0018,2004.
R.Lot,AMotorcycleTireModelforDynamicSimulations:TheoreticalandExperimentalAspects,Meccanica,V.39,pp.207-220,2004.
V.Cossalter,A.Doria,AnalysisofMotorcycleManoeuvresbasedontheMozziAxis,VehicleSystemDynamics,V.42,n°3,pp.175-194,2004.
R.S.Sharp,S.Evangelou,D.J.N.Limebeer,Advancesinthemodellingofmotorcycledynamics,MultibodySystemDynamics,V12,n°3,pp.251-283,2004.
R.S.Sharp,D.J.N.Limebeer,Onsteeringwobbleoscillationsofmotorcycles,JournalofMechanicalEngineeringSciencePartC,V.218,n12,p1449-1456,2004.
R.Lot,V.Cossalter,M.Massaro,TheSignificanceofFrameComplianceandRiderMobilityontheMotorcycleStability,InternationalConferenceonAdvancesinComputationalMultibodyDynamics-ECCOMAS,UniversidadPolitecnicadeMadrid,2005.
V.Cossalter,A.Doria,TheRelationbetweenContactPatchGeometryandtheMechanicalPropertiesofMotorcycleTyres,VehicleSystemDynamics,V.43,Suppl.,pp.156-167,2005.
V.Cossalter,A.Doria,TheInstantaneousScrewAxisofTwo-WheeledVehiclesinTypicalManoeuvres,XIXIAVSDSymposiumInternationalAssociationforVehicleSystemDynamics,Milano,2005
V.Cossalter,A.Doria,S.Garbin,R.Lot,Frequency-domainMethodforEvaluatingtheRideComfortofaMotorcycle,VehicleSystemDynamics,V.44,n°4,pp.339–355,2006.
V.Cossalter,J.Sadauckas,Elaborationandquantitativeassessmentofmanoeuvrabilityformotorcyclelanechange,VehicleSystemDynamics,Vol.xx,No.x,pp.xxx–xxx,2006.
V.Cossalter,R.LotM.Massaro,TheinfluenceofFrameComplianceandRiderMobilityontheScooterStability,VehicleSystemDynamics:,Vol.xx,No.x,pp.xxx–xxx,2007
V.Cossalter,R.Lot,M.Peretto,MotorcyclesSteadyTurning,JournalofAutomobileEngineering,Vol.xx,No.X,pp.xxx–xxx,2007
Books andReportsG.Pollone,Ilveicolo,Leprotto&BellaEditore,Torino,Italy,1970.
ISO,DraftStandardISO/TC108/WG9,ProposalsforGeneralizedRoadInputstoVehicles,1972.
J.Koch,ExperimentelleundAnalytischeUntersuchungendesMotorrad-FahrerSystems,Dissertation,Berlin,1978.
C.Koenen,Thedynamicbehaviourofamotorcyclewhenrunningstraightaheadandwhencornering,DoctoralDissertation,DelftUniversity,1983.
B.Bayer,DasPendelnundFlatternvonKraftradern,InstitutfurZweiradsicherheit,
Bochum,1986,(inGerman).
T.D.Gillespie,FundamentalsofVehicleDynamics,SAE,Warrendale,1992.
H.W.Bonsch,EinfuhrungindieMotorradtechik,MotorbuchVerlag,Stuttgart,Germany,1993,(inGerman).
J.Bradley,TheRacingMotorcycle,BroadlandLeisurePublications,York,England,1996.

G.Genta,MotorVehicleDynamics,WorldScientificPublishing,Singapore,1997.ISO2631,Mechanicalvibrationandshock,Evaluationofhumanexposuretowhole-bodyvibration,InternationalOrganizationforStandardization,1997.
R.Lot,Studiodellastabilitàedellamaneggevolezzadiveicoliadueruote,DoctoralDissertation,UniversityofPadova,Italy,1998,(initalian).
F.Maggio,Modidivibraredellamotocicletta:Accoppiamentitramodilateralieverticali,DegreeReport,UniversityofPadova,Italy,2001,(initalian).
ISO5349,Mechanicalvibration,Measurementandevaluationofhumanexposuretohand-transmittedvibration,InternationalOrganizationforStandardization,2001.H.B.Pacejka,TireandVehicleDynamics,ButterworthHeinemann,Oxford,2005.

Index
Acceleration-inrectilinearmotion-index-traction-limited-wheelinglimited
Aerodynamics-dragarea-dragforce-liftforce
BouncevibrationmodeBraking
-forwardflipover-optimalbraking
Camberangle (seealsorollangle)CapsizeCasterangle
-definition-variation
CenterofgravityChaintransmission
-inclinationangle-squatratio,angle
ChatteringComfortDamping
-optimalratio-reduced-ratio
Directionalbehavior-criticalvelocity-neutral-oversteering-understeering
DirectionalstabilityEnteringinaturn
-fast-slow-Uturn-chicane
Equilibrium-onacurve-rearsuspension-rectilinearmotion
Force-aerodynamic-braking-camber-cornering

-contact-drag-driving-lateralintransientstate-lateral-lift-longitudinal-rollingresistance-sideslip-transferload
ForwardflipoverFrictionellipseGyroscopiceffect
-generatedbyyawmotion-generatedbyrollmotion-generatedbysteering
Handling-optimalmaneuvermethod-handlingtest-lanechangetest-Kochindex-obstacleavoidancetest-slalomtest-steadystatetest-Uturntest
Highside
Kickback
InertiatensorIn-planedynamics
MagicformulaManeuverability(seealsohandling)MasscenterMotion
-rectilinear-steadyturning
Multi-bodycodesModel
-tire-ofmotorcycleonaturn-inplane(1d.off.)-inplane(2d.off.)-inplane(4d.off.)-mono-suspension-kinematic-weave(1d.off.)-wobble(1d.off.)-multi-body
ObstacleavoidancetestOffsetOptimalManeuvermethodOversteerPath
-curvature-radius
Pitch-angle-vibrationmode
Preload

Radius-tirerolling-path
Road-powerspectraldensity-roadexcitation-roadirregularities-roadslope
Roll-effectiveangle-frontwheelangle-idealangle-index-angle-motion
Rolling-rollingradius-rollingresistance
ScootersuspensionSelf-alignmentmomentShafttransmission
-squatratioShockabsorbers
-characteristics-single,doubleeffect
SideslipangleSlalomtestSlip
-longitudinal-side(seealsosideslip)
StabilitySquatratioSquatangleSteadyturningtestSteering
-criticalvelocity-effectiveangle-kinematicangle-angle-ratio-neutral-over-under-headheight-torque
Stiffness-progressive-reducedstiffness-degressive-structural
SwingingarmSuspension
-anti-divesuspension-four-barlinkagesuspension-frontsuspension-linkagesuspension-mono-suspension-preload-rearsuspension-swingingarm-Telelever
Telescopicfork

Tire-camberforce-contactpoint-frictionellipse-lateralforce-lateralstiffness-longitudinalforce-magicformula-overturningmoment-relaxationlength-rollingradius-self-aligningmoment-twistingmoment-vibrationalmodes-yawmoment-sideslipforce
Torque-steeringcomponent-steeringtorque
Trail-effectivetrail-mechanicaltrail-normaltrail-trailofthetire-variation
Transferload-inbraking-inrectilinearmotion
TransmissibilityTrim
-inacceleration-inbraking-incornering-squatratio-squatangle-rectilinearmotion
Twistingmoment
UndersteerUnsprungmass
Vibration-inplane(seebounce,pitch,wheelhop)-incornering-instraightrunning-outofplane(seecapsize,weave,wobble)-structuralmode-tiremode
WeaveWheel
-velocityincurve-climbingastep-contactpointsliding-hop
Wheelbase-definition
Wobble
Yaw-tiresizeeffectonyaw-.tiremoment