unidad 1 senales y sistemas
TRANSCRIPT

INSTRUMENTACIÓN II
Profesor
Diego Fernando Ramírez jiménez Ing.
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Señales y Sistemas
Introducción:
Las señales están presentes en todo momento y en cualquier lugar. En ocasiones seconviven con ellas, se generan y se procesan sin darnos cuenta. Los conceptos deseñales y sistemas son necesarios en múltiples áreas de ingeniería y otras disciplinas.Algunos ejemplos de señales pueden ser las notas de un instrumento musical, latemperatura en un recinto, la voz, la frecuencia cardiaca, entre otras. Las señalespueden ser generadas por diferentes fuentes y de diferentes tipos y una vez que secomprenda la forma en que pueden ser generadas, caracterizadas, procesadas yrepresentadas matemáticamente, pueden conocerse que tipo de operaciones sepueden realizar con el objetivo de extraer información de ellas.
En algunas aplicaciones practicas, las señales requieren ser tratadas en una o variasetapas llamadas etapas de pre-procesamiento, de tal forma que se pueda extraer lamayor cantidad de información en lo que se conoce como procesamiento de señal.En este sentido, un sistema de procesamiento de señales es un dispositivohardware/software que realiza operaciones preestablecidas sobre las señales.
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA

Conceptos de Señales
Una seña puede establecerse como la manifestación de un
fenómeno expresada como una cantidad física, y por lo general
contiene información sobre el estado, comportamiento y/o la
naturaleza del fenómeno y del sistema físico que produjo la señal.
Una parte importante de las señales con que se trabaja en
ingeniería, se genera por medios naturales como la voz, la
humedad relativa, o la temperatura. Sin embargo, es posible
producir señales sintéticamente, como por ejemplo el voltaje a
través de un capacitor o la corriente en una resistencia dentro de
un circuito RC; o generadas mediante el uso de
software/hardware en computadoras.
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Conceptos de Señales Campos de Aplicación:
– Biomedicina
– Robótica
– Procesamiento y transmisión de voz, texto e imágenes.
– Sincronización y detección de fallas en motores
– Análisis de vibraciones en máquinas
– Integración de sistemas multisensoriales
– Análisis de series de tiempo
– Procesamiento de Señales Sísmicas
– Procesamiento de Señales Espaciales
– Televisión Digital
– Telefonía Móvil
– Radio Transmisión
– ……
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA

Representación de las Señales
Se puede definir matemáticamente una señal como una función que
representa la variación en el tiempo de alguna variable física. Sin embargo,
es importante tener en cuenta que la función no describe la variable física
en sí misma. Por lo anterior y para facilitar el análisis matemático, se utilizan
las representaciones de señales mediante funciones de una o más
variables independientes.
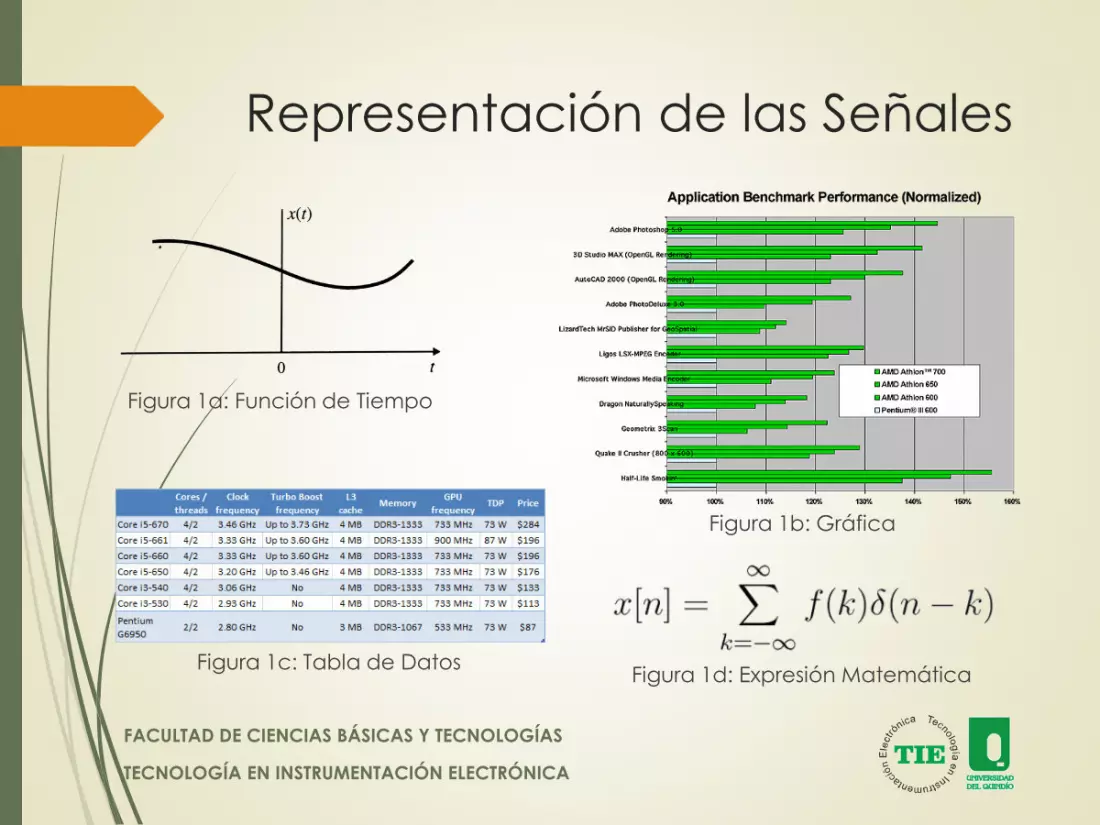
Las representaciones de la señal se denominan también el modelo de la
señal. Existen muchas clases de modelos de señales que ofrecen diferente
información acerca del proceso físico fundamental. Las funciones de
tiempo son la clase más directa de modelos de señal. Otras formas pueden
ser a través de conjuntos de datos, reglas, gráficas, ecuaciones y tablas de
datos (Figura 1).
La representación de una señal puede realizarse directamente en el mismo
dominio inicial de sus variables independientes o puede trasladarse a un
dominio diferente mediante el uso de transformaciones como la
Transformada de Fourier o la Transformada z.
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Representación de las Señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 1d: Expresión MatemáticaFigura 1c: Tabla de Datos
Figura 1a: Función de Tiempo
Figura 1b: Gráfica
Señales Aleatorias y Deterministas
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
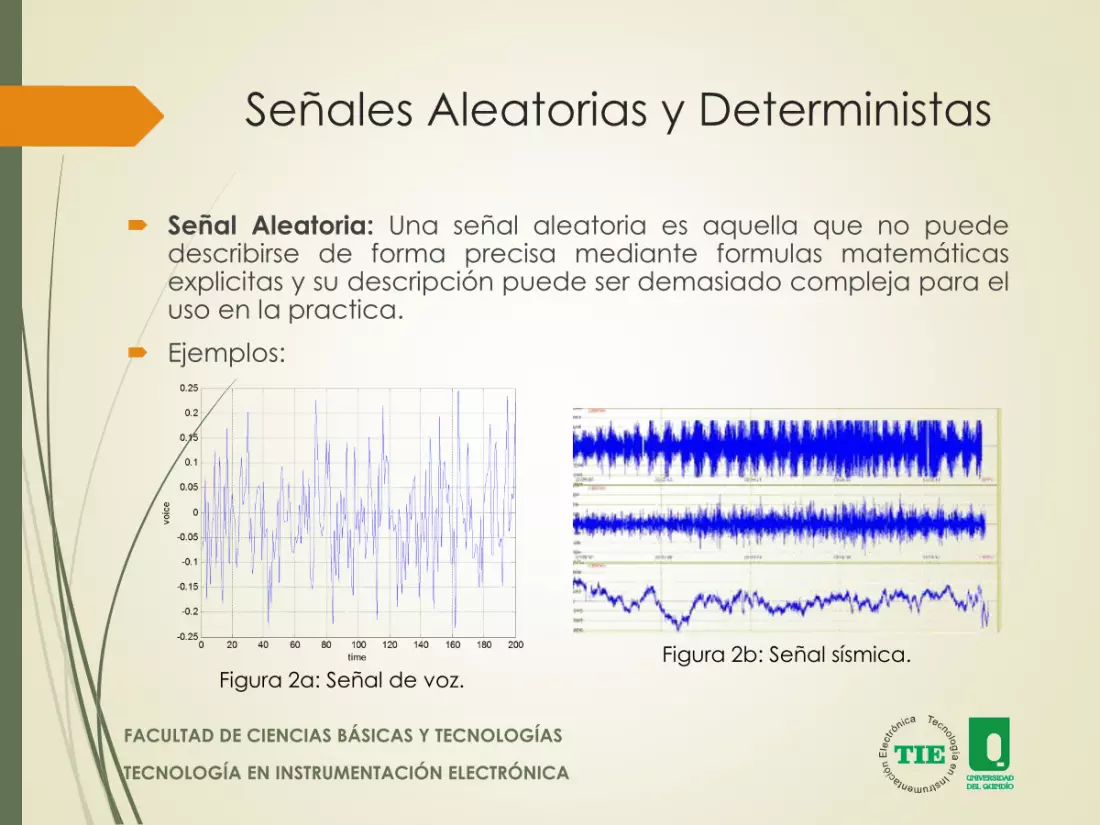
Señal Aleatoria: Una señal aleatoria es aquella que no puededescribirse de forma precisa mediante formulas matemáticasexplicitas y su descripción puede ser demasiado compleja para eluso en la practica.
Ejemplos:
Figura 2a: Señal de voz.Figura 2b: Señal sísmica.
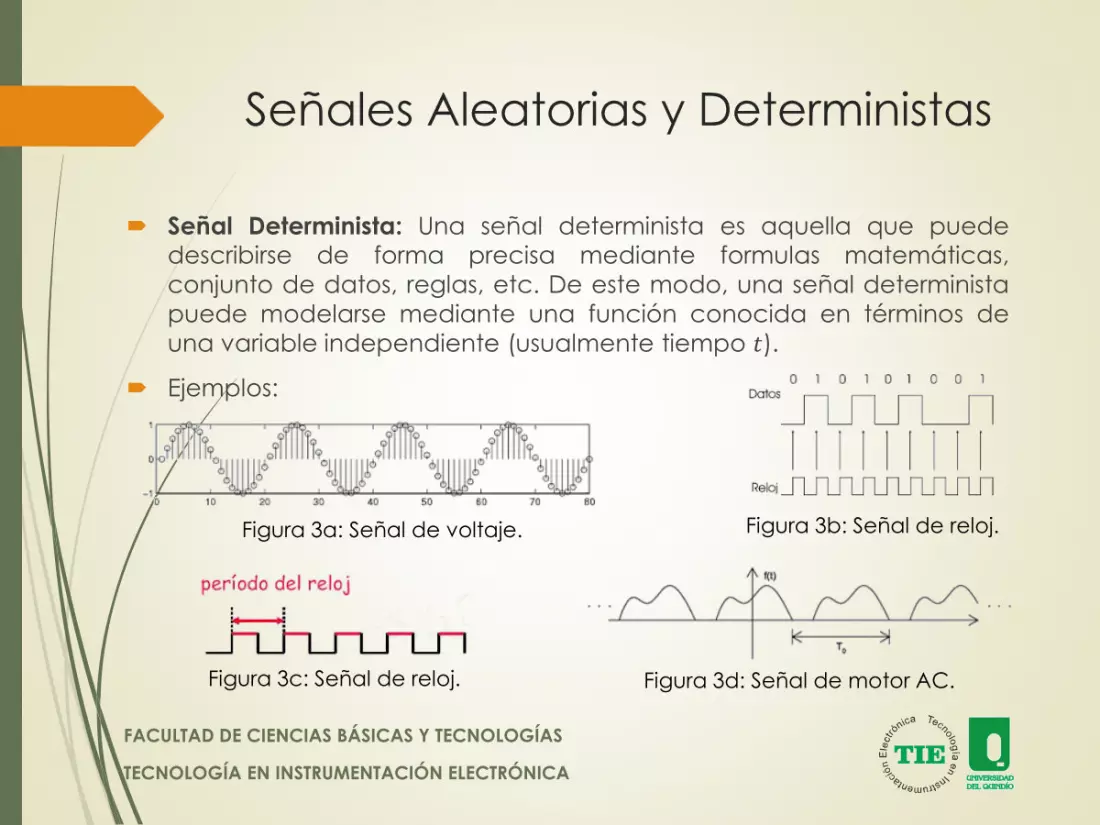
Señal Determinista: Una señal determinista es aquella que puededescribirse de forma precisa mediante formulas matemáticas,
conjunto de datos, reglas, etc. De este modo, una señal determinista
puede modelarse mediante una función conocida en términos de
una variable independiente (usualmente tiempo 𝑡).
Ejemplos:
Señales Aleatorias y Deterministas
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 3b: Señal de reloj.Figura 3a: Señal de voltaje.
Figura 3c: Señal de reloj. Figura 3d: Señal de motor AC.
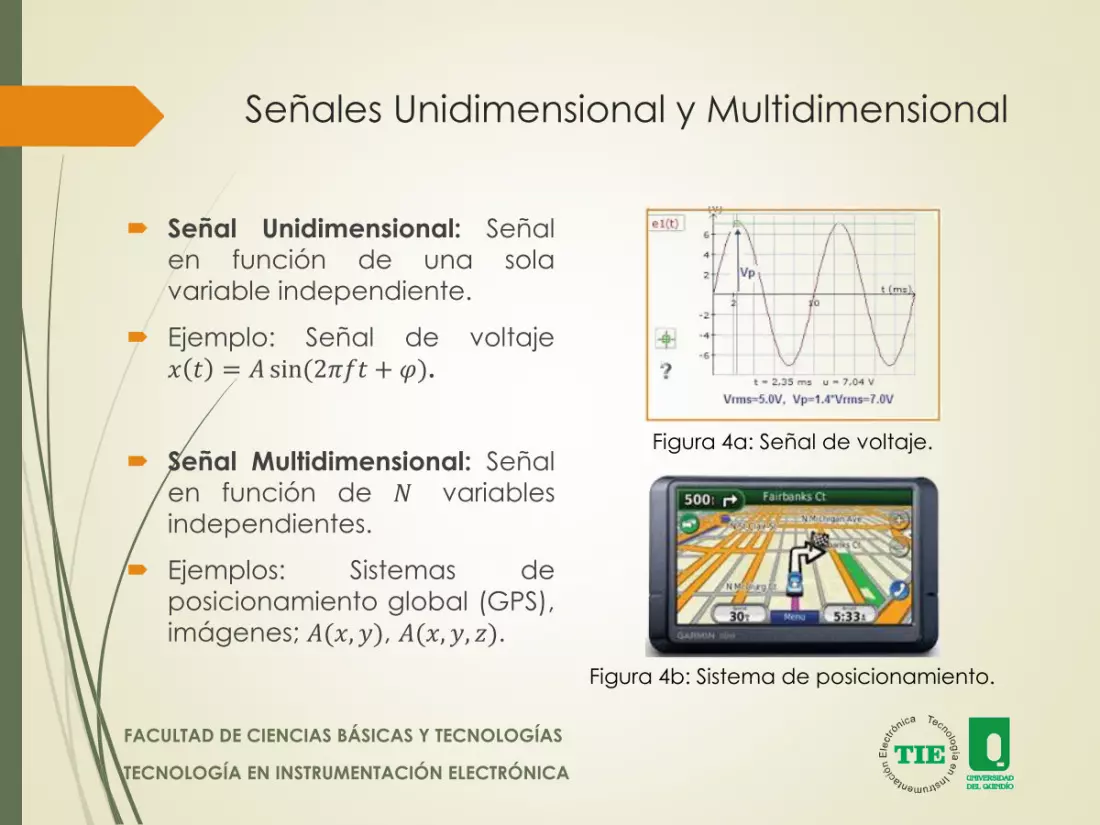
Señal Unidimensional: Señalen función de una solavariable independiente.
Ejemplo: Señal de voltaje𝑥 𝑡 = 𝐴 sin(2𝜋𝑓𝑡 + 𝜑).
Señal Multidimensional: Señal
en función de 𝑁 variablesindependientes.
Ejemplos: Sistemas deposicionamiento global (GPS),imágenes; 𝐴(𝑥, 𝑦), 𝐴(𝑥, 𝑦, 𝑧).
Señales Unidimensional y Multidimensional
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 4a: Señal de voltaje.
Figura 4b: Sistema de posicionamiento.
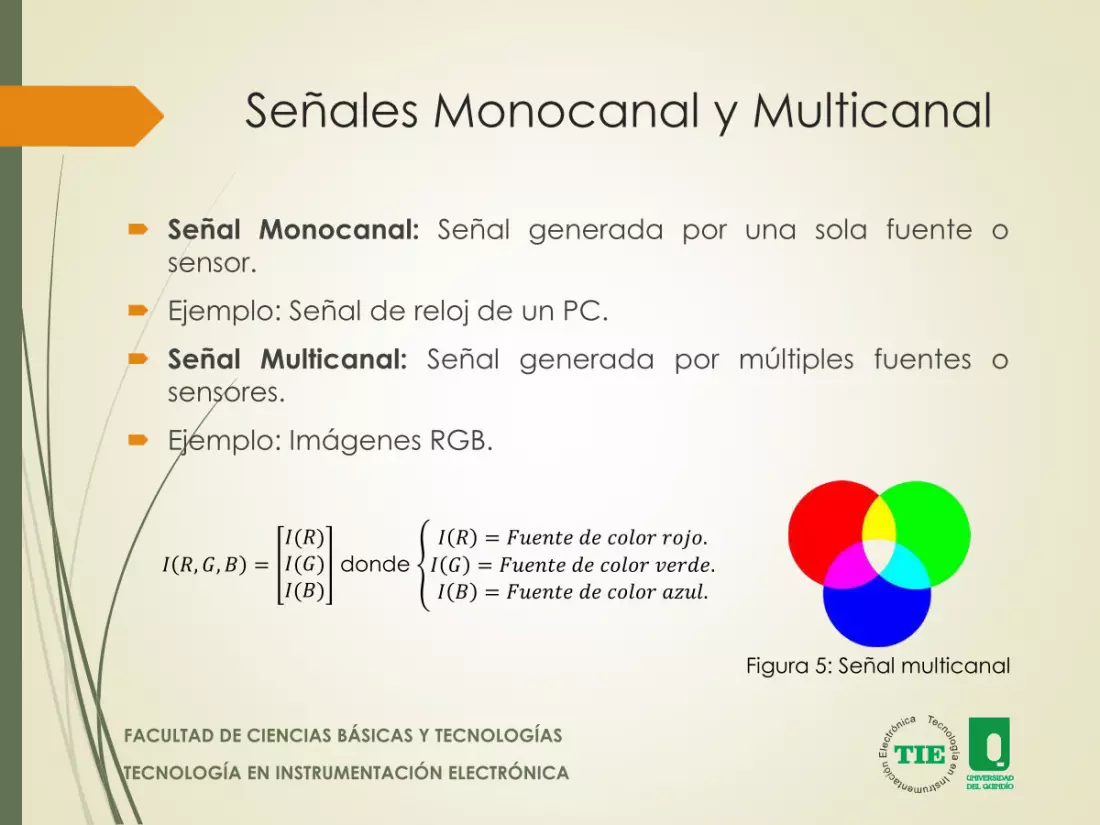
Señal Monocanal: Señal generada por una sola fuente o
sensor.
Ejemplo: Señal de reloj de un PC.
Señal Multicanal: Señal generada por múltiples fuentes osensores.
Ejemplo: Imágenes RGB.
Señales Monocanal y Multicanal
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
𝐼 𝑅, 𝐺, 𝐵 =
𝐼(𝑅)𝐼(𝐺)𝐼(𝐵)
donde
𝐼 𝑅 = 𝐹𝑢𝑒𝑛𝑡𝑒 𝑑𝑒 𝑐𝑜𝑙𝑜𝑟 𝑟𝑜𝑗𝑜.
𝐼 𝐺 = 𝐹𝑢𝑒𝑛𝑡𝑒 𝑑𝑒 𝑐𝑜𝑙𝑜𝑟 𝑣𝑒𝑟𝑑𝑒.𝐼 𝐵 = 𝐹𝑢𝑒𝑛𝑡𝑒 𝑑𝑒 𝑐𝑜𝑙𝑜𝑟 𝑎𝑧𝑢𝑙.
Figura 5: Señal multicanal
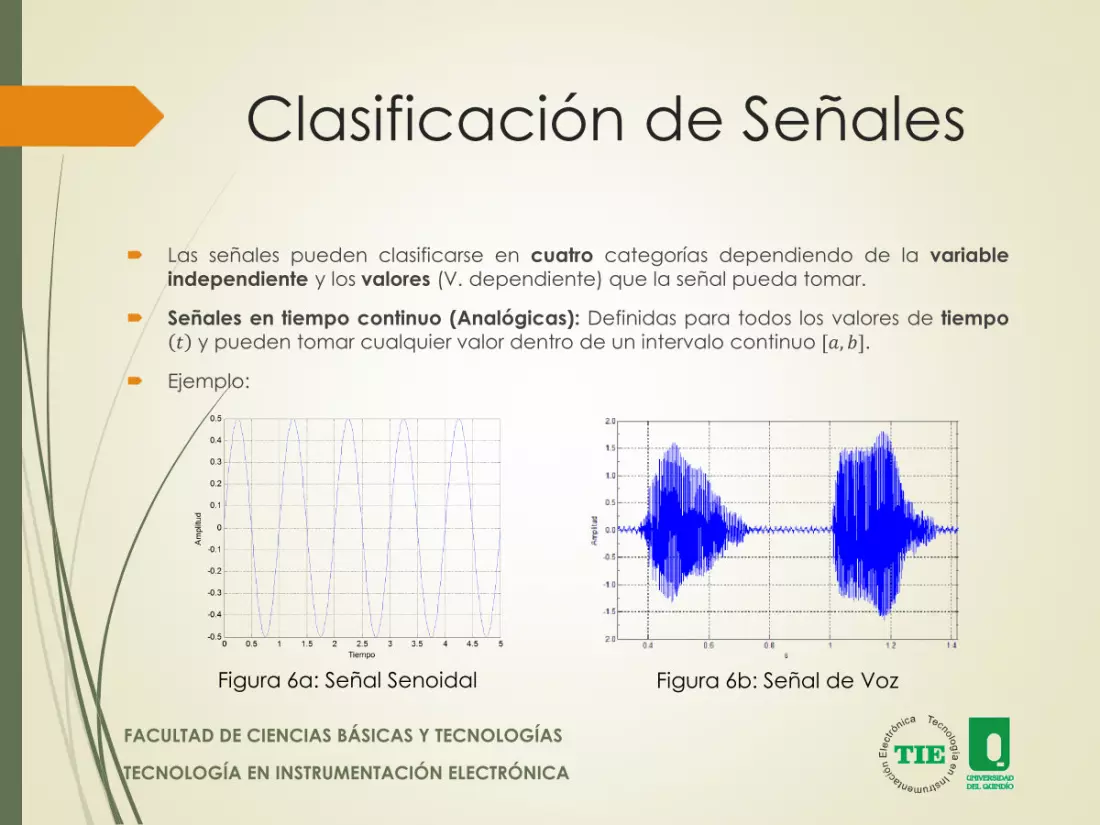
Las señales pueden clasificarse en cuatro categorías dependiendo de la variable
independiente y los valores (V. dependiente) que la señal pueda tomar.
Señales en tiempo continuo (Analógicas): Definidas para todos los valores de tiempo
𝑡 y pueden tomar cualquier valor dentro de un intervalo continuo [𝑎, 𝑏].
Ejemplo:
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 6b: Señal de VozFigura 6a: Señal Senoidal
Clasificación de Señales
Señales de tiempo continuo y
tiempo discreto
Señales de tiempo Discreto: Definidas solo para determinados instantes ovalores de tiempo, que pueden ser o no equidistantes dentro de unintervalo [𝑎, 𝑏].
Las señales en tiempo discreto se pueden originar de dos formas:Muestreando los valores de una señal analógica en determinados instantesde tiempo 𝒏, y Acumulando valores de una variable en intervalos detiempo a lo largo de un determinado periodo.
Una señal de tiempo discreto 𝑥 𝑛 puede obtenerse mediante el muestreode una señal 𝑥 𝑡 de tiempo continuo tal como:
𝑥 𝑡0 , 𝑥 𝑡1 , 𝑥 𝑡2 , … , 𝑥(𝑡𝑛)
O en forma más corta como:𝑥[0], 𝑥[1], 𝑥 2 ,… , 𝑥[𝑛]
Donde se entiende que:
𝑥𝑛 = 𝑥 𝑛 = 𝑥(𝑡𝑛)
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Señales de tiempo continuo y
tiempo discreto
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
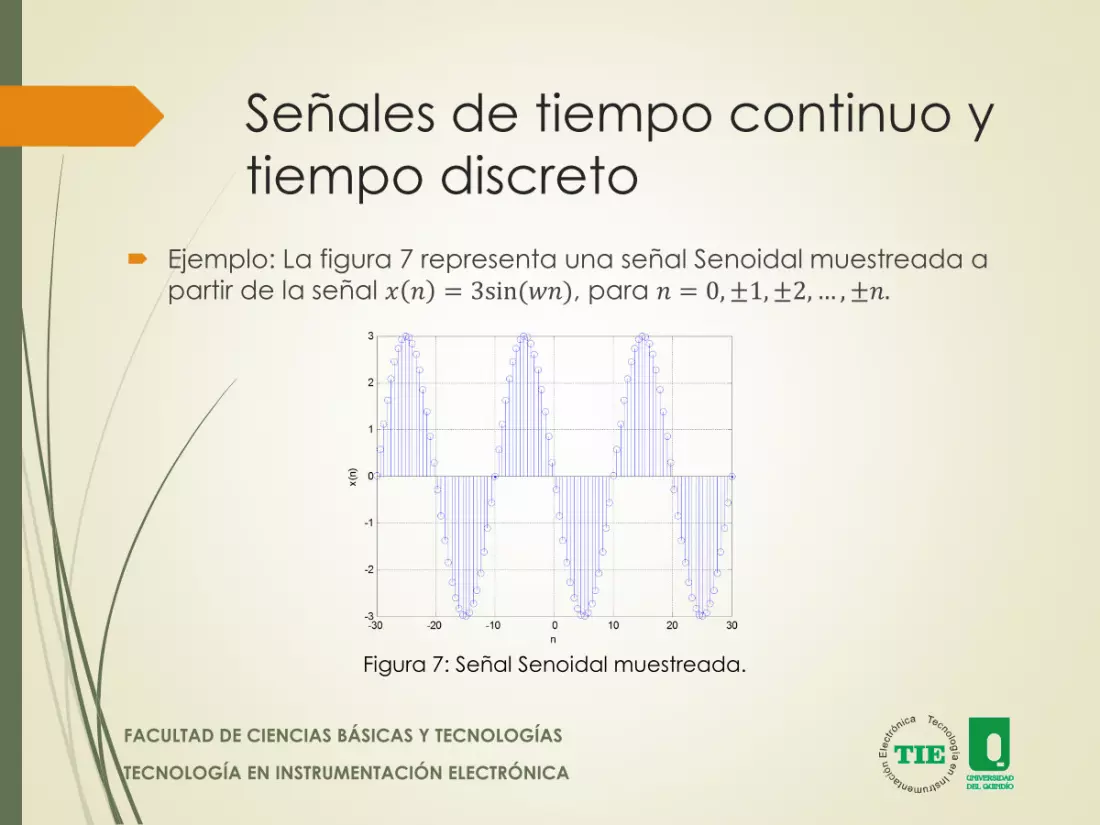
Ejemplo: La figura 7 representa una señal Senoidal muestreada a partir de la señal 𝑥 𝑛 = 3sin(𝑤𝑛), para 𝑛 = 0,±1,±2,… ,±𝑛.
Figura 7: Señal Senoidal muestreada.
Señales de tiempo continuo y
tiempo discreto
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
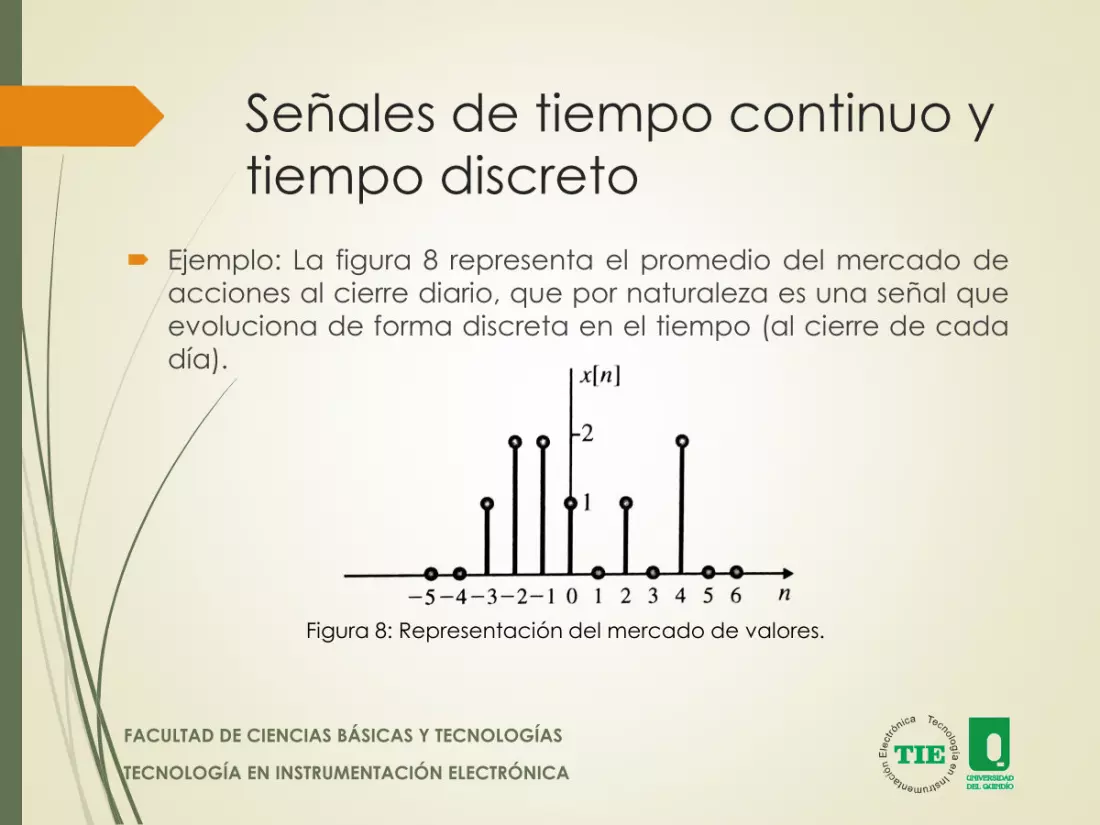
Ejemplo: La figura 8 representa el promedio del mercado de
acciones al cierre diario, que por naturaleza es una señal que
evoluciona de forma discreta en el tiempo (al cierre de cada
día).
Figura 8: Representación del mercado de valores.
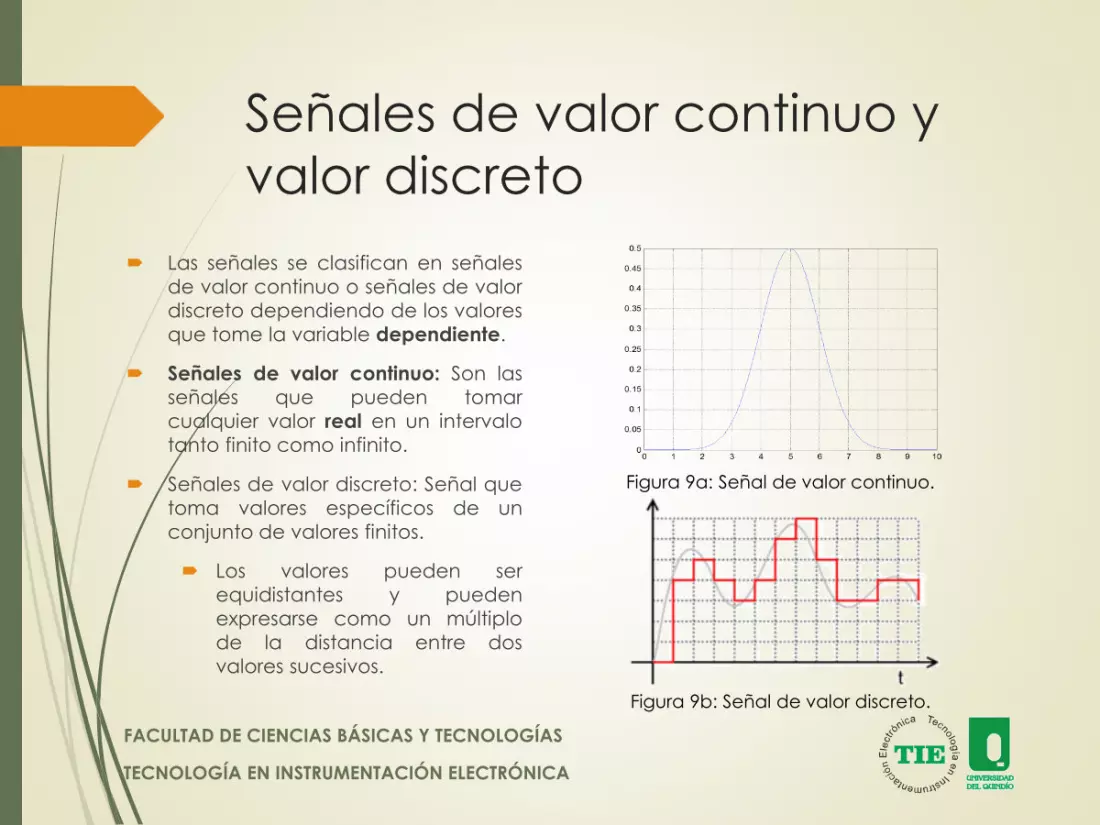
Las señales se clasifican en señales
de valor continuo o señales de valor
discreto dependiendo de los valores
que tome la variable dependiente.
Señales de valor continuo: Son las
señales que pueden tomar
cualquier valor real en un intervalo
tanto finito como infinito.
Señales de valor discreto: Señal que
toma valores específicos de un
conjunto de valores finitos.
Los valores pueden ser
equidistantes y pueden
expresarse como un múltiplo
de la distancia entre dos
valores sucesivos.
Señales de valor continuo y
valor discreto
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 9a: Señal de valor continuo.
Figura 9b: Señal de valor discreto.

Una señal digital es aquella cuyas variables dependientes e
independientes son discretas. La salida de un conversor análogico-
digital (CAD) es un ejemplo de una señal digital que se ilustra en la
Figura 10.
Señal Digital
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 10: Señal digital.
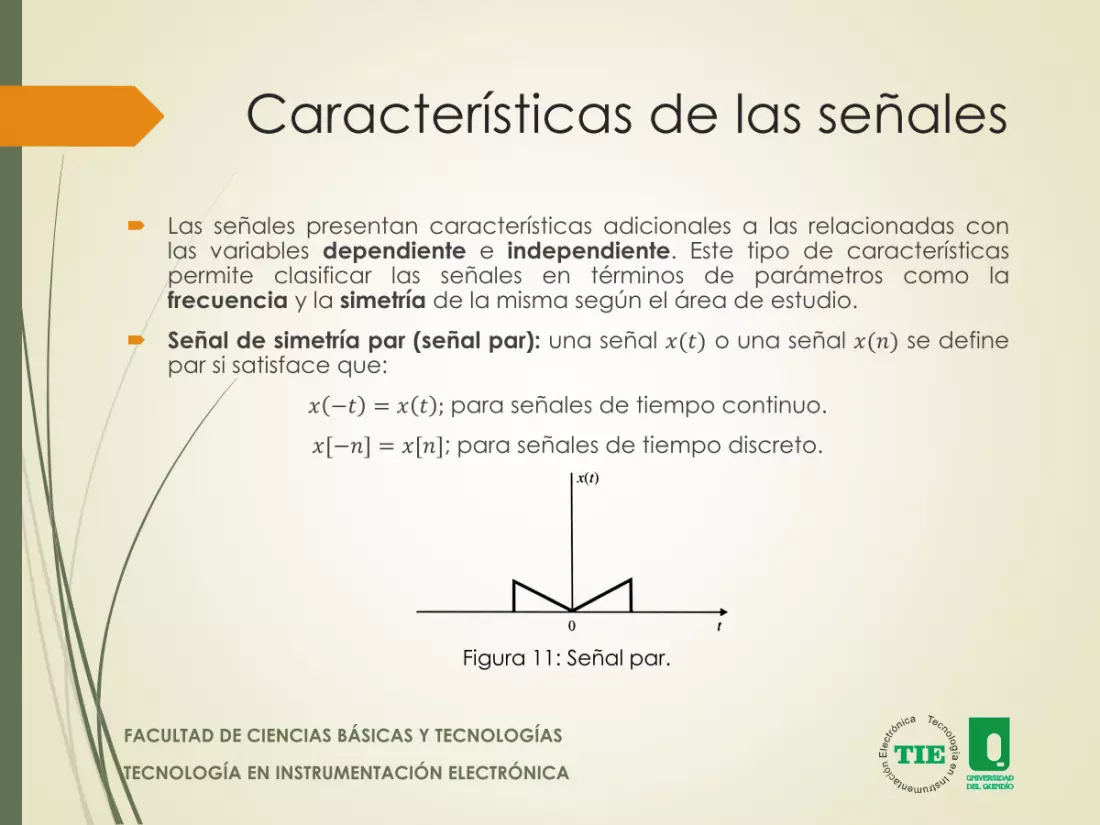
Las señales presentan características adicionales a las relacionadas conlas variables dependiente e independiente. Este tipo de característicaspermite clasificar las señales en términos de parámetros como lafrecuencia y la simetría de la misma según el área de estudio.
Señal de simetría par (señal par): una señal 𝑥(𝑡) o una señal 𝑥(𝑛) se definepar si satisface que:
𝑥 −𝑡 = 𝑥 𝑡 ; para señales de tiempo continuo.
𝑥[−𝑛] = 𝑥[𝑛]; para señales de tiempo discreto.
Características de las señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 11: Señal par.

Señal de simetría impar (señal impar): una señal 𝑥(𝑡) o una
señal 𝑥(𝑛) se define impar si satisface que:
𝑥 −𝑡 = −𝑥 𝑡 ; para señales de tiempo continuo.
𝑥 −𝑛 = −𝑥[𝑛]; para señales de tiempo discreto.
Características de las señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 12: Señal impar.

Descomposición de señales: Cualquier señal puede
expresarse como la suma de dos componentes, una par y otra
impar.
𝑥𝑝𝑎𝑟 𝑡 = 1
2{𝑥 𝑡 + 𝑥(−𝑡)} y 𝑥𝑖𝑚𝑝𝑎𝑟 𝑡 =
1
2{𝑥 𝑡 − 𝑥(−𝑡)}
𝑥 𝑡 = 𝑥𝑝𝑎𝑟 𝑡 + 𝑥𝑖𝑚𝑝𝑎𝑟(𝑡)
𝑥𝑝𝑎𝑟 𝑛 = 1
2{𝑥 𝑛 + 𝑥(−𝑛)} y 𝑥𝑖𝑚𝑝𝑎𝑟 𝑛 =
1
2{𝑥 𝑛 − 𝑥(−𝑛)}
𝑥 𝑛 = 𝑥𝑝𝑎𝑟 𝑛 + 𝑥𝑖𝑚𝑝𝑎𝑟(𝑛)
Características de las señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Señales periódicas y no periódicas (aperiódicas): Una
señal 𝑥(𝑡) o una señal es periódica con periodo 𝑇 si existe
un valor positivo distinto de cero tal que:
𝑥 𝑡 + 𝑇 = 𝑥(𝑡), para todo 𝑡.
Una señal 𝑥(𝑛) o una señal es periódica con periodo 𝑁 si
existe un valor positivo distinto de cero tal que:
𝑥 𝑛 + 𝑁 = 𝑥(𝑛), para todo 𝑛.
El valor más pequeño para el que se cumplen las
expresiones anteriores se denomina periodo fundamental.
Si no existen un 𝑁 y un 𝑇, la señal se denomina aperiódica.
Características de las señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
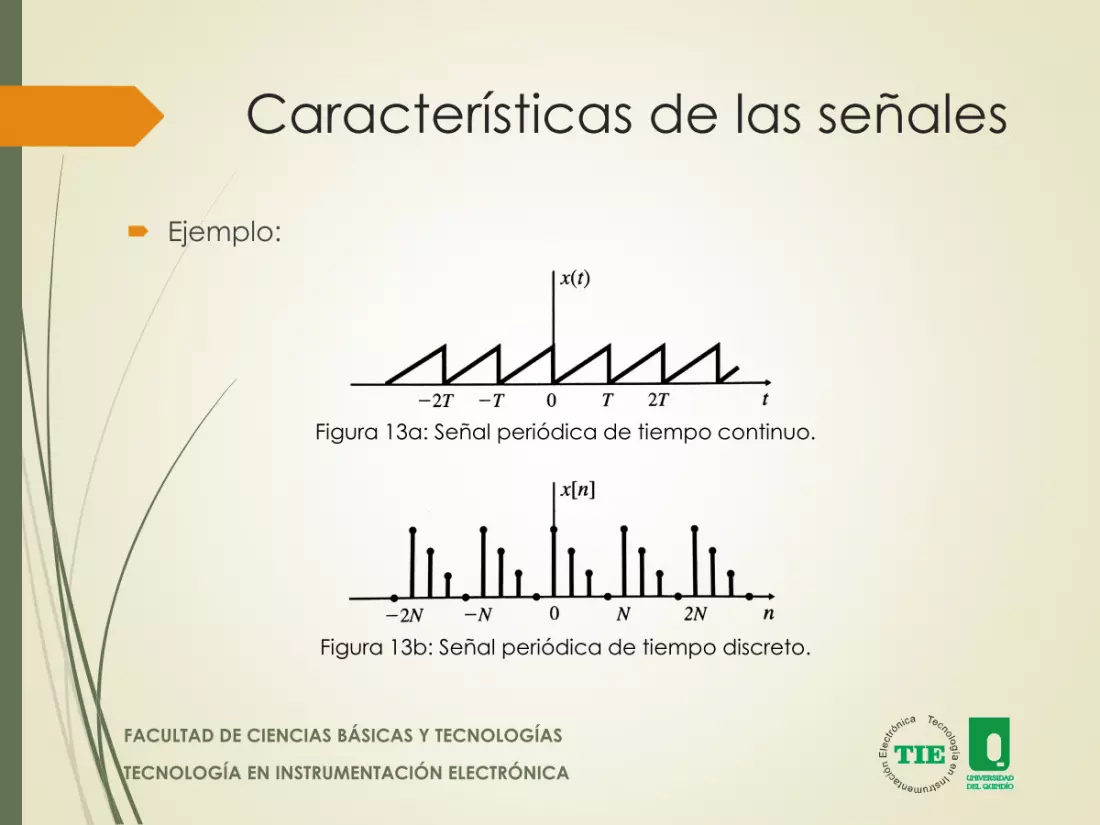
Ejemplo:
Características de las señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 13a: Señal periódica de tiempo continuo.
Figura 13b: Señal periódica de tiempo discreto.
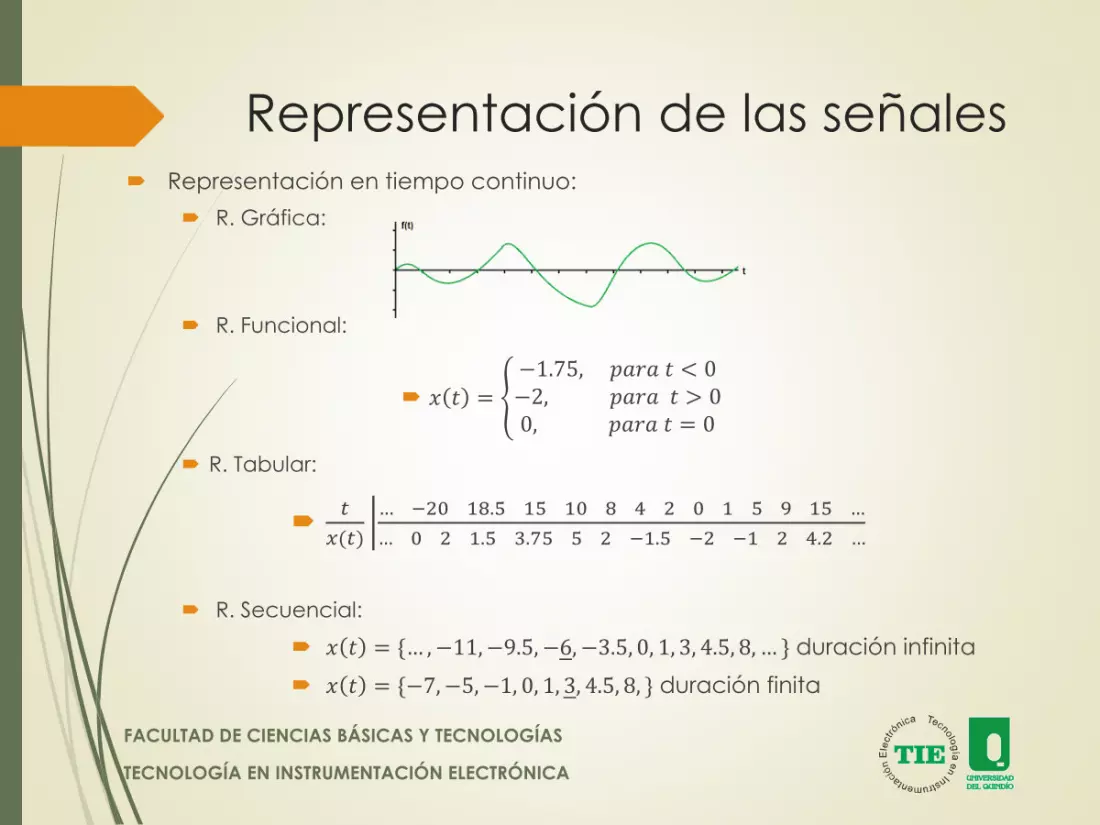
Representación en tiempo continuo:
R. Gráfica:
R. Funcional:
𝑥 𝑡 = −1.75, 𝑝𝑎𝑟𝑎 𝑡 < 0−2, 𝑝𝑎𝑟𝑎 𝑡 > 00, 𝑝𝑎𝑟𝑎 𝑡 = 0
R. Tabular:
𝑡
𝑥(𝑡) … −20 18.5 15 10 8 4 2 0 1 5 9 15 …
… 0 2 1.5 3.75 5 2 −1.5 −2 −1 2 4.2 …
R. Secuencial:
𝑥 𝑡 = {… ,−11,−9.5, −6, −3.5, 0, 1, 3, 4.5, 8, … } duración infinita
𝑥 𝑡 = {−7,−5, −1, 0, 1, 3, 4.5, 8, } duración finita
Representación de las señales
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
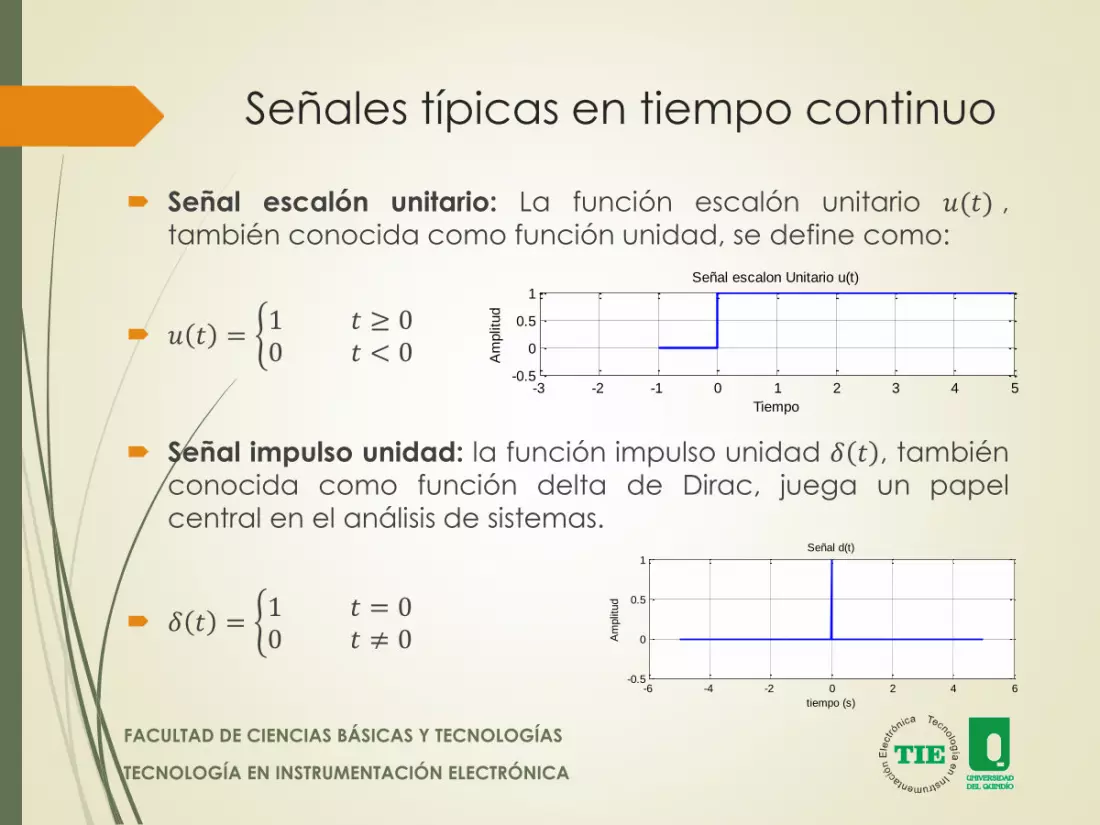
Señal escalón unitario: La función escalón unitario 𝑢(𝑡) ,
también conocida como función unidad, se define como:
𝑢 𝑡 = 1 𝑡 ≥ 00 𝑡 < 0
Señal impulso unidad: la función impulso unidad 𝛿 𝑡 , también
conocida como función delta de Dirac, juega un papel
central en el análisis de sistemas.
𝛿 𝑡 = 1 𝑡 = 00 𝑡 ≠ 0
Señales típicas en tiempo continuo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
-6 -4 -2 0 2 4 6-0.5
0
0.5
1Señal d(t)
tiempo (s)
Am
plit
ud
-3 -2 -1 0 1 2 3 4 5-0.5
0
0.5
1
Tiempo
Am
plit
ud
Señal escalon Unitario u(t)
-3 -2 -1 0 1 2 3 4 5-0.5
0
0.5
1
-3 -2 -1 0 1 2 3 4 5-0.5
0
0.5
1
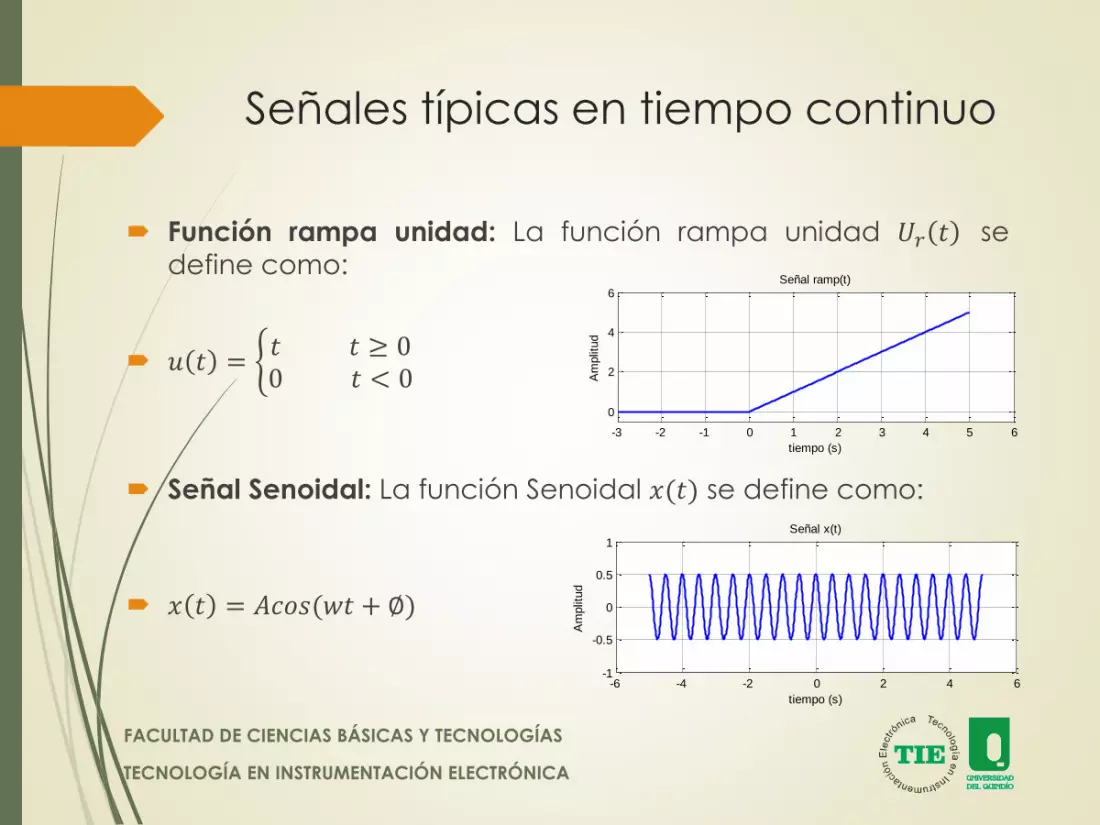
Función rampa unidad: La función rampa unidad 𝑈𝑟 𝑡 se
define como:
𝑢 𝑡 = 𝑡 𝑡 ≥ 00 𝑡 < 0
Señal Senoidal: La función Senoidal 𝑥(𝑡) se define como:
𝑥 𝑡 = 𝐴𝑐𝑜𝑠(𝑤𝑡 + ∅)
Señales típicas en tiempo continuo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
-3 -2 -1 0 1 2 3 4 5 6
0
2
4
6Señal ramp(t)
tiempo (s)
Am
plit
ud
-6 -4 -2 0 2 4 6-1
-0.5
0
0.5
1Señal x(t)
tiempo (s)
Am
plit
ud
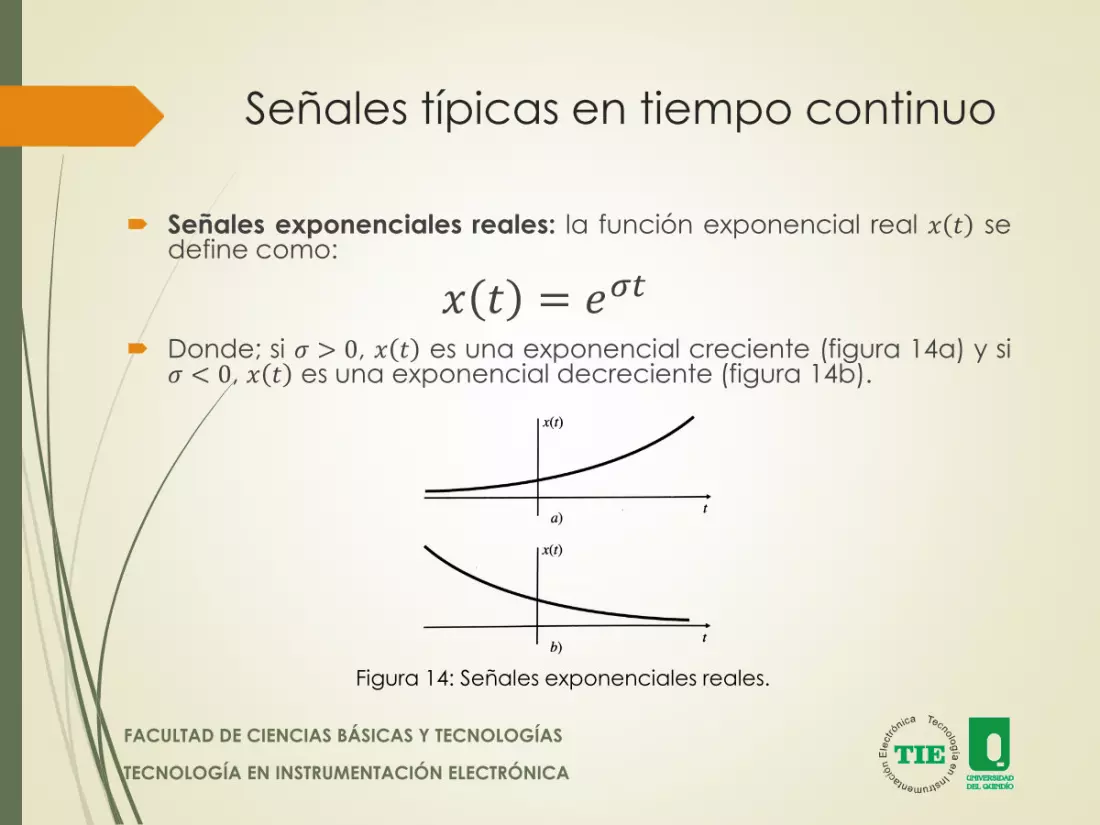
Señales exponenciales reales: la función exponencial real 𝑥 𝑡 sedefine como:
𝑥 𝑡 = 𝑒𝜎𝑡
Donde; si 𝜎 > 0, 𝑥 𝑡 es una exponencial creciente (figura 14a) y si𝜎 < 0, 𝑥 𝑡 es una exponencial decreciente (figura 14b).
Señales típicas en tiempo continuo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 14: Señales exponenciales reales.
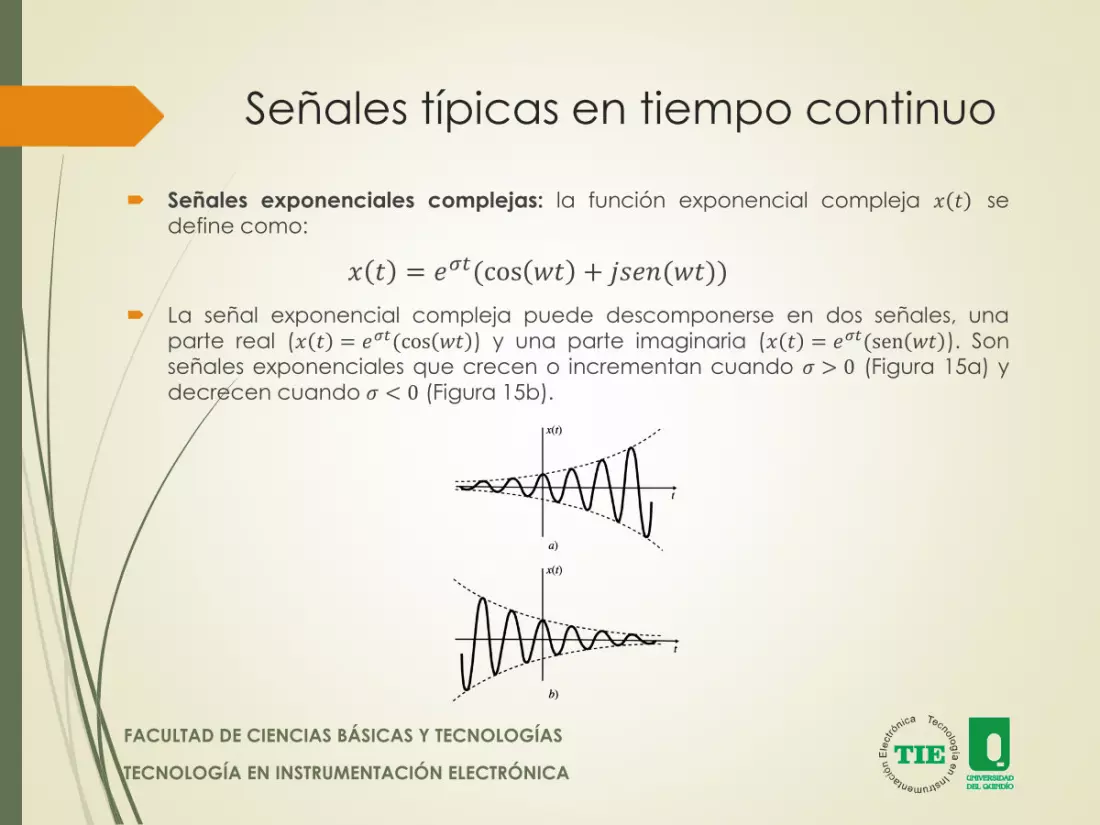
Señales exponenciales complejas: la función exponencial compleja 𝑥 𝑡 sedefine como:
𝑥 𝑡 = 𝑒𝜎𝑡(cos 𝑤𝑡 + 𝑗𝑠𝑒𝑛(𝑤𝑡))
La señal exponencial compleja puede descomponerse en dos señales, unaparte real (𝑥 𝑡 = 𝑒𝜎𝑡(cos 𝑤𝑡 ) y una parte imaginaria (𝑥 𝑡 = 𝑒𝜎𝑡(sen 𝑤𝑡 ). Sonseñales exponenciales que crecen o incrementan cuando 𝜎 > 0 (Figura 15a) ydecrecen cuando 𝜎 < 0 (Figura 15b).
Señales típicas en tiempo continuo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA

-1 0 1 2 3 4 5 6 7 8-1
-0.5
0
0.5
1Señal x(t) real
tiempo (s)
Am
plit
ud
-1 0 1 2 3 4 5 6 7 8-1
-0.5
0
0.5
1Señal x(t) imaginaria
tiempo (s)
Am
plit
ud
Señales típicas en tiempo continuo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Ejemplo: en la figura 16, se puede observar una señal
exponencial compleja decreciente. En la figura 16a; se
observa la parte real y en la figura 16b; se observa la parte
imaginaria de la señal 𝑥(𝑡).
Figura 16: Señal exponencial compleja.
Señales típicas en tiempo continuo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
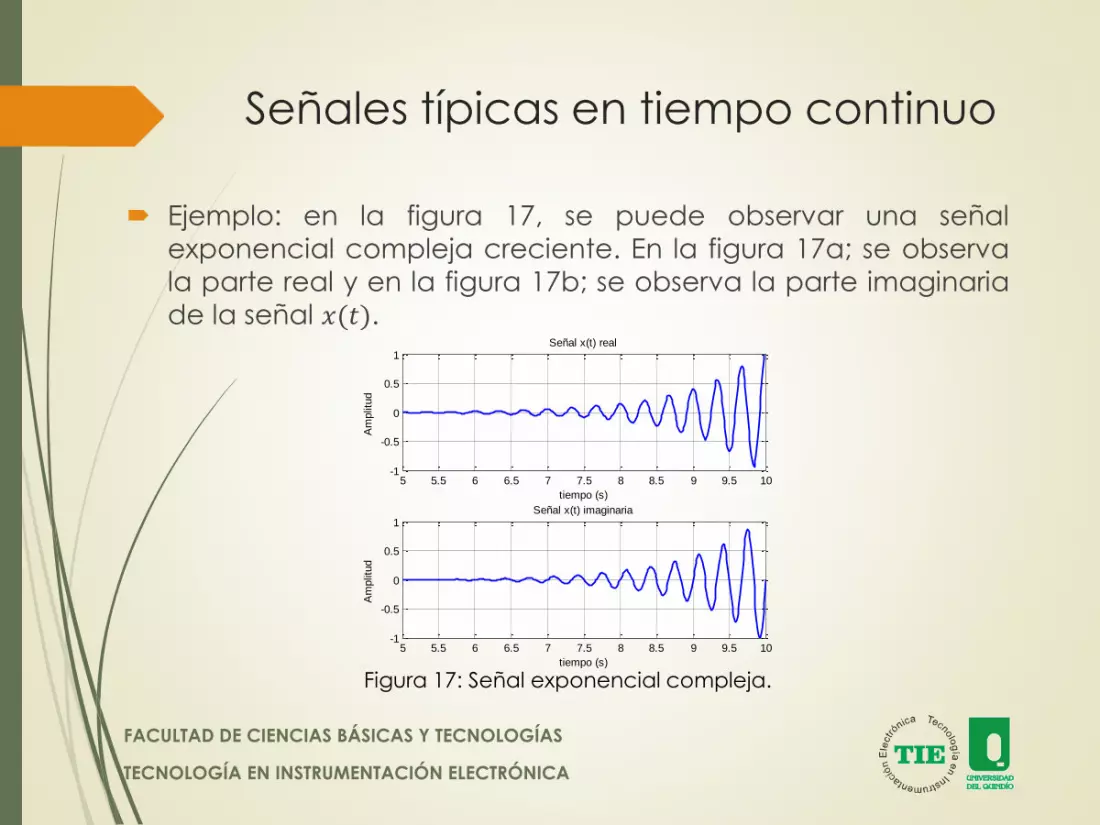
Ejemplo: en la figura 17, se puede observar una señal
exponencial compleja creciente. En la figura 17a; se observa
la parte real y en la figura 17b; se observa la parte imaginaria
de la señal 𝑥(𝑡).
5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10-1
-0.5
0
0.5
1Señal x(t) real
tiempo (s)
Am
plit
ud
5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10-1
-0.5
0
0.5
1Señal x(t) imaginaria
tiempo (s)
Am
plit
ud
Figura 17: Señal exponencial compleja.
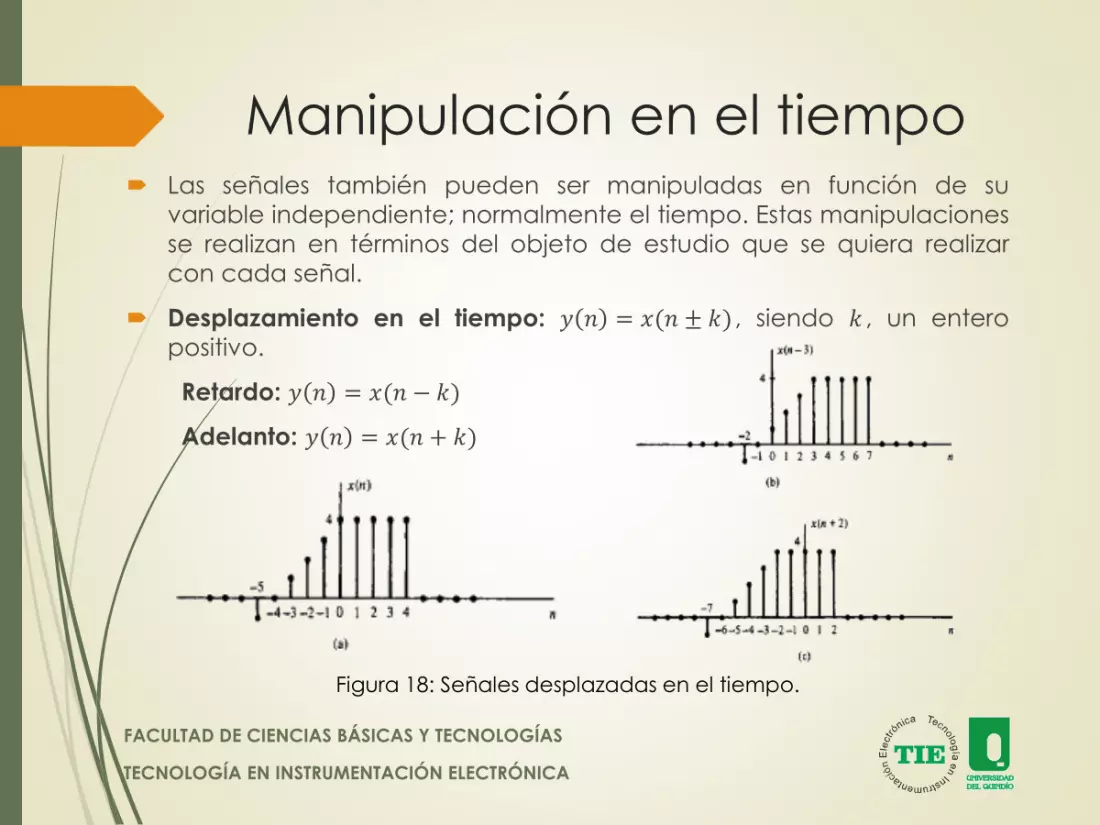
Las señales también pueden ser manipuladas en función de su
variable independiente; normalmente el tiempo. Estas manipulaciones
se realizan en términos del objeto de estudio que se quiera realizar
con cada señal.
Desplazamiento en el tiempo: 𝑦 𝑛 = 𝑥(𝑛 ± 𝑘) , siendo 𝑘 , un entero
positivo.
Retardo: 𝑦 𝑛 = 𝑥(𝑛 − 𝑘)
Adelanto: 𝑦 𝑛 = 𝑥(𝑛 + 𝑘)
Manipulación en el tiempo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 18: Señales desplazadas en el tiempo.
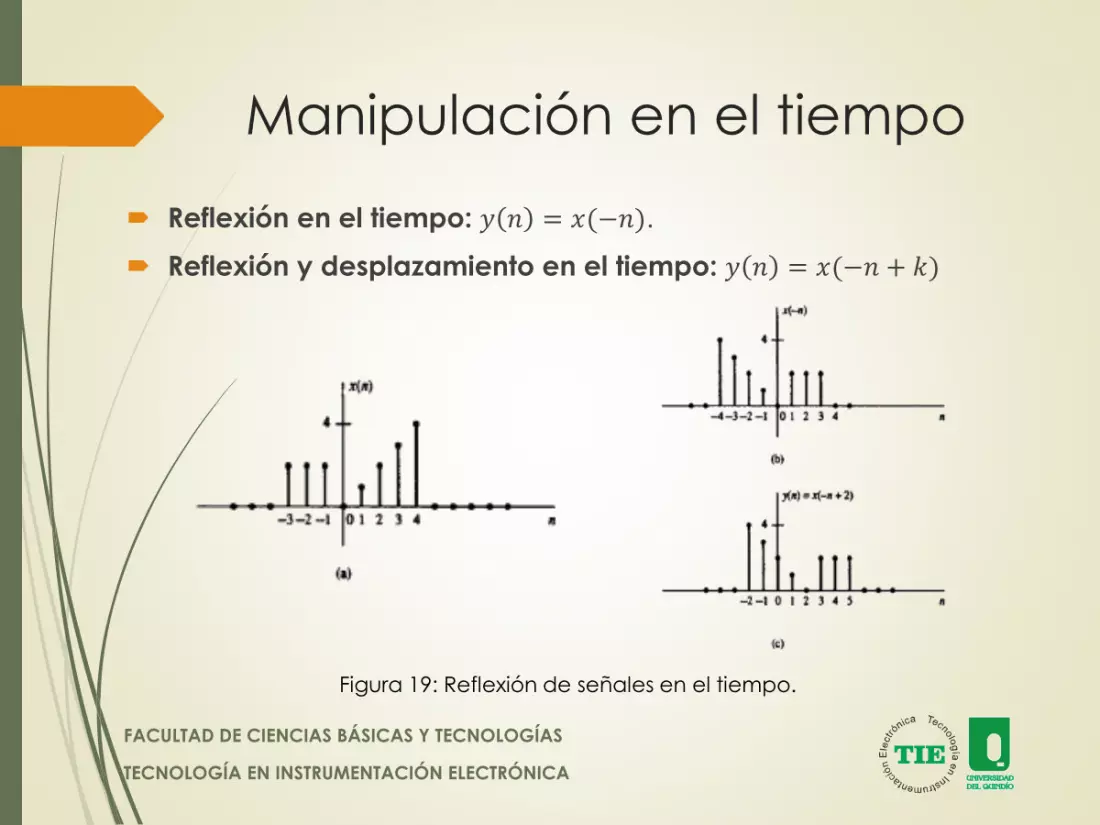
Reflexión en el tiempo: 𝑦 𝑛 = 𝑥(−𝑛).
Reflexión y desplazamiento en el tiempo: 𝑦 𝑛 = 𝑥(−𝑛 + 𝑘)
Manipulación en el tiempo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 19: Reflexión de señales en el tiempo.
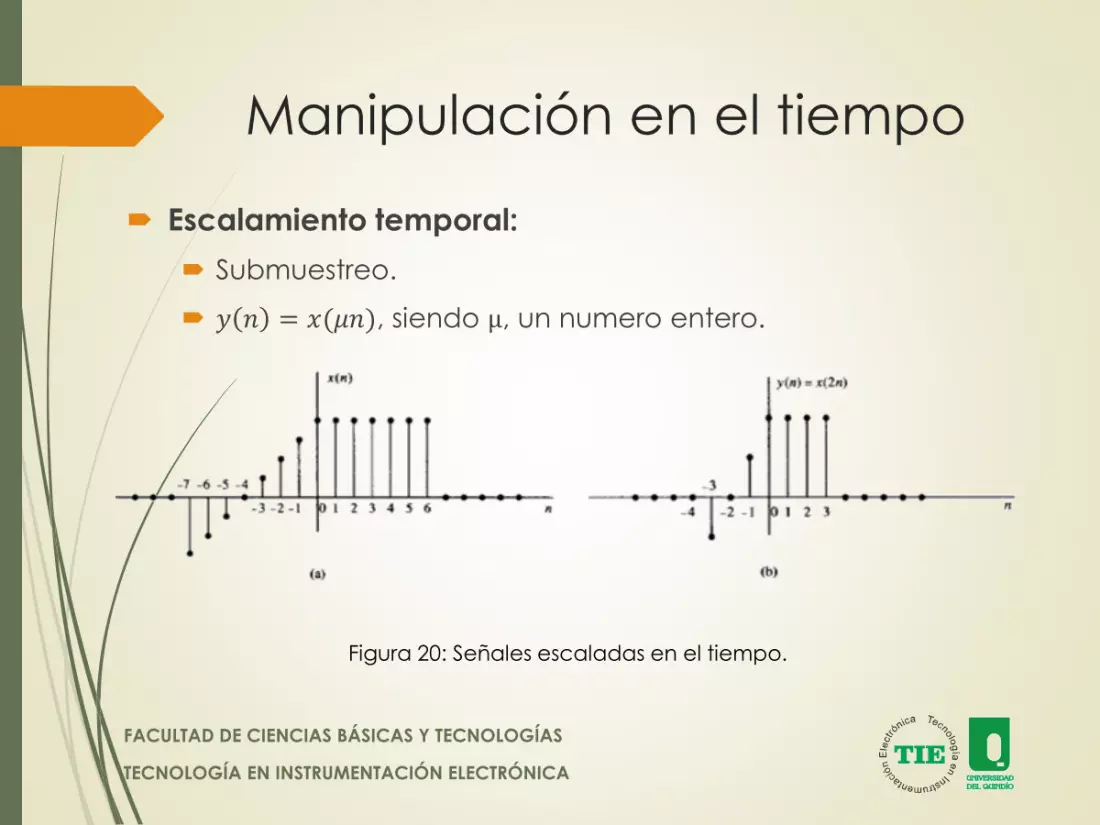
Escalamiento temporal:
Submuestreo.
𝑦 𝑛 = 𝑥(𝜇𝑛), siendo μ, un numero entero.
Manipulación en el tiempo
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA
Figura 20: Señales escaladas en el tiempo.

Escalamiento: 𝑦 𝑛 = 𝐴𝑥(𝑛) −∞ < 𝑛 < ∞
Suma y Resta: 𝑦 𝑛 = 𝑥1(𝑛) ± 𝑥2(𝑛) −∞ < 𝑛 < ∞
Multiplicación: 𝑦 𝑛 = 𝑥1 𝑛 . 𝑥2(𝑛) −∞ < 𝑛 < ∞
División: 𝑦 𝑛 = 𝑥1 𝑛 ./𝑥2(𝑛) −∞ < 𝑛 < ∞
Exponenciación: 𝑦 𝑛 = 𝑥1 𝑛 . ^𝑥2(𝑛) −∞ < 𝑛 < ∞
Manipulación en amplitud
FACULTAD DE CIENCIAS BÁSICAS Y TECNOLOGÍAS
TECNOLOGÍA EN INSTRUMENTACIÓN ELECTRÓNICA